DCS 500 Thyristor-Stromrichter für DC-Antriebssysteme 25 ... · Stromversorgung der Elektronik...
61
DCS 500 Thyristor-Stromrichter für DC-Antriebssysteme 25 bis 5150 A 6 bis 5000 kW Systembeschreibung DCS 500B / DCF 500B
Transcript of DCS 500 Thyristor-Stromrichter für DC-Antriebssysteme 25 ... · Stromversorgung der Elektronik...
3ADW000066R0903 DCS500 System description d i
DCS 500 Thyristor-Stromrichterfür DC-Antriebssysteme
25 bis 5150 A6 bis 5000 kW
SystembeschreibungDCS 500B / DCF 500B
3ADW000066R0903 DCS500 System description d i
Neueste Technik, hohe Leistung und ein benutzerfreundliches Konzept
Eine Vielzahl industrieller Anwen-dungenDie DCS, DCA, DCF und DCR Stromrichter erfül-len die Forderungen auch anspruchsvollster Anwen-dungen:• Metallindustrie• Papier- und Zellstoffindustrie• Materialtransport• Prüfstände• Nahrungsmittel- und Getränkeindustrie• Druckindustrie• Kunststoff- und Gummiindustrie• Ölplattformen• Schiffe• Skilifte• Magnete• MG-Sets• Elektrolyse• Batterieladegeräte• und vieles mehr
Die DCS 500 Reihe ist eine komplette Baureihe vonDC-Stromrichtern mit einer hohen Leistung und Zu-verlässigkeit für die Einspeisung und Steuerung vonDC-Maschinen.
DCA 500 ist ein in einen Stromrichterschrank einge-bautes DCS 500 Stromrichtermodul mit der Bezeich-nung “Common Cabinet” (siehe separate Dokumen-tation).
DCF 500 ist ein modifiziertes DCS 500 Modul, dasauch andere Verbraucher als die Ankerstromkreise vonDC-Maschinen (z.B. induktive Verbraucher wie dieFeldwicklungen von Motoren, Magneten usw.) versor-gen kann.
Für Modernisierungsprojekte hat ABB ein spezielles“Rebuild Kit” DCR 500 genannt, entwickelt, mit demAltanlagen mit moderner Digitaltechnik ausgestattetwerden können (siehe separate Dokumentation).
Durch die verfügbaren Optionen können die meistentechnischen Anforderungen und Leistungserwartun-gen sowie viele Sicherheitsvorschriften erfüllt werden.In der gesamten Produktreihe verwendete gleichartigeElektronik reduziert die Anzahl der Ersatzteile, verein-facht die Lagerhaltung und reduziert den Schulungs-aufwand.
WERKZEUGE• Mit dem benutzerfreundlichen CMT-Tool (Com-
missioning and Maintenance Tool) für die Pro-grammierung, Inbetriebnahme, Überwachung undWartung von Antrieben wird eine Reduzierung desAufwandes, der Zeit und der Kosten erreicht.
• Datenlogger • Trends • Fehler-Logger• Parameter/Signale • Vor-Ort-Betrieb
• Das GAD-Tool (Graphical Application Designer)enthält eine umfangreiche Bibliothek von Standard-Funktionsbausteinen für die Erstellung kundenspe-zifischer Softwarelösungen und zur Dokumentationwährend der Programmierung.
CMT und GAD bilden zusammen ein leistungsfähigesWerkzeug, mit dem der Planungs-, Inbetriebnahmeund Wartungsingenieur auf effiziente Weise beste Ergeb-nisse erzielen kann.
II D 1-2
3ADW000066R0903 DCS500 System description d i
1 DCS 500 - eine moderne Technik
Flexibles Konzept Anwenderfreundlichkeit
Hardware-Grundausstattung Thyristorbrücke(n) (ab Bauform A5 mit eingebau-
ten Sicherungen) Temperaturüberwachung der Thyristorbrücke(n) Lüfter Stromversorgung der Elektronik Rechnerkarte
Zusätzliche in das Modul integrierbare Komponen-ten Feldstromrichter
– ungesteuerte Diodenbrücke, 6A, oder– halbgesteuerte Diodenbrücke, 16 A
Datenübertragungskarte Bedienpanel
Anwendungsabhängig kann darüber hinaus mit demnachstehend aufgeführten Zubehör das Antriebspaketindividuell zusammengestellt werden Externe Feldeinspeisegeräte Zusätzliche E/A-Karten Feldbusmodule für verschiedene Datenübertragungs-
protokolle EMV-Filter Anwendungssoftwarepakete PC-Programme
Die Antriebssystem-Funktionalität kann in verschie-dene Feldbussteuerungssysteme -einfache bis zu be-triebsweiten Steuerungssystemen- integriert werden.
DCS 500 ist ein frei programmierbarer, für nahezu alleAnwendungen geeigneter Antrieb. Templates (Vorla-gen) wie Master-Follower, Wickler usw. sind erhält-lich.DCS 500 steht für ein komplettes Programm im Lei-stungsbereich von 25 A bis 5200 A als Stromrichtermo-dul (bei 12-Puls-Parallelschaltung, bis ca. 10.000 A),geeignet für den Betrieb in allen gängigen Drehstrom-netzen.
Alle Produkte tragen das CE-Kennzeichen.
Das Werk für die Fertigung von DC-Stromrichtern desGeschäftsbereichs Drives von ABB Automation Pro-ducts in Lampertheim verwendet ein Qualitätsmana-gementsystem nach DIN EN ISO 9001 und ein Um-weltmanagementsystem nach DIN EN ISO 14001.
DCS 500 Stromrichter sind ebenfalls nach UL (Under-writers Laboratory) zugelassen.
Sie erfüllen auch die entsprechenden EMV-Normenfür Australien und Neuseeland und besitzen das C-Tick-Kennzeichen.
DCS 500 Stromrichter sind sowohl für Standardan-triebsanwendungen als auch für anspruchsvolle An-wendungen geeignet.
PC-Programme machen den Antrieb anwenderfreund-lich und bieten einen gehobenen Bedienkomfort.
GerätebaubreiheDas Lieferprogramm besteht aus 5 Baugrößen, C1, C2,A5, A6 und A7.Es können sowohl Modul- als auch Standardschränkegeliefert werden.
C1 - Modul DCA-Schaltschrank
II D 1-3
DIN EN ISO 9001
DIN EN ISO 14001
3ADW000066R0903 DCS500 System description d i
Inhaltsverzeichnis
II D SYSTEMBESCHREIBUNG1 DCS 500 - Stromrichter der neuen Generation . II D 1-3
2 Übersicht über die DCS 500 Komponenten ...... II D 2-12.1 Umgebungsbedingungen ............................................................ II D 2-42.2 DCS 500 Stromrichtermodule ..................................................... II D 2-52.3 DCS 500 Überlastbarkeit ............................................................ II D 2-82.4 Feldversorgung ......................................................................... II D 2-102.5 Optionen für DCS 500B / DCF 500B Stromrichtermodule ........ II D 2-12
Ein-/Ausgänge ........................................................................... II D 2-12Bedien-/ und Anzeigeeinheit ..................................................... II D 2-15Serielle SchnittstelleBedienung durch PC ................................................................. II D 2-16Steuerung .................................................................................. II D 2-16
2.6 Antriebsoptionen ....................................................................... II D 2-18Netzdrosseln L1 ........................................................................ II D 2-18Aspekte der Absicherung des Ankerstromkreises und der Feld-versorgung von DC-Antrieben ................................................ ...II D 2-20F1 Halbleitersicherungen und Sicherungshalter für die Wechsel-und Gleichstromseite ................................................................. II D 2-22F3.x Sicherungen und Sicherungshalter für die 2-phasigeFeldversorgung ......................................................................... II D 2-22Transformator T3 für die Feldversorgung ................................. II D 2-22Netzdrossel ............................................................................... II D 2-23Hilfstransformator T2 für Elektronik-/ Lüfterversorgung ............ II D 2-23Differenzstromerkennung .......................................................... II D 2-23EMV-Filter ................................................................................. II D 2-24
3 Planung von Antrieben ...................................... II D 3-13.1 Standardantriebskonfiguration mit internem Feld ....................... II D 3-33.2 Konfiguration mit internem Feld mit einer geringeren
Anzahl externer Komponenten .................................................... II D 3-53.3 Standardantriebskonfiguration mit externem
halbgesteuertem Feld (1-phasig) ................................................ II D 3-63.4 Standardkonfiguration mit vollgesteuertem Feld (3-phasig)
ohne Ankerstromrichter ............................................................... II D 3-73.5 Typische Konfiguration für Hochleistungsantriebe ..................... II D 3-83.6 Typische Konfiguration für Hochleistungsantriebe in einer
12-Puls-Parallel-Master-Follower-Anwendung ......................... II D 3-10
4 Software-Übersicht (Vers. 21.2xx) .................... II D 4-14.1 GAD Engineering-Programm ...................................................... II D 4-14.2 Einführung in die Struktur und Verwendung ............................... II D 4-2
Softwarestrukturpläne mit Kurzbeschreibung
II D 1-4
II D 2-1
3ADW000066R0903 DCS500 System description d i
2 Übersicht über die DCS 500 Komponenten
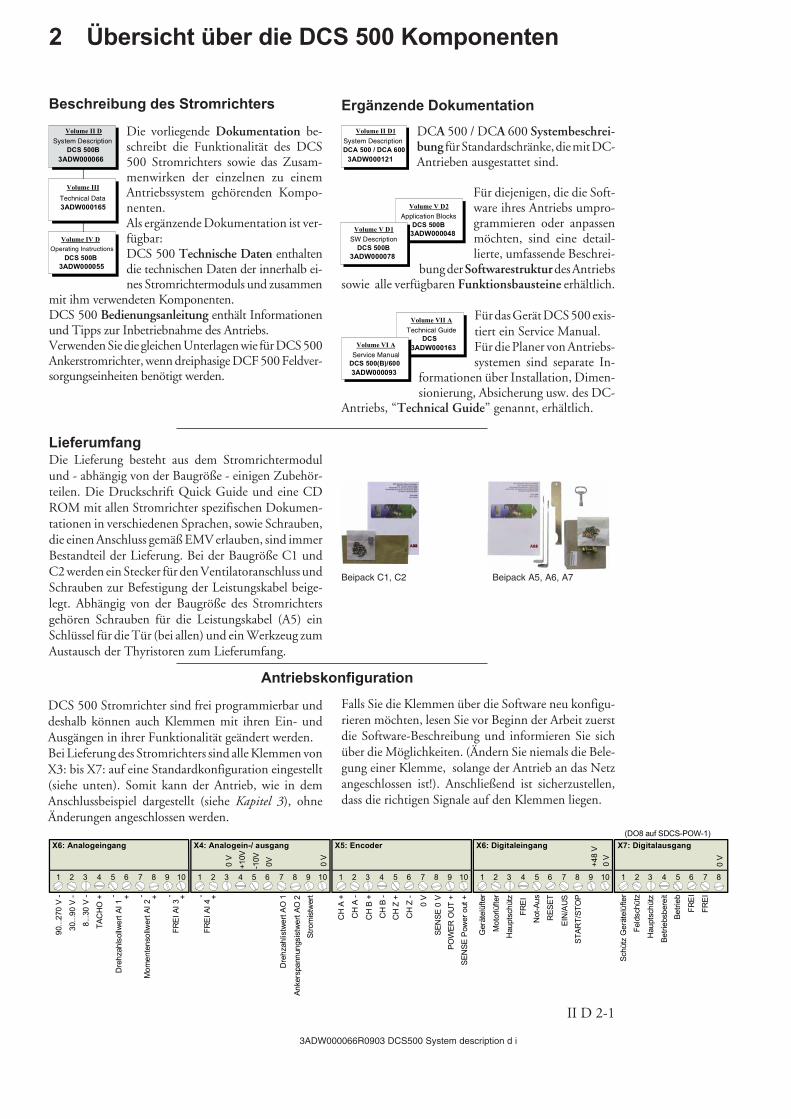
Beschreibung des Stromrichters
Antriebskonfiguration
DCA 500 / DCA 600 Systembeschrei-bung für Standardschränke, die mit DC-Antrieben ausgestattet sind.
Für diejenigen, die die Soft-ware ihres Antriebs umpro-grammieren oder anpassenmöchten, sind eine detail-lierte, umfassende Beschrei-
bung der Softwarestruktur des Antriebssowie alle verfügbaren Funktionsbausteine erhältlich.
Für das Gerät DCS 500 exis-tiert ein Service Manual.Für die Planer von Antriebs-systemen sind separate In-
formationen über Installation, Dimen-sionierung, Absicherung usw. des DC-
Antriebs, “Technical Guide” genannt, erhältlich.
Falls Sie die Klemmen über die Software neu konfigu-rieren möchten, lesen Sie vor Beginn der Arbeit zuerstdie Software-Beschreibung und informieren Sie sichüber die Möglichkeiten. (Ändern Sie niemals die Bele-gung einer Klemme, solange der Antrieb an das Netzangeschlossen ist!). Anschließend ist sicherzustellen,dass die richtigen Signale auf den Klemmen liegen.
DCS 500 Stromrichter sind frei programmierbar unddeshalb können auch Klemmen mit ihren Ein- undAusgängen in ihrer Funktionalität geändert werden.Bei Lieferung des Stromrichters sind alle Klemmen vonX3: bis X7: auf eine Standardkonfiguration eingestellt(siehe unten). Somit kann der Antrieb, wie in demAnschlussbeispiel dargestellt (siehe Kapitel 3), ohneÄnderungen angeschlossen werden.
Die vorliegende Dokumentation be-schreibt die Funktionalität des DCS500 Stromrichters sowie das Zusam-menwirken der einzelnen zu einemAntriebssystem gehörenden Kompo-nenten.Als ergänzende Dokumentation ist ver-fügbar:DCS 500 Technische Daten enthaltendie technischen Daten der innerhalb ei-nes Stromrichtermoduls und zusammen
mit ihm verwendeten Komponenten.DCS 500 Bedienungsanleitung enthält Informationenund Tipps zur Inbetriebnahme des Antriebs.Verwenden Sie die gleichen Unterlagen wie für DCS 500Ankerstromrichter, wenn dreiphasige DCF 500 Feldver-sorgungseinheiten benötigt werden.
Ergänzende Dokumentation
Application BlocksDCS 500B
3ADW000048
Volume V D2
SW DescriptionDCS 500B
3ADW000078
Volume V D1
Technical GuideDCS
3ADW000163
Volume VII A
Service ManualDCS 500(B)/6003ADW000093
Volume VI A
1 102 3 4 5 6 7 8 9
90...
270
V - +
30...
90 V
-
8...3
0 V
- - + -
1 102 3 4 5 6 7 8 9
0 V
0 V
+10V
0V-10V
1 102 3 4 5 6 7 8 9
0 V
CH
A +
CH
A -
1 102 3 4 5 6 7 8 9
+48
V0
V
1 2 3 4 5 6 7 8
0 V
+- +-
CH
B +
CH
B -
CH
Z +
CH
Z -
X6: Analogeingang X4: Analogein-/ ausgang X5: Encoder X6: Digitaleingang X7: Digitalausgang
STAR
T/ST
OP
Mot
orlü
fter
Hau
ptsc
hütz
FRE
I
Not
-Aus
RES
ET
EIN
/AU
S
Schü
tz G
erät
elüf
ter
Feld
schü
tz
Hau
ptsc
hütz
Betri
ebsb
erei
tBe
trieb
FRE
I
FRE
I
Dre
hzah
lsol
lwer
t AI 1
Mom
ente
nsol
lwer
t AI 2
FRE
I AI 3
FRE
I AI 4
Dre
hzah
listw
ert A
O 1
Anke
rspa
nnun
gsis
twer
t AO
2St
rom
istw
ert
SEN
SE 0
VPO
WER
OU
T +
SEN
SE P
ower
out
+
(DO8 auf SDCS-POW-1)
TAC
HO
+
Ger
ätel
üfte
r
System Description
DCS 500B3ADW000066
Volume II D
Operating Instructions
DCS 500B3ADW000055
Volume IV D
Technical Data3ADW000165
Volume III
LieferumfangDie Lieferung besteht aus dem Stromrichtermodulund - abhängig von der Baugröße - einigen Zubehör-teilen. Die Druckschrift Quick Guide und eine CDROM mit allen Stromrichter spezifischen Dokumen-tationen in verschiedenen Sprachen, sowie Schrauben,die einen Anschluss gemäß EMV erlauben, sind immerBestandteil der Lieferung. Bei der Baugröße C1 undC2 werden ein Stecker für den Ventilatoranschluss undSchrauben zur Befestigung der Leistungskabel beige-legt. Abhängig von der Baugröße des Stromrichtersgehören Schrauben für die Leistungskabel (A5) einSchlüssel für die Tür (bei allen) und ein Werkzeug zumAustausch der Thyristoren zum Lieferumfang.
Beipack A5, A6, A7Beipack C1, C2
System Description
DCA 500 / DCA 6003ADW000121
Volume II D1
II D 2-2
3ADW000066R0903 DCS500 System description d i
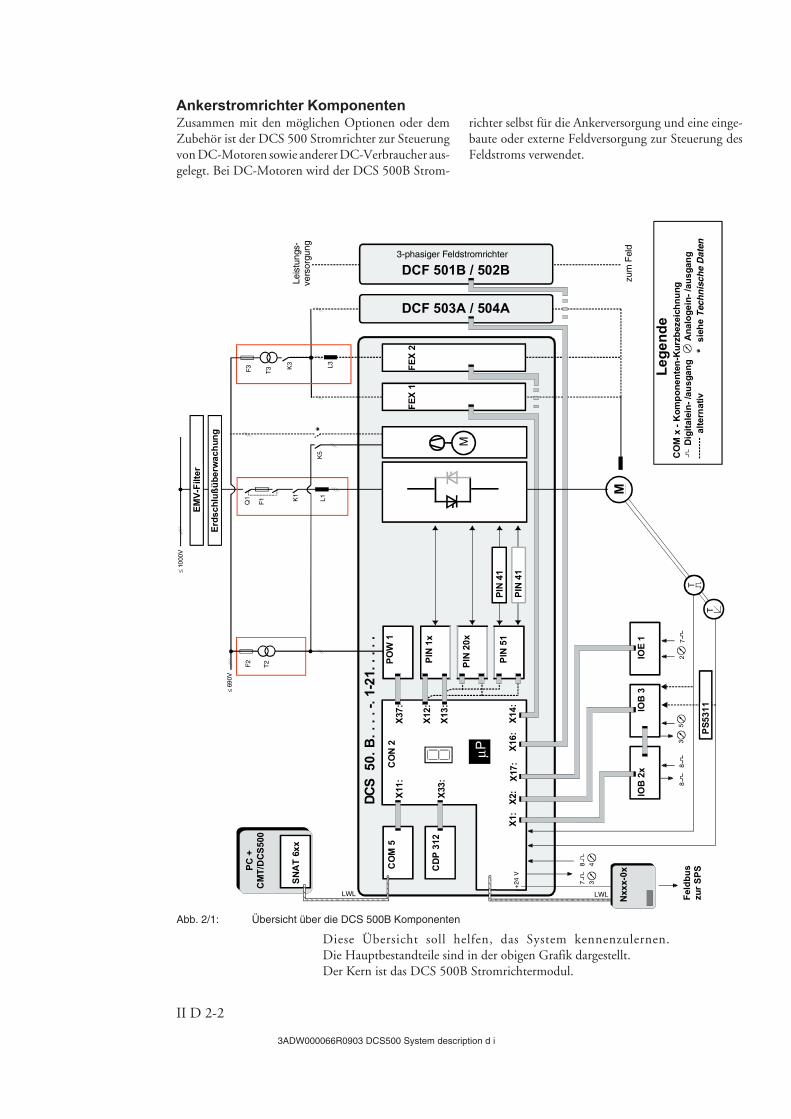
Zusammen mit den möglichen Optionen oder demZubehör ist der DCS 500 Stromrichter zur Steuerungvon DC-Motoren sowie anderer DC-Verbraucher aus-gelegt. Bei DC-Motoren wird der DCS 500B Strom-
Diese Übersicht soll helfen, das System kennenzulernen.Die Hauptbestandteile sind in der obigen Grafik dargestellt.Der Kern ist das DCS 500B Stromrichtermodul.
Abb. 2/1: Übersicht über die DCS 500B Komponenten
Ankerstromrichter Komponentenrichter selbst für die Ankerversorgung und eine einge-baute oder externe Feldversorgung zur Steuerung desFeldstroms verwendet.
L1K1
T2
Q1
F2
F3
X12:
X13:
X37:
X1:
X2:
M
T
T
83
85
72
X17:
X16:
X14:
PC +
CM
T/D
CS5
00
DCF 503A / 504A
CO
M 5
CO
N 2
POW
1
PIN
1x
PIN
51
DCF 501B / 502B
IOB
2x
IOB
3IO
E 1
PS53
11
X11:
X33:
PIN
20x
7 3
8 4
T3
F1
K5
K3
≤ 69
0V
≤ 10
00V
CD
P 31
2
SNA
T 6x
x
FEX
1FE
X 2
Nxx
x-0x
µPM
DCS
50.
B..
..-.
1-21
....
.
PIN
41
PIN
41
L3*
+24
V
CO
M x
- K
ompo
nent
en-K
urzb
ezei
chnu
ngD
igita
lein
- /au
sgan
gA
nalo
gein
- /au
sgan
gal
tern
ativ
EMV-
Filte
r
Erds
chlu
ßübe
rwac
hung
Feld
bus
zur S
PS
LWL LWL
Lege
nde
7.1
- aus
führ
liche
Bes
chre
ibun
g si
ehe
Kap
itel 7
.1si
ehe
Tec
hn
isch
e D
aten
*
zum
Fel
d
Leis
tung
s-ve
rsor
gung
3-phasiger Feldstromrichter
II D 2-3
3ADW000066R0903 DCS500 System description d i
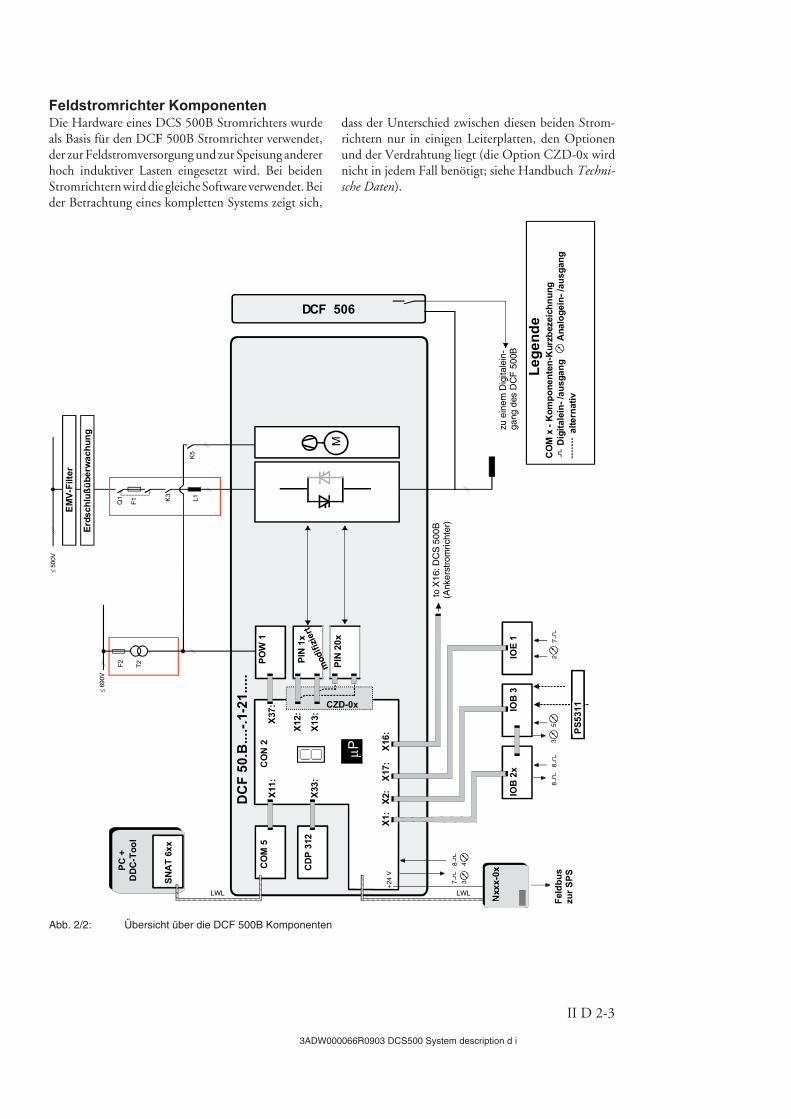
Die Hardware eines DCS 500B Stromrichters wurdeals Basis für den DCF 500B Stromrichter verwendet,der zur Feldstromversorgung und zur Speisung andererhoch induktiver Lasten eingesetzt wird. Bei beidenStromrichtern wird die gleiche Software verwendet. Beider Betrachtung eines kompletten Systems zeigt sich,
Abb. 2/2: Übersicht über die DCF 500B Komponenten
Feldstromrichter Komponentendass der Unterschied zwischen diesen beiden Strom-richtern nur in einigen Leiterplatten, den Optionenund der Verdrahtung liegt (die Option CZD-0x wirdnicht in jedem Fall benötigt; siehe Handbuch Techni-sche Daten).
X1:
X2:
X17:
X16:
CO
M 5
CO
N 2
X11:
X33:
CD
P 31
2
µP
83
85
72
IOB
2x
IOB
3IO
E 1
PS53
11
7 3
8 4
Nxx
x-0x
+24
V
L1K3
T2
Q1
F2
X37:
PC +
DD
C-T
ool
POW
1
PIN
1x
DCF 506
PIN
20x
F1
K5
≤ 69
0V
≤ 50
0V
SNA
T 6x
x
M
DC
F 50
.B...
.-.1-
21...
..
X12:
X13:
CZD-0x
CO
M x
- K
ompo
nent
en-K
urzb
ezei
chnu
ngD
igita
lein
- /au
sgan
gA
nalo
gein
- /au
sgan
gal
tern
ativ
EMV-
Filte
r
Erds
chlu
ßübe
rwac
hung
Lege
nde
7.1
- aus
führ
liche
Bes
chre
ibun
g si
ehe
Kap
itel 7
.1
LWL
mod
ifizie
rt
to X
16: D
CS
500
B
(Ank
erst
rom
richt
er)
zu e
inem
Dig
itale
in-
gang
des
DC
F 5
00B
Feld
bus
zur S
PS
LWL
II D 2-4
3ADW000066R0903 DCS500 System description d i
2.1 Umgebungsbedingungen
NetzanschlussSpannung, 3-phasig: 230 bis 1000 V gem. IEC 60038Spannungsabweichung: ±10% dauernd; ±15% kurzzeitig *Nennfrequenz: 50 Hz oder 60 HzStatische Frequenzabweichung: 50 Hz ±2 %; 60 Hz ±2 %Dynamisch: Frequenzbereich: 50 Hz ±5 Hz; 60 Hz ± 5 Hz
df/dt: 17 % / s* = 0,5 bis 30 Zyklen
Anmerkung: Der Spannungsabweichung muss bei Netzrückspeisungbesondere Aufmerksamkeit geschenkt werden.
