Beispiele für Schwingungen kontinuierlicher Systeme · LEHRSTUHL FÜR BAUSTATIK UNIVERSITÄT...
45
UNIVERSITÄT SIEGEN LEHRSTUHL FÜR BAUSTATIK Baudynamik (Master) – SS 2017 Beispiele für Schwingungen kontinuierlicher Systeme 1
Transcript of Beispiele für Schwingungen kontinuierlicher Systeme · LEHRSTUHL FÜR BAUSTATIK UNIVERSITÄT...
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Baudynamik (Master) – SS 2017
Beispiele für Schwingungen kontinuierlicher Systeme
1
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Baudynamik (Master) – SS 2017
Beispiele: Erzwungene Stabschwingungen
2
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
2
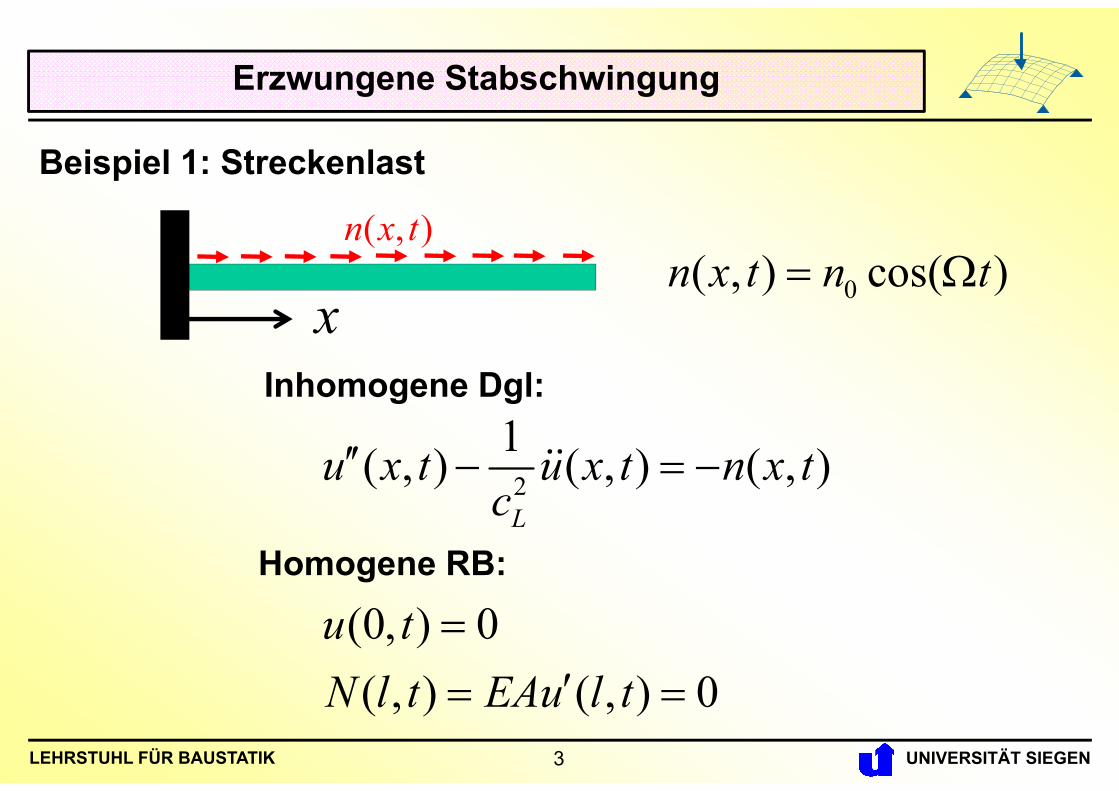
1( , ) ( , ) ( , )L
u x t u x t n x tc
Homogene RB:
(0, ) 0( , ) ( , ) 0
u tN l t EAu l t
Inhomogene Dgl:
Erzwungene Stabschwingung
x 0( , ) cos( )n x t n t ( , )n x t
Beispiel 1: Streckenlast
3
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
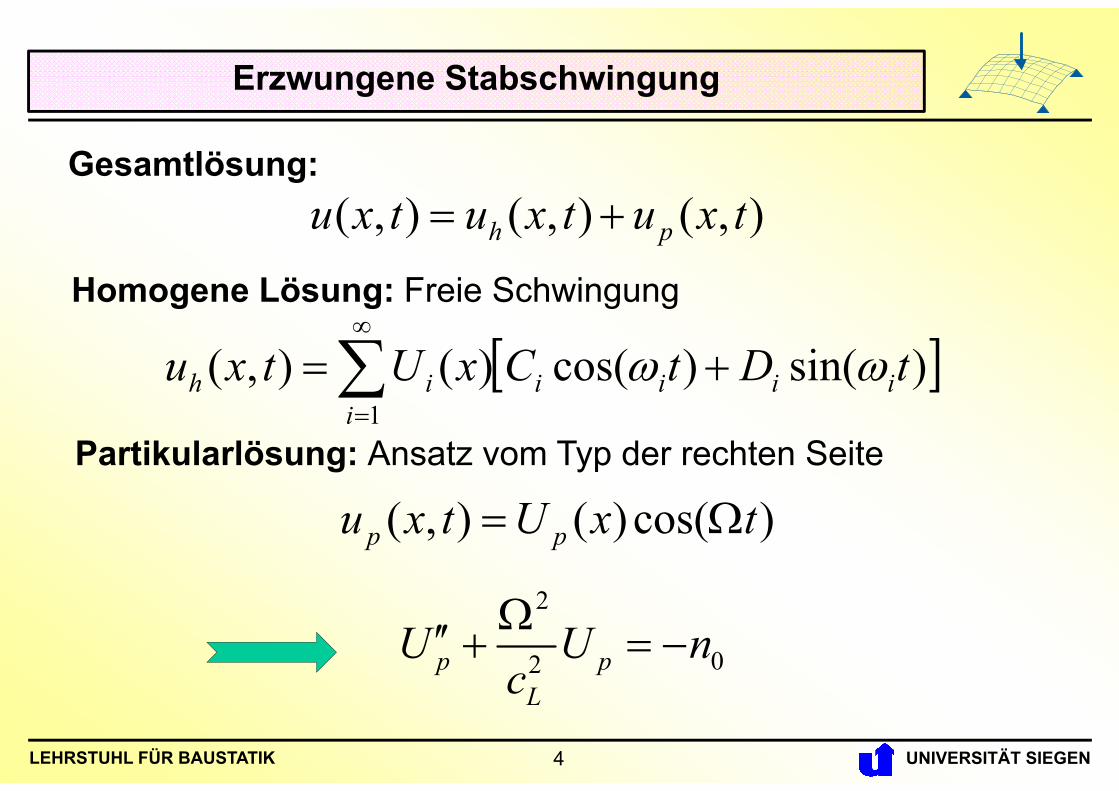
),(),(),( txutxutxu ph
)sin()cos()(),(1
tDtCxUtxu iiiii
ih
)cos()(),( txUtxu pp
2
02p pL
U U nc
Gesamtlösung:
Homogene Lösung: Freie Schwingung
Partikularlösung: Ansatz vom Typ der rechten Seite
Erzwungene Stabschwingung
4
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
2
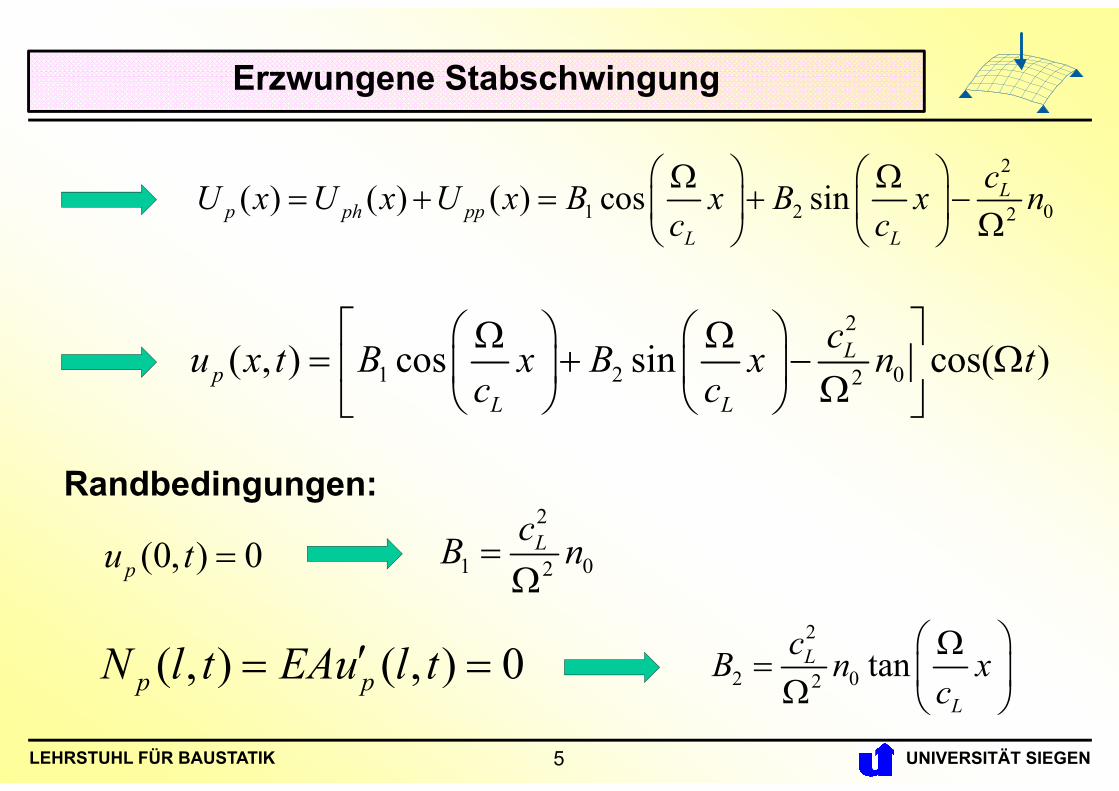
1 2 02( ) ( ) ( ) cos sin Lp ph pp
L L
cU x U x U x B x B x nc c
2
1 2 02( , ) cos sin cos( )Lp
L L
cu x t B x B x n tc c
(0, ) 0pu t
( , ) ( , ) 0p pN l t EAu l t
2
1 02LcB n
2
2 02 tanL
L
cB n xc
Randbedingungen:
Erzwungene Stabschwingung
5
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
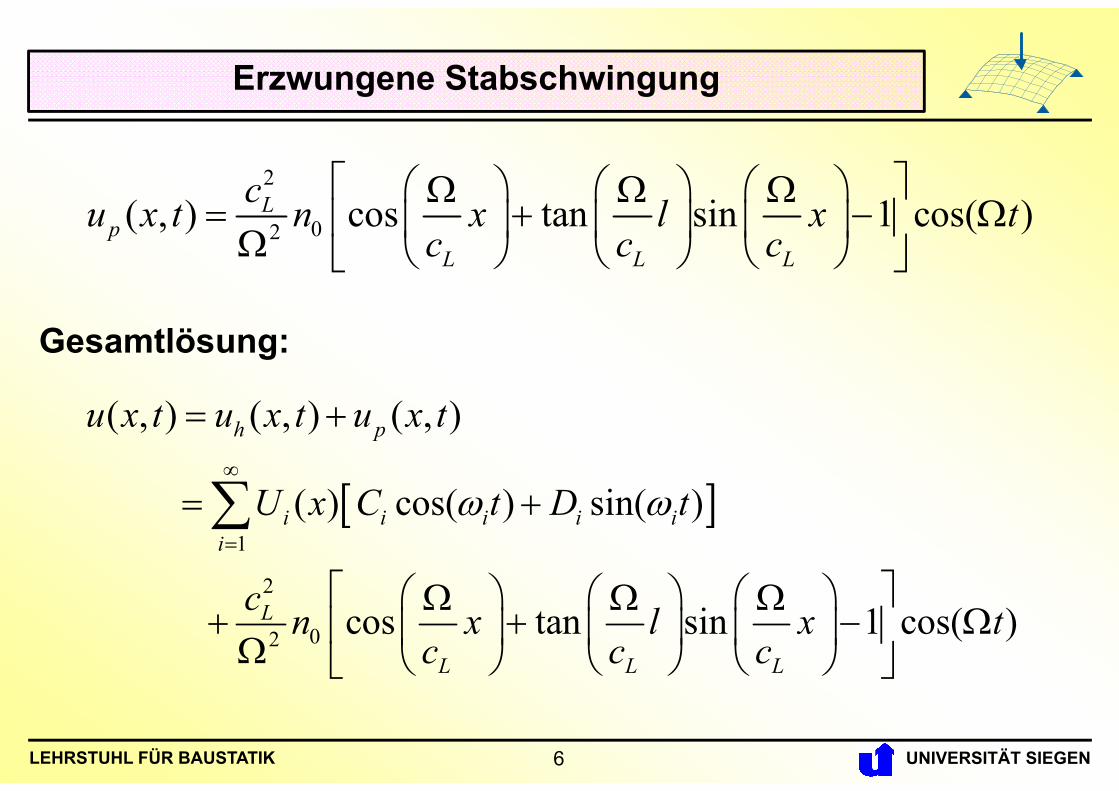
Erzwungene Stabschwingung
2
02( , ) cos tan sin 1 cos( )Lp
L L L
cu x t n x l x tc c c
1
2
02
( , ) ( , ) ( , )
( ) cos( ) sin( )
cos tan sin 1 cos( )
h p
i i i i ii
L
L L L
u x t u x t u x t
U x C t D t
c n x l x tc c c
Gesamtlösung:
6
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
0
0
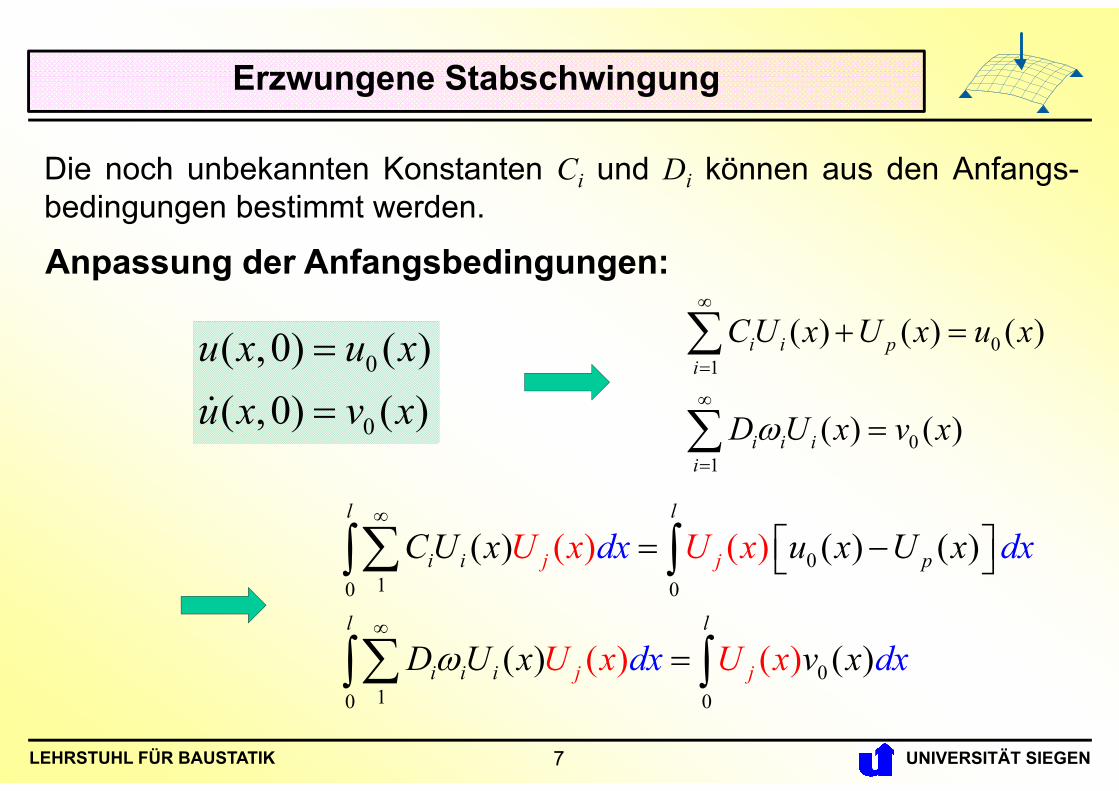
( ,0) ( )( ,0) ( )u x u xu x v x
010 0
010 0
( ) ( )( ) ( )
( ) ( )
( )
( ) ( )
j j
j
l l
i i p
l l
i i ji
C dx dx
d
U x U x
U x x
U x u x U x
D dU x vx xU x
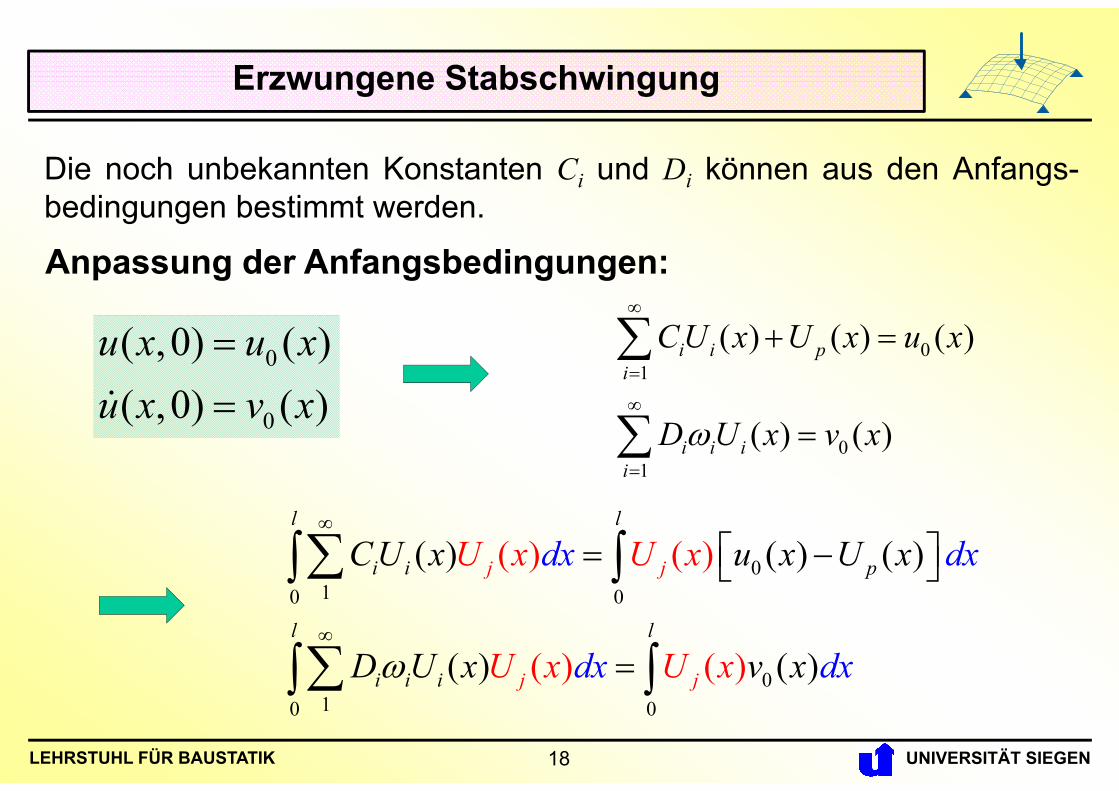
Anpassung der Anfangsbedingungen:
Erzwungene Stabschwingung
01
01
( ) ( ) ( )
( ) ( )
i i pi
i i ii
CU x U x u x
D U x v x
Die noch unbekannten Konstanten Ci und Di können aus den Anfangs-bedingungen bestimmt werden.
