)/-Iv - dsv.rub.de · Bild 2. Signalfliii3graplieii rekursiver Filter a) direkte Form b)...
12
Nachrichtentechnik Heinz Göckler Sonderdruck aus ntzArchiv Bd. 7 (1985) H. 3, S. 47-57
Transcript of )/-Iv - dsv.rub.de · Bild 2. Signalfliii3graplieii rekursiver Filter a) direkte Form b)...

Nachrichtentechnik
Heinz Göckler
Sonderdruck aus ntzArchiv Bd. 7 (1985) H. 3, S. 47-57

In digitalen Tonstudios m i t hohem Qualitätsstandard werden zur individuellen Klanglormung einstellbare Digitalfilter benötigt. In dieser Studie wird die Eignung linearphasiger Filter mi t endlicher Dauer der lmpulsantwort (direkte Form und Taylor-Struktur) und minimalphasiger rekursiver Filter (direkte und Kaskadenform, Wellendigitalfilter) für diese Aufgabenstellung untersucht. Dazu werden die wesentlichen Eigenschaften der genannten Filtertypen in Erinnerung gerufen. Darüber hinaus werden Frequenztransforma- tionen für linearphasige FIR-Filter (Finite Impulse Response) und rekursive Filter (Allpaßtransformation) behandelt. Schließlich werden verschiedene Realisierungsmöglichkeiten mit hochintegrier- ten Bausteinen diskutiert und anhand erster Aufwandsabschätzun- gen verglichen. Dabei beruht ein erfolgversprechender Lösungsansatz auf der Realisierung einstellbarer nichtrekursiver Filter mi t linearer Phase mi t einem Signalprozessor.
In a high-quality digital studio variable digital filters are used for sound control. In this Paper, the suitability of linear-phase finite impulse response (FIR) filters in direct form and as Taylor-structure and minimum-phase recursive filters in direct and cascade forms and as wave digital filters is investigated. To this end, the essential features of these filter classes are recalled. In addition, the applica- t ion of frequency transformations for linear-phase FIR filters and allpass transformations for recursive filters are discussed. Various VLSI implementations are compared with each other. As a result, a promising realization of variable low- and highpass digital filters for audio signal processing is based on a linear-phase direct form FIR filter implemented on a signal processor.
Frequenzgänge F requenz t r a~ i s fo rma t io~~e~~ bekannt [z.B. 7-9, 40, 411, mit deren I-iilfe eine Filtercliarakteristik durch die Variation nur weniger Parameter (Bandbreite, Mittenfrequenz) verändert werden kann.
Irn Rahmen dieses Berichts wird versucht, ein auiwaiid- günstiges und flexibles Konzept für die digitale Inipleinen- tierung von stufenweise einstellbaren Filtern niedriger Ordnung für tontechnisclie Anwendungen zu erarbeiten. Bevor jedoch auf die zentrale Problematik der Filterimple- n~ent ierung eingegangen werden kann, sind zunächst die für die vorliegende A~ifgabenstellung wesentlichen Eigenscliaf- teil der im einzelnen zu betrachtenden Filterstrukturen - linearphasige FIR-Filter, rekursive Filter in der direkten oder Kaskadenform und als WDF - zusammenzustellen. Anschließend werden kurz die wichtigsten, für die genann- ten Filterstrukturen geeigneten Frequenzachsentransforma- tionen und die damit zusanmenhängende Fragen bezüg- lich der Filterrealisierung besprochen. In1 Anschluß daran können dann verschiedene Möglichkeiten zur Iinplemen- tierung dieser Filterstrukturen mit veränderbarer Wirkungs- funktion verglichen werden, wobei besonders der Einsatz von Mikroprozessoren diskutiert wird.
2 Filterstrukturen und deren Eigenschaften 1 Einleitung
Zur Verbesserung der Tonqualität werden die von Natur aus analogen Signale in Tonstudios in zunehmendem Maße digi- tal verarbeitet. Dies bedingt, daß sämtliche Einrichtungen zur Programmgestalt~iiig, wie z.B. Schneidevorriclit~~ngen, Regie- und Mischpulte, Filter und Entzerrer, ebenfalls digi- tal realisiert werden müssen [ l , 21. Dabei sollen die von analogen Realisierungen her gewohnten Möglichkeiten zur Einstellung und Bedienung weitestgehend erhalten bleiben. Dies gilt besonders auch für die stufenweise einstellbaren Tiefpaß- und Hochpaßfilter zur Klangforinung und Effekt- erzeugung. In der Tontechnik werden für diese Aufgabe vor- zugsweise Filter niedriger Ordnung mit n-iaximal flachem Betragsverlauf in1 Diirchlal3bereich und vorgegebener Flankensteilheit (z.B. Potenzfilter) eingesetzt. Die digitale Verarbeitung geschieht hierbei mit einer Abtastrate um 50 kHz.
Zur Lösung der genannten Aufgabe bieten sich unter- schiedliche Strukturen digitaler Filter an. Als Beispiele hier- Kir seien genannt: Nicl-itrekursive (FIR-) Filter [3, 41, die mit exakt linearem Phasengang (konstanter Gruppenlauf- zeit) realisiert werden können, und rekursive Filter, bei- spielsweise in der direkten Form [3, 41 oder als Wellen- digitalfilter (WDF) [5, 61. Weiterhin sind zur Variation der
*) Dip1.-Ing. Heinz Göckler. ANT Nachrichtentechnik GmbH, Backnang. Manuskripteingang: 5. 9. 1984
In diesem Abschnitt werden die nachfolgend betrachteten Filterstrukturen dargestellt und deren Eigenschaften disk~i- tiert. Da verschiedene Arbeiten [10, 111 die Forderung eines linearen Phasenverlaufs der Filterwirk~ingsf~inktiori nahelegen, wird zunächst auf niclztrekursive (FIR, Finite Impulse Response) Filter mit symmetrischer Imp~~lsan twor t eingegangen, die einen exakt linearen Phasengang auf- weisen. Eine alternative Möglichkeit ist die Verwendung rekursiver Filter, z.B. in der direkten oder Kaskadenform oder als Wellendigitalfilter (WDF). Diese-Filter sind übli- cherweise n~inimalpliasig, ihre Gruppenlaufzeit ist grund- sätzlich immer frequenzabliängig [3, 4 , 401.
2.1 Linearphasige. FIR-Filter
In Bild 1 sind zwei Signalfl~~ßgraphen linearpliasiger FIR- Filter dargestellt [8, 121. Die Wirkungsf~inktioii der meist verwendeten direkten Form (Bild I a) ist durch
gegeben, wobei für den Filtergrad bzw. für die kaiioilische Anzalil der Verzöger~iilgsglieder N = 2 11 gilt. Die Taylor- Struktur (Bild 1 b) eignet sich zur unmittelbaren Inipleme~l- tierung einer Frequeiizaclisentransformation, bei der die

0)
xlkl o-
Bild I . Signalflußgrapheii linearphasigcr FIR-Filtci a ) clirckte Form 14, 12 , 401 b) Taylor-Striikt~ir [8]
Linearpliasigkeit des Prototypfilters erhalten bleibt (vgl. Abschnitt 3.1). Die zugehörige Wirkungsfunktion ist [SI:
= - 1 1 C ff, [(z + z-1 )/-Iv 72=0
Dabei lassen sich die Werte {U,) mit Hilfe der Koeffizien- ten des Tschebysclieff-Polyiioins 11-ter Ordnung von der Impulsantwort {lz,) gemäß GI. (1) ableiten. Auch hier gilt für den Filtergrad N = 2 11, wohingegell die Zahl der Verzö- gerungsglieder größer als Ar ist (nichtkarioniscl~e Struktur). Durch Kaskadieruiig von Taylor-Blöcken vierten Grades Iäßt sich allerdings die Zalil der Verzöger~ingeri auf N ver- mindern [8].
Nachfolgend werden die hier interessierenden Eigen- schaften der Filterstrukturen gemäß Bild 1 i ~ i i einzelnen zusaminenge tragen.
hht heiden Strukturen sind beliebige Frequenzgänge des Betrags der Wirkuiigsfunktioii realisierbar: Durclilaßbereich tscliebyscheffscli [13, 141 oder iiiaxiii~al flach [15, 161, des- gleichen im Sperrbereicli. Ini Übergangsbereich (Filterflan- ken) können beliebige Verläufe approximiert werden [42]. Der Phaseiigang der Wirkungsf~inktioneii geinäß Gln. (1 ) tind (2) ist exakt linear, die Gruppenlaufzeit frequenz- ~inabliängig. Als Folge ergibt sich eine hohe Gsunclla~~fzeit dieser Filter:
hierbei ist .fA die Abtastfrequenz.
