![FEM-Simulation mit NX-Nastran, CATIA, FEMAP und · PDF fileCES Eckard GmbH // Creative Engineering Services [3] Inhaltsverzeichnis Schulungsbausteine CATIA –FEM, V5 und V6 CATIA-V5](https://static.fdokument.com/doc/165x107/5a78a7cf7f8b9ae91b8d8303/fem-simulation-mit-nx-nastran-catia-femap-und-eckard-gmbh-creative-engineering.jpg)
-Catia v5 Dmu Kinematik
25
1 Bewegungen erzeugen mit dem DMU Kinematics Simulator der Version 5 Release 6 von Erstellt von Peter Bach Prof. Dr-Ing. M. Schuth, Labor für Gerätebau des Fachbereichs Maschinenbau der FH-Trier
-
Upload
holita6969 -
Category
Documents
-
view
370 -
download
5
Transcript of -Catia v5 Dmu Kinematik

1
Bewegungen erzeugen mit dem
DMU Kinematics Simulator
der Version 5 Release 6 von
Erstellt von Peter Bach
Prof. Dr-Ing. M. Schuth, Labor für Gerätebau
des Fachbereichs Maschinenbau der FH-Trier

2
Inhalt
1. EINLEITUNG ......................................................................................................... 3
2. ALLGEMEINES ZU MECHANISMEN UND GETRIEBEN..................................... 4
3. MECHANISMEN ERZEUGEN ............................................................................... 5
3.1 BEDINGUNGEN ERZEUGEN IM ASSEMBLY DESIGN................................................... 5
3.2 ERSTE SCHRITTE IN DER KINEMATIKUMGEBUNG ..................................................... 7
3.3 WEITERE VERBINDUNGSTYPEN........................................................................... 11
4. SIMULATIONEN ERZEUGEN............................................................................. 13
4.1 SIMULATION MIT BEFEHLEN ................................................................................ 13
4.2 SIMULATION MIT REGELN ................................................................................... 16
5. ARBEITEN MIT SIMULATIONEN / WIEDERGABEN ......................................... 20
5.1 SIMULATIONEN UMWANDELN............................................................................... 20
5.2 VERLÄUFE ERSTELLEN ....................................................................................... 22
5.3 ÜBERSCHNEIDUNGSERKENNUNG........................................................................ 23
5.4 TRANSLATIONSVOLUMINA .................................................................................. 24
6. NACHWORT........................................................................................................ 25
7. QUELLENANGABEN.......................................................................................... 25

3
1. Einleitung
Diese Dokumentation dient dazu, einen schnellen Einstieg in den DMU Kinematic
Simulator ( DMU = digital mockup = digitale Modellerstellung ) der Version 5 von
CATIA® zu finden. Sie soll denen weiterhelfen, die bisher noch keine Erfahrung auf
dem Gebiet der kinematischen Simulationen gemacht haben und denen, die bereits
mit der Kinematik der Version 4 vertraut sind und den Einstieg in die Version 5 ( kurz:
V5 ) suchen. Vorraussetzung um mit diesem Modul zu arbeiten ist, dass der Nutzer
Kenntnisse auf dem Gebiet der Kinematik besitzt, d.h. er kennt Begriffe wie
Freiheitsgrad und Zwanglauf. In Kapitel 2 werden – um sich die Thematik vor Augen
zu führen – diesbezüglich wichtige Begriffe erklärt.
Der Simulator, der für Windows NT/2000 und Unix verfügbar ist, dient zum Erzeugen
von Baugruppenbewegungen und ist ein eigenständiges Programm, mit dem man
Kollisionsuntersuchungen durchführen, Translationsvolumina ermitteln, Verläufe von
Bewegungen darstellen, Abläufe veranschaulichen und daraus Präsentationen
erstellen kann. Anhand von einfachen Beispielen, wie z.B. viergliedrigen
kinematischen Ketten, wird auf den nachfolgenden Seiten erklärt, wie Bewegungen
erzeugt werden und welche Anwendung dies finden kann.
Die Neuerungen gegenüber der Version 4 sind dem DMU Kinematics Simulator User
Guide zu entnehmen ( auf der Documentation Workbench der V5 ).
Die Dokumentation stützt sich auf die deutsche Release 6 der Version 5, da bei
älteren Ausgaben wichtige Funktionen fehlen und z.T. keine Bewegungen erzeugt
werden können..
Die Beispiele, die zur Darstellung genutzt werden, lehnen sich hauptsächlich an die
Vorlesung Getriebelehre von Prof. Dr.-Ing. Michael Schuth des Fachbereichs
Maschinenbau der Fachhochschule Trier.

