64-544 Grundlagen der Signalverarbeitung und Robotik (Teil2)
31
Universität Hamburg MIN-Fakultät Fachbereich Informatik 64-544 Grundlagen der Signalverarbeitung und Robotik 64-544 Grundlagen der Signalverarbeitung und Robotik http://tams.informatik.uni-hamburg.de/ lectures/2014ss/vorlesung/GdSR Jianwei Zhang, Bernd Schütz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich Informatik Technische Aspekte Multimodaler Systeme Sommersemester 2014 J. Zhang, Bernd Schütz 1
Transcript of 64-544 Grundlagen der Signalverarbeitung und Robotik (Teil2)

Universität Hamburg
MIN-FakultätFachbereich Informatik
64-544 Grundlagen der Signalverarbeitung und Robotik
64-544Grundlagen der Signalverarbeitung und Robotik
http://tams.informatik.uni-hamburg.de/lectures/2014ss/vorlesung/GdSR
Jianwei Zhang, Bernd Schütz
Universität HamburgFakultät für Mathematik, Informatik und NaturwissenschaftenFachbereich InformatikTechnische Aspekte Multimodaler Systeme
Sommersemester 2014
J. Zhang, Bernd Schütz 1
Universität Hamburg
MIN-FakultätFachbereich Informatik
64-544 Grundlagen der Signalverarbeitung und Robotik
Gliederung1. Einführung2. Grundlagen der Robotik3. Grundlagen der Sensorik4. Verarbeitung von Scandaten5. Rekursive Zustandsschätzung6. Fuzzy-Logik7. Steuerungsarchitekturen
J. Zhang, Bernd Schütz 2
Universität Hamburg
MIN-FakultätFachbereich Informatik
64-544 Grundlagen der Signalverarbeitung und Robotik
64-544 Vorlesung
Vorlesung Do. 10:15 -11:45 Uhr, Hörsaal CChemie MLKP6
Web Teil 1 http://kogs-www.informatik.uni-hamburg.de//~seppke/?page=nano-14
Teil 2 http://tams.informatik.uni-hamburg.de/lectures/2014ss/vorlesung/GdSR
Name Prof. Dr. Jianwei Zhang (Bernd Schütz)Büro F-308 (F322)E-mail zhang(schuetz)@informatik.uni-hamburg.de
Sekretariat Tatjana TetsisBüro F-311Telefon (040) 42883-2430E-mail [email protected]
J. Zhang, Bernd Schütz 3
Universität Hamburg
MIN-FakultätFachbereich Informatik
64-544 Grundlagen der Signalverarbeitung und Robotik
64-545 Übungen
Übungen Mi. 10:15 - 11:45 Uhr, Mi. 12:15 - 13:45 UhrRaum Gruppe 1: 0C 24 b MLKP6
Gruppe 2: PC 261 MLKP6
Web http://tams.informatik.uni-hamburg.de/lectures/
2014ss/vorlesung/GdSR/uebungen/
Name Manfred GroveBüro F-332Telefon (040) 42883-2511E-mail [email protected]
J. Zhang, Bernd Schütz 4
Universität Hamburg
MIN-FakultätFachbereich Informatik
64-544 Grundlagen der Signalverarbeitung und Robotik
Übungen: organisatorisches
I Ausgabe der Aufgabenblätter am Tag der Vorlesung unter:http://tams-www.informatik.uni-hamburg.de/lectures/2014ss/vorlesung/GdSR/uebungen
I Abgabe der Übungsblätter:I Mittwoch 6:00 Uhr der darauffolgenden Woche,
ggf. per E-Mail an: [email protected] Arbeitsgruppen mit bis zu drei Studierenden erwünscht
I In den Übungsstunden werden Lösungen von Teilnehmernvorgetragen und gemeinsam besprochen.
I Scheinkriterien:Die abgegebenen Lösungen werden bewertet, für eine erfolgreicheÜbungsteilnahme ist mindestens die Hälfte der maximalen Punktzahlplus einmal Vorrechnen (jeweils für Teil 1 und Teil 2) erforderlich.
