
ASO ASR d - auma.com · Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50 AUMA...
25
Schwenkantriebe AS 6 - AS 50 ASO 3 - ASO 6 ASR 6 - ASR 50 Betriebsanleitung DIN ISO 9001/ EN 29001 Zertifikat-Registrier-Nr. 12 100 4269
Transcript of ASO ASR d - auma.com · Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50 AUMA...
Schwenkantriebe
AS 6 - AS 50ASO 3 - ASO 6
ASR 6 - ASR 50
Betriebsanleitung
DIN ISO 9001/EN 29001
Zertifikat-Registrier-Nr.12 100 4269

2
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
Gültigkeit dieser Anleitung: Diese Anleitung gilt für Schwenkantriebe mit Schaltplanbezeich-nungen CI V . . . AI . . . (3. Stelle „V”),siehe Typenschild AUMA VARIOMATIC.
Inhaltsverzeichnis1. Sicherheitshinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1 Anwendungsbereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Kurzbeschreibung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Inbetriebnahme (Elektroanschluss) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Wartung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.5 Warnhinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.6 Weitere Hinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Technische Daten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3. Transport und Lagerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4. Handbetrieb. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
5. Anbau an Armatur/ Getriebe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
6. Überprüfung der mechanischen Endlagen ZU und AUF. . . . . . . . . . . . . . . . . . . . . . . . . 66.1 Endlage ZU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66.2 Wegabhängiges Abschalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66.3 Drehmomentabhängiges Abschalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66.4 Einstellung ZU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66.5 Endlage AUF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76.6 Einstellwerte für Endanschläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
7. Elektroanschluss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
8. Einstellung der internen Endlagen-Erkennung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98.1 Einstellung für Endlage AUF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98.2 Einstellung für Endlage ZU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
9. Einstellung der Drehmomentabschaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
10. Einstellung der mechanischen Stellungsanzeige . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
11. Probelauf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
12. Einstellung Potentiometer (Option) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
13. Einstellung der Stellungsrückführung 0/4 - 20 mA (Option) . . . . . . . . . . . . . . . . . . . . . . 11
14. Programmierung AUMA VARIOMATIC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1214.1 Programmierung bei eingebauter BUS-Platine (MODBUS, PROFIBUS und INTERBUS S) . . . . . . 13
15. Stellungsregler (Option) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1415.1 Technische Daten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1415.2 Einstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1415.3 Programmierung Regler-Platine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1415.4 Regler-Abgleich Endlage ZU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1515.5 Regler-Abgleich Endlage AUF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1615.6 Einstellung Empfindlichkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
16. Einstellung der Stellzeit (Abtriebsdrehzahl) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1716.1 Einstellung der Stellzeit über interne Führungsgröße . . . . . . . . . . . . . . . . . . . . . . . . . . 1716.2 Einstellung der Stellzeit über Drehzahl-Interface-Platine (Option). . . . . . . . . . . . . . . . . . . . 1816.3 Weitere Funktionen der Drehzahl-Interface-Platine in Verbindung mit Stellungsregler (Option) . . . . 19
17. Signal-Platine (Option) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
18. Sicherungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
19. Wartung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
20. Konformitätsbescheinigung und Herstellererklärung . . . . . . . . . . . . . . . . . . . . . . . . . 22
1. Sicherheitshinweise1.1 Anwendungsbereich AUMA Schwenkantriebe sind für die Betätigung von Industriearmaturen, wie
z. B. Klappen und Hähnen bestimmt.Bei anderen Anwendungen und eventuell hieraus resultierenden Schädenhaftet der Hersteller nicht. Das Risiko trägt allein der Anwender.Zur bestimmungsgemäßen Verwendung gehört auch das Beachten dieserBetriebsanleitung.
1.2 Kurzbeschreibung AUMA Schwenkantriebe vom Typ ASO 3 - ASO 6 und AS(R) 6 - AS(R) 50sind als modulare Funktionseinheiten aufgebaut. Motor und Getriebe sind ineinem gemeinsamen Gehäuse untergebracht und bilden mit der Abtriebs-welle eine koaxiale Einheit.Handbetrieb ist ohne Umschaltung möglich.Die Schwenkantriebe werden elektromotorisch angetrieben und über dieSteuerung AUMA VARIOMATIC angesteuert. Diese Steuerung ist im Lie-ferumfang enthalten.Die Stellzeit kann stufenlos im Bereich 4 - 60 / 6 - 90 s (abhängig von Bau-größe) für 90° Schwenkwinkel eingestellt werden.
1.3 Inbetriebnahme(Elektroanschluss)
Beim Betrieb elektrischer Geräte stehen zwangsläufig bestimmte Teile untergefährlicher Spannung. Arbeiten an elektrischen Anlagen oder Betriebsmit-teln dürfen nur von einer Elektrofachkraft oder von unterwiesenen Personenunter Anleitung und Aufsicht einer Elektrofachkraft den elektrotechnischenRegeln entsprechend vorgenommen werden.
1.4 Wartung Wartungshinweise (siehe Seite 21) müssen beachtet werden, da ansonstendie sichere Funktion des Schwenkantriebes nicht mehr gewährleistet ist.
1.5 Warnhinweise Bei Nichtbeachtung der Warnhinweise können schwere Körperverletzungenoder Sachschäden auftreten. Entsprechend qualifiziertes Personal mussgründlich mit allen Warnungen gemäß dieser Betriebsanleitung vertrautsein.Der einwandfreie und sichere Betrieb setzt sachgemäßen Transport, fach-gerechte Lagerung, Aufstellung, Montage sowie sorgfältige Inbetriebnahmevoraus.Um sicherheitsrelevante Vorgänge in dieser Betriebsanleitung hervorzuhe-ben, gelten folgende Sicherheitshinweise, wobei jeder Hinweis durch einentsprechendes Piktogramm gekennzeichnet ist
Dieses Zeichen bedeutet: Hinweis!„Hinweis” markiert Aktivitäten oder Vorgänge, die einen wesentlichen Ein-fluss auf den ordnungsgemäßen Betrieb haben. Bei Nichtbeachtung könnenunter Umständen Folgeschäden auftreten.
Dieses Zeichen bedeutet: Elektrostatisch gefährdete Bauteile!Wenn dieses Zeichen an Platinen angebracht ist, befinden sich dort Bau-teile, die durch elektrostatische Entladungen beschädigt oder zerstört wer-den können. Falls bei Einstellarbeiten, Messungen oder Austausch von Pla-tinen Bauteile angefasst werden müssen, ist unmittelbar zuvor durch Berüh-ren einer geerdeten, metallischen Oberfläche (z. B. am Gehäuse) für Entla-dung zu sorgen.
Dieses Zeichen bedeutet: Warnung!„Warnung” deutet auf Aktivitäten oder Vorgänge hin, die, falls nicht ord-nungsgemäß durchgeführt, zu einem Sicherheitsrisiko für Personen oderSachwerte führen können.
1.6 Weitere Hinweise Dieses Zeichen bedeutet: Arbeitsschritte eventuell bereits durchArmaturenhersteller durchgeführt !Wenn Stellantriebe auf einer Armatur ausgeliefert werden, erfolgt dieserArbeitsschritt im Armaturenwerk.Eine Überprüfung der Einstellung muss bei der Inbetriebnahmeerfolgen!
3
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
MOV
M
2. Technische Daten
4
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
Abschaltmoment beideRichtungen
max. Nm 321) 631) 63 125 250 500
min. Nm – – 25 50 100 200
AUMA Schwenkantriebefür
AUF - ZU BetriebType ASO 3 ASO 6 AS 6 AS 12 AS 25 AS 50
AUMA Schwenkantriebefür
RegelbetriebType – – ASR 6 ASR 12 ASR 25 ASR 50
Drehmoment imRegelbetrieb Nm – – 30 60 120 240
Faktor 2) (Handbetrieb) 15
Handrad-Umdrehungen für 90o 13,5
Schwenkbereich (Endanschläge indiesem Bereich einstellbar) Standard 90o (82o – 98o)
Stellzeit für 90o 3) s 4 - 60 6 - 90
BetriebsartVDE0530 /IEC 34
AUF - ZUAntriebe Kurzzeitbetrieb S2 - 15 min
Regel-antriebe
Aussetzbetrieb S5 - 40% EDSchalthäufigkeit max. 1 800 c/h4)
Impulsdauer(Ansteuerung) min. ms – – 50 50 70 70
Isolierstoffklasse (Motorwicklung) F
Stromwerte bei Einphasen-Anschluss 5) Effektivwerte
220 - 240 V; 50 / 60Hz max. A 0,7 1,5 1,5 2,4 3,2
110 - 120 V; 50 / 60Hz max. A 1,5 3,0 3,0 4,8 6,4
Absicherung empfohlene Absicherung der Netzleitung: 6 A8),Kennlinie D nach VDE 0641 und IEC/EN 60 898
Elektr. Leistungsaufnahmebei kürzester Stellzeit ca. W 75 160 160 260 360
Gewicht mit Steuerung ca. kg 8 8 11 16 24
Schutzart nach EN 60 529 Standard: IP 67 6); Option: Antrieb IP 68 7), Steuerung IP 67 für Wandmontage
Umgebungstemperatur AUF-ZU Antriebe: – 25 oC bis +70 oC / Regelantriebe: – 25 oC bis +60 oC
Elektroanschluss bei direktaufgebauterElektronik-SteuerungAUMA VARIOMATIC
Fernan-steuerung/Meldungen
Steckverbinder mit 48 poligem Schraubanschluss; max. 2,5 mm2
Option: Crimpanschluss für flexible Aderleitungen, 40 polig; 0,75 - 1,0 mm2
auf Wunsch 0,5 mm2 oder 1,5 mm2 möglich
Netz Steckverbinder mit Schraubanschluss; max.6 mm2
Option: Crimpanschluss für flexible Aderleitungen, 0,75 - 1,5 mm2
Anschlüsse für Ver-bindungsleitungen beigetrennt installierterElektronik-SteuerungAUMA VARIOMATIC
Steuerung Steckverbinder mit Crimpanschluss für flexible Aderleitungen, 40 polig;0,75 - 1 mm2, auf Wunsch 0,5 mm2 oder 1,5 mm2 möglich
Motor Steckverbinder mit Crimpanschluss für flexible Aderleitungen,0,75 - 1,5 mm2
Für den elektrischen Betrieb der Schwenkantriebe wird die Elekronik-Steuerung AUMA VARIOMATICbenötigt. Diese wird wahlweise zum direkten Anbau oder für Wandmontage geliefert. Bei getrennt installier-ter Elektronik-Steuerung müssen abgeschirmte Leitungen verwendet werden. Hinweise zur Schirmung undErdung gemäß Schaltplan und Legende sind zu beachten. Die max. zulässigen Leitungslängen zwischenSchwenkantrieb und VARIOMATIC betragen bei den Typen AS und ASR : 100 m, bei Typen ASO: 15 m.
1) Drehmomentmessung nicht vorhanden. Abschaltungüber Motorstrom-Messung.
2) Umrechnungsfaktor von Abtriebsmoment zu Eingangsmomentam Handrad
3) Einstellbar über Potentiometer in Elektronik-Steuerung4) Um eine möglichst lange wartungs- und störungsfreie Betriebs-
zeit zu erreichen, sollte die Schalthäufigkeit im normalen Betriebso gering wie für den Prozess zulässig gewählt werden.
5) Maximal-Werte bei kürzester Stellzeit.6) IP 67 bedeutet: Schutz gegen kurzzeitiges Eintauchen in Wasser
bis maximal 1 m Wassersäule für die Dauer von 30 Minuten.7) IP 68 bedeutet: Schutz gegen Überflutung bis maximal 6 m
Wassersäule für die Dauer von 72 Stunden, bis zu10 Betätigungen während der Überflutung.
8) Gruppen von bis zu 4 Antrieben können mit einem Sicherungsauto-mat 20 A, Kennlineie D nach VDE 0641 und IEC/EN 60 898 abge-sichert werden.
3. Transport und Lagerung .Transport zum Aufstellungsort in fester Verpackung..Hebezeug nicht am Handrad befestigen..wenn Schwenkantrieb auf Armatur gebaut ist, Hebezeug an der Armaturund nicht am Schwenkantrieb befestigen..Lagerung in gut belüftetem, trockenem Raum..Schutz gegen Bodenfeuchtigkeit durch Lagerung in Regal oder auf Holz-rost..Abdeckung zum Schutz gegen Staub und Schmutz..Blanke Flächen mit geeignetem Korrosionsschutzmittel behandeln.
Wenn Schwenkantriebe für lange Zeit (mehr als 6 Monate) gelagert werdensollen, müssen unbedingt folgende Punkte zusätzlich beachtet werden:
.Vor dem Einlagern: Schutz der blanken Flächen, insbesondere der Ab-triebsteile und Anbaufläche durch Langzeitkorrosionsschutzmittel.. Im Abstand von ca. 6 Monaten Kontrolle auf Korrosionsbildung. Falls An-sätze zur Korrosion vorhanden, erneuten Korrosionsschutz vornehmen.
Nach dem Aufbau den Schwenkantrieb sofort elektrisch anschließen, damitdie Heizung Kondenswasserbildung verhindert.
4. Handbetrieb Der Handbetrieb wird durch Drehen am Handrad aktiviert. Eine Umschal-tung ist nicht erforderlich. Im Motorbetrieb steht das Handrad still.
