CoDeSys Soft-PLC · Das Setup-Programm installiert anschliessend automatisch die Grossenbacher...
27
SYSTEMBESCHREIBUNG CoDeSys Soft-PLC Rundtime-Systeme Software Grossenbacher Systeme AG Spinnereistrasse 10, CH-9008 St. Gallen Phone +41 (0)71 243 29 29 / Fax +41 (0)71 243 29 28 [email protected] / www.gesys.ch Grossenbacher Systeme GmbH Ruhrstrasse 15, DE-63452 Hanau Phone +49 (0)6181 6751 999/ Fax +49 (0)6181 6751 998 [email protected] CoDeSys Soft-PLC
Transcript of CoDeSys Soft-PLC · Das Setup-Programm installiert anschliessend automatisch die Grossenbacher...

SYSTEMBESCHREIBUNG
CoDeSys Soft-PLC Rundtime-Systeme Software
Grossenbacher Systeme AG Spinnereistrasse 10, CH-9008 St. Gallen Phone +41 (0)71 243 29 29 / Fax +41 (0)71 243 29 28 [email protected] / www.gesys.ch
Grossenbacher Systeme GmbH Ruhrstrasse 15, DE-63452 Hanau Phone +49 (0)6181 6751 999/ Fax +49 (0)6181 6751 998 [email protected]
CoDeSys Soft-PLC
CoDeSys Soft-PLC Rundtime-Systeme Software
DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
Urheberrechtshinweis
Unterlage für zukünftige Verwendung aufbewahren!
Diese Unterlagen sind geistiges Eigentum der Grossenbacher Systeme AG, der auch das ausschliessliche Urheberrecht daran zusteht. Eine inhaltliche Änderung, die Vervielfältigung oder der Nachdruck dieser Unterlagen sowie deren Weitergabe an Dritte ist nur mit der ausdrücklichen Erlaubnis der Grossenbacher Systeme AG gestattet. Grossenbacher Systeme AG lehnt jede Haftung für Schäden ab, die durch die Anwendung von falschen bzw. unzureichenden oder aufgrund fehlender Informationen in diesen Unterlagen entstehen. Grossenbacher Systeme AG behält sich das Recht vor, dieses Dokument teilweise oder vollständig zu ändern.
Alle Marken- und Produktnamen sind Warenzeichen oder eingetragene Warenzeichen der jeweiligen Titelhalter.
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 1
Bestimmungsgemässer Gebrauch Hardware, Software, Betriebssysteme und Treiber dürfen nur für die beschriebenen Einsatzfälle und nur in Verbindung mit den von Grossenbacher Systeme AG empfohlenen Komponenten verwendet werden.
Warnung
Defekte, die durch unsachgemässe Behandlung des Gerätes entstehen, sind von der Garantie ausgeschlossen.
Über dieses Gerät dürfen keine sicherheitsrelevanten Funktionen im Sinne von Personen- und Maschinenschutz, realisiert werden.
Für Folgeschäden, die durch einen Ausfall oder eine Funktionsstörung entstehen, wird jede Haftung abgelehnt.
Alle in diesem Dokument angegebenen Daten sind keine zugesicherten Eigenschaften im rechtlichen Sinn.
CoDeSys Soft-PLC Rundtime-Systeme Software
2 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
Sicherheitstechnische Hinweise für den Benutzer
Diese Systembeschreibung enthält die erforderlichen Informationen für den bestimmungsgemässen Gebrauch der darin beschriebenen Produkte. Es wendet sich an technisch qualifiziertes Personal.
Qualifiziertes Personal im Sinne der sicherheitsbezogenen Hinweise in dieser Systembeschreibung oder auf dem Produkt selbst sind Personen, die:
- entweder als Projektierungspersonal mit den Sicherheitskonzepten der Automatisierungstechnik vertraut sind,
- oder als Bedienpersonal im Umgang mit Einrichtungen der Automatisierungstechnik unterwiesen sind und den auf die Bedienung bezogenen Inhalt dieser Systembeschreibung kennen,
- oder als Inbetriebsetzungs- und Servicepersonal eine zur Reparatur derartiger Einrichtungen der Automatisierungstechnik befähigende Ausbildung besitzen, sowie die Berechtigung haben, Stromkreise und Geräte/Systeme gemäss den Standards der Sicherheitstechnik in Betrieb zu nehmen.
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 3
Inhaltsverzeichnis
1 SYMBOLERKLÄRUNG .................................................................................................................................. 4
2 EINLEITUNG.................................................................................................................................................. 5
3 INSTALLATION ............................................................................................................................................. 6
3.1 CODESYS TARGET ....................................................................................................................................................6
3.1.1 CoDeSys SoftMotion ...................................................................................................................................7 3.1.2 CoDeSys Target-Visualisierung ...............................................................................................................7 3.1.3 CoDeSys Web-Visualisierung ....................................................................................................................7
3.2 RUNTIME-SYSTEM .....................................................................................................................................................8
3.2.1 Konfigurationsdatei rts3S.cfg .................................................................................................................8 3.2.2 Hardware ....................................................................................................................................................10
3.3 KONFIGURATION PROFIBUS DP-MASTER/MPI ODER SLAVE AUF DEM ZIELSYSTEM ................................................11
3.4 RUNTIME-SYSTEM UPDATE .....................................................................................................................................11
4 SOFT-PLC ..................................................................................................................................................... 12
4.1 LEISTUNGSMERKMALE .............................................................................................................................................12
4.2 SOFT-PLC STARTEN ................................................................................................................................................12
4.3 BETRIEBZUSTÄNDE DER PLC ...................................................................................................................................13
4.4 BETRIEBSARTENUMSCHALTUNG ...............................................................................................................................14
4.5 STARTVERHALTEN/ANLAUF ....................................................................................................................................15
4.6 VERHALTEN DER STEUERUNG BEI FEHLER ................................................................................................................15
4.7 FUNKTIONEN DER PLC-LIBRARIES ...........................................................................................................................16
4.8 PLC-BROWSER – BEFEHLE .......................................................................................................................................17
4.9 RETAIN-DATEN .......................................................................................................................................................17
5 PROGRAMMIERUNG DER STEUERUNG ................................................................................................. 18
5.1 VERBINDUNG DES PROGRAMMIER-PC MIT DER STEUERUNG ....................................................................................18
5.2 EINSTELLUNG DES PROGRAMMIER-PC FÜR DIE ETHERNET-KOMMUNIKATION .........................................................18
5.3 EINSTELLUNG DER ETHERNET KOMMUNIKATION IN DER CODESYS PROGRAMMIEROBERFLÄCHE ............................18
5.4 EINSTELLUNG DER IP-ADRESSE AUF DEM ZIELSYSTEM .............................................................................................18
5.5 EINSTELLUNGEN DER SERIELLEN KOMMUNIKATION.................................................................................................18
6 FELDBUS: CAN............................................................................................................................................ 19
6.1 DIE EIGENSCHAFTEN VON CAN..............................................................................................................................19
6.2 CANOPEN...............................................................................................................................................................20
6.2.1 CANopen Kommunikationsprofil ..........................................................................................................20 6.2.2 CANopen Geräteprofile ...........................................................................................................................21
6.3 VERDRAHTUNG .......................................................................................................................................................21
7 VERSIONSGESCHICHTE ............................................................................................................................ 23
8 STICHWORTVERZEICHNIS ....................................................................................................................... 24
CoDeSys Soft-PLC Rundtime-Systeme Software
4 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
1 Symbolerklärung
Gefahrenhinweise
Die folgenden Hinweise dienen Ihrer persönlichen Sicherheit und dem Schutz vor Beschädigung des beschriebenen Produkts oder angeschlossener Geräte.
Sicherheitshinweise und Warnungen zur Abwendung von Gefahren für Leben und Gesundheit von Benutzern oder Instandhaltungspersonal, sowie zur Vermeidung von Sachschäden werden in dieser Anleitung durch die hier definierten Piktogramme hervorgehoben. Grundsätzlich wird in diesem Dokument unterschieden zwischen Piktogramme als „Warnung“ und Piktogramme als "Hinweis“.
Warnungen haben allgemein folgende Bedeutung:
Tod, schwere Körperverletzung oder erhebliche Sachschäden können eintreten, wenn die entsprechenden Vorsichtsmassnahmen nicht getroffen werden.
Die einzelnen Piktogramme als „Warnung“ haben folgende Bedeutung:
Achtung ! Allgemein ! Ist ein Hinweis, der beachtet werden muss, um sich rechtzeitig vor Gefahren während und um den Betrieb des Gerätes zu schützen. Das richtige Vorgehen ist zu beachten.
Achtung ! Stromschlag ! In elektrischen Anlagen können für Menschen gefährliche Spannungen auftreten. Bei Berührung von spannungsführenden Teilen besteht die Gefahr eines elektrischen Stromschlags.
Achtung ! ESD-Schutzmassnahmen beachten ! Elektrostatische Entladungen können elektronische Bauteile zerstören.
