Datentypen, -formate, -skalen und -topologienc5hema/gis_ws04/ha/brandt.pdf · Da Daten den Kern...
18
Friedrich-Schiller-Universität Jena Institut für Geographie HpS Analyse und Modellierung räumlicher Daten Leitung: Dr. Martin Herold Wintersemester 2004/05 Tommy Brandt Datentypen, -formate, -skalen und -topologien Inhalt: 1 Einleitung 2 2 Räumlich Modellbildung 2 3 Kartographische Grundlagen 4 3.1 Koordinatensysteme 4 3.2 Kartennetzentwürfe 5 3.3 Geodätische Abbildungen 7 4 Datentypen in GIS 7 4.1 Vektordaten (Topologie aus Punkten, Linien und Flächen) 8 4.1.1 TIN 10 4.1.2 LATTICE 11 4.2 Rasterdaten (Das Rasterdatenmodell GRID) 11 4.3 Attributdaten in Geodatenbanken 13 5 Metadaten 14 5.1 Typen von Metainformation 14 5.3 Unterschiedliche Betrachtungsweisen 15 5.4 Beispiel für den Aufbau eines Objektschlüsselkatalogs 16 6. Schlussbetrachtung 16 Literatur 16
Transcript of Datentypen, -formate, -skalen und -topologienc5hema/gis_ws04/ha/brandt.pdf · Da Daten den Kern...

Friedrich-Schiller-Universität Jena Institut für Geographie HpS Analyse und Modellierung räumlicher Daten Leitung: Dr. Martin Herold Wintersemester 2004/05 Tommy Brandt
Datentypen, -formate, -skalen und -topologien Inhalt:
1 Einleitung 2
2 Räumlich Modellbildung 2
3 Kartographische Grundlagen 4
3.1 Koordinatensysteme 4
3.2 Kartennetzentwürfe 5
3.3 Geodätische Abbildungen 7
4 Datentypen in GIS 7
4.1 Vektordaten (Topologie aus Punkten, Linien und Flächen) 8
4.1.1 TIN 10
4.1.2 LATTICE 11
4.2 Rasterdaten (Das Rasterdatenmodell GRID) 11
4.3 Attributdaten in Geodatenbanken 13
5 Metadaten 14
5.1 Typen von Metainformation 14
5.3 Unterschiedliche Betrachtungsweisen 15
5.4 Beispiel für den Aufbau eines Objektschlüsselkatalogs 16
6. Schlussbetrachtung 16
Literatur 16
2
1 Einleitung
Die hier vorliegende Arbeit soll sich in erster Linie mit der Analyse verschiedener Datenkate-gorien in gängigen Geo-Informationssystemen beschäftigen und so einen Einstieg für das Hauptseminar „Analyse und Modellierung räumlicher Daten“ bieten. Im ersten Teil der Ar-beit geht es vor allem um unterschiedliche Repräsentationsmöglichkeiten von Geo-Objekten, die sich größtenteils aus deren späterer Nutzung ergeben. Zunächst soll das Konzept der räumlichen Modellbildung und anschließend verschiedene kartographische Grundlagen erör-tert werden. Da Daten den Kern eines jeden GIS bilden und somit einen entscheidenden An-teil an der späteren Geodatenmodellierung haben, wird ihnen im zweiten Teil dieser Arbeit ein besonders breiter Raum gewidmet. Abschließend sollen die Möglichkeiten der Datenver-waltung kurz um rissen werden. Zuletzt folgt dann ein Auszug zum Thema Metadaten, die sich in den vergangen Jahren zu einem unerlässlichen Werkzeug, nicht nur in Bezug auf Geo-Informationssysteme, entwickelt haben.
2 Räumlich Modellbildung
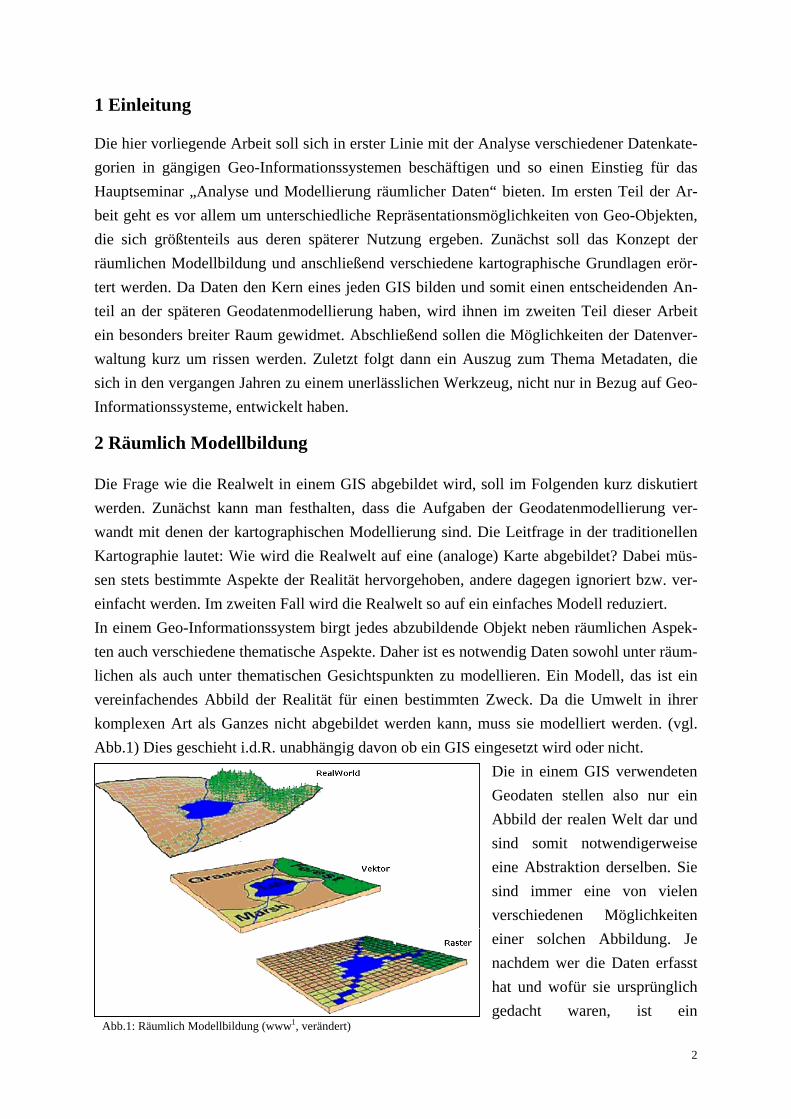
Die Frage wie die Realwelt in einem GIS abgebildet wird, soll im Folgenden kurz diskutiert werden. Zunächst kann man festhalten, dass die Aufgaben der Geodatenmodellierung ver-wandt mit denen der kartographischen Modellierung sind. Die Leitfrage in der traditionellen Kartographie lautet: Wie wird die Realwelt auf eine (analoge) Karte abgebildet? Dabei müs-sen stets bestimmte Aspekte der Realität hervorgehoben, andere dagegen ignoriert bzw. ver-einfacht werden. Im zweiten Fall wird die Realwelt so auf ein einfaches Modell reduziert. In einem Geo-Informationssystem birgt jedes abzubildende Objekt neben räumlichen Aspek-ten auch verschiedene thematische Aspekte. Daher ist es notwendig Daten sowohl unter räum-lichen als auch unter thematischen Gesichtspunkten zu modellieren. Ein Modell, das ist ein vereinfachendes Abbild der Realität für einen bestimmten Zweck. Da die Umwelt in ihrer komplexen Art als Ganzes nicht abgebildet werden kann, muss sie modelliert werden. (vgl. Abb.1) Dies geschieht i.d.R. unabhängig davon ob ein GIS eingesetzt wird oder nicht.