7
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
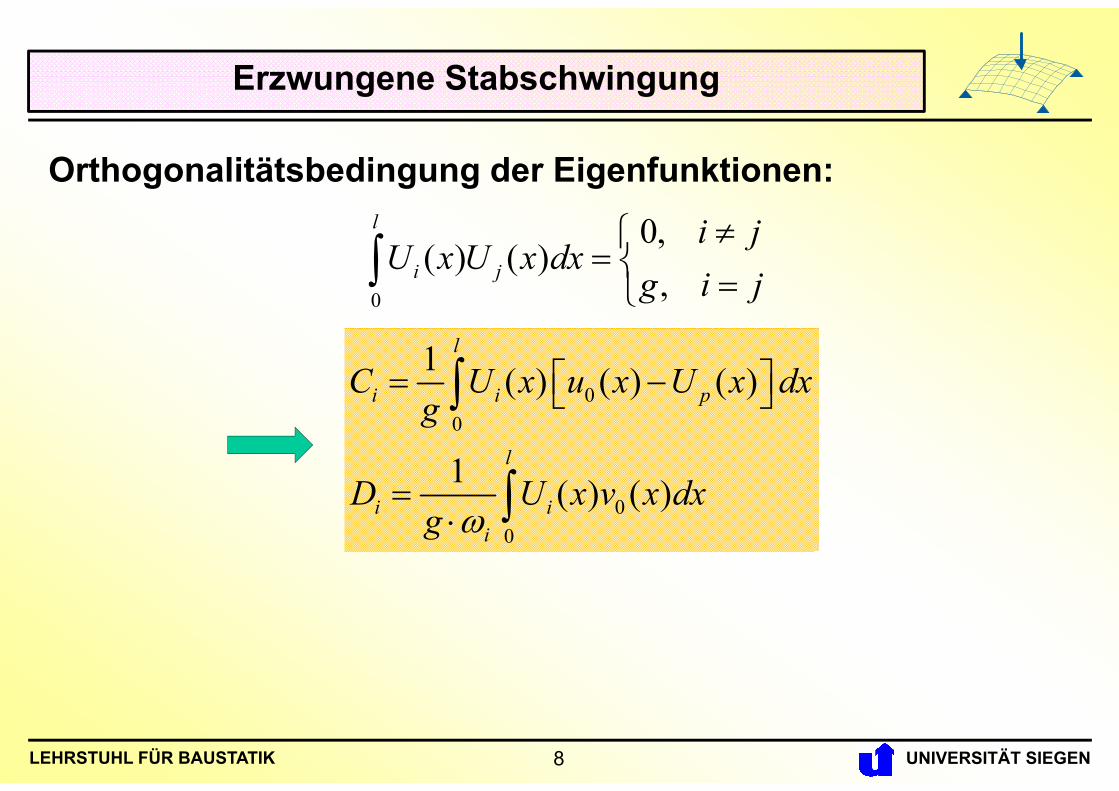
0
0, ( ) ( )
,
l
i j
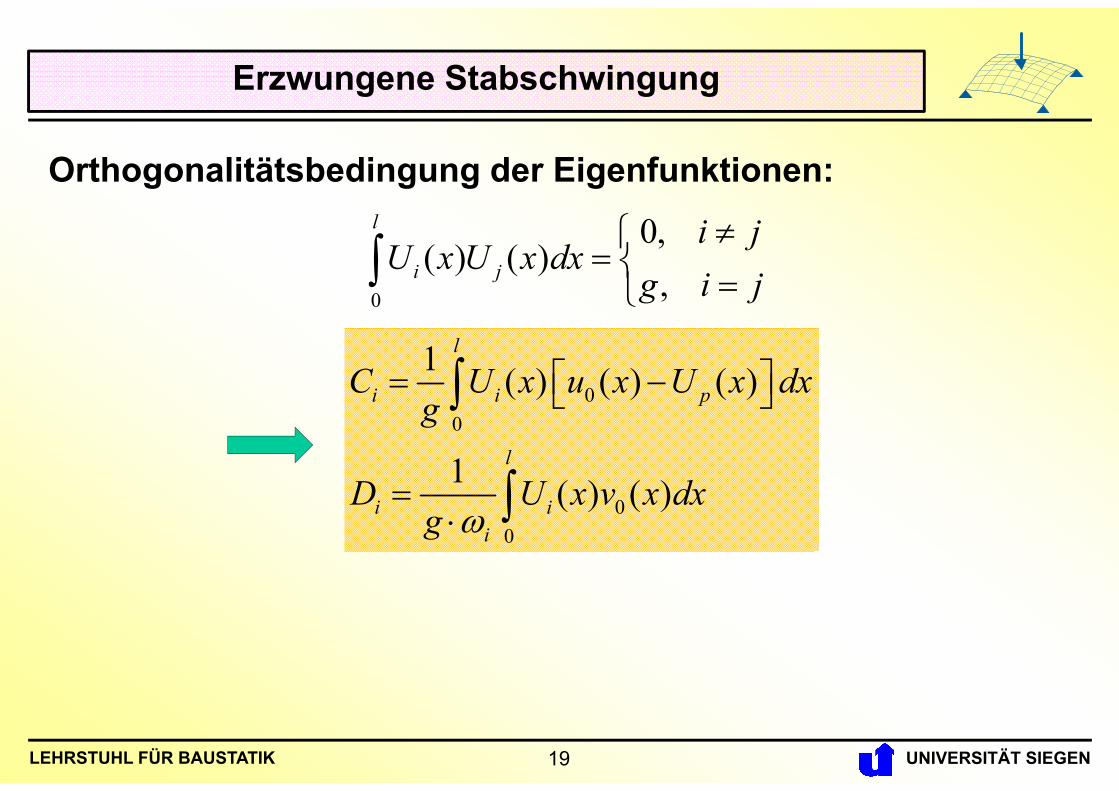
i jU x U x dx
g i j
00
00
1 ( ) ( ) ( )
1 ( ) ( )
l
i i p
l
i ii
C U x u x U x dxg
D U x v x dxg
Orthogonalitätsbedingung der Eigenfunktionen:
Erzwungene Stabschwingung
8
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
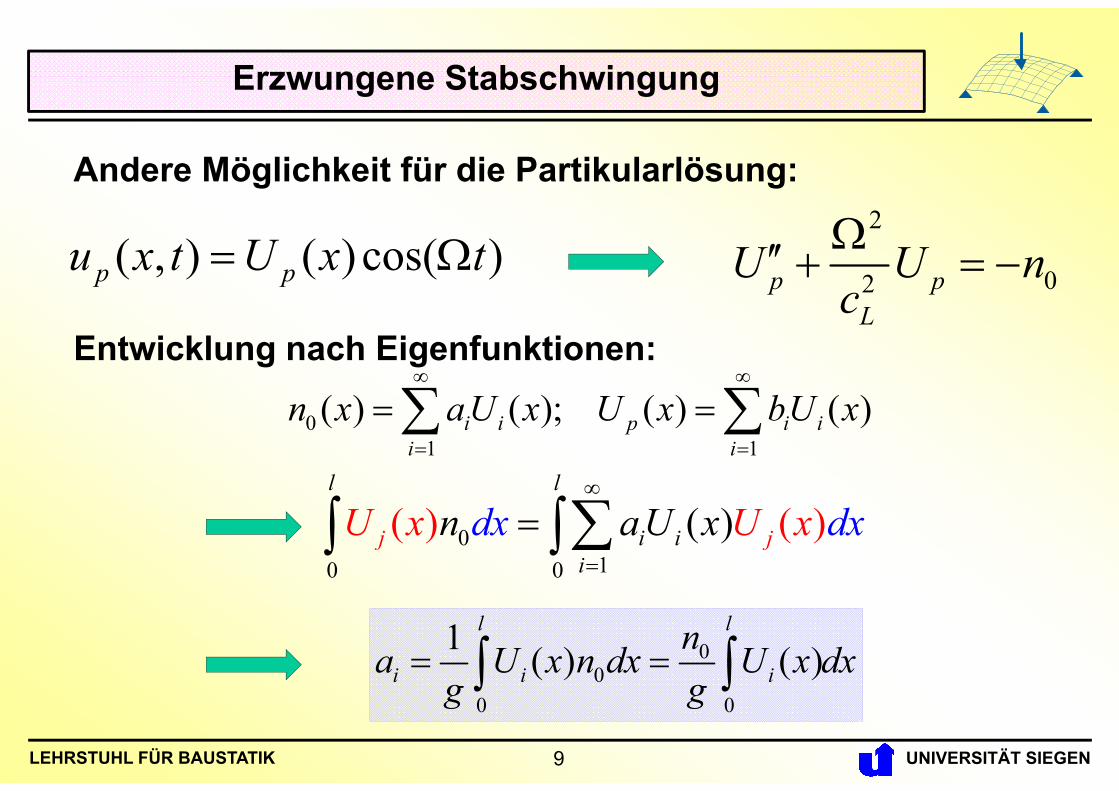
01 1
( ) ( ); ( ) ( )i i p i ii i
n x aU x U x bU x
010 0
)( ) )( (l l
i ii
j jU x Un aU xdx dxx
00
0 0
1 ( ) ( )l l
i i ina U x n dx U x dx
g g
Entwicklung nach Eigenfunktionen:
Erzwungene Stabschwingung
)cos()(),( txUtxu pp 2
02p pL
U U nc
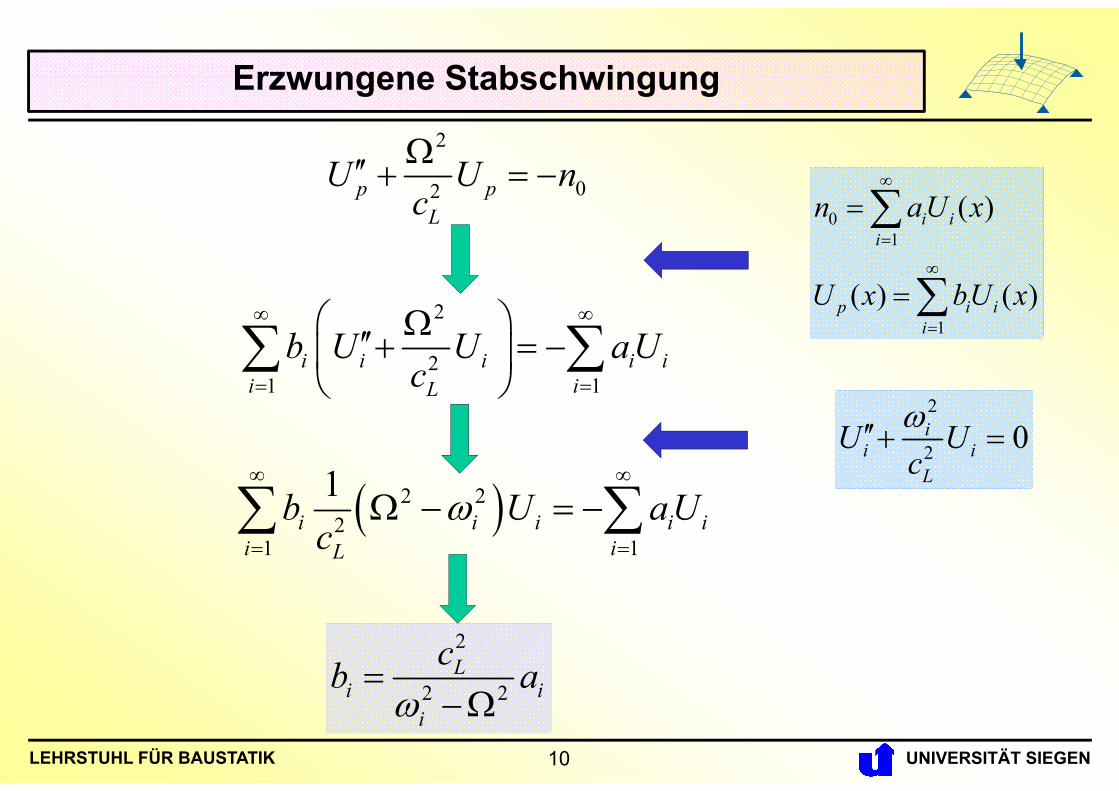
Andere Möglichkeit für die Partikularlösung:
9
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Stabschwingung
2
2 0ii i
L
U Uc
2
21 1
i i i i ii iL
b U U aUc
2 22
1 1
1i i i i i
i iL
b U aUc
2
2 2L
i ii
cb a
01
1
( )
( ) ( )
i ii
p i ii
n aU x
U x bU x
2
02p pL
U U nc
10
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
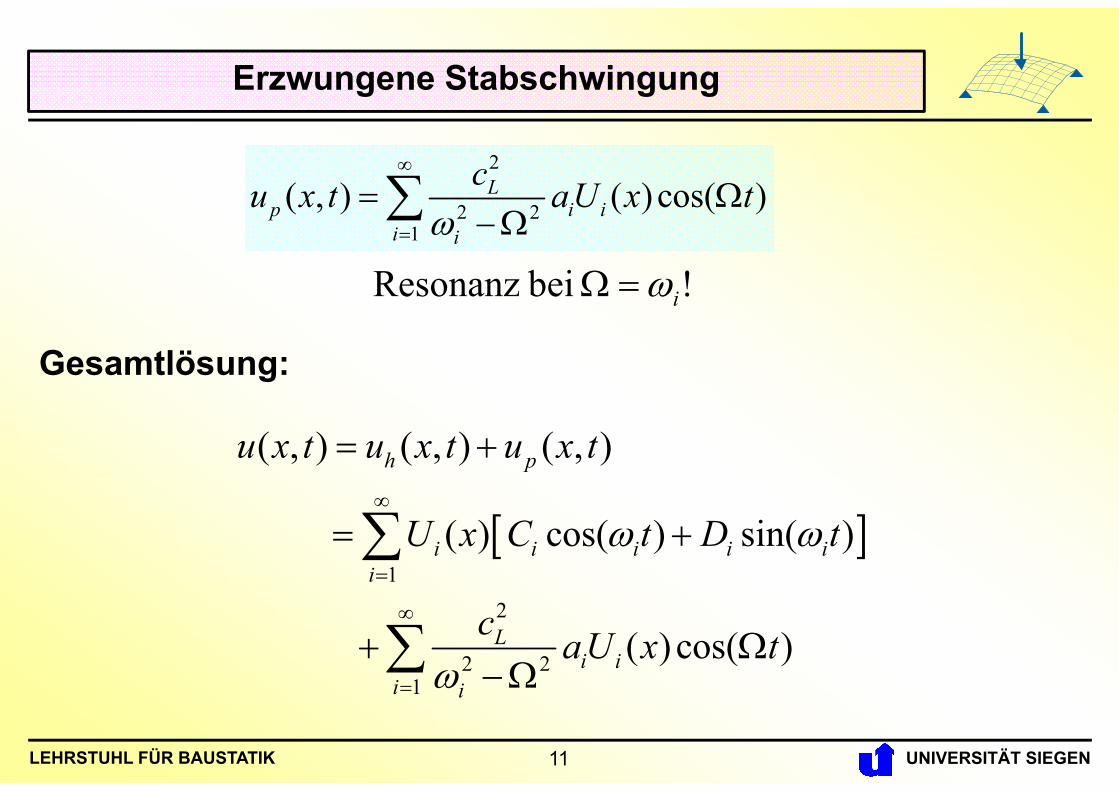
2
2 21
( , ) ( ) cos( )Lp i i
i i
cu x t aU x t
! bei Resonanz i
Erzwungene Stabschwingung
1
2
2 21
( , ) ( , ) ( , )
( ) cos( ) sin( )
( ) cos( )
h p
i i i i ii
Li i
i i
u x t u x t u x t
U x C t D t
c aU x t
Gesamtlösung:
11
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
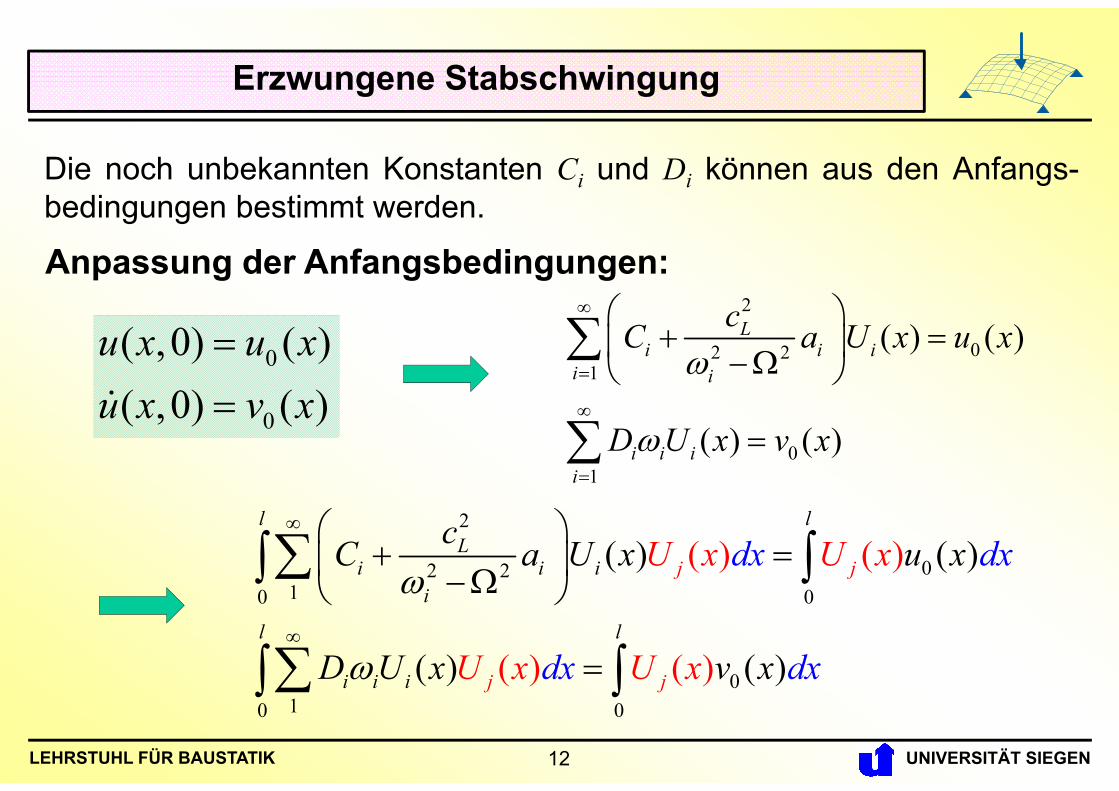
0
0
( ,0) ( )( ,0) ( )u x u xu x v x
2
02 210 0
010 0
( ) ( )
(
( ) ( )
( ) () ( ))
l lL
i i ii
l l
i i i
j j
j j
dx dx
dx
U x U x
U x
cC a U x u x
D U x v xU dx x
Anpassung der Anfangsbedingungen:
Erzwungene Stabschwingung
2
02 21
01
( ) ( )
( ) ( )
Li i i
i i
i i ii
cC a U x u x
D U x v x
Die noch unbekannten Konstanten Ci und Di können aus den Anfangs-bedingungen bestimmt werden.
