4 Geometrie A - Springer · 4 Geometrie H.-J. Schulz, Berlin Bemerkungen zur elementaren Geometrie...
21
4 Geometrie H.-J. Schulz, Berlin Bemerkungen zur elementaren Geometrie In der Geometrie werden – ausgehend von durch Abstraktion gewonnenen Grundfiguren (Punkt, Gerade, Ebene) und Grundrelationen (ZugehɆrigkeit=Inzidenz, Symbol 2 ; An- ordnung, Symbole <, = und >; Deckungsgleichheit=Kon- gruenz, Symbol ffi ; Stetigkeit=dichte Anordnung der Punkte) – Axiome aufgestellt, die unmittelbar verstȨndlich und nicht anderweitig zu beweisen sind. 4.1 Planimetrie In der Planimetrie (FlȨchenmessung) wird eine unendlich ausgedehnte Ebene als gegeben vorausgesetzt. In Bildern sind nur endliche Ausschnitte darstellbar. 4.1.1 Punkt, Gerade, Strahl, Strecke, Streckenzug Parallelen. Zwei Geraden heißen parallel, wenn sie keinen oder alle Punkte gemeinsam haben. Aus den Axiomen folgt fɒr die Schnittpunkte mehrerer Geraden: – Zwei verschiedene, nichtparallele Geraden haben genau ei- nen Punkt gemeinsam: den Schnittpunkt. n verschiedene, nicht paarweise parallele Geraden ergeben n(n-1)/2 Schnittpunkte (z.B. haben vier Geraden sechs Schnitt- punkte). – Durch einen Punkt einer Ebene lassen sich unendlich viele Geraden legen. Sie bilden ein Geradenbɒschel; der Schnitt- punkt heißt TrȨger des Bɒschels. – Die Gesamtheit aller zu einer gegebenen Geraden paralle- len Geraden bildet ein Parallelenbɒschel oder eine Rich- tung. Der TrȨger des Parallelenbɒschels liegt im Unendlichen. – Durch drei verschiedene Punkte, die nicht auf einer Ge- raden liegen, lassen sich genau drei verschiedene Geraden durch je zwei Punkte legen. Sie bestimmen eine Ebene im Raum. Halbgerade. Ein Punkt A auf der Geraden teilt diese in zwei Halbgeraden. Achse. Eine orientierte Gerade heißt Achse. Die Orientierung (der Richtungssinn) einer Geraden wird durch einen Pfeil, der den Durchlaufsinn angibt, oder ein geordnetes Punktepaar kenntlich gemacht, dessen erster Punkt z.B. der Anfangspunkt der Halbgeraden ist. Strahl. Eine orientierte Halbgerade mit Anfangspunkt heißt Strahl. Strecke. Zwei verschiedene Punkte A, B auf einer Geraden definieren die Strecke AB durch ihre Endpunkte. Zum Ver- gleich verschiedener Strecken mit Hilfe der Kongruenz- axiome werden Abbildungen der Ebene auf sich definiert, die die AbstȨnde und Anordnungen der Punkte einer Figur in sich nicht Ȩndern, mit denen man aber Figuren „ɒbereinander- schieben“ und auf Deckung vergleichen kann. Diese Abbil- dungen sind anschaulich mit den Bewegungen Parallelver- schiebung, Drehung um einen Punkt und Spiegelung an einer Geraden zu beschreiben. Streckenzug. Eine zusammenhȨngende Folge von Strecken verschiedener Richtung heißt Streckenzug (Polygonzug: Po- lygon=Vieleck). Die je zwei Strecken gemeinsamen Punkte werden Eckpunkte genannt. Ist der Polygonzug geschlossen, d.h. fallen Anfangspunkt der ersten Strecke und Endpunkt der n-ten Strecke zusammen, so bildet der Polygonzug den Rand eines n-Ecks mit den Strecken als Seiten. Die Verbindungs- strecken zweier Eckpunkte, die nicht Seiten sind, heißen Dia- gonalen. Ein Polygon ist konvex, wenn fɒr zwei beliebige Punkte des Polygons auch alle Punkte der Verbindungsstrecke zum Polygon gehɆren, anderenfalls ist es konkav. 4.1.2 Orientierung einer Ebene Eine Gerade g zerlegt eine Ebene p in eine positive ðp þ Þ und negative ðp Þ Halbebene; sie ist Rand fɒr jede dieser Halb- ebenen. Wird die Gerade orientiert mit der Wahl eines Strahls g þ , so markiert die Kreislinie mit Durchlaufsinn die Orientie- rung der Ebene, die durch den Punkt B 2 g þ entsteht, wenn g þ in p þ hineingedreht wird. Der mathematisch positive Drehsinn einer Ebene ist entgegen dem Uhrzeigersinn (Bild 1). 4.1.3 Winkel Zwei Strahlen a þ ; b þ (Bild 2 a) mit gemeinsamem Anfangs- punkt S (Scheitel) bilden die Schenkel zweier ungerichteter Winkel (PfeilbɆgen 1 und 2). So ist der Winkel \ ASB oder \ða þ ; b þ Þ mit den Pfeilen 1 und 2 entgegen dem Uhrzeiger- sinn mathematisch positiv. Er ist durch Zahlenwert und Rich- tung bestimmt. Nach der GrɆße (Bild 2 b) werden a spitze, b rechte, g stumpfe, d gestreckte, e ɒberstumpfe und z volle Winkel unterschieden (Einheiten s. DIN 1315). Winkel an zwei einander schneidenden Geraden (Bild 2 c). Nebenwinkel sind a und b, b und g, g und d, d and a. Es gilt a þ b ¼ 180°; a hat mit b einen Schenkel gemeinsam. Schei- telwinkel sind a und g, b und d. Es gilt a=g und b=d. Sup- plementwinkel haben die Winkelsumme 180, Komplement- winkel 90. 4.1.4 StrahlensȨtze Werden zwei parallele Geraden von einer dritten geschnitten, so gelten fɒr die dabei entstehenden Winkel (Bild 3): I4.1 Planimetrie A 21 A Bild 1. Orientierung einer Ebene Bild 2. Ebene Winkel. a Richtungssinn; b Bezeichnungen; c Paarun- gen Bild 3. Winkel an Parallelen, die von einer Geraden geschnitten werden
Transcript of 4 Geometrie A - Springer · 4 Geometrie H.-J. Schulz, Berlin Bemerkungen zur elementaren Geometrie...

4 Geometrie
H.-J. Schulz, Berlin
Bemerkungen zur elementaren Geometrie
In der Geometrie werden – ausgehend von durch Abstraktiongewonnenen Grundfiguren (Punkt, Gerade, Ebene) undGrundrelationen (Zugeh�rigkeit=Inzidenz, Symbol 2 ; An-ordnung, Symbole <, = und >; Deckungsgleichheit=Kon-gruenz, Symbol ffi ; Stetigkeit=dichte Anordnung derPunkte) – Axiome aufgestellt, die unmittelbar verst�ndlichund nicht anderweitig zu beweisen sind.
4.1 Planimetrie
In der Planimetrie (Fl�chenmessung) wird eine unendlichausgedehnte Ebene als gegeben vorausgesetzt. In Bildern sindnur endliche Ausschnitte darstellbar.
4.1.1 Punkt, Gerade, Strahl, Strecke, Streckenzug
Parallelen. Zwei Geraden heißen parallel, wenn sie keinenoder alle Punkte gemeinsam haben. Aus den Axiomen folgtf�r die Schnittpunkte mehrerer Geraden:– Zwei verschiedene, nichtparallele Geraden haben genau ei-
nen Punkt gemeinsam: den Schnittpunkt. n verschiedene,nicht paarweise parallele Geraden ergeben n(n-1)/2Schnittpunkte (z.B. haben vier Geraden sechs Schnitt-punkte).
– Durch einen Punkt einer Ebene lassen sich unendlich vieleGeraden legen. Sie bilden ein Geradenb�schel; der Schnitt-punkt heißt Tr�ger des B�schels.
– Die Gesamtheit aller zu einer gegebenen Geraden paralle-len Geraden bildet ein Parallelenb�schel oder eine Rich-tung. Der Tr�ger des Parallelenb�schels liegt imUnendlichen.
– Durch drei verschiedene Punkte, die nicht auf einer Ge-raden liegen, lassen sich genau drei verschiedene Geradendurch je zwei Punkte legen. Sie bestimmen eine Ebene imRaum.
Halbgerade. Ein Punkt A auf der Geraden teilt diese in zweiHalbgeraden.
Achse. Eine orientierte Gerade heißt Achse. Die Orientierung(der Richtungssinn) einer Geraden wird durch einen Pfeil, derden Durchlaufsinn angibt, oder ein geordnetes Punktepaarkenntlich gemacht, dessen erster Punkt z.B. der Anfangspunktder Halbgeraden ist.
Strahl. Eine orientierte Halbgerade mit Anfangspunkt heißtStrahl.
Strecke. Zwei verschiedene Punkte A, B auf einer Geradendefinieren die Strecke AB durch ihre Endpunkte. Zum Ver-gleich verschiedener Strecken mit Hilfe der Kongruenz-axiome werden Abbildungen der Ebene auf sich definiert, diedie Abst�nde und Anordnungen der Punkte einer Figur in sichnicht �ndern, mit denen man aber Figuren „�bereinander-schieben“ und auf Deckung vergleichen kann. Diese Abbil-dungen sind anschaulich mit den Bewegungen Parallelver-schiebung, Drehung um einen Punkt und Spiegelung an einerGeraden zu beschreiben.
Streckenzug. Eine zusammenh�ngende Folge von Streckenverschiedener Richtung heißt Streckenzug (Polygonzug: Po-lygon=Vieleck). Die je zwei Strecken gemeinsamen Punktewerden Eckpunkte genannt. Ist der Polygonzug geschlossen,d.h. fallen Anfangspunkt der ersten Strecke und Endpunkt dern-ten Strecke zusammen, so bildet der Polygonzug den Randeines n-Ecks mit den Strecken als Seiten. Die Verbindungs-
strecken zweier Eckpunkte, die nicht Seiten sind, heißen Dia-gonalen. Ein Polygon ist konvex, wenn f�r zwei beliebigePunkte des Polygons auch alle Punkte der Verbindungsstreckezum Polygon geh�ren, anderenfalls ist es konkav.
4.1.2 Orientierung einer Ebene
Eine Gerade g zerlegt eine Ebene p in eine positive ðpþÞ undnegative ðp�Þ Halbebene; sie ist Rand f�r jede dieser Halb-ebenen. Wird die Gerade orientiert mit der Wahl eines Strahlsgþ, so markiert die Kreislinie mit Durchlaufsinn die Orientie-rung der Ebene, die durch den Punkt B 2 gþ entsteht, wenngþ in pþ hineingedreht wird. Der mathematisch positiveDrehsinn einer Ebene ist entgegen dem Uhrzeigersinn(Bild 1).
4.1.3 Winkel
Zwei Strahlen aþ;bþ (Bild 2 a) mit gemeinsamem Anfangs-punkt S (Scheitel) bilden die Schenkel zweier ungerichteterWinkel (Pfeilb�gen 1 und 2). So ist der Winkel \ ASB oder\ðaþ;bþÞ mit den Pfeilen 1 und 2 entgegen dem Uhrzeiger-sinn mathematisch positiv. Er ist durch Zahlenwert und Rich-tung bestimmt. Nach der Gr�ße (Bild 2 b) werden a spitze, brechte, g stumpfe, d gestreckte, e �berstumpfe und z volleWinkel unterschieden (Einheiten s. DIN 1315).
Winkel an zwei einander schneidenden Geraden (Bild 2 c).Nebenwinkel sind a und b, b und g, g und d, d and a. Es giltaþb¼ 180�;a hat mit b einen Schenkel gemeinsam. Schei-telwinkel sind a und g, b und d. Es gilt a=g und b=d. Sup-plementwinkel haben die Winkelsumme 180, Komplement-winkel 90.
4.1.4 Strahlens�tze
Werden zwei parallele Geraden von einer dritten geschnitten,so gelten f�r die dabei entstehenden Winkel (Bild 3):
I4.1 Planimetrie A 21
A
Bild 1. Orientierung einer Ebene
Bild 2. Ebene Winkel. a Richtungssinn; b Bezeichnungen; c Paarun-gen
Bild 3. Winkel an Parallelen, die von einer Geraden geschnittenwerden
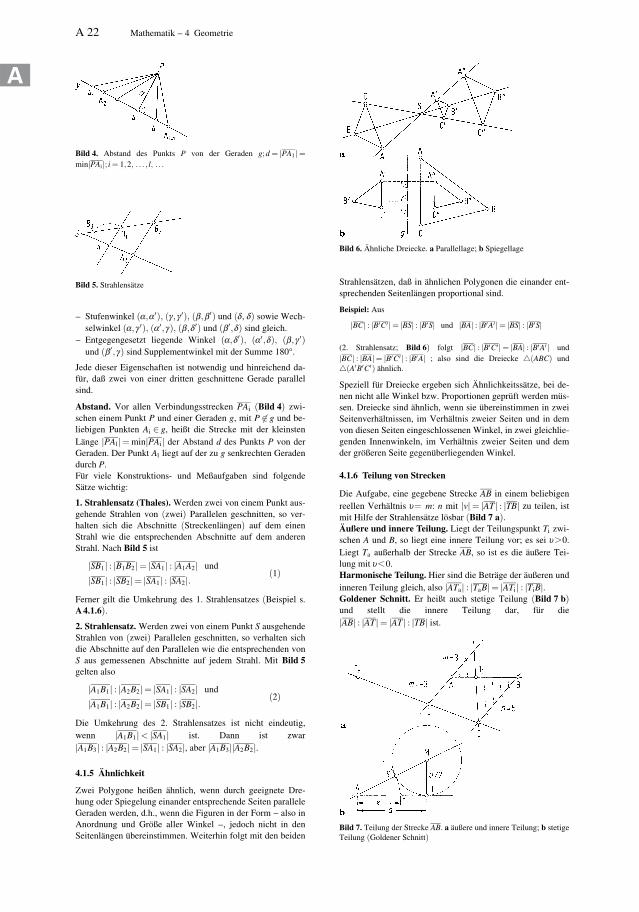
– Stufenwinkel ða;a0Þ; ðg;g0Þ; ðb;b0Þ und (d, d) sowie Wech-selwinkel ða;g0Þ; ða0;gÞ; ðb;d0Þ und ðb0;dÞ sind gleich.
– Entgegengesetzt liegende Winkel ða;d0Þ; ða0;dÞ; ðb;g0Þund ðb0;gÞ sind Supplementwinkel mit der Summe 180�.
Jede dieser Eigenschaften ist notwendig und hinreichend da-f�r, daß zwei von einer dritten geschnittene Gerade parallelsind.
Abstand. Vor allen Verbindungsstrecken PAi (Bild 4) zwi-schen einem Punkt P und einer Geraden g, mit P 62 g und be-liebigen Punkten Ai 2 g, heißt die Strecke mit der kleinstenL�nge jPAlj ¼minjPAij der Abstand d des Punkts P von derGeraden. Der Punkt Al liegt auf der zu g senkrechten Geradendurch P.F�r viele Konstruktions- und Meßaufgaben sind folgendeS�tze wichtig:
1. Strahlensatz (Thales). Werden zwei von einem Punkt aus-gehende Strahlen von (zwei) Parallelen geschnitten, so ver-halten sich die Abschnitte (Streckenl�ngen) auf dem einenStrahl wie die entsprechenden Abschnitte auf dem anderenStrahl. Nach Bild 5 ist
jSB1j : jB1B2j ¼ jSA1j : jA1A2j und
jSB1j : jSB2j ¼ jSA1j : jSA2j:ð1Þ
Ferner gilt die Umkehrung des 1. Strahlensatzes (Beispiel s.A4.1.6).
2. Strahlensatz. Werden zwei von einem Punkt S ausgehendeStrahlen von (zwei) Parallelen geschnitten, so verhalten sichdie Abschnitte auf den Parallelen wie die entsprechenden vonS aus gemessenen Abschnitte auf jedem Strahl. Mit Bild 5gelten also
jA1B1j : jA2B2j ¼ jSA1j : jSA2j und
jA1B1j : jA2B2j ¼ jSB1j : jSB2j:ð2Þ
Die Umkehrung des 2. Strahlensatzes ist nicht eindeutig,wenn jA1B1j< jSA1j ist. Dann ist zwarjA1B3j : jA2B2j ¼ jSA1j : jSA2j, aber jA1B3jjA2B2j.
4.1.5 �hnlichkeit
Zwei Polygone heißen �hnlich, wenn durch geeignete Dre-hung oder Spiegelung einander entsprechende Seiten paralleleGeraden werden, d.h., wenn die Figuren in der Form – also inAnordnung und Gr�ße aller Winkel –, jedoch nicht in denSeitenl�ngen �bereinstimmen. Weiterhin folgt mit den beiden
Strahlens�tzen, daß in �hnlichen Polygonen die einander ent-sprechenden Seitenl�ngen proportional sind.