Hinweise haben allgemein folgende Bedeutung:
Wichtige Information über das Produkt oder den jeweiligen Teil der Anleitung, auf die besonders aufmerksam gemacht werden soll.
Das verwendete Piktogramm als „Hinweis“ hat folgende Bedeutung:
Beschreibung der wichtigen, hinweisenden Information.
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 5
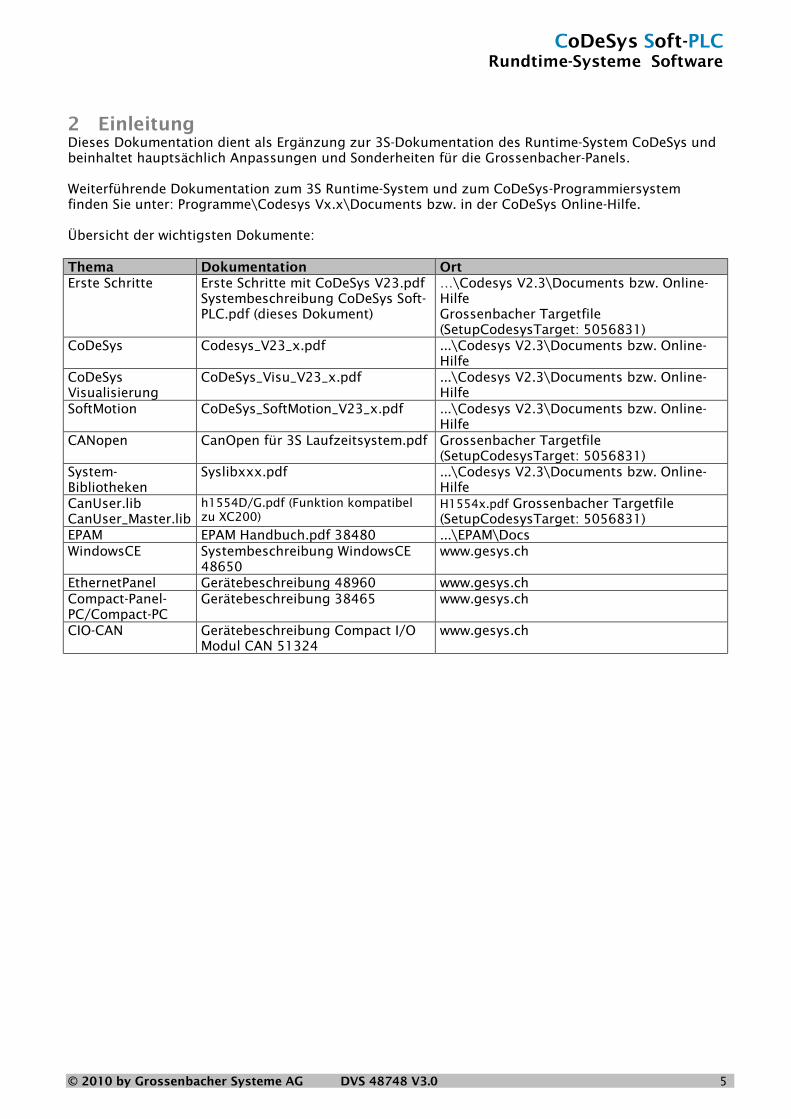
2 Einleitung Dieses Dokumentation dient als Ergänzung zur 3S-Dokumentation des Runtime-System CoDeSys und beinhaltet hauptsächlich Anpassungen und Sonderheiten für die Grossenbacher-Panels. Weiterführende Dokumentation zum 3S Runtime-System und zum CoDeSys-Programmiersystem finden Sie unter: Programme\Codesys Vx.x\Documents bzw. in der CoDeSys Online-Hilfe. Übersicht der wichtigsten Dokumente: Thema Dokumentation Ort Erste Schritte Erste Schritte mit CoDeSys V23.pdf
Systembeschreibung CoDeSys Soft-PLC.pdf (dieses Dokument)
…\Codesys V2.3\Documents bzw. Online-Hilfe Grossenbacher Targetfile (SetupCodesysTarget: 5056831)
CoDeSys Codesys_V23_x.pdf ...\Codesys V2.3\Documents bzw. Online-Hilfe
CoDeSys Visualisierung
CoDeSys_Visu_V23_x.pdf ...\Codesys V2.3\Documents bzw. Online-Hilfe
SoftMotion CoDeSys_SoftMotion_V23_x.pdf ...\Codesys V2.3\Documents bzw. Online-Hilfe
CANopen CanOpen für 3S Laufzeitsystem.pdf Grossenbacher Targetfile (SetupCodesysTarget: 5056831)
System-Bibliotheken
Syslibxxx.pdf ...\Codesys V2.3\Documents bzw. Online-Hilfe
CanUser.lib CanUser_Master.lib
h1554D/G.pdf (Funktion kompatibel zu XC200)
H1554x.pdf Grossenbacher Targetfile (SetupCodesysTarget: 5056831)
EPAM EPAM Handbuch.pdf 38480 ...\EPAM\Docs WindowsCE Systembeschreibung WindowsCE
48650 www.gesys.ch
EthernetPanel Gerätebeschreibung 48960 www.gesys.ch Compact-Panel-PC/Compact-PC
Gerätebeschreibung 38465 www.gesys.ch
CIO-CAN Gerätebeschreibung Compact I/O Modul CAN 51324
www.gesys.ch
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 6
3 Installation Damit die Grossenbacher Panels mit CoDeSys programmiert werden können, muss vorgängig das Programmiertool CoDeSys V2.3 (SP5 oder neuer) und das entsprechende Target installiert werden. Das Programmiertool CoDeSys kann von der 3S Homepage (Support & Download – Kundendownload): http://www.3s-software.com oder von der Grossenbacher Systeme Homepage: http://www.gesys.ch geladen werden:
Die Grossenbacher Panels sind mit der CoDeSys Version 2.3 SP5 (2.3.5.8) getestet. Die Verwendung neuerer CoDeSys-Versionen ist normalerweise problemlos möglich, es kann aber keine Funktionsgarantie übernommen werden!
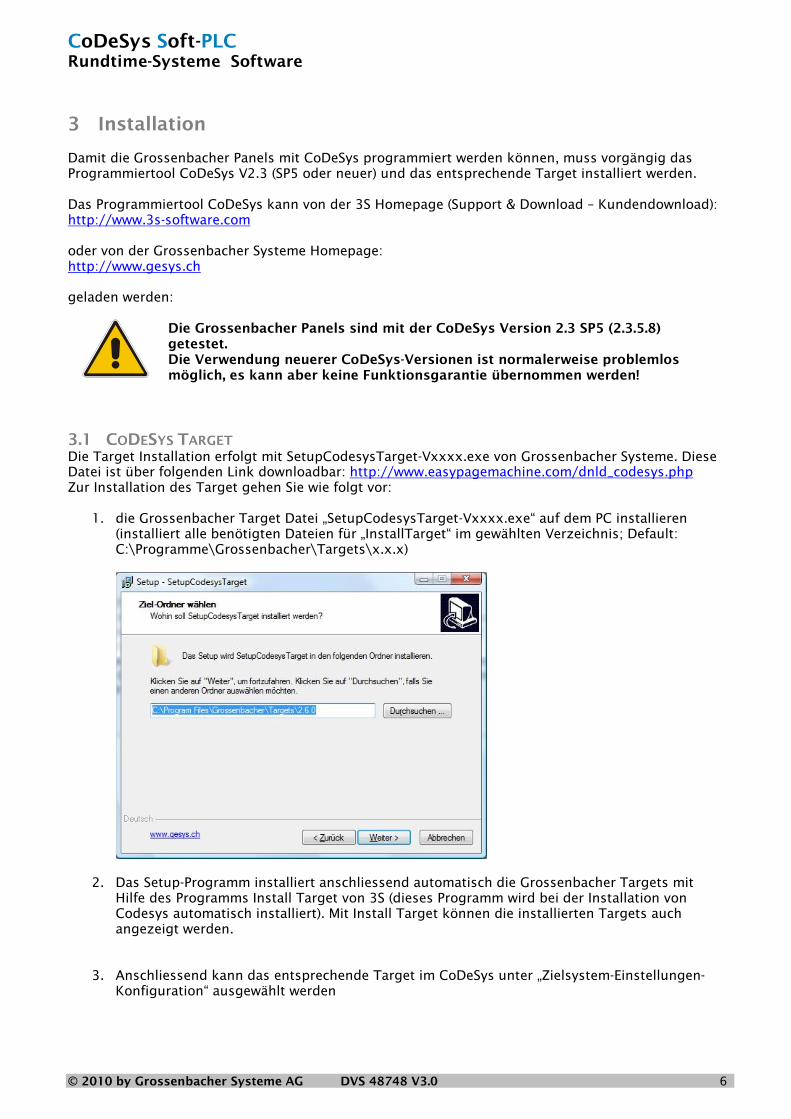
3.1 CODESYS TARGET Die Target Installation erfolgt mit SetupCodesysTarget-Vxxxx.exe von Grossenbacher Systeme. Diese Datei ist über folgenden Link downloadbar: http://www.easypagemachine.com/dnld_codesys.php Zur Installation des Target gehen Sie wie folgt vor:
1. die Grossenbacher Target Datei „SetupCodesysTarget-Vxxxx.exe“ auf dem PC installieren (installiert alle benötigten Dateien für „InstallTarget“ im gewählten Verzeichnis; Default: C:\Programme\Grossenbacher\Targets\x.x.x)
2. Das Setup-Programm installiert anschliessend automatisch die Grossenbacher Targets mit Hilfe des Programms Install Target von 3S (dieses Programm wird bei der Installation von Codesys automatisch installiert). Mit Install Target können die installierten Targets auch angezeigt werden.
