1 Kupplungssysteme und Torsionsdämpfer 1 ... - … · Schaeffl er KOLLOQUIUM 2010 1...
10
Schaeffler KOLLOQUIUM 2010 1 Kupplungssysteme und Torsionsdämpfer 8 Schaeffler KOLLOQUIUM 2010 9 1 Kupplungssysteme und Torsionsdämpfer 1 1 Kupplungssysteme und Torsionsdämpfer 9 Schaeffler KOLLOQUIUM 2010 Schaeffler KOLLOQUIUM 2010 8 LuK Kupplungssysteme und Torsionsdämpfer Schlüsselelemente für effiziente Antriebsstränge Mahias Zink Markus Hausner
Transcript of 1 Kupplungssysteme und Torsionsdämpfer 1 ... - … · Schaeffl er KOLLOQUIUM 2010 1...

Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
8 Schaeffl er KOLLOQUIUM 2010 9
1Kupplungssysteme und Torsionsdämpfer
1
1 Kupplungssysteme und Torsionsdämpfer
9Schaeffl er KOLLOQUIUM 2010Schaeffl er KOLLOQUIUM 20108
LuK Kupplungssysteme und Torsionsdämpfer
Schlüsselelemente für effi ziente Antriebsstränge
Matt hias ZinkMarkus Hausner
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
10 Schaeffl er KOLLOQUIUM 2010 11
1Kupplungssysteme und Torsionsdämpfer
1EinleitungBis vor wenigen Jahren war die Motorenentwick-lung stark geprägt durch eine steti ge Erhöhung des spezifi schen Motormoments bei Dieselmotoren mit neuen Einspritztechnologien kombiniert mit Aufl adung. Seit Beginn der 90er Jahre wurden da-durch die auf den Hubraum bezogenen möglichen Motormomente in etwa verdreifacht. Der typische Dieselmotor hatt e dabei ein Hubvolumen von etwa zwei Litern und vier Zylinder, womit diese Aggrega-te heute in der Lage sind 450 Nm und mehr zu er-zeugen [1]. Diese Evoluti on bei den Dieselmotoren steigerte in hohem Maße Fahrspaß und Effi zienz. Damit auch bezüglich Komfort kompromisslose Er-gebnisse erzielt werden können, wuchsen in ver-gleichbarem Maße die Anforderungen an den Drehschwingungsdämpfer, der zum einen die ho-hen Momente übertragen und zum anderen die hohen Wechselmomente wirkungsvoll vom An-triebsstrang fern halten muss.
Bei der Wahl des Getriebes konnte sich der Kunde bis-her im Wesentlichen zwischen einem Handschaltge-triebe oder einem Automati kgetriebe entscheiden, in vergleichsweise seltenen Fällen auch für ein CVT oder ein automati siertes Handschaltgetriebe.
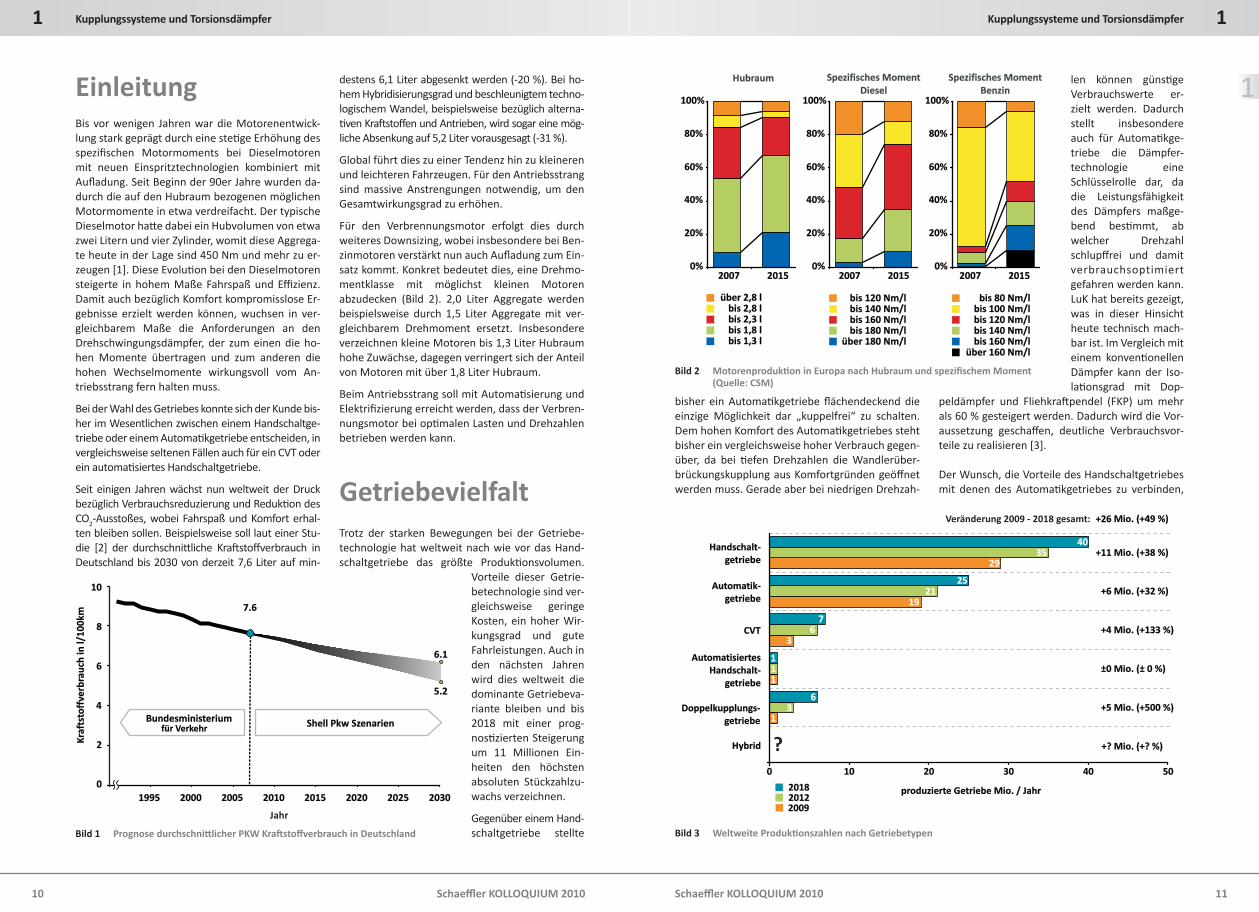
Seit einigen Jahren wächst nun weltweit der Druck bezüglich Verbrauchsreduzierung und Redukti on des CO2-Ausstoßes, wobei Fahrspaß und Komfort erhal-ten bleiben sollen. Beispielsweise soll laut einer Stu-die [2] der durchschnitt liche Kraft stoff verbrauch in Deutschland bis 2030 von derzeit 7,6 Liter auf min-
destens 6,1 Liter abgesenkt werden (-20 %). Bei ho-hem Hybridisierungsgrad und beschleunigtem techno-logischem Wandel, beispielsweise bezüglich alterna-ti ven Kraft stoff en und Antrieben, wird sogar eine mög-liche Absenkung auf 5,2 Liter vorausgesagt (-31 %).
Global führt dies zu einer Tendenz hin zu kleineren und leichteren Fahrzeugen. Für den Antriebsstrang sind massive Anstrengungen notwendig, um den Gesamtwirkungsgrad zu erhöhen.
Für den Verbrennungsmotor erfolgt dies durch weiteres Downsizing, wobei insbesondere bei Ben-zinmotoren verstärkt nun auch Aufl adung zum Ein-satz kommt. Konkret bedeutet dies, eine Drehmo-mentklasse mit möglichst kleinen Motoren abzudecken (Bild 2). 2,0 Liter Aggregate werden beispielsweise durch 1,5 Liter Aggregate mit ver-gleichbarem Drehmoment ersetzt. Insbesondere verzeichnen kleine Motoren bis 1,3 Liter Hubraum hohe Zuwächse, dagegen verringert sich der Anteil von Motoren mit über 1,8 Liter Hubraum.
Beim Antriebsstrang soll mit Automati sierung und Elektrifi zierung erreicht werden, dass der Verbren-nungsmotor bei opti malen Lasten und Drehzahlen betrieben werden kann.
GetriebevielfaltTrotz der starken Bewegungen bei der Getriebe-technologie hat weltweit nach wie vor das Hand-schaltgetriebe das größte Produkti onsvolumen.
Vorteile dieser Getrie-betechnologie sind ver-gleichsweise geringe Kosten, ein hoher Wir-kungsgrad und gute Fahrleistungen. Auch in den nächsten Jahren wird dies weltweit die dominante Getriebeva-riante bleiben und bis 2018 mit einer prog-nosti zierten Steigerung um 11 Millionen Ein-heiten den höchsten absoluten Stückzahlzu-wachs verzeichnen.
Gegenüber einem Hand-schaltgetriebe stellte
bisher ein Automati kgetriebe fl ächendeckend die einzige Möglichkeit dar „kuppelfrei“ zu schalten. Dem hohen Komfort des Automati kgetriebes steht bisher ein vergleichsweise hoher Verbrauch gegen-über, da bei ti efen Drehzahlen die Wandlerüber-brückungskupplung aus Komfortgründen geöff net werden muss. Gerade aber bei niedrigen Drehzah-
len können günsti ge Verbrauchswerte er-zielt werden. Dadurch stellt insbesondere auch für Automati kge-triebe die Dämpfer-technologie eine Schlüsselrolle dar, da die Leistungsfähigkeit des Dämpfers maßge-bend besti mmt, ab welcher Drehzahl schlupff rei und damit verbrauchsoptimiert gefahren werden kann. LuK hat bereits gezeigt, was in dieser Hinsicht heute technisch mach-bar ist. Im Vergleich mit einem konventi onellen Dämpfer kann der Iso-lati onsgrad mit Dop-
peldämpfer und Fliehkraft pendel (FKP) um mehr als 60 % gesteigert werden. Dadurch wird die Vor-aussetzung geschaff en, deutliche Verbrauchsvor-teile zu realisieren [3].
Der Wunsch, die Vorteile des Handschaltgetriebes mit denen des Automati kgetriebes zu verbinden,
20002000 20102010 20202020 20302030
1010
88
66
44
22
00
6.16.1
5.25.2
7.67.6
19951995 20052005 20152015 20252025
KKrraa
fts
ftstt
off
off
vverb
re
rbra
uch
inl/
10
0km
au
chin
l/1
00
km
BundesminisBundesministteriumeriumfürfür VVerkerkehrehr
ShellShell Pkw SzPkw Szenarienenarien
Jahr
Bild 1 Prognose durchschnitt licher PKW K raft stoff verbrauch in Deutschland
0%0%
20%20%
40%40%
60%60%
80%80%
100%100%
0%0%
20%20%
40%40%
60%60%
80%80%
100%100%
0%0%
20%20%
40%40%
60%60%
80%80%
100%100%
20072007 20152015 20072007 20152015 20072007 20152015
SpeSpezifischeszifisches MomenMomenttDieselDiesel
SpeSpezifischeszifisches MomenMomenttBenzinBenzin
HubrHubraumaum
bisbis 120 Nm/l120 Nm/lbisbis 140 Nm/l140 Nm/lbisbis 160 Nm/l160 Nm/lbisbis 180 Nm/l180 Nm/l
überüber 180 Nm/l180 Nm/l
bisbis 80 Nm/l80 Nm/lbisbis 100 Nm/l100 Nm/lbisbis 120 Nm/l120 Nm/lbisbis 140 Nm/l140 Nm/lbisbis 160 Nm/l160 Nm/l
überüber 160 Nm/l160 Nm/l
überüber 2,8 l2,8 lbisbis 2,8 l2,8 lbisbis 2,3 l2,3 lbisbis 1,8 l1,8 lbisbis 1,3 l1,3 l
Bild 2 Motorenprodukti on in Europa nach Hubraum und spezifi schem Moment (Quelle: CSM)
505030302020101000
(+49 %)(+49 %)
(+32 %)(+32 %)+6+6
(+133 %)(+133 %)+4+4
(± 0 %)(± 0 %)±0±0
(+? %)(+? %)+?+?
(+500 %)(+500 %)+5+5
(+38 %)(+38 %)+11+11
4040
200920092012201220182018
?
1133
66
+26+26
29293535
4040
111111
3366
77
1919
25252121
Handschalt-Handschalt-ggeetriebetriebe
CVTCVT
HybridHybrid
AutAutomaomatisierttisiertesesHandschalt-Handschalt-
ggeetriebetriebe
AutAutomaomatik-tik-ggeetriebetriebe
DoppelkDoppelkupplungs-upplungs-ggeetriebetriebe
prproduziertoduzierte Gee Getriebetriebe Mio.Mio. // JahrJahr
Veränderung 2009 - 2018 gesamt: Mio.Mio.
Mio.Mio.
Mio.Mio.