12
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
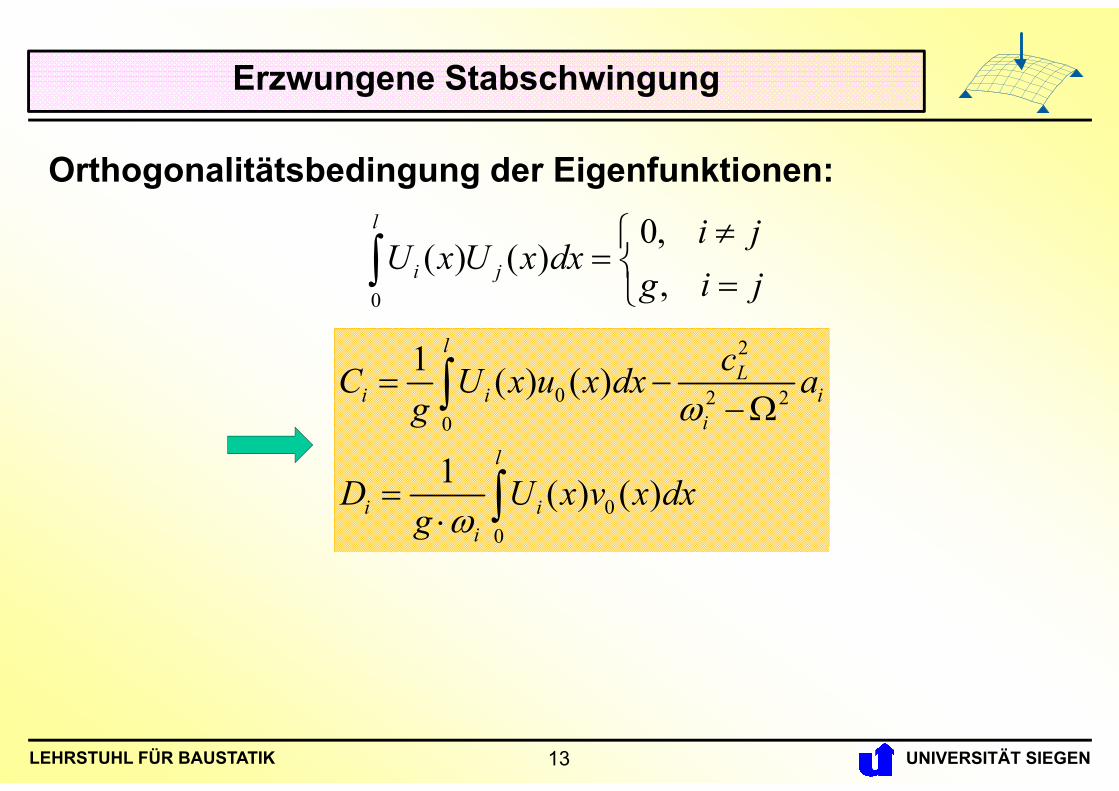
0
0, ( ) ( )
,
l
i j
i jU x U x dx
g i j
2
0 2 20
00
1 ( ) ( )
1 ( ) ( )
lL
i i ii
l
i ii
cC U x u x dx ag
D U x v x dxg
Orthogonalitätsbedingung der Eigenfunktionen:
Erzwungene Stabschwingung
13
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
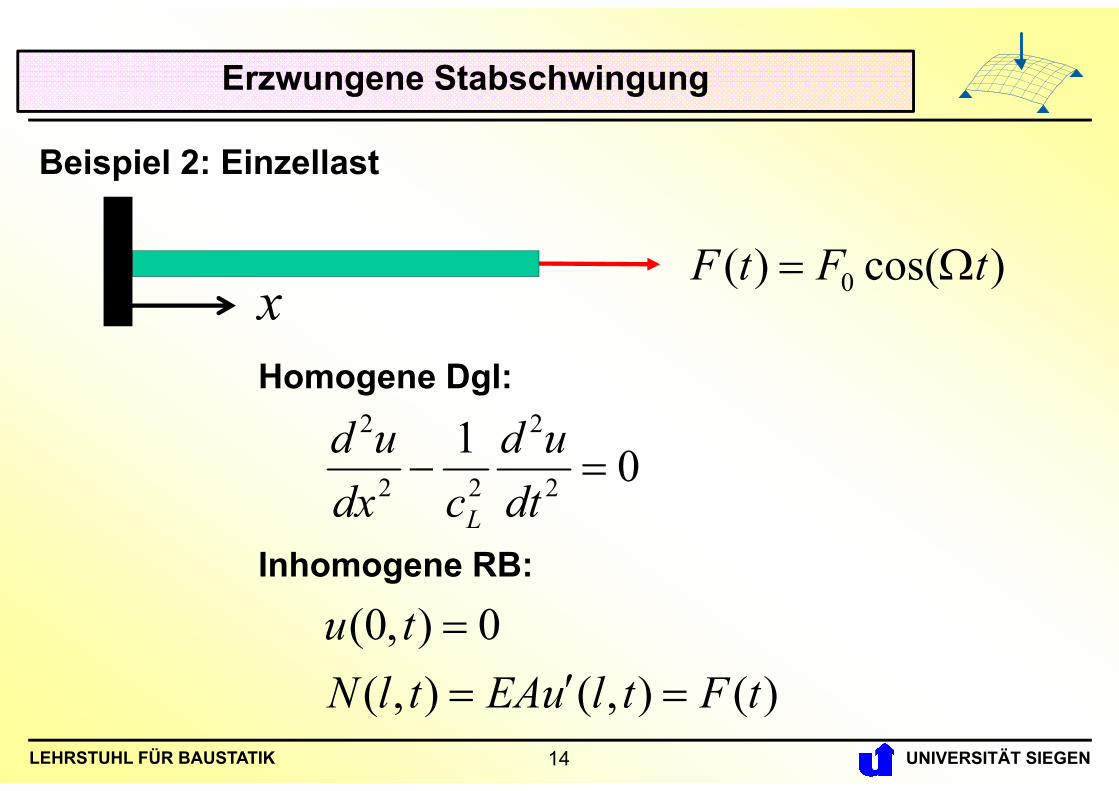
x)cos()( 0 tFtF
012
2
22
2
dtud
cdxud
L
Inhomogene RB:
)(),(),(0),0(
tFtluEAtlNtu
Homogene Dgl:
Erzwungene Stabschwingung
Beispiel 2: Einzellast
14
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
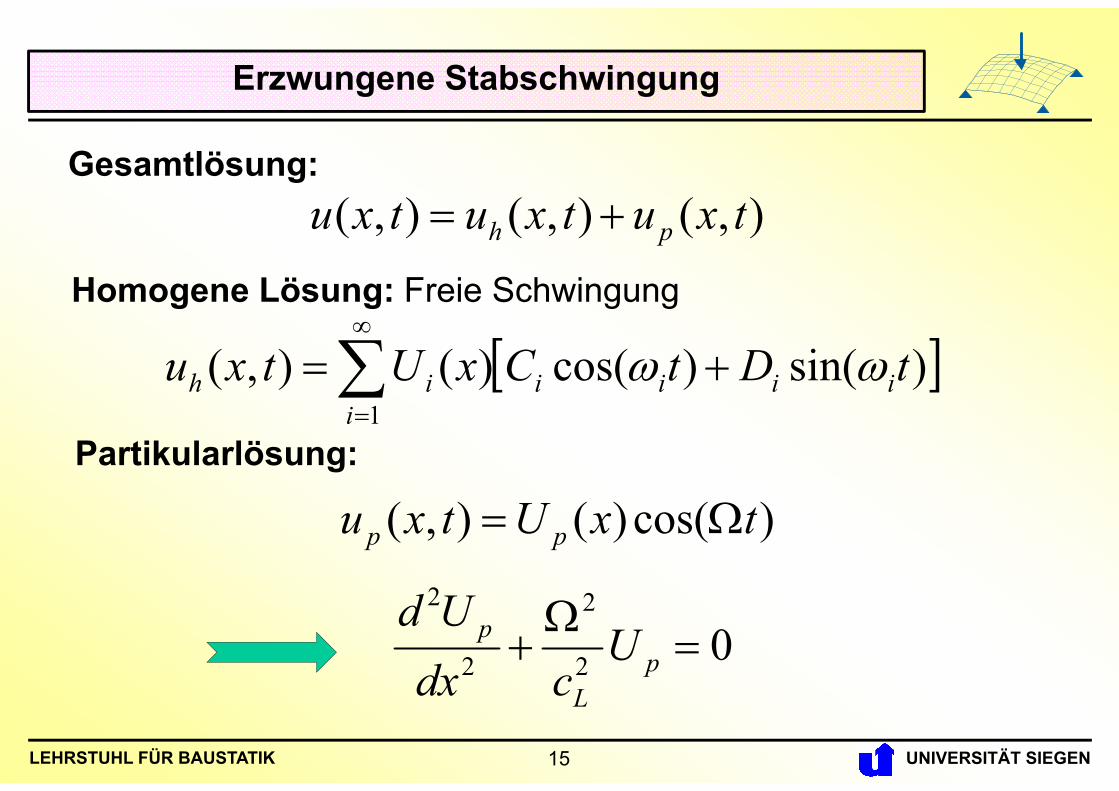
),(),(),( txutxutxu ph
)sin()cos()(),(1
tDtCxUtxu iiiii
ih
)cos()(),( txUtxu pp
02
2
2
2
pL
p Ucdx
Ud
Gesamtlösung:
Homogene Lösung: Freie Schwingung
Partikularlösung:
Erzwungene Stabschwingung
15
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
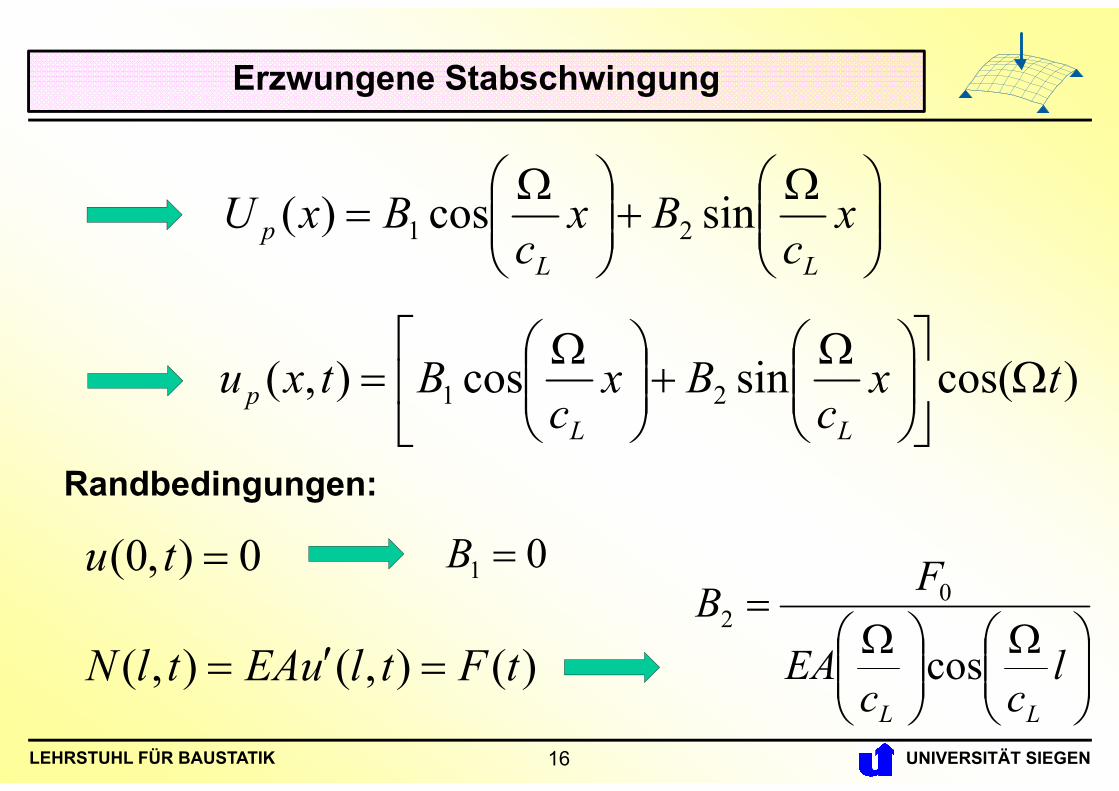
x
cBx
cBxU
LLp sincos)( 21
)cos(sincos),( 21 txc
Bxc
BtxuLL
p
0),0( tu
)(),(),( tFtluEAtlN
01 B
lcc
EA
FB
LL
cos
02
Randbedingungen:
Erzwungene Stabschwingung
16
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
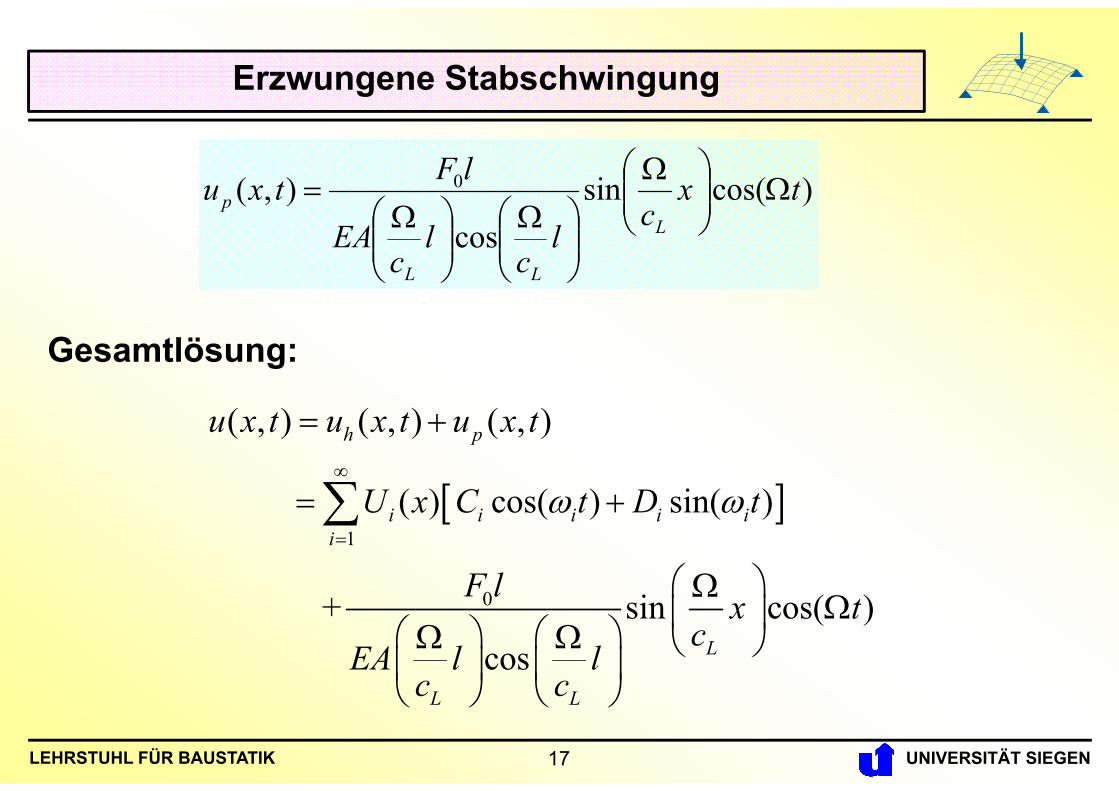
)cos(sincos
),( 0 txc
lc
lc
EA
lFtxuL
LL
p
Erzwungene Stabschwingung
1
0
( , ) ( , ) ( , )
( ) cos( ) sin( )
+ sin cos( )cos
h p
i i i i ii
L
L L
u x t u x t u x t
U x C t D t
F l x tc
EA l lc c
Gesamtlösung:
17
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
0
0
( ,0) ( )( ,0) ( )u x u xu x v x
010 0
010 0
( ) ( )( ) ( )
( ) ( )
( )
( ) ( )
j j
j
l l
i i p
l l
i i ji
C dx dx
d
U x U x
U x x
U x u x U x
D dU x vx xU x
Anpassung der Anfangsbedingungen:
Erzwungene Stabschwingung
01
01
( ) ( ) ( )
( ) ( )
i i pi
i i ii
CU x U x u x
D U x v x
