Adaptive Cruise Control - Informatik · Adaptive Cruise Control Im Autonome Fahrzeuge Seminar...
26
Adaptive Cruise Control Im Autonome Fahrzeuge Seminar Marc-Andre Genzel Joaquin Rivera Padron ([email protected] ) Freie Universität Berlin, SoSe 05
Transcript of Adaptive Cruise Control - Informatik · Adaptive Cruise Control Im Autonome Fahrzeuge Seminar...
Adaptive Cruise Control
Im Autonome Fahrzeuge SeminarMarc-Andre Genzel
Joaquin Rivera Padron ([email protected])
Freie Universität Berlin, SoSe 05
- Ziel: Unfälle zu vermeiden.
- Mittel: Advanced Driver Assistance Systeme (ADAS).
- Markt state of the art.
- Länderprojekten und Zukunft.
Inhalt

Das Problem
Unfälle, Studien und Statistik
Jährlich ereignen sich auf Europas Straßen rund 1,5 Millionen Unfälle.
Mehr als ein Drittel aller Unfälle ist durch Spurwechsel und durch unbeabsichtigtes Verlassen der Fahrspur ausgelöst.
Etwa ein weiteres Drittel der Unfälle ist durch Auffahren und durch Frontalzusammenstöße verursacht.
In Deutschland sind Kollisionen mit vorausfahrenden oder kreuzenden Fahrzeugen rund 40 % aller Verkehrsunfälle.
Etwa ein Drittel aller Autounfälle beruht auf Kollisionen mit Fahrzeugen oder Objekten auf der Fahrbahn.
Mehr als zwei Drittel aller Auffahrunfälle entstehen durch Unachtsamkeit. In weiteren 11 % kommt zur Unaufmerksamkeit noch zu dichtes Auffahren hinzu, in 9 % aller Auffahrunfälle ist zu dichtes Auffahren der alleinige Grund.
Bei fast 50 % der Kollisionsunfälle bremst der Fahrer gar nicht und in weiteren etwa 20 % zu leicht.
Bruchteile von Sekunden zu reagieren: Studien ergeben, daß rund 60 % der Auffahrunfälle und fast ein Drittel der Frontalzusammenstöße gar nicht passieren würden, wenn der Fahrer nur eine halbe Sekundefrüher reagieren könnte.
Die Lösung
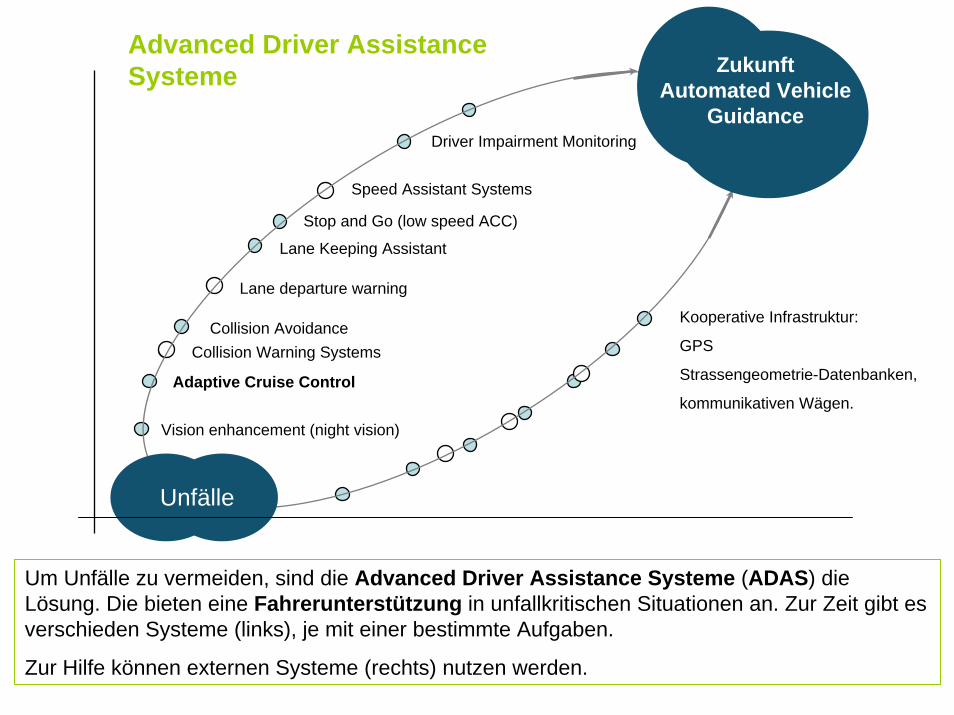
Advanced Driver Assistance Systeme
Adaptive Cruise Control
Lane departure warning
Vision enhancement (night vision)
Stop and Go (low speed ACC)
Lane Keeping Assistant
Collision Warning SystemsCollision Avoidance
Speed Assistant Systems
Um Unfälle zu vermeiden, sind die Advanced Driver Assistance Systeme (ADAS) die Lösung. Die bieten eine Fahrerunterstützung in unfallkritischen Situationen an. Zur Zeit gibt es verschieden Systeme (links), je mit einer bestimmte Aufgaben.