Mio.Mio.
Mio.Mio.
Mio.Mio.
Mio.Mio.
Bild 3 Weltweite Produkti onszahlen nach Getriebetypen
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
12 Schaeffl er KOLLOQUIUM 2010 13
1Kupplungssysteme und Torsionsdämpfer
1führte zu der Entwicklung von Doppelkupplungsge-trieben. Dieses neue Getriebekonzept zeigt, wie sich Fahrspaß, Verbrauch und Komfort beeindru-ckend kombinieren lassen. Hier werden in den nächsten Jahren die höchsten relati ven Zuwächse realisiert.
Die weitere Automati sierung und Elektrifi zierung fi ndet in der Hybridisierung ihre konsequente Fort-setzung. Auch hier ist das Ziel, ohne Abstriche bei Komfort und Fahrspaß den Verbrauch durch Ener-giemanagement weiter zu senken. Wie stark sich die Marktdurchdringung und mit welchen Hybrid-konzepten diese sich entwickeln wird, ist derzeit noch nicht vollständig absehbar. Sicher scheint je-doch, dass sich die Hybridisierung in den nächsten Jahren fl ächendeckend in den Modellreihen der Automobilhersteller etablieren wird.
Der Beitrag der Getriebe zu günstigen Ver-brauchswerten ergibt sich zu einem Großteil durch die Schaffung der Grundlage, den Ver-brennungsmotor bei geringem spezifischem Ver-brauch zu betreiben. Hierzu nimmt die Anzahl der Gänge sowie die Spreizung zu. Eine Automa-tisierung sorgt dafür, dass immer der richtige Gang eingelegt ist. Beim Handschaltgetriebe ist Letzteres dem Fahrer überlassen, aber auch hier kann eine visuelle Schaltempfehlung positiv un-terstützen, wenn der Fahrer sich in dem empfoh-lenen Gang wohl fühlt.
Weitere Anstrengungen betreff en den mechani-schen Wirkungsgrad. Geringere Reibung und Leichtbau führen jedoch auch zu einer höheren Sensiti vität gegenüber Drehschwingungen, da we-niger Masse bewegt und Schwingungen weniger gedämpft werden. Insbesondere bei Doppelkupp-lungsgetrieben steigen die Anforderungen hin-sichtlich Drehungleichförmigkeit gegenüber einem Handschaltgetriebe deutlich an, da ein Teilgetriebe nicht im Kraft fl uss liegt und daher anfällig für Ras-selgeräusche ist. Daher muss gesamthaft berück-sichti gt werden, dass diesbezügliche Opti mierun-gen, je nach Ausgangslage, auch mit höheren Anforderungen an die Drehschwingungsdämpfer einhergehen.
Opti male Dämpfer für komfortables Fahren bei geringem VerbrauchUnabhängig vom Getriebekonzept werden Fahr-zeuge, abgesehen vom rein elektrischen Fahren, in absehbarer Zukunft nach wie vor verbrennungs-motorisch angetrieben. Das bedeutet, die grund-
sätzlichen Anforderun-gen an der Schnitt stelle zwischen Motor und Getriebe sind für alle Getriebevarianten zu-nächst gleich. Neben einem Anfahrelement und der Übertragung des mitt leren Momen-tes müssen die Wech-selmomente bedämpft werden. Dabei steigt die Anforderung an den Dämpfer mit höhe-ren Momenten bei niedrigen Drehzahlen und Reduzierung der Zylinderzahl. Oder an-ders ausgedrückt: Die Anforderungen an den Dämpfer steigen bei der Zielstellung nach geringem Verbrauch, bei gleichbleibendem Fahrspaß und Komfort.
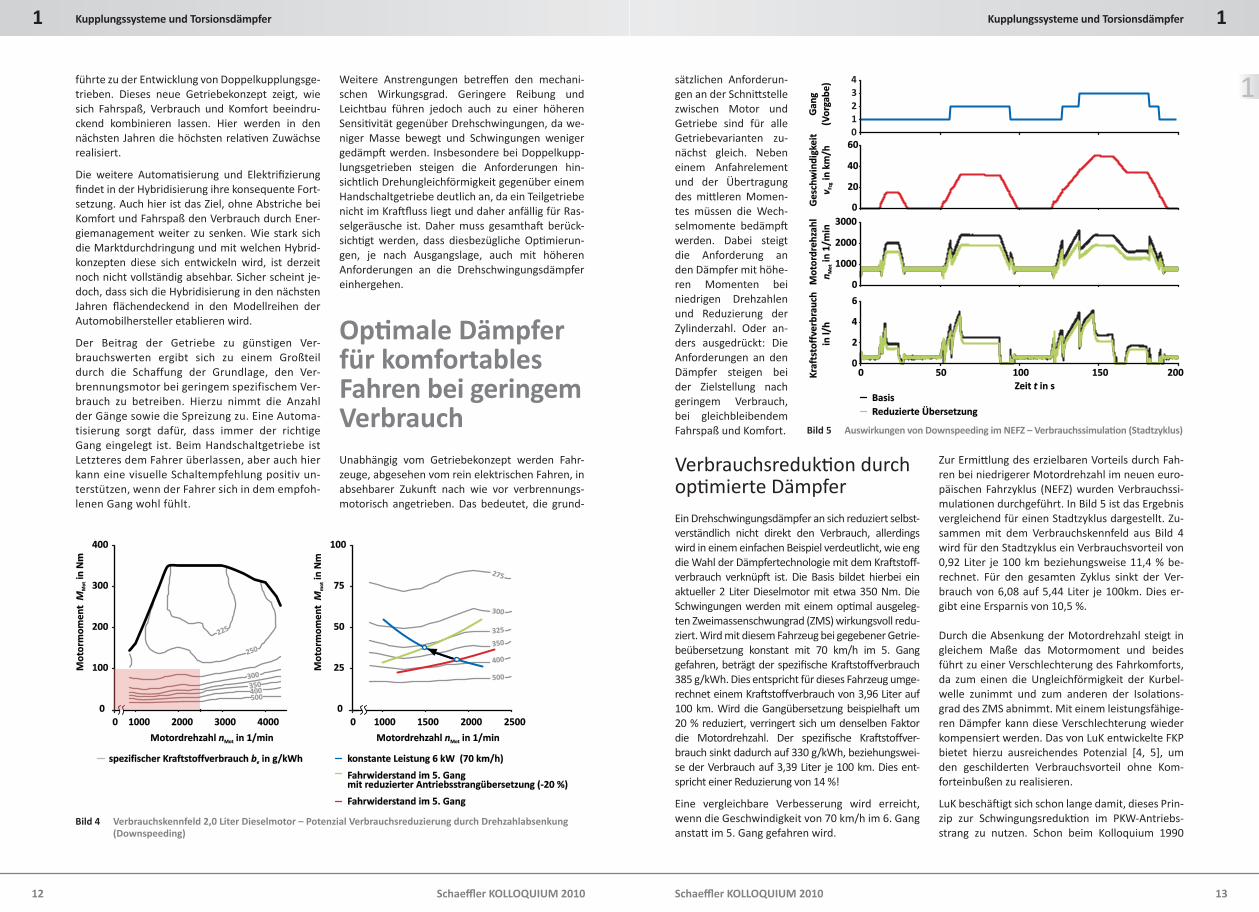
Verbrauchsredukti on durch opti mierte DämpferEin Drehschwingungsdämpfer an sich reduziert selbst-verständlich nicht direkt den Verbrauch, allerdings wird in einem einfachen Beispiel verdeutlicht, wie eng die Wahl der Dämpfertechnologie mit dem Kraft stoff -verbrauch verknüpft ist. Die Basis bildet hierbei ein aktueller 2 Liter Dieselmotor mit etwa 350 Nm. Die Schwingungen werden mit einem opti mal ausgeleg-ten Zweimassenschwungrad (ZMS) wirkungsvoll redu-ziert. Wird mit diesem Fahrzeug bei gegebener Getrie-beübersetzung konstant mit 70 km/h im 5. Gang gefahren, beträgt der spezifi sche Kraft stoff verbrauch 385 g/kWh. Dies entspricht für dieses Fahrzeug umge-rechnet einem Kraft stoff verbrauch von 3,96 Liter auf 100 km. Wird die Gangübersetzung beispielhaft um 20 % reduziert, verringert sich um denselben Faktor die Motordrehzahl. Der spezifi sche Kraft stoff ver-brauch sinkt dadurch auf 330 g/kWh, beziehungswei-se der Verbrauch auf 3,39 Liter je 100 km. Dies ent-spricht einer Reduzierung von 14 %!
Eine vergleichbare Verbesserung wird erreicht, wenn die Geschwindigkeit von 70 km/h im 6. Gang anstatt im 5. Gang gefahren wird.
Zur Ermitt lung des erzielbaren Vorteils durch Fah-ren bei niedrigerer Motordrehzahl im neuen euro-päischen Fahrzyklus (NEFZ) wurden Verbrauchssi-mulati onen durchgeführt. In Bild 5 ist das Ergebnis vergleichend für einen Stadtzyklus dargestellt. Zu-sammen mit dem Verbrauchskennfeld aus Bild 4 wird für den Stadtzyklus ein Verbrauchsvorteil von 0,92 Liter je 100 km beziehungsweise 11,4 % be-rechnet. Für den gesamten Zyklus sinkt der Ver-brauch von 6,08 auf 5,44 Liter je 100km. Dies er-gibt eine Ersparnis von 10,5 %.
Durch die Absenkung der Motordrehzahl steigt in gleichem Maße das Motormoment und beides führt zu einer Verschlechterung des Fahrkomforts, da zum einen die Ungleichförmigkeit der Kurbel-welle zunimmt und zum anderen der Isolati ons-grad des ZMS abnimmt. Mit einem leistungsfähige-ren Dämpfer kann diese Verschlechterung wieder kompensiert werden. Das von LuK entwickelte FKP bietet hierzu ausreichendes Potenzial [4, 5], um den geschilderten Verbrauchsvorteil ohne Kom-forteinbußen zu realisieren.
LuK beschäft igt sich schon lange damit, dieses Prin-zip zur Schwingungsredukti on im PKW-Antriebs-strang zu nutzen. Schon beim Kolloquium 1990
00 20002000 30003000 40004000
00
100100
200200
300300
250250
300300
350350400400500500
10001000
400400
225225
100100
400400
500500
275275
350350
300300
325325
00 15001500 20002000 25002500
00
2525
5050
7575
10001000
Mo
tM
oto
rmo
me
no
rmo
me
ntt
inN
min
Nm
MMM
ot
Mo
t
Mo
tM
oto
rmo
me
no
rmo
me
ntt
inN
min
Nm
MMmm
ot
ot
MotMotorordrdrehzehzahlahl ininnnMotMot 1/min1/minMotMotorordrdrehzehzahlahl in 1/minin 1/minnnMotMot
FFahrahrwiderwiderssttand im 5. Gangand im 5. Gangmit rmit reduzierteduzierter Aner Antriebtriebsssstrtrangüberangübersesetztzung (-20 %)ung (-20 %)
FFahrahrwiderwiderssttand im 5. Gangand im 5. Gang
kkonsonsttanantte Leise Leistung 6 kW (70 km/h)tung 6 kW (70 km/h)spespezifischer Kzifischer Krraaftsftsttoffoffvverbrerbrauchauch in gin g/kWh/kWhbbee
Bild 4 Verbrauchskennfeld 2,0 Liter Dieselmotor – Potenzial Verbrauchsreduzierung durch Drehzahlabsenkung (Downspeeding)
1
0
2
3
4
150150 200200
00
10001000
20002000
30003000
00 5050 10010000
22
44
66
00
2020
4040
6060
Ga
ng
Ga
ng
(V(Vo
ro
rgga
be
)a
be
)KK
rraaft
sft
stto
ffo
ffvve
rbr
erb
rau
cha
uch
inl/
hin
l/h
Ge
sch
Ge
sch
win
dig
kw
ind
igke
ite
itvv
FzFzgg
inkm
/hin
km/h
BasisBasis
RReduzierteduziertee ÜberÜbersesetztzungung
ZZeiteit tt in sin s
Mo
tM
oto
ro
rdr
dre
hz
eh
zah
la
hl
ininnn
Mo
tM
ot
1/m
in1
/min
Bild 5 Auswirkungen von Downspeeding im NEFZ – Verbrauchssimulati on (Stadtzyklus)
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
14 Schaeffl er KOLLOQUIUM 2010 15
1Kupplungssysteme und Torsionsdämpfer
1
wurde diese Technik in Verbindung mit einer ge-dämpft en Kupplungsscheibe erläutert [6]. Im Kol-loquium 2002 wurde das FKP auf der Sekundärsei-te eines ZMS vorgestellt [7] und seit 2008 ist diese Technologie erfolgreich in Serie.