Die noch unbekannten Konstanten Ci und Di können aus den Anfangs-bedingungen bestimmt werden.
18
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
0
0, ( ) ( )
,
l
i j
i jU x U x dx
g i j
00
00
1 ( ) ( ) ( )
1 ( ) ( )
l
i i p
l
i ii
C U x u x U x dxg
D U x v x dxg
Orthogonalitätsbedingung der Eigenfunktionen:
Erzwungene Stabschwingung
19
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Baudynamik (Master) – SS 2017
Beispiele: Erzwungene Balkenschwingungen
20
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Balkenschwingung
21
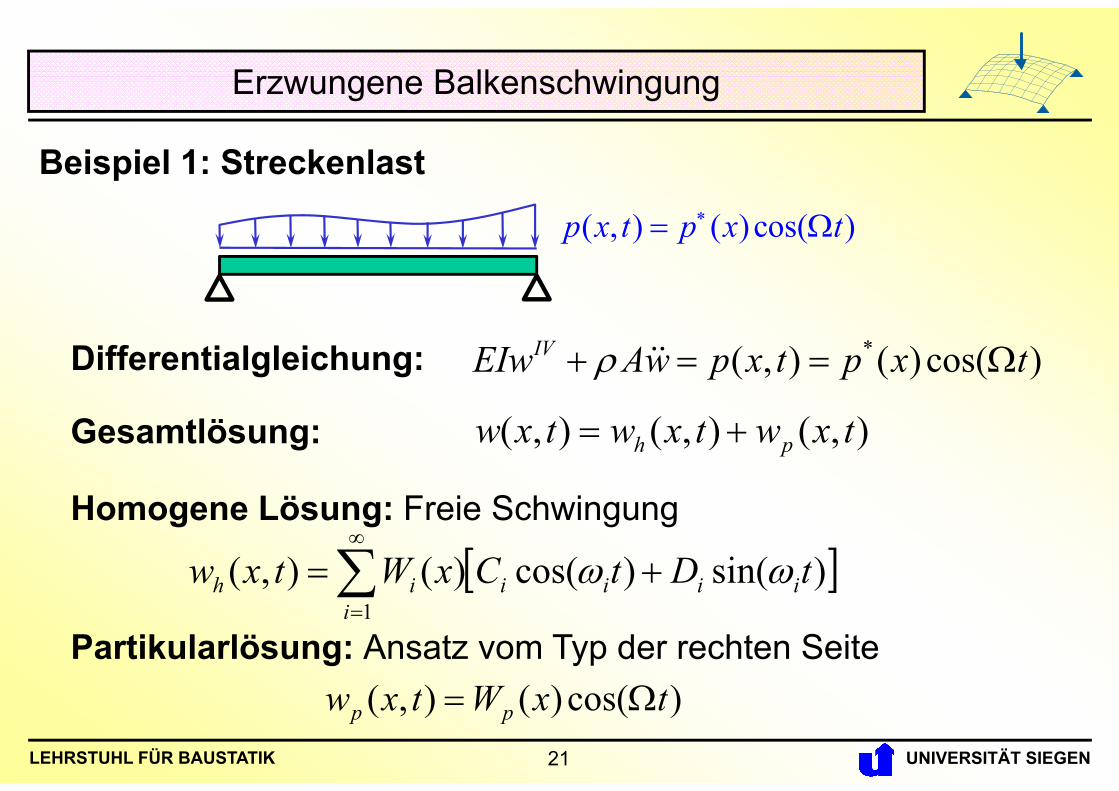
( , ) ( ) cos( )p x t p x t
Beispiel 1: Streckenlast
),(),(),( txwtxwtxw ph
)sin()cos()(),(1
tDtCxWtxw iiiii
ih
)cos()(),( txWtxw pp
Gesamtlösung:
Homogene Lösung: Freie Schwingung
Partikularlösung: Ansatz vom Typ der rechten Seite
*( , ) ( ) cos( )IVEIw Aw p x t p x t Differentialgleichung:
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
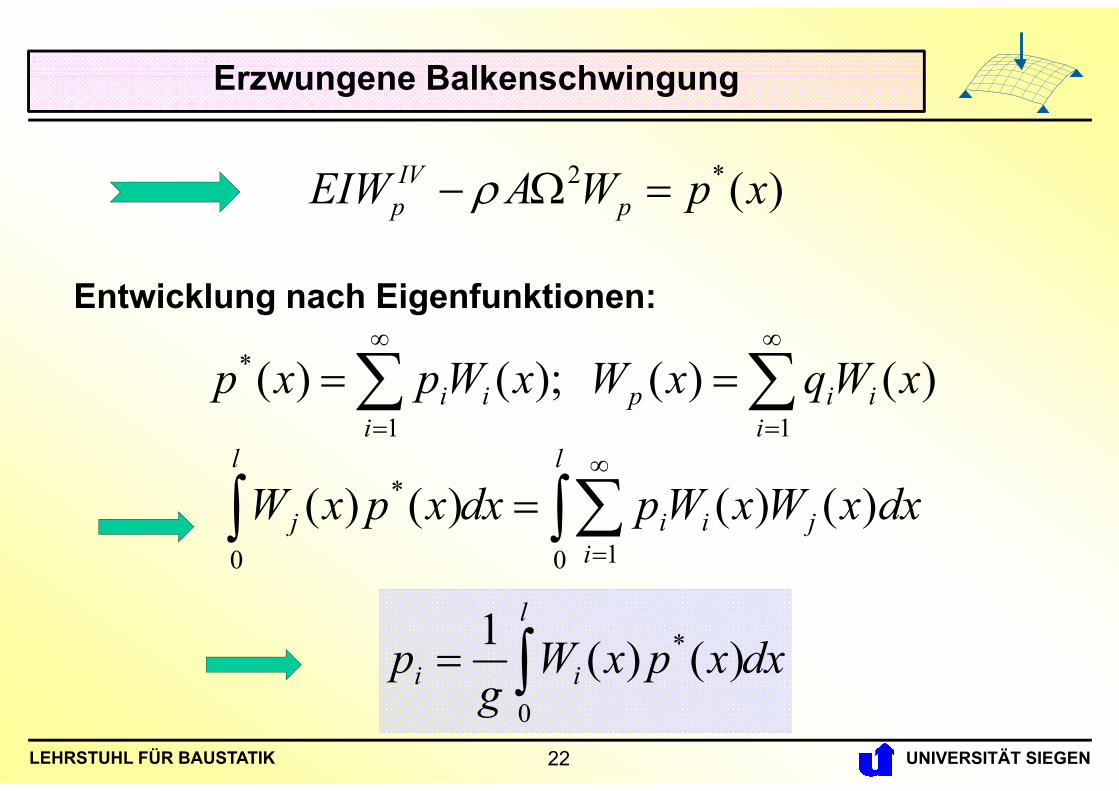
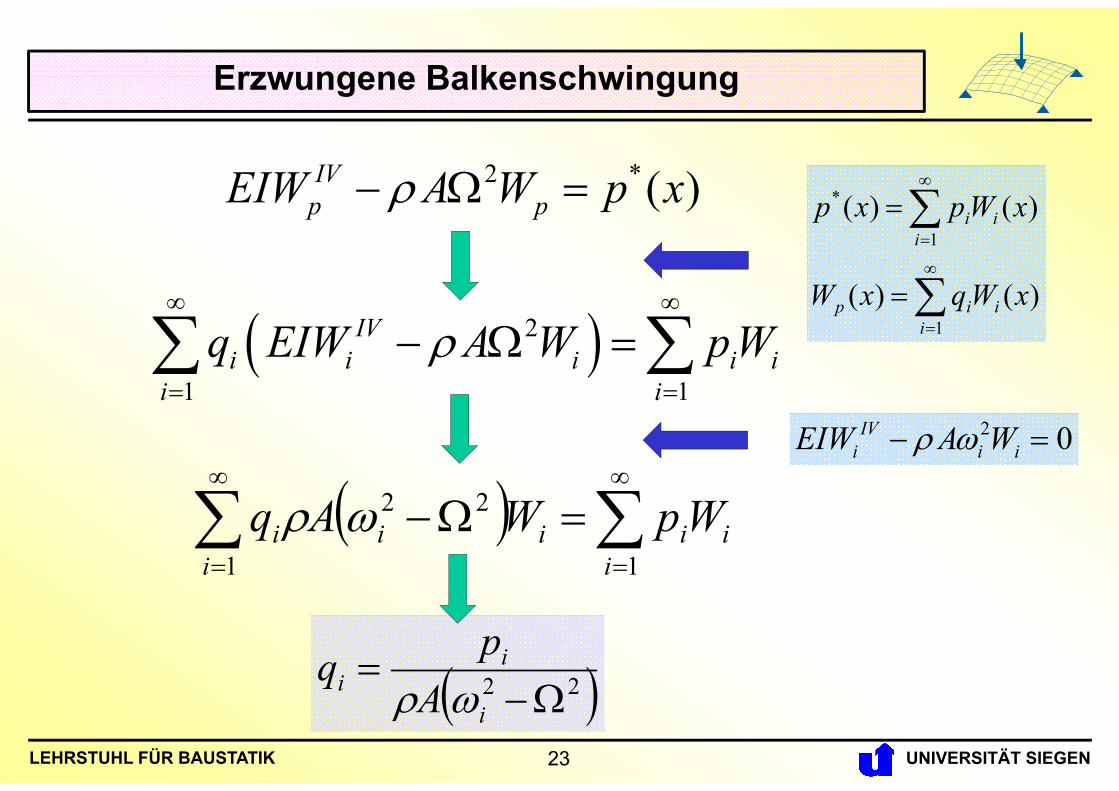
2 *( )IVp pEIW A W p x
)()( );()(11
* xWqxWxWpxpi
iipi
ii
l
ji
ii
l
j dxxWxWpdxxpxW0 10
* )()()()(
dxxpxWg
pl
ii 0
* )()(1
Entwicklung nach Eigenfunktionen:
Erzwungene Balkenschwingung
22
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Balkenschwingung
2 0IVi i iEIW A W
2
1 1
IVi i i i i
i i
q EIW A W pW
11
22
iii
iiii WpWAq
22
i
ii A
pq
2 *( )IVp pEIW A W p x
)()(
)()(
1
1
*
xWqxW
xWpxp
iiip
iii
23
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
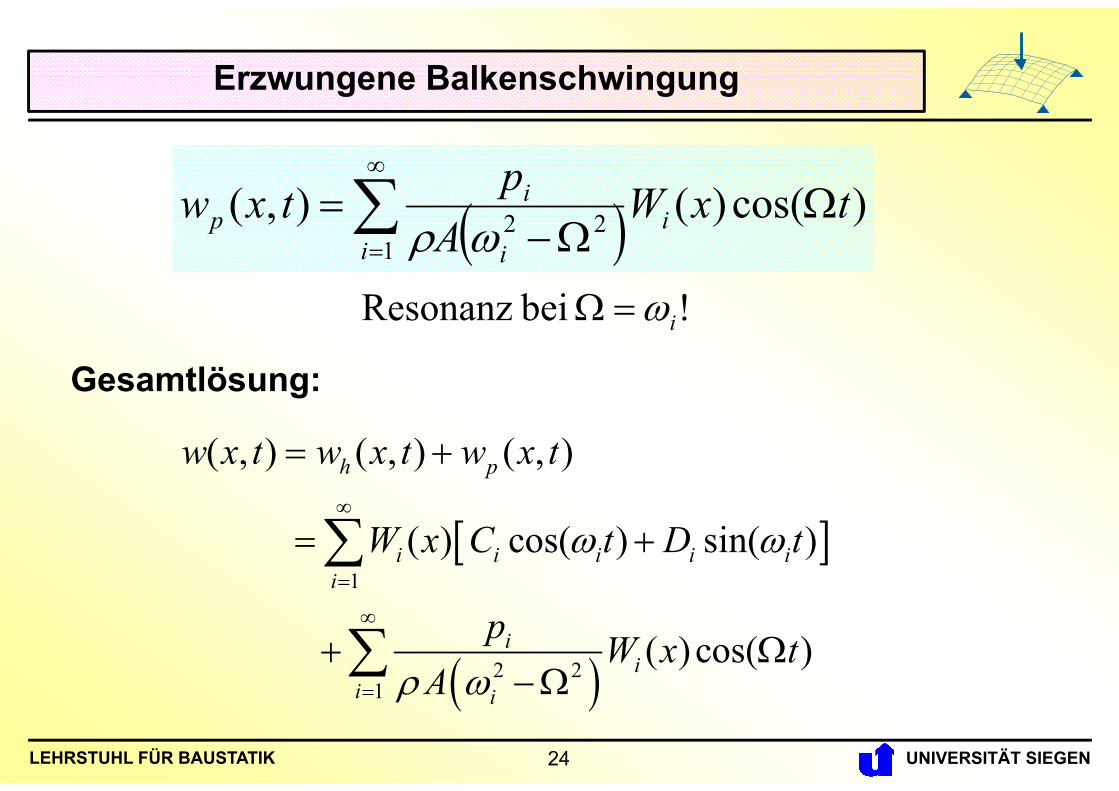
1
22 )cos()(),(i
ii
ip txW
Aptxw
! bei Resonanz i
Erzwungene Balkenschwingung
1
2 21
( , ) ( , ) ( , )
( ) cos( ) sin( )
( ) cos( )
h p
i i i i ii
ii
i i
w x t w x t w x t
W x C t D t
p W x tA
Gesamtlösung:
24
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
