Aufgabensammlung Maschinendynamik - IDS · se) stellt ein schwingungsf¨ahiges System dar. Die...
36
Aufgabensammlung Maschinendynamik www.ifm.uni-hannover.de Version 1.2
Transcript of Aufgabensammlung Maschinendynamik - IDS · se) stellt ein schwingungsf¨ahiges System dar. Die...

Aufgabensammlung
Maschinendynamik
www.ifm.uni-hannover.de Version 1.2

II Aufgabensammlung Maschinendynamik

Inhaltsverzeichnis III
Inhaltsverzeichnis
1 1-FHG-Systeme 1
1.1 Langsschwinger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Schwinger mit einem Freiheitsgrad . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Gefuhrte Bewegung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.4 Drehschwinger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.5 Reihen- und Parallelschaltung von Federn . . . . . . . . . . . . . . . . . . . 3
1.6 Reibschwinger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.7 Ausschwingversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.8 PKW-Anhanger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Dynamik der starren Maschine 5
2.1 Kolbenantrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Gelenkmechanismus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Bewegungsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Aufstellung der starren Maschine 6
3.1 Federkrafterregung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.2 Indirekte Erregung am Dampfer . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.3 Direkte Erregung an der Masse . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.4 Drehschwinger mit indirekter Erregung . . . . . . . . . . . . . . . . . . . . . 7
3.5 Messung von Bodenschwingungen . . . . . . . . . . . . . . . . . . . . . . . . 7
3.6 Maschinenaufstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.7 Bodenkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.8 Radaufhangung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.9 Nahmaschine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 n-FHG-Systeme 11
4.1 Translationsschwingungen 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.2 Translationsschwingungen 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.3 Tilgung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.4 Gekoppelte Massen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5 Torsionsschwingungen in Antriebssystemen 12
5.1 Drehschwinger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.2 Drehschwingungen 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.3 Drehschwingungen 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
IV Aufgabensammlung Maschinendynamik
5.4 Holzer-Tolle-Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.5 Ubertragungsmatrizen 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.6 Ubertragungsmatrizen 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.7 Federgefesselter Dampfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.8 Motorradmotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.9 Antriebssystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.10 Verzweigtes Torsionsschwingungssystem . . . . . . . . . . . . . . . . . . . . . 16
6 Biegeschwingungen rotierender Wellen 17
6.1 Biegeschwingungen 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6.2 Biegeschwingungen 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6.3 Kritische Drehzahlen 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6.4 Kritische Drehzahlen 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.5 Stabilitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.6 Hohlwelle mit Scheibe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.7 Auskragende Welle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.8 Laval-Laufer mit symmetrischen Querschnitt . . . . . . . . . . . . . . . . . . 20
7 Biegeschwingungen massebehafteter Balken 20
7.1 Rayleigh-Quotient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7.2 Drehkorper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
8 Massenausgleich und Auswuchten von Maschinen 21
8.1 Schubkurbelgetriebe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
8.2 Viergelenkgetriebe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
9 Losungen 22
1 1-FHG-Systeme 1
1 1-FHG-Systeme
1.1 Langsschwinger
Ein reibungsfrei gelagerte Masse m ist uber zwei Fe-
dern mit der Umgebung verbunden.
Gegeben: m, c1, c2.
Anfangsbedingungen: x(0) = x0; x(0) = v0.
Gesucht:
a) Bewegungsdifferentialgleichung,
b) allgemeine Losung,
c) Schwingungsamplitude A,
d) Phasenverschiebung ϕ,
e) Eigenkreisfrequenz ω0,
f) Eigenfrequenz f0,
g) Schwingungsdauer T0.
Losung s. S. 22
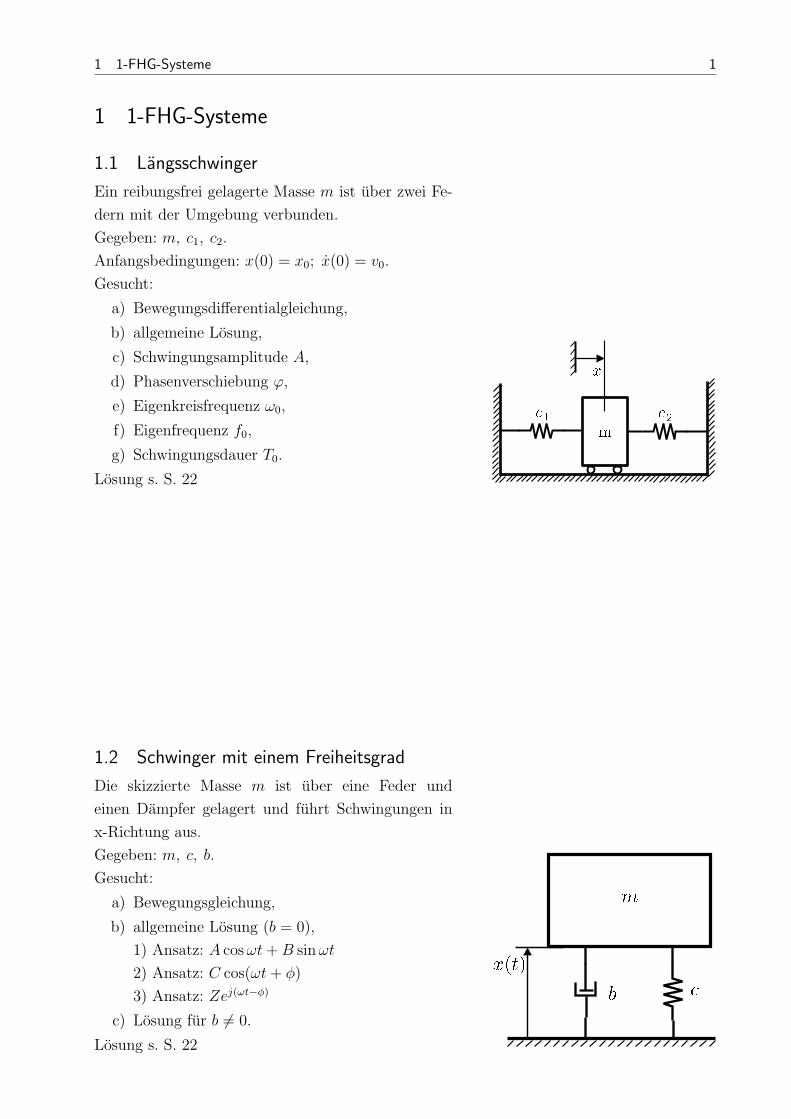
1.2 Schwinger mit einem Freiheitsgrad
Die skizzierte Masse m ist uber eine Feder und
einen Dampfer gelagert und fuhrt Schwingungen in
x-Richtung aus.
Gegeben: m, c, b.
Gesucht:
a) Bewegungsgleichung,
b) allgemeine Losung (b = 0),
1) Ansatz: A cos ωt + B sin ωt
2) Ansatz: C cos(ωt + φ)
3) Ansatz: Zej(ωt−φ)
c) Losung fur b 6= 0.
Losung s. S. 22
2 Aufgabensammlung Maschinendynamik
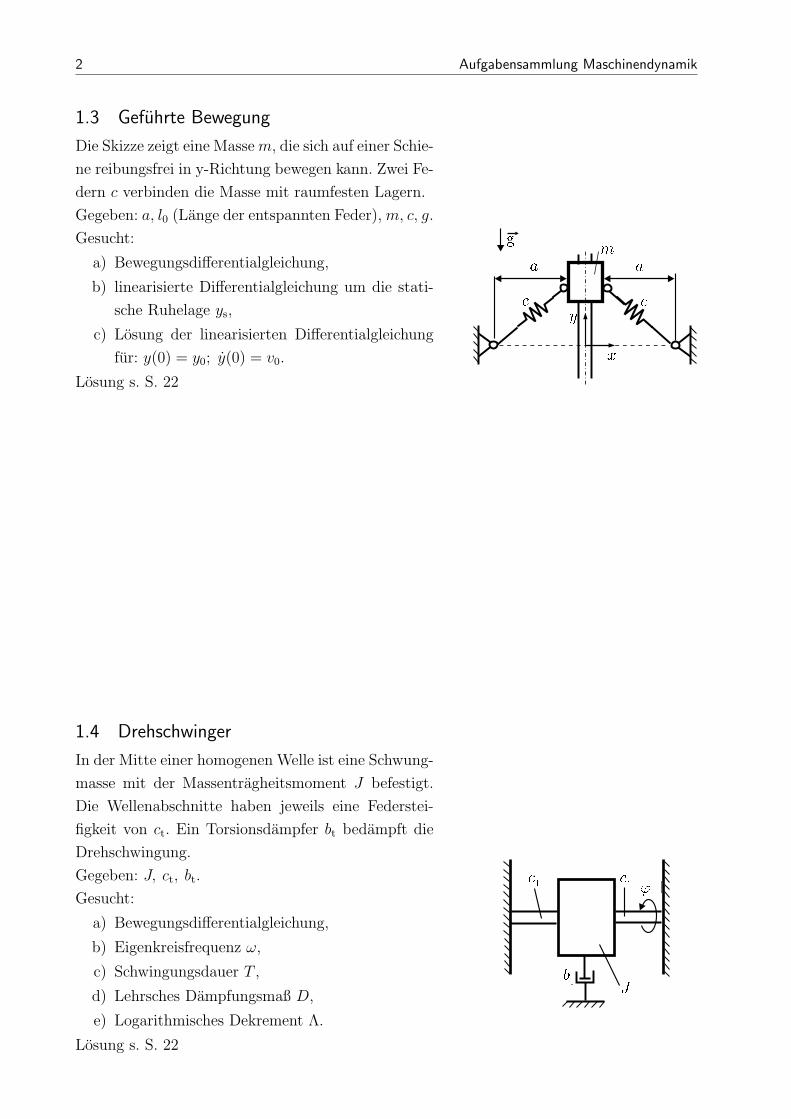
1.3 Gefuhrte Bewegung
Die Skizze zeigt eine Masse m, die sich auf einer Schie-
ne reibungsfrei in y-Richtung bewegen kann. Zwei Fe-
dern c verbinden die Masse mit raumfesten Lagern.
Gegeben: a, l0 (Lange der entspannten Feder), m, c, g.
Gesucht:
a) Bewegungsdifferentialgleichung,
b) linearisierte Differentialgleichung um die stati-
sche Ruhelage ys,
c) Losung der linearisierten Differentialgleichung
fur: y(0) = y0; y(0) = v0.
Losung s. S. 22
1.4 Drehschwinger
In der Mitte einer homogenen Welle ist eine Schwung-
masse mit der Massentragheitsmoment J befestigt.
Die Wellenabschnitte haben jeweils eine Federstei-
figkeit von ct. Ein Torsionsdampfer bt bedampft die
Drehschwingung.
Gegeben: J, ct, bt.
Gesucht:
a) Bewegungsdifferentialgleichung,
b) Eigenkreisfrequenz ω,
c) Schwingungsdauer T ,
d) Lehrsches Dampfungsmaß D,
e) Logarithmisches Dekrement Λ.
Losung s. S. 22
1 1-FHG-Systeme 3
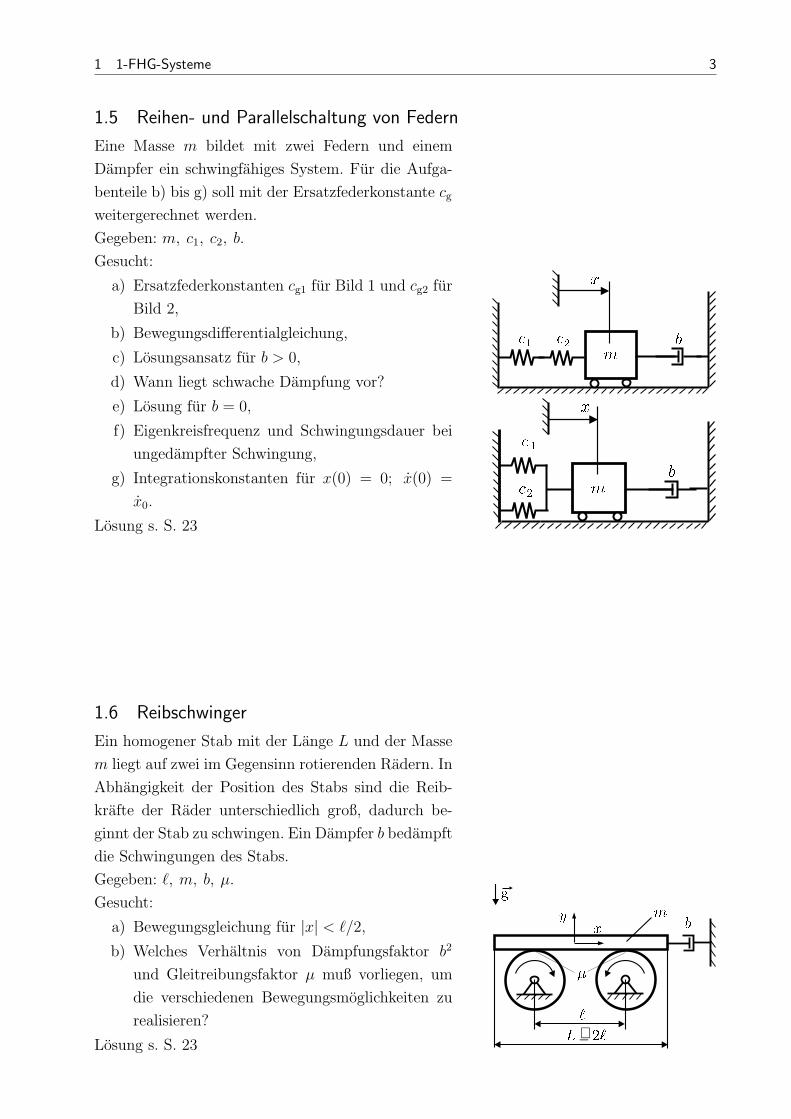
1.5 Reihen- und Parallelschaltung von Federn
Eine Masse m bildet mit zwei Federn und einem
Dampfer ein schwingfahiges System. Fur die Aufga-
benteile b) bis g) soll mit der Ersatzfederkonstante cg
weitergerechnet werden.
Gegeben: m, c1, c2, b.
Gesucht:
a) Ersatzfederkonstanten cg1 fur Bild 1 und cg2 fur
Bild 2,
b) Bewegungsdifferentialgleichung,
c) Losungsansatz fur b > 0,
d) Wann liegt schwache Dampfung vor?
e) Losung fur b = 0,
f) Eigenkreisfrequenz und Schwingungsdauer bei
ungedampfter Schwingung,
g) Integrationskonstanten fur x(0) = 0; x(0) =
x0.
Losung s. S. 23
1.6 Reibschwinger
Ein homogener Stab mit der Lange L und der Masse
m liegt auf zwei im Gegensinn rotierenden Radern. In
Abhangigkeit der Position des Stabs sind die Reib-
krafte der Rader unterschiedlich groß, dadurch be-
ginnt der Stab zu schwingen. Ein Dampfer b bedampft
die Schwingungen des Stabs.
Gegeben: `, m, b, µ.
Gesucht:
a) Bewegungsgleichung fur |x| < `/2,
b) Welches Verhaltnis von Dampfungsfaktor b2
und Gleitreibungsfaktor µ muß vorliegen, um
die verschiedenen Bewegungsmoglichkeiten zu
realisieren?
Losung s. S. 23
>
4 Aufgabensammlung Maschinendynamik
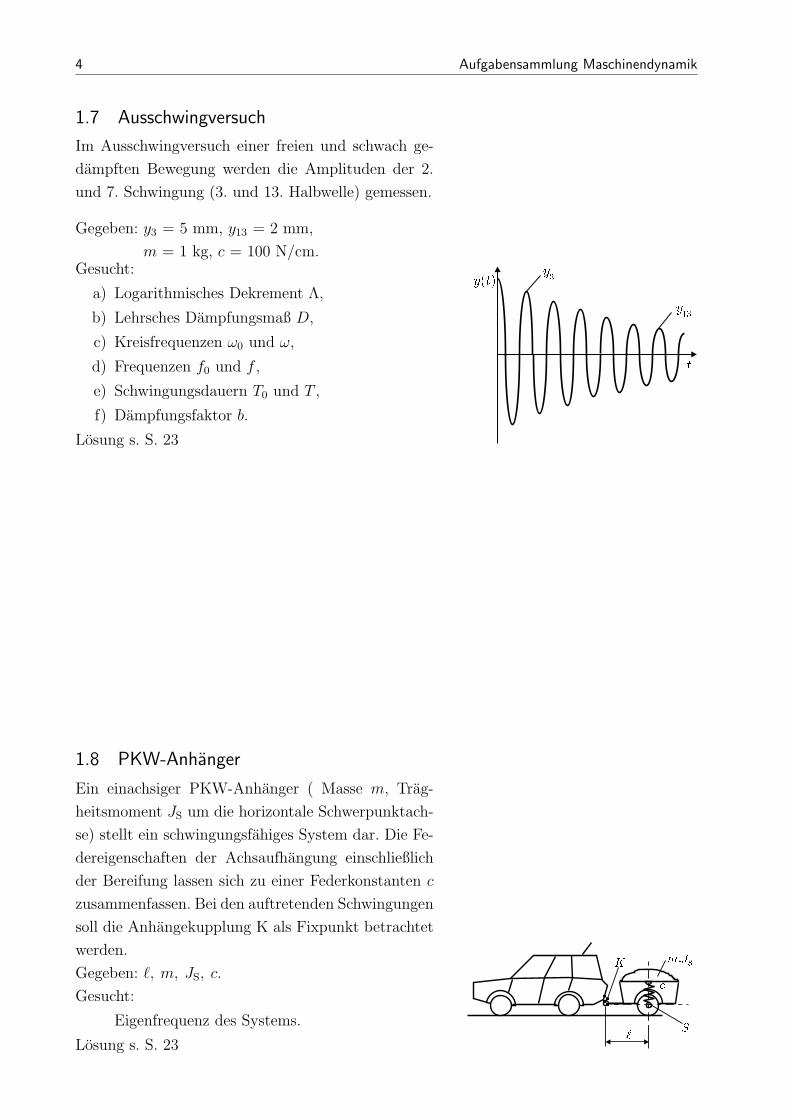
1.7 Ausschwingversuch
Im Ausschwingversuch einer freien und schwach ge-
dampften Bewegung werden die Amplituden der 2.
und 7. Schwingung (3. und 13. Halbwelle) gemessen.
Gegeben: y3 = 5 mm, y13 = 2 mm,
m = 1 kg, c = 100 N/cm.Gesucht:
a) Logarithmisches Dekrement Λ,
b) Lehrsches Dampfungsmaß D,
c) Kreisfrequenzen ω0 und ω,
d) Frequenzen f0 und f ,
e) Schwingungsdauern T0 und T ,
f) Dampfungsfaktor b.
Losung s. S. 23
1.8 PKW-Anhanger
Ein einachsiger PKW-Anhanger ( Masse m, Trag-
heitsmoment JS um die horizontale Schwerpunktach-
se) stellt ein schwingungsfahiges System dar. Die Fe-
dereigenschaften der Achsaufhangung einschließlich
der Bereifung lassen sich zu einer Federkonstanten c
zusammenfassen. Bei den auftretenden Schwingungen
soll die Anhangekupplung K als Fixpunkt betrachtet
werden.
Gegeben: `, m, JS, c.
Gesucht:
Eigenfrequenz des Systems.
Losung s. S. 23
2 Dynamik der starren Maschine 5
