Architektur für Multi-Roboter Kooperation · Stefan Merten Architektur für Multi-Roboter...
37
Steuerungsarchitektur für Multi-Roboter Kooperation Referent: Stefan Merten 31.01.2005 ALLIANCE: An Architecture for Fault Tolerant Multi-Robot Cooperation Lynne E. Parker
-
Upload
trannguyet -
Category
Documents
-
view
223 -
download
0
Transcript of Architektur für Multi-Roboter Kooperation · Stefan Merten Architektur für Multi-Roboter...
Steuerungsarchitektur für Multi-Roboter Kooperation
Referent: Stefan Merten
31.01.2005
ALLIANCE: An Architecture for Fault Tolerant Multi-Robot CooperationLynne E. Parker
2Stefan Merten Architektur für Multi-Roboter Kooperation
Übersicht
§ Architekturen zur Kooperation
§ ALLIANCE
§ Erweiterungen zu ALLIANCE
3Stefan Merten Architektur für Multi-Roboter Kooperation
Kooperation - Vorteile
§ Viele einfache Roboter günstiger als ein sehr komplexer
§ Aufgabenbereich zu komplex für einen Roboter alleine
§ Höhere Stabilität durch Parallelität und Redundanzen
§ Bearbeitung verschiedener Teilaufgaben zur gleichen Zeit an unterschiedlichen Orten
4Stefan Merten Architektur für Multi-Roboter Kooperation
Kooperation - Nachteile