Beispiel: Aus
jBCj : jB0C0 j ¼ jBSj : jB0Sj und jBAj : jB0A0 j ¼ jBSj : jB0Sj
(2. Strahlensatz; Bild 6) folgt jBCj : jB0C0 j ¼ jBAj : jB0A0 j undjBCj : jBAj ¼ jB0C0 j : jB0Aj ; also sind die Dreiecke 4(ABC) und4ðA0B0C0 Þ �hnlich.
Speziell f�r Dreiecke ergeben sich �hnlichkeitss�tze, bei de-nen nicht alle Winkel bzw. Proportionen gepr�ft werden m�s-sen. Dreiecke sind �hnlich, wenn sie �bereinstimmen in zweiSeitenverh�ltnissen, im Verh�ltnis zweier Seiten und in demvon diesen Seiten eingeschlossenen Winkel, in zwei gleichlie-genden Innenwinkeln, im Verh�ltnis zweier Seiten und demder gr�ßeren Seite gegen�berliegenden Winkel.
4.1.6 Teilung von Strecken
Die Aufgabe, eine gegebene Strecke AB in einem beliebigenreellen Verh�ltnis u= m: n mit jvj ¼ jATj : jTBj zu teilen, istmit Hilfe der Strahlens�tze l�sbar (Bild 7 a).�ußere und innere Teilung. Liegt der Teilungspunkt Ti zwi-schen A und B, so liegt eine innere Teilung vor; es sei u>0.Liegt Ta außerhalb der Strecke AB, so ist es die �ußere Tei-lung mit u<0.Harmonische Teilung. Hier sind die Betr�ge der �ußeren undinneren Teilung gleich, also jATaj : jTaBj ¼ jATij : jTiBj.Goldener Schnitt. Er heißt auch stetige Teilung (Bild 7 b)und stellt die innere Teilung dar, f�r diejABj : jATj ¼ jAT j : jTBj ist.
A 22 Mathematik – 4 Geometrie
A
Bild 4. Abstand des Punkts P von der Geraden g;d¼ jPA1 j ¼minjPAij; i¼ 1;2; . . . ; l; . . .
Bild 5. Strahlens�tze
Bild 6. �hnliche Dreiecke. a Parallellage; b Spiegellage
Bild 7. Teilung der Strecke AB. a �ußere und innere Teilung; b stetigeTeilung (Goldener Schnitt)
Beispiel: Gegeben ist die Strecke AB. Gesucht werden Ti f�r u=3:5und Ta f�r u=-3:5. – Die Geraden durch (A, D) und (B, C) sind belie-bige Parallelen. Mit Hilfe weiterer Parallelen (gestrichelt) ist dieStrecke AB in n+ m gleich große Strecken zu teilen (Bild 7 a).
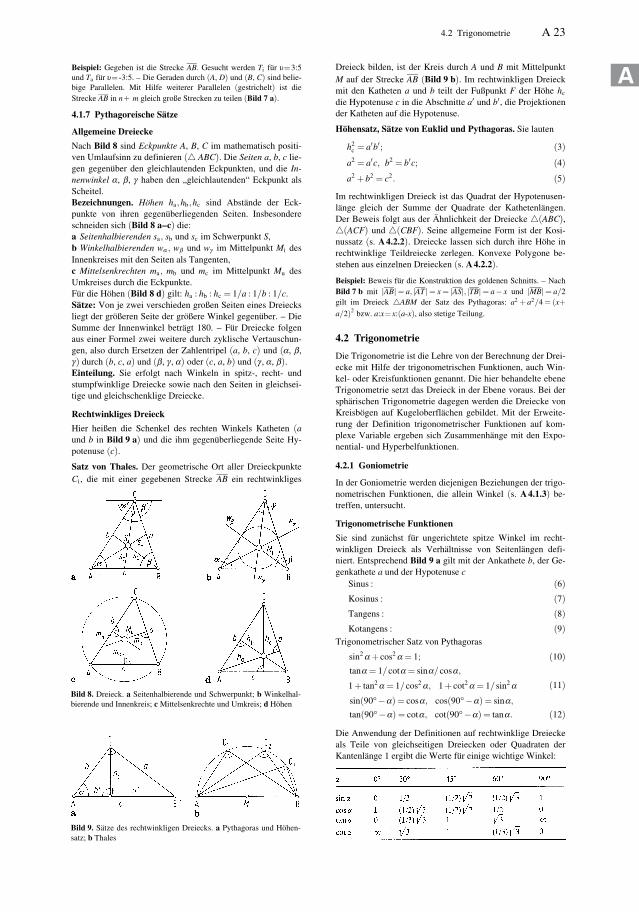
4.1.7 Pythagoreische S�tze
Allgemeine Dreiecke
Nach Bild 8 sind Eckpunkte A, B, C im mathematisch positi-ven Umlaufsinn zu definieren (4 ABC). Die Seiten a, b, c lie-gen gegen�ber den gleichlautenden Eckpunkten, und die In-nenwinkel a, b, g haben den „gleichlautenden“ Eckpunkt alsScheitel.Bezeichnungen. H�hen ha;hb;hc sind Abst�nde der Eck-punkte von ihren gegen�berliegenden Seiten. Insbesondereschneiden sich (Bild 8 a–c) die:a Seitenhalbierenden sa; sb und sc im Schwerpunkt S,b Winkelhalbierenden wa; wb und wg im Mittelpunkt Mi desInnenkreises mit den Seiten als Tangenten,c Mittelsenkrechten ma; mb und mc im Mittelpunkt Mu desUmkreises durch die Eckpunkte.F�r die H�hen (Bild 8 d) gilt: ha : hb : hc ¼ 1=a : 1=b : 1=c.S�tze: Von je zwei verschieden großen Seiten eines Dreiecksliegt der gr�ßeren Seite der gr�ßere Winkel gegen�ber. – DieSumme der Innenwinkel betr�gt 180. – F�r Dreiecke folgenaus einer Formel zwei weitere durch zyklische Vertauschun-gen, also durch Ersetzen der Zahlentripel (a, b, c) und (a, b,g) durch (b, c, a) und (b, g, a) oder (c, a, b) und (g, a, b).Einteilung. Sie erfolgt nach Winkeln in spitz-, recht- undstumpfwinklige Dreiecke sowie nach den Seiten in gleichsei-tige und gleichschenklige Dreiecke.
Rechtwinkliges Dreieck
Hier heißen die Schenkel des rechten Winkels Katheten (aund b in Bild 9 a) und die ihm gegen�berliegende Seite Hy-potenuse (c).
Satz von Thales. Der geometrische Ort aller DreieckpunkteCi, die mit einer gegebenen Strecke AB ein rechtwinkliges
Dreieck bilden, ist der Kreis durch A und B mit MittelpunktM auf der Strecke AB (Bild 9 b). Im rechtwinkligen Dreieckmit den Katheten a und b teilt der Fußpunkt F der H�he hc
die Hypotenuse c in die Abschnitte a0 und b0, die Projektionender Katheten auf die Hypotenuse.
H�hensatz, S�tze von Euklid und Pythagoras. Sie lauten
h2c ¼ a0b0; ð3Þ
a2 ¼ a0c; b2 ¼ b0c; ð4Þa2þ b2 ¼ c2: ð5Þ
Im rechtwinkligen Dreieck ist das Quadrat der Hypotenusen-l�nge gleich der Summe der Quadrate der Kathetenl�ngen.Der Beweis folgt aus der �hnlichkeit der Dreiecke 4(ABC),4(ACF) und 4(CBF). Seine allgemeine Form ist der Kosi-nussatz (s. A4.2.2). Dreiecke lassen sich durch ihre H�he inrechtwinklige Teildreiecke zerlegen. Konvexe Polygone be-stehen aus einzelnen Dreiecken (s. A4.2.2).
Beispiel: Beweis f�r die Konstruktion des goldenen Schnitts. – NachBild 7 b mit jABj ¼ a; jAT j ¼ x¼ jASj; jTBj ¼ a� x und jMBj ¼ a=2gilt im Dreieck 4ABM der Satz des Pythagoras: a2 þ a2=4¼ ðxþa=2Þ2 bzw. a:x=x:(a-x), also stetige Teilung.
4.2 Trigonometrie
Die Trigonometrie ist die Lehre von der Berechnung der Drei-ecke mit Hilfe der trigonometrischen Funktionen, auch Win-kel- oder Kreisfunktionen genannt. Die hier behandelte ebeneTrigonometrie setzt das Dreieck in der Ebene voraus. Bei dersph�rischen Trigonometrie dagegen werden die Dreiecke vonKreisb�gen auf Kugeloberfl�chen gebildet. Mit der Erweite-rung der Definition trigonometrischer Funktionen auf kom-plexe Variable ergeben sich Zusammenh�nge mit den Expo-nential- und Hyperbelfunktionen.
4.2.1 Goniometrie
In der Goniometrie werden diejenigen Beziehungen der trigo-nometrischen Funktionen, die allein Winkel (s. A4.1.3) be-treffen, untersucht.
Trigonometrische Funktionen
Sie sind zun�chst f�r ungerichtete spitze Winkel im recht-winkligen Dreieck als Verh�ltnisse von Seitenl�ngen defi-niert. Entsprechend Bild 9 a gilt mit der Ankathete b, der Ge-genkathete a und der Hypotenuse c
Sinus : ð6ÞKosinus : ð7ÞTangens : ð8ÞKotangens : ð9Þ
Trigonometrischer Satz von Pythagoras
sin2 aþ cos2 a¼ 1; ð10Þtana¼ 1=cota¼ sina=cosa;
1þ tan2 a¼ 1=cos2 a; 1þ cot2 a¼ 1=sin2 a ð11Þsinð90��aÞ ¼ cosa; cosð90��aÞ ¼ sina;tanð90��aÞ ¼ cota; cotð90��aÞ ¼ tana: ð12Þ
Die Anwendung der Definitionen auf rechtwinklige Dreieckeals Teile von gleichseitigen Dreiecken oder Quadraten derKantenl�nge 1 ergibt die Werte f�r einige wichtige Winkel:
I4.2 Trigonometrie A 23
A
Bild 8. Dreieck. a Seitenhalbierende und Schwerpunkt; b Winkelhal-bierende und Innenkreis; c Mittelsenkrechte und Umkreis; d H�hen
Bild 9. S�tze des rechtwinkligen Dreiecks. a Pythagoras und H�hen-satz; b Thales
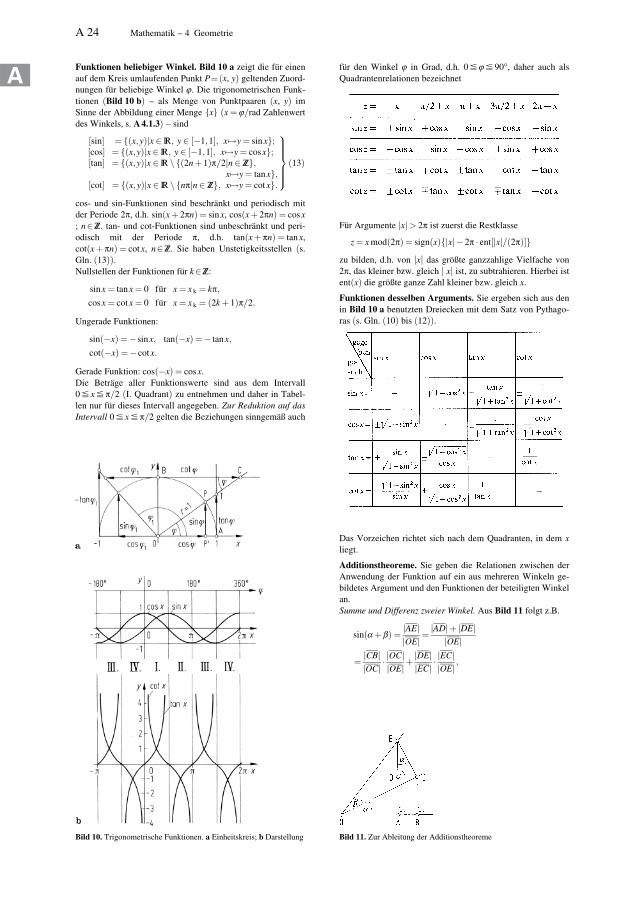
Funktionen beliebiger Winkel. Bild 10 a zeigt die f�r einenauf dem Kreis umlaufenden Punkt P=(x, y) geltenden Zuord-nungen f�r beliebige Winkel j. Die trigonometrischen Funk-tionen (Bild 10 b) – als Menge von Punktpaaren (x, y) imSinne der Abbildung einer Menge {x} ðx¼ j=rad Zahlenwertdes Winkels, s. A4.1.3) – sind
½sin� ¼ fðx;yÞjx 2R; y 2 ½�1;1�; x7!y¼ sin xg;½cos� ¼ fðx;yÞjx 2R; y 2 ½�1;1�; x7!y¼ cosxg;½tan� ¼ fðx;yÞjx 2R n fð2nþ 1Þp=2jn2Zg;
x 7!y¼ tanxg;½cot� ¼ fðx;yÞjx 2R n fnpjn2Zg; x 7!y¼ cotxg:
9>>>>=>>>>;ð13Þ
cos- und sin-Funktionen sind beschr�nkt und periodisch mitder Periode 2p, d.h. sinðxþ 2pnÞ ¼ sinx, cosðxþ 2pnÞ ¼ cosx; n2Z. tan- und cot-Funktionen sind unbeschr�nkt und peri-odisch mit der Periode p, d.h. tanðxþpnÞ ¼ tanx,cotðxþpnÞ ¼ cotx, n2Z. Sie haben Unstetigkeitsstellen (s.Gln. (13)).Nullstellen der Funktionen f�r k2Z:
sinx¼ tanx¼ 0 f�r x¼ x k ¼ kp;cosx¼ cotx¼ 0 f�r x¼ x k ¼ ð2kþ 1Þp=2:
Ungerade Funktionen:
sinð�xÞ ¼ � sinx; tanð�xÞ ¼ � tanx;
cotð�xÞ ¼ �cotx:
Gerade Funktion: cosð�xÞ ¼ cosx.Die Betr�ge aller Funktionswerte sind aus dem Intervall0 % x % p=2 (I. Quadrant) zu entnehmen und daher in Tabel-len nur f�r dieses Intervall angegeben. Zur Reduktion auf dasIntervall 0 % x % p=2 gelten die Beziehungen sinngem�ß auch
f�r den Winkel j in Grad, d.h. 0 %j% 90�, daher auch alsQuadrantenrelationen bezeichnet
F�r Argumente jxj> 2p ist zuerst die Restklasse
z¼ x modð2pÞ ¼ signðxÞfjxj � 2p � ent½jxj=ð2pÞ�g
zu bilden, d.h. von |x| das gr�ßte ganzzahlige Vielfache von2p, das kleiner bzw. gleich | x| ist, zu subtrahieren. Hierbei istentðxÞ die gr�ßte ganze Zahl kleiner bzw. gleich x.
Funktionen desselben Arguments. Sie ergeben sich aus denin Bild 10 a benutzten Dreiecken mit dem Satz von Pythago-ras (s. Gln. (10) bis (12)).
Das Vorzeichen richtet sich nach dem Quadranten, in dem xliegt.
Additionstheoreme. Sie geben die Relationen zwischen derAnwendung der Funktion auf ein aus mehreren Winkeln ge-bildetes Argument und den Funktionen der beteiligten Winkelan.Summe und Differenz zweier Winkel. Aus Bild 11 folgt z.B.
sinðaþbÞ ¼ jAEjjOEj
¼ jADj þ jDEjjOEj
¼ jCBjjOCj
� jOCjjOEj
þ jDEjjECj
� jECjjOEj
;
A 24 Mathematik – 4 Geometrie
A
Bild 10. Trigonometrische Funktionen. a Einheitskreis; b Darstellung Bild 11. Zur Ableitung der Additionstheoreme
sinða�bÞ ¼ sina cosb� cosa sinb;cosða�bÞ ¼ cosa cosb� sina sinb;
tanða�bÞ ¼ tana�tanb1�tana tanb ;
cotða�bÞ ¼ cota cotb�1cotb�cota :
9>>>>=>>>>;
ð16Þ
sinðaþbÞþ sinða�bÞ ¼ 2 sina cosb;sinðaþbÞ� sinða�bÞ ¼ �2cosa sinb;cosðaþbÞþ cosða�bÞ ¼ 2cosa cosb;cosðaþbÞ� cosða�bÞ ¼�2sina sinb;sinðaþbÞ sinða�bÞ ¼ cos2 b� cos2 a¼ sin2 a� sin2 b;cosðaþbÞcosða�bÞ ¼ cos2 b� sin2 a¼ cos2 a� sin2 b:
9>>>>>>>>>>=>>>>>>>>>>;
ð17Þ
Vielfache und Teile eines Winkels. Mit b=a oder a/2 folgen
sin2a ¼ 2 sina cosa; sina¼ 2 sinða=2Þcosða=2Þ;cos2a ¼ cos2 a� sin2 a;cosa¼ cos2ða=2Þ� sin2ða=2Þ;tan2a ¼ 2 tana
1�tan2 a ; tana¼ 2 tanða=2Þ1�tan2ða=2Þ ;
cot2a ¼ cot2 a�12cota ; cota¼ cot2ða=2Þ�1
2cotða=2Þ :
9>>>>>>=>>>>>>;ð18Þ
sin3a ¼ 3 sina� 4 sin3 a;sin4a ¼ 8 sina cos3 a� 4 sina cosa;cos3a ¼ 4cos3 a� 3cosa;cos4a ¼ 8cos4 a� 8cos2 aþ 1:
9>>=>>;
ð19Þ
sinðnaÞ ¼ n
1
� �sina cosn�1 a� n
3
� �sin3 a cosn3 a
þ n
5
� �sin5 a cosn�5 a�þ . . . ;
cosðnaÞ ¼ n
0
� �cosn a� n
2
� �sin2 a cosn�2 a
þ n
4
� �sin4 a cosn�4 a�þ . . .