3. Anschliessend kann das entsprechende Target im CoDeSys unter „Zielsystem-Einstellungen-
Konfiguration“ ausgewählt werden

CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 7
3.1.1 CoDeSys SoftMotion Die Target-Datei für Grossenbacher Panels beinhaltet den Support für die CoDeSys SoftMotion. SoftMotion kann in CoDeSys aktiviert werden. „Zielsystem-Einstellungen“ „Allgemein“ „SoftMotion“
Die CoDeSys Soft-Motion ist Runtime-Lizenz pflichtig!
3.1.2 CoDeSys Target-Visualisierung Die Target-Datei für Grossenbacher Panels beinhaltet den Support für die CoDeSys Target-Visualisierung. Die Target-Visualisierung kann in CoDeSys aktiviert werden: „Zielsystem-Einstellungen“ „Visualisierung“ „Target-Visualisierung“ Für die Target-Visualisierung muss die Bibliothek: SysLibTargetVisu.lib ins Projekt eingefügt werden.
Die CoDeSys Target-Visualisierung ist Runtime-Lizenz pflichtig!
3.1.3 CoDeSys Web-Visualisierung Die Target-Datei für Grossenbacher Panels beinhaltet den Support für die CoDeSys Web-Visualisierung. Die Web-Visualisierung kann in CoDeSys aktiviert werden: „Zielsystem-Einstellungen“ „Visualisierung“ „Web-Visualisierung“
Die CoDeSys Web-Visualisierung ist Runtime-Lizenz pflichtig!
Für die CoDeSys Web-Visualisierung muss der Codesys Web-Server auf dem Panel installiert werden. Der Codesys Web-Server ist im Verzeichnis StorageCard\PLCRts\webserver.exe Um den Web-Server zu starten muss die PLC.BAT angepasst werden (REM vor der Zeile webserver.exe entfernen). Beispiel PLC.BAT: REM Start the PLC-RTS CALL \StorageCard\PlcRts\PLCWinCEx86.exe %1 %2 REM Start the WebServer for WebVisu START \PlcRts\webserver.exe Nach dem Download eines Codesys-Projekts mit Web-Visualisierung kann das Projekt im Internet-Browser wie folgt ausgeführt werden (s.a. Codesys_Visu_Vx.x_D.pdf: Kap.4): http://<IP-Adresse des Geräts>:8080/webvisu.htm Beispiel: http://192.168.0.99:8080/webvisu.htm
CoDeSys Soft-PLC Rundtime-Systeme Software
8 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
3.2 RUNTIME-SYSTEM Das Runtime-System basiert auf dem WindowsCE RTS von 3S V2.4.4 und besteht aus folgenden Dateien auf dem CompactFlash im Verzeichnis \StorageCard\PLCRts: PLCWinCEx86.exe …Soft-SPS Runtime-System CPC650.dll ...Systemanpassung HilDPM3S.dll …Hilscher Feldbus Treiber 3SSJA1000.dll …CAN-Bus Treiber SercosAutomata_1KW …Sercos Treiber SymArtilib.dll …SymArti Treiber SymArtiClient.dll ArtiClient.dll Rts3s.cfg ...System Konfigurationsdatei Shortcut to PLCWinCEx86 (RAM).lnk …Link zu \PLCRts\PLCWinCEx86.exe Webserver.exe …CoDeSys Webserver Webserver_conf.xml …Konfiguration CoDeSys Webserver Der Ordner \StorageCard\PLCPrg beinhaltet das PLC-Bootprojekt. Die Soft-PLC wird über die Autoexec.cmd beim Einschalten des Panels automatisch gestartet. (s.a. Systembeschreibung WindowsCE) Hierbei werden alle benötigten Dateien ins Verzeichnis \PLCRts im RAM kopiert, somit kann auch im Betrieb ein Update des Runtime-Systems erfolgen (s.a. Runtime-System Update)
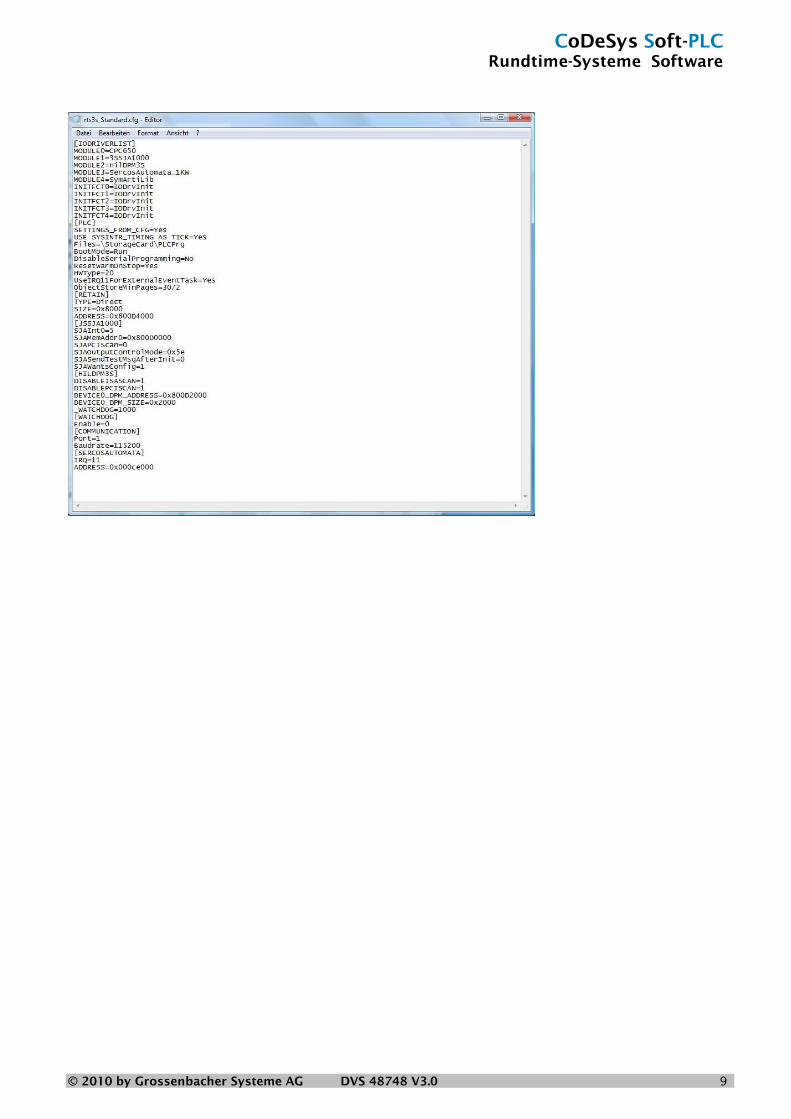
3.2.1 Konfigurationsdatei rts3S.cfg Die Konfigurationsdatei rts3S.cfg beinhaltet gerätespezifische Einstellungen und Konfigurationen. Diese Datei ist werkseitig vorkonfiguriert und muss i.A. nicht geändert werden. Folgende Defaultkonfigurationen werden geliefert:
• rts3s_Standard.cfg …Standard-Konfiguration (CAN1 und optional ProfibusDP) • rts3s_2xCAN.cfg …Konfiguration für Option 2.CAN und zusätzliche 24kByte
Retainmemory • rts3s_DeviceNet.cfg …Konfiguration für Option Devicenet
Beispiel Standard-Konfiguration mit CAN1
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 9
CoDeSys Soft-PLC Rundtime-Systeme Software
10 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
Verwenden Sie bei den Adressen (RETAIN, 3SSJA1000, HILDPM3S) absolute Werte (0x800D2000 anstatt 0xD2000). Zusätzliche Einträge für CAN2: SJAInt1=11 Interrupt Vector (s.a. Gerätebeschreibung; für EP-300: SJAInt1=7) SJAMemAddr1=0x800D1000 Adresse
3.2.2 Hardware Die Soft-PLC ist für die Industrie-PC Reihe der Grossenbacher Panels mit WindowsCE verwendbar. Die verfügbaren Schnittstellen sind gerätespezifisch (s.a. Gerätebeschreibung). Softwaremässig werden folgende Schnittstellen und Funktionen unterstützt:
Konfiguration: RetainMemory: 32kByte …Adresse und Grösse konfigurierbar (Default: 32kB auf Adresse 0x800D4000) 24kByte …zusätzliche 24kByte verfügbar mit Option 2.CAN (s.a. rts3s_2xcan.cfg) HW-Watchdog: keinen CAN (optional) - Anzahl Ports: max. 2 Stück - Adresse: frei einstellbar, Memory-Mode, Default: CAN1=0x800D0000, CAN2=0x800D1000 - Interrupt-Vector: frei einstellbar, Default: CAN1 = IRQ 5, CAN2 = IRQ 11 (CPC) bzw. 7 (EP) ProfibusDP-Master/Slave/MPI (PC104 Multi-I/O-Interface) (optional) - Adresse: frei einstellbar, Default: 0x800D2000, nur ein Modul - Dual-Port RAM Größe: 8kByte
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 11
3.3 KONFIGURATION PROFIBUS DP-MASTER/MPI ODER SLAVE AUF DEM ZIELSYSTEM Die Konfiguration von DP-Master/MPI bzw. DP-Slave erfolgt durch das Laden der entsprechenden Firmware auf das Profibus-Modul (Gerätevariante mit Profibus-DPM). Mit Hilfe der Utilities IoCfg.exe (StorageCard\Tools) kann die Profibus-Karte als Master/MPI oder Slave konfiguriert werden. Die hierzu benötigten FW Dateien PBM.G07 und PBS.G07 befinden sich ebenfalls im Verzeichnis StorageCard\Tools. (details s.a. Systembeschreibung WindowsCE)
Mit der Option „Profibus-DPM“ kann das Gerät als DP-Master/Slave oder mit MPI-Protokoll betrieben werden. Mit der Option Profibus-DPS/MPI nur als DP-Slave oder mit dem MPI-Protokoll.