§ Schwierige Modellierung:• Wie werden Aufgaben verteilt bzw. formuliert?• Wie bekommt ein Roboter eine Aufgabe?• Wie interagieren und kommunizieren die
Roboter?• Wie werden Konflikte erkannt und behoben?
§ Hauptprobleme: Fehlertoleranz und Anpassungsfähigkeit

5Stefan Merten Architektur für Multi-Roboter Kooperation
Ziel
6Stefan Merten Architektur für Multi-Roboter Kooperation
Architekturtypen (1)
§ Swarm-type (Ausschwärmen)• Vielzahl homogener Roboter• Zeitunkritische Aufgaben • Jeder Roboter hat gleiche Fähigkeiten• Umwelt ist großes Areal
7Stefan Merten Architektur für Multi-Roboter Kooperation
Architekturtypen (2)
§ Intentional-type (Absicht)• Geringe Anzahl heterogener Roboter• Zweck- und effizienzorientierte
Kooperation• Kontrollierte Aufgabenverteilung (zentral
und dezentral)
8Stefan Merten Architektur für Multi-Roboter Kooperation
ALLIANCE
§ Problem bisheriger Ansätze: dynamische und fehleranfällige Welt
§ Lösungsansatz:• Aufgabenorientierte Missionsbearbeitung
in verhaltensgesteuertem System• Autonome Entscheidung über Aufgaben• Unabhängige Bearbeitung von Aufgaben
9Stefan Merten Architektur für Multi-Roboter Kooperation
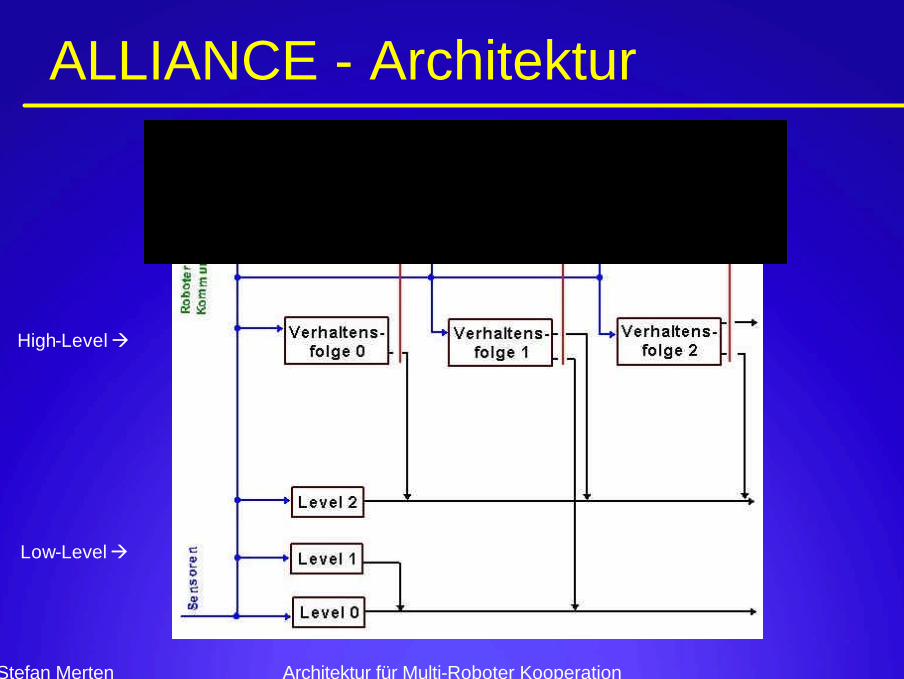
ALLIANCE - Architektur
