
Beurteilung der Fahrzeug-Längsdynamik · * Studienarbeit im Labor Antriebstechnik von Herrn...
18
* Studienarbeit im Labor Antriebstechnik von Herrn Benjamin Biehler Beurteilung der Fahrzeug-Längsdynamik * • Simulationsprogramm zur Beurteilung der Längsdynamik von Fahrzeugen • Ermittlung der Fahrleistungen von Fahrzeugen wie z.B. - Beschleunigungszeiten des Fahrzeuges - mit Durchschalten der Gänge - in den einzelnen Gängen - Geschwindigkeiten in den einzelnen Gängen - Anfahrvorgänge bei verschiedenen Fahrbahnzuständen - dynamische Lasten im Triebstrang - Beurteilung einer Fahrgeschwindigkeitsregelung (Tempomat) - Kraftstoffverbrauch des Fahrzeuges Fachbereich Maschinenbau Prof. Dr.-Ing. Schmitt
Transcript of Beurteilung der Fahrzeug-Längsdynamik · * Studienarbeit im Labor Antriebstechnik von Herrn...
* Studienarbeit im Labor Antriebstechnik von Herrn Benjamin Biehler
Beurteilung der Fahrzeug-Längsdynamik *• Simulationsprogramm zur Beurteilung der Längsdynamik von Fahrzeugen
• Ermittlung der Fahrleistungen von Fahrzeugen wie z.B.- Beschleunigungszeiten des Fahrzeuges
- mit Durchschalten der Gänge- in den einzelnen Gängen
- Geschwindigkeiten in den einzelnen Gängen- Anfahrvorgänge bei verschiedenen Fahrbahnzuständen- dynamische Lasten im Triebstrang- Beurteilung einer Fahrgeschwindigkeitsregelung (Tempomat)- Kraftstoffverbrauch des Fahrzeuges
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