Im realen Fahrbetrieb wird das Verbrauchsreduzie-rungspotenzial bei Einsatz eines ZMS mit FKP bestä-
ti gt. Zusammen mit anderen Maßnahmen konnte der Verbrauch bei einem Serienfahr-zeug mit Handschaltge-triebe um 0,7 Liter ohne Komforteinbußen ge-senkt werden. Ein Er-folg, der ohne leistungs-fähigen Dämpfer nicht möglich gewesen wäre.
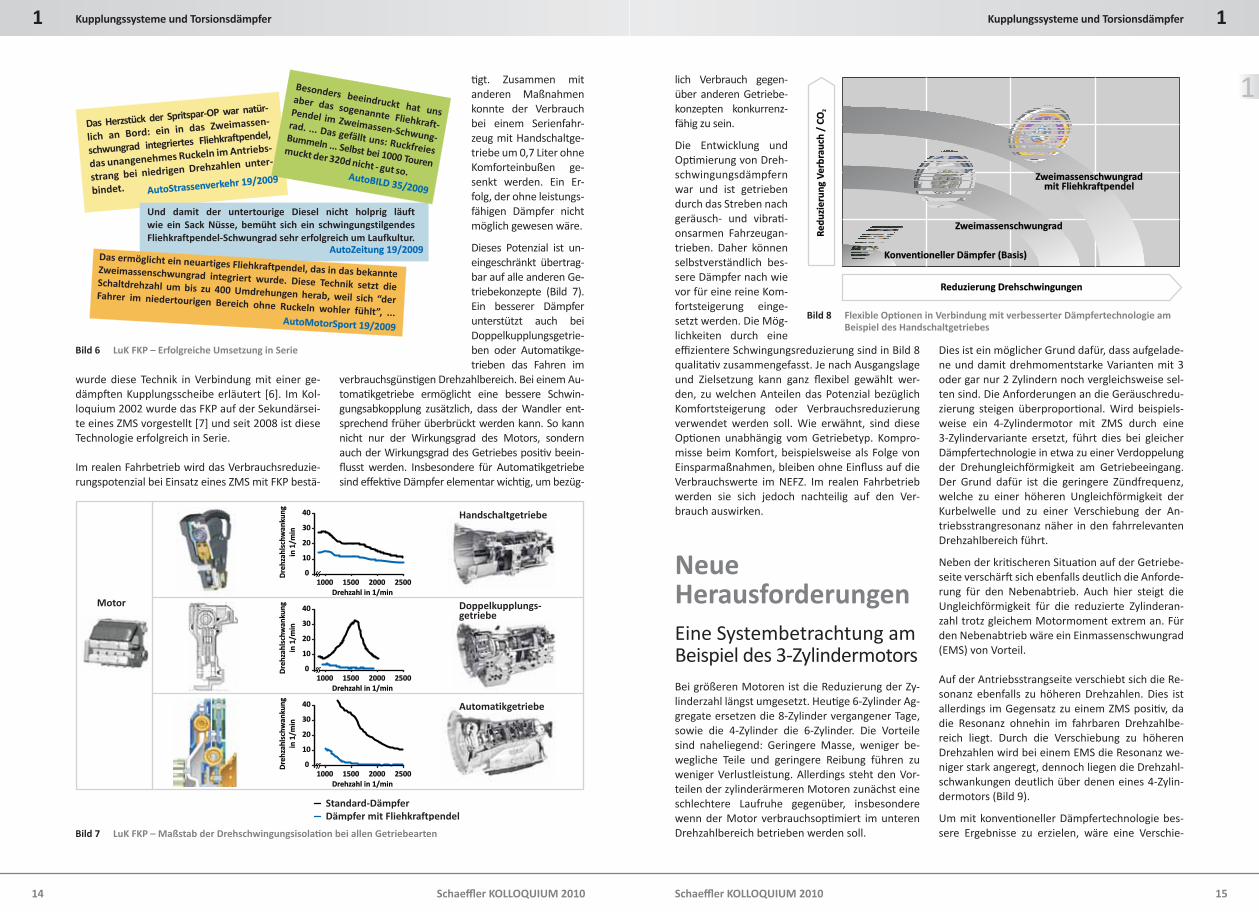
Dieses Potenzial ist un-eingeschränkt übertrag-bar auf alle anderen Ge-triebekonzepte (Bild 7). Ein besserer Dämpfer unterstützt auch bei Doppelkupplungsgetrie-ben oder Automati kge-trieben das Fahren im
verbrauchsgünsti gen Drehzahlbereich. Bei einem Au-tomati kgetriebe ermöglicht eine bessere Schwin-gungsabkopplung zusätzlich, dass der Wandler ent-sprechend früher überbrückt werden kann. So kann nicht nur der Wirkungsgrad des Motors, sondern auch der Wirkungsgrad des Getriebes positi v beein-fl usst werden. Insbesondere für Automati kgetriebe sind eff ekti ve Dämpfer elementar wichti g, um bezüg-
lich Verbrauch gegen-über anderen Getriebe-konzepten konkurrenz-fähig zu sein.
Die Entwicklung und Opti mierung von Dreh-schwingungsdämpfern war und ist getrieben durch das Streben nach geräusch- und vibrati -onsarmen Fahrzeugan-trieben. Daher können selbstverständlich bes-sere Dämpfer nach wie vor für eine reine Kom-fortsteigerung einge-setzt werden. Die Mög-lichkeiten durch eine effi zientere Schwingungsreduzierung sind in Bild 8 qualitati v zusammengefasst. Je nach Ausgangslage und Zielsetzung kann ganz fl exibel gewählt wer-den, zu welchen Anteilen das Potenzial bezüglich Komfortsteigerung oder Verbrauchsreduzierung verwendet werden soll. Wie erwähnt, sind diese Opti onen unabhängig vom Getriebetyp. Kompro-misse beim Komfort, beispielsweise als Folge von Einsparmaßnahmen, bleiben ohne Einfl uss auf die Verbrauchswerte im NEFZ. Im realen Fahrbetrieb werden sie sich jedoch nachteilig auf den Ver-brauch auswirken.
Neue Herausforderungen Eine Systembetrachtung am Beispiel des 3-ZylindermotorsBei größeren Motoren ist die Reduzierung der Zy-linderzahl längst umgesetzt. Heuti ge 6-Zylinder Ag-gregate ersetzen die 8-Zylinder vergangener Tage, sowie die 4-Zylinder die 6-Zylinder. Die Vorteile sind naheliegend: Geringere Masse, weniger be-wegliche Teile und geringere Reibung führen zu weniger Verlustleistung. Allerdings steht den Vor-teilen der zylinderärmeren Motoren zunächst eine schlechtere Laufruhe gegenüber, insbesondere wenn der Motor verbrauchsopti miert im unteren Drehzahlbereich betrieben werden soll.
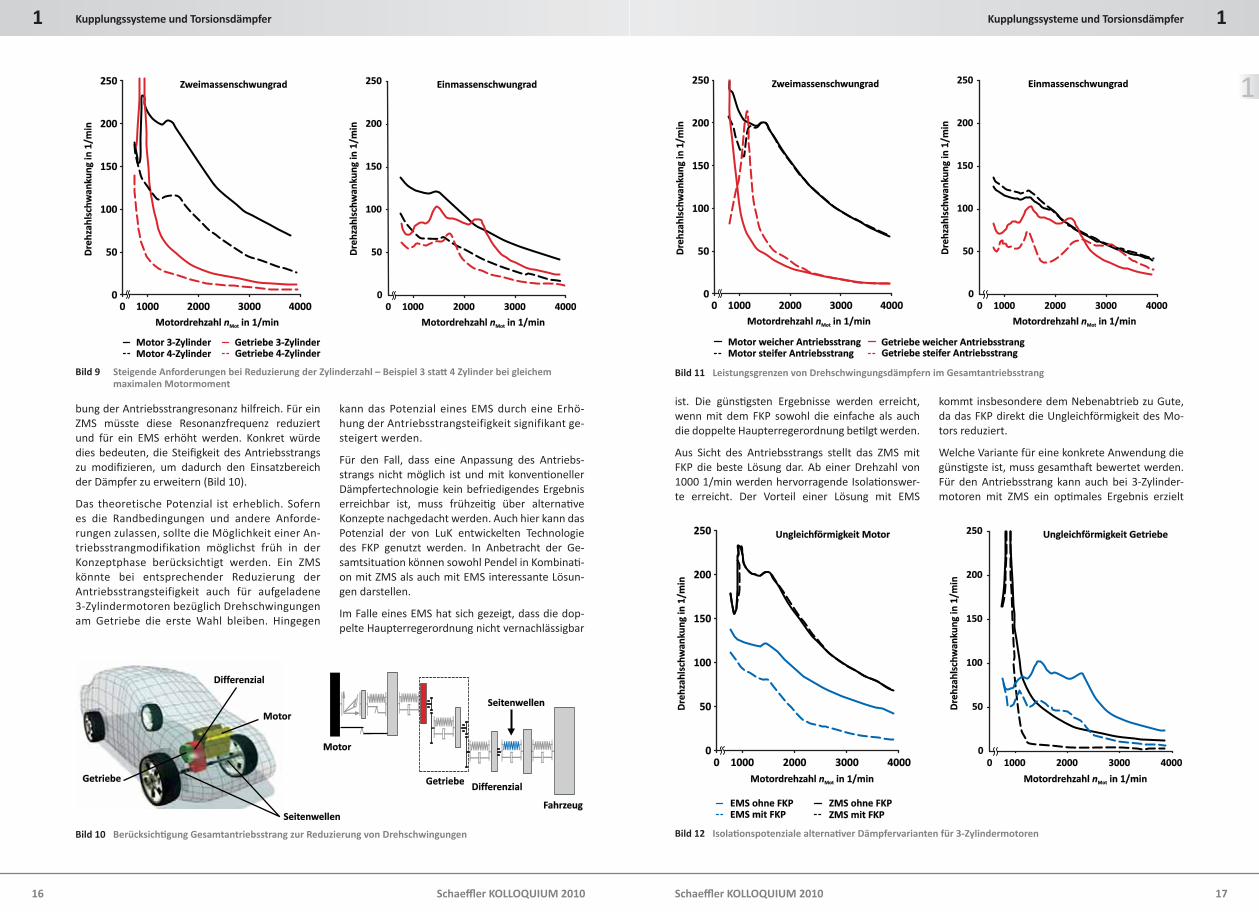
Dies ist ein möglicher Grund dafür, dass aufgelade-ne und damit drehmomentstarke Varianten mit 3 oder gar nur 2 Zylindern noch vergleichsweise sel-ten sind. Die Anforderungen an die Geräuschredu-zierung steigen überproporti onal. Wird beispiels-weise ein 4-Zylindermotor mit ZMS durch eine 3-Zylindervariante ersetzt, führt dies bei gleicher Dämpfertechnologie in etwa zu einer Verdoppelung der Drehungleichförmigkeit am Getriebeeingang. Der Grund dafür ist die geringere Zündfrequenz, welche zu einer höheren Ungleichförmigkeit der Kurbelwelle und zu einer Verschiebung der An-triebsstrangresonanz näher in den fahrrelevanten Drehzahlbereich führt.
Neben der kriti scheren Situati on auf der Getriebe-seite verschärft sich ebenfalls deutlich die Anforde-rung für den Nebenabtrieb. Auch hier steigt die Ungleichförmigkeit für die reduzierte Zylinderan-zahl trotz gleichem Motormoment extrem an. Für den Nebenabtrieb wäre ein Einmassenschwungrad (EMS) von Vorteil.
Auf der Antriebsstrangseite verschiebt sich die Re-sonanz ebenfalls zu höheren Drehzahlen. Dies ist allerdings im Gegensatz zu einem ZMS positi v, da die Resonanz ohnehin im fahrbaren Drehzahlbe-reich liegt. Durch die Verschiebung zu höheren Drehzahlen wird bei einem EMS die Resonanz we-niger stark angeregt, dennoch liegen die Drehzahl-schwankungen deutlich über denen eines 4-Zylin-dermotors (Bild 9).