Die in einem GIS verwendeten Geodaten stellen also nur ein Abbild der realen Welt dar und sind somit notwendigerweise eine Abstraktion derselben. Sie sind immer eine von vielen verschiedenen Möglichkeiten einer solchen Abbildung. Je nachdem wer die Daten erfasst hat und wofür sie ursprünglich gedacht waren, ist ein
Abb.1: Räumlich Modellbildung (www1, verändert)

3
unterschiedlich hoher Grad der Näherung, der Vereinfachung und des Weglassens erkennbar. (BARTELME 20003:20f.) Bei der Konzipierung von Modellen kommt es neben der Wahl des Generalisierungsgrades auch auf deren spätere Nutzung an. Nur wenn von vornherein zukünftige Anforderungen an ein Modell berücksichtigt werden, kann die Realwelt bestmöglich in einem GIS (oder eben einer Karte) abbildet werden. Für die Realisierung stehen in Geo-Informationssystemen ver-schiedene Konzepte zur Verfügung, von denen 3 im Folgenden kurz beschrieben werden sollen: Das Layerprinzip, das Objektklassenprinzip und die Unterscheidung in Datenkatego-rien. Die Modellierung von Geodaten mit Hilfe des Layerprinzips beruht i.d.R. auf einem Modell der Realität, das dieselbe in Schichten unterteilt (vgl. Abb.2). Diese Art der Modellierung
bildet die Grundlage für die Zuweisung von unterschiedlichsten thematischen Mengen zu geo-metrischen Daten. Sie ist die Vor-aussetzung und ein Hilfsmittel für die Attributierung. In der Literatur wird diese Art der Modellierung auch häufig als geo-relationale Modellierung bezeichnet, weil die verwendeten Attribute meist in angekoppelten relationalen Daten-
banken (siehe auch 4.3) abgelegt werden. Das Objektklassenprinzip ist im Vergleich zum älteren Layerprinzip (oder auch Schichten-prinzip) wesentlich flexibler, aber noch weniger stark verbreitet. Es beruht auf einer hierarchi-schen (oder auch netzwerkartigen) Anordnung von thematischen Mengen. Das bekannteste Modell ist der hierarchische Baum, der auch den Basissystemen ALK und ATKIS zugrunde liegt. (www2) Es bleibt jedoch abzuwarten, ob die Zukunft von GIS in Richtung modulare objektorientierte Systeme führen wird. Neben dem Layer- und Objektklassenprinzip stellt die strikte Unterteilung in Datenkategorien ein weiteres Konzept für die Modellkonzeption dar. Hier werden Daten zur Beantwortung raumbezogener Fragestellungen zunächst in 4 Kategorien unterteilt: geometrische Basisdaten, geometrische Fachdaten, Basis-Sachdaten und Fach-Sachdaten. Dies erlaubt nicht nur die Unterscheidung zwischen Sachdaten und geometrischen Daten, sondern auch die Differenzie-rung in Basis- und Fachdaten (Art der Datenhaltung). Basisdaten werden in diesem Zusam-menhang zentral vorgehalten und fortgeschrieben, weil sie von verschiedenen Stellen benötigt werden. (Bspw. käme kein Landschaftsplaner auf die Idee, eine TK25 zu zeichnen.) Fachda-ten hingegen werden für fachspezifische Daten benötigt und stammen i.d.R. vom Fachanwen-
Abb.2: Das Layer-Prinzip: (a) Landnutzungskarte (b) Karte der Topographie (c) Bodenkarte (Eigene Darstellung)
a
b
c

4
der selbst. Diese Art der Modellkonzeption wird vorrangig in Umweltinformationssystemen angewendet, wo nach Datenerfassung und -analyse unterschieden werden muss. Zur Vertie-fung dieses Konzeptes dienen die praktischen Ausarbeitungen des Umweltministeriums Ba-den-Württemberg in Zusammenarbeit mit McKinsey. (MCKINSEY & COMPANY, INC 1988)
3 Kartographische Grundlagen
Um die räumliche Codierung innerhalb von Geo-Informationssystemen verstehen zu können, ist ein gewisses kartographisches Know-how notwendig. Dazu gehört das Verständnis über verschiedene Koordinatensysteme, Kartennetzentwürfe und geodätische Abbildungen, deren spezifische Eigenschaften hier kurz skizziert werden sollen.
3.1 Koordinatensysteme
Eines der zentralen Probleme bei der Verwendung von Geodaten liegt darin, dass diese oft in unterschiedlichen Koordinatensystemen und in verschiedenen Bezugssystemen vorliegen, jedoch gemeinsam genutzt werden sollen. Um dies gewährleisten zu können, muss man zuerst ein Grundverständnis für die verschiedenen Koordinatensysteme entwickeln. Koordinatensysteme können grundsätzlich in ebene (2D) und räumliche (3D) Systeme unter-teilt werden. Ebene (kartesischen) Koordinatensysteme (vgl. Abb.3) werden vor allem zur Darstellung von Karten mit großen und mittleren Maßstäben verwendet. Sie entstehen durch mathematische Abbildungen, wobei die positive x-Achse (Ordinate = Hochwert) nach Norden und die positive y-Achse (Abszisse = Rechtswert) nach Osten zeigt. Neben ebenen Koordina-
tensystemen für Vektordaten (siehe auch 4.1) existieren auch Systeme speziell für Rasterdaten (siehe auch 4.2). In diesen Systemen wird jedes einzelne Pixel durch seinen Zeilen- und Spaltenindex (m,n) als Koordinate eindeutig festgelegt und erhält dann
genau einen Koordinatenwert. (BILL 1996:12ff.) Räumliche Koordinatensysteme hingegen definieren sich auf eine andere Art und Weise (vgl. Abb.4). Zunächst wird in einem geozentrischen erdfesten XYZ-Koordinatensystem ein Ober-flächenpunkt P (im Erdschwerefeld bezogen auf eine mittlere Rotationsachse der Erde) fest-gelegt. Dieses auf die Griechen zurückgeführte sphärische System bezeichnet als Äquator Ä, den Kreis, dessen Ebene senkrecht zur mittleren Nord-Süd-Rotationsachse der Erde durch den Erdmittelpunkt M verläuft und die XY-Ebene aufspannt. Die parallel zum Äquator verlaufen-den Breitenkreise werden vom Äquator aus polwärts in Winkelwerten von 0 bis 90 Grad ge-
Abb.3: Ebene Koordinatensysteme für Vektor- und Rasterdaten (BILL 1996:14, verändert)

5
zählt und zwar als nördliche bzw. südliche geographische Breite φ. Die Meridiane oder Län-genkreise schneiden den Äquator und alle Breitenkreise senkrecht. Dabei verlaufen sie stets durch den Nord- bzw. Südpol. Die XZ-Ebene liegt in der mittleren Meridianebene von Greenwich. Ihre geographische Länge λ wird vom 1884 international vereinbarten Nullmeridian in Greenwich aus westlich und östlich von je 0 bis 180 Grad gezählt. (HAKE
& GRÜNREICH 19947:34ff.) Der Begriff „mittlere“ weist darauf hin, dass die Erdrotation nicht um eine starre Achse erfolgt, sondern wegen der Polbewegung eine leichte Pendelbewegung stattfindet. Bei der Annahme der Erdfigur als Rotationsellipsoid liegt der Scheitelpunkt des Winkels für die geographische Breite φ außerhalb des Ermittelpunkts, während bei der Annahme als Kugel der Scheitelpunkt von φ und der Erdmittelpunkt identisch sind. Damit lässt sich jeder Oberflächenpunkt P in einem geographischen Koordinatensystem mit den Polarkoordinaten φ, λ, h oder in einem kartesischen Koordinatensystem mit den Koordinaten x, y, z angeben. Exakte Formeln zur Umrechnung von Koordinatensystemen, sowie weitere Erläuterungen sind in den Werken von BILL und HAKE zu finden. Abbildungen einer Kugel oder eines Ellipsoiden in die Ebene haben stets krummlinige Koor-dinatensysteme zur Folge, die bei kleinmaßstäblichen Abbildungen zu Verzerrungen führen. Daraus lässt sich ableiten, dass das Original nicht längen-, winkel- und flächentreu auf eine Ebene abbildet werden kann. Betracht man sich jedoch topographische Darstellungen oder Katasterkarten, z.B. die amtlichen Verzeichnisse der Grundstücke, so stellt man trotz dieser Erkenntnis die Verwendung ebener Koordinatensysteme fest. Im Folgenden soll deshalb auf die Projektion räumlicher Koordinaten in die Ebene, die auch als Kartennetzentwurf oder kartographische Abbildung bezeichnet wird, genauer eingegangen werden.