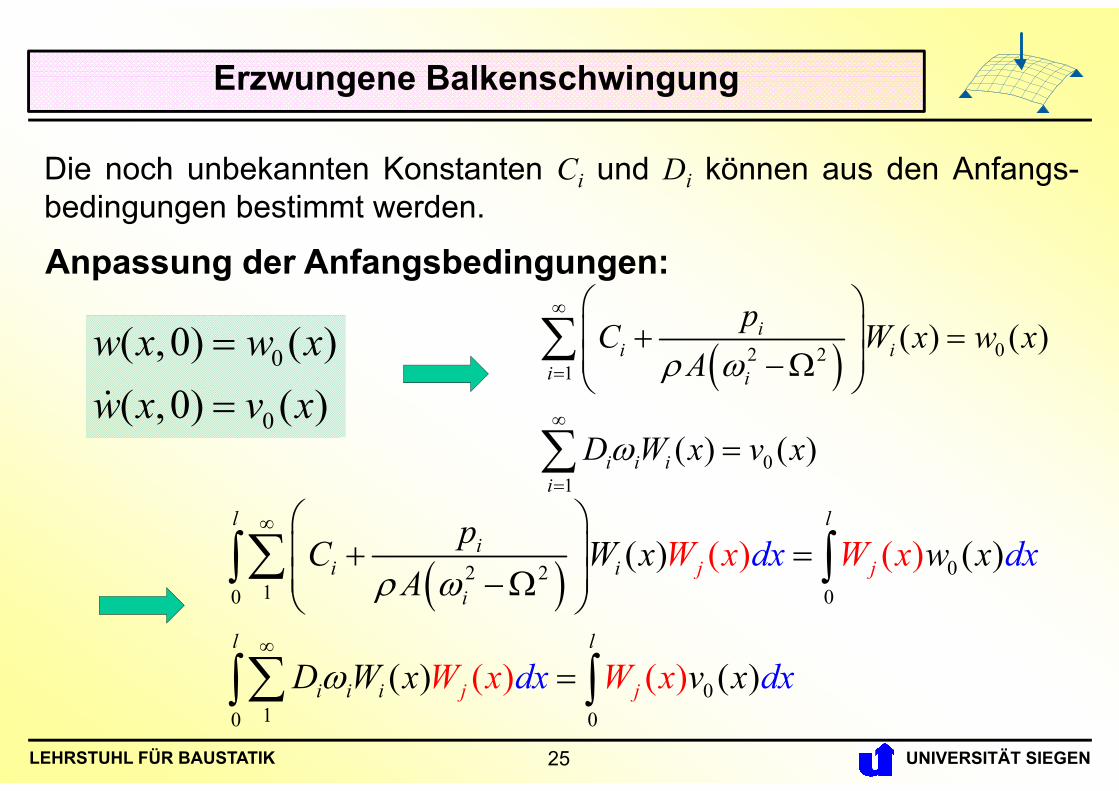
0
0
( ,0) ( )( ,0) ( )w x w xw x v x
02 210 0
010 0
( ) ( )( ) ( )
( ) (( ) ) ( )
l li
i ii
l l
i i i
j j
j j
pC W x w xW x W x
W
dx dxA
D W x dx dxvx W x x
Anpassung der Anfangsbedingungen:
Erzwungene Balkenschwingung
02 21
01
( ) ( )
( ) ( )
ii i
i i
i i ii
pC W x w xA
D W x v x
Die noch unbekannten Konstanten Ci und Di können aus den Anfangs-bedingungen bestimmt werden.
25
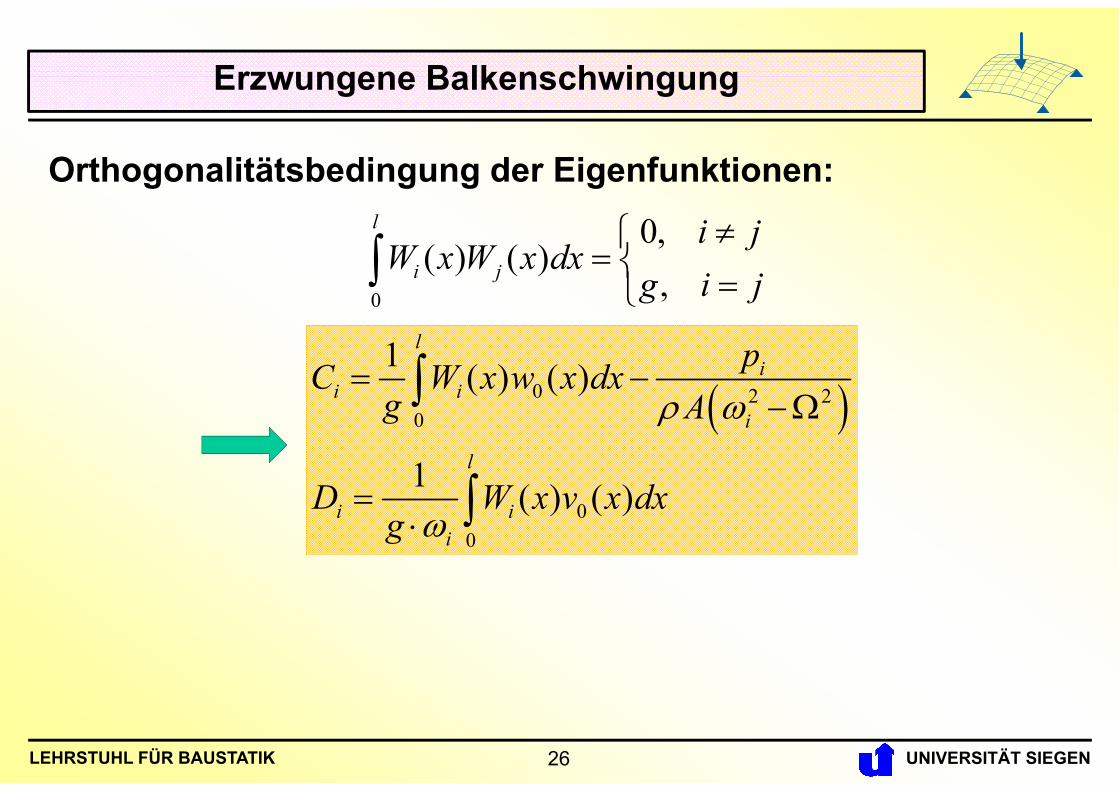
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
0
0, ( ) ( )
,
l
i j
i jW x W x dx
g i j
0 2 20
00
1 ( ) ( )
1 ( ) ( )
li
i ii
l
i ii
pC W x w x dxg A
D W x v x dxg
Orthogonalitätsbedingung der Eigenfunktionen:
Erzwungene Balkenschwingung
26
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Balkenschwingung
27
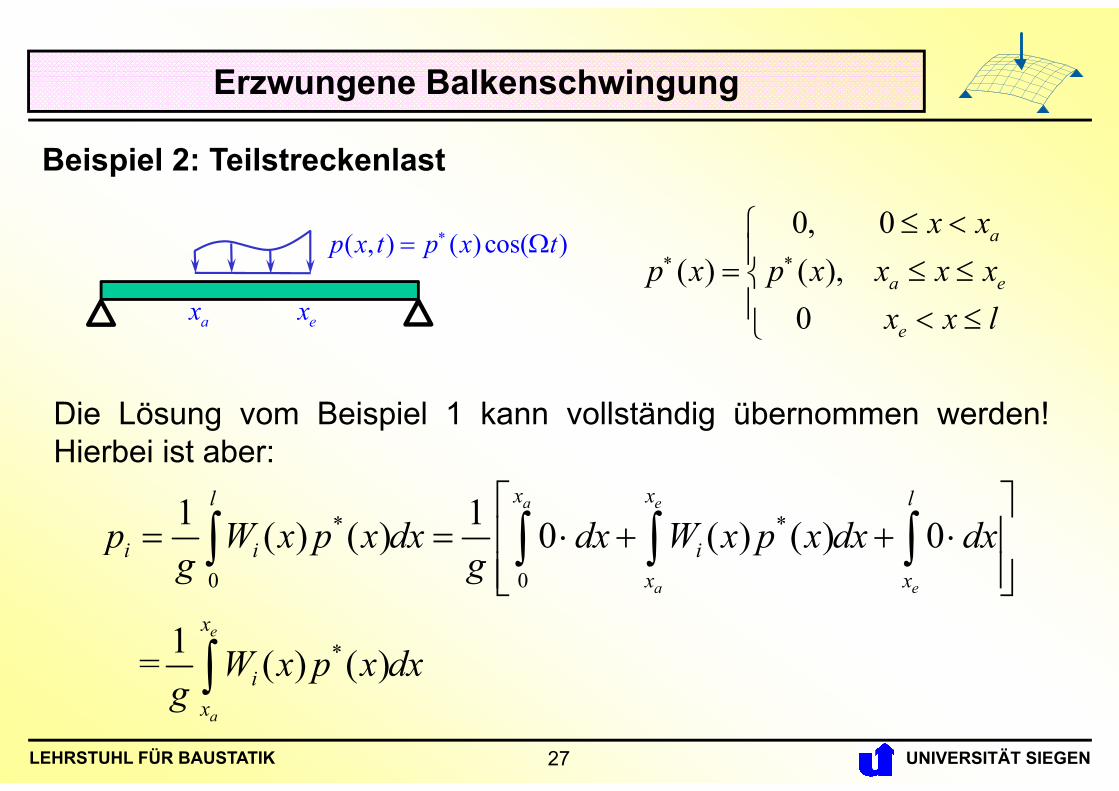
0, 0( ) ( ),
0
a
a e
e
x xp x p x x x x
x x l
Die Lösung vom Beispiel 1 kann vollständig übernommen werden!Hierbei ist aber:
Beispiel 2: Teilstreckenlast
* *
0 0
*
1 1( ) ( ) 0 ( ) ( ) 0
1 = ( ) ( )
a e
a e
e
a
x xl l
i i ix x
x
ix
p W x p x dx dx W x p x dx dxg g
W x p x dxg
( , ) ( ) cos( )p x t p x t
ax ex
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Balkenschwingung
28
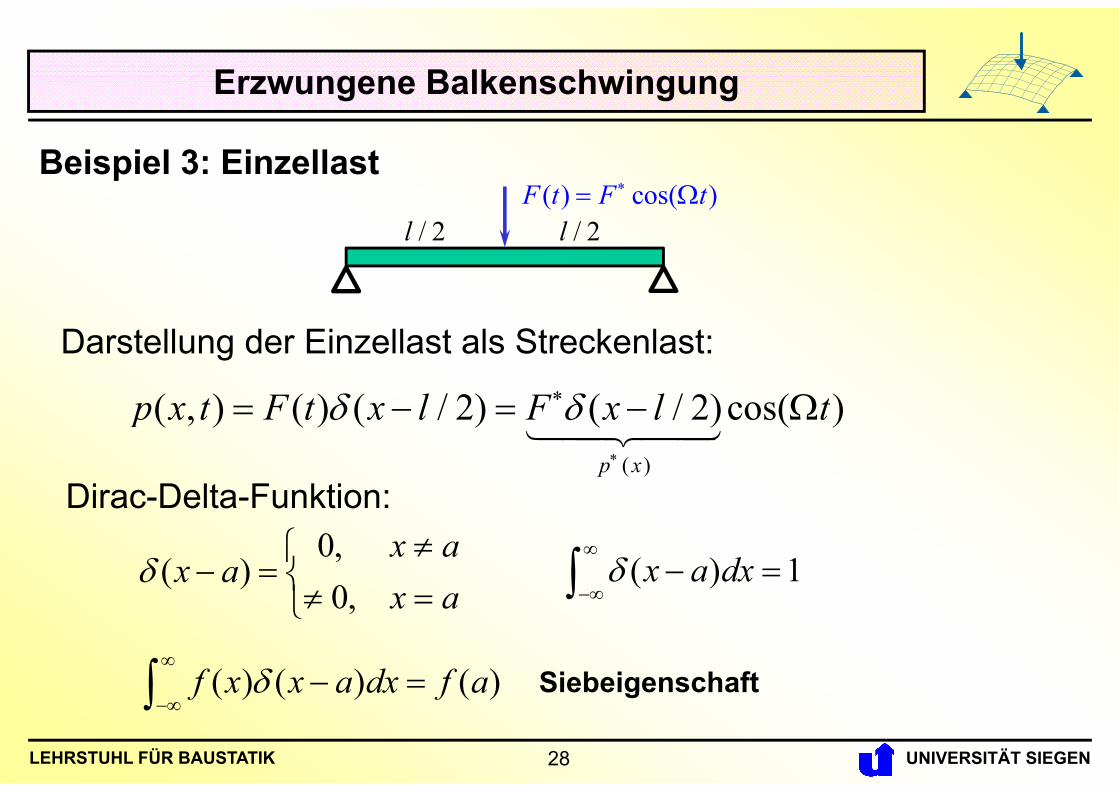
Beispiel 3: Einzellast
( )
( , ) ( ) ( / 2) ( / 2)cos( )p x
p x t F t x l F x l t
Dirac-Delta-Funktion:
Darstellung der Einzellast als Streckenlast:
( ) cos( )F t F t / 2l / 2l
0,( )
0,x a
x ax a
( ) 1x a dx
( ) ( ) ( )f x x a dx f a
Siebeigenschaft
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Balkenschwingung
29
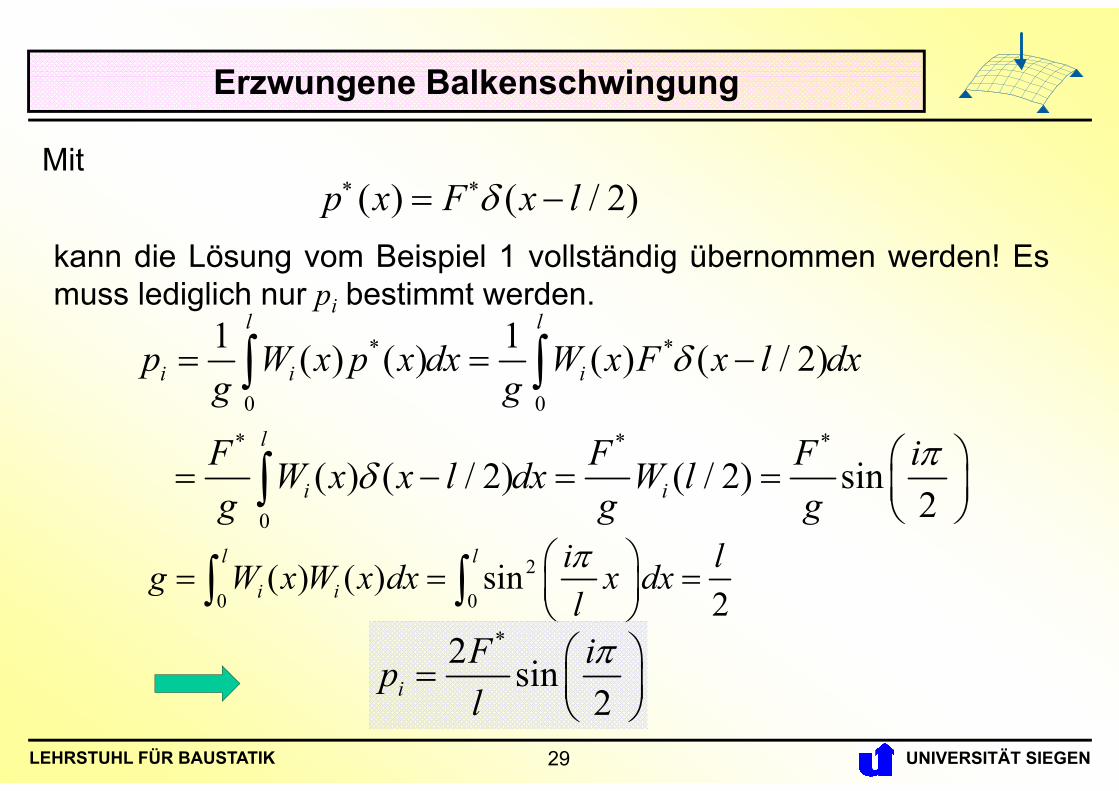
( ) ( / 2)p x F x l kann die Lösung vom Beispiel 1 vollständig übernommen werden! Esmuss lediglich nur pi bestimmt werden.
