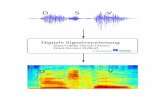
1 Digitale Filter - dnt.kr.hsnr.dednt.kr.hsnr.de/DSV14/skripte_dss/filter.pdf · Impulsantwort...
20
H.G. Hirsch 1 DSS-WS 2011/12 1 Digitale Filter Die Extraktion oder die Wichtung bestimmter Frequenzkomponenten eines Signals stellt einen fundamentalen Bestandteil der Signalverarbeitung dar. Im vorhergehenden Kapitel zur Diskreten Fourier Transformation wurde bereits gezeigt, wie man die Impulsantworten bestimmter Filter bestimmen kann. In diesem Kapitel wird die konkrete Realisierung als digitale Filter aufgezeigt. Die grundlegenden Eigenschaften digitaler Filter und die Analyse ihres Verhaltens im Spektralbereich mit Hilfe der Z- Transformation werden erläutert. Es werden die Unterschiede von Filtern mit begrenzter Impulsantwort (FIR) und Filter mit zeitlich nicht begrenzter Impulsantwort (IIR) aufgezeigt. Abschließend werden verschiedene Verfahren zum Entwurf digitaler Filter vorgestellt. 1.1 Digitales Filter als Beispiel eines linearen, zeitinvarianten, diskreten Systems Bei digitalen Filtern handelt es sich um lineare, zeitinvariante, diskrete Systeme mit einem zeitdiskreten Eingangs- und einem zeitdiskreten Ausgangssignal. Das lineare und zeitinvariante Verhalten von Systemen wurde bereits in Kapitel 2 ausführlich beschrieben: Ein System weist ein lineares Verhalten auf, wenn das Eingangssignal x(n) = a 1 ·x 1 (n) + a 2 ·x 2 (n), das eine Linearkombination der beiden Signale x 1 (n) und x 2 (n) darstellt, das Ausgangssignal y(n) = a 1 ·y 1 (n) + a 2 ·y 2 (n) erzeugt. Dabei stellen y 1 (n) und y 2 (n) die Ausgangssignale dar, die bei der alleinigen Betrachtung von x 1 (n) oder x 2 (n) als Eingangssignal am Ausgang generiert würden. Desweiteren nennt man ein System zeitinvariant, wenn ein um m Abtastintervalle verzögertes Eingangssignal x(n-m) ein ebenfalls um m Abtastintervalle verzögertes Ausgangssignal y(n-m) erzeugt. Ausgehend von diesen Definitionen kann man ein lineares, zeitinvariantes, diskretes System mit den in Bild 4.1 gezeigten Grundelementen aufbauen. Dies sind der Addierer, der Multiplizierer mit einer Konstanten und ein Verzögerungselement, das das zeitdiskrete Signal um ein Abtastintervall T verzögert. Diese Grundfunktionen lassen sich mit einem Digitalrechner oder einer digitalen Schaltungsanordnung einfach realisieren.
Transcript of 1 Digitale Filter - dnt.kr.hsnr.dednt.kr.hsnr.de/DSV14/skripte_dss/filter.pdf · Impulsantwort...

HG Hirsch 1 DSS-WS 201112
1 Digitale Filter
Die Extraktion oder die Wichtung bestimmter Frequenzkomponenten eines Signals stellt einen
fundamentalen Bestandteil der Signalverarbeitung dar Im vorhergehenden Kapitel zur Diskreten
Fourier Transformation wurde bereits gezeigt wie man die Impulsantworten bestimmter Filter
bestimmen kann
In diesem Kapitel wird die konkrete Realisierung als digitale Filter aufgezeigt Die grundlegenden
Eigenschaften digitaler Filter und die Analyse ihres Verhaltens im Spektralbereich mit Hilfe der Z-
Transformation werden erlaumlutert Es werden die Unterschiede von Filtern mit begrenzter
Impulsantwort (FIR) und Filter mit zeitlich nicht begrenzter Impulsantwort (IIR) aufgezeigt
Abschlieszligend werden verschiedene Verfahren zum Entwurf digitaler Filter vorgestellt
11 Digitales Filter als Beispiel eines linearen zeitinvarianten diskreten Systems
Bei digitalen Filtern handelt es sich um lineare zeitinvariante diskrete Systeme mit einem
zeitdiskreten Eingangs- und einem zeitdiskreten Ausgangssignal Das lineare und zeitinvariante
Verhalten von Systemen wurde bereits in Kapitel 2 ausfuumlhrlich beschrieben
Ein System weist ein lineares Verhalten auf wenn das Eingangssignal x(n) = a1x1(n) + a2x2(n)
das eine Linearkombination der beiden Signale x1(n) und x2(n) darstellt das Ausgangssignal y(n) =
a1y1(n) + a2y2(n) erzeugt Dabei stellen y1(n) und y2(n) die Ausgangssignale dar die bei der
alleinigen Betrachtung von x1(n) oder x2(n) als Eingangssignal am Ausgang generiert wuumlrden
Desweiteren nennt man ein System zeitinvariant wenn ein um m Abtastintervalle verzoumlgertes
Eingangssignal x(n-m) ein ebenfalls um m Abtastintervalle verzoumlgertes Ausgangssignal y(n-m)
erzeugt
Ausgehend von diesen Definitionen kann man ein lineares zeitinvariantes diskretes System mit
den in Bild 41 gezeigten Grundelementen aufbauen Dies sind der Addierer der Multiplizierer mit
einer Konstanten und ein Verzoumlgerungselement das das zeitdiskrete Signal um ein Abtastintervall
T verzoumlgert Diese Grundfunktionen lassen sich mit einem Digitalrechner oder einer digitalen
Schaltungsanordnung einfach realisieren
HG Hirsch 2 DSS-WS 201112
Bild 41 Grundelemente eines linearen zeitinvarianten zeitdiskreten Systems
Ein einfaches Beispiel eines linearen zeitinvarianten diskreten Systems das aus diesen
Grundelementen gebildet wird ist in Bild 42 dargestellt
Bild 42 Schaltungsanordnung eines einfachen digitalen Filters
Das Ausgangssignal laumlsst sich beschreiben als
)1()()()()( 10
1
10 minussdot+sdot=minussdot+sdot==
nxbnxbTnxbnxbnyT
Die Beschreibung von y(n) in dieser Form bezeichnet man auch als Differenzengleichung Damit
laumlsst sich die Impulsantwort h(n) dieses Filters bestimmen zu
)1()()( 10 minussdot+sdot= nbnbnh δδ
Bild 43 Impulsantwort des in Bild 42 dargestellten Filters
b1
b0
Zeit
-2T -T 0 T 2T
y(n)=x(n-1) x(n)
x2(n)
+ x1(n)
y(n)= x1(n)+ x2(n) T
a y(n)=ax(n) x(n)
b0
b1
+
T
x(n) y(n)
HG Hirsch 3 DSS-WS 201112
Das Ausgangssignal des Filters laumlsst sich bei Kenntnis der Impulsantwort mit Hilfe der diskreten
Faltung bestimmen
Moumlchte man die spektralen Eigenschaften dieses Systems analysieren so laumlsst sich durch
Anwendung der Fourier Transformation der Frequenzgang H(f) = Y(f)X(f) bestimmen zu
( ) ( ) ( )TfbjTfbbebbfX
fYfH
efXbfXbfY
Tfj
Tfj
sdotsdotsdotsdotminussdot+sdotsdotsdotsdot+=sdot+==
sdotsdot+sdot=
sdotsdotsdotsdotminus
sdotsdotsdotsdotminus
πππ
π
2sin2cos)(
)()(
)()()(
1102
10
210
Damit ergibt sich der Betrag |H(f)| der Uumlbertragungsfunktion zu
( )[ ] ( )
( ) ( ) ( )
( )TfbbbbfH
TfbTfbTfbbb
TfbTfbbfH
sdotsdotsdotsdotsdotsdot++=
sdotsdotsdotsdot+sdotsdotsdotsdot+sdotsdotsdotsdotsdotsdot+
=sdotsdotsdotsdot+sdotsdotsdotsdot+=+=
π
πππ
ππ
2cos2)(
2sin2cos2cos2
2sin2cosImRe)(
10
2
1
2
0
22
122
110
2
0
22
1
2
1022
Der Betrag |H(f)| des Frequenzgangs laumlsst sich fuumlr die Werte b0=b1=1 sowie b0=1 und b1=(-1)
bestimmen zu
( )
( ) Tiefpassf
fTffH
giltEs
TffH
a
rArr
sdotsdot=sdotsdotsdot=rArr
sdot+plusmn=sdotrArr+
plusmn=
sdotsdotsdotsdot+=
ππ
αααα
π
cos2cos2)(
cos222cos22
cos12cos
2cos22)(
( )
( ) Hochpassf
fTffH
giltEs
TffH
a
rArr
sdotsdot=sdotsdotsdot=rArr
sdotminusplusmn=sdotrArrminus
plusmn=
sdotsdotsdotsdotminus=
ππ
αααα
π
sin2sin2)(
cos222sin22
cos12sin
2cos22)(
Die resultierenden Verlaumlufe der Frequenzgaumlnge werden in Bild 44 wiedergegeben Fuumlr den Fall
b1=1 besitzt die Uumlbertragungsfunktion dieser einfachen Anordnung eine Tiefpasscharakteristik und
11 10 == bb
11 10 minus== bb
HG Hirsch 4 DSS-WS 201112
fuumlr b1=(-1) eine Hochpasscharakteristik
Bild 44 Zwei moumlgliche Frequenzgaumlnge des in Bild 42 dargestellten Filters
Ein derartiges Hochpassfilter wird beispielsweise zur Houmlhenanhebung in der Sprachverarbeitung
verwendet mit b0=1 und b1=095 hellip 098 bei einer Abtastfrequenz von 8 kHz Damit werden
Spektralkomponenten im niedrigeren Frequenzbereich gedaumlmpft bei denen hauptsaumlchlich die
Energie eines Sprachsignals zu finden ist Umgekehrt werden houmlherfrequente Komponenten
angehoben bei denen Sprache geringere Energie besitzt die aber fuumlr bestimmte Laute zB
Zischlaute informationstragend sind Deshalb spricht man bei dieser Filterung auch von einer
Houmlhenanhebung (preemphasis) Insgesamt wird durch diese Filterung ein Signal erzeugt bei dem
die Energie gleichmaumlszligiger uumlber das gesamte Spektrum verteilt ist
12 Z Transformation
Das Verhalten digitaler Filter im Spektralbereich kann durch die Verwendung der Z Transformation
einfacher beschrieben und besser veranschaulicht werden als durch alleinige Verwendung der
HG Hirsch 5 DSS-WS 201112
Fourier Transformation In Analogie zur Laplace Transformation bei analogen Signalen
gewaumlhrleistet die Z Transformation bei zeitdiskreten Signalen auch eine Konvergenz fuumlr Signale
die beispielsweise Pole oder Dirac Stoumlsse im Spektrum besitzen und fuumlr die die Fourier
Transformation keine Konvergenz aufweist
Die Z Transformation eines zeitdiskreten Signals x(n) ist im Allgemeinen definiert zu
sumsuminfin
minusinfin=
minus=infin
minusinfin=
sdotminus sdot=sdotsdot=n
nT
n
TnznxzTnxzX )()()(
1
Dabei beschreibt z im allgemeinen einen komplexen Wert ( )fjez
sdotsdotsdot+= πσ 2 Damit ist das Z Spektrum
in einer komplexen Ebene definiert sumsuminfin
minusinfin=
sdotsdotsdotsdotsdotminussdotsdotminusinfin
minusinfin=
sdotminus sdotsdotsdot=sdotsdot=n
TnfjTn
n
TneeTnxzTnxzX
πσ 2)()()(
Durch die Multiplikation mit dem Term Tne
sdotsdotminusσ kann man auch fuumlr Signale die keine Konvergenz
besitzen bei einem entsprechend gewaumlhlten σ die Konvergenz des Signals TneTnx sdotsdotminussdotsdot σ)(
erreichen
Beschraumlnkt man sich auf Signale deren Fourier Transformierte Konvergenz aufweisen koumlnnen Z
Transformierte und Fourier Transformierte ineinander uumlberfuumlhrt werden durch Setzen von 0=σ
Ausgehend von suminfin
minusinfin=
minussdot=n
nznxzX )()( kann durch Substitution mit af
fj
Tfjeez
sdotsdotsdotsdotsdotsdotsdot ==
ππ
22
das
Fourier Spektrum sumsuminfin
minusinfin=
sdotsdotsdotsdotminusinfin
minusinfin=
sdotsdotsdotsdotsdotminus sdotsdot=sdotsdot=n
ff
nj
n
Tnfj aeTnxeTnxfXπ
π2
2 )()()( bestimmt werden
Das Fourier Spektrum findet sich dann in der komplexen Z Ebene auf dem Einheitskreis |z|=1 wie
es in Bild 45 veranschaulicht wird
Bild 45 Auftreten der Fourier Transformierten auf dem Einheitskreis der Z Transformierten
f=fa4
Im(z)
Re(z)
|z|=1
f=0
f=3fa4
f=fa2
HG Hirsch 6 DSS-WS 201112
Bei der Z Transformation gelten ebenfalls die Theoreme der Fourier Transformation Insbesondere