Die Profibus-DP Konfiguration ist gerätespezifisch und wird nicht bei allen Geräten angeboten (s.a. Gerätebeschreibung). In der Konfiguration als DP-Master kann auch das MPI-Protokoll gefahren werden. Hierfür wird die MPI_lib.lib benötigt. In der Konfiguration als DP-Slave ist bei der Konfiguration des DP-Master die GSD-Datei HIL_06e7.gsd zu verwenden.
3.4 RUNTIME-SYSTEM UPDATE Neben dem Anwenderprogramm und dem EPAM-Projekt befindet sich auch das komplette Runtime-System der Steuerungen inkl. Betriebsystem WindowsCE auf der Compact-Flash-Speicherkarte. Der Runtime-System Update kann mit Hilfe des Programms SetupTargetFirmwareWinCEx86-Vxxx.exe via CompactFlash-Adapter und PC oder via FTP erfolgen (s.a. Systembeschreibung WindowsCE) Mit SetupTargetFirmware wird das Betriebsystem WindowsCE inkl. Tools, das PLC- und das EPAM-Runtime System installiert.
Remanente PLC-Daten (Retaindaten) sind nicht automatisch auf der CF-Karte gespeichert und werden daher nicht kopiert! Zur Sicherung bzw. Restore von Retaindaten s.a. Codesys PLC-Browser-Befehle: Saveretain - sichert Retaindaten in Datei [Dateiname] Restoreretain - restauriert Retaindaten von Datei [Dateiname]
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 12
4 Soft-PLC
4.1 LEISTUNGSMERKMALE
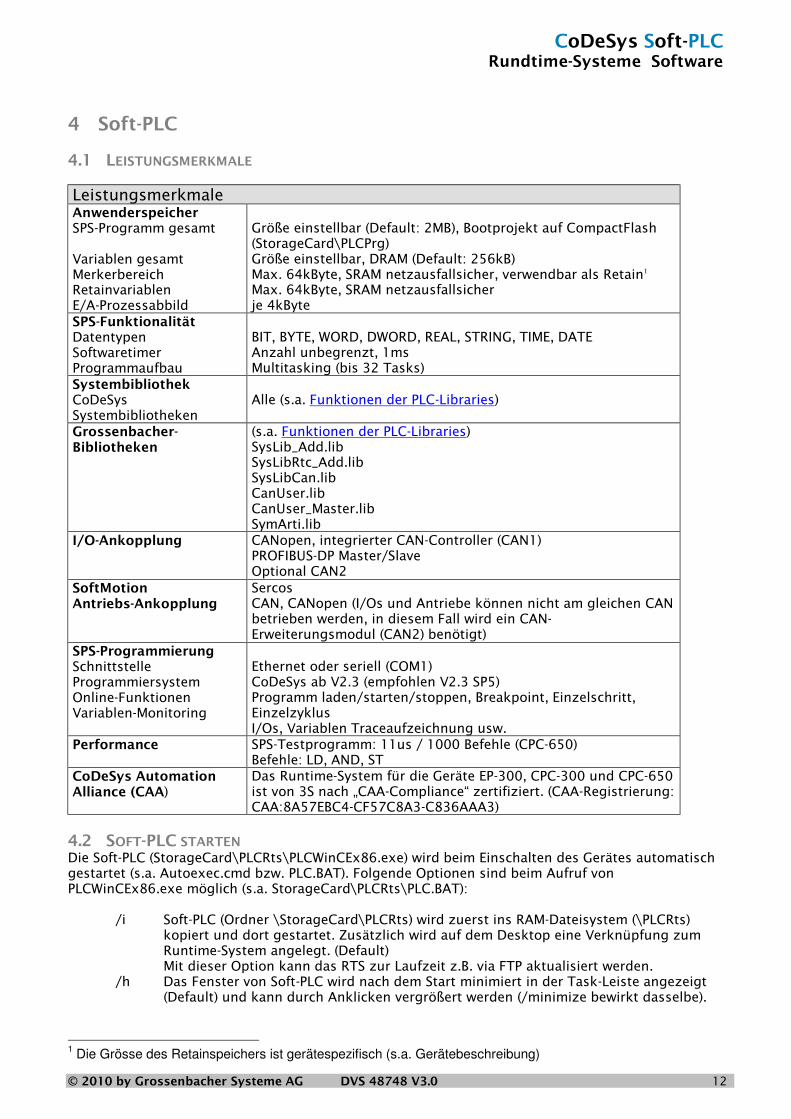
Leistungsmerkmale Anwenderspeicher SPS-Programm gesamt Variablen gesamt Merkerbereich Retainvariablen E/A-Prozessabbild
Größe einstellbar (Default: 2MB), Bootprojekt auf CompactFlash (StorageCard\PLCPrg) Größe einstellbar, DRAM (Default: 256kB) Max. 64kByte, SRAM netzausfallsicher, verwendbar als Retain1 Max. 64kByte, SRAM netzausfallsicher je 4kByte
SPS-Funktionalität Datentypen Softwaretimer Programmaufbau
BIT, BYTE, WORD, DWORD, REAL, STRING, TIME, DATE Anzahl unbegrenzt, 1ms Multitasking (bis 32 Tasks)
Systembibliothek CoDeSys Systembibliotheken
Alle (s.a. Funktionen der PLC-Libraries)
Grossenbacher-Bibliotheken
(s.a. Funktionen der PLC-Libraries) SysLib_Add.lib SysLibRtc_Add.lib SysLibCan.lib CanUser.lib CanUser_Master.lib SymArti.lib
I/O-Ankopplung
CANopen, integrierter CAN-Controller (CAN1) PROFIBUS-DP Master/Slave Optional CAN2
SoftMotion Antriebs-Ankopplung
Sercos CAN, CANopen (I/Os und Antriebe können nicht am gleichen CAN betrieben werden, in diesem Fall wird ein CAN-Erweiterungsmodul (CAN2) benötigt)
SPS-Programmierung Schnittstelle Programmiersystem Online-Funktionen Variablen-Monitoring
Ethernet oder seriell (COM1) CoDeSys ab V2.3 (empfohlen V2.3 SP5) Programm laden/starten/stoppen, Breakpoint, Einzelschritt, Einzelzyklus I/Os, Variablen Traceaufzeichnung usw.
Performance SPS-Testprogramm: 11us / 1000 Befehle (CPC-650) Befehle: LD, AND, ST
CoDeSys Automation Alliance (CAA)
Das Runtime-System für die Geräte EP-300, CPC-300 und CPC-650 ist von 3S nach „CAA-Compliance“ zertifiziert. (CAA-Registrierung: CAA:8A57EBC4-CF57C8A3-C836AAA3)
4.2 SOFT-PLC STARTEN Die Soft-PLC (StorageCard\PLCRts\PLCWinCEx86.exe) wird beim Einschalten des Gerätes automatisch gestartet (s.a. Autoexec.cmd bzw. PLC.BAT). Folgende Optionen sind beim Aufruf von PLCWinCEx86.exe möglich (s.a. StorageCard\PLCRts\PLC.BAT):
/i Soft-PLC (Ordner \StorageCard\PLCRts) wird zuerst ins RAM-Dateisystem (\PLCRts) kopiert und dort gestartet. Zusätzlich wird auf dem Desktop eine Verknüpfung zum Runtime-System angelegt. (Default)
Mit dieser Option kann das RTS zur Laufzeit z.B. via FTP aktualisiert werden. /h Das Fenster von Soft-PLC wird nach dem Start minimiert in der Task-Leiste angezeigt
(Default) und kann durch Anklicken vergrößert werden (/minimize bewirkt dasselbe).