Zur Hilfe können externen Systeme (rechts) nutzen werden.
Driver Impairment Monitoring
Unfälle
Kooperative Infrastruktur:
GPS
Strassengeometrie-Datenbanken,
kommunikativen Wägen.
ZukunftAutomated Vehicle
Guidance
Die ADAS nutzen Sensoren, um die Umfeld des Wagens zu erkennen.
Sensoren in ADAS:• Laser• Radar• Kamera
Sensoren bestimmen die Eigenschaften des Systems. Jeder Sensor besitzt bestimmteVor – und Nachteile.
Zusätzliche Sensoren (für sekundären Einsatz):• Ultraschall• Infrarot
Geeignete Sensoren für ADAS
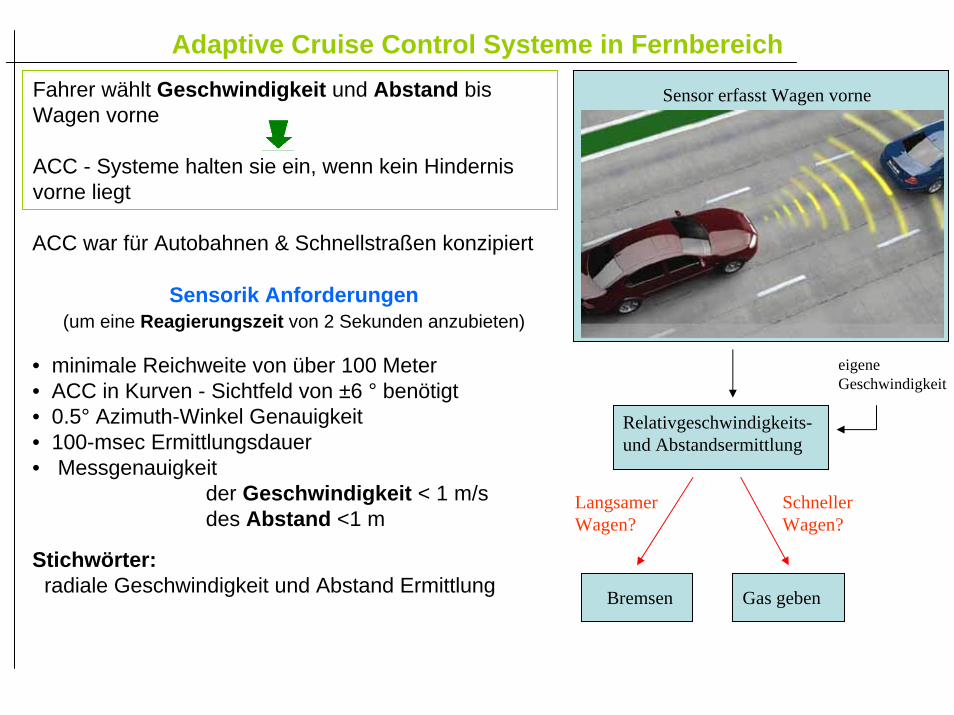
Adaptive Cruise Control Systeme in FernbereichFahrer wählt Geschwindigkeit und Abstand bis Wagen vorne
ACC - Systeme halten sie ein, wenn kein Hindernis vorne liegt
Stichwörter:radiale Geschwindigkeit und Abstand Ermittlung
ACC war für Autobahnen & Schnellstraßen konzipiert
Sensorik Anforderungen(um eine Reagierungszeit von 2 Sekunden anzubieten)
• minimale Reichweite von über 100 Meter • ACC in Kurven - Sichtfeld von ±6 ° benötigt• 0.5° Azimuth-Winkel Genauigkeit• 100-msec Ermittlungsdauer• Messgenauigkeit
der Geschwindigkeit < 1 m/sdes Abstand <1 m
eigene Geschwindigkeit
Sensor erfasst Wagen vorne
Bremsen
Relativgeschwindigkeits-und Abstandsermittlung
Langsamer Wagen?
Schneller Wagen?