Satz von Euler und Moivre. F�r komplexe Zahlen (s. A2.2.3)gilt expðiaÞ ¼ cosaþ i sina und ðcosaþ i sinaÞn ¼ cosðnaÞþi sinðnaÞ ¼ expðn iaÞ.Potenzen der Funktionen. Die Umformung der Gln. (18) lie-fert
sin2 a¼ ð1� cos2aÞ=2; cos2 a¼ ð1þ cos2aÞ=2;sin3 a¼ ð3 sina� sin3aÞ=4;cos3 a¼ ð3cosaþ cos3aÞ=4:
9=;ð20Þ
Summen und Differenzen der Funktionen. Sie ergeben sichaus den Gln. (16) mit a0 þb0 ¼ b und a0 �b0 ¼ a zu
sina� sinb¼ 2 sina�b
2� cos
a�b2
;
cosaþ cosb ¼ 2cosaþb
2� cos
a�b2
;
cosa� cosb ¼�2 sinaþb
2� sin
a�b2
:
9>>>>>>>=>>>>>>>;
ð21Þ
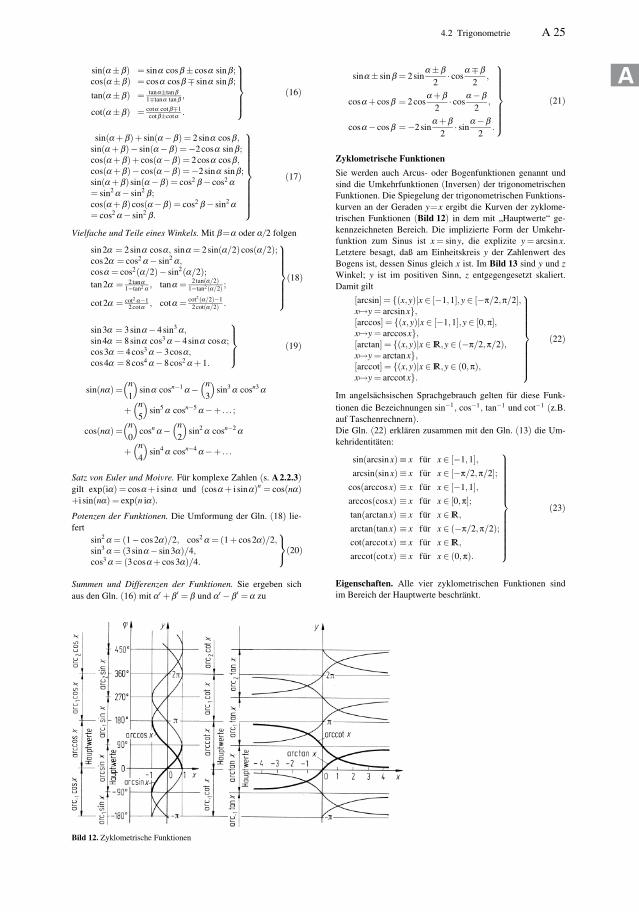
Zyklometrische Funktionen
Sie werden auch Arcus- oder Bogenfunktionen genannt undsind die Umkehrfunktionen (Inversen) der trigonometrischenFunktionen. Die Spiegelung der trigonometrischen Funktions-kurven an der Geraden y=x ergibt die Kurven der zyklome-trischen Funktionen (Bild 12) in dem mit „Hauptwerte“ ge-kennzeichneten Bereich. Die implizierte Form der Umkehr-funktion zum Sinus ist x¼ siny, die explizite y¼ arcsin x.Letztere besagt, daß am Einheitskreis y der Zahlenwert desBogens ist, dessen Sinus gleich x ist. Im Bild 13 sind y und zWinkel; y ist im positiven Sinn, z entgegengesetzt skaliert.Damit gilt
½arcsin� ¼ fðx;yÞjx 2 ½�1;1�;y 2 ½�p=2;p=2�;x7!y¼ arcsinxg;½arccos� ¼ fðx;yÞjx 2 ½�1;1�;y 2 ½0;p�;x7!y¼ arccosxg;½arctan� ¼ fðx;yÞjx 2R;y 2 ð�p=2;p=2Þ;x7!y¼ arctanxg;½arccot� ¼ fðx;yÞjx 2R;y 2 ð0;pÞ;x7!y¼ arccotxg:
9>>>>>>>>>>=>>>>>>>>>>;
ð22Þ
Im angels�chsischen Sprachgebrauch gelten f�r diese Funk-tionen die Bezeichnungen sin�1; cos�1; tan�1 und cot�1 (z.B.auf Taschenrechnern).Die Gln. (22) erkl�ren zusammen mit den Gln. (13) die Um-kehridentit�ten:
sinðarcsin xÞ � x f�r x 2 ½�1;1�;arcsinðsinxÞ � x f�r x 2 ½�p=2;p=2�;
cosðarccosxÞ � x f�r x 2 ½�1;1�;arccosðcosxÞ � x f�r x 2 ½0;p�;tanðarctanxÞ � x f�r x 2R;
arctanðtanxÞ � x f�r x 2 ð�p=2;p=2Þ;cotðarccotxÞ � x f�r x 2R;
arccotðcotxÞ � x f�r x 2 ð0;pÞ:
9>>>>>>>>>>>>>>=>>>>>>>>>>>>>>;
ð23Þ
Eigenschaften. Alle vier zyklometrischen Funktionen sindim Bereich der Hauptwerte beschr�nkt.
I4.2 Trigonometrie A 25
A
Bild 12. Zyklometrische Funktionen
Nullstellen: arcsin x¼ 0 f�r x=0, arccosx =0 f�r x=1 undarctanx¼ 0 f�r x=0.Ungerade Funktionen: arcsinð�xÞ ¼ �arcsin x;arctanð�xÞ ¼ �arctanx.Negative Argumente: arccosð�xÞ ¼ p� arccosx;arccotð�xÞ ¼ p� arccotx.k-ter Monotoniebereich der Sinus-Funktion: Mit �p=2þ kp %
x % p=2þ kp ist die Umkehrfunktion f�r diesen Bereich derk-te Nebenwert arck sinx f�r k 2Z. Damit wirdy¼ arck sinx¼ kpþð�1Þk arcsin x
f�r y 2 ½�p=2þ kp;kpþ p=2�;
y¼kpþ arccosx f�r k gerade
ðkþ 1Þp� arccosx f�r k ungerade
(
und y 2 ½kp; ðkþ 1Þp�;y¼ arck tanx¼ kpþ arctanx
f�r y 2 ð�p=2þ kp;kpþ p=2Þ;y¼ arck cotx¼ kpþ arccotx f�r y 2 ðkp;ðkþ 1ÞpÞ;k¼ 0 liefert die Hauptwerte:
Beispiel: 0;1ðx� 4Þ2 þ sinx¼ 0: – Einer Skizze entnimmt man denSchnittpunkt der Parabel y¼�0;1ðx� 4Þ2 mit der Sinuskurve unddaß ein Wert x 2 ðp;4Þ sein muß. Will man mit dem Iterationsverfah-ren (s. A9.2.1) xiþ1 aus xi berechnen, so ist
xiþ1 ¼ p� arcsin½�ðxi � 4Þ2=10� ¼ pþ arcsin½ðxi � 4Þ2=10�
zu bilden und damit auf den f�r die Inversion g�ltigen Monotoniebe-reich zu reduzieren. Mit x0 ¼ 3;2 erh�lt man nach einigen Schrittenxi ¼ 3;20486 als brauchbare N�herungsl�sung.
Beziehungen im Bereich der Hauptwerte. Es gelten:
arcsin x¼ p=2� arccosx¼ arctanðx=ffiffiffiffiffiffiffiffiffiffiffiffi1� x2p
Þ;arccosx¼ p=2� arcsin x¼ arccosðx=
ffiffiffiffiffiffiffiffiffiffiffiffi1� x2p
Þ;
arctanx¼ p=2� arccotx¼ arcsinðx=ffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
pÞ;
arccotx¼ p=2� arctanx¼ arccosðx=ffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
pÞ;
arccotx¼arctanð1=xÞ f�r x> 0;
pþ arctanð1=xÞ f�r x< 0:
�
9>>>>>>>>>>=>>>>>>>>>>;
ð24Þ
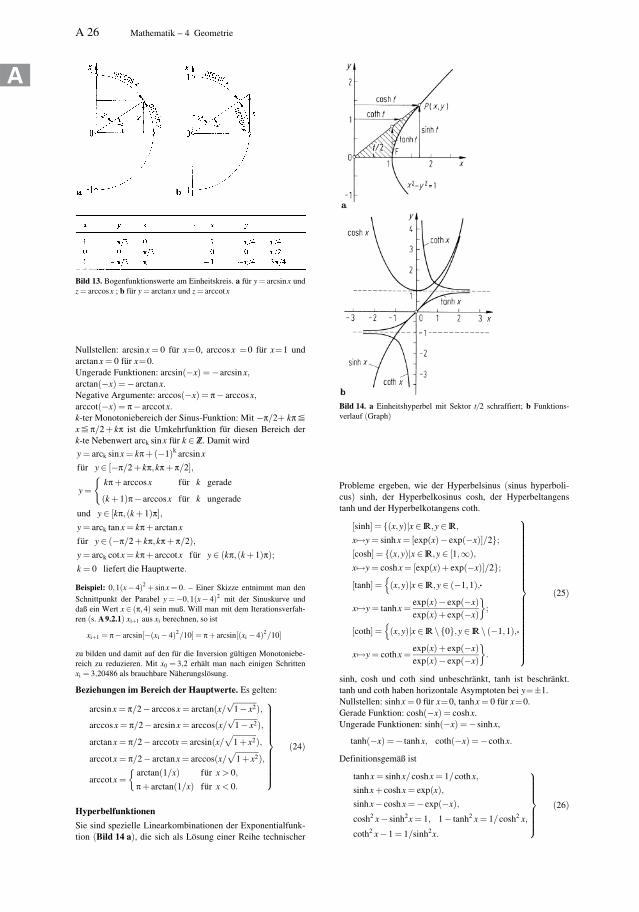
Hyperbelfunktionen
Sie sind spezielle Linearkombinationen der Exponentialfunk-tion (Bild 14 a), die sich als L�sung einer Reihe technischer
Probleme ergeben, wie der Hyperbelsinus (sinus hyperboli-cus) sinh, der Hyperbelkosinus cosh, der Hyperbeltangenstanh und der Hyperbelkotangens coth.
½sinh� ¼ fðx;yÞjx 2R;y 2R;
x 7!y¼ sinh x¼ ½expðxÞ� expð�xÞ�=2g;½cosh� ¼ fðx;yÞjx 2R;y 2 ½1;1Þ;x 7!y¼ coshx¼ ½expðxÞþ expð�xÞ�=2g;
½tanh� ¼ ðx;yÞjx 2R;y 2 ð�1;1Þ;n
x 7!y¼ tanhx¼ expðxÞ� expð�xÞexpðxÞþ expð�xÞ
;
½coth� ¼ ðx;yÞjx 2R n f0g;y 2R n ð�1;1Þ;n
x 7!y¼ cothx¼ expðxÞþ expð�xÞexpðxÞ� expð�xÞ
:
9>>>>>>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>>>>>>;
ð25Þ
sinh, cosh und coth sind unbeschr�nkt, tanh ist beschr�nkt.tanh und coth haben horizontale Asymptoten bei y=�1.Nullstellen: sinhx¼ 0 f�r x=0, tanhx¼ 0 f�r x=0.Gerade Funktion: coshð�xÞ ¼ coshx.Ungerade Funktionen: sinhð�xÞ ¼� sinh x,
tanhð�xÞ ¼ � tanhx; cothð�xÞ ¼ �cothx:
Definitionsgem�ß ist
tanhx¼ sinhx=coshx¼ 1=cothx;
sinhxþ coshx¼ expðxÞ;sinhx� coshx¼�expð�xÞ;cosh2 x� sinh2x¼ 1; 1� tanh2 x¼ 1=cosh2 x;
coth2 x� 1¼ 1=sinh2x:
9>>>>>>=>>>>>>;
ð26Þ
A 26 Mathematik – 4 Geometrie
A
Bild 13. Bogenfunktionswerte am Einheitskreis. a f�r y¼ arcsinx undz¼ arccosx ; b f�r y¼ arctan x und z¼ arccot x
Bild 14. a Einheitshyperbel mit Sektor t/2 schraffiert; b Funktions-verlauf (Graph)
Additionstheoreme. Analog den Kreisfunktionen gilt
sinhðx� yÞ ¼ sinh x coshy� coshx sinh y;
coshðx� yÞ ¼ coshxcoshy� sinh x sinhy;
tanhðx� yÞ ¼ tanhx� tanhy
1� tanhx tanhy;
cothðx� yÞ ¼ 1� cothx cothy
cothx� cothy:
9>>>>>>>=>>>>>>>;
ð27Þ
sinhðnxÞ ¼ n
1
� �coshn�1 x sinh x
þ n
3
� �coshn�3 x sinh3x
;þ . . .þ n
n� 1
� �coshx sinhn�1x;
coshðnxÞ ¼coshn xþ n
2
� �coshn�2 x sinh2x
þ . . .þ n
n
� �sinhnx:
9>>>>>>>>>>>>=>>>>>>>>>>>>;
ð28Þ
Deutung an der Einheitshyperbel. So wie x¼ cosj;y¼ sinjeine Parameterdarstellung des Einheitskreises mit dem Para-meter j ist, ergeben sich x¼�cosh t; y¼ sinh t f�r die Ein-heitshyperbel. x2 � y2 ¼ cosh2 t� sinh2t ¼ 1. Die Koordinatendes Punkts P in Bild 14 b sind den Hyperbelsinus- und Hyper-belkosinuswerten des Parameters t zuzuordnen. Der Parametert ist ein Maß f�r die Fl�che A des schraffierten HyperbelsektorsOPF, wie mittels Integration nachweisbar ist.
t¼ lnðcosh tþffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffifficosh2 t� 1
pÞ ¼ 2A: ð29Þ
Die tanh-t-Werte sind Strecken auf der Scheiteltangente, diecoth- t-Werte Strecken auf der Geraden y=1, jeweils bis zumSchnitt mit der Strecke OP.
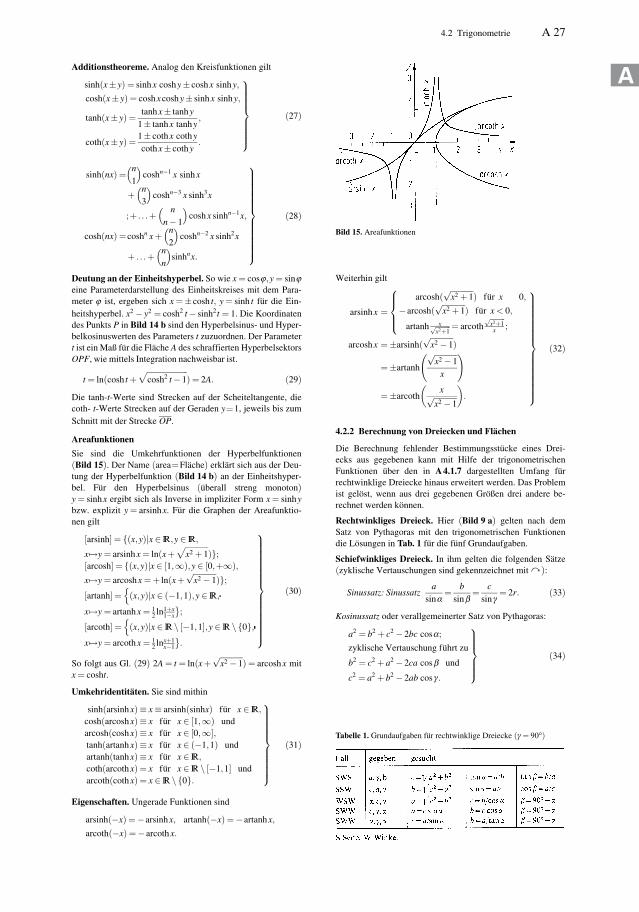
Areafunktionen
Sie sind die Umkehrfunktionen der Hyperbelfunktionen(Bild 15). Der Name (area=Fl�che) erkl�rt sich aus der Deu-tung der Hyperbelfunktion (Bild 14 b) an der Einheitshyper-bel. F�r den Hyperbelsinus (�berall streng monoton)y¼ sinhx ergibt sich als Inverse in impliziter Form x¼ sinhybzw. explizit y¼ arsinhx. F�r die Graphen der Areafunktio-nen gilt
½arsinh� ¼ fðx;yÞjx 2R;y 2R;
x 7!y¼ arsinhx¼ lnðxþffiffiffiffiffiffiffiffiffiffiffiffix2þ 1
pÞg;
½arcosh� ¼ fðx;yÞjx 2 ½1;1Þ;y 2 ½0;þ1Þ;x 7!y¼ arcoshx¼þ lnðxþ
ffiffiffiffiffiffiffiffiffiffiffiffix2� 1p
Þg;½artanh� ¼ ðx;yÞjx 2 ð�1;1Þ;y 2R;
nx 7!y¼ artanh x¼ 1
2 ln1þx1�x
�;
½arcoth� ¼ ðx;yÞjx 2R n ½�1;1�;y 2R n f0g;n
x 7!y¼ arcoth x¼ 12 lnxþ1
x�1
�:
9>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>;
ð30Þ
So folgt aus Gl. (29) 2A¼ t¼ lnðxþffiffiffiffiffiffiffiffiffiffiffiffix2 � 1p
Þ¼ arcoshx mitx¼ cosht.