3.2 Kartennetzentwürfe
Kartennetzentwürfe lassen sich als eine spezielle Anwendung mathematischer Abbildungen verstehen, die Netzlinien und Punkte eines Koordinatensystems von der exakt definierten Oberfläche eines Weltkörpers in die Ebene abbilden. (HAKE & GRÜNREICH 19947:42f.) Die Schwierigkeit bei der Abbildung der Erdoberfläche in die Ebene besteht darin, dass der Erd-körper mathematisch nicht genau durch einen Rotationsellipsoiden dargestellt werden kann. Durch die unterschiedliche Massenverteilung auf der Erdoberfläche eignet sich zur bestmög-lichen Approximation allenfalls der Geoid. Er stellt eine Niveaufläche dar, die im Vergleich zum Ellipsoiden keine glatte, sondern eine schwach wellige Oberfläche aufweist (vgl. Abb.5).
Abb.4: Geographisches Koordinatensystem auf der Kugel und globales Koordinatensystem (HAKE & GRÜNREICH 19947:35, verän-dert)

6
Abb.7: Verschiedene Darstellungsformen einer zylindrischen Abbildung (a) normale Abbildung (b) transver-sale Abbildung (c) schiefachsige Abbildung (HAKE & GRÜNREICH 19947:44ff, verändert)
Dabei sind die Abweichungen des Geoids von einem ihm optimal angepassten Rotations-ellipsoid nur sehr gering. (HAKE &
GRÜNREICH 19947:29ff.) So ist es wohl auch zu erklären, dass der Geoid ausschließlich in der Geodäsie z.B. bei Höhenmessungen zur Anwendung kommt, während der Ellipsoid zur Lagebestimmung eines Punktes als Bezugskörper genutzt wird. Das dabei
häufig auftauchende geodätische Datum kann als eine allgemeine Angabe zur Dimensionierung des gewählten Ellipsoiden, sowie der Lage seines Mittelpunktes zum globa-len Geozentrum verstanden werden. Generell wird bei allen Kartennetzentwüfen das Gradnetz, das alle Punkte der Erde einheitlich bestimmt, in die Ebene projiziert, wodurch es zu Verzerrungen kommt. Mit Hilfe verschie-denster mathematischer Berechnungen kann die Erde dann entweder längentreu (ab-
standstreu), flächentreu oder winkeltreu abgebildet werden. Dabei können grundsätzlich die in Grafik 6 visualisierten Möglichkeiten der Abbildung einer Ellipsoidoberfläche in die Ebene unterschieden werden. Man differenziert Kartennetzentwüfe demnach in azimutale, zylindrische und konische Abbildungen.
Weiterhin ist es von Relevanz für die verschiedenen Lagemöglichkeiten der Abbildungsfläche ein Gefühl zu entwickeln. Hier kann nochmals zwischen normalen, transversalen und schie-fachsigen Abbildungen unterschieden werden. Wird bspw. die Referenzfläche entlang der Rotationsachse der Erde angelegt, spricht man von einer normalen Position (vgl. Abb.7). Ist sie dagegen in der Äquatorebene, d.h. um 90 Grad gegen die Rotationsachse der Erde gedreht orientiert, so handelt es sich um eine transversale Position. Eine beliebige Orientierung der Achse des Referenzkörpers im Raum nennt man schiefachsige Abbildung. (HAKE & GRÜN-
REICH 19947:45ff.) Auch an dieser Stelle sei darauf verwiesen, dass eine ausführliche Be-schreibung zu Kartennetzentwürfen bei HAKE (19947) nachgelesen werden kann.