Durch Drehen am Handrad während des Motorbetriebeswird, je nach Drehrichtung, eine Verlängerung bzw.Verkürzung der Stellzeit bewirkt.
5. Anbau an Armatur/ Getriebe .Vor dem Anbau Schwenkantrieb auf Beschädigungenuntersuchen..Beschädigte Teile müssen durch Original-Ersatzteileersetzt werden.
Der Aufbau ist am einfachsten, wenn die Armaturenwelle senkrecht nachoben zeigt. Der Aufbau kann aber auch in jeder anderen Lage erfolgen.Der Schwenkantrieb wird ab Werk in Stellung ZU ausgeliefert..Bei Klappen ist die Anbauposition die Endlage ZU..Bei Hähnen ist die Anbauposition die Endlage AUF.
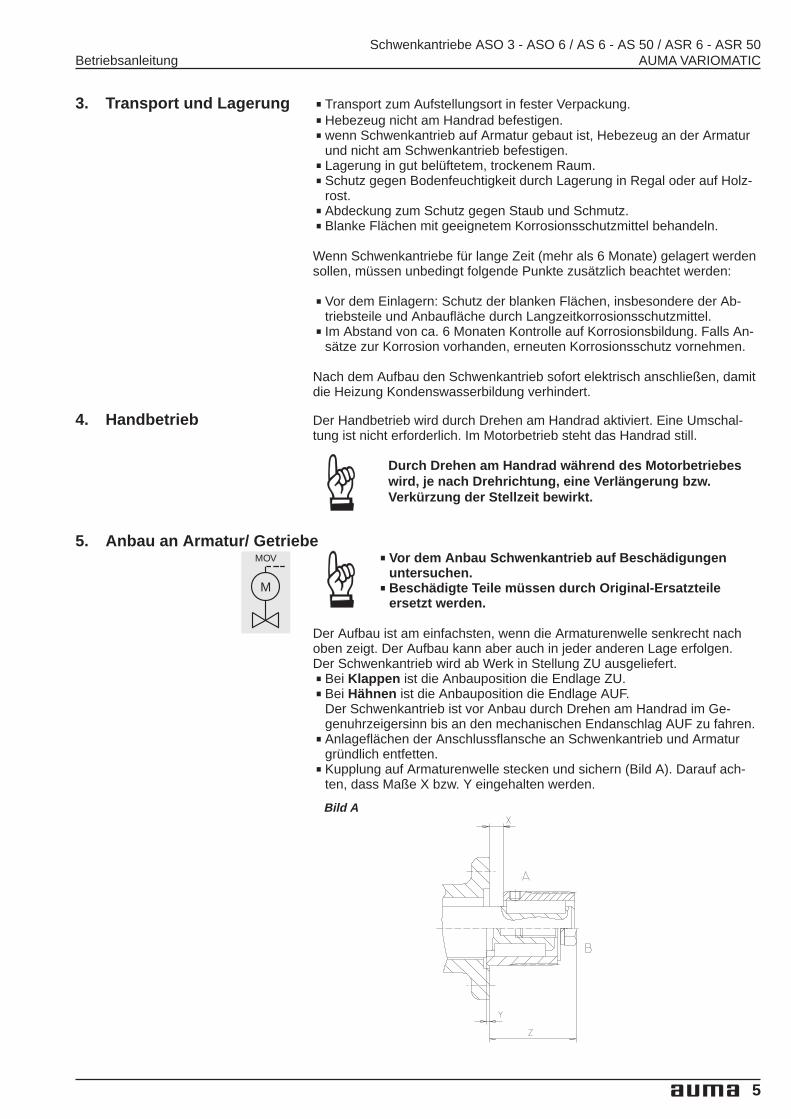
Der Schwenkantrieb ist vor Anbau durch Drehen am Handrad im Ge-genuhrzeigersinn bis an den mechanischen Endanschlag AUF zu fahren..Anlageflächen der Anschlussflansche an Schwenkantrieb und Armaturgründlich entfetten..Kupplung auf Armaturenwelle stecken und sichern (Bild A). Darauf ach-ten, dass Maße X bzw. Y eingehalten werden.
5
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
Bild A
MOV
M
.Verzahnung der Kupplung mit säurefreiem Fett gut einfetten..Antrieb so aufsetzen, dass die Befestigungsbohrungen im Antrieb bzw. imArmaturenflansch fluchten.Bei Bedarf den Antrieb um einen Zahn auf der Kupplung versetzen.Ggf. das Handrad etwas in Richtung AUF bzw. ZU drehen, bis Bohrungenfluchten..Auf Zentrierung und volle Anlage des Armaturenflansches achten..Antrieb mit Schrauben befestigen. Schrauben über Kreuz mit Drehmo-mentschlüssel anziehen (Anzugsmomente siehe Tabelle 1).
6. Überprüfung der mechanischen Endlagen ZU und AUFDie Überprüfung kann nur an Armaturen durchgeführt werden, die nochnicht in eine Rohrleitung montiert sind.
6.1 Endlage ZU .Übereinstimmung von mechanischer Endlage der Armatur und mechani-schem Endanschlag im Antrieb durch Drehen am Handrad prüfen (Endla-ge ZU im Uhrzeigersinn).
6.2 Wegabhängiges Abschalten .Bei wegabhängigem Abschalten wird immer der mechanische Endan-schlag im Antrieb angefahren
6.3 DrehmomentabhängigesAbschalten
.Bei drehmomentabhängigem Abschalten in Endlage ZU muss der mecha-nische Endanschlag des Antriebs auf größeren Schwenkwinkel als der tat-sächlich benötigte Schwenkwinkel der Armatur eingestellt werden.
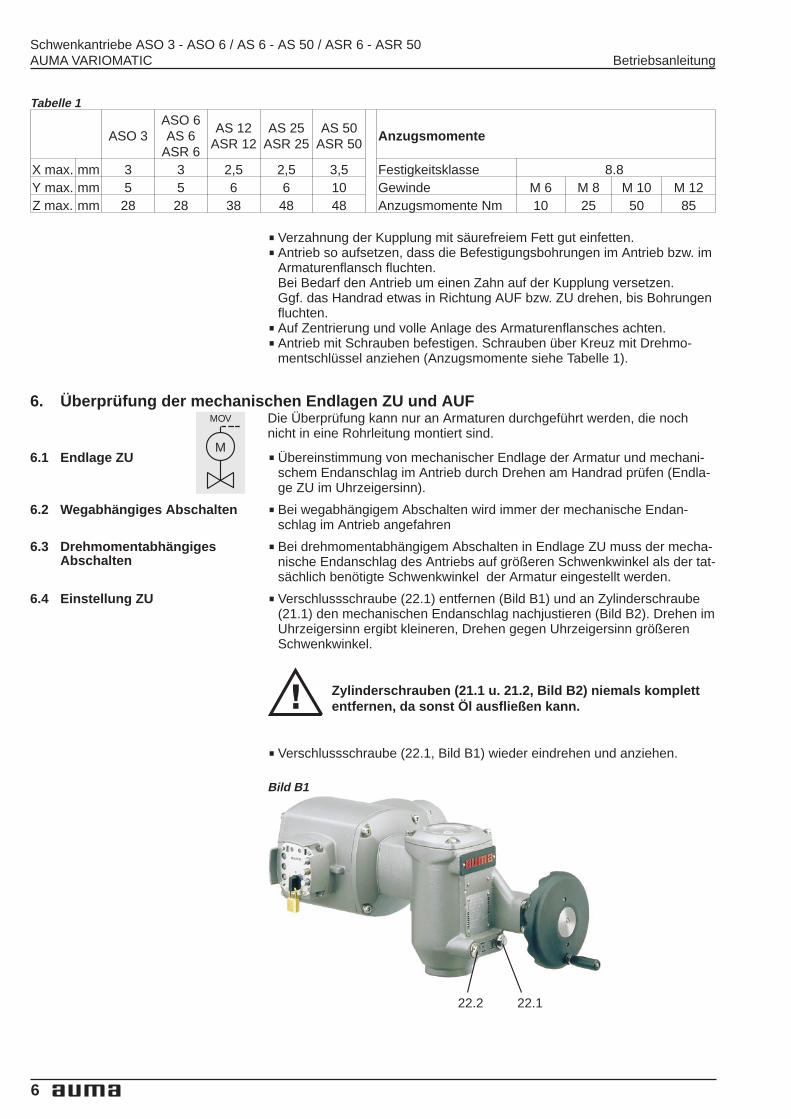
6.4 Einstellung ZU .Verschlussschraube (22.1) entfernen (Bild B1) und an Zylinderschraube(21.1) den mechanischen Endanschlag nachjustieren (Bild B2). Drehen imUhrzeigersinn ergibt kleineren, Drehen gegen Uhrzeigersinn größerenSchwenkwinkel.
Zylinderschrauben (21.1 u. 21.2, Bild B2) niemals komplettentfernen, da sonst Öl ausfließen kann.
.Verschlussschraube (22.1, Bild B1) wieder eindrehen und anziehen.
6
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
22.122.2
Bild B1
ASO 3ASO 6AS 6
ASR 6
AS 12ASR 12
AS 25ASR 25
AS 50ASR 50
Anzugsmomente
X max. mm 3 3 2,5 2,5 3,5 Festigkeitsklasse 8.8Y max. mm 5 5 6 6 10 Gewinde M 6 M 8 M 10 M 12Z max. mm 28 28 38 48 48 Anzugsmomente Nm 10 25 50 85
Tabelle 1
MOV
M
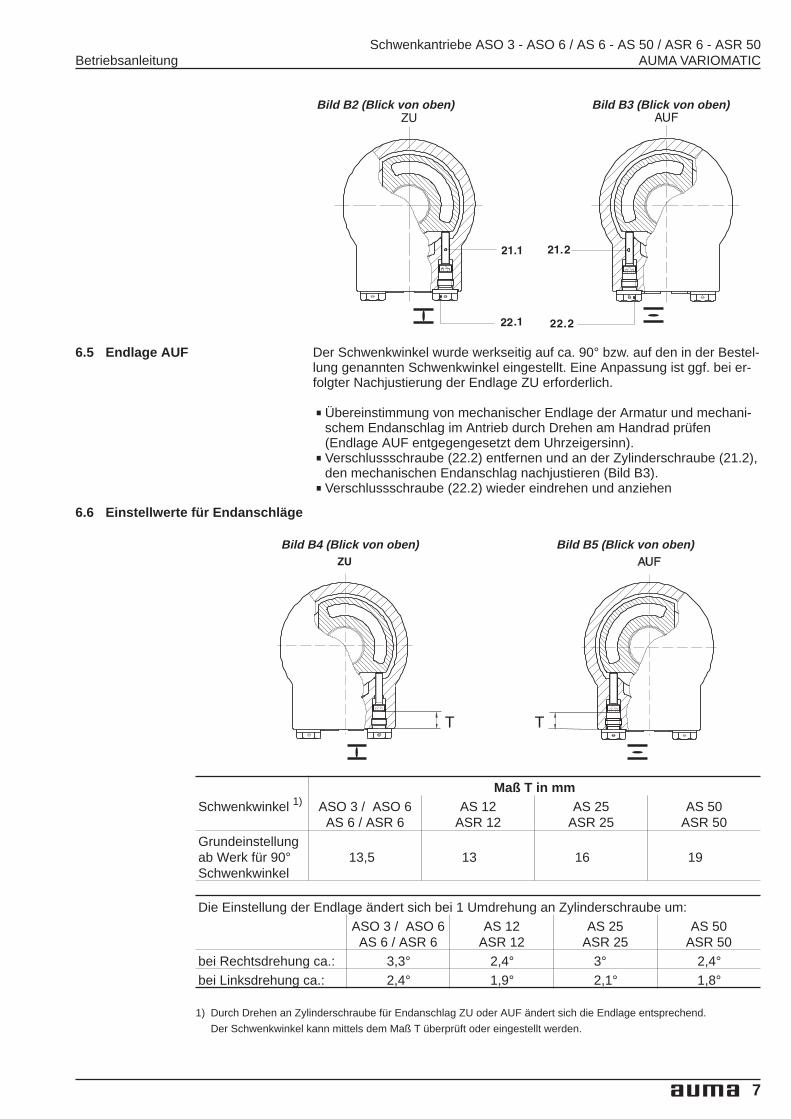
6.5 Endlage AUF Der Schwenkwinkel wurde werkseitig auf ca. 90° bzw. auf den in der Bestel-lung genannten Schwenkwinkel eingestellt. Eine Anpassung ist ggf. bei er-folgter Nachjustierung der Endlage ZU erforderlich.
.Übereinstimmung von mechanischer Endlage der Armatur und mechani-schem Endanschlag im Antrieb durch Drehen am Handrad prüfen(Endlage AUF entgegengesetzt dem Uhrzeigersinn)..Verschlussschraube (22.2) entfernen und an der Zylinderschraube (21.2),den mechanischen Endanschlag nachjustieren (Bild B3)..Verschlussschraube (22.2) wieder eindrehen und anziehen
6.6 Einstellwerte für Endanschläge
7
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
Bild B4 (Blick von oben) Bild B5 (Blick von oben)
Maß T in mmSchwenkwinkel 1) ASO 3 / ASO 6
AS 6 / ASR 6AS 12
ASR 12AS 25
ASR 25AS 50
ASR 50Grundeinstellungab Werk für 90°Schwenkwinkel
13,5 13 16 19
Die Einstellung der Endlage ändert sich bei 1 Umdrehung an Zylinderschraube um:ASO 3 / ASO 6
AS 6 / ASR 6AS 12
ASR 12AS 25
ASR 25AS 50
ASR 50bei Rechtsdrehung ca.: 3,3° 2,4° 3° 2,4°bei Linksdrehung ca.: 2,4° 1,9° 2,1° 1,8°
1) Durch Drehen an Zylinderschraube für Endanschlag ZU oder AUF ändert sich die Endlage entsprechend.