Umfang des Simulationsprogrammes• Modellierung der Motorcharakteristik über das Drehmoment-
Drehzahlverhalten unter Berücksichtigung des Schleppmomentes(Motorreibung) und Integration einer Leerlaufregelung
• Abbildung des Triebstranges mit Motor, Kupplung, Schaltgetriebe, Antriebswellen, Differentialgetriebe, Seitenwellen, Räder
• Abbildung der Karosserie mittels träger Masse, Luftwiderstand, Rollwiderstand und dynamischer Achslastverteilung
• Berücksichtigung einer ortsabhängigen in Längsrichtung geneigten Fahrbahn
• Berücksichtigung von ortsabhängigen Fahrbahnreibwerten
• Integration einer Fahrgeschwindigkeitsregelung
• Ermittlung der Kraftstoffverbrauchsdaten über Verbrauchs-Kennfeld während der Simulation
• Parametrierung verschiedener Fahrzeuge mittels Variablenliste
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
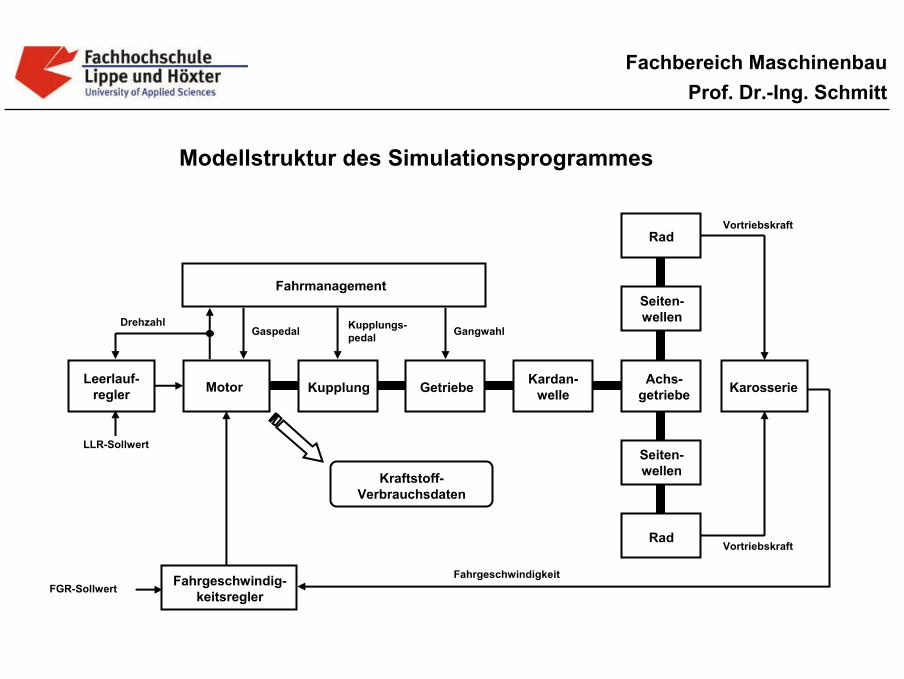
Modellstruktur des Simulationsprogrammes
MotorLeerlauf-regler Kupplung Getriebe Kardan-
welleAchs-
getriebe
Seiten-wellen
Seiten-wellen
Rad
Rad
Karosserie
Fahrgeschwindig-keitsregler
Fahrmanagement
Vortriebskraft
Vortriebskraft
Fahrgeschwindigkeit
GangwahlGaspedal Kupplungs-pedal
Drehzahl
LLR-Sollwert
FGR-Sollwert
Kraftstoff-Verbrauchsdaten
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
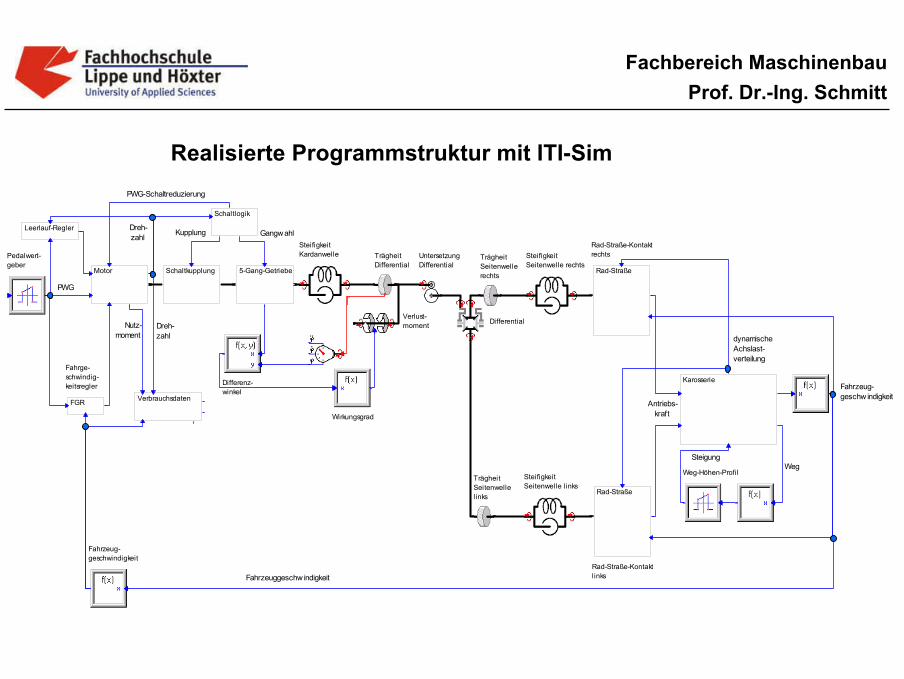
Realisierte Programmstruktur mit ITI-Sim
Pedalwert-geber
Differential
Untersetzung Differential