Abb.6: (a) Azimutale Abbildung (b) Zylindrische Abbildung (c) Koni-sche Abbildung (HAKE & GRÜNREICH 19947:44ff, verändert)
Abb.5: Der Geoid (HAKE & GRÜNREICH 19947:31, verändert)
7
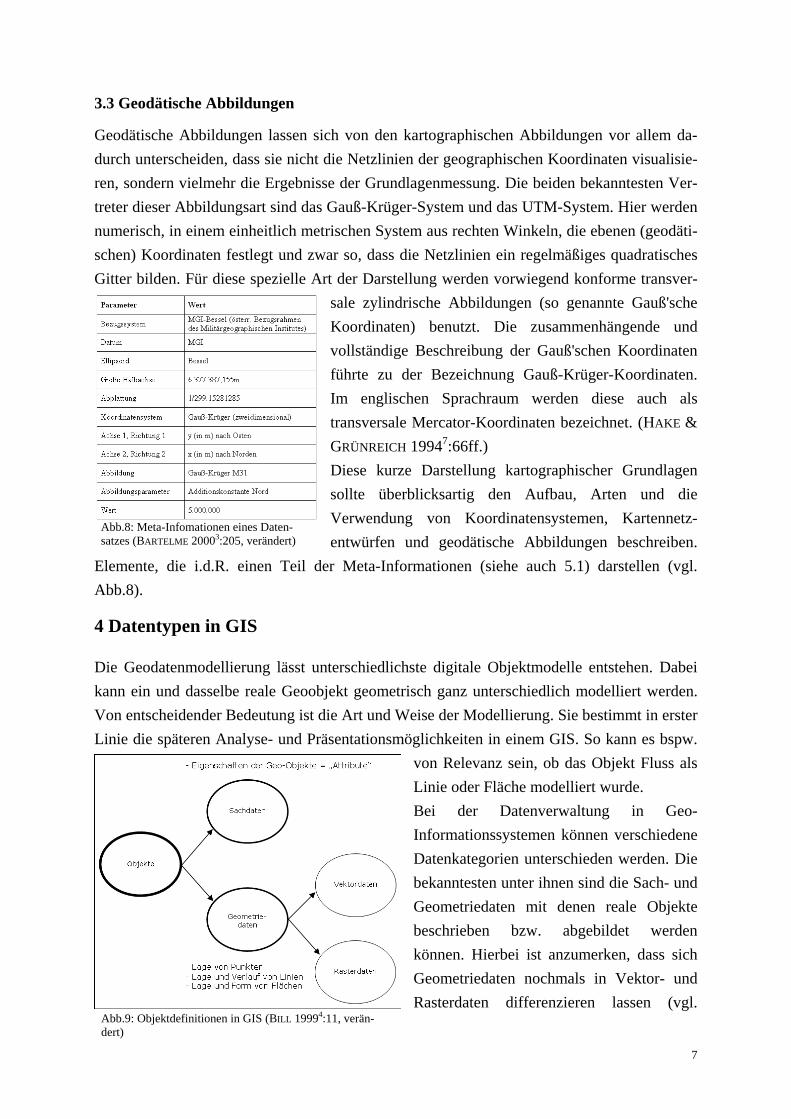
Abb.8: Meta-Infomationen eines Daten-satzes (BARTELME 20003:205, verändert)
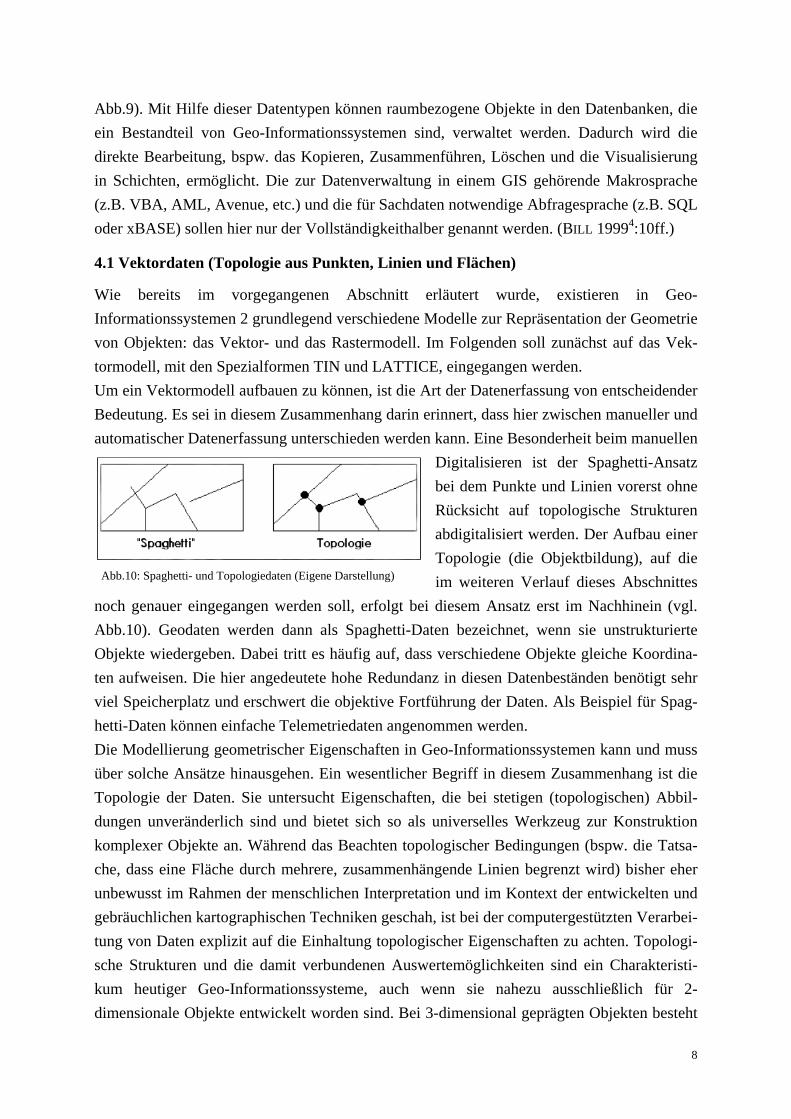
Abb.9: Objektdefinitionen in GIS (BILL 19994:11, verän-dert)
3.3 Geodätische Abbildungen
Geodätische Abbildungen lassen sich von den kartographischen Abbildungen vor allem da-durch unterscheiden, dass sie nicht die Netzlinien der geographischen Koordinaten visualisie-ren, sondern vielmehr die Ergebnisse der Grundlagenmessung. Die beiden bekanntesten Ver-treter dieser Abbildungsart sind das Gauß-Krüger-System und das UTM-System. Hier werden numerisch, in einem einheitlich metrischen System aus rechten Winkeln, die ebenen (geodäti-schen) Koordinaten festlegt und zwar so, dass die Netzlinien ein regelmäßiges quadratisches Gitter bilden. Für diese spezielle Art der Darstellung werden vorwiegend konforme transver-
sale zylindrische Abbildungen (so genannte Gauß'sche Koordinaten) benutzt. Die zusammenhängende und vollständige Beschreibung der Gauß'schen Koordinaten führte zu der Bezeichnung Gauß-Krüger-Koordinaten. Im englischen Sprachraum werden diese auch als transversale Mercator-Koordinaten bezeichnet. (HAKE &
GRÜNREICH 19947:66ff.) Diese kurze Darstellung kartographischer Grundlagen sollte überblicksartig den Aufbau, Arten und die Verwendung von Koordinatensystemen, Kartennetz-entwürfen und geodätische Abbildungen beschreiben.
Elemente, die i.d.R. einen Teil der Meta-Informationen (siehe auch 5.1) darstellen (vgl. Abb.8).
4 Datentypen in GIS
Die Geodatenmodellierung lässt unterschiedlichste digitale Objektmodelle entstehen. Dabei kann ein und dasselbe reale Geoobjekt geometrisch ganz unterschiedlich modelliert werden. Von entscheidender Bedeutung ist die Art und Weise der Modellierung. Sie bestimmt in erster Linie die späteren Analyse- und Präsentationsmöglichkeiten in einem GIS. So kann es bspw.
von Relevanz sein, ob das Objekt Fluss als Linie oder Fläche modelliert wurde. Bei der Datenverwaltung in Geo-Informationssystemen können verschiedene Datenkategorien unterschieden werden. Die bekanntesten unter ihnen sind die Sach- und Geometriedaten mit denen reale Objekte beschrieben bzw. abgebildet werden können. Hierbei ist anzumerken, dass sich Geometriedaten nochmals in Vektor- und Rasterdaten differenzieren lassen (vgl.
8
Abb.10: Spaghetti- und Topologiedaten (Eigene Darstellung)
Abb.9). Mit Hilfe dieser Datentypen können raumbezogene Objekte in den Datenbanken, die ein Bestandteil von Geo-Informationssystemen sind, verwaltet werden. Dadurch wird die direkte Bearbeitung, bspw. das Kopieren, Zusammenführen, Löschen und die Visualisierung in Schichten, ermöglicht. Die zur Datenverwaltung in einem GIS gehörende Makrosprache (z.B. VBA, AML, Avenue, etc.) und die für Sachdaten notwendige Abfragesprache (z.B. SQL oder xBASE) sollen hier nur der Vollständigkeithalber genannt werden. (BILL 19994:10ff.)