Umkehridentit�ten. Sie sind mithin
sinhðarsinhxÞ � x� arsinhðsinhxÞ f�r x 2R;
coshðarcoshxÞ � x f�r x 2 ½1;1Þ undarcoshðcoshxÞ � x f�r x 2 ½0;1�;tanhðartanh xÞ � x f�r x 2 ð�1;1Þ undartanhðtanhxÞ � x f�r x 2R;
cothðarcoth xÞ ¼ x f�r x 2R n ½�1;1� undarcothðcothxÞ ¼ x 2R n f0g:
9>>>>>>>>>=>>>>>>>>>;
ð31Þ
Eigenschaften. Ungerade Funktionen sind
arsinhð�xÞ ¼ �arsinhx; artanhð�xÞ ¼ �artanhx;
arcothð�xÞ ¼�arcoth x:
Weiterhin gilt
arsinhx ¼arcoshð
ffiffiffiffiffiffiffiffiffiffiffiffix2þ 1p
Þ f�r x 0;
�arcoshðffiffiffiffiffiffiffiffiffiffiffiffix2þ 1p
Þ f�r x< 0;
artanh xffiffiffiffiffiffiffiffix2þ1p ¼ arcoth
ffiffiffiffiffiffiffiffix2þ1p
x ;
8>><>>:
arcosh x ¼�arsinhðffiffiffiffiffiffiffiffiffiffiffiffix2� 1p
Þ
¼�artanh
ffiffiffiffiffiffiffiffiffiffiffiffix2� 1p
x
!
¼�arcothxffiffiffiffiffiffiffiffiffiffiffiffi
x2� 1p� �
:
9>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>;
ð32Þ
4.2.2 Berechnung von Dreiecken und Fl�chen
Die Berechnung fehlender Bestimmungsst�cke eines Drei-ecks aus gegebenen kann mit Hilfe der trigonometrischenFunktionen �ber den in A4.1.7 dargestellten Umfang f�rrechtwinklige Dreiecke hinaus erweitert werden. Das Problemist gel�st, wenn aus drei gegebenen Gr�ßen drei andere be-rechnet werden k�nnen.
Rechtwinkliges Dreieck. Hier (Bild 9 a) gelten nach demSatz von Pythagoras mit den trigonometrischen Funktionendie L�sungen in Tab. 1 f�r die f�nf Grundaufgaben.
Schiefwinkliges Dreieck. In ihm gelten die folgenden S�tze(zyklische Vertauschungen sind gekennzeichnet mit { ):
Sinussatz: Sinussatza
sina¼ b
sinb¼ c
sing¼ 2r: ð33Þ
Kosinussatz oder verallgemeinerter Satz von Pythagoras:
a2 ¼ b2þ c2� 2bc cosa;
zyklische Vertauschung f�hrt zu
b2 ¼ c2þ a2� 2ca cosb und
c2 ¼ a2þ b2� 2ab cosg:
9>>>>=>>>>;
ð34Þ
I4.2 Trigonometrie A 27
A
Tabelle 1. Grundaufgaben f�r rechtwinklige Dreiecke ðg¼ 90�Þ
Bild 15. Areafunktionen
Bedingte Identit�ten f�r die Winkelfunktionen: Wegenaþbþ g¼ 180� folgen aus den Additionstheoremen
sina¼ sinðbþ gÞ;sinða=2Þ ¼ cos½ðbþ gÞ=2�; cosa¼�cosðbþ gÞ;cosða=2Þ ¼ sin½ðbþ gÞ=2� und { :
Summe der Projektionen. Jede Seite l�ßt sich aus den beidenanderen Seiten berechnen; a¼ bcosgþ ccosb und [{ .Tangenssatz oder Nepersche Formel:
tana�b
2¼ a� b
aþ b� tan
aþb2
mitaþb
2¼ 180�� g
2und { :
ð35Þ
Mollweidesche Formeln:
ðbþ cÞsinða=2Þ ¼ a cos½ðb� gÞ=2� und
ðb� cÞcosða=2Þ ¼ a sin½ðb� gÞ2� sowie { :
)ð36Þ
Halbwinkelsatz:
tana2¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðs� bÞðs� cÞ
sðs� aÞ
sund { : ð37Þ
L�sung der Grundaufgaben im schiefwinkligen Dreieck s.Tab. 2.
Fl�chenberechnung s. Tab. 4.
4.3 Stereometrie
Die Stereometrie ist die Erweiterung der in A4.1 und A4.2dargestellten euklidischen Geometrie der Ebene auf den drei-dimensionalen Raum, in dem die Betrachtung auf die Punkte,die nicht in einer Ebene liegen, ausgedehnt wird. DieserRaum wird mit R3 bezeichnet und durch ein Volumenmaß ge-messen. Die Dimension eines Raums, die in der Vektoralge-bra mit der Zahl der linear unabh�ngigen Basisvektoren defi-niert wird, ist in der axiomatischen Geometrie mit der Zahlder Maße zur Messung von Eigenschaften der Punktmengenerkl�rbar.
4.3.1 Punkt, Gerade und Ebene im Raum
Punkt, Gerade und Ebene sind die Grundelemente des Raums.Innerhalb jeder Ebene des Raums gelten die Gesetze der Pla-nimetrie. Die Erweiterung der Axiome und des Parallelenbe-griffs ergeben mit den Symbolen 2 Element der Menge, �
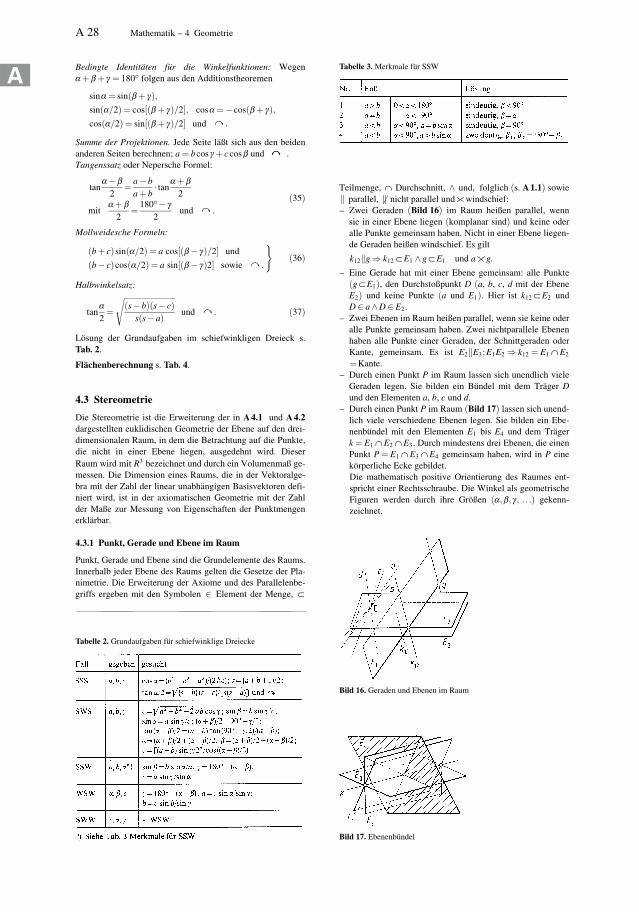
Teilmenge, ˙ Durchschnitt, ^ und, folglich (s. A1.1) sowiek parallel, 6k nicht parallel und windschief:– Zwei Geraden (Bild 16) im Raum heißen parallel, wenn
sie in einer Ebene liegen (komplanar sind) und keine oderalle Punkte gemeinsam haben. Nicht in einer Ebene liegen-de Geraden heißen windschief. Es gilt
k12kg) k12 � E1 ^ g � E1 und a g.
– Eine Gerade hat mit einer Ebene gemeinsam: alle Punkte(g � E1), den Durchstoßpunkt D (a, b, c, d mit der EbeneE2) und keine Punkte (a und E1). Hier ist k12 � E2 undD 2 a^D 2 E2 .
– Zwei Ebenen im Raum heißen parallel, wenn sie keine oderalle Punkte gemeinsam haben. Zwei nichtparallele Ebenenhaben alle Punkte einer Geraden, der Schnittgeraden oderKante, gemeinsam. Es ist E2kE3;E1E2) k12 ¼ E1 ˙ E2
=Kante.– Durch einen Punkt P im Raum lassen sich unendlich viele
Geraden legen. Sie bilden ein B�ndel mit dem Tr�ger Dund den Elementen a, b, c und d.
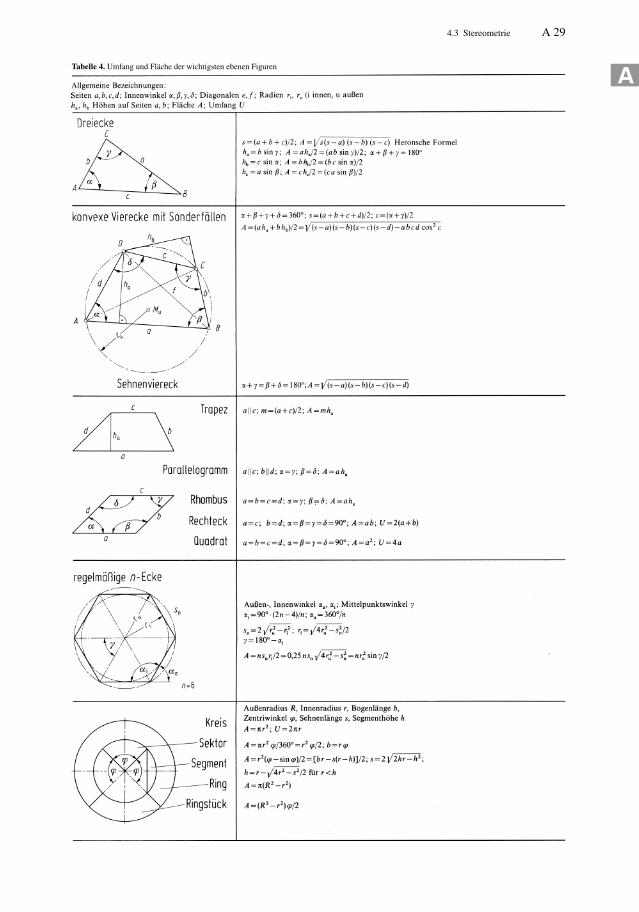
– Durch einen Punkt P im Raum (Bild 17) lassen sich unend-lich viele verschiedene Ebenen legen. Sie bilden ein Ebe-nenb�ndel mit den Elementen E1 bis E4 und dem Tr�gerk¼ E1 ˙ E2 ˙ E3 . Durch mindestens drei Ebenen, die einenPunkt P¼ E1 ˙ E3 ˙ E4 gemeinsam haben, wird in P einek�rperliche Ecke gebildet.Die mathematisch positive Orientierung des Raumes ent-spricht einer Rechtsschraube. Die Winkel als geometrischeFiguren werden durch ihre Gr�ßen (a;b;g; . . .) gekenn-zeichnet.
A 28 Mathematik – 4 Geometrie
A
Tabelle 2. Grundaufgaben f�r schiefwinklige Dreiecke
Tabelle 3. Merkmale f�r SSW
Bild 16. Geraden und Ebenen im Raum
Bild 17. Ebenenb�ndel
I4.3 Stereometrie A 29
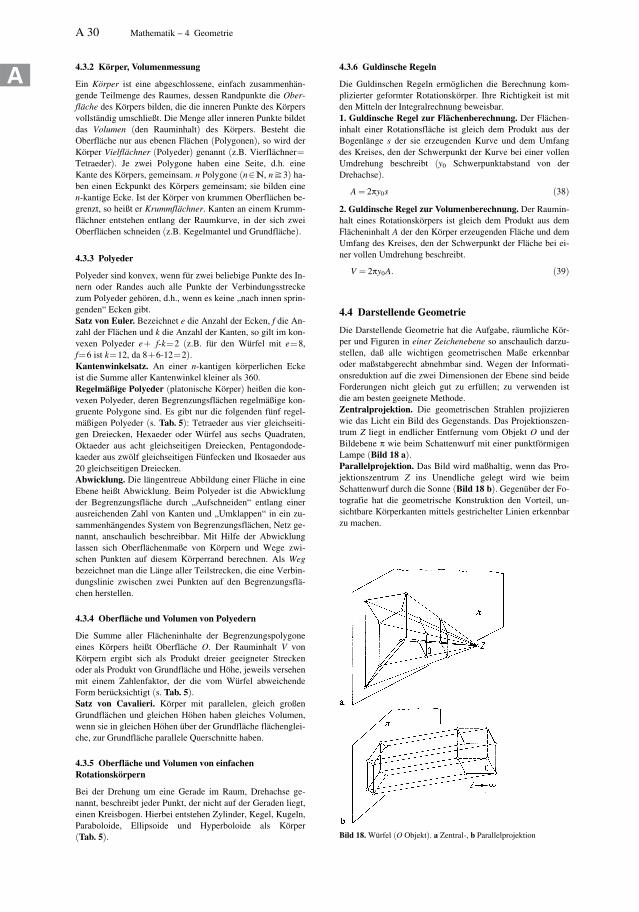
ATabelle 4. Umfang und Fl�che der wichtigsten ebenen Figuren
4.3.2 K�rper, Volumenmessung
Ein K�rper ist eine abgeschlossene, einfach zusammenh�n-gende Teilmenge des Raumes, dessen Randpunkte die Ober-fl�che des K�rpers bilden, die die inneren Punkte des K�rpersvollst�ndig umschließt. Die Menge aller inneren Punkte bildetdas Volumen (den Rauminhalt) des K�rpers. Besteht dieOberfl�che nur aus ebenen Fl�chen (Polygonen), so wird derK�rper Vielfl�chner (Polyeder) genannt (z.B. Vierfl�chner=Tetraeder). Je zwei Polygone haben eine Seite, d.h. eineKante des K�rpers, gemeinsam. n Polygone (n2N, n ^3) ha-ben einen Eckpunkt des K�rpers gemeinsam; sie bilden einen-kantige Ecke. Ist der K�rper von krummen Oberfl�chen be-grenzt, so heißt er Krummfl�chner. Kanten an einem Krumm-fl�chner entstehen entlang der Raumkurve, in der sich zweiOberfl�chen schneiden (z.B. Kegelmantel und Grundfl�che).