1 Die Grösse des Retainspeichers ist gerätespezifisch (s.a. Gerätebeschreibung)

CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 13
4.3 BETRIEBZUSTÄNDE DER PLC Die Betriebszustände werden im PLC-Fenster, in der Taskleiste (LED-Icon rechts unten) und über die Status-LEDs2 angezeigt. Im RUN-Zustand der SPS leuchtet die RUN-LED (grüne LED) 2 und im Infobereich der Taskleiste wird ebenfalls eine grüne LED dargestellt. In den anderen Zuständen (STOP, STOP-BREAKPOINT, …) wird in der Taskleiste ein rote LED dargestellt. Bei einem Fehler im Runtime-System leuchtet die FAIL-LED (rote LED) 2. Power on Im Zustand „Power on“ befindet sich kein Anwenderprogramm auf der Steuerung. In diesem Zustand kann ein neues Programm auf die Steuerung geladen werden. Der Zustand „Power on“ wird in der Programmiersoftware angezeigt. Stop (Stop-RESET)
Die Betriebsart „Stop“ entspricht NICHT dem 3S Standard! In der Betriebsart „Stop“ wird auf den Grossenbacher Panels ein Stop-Reset ausgeführt! (mit ResetWarmOnStop=No in der RTS3s.cfg Datei kann das Standardverhalten konfiguriert werden)
Der Betriebszustand „Stop“ ist durch folgende Merkmale charakterisiert:
• Es befindet sich ein Anwenderprogramm in der Steuerung • Das Anwenderprogramm wird nicht durchlaufen
„Stop“ setzt mit Ausnahme der remanenten (RETAIN, PERSISTANT) Variablen alle Variablen auf den Wert zurück, mit dem sie initialisiert wurden. Variablen, die nicht explizit mit einem Initialisierungswert versehen wurden, werden auf die Standardinitialwerte gesetzt (Integer-Zahlen beispielsweise auf 0). Alle Ausgänge werden auf 0 gesetzt. Der Betriebszustand „Stop“ wird angenommen:
• Nach Einschalten der Spannung wenn der Betriebsarten-Schalter in Stellung „Stop-RESET“ steht • Über die Programmiersoftware im PC (Online-Stop bzw. -Reset) • Nach einer Zykluszeitüberschreitung
Run Im Zustand RUN wird das Anwenderprogramm zyklisch abgearbeitet. Der Betriebszustand RUN wird eingenommen:
• Nach Einschalten der Spannung wenn der Betriebsarten-Schalter (BAS) in Stellung „RUN“ steht • Über die Programmiersoftware im PC
System Fault SF Es können folgende Systemfehler auftreten:
• Hardware-Fehler • System-Fehler der Firmware
CoDeSys Soft-PLC Rundtime-Systeme Software
14 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
4.4 BETRIEBSARTENUMSCHALTUNG Die Betriebsartenumschaltung erfolgt über: Betriebsartenschater (BAS)2 Stellung: Stop-RESET ...PLC startet in der Betriebsart STOP Stellung: RUN ...PLC startet in der Betriebsart RUN
Wenn der BAS auf Stop-Reset steht, so kann die PLC weder von Codesys aus noch über den Start-Button im PLC-Fenster gestartet werden! Ist kein BAS vorhanden, so startet die PLC mit der Betriebsart RUN.
Programmier-Software Reset, Stop Reset bzw. Stop setzt mit Ausnahme der remanenten (RETAIN, PERSISTANT) Variablen alle Variablen auf den Wert zurück, mit dem sie initialisiert wurden. Variablen, die nicht explizit mit einem Initialisierungswert versehen wurden, werden auf die Standardinitialwerte gesetzt (Integer-Zahlen beispielsweise auf 0). Alle Ausgänge werden auf 0 gesetzt. Bevor alle Variablen überschrieben werden, erfolgt eine Sicherheitsabfrage durch CoDeSys. Die Situation entspricht der bei einem Stromausfall oder beim Aus-/Einschalten der Steuerung (Warmstart). Benutzen Sie den Befehl ‘Online’ ’Start’, um die Steuerung und damit die Programmabarbeitung erneut zu starten. Reset-Kalt Dieser Befehl setzt alle Variablen, auch RETAIN-Variablen, auf den Initialisierungswert zurück. Nur persistente Variablen behalten den Wert, den Sie vor dem Reset hatten. Alle Ausgänge werden auf 0 gesetzt. Reset-Ursprung Dieser Befehl setzt alle Variablen, auch die remanenten (RETAIN und PERSISTANT) auf den Initialisierungswert zurück und löscht das Anwenderprogramm auf der Steuerung. Die Steuerung wird in den Urzustand zurückversetzt. Alle Ausgänge werden auf 0 gesetzt. Start Dieser Befehl startet die Abarbeitung des Anwenderprogramms in der Steuerung. Der Befehl kann ausgeführt werden, unmittelbar nach dem Befehl ‘Online’ ’Laden’ oder nachdem das Anwenderprogramm in der Steuerung mit dem Befehl ‘Online’ ’Stop’ gestoppt wurde oder wenn das Anwenderprogramm auf einem Breakpoint steht oder wenn der Befehl 'Online' 'Einzelzyklus' ausgeführt wurde. Eine detaillierte Beschreibung der Online-Funktionen finden Sie auch im Codesys-Handbuch. BREAKPOINT: Alle Ausgänge bleiben gesetzt WATCHDOG: Ausgänge werden auf 0 gesetzt , Zustand der Variablen bleibt erhalten, bei START wird RESET WARM ausgeführt.
2 gerätespezifisch (s.a. Gerätebeschreibung)

CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 15
4.5 STARTVERHALTEN/ANLAUF Nach dem Einschalten der Spannung wird das Anwenderprogramm aus dem CompactFlash™ ins RAM geladen und die PLC gestartet. Ablauf
Ist kein BAS vorhanden, so startet die PLC in der Betriebsart RUN.
4.6 VERHALTEN DER STEUERUNG BEI FEHLER Fehler Verhalten der Steuerung SF-LED3 Watchdog (Zykluszeitüberschreitung) Ausgänge werden auf 0 gesetzt , Zustand der
Variablen bleibt erhalten, bei START muss zuvor ein RESET WARM ausgeführt werden.
On
Ganzzahl-Division durch Null (Integer) Wie Watchdog On Gleitzahl-Division durch Null (Real) Falsches Resultat, Steuerung läuft weiter muss
in der Applikation abgefangen werden! -
Batteriefehler Muss in der Applikation projektiert werden (s.a. SysRtcCheckBattery)
-
3 gerätespezifisch (s.a. Gerätebeschreibung)
RemanenteDateno.k. ?
Netz ein
PLC-Programm vorhanden
?
PLC- Status:Run
PLC- Status:Stop
PLC- Status:System Fault
PLC-Status:Power on
BAS=RUN ?
Hardware-o.k.?
Nein
Nein
Nein
Ja
Reset-kalt
NeinRemanenteDateno.k. ?
Netz ein
PLC-Programm vorhanden
?
PLC- Status:Run
PLC- Status:Stop
PLC- Status:System Fault
PLC-Status:Power on
BAS=RUN ?
Hardware-o.k.?