J. Zhang, Bernd Schütz 5
Universität Hamburg
MIN-FakultätFachbereich Informatik
64-544 Grundlagen der Signalverarbeitung und Robotik
Terminübersicht, Teil 2 – Robotik
21.05.14 Übung (Teil 1)22.05.14 VL
28.05.14 Übung29.05.14 (VL) Christi Himmelfahrt
04.06.14 Laborführung TAMS05.06.14 VL
11.06.14 (Übung) Pfingstferien12.06.14 (VL) Pfingsterien
18.06.14 Übung19.06.14 VL
25.06.14 Übung26.06.14 VL
02.07.14 Übung03.07.14 VL
09.07.14 Übung10.07.14 VL
J. Zhang, Bernd Schütz 6
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
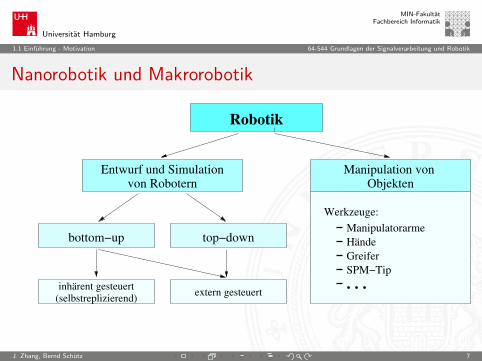
Nanorobotik und Makrorobotik
Robotik
Werkzeuge:
Manipulatorarme
Hände
Greifer
SPM−Tip
bottom−up top−down
extern gesteuert(selbstreplizierend)
inhärent gesteuert
Manipulation von Objekten
Entwurf und Simulationvon Robotern
J. Zhang, Bernd Schütz 7
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
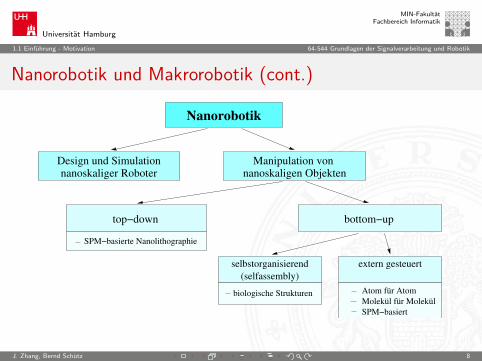
Nanorobotik und Makrorobotik (cont.)
selbstorganisierend
(selfassembly)
biologische Strukturen
top−down
Nanorobotik
bottom−up
extern gesteuert
Atom für Atom
Molekül für Molekül
SPM−basiert
Design und Simulationnanoskaliger Roboter
Manipulation von nanoskaligen Objekten
SPM−basierte Nanolithographie
J. Zhang, Bernd Schütz 8
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
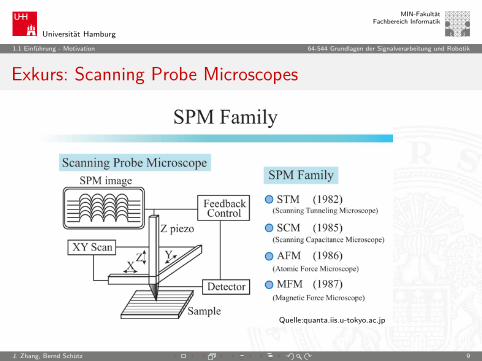
Exkurs: Scanning Probe Microscopes
Quelle:quanta.iis.u-tokyo.ac.jp
J. Zhang, Bernd Schütz 9
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
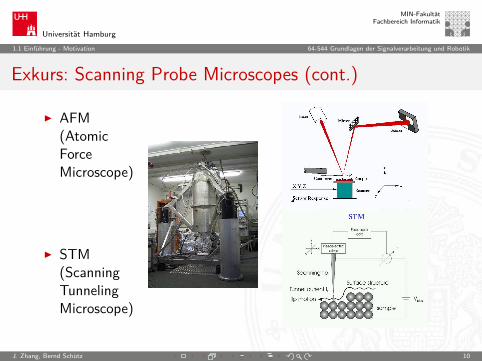
Exkurs: Scanning Probe Microscopes (cont.)
