1. Bestandteile der CAD/CAM-Systeme - static.aminer.org · CAD/CAM-System noch weitere...
35
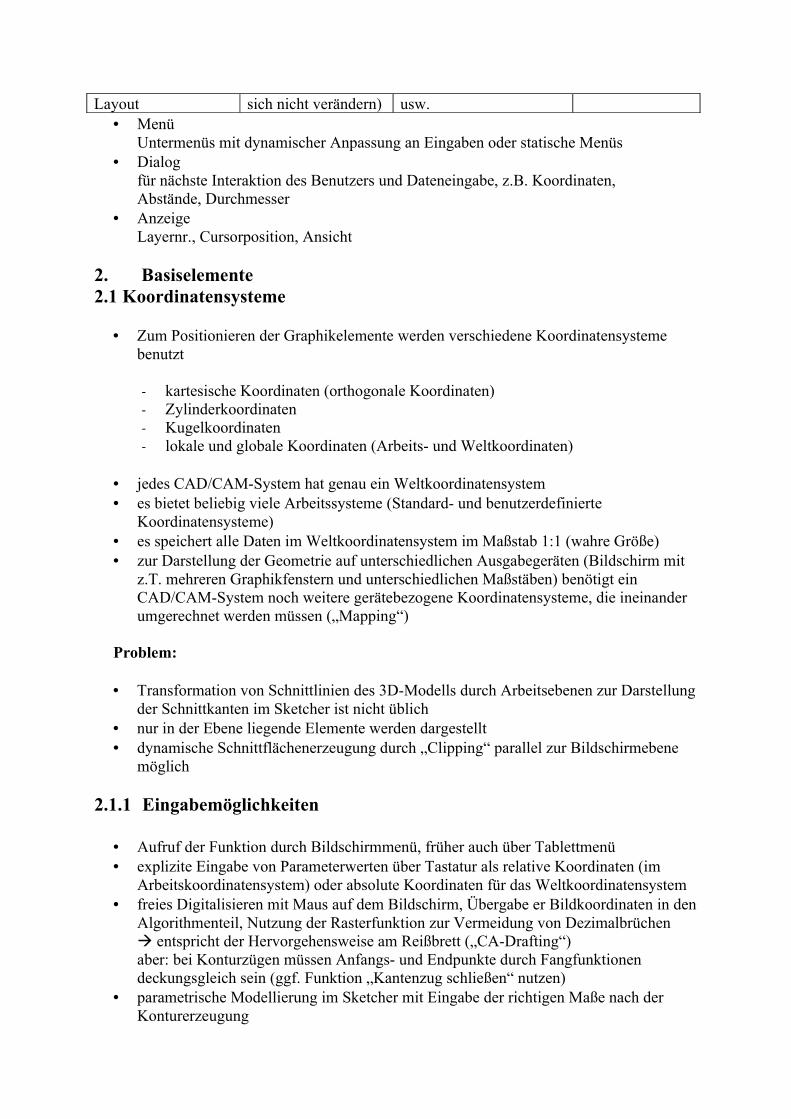
1. Bestandteile der CAD/CAM-Systeme • alle modular aufgebaut jedes Modul einzeln nutzbar und erhältlich • 3 Bereiche (Bausteine): - Datenbank - Methodenbank - Kommunikationsmodul 1.1 Datenbank • Verwaltung und Zugriff aller durch das System erzeugten Daten 1.2 Methodenbank • alle zur Erzeugung und Bearbeitung von Geometriedaten notwendigen Funktionen Geometriemodellierung (Design) erfolgt durch Modellierkern und ist Teil der Me- thodenbank • verwaltet, steuert und überwacht alle Methoden zur Verarbeitung einer technischen Lösung • Erstellen der Geometrieelemente des Modells hier • Anwendungen bzw. Module in Methodenbank in CAD/CAM-Systemen sind u.a.: Wireframe Modeller (Kantenmodellierung, Drahtgeometrie) zur Erzeugung von 2D- und 3D- Linien- bzw. Kurvenelementen und Punkten Surface Modeller (Flächenmodellierung) zur Erzeugung von 3D-Flächenelementen Solid Modeller (Volumenmodellierung) zur Erzeugung von Volumenelementen (CSG bzw. B-Rep) Sheet Metal Modeller (Blechformmodellierung) zur Erzeugung von Blechteilen und ihrer Abwicklung Drafting Modeller (Zeichnungserstellung) zum Erstellen/Ableiten und Bearbeiten von Zeichnungen aus 3D-Modellen (Projektion der Ansichten) Assembly Modeller (Baugruppenerstellung) zum Laden und Positionieren von Einzelteilen zu einer Baugruppe mit Stück- listenerstellung Mechanism Design (Mehrkörpersimulationsfunktionen) zur Animation von mechanischen Bewegungsabläufen von Bauteilen innerhalb von Baugruppen Simulation (FEM – Berechnung) zur Belastungs- und Verformungsanalyse der Bauteile Test Zeit – Ablauf, Modellvorbereitung, Signal Processing, Änderungen, Beziehungen, Werkstoffermüdung Manufacturing (Simulation der Herstellung und NC-Datenerzeugung) Management (Datenverwaltung) Anwenderprogrammierschnittstelle zur Erweiterung und Anpassung an die speziellen Anforderungen des Anwenders Geometry Translators (Schnittstellen) zur Konvertierung der Systemdaten in neutrale Datenformate, z.B.: • IGES (Initial Graphics Exchange
Transcript of 1. Bestandteile der CAD/CAM-Systeme - static.aminer.org · CAD/CAM-System noch weitere...
1. Bestandteile der CAD/CAM-Systeme
• alle modular aufgebaut jedes Modul einzeln nutzbar und erhältlich• 3 Bereiche (Bausteine):
- Datenbank- Methodenbank- Kommunikationsmodul
1.1 Datenbank
• Verwaltung und Zugriff aller durch das System erzeugten Daten
1.2 Methodenbank
• alle zur Erzeugung und Bearbeitung von Geometriedaten notwendigen Funktionen Geometriemodellierung (Design) erfolgt durch Modellierkern und ist Teil der Me- thodenbank• verwaltet, steuert und überwacht alle Methoden zur Verarbeitung einer technischen Lösung• Erstellen der Geometrieelemente des Modells hier• Anwendungen bzw. Module in Methodenbank in CAD/CAM-Systemen sind u.a.:
Wireframe Modeller (Kantenmodellierung, Drahtgeometrie)
zur Erzeugung von 2D- und 3D- Linien- bzw. Kurvenelementen und Punkten
Surface Modeller (Flächenmodellierung) zur Erzeugung von 3D-FlächenelementenSolid Modeller (Volumenmodellierung) zur Erzeugung von Volumenelementen (CSG
bzw. B-Rep)Sheet Metal Modeller (Blechformmodellierung)
zur Erzeugung von Blechteilen und ihrer Abwicklung
Drafting Modeller (Zeichnungserstellung) zum Erstellen/Ableiten und Bearbeiten von Zeichnungen aus 3D-Modellen (Projektion der Ansichten)
Assembly Modeller (Baugruppenerstellung) zum Laden und Positionieren von Einzelteilen zu einer Baugruppe mit Stück- listenerstellung
Mechanism Design (Mehrkörpersimulationsfunktionen)
zur Animation von mechanischen Bewegungsabläufen von Bauteilen innerhalb von Baugruppen
Simulation (FEM – Berechnung) zur Belastungs- und Verformungsanalyse der Bauteile
Test Zeit – Ablauf, Modellvorbereitung, Signal Processing, Änderungen, Beziehungen, Werkstoffermüdung
Manufacturing (Simulation der Herstellung und NC-Datenerzeugung)Management (Datenverwaltung)Anwenderprogrammierschnittstelle zur Erweiterung und Anpassung an die
speziellen Anforderungen des AnwendersGeometry Translators (Schnittstellen) zur Konvertierung der Systemdaten in
neutrale Datenformate, z.B.: • IGES (Initial Graphics Exchange

Specification) • STEP (Standard fort he Exchange of Product Model Data) • DXF (Drawing Interchange File Format) • VDA-FS (VDA-Flächenschnittstelle) DIN 66301 • SET (Specification d’Echange et de Transfert)
• Modellierkerne (erzeugen Geometrie)Kern Anwendungsbeispiele VorteileParaSolid Unigraphics, MicroStation,
SolidEdge• ermöglicht 3D-Modellierung• portabel sowohl HighEnd-Anwendungen als auch in Anwendungen im mittleren Preis- Leistungssegment• erlaubt Zugriff auf 3D-Daten• schnell• benutzerfreundlich• zuverlässig
Acis Autodesk, Mechanical Desktop, ICEM DDN, CADdy
• objektorientiert• besteht aus C++-Bibliothek mit 35 DLLs• Drahtkanten-, Flächen-, Volumenmodellie- rung mit verzweigter und einfacher Topologie• Entwicklung und Änderung komplizierter Modelle für Entwickler und Anwender an- hand zahlreicher Operationen• Verbinden, Schieben, Prägung, Umfassen, Extrahieren von Flächen, Offsetflächenerzeu- gung, Teilen, Segmentieren, Anpassen/Trim- men, Interpolieren von Flächen• Boolsche Operationen• Abfragefunktion von Längen-, Bereichs- und Masseneigenschaften
andere CATIA V4, HiCAD, I-DEAS u.v.a.
· Kommunikationsmodul mit Benutzerschnittstelle· Eingabe per Tastatur, Maus …· Ausgabe auf dem Bildschirm
Bereiche
Graphik für bildhafte Darstellung des Geometriemodelles: mgl. sind ein oder mehrere Fenster für Ansichten und
Menü zum Funktionsaufruf mit Untermenüs (dynamische Anpassung an mgl. Eingaben und/oder statische Menüs, die
Dialog für Zustandsabfragen, für die nächste Interaktion des Benutzers und Dateneingabe, z.B. Koordinaten oder Abstände, Durchmesser
Anzeige der Zustände (Layernr., Cursorposition, Ansicht usw.)