Um mit konventi oneller Dämpfertechnologie bes-sere Ergebnisse zu erzielen, wäre eine Verschie-
4040
2020
1010
0010001000 15001500 20002000 25002500
3030
4040
2020
1010
0010001000 15001500 20002000 25002500
3030
4040
2020
1010
0010001000 15001500 20002000 25002500
3030
Doppelkupplungs-getriebe
Automatikgetriebe
Motor
Handschaltgetriebe
Standard-DämpferDämpfer mit Fliehkraftpendel
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
DrDrehzehzahl in 1/minahl in 1/min
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
DrDrehzehzahl in 1/minahl in 1/min
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
DrDrehzehzahl in 1/minahl in 1/min
Bild 7 LuK FKP – Maßstab der Drehschwingungsisolati on bei allen GetriebeartenRR
ed
uzi
eru
ng
ed
uzi
eru
ng
VVe
rbr
erb
rau
ch/
Ca
uch
/C
OO22
RReduzierungeduzierung DrDrehschehschwingungwingungenen
KKononvvenentionellertioneller DämpDämpffer (Basis)er (Basis)
ZZwweimassenscheimassenschwungrwungradad
ZZwweimassenscheimassenschwungrwungradadmit Fliehkrmit Fliehkraaftpendelftpendel
Bild 8 Flexible Opti onen in Verbindung mit verbesserter Dämpfertechnologie am Beispiel des Handschaltgetriebes
Das Herzstück der Spritspar-OP war natür-
lich an Bord: ein in das Zweimassen-
schwungrad integriertes Fliehkraftpendel,
das unangenehmes Ruckeln im Antriebs-
strang bei niedrigen Drehzahlen unter-
bindet. AAuuttooSStrtraasssseennvveerrkkeehhrr 1199/2/2000099
Und damit der untertourige Diesel nicht holprig läuftwie ein Sack Nüsse, bemüht sich ein schwingungstilgendesFliehkraftpendel-Schwungrad sehr erfolgreich um Laufkultur.
AutAutoZoZeitung 19/2009eitung 19/2009Das ermöglicht ein neuartiges Fliehkraftpendel, das in das bekannteZweimassenschwungrad integriert wurde. Diese Technik setzt dieSchaltdrehzahl um bis zu 400 Umdrehungen herab, weil sich “derFahrer im niedertourigen Bereich ohne Ruckeln wohler fühlt”, ...
AAuuttooMMoottoorrSSppoorrt 19/2009t 19/2009
Besonders beeindruckt hat unsaber das sogenannte Fliehkraft-Pendel im Zweimassen-Schwung-rad. ... Das gefällt uns: RuckfreiesBummeln ... Selbst bei 1000 Tourenmuckt der 320d nicht - gut so.AAuuttooBBIILLDD 3355//22000099
Bild 6 LuK FKP – Erfolgreiche Umsetzung in Serie
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
16 Schaeffl er KOLLOQUIUM 2010 17
1Kupplungssysteme und Torsionsdämpfer
1
bung der Antriebsstrangresonanz hilfreich. Für ein ZMS müsste diese Resonanzfrequenz reduziert und für ein EMS erhöht werden. Konkret würde dies bedeuten, die Steifi gkeit des Antriebsstrangs zu modifi zieren, um dadurch den Einsatzbereich der Dämpfer zu erweitern (Bild 10).
Das theoretische Potenzial ist erheblich. Sofern es die Randbedingungen und andere Anforde-rungen zulassen, sollte die Möglichkeit einer An-triebsstrangmodifikation möglichst früh in der Konzeptphase berücksichtigt werden. Ein ZMS könnte bei entsprechender Reduzierung der Antriebsstrangsteifigkeit auch für aufgeladene 3-Zylindermotoren bezüglich Drehschwingungen am Getriebe die erste Wahl bleiben. Hingegen
kann das Potenzial eines EMS durch eine Erhö-hung der Antriebsstrangsteifigkeit signifikant ge-steigert werden.
Für den Fall, dass eine Anpassung des Antriebs-strangs nicht möglich ist und mit konventi oneller Dämpfertechnologie kein befriedigendes Ergebnis erreichbar ist, muss frühzeiti g über alternati ve Konzepte nachgedacht werden. Auch hier kann das Potenzial der von LuK entwickelten Technologie des FKP genutzt werden. In Anbetracht der Ge-samtsituati on können sowohl Pendel in Kombinati -on mit ZMS als auch mit EMS interessante Lösun-gen darstellen.
Im Falle eines EMS hat sich gezeigt, dass die dop-pelte Haupterregerordnung nicht vernachlässigbar
ist. Die günsti gsten Ergebnisse werden erreicht, wenn mit dem FKP sowohl die einfache als auch die doppelte Haupterregerordnung beti lgt werden.
Aus Sicht des Antriebsstrangs stellt das ZMS mit FKP die beste Lösung dar. Ab einer Drehzahl von 1000 1/min werden hervorragende Isolati onswer-te erreicht. Der Vorteil einer Lösung mit EMS
kommt insbesondere dem Nebenabtrieb zu Gute, da das FKP direkt die Ungleichförmigkeit des Mo-tors reduziert.
Welche Variante für eine konkrete Anwendung die günsti gste ist, muss gesamthaft bewertet werden. Für den Antriebsstrang kann auch bei 3-Zylinder-motoren mit ZMS ein opti males Ergebnis erzielt
00
100100
150150
200200
20002000 30003000 400040001000100000
250250
5050
00
100100
150150
200200
250250
5050
20002000 30003000 400040001000100000
ZZwweimassenscheimassenschwungrwungradad EinmassenschEinmassenschwungrwungradad
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
MotMotorordrdrehzehzahlahl nnMotMot in 1/minin 1/min
MotMotor 3-Zor 3-Zylinderylinder GeGetriebe 3-Ztriebe 3-ZylinderylinderGeGetriebe 4-Ztriebe 4-Zylinderylinder
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
MotMotorordrdrehzehzahlahl nnMotMot in 1/minin 1/min
MotMotor 4-Zor 4-Zylinderylinder
Bild 9 Steigende Anforderungen bei Reduzierung der Zylinderzahl – Beispiel 3 statt 4 Zylinder bei gleichem maximalen Motormoment
MotMotoror
DiffDiffererenzialenzial
SeitSeitenenwwellenellen
MotMotoror
GeGetriebetriebe
FFahrzahrzeugeug
DiffDiffererenzialenzial
SeitSeitenenwwellenellen
GeGetriebetriebe
Bild 10 Berücksichti gung Gesamtantriebsstrang zur Reduzierung von Drehschwingungen
00
100100
150150
200200
20002000 30003000 400040001000100000
250250
5050
00
100100
150150
200200
250250
5050
20002000 30003000 400040001000100000
ZZwweimassenscheimassenschwungrwungradad EinmassenschEinmassenschwungrwungradad
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
MotMotorordrdrehzehzahlahl nnMotMot in 1/minin 1/min
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
MotMotorordrdrehzehzahlahl nnMotMot in 1/minin 1/min
MotMotor wor weicher Aneicher Antriebtriebsssstrtrangang GeGetriebetriebe wweicher Aneicher AntriebtriebsssstrtrangangGeGetriebetriebe sstteifeifer Aner AntriebtriebsssstrtrangangMotMotoror sstteifeifer Aner Antriebtriebsssstrtrangang
Bild 11 Leistungsgrenzen von Drehschwingungsdämpfern im Gesamtantriebsstrang
00
100100
150150
200200
20002000 30003000 400040001000100000
250250
5050
00
100100
150150
200200
250250
5050
20002000 30003000 400040001000100000
UngleichUngleichfförmigkörmigkeit Moteit Motoror UngleichUngleichfförmigkörmigkeit Geeit Getriebetriebe
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
MotMotorordrdrehzehzahlahl nnMotMot in 1/minin 1/min
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gu
ng
in1
/min
in1
/min
MotMotorordrdrehzehzahlahl nnMotMot in 1/minin 1/min
EMS ohne FKPEMS ohne FKP ZMS ohne FKPZMS ohne FKPZMS mit FKPZMS mit FKPEMS mit FKPEMS mit FKP
Bild 12 Isolati onspotenziale alternati ver Dämpfervarianten für 3-Zylindermotoren
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
18 Schaeffl er KOLLOQUIUM 2010 19
1Kupplungssysteme und Torsionsdämpfer
1werden. Für eventuell kriti sche Schwingungen auf der Nebenabtriebsseite hat LuK ebenfalls eine Lö-sung entwickelt, die im folgenden Abschnitt erläu-tert wird.
Lösung für den NebenabtriebBei den oben gezeigten Möglichkeiten zur Schwingungsreduzierung bei aufgeladenen 3-Zy-lindermotoren bieten auch Varianten mit ZMS das höchste Potenzial. Insbesondere kombiniert mit einem FKP können theoretisch beste Isolati-onsergebnisse schon ab niedriger Motordreh-zahl erreicht werden. Ein Nachteil gegenüber Varianten mit EMS sind die größeren Schwingun-gen auf der Nebenabtriebsseite. Auch hierfür hat LuK eine Lösung, mit der die Schwingungen auf ein geringes Niveau gebracht werden kön-nen. Das Vorbild ist das bewährte Prinzip des ZMS. Mit dieser Technologie, in entsprechend kleinerer Ausführung, kann auch für den Neben-abtrieb ein überkritischer Betrieb ermöglicht werden. Bild 13 zeigt eine Konstruktion für einen LuK Riemenscheibenentkoppler (RSE) [8]. Der RSE ist dabei direkt auf dem freien Kurbelwelle-
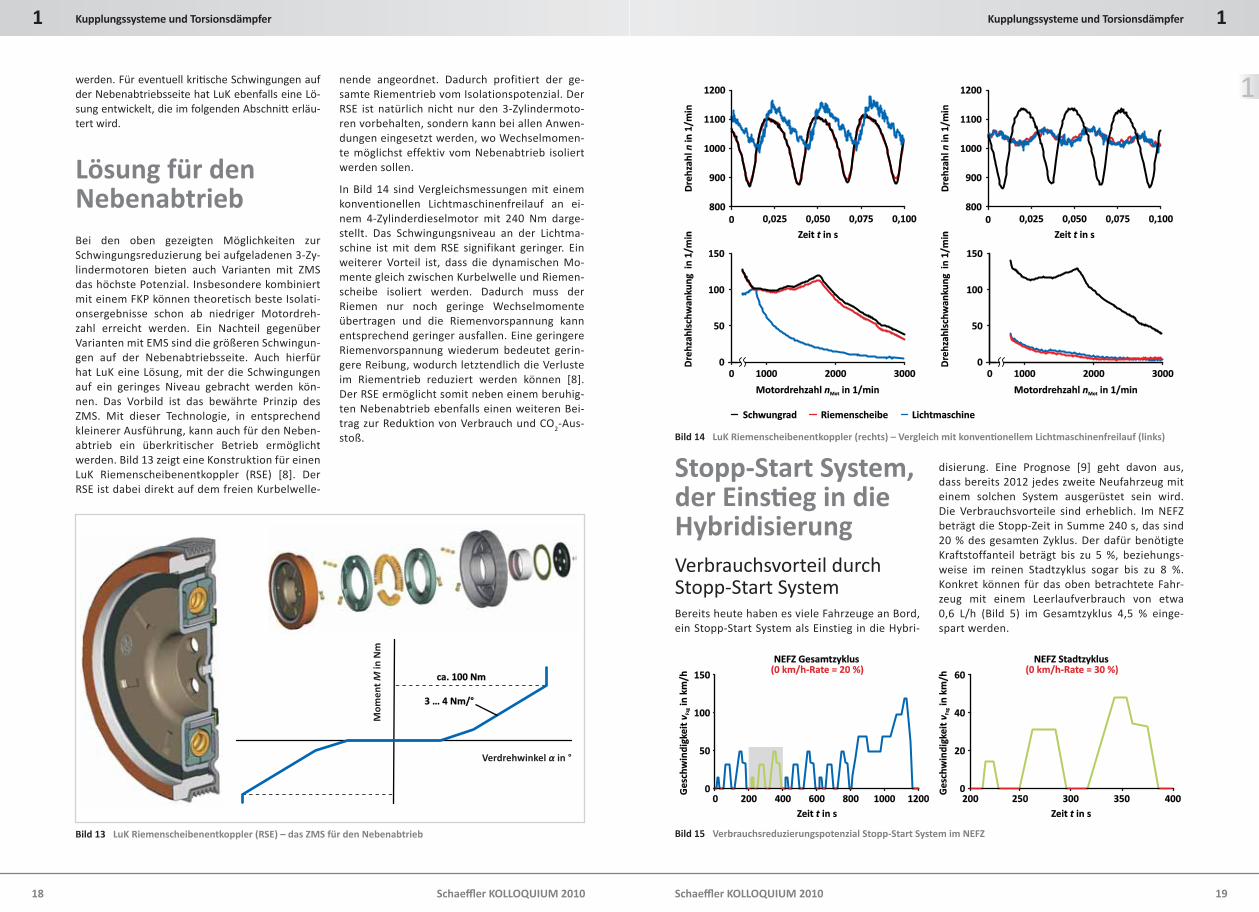
nende angeordnet. Dadurch profitiert der ge-samte Riementrieb vom Isolationspotenzial. Der RSE ist natürlich nicht nur den 3-Zylindermoto-ren vorbehalten, sondern kann bei allen Anwen-dungen eingesetzt werden, wo Wechselmomen-te möglichst effektiv vom Nebenabtrieb isoliert werden sollen.