2 Dynamik der starren Maschine
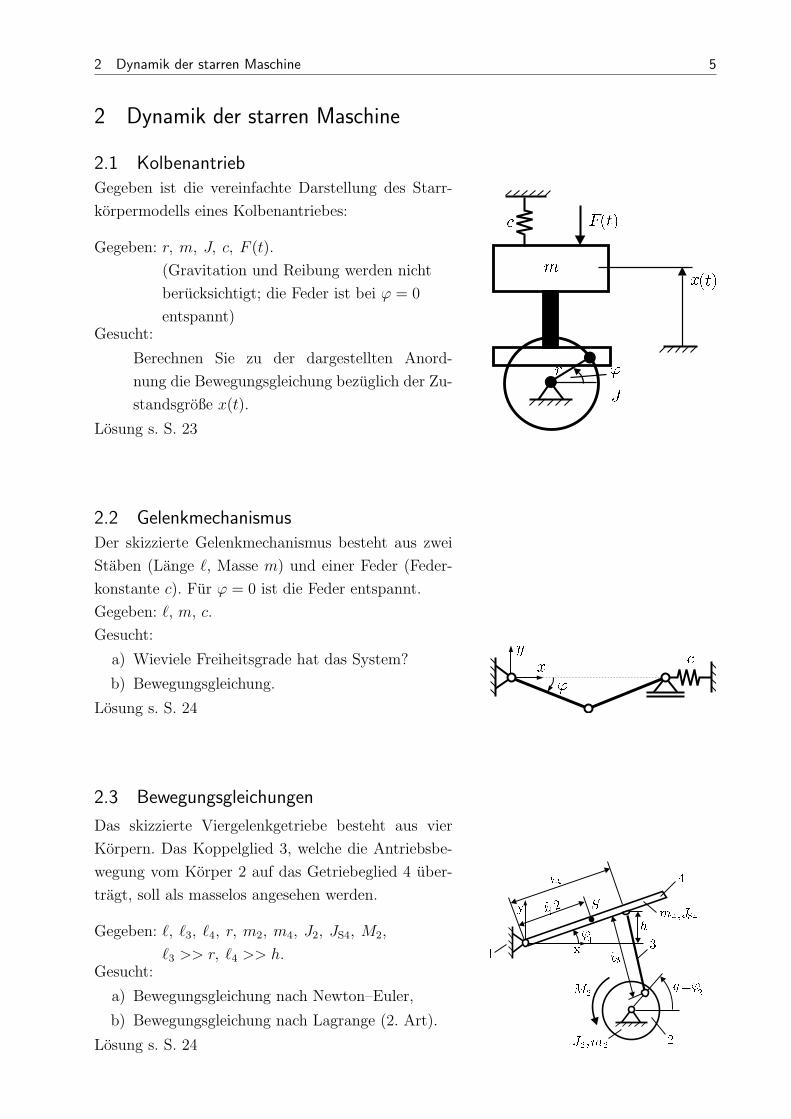
2.1 KolbenantriebGegeben ist die vereinfachte Darstellung des Starr-
korpermodells eines Kolbenantriebes:
Gegeben: r, m, J, c, F (t).
(Gravitation und Reibung werden nicht
berucksichtigt; die Feder ist bei ϕ = 0
entspannt)Gesucht:
Berechnen Sie zu der dargestellten Anord-
nung die Bewegungsgleichung bezuglich der Zu-
standsgroße x(t).
Losung s. S. 23
2.2 GelenkmechanismusDer skizzierte Gelenkmechanismus besteht aus zwei
Staben (Lange `, Masse m) und einer Feder (Feder-
konstante c). Fur ϕ = 0 ist die Feder entspannt.
Gegeben: `, m, c.
Gesucht:
a) Wieviele Freiheitsgrade hat das System?
b) Bewegungsgleichung.
Losung s. S. 24
2.3 Bewegungsgleichungen
Das skizzierte Viergelenkgetriebe besteht aus vier
Korpern. Das Koppelglied 3, welche die Antriebsbe-
wegung vom Korper 2 auf das Getriebeglied 4 uber-
tragt, soll als masselos angesehen werden.
Gegeben: `, `3, `4, r, m2, m4, J2, JS4, M2,
`3 >> r, `4 >> h.Gesucht:
a) Bewegungsgleichung nach Newton–Euler,
b) Bewegungsgleichung nach Lagrange (2. Art).
Losung s. S. 24
! "
#
$
%'&(
6 Aufgabensammlung Maschinendynamik
3 Aufstellung der starren Maschine
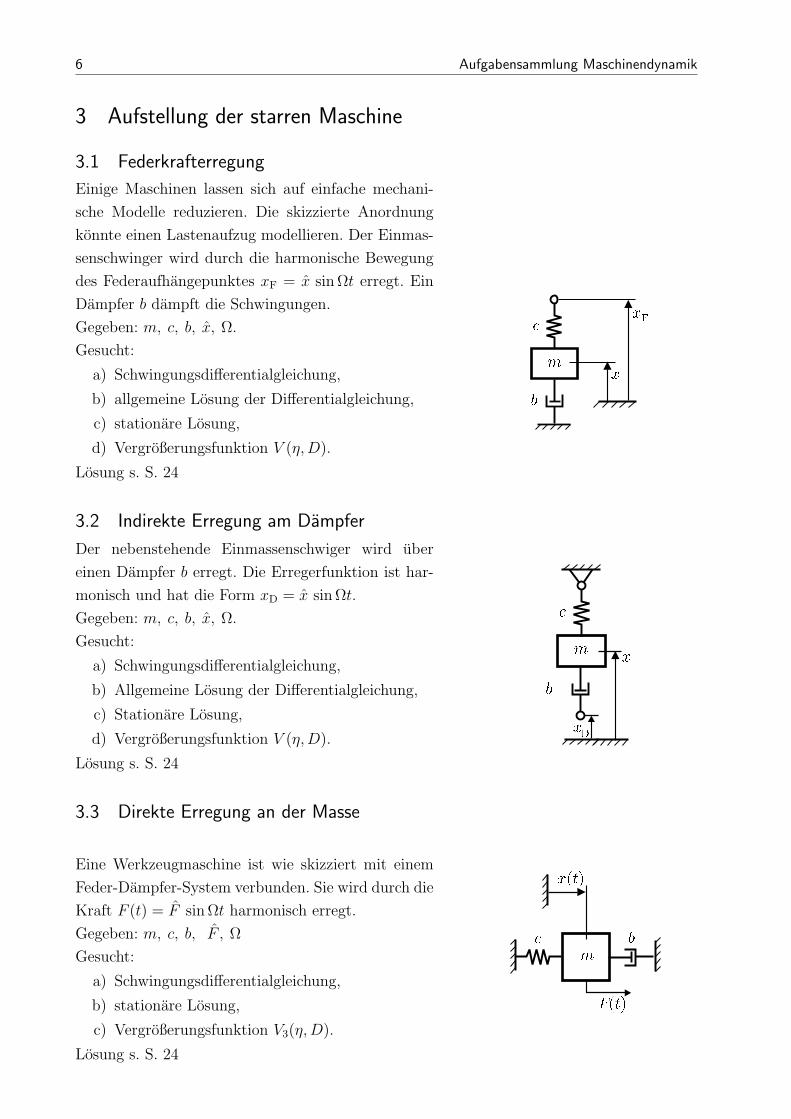
3.1 Federkrafterregung
Einige Maschinen lassen sich auf einfache mechani-
sche Modelle reduzieren. Die skizzierte Anordnung
konnte einen Lastenaufzug modellieren. Der Einmas-
senschwinger wird durch die harmonische Bewegung
des Federaufhangepunktes xF = x sin Ωt erregt. Ein
Dampfer b dampft die Schwingungen.
Gegeben: m, c, b, x, Ω.
Gesucht:
a) Schwingungsdifferentialgleichung,
b) allgemeine Losung der Differentialgleichung,
c) stationare Losung,
d) Vergroßerungsfunktion V (η, D).
Losung s. S. 24
3.2 Indirekte Erregung am Dampfer
Der nebenstehende Einmassenschwiger wird uber
einen Dampfer b erregt. Die Erregerfunktion ist har-
monisch und hat die Form xD = x sin Ωt.
Gegeben: m, c, b, x, Ω.
Gesucht:
a) Schwingungsdifferentialgleichung,
b) Allgemeine Losung der Differentialgleichung,
c) Stationare Losung,
d) Vergroßerungsfunktion V (η, D).
Losung s. S. 24
3.3 Direkte Erregung an der Masse
Eine Werkzeugmaschine ist wie skizziert mit einem
Feder-Dampfer-System verbunden. Sie wird durch die
Kraft F (t) = F sin Ωt harmonisch erregt.
Gegeben: m, c, b, F , Ω
Gesucht:
a) Schwingungsdifferentialgleichung,
b) stationare Losung,
c) Vergroßerungsfunktion V3(η, D).
Losung s. S. 24
3 Aufstellung der starren Maschine 7
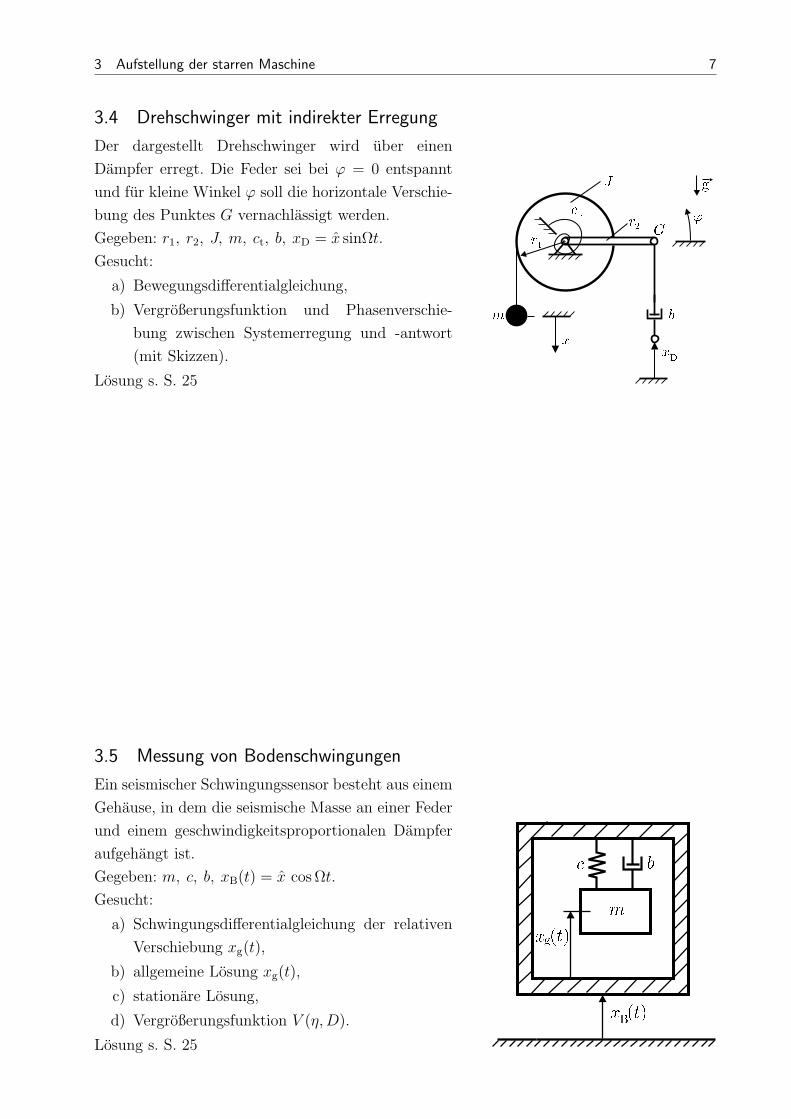
3.4 Drehschwinger mit indirekter Erregung
Der dargestellt Drehschwinger wird uber einen
Dampfer erregt. Die Feder sei bei ϕ = 0 entspannt
und fur kleine Winkel ϕ soll die horizontale Verschie-
bung des Punktes G vernachlassigt werden.
Gegeben: r1, r2, J, m, ct, b, xD = x sinΩt.
Gesucht:
a) Bewegungsdifferentialgleichung,
b) Vergroßerungsfunktion und Phasenverschie-
bung zwischen Systemerregung und -antwort
(mit Skizzen).
Losung s. S. 25
3.5 Messung von Bodenschwingungen
Ein seismischer Schwingungssensor besteht aus einem
Gehause, in dem die seismische Masse an einer Feder
und einem geschwindigkeitsproportionalen Dampfer
aufgehangt ist.
Gegeben: m, c, b, xB(t) = x cos Ωt.
Gesucht:
a) Schwingungsdifferentialgleichung der relativen
Verschiebung xg(t),
b) allgemeine Losung xg(t),
c) stationare Losung,
d) Vergroßerungsfunktion V (η, D).
Losung s. S. 25
8 Aufgabensammlung Maschinendynamik
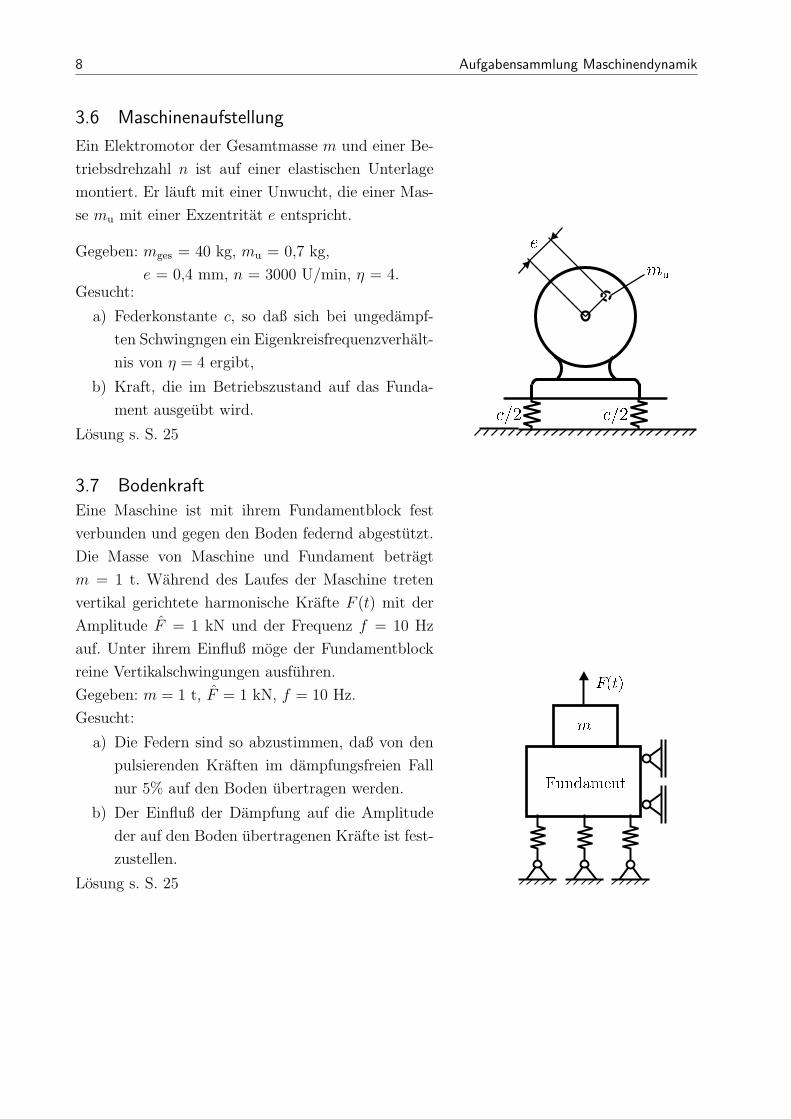
3.6 Maschinenaufstellung
Ein Elektromotor der Gesamtmasse m und einer Be-
triebsdrehzahl n ist auf einer elastischen Unterlage
montiert. Er lauft mit einer Unwucht, die einer Mas-
se mu mit einer Exzentritat e entspricht.
Gegeben: mges = 40 kg, mu = 0,7 kg,
e = 0,4 mm, n = 3000 U/min, η = 4.Gesucht:
a) Federkonstante c, so daß sich bei ungedampf-
ten Schwingngen ein Eigenkreisfrequenzverhalt-
nis von η = 4 ergibt,
b) Kraft, die im Betriebszustand auf das Funda-
ment ausgeubt wird.
Losung s. S. 25
3.7 BodenkraftEine Maschine ist mit ihrem Fundamentblock fest
verbunden und gegen den Boden federnd abgestutzt.
Die Masse von Maschine und Fundament betragt
m = 1 t. Wahrend des Laufes der Maschine treten
vertikal gerichtete harmonische Krafte F (t) mit der
Amplitude F = 1 kN und der Frequenz f = 10 Hz
auf. Unter ihrem Einfluß moge der Fundamentblock
reine Vertikalschwingungen ausfuhren.
Gegeben: m = 1 t, F = 1 kN, f = 10 Hz.
Gesucht:
a) Die Federn sind so abzustimmen, daß von den
pulsierenden Kraften im dampfungsfreien Fall
nur 5% auf den Boden ubertragen werden.
b) Der Einfluß der Dampfung auf die Amplitude
der auf den Boden ubertragenen Krafte ist fest-
zustellen.
Losung s. S. 25
3 Aufstellung der starren Maschine 9
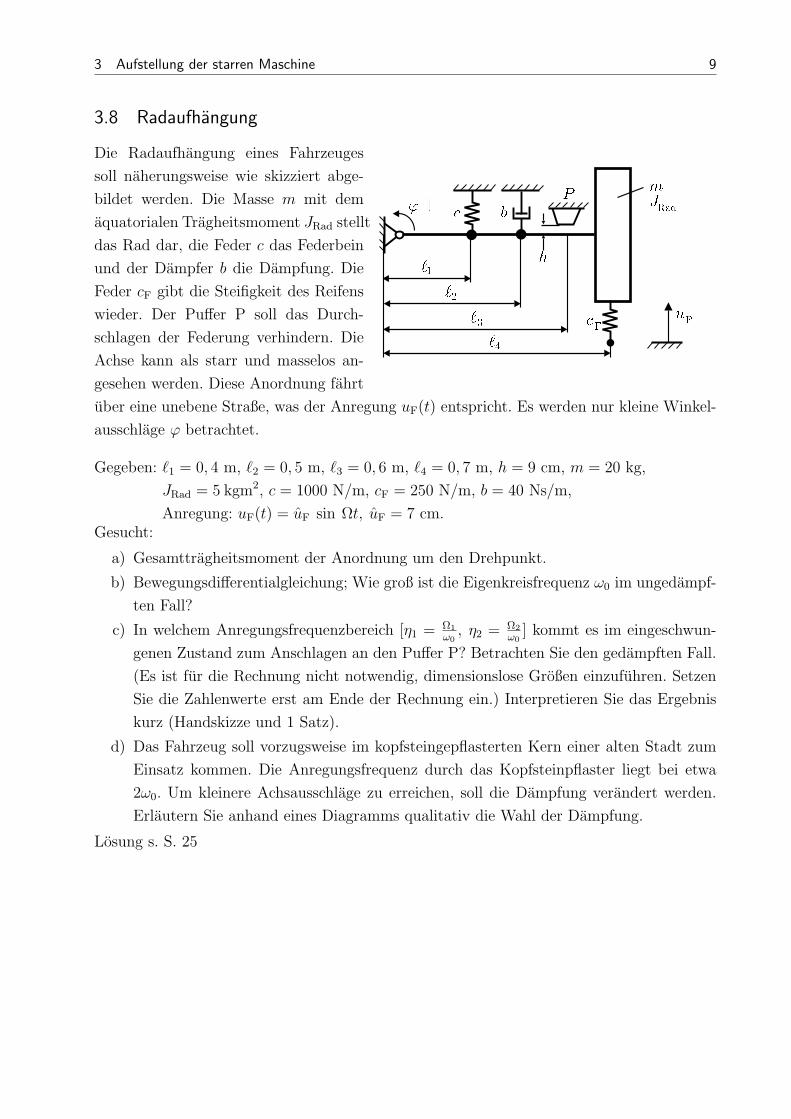
3.8 Radaufhangung
Die Radaufhangung eines Fahrzeuges
soll naherungsweise wie skizziert abge-
bildet werden. Die Masse m mit dem
aquatorialen Tragheitsmoment JRad stellt
das Rad dar, die Feder c das Federbein
und der Dampfer b die Dampfung. Die
Feder cF gibt die Steifigkeit des Reifens
wieder. Der Puffer P soll das Durch-
schlagen der Federung verhindern. Die
Achse kann als starr und masselos an-
gesehen werden. Diese Anordnung fahrt
uber eine unebene Straße, was der Anregung uF(t) entspricht. Es werden nur kleine Winkel-
ausschlage ϕ betrachtet.
Gegeben: `1 = 0, 4 m, `2 = 0, 5 m, `3 = 0, 6 m, `4 = 0, 7 m, h = 9 cm, m = 20 kg,
JRad = 5 kgm2, c = 1000 N/m, cF = 250 N/m, b = 40 Ns/m,
Anregung: uF(t) = uF sin Ωt, uF = 7 cm.Gesucht:
a) Gesamttragheitsmoment der Anordnung um den Drehpunkt.
b) Bewegungsdifferentialgleichung; Wie groß ist die Eigenkreisfrequenz ω0 im ungedampf-
ten Fall?
c) In welchem Anregungsfrequenzbereich [η1 = Ω1
ω0, η2 = Ω2
ω0] kommt es im eingeschwun-
genen Zustand zum Anschlagen an den Puffer P? Betrachten Sie den gedampften Fall.
(Es ist fur die Rechnung nicht notwendig, dimensionslose Großen einzufuhren. Setzen
Sie die Zahlenwerte erst am Ende der Rechnung ein.) Interpretieren Sie das Ergebnis
kurz (Handskizze und 1 Satz).
d) Das Fahrzeug soll vorzugsweise im kopfsteingepflasterten Kern einer alten Stadt zum
Einsatz kommen. Die Anregungsfrequenz durch das Kopfsteinpflaster liegt bei etwa
2ω0. Um kleinere Achsausschlage zu erreichen, soll die Dampfung verandert werden.
Erlautern Sie anhand eines Diagramms qualitativ die Wahl der Dampfung.
Losung s. S. 25
10 Aufgabensammlung Maschinendynamik
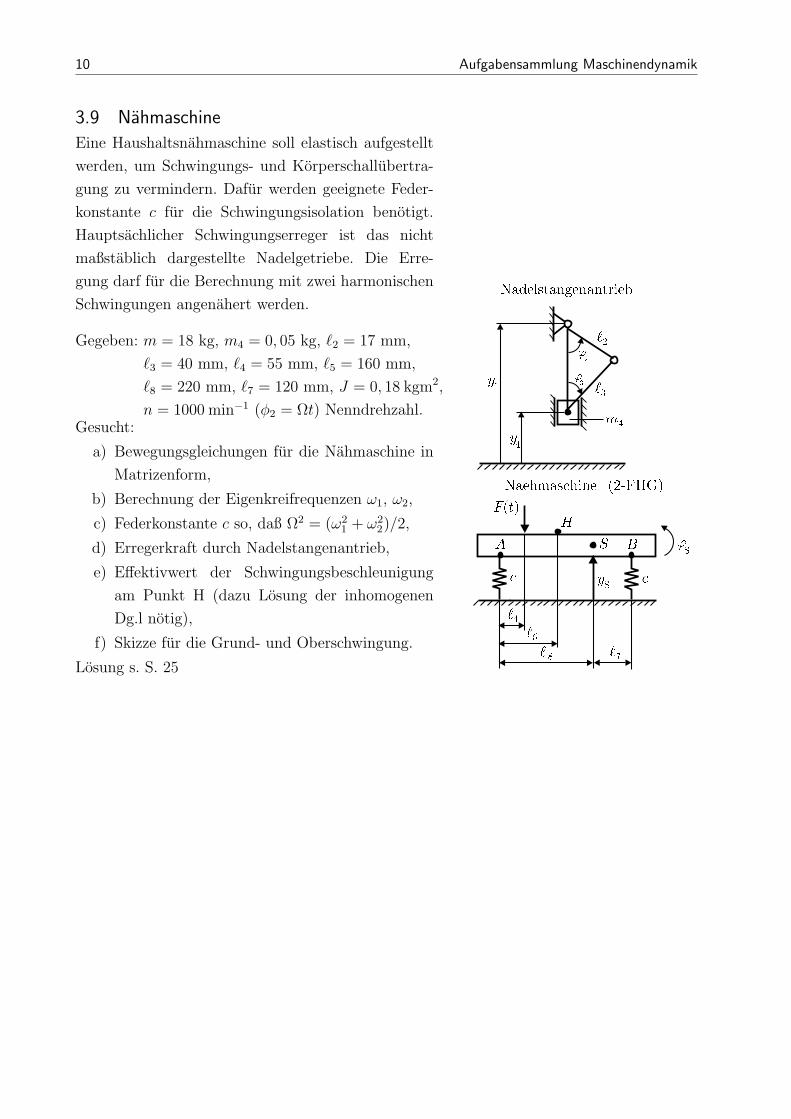
3.9 Nahmaschine
Eine Haushaltsnahmaschine soll elastisch aufgestellt
werden, um Schwingungs- und Korperschallubertra-
gung zu vermindern. Dafur werden geeignete Feder-
konstante c fur die Schwingungsisolation benotigt.
Hauptsachlicher Schwingungserreger ist das nicht
maßstablich dargestellte Nadelgetriebe. Die Erre-
gung darf fur die Berechnung mit zwei harmonischen
Schwingungen angenahert werden.
Gegeben: m = 18 kg, m4 = 0, 05 kg, `2 = 17 mm,
`3 = 40 mm, `4 = 55 mm, `5 = 160 mm,
`8 = 220 mm, `7 = 120 mm, J = 0, 18 kgm2,
n = 1000 min−1 (φ2 = Ωt) Nenndrehzahl.Gesucht:
a) Bewegungsgleichungen fur die Nahmaschine in
Matrizenform,
b) Berechnung der Eigenkreifrequenzen ω1, ω2,
c) Federkonstante c so, daß Ω2 = (ω21 + ω2
2)/2,
d) Erregerkraft durch Nadelstangenantrieb,
e) Effektivwert der Schwingungsbeschleunigung
am Punkt H (dazu Losung der inhomogenen
Dg.l notig),
f) Skizze fur die Grund- und Oberschwingung.
Losung s. S. 25
!
"#
$%&
'
(*),+.-0/21435),6879-06:),6;3=<?>@-0A
BDCFEHG.IJC,K?LMG.NPO8E QSR0TVUXWZY\[
4 n-FHG-Systeme 11
4 n-FHG-Systeme
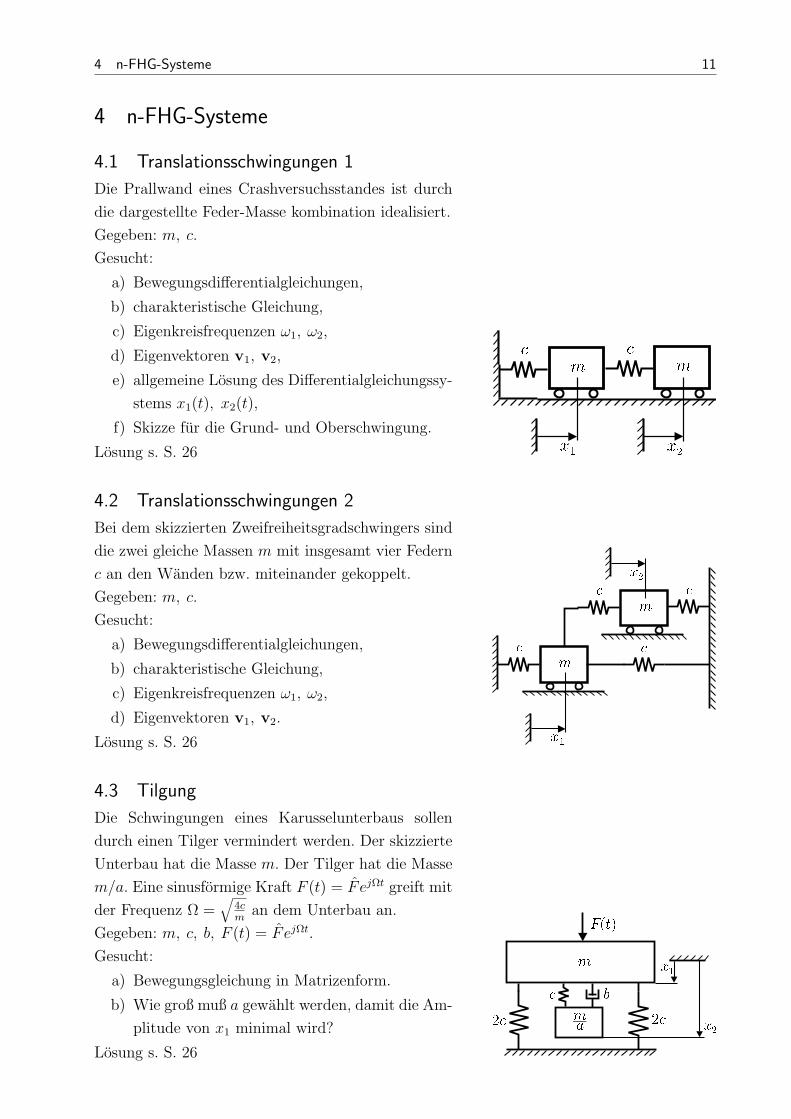
4.1 Translationsschwingungen 1
Die Prallwand eines Crashversuchsstandes ist durch
die dargestellte Feder-Masse kombination idealisiert.
Gegeben: m, c.
Gesucht:
a) Bewegungsdifferentialgleichungen,
b) charakteristische Gleichung,
c) Eigenkreisfrequenzen ω1, ω2,
d) Eigenvektoren v1, v2,
e) allgemeine Losung des Differentialgleichungssy-
stems x1(t), x2(t),
f) Skizze fur die Grund- und Oberschwingung.
Losung s. S. 26
4.2 Translationsschwingungen 2
Bei dem skizzierten Zweifreiheitsgradschwingers sind
die zwei gleiche Massen m mit insgesamt vier Federn
c an den Wanden bzw. miteinander gekoppelt.
Gegeben: m, c.