4.1 Vektordaten (Topologie aus Punkten, Linien und Flächen)
Wie bereits im vorgegangenen Abschnitt erläutert wurde, existieren in Geo-Informationssystemen 2 grundlegend verschiedene Modelle zur Repräsentation der Geometrie von Objekten: das Vektor- und das Rastermodell. Im Folgenden soll zunächst auf das Vek-tormodell, mit den Spezialformen TIN und LATTICE, eingegangen werden. Um ein Vektormodell aufbauen zu können, ist die Art der Datenerfassung von entscheidender Bedeutung. Es sei in diesem Zusammenhang darin erinnert, dass hier zwischen manueller und automatischer Datenerfassung unterschieden werden kann. Eine Besonderheit beim manuellen
Digitalisieren ist der Spaghetti-Ansatz bei dem Punkte und Linien vorerst ohne Rücksicht auf topologische Strukturen abdigitalisiert werden. Der Aufbau einer Topologie (die Objektbildung), auf die im weiteren Verlauf dieses Abschnittes
noch genauer eingegangen werden soll, erfolgt bei diesem Ansatz erst im Nachhinein (vgl. Abb.10). Geodaten werden dann als Spaghetti-Daten bezeichnet, wenn sie unstrukturierte Objekte wiedergeben. Dabei tritt es häufig auf, dass verschiedene Objekte gleiche Koordina-ten aufweisen. Die hier angedeutete hohe Redundanz in diesen Datenbeständen benötigt sehr viel Speicherplatz und erschwert die objektive Fortführung der Daten. Als Beispiel für Spag-hetti-Daten können einfache Telemetriedaten angenommen werden. Die Modellierung geometrischer Eigenschaften in Geo-Informationssystemen kann und muss über solche Ansätze hinausgehen. Ein wesentlicher Begriff in diesem Zusammenhang ist die Topologie der Daten. Sie untersucht Eigenschaften, die bei stetigen (topologischen) Abbil-dungen unveränderlich sind und bietet sich so als universelles Werkzeug zur Konstruktion komplexer Objekte an. Während das Beachten topologischer Bedingungen (bspw. die Tatsa-che, dass eine Fläche durch mehrere, zusammenhängende Linien begrenzt wird) bisher eher unbewusst im Rahmen der menschlichen Interpretation und im Kontext der entwickelten und gebräuchlichen kartographischen Techniken geschah, ist bei der computergestützten Verarbei-tung von Daten explizit auf die Einhaltung topologischer Eigenschaften zu achten. Topologi-sche Strukturen und die damit verbundenen Auswertemöglichkeiten sind ein Charakteristi-kum heutiger Geo-Informationssysteme, auch wenn sie nahezu ausschließlich für 2-dimensionale Objekte entwickelt worden sind. Bei 3-dimensional geprägten Objekten besteht

9
Abb.11: Coverage eines Gewässernetzes (Eigene Darstellung)
hingegen noch Bedarf an wissenschaftlicher Untersuchung und praktischer Realisierung, bspw. bei Gebäudeinformationssystemen. (www3) Es kann also festgehalten werden, dass topologische Datenbestände im Vergleich zu Spaghetti-Daten wesentlich redundanzärmer und effizienter zu analysieren sind. (BILL & FRITSCH 19942:220ff.) Visualisierte Beispiele für topologische Strukturen finden sich im Buch von BILL (19942) auf Seite 237. Nachdem bereits in den vorangegangenen Abschnitten gewisse Grundlagen zur Heranführung an das Vektormodell erläutert wurden, soll es nun als ein Modell zur Darstellung komplexer Objekte noch weiter differenziert werden: Das Vektormodell versteht sich als eine Form, die komplexe Objekte durch strukturierte bzw. geordnete Mengen einfacher Objekte darstellen kann. Hierfür stehen folgende 3 Kernelemente zur Verfügung: Punkte, Linien und Flächen. Der Punkt ist das geometrische Grundelement des Vektormodells und ist durch seinen Koor-dinaten-Vektor im 2D- oder 3D-Raum eindeutig definiert. Die Beschreibung aller Vektorele-mente beruht letztenendes auf Punkten, die die Träger der Koordinateninformation sind. Da-mit lässt sich auch die relative einfache Speicherung von Punktdaten erklären. Sie erfolgt mithilfe von Koordinaten in Form regulärer Tabellen an die beliebig viele thematische Infor-mationen (in Form neuer Spalten) angehängt werden können. Im Vergleich dazu stellen Li-nien die Verbindung zwischen verschiedensten Punkten her. Sie beginnen und enden mit einem Punkt, der auch als Knoten (engl. node) bezeichnet wird. Zur Art der Speicherung ist zu sagen, dass Linien als eine Reihe von Punktpaaren gespeichert werden. Dabei kann die Form der Verbindung als Zusatzvorschrift angegeben werden (z.B. Gerade, Kreisbogen, etc.). Flächen im Gegensatz zu Linien und Punkten sind wesentlich komplexer in ihrer Form. Den einfachsten Fall stellen hier geschlossene Polygonzüge dar bei denen Anfangs- und Endknoten identisch sein müssen. Von entscheidender Bedeutung ist hier die zwingend erfor-derliche Geschlossenheit von Polygonen. Sie ist vor allem für zahlreiche Verarbeitungsschrit-te unentbehrlich (z.B. das Befüllen von Flächen mit graphischen Signaturen oder das Berech-
nen von Flächenausmaßen). (BARTELME 20003:54ff.) Bei der Verwaltung des Vektormodells in einem GIS stößt man häufig auf den Begriff Coverage. Er signalisiert, dass die hier vorliegenden Vektordaten bereits in separaten Informationsebenen verwaltet werden (vgl. Abb.11). D.b., dass bei digitalen Informationsebenen bereits eine Verknüpfung zwischen Attribut- und Lagedaten stattgefunden hat. So kann der mit Attributdaten versehene Layer eines Gewässernetzes und der eines Straßennetzes als ein separates und von einander unabhängiges Coverage aufgefasst werden. Abschließend sollen nun die Vor-
und Nachteile des Vektormodells diskutiert werden. Zunächst einmal zeigt die praktische

10
Abb.12: Konzeption eines TIN (www4, verändert)
Anwendung des Modells, dass vektorbasierte Daten offensichtlich ideal für die Erfassung von Karten und Plänen sind. Dies vor allem, weil Vektorendaten maßstabsunabhängig gespeichert und beliebig überlagert und kombiniert werden können. Allerdings kann dies immer nur in der Genauigkeit geschehen, die aus der Datenerfassung und aus den darauf folgenden Verar-beitungsschritten resultierte. Da Objekte vektoriell mit beliebig hoher geometrischer Genau-igkeit (in Lage und Form) darstellbar sind, eignen sie sich besonders gut für die Modellierung von diskreten Einzelobjekten bzw. Flächenmosaiken mit scharfen Grenzen. Im Umkehr-schluss bedeutet dies natürlich, dass das Vektordatenmodell nicht für die Visualisierung von flächenhaften kontinuierlichen Verteilungen genutzt werden sollte. Negativ an diesem Da-tenmodell ist die wesentlich aufwendigere Verarbeitung bei logischen und algebraischen Operationen (z.B. Flächeninhaltsberechnung, Verschneidungen, Nachbarschaftsanalysen) anzusehen. Sie sind i.d.R. rechnerisch aufwendiger als im Rastermodell, wobei dies entschei-det von der Wahl und Konfiguration der verwendeten Hardware abhängt. Zuletzt bleibt fest-zuhalten, dass die Datenmengen dieses Modells wesentlich kleiner (bezogen auf die Datei-größe) sind als die in einem Rastermodell. (BILL & FRITSCH 19942:21ff.)
4.1.1 TIN
Das TIN (Triangulated Irregular Network) stellt, als Sonderfall des Vektordatenmodells, ein dreiecksvermaschtes Höhenmodell dar. Es besteht aus einer willkürlichen Verteilung von
Punkten (Knoten) und Kanten, die gleichseitige (sich nicht überlappende) Dreiecksflächen bilden. (BARTELME 20003:115f.) Jeder Punkt in einem TIN verfügt neben einer X- und Y-Koordinate auch über ein oder mehrere Attribute (z.B. die Punkthöhe). Das Konzept dieses Modells basiert auf einem unregelmäßigen Muster von Z-Werten (wobei es sich um direkt bestimmte Originaldaten handeln kann). TIN’s können demzufolge (unter Einbeziehung von Bruchkanten und Aussparungsflächen) als 3-dimensionales Gelände-modelle bezeichnet werden (vgl. Abb.12). Wenn in diesem Modell für jeden Punkt genau ein Attributwert (Z-Koordinate) existiert, so können die einzelnen Punkte zwischen den Knotenpunkten relativ einfach interpoliert werden. TIN’s gestatten, und das ist ihr größter Vorteil gegenüber den GRID’s (siehe 4.2), die schnelle Anpassung der Daten und die Verwendung unregelmä-ßiger Verteilungen. Darüber hinaus können sie aus
Daten unterschiedlichster Herkunft erstellt werden. Diese 3 Komponenten ermöglichen es, eine unter Umständen recht komplizierte und unregelmäßige Oberfläche in einer verhältnis-

11
Abb.13: Vergleich von LATTICE und GRID (www5, verändert)
mäßig kleinen Datei darzustellen. Dabei lassen sich die Oberflächenunterschiede wesentlich detaillierter visualisieren als in einem konventionellen Raster. Aus diesen Argumenten kann man schließen, dass sich Triangulated Irregular Networks ganz besonders gut für die Model-lierung realer Oberflächen eignen. (BARTELME 20003:150ff.)