Layout sich nicht verändern) usw.• Menü
Untermenüs mit dynamischer Anpassung an Eingaben oder statische Menüs• Dialog
für nächste Interaktion des Benutzers und Dateneingabe, z.B. Koordinaten,Abstände, Durchmesser
• AnzeigeLayernr., Cursorposition, Ansicht
2. Basiselemente2.1 Koordinatensysteme
• Zum Positionieren der Graphikelemente werden verschiedene Koordinatensysteme benutzt
- kartesische Koordinaten (orthogonale Koordinaten)- Zylinderkoordinaten- Kugelkoordinaten- lokale und globale Koordinaten (Arbeits- und Weltkoordinaten)
• jedes CAD/CAM-System hat genau ein Weltkoordinatensystem• es bietet beliebig viele Arbeitssysteme (Standard- und benutzerdefinierte
Koordinatensysteme)• es speichert alle Daten im Weltkoordinatensystem im Maßstab 1:1 (wahre Größe)• zur Darstellung der Geometrie auf unterschiedlichen Ausgabegeräten (Bildschirm mit
z.T. mehreren Graphikfenstern und unterschiedlichen Maßstäben) benötigt ein CAD/CAM-System noch weitere gerätebezogene Koordinatensysteme, die ineinander umgerechnet werden müssen („Mapping“)
Problem:
• Transformation von Schnittlinien des 3D-Modells durch Arbeitsebenen zur Darstellung der Schnittkanten im Sketcher ist nicht üblich
• nur in der Ebene liegende Elemente werden dargestellt• dynamische Schnittflächenerzeugung durch „Clipping“ parallel zur Bildschirmebene
möglich
2.1.1 Eingabemöglichkeiten
• Aufruf der Funktion durch Bildschirmmenü, früher auch über Tablettmenü• explizite Eingabe von Parameterwerten über Tastatur als relative Koordinaten (im
Arbeitskoordinatensystem) oder absolute Koordinaten für das Weltkoordinatensystem• freies Digitalisieren mit Maus auf dem Bildschirm, Übergabe er Bildkoordinaten in den
Algorithmenteil, Nutzung der Rasterfunktion zur Vermeidung von Dezimalbrüchen entspricht der Hervorgehensweise am Reißbrett („CA-Drafting“) aber: bei Konturzügen müssen Anfangs- und Endpunkte durch Fangfunktionen deckungsgleich sein (ggf. Funktion „Kantenzug schließen“ nutzen)
• parametrische Modellierung im Sketcher mit Eingabe der richtigen Maße nach der Konturerzeugung

• teilweise automatisches Erkennen von Zwangsbedingungen wie parallel, rechtwinklig, tangential, Punkt auf Linie usw., sonst Festlegen der Bedingungen bei Maßeingabe
2.2 Erzeugen von geometrischen Elementen für Kantenmodelle2.2.1 Erzeugung von Punkten
(1) absolute Koordinatendirekte Eingabe über die Tastatur, indirekte Eingabe über das Digitalisieren
(2) relative Koordinaten(3) Mittelpunkt(4) Endpunkt(5) Schnittpunkt(6) Lotfußpunkt(7) Tangentpunkt(8) Punkt auf Kurve(9) Spurpunkt (Durchstoßpunkt)
2.2.2 Erzeugen von Linien
(1) Linie- zwischen zwei Punkten stabiler, von CAD-Systemen eher genutzt- Punkt und Richtungsvektor + vorgegebene Länge eleganter
(2) Parallele- zu gegebener Linie- zu einer Koordinatenachse
(3) Neigungswinkel zu gegebener Linie oder Achse(4) Senkrechte / Mittelsenkrechte(5) Horizontale / Vertikale
- in 3D definieren in einem globalen Koordinatensystem, welche Richtung horizontal, welche vertikal ist
- nach Bildkoordinaten bestimmen(6) Tangential an einen Kegelschnitt(1-6) auch mit expliziter Vorgabe der Länge
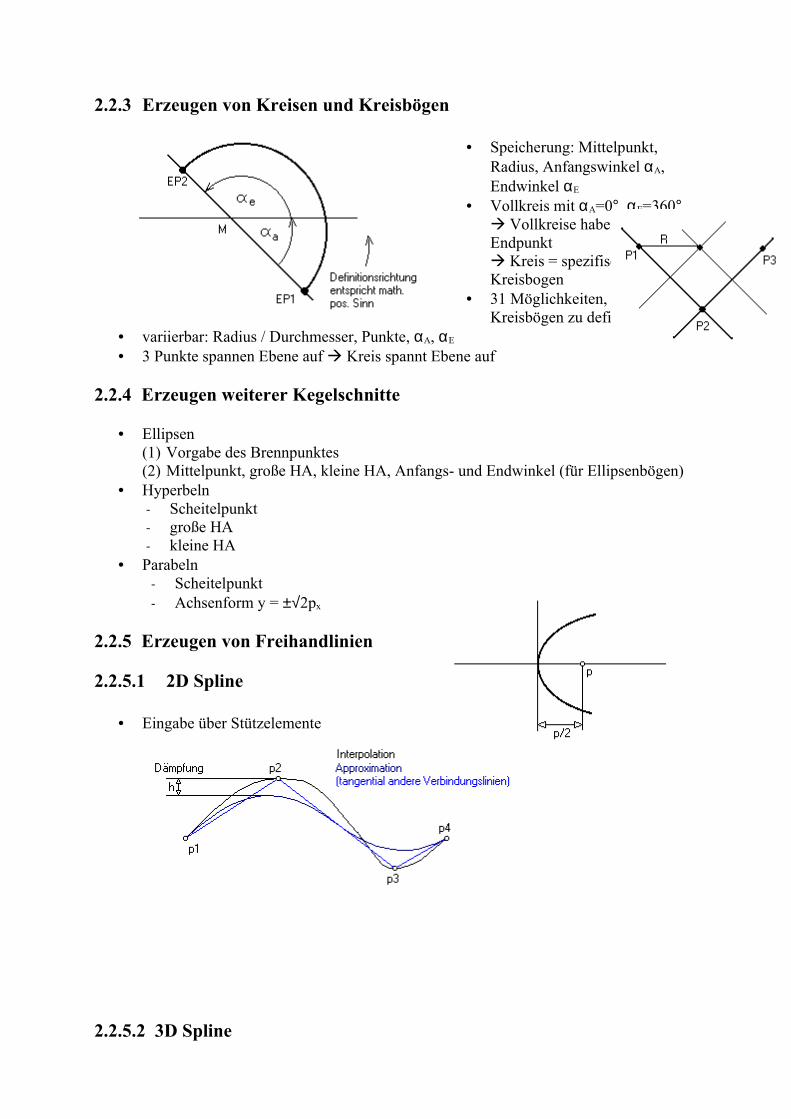
2.2.3 Erzeugen von Kreisen und Kreisbögen
• Speicherung: Mittelpunkt, Radius, Anfangswinkel αA, Endwinkel αE
• Vollkreis mit αA=0°, αE=360° Vollkreise haben einen Endpunkt Kreis = spezifischer Kreisbogen
• 31 Möglichkeiten, Kreise und Kreisbögen zu definieren
• variierbar: Radius / Durchmesser, Punkte, αA, αE
• 3 Punkte spannen Ebene auf Kreis spannt Ebene auf
2.2.4 Erzeugen weiterer Kegelschnitte
• Ellipsen(1) Vorgabe des Brennpunktes(2) Mittelpunkt, große HA, kleine HA, Anfangs- und Endwinkel (für Ellipsenbögen)
• Hyperbeln- Scheitelpunkt- große HA- kleine HA
• Parabeln- Scheitelpunkt- Achsenform y = ±√2px
2.2.5 Erzeugen von Freihandlinien
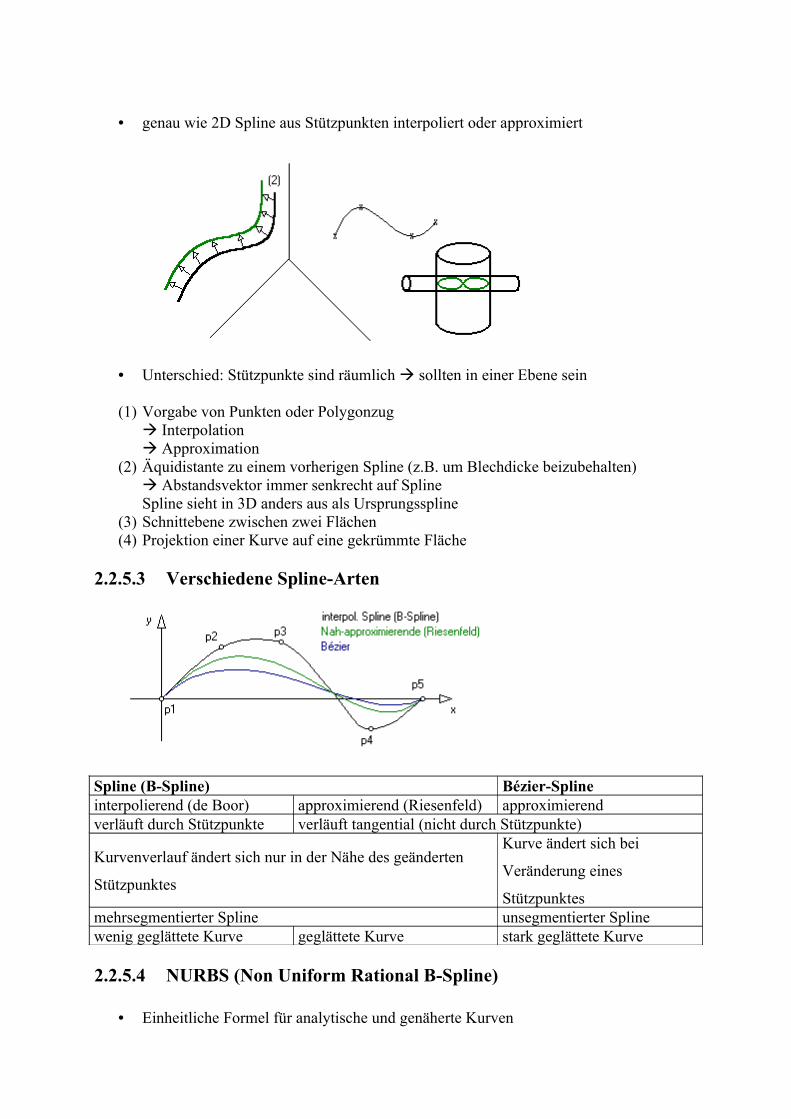
2.2.5.1 2D Spline
• Eingabe über Stützelemente
2.2.5.2 3D Spline
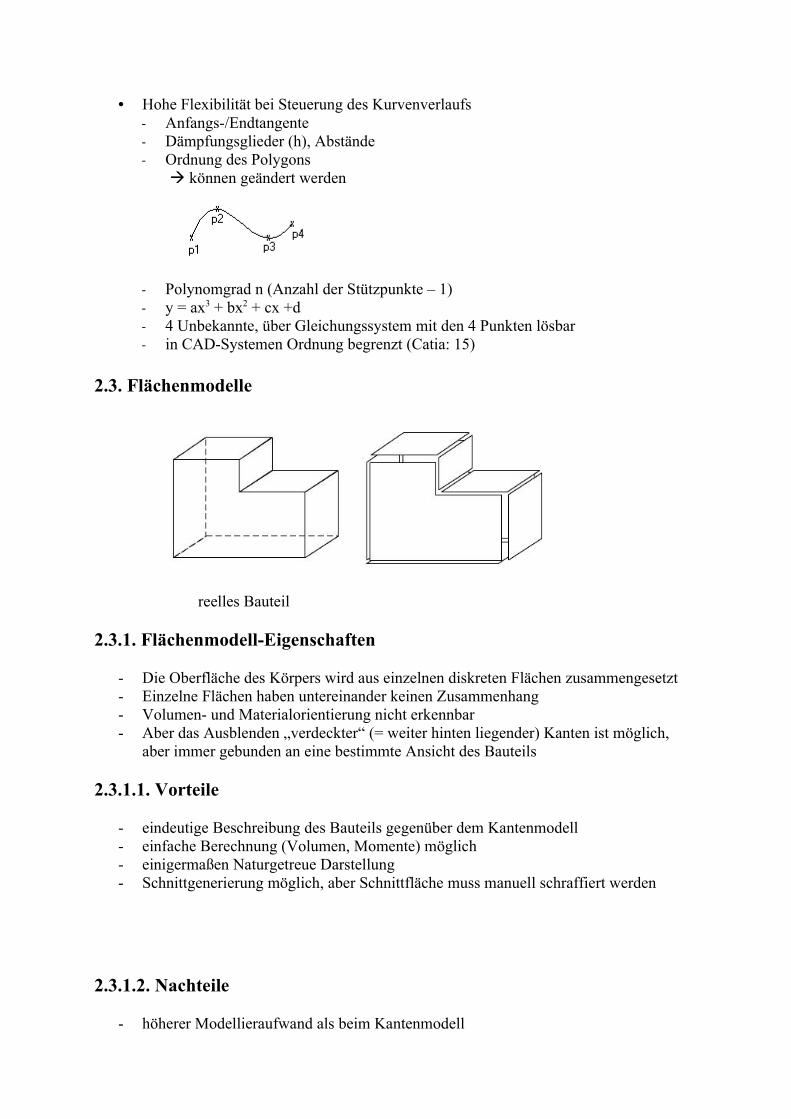
• genau wie 2D Spline aus Stützpunkten interpoliert oder approximiert
• Unterschied: Stützpunkte sind räumlich sollten in einer Ebene sein
(1) Vorgabe von Punkten oder Polygonzug Interpolation Approximation
(2) Äquidistante zu einem vorherigen Spline (z.B. um Blechdicke beizubehalten) Abstandsvektor immer senkrecht auf SplineSpline sieht in 3D anders aus als Ursprungsspline
(3) Schnittebene zwischen zwei Flächen(4) Projektion einer Kurve auf eine gekrümmte Fläche
2.2.5.3 Verschiedene Spline-Arten
Spline (B-Spline) Bézier-Splineinterpolierend (de Boor) approximierend (Riesenfeld) approximierendverläuft durch Stützpunkte verläuft tangential (nicht durch Stützpunkte)
Kurvenverlauf ändert sich nur in der Nähe des geänderten
Stützpunktes
Kurve ändert sich bei
Veränderung eines
Stützpunktesmehrsegmentierter Spline unsegmentierter Splinewenig geglättete Kurve geglättete Kurve stark geglättete Kurve
2.2.5.4 NURBS (Non Uniform Rational B-Spline)
• Einheitliche Formel für analytische und genäherte Kurven
• Hohe Flexibilität bei Steuerung des Kurvenverlaufs- Anfangs-/Endtangente- Dämpfungsglieder (h), Abstände- Ordnung des Polygons können geändert werden
- Polynomgrad n (Anzahl der Stützpunkte – 1) - y = ax3 + bx2 + cx +d- 4 Unbekannte, über Gleichungssystem mit den 4 Punkten lösbar- in CAD-Systemen Ordnung begrenzt (Catia: 15)
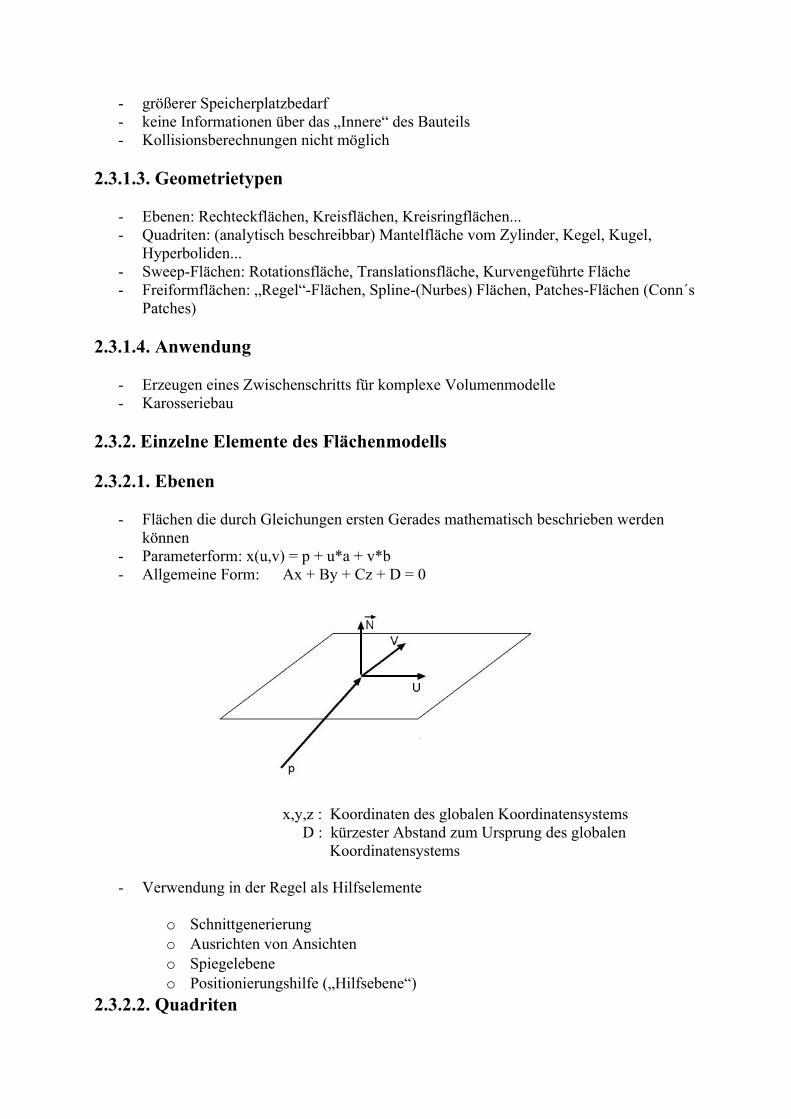
2.3. Flächenmodelle
reelles Bauteil
2.3.1. Flächenmodell-Eigenschaften
- Die Oberfläche des Körpers wird aus einzelnen diskreten Flächen zusammengesetzt- Einzelne Flächen haben untereinander keinen Zusammenhang- Volumen- und Materialorientierung nicht erkennbar- Aber das Ausblenden „verdeckter“ (= weiter hinten liegender) Kanten ist möglich,
aber immer gebunden an eine bestimmte Ansicht des Bauteils
2.3.1.1. Vorteile
- eindeutige Beschreibung des Bauteils gegenüber dem Kantenmodell- einfache Berechnung (Volumen, Momente) möglich- einigermaßen Naturgetreue Darstellung- Schnittgenerierung möglich, aber Schnittfläche muss manuell schraffiert werden
2.3.1.2. Nachteile
- höherer Modellieraufwand als beim Kantenmodell
- größerer Speicherplatzbedarf- keine Informationen über das „Innere“ des Bauteils- Kollisionsberechnungen nicht möglich
2.3.1.3. Geometrietypen
- Ebenen: Rechteckflächen, Kreisflächen, Kreisringflächen...- Quadriten: (analytisch beschreibbar) Mantelfläche vom Zylinder, Kegel, Kugel,
Hyperboliden...- Sweep-Flächen: Rotationsfläche, Translationsfläche, Kurvengeführte Fläche- Freiformflächen: „Regel“-Flächen, Spline-(Nurbes) Flächen, Patches-Flächen (Conn´s
Patches)
2.3.1.4. Anwendung
- Erzeugen eines Zwischenschritts für komplexe Volumenmodelle- Karosseriebau
2.3.2. Einzelne Elemente des Flächenmodells
2.3.2.1. Ebenen
- Flächen die durch Gleichungen ersten Gerades mathematisch beschrieben werden können
- Parameterform: x(u,v) = p + u*a + v*b- Allgemeine Form: Ax + By + Cz + D = 0
x,y,z : Koordinaten des globalen Koordinatensystems D : kürzester Abstand zum Ursprung des globalen Koordinatensystems
- Verwendung in der Regel als Hilfselemente