Gesucht:
a) Bewegungsdifferentialgleichungen,
b) charakteristische Gleichung,
c) Eigenkreisfrequenzen ω1, ω2,
d) Eigenvektoren v1, v2.
Losung s. S. 26
4.3 Tilgung
Die Schwingungen eines Karusselunterbaus sollen
durch einen Tilger vermindert werden. Der skizzierte
Unterbau hat die Masse m. Der Tilger hat die Masse
m/a. Eine sinusformige Kraft F (t) = F ejΩt greift mit
der Frequenz Ω =√
4cm
an dem Unterbau an.
Gegeben: m, c, b, F (t) = F ejΩt.
Gesucht:
a) Bewegungsgleichung in Matrizenform.
b) Wie groß muß a gewahlt werden, damit die Am-
plitude von x1 minimal wird?
Losung s. S. 26
12 Aufgabensammlung Maschinendynamik
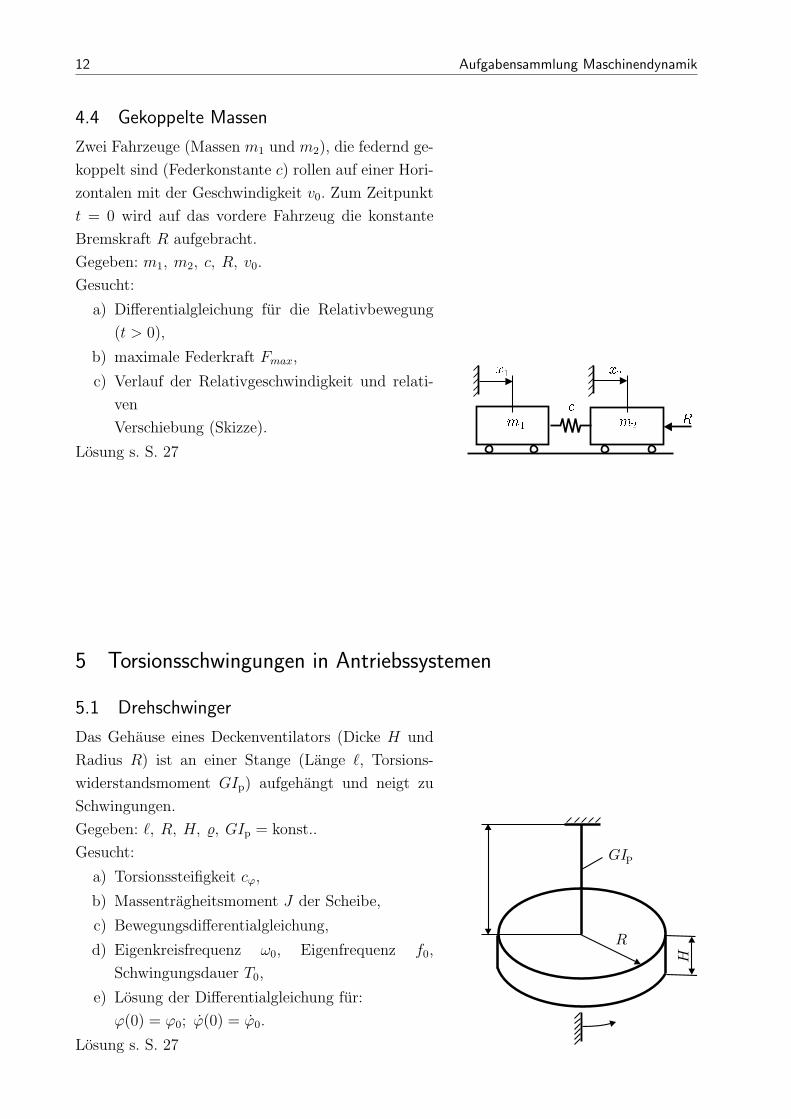
4.4 Gekoppelte Massen
Zwei Fahrzeuge (Massen m1 und m2), die federnd ge-
koppelt sind (Federkonstante c) rollen auf einer Hori-
zontalen mit der Geschwindigkeit v0. Zum Zeitpunkt
t = 0 wird auf das vordere Fahrzeug die konstante
Bremskraft R aufgebracht.
Gegeben: m1, m2, c, R, v0.
Gesucht:
a) Differentialgleichung fur die Relativbewegung
(t > 0),
b) maximale Federkraft Fmax,
c) Verlauf der Relativgeschwindigkeit und relati-
ven
Verschiebung (Skizze).
Losung s. S. 27
5 Torsionsschwingungen in Antriebssystemen
5.1 Drehschwinger
Das Gehause eines Deckenventilators (Dicke H und
Radius R) ist an einer Stange (Lange `, Torsions-
widerstandsmoment GIp) aufgehangt und neigt zu
Schwingungen.
Gegeben: `, R, H, %, GIp = konst..
Gesucht:
a) Torsionssteifigkeit cϕ,
b) Massentragheitsmoment J der Scheibe,
c) Bewegungsdifferentialgleichung,
d) Eigenkreisfrequenz ω0, Eigenfrequenz f0,
Schwingungsdauer T0,
e) Losung der Differentialgleichung fur:
ϕ(0) = ϕ0; ϕ(0) = ϕ0.
Losung s. S. 27
H
GIP
R
’
‘
5 Torsionsschwingungen in Antriebssystemen 13
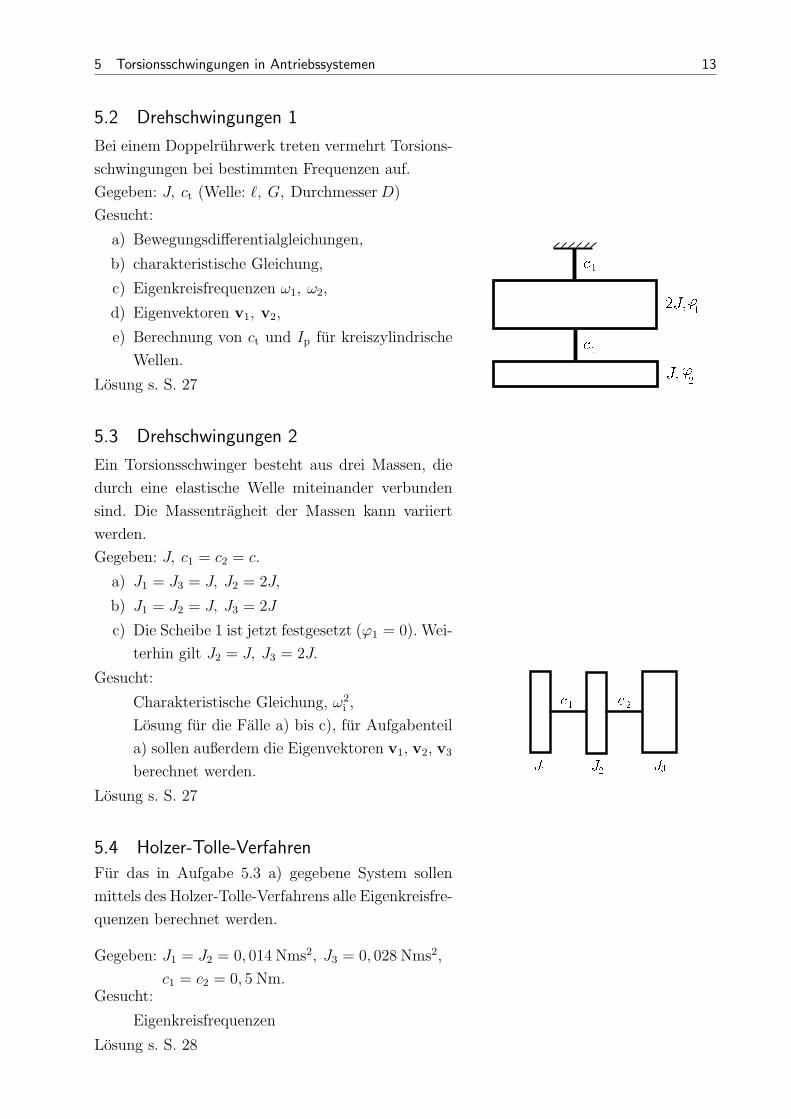
5.2 Drehschwingungen 1
Bei einem Doppelruhrwerk treten vermehrt Torsions-
schwingungen bei bestimmten Frequenzen auf.
Gegeben: J, ct (Welle: `, G, Durchmesser D)
Gesucht:
a) Bewegungsdifferentialgleichungen,
b) charakteristische Gleichung,
c) Eigenkreisfrequenzen ω1, ω2,
d) Eigenvektoren v1, v2,
e) Berechnung von ct und Ip fur kreiszylindrische
Wellen.
Losung s. S. 27
5.3 Drehschwingungen 2
Ein Torsionsschwinger besteht aus drei Massen, die
durch eine elastische Welle miteinander verbunden
sind. Die Massentragheit der Massen kann variiert
werden.
Gegeben: J, c1 = c2 = c.
a) J1 = J3 = J, J2 = 2J,
b) J1 = J2 = J, J3 = 2J
c) Die Scheibe 1 ist jetzt festgesetzt (ϕ1 = 0). Wei-
terhin gilt J2 = J, J3 = 2J.
Gesucht:
Charakteristische Gleichung, ω2i ,
Losung fur die Falle a) bis c), fur Aufgabenteil
a) sollen außerdem die Eigenvektoren v1, v2, v3
berechnet werden.
Losung s. S. 27
5.4 Holzer-Tolle-Verfahren
Fur das in Aufgabe 5.3 a) gegebene System sollen
mittels des Holzer-Tolle-Verfahrens alle Eigenkreisfre-
quenzen berechnet werden.
Gegeben: J1 = J2 = 0, 014 Nms2, J3 = 0, 028 Nms2,
c1 = c2 = 0, 5 Nm.Gesucht:
Eigenkreisfrequenzen
Losung s. S. 28
14 Aufgabensammlung Maschinendynamik
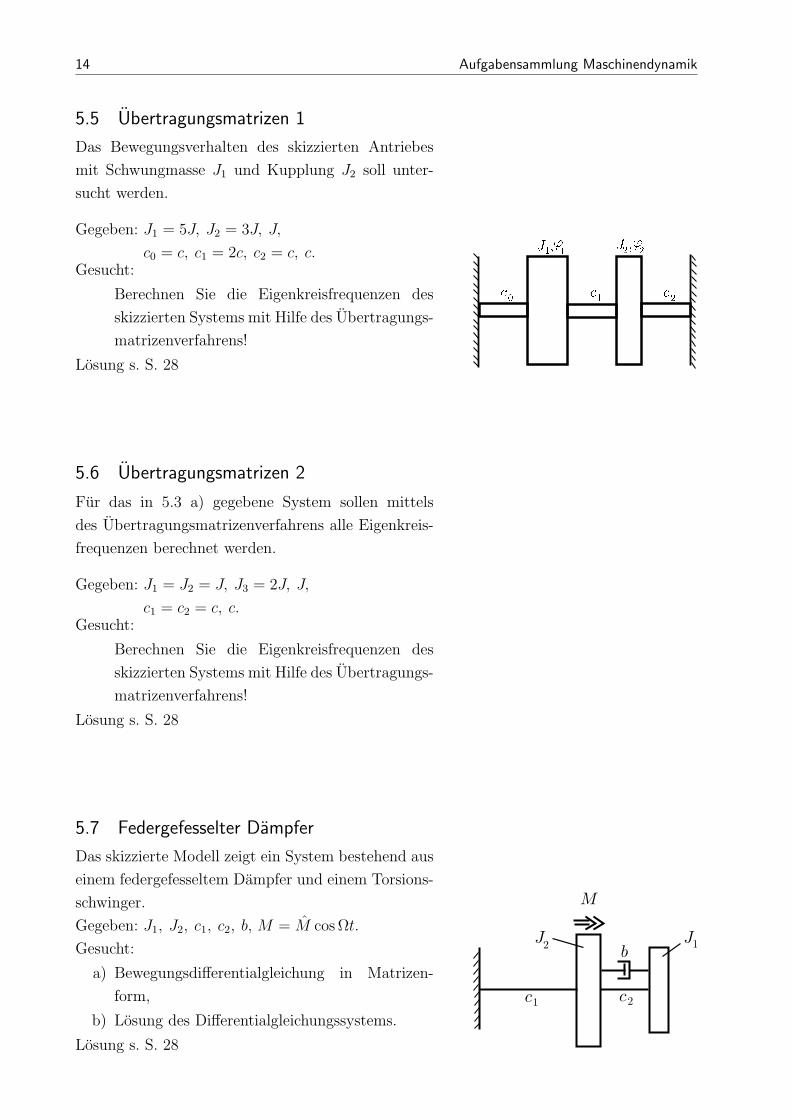
5.5 Ubertragungsmatrizen 1
Das Bewegungsverhalten des skizzierten Antriebes
mit Schwungmasse J1 und Kupplung J2 soll unter-
sucht werden.
Gegeben: J1 = 5J, J2 = 3J, J,
c0 = c, c1 = 2c, c2 = c, c.Gesucht:
Berechnen Sie die Eigenkreisfrequenzen des
skizzierten Systems mit Hilfe des Ubertragungs-
matrizenverfahrens!
Losung s. S. 28
5.6 Ubertragungsmatrizen 2
Fur das in 5.3 a) gegebene System sollen mittels
des Ubertragungsmatrizenverfahrens alle Eigenkreis-
frequenzen berechnet werden.
Gegeben: J1 = J2 = J, J3 = 2J, J,
c1 = c2 = c, c.Gesucht:
Berechnen Sie die Eigenkreisfrequenzen des
skizzierten Systems mit Hilfe des Ubertragungs-
matrizenverfahrens!
Losung s. S. 28
5.7 Federgefesselter Dampfer
Das skizzierte Modell zeigt ein System bestehend aus
einem federgefesseltem Dampfer und einem Torsions-
schwinger.
Gegeben: J1, J2, c1, c2, b, M = M cos Ωt.
Gesucht:
a) Bewegungsdifferentialgleichung in Matrizen-
form,
b) Losung des Differentialgleichungssystems.
Losung s. S. 28
c c
JJ
M
b
1 2
12
5 Torsionsschwingungen in Antriebssystemen 15
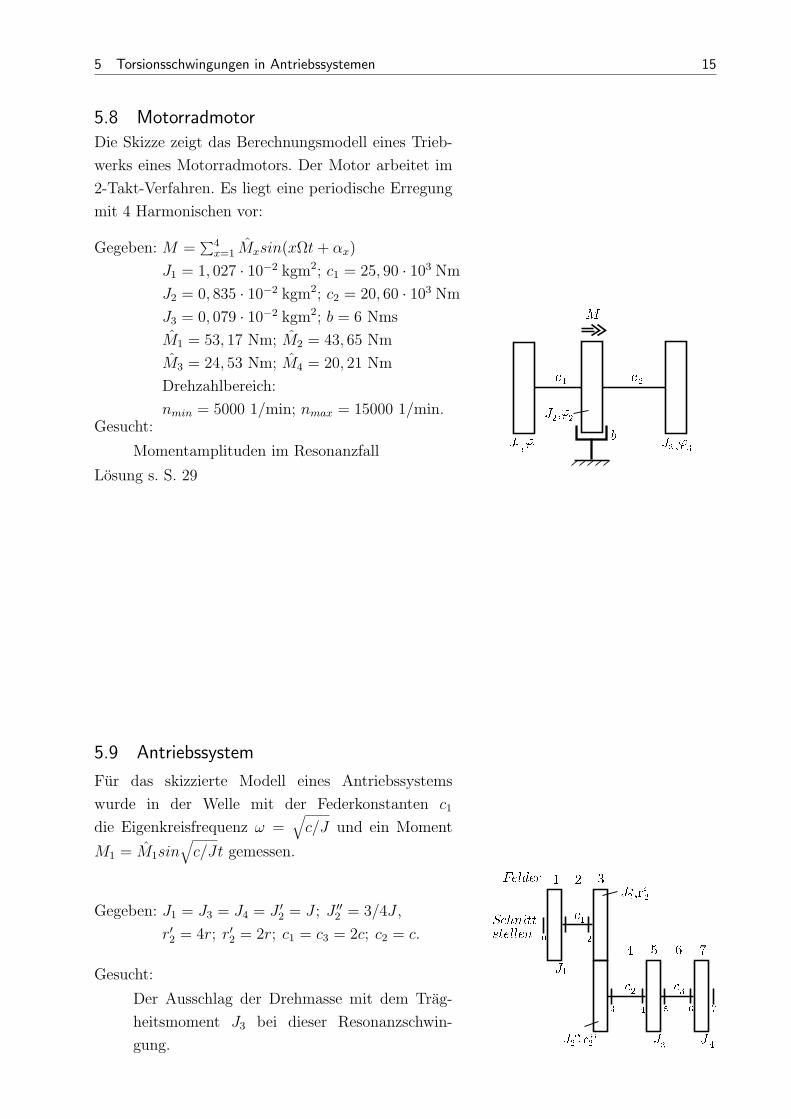
5.8 MotorradmotorDie Skizze zeigt das Berechnungsmodell eines Trieb-
werks eines Motorradmotors. Der Motor arbeitet im
2-Takt-Verfahren. Es liegt eine periodische Erregung
mit 4 Harmonischen vor:
Gegeben: M =∑4
x=1 Mxsin(xΩt + αx)
J1 = 1, 027 · 10−2 kgm2; c1 = 25, 90 · 103 Nm
J2 = 0, 835 · 10−2 kgm2; c2 = 20, 60 · 103 Nm
J3 = 0, 079 · 10−2 kgm2; b = 6 Nms
M1 = 53, 17 Nm; M2 = 43, 65 Nm
M3 = 24, 53 Nm; M4 = 20, 21 Nm
Drehzahlbereich:
nmin = 5000 1/min; nmax = 15000 1/min.Gesucht:
Momentamplituden im Resonanzfall
Losung s. S. 29
5.9 Antriebssystem
Fur das skizzierte Modell eines Antriebssystems
wurde in der Welle mit der Federkonstanten c1
die Eigenkreisfrequenz ω =√
c/J und ein Moment
M1 = M1sin√
c/Jt gemessen.
Gegeben: J1 = J3 = J4 = J ′2 = J ; J ′′
2 = 3/4J ,
r′2 = 4r; r′2 = 2r; c1 = c3 = 2c; c2 = c.
Gesucht:
Der Ausschlag der Drehmasse mit dem Trag-
heitsmoment J3 bei dieser Resonanzschwin-
gung.
!
" # $ %& ' (
) * + , -
.
/
0 1 2343 5
64798;: <
=?> @4@
A
B C
D
E F
16 Aufgabensammlung Maschinendynamik
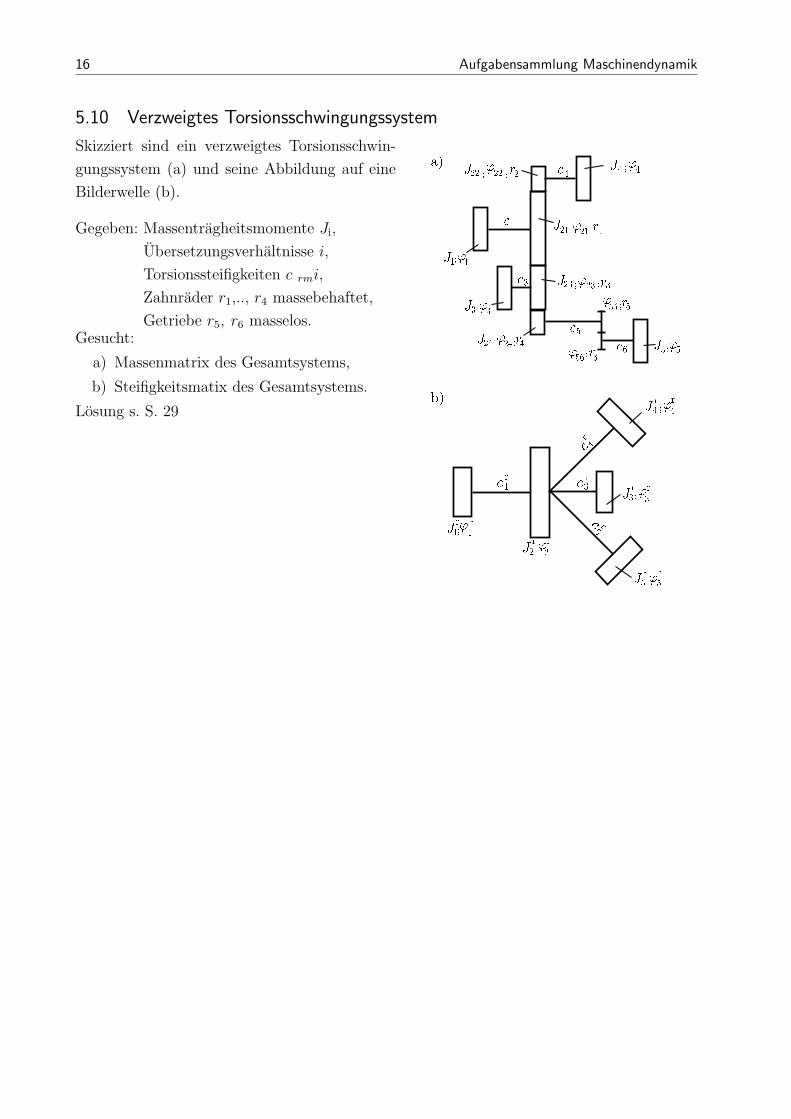
5.10 Verzweigtes Torsionsschwingungssystem
Skizziert sind ein verzweigtes Torsionsschwin-
gungssystem (a) und seine Abbildung auf eine
Bilderwelle (b).
Gegeben: Massentragheitsmomente Ji,
Ubersetzungsverhaltnisse i,
Torsionssteifigkeiten c rmi,
Zahnrader r1,.., r4 massebehaftet,
Getriebe r5, r6 masselos.Gesucht:
a) Massenmatrix des Gesamtsystems,
b) Steifigkeitsmatix des Gesamtsystems.
Losung s. S. 29
!
"
#
$
%
&'
(
)*) +
,.-
/10
2
34
5678:9 ;
<=>?
@A
B
CD1E
F*G
H.I
J:KL
M
N*NO
P Q
R
STU
V
W
X
Y
Z [
\]^*^_a`
bcde
fghjilkm
nporqstu
v
w
x
y
z
|
~
p
¡£¢
6 Biegeschwingungen rotierender Wellen 17
6 Biegeschwingungen rotierender Wellen
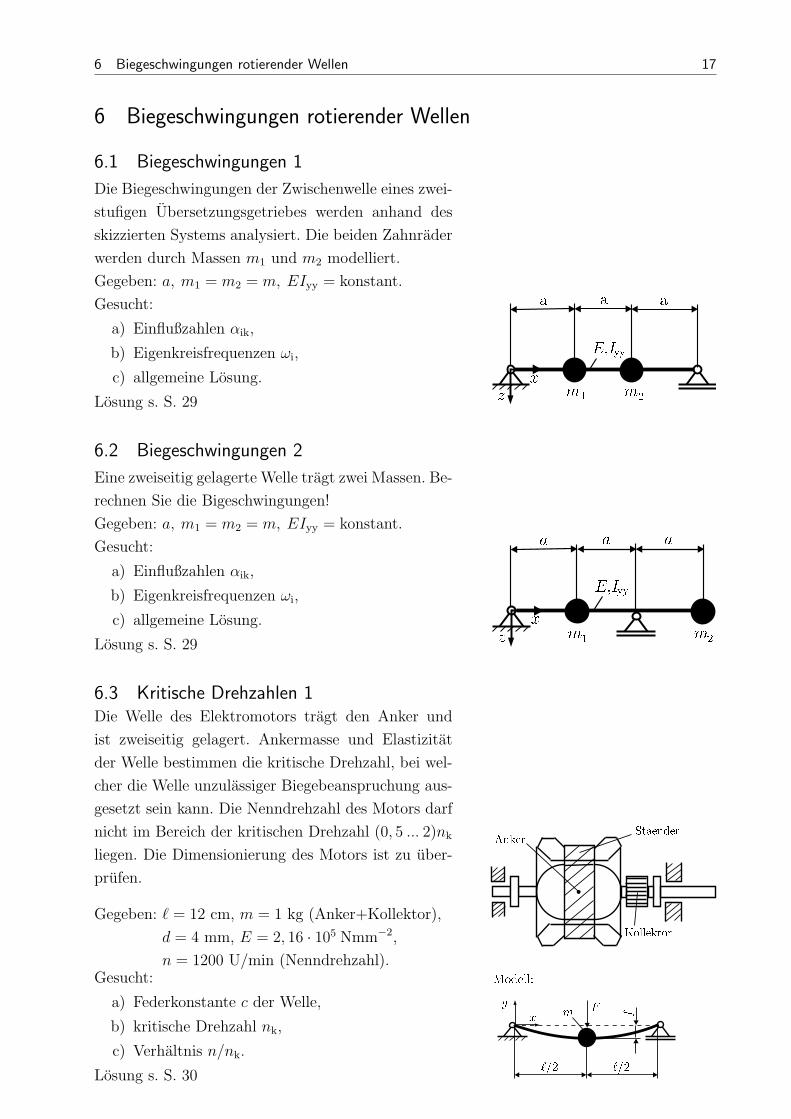
6.1 Biegeschwingungen 1
Die Biegeschwingungen der Zwischenwelle eines zwei-
stufigen Ubersetzungsgetriebes werden anhand des
skizzierten Systems analysiert. Die beiden Zahnrader
werden durch Massen m1 und m2 modelliert.
Gegeben: a, m1 = m2 = m, EIyy = konstant.
Gesucht:
a) Einflußzahlen αik,
b) Eigenkreisfrequenzen ωi,
c) allgemeine Losung.
Losung s. S. 29
6.2 Biegeschwingungen 2
Eine zweiseitig gelagerte Welle tragt zwei Massen. Be-
rechnen Sie die Bigeschwingungen!
Gegeben: a, m1 = m2 = m, EIyy = konstant.
Gesucht:
a) Einflußzahlen αik,
b) Eigenkreisfrequenzen ωi,
c) allgemeine Losung.
Losung s. S. 29
6.3 Kritische Drehzahlen 1Die Welle des Elektromotors tragt den Anker und
ist zweiseitig gelagert. Ankermasse und Elastizitat
der Welle bestimmen die kritische Drehzahl, bei wel-
cher die Welle unzulassiger Biegebeanspruchung aus-
gesetzt sein kann. Die Nenndrehzahl des Motors darf
nicht im Bereich der kritischen Drehzahl (0, 5 ... 2)nk
liegen. Die Dimensionierung des Motors ist zu uber-
prufen.
Gegeben: ` = 12 cm, m = 1 kg (Anker+Kollektor),
d = 4 mm, E = 2, 16 · 105 Nmm−2,
n = 1200 U/min (Nenndrehzahl).Gesucht:
a) Federkonstante c der Welle,
b) kritische Drehzahl nk,
c) Verhaltnis n/nk.
Losung s. S. 30
!" # $ %
&(')*(+,
-/.103245476
18 Aufgabensammlung Maschinendynamik
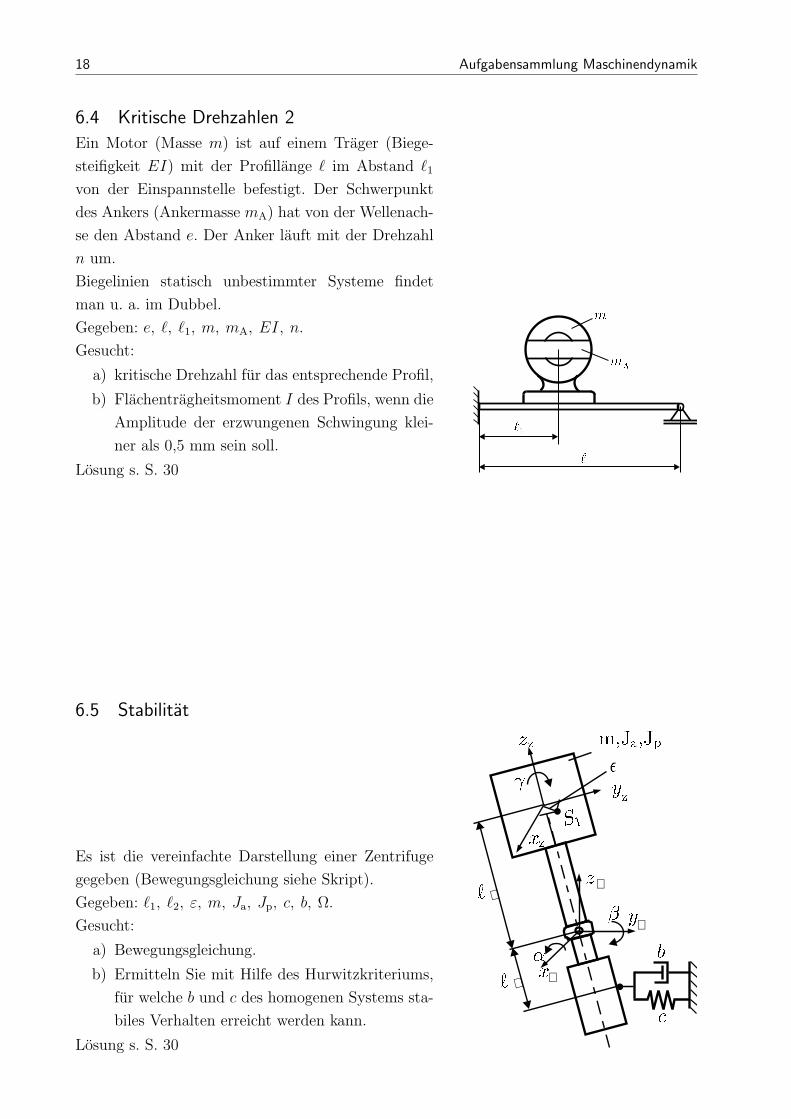
6.4 Kritische Drehzahlen 2
Ein Motor (Masse m) ist auf einem Trager (Biege-
steifigkeit EI) mit der Profillange ` im Abstand `1
von der Einspannstelle befestigt. Der Schwerpunkt
des Ankers (Ankermasse mA) hat von der Wellenach-
se den Abstand e. Der Anker lauft mit der Drehzahl
n um.
Biegelinien statisch unbestimmter Systeme findet
man u. a. im Dubbel.
Gegeben: e, `, `1, m, mA, EI, n.
Gesucht:
a) kritische Drehzahl fur das entsprechende Profil,
b) Flachentragheitsmoment I des Profils, wenn die
Amplitude der erzwungenen Schwingung klei-
ner als 0,5 mm sein soll.
Losung s. S. 30
6.5 Stabilitat
Es ist die vereinfachte Darstellung einer Zentrifuge
gegeben (Bewegungsgleichung siehe Skript).
Gegeben: `1, `2, ε, m, Ja, Jp, c, b, Ω.
Gesucht:
a) Bewegungsgleichung.
b) Ermitteln Sie mit Hilfe des Hurwitzkriteriums,
fur welche b und c des homogenen Systems sta-
biles Verhalten erreicht werden kann.
Losung s. S. 30
1
2
1
1
1