I AFM(AtomicForceMicroscope)
I STM(ScanningTunnelingMicroscope)
J. Zhang, Bernd Schütz 10
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
SPM als Roboter
I 3 DOF-RobotI Bewegung in x,y,z
I x, y normalerweise open-loopI z normalerweise closed-loop
I Piezos als AktuatorenI HystereseI Kriechen (creep)
I SensorikI Fusion von Sensordaten
(z. B. AFM: laterale Kräfte & Topographie)I Temperaturdrift
J. Zhang, Bernd Schütz 11
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
Manipulation
I MakrorobotikI physikalische Prozesse und Mechanik weitestgehend verstandenI leistungsfähige Modelle vorhandenI viele Möglichkeiten der Automation
I NanorobotikI physikalische u. chemische Prozesse in aktiver ForschungI Umgebung hat starken Einfluss auf das ExperimentI nicht beschränkt auf mechanische Interaktion
(Temperatur, Licht, Elektrostatik, PH-Wert, . . .)
J. Zhang, Bernd Schütz 12
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
Nanomanipulation & Automation
I viele UnwägbarkeitenI fast alle Bereiche unter aktueller Forschung⇒ möglichst auf Bewährtes zurückgreifen!
I möglichst viel aus Makrorobotik adaptieren=⇒ Kennenlernen von Konzepten aus der Makrorobotik, die auch
in der Nanorobotik eingesetzt werden können.aber: grundlegend andere physikalische u. chemische Effekte
im nanoskaligen BereichI neue Konzepte und Verfahren werden entwickelt werden
müssenI was kann übernommen werden?I was kann adaptiert werden?I was muss grundlegend neu entwickelt werden?
J. Zhang, Bernd Schütz 13
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
Entwurf von Robotersystemen
I MethodikI Entwurf und Aufbau des (mechanischen) SystemsI Kinematik und DynamikI Modellierung und SimulationI Kontroll-Strukturen und -AlgorithmenI SoftwarearchitekturI SystemintegrationI . . .
J. Zhang, Bernd Schütz 14
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
Welche (Teil-) Aufgaben werden vom Systemdurchgeführt?
I LokalisationI PfadplanungI BewegungI ManipulationI Kontrolle von Kraft, Geschwindigkeit. . .I Sensordatenerfassung und -verarbeitungI Fusion und Interpretation der DatenI Mensch-Maschine SchnittstelleI InteraktionsmöglichkeitenI . . .
J. Zhang, Bernd Schütz 15
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
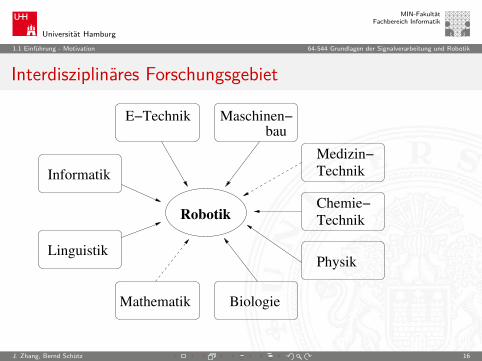
Interdisziplinäres Forschungsgebiet
Informatik
Linguistik
E−Technik Maschinen−bau
Technik
Medizin−
Physik
Robotik
Mathematik Biologie
Technik
Chemie−
J. Zhang, Bernd Schütz 16
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
Interdisziplinäres Forschungsgebiet (cont.)
Robotik umfasst sehr viele Teilgebiete allein aus der Informatik
I Architektur- und SystementwurfI Künstliche IntelligenzI BildverarbeitungI SprachverarbeitungI Neuronale NetzeI RegelungstechnikI MechatronikI . . .