SchutzartStromrichtermodul und Zubehör(Netzdrossel, Sicherungshalter,Feldversorgungsgerät, usw.): IP 00Schaltschrank: IP20/21/31/41
FarbanstrichStromrichtermodul: NCS 170 4 Y015RSchaltschrank: hellgrau RAL 7035
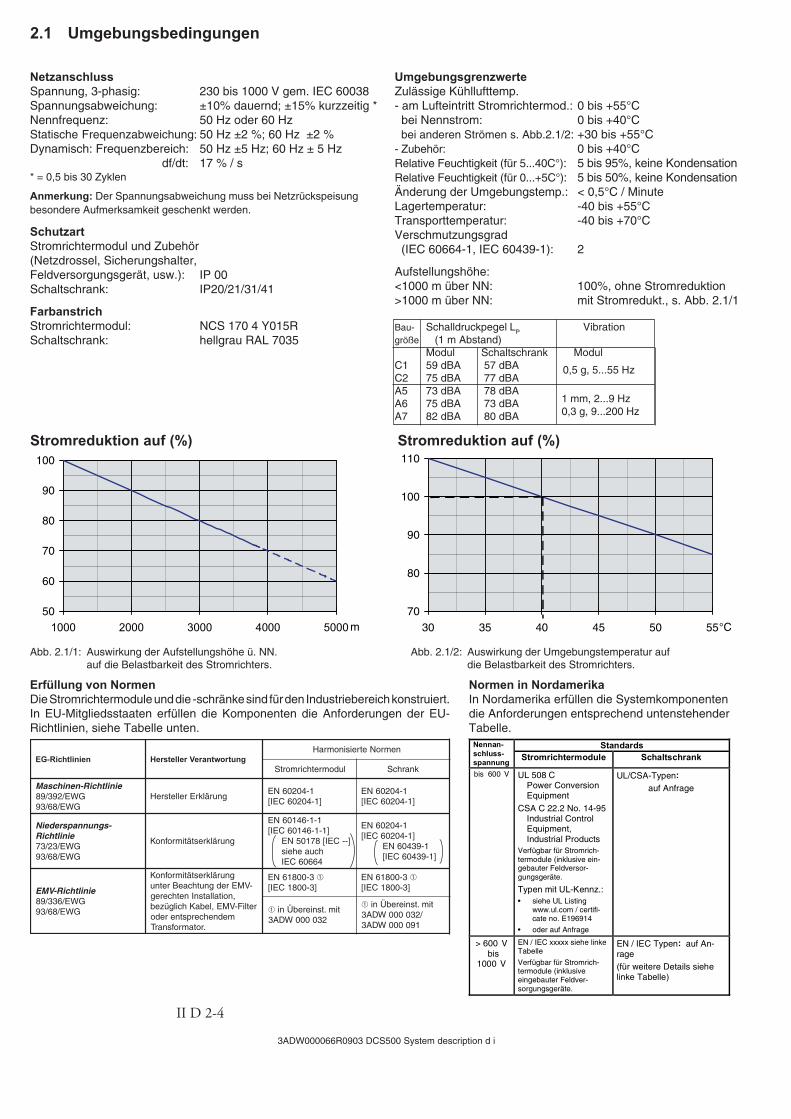
Abb. 2.1/1: Auswirkung der Aufstellungshöhe ü. NN.auf die Belastbarkeit des Stromrichters.
Stromreduktion auf (%)
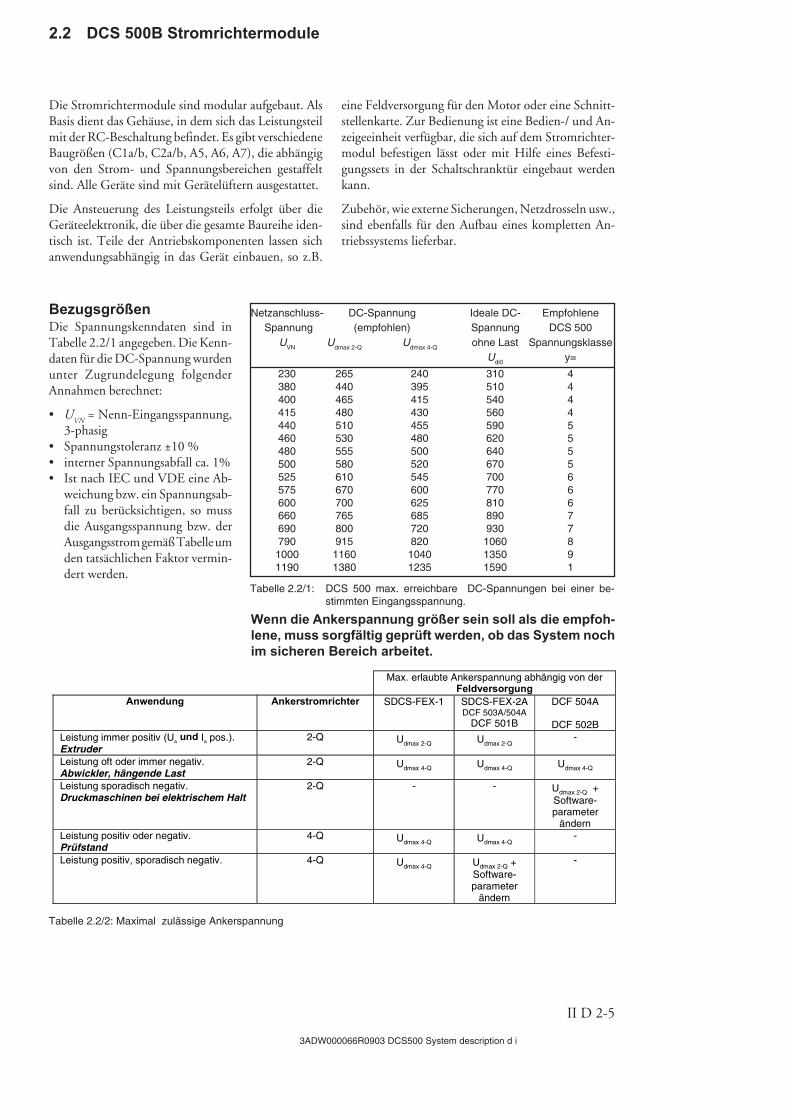
Abb. 2.1/2: Auswirkung der Umgebungstemperatur aufdie Belastbarkeit des Stromrichters.
Stromreduktion auf (%)
UmgebungsgrenzwerteZulässige Kühllufttemp.- am Lufteintritt Stromrichtermod.: 0 bis +55°C bei Nennstrom: 0 bis +40°C bei anderen Strömen s. Abb.2.1/2: +30 bis +55°C- Zubehör: 0 bis +40°CRelative Feuchtigkeit (für 5...40C°): 5 bis 95%, keine KondensationRelative Feuchtigkeit (für 0...+5C°): 5 bis 50%, keine KondensationÄnderung der Umgebungstemp.: < 0,5°C / MinuteLagertemperatur: -40 bis +55°CTransporttemperatur: -40 bis +70°CVerschmutzungsgrad (IEC 60664-1, IEC 60439-1): 2
Aufstellungshöhe:<1000 m über NN: 100%, ohne Stromreduktion>1000 m über NN: mit Stromredukt., s. Abb. 2.1/1
Bau- Schalldruckpegel LP Vibrationgröße (1 m Abstand)
Modul Schaltschrank Modul enclosed conv.C1 59 dBA 57 dBA g, 2...150 HzC2 75 dBA 77 dBA g, 2...150 HzA5 73 dBA 78 dBA g, 2...150 HzA6 75 dBA 73 dBA g, 2...150 HzA7 82 dBA 80 dBA g, 2...150 Hz
Erfüllung von NormenDie Stromrichtermodule und die -schränke sind für den Industriebereich konstruiert.In EU-Mitgliedsstaaten erfüllen die Komponenten die Anforderungen der EU-Richtlinien, siehe Tabelle unten.
Normen in NordamerikaIn Nordamerika erfüllen die Systemkomponentendie Anforderungen entsprechend untenstehenderTabelle.
70
80
90
100
110
30 35 40 45 50 55°C50
60
70
80
90
100
1000 2000 3000 4000 5000 m
neinilthciR-GE gnutrowtnareVrelletsreHnemroNetreisinomraH
ludomrethcirmortS knarhcS
einilthciR-nenihcsaMGWE/293/98
GWE/86/39gnurälkrErelletsreH
1-40206NE]1-40206CEI[
1-40206NE]1-40206CEI[
-sgnunnapsredeiNeinilthciRGWE/32/37GWE/86/39
gnurälkrestätimrofnoK
1-1-64106NE]1-1-64106CEI[
]--CEI[87105NEhcuaeheis46606CEI
1-40206NE]1-40206CEI[
1-93406NE]1-93406CEI[
einilthciR-VMEGWE/633/98
GWE/86/39
gnurälkrestätimrofnoK-VMEredgnuthcaeBretnu
,noitallatsnInethceregretliF-VME,lebaKhcilgüzeb
mednehcerpstneredo.rotamrofsnarT
3-00816NE ➀]3-0081CEI[
3-00816NE ➀]3-0081CEI[
➀ tim.tsnierebÜni230000WDA3
➀ tim.tsnierebÜni/230000WDA3
190000WDA3
0,5 g, 5...55 Hz
1 mm, 2...9 Hz0,3 g, 9...200 Hz
Standards Nennan-schluss-spannung Stromrichtermodule Schaltschrank
bis 600 V UL 508 C Power Conversion Equipment
CSA C 22.2 No. 14-95 Industrial Control Equipment, Industrial Products
Verfügbar für Stromrich-termodule (inklusive ein-gebauter Feldversor-gungsgeräte.
Typen mit UL-Kennz.: • siehe UL Listing
www.ul.com / certifi-cate no. E196914
• oder auf Anfrage
UL/CSA-Typen: auf Anfrage
> 600 V bis
1000 V
EN / IEC xxxxx siehe linke Tabelle
Verfügbar für Stromrich-termodule (inklusive eingebauter Feldver-sorgungsgeräte.
EN / IEC Typen: auf An-rage (für weitere Details siehe linke Tabelle)
II D 2-5
3ADW000066R0903 DCS500 System description d i
2.2 DCS 500B Stromrichtermodule
Die Stromrichtermodule sind modular aufgebaut. AlsBasis dient das Gehäuse, in dem sich das Leistungsteilmit der RC-Beschaltung befindet. Es gibt verschiedeneBaugrößen (C1a/b, C2a/b, A5, A6, A7), die abhängigvon den Strom- und Spannungsbereichen gestaffeltsind. Alle Geräte sind mit Gerätelüftern ausgestattet.
Die Ansteuerung des Leistungsteils erfolgt über dieGeräteelektronik, die über die gesamte Baureihe iden-tisch ist. Teile der Antriebskomponenten lassen sichanwendungsabhängig in das Gerät einbauen, so z.B.
eine Feldversorgung für den Motor oder eine Schnitt-stellenkarte. Zur Bedienung ist eine Bedien-/ und An-zeigeeinheit verfügbar, die sich auf dem Stromrichter-modul befestigen lässt oder mit Hilfe eines Befesti-gungssets in der Schaltschranktür eingebaut werdenkann.
Zubehör, wie externe Sicherungen, Netzdrosseln usw.,sind ebenfalls für den Aufbau eines kompletten An-triebssystems lieferbar.
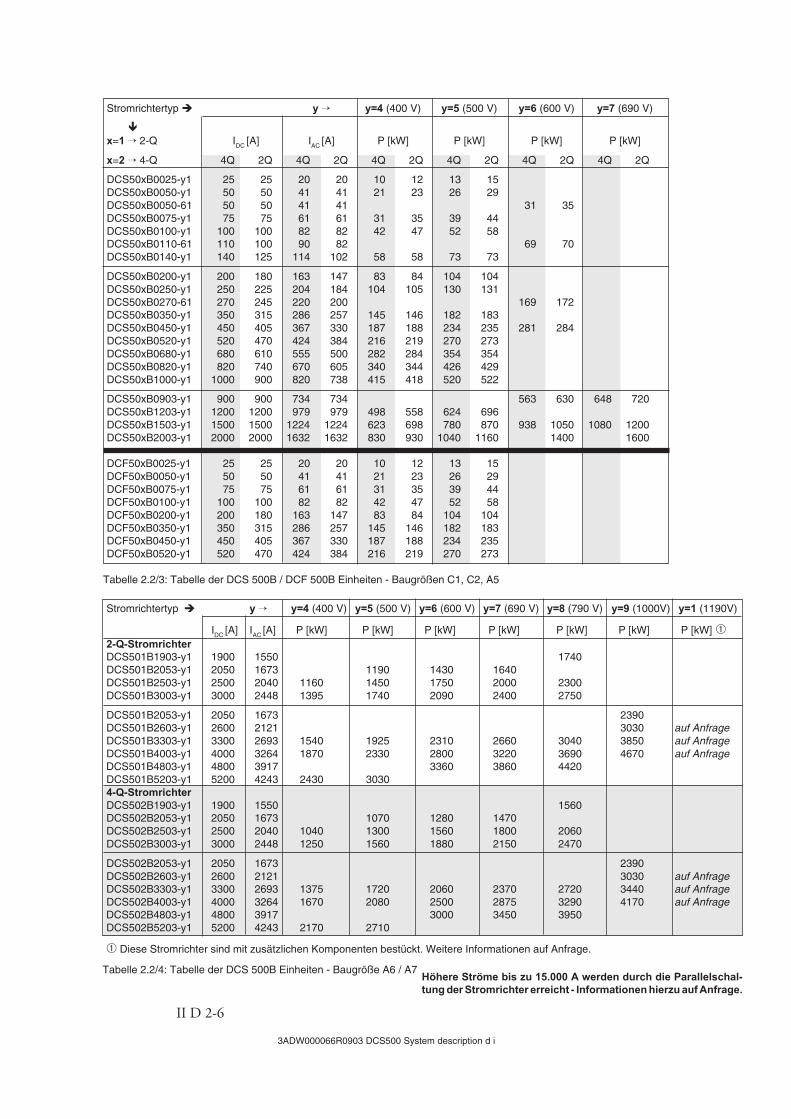
BezugsgrößenDie Spannungskenndaten sind inTabelle 2.2/1 angegeben. Die Kenn-daten für die DC-Spannung wurdenunter Zugrundelegung folgenderAnnahmen berechnet:
• UVN
= Nenn-Eingangsspannung,3-phasig
• Spannungstoleranz ±10 %• interner Spannungsabfall ca. 1%• Ist nach IEC und VDE eine Ab-
weichung bzw. ein Spannungsab-fall zu berücksichtigen, so mussdie Ausgangsspannung bzw. derAusgangsstrom gemäß Tabelle umden tatsächlichen Faktor vermin-dert werden.
Tabelle 2.2/1: DCS 500 max. erreichbare DC-Spannungen bei einer be-stimmten Eingangsspannung.
Netzanschluss- DC-Spannung Ideale DC- Empfohlene Spannung (empfohlen) Spannung DCS 500
UVN Udmax 2-Q Udmax 4-Q ohne Last SpannungsklasseUdi0 y=
230 265 240 310 4380 440 395 510 4400 465 415 540 4415 480 430 560 4440 510 455 590 5460 530 480 620 5480 555 500 640 5500 580 520 670 5525 610 545 700 6575 670 600 770 6600 700 625 810 6660 765 685 890 7690 800 720 930 7790 915 820 1060 81000 1160 1040 1350 91190 1380 1235 1590 1
Max. erlaubte Ankerspannung abhängig von der Feldversorgung
Anwendung Ankerstromrichter SDCS-FEX-1 SDCS-FEX-2A DCF 503A/504A
DCF 501B
DCF 504A
DCF 502B Leistung immer positiv (Ua und Ia pos.). Extruder
2-Q Udmax 2-Q Udmax 2-Q -
Leistung oft oder immer negativ. Abwickler, hängende Last
2-Q Udmax 4-Q Udmax 4-Q Udmax 4-Q
Leistung sporadisch negativ. Druckmaschinen bei elektrischem Halt
2-Q - - Udmax 2-Q + Software- parameter
ändern Leistung positiv oder negativ. Prüfstand
4-Q Udmax 4-Q Udmax 4-Q -
Leistung positiv, sporadisch negativ.
4-Q Udmax 4-Q Udmax 2-Q + Software- parameter
ändern
-
Wenn die Ankerspannung größer sein soll als die empfoh-lene, muss sorgfältig geprüft werden, ob das System nochim sicheren Bereich arbeitet.
Tabelle 2.2/2: Maximal zulässige Ankerspannung
II D 2-6
3ADW000066R0903 DCS500 System description d i
Stromrichtertyp y → y=4 (400 V) y=5 (500 V) y=6 (600 V) y=7 (690 V)
x=1 → 2-Q IDC [A] IAC [A] P [kW] P [kW] P [kW] P [kW]
x=2 → 4-Q 4Q 2Q 4Q 2Q 4Q 2Q 4Q 2Q 4Q 2Q 4Q 2Q
DCS50xB0025-y1 25 25 20 20 10 12 13 15DCS50xB0050-y1 50 50 41 41 21 23 26 29DCS50xB0050-61 50 50 41 41 31 35DCS50xB0075-y1 75 75 61 61 31 35 39 44DCS50xB0100-y1 100 100 82 82 42 47 52 58DCS50xB0110-61 110 100 90 82 69 70DCS50xB0140-y1 140 125 114 102 58 58 73 73
DCS50xB0200-y1 200 180 163 147 83 84 104 104DCS50xB0250-y1 250 225 204 184 104 105 130 131DCS50xB0270-61 270 245 220 200 169 172DCS50xB0350-y1 350 315 286 257 145 146 182 183DCS50xB0450-y1 450 405 367 330 187 188 234 235 281 284DCS50xB0520-y1 520 470 424 384 216 219 270 273DCS50xB0680-y1 680 610 555 500 282 284 354 354DCS50xB0820-y1 820 740 670 605 340 344 426 429DCS50xB1000-y1 1000 900 820 738 415 418 520 522
DCS50xB0903-y1 900 900 734 734 563 630 648 720DCS50xB1203-y1 1200 1200 979 979 498 558 624 696DCS50xB1503-y1 1500 1500 1224 1224 623 698 780 870 938 1050 1080 1200DCS50xB2003-y1 2000 2000 1632 1632 830 930 1040 1160 1400 1600
DCF50xB0025-y1 25 25 20 20 10 12 13 15DCF50xB0050-y1 50 50 41 41 21 23 26 29DCF50xB0075-y1 75 75 61 61 31 35 39 44DCF50xB0100-y1 100 100 82 82 42 47 52 58DCF50xB0200-y1 200 180 163 147 83 84 104 104DCF50xB0350-y1 350 315 286 257 145 146 182 183DCF50xB0450-y1 450 405 367 330 187 188 234 235DCF50xB0520-y1 520 470 424 384 216 219 270 273
Tabelle 2.2/3: Tabelle der DCS 500B / DCF 500B Einheiten - Baugrößen C1, C2, A5
Stromrichtertyp y → y=4 (400 V) y=5 (500 V) y=6 (600 V) y=7 (690 V) y=8 (790 V) y=9 (1000V) y=1 (1190V)
IDC [A] IAC [A] P [kW] P [kW] P [kW] P [kW] P [kW] P [kW] P [kW] ➀2-Q-StromrichterDCS501B1903-y1 1900 1550 1740DCS501B2053-y1 2050 1673 1190 1430 1640 1890DCS501B2503-y1 2500 2040 1160 1450 1750 2000 2300DCS501B3003-y1 3000 2448 1395 1740 2090 2400 2750
DCS501B2053-y1 2050 1673 2390DCS501B2603-y1 2600 2121 3030 auf AnfrageDCS501B3303-y1 3300 2693 1540 1925 2310 2660 3040 3850 auf AnfrageDCS501B4003-y1 4000 3264 1870 2330 2800 3220 3690 4670 auf AnfrageDCS501B4803-y1 4800 3917 3360 3860 4420DCS501B5203-y1 5200 4243 2430 30304-Q-StromrichterDCS502B1903-y1 1900 1550 1560DCS502B2053-y1 2050 1673 1070 1280 1470 1690DCS502B2503-y1 2500 2040 1040 1300 1560 1800 2060DCS502B3003-y1 3000 2448 1250 1560 1880 2150 2470
DCS502B2053-y1 2050 1673 2390DCS502B2603-y1 2600 2121 3030 auf AnfrageDCS502B3303-y1 3300 2693 1375 1720 2060 2370 2720 3440 auf AnfrageDCS502B4003-y1 4000 3264 1670 2080 2500 2875 3290 4170 auf AnfrageDCS502B4803-y1 4800 3917 3000 3450 3950DCS502B5203-y1 5200 4243 2170 2710
➀ Diese Stromrichter sind mit zusätzlichen Komponenten bestückt. Weitere Informationen auf Anfrage.
Tabelle 2.2/4: Tabelle der DCS 500B Einheiten - Baugröße A6 / A7 Höhere Ströme bis zu 15.000 A werden durch die Parallelschal-tung der Stromrichter erreicht - Informationen hierzu auf Anfrage.

II D 2-7
3ADW000066R0903 DCS500 System description d i
Stromrichtertyp ➂ Abmessungen Gewicht Abstände Bau- Verlustleistung Lüfter- Halbleiter- H x W x D oben/unten/seitlich größe bei 500V anschluss sicherungen
[mm] [kg] [mm] PV [kW]
DCS50xB0025-y1 420x273x195 7,1 150x100x5 C1a < 0,2 230 V/1-ph externDCS50xB0050-y1 420x273x195 7,2 150x100x5 C1a < 0,2 230 V/1-ph externDCS50xB0050-61 420x273x195 7,6 150x100x5 C1a - 230 V/1-ph externDCS50xB0075-y1 420x273x195 7,6 150x100x5 C1a < 0,3 230 V/1-ph externDCS50xB0100-y1 469x273x228 11,5 250x150x5 C1b < 0,5 230 V/1-ph externDCS50xB0110-61 469x273x228 11,5 250x150x5 C1b - 230 V/1-ph externDCS50xB0140-y1 469x273x228 11,5 250x150x5 C1b < 0,6 230 V/1-ph extern
DCS50xB0200-y1 505x273x361 22,3 250x150x5 C2a < 0,8 230 V/1-ph externDCS50xB0250-y1 505x273x361 22,3 250x150x5 C2a < 1,0 230 V/1-ph externDCS50xB0270-61 505x273x361 22,8 250x150x5 C2a - 230 V/1-ph externDCS50xB0350-y1 505x273x361 22,8 250x150x5 C2a < 1,3 230 V/1-ph externDCS50xB0450-y1 505x273x361 28,9 250x150x10 C2a < 1,5 230 V/1-ph externDCS50xB0520-y1 505x273x361 28,9 250x150x10 C2a < 1,8 230 V/1-ph externDCS50xB0680-y1 652x273x384 42 250x150x10 C2b < 1,6 230 V/1-ph externDCS50xB0820-y1 652x273x384 42 250x150x10 C2b < 2,0 230 V/1-ph externDCS50xB1000-y1 652x273x384 42 250x150x10 C2b < 2,5 230 V/1-ph extern
DCS50xB0903-y1 1050x510x410 110 300x100x20 A5 - 230 V/1-ph internDCS50xB1203-y1 1050x510x410 110 300x100x20 A5 < 5,2 230 V/1-ph internDCS50xB1503-y1 1050x510x410 110 300x100x20 A5 < 5,5 230 V/1-ph internDCS50xB2003-y1 1050x510x410 110 300x100x20 A5 < 6,6 230 V/1-ph intern
DCS50xB1903-81 1750x460x410 180 ➂ x0x50 A6 - 400...500 V/3-phDCS50xB2053-y1 1750x460x410 180 ➂ x0x50 A6 < 7,9 bei y = 4, 5, 8 internDCS50xB2503-y1 1750x460x410 180 ➂ x0x50 A6 < 9,3 500...690 V/3-phDCS50xB3003-y1 1750x460x410 180 ➂ x0x50 A6 < 11,9 bei y = 6, 7
DCS50xB2053-y1L➀ 1750x770x570 315 A7 - 400/690 V/3-phDCS50xB2603-y1L➀ 1750x770x570 315 A7 - 400/690 V/3-ph internDCS50xB3203-y1L➀ 1750x770x570 315 A7 - 400/690 V/3-phDCS50xB3303-y1L➀ 1750x770x570 315 A7 < 15 400/690 V/3-phDCS50xB4003-y1L➀ 1750x770x570 315 A7 < 16 400/690 V/3-phDCS50xB4803-y1L➀ 1750x770x570 315 A7 - 400/690 V/3-phDCS50xB5203-y1L➀ 1750x770x570 315 A7 < 20 400/690 V/3-ph
➀ Sammelschienenanschluss auf der rechten Seite ist optionalBeispiel für die Typenbezeichnung: Anschluss links DCS50xB5203-y1L; Anschluss rechts DCS50xB5203-y1R
➁ x=1 → 2-Q; x=2 → 4-Q; y=4...9/1 → 400...1000 V/1190 V Versorgungsspannung
➂ Die Abluft muss den Schaltschrank über den Abluftkanal verlassen
auch als Stromrichter zur Feldversorgung DCF50xB (für 500 V s. auch Tabelle 2.2/3) lieferbar. Daten sind mit denen des Ankerstromrichters DCS50xB identisch
Tabelle 2.2/5: Tabelle der DCS 500B Einheiten
im Schrank zuinstallieren
Baugröße C2Baugröße C1 Baugröße A5 Baugröße A6 Baugröße A7 - Sammelschie-nenanschluss links

II D 2-8
3ADW000066R0903 DCS500 System description d i
2.3 DCS 500 ÜberlastbarkeitUm die Komponenten des Antriebssystems möglichst effizient an das Bela-stungsprofil der Arbeitsmaschine anzupassen, können die AnkerstromrichterDCS 500B mit Hilfe des Lastzyklus dimensioniert werden. Lastzyklen von Ar-beitsmaschinen werden z.B. in den Vorschriften IEC 146 oder IEEE definiert.Für die Stromrichtermodule sind die Ströme für die Belastungsarten DC I bis DC IV (siehe Grafik auf der nächstenSeite) in der folgenden Tabelle aufgeführt.
Typ IDC I IDC II IDC III IDC IV
Dauer- 100 % 150 % 100 % 150 % 100 % 200 %strom 15 min 60 s 15 min 120 s 15 min 10 s
400 V / 500 V [A] [A] [A] [A]DCS 50xB0025-41/51 25 24 36 23 35 24 48DCS 50xB0050-41/51 50 44 66 42 63 40 80DCS 50xB0075-41/51 75 60 90 56 84 56 112DCS 50xB0100-41/51 100 71 107 69 104 68 136DCS 501B0140-41/51 125 94 141 91 137 90 180DCS 502B0140-41/51 140 106 159 101 152 101 202DCS 501B0200-41/51 180 133 200 132 198 110 220DCS 502B0200-41/51 200 149 224 146 219 124 248DCS 501B0250-41/51 225 158 237 155 233 130 260DCS 502B0250-41/51 250 177 266 173 260 147 294DCS 501B0350-41/51 315 240 360 233 350 210 420DCS 502B0350-41/51 350 267 401 258 387 233 466DCS 501B0450-41/51 405 317 476 306 459 283 566DCS 502B0450-41/51 450 352 528 340 510 315 630DCS 501B0520-41/51 470 359 539 347 521 321 642DCS 502B0520-41/51 520 398 597 385 578 356 712DCS 501B0680-41/51 610 490 735 482 732 454 908DCS 502B0680-41/51 680 544 816 538 807 492 984DCS 501B0820-41/51 740 596 894 578 867 538 1076DCS 502B0820-41/51 820 664 996 648 972 598 1196DCS 501B1000-41/51 900 700 1050 670 1005 620 1240DCS 502B1000-41/51 1000 766 1149 736 1104 675 1350DCS 50xB1203-41/51 1200 888 1332 872 1308 764 1528DCS 50xB1503-41/51 1500 1200 1800 1156 1734 1104 2208DCS 50xB2003-41/51 2000 1479 2219 1421 2132 1361 2722DCS 50xB2053-51 2050 1550 2325 1480 2220 1450 2900DCS 501B2503-41/51 2500 1980 2970 1880 2820 1920 3840DCS 502B2503-41/51 2500 2000 3000 1930 2895 1790 3580DCS 501B3003-41/51 3000 2350 3525 2220 3330 2280 4560DCS 502B3003-41/51 3000 2330 3495 2250 3375 2080 4160DCS 50xB3303-41/51 3300 2416 3624 2300 3450 2277 4554DCS 50xB4003-41/51 4000 2977 4466 2855 4283 2795 5590DCS 50xB5203-41/51 5200 3800 5700 3669 5504 3733 7466600 V / 690 VDCS 50xB0050-61 50 44 66 43 65 40 80DCS 501B0110-61 100 79 119 76 114 75 150DCS 502B0110-61 110 87 130 83 125 82 165DCS 501B0270-61 245 193 290 187 281 169 338DCS 502B0270-61 270 213 320 207 311 187 374DCS 501B0450-61 405 316 474 306 459 282 564DCS 502B0450-61 450 352 528 340 510 313 626DCS 50xB0903-61/71 900 684 1026 670 1005 594 1188DCS 50xB1503-61/71 1500 1200 1800 1104 1656 1104 2208DCS 501B2003-61/71 2000 1479 2219 1421 2132 1361 2722DCS 50xB2053-61/71 2050 1520 2280 1450 2175 1430 2860DCS 501B2503-61/71 2500 1940 2910 1840 2760 1880 3760DCS 502B2503-61/71 2500 1940 2910 1870 2805 1740 3480DCS 501B3003-61/71 3000 2530 3795 2410 3615 2430 4860DCS 502B3003-61/71 3000 2270 3405 2190 3285 2030 4060DCS 50xB3303-61/71 3300 2416 3624 2300 3450 2277 4554DCS 50xB4003-61/71 4000 3036 4554 2900 4350 2950 5900DCV 50xB4803-61/71 4800 3734 5601 3608 5412 3700 7400790 VDCS 50xB1903-81 1900 1500 2250 1430 2145 1400 2800DCS 501B2503-81 2500 1920 2880 1820 2730 1860 3720DCS 502B2503-81 2500 1910 2865 1850 2775 1710 3420DCS 501B3003-81 3000 2500 3750 2400 3600 2400 4800DCS 502B3003-81 3000 2250 3375 2160 3240 2000 4000DCS 50xB3303-81 3300 2655 3983 2540 3810 2485 4970DCS 50xB4003-81 4000 3036 4554 2889 4334 2933 5866DCS 50xB4803-81 4800 3734 5601 3608 5412 3673 73461000 VDCS 50xB2053-91 2050 1577 2366 1500 2250 1471 2942DCS 50xB2603-91 2600 2000 3000 1900 2850 1922 3844DCS 50xB3303-91 3300 2551 3827 2428 3642 2458 4916DCS 50xB4003-91 4000 2975 4463 2878 4317 2918 58361190 V Daten auf Anfrage
x=1 → 2-Q; x=2 → 4-Q
Tabelle 2.3/1: Die Strömeder Stromrichtermodulebei den jeweiligen Last-zyklen. Die Kenndaten be-ziehen sich auf eineUmgebungstemperaturvon max. 40°C und eineAufstellungshöhe vonmax. 1000 m.