Der Filtergrad N liiiearpliasiger Tief- und Hocliplsse ist grundsätzlich höher als der mininialpl-iasiger rekursiver Filter mit entsprechendem Dänipfungsverlauf [3, 41. Bei vorgegebenen Durclilaß- und Sperrbereichstoleranzeii ist der Filtergrad eines Tiefpasses gemäß [17] in guter Näherung
umgekehrt proportional zur relativen Breite der Frequenz- lücke AF = A J / fA zwisclien Durcl-ilaß- und Sperrbereicli (Übergaiigsbereich). Ist für Tiefpässe, wie in der Tontechiiik üblich, a~ißerhalb des Durclilaßbereiclis ein bestimniter Dämpfungsanstieg pro Oktavband gefordert, so ist die Sperrgrei-izfreq~ienz fs proportional zur Durclilaßeck- frequenz f d , es gilt also Js = c f d , wobei C eine Proportiona- lilätskonstante ist. Führt inan diese Beziehung in clie Abscliätzungsforiiiel [ I71 für den Grad linearphasiger FIR- Tiefpaßfilter ein, so erhält man clen Zusaniinenhang, der sinngemäß auch für I-Ioclzpässe gilt:
Of'fensiclitlich ist bei clen hier vorliegenden Randbedin- gungen der erforderliche Filtergrad liiiearpliasiger Tief- und I-Ioclipässe zur spezifizierten Filterbandbreite umgekehrt proportional. (Zahlenbeispiele sind Abschnitt 5 zu eiitnel-i- iiien. )
I-Iierbei ist zwischen den beiden Strukturen von Bild 1 zu iinterscheiden. Für die direkte Form (Bild 1 a) gilt:
- Multiplikationsrate : M D = ( n + 1 ) f A = (NI2 + 1 ) .fA , - Additionsrate: AD=2i7 f A = N f A , - Zahl der
Verzögerungsglieder: VD = 2 tz = N .
Für die Taylor-Struktur (Bild 1 b) gilt:
- M~iltiplikationsrate: lWT = ( n + 1) fA =MD , - Additionsrate: AT =2rz f A = A D ,
' - Zahl der Verzögerungsglieder: VT = 2 iz = 1,s V D .
Ein weiterer Parameter, der in den Gesamtaufwand einer Filterrealisierung eingeht, ist die Koeffizientenwortlänge. Sie hängt vom Filtergrad und von den Genauigkeitsanforde- rungen an die Filterfiinktion ab [I-1. Aufgrund eingehender Untersucliungen der direkten Form und der mit der Taylor- Struktur verwandten Newton-Struktur ist davon aus- zugehen, daß die Taylor-Struktur eine etwas größere innere Wortlänge erfordert als die direkte Form [12].
Da FIR-Filter gemäß Bild 1 nicl-itrek~~rsive (iückkopplungs- freie) Systeme darstellen, können grundsätzlicli keine Instabilitäten auftreten.
Unter der ~iina1;me gleiclier Wortlängen am Filtereingang und -ausgang ist die Ausgangsfolge eines Digitalfilters auf- grunil von filterinterneii Rundungsvorgäiigen (Niclitlineari- täten) grundsätzlicli fehlerbel-iaftet. Zur rechneriscl-ien Erfassung dieser Effekte werden Rundungs- oder Scl-ineicle- vorgänge übliclierweise durch weiße Rauscliq~iellen model- liert [3, 4, 121.
Offensiclitlicl-i sind die beiden Strukturen gemäß Bild 1 mit nur einer einzigen Rundungsstelle, nänilicl-i unmittelbar ani Filterausgang, realisierbar. Dies ist allerdings nur dann möglich, wenn alle Teilprodukte in unverkürzter Form aufaddiert werden. Dies bedingt in der Taylor-Struktur (Bild 1 b) darüber hinaus eine Vergrößerung der Wortlänge in der unteren, aus 11 Verzögerungsgliedern aufgebauten

Bild 2. Signalfliii3graplieii rekursiver Filter a) direkte Form b) Kaskadenform mit L bzw. L - 1 Tcilfilterblöcken vom Grad 2
und 0 bzw. ciri Block von1 Grad 1, falls N gerade bzw. ungerade ist
Schiebekette. Unter diesen Voraussetzungen erzeugen die beiden Strukturen gemäß Bild 1 den für Digitalfilter kleinst- möglichen Rauschbeitrag [ 121.
2.2 Rekursive Filter
In Bild 2 ist ein rekursives Filter in der direkten und in der Kaskadenform dargestellt, während Bild 3 ein Wellendigital- filter (WDF) mit dem zugehörigen Referenzfilter wieder- gibt.
Die allgemeine Form der Wirkungsfunktion eines rekur- siven Filters ist - unabhängig von der jeweiligen Realisie- rung - beispielsweise durch [3, 4 , 401
gegeben; hierbei ist N wiederum der Filtergrad. Die unmittelbare Realisierung der gebrochen rationalen
Polynomform von H R ( z ) fiihrt auf die direkte Form (Bild 2a). Die Kaskadenform (Bild 2b) leitet sich von der Produktform in GI. (5) ab, wobei die Teilwirk~ingsfunk- tionen HA(z) höchstens von 2. Ordnung sind:
Iin Gegensatz dazu läßt sich ein WDF nicht unn~ittelbar aus GI. (5) ableiten. Hier wird iiblicherv~eise der Weg über ein Referenzfilter, meist einem beidseitig resistiv abge- schlossenen Reaktanzfilter (Bild 3 a), beschritten, indem die einzelnen Schalte!emente des Referenzfilters durch äquiva- lente digitale Glieder ersetzt werden und das Verbindungs- netzwerk mit sogenannten Aclaptoren nachgebildet wird [5,61.
Nachfolgend werden zunächst die allen rekursiven Filtern gemeinsamen Eigenschaften zusam~iiei~gestellt, die hier von Interesse sind. Danach folgt die Diskussion von Uiltersclieiduilgsinerkinaleii in zwei Uilterabschnitteil.
Zu allen aus der Verarbeitung zeitkoiltiriuierliclier Signale bekannten Frequenzgängen von Wirkuiigsf~inklioileii exi- stieren entsprechende gebrocl-ien ratiunale Wirk~~ngsfunk- tionen digitaler Filter gemäß G1. (5). Dies gilt besonders für die stanclardisierten Filtertypen mit minimaler Phase, wie z.B. Potenz- (Butterwortli-), Tschebyscheff- und Cauer- Filter [18, 191. Dabei ist allerdings zu beachten, daß als Folge der Periodizität des Frequenzgangs zeitdiskreter Filter eine nichtlineare Verzerrung der Frequenzachse auf- tritt [3, 4 , 191. Aufgrund der Miilirilalplzasigkeit ist die Gruncllaufzeit dieser Filtertypen erheblich kleiner als die entspechender linearplzasiger FIR-Filter gernäß GI. (3) (dies gilt auch deshalb, weil der erforderliche Filtergrad niedriger ist).
Filtergrad:
Der erforderliche Filtergrad rekursiver Filter für eine vor- gegebene Dämpf~ingsforderung ist kleiner als der linear- pliasiger FIR-Filter. Iin Gegensatz zu GI. (4) ist - wie bei Filtern für kontinuierliche Signale - der Filtergrad unabhängig von der Filterbandbreite.
Der Vergleich der Rauscheigenschaften rekursiver Filter mit den unter optiinalen Bedingungen betriebenen linearphasi- gen FIR-Filtern gemäß Abschnitt 2.1 fallt stets zu ungun- sten rekursiver Filter aus. Dies ist dadurch bedingt, daß in den Rückkopplungszweigen rekursiver Filter (Bild 2a) grundsätzlich Wortlängenverkürz~mgen vorgenommen wer- den müssen. Selbstverständlich Iäßt sich der Eigenrausch-
boA+ blAz-l + bzhz-' beitrag rekursiver Filter durch eine gröfiere filterinterne HA (z) = ; Coh"1.
cOA + c l h z - l + C ~ ~ Z - ' (6) Wortlänge, c1.h. durch Erhöhung des Aufwands, lierab-
setzen.
