Analytische Berechnung magnetischer Felder in ... · Analytische Berechnung magnetischer Felder in...
244
Analytische Berechnung magnetischer Felder in Permanentmagnet erregten Maschinen Vom Fachbereich Elektrotechnik der Helmut-Schmidt-Universität Universität der Bundeswehr Hamburg zur Erlangung des akademischen Grades eines Doktor-Ingenieurs genehmigte DISSERTATION von Jörg Peschke aus Rheine Hamburg 2006
Transcript of Analytische Berechnung magnetischer Felder in ... · Analytische Berechnung magnetischer Felder in...

Analytische Berechnung magnetischer Felder in Permanentmagnet erregten Maschinen
Vom Fachbereich Elektrotechnik
der
Helmut-Schmidt-Universität
Universität der Bundeswehr Hamburg
zur Erlangung des akademischen Grades eines Doktor-Ingenieurs
genehmigte
DISSERTATION
von
Jörg Peschke
aus Rheine
Hamburg 2006

Referent: Prof. Dr.-Ing. E. Bolte Koreferent: Prof. Dr. rer. nat. M. Clemens Tag der mündlichen Prüfung: 16.06.2006

Vorwort Diese Arbeit entstand während meiner Zeit als wissenschaftlicher Mitarbeiter an der
Professur für Elektrische Maschinen und Antriebe der Helmut-Schmidt-Universität /
Universität der Bundeswehr in Hamburg.
Mein Dank gilt insbesondere Herrn Prof. Dr.-Ing. E. Bolte für die Möglichkeit, diese
Arbeit an seiner Professur zu fertigen. Seine Anleitung, sein wertvoller Rat und seine
ständige Bereitschaft zur fachkundigen Diskussion haben die vorliegende Veröffentli-
chung ermöglicht.
Auch die Mitarbeiterinnen und Mitarbeiter der Professur haben mit zahlreichen Ideen
und Hinweisen sowie freundschaftlichem Ansporn viel zu meiner Arbeit beigetragen.
Meiner Lebensgefährtin Gaby danke ich für den wohl schwierigsten Teil bei der Vor-
bereitung des Skriptes: Sie hat mich während dessen Entstehung stets ermutigt, er-
tragen und gehalten, in jeder Situation.
Ein abschließender, großer Dank sei meinen Eltern gewidmet. Sie haben mir stets
beiseite gestanden, den Weg zu dieser Veröffentlichung vorbereitet und mich unter-
stützt, wo immer es Ihnen möglich war.
Hamburg, im Oktober 2006
Jörg Peschke


Seite 1
1. Einleitung............................................................................................. 5 1.1 Gegenstand der Arbeit .......................................................................... 6 1.2 Quellen des ersten Kapitels .................................................................. 7 2. Detaillierung des mathematischen Modells Permanentmagnet
erregter Radialflussmaschinen .......................................................... 8 2.1 Allgemeines zur Modellierung ............................................................... 8 2.1.1 Betrachtete Maschinenausführungen.................................................... 8 2.1.2 Aufteilung des elektromagnetischen Feldes der Maschine ................... 9 2.1.3 Erfassung der Eigenschaften der Magnetwerkstoffe........................... 10 2.2 Beschreibung des verwendeten mathematischen Modells ................. 11 2.3 Quellen des zweiten Kapitels .............................................................. 13 3. Ableitung des magnetischen Vektorpotentials aus den
Maxwellschen Gleichungen.............................................................. 14 3.1 Ableitung des magnetischen Vektorpotentials im Vakuum.................. 14 3.2 Betrachtung des Einflusses der Materialgleichungen.......................... 18 3.2.1 Betrachtung dia- und paramagnetischer Werkstoffe ........................... 21 3.2.2 Betrachtung ferromagnetischer Werkstoffe......................................... 24 3.3 Betrachtung des magnetischen Vektorpotentials unter dem Einfluss
von Materie.......................................................................................... 29 3.3.1 Das Vektorpotential in dia- und paramagnetischer Materie................. 29 3.3.2 Das magnetische Vektorpotential in ferromagnetischer Materie ......... 30 3.3.3 Magnetisierte Materie als Ursache magnetischen Vektorpotentials .... 31 3.3.4 Randbedingung des magnetischen Vektorpotentials .......................... 33 3.4 Schlussfolgerungen zur Anwendung des magnetischen
Vektorpotentials................................................................................... 36 3.5 Quellen des dritten Kapitels ................................................................ 38 4. Berechung eines 6-Schichtenmodells Permanentmagnet erregter
Maschinen.......................................................................................... 40 4.1 Formulierung des Feldproblems.......................................................... 40 4.2 Darstellung des Gebietes permanenter Polarisation ........................... 41 4.2.1 Beschreibung der Magnetisierungsfunktion ........................................ 41 4.2.2 Beschreibung der Magnetisierung durch eine Ersatzstromdichte....... 49 4.2.3 Beschreibung der Magnetisierung durch einen Ersatzstrombelag ..... 49 4.3 Lösung des Feldproblems................................................................... 50 4.3.1 Lösung des Feldproblems der nicht erregten Räume in
Zylinderkoordinaten ............................................................................. 50 4.3.2 Lösung des Ansatzes für den Permanentmagnet erregten Raum in
Zylinderkoordinaten ............................................................................. 52 4.3.3 Zusammenstellung der Lösungsansätze............................................. 54 4.3.4 Auswertung der Randbedingungen an den Grenzflächen................... 55 4.3.4.1 Randbedingungen in allen Feldräumen .............................................. 56 4.3.4.2 Randbedingungen an der Grenzfläche Welle – Läuferjoch................. 56 4.3.4.3 Randbedingungen an der Grenzfläche Ständer - Außenraum ............ 57 4.3.4.4 Randbedingungen an der Grenzfläche Luftspalt - Ständer ................. 58 4.3.4.5 Randbedingungen an der Grenzfläche Läuferjoch –Dauermagnet ..... 59 4.3.4.6 Randbedingungen an der Grenzfläche Dauermagnet - Luftspalt ........ 61 4.3.4.7 Errechnen der Konstanten für den Feldraum des Dauermagneten..... 63

Seite 2
4.3.5 Zusammenstellung der errechneten Konstanten................................. 65 4.4 Ermittlung von Feldgrößen aus den Vektorpotentialen ....................... 67 4.5 Berechnung der Polradspannung........................................................ 68 4.5.1 Berechnung der Flussverkettung einer Spule ..................................... 68 4.5.2 Berechnung der Flussverkettung einer Spulengruppe ........................ 72 4.5.3 Berechnung der Flussverkettung der Wicklungsstränge ..................... 73 4.5.4 Berechnung der Strangspannungen ................................................... 75 4.6 Numerische Berechnung eines Beispielproblems............................... 77 4.7 Quellen des vierten Kapitels................................................................ 86 5. Bestimmung der Streuziffer aus der zweidimensionalen
Feldberechnung................................................................................. 87 5.1 Quellen des fünften Kapitels ............................................................... 96 6. Berechnung eines Vielschichtenmodells Permanent erregter
Maschinen.......................................................................................... 97 6.1 Formulierung des Feldproblems.......................................................... 97 6.2 Lösung des Feldproblems................................................................... 99 6.2.1 Lösungsansatz .................................................................................... 99 6.2.2 Formulierung eines Algorithmus zur Konstantenbestimmung ........... 100 6.3 Bestimmung der Konstanten............................................................. 102 6.3.1 Allgemeine Bestimmung der Konstanten an den Grenzflächen ri ..... 102 6.3.2 Bestimmung der Konstanten an den Grenzflächen r=r1 und r=rM ..... 104 6.3.3 Bestimmung der Konstanten an den Grenzflächen r=rE-1 und r=rE ... 104 6.4 Zusammenfassende Darstellung des Algorithmus zur Berechnung
aller Konstanten des Gleichungssystems.......................................... 106 6.5 Anwendung des Algorithmus............................................................. 109 6.6 Quellen des sechsten Kapitels .......................................................... 110 7. Definition und Bestimmung von Ersatzpermeabilitäten für die
zweidimensionale Feldberechnung ............................................... 111 7.1 Definition und Bestimmung von Ersatzpermeabilitäten für die
zweidimensionale Feldberechnung ................................................... 111 7.1.1 Bestimmung und Formulierung der Werkstoffkennlinie..................... 115 7.1.1.1 Interpolation diskret vorliegender Wertepaare von
Magnetisierungskurven ..................................................................... 115 7.1.1.2 Approximation der Magnetisierungskurve durch eine parametrierte
Hilfsfunktion....................................................................................... 119 7.1.2 Bestimmung der die Ersatzpermeabilität festlegenden Feldgröße .... 125 7.1.3 Konvergenz und Abbruch des Algorithmus zur
Ersatzpermeabilitätsbestimmung....................................................... 130 7.1.4 Berechnung eines Beispielproblems ................................................. 133 7.2 Quellen des siebten Kapitels............................................................. 139 8. Nutung ............................................................................................. 140 8.1 Berücksichtigung der Nutung durch einen vergrößerten Luftspalt..... 140 8.2 Quellen des achten Kapitels.............................................................. 144

Seite 3
9. Integration der Ankerwicklung in das zweidimensionale Schichtenmodell.............................................................................. 145
9.1 Formulierung des Feldproblems........................................................ 145 9.2 Entwicklung des Strombelags der Statorwicklung............................. 147 9.2.1 Superposition der Spulen zu einer Spulengruppe............................. 150 9.2.2 Superposition der Spulengruppen zu einem Strang.......................... 152 9.2.3 Superposition der Statorstränge........................................................ 154 9.2.4 Integration des Strombelags in die Modellanordnung ....................... 157 9.3 Numerische Berechnung eines Beispielproblems............................. 160 9.4 Berechnung der Statorflussverkettung .............................................. 164 9.5 Quelle des neunten Kapitels ............................................................. 166 10. Beispielrechnungen........................................................................ 167 10.1 Berechnungsergebnisse für den Synchronmotor MSKS 071-13 der
Firma Lenze GmbH & Co. KG ........................................................... 167 10.1.1 Eingabedaten.................................................................................... 167 10.1.2 Berechnungsergebnisse ................................................................... 169 10.1.2.1 Carterfaktor ....................................................................................... 169 10.1.2.2 Modellierung der Permeabilitätsverteilung in Rotor und Stator ......... 170 10.1.2.3 Berechnung des magnetischen Vektorpotentials .............................. 175 10.1.2.4 Berechnung magnetischer Flussdichte im Leerlauf........................... 176 10.1.2.5 Berechnung des Bohrungsfeldes ...................................................... 176 10.1.3 Berechnung von aus den Feldern abgeleiteter Größen .................... 185 10.1.3.1 Berechnung von Flussverkettung und Polradspannung.................... 185 10.2 Berechnungsergebnisse für den Torquemotor MBT210C der Firma
Bosch-Rexroth AG............................................................................. 187 10.2.1 Eingabedaten.................................................................................... 187 10.2.1.1 Eingabedaten konzentrierter Wicklungen.......................................... 189 10.2.2 Berechnungsergebnisse ................................................................... 192 10.2.2.1 Carterfaktor ....................................................................................... 192 10.2.2.2 Modellierung der Permeabilitätsverteilung in Rotor und Stator ......... 192 10.2.2.3 Berechnung des magnetischen Vektorpotentials .............................. 194 10.2.3 Berechnung von aus den Feldern abgeleiteter Größen .................... 201 10.2.3.1 Berechnung von Flussverkettung und Polradspannung.................... 201 10.3 Quellen des zehnten Kapitels............................................................ 205 11. Zusammenfassung und Ausblick .................................................. 206

Seite 4
Anlage 1: Technische Daten des Servomotors der Firma Lenze................. 207 Anlage 2: Technische Daten des Torquemotors der Firma Bosch-Rexroth 212 Anlage 3: Programmbeschreibung................................................................. 215 Anlage 4: Quellenverzeichnis ......................................................................... 225 Anlage 5: Verzeichnis der verwendeten Variablen........................................ 230 Anlage 6: Lebenslauf des Autors ................................................................... 238

Seite 5
1. Einleitung Die Permanentmagnet erregte Maschine hat mit der Weiterentwicklung von Magnet-
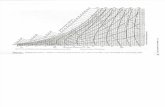
werkstoffen in den letzten Jahren (siehe auch Bild 1.1) eine rapide Zunahme von
Anwendungsmöglichkeiten erfahren. Frühere Grenzen, gesetzt durch die Energie-
dichte, thermische Belastbarkeit und Korrosionsanfälligkeit von Dauermagneten sind
überwunden.
Die resultierende Motorentechnologie vereint nunmehr einige hervorragende Eigen-
schaften wie guten Wirkungsgrad und höchste Kompaktheit (Drehmoment pro Volu-
men) mit einfacher Positionierbarkeit, hoher Gleichlaufgüte und Wartungsfreiheit.
Daher werden Permanentmagnet erregte Maschinen nun auch für größere Leistun-
gen interessant. Großmaschinen im Schiffbau (100...300 min-1), langsam laufende
Windenergiegeneratoren (17 min-1), getriebelose Traktionsantriebe (2100 min-1) und
schnell laufende Generatoren (13000 min-1) in Bereichen von (1...4 MW) sind Bei-
spiele dafür, wie Permanentmagnet erregte Maschinen vielfältige Anwendungen er-
obern (siehe auch Quelle [1.1, S. 1]).
Bild 1.1 Energiedichte verschiedener Permanentmagnetmaterialien

Seite 6
1.1 Gegenstand der Arbeit Zuverlässige und genaue Ergebnisse der Feldberechnung sind nicht nur die Voraus-
setzung für verlässliche Kraft- und Momentberechnungen, sondern auch ein uner-
lässliches Hilfsmittel für Entwurf und Dimensionierung Permanentmagnet erregter
Maschinen. In dieser Arbeit wird die analytische Berechnung der magnetischen Fel-
der in solchen Maschinen thematisiert.
Die entwickelte Theorie der Feldrechnungen soll dabei in keiner Weise in Konkurrenz
zu bereits etablierten numerischen Methoden (z.B. Methode der finiten Elemente)
stehen, sondern diese um die Einblicke und Möglichkeiten eines analytischen For-
melwerks ergänzen.
Die Ausführungen werden, obwohl universell anwendbar, für die Klasse der Radial-
flussmaschinen ausgestaltet. Bild 1.1.1 zeigt die gebräuchlichen Ausführungsformen
solcher Maschinen für innen liegende Erregerteile.
Ankerwicklungsvarianten:
- Drahtwicklung in Nuten
- Luftspaltwicklung
- Konzentrierte Wicklungen
um einen Zahn
Varianten des Erregerteils: - Feldwicklung
- PM-Ring am Luftspalt
- PM-Blöcke am Luftspalt
- PM-Blöcke in Flussführung
Bild 1.1.1. Ausführungsformen von fremd erregten Maschinen mit radialer
Flussorientierung und innen liegendem Erregerteil

Seite 7
Die Motivation dieser Arbeit basiert auf der Lektüre von Quelle [1.2] („Instantaneous
Magnetic Field Distribution in Brushless Permanent Magnet DC Motors“). In dieser
Veröffentlichung wird die magnetische Feldverteilung an zylindrisch modellierten
dauermagneterregten Motoren mit Hilfe des magnetischen Skalarpotentials durchge-
führt.
Aufgrund der Vereinfachungen der verwendeten Motorenmodellierung bieten die Er-
gebnisse des Berichts vielfältige Möglichkeiten der Weiterentwicklung. Die grund-
sätzliche Idee der Feldberechnung soll in dieser Arbeit einen Fortgang finden, jedoch
wird das Motorenmodell in vielen Aspekten - mit einem besonderen Augenmerk auf
die Beschreibung der magnetischen Werkstoffeigenschaften der Eisenwege - erheb-
lich verbessert und ergänzt. Eine diesbezügliche, detaillierte Einführung in die ange-
wendete Motorenmodellierung dieser Arbeit wird im Folgekapitel gegeben.
Die zur Veranschaulichung und Verifikation des Formelwerks durchgeführten nume-
rischen Rechnungen dieser Veröffentlichung verwenden als Beispiele einen univer-
sell einsetzbaren Synchron-Servomotor MDSKSRS 071-13 der Firma Lenze GmbH
& Co. KG sowie einen hochmodernen Drehmoment- (Torque-) Motor MBT210C der
Firma Bosch Rexroth AG. Die technischen Daten dieser Motoren sind in den beige-
fügten Anlagen 1 und 2 einzusehen.
1.2 Quellen des ersten Kapitels [1.1] E. Bolte Technischer Bericht Nr. 27
Auslegung von Permanentmagnet erregten Maschinen
mit radialer Flussorientierung
Universität der Bundeswehr Hamburg
2002
[1.2] Z.Q. Zhu
D. Howe
E. Bolte
B. Ackermann
Instantaneous Magnetic Field Distribution in Brushless
Permanent Magnet DC Motors
IEEE Transactions on Magnetics
Volume 29. No. 1, S. 124-135
1993

Seite 8
2. Detaillierung des mathematischen Modells Permanent-magnet erregter Radialflussmaschinen
2.1 Allgemeines zur Modellierung Ziel der Modellbildung ist es, das Betriebsverhalten einer rotierenden elektrischen
Maschine quantitativ zu beschreiben. Die Beschreibung des nach Außen in Erschei-
nung tretenden Verhaltens an der Welle und den elektrischen Zuleitungen liegt dann
in Form mathematischer Beziehungen vor. Die Modellierung erfolgt entweder analy-
tisch, von den physikalischen Vorgängen im Innern der Maschine ausgehend, oder
man beschreibt das beobachtete Verhalten mit Hilfe empirisch gefundener Bezie-
hungen.
Die hier angestrebte analytische Behandlung basiert auf der Anwendung allgemeiner
Feldgleichungen zur Beschreibung elektromagnetischer Vorgänge in Permanent-
magnet erregten Maschinen. Dabei soll die Auflösung so weit gehen, dass die für
einen Vorgang maßgebenden Parameter auf die geometrischen Abmessungen und
die Werkstoffeigenschaften zurückgeführt werden.
Der allgemeine Ausgang der Betrachtungen sind also die Feldgleichungen des qua-
sistationären Magnetfeldes. Ihre Anwendung auf die betrachtete Anordnung macht
aufgrund ihrer Komplexität stets vereinfachende Annahmen erforderlich. Sie müssen
so gut gewählt werden, dass die zu untersuchenden Einflüsse möglichst gut erfasst
und nicht durch Andere überdeckt werden. Die Lösung der Feldgleichungen liefert
schließlich Beziehungen zwischen Integralgrößen (wie Spannungen, Stromstärken
und Flussverkettungen), die über Integralparameter (wie Widerstände und Induktivi-
täten) miteinander verknüpft sind. Dabei werden diese Integralparameter als Funkti-
on der Geometrie und Werkstoffdaten gewonnen (siehe auch Quelle [2.1, S. 25]).
Die Vereinfachungen zur Anwendung der Feldgleichungen der quasistationären Fel-
der sollen nun vorgestellt werden.
2.1.1 Betrachtete Maschinenausführungen Rotierende elektrische Maschinen weisen im Allgemeinen eine Reihe von Symmet-
rieeigenschaften auf, deren Berücksichtigung die Analyse von vornherein wesentlich

Seite 9
vereinfacht. Zu diesen Symmetrieeigenschaften gehört vor allem der sich periodisch
in jedem Polpaar wiederholende geometrische Aufbau. Bei der Analyse des Be-
triebsverhaltens soll im Folgenden angenommen werden, dass diese Symmetrie voll-
ständig ist. Eine weitere Symmetrieeigenschaft ist dadurch gegeben, dass die Wick-
lungsstränge mehrsträngiger Maschinen gleichartig aufgebaut und um den der
Strangzahl entsprechenden Teil der Polpaarteilung gegeneinander versetzt sind.
Damit werden vor allem durch die Fertigung der Maschinen bedingte geringfügige
Abweichungen der Symmetrie durch das verwendete Modell negiert. Die Modellie-
rung von Betriebsstörungen - verursacht durch Verletzungen der Symmetrie - wird
mit dem angestrebten Modell nicht möglich sein.
2.1.2 Aufteilung des elektromagnetischen Feldes der Maschine Die Aufteilung des Feldes in Luftspalt- und Streufelder ist stets möglich, sieht aber
von Zeitpunkt zu Zeitpunkt in Abhängigkeit von der Läuferstellung etwas anders aus
(siehe auch Quelle [2.1, S. 43]). Deshalb ist die Feldaufteilung nur im Zusammen-
hang mit den Annahmen sinnvoll, dass die Streufelder unabhängig von der Läufer-
bewegung und sättigungsunabhängig sind. Sie führt jedoch auf sehr praktikable Mo-
delle, die sich vor allem in der Berechnungspraxis bewährt haben (siehe auch die
Quellen [2.1, S. 43] und [2.2, S. 9.2]).
Bild 2.1.2.1 Zerlegung des dreidimensionalen Feldes einer rotationssymmet-
rischen elektrischen Maschine in entkoppelte Teilfelder: Luft-
spaltfeld, Stirnstreufeld und Nutstreufeld.

Seite 10
Die Ausführungen dieser Arbeit sollen sich auf die koppelnden Luftspaltfelder be-
schränken, da das Betriebsverhalten elektrischer Maschinen im Wesentlichen durch
diese bestimmt ist (siehe auch Quelle [2.2, S. 9.1]). Die Modellierung der (entkoppel-
ten) Streufelder wird Gegenstand weiterer Arbeiten sein (siehe auch Quelle [2.2]).
2.1.3 Erfassung der Eigenschaften der Magnetwerkstoffe Die realen Eigenschaften der ferromagnetischen Stoffe sind in geschlossener analy-
tischer Form kaum zu berücksichtigen. Ursache dafür ist der nichtlineare mehrdeuti-
ge und von der Vorgeschichte abhängige Verlauf der Magnetisierungskurve des ver-
wendeten Werkstoffs. Außerdem kommt es in ferromagnetischen Abschnitten eines
Magnetkreises bei zeitlich veränderlichem Feld zur Ausbildung von Wirbelströmen.
Vielfach genügt es, diese Einflüsse genähert zu erfassen. Folgende Vereinfachungs-
ebenen werden unterschiedlich hohen Ansprüchen gerecht:
― Annahme unendlicher Eisenpermeabilität und fehlender Wirbelströme,
― Annahme magnetisch linearer Verhältnisse und fehlender Wirbelströme,
― Genäherte Berücksichtigung der Nichtlinearität der Werkstoffe,
― Genäherte Berücksichtigung der Nichtlinearität der Werkstoffe und der Wirbel-
ströme.
Die ersten beiden Vereinfachungsebenen sind die meistverwendeten Ausgangspunk-
te für die analytische Behandlung des Betriebsverhaltens elektrischer Maschinen.
Die Ausführungen dieser Arbeit sollen - ausgehend von der Annahme magnetisch
linearer Verhältnisse - ein Modell entwickeln, welche die Nichtlinearität der Werkstof-
fe berücksichtigt und den Schritt zu noch genaueren Berechnungen vorbereitet.
2.1.4. Mathematische Formulierung der elektromagnetischen Felder
Die Hauptaufgabe ist es nun, elektromagnetische Felder in radialsymmetrischen
elektrischen Maschinen zu ermitteln. Die Erfahrung zeigt, dass die Einführung einer
zweckmäßig gewählten Hilfsfunktion die Feldberechnung stark vereinfacht. In dieser
Arbeit soll die Lösung des Feldproblems im magnetischen Vektorpotential - abgelei-
tet aus den Maxwellschen Gleichungen - erfolgen. Neben der Möglichkeit, die Feld-
rechnungen beachtlich zu verkürzen, weist das magnetische Vektorpotential weitere
beachtliche Eigenschaften und Merkmale auf (siehe auch Quelle [2.2, S. 9.4]):

Seite 11
Ar
.... Magnetisches Vektorpotential
rotB A=rr
.... Magnetische Flussdichte
AdlΦ = ∫rr
…. Magnetischer Fluss
1/ 2mW AJdv= ∫∫∫r r
.... Magnetische Energie
.A const= .... Magnetische Feldlinien
für ebene Felder z-gerichteten Vektorpotentials
Die Definition des magnetischen Vektorpotentials wird im Rahmen dieser Arbeit aus
den Maxwellschen Gleichungen abgeleitet werden.
2.2 Beschreibung des verwendeten mathematischen Modells Mit den vorangegangenen Überlegungen ist es nun möglich, eine Ersatzanordnung
zur Berechnung des Feldproblems zu detaillieren. Der Berechnung des Luftspaltfel-
des Permanentmagnet erregter Maschinen wird eine zweidimensionale Feldvertei-
lung in Außenraum, Stator- und Rotoreisen, Welle, Permanentmagnetanordnung und
Luftspalt zugrunde gelegt. Bild 2.2.2 gibt die folgende Übersicht:
Bild 2.2.1 Untersuchte Modellanordnung am Beispiel eines Innenläufermo-
tors. Dargestellt ist der Querschnitt in der (r,ϕ)-Ebene.
Die betrachteten Feldräume sind: Welle (1), Rotor (2), Perma-
nentmagnetanordnung (3), Luftspalt (4), Anker (5) und Außen-
raum (6).

Seite 12
Die in dieser Arbeit dokumentierte Theorie schließt sowohl Innen- als auch Außen-
läufermotorenmodellierung folgender Eigenschaften ein:
― Berechnung eines zweidimensionalen Magnetfeldes in der (r,ϕ)-Ebene, ange-
regt durch eine Permanentmagnetanordnung auf dem Rotor und durch Strö-
me in der Statorwicklung.
― Die Permanentmagnetanordnung wird durch eine Stromdichteverteilung im
Feldraum (3) in die Rechnung eingeführt.
― Die Stromverteilung der Statorwicklung wird durch einen flächigen Strombelag
auf dem Radius (4) des Stators eingeführt.
― Die dem Rotor zugewandte zylindrische Statorfläche auf dem Radius (4) wird
als glatt angenommen. Die Statornutung wird näherungsweise durch einen
vergrößerten Luftspalt modelliert.
― Alle Feldräume werden modelliert durch konzentrisch angeordnete, glattflä-
chige (Hohl-) Kreiszylinder.
― Für alle Feldräume (1 bis 6) werden homogene und isotrope Werkstoffeigen-
schaften unterstellt.
― Die (unterschiedlichen) nichtlinearen Werkstoffeigenschaften von Rotoreisen
im Feldraum (2) und Statoreisen im Feldraum (5) werden iterativ aus dem e-
lektromagnetischen Feld der Maschine bestimmt.
― Für die verschiedenen Feldräume (1 bis 6) werden jeweils konstante Tempe-
raturen unterstellt.
― Die Zeitabhängigkeit ist dadurch definiert, dass ein Betrieb mit konstanter
Drehzahl an einem symmetrischen Drehspannungssystem untersucht wird.
― Zur mathematischen Beschreibung wird das magnetische Vektorpotential in
Zylinderkoordinaten genutzt
Weitere zweckmäßige Detaillierungen des Modells werden in den verschiedenen
Kapiteln dieser Arbeit vorgenommen werden.

Seite 13
2.3 Quellen des zweiten Kapitels [2.1] G. Müller Theorie elektrischer Maschinen
VCH Verlagsgesellschaft GmbH
1995
[2.2] E. Bolte Vorlesungsskript
Elektrische Maschinen und Antriebe
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005

Seite 14
3. Ableitung des magnetischen Vektorpotentials aus den Maxwellschen Gleichungen
3.1 Ableitung des magnetischen Vektorpotentials im Vakuum
Diese Arbeit behandelt die Maxwellschen Gleichungen als Grundlage für die Berech-
nung magnetischer Felder. Die Maxwellschen Gleichungen bilden ein System von
Beziehungen, die verschiedene Feldgrößen so miteinander verkoppeln, dass sie mit
den experimentellen Befunden elektromagnetischer Erscheinungen in völliger Über-
einstimmung stehen.
(3.1.1.a) A
Edl BdAt∂
= −∂∫ ∫∫
r rr r
(3.1.1.b) A V
DdA dρ τ=∫∫ ∫∫∫rr
(3.1.1.c) A
Hdl J D dAt∂⎛ ⎞= +⎜ ⎟∂⎝ ⎠∫ ∫∫
r rr r r
(3.1.1.d) 0A
BdA =∫∫rr
Die Berechnung elektrischer Maschinen erfordert oft, Magnetfelder gegebener geo-
metrischer Anordnungen von Strömen zu berechnen. Bei Problemen einfacher, zeit-
unabhängiger magnetischer Kreise können diese Felder mittels der Gleichung
(3.1.1.c) direkt angegeben werden:
A
Hdl J D dAt∂⎛ ⎞= +⎜ ⎟∂⎝ ⎠∫ ∫∫
r rr r r
A
Hdl JdA=∫ ∫∫r rr r
Hdl I=∫rr
Meist sind die gegebenen Anordnungen jedoch komplizierter und es muss zu um-
ständlicheren Methoden gegriffen werden. Hierbei spielt die Anwendung der Hilfs-
größe des magnetischen Vektorpotentials eine besonders wichtige Rolle. Zu dessen

Seite 15
Herleitung ist es sinnvoll, die integrale Darstellung der Maxwellschen Gleichungen
umzuformen. Während die Gleichungen (3.1.1) geometrische Größen enthalten kön-
nen, werden in den äquivalenten Gleichungen differentieller Form ausschließlich
Feldgrößen in einer vom Koordinatensystem unabhängigen Darstellung genutzt:
(3.1.2.a) rot E Bt∂
= −∂
r r
(3.1.2.b) div D ρ=r
(3.1.2.c) rot H J Dt∂
= +∂
r r r
(3.1.2.d) div 0B =r
Da die magnetische Flussdichte Br
quellenfrei definiert ist (3.1.2.d), ist deren Darstel-
lung durch ihre Wirbel möglich (siehe auch Quelle [3.1, S. 218 ff.]):
(3.1.3) div 0B =r
, rotB A=rr
( ) ( )div rot 0A A A= ∇ ∇× = ∇×∇ =r r r
Zur Beschreibung des magnetischen Feldes ist - im Gegensatz zum elektrostati-
schen Feld - also eine vektorielle Funktion notwendig. Lediglich in nicht Strom
durchflossenen Gebieten lässt sich auch die magnetische Feldstärke als Gradient
eines skalaren magnetischen Potentials berechnen.
Das Vektorpotential Ar
ist aus Gleichung (3.1.3) nur bis auf den Gradienten einer
skalaren Funktion bestimmbar:
0 grad SA A A= +r r
0 0rot rot rot grad rotSB A A A A= = + =r r rr
Um Ar
eindeutig zu definieren, benötigt man also neben Aussagen über seine Wirbel
auch Aussagen über seine Quellen. Es zeigt sich nun allerdings, dass man - ohne

Seite 16
die physikalischen Eigenschaften (3.1.2) zu verletzen - über die Quellen beliebig
verfügen kann (siehe auch Quelle [3.1, S. 218 ff.]).
Um diese ausstehende Nebenbedingung so zu wählen, dass Rechenvorteile entste-
hen, ist es notwendig, die Gleichungen (3.1.2.a) und (3.1.2.c) zu verknüpfen. Die Er-
gänzung des unterbestimmten maxwellschen Gleichungssystems erfolgt durch die
Materialgleichungen. Im Vakuum gelten die Kopplungen
(3.1.4.a) 0D Eε=r r
, 0[ ] AsVm
ε =
(3.1.4.b) 0B Hμ=r r
, 0[ ] VsAm
μ =
Haben wir es mit anderen Medien zu tun, so müssen wir in irgendeiner Weise Dr
in
Abhängigkeit von Er
und Br
als Funktion von Hr
angeben. Diese Zusammenhänge
werden zu einem späteren Zeitpunkt ausführlich betrachtet.
Die Maxwell-Gleichung (3.1.2.c) ergänzt mit dem magnetischen Vektorpotential und
den Materialgleichungen des Vakuums lautet:
0 0
0 0 0
rot
rot
rot
H J Dt
B J Dt
B J Et
μ μ
μ ε μ
∂= +
∂∂
= +∂∂
= +∂
r r r
r r r
r r r
(3.1.5) 0 0 0rot rot A J Et
μ ε μ ∂= +
∂
r r r
Um nun die Feldgröße Er
in (3.1.5) zu eliminieren, wird die Maxwell-Gleichung
(3.1.2.a) umgeformt und eingesetzt (siehe auch Quelle [3.7, S. 218]):

Seite 17
rot rot
rot 0 rot grad
grad
E B At t
E At
E At
ϕ
ϕ
∂ ∂= − = −
∂ ∂∂⎛ ⎞+ = ≡⎜ ⎟∂⎝ ⎠
∂+ = −∂
rr r
rr
rr
(3.1.6) gradE At
ϕ∂= − −
∂
rr
2
0 0 0 0 0 2rot rot gradA J At t
μ ε μ ϕ ε μ∂ ∂= − −
∂ ∂
r rr
Mit der Definition des vektoriellen Laplace-Operators erhalten wir schließlich das Er-
gebnis:
2
0 0 0 0 0 2
graddiv rot rot
graddiv grad
A A A
A A J At t
μ ε μ ϕ ε μ
Δ = −
∂ ∂Δ = − + +
∂ ∂
r r r
r r rr
(3.1.7) 2
0 0 0 0 02 grad div gradA A J At t
ε μ μ ε μ ϕ∂ ∂⎛ ⎞Δ − = − + +⎜ ⎟∂ ∂⎝ ⎠
r r rr
Nun ist der Zeitpunkt gekommen, um die noch immer unbekannte Divergenz von Ar
zu wählen. Der Freiheitsgrad wird genutzt, um die Wellengleichung (3.1.7) zu verein-
fachen:
(3.1.8.a) 0 0div Atϕμ ε ∂
= −∂
r
(3.1.8.b)
2
0 0 02A A Jt
ε μ μ∂Δ − = −
∂
r r r
Diese Wahl der Divergenz des magnetischen Vektorpotentials (3.1.8) ist unter dem
Namen „Lorentz-Eichung“ bekannt (siehe auch Quelle [3.2, S. 197 ff.]); mit der in

Seite 18
(3.1.6) eingeführten Hilfsgröße ϕ ist das elektrische Skalarpotential eingeführt, für
welches folgende skalare Wellengleichung gefunden wird:
(3.1.8.c) 2
0 0 20tρϕ ε μ ϕε
∂Δ − = −
∂
Die Beschreibung der Potentialfunktionen (3.1.7) und (3.1.8) vereinfacht sich für den
statischen Fall zur „Poisson-Gleichung“ und der vereinfachten „Coulomb-Eichung“
(siehe auch Quelle [3.1, S. 218]):
(3.1.9a) ( )0
0
grad div 0A J A
A J
μ
μ
Δ = − + +
Δ = −
r rr
r r
(3.1.9b) div 0A =r
Mit den Gleichungen (3.1.8) und (3.1.9) ist für den zeitunabhängigen Fall die Hilfs-
größe des magnetischen Vektorpotentials im Vakuum eindeutig definiert.
3.2 Betrachtung des Einflusses der Materialgleichungen
Die bisherige Betrachtung der Maxwellschen Gleichungen, deren Wechselwirkungen
und die Ableitung der Hilfspotentiale wurde im Vakuum durchgeführt. In diesem gel-
ten die Definitionen:
0D Eε=r r
0B Hμ=r r
Dabei werden die Skalare 0ε (Dielektrizitätskonstante des Vakuums) und 0μ (Per-
meabilitätskonstante des Vakuums) als zeitunabhängig konstant angenommen. Wei-
terhin hat Maxwell in Zusammenhang mit der Hypothese eines Licht tragenden Me-
diums (Äther) folgende Definition eingeführt, um der Wellengleichung zu genügen
(siehe auch Quelle [3.6, S. 288-290]):

Seite 19
0 0 2
1c
ε μ =
Diese einfache Kopplung der Maxwellschen Gleichungen durch die proportionale
Verknüpfung der Feldgrößen verliert mit dem Einbringen allgemeinen Materials je-
doch seine Gültigkeit. Nun ist es notwendig, die Wechselwirkungen elektromagneti-
scher Strahlung mit Materie durch geeignete Parameter (Leitfähigkeit, Permeabilität
und Permittivität) zu beschreiben.
Wirkt ein elektrisches Feld 0Er
auf ein Material, so werden sich die Ladungsverteilun-
gen der Moleküle dieses Materials ausrichten, was zu einer Dipolmomentmenge pr
führen wird (siehe auch Quelle [3.8]). Bei N Molekülen führt dies zu einer so genann-
ten Polarisation Pr
:
P Np=r r
Diese Polarisation wiederum bedingt die Entstehung einer Oberflächenladungsdichte
polρ und damit auch ein Gegenfeld polEr
zum Erregerfeld 0Er
:
pol Pnρ = −rr , div polP ρ= −
r
(3.2.1) 0 polE E E= +r r r
, 0
polpolE
ρε
= −r
Falls sich die Polarisation als Funktion der Zeit ändert, so entsteht zudem ein Strom
mit der Stromdichte polJr
:
(3.2.2) poldl dPJ Nqv Nqdt dt
= = =r r
r r
Analog zur Polarisation bei einem elektrischen Feld spricht man von der Magnetisie-
rung Mr
als Konsequenz eines Magnetfeldes 0Br
auf Materie (siehe auch Quelle [3.8,
S. 132 ff.]). mr wird hierbei als das magnetische Moment bezeichnet:

Seite 20
m AI=rr
(3.2.3) 0B B M= −r r r
, M Nm=r r
Durch die induzierten Ringströme entsteht wiederum eine Stromdichte magJr
:
(3.2.4) rotmagJ M=r r
Anhand dieser Wechselwirkungen mit eingebrachter Materie können die Maxwell-
schen Gleichungen (3.1.2) korrigiert werden (siehe auch Quelle [3.7]):
(3.2.5.a) rot E Bt∂
= −∂
r r
(3.2.5.b) 00 0
div PE ρε ε
⎛ ⎞+ =⎜ ⎟
⎝ ⎠
rr
(3.2.5.c) ( ) ( )0 0 0 0 0 0 00
rot pol magPB M J J J E
tμ μ μ ε
ε⎛ ⎞∂
− = + + + +⎜ ⎟∂ ⎝ ⎠
rr r r r r r
(3.2.5.d) div 0B =r
Um dieses Gleichungssystem eleganter schreiben zu können, definiert man häufig
(siehe auch Quelle [3.7]):
(3.2.6) 0 0D E Pε≡ +r r r
, 0
0
BH Mμ
≡ −r
r r und 0ges pol magJ J J J J≡ = + +
r r r r r
Das Gleichungssystem (3.2.5) kann mit Hilfe der Definitionen (3.2.6) wieder in das
System der ursprünglichen Maxwellschen Gleichungen (3.1.2) übergehen, allerdings
geht damit oft die Einsicht der vorangegangenen Betrachtungen verloren.
Nun ist es an der Zeit, die Magnetisierung ( )M f B=r r
und die Polarisation ( )P g E=r r
genauer zu bestimmen. Der funktionale Zusammenhang ist durch das Material ge-
geben. Falls die Funktion bekannt sein sollte, können Mr
und Pr
eliminiert und das
System der Maxwellschen Gleichungen gelöst werden. Im Allgemeinen sind die Fun-
ktionen f und g sehr kompliziert.

