ARGO-Kurzbeschreibung Seite 2/8 11.07 · ARGO-Kurzbeschreibung Seite 2/8 11.07.01 mit...
8
Transcript of ARGO-Kurzbeschreibung Seite 2/8 11.07 · ARGO-Kurzbeschreibung Seite 2/8 11.07.01 mit...


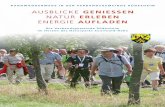
ARGO-Kurzbeschreibung Seite 2/8 11.07.01
mit Inland-ECDIS-Karte und Radarbild des Rheins bei Rüdesheim,Bild 1
2 Pilotprojekt 1998/99
Im Pilotprojekt wurde ein System entwickelt, das die Komponenten elektronische Flusskarte mit Tie-
fenlinien, Radarbild und Satellitenortung (DGPS) vereint. Für die Karte wurde das erprobte System der
elektronischen Seekarte (ECDIS: Electronic Chart Display and Information System) an die Verhältnisse
der Binnenwasserstraßen angepasst und in internationaler Zusammenarbeit zu Inland-ECDIS weiterent-
wickelt. Dadurch wurde die für den Rhein wichtige grenzüberschreitende Verwendbarkeit des Systems
erreicht.
Für die Überlagerung von Radarbild und Karte (Radar-Map-Matching) sowie für die Positionierung des
eigenen Schiffes in der Karte mit Satellitenortung (DGPS) wurde das Integrierte Navigationssystem der
Universität Stuttgart im Rahmen eines Forschungs- und Entwicklungsvorhabens an Inland-ECDIS an-
gepasst.
Für die Darstellung der Tiefeninformationen bezogen auf den aktuellen Wasserstand wurde folgen-
des Verfahren entwickelt: Der Schiffsführer gibt in den ARGO-Computer einen bestimmten Pegelstand
und die gewünschte Wassertiefe (Tiefenanspruch) ein. Er erkennt dann auf dem Bildschirm die verfüg-
baren Wassertiefen in Form von Tiefenlinien unter dem aktuellen Wasserstand sowie die Ränder des
Fahrstreifens, der seiner Eingabe „Tiefenanspruch“ entspricht.
Im Pilotprojekt wurden 1998 ein Prototyp von ARGO auf dem MS "Mainz" der WSD Südwest eingerichtet
und erste elektronische Karten produziert. Im Jahr 1999 wurde der Prototyp verbessert und es wurden
Testfahrten mit Genauigkeitsmessungen durchgeführt.
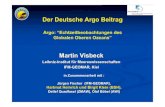
ARGO-Prototyp im Steuerstand des MS “Mainz“ der Wasser- und Schifffahrtsdirektion Südwest mit elektroni-scher Wasserstraßenkarte nach dem Standard Inland-ECDIS und mit Radarbildüberlagerung, 5.3.1999,Entwicklung durch das Institut für Systemdynamik und Regelungstechnik der Universität StuttgartBilder 2a und 2b, Peter Kluytenaar, Rotterdam

ARGO-Kurzbeschreibung Seite 3/8 11.07.01
3 Betriebsarten
ARGO gibt es in zwei Betriebsarten, und zwar für den oben beschriebenen Navigationsbetrieb und für den
Informationsbetrieb.
Im Navigationsbetrieb werden die Inland-ECDIS-Karte und das Radarbild auf einem einzigen Monitor
angezeigt. Für die Ortung werden zwei unabhängige Systeme eingesetzt, und zwar Radar-Map-Matching
und Satellitenortung (DGPS). Die Genauigkeit der Kartenposition in Bezug zum Schiff wird nach Lage und
Richtung überwacht.
Der Informationsbetrieb dient nicht der Schiffssteuerung sondern hat die Funktion eines elektrischen
Atlasses. Im Informationsbetrieb wird in ARGO nur die Inland-ECDIS-Karte ohne die exakte Position des
Schiffes gezeigt. Es ist möglich, den Kartenvorschub entlang der Flussachse so zu steuern, dass die
Fahrrinnenachse etwa in Bildmitte liegt und die Ausrichtung der Karte in etwa der Vorausdarstellung eines
Radarbildes entspricht.