geht die Faltung im Zeitbereich in eine Multiplikation im Z Spektrum uumlber
)()()()()()( zHzXzYnhnxny sdot=lowast=
Fuumlr das in Abschnitt 41 verwendete Beispiel eines einfachen digitalen Filters ergibt sich die
Uumlbertragungsfunktion bei Anwendung der Z Transformation zu
110
110
2
210
)(
)()(
)()()(
)()()(
minus
minussdotsdotsdotsdot
sdotsdotsdotsdotminus
sdot+==
sdotsdot+sdot=rArr=
sdotsdot+sdot=
zbbzX
zYzH
zzXbzXbzYzeMit
efXbfXbfY
Tfj
Tfj
π
π
Die Verzoumlgerung um ein Abtastintervall fuumlhrt bei Betrachtung der Z Transformierten zu einer
Multiplikation mit z-1
Dies verdeutlicht dass man fuumlr ein lineares zeitinvariantes diskretes System
die Z Transformierte auf einfache Weise bestimmen kann Tritt bei einem Filter eine Verzoumlgerung
eines Signals um N Abtastintervalle auf so entspricht dies der Multiplikation der Z Transformierten
des Signals mit z-N
( ) NzzXNnxNnnx minussdotminus=minuspartlowast )()()(
Durch die Substitution aff
jTfj
eezsdotsdotsdot
sdotsdotsdotsdot ==π
π2
2 kann aus der Uumlbertragungsfunktion H(z) der
Frequenzgang H(f) unmittelbar bestimmt werden
13 FIR Filter
Finite Impulse Response (FIR) Filter sind wie es ihr Name schon verdeutlicht dadurch
gekennzeichnet daszlig ihre Impulsantwort eine endliche Laumlnge aufweist Alle Filter mit einer nicht-
rekursiven Struktur wie es beispielhaft in Bild 46 dargestellt ist sind FIR Filter Nicht rekursiv
bedeutet dass es keine Ruumlckkopplung des Ausgangssignals y(n) in dieser Schaltungsanordnung
gibt
Das Ausgangssignal y(n) setzt sich aus einer Summe gewichteter und um bis zu N Abtastintervalle
verzoumlgerter Versionen des Eingangssignals x(n) zusammen Man bezeichnet die in Bild 46
dargestellte Filterstruktur auch als Transversalfilter Es wird der Begriff der Filterordnung
eingefuumlhrt der der Anzahl von Verzoumlgerungselementen entspricht die zur Generierung der groumlszligten
Verzoumlgerung des Eingangssignals benoumltigt werden Die Filterordnung ist in diesem allgemeinen
Beispiel folglich N Die Faktoren bk bezeichnet man als Filterkoeffizienten
HG Hirsch 7 DSS-WS 201112
Bild 46 Struktur eines Transversalfilters
Das Ausgangssignal y(n) laumlszligt sich als Differenzengleichung beschreiben zu
)()]1([)2()1()()( 1210 NnxbNnxbnxbnxbnxbny NN minussdot+minusminussdot++minussdot+minussdot+sdot= minusL
Durch Anwendung der Z Transformation laumlszligt sich die Uumlbertragungsfunktion H(z) bestimmen zu
sum=
minusminusminusminusminus
minusminus
minusminusminusminus
minusminus
sdot=sdot+sdot++sdot+sdot+==
sdotsdot+sdotsdot++sdotsdot+sdotsdot+sdot=N
k
k
k
N
N
N
N
N
N
N
N
zbzbzbzbzbbzX
zYzH
zzXbzzXbzzXbzzXbzXbzY
0
)1(1
22
110
)1(1
22
110
)(
)()(
)()()()()()(
L
L
Die Uumlbertragungsfunktion H(z) laumlsst sich einfach umformen so dass nur positive Exponenten bei
den z Termen auftreten
N
NN
NNN
z
bzbzbzbzbzH
+sdot++sdot+sdot+sdot= minus
minusminus 11
22
110)(
L
Im Zaumlhler tritt dabei ein Polynom vom Grad N auf Ermittelt man die Nullstellen dieses Polynoms
und betrachtet deren Lage in der komplexen Z Ebene so laumlsst sich damit auf einfache Weise
feststellen bei welchen Frequenzen der Frequenzgang des Filters Minima aufweist Man erhaumllt
somit eine grobe Vorstellung uumlber das Aussehen der Frequenzcharakteristik des Filters Diese
Betrachtungsweise wird bei der Darstellung der IIR Filter detaillierter vorgestellt
Nicht rekursive Filter sind wegen der fehlenden Ruumlckkopplung immer stabil wobei der Begriff der
Stabilitaumlt bei der Betrachtung nicht-rekursiver Filter noch genauer erlaumlutert wird FIR Filter sind
zudem linearphasig wenn die Filterkoeffizienten eine der in Bild 47 gezeigten Symmetrien
aufweisen
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
HG Hirsch 8 DSS-WS 201112
Bild 47 Symmetrische Impulsantworten linearphasiger FIR Filter
Man bezeichnet derartige Filter als linearphasig weil der Phasengang der Uumlbertragungsfunktion
eine lineare Abhaumlngigkeit der Phase von der Frequenz aufweist Der Phasengang Φ(f) laumlszligt sich
mittels ( ) TN
ff sdotsdotsdotsdotminus=Φ2
2 π beschreiben
Anschaulich bedeutet das linearphasige Verhalten eine zeitliche Verschiebung des Signalverlaufs
am Ausgang um N2 Abtastintervalle ohne Verzerrungen im Vergleich zum Signalverlauf am
Eingang Diese anschauliche Betrachtungsweise laumlszligt sich formal als konstante Gruppenlaufzeit τg
beschreiben Die Gruppenlaufzeit ist definiert als die Ableitung der Phase uumlber der Frequenz zu
( )f
fg
part
Φpartsdot
sdotminus=
πτ
2
1 Aus dem zuvor angegebenen Phasengang fuumlr Filter mit symmetrischer
Anordnung der Filterkoeffizienten folgt somit eine konstante Gruppenlaufzeit
( )T
NT
N
f
fg sdot=
sdotsdotsdotminussdot
sdotminus=
part
Φpartsdot
sdotminus=
222
2
1
2
1π
ππτ
Dies wird auch in Bild 48 verdeutlicht in dem die Filterung zweier Schwingungen eines
Sinussignals mit einer dreieckfoumlrmigen Impulsantwort eines symmetrischen FIR Filters der
Ordnung 6 dargestellt ist Abgesehen von den Ein- und Ausschwingvorgaumlngen zu Beginn und am
Ende des Signalabschnitts bleibt die Form der Sinusschwingung unbeeinflusst Es kommt zu einer
zeitlichen Verzoumlgerung des Ausgangssignals um N2 = 3 Abtastwerte
punktsymmetrisch
spiegelsymmetrisch N - gerade
N - gerade
N - ungerade
N - ungerade
HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 2 DSS-WS 201112
Bild 41 Grundelemente eines linearen zeitinvarianten zeitdiskreten Systems
Ein einfaches Beispiel eines linearen zeitinvarianten diskreten Systems das aus diesen
Grundelementen gebildet wird ist in Bild 42 dargestellt
Bild 42 Schaltungsanordnung eines einfachen digitalen Filters
Das Ausgangssignal laumlsst sich beschreiben als
)1()()()()( 10
1
10 minussdot+sdot=minussdot+sdot==
nxbnxbTnxbnxbnyT
Die Beschreibung von y(n) in dieser Form bezeichnet man auch als Differenzengleichung Damit
laumlsst sich die Impulsantwort h(n) dieses Filters bestimmen zu
)1()()( 10 minussdot+sdot= nbnbnh δδ
Bild 43 Impulsantwort des in Bild 42 dargestellten Filters
b1
b0
Zeit
-2T -T 0 T 2T
y(n)=x(n-1) x(n)
x2(n)
+ x1(n)
y(n)= x1(n)+ x2(n) T
a y(n)=ax(n) x(n)
b0
b1
+
T
x(n) y(n)
HG Hirsch 3 DSS-WS 201112
Das Ausgangssignal des Filters laumlsst sich bei Kenntnis der Impulsantwort mit Hilfe der diskreten
Faltung bestimmen
Moumlchte man die spektralen Eigenschaften dieses Systems analysieren so laumlsst sich durch
Anwendung der Fourier Transformation der Frequenzgang H(f) = Y(f)X(f) bestimmen zu
( ) ( ) ( )TfbjTfbbebbfX
fYfH
efXbfXbfY
Tfj
Tfj
sdotsdotsdotsdotminussdot+sdotsdotsdotsdot+=sdot+==
sdotsdot+sdot=
sdotsdotsdotsdotminus
sdotsdotsdotsdotminus
πππ
π
2sin2cos)(
)()(
)()()(
1102
10
210
Damit ergibt sich der Betrag |H(f)| der Uumlbertragungsfunktion zu
( )[ ] ( )
( ) ( ) ( )
( )TfbbbbfH
TfbTfbTfbbb
TfbTfbbfH
sdotsdotsdotsdotsdotsdot++=
sdotsdotsdotsdot+sdotsdotsdotsdot+sdotsdotsdotsdotsdotsdot+
=sdotsdotsdotsdot+sdotsdotsdotsdot+=+=
π
πππ
ππ
2cos2)(
2sin2cos2cos2
2sin2cosImRe)(
10
2
1
2
0
22
122
110
2
0
22
1
2
1022
Der Betrag |H(f)| des Frequenzgangs laumlsst sich fuumlr die Werte b0=b1=1 sowie b0=1 und b1=(-1)
bestimmen zu
( )
( ) Tiefpassf
fTffH
giltEs
TffH
a
rArr
sdotsdot=sdotsdotsdot=rArr
sdot+plusmn=sdotrArr+
plusmn=
sdotsdotsdotsdot+=
ππ
αααα
π
cos2cos2)(
cos222cos22
cos12cos
2cos22)(
( )
( ) Hochpassf
fTffH
giltEs
TffH
a
rArr
sdotsdot=sdotsdotsdot=rArr
sdotminusplusmn=sdotrArrminus
plusmn=
sdotsdotsdotsdotminus=
ππ
αααα
π
sin2sin2)(
cos222sin22
cos12sin
2cos22)(
Die resultierenden Verlaumlufe der Frequenzgaumlnge werden in Bild 44 wiedergegeben Fuumlr den Fall
b1=1 besitzt die Uumlbertragungsfunktion dieser einfachen Anordnung eine Tiefpasscharakteristik und
11 10 == bb
11 10 minus== bb
HG Hirsch 4 DSS-WS 201112
fuumlr b1=(-1) eine Hochpasscharakteristik
Bild 44 Zwei moumlgliche Frequenzgaumlnge des in Bild 42 dargestellten Filters
Ein derartiges Hochpassfilter wird beispielsweise zur Houmlhenanhebung in der Sprachverarbeitung
verwendet mit b0=1 und b1=095 hellip 098 bei einer Abtastfrequenz von 8 kHz Damit werden
Spektralkomponenten im niedrigeren Frequenzbereich gedaumlmpft bei denen hauptsaumlchlich die
Energie eines Sprachsignals zu finden ist Umgekehrt werden houmlherfrequente Komponenten
angehoben bei denen Sprache geringere Energie besitzt die aber fuumlr bestimmte Laute zB
Zischlaute informationstragend sind Deshalb spricht man bei dieser Filterung auch von einer
Houmlhenanhebung (preemphasis) Insgesamt wird durch diese Filterung ein Signal erzeugt bei dem
die Energie gleichmaumlszligiger uumlber das gesamte Spektrum verteilt ist
12 Z Transformation
Das Verhalten digitaler Filter im Spektralbereich kann durch die Verwendung der Z Transformation
einfacher beschrieben und besser veranschaulicht werden als durch alleinige Verwendung der
HG Hirsch 5 DSS-WS 201112
Fourier Transformation In Analogie zur Laplace Transformation bei analogen Signalen
gewaumlhrleistet die Z Transformation bei zeitdiskreten Signalen auch eine Konvergenz fuumlr Signale
die beispielsweise Pole oder Dirac Stoumlsse im Spektrum besitzen und fuumlr die die Fourier
Transformation keine Konvergenz aufweist
Die Z Transformation eines zeitdiskreten Signals x(n) ist im Allgemeinen definiert zu
sumsuminfin
minusinfin=
minus=infin
minusinfin=
sdotminus sdot=sdotsdot=n
nT
n
TnznxzTnxzX )()()(
1
Dabei beschreibt z im allgemeinen einen komplexen Wert ( )fjez
sdotsdotsdot+= πσ 2 Damit ist das Z Spektrum
in einer komplexen Ebene definiert sumsuminfin
minusinfin=
sdotsdotsdotsdotsdotminussdotsdotminusinfin
minusinfin=
sdotminus sdotsdotsdot=sdotsdot=n
TnfjTn
n
TneeTnxzTnxzX
πσ 2)()()(
Durch die Multiplikation mit dem Term Tne
sdotsdotminusσ kann man auch fuumlr Signale die keine Konvergenz
besitzen bei einem entsprechend gewaumlhlten σ die Konvergenz des Signals TneTnx sdotsdotminussdotsdot σ)(
erreichen
Beschraumlnkt man sich auf Signale deren Fourier Transformierte Konvergenz aufweisen koumlnnen Z
Transformierte und Fourier Transformierte ineinander uumlberfuumlhrt werden durch Setzen von 0=σ