4
2. Allgemeines zu Mechanismen und Getrieben
Getriebe dienen zum Wandeln oder Übertragen von Kräften und Bewegungen. Sie
bestehen aus wenigstens zwei Gliedern, von denen eines als Gestell festgelegt
wurde ( gestellfest machen ). Dies bedeutet, dass das Glied absolut im Raum
verankert wird. Hinsichtlich der Vollständigkeit unterscheidet man zwischen
kinematischen Ketten, Mechanismen und Getrieben :
Bei einer geschlossenen kinematischen Kette ist jedes Glied an mindestens zwei
kinematisch nicht identischen Stellen mit je einem Nachbarglied verbunden ( s.
Abb.1 ). Wenn mindestens ein Glied mit n Gliedern nur an n kinematisch identischen
Stellen verbunden ist, spricht man von einer offenen kinematischen Kette
( s. Abb.2 ).
Anmerkung : 12,23 ... kennzeichnen die Gelenke
1,2,3 ... kennzeichnen die Glieder
1223
3414
2
13
4
1223
3414
2
13
4
1223
3414
2
13
4
1223
3414
2
13
4 Abbildung 1: geschlossene kinemat. Kette
1111 2222 33334444
12121212
23232323
34343434 Abbildung 2 : offene kinemat. Kette
Ein Mechanismus entsteht aus einer
kinemat. Kette, indem man eines ihrer
Elemente gestellfest macht.
1223
3414
2
13
1223
3414
2
13
1223
3414
2
13
1223
3414
2
13
4
Abbildung 3 : Mechanismus, bei dem z.B. Glied 4 gestellfest gemacht wurde

5
Ein angetriebener Mechanismus wird als Getriebe bezeichnet und kann ein oder
mehrere An- und Abtriebsglieder besitzen. Das Beispiel von Abb. 3 besitzt einen
Freiheitsgrad. Damit es zwangläufig ist, muss der Freiheitsgrad ( oder Laufgrad ) der
Zahl der Antriebe ( in CATIA® : Zahl der Befehle ) entsprechen. In diesem Fall kann
z.B. Glied 1 als Antrieb dienen, wobei über den Antriebswinkel ϕ die Position jedes
einzelnen Gliedes eindeutig bestimmt werden kann. Das so entstandene Getriebe
wird nach den Gliederlängen und der Anordnung als Doppelaußenschwinge
bezeichnet ( vgl. Vorlesung Getriebelehre).
3. Mechanismen Erzeugen
Ein simulierbarer Mechanismus ist die Grundvoraussetzung für die Erzeugung einer
Simulation bzw. einer Animation. Ziel dieses Kapitel ist es, einen solchen
Mechanismus zu erzeugen.
3.1 Bedingungen Erzeugen im Assembly Design
Vorraussetzung zur Erstellung eines Mechanismus ist, dass man mindestens 2 Parts
( z.B. einen Bolzen und einen Hohlzylinder oder zwei Laschen ) im Assembly Design
als separate Baugruppen vorliegen hat und diese im Spezifikationsbaum angezeigt
werden. Als ersten Schritt versucht man, die Teile mit Bedingungen zu verknüpfen,
um so ihre Lage zueinander zu bestimmen und später Bewegungen zuzulassen. In
der Symbolleiste Bedingungen sind zu finden Kongruenz, Kontakt, Offset, Winkel
und Komponente fixieren. Mit der Kongruenzbedingung lassen sich Punkte,
Linien ( auch Mittelpunktsachsen von Rundteilen ), Ebenen/Flächen untereinander
kongruieren. Zum Beispiel lassen sich die Achsen eines Bolzen und einer Bohrung in
Deckung bringen. Selektiert man in diesem Fall Kongruenz und wählt anschließend
die beiden Achsen an, wird die Bedingung erzeugt. Ohne eine weitere Bedingung,
die den Bolzen in axialer Richtung positioniert ( z.B. definierte Offsetbedingung
zwischen den Stirnflächen ), lässt sich der Bolzen später in der Bohrung um die
eigene Achse drehen und in axialer Richtung verschieben ( 2 Freiheitsgrade ). Mit
der Offsetbedingung kann man Punkten, Linien und Ebenen/Flächen untereinander
definierte Abstände ( Zahlwert ) zuordnen. Wie bereits angesprochen wird diese
Bedingung am häufigsten für zwei ebene Flächen verwendet um ihren Abstand fest

6
zu legen. Die Kontaktbedingung ist identisch einer Offsetbedingung, bei der als
Abstand 0 mm angegeben ist. Winkelbedingungen dienen zur Festlegung von
Winkeln zwischen Linien, Achsen, und ebenen Flächen.
Mit Komponente fixieren lassen sich Parts absolut im Raum und relativ zu anderen
Parts fixieren ( absolut im Raum ist standardmäßig aktiv, lässt sich aber durch
Doppelklicken auf die Bedingung im Spezifikationsbaum unter Bedingungsdefinition
umschalten ), was einem gestellfest machen wie es in Kapitel 2 beschrieben wurde
gleich kommt. Weitere Einzelheiten sind dem Assembly Design User Guide
( s. Workbench Documentation ) zu entnehmen.
Kongruenzbedingung Offsetbedingung Kontaktbedingung Winkelbedingung Komponente fixieren
Abbildung 4 : wichtige Bedingungen
Ein einfaches Beispiel eines Getriebes besteht z.B. aus zwei Laschen. Eine ist
raumfest fixiert, die andere rotiert um das gemeinsames Gelenk. An der Gelenkstelle
wird zunächst die Kontaktbedingung angebracht ( Fläche/Fläche ). Im nächsten
Schritt werden die gemeinsamen Achsen durch die Kongruenzbedingung in Deckung
gebracht und eins der beiden Glieder wird fixiert ( Komponente fixieren ). Das erste
Glied kann sich nun um das zweite drehen ( es besitzt 1 Freiheitsgrad ). Setzt man
Abbildung 5 : Laschen mit Bedingungen versehen