Der Schwenkwinkel kann mittels dem Maß T überprüft oder eingestellt werden.
Bild B2 (Blick von oben) Bild B3 (Blick von oben)
7. Elektroanschluss Arbeiten an elektrischen Anlagen oder Betriebsmittelndürfen nur von einer Elektrofachkraft oder vonunterwiesenen Personen unter Anleitung und Aufsicht einerElektrofachkraft den elektrotechnischen Regelnentsprechend vorgenommen werden.
AUMA Schwenkantriebe werden über die Steuerung AUMA VARIOMATICbetrieben. Diese Steuerung kann am Antrieb angebaut oder für separateWandmontage vorgesehen sein.Der netzseitige, elektrische Anschluss erfolgt standardmäßig über Steckver-binder mit Schraubanschluss.
Bei separater Installation der AUMA VARIOMATIC auf Wandhalter sindzusätzlich geeignete, flexible und geschirmte Verbindungsleitungen zuverwenden. Die max. zulässigen Leitungslängen zwischen Schwenkantriebund VARIOMATIC betragen für Typen AS und ASR : 100 m,für Typen ASO: 15 m.Auf Anfrage können komplette Leitungssätze auch nachträglich ab Werkbezogen werden..Kontrolle, ob Stromart und Netzspannung mit Motordaten übereinstimmen
(siehe Typenschild an Steuerung AUMA VARIOMATIC)..Steckerdeckel abnehmen..Dem Leitungsdurchmesser angepasste, geeignete Kabelverschraubungenin Schutzart IP 67 (Option IP 68) einsetzen..Bei Verbindungsleitungen zur AUMA VARIOMATIC (Wandhalter) undbei kontinuierlichem Stellungsrückführsignal (Option) auf fachgerechtenAnschluss der Schirmung achten..Leitungen gemäß Schaltplan CI V... AI... (siehe Typenschild) anschließen.Anschlussquerschnitte : Steuerleitungen max. 2,5 mm2,
Netzanschluss max. 6 mm2.
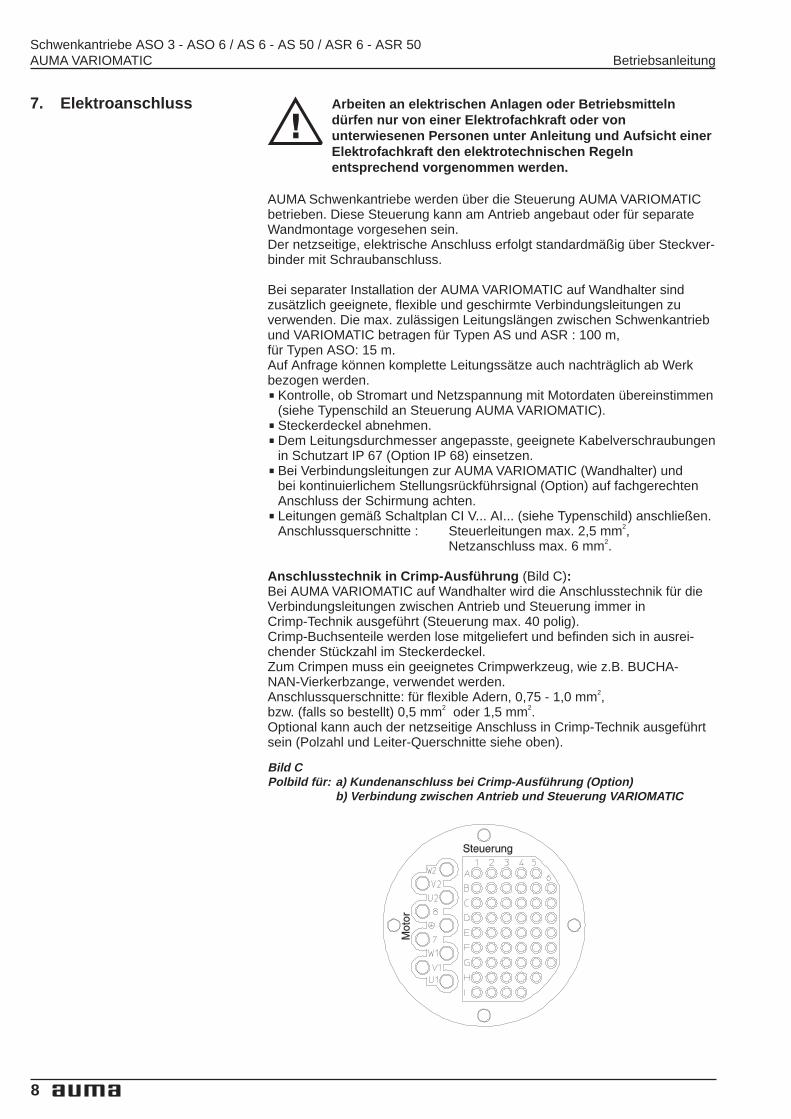
Anschlusstechnik in Crimp-Ausführung (Bild C):Bei AUMA VARIOMATIC auf Wandhalter wird die Anschlusstechnik für dieVerbindungsleitungen zwischen Antrieb und Steuerung immer inCrimp-Technik ausgeführt (Steuerung max. 40 polig).Crimp-Buchsenteile werden lose mitgeliefert und befinden sich in ausrei-chender Stückzahl im Steckerdeckel.Zum Crimpen muss ein geeignetes Crimpwerkzeug, wie z.B. BUCHA-NAN-Vierkerbzange, verwendet werden.Anschlussquerschnitte: für flexible Adern, 0,75 - 1,0 mm2,bzw. (falls so bestellt) 0,5 mm2 oder 1,5 mm2.Optional kann auch der netzseitige Anschluss in Crimp-Technik ausgeführtsein (Polzahl und Leiter-Querschnitte siehe oben).
8
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
Bild CPolbild für: a) Kundenanschluss bei Crimp-Ausführung (Option)
b) Verbindung zwischen Antrieb und Steuerung VARIOMATIC
8. Einstellung der internen Endlagen-Erkennung
Für die Einstellung der Endlagen-Erkennung muss der Antrieb auf dieArmatur aufgebaut sein.
Die interne Endlagen-Erkennung wird im Werk für einen Schwenkwinkel von90° eingestellt. Eine nachträgliche Änderung ist nur bei anderen Schwenk-winkeln erforderlich. Vor dem Einstellen des elektrischen Schwenkwinkelsmüssen die Endanschläge gemäß Pkt. 6, Seite 6, auf den entsprechendenWert eingestellt sein.
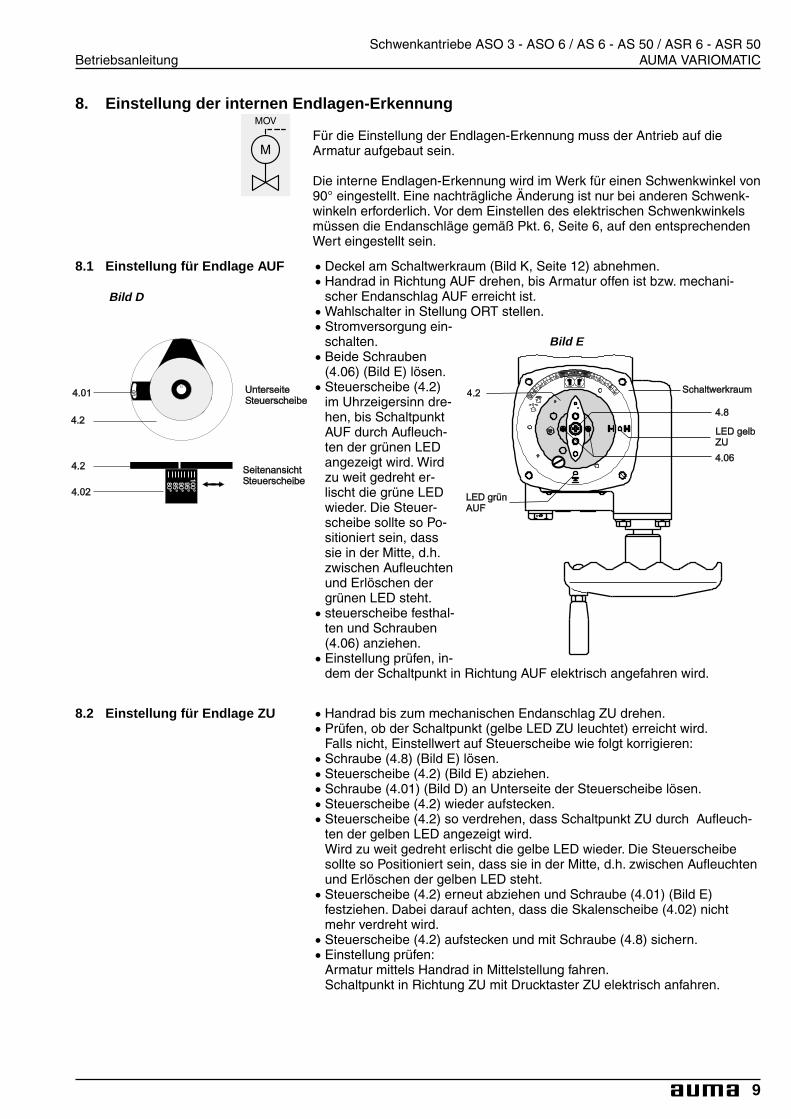
8.1 Einstellung für Endlage AUF .Deckel am Schaltwerkraum (Bild K, Seite 12) abnehmen..Handrad in Richtung AUF drehen, bis Armatur offen ist bzw. mechani-scher Endanschlag AUF erreicht ist..Wahlschalter in Stellung ORT stellen..Stromversorgung ein-schalten..Beide Schrauben(4.06) (Bild E) lösen..Steuerscheibe (4.2)im Uhrzeigersinn dre-hen, bis SchaltpunktAUF durch Aufleuch-ten der grünen LEDangezeigt wird. Wirdzu weit gedreht er-lischt die grüne LEDwieder. Die Steuer-scheibe sollte so Po-sitioniert sein, dasssie in der Mitte, d.h.zwischen Aufleuchtenund Erlöschen dergrünen LED steht..steuerscheibe festhal-ten und Schrauben(4.06) anziehen..Einstellung prüfen, in-dem der Schaltpunkt in Richtung AUF elektrisch angefahren wird.
8.2 Einstellung für Endlage ZU .Handrad bis zum mechanischen Endanschlag ZU drehen..Prüfen, ob der Schaltpunkt (gelbe LED ZU leuchtet) erreicht wird.Falls nicht, Einstellwert auf Steuerscheibe wie folgt korrigieren:.Schraube (4.8) (Bild E) lösen..Steuerscheibe (4.2) (Bild E) abziehen..Schraube (4.01) (Bild D) an Unterseite der Steuerscheibe lösen..Steuerscheibe (4.2) wieder aufstecken..Steuerscheibe (4.2) so verdrehen, dass Schaltpunkt ZU durch Aufleuch-ten der gelben LED angezeigt wird.Wird zu weit gedreht erlischt die gelbe LED wieder. Die Steuerscheibesollte so Positioniert sein, dass sie in der Mitte, d.h. zwischen Aufleuchtenund Erlöschen der gelben LED steht..Steuerscheibe (4.2) erneut abziehen und Schraube (4.01) (Bild E)festziehen. Dabei darauf achten, dass die Skalenscheibe (4.02) nichtmehr verdreht wird..Steuerscheibe (4.2) aufstecken und mit Schraube (4.8) sichern..Einstellung prüfen:Armatur mittels Handrad in Mittelstellung fahren.Schaltpunkt in Richtung ZU mit Drucktaster ZU elektrisch anfahren.