J. Zhang, Bernd Schütz 17

Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
Ein Roboter aus der MakroweltWillow Garage Personal Robot 2 (PR2)
J. Zhang, Bernd Schütz 18
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
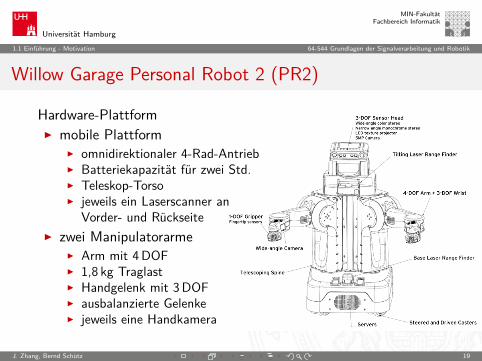
Willow Garage Personal Robot 2 (PR2)
Hardware-PlattformI mobile Plattform
I omnidirektionaler 4-Rad-AntriebI Batteriekapazität für zwei Std.I Teleskop-TorsoI jeweils ein Laserscanner an
Vorder- und RückseiteI zwei Manipulatorarme
I Arm mit 4DOFI 1,8 kg TraglastI Handgelenk mit 3DOFI ausbalanzierte GelenkeI jeweils eine Handkamera
J. Zhang, Bernd Schütz 19
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
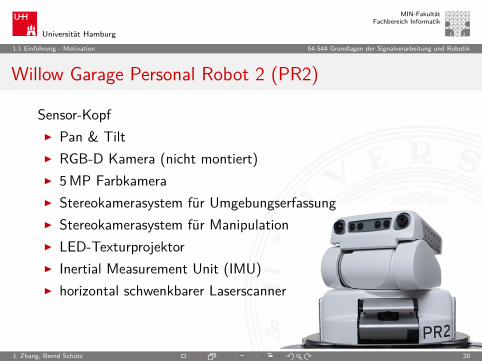
Willow Garage Personal Robot 2 (PR2)
Sensor-KopfI Pan & TiltI RGB-D Kamera (nicht montiert)I 5MP FarbkameraI Stereokamerasystem für UmgebungserfassungI Stereokamerasystem für ManipulationI LED-TexturprojektorI Inertial Measurement Unit (IMU)I horizontal schwenkbarer Laserscanner
J. Zhang, Bernd Schütz 20
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
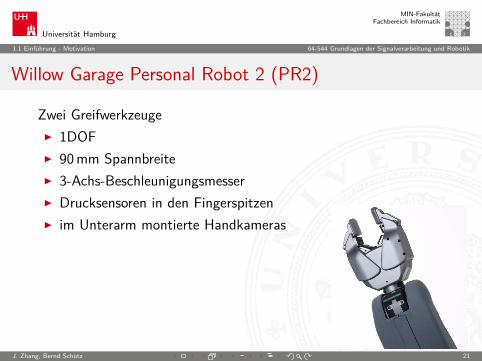
Willow Garage Personal Robot 2 (PR2)
Zwei GreifwerkzeugeI 1DOFI 90mm SpannbreiteI 3-Achs-BeschleunigungsmesserI Drucksensoren in den FingerspitzenI im Unterarm montierte Handkameras
J. Zhang, Bernd Schütz 21
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
Willow Garage Personal Robot 2 (PR2)
Zwei on-board RechnerI Quad-Core i7 Xeon (8 Cores)I 24 GB SpeicherI 1.5 TB WechsellaufwerkeI Multi-gigabit Verbindung zwischen den RechnernI Kameras an Gigabit-Netzwerk angeschlossen,
Verschlusssynchronisierung mit 1ms AuflösungI 1 kHz Regelschleife für alle Motore über EtherCAT
J. Zhang, Bernd Schütz 22
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
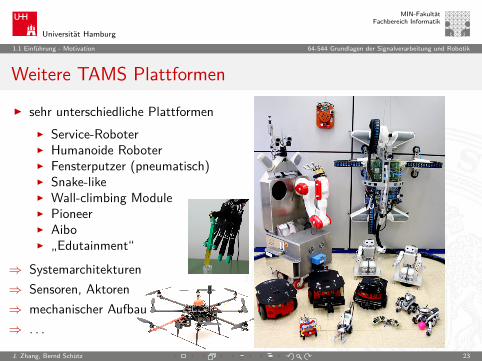
Weitere TAMS Plattformen
I sehr unterschiedliche PlattformenI Service-RoboterI Humanoide RoboterI Fensterputzer (pneumatisch)I Snake-likeI Wall-climbing ModuleI PioneerI AiboI „Edutainment“
⇒ Systemarchitekturen⇒ Sensoren, Aktoren⇒ mechanischer Aufbau⇒ . . .