Steifigkeit Kardanwelle Trägheit
Seitenwelle rechts
Trägheit Seitenwelle links
Steifigkeit Seitenwelle rechts
Steifigkeit Seitenwelle links
Trägheit Differential
Differenz-winkel
Verlust- moment
Wirkungsgrad
Weg-Höhen-Profil
5-Gang-Getriebe
Rad-Straße-Kontakt links
Rad-Straße
Karosserie
Schaltkupplung
Leerlauf-Regler
Verbrauchsdaten
Motor
Fahrge-schwindig-keitsregler
FGR
Schaltlogik
Rad-Straße-Kontakt rechts
Rad-Straße
Fahrzeug-geschwindigkeit
Gangwahl
Nutz-moment
PWG-Schaltreduzierung
Kupplung
Fahrzeuggeschw indigkeit
Fahrzeug-geschw indigkeit
Weg Steigung
Antriebs-kraft
Dreh-zahl
Dreh-zahl
PWG
dynamischeAchslast-verteilung
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
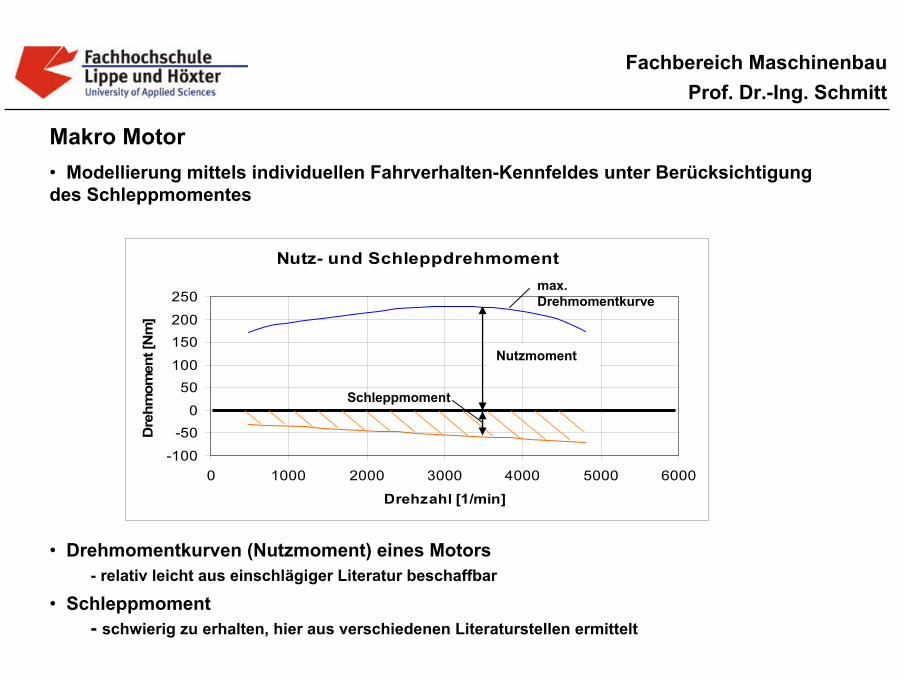
Makro Motor• Modellierung mittels individuellen Fahrverhalten-Kennfeldes unter Berücksichtigung des Schleppmomentes
• Drehmomentkurven (Nutzmoment) eines Motors- relativ leicht aus einschlägiger Literatur beschaffbar
• Schleppmoment- schwierig zu erhalten, hier aus verschiedenen Literaturstellen ermittelt
Nutz- und Schleppdrehmoment
-100-50
050
100150200250
0 1000 2000 3000 4000 5000 6000
Drehzahl [1/min]
Dre
hmom
ent [
Nm
]
Nutzmoment
Schleppmoment
max. Drehmomentkurve
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
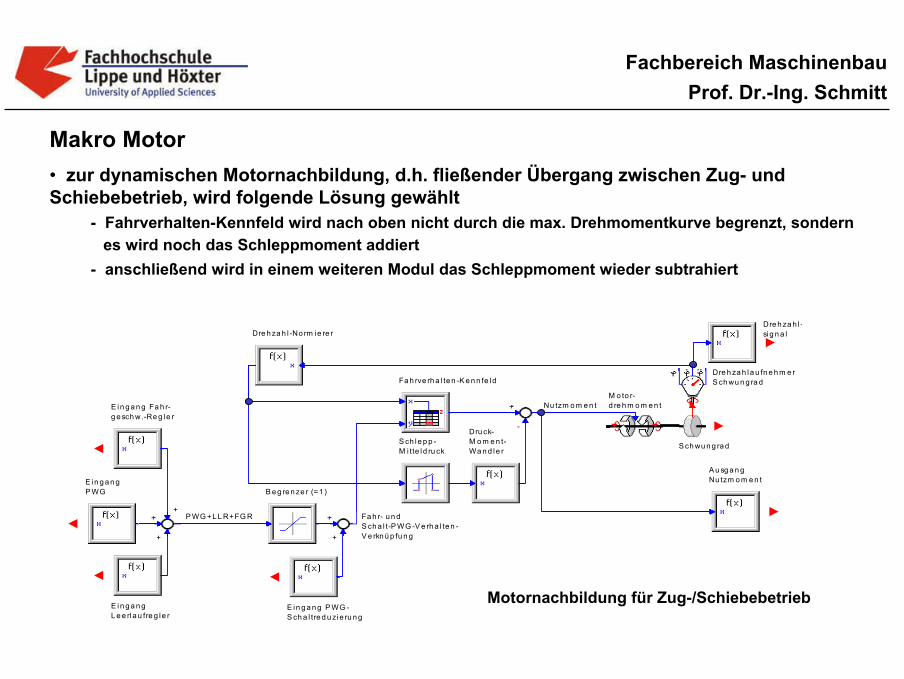
Makro Motor• zur dynamischen Motornachbildung, d.h. fließender Übergang zwischen Zug- und Schiebebetrieb, wird folgende Lösung gewählt