2.2.1 Direkte urzd Kaskaclenforrn
In diesem Unterabschnitt wird auf die spezifischen Eigen- schaften digitaler Potenz-, Tschebyscheff- und Cauer-Filter
T C N - i ' 2 gemäß Bild 2 eingegangen. Bei diesen Filtertypen gelten für die Koeffizienten der Zählerpolynonie von U R (z) gemäfi Gln. (5) und (6) die Syminetriebezieli~~~lgeii:
b , = bN-I, für alle V . (7)
Die nachfolgenden Angaben basieren auf der Aiinahme, daß der Filtergrad Ar gerade ist (L = N / 2 für die Kaskaden-
Bild 3. Wellendigitalfilter als Allpolfilter form) und daß die Realisierung des Zählerpolynoms unter
a) Referenzfilter Ausnutzung von GI. (7) entsprechend Bild l a vorgenoin- b) vom Referenzfiltk abgeleitete digitale Realisierung (WDF) inen wird:

Au fivaricl flir. die Sc/iolt~lrigsrealisiei7itig: tierten Strukturen. Daher ist es ~iiögliclz, in1 WDF univer- selle Multiplikationen durch weniger aufwendige Schiebe-
Für die direkte Form (Bild 2a ) gilt: operationen und Additionen zu ersetzen, was durch eine spezielle Koeffizientencodieruilg (CSD-Code) noch begün-
- Multiplikationsrate: A f R D = (NI2 + 1 + N ) fA stigt wird [22, 371. = ( 1 , 5 N + I ) ~ A ,
- Adclitionsrate: A R D = 2 N f ~ , - Zahl der
Verzögeizitigsglieder: V R D = Ar.
Für die Kaskaclenform (Bild 2b) gilt:
- Multiplikationsrate: A f R K = 11ffA L = 4 L fA
- Additionsrate: - Zahl der
Verzögerungsglieder: VRI< = VRD = Ar
Auch bei rekursiven Filtern ist die Koeffizientenwort- länge vom Filtergrad und von den vorgegebenen Spezifika- tionen abhängig. Dabei erfordert die direkte Form vor allem bei steilen Filtern bzw. bei höheren Filtergraden eine größere Wortlänge als die Kaskadenform [3, 41.
Ein ideales zeitdiskretes Filter ist ein lineares System, das irn systemtlieoretisclie~i Sinne stabil ist. Bei praktisch reali- sierten Digitalfiltern ist dagegen die Dynamik aufgrund der endlichen Wortlänge der Signale begrenzt, weshalb ein digitales Filter - bedingt durch Rundungsvorgänge und Überlaufmaiiip~~lationen - im allgemeinen nichtlineare Eigenschaften aufweist. Als Folge dieser Nichtlinearitäten können bei nichtangeregten rekursiven Digitalfiltern in Abhängigkeit von den jeweiligen Anfangszuständen der Datenspeicller (Verzögerungsglieder) Überlaufschwingungen und/oder granulare Schwingungen (Grenzzyklen) auftreten [20]. Letztere sind dadurch gekennzeichnet, daß ihre Aniplitude kleiner ist als die jeweilige Aussteuergrenze des Filters. Bei deterministischen (z.B. periodischen) Eingangs- folgen eines rekursiven Filters können sich darüber hinaus in Abhängigkeit von den filterinteriien Anfangsbedingungen durch Zalilenbereichüberschreitungeii verschiedene statio- näre Zustände für ein und dasselbe Eingangssignal einstellen (vgl. Antwortstabilität [20]). Diese Stabilitätsprobleme rekursiver Digitalfilter lassen sich mit der Kaskadenform gemäß Bild 2 b besser - wenn auch nicht völlig - beherr- schen als mit der direkten Form (Bild 2a).
2.2.2 Welleiidigitalfilter
Bei der Betrachtung der WDF wird von Allpolfiltern, z.B. Potenz- und Tscliebyscheff-Filtern, ausgegangen, wobei die zugehörigen Referenzfilter als Abzweigschaltungen vor- liegen [ 18, 2 1 1. Bezüglich der Zahl der Verzögerungsglieder
s i n d diese WDF kanonisch (Bild 3).
ALL fivancl fiir die Sclzalt~irigsrealisier~~tig [2 1 , 221:
- Multiplikatio~israte: MRW = ( N + I) fA , - Aclditionsrate: ARW = 6 N f ~ , - Zahl der
Verzögerungsglieder: VRw = N .
Die in Abschnitt 2.2.1 angesprochenen Stabilitätsprobleme rekursiver Filter lassen sich durch den Einsatz von WDF (z.B. in der Form geniäi3 Bild 3) vollständig beherrschen [20, 211.
3 Frequenztransformationen
Analog zu den Reaktanztransformationen, mit clenen sich der Frequenzgang kontinuierlicher Filter verändern Iäßt, kann man mit I-Iilfe von Allpaßtransformatioiieri die Übertragungscharakteristik digitaler Filter variieren bzw. ~imrechneii [7 , 9, 23, 24, 40, 411. Ein derartiger Trans- forinatioiisalgoritlim~~s kann schalt~ingstechnisch irnplernen- tiert werden, indem jedes Verzögerungsglied gemäß der Beziehung
durch ein komplexeres digitales Netzwerk ersetzt wird. Ist dabei g (z-l) voraussetz~~ngsgeniäß eine Allpaßfunktion, so kann durch Änderung nur eines Parameters beispielsweise die Durchlaßgrenzfreq~~enz eines digitalen Tiefpaßfilters beliebiger Ordnung variiert werden. Nachteilig ist, daß durch diese Allpaßtransformation eine ursprünglich vorhan- dene lineare Phase verloren geht [9, 411. Darüber hinaus treten bei rekursiven Prototypfiltern verzögerungsfreie und damit nicht realisierbare Schleifen auf [9, 24, 4 I], was am Beispiel eines WDF-Adaptors in Bild 4 gezeigt ist. Aus diesem Grund wird nachfolgend zunächst eine Frequenz- achsentransformation fur linearphasige FIR-Filter beschrie-
Allpoß
1 Ordnung
Verzögerungsfreie Schle i fe
~ ~ f ~ ~ ~ ~ ~ ~ d der günstigeil ~mpf ind~ic~~e i t se ige i l sc~ ,a f te l l Bild 4. Direkte Implementierung der Tiefpaß-Tiefpaß-Transforma- tion (14) in WDF
der resistiv abgeschlossenen Referenzfilter (Bild 3 a) sind die a) synlbolische für die Koeffizienten Von WDF erforderlichen Wortläilgeil b) vollständige DarstelluIig mit Kennzeiclinung der verzögerungs- im allgemeinen erheblich kürzer als die für alle bisher disku- freien Schleife [ 6 ]

ben, bei deren Anweiidu~lg die Eigenschaft der linearen Phase erhalten bleibt [8]. Danach wird auf die iiach den genannten Einscliränkungen noch verbleibenden Möglicli- keiteii für den Einsatz der Allpaßtransforiiiation [7] bei rekursiven Filtern eingegangen.
3.1 Linearphasige FIR-Filter
Die zii beschreibende Frequenztransfor~i~ation für liiiear- phasige FIR-Filter [X, 251 basiert auf der Verwendung der Taylor-Struktur (Bild 1 b) mit der zugehörigen Wirkungs- funktion HTO ((z + z-l)/2) geinäfi GI. (2). An die Stelle der allgemeinen Beziehung (8) tritt die Variablensubstit~itioii
mit cler frequenztransformierentlen Eigenschaft:
Da eine Tiefpafi-Tiefpaß-Transformation gemäß GI. (9 a) durch einen Parameter eindeutig festgelegt ist, niuß als Zusatzbedingung ein tra~isforrnationsinvari~~~iter Punkt auf cler Frequenzaclise f = f p = f i vorgegeben werden 181, für den gilt:
Dann ergibt sich beispielsweise für f i = 0 :
oder für f i = fA/2:
Soll die Durchlaßgrenzfrequeilz fd eines Prototyptief- paßfilters nach f 2 traiisformiert werden, so ist der ver- bleibende Parameter A scl-iließlicli durch
festgelegt. Dabei bezieht sich das obere Vorzeichen auf die Bedingung (1 1) und das untere auf G1. (12). Für die Tief- paß-Iloclipaß-Trarisfonnatioii gelten entsprechende Zusarn- nienhänge. Hierbei ist lediglich auf der rechten Seite von GI. (9a) z durch - z zu ersetzen [7].