High-Levelà
Low-Levelà
10Stefan Merten Architektur für Multi-Roboter Kooperation
ALLIANCE – Anforderungen
§ Erkennung des eigenen Fortschritts
§ Wahrnehmung der Aktivität anderer Roboter
§ Kein Gegnerbewusstsein (kein Lügen)
§ Abhängigkeiten von Teilaufgaben müssen vorgegeben sein
11Stefan Merten Architektur für Multi-Roboter Kooperation
ALLIANCE – Annahmen
§ Kommunikation ist nicht garantiert
§ Fehlerbehaftete Sensoren und Manipulatoren
§ Teilsysteme eines Roboters könnenausfallen
§ Keine zentrale Speicherung aller Weltinformationen
12Stefan Merten Architektur für Multi-Roboter Kooperation
Modellierung der Welt
§ Mission: M§ Teilaufgaben: { t1, t2, …, tm }§ Roboter: { r1, r2, …, rn }§ Verhaltensfolgen von ri: { ai1, …, aip }§ Zuordnungsfunktion: tx = hi(aij)
13Stefan Merten Architektur für Multi-Roboter Kooperation
Modell - Umsetzung
§ Unterschiedliche Bearbeitung von Teilaufgaben möglich je nach Roboter
§ Ständige Benachrichtigung des Teams über bearbeitete Aufgabe
§ Mehrere Roboter können gleichzeitig an einer Aufgabe arbeiten
14Stefan Merten Architektur für Multi-Roboter Kooperation
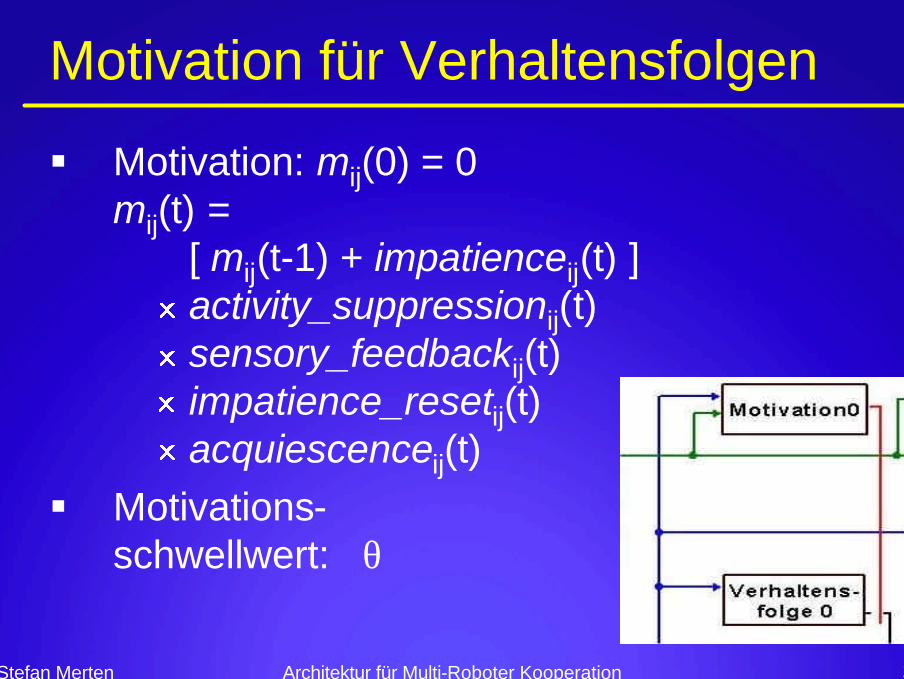
Motivation für Verhaltensfolgen
§ Motivation: mij(0) = 0 mij(t) =