Gas geben
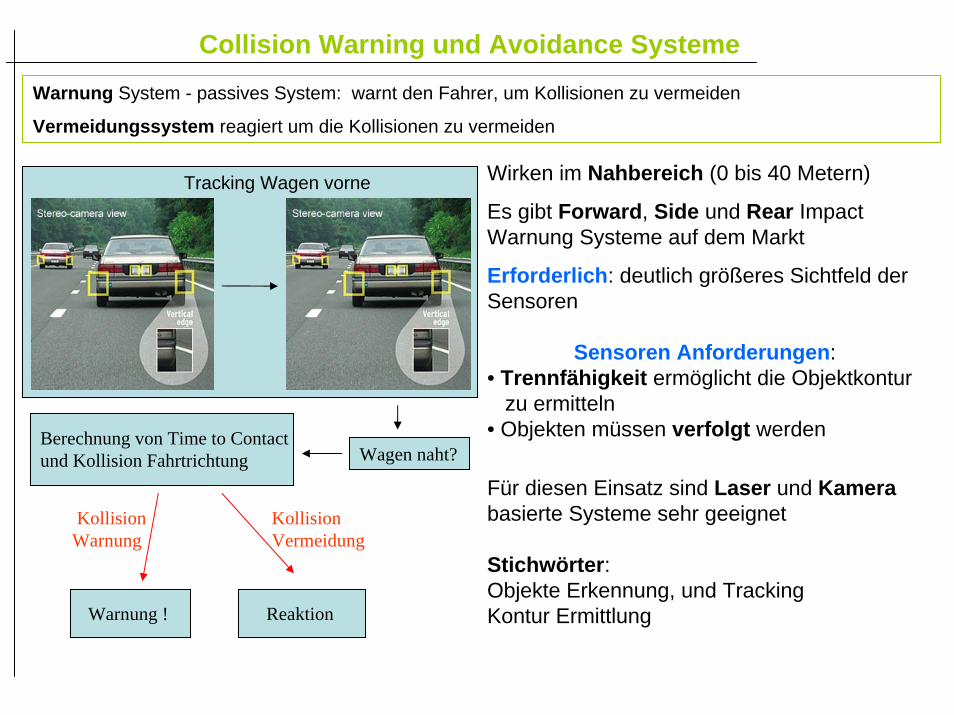
Collision Warning und Avoidance SystemeWarnung System - passives System: warnt den Fahrer, um Kollisionen zu vermeiden
Vermeidungssystem reagiert um die Kollisionen zu vermeiden
Wirken im Nahbereich (0 bis 40 Metern)
Es gibt Forward, Side und Rear Impact Warnung Systeme auf dem Markt
Erforderlich: deutlich größeres Sichtfeld der Sensoren
Warnung ! Reaktion
Kollision Vermeidung
Kollision Warnung
Tracking Wagen vorne
Wagen naht?Berechnung von Time to Contactund Kollision Fahrtrichtung
Sensoren Anforderungen:• Trennfähigkeit ermöglicht die Objektkontur
zu ermitteln• Objekten müssen verfolgt werden
Für diesen Einsatz sind Laser und Kamerabasierte Systeme sehr geeignet
Stichwörter:Objekte Erkennung, und TrackingKontur Ermittlung
Lane Keeping Assistent und Lane Departure Warning
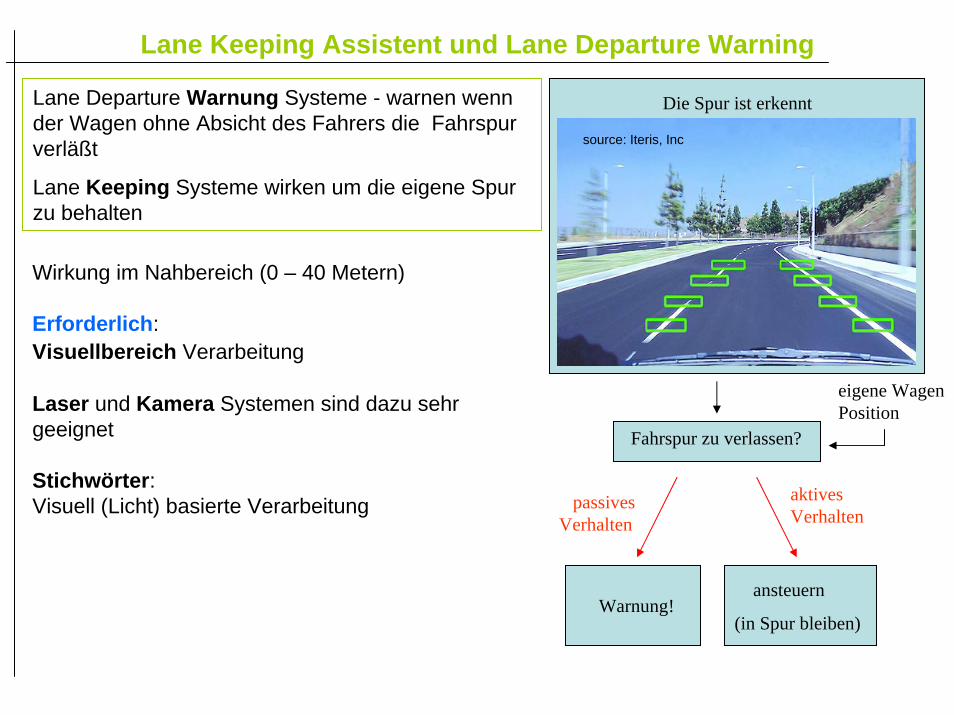
Lane Departure Warnung Systeme - warnen wenn der Wagen ohne Absicht des Fahrers die Fahrspur verläßt
Lane Keeping Systeme wirken um die eigene Spur zu behalten
Wirkung im Nahbereich (0 – 40 Metern)
Erforderlich:Visuellbereich Verarbeitung
Laser und Kamera Systemen sind dazu sehr geeignet
Stichwörter: Visuell (Licht) basierte Verarbeitung
Die Spur ist erkennt
Warnung!ansteuern
(in Spur bleiben)
eigene Wagen Position
aktives Verhalten
passives Verhalten
Fahrspur zu verlassen?