II D 2-9
3ADW000066R0903 DCS500 System description d i
Betriebs- Stromrichter- Typische Anwendungen Lastzyklus zyklus last
DC I IDC I dauernd(IdN) Pumpen, Lüfter
DC II IDC II für 15 min und Extruder, Bandförderer1,5 * IDC II für 60 s
DC III * IDC III für 15 min und Extruder, Bandförderer1,5 * IDC III für 120 s
DC IV * IDC IV für 15 min und2 * IDC IV für 10 s
100%
150% 100%
150% 100%
200% 100%
15 min
15 min
15 min
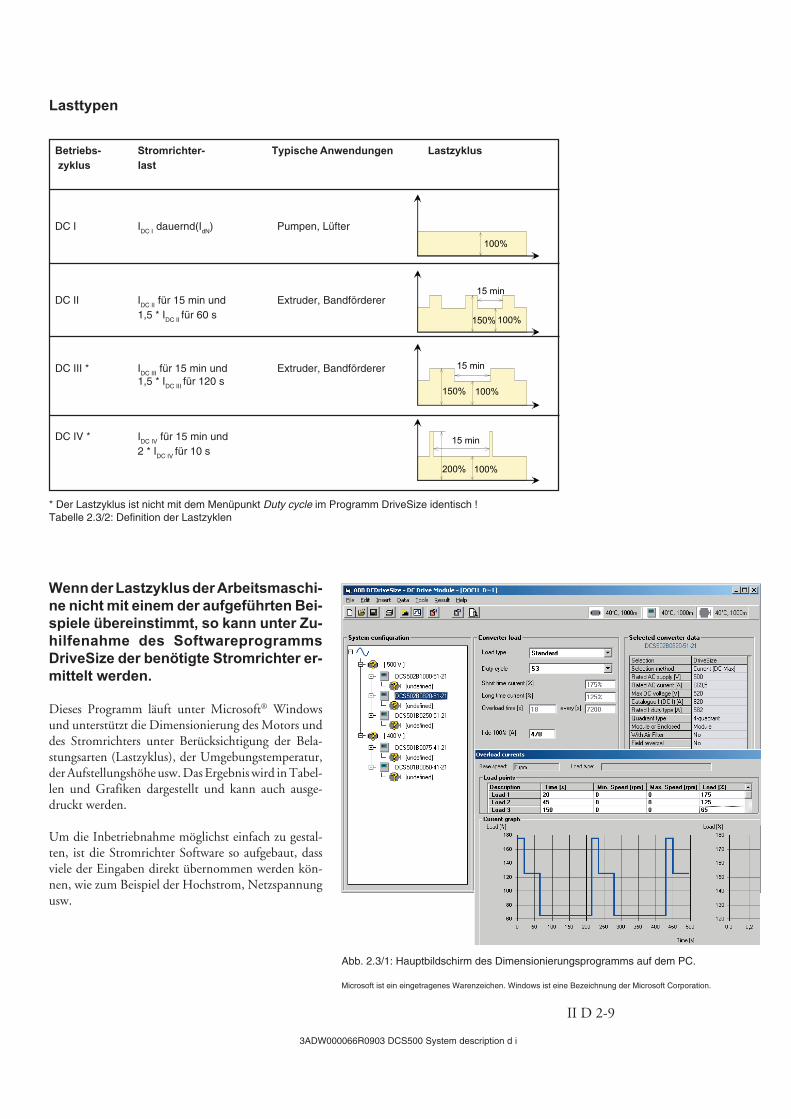
Wenn der Lastzyklus der Arbeitsmaschi-ne nicht mit einem der aufgeführten Bei-spiele übereinstimmt, so kann unter Zu-hilfenahme des SoftwareprogrammsDriveSize der benötigte Stromrichter er-mittelt werden.
Dieses Programm läuft unter Microsoft® Windowsund unterstützt die Dimensionierung des Motors unddes Stromrichters unter Berücksichtigung der Bela-stungsarten (Lastzyklus), der Umgebungstemperatur,der Aufstellungshöhe usw. Das Ergebnis wird in Tabel-len und Grafiken dargestellt und kann auch ausge-druckt werden.
Um die Inbetriebnahme möglichst einfach zu gestal-ten, ist die Stromrichter Software so aufgebaut, dassviele der Eingaben direkt übernommen werden kön-nen, wie zum Beispiel der Hochstrom, Netzspannungusw.
Abb. 2.3/1: Hauptbildschirm des Dimensionierungsprogramms auf dem PC.
Microsoft ist ein eingetragenes Warenzeichen. Windows ist eine Bezeichnung der Microsoft Corporation.
Lasttypen
* Der Lastzyklus ist nicht mit dem Menüpunkt Duty cycle im Programm DriveSize identisch !Tabelle 2.3/2: Definition der Lastzyklen

II D 2-10
3ADW000066R0903 DCS500 System description d i
2.4 Feldversorgung
Allgemeine Daten
SDCS-FEX-1• Diodenbrücke• 6 A Nennstrom• Interne Minimalfeldstrom-Überwachung, die nicht
eingestellt werden muss.• Aufbau und Komponenten sind für eine Isolations-
spannung von 600 V AC ausgelegt.• Ausgangsspannung U
A:
U U TOLA V= +⎛
⎝⎜⎞⎠⎟
* * ,100%100%
0 9
TOL = Netzspannungstoleranz in %U
V = Netzspannung
• Empfehlung:Feldspannung ~ 0,9 * U
V
SDCS-FEX-2A• Halbgesteuerte Thyristor-/Diodenbrücke (1-Q)• Mikroprozessorsteuerung mit Versorgung der Elek-
tronik durch den Ankerstromrichter.• Aufbau und Komponenten sind für eine Isolations-
spannung von 600 V AC ausgelegt.• Bei entsprechender Spannungsreserve ist eine schnelle
Erregung möglich; Entregung erfolgt über eineFeldzeitkonstante.
• Ausgangsspannung UA:
U U TOLA V= +⎛
⎝⎜⎞⎠⎟
* * ,100%100%
0 9
TOL = Netzspannungstoleranz in %U
V = Netzspannung
• Empfehlung:Feldspannung 0,6 bis 0,8 * U
V
Alle Feldstromrichter (außer SDCS-FEX-1) werdenvom Ankerstromrichter über eine serielle Schnittstellemit einer Geschwindigkeit von 62,5 kBaud gesteuert.Diese Schnittstelle dient zur Parametrierung, Steue-rung und Diagnose des Feldstromrichters und ermög-licht so eine genaue Steuerung. Außerdem ermöglichtsie die Ansteuerung eines internen (SDCS-FEX-2A)und eines externen (DCF 501B/2B/3A/4A) Feldver-sorgungsgerätes oder zweier externer Feldversorgungs-geräte (2 x DCF 501B/2B/3A/4A). Die dafür notwen-dige Softwarefunktion ist in jedem DC-Stromrichtervorhanden.
Feldstromrichtertypen
• Ströme von 6 bis 520 A• Minimalfeldstrom-Überwachung• Integrierter, externer Feldstromrichter oder völlig
separater Schaltschrank• 2-Phasen- oder 3-Phasen-Ausführung• Volldigitale Steuerung (außer SDCS-FEX-1)
Zur Anpassung der AC-Eingangsspannung an die Feld-spannung und zur Reduzierung der Spannungswellig-keit im Feldkreis wird der Einbau eines Spartransfor-mators in den Versorgungskreis des Feldstromrichtersempfohlen.
SDCS-FEX-1
SDCS-FEX-2A
II D 2-11
3ADW000066R0903 DCS500 System description d i
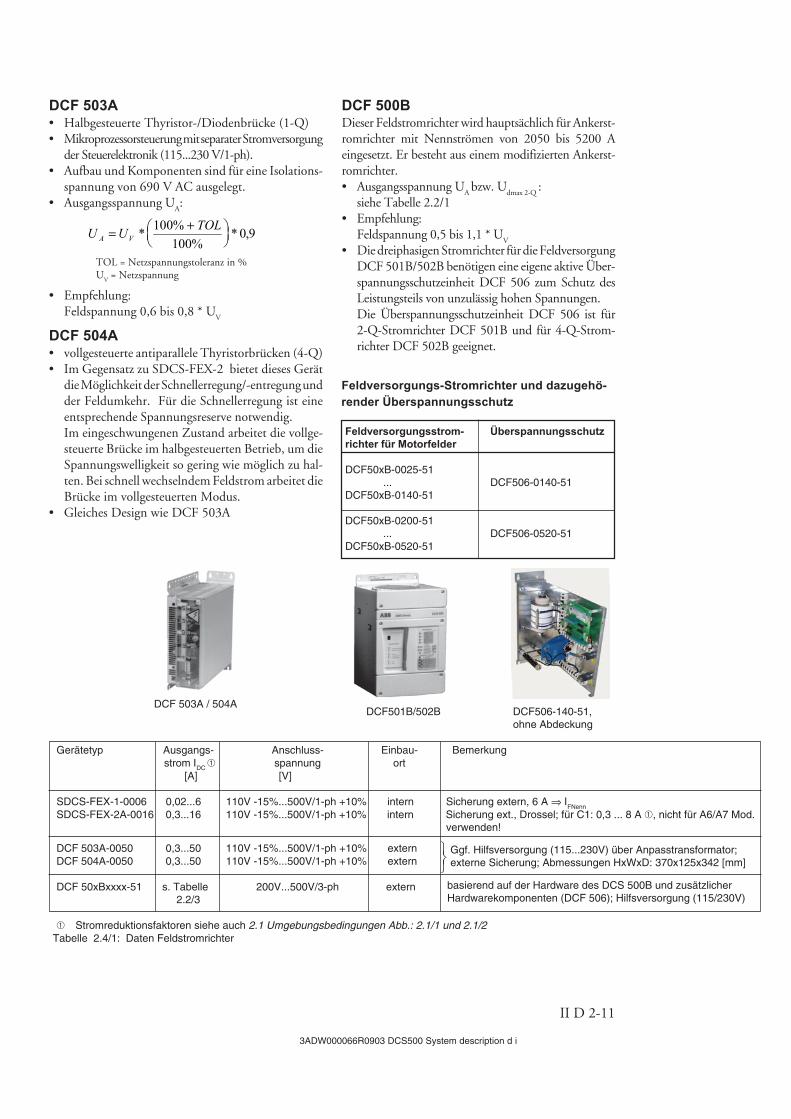
DCF 503A• Halbgesteuerte Thyristor-/Diodenbrücke (1-Q)• Mikroprozessorsteuerung mit separater Stromversorgung
der Steuerelektronik (115...230 V/1-ph).• Aufbau und Komponenten sind für eine Isolations-
spannung von 690 V AC ausgelegt.• Ausgangsspannung U
A:
U U TOLA V= +⎛
⎝⎜⎞⎠⎟
* * ,100%100%
0 9
TOL = Netzspannungstoleranz in %U
V = Netzspannung
• Empfehlung:Feldspannung 0,6 bis 0,8 * U
V
DCF 504A• vollgesteuerte antiparallele Thyristorbrücken (4-Q)• Im Gegensatz zu SDCS-FEX-2 bietet dieses Gerät
die Möglichkeit der Schnellerregung/-entregung undder Feldumkehr. Für die Schnellerregung ist eineentsprechende Spannungsreserve notwendig.Im eingeschwungenen Zustand arbeitet die vollge-steuerte Brücke im halbgesteuerten Betrieb, um dieSpannungswelligkeit so gering wie möglich zu hal-ten. Bei schnell wechselndem Feldstrom arbeitet dieBrücke im vollgesteuerten Modus.
• Gleiches Design wie DCF 503A
DCF 500BDieser Feldstromrichter wird hauptsächlich für Ankerst-romrichter mit Nennströmen von 2050 bis 5200 Aeingesetzt. Er besteht aus einem modifizierten Ankerst-romrichter.• Ausgangsspannung U
A bzw. U
dmax 2-Q :
siehe Tabelle 2.2/1• Empfehlung:
Feldspannung 0,5 bis 1,1 * UV
• Die dreiphasigen Stromrichter für die FeldversorgungDCF 501B/502B benötigen eine eigene aktive Über-spannungsschutzeinheit DCF 506 zum Schutz desLeistungsteils von unzulässig hohen Spannungen.Die Überspannungsschutzeinheit DCF 506 ist für2-Q-Stromrichter DCF 501B und für 4-Q-Strom-richter DCF 502B geeignet.
Gerätetyp Ausgangs- Anschluss- Einbau- Bemerkung strom IDC ➀ spannung ort
[A] [V]
SDCS-FEX-1-0006 0,02...6 110V -15%...500V/1-ph +10% intern Sicherung extern, 6 A ⇒ IFNenn
SDCS-FEX-2A-0016 0,3...16 110V -15%...500V/1-ph +10% intern Sicherung ext., Drossel; für C1: 0,3 ... 8 A ➀, nicht für A6/A7 Mod. verwenden!
DCF 503A-0050 0,3...50 110V -15%...500V/1-ph +10% externDCF 504A-0050 0,3...50 110V -15%...500V/1-ph +10% extern
DCF 50xBxxxx-51 s. Tabelle 200V...500V/3-ph extern2.2/3
➀ Stromreduktionsfaktoren siehe auch 2.1 Umgebungsbedingungen Abb.: 2.1/1 und 2.1/2Tabelle 2.4/1: Daten Feldstromrichter
⎫⎬⎭
Ggf. Hilfsversorgung (115...230V) über Anpasstransformator;externe Sicherung; Abmessungen HxWxD: 370x125x342 [mm]
basierend auf der Hardware des DCS 500B und zusätzlicherHardwarekomponenten (DCF 506); Hilfsversorgung (115/230V)
DCF506-140-51,ohne Abdeckung
DCF501B/502B
Feldversorgungs-Stromrichter und dazugehö-render Überspannungsschutz
Feldversorgungsstrom- Überspannungsschutzrichter für Motorfelder
DCF50xB-0025-51 ... DCF506-0140-51DCF50xB-0140-51
DCF50xB-0200-51 ... DCF506-0520-51DCF50xB-0520-51
DCF 503A / 504A
II D 2-12
3ADW000066R0903 DCS500 System description d i
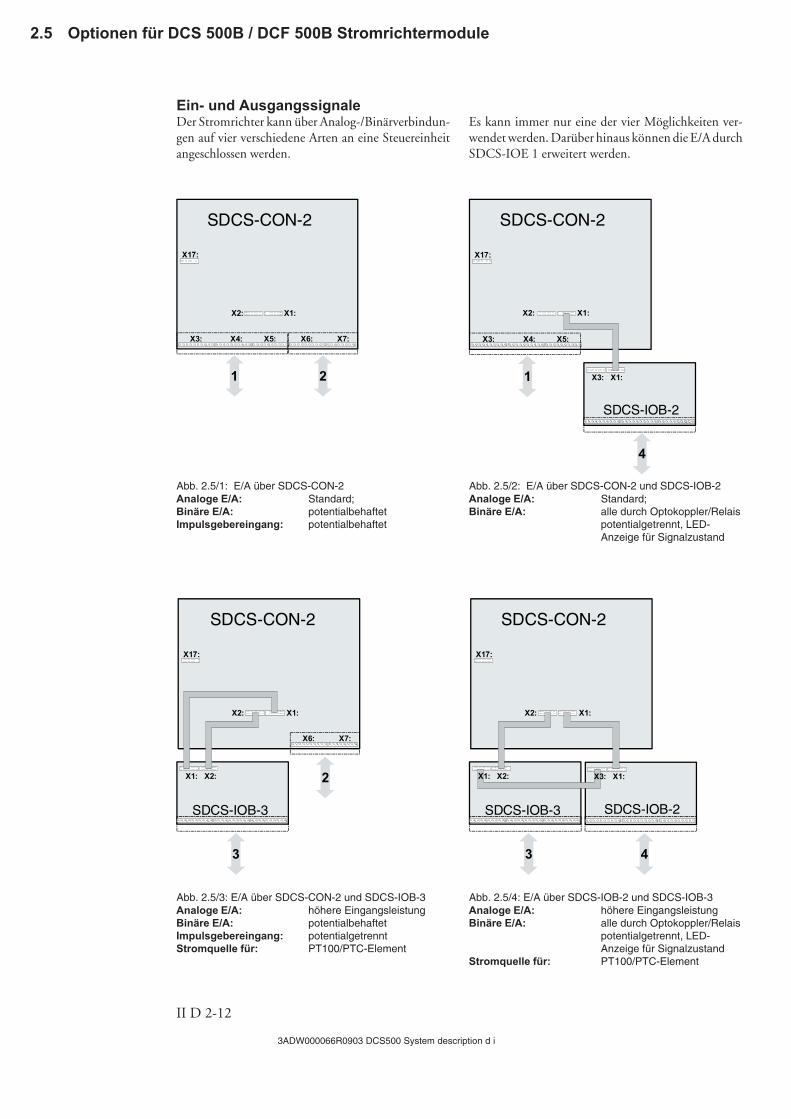
Ein- und AusgangssignaleEs kann immer nur eine der vier Möglichkeiten ver-wendet werden. Darüber hinaus können die E/A durchSDCS-IOE 1 erweitert werden.
Abb. 2.5/1: E/A über SDCS-CON-2Analoge E/A: Standard;Binäre E/A: potentialbehaftetImpulsgebereingang: potentialbehaftet
Abb. 2.5/2: E/A über SDCS-CON-2 und SDCS-IOB-2Analoge E/A: Standard;Binäre E/A: alle durch Optokoppler/Relais
potentialgetrennt, LED-Anzeige für Signalzustand
Abb. 2.5/3: E/A über SDCS-CON-2 und SDCS-IOB-3Analoge E/A: höhere EingangsleistungBinäre E/A: potentialbehaftetImpulsgebereingang: potentialgetrenntStromquelle für: PT100/PTC-Element
Abb. 2.5/4: E/A über SDCS-IOB-2 und SDCS-IOB-3Analoge E/A: höhere EingangsleistungBinäre E/A: alle durch Optokoppler/Relais
potentialgetrennt, LED-Anzeige für Signalzustand
Stromquelle für: PT100/PTC-Element
Der Stromrichter kann über Analog-/Binärverbindun-gen auf vier verschiedene Arten an eine Steuereinheitangeschlossen werden.
X3: X4: X5: X6: X7:
X2: X1:
X17:
SDCS-CON-2
1 2
X3: X4: X5:
X2: X1:
X17:
SDCS-CON-2
X3: X1:
SDCS-IOB-2
1
4
X1: X2:
SDCS-IOB-3
X6: X7:
X2:
X17:
X1:
3
2
SDCS-CON-2
X2:
SDCS-IOB-3
X2:
X17:
SDCS-CON-2
X1:
SDCS-IOB-2
X1:
X1: X3:
3 4
2.5 Optionen für DCS 500B / DCF 500B Stromrichtermodule
II D 2-13
3ADW000066R0903 DCS500 System description d i
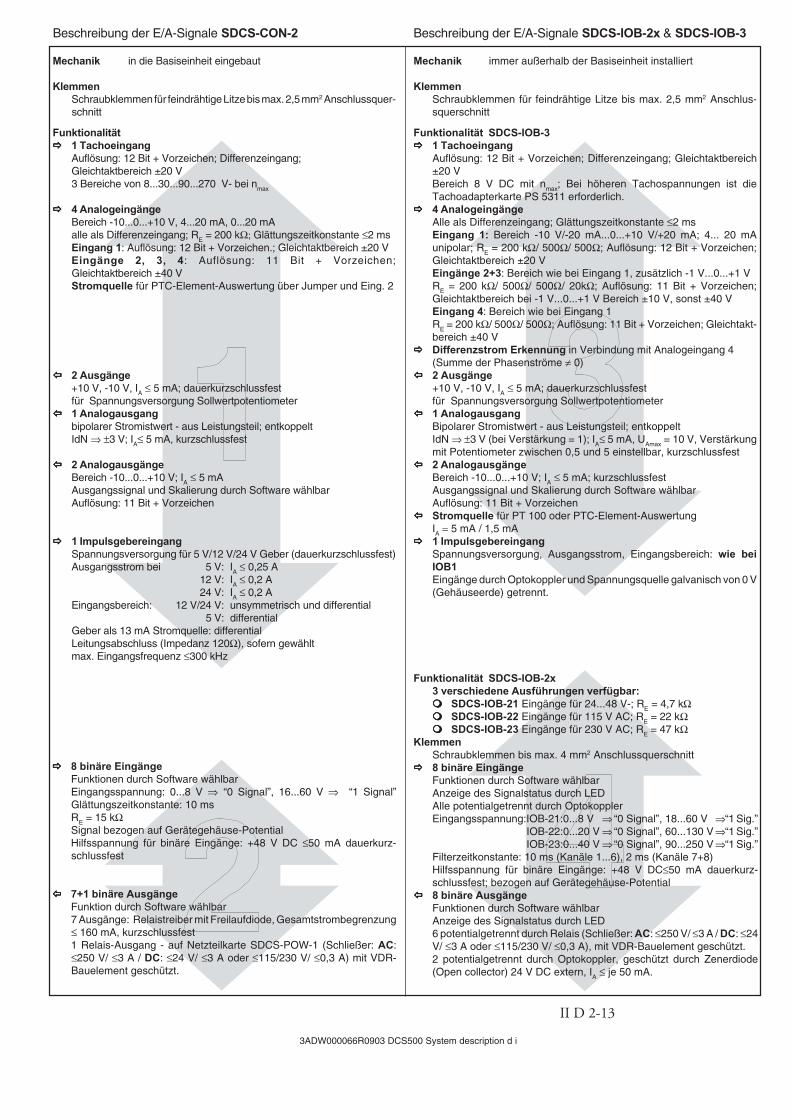
Beschreibung der E/A-Signale SDCS-CON-2
Mechanik in die Basiseinheit eingebaut
KlemmenSchraubklemmen für feindrähtige Litze bis max. 2,5 mm2 Anschlussquer-schnitt
Funktionalität1 TachoeingangAuflösung: 12 Bit + Vorzeichen; Differenzeingang;Gleichtaktbereich ±20 V3 Bereiche von 8...30...90...270 V- bei nmax
4 AnalogeingängeBereich -10...0...+10 V, 4...20 mA, 0...20 mAalle als Differenzeingang; RE = 200 kΩ; Glättungszeitkonstante ≤2 msEingang 1: Auflösung: 12 Bit + Vorzeichen.; Gleichtaktbereich ±20 VEingänge 2, 3, 4: Auflösung: 11 Bit + Vorzeichen;Gleichtaktbereich ±40 VStromquelle für PTC-Element-Auswertung über Jumper und Eing. 2
2 Ausgänge+10 V, -10 V, IA ≤ 5 mA; dauerkurzschlussfestfür Spannungsversorgung Sollwertpotentiometer1 Analogausgangbipolarer Stromistwert - aus Leistungsteil; entkoppeltIdN ⇒ ±3 V; IA≤ 5 mA, kurzschlussfest
2 AnalogausgängeBereich -10...0...+10 V; IA ≤ 5 mAAusgangssignal und Skalierung durch Software wählbarAuflösung: 11 Bit + Vorzeichen
1 ImpulsgebereingangSpannungsversorgung für 5 V/12 V/24 V Geber (dauerkurzschlussfest)Ausgangsstrom bei 5 V: IA ≤ 0,25 A
12 V: IA ≤ 0,2 A24 V: IA ≤ 0,2 A
Eingangsbereich: 12 V/24 V: unsymmetrisch und differential5 V: differential
Geber als 13 mA Stromquelle: differentialLeitungsabschluss (Impedanz 120Ω), sofern gewähltmax. Eingangsfrequenz ≤300 kHz
Beschreibung der E/A-Signale SDCS-IOB-2x & SDCS-IOB-3
Mechanik immer außerhalb der Basiseinheit installiert
KlemmenSchraubklemmen für feindrähtige Litze bis max. 2,5 mm2 Anschlus-squerschnitt
Funktionalität SDCS-IOB-31 TachoeingangAuflösung: 12 Bit + Vorzeichen; Differenzeingang; Gleichtaktbereich±20 VBereich 8 V DC mit nmax; Bei höheren Tachospannungen ist dieTachoadapterkarte PS 5311 erforderlich.4 AnalogeingängeAlle als Differenzeingang; Glättungszeitkonstante ≤2 msEingang 1: Bereich -10 V/-20 mA...0...+10 V/+20 mA; 4... 20 mAunipolar; RE = 200 kΩ/ 500Ω/ 500Ω; Auflösung: 12 Bit + Vorzeichen;Gleichtaktbereich ±20 VEingänge 2+3: Bereich wie bei Eingang 1, zusätzlich -1 V...0...+1 VRE = 200 kΩ/ 500Ω/ 500Ω/ 20kΩ; Auflösung: 11 Bit + Vorzeichen;Gleichtaktbereich bei -1 V...0...+1 V Bereich ±10 V, sonst ±40 VEingang 4: Bereich wie bei Eingang 1RE = 200 kΩ/ 500Ω/ 500Ω; Auflösung: 11 Bit + Vorzeichen; Gleichtakt-bereich ±40 VDifferenzstrom Erkennung in Verbindung mit Analogeingang 4(Summe der Phasenströme ≠ 0)2 Ausgänge+10 V, -10 V, IA ≤ 5 mA; dauerkurzschlussfestfür Spannungsversorgung Sollwertpotentiometer1 AnalogausgangBipolarer Stromistwert - aus Leistungsteil; entkoppeltIdN ⇒ ±3 V (bei Verstärkung = 1); IA≤ 5 mA, UAmax = 10 V, Verstärkungmit Potentiometer zwischen 0,5 und 5 einstellbar, kurzschlussfest2 AnalogausgängeBereich -10...0...+10 V; IA ≤ 5 mA; kurzschlussfestAusgangssignal und Skalierung durch Software wählbarAuflösung: 11 Bit + VorzeichenStromquelle für PT 100 oder PTC-Element-AuswertungIA = 5 mA / 1,5 mA1 ImpulsgebereingangSpannungsversorgung, Ausgangsstrom, Eingangsbereich: wie beiIOB1Eingänge durch Optokoppler und Spannungsquelle galvanisch von 0 V(Gehäuseerde) getrennt.