o Schnittgenerierungo Ausrichten von Ansichteno Spiegelebeneo Positionierungshilfe („Hilfsebene“)
2.3.2.2. Quadriten

- Flächen die durch Gleichungen zweiten Gerades mathematisch beschreiben werden können z.B. Zylinder sqrt (x² + y²) + z
- Zylinder, Kegel, Hyperboloid-, Paraboloid-Mantelfläche, Ellipsoid, Kugel-, Torusfläche
- Häufige Vertreter: Kreiszylinder, Kreiskegel, Kugel
2.3.2.3. Sweep-Flächen
- Flächen entstehen durch verschieben einer Kontur entlang einer Leitkurve im Raum- Leitkurve:
o Gerade: „tabulierte Fläche“o Gekrümmt: „Schiebefläche“
- Winkel zwischen der Ebene, die die Kontur aufspannt, und der Leitkurve ist immer konstant
- Bei manchen Modellieren kann die Kontur über ihre Abmessungen/ Parametern verändert werden, z.B. Übergang von Rundrohr zu Rechteckrohr im Anlagebau
2.3.2.3.3. Projektionsflächen
- Flächen entstehen durch das Projizieren einer Kontur auf eine andere Fläche mit einem gegebenen Projektionswinkel
2.3.2.4. Zusammengesetzte Flächen
- Standartflächen, die zu einer neuen Fläche verbunden werden- Vorraussetzung: Die einzelnen Flächen müssen gemeinsame Kanten gleicher Längen
besitzen- Wenn daraus eine neue stetige Fläche entstehen soll, müssen an den gemeinsamen
Kanten auch die Tangenten gleich sein
Hauptanwendung: NC-Programmierung
Isoparametrische Kurven. Von Fläche abgeleitet

Kombinieren (erzeugt immer nur Kurven!)1. Laden der Vorderansicht in die x-y-Ebene
(oder y-z-Ebene)
2. Laden der Seitenansicht in die y-z-Ebene (oder x-z-Ebene)
(Ebene von System zu System verschieden)
-> aus Kurven nichtsichtbare Projektionsebenen erzeugt
-> Schnittlinie der Projektionsebenen ergibt Raumkurve = Kante des 3-D-Modells
2.3.2.5 Offsetflächen
- haben von Ausgangsfläche einen const. Abstand- Krümmungen und Größe der Fläche sind von denen der Ausgangsfläche verschieden.
2.3.2.6 Netzfläche
Punktenetz (Punkte müssen einzeln u. reihenweise identifiziert werden)-> quadratische Matrix nötig-> genauso viele Linienpunkte wie Spaltenpunkte-> Netzfläche nicht veränderbar-> aber: andere Flächen davon ableitbar
Querschnitte (vorh. Kurven müssen alle offen oder alle geschlossen sein)-> entweder offene oder geschlossene Fläche entsteht-> nur parallele oder quasi-parallele Kurven notw.
Kurvennetz (jede Querkurve muss alle Primärkurven schneiden!)
2.3.2.7 Regelfläche
Zwei Elemente durch gerade Linie verbunden -> zw. Linien Fläche aufgespannt

Bei Linienselektion immer an einem Ende vornehmen. Wird beim oberem Bild die untere Kurve im rechten Bereich selektiert, dann entsteht eine Fläche, die keiner braucht.
2.3.2.8 Ausrundungsfläche
Erzeugt durch gedachten Weg einer Rollkugel
2.3.2.9 Getrimmte Flächen
Ausgangsfläche gegeben - meistens zu groß. Durch geschlossene Kurven innerhalb der Fläche oder Kurven, die den Flächenrand zweimal schneiden, lassen sich Bereiche der Fläche definieren, die von der Fläche entfernt werden sollen. Die Flächenlinien bleiben erhalten für das Objekt, das Fläche bleibt. (Die Ausgangsfläche bleibt in der Datenbank gespeichert und ist so jederzeit wiederherstellbar.)
2.3.2.10 B-Spline-Flächen
B-Spline-Kurven als GrundlageBSF lassen sich nach Erzeugung je nach verwendetem System in begrenztem Umfang verändern und nach Wünschen des Konstrukteurs anpassen.
2.3.2.10.1 Def. Randkurven wählen (hier B-Splines)Bei zweien Systemabhängig.
2.3.2.10.2 Kurvensatz
2.3.2.10.3 Kontrollpunkte
Def. von Kontrollpunkten (Polygonpunkte), unter denen Fläche aufgespannt wird. Eckpunkte der Fläche, die entstehen soll, entsprechen Polygonpunkten.
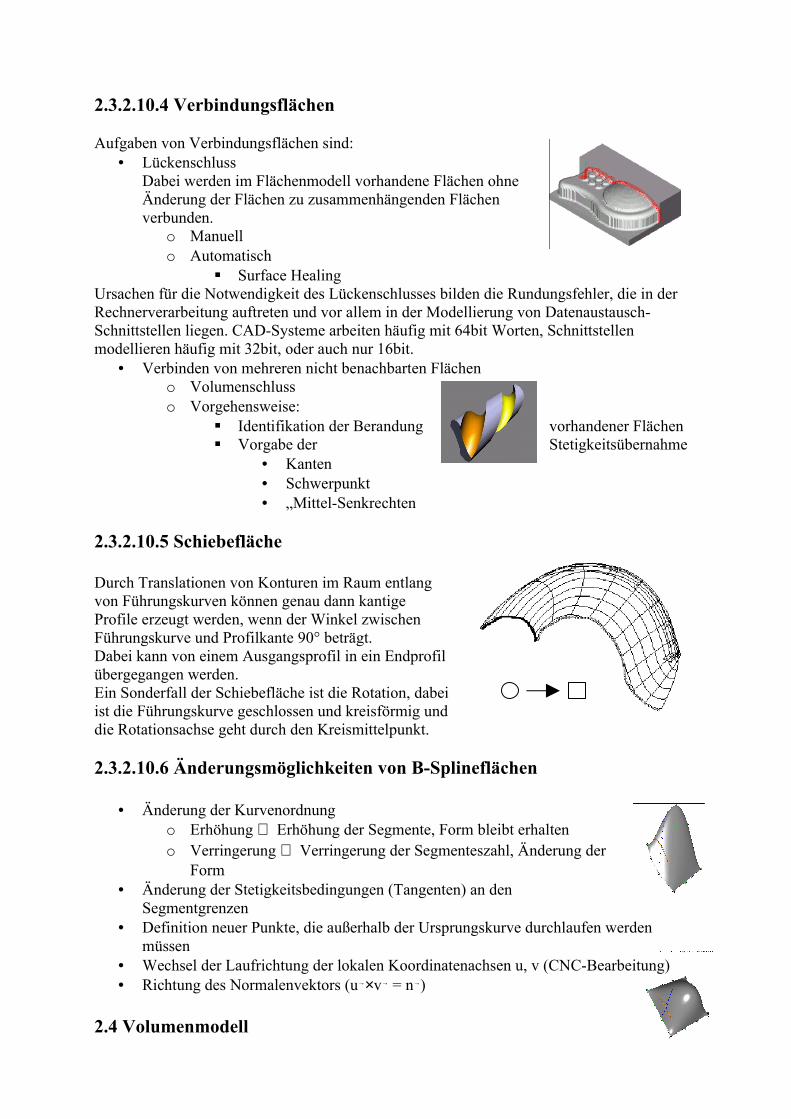
2.3.2.10.4 Verbindungsflächen
Aufgaben von Verbindungsflächen sind:• Lückenschluss
Dabei werden im Flächenmodell vorhandene Flächen ohne Änderung der Flächen zu zusammenhängenden Flächen verbunden.
o Manuello Automatisch
Surface HealingUrsachen für die Notwendigkeit des Lückenschlusses bilden die Rundungsfehler, die in der Rechnerverarbeitung auftreten und vor allem in der Modellierung von Datenaustausch-Schnittstellen liegen. CAD-Systeme arbeiten häufig mit 64bit Worten, Schnittstellen modellieren häufig mit 32bit, oder auch nur 16bit.
• Verbinden von mehreren nicht benachbarten Flächeno Volumenschlusso Vorgehensweise:
Identifikation der Berandung vorhandener Flächen Vorgabe der Stetigkeitsübernahme
• Kanten• Schwerpunkt• „Mittel-Senkrechten
2.3.2.10.5 Schiebefläche
Durch Translationen von Konturen im Raum entlang von Führungskurven können genau dann kantige Profile erzeugt werden, wenn der Winkel zwischen Führungskurve und Profilkante 90° beträgt.Dabei kann von einem Ausgangsprofil in ein Endprofil übergegangen werden. Ein Sonderfall der Schiebefläche ist die Rotation, dabei ist die Führungskurve geschlossen und kreisförmig und die Rotationsachse geht durch den Kreismittelpunkt.
2.3.2.10.6 Änderungsmöglichkeiten von B-Splineflächen
• Änderung der Kurvenordnungo Erhöhung ⇒ Erhöhung der Segmente, Form bleibt erhalteno Verringerung ⇒ Verringerung der Segmenteszahl, Änderung der
Form• Änderung der Stetigkeitsbedingungen (Tangenten) an den
Segmentgrenzen • Definition neuer Punkte, die außerhalb der Ursprungskurve durchlaufen werden
müssen• Wechsel der Laufrichtung der lokalen Koordinatenachsen u, v (CNC-Bearbeitung)• Richtung des Normalenvektors (u→×v→ = n→)
2.4 Volumenmodell

In einem Volumenmodell sind die umhüllenden Flächen geschlossen und bilden eine Einheit. Das heißt, die Vektorsumme aller Normalenvektoren ist null und das GAUSS-Integral ist erfüllt.
2.4.1 Arten von Volumenmodellen
BRep, Boundary Representation beschreibt das Volumen durch die umrandenden Oberflächen.CSG, Constructive Solid Geometry setzt komplexe geometrische Körper aus Grundkörpern mittels Boole’schen Operationen zusammen. 2.4.1.1 BRep – Flächenbegrenzungsmodell
Die Modellierung mit BRep stammt aus Europa und wird hier auch bevorzugt eingesetzt. BRep modelliert Volumina über die vorhandene Oberflächen und führt ständig eine Konsistenzprüfung (Oberflächendichtheit: Vektorsumme der Normalenvektoren = 0) durch.
Verbindungsflächenerzeugung stelle eine wichtige Eigenschaft in der Arbeit mit BRep dar. Surface Healing ist eine Standardfunktion verschiedener 3D-Modellierkerne, so wie Parasolid und ACIS, um die bekanntesten zu nennen.Flächen der Volumen werden nach jeder Generierung (Insert, Delete, Change) vollständig aktualisiert, „immediate response“.Die Beschreibung der Geometrie in BRep ist deskriptiv und beschreibt den Endzustand und nicht den Bearbeitungsweg (vgl. Buch, Gemälde).Nach Kung-Fu-Tse: „Nicht nur das Ergebnis, sondern auch der Weg sind das Ziel.“
2.4.1.2 CSG-Modelle (Vollkörpermodelle)
Die CSG-Methode ist in den USA beheimatet und findet dort auch bevorzugt ihre Anwendung. Das Körpervolumen eines komplexen CSG-Körpers wird duch Boole’sche Verknüpfungen (Mengenoperationen: ∪, ∩, \) von Volumenprimitiva, wie Zylinder, Kegel, Kugel, Quader, Keil, Torus und anderen, „zusammen“-gesetzt. Diese können:
• Analytisch beschreibbaro Quadero Kegelo Zylindero Kugelo Torus
• Schiebevoluminao Profile, vgl.