9
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
MOV
M
Bild D
Bild E
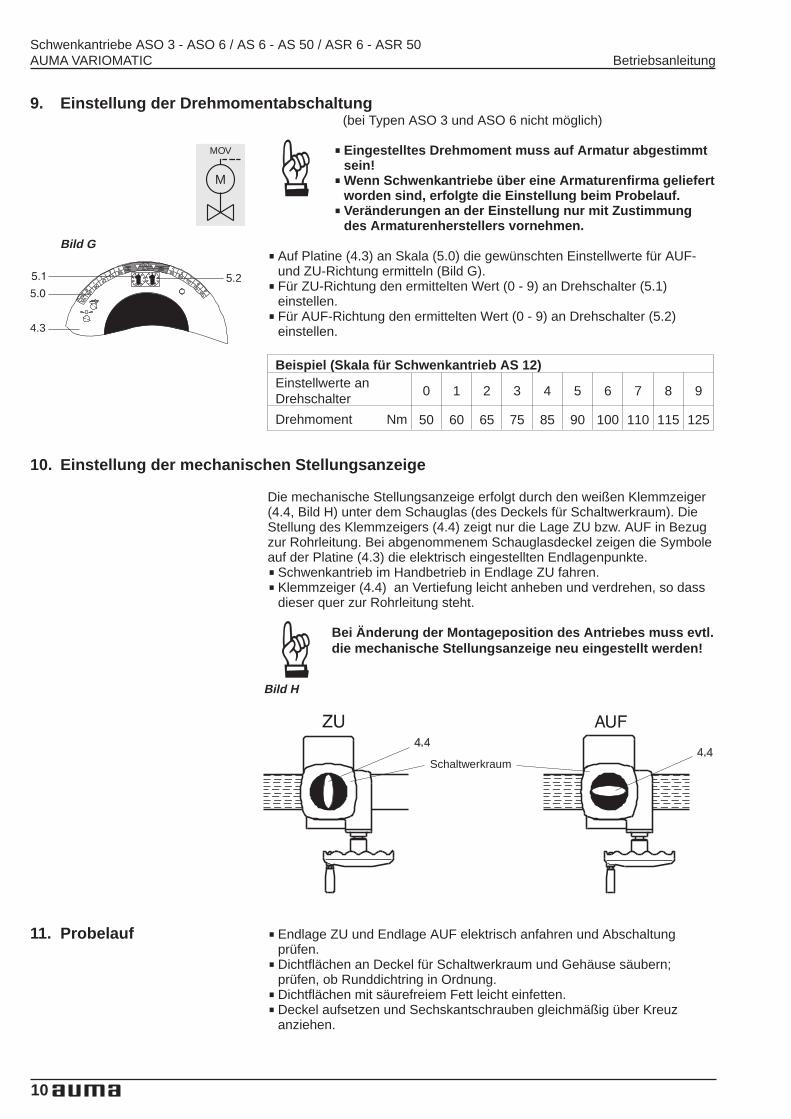
9. Einstellung der Drehmomentabschaltung(bei Typen ASO 3 und ASO 6 nicht möglich)
.Eingestelltes Drehmoment muss auf Armatur abgestimmtsein!.Wenn Schwenkantriebe über eine Armaturenfirma geliefertworden sind, erfolgte die Einstellung beim Probelauf..Veränderungen an der Einstellung nur mit Zustimmungdes Armaturenherstellers vornehmen.
.Auf Platine (4.3) an Skala (5.0) die gewünschten Einstellwerte für AUF-und ZU-Richtung ermitteln (Bild G)..Für ZU-Richtung den ermittelten Wert (0 - 9) an Drehschalter (5.1)einstellen..Für AUF-Richtung den ermittelten Wert (0 - 9) an Drehschalter (5.2)einstellen.
10. Einstellung der mechanischen Stellungsanzeige
Die mechanische Stellungsanzeige erfolgt durch den weißen Klemmzeiger(4.4, Bild H) unter dem Schauglas (des Deckels für Schaltwerkraum). DieStellung des Klemmzeigers (4.4) zeigt nur die Lage ZU bzw. AUF in Bezugzur Rohrleitung. Bei abgenommenem Schauglasdeckel zeigen die Symboleauf der Platine (4.3) die elektrisch eingestellten Endlagenpunkte..Schwenkantrieb im Handbetrieb in Endlage ZU fahren..Klemmzeiger (4.4) an Vertiefung leicht anheben und verdrehen, so dass
dieser quer zur Rohrleitung steht.
Bei Änderung der Montageposition des Antriebes muss evtl.die mechanische Stellungsanzeige neu eingestellt werden!
11. Probelauf .Endlage ZU und Endlage AUF elektrisch anfahren und Abschaltungprüfen..Dichtflächen an Deckel für Schaltwerkraum und Gehäuse säubern;prüfen, ob Runddichtring in Ordnung..Dichtflächen mit säurefreiem Fett leicht einfetten..Deckel aufsetzen und Sechskantschrauben gleichmäßig über Kreuzanziehen.
10
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
5.2
4.3
Bild G
Beispiel (Skala für Schwenkantrieb AS 12)Einstellwerte anDrehschalter
0 1 2 3 4 5 6 7 8 9
Drehmoment Nm 50 60 65 75 85 90 100 110 115 125
MOV
M
Schaltwerkraum
Bild H
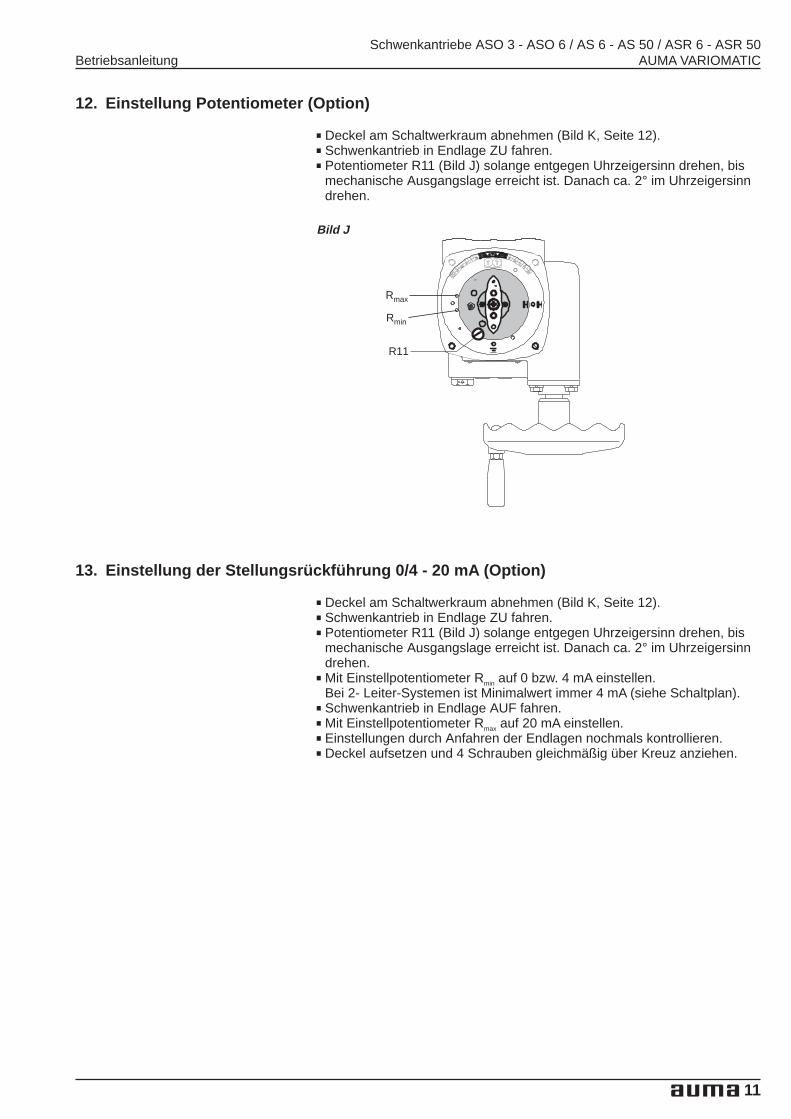
12. Einstellung Potentiometer (Option)
.Deckel am Schaltwerkraum abnehmen (Bild K, Seite 12)..Schwenkantrieb in Endlage ZU fahren..Potentiometer R11 (Bild J) solange entgegen Uhrzeigersinn drehen, bismechanische Ausgangslage erreicht ist. Danach ca. 2° im Uhrzeigersinndrehen.
13. Einstellung der Stellungsrückführung 0/4 - 20 mA (Option)
.Deckel am Schaltwerkraum abnehmen (Bild K, Seite 12)..Schwenkantrieb in Endlage ZU fahren..Potentiometer R11 (Bild J) solange entgegen Uhrzeigersinn drehen, bismechanische Ausgangslage erreicht ist. Danach ca. 2° im Uhrzeigersinndrehen..Mit Einstellpotentiometer Rmin auf 0 bzw. 4 mA einstellen.Bei 2- Leiter-Systemen ist Minimalwert immer 4 mA (siehe Schaltplan)..Schwenkantrieb in Endlage AUF fahren..Mit Einstellpotentiometer Rmax auf 20 mA einstellen..Einstellungen durch Anfahren der Endlagen nochmals kontrollieren..Deckel aufsetzen und 4 Schrauben gleichmäßig über Kreuz anziehen.
11
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
Rmax
Rmin
R11
Bild J
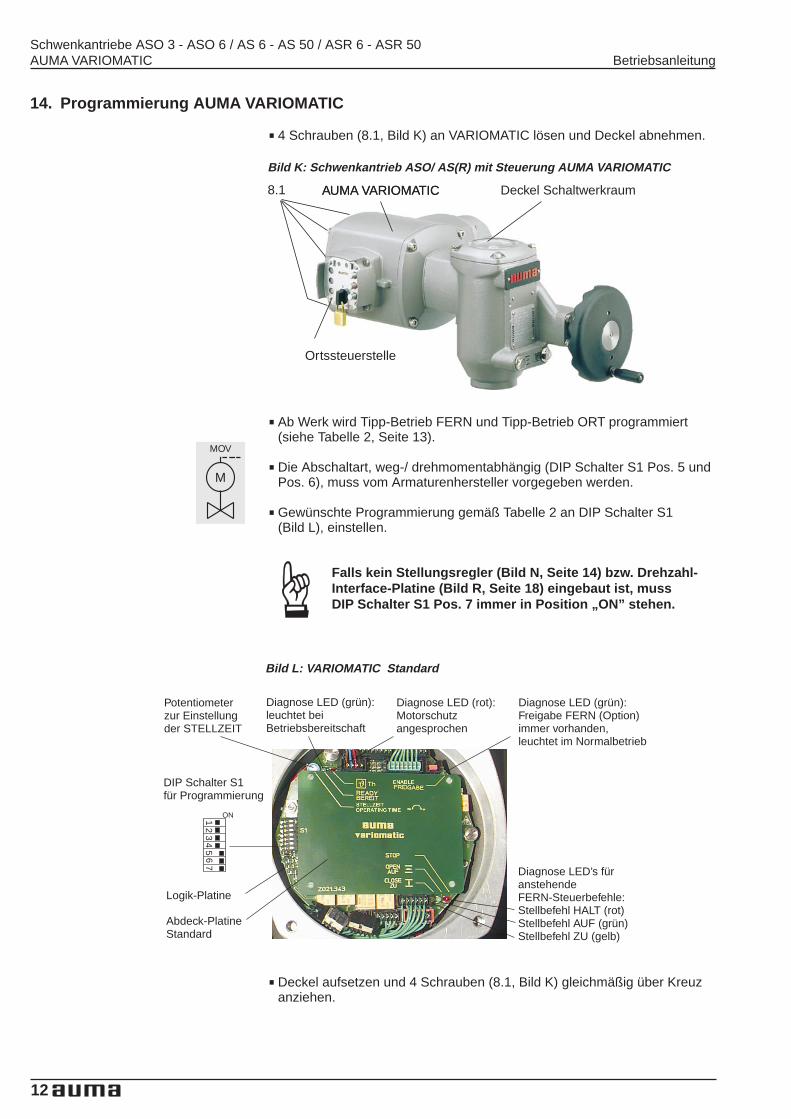
14. Programmierung AUMA VARIOMATIC
.4 Schrauben (8.1, Bild K) an VARIOMATIC lösen und Deckel abnehmen.
.Ab Werk wird Tipp-Betrieb FERN und Tipp-Betrieb ORT programmiert(siehe Tabelle 2, Seite 13).
.Die Abschaltart, weg-/ drehmomentabhängig (DIP Schalter S1 Pos. 5 undPos. 6), muss vom Armaturenhersteller vorgegeben werden.
.Gewünschte Programmierung gemäß Tabelle 2 an DIP Schalter S1(Bild L), einstellen.
Falls kein Stellungsregler (Bild N, Seite 14) bzw. Drehzahl-Interface-Platine (Bild R, Seite 18) eingebaut ist, mussDIP Schalter S1 Pos. 7 immer in Position „ON” stehen.
.Deckel aufsetzen und 4 Schrauben (8.1, Bild K) gleichmäßig über Kreuzanziehen.
12
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
Ortssteuerstelle
AUMA VARIOMATIC Deckel Schaltwerkraum8.1 AUMA VARIOMATIC
Bild K: Schwenkantrieb ASO/ AS(R) mit Steuerung AUMA VARIOMATIC
MOV
M
DIP Schalter S1für Programmierung
Abdeck-PlatineStandard
ON12
34
56
7
Potentiometerzur Einstellungder STELLZEIT
Diagnose LED (grün):leuchtet beiBetriebsbereitschaft
Diagnose LED (rot):Motorschutzangesprochen
Diagnose LED (grün):Freigabe FERN (Option)immer vorhanden,leuchtet im Normalbetrieb
Diagnose LED’s füranstehendeFERN-Steuerbefehle:Stellbefehl HALT (rot)Stellbefehl AUF (grün)Stellbefehl ZU (gelb)
Logik-Platine
Bild L: VARIOMATIC Standard
Selbsthaltung FERN muss in Verbindung mit Stellungsregler(Pkt. 15, Seite 14) ausgeschaltet sein.