source: Iteris, Inc
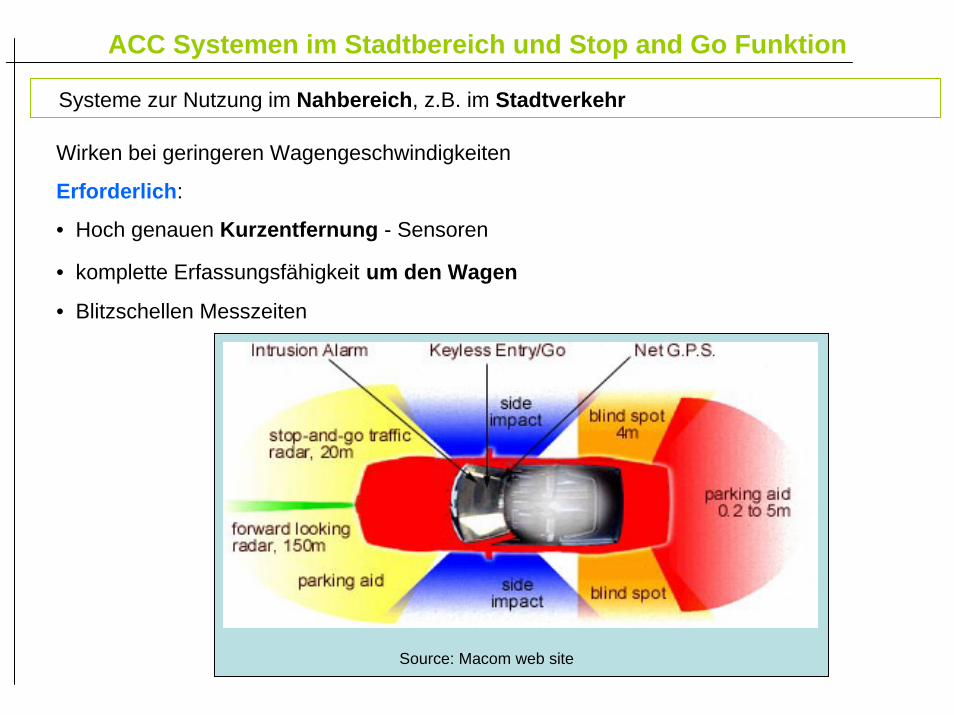
ACC Systemen im Stadtbereich und Stop and Go Funktion
Wirken bei geringeren Wagengeschwindigkeiten
Erforderlich:
• Hoch genauen Kurzentfernung - Sensoren
• komplette Erfassungsfähigkeit um den Wagen
• Blitzschellen Messzeiten
Source: Macom web site
Systeme zur Nutzung im Nahbereich, z.B. im Stadtverkehr
Andere Systeme, die es gibt
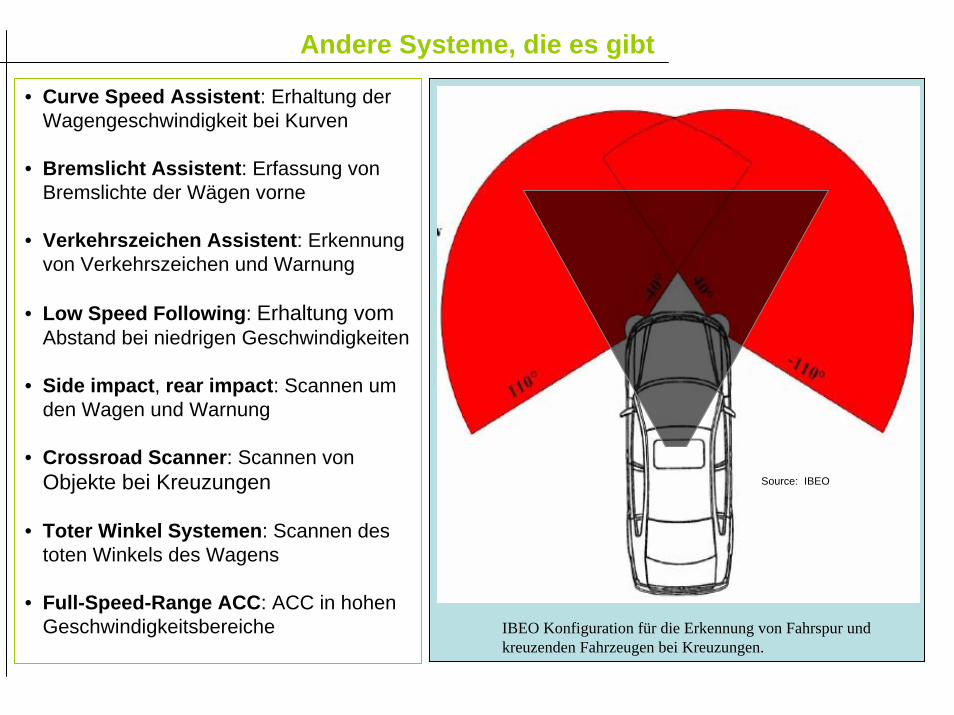
• Curve Speed Assistent: Erhaltung derWagengeschwindigkeit bei Kurven
• Bremslicht Assistent: Erfassung von Bremslichte der Wägen vorne
• Verkehrszeichen Assistent: Erkennung von Verkehrszeichen und Warnung
• Low Speed Following: Erhaltung vom Abstand bei niedrigen Geschwindigkeiten
• Side impact, rear impact: Scannen um den Wagen und Warnung
• Crossroad Scanner: Scannen von Objekte bei Kreuzungen
• Toter Winkel Systemen: Scannen des toten Winkels des Wagens
• Full-Speed-Range ACC: ACC in hohen Geschwindigkeitsbereiche
Source: IBEO
IBEO Konfiguration für die Erkennung von Fahrspur und kreuzenden Fahrzeugen bei Kreuzungen.
ADAS auf dem Markt
In Japan seit 1997, in Europa seit 1999, und in den USA seit 2000
In Autos, Bus und Lkw:
• Europa– Electronic Stability Control– Adaptive Cruise Control– Lane Departure Warning– Low Speed Following
• Japan – Adaptive Cruise Control– Lane Keeping Assistance– Lane Departure Prevention– Collision mitigation braking– Low Speed Following– Automated Parallel Parking
• USA– ACC– Forward Alert– Lane Departure Warning System– Pre-Crash Brake Assist– Collision Mitigation Braking System