7
nun den 3D-Kompass ( standardmäßig in der rechten oberen Ecke der Arbeits-
fläche ) auf das bewegliche Glied und hält danach die Shift-Taste der Tastatur
gedrückt, dann kann man mit der Mouse durch Anklicken und Ziehen des Kompass
eine undefinierte Bewegung erzeugen ( dient zum groben Ändern der Position ).
3.2 Erste Schritte in der Kinematikumgebung
Zu finden ist die Umgebung unter Start/Digitale Modellerstellung/DMU Kinematics.
Es gibt generell zwei Möglichkeiten einen Mechanismus zu erzeugen. Am
einfachsten und schnellsten geschieht es ( wenn zuvor die Bedingungen im
Assembly Design richtig gesetzt wurden ) durch Wahl des Icon Umwandlung von
Baugruppenbedingungen in der Symbolleiste DMU Kinematics. Selektiert man
danach in dem sich öffnenden Fenster Neuer Mechanismus und anschließend
Automatisch erzeugen, dann werden die Bedingungen, die zuvor gesetzt wurden, in
eine Verbindung umgewandelt. Dies wird in der Verzeichnisstruktur unter
Applications/Mechanismus.1/Verbindungen.1 angezeigt ( Namen von Verbindungen
und Mechanismen lassen sich jederzeit über rechte Mouse-Taste, Eigenschaften
ändern ). Die in dem Fall der beiden Laschen automatisch erzeugte Drehverbindung
( Rotationsverbindung ) setzt sich nun aus den im Assembly Design erzeugten
Bedingungen Flächenkontakt und Kongruenz ( kongruiert Mittelpunktsachsen )
zusammen. Als Festkomponente wird wie definiert Glied 2 angezeigt und somit
wurde der Mechanismus erzeugt.
Abbildung 6 : Verbindungsbearbeitung

8
Um diesen zu simulieren, fehlt der Verbindung ein Befehl, d.h. der Mechanismus
besitzt noch einen Freiheitsgrad und dadurch muss ein „Antrieb“ festgelegt werden.
Durch Doppelklick auf die jeweilige Verbindung ( hier : Verbindung.1 ) öffnet sich das
Fenster Verbindungsbearbeitung ( s. Abb. 6 ) und man wählt Abhängiger Winkel.
Die Simulation kann nun durch einen definierten Befehl erfolgen ( wird durch die
Information Der Mechanismus kann simuliert werden angezeigt ). Selektiert man
unter Verbindungslimits zudem eine Obergrenze bzw. Untergrenze, dann können wie
hier bei einer Rotationsverbindung Gradzahlen gewählt werden, die die Drehung bei
der späteren Simulation in die eine oder andere Richtung begrenzen ( 0°-Stellung
bezieht sich auf die aktuelle Position ).
Man kann aber auch in DMU Kinematics Verbindungen „manuell“ erzeugen, die
zudem die erforderlichen Bedingungen erstellen. Ausgangspunkt sind die einzelnen
Parts zwischen denen zunächst keine Bedingungen existieren. Auf der Symbolleiste
DMU Kinematics ( s. Abb. 7 ) in der Kinematikumgebung befinden sich eine Reihe
von Verbindungen die für die Zuordnung verwendet werden können.
Abbildung. 7 : Die DMU-Kinematics Symbolleiste
Abbildung 8 : Verbindungserzeugung
Die Vorgehensweise im Beispiel der beiden Laschen sieht wie folgt aus : Das Icon
Rotationsverbindung , welches sich unter Verbindungen ( 3. Icon auf der DMU
Kinematics - Symbolleiste verbirgt, wird selektieren ( auch zu finden im Pull-down-