Ausgehend von suminfin
minusinfin=
minussdot=n
nznxzX )()( kann durch Substitution mit af
fj
Tfjeez
sdotsdotsdotsdotsdotsdotsdot ==
ππ
22
das
Fourier Spektrum sumsuminfin
minusinfin=
sdotsdotsdotsdotminusinfin
minusinfin=
sdotsdotsdotsdotsdotminus sdotsdot=sdotsdot=n
ff
nj
n
Tnfj aeTnxeTnxfXπ
π2
2 )()()( bestimmt werden
Das Fourier Spektrum findet sich dann in der komplexen Z Ebene auf dem Einheitskreis |z|=1 wie
es in Bild 45 veranschaulicht wird
Bild 45 Auftreten der Fourier Transformierten auf dem Einheitskreis der Z Transformierten
f=fa4
Im(z)
Re(z)
|z|=1
f=0
f=3fa4
f=fa2
HG Hirsch 6 DSS-WS 201112
Bei der Z Transformation gelten ebenfalls die Theoreme der Fourier Transformation Insbesondere
geht die Faltung im Zeitbereich in eine Multiplikation im Z Spektrum uumlber
)()()()()()( zHzXzYnhnxny sdot=lowast=
Fuumlr das in Abschnitt 41 verwendete Beispiel eines einfachen digitalen Filters ergibt sich die
Uumlbertragungsfunktion bei Anwendung der Z Transformation zu
110
110
2
210
)(
)()(
)()()(
)()()(
minus
minussdotsdotsdotsdot
sdotsdotsdotsdotminus
sdot+==
sdotsdot+sdot=rArr=
sdotsdot+sdot=
zbbzX
zYzH
zzXbzXbzYzeMit
efXbfXbfY
Tfj
Tfj
π
π
Die Verzoumlgerung um ein Abtastintervall fuumlhrt bei Betrachtung der Z Transformierten zu einer
Multiplikation mit z-1
Dies verdeutlicht dass man fuumlr ein lineares zeitinvariantes diskretes System
die Z Transformierte auf einfache Weise bestimmen kann Tritt bei einem Filter eine Verzoumlgerung
eines Signals um N Abtastintervalle auf so entspricht dies der Multiplikation der Z Transformierten
des Signals mit z-N
( ) NzzXNnxNnnx minussdotminus=minuspartlowast )()()(
Durch die Substitution aff
jTfj
eezsdotsdotsdot
sdotsdotsdotsdot ==π
π2
2 kann aus der Uumlbertragungsfunktion H(z) der
Frequenzgang H(f) unmittelbar bestimmt werden
13 FIR Filter
Finite Impulse Response (FIR) Filter sind wie es ihr Name schon verdeutlicht dadurch
gekennzeichnet daszlig ihre Impulsantwort eine endliche Laumlnge aufweist Alle Filter mit einer nicht-
rekursiven Struktur wie es beispielhaft in Bild 46 dargestellt ist sind FIR Filter Nicht rekursiv
bedeutet dass es keine Ruumlckkopplung des Ausgangssignals y(n) in dieser Schaltungsanordnung
gibt
Das Ausgangssignal y(n) setzt sich aus einer Summe gewichteter und um bis zu N Abtastintervalle
verzoumlgerter Versionen des Eingangssignals x(n) zusammen Man bezeichnet die in Bild 46
dargestellte Filterstruktur auch als Transversalfilter Es wird der Begriff der Filterordnung
eingefuumlhrt der der Anzahl von Verzoumlgerungselementen entspricht die zur Generierung der groumlszligten
Verzoumlgerung des Eingangssignals benoumltigt werden Die Filterordnung ist in diesem allgemeinen
Beispiel folglich N Die Faktoren bk bezeichnet man als Filterkoeffizienten
HG Hirsch 7 DSS-WS 201112
Bild 46 Struktur eines Transversalfilters
Das Ausgangssignal y(n) laumlszligt sich als Differenzengleichung beschreiben zu
)()]1([)2()1()()( 1210 NnxbNnxbnxbnxbnxbny NN minussdot+minusminussdot++minussdot+minussdot+sdot= minusL
Durch Anwendung der Z Transformation laumlszligt sich die Uumlbertragungsfunktion H(z) bestimmen zu
sum=
minusminusminusminusminus
minusminus
minusminusminusminus
minusminus
sdot=sdot+sdot++sdot+sdot+==
sdotsdot+sdotsdot++sdotsdot+sdotsdot+sdot=N
k
k
k
N
N
N
N
N
N
N
N
zbzbzbzbzbbzX
zYzH
zzXbzzXbzzXbzzXbzXbzY
0
)1(1
22
110
)1(1
22
110
)(
)()(
)()()()()()(
L
L
Die Uumlbertragungsfunktion H(z) laumlsst sich einfach umformen so dass nur positive Exponenten bei
den z Termen auftreten
N
NN
NNN
z
bzbzbzbzbzH
+sdot++sdot+sdot+sdot= minus
minusminus 11
22
110)(
L
Im Zaumlhler tritt dabei ein Polynom vom Grad N auf Ermittelt man die Nullstellen dieses Polynoms
und betrachtet deren Lage in der komplexen Z Ebene so laumlsst sich damit auf einfache Weise
feststellen bei welchen Frequenzen der Frequenzgang des Filters Minima aufweist Man erhaumllt
somit eine grobe Vorstellung uumlber das Aussehen der Frequenzcharakteristik des Filters Diese
Betrachtungsweise wird bei der Darstellung der IIR Filter detaillierter vorgestellt
Nicht rekursive Filter sind wegen der fehlenden Ruumlckkopplung immer stabil wobei der Begriff der
Stabilitaumlt bei der Betrachtung nicht-rekursiver Filter noch genauer erlaumlutert wird FIR Filter sind
zudem linearphasig wenn die Filterkoeffizienten eine der in Bild 47 gezeigten Symmetrien
aufweisen
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
HG Hirsch 8 DSS-WS 201112
Bild 47 Symmetrische Impulsantworten linearphasiger FIR Filter
Man bezeichnet derartige Filter als linearphasig weil der Phasengang der Uumlbertragungsfunktion
eine lineare Abhaumlngigkeit der Phase von der Frequenz aufweist Der Phasengang Φ(f) laumlszligt sich
mittels ( ) TN
ff sdotsdotsdotsdotminus=Φ2
2 π beschreiben
Anschaulich bedeutet das linearphasige Verhalten eine zeitliche Verschiebung des Signalverlaufs
am Ausgang um N2 Abtastintervalle ohne Verzerrungen im Vergleich zum Signalverlauf am
Eingang Diese anschauliche Betrachtungsweise laumlszligt sich formal als konstante Gruppenlaufzeit τg
beschreiben Die Gruppenlaufzeit ist definiert als die Ableitung der Phase uumlber der Frequenz zu
( )f
fg
part
Φpartsdot
sdotminus=
πτ
2
1 Aus dem zuvor angegebenen Phasengang fuumlr Filter mit symmetrischer
Anordnung der Filterkoeffizienten folgt somit eine konstante Gruppenlaufzeit
( )T
NT
N
f
fg sdot=
sdotsdotsdotminussdot
sdotminus=
part
Φpartsdot
sdotminus=
222
2
1
2
1π
ππτ
Dies wird auch in Bild 48 verdeutlicht in dem die Filterung zweier Schwingungen eines
Sinussignals mit einer dreieckfoumlrmigen Impulsantwort eines symmetrischen FIR Filters der
Ordnung 6 dargestellt ist Abgesehen von den Ein- und Ausschwingvorgaumlngen zu Beginn und am
Ende des Signalabschnitts bleibt die Form der Sinusschwingung unbeeinflusst Es kommt zu einer
zeitlichen Verzoumlgerung des Ausgangssignals um N2 = 3 Abtastwerte
punktsymmetrisch
spiegelsymmetrisch N - gerade
N - gerade
N - ungerade
N - ungerade
HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 3 DSS-WS 201112
Das Ausgangssignal des Filters laumlsst sich bei Kenntnis der Impulsantwort mit Hilfe der diskreten
Faltung bestimmen
Moumlchte man die spektralen Eigenschaften dieses Systems analysieren so laumlsst sich durch
Anwendung der Fourier Transformation der Frequenzgang H(f) = Y(f)X(f) bestimmen zu
( ) ( ) ( )TfbjTfbbebbfX
fYfH
efXbfXbfY
Tfj
Tfj
sdotsdotsdotsdotminussdot+sdotsdotsdotsdot+=sdot+==
sdotsdot+sdot=
sdotsdotsdotsdotminus
sdotsdotsdotsdotminus
πππ
π
2sin2cos)(
)()(
)()()(
1102
10
210
Damit ergibt sich der Betrag |H(f)| der Uumlbertragungsfunktion zu
( )[ ] ( )
( ) ( ) ( )
( )TfbbbbfH
TfbTfbTfbbb
TfbTfbbfH
sdotsdotsdotsdotsdotsdot++=
sdotsdotsdotsdot+sdotsdotsdotsdot+sdotsdotsdotsdotsdotsdot+
=sdotsdotsdotsdot+sdotsdotsdotsdot+=+=
π
πππ
ππ
2cos2)(
2sin2cos2cos2
2sin2cosImRe)(
10
2
1
2
0
22
122
110
2
0
22
1
2
1022
Der Betrag |H(f)| des Frequenzgangs laumlsst sich fuumlr die Werte b0=b1=1 sowie b0=1 und b1=(-1)
bestimmen zu
( )
( ) Tiefpassf
fTffH
giltEs
TffH
a
rArr
sdotsdot=sdotsdotsdot=rArr
sdot+plusmn=sdotrArr+
plusmn=
sdotsdotsdotsdot+=
ππ
αααα
π
cos2cos2)(
cos222cos22
cos12cos
2cos22)(
( )
( ) Hochpassf
fTffH
giltEs
TffH
a
rArr
sdotsdot=sdotsdotsdot=rArr
sdotminusplusmn=sdotrArrminus
plusmn=
sdotsdotsdotsdotminus=
ππ
αααα
π
sin2sin2)(
cos222sin22
cos12sin
2cos22)(
Die resultierenden Verlaumlufe der Frequenzgaumlnge werden in Bild 44 wiedergegeben Fuumlr den Fall
b1=1 besitzt die Uumlbertragungsfunktion dieser einfachen Anordnung eine Tiefpasscharakteristik und
11 10 == bb
11 10 minus== bb
HG Hirsch 4 DSS-WS 201112
fuumlr b1=(-1) eine Hochpasscharakteristik
Bild 44 Zwei moumlgliche Frequenzgaumlnge des in Bild 42 dargestellten Filters
Ein derartiges Hochpassfilter wird beispielsweise zur Houmlhenanhebung in der Sprachverarbeitung
verwendet mit b0=1 und b1=095 hellip 098 bei einer Abtastfrequenz von 8 kHz Damit werden
Spektralkomponenten im niedrigeren Frequenzbereich gedaumlmpft bei denen hauptsaumlchlich die
Energie eines Sprachsignals zu finden ist Umgekehrt werden houmlherfrequente Komponenten
angehoben bei denen Sprache geringere Energie besitzt die aber fuumlr bestimmte Laute zB
Zischlaute informationstragend sind Deshalb spricht man bei dieser Filterung auch von einer
Houmlhenanhebung (preemphasis) Insgesamt wird durch diese Filterung ein Signal erzeugt bei dem
die Energie gleichmaumlszligiger uumlber das gesamte Spektrum verteilt ist
12 Z Transformation
Das Verhalten digitaler Filter im Spektralbereich kann durch die Verwendung der Z Transformation
einfacher beschrieben und besser veranschaulicht werden als durch alleinige Verwendung der
HG Hirsch 5 DSS-WS 201112
Fourier Transformation In Analogie zur Laplace Transformation bei analogen Signalen
gewaumlhrleistet die Z Transformation bei zeitdiskreten Signalen auch eine Konvergenz fuumlr Signale
die beispielsweise Pole oder Dirac Stoumlsse im Spektrum besitzen und fuumlr die die Fourier
Transformation keine Konvergenz aufweist
Die Z Transformation eines zeitdiskreten Signals x(n) ist im Allgemeinen definiert zu
sumsuminfin
minusinfin=
minus=infin
minusinfin=
sdotminus sdot=sdotsdot=n
nT
n
TnznxzTnxzX )()()(
1
Dabei beschreibt z im allgemeinen einen komplexen Wert ( )fjez
sdotsdotsdot+= πσ 2 Damit ist das Z Spektrum
in einer komplexen Ebene definiert sumsuminfin
minusinfin=
sdotsdotsdotsdotsdotminussdotsdotminusinfin
minusinfin=
sdotminus sdotsdotsdot=sdotsdot=n
TnfjTn
n
TneeTnxzTnxzX
πσ 2)()()(
Durch die Multiplikation mit dem Term Tne
sdotsdotminusσ kann man auch fuumlr Signale die keine Konvergenz
besitzen bei einem entsprechend gewaumlhlten σ die Konvergenz des Signals TneTnx sdotsdotminussdotsdot σ)(
erreichen
Beschraumlnkt man sich auf Signale deren Fourier Transformierte Konvergenz aufweisen koumlnnen Z
Transformierte und Fourier Transformierte ineinander uumlberfuumlhrt werden durch Setzen von 0=σ
Ausgehend von suminfin
minusinfin=
minussdot=n
nznxzX )()( kann durch Substitution mit af
fj