6 Biegeschwingungen rotierender Wellen 19
6.6 Hohlwelle mit ScheibeEine Hohlwelle mit gleichbleibenden Querschnitt
(Biegesteifigkeit EI), die in isotrop elastischen La-
gern gelagert ist, tragt im Abstand a vom linken La-
ger eine Scheibe mit der Masse m. Der Kreiseleinfluß
ist, weil die Scheibe nicht weit von der Wellenmitte
angeordnetist, gering und wird nicht berucksichtigt.
Modellieren Sie die Scheibe als Punktmasse.
Gegeben: a = 0, 6 m, ` = 1 m, m = 31, 3 kg,
c1 = 11 · 104 N/m,
c2 = 15 · 104 N/m,
EI = 26370Nm2.
Gesucht:
a) Berechnen Sie die biegekritische Drehzahl oh-
ne Berucksichtigung der Lagerelastizitat (starre
Lager).
b) Berechnen Sie die Eigenkreisfrequenz unter Be-
rucksichtigung der Lager- und der Wellenelasti-
zitat.
Losung s. S. 30
6.7 Auskragende Welle
Eine auskragende Welle (Biegesteifigkeit EI) tragt an
ihrem Ende eine Kreisscheibe (m, JA, JP, ε) und ro-
tiert mit der Winkelgeschwindigkeit Ω.
Gegeben: `, m, JA, JP, EI, Ω.
Gesucht:
Eigenwerte in Abhangigkeit der Winkelge-
schwindigkeit Ω.
Losung s. S. 31
20 Aufgabensammlung Maschinendynamik
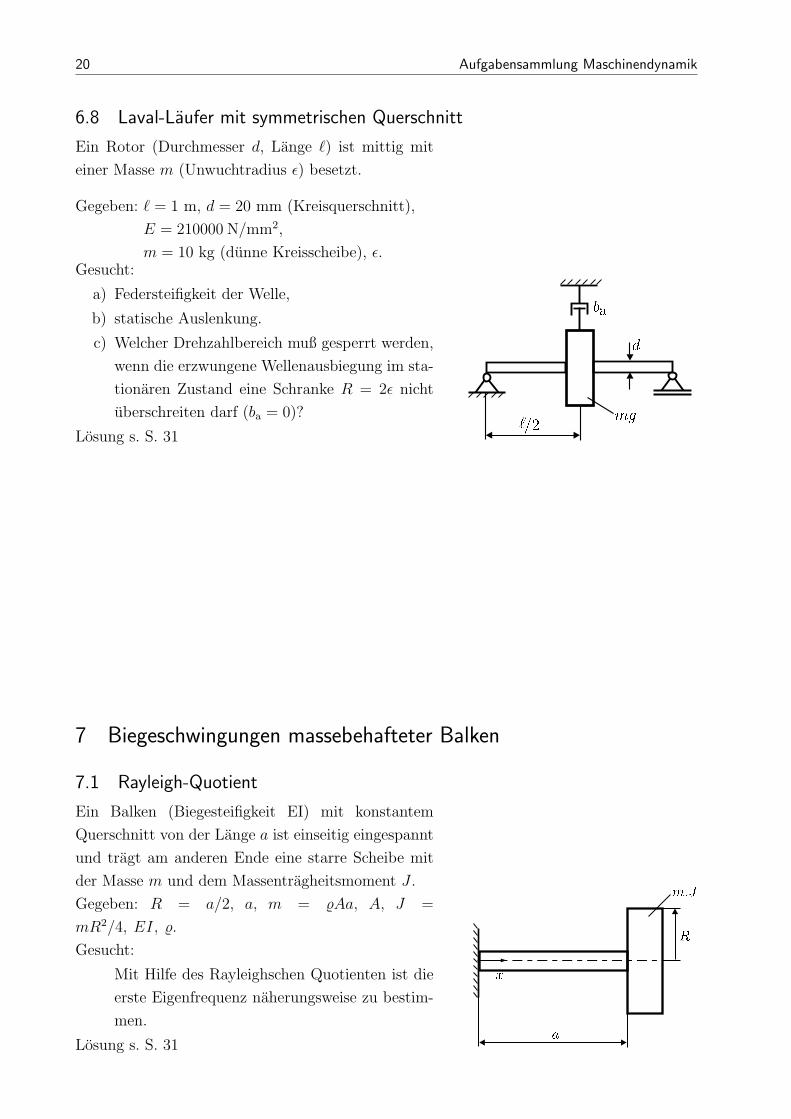
6.8 Laval-Laufer mit symmetrischen Querschnitt
Ein Rotor (Durchmesser d, Lange `) ist mittig mit
einer Masse m (Unwuchtradius ε) besetzt.
Gegeben: ` = 1 m, d = 20 mm (Kreisquerschnitt),
E = 210000 N/mm2,
m = 10 kg (dunne Kreisscheibe), ε.Gesucht:
a) Federsteifigkeit der Welle,
b) statische Auslenkung.
c) Welcher Drehzahlbereich muß gesperrt werden,
wenn die erzwungene Wellenausbiegung im sta-
tionaren Zustand eine Schranke R = 2ε nicht
uberschreiten darf (ba = 0)?
Losung s. S. 31
7 Biegeschwingungen massebehafteter Balken
7.1 Rayleigh-Quotient
Ein Balken (Biegesteifigkeit EI) mit konstantem
Querschnitt von der Lange a ist einseitig eingespannt
und tragt am anderen Ende eine starre Scheibe mit
der Masse m und dem Massentragheitsmoment J .
Gegeben: R = a/2, a, m = %Aa, A, J =
mR2/4, EI, %.
Gesucht:
Mit Hilfe des Rayleighschen Quotienten ist die
erste Eigenfrequenz naherungsweise zu bestim-
men.
Losung s. S. 31
8 Massenausgleich und Auswuchten von Maschinen 21
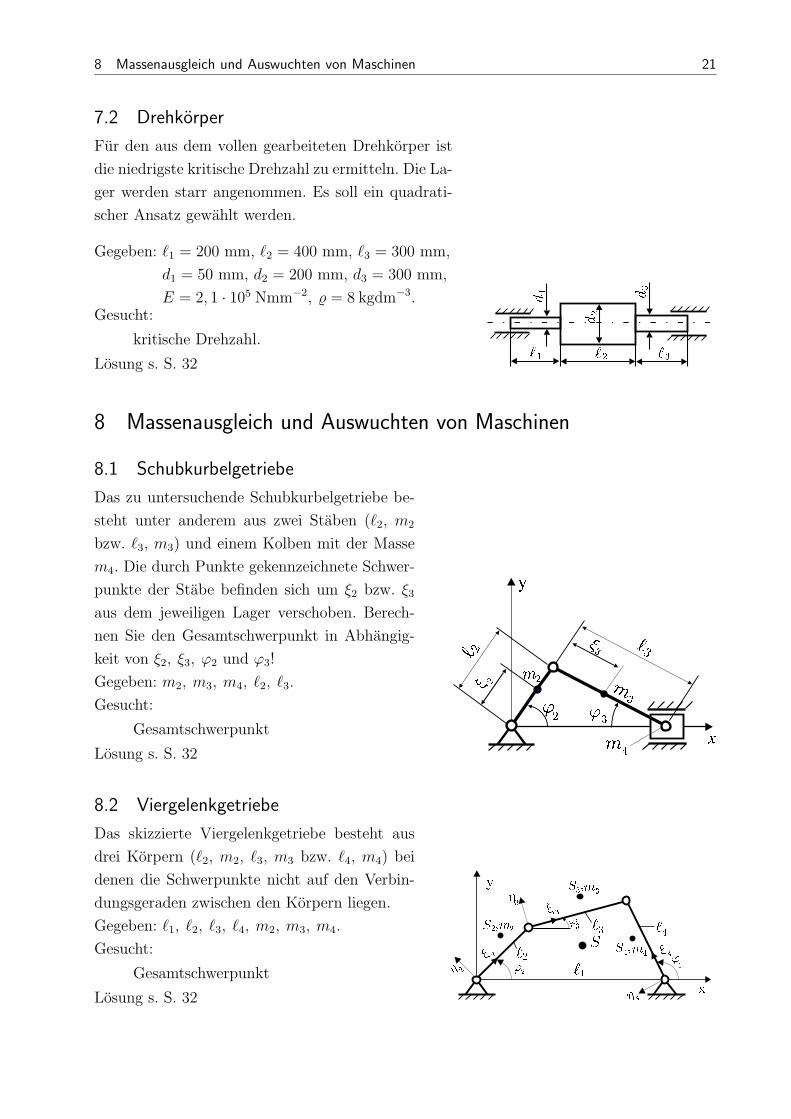
7.2 Drehkorper
Fur den aus dem vollen gearbeiteten Drehkorper ist
die niedrigste kritische Drehzahl zu ermitteln. Die La-
ger werden starr angenommen. Es soll ein quadrati-
scher Ansatz gewahlt werden.
Gegeben: `1 = 200 mm, `2 = 400 mm, `3 = 300 mm,
d1 = 50 mm, d2 = 200 mm, d3 = 300 mm,
E = 2, 1 · 105 Nmm−2, % = 8 kgdm−3.Gesucht:
kritische Drehzahl.
Losung s. S. 32
8 Massenausgleich und Auswuchten von Maschinen
8.1 Schubkurbelgetriebe
Das zu untersuchende Schubkurbelgetriebe be-
steht unter anderem aus zwei Staben (`2, m2
bzw. `3, m3) und einem Kolben mit der Masse
m4. Die durch Punkte gekennzeichnete Schwer-
punkte der Stabe befinden sich um ξ2 bzw. ξ3
aus dem jeweiligen Lager verschoben. Berech-
nen Sie den Gesamtschwerpunkt in Abhangig-
keit von ξ2, ξ3, ϕ2 und ϕ3!
Gegeben: m2, m3, m4, `2, `3.
Gesucht:
Gesamtschwerpunkt
Losung s. S. 32
8.2 Viergelenkgetriebe
Das skizzierte Viergelenkgetriebe besteht aus
drei Korpern (`2, m2, `3, m3 bzw. `4, m4) bei
denen die Schwerpunkte nicht auf den Verbin-
dungsgeraden zwischen den Korpern liegen.
Gegeben: `1, `2, `3, `4, m2, m3, m4.
Gesucht:
Gesamtschwerpunkt
Losung s. S. 32
!"#
$
%
&
'
() *
+
, -
.
/
0
1
243