9
Menü unter Einfügen/Verbindungen ), und es wird durch Anwahl ein neuer
Mechanismus erzeugt. Durch Selektion der entsprechenden Achsen und Flächen
( bezogen auf das Beispiel der beiden Laschen ) entstehen die entsprechenden
Bedingungen ( in diesem Fall eine Kontakt- und Drehverbindung ). Mit Abhängiger
Winkel wird wiederum ein Befehl dem Mechanismus hinzugefügt. Sollen die Ebenen
zudem einen gewissen Abstand haben, dann kann dies durch einen Offset-Wert
festgelegt werden ( führt zur Erzeugung einer Offset-Bedingung, vgl. Kap. 3.1. Auf
dieser Symbolleiste ( DMU Kinematics ) befindet sich das Icon Komponente fixieren
, mit dem das entsprechende Glied raumfest gemacht wird. Der Mechanismus
kann nun abermals simuliert werden.
Abbildung 9 : Kurbelschwinge
Ein weiteres Beispiel ist die in Abb.9 dargestellte Kurbelschwinge. Die 4 Glieder
werden im Assembly Design mit Bedingungen versehen ( Festkomponente
bestimmen, Kongruenzbedingungen verwenden, usw., vgl. vorheriges Beispiel ). Bei
der automatischen Umwandlung der Baugruppenbedingungen werden die
Verbindungen erzeugt. Es fehlt lediglich ein Befehl, um einen Zwanglauf zu
erzeugen, da die Kurbelschwinge noch einen Freiheitsgrad besitzt. Bei der
Festlegung der Bedingungen ist darauf zu achten, dass es zu keinen
Überbestimmungen oder Unterbestimmungen kommt. Bei statischer
Überbestimmtheit und statischer Bestimmtheit ( Freiheitsgrad bzw. Laufgrad F ist
<= 0 ) ist ein Mechanismus nicht simulierbar. Bei Unterbestimmtheit müssen
fehlende Befehle oder Bedingungen ergänzt werden. Ein einfaches Beispiel hierfür
ist ein Ring, der sich um einen fixierten Bolzen dreht ( s. Abb. 11 ). Dieser Ring

10
besitzt, wenn lediglich die Achsen kongruiert wurden, 2 Freiheitsgrade ( 1 Rotation, 1
Translation ). Zwischen beiden Teilen wird eine Zylindrische Verbindung durch
die Umwandlung der Baugruppenbedingungen erstellt. Im Fenster
Verbindungserzeugung stehen als Befehle Abhängiger Winkel und Abhängige
Länge zur Auswahl. Ist nur einer der beiden Befehle selektiert, dann ist die
Verbindung unterbestimmt, d.h. sie ist nicht zwangläufig, da die Anzahl der
Freiheitsgrade ( 2 ) nicht mit der Anzahl der Befehle bzw. Antriebe ( 1 )
übereinstimmt. Erst wenn beide Befehle selektiert sind, kann der Mechanismus
simuliert werden.
Abbildung 10 : Verbindungserzeugung Zylindrisch ohne selektion der Befehle
Abbildung 11 : Ring dreht sich um Zylinder

11
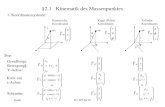
3.3 Weitere Verbindungstypen
Neben der unter den vorherigen Punkten vorgestellten Rotationsverbindung und
Zylindrische Verbindung gibt es eine Vielzahl weiterer Verbindungen, die sich
zum einen z.T. aus den Bedingungen automatisch erzeugen lassen oder auf der
DMU Kinematics – Oberfläche explizit zwischen den Teilen erzeugt werden müssen,
da das Programm bei der automatischen Umwandlung diese Bedingungen nicht
richtig interpretiert.
Prismatische Starre Kugel- Ebene Zahnrad- Zahnstangen- Kabel-
Verbindung Verbindung verbindung Verbindung verbindung verbindung verbindung
( 1 Befehl ) ( 0 Befehle ) ( 0 Befehle ) ( 0 Befehle ) ( 1 Befehl ) ( 1 Befehl ) ( 1 Befehl )
Abbildung 12 : Beispiele weiterer Verbindungen
Nicht zu allen Verbindungstypen lassen sich Befehle zuordnen, wie z.B. zur Ebenen
Verbindung. Hierbei werden lediglich zwei Ebenen selektiert, um diese Verbindung
zu erzeugen. Neben den oben aufgeführten Verbindungen existieren noch die
Schraubverbindung ( 2 Befehle ), die Punktkurvenverbindung ( 1 Befehl ), die
Gleitkurvenverbindung ( 0 Befehle ), die Rollkurvenverbindung ( 1 Befehl ), die
Punkt-Flächen-Verbindung ( 0 Befehle ), die Universalverbindung ( 0 Befehle ) und
die Doppelgelenkverbindung ( 0 Befehle ). Diese Verbindungen können nicht
automatisch erzeugt werden und müssen auf jeden Fall manuell eingefügt werden.
Das nächste Beispiel stellt eine versetzte Schubkurbel dar. Damit sie simuliert
werden kann, soll sie 3 Rotationsverbindungen und eine Ebene Verbindung
besitzen. Wenn man die Bedingungen im Assembly Design setzt ( Kongruenz der
Achsen, Offset-Bedingungen von Ebenen ) und diese umwandelt, erzeugt das
Programm die erforderlichen Verbindungen.