Tfjeez
sdotsdotsdotsdotsdotsdotsdot ==
ππ
22
das
Fourier Spektrum sumsuminfin
minusinfin=
sdotsdotsdotsdotminusinfin
minusinfin=
sdotsdotsdotsdotsdotminus sdotsdot=sdotsdot=n
ff
nj
n
Tnfj aeTnxeTnxfXπ
π2
2 )()()( bestimmt werden
Das Fourier Spektrum findet sich dann in der komplexen Z Ebene auf dem Einheitskreis |z|=1 wie
es in Bild 45 veranschaulicht wird
Bild 45 Auftreten der Fourier Transformierten auf dem Einheitskreis der Z Transformierten
f=fa4
Im(z)
Re(z)
|z|=1
f=0
f=3fa4
f=fa2
HG Hirsch 6 DSS-WS 201112
Bei der Z Transformation gelten ebenfalls die Theoreme der Fourier Transformation Insbesondere
geht die Faltung im Zeitbereich in eine Multiplikation im Z Spektrum uumlber
)()()()()()( zHzXzYnhnxny sdot=lowast=
Fuumlr das in Abschnitt 41 verwendete Beispiel eines einfachen digitalen Filters ergibt sich die
Uumlbertragungsfunktion bei Anwendung der Z Transformation zu
110
110
2
210
)(
)()(
)()()(
)()()(
minus
minussdotsdotsdotsdot
sdotsdotsdotsdotminus
sdot+==
sdotsdot+sdot=rArr=
sdotsdot+sdot=
zbbzX
zYzH
zzXbzXbzYzeMit
efXbfXbfY
Tfj
Tfj
π
π
Die Verzoumlgerung um ein Abtastintervall fuumlhrt bei Betrachtung der Z Transformierten zu einer
Multiplikation mit z-1
Dies verdeutlicht dass man fuumlr ein lineares zeitinvariantes diskretes System
die Z Transformierte auf einfache Weise bestimmen kann Tritt bei einem Filter eine Verzoumlgerung
eines Signals um N Abtastintervalle auf so entspricht dies der Multiplikation der Z Transformierten
des Signals mit z-N
( ) NzzXNnxNnnx minussdotminus=minuspartlowast )()()(
Durch die Substitution aff
jTfj
eezsdotsdotsdot
sdotsdotsdotsdot ==π
π2
2 kann aus der Uumlbertragungsfunktion H(z) der
Frequenzgang H(f) unmittelbar bestimmt werden
13 FIR Filter
Finite Impulse Response (FIR) Filter sind wie es ihr Name schon verdeutlicht dadurch
gekennzeichnet daszlig ihre Impulsantwort eine endliche Laumlnge aufweist Alle Filter mit einer nicht-
rekursiven Struktur wie es beispielhaft in Bild 46 dargestellt ist sind FIR Filter Nicht rekursiv
bedeutet dass es keine Ruumlckkopplung des Ausgangssignals y(n) in dieser Schaltungsanordnung
gibt
Das Ausgangssignal y(n) setzt sich aus einer Summe gewichteter und um bis zu N Abtastintervalle
verzoumlgerter Versionen des Eingangssignals x(n) zusammen Man bezeichnet die in Bild 46
dargestellte Filterstruktur auch als Transversalfilter Es wird der Begriff der Filterordnung
eingefuumlhrt der der Anzahl von Verzoumlgerungselementen entspricht die zur Generierung der groumlszligten
Verzoumlgerung des Eingangssignals benoumltigt werden Die Filterordnung ist in diesem allgemeinen
Beispiel folglich N Die Faktoren bk bezeichnet man als Filterkoeffizienten
HG Hirsch 7 DSS-WS 201112
Bild 46 Struktur eines Transversalfilters
Das Ausgangssignal y(n) laumlszligt sich als Differenzengleichung beschreiben zu
)()]1([)2()1()()( 1210 NnxbNnxbnxbnxbnxbny NN minussdot+minusminussdot++minussdot+minussdot+sdot= minusL
Durch Anwendung der Z Transformation laumlszligt sich die Uumlbertragungsfunktion H(z) bestimmen zu
sum=
minusminusminusminusminus
minusminus
minusminusminusminus
minusminus
sdot=sdot+sdot++sdot+sdot+==
sdotsdot+sdotsdot++sdotsdot+sdotsdot+sdot=N
k
k
k
N
N
N
N
N
N
N
N
zbzbzbzbzbbzX
zYzH
zzXbzzXbzzXbzzXbzXbzY
0
)1(1
22
110
)1(1
22
110
)(
)()(
)()()()()()(
L
L
Die Uumlbertragungsfunktion H(z) laumlsst sich einfach umformen so dass nur positive Exponenten bei
den z Termen auftreten
N
NN
NNN
z
bzbzbzbzbzH
+sdot++sdot+sdot+sdot= minus
minusminus 11
22
110)(
L
Im Zaumlhler tritt dabei ein Polynom vom Grad N auf Ermittelt man die Nullstellen dieses Polynoms
und betrachtet deren Lage in der komplexen Z Ebene so laumlsst sich damit auf einfache Weise
feststellen bei welchen Frequenzen der Frequenzgang des Filters Minima aufweist Man erhaumllt
somit eine grobe Vorstellung uumlber das Aussehen der Frequenzcharakteristik des Filters Diese
Betrachtungsweise wird bei der Darstellung der IIR Filter detaillierter vorgestellt
Nicht rekursive Filter sind wegen der fehlenden Ruumlckkopplung immer stabil wobei der Begriff der
Stabilitaumlt bei der Betrachtung nicht-rekursiver Filter noch genauer erlaumlutert wird FIR Filter sind
zudem linearphasig wenn die Filterkoeffizienten eine der in Bild 47 gezeigten Symmetrien
aufweisen
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
HG Hirsch 8 DSS-WS 201112
Bild 47 Symmetrische Impulsantworten linearphasiger FIR Filter
Man bezeichnet derartige Filter als linearphasig weil der Phasengang der Uumlbertragungsfunktion
eine lineare Abhaumlngigkeit der Phase von der Frequenz aufweist Der Phasengang Φ(f) laumlszligt sich
mittels ( ) TN
ff sdotsdotsdotsdotminus=Φ2
2 π beschreiben
Anschaulich bedeutet das linearphasige Verhalten eine zeitliche Verschiebung des Signalverlaufs
am Ausgang um N2 Abtastintervalle ohne Verzerrungen im Vergleich zum Signalverlauf am
Eingang Diese anschauliche Betrachtungsweise laumlszligt sich formal als konstante Gruppenlaufzeit τg
beschreiben Die Gruppenlaufzeit ist definiert als die Ableitung der Phase uumlber der Frequenz zu
( )f
fg
part
Φpartsdot
sdotminus=
πτ
2
1 Aus dem zuvor angegebenen Phasengang fuumlr Filter mit symmetrischer
Anordnung der Filterkoeffizienten folgt somit eine konstante Gruppenlaufzeit
( )T
NT
N
f
fg sdot=
sdotsdotsdotminussdot
sdotminus=
part
Φpartsdot
sdotminus=
222
2
1
2
1π
ππτ
Dies wird auch in Bild 48 verdeutlicht in dem die Filterung zweier Schwingungen eines
Sinussignals mit einer dreieckfoumlrmigen Impulsantwort eines symmetrischen FIR Filters der
Ordnung 6 dargestellt ist Abgesehen von den Ein- und Ausschwingvorgaumlngen zu Beginn und am
Ende des Signalabschnitts bleibt die Form der Sinusschwingung unbeeinflusst Es kommt zu einer
zeitlichen Verzoumlgerung des Ausgangssignals um N2 = 3 Abtastwerte
punktsymmetrisch
spiegelsymmetrisch N - gerade
N - gerade
N - ungerade
N - ungerade
HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 4 DSS-WS 201112
fuumlr b1=(-1) eine Hochpasscharakteristik
Bild 44 Zwei moumlgliche Frequenzgaumlnge des in Bild 42 dargestellten Filters
Ein derartiges Hochpassfilter wird beispielsweise zur Houmlhenanhebung in der Sprachverarbeitung
verwendet mit b0=1 und b1=095 hellip 098 bei einer Abtastfrequenz von 8 kHz Damit werden
Spektralkomponenten im niedrigeren Frequenzbereich gedaumlmpft bei denen hauptsaumlchlich die
Energie eines Sprachsignals zu finden ist Umgekehrt werden houmlherfrequente Komponenten
angehoben bei denen Sprache geringere Energie besitzt die aber fuumlr bestimmte Laute zB
Zischlaute informationstragend sind Deshalb spricht man bei dieser Filterung auch von einer
Houmlhenanhebung (preemphasis) Insgesamt wird durch diese Filterung ein Signal erzeugt bei dem
die Energie gleichmaumlszligiger uumlber das gesamte Spektrum verteilt ist
12 Z Transformation
Das Verhalten digitaler Filter im Spektralbereich kann durch die Verwendung der Z Transformation
einfacher beschrieben und besser veranschaulicht werden als durch alleinige Verwendung der
HG Hirsch 5 DSS-WS 201112
Fourier Transformation In Analogie zur Laplace Transformation bei analogen Signalen
gewaumlhrleistet die Z Transformation bei zeitdiskreten Signalen auch eine Konvergenz fuumlr Signale
die beispielsweise Pole oder Dirac Stoumlsse im Spektrum besitzen und fuumlr die die Fourier
Transformation keine Konvergenz aufweist
Die Z Transformation eines zeitdiskreten Signals x(n) ist im Allgemeinen definiert zu
sumsuminfin
minusinfin=
minus=infin
minusinfin=
sdotminus sdot=sdotsdot=n
nT
n
TnznxzTnxzX )()()(
1
Dabei beschreibt z im allgemeinen einen komplexen Wert ( )fjez
sdotsdotsdot+= πσ 2 Damit ist das Z Spektrum
in einer komplexen Ebene definiert sumsuminfin
minusinfin=
sdotsdotsdotsdotsdotminussdotsdotminusinfin
minusinfin=
sdotminus sdotsdotsdot=sdotsdot=n
TnfjTn
n
TneeTnxzTnxzX
πσ 2)()()(
Durch die Multiplikation mit dem Term Tne
sdotsdotminusσ kann man auch fuumlr Signale die keine Konvergenz
besitzen bei einem entsprechend gewaumlhlten σ die Konvergenz des Signals TneTnx sdotsdotminussdotsdot σ)(
erreichen
Beschraumlnkt man sich auf Signale deren Fourier Transformierte Konvergenz aufweisen koumlnnen Z
Transformierte und Fourier Transformierte ineinander uumlberfuumlhrt werden durch Setzen von 0=σ
Ausgehend von suminfin
minusinfin=
minussdot=n
nznxzX )()( kann durch Substitution mit af
fj
Tfjeez
sdotsdotsdotsdotsdotsdotsdot ==
ππ
22
das
Fourier Spektrum sumsuminfin
minusinfin=
sdotsdotsdotsdotminusinfin
minusinfin=
sdotsdotsdotsdotsdotminus sdotsdot=sdotsdot=n
ff
nj
n
Tnfj aeTnxeTnxfXπ
π2
2 )()()( bestimmt werden
Das Fourier Spektrum findet sich dann in der komplexen Z Ebene auf dem Einheitskreis |z|=1 wie
es in Bild 45 veranschaulicht wird
Bild 45 Auftreten der Fourier Transformierten auf dem Einheitskreis der Z Transformierten
f=fa4
Im(z)
Re(z)
|z|=1
f=0
f=3fa4
f=fa2
HG Hirsch 6 DSS-WS 201112
Bei der Z Transformation gelten ebenfalls die Theoreme der Fourier Transformation Insbesondere
geht die Faltung im Zeitbereich in eine Multiplikation im Z Spektrum uumlber
)()()()()()( zHzXzYnhnxny sdot=lowast=
Fuumlr das in Abschnitt 41 verwendete Beispiel eines einfachen digitalen Filters ergibt sich die
Uumlbertragungsfunktion bei Anwendung der Z Transformation zu
110
110
2
210
)(
)()(
)()()(
)()()(
minus
minussdotsdotsdotsdot
sdotsdotsdotsdotminus
sdot+==
sdotsdot+sdot=rArr=
sdotsdot+sdot=
zbbzX
zYzH
zzXbzXbzYzeMit
efXbfXbfY
Tfj
Tfj
π
π
Die Verzoumlgerung um ein Abtastintervall fuumlhrt bei Betrachtung der Z Transformierten zu einer
Multiplikation mit z-1
Dies verdeutlicht dass man fuumlr ein lineares zeitinvariantes diskretes System
die Z Transformierte auf einfache Weise bestimmen kann Tritt bei einem Filter eine Verzoumlgerung
eines Signals um N Abtastintervalle auf so entspricht dies der Multiplikation der Z Transformierten
des Signals mit z-N
( ) NzzXNnxNnnx minussdotminus=minuspartlowast )()()(
Durch die Substitution aff
jTfj
eezsdotsdotsdot
sdotsdotsdotsdot ==π
π2
2 kann aus der Uumlbertragungsfunktion H(z) der