- Fahrverhalten-Kennfeld wird nach oben nicht durch die max. Drehmomentkurve begrenzt, sondern es wird noch das Schleppmoment addiert
- anschließend wird in einem weiteren Modul das Schleppmoment wieder subtrahiert
S ch wu n g ra d
Dre h za h la u fn e h m e r S ch wu n g ra d
M o to r-d re h m o m e n t Nu tzm o m e n t +
-
Fa h rve rh a l te n -K e n n fe l d
S ch le p p -M i tte ld ru ck
Dre h za h l -No rm ie re r
Dru ck-M o m e n t-Wa n d le r
P WG +L L R+FG R +
+
+
B e g re n ze r (=1 )
Fa h r- u n d S ch a l t-P WG -V e rh a l te n -V e rkn ü p fu n g
+
+
Dre h za h l -sig n a l
A u sg a n gNu tzm o m e n t E in g a n g
P WG
E i n g a n gL e e rl a u fre g le r
E i n g a n g Fa h r-g e sch w.-Re g l e r
E in g a n g P WG -S ch a l tre d u zi e ru n g
Motornachbildung für Zug-/Schiebebetrieb
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
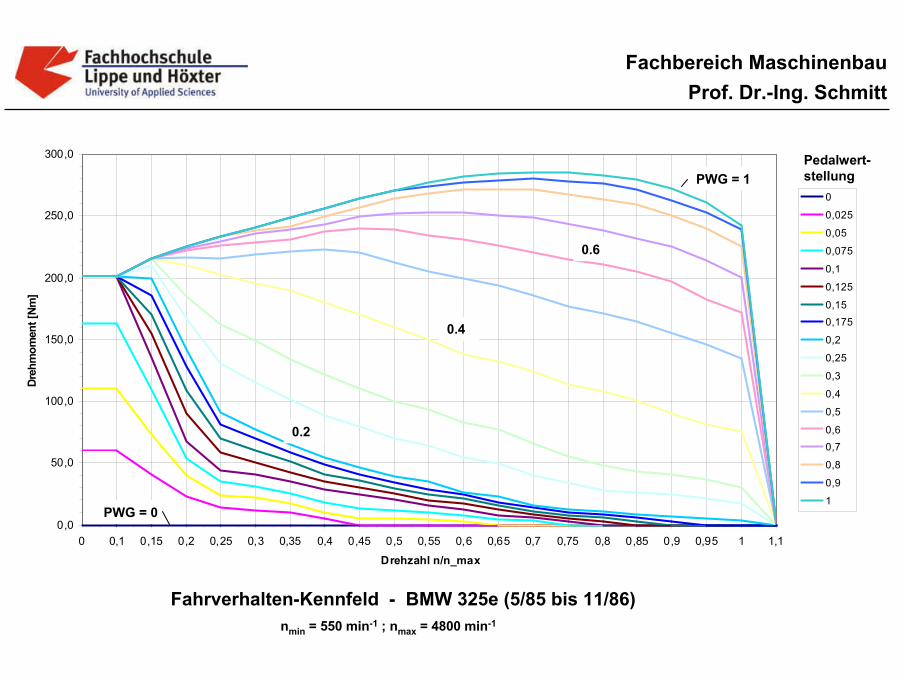
Fahrverhalten-Kennfeld - BMW 325e (5/85 bis11/86)
0,0
50,0
100,0
150,0
200,0
250,0
300,0
0 0,1 0,15 0,2 0,25 0,3 0,35 0,4 0,45 0,5 0,55 0,6 0,65 0,7 0,75 0,8 0,85 0,9 0,95 1 1,1 Drehzahl n/n_max
Dreh
mom
ent [
Nm]
0
0,025
0,05
0,075
0,1
0,125
0,150,175
0,2
0,25
0,3
0,4
0,5
0,60,7
0,8
0,9
1
Pedalwert-stellung
Fahrverhalten-Kennfeld - BMW 325e (5/85 bis 11/86)nmin = 550 min-1 ; nmax = 4800 min-1
PWG = 0
PWG = 1
0.2
0.4
0.6
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
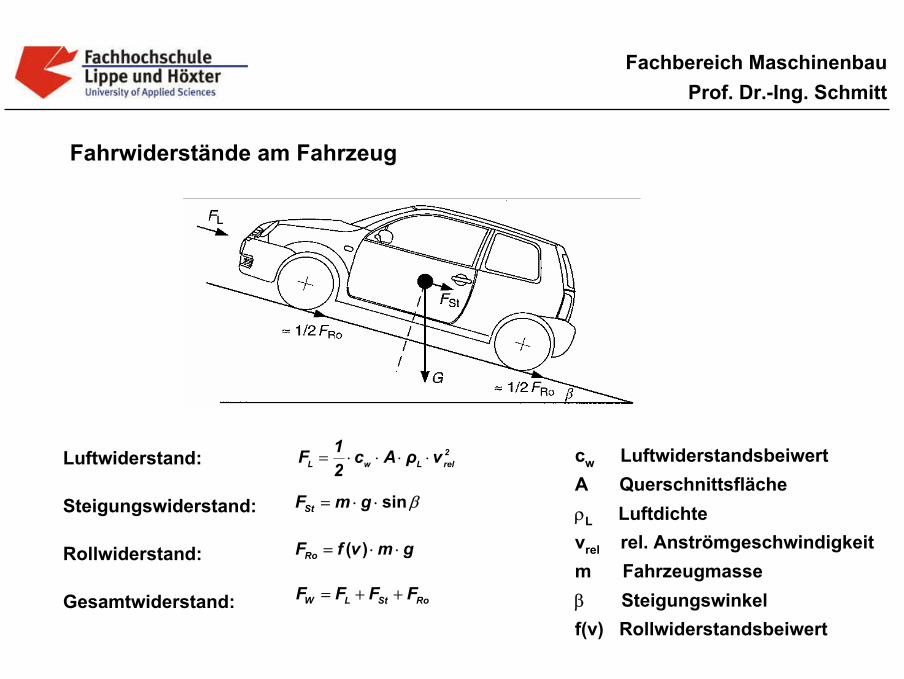