• Rotationsvolumina• Sinnvolle Verknüpfungen sein.
Das Modell von CSG ist prozedural und hat keine Methoden der Evaluation der Konsistenz.
2.4.1.3 Hybride ModelleDiese Modelle verbinden Eigenschaften von CSG und BRep.Die Vorgehensweise bei der Erstellung von Volumengeometrien ist so dem Anwender freigestellt. Die Darstellungs- und Speicherungsform der der Zwischenergebnisse findet in BRep statt und die Aufzeichnung des Weges erfolgt in CSG-üblichen Bäumen. So werden die Vorteile beider Verfahren genutzt. Aus Brep stammt die Konsistenzprüfung und die Darstellung und Speicherung der Zwischenergebnisse und die Optionen der Änderbarkeit und Verwaltung werden durch die CSG-Funktionalität bereitgestellt.
2.4.1 Folgerung
Gerade bei CSG-Modellierern, aber auch generell, ist es dringend erforderlich, sich im Vorfeld über die Modellierungsreihenfolge (z.B. Verknüpfungen) klar zu werden! Arbeitsvorbereitung für das Modellieren
2.4.1.4 Gründe
• konsistentere Datenstruktur bei einfachen Verknüpfungen oder wenige Verknüpfungsebenen
• bessere Übersicht über CSG-Bäume• bei jeder Änderung der Geometrie (=Änderung von Verknüpfungen und/oder
Grundelementen) muss jede Verknüpfung neu aufgebaut werden
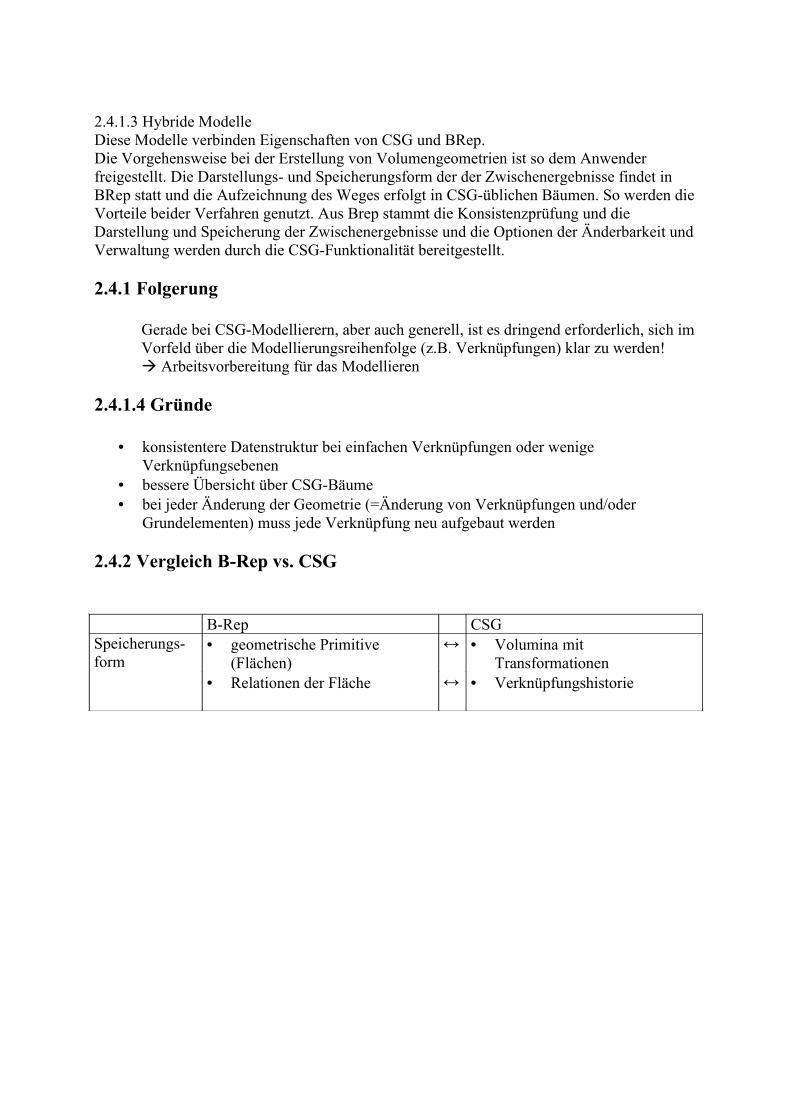
2.4.2 Vergleich B-Rep vs. CSG
B-Rep CSGSpeicherungs-form
• geometrische Primitive (Flächen)
↔ • Volumina mit Transformationen
• Relationen der Fläche ↔ • Verknüpfungshistorie
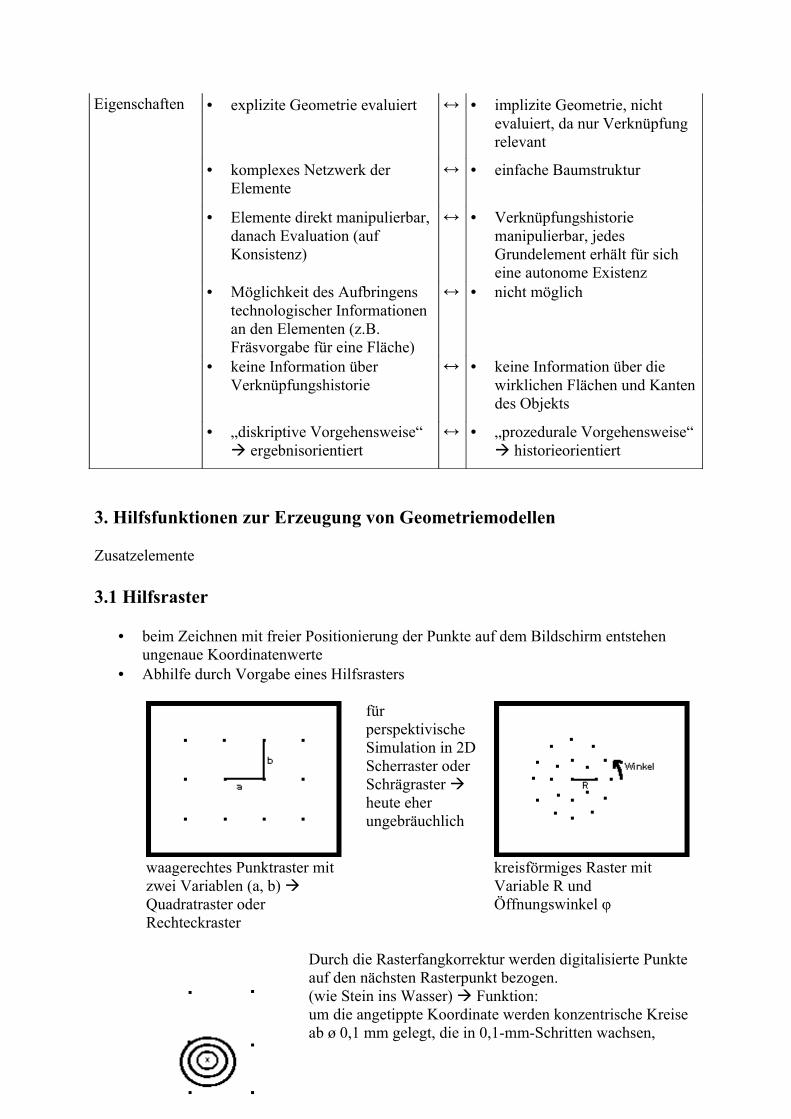
Eigenschaften • explizite Geometrie evaluiert ↔ • implizite Geometrie, nicht evaluiert, da nur Verknüpfung relevant
• komplexes Netzwerk der Elemente
↔ • einfache Baumstruktur
• Elemente direkt manipulierbar, danach Evaluation (auf Konsistenz)
↔ • Verknüpfungshistorie manipulierbar, jedes Grundelement erhält für sich eine autonome Existenz
• Möglichkeit des Aufbringens technologischer Informationen an den Elementen (z.B. Fräsvorgabe für eine Fläche)
↔ • nicht möglich
• keine Information über Verknüpfungshistorie
↔ • keine Information über die wirklichen Flächen und Kanten des Objekts
• „diskriptive Vorgehensweise“ ergebnisorientiert
↔ • „prozedurale Vorgehensweise“ historieorientiert
3. Hilfsfunktionen zur Erzeugung von Geometriemodellen
Zusatzelemente
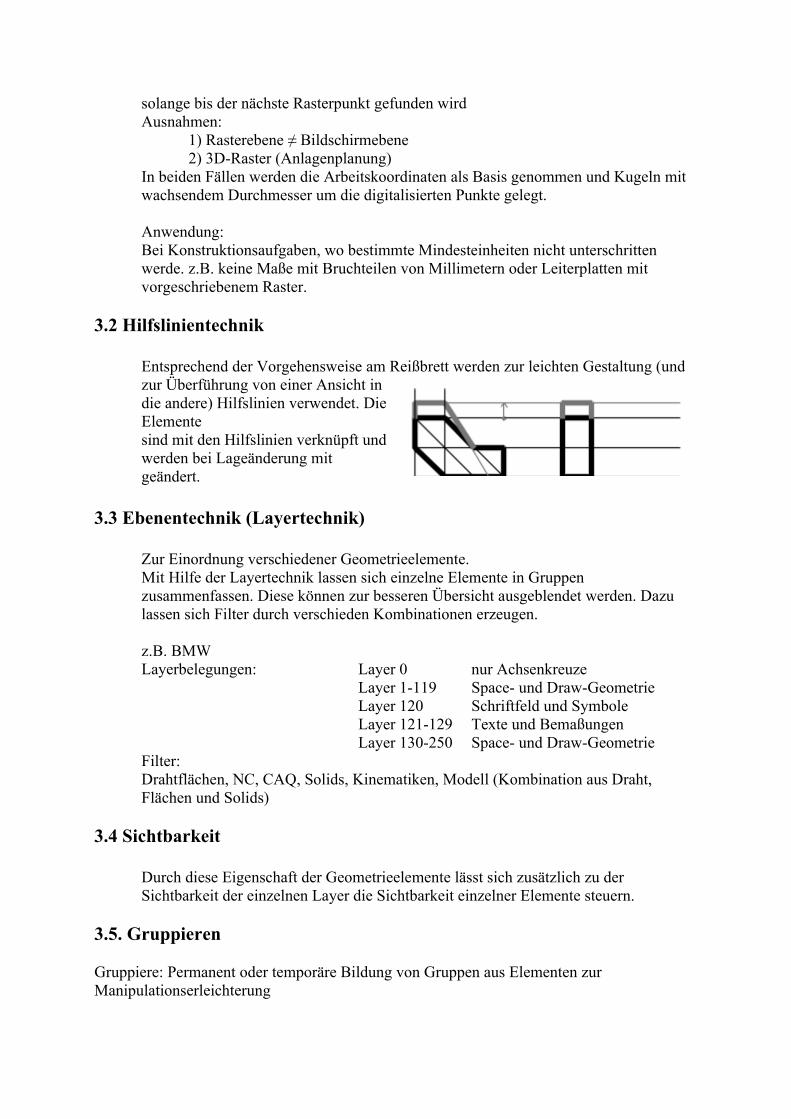
3.1 Hilfsraster
• beim Zeichnen mit freier Positionierung der Punkte auf dem Bildschirm entstehen ungenaue Koordinatenwerte
• Abhilfe durch Vorgabe eines Hilfsrasters
für perspektivische Simulation in 2D Scherraster oder Schrägraster heute eher ungebräuchlich
waagerechtes Punktraster mit zwei Variablen (a, b) Quadratraster oder Rechteckraster
kreisförmiges Raster mit Variable R und Öffnungswinkel φ
Durch die Rasterfangkorrektur werden digitalisierte Punkte auf den nächsten Rasterpunkt bezogen.(wie Stein ins Wasser) Funktion:um die angetippte Koordinate werden konzentrische Kreise ab ø 0,1 mm gelegt, die in 0,1-mm-Schritten wachsen,
solange bis der nächste Rasterpunkt gefunden wirdAusnahmen:
1) Rasterebene ≠ Bildschirmebene2) 3D-Raster (Anlagenplanung)
In beiden Fällen werden die Arbeitskoordinaten als Basis genommen und Kugeln mit wachsendem Durchmesser um die digitalisierten Punkte gelegt.
Anwendung:Bei Konstruktionsaufgaben, wo bestimmte Mindesteinheiten nicht unterschritten werde. z.B. keine Maße mit Bruchteilen von Millimetern oder Leiterplatten mit vorgeschriebenem Raster.
3.2 Hilfslinientechnik
Entsprechend der Vorgehensweise am Reißbrett werden zur leichten Gestaltung (und zur Überführung von einer Ansicht in die andere) Hilfslinien verwendet. Die Elemente sind mit den Hilfslinien verknüpft und werden bei Lageänderung mit geändert.
3.3 Ebenentechnik (Layertechnik)
Zur Einordnung verschiedener Geometrieelemente.Mit Hilfe der Layertechnik lassen sich einzelne Elemente in Gruppen zusammenfassen. Diese können zur besseren Übersicht ausgeblendet werden. Dazu lassen sich Filter durch verschieden Kombinationen erzeugen.
z.B. BMWLayerbelegungen: Layer 0 nur Achsenkreuze
Layer 1-119 Space- und Draw-GeometrieLayer 120 Schriftfeld und SymboleLayer 121-129 Texte und BemaßungenLayer 130-250 Space- und Draw-Geometrie
Filter:Drahtflächen, NC, CAQ, Solids, Kinematiken, Modell (Kombination aus Draht, Flächen und Solids)
3.4 Sichtbarkeit
Durch diese Eigenschaft der Geometrieelemente lässt sich zusätzlich zu der Sichtbarkeit der einzelnen Layer die Sichtbarkeit einzelner Elemente steuern.