[ mij(t-1) + impatienceij(t) ] activity_suppressionij(t)sensory_feedbackij(t)impatience_resetij(t)acquiescenceij(t)
§ Motivations-schwellwert: θ
15Stefan Merten Architektur für Multi-Roboter Kooperation
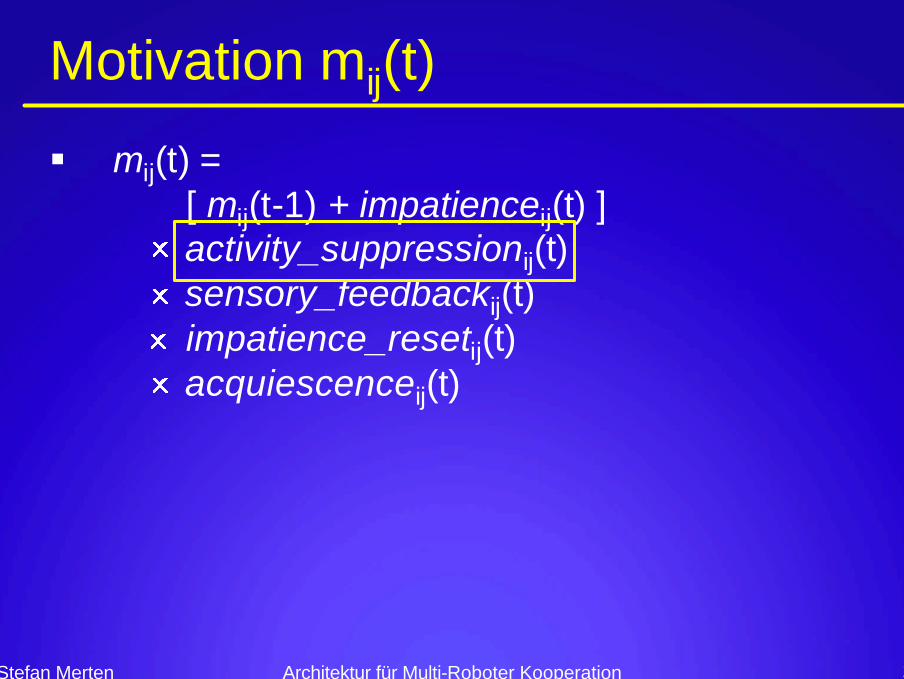
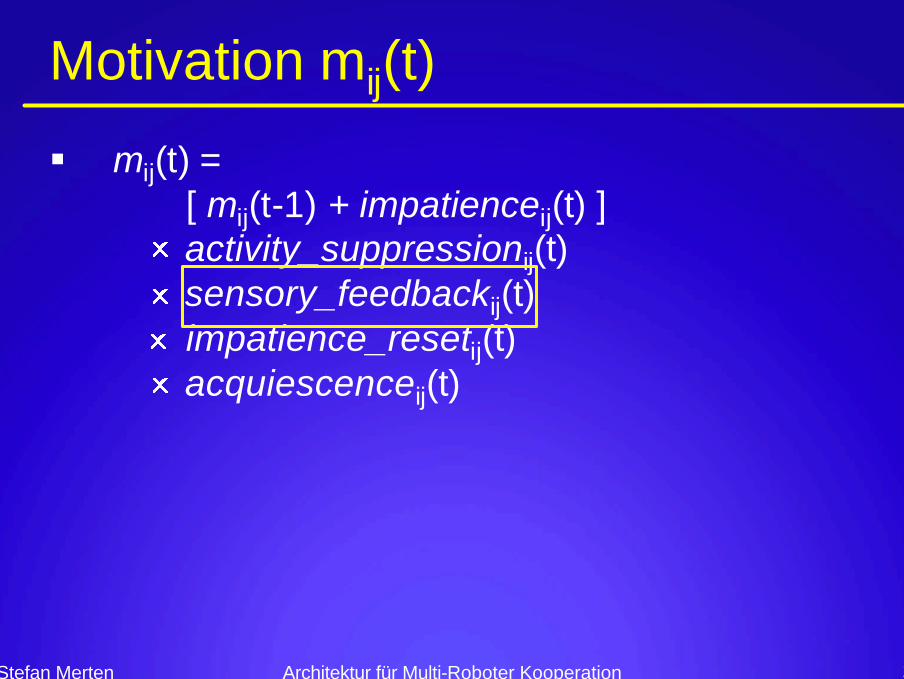
Motivation mij(t)
§ mij(t) =[ mij(t-1) + impatienceij(t) ] activity_suppressionij(t)sensory_feedbackij(t)impatience_resetij(t)acquiescenceij(t)
16Stefan Merten Architektur für Multi-Roboter Kooperation
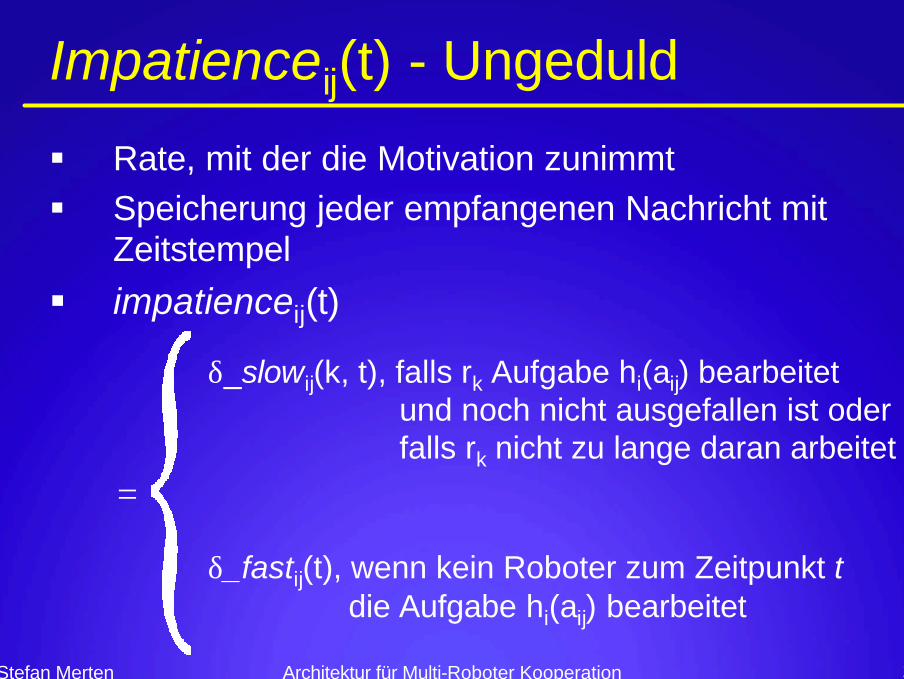
Impatienceij(t) - Ungeduld
§ Rate, mit der die Motivation zunimmt§ Speicherung jeder empfangenen Nachricht mit
Zeitstempel§ impatienceij(t)
=
δ_slowij(k, t), falls rk Aufgabe hi(aij) bearbeitetund noch nicht ausgefallen ist oderfalls rk nicht zu lange daran arbeitet
δ_fastij(t), wenn kein Roboter zum Zeitpunkt tdie Aufgabe hi(aij) bearbeitet
17Stefan Merten Architektur für Multi-Roboter Kooperation
Motivation mij(t)
§ mij(t) =[ mij(t-1) + impatienceij(t) ] activity_suppressionij(t)sensory_feedbackij(t)impatience_resetij(t)acquiescenceij(t)
18Stefan Merten Architektur für Multi-Roboter Kooperation
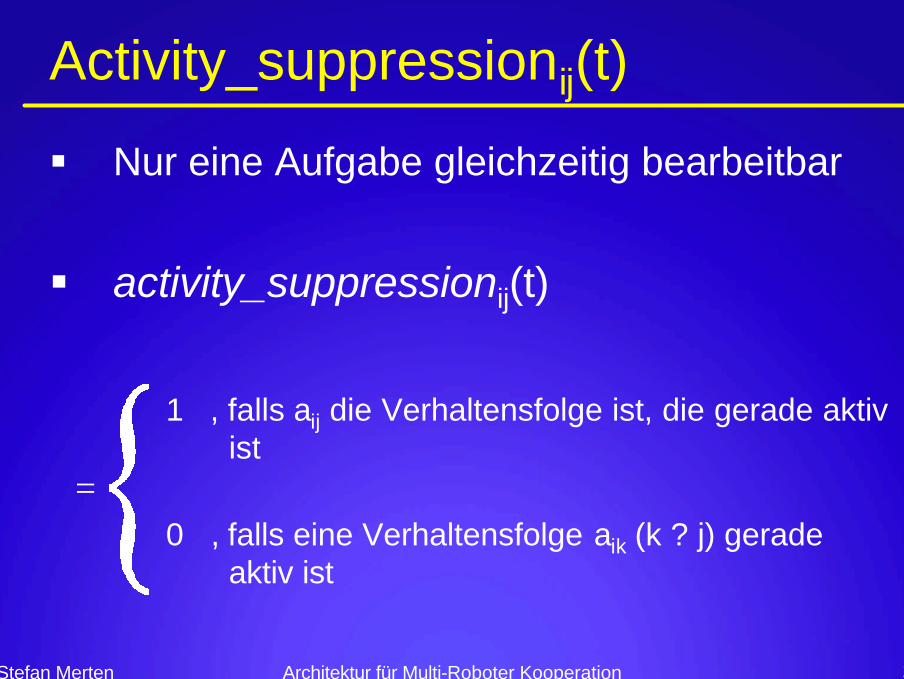