Seite 21
3.2.1 Betrachtung dia- und paramagnetischer Werkstoffe Unter der Annahme des Ausschlusses starker Felder und ferromagnetischer Materia-
lien kann für lineare und isotrope Materialien folgender Zusammenhang festgehalten
werden (siehe auch Quelle [3.8]):
(3.2.1.1.a) ( )M f B Bα= =r r r
(3.2.1.1.b) ( )P g E Eβ= =r r r
Somit wird aus den Maxwellgleichungen ein Satz linearer Differentialgleichungen und
es gilt das Superpositionsprinzip.
Der Zusammenhang der Gleichungen (3.2.1.1) gilt leider nicht für beliebig schnell
veränderliche Felder; die Trägheit der Elektronen macht sich bemerkbar. Damit
hängt ( )M tr
nicht nur von Br
zur Zeit t ab, sondern auch von den früheren Zeiten t´
(Vorgeschichte). Damit ist ( )konst t tα α ′≠ = − . Analoges gilt auch für die Polarisation
(siehe auch Quelle [3.9]).
0
( ) ( ) ( )
( ) ( )
( ) ( ) ,
tt
t
M t t t E t t
t t E t dt
E t d t tτ
α
α
α τ τ τ τ
′
′=−∞
∞
=
′ ′= − Δ
′ ′ ′= −
′= − = −
∑
∫∫
r r
r
r
Um die unter diesen Umständen sehr schwer zu lösende Kopplung der Maxwellglei-
chungen zu vereinfachen, sei hier die Annahme der harmonischen Änderung der
magnetischen und elektrischen Felder eingeführt:
(3.2.1.2.a) ( ) ( , , ) j tB t B x y z e ω=r r
, ( )( ) ( , , ) j tB t B x y z e ω ττ −− =r r
(3.2.1.2.b) ( ) ( , , ) j tE t E x y z e ω=r r
, ( )( ) ( , , ) j tE t E x y z e ω ττ −− =r r
Damit ergeben sich folgende Zusammenhänge:

Seite 22
(3.2.1.3.a) 0( ) ( , , ) ( )
( ) ( )
j t jM t B x y z e e d
B t
ω ωτ
τα τ τ
α ω
∞ −
==
≡ ⋅
∫r r
r
(3.2.1.3.b) 0( ) ( , , ) ( )
( ) ( )
j t jP t E x y z e e d
E t
ω ωτ
τβ τ τ
β ω
∞ −
==
≡ ⋅
∫r r
r
Daraus folgt, dass Materie, die einem schwachen stationären Feld von beliebiger
Frequenz ausgesetzt ist, linear reagiert. Die Proportionalitätsfaktoren α(ω) und β(ω)
sind frequenzabhängig und komplex (siehe auch Quelle [6]); die nicht triviale Be-
stimmung muss aus dem Experiment oder der Theorie der Werkstoffwissenschaften
erfolgen und ist nicht Teil dieser Ausarbeitung).
Aus historischen Gründen wird der Zusammenhang (3.2.1.3) zwischen Magnetisie-
rung, Polarisation und dem Feld in anderer Weise notiert:
(3.2.1.4.a) 0
1 1( ) 1 ( )( )r
M t B tμ μ ω
⎛ ⎞= −⎜ ⎟
⎝ ⎠
r r
(3.2.1.4.b) ( )0( ) ( ) 1 ( )rP t E tε ε ω= −r r
Die neu eingeführte Funktion ( )rμ ω heißt dabei „relative Permeabilität“, ( )rε ω wird
mit „relative Permittivität“ bezeichnet. Mit den Gleichungen (3.2.1.2.1.5) werden die
magnetische Suszeptibilität ( )mχ ω und die elektrische Suszeptibilität ( )eχ ω einge-
führt (siehe auch Quelle [3.7]).
(3.2.1.5.a) 0 0
( ) 1 ( )( ) ( ) ( )1 ( )
m m
m
M t B t B tχ ω χ ωμ μ χ ω
= =+
r r r
0( ) (1 ( ))mμ ω μ χ ω= + , 0
( )( ) 1 ( )r mμ ωμ ω χ ωμ
= = + , 0( ) ( )rμ ω μ μ ω=

Seite 23
(3.2.1.5.b) 0( ) ( ) ( )eP t E tε χ ω=r r
0 (1 ( ))eε ε χ ω= + , 0
( )( ) 1 ( )r eε ωε ω χ ωε
= = + , 0( ) ( )rε ω ε ε ω=
Anhand der Beschaffenheit der Konstanten ( )rμ ω , welche die Wirkung des inneren
Magnetfeldes von Materie umschreibt, werden Materialien in verschiedene Klassen
eingeteilt:
( )1 rμ> Diamagnetische Werkstoffe (Inneres Br
-Feld leicht erniedrigt):
Der Diamagnetismus existiert in allen Körpern; er kann jedoch durch andere Effekte
überdeckt werden. In diamagnetische Materialien sind die Elektronen jeweils in Paa-
ren vorhanden, deren magnetische Momente entgegengesetzt ausgerichtet sind.
Daraus folgt, dass diese - unabhängig von der Temperatur - nicht zum Magnetismus
beitragen (siehe auch Quelle [3.5, S. 80 ff.]).
Typische diamagnetische Werkstoffe sind Ag, Au, Bi und Cu mit 0.999rμ ≈ .
( )1 rμ< Paramagnetische Werkstoffe (Inneres Br
-Feld leicht erhöht):
In paramagnetische Materialien existieren magnetische Momente, welche ohne
Magnetfeld zufällig orientiert sind und sich deshalb gegenseitig kompensieren. Liegt
ein äußeres Magnetfeld an, so werden die magnetischen Momente teilweise ausge-
richtet und erzeugen eine Polarisation parallel zum äußeren Feld. Die Stärke dieser
Polarisation ist durch das Gleichgewicht zwischen dem Energiegewinn durch paralle-
le Orientierung und der thermischen Bewegung gegeben. Dieser Zusammenhang ist
durch das Curie-Weiß´sche Gesetz beschrieben (siehe auch Quelle [3.5, S. 80 ff.]).
Typische paramagnetische Werkstoffe sind Sn, Pt, W und Al mit 1,001rμ ≈ .
Die Formeln der Gleichungen (3.2.1.5) können für paramagnetische Materie mit Hilfe
des Curie-Weiß-Gesetzes korrigiert werden. Abweichungen des linearen Verhaltens
findet man bei tiefen Temperaturen und hohen Feldern. Diese können dadurch er-
klärt werden, dass dann alle Dipole vollständig ausgerichtet sind. Eine quantitative

Seite 24
Behandlung ist nur mit Hilfe der Quantenmechanik möglich und soll hier außer Acht
gelassen werden.
(3.2.1.6.a) , ( , ) ( ) /m para T C Tχ ω ω= ..... Curie-Weiß-Gesetz
,0
( , )( , ) 1 ( ) /para
r para
TT C T
μ ωμ ω ω
μ= = +
(3.2.1.6.b) 0( , ) ( , )rT Tμ ω μ μ ω=
0
( )( ) 1 ( )r eε ωε ω χ ωε
= = +
(3.2.1.6.c) 0( ) ( )rε ω ε ε ω=
Die materialabhängige Konstante C ist unter den Namen „Curie-Konstante“ bekannt.
Mit diesen Feststellungen sollen die Betrachtungen der Materialgleichungen von dia-
und paramagnetischen Werkstoffen abgeschlossen werden. Auswirkungen dieser
Gleichung auf die Berechnung magnetischer Felder mit Hilfe des magnetischen Vek-
torpotentials werden später diskutiert werden.
3.2.2 Betrachtung ferromagnetischer Werkstoffe Nun sollen die bisher ausgeschlossenen ferromagnetischen Substanzen diskutiert
werden:
( )1 rμ< Ferromagnetische Werkstoffe (Inneres Br
-Feld stark erhöht):
In ferromagnetischen Werkstoffen liegt eine so starke Wechselwirkung einzelner
magnetischer Dipole untereinander vor, dass eine Ausrichtung spontan erfolgen
kann, ohne äußeres angelegtes Feld. Diese Bereiche geordneter Dipole - auch als
Weißsche Bezirke bezeichnet - erzeugen mit dem Anlegen eines äußeren Feldes
eine zum Feld parallel ausgerichtete starke Polarisation. Thermische Bewegungen,

Seite 25
beschrieben durch das Curie- und das Curie-Weiß-Gesetz, wirken dieser parallelen
Orientierung entgegen.
Typische ferromagnetische Werkstoffe sind Fe, Ni, Co und seltene Erden (siehe
auch Quelle [3.5, S. 82 ff.]).
Um Aussagen über die Abhängigkeiten von Magnetisierung und Permeabilität zu
gewinnen, wird das einfache Modell gemäß Formel (3.2.3) weiterentwickelt. Ferner
ist zu berücksichtigen, dass - der Quantentheorie zufolge - nur zwei Einstellungs-
richtungen der Dipole zum Magnetfeld möglich sind, nämlich parallel und antiparallel.
Am Ort des Atoms wird nicht nur das angelegte äußere Feld 0Hr
wirksam sein, son-
dern es werden sich auch die Einflüsse benachbarter Dipole in irgendeiner Weise
bemerkbar machen. Diese Einflüsse werden pauschal als inneres Feld iHr
proportio-
nal zur Magnetisierung angesetzt.
m AI=rr , M Nm=
r r
(3.2.2.1) *iH W M=r r
..... * Weisscher FaktorW
Damit kann man das Feld an der Stelle des Dipols beschreiben durch:
(3.2.2.2) *0 0iH H H H W M= + = +
r r r r r
Mit der Energie des Dipols und der Feststellung, dass nur zwei Einstellungsmöglich-
keiten für dessen Orientierung möglich sind, kann man den Mittelwert des Dipolmo-
ments m errechnen (siehe auch Quelle [3.5]):
(3.2.2.3) ( )*0 0W m H W Mμ= − +
(3.2.2.4) ( )*
0 0tanhm H W M
m mkT
μ⎛ ⎞+⎜ ⎟=⎜ ⎟⎝ ⎠
r
Da in diesem Fall die Wechselwirkung der Dipole untereinander nicht klein ist (wie
bei den dia- und paramagnetischen Werkstoffen), kann die hyperbolische Funktion

Seite 26
nicht durch ihr eigenes Argument angenähert werden, sondern muss erhalten blei-
ben (siehe auch Quelle [3.5]). Somit ergibt sich für die Magnetisierung:
M Nm=
(3.2.2.5) ( )*
0 0tanhs
m H W MM M m
kTμ⎛ ⎞+
⎜ ⎟=⎜ ⎟⎝ ⎠
mit sM Nm=
sM ist die Sättigungsmagnetisierung, d.h. die Magnetisierung, die sich bei vollständi-
ger Ausrichtung aller Dipole ergibt.
Gegen die spontane Magnetisierung ferromagnetischer Werkstoffe wirkt die thermi-
sche Bewegung. Daher existiert für jedes ferromagnetische Material eine Temperatur
Tc, oberhalb derer sich die Werkstoffe wie Paramagnetika verhalten. Die genaue
Temperaturabhängigkeit der Suszeptibilität in diesem Fall ist jedoch etwas anders als
bei reinen Paramagneten beschrieben:
( ),( )
m ferroC
CTT T
ωχ =−
für CT T>
Die Suszeptibilität nimmt also mit abnehmender Temperatur zu und divergiert bei der
kritischen Temperatur Tc, der Curie Temperatur. Bei dieser Temperatur genügt (idea-
lisiert) schon ein beliebig kleines Feld, um eine makroskopische magnetische Polari-
sation zu erzeugen, es entsteht eine temperaturabhängige spontane Polarisation
nach (3.2.2.5).
Aus dem beschriebenen Verhalten der spontanen Magnetisierung lässt sich schlie-
ßen, dass der Zusammenhang von Magnetisierung und Magnetfeld nicht nur statis-
tisch bestimmt ist, sondern auch nichtlinear von der Vorgeschichte des Materials und
von der Temperatur abhängt. Zudem lässt sich die Permeabilität rμ nicht als eindeu-
tige Funktion beschreiben.
Daher ist man im Allgemeinen dazu übergegangen, diesen Zusammenhang durch
die Angabe einer Kurve zu beschreiben:

Seite 27
Bild 3.2.2.1 Magnetisierungskurve ferromagnetischer Materialien
Die Magnetisierung in einem ferromagnetischen Material hängt nicht
nur von der angelegten Feldstärke ab, sondern auch von der Vorge-
schichte, die das Material durchlaufen hat: Ausgehend vom nicht mag-
netisierten Material (Nullpunkt) wächst M mit zunehmender Feldstärke
bis zur Sättigungsmagnetisierung sM an (rot dargestellte „Neukurve“).
Die zugehörige Feldstärke sH wird als Sättigungsfeldstärke bezeichnet.
Bei Verringerung des Magnetfeldes wird eine höher gelegene Kurve
durchlaufen; bei ( 0H = ) ist noch eine Magnetisierung, die Remanenz
rM vorhanden. Bei Umkehr der Feldrichtung verschwindet schließlich
die Magnetisierung, die erforderlich Feldstärke ist die Koerzivfeldstär-
ke cH .
Bei weichmagnetischen Materialien - Werkstoffen mit einer schmalen Magnetisie-
rungskennlinie - und Aussteuerung ohne Gleichstromvormagnetisierung ist es meist
zulässig, die beiden äußeren Äste der Hystereseschleife durch eine mittlere Kurve zu
ersetzen (siehe auch Quelle [3.5, S. 81 ff.]).
(3.2.2.6) ( )M f H=
M ↑
H →
rM
cH
sM

Seite 28
Mit dieser so genannten Magnetisierungskurve ist zwar ein eindeutiger Zusammen-
hang erzwungen worden, aber die entstandene Funktion stellt immer noch einen
nichtlinearen Zusammenhang dar.
Erst unter der Voraussetzung magnetisch weicher Materialien und der Forderung
sehr kleiner niedrigfrequenter oder statischer und nicht vormagnetisierter Felder kann
ein linearer Zusammenhang angenähert werden, um eine Lösung des Maxwellschen
Gleichungssystems erreichen zu können:
Bild 3.2.2.2 Hystereseschleife, Magnetisierungsfunktion und verschiedene Permea-
bilitätszahlen bei Ferromagnetika.
( )M f H=
(3.2.2.7) ( ) ( ) ( ) ( )0 0 1 0 2N
r N r rN
d MP f H P PdH H
μ μ μ μ μ μΔ= = ≈ ≈
Δ
Die bisher nicht betrachtete elektrische Suszeptibilität ferromagnetischer Werkstoffe
verhält sich im Allgemeinen ähnlich, wie bereits bei den para- und diamagnetischen
Materialien aufgezeigt (siehe auch Quelle [3.5]). Daher sollen hier nur die Ergebnisse
aus (3.2.1) übernommen und notiert werden:
M ↑
H →NHΔ
NMΔ
( )M f H=
2BΔ1 NP P 2P
2 HΔ

Seite 29
(3.2.2.8) 0( ) ( ) ( )eP t E tε χ ω=r r
0 (1 ( ))eε ε χ ω= + , 0
( )( ) 1 ( )r eε ωε ω χ ωε
= = + , 0( ) ( )rε ω ε ε ω=
Mit dieser Feststellung soll die Abhandlung der Materialeigenschaften ferromagneti-
scher Werkstoffe abgeschlossen werden. Betrachtungen in Bezug auf das magneti-
sche Vektorpotential werden im nächsten Kapitel erörtert werden.
3.3 Betrachtung des magnetischen Vektorpotentials unter dem Einfluss von Materie
Nun sollen die Wechselwirkungen elektromagnetischer Strahlung mit Materie in die
Ableitung des magnetischen Vektorpotentials eingebracht werden. Hierzu soll nicht
nur die Isotropie des eingebrachten Werkstoffs vorausgesetzt werden, sondern auch
dessen Homogenität - das heißt, das Material im gesamten betrachteten Feldraum
kann durch die beiden Funktionen ( , , )r r T Eε ε ω=r
und ( , , , )r r t T Hμ μ ω ′=r
charakteri-
siert werden.
Da aufgrund der Ergebnisse aus Kapitel 3.2 grundsätzlich verschiedene nicht lineare
Materialgleichungen vorausgesetzt werden müssen, bietet es sich an, die Ableitung
des Vektorpotentials in den verschiedenen Werkstoffarten
― Dia- und paramagnetische Materie,
― Ferromagnetische Materie und
― Spontan magnetisierte ferromagnetische Materie (Permanentmagnete)
gesondert zu betrachten. Zum Schluss der Betrachtungen werden die Randbedin-
gungen des Potentials an der Grenze zweier Medien hergeleitet.
3.3.1 Das magnetische Vektorpotential in dia- und paramagnetischer Ma-terie
In Kapitel 3.2.1 wurden die Maxwellschen Gleichungen mit den Stoffeigenschaften
(3.2.26) gekoppelt. Unter der Voraussetzung schwacher stationärer Felder und nicht

Seite 30
niedriger - von den Feldgrößen unabhängiger - Temperaturen wurde ein linearer
Zusammenhang hergeleitet.
Damit ist die Kopplung der Maxwellschen Gleichungen (3.1.5) mit den folgenden Ma-
terialgleichungen ohne weiteres möglich (siehe auch Quelle [3.7]):
( , )B T Hμ ω=r r
0( , ) ( , )rT Tμ ω μ μ ω= , ( , ) 1 ( , )r mT Tμ ω χ ω= +
( )D Eε ω=r r
0( ) ( )rε ω ε ε ω= , ( ) 1 ( )r eε ω χ ω= +
Die Ergebnisse der Herleitung des magnetischen Vektorpotentials im Vakuum kön-
nen somit - unter Modifikation der Materialgleichung - direkt übernommen werden
und ergeben:
(3.3.1.1) 2
02( ) ( , ) ( , )A T A T Jt
ε ω μ ω μ ω∂Δ − = −
∂
r r r
div ( ) ( , )A Ttϕε ω μ ω ∂
= −∂
r
Diese Differentialgleichung wird unter der Forderung des quellenfrei definierten mag-
netischen Vektorpotentials besonders einfach:
(3.3.1.2) 0( , )A T Jμ ωΔ = −r r
3.3.2 Das magnetische Vektorpotential in ferromagnetischer Materie Aufgrund der komplexen Zusammenhänge in den Materialgleichungen ferromagneti-
scher Werkstoffe ist eine direkte Kopplung der Maxwellschen Gleichungen ohne grö-
ßere Einschränkungen der Allgemeinheit nicht mehr möglich.
Daher soll die Ableitung eines magnetischen Vektorpotentials nur für die vereinfach-
ten Abbildungen mit Hilfe einer Magnetisierungsfunktion (3.2.2.6) durchgeführt wer-
den:

Seite 31
rotB A=r
, 0 ( )B f Hμ=r r
, 0 rD Eε ε=r r
( ) 0rot H J Dt∂
= +∂
r r r
( )10 0 0 0rot ( ) ( , )rf B J T E
tμ μ ε ε ω− ∂
= +∂
r r r
(3.3.2.1) ( )2
10 0 0 0 2rot (rot ) ( , ) gradrf A J T A
tμ μ ε ε ω ϕ− ∂
= + − −∂
r rr
Diese Gleichung ist unter Vorgabe der Funktion der magnetischen Flussdichte in Ab-
hängigkeit von der Feldstärke zu lösen, um das Vektorpotential analytisch zu
bestimmen. Dies - und das Finden der Lösung der dann entstandenen Differential-
gleichung - ist im Regelfall jedoch kein trivialer mathematischer Vorgang, so dass in
der Regel auf andere Möglichkeiten zurückgegriffen wird (siehe auch Quelle [3.2, S.
219 ff.]). Darauf soll jedoch erst später eingegangen werden.
Um eine analytische Lösung für das Potential vorzustellen, greift man daher oft auf
die Vereinfachung der Gleichungen (3.2.2.6) zurück. Mittels dieser Methode geht das
magnetische Vektorpotential über in die bekannte Gleichung (3.3.1.1).
2
02( ) ( , ) ( , )A T A T Jt
ε ω μ ω μ ω∂Δ − = −
∂
r r r
div ( ) ( , )A Ttϕε ω μ ω ∂
= −∂
r
3.3.3 Magnetisierte Materie als Ursache magnetischen Vektorpotentials Ist die spontane Magnetisierung von Materie (Permanentmagnet) alleinige Ursache
eines Feldes, so wird die Magnetisierungsvorgabe konstant oder zumindest mit ei-
nem konstanten Anteil angenommen werden (siehe auch Quelle [3.2]):
(3.3.3.1) 0 ( , )VM M M H T= +r r r r

Seite 32
Um die Maxwellschen Gleichungen für diesen Fall koppeln zu können, soll der vari-
able Anteil MV der Magnetisierung nach (3.3.2) bei von den Feldgrößen unabhängi-
ger Temperatur als linear abhängig von der äußeren magnetischen Feldstärke ange-
nommen werden:
(3.3.3.2) 0 0( )mM M T Hχ= + ⋅r r r
Aufgrund der vorhandenen Magnetisierung wird sich im Inneren des Materials sowie
bei endlichen Abmessungen des Volumens auch außerhalb des spontan magneti-
sierten Materials ein Feld aufbauen. Da im Bereich eines so erzeugten Feldes kein
Feld erzeugender Strom vorhanden sein soll, nehmen die Maxwellschen Gleichun-
gen (3.2.4) und (3.2.5) zur Beschreibung des Feldzustandes folgende Form an:
div 0B =r
, 0 0rot 0J H= ≡r r
Zwischen der Feldstärke und der magnetischen Flussdichte gilt im Inneren des mag-
netisierten Materials unter Anwendung des Zusammenhangs aus (3.2.6):
( ) ( )0 0 0 0 0 0 0 0m mB H M H M H Hμ χ μ μ χ= + + = + +r r r r r r r
Aufgrund der Rotationsfreiheit der magnetischen Feldstärke könnte diese als Gra-
dientenfeld einer skalaren magnetischen Potentialfunktion dargestellt werden. Für die
magnetische Flussdichte wird nun jedoch wie bisher ein Vektorpotential angegeben,
welches zweckmäßig nach Coulomb geeicht wurde (siehe Gleichung (3.1.9)):
rotB A=rr
, div 0A =r
Um eine Beschreibung von Flussdichte und Feldstärke zu erhalten, wird nun die Ro-
tation der Feld erregenden Magnetisierung untersucht:
(3.3.3.3) ( )0 00
1mBM Hχμ
= − +r
r r , ( )0 0
0 0
rot rot 1 rot rotmB BM Hχμ μ
= − + =r r
r r

Seite 33
0 0rot rotB Mμ=r r
Die Rotation der magnetischen Feldstärke ergibt sich mangels Feld erregender
Stromdichten nach (3.1.2.c) zu Null. Wird der Vektor der magnetischen Flussdichte
durch das magnetische Vektorpotential ausgedrückt, folgt:
0 0rot rot rot rot graddivM B A A Aμ = = = − Δr r rr r
(3.3.3.4) 0 0rotA MμΔ = −r r
Diese Gleichung des divergenzfreien magnetischen Vektorpotentials entspricht voll-
kommen der Gleichung (3.3.1.2), falls die Rotation der Magnetisierung durch eine
zeitunabhängige Stromdichte ersetzt wird:
(3.3.3.5) 0rot ( , )rM T Jμ ωr r
Das heißt, die Rotation der Magnetisierung kann durch eine Stromdichteverteilung
als Anregungsgröße sowohl für das magnetische Vektorpotential, als auch für das
magnetische Skalarpotential substituiert werden (siehe auch Quelle [3.2]).
3.3.4 Randbedingung des magnetischen Vektorpotentials Um Betrachtungen an der Grenze zweier Medien durchführen zu können, ist es not-
wendig, Randbedingungen für das magnetische Vektorpotential an der Grenzfläche
zu definieren. Nun kann dem Anwender neben den bekannten Bedingungen für die
magnetische Flussdichte und Feldstärke eine weitere Randbedingung - abgeleitet
aus der Definition des magnetischen Vektorpotentials - zur Verfügung gestellt wer-
den. Zur Herleitung werden daher zuerst die Beschreibung der Rotation des Vektor-
potentials, danach die Beschreibung seiner Quellen ausgewertet.
Den nun folgenden Ausführungen ist die Geometrie des Bildes 3.3.4.1 zugrunde ge-
legt: Die Betrachtung der elektromagnetischen Größen erfolgt für eine kleine recht-

Seite 34
eckförmige Fläche F. Die Fläche F durchsetzt die Grenze zweier Medien senkrecht.
Der Normaleneinheitsvektor steht senkrecht zur Grenzfläche und weist vom ersten
Medium in das zweite.
Bild 3.3.4.1 Anordnung zur Ableitung der Randbedingungen
Aus der Definition der Quellen des magnetischen Vektorpotentials erhält man mit
Hilfe des Stokes’schen Satzes:
rotB A=rr
(3.3.4.1) ( )
rotF F Kontur F
Bdf Adf Ads= =∫∫ ∫∫ ∫r rr rr r
Wird nun das Integrationsgebiet auf der Grenzlinie der Medien zusammengezogen,
indem Δh gegen Null definiert wird, so erhält man aufgrund der Endlichkeit der Kraft-
flussdichte:
(3.3.4.2) 0
lim 0h
F
BdfΔ →
=∫∫rr
(3.3.4.3) ( )1 2 1 20( )
limh
Kontur F s s s
Ads Ads Ads A A dsΔ →
Δ Δ Δ
= + = −∫ ∫ ∫ ∫r r r r rr r r r
1 2ds ds= −r r
1dsr
2dsr
df hΔnr 1Medium
2Medium

Seite 35
Aus (3.3.4.2) und (3.3.4.3) kann man schließen, dass die Tangentialkomponente des
Vektorpotentials an der Grenze zweier Medien stetig ist.
Bedingungen für die Betrachtung der Normalkomponenten des magnetischen Vek-
torpotentials werden aus der Eichung der Quellen des Potentials gewonnen:
div Atϕμε ∂= −∂
r Lorentz-Eichung
div 0A =r
Coulomb-Eichung
Bild 3.3.4.2 Anordnung zur Ableitung der Randbedingungen
Zur Beschreibung der Divergenz wird ein zylinderförmiges Volumenelement mit der
Höhe Δh und den Stirnflächen f betrachtet, das die Grenzfläche zwischen den Me-
dien durchsetzt. Die Verkleinerung des Volumenelementes wird wiederum durch die
Verringerung der Höhe Δh erreicht. Damit erhält man für die Divergenz:
( ) ( )1 2 1 10( )
limh
Fläche V F F
Adf Adf Adf A A ndfΔ →
= + = −∫ ∫∫ ∫∫r r rr r r r r r
1 2df df ndf= − =r r r
1dfr
2dfr
hΔnr
1Medium
2Medium

Seite 36
Wir erhalten also das Ergebnis, dass die Normalkomponente stetig durch die Grenze
zweier Medien geht, falls das magnetische Vektorpotential quellenfrei definiert ist.
Anderenfalls springt die Normalkomponente - abhängig von der Eichung des Poten-
tials - um einen endlichen Wert.
Das Verhalten des quellenfreien magnetischen Vektorpotentials an einer Grenzfläche
zweier Medien ist also insgesamt stetig.
(3.3.4.4)
( )
( )
1 2
1 2
1 2
0
0 mit div 0
n A A
n A A A
A A
⎫× − =⎪⎪⎪⋅ − = =⎬⎪⎪⎪= ⎭
r
rr
r r
3.4 Schlussfolgerungen zur Anwendung des magnetischen Vektorpo-tentials
In den bisherigen Ausführungen ist es gelungen, die Maxwellschen Gleichungen mit
verschiedenen Materialgleichungen zu koppeln und daraus ein magnetisches Vek-
torpotential abzuleiten:
rot E Bt∂
= −∂
r r
00 0
div PE ρε ε
⎛ ⎞+ =⎜ ⎟
⎝ ⎠
rr
( ) ( )0 0 0 0 0 0 0 00
rot pol magPB M J J J E
tμ μ μ ε
ε⎛ ⎞∂
− = + + + +⎜ ⎟∂ ⎝ ⎠
rr r r r r r
div 0B =r
Explizite analytische Lösungen für das magnetische Vektorpotential ließen sich je-
doch nur für vereinfachte Werkstoffmodelle anführen.

Seite 37
0 0 0rot ( , )rA M T Jμ μ μ ωΔ = − −r r r
0( , ) ( , )rT Tμ ω μ μ ω= , 0( ) ( )rε ω ε ε ω=
Die Voraussetzung von Linearität, Homogenität und Isotropie der Werkstoffe wird vor
allem bei der Berechnung elektrischer Maschinen zu Konflikten führen, da gerade
hier häufig ferromagnetische Materialien verwendetet werden.
Um sich den in Abschnitt 3 ausgeführten mathematischen Schwierigkeiten nicht aus-
zusetzen, soll hier abschließend ein Lösungsweg aufgezeigt werden, der vor allem
unter Nutzung technischer Hilfsmittel eine gewisse Attraktivität hat (siehe auch Quel-
le [3.2], S. 203 f.).
Anhand der für eingebrachte allgemeine Materie korrigierten Maxwellschen Glei-
chungen (3.2.5) erkennt man, dass sich die Gleichungen nur durch zusätzliche Ter-
me von den im Vakuum gültigen Maxwellgleichungen unterscheiden. Daraus folgt,
dass man unter der Nutzung des - bereits in (3.3.3.5) angeführten - Substitutions-
oder Äquivalenzprinzips jedes Material durch entsprechende Quellen ersetzen kann.
Das Material kann also unter Ersatz durch fiktive Quellenverteilungen negiert wer-
den; die nun genutzten Materialgleichungen für das Vakuum sind linear und entspre-
chend einfach zu bearbeiten.
Wesentlich ist, dass nun die Gleichungen, falls alle Ladungs- und Stromdichten be-
kannt sind, mit den bereits besprochenen Verfahren direkt gelöst werden können.
Natürlich sind die materialbedingten Quellen nicht sofort im Voraus bekannt und im
Allgemeinen von den Feldstärken abhängig. Daher folgt die Berechnung folgendem
iterativen Schema:
1. Schritt: Die freien Feldquellen erzeugen ein Feld im gesamten betrach-
teten Raum (Vakuum).
2. Schritt: Dieses Feld polarisiert / magnetisiert das Material.
3. Schritt: Die Polarisation und die Magnetisierung haben die Wirkung zu-
sätzlicher Quellen und erzeugen ein zusätzliches Feld, das zum
bisherigen Feld der Quellen zu addieren ist.
4. Schritt: Gehe zum zweiten Schritt, bis die gewünschte Rechengenauig-
keit erreicht und das System ausgeregelt ist.

Seite 38
Beachtenswert ist, dass höchstens der zweite Schritt dieses Verfahrens nichtlinear
sein kann.
Diese Ausführungen sollen die Diskussion um das magnetische Vektorpotential in
Abhängigkeit von den Materialgleichungen mit dem Verweis auf weitere Literatur ab-
schließen.
3.5 Quellen des dritten Kapitels [3.1] S. Blume Theorie elektromagnetischer Felder
Studientexte der Elektrotechnik
Eltex Verlag
1982
[3.2] P. Leuchtmann Einführung in die elektromagnetische Feldtheorie
Pearson Education Deutschland
2005
[3.3] G. Lautz Elektromagnetische Felder
Teubner Studienbücher
1985
[3.4] I. Wolff Maxwellsche Theorie
Grundlagen und Anwendungen
Springer Verlag
1997
[3.5] W. Schultz Dielektrische und magnetische Eigenschaften der Werk-
stoffe
Vieweg Verlag
1978
[3.6] H. Schilling Elektromagnetische Felder und Wellen
Physik in Beispielen
Verlag Harry Deutsch
1975

Seite 39
[3.7] M. Ehrich Vorlesungsskript
Theoretische Elektrotechnik
Universität der Bundeswehr Hamburg
1994
[3.8] A. Zippelius Vorlesungsskript
Theoretische Physik
Maxwell Gleichung in Wechselwirkung mit Materie
Georg-August-Universität Göttingen
2005
[3.9] M. Kämpfer
Vorlesungsskript
Mikrowellenphysik
Universität Bern
2005

Seite 40
4. Berechung eines 6-Schichtenmodells Permanentmagnet erregter Maschinen
4.1 Formulierung des Feldproblems
Mit den Überlegungen aus Kapitel 2 wurde eine Ersatzanordnung zur Berechnung
des Feldproblems elektrischer Maschinen detailliert. In diesem Kapitel soll zunächst
mit der Berechnung des zeitunabhängigen Rotorfeldes in einem Modell von 6
Schichten konstant angenommener Permeabilität die Basis für das weitere Vorgehen
geschaffen werden. Bild 4.1.1 gibt eine Übersicht über das vereinfachte Motorenmo-
dell:
Bild 4.1.1 Untersuchte Modellanordnung am Beispiel eines Innenläufermo-
tors. Dargestellt ist der Querschnitt in der (r,ϕ)-Ebene.
Die betrachteten Feldräume sind: Welle (1), Rotor (2), Perma-
nentmagnetanordnung (3), Luftspalt (4), Anker (5) und Außen-
raum (6).

Seite 41
Die Modellierung basiert auf folgenden Annahmen:
― Berechnung eines zweidimensionalen Magnetfeldes in der (r,ϕ)-Ebene, ange-
regt durch eine Permanentmagnetanordnung auf dem Rotor.
― Die Permanentmagnetanordnung wird durch eine Stromdichteverteilung im
Feldraum (3) in die Rechnung eingeführt.
― Die dem Rotor zugewandte zylindrische Statorfläche auf dem Radius (4) wird
als glatt angenommen.
― Sechs Feldräume werden durch konzentrisch angeordnete, glatte (Hohl-)
Kreiszylinder modelliert.
― Für alle sechs Feldräume werden lineare, homogene und isotrope Werkstoff-
eigenschaften unterstellt.
― Für die verschiedenen Feldräume (1 bis 6) werden jeweils konstante Tempe-
raturen unterstellt.
― Es ist keine Zeitabhängigkeit des Rotorfeldes definiert.
― Das magnetische Vektorpotential wird in Zylinderkoordinaten bestimmt.
Es bietet sich die Vorgehensweise an, die Magnetisierung im Feldraum 3 durch eine
Stromdichte zu beschreiben (siehe auch Gleichung (3.3.3.5)), um die - von der
Stromdichte abhängigen - Differentialgleichungen für die einzelnen Feldräume zu
lösen. Am Ende des Kapitels soll eine analytische Lösung für das magnetische Vek-
torpotential Ar
vorgestellt werden.
4.2 Darstellung des Gebietes permanenter Polarisation
4.2.1 Beschreibung der Magnetisierungsfunktion ( ),r ϕ2M Für die Berechnungen des magnetischen Vektorpotentials soll das in gestreckter
Darstellung abgebildete zweipolige Magnetisierungsmuster angenommen werden
(siehe Bild 4.2.1.1 auf der Folgeseite). Die Magnetisierungsfunktion des Permanent-
magnetrings sei für die Berechnungen vom Radius r unabhängig; als Bezugsradius

Seite 42
für die folgenden Betrachtungen wurde der Radius 2r der Grenzfläche zwischen Ro-
torkern und Permanentmagnetring gewählt.
Um spätere Berechnungen zu erleichtern, soll für die Beschreibung der Magnetisie-
rungsfunktion auf der Abszisse das Bogenmaß verwendet werden. Daher werden die
die Magnetisierung beschreibenden Parameter Polbreite yf, Polübergangsbreite bf
und die Breite der Totzone (τp,f -bf -yf) in die Konstanten α und β umformuliert.
Bild 4.2.1.1 Darstellung der Magnetisierungsfunktion M(ϕ2)
Auf der nächsten Seite gibt Tabelle 4.2.1.1 einen Überblick über die Bestimmung der
Parameter α und β aus den Eingabewerten yf und bf :
2ϕ2π α β
,0,5 p fτ⋅fyfb
5 4 3 2 1 r r r r r22 rπ
( )2M ϕ
M̂
0
M̂−
M↓ M↓M↑
12 M̂− ⋅

Seite 43
22
xr
ϕ = 2 2x rϕ=
2
12
f fy br
α−
= 2
12
f fy br
β+
=
Tabelle 4.2.1.1. Bestimmung der Parameter α und β aus den Eingabewerten
yf und bf
Für die zu berechnende zweipolige Magnetisierungsfunktion ergeben sich aus der
Tabelle die Gleichungen (4.2.2.1) und (4.2.1.2)
(4.2.1.1) 22
f fy br
α−
=
(4.2.1.2) 22
f fy br
β+
=
Die Magnetisierungsfunktion M(ϕ2) lässt sich nun wie folgt beschreiben:
(4.2.1.3) ( )
2
2 2
2
ˆ 0ˆ
für
0 / 2
r
r
M e
MM e
ϕ α
β ϕ α ϕ ββ α
β ϕ π
⎧ ⋅ ≤ ≤⎪⎪= − ⋅ ≤ ≤⎨
−⎪⎪ ≤ ≤⎩
r
r r
Für weitere Betrachtungen ist es sinnvoll, die vorgegebene Magnetisierung M(ϕ2) in
eine Reihe zu entwickeln. Aufgrund gerader Ordnung und Symmetrie 3. Art genügt
eine Koeffizientenbestimmung für symmetrische Funktionen:
(4.2.1.4) 2( ) rM M eϕ=r r
(4.2.1.5) 2cos( ) rM k eμ
μ
μϕ=∑r r mit
/ 2
2 2 20
4 ( )cos( ) k M dπ
μ ϕ μϕ ϕπ
= ∫

Seite 44
( )
( ) ( ) ( )
( )
/ 2
2 2 20
2 20
22 2 2 2
2
0
22 2 2
4 ( )cos( )
4 ˆ cos( )
4 4ˆ ˆcos( ) cos( )
ˆ4 sin
ˆ ˆ cos4 1 4 1sin sin
ˆ4 sin
ˆ4 1
k M d
M d
M d M d
M
M M
M
πμ
α
β β
α α
α
ββ
α α
ϕ μϕ ϕπ
μϕ ϕπ
β ϕμϕ ϕ μϕ ϕπ β α π β α
μϕπ μ
μϕβ μϕ ϕ μϕπ μ β α π μ β α μ
μαπ μ
π μ
=
=
+ −− −
⎡ ⎤= ⎢ ⎥⎣ ⎦
⎡ ⎤⎡ ⎤ ⎛ ⎞+ − +⎢ ⎥⎢ ⎥ ⎜ ⎟− −⎢ ⎥⎝ ⎠⎣ ⎦ ⎣ ⎦
=
+
∫
∫
∫ ∫
( ) ( ) ( )
( ) ( )( )
( ) ( ) ( )
( ) ( )( )
( ) ( ) ( ) ( )
( ) ( )( )
22 2 2
22 2
2
2
cossin sin
ˆ4 1 sin
ˆ cos4 1 sin
ˆ4 1 sin
ˆ cos cos4 1 sin
ˆ4 1 cos cos
ˆ4 1 2 sin si2
M
M
M
M
M
M
M
β
α
β
α
μϕβ μϕ ϕ μϕ
β α μ
β α μαπ μ β α
μϕβ ϕ μϕ
π μ β α μ
β α μαπ μ β α
μβ μαβ α μα
π μ β α μ μ
μα μβπ μ β α
α βμπ μ β α
⎡ ⎤− −⎢ ⎥− ⎣ ⎦
= −−
⎡ ⎤+ − −⎢ ⎥− ⎣ ⎦
= −−
⎛ ⎞+ − − − +⎜ ⎟− ⎝ ⎠
= −−
+⎛ ⎞= − ⋅ ⋅⎜ ⎟− ⎝ ⎠n
2α βμ⎛ − ⎞⎛ ⎞
⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠

Seite 45
( )( )
2
ˆ4 1 2sin sin2 2 2
ˆ2 sin si2 2
Mk
M
μ μ β αβ α β αμ μπ μ β α μ β α
β α β αμ μπ μ
⎛ ⎞−+ −⎛ ⎞ ⎛ ⎞= ⋅ ⋅ ⋅⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟− −⎝ ⎠ ⎝ ⎠⎝ ⎠
+ −⎛ ⎞ ⎛ ⎞= ⋅ ⋅⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Daher ergibt sich die Magnetisierungsfunktion M(ϕ2) in einer Reihe beschrieben zu
Gleichung (4.2.1.6)
(4.2.1.6) 2 2( ) cos( ) r rM M e k eμ
μ
ϕ μϕ= =∑r r r
ˆ2 sin si
2 2Mkμ β α β αμ μ
π μ+ −⎛ ⎞ ⎛ ⎞= ⋅ ⋅⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
( )2 1aμ = + mit max0,1,2a a= K
In Analogie zu den Bezugsdokumenten [4.1] und [4.2] seien hier der Sehnungsfaktor
KS,f und der Nutschlitzbreitenfaktor KN,f für die Magnetisierung eingeführt.
(4.2.1.7) , 2.1.1.sin sin
2 2f
S f Tabellepf
yKμ β α πμ μ
τ⎛ ⎞+⎛ ⎞= = ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Sehnungsfaktor
(4.2.1.8) , 2.1.1.si si
2 2f
N f Tabellepf
bKμ β α πμ μ
τ⎛ ⎞−⎛ ⎞= = ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Nutschlitzbreitenfaktor
, ,
ˆ2S f N f
Mk K Kμ μ μ
π μ= ⋅ ⋅
Bisher wurde die Erregung durch ein Magnetsegment betrachtet. Zur Verallgemeine-
rung der Betrachtungen soll nun zur beliebig-polpaarigen Ersatzanordnung überge-
gangen werden:
Die Magnetisierungsfunktion des einzelnen Pols wird nun um jeweils τp,f verschoben
und aufsummiert werden. Zu beachten ist, dass die geradzahligen Segmente negativ
magnetisiert sind. Damit ergibt sich:

Seite 46
( ) ( )( )2
2 2 ,1
( ) cos 1 1 fp
r p f rM M e k eμ
ρ μ
ϕ μϕ μ ρ τ ρ π=
= = − − + −∑∑r r r
,22p f
fpπτ =
( )2 1aμ = + mit max0,1,2a a= K
( ) ( )( )2
2 2 ,1
( ) cos 1 1 fp
r p f rM M e k eμ
ρ μ
ϕ μϕ μ ρ τ ρ π=
= = − − + −∑∑r r r
( )2
21
cos 1 1 fp
rf
M k ep
μ
ρ μ
μμϕ ρ π=
⎛ ⎞⎛ ⎞= − − −⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠∑∑
r r
2
21
cos 1 1 fp
rf f
M k ep p
μ
ρ μ
μ μμϕ π ρ π=
⎛ ⎞⎛ ⎞ ⎛ ⎞= + − − −⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠∑∑
r r
( )
2
sin 12 1
cos 1 1 2
sin 12
ff f
rf f
f
pp p
M k ep p
p
μ
μ
μππμ μμϕ π
π μ
⎛ ⎞⎛ ⎞−⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟ ⎛ ⎞+⎛ ⎞ ⎛ ⎞⎝ ⎠⎝ ⎠ ⎜ ⎟= + − + −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎛ ⎞⎛ ⎞ ⎝ ⎠ ⎝ ⎠⎝ ⎠−⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑r r
( )( ) ( )
2
sin 2 1 cos 1 1
2sin 1
2
f fr
f f
f
p pM k e
p p
p
μ
μ
π μ πμ μμϕ ππ μ
⎛ ⎞− +⎛ ⎞ ⎛ ⎞⎜ ⎟= + − + −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎛ ⎞⎛ ⎞ ⎝ ⎠ ⎝ ⎠⎝ ⎠−⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑r r
Da sich der Zähler des Vorfaktors zu Null ergibt, ist für die Bildung eines Grenzwer-
tes des Bruches nach l´Hospital folgende Forderung notwendig:
12 f
ap
π μ π⎛ ⎞
− = ⋅⎜ ⎟⎜ ⎟⎝ ⎠
, 1 2f
apμ⎛ ⎞
− =⎜ ⎟⎜ ⎟⎝ ⎠

Seite 47
(4.2.1.09) 2 1f
apμ
= + mit max0,1,2a a= K
Der Grenzwert des Vorfaktors ergibt sich also zu:
( )sin' 2 1 cos 2 1
2 22 2 1
sin' 1 cos 12 2
f ff f a
f f
f f
p pp p
p p
p p
π μ π μ
π μ π μ
⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞⋅ − ⋅ −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠= ⋅ = ⋅ −
⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞− −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠
Damit erhält man für die Magnetisierungsfunktion:
( ) ( )2
2 12 1 cos 1 1
2a f
f rf f
pM p k e
p pμ
μ
πμ μμϕ π⎛ ⎞+⎛ ⎞ ⎛ ⎞⎜ ⎟= ⋅ − + − + −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
∑r r
( ) ( )22 1 cos af rM p k a eμ
μ
μϕ π= ⋅ − +∑r r
( )22 cos f rM p k eμ
μ
μϕ=∑r r
Mit diesem Teilergebnis und der Forderung (4.2.1.09) ergibt sich für die Magnetisie-
rungsunktion:
(4.2.1.10.a) 2( ) rM M eϕ=r r
(4.2.1.10.b) ( ) ( )2 2 2 cos fM p kμμ
ϕ μϕ=∑
(4.2.1.10.c) , ,
ˆ2S f N f
Mk K Kμ μ μ
π μ= ⋅ ⋅

Seite 48
(4.2.1.10.d) , sin2
fS f
f pf
yK
pμ μ π
τ
⎛ ⎞= ⎜ ⎟⎜ ⎟
⎝ ⎠ , , si
2f
N ff pf
bK
pμ μ π
τ
⎛ ⎞= ⎜ ⎟⎜ ⎟
⎝ ⎠
2 1f
apμ
= + mit max0,1,2a a= K
Die Magnetisierungsfunktion soll in der Form (4.2.1.10) für die weiteren Betrachtun-
gen im Feldraum des PM-Ringes eingeführt werden.
Bild 4.2.1.2 gibt einen Eindruck errechneter Ergebnisse. Die physikalische Zweck-
mäßigkeit dieser Abbildung eines Permanentmagneten ist im Weiteren auf Plausibili-
tät und Abbildungstreue zu prüfen.
Bild 4.2.1.2. Darstellung eines Beispiels einer Magnetisierungsfunktion M(ϕ2) mit
α=0.5, β=1.0, pf =1 und dem Parameter amax =(5,10, 50)
0
0 α β 0.5π
ˆ0.5M
M̂
2ϕ →
M ↑

Seite 49
4.2.2 Beschreibung der Magnetisierung durch eine Ersatzstromdichte
Mittels des in Gleichung (3.3.3.5) eingeführten Äquivalenzmodells lässt sich die
Magnetisierung der Permanentmagnete nun durch eine Ersatzstromdichteverteilung
im Feldraum 3 darstellen:
(4.2.2.1) ( ) ( )30 2 0 0 2rot ,rA M J rμ ϕ μ μ ϕΔ = − = −
r r r
(4.2.2.2) ( )0 2,J r ϕ =r
3 3
22
2
rot ( ) 1 ( ) zr r
M M er
ϕ ϕμ μ ϕ
∂= ⋅
∂
rr
( )3
0 2 22
2, cos( )f
zr
pJ r k e
rμ
μ
ϕ μϕμ ϕ
⎛ ⎞∂= ⎜ ⎟∂ ⎝ ⎠
∑r r
(4.2.2.3) ( )3
0 2 2
2, sin( ) f
zr
pJ r k e
rμ
μ
ϕ μ μϕμ
= ∑r r
, ,
ˆ2S f N f
Mk K Kμ μ μ
π μ= ⋅ ⋅
2 1f
apμ
= + mit max0,1,2a a= K
4.2.3 Beschreibung der Magnetisierung durch einen Ersatzstrombelag
Zu Vergleichs- und Verifikationszwecken kann es nützlich sein, die Ersatzstromdichte
( )0 2,J r ϕr
in einem korrespondierenden Strombelag ( )0 2a ϕ auf dem Radius 2r dar-
zustellen. Hierzu wird die Ersatzstromdichte über den Radius des Permanentmagnet-
ringes integriert.
(4.2.3.01) ( ) ( )3
2
0 2 0 2, r
r
a J r drϕ ϕ= ∫r

Seite 50
(4.2.3.02) ( )3 3
3 20 2 2 2
2 2
2 2ln sin( ) ln sin( )f f PM
r r
p pr ra k kr r
μ μ
μ μ
δϕ μ μϕ μ μϕμ μ
⎛ ⎞ ⎛ ⎞+= ⋅ = ⋅⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠∑ ∑
, ,
ˆ2S f N f
Mk K Kμ μ μ
π μ= ⋅ ⋅
2 1f
apμ
= + mit max0,1,2a a= K
4.3 Lösung des Feldproblems
4.3.1 Lösung des Feldproblems der nicht erregten Räume in Zylinderkoordinaten
Für die anregungsfreien Feldräume Welle, Läuferjoch, Luftspalt, Ständer und Außen-
raum ist das magnetische Vektorpotential Aur
durch die Laplacesche Differentialglei-
chung 0AΔ = (3.1.9) beschrieben. Gemäß den Festlegungen in Kapitel 2.2 wird der
Laplace-Operator problemangepasst in Zylinderkoordinaten formuliert:
(4.3.1.1) 2 2
2 2 22
1 1 0A A A Ar r r r ϕ∂ ∂ ∂
Δ = + + =∂ ∂ ∂
ur
Die Lösung der Gleichung erfolgt traditionell mittels des Separationsansatzes
2( ) ( )A R r ϕ= ⋅Φ
(4.3.1.2) 2
1 1 0R RAR r R r′′ ′ ′′Φ
Δ ≡ + + =Φ
Mit der Wahl von 2n′′Φ Φ = sowie durch Trennung der Veränderlichen erhält man
für die FunktionΦ :
(4.3.1.3) 1 2 2
3 2 4 2
sin( ) cos( )
K KK K
ϕμϕ μϕ
+⎧Φ = ⎨ +⎩
=0>1,
μμ μ ∈
Für die Differentialgleichung 2 2 0r R rR n R′′ ′+ − = ist folgende Lösung bekannt:

Seite 51
(4.3.1.4) 5 6
7 8
ln( ) K K rR
K r K rμ μ−
+⎧⎪= ⎨+⎪⎩
=0>0,
μμ μ ∈
Die Linearkombination der Einzellösungen (4.3.1.3) und (4.3.1.4) führt zur allgemei-
nen Lösung:
(4.3.1.5) ( ) ( )
( ) ( )1 2 2 3 4
5 2 6 2 7 8
ln( )
sin( ) cos( )
K K K K rA K K K r K rμ μ μ μ μ μ
μ
ϕ
μϕ μϕ −
+ ⋅ + +⎧⎪= ⎨ + ⋅ +⎪⎩∑
Mit Einführung der Periodizität 2 2( , ) ( , 2 )A r A rϕ ϕ π= +r r
folgen 2 0K = und μ ∈
(4.3.1.6) ( )
( ) ( )1 3 4
5 2 6 2 7 8
ln( )
sin( ) cos( )
K K K rA K K K r K rμ μ μ μ μ μ
μ
μϕ μϕ −
⋅ + +⎧⎪= ⎨ + ⋅ +⎪⎩∑
Die Forderung der Endlichkeit des Betrages von 2( , )A r ϕr
bei Radien der Grenzwerte
Null und Unendlich bedingt 4 0K =
(4.3.1.7) ( ) ( )1 3
5 2 6 2 7 8
sin( ) cos( )
K KA K K K r K rμ μ μ μ μ μ
μ
μϕ μϕ −
⋅ +⎧⎪= ⎨ + ⋅ +⎪⎩∑
Die Berücksichtigung der Feldanregung durch den PM-Magnetring führt aufgrund
rein gerader Funktionen in den Radialkomponenten der generierten Flussdichte zu
einer weiteren Vereinfachung:
(4.3.1.8) ( )1 3
5 2 7 8
sin( )
K KA K K r K rμ μ μ μ μ
μ
μϕ −
⋅ +⎧⎪= ⎨ ⋅ +⎪⎩∑
mit ( )
max
2 1
0,1,2,fp a
a a
μ = +
= K