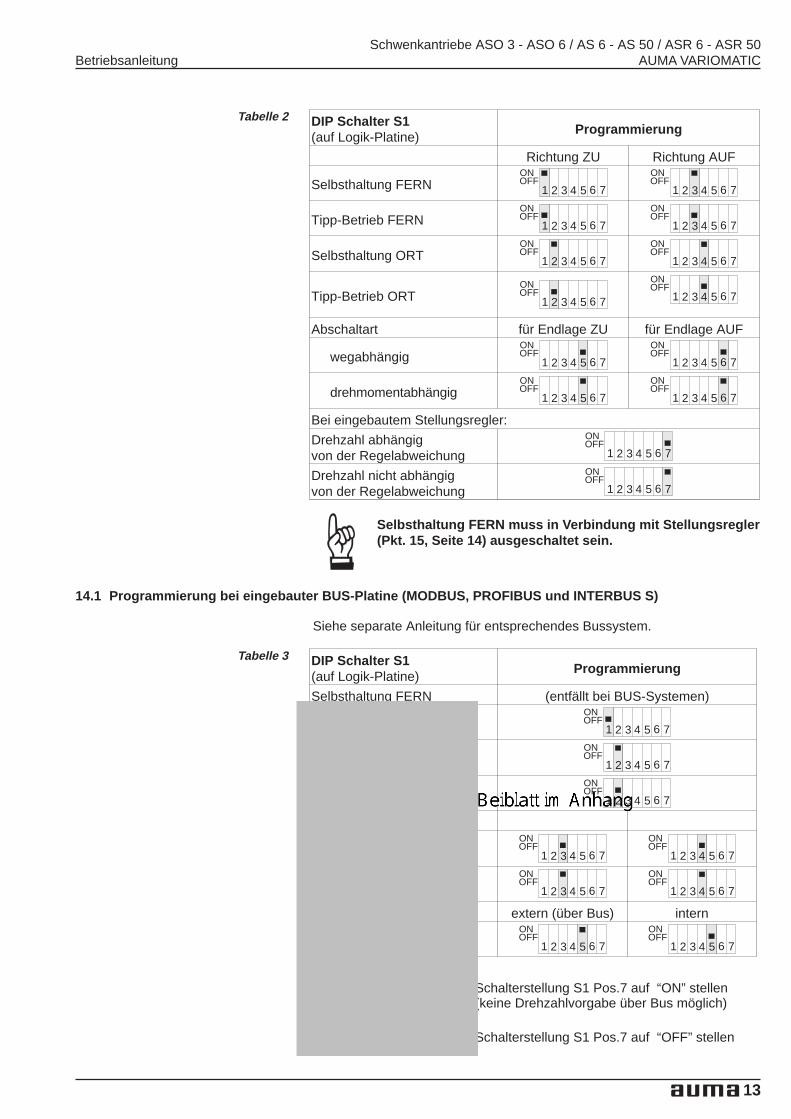
14.1 Programmierung bei eingebauter BUS-Platine (MODBUS, PROFIBUS und INTERBU S S)
Siehe separate Anleitung für entsprechendes Bussystem.
1) Profibus FMS und Schalterstellung S1 Pos.7 auf “ON” stellenMODBUS (keine Drehzahlvorgabe über Bus möglich)Profibus DP undINTERBUS-S Schalterstellung S1 Pos.7 auf “OFF” stellen
DIP Schalter S1(auf Logik-Platine)
Programmierung
Richtung ZU Richtung AUF
Selbsthaltung FERN
Tipp-Betrieb FERN
Selbsthaltung ORT
Tipp-Betrieb ORT
Abschaltart für Endlage ZU für Endlage AUF
wegabhängig
drehmomentabhängig
Bei eingebautem Stellungsregler:
Drehzahl abhängigvon der Regelabweichung
Drehzahl nicht abhängigvon der Regelabweichung
Tabelle 2
13
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
DIP Schalter S1(auf Logik-Platine)
Programmierung
Selbsthaltung FERN (entfällt bei BUS-Systemen)
Tipp-Betrieb FERN
Selbsthaltung ORT
Tipp-Betrieb ORT
wegabhängig
drehmomentabhängig
extern (über Bus) intern
Drehzahlvorgabe 1)
Tabelle 3
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
ON
1 2 3 4 5 6 7OFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF 1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
1 2 3 4 5 6 7
ONOFF
BarthK
1) Profibus FMS und Schalterstellung S1 Pos.7 auf “ON” stellen MODBUS (keine Drehzahlvorgabe über Bus möglich) Profibus DP und INTERBUS-S Schalterstellung S1 Pos.7 auf “OFF” stellen DIP Schalter S1 (auf Logik-Platine) Programmierung Selbsthaltung FERN (entfällt bei BUS-Systemen) Tipp-Betrieb FERN Selbsthaltung ORT Tipp-Betrieb ORT Abschaltart für Endlage ZU für Endlage AUF wegabhängig drehmomentabhängig extern (über Bus) intern Drehzahlvorgabe 1) 1 2 3 4 5 6 7 ON OFF 1 2 3 4 5 6 7 ON OFF 1 2 3 4 5 6 7 ON OFF 1 2 3 4 5 6 7 ON OFF 1 2 3 4 5 6 7 ON OFF 1 2 3 4 5 6 7 ON OFF 1 2 3 4 5 6 7 ON OFF 1 2 3 4 5 6 7 ON OFF 1 2 3 4 5 6 7 ON OFF
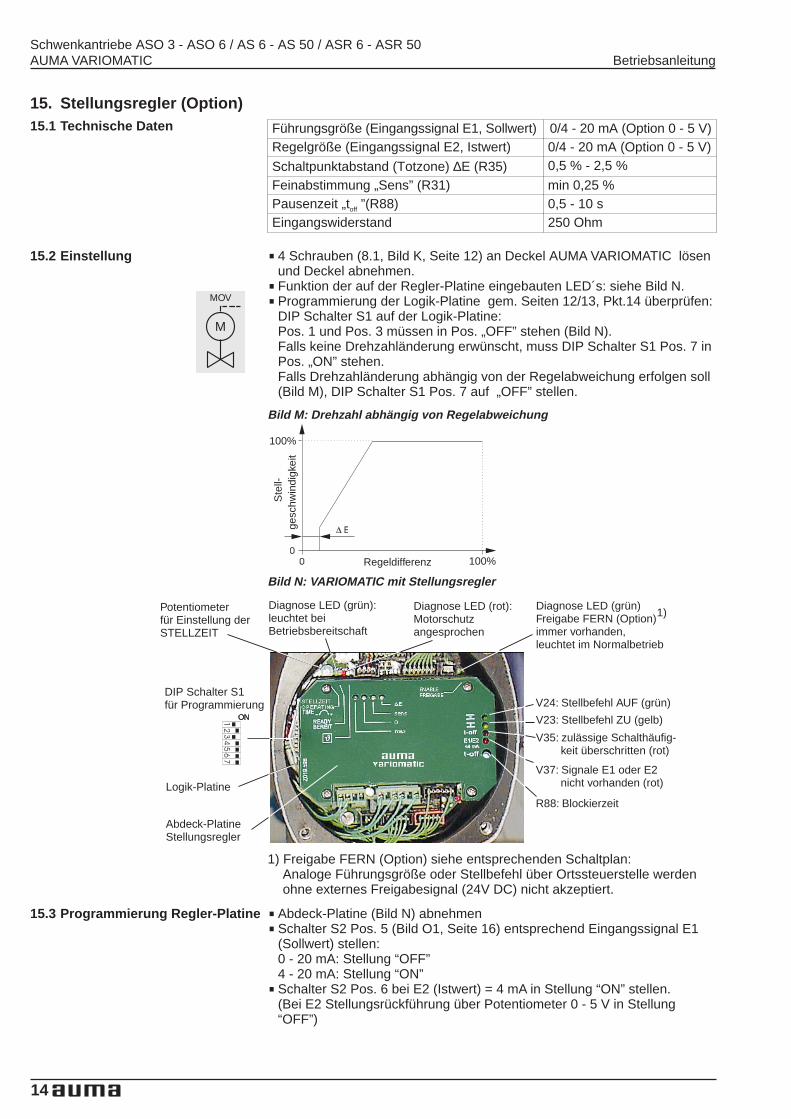
15. Stellungsregler (Option)15.1 Technische Daten
15.2 Einstellung .4 Schrauben (8.1, Bild K, Seite 12) an Deckel AUMA VARIOMATIC lösenund Deckel abnehmen..Funktion der auf der Regler-Platine eingebauten LED´s: siehe Bild N..Programmierung der Logik-Platine gem. Seiten 12/13, Pkt.14 überprüfen:DIP Schalter S1 auf der Logik-Platine:Pos. 1 und Pos. 3 müssen in Pos. „OFF” stehen (Bild N).Falls keine Drehzahländerung erwünscht, muss DIP Schalter S1 Pos. 7 inPos. „ON” stehen.Falls Drehzahländerung abhängig von der Regelabweichung erfolgen soll(Bild M), DIP Schalter S1 Pos. 7 auf „OFF” stellen.
1) Freigabe FERN (Option) siehe entsprechenden Schaltplan:Analoge Führungsgröße oder Stellbefehl über Ortssteuerstelle werdenohne externes Freigabesignal (24V DC) nicht akzeptiert.
15.3 Programmierung Regler-Platine .Abdeck-Platine (Bild N) abnehmen.Schalter S2 Pos. 5 (Bild O1, Seite 16) entsprechend Eingangssignal E1(Sollwert) stellen:0 - 20 mA: Stellung “OFF”4 - 20 mA: Stellung “ON”.Schalter S2 Pos. 6 bei E2 (Istwert) = 4 mA in Stellung “ON” stellen.(Bei E2 Stellungsrückführung über Potentiometer 0 - 5 V in Stellung“OFF”)
14
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
Ste
ll-ge
schw
indi
gkei
t
100%
Regeldifferenz 100%
Bild M: Drehzahl abhängig von Regelabweichung
1)Diagnose LED (grün)Freigabe FERN (Option)immer vorhanden,leuchtet im Normalbetrieb
V24: Stellbefehl AUF (grün)
V23: Stellbefehl ZU (gelb)
V35: zulässige Schalthäufig-keit überschritten (rot)
V37: Signale E1 oder E2nicht vorhanden (rot)
R88: Blockierzeit
12
34
56
7
DIP Schalter S1für Programmierung
Abdeck-PlatineStellungsregler
Potentiometerfür Einstellung derSTELLZEIT
Diagnose LED (grün):leuchtet beiBetriebsbereitschaft
Logik-Platine
Diagnose LED (rot):Motorschutzangesprochen
Bild N: VARIOMATIC mit Stellungsregler
MOV
M
Führungsgröße (Eingangssignal E1, Sollwert) 0/4 - 20 mA (Option 0 - 5 V)Regelgröße (Eingangssignal E2, Istwert) 0/4 - 20 mA (Option 0 - 5 V)
Schaltpunktabstand (Totzone) ∆E (R35) 0,5 % - 2,5 %
Feinabstimmung „Sens” (R31) min 0,25 %Pausenzeit „toff ”(R88) 0,5 - 10 sEingangswiderstand 250 Ohm
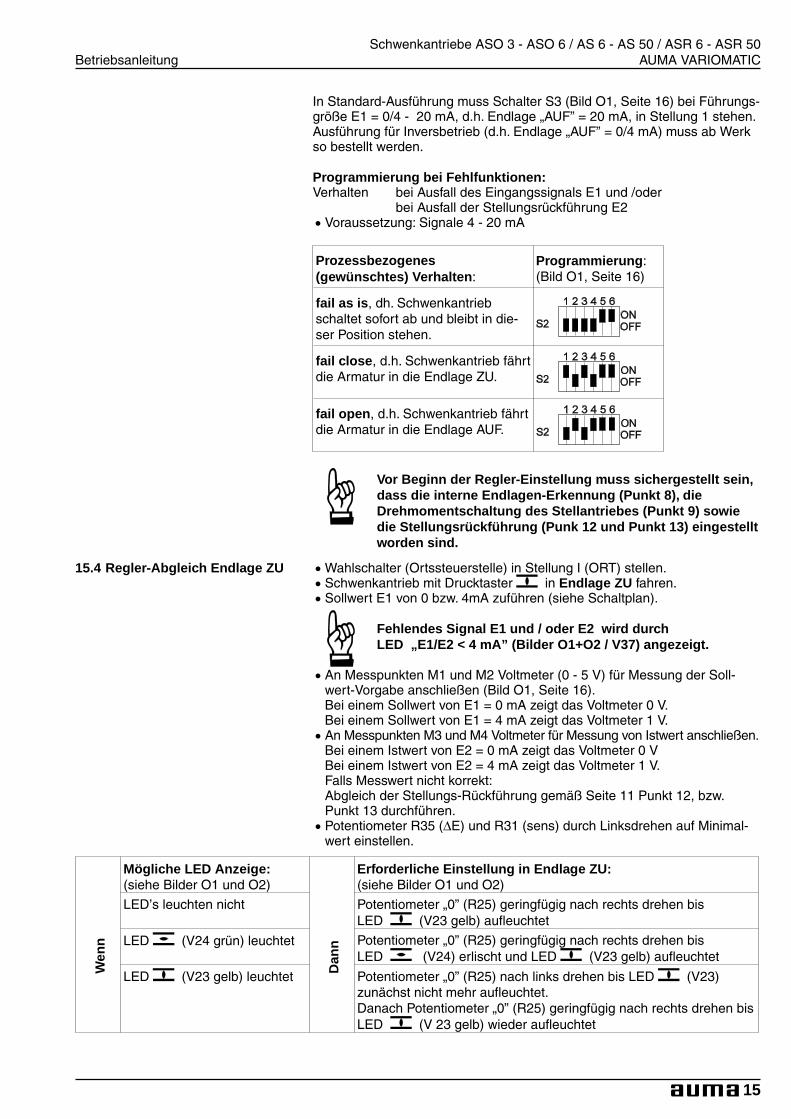
In Standard-Ausführung muss Schalter S3 (Bild O1, Seite 16) bei Führungs-größe E1 = 0/4 - 20 mA, d.h. Endlage „AUF” = 20 mA, in Stellung 1 stehen.Ausführung für Inversbetrieb (d.h. Endlage „AUF” = 0/4 mA) muss ab Werkso bestellt werden.