Activity_suppressionij(t)
§ Nur eine Aufgabe gleichzeitig bearbeitbar
§ activity_suppressionij(t)
=
1 , falls aij die Verhaltensfolge ist, die gerade aktivist
0 , falls eine Verhaltensfolge aik (k ? j) geradeaktiv ist
19Stefan Merten Architektur für Multi-Roboter Kooperation
Motivation mij(t)
§ mij(t) =[ mij(t-1) + impatienceij(t) ] activity_suppressionij(t)sensory_feedbackij(t)impatience_resetij(t)acquiescenceij(t)
20Stefan Merten Architektur für Multi-Roboter Kooperation
Sensory_feedbackij(t)
§ Sensoren melden, dass Aufgabe verfügbar
§ sensory_feedbackij(t)
=
1 , falls Sensoren zeigen, dass Aufgabe hi(aij)bearbeitbar ist
0 , sonst
21Stefan Merten Architektur für Multi-Roboter Kooperation
Motivation mij(t)
§ mij(t) =[ mij(t-1) + impatienceij(t) ] activity_suppressionij(t)sensory_feedbackij(t)impatience_resetij(t)acquiescenceij(t)
22Stefan Merten Architektur für Multi-Roboter Kooperation
Impatience_resetij(t)
§ Motivation zurücksetzen, wenn Teammitglied Aufgabe übernommen hat
§ impatience_resetij(t)
=
1 , normalerweise
0 , falls anderer Roboter zum ersten Mal Nachrichtschickt, dass er Aufgabe hi(aij) bearbeitet
23Stefan Merten Architektur für Multi-Roboter Kooperation