Seite 52
Eine letzte Umformulierung des magnetischen Vektorpotentials führt zu
(4.3.1.09) ( )1 2 3 2sin( )A C C C r rμ μ μ μ
μ
μϕ−= + ⋅ + ⋅∑
mit ( )
max
2 1
0,1,2,fp a
a a
μ = +
= K
Dieser Ansatz wird im Weiteren übernommen und in Abschnitt 4.3.5 an die besonde-
ren Eigenschaften der zu betrachtenden Feldräume angepasst. Die verbleibenden
Konstanten werden aus den Randbedingungen ermittelt.
4.3.2 Lösung des Ansatzes für den Permanentmagnet erregten Raum in Zylinderkoordinaten
Der nun zu untersuchende Feldraum des Permanentmagnetes wird als magnetosta-
tischer Fall mit eingeprägter Ersatzstromdichte betrachtet. Hier ist die Gleichung
(3.1.9) ( A Jμ ′Δ = −r r
) zu lösen; sie gilt für konstante Permeabilität.
(4.3.2.1) ( )3
2 2
0 0 22 2 22
1 1 ,rA A A A J rr r r r
μ μ ϕϕ
∂ ∂ ∂Δ = + + = −
∂ ∂ ∂
ur r
mit ( ) ( )30 0 2 2
1, sinr zJ r a er
μ
μ
μ μ ϕ μϕ− = − ∑r r ,
02 fa p kμ μμ μ= − und ( ) max2 1 , 0,1,2,fp a a aμ = + = K
Neben der in Kapitel 4.3.1 ermittelten homogenen Lösung der Differentialgleichung
wird nun eine additionale partikuläre Lösung gefunden werden.
Die Störfunktion ( )30 0 2,r J rμ μ ϕ−r
lässt ein Ergebnis der Art
(4.3.2.2) 2sin( )pA Kμμ
μϕ′ = ∑

Seite 53
vermuten. Durch Einsetzen von A′ in die ursprüngliche DGL erhält man neben dem
Beweis der Richtigkeit der Vermutung von A′ die Konstante pKμ mit:
(4.3.2.3) 211p
aKμ
μ
μμ≠
=−
Die Lösung der DGL für 1μ = findet sich durch Substitution von r durch r = te und
nochmaliges Einsetzen von 2( , )tA A e ϕ′′ ′′= in die Ursprungsgleichung.
Als Ergebnis erhält man:
(4.3.2.4) 12
1
1 ln( )sin( )2
A ar rμ
ϕ=
′′ =
Die allgemeine Lösung der DGL im Feldraum ergibt sich nun durch die Linearkombi-
nation der gefundenen homogenen und partikulären Einzellösungen zu:
(4.3.2.5)
( )1 2 3 2
22
sin( )
+ sin( )(1 )
C C C r r
Aa r
μ μ μ μ
μ
μ
μ
μϕ
μϕμ
−⎧ ⎡ ⎤+ + ⋅⎣ ⎦⎪⎪= ⎨ ⎡ ⎤⎪ ⎢ ⎥⎪ −⎣ ⎦⎩
∑
∑
mit ( )max
12 1
0,1,2,fp a
a a
μμ>
= +
= K
sowie
(4.3.2.6) ( )1 1
1 2 3 2
12
sin( )
1 ln( )sin( ) 2
C C C r rA
ar r
ϕ
ϕ
−⎧ ⎡ ⎤+ + ⋅⎣ ⎦⎪= ⎨ ⎡ ⎤+⎪ ⎢ ⎥⎣ ⎦⎩

Seite 54
(4.3.2.7) ( )1 1
1 2 3 2
12
sin( )
1 ln( )sin( ) 2
C C C r rA
ar r
ϕ
ϕ
−⎧ ⎡ ⎤+ + ⋅⎣ ⎦⎪= ⎨ ⎡ ⎤+⎪ ⎢ ⎥⎣ ⎦⎩
mit ( )2 1 1
01
f
f
p a
ap
μ = + =
==
Dieser Ansatz wird im Weiteren übernommen; die verbleibenden Konstanten werden
in Abschnitt 4.3.5 aus den gültigen Randbedingungen ermittelt.
4.3.3 Zusammenstellung der Lösungsansätze Der allgemeine Lösungsansatz lässt sich für die Feldräume 1 (Welle) und 6 (Außen-
raum) aufgrund der speziellen Bedingungen 10limr
A→
≠ ∞ und 6limr
A→∞
≠ ∞ weiter
vereinfachen. Daher:
1 1,1 2,1 2sin( )A C C rμ μ
μ
μϕ= + ⋅ ⋅∑
6 1,6 2,6 2sin( )A C C rμ μ
μ
μϕ−= + ⋅ ⋅∑
Somit bleiben folgende Gleichungen an ihren Randbedingungen zu betrachten:
(4.3.3.1) 1 1,1 2,1 2sin( )A C C rμ μ
μ
μϕ= + ⋅ ⋅∑
(4.3.3.2) ( )2 1,2 2,2 3,2 2sin( )A C C C r rμ μ μ μ
μ
μϕ−= + ⋅ + ⋅∑

Seite 55
(4.3.3.3)
( )
( )
( )( )
1,3 2,3 3,3 2
3 221
121
sin( )
sin( )(1 )
1 ln sin( )2
C C C r r
aA r
a r r
μ μ μ μ
μ
μ
μ μ
μ
μϕ
μϕμ
ϕ
−
≠
=
⎧ + ⋅ + ⋅⎪⎪⎪⎪= + ⋅ ⋅⎨
−⎪⎪+ ⋅ ⋅ ⋅⎪
⎪⎩
∑
∑
(4.3.3.4) ( )4 1,4 2,4 3,4 2sin( )A C C C r rμ μ μ μ
μ
μϕ−= + ⋅ + ⋅∑
(4.3.3.5) ( )5 1,5 2,5 3,5 2sin( )A C C C r rμ μ μ μ
μ
μϕ−= + ⋅ + ⋅∑
(4.3.3.6) 6 1,6 2,6 2sin( )A C C rμ μ
μ
μϕ−= + ⋅ ⋅∑
4.3.4 Auswertung der Randbedingungen an den Grenzflächen Die Randbedingungen des magnetischen Vektorpotentials an Grenzflächen sind
nach Gleichung (3.3.3.4) definiert mit der Stetigkeit des Vektorpotentials
(4.3.4.1) i+1( ) ( ) i i iA r A r=
sowie der Kontinuitätsbedingung für die Tangentialkomponente der magnetischen
Feldstärke nach den Gleichungen (3.3.4.2) und (3.3.4.3):
(4.3.4.2) i 2 i+1 2 2( ) ( ) ( ) i i iH r H r a rϕ ϕ ϕ∂ − ∂ = ∂
(4.3.4.3) 1
1
1 1 0i ii i
i i
r rr r
A Ar rμ μ
+
+
∂ ∂⎛ ⎞ ⎛ ⎞− + =⎜ ⎟ ⎜ ⎟∂ ∂⎝ ⎠ ⎝ ⎠
Mit den sich ergebenden 10 Gleichungen an den entsprechenden 5 Grenzflächen
lässt sich das Gleichungssystem nach Kapitel 4.3.3 vollständig lösen.

Seite 56
4.3.4.1 Randbedingungen in allen Feldräumen Eine der Konstanten des vorliegenden Gleichungssystems ist frei wählbar. Im Fol-
genden sei 1, 1 0C = gesetzt. Aufgrund der Kontinuität des Vektorpotentials gilt damit
für alle 1, i 0C = .
4.3.4.2 Randbedingungen an der Grenzfläche Welle – Läuferjoch
Stetigkeit des Vektorpotentials bei 1r r=
(4.3.4.2.1) ( )
( ) ( )
1 1 2,1 2 1
2 1 2,2 2 3,2 1 1
sin( )
sin( )
A r C r
A r C C r r
μ μ
μ
μ μ μ μ
μ
μϕ
μϕ −
= =
= +
∑
∑
(4.3.4.2.2) ( )3,2 1 1
2,1 2,21
C r rC C
r
μ μ μμ μ
μ
−+=
Stetigkeit der Tangentialkomponente der Feldstärke bei 1r r=
(4.3.4.2.3)
( )
1 11
2 21
2,1 112 1
0 0
2,2 1 122 3,2 1 1
0 0
1 sin( )
1 sin( )
r rr r
r rr r
CA rr
CA C r rr
μμ
μ
μμ μ μ
μ
μϕ μμ μ μ μ
μϕ μ μμ μ μ μ
−
=
− − −
=
∂= =
∂
∂= −
∂
∑
∑
(4.3.4.2.4) ( )
1
2
3,2 1 12,1 2,2
1
r
r
C r rC C
r
μ μ μμ μ
μ
μμ
−−=
Diese Gleichungen führen gleichgesetzt direkt zu
(4.3.4.2.5) 1 2
1 2
23,2 1
r r
r r
C rμ μμ μμ μ
−+=
−
(4.3.4.2.6) ( )22,1 2,2 3,2 1C C C rμ μ μ μ−= +

Seite 57
4.3.4.3 Randbedingungen an der Grenzfläche Ständer - Außenraum
Stetigkeit des Vektorpotentials bei 5r r=
(4.3.4.3.1) ( ) ( )
( )
5 5 2,5 2 3,5 5 5
6 5 2,6 2 5
sin( )
sin( )
A r C C r r
A r C r
μ μ μ μ
μ
μ μ
μ
μϕ
μϕ
−
−
= + =
=
∑
∑
(4.3.4.3.2) ( )3,5 5 5
2,6 2,55
C r rC C
r
μ μ μμ μ
μ
−
−
+=
Stetigkeit der Tangentialkomponente der Feldstärke bei 5r r=
(4.3.4.3.3)
( )
( )
5 55
5 65
2,5 1 152 3,5 5 5
0 0
2,6 162 5
0 0
1 sin( )
1 sin( )
r rr r
r rr r
CA C r rr
CA rr
μμ μ μ
μ
μμ
μ
μϕ μ μμ μ μ μ
μϕ μμ μ μ μ
− − −
=
− −
=
∂= −
∂
∂= −
∂
∑
∑
(4.3.4.3.4) ( )
6
5
3,5 5 52,6 2,5
5
r
r
C r rC C
r
μ μ μμ μ
μ
μμ
−
−
−= −
Die Gleichungen führen gleichgesetzt direkt zu
(4.3.4.3.5) 6 5
6 5
23,5 5
r r
r r
C rμ μμ μμ μ
−−=
+
(4.3.4.3.6) ( )22,6 2,5 3,5 5 1C C C rμ μ μ μ= +

Seite 58
4.3.4.4 Randbedingungen an der Grenzfläche Luftspalt - Ständer
Stetigkeit des Vektorpotentials bei 4r r=
(4.3.4..4.1) ( ) ( )
( ) ( )
4 4 2,4 2 3,4 4 4
5 4 2,5 2 3,5 4 4
sin( )
sin( )
A r C C r r
A r C C r r
μ μ μ μ
μ
μ μ μ μ
μ
μϕ
μϕ
−
−
= + =
= +
∑
∑
(4.3.4.4.2) ( )( )
3,4 4 42,5 2,4
3,5 4 4
C r rC C
C r r
μ μ μμ μ
μ μ μ
−
−
+=
+
Stetigkeit der Tangentialkomponente der Feldstärke bei 4r r=
(4.3.4.4.3)
( )( )
( )( )
4 44
5 54
2,4 1 142 3,4 4 4
0 0
2,5 1 152 3,5 4 4
0 0
1 sin
1 sin
r rr r
r rr r
CA C r rr
CA C r rr
μμ μ μ
μ
μμ μ μ
μ
μϕ μ μμ μ μ μ
μϕ μ μμ μ μ μ
− − −
=
− − −
=
∂= −
∂
∂= −
∂
∑
∑
(4..3.4.4..4) ( )( )
5
4
3,4 4 42,5 2,4
3,5 4 4
r
r
C r rC C
C r r
μ μ μμ μ
μ μ μ
μμ
−
−
−=
−
Die Gleichungen führen ineinander eingesetzt zu
(4.3.4..4.5)
25 43,5 4
5 43,4
2 5 43,5 4
5 4
1
C rC
C r
μ μ
μ
μ μ
μ μμ μμ μμ μ
−−+
+=
−+
+
(4.3.4..4.6) ( )( )
23,4 4
2,5 2,4 23,5 4
C rC C
C r
μ μμ μ
μ μ
−
−
+=
+

Seite 59
4.3.4.5 Randbedingungen an der Grenzfläche Läuferjoch – Permanent-magnet
Stetigkeit der des Vektorpotentials für den Fall 1μ > bei 2r r=
(4.3.4.5.1) ( ) ( )
( ) ( )
2 2 2,2 2 3,2 2 2
3 2 2,3 3,3 2 2 2 22
sin( )
sin( )(1 )
A r C C r r
aA r C C r r r
μ μ μ μ
μ
μμ μ μ μ
μ
μϕ
μϕμ
−
−
= + =
⎛ ⎞= + +⎜ ⎟−⎝ ⎠
∑
∑
(4.3.4.5.2) ( )2,3 3,3 2 2 22
2,23,2 2 2
(1 )aC C r r r
CC r r
μμ μ μ μ
μμ μ μ
μ−
−
+ +−=
+
Stetigkeit der Tangentialkomponente der Feldstärke für den Fall 1μ > bei 2r r=
(4.3.5.5.3)
( )
( )
3 32
3
2 22
2,3 1 132 3,3 2 2
0 0
22 20
2,2 1 122 3,2 2 2
0 0
1 sin( )
+ sin( )(1 )
1 sin( )
r rr r
r
r rr r
CA C r rr
a
CA C r rr
μμ μ μ
μ
μ
μμ μ μ
μ
μϕ μ μμ μ μ μ
μϕμ μ μ
μϕ μ μμ μ μ μ
− − −
=
− − −
=
∂= −
∂
=−
∂= −
∂
∑
∑
(4.3.4.5.4) ( )
( )2
3
1 12,3 3,3 2 2 2
2,2 1 13,2 2 2
+(1 ) = r
r
aC C r rC
C r r
μμ μ μ μ
μμ μ μ
μ μμ μμ μ μ
− − −
− − −
−−
−
Durch Ein- und Gleichsetzen ergeben sich
(4.3.4.5.5) ( ) ( )
( )
2 12,3 3,3 2 22
2,2 23,2 2
1aC C r r
CC r
μμ μ μ μ
μμ
μ− − +
−
+ +−
=+

Seite 60
(4.3.4.5.6) ( )( ) ( )( )
2
3
3 2
12
22
2,3 2 22 3,3 2 3,3 2
11
r
r
r r
ar K
CK C r C r
μ μ
μμ μ μ μ
μμ μμ
μ μ
− +
− −
⎛ ⎞−⎜ ⎟⎜ ⎟− ⎝ ⎠=
+ − −
mit 2
3,2 22 2
3,2 2
C rK
C r
μ μμ
μ μ
−
−
−≡
+
Stetigkeit des Vektorpotentials für den Fall 1μ = bei 2r r=
(4.3.4.5.7)
( ) ( )
( ) ( ) ( )
1 1 12 2 2 3,2 2 2 2,2
11 1 1
3 2 2 3,3 2 2 2,3 2 2 2
sin( ) =
sin( ) ln sin( )2
A r C r r C
aA r C r r C r r
μ
μ
ϕ
ϕ ϕ
−
−
= +
= + +
∑
∑
(4.3.4.5.8) ( ) ( )
( )
11 1 1
2,3 3,3 2 2 2 21
2,2 1 13,2 2 2
ln2aC C r r r r
CC r r
−
−
+ +=
+
Stetigkeit der Tangentialkomponente der Feldstärke für den Fall 1μ = bei 2r r=
(4.3.4.5.9)
( )
( ) ( )( )
2 22
3 3 32
12,2 1 22
2 3,2 20 0
1 12,3 1 23
2 3,3 2 2 20 0 0
1 sin( ) =
1 sin( ) + ln 1 sin( )2
r rr r
r r rr r
CA C rr
CA aC r rr
μ
μ
ϕμ μ μ μ
ϕ ϕμ μ μ μ μ μ
−
=
−
=
∂= −
∂
∂= − +
∂
∑
∑
(4.3.4.5.10) ( ) ( )( )
( )2
3
11 1 2
2,3 3,3 2 21
2,2 1 23,2 2
+ ln 12 = r
r
aC C r rC
C rμμ
−
−
− +
−
Durch Einsetzen ergibt sich:
(4.3.4.5.11) ( ) ( )
( )
11 1 2
2,3 3,3 2 21
2,2 1 23,2 2
ln2aC C r r
CC r
−
−
+ +=
+

Seite 61
Hieraus ergibt sich nach elementaren Umrechnungen:
(4.3.4.5.12) ( )( ) ( )
( ) ( )( )
2
3
3 2
12 2 2
12,3 1 2 1 2
2 3,3 2 3,3 2
ln 1 lnr
r
r r
a r K rC
K C r C rμ
μμ
μ μ− −
⎛ ⎞+ −⎜ ⎟⎜ ⎟
⎝ ⎠=+ − −
mit 1 2
3,2 212 1 2
3,2 2
C rK
C r
−
−
−≡
+
4.3.4.6 Randbedingungen an der Grenzfläche Permanentmagnet - Luft-spalt
Stetigkeit des Vektorpotentials für den Fall 1μ > bei 3r r=
(4.3.4.6.1) ( ) ( )
( ) ( )
4 3 2,4 2 3,4 3 3
3 3 2,3 3,3 3 3 3 22
sin( )
sin( )(1 )
A r C C r r
aA r C C r r r
μ μ μ μ
μ
μμ μ μ μ
μ
μϕ
μϕμ
−
−
= + =
⎛ ⎞= + +⎜ ⎟−⎝ ⎠
∑
∑
(4.3.4.6.2) ( )
( )2,3 3,3 3 3 32
2,43,4 3 3
(1 )aC C r r r
CC r r
μμ μ μ μ
μμ μ μ
μ−
−
+ +−=
+
Stetigkeit der Tangentialkomponente der Feldstärke für den Fall 1μ > bei 3r r=
(4.6.4.6.3) ( )
( )
3 3 33
4 43
2,3 1 13 22 3,3 3 3 2
0 0 0
2,4 1 142 3,4 3 3
0 0
1 sin( )sin( ) + (1 )
1 sin( )
r r rr r
r rr r
CA aC r rr
CA C r rr
μ μμ μ μ
μ
μμ μ μ
μ
μϕμϕ μ μμ μ μ μ μ μ μ
μϕ μ μμ μ μ μ
− − −
=
− − −
=
∂= − =
∂ −
∂= −
∂
∑
∑
(4.3.4.6.4) ( )
( )4
3
2,3 3,3 2 2 2
2,43,4 3 3
+(1 ) = r
r
aC C r rC
C r r
μμ μ μ μ
μμ μ μ
μ μμ μμ μ μ
−
−
−−
−

Seite 62
Die Gleichungen führen ineinander eingesetzt zu
(4.3.4.6.5) ( ) ( )
( )
2 12,3 3,3 3 32
2,4 23,4 3
1aC C r r
CC r
μμ μ μ μ
μμ
μ− − +
−
+ +−
=+
(4.3.4.6.6) ( )( ) ( )( )
4
3
3 4
13
42
2,3 2 24 3,3 3 3,3 3
11
r
r
r r
ar K
CK C r C r
μ μμ
μμ μ μ μ μ
μμ μμ
μ μ
− +
− −
⎛ ⎞−⎜ ⎟⎜ ⎟− ⎝ ⎠=
+ − −
mit 2
3,4 34 2
3,4 3
C rK
C r
μ μμ
μ μ
−
−
−≡
+
Aus der Stetigkeit des Vektorpotentials für Fall 1μ = bei 3r r=
(4.3.4.6.7) ( ) ( ) ( )
( ) ( )
11 1 1
3 3 2 3,3 3 3 2,3 3 3 2
1 1 14 3 2 3,4 3 3 2,4
sin( ) ln sin( )2
sin( )
aA r C r r C r r
A r C r r Cμ
μ
ϕ ϕ
ϕ
−
−
= + + =
= +
∑
∑
(4.3.4.6.8) ( ) ( )
( )
11 1 1
2,3 3,3 3 3 3 31
2,4 1 13,4 3 3
ln2aC C r r r r
CC r r
−
−
+ +=
+
Stetigkeit der Tangentialkomponente der Feldstärke für den Fall 1μ = bei 3r r=
(4.3.4.6.9) ( ) ( )( )
( )
3 3 33
4 43
1 12,3 1 23
2 3,3 3 3 20 0 0
12,4 1 24
2 3,4 30 0
1 sin( ) + ln 1 sin( )2
1 sin( )
r r rr r
r rr r
CA aC r rr
CA C rr
μ
μ
ϕ ϕμ μ μ μ μ μ
ϕμ μ μ μ
−
=
−
=
∂= − + =
∂
∂= −
∂
∑
∑

Seite 63
(4.3.4.6.10) ( ) ( )( )
( )4
3
11 1 2
2,3 3,3 3 31
2,4 1 23,4 3
+ ln 12 = r
r
aC C r rC
C rμμ
−
−
− +
−
Durch Einsetzen ergibt sich:
(4.3.4.6.11) ( ) ( )
( )
11 1 2
2,3 3,3 3 31
2,4 1 23,4 3
ln2aC C r r
CC r
−
−
+ +=
+
Hieraus ergibt sich nach elementaren Umrechnungen:
(4.3.4.6.12) ( )( ) ( )
( ) ( )
4
3
3 4
13 4 3
12,3 1 1 2 1 2
4 3,3 3 3,3 3
ln 1 lnr
r
r r
a r K rC
K C r C r
μμ
μ μ− −
⎛ ⎞+ −⎜ ⎟⎜ ⎟
⎝ ⎠=+ − −
mit 1 2
3,4 314 1 2
3,4 3
C rK
C r
−
−
−≡
+
4.3.4.7 Errechnen der Konstanten für den Feldraum des Permanentmag-neten
Aus den Gleichungen (4.3.4.5.12) und (4.3.4.6.12) ergeben sich für 2,3Cμ
( )( ) ( )
( )( ) ( )
4 2
3 3
3 4 3 2
1 13 2
4 22 2!
2,3 2 2 2 24 3,3 3 3,3 3 2 3,3 2 3,3 2
1 11 1
r r
r r
r r r r
ar arK K
CK C r C r K C r C r
μ μ μ μ
μμ μ μ μ μ μ μ μ
μ μμ μ μ μμ μ
μ μ μ μ
− + − +
− − − −
⎛ ⎞ ⎛ ⎞− −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠= =
+ − − + − −
Hiermit lässt sich 3,3Cμ extrahieren um das Gleichungssystem nach Abschnitt 4.3.3
für den Fall (μ >1) aufzulösen:

Seite 64
(4.3.4.7.1) ( ) ( )( ) ( )
3 2 3 4
2 3 3 4
2 23 2 2 3 4
3,33 2 4
r r r r
r r r r
K r K r KC
K K K
μ μμ
μ
μ μ μ μ
μ μ μ μ
− −− − +=
− + −
mit ( )( )
4 3
2 3
13 4
3 12 2
r r
r r
r KK
r K
μμ
μ
μ μ μ
μ μ μ
− +
− +
−≡
−
Das Gleichungssystem ist hiermit für den Fall (μ>1) gelöst, es bleiben noch die Kon-
stanten sowie deren Abhängige für den partikulären Fall zu bestimmen:
(4.3.4.7.2) ( )( ) ( )( )
( ) ( )
( )( ) ( )( )( ) ( )
4 3 2 3
3 3
3 4 3 2
1 12 2
3 3 4 3 2 2 2 2
1 1 2 1 2 1 1 2 1 24 3,3 3 3,3 3 2 3,3 2 3,3 2
ln 1 ln ln 1 ln
1 1 1 1
r r r rr r
r r r r
a ar r K r r r K r
K C r C r K C r C r
μ μ μ μμ μ
μ μ μ μ
+ − + −
=+ − − + − −
Nun lässt sich 13,3C extrahieren:
(4.3.4.7.3) ( ) ( )( ) ( )
3 2 3 4
2 3 3 4
1 2 2 13 2 2 3 41
3,3 1 1 13 2 4
r r r r
r r r r
K r K r KC
K K K
μ μ μ μ
μ μ μ μ
− −+ − +=
− + −
mit ( )( ) ( )( )( ) ( )
4 3
2 3
13 4 31
3 12 2 2
ln 1 lnln 1 ln
r r
r r
r K rK
r K rμ μμ μ
+ −≡
+ −
Das Gleichungssystem nach Kapitel 4.3.3 ist hiermit vollständig gelöst.

Seite 65
4.3.5 Zusammenstellung der errechneten Konstanten
Für den Fall (μ >1) gilt nun folgende Zusammenstellung der Konstanten ,i jC :
( )22,1 2,2 3,2 1C C C rμ μ μ μ−= +
( ) ( )( )
2 12,3 3,3 2 22
2,2 23,2 2
1aC C r r
CC r
μμ μ μ μ
μμ
μ− − +
−
+ +−
=+
und 1 2
1 2
23,2 1
r r
r r
C rμ μμ μμ μ
−+=
−
( )( ) ( )( )
2
3
3 2
12
22
2,3 2 22 3,3 2 3,3 2
11
r
r
r r
ar K
CK C r C r
μ μ
μμ μ μ μ
μμ μμ
μ μ
− +
− −
⎛ ⎞−⎜ ⎟⎜ ⎟− ⎝ ⎠=
+ − − mit
23,2 2
2 23,2 2
C rK
C r
μ μμ
μ μ
−
−
−≡
+
( ) ( )( ) ( )
3 2 3 4
2 3 3 4
2 23 2 2 3 4
3,33 2 4
r r r r
r r r r
K r K r KC
K K K
μ μμ
μ
μ μ μ μ
μ μ μ μ
− −− − +=
− + − mit
( )( )
4 3
2 3
13 4
3 12 2
r r
r r
r KK
r K
μμ
μ
μ μ μ
μ μ μ
− +
− +
−≡
−
( )( ) ( )( )
4
3
3 4
13
42
2,3 2 24 3,3 3 3,3 3
11
r
r
r r
ar K
CK C r C r
μ μμ
μμ μ μ μ μ
μμ μμ
μ μ
− +
− −
⎛ ⎞−⎜ ⎟⎜ ⎟− ⎝ ⎠=
+ − − mit
23,4 3
4 23,4 3
C rK
C r
μ μμ
μ μ
−
−
−≡
+
( ) ( )( )
2 12,3 3,3 3 32
2,4 23,4 3
1aC C r r
CC r
μμ μ μ μ
μμ
μ− − +
−
+ +−
=+
und
25 43,5 4
5 43,4
2 5 43,5 4
5 4
1
C rC
C r
μ μ
μ
μ μ
μ μμ μμ μμ μ
−−+
+=
−+
+
( )( )
23,4 4
2,5 2,4 23,5 4
C rC C
C r
μ μμ μ
μ μ
−
−
+=
+ und 6 5
6 5
23,5 5
r r
r r
C rμ μμ μμ μ
−−=
+
( )22,6 2,5 3,5 5 1C C C rμ μ μ μ= +

Seite 66
Für den Fall (μ =1) wurden folgende Konstanten errechnet:
( )1 1 1 22,1 2,2 3,2 1C C C r−= +
( ) ( )
( )
11 1 2
2,3 3,3 2 21
2,2 1 23,2 2
ln2aC C r r
CC r
−
−
+ +=
+ und 1 2
1 2
1 23,2 1
r r
r r
C rμ μμ μ
−+=
−
( )( ) ( )( )( ) ( )( )
2 3
3
3 2
12
2 2 2 21
2,3 1 2 1 22 3,3 2 3,3 2
ln 1 ln
1 1
r rr
r r
a r r K rC
K C r C rμ
μ μμ
μ μ
+ −
=+ − −
mit 1 2
3,2 212 1 2
3,2 2
11
C rK
C r−
=+
( ) ( )( ) ( )
3 2 3 4
2 3 3 4
1 2 2 13 2 2 3 41
3,3 1 1 13 2 4
r r r r
r r r r
K r K r KC
K K K
μ μ μ μ
μ μ μ μ
− −+ − +=
− + −
( )( ) ( )( )( ) ( )
4 3
2 3
13 4 31
3 12 2 2
ln 1 lnln 1 ln
r r
r r
r K rK
r K rμ μμ μ
+ −≡
+ −
( )( ) ( )
( ) ( )
4
3
3 4
13 4 3
12,3 1 1 2 1 2
4 3,3 3 3,3 3
ln 1 lnr
r
r r
a r K rC
K C r C r
μμ
μ μ− −
⎛ ⎞+ −⎜ ⎟⎜ ⎟
⎝ ⎠=+ − −
mit 1 2
3,4 314 1 2
3,4 3
C rK
C r
−
−
−≡
+
( ) ( )
( )
11 1 2
2,3 3,3 3 31
2,4 1 23,4 3
ln2aC C r r
CC r
−
−
+ +=
+ und
1 25 43,5 4
1 5 43,4
1 2 5 43,5 4
5 4
1
C rC
C r
μ μμ μμ μμ μ
−−+
+=
−+
+
1 2
3,4 41 12,5 2,4 1 2
3,5 4
11
C rC C
C r+
=+
und 6 5
6 5
1 23,5 5
r r
r r
C rμ μμ μ
−−=
+
( )1 1 1 22,6 2,5 3,5 5 1C C C r= +

Seite 67
4.4 Ermittlung von Feldgrößen aus den Vektorpotentialen Unter Zugrundelegung des Vektorpotentials gemäß (4.3.3) und der Beziehung (4.4.1)
werden nun die radialen und tangentialen Flussdichten und Feldstärken außerhalb
des Permanentmagnetringes berechnet werden.
(4.4.1) rot i iB A=rr
Da das magnetische Vektorpotential in unseren Betrachtungen nur aus einer Zeuur
-
gerichteten Komponente besteht, folgt in den Feldräumen:
( ) ( ) ( )2 1, 2, 3, 2, sini i i i zA r C C C r r eμ μ μ μ
μ
ϕ μϕ−⎛ ⎞= + +⎜ ⎟⎝ ⎠
∑uur r
(4.4.2) ( ) ( ) ( )2 222 2 2
2
1, , ,ri i i r r
A AB r B r e B r e e er rϕ ϕ ϕϕ ϕ ϕ
ϕ∂ ∂
= + = − +∂ ∂
r rr r r r r
(4.4.3) ( ) ( ) ( )2 222 2 2
0 , 0 , 2
1 1 1, , ,ri i i r r
r i r i
A AH r H r e H r e e er rϕ ϕ ϕϕ ϕ ϕ
μ μ μ μ ϕ∂ ∂
= + = − +∂ ∂
r rr r r r r
(4.4.4) ( ) ( ) ( )2 3, 2, 2, cosri i i rB r C r r C e
rμ μ μ μ
μ
μϕ μϕ−= +∑r r
(4.4.5) ( ) ( ) ( )2 3, 2, 20 ,
1, cosri i i r
r i
H r C r r C er
μ μ μ μ
μ
μϕ μϕμ μ
−= +∑r r
(4.4.6) ( ) ( ) ( )22 2 3, 2, 2, sini i iB r C r r C e
rϕ
μ μ μ μϕ
μ
μϕ μϕ−= − −∑r r
(4.4.7) ( ) ( ) ( )22 2 3, 2, 2
0 ,
1, sini i ir i
H r C r r C erϕ
μ μ μ μϕ
μ
μϕ μϕμ μ
−= − −∑r r
Die Gleichungen (4.4.2) bis (4.4.7) geben die magnetische Flussdichten und Feld-
stärken in den Feldräumen 1, 2 und 4-6 wieder.
Innerhalb des Permanentmagneten werden magnetische Flussdichte und Feldstärke
durch die Gleichungen (4.4.8) beschrieben:

Seite 68
(4.4.8.a) 0PJ Mμ=r r
(4.4.8.b) 3 0 ,3 3r PB H Jμ μ= +r r r
4.5 Berechnung der Polradspannung Da die Polradspannung eine elementare Größe der Maschinenberechnung sowie ein
hervorragendes Mittel der Verifikation der bisherigen Ausführungen darstellt, soll die-
se nun im Vorgriff auf die noch folgenden Betrachtungen zur Berücksichtigung der
Statornutung (Abschnitt 8) und der genauen Beschreibung der Ankerwicklung (Ab-
schnitt 9) errechnet werden. Die Berechnung der Polradspannung erfolgt aufbauend
auf die Ergebnisse der Feldberechnungen in Kapitel 4.3.
4.5.1 Berechnung der Flussverkettung einer Spule Bild 4.5.1.1 Definition der ( )1, , ,n kκ ρ= -ten Spulenwindung im verwendeten
Koordinatensystem
2ϕ( )tϑ
0
In der Aufsicht auf die Anker-Wicklung ist die Oberschicht der Wicklung auf der rechten, die Unterschicht auf der linken Seite in den Nuten dargestellt. Die 1. Windung der (κ,ρ,k)-ten Spule befindet sich in beiden Nuten an der linken Nutgren-ze.
1y
,1sb
1ϕ
, ,kκ ρΔ
, ,kiκ ρ, ,kUκ ρ
Rotornullachse

Seite 69
Für die Flussverkettung einer beliebigen Spule des Stators gilt
(4.5.1.01) ( ), , , , , ,n k n kA dlμ μκ ρ κ ρψ = ∫
rr
Aufgrund des zr -gerichteten Vektorpotentials vereinfacht sich das Integral zur Multi-
plikation
(4.5.1.02) ( ) ( )( ), , , 4 1 4 1, , , , , ,, , , ,n k L Rn k n k
A r t A r t lμκ ρ κ ρ κ ρ
ψ ϕ ϕ= − ⋅
Im erregungsfreien Luftspalt ergibt sich das magnetische Vektorpotential zu
(4.5.1.03) ( ) ( ) ( )( )4 1 2 3 4 4 1, ,, , sin
kA r t C C r rμ μ μ μ
κ ρμ
ϕ μ ϕ ϑ−= + −∑
Die Betrachtung an den linken und rechten Grenzen der ( ), , ,n kκ ρ ten Spulenwin-
dung ergibt sich nach Bild 4.5.1.1 bei
(4.5.1.04) ( )( )
,1 ,111 , ,
1 ,1 1 ,1 1 ,1
11 2 2
s sL k
p p p
n b byN p p pκ ρ
π ππϕτ τ τ
−= Δ + − −
− ,
(4.5.1.05) ( )( )
,1 ,111 , ,
1 ,1 1 ,1 1 ,1
11 2 2
s sR k
p p p
n b byN p p pκ ρ
π ππϕτ τ τ
−= Δ + + −
− ,
(4.5.1.06) ( ) ( ) ( ), , 1 1 121 1 1 2k Nwa
m q k qkκ ρ κ ρ ϕ
⎡ ⎤Δ = − + − + −⎢ ⎥
⎣ ⎦ ,
1
1 1 12N q p mπϕ =
Hieraus folgt für die Potentiale sowie die Flussverkettung der ( ), , ,n kκ ρ -ten Spulen-
windung

Seite 70
( ) ( )( )( )
4 1 3 4 4 2, , ,
,1 ,11, ,
1 ,1 1 ,1 1 ,1
, ,
1 sin
1 2 2
L n k
s sk
p p p
A r t C r r C
n b byN p p p
μ μ μ μ μκ ρ
κ ρ
ϕ
π ππμ ϑτ τ τ
−= + ⋅
⎛ ⎞⎛ ⎞−⋅ Δ + − − −⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠⎝ ⎠
(4.5.1.07)
( )( )( )
( )( )
, , , 3 4 4 2
,1 ,11, ,
1 ,1 1 ,1 1 ,1
,1 ,11, ,
1 ,1 1 ,1 1 ,1
1sin
1 2 2
1sin
1 2 2
n k
s sk
p p p
s sk
p p p
l C r r C
n b byN p p p
n b byN p p p
μ μ μ μ μκ ρ
κ ρ
κ ρ
π ππμ ϑτ τ τ
π ππμ ϑτ τ τ
−⎡ ⎤Φ = + ⋅⎣ ⎦⎡ ⎤⎛ ⎞⎛ ⎞−⎢ ⎥+ Δ + + − −⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎢ ⎥⎝ ⎠⎝ ⎠⋅ ⎢ ⎥
⎛ ⎞⎛ ⎞⎢ ⎥−− Δ + − − −⎜ ⎟⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟−⎢ ⎥⎝ ⎠⎝ ⎠⎣ ⎦
Diese Gleichung vereinfacht sich unter Anwendung eines Additionstheorems
( )( )( )
, , , 3 4 4 2
,1 ,1, ,
1 ,1 1 ,1
1
1 ,1
1 2cos
1 2
sin2
n k
s sk
p p
p
l C r r C
n b bN p p
yp
μ μ μ μ μκ ρ
κ ρ
π πμ ϑ
τ τ
μπτ
−⎡ ⎤Φ = + ⋅⎣ ⎦⎡ ⎤⎛ ⎞⎛ ⎞−⎢ ⎥⋅ Δ + − −⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎢ ⎥⎝ ⎠⎝ ⎠⎣ ⎦⎡ ⎤⎛ ⎞⋅ ⎢ ⎥⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
Nun kann die Flussverkettung aller Windungen der ( ), ,kκ ρ ten Spule berechnet wer-
den:
(4.5.1.08) , , , , ,1
N
k n kn
μ μκ ρ κ ρ
=
Ψ = Φ∑
(4.5.1.09) ( )
( ) ( )
1, , 3 4 4 2
1 ,1
,1 ,1 ,1, ,
1 1 ,1 1 ,1 1 ,1
sin2
2cos1 2 1
kp
Ns s s
kn p p p
yl C r r Cp
b b bn
N p p N p
μ μ μ μ μκ ρ
κ ρ
μπτ
μπ μπ μπμ μϑ
τ τ τ
−
=
⎛ ⎞Ψ = + ⋅⎜ ⎟⎜ ⎟
⎝ ⎠⎛ ⎞
⋅ Δ − − − +⎜ ⎟⎜ ⎟− −⎝ ⎠∑

Seite 71
Diese Gleichung vereinfacht sich unter Umformulierung der Summe sowie der Ein-
führung des Sehnungsfaktors ,1SKμ zu
(4.5.1.10) 1,1
1 ,1
sin2S
p
yKp
μ μ πτ
⎛ ⎞= ⎜ ⎟⎜ ⎟
⎝ ⎠
(4.5.1.11) ( )
( )
, , ,1 2 3 4 4
,1 ,1, ,
1 1 ,1 1 ,1
2cos2 1
k S
Ns s
kn p p
l K C C r r
b bn
p N p
μ μ μ μ μ μκ ρ
κ ρ
μπ μπμ μϑ
τ τ
−
=
Ψ = + ⋅
⎛ ⎞⋅ Δ − − +⎜ ⎟⎜ ⎟−⎝ ⎠∑
( )
( ) ( ) ( )
, , 2 3 4 4
,1 ,1, ,
1 ,1 1 ,1
2
sin sin cos2 1 2 1
k S
s sk
p p
l K C C r r
N b bN p N p
μ μ μ μ μ μκ ρ
κ ρ
μπ μπμ μϑ
τ τ
−Ψ = − + ⋅
⎛ ⎞ ⎛ ⎞⋅ ⋅ Δ −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠
( )
( ) ( ) ( )
, , 2 3 4 4
,1 ,1, ,
1 ,1 1 ,1
2
sin sin cos2 1 2 1
k S
s sk
p p
l K C C r r
N b bN N
N p N p
μ μ μ μ μ μκ ρ
κ ρ
μπ μπμ μϑ
τ τ
−Ψ =− + ⋅
⎡ ⎤⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞⎢ ⎥⋅ Δ −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟− −⎢ ⎥⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎣ ⎦
Mit der Einführung des Nutschlitzbreitenfaktors ,1NKμ sowie des Polradwinkels Pϕ
erhält man:
(4.5.1.12) ( ) ( )
,1 ,1,1
1 ,1 1 ,1
,1,1N
1 ,1
sin sin , 2 1 2 1
lim si2
s sN
p p
sN
p
N b bK N
N p N p
bK
p
μ
μ
μπ μπτ τ
μπτ→∞
⎛ ⎞⎛ ⎞ ⎛ ⎞= ⋅⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟− −⎝ ⎠ ⎝ ⎠⎝ ⎠
⎛ ⎞= ⎜ ⎟⎜ ⎟
⎝ ⎠
(4.5.1.13) ( )
( ), , ,1 ,1 2 3 4 4
, ,
2
cos
k S N
k
lN K K C C r rμ μ μ μ μ μ μκ ρ
κ ρμ μϑ
−Ψ = − + ⋅
⋅ Δ −

Seite 72
(4.5.1.14) 0 2Pπϕ μϑ= +
(4.5.1.15) ( )( )( )
, , ,1 ,1 2 3 4 4
, ,
2
sin
k f S N
k P
lNp K K C C r r
t
μ μ μ μ μ μ μκ ρ
κ ρμ ϕ μϑ
−Ψ = − + ⋅
⋅ Δ − −
4.5.2 Berechnung der Flussverkettung einer Spulengruppe Unter Voraussetzung der Reihenschaltung aller Spulen pro Gruppe ist zur weiteren
Berechnung der Flussverkettung die Summe aller Spulen der ( ),kρ ten Spulengrup-
pe zu bilden
(4.5.2.01) , , ,1
q
k kμ μ
ρ κ ρκ =
Ψ = Ψ∑
(4.5.2.02) ( )( )( )
,1 ,1 2 3 4 4
,1 , ,
2
sin
q S N
k
k P
lN K K C C r r
t
μ μ μ μ μ μ
μρ
κ κ ρμ ϕ μϑ
−
=
⎡ ⎤− + ⋅⎢ ⎥Ψ =⎢ ⎥⋅ Δ − −⎣ ⎦
∑
( )
( ) ( ) ( )
,1 ,1 2 3 4 4
,1
1 1 1 1 1 1 1 1 1
2
sin 1 12 2
f S Nq
k
Pwa
lNp K K C C r r
k tq p m q p m p k p m
μ μ μ μ μ μ
μρ
κμπ μπ μπ μπκ ρ ϕ μϑ
−
=
⎡ ⎤− + ⋅⎢ ⎥
Ψ = ⎢ ⎥⎛ ⎞⋅ − + − + − − −⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
∑
Diese Gleichung vereinfacht sich unter Umformulierung der Summe sowie der Ein-
führung des Zonungsfaktors ,1ZKμ zu
(4.5.2.03) ( )
( ) ( ) ( )
,1 ,1 2 3 4 41 1 1 1 1
,
1 1 1 1 1 1
2 sin sin2 2
sin 1 1
S N
k
Pwa
l K K C C r rp m p m q
k tq p m p k p m
μ μ μ μ μ μ
μρ
μπ μπ
μπ μπ μπρ ϕ μϑ
−⎡ ⎤⎛ ⎞ ⎛ ⎞− + ⋅ ⋅⎢ ⎥⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎢ ⎥Ψ = ⎢ ⎥⎛ ⎞⎢ ⎥⋅ − + − + − − −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦

Seite 73
(4.5.2.04) 1 1 1 1 1 1
1 sin sin2 2ZK
q p m p m qμ μπ μπ⎛ ⎞ ⎛ ⎞
= ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(4.5.2.05) ( )
( ) ( ) ( )
1 ,1 ,1 ,1 2 3 4 4
,
1 1 1 1 1
2
2sin 1 1
S N Z
k
Pwa
q l K K K C C r r
k tp m p k p m
μ μ μ μ μ μ μ
μρ μπ μπ μπρ ϕ μϑ
−⎡ ⎤− + ⋅⎢ ⎥
Ψ = ⎢ ⎥⎛ ⎞⋅ − + − + − − −⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
Mit der Einführung des Wicklungsfaktors ,1WKμ erhält man den Verkettungsteil der μ -
ten Oberwelle in der ( ),kρ -ten Spulengruppe des Stators
(4.5.2.06) ,1 ,1 ,1 ,1W S N ZK K K Kμ μ μ μ=
(4.5.2.07) ( )
( ) ( ) ( )
,1 2 1 3 4 4
,
1 1 1 1 1
2
sin 1 1
W
k
Pwa
K C Nq l C r r
k tqp m p k p m
μ μ μ μ μ
μρ μπ μπ μπρ ϕ μϑ
−⎡ ⎤− + ⋅⎢ ⎥
Ψ = ⎢ ⎥⎛ ⎞⋅ + − + − − −⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
Zur weiteren Vereinfachung und Betrachtung sind Kenntnisse der äußeren Beschal-
tung der Stränge und Pole notwendig.
4.5.3 Berechnung der Flussverkettung der Wicklungsstränge Zur weiteren Berechnung der Polradspannung soll eine Beschaltung der einzelnen
Spulengruppen nach Bild 4.5.3.1 angenommen werden. Die Anzahl der parallel ge-
schalteten Zweige ist mit der Variablen a1 beschrieben.