In Bild 14 sind Vergleichsmessungen mit einem konventionellen Lichtmaschinenfreilauf an ei-nem 4-Zylinderdieselmotor mit 240 Nm darge-stellt. Das Schwingungsniveau an der Lichtma-schine ist mit dem RSE signifikant geringer. Ein weiterer Vorteil ist, dass die dynamischen Mo-mente gleich zwischen Kurbelwelle und Riemen-scheibe isoliert werden. Dadurch muss der Riemen nur noch geringe Wechselmomente übertragen und die Riemenvorspannung kann entsprechend geringer ausfallen. Eine geringere Riemenvorspannung wiederum bedeutet gerin-gere Reibung, wodurch letztendlich die Verluste im Riementrieb reduziert werden können [8]. Der RSE ermöglicht somit neben einem beruhig-ten Nebenabtrieb ebenfalls einen weiteren Bei-trag zur Reduktion von Verbrauch und CO2-Aus-stoß.
Stopp-Start System, der Einsti eg in die HybridisierungVerbrauchsvorteil durch Stopp-Start SystemBereits heute haben es viele Fahrzeuge an Bord, ein Stopp-Start System als Einstieg in die Hybri-
disierung. Eine Prognose [9] geht davon aus, dass bereits 2012 jedes zweite Neufahrzeug mit einem solchen System ausgerüstet sein wird. Die Verbrauchsvorteile sind erheblich. Im NEFZ beträgt die Stopp-Zeit in Summe 240 s, das sind 20 % des gesamten Zyklus. Der dafür benötigte Kraftstoffanteil beträgt bis zu 5 %, beziehungs-weise im reinen Stadtzyklus sogar bis zu 8 %. Konkret können für das oben betrachtete Fahr-zeug mit einem Leerlaufverbrauch von etwa 0,6 L/h (Bild 5) im Gesamtzyklus 4,5 % einge-spart werden.
33 …… 4 Nm/°4 Nm/°
cca.a. 100 Nm100 Nm
Verdrehwinkel in °α
Mo
me
nt
inN
mM
Bild 13 LuK Riemenscheibenentkoppler (RSE) – das ZMS für den Nebenabtrieb
150150
0000
5050
100100
20002000 3000300010001000
00 0,0750,075 0,1000,1000,0250,025 0,0500,05000 0,0750,075 0,1000,100800800
900900
10001000
11001100
12001200
0,0250,025 0,0500,050800800
900900
10001000
11001100
12001200
150150
0000
5050
100100
20002000 3000300010001000
ZZeiteit in sin stt
Dr
Dre
hz
eh
zah
la
hl
in1
/min
in1
/min
nn
ZZeiteit in sin stt
MotMotorordrdrehzehzahlahl ininnnMotMot 1/min1/min
Dr
Dre
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gin
un
gin
1/m
in1
/min
Dr
Dr e
hz
eh
zah
lsch
ah
lsch
wwa
nk
an
kun
gin
un
gin
1/m
in1
/min
Dr
Dre
hz
eh
zah
la
hl
in1
/min
in1
/min
nn
MotMotorordrdrehzehzahlahl ininnnMotMot 1/min1/min
SchSchwungrwungradad RiemenscheibeRiemenscheibe LichLichtmaschinetmaschine
Bild 14 LuK Riemenscheibenentkoppler (rechts) – Vergleich mit konventi onellem Lichtmaschinenfreilauf (links)
00
6060
4040
2020
200200 25025000
150150
100100
5050
00 12001200200200 400400 600600 800800 10001000 400400300300 350350
Ge
sch
Ge
sch
win
dig
kw
ind
igke
ite
itinin
vvFzFz
ggkm
/hkm
/h
ZZeiteit in sin stt ZZeiteit in sin stt
Ge
sch
Ge
sch
win
dig
kw
ind
igke
ite
itinin
vvFzFz
ggkm
/hkm
/h
NEFNEFZZ GesamGesamtztzyklusyklus(0 km/h-Ra(0 km/h-Ratte = 20 %)e = 20 %) (0 km/h-Ra(0 km/h-Rattee = 30 %)= 30 %)
NEFNEFZZ StStadtzadtzyklusyklus
Bild 15 Verbrauchsreduzierungspotenzial Stopp-Start System im NEFZ
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
20 Schaeffl er KOLLOQUIUM 2010 21
1Kupplungssysteme und Torsionsdämpfer
1
Notwendigkeit und Opti on in Verbindung mit Stopp-Start SystemDie grundsätzlichen Anforderungen an ein Kupp-lungs- und Dämpfersystem für Anwendungen mit Stopp-Start Funkti on ändern sich nur geringfügig. Im Falle eines ZMS müssen mehr Stopp- und Start-vorgänge ertragen werden können. Eventuell muss der Anlasserzahnkranz etwas verschleißfester aus-geführt werden. Hinsichtlich des Komforts ist si-cherlich das Stopp- und Startverhalten kriti scher zu betrachten. Da der Fahrer nicht, wie gewohnt, den Motor akti v aus- und einschaltet, ist aus dieser Sicht mit höheren Anforderungen zu rechnen.
Deutlichere Konsequenzen ergeben sich für Aus-rücksystemkomponenten, da Stopp-Start Systeme
Informati onen bezüglich der Kupplungspositi on benöti gen. Die Positi onserfassung bei Kupplungs-systemen an sich ist nicht neu; es gibt eine Vielzahl von Systemen, die diese Informati on benöti gen:
Stopp-Start System
Geschwindigkeitsregelanlage (Tempomat)
Start-Lock
Kupplungen bei Hybridanwendungen
Elektrische Parkbremse
Berganfahrhilfe (Hill-Holder)
Eingangssignal für automati sierte Handschalt- und Doppelkupplungsgetriebe
Aufgrund des Trends zu vermehrter Elektrifi zie-rung, beim Handschaltgetriebe stark getrieben
durch Stopp-Start Anwendungen, nimmt die An-zahl der Projekte bei Ausrückzylindern mit Weg-messtechnik in starkem Maße zu. Bei LuK fi nden hierzu intensive Entwicklungen statt , um aus Sicht von Bauraum, Leistung und Kosten das beste Mes-sprinzip zu fi nden [10].
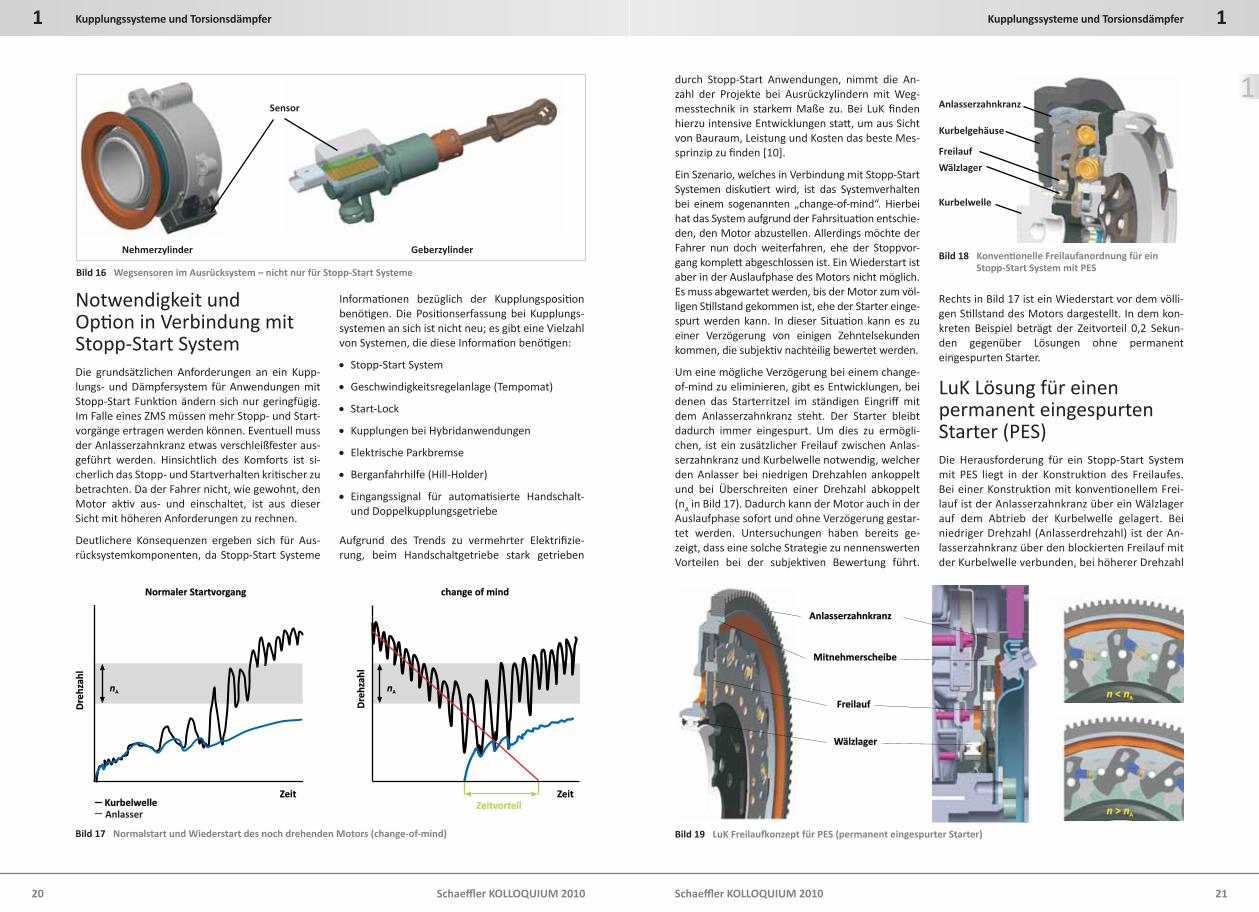
Ein Szenario, welches in Verbindung mit Stopp-Start Systemen diskuti ert wird, ist das Systemverhalten bei einem sogenannten „change-of-mind“. Hierbei hat das System aufgrund der Fahrsituati on entschie-den, den Motor abzustellen. Allerdings möchte der Fahrer nun doch weiterfahren, ehe der Stoppvor-gang komplett abgeschlossen ist. Ein Wiederstart ist aber in der Auslaufphase des Motors nicht möglich. Es muss abgewartet werden, bis der Motor zum völ-ligen Sti llstand gekommen ist, ehe der Starter einge-spurt werden kann. In dieser Situati on kann es zu einer Verzögerung von einigen Zehntelsekunden kommen, die subjekti v nachteilig bewertet werden.
Um eine mögliche Verzögerung bei einem change-of-mind zu eliminieren, gibt es Entwicklungen, bei denen das Starterritzel im ständigen Eingriff mit dem Anlasserzahnkranz steht. Der Starter bleibt dadurch immer eingespurt. Um dies zu ermögli-chen, ist ein zusätzlicher Freilauf zwischen Anlas-serzahnkranz und Kurbelwelle notwendig, welcher den Anlasser bei niedrigen Drehzahlen ankoppelt und bei Überschreiten einer Drehzahl abkoppelt (n
A in Bild 17). Dadurch kann der Motor auch in der Auslaufphase sofort und ohne Verzögerung gestar-tet werden. Untersuchungen haben bereits ge-zeigt, dass eine solche Strategie zu nennenswerten Vorteilen bei der subjekti ven Bewertung führt.
Rechts in Bild 17 ist ein Wiederstart vor dem völli-gen Sti llstand des Motors dargestellt. In dem kon-kreten Beispiel beträgt der Zeitvorteil 0,2 Sekun-den gegenüber Lösungen ohne permanent eingespurten Starter.
LuK Lösung für einen permanent eingespurten Starter (PES)Die Herausforderung für ein Stopp-Start System mit PES liegt in der Konstrukti on des Freilaufes. Bei einer Konstrukti on mit konventi onellem Frei-lauf ist der Anlasserzahnkranz über ein Wälzlager auf dem Abtrieb der Kurbelwelle gelagert. Bei niedriger Drehzahl (Anlasserdrehzahl) ist der An-lasserzahnkranz über den blockierten Freilauf mit der Kurbelwelle verbunden, bei höherer Drehzahl
Nehmerzylinder Geberzylinder
Sensor
Bild 16 Wegsensoren im Ausrücksystem – nicht nur für Stopp-Start Systeme
nnAA nnAA
KKurbelwurbelwelleelleAnlasser
ZZeiteit
Dr
Dre
hz
eh
zah
la
hl
ZZeiteit
Dr
Dre
hz
eh
zah
la
hl
ZZeitveitvortorteileil
NormalerNormaler StStartvartvororggangang changchangee of mindof mind
Bild 17 Normalstart und Wiederstart des noch drehenden Motors (change-of-mind)
Anlasserzahnkranz
Kurbelgehäuse
Freilauf
Wälzlager
Kurbelwelle
Bild 18 Konventi onelle Freilaufanordnung für ein Stopp-Start System mit PES
nn >> nnAA
nn << nnAA
WWälzlagälzlagerer
AnlasserzAnlasserzahnkrahnkranzanz
MitnehmerMitnehmerscheibescheibe
FrFreilaufeilauf
Bild 19 LuK Freilaufk onzept für PES (permanent eingespurter Starter)
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
22 Schaeffl er KOLLOQUIUM 2010 23
1Kupplungssysteme und Torsionsdämpfer
1überholt die Kurbelwelle den Anlasser, womit er abgekoppelt wird. Bei einer solchen Anordnung wird das Wälzlager während des gesamten Betrie-bes beansprucht und zwar mit der Motordreh-zahl. Dadurch sind die Anforderungen an das La-ger extrem hoch, da es auf die maximale Motordrehzahl und die vollen Motorbetriebs-stunden ausgelegt werden muss. Ebenfalls läuft der Freilauf immer mit Motordrehzahl um. Da-durch erzeugen beide Komponenten, Lager und Freilauf, während des gesamten Motorbetriebs ein Schleppmoment und damit zusätzliche Ver-lustleistung.