Motivation mij(t)
§ mij(t) =[ mij(t-1) + impatienceij(t) ] activity_suppressionij(t)sensory_feedbackij(t)impatience_resetij(t)acquiescenceij(t)
24Stefan Merten Architektur für Multi-Roboter Kooperation
Acquiescenceij(t)
§ Der Roboter gibt von alleine auf§ acquiescenceij(t)
= 0 , falls zu lange an Aufgabe gearbeitet oder falls lang genug an Aufgabe gearbeitet undein anderer Roboter hilft bereits
1 , normalerweise
25Stefan Merten Architektur für Multi-Roboter Kooperation
Motivation mij(t)
§ mij(t) =[ mij(t-1) + impatienceij(t) ] activity_suppressionij(t)sensory_feedbackij(t)impatience_resetij(t)acquiescenceij(t)
§ Speicherung von Nachrichten, Parametern (θ, τi, φij(k), λij, ψij) und aktuellem Zustand mij
26Stefan Merten Architektur für Multi-Roboter Kooperation
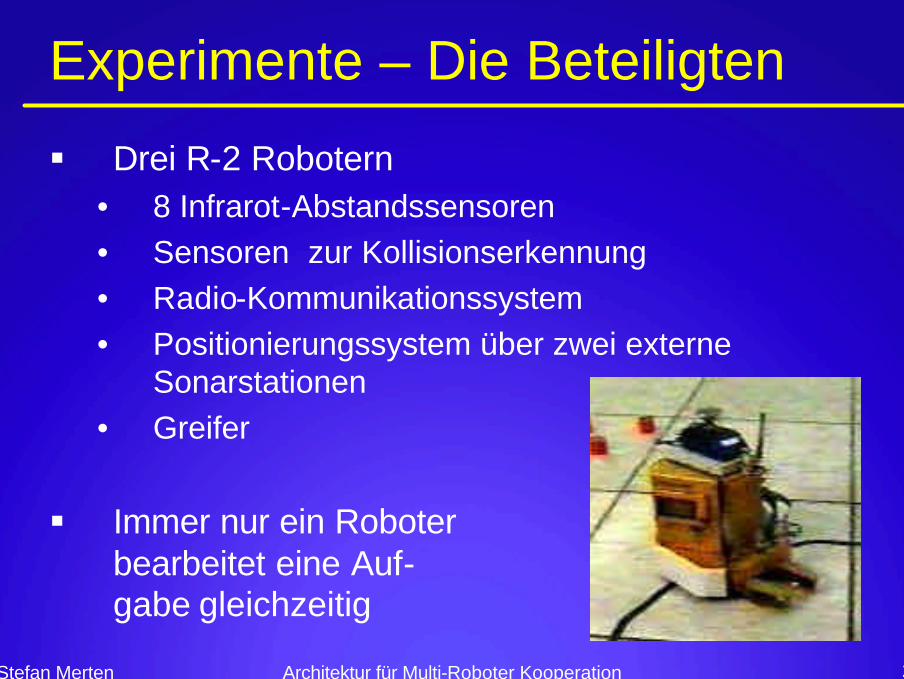
Experimente – Die Beteiligten
§ Drei R-2 Robotern• 8 Infrarot-Abstandssensoren • Sensoren zur Kollisionserkennung• Radio-Kommunikationssystem• Positionierungssystem über zwei externe
Sonarstationen• Greifer
§ Immer nur ein Roboterbearbeitet eine Auf-gabe gleichzeitig
27Stefan Merten Architektur für Multi-Roboter Kooperation
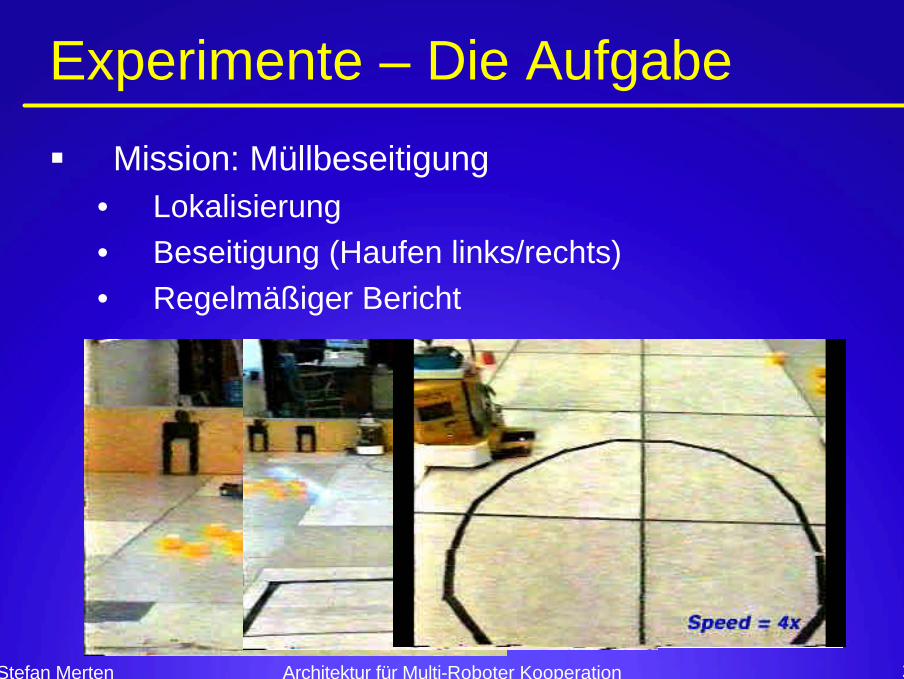
Experimente – Die Aufgabe