2
0 0( ) ( ) sin
2l l
i ii lg W x W x dx x dxl
Mit
* *
0 0
* * *
0
1 1( ) ( ) ( ) ( / 2)
( ) ( / 2) ( / 2) sin2
l l
i i i
l
i i
p W x p x dx W x F x l dxg g
F F F iW x x l dx W lg g g
*2 sin2i
F ipl
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
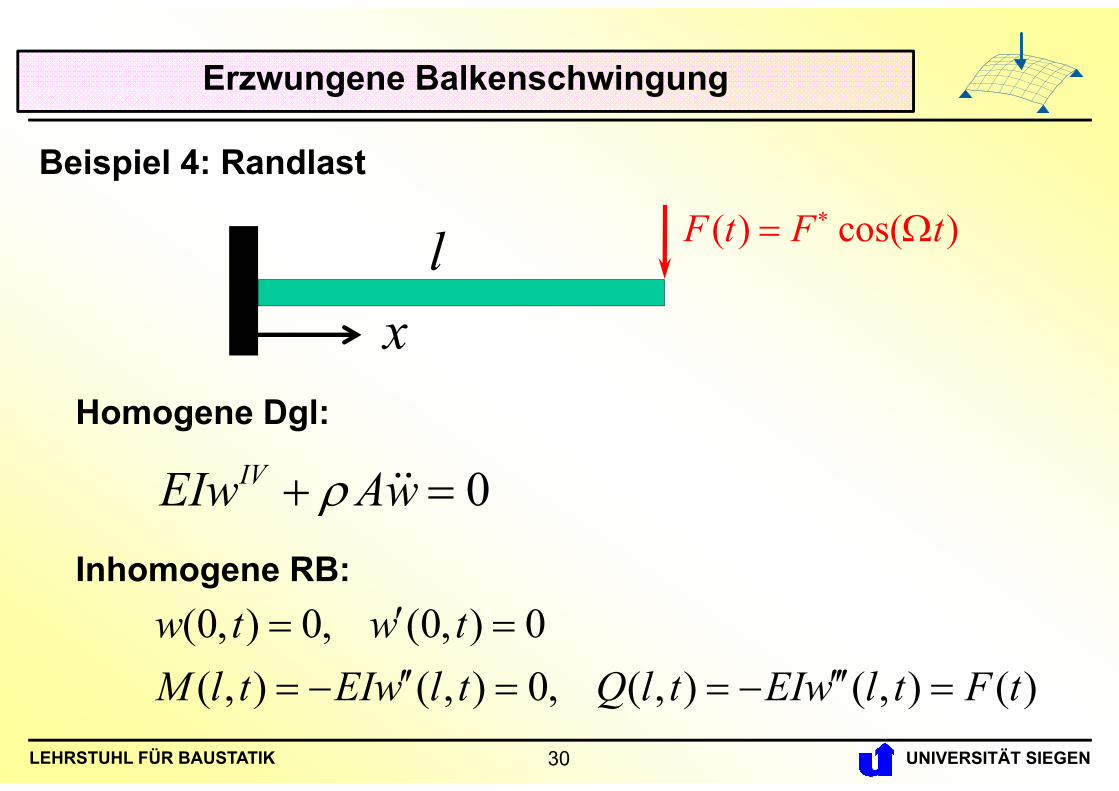
Inhomogene RB:(0, ) 0, (0, ) 0( , ) ( , ) 0, ( , ) ( , ) ( )
w t w tM l t EIw l t Q l t EIw l t F t
Homogene Dgl:
Erzwungene Balkenschwingung
Beispiel 4: Randlast
x
( ) cos( )F t F t l
0IVEIw Aw
30
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
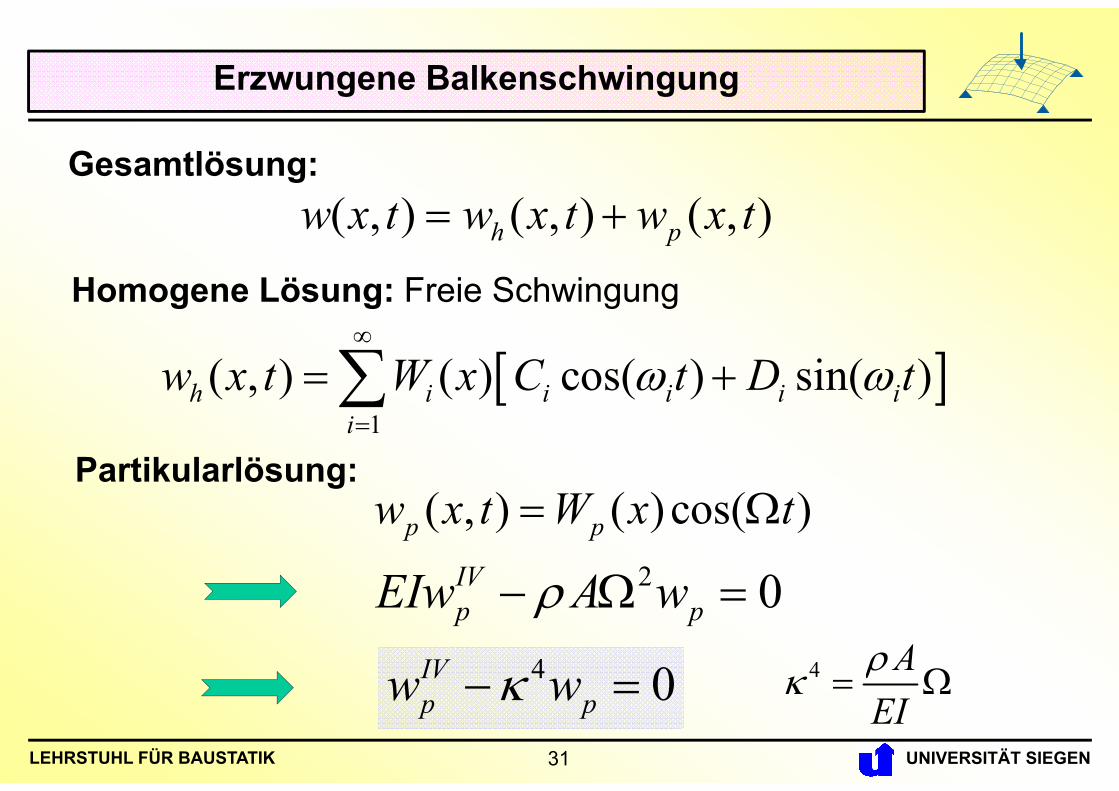
( , ) ( , ) ( , )h pw x t w x t w x t
1
( , ) ( ) cos( ) sin( )h i i i i ii
w x t W x C t D t
( , ) ( ) cos( )p pw x t W x t
Gesamtlösung:
Homogene Lösung: Freie Schwingung
Partikularlösung:
Erzwungene Balkenschwingung
2 0IVp pEIw A w
4 0IVp pw w 4 A
EI
31
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
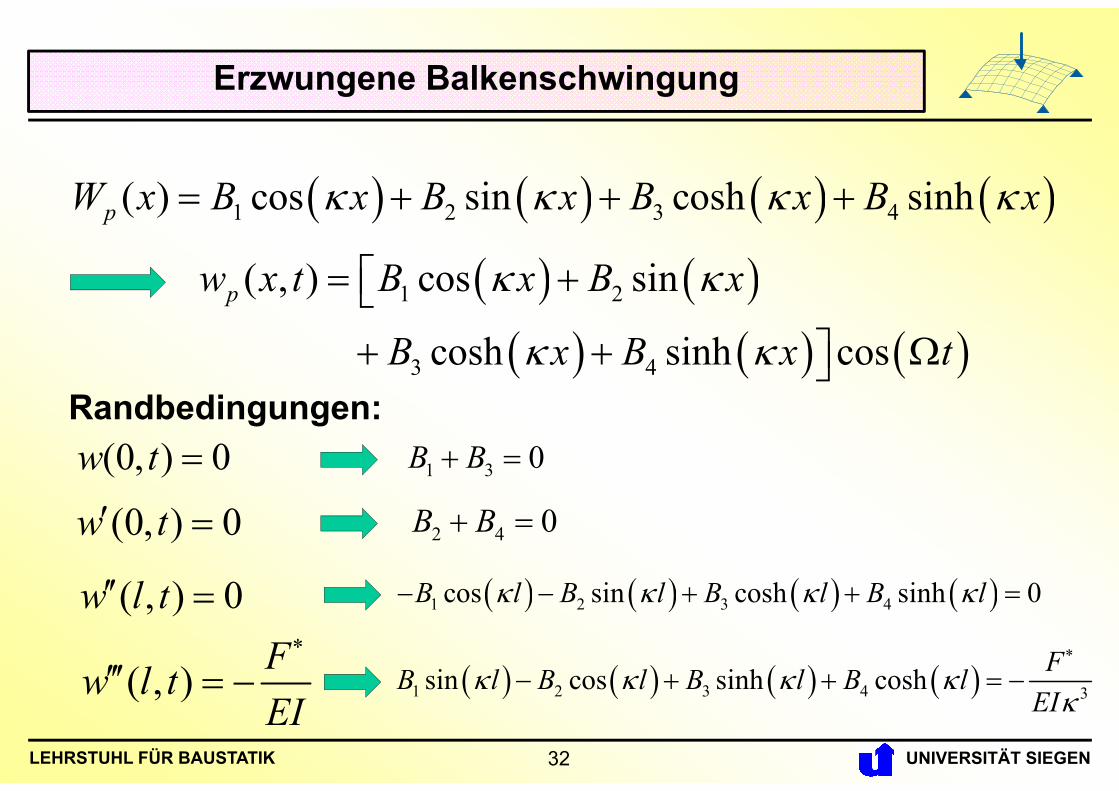
1 2 3 4( ) cos sin cosh sinhpW x B x B x B x B x
(0, ) 0w t
( , ) Fw l tEI
1 3 0B B Randbedingungen:
Erzwungene Balkenschwingung
1 2
3 4
( , ) cos sin
cosh sinh cospw x t B x B x
B x B x t
(0, ) 0w t 2 4 0B B
( , ) 0w l t 1 2 3 4cos sin cosh sinh 0B l B l B l B l
1 2 3 4 3sin cos sinh cosh FB l B l B l B lEI
32
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
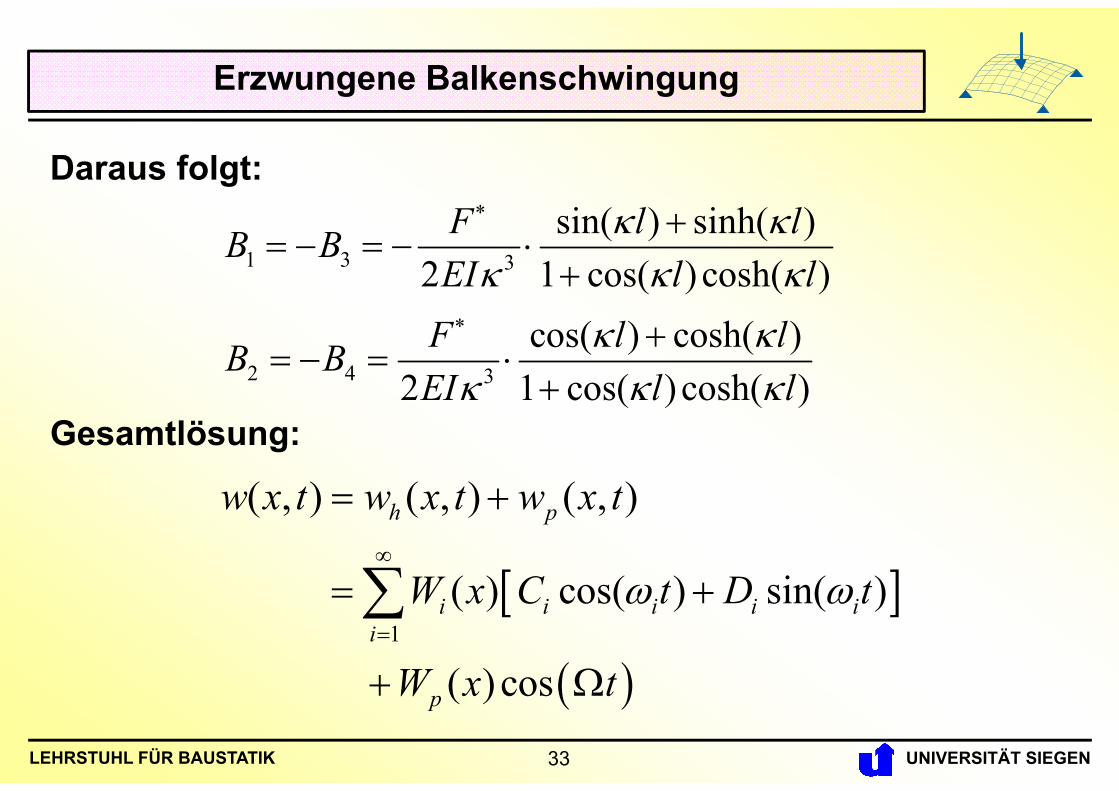
1 3 3
2 4 3
sin( ) sinh( )2 1 cos( ) cosh( )
cos( ) cosh( )2 1 cos( )cosh( )
F l lB BEI l lF l lB BEI l l
Daraus folgt:
Erzwungene Balkenschwingung
1
( , ) ( , ) ( , )
( ) cos( ) sin( )
( ) cos
h p
i i i i ii
p
w x t w x t w x t
W x C t D t
W x t
Gesamtlösung:
33

UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
0
0
( ,0) ( )( ,0) ( )w x w xw x v x
010 0
010 0
( ) ( )( ) ( )
( ) ( )
( )
( ) ( )
j j
j
l l
i i p
l l
i i ji
C dx dx
d
W x W x
W x x
W x w x W x
D dW x vx xW x
Anpassung der Anfangsbedingungen:
Erzwungene Balkenschwingung
01
01
( ) ( ) ( )
( ) ( )
i i pi
i i ii
CW x W x w x
D W x v x
Die noch unbekannten Konstanten Ci und Di können aus den Anfangs-bedingungen bestimmt werden.