Programmierung bei Fehlfunktionen:Verhalten bei Ausfall des Eingangssignals E1 und /oder
bei Ausfall der Stellungsrückführung E2.Voraussetzung: Signale 4 - 20 mA
Vor Beginn der Regler-Einstellung muss sichergestellt sein,dass die interne Endlagen-Erkennung (Punkt 8), dieDrehmomentschaltung des Stellantriebes (Punkt 9) sowiedie Stellungsrückführung (Punk 12 und Punkt 13) eingestelltworden sind.
15.4 Regler-Abgleich Endlage ZU .Wahlschalter (Ortssteuerstelle) in Stellung I (ORT) stellen..Schwenkantrieb mit Drucktaster in Endlage ZU fahren..Sollwert E1 von 0 bzw. 4mA zuführen (siehe Schaltplan).
Fehlendes Signal E1 und / oder E2 wird durchLED „E1/E2 < 4 mA” (Bilder O1+O2 / V37) angezeigt.
.An Messpunkten M1 und M2 Voltmeter (0 - 5 V) für Messung der Soll-wert-Vorgabe anschließen (Bild O1, Seite 16).Bei einem Sollwert von E1 = 0 mA zeigt das Voltmeter 0 V.Bei einem Sollwert von E1 = 4 mA zeigt das Voltmeter 1 V..An Messpunkten M3 und M4 Voltmeter für Messung von Istwert anschließen.Bei einem Istwert von E2 = 0 mA zeigt das Voltmeter 0 VBei einem Istwert von E2 = 4 mA zeigt das Voltmeter 1 V.Falls Messwert nicht korrekt:Abgleich der Stellungs-Rückführung gemäß Seite 11 Punkt 12, bzw.Punkt 13 durchführen..Potentiometer R35 (∆E) und R31 (sens) durch Linksdrehen auf Minimal-wert einstellen.
15
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
Prozessbezogenes(gewünschtes) Verhalten:
Programmierung:(Bild O1, Seite 16)
fail as is, dh. Schwenkantriebschaltet sofort ab und bleibt in die-ser Position stehen.
fail close, d.h. Schwenkantrieb fährtdie Armatur in die Endlage ZU.
fail open, d.h. Schwenkantrieb fährtdie Armatur in die Endlage AUF.
Wen
n
Mögliche LED Anzeige:(siehe Bilder O1 und O2)
Dan
n
Erforderliche Einstellung in Endlage ZU:(siehe Bilder O1 und O2)
LED’s leuchten nicht Potentiometer „0” (R25) geringfügig nach rechts drehen bisLED (V23 gelb) aufleuchtet
LED (V24 grün) leuchtet Potentiometer „0” (R25) geringfügig nach rechts drehen bisLED (V24) erlischt und LED (V23 gelb) aufleuchtet
LED (V23 gelb) leuchtet Potentiometer „0” (R25) nach links drehen bis LED (V23)zunächst nicht mehr aufleuchtet.Danach Potentiometer „0” (R25) geringfügig nach rechts drehen bisLED (V 23 gelb) wieder aufleuchtet
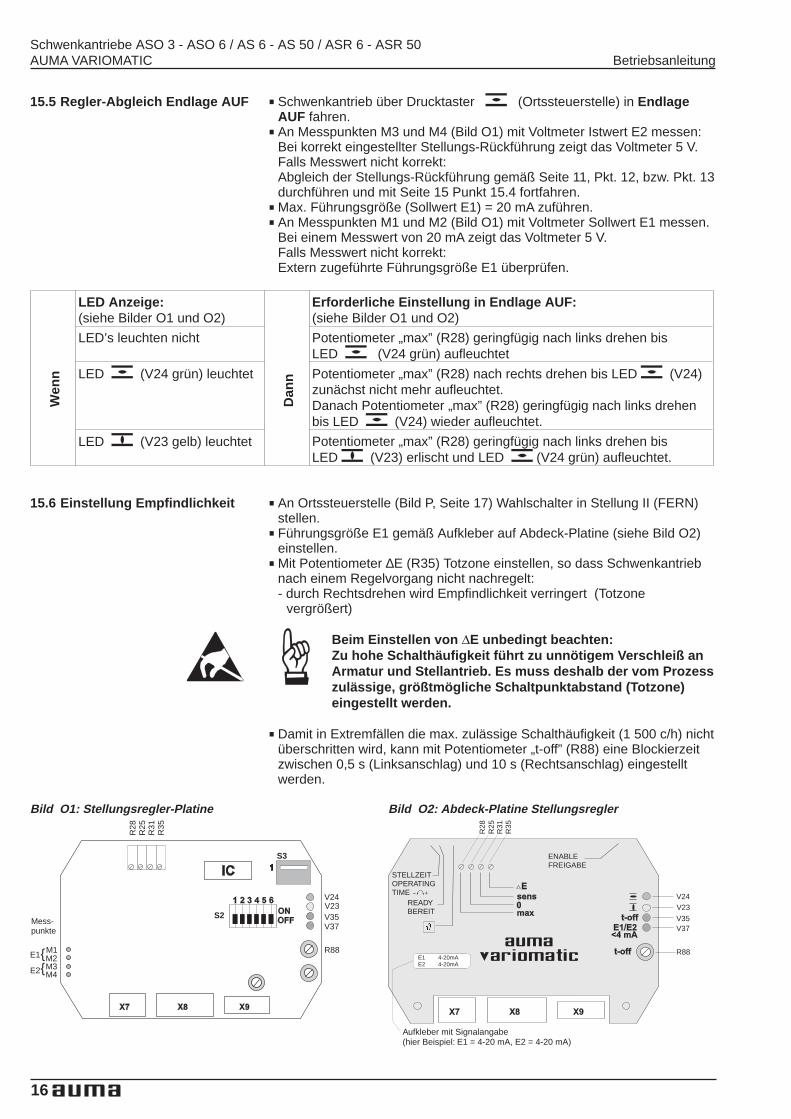
15.5 Regler-Abgleich Endlage AUF .Schwenkantrieb über Drucktaster (Ortssteuerstelle) in EndlageAUF fahren..An Messpunkten M3 und M4 (Bild O1) mit Voltmeter Istwert E2 messen:Bei korrekt eingestellter Stellungs-Rückführung zeigt das Voltmeter 5 V.Falls Messwert nicht korrekt:Abgleich der Stellungs-Rückführung gemäß Seite 11, Pkt. 12, bzw. Pkt. 13durchführen und mit Seite 15 Punkt 15.4 fortfahren..Max. Führungsgröße (Sollwert E1) = 20 mA zuführen..An Messpunkten M1 und M2 (Bild O1) mit Voltmeter Sollwert E1 messen.Bei einem Messwert von 20 mA zeigt das Voltmeter 5 V.Falls Messwert nicht korrekt:Extern zugeführte Führungsgröße E1 überprüfen.
15.6 Einstellung Empfindlichkeit .An Ortssteuerstelle (Bild P, Seite 17) Wahlschalter in Stellung II (FERN)stellen..Führungsgröße E1 gemäß Aufkleber auf Abdeck-Platine (siehe Bild O2)einstellen..Mit Potentiometer ∆E (R35) Totzone einstellen, so dass Schwenkantriebnach einem Regelvorgang nicht nachregelt:- durch Rechtsdrehen wird Empfindlichkeit verringert (Totzone
vergrößert)
Beim Einstellen von E unbedingt beachten:Zu hohe Schalthäufigkeit führt zu unnötigem Verschleiß anArmatur und Stellantrieb. Es muss deshalb der vom Prozesszulässige, größtmögliche Schaltpunktabstand (Totzone)eingestellt werden.
.Damit in Extremfällen die max. zulässige Schalthäufigkeit (1 500 c/h) nichtüberschritten wird, kann mit Potentiometer „t-off” (R88) eine Blockierzeitzwischen 0,5 s (Linksanschlag) und 10 s (Rechtsanschlag) eingestelltwerden.
16
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
Wen
n
LED Anzeige:(siehe Bilder O1 und O2)
Dan
nErforderliche Einstellung in Endlage AUF:(siehe Bilder O1 und O2)
LED’s leuchten nicht Potentiometer „max” (R28) geringfügig nach links drehen bisLED (V24 grün) aufleuchtet
LED (V24 grün) leuchtet Potentiometer „max” (R28) nach rechts drehen bis LED (V24)zunächst nicht mehr aufleuchtet.Danach Potentiometer „max” (R28) geringfügig nach links drehenbis LED (V24) wieder aufleuchtet.
LED (V23 gelb) leuchtet Potentiometer „max” (R28) geringfügig nach links drehen bisLED (V23) erlischt und LED (V24 grün) aufleuchtet.
R28
R25
R31
R35
V24
STELLZEITOPERATINGTIME
ENABLEFREIGABE
READYBEREIT V23
V35V37
R88
J
- +
Aufkleber mit Signalangabe(hier Beispiel: E1 = 4-20 mA, E2 = 4-20 mA)
E1 4-20mAE2 4-20mA
auma
variomatic
Bild O2: Abdeck-Platine Stellungsregler
R28
R25
R31
R35
M4M3M2M1E1
Mess-punkte
{
S3
S2
V24V23V35V37
R88
E2{
Bild O1: Stellungsregler-Platine
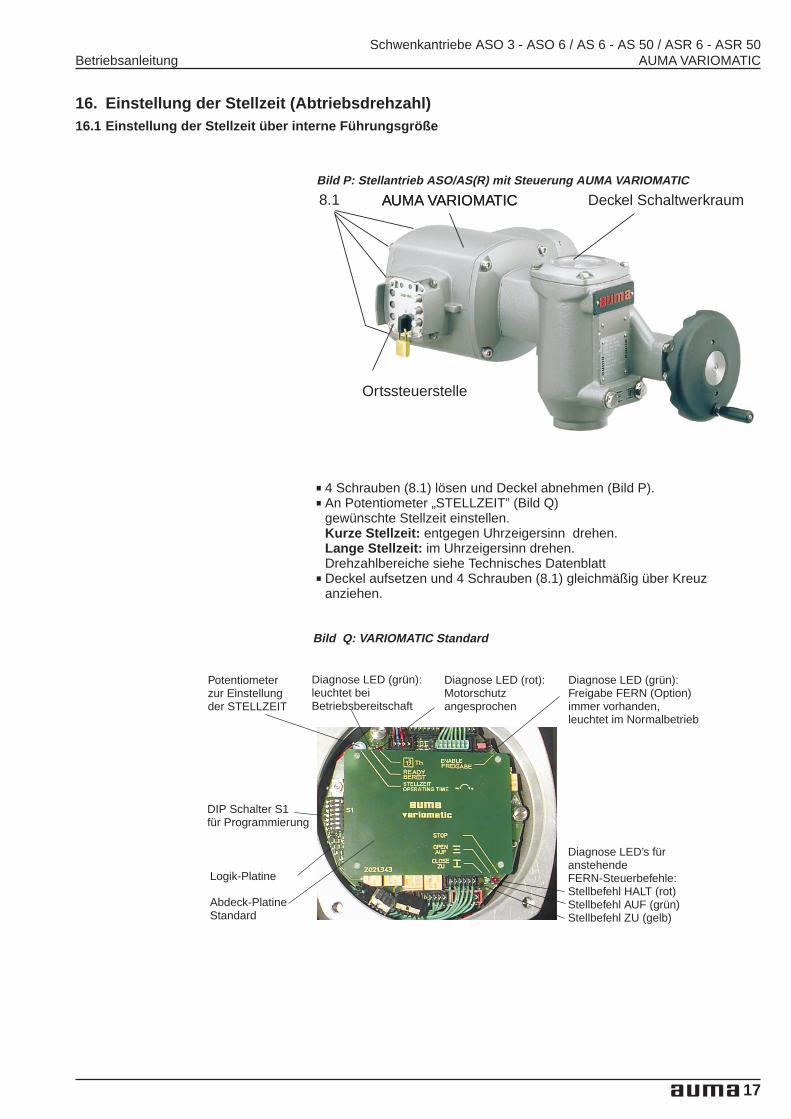
16. Einstellung der Stellzeit (Abtriebsdrehzahl)16.1 Einstellung der Stellzeit über interne Führungsgröße
.4 Schrauben (8.1) lösen und Deckel abnehmen (Bild P)..An Potentiometer „STELLZEIT” (Bild Q)gewünschte Stellzeit einstellen.Kurze Stellzeit: entgegen Uhrzeigersinn drehen.Lange Stellzeit: im Uhrzeigersinn drehen.Drehzahlbereiche siehe Technisches Datenblatt.Deckel aufsetzen und 4 Schrauben (8.1) gleichmäßig über Kreuzanziehen.