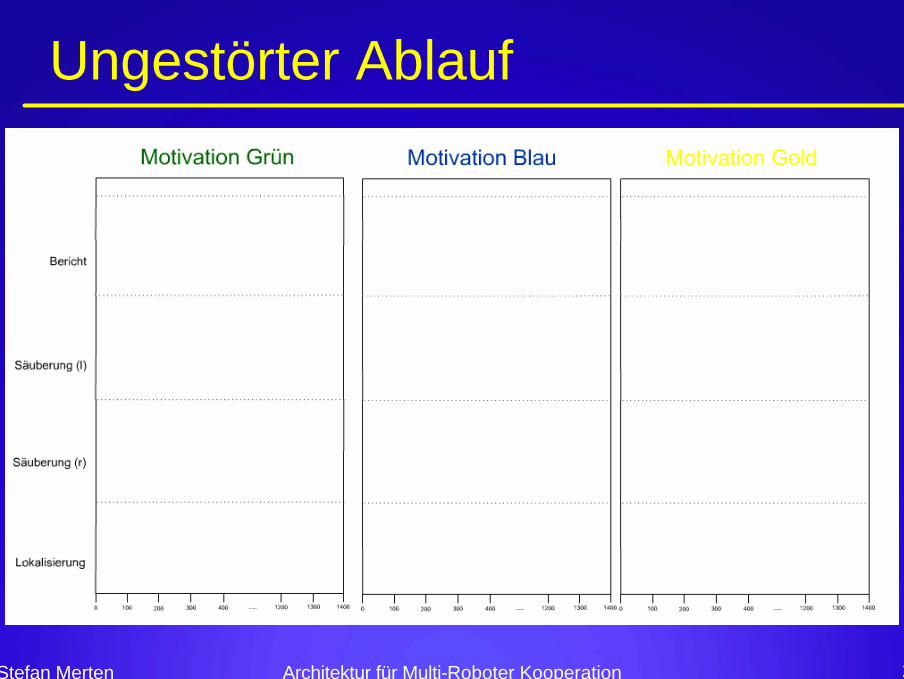
§ Mission: Müllbeseitigung• Lokalisierung• Beseitigung (Haufen links/rechts)• Regelmäßiger Bericht
28Stefan Merten Architektur für Multi-Roboter Kooperation
Ungestörter Ablauf
29Stefan Merten Architektur für Multi-Roboter Kooperation
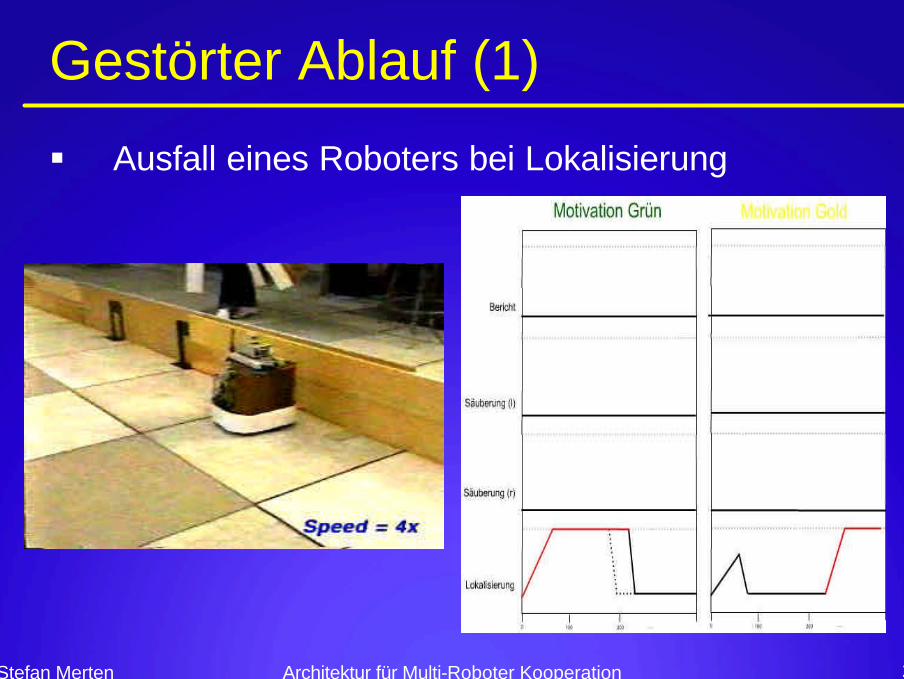
Gestörter Ablauf (1)
§ Ausfall eines Roboters bei Lokalisierung
30Stefan Merten Architektur für Multi-Roboter Kooperation
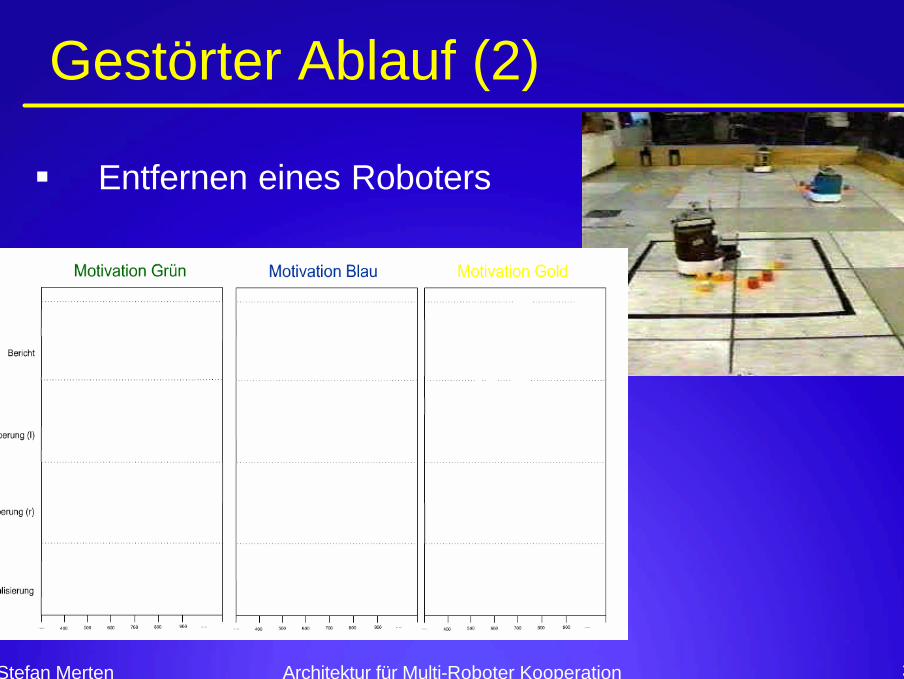
Gestörter Ablauf (2)
§ Entfernen eines Roboters
31Stefan Merten Architektur für Multi-Roboter Kooperation
Einstellung der Parameter
§ Alle Parameter manuell setzen§ Automatisches Anpassen der Parameter
• Bearbeitungszeiten mitspeichern• Ergebnisse auswerten• Parameter anpassen
à L-ALLIANCE
32Stefan Merten Architektur für Multi-Roboter Kooperation
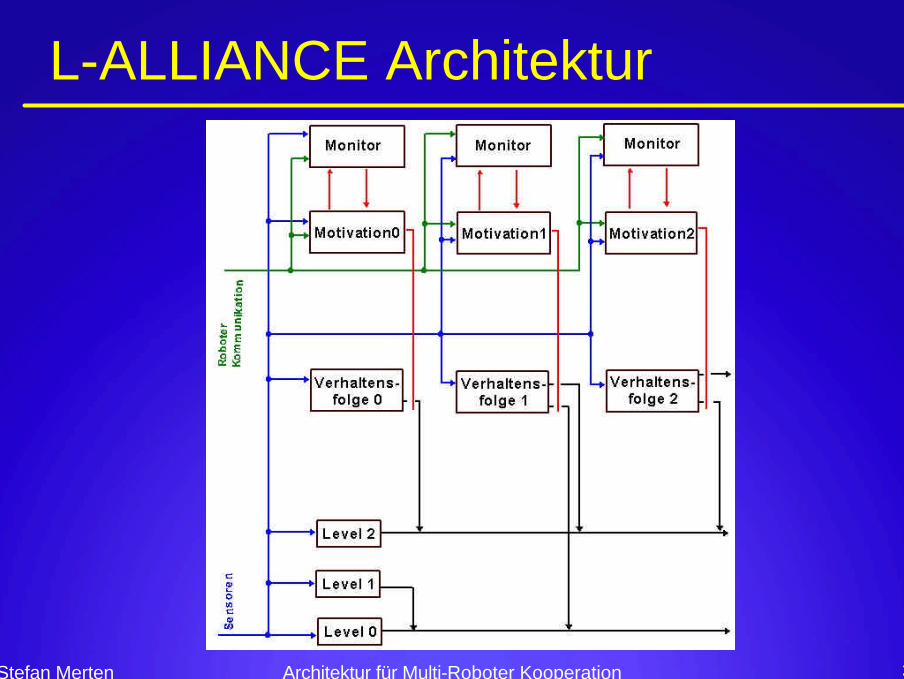
L-ALLIANCE Architektur
33Stefan Merten Architektur für Multi-Roboter Kooperation
Parameter Berechnung
§ Optimierungsvorgehen• Durchschnittlich Bearbeitungszeit
à ψij(t), φij(k, t)• Motivationsschwellwert optimal erreichen
à δ_slowij(k, t)• Bevorzugung kleine Aufgaben mit schlechter