Neben cler Erhaltung des linearen Pliasengangs von FIR- Filtern hat diese Frecluenztraiisforination die Eigenscliaft, daß der Teilabsclmitt des Betragsverlaufs der Prototyp- wirku~lgsfunktion in1 Freqiienzintervall [fi, fz] C [O, fA/2] auf den gesamten Nyquistfrequenzbereicli [O, fA/2] abgebil- det wird [8, 251. Dadurch wird die Breite des Übergangs- bereiclis nf gr~~ndsätzlicli vergrößert. Demzufolge niuß beim Entwurf des Pro totypfilters von der scliärfsten Einzel- spezifikation ausgegangen werden. Gemäß GI. (4) führt diese Forderung bei cler hier vorliegenden Aufgabenstellung auf das Filter mit der größten absoluten Flankensteillieit. Da die Freq~~erizachsentra~~sformation (9b) in weiten Bereichen in guter Nälierung linear ist [25], wird durch deren Anwendung die relative Flankensteillieit (Däinpfungs- anstieg pro Oktave) des Prototypfilters nur verhältnis- mäßig wenig verändert. Geinessen an dem optimalen Filter-
Bild 5. Sigiialfliißgraplieii zur Iinplenieiitieruiig einstellbarer FIR- Filter mit linearer Phase (Taylor-Str~iktur) a) allgemeine Frcq~ienzaclisentraiisformation b) Spezialfall gern35 GI. (11) und GI. (12)
entwurf für eine vorgegebene Uurchlaßgreilzfreq~1e1iz fd =J'$ ist gemäß GI. (4) der Filtergrad N des transformier- ten Prototypfilters allerdings zu hoch [8].
In Bild 5a ist eine Taylor-Struktur wiedergegeben, in der die Frequeiiztra~isforinatiori GI. (9) implementiert ist. Diese Anordnung Iäßt sich durch die Berücksiclitigling von G1. ( 1 1) bzw. GI. (1 2) vereinfachen (Bild 5 b). Für jedes substituierende Netzwerk werden dann nur ein zusätz- licher Multiplizierer und - wie in der Originalstruktur (Bild 1 b) - zwei Verzögerungsglieder benötigt.
Mit der Freq~~enztransforination (9) ist es weiterhin möglich, die Koeffizienten einer Taylor-Struktur in Abhä~i - gigkeit von der Durcl-ilaßgrenzfreq~1enz des Filters umzu- rechnen. Darüber liinaus kann Inan auch die Koeffizienten (a,) der Taylor-Struktur in die Koeffizienten {h,,) der auf- wandsgünstigeren direkten Form überführen (Bild 1). I11 beiden Fällen ist allerdings ein erheblicher Rechenaufwand erforderlich.
3.2 Rekursive Filter
Für rekursive Filter nimmt in1 Fall der Tiefpafi-Tiefpaß- Transformation die allgenieine Beziehung (8) die Form
an [7, 41, 421. Dabei gilt für den Parameter a:
wobei fd wiecleruin die Durcl-ilaßgrenzfreq~~eiiz des Proto- typfilters und f$ die zugehörige transforinierte Frequenz ist. Setzt man in GI. (14) z = exp ( j 2 ~rJ'/f*), so erhält man unter Berücksichtigung von G1. (15) die funktionalen Zusainmenliänge [23]:

Iin Gegensatz zu GI. (9) wircl init der Trailsforiiiatioii (16) die gesamte Freqiiei-izaclise des Prototypfilters auf die gesamte Frequenzaclise des Bilclbereichs abgebildet. Da clie beiden Frequei~zpiinkte j'p = J ' = 0 uiid J'P = J ' = Jh/2 trans- forinatioiisiiivariant sind, ist die Abbildung (16) iirn so stärker nichtlinear, je größer die Betragscliffereiiz I Jd -J '$ I bzw. I Q I ist. Als Folge wird die ursprüngliclie relative Flan- keiisteilheit des Prototypfilters mehr oder weniger ver- fälscht. Dabei bewirkt die Abbildung (16) eine Streckung (Stauchung) der Frequenzachse, wenn clie~Steigung gemäß GI. (17) größer (kleiner) ist als Eins. Bezogen auf die Orgiiialfrequenzaclise stoßen cliese beiclen Teilbereiche bei der Frequenz
aneinander. Für die hier interessierei-icle relative Flanken- steillieit ist dagegen die Frequenz J'„ von Bedeutung, bei der die Steigung GI. (17) cler Abbildungsf~inktioil (16) den Wunschwert clfP/df = J'$/& anilimint:
Wälilt man die Durclilaßgrenzfreqi~e~lz fd des Prototyp- filters zu
entsprechend der kleinsten vorkoinrneildeii Bandbreite aller vom Prototypen abgeleiteten Tiefpässe, so gilt wegen G1.(15) a<O, ( I - a ) / ( l + a ) > l uncl f $ / f d > l . Mit GI. (19) folgt dann uninittelbar, claß j, f l ist. Darüber hinaus läßt sich zeigen, claß auch die Beziehui-ig
gilt. Deinzufolge führt die Festlegiiiig der Durclilaßeck- frcquenz des Prototypfilters gemäß G1. (20) wegen GI. (21) stets zu einer Erhöhung der relativen Flankeiisteilheit.
Eiitsprechende Überlegungen gelten si~ingemäß aiich für die Tiefpaß-Hoclipaß-Traiisforination [7, 231:
3.2.1 Direkte z i~~cl RnslcaclerzJOrr~7
Da die unmittelbare Imple~nentierung der Variablentrails- formationeil (14) und (22) in rekursiven Filtern zu verzöge- rungsfreien Schleifen führt (Bild 4), können cliese Allpaß- trailsformationen in1 Z ~ ~ s a n ~ i n e n h a n g mit diesen Filtern nur für die Koeffizieiltenui~irecliri~i~~g eingesetzt werden. Bei- spielsweise führt die Anwentlung der Tiefpaß-Tiefpaß-Tra~is- fo r i i i a t io~~ (14) auf einen Filterblock vom Grad 2 gemäß
G1. (6) in Al~liiingigkeit von den Koeffizienten des Proto- typfilters auf clie trai-isformierteil Koeffizieiitenwerte [9, 411:
bE/\ = ( 1 /cgA) [boA „ + @!* b2h] >
Offensichtlich ist bei einer I~i~pl~riieiitieriiiig der Allpaß- triirisforii~atioi~eii per Koeffizienteii~iiiirecl~ii~iilg die in1 allgenieinen weniger erwiiilsclite Operation der Division aus- zuführen.
Entsprechend wie bei der direkten oder Kaskaclenforni rekursiver Filter ist es auch bei WDF inöglicli, die Aclaptor- koeffizienten z.B. eines Tiefpaßfilters mit einstelll~arer Durclilaßgreilzfreq~ieiiz von einem Prototypfilter abzu- leiten. Im Fall cler WDF bietet sich als Prototyp das Refe- renzfilter an. Die Freq~~eiiztrailcforination kann dann in1 Frequenzbereich des Referenzfilters durch Umnormieren der Eleinentewerte mit der gewünschten Durchlaßgrenz- frequenz J's vor,genoinrneil werden [3, 18, 191. Anscliließencl sind lecliglich die Adaptorkoeffiziei~tei~ und die vorab nicht bekannten Torwiderstände für eine fest vorgegebene Filter- struktur zu berechnen. Dies entspricht dem übliclien Vorgang der Überführung eines Referenzfilters in die zugehörige WDF-Struktur [5, 6 , 211, wobei - wie im Falle der Kaskadenform - Divisionen ausgefuhrt werden müssen. Der hierfür erforderliche Recheilaufwand ist in seinem U~nfaiig vergleichbar mit dein für die Unirechiiung cler Kaskadenforin gemäß GI. (23).
Ein ähiilicher Vorschlag ist [26] zu eiltnehmen. Dort wird eine universelle Bandpaßstruktiir eines WDF zugrunde- gelegt. Aiisgehencl von dieser A~iorcl~iung ist es dann mög- lich, Allpaßtra~~sforrnatioiien 1 . und 2. Ordnung (2.B. Tiefpaß-Tiefpaß- und Tiefpaß-Baiidpaß-Transformatioile~i) durchzuführen.
4 Vergleich unterschiedlicher Realisier~~~~gsmöglichkeiten
Nach den bisherigen Ausführungen bieten sich für clie Realisierung eiilstellbarer Digitalfilter in1 wesentlichen drei Möglichkeiten an:
A. Die Filterparanieter wercleii für vorgegebene Spezifika- tionen berechnet und an clas Filter mit einstellbaren Koeffizienten übergeben [9, 4 1, 431. Während clie Signal- verarbeitung iin Filter in Echtzeit vorgei.iomrnen wircl, steht für die Koeffizienteiiermittl~~iig auch bei nicht- trivialen Algorithmen ausreichend Zeit zur Verfügung (Größeiiordn~~iig in1 Sek~incleiibereicli). Als Möglichlceit für die Koeffizieiitenberecl~nung bieten sich vereiilfachte (gegebenenfalls suboptiil~ale) Filtereiltwiirfsverfahreil oder die in Abschnitt 3 belianclelteii Frequeilzachseii- transfornlatioilei~ an.