J. Zhang, Bernd Schütz 23
Universität Hamburg
MIN-FakultätFachbereich Informatik
1.1 Einführung - Motivation 64-544 Grundlagen der Signalverarbeitung und Robotik
Robotik macht Spaß!
I Roboter bewegen sich - Rechner nichtI Interdisziplinarität:
I Soft- und HardwaretechnikI SensortechnikI MechatronikI RegelungstechnikI Multimedia, ...
I Ein Traum der Menschheit:"Computer sind das bis heute genialste Produktmenschlicher Faulheit" (IBM-Werbung, 70iger Jahre).Roboter = Computer++
J. Zhang, Bernd Schütz 24
Universität Hamburg
MIN-FakultätFachbereich Informatik
2.1 Grundlagen der Robotik - Grundbegriffe 64-544 Grundlagen der Signalverarbeitung und Robotik
EinführungGrundbegriffe
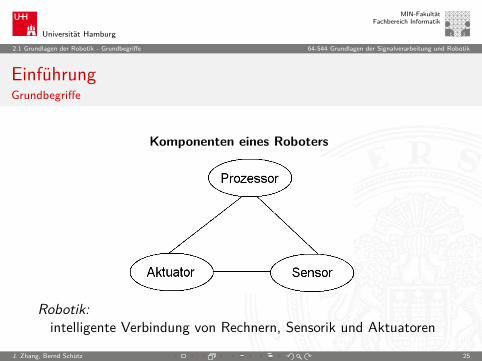
Komponenten eines Roboters
Robotik:intelligente Verbindung von Rechnern, Sensorik und Aktuatoren
J. Zhang, Bernd Schütz 25
Universität Hamburg
MIN-FakultätFachbereich Informatik
2.1 Grundlagen der Robotik - Grundbegriffe 64-544 Grundlagen der Signalverarbeitung und Robotik
Definition von Industrierobotern
Ein Roboter ist laut RIA (Robot Institute of America):...a reprogrammable and multifunctional manipulator,devised for the transport of materials, parts, tools orspecialized systems, with varied and programmedmovements, with the aim of carrying out varied tasks.
Die JARA (Japan Robot Association) z. B. gibt folgendeMerkmale vor:I Manual ManipulatorI fixed Sequence RobotI variable Sequence Robot
I Playback RobotI Numerical Control RobotI Intelligent Robot
J. Zhang, Bernd Schütz 26
Universität Hamburg
MIN-FakultätFachbereich Informatik
2.1 Grundlagen der Robotik - Grundbegriffe 64-544 Grundlagen der Signalverarbeitung und Robotik
Hintergrund einiger Termini
“Robot”: wurde populär durch Rossum’s Universal Robots vonKarel Capek (R.U.R., 1923)
“Robotics”: geprägt durch Isaac Asimov (Runaround, 1942)“Autonomous”: (wörtlich) (gr.) “nach eigenen Gesetzen lebend”
(Auto: Selbst; nomos: Gesetz)“Personal Robot”: ein kleines mobiles Robotersystem mit
einfachen Fähigkeiten; Sichtsystem, Sprechen, Bewegung,usw. (ab 1980).