Für die LuK Lösung kann einfache Wälzlagertech-nik eingesetzt werden, da die Belastung um ein Vielfaches geringer ausfällt, als bei einer konven-ti onellen Freilaufanordnung. Hierbei wird der An-lasserzahnkranz nicht mehr auf dem drehenden Abtrieb der Kurbelwelle gelagert, sondern auf dem stehenden Kurbelgehäuse (Bild 19). Der Frei-lauf ist als Fliehkraft kupplung ausgeführt und mit der Kurbelwelle verschraubt. Bei überschreiten des Anlasserdrehzahlbereiches (nA in Bild 17) öff -net die Fliehkraft kupplung und koppelt dadurch den Anlasserzahnkranz von der Kurbelwelle ab. Bei dieser Anordnung muss das Wälzlager ledig-lich auf die Anlasserdrehzahl und auf die Dauer der Stopp- und Startvorgänge ausgelegt werden. Nach dem Motorstart erzeugt diese Anordnung kein zusätzliches Schleppmoment und damit kei-ne Verlustleistung. Der LuK Freilauf für ein PES ist dadurch äußerst robust und ohne Nachteile für den Gesamtwirkungsgrad.
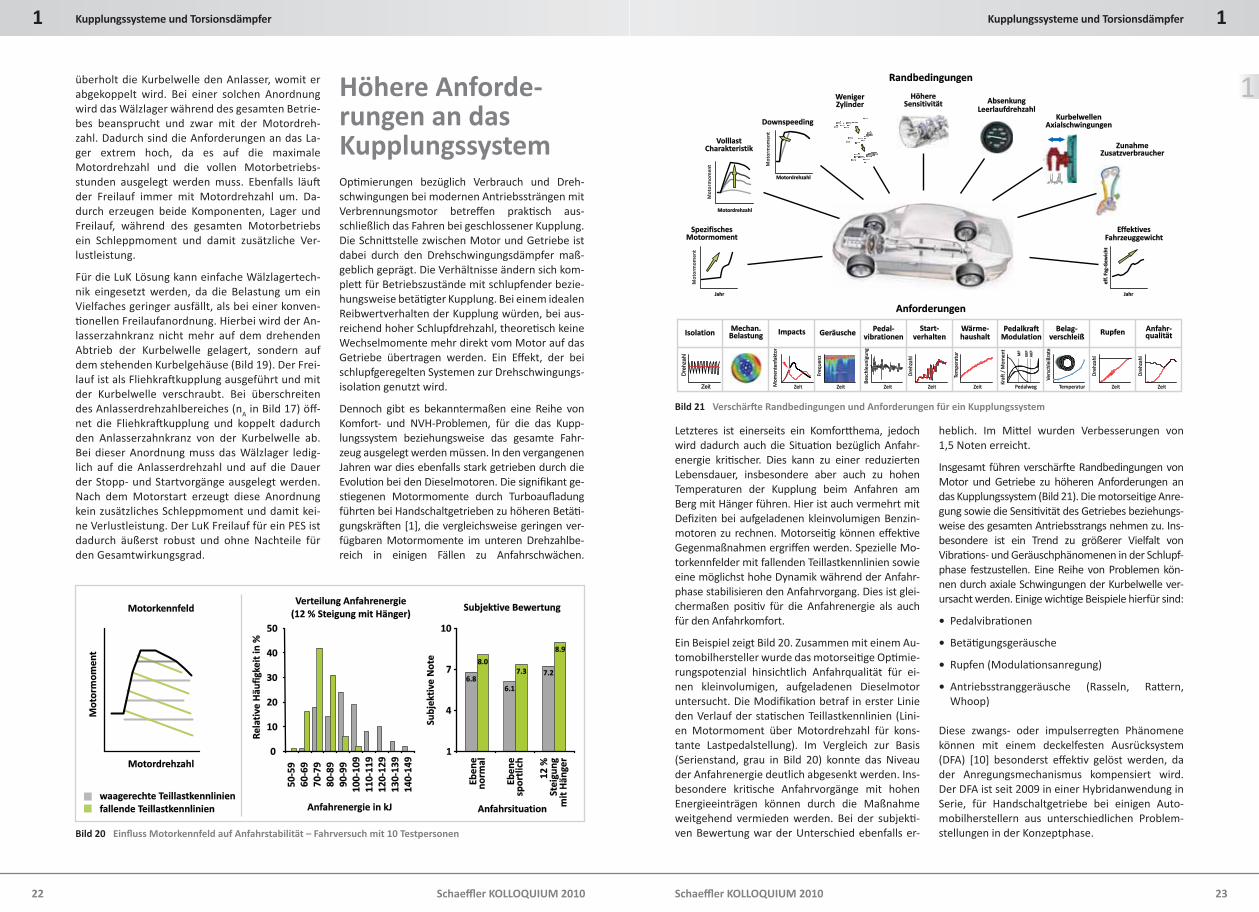
Höhere Anforde-rungen an das KupplungssystemOpti mierungen bezüglich Verbrauch und Dreh-schwingungen bei modernen Antriebssträngen mit Verbrennungsmotor betreff en prakti sch aus-schließlich das Fahren bei geschlossener Kupplung. Die Schnitt stelle zwischen Motor und Getriebe ist dabei durch den Drehschwingungsdämpfer maß-geblich geprägt. Die Verhältnisse ändern sich kom-plett für Betriebszustände mit schlupfender bezie-hungsweise betäti gter Kupplung. Bei einem idealen Reibwertverhalten der Kupplung würden, bei aus-reichend hoher Schlupfdrehzahl, theoreti sch keine Wechselmomente mehr direkt vom Motor auf das Getriebe übertragen werden. Ein Eff ekt, der bei schlupfgeregelten Systemen zur Drehschwingungs-isolati on genutzt wird.
Dennoch gibt es bekanntermaßen eine Reihe von Komfort- und NVH-Problemen, für die das Kupp-lungssystem beziehungsweise das gesamte Fahr-zeug ausgelegt werden müssen. In den vergangenen Jahren war dies ebenfalls stark getrieben durch die Evoluti on bei den Dieselmotoren. Die signifi kant ge-sti egenen Motormomente durch Turboaufl adung führten bei Handschaltgetrieben zu höheren Betäti -gungskräft en [1], die vergleichsweise geringen ver-fügbaren Motormomente im unteren Drehzahlbe-reich in einigen Fällen zu Anfahrschwächen.
Letzteres ist einerseits ein Komfortt hema, jedoch wird dadurch auch die Situati on bezüglich Anfahr-energie kriti scher. Dies kann zu einer reduzierten Lebensdauer, insbesondere aber auch zu hohen Temperaturen der Kupplung beim Anfahren am Berg mit Hänger führen. Hier ist auch vermehrt mit Defi ziten bei aufgeladenen kleinvolumigen Benzin-motoren zu rechnen. Motorseiti g können eff ekti ve Gegenmaßnahmen ergriff en werden. Spezielle Mo-torkennfelder mit fallenden Teillastkennlinien sowie eine möglichst hohe Dynamik während der Anfahr-phase stabilisieren den Anfahrvorgang. Dies ist glei-chermaßen positi v für die Anfahrenergie als auch für den Anfahrkomfort.
Ein Beispiel zeigt Bild 20. Zusammen mit einem Au-tomobilhersteller wurde das motorseiti ge Opti mie-rungspotenzial hinsichtlich Anfahrqualität für ei-nen kleinvolumigen, aufgeladenen Dieselmotor untersucht. Die Modifi kati on betraf in erster Linie den Verlauf der stati schen Teillastkennlinien (Lini-en Motormoment über Motordrehzahl für kons-tante Lastpedalstellung). Im Vergleich zur Basis (Serienstand, grau in Bild 20) konnte das Niveau der Anfahrenergie deutlich abgesenkt werden. Ins-besondere kriti sche Anfahrvorgänge mit hohen Energieeinträgen können durch die Maßnahme weitgehend vermieden werden. Bei der subjekti -ven Bewertung war der Unterschied ebenfalls er-
heblich. Im Mitt el wurden Verbesserungen von 1,5 Noten erreicht.
Insgesamt führen verschärft e Randbedingungen von Motor und Getriebe zu höheren Anforderungen an das Kupplungssystem (Bild 21). Die motorseiti ge Anre-gung sowie die Sensiti vität des Getriebes beziehungs-weise des gesamten Antriebsstrangs nehmen zu. Ins-besondere ist ein Trend zu größerer Vielfalt von Vibrati ons- und Geräuschphänomenen in der Schlupf-phase festzustellen. Eine Reihe von Problemen kön-nen durch axiale Schwingungen der Kurbelwelle ver-ursacht werden. Einige wichti ge Beispiele hierfür sind:
• Pedalvibrati onen
• Betäti gungsgeräusche
• Rupfen (Modulati onsanregung)
• Antriebsstranggeräusche (Rasseln, Ratt ern, Whoop)
Diese zwangs- oder impulserregten Phänomene können mit einem deckelfesten Ausrücksystem (DFA) [10] besonderst eff ekti v gelöst werden, da der Anregungsmechanismus kompensiert wird. Der DFA ist seit 2009 in einer Hybridanwendung in Serie, für Handschaltgetriebe bei einigen Auto-mobilherstellern aus unterschiedlichen Problem-stellungen in der Konzeptphase.