Markt state of the art
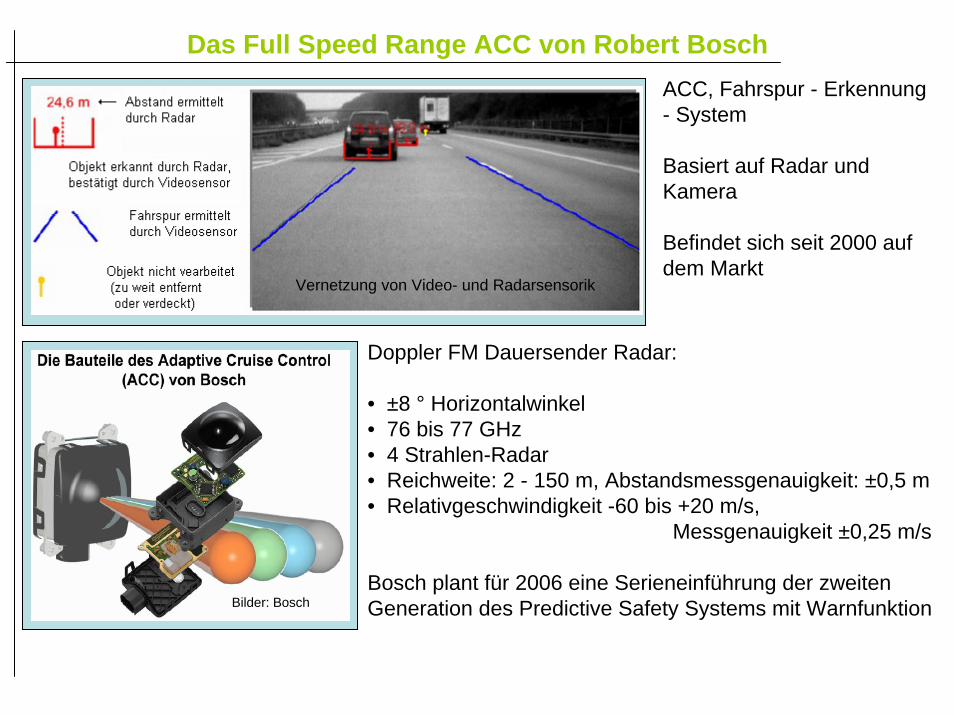
Doppler FM Dauersender Radar:
• ±8 ° Horizontalwinkel• 76 bis 77 GHz• 4 Strahlen-Radar• Reichweite: 2 - 150 m, Abstandsmessgenauigkeit: ±0,5 m• Relativgeschwindigkeit -60 bis +20 m/s,
Messgenauigkeit ±0,25 m/s
Bosch plant für 2006 eine Serieneinführung der zweiten Generation des Predictive Safety Systems mit WarnfunktionBilder: Bosch
Vernetzung von Video- und Radarsensorik
Das Full Speed Range ACC von Robert BoschACC, Fahrspur - Erkennung - System
Basiert auf Radar und Kamera
Befindet sich seit 2000 auf dem Markt
Forewarn ® von Delphi Corporation (www.delphi.com). Automotive News PACE 2000 AwardACC, Objekt Detektierung, Forward Warnung76 GHz Radar. Reichweite 150 MeterEingebaut in Jaguar XKE (seit 1999), Cadillac XLR
EAT – 300 von Eaton VORAD Technologies (www.eaton.com/VORAD). Collision WarningSystem, Obstacle Detection und ACCForward / Side Monopulse 24.725 GHz Radar. Reichweite: 1 – 110m. Sichtfeld: ±6 °Relativgeschwindigkeit 0.4 – 160 km/h. Eigene Geschwindigkeit: 0.8 – 190 km/hACC Reagierungszeit 2.25 s - 3.25 sEingebaut in LKW und Busse
Distronic von DaimlerChrysler77-GHz, Pulse Doppler Radar von M/A-Com (www.macom.com). Reichweite 150 Meter. 3 Strahlen Antenne, 3° StrahlenbreiteEingebaut in Mercedes S-Klasse (seit 1999)
Wagen Hersteller: BMW, Jaguar, Renault, Audi, Volkswagen, Porsche, Opel/GM, Volvo, DaimlerChrysler, Fiat, Toyota, Mitsubishi