17
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
Ortssteuerstelle
AUMA VARIOMATIC Deckel Schaltwerkraum8.1 AUMA VARIOMATICBild P: Stellantrieb ASO/AS(R) mit Steuerung AUMA VARIOMATIC
DIP Schalter S1für Programmierung
Abdeck-PlatineStandard
Potentiometerzur Einstellungder STELLZEIT
Diagnose LED (grün):leuchtet beiBetriebsbereitschaft
Diagnose LED (rot):Motorschutzangesprochen
Diagnose LED (grün):Freigabe FERN (Option)immer vorhanden,leuchtet im Normalbetrieb
Diagnose LED’s füranstehendeFERN-Steuerbefehle:Stellbefehl HALT (rot)Stellbefehl AUF (grün)Stellbefehl ZU (gelb)
Logik-Platine
Bild Q: VARIOMATIC Standard
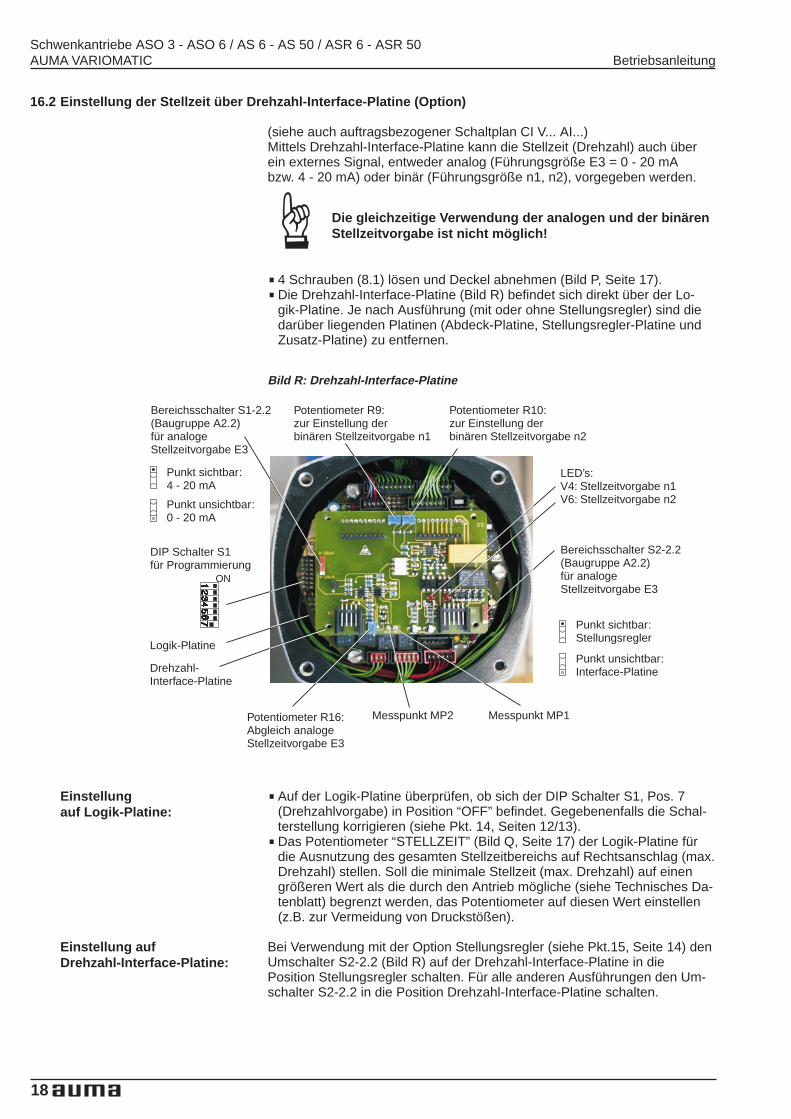
16.2 Einstellung der Stellzeit über Drehzahl-Interface-Platine (Option)
(siehe auch auftragsbezogener Schaltplan CI V... AI...)Mittels Drehzahl-Interface-Platine kann die Stellzeit (Drehzahl) auch überein externes Signal, entweder analog (Führungsgröße E3 = 0 - 20 mAbzw. 4 - 20 mA) oder binär (Führungsgröße n1, n2), vorgegeben werden.
Die gleichzeitige Verwendung der analogen und der binärenStellzeitvorgabe ist nicht möglich!
.4 Schrauben (8.1) lösen und Deckel abnehmen (Bild P, Seite 17)..Die Drehzahl-Interface-Platine (Bild R) befindet sich direkt über der Lo-gik-Platine. Je nach Ausführung (mit oder ohne Stellungsregler) sind diedarüber liegenden Platinen (Abdeck-Platine, Stellungsregler-Platine undZusatz-Platine) zu entfernen.
Einstellungauf Logik-Platine:
.Auf der Logik-Platine überprüfen, ob sich der DIP Schalter S1, Pos. 7(Drehzahlvorgabe) in Position “OFF” befindet. Gegebenenfalls die Schal-terstellung korrigieren (siehe Pkt. 14, Seiten 12/13)..Das Potentiometer “STELLZEIT” (Bild Q, Seite 17) der Logik-Platine fürdie Ausnutzung des gesamten Stellzeitbereichs auf Rechtsanschlag (max.Drehzahl) stellen. Soll die minimale Stellzeit (max. Drehzahl) auf einengrößeren Wert als die durch den Antrieb mögliche (siehe Technisches Da-tenblatt) begrenzt werden, das Potentiometer auf diesen Wert einstellen(z.B. zur Vermeidung von Druckstößen).
Einstellung aufDrehzahl-Interface-Platine:
Bei Verwendung mit der Option Stellungsregler (siehe Pkt.15, Seite 14) denUmschalter S2-2.2 (Bild R) auf der Drehzahl-Interface-Platine in diePosition Stellungsregler schalten. Für alle anderen Ausführungen den Um-schalter S2-2.2 in die Position Drehzahl-Interface-Platine schalten.
18
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
DIP Schalter S1für Programmierung
LED’s:V4: Stellzeitvorgabe n1V6: Stellzeitvorgabe n2
Logik-Platine
ON
Drehzahl-Interface-Platine
Bereichsschalter S1-2.2(Baugruppe A2.2)für analogeStellzeitvorgabe E3
Bereichsschalter S2-2.2(Baugruppe A2.2)für analogeStellzeitvorgabe E3
Punkt sichtbar:4 - 20 mA
Punkt sichtbar:Stellungsregler
Punkt unsichtbar:0 - 20 mA
Punkt unsichtbar:Interface-Platine
Potentiometer R9:zur Einstellung derbinären Stellzeitvorgabe n1
Potentiometer R16:Abgleich analogeStellzeitvorgabe E3
Potentiometer R10:zur Einstellung derbinären Stellzeitvorgabe n2
Messpunkt MP2 Messpunkt MP1
Bild R: Drehzahl-Interface-Platine
AnalogeStellzeitvorgabe E3:
Die analoge Stellzeitvorgabe E3 (siehe Schaltplan CI V... AI...) kann mitdem Bereichsschalter S1-2.2 (Bild R) wahlweise auf 0 - 20 mA oder4 - 20 mA eingestellt werden.Nach einer Umstellung ist ein Abgleich des max. Wertes (20 mA) erforder-lich.Der Abgleich wird dann wie folgt durchgeführt:.Anlegen von 24 V DC +/- 10 % am Analogeingang der Drehzahl-Interfa-
ce-Platine (siehe Schaltplan CI V... AI...)max. Stromaufnahme ≤ 30mA.Anlegen von 20 mA an der Stellzeitvorgabe E3 der Drehzahl-Interfa-ce-Platine (siehe Schaltplan CI V... AI...).Messen der Spannung zwischen MP1 und MP2 (Bild R)..Abgleichen der Spannung auf 10,00 V +/- 0,01 V durch Einstellung mitdem Potentiometer R16 (Bild R).
BinäreStellzeitvorgabe n1, n2
Zur Einstellung der Stellzeit über binäre Signale stehen zwei Eingänge zurVerfügung.Die Einstellung der beiden Stellzeiten wird wie folgt durchgeführt:Ansteuern der binären Stellzeitvorgabe n1 durch.Anlegen von 24 V DC am Binäreingang n1 der Drehzahl-Interface-Platine
(siehe Schaltplan CI V... AI...)Eine optische Kontrolle des angelegten Signals ist durch LED V4 (Bild R)möglich..Die Einstellung der Stellzeit erfolgt durch Potentiometer R9 (Bild R),Rechtsdrehung entspricht höherer Drehzahl = kürzerer Stellzeit.
Ansteuern der binären Stellzeitvorgabe n2 durch.Anlegen von 24 V DC am Binäreingang n2 der Drehzahl-Interface-Platine(siehe Schaltplan CI V... AI...)Eine optische Kontrolle des angelegten Signals ist durch LED V6 (Bild R)möglich..Die Einstellung der Stellzeit erfolgt durch Potentiometer R10 (Bild R),Rechtsdrehung entspricht höherer Drehzahl = kürzerer Stellzeit.
.Bei gleichzeitiger Ansteuerung von n1 und n2 hat diekürzere Stellzeit Vorrang..Ohne Ansteuerung von n1 und n2 ist die maximaleStellzeit vorhanden.
.Über die Ortssteuerstelle fährt der Antrieb immer mit max.Drehzahl (kürzeste Stellzeit)..Eine Steuerung der eingestellten Drehzahl (Stellzeit) kannnur über FERN Befehle vorgenommen werden.
16.3 Weitere Funktionen der Drehzahl-Interface-Platine in Verbindung mit Stellungsregler (Option)
.Fernumschaltung der Stellzeitvorgabe
Diese Funktion ist nur in Verbindung mit der analogen, bzw.binären Stellzeitvorgabe (Umschalter S2-2.2 in PositionStellungsregler, Bild R) möglich.
Die Stellzeitvorgabe kann von Fern, zwischen der vom Stellungsreglerbestimmten und einer durch den Kunden über die Drehzahl-Interface-Platine vorgegebenen Stellzeit, mit einem + 24 V DC Signal umgeschaltetwerden.
19
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
.AUTO/FERN Umschaltung
Der Stellungsregler kann von Fern mit einem +24 V DC Signal komplettabgeschaltet werden. Dies ermöglicht die Nutzung von binären Ansteuer-signalen (AUF, HALT, ZU) in Verbindung mit der analogen, bzw. binärenStellzeitvorgabe.
1) Die binären Ansteuersignale müssen extern (Kunde)verriegelt sein, solange der Stellungsregler aktiv ist.
2) Nur in Verbindung mit der analogen, bzw. binärenStellzeitvorgabe (Umschalter S2-2.2 in PositionStellungsregler, Bild R, Seite 18).
3) Liegt kein externes Signal an, fährt der Antrieb mit seinerlangsamsten Drehzahl, bzw. längsten Stellzeit.
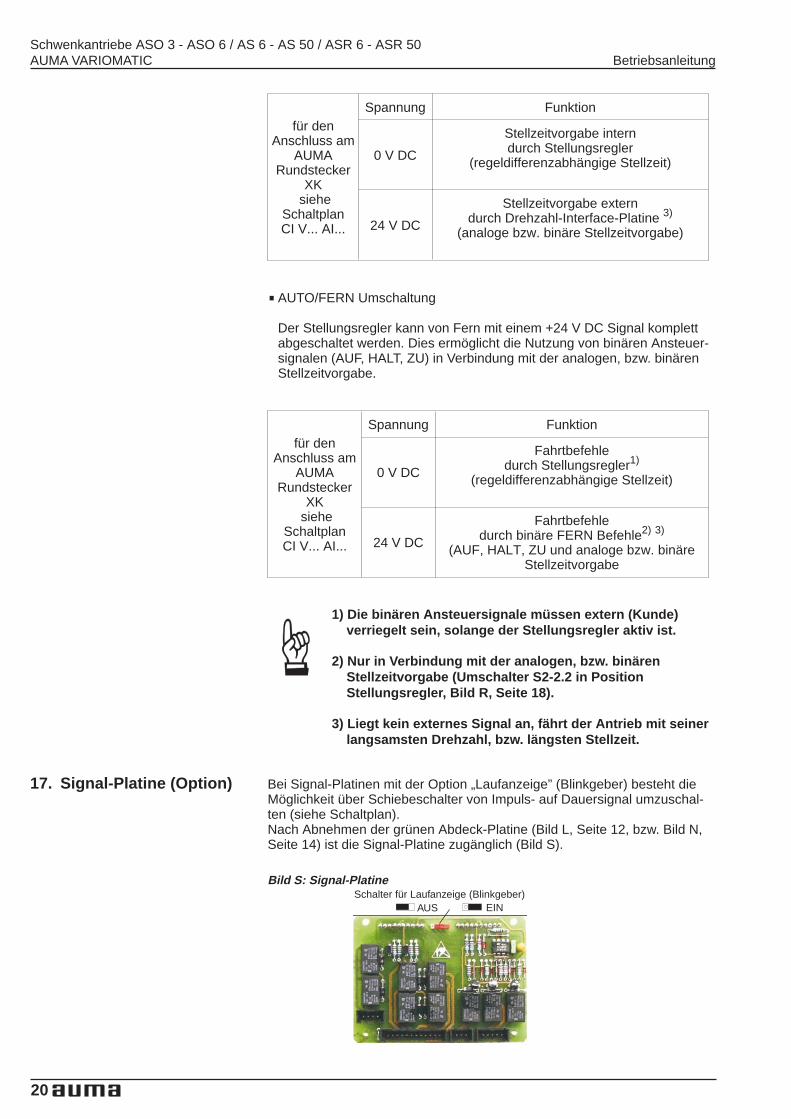
17. Signal-Platine (Option) Bei Signal-Platinen mit der Option „Laufanzeige” (Blinkgeber) besteht dieMöglichkeit über Schiebeschalter von Impuls- auf Dauersignal umzuschal-ten (siehe Schaltplan).Nach Abnehmen der grünen Abdeck-Platine (Bild L, Seite 12, bzw. Bild N,Seite 14) ist die Signal-Platine zugänglich (Bild S).