oder große Aufgaben mit gute Qualifikation à δ_fastij(t)
§ Globale Parameter wie θ, τ bleiben unverändert
34Stefan Merten Architektur für Multi-Roboter Kooperation
Ergebnis
§ Mission wird zuverlässig erfüllt§ Unerwartete Ereignisse werden
kompensiert§ Kein Vorwissen über Teammitglieder
nötig
§ Nur unabhängige Teilaufgaben§ Keine Teilziele definierbar
35Stefan Merten Architektur für Multi-Roboter Kooperation
Ziel
§ Noch weniger Vorgaben über Umwelt und Mission
§ Verbesserung der Wahrnehmung der anderen Roboter über Sensoren
36Stefan Merten Architektur für Multi-Roboter Kooperation
Quellen§ Lynne E. Parker. ALLIANCE: An Architecture
for Fault Tolerant Multi-Robot Cooperation. In IEEE Transactions on Robotics and Automation, Vol. 14, No 2, April 1998
§ Brain P. Gerkey and Maja J Mataric. A formal analysis and taxonomy of task allocation in multi-robot systems. In Intl. J. Of Robotics Research 23(9), p. 030-954, September 2004
§ A. Farinelli et al. Multirobot Systems: A Classification Focused on Coordination. In IEEE Transactions on Systems, Man, and Cybernetics-Part B, Vol. 34, No.5, Oktober 2004
37Stefan Merten Architektur für Multi-Roboter Kooperation
Ende
§ Fragen und gefragt werden…
???
? ? ?
?