Frequenzgang H(f) unmittelbar bestimmt werden
13 FIR Filter
Finite Impulse Response (FIR) Filter sind wie es ihr Name schon verdeutlicht dadurch
gekennzeichnet daszlig ihre Impulsantwort eine endliche Laumlnge aufweist Alle Filter mit einer nicht-
rekursiven Struktur wie es beispielhaft in Bild 46 dargestellt ist sind FIR Filter Nicht rekursiv
bedeutet dass es keine Ruumlckkopplung des Ausgangssignals y(n) in dieser Schaltungsanordnung
gibt
Das Ausgangssignal y(n) setzt sich aus einer Summe gewichteter und um bis zu N Abtastintervalle
verzoumlgerter Versionen des Eingangssignals x(n) zusammen Man bezeichnet die in Bild 46
dargestellte Filterstruktur auch als Transversalfilter Es wird der Begriff der Filterordnung
eingefuumlhrt der der Anzahl von Verzoumlgerungselementen entspricht die zur Generierung der groumlszligten
Verzoumlgerung des Eingangssignals benoumltigt werden Die Filterordnung ist in diesem allgemeinen
Beispiel folglich N Die Faktoren bk bezeichnet man als Filterkoeffizienten
HG Hirsch 7 DSS-WS 201112
Bild 46 Struktur eines Transversalfilters
Das Ausgangssignal y(n) laumlszligt sich als Differenzengleichung beschreiben zu
)()]1([)2()1()()( 1210 NnxbNnxbnxbnxbnxbny NN minussdot+minusminussdot++minussdot+minussdot+sdot= minusL
Durch Anwendung der Z Transformation laumlszligt sich die Uumlbertragungsfunktion H(z) bestimmen zu
sum=
minusminusminusminusminus
minusminus
minusminusminusminus
minusminus
sdot=sdot+sdot++sdot+sdot+==
sdotsdot+sdotsdot++sdotsdot+sdotsdot+sdot=N
k
k
k
N
N
N
N
N
N
N
N
zbzbzbzbzbbzX
zYzH
zzXbzzXbzzXbzzXbzXbzY
0
)1(1
22
110
)1(1
22
110
)(
)()(
)()()()()()(
L
L
Die Uumlbertragungsfunktion H(z) laumlsst sich einfach umformen so dass nur positive Exponenten bei
den z Termen auftreten
N
NN
NNN
z
bzbzbzbzbzH
+sdot++sdot+sdot+sdot= minus
minusminus 11
22
110)(
L
Im Zaumlhler tritt dabei ein Polynom vom Grad N auf Ermittelt man die Nullstellen dieses Polynoms
und betrachtet deren Lage in der komplexen Z Ebene so laumlsst sich damit auf einfache Weise
feststellen bei welchen Frequenzen der Frequenzgang des Filters Minima aufweist Man erhaumllt
somit eine grobe Vorstellung uumlber das Aussehen der Frequenzcharakteristik des Filters Diese
Betrachtungsweise wird bei der Darstellung der IIR Filter detaillierter vorgestellt
Nicht rekursive Filter sind wegen der fehlenden Ruumlckkopplung immer stabil wobei der Begriff der
Stabilitaumlt bei der Betrachtung nicht-rekursiver Filter noch genauer erlaumlutert wird FIR Filter sind
zudem linearphasig wenn die Filterkoeffizienten eine der in Bild 47 gezeigten Symmetrien
aufweisen
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
HG Hirsch 8 DSS-WS 201112
Bild 47 Symmetrische Impulsantworten linearphasiger FIR Filter
Man bezeichnet derartige Filter als linearphasig weil der Phasengang der Uumlbertragungsfunktion
eine lineare Abhaumlngigkeit der Phase von der Frequenz aufweist Der Phasengang Φ(f) laumlszligt sich
mittels ( ) TN
ff sdotsdotsdotsdotminus=Φ2
2 π beschreiben
Anschaulich bedeutet das linearphasige Verhalten eine zeitliche Verschiebung des Signalverlaufs
am Ausgang um N2 Abtastintervalle ohne Verzerrungen im Vergleich zum Signalverlauf am
Eingang Diese anschauliche Betrachtungsweise laumlszligt sich formal als konstante Gruppenlaufzeit τg
beschreiben Die Gruppenlaufzeit ist definiert als die Ableitung der Phase uumlber der Frequenz zu
( )f
fg
part
Φpartsdot
sdotminus=
πτ
2
1 Aus dem zuvor angegebenen Phasengang fuumlr Filter mit symmetrischer
Anordnung der Filterkoeffizienten folgt somit eine konstante Gruppenlaufzeit
( )T
NT
N
f
fg sdot=
sdotsdotsdotminussdot
sdotminus=
part
Φpartsdot
sdotminus=
222
2
1
2
1π
ππτ
Dies wird auch in Bild 48 verdeutlicht in dem die Filterung zweier Schwingungen eines
Sinussignals mit einer dreieckfoumlrmigen Impulsantwort eines symmetrischen FIR Filters der
Ordnung 6 dargestellt ist Abgesehen von den Ein- und Ausschwingvorgaumlngen zu Beginn und am
Ende des Signalabschnitts bleibt die Form der Sinusschwingung unbeeinflusst Es kommt zu einer
zeitlichen Verzoumlgerung des Ausgangssignals um N2 = 3 Abtastwerte
punktsymmetrisch
spiegelsymmetrisch N - gerade
N - gerade
N - ungerade
N - ungerade
HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 5 DSS-WS 201112
Fourier Transformation In Analogie zur Laplace Transformation bei analogen Signalen
gewaumlhrleistet die Z Transformation bei zeitdiskreten Signalen auch eine Konvergenz fuumlr Signale
die beispielsweise Pole oder Dirac Stoumlsse im Spektrum besitzen und fuumlr die die Fourier
Transformation keine Konvergenz aufweist
Die Z Transformation eines zeitdiskreten Signals x(n) ist im Allgemeinen definiert zu
sumsuminfin
minusinfin=
minus=infin
minusinfin=
sdotminus sdot=sdotsdot=n
nT
n
TnznxzTnxzX )()()(
1
Dabei beschreibt z im allgemeinen einen komplexen Wert ( )fjez
sdotsdotsdot+= πσ 2 Damit ist das Z Spektrum
in einer komplexen Ebene definiert sumsuminfin
minusinfin=
sdotsdotsdotsdotsdotminussdotsdotminusinfin
minusinfin=
sdotminus sdotsdotsdot=sdotsdot=n
TnfjTn
n
TneeTnxzTnxzX
πσ 2)()()(
Durch die Multiplikation mit dem Term Tne
sdotsdotminusσ kann man auch fuumlr Signale die keine Konvergenz
besitzen bei einem entsprechend gewaumlhlten σ die Konvergenz des Signals TneTnx sdotsdotminussdotsdot σ)(
erreichen
Beschraumlnkt man sich auf Signale deren Fourier Transformierte Konvergenz aufweisen koumlnnen Z
Transformierte und Fourier Transformierte ineinander uumlberfuumlhrt werden durch Setzen von 0=σ
Ausgehend von suminfin
minusinfin=
minussdot=n
nznxzX )()( kann durch Substitution mit af
fj
Tfjeez
sdotsdotsdotsdotsdotsdotsdot ==
ππ
22
das
Fourier Spektrum sumsuminfin
minusinfin=
sdotsdotsdotsdotminusinfin
minusinfin=
sdotsdotsdotsdotsdotminus sdotsdot=sdotsdot=n
ff
nj
n
Tnfj aeTnxeTnxfXπ
π2
2 )()()( bestimmt werden
Das Fourier Spektrum findet sich dann in der komplexen Z Ebene auf dem Einheitskreis |z|=1 wie
es in Bild 45 veranschaulicht wird
Bild 45 Auftreten der Fourier Transformierten auf dem Einheitskreis der Z Transformierten
f=fa4
Im(z)
Re(z)
|z|=1
f=0
f=3fa4
f=fa2
HG Hirsch 6 DSS-WS 201112
Bei der Z Transformation gelten ebenfalls die Theoreme der Fourier Transformation Insbesondere
geht die Faltung im Zeitbereich in eine Multiplikation im Z Spektrum uumlber
)()()()()()( zHzXzYnhnxny sdot=lowast=
Fuumlr das in Abschnitt 41 verwendete Beispiel eines einfachen digitalen Filters ergibt sich die
Uumlbertragungsfunktion bei Anwendung der Z Transformation zu
110
110
2
210
)(
)()(
)()()(
)()()(
minus
minussdotsdotsdotsdot
sdotsdotsdotsdotminus
sdot+==
sdotsdot+sdot=rArr=
sdotsdot+sdot=
zbbzX
zYzH
zzXbzXbzYzeMit
efXbfXbfY
Tfj
Tfj
π
π
Die Verzoumlgerung um ein Abtastintervall fuumlhrt bei Betrachtung der Z Transformierten zu einer
Multiplikation mit z-1
Dies verdeutlicht dass man fuumlr ein lineares zeitinvariantes diskretes System
die Z Transformierte auf einfache Weise bestimmen kann Tritt bei einem Filter eine Verzoumlgerung
eines Signals um N Abtastintervalle auf so entspricht dies der Multiplikation der Z Transformierten
des Signals mit z-N
( ) NzzXNnxNnnx minussdotminus=minuspartlowast )()()(
Durch die Substitution aff
jTfj
eezsdotsdotsdot
sdotsdotsdotsdot ==π
π2
2 kann aus der Uumlbertragungsfunktion H(z) der
Frequenzgang H(f) unmittelbar bestimmt werden
13 FIR Filter
Finite Impulse Response (FIR) Filter sind wie es ihr Name schon verdeutlicht dadurch
gekennzeichnet daszlig ihre Impulsantwort eine endliche Laumlnge aufweist Alle Filter mit einer nicht-
rekursiven Struktur wie es beispielhaft in Bild 46 dargestellt ist sind FIR Filter Nicht rekursiv
bedeutet dass es keine Ruumlckkopplung des Ausgangssignals y(n) in dieser Schaltungsanordnung
gibt
Das Ausgangssignal y(n) setzt sich aus einer Summe gewichteter und um bis zu N Abtastintervalle
verzoumlgerter Versionen des Eingangssignals x(n) zusammen Man bezeichnet die in Bild 46
dargestellte Filterstruktur auch als Transversalfilter Es wird der Begriff der Filterordnung
eingefuumlhrt der der Anzahl von Verzoumlgerungselementen entspricht die zur Generierung der groumlszligten
Verzoumlgerung des Eingangssignals benoumltigt werden Die Filterordnung ist in diesem allgemeinen
Beispiel folglich N Die Faktoren bk bezeichnet man als Filterkoeffizienten
HG Hirsch 7 DSS-WS 201112
Bild 46 Struktur eines Transversalfilters
Das Ausgangssignal y(n) laumlszligt sich als Differenzengleichung beschreiben zu
)()]1([)2()1()()( 1210 NnxbNnxbnxbnxbnxbny NN minussdot+minusminussdot++minussdot+minussdot+sdot= minusL
Durch Anwendung der Z Transformation laumlszligt sich die Uumlbertragungsfunktion H(z) bestimmen zu
sum=
minusminusminusminusminus
minusminus
minusminusminusminus
minusminus
sdot=sdot+sdot++sdot+sdot+==
sdotsdot+sdotsdot++sdotsdot+sdotsdot+sdot=N
k
k
k
N
N
N
N
N
N
N
N
zbzbzbzbzbbzX
zYzH
zzXbzzXbzzXbzzXbzXbzY
0
)1(1
22
110
)1(1
22
110
)(
)()(
)()()()()()(
L
L
Die Uumlbertragungsfunktion H(z) laumlsst sich einfach umformen so dass nur positive Exponenten bei
den z Termen auftreten
N
NN
NNN
z
bzbzbzbzbzH
+sdot++sdot+sdot+sdot= minus
minusminus 11
22
110)(
L
Im Zaumlhler tritt dabei ein Polynom vom Grad N auf Ermittelt man die Nullstellen dieses Polynoms
und betrachtet deren Lage in der komplexen Z Ebene so laumlsst sich damit auf einfache Weise
feststellen bei welchen Frequenzen der Frequenzgang des Filters Minima aufweist Man erhaumllt
somit eine grobe Vorstellung uumlber das Aussehen der Frequenzcharakteristik des Filters Diese
Betrachtungsweise wird bei der Darstellung der IIR Filter detaillierter vorgestellt
Nicht rekursive Filter sind wegen der fehlenden Ruumlckkopplung immer stabil wobei der Begriff der
Stabilitaumlt bei der Betrachtung nicht-rekursiver Filter noch genauer erlaumlutert wird FIR Filter sind
zudem linearphasig wenn die Filterkoeffizienten eine der in Bild 47 gezeigten Symmetrien
aufweisen
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
HG Hirsch 8 DSS-WS 201112
Bild 47 Symmetrische Impulsantworten linearphasiger FIR Filter