Fahrwiderstände am Fahrzeug
Luftwiderstand:
Steigungswiderstand:
Rollwiderstand:
Gesamtwiderstand:
2relLwL vρAc
21F ⋅⋅⋅⋅=
sinβ⋅⋅= gmFSt
gmvfFRo ⋅⋅= )(
RoStLW FFFF ++=
cw LuftwiderstandsbeiwertA QuerschnittsflächeρL Luftdichtevrel rel. Anströmgeschwindigkeitm Fahrzeugmasseβ Steigungswinkel f(v) Rollwiderstandsbeiwert
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
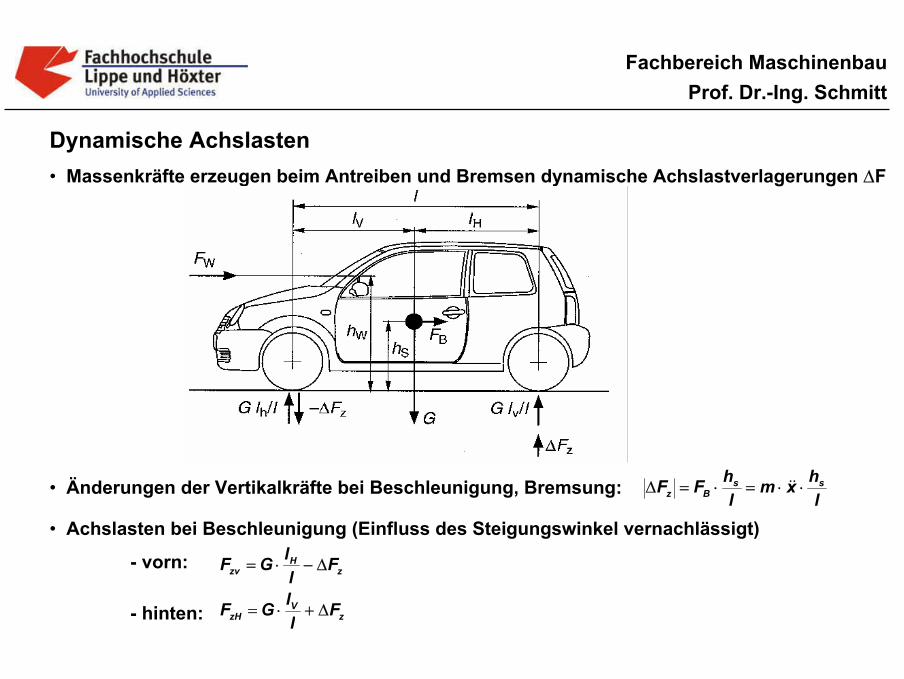
Dynamische Achslasten• Massenkräfte erzeugen beim Antreiben und Bremsen dynamische Achslastverlagerungen ∆F
• Änderungen der Vertikalkräfte bei Beschleunigung, Bremsung: lhxm
lhFF ss
Bz ⋅⋅=⋅=∆ &&
• Achslasten bei Beschleunigung (Einfluss des Steigungswinkel vernachlässigt)
- vorn:
- hinten:
zH
zv FllGF ∆−⋅=
zV
zH FllGF ∆+⋅=
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
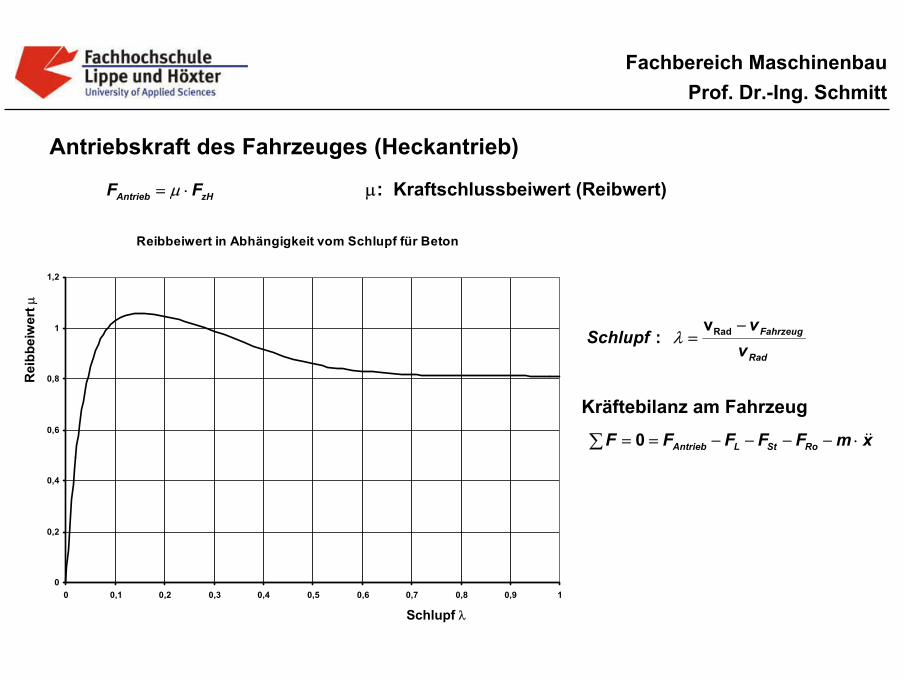
Antriebskraft des Fahrzeuges (Heckantrieb)
zHAntrieb FF ⋅= µ µ: Kraftschlussbeiwert (Reibwert)
Reibbeiwert in Abhängigkeit vom Schlupf für Beton
0
0,2
0,4
0,6
0,8
1
1,2
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Schlupf (lam da)
Rei
bbei
wer
t (m
y)
Schlupf λ
Rei
bbei
wer
t µ
Rad
Fahrzeug
vv
Schlupf−
= Radv : λ
Kräftebilanz am Fahrzeug
∑ ⋅−−−−== xmFFFFF RoStLAntrieb &&0
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
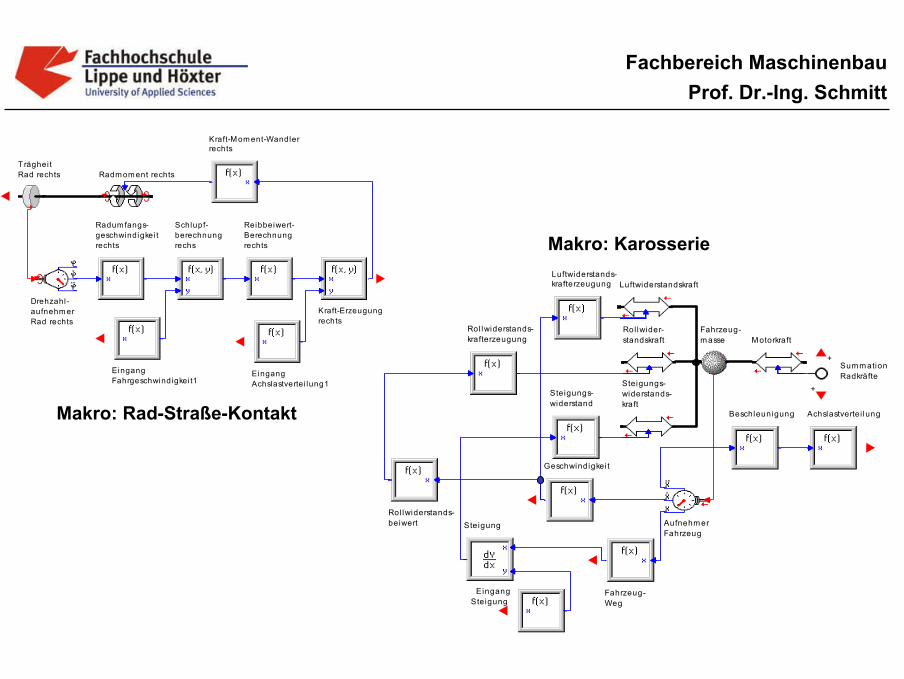
T räghei t Rad rechts
Drehzahl-aufnehm er Rad rechts
Radum fangs-geschwindigkei t rechts
Schlupf-berechnung rechs