4.3.3 Polyeder
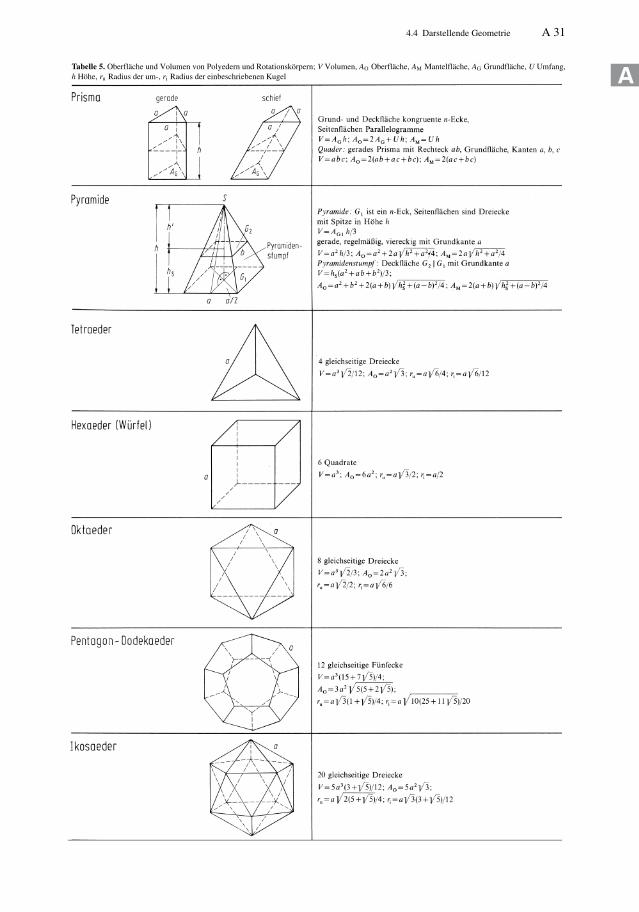
Polyeder sind konvex, wenn f�r zwei beliebige Punkte des In-nern oder Randes auch alle Punkte der Verbindungsstreckezum Polyeder geh�ren, d.h., wenn es keine „nach innen sprin-genden“ Ecken gibt.Satz von Euler. Bezeichnet e die Anzahl der Ecken, f die An-zahl der Fl�chen und k die Anzahl der Kanten, so gilt im kon-vexen Polyeder e+ f-k=2 (z.B. f�r den W�rfel mit e=8,f=6 ist k=12, da 8+6-12=2).Kantenwinkelsatz. An einer n-kantigen k�rperlichen Eckeist die Summe aller Kantenwinkel kleiner als 360.Regelm�ßige Polyeder (platonische K�rper) heißen die kon-vexen Polyeder, deren Begrenzungsfl�chen regelm�ßige kon-gruente Polygone sind. Es gibt nur die folgenden f�nf regel-m�ßigen Polyeder (s. Tab. 5): Tetraeder aus vier gleichseiti-gen Dreiecken, Hexaeder oder W�rfel aus sechs Quadraten,Oktaeder aus acht gleichseitigen Dreiecken, Pentagondode-kaeder aus zw�lf gleichseitigen F�nfecken und Ikosaeder aus20 gleichseitigen Dreiecken.Abwicklung. Die l�ngentreue Abbildung einer Fl�che in eineEbene heißt Abwicklung. Beim Polyeder ist die Abwicklungder Begrenzungsfl�che durch „Aufschneiden“ entlang einerausreichenden Zahl von Kanten und „Umklappen“ in ein zu-sammenh�ngendes System von Begrenzungsfl�chen, Netz ge-nannt, anschaulich beschreibbar. Mit Hilfe der Abwicklunglassen sich Oberfl�chenmaße von K�rpern und Wege zwi-schen Punkten auf diesem K�rperrand berechnen. Als Wegbezeichnet man die L�nge aller Teilstrecken, die eine Verbin-dungslinie zwischen zwei Punkten auf den Begrenzungsfl�-chen herstellen.
4.3.4 Oberfl�che und Volumen von Polyedern
Die Summe aller Fl�cheninhalte der Begrenzungspolygoneeines K�rpers heißt Oberfl�che O. Der Rauminhalt V vonK�rpern ergibt sich als Produkt dreier geeigneter Streckenoder als Produkt von Grundfl�che und H�he, jeweils versehenmit einem Zahlenfaktor, der die vom W�rfel abweichendeForm ber�cksichtigt (s. Tab. 5).Satz von Cavalieri. K�rper mit parallelen, gleich großenGrundfl�chen und gleichen H�hen haben gleiches Volumen,wenn sie in gleichen H�hen �ber der Grundfl�che fl�chenglei-che, zur Grundfl�che parallele Querschnitte haben.
4.3.5 Oberfl�che und Volumen von einfachenRotationsk�rpern
Bei der Drehung um eine Gerade im Raum, Drehachse ge-nannt, beschreibt jeder Punkt, der nicht auf der Geraden liegt,einen Kreisbogen. Hierbei entstehen Zylinder, Kegel, Kugeln,Paraboloide, Ellipsoide und Hyperboloide als K�rper(Tab. 5).
4.3.6 Guldinsche Regeln
Die Guldinschen Regeln erm�glichen die Berechnung kom-plizierter geformter Rotationsk�rper. Ihre Richtigkeit ist mitden Mitteln der Integralrechnung beweisbar.1. Guldinsche Regel zur Fl�chenberechnung. Der Fl�chen-inhalt einer Rotationsfl�che ist gleich dem Produkt aus derBogenl�nge s der sie erzeugenden Kurve und dem Umfangdes Kreises, den der Schwerpunkt der Kurve bei einer vollenUmdrehung beschreibt (y0 Schwerpunktabstand von derDrehachse).
A¼ 2py0s ð38Þ
2. Guldinsche Regel zur Volumenberechnung. Der Raumin-halt eines Rotationsk�rpers ist gleich dem Produkt aus demFl�cheninhalt A der den K�rper erzeugenden Fl�che und demUmfang des Kreises, den der Schwerpunkt der Fl�che bei ei-ner vollen Umdrehung beschreibt.
V ¼ 2py0A: ð39Þ
4.4 Darstellende Geometrie
Die Darstellende Geometrie hat die Aufgabe, r�umliche K�r-per und Figuren in einer Zeichenebene so anschaulich darzu-stellen, daß alle wichtigen geometrischen Maße erkennbaroder maßstabgerecht abnehmbar sind. Wegen der Informati-onsreduktion auf die zwei Dimensionen der Ebene sind beideForderungen nicht gleich gut zu erf�llen; zu verwenden istdie am besten geeignete Methode.Zentralprojektion. Die geometrischen Strahlen projizierenwie das Licht ein Bild des Gegenstands. Das Projektionszen-trum Z liegt in endlicher Entfernung vom Objekt O und derBildebene p wie beim Schattenwurf mit einer punktf�rmigenLampe (Bild 18 a).Parallelprojektion. Das Bild wird maßhaltig, wenn das Pro-jektionszentrum Z ins Unendliche gelegt wird wie beimSchattenwurf durch die Sonne (Bild 18 b). Gegen�ber der Fo-tografie hat die geometrische Konstruktion den Vorteil, un-sichtbare K�rperkanten mittels gestrichelter Linien erkennbarzu machen.
A 30 Mathematik – 4 Geometrie
A
Bild 18. W�rfel (O Objekt). a Zentral-, b Parallelprojektion
I4.4 Darstellende Geometrie A 31
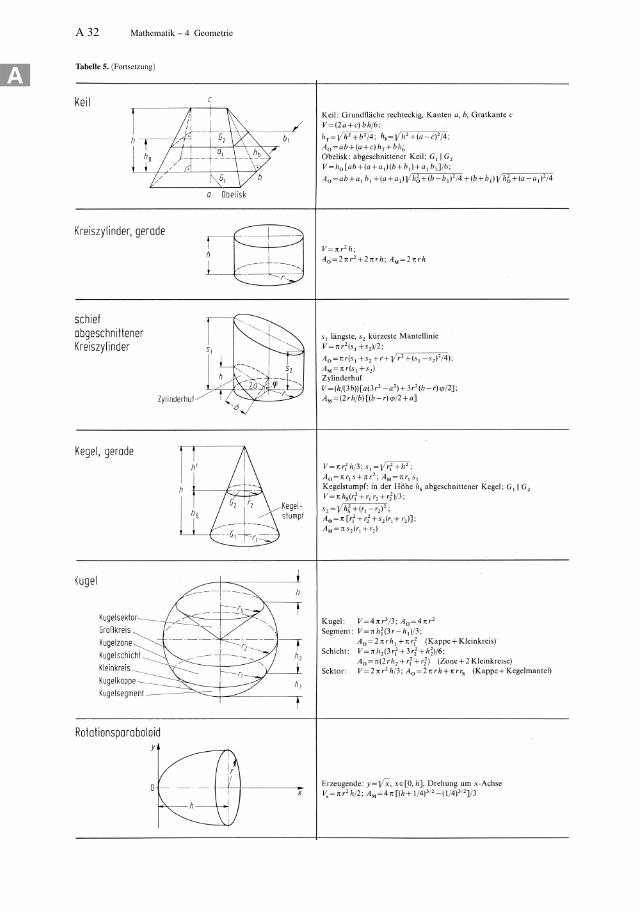
ATabelle 5. Oberfl�che und Volumen von Polyedern und Rotationsk�rpern; V Volumen, AO Oberfl�che, AM Mantelfl�che, AG Grundfl�che, U Umfang,h H�he, ru Radius der um-, ri Radius der einbeschriebenen Kugel
A 32 Mathematik – 4 Geometrie
ATabelle 5. (Fortsetzung)
4.4.1 Vergleich der Projektionsarten
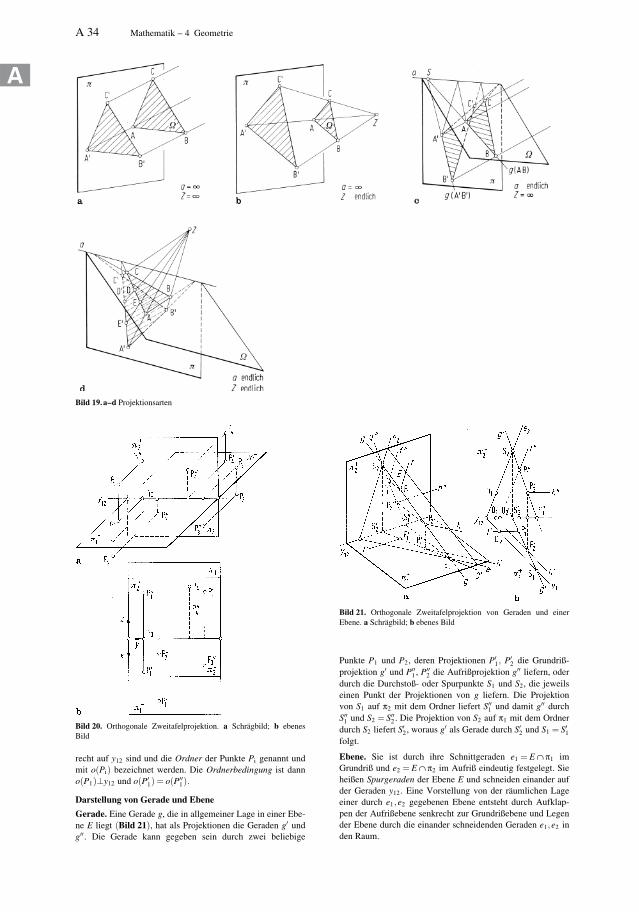
Die Zentral- und die Parallelprojektion werden einzeln da-durch modifiziert, daß die Projektionsrichtungen senkrechtoder schr�g zur Projektionsebene p orientiert sind. Die „G�te“der Abbildung ergibt sich aus der Invarianz (Unver�nderlich-keit) der geometrischen Maße oder Maßverh�ltnisse des Ob-jekts wie die Erhaltung der folgenden acht Gr�ßen und Eigen-schaften: Strecken, Winkel, Fl�chen, Parallelit�t, Strecken-verh�ltnisse, Teilungsverh�ltnisse f�r Strecken zwischen dreiPunkten auf einer Geraden (s. A3.1.6), Doppelverh�ltnissef�r Strecken zwischen vier geordneten Punkten A, B, C und Dauf einer Geraden, also AC : BC ¼ AD : BD, und der Zugeh�-rigkeit von Punkten zu einer Geraden (Inzidenz).Es gen�gt, die �bersichtlichen Projektionen eines ebenenDreiecks zu untersuchen. Als Modelle eignen sich daf�r diedreieckige Pyramide f�r die Zentralprojektion mit dem Zen-trum Z im Endlichen (Pyramidenspitze) und das dreieckigePrisma f�r die Parallelprojektion mit Z im Unendlichen, derenSeitenkanten die Projektionsstrahlen sind. Die zu untersu-chende Objektebene W kann parallel oder schr�g zur Projek-tionsebene angeordnet sein; die Schnittgerade a=W˙p liegtim Unendlichen bzw. in Endlichen. Damit ergeben sich dievier Projektionen in Bild 19. Die von den Objektpunkten pro-jizierten Bildpunkte erhalten einen Strich (0).
a Parallelprojektion zwischen parallelen Ebenen (a=1 ,Z=1 ), die definitionsgem�ß Kongruenz erzeugt. Hierbeisind alle acht Eigenschaften invariant.
b Zentralprojektion zwischen parallelen Ebenen (a=1 ,Z endlich). Sie erzeugt nach dem Strahlensatz (auf den Seiten-fl�chen der Pyramide) �hnlichkeit, d.h., invariant sind Winkelund Parallelit�t, Strecken-, Teil- und Doppelverh�ltnisse(Strahlens�tze in den Ebenen W und p) sowie die Inzidenz.
c Parallelprojektion zwischen geneigten Ebenen (a end-lich, Z=1 ) erzeugt perspektive Affinit�t. Sie ist durch fol-gende Eigenschaften gekennzeichnet: Affine Punkte wie Aund A0; B und B0 liegen auf Parallelen gðAA0ÞkgðBB0Þ und er-halten damit die Parallelit�t und Inzidenz. Affine Geradenwie g(AB) �W und g0ðA0B0Þ� p schneiden einander in einem
Punkt auf a; gðABÞ˙ g0ðA0B0Þ ¼ S 2 a: Die Strahlens�tze, et-wa f�r \ðB0SBÞ, erhalten die Teilungsverh�ltnisse.
d Zentralprojektion zwischen geneigten Ebenen (a end-lich, Z endlich) erzeugt die perspektive Kollineation. Hiersind nur noch Doppelverh�ltnis und Inzidenz invariant; esgibt nur eine sehr „schwache“ Verwandtschaft zwischen Ob-jekt und Bild. Ihre konstruktiven Merkmale sind: KollinearePunkte wie A und A0; B und B0 liegen auf Kollineationsstrah-len, die einander in einem Punkt Z schneiden und die Inzidenzherstellen. Kollineare Geraden wie g(AB)�W undgðA0B0Þ� p schneiden einander auf der Kollineationsachsea=W˙p. Die Erhaltung des Doppelverh�ltnisses folgt ausdem Sinussatz, etwa f�r jCDj : jDEj ¼ jCAj : jEAj in der Ebe-ne durch C0ZA0:Aus diesen Projektionen werden die f�r den Anwendungsfallgeeigneten Konstruktionen ausgew�hlt. H�chste Anspr�chean Maßhaltigkeit und �hnlichkeit erf�llt die orthogonale Par-allelprojektion auf mehrere Bildebenen bei Werkstattzeich-nungen und Baupl�nen. Bessere Anschaulichkeit ergibt dieschr�ge Parallelprojektion auf eine Tafel. Dem visuellen Ein-druck am �hnlichsten ist die Perspektive der Zentralprojektionmit dem gr�ßten Verlust an Maßhaltigkeit.
4.4.2 Orthogonale Zweitafelprojektion
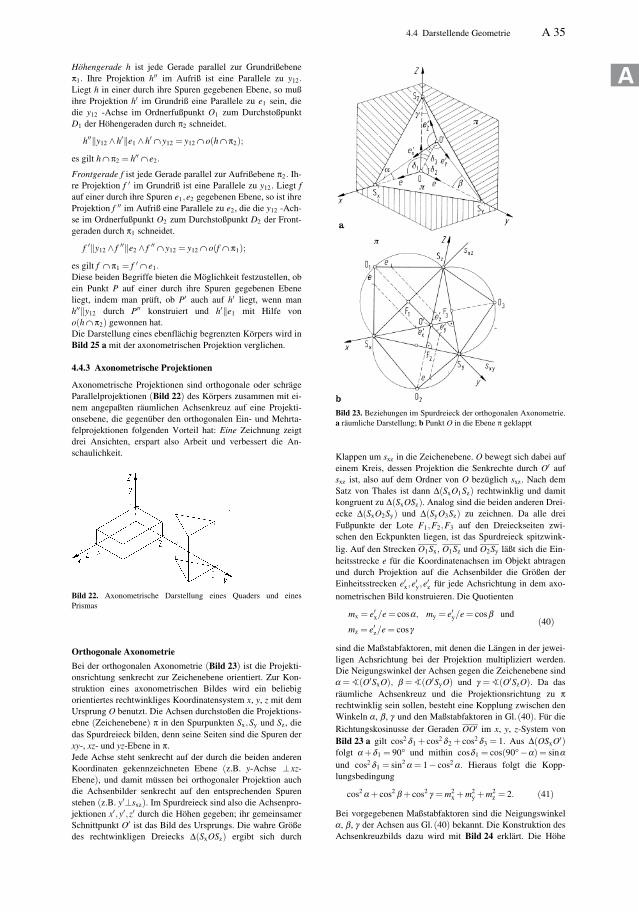
Die orthogonale Zweitafelprojektion ist eine senkrechte Par-allelprojektion des Objekts auf zwei senkrecht zueinander an-geordnete Projektionsebenen p1 und p2, die um die ihnen ge-meinsame Schnittgerade y12 geklappt und so in die Zeichen-ebene gelegt werden (Bild 20). Dabei soll die vordere positi-ve Grundrißebene pþ1 zusammen mit der in sie hineingeklapp-ten negativen Aufrißebene p�2 unterhalb von y12 liegen. Ausder Zweitafelprojektion ergibt sich, daß der Punkt P1 senk-recht �ber P01 in der H�he P10P001 angeordnet ist.Es wird festgelegt, daß bei Gesamtansichten das abzubildendeObjekt vollst�ndig im I. Raum-Quadranten liegt und somitnur pþ1 unterhalb y12 und pþ2 oberhalb y12 in der Zeichenebeneben�tigt werden. Beim Klappvorgang bewegen sich die proji-zierten Punkte auf ebenen, zu y12 senkrechten Kreisb�gen, de-ren Projektionen die in Bild 20 b gestrichelten Geraden senk-
I4.4 Darstellende Geometrie A 33
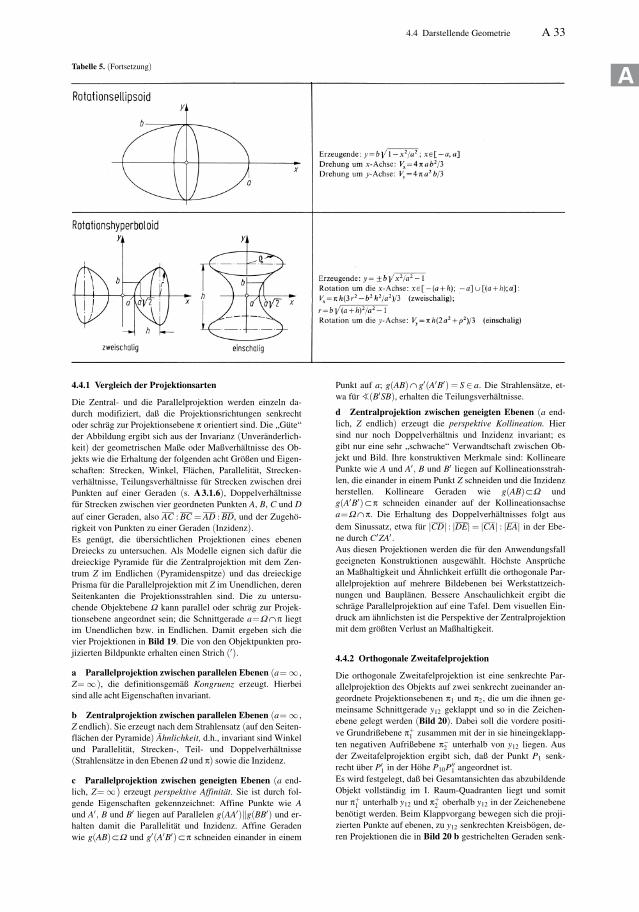
ATabelle 5. (Fortsetzung)
recht auf y12 sind und die Ordner der Punkte Pi genannt undmit oðPiÞ bezeichnet werden. Die Ordnerbedingung ist dannoðP1Þ?y12 und oðP01Þ ¼ oðP001Þ:
Darstellung von Gerade und Ebene
Gerade. Eine Gerade g, die in allgemeiner Lage in einer Ebe-ne E liegt (Bild 21), hat als Projektionen die Geraden g0 undg00. Die Gerade kann gegeben sein durch zwei beliebige
Punkte P1 und P2 , deren Projektionen P01; P02 die Grundriß-projektion g0 und P001 , P002 die Aufrißprojektion g00 liefern, oderdurch die Durchstoß- oder Spurpunkte S1 und S2, die jeweilseinen Punkt der Projektionen von g liefern. Die Projektionvon S1 auf p2 mit dem Ordner liefert S001 und damit g00 durchS001 und S2 ¼ S002 . Die Projektion von S2 auf p1 mit dem Ordnerdurch S2 liefert S02 , woraus g0 als Gerade durch S02 und S1 ¼ S01folgt.