20
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
für denAnschluss am
AUMARundstecker
XKsiehe
SchaltplanCI V... AI...
Spannung Funktion
0 V DC
Stellzeitvorgabe interndurch Stellungsregler
(regeldifferenzabhängige Stellzeit)
24 V DC
Stellzeitvorgabe externdurch Drehzahl-Interface-Platine 3)
(analoge bzw. binäre Stellzeitvorgabe)
für denAnschluss am
AUMARundstecker
XKsiehe
SchaltplanCI V... AI...
Spannung Funktion
0 V DC
Fahrtbefehledurch Stellungsregler1)
(regeldifferenzabhängige Stellzeit)
24 V DC
Fahrtbefehledurch binäre FERN Befehle2) 3)
(AUF, HALT, ZU und analoge bzw. binäreStellzeitvorgabe
Schalter für Laufanzeige (Blinkgeber)AUS EIN
Bild S: Signal-Platine
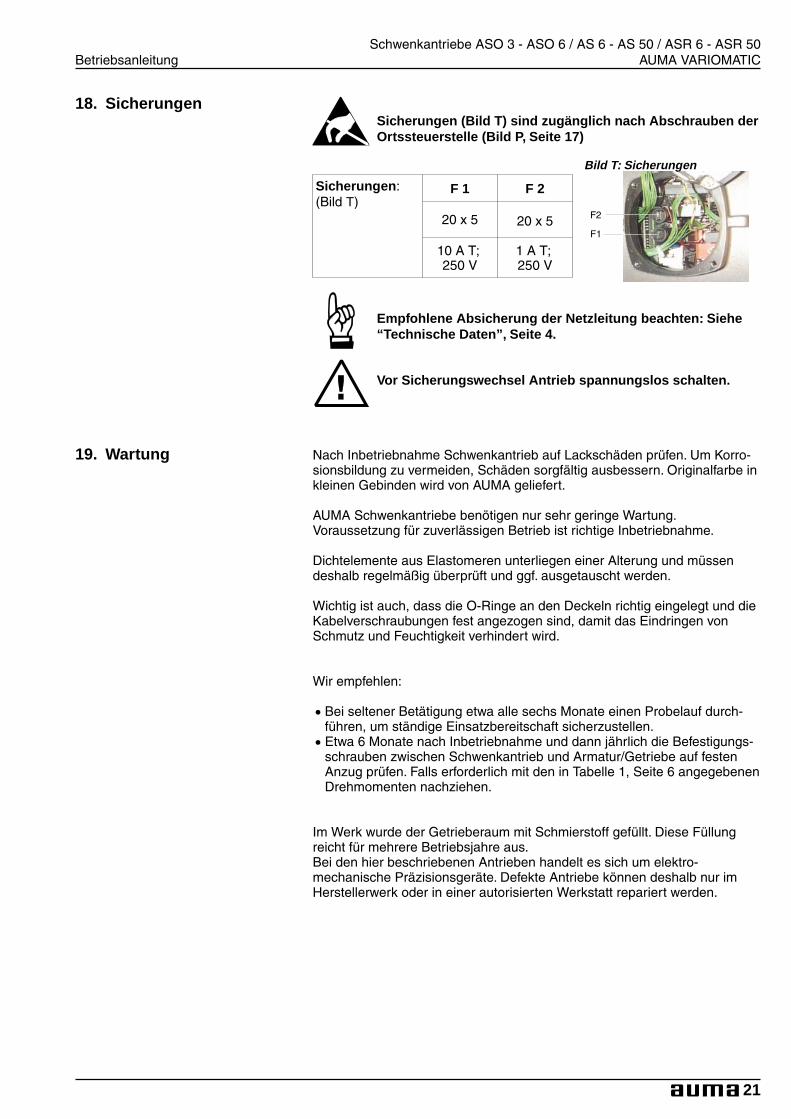
18. SicherungenSicherungen (Bild T) sind zugänglich nach Abschrauben derOrtssteuerstelle (Bild P, Seite 17)
Empfohlene Absicherung der Netzleitung beachten: Siehe“Technische Daten”, Seite 4.
Vor Sicherungswechsel Antrieb spannungslos schalten.
19. Wartung Nach Inbetriebnahme Schwenkantrieb auf Lackschäden prüfen. Um Korro-sionsbildung zu vermeiden, Schäden sorgfältig ausbessern. Originalfarbe inkleinen Gebinden wird von AUMA geliefert.
AUMA Schwenkantriebe benötigen nur sehr geringe Wartung.Voraussetzung für zuverlässigen Betrieb ist richtige Inbetriebnahme.
Dichtelemente aus Elastomeren unterliegen einer Alterung und müssendeshalb regelmäßig überprüft und ggf. ausgetauscht werden.
Wichtig ist auch, dass die O-Ringe an den Deckeln richtig eingelegt und dieKabelverschraubungen fest angezogen sind, damit das Eindringen vonSchmutz und Feuchtigkeit verhindert wird.
Wir empfehlen:
.Bei seltener Betätigung etwa alle sechs Monate einen Probelauf durch-führen, um ständige Einsatzbereitschaft sicherzustellen..Etwa 6 Monate nach Inbetriebnahme und dann jährlich die Befestigungs-schrauben zwischen Schwenkantrieb und Armatur/Getriebe auf festenAnzug prüfen. Falls erforderlich mit den in Tabelle 1, Seite 6 angegebenenDrehmomenten nachziehen.
Im Werk wurde der Getrieberaum mit Schmierstoff gefüllt. Diese Füllungreicht für mehrere Betriebsjahre aus.Bei den hier beschriebenen Antrieben handelt es sich um elektro-mechanische Präzisionsgeräte. Defekte Antriebe können deshalb nur imHerstellerwerk oder in einer autorisierten Werkstatt repariert werden.
21
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
F2
F1
Bild T: Sicherungen
Sicherungen:(Bild T)
F 1 F 2
20 x 5 20 x 5
10 A T;250 V
1 A T;250 V
20. Konformitätsbescheinigung und Herstellererklärung
22
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50AUMA VARIOMATIC Betriebsanleitung
23
Schwenkantriebe ASO 3 - ASO 6 / AS 6 - AS 50 / ASR 6 - ASR 50Betriebsanleitung AUMA VARIOMATIC
Y000.237/001/de/1.00
SchneckengetriebeGS 40.3 – GS 125.3GS 160 – GS 500Drehmoment bis 360 000 Nm
HebelgetriebeGF 50.3 – GF 125.3GF 160 – GF 250Drehmoment bis 32 000 Nm
SchwenkantriebeAS 6 – AS 50Drehmoment von 25 bis 500 NmStellzeiten für 90° von 4 bis 90 s
SchwenkantriebeSG 05.1 – SG 12.1Drehmoment von 100 bis 1 200 NmStellzeiten für 90° von 4 bis 180 s
KegelradgetriebeGK 10.2 – GK 40.2Drehmoment bis 16 000 Nm
Lineareinheiten LEmit Drehantrieben SASchubkräfte von 4 kN bis 217 kNHübe bis 400 mmStellgeschwindigkeitenvon 20 bis 360 mm/min
DrehantriebeSA 07.1 – SA 16.1 / SA 25.1 – SA 48.1Drehmoment von 10 bis 32 000 NmDrehzahlen von 4 bis 180 min-1
StirnradgetriebeGST 10.1 – GST 40.1Drehmoment bis 16 000 Nm
Steuerung AUMA MATICmit Drehantrieben SA/ SARDrehmoment von 10 bis 1 000 NmDrehzahlen von 4 bis 180 min-1
WERNER RIESTER GmbH & Co. KGArmaturen- und MaschinenantriebePostfach 1362 D - 79373 MüllheimTel 07631/809-0 Fax 07631/13218e-mail [email protected]://www.auma.com
WERNER RIESTER GmbH & Co. KGArmaturen- und MaschinenantriebePostfach 1151 D - 73747 OstfildernTel 0711/34803-0 Fax 0711/34803-34e-mail [email protected]
DIN ISO 9001/EN 29001
Zertifikat-Registrier-Nr.12 100 4269
Beiblatt zur BetriebsanleitungASO 3 - ASO 6/ AS 6 - AS 50/ ASR 6 - ASR 50Ausgabe 1.00
AUMA VARIOMATICBus
R
Ausgabe 1.00Y000.584/001/de
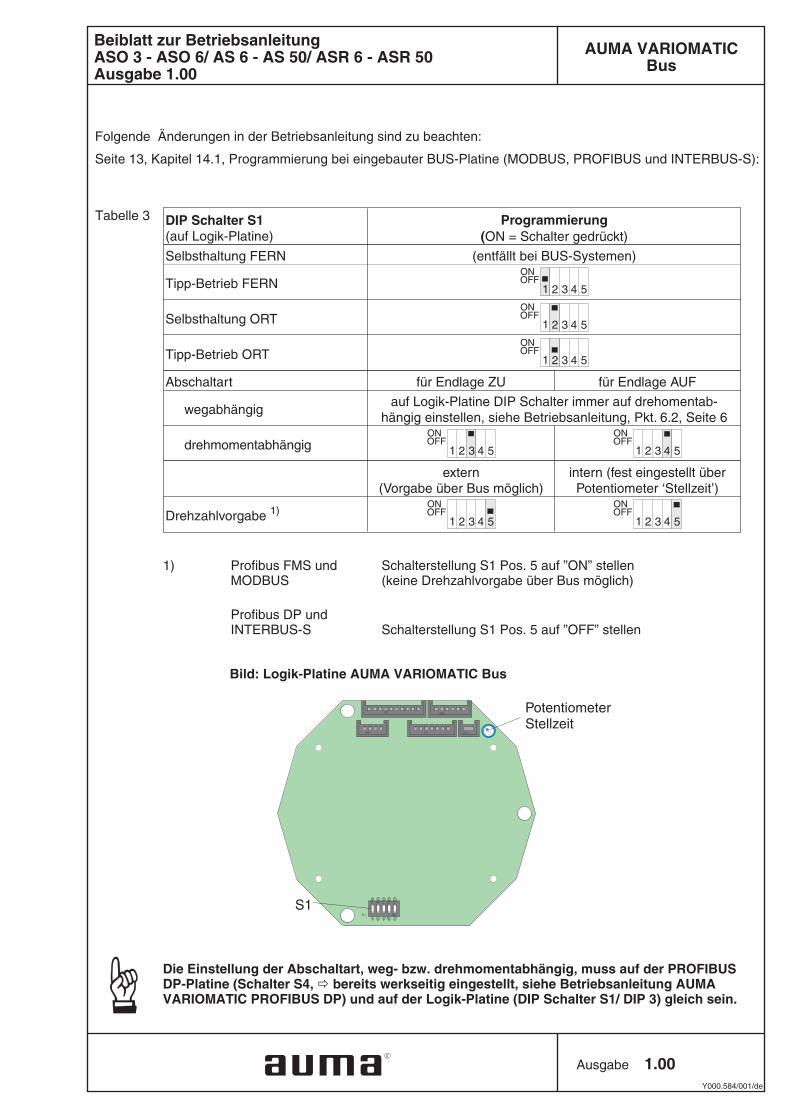
Folgende Änderungen in der Betriebsanleitung sind zu beachten:
Seite 13, Kapitel 14.1, Programmierung bei eingebauter BUS-Platine (MODBUS, PROFIBUS und INTERBUS-S):
1) Profibus FMS und Schalterstellung S1 Pos. 5 auf ”ON” stellenMODBUS (keine Drehzahlvorgabe über Bus möglich)
Profibus DP undINTERBUS-S Schalterstellung S1 Pos. 5 auf ”OFF” stellen
Die Einstellung der Abschaltart, weg- bzw. drehmomentabhängig, muss auf der PROFIBUSDP-Platine (Schalter S4, � bereits werkseitig eingestellt, siehe Betriebsanleitung AUMAVARIOMATIC PROFIBUS DP) und auf der Logik-Platine (DIP Schalter S1/ DIP 3) gleich sein.
DIP Schalter S1(auf Logik-Platine)
Programmierung(ON = Schalter gedrückt)
Selbsthaltung FERN (entfällt bei BUS-Systemen)
Tipp-Betrieb FERN
Selbsthaltung ORT
Tipp-Betrieb ORT
Abschaltart für Endlage ZU für Endlage AUF
wegabhängigauf Logik-Platine DIP Schalter immer auf drehomentab-
hängig einstellen, siehe Betriebsanleitung, Pkt. 6.2, Seite 6
drehmomentabhängig
extern(Vorgabe über Bus möglich)
intern (fest eingestellt überPotentiometer ‘Stellzeit’)
Drehzahlvorgabe 1)
Tabelle 3
1 2 3 4 5
ONOFF
1 2 3 4 5
ONOFF
1 2 3 4 5
ONOFF
1 2 3 4 5
ONOFF
1 2 3 4 5
ONOFF
1 2 3 4 5
ONOFF
1 2 3 4 5
ONOFF
S1
PotentiometerStellzeit
Bild: Logik-Platine AUMA VARIOMATIC Bus


