Seite 74
Bild 4.5.3.1: Beispiel einer Schaltung von Spulengruppen zu Wicklungssträngen
(a1=3)
(4.5.3.01) max
,1
k k
ρμ
ρρ =
Ψ = Ψ∑
(4.5.3.02) 1max
1WA
pka
ρ =
( )
( ) ( ) ( )
,1 2 1 3 4 4
,
1 1 1 1 1
2
sin 1 1
W
k
Pwa
K C Nq l C r r
k tqp m p k p m
μ μ μ μ μ
μρ μπ μπ μπρ ϕ μϑ
−⎡ ⎤− + ⋅⎢ ⎥
Ψ = ⎢ ⎥⎛ ⎞⋅ + − + − − −⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(4.5.3.03) ( )
( ) ( ) ( )max
,1 2 3 4 4
1
1 1 1 1 1
2
2sin 1 1
W
k
Pwa
K C Nq l C r r
k tqp m p k p m
μ μ μ μ μ
ρμ
ρμπ μπ μπρ ϕ μϑ
−
=
⎡ ⎤− + ⋅⎢ ⎥
Ψ = ⎢ ⎥⎛ ⎞⋅ + − + − − −⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
∑
( )
( ) ( )max
,1 2 3 4 4
1
1 1 1 1 1 1
2
2sin 1
W
k
Pwa
K C N l C r r
k tqp m p m k p m
μ μ μ μ μ
ρμ
ρμπ μπ μπ ϕ μϑ
−
=
⎡ ⎤− + ⋅⎢ ⎥
Ψ = ⎢ ⎥⎛ ⎞⋅ − − + − − −⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
∑
1,KU 3,KU 5,KU
KU
KI
1,KI 3,KI 5,KI
1σ = 2σ = 3σ = 4σ = 5σ = 6σ =

Seite 75
(4.5.3.04) ( ) ( )
( ) ( )
1
1,1 1 1 2 3 4 4
1 1 1 1 1 1
2
2sin 1
W WAa
k
Pwa
K k p q N C l C r r
k tqp m p m k p m
μ μ μ μ μ
μμπ μπ μπ ϕ μϑ
−⎡ ⎤− + ⋅⎢ ⎥
Ψ = ⎢ ⎥⎛ ⎞⎢ ⎥⋅ − + − − −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
4.5.4 Berechnung der Strangspannungen Die Polradspannung kUμ der -μ ten Oberwelle berechnet sich nun nach
(4.5.6.01) k kdUdt
μ μ= Ψ
(4.5.4.02) ( ) ( )
( ) ( )
1
1,1 1 2 3 4 4
1 1 1 1 1 1
2
2sin 1
W WAa
k
Pwa
K k p qN C l C r rdUdt k t
qp m p m k p m
μ μ μ μ μ
μμπ μπ μπ ϕ ϑ
−⎡ ⎤− + ⋅⎢ ⎥
= ⎢ ⎥⎛ ⎞⎢ ⎥⋅ − + − − −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
Bei der Betrachtung der Polradspannung im stationären Betrieb ergeben sich ( )tϑ
und kUμ zu
(4.5.4.03) ( ) 0t tϑ ϑ= Ω + , 0 2Pπϕ μϑ= +
(4.5.4.04) ( ) ( )
( )
1
1,1 1 2 3 4 4
1 1 1 1 1 1
2
2sin 1
W WAa
k
Pwa
K k p qN C l C r rdUdt k t
qp m p m k p m
μ μ μ μ μ
μμπ μπ μπ μ ϕ
−⎡ ⎤− + ⋅⎢ ⎥
= ⎢ ⎥⎛ ⎞⎢ ⎥⋅ − + − − Ω −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(4.5.4.05) ( ) ( )
( )
1
1,1 2 3 4 4
1 1 1 1 1 1
2
2cos 1
W WAa
k
Pwa
K k pqN C l C r rU
k tqp m p m k p m
μ μ μ μ μ
μ
μ
μπ μπ μπ μ ϕ
−⎡ ⎤Ω + ⋅⎢ ⎥
= ⎢ ⎥⎛ ⎞⎢ ⎥⋅ − + − − + Ω +⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦

Seite 76
(4.5.4.06) ( ) ( )
( )1
1,1 1 1 2 3 4 4
1 1 1 1 1
2
2 11 1cos
W WAa
k
PWA
K k p q N C l C r r
U kt
p m k q p m
μ μ μ μ μ
μ
μ
μπμπ μ ϕ
−⎡ ⎤Ω + ⋅⎢ ⎥
= ⎢ ⎥⎛ ⎞−⎛ ⎞⎢ ⎥⋅ − + + Ω +⎜ ⎟⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎝ ⎠⎣ ⎦
Mit der Einführung der Serienwindungszahl w ergibt sich schließlich die Polradspan-
nung zu:
(4.5.4.07) 11 1
1
WAk pw Nqa
=
(4.5.4.08) ( )
( ),1 2 3 4 4
1 1 1 1 1
2
2 11 1cos
W
k
PWA
K w C l C r r
U kt
p m k q p m
μ μ μ μ μ
μ
μ
μπμπ μ ϕ
−⎡ ⎤Ω + ⋅⎢ ⎥
= ⎢ ⎥⎛ ⎞−⎛ ⎞⋅ − + + Ω +⎢ ⎥⎜ ⎟⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎝ ⎠⎣ ⎦

Seite 77
4.6 Numerische Berechnung eines Beispielproblems Zu Verifikation und Veranschaulichung sollen nun numerische Ergebnisse für das
Vektorpotential, dessen abgeleitete Feldgrößen sowie die Polradspannung gefunden
werden. Der zu untersuchende Motor ist eine dreipolpaarige Synchronmaschine der
Firma Lenze GmbH & Co. KG, welche zum Antrieb einer CNC-Maschine konzipiert
wurde.
Die grundlegenden Motordaten sind in Tabelle 4.6.1 zusammengefasst; weitere In-
formationen sind den Quellen [4.3] und [4.4] sowie der Anlage 1 zu entnehmen.
Daten Bemerkung
1,gr 0.01250 m Geometrieradius Welle
2,gr 0.02590 m Geometrieradius Rotorkern
3,gr 0.02940 m Geometrieradius Außenradius des PM-Ring
4,gr 0.03000 m Geometrieradius Luftspalt
5,gr 0.05325 m Geometrieradius Außenradius des Stators
1p 4 Polpaarzahl des Ankers
1m 3 Strangzahl des Ankers
1q 1 Lochzahl des Ankers
rB 1.05 T Remanenzinduktion des Magnetwerkstoffes
,3rμ 1.07 Permeabilität Permanentmagnetmaterial
fp 3 Polpaarzahl der PM-Erregung
1p 3 Polpaarzahl
1m 3 Strangzahl
1q 2 Lochzahl
1N 23 Windungszahl einer Spule
1a 1 Anzahl paralleler Zweige
Tabelle 4.6.1 Elementare technische Daten des Synchronmotors der Firma
Lenze GmbH & Co. KG

Seite 78
Bild 4.6.1 Synchronmotor der Firma Lenze GmbH & Co. KG
bei demontiertem Rotor
Leider sind Messungen magnetischer Felder bei montierten Maschinen nicht zu rea-
lisieren. Daher wurde, um die Ergebnisse der Rechnungen zu verifizieren, der Rotor
in ein Messjoch nach Bild 4.6.2 eingeschoben. Zur Messung des Rotorfeldes wurde
in die Nut einer Isolierstoffbuchse, welche die koaxiale Anordnung von Joch und Ro-
tor sicherstellt, eine Hallsonde eingebracht. Die folgende Betrachtungen und Verifika-
tionsprozeduren beziehen sich auf diesen Messaufbau.
Bild 4.6.2 Schnittzeichnung des verwendeten Messjochs und geometrische Ab-
maße sowie technische Daten der Hallsonde.

Seite 79
Unter der Verwendung des in Bild 4.6.2 dargestellten Messjochs ändern sich die
Eingabedaten für die numerischen Berechnungen. Die zu Tabelle 4.6.1 differieren-
den Werte sind in der Tabelle 4.6.2 aufgeführt:
Daten
Bemerkung
3,gr 0.02940 m Geometrieradius: Außenradius des PM-Ring
4, 4,g MJr r= 0.03150 m Geometrieradius: Bohrungsradius Messjoch
5, 5,g MJr r= 0.07250 m Geometrieradius Außenradius Messjoch
CK 1 Keine Verwendung des Carterfaktors
Tabelle 4.6.2 Eingabewerte zur Rechnung der Felder bei der Verwendung des
Messjochs nach Bild 4.6.2
Die folgenden Bilder zeigen die Rechenergebnisse für das magnetische Vektorpoten-
tial auf dem Bohrungsradius des Messjochs über den Umfangswinkel ϕ (Bild 4.6.3)
und eine dreidimensionale Darstellung des Potentials in der (r,ϕ)-Ebene (Bild 4.6.4).
Mit der Bestimmung des magnetischen Vektorpotentials können die Feldlinien des
behandelten Problems als Linien konstanten Potentials direkt gezeichnet werden.
Als Ergebnisse der Flussdichteberechnungen werden in den Bildern 4.6.6 und 4.6.8
die Radialkomponente der magnetischen Flussdichte und in Bild 4.6.7 die Tangenti-
alkomponente der magnetischen Flussdichte auf dem Bohrungsradius des Mess-
jochs über den Umfangswinkel ϕ dargestellt. Das Bild 4.6.5 gibt eine Übersicht über
den Betrag der magnetischen Flussdichte in der (r,ϕ)-Ebene. Die Bilder finden sich
auf den nächsten Seiten.
Die Anzahl der errechneten Oberwellen wurde für alle folgenden Bilddarstellungen
auf amax=10 datiert.

Seite 80
Bild 4.6.3 Darstellung des magnetischen Vektorpotentials auf dem Bohrungs-
radius des Messjochs über den Umfangswinkel ϕ
Bild 4.6.3 Dreidimensionale Darstellung des magnetischen Vektorpotentials in
der (r,ϕ)-Ebene

Seite 81
Bild 4.6.5 Dreidimensionale Darstellung des Betrags der magnetischen Fluss-
dichte in der (r,ϕ)-Ebene
Bild 4.6.6 Radialkomponente der magnetischen Flussdichte auf dem Bohrungs-
radius des Messjochs über den Umfangswinkel ϕ

Seite 82
Bild 4.6.7 Tangentialkomponente der magnetischen Flussdichte auf dem
Bohrungsradius des Messjochs über den Umfangswinkel ϕ
Bild 4.6.8 Die Bildbeschreibung befindet sich auf der nächsten Seite

Seite 83
Bild 4.6.8 Darstellung der Radialkomponente der magnetischen Flussdichte
Die blaue Kurve entspricht der Auswertung der Berechnungsergebnisse
nach Kapitel 4.3 und 4.4.
Die rote Kurve zeigt die mit einem Teslameter „Sypris Gauß/Tesla Me-
ter Modell 5080“ (absolute Genauigkeit 2.5%) aufgenommenen Mess-
werte im Messjoch.
Der Durchmesser der aktiven Fläche der Hallsonde von 3,8mm (ent-
spricht 0,12rad) muss insbesondere bei der Begutachtung der Signal-
flanken berücksichtigt werden. Der Rotor wurde per Schrittmotor in
1800 Schritten (entsprechend 0.0035rad) über den Gesamtumfang im
Joch gedreht; mit jedem Schritt wurde ein Messwert aufgenommen.
Ungenauigkeiten bezüglich der radialen Anordnung der Sonde von ma-
ximal ±0,25mm können in der Betrachtung der Messergebnisse ver-
nachlässigt werden.
Tabelle 4.6.3 gibt einen Vergleich der Feldrechnungen nach Kapitel 4.3 und 4.4 so-
wie über die bereits in den Quellen [4.1] und [4.4] durchgeführten Messungen und
Berechnungen der Scheitelwerte der Radialkomponenten der magnetischen Fluss-
dichte.
Messwerte
Feldrechnungen
ˆ 0,5760rB =
Messung nach Quelle [4.4] (Fluxmeter T2B)
ˆ 0,610rB =Eindimensionale Feldberech-nung nach den Quellen [4.1] und [4.4]
ˆ 0,5975rB =
Messung nach Kapitel 4.6 (Teslameter 5080)
ˆ 0,586rB = Zweidimensionale Feldberech-nung nach Quelle [4.4]
ˆ 0,605rB =
Zweidimensionale Feldberech-nungen nach den Kapiteln 4.3 und 4.4
Tabelle 4.6.3 Vergleich der Ergebnisse verschiedener Feldberechnungen

Seite 84
Um die Rechenergebnisse des Kapitels 4.5 („Berechnung der Polradspannung“) zu
prüfen, wurde die Synchronmaschine wieder montiert und über einen Drehmoment-
messflansch (HBM T10F) mit einer fremd gekühlten Gleichstromnebenschlussma-
schine der Firma Siemens gekuppelt. Der Prüfling wurde nun von der Neben-
schlussmaschine angetrieben. Hierbei wurde die Polradspannung aufgenommen.
Bild 4.6.6 Darstellung der Berechnung und der Messungen der Polradspannung
Die schwarze Kurve zeigt die Messung der Polradspannung des Syn-
chronmotors der Firma Lenze GmbH & Co. KG bei einer Drehzahl von
2000 min-1 gegen einen künstlichen Sternpunkt. Die Werte wurden mit
einem potentialfreien Spannungsverstärker (absolute Genauigkeit
0.02%) und einem Oszilloskop „Ultima 500d“ der Firma Gould ermittelt.
Die Grundwellenbetrachtung der entsprechenden Rechnung nach den
Kapitel 4.3 und 4.4 ist in roter Farbe dargestellt, die blaue Kurve zeigt
die Summe der Grund- und Oberwellen der Rechnung bei einer Sum-
mationsgrenze amax=10.

Seite 85
Bild 4.6.7 Darstellung des Amplitudenspektrums der nach den Kapiteln 4.3 und
4.4 berechneten Polradspannung.

Seite 86
4.7 Quellen des vierten Kapitels
[4.1] E. Bolte Vorlesungsskript
Elektrische Maschinen und Antriebe, Gliederung 1
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005
[4.2] E. Bolte Vorlesungsskript
Elektrische Maschinen und Antriebe, Gliederung 3
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005
[4.3] K. Mallien Messbericht „Lenze Servomotor“
Universität der Bundeswehr Hamburg
1998
[4.4] N. Hampel Diplomarbeit
Servoantrieb mit Permanentmagnet erregtem Motor
Universität der Bundeswehr Hamburg
1999

Seite 87
5. Bestimmung der Streuziffer aus der zweidimensionalen Feldberechnung
Das Verhältnis der Streuflüsse zum Hauptfluss ist definiert als die Streuziffer. Diese
soll nun aus der analytisch durchgeführten zweidimensionalen Feldberechnung be-
stimmt werden.
(5.1) 1 M L M
L L L
StreuflussHauptfluss
σφ φ φ φσφ φ φ
−= = = = − Streuziffer
Die Polflüsse sowie deren Verhältnis zueinander können direkt aus der Lösung für
das z-gerichtete magnetische Vektorpotential (siehe Kapitel 3) abgeleitet werden:
(5.2) ( ) ( ) ( ) ( )( )* * * *2 2 2, , ,
r lr A r dl l A r A rμ μ μ μφ ϕ ϕ ϕ= = −∫
uurr r r
mit 2 2rfp
πϕ = + , 2 2lfp
πϕ = − , ( )2 1fp aμ = + und
( ) ( ) ( )* * * *2 2 1, 2, 2 3, 1,, , sin( ) , 0
r ri i i i iA r A r C C C r r Cμ μ μ μ μ μϕ ϕ μϕ ϑ −= = + + + ≡r r
Die Bestimmung der Polflüsse und der Streuziffer für die Grundwelleneinflüsse (μ =
pf ≡ p) folgt nun aus der Lösung des magnetischen Vektorpotentials der korrespon-
dierenden Feldräume zu:
( ) ( )
( )
* * *2, 3,
* *2, 3,
sin sin2 2
2
p p p p pi i f f
p p pi i
r l C C r r p pp p
lC C r r
π πφ −
−
⎛ ⎞⎛ ⎞ ⎛ ⎞= + − −⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
= +
(5.3.a) ( ) ( )( )( )
4 4 2 4 4 2
2,4 3,4 4 4
, ,
2
r l
p P PL
p p p
l A r A r
lC C r r
φ ϕ ϕ−
= −
= +
r r

Seite 88
(5.3.b) ( ) ( )( )( )
2 2 2 2 2 2
2,2 3,2 2 2
, ,
2
r l
p P PM
p p p
l A r A r
lC C r r
φ ϕ ϕ−
= −
= +
r r
(5.4) ( )( )
2,2 3,2 2 2
2,4 3,4 4 4
1 1p p p pp
p Mp p p p p
L
C C r r
C C r rφσ σφ
−
−
+≡ = − = −
+
Die Gleichung (5.4) lässt sich nun mit den in Kapitel 3 gefundenen Ergebnissen nu-
merisch bestimmen.
Um die Ergebnisse der Streuzifferrechnung mit bereits gefundenen Lösungen aus
den Quellen [5.1] und [5.2] vergleichen zu können, wurde für die weiteren Berech-
nungen die vereinfachende Anordnung nach Bild 5.1 zugrunde gelegt.
Bild 5.1 Anordnung zur vereinfachten Berechnung der Streuziffer σ
Welle und Rotorkern sind mit hochpermeablem Material gefüllt, ebenso
der in das Unendliche ausgedehnte Stator mit dem Innendurchmesser
2*r4. Die Feld erzeugenden Permanentmagnete sind auf dem Rotor-
kern bei r2 aufgebracht und haben eine Höhe von (r3-r2).
rμ →∞
2 3 4 r r r
rμ →∞
rμ →∞
2ϕ*r
Mφ
Lφ

Seite 89
Weiterhin seien zur Vereinfachung späterer Grenzwertbildungen der Bezug der Ra-
dien r3 und r4 auf den Radius des Rotorkerns eingeführt:
( )3
2
1 PMrr= + Δ , ( )4
2
1 Rrr= + Δ
Damit ergibt sich für die Streuziffer folgende Formulierung:
(5.5) ( )( ) ( )( )
22,2 3,2 2
22,4 3,4 2
11
1 1
p p p
p pp p pR R
C C r
C C rσ
−
+= −
+ Δ + + Δ
In einer Nebenrechnung sind nun die Konstanten 3,2PC und 3,4
PC zu ermitteln:
1 2
1 2
23,2 1
r rp p
r r
C rμ μμ μ
−+=
−
( )1 2
1 1 2 11 22
2 23,2 1 1 0 0 0
lim = lim lim lim 1 0r
r
r rp p p
r r rr r
C r rμ
μ
μ μμ μ
− −
→ → →∞ →→∞
⎛ ⎞⎛ ⎞+⎜ ⎟ = − ⋅ =⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠⎝ ⎠
3,2 0pC⇒ =
( )
( )
22 25 4 5 43,5 4 3,5 2
5 4 5 43,4
22 25 4 5 43,5 4 3,5 2
5 4 5 4
1
1 1 1
pp p p pr r r rR
p r r
pp p p pr r r rR
r r r r
C r C rC
C r C r
μ μ μ μμ μ μ μμ μ μ μμ μ μ μ
−− −− −+ + + Δ
+ += =
− −+ + Δ +
+ +
( )
( )
( )( )5 5
2 25 42 23,5 2
3,5 25 43,4 2 2 2 2 5 4 3,5 23,5 2
5 4
1 1lim = lim
1 11 1r r
pp pr rpp pR
Rp r rpp ppp p r r RR
r r
C r C rC
C rC rμ μ
μ μμ μ
μ μμ μ
− −− −
→∞ →∞
−⎛ ⎞+ +Δ⎜ ⎟ ⎛ ⎞+ +Δ+⎜ ⎟ ⎜ ⎟=− ⎜ ⎟⎜ ⎟ +Δ ++Δ + ⎝ ⎠⎜ ⎟+⎝ ⎠
Nebenrechnungen (NR) 6 5
6 5
23,5 5
r rp p
r r
C rμ μμ μ
−−=
+

Seite 90
(NR) ( )6 5
5 5 5 56 55
2 23,4 5 5
lim = lim lim lim 1 0r
r
r rp p p
r r rr r
C r rμ
μ
μ μμ μ
− −
→∞ →∞ →∞ →∞→∞
⎛ ⎞⎛ ⎞−⎜ ⎟ = − ⋅ =⎜ ⎟⎜ ⎟⎜ ⎟+⎝ ⎠⎝ ⎠
( ) 2 23,4 21 pp p
RC r− −⇒ = + Δ
Das Einsetzen der Zwischenergebnisse liefert die Gleichungen:
( ) ( ) ( )( )
2,22
2,4
11 1 1
p
p p ppR R R
C
Cσ
− −= −
+ Δ + Δ + + Δ
(5.6) ( )
2,2
2,4
1 12 1
p
ppR
CC
σ −= ⋅ −⋅ + Δ
Nun sind in weiteren Nebenrechnungen die verbleibenden Konstanten zu finden. Zu
beachten ist hier, dass aufgrund der Art der Lösung des Vektorpotentials eine Fallun-
terscheidung bezüglich (p=1 , p>1) getroffen werden muss. An dieser Stelle wird der
in der Praxis relevante Fall (p>1) untersucht werden:
( ) ( )
( )3
2 12,3 3,3 2 22
2,2 23,2 2
1
pp p p p
rpp p
aC C r rp
CC r
μ− − +
−
+ +−
=+
( ) ( )3
2 12,2 2,3 3,3 2 22
11
pp p p p p
r
aC C C r rpμ
+= + +−
( ) ( )
( )3
2 12,3 3,3 3 32
2,4 23,4 3
1
pp p p p
rpp
aC C r rp
CC r
μ− − +
−
+ +−
=+

Seite 91
( )( ) ( ) ( )
( ) ( )( )3
2 12 12,3 3,3 2 22
2,4 2 22 22 2
1 11
1 1
pp pp p p p
PM PMrp
p pp pR PM
aC C r rp
Cr r
μ− − +− − +
− −− −
+ + Δ + + Δ−
=+ Δ + + Δ
( )( ) ( ) ( )
( ) ( )3
2 12 12,3 3,3 2 22
2,4 2 2
1 11
1 1
pp pp p p p
PM PMrp
p pR PM
aC C r rp
Cμ
− − + +
− −
+ + Δ + + Δ−
=+ Δ + + Δ
( ) ( )( )2 22,22,
2,4
1 1p
p pR PMp
CK
C σ− −⇒ = + Δ + + Δ
(5.7.a) ( ) ( )( )( ) ( ) ( )
3
3
2 12,3 3,3 2 22
2,2 12 1
2,3 3,3 2 22
11
1 11
pp p p p
rp
p pp p p pPM PM
r
aC C r rp
KaC C r r
p
σ
μ
μ
+
− + +
+ +−
≡+ + Δ + + Δ
−
( )
2,2
2,4
1 12 1
p
ppR
CC
σ −= ⋅ −⋅ + Δ
(5.7.b) ( ) ( )
( )
2 2
2,
1 11
2 1
p pR PM
pR
K σσ− −
−
+ Δ + + Δ= ⋅ −
+ Δ
Eine weitere Ausformulierung der Terme (5.7) wird keine weiteren Vereinfachungen
für die Formulierung der Streuziffer ergeben. Numerisch ermittelte Ergebnisse der
Streuziffer werden am Ende dieses Kapitels vorgestellt und kommentiert werden.
Um die Rechnung zu verifizieren, ist ein Vergleich mit den Quellen [5.1] und [5.2] in-
teressant. Dazu werden die bisher mittels einer Stromdichte modellierten Permanent-
magnete im Feldraum 3 mit dem Grenzwert (ΔPM → 0) in einen Strombelag gedrängt:
2,0lim 1PM
K σΔ →=

Seite 92
( ) ( )
( )
2 2
0 0
1 1lim lim 1
2 1PM PM
p pR PM
pR
σ− −
−Δ → Δ →
+ Δ + + Δ= −
+ Δ
(5.8) ( )( )
( ) ( )2
0
1 1 1 1lim 1 1
22 1PM
p p pR R R
pR
σ− −
−Δ →
+ Δ + + Δ + + Δ= − = −
+ Δ
Dieser Übergang liefert also bereits gefundene Ergebnisse (siehe auch die Quellen
[5.1] und [5.2]).
Nun sollen einige Resultate der Streuzifferberechnungen nach Gleichung (5.4), Glei-
chung (5.7.b) und Gleichung (5.8) dargestellt und miteinander verglichen werden. Als
Referenzmodelle für diese Rechnungen wurden die in den Anlagen 1 und 2 vorge-
stellten Maschinen sowie ein weiterer Drehmoment- (Torque-) Motor der Firma
Gabler (GmbH) ausgewählt.
MKSRS 071-13
(Firma Lenze)
SCI 7680-700B-022
(Firma Gabler)
MBT210C
(Firma Bosch-Rexroth)
p -- 3 12 20
,3rμ -- 1,05 1,05 1,05
1r mm 12,50 58,70 60,00
2r mm 25,90 65,30 71,30
3r mm 29,40 68,60 77,90
4r mm 30,00 69,80 78,40
5r mm 53,25 97,80 105,00
RΔ -- 0,158 0,069 0,10
Tabelle 5.1 Zusammenstellung der Eingabewerte für die Streuzifferberechnungen.

Seite 93
Bild 5.2 Streuzifferberechnungen für den sechspoligen Servomotor MDSKSRS
071-13 der Firma Lenze GmbH & Co. KG.
Kurve der Farbe „rot“:
Diese Kurve entspricht dem Ergebnis der Feldrechnung ohne Vereinfa-
chungen, ermittelt nach Gleichung (5.04).
Kurve der Farbe „grün“ gestrichelt:
Die der rotfarbigen nahezu identische grüne Kurve wurde mit den in
Bild 5.1 vereinbarten Vernachlässigungen mittels der Gleichung (5.07)
bestimmt.
Kurven der Farbe „blau“:
Der bereits aus den Quellen [5.1] und [5.2] bekannte Term (5.08) (Ver-
einfachungen nach Bild 5.1 sowie Modellierung der Permanentmagnete
durch einen Strombelag) wird in der hellblauen Farbe dargestellt. Die
dunkelblaue Kurve entspricht einer Referenzrechnung nach (5.07), al-
lerdings wurde hier zu Vergleichszwecken die Höhe der Permanent-
magnete mit einem Prozent des tatsächlichen relativen Wertes dm mo-
delliert (d´m = 0.01 * dm / r2).

Seite 94
Bild 5.3 Streuzifferberechnungen für den zwölfpolpaarigen Drehmomentmotor
SCI 7680-700B-022 der Firma Gabler (GmbH)
Kurve der Farbe „rot“:
Diese Kurve entspricht dem Ergebnis der Feldrechnung ohne Vereinfa-
chungen, ermittelt nach Gleichung (1.04).
Kurve der Farbe „grün“ gestrichelt:
Die der rotfarbigen nahezu identische grüne Kurve wurde mit den in
Bild 5.1 vereinbarten Vernachlässigungen mittels der Gleichung (5.07)
bestimmt.
Kurven der Farbe „blau“:
Der bereits aus den Quellen [5.1] und [5.2] bekannte Term (5.08) (Ver-
einfachungen nach Bild 5.1 sowie Modellierung der Permanentmagnete
durch einen Strombelag) wird in der hellblauen Farbe dargestellt. Die
dunkelblaue Kurve entspricht einer Referenzrechnung nach (5.07), al-
lerdings wurde hier zu Vergleichszwecken die Höhe der Permanent-
magnete mit einem Prozent des tatsächlichen relativen Wertes dm mo-
delliert (d´m = 0.01 * dm / r2).

Seite 95
Bild 5.4 Streuzifferberechnungen für den zwanzigpolpaarigen Motor MBT 210C.
der Firma Bosch-Rexroth AG
Kurve der Farbe „rot“:
Diese Kurve entspricht dem Ergebnis der Feldrechnung ohne Vereinfa-
chungen, ermittelt nach Gleichung (5.04).
Kurve der Farbe „grün“ gestrichelt:
Die der rotfarbigen nahezu identische grüne Kurve wurde mit den in
Bild 5.1 vereinbarten Vernachlässigungen mittels der Gleichung (5.07)
bestimmt.
Kurven der Farbe „blau“:
Der bereits aus den Quellen [5.1] und [5.2] bekannte Term (5.08) (Ver-
einfachungen nach Bild 5.1 sowie Modellierung der Permanentmagnete
durch einen Strombelag) wird in der hellblauen Farbe dargestellt. Die
dunkelblaue Kurve entspricht einer Referenzrechnung nach (5.07), al-
lerdings wurde hier zu Vergleichszwecken die Höhe der Permanent-
magnete mit einem Prozent des tatsächlichen relativen Wertes dm mo-
delliert (d´m = 0.01 * dm / r2).

Seite 96
Wie aus den Bildern 5.3 bis 5.5 zu ersehen ist, bietet die Streuzifferberechnung mit-
tels der Gleichungen (5.4) und (5.7) in sich konsistente Ergebnisse.
Die Modellierung der Erregung mittels eines Strombelags scheint für die Streuziffer-
berechnungen unbrauchbar. Die Ergebnisse mit den in Gleichung (5.08) dargestell-
ten Vereinfachungen liefern - vor allem bei hochpolpaarigen Maschinen - erhebliche
Abweichungen zu den beiden vorgenannten Rechnungen.
Die Ergebnisse der Gleichung (5.8) wurden mittels der Gleichung (5.7) bei einer nicht
den tatsächlichen geometrischen Gegebenheiten entsprechenden Permanenterre-
gung verifiziert (Variation der Permanentmagnethöhe d´m = 0.01 * dm / r2).
5.1 Quellen des fünften Kapitels [5.1] E. Bolte Technischer Bericht Nr. 27
Auslegung von Permanentmagnet erregten Maschinen mit
radialer Flussorientierung
Universität der Bundeswehr Hamburg
2002
[5.2] E. Bolte Vorlesungsskript
Elektrische Maschinen und Antriebe
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005

Seite 97
6. Berechnung eines Vielschichtenmodells Permanent er-regter Maschinen
6.1 Formulierung des Feldproblems In den vorangegangenen Überlegungen wurde eine Maschine mittels der in Bild
6.1.1 dargestellten Ersatzanordnung modelliert, um eine analytische Lösung für die
Berechnung des magnetischen Vektorpotentials vorzustellen.
Bild 6.1.1 Untersuchte Modellanordnung am Beispiel eines Innenläufermo-
tors. Dargestellt ist der Querschnitt in der (r,ϕ)-Ebene.
Die Berechnung des Vektorpotentials erfolgte hierbei separat in den in Bild 6.1.1 be-
zeichneten 6 Feldräumen mittels der Gleichungen
(6.1.1) 2 2
2 2 22
1 1 0A A A Ar r r r ϕ∂ ∂ ∂
Δ = + + =∂ ∂ ∂
ur (Feldräume 1,2,4,5 und 6)
(6.1.2) ( )2 2
0 22 2 22
1 1 ,A A A A J rr r r r
μ ϕϕ
∂ ∂ ∂ ′Δ = + + = −∂ ∂ ∂
ur r (Feldraum 3)

Seite 98
Um den weichmagnetischen Eigenschaften der Permeabilität in den Feldräumen 2
und 5 (Rotor und Stator) Rechnung tragen zu können, ist es nun sinnvoll, die Anzahl
der betrachteten Räume zu erhöhen. Hierzu soll ein Rechenschema entwickelt wer-
den, dass das bereits betrachtete sechsschichtige Modell in eines beliebig vieler
Feldräume (siehe Bild 6.1.2) überführt.
Bild 6.1.2 Anordnung und Nomenklatur der Feldräume des Vielschichtenmodells
Dargestellt ist die Schichtung von (M+1) Feldräumen, deren Nomenkla-
tur denen der Radien äquivalent ist. Das Zentrum der konzentrisch zu-
einander angeordneten Feldräume findet sich am oberen Bildrand der
gestreckten Darstellung. Der Radius rM bezeichnet den Außenradius
des Stators. Der Außenraum der Maschine ist demzufolge der Feld-
raum M+1.
Der mit dem Index E bezeichnete - grau dargestellte - Raum ist der
der Permanentmagneterregung, der Raum AE+1 der des Luftspaltes.
Der zu entwickelnde Algorithmus soll nun das in (M+1) Feldräume separierte Feld-
problem in Zylinderkoordinaten mit genau einer Felderregung im Raume (E) lösen.
Die Lösungsansätze für das magnetische Vektorpotential können hierbei ohne weite-
re Modifikation aus den vorhergehenden Kapiteln übernommen werden.
2 0 AΔ =uur
1 0 EA −Δ =uuuur
rot EA J Mμ μ′Δ = − = −uur uur uur
1 0 EA +Δ =uuuur
0 MAΔ =uuur
1 1r0 , limM MA A+ +→∞
Δ = ≠ ∞uuuuur uuuuur
1 1r 00 , limA A
→Δ = ≠ ∞uur uur
M
r
0
r1
r2
rE-2
rE-1
rE
rE+1
rM-1
rM
1
2
E-1
E
E+1
M
M+1
M
M
M
A
A
A
A
A
A
A

Seite 99
Die Rahmenbedingungen der Modellierung für folgende Rechnungen sind im Fol-
genden wiedergegeben:
― Berechnung eines zweidimensionalen Magnetfeldes in der (r,ϕ)-Ebene, ange-
regt durch eine Permanentmagnetanordnung.
― Die Permanentmagnetanordnung wird durch eine Stromdichteverteilung im
Feldraum (E) in die Rechnung eingeführt.
― Die dem Rotor zugewandte zylindrische Statorfläche wird als glatt angenom-
men.
― Es werden mittels konzentrisch angeordneter, glatter (Hohl-) Kreiszylinder
M+1 Feldräume modelliert.
― Für alle Feldräume werden lineare, homogene und isotrope Werkstoffeigen-
schaften unterstellt.
― Für die verschiedenen Feldräume werden jeweils konstante Temperaturen un-
terstellt.
― Zeitabhängigkeit ist nicht definiert.
― Das magnetische Vektorpotential wird in Zylinderkoordinaten bestimmt.
6.2 Lösung des Feldproblems
6.2.1 Lösungsansatz Die Lösung der durch die Gleichungen (6.1.1) und (6.1.2) beschriebenen magneti-
schen Vektorpotentiale ist bereits ermittelt und wird hier unverändert für die Feldräu-
me 1 bis M+1 übernommen:
(6.2.1.1) 1 1,1 2,1 2sin( )A C C rμ μ
μ
μϕ= + ⋅ ⋅∑
(6.2.2.1) ( )2 1,2 2,2 3,2 2sin( )A C C C r rμ μ μ μ
μ
μϕ−= + ⋅ + ⋅∑

Seite 100
(6.2.3.1) ( )1, 2, 3, 23 1
sin( )i i i ii E
A C C C r rμ μ μ μ
μ
μϕ−
= −
= + ⋅ + ⋅∑K
(6.2.4.1)
( )
( )
( )( )
1, 2, 3, 2
221
1
21
sin( )
sin( )(1 )
ln sin( )2
E E E
E
C C C r r
aA r
a r r
μ μ μ μ
μ
μ
μ μ
μ
μϕ
μϕμ
ϕ
−
≠
=
⎧ + ⋅ + ⋅⎪⎪⎪⎪= + ⋅ ⋅⎨
−⎪⎪⎪ + ⋅ ⋅ ⋅⎪⎩
∑
∑
(6.2.5.1) ( )1, 2, 3, 21 1
sin( )i i i ii E M
A C C C r rμ μ μ μ
μ
μϕ−
= + −
= + ⋅ + ⋅∑K
(6.2.6.1) ( )1, 2, 3, 2sin( )M M M MA C C C r rμ μ μ μ
μ
μϕ−= + ⋅ + ⋅∑
(6.2.7.1) 1 1, 1 2, 1 2sin( )M M MA C C rμ μ
μ
μϕ−+ + += + ⋅ ⋅∑
6.2.2 Formulierung eines Algorithmus zur Konstantenbestimmung Die Vorgehensweise der nun notwendigen Konstantenbestimmung kann recht ein-
fach aus den vorangegangenen Betrachtungen abgeleitet werden. Die Verallgemei-
nerung des in Kapitel 4 eingeführten Verfahrens der Feldberechnung kann dem Algo-
rithmus aus Bild 6.2.2.1 auf der Folgeseite entnommen werden.

Seite 101
(Start des Algorithmus)
1. Schritt: Errechne die Konstanten 3,2Cμ und 3,MCμ
2. Schritt: Errechne alle Konstanten 3,iCμ für die (Iteration)
Feldräume 3 1EA A −K und 1 1M EA A− +K
3. Schritt: Errechne die Konstanten 1
3,EC , 1
2,EC ,
1
2, 1EC − und 1
2, 1EC +
Errechne die Konstanten 3,ECμ , 2,ECμ ,
2, 1ECμ − und 2, 1ECμ +
4. Schritt: Errechne alle Konstanten 2,iCμ für die (Iteration)
Feldräume 2 2EA A− K und 2E MA A+ K
5. Schritt: Errechne die Konstanten 2,1Cμ und 2, 1MCμ +
für die Feldräume 1A und 1MA +
(Sämtliche Konstanten sind errechnet - Ende des Algorithmus)
Bild 6.2.2.1 Algorithmus zur Konstantenbestimmung in M+1 Feldräumen
Mit der in Bild 6.2.2.1 beschriebenen Vorgehensweise ergeben sich bezüglich der
Wahl der Variablen M und E folgende Einschränkungen:
(6.2.2.8) 4 E≤ und 2E M+ ≤
Der Wahl der Anzahl der Feldräume ist außer dieser Bedingung keine weitere Gren-
ze gesetzt; sie sollte in Abhängigkeit des zu lösenden Feldproblems und der zu er-
wartenden Programmlaufzeiten getroffen werden.

Seite 102
6.3 Bestimmung der Konstanten Die Randbedingungen des magnetischen Vektorpotentials an Grenzflächen sind
nach Kapitel 3 mit der Stetigkeit des Vektorpotentials
(6.3.1) i+1( ) ( ) i i iA r A r=
und der Kontinuitätsbedingung für die Tangentialkomponente der magnetischen
Feldstärke definiert:
(6.3.2) i 2 i+1 2 2( ) ( ) ( ) i i iH r H r a rϕ ϕ ϕ∂ − ∂ = ∂ .
(6.3.3) 1
1
1 1 0i i
i i
r rri ri
A Ar rμ μ
+
+
∂ ∂⎛ ⎞ ⎛ ⎞− + =⎜ ⎟ ⎜ ⎟∂ ∂⎝ ⎠ ⎝ ⎠
6.3.1 Allgemeine Bestimmung der Konstanten an den Grenzflächen ri (Iteration)
Der allgemeine Iterationsschritt ist an einer der endlich vielen Grenzflächen ir der
Feldräume mit den Eigenschaften 0iAΔ =uur
und 1 0iA +Δ =uuur
definiert. Der Iterationsstart
sowie der Iterationsschluss erfolgen an den besonderen Feldräumen 1 1 , und E MA A A +
und werden gesondert betrachtet.
Eine der Konstanten des vorliegenden Gleichungssystems ist frei wählbar. Im Fol-
genden sei 1, 1 0C = gesetzt. Aufgrund der Kontinuität des Vektorpotentials gilt damit
für alle 1, i 0C = .

Seite 103
Stetigkeit des Vektorpotentials an einer Grenzfläche r=ri
(6.3.1.1) ( ) ( )
( ) ( )
2, 2 3,
1 2, 1 2 3, 1
sin( )
sin( )
i i i i i i
i i i i i i
A r C C r r
A r C C r r
μ μ μ μ
μ
μ μ μ μ
μ
μϕ
μϕ
−
−+ + +
= + =
= +
∑
∑
(6.3.1.2) ( ) ( )2, 3, 2, 1 3, 1i i i i i i i iC C r r C C r rμ μ μ μ μ μ μ μ− −+ ++ = +
Stetigkeit der Tangentialkomponente der Feldstärke an einer Grenzfläche r=ri
(6.3.1.3)
( )( )
( )( )1 1
2, 1 12 3,
0 0
2, 1 1 112 3, 1
0 0
1 sin =
1 sin
i ii
i ii
iii i i
r rr r
iii i i
r rr r
CA C r rr
CA C r rr
μμ μ μ
μ
μμ μ μ
μ
μϕ μ μμ μ μ μ
μϕ μ μμ μ μ μ
+ +
− − −
=
+ − − −++
=
∂= −
∂
∂= −
∂
∑
∑
(6.3.1.4) ( ) ( )1
2, 2, 13, 3, 1
i i
i ii i i i i i
r r
C CC r r C r r
μ μμ μ μ μ μ μ
μ μ+
+− −+− = −
Diese Gleichungen führen ineinander eingesetzt und elementar umgeformt zu:
(6.3.1.5)
1
1
1
1
23,
3, 12
3, 1
i i
i i
i i
i i
r ri i
r ri
r ri i
r r
r CC
C r
μ μ
μ
μ μ
μ μμ μ
μ μμ μ
+
+
+
+
−
+
−−
+=
−−
+
oder
1
1
1
1
23,
3, 12
3, 1
i i
i i
i i
i i
r ri i
r ri
r ri i
r r
C rC
C r
μ μ
μ
μ μ
μ μμ μ
μ μμ μ
−
−
−
−
−
−
−+
+=
−+
+
(6.3.1.6) 2
3,2, 1 2, 2
3, 1
1 1
i ii i
i i
C rC C
C r
μ μμ μ
μ μ++
+=
+ oder
23,
2, 1 2, 23, 1
1 1
i ii i
i i
C rC C
C r
μ μμ μ
μ μ−−
+=
+

Seite 104
6.3.2 Bestimmung der Konstanten an den Grenzflächen r=r1 und r=rM (Iterationsstart)
Mit den Bedingungen 1r 0
lim A→
≠ ∞uur
und 1rlim MA +→∞
≠ ∞uuuuur
folgt die Hinfälligkeit der Konstan-
ten 3,1Cμ in den Feldräumen 1 1 und MA A + . Daher eignen sich die Betrachtungen an
den Grenzflächen 1r r= und Mr r= besonders zum Iterationsstart und werden hier in
die Rechnung eingebracht. Eine Herleitung der Gleichungen (6.3.2.1) bis (6.3.2.4)
findet sich in Kapitel 4 und wird hier nicht weiter ausgeführt:
(6.3.2.1) 1 2
1 2
23,2 1
r r
r r
C rμ μμ μμ μ
−+=
−
(6.3.2.2) ( )22,1 2,2 3,2 1C C C rμ μ μ μ−= +
(6.3.2.3) 1
1
23,
M M
M M
r rM M
r r
C rμ μμ μμ μ
+
+
−−=
−
(6.3.2.4) ( )22, 1 2, 3, 1M M M MC C C rμ μ μ μ
+ = +
6.3.3 Bestimmung der Konstanten an den Grenzflächen r=rE-1 und r=rE (Iterationsschluss)
Nach den vorherigen Betrachtungen stellt man fest, dass für eine vollständige iterati-
ve Lösung nur noch die Konstanten 2, 2,E-1 2, 1 , C , E EC C + sowie 3,EC herzuleiten sind.
Diese sind mit den Randbedingungen an r=rE-1 und r=rE vollständig bestimmt. Die
Herleitung der Ergebnisse findet sich in Kapitel 4.