4.1.2 LATTICE
Das LATTICE stellt ähnlich wie das TIN eine Mischform aus Raster- und Vektordatenmodell dar. Der Aufbau eines LATTICE entspricht im Wesentlichen dem eines GRID’s. Als ent-scheidendes Wesensmerkmal kann die unterschiedliche Art der Interpretation von XYZ-Koordinaten angesehen werden. Im Rasterdatenmodell, das im Folgenden Abschnitt noch
genauer erläutert wird, erhält die gesamte Fläche einer Zelle (oder auch Pixel) jeweils einen Z-Wert zugeordnet, wohingegen im LATTICE die Z-Koordinate als Höhenpunkt eines einzelnen Punktes verstanden werden kann (vgl. Abb.13). Wie die Grafik 13 deutlich zeigt, befindet sich die Basis dieser
Koordinate im Mittelpunkt der entsprechenden Rasterzelle. Da das LATTICE-Modell in der modernen Literatur und den aktuellen GIS-Diskussionen kaum Beachtung findet, ist es relativ schwer die Vor- und Nachteile dieses Datenmodells gegeneinander abzuwägen. Fest steht, dass das LATTICE (ähnlich der Anwendung des TIN’s) für Oberflächenmodellierung und dort speziell für die Repräsentation und Visualisierung von Reliefschattierungen, Neigungen aber auch zur 3D-Visualisierung geeignet ist. (www6)
4.2 Rasterdaten (Das Rasterdatenmodell GRID)
Die Rasterdarstellung bezieht sich im Unterschied zum Vektordatenmodell ausschließlich auf Flächen und entspricht im Wesentlichen dem Coverage im Vektorformat. Dem Rastermodell liegt die Annahme zugrunde, dass der Interessenbereich in Teilflächen mit homogener The-matik aufgeteilt wird. Dies bezeichnet man als Mosaik (engl. tesselation). Die häufigste Form des Mosaiks stellt die quadratische (oder zumindest rechteckige) Aufteilung in regelmäßige Rasterzellen (engl. grid) dar. (BARTELME 20003:53) Die Repräsentation erfolgt i.d.R. zeilen- und spaltenweise durch eine Matrix, die auch als Pixel bezeichnet wird. Zwischen den Ele-menten der Matrix existieren keine logischen Verbindungen, jedoch können sehr wohl geo-grafische Beziehungen hergestellt werden. In diesem Zusammenhang sei an die Fernerkun-dung erinnert, die stets Rasterdaten liefert. Hier stellt jede Rasterzelle eine Einheit dar, der genau ein Attribut zugeordnet werden kann. (Auch wenn die Zelle leer ist besitzt sie einen Wert). (BILL & FRITSCH 19942:25f.) In der Geoinformatik wird dieses Datenmodell hauptsächlich für die Realisierung und An-wendung digitaler Geländemodelle genutzt. Es dient aber auch der Verwaltung, Analyse,
12
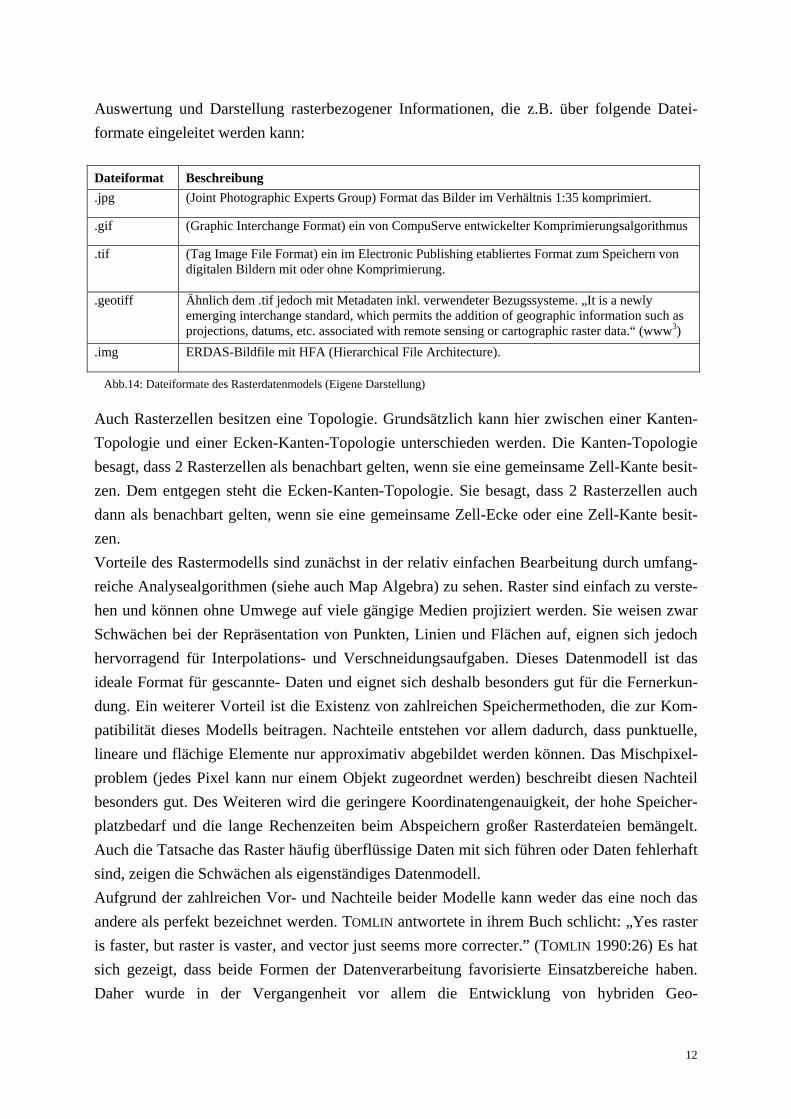
Auswertung und Darstellung rasterbezogener Informationen, die z.B. über folgende Datei-formate eingeleitet werden kann: Dateiformat Beschreibung .jpg (Joint Photographic Experts Group) Format das Bilder im Verhältnis 1:35 komprimiert.
.gif (Graphic Interchange Format) ein von CompuServe entwickelter Komprimierungsalgorithmus
.tif (Tag Image File Format) ein im Electronic Publishing etabliertes Format zum Speichern von digitalen Bildern mit oder ohne Komprimierung.
.geotiff Ähnlich dem .tif jedoch mit Metadaten inkl. verwendeter Bezugssysteme. „It is a newly emerging interchange standard, which permits the addition of geographic information such as projections, datums, etc. associated with remote sensing or cartographic raster data.“ (www3)
.img ERDAS-Bildfile mit HFA (Hierarchical File Architecture).