Systemen Hersteller: Bosch, Delphi, Fujitsu-Ten, Valeo Raytheon Systems, M/A-Com, and Visteon
ACC Systemen auf dem Markt
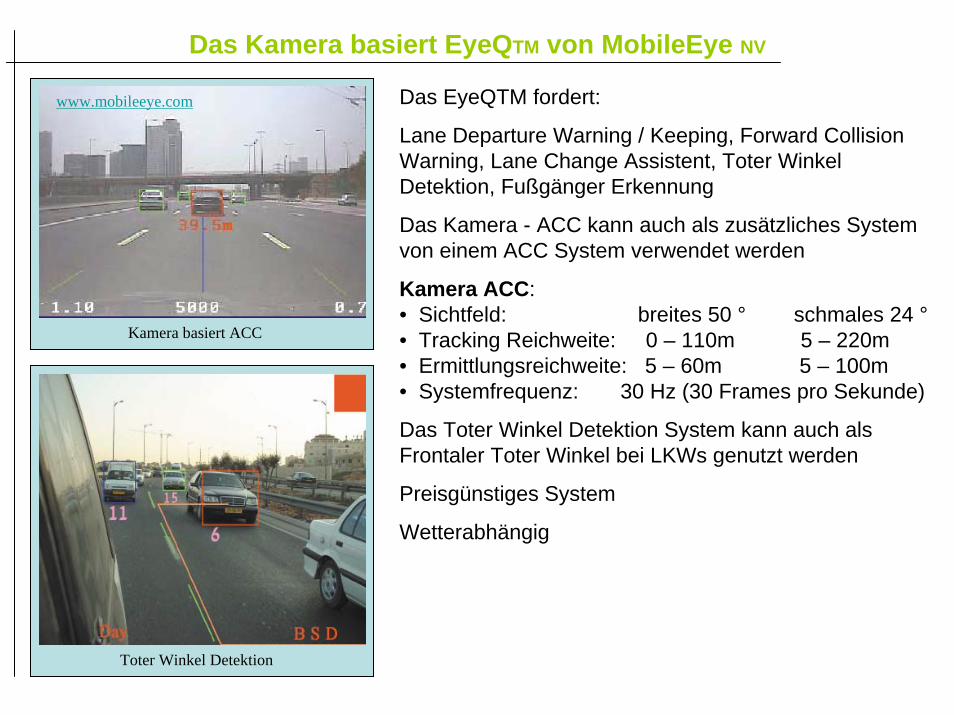
Das EyeQTM fordert:
Lane Departure Warning / Keeping, Forward CollisionWarning, Lane Change Assistent, Toter Winkel Detektion, Fußgänger Erkennung
Das Kamera - ACC kann auch als zusätzliches System von einem ACC System verwendet werden
Kamera ACC:• Sichtfeld: breites 50 ° schmales 24 °• Tracking Reichweite: 0 – 110m 5 – 220m• Ermittlungsreichweite: 5 – 60m 5 – 100m• Systemfrequenz: 30 Hz (30 Frames pro Sekunde)
Das Toter Winkel Detektion System kann auch als Frontaler Toter Winkel bei LKWs genutzt werden
Preisgünstiges System
Wetterabhängig
Toter Winkel Detektion
Kamera basiert ACC
www.mobileeye.com
Das Kamera basiert EyeQTM von MobileEye NV
Kamera Systeme auf dem Markt
SafeTRAC, von Assistware Technology (www.assistware.com)Warnt: Lane Departure, Lane Change ohne Signalisieren, Fahrerunachtsamkeit IndikatorErmittelt: Position in Fahrspur, Straßen Geometrie, lateral Geschwindigkeit
AutoVue, von Iteris, Inc (www.iteris.com). 2005 PACE Award (Automotive Suppliers’ & OEMs Contributions to Excellence)
Eingebaut in: Nissan Infiniti FX und Infiniti M45. Preis: $4,200.00
LKW Century und Argosy LKW. Preis: $200 to $300
Aglaia GmbH Berlin (www.aglaia-gmbh.de)Fahrspur, Objekt und Verkehrsschilder Erkennung Rückwärts Kamera. Scheinwerfer und Schlussleuchte Erkennung
Die Systeme erschienen zuerst in Mercedes LKWs, gefolgt von Freightliner (AutoVue) und SafeTRAC
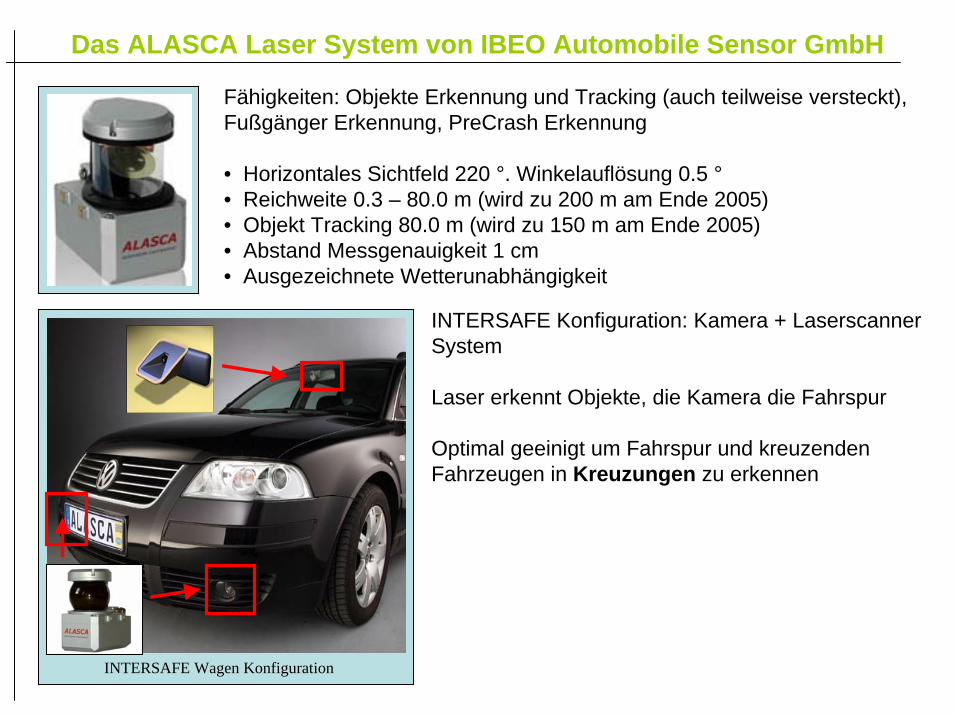