Seite 105
Für den Fall (μ >1) gilt nun folgende Zusammenstellung der Konstanten ,i jC :
(6.3.3.1) ( ) ( )( )
12 1
2, 3, 1 2
2, 1 23, 1 1
11
1
EE E E
EE E
arC C r
CC r
μ μμ μ μ
μμ μ
μ
+−
−
−− −
+ +−
=+
(6.3.3.2) ( ) ( )
( ) ( )( )1
1
11
12
2, 2 21 3, 1 3, 1
1
1 1
E E
E E
Er E r
EE r E E r E E
ar K
CK C r C r
μ μ
μμ μ μ μ μ
μ μμ
μ μ
−
−
+−
−
− − −
−−
=+ − −
mit 2
3, 1 11 2
3, 1 1
11
E EE
E E
C rK
C r
μ μμ
μ μ− −
−− −
−=
+
(6.3.3.3) ( ) ( )
( ) ( )1 1
1 1
1 13, 2 2
1 1 1
E E E E
E E E E
r E r E E r rE
E E E r r E r E r
K K KC
K r K r Kμ
μ μ μ
μ μ μ μ
μ μ μ μ+ −
− +
+ −
− − +
+ − +=
− + −
mit ( )( )
1
1
11
11 1
E E
E E
E r E rE
E r E r
r KK
r K
μμ
μ
μ μ
μ μ+
−
++
+− −
−=
−
(6.3.3.4) ( ) ( )
( ) ( )( )1
1
11
12
2, 2 1 21 3, 3,
1
1 1
E E
E E
Er E r
EE r E E r E E
ar K
CK C r C r
μ μ
μμ μ μ μ
μ μμ
μ μ
+
+
+
+
+
−−
=+ − −
mit 2
3, 11 2
3, 1
11
E EE
E E
C rK
C r
μ μμ
μ μ+
++
−=
+
(6.3.3.5) ( ) ( )( )
12
2, 3, 2
2, 1 23, 1
11
1
EE E E
EE E
arC C r
CC r
μ μμ μ μ
μμ
μ
+
++
+ +−
=+

Seite 106
Wie bereits in Kapitel 4 festgestellt, ist der Fall μ =1 speziell zu betrachten:
(6.3.3.6) ( ) ( )( )
( )
1 1
1 12, 1 2
3, 1 11
2, 1 1 23, 1 1
+ ln 12
=
E E
E E
E r rE E E
r rE
E E
C aC r r
CC r
μ μμ μ
− −−− −
− −− −
− +
−
(6.3.3.7) ( ) ( )( ) ( )
1 1
1 1
1 11 11
3, 1 2 1 2 11 1 1
E E E E
E E E E
E E r r r E rE
E E E r r E E r r
K K KC
K r K r K
μ μ μ μ
μ μ μ μ− +
− +
− +
− − +
+ + +=
− − −
(6.3.3.8) ( )( ) ( )( )
( ) ( )( )1
1
12
11
2, 1 1 2 1 21 3, 3,
ln 1 ln2
1 1
E E
E E
E r E r E E
EE r E E r E E
a r r K rC
K C r C r
μ μ
μ μ
+
+
+
+
+ −=
+ − −
(6.3.3.9) ( ) ( )( )
( )
1 1
1 12, 1 2
3,1
2, 1 1 23, 1
+ ln 12
=
E E
E E
E r rE E E
r rE
E E
C aC r r
CC r
μ μμ μ
+ +−
+ −+
− +
−
Hiermit ist das Gleichungssystem vollständig gelöst.
6.4 Zusammenfassende Darstellung des Algorithmus zur Berechnung aller Konstanten des Gleichungssystems
Mit der Lösung des Gleichungssystems kann der in Bild 6.2.1 dargestellte Algorith-
mus mit entsprechenden Anweisungen gefüllt werden. Die folgende Darstellung von
Rechenschritten soll auch als übersichtliche Zusammenfassung der bisher erarbeite-
ten Teillösungen verstanden werden.

Seite 107
(Start des Algorithmus)
1. Schritt: Errechne die Konstanten 3,2Cμ und 3,MCμ
1 2
1 2
23,2 1
r r
r r
C rμ μμ μμ μ
−+=
− und 1
1
23,
M M
M M
r rM M
r r
C rμ μμ μμ μ
+
+
−−=
+
2. Schritt: Errechne alle Konstanten 3,iCμ für die Feldräume 3 1EA A −K
und 1 1M EA A− +K
1
1
1
1
23,
3, 12
3, 1
i i
i i
i i
i i
r ri i
r ri
r ri i
r r
r CC
C r
μ μ
μ
μ μ
μ μμ μ
μ μμ μ
+
+
+
+
−
+
−−
+=
−−
+
und
1
1
1
1
23,
3, 12
3, 1
i i
i i
i i
i i
r ri i
r ri
r ri i
r r
C rC
C r
μ μ
μ
μ μ
μ μμ μ
μ μμ μ
−
−
−
−
−
−
−+
+=
−+
+
3. Schritt: Errechne die Konstanten 13,EC , 1
2,EC , 12, 1EC − und 1
2, 1EC + für den Fall
(μ=1), sowie die Konstanten 3,ECμ , 2,ECμ , 2, 1ECμ − und 2, 1ECμ + für den Fall
(μ>1).
( ) ( )( )
( )
1 1
1 12, 1 2
3, 1 11
2, 1 1 23, 1 1
+ ln 12
=
E E
E E
E r rE E E
r rE
E E
C aC r r
CC r
μ μμ μ
− −−− −
− −− −
− +
−
( ) ( )( )
12 1
2, 3, 1 2
2, 1 23, 1 1
11
1
EE E E
EE E
arC C r
CC r
μ μμ μ μ
μμ μ
μ
+−
−
−− −
+ +−
=+
( ) ( )( )
( )
1 1
1 12, 1 2
3,1
2, 1 1 23, 1
+ ln 12
=
E E
E E
E r rE E E
r rE
E E
C aC r r
CC r
μ μμ μ
+ +−
+ −+
− +
−

Seite 108
Noch 3. Schritt: Errechne die Konstanten 13,EC , 1
2,EC , 12, 1EC − und 1
2, 1EC + für den
Fall (μ=1) sowie die Konstanten 3,ECμ , 2,ECμ , 2, 1ECμ − und 2, 1ECμ +
für den Fall (μ>1)
( ) ( )( )
12
2, 3, 2
2, 1 23, 1
11
1
EE E E
EE E
arC C r
CC r
μ μμ μ μ
μμ
μ
+
++
+ +−
=+
( )( ) ( )( )
( ) ( )( )1
1
12
11
2, 1 1 2 1 21 3, 3,
ln 1 ln2
1 1
E E
E E
E r E r E E
EE r E E r E E
a r r K rC
K C r C r
μ μ
μ μ
+
+
+
+
+ −=
+ − −
( ) ( )
( ) ( )( )1
1
11
12
2, 2 21 3, 1 3, 1
1
1 1
E E
E E
Er E r
EE r E E r E E
ar K
CK C r C r
μ μ
μμ μ μ μ μ
μ μμ
μ μ
−
−
+−
−
− − −
−−
=+ − −
( ) ( )( ) ( )
1 1
1 1
1 11 11
3, 1 2 1 2 11 1 1
E E E E
E E E E
E E r r r E rE
E E E r r E E r r
K K KC
K r K r K
μ μ μ μ
μ μ μ μ− +
− +
− +
− − +
+ + +=
− − −
( ) ( )
( ) ( )1 1
1 1
1 13, 2 2
1 1 1
E E E E
E E E E
r E r E E r rE
E E E r r E r E r
K K KC
K r K r Kμ
μ μ μ
μ μ μ μ
μ μ μ μ+ −
− +
+ −
− − +
+ − +=
− + −
4. Schritt: Errechne alle Konstanten 2,iCμ für die Feldräume 2 2EA A− K und
2E MA A+ K
2
3,2, 1 2, 2
3, 1
11
i ii i
i i
C rC C
C r
μ μμ μ
μ μ++
+=
+ und
23,
2, 1 2, 23, 1
1 1
i ii i
i i
C rC C
C r
μ μμ μ
μ μ−−
+=
+

Seite 109
5. Schritt: Errechne die Konstanten 2,1Cμ und 2, 1MCμ + für die Feldräume 1A und
1MA +
1
1 2
22,1 2,2 1
2 r
r r
C C rμ μ μμμ μ
−=−
und 1
1
2, 1 2,
2M
M M
rM M
r r
C Cμ μ μμ μ
+
+
+ =+
Sämtliche Konstanten sind errechnet.
(Ende des Algorithmus).
6.5 Anwendung des Algorithmus Die Bilder 6.5.1 und 6.5.2 zeigen das nach dem Algorithmus aus Kapitel 6.4 errech-
nete magnetostatische Feld einer Permanentmagnet erregten Synchronmaschine
(Lenze GmbH & Co. KG; siehe auch Anlage 1). Der Wert der Permeabilitätszahlen
für das Eisenteil des magnetischen Kreises wurde in der Rechnung konstant ange-
nommen, um mit Kapitel 4 vergleichen zu können. Die Ergebnisse der Feldberech-
nung sind identisch mit denen der Rechnung in Kapitel 4.
Bild 6.5.1 Ausschnittvergrößerung des Permanentmagnetringes des Bildes 6.5.2 auf der nächsten Seite Zur besseren Orientierung wurden in diesem Bild die Konturen von Rotor, Magne-ten und Stator hervorgehoben und die einzelnen Feldräume dargestellt. Die Definition der Räume in Rotorjoch und Statoreisen ist gut zu erkennen.

Seite 110
Bild 6.5.2 Feldbild für den Synchronmotor der Firma Lenze GmbH & Co. KG:
Die Rechnung wurde in 191 Räumen durchgeführt (M=190), der Feld-
raum der Permanentmagneterregung wurde auf den Feldraum E=90
festgelegt. Die Darstellung wurde in einer Auflösung von 400 x 400
Feldpunkten berechnet, die Grenzen der Einzelfeldräume sind der
Übersichtlichkeit halber nicht dargestellt
6.6 Quellen des sechsten Kapitels Es wurden keine externen Quellen verwendet.

Seite 111
7. Definition und Bestimmung von Ersatzpermeabilitäten für die zweidimensionale Feldberechnung
7.1 Definition und Bestimmung von Ersatzpermeabilitäten für die
zweidimensionale Feldberechnung Für die bisher durchgeführten Feldberechnungen wurden in den Feldräumen von
Welle, Rotor, Permanentmagnetring, Luftspalt, Stator und Außenraum konstante
Permeabilitätswerte genutzt. Mit dem in Kapitel 6 entwickelten Algorithmus zur Be-
rechnung des Feldproblems in M+1 Feldräumen ist es nun jedoch möglich, die Per-
meabilität in Abhängigkeit des Radius variabel zu gestalten. Damit kann der Forde-
rung nach einer von verschiedensten Feldgrößen abhängigen (Ersatz-) Permeabilität
für die Eisenteile (Rotor, Stator) der berechneten Maschinen Rechnung getragen
werden. Die Feldverteilung einer Beispielrechnung zusammen mit der von der mag-
netischen Flussdichte abhängigen Permeabilität - dargestellt in den Bildern 7.1.1 -
verdeutlicht die Notwendigkeit dieses Vorgehens.
Bild 7.1.1.a Werkstoffkennlinie des im Synchron-Servomotor MDSKSRS 071-13 der
Firma Lenze GmbH & Co. KG verwendeten Elektroblechs

Seite 112
Bild 7.1.1b Berechnung der zweidimensionalen Feldverteilung des Permanent-
magnet erregten Lenze-Servoantriebs bei unbestromtem Stator. Grund-
lage der Rechnung sind der Kapitel 4 dieser Arbeit sowie das Datenblatt
der Maschine in Anlage 1.
Daher soll nun eine Permeabilitätszahl-Berechnung so in die Analyse der Motoren
einbezogen werden, dass die Feldverteilung im Magnetkreis und die Werkstoffkenn-
linie der verwendeten Bleche weitgehend berücksichtigt werden. Hierzu wird der be-
reits im Kapitel 3.4 angedeutete iterative Algorithmus zur Bestimmung der Ersatz-
permeabilitäten in den verschiedenen Feldräumen übernommen und konkretisiert:
Schritt 1 Eingabe aller zur Feldberechnung benötigten Geometrie- und
Werkstoffgrößen.
Schritt 2 Feldberechnung unter Annahme von linearen, homogenen und
isotropen Werkstoffeigenschaften und konstanter Geometrieeigen-
schaften.

Seite 113
Schritt 3 Ermittlung aller die Geometrie- und Werkstoffeigenschaften beein-
flussenden Feldgrößen.
Schritt 4 Modellierung von Ersatzgrößen der Geometrie- und Werkstoffei-
genschaften mit Hilfe der im dritten Schritt gefundenen Feldgrößen.
Schritt 5 Korrektur der Modelleigenschaften mit den in Schritt 4 ermittelten
Ersatzgrößen.
Schritt 6 Wiederholung der Schritte 2 bis 5, bis die gewünschte Abbildungs-
treue erreicht ist.
Diese Rechenvorschrift ist – trotz der Möglichkeit, beliebig viele nichtlineare Vorgän-
ge über fünften Schritt zu berücksichtigen – nur durch eine Konvergenzforderung in
Schritt sechs eingeschränkt. Dies bedeutet in der Praxis, dass nicht nur die Permea-
bilitätswerte über diesen Algorithmus korrigiert werden können, sondern auch weitere
Parameter wie z.B. die Leitfähigkeit der Materialien (z.B. als Funktion der Tempera-
tur) oder mechanische Ausmaße (z.B. über eine Korrektur des modellierten Luftspal-
tes in Abhängigkeit magnetischer Feldgrößen oder ebenfalls der Temperatur).
In dieser Arbeit sollen die Möglichkeiten der Rechenvorschrift dazu genutzt werden,
eine eindimensionale, von der magnetischen Flussdichte der Felderregung abhängi-
ge Ersatzpermeabilitätsvertellung zu errechnen
(7.1.01) , .r Stator Constμ ≠ ( ), , , ,r Stator r Stator ers r Bμ μ≡r
, .r Rotor Constμ ≠ ( ), , , ,r Rotor r Rotor ers r Bμ μ≡r
Mit dieser Formulierung lässt sich die oben angeführte Vorgehensweise zum Algo-
rithmus in Bild 7.1.2 auf der Folgeseite detaillieren:

Seite 114
(Start des Algorithmus) 1. Schritt: Eingabe der Geometrie- und Werkstoffgrößen
2. Schritt: Definition der Werkstoffkennlinien ( ),r wkl Bμ für Rotor und Stator
Initialisierung von Startwerten , , ,0r ers iμ für die Iteration
3. Schritt: Iteration zur Ermittlung der Ersatzpermeabilitäten in allen Feldräumen
3.1. Schritt: Errechne die Konstanten 2, ,i nCμ und 3, ,i nCμ für alle Feldräume
3.2. Schritt: Errechne für die Feldräume des Rotors und des Stators jeweils eine
repräsentative magnetische Flussdichte , ,ers i nBr
3.3. Schritt: Bestimme für die Feldräume des Rotors und Stators eine Permeabilität
, , ,r wkl i nμ aus der dem Raum entsprechenden Werkstoffkennlinie
3.4. Schritt: Bestimme für die Feldräume des Rotors und des Stators eine gewich-
tete Ersatzpermeabilität ( ) ( ), , , 1 , , , , , , 1r ers i n r ers i n r wkl i nG Gμ μ μ+ = ⋅ + +
3.5. Schritt: Falls das Abbruchkriterium nicht erfüllt ist, wiederhole Schritt 3 4. Schritt Führe die Feldberechnung durch Ausgabe aller zu berechnenden physikalischen Größen. (Ende des Algorithmus)
Bild 7.1.2 Algorithmus zur Bestimmung von Ersatzpermeabilitäten für die zwei-
dimensionale Feldrechnung einer Permanentmagneterregung im un-
bestromten Stator.
Die im Schritt 3.4. eingeführte Variable G entspricht - bei Betrachtung
der Iteration als Ausgleichsvorgang - dem Gewicht des integralen Be-
standteils einer „PI“-Regelstrecke.

Seite 115
7.1.1 Bestimmung und Formulierung der Werkstoffkennlinie In der Regel liegen die Werkstoffdaten der in Stator und Rotor verwendeten Elektro-
bleche als Datenblattangaben der entsprechenden Hersteller oder als Ergebnisse
eigener Messungen vor. Die Angabe der Permeabilität als Funktion magnetischer
Feldgrößen, der Feldfrequenzen und der Temperatur ist zwar von hohem praktischen
Wert, meist jedoch aufgrund der in Kapitel 3 aufgeführten Schwierigkeiten nicht üb-
lich. Daher soll in diesem Kapitel die Ermittlung einer zur Abarbeitung des in Bild
7.1.2 definierten Algorithmus hinreichenden Ersatzfunktion beleuchtet werden.
Da die Formulierung einer solchen Funktion im Wesentlichen von der Beschaffenheit
der Kenntnisse der Werkstoffeigenschaften abhängt, werden im Folgenden zwei al-
ternative Vorgehensweisen vorgestellt werden: Die Bearbeitung diskret aufgenom-
mener verlässlicher Wertepaare der B(H)-Kennlinie sowie die Bildung einer paramet-
rierten Hilfsfunktion bei unsicheren oder unzureichenden Kenntnissen der Magneti-
sierungskurven.
7.1.1.1 Interpolation diskret vorliegender Wertepaare von Magnetisie-rungskurven
Als Basismaterial für das weitere Vorgehen werden tabellarisch aufgeführte Messrei-
hen oder Datenblattangaben in der Form des Bildes 7.1.1.1.1 angenommen. Um die
gegebenen Tupel (|Bm|,|Hm|)|ω,T=const. der Anzahl mmax für beliebige Feldstärkebeträge
auswerten zu können, ist eine Interpolation der Datenreihen notwendig. Aufgrund der
relativ hohen Anzahl von Stützstellen ist die Bildung eines Interpolationspolynoms
über das gesamte Messintervall ungünstig, da Polynome hoher Ordnung den Verlauf
der Messreihen - besonders zum Messintervallende hin - wesentlich verfälschen
würden.
Abhilfe wird daher in einer leicht differenzierbaren stückweisen Polynominterpolation
niederer Ordnung gesucht. Die Wahl fällt auf eine kubische Spline-Interpolation, in
welcher die beiden einem beliebigen Feldstärkebetrag am nächsten liegenden Stütz-
stellen ausgewertet und in ein Polynom dritten Grades formuliert werden:

Seite 116
Permeabilität des Bleches: Abhängig von der Sättigung gemäß folgender Tabelle N=0001 HMAX=00024.0 BMAX=0.050 F=00000 T=00020 N=0002 HMAX=00036.0 BMAX=0.100 F=00000 T=00020 N=0003 HMAX=00045.0 BMAX=0.105 F=00000 T=00020 N=0004 HMAX=00053.0 BMAX=0.200 F=00000 T=00020 N=0005 HMAX=00059.0 BMAX=0.250 F=00000 T=00020 N=0006 HMAX=00064.0 BMAX=0.300 F=00000 T=00020 N=0007 HMAX=00068.0 BMAX=0.350 F=00000 T=00020 N=0008 HMAX=00071.5 BMAX=0.400 F=00000 T=00020 N=0009 HMAX=00074.5 BMAX=0.450 F=00000 T=00020 N=0010 HMAX=00077.5 BMAX=0.500 F=00000 T=00020 N=0011 HMAX=00081.0 BMAX=0.550 F=00000 T=00020 N=0012 HMAX=00085.0 BMAX=0.600 F=00000 T=00020 N=0013 HMAX=00089.5 BMAX=0.650 F=00000 T=00020 N=0014 HMAX=00094.5 BMAX=0.700 F=00000 T=00020 N=0015 HMAX=00100.0 BMAX=0.750 F=00000 T=00020 N=0016 HMAX=00106.0 BMAX=0.800 F=00000 T=00020 N=0017 HMAX=00113.0 BMAX=0.850 F=00000 T=00020 N=0018 HMAX=00121.0 BMAX=0.900 F=00000 T=00020 N=0019 HMAX=00131.5 BMAX=0.950 F=00000 T=00020 N=0020 HMAX=00143.5 BMAX=1.000 F=00000 T=00020 N=0021 HMAX=00158.0 BMAX=1.050 F=00000 T=00020 N=0022 HMAX=00176.0 BMAX=1.100 F=00000 T=00020 N=0023 HMAX=00198.5 BMAX=1.150 F=00000 T=00020 N=0024 HMAX=00228.0 BMAX=1.200 F=00000 T=00020 N=0025 HMAX=00275.0 BMAX=1.250 F=00000 T=00020 N=0026 HMAX=00340.0 BMAX=1.300 F=00000 T=00020 N=0027 HMAX=00430.0 BMAX=1.350 F=00000 T=00020 N=0028 HMAX=00590.0 BMAX=1.400 F=00000 T=00020 N=0029 HMAX=00860.0 BMAX=1.450 F=00000 T=00020 N=0030 HMAX=01400.0 BMAX=1.500 F=00000 T=00020 N=0031 HMAX=02100.0 BMAX=1.550 F=00000 T=00020 N=0032 HMAX=03150.0 BMAX=1.600 F=00000 T=00020 N=0033 HMAX=04600.0 BMAX=1.650 F=00000 T=00020 N=0034 HMAX=06450.0 BMAX=1.700 F=00000 T=00020 N=0035 HMAX=08800.0 BMAX=1.750 F=00000 T=00020 N=0036 HMAX=11600.0 BMAX=1.800 F=00000 T=00020 N=0037 HMAX=14800.0 BMAX=1.850 F=00000 T=00020 N=0038 HMAX=18700.0 BMAX=1.900 F=00000 T=00020 N=0039 HMAX=23300.0 BMAX=1.950 F=00000 T=00020 N=0040 HMAX=28900.0 BMAX=2.000 F=00000 T=00020 Bild 7.1.1.1.1 Permeabilität des in einem Synchronmotor der Firma Lenze GmbH &
Co. KG verwendeten Elektrobleches für eine Anregung zeitlich konstan-
ter magnetischer Feldstärke H bei einer Temperatur von 20°C.

Seite 117
(7.1.1.1.1) 1
3 23, 2, 1, 0,( )
m mm m m m m B B B
H B s B s B s B s+< <
= + + + , max1m m= K
An den vorgegebenen Verbindungsstützstellen Bm und Bm+1 müssen, um numerische
Instabilitäten zu verhindern, weitere Kurvenstücke ohne Sprung (stetig) und ohne
Knick (differenzierbar) aneinander gefügt werden können.
Zudem sollen die Kurvenstücke in den Verbindungsstützstellen eine identische
Krümmung haben, d.h. die Krümmung soll an den Messpunkten stetig verlaufen (die
2. Ableitung muss existieren und stetig sein).
Es werden also zu den mmax vorgegebenen Messpunkten mmax–1 Polynome
3. Ordnung erzeugt, welche an den Stützstellen 2 mal stetig differenzierbar sind:
(7.1.1.1.2.a) ( ) ( ) ( ) ( )1
1 1 , m m
m m m m
B B B B
H B H B H B H BB B B B
+
− +
= =
∂ ∂ ∂ ∂= =
∂ ∂ ∂ ∂
(7.1.1.1.3.a) ( ) ( ) ( ) ( )
1
2 2 2 21 1
2 2 2 2 , m m
m m m m
B B B B
H B H B H B H BB B B B
+
− +
= =
∂ ∂ ∂ ∂= =
∂ ∂ ∂ ∂
Mit der bisherigen Beschreibung ist das entstandene Gleichungssystem noch unter-
bestimmt. Die Wahlfreiheit der Steigung und der 2. Ableitung der Polynome an den
Randstellen zu nutzen, obliegt dem Anwender. Es bietet sich an, die Krümmung zu
Null zu bemessen und die erste Ableitung der Beschaffenheit der Magnetisierungs-
kurve anzupassen:
(7.1.1.1.2.b) ( ) ( )max
max
1 max
11 ,
m
mm
B B B B
H BH BK K
B B= =
∂∂≡ ≡
∂ ∂
(7.1.1.1.3.b) ( ) ( )max
1 max
221
2 2 0m
m
B B B B
H BH BB B
= =
∂∂= ≡
∂ ∂
Die anschließende Ermittlung der Funktionen der Permeabilität in den Teilintervallen
durch Division ist elementarer Natur:

Seite 118
(7.1.1.1.4) ( )
1
, , 3 20 3, 2, 1, 0,
( ) m m
r WKL mm m m m B B B
BBs B s B s B s
μμ
+< <
=+ + +
, max1m m= K
Dieses Verfahren soll abschließend am Beispiel der Magnetisierungskurve aus Bild
7.1.1.1 in der Bildfolge 7.1.1.1.2 veranschaulicht werden:
Bild 7.1.1.1.2 Beschreibung siehe nächste Seite

Seite 119
Bild 7.1.1.1.2 Formulierung einer Funktion für die Permeabilität mit Hilfe der Spline-
Interpolation. Dargestellt sind die diskreten Messpunkte der Magnetisie-
rungskurve des Materials nach Bild 7.1.1.1, deren Interpolation mittels
kubischer Splines (mit Randglättung) und die aus dieser Funktionenfol-
ge resultierende Permeabilitätsfunktion.
7.1.1.2 Approximation der Magnetisierungskurve durch eine parametrier-te Hilfsfunktion
Falls wenige oder keine Kenntnisse über die Werkstoffeigenschaften der verwende-
ten Elektrobleche in Rotor und Stator vorliegen, ist es sinnvoll, die Magnetisierungs-
kurve durch eine parametrierte Hilfsfunktion darzustellen.
Die Wahl der Funktion wird von der Forderung einer differenzierbaren Funktion be-
gleitet, um Sprünge oder Unstetigkeiten in deren ersten Ableitung zu vermeiden. Ar-
beiten über geeignete Ansätze zur Bildung einer solchen Magnetisierungsfunktion für
schwach oder stark gesättigte Eisen findet man in der Quelle [7.1].
Im Folgenden soll ein Exponentenansatz mit drei Parametern weiterverfolgt werden:
(7.1.1.2.1) ( )( , , , ) r BH H B p q r B p q e≡ = ⋅ + ⋅

Seite 120
Falls keine Tupel (|Bi|,|Hi|)|ω,T=const. des zu untersuchenden Materials bekannt sind
oder verschiedenartige Materialien mit Hilfe der Feldrechnungen überprüft werden
sollen, bietet es sich an, die Kurve mittels eines bekannten Materials zu normieren
und die Parameter als Relativangabe in den Feldrechnungen zu variieren.
(7.1.1.2.2) ( ) ( ) ( )( )r BMr r Br BM r BMH B p p q q e ⋅= ⋅ ⋅ + ⋅ ⋅
Nun werden die Funktionsparameter p, q und r nach dem Kriterium der Minimierung
der Fehlerquadratsumme gewählt:
(7.1.1.2.3) ( )( )max 2
max1
min , , , , 1m
m mm
E H H B p q r m m=
⎛ ⎞= − =⎜ ⎟
⎝ ⎠∑ K
Die Minimierung der Quadratsumme der Residuen der Funktion mit den diskreten
Messdaten (|Bm|,|Hm|)|ω,T=const. fordert die Gleichung:
( ) ( )( )( ) ( )( )( ) ( )( )
( )( )( )
2 2
1
2 22
32 2
2 , , , , , ,, , , 0
2 , , , , , , , , , 00, , ,
2 , , , , , ,
m m m mm
m m m mm
m m m mm
H H H B p q r H B p q r ph B p q r
H H H B p q r H B p q r q h B p q r
h B p q rH H H B p q r H B p q r r
⎛ ⎞∂ − + ∂⎜ ⎟ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟∂ − + ∂ ≡ ≡⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠∂ − + ∂⎜ ⎟⎝ ⎠
∑
∑
∑
Die Lösung dieses nichtlinearen Gleichungssystems ist problematisch. Daher soll
das System nach dem mehrdimensionalen Gauß-Newton-Verfahren linearisiert wer-
den, um die Nullstelle iterativ zu nähern:
(7.1.1.2.4) ( )( )( )( )
( )( )( )
1
1 11
1 2 2
1 3 3
, , , ,
, , , , , ,
, , , ,
i i i i i ii i
i f i i i i i i i i i i
i i i i i i i i
h p q r h p q rp pq N p q r q D h p q r h p q rr r h p q r h p q r
−
+
+
+
⎛ ⎞⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟= ≡ − ⋅⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
mit ( )( )( )
( )( )
( )
1 1 1 11 2 3
2 2 2 2
3 3 33 , ,
, , , ,
, , , ,
, ,i i i
i i i
i i i
i i i p q r
h p q r h p h q h rh h h
D h p q r h p h q h rp q r
h p h q h rh p q r
⎛ ⎞ ∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞⎜ ⎟ ∂ ⎜ ⎟≡ = ∂ ∂ ∂ ∂ ∂ ∂⎜ ⎟ ⎜ ⎟∂⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠⎝ ⎠

Seite 121
Da die Berechnung der Inversen der Jakobi-Matrix sehr aufwändig ist, wird auf deren
Berechnung verzichtet und folgender Weg gewählt:
( )( )( )
( )( )( )
1
1 1
2 2
3 3
, , , ,
, , , ,
, , , ,
i i i i i i
i i i i i i
i i i i i i
h p q r h p q rpq D h p q r h p q rr h p q r h p q r
−⎛ ⎞⎛ ⎞ ⎛ ⎞Δ⎛ ⎞ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟Δ ≡ − ⋅⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟Δ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
(7.1.1.2.5) ( )( )( )
( )( )( )
1 1
2 2
3 3
, , , ,
, , , ,
, , , ,
i i i i i i
i i i i i i
i i i i i i
h p q r h p q rpD h p q r q h p q r
rh p q r h p q r
⎛ ⎞ ⎛ ⎞Δ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟⋅ Δ = −⎜ ⎟ ⎜ ⎟⎜ ⎟
⎜ ⎟⎜ ⎟ ⎜ ⎟Δ⎝ ⎠⎝ ⎠ ⎝ ⎠
Mit der Lösung (Δp ; Δq ; Δr) dieses einfach zu bestimmenden linearen Gleichungs-
systems kann nun eine Iterationsvorschrift hergeleitet werden:
(7.1.1.2.6) 1
1
1
i i
i i
i i
p p pq q q
rr r
+
+
+
Δ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟= + Δ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎜ ⎟⎜ ⎟ ⎜ ⎟ Δ⎝ ⎠⎝ ⎠ ⎝ ⎠
Nun können die Nullstellen des Gleichungssystems - und damit die optimierten Wer-
te für die Parameter der Hilfsfunktion - in beliebiger Genauigkeit angenähert werden.
Der auf einer Taylor-Entwicklung zweiten Grades basierende Beweis lokaler Konver-
genz des Verfahrens wird in Quelle [7.2] ausgeführt (Satz von Kantorowitsch).
Die Wahl des Tripels (p0,q0,r0) für den Start der lokal konvergenten Iteration ist - auf-
grund der Möglichkeit divergenter oder oszillierender Ergebnisfolgen - mit Sorgfalt
zu betrachten. Ein mögliches Verfahren zur ersten Bestimmung der Parameter bietet
die partielle Näherung der Hilfsfunktion durch ihre Summanden:
( )( , , , ) r BH B p q r B p q e= ⋅ + ⋅
( , , , ) ( , ) ( , , )r BL RH B p q r B p B q e H B p H B q r= ⋅ + ⋅ ⋅ ≡ +

Seite 122
(7.1.1.2.7) 0
0 0
( , ) für 0( )
( , , ) für L
R
L m
R m
H B p B BH B
H B q r B B
≤ ≤⎧⎪≈ ⎨ ≤⎪⎩
Mit diesem Ansatz ist die Abschätzung der Startwerte (p0,q0,r0) einfach: Der Parame-
ter p0 wird durch eine Regression der linearen Funktion HL(B,p0) gewonnen, das Tu-
pel (q0,r0) durch die Auswertung der Exponentialfunktion HR(B,q0,r0) in den Aufpunk-
ten bei Bm,R und Bm,max:
(7.1.1.2.8) 10
2
1
L
L
m
m mm
m
mm
B Hp
B
=
=
=∑
∑ ,
( )00exp
R
R R
m
m m
Hq
B r B= ,
max
max
max
00
ln m
m
m
Hq B
rB
⎛ ⎞⎜ ⎟⎜ ⎟⋅⎝ ⎠=
Das den „Sättigungsknick“ vollständig umschließende Intervall [Bm,L , Bm,R] kann für
Messreihen mit Stützstellen im Bereich (0 ≤ B ≤ Bmax ≈ 2T) sehr gut abgeschätzt wer-
den mit:
(7.1.1.2.8.a)
0 0
0 0
0 0
0 0
11
1 1
11
1 1
1
1.5 3
L L
L L
R R
R R
m mm m
m m m m
m mm m
m m m m
H HH HB B g B B
gH HH H
gB B B B
++
+ +
++
+ +
−− ⎫≤ ⋅ ⎪− − ⎪ ≈⎬−− ⎪≥ ⋅ ⎪− − ⎭
K
(7.1.1.2.8.b) 0 0 max 0 0
0 0 max 0 0
1 1
1 1
m m m m m
m m m m m
H H H H HB B B B B
− +
− +
− −≤ ≤
− −
Die Qualität dieser Festlegung ist allerdings direkt von den Kenntnissen der zu mo-
dellierenden Magnetisierungskennlinie (Anzahl mmax und Lokalität der Messpunkte)
abhängig.
Ein Beispiel für die Wahl der Intervallgrenzen und der Startwerte für das Gauß-
Newtonsche Iterationsverfahren sowie dessen Durchführung ist in der Bildfolge
7.1.1.2.1 illustriert und soll die Betrachtungen zur Parameterwahl abschließen.

Seite 123
Bild 7.1.1.2.1.a Approximation der Magnetisierungskurve durch eine parametri-
sierte Hilfsfunktion:
Die diskreten Werte der Magnetisierungskurve sind in blauer
Farbe dargestellt.
Die Startwerte zur Optimierung der Parameter (p,q,r) der Hilfs-
funktion durch eine Gauß-Newtonsche Iteration werden in dem
Teilintervall [0...Bm,L] durch eine lineare Regression und in dem
Teilintervall [Bm,R...Bm,max] durch zwei Fixpunkte ermittelt.
Der Punkt (Bm,0=1.5T) wurde über einen Vergleich der Steigung
der diskreten Wertefolge und der Steigung der durch die Punkte
(0,0) und (Hmax,Bmax) beschriebenen Gerade, gezeichnet in roter
Farbe, bestimmt. Die schwarz eingezeichneten Intervalle sind mit
diesem Punkt (Bm,0=1.5T) und dem Gewicht (g=2) über die Glei-
chung (7.1.1.2.8) definiert und umschließen den so genannten
„Sättigungsknick“.

Seite 124
Bild 7.1.1.2.1.b Approximation der Magnetisierungskurve durch eine Hilfs-
funktion: Die diskreten Werte der vorgegebenen Magnetisie-
rungskurve sind in schwarzer Farbe dargestellt.
Die blau notierte Kurve entspricht der nicht optimierten Hilfs-
funktion mit den Parametern (p0=188.25, q0=0.4325, r0=5.2017),
welche als Startwerte für die Gauß-Newtonsche Iteration ver-
wendet wurden.
Die in der Farbe rot dargestellte Kurve entspricht der Hilfsfunkti-
on mit den Parametern (p=-339.37 ,q=2.7154, r=4.3144). Die Op-
timierung der Parameter wurde über den gesamten Bereich der
diskreten Werte der magnetischen Flussdichte (0...2T) durchge-
führt. Die Nullstellensuche der Ableitung der Funktion der kleins-
ten Fehlerquadrate wurde nach 238 Iterationen mit einer Genau-
igkeit von (ε < 10-8) abgeschlossen. Die gefundene Funktion lie-
fert im Bereich von (1.6...2T) eine gute Abbildung der vorgege-
benen Magnetisierungskurve.

Seite 125
Noch Bild 7.1.1.2.1.b Die Funktion der Farbe grün entspricht der Hilfsfunktion
mit den Parametern (p=134.74 ,q=0.0013, r=8.8551). Die
Optimierung der Parameter über den Bereich (0...Bm,R≈
1.6T) bietet eine hervorragende Näherung der diskreten
Werte bis 1.65T. Das Optimierungsverfahren wurde nach
nur 188 Iterationen mit der Genauigkeit der Nullstellensu-
che von (ε < 10-8) abgebrochen.
7.1.2 Bestimmung der die Ersatzpermeabilität festlegenden Feldgröße Zur Bestimmung einer Ersatzpermeabilität μr,ers,i,n+1 im Feldraum i ist es notwendig,
einen für diesen Raum repräsentativen Betrag der magnetischen Flussdichte |Bers| zu
bestimmen. Die Radial- und Tangentialkomponenten der Flussdichte werden gemäß
berechnet zu:
( ) ( )
2 22 2 22
rot
1, ,r
i i
i i i r r
B A
A AB B r e B r e e er rϕ ϕ ϕϕ ϕ
ϕ
=
∂ ∂= + = − +
∂ ∂
rr
r rr r r r r
(7.1.2.01) ( ) ( ) ( ), 2 3, 2, 2, cosr i i i rB r C r r C e
rμ μ μ μ
μ
μϕ μϕ−= +∑r r
(7.1.2.02) ( ) ( ) ( )
2 2, 2 3, 2, 2, sini i iB r C r r C er
μ μ μ μϕ ϕ
μ
μϕ μϕ−= − −∑r r
Die Beträge der (Ersatz-) Permeabilitäten gehen über die Konstanten C2,i und C3,i in
die Rechnung ein. Fallunterscheidungen entfallen bei dieser Betrachtung, da die
Feldräume konstant zu betrachtender Permeabilität (Welle, Außenraum, Luftspalt)
ebenso wie der des Permanentmagnetringes aus dieser Betrachtung ausgenommen
werden sollen.

Seite 126
Zur Veranschaulichung werden die Komponenten der Flussdichte der bereits in der
Bildfolge 7.1.1 zitierten Feldrechnung im willkürlich ausgewählten Feldraum (i=40)
dargestellt in Bildfolge 7.1.2.1
Bild 7.1.2.1.a Darstellung der Radial- (blau) und Tangentialkomponenten (rot) der
magnetischen Flussdichte im Feldraum (i=40) über dem Umfangswinkel
ϕ2. Parameter dieser Rechnung sind die Radien der Flussdichterech-
nung, welche mit r=r39, r=(r39+r40)/2 und r=r40 angesetzt wurden. Die
Rechnung wurde in M=100 Feldräumen mit der Erregung im Raume
E=50 durchgeführt.

Seite 127
Bild 7.1.2.1.b Darstellung des Betrags der magnetischen Flussdichtekomponenten
und deren arithmetische Mittelwerte über den Umfangswinkel. Paramet-
riert sind die Daten über die Radien (r=r39) in blauer Farbe, r=(r39+r40)/2
in roter Farbe und r=r40 in schwarzer Farbe.
Mit der Forderung der Isotropie der Permeabilität in allen Feldräumen bietet sich der
Betrag der Flussdichte zur Ermittlung einer repräsentativen Feldgröße zur Auswer-
tung der Werkstoffkennlinien an:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( )
2
2 2
2 2 2 2, , 2 , , 2 , , 2
2 2 2 2, , , , , , 2
ˆ ˆ, cos sin
ˆ ˆ ˆ cos
ers i n r i n i n
i n r i n i n
B r B r B r
B r B r B r
μ μϕ
μ
μ μ μϕ ϕ
μ
ϕ μϕ μϕ
μϕ
= +
= + −
∑
∑
(7.1.2.03) ( ) ( ) ( ) ( )( ) ( )( )
2 2
2 2 2, , 2 , , , , , , 2
1ˆ ˆ ˆ, 1 cos 22ers i n i n r i n i nB r B r B r B rμ μ μ
ϕ ϕμ
ϕ μϕ= + − +∑

Seite 128
Nun sind zur Ermittlung eines repräsentativen Betrags der magnetischen Flussdichte
im Feldraum i die Variablen Radius und Umfangswinkel zu eliminieren. In einem ers-
ten Schritt bietet sich die Bildung eines Durchschnittwertes über den Umfangswinkel
ϕ2 an. Die Wahl des arithmetischen Mittels über ϕ2 verspricht hier die größte Plausibi-
lität, kann jedoch diskutiert und auf Abbildungstreue geprüft werden. Das Ergebnis ist
der Gleichung (7.1.2.01) direkt zu entnehmen.
( ) ( ) ( ) ( )( )
( ) ( )
( ) ( )
2 2
2
2 2 2, , , , , , , ,
2 2, , , ,
2 1 2 122, 3,
1ˆ ˆ ˆ2
1 ˆ ˆ2
ers i n i n r i n i n
i n r i n
i i
B r B r B r B r
B r B r
C C r r
μ μ μϕ ϕ
μ
μ μϕ
μ
μ μμ μ
μ
μ − − +
= + −
= +
= +
∑
∑
∑
Zur Ermittlung eines repräsentativen Flussdichtebetrages über den Radius kommen
verschiedene Methoden in Frage. Die einfachste Lösung ist sicherlich die Einführung
eines repräsentativen Radius rers,i für den Feldraum i:
1, 2
i iers i
r rr −=
+
( )
2
, , , , ,
2 21 1, , , , , ,
1 ˆ ˆ2 22
ers i n ers i n ers i
i i i iers i n i n r i n
B B r
r r r rB B Bμ μϕ
μ
− −
=
+ +⎛ ⎞ ⎛ ⎞= +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
∑
(7.1.2.04) ( ) ( )2 1 2 1
2 1 1, , 2, 3, 2 2
i i i iers i n i i
r r r rB C Cμ μ
μ μ
μ
μ− − +
− −+ +⎛ ⎞ ⎛ ⎞= +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
∑
Diese Möglichkeit berücksichtigt jedoch nicht die vor allem in der Nähe der Erregung
auftretenden nichtlinearen Werte der Steigung der Flussdichtebetragsfunktion über
den Radius. Daher soll stattdessen das Verfahren eines gewichteten Mittels über den
Radius angewandt werden:

Seite 129
( )1
, , , ,1
1 i
i
r
ers i n ers i ni i r
B B r drr r
−+
=− ∫
( )
( ) ( )1
2
2 2, , , , , ,
1
1 ˆ ˆ2
i
i
r
ers i n i n r i nri i
B B r B r drr r
μ μϕ
μ
+
+
= +−
∑∫
(7.1.2.05) ( )
( ) ( )1
2 1 2 12, 2, , 3,
1
i
i
ri
ers i n ii i r
CB C r r dr
r r
μμ μμ
μ
μ +− − +
+
= +−∑ ∫
Die Lösung des Integrals in (7.1.2.05) ist nicht elementarer Natur (siehe auch Quelle
[7.2]), daher wird im Folgenden auf die numerisch ermittelten Ergebnisse in Bild
7.1.2.2 verwiesen.
Bild 7.1.2.2 Ermittlung des Betrags einer repräsentativen magnetischen Flussdichte.
Dargestellt ist der Flussdichtebetrag über der Nummer i des zu reprä-
sentierenden Feldraumes. Die Ergebnisse der Rechnung nach
(7.1.2.05) sind in der Farbe blau dargestellt, die Ergebnisse der Glei-
chung (7.1.2.04) in der punktierten Linie der Farbe rot.

Seite 130
7.1.3 Konvergenz und Abbruch des Algorithmus zur Ersatzpermeabili-tätsbestimmung
Es scheint einleuchtend, die Iteration des Algorithmus zur Bestimmung der Ersatz-
permeabilitäten in den verschiedenen Feldräumen mit folgender Forderung abzubre-
chen:
(7.1.3.01) { }
, , , 1 , , ,
,2 i M \ ; 1 ,1 n
, 0r ers i n r ers i n
i E Enμ μ εε ε
+
∈ ≤ ≤ +⎧⎪
− ≤ ∈ ≤⎨⎪ ∈ >⎩
Dieses Kriterium basiert jedoch auf der Annahme der Existenz eines solchen Grenz-
wertes ε, mit dem für die Permeabilitätenfolgen aller Feldräume gilt:
(7.1.3.02) , , , 1 , , ,lim 0r ers i n r ers i nnμ μ+→∞
− =
Falls der Nachweis dieser Konvergenz gelänge, wäre die Wahl des Iterationsab-
bruchs hinreichend und der Algorithmus stabil definiert.
Die Existenz eines solchen Grenzwertes ε kann über den Nachweis der Konvergenz
der Teilfolgen [μr,ers,1,E-1] und [μr,ers,M,E+2] und eine folgende vollständige Induktion für
die Feldräume (E-2...1) und (E+2...M) erfolgen. Leider zeigt sich dieser Ansatz in der
Praxis aufgrund der Komplexität der Konstanten C2,i,n(μr,i-1 , μr,i) und C3,i,n(μr,i-1 , μr,i)
derart aufwändig, dass auf einen Nachweis verzichtet werden muss.
Um die Stabilität des Algorithmus trotz fehlenden Konvergenznachweises sicherzu-
stellen, ist es also notwendig, die Abbruchbedingung um eine maximale Zahl erlaub-
ter Iterationsschritte zu ergänzen. Im Falle eines Abbruchs aufgrund der maximal
definierten Zahl von Iterationsschritten ist das Ergebnis der gewonnenen Ersatzper-
meabilität zu prüfen und gegebenenfalls zu korrigieren; eine automatisierte Anpas-
sung des Regelgewichtes G ist ebenfalls denkbar.
(7.1.3.03) ( ) ( ), , , 1 , , , maxr ers i n r ers i n n nμ μ ε+ − ≤ ∨ ≥

Seite 131
In experimenteller Überprüfung des Algorithmus zeigten sich die Reihen der Ersatz-
permeabilitäten für (G≥2 , ε=0.01% , nmax=50) ausnahmslos gegen einen Grenzwert
konvergierend; der Abbruch der Schleife erfolgte in den meisten Fällen bei n≤ 25. Die
Wahl von G<2 scheint hingegen bei ungenauer Definition der Initialisierungsdaten
μr,ers,i,0 unsicher gewichtet zu sein: Einzelne Fälle divergierender Folgen wurden fest-
gestellt.
Einige experimentelle Überprüfungen zur Konvergenz der Ersatzpermeabilitäten für
die bereits in der Bildfolge 7.1.1 zitierte Feldberechnung sind in der Bildfolge 7.1.3.1
illustriert.
Bild 7.1.3.1.a Die Erläuterungen zu den Bildern 7.1.3.1.a und 7.1.3.1.b befinden sich
auf der nächsten Seite

Seite 132
Bild 7.1.3.1.b Überprüfung der Konvergenz der Ersatzpermeabilitätenfolgen für die
zweidimensionale Feldberechnung der Synchronmaschine MKSRS
071-13 der Firma Lenze GmbH & Co. KG im Leerlauf.
Aufgetragen ist die farbig gekennzeichnete Ersatzpermeabilität über der
Nummerierung der M=100 Feldräume und die Anzahl der Iterations-
schritte. Gut zu erkennen ist der Luftspalt (Feldraum 51) mit der kon-
stanten Permeabilität (μr=1) sowie der Feldraum (i=50) des Permanent-
magnetringes mit (μr=1.07).
Die Parameter der Iteration aus Bild a wurden datiert mit: (G = 2, nmax =
50, ε = 0.01%, μr,ers,i,0 = 5500 ≈ max(μr,WKL,i)). Der Abbruch der Rech-
nung erfolgt aufgrund der Konvergenz der Folgen bei (n=19).
Die Parameter der Iteration aus Bild b wurden datiert mit: (G = 0, nmax =
50, ε = 0.01%, μr,ers,i,0 = 5500 ≈ max(μr,WKL,i)). Der Abbruch erfolgte mit
der maximal erlaubten Anzahl der Iterationsschritte. Die Divergenz der
Folgen im Rotor ist gut zu erkennen (19<idiv<45).