Informationsbetrieb auf dem ARGO-Viewer der Fa. SevenCs GmbH
Bild 3a: Objektreport für eine Tonne (Rhein bei Mainz)
Bild 3b: Anzeige eines Fahrstreifens (weiß und hellgrau) für einen vom Schiffer gewählten Pegelstand undeinen gewählten Tiefenanspruch (Rhein bei Oestrich).
Beide Betriebsarten können sowohl in der Vorausschau als auch während der Fahrt eingesetzt werden.
4 Probebetrieb 2000/2001

ARGO-Kurzbeschreibung Seite 4/8 11.07.01
4.1 Allgemeines
Nachdem im Pilotprojekt die technische Machbarkeit gezeigt worden ist, konzentriert sich die nächste
Stufe in der Entwicklung von ARGO auf eine Erprobung des Systems im Navigationsbetrieb in der Praxis.
Die Wasser- und Schifffahrtsverwaltung des Bundes führt deshalb in Zusammenarbeit mit der Berufs-
schifffahrt vom 01.08.2000 bis zum 31.12.2001 eine Erprobung im Navigationsbetrieb mit und ohne Tie-
feninformationen durch.
Es nehmen 12 Güterschiffe am Probebetrieb teil. Als Navigationssystem kommt eine Entwicklung der
Fa. Innovative Navigation GmbH, der "Radarpilot 720°", zum Einsatz (siehe Kapitel 8.1).
Der Schiffseigner rüstet sein Güterschiff auf seine Kosten mit dem "Radarpilot 720°" aus. Die Wasser-
und Schifffahrtsdirektion Südwest leistet für die Teilnahme am Probebetrieb einen Zuschuss.
4.2 Ziele des Probebetriebes
Mit dem ARGO-Probebetrieb am 01.08.2000 werden folgende Ziele verfolgt:
A Brauchbarkeit und Nutzen für die Schifffahrtstreibenden
� Nautischer und wirtschaftlicher Nutzen durch die Tiefeninformationen (Auswirkungen auf Fahrwege,
kritische Begegnungen, Überholungen, Sohlenkontakte, Änderungen des Abladeverhaltens)
� Überprüfung der Positions- und Richtungssicherheit
� Überprüfung der Praxistauglichkeit des Systems (Bedienung, Zuverlässigkeit)
B Handhabung und Kosten des Systems für die WSV
� Auswirkungen auf das Peilwesen der WSV (Peilverfahren, Umfang, Häufigkeit, Auswertung, Bekannt-
machung)
� Aktualisierung der Tiefeninformationen in der elektronischen Karte (Häufigkeit, Umfang, organisatori-
scher Ablauf)
� Auswirkungen auf Verkehrssicherung und Unterhaltung
4.3 Strecken und elektronische Karten
Der Probebetrieb umfasst die Rheinstrecke von Budenheim (km 508) bis Lorch (km 540) mit Tiefeninfor-
mationen in der elektronischen Karte. Darüber hinaus werden für die Rheinstrecke von Iffezheim (km 336)
bis Lobith (km 857) und für die Donaustrecke von Straubing bis Vilshofen die elektronischen Karten ohne
Tiefeninformationen bereitgestellt und ebenfalls erprobt.

ARGO-Kurzbeschreibung Seite 5/8 11.07.01
Die Wasser- und Schifffahrtsverwaltung stellt während der Dauer des Probebetriebes die von ihr heraus-
gegebenen elektronischen Karten der oben genannten Strecken mit Updates zur Verfügung. Die Karten
dürfen nicht weitergegeben werden.