Nein
Nein
Nein
Ja
Reset-kalt
Nein
CoDeSys Soft-PLC Rundtime-Systeme Software
16 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
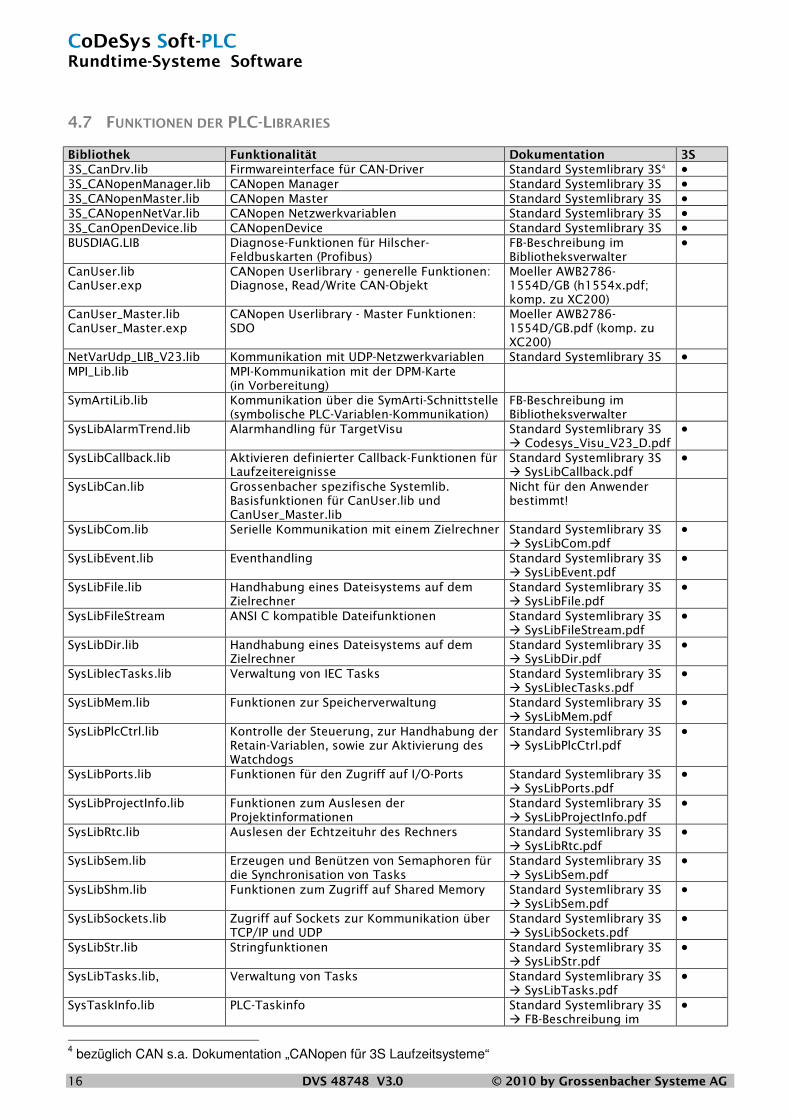
4.7 FUNKTIONEN DER PLC-LIBRARIES Bibliothek Funktionalität Dokumentation 3S 3S_CanDrv.lib Firmwareinterface für CAN-Driver Standard Systemlibrary 3S4 3S_CANopenManager.lib CANopen Manager Standard Systemlibrary 3S 3S_CANopenMaster.lib CANopen Master Standard Systemlibrary 3S 3S_CANopenNetVar.lib CANopen Netzwerkvariablen Standard Systemlibrary 3S 3S_CanOpenDevice.lib CANopenDevice Standard Systemlibrary 3S BUSDIAG.LIB Diagnose-Funktionen für Hilscher-
Feldbuskarten (Profibus) FB-Beschreibung im Bibliotheksverwalter
CanUser.lib CanUser.exp
CANopen Userlibrary - generelle Funktionen: Diagnose, Read/Write CAN-Objekt
Moeller AWB2786-1554D/GB (h1554x.pdf; komp. zu XC200)
CanUser_Master.lib CanUser_Master.exp
CANopen Userlibrary - Master Funktionen: SDO
Moeller AWB2786-1554D/GB.pdf (komp. zu XC200)
NetVarUdp_LIB_V23.lib Kommunikation mit UDP-Netzwerkvariablen Standard Systemlibrary 3S MPI_Lib.lib MPI-Kommunikation mit der DPM-Karte
(in Vorbereitung)
SymArtiLib.lib Kommunikation über die SymArti-Schnittstelle (symbolische PLC-Variablen-Kommunikation)
FB-Beschreibung im Bibliotheksverwalter
SysLibAlarmTrend.lib Alarmhandling für TargetVisu Standard Systemlibrary 3S Codesys_Visu_V23_D.pdf
SysLibCallback.lib Aktivieren definierter Callback-Funktionen für Laufzeitereignisse
Standard Systemlibrary 3S SysLibCallback.pdf
SysLibCan.lib Grossenbacher spezifische Systemlib. Basisfunktionen für CanUser.lib und CanUser_Master.lib
Nicht für den Anwender bestimmt!
SysLibCom.lib Serielle Kommunikation mit einem Zielrechner Standard Systemlibrary 3S SysLibCom.pdf
SysLibEvent.lib Eventhandling Standard Systemlibrary 3S SysLibEvent.pdf
SysLibFile.lib Handhabung eines Dateisystems auf dem Zielrechner
Standard Systemlibrary 3S SysLibFile.pdf
SysLibFileStream ANSI C kompatible Dateifunktionen Standard Systemlibrary 3S SysLibFileStream.pdf
SysLibDir.lib Handhabung eines Dateisystems auf dem Zielrechner
Standard Systemlibrary 3S SysLibDir.pdf
SysLibIecTasks.lib Verwaltung von IEC Tasks Standard Systemlibrary 3S SysLibIecTasks.pdf
SysLibMem.lib Funktionen zur Speicherverwaltung Standard Systemlibrary 3S SysLibMem.pdf
SysLibPlcCtrl.lib Kontrolle der Steuerung, zur Handhabung der Retain-Variablen, sowie zur Aktivierung des Watchdogs
Standard Systemlibrary 3S SysLibPlcCtrl.pdf
SysLibPorts.lib Funktionen für den Zugriff auf I/O-Ports Standard Systemlibrary 3S SysLibPorts.pdf
SysLibProjectInfo.lib Funktionen zum Auslesen der Projektinformationen
Standard Systemlibrary 3S SysLibProjectInfo.pdf
SysLibRtc.lib Auslesen der Echtzeituhr des Rechners Standard Systemlibrary 3S SysLibRtc.pdf
SysLibSem.lib Erzeugen und Benützen von Semaphoren für die Synchronisation von Tasks
Standard Systemlibrary 3S SysLibSem.pdf
SysLibShm.lib Funktionen zum Zugriff auf Shared Memory Standard Systemlibrary 3S SysLibSem.pdf
SysLibSockets.lib Zugriff auf Sockets zur Kommunikation über TCP/IP und UDP
Standard Systemlibrary 3S SysLibSockets.pdf
SysLibStr.lib Stringfunktionen Standard Systemlibrary 3S SysLibStr.pdf
SysLibTasks.lib, Verwaltung von Tasks Standard Systemlibrary 3S SysLibTasks.pdf
SysTaskInfo.lib PLC-Taskinfo Standard Systemlibrary 3S FB-Beschreibung im
4 bezüglich CAN s.a. Dokumentation „CANopen für 3S Laufzeitsysteme“

CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 17
Bibliotheksverwalter SysLibTargetVisu.lib, SysLibVisu.lib
Codesys Visualisierung Standard Systemlibrary 3S Codesys_Visu_V23_D.pdf
SysLibTime.lib Zusatzfunktionen zum Auslesen der Echtzeituhr des Rechners (siehe auch SysLibRtc.lib); wird zur Darstellung der Taskzeitauswertung in der Taskkonfiguration von CoDeSys benötigt
Standard Systemlibrary 3S SysLibTime.pdf
SysLib_Add.lib Grossenbacher Panel spezifische Zusatzfunktionen (z.B. IP-Adresse lesen/setzen, MAC-Adresse lesen etc.)
FB-Beschreibung im Bibliotheksverwalter
SysLibRTC_Add.lib Grossenbacher Panel spezifische Zusatzfunktionen für Datum/Zeit Konvertierung
FB-Beschreibung im Bibliotheksverwalter
4.8 PLC-BROWSER – BEFEHLE Zusätzlich zu den in Kapitel „6.13.2 Kommandoeingabe im PLC-Browser“ des Codesys-Handbuch aufgeführten Befehlen sind folgende Kommandos implementiert: Befehl Funktion Bemerkung tskclear Löschen der IEC-Task-Info (cycle count, cycletime-
max/min/avg)
reboot Neustart des Zielsystems. CoDeSys wird ausgelogged plcload Anzeige der CPU-Last in Prozent (PLC load des
Scheduler, IEC-Tasks und Kommunikation) Der Wert gibt einen groben Hinweis auf die Systemlast. Der Wert kann in Abhängigkeit der tatsächlich benötigten Abarbeitungszeit für das PLC-Projekt schwanken. Eine sehr hohe CPU-Last (>80%) kann zur Beeinträchtigung der Systemfunktionalität (z.B. Visualisierung, FTP-Server, RemoteServer etc.) führen.
rtsinfo Anzeige der Runtime System Information (Version, IO Treiber)
traceschedon Task trace ein traceschedstore Task trace in Datei speichern [Dateiname] SaveRetain Retaindaten in Datei auf CF speichern RestoreRetain Retaindaten von Datei laden
4.9 RETAIN-DATEN Retaindaten werden in einem netzausfallsicheren Speicherbereich gehalten. Der verfügbare Speicherbereich ist hardwarabhängig (s.a. Gerätebeschreibung). Die letzten 12 Bytes dieses Speicherbereichs sind reserviert und enthalten eine projektspezifische Kennung. Beim Wechsel eines CF von einem Gerät in ein anderes bzw. beim Laden eines anderen Projekts werden die Retaindaten initialisiert.