Seite 133
7.1.4 Berechnung eines Beispielproblems Zur Verifikation und Veranschaulichung der Bestimmung von Ersatzpermeabilitäten
und deren Einfluss auf die Berechnung einer Maschine soll ein Vergleich mit der im
Kapitel 4 ausgeführten Beispielrechnung angeführt werden. In der Rechnung wurde
das Feld eines Rotors einer sechspoligen Synchronmaschine in einem Messjoch be-
rechnet; die Ergebnisse wurden mittels der Messung der Radialkomponente der
magnetischen Flussdichte im Luftspalt verifiziert.
Die grundlegenden Daten der Rechnung sind in Tabelle 7.1.4.1 zusammengefasst:
Daten
Bemerkung
1,gr 0.01250 m Geometrieradius: Welle
2,gr 0.02590 m Geometrieradius: Rotorkern
3,gr 0.02940 m Geometrieradius: Außenradius des PM-Ring
4,gr 0.03000 m Geometrieradius: Bohrungsradius Messjoch
5,gr 0.05325 m Geometrieradius: Außenradius des Messjoch
rB 1.05 T Remanenzinduktion des Magnetwerkstoffes
,3rμ 1.07 Permeabilität Permanentmagnetmaterial
fp 3 Polpaarzahl der PM-Erregung
Tabelle 7.1.4.1 Technische Daten des Synchronmotors der Firma Lenze GmbH
& Co. KG
Die Rechnung zur Ermittlung der Ersatzpermeabilitäten für Rotorkern und Messjoch
erfolgte mittels des in Bild 7.1.2 dargestellten Algorithmus. Die Modellierung der
Magnetisierungskennlinie wurde durch eine Spline-Interpolation vorgenommen (sie-
he auch Bild 7.1.1.1.1), die die Ersatzpermeabilität festlegende Feldgröße wurde
nach Gleichung (7.1.2.05) berechnet.
Die Parameter der Iteration wurden zu G=2 , ε=0.01% , nmax=50 gewählt.

Seite 134
Die Berechnung der magnetischen Flussdichte erfolgte nach der Bestimmung der
Ersatzpermeabilitäten in (M=100) Feldräumen mit der Erregung im Feldraum (E=50)
nach dem in Abschnitt 4 beschriebenen Modell.
Bei der Berechnung des Motorenmodells mit konstanten Permeabilitätszahlen wur-
den die Eingabedaten mit μR,Rotor=μR,Messjoch=5500 datiert. Die Iteration zur Bestim-
mung der Ersatzpermeabilitäten startet – um die Rechnungen vergleichen zu kön-
nen, mit identischen Eingabewerten.
Die Ergebnisse der Ermittlung der Ersatzpermeabilitäten sowie die Berechnung der
Komponenten der magnetischen Flussdichte an der Bohrungsfläche des Messjochs
sind in der Bildfolge 7.1.4.1 zusammengestellt und schließen die Betrachtungen ab.
Bild 7.1.4.1.a Die Iteration zur Berechnung der Ersatzpermeabilitäten wurde nach 19
Schritten aufgrund des Erreichens der Konvergenz (ε<0.01%) beendet.
Die Magnetisierungskennlinien der Materialien von Rotor und Messjoch
sind dem Bild 7.1.1.1.1 zu entnehmen.

Seite 135
Bild 7.1.4.1.b Die Ergebnisse der Ersatzpermeabilitätenberechnung sind in diesen
beiden Grafiken einzusehen. Oben ist die Verteilung der Permeabilitä-
ten über die einzelnen Feldräume dargestellt. Das untere Bild zeigt die
Verteilung der Permeabilitäten - orientiert am geometrischen Aufbau
der Maschine - in der (r,ϕ)-Ebene.

Seite 136
Bild 7.1.4.1.c Darstellung der Radialkomponente der magnetischen Flussdichte an
der Oberfläche der Messjochbohrung.
In blauer Farbe ist die Rechnung nach Kapitel 4 mit konstant ange-
nommenen Permeabilitäten (μR,Rotor=μR,Joch=5500) dargestellt.
Die nahezu identische, rot gestrichelt dargestellte Kurve entspricht den
Ergebnissen, welche mit Hilfe der Ersatzpermeabilitäten ermittelt wur-
den (Modell mit M=100 Feldräumen, der Erregung im Feldraum E=50
und den errechneten Ersatzpermeabilitäten aus Bild 7.1.4.1.b.

Seite 137
Bild 7.1.4.1.d Die Tangentialkomponente der magnetischen Flussdichte an der Ober-
fläche der Messjochbohrung.
In blauer Farbe ist die Rechnung nach Kapitel 4 mit konstant ange-
nommenen Permeabilitäten (μR,Rotor=μR,Joch=5500) dargestellt.
Die Kurve in roter Farbe entspricht den Ergebnissen der Rechnung mit-
tels der Ersatzpermeabilitäten (die Modellparameter sind mit denen des
Bildes 7.1.4.1.c identisch).

Seite 138
Bild 7.1.4.1.e Darstellung des Betrags der magnetischen Flussdichte in der (r,ϕ)-
Ebene.
Deutlich ist der Unterschied der Feldrechnungen (Oben: Rechnung bei
konstanter Permeabilität, Unten: Rechnung mit Ersatzpermeabilitäten
nach Bild 7.1.4.1.c zu erkennen.
Gut zu beobachten sind die Flussdichtebetragsdifferenzen auf dem Um-
fang der Welle und dem Außenumfang des Messjochs sowie die Feld-
unterschiede am Außenradius des Rotorkerns.

Seite 139
7.2 Quellen des siebten Kapitels [7.1] H. Fischer
H. Moser
Die Nachbildung von Magnetisierungskurven durch ein-
fache algebraische oder transzendente Funktionen
Archiv für Elektrotechnik 42, S. 286-299
1956
[7.2] I.N. Bronstein
K.A. Semendjajew
Taschenbuch der Mathematik
Verlag Harry Deutsch
22. Auflage

Seite 140
8. Nutung 8.1 Berücksichtigung der Statornutung durch einen vergrößerten
Luftspalt Unter dem Einfluss der bisher nicht betrachteten Nutöffnungen kommt es zu Einsat-
telungen des Feldverlaufs. Wenn dieser Effekt vernachlässigt werden soll, vergrößert
man im Allgemeinen die geometrischen Abmaße des Luftspaltes δg auf die ideelle
Luftspaltbreite des Modells δm, um bei gleichem magnetischen Spannungsabfall den
gleichen Fluss durch die Nutteilung bzw. eine dem mittleren Wert des tatsächlichen
Verlaufs entsprechende Induktion zu erhalten. Im Falle der Permanentmagneterreg-
ten Maschine ist jedoch auch der geringen Permeabilität der Dauermagnete (μr,PM≈1)
Rechnung zu tragen. Im einfachsten - hier angewendeten - Fall werden die geomet-
rischen Abmaße der Permanentmagneterregung δPM dem Luftspalt zugeschlagen.
Die ideelle Luftspaltbreite wird daher mit Hilfe des Carterschen Faktors bestimmt zu:
(8.1.1) m PM m PMC
g PM
K δ δ δ δδ δ δ
+ += ≡
+
Der Cartersche Faktor ist stets größer als eins und wird für den Fall ermittelt, dass
über benachbarten Zahnköpfen gleiche Luftspaltinduktionen herrschen. Im Allgemei-
nen muss KC aus einer zweidimensionalen Modellierung der Nut und entsprechender
Feldrechnung ermittelt werden.
Auf die Ermittlung des Carterschen Faktors soll im Weiteren nicht eingegangen wer-
den. Als allgemein akzeptiertes Werkzeug der Vereinfachung existiert zu seiner Be-
stimmung vielfältiges Material unterschiedlicher Komplexität und Qualität. Insbeson-
dere sei der Leser auf die Quellen [8.1] bis [8.5] hingewiesen.
Nach Quelle [8.1] wurde für tiefe Nuten folgender Ansatz mittels konformer Abbildung
ermittelt:

Seite 141
(8.1.2) ,1
,1
nC
n
Kτ
τ δα=
−
(8.1.3) ( )( )4 ln costgα β β βπ
= + , ,112
Nbtgβ
δ=
(8.1.4) ( )2
,1
,1
15 /
N
N
bb
αδ δ
⎛ ⎞≈ ⎜ ⎟ +⎝ ⎠
, ( ) ( ),1 ,1 ,1/ 1N N Nb h bδ ≥ ∧
Die Gültigkeit der Beziehungen (8.1) ist zunächst daran gebunden, dass die Feldform
innerhalb einer Nutteilung nur geringfügige Änderungen aufweist. Die Vorstellung
des quasihomogenen Luftspaltfeldes und damit die Gültigkeit der Gleichungen ist
also äußerst kritisch zu bewerten und daher gesondert zu betrachten.
Die Grundgeometrie für die Anwendung des Carterfaktors als Vergrößerungsfaktor
des ideellen Luftspaltes ist in Bild 8.1.1 dargestellt. Die im Anschluss folgende Tabel-
le 8.1.1 gibt der Übersichtlichkeit halber die Nomenklatur der Radien wieder und Bild
8.1.2 skizziert zu erwartende Zahlenwerte für den Faktor α des Carterfaktors mit dem
Parameter (bN,1 /δ).
Beschreibung Nomenklatur der Radien der Geo-
metriedaten
Nomenklatur der Radien der Ersatz-
anordnung
Nomenklatur der Radien der Feld-räume des Motor-
modells Außenradius der Motor-welle r1g r1m=r1g r1=r1m
Begrenzungsradien der Feldräume des Rotors r2 bis rE-2
Außenradius des Rotor-kerns r2g r2m=r2g rE-1=r2m
Außenradius des Per-manentmagnetringes r3g r3m=r3g rE=r3m
Bohrungsradius des Stators r4g r4m=r4g+δ(KC-1) rE+1=r4m
Begrenzungsradien der Feldräume des Stators rE+2 bis rM-1
Außenradius des Sta-tors r5g r5m=r5+δ(KC-1) rM=r5m
Tabelle 8.1.1 Nomenklatur der Radien

Seite 142
( )4 2g PM g gr rδ δ δ= + = −
( )
( )
1 1
2 2
3 3 4 4
5 5
1
1
m g
m g
m g m g C
m g C
r r
r r
r r r r K
r r K
δ
δ
=
=
= = + −
= + −
Bild 8.1.1 Überführung des geometrischen Modells in eine Ersatzanordnung. Die
geometrischen Abmaße des Luftspaltes werden mittels des Carterfak-
tors in einen ideellen Luftspalt quasihomogenen Feldes projiziert. Die
Normierung der Anordnung erfolgt über den Außenradius der Perma-
nentmagnetanordnung (r3g=r3m). Die Vergrößerung des modellierten
Luftspaltes wird durch Variation der Statorradien r4m=r4g+δ(KC-1) und
r5m=r5g+δ(KC-1) erreicht.
5 4 3 2 1g g g g gr r r r r
,1Nh
,1Jh
,1Nb
,1Nτ
1 2 3 4 5m m m m mr r r r r
,1Nτ
M↑M↓
( 1)CKδ −
( 1)CKδ −

Seite 143
Bild 8.1.2 Zahlenwerte des für die Bildung des Carterfaktors benötigten Faktors α
in Abhängigkeit von (bN,1 /δ) im Bereich von (1 ... 5). Die blau gezeich-
nete Linie repräsentiert die Näherung nach Gleichung (8.1.4), die Rech-
nung nach Gleichung (8.1.3) ist in der Farbe grün gezeichnet.

Seite 144
8.2 Quellen des achten Kapitels [8.1] E. Bolte Vorlesungsskript
Lehrveranstaltung “Elektrische Maschinen und Antriebe“
Universität der Bundeswehr Hamburg
1995
[8.2] R. Richter Elektrische Maschinen
Birkhäuser Verlag, 3. Auflage
1967
[8.3] G. Müller Grundlagen elektrischer Maschinen
Reihe: Elektrische Maschinen
VCH Verlagsgesellschaft mbH Weinheim
1994
[8.4] G. Müller Theorie elektrischer Maschinen
Reihe: Elektrische Maschinen
VCH Verlagsgesellschaft mbH Weinheim
1995
[8.5] K. Vogt Berechnung elektrischer Maschinen
Reihe: Elektrische Maschinen
VCH Verlagsgesellschaft mbH Weinheim
1996

Seite 145
9. Integration der Ankerwicklung in das zweidimensionale Schichtenmodell
9.1 Formulierung des Feldproblems Bei den bisherigen Betrachtungen wurde eine Maschine auf das in Bild 9.1.1 darge-
stellte Modell erweitert, um eine analytische Lösung für die Berechnung des magne-
tischen Vektorpotentials vorzustellen.
Bild 9.1.1 Anordnung und Nomenklatur der Feldräume des Motormodells
Darstellung der Schichtung der M+1 Feldräume, deren Nomenklatur
denen der Radien äquivalent ist. Das Zentrum der konzentrisch zuein-
ander angeordneten Feldräume befindet sich am oberen Bildrand der
gestreckten Darstellung, der Radius rM bezeichnet den Außenradius
des Stators. Der Außenraum der Maschine ist demzufolge der Feld-
raum M+1.
Der mit dem Index E bezeichnete - grau dargestellte - Raum ist der
der Permanentmagneterregung, der Raum AE+1 der des Luftspaltes.
2 0 AΔ =uur
1 0 EA −Δ =uuuur
rot EA J Mμ μ′Δ = − = −uur uur uur
1 0 EA +Δ =uuuur
0 MAΔ =uuur
1 1r0 , limM MA A+ +→∞
Δ = ≠ ∞uuuuur uuuuur
1 1r 00 , limA A
→Δ = ≠ ∞uur uur
M
M
r
0
r1
r2
rE-2
rE-1
rE
rE+1
rM-1
rM
ΑΑ
ΑΑΑ
ΑΑ
1
2
E-1
E
E+ 1
M
M+ 1
M
M

Seite 146
Die Berechnung des Vektorpotentials erfolgte hierbei separat in den in Bild 9.1.1 be-
zeichneten M+1 Feldräumen mittels der Gleichungen:
( )2, zA A r eϕ≡r r
(9.1.1) 2 2
2 2 22
1 1 0A A A Ar r r r ϕ∂ ∂ ∂
Δ = + + =∂ ∂ ∂
ur
(Feldräume 1... E-1 , E+1...M+1)
(9.1.2) ( )2 2
0 22 2 22
1 1 ,A A A A J rr r r r
μ ϕϕ
∂ ∂ ∂ ′Δ = + + = −∂ ∂ ∂
ur r
(Feldraum E)
Zur weiteren Analyse des Luftspaltfeldes soll nun das Feld der Ankerwicklung in die
Betrachtungen einbezogen werden. Dazu wird das bereits untersuchte Ersatzprob-
lem um die Modellierung einer verteilten und symmetrisch aufgebauten (Anker-)
Wicklung ergänzt:
― Berechnung eines zweidimensionalen Magnetfeldes in der (r,ϕ)-Ebene, ange-
regt durch eine Permanentmagnetanordnung auf dem Rotor und durch Strö-
me in einer Ankerwicklung.
― Die Permanentmagnetanordnung wird durch eine Stromdichteverteilung im
entsprechenden Feldraum (3) in die Rechnung eingeführt.
― Die Stromverteilung der Statorwicklung wird durch einen flächigen Strombelag
auf dem Radius (4) des Stators eingeführt.
― Die dem Rotor zugewandte zylindrische Statorfläche auf dem Radius(4) wird
als glatt angenommen. Die Statornutung wird näherungsweise durch einen
vergrößerten Luftspalt modelliert.
― Alle Feldräume werden modelliert durch konzentrisch angeordnete, glatte
(Hohl-) Kreiszylinder.
― Für alle Feldräume werden homogene und isotrope Werkstoffeigenschaften
unterstellt.

Seite 147
― Die (unterschiedlichen) nichtlinearen Werkstoffeigenschaften der weichmag-
netischen Eisenteile werden iterativ aus dem elektromagnetischen Feld der
Maschine bestimmt.
― Für die verschiedenen Feldräume werden jeweils konstante Temperaturen un-
terstellt.
― Die Zeitabhängigkeit ist dadurch definiert, dass ein Betrieb mit konstanter
Drehzahl an einem symmetrischen Drehspannungssystem untersucht wird.
― Das magnetische Vektorpotential wird in Zylinderkoordinaten bestimmt.
Mit diesem Vorgehen kann das bisher Verwendete fast vollständig weitergenutzt
werden. Es ist lediglich die Randbedingung der Kontinuität für die Tangentialkompo-
nente der magnetischen Feldstärke auf dem Radius rE+1 zu korrigieren:
(9.1.3) ( )1 12 1
E+2 E 11 1
1 1
E EE Er rr r
A A ar r
ϕμ μ
+ ++ +
+∂ ∂⎛ ⎞ ⎛ ⎞− =⎜ ⎟ ⎜ ⎟∂ ∂⎝ ⎠ ⎝ ⎠
Die Berechnung des Strombelags der Statorwicklung ist nun die zunächst anzuge-
hende Aufgabe.
9.2 Entwicklung des Strombelags der Statorwicklung Die Abhängigkeit des Strombelags a1(ϕ) folgt aus der Verteilung der Statorwicklung
in Umfangsrichtung. Bild 9.2.1 zeigt eine Spule, aus der durch Reihenentwicklung
und Superposition die ϕ -Abhängigkeit des Strombelags für eine beliebige verteilte
und symmetrische Dreiphasenwicklung abgeleitet wird.
Um die Superposition einzelner Spulen zu einer beliebigen symmetrischen Dreipha-
senwicklung durchzuführen, ist eine Definition der Wicklungsparameter notwendig.
Ein Beispiel eines Wicklungsaufbaus ist in Bild 9.2.2, die Nomenklatur der Parameter
in Tabelle 9.2.1 vorgestellt:

Seite 148
Wicklungsparameter einer symmetrischen Statorwicklung mit 60° Zonenbreite
1,2, ... N1 Windungen pro Spule
1,2, ... κ ... q1 Spulen pro Spulengruppe
1,2, ... ρ ... KWA.p1 Spulengruppen pro Strang
1,2, ... a Anzahl parallel geschalteter Spulengruppen pro Strang
1.2, ... k ... (m1=3) Anzahl der Stränge (m1=3)
KWA = 1 ∨ 2 Wicklungsartfaktor
(1... Einschichtwicklung) (2... Zweischichtwicklung)
Tabelle 9.2.1 Nomenklatur der Parameter verteilter Wicklungen
Bild 9.2.2 Aufbau einer Drehstrom-Zweischichtwicklung mit 60° Zonenbreite
Darstellung für eine vierpolige Ausführung mit zwei Spulen pro Spulen-
gruppe, wobei die Spulengruppen des Stranges in Reihe geschaltet
sind.
Oben: Nutenplan und Koordinatensystem
Unten: Wickelschema für den ersten Strang

Seite 149
Bild 9.2.1 Strombelag und Koordinatensystem einer Spule der Statorwicklung
Für diese erste Spule der ersten Spulengruppe des ersten Strangs ergibt die Ent-
wicklung einer Fourier-Reihe für den Strombelag (siehe auch Kapitel 4 und Quelle
[9.1]):
(9.2.01) ( ) ( )1,1,1,1 sina bνν
ϕ νϕ=∑ , 1,2,3,ν = K
1,1 ,1 1,1,1
1 ,1
1,1
1 ,1
1,1
1 ,1
,1 1
2
sin , Sehnungsfaktor2
si , Nutschlitzbreitenfaktor2
2 / 2 , Polteilung
S Np
Sp
Np
p SW
Nb K K ip
yKp
bKp
r p
ν ν ν
ν
ν
τ
ν πτ
ν πτ
τ π
= − ⋅ ⋅ ⋅
⎛ ⎞= ⎜ ⎟⎜ ⎟
⎝ ⎠⎛ ⎞
= ⎜ ⎟⎜ ⎟⎝ ⎠
=
ϕ
1y
1
2y1b
1( )a ϕ
1
1
N ib
1
1
N ib

Seite 150
Um den Strombelag einer beliebigen κ-ten Spule der ρ-ten Spulengruppe des k-ten
Strangs darzustellen, ist folgende Koordinatentransformation für den Ausdruck
(9.2.01) notwendig:
(9.2.02.a) ( ) ( ) ( ), , ,1 1 1 ,1,1 1 1
2 21 1 1k N NWA
m q kK p mκ ρ
πϕ ϕ κ α ρ α= − − − − − −
( ),1 1 1 12 / 2 , NutteilungN p m qα π=
(9.2.02.b) ( ) ( )( )
( ) ( )
,1
1, , , , ,1 1 ,1
,1 1 1
1sin 2 21 1
N
k kN
WA
a b im q k
K p m
ν νκ ρ κ ρ
νϕ κ ναϕ πρ ν α ν
⎛ − − − ⎞⎜ ⎟
= ⎜ ⎟− − −⎜ ⎟⎝ ⎠
9.2.1 Superposition der Spulen zu einer Spulengruppe Da die q1 Spulen der (ρ,k)-ten Spulengruppe in Reihe geschaltet sind, genügt zur
Überlagerung eine einfache Summierung:
( ) ( )( )
( ) ( )
,1
1, , , ,1 1 1 ,1
,1 1 1
1sin 2 21 1
Nq
k kN
WA
a b im q k
K p m
ν νρ κ ρ
κ
νϕ κ ναϕ πρ ν α ν=
⎛ − − − ⎞⎜ ⎟
= ⎜ ⎟− − −⎜ ⎟⎝ ⎠
∑
( ) ( )( )
( ) ( )
,1 11 1 11 1
1, , ,
1 1 ,1,1 1 11 1 1
1sin22
sin2 21 1sin
2
N
k k
NWA
qp mqp m
a b imq k
K pmp mq
ν νρ ρ
ν πν π νϕ ναϕ
πν π ρ ν α ν
⎛ ⎞ ⎛ ⎞+ − + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎜ ⎟= ⋅
⎜ ⎟⎛ ⎞ − − −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠
Mit der Einführung eines Zonungsfaktors KZ,1 vereinfacht sich der Ausdruck zu:
(9.2.1.01.a) ( ) ( )( )
( ) ( )
,1 11 1 1
1, , , ,1
1 1 ,1,1 1 1
12
sin2 21 1
N
k k Z
NWA
qp m q
a b i Km q k
K p m
ν ν νρ ρ
ν πνϕ ναϕ
πρ ν α ν
⎛ ⎞+ − + −⎜ ⎟⎜ ⎟= ⋅ ⋅⎜ ⎟
− − −⎜ ⎟⎜ ⎟⎝ ⎠

Seite 151
(9.2.1.01.b) 1 1,1
1 1 1
sin2
sin2
Z
p mK
qp m q
ν
ν π
ν π
⎛ ⎞⎜ ⎟⎝ ⎠=⎛ ⎞
⋅ ⎜ ⎟⎝ ⎠
Zusammenfassungen im Argument der Sinusfunktion führen den Ausdruck über in:
( ) ( )( )
( ) ( )
1 ,1
1, , , ,1,1
1 1 1
12
sin21 1
2
N
k k ZWA
qa b i q K K
kp p m
ν ν νρ ρ
ννϕ αϕ πν ν πρ
⎛ ⎞+ − −⎜ ⎟⎜ ⎟= ⋅ ⋅ ⋅⎜ ⎟− − −⎜ ⎟⎝ ⎠
(9.2.1.01.c) ( ) ( )( )
( ) ( )
,11
1, , , ,1,1
1 1 1
12
sin21 1
2
N
k k ZWA
qa b i q K
Kk
p p m
ν ν νρ ρ
αν ϕ
ϕπν ν πρ
⎛ ⎞⎛ ⎞− − −⎜ ⎟⎜ ⎟
⎝ ⎠⎜ ⎟= ⋅ ⋅ ⋅ ⎜ ⎟⎜ ⎟− − −⎜ ⎟⎝ ⎠
Der erste Summand des Sinusargumentes legt eine Verschiebung des Koordinaten-
ursprungs in den Schwerpunkt der ersten Spulengruppe nahe. Es wird das Argument
ϕ1 eingeführt (siehe auch Bild 9.2.2):
(9.2.1.02.a) ( ) ( ),11 11
2Nq
αν ϕ ν ϕ β⎛ ⎞
− − ≡ −⎜ ⎟⎝ ⎠
(9.2.1.02.b) ( ) ,11 11
2Nq
αβ− =
(9.2.1.02.c) ( )1 1ν ϕ β νϕ− ≡
(9.2.1.03) ( ) ( ) ( ) ( ),11, , , 1 ,1 1
1 1 1
2sin 1 12
WAk k Z
Ka b i q K k
p p mν ν ν
ρ ρ
πν ν πϕ νϕ ρ⎛ ⎞
= ⋅ ⋅ ⋅ − − − −⎜ ⎟⎝ ⎠

Seite 152
9.2.2 Superposition der Spulengruppen zu einem Strang Bei der Überlagerung der Spulengruppen zu einem Strang muss die Zusammen-
schaltung der Spulengruppen beachtet werden. Da parallele Zweige der Anzahl a
zugelassen werden sollen, ist es notwendig, einen Zweigstrom iz,k einzuführen. Die
negative Beschaltung der geradzahligen Spulengruppen wird durch einen zusätzli-
chen Summanden (ρ-1).π berücksichtigt:
( ) ( )( )
( ) ( )
,11
11, , , 1 ,1
1 1
12
sin21 1
WA
k z k Z
Kp
a b i q Kk
p m
ν ν νρ
πννϕ ρϕ
ν π ρ π
⎛ ⎞− − −⎜ ⎟
⎜ ⎟= ⋅ ⋅ ⋅⎜ ⎟
− + −⎜ ⎟⎜ ⎟⎝ ⎠
Um die Superposition der Spulengruppen in einer Summe auszudrücken zu können,
ist es notwendig, im Folgenden die Gleichheit der Zweigströme iz,k zu fordern. Damit
kann für den Fall einer Zweischichtwicklung die Summation über 2p Spulengruppen
pro Strang vollzogen werden:
(9.2.2.01) , /z k ki i a=
,1 2WAK =
( ) ( )( )
( ) ( )
121
1, , 1 ,11
1 1
1sin
21 1
p
k z k Z
pa b i q K
kp m
ν ν ν
ρ
ννϕ ρ πϕ
ν π ρ π=
⎛ ⎞− − −⎜ ⎟⎜ ⎟= ⋅ ⋅ ⋅⎜ ⎟
− + −⎜ ⎟⎝ ⎠
∑
( ) ( )( )
( )
121
1, , 1 ,11
1 1
1 1sin
21
p
k z k Zp
a b i q Kk
p m
ν ν ν
ρ
ννϕ ρ πϕ
ν π=
⎛ ⎞⎛ ⎞− − − −⎜ ⎟⎜ ⎟
⎝ ⎠⎜ ⎟= ⋅ ⋅ ⋅ ⎜ ⎟⎜ ⎟−⎜ ⎟⎝ ⎠
∑

Seite 153
( ) ( )( )( )
( )( )( )
( )
1
1
2 1 11 1
1, , 1 ,1 2
1 1
2 1 1sin 2 1 2sin
2sin 1 1
p
k z k Z
p
pp pa b i q K
kp m
νπν ν ν
νπ
ν πνϕϕ
ν π
⎛ ⎞⎛ ⎞− + − −⎜ ⎟⎜ ⎟− ⎝ ⎠⎜ ⎟= ⋅ ⋅ ⋅ ⋅ ⎜ ⎟− ⎜ ⎟−⎜ ⎟
⎝ ⎠
Der bei der Summation entstandene Faktor liefert nur einen von Null verschiedenen
Wert, wenn folgende Wellenformel erfüllt wird:
(9.2.2.02) 1
1 2 1,2,3,b bpν⎛ ⎞
− = =⎜ ⎟⎝ ⎠
K K
Damit ergibt sich für den Ausdruck der Strombelagsfunktion einer Zweischichtwick-
lung:
( ) ( ) ( )( )
( )
( )
1 121
1, , 1 ,1 2
1 1
2 1 2sin 2 2 2sin 2sin 2 1
k z k Z
p bp b
a b i q Kb k
p m
πν ν ν
π
πνϕϕ ν π
⎛ ⎞− + −⎜ ⎟⎜ ⎟= ⋅ ⋅ ⋅ ⋅⎜ ⎟−⎜ ⎟⎝ ⎠
( ) ( ) ( )
( )
( )
1 11
1, , 1 ,1
1 1
2 12 sin 21cosk z k Z
p bpa b i q K
kbp m
ν ν ν
νϕ πϕ ν π
π
⎛ − + −⎞⎜ ⎟= ⋅ ⋅ ⋅ ⋅ ⎜ ⎟−⎜ ⎟⎝ ⎠
(9.2.2.03) ( ) ( ) ( )1, , 1 ,1 1 11 1
22 sin 1k z k Za b i q K p kp m
ν ν ν ν πϕ νϕ⎛ ⎞
= ⋅ ⋅ ⋅ ⋅ − −⎜ ⎟⎝ ⎠
Für die Entwicklung der Strombelagsfunktion für Einschichtwicklungen sind keine
negativ geschalteten Spulengruppen zu berücksichtigen; die Summierung wird über
p Spulengruppen durchgeführt:
,1 1WAK =

Seite 154
( ) ( ) ( ) ( )1, , 1 ,1 11 1 1 1
2sin 1 12
p
k z k Za b i q K kp p m
ν ν ν
ρ
ν π ν πϕ νϕ ρ=
⎛ ⎞= ⋅ ⋅ ⋅ − − − −⎜ ⎟
⎝ ⎠∑
( ) ( ) ( )1, , 1 ,1 1 11 1
2sin 1k z k WAa b i q K p kp m
ν ν ν πϕ νϕ⎛ ⎞
= ⋅ ⋅ ⋅ ⋅ − −⎜ ⎟⎝ ⎠
M
Die Rechnung wird in gleicher Art wie die vorhergehenden Betrachtungen zur Zwei-
schichtwicklung durchgeführt. Das Ergebnis ist - bis auf einen Multiplikator - iden-
tisch mit (9.2.2.03), auch die Ordnungszahlbedingungen (9.2.2.02) bleiben erhalten.
Somit lässt sich folgende Funktion für den allgemeinen Fall der die Ein- und Zwei-
schichtwicklungen notieren:
(9.2.2.04) ( ) ( ) ( )1, , 1 ,1 ,1 1 11 1
2sin 1k z k Z WAa b i q K K p kp m
ν ν ν ν πϕ νϕ⎛ ⎞
= ⋅ ⋅ ⋅ ⋅ ⋅ − −⎜ ⎟⎝ ⎠
9.2.3 Superposition der Statorstränge Für den stationären Betrieb symmetrisch gebauter und gespeister Maschinen kann
folgender Ansatz für die Strangströme ik gemacht werden:
(9.2.3.01.a) ( ) ( )11
2Re 2 exp 1ki t I j t kmπω
⎧ ⎫⎛ ⎞⎛ ⎞⎪ ⎪= − −⎜ ⎟⎨ ⎬⎜ ⎟⎜ ⎟⎝ ⎠⎪ ⎪⎝ ⎠⎩ ⎭
Die Rechnungen sollen im Folgenden nur für den Fall (m1=3) fortgeführt werden:
(9.2.3.01.b) ( ) ( )( )( ){ }21 3Re 2 exp 1ki t I j t kω π= − −
Damit geht die Strombelagsfunktion (9.2.2.04) über in:

Seite 155
(9.2.3.02) ( ) ( ) ( )
( )( )( ){ }
1 ,1 11, 1 ,1 1
1
23
22 sin 13
Re exp 1
WAk Z
I
q K pa b I K k
a p
j t k
ν ν ν νϕ νϕ π
ω ϕ π
⋅ ⋅ ⎛ ⎞= ⋅ ⋅ − − ⋅⎜ ⎟
⎝ ⎠
⋅ + − −
( ) ( )
( )
( )
1 ,1 11, 1 ,1
11
11
2
1 2Re exp 1 12 3
1 2Re exp 1 12 3
WAk Z
I
I
q K pa b I K
a
j t kj p
j t kj p
ν ν νϕ
νω ϕ νϕ π
νω ϕ νϕ π
⋅ ⋅= ⋅ ⋅
⎡ ⎤⎧ ⎫⎛ ⎞⎛ ⎞⎛ ⎞⎪ ⎪⎢ ⎥+ + − + − −⎜ ⎟⎜ ⎟⎨ ⎬⎜ ⎟⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎝ ⎠⎪ ⎪⎝ ⎠⎩ ⎭⎢ ⎥⋅⎧ ⎫⎢ ⎥⎛ ⎞⎛ ⎞⎛ ⎞⎪ ⎪− + − + + −⎢ ⎥⎜ ⎟⎜ ⎟⎨ ⎬⎜ ⎟⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎝ ⎠⎪ ⎪⎝ ⎠⎩ ⎭⎣ ⎦
In diesem Ausdruck befinden sich zwei Summanden für eine Ordnungszahlν. Durch
eine Modifizierung der Wellenformel kann die Funktion jedoch vereinfacht werden:
(9.2.3.03.a) 1 2 , b 0, 1, 2, 3bpν⎛ ⎞− = = ± ± ±⎜ ⎟
⎝ ⎠K
(9.2.3.03.b)
( ) ( )
( )
1 ,1 11, 1 ,1
11
2
1 2Re exp 1 12 3
WAk Z
I
q K pa b I K
a
j t kj p
ν ν νϕ
νω ϕ νϕ π
⋅ ⋅= − ⋅
⎧ ⎫⎛ ⎞⎛ ⎞⎛ ⎞⎪ ⎪⋅ + − + − −⎜ ⎟⎜ ⎟⎨ ⎬⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠⎪ ⎪⎝ ⎠⎩ ⎭
Nun kann eine Summe über die (m1=3) Statorstränge gebildet werden:
( ) ( ) 1 ,1 11 1 ,1
1
11 1
2
1 2 2Re exp 1 12 3 3
mWA
Zk
I
q K pa b I K
a
j t kj p p
ν ν νϕ
ν νω ϕ νϕ π π
=
⋅ ⋅= − ⋅
⎧ ⎫⎛ ⎞⎛ ⎞⎛ ⎞ ⎛ ⎞⎪ ⎪⋅ + − + − − −⎜ ⎟⎜ ⎟⎨ ⎬⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎪ ⎪⎝ ⎠⎩ ⎭
∑

Seite 156
( ) ( ) ( )( )( )( )
1 ,1 11 1 ,1
3
11 1
sin 12
sin 1
1 2Re exp 4 1 12 3 3
pWAZ
p
I
q K pa b I K
a
j tj p p
νν ν ν
ν π
πϕ
ν π νω ϕ νϕ π
−⋅ ⋅= − ⋅
−
⎧ ⎫⎛ ⎞⎛ ⎞⎛ ⎞ ⎛ ⎞⎪ ⎪⋅ + − + − − −⎜ ⎟⎜ ⎟⎨ ⎬⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎪ ⎪⎝ ⎠⎩ ⎭
Der bei der Summation entstandene Faktor liefert nur einen von Null verschiedenen
Wert, wenn die Wellenformel wie folgt modifiziert wird:
(9.2.3.04) 11
1 2 6 , 0, 1, 2, 3bm b bpν⎛ ⎞
− = = = ± ± ±⎜ ⎟⎝ ⎠
K
Damit ergibt sich für die Funktion des Strombelags:
( ) ( ) ( )
( )( )
1 ,1 11 1 ,1 1
1
2 3
1Re exp2
WAZ
I
q K pa b I K m
a
j tj
ν ν νϕ
ω ϕ νϕ
⋅ ⋅= − ⋅ = ⋅
⎧ ⎫⋅ + −⎨ ⎬
⎩ ⎭
( ) ( )
( )( ){ }
1 ,1 11 1 ,1
1
3 22
Re exp
WAZ
I
q K pa b I K
aj j t
ν ν νϕ
ω ϕ νϕ
⋅ ⋅= ⋅
⋅ + −
( )
( )( ){ }
1 ,1 111 1 ,1
1 ,1
1
3 2 22
Re exp
WAZ
p
I
q K pIa N Kp a
j j t
ν νϕτ
ω ϕ νϕ
⋅ ⋅= ⋅ ⋅ ⋅ ⋅
⋅ + −
( ) ( )1 ,1 111 1 ,1 1
1 ,1
3 2 2 sin2
WAZ I
p
q K pIa N K tp a
ν νϕ ω ϕ νϕτ
⋅ ⋅= ⋅ ⋅ ⋅ ⋅ + −
Die Einführung der Serienwindungszahl w und des Wicklungsfaktors KW,1 vereinfa-
chen den gefundenen Ausdruck:

Seite 157
(9.2.3.05.a) ( ) ( ) ( )11 ,1 1
1 ,1
23 sinw Ip
Ia w K tp
ν νϕ ω ϕ νϕτ
= ⋅ ⋅ ⋅ + −
(9.2.3.05b) ( ) 16 1 , 0, 1, 2, 3b p bν = + = ± ± ± K
(9.2.3.05.c) ,1 11 1
WAK pw q N
a⋅
= ⋅ ⋅
(9.2.3.05.d) ,1 ,1 ,1 ,1W N S ZK K K Kν ν ν ν= ⋅ ⋅
Mit den Gleichungen (9.2.3.05) ist die Funktion a1(ϕ1) vollständig bestimmt.
9.2.4 Integration des Strombelags in die Modellanordnung
( ) ( ) ( )1, 1 1 1 1, 1,2 1 1, 1,3 1 1 1, sinE E E E E E IA r C C r r tν ν ν ν νϕ ω ϕ νϕ−+ + + + + += + + −
1Er +
( )1 1 1,Ea rν ϕ+
( ) ( ) ( )1, 2 1 1 1, 2,2 1 1, 2,3 1 1 1, sinE E E E E E IA r C C r r tν ν ν ν νϕ ω ϕ νϕ−+ + + + + += + + −
Bild 9.3.1 Anordnung des Strombelags in der Schichtung der M+1 Feldräume. Der
Feldraum E+1 entspricht dem Raum des Luftspaltes, der Raum E+2 ist
der erste Feldraum der M-E+2 Statorschichten. Auf dem Bohrungsradi-
us des Stators rE+1 befindet sich der Strombelag zur Modellierung der
Statorwicklung.
Die Formulierung der Vektorpotentiale lässt sich - mit der Modifikation des an den
Strombelag (9.2.3.05) angepassten Sinusargumentes den vorhergehenden Abschnit-
ten entnehmen:
( ) ( ) ( )1, 1 1 1,2, 1 1,3, 1 1, sinE E E IA r C C r r tν ν ν ν νϕ ω ϕ νϕ−+ + += + + −

Seite 158
( ) ( ) ( )1, 2 1 1,2, 2 1,3, 2 1, sinE E E IA r C C r r tν ν ν ν νϕ ω ϕ νϕ−+ + += + + −
1
1
1
1
21,3,
1,3, 12
1,3, 1 1
E E
E E
E E
E E
r rE E
r rE
r rE E
r r
r CC
C r
ν ν
ν
ν ν
μ μμ μ
μ μμ μ
+
+
+
+
−
+
+
−−
+=
−−
+
3 2
3 2
3 2
3 2
21,3, 3 2
1,3, 22
1,3, 3 2 1
E E
E E
E E
E E
r rE E
r rE
r rE E
r r
C rC
C r
ν ν
ν
ν ν
μ μμ μ
μ μμ μ
+ +
+ +
+ +
+ +
−+ +
+
+ +
−+
+=
−+
+
Nun ist der Strombelag auf dem Radius rE+1 in das Modell aus Bild 9.1.1 einzufügen.
Die verbleibenden Konstanten des Gleichungssystems für das magnetische Vektor-
potential sind so zu bestimmen, dass an dieser Grenzschicht den Randbedingungen
aus Kapitel 3.4 genügt wird:
(9.3.01) 1,E+1 1 1,E+2 1( ) ( ) E EA r A r+ +=
(9.3.02.a) 1,E+1 1 1 1,E+2 1 1 1 1 1( ) ( ) ( ) E E EH r H r a rϕ ϕ ϕ+ + +∂ − ∂ = ∂ .
(9.3.02.b) ( )1 21 1
1,E+1 1,E+21 1 1
0 0
1 1 ,E EE Er rr r
A Aa r
r rϕ
μ μ μ μ+ ++ +
∂ ∂⎛ ⎞ ⎛ ⎞− =⎜ ⎟ ⎜ ⎟∂ ∂⎝ ⎠ ⎝ ⎠
Aus der Gleichung (9.3.01) folgen die Beziehungen:
( ) ( )1, 1 1 1 1, 2 1 1, ,E E E EA r A rν νϕ ϕ+ + + +=
( ) ( )1, 1,2 1, 1,3 1 1 1, 2,2 1, 2,3 1 1E E E E E E E EC C r r C C r rν ν ν ν ν ν ν ν− −+ + + + + + + ++ = +
(9.3.03) ( )( )
21, 2,3 1
1, 1,2 1, 2,2 1 1, 2,221, 1,3 1
1
1E E
E E EE E
C rC C K C
C r
ν νν ν ν ν
ν ν
+ ++ + +
+ +
+= ≡ ⋅
+

Seite 159
Die Umformulierung von (9.3.02) und das Einsetzen des Ausdrucks (9.3.03)
ergeben:
( ) ( ) ( )
( ) ( )
1 2
1, 1,2 1, 1,3 1 1 1, 2,2 1, 2,3 1 11
0 1 0 1
1,1 1
1 ,1
sin
3 2 2 sin2
E E
E E E E E E E EI
r E r E
w Ip
C C r r C C r rt
r r
I w K tp
ν ν ν ν ν ν ν ν
ν
ν νω ϕ νϕ
μ μ μ μ
ω ϕ νϕτ
+ +
− −+ + + + + + + +
+ +
⎛ ⎞− −⎜ ⎟− + −⎜ ⎟⎝ ⎠
= ⋅ ⋅ ⋅ + −
( ) ( )
( )1 2
1, 1,2 1, 1,3 1 1 1, 2,2 1, 2,3 1 1
0 1 1,1
1 ,1
3 2 22
E E
E E E E E E E E
r r
Ew
p
C C r r C C r r
r I w Kp
ν ν ν ν ν ν ν ν
ν
μ μ
μν τ
+ +
− −+ + + + + + + +
+
− −−
⎛ ⎞= ⋅ ⋅ ⋅⎜ ⎟⎜ ⎟
⎝ ⎠
( )
( ) ( )
1 2
2 1
0 1 1,1
1 ,11, 2,2
1 1, 1,3 1 1 1, 2,3 1 1
3 2 22
E E
E E
r r Ew
pE
r E E E r E E E
r I w Kp
CK C r r C r r
ν
νν ν ν ν ν ν ν
μ μ μν τ
μ μ
+ +
+ +
+
+ − −+ + + + + +
⎛ ⎞⋅ ⋅ ⋅⎜ ⎟⎜ ⎟
⎝ ⎠=− − −
(9.3.04) ( )
( ) ( )
1 2
2 1
0 1 1,1
1 ,11, 2,2 2 2
1 1, 1,3 1 1, 2,3 1
3 2 22
1 1
E E
E E
r r Ew
pE
r E E r E E
r I w Kp
CK C r C r
νν
νν ν ν ν ν
μ μ μν τ
μ μ
+ +
+ +
+
++ + + +
⎛ ⎞⋅ ⋅ ⋅⎜ ⎟⎜ ⎟
⎝ ⎠=− − −
Mit den Gleichungen (9.3.03) und (9.3.04) ist das Gleichungssystem des magneti-
schen Vektorpotentials vollständig bestimmt. Das Potential kann nun in den Algo-
rithmus nach Kapitel 6 eingefügt werden.