3.5. Gruppieren
Gruppiere: Permanent oder temporäre Bildung von Gruppen aus Elementen zur Manipulationserleichterung
- Temporäre Gruppen werden zum spiegeln, verschieben, drehen und skalieren sowei zum Festlegen der Schraffurgrenzen benötigt. Manche Systeme lösen nach dieser Bearbeitung die Gruppe wieder auf.
- Permanente Gruppen fassen i.d.R. einzelne Ansichten oder zusammengehörige Elemente zu einer Baugruppe zusammen.Durch Gruppierung können beliebig komplexe Hierarchien aufgebaut werden.
3.6. Gummibandtechnik
- Diese Technik dient zur Variierung der Geometrie während ihrer Eingabe, z.B. Länge eines Körpers, Durchmesser eines Zylinders, Neigungswinkel eines Keils u.s.w.
3.7. Identifizierungshilfen
- Bei hoher Belegung des Bildschirms mit Elementen oder der gezielten Suche nach bestimmten Elementtypen müssen entsprechende Auswahlmöglichkeiten vorhanden sein.
- Durchblättern mit „Highlighten“ der Elemente in der Reihenfolge ihrer Entstehung auf der Basis der „Master Index List“
- Benutzung von Lupenfunktionen- Vorgabe des Elementtyps, der zu Identifiziert werden soll.- Bei 3D-Systemen : Herausschwenken des interessierenden Modells in eine parallele
Ebene
3.8. Manipulationsfunktionen
zu dieser Gruppe gehören Drehen, Spiegeln, Verschieben, Skalieren.Rechnerintern werden diese Funktionen durch Multiplikation der Ortsvektoren mit Transformationsmatrizen nachgebildet.Um eine einheitliche Vorgehensweise zu ermöglichen, werden so genannte Homogene Koordinaten benutzt. Diese haben eine zusätzliche Koordinate mit dem Wert 1 aus 2D- Koordinaten werden 3D- Koordinaten
aus 3D- Koordinaten werden 4D- Koordinatenaus 2x2-Transformationsmatrizen werden 3x3 Transformationsmatrizenaus 3x3-Transformationsmatrizen werden 4x4 Transformationsmatrizen
3.8.1. Symmetrieoperationen(ohne Formänderung)
3.5. Gruppieren
Gruppiere: Permanent oder tempoäre Bildung von Gruppen aus Elementen zur Manipulationserleichterung
- Tempoäre Gruppen werden zum spiegeln, verschieben, drehen und skalieren sowei zum Festlegen der Schraffurgrenzen benötigt. Manche Systeme lösen nach dieser Bearbeitung die Gruppe wieder auf.
- Permanente Gruppen fassen i.d.R. einzelne Ansichten oder zusammengehörige Elemente zu einer Baugruppe zusammen.Durch Gruppierung können beliebig komplexe Hierachien aufgebaut werden.
3.6. Gummibandtechnik
- Diese Technik dient zur Variierung der Geometrie während ihrer Eingabe, z.B. Länge eines Körpers, Durchmesser eines Zylinders, Neigungswinkel eines Keils u.s.w.
3.7. Identifizierungshilfen
- Bei hoher Belegung des Bildschirms mit Elementen oder der gezielten Suche nach bestimmten Elementtypen müssen entsprechende Auswahlmöglichkeiten vorhanden sein.
- Durchblättern mit „Highlighten“ der Elemente in der Reihenfolge ihrer Entstehung auf der Basis der „Master Index List“
- Benutzung von Lupenfunktionen- Vorgabe des Elementtyps, der zu Identifiziert werden soll.- Bei 3D-Systemen : Herausschwenken des interessierenden Modells in eine parallele
Ebene
3.8. Manipulationsfunktionen
zu dieser Gruppe gehören Drehen, Spiegeln, Verschieben, Skalieren.Rechnerintern werden diese Funktionen durch Multiplikation der Ortsvektoren mit Transformationsmatrizen nachgebildet.Um eine einheitliche Vorgehensweise zu ermöglichen, werden sogenannte Homogene Koordinaten benutzt. Diese haben eine zusätzliche Koordinate mit dem Wert 1 aus 2D- Koordinaten werden 3D- Koordinaten
aus 3D- Koordinaten werden 4D- Koordinatenaus 2x2-Transformationsmatrizen werden 3x3 Transformationsmatrizenaus 3x3-Transformationsmatrizen werden 4x4 Transformationsmatrizen
3.8.1. Symmetrieoperationen(ohne Formänderung)
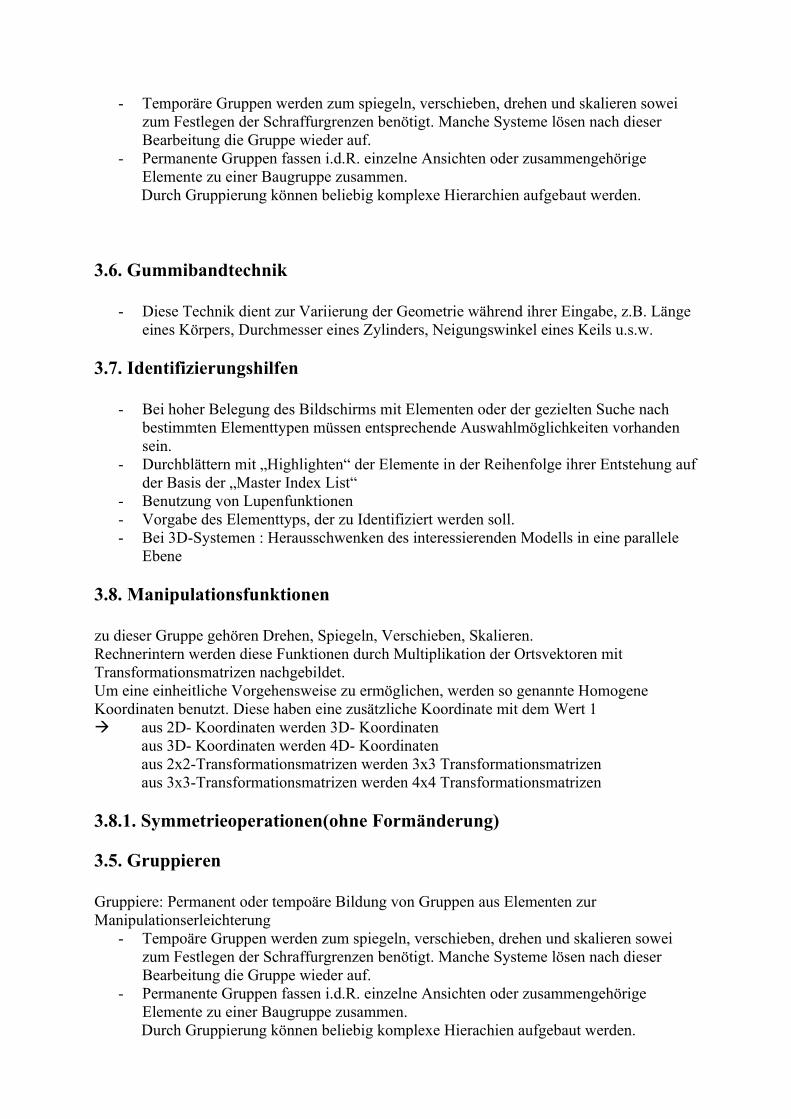
3.8.1.1. Verschieben (Translieren weil Englisch „Translation“)
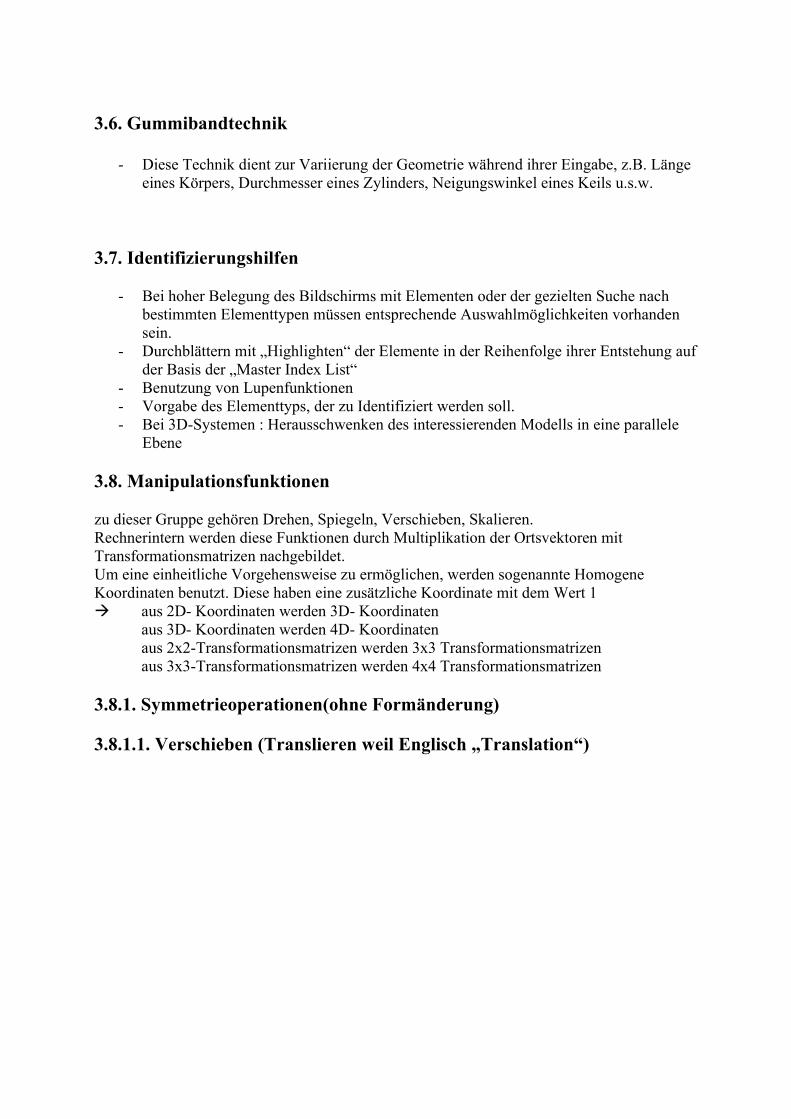
Im Rechner wird die „verschobene“ Geometrie am neuen Ort neu generiert und die Ausgangsgeometrie gelösch2.8.1.2. Drehen (Rotation)
Verdrehen der Ausgangsgeometrie um Drehwinkel alpha.Im Rechner wird die Ausgangsgeometrie gelöscht und die „gedrehte“ Geometrie neu erzeugt.
3.8.1.3. Spiegeln

Rechnerintern wird Spiegelung durch zwei Drehungen um die nichtbeteiligten Achsen nachgebildet, hier also y- und z- Achse.Im Rechner wird die Ausgangsgeometrie gelöscht und die „gespiegelte“ Geometrie neu erzeugt.
3.8.1.4. Kopieren
Die Ausgangsgeometrie kann durch Aktivieren einer Kopierfunktion (Klonen) beibehalten werden. In diesem Fall wird die Ausgangsgeometrie nicht gelöscht.Anwendungsbeispiele:
- Flansche mit Bohrbildern- Schneidfolien von Rasier- Gekachelte Oberflächen
2.8.2. Funktionen mit Formänderung
3.8.2.1. Trimmen
In Form bringen oder Anpassen der Geometrie durch verkürzen von 2D- und 3D Elementen (vgl. Gummibandeffekt)Zu beachten:
- Reihenfolge beim Festlegen der Trimmgrenzen und den zu trimmenden Element- Reihenfolge, ob die zu erhaltende oder zu trimmende „Seite“ selektiert werden
muß
Linien

Kreise und Kreisbögen
Freihandlinien
Freihandlinien können nur vom letzten Segment aus verkürzt werden !