Ebene. Sie ist durch ihre Schnittgeraden e1 ¼ E ˙ p1 imGrundriß und e2 ¼ E ˙ p2 im Aufriß eindeutig festgelegt. Sieheißen Spurgeraden der Ebene E und schneiden einander aufder Geraden y12: Eine Vorstellung von der r�umlichen Lageeiner durch e1;e2 gegebenen Ebene entsteht durch Aufklap-pen der Aufrißebene senkrecht zur Grundrißebene und Legender Ebene durch die einander schneidenden Geraden e1;e2 inden Raum.
A 34 Mathematik – 4 Geometrie
A
Bild 19.a–d Projektionsarten
Bild 20. Orthogonale Zweitafelprojektion. a Schr�gbild; b ebenesBild
Bild 21. Orthogonale Zweitafelprojektion von Geraden und einerEbene. a Schr�gbild; b ebenes Bild
H�hengerade h ist jede Gerade parallel zur Grundrißebenep1 . Ihre Projektion h00 im Aufriß ist eine Parallele zu y12.Liegt h in einer durch ihre Spuren gegebenen Ebene, so mußihre Projektion h0 im Grundriß eine Parallele zu e1 sein, diedie y12 -Achse im Ordnerfußpunkt O1 zum DurchstoßpunktD1 der H�hengeraden durch p2 schneidet.
h00ky12 ^ h0ke1 ^ h0˙ y12 ¼ y12 ˙ oðh ˙ p2Þ;
es gilt h ˙ p2 ¼ h00 ˙ e2:
Frontgerade f ist jede Gerade parallel zur Aufrißebene p2: Ih-re Projektion f 0 im Grundriß ist eine Parallele zu y12 . Liegt fauf einer durch ihre Spuren e1;e2 gegebenen Ebene, so ist ihreProjektion f 00 im Aufriß eine Parallele zu e2, die die y12 -Ach-se im Ordnerfußpunkt O2 zum Durchstoßpunkt D2 der Front-geraden durch p1 schneidet.
f 0ky12 ^ f 00ke2 ^ f 00˙ y12 ¼ y12 ˙ oðf ˙ p1Þ;
es gilt f ˙ p1 ¼ f 0˙ e1:Diese beiden Begriffe bieten die M�glichkeit festzustellen, obein Punkt P auf einer durch ihre Spuren gegebenen Ebeneliegt, indem man pr�ft, ob P0 auch auf h0 liegt, wenn manh00ky12 durch P00 konstruiert und h0ke1 mit Hilfe vonoðh ˙ p2Þ gewonnen hat.Die Darstellung eines ebenfl�chig begrenzten K�rpers wird inBild 25 a mit der axonometrischen Projektion verglichen.
4.4.3 Axonometrische Projektionen
Axonometrische Projektionen sind orthogonale oder schr�geParallelprojektionen (Bild 22) des K�rpers zusammen mit ei-nem angepaßten r�umlichen Achsenkreuz auf eine Projekti-onsebene, die gegen�ber den orthogonalen Ein- und Mehrta-felprojektionen folgenden Vorteil hat: Eine Zeichnung zeigtdrei Ansichten, erspart also Arbeit und verbessert die An-schaulichkeit.
Bild 22. Axonometrische Darstellung eines Quaders und einesPrismas
Orthogonale Axonometrie
Bei der orthogonalen Axonometrie (Bild 23) ist die Projekti-onsrichtung senkrecht zur Zeichenebene orientiert. Zur Kon-struktion eines axonometrischen Bildes wird ein beliebigorientiertes rechtwinkliges Koordinatensystem x, y, z mit demUrsprung O benutzt. Die Achsen durchstoßen die Projektions-ebne (Zeichenebene) p in den Spurpunkten Sx;Sy und Sz, diedas Spurdreieck bilden, denn seine Seiten sind die Spuren derxy-, xz- und yz-Ebene in p.Jede Achse steht senkrecht auf der durch die beiden anderenKoordinaten gekennzeichneten Ebene (z.B. y-Achse ?xz-Ebene), und damit m�ssen bei orthogonaler Projektion auchdie Achsenbilder senkrecht auf den entsprechenden Spurenstehen (z.B. y0?sxz). Im Spurdreieck sind also die Achsenpro-jektionen x0;y0; z0 durch die H�hen gegeben; ihr gemeinsamerSchnittpunkt O0 ist das Bild des Ursprungs. Die wahre Gr�ßedes rechtwinkligen Dreiecks DðSxOSzÞ ergibt sich durch
Klappen um sxz in die Zeichenebene. O bewegt sich dabei aufeinem Kreis, dessen Projektion die Senkrechte durch O0 aufsxz ist, also auf dem Ordner von O bez�glich sxz. Nach demSatz von Thales ist dann DðSxO1SzÞ rechtwinklig und damitkongruent zu DðSxOSzÞ. Analog sind die beiden anderen Drei-ecke DðSxO2SyÞ und DðSyO3SzÞ zu zeichnen. Da alle dreiFußpunkte der Lote F1;F2;F3 auf den Dreieckseiten zwi-schen den Eckpunkten liegen, ist das Spurdreieck spitzwink-lig. Auf den Strecken O1Sx; O1Sz und O2Sy l�ßt sich die Ein-heitsstrecke e f�r die Koordinatenachsen im Objekt abtragenund durch Projektion auf die Achsenbilder die Gr�ßen derEinheitsstrecken e0x;e
0y;e0z f�r jede Achsrichtung in dem axo-
nometrischen Bild konstruieren. Die Quotienten
mx ¼ e0x=e¼ cosa; my ¼ e0y=e¼ cosb und
mz ¼ e0z=e¼ cosgð40Þ
sind die Maßstabfaktoren, mit denen die L�ngen in der jewei-ligen Achsrichtung bei der Projektion multipliziert werden.Die Neigungswinkel der Achsen gegen die Zeichenebene sinda¼\ðO0SxOÞ; b¼\ðO0SyOÞ und g¼\ðO0SzOÞ: Da dasr�umliche Achsenkreuz und die Projektionsrichtung zu prechtwinklig sein sollen, besteht eine Kopplung zwischen denWinkeln a, b, g und den Maßstabfaktoren in Gl. (40). F�r dieRichtungskosinusse der Geraden OO0 im x, y, z-System vonBild 23 a gilt cos2 d1þ cos2 d2þ cos2 d3 ¼ 1. Aus DðOSxO0Þfolgt aþ d1 ¼ 90� und mithin cosd1 ¼ cosð90��aÞ ¼ sinaund cos2 d1 ¼ sin2 a¼ 1� cos2 a: Hieraus folgt die Kopp-lungsbedingung
cos2 aþ cos2 bþ cos2 g¼m2xþm2
y þm2z ¼ 2: ð41Þ
Bei vorgegebenen Maßstabfaktoren sind die Neigungswinkela, b, g der Achsen aus Gl. (40) bekannt. Die Konstruktion desAchsenkreuzbilds dazu wird mit Bild 24 erkl�rt. Die H�he
I4.4 Darstellende Geometrie A 35
A
Bild 23. Beziehungen im Spurdreieck der orthogonalen Axonometrie.a r�umliche Darstellung; b Punkt O in die Ebene p geklappt
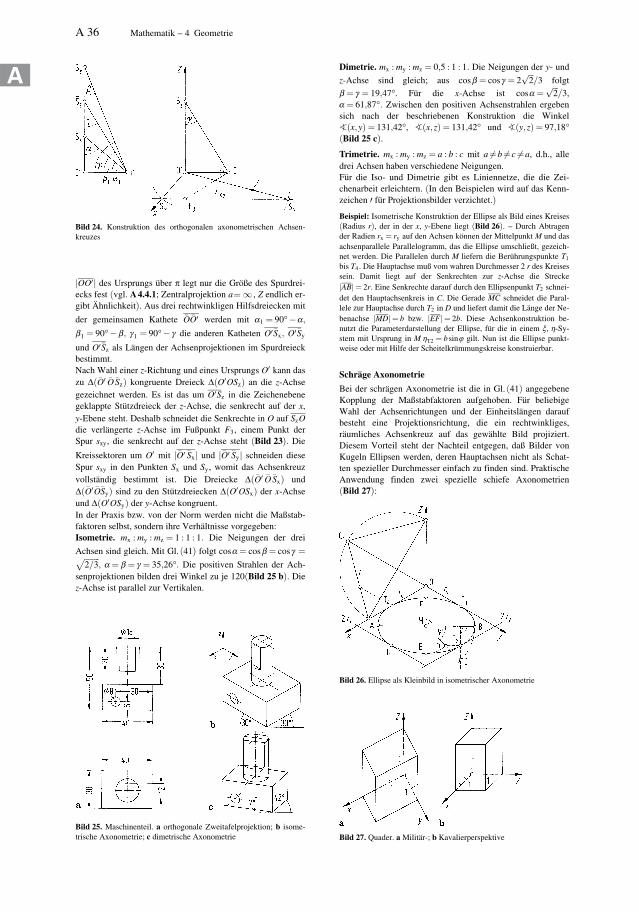
jOO0 j des Ursprungs �ber p legt nur die Gr�ße des Spurdrei-ecks fest (vgl. A4.4.1; Zentralprojektion a=1 , Z endlich er-gibt �hnlichkeit). Aus drei rechtwinkligen Hilfsdreiecken mit
der gemeinsamen Kathete �O�O0 werden mit a1 ¼ 90��a;b1 ¼ 90��b; g1 ¼ 90�� g die anderen Katheten O0�Sx; O0�Sy
und O0�Sz als L�ngen der Achsenprojektionen im Spurdreieckbestimmt.Nach Wahl einer z-Richtung und eines Ursprungs O0 kann daszu Dð�O0 �O�SzÞ kongruente Dreieck DðO0OSzÞ an die z-Achsegezeichnet werden. Es ist das um O0Sz in die Zeichenebenegeklappte St�tzdreieck der z-Achse, die senkrecht auf der x,y-Ebene steht. Deshalb schneidet die Senkrechte in O auf SzOdie verl�ngerte z-Achse im Fußpunkt F3 , einem Punkt derSpur sxy, die senkrecht auf der z-Achse steht (Bild 23). Die
Kreissektoren um O0 mit j�O0 �Sxj und j�O0 �Syj schneiden dieseSpur sxy in den Punkten Sx und Sy, womit das Achsenkreuzvollst�ndig bestimmt ist. Die Dreiecke Dð�O0 �O�SxÞ undDð�O0 �O�SyÞ sind zu den St�tzdreiecken DðO0OSxÞ der x-Achseund DðO0OSyÞ der y-Achse kongruent.In der Praxis bzw. von der Norm werden nicht die Maßstab-faktoren selbst, sondern ihre Verh�ltnisse vorgegeben:Isometrie. mx : my : mz ¼ 1 : 1 : 1: Die Neigungen der dreiAchsen sind gleich. Mit Gl. (41) folgt cosa¼ cosb¼ cosg ¼ffiffiffiffiffiffiffiffi
2=3p
; a¼ b¼ g¼ 35;26�: Die positiven Strahlen der Ach-senprojektionen bilden drei Winkel zu je 120(Bild 25 b). Diez-Achse ist parallel zur Vertikalen.
Dimetrie. mx : my : mz ¼ 0;5 : 1 : 1: Die Neigungen der y- undz-Achse sind gleich; aus cosb¼ cosg¼ 2
ffiffiffi2p
=3 folgtb¼ g¼ 19;47�. F�r die x-Achse ist cosa¼
ffiffiffi2p
=3,a¼ 61;87�: Zwischen den positiven Achsenstrahlen ergebensich nach der beschriebenen Konstruktion die Winkel\ðx;yÞ ¼ 131;42�, \ðx; zÞ ¼ 131;42� und \ðy; zÞ ¼ 97;18�(Bild 25 c).
Trimetrie. mx : my : mz ¼ a : b : c mit a 6¼b 6¼c 6¼a, d.h., alledrei Achsen haben verschiedene Neigungen.F�r die Iso- und Dimetrie gibt es Liniennetze, die die Zei-chenarbeit erleichtern. (In den Beispielen wird auf das Kenn-zeichen 0 f�r Projektionsbilder verzichtet.)
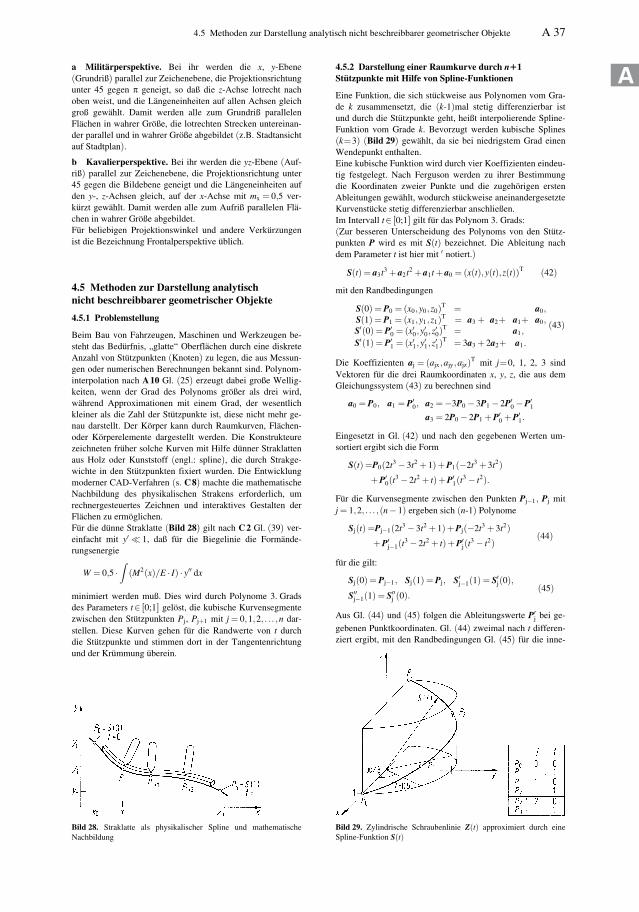
Beispiel: Isometrische Konstruktion der Ellipse als Bild eines Kreises(Radius r), der in der x, y-Ebene liegt (Bild 26). – Durch Abtragender Radien rx ¼ ry auf den Achsen k�nnen der Mittelpunkt M und dasachsenparallele Parallelogramm, das die Ellipse umschließt, gezeich-net werden. Die Parallelen durch M liefern die Ber�hrungspunkte T1
bis T4 : Die Hauptachse muß vom wahren Durchmesser 2 r des Kreisessein. Damit liegt auf der Senkrechten zur z-Achse die StreckejABj ¼ 2r. Eine Senkrechte darauf durch den Ellipsenpunkt T2 schnei-det den Hauptachsenkreis in C. Die Gerade MC schneidet die Paral-lele zur Hauptachse durch T2 in D und liefert damit die L�nge der Ne-benachse jMDj ¼ b bzw. jEFj ¼ 2b. Diese Achsenkonstruktion be-nutzt die Parameterdarstellung der Ellipse, f�r die in einem x, h-Sy-stem mit Ursprung in M hT2 ¼ b sinj gilt. Nun ist die Ellipse punkt-weise oder mit Hilfe der Scheitelkr�mmungskreise konstruierbar.