34
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
0
0, ( ) ( )
,
l
i j
i jW x W x dx
g i j
00
00
1 ( ) ( ) ( )
1 ( ) ( )
l
i i p
l
i ii
C W x w x W x dxg
D W x v x dxg
Orthogonalitätsbedingung der Eigenfunktionen:
Erzwungene Balkenschwingung
35
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Baudynamik (Master) – SS 2017
Beispiele: Erzwungene Plattenschwingungen
36
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Plattenschwingung
*
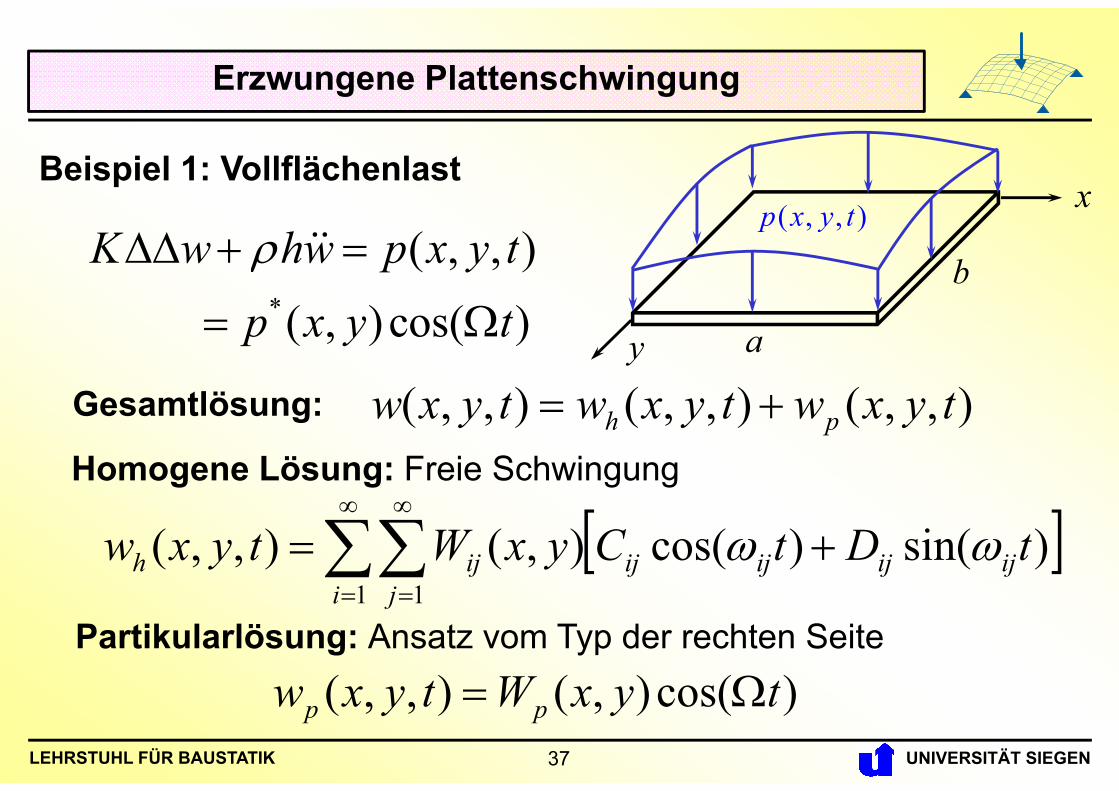
( , , ) ( , ) cos( )K w hw p x y t
p x y t
),,(),,(),,( tyxwtyxwtyxw ph
1 1
)sin()cos(),(),,(i j
ijijijijijh tDtCyxWtyxw
)cos(),(),,( tyxWtyxw pp
Gesamtlösung:
Homogene Lösung: Freie Schwingung
Partikularlösung: Ansatz vom Typ der rechten Seite
Beispiel 1: Vollflächenlast( , , )p x y t x
y a
b
37
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
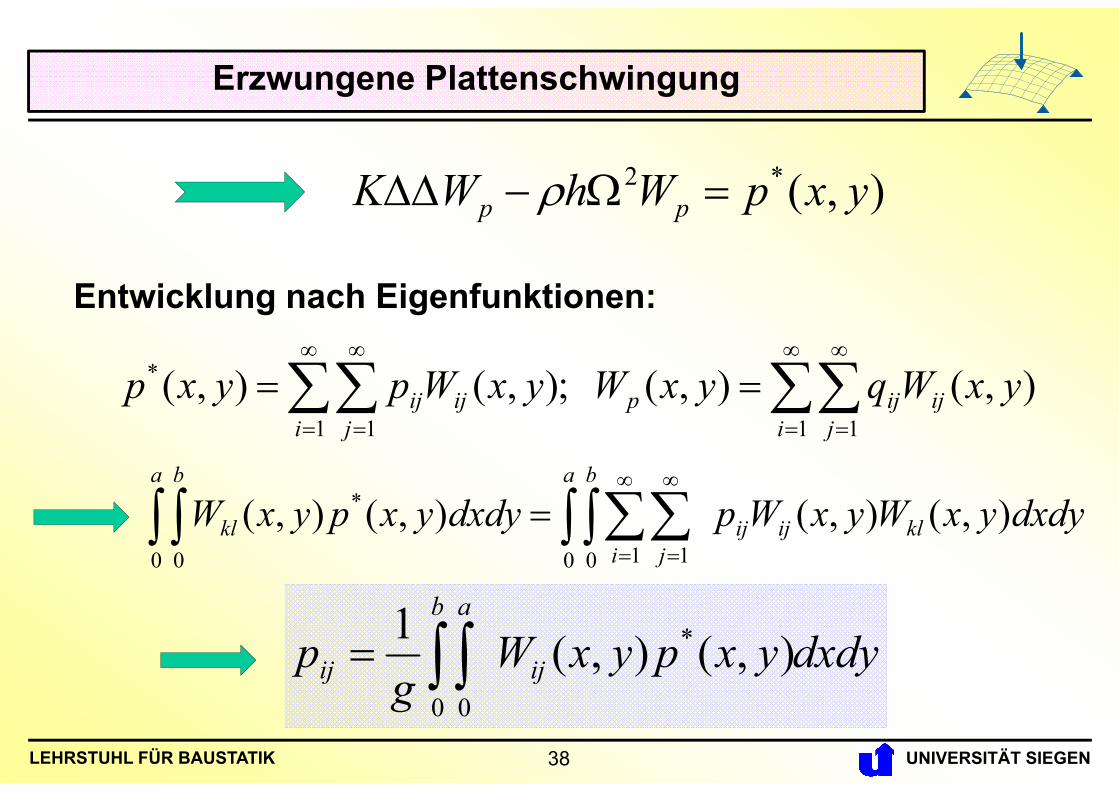
Erzwungene Plattenschwingung
1 11 1
* ),(),( ;),(),(i j
ijijpi j
ijij yxWqyxWyxWpyxp
a b
kli
ijijj
a b
kl dxdyyxWyxWpdxdyyxpyxW0 0 1 10 0
* ),(),(),(),(
dxdyyxpyxWg
pb
ij
a
ij 0
*
0
),(),(1
Entwicklung nach Eigenfunktionen:
),(*2 yxpWhWK pp
38
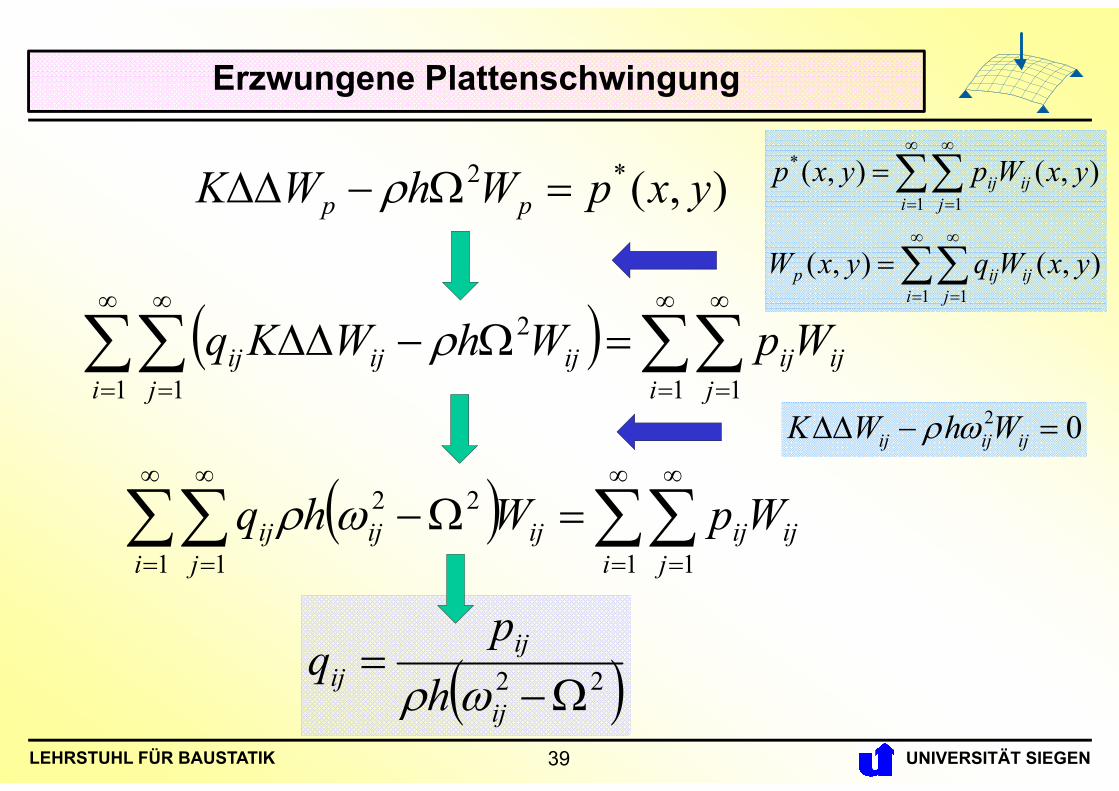
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
2 0ij ij ijK W h W
1 11 1
2
i jijij
i jijijij WpWhWKq
1 11 1
22
i jijij
i jijijij WpWhq
22
ij
ijij h
pq
),(*2 yxpWhWK pp
1 1
1 1
*
),(),(
),(),(
i jijijp
i jijij
yxWqyxW
yxWpyxp
Erzwungene Plattenschwingung
39
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
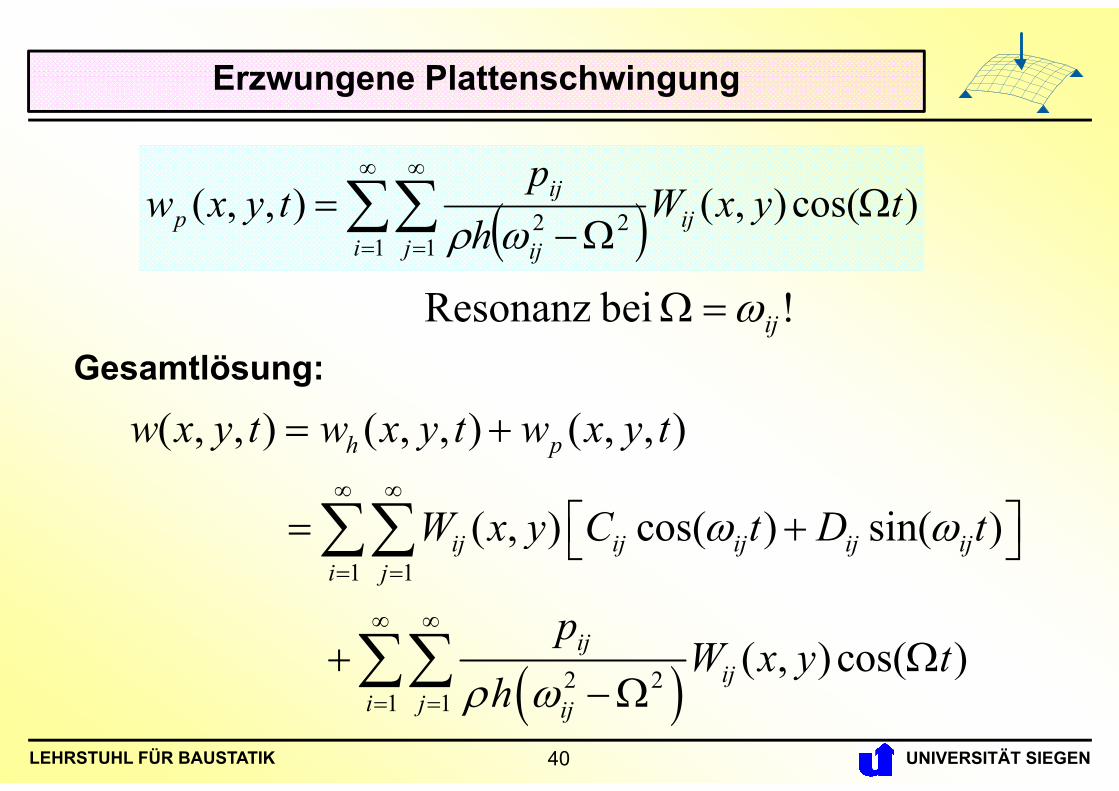
Erzwungene Plattenschwingung
1 1
22 )cos(),(),,(i j
ijij
ijp tyxW
hp
tyxw
! bei Resonanz ij
1 1
2 21 1
( , , ) ( , , ) ( , , )
( , ) cos( ) sin( )
( , ) cos( )
h p
ij ij ij ij iji j
ijij
i j ij
w x y t w x y t w x y t
W x y C t D t
pW x y t
h
Gesamtlösung:
40
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
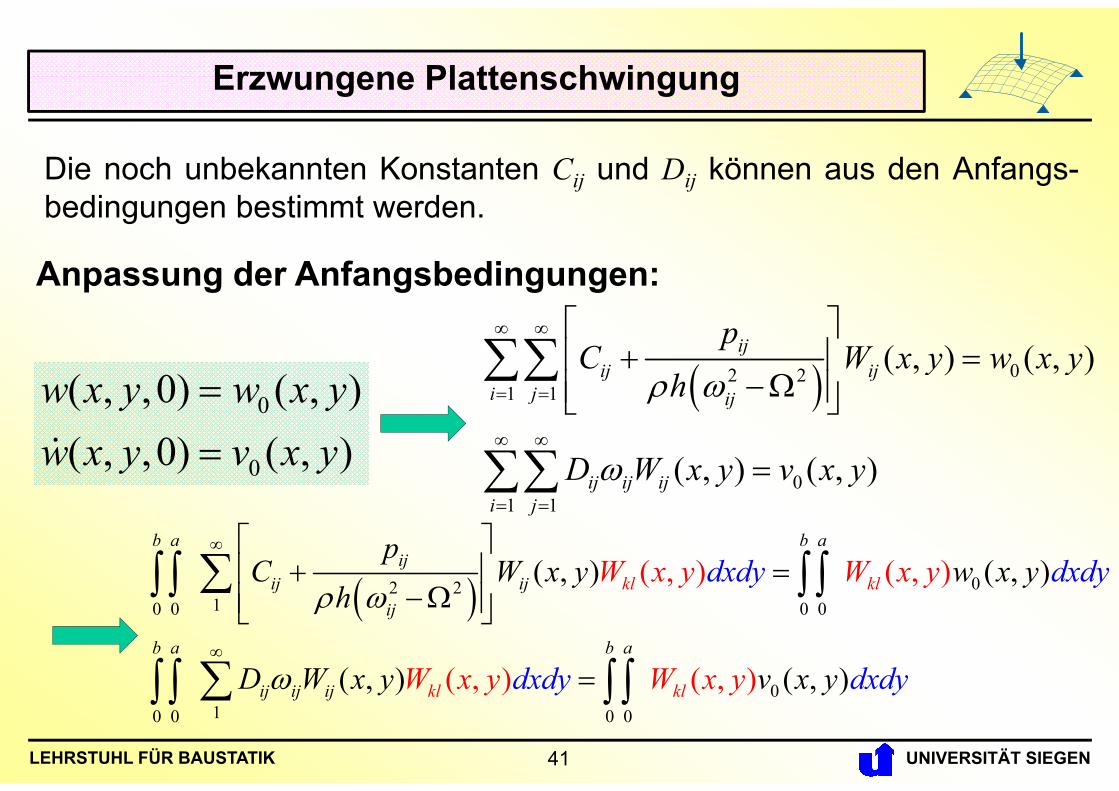
0
0
( , ,0) ( , )( , ,0) ( , )w x y w x yw x y v x y
02 21 1
01 1
( , ) ( , )
( , ) ( , )
ijij ij
i j ij
ij ij iji j
pC W x y w x y
h
D W x y v x y
02 210 0 0 0
010 0 0 0
( , ) ( , )
( , ) ( ,
( , ) ( , )
( , ))) ( ,
kl kl
kl kl
b a b aij
ij ijij
b a b a
ij ij ij
dxdy dxdy
dxdy
pC W x y w x y
h
D W x y v x y dxdy
W x y W x y
W x y W x y
Anpassung der Anfangsbedingungen:
Erzwungene Plattenschwingung
Die noch unbekannten Konstanten Cij und Dij können aus den Anfangs-bedingungen bestimmt werden.