Funktionalität SDCS-IOB-2x3 verschiedene Ausführungen verfügbar:
SDCS-IOB-21 Eingänge für 24...48 V-; RE = 4,7 kΩSDCS-IOB-22 Eingänge für 115 V AC; RE = 22 kΩSDCS-IOB-23 Eingänge für 230 V AC; RE = 47 kΩ
KlemmenSchraubklemmen bis max. 4 mm2 Anschlussquerschnitt8 binäre EingängeFunktionen durch Software wählbarAnzeige des Signalstatus durch LEDAlle potentialgetrennt durch OptokopplerEingangsspannung:IOB-21:0...8 V ⇒ “0 Signal”, 18...60 V ⇒ “1 Sig.”
IOB-22:0...20 V ⇒ “0 Signal”, 60...130 V ⇒ “1 Sig.”IOB-23:0...40 V ⇒ “0 Signal”, 90...250 V ⇒ “1 Sig.”
Filterzeitkonstante: 10 ms (Kanäle 1...6), 2 ms (Kanäle 7+8)Hilfsspannung für binäre Eingänge: +48 V DC≤50 mA dauerkurz-schlussfest; bezogen auf Gerätegehäuse-Potential8 binäre AusgängeFunktionen durch Software wählbarAnzeige des Signalstatus durch LED6 potentialgetrennt durch Relais (Schließer: AC: ≤250 V/ ≤3 A / DC: ≤24V/ ≤3 A oder ≤115/230 V/ ≤0,3 A), mit VDR-Bauelement geschützt.2 potentialgetrennt durch Optokoppler, geschützt durch Zenerdiode(Open collector) 24 V DC extern, IA ≤ je 50 mA.
8 binäre EingängeFunktionen durch Software wählbarEingangsspannung: 0...8 V ⇒ “0 Signal”, 16...60 V ⇒ “1 Signal”Glättungszeitkonstante: 10 msRE = 15 kΩSignal bezogen auf Gerätegehäuse-PotentialHilfsspannung für binäre Eingänge: +48 V DC ≤50 mA dauerkurz-schlussfest
7+1 binäre AusgängeFunktion durch Software wählbar7 Ausgänge: Relaistreiber mit Freilaufdiode, Gesamtstrombegrenzung≤ 160 mA, kurzschlussfest1 Relais-Ausgang - auf Netzteilkarte SDCS-POW-1 (Schließer: AC:≤250 V/ ≤3 A / DC: ≤24 V/ ≤3 A oder ≤115/230 V/ ≤0,3 A) mit VDR-Bauelement geschützt.
II D 2-14
3ADW000066R0903 DCS500 System description d i
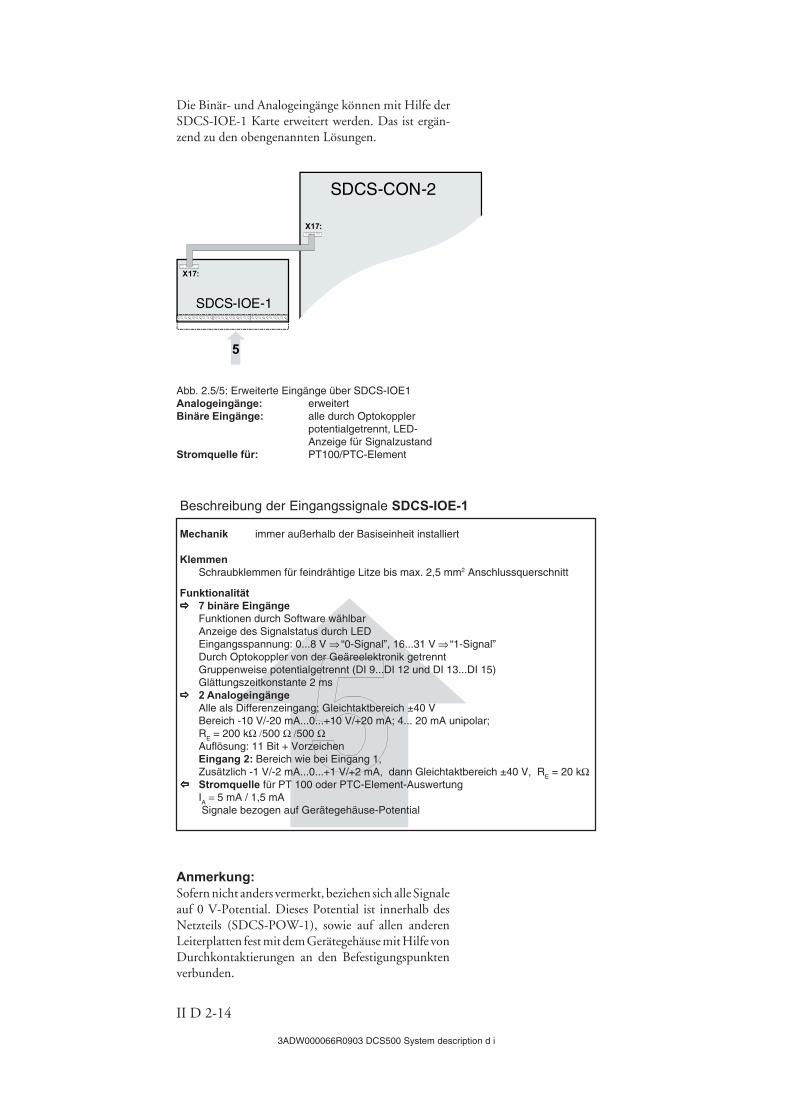
Anmerkung:Sofern nicht anders vermerkt, beziehen sich alle Signaleauf 0 V-Potential. Dieses Potential ist innerhalb desNetzteils (SDCS-POW-1), sowie auf allen anderenLeiterplatten fest mit dem Gerätegehäuse mit Hilfe vonDurchkontaktierungen an den Befestigungspunktenverbunden.
X17:
SDCS-IOE-1 X3: X4: X5: X6: X7:
X2: X1:
X17:
SDCS-CON-2
4 x
ana
log
1 x
Tac
ho
7 x
digi
tal
8 x
dig
ital
2 x
anal
og
Pul
sgeb
er
5
Die Binär- und Analogeingänge können mit Hilfe derSDCS-IOE-1 Karte erweitert werden. Das ist ergän-zend zu den obengenannten Lösungen.
Abb. 2.5/5: Erweiterte Eingänge über SDCS-IOE1Analogeingänge: erweitertBinäre Eingänge: alle durch Optokoppler
potentialgetrennt, LED-Anzeige für Signalzustand
Stromquelle für: PT100/PTC-Element
Beschreibung der Eingangssignale SDCS-IOE-1
Mechanik immer außerhalb der Basiseinheit installiert
KlemmenSchraubklemmen für feindrähtige Litze bis max. 2,5 mm2 Anschlussquerschnitt
Funktionalität7 binäre EingängeFunktionen durch Software wählbarAnzeige des Signalstatus durch LEDEingangsspannung: 0...8 V ⇒ “0-Signal”, 16...31 V ⇒ “1-Signal”Durch Optokoppler von der Geäreelektronik getrenntGruppenweise potentialgetrennt (DI 9...DI 12 und DI 13...DI 15)Glättungszeitkonstante 2 ms2 AnalogeingängeAlle als Differenzeingang; Gleichtaktbereich ±40 VBereich -10 V/-20 mA...0...+10 V/+20 mA; 4... 20 mA unipolar;RE = 200 kΩ /500 Ω /500 ΩAuflösung: 11 Bit + VorzeichenEingang 2: Bereich wie bei Eingang 1,Zusätzlich -1 V/-2 mA...0...+1 V/+2 mA, dann Gleichtaktbereich ±40 V, RE = 20 kΩStromquelle für PT 100 oder PTC-Element-AuswertungIA = 5 mA / 1,5 mA Signale bezogen auf Gerätegehäuse-Potential
II D 2-15
3ADW000066R0903 DCS500 System description d i
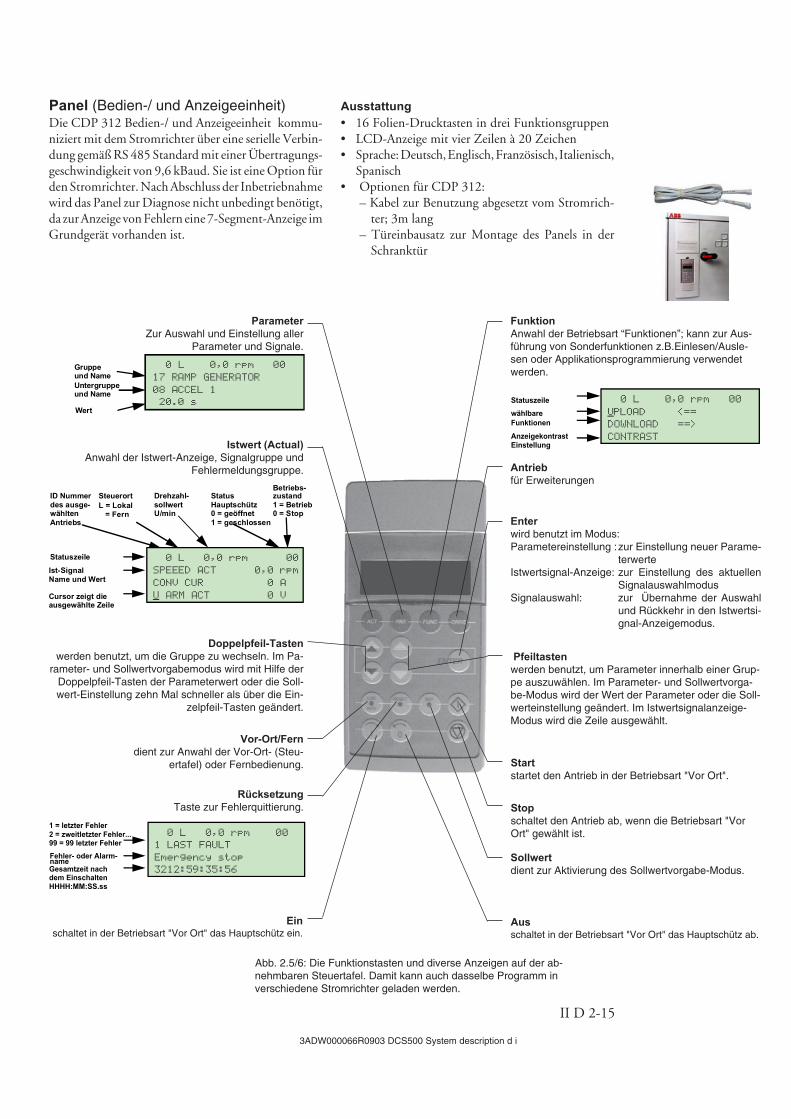
Panel (Bedien-/ und Anzeigeeinheit)Die CDP 312 Bedien-/ und Anzeigeeinheit kommu-niziert mit dem Stromrichter über eine serielle Verbin-dung gemäß RS 485 Standard mit einer Übertragungs-geschwindigkeit von 9,6 kBaud. Sie ist eine Option fürden Stromrichter. Nach Abschluss der Inbetriebnahmewird das Panel zur Diagnose nicht unbedingt benötigt,da zur Anzeige von Fehlern eine 7-Segment-Anzeige imGrundgerät vorhanden ist.
Abb. 2.5/6: Die Funktionstasten und diverse Anzeigen auf der ab-nehmbaren Steuertafel. Damit kann auch dasselbe Programm inverschiedene Stromrichter geladen werden.
Istwert (Actual)Anwahl der Istwert-Anzeige, Signalgruppe und
Fehlermeldungsgruppe.
ParameterZur Auswahl und Einstellung aller
Parameter und Signale.
FunktionAnwahl der Betriebsart “Funktionen”; kann zur Aus-führung von Sonderfunktionen z.B.Einlesen/Ausle-sen oder Applikationsprogrammierung verwendetwerden.
Antriebfür Erweiterungen
Doppelpfeil-Tastenwerden benutzt, um die Gruppe zu wechseln. Im Pa-
rameter- und Sollwertvorgabemodus wird mit Hilfe derDoppelpfeil-Tasten der Parameterwert oder die Soll-wert-Einstellung zehn Mal schneller als über die Ein-
zelpfeil-Tasten geändert.
Pfeiltastenwerden benutzt, um Parameter innerhalb einer Grup-pe auszuwählen. Im Parameter- und Sollwertvorga-be-Modus wird der Wert der Parameter oder die Soll-werteinstellung geändert. Im Istwertsignalanzeige-Modus wird die Zeile ausgewählt.
Enterwird benutzt im Modus:Parametereinstellung :zur Einstellung neuer Parame-
terwerteIstwertsignal-Anzeige: zur Einstellung des aktuellen
SignalauswahlmodusSignalauswahl: zur Übernahme der Auswahl
und Rückkehr in den Istwertsi-gnal-Anzeigemodus.
Vor-Ort/Ferndient zur Anwahl der Vor-Ort- (Steu-
ertafel) oder Fernbedienung.
RücksetzungTaste zur Fehlerquittierung.
Sollwertdient zur Aktivierung des Sollwertvorgabe-Modus.
Startstartet den Antrieb in der Betriebsart "Vor Ort".
Stopschaltet den Antrieb ab, wenn die Betriebsart "VorOrt" gewählt ist.
Einschaltet in der Betriebsart "Vor Ort" das Hauptschütz ein.
Ausschaltet in der Betriebsart "Vor Ort" das Hauptschütz ab.
Ausstattung• 16 Folien-Drucktasten in drei Funktionsgruppen• LCD-Anzeige mit vier Zeilen à 20 Zeichen• Sprache: Deutsch, Englisch, Französisch, Italienisch,
Spanisch• Optionen für CDP 312:
– Kabel zur Benutzung abgesetzt vom Stromrich-ter; 3m lang
– Türeinbausatz zur Montage des Panels in derSchranktür
0 L 0,0 rpm 001 LAST FAULTEmergency stop3212:59:35:56
1 = letzter Fehler2 = zweitletzter Fehler...99 = 99 letzter Fehler
Gesamtzeit nach dem EinschaltenHHHH:MM:SS.ss
Fehler- oder Alarm-name
StatuszeilewählbareFunktionen
AnzeigekontrastEinstellung
0 L 0,0 rpm 00UPLOAD <==DOWNLOAD ==>CONTRAST
ID Nummer des ausge- wähltenAntriebs
SteuerortL = Lokal = Fern
StatusHauptschütz0 = geöffnet1 = geschlossen
Drehzahl-sollwertU/min
Betriebs-
1 = Betrieb0 = Stop
Statuszeile
Ist-SignalName und Wert
Cursor zeigt dieausgewählte Zeile
0 L 0,0 rpm 00SPEEED ACT 0,0 rpmCONV CUR 0 AU ARM ACT 0 V
zustand
0 L 0,0 rpm 00 17 RAMP GENERATOR08 ACCEL 1 20.0 s
Gruppeund NameUntergruppeund Name
Wert
II D 2-16
3ADW000066R0903 DCS500 System description d i
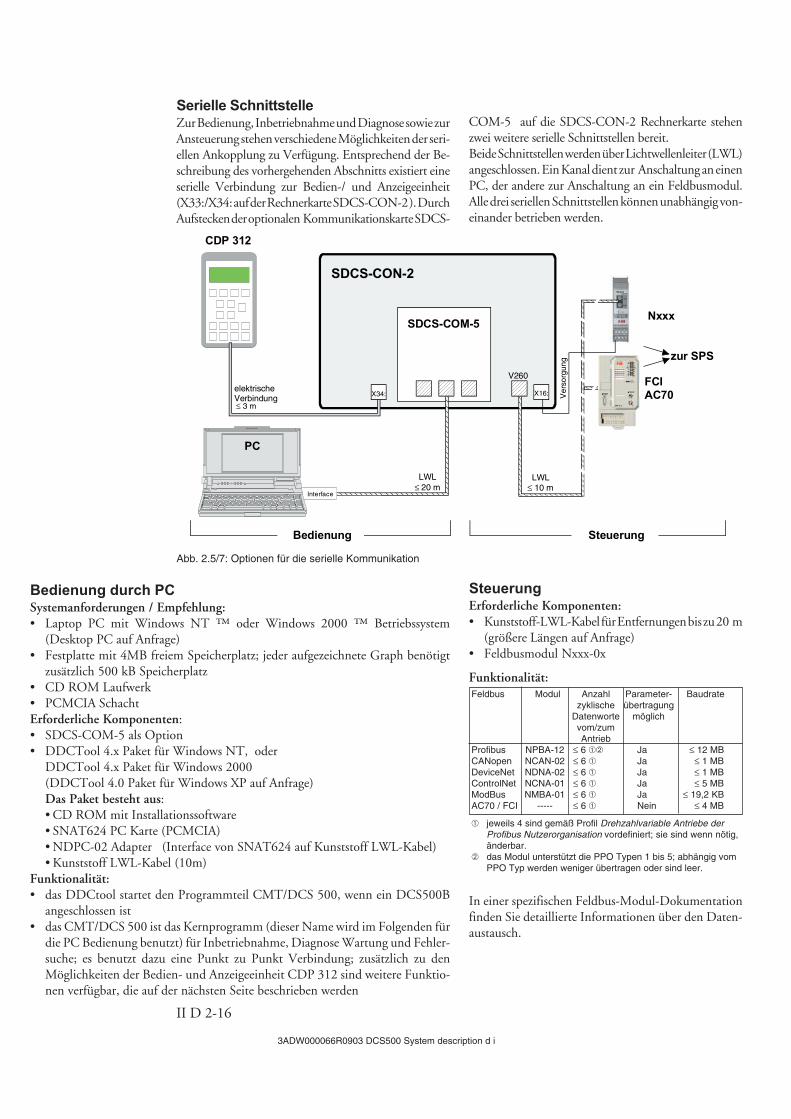
Serielle SchnittstelleZur Bedienung, Inbetriebnahme und Diagnose sowie zurAnsteuerung stehen verschiedene Möglichkeiten der seri-ellen Ankopplung zu Verfügung. Entsprechend der Be-schreibung des vorhergehenden Abschnitts existiert eineserielle Verbindung zur Bedien-/ und Anzeigeeinheit(X33:/X34: auf der Rechnerkarte SDCS-CON-2 ). DurchAufstecken der optionalen Kommunikationskarte SDCS-
SteuerungErforderliche Komponenten:• Kunststoff-LWL-Kabel für Entfernungen bis zu 20 m
(größere Längen auf Anfrage)• Feldbusmodul Nxxx-0x
Funktionalität:
In einer spezifischen Feldbus-Modul-Dokumentationfinden Sie detaillierte Informationen über den Daten-austausch.
Bedienung durch PCSystemanforderungen / Empfehlung:• Laptop PC mit Windows NT ™ oder Windows 2000 ™ Betriebssystem
(Desktop PC auf Anfrage)• Festplatte mit 4MB freiem Speicherplatz; jeder aufgezeichnete Graph benötigt
zusätzlich 500 kB Speicherplatz• CD ROM Laufwerk• PCMCIA SchachtErforderliche Komponenten:• SDCS-COM-5 als Option• DDCTool 4.x Paket für Windows NT, oder
DDCTool 4.x Paket für Windows 2000(DDCTool 4.0 Paket für Windows XP auf Anfrage)Das Paket besteht aus:• CD ROM mit Installationssoftware• SNAT624 PC Karte (PCMCIA)• NDPC-02 Adapter (Interface von SNAT624 auf Kunststoff LWL-Kabel)• Kunststoff LWL-Kabel (10m)
Funktionalität:• das DDCtool startet den Programmteil CMT/DCS 500, wenn ein DCS500B
angeschlossen ist• das CMT/DCS 500 ist das Kernprogramm (dieser Name wird im Folgenden für
die PC Bedienung benutzt) für Inbetriebnahme, Diagnose Wartung und Fehler-suche; es benutzt dazu eine Punkt zu Punkt Verbindung; zusätzlich zu denMöglichkeiten der Bedien- und Anzeigeeinheit CDP 312 sind weitere Funktio-nen verfügbar, die auf der nächsten Seite beschrieben werden
Abb. 2.5/7: Optionen für die serielle Kommunikation
COM-5 auf die SDCS-CON-2 Rechnerkarte stehenzwei weitere serielle Schnittstellen bereit.Beide Schnittstellen werden über Lichtwellenleiter (LWL)angeschlossen. Ein Kanal dient zur Anschaltung an einenPC, der andere zur Anschaltung an ein Feldbusmodul.Alle drei seriellen Schnittstellen können unabhängig von-einander betrieben werden.
SDCS-COM-5
CDP 312
X34:
Interface
PC
≤ 3 m
SDCS-CON-2
X16:
V260 FCIAC70
Nxxx
zur SPS
LWL≤ 10 m
LWL≤ 20 m
Ver
sorg
ung
SteuerungBedienung
elektrischeVerbindung
Feldbus Modul Anzahl Parameter- Baudratezyklische übertragung
Datenworte möglichvom/zumAntrieb
Profibus NPBA-12 ≤ 6 ➀➁ Ja ≤ 12 MBCANopen NCAN-02 ≤ 6 ➀ Ja ≤ 1 MBDeviceNet NDNA-02 ≤ 6 ➀ Ja ≤ 1 MBControlNet NCNA-01 ≤ 6 ➀ Ja ≤ 5 MBModBus NMBA-01 ≤ 6 ➀ Ja ≤ 19,2 KBAC70 / FCI ----- ≤ 6 ➀ Nein ≤ 4 MB
➀ jeweils 4 sind gemäß Profil Drehzahlvariable Antriebe derProfibus Nutzerorganisation vordefiniert; sie sind wenn nötig,änderbar.
➁ das Modul unterstützt die PPO Typen 1 bis 5; abhängig vomPPO Typ werden weniger übertragen oder sind leer.
II D 2-17
3ADW000066R0903 DCS500 System description d i
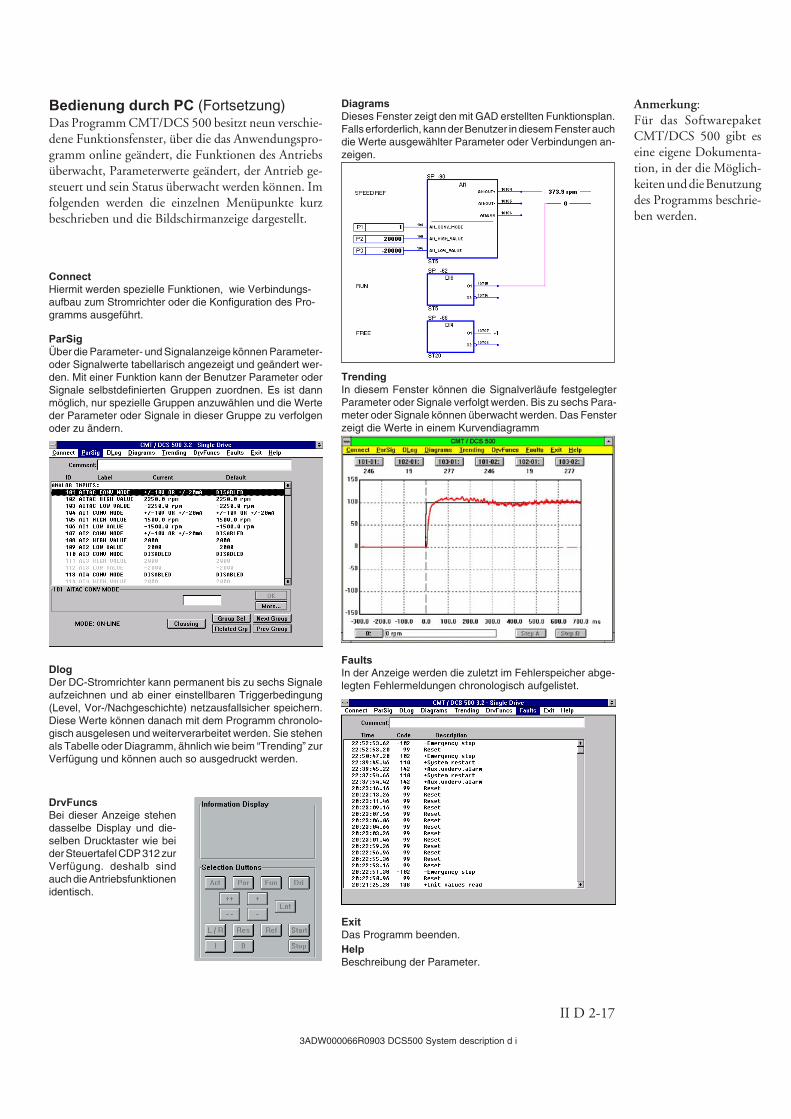
Bedienung durch PC (Fortsetzung)Das Programm CMT/DCS 500 besitzt neun verschie-dene Funktionsfenster, über die das Anwendungspro-gramm online geändert, die Funktionen des Antriebsüberwacht, Parameterwerte geändert, der Antrieb ge-steuert und sein Status überwacht werden können. Imfolgenden werden die einzelnen Menüpunkte kurzbeschrieben und die Bildschirmanzeige dargestellt.
ParSigÜber die Parameter- und Signalanzeige können Parameter-oder Signalwerte tabellarisch angezeigt und geändert wer-den. Mit einer Funktion kann der Benutzer Parameter oderSignale selbstdefinierten Gruppen zuordnen. Es ist dannmöglich, nur spezielle Gruppen anzuwählen und die Werteder Parameter oder Signale in dieser Gruppe zu verfolgenoder zu ändern.
DlogDer DC-Stromrichter kann permanent bis zu sechs Signaleaufzeichnen und ab einer einstellbaren Triggerbedingung(Level, Vor-/Nachgeschichte) netzausfallsicher speichern.Diese Werte können danach mit dem Programm chronolo-gisch ausgelesen und weiterverarbeitet werden. Sie stehenals Tabelle oder Diagramm, ähnlich wie beim “Trending” zurVerfügung und können auch so ausgedruckt werden.
DiagramsDieses Fenster zeigt den mit GAD erstellten Funktionsplan.Falls erforderlich, kann der Benutzer in diesem Fenster auchdie Werte ausgewählter Parameter oder Verbindungen an-zeigen.
TrendingIn diesem Fenster können die Signalverläufe festgelegterParameter oder Signale verfolgt werden. Bis zu sechs Para-meter oder Signale können überwacht werden. Das Fensterzeigt die Werte in einem Kurvendiagramm
DrvFuncsBei dieser Anzeige stehendasselbe Display und die-selben Drucktaster wie beider Steuertafel CDP 312 zurVerfügung. deshalb sindauch die Antriebsfunktionenidentisch.
FaultsIn der Anzeige werden die zuletzt im Fehlerspeicher abge-legten Fehlermeldungen chronologisch aufgelistet.
ExitDas Programm beenden.HelpBeschreibung der Parameter.
ConnectHiermit werden spezielle Funktionen, wie Verbindungs-aufbau zum Stromrichter oder die Konfiguration des Pro-gramms ausgeführt.
Anmerkung:Für das SoftwarepaketCMT/DCS 500 gibt eseine eigene Dokumenta-tion, in der die Möglich-keiten und die Benutzungdes Programms beschrie-ben werden.