Man bezeichnet derartige Filter als linearphasig weil der Phasengang der Uumlbertragungsfunktion
eine lineare Abhaumlngigkeit der Phase von der Frequenz aufweist Der Phasengang Φ(f) laumlszligt sich
mittels ( ) TN
ff sdotsdotsdotsdotminus=Φ2
2 π beschreiben
Anschaulich bedeutet das linearphasige Verhalten eine zeitliche Verschiebung des Signalverlaufs
am Ausgang um N2 Abtastintervalle ohne Verzerrungen im Vergleich zum Signalverlauf am
Eingang Diese anschauliche Betrachtungsweise laumlszligt sich formal als konstante Gruppenlaufzeit τg
beschreiben Die Gruppenlaufzeit ist definiert als die Ableitung der Phase uumlber der Frequenz zu
( )f
fg
part
Φpartsdot
sdotminus=
πτ
2
1 Aus dem zuvor angegebenen Phasengang fuumlr Filter mit symmetrischer
Anordnung der Filterkoeffizienten folgt somit eine konstante Gruppenlaufzeit
( )T
NT
N
f
fg sdot=
sdotsdotsdotminussdot
sdotminus=
part
Φpartsdot
sdotminus=
222
2
1
2
1π
ππτ
Dies wird auch in Bild 48 verdeutlicht in dem die Filterung zweier Schwingungen eines
Sinussignals mit einer dreieckfoumlrmigen Impulsantwort eines symmetrischen FIR Filters der
Ordnung 6 dargestellt ist Abgesehen von den Ein- und Ausschwingvorgaumlngen zu Beginn und am
Ende des Signalabschnitts bleibt die Form der Sinusschwingung unbeeinflusst Es kommt zu einer
zeitlichen Verzoumlgerung des Ausgangssignals um N2 = 3 Abtastwerte
punktsymmetrisch
spiegelsymmetrisch N - gerade
N - gerade
N - ungerade
N - ungerade
HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 6 DSS-WS 201112
Bei der Z Transformation gelten ebenfalls die Theoreme der Fourier Transformation Insbesondere
geht die Faltung im Zeitbereich in eine Multiplikation im Z Spektrum uumlber
)()()()()()( zHzXzYnhnxny sdot=lowast=
Fuumlr das in Abschnitt 41 verwendete Beispiel eines einfachen digitalen Filters ergibt sich die
Uumlbertragungsfunktion bei Anwendung der Z Transformation zu
110
110
2
210
)(
)()(
)()()(
)()()(
minus
minussdotsdotsdotsdot
sdotsdotsdotsdotminus
sdot+==
sdotsdot+sdot=rArr=
sdotsdot+sdot=
zbbzX
zYzH
zzXbzXbzYzeMit
efXbfXbfY
Tfj
Tfj
π
π
Die Verzoumlgerung um ein Abtastintervall fuumlhrt bei Betrachtung der Z Transformierten zu einer
Multiplikation mit z-1
Dies verdeutlicht dass man fuumlr ein lineares zeitinvariantes diskretes System
die Z Transformierte auf einfache Weise bestimmen kann Tritt bei einem Filter eine Verzoumlgerung
eines Signals um N Abtastintervalle auf so entspricht dies der Multiplikation der Z Transformierten
des Signals mit z-N
( ) NzzXNnxNnnx minussdotminus=minuspartlowast )()()(
Durch die Substitution aff
jTfj
eezsdotsdotsdot
sdotsdotsdotsdot ==π
π2
2 kann aus der Uumlbertragungsfunktion H(z) der
Frequenzgang H(f) unmittelbar bestimmt werden
13 FIR Filter
Finite Impulse Response (FIR) Filter sind wie es ihr Name schon verdeutlicht dadurch
gekennzeichnet daszlig ihre Impulsantwort eine endliche Laumlnge aufweist Alle Filter mit einer nicht-
rekursiven Struktur wie es beispielhaft in Bild 46 dargestellt ist sind FIR Filter Nicht rekursiv
bedeutet dass es keine Ruumlckkopplung des Ausgangssignals y(n) in dieser Schaltungsanordnung
gibt
Das Ausgangssignal y(n) setzt sich aus einer Summe gewichteter und um bis zu N Abtastintervalle
verzoumlgerter Versionen des Eingangssignals x(n) zusammen Man bezeichnet die in Bild 46
dargestellte Filterstruktur auch als Transversalfilter Es wird der Begriff der Filterordnung
eingefuumlhrt der der Anzahl von Verzoumlgerungselementen entspricht die zur Generierung der groumlszligten
Verzoumlgerung des Eingangssignals benoumltigt werden Die Filterordnung ist in diesem allgemeinen
Beispiel folglich N Die Faktoren bk bezeichnet man als Filterkoeffizienten
HG Hirsch 7 DSS-WS 201112
Bild 46 Struktur eines Transversalfilters
Das Ausgangssignal y(n) laumlszligt sich als Differenzengleichung beschreiben zu
)()]1([)2()1()()( 1210 NnxbNnxbnxbnxbnxbny NN minussdot+minusminussdot++minussdot+minussdot+sdot= minusL
Durch Anwendung der Z Transformation laumlszligt sich die Uumlbertragungsfunktion H(z) bestimmen zu
sum=
minusminusminusminusminus
minusminus
minusminusminusminus
minusminus
sdot=sdot+sdot++sdot+sdot+==
sdotsdot+sdotsdot++sdotsdot+sdotsdot+sdot=N
k
k
k
N
N
N
N
N
N
N
N
zbzbzbzbzbbzX
zYzH
zzXbzzXbzzXbzzXbzXbzY
0
)1(1
22
110
)1(1
22
110
)(
)()(
)()()()()()(
L
L
Die Uumlbertragungsfunktion H(z) laumlsst sich einfach umformen so dass nur positive Exponenten bei
den z Termen auftreten
N
NN
NNN
z
bzbzbzbzbzH
+sdot++sdot+sdot+sdot= minus
minusminus 11
22
110)(
L
Im Zaumlhler tritt dabei ein Polynom vom Grad N auf Ermittelt man die Nullstellen dieses Polynoms
und betrachtet deren Lage in der komplexen Z Ebene so laumlsst sich damit auf einfache Weise
feststellen bei welchen Frequenzen der Frequenzgang des Filters Minima aufweist Man erhaumllt
somit eine grobe Vorstellung uumlber das Aussehen der Frequenzcharakteristik des Filters Diese
Betrachtungsweise wird bei der Darstellung der IIR Filter detaillierter vorgestellt
Nicht rekursive Filter sind wegen der fehlenden Ruumlckkopplung immer stabil wobei der Begriff der
Stabilitaumlt bei der Betrachtung nicht-rekursiver Filter noch genauer erlaumlutert wird FIR Filter sind
zudem linearphasig wenn die Filterkoeffizienten eine der in Bild 47 gezeigten Symmetrien
aufweisen
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
HG Hirsch 8 DSS-WS 201112
Bild 47 Symmetrische Impulsantworten linearphasiger FIR Filter
Man bezeichnet derartige Filter als linearphasig weil der Phasengang der Uumlbertragungsfunktion
eine lineare Abhaumlngigkeit der Phase von der Frequenz aufweist Der Phasengang Φ(f) laumlszligt sich
mittels ( ) TN
ff sdotsdotsdotsdotminus=Φ2
2 π beschreiben
Anschaulich bedeutet das linearphasige Verhalten eine zeitliche Verschiebung des Signalverlaufs
am Ausgang um N2 Abtastintervalle ohne Verzerrungen im Vergleich zum Signalverlauf am
Eingang Diese anschauliche Betrachtungsweise laumlszligt sich formal als konstante Gruppenlaufzeit τg
beschreiben Die Gruppenlaufzeit ist definiert als die Ableitung der Phase uumlber der Frequenz zu
( )f
fg
part
Φpartsdot
sdotminus=
πτ
2
1 Aus dem zuvor angegebenen Phasengang fuumlr Filter mit symmetrischer
Anordnung der Filterkoeffizienten folgt somit eine konstante Gruppenlaufzeit
( )T
NT
N
f
fg sdot=
sdotsdotsdotminussdot
sdotminus=
part
Φpartsdot
sdotminus=
222
2
1
2
1π
ππτ
Dies wird auch in Bild 48 verdeutlicht in dem die Filterung zweier Schwingungen eines
Sinussignals mit einer dreieckfoumlrmigen Impulsantwort eines symmetrischen FIR Filters der
Ordnung 6 dargestellt ist Abgesehen von den Ein- und Ausschwingvorgaumlngen zu Beginn und am
Ende des Signalabschnitts bleibt die Form der Sinusschwingung unbeeinflusst Es kommt zu einer
zeitlichen Verzoumlgerung des Ausgangssignals um N2 = 3 Abtastwerte
punktsymmetrisch
spiegelsymmetrisch N - gerade
N - gerade
N - ungerade
N - ungerade
HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 7 DSS-WS 201112
Bild 46 Struktur eines Transversalfilters
Das Ausgangssignal y(n) laumlszligt sich als Differenzengleichung beschreiben zu
)()]1([)2()1()()( 1210 NnxbNnxbnxbnxbnxbny NN minussdot+minusminussdot++minussdot+minussdot+sdot= minusL
Durch Anwendung der Z Transformation laumlszligt sich die Uumlbertragungsfunktion H(z) bestimmen zu
sum=
minusminusminusminusminus
minusminus
minusminusminusminus
minusminus
sdot=sdot+sdot++sdot+sdot+==
sdotsdot+sdotsdot++sdotsdot+sdotsdot+sdot=N
k
k
k
N
N
N
N
N
N
N
N
zbzbzbzbzbbzX
zYzH
zzXbzzXbzzXbzzXbzXbzY
0
)1(1
22
110
)1(1
22
110
)(
)()(
)()()()()()(
L
L
Die Uumlbertragungsfunktion H(z) laumlsst sich einfach umformen so dass nur positive Exponenten bei
den z Termen auftreten
N
NN
NNN
z
bzbzbzbzbzH
+sdot++sdot+sdot+sdot= minus
minusminus 11
22
110)(
L
Im Zaumlhler tritt dabei ein Polynom vom Grad N auf Ermittelt man die Nullstellen dieses Polynoms
und betrachtet deren Lage in der komplexen Z Ebene so laumlsst sich damit auf einfache Weise
feststellen bei welchen Frequenzen der Frequenzgang des Filters Minima aufweist Man erhaumllt
somit eine grobe Vorstellung uumlber das Aussehen der Frequenzcharakteristik des Filters Diese
Betrachtungsweise wird bei der Darstellung der IIR Filter detaillierter vorgestellt
Nicht rekursive Filter sind wegen der fehlenden Ruumlckkopplung immer stabil wobei der Begriff der
Stabilitaumlt bei der Betrachtung nicht-rekursiver Filter noch genauer erlaumlutert wird FIR Filter sind
zudem linearphasig wenn die Filterkoeffizienten eine der in Bild 47 gezeigten Symmetrien
aufweisen
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
HG Hirsch 8 DSS-WS 201112
Bild 47 Symmetrische Impulsantworten linearphasiger FIR Filter
Man bezeichnet derartige Filter als linearphasig weil der Phasengang der Uumlbertragungsfunktion
eine lineare Abhaumlngigkeit der Phase von der Frequenz aufweist Der Phasengang Φ(f) laumlszligt sich
mittels ( ) TN
ff sdotsdotsdotsdotminus=Φ2
2 π beschreiben
Anschaulich bedeutet das linearphasige Verhalten eine zeitliche Verschiebung des Signalverlaufs
am Ausgang um N2 Abtastintervalle ohne Verzerrungen im Vergleich zum Signalverlauf am
Eingang Diese anschauliche Betrachtungsweise laumlszligt sich formal als konstante Gruppenlaufzeit τg
beschreiben Die Gruppenlaufzeit ist definiert als die Ableitung der Phase uumlber der Frequenz zu
( )f
fg
part
Φpartsdot
sdotminus=
πτ
2
1 Aus dem zuvor angegebenen Phasengang fuumlr Filter mit symmetrischer
Anordnung der Filterkoeffizienten folgt somit eine konstante Gruppenlaufzeit
( )T
NT
N
f
fg sdot=
sdotsdotsdotminussdot
sdotminus=
part
Φpartsdot
sdotminus=
222
2
1
2
1π
ππτ
Dies wird auch in Bild 48 verdeutlicht in dem die Filterung zweier Schwingungen eines
Sinussignals mit einer dreieckfoumlrmigen Impulsantwort eines symmetrischen FIR Filters der
Ordnung 6 dargestellt ist Abgesehen von den Ein- und Ausschwingvorgaumlngen zu Beginn und am
Ende des Signalabschnitts bleibt die Form der Sinusschwingung unbeeinflusst Es kommt zu einer