00
1010
2020
4040
5050
3030
11
77
1010
7.27.2
6.16.16.86.8
8.98.9
7.37.38.08.0
44
50
-59
50
-59
60
-69
60
-69
70
-79
70
-79
80
-89
80
-89
90
-99
90
-99
10
0-1
09
10
0-1
09
11
0-1
19
11
0-1
19
12
0-1
29
12
0-1
29
13
0-1
39
13
0-1
39
14
0-1
49
14
0-1
49MotMotorordrdrehzehzahlahl
Mo
tM
oto
rmo
me
no
rmo
me
ntt
MotMotorkorkennennffeldeld
wwaagaagererechechttee TTeillaseillastktkennlinienennlinienffallendeallende TTeillaseillastktkennlinienennlinien
RRe
lae
lati
vti
veeH
äu
figk
Hä
ufi
gke
itin
%e
itin
%
Ebe
ne
Ebe
ne
no
rma
ln
orm
al
Ebe
ne
Ebe
ne
spo
rtlic
hsp
ort
lich
12
%1
2%
StSte
igu
ng
eig
un
gm
itH
än
gm
itH
än
ger
er
Sub
jek
Sub
jekt
iv tivee
No
tN
otee
VVerterteilungeilung AnAnffahrahrenerenergiegie(12 % St(12 % Steigung mit Hängeigung mit Hänger)er)
SubjekSubjektivtivee BeBewwertungertung
AnAnffahrahrenerenergiegie in kJin kJ AnAnffahrahrsituasituationtion
MotMotorkorkennennffeldeld
Bild 20 Einfl uss Motorkennfeld auf Anfahrstabilität – Fahrversuch mit 10 Testpersonen
JahrJahr
MotMotorordrdrehzehzahlahl
MotMotorordrdrehzehzahlahl
JahrJahr
RandbedingungRandbedingungenen
Dr
Dre
hz
eh
zah
la
hl
ZZeiteit
Dr
Dre
hz
eh
zah
la
hl
ZZeiteit
VVe
re
rsch
leiß
rsc
hle
ißraa
ttee
TTemperemperaaturtur
KKrraa
ft/
Mo
me
nft
/M
om
en
tt
PPedalwedalwegeg
MP
MP
EK
PE
KP
AK
PA
KP
TTem
pe
re
mp
eraa
tur
tur
ZZeiteit
Dr
Dre
hz
eh
zah
la
hl
ZZeiteitMo
me
nM
om
en
tten
en
ffak
aktto
ro
r
ZZeiteit
Be
sch
leu
nig
un
gB
esc
hle
un
igu
ng
ZZeiteit
Dre
hza
hl
Dre
hza
hl
ZeitZeit
Fr
Fre
qu
en
ze
qu
en
z
ZZeiteit
SpeSpezifischeszifischesMotMotormomenormomentt
VVolllasolllasttCharCharakaktteriseristiktik
DoDownspeedingwnspeeding
WWenigenigererZZylinderylinder
HöherHöhereeSensitivitSensitivitäätt AbAbsenksenkungung
LeerlaufLeerlaufdrdrehzehzahlahlKKurbelwurbelwellenellen
AxialschAxialschwingungwingungenen
ZunahmeZunahmeZusaZusatztzvverbrerbraucheraucher
EEffffekektivtivesesFFahrzahrzeugeugggeewichwichtt
Mo
torm
om
en
t
Mo
torm
om
en
t Mo
torm
om
en
t
eeffff
. Fz
. Fzg
-Ge
g-G
ew
ich
wic
htt
IsolaIsolationtion ImpactsImpactsMechan.Mechan.BelasBelastungtung
AnAnffahr-ahr-qualitqualitäättGerGeräuscheäusche
StStart-art-vverhalterhaltenen
WWärme-ärme-haushalthaushalt
PPedal-edal-vibrvibraationentionen
PPedalkredalkraaftftModulaModulationtion
RupRupffenenBelag-Belag-vvererschleißschleiß
AnAnffororderungderungenen
Bild 21 Verschärft e Randbedingungen und Anforderungen für ein Kupplungssystem
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
24 Schaeffl er KOLLOQUIUM 2010 25
1Kupplungssysteme und Torsionsdämpfer
1
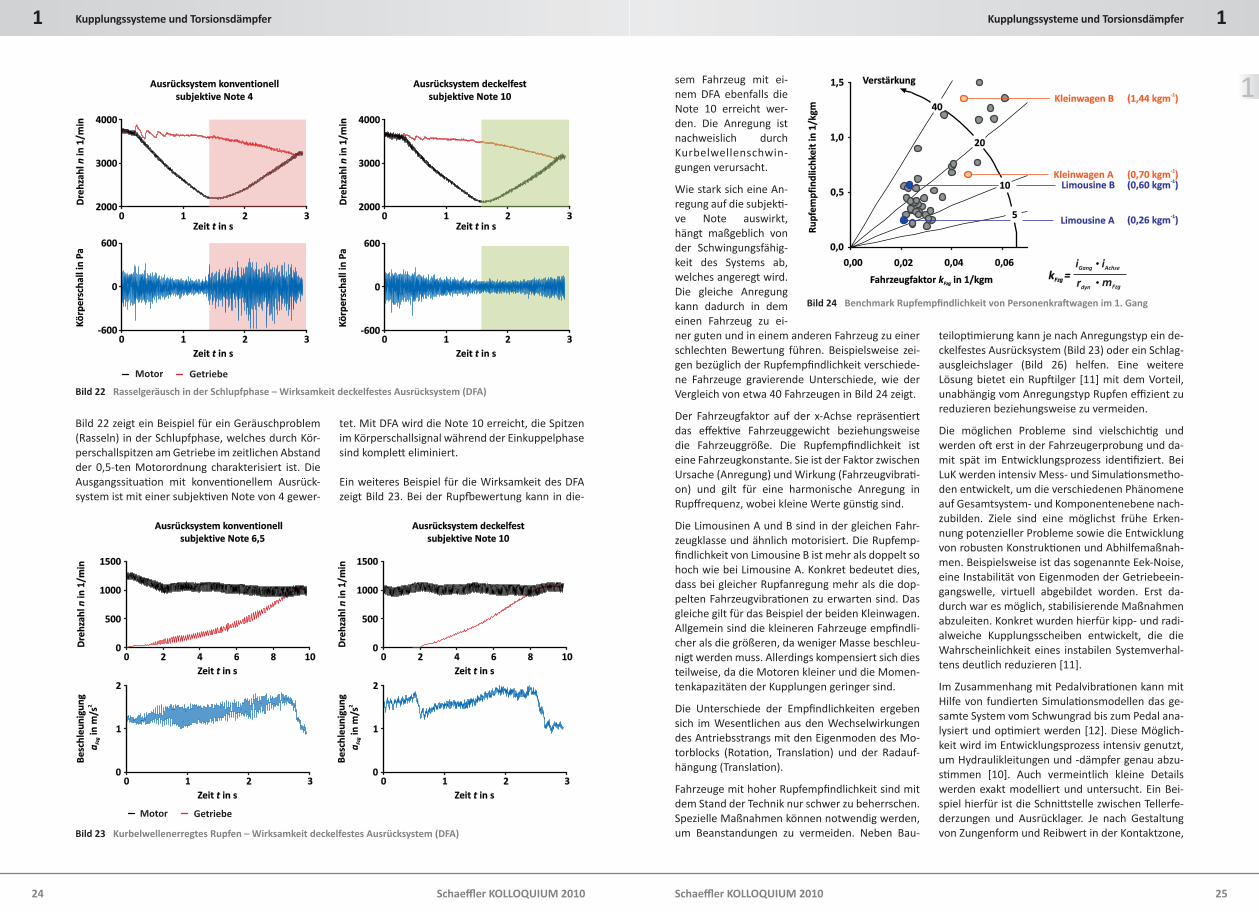
Bild 22 zeigt ein Beispiel für ein Geräuschproblem (Rasseln) in der Schlupfphase, welches durch Kör-perschallspitzen am Getriebe im zeitlichen Abstand der 0,5-ten Motorordnung charakterisiert ist. Die Ausgangssituati on mit konventi onellem Ausrück-system ist mit einer subjekti ven Note von 4 gewer-
tet. Mit DFA wird die Note 10 erreicht, die Spitzen im Körperschallsignal während der Einkuppelphase sind komplett eliminiert.
Ein weiteres Beispiel für die Wirksamkeit des DFA zeigt Bild 23. Bei der Rupfb ewertung kann in die-
sem Fahrzeug mit ei-nem DFA ebenfalls die Note 10 erreicht wer-den. Die Anregung ist nachweislich durch Kurbelwellenschwin-gungen verursacht.
Wie stark sich eine An-regung auf die subjekti -ve Note auswirkt, hängt maßgeblich von der Schwingungsfähig-keit des Systems ab, welches angeregt wird. Die gleiche Anregung kann dadurch in dem einen Fahrzeug zu ei-ner guten und in einem anderen Fahrzeug zu einer schlechten Bewertung führen. Beispielsweise zei-gen bezüglich der Rupfempfi ndlichkeit verschiede-ne Fahrzeuge gravierende Unterschiede, wie der Vergleich von etwa 40 Fahrzeugen in Bild 24 zeigt.
Der Fahrzeugfaktor auf der x-Achse repräsenti ert das eff ekti ve Fahrzeuggewicht beziehungsweise die Fahrzeuggröße. Die Rupfempfi ndlichkeit ist eine Fahrzeugkonstante. Sie ist der Faktor zwischen Ursache (Anregung) und Wirkung (Fahrzeugvibrati -on) und gilt für eine harmonische Anregung in Rupff requenz, wobei kleine Werte günsti g sind.
Die Limousinen A und B sind in der gleichen Fahr-zeugklasse und ähnlich motorisiert. Die Rupfemp-fi ndlichkeit von Limousine B ist mehr als doppelt so hoch wie bei Limousine A. Konkret bedeutet dies, dass bei gleicher Rupfanregung mehr als die dop-pelten Fahrzeugvibrati onen zu erwarten sind. Das gleiche gilt für das Beispiel der beiden Kleinwagen. Allgemein sind die kleineren Fahrzeuge empfi ndli-cher als die größeren, da weniger Masse beschleu-nigt werden muss. Allerdings kompensiert sich dies teilweise, da die Motoren kleiner und die Momen-tenkapazitäten der Kupplungen geringer sind.
Die Unterschiede der Empfi ndlichkeiten ergeben sich im Wesentlichen aus den Wechselwirkungen des Antriebsstrangs mit den Eigenmoden des Mo-torblocks (Rotati on, Translati on) und der Radauf-hängung (Translati on).
Fahrzeuge mit hoher Rupfempfi ndlichkeit sind mit dem Stand der Technik nur schwer zu beherrschen. Spezielle Maßnahmen können notwendig werden, um Beanstandungen zu vermeiden. Neben Bau-
teilopti mierung kann je nach Anregungstyp ein de-ckelfestes Ausrücksystem (Bild 23) oder ein Schlag-ausgleichslager (Bild 26) helfen. Eine weitere Lösung bietet ein Rupft ilger [11] mit dem Vorteil, unabhängig vom Anregungstyp Rupfen effi zient zu reduzieren beziehungsweise zu vermeiden.
Die möglichen Probleme sind vielschichti g und werden oft erst in der Fahrzeugerprobung und da-mit spät im Entwicklungsprozess identi fi ziert. Bei LuK werden intensiv Mess- und Simulati onsmetho-den entwickelt, um die verschiedenen Phänomene auf Gesamtsystem- und Komponentenebene nach-zubilden. Ziele sind eine möglichst frühe Erken-nung potenzieller Probleme sowie die Entwicklung von robusten Konstrukti onen und Abhilfemaßnah-men. Beispielsweise ist das sogenannte Eek-Noise, eine Instabilität von Eigenmoden der Getriebeein-gangswelle, virtuell abgebildet worden. Erst da-durch war es möglich, stabilisierende Maßnahmen abzuleiten. Konkret wurden hierfür kipp- und radi-alweiche Kupplungsscheiben entwickelt, die die Wahrscheinlichkeit eines instabilen Systemverhal-tens deutlich reduzieren [11].