II D 2-18
3ADW000066R0903 DCS500 System description d i
2.6 Antriebsoptionen
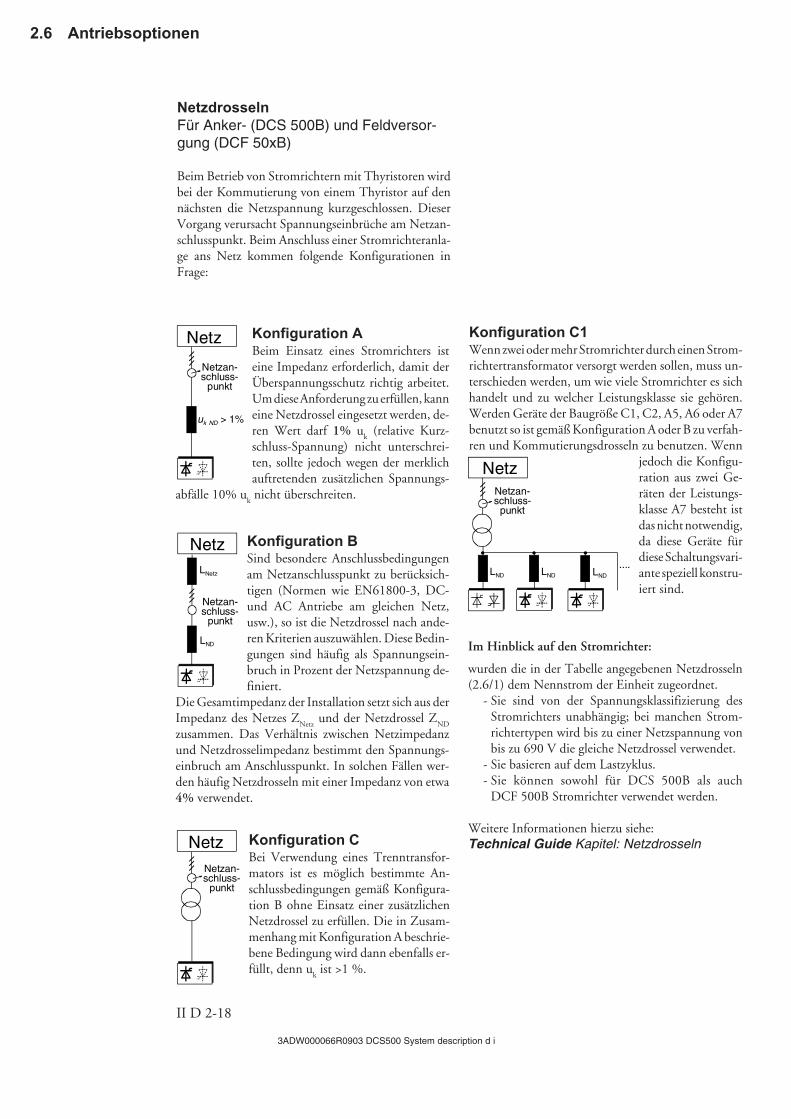
NetzdrosselnFür Anker- (DCS 500B) und Feldversor-gung (DCF 50xB)
Beim Betrieb von Stromrichtern mit Thyristoren wirdbei der Kommutierung von einem Thyristor auf dennächsten die Netzspannung kurzgeschlossen. DieserVorgang verursacht Spannungseinbrüche am Netzan-schlusspunkt. Beim Anschluss einer Stromrichteranla-ge ans Netz kommen folgende Konfigurationen inFrage:
Im Hinblick auf den Stromrichter:
wurden die in der Tabelle angegebenen Netzdrosseln(2.6/1) dem Nennstrom der Einheit zugeordnet.
- Sie sind von der Spannungsklassifizierung desStromrichters unabhängig; bei manchen Strom-richtertypen wird bis zu einer Netzspannung vonbis zu 690 V die gleiche Netzdrossel verwendet.
- Sie basieren auf dem Lastzyklus.- Sie können sowohl für DCS 500B als auch
DCF 500B Stromrichter verwendet werden.
Weitere Informationen hierzu siehe:Technical Guide Kapitel: Netzdrosseln
Konfiguration ABeim Einsatz eines Stromrichters isteine Impedanz erforderlich, damit derÜberspannungsschutz richtig arbeitet.Um diese Anforderung zu erfüllen, kanneine Netzdrossel eingesetzt werden, de-ren Wert darf 1% u
k (relative Kurz-
schluss-Spannung) nicht unterschrei-ten, sollte jedoch wegen der merklichauftretenden zusätzlichen Spannungs-
abfälle 10% uk nicht überschreiten.
Konfiguration BSind besondere Anschlussbedingungenam Netzanschlusspunkt zu berücksich-tigen (Normen wie EN61800-3, DC-und AC Antriebe am gleichen Netz,usw.), so ist die Netzdrossel nach ande-ren Kriterien auszuwählen. Diese Bedin-gungen sind häufig als Spannungsein-bruch in Prozent der Netzspannung de-finiert.
Die Gesamtimpedanz der Installation setzt sich aus derImpedanz des Netzes Z
Netz und der Netzdrossel Z
ND
zusammen. Das Verhältnis zwischen Netzimpedanzund Netzdrosselimpedanz bestimmt den Spannungs-einbruch am Anschlusspunkt. In solchen Fällen wer-den häufig Netzdrosseln mit einer Impedanz von etwa4% verwendet.
Konfiguration CBei Verwendung eines Trenntransfor-mators ist es möglich bestimmte An-schlussbedingungen gemäß Konfigura-tion B ohne Einsatz einer zusätzlichenNetzdrossel zu erfüllen. Die in Zusam-menhang mit Konfiguration A beschrie-bene Bedingung wird dann ebenfalls er-füllt, denn u
k ist >1 %.
Konfiguration C1Wenn zwei oder mehr Stromrichter durch einen Strom-richtertransformator versorgt werden sollen, muss un-terschieden werden, um wie viele Stromrichter es sichhandelt und zu welcher Leistungsklasse sie gehören.Werden Geräte der Baugröße C1, C2, A5, A6 oder A7benutzt so ist gemäß Konfiguration A oder B zu verfah-ren und Kommutierungsdrosseln zu benutzen. Wenn
jedoch die Konfigu-ration aus zwei Ge-räten der Leistungs-klasse A7 besteht istdas nicht notwendig,da diese Geräte fürdiese Schaltungsvari-ante speziell konstru-iert sind.
Netzan-schluss-
punkt
Netz
uk ND > 1%
Netz
Netzan-schluss-
punkt
LNetz
LND
Netzan-schluss-
punkt
Netz
....LND LND LND
Netzan-schluss-
punkt
Netz
II D 2-19
3ADW000066R0903 DCS500 System description d i
Abb. 1 Abb. 2 Abb. 3
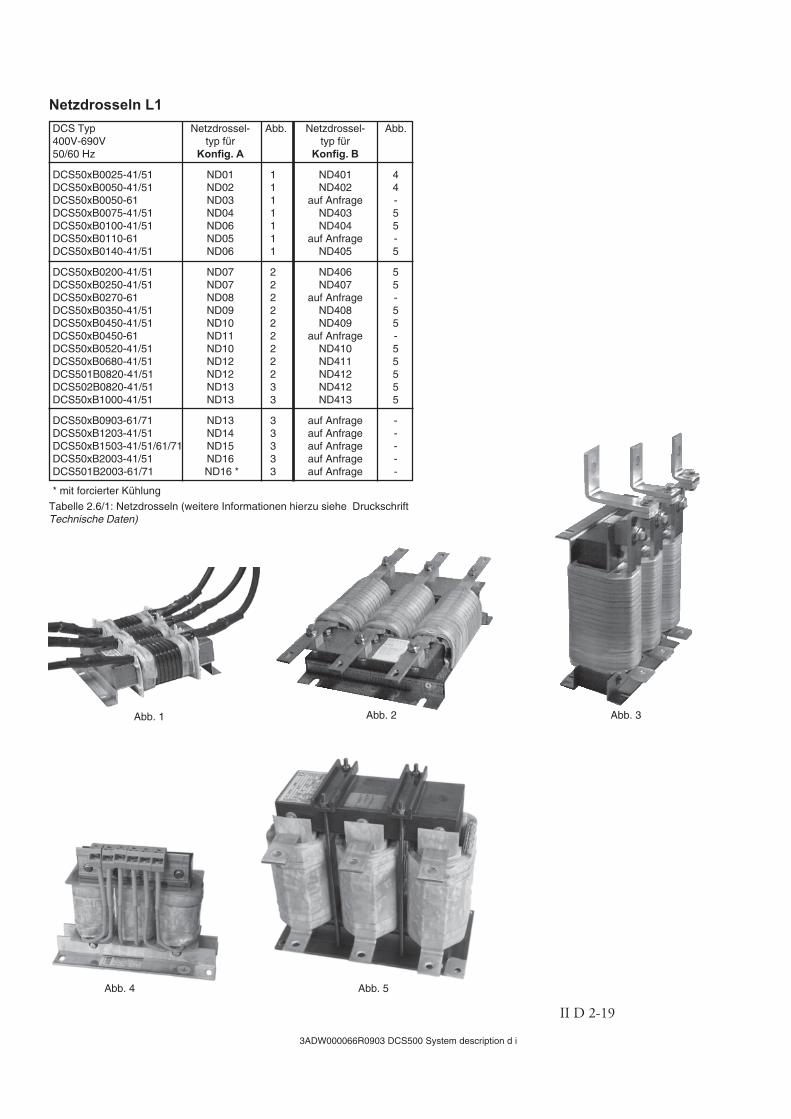
DCS Typ Netzdrossel- Abb. Netzdrossel- Abb.400V-690V typ für typ für50/60 Hz Konfig. A Konfig. B
DCS50xB0025-41/51 ND01 1 ND401 4DCS50xB0050-41/51 ND02 1 ND402 4DCS50xB0050-61 ND03 1 auf Anfrage -DCS50xB0075-41/51 ND04 1 ND403 5DCS50xB0100-41/51 ND06 1 ND404 5DCS50xB0110-61 ND05 1 auf Anfrage -DCS50xB0140-41/51 ND06 1 ND405 5
DCS50xB0200-41/51 ND07 2 ND406 5DCS50xB0250-41/51 ND07 2 ND407 5DCS50xB0270-61 ND08 2 auf Anfrage -DCS50xB0350-41/51 ND09 2 ND408 5DCS50xB0450-41/51 ND10 2 ND409 5DCS50xB0450-61 ND11 2 auf Anfrage -DCS50xB0520-41/51 ND10 2 ND410 5DCS50xB0680-41/51 ND12 2 ND411 5DCS501B0820-41/51 ND12 2 ND412 5DCS502B0820-41/51 ND13 3 ND412 5DCS50xB1000-41/51 ND13 3 ND413 5
DCS50xB0903-61/71 ND13 3 auf Anfrage -DCS50xB1203-41/51 ND14 3 auf Anfrage -DCS50xB1503-41/51/61/71 ND15 3 auf Anfrage -DCS50xB2003-41/51 ND16 3 auf Anfrage -DCS501B2003-61/71 ND16 * 3 auf Anfrage -
* mit forcierter Kühlung
Netzdrosseln L1
Tabelle 2.6/1: Netzdrosseln (weitere Informationen hierzu siehe DruckschriftTechnische Daten)
Abb. 5Abb. 4
II D 2-20
3ADW000066R0903 DCS500 System description d i
Konsequenz für die Ankerversorgung
Aus Kostengründen werden bei manchen Anwendun-gen Standardsicherungen anstelle der teureren Halblei-ter-Sicherungen verwendet. Unter normalen und stabi-len Betriebsbedingungen ist diese Entscheidung nach-vollziehbar und verständlich, solange bestimmte Feh-ler ausgeschlossen werden können.
Bei einer Störung kann diese Ersparnis jedoch erheb-lich höhere Folgekosten nach sich ziehen. Explodieren-de Leistungshalbleiter können nicht nur den Strom-richter zerstören, sondern auch einen Brand verursa-chen.
Ein adäquater Schutz vor Kurzschluss und Erdschluss,wie in der Norm EN50178 festgelegt, ist nur mitgeeigneten Halbleiter- Sicherungen möglich
Allgemeines
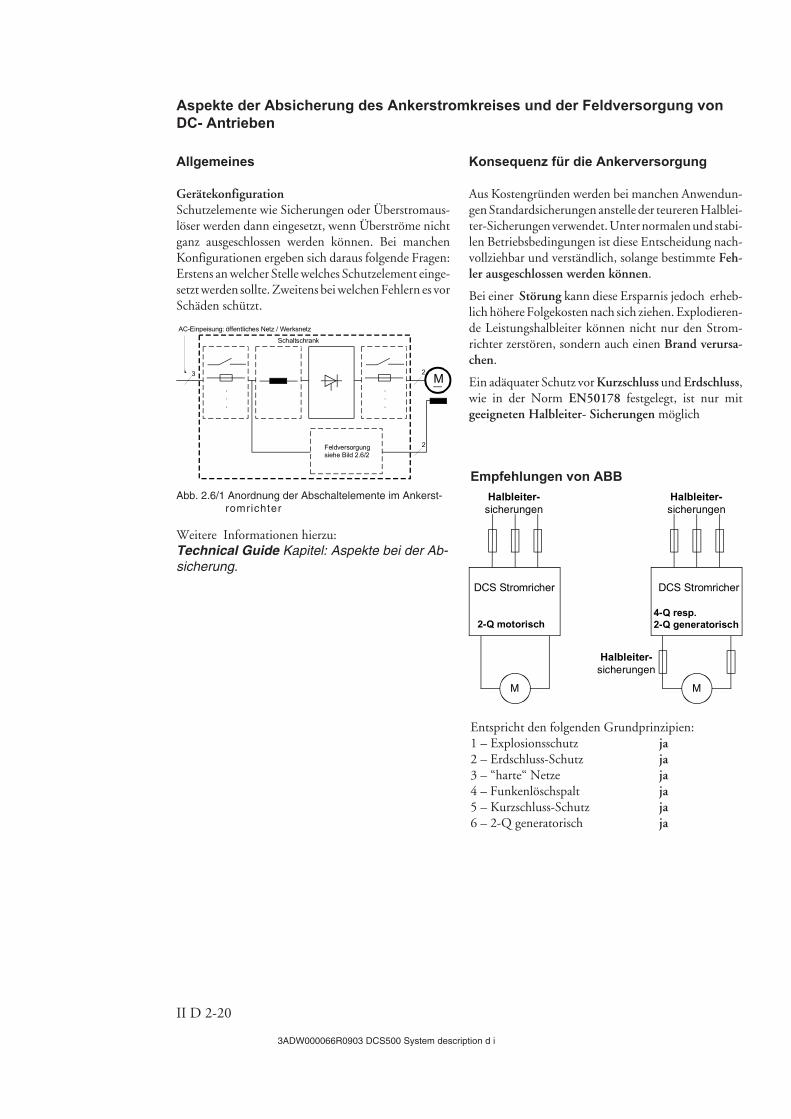
GerätekonfigurationSchutzelemente wie Sicherungen oder Überstromaus-löser werden dann eingesetzt, wenn Überströme nichtganz ausgeschlossen werden können. Bei manchenKonfigurationen ergeben sich daraus folgende Fragen:Erstens an welcher Stelle welches Schutzelement einge-setzt werden sollte. Zweitens bei welchen Fehlern es vorSchäden schützt.
Abb. 2.6/1 Anordnung der Abschaltelemente im Ankerst-romrichter
Aspekte der Absicherung des Ankerstromkreises und der Feldversorgung vonDC- Antrieben
Weitere Informationen hierzu:Technical Guide Kapitel: Aspekte bei der Ab-sicherung.
Entspricht den folgenden Grundprinzipien:1 – Explosionsschutz ja2 – Erdschluss-Schutz ja3 – “harte“ Netze ja4 – Funkenlöschspalt ja5 – Kurzschluss-Schutz ja6 – 2-Q generatorisch ja
Empfehlungen von ABB
M...
.
.
.
3
2
2
Feldversorgungsiehe Bild 2.6/2
AC-Einpeisung: öffentliches Netz / Werksnetz
Schaltschrank
M M
DCS Stromricher
2-Q motorisch
Halbleiter-sicherungen
Halbleiter-sicherungen
DCS Stromricher
4-Q resp.2-Q generatorisch
Halbleiter-sicherungen
II D 2-21
3ADW000066R0903 DCS500 System description d i
Konsequenz für die Feldversorgung
Grundsätzlich gelten für die Feldversorgung die glei-chen Bedingungen wie für die Ankerversorgung. Ab-hängig von dem verwendeten Stromrichter (Dioden-brücke, halbgesteuerte Brücke, vollgesteuerte 4-Qua-dranten-Brücke) können einige Fehlerquellen entfal-len. Wegen spezieller Anlagenbedingungen, wie z.B.der Einspeisung über einen Spartransformator odereinen Trenntransformator kommen neue Schutzbe-dingungen hinzu.
Die folgenden Konfigurationen kommen relativ häufigvor:
Im Gegensatz zur Ankerversorgung werden bei derFeldversorgung auf der Gleichstromseite niemals Si-cherungen verwendet, da ein Auslösen unter Umstän-den zu einem größeren Schaden führen könnte als dieUrsache, die zum Ansprechen der Sicherung geführthat (ein kleiner aber lang anhaltender Überstrom;Alterung der Sicherung; Kontaktprobleme; usw.).
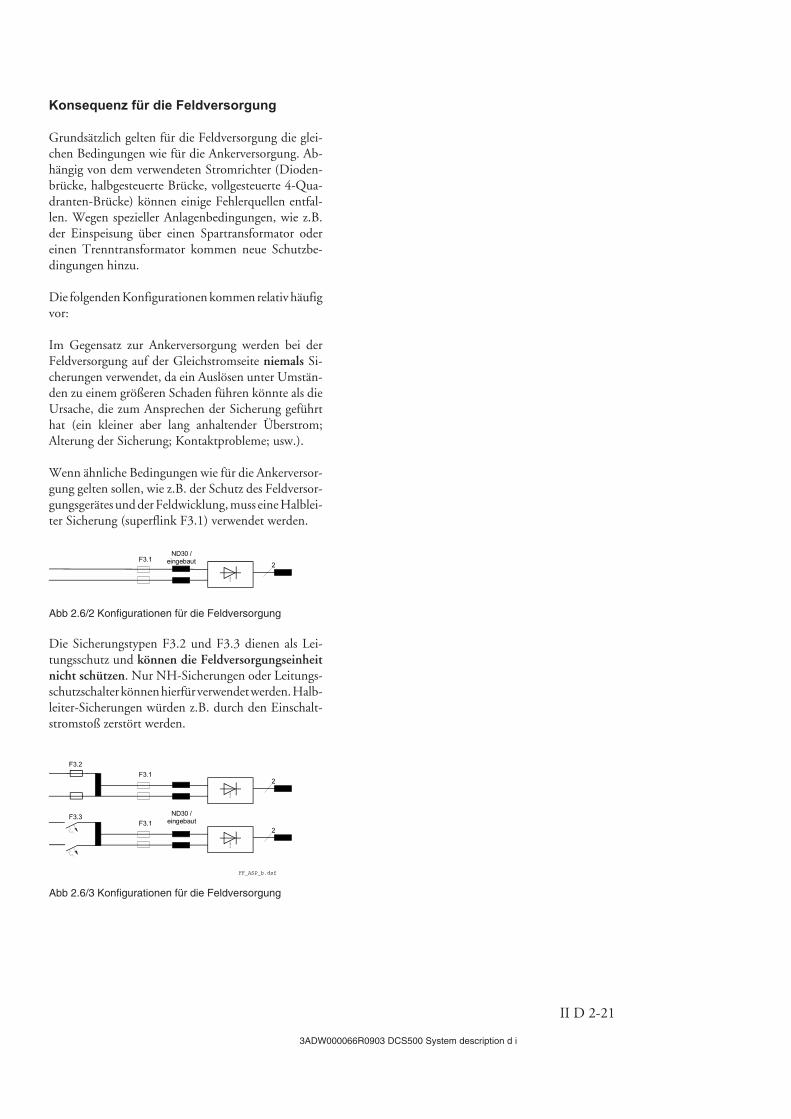
Wenn ähnliche Bedingungen wie für die Ankerversor-gung gelten sollen, wie z.B. der Schutz des Feldversor-gungsgerätes und der Feldwicklung, muss eine Halblei-ter Sicherung (superflink F3.1) verwendet werden.
2F3.1
ND30 /eingebaut
Abb 2.6/2 Konfigurationen für die Feldversorgung
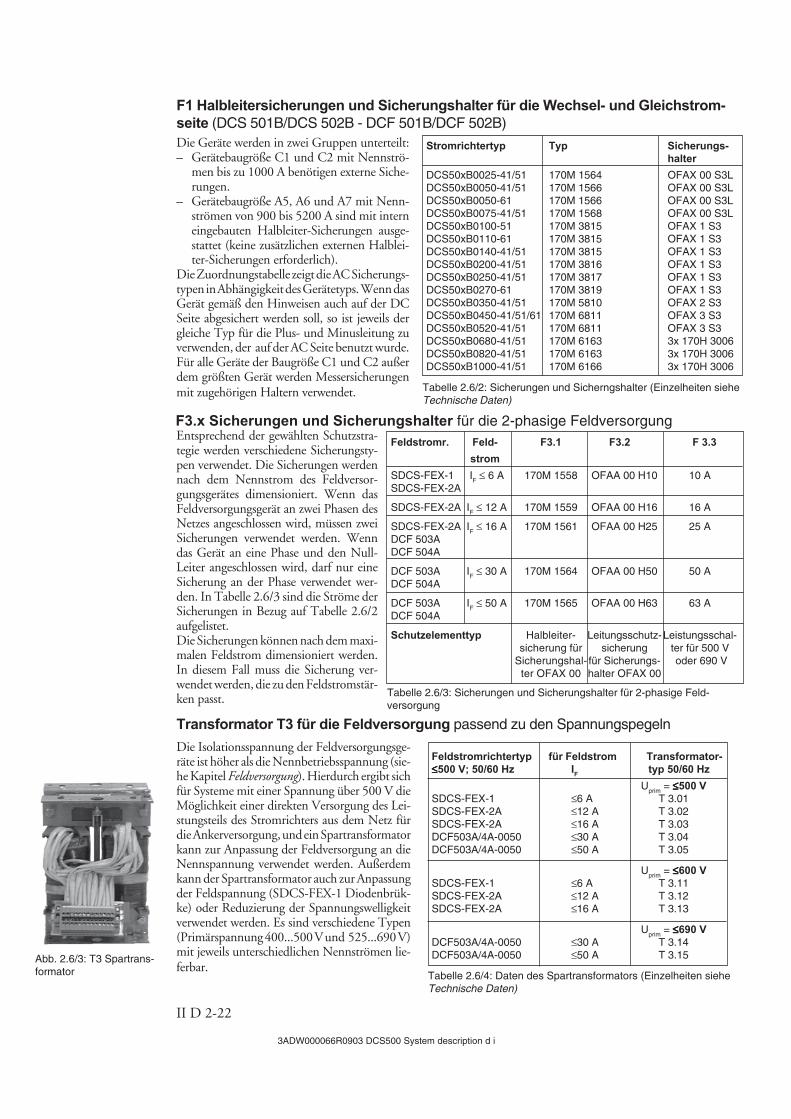
Die Sicherungstypen F3.2 und F3.3 dienen als Lei-tungsschutz und können die Feldversorgungseinheitnicht schützen. Nur NH-Sicherungen oder Leitungs-schutzschalter können hierfür verwendet werden. Halb-leiter-Sicherungen würden z.B. durch den Einschalt-stromstoß zerstört werden.
F3.3
2
2
F3.2
F3.1
F3.1
FF_ASP_b.dsf
ND30 /eingebaut
Abb 2.6/3 Konfigurationen für die Feldversorgung
II D 2-22
3ADW000066R0903 DCS500 System description d i
Feldstromrichtertyp für Feldstrom Transformator-≤≤≤≤≤500 V; 50/60 Hz IF typ 50/60 Hz
Uprim = ≤≤≤≤≤500 VSDCS-FEX-1 ≤6 A T 3.01SDCS-FEX-2A ≤12 A T 3.02SDCS-FEX-2A ≤16 A T 3.03DCF503A/4A-0050 ≤30 A T 3.04DCF503A/4A-0050 ≤50 A T 3.05
Uprim = ≤≤≤≤≤600 VSDCS-FEX-1 ≤6 A T 3.11SDCS-FEX-2A ≤12 A T 3.12SDCS-FEX-2A ≤16 A T 3.13
Uprim = ≤≤≤≤≤690 VDCF503A/4A-0050 ≤30 A T 3.14DCF503A/4A-0050 ≤50 A T 3.15
Tabelle 2.6/4: Daten des Spartransformators (Einzelheiten sieheTechnische Daten)
Transformator T3 für die Feldversorgung passend zu den Spannungspegeln
Abb. 2.6/3: T3 Spartrans-formator
F1 Halbleitersicherungen und Sicherungshalter für die Wechsel- und Gleichstrom-seite (DCS 501B/DCS 502B - DCF 501B/DCF 502B)Die Geräte werden in zwei Gruppen unterteilt:– Gerätebaugröße C1 und C2 mit Nennströ-
men bis zu 1000 A benötigen externe Siche-rungen.
– Gerätebaugröße A5, A6 und A7 mit Nenn-strömen von 900 bis 5200 A sind mit interneingebauten Halbleiter-Sicherungen ausge-stattet (keine zusätzlichen externen Halblei-ter-Sicherungen erforderlich).
Die Zuordnungstabelle zeigt die AC Sicherungs-typen in Abhängigkeit des Gerätetyps. Wenn dasGerät gemäß den Hinweisen auch auf der DCSeite abgesichert werden soll, so ist jeweils dergleiche Typ für die Plus- und Minusleitung zuverwenden, der auf der AC Seite benutzt wurde.Für alle Geräte der Baugröße C1 und C2 außerdem größten Gerät werden Messersicherungenmit zugehörigen Haltern verwendet.
Die Isolationsspannung der Feldversorgungsge-räte ist höher als die Nennbetriebsspannung (sie-he Kapitel Feldversorgung). Hierdurch ergibt sichfür Systeme mit einer Spannung über 500 V dieMöglichkeit einer direkten Versorgung des Lei-stungsteils des Stromrichters aus dem Netz fürdie Ankerversorgung, und ein Spartransformatorkann zur Anpassung der Feldversorgung an dieNennspannung verwendet werden. Außerdemkann der Spartransformator auch zur Anpassungder Feldspannung (SDCS-FEX-1 Diodenbrük-ke) oder Reduzierung der Spannungswelligkeitverwendet werden. Es sind verschiedene Typen(Primärspannung 400...500 V und 525...690 V)mit jeweils unterschiedlichen Nennströmen lie-ferbar.
Entsprechend der gewählten Schutzstra-tegie werden verschiedene Sicherungsty-pen verwendet. Die Sicherungen werdennach dem Nennstrom des Feldversor-gungsgerätes dimensioniert. Wenn dasFeldversorgungsgerät an zwei Phasen desNetzes angeschlossen wird, müssen zweiSicherungen verwendet werden. Wenndas Gerät an eine Phase und den Null-Leiter angeschlossen wird, darf nur eineSicherung an der Phase verwendet wer-den. In Tabelle 2.6/3 sind die Ströme derSicherungen in Bezug auf Tabelle 2.6/2aufgelistet.Die Sicherungen können nach dem maxi-malen Feldstrom dimensioniert werden.In diesem Fall muss die Sicherung ver-wendet werden, die zu den Feldstromstär-ken passt.
F3.x Sicherungen und Sicherungshalter für die 2-phasige FeldversorgungFeldstromr. Feld- F3.1 F3.2 F 3.3
stromSDCS-FEX-1 IF ≤ 6 A 170M 1558 OFAA 00 H10 10 ASDCS-FEX-2A
SDCS-FEX-2A IF ≤ 12 A 170M 1559 OFAA 00 H16 16 A
SDCS-FEX-2A IF ≤ 16 A 170M 1561 OFAA 00 H25 25 ADCF 503ADCF 504A
DCF 503A IF ≤ 30 A 170M 1564 OFAA 00 H50 50 ADCF 504A
DCF 503A IF ≤ 50 A 170M 1565 OFAA 00 H63 63 ADCF 504A
Schutzelementtyp Halbleiter- Leitungsschutz-Leistungsschal-sicherung für sicherung ter für 500 V
Sicherungshal- für Sicherungs- oder 690 Vter OFAX 00 halter OFAX 00
Tabelle 2.6/3: Sicherungen und Sicherungshalter für 2-phasige Feld-versorgung
Stromrichtertyp Typ Sicherungs-halter
DCS50xB0025-41/51 170M 1564 OFAX 00 S3LDCS50xB0050-41/51 170M 1566 OFAX 00 S3LDCS50xB0050-61 170M 1566 OFAX 00 S3LDCS50xB0075-41/51 170M 1568 OFAX 00 S3LDCS50xB0100-51 170M 3815 OFAX 1 S3DCS50xB0110-61 170M 3815 OFAX 1 S3DCS50xB0140-41/51 170M 3815 OFAX 1 S3DCS50xB0200-41/51 170M 3816 OFAX 1 S3DCS50xB0250-41/51 170M 3817 OFAX 1 S3DCS50xB0270-61 170M 3819 OFAX 1 S3DCS50xB0350-41/51 170M 5810 OFAX 2 S3DCS50xB0450-41/51/61 170M 6811 OFAX 3 S3DCS50xB0520-41/51 170M 6811 OFAX 3 S3DCS50xB0680-41/51 170M 6163 3x 170H 3006DCS50xB0820-41/51 170M 6163 3x 170H 3006DCS50xB1000-41/51 170M 6166 3x 170H 3006
Tabelle 2.6/2: Sicherungen und Sicherngshalter (Einzelheiten sieheTechnische Daten)

II D 2-23
3ADW000066R0903 DCS500 System description d i
Hilfstransformator T2 für Elektronik-und Lüfterversorgung
Der Stromrichter benötigt verschiedene Hilfsspannun-gen. So benötigt z.B. die Geräteelektronik 115 V/1-phasig oder 230 V/1-phasig, die Gerätelüfter benöti-gen entsprechend ihrer Baugröße 230 V/1-phasig oder400 V/690 V/3-phasig. Der Hilfstransformator T2steht für die Versorgung der Elektronik und der Ein-phasenlüfter zur Verfügung und kann alle Einphasen-lüfter versorgen, einschließlich den vom StromrichterBaugrösse A5.