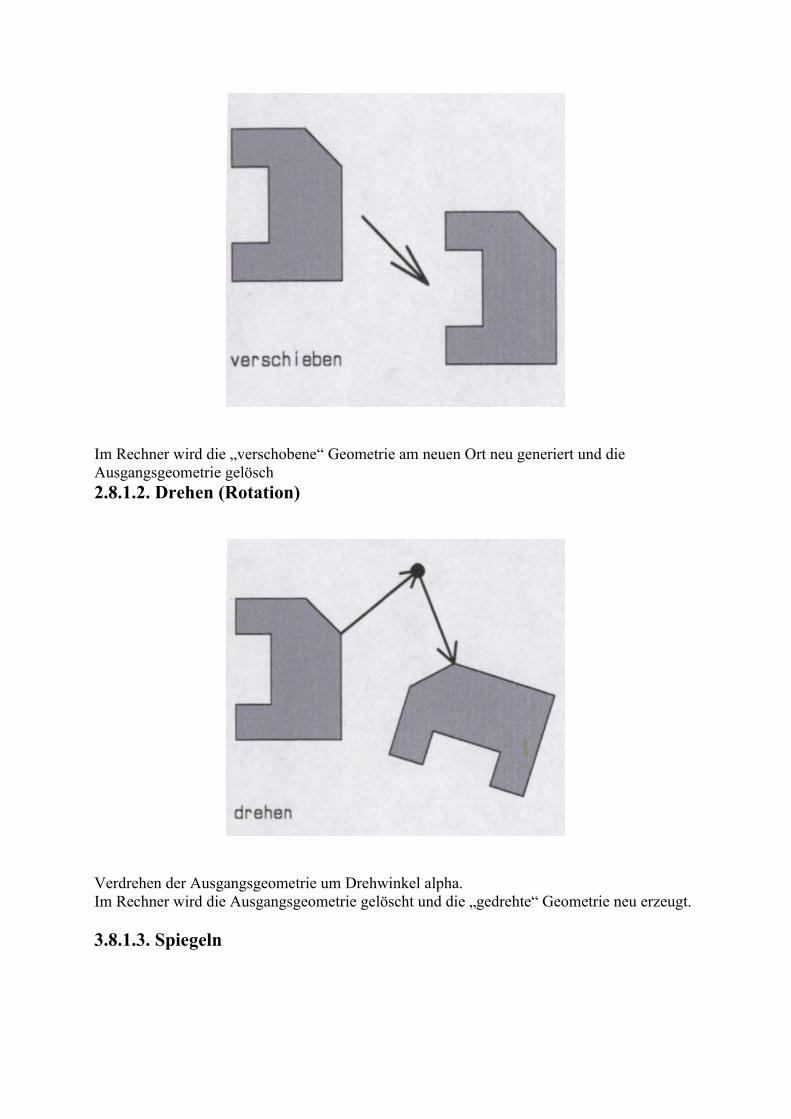
Verlängerung von Freihandlinien: Nur dann wenn mit analytischen Elementen (Linie, Kreisbogen) oder parametrisch (Weiterführung der Funktion des letzten Segments) verlängert wird
3.8.2 Skalieren
Verändern der Größenparameter einer GeometrieLinie: Verlängern, Verkürzen (auch durch Trimmen realisierbar)Kreis/ Kreisbogen: Anfangswinkel, Endwinkel, DurchmesserFreihandlinie: Lage und Abstand der definierenden PunkteFlächen: Abstand der definierenden Punkte
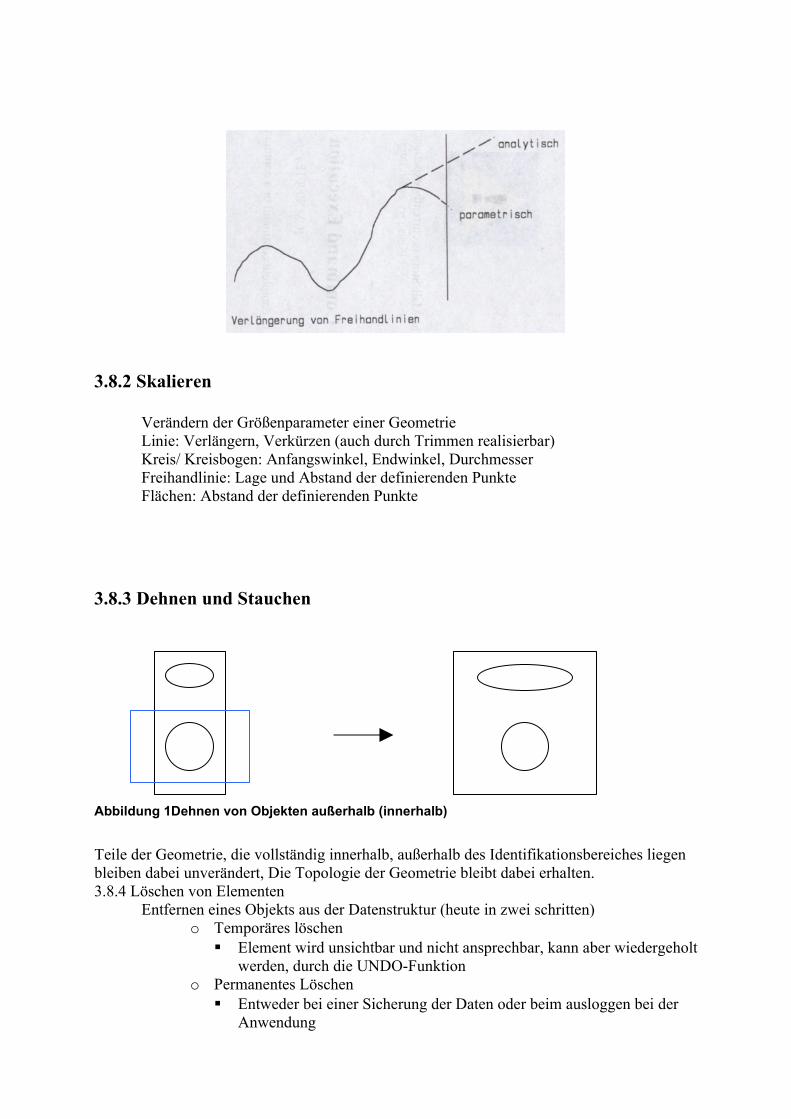
3.8.3 Dehnen und Stauchen
Abbildung 1Dehnen von Objekten außerhalb (innerhalb)
Teile der Geometrie, die vollständig innerhalb, außerhalb des Identifikationsbereiches liegen bleiben dabei unverändert, Die Topologie der Geometrie bleibt dabei erhalten. 3.8.4 Löschen von Elementen
Entfernen eines Objekts aus der Datenstruktur (heute in zwei schritten)o Temporäres löschen Element wird unsichtbar und nicht ansprechbar, kann aber wiedergeholt
werden, durch die UNDO-Funktiono Permanentes Löschen Entweder bei einer Sicherung der Daten oder beim ausloggen bei der
Anwendung
3.9 Aufbereiten eines Geometriemodells zu einer technischen Zeichnung
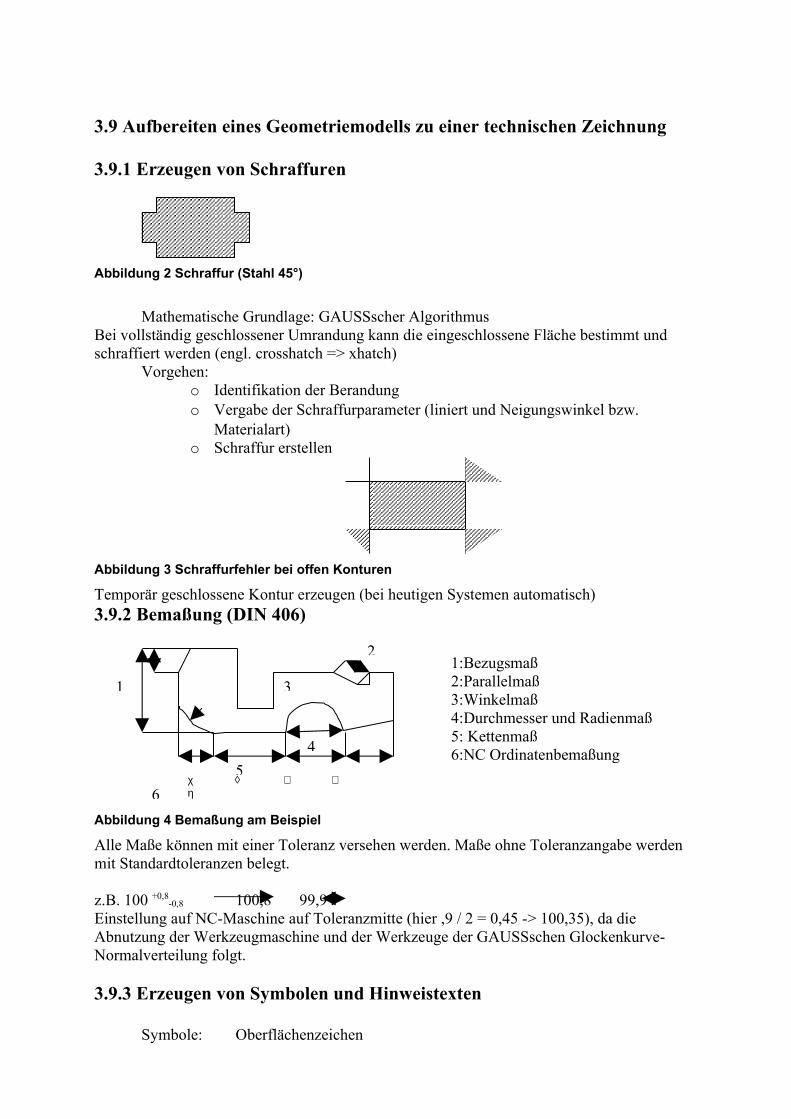
3.9.1 Erzeugen von Schraffuren
Abbildung 2 Schraffur (Stahl 45°)
Mathematische Grundlage: GAUSSscher AlgorithmusBei vollständig geschlossener Umrandung kann die eingeschlossene Fläche bestimmt und schraffiert werden (engl. crosshatch => xhatch)
Vorgehen:o Identifikation der Berandungo Vergabe der Schraffurparameter (liniert und Neigungswinkel bzw.
Materialart)o Schraffur erstellen
Abbildung 3 Schraffurfehler bei offen Konturen
Temporär geschlossene Kontur erzeugen (bei heutigen Systemen automatisch)3.9.2 Bemaßung (DIN 406)
Abbildung 4 Bemaßung am Beispiel
Alle Maße können mit einer Toleranz versehen werden. Maße ohne Toleranzangabe werden mit Standardtoleranzen belegt.
z.B. 100 +0,8-0,8 100,8 99,9
Einstellung auf NC-Maschine auf Toleranzmitte (hier ,9 / 2 = 0,45 -> 100,35), da die Abnutzung der Werkzeugmaschine und der Werkzeuge der GAUSSschen Glockenkurve-Normalverteilung folgt.
3.9.3 Erzeugen von Symbolen und Hinweistexten
Symbole: Oberflächenzeichen
1:Bezugsmaß2:Parallelmaß3:Winkelmaß4:Durchmesser und Radienmaß5: Kettenmaß6:NC Ordinatenbemaßung
1
2
3
45
χ ◊ ∴ ∇ηy x N τ
6

Form und Lage-ToleranzenSymbole für Fertigungsverfahren (z.B. Schweißverfahren)
Abbildung 5 Symbol für Fertigungstoleranz der Rautiefe beispielsweise beim Drehen, Fräsen
Hinweistexte: Bearbeitungshinweise
3.9.4 Erzeugen von Einzelheiten (Ausschnittsvergrößerung)
Abbildung 6 Ausschnittvergrößerung
Abbildung 7 Ausschnitt
3.9.5 Zeichnungsrahmen und SchriftfeldZeichnungsrahmen: Begrenzt die Zeichnung, enthält allgemeine organisatorische Informationen sowie den Copyright © – Hinweis
Schriftfeld: Spezielle organisatorische Daten sowie Stammdaten, Firmenname, Name des Bearbeiters und Maßstab der Darstellung Inhalte des Produktdatenmanagements
4 Produktdatenmanagement (EDM/PDM)Inhalte:
Erfassen und verwalten der Daten und Unterlagen über Produkte und die sie modellierenden Systeme im Bereich der Produktentwicklung
√ Rt 20 : Rautiefe
A
A Originalmaß

Abbildung 8 Komponenten der Produktentwicklung
Unterstützung der Phasen der Produktentwicklung bis zur Freigabe für die Fertigung Nachfolgendes System: PPS (Produktionsplanungs- und steuerungssystem) bzw. ERP
(Enterprise Resource Planning). Diese verwalten die Daten für die Fertigung, Verwaltung und das Controling
Richtlinie: VDI 2219 Abkürzung EDM: Engineering Data Management – Prozessoptimierte Daten Abkürzung PDM: Product Data Management – Produktorientierte Daten WORKFLOW = fest verkettet Reihenfolge von Aktivitäten
4.1 Zusammenspiel von CAx – EDM/PDM und PPS
Sichtweisen in der Produktent-wicklung
Produkte -> Produktmodelle in CAD
Prozesssicht -> Vorgehensmodell Datensicht -> Datenstrukturen in EDM/PDM
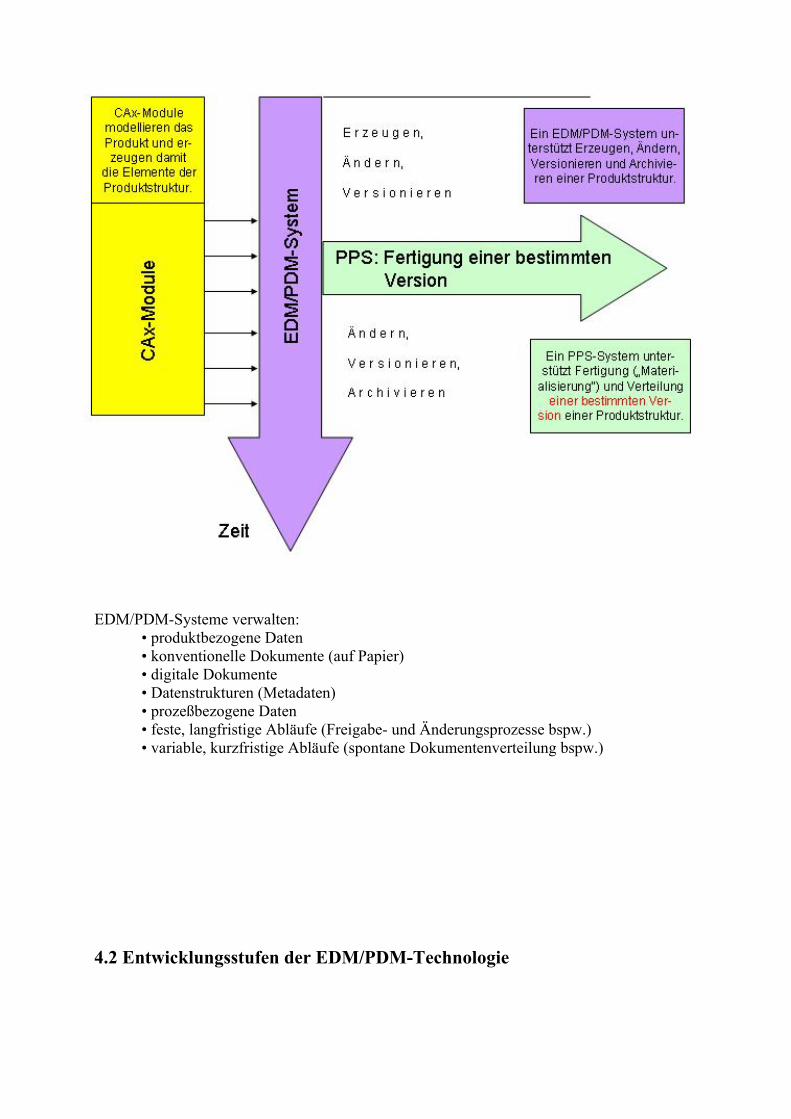
EDM/PDM-Systeme verwalten:• produktbezogene Daten• konventionelle Dokumente (auf Papier)• digitale Dokumente• Datenstrukturen (Metadaten)• prozeßbezogene Daten• feste, langfristige Abläufe (Freigabe- und Änderungsprozesse bspw.)• variable, kurzfristige Abläufe (spontane Dokumentenverteilung bspw.)