12
Abbildung 13 : versetzte Schubkurbel
Ein wichtiges Hilfsmittel zur Erzeugung des Mechanismus ist hierbei die
Mechanismusanalyse , zu finden auf der DMU Kinematics – Symbolleiste. In
diesem Fenster erkennt man u.a. ob ein Mechanismus überhaupt simuliert werden
kann und wie viele Freiheitsgrade er mit und ohne Befehle besitzt. Ist Freiheitsgrade
mit Befehlen ungleich Null, dann ist der Mechanismus nicht simulierbar. Durch Wahl
von Mehr werden hierzu alle einzelnen Verbindungen im Detailbereich
( Verbindungsname, Verbindungstyp, Befehl, usw. ) aufgeführt.
Abbildung 14 : Die Mechanismusanalyse einer Schubkurbel mit Detailbereich

13
Durch Selektion werden sie zwischen den Teilen gekennzeichnet. Kann ein
Mechanismus nicht sofort erzeugt werden, sollte man alle Verbindungen einzeln
anwählen und nachschauen, wo eine Verbindung oder ein Befehl fehlt oder einige
sogar doppelt vorhanden ist. Ein sehr häufiger Fehler ist z.B., dass zwischen zwei
Teilen keine Verbindung existiert weil sie u.U. vergessen wurde. Wird sie nun dem
Mechanismus hinzugefügt, kann man anhand der Analyse erkennen, ob die
Simulation durchführbar ist.
4. Simulationen Erzeugen
Die Erzeugung von Simulationen und Animationen setzt voraus, dass der
Mechanismus simulierbar ist. Ist dies der Fall, dann kann man auf einfache Weise
Simulationen erzeugen und diese z.B. in Video-Dateien umwandeln, die dann
unabhängig von CATIA® abgespielt werden können.
Abbildung 15: Symbolleiste Animation
4.1 Simulation mit Befehlen
Dass die Simulation mit Befehlen erzeugt wird, ist an dem Icon Simulation mit
Befehlen ersichtlich, welches sich auf der Symbolleiste Simulation ( im DMU
Kinematic Simulator ) befindet. Als erster Schritt wird hierzu das Icon Simulation
auf der Symbolleiste Animation angewählt. Es muss nun ein simulierbarer
Mechanismus aus der Liste gewählt werden, den man zuvor erzeugt hat. Es öffnen
sich danach die Fenster Simulation bearbeiten und Kinematische Simulation
( s. nachfolgende Abbildungen ). In dem letztgenannten befinden sich ein oder
mehrere Schieberegler, deren Anzahl mit der Anzahl Befehle übereinstimmt. Bewegt
man mit dem Mauszeiger einen der Regler, dann ist zeitgleich eine Bewegung am
Bauteil festzustellen. Links bzw. rechts neben dem Regler stehen die Limits, die

14
maximal angefahren werden können. Die aktuelle Stellung der Glieder zueinander ist
in dem kleinen weiß hinterlegtem Fenster ersichtlich. Die Limits können unter ( 10 )
geändert werden. Bei rotatorischen Verbindungen, denen ein Befehl zugeordnet
wurde, wie z.B. bei einer zylindrischen Verbindung werden die Stellungen in
Gradzahlen angegeben. Bei Befehlen von prismatischen Verbindungen oder Punkt-
Kurven-Verbindungen sind die Positionen in Längeneinheiten, sprich in mm,
angegeben.
Zur Erzeugung der Simulation kann man zum einen mit Automatischem Einfügen
( 5 , s. Abb. 16-18 ) arbeiten. Ist dieses Feld inaktiv ( Standard ), müssen die Felder
Einfügen, Ändern, Löschen, Überspringen ( 1 ) im Fenster Simulation bearbeiten
aktiv sein und die Steuerungstasten ( 2 ), die mit denen eines Kassettenrecorders
oder Videorecorders vergleichbar sind, inaktiv sein bzw. grau erscheinen. Ist dies
nicht der Fall, muss man die Taste Löschen betätigen und danach Einfügen, um den
beschriebenen Zustand zu erreichen. Im Fenster Kinematische Simulation ändert
man nun einen oder mehrere Wert so ab, dass das Bauteil die gewünscht Bewegung
ausführt und in eine andere Position übergeht. Dies kann entweder über den
Schieberegler ( 8 ) durch die Maus geschehen oder über die Pfeiltasten ( 9 ).
Danach wählt man Einfügen und die Simulation wird mit der gerade manuell
getätigten Bewegung erzeugt. Ändert man danach wiederum einen Wert und wählt
man Einfügen, dann wird diese zweite Bewegung der Ersten angehängt. Dies lässt
sich beliebig oft wiederholen. Stehen einem mehrere Befehle zur Auswahl, dann
lassen sich schrittweise die einzelnen Glieder bewegen oder bei gleichzeitiger
Änderung mehrerer Befehle ein gemeinsamer Ablauf erzielen. Mit Play lässt sich
dann die gesamte Simulation abspielen. Die Taste ( 3 ) lässt die Simulation entweder
einmalig, als Endlosschleife oder einmalig vor und zurück abspielen. Die Wert im
Feld ( 4 ) dient zum Darstellen des Verlaufs und nimmt in diesem Fall ( bei kein
automat. Einfügen ) nur ganze Zahlen an. Mit jedem Einfügen wird die Zahl um 1
erhöht. ( 0 = Anfangszustand, n = Endzustand der Bewegung, mit n = 1,2,3,... ).
Unter ( 7 ) lässt sich das Zeitintervall, bzw. die Geschwindigkeit Regeln, mit der die
Simulation wiedergegeben werden soll. Es können hierfür die Werte 1, 0,2, 0,1, 0,04,
0,02 und 0,01 gewählt werden ( 0.01 entspricht Faktor 1/100 langsamer ). Es ist zu
erwähnen, dass die Zeit, die benötigt wird, vom obersten Wert zum niedrigsten Wert
( Regler ganz links nach ganz rechts ) zu gelangen, ca. 4 Sekunden beträgt falls für
( 7 ) 0,01 eingestellt ist. Diese Zeit ist aber in erster Linie von der Rechnerleistung