“Service Robot”: ein mobiles Handhabungssystem mit Sensoren füranspruchsvolle Operationen in Service-Bereichen (ab 1989)
J. Zhang, Bernd Schütz 27
Universität Hamburg
MIN-FakultätFachbereich Informatik
2.2 Grundlagen der Robotik - Roboterklassifikation 64-544 Grundlagen der Signalverarbeitung und Robotik
Roboterklassifikation
I nach Antriebsprinzipelektrisch, hydraulisch, pneumatisch, biologisch
I nach ArbeitsbereichI mobil
Steuerung, Art der FortbewegungI stationär
Freiheitsgrade (DOF und Bewegungsfreiheitsgrade) der ManipulatorenArt der Gelenke (translatorisch, rotatorisch, Kombinationen)
I nach AnwendungManipulation, Montage, Transport,. . .,Unterwasser,. . .,Rescue,. . .,Service-Robot,. . .
I nach Intelligenzmanuelle/automatische Steuerung, Rechenleistung/Sensorik, Lernfähigkeit
J. Zhang, Bernd Schütz 28
Universität Hamburg
MIN-FakultätFachbereich Informatik
2.2 Grundlagen der Robotik - Roboterklassifikation 64-544 Grundlagen der Signalverarbeitung und Robotik
Exkurs: Freiheitsgrade eines Roboters/Manipulators
Degrees of Freedom (DOF):Die Anzahl der unabhängigen Bewegungen f im Bezugskoor-dinatensystem. Der Freiheitsgrad (DOF) wird von der Anzahl derunabhängigen Variablen des Steuerungssystems bestimmt.I Auf einer Ebene: 2 Translationen, 1 Rotation; Freiheitsgrad: f=3I In einem Raum: 3 Translationen, 3 Rotationen; Freiheitsgrad: f=6
Bewegungsfreiheitsgrad:Anzahl der Gelenke F eines Manipulators, die unabhängiggesteuert werden.I Freiheitsgrad eines Translationsgelenks: FT = 1I Freiheitsgrad eines Rotationsgelenks: FR ≤ 3I Bewegungsfreiheitsgrad: F =
n∑i=1
(FRi + FTi )
J. Zhang, Bernd Schütz 29
Universität Hamburg
MIN-FakultätFachbereich Informatik
2.2 Grundlagen der Robotik - Roboterklassifikation 64-544 Grundlagen der Signalverarbeitung und Robotik
Exkurs: Freiheitsgrade, Beispiele
I Auf dem Boden bewegliches Fahrzeug:I Translation auf der Bodenfläche (x, y-Koordinate)I Drehung um die senkrecht zur Bodenfläche stehende z-Achse⇒ Freiheitsgrad: f = 3
I Festkörper im dreidimensionalen Raum:I Ort im Raum (x,y,z-Koordinate, Translationen in drei Richtungen)I Rotation um die Achsen des kartesischen Koordinatensystems⇒ Freiheitsgrad: f = 6
I Roboterarm mit 8 Drehachsen:I Bewegungsfreiheitsgrad F ist 8
aber: Freiheitsgrad: f = 6I menschliche Hand
I Bewegungsfreiheitsgrad F ist 22aber: Freiheitsgrad: f = 6
J. Zhang, Bernd Schütz 30
Universität Hamburg
MIN-FakultätFachbereich Informatik
2.2 Grundlagen der Robotik - Roboterklassifikation 64-544 Grundlagen der Signalverarbeitung und Robotik
Literatur
Wichtige Sekundärliteratur:I K. S. Fu, R. C. Gonzales and C. S. G. Lee, Robotics:
Control, Sensing, Vision and Intelligence, McGraw-Hill, 1987I R. P. Paul, Robot Manipulators: Mathematics, Programming
and Control, MIT Press, 1981I J. J. Craig. Introduction to Robotics, Addison-Wesley, 1989.
J. Zhang, Bernd Schütz 31