Das ALASCA Laser System von IBEO Automobile Sensor GmbH
INTERSAFE Konfiguration: Kamera + Laserscanner System
Laser erkennt Objekte, die Kamera die Fahrspur
Optimal geeinigt um Fahrspur und kreuzenden Fahrzeugen in Kreuzungen zu erkennen
INTERSAFE Wagen Konfiguration
Fähigkeiten: Objekte Erkennung und Tracking (auch teilweise versteckt), Fußgänger Erkennung, PreCrash Erkennung
• Horizontales Sichtfeld 220 °. Winkelauflösung 0.5 °• Reichweite 0.3 – 80.0 m (wird zu 200 m am Ende 2005)• Objekt Tracking 80.0 m (wird zu 150 m am Ende 2005)• Abstand Messgenauigkeit 1 cm• Ausgezeichnete Wetterunabhängigkeit
Omron Automotive Electronics (www.omron.com)
ACC Fernbereich, Stop & Go ACC, Fahrspur ErkennungReichweite 1 - 150 m, 30 Grad Sichtfeld, mehrere Objekte Erkennung
Ausgezeichnete Wetterunabhängigkeit
Laser Systeme auf dem Markt
Laser basierte Systeme dominieren den Markt in Japan
Wagen Hersteller: Toyota Celsior, Toyota Progress, Mitsubishi Diamante, Lexus
Dynamic Laser Cruise Control von Lexus. ACC, mit oder ohne Pre-Collision Systeme
Vertikales Sichtfeld: 4.4°. Sichtfeld: 16°
Preis im Luxury Package ($5,935)
Eingebaut in Lexus LS430
Länderprojekten und Zukunft
Sicherheitsziele bei Ländern
• Europa eSafety Initiative: - Reduktion des 50% der Strassentodesfälle bei 2010- 20% der neuen Wägen ausgestattet mit Driver Assistance Systems
• Japan:Reduktion des 50% der Straßentodesfälle bei 2013
• Australien:Reduktion des 40% der Straßentodesfälle bei 2010
• USA:Reduktion der Unfallrate im 1/3 bei 2008.