41
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
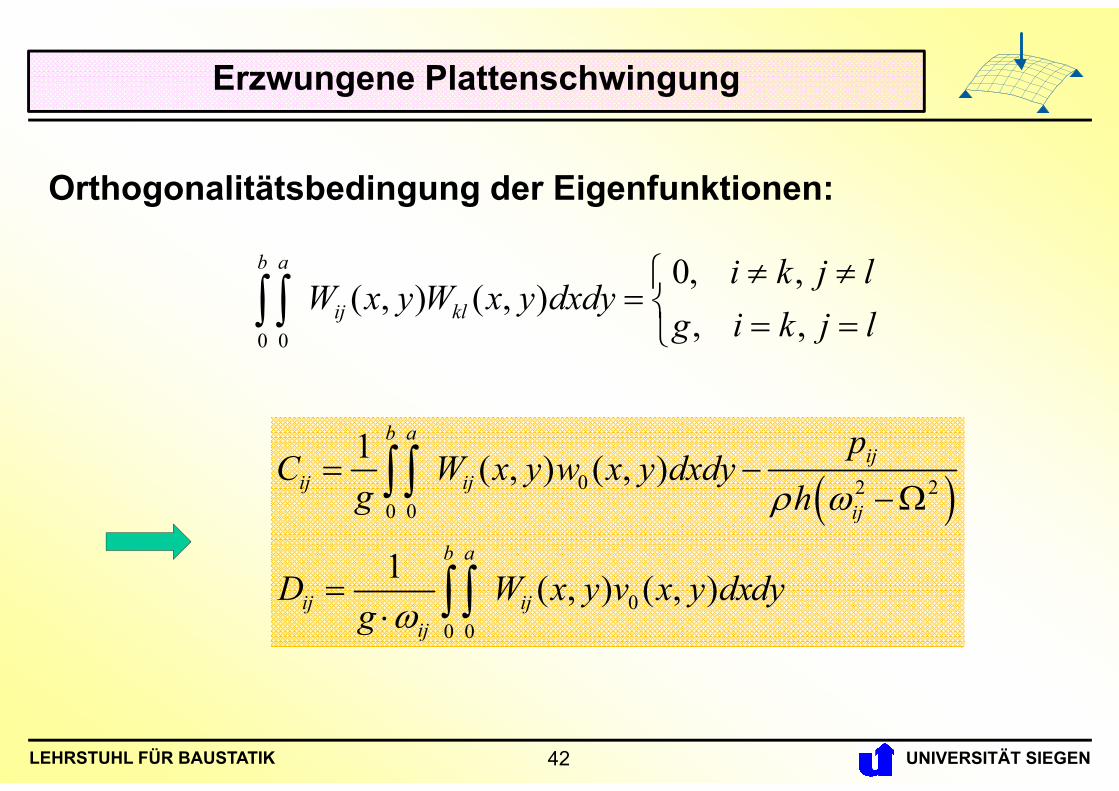
Erzwungene Plattenschwingung
0 0
0, , ( , ) ( , )
, ,
b a
ij kl
i k j lW x y W x y dxdy
g i k j l
0 2 20 0
00 0
1 ( , ) ( , )
1 ( , ) ( , )
b aij
ij ijij
b a
ij ijij
pC W x y w x y dxdy
g h
D W x y v x y dxdyg
Orthogonalitätsbedingung der Eigenfunktionen:
42
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Plattenschwingung
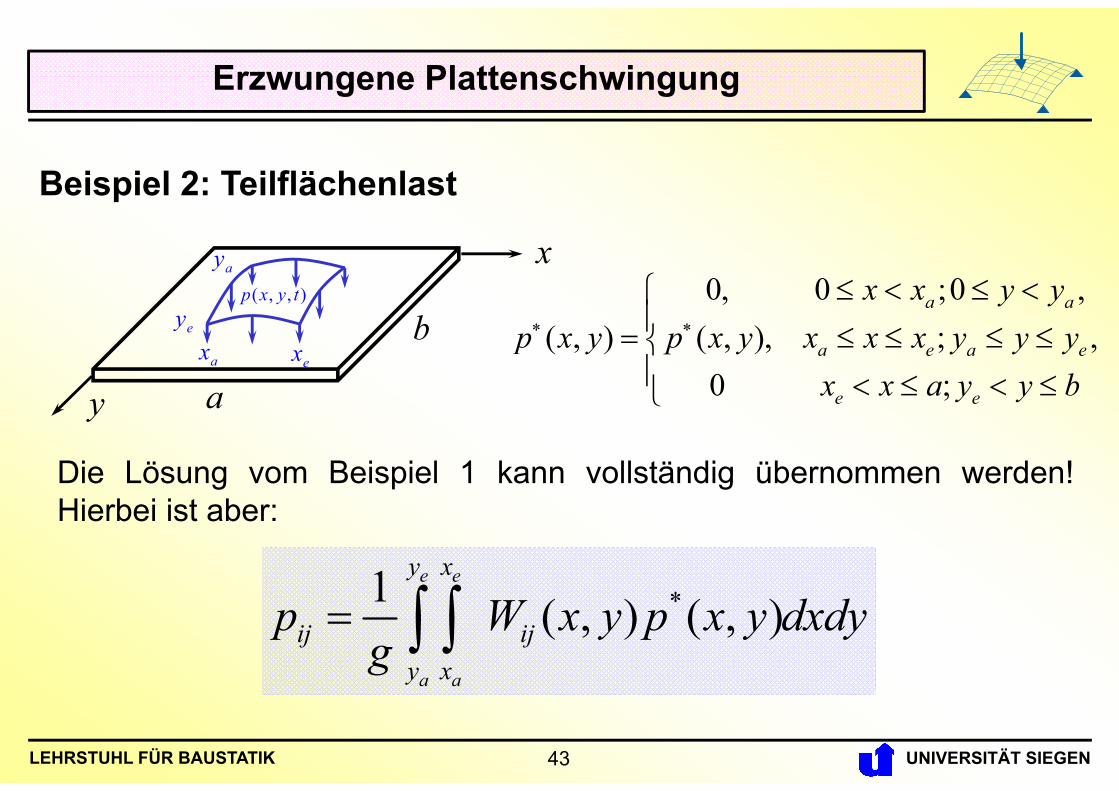
Beispiel 2: Teilflächenlast
x
y a
( , , )p x y t
bax ex
ay
ey0, 0 ;0 ,
( , ) ( , ), ; ,0 ;
a a
a e a e
e e
x x y yp x y p x y x x x y y y
x x a y y b
Die Lösung vom Beispiel 1 kann vollständig übernommen werden!Hierbei ist aber:
*1 ( , ) ( , )e e
a a
y x
ij ijy x
p W x y p x y dxdyg
43
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Plattenschwingung
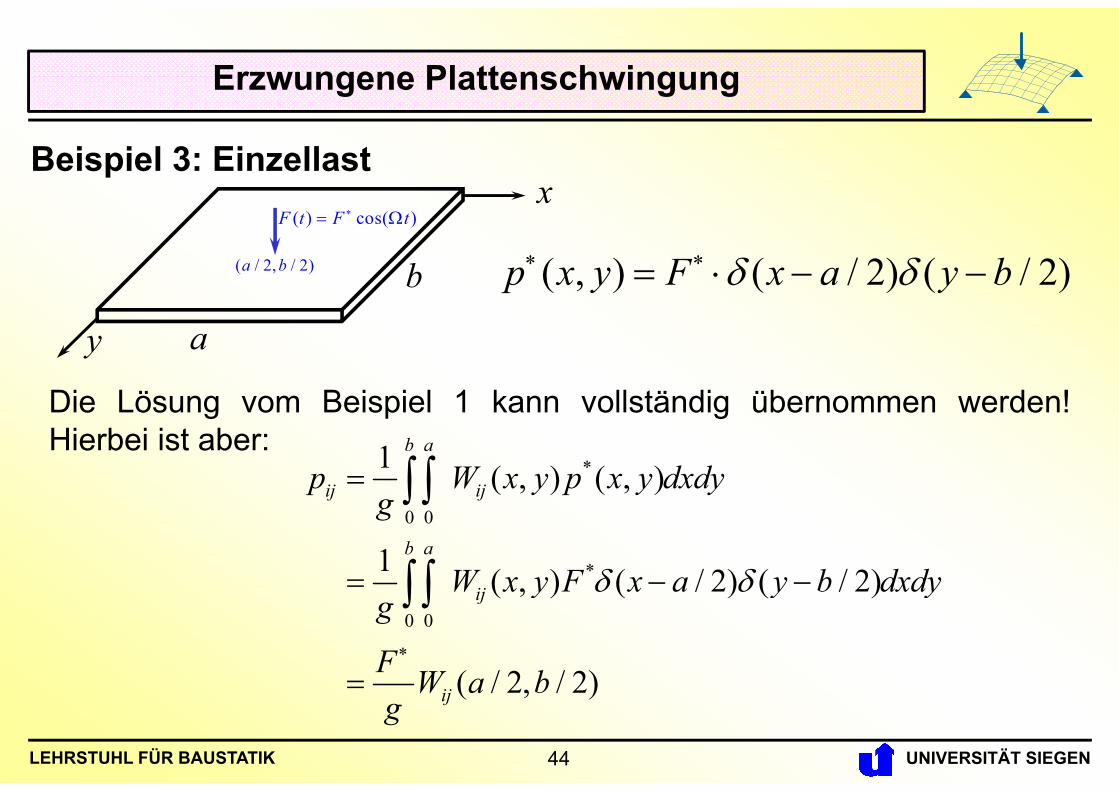
Beispiel 3: Einzellastx
y a
( ) cos( )F t F t
b( / 2, / 2)a b ( , ) ( / 2) ( / 2)p x y F x a y b
Die Lösung vom Beispiel 1 kann vollständig übernommen werden!Hierbei ist aber:
*
0 0
*
0 0
1 ( , ) ( , )
1 ( , ) ( / 2) ( / 2)
( / 2, / 2)
b a
ij ij
b a
ij
ij
p W x y p x y dxdyg
W x y F x a y b dxdyg
F W a bg
44
UNIVERSITÄT SIEGENLEHRSTUHL FÜR BAUSTATIK
Erzwungene Plattenschwingung
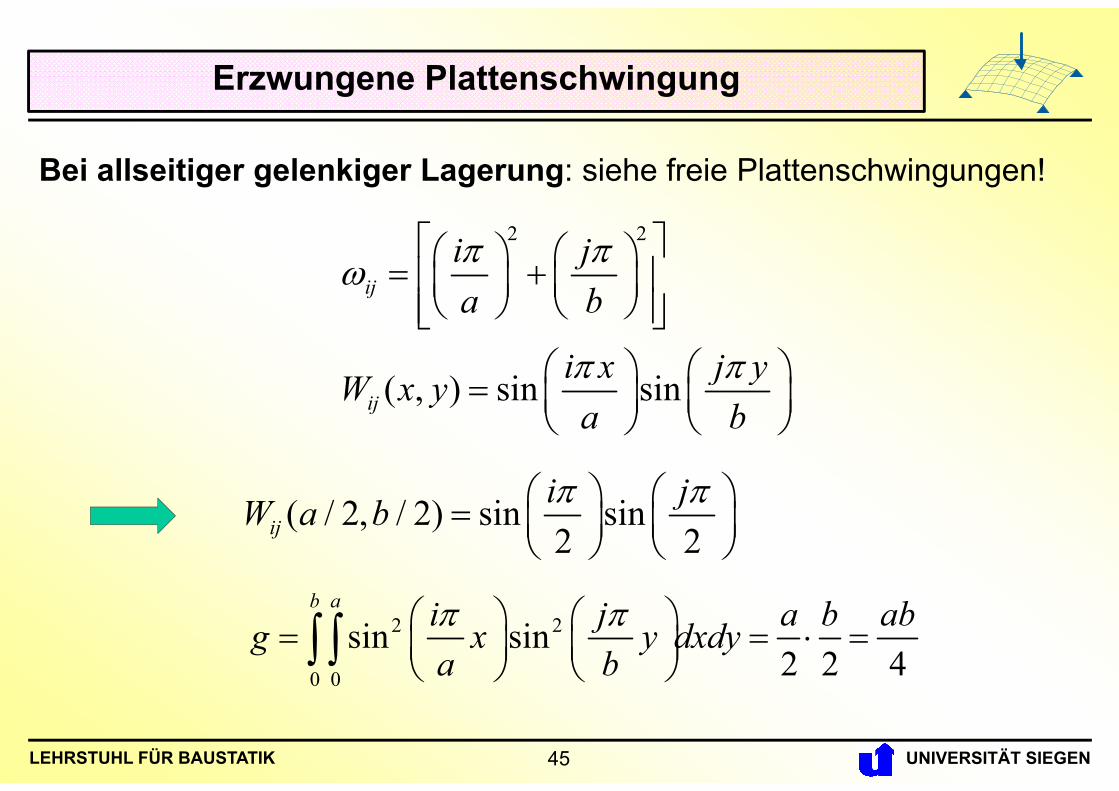
2 2
( , ) sin sin
ij
ij
i ja b
i x j yW x ya b
Bei allseitiger gelenkiger Lagerung: siehe freie Plattenschwingungen!
( / 2, / 2) sin sin2 2iji jW a b
2 2
0 0
sin sin2 2 4
b a i j a b abg x y dxdya b
45