22 Aufgabensammlung Maschinendynamik
9 Losungen
1.1 Langssschwinger
a) mx = −(c1 + c2)x bzw. x + ω20x = 0 mit ω2
0 = c1 + c2m
b) x(t) = C1 cos ω0t + C2 sin ω0t = Asin(ω0t− ϕ)
c) A =
√x2
0 +v2
0
ω20
d) ϕ = arctan v0x0ω0
e) ω0 =√
c1 + c2m
f) f0 = 1T0
g) T0 = 2πω0
= 2π√
mc1 + c2
1.2 Schwinger mit einem FHG
a) mx + bx + cx = 0 (Dgl 2.Ordnung, Kraftgleichung)
b) x(t) = x0 ∗ cosω0t , mit ω0 =√
cm
c) Eigenwerte λ1/2 = −D ±√
D2 − 1
Fallunterscheidung:
I. 0 ≤ D < 1 ⇒ λ1/2 = −D ± j√
1−D2
II. D = 1 ⇒ λ1/2 = −D = −1
III. D > 1 ⇒ λ1/2 = −D ±√
D2 − 1
1.3 Gefuhrte Bewegung
a) y + f(y) = 0; f(y) = 2cym
1− `0√y2 + a2
+ g
b) y = 0; y = 0; f(ys) = 0; y + f ′(ys)y = f ′(ys)ys
c) y(t) = A cos(ω0t− ϕ) + B
A =
√(y0 − ys)2 +
v20
ω20
; ω0 =√
f ′(ys); ϕ = arctan v0
ω0(y0 − ys); B = ys
1.4 Drehschwinger
a) ϕ + 2Dω0ϕ + ω20ϕ = 0 mit 2Dω0 = bt
J und ω20 = 2ct
Jb) ω = ω0
√1−D2
c) T = 2πω
d) D = bt
2√
2Jct
e) Λ = 2 ln
∣∣∣∣∣∣∣∣ϕ(tn)
ϕ(tn +
T
2
)∣∣∣∣∣∣∣∣ =
2πD√1−D2