zeitlichen Verzoumlgerung des Ausgangssignals um N2 = 3 Abtastwerte
punktsymmetrisch
spiegelsymmetrisch N - gerade
N - gerade
N - ungerade
N - ungerade
HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 8 DSS-WS 201112
Bild 47 Symmetrische Impulsantworten linearphasiger FIR Filter
Man bezeichnet derartige Filter als linearphasig weil der Phasengang der Uumlbertragungsfunktion
eine lineare Abhaumlngigkeit der Phase von der Frequenz aufweist Der Phasengang Φ(f) laumlszligt sich
mittels ( ) TN
ff sdotsdotsdotsdotminus=Φ2
2 π beschreiben
Anschaulich bedeutet das linearphasige Verhalten eine zeitliche Verschiebung des Signalverlaufs
am Ausgang um N2 Abtastintervalle ohne Verzerrungen im Vergleich zum Signalverlauf am
Eingang Diese anschauliche Betrachtungsweise laumlszligt sich formal als konstante Gruppenlaufzeit τg
beschreiben Die Gruppenlaufzeit ist definiert als die Ableitung der Phase uumlber der Frequenz zu
( )f
fg
part
Φpartsdot
sdotminus=
πτ
2
1 Aus dem zuvor angegebenen Phasengang fuumlr Filter mit symmetrischer
Anordnung der Filterkoeffizienten folgt somit eine konstante Gruppenlaufzeit
( )T
NT
N
f
fg sdot=
sdotsdotsdotminussdot
sdotminus=
part
Φpartsdot
sdotminus=
222
2
1
2
1π
ππτ
Dies wird auch in Bild 48 verdeutlicht in dem die Filterung zweier Schwingungen eines
Sinussignals mit einer dreieckfoumlrmigen Impulsantwort eines symmetrischen FIR Filters der
Ordnung 6 dargestellt ist Abgesehen von den Ein- und Ausschwingvorgaumlngen zu Beginn und am
Ende des Signalabschnitts bleibt die Form der Sinusschwingung unbeeinflusst Es kommt zu einer
zeitlichen Verzoumlgerung des Ausgangssignals um N2 = 3 Abtastwerte
punktsymmetrisch
spiegelsymmetrisch N - gerade
N - gerade
N - ungerade
N - ungerade
HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 9 DSS-WS 201112
Bild 48 Ausgangssignal y(n) eines symmetrischen FIR Filters nach Faltung von x(n) mit h(n)
Mit FIR Filtern koumlnnen die haumlufig benoumltigten Basis Filtercharakteristiken wie Tiefpaszlig Hochpaszlig
Bandpaszlig und Bandsperre als auch komplexere Filterstrukturen realisiert werden
14 IIR Filter
Im Gegensatz zu FIR Filtern besitzen Infinite Impulse Response (IIR) Filter eine Impulsantwort die
keine endliche Laumlnge aufweist Dies ist die Folge von Ruumlckkopplungen des Ausgangssignals in die
Schaltungsanordnung wie es in der allgemeinen Darstellung eines rekursiven Filters in Bild 49 zu
sehen ist Der obere Teil des Bildes entspricht dem bereits zuvor gezeigten FIR Transversalfilter
Weiterhin wird das Ausgangssignal jedoch um bis zu M Abtastintervalle verzoumlgert und ebenfalls
gewichtet aufaddiert Das Ausgangssignal laumlszligt sich beschreiben als Differenzengleichung mit
sumsum==
minussdotminusminussdot=
minussdotminusminusminussdotminusminussdotminusminussdot++minussdot+sdot=M
k
k
N
k
k
MN
knyaknxb
MnyanyanyaNnxbnxbnxbny
00
2110
)()(
)()2()1()()1()()( LL
HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 10 DSS-WS 201112
Bild 49 Nicht-kanonische Direktstruktur eines IIR Filters
Die Uumlbertragungsfunktion H(z) dieser allgemeinen Darstellung eines IIR Filters ergibt sich mit
Hilfe der Z Transformation zu
( ) ( )
sum
sum
=
minus
=
minus
minusminusminus
minusminus
minusminusminusminusminus
minusminusminusminusminus
sdot+
sdot
=sdot++sdot+sdot+
sdot++sdot+==
sdot++sdot+sdot=sdot++sdot+sdot+sdot
sdotsdotminusminussdotsdotminussdotsdotminussdotsdot++sdotsdot+sdot=
M
k
k
k
N
k
k
k
M
M
N
N
N
N
M
M
M
M
N
N
za
zb
zazaza
zbzbb
zX
zYzH
zbzbbzXzazazazY
zzYazzYazzYazzXbzzXbzXbzY
1
02
21
1
110
110
22
11
22
11
110
11)(
)()(
)(1)(
)()()()()()()(
L
L
LL
LL
Die Ordnung dieses Filters ist bestimmt durch den groumlszligeren der beiden Werte M und N In vielen
praktischen Anwendungen ist N haumlufig gleich M Die Polynome der Uumlbertragungsfunktion H(z) im
Zaumlhler und Nenner koumlnnen durch Faktorisierung in einer anderen Form dargestellt werden
( ) ( ) ( )( ) ( ) ( )
NM
M
N
M
N
M
MMM
N
NN
zpzpzpz
ozozozb
z
z
azazaz
bzbzb
zX
zYzH
minus
minus
minus
minusminus
minus
sdotminussdotsdotminussdotminus
minussdotsdotminussdotminussdot
=sdot++sdot+sdot+
++sdot+sdot==
L
L
L
L
21
210
22
11
110
)(
)()(
x(n)
b0
+
T
y(n)
T T T
b1 b2 bN bN-1
+ + +
hellip
T T T T
hellip -a1 -a2 -aM-1 -aM
HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 11 DSS-WS 201112
Die im Allgemeinen komplexen Werte oi werden als Nullstellen von H(z) und die Werte pi als Pole
von H(z) bezeichnet Mit ihrer Kenntnis kann der grobe Verlauf des Frequenzgangs bereits
abgeschaumltzt werden
Die Nullstellen und Pole koumlnnen in der komplexen Z Ebene dargestellt werden Diese Darstellung
wird als Pol-Nullstellendiagramm bezeichnet dem wesentliche Eigenschaften des Filters
entnommen werden koumlnnen Zunaumlchst gilt grundsaumltzlich daszlig reele Koeffizienten ai und bi zu Polen
und Nullstellen fuumlhren die entweder selbst reel sind oder sich als konjugiert komplexes Paar von
Polen oder Nullstellen ergeben Aus der Lage der Pole in der komplexen Z Ebene kann man die
Stabilitaumlt des Filters erkennen Ein zeitdiskretes System heiszligt stabil wenn sich bei einer Folge
amplitudenbeschraumlnkter Eingangswerte |x(n)|ltinfin auch am Ausgang eine Folge
amplitudenbeschraumlnkter Werte |y(n)|ltinfin einstellt Diese Bedingung ist erfuumlllt wenn fuumlr die
Impulsantwort h(n) gilt infinltsuminfin
=0
)(n
nh
Bild 410 Stabilitaumltsbereich fuumlr die Lage der Pole von H(z)
Dieser Bedingung im Zeitbereich entspricht bei Betrachtung der Z Transformierten eine Lage der
Polstellen innerhalb des Einheitskreises also es gilt |pi|lt1 fuumlr alle i Diese Bedingung wird in Bild
410 veranschaulicht in der der Stabilitaumltsbereich fuumlr die Lage der Pole in der komplexen Z Ebene
dargestellt ist
Im Folgenden wird beispielhaft das in Bild 411 dargestellte Filter 2Ordnung analysiert
Im(z)
Re(z)
|z|=1
instabil
stabil
HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 12 DSS-WS 201112
Bild 411 IIR Filter 2 Ordnung
Das Ausgangssignal laumlsst sich beschreiben als Differenzengleichung
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
Daraus laumlsst sich die Uumlbertragungsfunktion H(z) bestimmen zu
( ) ( ) ( ) ( )2510224502450 minussdotminusminussdotminussdot= nynxnxny
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
22
22
5101
12450
)(
)()(
124505101
51024502450
minus
minus
minusminus
minusminus
sdot+
minussdot==
minussdotsdot=sdot+sdot
sdotsdotminussdotsdotminussdot=
z
z
zX
zYzH
zzXzzY
zzYzzXzXzY
Zur Bestimmung der Nullstellen und Pole der Uumlbertragungsfunktion wird die Uumlbertragungsfunktion
umgeformt
jpjppzPolstellen
ooznNullstelle
z
z
z
z
z
zzH
sdot=sdotminus=minusplusmn=rArr=+
=minus=rArr=minus
+
minussdot=sdot
sdot+
minussdot=
minus
minus
71410714105100510
1101
510
12450
5101
12450)(
21212
212
2
2
2
2
2
2
Die Lage der reelen Nullstellen in der komplexen Z Ebene ist mit kleinen Kreisen und die Lage des
konjugiert komplexen Polpaares mit Kreuzen in Bild 412 markiert
y(n)
x(n)
0245 -0245
-051
T
+
T
+
T T
HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 13 DSS-WS 201112
Bild 412 Lage der Null- und Polstellen des Filters 2 Ordnung
Aus der Lage der Null- und Polstellen kann man einfach und schnell den Frequenzgang abschaumltzen
Aus dem Winkel unter dem eine Null- oder Polstelle auftritt kann man naumlherungsweise auf die
Frequenz schlieszligen bei der im Frequenzgang ein Extremwert auftritt Die Zuordnung der
Frequenzen von 0 bis zur halben Abtastfrequenz gemaumlszlig der Bewegung auf dem oberen Halbkreis
wurde in Bild 45 verdeutlicht Dabei resultiert aus einer Nullstelle also einem Wert bei dem das
Zaumlhlerpolynom den Wert Null annimmt ein Minimum im Frequenzgang Umgekehrt resultiert aus
einer Polstelle also einem Wert bei dem das Nennerpolynom den Wert Null annimmt ein
Maximum im Frequenzgang Die Uumlbertragungsfunktion H(f) ergibt sich aus den Werten von H(z)
auf dem Einheitskreis Daher faumlllt ein Minimum oder Maximum umso extremer aus je naumlher die
Null- oder Polstelle am Einheitskreis liegt Liegt eine Nullstelle auf dem Einheitskreis so nimmt die
Uumlbertragungsfunktion H(f) bei der zugehoumlrigen Frequenz den Wert Null an
In dem betrachteten Beispiel resultiert somit aus der Nullstelle 12 =o die unter dem Winkel von
0=ϕ auftritt ( ) 00 ==fH und aus der Nullstelle 11 minus=o die unter dem Winkel von πϕ =
-j
Im(z)
Re(z)
minus1 minus075 minus05 minus025 0 025 05 075 1
minus1
minus075
minus05
minus025
0
025
05
075
1
Rez
Imz
Nullstellen
Polstellen
HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 14 DSS-WS 201112
auftritt 02 =
= af
fH Damit werden Frequenzanteile bei 0=f (= Gleichanteil) und bei
2af
f = durch dieses Filter vollstaumlndig unterdruumlckt Aus der Polstelle die auf der imaginaumlren
unter dem Winkel von 2πϕ = auftritt resultiert ein Maximum bei 4
aff = Die konjugiert
komplexe Polstelle im negativen Bereich der imaginaumlren Achse beschreibt das wiederholte
Auftreten des Maximums oberhalb von 2af
bei aff sdot= 43 Aus dieser kurzen Analyse der Lage
von Null- und Polstellen kann man folgern dass das Filter eine Bandpasscharakteristik besitzt
Die genaue Berechnung einiger Werte von H(f) kann durch die Substitution aff
j
ezsdotsdotsdot
=π2
vorgenommen werden
( ) 0510
1245020
5101
1124500
510
12450
510
1
2450)(
2
2
4
4
22
22
2
=+
minussdot=
==
+
minussdot==
+
minussdot=
+
minus
sdot==
sdotsdot
sdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
sdotsdotsdot
=sdotsdotsdot
π
π
π
π
π
π
π
j
j
a
ff
j
ff
j
ff
j
ff
j
ez
e
effHfH
e
e
e
e
fHa
a
a
a
aff
j
1490
490
5101
112450
510
124504 =
minus
minus=
+minus
minusminussdot=
+
minussdot=
=
sdot
sdot
π
π
j
j
a
e
effH
Bild 413 Frequenzgang |H(f)| des Filters 2Ordnung
HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 15 DSS-WS 201112
Eine naumlhere Lage der Polstellen am Einheitskreis wuumlrde zu einem groumlszligeren Wert von
= 4
affH fuumlhren Der genaue Verlauf des Betrags der Uumlbertragungsfunktion ist in Bild 413
wiedergegeben
Mit IIR Filtern koumlnnen auch alle Basis-Filterstrukturen wie Tiefpaszlig Hochpaszlig Bandpaszlig und