Eingangsspannung: 380...690 V/1-phasig; 50/60 HzAusgangsspannung: 115/230 V/1-phasigLeistung: 1400 VA
.
Abb. 2.6/4: T2 Hilfstransformator
Differenzstromerkennung
Diese Funktion ist in der Standardsoftware enthalten.Wenn diese Funktion benötigt wird, muss der Analog-eingang AI4 aktiviert werden und ein Stromsignal derdrei Phasenströme muss durch einen Stromwandlerauf AI4 gelegt werden. Wenn der Summenstrom un-gleich Null ist, wird eine Meldung ausgegeben (siehehierzu die Druckschrift Technische Daten).
Netzdrossel
Wird der Feldstromrichter SDCS-FEX-2A eingesetzt,sollte wegen der EMV-Verträglichkeit auch eine Netz-drossel verwendet werden. Beim SDCS-FEX-1 (Dioden-brücke) ist keine Netzdrossel notwendig, und beim Feld-stromrichter DCF 503A/504A ist sie bereits installiert.
Stromrichter Drossel≤≤≤≤≤500 V; 50/60 Hz
SDCS-FEX-2A ND 30
Tabelle 2.6/4: Netzdrossel (weitere Informationen hierzusiehe Druckschrift Technische Daten)
II D 2-24
3ADW000066R0903 DCS500 System description d i
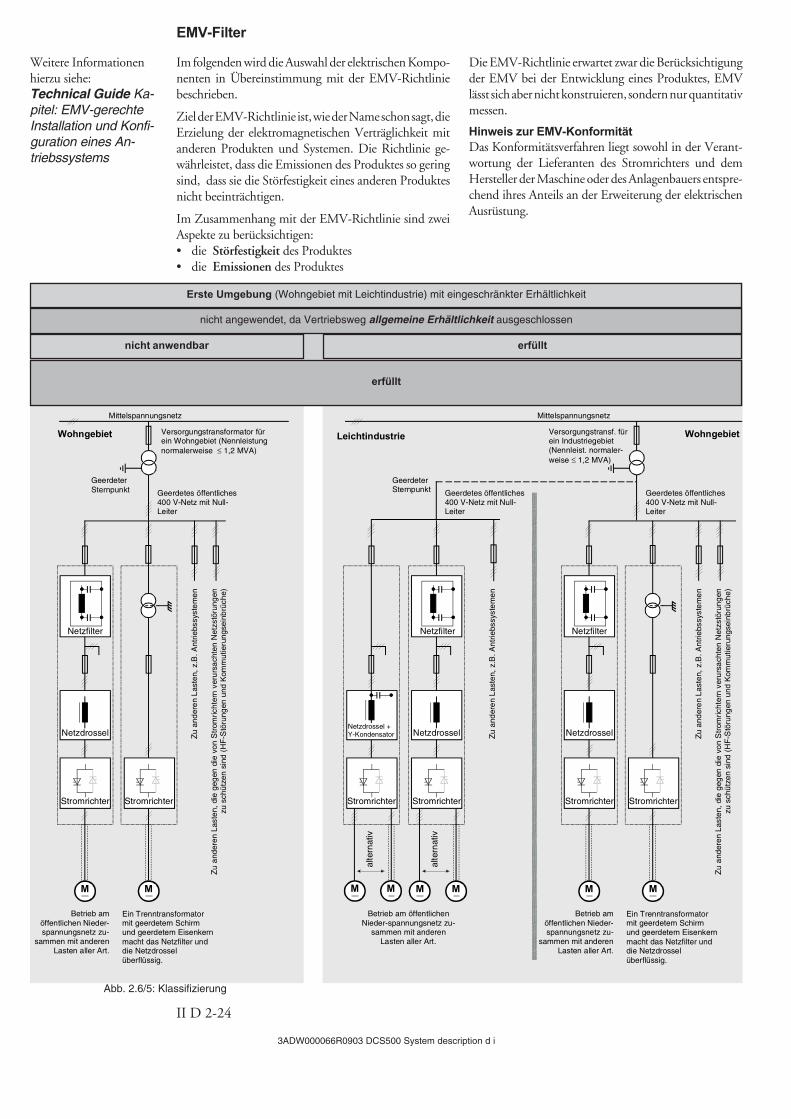
Abb. 2.6/5: Klassifizierung
nicht anwendbar
Erste Umgebung (Wohngebiet mit Leichtindustrie) mit eingeschränkter Erhältlichkeit
nicht angewendet, da Vertriebsweg allgemeine Erhältlichkeit ausgeschlossen
erfüllt
erfüllt
Im folgenden wird die Auswahl der elektrischen Kompo-nenten in Übereinstimmung mit der EMV-Richtliniebeschrieben.
Ziel der EMV-Richtlinie ist, wie der Name schon sagt, dieErzielung der elektromagnetischen Verträglichkeit mitanderen Produkten und Systemen. Die Richtlinie ge-währleistet, dass die Emissionen des Produktes so geringsind, dass sie die Störfestigkeit eines anderen Produktesnicht beeinträchtigen.
Im Zusammenhang mit der EMV-Richtlinie sind zweiAspekte zu berücksichtigen:• die Störfestigkeit des Produktes• die Emissionen des Produktes
Die EMV-Richtlinie erwartet zwar die Berücksichtigungder EMV bei der Entwicklung eines Produktes, EMVlässt sich aber nicht konstruieren, sondern nur quantitativmessen.
Hinweis zur EMV-KonformitätDas Konformitätsverfahren liegt sowohl in der Verant-wortung der Lieferanten des Stromrichters und demHersteller der Maschine oder des Anlagenbauers entspre-chend ihres Anteils an der Erweiterung der elektrischenAusrüstung.
EMV-Filter
Weitere Informationenhierzu siehe:Technical Guide Ka-pitel: EMV-gerechteInstallation und Konfi-guration eines An-triebssystems
MM
Netzfilter
Stromrichter
Netzdrossel
Versorgungstransformator für ein Wohngebiet (Nennleistung normalerweise ≤ 1,2 MVA)
Geerdetes öffentliches 400 V-Netz mit Null-Leiter
Mittelspannungsnetz
Geerdeter Sternpunkt
Zu
and
ere
n L
aste
n, z
.B. A
ntrie
bssy
ste
me
n
Ein Trenntransformator mit geerdetem Schirm und geerdetem Eisenkern macht das Netzfilter und die Netzdrossel überflüssig.
Betrieb am öffentlichen Nieder-spannungsnetz zu-
sammen mit anderen Lasten aller Art.
Stromrichter
Wohngebiet
Zu
and
eren
Las
ten,
die
geg
en d
ie v
on S
trom
richt
ern
ver
urs
ach
ten
Net
zstö
rung
en
zu s
chüt
zen
sind
(H
F-S
töru
ngen
und
Kom
mut
ieru
ngse
inb
rüch
e)
MMMM MM
alte
rnat
iv
Netzdrossel
Netzfilter
Stromrichter
Geerdetes öffentliches 400 V-Netz mit Null-Leiter
Versorgungstransf. für ein Industriegebiet (Nennleist. normaler-weise ≤ 1,2 MVA)
Geerdeter Sternpunkt Geerdetes öffentliches
400 V-Netz mit Null-Leiter
Mittelspannungsnetz
alte
rnat
iv
Netzdrossel + Y-Kondensator
Stromrichter
Leichtindustrie
Netzfilter
Stromrichter
NetzdrosselZu
and
ere
n L
aste
n, z
.B. A
ntrie
bssy
ste
me
n
Zu
and
eren
Las
ten,
die
geg
en d
ie v
on S
trom
richt
ern
ver
urs
ach
ten
Net
zstö
rung
en
zu s
chüt
zen
sind
(H
F-S
töru
ngen
und
Kom
mut
ieru
ngse
inb
rüch
e)
Zu
and
ere
n L
aste
n, z
.B. A
ntrie
bssy
ste
me
n
Stromrichter
Wohngebiet
Ein Trenntransformator mit geerdetem Schirm und geerdetem Eisenkern macht das Netzfilter und die Netzdrossel überflüssig.
Betrieb am öffentlichen Nieder-spannungsnetz zu-
sammen mit anderen Lasten aller Art.
Betrieb am öffentlichen Nieder-spannungsnetz zu-
sammen mit anderen Lasten aller Art.
II D 2-25
3ADW000066R0903 DCS500 System description d i
EN 61800-3
EN 61000-6-3
EN 61000-6-4
EN 61000-6-2
EN 61000-6-1
erfüllt
erfüllt
Zweite Umgebung (Industrie) mit eingeschränkter Erhältlichkeit
auf Kundenanfrage erfüllt
nicht anwendbar
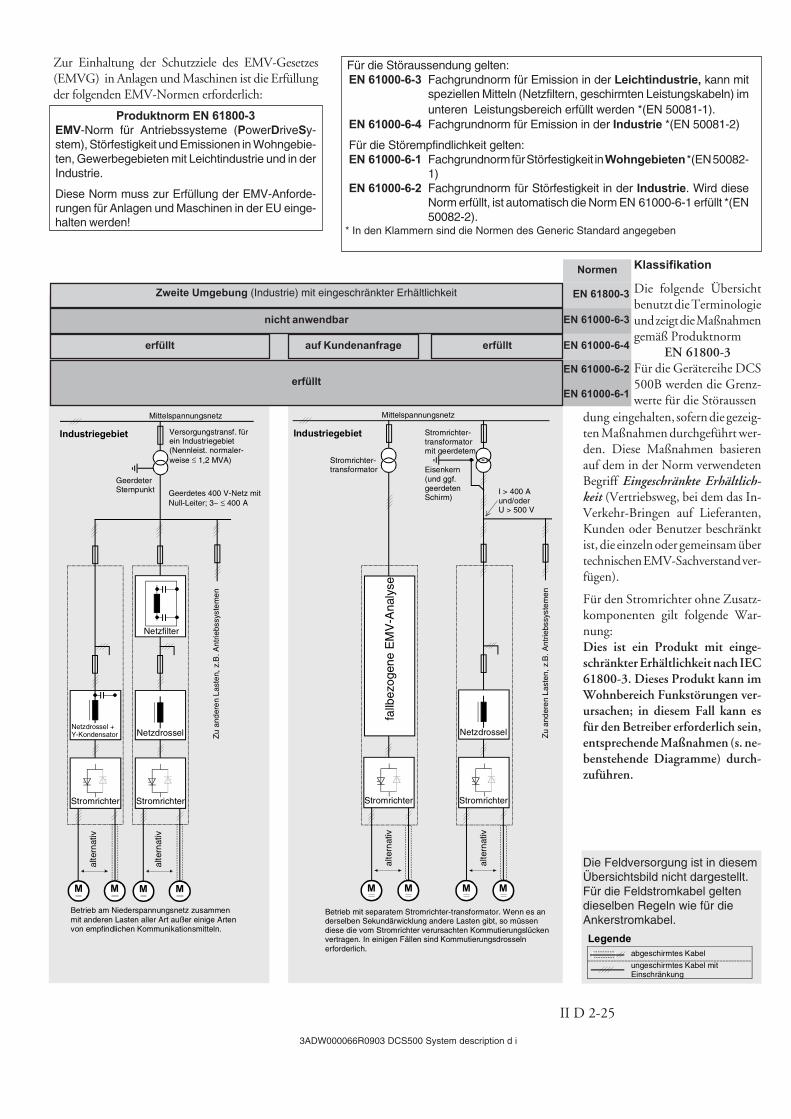
Normen Klassifikation
Die folgende Übersichtbenutzt die Terminologieund zeigt die Maßnahmengemäß Produktnorm
EN 61800-3Für die Gerätereihe DCS500B werden die Grenz-werte für die Störaussen
Zur Einhaltung der Schutzziele des EMV-Gesetzes(EMVG) in Anlagen und Maschinen ist die Erfüllungder folgenden EMV-Normen erforderlich:
Produktnorm EN 61800-3EMV-Norm für Antriebssysteme (PowerDriveSy-stem), Störfestigkeit und Emissionen in Wohngebie-ten, Gewerbegebieten mit Leichtindustrie und in derIndustrie.
Diese Norm muss zur Erfüllung der EMV-Anforde-rungen für Anlagen und Maschinen in der EU einge-halten werden!
Für die Störaussendung gelten:EN 61000-6-3 Fachgrundnorm für Emission in der Leichtindustrie, kann mit
speziellen Mitteln (Netzfiltern, geschirmten Leistungskabeln) imunteren Leistungsbereich erfüllt werden *(EN 50081-1).
EN 61000-6-4 Fachgrundnorm für Emission in der Industrie *(EN 50081-2)
Für die Störempfindlichkeit gelten:EN 61000-6-1 Fachgrundnorm für Störfestigkeit in Wohngebieten *(EN 50082-
1)EN 61000-6-2 Fachgrundnorm für Störfestigkeit in der Industrie. Wird diese
Norm erfüllt, ist automatisch die Norm EN 61000-6-1 erfüllt *(EN50082-2).
* In den Klammern sind die Normen des Generic Standard angegeben
dung eingehalten, sofern die gezeig-ten Maßnahmen durchgeführt wer-den. Diese Maßnahmen basierenauf dem in der Norm verwendetenBegriff Eingeschränkte Erhältlich-keit (Vertriebsweg, bei dem das In-Verkehr-Bringen auf Lieferanten,Kunden oder Benutzer beschränktist, die einzeln oder gemeinsam übertechnischen EMV-Sachverstand ver-fügen).
Für den Stromrichter ohne Zusatz-komponenten gilt folgende War-nung:Dies ist ein Produkt mit einge-schränkter Erhältlichkeit nach IEC61800-3. Dieses Produkt kann imWohnbereich Funkstörungen ver-ursachen; in diesem Fall kann esfür den Betreiber erforderlich sein,entsprechende Maßnahmen (s. ne-benstehende Diagramme) durch-zuführen.
Die Feldversorgung ist in diesemÜbersichtsbild nicht dargestellt.Für die Feldstromkabel geltendieselben Regeln wie für dieAnkerstromkabel.
Legende
ungeschirmtes Kabel mit Einschränkung
abgeschirmtes Kabel
MMMM
Netzdrossel
Netzfilter
Stromrichter
Versorgungstransf. für ein Industriegebiet (Nennleist. normaler-weise ≤ 1,2 MVA)
Geerdeter Sternpunkt Geerdetes 400 V-Netz mit
Null-Leiter; 3~ ≤ 400 A
Stromrichter
Mittelspannungsnetz
Zu
and
ere
n L
aste
n, z
.B. A
ntrie
bssy
ste
me
n
Netzdrossel + Y-Kondensator
Industriegebiet
Betrieb am Niederspannungsnetz zusammen mit anderen Lasten aller Art außer einige Arten von empfindlichen Kommunikationsmitteln.
alte
rnat
iv
alte
rnat
iv
MMMM
Stromrichter-transformator
fallb
ezog
ene
EM
V-A
naly
se
Mittelspannungsnetz
Industriegebiet
alte
rnat
iv
Stromrichter
Stromrichter-transformatormit geerdetem
Eisenkern(und ggf. geerdeten Schirm)
Netzdrossel
alte
rnat
iv
Stromrichter
I > 400 A und/oder U > 500 V
Zu
and
ere
n L
aste
n, z
.B. A
ntrie
bssy
ste
me
n
Betrieb mit separatem Stromrichter-transformator. Wenn es an derselben Sekundärwicklung andere Lasten gibt, so müssen diese die vom Stromrichter verursachten Kommutierungslücken vertragen. In einigen Fällen sind Kommutierungsdrosseln erforderlich.
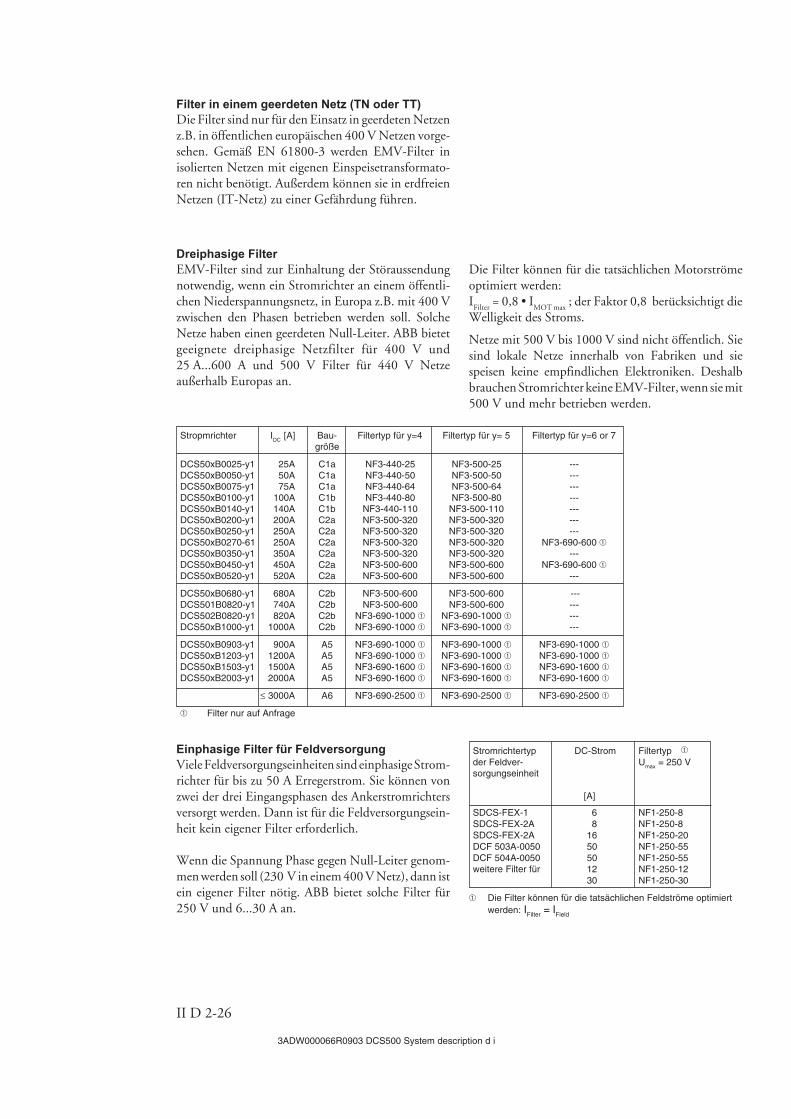
II D 2-26
3ADW000066R0903 DCS500 System description d i
Dreiphasige FilterEMV-Filter sind zur Einhaltung der Störaussendungnotwendig, wenn ein Stromrichter an einem öffentli-chen Niederspannungsnetz, in Europa z.B. mit 400 Vzwischen den Phasen betrieben werden soll. SolcheNetze haben einen geerdeten Null-Leiter. ABB bietetgeeignete dreiphasige Netzfilter für 400 V und25 A...600 A und 500 V Filter für 440 V Netzeaußerhalb Europas an.
Stromrichtertyp DC-Strom Filtertypder Feldver- Umax = 250 Vsorgungseinheit
[A]
SDCS-FEX-1 6 NF1-250-8SDCS-FEX-2A 8 NF1-250-8SDCS-FEX-2A 16 NF1-250-20DCF 503A-0050 50 NF1-250-55DCF 504A-0050 50 NF1-250-55weitere Filter für 12 NF1-250-12
30 NF1-250-30
➀ Die Filter können für die tatsächlichen Feldströme optimiertwerden: IFilter = IField
➀
Filter in einem geerdeten Netz (TN oder TT)Die Filter sind nur für den Einsatz in geerdeten Netzenz.B. in öffentlichen europäischen 400 V Netzen vorge-sehen. Gemäß EN 61800-3 werden EMV-Filter inisolierten Netzen mit eigenen Einspeisetransformato-ren nicht benötigt. Außerdem können sie in erdfreienNetzen (IT-Netz) zu einer Gefährdung führen.
Einphasige Filter für FeldversorgungViele Feldversorgungseinheiten sind einphasige Strom-richter für bis zu 50 A Erregerstrom. Sie können vonzwei der drei Eingangsphasen des Ankerstromrichtersversorgt werden. Dann ist für die Feldversorgungsein-heit kein eigener Filter erforderlich.
Wenn die Spannung Phase gegen Null-Leiter genom-men werden soll (230 V in einem 400 V Netz), dann istein eigener Filter nötig. ABB bietet solche Filter für250 V und 6...30 A an.
Stropmrichter IDC
[A] Bau- Filtertyp für y=4 Filtertyp für y= 5 Filtertyp für y=6 or 7größe
DCS50xB0025-y1 25A C1a NF3-440-25 NF3-500-25 ---DCS50xB0050-y1 50A C1a NF3-440-50 NF3-500-50 ---DCS50xB0075-y1 75A C1a NF3-440-64 NF3-500-64 ---DCS50xB0100-y1 100A C1b NF3-440-80 NF3-500-80 ---DCS50xB0140-y1 140A C1b NF3-440-110 NF3-500-110 ---DCS50xB0200-y1 200A C2a NF3-500-320 NF3-500-320 ---DCS50xB0250-y1 250A C2a NF3-500-320 NF3-500-320 ---DCS50xB0270-61 250A C2a NF3-500-320 NF3-500-320 NF3-690-600 ➀DCS50xB0350-y1 350A C2a NF3-500-320 NF3-500-320 ---DCS50xB0450-y1 450A C2a NF3-500-600 NF3-500-600 NF3-690-600 ➀DCS50xB0520-y1 520A C2a NF3-500-600 NF3-500-600 ---
DCS50xB0680-y1 680A C2b NF3-500-600 NF3-500-600 ---DCS501B0820-y1 740A C2b NF3-500-600 NF3-500-600 ---DCS502B0820-y1 820A C2b NF3-690-1000 ➀ NF3-690-1000 ➀ ---DCS50xB1000-y1 1000A C2b NF3-690-1000 ➀ NF3-690-1000 ➀ ---
DCS50xB0903-y1 900A A5 NF3-690-1000 ➀ NF3-690-1000 ➀ NF3-690-1000 ➀DCS50xB1203-y1 1200A A5 NF3-690-1000 ➀ NF3-690-1000 ➀ NF3-690-1000 ➀DCS50xB1503-y1 1500A A5 NF3-690-1600 ➀ NF3-690-1600 ➀ NF3-690-1600 ➀DCS50xB2003-y1 2000A A5 NF3-690-1600 ➀ NF3-690-1600 ➀ NF3-690-1600 ➀
≤ 3000A A6 NF3-690-2500 ➀ NF3-690-2500 ➀ NF3-690-2500 ➀
➀ Filter nur auf Anfrage
Die Filter können für die tatsächlichen Motorströmeoptimiert werden:I
Filter = 0,8 • I
MOT max ; der Faktor 0,8 berücksichtigt die
Welligkeit des Stroms.
Netze mit 500 V bis 1000 V sind nicht öffentlich. Siesind lokale Netze innerhalb von Fabriken und siespeisen keine empfindlichen Elektroniken. Deshalbbrauchen Stromrichter keine EMV-Filter, wenn sie mit500 V und mehr betrieben werden.
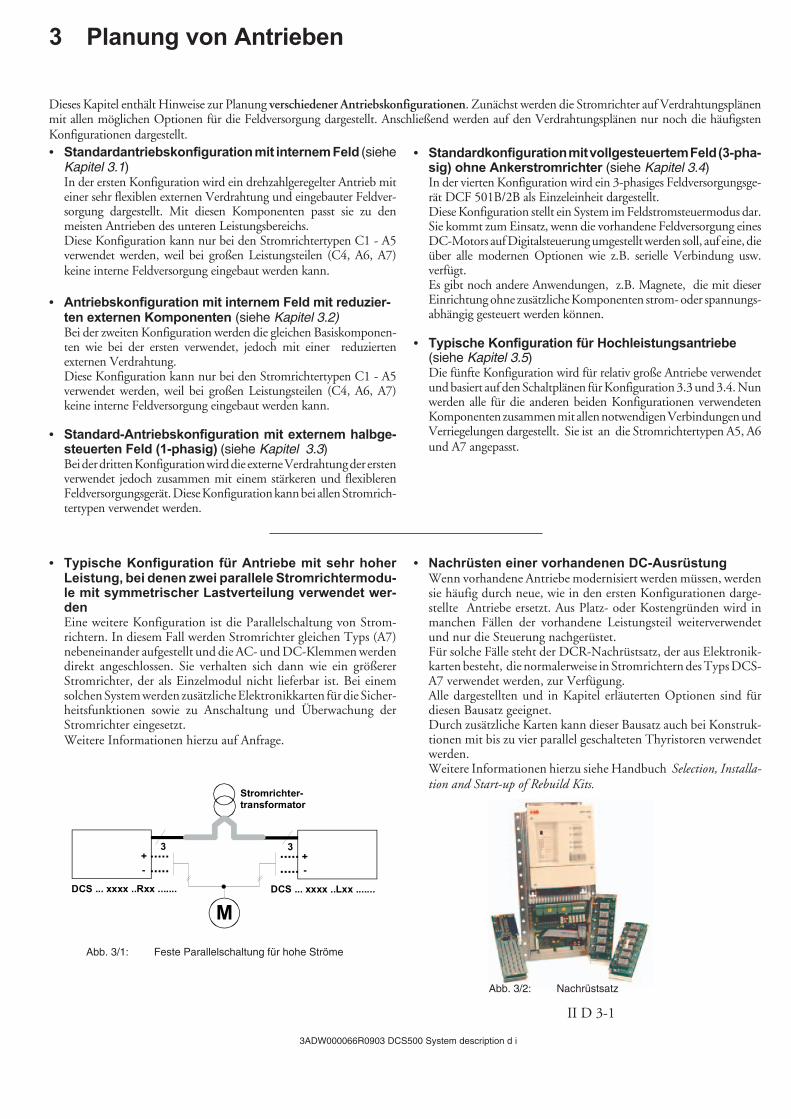
II D 3-1
3ADW000066R0903 DCS500 System description d i
3 Planung von Antrieben
Dieses Kapitel enthält Hinweise zur Planung verschiedener Antriebskonfigurationen. Zunächst werden die Stromrichter auf Verdrahtungsplänenmit allen möglichen Optionen für die Feldversorgung dargestellt. Anschließend werden auf den Verdrahtungsplänen nur noch die häufigstenKonfigurationen dargestellt.
• Standardkonfiguration mit vollgesteuertem Feld (3-pha-sig) ohne Ankerstromrichter (siehe Kapitel 3.4)In der vierten Konfiguration wird ein 3-phasiges Feldversorgungsge-rät DCF 501B/2B als Einzeleinheit dargestellt.Diese Konfiguration stellt ein System im Feldstromsteuermodus dar.Sie kommt zum Einsatz, wenn die vorhandene Feldversorgung einesDC-Motors auf Digitalsteuerung umgestellt werden soll, auf eine, dieüber alle modernen Optionen wie z.B. serielle Verbindung usw.verfügt.Es gibt noch andere Anwendungen, z.B. Magnete, die mit dieserEinrichtung ohne zusätzliche Komponenten strom- oder spannungs-abhängig gesteuert werden können.