9 Losungen 23
1.5 Reihen- und Parallelschalung von Federn
a) 1cg1
= 1c1
+ 1c2
, cg1 = c1c2c1 + c2
; cg2 = c1 + c2
b) x + 2Dω0x + ω20x = 0 mit 2Dω0 = b
m und ω20 =
cgm
c) x(t) = Ceλt
d) b2√
cm< 1
e) x(t) = C1 cos ω0t + C2 sin ω0t
f) ω0 =√
cgm ; T0 = 2π
ω0= 2π√
cg
m
g) C1 = 0; C2 = x0ω0
1.6 Reibschwinger
a) x + 2Dω0x + ω20x = 0 mit 2Dω0 = b
m und ω20 = 2µg
`
b) D>=<
1; b2
µ>=<
8m2g`
1.7 Ausschwingversuch
a) Λ = 0, 183
b) D = 0, 0291
c) ω0 = 100 1s ; ω = 99, 96 1
sd) f0 = 15, 92 Hz; f = 15, 91 Hz
e) T0 = 62, 8 ms; T = 62, 9 ms
f) b = 5, 83 Nsm
1.8 Pkw-Anhanger
Auslenkung des Schwerpunktes: x = `ϕ
Ruckstellkraft der Feder: Fx = cx
Drallsatz um den raumfesten Punkt K: JKϕ = −cx` → (JS + m`2)ϕ + c`2ϕ = 0
Eigenkreisfrequenz: ω2 = c`2
JS + m`2
Eigenfrequenz: f = ω2π
2.1 Kolbenantrieb
Kinematische Beziehungen:
ϕ(t) = arcsin(1rx(t))
ω(t) = ddtϕ(t) = 1√
r2 − x(t)2x(t)
Lagrangefunktion: L = 12Jω(t)2 + 1
2mx(t)2 + 12cx(t)2
Bewegungsgleichung:(m + J
r2 − x(t)2
)x(t) +
Jx(t)(r2 − x(t)2
)2 x(t)2 + c x(t) = −F (t)