Auch Rasterzellen besitzen eine Topologie. Grundsätzlich kann hier zwischen einer Kanten-Topologie und einer Ecken-Kanten-Topologie unterschieden werden. Die Kanten-Topologie besagt, dass 2 Rasterzellen als benachbart gelten, wenn sie eine gemeinsame Zell-Kante besit-zen. Dem entgegen steht die Ecken-Kanten-Topologie. Sie besagt, dass 2 Rasterzellen auch dann als benachbart gelten, wenn sie eine gemeinsame Zell-Ecke oder eine Zell-Kante besit-zen. Vorteile des Rastermodells sind zunächst in der relativ einfachen Bearbeitung durch umfang-reiche Analysealgorithmen (siehe auch Map Algebra) zu sehen. Raster sind einfach zu verste-hen und können ohne Umwege auf viele gängige Medien projiziert werden. Sie weisen zwar Schwächen bei der Repräsentation von Punkten, Linien und Flächen auf, eignen sich jedoch hervorragend für Interpolations- und Verschneidungsaufgaben. Dieses Datenmodell ist das ideale Format für gescannte- Daten und eignet sich deshalb besonders gut für die Fernerkun-dung. Ein weiterer Vorteil ist die Existenz von zahlreichen Speichermethoden, die zur Kom-patibilität dieses Modells beitragen. Nachteile entstehen vor allem dadurch, dass punktuelle, lineare und flächige Elemente nur approximativ abgebildet werden können. Das Mischpixel-problem (jedes Pixel kann nur einem Objekt zugeordnet werden) beschreibt diesen Nachteil besonders gut. Des Weiteren wird die geringere Koordinatengenauigkeit, der hohe Speicher-platzbedarf und die lange Rechenzeiten beim Abspeichern großer Rasterdateien bemängelt. Auch die Tatsache das Raster häufig überflüssige Daten mit sich führen oder Daten fehlerhaft sind, zeigen die Schwächen als eigenständiges Datenmodell. Aufgrund der zahlreichen Vor- und Nachteile beider Modelle kann weder das eine noch das andere als perfekt bezeichnet werden. TOMLIN antwortete in ihrem Buch schlicht: „Yes raster is faster, but raster is vaster, and vector just seems more correcter.” (TOMLIN 1990:26) Es hat sich gezeigt, dass beide Formen der Datenverarbeitung favorisierte Einsatzbereiche haben. Daher wurde in der Vergangenheit vor allem die Entwicklung von hybriden Geo-
Abb.14: Dateiformate des Rasterdatenmodels (Eigene Darstellung)

13
Informationssystemen vorangetrieben; Systeme, die sowohl Vektor- als auch Rasterdaten verarbeiten können und die gegenseitige Konvertierung zulassen.
4.3 Attributdaten in Geodatenbanken
Die Speicherung und Verarbeitung von Attributdaten (oder Sachdaten) hat eine lange Traditi-on in privatwirtschaftlich und öffentlich genutzten DV-Anwendungen. Speziell in GIS hat man früher einfachste Datenverwaltungssysteme verwendet, die in der Handhabung jedoch alles andere als einfach waren. Heute benutzt man zur Verwaltung von Attributdaten größten-teils relationale Datenbankmanagementsysteme (RDBMS). Der Kern dieses Konzepts ist die Verteilung und Verwaltung von Daten auf verschiedene Tabellen. Dabei erfolgt die Speiche-rung keineswegs willkürlich, sondern nach bestimmten Regeln, die gewährleisten sollen, dass verschiedenste Attributdaten wieder gefunden werden können. In den Datenbanken der heuti-gen GIS-Systeme werden Attributdaten mit kartographischen Daten verknüpft. Durch diese Verbindung, die auch als Link bezeichnet wird, kann die Suche nach Attributen, kartographi-schen Gegebenheiten oder beidem erfolgen; es entstehen raumbezogene Informationen. Vor diesem Hintergrund können die speziellen Anforderungen an ein RDBMS wie folgt zusam-mengefasst werden:
- Datensicherheit - Datenkonsistenz - optimale Flexibilität bei Suchanfragen (ohne Kenntnisse vom Aufbau der Datenbank) - effiziente Speicherplatzverwaltung (größtmögliche Redundanzfreiheit) - leichte Aktualisierungsmöglichkeiten - Mehrbenutzerzugriff
Eins der größten Probleme in Bezug auf RDBMS ist die relativ schwierige Implementierung solcher Systeme und verhältnismäßig hohe Kosten für deren Entwicklung und Fortführung. Nachdem hier speziell die Eigenschaften von Datenbanken skizziert wurden, soll es abschlie-ßend noch einmal um Attributdaten gehen. Als Attribut- oder auch Sachendaten sind in GIS-Systemen sämtliche nichtgeometrische Elemente zu verstehen. Sie können entweder räumli-che (z.B. Flächenzahl) oder thematische (z.B. Hautfarbe der Bevölkerung) Informationen enthalten und sowohl in digitaler als auch in analoger Form vorliegen. Ein wichtiger Punkt in Bezug auf Attributdaten ist das Verständnis über hierarchisch angeordnete, merkmalspezifi-sche Skalen, die je nach Informationsgehalt der Attributdaten zu wählen sind und bei späteren Auswertemöglichkeiten von entscheidender Bedeutung sein können. In diesem Zusammen-hang sei an folgende 3 Skalen erinnert: - nominal Skala (z.B. Bildung von Biotoptypen, die nicht geordnet werden können) - ordinal Skala (z.B. Gefährdungsklassen in den Roten Listen) - metrische Skala (z.B. Messung des Nitratgehalts im Grundwasser)

14
Abb.15: Skalenniveau und Informationsgehalt (BILL 19992:45, verändert)
BILL (vgl. Abb.15) zeigt, dass nominalskalierte Daten den geringsten Gehalt an Informationen enthalten. Gleichzeitig macht er deutlich, dass der Übergang von einem höheren Skalenniveau zum niedrigeren unter Informationsverlust möglich ist, während dies in umgekehrter Form so nicht der Fall ist. (BILL 19992:44ff.) Mit einem Beispiel aus der Risikoanalyse soll im Folgenden kurz das Zusammenspiel von Skalenniveaus und Attributdaten skizziert werden. Denn gerade bei Risikoanalysen neigt man häufig dazu ordinalskalierte Daten zu
verwenden. Das Ergebnis ist dann bspw. eine Skalierung (für das Attribut Waldbrand) in die relativen Klassen: |sehr hoch| |hoch| |mittel| |gering| |sehr gering|. Anhand dieses Beispiels sieht man recht deutlich, dass die Art und Weise der Klassenbildung einen wesentlichen Ein-fluss auf die darstellbaren Inhalte nehmen wird. Geo-Informationssysteme bieten heute größ-tenteils vorgefertigte Lösungen zur Klassenbildung zwischen zwei Extremen der Grundge-samtheit an (z.B. gleichmäßige Intervalle, logarithmische Intervalle, gleich besetzte Klassen). Dies strahlt vor allem für Anfänger eine hohe Bedienerfreundlichkeit aus, lädt jedoch auch zur unkritischen Übernahme ein. Unbedachte oder manipulierte Klassenbildung und ihre anschließende Darstellung können dann zu möglichen Fehlinterpretationen führen.
5 Metadaten
Um sicherzustellen das Daten nicht zweckentfremdet verwendet werden und damit zu fal-schen Schlussfolgerungen führen, müssen die Annahmen und Einschränkungen unter dehnen Sie entstanden sind, dokumentiert werden. Das was bei dieser Dokumentation entsteht, be-zeichnet man als Metadaten – „Daten über Daten“ (BARTELME 20003:232). Die Meta-Information ist folglich diejenige Information, die den Inhalt eines relevanten Modells be-schreibt. Diese Art von Information ist unverzichtbar, wenn Benutzer Daten anderer Instituti-onen nutzen wollen, von denen sie meist weder wissen, wo sie abgelegt sind, noch wie sie aufgebaut und zustande gekommen sind. Für die eindeutige Definition von Metadaten wurde die ISO 19115 geschaffen. Sie beinhaltet die verbindliche Struktur für die Beschreibung von Geodaten und erleichtert so den Anwen-dern Daten zu finden, auszuwählen, zu erwerben und zu verwenden (BARTELME 20003:232f). Meta-Informationen befinden sich größtenteils in einem so genannten „Header-File“ zu den eigentlichen Daten. Aber auch einfache Beschreibungsdateien (z.B. readme.txt) können Meta-Informationen enthalten.