4.2 Entwicklungsstufen der EDM/PDM-Technologie
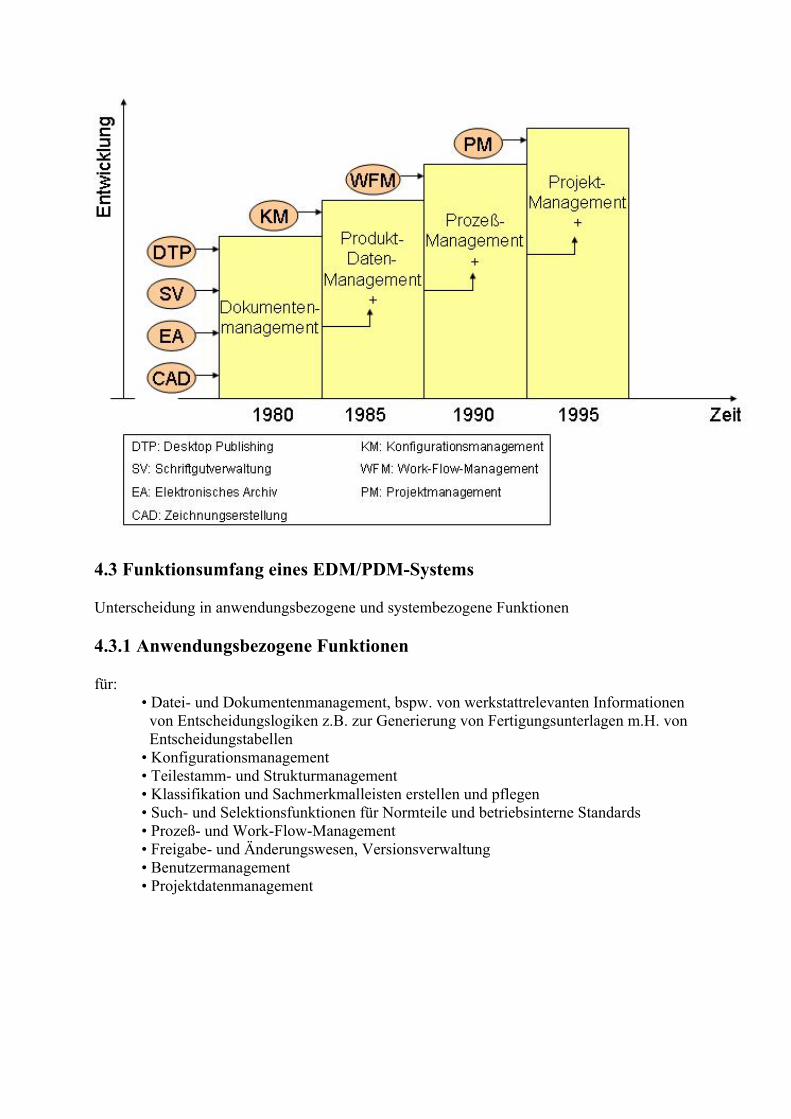
4.3 Funktionsumfang eines EDM/PDM-Systems
Unterscheidung in anwendungsbezogene und systembezogene Funktionen
4.3.1 Anwendungsbezogene Funktionen
für:• Datei- und Dokumentenmanagement, bspw. von werkstattrelevanten Informationen von Entscheidungslogiken z.B. zur Generierung von Fertigungsunterlagen m.H. von Entscheidungstabellen• Konfigurationsmanagement• Teilestamm- und Strukturmanagement• Klassifikation und Sachmerkmalleisten erstellen und pflegen• Such- und Selektionsfunktionen für Normteile und betriebsinterne Standards• Prozeß- und Work-Flow-Management• Freigabe- und Änderungswesen, Versionsverwaltung• Benutzermanagement• Projektdatenmanagement

4.3.2 Systembezogene Funktionen
• Kommunikation- Produktdatenaustausch (VDA-FS, IGES, STEP; Ziel: möglichst viele Modelldaten von möglichst vielen CAD-Systemen lesbar)
• Datentransport- Datenverteilung, Mailing
• Viewing- Druck- / Plotausgaben- Erzeugersysteme (CAD, NC, DTP)
• Datensicherung- Festlegen von Zugriffsrechten auf Daten und Funktionen- Privilegienverwaltung und –kontrolle- Verwaltung der Benutzer und Benutzergruppen (Rollen)
• Archivierung- technischer Produktdaten (technischer Teilestamm und Stückliste)- technischer Dokumente und Unterlagen
4.4 Strategische Bedeutung einer EDM/PDM-Anwendung
• Unternehmensziele bei Produktanlauf- Reduktion der Produktanlaufzeit und der verursachten Kosten- fertigungs-, montage- und planungsgerechte Produktstruktur- Erhöhung der Produktqualität
• Rationalisierung durch- Projektmanagement- Verbesserung der technischen Ablauforganisation- Simultaneous Engineering
4.4.1 EDM/PDM als zentrales Zugriffssystem auf Produktdaten
• einheitliche, zentrales, unternehmensweites Produktdatenmodell wird angestrebt• EDM/PDM kanalisiert Anfragen zum Produktmodell über
- geometrische Informationen (CAD)- technische Informationen (CAM)- Strukturinformationen (bspw. Baugruppenzusammensetzung)- Qualitätsinformationen (CAQ)
4.4.2 EDM/PDM zur Abbildung der betrieblichen Ablauforganisation
• Freigabe-, Änderungs- und Verbotswesen• Unterlagenfluss und –verteilung• Sicherheitsmechanismen• Kommunikation bzgl. technischer Abläufe
4.5 Einführung in EDM / PDM
4.5.1 Ursachen / Gründe für die Einführung
• Zu lange Entwicklungszeit (8-36 Monate)• Zu lange Serienreifezeit (24-36 Monate)• Fehlendes Projektmanagement wiederkehrender Abläufe• Mangelhafte betriebliche Ordnungssysteme (Namensgebung, Klassifikation) Vereinfachung der Suche nach Vorhandenem
• Verfahren und Abläufe sind ungenügend dokumentiert• Mangelhafte Kostentransparenz
4.5.2 Einführungsreihenfolge
• Bestandsaufnahme (Ist-Analyse)• Sollkonzept• Relevante Kriterien für Anwendung festlegen (~ 50 Stück)• Konzentrieren des Angebots auf zwei – drei Kriterien• Benchmark (Testanwendung) anhand tatsächlicher Beispiele (Dauer zwei Wochen)• Verhandlung und Auswahl des Systems• Freigabe
Dauer 2 – 4 Monate
4.5.3 Einsatzmöglichkeiten
• Konsistente Datenpflege und –verteilung• Konfigurationsmanagement
o nach Produktvarianteno nach Entstehungszeit
• Klassifikation / Nummerierungssysteme
5. Datenbanken und Datenverwaltungssysteme
Eine Datenbank ist eine selbstständige, auf Dauer und für den flexiblen Gebrauch ausgelegte Datenorganisation, umfassend den Datenbestand (Datenbasis) und die dazugehörige Datenverwaltung. Die Daten im Bestand sollten weitestgehend redundanzfrei sein.
5.1 Grundlagen
5.1.1 Begriffe und Definitionen
• Konsistenzo Übereinstimmung des Inhalts der Datenbank mit ihrer Beschreibungo Innere Widerspruchsfreiheit der Daten
• Redundanzo Dopplung identischer Dateno Vorhanden, wenn ein Teil der Datenbank ohne Informationsverlust entfallen
kann• Tabelle
Ort, wo sich eigentliche Daten befinden• Datensatz (Record)
jede Zeile der Tabelle, wobei de Aufbau des Datensatzes durch die Definition der Tabelle vorgegeben ist
• DatenfeldTeil eines Datensatzes mit genauen Vorschriften über den zu speichernden Inhalt (Format, Gleitkommaposition, Zeichenlänge)

• Stammdatenfeststehender Inhalt einer Tabelle
• Bewegungsdatenveränderliche Teile einer Tabelle
• DatenmanipulationAnzeige oder Veränderung eines bestimmten Ausschnitts der Datenbank
• Transaktioneine in sich abgeschlossene Datenbankoperation, die konsistenzerhaltend sein muss
• NormalisierungAbbau von Redundanzen in einer relationalen Datenbank
Drei Arten von Datenbankena) Hierarchisch b) Relational c) Netzwerk
1 : n n : m
5.2 Aufbau von Datenbanken
5.2.1 Komponenten
• Datenbasis (für den flexiblen Gebrauch angelegte Datenbasis)o Selbstständigo Logisch strukturierto Exportierbar (vom Rest der Datenbank trennbar)o Importierbar in andere Datenbanken
• Metadatenbasis (Verwaltungsinformationen)o Zugriffsrechteo Wertebereicheo Inhaltsverzeichniso Datenbezeichnungen (Relationen)
Metadaten sind nicht Bestandteile der Datenbasis, müssen aber gemeinsam mit ihr exportiert bzw. importiert werden.