24 Aufgabensammlung Maschinendynamik
2.2 Gelenkmechanismus
a) 1 Freiheitsgrad
b) T = m`2ϕ2(13
+ sin2 ϕ)
U = −mg` sin ϕ + 2c`2(1− cos ϕ)2
2m`2(13
+ sin2 ϕ)ϕ + 2m`2 sin ϕ cos ϕϕ2 −mg` cos ϕ + 4c`2(1− cos ϕ) sin ϕ = 0
2.3 Bewegungsgleichungen
a) Stab: JS4ϕ4 = ΣM = F`4 cos ϕ4 −m4g`2 cos ϕ4
Scheibe: J2ϕ2 = M(t)− Fr cos ϕ2
⇒ (J2 + JS4r2
`24
)ϕ2 − JS4r2
`24
sin ϕ2 cos ϕ2ϕ22 + 1
2m4g``4
r cos ϕ2 = M(t)
b) Potentielle Energie: U = m4g`2
r`4
sinϕ2
Kinetische Energie: T = (12(J2 + JS4(r2
`24
cos2 ϕ2)ϕ22
⇒ (J2 + JS4r2
`24
)ϕ2 − JS4r2
`24
sin ϕ2 cos ϕ2ϕ22 + 1
2m4g``4
r cos ϕ2 = M(t)
3.1 Federkrafterregung
a) mx = c(xF − x)− bx; xF = x sin Ωt
x + 2Dω0x + ω20x = c
mx sin Ωt = ω20x sin Ωt mit 2Dω0 = b
m und ω20 = c
mb) x(t) = Be−Dω0t cos
(ω0
√1−D2t− α
)+ A sin(Ωt− ϕ)
B, α Integrationskonstanten
c) xSt(t) = A sin(Ωt− ϕ); A = x√(1− η2)2 + (2Dη)2
; ϕ = arctan 2Dη1− η2
d) V (η, D) = Ax = 1√
(1− η2)2 + (2Dη)2
3.2 Indirekte Erregung am Dampfer
a) mx = −cx− b(x− xD); xD = x sin Ωt
x + 2Dω0x + ω20x = 2Dω0Ωx cos Ωt mit 2Dω0 = b
m und ω20 = c
mb) x(t) = Be−Dω0t cos
(ω0
√1−D2t− α
)+ A cos(Ωt− ϕ)
B, α Integrationskonstanten
c) xSt(t) = A cos(Ωt− ϕ); A = 2Dηx√(1− η2)2 + (2Dη)2
; ϕ = arctan−1− η2
2Dη
d) V (η, D) = Ax = 2Dη√
(1− η2)2 + (2Dη)2
3.3 Direkte Erregung an Masse
a) x + 2Dω0x + ω20 x(t) = F
m sin Ωt
b) xSt(t) = Fc V1(η, D) sin(Ωt− ϕ)
c) V1(η, D) = 1√(1− η2)2 + (2Dη)2

9 Losungen 25
3.4 Drehschwinger mit indirekter Erregung
a) ϕ + 2Dω0ϕ + ω20ϕ = 2Dω0Ω
r2x cos Ωt + mgr1
J + mr21
mit 2Dωo =br2
2
J + mr21
und ω20 = ct
J + mr21
b) V (η, D) = 2Dη√(1− η2)2 + (2Dη)2
; ϕ = arctan 2Dη1− η2
3.5 Messung von Bodenschwingungen
a) xg + 2Dω0xg + ω20xg = Ω2x cos Ωt mit 2Dω0 = b
m und ω20 = c
mb) xg(t) = Be−Dω0t cos
(ω0
√1−D2t− α
)+ A cos(Ωt− ϕ)
A, B, α, ϕ Integrationskonstanten
c) xgSt(t) = A cos(Ωt− ϕ); A = xη2√
(1− η2)2 + (2Dη)2; ϕ = arctan 2Dη
1− η2
d) V (η, D) = Ax = η2√
(1− η2)2 + (2Dη)2
3.6 Maschinenaufstellung
a) c = mgesω20 = 246740 N
m
b) F = cx = ce muη2
mges|1− η2| = 1, 84 N
3.7 Bodenkraft
a) FB = F 1|1− η2| = 0, 05F
η = 4, 58; ω0 = Ωη = 13, 711
s ; c = ω20m = 188kN
mb) Mit zunehmender Dampfung wird die Bodenkraft großer.
3.8 Radaufhangung
a) J = JRad + m`24 = 14, 8 kgm2
b) Jϕ + b`22ϕ + (c`2
1 + cF `24)ϕ = cF`4u(t)
ω0 =
√c`2
1 + cF`24
J = 4, 368 1s
c) ϕp = cF`4uF(c`2
1 + cF`24
)√(1− η2)2 + (2Dη)2
≥ h`3
mit D =b`2
2
2√
(c`21 + cF`2
4) J
η1 = 0, 862; η2 = 1, 11
d) Bei η = 2 ist durch eine Erhohung der Dampfung keine wesentliche Verringerung der
Schwingungsamplitude zu erreichen.
3.9 Nahmaschine
a) myS + 2cyS + c(`7 − `8)φS = F (t)
JφS + c(`7 − `8)yS + c(`28 + `2
7)φS = (`8 − `4)F (t)
b) ω21/2 = a±
√a2 +
c2(`7 − `8)2
mJ

26 Aufgabensammlung Maschinendynamik
mit a =mc(`2
8 + `27) + 2Jc
2mJc) c = 47679, 47 N
md) F1 = 9, 321 N, F2 = 3, 961 N
e) Effektivwert der Schwingungsbeschleunigung am Punkt H dazu Losung der nichtho-
mogenen Dgl notig.
Der Losungsansatz nach Art der rechten Seite:
q = ΣAk ∗ cos(kΩt)
q = Σ− Ak ∗ kΩ ∗ sin(kΩt)
q = Σ− Ak ∗ (kΩ)2 ∗ cos(kΩt)
yH = 0, 41 ms2
4.1 Translationsschwingungen 1
a) x1 + 2cmx1 − c
mx2 = 0 x2 − cmx1 + c
mx2 = 0
b) λ4 − 3cmλ2 +
(cm
)2= 0
c) ω21 = c
2m
(3 +
√5)
; ω22 = c
2m
(3−
√5)
d) v1 =
1
1, 62
; v2 =
1
−0, 62
e) x(t) = ΣCivie
λit = C1v1 cos(ω1t− ϕ1) + C2v2 cos(ω2t− ϕ2)
Integrationskonstanten: C1, C2, ϕ1, ϕ2
4.2 Translationsschwingungen 2
a) mx1 = −cx1 − cx1 + c(x2 − x1)
mx2 = −c(x2 − x1)− cx2
b) λ4 − 5cmλ2 + 5
(cm
)2= 0
c) ω21 = c
2m
(5 +
√5)
; ω22 = c
2m
(5−
√5)
d) v1 =
1
1, 6
; v2 =
1
−0, 6
4.3 Tilgung
a) Bewegungsgleichung: m 0
0 ma
x1
x2
+
b −b
−b b
x1
x2
+
5c −c
−c c
x1
x2
=
F
0
ejΩt
b) dynamische Steifigkeitsmatrix:
S(Ω) =
−mΩ2 + jΩb + 5c −jΩb− c
−jΩb− c −mΩ2
a+ jΩb + c
erstes Element der Frequenzgangmatrix:
H11(Ω) = S22
det(S)= −Ω2m + ca + jbaΩ
m2Ω4 −mc(a + 5)Ω2 + 4c2a + j(−mb(a + 1)Ω3 + 4bcaΩ)Betrag der Auslenkung der Masse 1:
|x10| = |H11|F0 =
√(mc + 4b2)a2 − 8mca + 16mc
16mc3 + 64b2c2 F0 mit Ω =√
4cm