Schr�ge Axonometrie
Bei der schr�gen Axonometrie ist die in Gl. (41) angegebeneKopplung der Maßstabfaktoren aufgehoben. F�r beliebigeWahl der Achsenrichtungen und der Einheitsl�ngen daraufbesteht eine Projektionsrichtung, die ein rechtwinkliges,r�umliches Achsenkreuz auf das gew�hlte Bild projiziert.Diesem Vorteil steht der Nachteil entgegen, daß Bilder vonKugeln Ellipsen werden, deren Hauptachsen nicht als Schat-ten spezieller Durchmesser einfach zu finden sind. PraktischeAnwendung finden zwei spezielle schiefe Axonometrien(Bild 27):
A 36 Mathematik – 4 Geometrie
A
Bild 24. Konstruktion des orthogonalen axonometrischen Achsen-kreuzes
Bild 25. Maschinenteil. a orthogonale Zweitafelprojektion; b isome-trische Axonometrie; c dimetrische Axonometrie
Bild 26. Ellipse als Kleinbild in isometrischer Axonometrie
Bild 27. Quader. a Milit�r-; b Kavalierperspektive
a Milit�rperspektive. Bei ihr werden die x, y-Ebene(Grundriß) parallel zur Zeichenebene, die Projektionsrichtungunter 45 gegen p geneigt, so daß die z-Achse lotrecht nachoben weist, und die L�ngeneinheiten auf allen Achsen gleichgroß gew�hlt. Damit werden alle zum Grundriß parallelenFl�chen in wahrer Gr�ße, die lotrechten Strecken untereinan-der parallel und in wahrer Gr�ße abgebildet (z.B. Stadtansichtauf Stadtplan).
b Kavalierperspektive. Bei ihr werden die yz-Ebene (Auf-riß) parallel zur Zeichenebene, die Projektionsrichtung unter45 gegen die Bildebene geneigt und die L�ngeneinheiten aufden y-, z-Achsen gleich, auf der x-Achse mit mx ¼ 0;5 ver-k�rzt gew�hlt. Damit werden alle zum Aufriß parallelen Fl�-chen in wahrer Gr�ße abgebildet.F�r beliebigen Projektionswinkel und andere Verk�rzungenist die Bezeichnung Frontalperspektive �blich.
4.5 Methoden zur Darstellung analytischnicht beschreibbarer geometrischer Objekte
4.5.1 Problemstellung
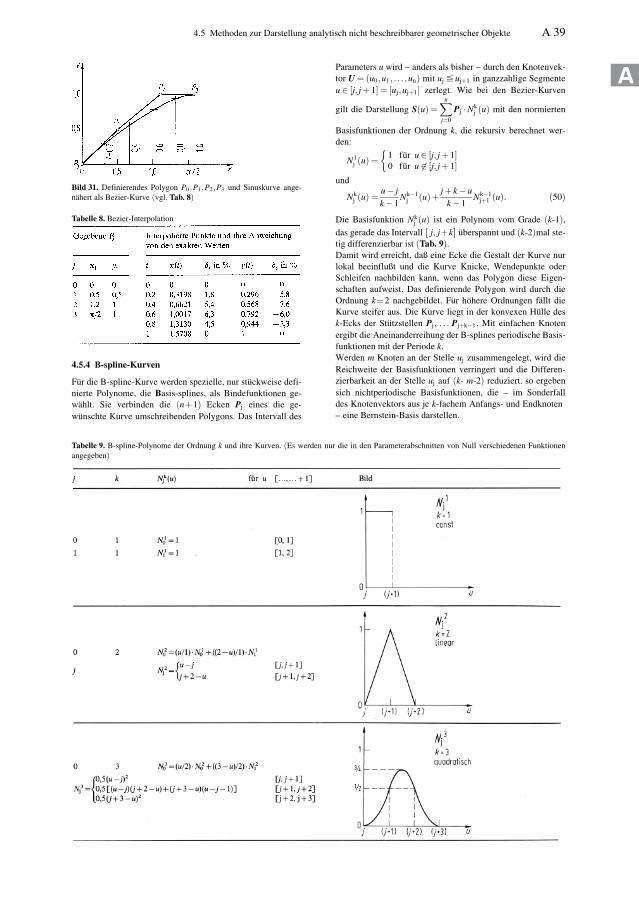
Beim Bau von Fahrzeugen, Maschinen und Werkzeugen be-steht das Bed�rfnis, „glatte“ Oberfl�chen durch eine diskreteAnzahl von St�tzpunkten (Knoten) zu legen, die aus Messun-gen oder numerischen Berechnungen bekannt sind. Polynom-interpolation nach A10 Gl. (25) erzeugt dabei große Wellig-keiten, wenn der Grad des Polynoms gr�ßer als drei wird,w�hrend Approximationen mit einem Grad, der wesentlichkleiner als die Zahl der St�tzpunkte ist, diese nicht mehr ge-nau darstellt. Der K�rper kann durch Raumkurven, Fl�chen-oder K�rperelemente dargestellt werden. Die Konstrukteurezeichneten fr�her solche Kurven mit Hilfe d�nner Straklattenaus Holz oder Kunststoff (engl.: spline), die durch Strakge-wichte in den St�tzpunkten fixiert wurden. Die Entwicklungmoderner CAD-Verfahren (s. C8) machte die mathematischeNachbildung des physikalischen Strakens erforderlich, umrechnergesteuertes Zeichnen und interaktives Gestalten derFl�chen zu erm�glichen.F�r die d�nne Straklatte (Bild 28) gilt nach C 2 Gl. (39) ver-einfacht mit y0 1, daß f�r die Biegelinie die Form�nde-rungsenergie
W ¼ 0;5 �ZðM2ðxÞ=E � IÞ � y00 dx
minimiert werden muß. Dies wird durch Polynome 3. Gradsdes Parameters t2 [0;1] gel�st, die kubische Kurvensegmentezwischen den St�tzpunkten Pj, Pjþ1 mit j¼ 0;1;2; . . . ;n dar-stellen. Diese Kurven gehen f�r die Randwerte von t durchdie St�tzpunkte und stimmen dort in der Tangentenrichtungund der Kr�mmung �berein.
4.5.2 Darstellung einer Raumkurve durch n+1St�tzpunkte mit Hilfe von Spline-Funktionen
Eine Funktion, die sich st�ckweise aus Polynomen vom Gra-de k zusammensetzt, die (k-1)mal stetig differenzierbar istund durch die St�tzpunkte geht, heißt interpolierende Spline-Funktion vom Grade k. Bevorzugt werden kubische Splines(k=3) (Bild 29) gew�hlt, da sie bei niedrigstem Grad einenWendepunkt enthalten.Eine kubische Funktion wird durch vier Koeffizienten eindeu-tig festgelegt. Nach Ferguson werden zu ihrer Bestimmungdie Koordinaten zweier Punkte und die zugeh�rigen erstenAbleitungen gew�hlt, wodurch st�ckweise aneinandergesetzteKurvenst�cke stetig differenzierbar anschließen.Im Intervall t2 [0;1] gilt f�r das Polynom 3. Grads:(Zur besseren Unterscheidung des Polynoms von den St�tz-punkten P wird es mit SðtÞ bezeichnet. Die Ableitung nachdem Parameter t ist hier mit 0 notiert.)
SðtÞ ¼ a3t3þ a2t2þ a1tþ a0 ¼ ðxðtÞ;yðtÞ;zðtÞÞT ð42Þ
mit den Randbedingungen
Sð0Þ ¼ P0 ¼ ðx0;y0; z0ÞT ¼ a0;Sð1Þ ¼ P1 ¼ ðx1;y1; z1ÞT ¼ a3þ a2þ a1þ a0;S0ð0Þ ¼ P00 ¼ ðx00;y00; z00Þ
T ¼ a1;
S0ð1Þ ¼ P01 ¼ ðx01;y01; z01ÞT ¼ 3a3þ 2a2þ a1:
ð43Þ
Die Koeffizienten aj ¼ ðajx;ajy;ajzÞT mit j=0, 1, 2, 3 sindVektoren f�r die drei Raumkoordinaten x, y, z, die aus demGleichungssystem (43) zu berechnen sind
a0 ¼ P0; a1 ¼ P00; a2 ¼�3P0 � 3P1� 2P00�P01a3 ¼ 2P0� 2P1þP00 þP01:
Eingesetzt in Gl. (42) und nach den gegebenen Werten um-sortiert ergibt sich die Form
SðtÞ ¼P0ð2t3� 3t2þ 1ÞþP1ð�2t3þ 3t2ÞþP00ðt3� 2t2þ tÞþP01ðt3� t2Þ:
F�r die Kurvensegmente zwischen den Punkten Pj�1; Pj mitj¼ 1;2; . . . ;ðn� 1Þ ergeben sich (n-1) Polynome
SjðtÞ ¼Pj�1ð2t3� 3t2þ 1ÞþPjð�2t3þ 3t2ÞþP0j�1ðt3� 2t2þ tÞþP0jðt3� t2Þ
ð44Þ
f�r die gilt:
Sjð0Þ ¼ Pj�1; Sjð1Þ ¼ Pj; S0j�1ð1Þ ¼ S0jð0Þ;S00j�1ð1Þ ¼ S00j ð0Þ:
ð45Þ
Aus Gl. (44) und (45) folgen die Ableitungswerte P0j bei ge-gebenen Punktkoordinaten. Gl. (44) zweimal nach t differen-ziert ergibt, mit den Randbedingungen Gl. (45) f�r die inne-
I4.5 Methoden zur Darstellung analytisch nicht beschreibbarer geometrischer Objekte A 37
A
Bild 28. Straklatte als physikalischer Spline und mathematischeNachbildung
Bild 29. Zylindrische Schraubenlinie ZðtÞ approximiert durch eineSpline-Funktion SðtÞ

ren Segmente von P1 bis Pn�1 , (n-1) lineare Gleichungen, diesich rekursiv l�sen lassen
P0j�1þ 4P0jþP0jþ1 ¼�3Pj�1þ 3Pjþ1
f�r j¼ 1;2; . . . ; ðn� 1Þ:ð46Þ
F�r die beiden �ußeren Segmente k�nnen die Randbedingun-gen f�r zwei bevorzugte F�lle aufgestellt werden:Fall I. Die Enden sind frei, d. h. die Kr�mmung verschwindetin den �ußeren Punkten: S001ð0Þ ¼ 0¼ S00nð1Þ also folgt damit
2P00þP01 ¼�3P0 þ 3P1
und
P0n�1þ 2P0n ¼�3Pn�1þ 3Pn: ð47Þ
Fall II. Die Enden sind eingespannt, d. h. die ersten Ableitun-gen sind in den Endpunkten vorgegeben:
S01ð0Þ ¼ P00 und S0nð1Þ ¼ P0n: ð48Þ
Damit lassen sich f�r jedes Segment beliebige Zwischen-punkte nach Gl. (44) ausrechnen und zeichnen.
Beispiel: Gegeben sei ein St�ck einer zylindrischen Schraubenlinie,die exakt durch die Gleichung ZðsÞ ¼ ðcosðsÞ; sinðsÞ;sÞT im Inter-vall s 2 ½0;p� beschrieben wird, und das an (n+1)=4 St�tzpunktenzum Vergleich der Darstellungsg�te durch eine Spline-Funktion SðtÞapproximiert werden soll (s. Bild 29), Tab. 6.
Die Steigungen in den Endpunkten sind bekannt, so daß der Fall IIvorliegt (Gl. (48)):
P00 ¼ Z01ð0Þ ¼ ðx00 ;y00 ; z00ÞT ¼ ð0;1;1ÞT
P03 ¼ Z03ð1Þ ¼ ðx03 ;y03 ; z03ÞT ¼ ð0;�1;1ÞT:
Aus Gl. (48) und (46) folgt
ð48Þ : x00 ¼ 0ð46Þ j¼ 1 : x00 þ 4 x01 þ x02 ¼�3 � 1þ 3 � ð�0;5Þ ¼�4;5
j¼ 2 : x01 þ 4x02þ x03 ¼�3 � 0;5þ 3 � ð�1Þ ¼�4;5ð48Þ : x03 ¼ 0:
Aufgel�st ergeben sich die Werte x00 ¼ 0 ; x01 ¼�0;9 ; x02 ¼�0;9 ;x03 ¼ 0, die zusammen mit den Punktkoordinaten in Gl. (44) eingesetztwerden:
x1ðtÞ ¼ 1 � ð2t3 � 3t2 þ 1Þþ 0;5 � ð�2t3 þ 3t2Þ� 0;9 � ðt3 � t2Þ:
Durch Umsortieren nach Potenzen von t folgen auch die Koeffizien-ten ajx der Gl. (42) f�r das erste Segment, n�mlich
x1ðtÞ ¼ 0;1 � t3 � 0;6 � t2 þ 1;
also
a3x ¼ 0;1; a2x ¼�0;6; a1x ¼ 0; a0x ¼ 1:
Analog lassen sich die Gleichungen f�r die anderen Segmente und f�rdie y- bzw. z-Koordinaten aufschreiben. Die Ergebnisse sind in Tab. 7zusammengefaßt.
Die Abweichungen sind graphisch nicht darstellbar.
Dieser einfachen Anwendbarkeit der Spline-Funktion stehtder Nachteil gegen�ber, daß die �nderung eines St�tzpunktsvollst�ndige Neuberechnung erfordert. Kurvenz�ge mit beab-sichtigten Knicken (Unstetigkeiten der ersten Ableitung) odersprunghafter �nderung der Kr�mmung (Unstetigkeiten derzweiten Ableitung) werden in Bereiche zerlegt, f�r die je-weils eigene Spline-Funktionen berechnet werden.
4.5.3 Bezier-Kurven
Die in Gl. (44) auftretenden Hermite-Polynome des Parame-ters t heißen Binde- oder Basisfunktionen (blending-functi-ons). Durch die Wahl anderer Bindefunktionen kann das Ver-halten der approximierenden glatten Kurve beeinflußt wer-den. Das gibt dem interaktiv arbeitenden Konstrukteur dieM�glichkeit, durch einen Polygonzug das Verhalten im Gro-ben vorzugeben. Bevorzugt werden die Punkte zur Bestim-mung des Polygons gew�hlt. Bei (n+1) PolygoneckpunktenPj mit j¼ 0;1; . . . ;n im Parameterintervall t 2 ½0;1� erfolgt dieDarstellung der Bezier-Kurve durch
SðtÞ ¼Xn
j¼0
Pj �Bnj ðtÞ;
wobei als Basisfunktionen Bnj ðtÞ die Bernsteinfunktionen die-
nen. Sie lauten
Bnj ðtÞ ¼
n
j
� �tj � ð1� tÞn�j mit der Eigenschaft
Xn
j¼0
Bnj ðtÞ � 1:
ð49Þ
So ist B10 ¼ 1� t und B1
1 ¼ t, ferner B30 ¼ ð1� tÞ3,
B31 ¼ 3t � ð1� tÞ2; B3
2 ¼ 3t2 � ð1� tÞ und B33 ¼ t3 , wie in
Bild 30 a, b f�r n=1 und n=3 graphisch dargestellt.
Beispiel: Es soll die Sinuskurve im ersten Quadranten mittels des Po-lygons durch die willk�rlich gew�hlten Punkte P0;P1 ;P2 ;P3 nachBild 31 als Bezier-Kurve SðtÞ approximiert werden (Tab. 8).
SðtÞ ¼ xðtÞyðtÞ
� � mit xðtÞ;¼X3
j¼0
xj �B3j ðtÞ und
yðtÞ;¼X3
j¼0
yj �B3j ðtÞ
xðtÞ ¼ 0;5 � 3tð1� tÞ2 þ 1;2 � 3t2ð1� tÞþ ðp=2Þ � t3
yðtÞ ¼ 0;5 � 3tð1� tÞ2 þ 3t2ð1� tÞþ t3
dx ¼ 100ðxðtÞ� t p=2Þ=ðt p=2Þ %
dy ¼ 100ðyðtÞ� sinðxðtÞÞÞ= sinðxðtÞÞ %:
Die Genauigkeit ist f�r graphische Anwendungen wohl ausreichend.