15
Abbildung.16 : erforderlicher Zustand des Fensters ‚Simulation’ bearbeiten’ ohne ‚automa-tisches Einfügen’ vor der ersten Positionsänderung
abhängig und kann demnach von System zu System hiervon abweichen. Ändert man
zu jedem eingefügten Schritt die oberen und unteren Werte ( 10 ), dann kann man
die Geschwindigkeit quantitativ variieren. Eine definierte Geschwindigkeit ist
demnach nicht zu realisieren und ist so vom subjektiven Empfinden des Nutzer über
sie Zeitintervalle einzustellen.
Aktiviert man Blickpunkt animieren ( 6 ), dann kann man vor jedem Einfügen mit der
Maus die Bildschirmansicht ändern. Dieser Ansichtswechsel ist dann Bestandteil der
Simulation und wird als eine Art Flug von Ansicht 1 nach Ansicht 2 dargestellt.
Ist die Schaltfläche automatisches Einfügen aktiviert, dann kann man über den/die
Regler die Lage der Mechanismusteile ändern und nacheinander verschiedene
Positionen anfahren, ohne die Taste Einfügen zu betätigen. Die Bewegungen werden
1:1 übernommen und als Simulation gespeichert. Über die Tasten ( 1 ) lassen sich
erzeugte Schritte ändern oder löschen.
1 6
2
3
5
7
4

16
10
9 8
Abbildung 18 : Abgeschlossene Simulation
Abbildung 17: Kinematische Simulationen : Schieberegler mit Limits
4.2 Simulation mit Regeln
Die Simulation mit Regeln bedeutet, dass die Bewegung einer Verbindung
formelmäßig über eine Weg-Zeit-Funktion bzw. über eine Winkel-Zeit-Funktion
beschrieben werden kann. Die Erzeugung einer solchen Simulation wird an Hand
eines Kofferraumdeckelmechanismus veranschaulicht.

17
Abbildung 19 : Kofferraumdeckelmechanismus, der mit Regeln simuliert wird.
Als ersten Schritt markiert man im Spezifikationsbaum den zu simulierenden
Mechanismus, z.B. Mechanismus.1. Danach selektiert man auf der untersten
Symbolleiste das Icon Formel und es öffnet sich das Fenster Formel: ‚Name
des Mechanismus’ ‚ ( hier Mechanismus.1 ). Es werden nun die Parameter
angezeigt, die dem Mechanismus zugeordnet werden können. Bei einem
Mechanismus mit nur einem Befehl ist das neben der Zeit nur ein Parameter, der für
einen Winkel oder eine Länge steht ( hier : Winkel ). Mit einem Doppelklick auf den
Mechanismus ( 1, s. Abb. 20 – 22 ) öffnet sich der Formeleditor, in den letztendlich
eine formelmäßige Verknüpfung zwischen der Zeit und einem Befehl hergestellt wird.
Über den Assistent ( 2 ) wird im Datenverzeichnis Parameter selektiert, für den
Parameter die Zeit gewählt und als Zeit die, die dem Mechanismus zugeordnet
wurde. Die Zeile ( 6 ) wird mit der Formel ergänzt, die stets mit einem Schrägstrich „/“
beginnt. In diesem Beispiel wurde 1s * -20deg verwendet. Dies bedeutet, dass pro
Sekunde sich der Winkel um -20° ändert, ausgegangen von der Startposition.
Wichtig ist, das die Einheiten mit angegeben werden. Liegt keine Winkelabhängigkeit
sondern eine Längenabhängigkeit, dann ist anstatt deg für degree ( Grad ) ‚mm’ zu
verwenden. Besitzt ein Mechanismus mehrere Befehle, dann sind diese alle einzeln
mit Formeln zu versehen. Alle Grundeinstellungen des Fensters Formeln und
Formeleditor sind beizubehalten.