Reibbeiwert-Berechnung rechts
Radm om ent rechts
Kraft-M om ent-Wandler rechts
Kraft-Erzeugungrechts
EingangFahrgeschwindigkei t1
EingangAchslastvertei lung1
Fahrzeug-m asse
Aufnehm er Fahrzeug
M otorkraft
Luftwiderstandskraft Luftwiderstands-krafterzeugung
Sum m ation Radkräfte
+
+
Steigung
Steigungs-widerstand
Steigungs-widerstands-kraft
Achslastvertei lung
Rol lwiderstands-beiwert
Rol lwider-standskraft
Rol lwiderstands-krafterzeugung
Geschwindigkei t
Beschleunigung
Fahrzeug-Weg
EingangSteigung
Makro: Rad-Straße-Kontakt
Makro: Karosserie
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
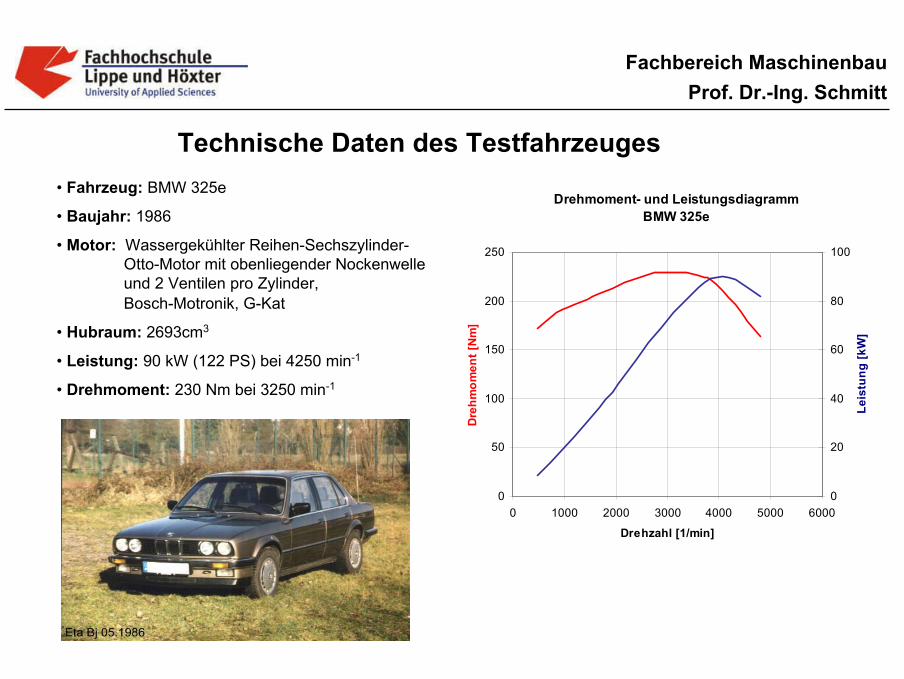
Technische Daten des Testfahrzeuges
Drehmoment- und LeistungsdiagrammBMW 325e
0
50
100
150
200
250
0 1000 2000 3000 4000 5000 6000
Drehzahl [1/min]
Dreh
mom
ent [
Nm
]
0
20
40
60
80
100
Leis
tung
[kW
]
• Fahrzeug: BMW 325e
• Baujahr: 1986
• Motor: Wassergekühlter Reihen-Sechszylinder-Otto-Motor mit obenliegender Nockenwelleund 2 Ventilen pro Zylinder, Bosch-Motronik, G-Kat
• Hubraum: 2693cm3
• Leistung: 90 kW (122 PS) bei 4250 min-1
• Drehmoment: 230 Nm bei 3250 min-1
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
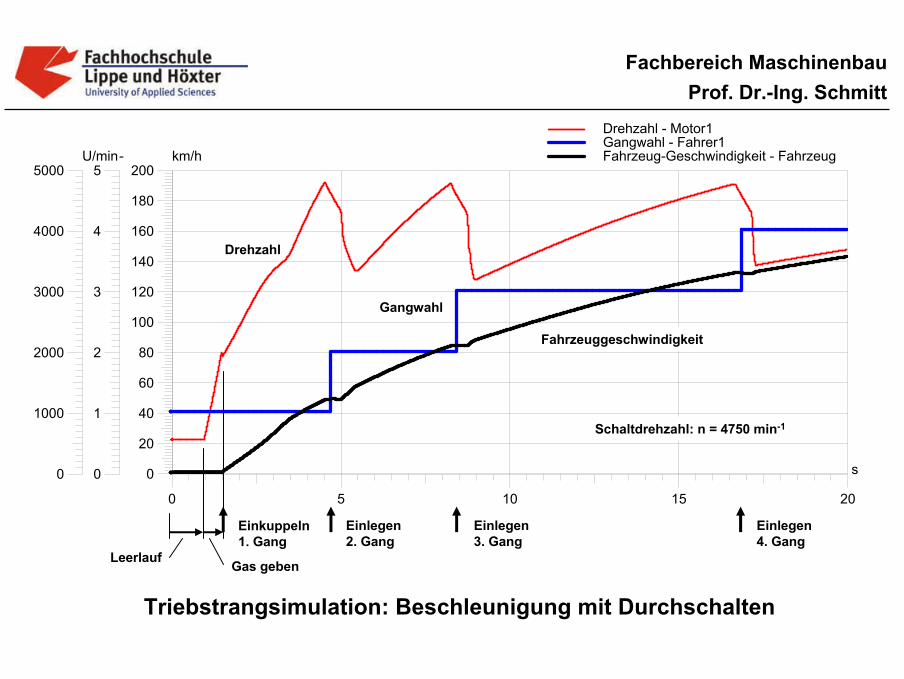
Triebstrangsimulation: Beschleunigung mit Durchschalten
0
1000
2000
3000
4000
5000U/min
0
1
2
3
4
5-
0
20
40
60
80
100
120
140
160
180
200km/h
0 5 10 15 20
s
Drehzahl - Motor1Gangwahl - Fahrer1Fahrzeug-Geschwindigkeit - Fahrzeug