• Typische Konfiguration für Hochleistungsantriebe(siehe Kapitel 3.5)Die fünfte Konfiguration wird für relativ große Antriebe verwendetund basiert auf den Schaltplänen für Konfiguration 3.3 und 3.4. Nunwerden alle für die anderen beiden Konfigurationen verwendetenKomponenten zusammen mit allen notwendigen Verbindungen undVerriegelungen dargestellt. Sie ist an die Stromrichtertypen A5, A6und A7 angepasst.
• Standardantriebskonfiguration mit internem Feld (sieheKapitel 3.1)In der ersten Konfiguration wird ein drehzahlgeregelter Antrieb miteiner sehr flexiblen externen Verdrahtung und eingebauter Feldver-sorgung dargestellt. Mit diesen Komponenten passt sie zu denmeisten Antrieben des unteren Leistungsbereichs.Diese Konfiguration kann nur bei den Stromrichtertypen C1 - A5verwendet werden, weil bei großen Leistungsteilen (C4, A6, A7)keine interne Feldversorgung eingebaut werden kann.
• Antriebskonfiguration mit internem Feld mit reduzier-ten externen Komponenten (siehe Kapitel 3.2)Bei der zweiten Konfiguration werden die gleichen Basiskomponen-ten wie bei der ersten verwendet, jedoch mit einer reduziertenexternen Verdrahtung.Diese Konfiguration kann nur bei den Stromrichtertypen C1 - A5verwendet werden, weil bei großen Leistungsteilen (C4, A6, A7)keine interne Feldversorgung eingebaut werden kann.
• Standard-Antriebskonfiguration mit externem halbge-steuerten Feld (1-phasig) (siehe Kapitel 3.3)Bei der dritten Konfiguration wird die externe Verdrahtung der erstenverwendet jedoch zusammen mit einem stärkeren und flexiblerenFeldversorgungsgerät. Diese Konfiguration kann bei allen Stromrich-tertypen verwendet werden.
• Typische Konfiguration für Antriebe mit sehr hoherLeistung, bei denen zwei parallele Stromrichtermodu-le mit symmetrischer Lastverteilung verwendet wer-denEine weitere Konfiguration ist die Parallelschaltung von Strom-richtern. In diesem Fall werden Stromrichter gleichen Typs (A7)nebeneinander aufgestellt und die AC- und DC-Klemmen werdendirekt angeschlossen. Sie verhalten sich dann wie ein größererStromrichter, der als Einzelmodul nicht lieferbar ist. Bei einemsolchen System werden zusätzliche Elektronikkarten für die Sicher-heitsfunktionen sowie zu Anschaltung und Überwachung derStromrichter eingesetzt.Weitere Informationen hierzu auf Anfrage.
• Nachrüsten einer vorhandenen DC-AusrüstungWenn vorhandene Antriebe modernisiert werden müssen, werdensie häufig durch neue, wie in den ersten Konfigurationen darge-stellte Antriebe ersetzt. Aus Platz- oder Kostengründen wird inmanchen Fällen der vorhandene Leistungsteil weiterverwendetund nur die Steuerung nachgerüstet.Für solche Fälle steht der DCR-Nachrüstsatz, der aus Elektronik-karten besteht, die normalerweise in Stromrichtern des Typs DCS-A7 verwendet werden, zur Verfügung.Alle dargestellten und in Kapitel erläuterten Optionen sind fürdiesen Bausatz geeignet.Durch zusätzliche Karten kann dieser Bausatz auch bei Konstruk-tionen mit bis zu vier parallel geschalteten Thyristoren verwendetwerden.Weitere Informationen hierzu siehe Handbuch Selection, Installa-tion and Start-up of Rebuild Kits.
Abb. 3/1: Feste Parallelschaltung für hohe Ströme
Abb. 3/2: Nachrüstsatz
+-
DCS ... xxxx ..Rxx .......
3
DCS ... xxxx ..Lxx .......
3
M
Stromrichter-transformator
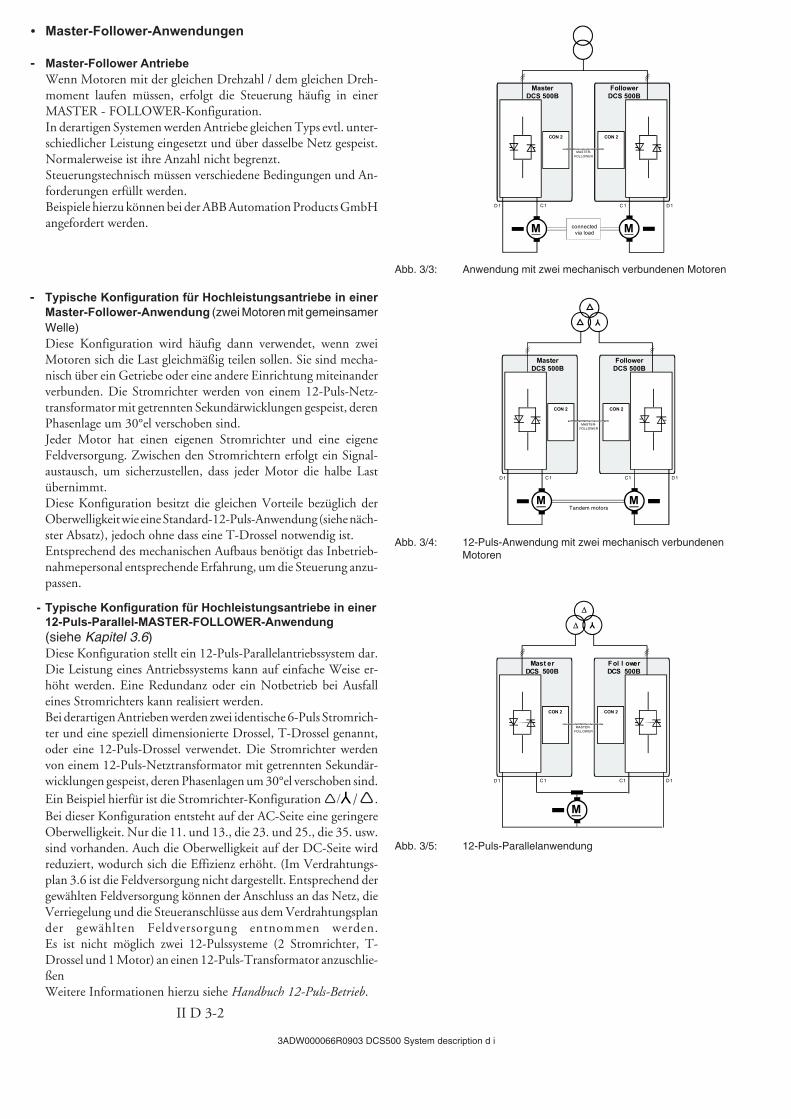
II D 3-2
3ADW000066R0903 DCS500 System description d i
• Master-Follower-Anwendungen
- Master-Follower AntriebeWenn Motoren mit der gleichen Drehzahl / dem gleichen Dreh-moment laufen müssen, erfolgt die Steuerung häufig in einerMASTER - FOLLOWER-Konfiguration.In derartigen Systemen werden Antriebe gleichen Typs evtl. unter-schiedlicher Leistung eingesetzt und über dasselbe Netz gespeist.Normalerweise ist ihre Anzahl nicht begrenzt.Steuerungstechnisch müssen verschiedene Bedingungen und An-forderungen erfüllt werden.Beispiele hierzu können bei der ABB Automation Products GmbHangefordert werden.
- Typische Konfiguration für Hochleistungsantriebe in einer12-Puls-Parallel-MASTER-FOLLOWER-Anwendung(siehe Kapitel 3.6)Diese Konfiguration stellt ein 12-Puls-Parallelantriebssystem dar.Die Leistung eines Antriebssystems kann auf einfache Weise er-höht werden. Eine Redundanz oder ein Notbetrieb bei Ausfalleines Stromrichters kann realisiert werden.Bei derartigen Antrieben werden zwei identische 6-Puls Stromrich-ter und eine speziell dimensionierte Drossel, T-Drossel genannt,oder eine 12-Puls-Drossel verwendet. Die Stromrichter werdenvon einem 12-Puls-Netztransformator mit getrennten Sekundär-wicklungen gespeist, deren Phasenlagen um 30°el verschoben sind.Ein Beispiel hierfür ist die Stromrichter-Konfiguration / / .Bei dieser Konfiguration entsteht auf der AC-Seite eine geringereOberwelligkeit. Nur die 11. und 13., die 23. und 25., die 35. usw.sind vorhanden. Auch die Oberwelligkeit auf der DC-Seite wirdreduziert, wodurch sich die Effizienz erhöht. (Im Verdrahtungs-plan 3.6 ist die Feldversorgung nicht dargestellt. Entsprechend dergewählten Feldversorgung können der Anschluss an das Netz, dieVerriegelung und die Steueranschlüsse aus dem Verdrahtungsplander gewählten Feldversorgung entnommen werden.Es ist nicht möglich zwei 12-Pulssysteme (2 Stromrichter, T-Drossel und 1 Motor) an einen 12-Puls-Transformator anzuschlie-ßenWeitere Informationen hierzu siehe Handbuch 12-Puls-Betrieb.
CON 2
MASTER-FOLLOWER
MasterDCS 500B
C1D1
M
CON 2
FollowerDCS 500B
C1 D1
Mconnectedvia load
Abb. 3/3: Anwendung mit zwei mechanisch verbundenen Motoren
Abb. 3/4: 12-Puls-Anwendung mit zwei mechanisch verbundenenMotoren
- Typische Konfiguration für Hochleistungsantriebe in einerMaster-Follower-Anwendung (zwei Motoren mit gemeinsamerWelle)Diese Konfiguration wird häufig dann verwendet, wenn zweiMotoren sich die Last gleichmäßig teilen sollen. Sie sind mecha-nisch über ein Getriebe oder eine andere Einrichtung miteinanderverbunden. Die Stromrichter werden von einem 12-Puls-Netz-transformator mit getrennten Sekundärwicklungen gespeist, derenPhasenlage um 30°el verschoben sind.Jeder Motor hat einen eigenen Stromrichter und eine eigeneFeldversorgung. Zwischen den Stromrichtern erfolgt ein Signal-austausch, um sicherzustellen, dass jeder Motor die halbe Lastübernimmt.Diese Konfiguration besitzt die gleichen Vorteile bezüglich derOberwelligkeit wie eine Standard-12-Puls-Anwendung (siehe näch-ster Absatz), jedoch ohne dass eine T-Drossel notwendig ist.Entsprechend des mechanischen Aufbaus benötigt das Inbetrieb-nahmepersonal entsprechende Erfahrung, um die Steuerung anzu-passen.
Abb. 3/5: 12-Puls-Parallelanwendung
CON 2
MASTER-FOLLOWER
Mast erDCS 500B
C1D1
M
CON 2
Fol l owerDCS 500B
C1 D1
∆
Y
∆
CON 2
C1D1
M
CON 2
C1 D1
M
Y
Tandem motors
MasterDCS 500B
FollowerDCS 500B
MASTER-FOLLOWER
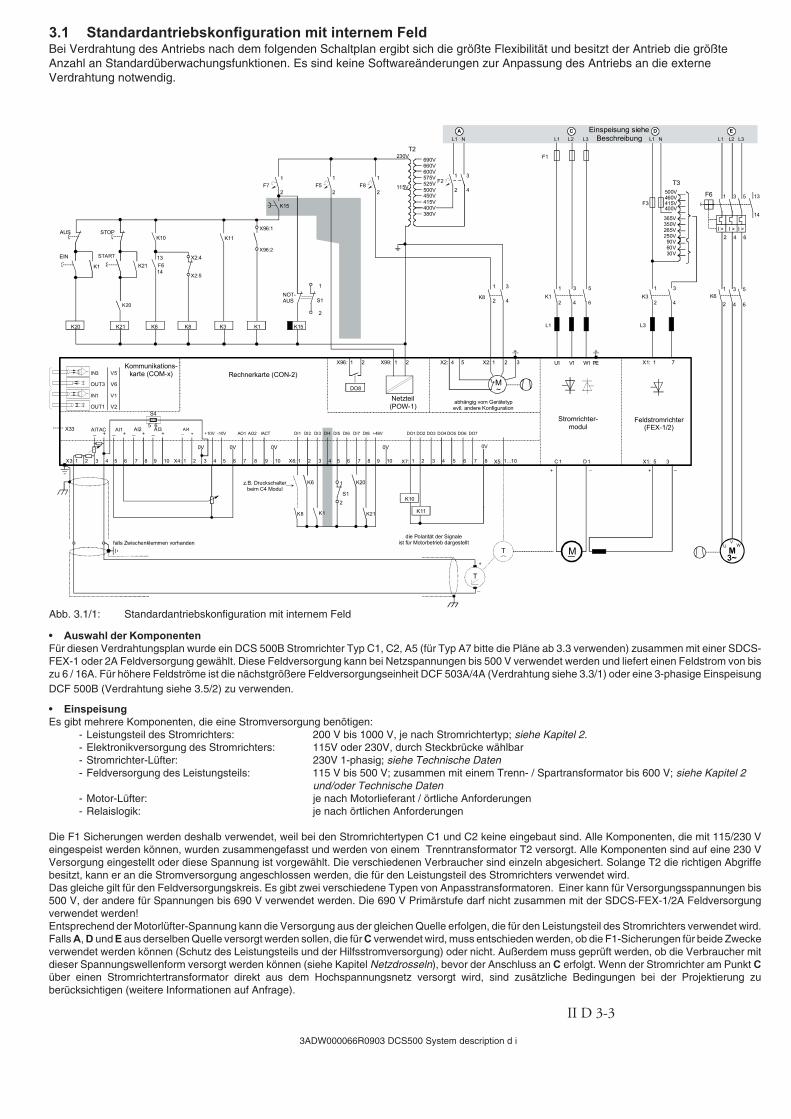
II D 3-3
3ADW000066R0903 DCS500 System description d i
Abb. 3.1/1: Standardantriebskonfiguration mit internem Feld
3.1 Standardantriebskonfiguration mit internem FeldBei Verdrahtung des Antriebs nach dem folgenden Schaltplan ergibt sich die größte Flexibilität und besitzt der Antrieb die größteAnzahl an Standardüberwachungsfunktionen. Es sind keine Softwareänderungen zur Anpassung des Antriebs an die externeVerdrahtung notwendig.
• Auswahl der KomponentenFür diesen Verdrahtungsplan wurde ein DCS 500B Stromrichter Typ C1, C2, A5 (für Typ A7 bitte die Pläne ab 3.3 verwenden) zusammen mit einer SDCS-FEX-1 oder 2A Feldversorgung gewählt. Diese Feldversorgung kann bei Netzspannungen bis 500 V verwendet werden und liefert einen Feldstrom von biszu 6 / 16A. Für höhere Feldströme ist die nächstgrößere Feldversorgungseinheit DCF 503A/4A (Verdrahtung siehe 3.3/1) oder eine 3-phasige EinspeisungDCF 500B (Verdrahtung siehe 3.5/2) zu verwenden.
• EinspeisungEs gibt mehrere Komponenten, die eine Stromversorgung benötigen:
- Leistungsteil des Stromrichters: 200 V bis 1000 V, je nach Stromrichtertyp; siehe Kapitel 2.- Elektronikversorgung des Stromrichters: 115V oder 230V, durch Steckbrücke wählbar- Stromrichter-Lüfter: 230V 1-phasig; siehe Technische Daten- Feldversorgung des Leistungsteils: 115 V bis 500 V; zusammen mit einem Trenn- / Spartransformator bis 600 V; siehe Kapitel 2
und/oder Technische Daten- Motor-Lüfter: je nach Motorlieferant / örtliche Anforderungen- Relaislogik: je nach örtlichen Anforderungen
Die F1 Sicherungen werden deshalb verwendet, weil bei den Stromrichtertypen C1 und C2 keine eingebaut sind. Alle Komponenten, die mit 115/230 Veingespeist werden können, wurden zusammengefasst und werden von einem Trenntransformator T2 versorgt. Alle Komponenten sind auf eine 230 VVersorgung eingestellt oder diese Spannung ist vorgewählt. Die verschiedenen Verbraucher sind einzeln abgesichert. Solange T2 die richtigen Abgriffebesitzt, kann er an die Stromversorgung angeschlossen werden, die für den Leistungsteil des Stromrichters verwendet wird.Das gleiche gilt für den Feldversorgungskreis. Es gibt zwei verschiedene Typen von Anpasstransformatoren. Einer kann für Versorgungsspannungen bis500 V, der andere für Spannungen bis 690 V verwendet werden. Die 690 V Primärstufe darf nicht zusammen mit der SDCS-FEX-1/2A Feldversorgungverwendet werden!Entsprechend der Motorlüfter-Spannung kann die Versorgung aus der gleichen Quelle erfolgen, die für den Leistungsteil des Stromrichters verwendet wird.Falls A, D und E aus derselben Quelle versorgt werden sollen, die für C verwendet wird, muss entschieden werden, ob die F1-Sicherungen für beide Zweckeverwendet werden können (Schutz des Leistungsteils und der Hilfsstromversorgung) oder nicht. Außerdem muss geprüft werden, ob die Verbraucher mitdieser Spannungswellenform versorgt werden können (siehe Kapitel Netzdrosseln), bevor der Anschluss an C erfolgt. Wenn der Stromrichter am Punkt Cüber einen Stromrichtertransformator direkt aus dem Hochspannungsnetz versorgt wird, sind zusätzliche Bedingungen bei der Projektierung zuberücksichtigen (weitere Informationen auf Anfrage).
IN3
OUT3
IN1
OUT1
V5
V6
V1
V2
X96:
DO8
1 2 X99: 1 2 X2: 4 5 X2: 1 2 3 U1 W1V1 PE
K1 F6
K20
K21K20 K3 K1
X96:1
X96:2
L1 L2 L3
F1
F3
K31 3
2 4
M~
T3F23
4
1
2
T2690V660V600V575V525V500V450V415V400V380V
115V
230V
K15
K15
S1
1
2
K6 K8
X2:4
X2:5
K11K10
K21
500V460V415V400V
365V350V265V250V90V60V30V
X33
C 1 D 1
AITAC AI1 AI2 AI3 AI4+10V -10V AO1 AO2 IACT DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V DO1 DO2 DO3 DO4 DO5 DO6 DO7_ _ _ _ _+ + + + +
T
T M
0V0V0V0V0V
X3: 1 2 3 4 5 6 7 8 9 10 X4: 1 2 3 4 5 6 7 8 9 10 X6: 1 2 3 4 5 6 7 8 9 10 X7: 1 2 3 4 5 6 7 8 1...10X5:+ _
+
_
K1
K20
K21
K6
K8
1
2
S1
K11
K10
S4
5 6
2 4 6
1 3 5K6
F51
2F8
1
2F7
1
2
2
1
4
3
6
5F6
I > I > I >
13
14
UV
WM3~
K11 3 5
2 4 6
L1
1
2
3
4K8
13
14
X1: 1 7
L3
X1: 5 3+ _
L1 N L1 N L1 L2 L3A C D E
Kommunikations-karte (COM-x) Rechnerkarte (CON-2)
Netzteil(POW-1)
Stromrichter-modul
EIN
AUS STOP
START
NOT-AUS
Feldstromrichter(FEX-1/2)
abhängig vom Gerätetypevtl. andere Konfiguration
die Polarität der Signaleist für Motorbetrieb dargestelltfalls Zwischenklemmen vorhanden
Einspeisung sieheBeschreibung
z.B. Druckschalter beim C4 Modul

II D 3-4
3ADW000066R0903 DCS500 System description d i
• SteuerungDie Relaislogik kann in drei Teile untergliedert werden:
a: Erzeugung eines EIN/AUS- und eines START/STOP-Befehls:Die mit K20 und K21 (Selbsthalterelais) dargestellten Befehle können mit einer SPS erzeugt und durch Relais, die eine Potentialtrennung ermöglichen,oder direkt mit 24 V Signalen an die Anschlüsse des Stromrichters übertragen werden. Es gibt keine zwingende Notwendigkeit, festverdrahtete Signalezu verwenden. Diese Befehle können auch über eine serielle Verbindung übertragen werden. Durch Wahl einer der beiden Möglichkeiten für die einzelnenSignale kann auch eine Mischlösung realisiert werden.
b: Erzeugung von Steuer- und Überwachungssignalen:Das Hauptschütz K1 für den Ankerstromkreis wird von einem Schwachstromkontakt auf der Elektronik-Einspeisekarte gesteuert. Der Status diesesSchützes wird vom Stromrichter über Binäreingang 3 überprüft. Das Feldversorgungsschütz K3 wird durch Hilfskontakt K11, der mit dem Binärausgangdes Stromrichters verbunden ist, gesteuert. Die Binärausgänge bestehen aus Relaistreibern, die jeweils ca. 50 mA ausgeben und einer Strombegrenzungvon ca. 160 mA für alle Ausgänge. Die Schütze K6 und K8 steuern die Lüfter des Antriebssystems. Sie werden von Hilfskontakt K10 (ähnlich K11)gesteuert. Ein Hilfskontakt des Leistungsschalters F6, der die Versorgung des Motorlüfters überwacht, ist mit K6 in Reihe geschaltet. Zur Überwachungder Versorgung des Stromrichter-Lüfters ist der Kontakt des Temperaturfühlers mit K8 in Reihe geschaltet. Die Hilfskontakte K6 und K8 werden zurÜberwachung des Status der Lüftereinspeisung durch den Stromrichter verwendet und an die Binäreingänge 1 und 2 angeschlossen. Die Funktion vonK15 wird im nächsten Abschnitt beschrieben.
c: Stopmodus zusätzlich zu EIN/AUS und START/STOP:In diesem Abschnitt wird die Reaktion des Antriebs beschrieben, wenn der Eingang EMERGENCY_STOP (906) oder COAST_STOP (905) aktiviert wird.Die für diese Erläuterung verwendete externe Verdrahtung ist nur als Beispiel zu verstehen!Für EMERGENCY STOP (Not-Halt) sind andere Voraussetzungen zu berücksichtigen. Diese Beschreibung konzentriert sich auf die Funktionalität undberücksichtigt keine speziellen, für den Typ der Maschine geltenden Sicherheitsbedingungen.Wenn in diesem Fall Not-Aus gedrückt wird, wird die Meldung über Binäreingang 5 an den Stromrichter übertragen. Der Stromrichter reagiertentsprechend der programmierten Funktion (über eine Rampe anhalten, Stromgrenze oder Austrudeln). Wenn der Stromrichter den Antrieb nichtinnerhalb der an K15 eingestellten Zeit zum Stillstand bringt, schaltet der Hilfskontakt die Steuerspannung aus. Daraufhin werden das Hauptschütz K1und alle anderen abgeschaltet. Das kann zum Ausfall von Komponenten führen (siehe Bedienungsanleitung). Dieses Risiko kann durch Einbau einerweiteren Zeitverzögerung (grau unterlegt) vermindert werden. Hierdurch wird ein anderer Stopmodus möglich.
- Mit dem Not-Aus-Signal wird die Rampenfunktion im Strom-richter in der zuvor beschriebenen Weise aktiviert. Wennder Antrieb innerhalb der von K15 vorgegebenen Zeit zumStillstand kommt, schaltet der Stromrichter das Haupt-schütz K1 ab. Wenn der Stromrichter den Antrieb nichtinnerhalb der festgelegten Zeit zum Stillstand bringt, akti-viert K15 die Funktion ELECTRICAL DISCONNECT mitder durch K16 festgelegten Zeitverzögerung. Diese Mel-dung wird über einen freien Binäreingang an den Strom-richter übertragen. Dieser Eingang muss auf den EingangCOAST_STOP der Antriebslogik gelegt werden. Der Ein-gang COAST_STOP bringt den Strom so schnell wiemöglich auf Null. Die Verzögerungszeit von K16 mussetwas höher liegen als die vom Stromregler benötigte Zeit,um den Strom auf Null zu bringen. Nach Ablauf der Zeit K16wird die Steuerspannung abgeschaltet und alle Schützefallen ab.
- Muss die Drehzahl des Antriebs nicht berücksichtigt wer-den, kann die Funktion ELECTRICAL DISCONNECT di-rekt initialisiert werden, die über K16 den Antrieb abschal-tet.
d: Schalten des Hauptschützes nur durch die Steuerung:Diese Betriebsart wird nicht als Standard-Ein- und Ausschaltreihenfolge empfohlen. Manchmal ist es jedoch einfacher, die Handhabung desNetzschützes beizubehalten (Modernisierung von Antrieben; Sicherheitskonzepte der gesamten Maschine, usw.) und so zu belassen, wie sie sich ggf.über Jahre bewährt hat, auch wenn die gesamte Sequenz im Stromrichtergerät realisiert ist. In solchen Fällen sollten die folgenden Punkte beachtetwerden:
- Es wird angenommen, dass der Befehl von der Steuerung als Relaiskontakt in Reihe mit K1 liegt (unterhalb der Klemmen X96: 1 und 2) oder in Reihemit dem Hilfskontakt K16 oder er ersetzt K16 komplett.
- Wenn das Netzschütz im generatorischen Betrieb geöffnet wird, kann es zu Bauteilefehlern kommen (siehe Betriebsanleitung).- Die Steuerung erzeugt den Befehl “Hauptschütz aus”. Für eine sichere Ausschaltung werden zwei Typen von Kontakten benötigt:- Ein vorauseilender Kontakt sollte mit einem unbenutzten binären Eingang und dieser dann mit dem Signal START_INHIBIT (908) verbunden werden.
Dadurch werden die Regler gesperrt und der Strom sollte dann auf Null zurück gehen. Der Stromrichter seinerseits generiert das Signal zum Abschaltendes Netzschützes unabhängig davon, ob die Funktion im Gerät benutzt wird oder nicht.
- Der normale Relaiskontakt kann dann das Netzschütz steuern.- Abhängig vom zeitlichen Bezug der einzelnen Signale kann es vorkommen, dass Alarm- oder Fehlermeldungen erscheinen. Diese müssen entweder
per RESET quittiert oder umgangen werden, z.B. durch die Auto Reclosing Funktion.
• AblaufWenn der EIN-Befehl an den Stromrichter ausgegeben wird und kein Fehlersignal aktiv ist, schließt der Stromrichter das Lüfter-, Feld- und Hauptschütz,prüft die Versorgungsspannung und den Status der Schütze und gibt, wenn keine Fehlermeldungen anstehen, die Regelung frei und wartet auf den Start-Befehl. Wenn der Start-Befehl gegeben ist, wird der Drehzahl-Sollwert freigegeben und der Drehzahlregelungsmodus ist aktiv (Einzelheiten hierzu sieheSoftware-Beschreibung).
EMER.STOP
K16
K15 K16
K15
ELEC.DISCONN.