4.4 Auswertung des Probebetriebes
Um die Auswertung des Probebetriebes zu ermöglichen, wird der "Radarpilot 720°" zusätzlich mit einer
Einrichtung zur Datenaufzeichnung (Datenlogger) ausgerüstet. Der Datenlogger zeichnet u. a. folgende
Daten während der gesamten Betriebszeit des "Radarpilot 720°" auf:
� Position und Orientierung bezogen auf Fluss und Fluss-km
� Verfügbarkeit und Qualität des Signals für die Satellitenortung (DGPS)
� Wendegeschwindigkeit und Ruderlage
� Betriebszustand der laufenden Positionsschätzung des "Radarpilot 720°" (Komponenten in Aktion oder
nicht in Aktion)
� Nutzereinstellungen am "Radarpilot 720°"
Für die Auswertung des Probebetriebes in der Rheinstrecke von Budenheim bis Lorch schaltet der
Schiffsführer im "Radarpilot 720°" eine erweiterte Aufzeichnung für die Speicherung von Szenen (Karte,
Schiffsposition, Schiffsorientierung, Radarbild) ein.
4.5 Verkehrssicherung im Probebetrieb
Der Umfang der von der Wasser- und Schifffahrtsverwaltung wahrgenommenen Verkehrssicherung (Soll-
tiefen in der Fahrrinne bezogen auf Gleichwertigen Wasserstand) bleibt unverändert.
Die Tiefeninformationen in der Strecke von Budenheim bis Lorch entsprechen Peilergebnissen von 1998
und einzelnen Nachpeilungen in den Folgejahren. Während des Probebetriebes wird es nur in Einzelfällen
möglich sein, die Tiefeninformationen in der Karte zu aktualisieren. Die Wasser- und Schifffahrtsverwal-
tung übernimmt keine Gewähr für die Richtigkeit der Tiefeninformationen in der elektronischen Karte. Der
Schiffsführer hat diesem Sachverhalt im Hinblick auf die Abladung und Nutzung der Tiefeninformationen
Rechnung zu tragen.
4.6 Verkehrsablauf im Probebetrieb
Schiffe, die den "Radarpilot 720°" als nautische Hilfe nutzen, haben kein Vorrecht gegenüber der anderen
Schifffahrt.

ARGO-Kurzbeschreibung Seite 6/8 11.07.01
5 Internationale Abstimmung
Im Rahmen des Pilotprojektes wurde zusammen mit den Wasserstraßenverwaltungen der Niederlande
und Österreichs der Standard ECDIS (Electronic Chart Display and Information System) der elektroni-
schen Seekarte um binnenschifffahrtsspezifische Karteninhalte und Darstellungsregeln erweitert, d. h.
ergänzt aber nicht geändert. Dies stellt die Kompatibilität der Ausrüstungen der Küstenschifffahrt und der
Binnenschifffahrt in den gemeinsam benutzten Schifffahrtsstraßen sicher. Das Ergebnis ist ein vorläufiger
(aber noch nicht vollständiger) Standard für eine elektronische Flusskarte (Inland ECDIS), der die Erstel-
lung gleichartiger Karten für Rhein, Donau und Elbe ermöglicht. Die Zentralkommission für die Rhein-
schifffahrt (ZKR) hat im Juni 2000 eine ad-hoc-Arbeitsgruppe gebildet, die sich mit Inland ECDIS befasst.
6 Zulassungsfragen von ARGO
Ein ARGO-System mit oder ohne Tiefenlinien, das Radar verwendet, muss die bestehenden Anforderun-
gen an Radargeräte1) erfüllen. Weitergehende Anforderungen an Bordrechner sind international vorgese-
hen; sie müssen ggf. später berücksichtigt werden.
Die Zulassung des Navigationssystems, wie z. B. des "Radarpilot 720°", erfolgt in drei Phasen.
Phase 1:Ab August 2000 vorläufige Betriebsgenehmigung der Schiffsuntersuchungskommission für die am Probe-
betrieb teilnehmenden Schiffe durch Eintragung in das Schiffsattest zur Benutzung des Navigationssy-
stems mit Tiefenlinien. Eine Grundlage hierzu ist die vorangegangene Typprüfung des Navigationssy-
stems durch die Fachstelle der WSV für Verkehrstechniken nach den o. g. Anforderungen und die Zulas-
sung als Tochtersichtgerät zu verschiedenen zugelassenen Navigationsradaranlagen.