Einkuppeln 1. Gang
Einlegen 2. Gang
Einlegen 3. Gang
Einlegen 4. Gang
Leerlauf Gas geben
Drehzahl
Fahrzeuggeschwindigkeit
Gangwahl
Schaltdrehzahl: n = 4750 min-1
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
-100
-50
0
50
100
150
200
250-
0 5 10 15 20
s
Nutzmoment - Motor1Leistung - 3Fahrzeug-Geschwindigkeit - Fahrzeug
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1-
0 5 10 15 20
s
Schlupf (rechts) - Rad-Straße-Kontakt rechts
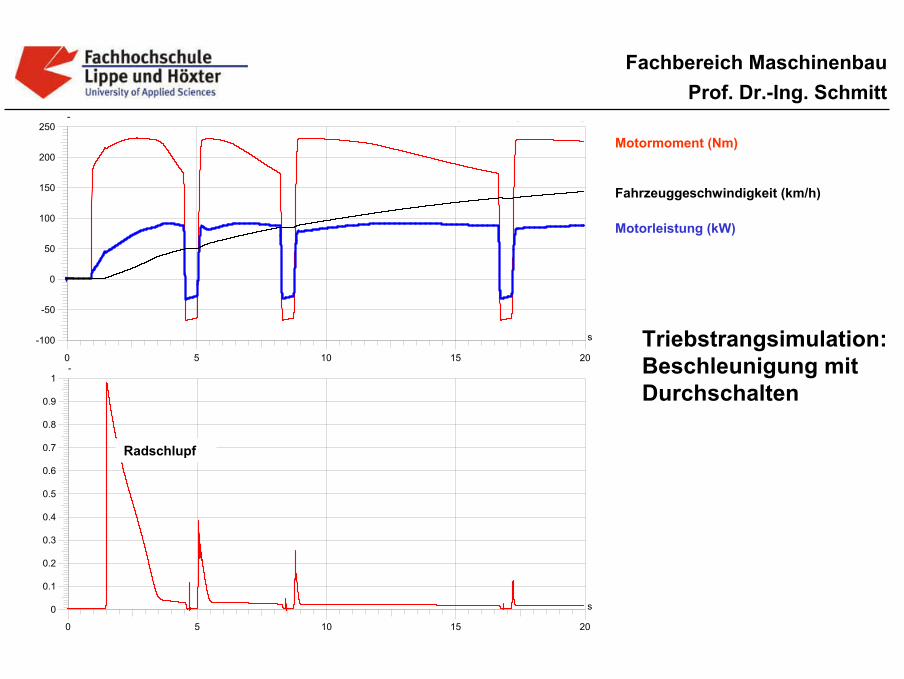
Triebstrangsimulation: Beschleunigung mit Durchschalten
Radschlupf
Motormoment (Nm)
Fahrzeuggeschwindigkeit (km/h)
Motorleistung (kW)
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
-4
-2
0
2
4
6m/s²
0
40
80
120
160
200km/h
0
100
200
300
400
500m
0
0.04
0.08
0.12
0.16
0.2-
0 5 10 15 20
s
Fahrzeug-Beschleunigung - FahrzeugFahrzeug-Geschwindigkeit - FahrzeugFahrweg - FahrzeugVerbrauchte Menge - 3
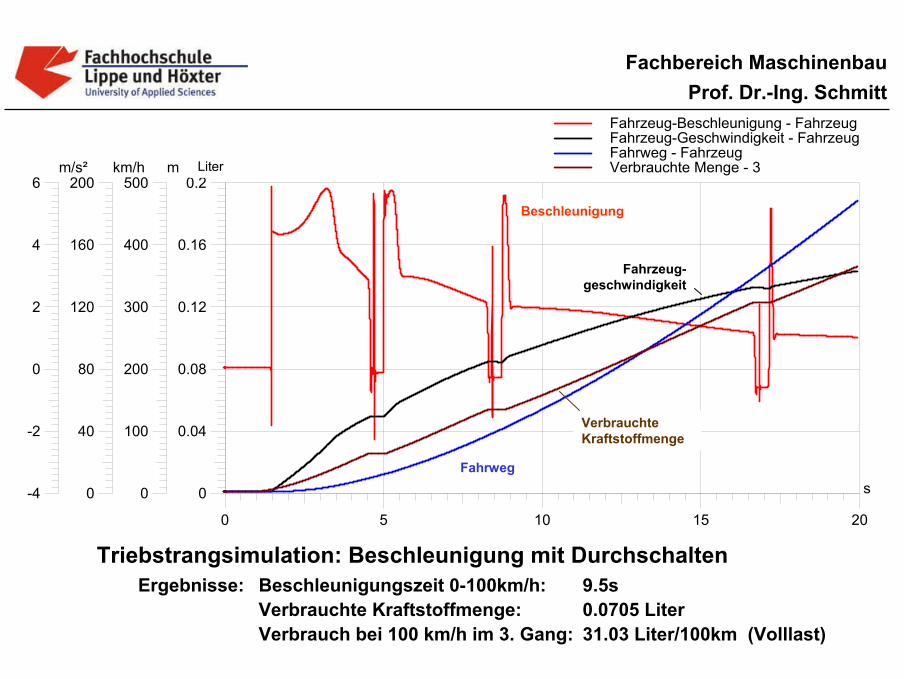
Triebstrangsimulation: Beschleunigung mit DurchschaltenErgebnisse: Beschleunigungszeit 0-100km/h: 9.5s
Verbrauchte Kraftstoffmenge: 0.0705 LiterVerbrauch bei 100 km/h im 3. Gang: 31.03 Liter/100km (Volllast)
Beschleunigung
Fahrweg
Fahrzeug-geschwindigkeit
Verbrauchte Kraftstoffmenge
Liter
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
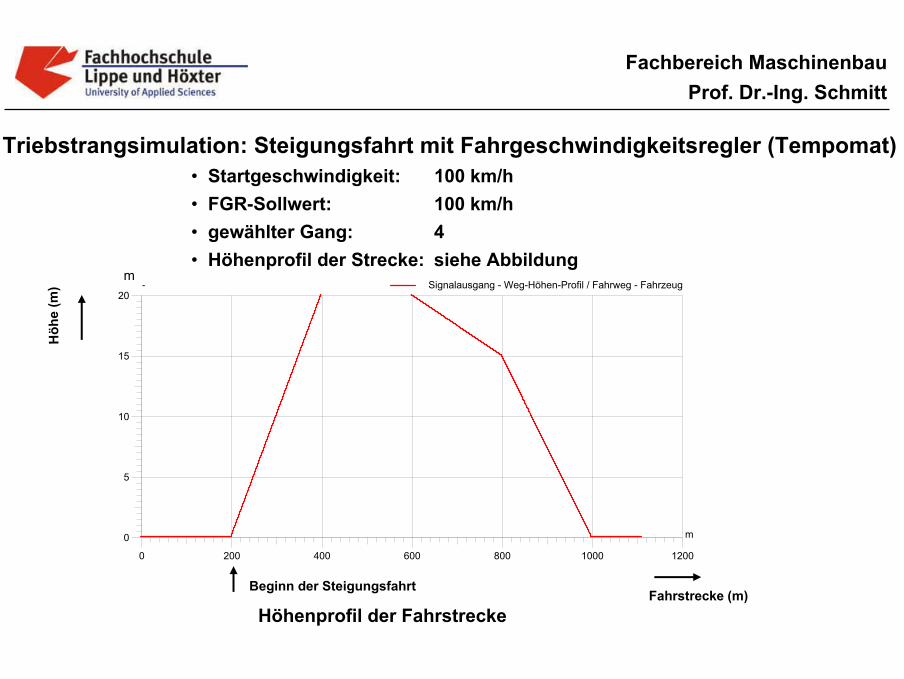
Triebstrangsimulation: Steigungsfahrt mit Fahrgeschwindigkeitsregler (Tempomat)