Im Zusammenhang mit Pedalvibrati onen kann mit Hilfe von fundierten Simulati onsmodellen das ge-samte System vom Schwungrad bis zum Pedal ana-lysiert und opti miert werden [12]. Diese Möglich-keit wird im Entwicklungsprozess intensiv genutzt, um Hydraulikleitungen und -dämpfer genau abzu-sti mmen [10]. Auch vermeintlich kleine Details werden exakt modelliert und untersucht. Ein Bei-spiel hierfür ist die Schnitt stelle zwischen Tellerfe-derzungen und Ausrücklager. Je nach Gestaltung von Zungenform und Reibwert in der Kontaktzone,
00 22 3311
00 22 3311
20002000
40004000
30003000
-600-600
600600
00
20002000
40004000
30003000
00 22 3311
00 22 3311-600-600
600600
00
AusrückAusrückssyyssttemem deckdeckelfelfesesttAusrückAusrückssyyssttemem kkononvvenentionelltionellsubjeksubjektivtivee NotNote 10e 10subjeksubjektivtivee NotNote 4e 4
ZZeiteit tt in sin s
ZZeiteit tt in sin sD
rD
reh
ze
hza
hl
ah
lnnin
1/m
inin
1/m
in
Dr
Dre
hz
eh
zah
la
hlnn
in1
/min
in1
/min
KKö
rpe
rö
rpe
rsch
all
sch
all
inP
inP
aa
ZZeiteit tt in sin s
ZZeiteit tt in sin s
KKö
rpe
rö
rpe
rsch
all
sch
all
inP
inP
aa
GetriebeMotor
Bild 22 Rasselgeräusch in der Schlupfphase – Wirksamkeit deckelfestes Ausrücksystem (DFA)
22
00
11
00 22 3311
500500
15001500
10001000
00 88 10102200
6644
500500
15001500
10001000
00 88 10102200
6644
22
00
11
00 22 3311
AusrückAusrückssyyssttemem deckdeckelfelfesesttAusrückAusrückssyyssttemem kkononvvenentionelltionellsubjeksubjektivtivee NotNote 10e 10subjeksubjektivtivee NotNote 6,5e 6,5
ZZeiteit tt in sin s
ZZeiteit tt in sin s
ZZeiteit tt in sin s
ZZeiteit tt in sin s
Dr
Dre
hz
eh
zah
la
hlnn
in1
/min
in1
/min
Be
sch
leu
nig
un
gB
esc
hle
un
igu
ng
aaF
zF
zggin
m/
inm
/ss22
Dr
Dre
hz
eh
zah
la
hlnn
in1
/min
in1
/min
Be
sch
leu
nig
un
gB
esc
hle
un
igu
ng
aaF
zF
zggin
m/
inm
/ss22
GetriebeMotor
Bild 23 Kurbelwellenerregtes Rupfen – Wirksamkeit deckelfestes Ausrücksystem (DFA)
55
0,00,0
0,50,5
1,01,0
1,51,5
0,000,00 0,020,02 0,040,04 0,060,06
2020
4040
1010
kk ==FzFzgg mFzg
iAchseiGang
rdyn
(1,44 kgm(1,44 kgm ))--11
(( kgmkgm ))--11
0,700,70(0,60 kgm(0,60 kgm ))
--11
(0,26 kgm(0,26 kgm ))--11
FFahrzahrzeugfeugfakakttoror kkFzFzgg in 1/kgmin 1/kgm
Ru
pR
up
ffem
pe
mp
fin
dlic
hk
fin
dlic
hke
ite
itin
1/k
gmin
1/k
gm
VVererssttärkärkungung
LimousineLimousine AA
LimousineLimousine BBKleinKleinwwagagenen AA
KleinKleinwwagagenen BB
Bild 24 Benchmark Rupfempfi ndlichkeit von Personenkraft wagen im 1. Gang
Schaeffl er KOLLOQUIUM 2010
1 Kupplungssysteme und Torsionsdämpfer
26 Schaeffl er KOLLOQUIUM 2010 27
1Kupplungssysteme und Torsionsdämpfer
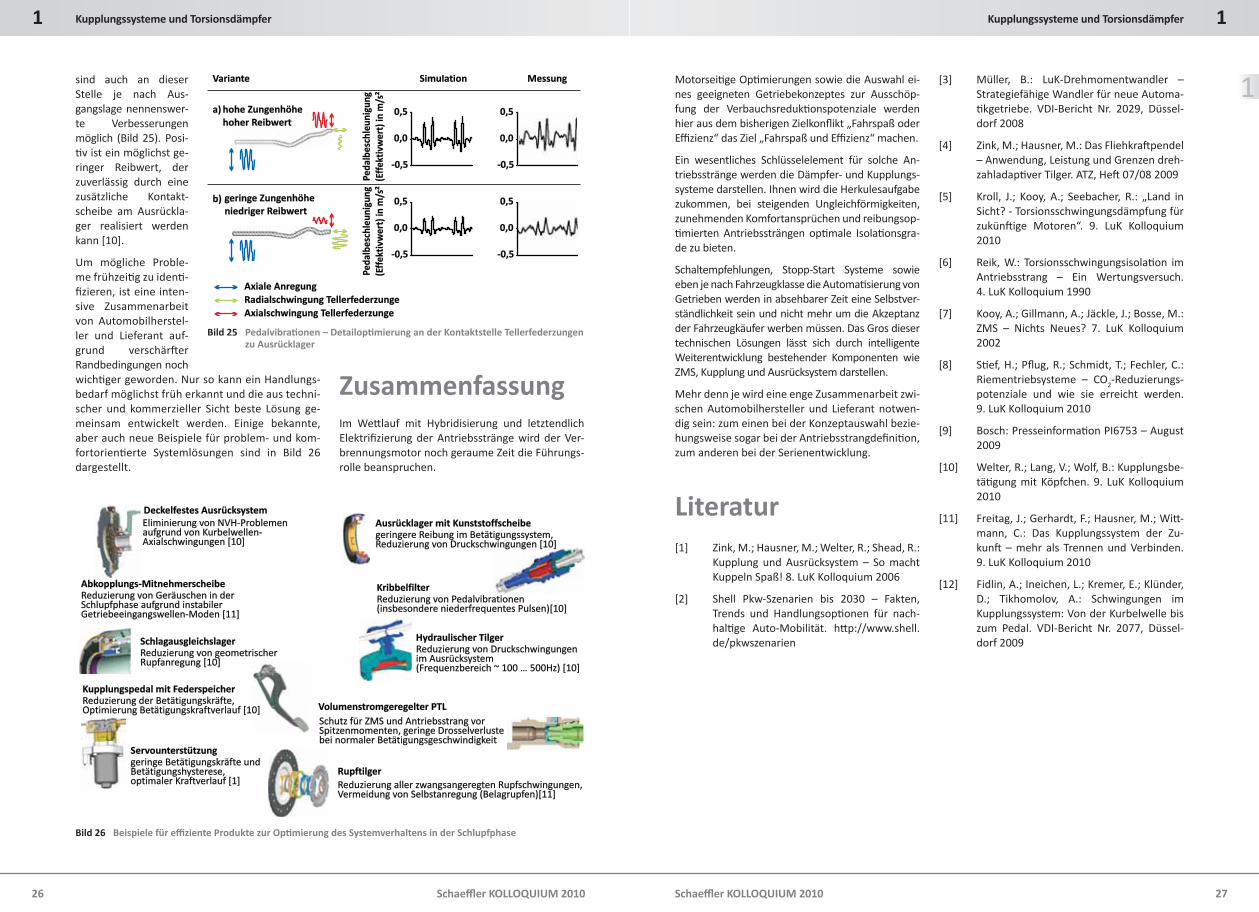
1sind auch an dieser Stelle je nach Aus-gangslage nennenswer-te Verbesserungen möglich (Bild 25). Posi-ti v ist ein möglichst ge-ringer Reibwert, der zuverlässig durch eine zusätzliche Kontakt-scheibe am Ausrückla-ger realisiert werden kann [10].
Um mögliche Proble-me frühzeiti g zu identi -fi zieren, ist eine inten-sive Zusammenarbeit von Automobilherstel-ler und Lieferant auf-grund verschärft er Randbedingungen noch wichti ger geworden. Nur so kann ein Handlungs-bedarf möglichst früh erkannt und die aus techni-scher und kommerzieller Sicht beste Lösung ge-meinsam entwickelt werden. Einige bekannte, aber auch neue Beispiele für problem- und kom-fortorienti erte Systemlösungen sind in Bild 26 dargestellt.
ZusammenfassungIm Wett lauf mit Hybridisierung und letztendlich Elektrifi zierung der Antriebsstränge wird der Ver-brennungsmotor noch geraume Zeit die Führungs-rolle beanspruchen.
Motorseiti ge Opti mierungen sowie die Auswahl ei-nes geeigneten Getriebekonzeptes zur Ausschöp-fung der Verbauchsredukti onspotenziale werden hier aus dem bisherigen Zielkonfl ikt „Fahrspaß oder Effi zienz“ das Ziel „Fahrspaß und Effi zienz“ machen.
Ein wesentliches Schlüsselelement für solche An-triebsstränge werden die Dämpfer- und Kupplungs-systeme darstellen. Ihnen wird die Herkulesaufgabe zukommen, bei steigenden Ungleichförmigkeiten, zunehmenden Komfortansprüchen und reibungsop-ti mierten Antriebssträngen opti male Isolati onsgra-de zu bieten.
Schaltempfehlungen, Stopp-Start Systeme sowie eben je nach Fahrzeugklasse die Automati sierung von Getrieben werden in absehbarer Zeit eine Selbstver-ständlichkeit sein und nicht mehr um die Akzeptanz der Fahrzeugkäufer werben müssen. Das Gros dieser technischen Lösungen lässt sich durch intelligente Weiterentwicklung bestehender Komponenten wie ZMS, Kupplung und Ausrücksystem darstellen.
Mehr denn je wird eine enge Zusammenarbeit zwi-schen Automobilhersteller und Lieferant notwen-dig sein: zum einen bei der Konzeptauswahl bezie-hungsweise sogar bei der Antriebsstrangdefi niti on, zum anderen bei der Serienentwicklung.
Literatur[1] Zink, M.; Hausner, M.; Welter, R.; Shead, R.:
Kupplung und Ausrücksystem – So macht Kuppeln Spaß! 8. LuK Kolloquium 2006
[2] Shell Pkw-Szenarien bis 2030 – Fakten, Trends und Handlungsopti onen für nach-halti ge Auto-Mobilität. htt p://www.shell.de/pkwszenarien
[3] Müller, B.: LuK-Drehmomentwandler – Strategiefähige Wandler für neue Automa-ti kgetriebe. VDI-Bericht Nr. 2029, Düssel-dorf 2008
[4] Zink, M.; Hausner, M.: Das Fliehkraft pendel – Anwendung, Leistung und Grenzen dreh-zahladapti ver Tilger. ATZ, Heft 07/08 2009
[5] Kroll, J.; Kooy, A.; Seebacher, R.: „Land in Sicht? - Torsionsschwingungsdämpfung für zukünft ige Motoren“. 9. LuK Kolloquium 2010
[6] Reik, W.: Torsionsschwingungsisolati on im Antriebsstrang – Ein Wertungsversuch. 4. LuK Kolloquium 1990
[7] Kooy, A.; Gillmann, A.; Jäckle, J.; Bosse, M.: ZMS – Nichts Neues? 7. LuK Kolloquium 2002
[8] Sti ef, H.; Pfl ug, R.; Schmidt, T.; Fechler, C.: Riementriebsysteme – CO2-Reduzierungs-potenziale und wie sie erreicht werden. 9. LuK Kolloquium 2010
[9] Bosch: Presseinformati on PI6753 – August 2009
[10] Welter, R.; Lang, V.; Wolf, B.: Kupplungsbe-täti gung mit Köpfchen. 9. LuK Kolloquium 2010
[11] Freitag, J.; Gerhardt, F.; Hausner, M.; Witt -mann, C.: Das Kupplungssystem der Zu-kunft – mehr als Trennen und Verbinden. 9. LuK Kolloquium 2010
[12] Fidlin, A.; Ineichen, L.; Kremer, E.; Klünder, D.; Tikhomolov, A.: Schwingungen im Kupplungssystem: Von der Kurbelwelle bis zum Pedal. VDI-Bericht Nr. 2077, Düssel-dorf 2009
DeckDeckelfelfesestteses AusrückAusrückssyyssttememEliminierung vEliminierung von NVH-Pron NVH-Problemenoblemenaufaufgrund vgrund von Kon Kurbelwurbelwellen-ellen-AxialschAxialschwingungwingungen [10]en [10]
SchlagSchlagausgleichslagausgleichslagererRReduzierung veduzierung von gon geomeeometrischertrischerRupRupffanranregung [10]egung [10]
KKribbelfiltribbelfiltererRReduzierung veduzierung von Pon Pedalvibredalvibraationentionen(insbesonder(insbesondere niederfre niederfrequenequenttes Pulsen)[10]es Pulsen)[10]
AusrücklagAusrücklagerer mit Kmit Kunsunstststtoffoffscheibescheibeggeringeringerere Re Reibung im Beeibung im Bettäätigungsstigungssyyssttem,em,RReduzierung veduzierung von Druckon Druckschschwingungwingungen [10]en [10]
HyHydrdraulischeraulischer TilgTilgererRReduzierung veduzierung von Druckon Druckschschwingungwingungenenim Ausrückim Ausrückssyyssttemem(Fr(Frequenzberequenzbereich ~ 100eich ~ 100 …… 500Hz) [10]500Hz) [10]
KKupplungspedalupplungspedal mitmit FFederederspeicherspeicherRReduzierung der Beeduzierung der Bettäätigungskrtigungskrääftfte,e,OpOptimierung Betimierung Bettäätigungskrtigungskraaftvftverlauf [10]erlauf [10] VVolumensolumenstrtromgomgereregegeltelterer PPTLTL
Schutz für ZMS und AnSchutz für ZMS und Antriebtriebsssstrtrang vang vororSpitzSpitzenmomenenmomentten, gen, geringeringe Dre Drosselvosselverluserlustteebei normaler Bebei normaler Bettäätigungsgtigungsgescheschwindigkwindigkeiteit
SerServvounountterersstütztützungungggeringeringe Bee Bettäätigungskrtigungskrääftfte unde undBeBettäätigungshtigungshyyssttererese,ese,opoptimaler Ktimaler Krraaftvftverlauf [1]erlauf [1]
RupRupftilgftilgerer
RReduzierung aller zeduzierung aller zwwangsangangsangereregegtten Rupen Rupffschschwingungwingungen,en,VVermeidung vermeidung von Selbon Selbssttanranregung (Belagrupegung (Belagrupffen)[11]en)[11]
AbkAbkopplungs-Mitnehmeropplungs-MitnehmerscheibescheibeRReduzierung veduzierung von Geron Geräuschen in deräuschen in derSchlupSchlupfphase auffphase aufgrund insgrund insttabilerabilerGeGetriebeeingtriebeeingangsangswwellen-Moden [11]ellen-Moden [11]
Bild 26 Beispiele für effi ziente Produkte zur Opti mierung des Systemverhaltens in der Schlupfphase
a)a)
b)b)
-0,5-0,5
0,00,0
0,50,5
-0,5-0,5
0,00,0
0,50,5
-0,5-0,5
0,00,0
0,50,5
-0,5-0,5
0,00,0
0,50,5
AxialeAxiale AnrAnregungegung
AxialschAxialschwingungwingung TTellerfellerfederzederzungungee
RadialschRadialschwingungwingung TTellerfellerfederzederzungungee
ggeringeringe Zunge Zungenhöheenhöheniedrigniedriger Rer Reibeibwwertert
PPed
alb
esch
leu
nig
un
ged
alb
esch
leu
nig
un
g(E(E
ffffekek
tiv
tivww
ert)
inm
/er
t)in
m/s
²s²
hohe Zunghohe Zungenhöheenhöhehoher Rhoher Reibeibwwertert
PPed
alb
esch
leu
nig
un
ged
alb
esch
leu
nig
un
g(E(E
ffffekek
tiv
tivww
ert)
inm
/er
t)in
m/s
²s²
MessungMessungSimulaSimulationtionVVarianarianttee
Bild 25 Pedalvibrati onen – Detailopti mierung an der Kontaktstelle Tellerfederzungen zu Ausrücklager