• Datenverwaltungssystem (DBMS)zur Realisierung aller Datenbankfunktionen
o Primäre Funktionen Datendefinition Datenmanipulation
o Sekundäre Funktionen Datensicherheit Datenschutz
Datenflexibilität Datenbankzugriffskomfort Systemwartung
z. B. Datencompiler (Formatübertragung)Abfragesprachen (SQL)Prüfroutinen zur Konsistenzsicherung
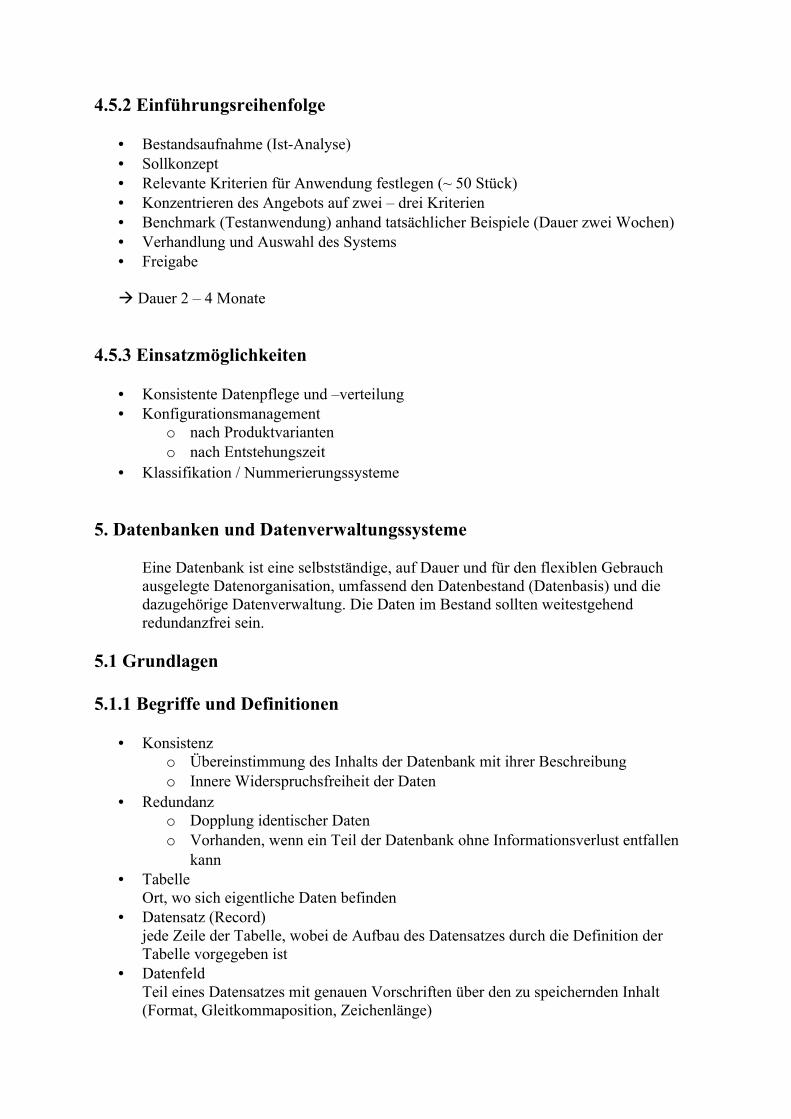
Abbildung 9 Konstruktionsarten und Rechnerunterstützung
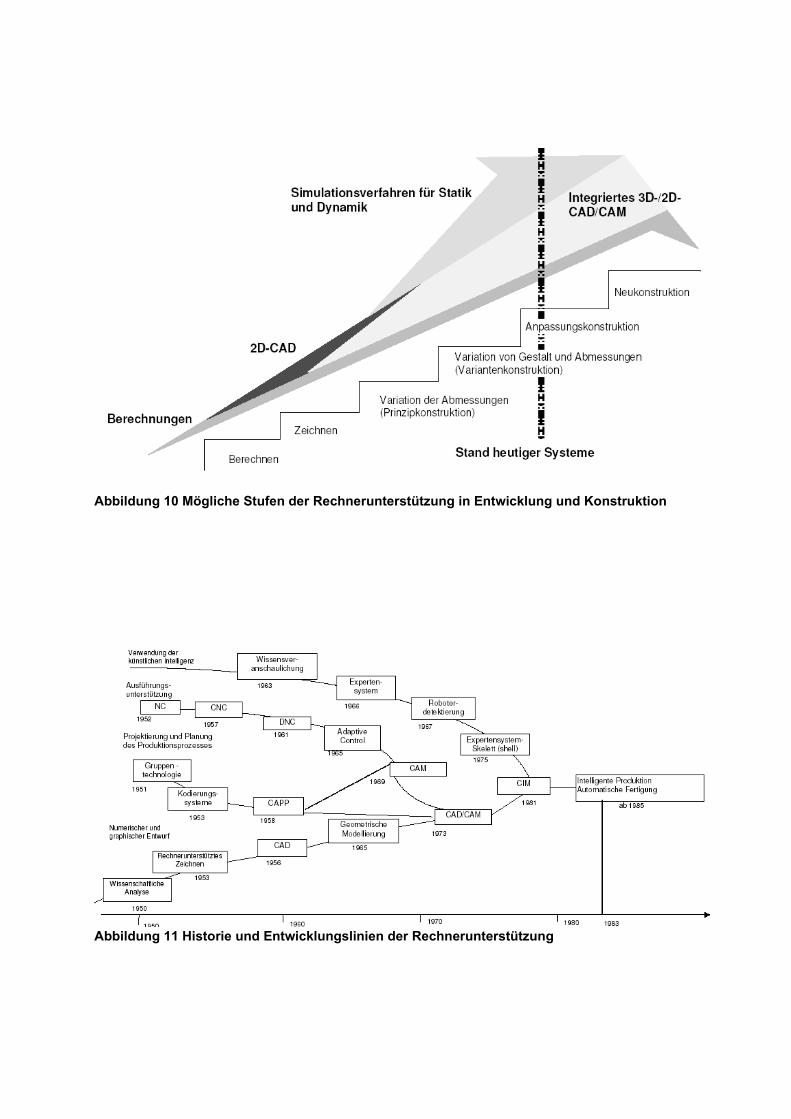
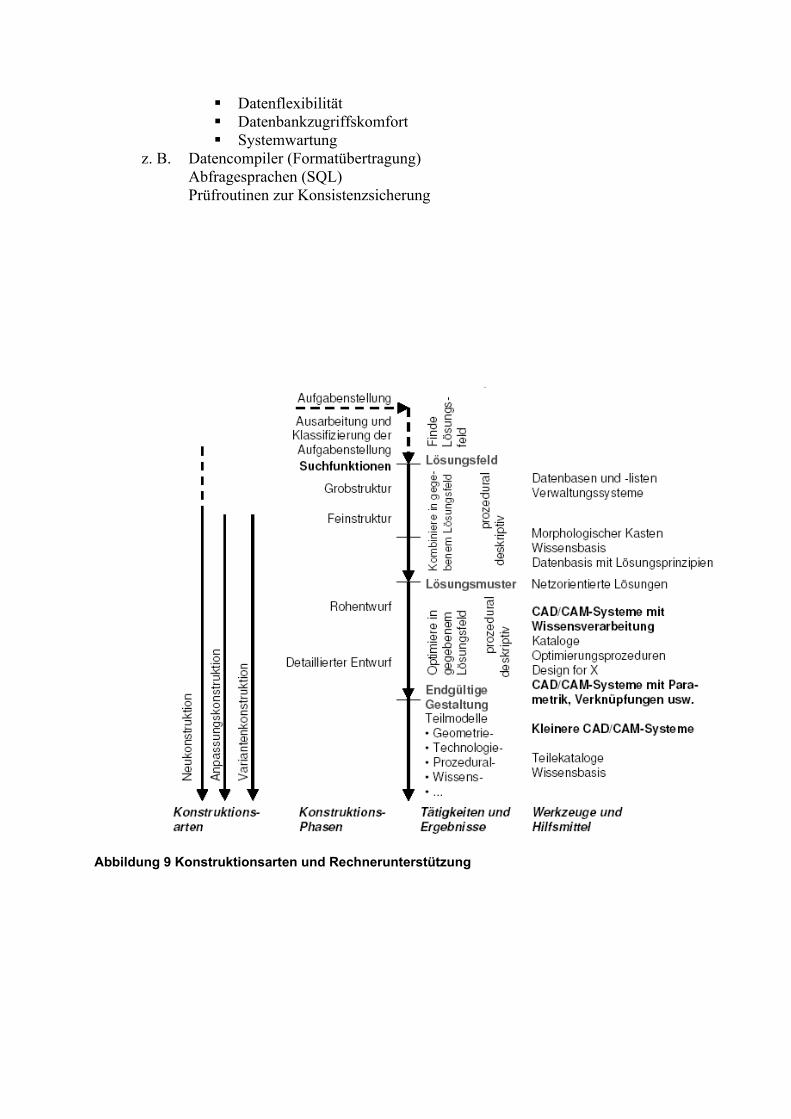
Abbildung 10 Mögliche Stufen der Rechnerunterstützung in Entwicklung und Konstruktion
Abbildung 11 Historie und Entwicklungslinien der Rechnerunterstützung
6. Wissensmanagement
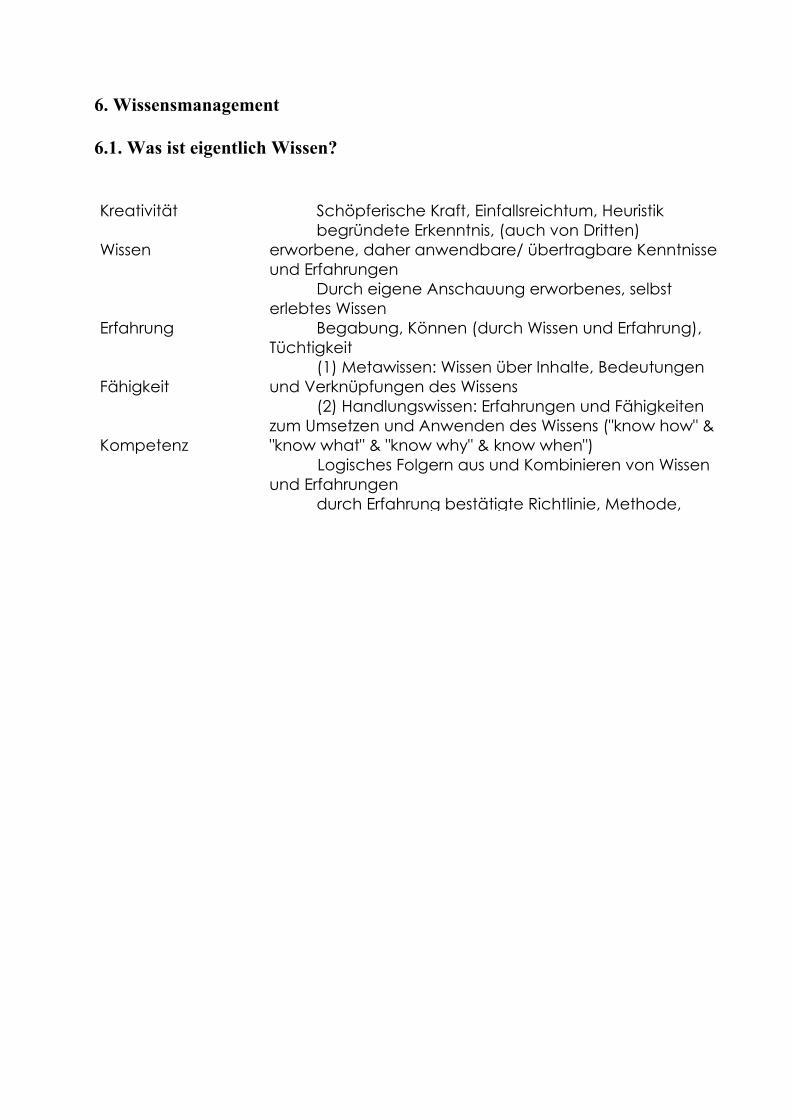
6.1. Was ist eigentlich Wissen?
Schöpferische Kraft, Einfallsreichtum, Heuristikbegründete Erkenntnis, (auch von Dritten)
erworbene, daher anwendbare/ übertragbare Kenntnisse und Erfahrungen
Durch eigene Anschauung erworbenes, selbst erlebtes Wissen
Begabung, Können (durch Wissen und Erfahrung), Tüchtigkeit
(1) Metawissen: Wissen über Inhalte, Bedeutungen und Verknüpfungen des Wissens
(2) Handlungswissen: Erfahrungen und Fähigkeiten zum Umsetzen und Anwenden des Wissens ("know how" & "know what" & "know why" & know when")
Logisches Folgern aus und Kombinieren von Wissen und Erfahrungen
durch Erfahrung bestätigte Richtlinie, Methode,
Kreativität
Wissen
Erfahrung
Fähigkeit
Kompetenz
Analytisches
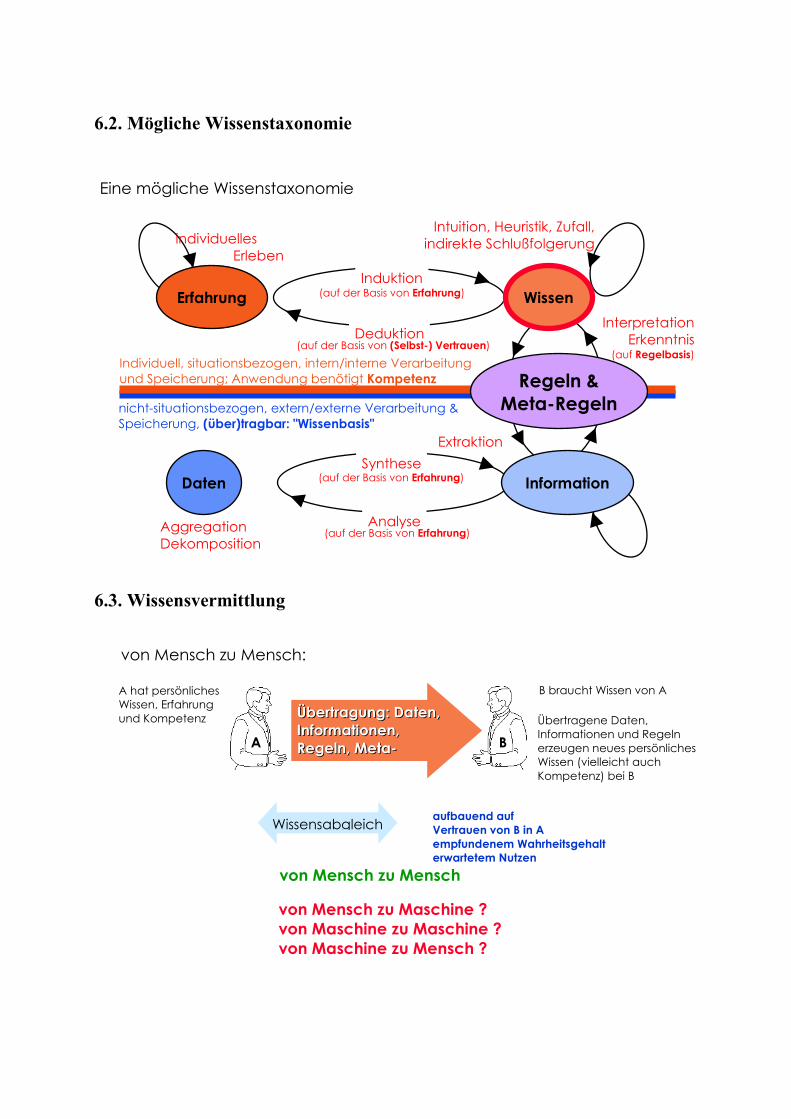
6.2. Mögliche Wissenstaxonomie
6.3. Wissensvermittlung
Eine mögliche Wissenstaxonomie
Wissen
Information
Analyse
Synthese
AggregationDekomposition
Erfahrung
Daten
Induktion
Deduktion
Intuition, Heuristik, Zufall,indirekte Schlußfolgerung
Regeln &Meta-Regeln
InterpretationErkenntnis
(auf Regelbasis)
Extraktion
Individuell, situationsbezogen, intern/interne Verarbeitung und Speicherung; Anwendung benötigt Kompetenz
nicht-situationsbezogen, extern/externe Verarbeitung & Speicherung, (über)tragbar: "Wissenbasis"
(auf der Basis von Erfahrung)
(auf der Basis von Erfahrung)
(auf der Basis von (Selbst-) Vertrauen)
(auf der Basis von Erfahrung)
individuellesErleben
B braucht Wissen von A
Übertragung: Daten, Übertragung: Daten, Informationen, Informationen, Regeln, Meta-Regeln, Meta-RegelnRegeln
A B
A hat persönliches Wissen, Erfahrung und Kompetenz Übertragene Daten,
Informationen und Regeln erzeugen neues persönliches Wissen (vielleicht auch Kompetenz) bei B
von Mensch zu Mensch:
von Mensch zu Maschine ?von Maschine zu Maschine ?von Maschine zu Mensch ?
aufbauend aufVertrauen von B in Aempfundenem Wahrheitsgehalterwartetem Nutzen
Wissensabgleich
von Mensch zu Mensch