Die Frequeilztrailsfomatioiieil gemäß Abschnitt 3 wer- den im Filter unmittelbar harclware- oder softwaremäßig realisiert. Der Frequenzgang des Filters läßt sicli dann mit nur wenigen Parametern - in1 Fall der Tiefpaß-Tief- paß-Tra~isformatioii mit nur einem Parameter - variie- ren. Iin Gegensatz zu A kann liier die Änderung der Filtercliarakteristik verzögerungsfrei erfolgen.
Die Koeffizientensätze aller gewünschten Filtereinstell- mögliclikeiten werden vorausbereclinet, abgespeichert und auf Abruf an das Filter mit veränderbaren Koeffi- zienten übergeben. Auch hier ist eine schnelle Umschal- tung der Filtercliarakteristik möglich. Allerdings ist die Variationsvielfalt dieser Implenientierung in1 Gegensatz zu A und B auf die abgespeiclierten Koeffizientensätze beschränkt.
Nachfolgend wird untersucht, wie sich diese drei Prinzi- pien mit Hilfe cler in Abschnitt 2 beschriebenen Filterstruk- turen realisieren lassen. Dabei sei vermerkt, claß der Ansatz cler verteilten Aritl-inietik [27-301 für einstellbare Filter im allgemeinen zu weniger effizienten Realisier~~ngsmöglicli- keiten führt.
4.1 Linearphasige FIR-Filter
In diesem Abschnitt sei zunächst auf die direkte Form gemäß Bild l a eingegangen, bei der für die Veränderung cler Filtercliarakteristik die Methoden A und C in Frage koininen. Für diese Struktur ist in Bild 6 eine effiziente Realisierung dargestellt, wobei aus Gründen der Übersicht- lichkeit von der Symmetrie der Impulsantwort (Linear- phasigkeit) kein Gebrauch gemacht wird: An den beiden Eingängen des Multiplizierer-Akku~nulator-Baustei~is (MAC [31]) liegen jeweils die miteinander zu multiplizierenden Daten und Koeffizienten in paralleler Form mit einer Wortbreite von W bit an (Tontechnik: W = 16). Die Ablauf- steuerung sorgt - von einem Zähler kontrolliert - für die Verknüpf~ing jeweils zusamineilgelzöreiider Größen [12, 321. Der Akkumulator arbeitet intern niit doppelter Wortlänge. Somit ist es möglich, mit einer einmaligen Wortläilgenverkürzung nach Beendigung des Akkumu- lationsvorgangs auszukommen (vgl. Abschnitt 2). Durch die Ablaufsteuerung ist weiterhin die Übernalime der mit der Abtastrate fA einlaufenden Eingangsfolge in den
Datenspeicher sichergestellt. Für die Koeffizienten wird ebenso wie für die Daten ein RAM als Arbeitsspeiclier eingesetzt. 1111 Fall der Änderung der Filtercliarakteristik wird dieser Arbeitsspeicher dann voin Koeffizienten- rechner (Methode A) oder voin Koeffizientenfestwert- speiclier (Methode C) neu bescliickt.
Eine hochintegrierte Realisierung der gesamten Anorcl- nung gemäfi Bild 6 erscheint mit Hilfe eines Signalprozes- sors gemäß [33] niöglich, falls man sicli zunäclist auf Methode C beschränkt. Hierbei ist aber zu beachten, claß je nach Wahl des Signalprozessors der Koeffizientenspeicher- platz (ROM) mehr oder weniger eingeschränkt ist. Aller- dings läßt sicli clie Symmetrie der Fillerkoeffiziente~i aus- nutzen. Anhand der gewünschten Anzahl unterschiecllicher Frequenzgänge und der pro Filtercharakteristik erforcler- lichen Koeffizientenzalil kann inan feststellen, o b Pür die hier vorliegende Aufgabe einer der Signalprozessoren gemäß [33] geeignet ist. Im übrigen sind die Eigenschaften dieser Signalprozessoren (Datenwortlänge 16 bit, Speicherkapazi- tät (ROM und RAM), Zykluszeit ~ 2 5 0 1 1 s ) cler liier interessierenclen tonteclinischen Anwendung angemessen.
Im Gegensatz zur direkten Form wird inan clie Taylor- Struktur (Bild 1) sinnvollerweise nur in1 Zusaininenhang mit der Methode B, cler unmittelbaren Iinpleiiieiltieru~ig der Frequenztransformation gemäß Abschnitt 3 (Bild 5), ein- setzen. Auch diese Struktur läßt sich grundsätzlich mit einem MAC-Baustein, der iin Zeitmultiplex betrieben wird, aufbauen. Da die Taylor-Struktur gemäß Bild 5 aber wesent- lich stärker vermascbt (weniger modular) ist als die direkte Form, erfordert eine Bild 6 entspreclieiide Realisierung (der Koeffizientenrechner bzw. -speicher entfallt) einen merk- lich höheren Aufwand für die Ablaufsteuerung. Demzufolge erscheint die Realisier~ing der Taylor-Struktur in1 Zusani- menhang mit Methode B mit Hilfe eines Signalprozessors als die angemessenere Lösung, da hier die koniplexere Ablauf- steuerung weitgehend durch das Mikroprogramm kontrol- liert werden kann. Bei dieser Implementierung müssen die für alle Filtercliarakteristikeii identischen Koeffizienten {a,Iv = 0 , 1, 2, . . . , n } voin Koeffizientenspeiclier (ROM) abrufbar sein. Darüber hinaus sind die ~~nterschiedlichen Frequenzgängen zugeordneten Parameter Ao„ bereitzustel- len (Bild 5). Auch diese Aufgabe kann der prozessorinterne Koeffizientenspeiclier walirnelimen. Da pro Frequenzgang nur ein zusätzlicher Parameter zu speichern ist, ist die
16 Eingang
Bild 6. Effiziente Realisierung von nichtrekursiven FIR-Filtern in der direkten Form mit Multiplizierer-Akkiiinulator-Baustein (IvIAC): Methode A und C
8

Bild 7. Niclitkanonisclie direkte Form rekursiver Filter
Variationsvielfalt - obwohl beschränkt - wesentlich größer als bei cler l'rozessorrealisiei-uiig der direkten Form auf cler Basis von Methode C. Allerdings ist zu bemerken, daß cler Eigenrauschbeitrag der so implementierten Taylor-Struktur aufgrund dei- verfügbaren internen Wortlänge cle~~tlich größer ist als der der beiden beschriebenen Realisieruiigs- möglichkeiten für clie direkte Forin (vgl. Abschnitt 2). Abhilfe könnte hier eine Doppelwortverarbeit~ing bringen, sofern unter den gegebenen Randbedingungen die Lei- stungsfähigkeit des jeweiligen Prozessors dazu ausreicht.
4.2 Rekursive Filter
Einstellbare rekursive Filter sind auf die Methoden A ~ i n d C beschränkt, da bei der schaltungsmäßigen Implementierung der in Abschnitt 3 besprocheneii Frequenztransforinat iom verzögerungsfreie Schleifen auftreten.
4.2.1 Direkte z~izcl Kaskade?zfou?z
Entsprechend Bild 6 lassen sich auch rekursive Filter in der direkten Forin unter Mel-irfachausiiutzung eines MAC-Bau- steins realisieren. Dabei wird von der in Bild 7 dargestellten Struktur ausgegangen, die iin Gegensatz zu Bild 2a mehr als die minimal mögliclie Anzahl von Verzögeru~igsgliederil benötigt. Die Verwendung dieser Struktur ist aber dennoch vorteilhaft, da die Struktur gemäß Bild 7 nur einen Suinina- tionspunkt aufweist. Die Architektur einer realisierenden Schaltungsanordnung für Bild 7 ist Bild 8 zu entnehiuen. Anstelle des einen Schieberegisters für die Daten (RAM) in Bild 6 sind zwei Schieberegister getreten - eines für die
Eingang * 16
Eingangsfolge ~ i n d eines für die Ausgangsfolge. Dadurch und wegen der größeren Zahl von Uinsclialtern ist der Aufwand für die Ablaufsteuerung höher als bei FIR-Filtern. Ferner ist zu beachten, claß trotz der cloppeltgeiia~~en Akkuni~ilation in1 MAC-Baustein clie Eigenrauschleistung einer rekursiven Realisier~ing stets größer ist als die einer entsprechenden nichtrekursiven liuplenieiitieruilg (s. Abschnitt 2).