18
2
1
Abbildung 20 : Fenster Formeln mit Parametern Zeit und Winkel eines Mechanismus
Abbildung 21 : Formeleditor, noch ohne Formel

19
3
4
5
7 8
9
Abbildung 22 : Formeleditor mit erstellter Formel
Betätigt man nun das Icon Simulation , so kann man nun im Fenster kinematische
Simulation neben der Simulation mit Befehlen die mit Regeln verwenden. Man lässt
die Bewegung über Play ablaufen und fügt sie im Fenster Simulation bearbeiten mit
Einfügen der Simulation hinzu ( s. 4.1 Simulation mit Befehlen ). Über die Taste ( 9 )
können z.B. auch Einzelschritte getätigt werden, die dann der Simulation zugefügt
werden können.
Abbildung 22 : Das verwenden von Regeln bei der Simulation
Die Anzahl der Schritte ( 7 ) legt nur die Anzahl der Bilder beim Abspielen in über
dieses Fenster fest. Spielt man die komplette Simulation über Simulation bearbeiten
6

20
ab, dann hat dieser Wert keinen Einfluss auf die Geschwindigkeit. Unter Regeln ( 8 )
verbirgt die grafische Darstellung der Bewegung in Abhängigkeit von der Zeit. Wie
schon angemerkt, ist die Zeit nicht wirklichkeitsnah und ist in diesem Fall nur ein
quantitativer Wert.
Abbildung 23 : Winkel-Zeit-Verlauf des Mechanismus: lineare Winkeländerung von 0° auf – 70 °
5. Arbeiten mit Simulationen / Wiedergaben
Die weiteren Anwendungen, wie z.B. Verlaufskurven oder die Überschnei-
dungserkennung, stellen den eigentlichen praktischen Nutzen des Moduls dar.
5.1 Simulationen umwandeln
Beim Umwandeln von Simulationen können Wiedergaben erzeugt werden, die ein
Abspielen der Simulation in CATIA® ermöglichen. Daneben können aus der
Simulation Video-Dateien erstellt werden, die sich auf jedem beliebigem Rechner mit
einem entsprechendem Programm ( z.B. Windows-Media-Player ) abgespielt werden
können. Nachteil gegenüber der Wiedergabe in CATIA® ist, dass die Dateien keinen

21
Bezug mehr zu dem Programm haben und Änderungen am Bauteil oder Änderungen
der Ansicht sich nicht übertragen lassen.
Mit dem Icon Simulation umwandeln auf der Symbolleiste Animation öffnet sich
das entsprechende Fenster. Hier kann man zum Einen zwischen Wiedergabe
generieren und zum Anderen Generieren in eine Animationsdatei wählen. Im ersten
Fall gibt man lediglich den Namen der Wiedergabe an ( Standard :
Wiedergabe.lfd.Nr. ) und definiert anschließend aus welcher Simulation diese
hervorgehen soll und in welchem Zeitintervall sie ablaufen soll. Durch OK wird diese
dann erzeugt und ist im Spezifikationsbaum unter Applications/Wiedergabe/Name
der Wiedergabe eingefügt. Unter Wiedergabe lassen sich diese mit einfacher,
doppelter, fünffacher oder zehnfacher Geschwindigkeit abspielen.
Das generieren in eine Animationsdatei ( Microsoft avi-Datei ) erfolgt ähnlich wie bei
der Generierung einer Wiedergabe. Die Datei wird in einem Verzeichnis erstellt und
die zu verwendende Simulation gewählt . Unter Konfigurieren stehen dem Nutzer
verschiedene Kompressoren zur Auswahl, die die Daten möglichst platzsparend
abspeichern. Die besten Resultate beim Abspielen der Video-Dateien wurden mit
dem Kompressor „Indeo® video 5.10“ erzielt. Mit einer niedrigen
Abbildung 24 : Simulation umwandeln
Komprimierungsqualität und Datenrate liegt die Dateigröße im Megabyte-Bereich,
aber die Abspielgeschwindigkeit und Qualität sind im Vergleich zu den anderen

22
Kompressoren am Anschaulichsten. Die gesamten Einstellungen sind jedoch stark
von der Leistung und Hardware ( u.a. Grafikkarte ) des Rechners abhängig. Neben
den Video-Dateien können auch Einzelbilder aus der Simulation erstellt werden, die
als Still Image Capture bezeichnet werden. Diese Option befindet sich in dem
Listenfeld, das standardmäßig Microsoft AVI anzeigt.
Abbildung 25: Wahl der Kompressoren : 4 stehen zur Auswahl 5.2 Verläufe erstellen
Mit Verlaufslinie werden Verläufe von beliebigen sich im Raum bewegenden
Punkten, die Bestandteil des Mechanismus sind, erzeugt. Das Programm erstellt
hierzu einen in einem neuen Fenster ( Part-Design ) ein catPart mit dem Namen
Verlaufslinie.lfd.Nr. In einem sich darin befindenen Geöffneten Körper liegen eine
Vielzahl von Punkten, die das Programm durch Angabe des zu Grunde liegenden
Mechanismus erstellt. Gleichzeitig wird aus diesen ein Spline erstellt, der dann die
eigentliche Verlauflinie darstellt. Durch Kopieren der Verlaufslinie.lfd.Nr. und
Einfügen in das Produkt kommt es zur Überlagerung des Mechanismus mit dem
Verlauf. Anwendungen für Verlauflinien sind die Ermittlung von Endpunkten, z.B. bei
Gelenkgetrieben, oder die Erstellung einer Evolvente oder Zykloide, die bei
Zahnradgetrieben Bedeutung hat.