Bandsperre realisiert werden
15 Realisierungsaspekte
Die Struktur des in Bild 49 dargestellten IIR Filters bezeichnet man als nicht-kanonische
Direktform Eine alternative Darstellung in der sogenannten 1 kanonischen Direktform ist in Bild
414 wiedergegeben wobei hier M=N angenommen wird
Bild 414 1 kanonische Direktform eines IIR Filters
Die Bezeichnung kanonisch beinhaltet dabei einen Aufbau des Filters mit der minimalen Anzahl
von Grundelementen also des Addierers mit zwei Eingaumlngen des Multiplizierers mit einer
Konstanten und der Verzoumlgerung um ein Abtastintervall
Fuumlr ein IIR Filter bei dem der Grad N des Zaumlhlerpolynoms dem Grad M des Nennerpolynoms
entspricht ergibt sich die Anzahl der
- Verzoumlgerungselemente zu N
- Addierer zu Nsdot2
- Multiplizierer zu 12 +sdot N
bN-1 b1 b0
-a1
x(n)
+ y(n)
T + T + + T
-aN-1 -aN
bN
hellip
hellip
HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 16 DSS-WS 201112
In der Praxis realisiert man ein Filter houmlherer Ordnung haumlufig durch eine Kaskadierung
(Hintereinanderschaltung) von IIR Filtern der Ordnung 2 Die Uumlbertragungsfunktion ergibt sich als
Produkt der Uumlbertragungsfunktionen der kaskadierten Filter 2 Ordnung Bei Betrachtung der
logarithmierten Betrags- oder Leistungsdichtespektren geht das Produkt in eine Summe uumlber Die
logarithmierten Frequenzgaumlnge lassen sich folglich einfach additiv uumlberlagern
L
L
++=
sdotsdot=
)(log)(log)(log
)()()(
21
21
fHfHfH
zHzHzH
Im Gegensatz zu FIR Filtern besitzen IIR Filter im Allgemeinen keinen linearen Phasengang und
damit eine frequenzabhaumlngige Gruppenlaufzeit Die Gruppenlaufzeit ist jedoch haumlufig kleiner als
die eines symmetrischen FIR Filters FIR Filter sind immer stabil wohingegen IIR Filter instabil
sein koumlnnen FIR Filter sind weniger empfindlich gegenuumlber Quantisierungseffekten aufgrund der
Quantisierung der Filterkoeffizienten mit einer begrenzten Anzahl von Bits und damit einer
begrenzten Genauigkeit in Digitalrechnern Bei IIR Filtern koumlnnen derartige
Quantisierungsungenauigkeiten durch die mehrfache Verwendung eines Filterkoeffizienten
aufgrund der Ruumlckkopplung zu Abweichungen von der gewuumlnschten Filtercharakteristik fuumlhren
Eine bestimmte Filtercharakteristik in einem vorgegeben Toleranzschema laumlszligt sich in der Regel
durch IIR Filter mit einer geringeren Ordnung als bei einem FIR Filter realisieren Damit sind der
Realisierungsaufwand und die benoumltigte Rechenkapazitaumlt in diesem Fall beim IIR Filter geringer
16 Filterentwurf
Nachdem in den vorangegangenen Abschnitten das Verhalten und die Eigenschaften digitaler Filter
vorgestellt wurden bleibt die Frage wie ein Filter zu entwerfen ist das eine bestimmte
Filtercharakteristik mit einem gewuumlnschten Frequenzgang aufweist Konkret fuumlhrt dies zu der
Frage welche Ordnung das Filter und welche Werte die Filterkoeffizienten eines FIR oder IIR
Filters anzunehmen haben um einen bestimmten Frequenzgang zu erzielen
In diesem Abschnitt wird die prinzipielle Vorgehensweise zur Bestimmung der Filterkoeffzienten
fuumlr IIR und FIR erlaumlutert ohne auf die im Detail recht komplexen algorithmischen Loumlsungen
einzugehen In nahezu allen verfuumlgbaren Programmpaketen zur digitalen Signalverarbeitung finden
sich Programme die die verschiedenen Entwurfsverfahren beinhalten und die zur Findung der
Filterkoeffizienten verwendet werden koumlnnen
HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 17 DSS-WS 201112
Der Entwurf von IIR Filtern beruht auf den bekannten Verfahren zur Bestimmung analoger Filter
mit einer bestimmten Filtercharakteristik Der Entwurf analoger Filter wiederum basiert auf dem
Ansatz daszlig der Betrag des Frequenzgangs in einem vorgegebenen Toleranzschema liegt wie es
beispielhaft fuumlr einen Tiefpaszlig in Bild 415 dargestellt ist In Analogie dazu kann man auch fuumlr
Hochpaszlig Bandpaszlig und Bandsperre entsprechende Toleranzschemata definieren
0 01 02 03 04 050
02
04
06
08
1
ffa
|H(f
)|
Bild 415 Toleranzschema zum Entwurf eines Tiefpasses
Das gezeigte Toleranzschema beinhaltet die Anforderung an den Betrag des Frequenzgangs
innerhalb des hell markierten Bereichs zu verlaufen und damit eine bestimmte Flankensteilheit beim
Uumlbergang vom Durchlaszlig- zum Sperrbereich und eine maximale Welligkeit im Durchlaszlig- und im
Sperrbereich zu gewaumlhrleisten Das Verhalten im Sperrbereich laumlsst sich durch den Wert von 1h als
mindestens zu erreichende Daumlmpfung
sdot
1
1log20h
in dB das Verhalten im Durchlassbereich
durch den Wert von 2h als maximal erlaubte Welligkeit
minussdot
211log20
h in dB beschreiben
Es existieren verschiedene Approximationsverfahren zum Filterentwurf die sich bezuumlglich der
Anforderungen an den Verlauf des Frequenzgangs unterscheiden Die 4 Verfahren werden in Bild
416 veranschaulicht wobei die dargestellten Frequenzgaumlnge durch Filterentwurf mit den jeweils
angegebenen Parametern mit Hilfe der Matlab Signalverarbeitungsroutinen bestimmt wurden
Die Butterworth Approximation beinhaltet die Forderung eines moumlglichst flachen Verlaufs des
Betragsspektrums im Durchlass- und Sperrbereich Die Tschebyscheff Approximationen vom Typ I
und II erlauben eine Welligkeit entweder im Durchlassbereich (Typ I) oder im Sperrbereich (Typ
2h
1h
HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 18 DSS-WS 201112
II) Bei der Approximation nach Cauer wird sowohl im Durchlass- als auch im Sperrbereich eine
Welligkeit zugelassen
Bild 417 Approximationsverfahren zum Entwurf von IIR Filtern
Alle Verfahren beruhen auf der Wahl bestimmter Funktionen zur Approximation des gewuumlnschten
Filterverlaufs wobei sich die prinzipiellen Funktionstypen der Verfahren unterscheiden
Beispielsweise werden die nach dem Cauer Verfahren bestimmten Filterfunktionen auch als
elliptische Filter bezeichnet da zur Approximation elliptische Funktionen verwendet werden
Die schlieszliglich gewaumlhlte Funktion mit den fuumlr das Filter spezifischen Parametern laumlszligt sich auch als
Laplace Transformierte H(p) darstellen Aus H(p) laumlszligt sich mit Hilfe der sogenannten bilinearen
Transformation durch die Substitution 1
1
1
12minus
minus
+
minussdot=
z
z
Tp die Uumlbertragungsfunktion H(z) bestimmen
Anschaulich bildet die bilineare Transformation den Frequenzgang der sich auf der imaginaumlren
Achse der Laplace Transformierten findet auf den Einheitskreis in der komplexen Z Ebene ab
Damit sind die Koeffizienten des IIR Filters bestimmt
HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 19 DSS-WS 201112
Zur Bestimmung der Koeffizienten eines FIR Filters gibt es verschiedene Verfahren von denen 3
im Folgenden kurz erlaumlutert werden Das erste Verfahren wird nach seinen Erfindern als Parks-
McClellan Methode bezeichnet Ausgangspunkt ist wie bei der Bestimmung der Koeffizienten eines
IIR Filters ein Toleranzschema fuumlr den gewuumlnschten Frequenzgang Zunaumlchst wird die
Filterordnung geschaumltzt Anschliessend werden mit Hilfe des sogenannten Remez-Exchange
Algorithmus in einem iterativen Prozess die Filterkoeffizienten eines symmetrischen FIR Filters so
lange veraumlndert bis der Frequenzgang sich innerhalb des festgelegten Toleranzschemas befindet
Die zweite Methode wird als Fenster-Verfahren bezeichnet Der gewuumlnschte Frequenzgang H(f)
wird mit Hilfe einer Inversen Fourier Transformation in den Zeitbereich transformiert wobei im
allgemeinen eine Impulsantwort h(n) generiert wird deren Laumlnge nicht beschraumlnkt ist Im Kapitel
zur diskreten Fourier-Transformation wurde beispielsweise der Si-foumlrmige Verlauf der
Impulsantwort eines idealen TP-Filters aus dem rechteckfoumlrmigen Verlauf im Frequenzbereich
hergeleitet Zur Beschraumlnkung der Filterlaumlnge wird dann durch die Wichtung der Impulsantwort
h(n) mit den Abtastwerten w(n) einer Fensterfunktion ein endlich langer Abschnitt der
Impulsantwort herausgeschnitten
Bild 418 Fenster-Verfahren zum Entwurf von FIR Filtern
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
minus50 minus40 minus30 minus20 minus10 0 10 20 30 40 50
0
05
1
0 50 100 150 200 250 300 350 400 450 500
0
05
1
Zeitms
Zeitms
Zeitms
FrequenzHz
h(n)
w(n)
h(n)w(n)
|H(f)|
HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden

HG Hirsch 20 DSS-WS 201112
Als Fensterfunktionen werden die gleichen Funktionen verwendet die auch bei der Diskreten
Fourier Transformation eingesetzt werden beispielsweise das Hanning- das Hamming- oder das
Kaiser-Fenster Ein Beispiel fuumlr den Entwurf eines Filters nach dem Fenster Verfahren wird in Bild
418 veranschaulicht
In der obersten Graphik wird der Verlauf der Si-foumlrmigen Impulsantwort gezeigt die zur
Realisierung eines idealen Tiefpasses mit einer Grenzfrequenz von 250 Hz bei einer Abtastfrequenz
von 1000 Hz benoumltigt wird In der darunter liegenden Graphik wird eine Hamming Funktion
dargestellt mit der die Werte der Impulsantwort gewichtet und zeitlich auf den Bereich -20 ms le t le
+20 ms begrenzt werden Das Ergebnis der Multiplikation der Abtastwerte der Impulsantwort mit
den Werten der Fensterfunktion wird in der dritten Graphik dargestellt Der sich aus einer Z-
Transformation ergebende Betrag der Uumlbertragungsfunktion |H(f)| wird in der untersten Graphik
veranschaulicht Die Wichtung mit der Fensterfunktion fuumlhrt zu einem bdquoglattenldquo Verlauf der
Frequenzcharakteristik im Durchlass- und Sperrbereich ohne das bei Wichtung mit einer
Rechteckfunktion typische Schwingungsverhalten Allerdings verringert sich dadurch die Steigung
des Frequenzgangs im Bereich der Grenzfrequenz
Das Frequenz-Abtastverfahren stellt eine dritte Moumlglichkeit zur Bestimmung der Koeffizienten
eines FIR Filters da Dabei wird der gewuumlnschte Frequenzverlauf in aumlquidistanten Abstaumlnden
abgetastet zu Erzeugung eines frequenzdiskreten Spektrums Durch Anwendung einer IDFT kann
daraus eine bereits zeitlich begrenzte Impulsantwort generiert werden