5.1 Typen von Metainformation
Nach DENZER und GÜTTLER lassen sich folgende 4 Arten von Meta-Information unterschei-

15
den (DENZER et al. 1995:272ff): A) Semantische Meta-Information: Die semantische Metainformation entspricht der einfachen Datenbeschreibung. Sie stellt die inhaltliche Beschreibung von Datenbeständen zur Verfügung. So kann ein Benutzer schneller feststellen, ob bestimmte Daten für ihn eine brauchbare Information darstellen. B) Syntaktische Meta-Information: Sie soll vorrangig den Zugriff auf den Katalog, den Thesaurus (Auflistung sinnesverwandter Wörter) und die Daten gewährleisten. Hierbei handelt es sich in erster Linie um Datenverar-beitungstechnik, von der der Benutzer möglichst verschont bleiben möchte. Die syntaktische Meta-Information stellt für DENZER und GÜTTLER das A und O der Meta-Information dar. C) Strukturelle Meta-Information: Mit Hilfe der strukturellen Meta-Information können Objektstrukturen näher beschrieben werden. Diese Informationen sind von besonderem Interesse, weil sich hieraus Rückschlüsse auf die technische Weiterverarbeitung (Schnittstelledefinition) ziehen lassen. D) Navigatorische Meta-Information: Sie dienen primär der Navigation und können somit Auskunft darüber geben, wo man Daten findet und wie man sich in einem Dateisystem dorthin bewegen kann.
5.3 Unterschiedliche Betrachtungsweisen
Meta-Informationen lassen sich nicht nur in unterschiedliche Typen differenzieren, man kann darüber hinaus auch unterschiedliche Betrachtungsweisen zur Anwendung bringen. Die Un-terscheidung zwischen räumlichen und zeitlichen Zugang, sowie sachlicher Spezifikation und der räumlichen Auflösung sollen im Folgenden kurz skizziert werden: A) Räumlicher Zugang: Der räumliche Zugang ist nur dann gewährleistet, wenn für jeden beliebigen Punkt, Linie oder Polygon festgestellt werden kann, ob bzw. welche Datenbestände dort vorliegen. B) Temporaler Zugang: Der temporale im Unterschied zum räumlichen Zugang gibt an für welchen Zeitraum die (gültigen) Daten vorliegen. C) Sachliche Spezifikationen: Sachliche Spezifikationen können in Form eines unter Umständen hierarchisch geordneten Thesaurus erzeugt werden und dienen der Beschreibung der Datenverarbeitungstechnik.

16
D) Räumliche Auflösung: Mit der räumlichen Auflösung wird der Maßstab der verwendeten Bestände festgelegt. Damit kann die Eignung für groß- bzw. kleinräumige Fragestellungen spezifiziert werden.
5.4 Beispiel für den Aufbau eines Objektschlüsselkatalogs
Der Aufbau eines solchen Katalogs kann wie folgt realisiert werden: Zunächst sollten für die Identifikation des Datensatzes die Festlegung der Zielsetzung, die Benennung der Thematik, aber auch die Definition der räumlicher Lage genau beschrieben werden. Anschließend folgen dann Ausführungen zur Datenqualität. Hier spielt vor allem die Herkunft, die Attribut- und Lagegenauigkeit, sowie die logische Konsistenz und Vollständigkeit eine wichtige Rolle. Danach folgt die räumliche Datenorganisation, in der das verwendete Datenmodell (Raster, Vektor, Topologie) näher spezifiziert wird. Die Georeferenzierung, d.h. die Benennung von Projektion, Datum und Koordinatensystem schließen sich dem an und münden in der Erörte-rung von Entitäten und Attributen. Abschließend sollte dann die Bezugsquelle, eine Metada-tenreferenz (mit Informationen zum Aktualitätsstand, der inhaltlichen Zuständigkeit der Me-tadaten) und ggf. eine Zitier-Information den Objektschlüsselkatalog abrunden.
6. Schlussbetrachtung
Die hier vorliegende Arbeit sollte die theoretischen Grundlagen für die Analyse und Model-lierung räumlicher Daten liefern. Zuerst wurde das Konzept der räumlichen Modellbildung vorgestellt und die Frage, wie die Realwelt adäquat als Modell dargestellt werden kann, dis-kutiert. Anschließend folgte eine kompakte Zusammenfassung kartographischer Grundlagen. Insbesondere wurden verschiedene Koordinatensysteme, Kartennetzentwürfe und geodätische Abbildungen vorgestellt. Kapitel 4 widmete sich dann den verschieden Datentypen heutiger Geo-Informationssysteme. Dabei wurde festgestellt, dass Aufgrund zahlreicher Vor- und Nachteile beider Datenmodelle vor allem die Entwicklung von hybriden Geo-Informationssystemen forciert wurde und diese heute eins der leistungsstärksten Instrumente für die Analyse und Modellierung räumlicher Daten darstellen. Danach folgte ein relativ kur-zer Abriss zu RDBMS und eine Erläuterung zur Verwaltung von Attributdaten in GIS-Systemen. Abgerundet wurde die Arbeit mit einem Überblick zu Metadaten, die auch in Zu-kunft weiter an Bedeutung gewinnen werden. Und dies vor allem, weil die Geodatenerfas-sung, -aufbereitung und -fortführung für GIS-Systeme den größten Kostenfaktor darstellen.
Literatur
BARTELME, N. (20003): Geoinformatik: Modelle, Strukturen, Funktionen. Berlin. BILL, R (19994): Grundlagen der Geo-Informationssysteme. Band 1. Hardware, Software

17
und Daten. Heidelberg. BILL, R (19992): Grundlagen der Geo-Informationssysteme. Band 2. Analysen, Anwendun-gen und neue Entwicklungen. Heidelberg. BILL, R. (1996): Grundlagen der Geo-Informationssysteme. Band 2. Analysen, Anwendun-gen und Entwicklungen. Heidelberg. BILL, R. & FRITSCH, D. (19942): Grundlagen der Geo-Informationssysteme. Band 1. Hard-ware, Software und Daten. Karlsruhe. DENZER, R. & GÜTTLER, R. (19952): Integration von Umweltdaten. In: PAGE, B. & HILTY, L.M. (Hrsg.): Umweltinformatik, Informatikmethoden für Umweltschutz und Umweltfor-schung. München. HAKE, G. & GRÜNREICH, D. (19947): Kartographie: Visualisierung raum-zeitlicher Informati-onen. Berlin. LONGLEY, P.A. (2001): Geographic information systems and science. New York. MCKINSEY & COMPANY, INC. (1988): Konzeption des ressortübergreifenden Umweltinforma-tionssystems (UIS) im Rahmen des Landessystemkonzeptes Baden-Württemberg. Stuttgart. TOMLIN, D. (1990): Geographic Information Systems and Cartographic Modelling. New Jersey. www1: http://www.innovativegis.com/basis/primer/concepts.html Zugriff am 24.11.2004 www2: http://www.atkis.de/ Zugriff am 09.12.2004 www3: http://www.gis-news.de/ Zugriff am 10.12.2004 www4: http://gio.uni-muenster.de/beitraege/ausg00_2/3danalyst/bastisteil/triangulation.html Zugriff am 12.12.2004 www5: http://www.laum.uni-hannover.de/ilr/lehre/Isv/Isv_Meth.htm#tin
18
Zugriff am 12.12.2004 www6: http://www2.geoinform.fh-mainz.de/~zipf/arcInfoBuch/book1.html Zugriff am 14.12.2004