Phase 2:Voraussichtlich ab Mitte 2001 - nach Vorliegen des kompletten Standards für Inland ECDIS und Zustim-
mung der ZKR - allgemeine Zulassung des Navigationssystems, jedoch Benutzung noch ohne Tiefenin-
formationen.
Phase 3:Nach Abschluss des Probebetriebes und Zustimmung der ZKR Erweiterung der allgemeinen Zulassung
auf die Benutzung mit Tiefeninformationen.
1) d. h. die "Vorschriften betreffend die Mindestanforderungen und Prüfbedingungen für Navigationsradaranlagen und für Wendean-
zeiger in der Rheinschifffahrt"

ARGO-Kurzbeschreibung Seite 7/8 11.07.01
7 Wirkbetrieb
Nach dem Abschluss des Probebetriebes sieht die Wasser- und Schifffahrtsverwaltung ihre Aufgabe le-
diglich darin, ihren Teil zur Weiterentwicklung des „Inland ECDIS Provisional Standard“ beizutragen sowie
jene Daten (Karten) laufend zur Verfügung zu stellen, über die nur die Verwaltung verfügt (Lage der Fahr-
rinne, Tiefeninformationen in abladebestimmenden Strecken, Schifffahrtszeichen).
8 Industrielle Produkte auf der Basis von ARGO
Schon jetzt oder in Kürze sind elektronische Karten nach dem System Inland ECDIS und die Hard- und
Software für die Anzeige derselben an Bord erhältlich.
8.1 Der "Radarpilot 720°" der Fa. Innovative Navigation GmbH
Der "Radarpilot 720°" (Bild 1) wurde von der Fa. Innovative Navigation entwickelt, deren Mitarbeiter an der
Universität Stuttgart an der Entwicklung des ARGO-Prototyps beteiligt waren.
Der "Radarpilot 720°" zeigt auf einer elektronischen Flusskarte die Uferlinien, Lage der Fahrrinne, Radar-
tonnen, Brücken, Hochspannungsleitungen, Kilometerschilder und Tafelzeichen an. Über eine nach-
rüstbare Buchse wird vom Bordradar das Radarbild abgegriffen und in die Flusskarte eingeblendet. Durch
Verwendung moderner Navigationstechnik wird sichergestellt, dass Karte und Radarbild immer gleich
orientiert sind und exakt den gleichen Bereich darstellen. Die Interpretation des Radarbildes wird so er-
heblich erleichtert. Der "Radarpilot 720°" erkennt automatisch andere Schiffe und markiert sie mit einem
orangefarbenen Geschwindigkeitspfeil. Ein Blick genügt, um auch bei Nebel einen Bergfahrer von einem
Talfahrer zu unterscheiden.
Der "Radarpilot 720°" enthält u. a. die Software der Fa. SevenCs für Inland ECDIS und erfüllt alle Anforde-
rungen an den Informationsbetrieb und den Navigationsbetrieb von Inland ECDIS. Der "Radarpilot 720°"
hat die Bedingungen für die Zulassung als Tochtersichtgerät zum bestehenden Radargerät erfüllt. Er be-
sitzt darüber hinaus die Funktionalitäten eines elektronischen Navigationssystems, wie sie im Rahmen der
Pilotprojektphase von ARGO entwickelt wurden.
Der "Radarpilot 720°" besteht aus einem Industrie-PC, einem Flachbildschirm, einer Rollkugel und einem
DGPS-Empfänger. Der "Radarpilot 720°" nutzt das auf allen großen Schiffen vorhandene Bordradar.
Der Preis für den Radarpilot liegt bei etwa 27.000 DM.
Weitere Informationen sind erhältlich unter der Internet-Adresse www.innovative-navigation.de sowie der
Anschrift IN-Innovative Navigation GmbH, Stammheimer Straße 10, D-70806 Kornwestheim, Telefon
07154/8 27-100, Fax 07154/8 27-104, E-Mail [email protected].