9 Losungen 27
Losen der Minimalbedingung:d(|x10|)
da = 0 ⇒ a = 4cmmc + 4b2
4.4 Gekoppelte Massen
a) xR + ω20xR = − R
m2mit ω2
0 =c(m1 + m2)
m1m2und xR = x2 − x1
Losung der Dgl.:
xR = − Rm2ω
20
(1− cos ω0t)
b) maximale Federkraft: Fmax = c ∗ xRmax = − 2Rm1
(m1 + m2)
c) Differentialgeschwindigkeit: x1 − x2 = xR = − Rm2ω0
sin ω0t
Differentialverschiebung: x1 − x2 = xR = − Rm2ω
20
(1− cos ω0t)
5.1 Drehschwinger
a) ct =GIp
`b) J = π
2%HR4 = m2 R2
c) ϕ + ω20ϕ = 0
d) ω0 =√
ctJ ; f0 = ω0
2π = 12π
√ctJ ; T0 = 1
f0= 2π
√Jct
e) ϕ(t) = ϕ0 cos ω0t + ϕ0ω0
sin ω0t
5.2 Drehschwingungen 1
a) 2Jϕ1 + 2ctϕ1 − ctϕ2 = 0; Jϕ2 − ctϕ1 + ctϕ2 = 0
b) 2J2ω4 − 4ctJω2 + c2t = 0
c) ω21 = ct
J
(1− 1√
2
); ω2
2 = ctJ
(1 + 1√
2
)
d) v1 =
1√2
; v2 =
1
−√
2
e) Ip = π
32D4; ct =GIp
l = πD4G32l
5.3 Drehschwingungen 2
a) 2J3λ6 − 6J2cλ4 + 4Jc2λ2 = 0
ω21 = 0; ω2
2 = cJ ; ω2
3 = 2cJ
v1 =
1
1
1
; v2 =
1
0
−1
; v3 =
1
−1
1
b) 2J3λ6 + 7J2cλ4 + 4Jc2λ2 = 0
ω21 = 0; ω2
2 = c4J
(7 +
√17)
; ω23 = c
4J
(7−
√17)
c) 2J2λ4 + 5Jcλ2 + c2 = 0
ω21 = c
4J
(5 +
√17)
; ω22 = c
4J
(5−
√17)

28 Aufgabensammlung Maschinendynamik
5.4 Holzer-Tolle-Verfahren
Das Losungsverfahren ist im Skript dargestellt.
ω01 = 0, ω02 = 35, 7 1s , ω03 = 71, 4 1
s
5.5 Ubertragungsmartizen 1
zL3 = F2M2F1M1F0︸ ︷︷ ︸
U
zR0 mit Fi =
1 1ci
0 1
, Mi =
1 0
−ω2Ji 1
U =
(1− ω2J2
c2
) (1− ω2J1
c1
)− ω2J1
c2
(1− ω2J2
c2
) (1c0
+ 1c1− ω2J1
c0c1
)− ω2J1
c0c2+ 1
c2(1− ω2J1
c1
)(−ω2J2)− ω2J1 −ω2J2
(1c0
+ 1c1− ω2J1
c0c1
)− ω2J1
c0+ 1
ϕL
3
ML3
=
U11 U12
U21 U22
ϕR0
MR0
ϕL
3 = U11ϕR0 + U12M
R0
Feste Einspannung: ϕR0 = 0, ϕL
3 = 0, ⇒ U12 = 0
ω21/2 =
J1(c1 + c2) + J2(c0 + c1)2J1J2
±√
J21 (c1 + c2)
2 + 2J1J2c21 + J2
2 (c0 + c1)2 − 2J1J2(c0c1 + c0c2 + c1c2)
4J21J2
2
ω21 = 0, 24 c
J , ω22 = 1, 35 c
J
5.6 Ubertragungsmartizen 2
zR3 = M3F2M2F1M1︸ ︷︷ ︸
U
zL1
U =
1− 3Jc
+ J2
c2ω2 2
c− J
c2ω2
−4Jω2 + 7J2
cω4 − 2J3
c2ω6 1− 5J
cω2 + 2J2
c2ω4
ϕR
3
MR3
=
U11 U12
U21 U22
ϕL1
ML1
Randbedingungen (freies Ende) MR
3 = ML1 = 0, ⇒ U21 = 0
ω21 = 0; ω2
2 = c4J
(7 +
√17)
; ω23 = c
4J
(7−
√17)
5.7 Federgefesselter Dampfer
a) M =
J1 0
0 J2
; C =
c2 −c2
−c2 c1 + c2
; B =
b −b
−b b
; F =
0
MejΩt
komplexe Amplitude: ϕ2 =
M(c2 − J1Ω2 + jbΩ)
(c1 − J2Ω2)(c2 − J1Ω
2)− c2J1Ω2 + jbΩ(c1 − J2Ω
2 − J1Ω2)

9 Losungen 29
5.8 Motorradmotor
ω21 = 5, 294 · 106 1
s2 ; ω1 = 2301 1s ; ne1 = 21984 1
min
ω22 = 28, 872 · 106 1
s2 ; ω2 = 5373 1s ; ne2 = 51337 1
minDie elastischen Momente betragen:
M12 = Mxbωi
c1[(ϕ1
ϕ2)i − 1]
M23 = Mxbωi
c2[1− ( ϕ3
ϕ2)i]
Es gilt: ( ϕ1
ϕ2)1 = −0, 91; ( ϕ3
ϕ2)1 = 1, 26; ( ϕ1
ϕ2)2 = −0, 09; ( ϕ3
ϕ2)2 = −9, 3
5.9 Antriebssystem
ϕ0 = M1c ; ϕ5 = ϕ0
2 ; ϕ5 = M12c
5.10 Verzweigtes Torsionsschwingungssystem
a) M =
J1 0 0 0 0
0 J2 0 0 0
0 0 J3 0 0
0 0 0 J4 0
0 0 0 0 J5
;
b) C =
c1 −c1 0 0 0
−c1 ∗ i13c3 i12c4 i14i56c56
0 i13c3 c3 0 0
0 i12c3 0 c4 0
0 i14i56c56 0 0 c56
= c1 + i13c3 + i212c4 + i214i
256c56
6.1 Biegeschwingungen 1
a) α11 = α22 = 49
a3
EIyy; α12 = α21 = 7
18a3
EIyy
b) ω21 = 18
EIyy
ma3 ; ω22 = 6
5EIyy
ma3
c) y(t) = C1
1
−1
cos
(√18
EIyy
ma3 t + α1
)+ C2
1
1
cos
(√65
EIyy
ma3 t + α2
)
6.2 Biegeschwingungen 2
a) α11 = 16
a3
EIyy; α12 = α21 = −1
4a3
EIyy; α22 = a3
EIyy
b) ω1 = 3, 1956
√EIyy
ma3 ; ω2 = 0, 4336
√EIyy
ma3
c) y(t) = C1
1
0, 2549
cos
(3, 1956
√EIyy
ma3 t + α1
)+
+ C2
1
−3, 92
cos
(0, 4336
√EIyy
ma3 t + α2
)

30 Aufgabensammlung Maschinendynamik
6.3 Kritische Drehzahlen 1
a) c =48EIyy
`3
b) nk = 30π
√cm = 2622 1
minc) n
nk= 0, 46
6.4 Kritische Drehzahlen 2
c = 12EI`3
`31(`− `1)
2(4`− `1); My + cy = mAω2e cos ωt; ω = nπ
30 ; M = m + mA
a) ω =√
cM ; nk = 30
π
√cM ; A = emAω2
|c−Mω2| ≤ 0, 5
b) I ≤(ω2M − emAω2
0, 5mm
)`31(`− `1)
2(4`− `1)12E`3
oder
I ≥(ω2M + emAω2
0, 5mm
)`31(`− `1)
2(4`− `1)12E`3
6.5 Stabilitat
a) Bewegungsgleichung: Ja 0
0 Jp
α
β
+
d`22 JpΩ
−JpΩ d`22
α
β
+
c`22 −mg`1 0
0 c`2 + mg`1
α
β
= 0
b) Charakteristische Gleichung:
λ4 +2L2
2dJa
λ3 +L4
2d2 + 2Jaκ + J2
pΩ2
J2a
λ2 +2L2
2dκJ2
a
λ + κ2
J2a
= 0
mit κ = L22k −mgL1
Nach Hurwitz:2L2
2dJa
> 0√ 2L2
2dκJ2
a
> 0 ⇒ κ!> 0 (∗)
κ2
J2a
> 0√ L4
2d2 + 2Jaκ + J2
pΩ2
J2a
> 0√
wegen (∗)
r1r2 − r3r0 = ... = L42d
2 + 2Jaκ + J2pΩ2 > 0
√wegen (∗)
r1r2r3 − r0r23 − r4r
21 = ... = L4
2d2 + J2
pΩ2 > 0√
wegen (∗)Laut Hurwitz-Kriterium ist das System fur beliebige d > 0 und κ > 0 stabil.
6.6 Hohlwelle mit Scheibe
a) c0 = 3EI `a2b2 = 13744 N
cm; ωkr =√
cm
= 209, 45 1s ; nkr = 2000 1
minb) Hinweis: Die Durchsenkung der Scheibe f laßt sich mit Hilfe einer Gradengleichung
ermitteln:
q1 = b∗Fc1l
, q2 = a∗Fc2l
qA = q1 + q2−q1
la = F
(b2
c1l2a2
c2l2
), qB = Fa2b2
3EIl
cLagerung = FqA
= 259 kN/m , cBiegung = FqB
= 1373 kN/m1
cges= 1
cL+ 1
cB, cges = 218 kN/m
nkr = 797 1/min , ωkr =√
cm
= 83, 45 1/s
q1 q2
qA
qB

9 Losungen 31
6.7 Auskragende Wellem 0 0 0
0 JA 0 0
0 0 m 0
0 0 0 JP
xs +
0 0 0 0
0 0 0 −JPΩ
0 0 0 0
0 JPΩ 0 0
xs +EI`3
12 6` 0 0
6` 4`2 0 0
0 0 12 −6`
0 0 −6` 4`2
xw = 0
Berechnung des charakteristischen Polynoms
Ansatz:
rw
ϕw
=
rw
ϕw
ejωt
⇒ mJAω4 −mJPΩω3 − (12EI`3 JA + 4EI
` m)ω2 + 12EI`3 JPΩω + 12
(EI)2
`4 = 0
Sonderfalle:
1. Ω = 0 (keine Kreiselwirkung)
ω21/2 = 2EI
JAm`3 [3JA + m`2 ±√
9J2A + 3JAm`2 + (m`2)2]
2. Ω = ω (Eigenfrequenz wird durch Unwucht angeregt
ω21/2 = 2EI
(JA − JP)m`3 [3(JA − JP) + m`2 ±√
9(JA − JP)2 + 3(JA − JP)m`2 + (m`2)2]
6.8 Laval-Laufer mit sym. Querschnitt
a) c = 48EI`3 = 79, 168 N
mm mit I = πd4
64
b) x = Fc = 1, 23 mm
c) Bewegungsgleichungen
zw + bamzw + c
mzw = εϕsinϕ + εϕ2cosϕ
yw + bamyw + c
myw = −εϕcosϕ + εϕ2sinϕ
rw = εη2
|1− η2| < R
⇒ unterkritisch η <
√R
R + ε =
√23 ⇒ uberkritisch η >
√R
R− ε =√
2
7.1 Rayleigh-Quotient
Fur eine grobe Naherung genugt als zulassige Funktion Z = z2. Diese erfullt die kine-
matischen Randbedingungen Z ′(0) = Z(0) = 0.
U(Z) = 12
a∫0
EI Z ′′2 dz = 2EIa
T (Z) = 12
a∫0
%AZ2 dz + 12m[Z(a)]2 + 1
2J [Z ′(a)]2 = 2940%Aa5
Es ergibt sich ω1 ≤√
U(Z)T (Z)
= 1, 661 1a2
√EI%A
Die ’exakte Losung’ ergibt sich dagegen zu ω1 = 1, 475 1a2
√EI%A

32 Aufgabensammlung Maschinendynamik
7.2 Drehkorper
I1 = 3, 07 · 10−7 m4, I2 = 0, 0000785 m4, I3 = 1, 18 · 10−6 m4,
A1 = 1, 96 · 10−3 m2, A2 = 0, 0314 m2, A3 = 3, 86 · 10−3 m2,
ω2 = U1 + U2 + U3T1 + T2 + T3
mit
U1 = 12
0,2∫0
EI1 w′′2 dx, U2 = 12
0,6∫0,2
EI2 w′′2 dx, U2 = 12
0,9∫0,6
EI3 w′′2 dx,
T1 = 12
0,2∫0
%A1w2 dx, T2 = 1
2
0,6∫0,2
%A2w2 dx, T3 = 1
2
0,9∫0,6
%A3w2 dx,
ωkr = 55, 4 1s ; nkr = 528 1
min
8.1 Schubkurbelgetriebe
(m2 + m3 + m4)rS = mrS2 + m3rS3 + m4rS4 mit
rS2 = ksiS2ejφ2 ; rS3 = `2e
jφ2 + ksiS3e−jφ3 ; rS4 = `2e
jφ2 + `3e−jφ3
Hinweis: Die Losung diser Aufgabe ist ausfuhrlich im Vorlesungsskript dargestellt.
8.2 Viergelenkgetriebe
rS2 = (ksiS2 + jηS2)ejφ2 = xS2 + jyS2
rS3 = `2ejφ2 + (ksiS3 + jηS3)ejφ3
rS4 = `1 + (ksiS4 + jηS4)ejφ4
Zwangsbedingung: `2ejφ2 + `3e
jφ3 = `1 + `4ejφ4
Zeiger zum Gesamtschwerpunkt: rS = m2rS2 + m2rS3 + m4rS4m2 + m3 + m4