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 18
5 Programmierung der Steuerung Die Programmierung der Steuerung erfolgt idealerweise über Ethernet mit TCP/IP Protokoll.
5.1 VERBINDUNG DES PROGRAMMIER-PC MIT DER STEUERUNG Bei einer direkten Verbindung, ohne Ethernet-Hub oder Switch, ist ein gekreuztes "Crosslink" Kabel zu verwenden. Steuerungsseitig ist eine standardisierte RJ45 Buchse angebracht. Erfolgt die Ethernetverbindung über einen Ethernet-Hub bzw. Switch sind von Hub zur Steuerung wie zum Programmier-PC nicht gekreuzte Kabel (patch) einzusetzen.
5.2 EINSTELLUNG DES PROGRAMMIER-PC FÜR DIE ETHERNET-KOMMUNIKATION
Auf dem Programmier-PC muss ein Netzwerkadapter und das TCP/IP Protokoll installiert sein. Auf der Steuerung muss eine zum Programmier-PC passende IP-Adresse z.B. im gleichen Subnetz eingestellt werden. Kontaktieren Sie hierfür ggf. Ihren Netzwerk-Administrator. Beispiel einer möglichen Konfiguration: Programmier-PC: 192.168.0.99 Steuerung: 192.168.0.100 Subnetz-Maske auf beiden Geräten: 255.255.255.0
Die Kommunikation zwischen PC und Steuerung kann einfach mit dem Kommandozeilen-Befehl ping „IP-Adresse“ überprüft werden. Meldet das Programm ping Timeouts, so sind entweder die Verkabelung oder die TCP/IP-Einstellungen nicht korrekt.
5.3 EINSTELLUNG DER ETHERNET KOMMUNIKATION IN DER CODESYS
PROGRAMMIEROBERFLÄCHE Die Einstellung der IP-Adresse der Steuerung erfolgt in Codesys im Menü „Online-Kommunikationsparameter“. Zur Kommunikation über Ethernet muss der TCP/IP-Treiber ausgewählt werden und die IP-Adresse des Gerätes eingegeben werden. (s.a. Codesys Handbuch)
5.4 EINSTELLUNG DER IP-ADRESSE AUF DEM ZIELSYSTEM Die IP-Adresse kann über das Control-Panel auf den WindowsCE Geräten („Start-Settings-Network and Dial-up Connections“ s.a. Systembeschreibung WindowsCE) oder mit einer EPAM-Applikation eingestellt werden. (s.a. EPAM-Handbuch)
5.5 EINSTELLUNGEN DER SERIELLEN KOMMUNIKATION Die Programmierung kann auch über die Standard-RS232-Schnittstelle (COM1) erfolgen. Die Verbindung zum Programmier-PC erfolgt mit Hilfe eines Standard-Nullmodem-Kabels. Zur Programmierung über die serielle Schnittstelle muss im Codesys unter Kommunikationsparameter der Serial(RS232) Treiber konfiguriert werden. Die Default Werte der Steuerung sind : COM1: 115200 Baud, No Parity, 1 Stopbit.
Die serielle Schnittstelle kann auch in der PLC-Applikation verwendet werden. In diesem Fall muss folgender Eintrag in der Datei rts3s.cfg erfolgen (StorageCard\PLCRts\rts3s.cfg): DisableSerialProgramming=Yes (Default ist No) Eine gleichzeitige Benutzung der COM1 als Programmierschnittstelle und in der Applikation ist nicht möglich!
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 19
6 Feldbus: CAN
6.1 DIE EIGENSCHAFTEN VON CAN CAN (Controller Area Network) ist ursprünglich für die Benutzung im Automobil entwickelt worden. Das Protokoll ist von zahlreichen Halbleiter - Herstellern implementiert worden, die diese CAN-Controller mit unterschiedlichsten Leistungsmerkmalen anbieten und damit einen sehr weiten Anwendungsbereich abdecken. CAN basierende Systeme findet man zur Zeit sowohl in der Industrie-, Prozess- und Gebäude-Automation als auch in Fahrzeugen fast jedes Automobil-Herstellers. Zwei der wichtigsten Eigenschaften von CAN sind die hohe Übertragungs-Sicherheit auch in schwieriger elektrischer Umgebung und extrem kurze Reaktionszeiten. CAN arbeitet als Multi-Master System, das heisst alle Knoten können ohne einen speziellen Master direkt miteinander kommunizieren. Dieses wird durch das sogenannte "Broadcasting"-Verfahren erreicht. Bei diesem Verfahren werden Netzwerk-Teilnehmer oder Knoten nicht adressiert wie in konventionellen Feldbussystemen, sondern es werden priorisierte "messages" (Nachrichten) von einem Sender zu allen anderen Knoten versendet. Jeder Empfänger-Knoten entscheidet selbständig auf der Basis des ,message identifiers' (der Nachrichtennummer) ob er die Nachricht weiterverarbeitet oder nicht. Der ,identifier' bestimmt ausserdem die Priorität der Nachricht, die benutzt wird um den Buszugriff der Knoten zu steuern. Die Buszugriffsmethode von CAN, die vollkommen unsynchronisiert stattfindet, wird ,non destructive bitwise bus arbitration' (zerstörungsfreie bitweise Buszuteilung) genannt. In dem Fall, dass zwei oder mehr Knoten gleichzeitig auf den Bus zugreifen, garantiert dieses Zuteilungsverfahren, dass die Nachricht mit der höchsten Priorität ohne Verzögerung verarbeitet wird und Nachrichten mit niedrigerer Priorität wiederholt werden müssen. Im Gegensatz zu konventionellen (Master-Slave) Bussystemen, wird eine niedrigere Busbelastung erreicht, weil die Übertragung von Daten im CAN-Netzwerk nur ,event-driven' (ereignisgesteuert) stattfindet, das heisst z.B. nur wenn sich das Eingangssignal eines I/0 Modules geändert hat. Ausserdem reduziert die oben genannte direkte Kommunikation zwischen den Knoten, ohne jede Nachricht zu einem Master zu schicken, die Anzahl der Nachrichten um die Hälfte. Diese beiden Eigenschaften führen zu sehr kurzen Reaktionszeiten von CAN basierten Systemen. Daher bietet CAN eine grosse Leistungsfähigkeit auch bei relativ niedrigen Übertragungsraten und deshalb können EMV Probleme und Kabelkosten reduziert werden. Eine andere wichtige Eigenschaft des CAN Protokolls, die grosse Übertragungssicherheit (Hamming Distanz 6) wird durch verschiedene, sich gegenseitig ergänzende Fehlererkennungsmechanismen erreicht. CAN basiert auf einer linearen Topologie mit abgeschirmter twisted-pair Verkabelung und Busabschlusswiderständen an beiden Enden der Buslinie. Die Datenübertragungsgeschwindigkeit ist spezifiziert im Bereich von 10 kBit/s bis zu 1 MBit/s. Bei 50 kBit/s sind z.B. 1000 m Buslänge erreichbar. Für höhere Übertragungsraten muss die Buslänge reduziert werden z.B. bis zu 25 m bei 1 Mbit/s.
CoDeSys Soft-PLC Rundtime-Systeme Software
20 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
6.2 CANOPEN Um ein offenes Netzwerk System zu erreichen, ist es nötig, auf eine standardisierte Kommunikation aufzusetzen. Daher benutzt CANopen den internationalen CAN Standard ISO 11898 als Basis für die Kommunikation. Dieser Standard deckt die Schichten 1 und 2 (Physical- und Data Link Layer) des ISO/OSI Kommunikationsmodells ab. Darauf aufbauend wurde innerhalb der internationalen Nutzer und Hersteller Organisation ,CAN in Automation' (CiA) die CANopen Profil-Familie entwickelt. Diese Profil-Familie besteht zum einen aus dem Kommunikations Profil (CiA DS-301), das die ISO/OSI Schicht 7 (Application Layer) repräsentiert und die Kommunikations-Mechanismen spezifiziert und zum anderen aus einer Reihe von Geräte-Profilen (CiA DS-40X) die die Gerätefunktionalitäten spezifizieren. Die folgenden Geräte-Profile existieren zur Zeit als ,CiA Draft Standard Proposals': für • I/0 Modules' (CiA DS-401), • Drives and Motion Control' (CiA DS-402), • Measuring Devices and Closed-Loop Control' (CiA DS-404) und • Encoders' (CiA DS-406).
6.2.1 CANopen Kommunikationsprofil Das CANopen Kommunikationsprofil spezifiziert, wie Daten zwischen den Netzwerk Knoten ausgetauscht werden sollen. Dafür wurden vier verschiedene Arten von Nachrichten definiert: • Network administration messages / Netzwerk Dienste • Service Data Objects (SDOs) / Servicedaten Objekte • Process Data Objects (PDOs) / Prozessdaten Objekte • Predefined Messages / Vordefinierte Nachrichten Network administration messages (Netzwerk Dienste) werden benutzt, um die Knoten und ihre Betriebszustände im Netzwerk zu steuern. Mit dieser Art von Nachrichten ist es z. B. möglich, die Datenübertragungsmechanismen eines Knoten zu konfigurieren. Eine weitere Möglichkeit, die diese Nachrichtenart bietet, ist das ,Node Guarding', so nennt man den CANopen Mechanismus mit dem Knoten erkannt werden können, die nicht länger an der Netzwerkkommunikation teilnehmen. Service Data Objects (Servicedaten Objekte) werden für niederpriore, azyklische Datenübertragungen in CANopen Netzwerken benutzt. Typischerweise werden SDOs für die Konfiguration von CANopen Knoten, zum Setzen von Geräteparametern und zum ,Download' von Programmen benutzt. Mit SDOs können Daten von beliebiger Länge übertragen werden, indem der sogenannte, segmented transfer' benutzt wird.