Beschränkt man sich bei der Variation des Filterfre- quenzgangs auf Methocle C, so Iäßt sich clie gesamte Anorcl- nung geniäi3 Bild 8 wiederum mit einem Signalprozessor realisieren. Da der Filtergrad rekursiver Filter erheblich kleiner sein kann als der nichtrekursiver Filter, stellt hier die beschränktere Zahl cler verfügbaren Koeffizienten- speicherplätze des Signalprozessors iin allgemeinen keinen Engpaß mehr dar. Darüber hinaus verbleibt wegen der durch clie kleineren Filtergrade bedingten geringeren Multiplika- tionsrate mehr Spielraum für die in1 Vergleich mit EIR- Filtern komplexere Ablaufsteuerung geniäi3 Bild 8.
Die bisherigen Ausführungen gelten enlsprechend auch für clie Kaskadenform gemäß Bild 2b. In diesen Zusammen- hang gestellt, repräsentiert Bild 8 die Sclzaltuilgsaiiord11~11lg für die Iinplementierurig eines Teilfilterblocks vom Grad 2. Zur Realisierung der Gesamtfilterfurlktion wird dieser eine Block 2. Grades in1 Filterinultiplexbetrieb mehrfach aus- genutzt 14, 231. Offensichtlich ist der Aufwand für die Ablaufsteuerung bei der Kaskadenform größer als bei der direkten Form. Ergänzend sei noch a ~ i f die Arbeit [34] hingewiesen, in der die Realisierung eines rekursiven Filter- blocks vom Grad 2 gemäß Bild 2 a unter Verwendung eines MAC beschrieben wird.
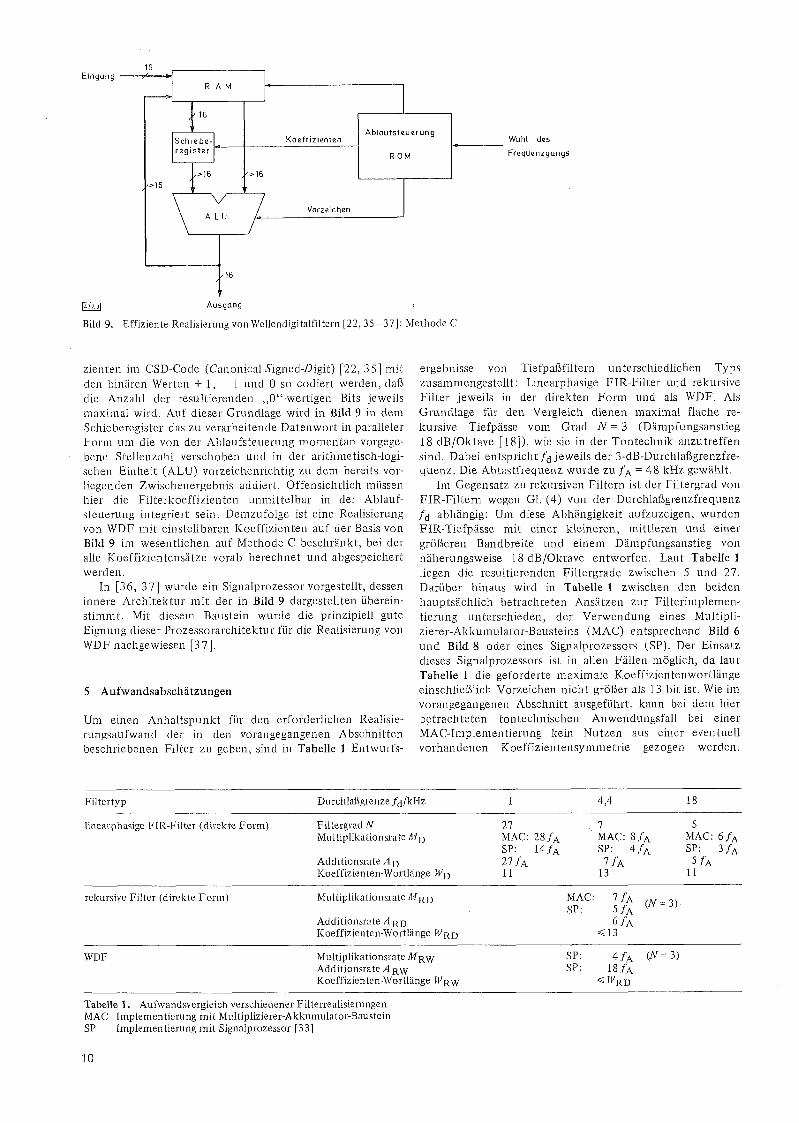
Wie in Abschnitt 2 ausgeführt, kommen WDF ,häufig mit kürzeren Wortlängen für die Filterkoeffizienten aus als andere Filtertypen [22]. Mit einer Signalprozessorstruktur gemäß Bild 9 Iäßt sich diese Eigenschaft der WDF vorteil- haft ausnutzen. Hierbei werden die einzelnen Multiplika- tionen durch wiederholte Schiebeoperationen mit jeweils nachfolgender Addition von Zwisclieilergebiiissen ~ealisiert. Die Durchführung von Multiplikationen ist auf diese Art um so effizienter, je kürzer die Koeffizientenwortlänge bzw. je mehr -0"-wertige Bits in den einzelnen Koeffizienten enthalten sind. Das Optimum erhält Inan, wenn die Koeffi-
Kaeff . -rechner
oder - Speicher Wahl des
( R O M ) Frequenz - g a n g = L-!-
Bild 8. Effiziente Realisierung von rekursiven Filtern in der direkten Form (nichtkanonisch) mit Miiltiplizierer-Akk~~mt~lator-Baustein (MAC): Methode A iiiid C
9
16
R A M C I Eingang
Ablaufsteuerung
Ausgang
Bild 9. Effiziente Rcalisieruiig von Wcllendigitalfiltcrn [22, 35-37]: Methode C
F Wahl des
Frequenzgangs
zienten in1 CSD-Code (Canonical Signecl-Digit) [22, 351 mit den binaren Werten + 1 , - 1 uncl 0 so codiert werden, daß die Anzahl der resultierenden „O"-wertigen Bits jeweils ~naximal wird. Auf dieser Grundlage wird in Bild 9 in dem Schieberegister das zu verarbeitende Datenwort in paralleler Form ~1111 die von der Abla~ifsteuerung momentan vorgege- bene Stellenzahl verschoben und in der aritl-imetiscli-logi- sclien Einheit (ALU) vorzeiclienrichtig zu dem bereits vor- liegenden Zwischenergebnis addiert. Offensichtlich müssen hier die Filterkoeffizienten inm mittelbar in der Ablauf- steuerung integriert sein. Demzufolge ist eine Realisierung von WDF mit eiilstellbaren Koeffizienten auf der Basis von Bild 9 in1 wesei~tlichen aiif Methode C beschränkt, bei der alle Koeffizientensätze vorab berechnet und abgespeicliert werden.
In [36, 371 wurde ein Signalprozessor vorgestellt, dessen innere Arcliitektur mit der in Bild 9 dargestellten überein- stinlint. hfit diesein Baustein wurde die prinzipiell gute Eignung dieser Prozessorarcllitektur für die Realisier~ing von WDF nachgewiesen [3 71.
Um einen Anhaltspunkt für deil erforderlicheil Realisie- rungsaufwancl der in den vorangegangenen Abschnitteiz beschriebenen Filter zu geben, sind in Tabelle 1 Entwurfs-
ergebnisse von Tiefpaßfiltern ~~nterschiecl l iche~~ Typs zusanimengestellt: Linearphasige FIR-Filter und rekursive Filter jeweils in der direkten Form uncl als WDF. Als Gnindlage fiir den Vergleich dienen maximal flache re- kursive Tiefpässe vom Grad IV = 3 (Dän~pf~ingsailstieg 18 dB/Oktave [18]), wie sie in der Tonteclinik anzutreffen sind. Dabei entspricht Jd jeweils der 3-dB-Durchlaßgreilzfre- quenz. Die Abtastfrequenz wurde zu f A = 48 kHz gewählt.