A 38 Mathematik – 4 Geometrie
A
Tabelle 6. St�tzpunkte Pj
Tabelle 7. Berechnete Steigungswerte P0j ¼ ðx0j;y0j; z0jÞT
Bild 30. Bezier-Kurven f�r n=1 und n =3
4.5.4 B-spline-Kurven
F�r die B-spline-Kurve werden spezielle, nur st�ckweise defi-nierte Polynome, die Basis-splines, als Bindefunktionen ge-w�hlt. Sie verbinden die (n+1) Ecken Pj eines die ge-w�nschte Kurve umschreibenden Polygons. Das Intervall des
Parameters u wird – anders als bisher – durch den Knotenvek-tor U¼ ðu0;u1; . . . ;unÞ mit uj % ujþ1 in ganzzahlige Segmenteu 2 ½j; jþ 1� ¼ ½uj;ujþ1� zerlegt. Wie bei den Bezier-Kurven
gilt die Darstellung SðuÞ ¼Xn
j¼0
Pj �Nkj ðuÞ mit den normierten
Basisfunktionen der Ordnung k, die rekursiv berechnet wer-den:
N1j ðuÞ ¼
1 f�r u2 ½j; jþ 1�0 f�r u 62 ½j; jþ 1�
�
und
Nkj ðuÞ ¼
u� j
k� 1Nk�1
j ðuÞþ jþ k� u
k� 1Nk�1
jþ1 ðuÞ: ð50Þ
Die Basisfunktion Nkj ðuÞ ist ein Polynom vom Grade (k-1),
das gerade das Intervall [ j, j+k] �berspannt und (k-2)mal ste-tig differenzierbar ist (Tab. 9).Damit wird erreicht, daß eine Ecke die Gestalt der Kurve nurlokal beeinflußt und die Kurve Knicke, Wendepunkte oderSchleifen nachbilden kann, wenn das Polygon diese Eigen-schaften aufweist. Das definierende Polygon wird durch dieOrdnung k=2 nachgebildet. F�r h�here Ordnungen f�llt dieKurve steifer aus. Die Kurve liegt in der konvexen H�lle desk-Ecks der St�tzstellen Pj; . . . Pjþk�1 . Mit einfachen Knotenergibt die Aneinanderreihung der B-splines periodische Basis-funktionen mit der Periode k.Werden m Knoten an der Stelle uj zusammengelegt, wird dieReichweite der Basisfunktionen verringert und die Differen-zierbarkeit an der Stelle uj auf (k- m-2) reduziert. so ergebensich nichtperiodische Basisfunktionen, die – im Sonderfalldes Knotenvektors aus je k-fachem Anfangs- und Endknoten– eine Bernstein-Basis darstellen.
I4.5 Methoden zur Darstellung analytisch nicht beschreibbarer geometrischer Objekte A 39
A
Bild 31. Definierendes Polygon P0;P1 ;P2 ;P3 und Sinuskurve ange-n�hert als Bezier-Kurve (vgl. Tab. 8)
Tabelle 8. Bezier-Interpolation
Tabelle 9. B-spline-Polynome der Ordnung k und ihre Kurven. (Es werden nur die in den Parameterabschnitten von Null verschiedenen Funktionenangegeben)

F�r die B-splines kann auch das umgekehrte Verfahren ent-wickelt werden: Sind am Anfang des Entwurfs einige Punkteder gesuchten Kurve bekannt, so kann mit dem zugeh�rigenPolygon so lange gearbeitet werden, bis die gew�nschte Formerreicht ist.
4.5.5 Fl�chendarstellung
Die Darstellung einer Fl�che erfolgt durch Linien, die auf derFl�che liegen, so daß die Techniken f�r Kurven passend inden dreidimensionalen Raum �bertragen werden.Ein Raumpunkt auf der Fl�che kann durch zwei unabh�ngigeParameter u, v mittels dreier Funktionen f�r die Koordinatenbeschrieben werden durch die allgemeine Form P¼ ðx;y; zÞ ¼ðxðu;uÞ;yðu;uÞ;zðu;uÞÞ. Es werden drei Kategorien von Fl�-chen unterschieden:
Strakfl�chen, dargestellt durch die Kurven ebener Schnittemit der Fl�che, z. B. H�henlinien in Landkarten, Wasserlinienund dazu parallele Kurven im Schiffbau oder Rumpfquer-schnitte im Schiff- und Flugzeugbau.Mit geeigneten Bindefunktionen F folgt
Pðu;uÞ ¼Xn
j¼0
Pðuj;uÞ �FjðuÞ f�r Schnitte uj ¼ const
oder
Pðu;uÞ ¼Xm
k¼0
Pðu;ukÞ �FjðuÞ f�r Schnitte uk ¼ const;ð51Þ
womit das Problem auf die einparametrische Kurvendarstel-lung reduziert ist.
Produktfl�chen sind aus der Interpolation von diskretenSt�tzpunkten darstellbar, die meist in einem Rechteckrasterangeordnet sind. Analog zur Kurvendarstellung nach Fergu-son werden vier Randkurven ringf�rmig zusammengef�gt.Die parametrischen partiellen Ableitungen in den St�tzstellensichern die stetigen Anschl�sse, um die Kurven an beliebigenStellen innerhalb dieses Rahmens zu interpolieren
Pðu;uÞ ¼Xn
j¼0
Xm
k¼0
Pðuj;ukÞ �FjðuÞ �FkðuÞ: ð52Þ
Summenfl�chen werden aus zwei einparametrischen Kur-venfamilien gebildet. Es wird das die Fl�che �berspannendeLiniennetz Pðuj;uÞ und Pðu;ukÞ aufgebaut, die ebenfalls �berrechteckigen (f�r kugelige Fl�chen auch dreieckigen) Fl�-chenrastern erkl�rt sind. Allgemein ergibt sich die Darstel-lung
Pðu;uÞ ¼ ðFjðuÞþFkðuÞ�FjðuÞ �FkðuÞÞ �Pj;kðu;uÞ: ð53Þ
Der negative Term ber�cksichtigt die Tatsache, daß bei derKombination der beiden Kurvenscharen die Werte derSchnittpunkte doppelt vorhanden sind und daher die Mittel-ebene subtrahiert werden muß.F�r die Summenfl�che nach Coons folgt mit den Bezeichnun-gen des Bildes 32 das Fl�chenst�ck �ber dem rechteckigenRaster mit den vier Randkurven Pð0;uÞ;Pð1;uÞ;Pðu;0Þ;Pðu;1Þ im ebenen Parameterbereich (u, u)2 [0;1]� [0;1].
Pðu;uÞ ¼Pð0;uÞ �F0ðuÞþPð1;uÞ �F1ðuÞþPðu;0Þ �F0ðuÞþPðu;1Þ �F1ðuÞ�Pð0;0Þ �F0ðuÞ �F0ðuÞ�Pð0;1Þ �F0ðuÞ �F1ðuÞ�Pð1;0Þ �F1ðuÞ �F0ðuÞ�Pð1;1Þ �F1ðuÞ �F1ðuÞ:
ð54Þ
Die FjðuÞ; FkðuÞ sind wieder geeignete Bindefunktionen mitEigenschaften, die die Stetigkeitsforderungen zum jeweils be-nachbarten Fl�chenst�ck erf�llen.
Im einfachsten Fall der linearen Coonsschen Fl�che leistendie linearen Lagrange-Polynome (A 10 Gl. (24)) den stetigenAnschluß an die Nachbarfl�chen, wobei allerdings Knickeauftreten k�nnen
F0ðuÞ ¼ 1� u; F1ðuÞ ¼ u;
F0ðuÞ ¼ 1� u; F1ðuÞ ¼ u:ð55Þ
Um dies zu vermeiden, muß die Stetigkeit der ersten partiel-len Ableitungen und die gemischte zweite Ableitung (Twist-vektor genannt) durch Bindefunktionen eingef�hrt werden
Pu ¼ ¶P=¶u; Pv ¼ ¶P=¶u; Puv ¼ ¶2P=¶u ¶u:
Damit folgt nach umfangreicher Schreibarbeit f�r die bikubi-sche Coonsche Fl�che, mit den Hermite-Polynomen
F0ðuÞ ¼ 2u3� 3u2 þ 1; F1ðuÞ ¼�2u3þ 3u2;
G0ðuÞ ¼ u3� 2u2 þ u; G1ðuÞ ¼ u3 � u2ð56Þ
mit u 2 ½0;1� und analog f�r u2 ½0;1� und den RandkurvenPð0;uÞ, Pð1;uÞ, Pðu;0Þ, Pðu;1Þ sowie den partiellen Ableitun-gen Pu;Pv;Puv in Matrixschreibweise
Pðu;uÞ ¼
F0 ðuÞF1 ðuÞG0 ðuÞG1 ðuÞ
266664
377775
T
�
Pð0;0Þ Pð0;1Þ j Pvð0;0Þ Pvð0;1ÞPð1;0Þ Pð1;1Þ j Pvð1;0Þ Pvð1;1Þ5
Puð0;0Þ Puð0;1Þ j Puvð0;0Þ Puvð0;1ÞPuð1;0Þ Puð1;1Þ j Puvð1;0Þ Puvð1;1Þ
266666664
377777775
�
F0 ðuÞF1 ðuÞG0 ðuÞG1 ðuÞ
266664
377775:
ð57Þ
Die Bestimmung des Twistvektors macht in der Praxis diemeisten Schwierigkeiten und er wird f�r nicht zu hohe An-spr�che oft zu Null gesetzt. Es gibt dann etwas flach wirkendeFl�chen.
Beispiel: Mit einer l�ngeren Rechnung an der Fl�che von Bild 33 mitden untenstehenden Daten im Rechteck 0 % x % 1 und 0% y %2 solldie Berechnung der Coonsschen Fl�che demonstriert werden:
A 40 Mathematik – 4 Geometrie
A
Bild 32. Fl�chenst�ck �ber rechteckigem Raster, dargestellt durchvier St�tzpunkte, Randkurven und partiellen Ableitungen in denSt�tzpunkten
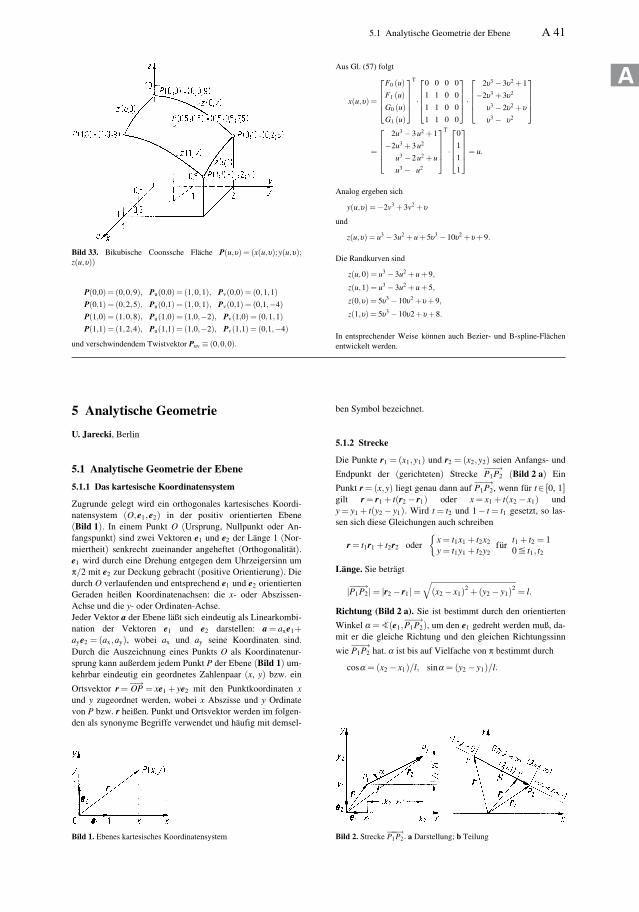
Pð0;0Þ ¼ ð0;0;9Þ; Puð0;0Þ ¼ ð1;0;1Þ; Pvð0;0Þ ¼ ð0;1;1ÞPð0;1Þ ¼ ð0;2;5Þ; Puð0;1Þ ¼ ð1;0;1Þ; Pvð0;1Þ ¼ ð0;1;�4ÞPð1;0Þ ¼ ð1;0;8Þ; Puð1;0Þ ¼ ð1;0;�2Þ; Pvð1;0Þ ¼ ð0;1;1ÞPð1;1Þ ¼ ð1;2;4Þ; Puð1;1Þ ¼ ð1;0;�2Þ; Pvð1;1Þ ¼ ð0;1;�4Þ
und verschwindendem Twistvektor Puv � ð0;0;0Þ.
Aus Gl. (57) folgt
xðu;uÞ ¼
F0 ðuÞF1 ðuÞG0 ðuÞG1 ðuÞ
26664
37775
T
�
0 0 0 0
1 1 0 0
1 1 0 0
1 1 0 0
26664
37775 �
2u3 � 3u2 þ 1
�2u3 þ 3u2
u3 � 2u2 þ uu3 � u2
26664
37775
¼
2u3 � 3u2 þ 1
�2u3 þ 3u2
u3 � 2u2 þ u
u3 � u2
26664
37775
T
�
0
1
1
1
26664
37775¼ u:
Analog ergeben sich
yðu;uÞ ¼�2v3 þ 3v2 þ u
und
zðu;uÞ ¼ u3 � 3u2 þ uþ 5u3 � 10u2 þ uþ 9:
Die Randkurven sind
zðu;0Þ ¼ u3 � 3u2 þ uþ 9;
zðu;1Þ ¼ u3 � 3u2 þ uþ 5;
zð0;uÞ ¼ 5u3 � 10u2 þ uþ 9;
zð1;uÞ ¼ 5u3 � 10u2þ uþ 8:
In entsprechender Weise k�nnen auch Bezier- und B-spline-Fl�chenentwickelt werden.
5 Analytische Geometrie
U. Jarecki, Berlin
5.1 Analytische Geometrie der Ebene
5.1.1 Das kartesische Koordinatensystem
Zugrunde gelegt wird ein orthogonales kartesisches Koordi-natensystem (O;e1;e2) in der positiv orientierten Ebene(Bild 1). In einem Punkt O (Ursprung, Nullpunkt oder An-fangspunkt) sind zwei Vektoren e1 und e2 der L�nge 1 (Nor-miertheit) senkrecht zueinander angeheftet (Orthogonalit�t).e1 wird durch eine Drehung entgegen dem Uhrzeigersinn ump=2 mit e2 zur Deckung gebracht (positive Orientierung). Diedurch O verlaufenden und entsprechend e1 und e2 orientiertenGeraden heißen Koordinatenachsen: die x- oder Abszissen-Achse und die y- oder Ordinaten-Achse.Jeder Vektor a der Ebene l�ßt sich eindeutig als Linearkombi-nation der Vektoren e1 und e2 darstellen: a¼ axe1þaye2 ¼ ðax;ayÞ, wobei ax und ay seine Koordinaten sind.Durch die Auszeichnung eines Punkts O als Koordinatenur-sprung kann außerdem jedem Punkt P der Ebene (Bild 1) um-kehrbar eindeutig ein geordnetes Zahlenpaar (x, y) bzw. ein
Ortsvektor r¼ OP�!¼ xe1þ ye2 mit den Punktkoordinaten x
und y zugeordnet werden, wobei x Abszisse und y Ordinatevon P bzw. r heißen. Punkt und Ortsvektor werden im folgen-den als synonyme Begriffe verwendet und h�ufig mit demsel-
ben Symbol bezeichnet.
5.1.2 Strecke
Die Punkte r1 ¼ ðx1;y1Þ und r2 ¼ ðx2;y2Þ seien Anfangs- und
Endpunkt der (gerichteten) Strecke P1P2��!
(Bild 2 a) Ein
Punkt r¼ ðx;yÞ liegt genau dann auf P1P2��!
, wenn f�r t2 [0, 1]gilt r¼ r1þ tðr2� r1Þ oder x¼ x1þ tðx2� x1Þ undy¼ y1þ tðy2� y1Þ: Wird t¼ t2 und 1� t¼ t1 gesetzt, so las-sen sich diese Gleichungen auch schreiben
r¼ t1r1þ t2r2 oderx¼ t1x1 þ t2x2
y¼ t1y1 þ t2y2
�f�r
t1þ t2 ¼ 10 % t1; t2
L�nge. Sie betr�gt
jP1P2��!j¼ jr2� r1j ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðx2� x1Þ2þðy2� y1Þ2
q¼ l:
Richtung (Bild 2 a). Sie ist bestimmt durch den orientierten
Winkel a¼\ðe1;P1P2��!Þ, um den e1 gedreht werden muß, da-
mit er die gleiche Richtung und den gleichen Richtungssinn
wie P1P2��!
hat. a ist bis auf Vielfache von p bestimmt durch
cosa¼ ðx2� x1Þ=l; sina¼ ðy2 � y1Þ=l:
I5.1 Analytische Geometrie der Ebene A 41
A
Bild 33. Bikubische Coonssche Fl�che Pðu;uÞ ¼ ðxðu;uÞ;yðu;uÞ;zðu;uÞÞ
Bild 1. Ebenes kartesisches Koordinatensystem Bild 2. Strecke P1P2���!
. a Darstellung; b Teilung