• England:Reduktion des 40% der Straßentodesfälle und erheblichen Verletzungen bei 2010

• Begann im 2001, endete im April 2005• 76 Millionen Euro geförderte Projekt:
– 32M Bundesforschungsministerium Deutschlands– 41M Schlüsselakteure der deutschen Automobil- und
Zuliefererindustrie• Schwerpunkte des INVENT:
– Fahrumgebungserfassung und Interpretation– Vorausschauende Aktive Sicherheit– Stauassistenz– Fahrerassistenz und Mensch-Maschine-Interaktion– Verkehrliche Wirkung, Recht und Akzeptanz – Verkehrsleistungsassistenz– Netzausgleich Individualverkehr– Verkehrsmanagement in Transport und Logistik
• Künftige Forschungsprojekte (mit 15 Millionen Euro gefordert):– Verkehrsmanagement 2010: das Verkehrsaufkommen optimal zu verteilen und unnötige
Fahrten zu vermeiden– Mikrosystemtechnik für Fahrassistenzsysteme: soll die Sicherheit im Straßenverkehr
steigern
In acht Teilprojekten zu den Bereichen Fahrerassistenz, Verkehrsmanagement und Logistik arbeiteten seit 2001 insgesamt 24 Projektpartner in Deutschland und Weltweit
Das INVENT (Intelligenter Verkehr und Nutzergerechte Technik) Projekt
• Transportation Research Board Workshop on Research Needed to Support Vehicle-Infrastructure Cooperation
– July 20-21 in Troy, Michigan– Developing research agenda to contribute to VII discussions
• Truck Automation: Opportunities & Deployment Paths– July 22 in Troy, Michigan– Summer Workshop of International Task Force on Vehicle-Highway Automation
• International Task Force on Vehicle-Highway Automation– ADAS and cooperative vehicle-highway systems– October 14-15 in Nagoya, Japan
• 2005 World Congress, San Francisco– USDOT National Intelligent Vehicle Meeting– Vehicle demonstration.
Relevant Events to ADAS
GraciasDanke

AIDE IST-1-507674-IP. Report on the review of the available guidelines and standards. Draft version. INFORMATION SOCIETY TECHNOLOGIES (IST) PROGRAMME
Ankel, M. ACC – Sensoren in Test, Voraussetzungen und Machbarkeit. Vortrag, Aachener Kolloquium Fahrzeug- und Motorentechnik, Aachen 1998.
Audi. www.audi.comAutomotive Distance Control Systems (ADC). www.adc-gmbh.deBundesministerium für Bildung und Forschung Website. www.bmbf.deBishop Consulting. www.IVsource.netBMW. www.bmw.comChristian Domsch, Dirk Neunzig. Werkzeuge und Testverfahren zur Entwicklung und Analyse von ACC – Systeme. Aachener Kolloquium
Fahrzeug- und Motorentechnik, Aachen 2000.Continental Automotive Systems. www.conti-online.comDaimlerChrysler. www.daimlerchrysler.comDelphi-Delco Electronic Systems. www.delphi.comEDN von Reed Electronics Group. www.edn.comBastiaensen, Edwin. Ministry of Transport - the Netherlands, AVV Transport Research Center.Advanced Driver Assistance Systems (ADA).
Session 76, Advanced Vehicle Operation, Review (1). ITS World Congress, Sydney, October 2nd 2001.Fujitsu. www.fujitsu.comIBEO Automobile Sensor GmbH. www.ibeo-as.comInfineon. www.infineon.comInglish, John. General Manager, Utah Transit Authority (2003). Transit IVI Technology Applications.Intelligent Transportation Society of America. www.itsa.orgM/A-COM Automotive. www.macom.comMassimo Bertozzi, Alberto Broggi, Massimo Cellario, Alessandra Fascioli, Paolo Lombardi, and Marco Porta, Artificial Vision in Road Vehicles,
Proceedings of the IEEE - Special issue on "Technology and Tools: Visual Perception", 90(7):1258-1271, July 2002.MEDEA+ Publications. www.medea.orgMitsubishi Electric. www.mitsubishielectric.comMobileEye NV: products‘ brochures and scientific papers. www.mobileye.comPeter Clarke. Adaptive cruise control takes to the highway. http:// eet.com/story/OEG19981020S0007Robert Bosch GmbH. www.bosch.comTRW Automotive Inc. www.trwauto.comValeo Raytheon Systems. www.valeo.comVisteon. www.visteon.comVolkswagen. www.vw.comVolvo. www.volvo.comWillie D. Jones. Keeping Cars from Crashing. http://www.spectrum.ieee.org/WEBONLY/publicfeature/sep01/intel1.html
…und alle oben stehend
Literatur