Seite 160
9.3 Numerische Berechnung eines Beispielproblems Zu Verifikation und Veranschaulichung sollen nun das Vektorpotential und dessen
abgeleitete Feldgrößen für das Bohrungsfeld einer dreipolpaarigen Synchronmaschi-
ne berechnet werden. Die Rechenergebnisse sind in der Bildfolge 9.3.1 dargestellt.
Die grundlegenden Motordaten sind in Tabelle 9.3.1 zusammengefasst; weitere In-
formationen sind der Anlage 1 zu entnehmen.
Daten Bemerkung
1,gr 0.01250 m Geometrieradius Welle
2,gr 0.02590 m Geometrieradius Rotorkern
3,gr 0.02940 m Geometrieradius Außenradius des PM-Ring
4,gr 0.03000 m Geometrieradius Luftspalt
5,gr 0.05325 m Geometrieradius Außenradius des Stators
1p 4 Polpaarzahl des Ankers
1m 3 Strangzahl des Ankers
1q 1 Lochzahl des Ankers
rB 1.05 T Remanenzinduktion des Magnetwerkstoffes
,3rμ 1.07 Permeabilität Permanentmagnetmaterial
fp 3 Polpaarzahl der PM-Erregung
1p 3 Polpaarzahl
1m 3 Strangzahl
1q 2 Lochzahl
1N 23 Windungszahl einer Spule
1a 1 Anzahl paralleler Zweige
1l 0.00760 m Blechpaketlänge
,1Sh 0.00500 m Streuschlitzhöhe
Tabelle 9.3.1 Technische Daten des Synchronmotors der Firma Lenze GmbH
& Co. KG

Seite 161
Bild 9.3.1.a Darstellung des magnetischen Vektorpotentials in der (r,ϕ)-Ebene.
Das Feld wurde berechnet für das Bohrungsfeld (Maschine bei ent-
nommenem Rotor) bei Nennbestromung der Ankerwicklung (In=7,0A)
und der Datierung der Parameter (ωt=0), (ϕI=0) und (bmax=4). Die Er-
satzpermeabilitäten der Stator-Elektrobleche wurden in 50 Feldräumen
modelliert (M=100 und E=50) und sind in Bild 9.3.1.c dargestellt. Die Er-
regung des magnetischen Vektorpotentials auf dem Radius der Stator-
bohrung (r=0.0300) ist gut zu erkennen.

Seite 162
Bild 9.3.1.b Darstellung des Betrags der magnetischen Flussdichte in der (r,ϕ)-
Ebene. Die Datierung der Feldrechnung ist Bild 9.3.1.a zu entnehmen.
Bild 9.3.1.c Darstellung der ermittelten Ersatzpermeabilitäten zur Berechnung des
Bohrungsfeldes der sechspoligen Synchronmaschine.

Seite 163
Bild 9.3.1.d Darstellung der Radialkomponente der magnetischen Flussdichte auf
dem Radius der Statorbohrung über den Umfangswinkel ϕ.
Bild 9.3.1.e Darstellung der Tangentialkomponente der magnetischen Flussdichte
auf dem Radius der Statorbohrung über den Umfangswinkel ϕ.

Seite 164
9.4 Berechnung der Statorflussverkettung Die in den vorhergegangenen Abschnitten berechneten Felder des Statorstromes
induzieren auch in den Statorsträngen. Nun soll die Flussverkettung der Spule (κ,ρ,k)
mit dem Statorfeld ermittelt werden. Da die Vektorpotentialverteilung bekannt ist, wird
der Fluss φ aus dem Wegintegral über das magnetische Vektorpotential gewonnen.
Die Flussverkettung des k-ten Stranges erfolgt wieder durch Summation über die
beteiligten Spulengruppen. Die Rechnung soll mit einem Verweis auf die Ausführun-
gen zur Ermittlung der Polradspannung in Abschnitt 4 kurz gehalten werden:
(9.4.01) ( )1 , , , 1, , , ,n k n kA dlν νκ ρ κ ρψ = ∫
rr
(9.4.02.a) ( ) ( )( ), , 1 ,1 1, 1 1 1, 1, 1 1 1,( ) , ,k N E E L E E Rl N K A r A rν ν νκ ρ ϕ ϕ+ + + +Ψ = − +
(9.4.02.b) ( ) ( ) ( )( ) 11, 1 1 1 1
1 1 1 1 ,1
2 11 1 1 22 2L
p
ym q k qp q m pπ πϕ κ ρ β
τ= − + − + − − −
(9.4.02.c) ( ) ( ) ( )( ) 11, 1 1 1 1
1 1 1 1 ,1
2 11 1 1 22 2R
p
ym q k qp q m pπ πϕ κ ρ β
τ= − + − + − − +
(9.4.02.d) ( ) ( ) ( )1, 1 1 1 1,2, 1 1,3, 1 1 1 1, sinE E E E E E IA r C C r r tν ν ν ν νϕ ω ϕ νϕ−+ + + + + += + + −
( ) ( )( ), , 1 ,1 1, 1 1 1, 1, 1 1 1,( ) , ,k N E E L E E Rl N K A r A rν ν νκ ρ ϕ ϕ+ + + +Ψ = − +
( )
( ) ( )( ), , 1,2, 1 1 ,1 1,3, 1 1 1
1, 1,
( )
sin sin
k E N E E E
I R I L
C l N K C r r
t t
ν ν ν ν νκ ρ
ω ϕ νϕ ω ϕ νϕ
−+ + + +Ψ = +
+ − − + −
( ), , 1,2, 1 1 ,1 1,3, 1 1 1
1, 1, 1
1 ,1
( )
2cos sin2 2
k E N E E E
I R I L
p
C l N K C r r
t t yp
ν ν ν ν νκ ρ
ω ϕ νϕ ω ϕ νϕ ν πτ
−+ + + +Ψ = + ⋅
⎛ ⎞+ − + + −⎛ ⎞⋅ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠

Seite 165
( ), , 1,2, 1 1 ,1 ,1 1,3, 1 1 1
1, 1,
2 ( )
cos2
k E N S E E E
R LI
C l N K K C r r
t
ν ν ν ν ν νκ ρ
νϕ νϕω ϕ
−+ + + +Ψ = + ⋅
+⎛ ⎞⋅ + −⎜ ⎟
⎝ ⎠
(9.4.03) ( )
( ) ( ) ( )( )
, , 1,2, 1 1 ,1 ,1 1,3, 1 1 1
1 1 1 11 1 1
2 ( )
2cos 1 1 1 22
k E N S E E E
I
C l N K K C r r
t mq k qpqm
ν ν ν ν ν νκ ρ
πω ϕ ν κ ρ νβ
−+ + + +Ψ = + ⋅
⎛ ⎞⋅ + − − + − + − −⎜ ⎟
⎝ ⎠
, , ,1
q
k kρ κ ρκ =
Ψ = Ψ∑
( )
( ) ( )( )
, 1,2, 1 1 ,1 ,1 1,3, 1 1 1
11 1 1 1 1
1 1 1 11 1 1
2 ( )
sin sin2 2
2cos 1 1 22
k E N S E E E
I
C l N K K C r r
qp m p m q
t m q k qp q m
ν ν ν ν ν νρ
ν π ν π
πω ϕ ν ρ νβ
−+ + + +Ψ = + ⋅
⎛ ⎞ ⎛ ⎞⋅ ⋅ ⋅⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎛ ⎞
⋅ + − − + − −⎜ ⎟⎝ ⎠
(9.4.04) ( )
( ) ( )( )
, 1,2, 1 1 1 ,1 1,3, 1 1 1
1 1 1 11 1 1
2 ( )
2cos 1 1 22
k E W E E E
I
C lq N K C r r
t m q k qp q m
ν ν ν ν νρ
πω ϕ ν ρ νβ
−+ + + +Ψ = + ⋅
⎛ ⎞⋅ + − − + − −⎜ ⎟
⎝ ⎠
2
,1
p
k kρρ =
Ψ = Ψ∑
( )( ) ( )
( )
1,2, 1 1 1 ,1 1,3, 1 1 1
1 1 1 1
1 1 1
2 ( )
2 cos 2 cos
2cos 1 1
k E W E E E
I
C lq N K C r r
p p bm bm
t kp m p
ν ν ν ν ν
π π
ν π νω ϕ π
−+ + + +Ψ = + ⋅
⋅ ⋅
⎛ ⎞⎛ ⎞⋅ + − − + −⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
( ) ( )1,2, 1 ,1 1,3, 1 1 11 1
22 ( ) cos 1k E W E E E IC l wK C r r t kp m
ν ν ν ν ν πω ϕ−+ + + +
⎛ ⎞Ψ = + ⋅ + − −⎜ ⎟
⎝ ⎠

Seite 166
(9.4.05) ( ) ( ),1 1,2, 1 1,3, 1 1 11
22 cos 13k W E E E E Ilw K C C r r t k
pν ν ν ν ν νω ϕ π−
+ + + +
⎛ ⎞Ψ = + ⋅ + − −⎜ ⎟
⎝ ⎠
( )1, 11
22 cos 13k k IL I t k
pνω ϕ π
⎛ ⎞Ψ ≡ + − −⎜ ⎟
⎝ ⎠
Damit ist die Statorflussverkettung für die dreisträngige Statorwicklung gefunden.
Eine weitere Vereinfachung der Terme durch die Expansion der Konstanten C2,E+1
und C3,E+1 ist nicht zu erwarten.
9.5 Quelle des neunten Kapitels
[9.1] E. Bolte Vorlesungsskript
Lehrveranstaltung Elektrische Maschinen und Antriebe
Universität der Bundeswehr Hamburg
1995

Seite 167
10. Beispielrechnungen
In diesem Teil der Arbeit soll das bisher gefundene Formelwerk mit Hilfe numerisch
ermittelter Ergebnisse illustriert werden. Als Beispiele für die zu analysierenden Mo-
toren wurden der universell einsetzbare Synchron-Servo-Antrieb MDSKS 071-13 der
Firma Lenze GmbH & Co. KG und der hochmoderne Drehmoment- (Torque-) Motor
MBT210C der Firma Bosch Rexroth AG ausgewählt. Die technischen Daten dieser
Motoren sind der Arbeit als Anlagen 1 und 2 beigefügt.
10.1 Berechnungsergebnisse für den Synchronmotor MSKS 071-13 der Firma Lenze GmbH & Co. KG
10.1.1 Eingabedaten
In diesem Abschnitt sollen die aus den Datenblattangaben der Anlage 1 abgeleiteten
Eingabewerte für die Rechnungen vorgestellt werden. Die Struktur der Tabellen für
die Eingabewerte ist an die Konstantendefinition der verwendeten Rechnerprogram-
me angelehnt. Eine Übersicht über die verwendeten Rechenalgorithmen und deren
Eingabeparameter gibt Anlage 3.
Daten Bemerkung
1,gr 0.01250 m Geometrieradius Welle
2,gr 0.02590 m Geometrieradius Rotorkern
3,gr 0.02940 m Geometrieradius Außenradius des PM-Ring
4,gr 0.03000 m Geometrieradius Luftspalt
5,gr 0.05325 m Geometrieradius Außenradius des Stators
,PM gδ 0.00660 m Dicke der Permanentmagnete
Tabelle 10.1.1.1 Allgemeine Geometriedaten

Seite 168
Daten Bemerkung
,1rμ 2000 Permeabilität Stahlwelle
,3rμ 1.07 Permeabilität Permanentmagnetmaterial
,4rμ 1 Permeabilität Luftspalt
,6rμ 1 Permeabilität Außenraum
Tabelle 10.1.1.2 Allgemeine Werkstoffdaten
Daten Bemerkung
1p 4 Polpaarzahl des Ankers
1m 3 Strangzahl des Ankers
1q 1 Lochzahl des Ankers
,1Sb 0.00520 m Nutöffnung
Tabelle 10.1.1.3 Eingabedaten zur Berechnung des Carterfaktors
Daten Bemerkung
rB 1.05 T Remanenzinduktion des Magnetwerkstoffes
,3rμ 1.07 Permeabilität Permanentmagnetmaterial
fp 3 Polpaarzahl der PM-Erregung
,p fτ Errechnet Polteilung der PM-Erregung
fy ,0.9 p fτ⋅ Polbreite der PM-Erregung (**)
fb ,0.1 p fτ⋅ Polübergangsbreite der PM-Erregung (**)
(**) Zu diesen Daten liegen leider keine Herstellerangaben
vor. Sie wurden geschätzt
Tabelle 10.1.1.4 Kenndaten des Permanentmagnetringes

Seite 169
Daten Bemerkung
1p 3 Polpaarzahl
1m 3 Strangzahl
1q 2 Lochzahl
1N 23 Windungszahl einer Spule
1a 1 Anzahl paralleler Zweige
1l 0.00760 m Blechpaketlänge
,1SA 1.075 mm2 Querschnittsfläche Spulendraht
,1Sh 0.00500 m Streuschlitzhöhe
,1Sb 0.00220 m Nutöffnung
,1NSb 0.00320 m Obere Nutbreite
,1Nb 0.00600 m Breite des Nutgrundes
Tabelle 10.1.1.5 Kenndaten der Statorwicklung
10.1.2 Berechnungsergebnisse
10.1.2.1 Carterfaktor
Der Carterfaktor und die resultierenden Korrekturen der geometrischen Radien zu
den Radien der Motormodellierung ergeben sich nach den Gleichungen (8.1) wie
folgt:
1.0424CK =
4, 0.0302mr⇒ =
5, 0.0534mr⇒ =

Seite 170
10.1.2.2 Modellierung der Permeabilitätsverteilung in Rotor und Stator
In dem Kapitel 7 dieser Arbeit wurden verschiedene Möglichkeiten der Modellierung
der Permeabilitäten in den einzelnen Feldräumen erarbeitet. In den folgenden Grafi-
ken werden die Ergebnisse der verschiedenen Rechnungen in übersichtlicher Form
dargestellt:
Bild 10.1.2.2.1 Darstellung der Modellierung der Abhängigkeit der magnetischen
Feldstärke von der Flussdichte im verwendeten Elektroblech. Die
Kennlinien der Bleche von Rotor und Stator sind nach Hersteller-
angabe identisch.
Die Kurve der Farbe grün zeigt die Abhängigkeit bei konstanter
Permeabilität von (μr=5500), die Kurve der Farbe blau stellt die
Modellierung der Funktion mittels einer optimierten Ersatzfunkti-
on nach Kapitel 7.1.1.1 dar und die Kurve der Farbe rot ent-
spricht der Modellierung mittels der Spline-Interpolation nach
Kapitel 7.1.1.2. Die schwarzen Kreuze markieren den tatsächli-
chen (Herstellerangabe nach Tabelle 7.1.1.1) Kurvenverlauf.

Seite 171
Bild 10.1.2.2.2 Darstellung der Abhängigkeit der relativen Permeabilität von der
magnetischen Flussdichte im verwendeten Elektroblech.
Die Kurve der Farbe grün zeigt die konstant modellierte relative
Permeabilität von (μr=5500), die Kurve der Farbe blau stellt die
Modellierung der Funktion mittels der optimierten Ersatzfunktion
nach Kapitel 7.1.1.1 dar und die Kurve der Farbe rot entspricht
der Modellierung mittels der Spline-Interpolation nach Kapitel
7.1.1.2.
Die Modellierung mittels der in Kapitel 7.1.1.2 vorgestellten Er-
satzfunktion ist trotz einer Optimierung der H(B)-Kurven-
Modellierung nicht in der Lage, die relative Permeabilität im un-
gesättigten Bereich der Elektrobleche korrekt wiederzugeben.
Hier gilt es festzustellen, dass die verwendeten Werkzeuge zwar
sinnvoll eingesetzt worden sind, aber die Wahl der Ersatzfunktion
(7.1.1.2.1) im Bereich von (0..1T) unzulänglich ist. Daher wird bei
dem weiteren Vorgehen von der Betrachtung dieser Modellierung
abgesehen.

Seite 172
Bild 10.1.2.2.3 Darstellung der ermittelten Ersatzpermeabilitäten in den ver-
schiedenen Feldräumen nach B(H)-Modellierung durch eine Er-
satzfunktion (oben) und eine Spline-Interpolation (unten)

Seite 173
Bild 10.1.2.2.4 Mit dieser Grafik soll die Ermittlung der Ersatzpermeabilitäten für
die Feldräume des Rotors und des Stators veranschaulicht wer-
den. Aufgetragen sind auf der Ordinate die Feldräume der Mo-
tormodellierung (mit den Parametern M=100 und E=50) und auf
der Abszisse die Anzahl der Iterationen des Algorithmus nach
Bild 7.1.2. Die Permeabilitätszahlen der Feldräume bei einem
bestimmten Iterationsschritt sind durch ein Farbschema gekenn-
zeichnet.
Bei der Modellierung der B(H)-Kurve fand bei der Erstellung die-
ses Beispiels die Spline-Interpolation nach Bild 10.1.2.2.1 An-
wendung. Die Iteration wurde aufgrund der Konvergenz der Fol-
ge der Ersatzpermeabilitäten abgebrochen. Parameter der
Rechnung wurden mit (G=2, ε=0.01, nmax=50) datiert, die Initiali-
sierung der relativen Permeabilitäten in den Feldräumen erfolgte
mit μr,Rotor=μr,Stator=5500.

Seite 174
Bild 10.1.2.2.5 Hier wird die Ersatzpermeabilitätsverteilung - errechnet mittels
der Spline-Interpolation der Werkstoffkennlinie - auf der Modellanord-
nung gezeigt, da die Grafiken der vorhergehenden Seiten einen linea-
ren Zusammenhang von Radius und Feldraumbreite suggerieren. Dies
ist jedoch aufgrund der Definition der Radien nach Bild 6.1.2 nicht der
Fall.
Dargestellt werden die ermittelten Ersatzpermeabilitäten in der (r,ϕ)-
Ebene. Die Feldräume des Luftspaltes und der Permanentmagnete sind
aufgrund ihrer nicht variablen Permeabilitätendefinition von
μr,Luftspalt=μr,4=1 und μr,Permanentmagnet=μr,3=1,07 gut zu erkennen.

Seite 175
10.1.2.3 Berechnung des magnetischen Vektorpotentials
In den Kapiteln 4 und 6 wurde das magnetische Vektorpotential der Synchronma-
schine der Firma Lenze GmbH & Co. KG bestimmt und mit (Feld-) Linien konstanten
Potentials direkt gezeichnet. Hier soll daher exemplarisch nur ein dreidimensionales
Feldbild des Motors gezeigt werden.
Den numerischen Werten des dargestellten magnetischen Vektorpotentials ist ein
Motormodell mit M=100 Feldräumen und den in Bild 10.1.2.2.5 dargestellten Ersatz-
permeabilitäten zugrunde gelegt. Die Permanentmagneterregung befindet sich im
Raum E=50. Die einzelnen Feldräume sind - der Übersichtlichkeit wegen - nicht in
der Grafik dargestellt, sehr wohl aber die Modellradien der Welle, des Rotors, des
Permanentmagnetringes und des Stators.
Bild 10.1.2.3.1 Magnetisches Vektorpotential in der (r,ϕ)-Ebene

Seite 176
10.1.2.4 Berechnung magnetischer Flussdichte im Leerlauf
In der nun folgenden Bildfolge werden die Ergebnisse der Rechnungen für die mag-
netische Flussdichte in der Maschine bei unbestromter Ankerwicklung dargestellt:
― Betrag der magnetischen Flussdichte
― Phasenlage der Magnetischen Flussdichte
― Radialkomponente der magnetischen Flussdichte
― Tangentialkomponente der magnetischen Flussdichte
Die Größen werden in dreidimensionalen Grafiken (r,ϕ,B(r,ϕ)) abgebildet. Das jeweils
obere Bild zeigt die Verteilung der magnetischen Flussdichte für eine Rechnung kon-
stanter Permeabilität (μr,Rotor=μr,2 = μr,Stator=μr,5 = 5500).
Zum direkten Vergleich zeigt das jeweils untere Bild auf einer Seite die Ergebnisse
der Feldrechnung unter Verwendung der in Bild 10.1.2.2.5 dargestellten Ersatzper-
meabilitäten.
Bei allen Rechnungen wurden die Permeabilitätszahlen des Luftspaltes und des Au-
ßenraumes mit μr=1 initialisiert; die Permeabilität der Stahlwelle wurde auf μr=2000
datiert.
Weitere Parameter: M=100, E=50, amax=12.
Die Anzahl berechneter Bildpunkte beträgt 300x300.

Seite 177
Bild 10.1.2.4.1 Darstellung des Betrages der magnetischen Flussdichte in der
(r,ϕ)-Ebene bei konstanter Permeabilität (oben) und bei Verwen-
dung der Ersatzpermeabilitäten nach Bild 10.1.2.2.5 (unten).

Seite 178
Bild 10.1.2.4.2 Darstellung der Phasenlage der magnetischen Flussdichte in der
(r,ϕ)-Ebene bei konstanter Permeabilität (oben) und bei Verwen-
dung der Ersatzpermeabilitäten nach Bild 10.1.2.2.5 (unten).

Seite 179
Bild 10.1.2.4.3 Darstellung der Radialkomponente der magnetischen Flussdich-
te in der (r,ϕ)-Ebene bei konstanter Permeabilität (oben) und bei
Verwendung der Ersatzpermeabilitäten nach Bild 10.1.2.2.5 (un-
ten).

Seite 180
Bild 10.1.2.4.4 Darstellung der Tangentialkomponente der magn. Flussdichte in
der (r,ϕ)-Ebene bei konstanter Permeabilität (oben) und bei Ver-
wendung der Ersatzpermeabilitäten nach Bild 10.1.2.2.5 (unten).

Seite 181
Bild 10.1.2.4.5 Darstellung der Radialkomponente der magnetischen Fluss-
dichte auf dem Radius der Statorbohrung über ϕ.
Die Ergebnisse der Rechnungen konstanter Permeabilität sind in
der Farbe blau gezeichnet. Die Rechnung bei Verwendung der
Ersatzpermeabilitäten nach (10.2.2.2.5) wird in der Farbe rot
dargestellt. Die Ergebnisse der Rechnungen sind nahezu iden-
tisch. Zu unterscheiden sind die Grundwellen der Radialkompo-
nenten der magnetischen Flussdichte (gestrichelt gezeichnet)
und die gesamte radiale Komponente (amax =12) der Flussdichte
(mit durchgezogener Linie gezeichnet).

Seite 182
10.1.2.5 Berechnung des Bohrungsfeldes
In den folgenden Abbildungen werden die Ergebnisse der Rechnungen für die Feld-
größen des Bohrungsfeldes der Maschine (Motor bei entnommenem Rotor) darge-
stellt:
― Ermittelte Ersatzpermeabilitäten
― Magnetisches Vektorpotential
― Betrag der magnetischen Flussdichte
― Radialkomponente der magnetischen Flussdichte
Die Größen werden in dreidimensionalen Grafiken abgebildet.
Bei allen Rechnungen wurden die Permeabilitätszahlen der Welle, des Luftspaltes
und des Außenraumes mit μr=1 initialisiert.
Weitere Parameter: M=100, E=50, amax=12.
Bild 10.1.2.5.1 Ermittelte Ersatzpermeabilitäten für die Ermittlung des Bohrungs-
feldes der sechspoligen Synchronmaschine

Seite 183
Bild 10.1.2.5.2 Darstellung des magnetischen Vektorpotentials in der (r,ϕ)-
Ebene
Bild 10.1.2.5.3 Darstellung des Betrags der magnetischen Flussdichte in der
(r,ϕ)-Ebene

Seite 184
Bild 10.1.2.5.4 Darstellung der Radialkomponente der magnetischen Flussdich-
te in der (r,ϕ)-Ebene

Seite 185
10.1.3 Berechnung von aus den Feldern abgeleiteter Größen
10.1.3.1 Berechnung von Flussverkettung und Polradspannung
Den Ergebnissen der Rechnungen in Abschnitt (4) wurden zur Modellverifikation be-
reits experimentell ermittelte Werte der Polradspannung gegenübergestellt. Daher
sollen die Ausführungen dieses Kapitels kurz gehalten werden.
Eine Grundwellenbetrachtung der Polradspannung bei einer Drehzahl von 2000 Um-
drehungen pro Minute ergibt:
ˆ 162.551GWpU V=
Das erfassbare Spektrum (amax = 12) der Polradspannung ergibt sich zu:
3 ˆ 162.551pU Vμ= =
9 ˆ 026.120pU Vμ= = 15 ˆ 002.592pU Vμ= = 21 ˆ 00.576pU Vμ= = −
27 ˆ 00.214pU Vμ= = − 33 ˆ 000.025pU Vμ= = 39 ˆ 020pU mVμ> <
Die Grundwellenflussverkettung (PM-Erregung zu einem Ankerstrang) ergibt sich zu:
, 258.7GWf k mVsΨ =
Die Erregerflussverkettung zu einem Ankerstrang ergibt sich zu:
3, 258.7f k mVsμ= Ψ =
9, 13.90f k mVsμ= Ψ = 15
, 0.825f k mVsμ= Ψ =
21, 0.131f k mVsμ= Ψ = − 27
, 0.038f k mVsμ= Ψ = −
33, 0.004f k mVsμ= Ψ = − 45
, 5f k Vsμ μ> Ψ <

Seite 186
Bild 10.1.3.1.1 Polradspannung bei einer Wellendrehzahl von 2000 Umdrehun-
gen/Minute. Dargestellt sind die Werte der Spannung über der
Zeit sowie das Amplitudenspektrum der Spannung (amax=12).

Seite 187
10.2 Berechnungsergebnisse für den Torquemotor MBT210C der Firma Bosch-Rexroth AG
10.2.1 Eingabedaten In diesem Abschnitt sollen die aus den Datenblattangaben der Anlage 2 abgeleiteten
Eingabewerte für die Rechnungen vorgestellt werden. Die Struktur der Tabellen für
die Eingabewerte ist an die Konstantendefinition der verwendeten Rechnerprogram-
me angelehnt. Eine Übersicht über die verwendeten Rechenalgorithmen und deren
Eingabeparameter gibt Anlage 3.
Leider sind zu vielen Eingabedaten des Modells dieser hochinteressanten Maschine
keine Herstellerangaben verfügbar. Diese, für die Feldberechnungen notwendigen
Werte wurden – wo möglich – durch eigene Messungen datiert und sind in den fol-
genden Tabellen mit (*) gekennzeichnet. Die Materialeigenschaften der Permanent-
magnete und der verwendeten Elektrobleche mussten leider geschätzt werden und
sind in den Tabellen mit (**) gekennzeichnet.
Die mit (***) gekennzeichneten Tabellenwerte beziehen sich auf Eingabedaten von –
bisher nicht betrachteten – Wicklungsaufbauten aus konzentrierten Spulen. Auf die
Behandlung dieser Parameter wird in Kapitel 10.2.1.1 näher eingegangen.
Daten Bemerkung
1,gr 0.06000 Geometrieradius Welle
2,gr 0.07130 Geometrieradius Rotorkern
3,gr 0.07790 Geometrieradius Außenradius des PM-Ring
4,gr 0.07840 Geometrieradius Luftspalt
5,gr 0.10500 Geometrieradius Außenradius des Stators
,PM gδ 0.00660 Dicke der Permanentmagnete
gδ 0.00050 Luftspalt
Tabelle 10.2.1.1 Allgemeine Geometriedaten

Seite 188
Daten Bemerkung
,1rμ 1 Permeabilität Hohlwelle
,3rμ 1,07 Permeabilität Permanentmagnetmaterial (**)
,4rμ 1 Permeabilität Luftspalt
,6rμ 1 Permeabilität Außenraum
Tabelle 10.2.1.2 Allgemeine Werkstoffdaten
Daten Bemerkung
1p 4 Polpaarzahl des Ankers
1m 3 Strangzahl des Ankers
,1WAK 2 Wicklungsartfaktor (***)
,1ZWZK 2 Zwischenzahnfaktor (***)
,1Sb 0.0052 Nutöffnung
Tabelle 10.2.1.3 Eingabedaten zur Berechnung des Carterfaktors
Daten Bemerkung
rB 1,05 Remanenzinduktion des Magnetwerkstoffes (**)
,3rμ 1,07 Permeabilität Permanentmagnetmaterial (**)
fp 20 Polpaarzahl der PM-Erregung
,p fτ Errechnet Polteilung der PM-Erregung
fy ,0.9 p fτ⋅ Polbreite der PM-Erregung (**)
fb ,0.1 p fτ⋅ Polübergangsbreite der PM-Erregung (**)
Tabelle 10.2.1.4 Kenndaten des Permanentmagnetringes

Seite 189
Daten Bemerkung
1p 4 Polpaarzahl
1m 3 Strangzahl
1N 69 Windungszahl einer Spule
WA,1K 2 Wicklungsartfaktor (***)
ZWZ ,1K 2 Zwischenzahnfaktor (***)
1a 1 Anzahl paralleler Zweige
1l 0.0076 Blechpaketlänge
,1SA 7,85E-7 Querschnittsfläche Spulendraht (*)
,1Zb 0.0050 Zwischenzahnbreite (***)
,1Sb 0.0058 Nutöffnung (*)
,1NSb 0.0052 Obere Nutbreite (*)
,1Nb 0.0060 Breite des Nutgrundes (*)
1y 0.0110 Spulenweite (*)
Tabelle 10.2.1.5 Kenndaten der Statorwicklung
10.2.1.1 Eingabedaten konzentrierter Wicklungen In den letzten Jahren sind viele Permanentmagnet erregte Motoren hoher Drehmo-
mentdichte als so genannte Torque-Motoren auf den Markt gekommen. Ohne dies
ausdrücklich herauszustellen, werden in diesen Motortypen hauptsächlich Wicklun-
gen aus konzentrierten Spulen verwendet. Der als Beispielmaschine gewählte
MBT210C ist ein Motor mit einer solchen Ankerwicklung.
In den bisherigen Ausführungen ist von einer verteilten Wicklungsausführung aus-
gegangen worden (siehe auch die Kapitel 4 und 9), die konzentrierten Wicklungen
sind jeweils um einen Zahn gewickelt und eignen sich besonders für hochpolige Er-
regerwicklungen und kurze Maschinenlängen. Die Bilder 10.2.1.1.1 sollen die Geo-
metrie der konzentrierten Wicklungen verdeutlichen.

Seite 190
Bild 10.2.1.1.1 Darstellung einer Polteilung einer konzentrierten dreisträngigen
Wicklung mit 1 1Z 3p=
Bild 10.2.1.1.2 Eine Polteilung einer konzentrierten dreisträngigen Wicklung mit
Zwischenzähnen. Die Zähnezahl berechnet sich hier zu:
1 1Z 2 3 p= ⋅ , die Zahl der bewickelten Zähne ergibt sich (wie o-
ben) zu *1 1Z 3 p=
Nun sind die Eingabegrößen des Wicklungsaufbaus so zu modifizieren, dass auch
diese Art der Erregerwicklung beschrieben werden kann. Die um die Möglichkeit der
Beschreibung konzentrierter Wicklungen erweiterten Eingabedaten werden in Tabel-
le 10.2.111 zusammengefasst.
Eine ausführliche Arbeit zur Behandlung und Berechnung konzentrierter Wicklungen
findet sich in den Quellen [10.1] und [10.2]; diese sollten bei weiterer Beschäftigung
mit diesem Thema zu Rate gezogen werden.

Seite 191
12 p Anzahl der Ankerfeldpole (Grundfeld),
WA 11, 2,3, ... ... , K pρ Spulen pro Strang,
11, 2, 3, ... k ... , m Wicklungsstränge,
WA,11
K2⎧
= ⎨⎩
Wicklungsartfaktor: Wicklung mit p1 Spulen pro Strang Wicklungsartfaktor: Wicklung mit 2p1 Spulen pro Strang
ZWZ ,11
K2⎧
= ⎨⎩
Zwischenzahnfaktor: Wicklung ohne Zwischenzähne Zwischenzahnfaktor: Wicklung mit Zwischenzähnen
*1 WA,1 1 1Z K m p= Anzahl der (bewickelten) Zähne
1 ZWZ ,1 WA,1 1 1Z K K m p= ⋅ ⋅ Zähnezahl
1 WA,1 1a 2 ... K p= ⋅ Anzahl der parallelen Zweige,
WA,1 11 1
1
K pw N
a⋅
= Serienwindungszahl,
1N Anzahl der Windungen pro Spule.
Tabelle 10.2.1.1.1 Definition und Nomenklatur konzentrierter Wicklungen

Seite 192
10.2.2 Berechnungsergebnisse
10.2.2.1 Carterfaktor
Der Carterfaktor und die resultierenden Korrekturen der geometrischen Radien zu
den Radien der Motormodellierung ergeben sich aus den Gleichungen 8.1 und nach
der Tabelle 8.1.1 des Kapitels 8 wie folgt:
1.0335CK =
4, 0.0786mr⇒ =
5, 0.1052mr⇒ =
10.2.2.2 Modellierung der Permeabilitätsverteilung in Rotor und Stator
Leider wurden die Daten der Elektrobleche von Rotor und Stator vom Hersteller nicht
bekannt gegeben, daher stehen genaue Daten zur weiteren Berechnung des Motors
nicht zur Verfügung.
Im weiteren Vorgehen sollen die Daten der Elektrobleche nach (7.1.1.1.1) als Nähe-
rung für die verwendeten Bleche angesehen werden.
Da die numerischen Ergebnisse der Modellierung der Elektrobleche bereits im Ab-
schnitt (10.1.2.2) untersucht wurden, werden hier in den folgenden Abbildungen nur
die resultierenden Ersatzpermeabilitätsverteilungen im Motormodell wiedergegeben.

Seite 193
Bild 10.2.2.2.1 Ersatzpermeabilitäten in der (r,ϕ)-Ebene (obere Darstellung) und
diskret aufgetragen über die verschiedenen Feldräume (M=100,
E=50) (untere Darstellung).

Seite 194
10.2.2.3 Berechnung des magnetischen Vektorpotentials
Mit der Bestimmung des magnetischen Vektorpotentials können die Feldlinien des
behandelten Feldproblems als Linien konstanten Potentials direkt gezeichnet wer-
den. Die mathematisch erfassbare Grenze der Berechnungen mittels der verwende-
ten Technik liegt für diese Grafik - wie für alle weiteren Berechnungen dieses Ab-
schnitts - bei (amax=2; μmax=100).
Bild 10.2.2.3.1 Darstellung des magnetischen Vektorpotentials in der (r,ϕ)-
Ebene. Die Feldräume von Welle, Rotorkern, Permanentmagnet-
ring und Statorjoch sind – der Übersichtlichkeit wegen - durch
schwarze Linien gekennzeichnet. Die Anzahl der berechneten
Feldräume betrug für diese Rechnung M=100, der Feldraum der
Erregung war E=50. Die Anzahl der berechneten Oberwellen be-
trug amax=2.

Seite 195
10.2.2.4 Berechnung des Leerlauffeldes
In der nun folgenden Bildfolge werden die Ergebnisse der Rechnungen für die mag-
netische Flussdichte in der Maschine bei unbestromter Ankerwicklung dargestellt:
― Betrag der magnetischen Flussdichte
― Phasenlage der magnetischen Flussdichte
― Radialkomponente der magnetischen Flussdichte
― Tangentialkomponente der magnetischen Flussdichte
Die Größen werden in dreidimensionalen Grafiken (r,ϕ,B(r,ϕ)) abgebildet. Das jeweils
obere Bild zeigt die Verteilung der magnetischen Flussdichte für eine Rechnung kon-
stanter Permeabilität (μr,Rotor=μr,2 = μr,Stator=μr,5 = 5500).
Zum direkten Vergleich zeigt das jeweils untere Bild auf einer Seite die Ergebnisse
der Feldrechnung unter Verwendung der in Bild 10.2.2.2.1 dargstellten Ersatzperme-
abilitäten.
Bei allen Rechnungen wurden die Permeabilitätszahlen der Welle, des Luftspaltes
und des Außenraumes mit μr=1 initialisiert.
Weitere Parameter: M=100, E=50, amax=2.
Die Anzahl berechneter Bildpunkte beträgt 500x500.

Seite 196
Bild 10.2.2.4.1 Darstellung des Betrages der magnetischen Flussdichte in der
(r,ϕ)-Ebene bei konstanter Permeabilität (oben) und bei Verwen-
dung der Ersatzpermeabilitäten nach Bild 10.1.2.2.1 (unten).

Seite 197
Bild 10.2.2.4.2 Darstellung der Phasenlage der magnetischen Flussdichte in der
(r,ϕ)-Ebene bei konstanter Permeabilität (oben) und bei Verwen-
dung der Ersatzpermeabilitäten nach Bild 10.1.2.2.1 (unten).

Seite 198
Bild 10.2.2.4.3 Darstellung der Radialkomponente der magnetischen Flussdich-
te in der (r,ϕ)-Ebene bei konstanter Permeabilität (oben) und bei
Verwendung der Ersatzpermeabilitäten nach Bild 10.1.2.2.1 (un-
ten).

Seite 199
Bild 10.2.2.4.4 Darstellung der Tangentialkomponente der magnetischen Fluss-
dichte in der (r,ϕ)-Ebene bei konstanter Permeabilität (oben) und
bei Verwendung der Ersatzpermeabilitäten nach Bild 10.1.2.2.1
(unten).

Seite 200
Bild 10.2.2.4.5 Darstellung der Radialkomponente der magnetischen Flussdich-
te auf dem Radius der Statorbohrung über ϕ.
Die Ergebnisse der Rechnungen konstanter Permeabilität sind in
der Farbe blau gezeichnet. Die Rechnung bei Verwendung der
Ersatzpermeabilitäten nach Bild 10.1.2.2.1 wird in der Farbe rot
dargestellt. Zu unterscheiden sind die Grundwellen der Radial-
komponenten der magnetischen Flussdichte (gestrichelt ge-
zeichnet) und die gesamte radiale Komponente (amax = 2) der
Flussdichte (mit durchgezogener Linie gezeichnet).

Seite 201
10.2.3 Berechnung von aus den Feldern abgeleiteten Größen
10.2.3.1 Berechnung von Flussverkettung und Polradspannung
Da die Flussverkettung der Permanentmagneterregung mit einem Ankerwicklungs-
strang eine elementare Größe der Maschinenberechnung sowie ein hervorragendes
Mittel zur Verifikation der erarbeiteten Theorien ist, soll diese nun – ebenso wie die
Polradspannung – berechnet werden. Der numerischen Auswertung liegt eine Moto-
renmodellierung in M=100 Feldräumen, die Verwendung konstanter Permeabilitäten
und die Verwendung einer Ersatzpermeabilitätsverteilung nach Bild 10.1.2.2.1
zugrunde.
Die Berechnung von Polradspannung und Flussverkettung basiert auf der Feldvertei-
lung der magnetischen Flussdichte und erfolgt aufbauend auf die Ergebnisse der
Rechnungen in den Quellen [10.1] und [10.2]. Das Formelwerk der Berechnung der
Flussverkettung ist hier der Übersichtlichkeit und Eindeutigkeit wegen wiedergege-
ben:
(10.2.3.1.1) ( )f ,k f ,k1 1
2ˆ cos k 1 ,p m
μ μ μ πΨ Ψ μ ϑ⎡ ⎤
= ⋅ − −⎢ ⎥⎣ ⎦
( )WA,1 1f ,k f ,SSp
1 1 1
K p 2ˆ cos k 1a p m
μ μ μ πΨ Ψ μ ϑ⎡ ⎤
= ⋅ ⋅ − −⎢ ⎥⎣ ⎦
( )WA,1 1 WA,1 1f ,k f ,SSp 1 N f ,SW
1 1
K p K p ˆˆ ˆ N ka a
μ μ μ μΨ Ψ φ= = ⋅ ⋅
(10.2.3.1.2) E 1 1f ,SSp f 1 N ,1 S ,1
2 r l2ˆ B̂ N k k2
μ μ μ μπΨπ μ
+=
ZWZ ,1
S ,1
N ,11 p,1
Kb
2k sip 2
μ μ πτ
⎛ ⎞⋅⎜ ⎟
= ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠

Seite 202
ZWZ ,1
ZK ,1 S ,1
S ,11 p,1
Kb b
2k sinp 2
μ μ πτ
+=
mit ZWZZK ,1 S ,1 K
Kb b y2
⎛ ⎞+ =⎜ ⎟⎝ ⎠
und ( )f maxp 2a 1 , a 0,1, 2,3, ... , aμ = + =
und 0tϑ Ω ϑ= +
Mittels der im vorhergehenden Kapitel errechneten Feldverteilung (siehe auch Bild
10.2.2.4.5) kann nun die Flussverkettung der Permanentmagneterregung mit den
Ankerwicklungssträngen numerisch bestimmt werden.
Die Grundwellenflussverkettung ergibt sich bei einer Rechnung mit konstant ange-
nommener Permeabilität in den Feldräumen zu:
( )20, 1
ˆ ˆ 0 0.3009GWf f k Vsμ ϑ=
=Ψ = Ψ = =
, 0.2128GWf eff VsΨ =
Die Berechnung des erfassbaren Spektrums (amax = 2) ergibt bei einer Rechnung mit
konstant angenommener Permeabilität in den Feldräumen folgende Werte:
( )20, 1
ˆ 0 0.3009f k Vsμ ϑ==Ψ = =
( )60, 1
ˆ 0 0.0072f k Vsμ ϑ==Ψ = = − ( )100
, 1ˆ 0 41.533f k Vsμ ϑ μ=
=Ψ = = −
Schließlich ergibt sich die Gesamtflussverkettung der Permanentmagneterregung mit
einem Strang der Ankerwicklung bei Rechnung mit konstant angenommener Perme-
abilität i den Feldräumen:
( )2
, 1 , 10
ˆ0 0.2937f k f ka
Vsμϑ= ==
Ψ = = Ψ =∑ mit ( )2 1fp aμ = ⋅ +

Seite 203
Bei der Rechnung mit den Ersatzpermeabilitäten nach Bild 10.2.2.2.1 ergeben sich
die folgenden Werte für die Flussverkettung:
( )20, 1
ˆ ˆ 0 0.2331GWf f k Vsμ ϑ=
=Ψ = Ψ = =
, 0.1648GWf eff VsΨ =
( )20, 1
ˆ 0 0.2331f k Vsμ ϑ==Ψ = =
( )60, 1
ˆ 0 0.0056f k Vsμ ϑ==Ψ = = − ( )100
, 1ˆ 0 32.713f k Vsμ ϑ μ=
=Ψ = = −
( )2
, 1 , 10
ˆ0 0.2274f k f ka
Vsμϑ= ==
Ψ = = Ψ =∑ mit ( )2 1fp aμ = ⋅ +
Die Betrachtung der Polradspannung bei einer Drehzahl von 300 Umdrehungen /
Minute ergibt bei Rechnung mit konstanter Permeabilität in allen Feldräumen:
ˆ 189.0386GWpU V= , 133.67GW
p effU V=
60 ˆ 13.4888pU Vμ= = − 100 ˆ 0.1305pU Vμ= = −
Die Betrachtung der Polradspannung bei einer Drehzahl von 300 Umdrehungen /
Minute ergibt bei Rechnung mit den Ersatzpermeabilitäten nach Bild 10.1.2.2.1:
ˆ 146.4426GWpU V= , 103.55GW
p effU V=
60 ˆ 10.5980pU Vμ= = − 100 ˆ 0.1028pU Vμ= = −
Die Polradspannungen der 3 Stränge und das Spektrum der Polradspannung eines
Stranges sind auf den Folgeseiten abgebildet.

Seite 204
Bild 10.2.3.1.1 Polradspannung bei 300 Umdrehungen pro Minute. Dargestellt
sind die Werte der Spannung über der Zeit sowie das Amplitu-
denspektrum der Spannung (amax=2).

Seite 205
10.3 Quellen des zehnten Kapitels [10.1] E. Bolte
B. Kipp
Technischer Bericht 34 „Bestimmung der Maschinenpara-
meter einer Dauermagnet erregten Maschine mit konzent-
rierten Wicklungen“
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005
[10.2] E. Bolte
Vorlesungsskript
Lehrveranstaltung Ausgewählte Kapitel elektrischer Ma-
schinen und Antriebe
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2006

Seite 206
11. Zusammenfassung und Ausblick
In den vorangegangenen Kapiteln wurden sowohl eine mathematische Modellierung
Permanentmagnet erregter Radialflussmaschinen entwickelt als auch die magneti-
schen Felder des Modells unter Anwendung allgemeiner Feldgleichungen berechnet.
Bei der Detaillierung des mathematischen Modells wurde besonderer Wert auf eine
hohe Wiedergabetreue der Modellierung der Permanentmagneterregung und der
Erfassung der Materialeigenschaften der aktiven Werkstoffe gelegt. Auf der Grundla-
ge der Modellierung wurden die magnetischen Felder mittels des aus den Maxwell-
schen Gleichungen abgeleiteten magnetischen Vektorpotentials analytisch berech-
net. Die Lösung der Feldgleichungen liefert neben detaillierten Aussagen über die
Verteilung der Felder schließlich Beziehungen zwischen Integralgrößen, wie Span-
nungen, Ströme und Flussverkettungen. Einige dieser Beziehungen wurden exem-
plarisch hergeleitet, um eine Verifikation von Modell und Rechnung zur Verfügung zu
stellen. Die numerische Auswertung erfolgte anhand zweier ausgesuchter Perma-
nentmagnet erregter Motoren.
Die in der Arbeit vorgeschlagenen und angewendeten Rechenvorschriften sollen
nicht als geschlossenes System betrachtet werden. Sie bieten viel mehr die Möglich-
keiten und Schnittstellen, die Modellierung Permanentmagnet erregter Maschinen
weiter zu detaillieren und zu ergänzen. Ein nahe liegender Vorschlag zur Weiterent-
wicklung ist sicherlich die Betrachtung von Temperaturabhängigkeiten der aktiven
Werkstoffe im Arbeitspunkt. Ebenso bieten sich die detaillierte Analyse und die Integ-
ration konzentrisch angeordneter Windungen in der Modellierung der Ankerwicklung
zur Erweiterung des bestehenden Maschinenmodells an.
Eine weitere – nicht triviale – Aufgabe wird es sein, die Berechnung der erstellten
Maschinenmodelle mit immer feiner aufgelösten Beschreibungen von Werkstoffei-
genschaften und Konstruktionsmerkmalen zu ermöglichen.