Iin Gegensatz zu rekursiven Filtern ist der Filtergrad von FIR-Filtern wegen G1. (4) von der Durchlaßgrenzfreq~ienz f d abhängig: Um diese Abhängigkeit aufzuzeigen, wurden FIR-Tiefpässe niit einer kleineren, mittleren und einer größeren Bandbreite und einem Dämpfungsai-istieg von näherungsweise 18 dB/Oktave entworfen. Laut Tabelle 1 liegen die resultierenden Filtergrade zwischen 5 und 27. Darüber hinaus wird in Tabelle 1 zwisclieii den beiden ha~iptsächlich betrachteten Ansätzen zur Filterin~pleinen- tierung unterschieden, der Verwendung eines Multipli- zierer-Akkui~~ulator-Ba~~steiils (MAC) entsprechend Bild 6 und Bild 8 oder eines Signalprozessors (SP). Der Einsatz dieses Sigilalprozessors ist in allen Fällen möglich, da laut Tabelle 1 die geforderte maximale Koeffizientenwortlänge einscl-iließlich Vorzeichen nicht größer als 13 bit ist. Wie in1 vorangegangenen Abschnitt ausgefulirt, kann bei dem hier betrachteten tontechnischen Anwendungsfall bei einer MAC-Implemei~tierurig kein Nutzen aus einer eventuell vorliandenen Koeffizientensyn~inetrie gezogen werden.
Filtertyp Durcl-ilaßgrenze fd/kI-Iz 1 4,4 18
linewphasige FIR-Filter (direkte Form) Filtergracl 27 7 5 Multiplikatioiisrate M D MAC: 2 8 f A MAC: 8 f A MAC: 6 f A
SP: 14 f A SP: 4 f A SP: 3 f A Additioiisrate A D 27 f' 7 f ~ 5 f ~ Kocffizicnten-Wortläiige !VD 11 13 11
rekiirsivc Filter (clirekte Form) Miiltiplikationsrate M R D h1AC: 7 f.4 (N= 3) SP: 5 f a
Adclitioiisrate A RD Koeffizieiiteii-Wortlii~ge W R D
WDF Multiplikationsrate MRW SP: 4 f A (Ar=3) Additionsrate A RW Sp: 1 8 f ~ Koeffizienten-Wortlänge WRW <
Tabelle I. Auf\vandsvcrgleicl verschiedener Filterrealisieruiigen MAC Iniplcrnentier~iiig mit Multiplizierer-Akkuiniilator-Baiisteiii SP Irnplemeiitierung mit Sigiialprozessor 1331

Deshalb sind bei clieser Realisierung die in Tabelle 1 angege- benen Werte für die M~iltiplikatiorisrate höher als bei der entsprechenden SP-Lösuiig.
Wie aus Tabelle 1 weiterhin zu entnehmen ist, Iianclelt es sicli in allen Fällen um verhältnismäßig einfache Filter. Bei einer Iinplemeiitierung der jeweiligen Filteralgoritliilie~i auf einem Signalprozessor mit einem großen Programnispeicher (> 51 2 Worte) verbleibt deshalb noch sehr viel Speicher- platz für andere Aufgaben. Es liegt daher der Gedanke nahe, in cleii Signalprozessor z~isätzlich ein Filterentw~irfspro- granim oder ein Programm zur FrequenztraiisforiiIntion a ~ i f - zurieli~neri uncl somit - vor allem in1 Fall cler FIR-Filter - clie Flexibilität des einstellbaren Filters wesentlich zu erhöhen [9, 411. Die in Abschnitt 3 beschriebenen Fre- q~~er iz t ra i i s fo r i i i a t io~~e~l für rekursive Filter uncl einfache Eiitw~~rfsverfahren für linearphasige FIR-Filter 138, 391 lassen vermuten, daß dieser Ansatz zur Implemeiitier~~ng einstellbarer Digitalfilter mit einem Signalprozessor gemäß 1331 realisierbar ist. Eine weitere Voraussetzung für clie Realisierbarkeit clieser Lösung ist, claß die jeweils aktuellen Filterlcoeffizieiiteii in den Arbeitsspeicher (RAh4) geladen und für die sich anschließende Sig~ialverarbeitu~ig ständig von dort abgerufen werden können, was gemäß 1331 mög- lich ist. Da laut Tabelle 1 maxin-ial 28 Datenwörter zusan- men mit 28 Koeffizienten abz~~speicliern sincl, verfiigt cler Arbeitsspeicher mit einer Kapazität > 128 X 16 bit für die hier vorliegende A~ifgabenstellung auch über eine aus- reichende Zahl von Speicherplätzen.
Ein grundsätzlicher Nachteil dieses Ansatzes, der bei einer Abtastfrequenz von fA = 4 8 kHz allerdings noch nicht zum Tragen kommt, ist die Verringer~ing des maximal möglichen Dateildurchsatzes durch den Prozessor. Dies ist dadurch bedingt, daß die Operanden des prozessorinternen Multiplizierers (Datenwort und Koeffizient) zeitlich nach- einander aus dem gleichen Speicher (RAM) geholt werden müssen.
6 Folgerungen
In diesem Bericht wurden exeinplarisch ~intersclzieclliche Möglicl-ikeiten für die Realisierung einstellbarer Digitalfilter für tontechnische Anwendungen beschrieben und disku- tiert.
Als Ergebnis der vorliegenden Untersuch~ing läßt sicli eine günstige und technisch a~icl-i machbare Lösung zur Realisierung einstellbarer Digitalfilter für die Tontechnik wie folgt charakterisieren:
- Filterstruktur: Linearphasiges FIR-Filter in der direkten Form (vgl. Bild 1 a).
- Filterimplementieruilg: Verwendung eines MAC-Bau- steins [3 11 zusammen mit je einem uinlaufenden Daten- und Kocffizientenspeicller (RAM) und einem Zähler zur Ablaufsteuerung (Bild 6) .
- Einr ich t~~ng zum Einstellen des Frequenzgaiigs der Filterwirkuilgsf~ii~ktioil: I~nplernentierung von Algoritli- men zur Freque~lztrarisforinatioii oder eines einfachen Filtereiltw~irfsverfal~reils auf einem separaten Prozessor. Iiiitialisier~ing der Berechnung cler Koeffizienten und deren Übergabe an den Koeffizientenspeicher des Filters vom Bedienpult aus.
Für die Verwendung der direkten Form transversaler Filter sprechen die optimaleil Rausch- und Stabilitäts- eigenschaften und unter U~nständen die Linearphasigkeit (frequeilz~iiiabliä~~gige Gruppeillaufzeit) dieser Struktur.
Darüber hinaus ist bei dieser Struktiir die Ablaufste~ieruiig wesentlich einfacher uncl folglich cler Aufwand für die Filterimplemeiltierung tle~itlich geringer als bei der Taylor- Struktur (vgl. Bild 5 ~ i n d 6). Schließlich gelten diese Aus- sagen auf entsprechencle Weise auch für den Vergleich der direkten Form transversaler Filter mit den diskutierten rekursiven Filterstrukt~iren.
Eine vereinfachte, wenn auch weniger flexible Variante der vorgeschlagenen Realisierung ergibt sich, wenn der Prozessor zur Berechnung der Filterkoeffizienten clurcli einen Festwertspeiclier (ROM) erselzl wird. Von diesem Speicher müssen ini Beclorfsfalle alle erforclerlicheri Filter- koeffizieiitensätze abrufbar sein. Eine solche Lös~iiig ist mit clen von [33] verfügbaren Signalprozessoren effizient im wesentlichen auf einein Chip realisierbar. Entsprecliencl wie bei der vorgeschlagenen Lös~ing Icann der jeweilige Signal- prozessor auch mit einem langsanieren externen Prozessor zu r Koeffizienten bcreclinuilg koni biniert werden. Der inter- essanteste Ansatz zur Realisierung einstellbarer Digitalfilter für tontechnische Anwenclu~lgen wird dann aber in dem Versuch bestehen, sowohl den Filteralgorithin~is als auch das Filterentwurfsverfi111re1l auf clemselben Prozessor zu implementieren. Hierzu sind allerclings noch eingehencle Unters~ ich~~ngen über z~ilässige Vereinfach~ingen der Filter- e i~ tw~i r f sa lgor i t l i~ i~e~i (Mininiierung der Anzahl der Befehle) durchz~iführen.
Der Autor ist clen Herren M. Bayer, E. Procliaska, H.-J. Rühl und H. Scheuermann für viele anregende Hinweise sehr zii Dank ver- pflichtet. Dank gebührt ferner Herrn Prof. E. Gleißner für die kritische Durchsiclit des Maiiuskripts.