23
Abbildung 26 : Verläufe zweier Gelenkpunkte Abbildung 27: Bahn einer Zykloiden eines Kofferraummechanismus 5.3 Überschneidungserkennung
Abbildung 28 : Überschneidungserkennung
Drei Icons stehen in Zusammenhang mit der Überschneidungserkennung zur
Verfügung : (Aus), (Ein), (Stopp). Ist die Erkennung eingeschaltet, dann werden
bestehende Überschneidungen an den Rändern der Schnittflächen Rot
gekennzeichnet, bei Stopp wird die Simulation oder Wiedergabe angehalten, wenn
es zu einer Überschneidung kommt. Bei Bewegungsabläufen jeglicher Art lässt sich
hierdurch feststellen, ob das Zusammenspiel der Teile funktioniert oder ob
Änderungen vorgenommen werden müssen. Ist dies der Fall, kann man über die
Wiedergabe ( sie bezieht sich auf die aktuellen Parts ) sofort das Ergebnis erkennen.
Die Erkennung kann auch hilfreich bei der Erzeugung von Simulationen sein, da
somit die Grenzen des Mechanismus ermittelt werden können, sprich niedrigster
Wert und höchster Wert bei der kinematischen Simulation angegeben ( s. Abschnitt
4.1 ) werden können. Stoppet der Mechanismus bei einer Überschneidung, dann
kann der Wert der aktuellen Position als Grenzwert übernommen werden.

24
5.4 Translationsvolumina
Über das Icon Translationsvolumen gelangt man in das gleichnamige Fenster,
indem zunächst Konfigurationen getätigt werden, wie die zu Grunde liegende
Wiedergabe, Genauigkeiten der Berechnung oder die mit einbezogenen Teile. Das
Resultat wir als cgr-Datei an einer benutzerdefinierten Stelle abgespeichert. Über
Einfügen/Vorhandene Komponente wird die Datei aufgerufen und das Volumen als
Solid dargestellt. Es erscheint als Part im Spezifikationsbaum welches ggf. in eine
Baugruppe verschoben werden kann. Durch Kombination mit der Überschnei-
dungserkennung lassen sich kritische Positionen der Teile ermitteln.
Abbildung 29 : Kofferraumdeckelmechanismus mit Translationsvolumen

25
6. Nachwort
Anhand von einfachen Beispielen wurde in den vorherigen Kapiteln das Arbeiten mit
dem Modul DMU Kinematics Simulator in anschaulicher Weise an einfachen
Beispielen erklärt. Es existiert aber eine Vielzahl von Sonderfällen bei denen -
besonders bei der Verbindungserzeugung - andere Strategien verwendet werden
müssen, als man zunächst annimmt. Einfaches Beispiel hierfür sind z.B. die
Kugelgelenke des bereits angesprochenen Kofferraumdeckelmechanismus, die in
diesem Fall als Universalverbindungen gehandhabt werden müssen und nicht wie
vermutet als Kugelgelenkverbindung. Nur durch praktische Erfahrung lässt sich bei
einem solchen Problem eine mögliche Lösung rasch finden. Um erfolgreich mit dem
Modul umgehen zu können, sollten die Übungen aus der Dokumentation
veranschaulicht werden und zudem eigene fiktive Mechanismen erstellt werden, an
denen man die Feinheiten des Programms erkundet. Die Programmierer arbeiten
fortlaufend daran, weitere Verbesserungen an den nachfolgenden Releases zu
tätigen. Zu Nennen ist hier der enorme Schritt von Release 4 zu Release 6 ( siehe
CATIA®-Installationen der FH-Trier ). Eine Vielzahl von Verbindungen kamen bei der
R 6 hinzu, die eine Erzeugung der Simulation von bestimmten Mechanismen erst
durchführbar gemacht haben. Es ist daher zu erwarten, dass bei den nachfolgenden
Releases sich viele neue Möglichkeiten den Nutzern bieten werden.
7. Quellenangaben
[1] Prof. Dr.-Ing. Michael Schuth
Vorlesungsskript Getriebelehre
[2] Dassault Système
CATIA® V5 R6 Workbench Documentation, englische Ausgabe
Produktsynthesis à DMU Kinematics Simulator