Seite 207
Anlage 1: Technische Daten des Synchron-Servomotors MDSKSRS 071-13 der Firma Lenze GmbH & Co. KG
Technische Daten
Synchron-Servomotor Firma Lenze GmbH & Co. KG
MDSKSRS 071-13
Allgemeines
Die Synchronmaschine MDSKSRS 071-13 ist mit einem sechspoligen Permanent-
magnet erregten Innenläufer aufgebaut. Das Magnetsystem wird durch 6 Reihen mit je 6
Magnetschalen gebildet. Die Wicklungen der 3 Stränge sind intern im Stern geschaltet.
Bemessungs- und Betriebsdaten:
Größe Einheit Zahlenwert Beschreibung
NP kW 3,2 Nennleistung
Nn 1−min 3700 Nenndrehzahl
Maxn 1−min 3950 Maximaldrehzahl bei 380 V
NM Nm 8,3 Nenndrehmoment
Nf Hz 185 Nennfrequenz
NU V 325 Nennspannung
NI A 7,0 Nennstrom
ϕcos 1,0 Leistungsfaktor
η % 82,0 Wirkungsgrad

Seite 208
Rotorgeometrie
Größe Einheit Zahlenwert Beschreibung
RotPaketl , mm 106,0 /
107,3
Blechpaketlänge über Kern
Blechpaketlänge über Magnetsegmenten
δ mm 0,6 Luftspalt
Rotaußend , mm 58,8 Rotoraußendurchmesser
Kernd mm 51,8 Durchmesser der Bleche
Welled mm 25,0 Wellendurchmesser
SegN 36 Anzahl der Magnetsegmente
Segmentl mm 17,5 Länge eines Magnetsegments ( Axial )
Segmentb mm 26,0 Breite eines Magnetsegments ( Umfang )
SegmentD mm 3,5 Dicke eines Magnetsegments (Radial )
BlechD mm 0,5 Blechdicke
Werkstoffdaten
Größe Einheit Zahlenwert Beschreibung
RB T 1,05 Remanenzinduktion des Magnetmaterials
rμ 1,07 Relative Permabilität das Magnetmaterials
Cuρ mΩ 1,786 E-8 Spezifischer Widerstand von Kupfer

Seite 209
Statorgeometrie
Zeichnung zur Nutgeometrie
Größe Einheit Zahlenwert Beschreibung
Paketl mm 105,0 Blechpaketlänge
außend mm 106,5 Statoraußendurchmesser
Bohrd mm 60,0 Bohrungsdurchmesser
Z 36 Nutenzahl
Nutt mm 13,5 Nuttiefe
Sh mm 0,5 Streuschlitzhöhe
Sb mm 2,2 Nutöffnung
NSb mm 3,2 Obere Nutbreite
Nb mm 6,0 Untere Nutbreite
NutA 2mm 59,8 Nutfläche
BlechD mm 0,5 Blechdicke

Seite 210
Wicklungsdaten
Größe Einheit Zahlenwert Beschreibung
p 3 Polpaarzahl
m 3 Strangzahl
q 2 Lochzahl ( Nuten pro Pol und Strang )
N 23 Windungszahl einer Spule
DrahtA 2mm 1,075 Querschnittsfläche des Kupferdrahtes
mittell m 0,33 Mittlere Windungslänge
Strl m 46,0 Wicklungslänge eines Stranges
KopfH mm 28 Wickelkopfhöhe
StrR Ω 0,761 Strangwiderstand
StrL mH 5,3 Stranginduktivität ( aL )

Seite 211
Werkstoffkennlinien von Rotor- und Statorelektroblech
Permeabilität des Bleches: Abhängig von der Sättigung gemäß folgender Tabelle N=0001 HMAX=00024.0 BMAX=0.050 F=00000 T=00020 N=0002 HMAX=00036.0 BMAX=0.100 F=00000 T=00020 N=0003 HMAX=00045.0 BMAX=0.105 F=00000 T=00020 N=0004 HMAX=00053.0 BMAX=0.200 F=00000 T=00020 N=0005 HMAX=00059.0 BMAX=0.250 F=00000 T=00020 N=0006 HMAX=00064.0 BMAX=0.300 F=00000 T=00020 N=0007 HMAX=00068.0 BMAX=0.350 F=00000 T=00020 N=0008 HMAX=00071.5 BMAX=0.400 F=00000 T=00020 N=0009 HMAX=00074.5 BMAX=0.450 F=00000 T=00020 N=0010 HMAX=00077.5 BMAX=0.500 F=00000 T=00020 N=0011 HMAX=00081.0 BMAX=0.550 F=00000 T=00020 N=0012 HMAX=00085.0 BMAX=0.600 F=00000 T=00020 N=0013 HMAX=00089.5 BMAX=0.650 F=00000 T=00020 N=0014 HMAX=00094.5 BMAX=0.700 F=00000 T=00020 N=0015 HMAX=00100.0 BMAX=0.750 F=00000 T=00020 N=0016 HMAX=00106.0 BMAX=0.800 F=00000 T=00020 N=0017 HMAX=00113.0 BMAX=0.850 F=00000 T=00020 N=0018 HMAX=00121.0 BMAX=0.900 F=00000 T=00020 N=0019 HMAX=00131.5 BMAX=0.950 F=00000 T=00020 N=0020 HMAX=00143.5 BMAX=1.000 F=00000 T=00020 N=0021 HMAX=00158.0 BMAX=1.050 F=00000 T=00020 N=0022 HMAX=00176.0 BMAX=1.100 F=00000 T=00020 N=0023 HMAX=00198.5 BMAX=1.150 F=00000 T=00020 N=0024 HMAX=00228.0 BMAX=1.200 F=00000 T=00020 N=0025 HMAX=00275.0 BMAX=1.250 F=00000 T=00020 N=0026 HMAX=00340.0 BMAX=1.300 F=00000 T=00020 N=0027 HMAX=00430.0 BMAX=1.350 F=00000 T=00020 N=0028 HMAX=00590.0 BMAX=1.400 F=00000 T=00020 N=0029 HMAX=00860.0 BMAX=1.450 F=00000 T=00020 N=0030 HMAX=01400.0 BMAX=1.500 F=00000 T=00020 N=0031 HMAX=02100.0 BMAX=1.550 F=00000 T=00020 N=0032 HMAX=03150.0 BMAX=1.600 F=00000 T=00020 N=0033 HMAX=04600.0 BMAX=1.650 F=00000 T=00020 N=0034 HMAX=06450.0 BMAX=1.700 F=00000 T=00020 N=0035 HMAX=08800.0 BMAX=1.750 F=00000 T=00020 N=0036 HMAX=11600.0 BMAX=1.800 F=00000 T=00020 N=0037 HMAX=14800.0 BMAX=1.850 F=00000 T=00020 N=0038 HMAX=18700.0 BMAX=1.900 F=00000 T=00020 N=0039 HMAX=23300.0 BMAX=1.950 F=00000 T=00020 N=0040 HMAX=28900.0 BMAX=2.000 F=00000 T=00020

Seite 212
Anlage 2: Technische Daten des Synchron-Torquemotors MBT 210 C der Firma Bosch Rexroth AG
Technische Daten
Synchron-Torquemotor Firma Bosch Rexroth AG
MBT 210 C
Allgemeines
Die Synchronmaschine MBT 210 C ist mit einem vierzigpoligen Permanentmagnet er-
regten Innenläufer aufgebaut. Der Stator ist mit einer dreisträngigen Wicklung aus kon-
zentrisch angeordneten Spulen versehen.
Bemessungs- und Betriebsdaten:
Größe Einheit Zahlenwert Beschreibung
NM Nm 120 Nenndrehmoment
Nn 1−min 270 Nenndrehzahl
maxM Nm 250 Maximaldrehmoment
maxn 1−min 600 Maximaldrehzahl

Seite 213
Rotorgeometrie
Größe Einheit Zahlenwert Beschreibung
δ mm 0,5 Luftspalt
Rotaußend , mm 155,8 Rotoraußendurchmesser
Kernd mm 142,6 Durchmesser der Bleche
Welled mm 120,0 Wellendurchmesser
SegN 40 Anzahl der Magnetsegmente
Statorgeometrie
Zeichnung zur Statorgeometrie
Größe Einheit Zahlenwert Beschreibung
Paketl mm 76,0 Blechpaketlänge
außend mm 210,0 Statoraussendurchmesser
Bohrd mm 156,8 Bohrungsdurchmesser
Z 48 Nutenzahl

Seite 214
Werkstoffdaten
Größe Einheit Zahlenwert Beschreibung
RB T 1,05 Remanenzinduktion des Magnetmaterials
rμ 1,07 Relative Permeabilität das Magnetmaterials
Cuρ mΩ 1,786 E-8 Spezifischer Widerstand von Kupfer
Wicklungsdaten
Größe Einheit Zahlenwert Beschreibung
p 4 Polpaarzahl
m 3 Strangzahl
N 69 Windungszahl einer Spule
Werkstoffkennlinien von Rotor- und Statorelektroblech
Keine Herstellerangaben

Seite 215
Anlage 3: Programmbeschreibung
Die in dieser Arbeit vorliegenden numerischen Berechnungen und Grafiken wurden
mit Hilfe von Rechnerprogrammen erstellt. Um dem Leser die Werkzeuge zugänglich
zu machen, sind die Quelltexte der Funktionen und der Grafikprozeduren diesem
Dokument auf einem Datenträger beigefügt. Das Ziel der Quelltexte ist das Entwick-
lungswerkzeug MATLAB (in der Version 6.5 Release 13) der Firma THE
MATHWORKS.
Die weitere Verwendung der Programmteile wird im Wesentlichen in zwei Varianten
zu unterteilen sein:
― Die Durchführung numerischer Rechnungen und die Erstellung von Grafiken
zu Test- und Verifikationszwecken (Der Nutzer ist in der Anwenderrolle)
― Die Integration der Funktionen und Prozeduren in eigene Programme und /
oder die Modifizierung und Verbesserung der Quelltexte nach eigenem Er-
messen (Der Nutzer ist in der Entwicklerrolle)
Es wurde versucht, bei der Programmentwicklung beide Varianten der weiteren Ver-
wendung zu unterstützen. Für die Nutzer in der Anwenderrolle ist eine grafische Be-
nutzeroberfläche erstellt worden, für die Nutzer des Quelltextes wurde eine konse-
quent modulare und funktionsorientierte Struktur ohne Nutzung globaler Variable
umgesetzt. Die Möglichkeiten der weiteren Programmverwendung sollen vorgestellt
werden.

Seite 216
1 Bedienung der grafischen Benutzeroberfläche (GUI)
Den Funktionen ist eine grafische Benutzeroberfläche beigefügt. Sie wird unter der
Entwicklungsoberfläche von MATLAB über den Aufruf der Funktion „PMModell-
GUI.m“ gestartet. Das Bild 1.1.a soll einen Eindruck von der nun erscheinenden Pro-
grammoberfläche geben.
Bild 1.1.a. Darstellung der grafischen Benutzeroberfläche (GUI)
Das Hauptfenster der Benutzeroberfläche unterteilt sich in vier Funktionsblöcke:
1.1 Die Berechnungsauswahl
Mit der Berechnungsauswahl kann mittels zweier „Pull-Down“-Menüs der gewünsch-
te Gegenstand der Rechnung – z.B. das magnetische Vektorpotential oder die Pol-
radspannung der modellierten Maschine – ausgesucht und mittels des Buttons „Be-
rechnung starten“ initiiert werden.

Seite 217
1.2 Das Logbuch
Im Logbuch werden alle im Programm ausgeführten Aktionen – insbesondere die
Änderung von Geometrie- Betriebs- und Werkstoffdaten – in Textform protokolliert.
Somit können die zuletzt getätigten Einstellungen und Eingaben noch eingesehen
werden, nachdem die zugehörigen Fenster und Menüs bereits geschlossen wurden.
1.3 Die Ausgabegrafik
Im rechten Teil des Fensters werden die Berechnungsresultate grafisch dargestellt.
1.4 Die Menüzeile
Die zur Rechnung anzugebenden Geometrie-, Werkstoff- und Betriebsdaten können
über das Fenstermenü „Modellparameter“ variiert werden. Zur Modifizierung der Da-
ten erscheinen Eingabefenster in der Art des Bildes 1.1.b.
Bild 1.1.b Darstellung der grafischen Eingabemenüs der GUI
Die Dateneingabe erfolgt über frei editierbare Felder und kann über die unten rechts
angeordneten Buttons verworfen oder bestätigt werden. Eine Plausibilitätsprüfung
der Daten erfolgt nicht.
Ist der Datensatz einer Maschine einmal erstellt, kann er über das Menü „Datei – Da-
tensatz speichern“ gesichert und per „Datei – Datensatz laden“ wiederhergestellt

Seite 218
werden. Die Programmoberfläche lädt bei ihrem Startvorgang automatisch die Datei
„Datensatz.mat“.
In dem Menü „Datei“ findet man zudem die Möglichkeit, den Bildschirminhalt auszu-
drucken, die Druckeinstellungen zu verändern sowie das Programm zu beenden.
Der Auswahlunterpunkt „grafische Darstellung“ ruft die aus MatLab bekannten Funk-
tionen zur Grafik- und Objektmodifizierung auf. Hiermit kann die grafische Darstel-
lung der Berechnungsergebnisse den eigenen Wünschen angepasst werden.
Online-Hilfe zum Hauptprogramm und MATLAB stehen ebenso wie eine Programm-
versionsinformation unter dem Menüpunkt „Hilfe“ zur Verfügung.
Auf eine Beschreibung der einzugebenden Berechnungsparameter soll hier verzich-
tet werden; eine entsprechende Dokumentation ist mit dieser Arbeit bereits vorhan-
den und sollte bei der Maschinenmodellierung zu Rate gezogen werden.
2 Direkte Nutzung der zur Verfügung gestellten Funktionen Bild 2.1 gibt zunächst Überblick über die Programmstruktur. Deutlich wird die Unter-
gliederung in die Definition von Konstanten, der Lösung der Differentialgleichungen
und der Berechnung der Felder, der abgeleiteten Feldgrößen und Grafiken.
Die Formulierung der dargestellten Programmteile unterliegt folgenden Konventio-
nen:
― Sämtliche Funktionen arbeiten ohne Deklaration globaler Variable und unter
konsequenter Nutzung der funktionsorientierten modularen Qualitäten des
Matlab-Interpreters
― Die Funktionen des Berechnungsmechanismus sind separat in jeweils einer
Datei mit einem dem Funktionsnamen identischen Dateinamen abgelegt
― Variable werden zwischen den Funktionen als Strukturen kommuniziert
― Die Nomenklatur der Variablen ist den in dieser Arbeit verwendeten Bezeich-
nungen identisch
― Variablennamen aus dem griechischen Zeichenvorrat werden in lateinischen
Buchstaben ausgeschrieben
― Indizes werden durch einen Unterstrich kenntlich gemacht.

Seite 219
Bild 2.1 Darstellung der Programmstruktur
Zur Übersicht soll in den folgenden Abschnitten eine Übersicht über die für die wei-
tere Nutzung relevanten Programmteile abgebildet werden.

Seite 220
2.1.1. Definition von Konstanten Im ersten Block des Programms werden alle zur Berechnung und Modellierung benö-
tigten Konstanten definiert. Die Konstanten sind als thematisch gegliederte Struktu-
ren abgelegt.
2.1.1.1. Programmkopf % Berechnung Permanentmagnet erregter Maschinen % Joerg Peschke, 11.01.2006 clear all % MATLAB clc % Version 6.5 Release 13 2.1.1.2. Definition der Berechnungsparameter % Eingabe allgemeiner Berechnungsparameter KONST.mu0=4*pi*0.0000001;
% Permeabilitätszahl mu_o % (Ganze Zahl)
KONST.M=100;
% Anzahl der berechneten Feldräume % (Ganze Zahl)
KONST.E=50;
% Nummer des Feldraumes der Erregung % (Ganze Zahl)
KONST.amax=11; % Maximale Ordnungszahl für die Berechnung des % Erregerfeldes (Ganze Zahl)
KONST.bmax=0; % Maximale Ordnungszahl für die Berechnung des % Ankerfeldes (Ganze Zahl)
KONST.NrPoints=30;
% Anzahl der berechneten Punkte (horizontal und % vertikal) bei 3D-Grafiken (Ganze Zahl)
KONST.NrLines=40;
% Anzahl der Äquipotentiallinien bei 3D-Grafiken % (Ganze Zahl)
KONST.Linien=false; % Darstellung der einzelnen Feldraumbegrenzungen % bei 3D-Grafiken (Ja/Nein)
KONST.Carterfaktor=false;
% Anwendung des Carterfaktors % (Ja/Nein)
KONST.BvHAusDatei=false ;
% Anwendung einer gespeicherten BvH-Kurve bei der % Bestimmuing von Ersatzpermeabilitäten (Ja/Nein)
KONST.BvHRotorDatei='RotorLenzeBvH.txt';
% Datenquelle für die BvH-Kurve des Rotors % (Dateiname)
KONST.BvHStatorDatei='StatorLenzeBvH.txt';
% Datenquelle für die BvH-Kurve des Stators % (Dateiname)
KONST.PHfunc=false;
% Anwendung einer Näherungsfunktion (Ja) oder einer % Splineinterpolation für die BvH-Kurve (Ja/Nein)
KONST.PHfuncRotorDatei='RotorLenzeParam.txt';
% Datenquelle für die Parameter der Näherungs- % funktion der Permeabilität des Rotors (Dateiname)
KONST.PHfuncStatorDatei='StatorLenzeParam.txt';
% Datenquelle für die Parameter der Näherungs- % funktion der Permeabilität des Stator (Dateiname)
KONST.PHfuncOpt=true;
% Anwendung einer Optimierung der Näherungsfunktion % an die gespeicherten BvH-Kurven (Ja/Nein)
KONST.PHfuncOptGenauigkeit=1e-6;
% Mindestgenauigkeit der automatischen Optimierung % an die gespeicherten BvH-Kurven (Fehlerquadrat)
KONST.PHfuncGesamtintervall=true;
% Optimierung der Näherungsfunktion über das Ge- % samtintervall oder "nur" bis zum Sättigungsknick
KONST.PIteration=false ;
% Bestimmung von Ersatzpermeabilitäten / Anwendung % der Initialisierungspermeabilitäten
KONST.PIterationabbruch_fest=false;
% Abbruch der Iteration zum Finden der Permeabili- % täten nach Iterationszahl (Ja)/ Genauigkeit(Nein)
KONST.PIterationabbruch_abs=50;
% Iterationszahl des Abbruchs der Iteration zum % Finden der Ersatzpermeabilitäten
KONST.PIterationabbruch_rel=0.001;
% Mindestgenauigkeit für den Abbruch der Iteration % zum Finden der Ersatzpermeabilitäten
KONST.PIterationPaltgewicht=0.5;
% Gewicht der PI-Regelung bei der Iteration zum % Finden der Ersatzpermeabilitäten
KONST.BerechnungRotor=true;
% Berechnung der Felder mit / ohne Erregung % (Ja/Nein)

Seite 221
KONST.BerechnungStator=false;
% Berechnung der Felder mit / ohne Ankerwicklung % (Ja/Nein)
KONST.t=0;
% Zeitpunkt t der Feldrechnung
2.1.1.3. Definition von Daten zur Berechnung des Carterfaktors % Eingabedaten Ankerwicklung zur Berechnung Carterfaktor SW.p1 = 3; % Polpaarzahl p Stator
% SW.m1 = 3; % Strangzahl m Stator
% SW.q1 = 2; % Lochzahl q Stator
% SW.b_n1 = 0.006; % Breite Nutgrund Stator
% 2.1.1.4. Definition allgemeiner Geometriedaten % Eingabe allgemeiner Geometriedaten (Radien) R(1)=0.0125; % Wellenradius
% R(2)=0.0259; % Radius Rotorkern
% R(3)=0.0294; % Aussenradius Permanentmagnetring
% R(4)=0.0315; % Bohrungsradius Stator
% R(5)=0.0533; % Aussenradius Stator
% R=Carterfaktor_R(KONST,SW,R); % Anwendung des Carterfaktors auf die
% geometrischen Radien R=Initialisierung_R(KONST,R); % Initialisierung der Radien für die M
% Feldraeume 2.1.1.5. Definition allgemeiner Werkstoffdaten % Eingabe allgemeiner Werkstoffdaten P_konst(1)=0001; % Initialisierungs-Permeabilität Welle
% P_konst(2)=5500; % Initialisierungs-Permeabilität Rotorkern
% P_konst(3)=1.05; % Initialisierungs-Permeabilität der
% Permanentmagnete P_konst(4)=0001; % Initialisierungs-Permeabilität Luftspalt
% P_konst(5)=5500; % Initialisierungs-Permeabilität Statorjoch
% P_konst(6)=0001; % Initialisierungs-Permeabilität Aussenraum
% P_konst=Initialisierung_P_konst(KONST,P_konst); % Initialisierung der Initialisierungs-
% Permeabilitäten für die M Feldraeume

Seite 222
2.1.1.6. Definition der Kenndaten des Permanentmagnetringes % Eingabedaten Permanentmagnetring / Rotor PM.Brem=1.07; % Remanenzinduktion des Magnetwerkstoffs des PM-
% Ringes PM.pf=3; % Polpaarzahl des Rotors
% PM.Mdach=PM.Brem/KONST.mu0; % Maximale Magnetisierung der PM-Erregung
% PM.tau=(2*pi)/(2*PM.pf); % Polteilung des Rotors
% PM.yf=PM.tau*0.9; % Polbreite des Rotors
% PM.bf=PM.tau*0.1; % Polübergangsbreite des Rotor
% PM.omega=0; % Drehzahl des Rotors
% (stationärer Betrieb) PM.theta0=pi/4; % theta_o
% (Initialisierungs-Stellungswinkel Rotor) 2.1.1.7. Definition der Kenndaten der Statorwicklung % Eingabedaten Ankerwicklung / Stator SW.p1 = 3; % Polpaarzahl p Stator
% SW.m1 = 3; % Strangzahl m Stator
% SW.q1 = 2; % Lochzahl q Stator
% SW.N1 = 11.5; % Windungszahl einer Spule Stator
% SW.kwa1 = 2; % Wicklungsartfaktor Stator
% SW.a1 = 1; % Anzahl paralleler Zweige Stator
% SW.l1 = 0.105; % Blechpaketlänge
% SW.A1 = 1.075; % Querschnittsfläche des Spulendrahts
% SW.s1 = 0; % spez. Leitwert des Spulendrahtes
% SW.bs1 = 0.0022; % Streuschlitzbreite
% SW.b1 = SW.bs1; % Nutschlitzbreite
% SW.b_n1 = 0.006; % Breite Nutgrund
% SW.tau_p1 = pi*R(4)/(SW.p1); % Polteilung
% SW.tau_n1 = pi*R(4)/(SW.p1.*SW.m1.*SW.q1); % Nutteilung
% SW.y1 = SW.tau_p1; % Polbreite
% SW.I1 = 15; % Statorstrom
% SW.omega = 0; % Frequenz Statorstrom
% SW.phiI = 0; % Winkel phi_i Statorstrom
%

Seite 223
2.1.2. Lösung der Differentialgleichungen des Modells Um die dem Nutzer zur Verfügung gestellten Anwenderfunktionen nutzen zu können,
ist es notwendig, die Konstanten der Differentialgleichungslösung zu ermitteln. Dies
geschieht mit dem Aufruf der Funktion „Feldberechnung“. Die Rückgabewerte der
Funktion sind nicht nur die Konstanten der Vektorpotentiale des Rotor- und Statorfel-
des, sondern auch eine Historie der Iteration der Permeabilitätszahlen und eine Feh-
leranalyse.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Start des Hauptprogramms %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% [P_neu,R_C_neu,S_C_neu,P_history_neu,Fehler_neu]= Feldberechnung(KONST,R,P,P_var_Stator,P_var_Rotor,PM,SW); P=P_neu; R_C=R_C_neu; S_C=S_C_neu; P_history=P_history_neu; Fehler=Fehler_neu; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Ende des Hauptprogramms %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 2.1.3. Liste der zur Verfügung gestellten Anwenderfunktionen Folgende Funktionen - dokumentiert mit Ein- und Ausgabeparametern - werden
dem Anwender zur Verfügung gestellt:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Liste der zur Verfügung gestellten Funktionen %%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% R_Konstantenfehler(KONST,PM,R_C);
% Funktion mit Rückgabewert: % 1, wenn Fehler in der Feldberechnung des % Rotors, 0 sonst
S_Konstantenfehler(KONST,SW,S_C);
% Funktion mit Rückgabewert: % 1, wenn Fehler in der Feldberechnung des % Stators, 0 sonst
A_z(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Funktion mit Rückgabewert: % Vektorpotential in Abhängigkeit von r und % phi
A_z_bild_3D(KONST,R,P,PM,R_C,SW,S_C);
% Prozedur % 3D-Bild: Vektorpotential über r und phi %
A_z_bild_2D_rkonst(KONST,R,P,PM,R_C,SW,S_C,r);
% Prozedur % 2D-Bild: Vektorpotential über phi, r=konst %
A_z_bild_2D_phikonst(KONST,R,P,PM,R_C,SW,S_C,phi);
% Prozedur % 2D-Bild: Vektorpotential über r, phi=konst %
B_phi(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Funktion mit Rückgabewert: % Tangentialkomponente der magnetischen % Flussdichte in Abhängigkeit von r,phi
B_r(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Funktion mit Rückgabewert: % Radialkomponente der magnetischen % Flussdichte in Abhängigkeit von r,phi
B_phi_bild_2D_rkonst(KONST,R,P,PM,R_C,SW,S_C,r);
% Prozedur % 2D-Bild: Tangentialkomponente der magne- % tischen Flussdichte über phi , r=konst

Seite 224
B_r_bild_2D_rkonst(KONST,R,P,PM,R_C,SW,S_C,r);
% Prozedur % 2D-Bild: Radialkomponente der magnetischen % Flussdichte über phi , r=konst
B_betrag(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Funktion mit Rückgabewert: % Betrag der magnetischen Flussdichte in % Abhängigkeit von r,phi
B_betrag_bild_3D(KONST,R,P,PM,R_C,SW,S_C);
% Prozedur % 3D-Bild: Betrag der magnetischen Fluss- % dichte über r und phi
B_r_bild_3D(KONST,R,P,PM,R_C,SW,S_C);
% Prozedur % 3D-Bild: Radialkomponente der magnetischen % Flussdichte über r und phi
B_phi_bild_3D(KONST,R,P,PM,R_C,SW,S_C);
% Prozedur % 3D-Bild: Tangentialkomponente der magne- % tischen Flussdichte über r und phi
B_phase(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Funktion mit Rückgabewert: % Phase der magnetischen Flussdichte in Abh. % von r,phi
B_phase_bild_3D(KONST,R,P,PM,R_C,SW,S_C);
% Prozedur % 3D-Bild: Phase der magnetischen Fluss- % dichte über r und phi
H_betrag(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Funktion mit Rückgabewert: % Betrag der magnetischen Feldstärke in Abh. % von r,phi
H_phase(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Funktion mit Rückgabewert: % Phase der magnetischen Feldstärke in Abh. % von r,phi
H_betrag_bild_3D(KONST,R,P,PM,R_C,SW,S_C);
% Prozedur % 3D-Bild: Phase der magnetischen Feldstärke % über r und phi
H_r(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Funktion mit Rückgabewert: % Radialkomponente der magnetischen Feld- % stärke in Abh. von r,phi
H_phi(KONST,R,P,PM,R_C,SW,S_C,r,phi);
% Prozedur % 2D-Bild: Tangentialkomponente der % magnetischen Feldstärke über phi , r=konst
P_bild_2D(KONST,R,P);
% Prozedur % 2D-Bild: Permeabilität über Feldraumnummer %
P_iteration_bild_3D(KONST,P_history);
% Prozedur % 3D-Bild: Iteration zur Bestimmung der % Ersatzpermeabilität
P_bild_3D(KONST,R,P,PM,R_C);
% Prozedur % 3D-Bild: Permeabilität über r und phi %
BvH_Rotor_Bild_2D(KONST,P,P_var_Rotor);
% Prozedur % 2D-Bild: BvH-Kurve des Rotormaterials
BvH_Stator_Bild_2D(KONST,P,P_var_Stator);
% Prozedur % 2D-Bild: BvH-Kurve des Statormaterials
BvP_Stator_Bild_2D(KONST,P,P_var_Stator);
% Prozedur % 2D-Bild: BvP-Kurve des Statormaterials
BvP_Rotor_Bild_2D(KONST,P,P_var_Rotor);
% Prozedur % 2D-Bild: BvP-Kurve des Rotormaterials
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Ende der Liste der zur Verfügung gestellten Funktionen %%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%

Seite 225
Anlage 4: Quellenverzeichnis Quellen des ersten Kapitels: [1.1] E. Bolte Technischer Bericht Nr. 27
Auslegung von Permanentmagnet erregten Maschinen
mit radialer Flussorientierung
Universität der Bundeswehr Hamburg
2002
[1.2] Z.Q. Zhu
D. Howe
E. Bolte
B. Ackermann
Instantaneous Magnetic Field Distribution in Brushless
Permanent Magnet DC Motors
IEEE Transactions on Magnetics
Volume 29. No. 1, S. 124-135
1993
Quellen des zweiten Kapitels: [2.1] G. Müller Theorie elektrischer Maschinen
VCH Verlagsgesellschaft GmbH
1995
[2.2] E. Bolte Vorlesungsskript
Elektrische Maschinen und Antriebe
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005
Quellen des dritten Kapitels: [3.1] S. Blume Theorie elektromagnetischer Felder
Studientexte der Elektrotechnik
Eltex Verlag
1982

Seite 226
[3.2] P. Leuchtmann Einführung in die elektromagnetische Feldtheorie
Pearson Education Deutschland
2005
[3.3] G. Lautz Elektromagnetische Felder
Teubner Studienbücher
1985
[3.4] I. Wolff Maxwellsche Theorie
Grundlagen und Anwendungen
Springer Verlag
1997
[3.5] W. Schultz Dielektrische und magnetische Eigenschaften der Werk-
stoffe
Vieweg Verlag
1978
[3.6] H. Schilling Elektromagnetische Felder und Wellen
Physik in Beispielen
Verlag Harry Deutsch
1975
[3.7] M. Ehrich Vorlesungsskript
Theoretische Elektrotechnik
Universität der Bundeswehr Hamburg
1994
[3.8] A. Zippelius Vorlesungsskript
Theoretische Physik
Maxwell Gleichung in Wechselwirkung mit Materie
Georg-August-Universität Göttingen
2005
[3.9] M. Kämpfer
Vorlesungsskript
Mikrowellenphysik
Universität Bern
2005

Seite 227
Quellen des vierten Kapitels:
[4.1] E. Bolte Vorlesungsskript
Elektrische Maschinen und Antriebe, Gliederung 1
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005
[4.2] E. Bolte Vorlesungsskript
Elektrische Maschinen und Antriebe, Gliederung 3
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005
[4.3] K. Mallien Messbericht „Lenze Servomotor“
Universität der Bundeswehr Hamburg
1998
[4.4] N. Hampel Diplomarbeit
Servoantrieb mit Permanentmagnet erregtem Motor
Universität der Bundeswehr Hamburg
1999
Quellen des fünften Kapitels: [5.1] E. Bolte Technischer Bericht Nr. 27
Auslegung von Permanentmagnet erregten Maschinen mit
radialer Flussorientierung
Universität der Bundeswehr Hamburg
2002
[5.2] E. Bolte Vorlesungsskript
Elektrische Maschinen und Antriebe
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005

Seite 228
Quellen des sechsten Kapitels: Es wurden keine externen Quellen verwendet.
Quellen des siebten Kapitels: [7.1] H. Fischer
H. Moser
Die Nachbildung von Magnetisierungskurven durch ein-
fache algebraische oder transzendente Funktionen
Archiv für Elektrotechnik 42, S. 286-299
1956
[7.2] I.N. Bronstein
K.A. Semendjajew
Taschenbuch der Mathematik
Verlag Harry Deutsch
22. Auflage
1985
Quellen des achten Kapitels: [8.1] E. Bolte Vorlesungsskript
Lehrveranstaltung “Elektrische Maschinen und Antriebe“
Universität der Bundeswehr Hamburg
1995
[8.2] R. Richter Elektrische Maschinen
Birkhäuser Verlag, 3. Auflage
1967
[8.3] G. Müller Grundlagen elektrischer Maschinen
Reihe: Elektrische Maschinen
VCH Verlagsgesellschaft mbH Weinheim
1994
[8.4] G. Müller Theorie elektrischer Maschinen
Reihe: Elektrische Maschinen
VCH Verlagsgesellschaft mbH Weinheim
1995

Seite 229
[8.5] K. Vogt Berechnung elektrischer Maschinen
Reihe: Elektrische Maschinen
VCH Verlagsgesellschaft mbH Weinheim
1996
Quelle des neunten Kapitels:
[9.1] E. Bolte Vorlesungsskript
Lehrveranstaltung Elektrische Maschinen und Antriebe
Universität der Bundeswehr Hamburg
1995
Quellen des zehnten Kapitels: [10.1] E. Bolte
B. Kipp
Technischer Bericht 34 „Bestimmung der Maschinenpara-
meter einer Dauermagnet erregten Maschine mit konzent-
rierten Wicklungen“
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2005
[10.2] E. Bolte
Vorlesungsskript
Lehrveranstaltung Ausgewählte Kapitel elektrischer Ma-
schinen und Antriebe
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
2006
Quelle des elften Kapitels:
[11.1] E. Bolte Vorlesungsskript
Lehrveranstaltung Elektrische Maschinen und Antriebe
Universität der Bundeswehr Hamburg
1995

Seite 230
Anlage 5: Verzeichnis der verwendeten Variablen a Ganze Zahl
maxa Maximale Ordnungszahl der Modellierung einer PM-Erregung
1a Anzahl paralleler Zweige der Ankerwicklung
a′ Ersatzstrombelag zur Modellierung der PM-Erregung
aμ Fourier-Koeffizient zur Bildung des magnetischen Vektorpotentials
A Magnetisches Vektorpotential
A Magnetisches Vektorpotential der PM-Erregung
iA Magnetisches Vektorpotential der PM-Erregung im i-ten Feldraum
1A Magnetisches Vektorpotential der Ankerwicklung
Aμ Magnetisches Vektorpotential einer Oberwelle der PM-Erregung
1Aμ Magnetisches Vektorpotential einer Oberwelle der Ankerwicklung
,1CuA Querschnittsfläche des Kupferdrahtes der Ankerwicklung
NutA Nutfläche
kA ,, ρκμ Vektorpotential einer Oberwelle der Erregung an einer Spule
1, , ,kAμκ ρ Vektorpotential einer Oberwelle der Ankerwicklung an einer Spule
b Ganze Zahl
1b Polübergangsbreite am Anker
fb Polübergangsbreite der PM-Erregung
fbμ Fourier-Koeffizient des Strombelags der Ankerwicklung
,1Nb Untere Nutbreite des Ankers
,1NSb Obere Nutbreite des Ankers
,1Sb Nutöffnung des Ankers
B Flussdichte

Seite 231
iB Flussdichte im i-ten Feldraum
rB Radiale Komponente der Flussdichte
ersB Magnetische Flussdichte zur Bestimmung von Ersatzpermeabilitäten
RB Remanenzinduktion des Magnetmaterials
Bϕ Umfangskomponente der Flussdichte
c Lichtgeschwindigkeit
C Curie-Konstante
1 3C CK Konstanten aus der Lösung der DGL des Vektorpotentials der PM-Err.
1 3C Cμ μK Konstanten aus der Lösung der DGL des Vektorpotentials der PM-Err.
1, 3,i iC Cμ μK Konstanten aus der Lösung der DGL des Vektorpotentials der PM-Err.
ϕcos Leistungsfaktor
Md Magnetdicke einer PM-Erregung
Md ′ Modellierte Magnetdicke einer PM-Erregung
1,gd Geometrischer Wellendurchmesser
2,gd Geometrischer Rotorkerndurchmesser
4,gd Geometrischer Messjochbohrungsdurchmesser
5,gd Geometrischer Messjochaußendurchmesser
D Elektrische Verschiebung
D Jakobi-Matrix
e Einheitsvektor
E Feldraum der Erregung
E Elektrische Feldstärke
1f − Umkehrfunktion
Nf Nennfrequenz

Seite 232
,1Nh Gemittelte Nuttiefe der Ankerwicklung
G Gewicht des integralen Anteils einer PI-Regelstrecke
PMh Schichtdicke der PM-Erregung
H Magnetische Feldstärke
iH Magnetische Feldstärke im i-ten Feldraum
rH Radialkomponente der magnetischen Feldstärke
Hϕ Tangentialkomponente der magnetischen Feldstärke
,1KH Wickelkopfhöhe der Ankerwicklung
I Elektrischer Strom
aI Strangstrom
kI Strangstrom
NI Nennstrom
j Imaginäre Einheit
J Stromdichte
J ′ Stromdichte zur Modellierung der PM-Erregung
kμ Fourier-Koeffizient zur Modellierung der PM-Erregung
WAk Wicklungsartfaktor
1 7K KK Konstanten aus der Lösung einer Differentialgleichung
1 7K Kμ μK Konstanten aus der Lösung der DGL des Vektorpotentials der PM-Err.
PK Konstanten aus der Lösung einer Differentialgleichung (partikulär)
CK Carterfaktor
1,Kμ σ Konstante zur Berechnung der Streuziffer
2,Kμ σ Konstante zur Berechnung der Streuziffer
,1NKμ Nutschlitzbreitenfaktor der Ankerwicklung

Seite 233
,N fKμ Nutschlitzbreitenfaktor der PM-Erregung
,1SKμ Sehnungsfaktor der Ankerwicklung
,S fKμ Sehnungsfaktor der PM-Erregung
,1ZKμ Zonungsfaktor der Ankerwicklung
,Z fKμ Zonungsfaktor der PM-Erregung
,1WKμ Wicklungsfaktor der Ankerwicklung
l Integrationsweg
1l Blechpaketlänge des Ankers
fl Blechpaketlänge des Rotors
,1il Ideelle Blechpaketlänge des Ankers
,i fl Ideelle Blechpaketlänge des Rotors
aL Drehfeldinduktivität, synchrone Induktivität
NL Nutstreuinduktivität
SL Stirnstreuinduktivität
StrL Stranginduktivität
StrLν Stranginduktivität einer Oberwelle
m Dipolmoment
1m Strangzahl des Ankers
M Anzahl betrachteter Feldräume
M Magnetisierung
M̂ Maximale Magnetisierung
NM Nenndrehmoment
n Natürliche Zahl
n Nummer eines Iterationsschrittes

Seite 234
maxn Maximal erlaubte Zahl von Iterationsschritten
n Normalenvektor
n Drehzahl
maxn Maximaldrehzahl
Nn Nenndrehzahl
N Windungszahl einer Spule
1N Windungszahl einer Spule der Ankerwicklung
fN Anzahl der Magnetsegmente
p Dipolmomentmenge
0,p p Konstanten zur Beschreibung einer Hilfsfunktion
1p Polpaarzahl des Ankers
fp Polpaarzahl PM-Erregung
P Polarisation
P Leistung
NP Nennleistung
0,q q Konstanten zur Beschreibung einer Hilfsfunktion
1q Lochzahl des Ankers
r Radius
0,r r Konstanten zur Beschreibung einer Hilfsfunktion
1 5r rK Radien der Motormodellierung
,m ir Radien der Motormodellierung
1 ,5g gr rK Radien der Motorgeometrie
ersr Radius zur Bestimmung von Ersatzpermeabilitäten
R Funktion des Lösungsansatzes einer Differentialgleichung

Seite 235
StrR Strangwiderstand
1s Gemittelte Nutbreite der Ankerwicklung
,i js Konstante zur Bestimmung eines Polynoms (Spline-Interpolation)
t Zeit
Nutt Nuttiefe
T Temperatur
CT Curie-Temperatur
ppU Polradspannung der Grundwelle
pUμ Polradspannung einer Oberwelle
U Spannung
kU Strangspannung
aU Strangspannung
NU Nennspannung
w Wicklungsfaktor
W Weisscher Faktor
mW Magnetische Energie
x Kartesische Koordinate
y Kartesische Koordinate
1y Polbreite der Ankerwicklung
fy Polbreite der PM-Erregung
z Kartesische Koordinate
z Zylinderkoordinate
1Z Nutenzahl des Ankers
α Faktor zur Berechnung des Carterfaktors

Seite 236
α Polbreite der PM-Erregung
β Polübergangsbreite der PM-Erregung
β Faktor zur Berechnung des Carterfaktors
χ Suszeptibilität
δ Luftspalt
gδ Geometrischer Luftspalt
mδ Modellierter Luftspalt
PMΔ Relative Dicke der PM-Erregung zur Berechnung der Streuziffer
RΔ Radienverhältnis zur Berechnung der Streuziffer
ε Grenzwert einer Folge
0ε Dieelektrizitätskonstante (Vakuum)
ϕ Zylinderkoordinate
ϕ Elektrisches Skalarpotential
1ϕ Zylinderkoordinate Anker
2ϕ Zylinderkoordinate Rotors
Pϕ Polradwinkel
φ Funktion eines Lösungsansatz einer Differentialgleichung
φ Magnetischer Fluss
σφ Streufluss
Lφ Luftspaltfluss
Mφ Gesamtfluss
μ Ordnungszahl
rμ Relative Permeabilität
,r iμ Relative Permeabilität im i-ten Feldraum

Seite 237
0μ Permeabilitätskonstante (Vakuum)
,r WKLμ Aus einer Werkstoffkennlinie bestimmte relative Permeabilität
ersμ Relative Ersatz-Permeabilität
ν Ordnungszahl
ρ Oberflächenladungsdichte
σ Streuziffer
,p fτ Polteilung der PM-Erregung
,1pτ Polteilung der Ankerwicklung
,1nτ Nutteilung der Ankerwicklung
,n fτ Nutteilung der PM-Erregung
Cuρ Spezifischer Widerstand von Kupfer
η Wirkungsgrad
υ Drehwinkel des Rotors in Bezug auf den Anker
0υ Drehwinkel des Rotors in Bezug auf den Anker (Initialisierung)
( )tυ Drehwinkel des Rotors in Bezug auf den Anker (Zeitliche Abhängigkeit)
ω elektrische Kreisfrequenz
Ω Mechanische Kreisfrequenz
ψ Flußverkettung
ψμ Flußverkettung einer Oberwelle

Seite 238
Anlage 6: Lebenslauf des Autors Persönliche Angaben Name Jörg Peschke Geburtsdatum 02. Juni 1971 Geburtsort Rheine in Nordrhein-Westfalen Familienstand Ledig Schulische Ausbildung 08/1977 – 07/1981 St. Michael Grundschule in Rheine 07/1981 – 06/1990 Gymnasium Dionysianum in Rheine, Abitur Berufstätigkeit 07/1990 – 12/2002 Offizier der Bundeswehr
an den Standorten München, Hamburg, El Paso und Husum. Der Ausbildungsweg zu dieser Tätigkeit beinhaltete neben einem Studium der Elektrotechnik Lehrgänge, in denen Fremdsprachenkenntnisse, Ausbildungsgrundsätze und Themen moderner Menschenführung vertieft wurden.
Seit 02/2003
Wissenschaftlicher Mitarbeiter bei der Helmut-Schmidt-Universität, Universität der Bundeswehr in Hamburg Fachbereich Elektrotechnik Professur für elektrische Maschinen und Antriebe
Hochschulstudium und Praktika Seit 07/2000
Studium der praktischen Informatik an der Fernuniversität in Hagen Studienschwerpunkt: Software Engineering Abschluss: Geplant für Dezember 2006
10/1991 – 10/1995
Studium der Elektrotechnik (Nachrichtentechnik) an der Universität der Bundeswehr in Hamburg Studienschwerpunkt: Theoretische Elektrotechnik Abschluss: Diplom-Ingenieur
07/1992 – 09/1992 08/1993 – 10/1993
Studien begleitende Praktika

Seite 239

Seite 240




![[Chem] Schoops - Analytische Chemie](https://static.fdokument.com/doc/165x107/5571f82249795991698cb7d7/chem-schoops-analytische-chemie.jpg)