CoDeSys Soft-PLC Rundtime-Systeme Software
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 21
Process Data Objects (Prozessdaten Objekte) werden für hochpriore, schnelle Datenübertragungen in CANopen Netzwerken benutzt. PDOs enthalten keinen Protokoll-Overhead, sie stellen somit eine Methode für sehr schnellen und flexiblen Datentransfer von einem Knoten zu einer beliebigen Anzahl weiterer Knoten dar. PDO Datentransfer kann in verschiedenen Arten durchgeführt werden. Eine Möglichkeit ist ,event controlled' (Ereignisgesteuert), das heisst das Datentransfer nur stattfindet, wenn ein bestimmtes Ereignis eingetreten ist. Dieses Ereignis kann z. B. das Wechseln des Zustands eines digitalen Signals oder die Änderung eines analogen Signals um mehr als einen vordefinierten Wert sein. Diese Art der Datenübertragung reduziert die Buslast auf ein Minimum und ermöglicht damit eine hohe Kommunikationsleistung und eine sehr kurze Reaktionszeit bei einer relativ geringen Datenrate. Alle relevanten Prozess-, bzw. Applikationsdaten sollten auf diese Weise übertragen werden. Daten in diesen PDOs sind begrenzt auf bis zu 8 Byte. Der Inhalt und die Struktur jedes PDOs kann individuell konfiguriert werden. Ausserdem ist es ebenfalls möglich mit den PDOs Daten aus Netzwerk-Knoten auszulesen. Dafür wird der ,remote transmission request' Mechanismus von CAN benutzt. Predefined Messages (Vordefinierte Nachrichten) sind im CANopen festgelegt für z.B. die Synchronisation. Dieses ist besonders wichtig in Applikationen, in denen Antriebe oder I/0-Module simultan ausgelesen bzw. beschrieben werden müssen.
6.2.2 CANopen Geräteprofile Die CANopen Geräte-Profile definieren nicht nur standardisierte Geräte-Funktionalitäten, sondern sie beinhalten auch Möglichkeiten für eine strukturierte Implementation herstellerspezifischer Eigenschaften. Diese Geräte-Profile ermöglichen es Herstellern standardisierte CANopen Geräte zu produzieren, die im Verbund mit Geräten anderer Hersteller funktionieren. Wie oben erwähnt, existieren z.Z. schon eine Reihe von Geräte-Profilen für verschieden Geräte. Dank all dieser Eigenschaften ist CANopen ein ideales Netzwerk System für nahezu alle Arten von automatisierten Geräten und Maschinen. CANopen ist damit sehr gut geeignet für den Daten-Austausch sowohl in der Leitebene als auch in der Feldebene mit seinen Sensoren und Aktoren, und das ganze möglicherweise integriert in einem physikalischen Netzwerk.
6.3 VERDRAHTUNG Die Verbindung der Teilnehmer am Bussystem untereinander erfolgt mit Feldbusleitungen, die der ISO 11898 entsprechen. Die Leitungen müssen demnach folgende elektrische Eigenschaften aufweisen:
Parameter Abkürzung Einhei
t Wert Wert Wert Bemerkung
min. nom. Max. Impedanz Z Ω 108 120 132 Gemessen zwischen zwei
Signalleitungen Spez. Widerstand
mΩ/m 70 Für den Empfänger-Baustein ist die Differenz-Spannung auf der Busleitung abhängig vom Leitungswiderstand zwischen ihm und dem Sender.
Leitungs-verzögerung
ns/m 5 Die minimale Verzögerungszeit zwischen zwei Punkten auf dem Bus sei Null. Die maximale Verzögerug wird bestimmt durch das Bit-Timing und die Verzögerung der Sende und Empfangs-Schaltungen.

CoDeSys Soft-PLC Rundtime-Systeme Software
22 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
Die Abbildung zeigt die minimale Verdrahtung mit Schirmung zwischen zwei Busteilnehmern am Beispiel Sub-D-Stecker. Am Anfang und am Ende jedes CAN-Buses muss ein Busabschluss-Widerstand ( 120 Ohm zwischen Pin 2 und Pin 7 des Sub-D-Steckers) angeschlossen werden. Die beiden Signaladern dürfen nicht vertauscht werden!
Bemerkung zu CAN-Schnittstelle HMI-PLC-Steuerungen: Es ist kein Busabschluss-Widerstand intern vorhanden! Pin 3 und 6 (CAN_GND) sind beide intern mit dem CAN-Ground verbunden. Pin 4, 5 und 8 dürfen nicht angeschlossen werden! Die CAN-Bus-Treiber werden intern gespiesen. Die interne Speisung ist nicht auf Pin 9 herausgeführt. (s.a. Gerätebeschreibung) Baudrate und Kabellängen
Baudrate max. Länge
10kBit/sec 2500m
20kBit/sec 2500m
50kBit/sec 1000m
100kBit/sec 650m
125kBit/sec 500m
250kBit/sec 250m
500kBit/sec 100m
800kBit/sec* 20m
1000kBit/sec* 6m
Bemerkung: Eine Baudrate von 800kBit/sec sowie 1000kBit/sec wird nicht auf allen Geräten unterstützt.
Software Systembeschreibung CoDeSys Soft-PLC
Versionsgeschichte
© 2010 by Grossenbacher Systeme AG DVS 48748 V3.0 23
7 Versionsgeschichte
Version Datum / Visum Änderungen :
1.0 04-06 / Fis Erstversion 2.0 05-08 / Fis Anpassung für Codesys RTS 2.4.4 3.0 02-10 / CMI Neue CI
Grossenbacher Systeme AG
Spinnereistrasse 10 CH-9008 St.Gallen Schweiz
Tel : +41(0)71/243 29 29
Fax : +41(0)71/243 29 28 Email : [email protected] Internet : www.gesys.ch

CoDeSys Soft-PLC Rundtime-Systeme Software
24 DVS 48748 V3.0 © 2010 by Grossenbacher Systeme AG
8 Stichwortverzeichnis
B
Baudrate und Kabellängen ................................ 25 Betriebsartenumschaltung ................................ 16 Betriebszustände der Steuerung
Power on ................................................................ 15
Run .......................................................................... 15
Stop ......................................................................... 15
System Fault ......................................................... 15
Betriebzustände der PLC ................................... 15 Busabschluss ...................................................... 25
C
CAA-Compliance ................................................. 13 CANopen.............................................................. 23 CANopen Geräteprofile ...................................... 24 CANopen Kommunikationsprofil...................... 23 CoDeSys Automation Alliance (CAA) ................ 13 CoDeSys SoftMotion ............................................. 7 CoDeSys Target .................................................... 6 CoDeSys Target-Visualisierung .......................... 7 CoDeSys Web-Visualisierung .............................. 7
D
Die Eigenschaften von CAN .............................. 22
E
Einleitung .............................................................. 5 Einstellung der Ethernet Kommunikation in der
CoDeSys Programmieroberfläche ................. 20 Einstellung der IP-Adresse auf dem Zielsystem
.......................................................................... 20 Einstellung des Programmier-PC für die
Ethernet-Kommunikation ............................... 20 Einstellungen der Seriellen Kommunikation... 20
F
Feldbus: CAN ...................................................... 22 Funktionen der PLC-Libraries ........................... 18
G
GSD-Datei HIL_06e7.gsd .................................... 12
H
Herstelleradresse ............................................... 26
I
Inhaltsverzeichnis ................................................ 3 Installation ............................................................ 6
K
Konfiguration Profibus DP-Master/MPI oder Slave auf dem Zielsystem .............................. 12
Konfigurationsdatei rts3S.cfg ............................. 9
L
Leistungsmerkmale ............................................ 13
M
MPI-Protokoll ....................................................... 12
P
PLC-Browser – Befehle ........................................ 19 Programmierung der Steuerung ....................... 20
R
Reset .................................................................... 16 Reset-Kalt ............................................................ 16 Reset-Ursprung ................................................... 16 Retain-Daten ....................................................... 19 RS232-Schnittstelle ............................................ 20 Runtime-System .................................................... 9 Runtime-System Update .................................... 12
S
Soft-PLC ............................................................... 13 Soft-PLC starten .................................................. 13 Start...................................................................... 16 Startverhalten/Anlauf ........................................ 17 Symbolerklärung .................................................. 4
V
Verbindung des Programmier-PC mit der Steuerung ........................................................ 20
Verdrahtung ........................................................ 24 Verhalten der Steuerung bei Fehler ................. 17 Versionsgeschichte ............................................ 26