Schrift tuin
Ricliaids, J. W . ; Ciaiwi~, I,: A prototype "all digital" studio mixing desk. Preprint 67th Conv. Audio Engng. Soc., New York, 31. 10.-3. 11. 1980 Sokamoto, N.; Yarnagirchi, S.; Ktriahaslii, A.: A professional digital audio mixer. Preprint 67 th Coiiv. Audio Engng. Soc., New York, 31. 10.-3.11. 1980 Rabinei, L. R.; Gold, B.: Theory and application of digital signal processing. Englewood Cliffs, N.J.: Prentice-Hall, 1975 Schiifllei, H. W.: Digitale Systeme zur Signalverarbeitung. Berlin: Springer, 1973 Fettweis, A.: Digital fil{er structures related t o classical filter networks. Arch.Elektr. Ubertr. 25 (1971) H. 2, S. 79-89 Scheiiermarzrz, H.: Grundlagen der Wellendigitalfilter. Wiss. Ber. AEG-Telefunken 5 4 (1981) H. 112, S. 11-24 Cor~stontinides, A . G.: Spectral transformations for digital filters. Proc.IEE 117 (1970) 5 . 1585-1590 Opper~heim, A. T< ; n/Ieckler~ biäirker, II! F. G. ; n/Ieiseierru, R . M.: Variable cutoff linear pliase digital filters. IEEE Trans. Circuit a. Syst. CAS-23 (1976) S. 199-203 Schiifller, H. W.: Implemeiitatioti of variable digital filters. In: Signal Processing: Tlieory and Applications (I-lrsg: M. Kurit; F. de Coulon). North-Holland, EURASIP, 1980 Cox , R . C.; Robir~soi!, D. M.: Some iiotes oii phase in speech sigiials. Proc. IEEE Iiit. Conf. Acoust. , Speech, Signal Process., Deiiver/Co, 9.-11.4. 1980, S. 150-153 Koite , H. W. W.; Bliithgerr, B. ; Swieri t ek , U.: Investigation procedure t o obtain perception limits of filter related sonic degradations in digital audio source encoding. I'reprint 67 th Conv. Audio Engiig. Soc., New York, 31. 10.-3. 11. 1980 Heute. U.: Über Realisierunasorobleme bei iiiclit-rekursiven Digitalfiltern Ausgew ~ i b - &er Nachr.-Syst. 20 (Iirsg.: W. Scliufiler). Erlangen, 1975 M c Clellarz, J H , Puiks, T W , RabineI, L R h computer program for designing optimuni FIR linear pliase digital filters. IEEE Trans. Audio Eleciroacoust AU-21 (1973) S. 506-526 McCollig, M. T.; Leoir, B. .J.: Coristrained FIR digital filters. IEEE Trans. Circuit a. Sys 5.893-902 F i ~ t o n m n r ~ ~ i 1U . CCD-Filter. München: Olden

Herrr?~ar~n, 0.; Rabirier, L. R.; Cliatz, D. S. K.: Practical design rules fo r Optimum finite impulse response low-pass digital filters. Bell Syst. Tecli. J . 52 (1973) S. 769-799 Saal, R . : I-Iandbucli zum Filterentwurf. Berlin: AEG-Tele- funken, 1979 Antoriioti, A.: Digital filters, analysis aiid design. New York: McGraw-Hill, 1979 Claaseri, T. A. C. M.; Atecklerzl„iii~ker, W. F. G. ; Peek, J. B. H.: Effects of quantization aiid overflow in recursive digital filters. IEEE Trans. Acoust., Speech, Signal Process. ASSP-24 (1976) S. 517-529 Meerkötter, K.: Beitrage zur Theorie der Welleiidigitalfilter. Diss. Ruhr-Univ. Boclium, 1979 Wegetier, W.: Entwurf von Wellendigitalfiltern mit rnini- malern Realisieruiigsaufwand. Diss. Ruhr-Univ. Bocliuni, 1980 Ki i~ i t z , W.; Scliiifller, W.; Wirikelr~keinpei. W.: Untersuchun- gen über Eigenschaften, Entwurf und Realisierung digitaler Filter. Ausgew. Arb.über Nadir.-Syst. 10 (Hrsg.: W. Scliüfller). Erlangen, 1969 Wi~~ke l~zkemper , W.: Einstellbare Filter. Ausgew. Arb. über Nach.-Syst. 16 (Hrsg.: W. Schüfiler). Erlangen, 1972 Crochiere, R . E.; Rabiiier, L. R.: On tlie properties of fre- quency transformations for variable cutoff linear phase digital filters. IEEE Trans. Circuit a. Syst. CAS-23 (1976) S. 684-686 EI-Gliorou~y, H. S.; Gtrpta, S. C.: Wave digital filter struc- tures with variable frequency cliaracteristics. IEEE Trans. Circuit a. Syst. CAS-23 (1976) S. 624-630 Peled, A.; Liti, B.: A new hardware realization of digital filters. IEEE Trans. Acoust., Speech, Signal Process. ASSP-22 (1974) S. 456-462 Biittiier, NI.; Schiifller, H. W.: O n structures for tlie imple- meiitation of tlie distributed arithmetic. ntz Nadir.-tecli. Z. 29 (1976) H. 6 , S. 472-477 Schröder, H.: Fast variable digital filters with programmable table look-up. Siemens Forsch.- U . EntwickL-Ber. 6 (1977) S. 191-197 Zernari, J.; Nagle, H. T.: A high-speed microprogrammable digital signal processor employing distributed arithmetic. IEEE J . Solid-State Circuits SC-1 5 (1980) S. 70-80 TRW Multipliers-Accumulators TDC 1 0 1 0 5 . Redondo Beacli/CA: TRW LSI Products, 1979 Schirm, L.: Multiplier-Accumulator application notes. EI Segundo/CA: TRW LSI Products, 1980, S. 1-14 Lacroiu, A.: Der integrierte Signalprozessor - Anwendungs- bereicli und Eigenscliaften. 14. Jtag. Gesell. f .Inform. (GI '84), TU Braunscliweig, Okt. 1984 Karii~oslci, R . J.: Second order recursive digital filter design with tlie TRW multiplier-accumulators. E1 Segundo/CA: TRW LSI Products, 1979 Esf&bari, D.; Hajek, S.; Tiibiaiia, M.: Microprogrammed digital filter. IBM Tech. Disclosure Bull. 1 8 (1976) S. 3326-3328
ANT Nachrichtentechnik GmbH Postfach 11 20 71 5 0 Backnang Telefon (0 71 91) 13-1 . Telex 7 24 406-0
Gazsi, L.: Hardware implementation of wave digital filters using programmable digital signal processors. Proc. Eur . Conf. Circuit Theory Des. (ECCTD % I ) , Den Haag, Sept . 1981, C. 1052-1057 Gazsi, L.; Fettweis, A.: VLSI realization of wave digital filters for coinmunication systems. Proc. Int. Symp. Circuits Syst. (ISCAS '82), Rom, Mai 1982, S. 272-275 Kaise;, J. F.; Reed, W. A.: Data smoothing using low-pass digital filters. Rev. Sci. Instr. 4 8 (1977) S. 1447-1457 Fischer, W.: Zur Theorie und Anwendung einfacher Entwurfs- verfahren für linearphasige Digitalfilter bei Vorschriften im Frequenzbereich. Diplomarb. a m Inst. f . Nach- tec l i . , Univ. Erlangen, 1979 Scl~iifller, frl. W.: Netzwerke, Signale und Systeme. Bd. 11: Theorie kontinuierlicher und diskreter Signale und Systeme. Berlin: Springer, 1984 Sckiifller, H. W.; Kalb, H. J.: Variable digital filters. Arch. Elektr. Übertr. 36 (1982) H. 6 , S. 229-237 Scliiifller, H. W.; SteJ~erz, P.: Zum Entwurf niclitrekursiver Filter mit interpolativen Nebenbedingungen. 5. Aacliener Kolloq., Aacheii, 1984, S. 182-185 Del Re, E.; De Vidi, R.: A practical method of coefficient computat ion for a microprocessor-coiitrollcd variable recur- sive filter. Signal Process. 2 (1980) S. 283-287
Dip1.-Ing. Heinz Göckler (4 1 ), NTG, stu- dierte an der Universität Karlsruhe Nach- richtentechilik. 1968 schloß er das Stu- cli~im mit einer Diplomarbeit an1 Lehrstuhl für Nachrichtentechnik der Universität Erlangen-Nüriiberg ab. Iin Jahr 1969 war er a11 der Universität Karlsruhe auf dem Gebiet der analogen Meßdatena~ifzeich- m n g tätig. 1970 trat er in die jetzige Firma
ANT Nachrichtentechnik GmbH ein, wo er nach einer Zeit in1 Fachbereich Raumfahrt seit 1972 in der Grundlagen- entwicklung auf dem Gebiet der analogen und digitalen Filterung und Signalverarbeitung engagiert ist. Er ist Mit- glied der NTG und der EURASIP und NTG-Preisträger des Jahres 1982.