0
5
10
15
20-
0 200 400 600 800 1000 1200
m
Signalausgang - Weg-Höhen-Profil / Fahrweg - Fahrzeug
• Startgeschwindigkeit: 100 km/h• FGR-Sollwert: 100 km/h• gewählter Gang: 4• Höhenprofil der Strecke: siehe Abbildung
Höhenprofil der Fahrstrecke
m
Beginn der SteigungsfahrtFahrstrecke (m)
Höh
e (m
)Fachbereich Maschinenbau
Prof. Dr.-Ing. Schmitt
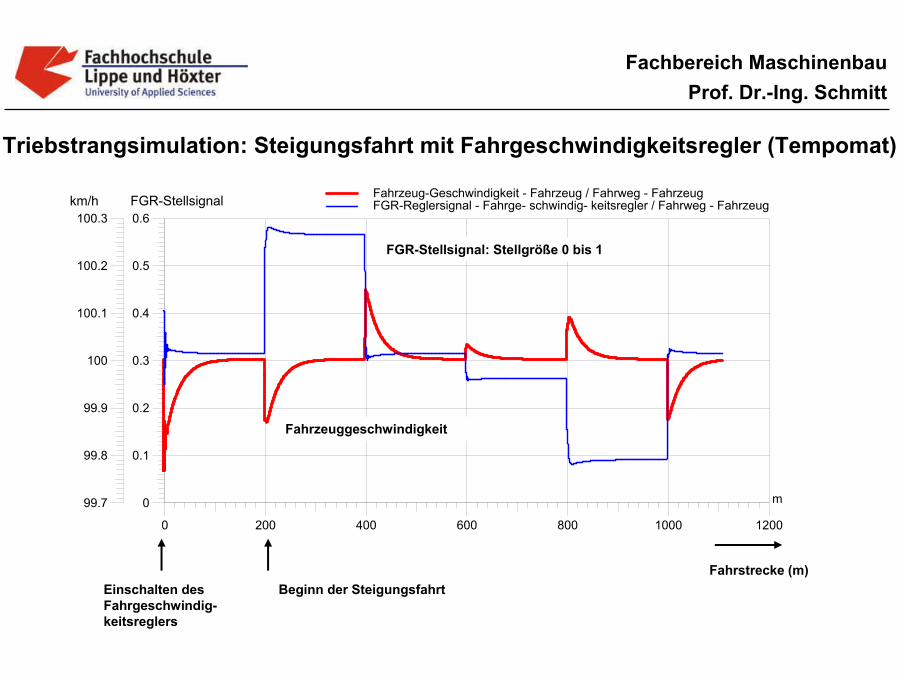
99.7
99.8
99.9
100
100.1
100.2
100.3km/h
0
0.1
0.2
0.3
0.4
0.5
0.6-
0 200 400 600 800 1000 1200
m
Fahrzeug-Geschwindigkeit - Fahrzeug / Fahrweg - FahrzeugFGR-Reglersignal - Fahrge- schwindig- keitsregler / Fahrweg - Fahrzeug
Triebstrangsimulation: Steigungsfahrt mit Fahrgeschwindigkeitsregler (Tempomat)
FGR-Stellsignal: Stellgröße 0 bis 1
Fahrzeuggeschwindigkeit
Einschalten des Fahrgeschwindig-keitsreglers
Beginn der SteigungsfahrtFahrstrecke (m)
km/h FGR-Stellsignal
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt
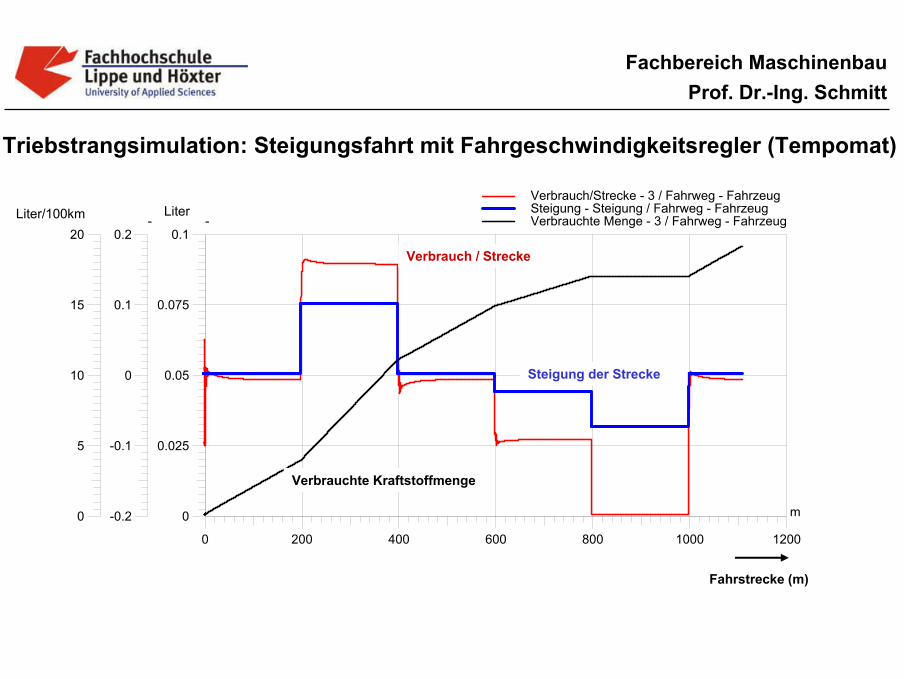
0
5
10
15
20-
-0.2
-0.1
0
0.1
0.2-
0
0.025
0.05
0.075
0.1-
0 200 400 600 800 1000 1200
m
Verbrauch/Strecke - 3 / Fahrweg - FahrzeugSteigung - Steigung / Fahrweg - FahrzeugVerbrauchte Menge - 3 / Fahrweg - Fahrzeug
Triebstrangsimulation: Steigungsfahrt mit Fahrgeschwindigkeitsregler (Tempomat)
Liter/100km Liter
Verbrauch / Strecke
Steigung der Strecke
Verbrauchte Kraftstoffmenge
Fahrstrecke (m)
Fachbereich MaschinenbauProf. Dr.-Ing. Schmitt


