DIx
K15
X6:9CON-2
S1
1
2
Not-Aus
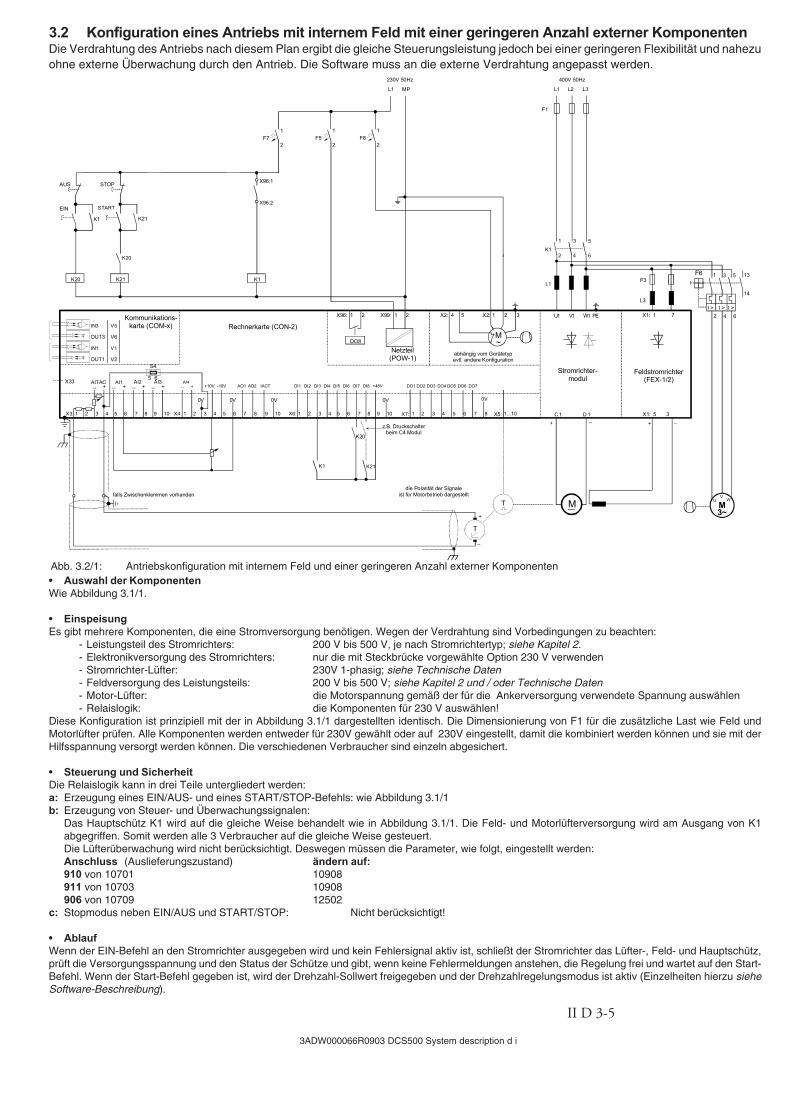
II D 3-5
3ADW000066R0903 DCS500 System description d i
Abb. 3.2/1: Antriebskonfiguration mit internem Feld und einer geringeren Anzahl externer Komponenten
3.2 Konfiguration eines Antriebs mit internem Feld mit einer geringeren Anzahl externer KomponentenDie Verdrahtung des Antriebs nach diesem Plan ergibt die gleiche Steuerungsleistung jedoch bei einer geringeren Flexibilität und nahezuohne externe Überwachung durch den Antrieb. Die Software muss an die externe Verdrahtung angepasst werden.
• Auswahl der KomponentenWie Abbildung 3.1/1.
• EinspeisungEs gibt mehrere Komponenten, die eine Stromversorgung benötigen. Wegen der Verdrahtung sind Vorbedingungen zu beachten:
- Leistungsteil des Stromrichters: 200 V bis 500 V, je nach Stromrichtertyp; siehe Kapitel 2.- Elektronikversorgung des Stromrichters: nur die mit Steckbrücke vorgewählte Option 230 V verwenden- Stromrichter-Lüfter: 230V 1-phasig; siehe Technische Daten- Feldversorgung des Leistungsteils: 200 V bis 500 V; siehe Kapitel 2 und / oder Technische Daten- Motor-Lüfter: die Motorspannung gemäß der für die Ankerversorgung verwendete Spannung auswählen- Relaislogik: die Komponenten für 230 V auswählen!
Diese Konfiguration ist prinzipiell mit der in Abbildung 3.1/1 dargestellten identisch. Die Dimensionierung von F1 für die zusätzliche Last wie Feld undMotorlüfter prüfen. Alle Komponenten werden entweder für 230V gewählt oder auf 230V eingestellt, damit die kombiniert werden können und sie mit derHilfsspannung versorgt werden können. Die verschiedenen Verbraucher sind einzeln abgesichert.
• Steuerung und SicherheitDie Relaislogik kann in drei Teile untergliedert werden:a: Erzeugung eines EIN/AUS- und eines START/STOP-Befehls: wie Abbildung 3.1/1b: Erzeugung von Steuer- und Überwachungssignalen:
Das Hauptschütz K1 wird auf die gleiche Weise behandelt wie in Abbildung 3.1/1. Die Feld- und Motorlüfterversorgung wird am Ausgang von K1abgegriffen. Somit werden alle 3 Verbraucher auf die gleiche Weise gesteuert.Die Lüfterüberwachung wird nicht berücksichtigt. Deswegen müssen die Parameter, wie folgt, eingestellt werden:Anschluss (Auslieferungszustand) ändern auf:910 von 10701 10908911 von 10703 10908906 von 10709 12502
c: Stopmodus neben EIN/AUS und START/STOP: Nicht berücksichtigt!
• AblaufWenn der EIN-Befehl an den Stromrichter ausgegeben wird und kein Fehlersignal aktiv ist, schließt der Stromrichter das Lüfter-, Feld- und Hauptschütz,prüft die Versorgungsspannung und den Status der Schütze und gibt, wenn keine Fehlermeldungen anstehen, die Regelung frei und wartet auf den Start-Befehl. Wenn der Start-Befehl gegeben ist, wird der Drehzahl-Sollwert freigegeben und der Drehzahlregelungsmodus ist aktiv (Einzelheiten hierzu sieheSoftware-Beschreibung).
IN3
OUT3
IN1
OUT1
V5
V6
V1
V2
X96:
DO8
1 2 X99: 1 2 X2: 4 5 X2: 1 2 3 U1 W1V1 PE
K1
K20
K21K20 K1
X96:1
X96:2
L1 L2 L3
400V 50Hz
F1
F3
M~
K21
X33
C 1 D 1
AITAC AI1 AI2 AI3 AI4+10V -10V AO1 AO2 IACT DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V DO1 DO2 DO3 DO4 DO5 DO6 DO7_ _ _ _ _+ + + + +
T
T M
0V0V0V0V0V
X3: 1 2 3 4 5 6 7 8 9 10 X4: 1 2 3 4 5 6 7 8 9 10 X6: 1 2 3 4 5 6 7 8 9 10 X7: 1 2 3 4 5 6 7 8 1...10X5:+ _
+
_
K1
K20
K21
S4
5 6
F51
2F8
1
2F7
1
2
K11 3 5
2 4 6
L1
X1: 1 7
L3
X1: 5 3
+ _
L1 MP
230V 50Hz
2
1
4
3
6
5F6
I > I > I >
13
14
UV
WM3~
Kommunikations-karte (COM-x) Rechnerkarte (CON-2)
Netzteil(POW-1)
Stromrichter-modul
EIN
AUS STOP
START
Feldstromrichter(FEX-1/2)
abhängig vom Gerätetypevtl. andere Konfiguration
die Polarität der Signaleist für Motorbetrieb dargestelltfalls Zwischenklemmen vorhanden
z.B. Druckschalter beim C4 Modul

II D 3-6
3ADW000066R0903 DCS500 System description d i
Abb. 3.3/1: Standardantriebskonfiguration mit externem halbgesteuertem Feld (1-phasig)
3.3 Standardantriebskonfiguration mit externem halbgesteuertem Feld (1-phasig)Bei Verdrahtung des Antriebs nach dem folgenden Schaltplan ergibt sich die größte Flexibilität und besitzt der Antrieb die größte Anzahlan Standardüberwachungsfunktionen. Es sind keine Softwareänderungen zur Anpassung des Antriebs an die externe Verdrahtung nötig.
• Auswahl der KomponentenFür diesen Verdrahtungsplan wurde ein DCS 500B Stromrichter zusammen mit einer DCF 503A/4A Feldversorgung gewählt. Wenn ein DCF 504A für dieFeldversorgung verwendet wird, ist eine Feldumkehr möglich. Dann ist bei weniger anspruchsvollen Antrieben ein DCS 501B (2-Q) für die Ankerversorgungausreichend. Diese Feldversorgung kann bei Netzspannungen bis 500V verwendet werden und liefert einen Feldstrom von bis zu 50 A. Für höhereFeldströme ist eine DCF 500B 3-Phasen-Versorgung (Verdrahtung siehe 3.5/2) notwendig.
• EinspeisungEs gibt mehrere Komponenten, die eine Stromversorgung benötigen:
- Leistungsteil des Stromrichters: 200 V bis 1000 V, je nach Stromrichtertyp; siehe Kapitel 2.- Elektronikversorgung des Stromrichters: 115 V oder 230 V, mit Steckbrücke gewählt- Stromrichter-Lüfter: 230 V 1-phasig; 400 V / 690 V 3-phasig bei A6/A7; siehe Technische Daten- Feldversorgung des Leistungsteils: 115 V bis 500 V; zusammen mit einem Trenn- / Spartransformator bis 690 V; siehe Kapitel 2
und/oder Technische Daten- Elektronikversorgung der Feldeinheit: 115 V bis 230 V- Motor-Lüfter: je nach Motorlieferant / örtliche Anforderungen- Relaislogik: je nach örtlichen Anforderungen
Diese Konfiguration ist prinzipiell mit der in Abbildung 3.1/1 dargestellten identisch. Zusätzlich zu der Darstellung in Abbildung 3.1/1 benötigt dasFeldversorgungsgerät eine Versorgung der Elektronik, die separat abgesichert ist und die von der durch T2 erzeugten 230V Spannung stammt. DieserFeldregler wird über eine serielle Verbindung, die an X16: des Ankerstromrichters angeschlossen ist, gesteuert. Der 690V Primärabgriff kann bei dieser Artder Feldversorgung verwendet werden!Falls A, D und E aus derselben Quelle versorgt werden sollen, die für C verwendet wird, muss entschieden werden, ob die F1- Sicherungen für beide Zweckeverwendet werden können (Schutz des Leistungsteils und der Hilfsstromversorgung) oder nicht. Außerdem muss vor dem Anschluss an C geprüft werden,ob die Verbraucher mit dieser Spannungswellenform versorgt werden können (siehe Kapitel Netzdrosseln).
• SteuerungDie Relaislogik kann in drei Teile untergliedert werden (siehe Abbildung 3.1/1). Prinzipiell kann die in Abbildung 3.2/1 dargestellte Logik für dieseKonfiguration verwendet werden. Die Größe des Antriebs und/oder sein Wert können als Kriterien für die Auswahl der Logik gemäß Abbildung 3.1/1 oderAbbildung 3.2/1 oder einer Kombination aus beiden zugrundegelegt werden.
* Empfehlung: bei Einsatz eines DCF 504A Feldversorgungsgerätes, die Ansteuerung von K3, wie dargestellt belassen!
• AblaufWie Abbildung 3.1/1.
IN3
OUT3
IN1
OUT1
V5
V6
V1
V2
X96:
DO8
1 2 X99: 1 2 X2: 4 5 X2: 1 2 3 U1 W1V1 PE U1 V1
K1 F6
K20
K21K20 K3 K1
X96:1
X96:2
F1
F3
K31 3
2 4
M~
T3F23
4
1
2
T2690V660V600V575V525V500V450V415V400V380V
115V
230V
K15
K15
S1
1
2
K6 K8
X2:4
X2:5
K11K10
K21
500V460V415V400V
365V350V265V250V90V60V30V
X33
C 1 D 1 C1 D1
AITAC AI1 AI2 AI3 AI4+10V -10V AO1 AO2 IACT DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V DO1 DO2 DO3 DO4 DO5 DO6 DO7_ _ _ _ _+ + + + +
T
T M
0V0V0V0V0V
X3: 1 2 3 4 5 6 7 8 9 10 X4: 1 2 3 4 5 6 7 8 9 10 X6: 1 2 3 4 5 6 7 8 9 10 X7: 1 2 3 4 5 6 7 8 1...10X5:
+ _ + _
+
_
K1
K20
K21
K6
K8
1
2
S1
K11
K10
S4
5 6
X16:321
X2:
321
X3: 21
2 4 6
1 3 5K6
F51
2F9
1
2F8
1
2F7
1
2
2
1
4
3
6
5F6
I > I > I >
13
14
UV
WM3~
K11 3 5
2 4 6
L1
1
2
3
4K8
13
14
L1 L2 L3L1 N L1 N L1 L2 L3A C D E
*
Kommunikations-karte (COM-x) Rechnerkarte (CON-2)
Netzteil(POW-1)
Stromrichter-modul
EIN
AUS STOP
START
NOT-AUS
Feldstromrichter(DCF 503A/504A) *
abhängig vom Gerätetypevtl. andere Konfiguration
die Polarität der Signaleist für Motorbetrieb dargestelltfalls Zwischenklemmen vorhanden
Einspeisung sieheBeschreibung
z.B. Druckschalter beim C4 Modul

II D 3-7
3ADW000066R0903 DCS500 System description d i
3.4 Standardkonfiguration mit einem vollgesteuerten Feld (3-phasig) ohne AnkerstromrichterDer DCS 500B Stromrichter wird bei einer nicht motorischen Anwendung als DCF 500B Version verwendet. Ob der Antrieb nach diesemBeispiel oder nach Abbildung 3.2/1 verdrahtet werden soll, hängt von der Anwendung und den Anforderungen ab. Die Softwarestrukturmuss angepasst werden und ist im Bedienhandbuch beschrieben.
• Auswahl der KomponentenFür diesen Verdrahtungsplan wurde ein DCF 500B Stromrichter Typ C1 oder C2 zusammen mit einer DCF 506 Einheit, die als Überspannungsschutz dient,ausgewählt.
• EinspeisungEs gibt mehrere Komponenten, die eine Stromversorgung benötigen:
- Leistungsteil des Stromrichters: 200 V bis 500 V, je nach Stromrichtertyp; siehe Kapitel 2.- Elektronikversorgung des Stromrichters: 115 V oder 230 V, mit Steckbrücke gewählt- Stromrichter-Lüfter: 230 V 1-phasig bei C1 + C2; siehe Technische Daten- Relaislogik: je nach örtlichen Anforderungen
Prinzipiell gemäß Abbildung 3.1/1. Wird der Stromrichter am Punkt C über einen Stromrichtertransformator direkt aus dem Hochspannungsnetz versorgt,so ist sicher zu stellen, dass der Hochspannungsschalter nicht geöffnet wird, solange Feldstrom fließt. Außerdem sind zusätzliche Bedingungen bei derProjektierung zu berücksichtigen (weitere Informationen auf Anfrage).
• SteuerungDie Relaislogik kann in drei Teile untergliedert werden.a: Erzeugung eines EIN/AUS- und eines START/STOP-Befehls: wie Abbildung 3.1/1b: Erzeugung von Steuer- und Überwachungssignalen: Prinzipiell identisch mit Abbildung 3.1/1.
Anstelle der Überwachung des Motorlüfters an Binäreingang 2, den es hier nicht gibt, aber als Kühleinrichtung für die Drossel dienen kann, wird derÜberspannungsschutz DCF 506 durch denselben Eingang überwacht. Wenn ein zusätzliches Kühlgerät überwacht werden soll, können zusätzlicheFunktionsbausteine verwendet werden.
c: Stopmodus zusätzlich zu EIN/AUS und START/STOP: Prinzipiell identisch mit Abbildung 3.1/1In diesem Fall kann es erheblich wichtiger sein, sich auf eine Verminderung des Stroms als auf andere Aspekte zu konzentrieren. Ist dies der Fall, istfür Parameter EMESTOP_MODE die Einstellung Austrudeln zu wählen.
• AblaufWie Abbildung 3.1/1.
Abb. 3.4/1: Standardkonfiguration mit vollgeteuertem Feld (3-phasig) ohne Ankerstromrichter
IN3
OUT3
IN1
OUT1
V5
V6
V1
V2
X96:
DO8
1 2 X99: 1 2 X2: 4 5 X2: 1 2 3 U1 W1V1 PE
F1.2
M~
X33 AITAC AI1 AI2 AI3 AI4+10V -10V AO1 AO2 IACT DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V DO1 DO2 DO3 DO4 DO5 DO6 DO7_ _ _ _ _+ + + + +
0V0V0V0V0V
X3: 1 2 3 4 5 6 7 8 9 10 X4: 1 2 3 4 5 6 7 8 9 10 X6: 1 2 3 4 5 6 7 8 9 10 X7: 1 2 3 4 5 6 7 8 1...10X5:
K8
K1
S4
5 6
K11 3 5
2 4 6
L1
C 1 D 1
+ _ +
X4:1
X4:2
_X11 X12
DCF 506
K10
L1 L2 L3C
K1
K20
K21K20 K1
X96:1
X96:2
F23
4
1
2
T2690V660V600V575V525V500V450V415V400V380V
115V
230V
K15
K15
S1
1
2
K8
X2:4
X2:5
K10
K21
F51
2F8
1
2F7
1
2
1
2
3
4K8
L1 NA
K20
K21
1
2
S1
Kommunikations-karte (COM-x) Rechnerkarte (CON-2)
Netzteil(POW-1)
Stromrichter-modul
EIN
AUS STOP
START
NOT-AUS
Überspannungs-schutz
abhängig vom Gerätetypevtl. andere Konfiguration
Einspeisung sieheBeschreibung
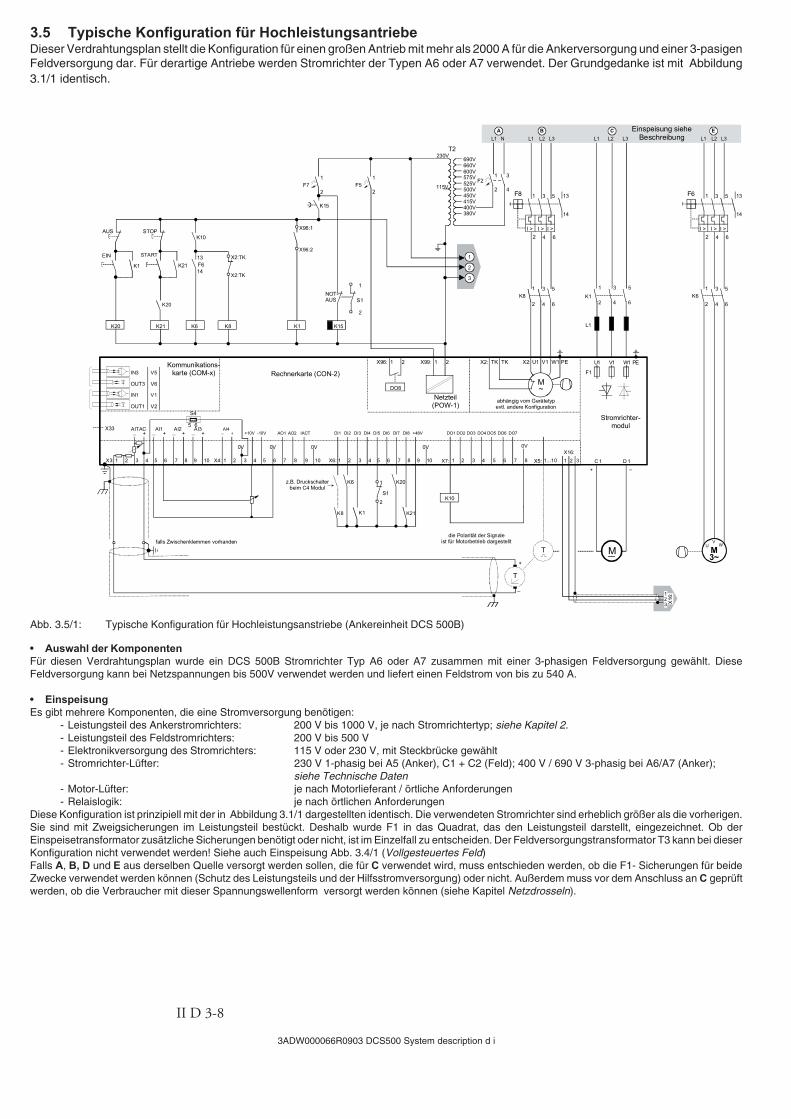
II D 3-8
3ADW000066R0903 DCS500 System description d i
3.5 Typische Konfiguration für HochleistungsantriebeDieser Verdrahtungsplan stellt die Konfiguration für einen großen Antrieb mit mehr als 2000 A für die Ankerversorgung und einer 3-pasigenFeldversorgung dar. Für derartige Antriebe werden Stromrichter der Typen A6 oder A7 verwendet. Der Grundgedanke ist mit Abbildung3.1/1 identisch.
Abb. 3.5/1: Typische Konfiguration für Hochleistungsanstriebe (Ankereinheit DCS 500B)
• Auswahl der KomponentenFür diesen Verdrahtungsplan wurde ein DCS 500B Stromrichter Typ A6 oder A7 zusammen mit einer 3-phasigen Feldversorgung gewählt. DieseFeldversorgung kann bei Netzspannungen bis 500V verwendet werden und liefert einen Feldstrom von bis zu 540 A.
• EinspeisungEs gibt mehrere Komponenten, die eine Stromversorgung benötigen:
- Leistungsteil des Ankerstromrichters: 200 V bis 1000 V, je nach Stromrichtertyp; siehe Kapitel 2.- Leistungsteil des Feldstromrichters: 200 V bis 500 V- Elektronikversorgung des Stromrichters: 115 V oder 230 V, mit Steckbrücke gewählt- Stromrichter-Lüfter: 230 V 1-phasig bei A5 (Anker), C1 + C2 (Feld); 400 V / 690 V 3-phasig bei A6/A7 (Anker);
siehe Technische Daten- Motor-Lüfter: je nach Motorlieferant / örtliche Anforderungen- Relaislogik: je nach örtlichen Anforderungen
Diese Konfiguration ist prinzipiell mit der in Abbildung 3.1/1 dargestellten identisch. Die verwendeten Stromrichter sind erheblich größer als die vorherigen.Sie sind mit Zweigsicherungen im Leistungsteil bestückt. Deshalb wurde F1 in das Quadrat, das den Leistungsteil darstellt, eingezeichnet. Ob derEinspeisetransformator zusätzliche Sicherungen benötigt oder nicht, ist im Einzelfall zu entscheiden. Der Feldversorgungstransformator T3 kann bei dieserKonfiguration nicht verwendet werden! Siehe auch Einspeisung Abb. 3.4/1 (Vollgesteuertes Feld)Falls A, B, D und E aus derselben Quelle versorgt werden sollen, die für C verwendet wird, muss entschieden werden, ob die F1- Sicherungen für beideZwecke verwendet werden können (Schutz des Leistungsteils und der Hilfsstromversorgung) oder nicht. Außerdem muss vor dem Anschluss an C geprüftwerden, ob die Verbraucher mit dieser Spannungswellenform versorgt werden können (siehe Kapitel Netzdrosseln).
IN3
OUT3
IN1
OUT1
V5
V6
V1
V2
X96:
DO8
1 2 X99: 1 2 X2: TK TK X2: U1 V1 W1 U1 W1V1 PE
K1 F6
K20
K21K20 K1
X96:1
X96:2
M~
F23
4
1
2
T2690V660V600V575V525V500V450V415V400V380V
115V
230V
K15
K15
S1
1
2
K6 K8
X2:TK
X2:TK
K10
K21
X33
C 1 D 1
AITAC AI1 AI2 AI3 AI4+10V -10V AO1 AO2 IACT DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V DO1 DO2 DO3 DO4 DO5 DO6 DO7_ _ _ _ _+ + + + +
T
T M
0V0V0V0V0V
X3: 1 2 3 4 5 6 7 8 9 10 X4: 1 2 3 4 5 6 7 8 9 10 X6: 1 2 3 4 5 6 7 8 9 10 X7: 1 2 3 4 5 6 7 8 1...10X5:+ _
+
_
K1
K20
K21
K6
K8
1
2
S1K10
S4
5 6
X16:321
2 4 6
1 3 5K6
F51
2F7
1
2
2
1
4
3
6
5F6
I > I > I >
13
14
UV
WM3~
K11 3 5
2 4 6
L1
13
14
2 4 6
1 3 5K8
2
1
4
3
6
5F8
I > I > I >
13
14
PE
1
2
3
F1
L1 L2 L3L1 N L1 L2 L3A B C E
L1 L2 L3
X16
:
321
Kommunikations-karte (COM-x) Rechnerkarte (CON-2)
Netzteil(POW-1)
Stromrichter-modul
EIN
AUS STOP
START
NOT-AUS
abhängig vom Gerätetypevtl. andere Konfiguration
die Polarität der Signaleist für Motorbetrieb dargestelltfalls Zwischenklemmen vorhanden
Einspeisung sieheBeschreibung
z.B. Druckschalter beim C4 Modul
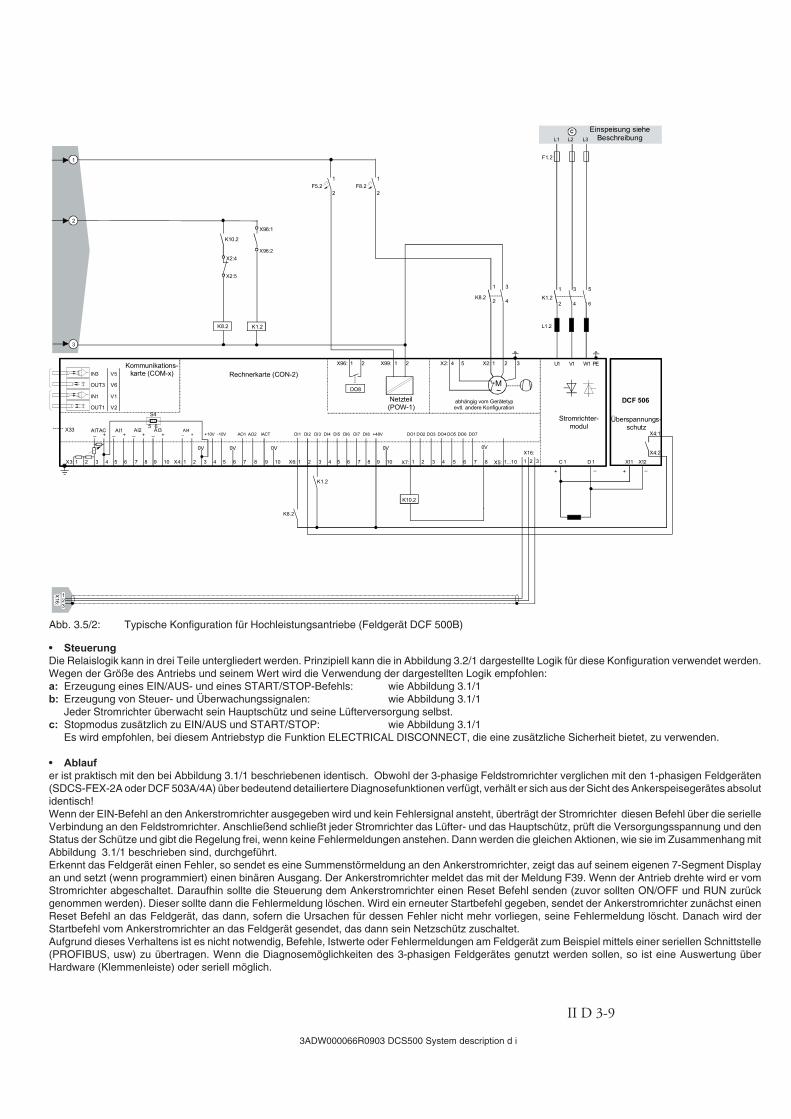
II D 3-9
3ADW000066R0903 DCS500 System description d i
Abb. 3.5/2: Typische Konfiguration für Hochleistungsantriebe (Feldgerät DCF 500B)
• SteuerungDie Relaislogik kann in drei Teile untergliedert werden. Prinzipiell kann die in Abbildung 3.2/1 dargestellte Logik für diese Konfiguration verwendet werden.Wegen der Größe des Antriebs und seinem Wert wird die Verwendung der dargestellten Logik empfohlen:a: Erzeugung eines EIN/AUS- und eines START/STOP-Befehls: wie Abbildung 3.1/1b: Erzeugung von Steuer- und Überwachungssignalen: wie Abbildung 3.1/1
Jeder Stromrichter überwacht sein Hauptschütz und seine Lüfterversorgung selbst.c: Stopmodus zusätzlich zu EIN/AUS und START/STOP: wie Abbildung 3.1/1
Es wird empfohlen, bei diesem Antriebstyp die Funktion ELECTRICAL DISCONNECT, die eine zusätzliche Sicherheit bietet, zu verwenden.
• Ablaufer ist praktisch mit den bei Abbildung 3.1/1 beschriebenen identisch. Obwohl der 3-phasige Feldstromrichter verglichen mit den 1-phasigen Feldgeräten(SDCS-FEX-2A oder DCF 503A/4A) über bedeutend detailiertere Diagnosefunktionen verfügt, verhält er sich aus der Sicht des Ankerspeisegerätes absolutidentisch!Wenn der EIN-Befehl an den Ankerstromrichter ausgegeben wird und kein Fehlersignal ansteht, überträgt der Stromrichter diesen Befehl über die serielleVerbindung an den Feldstromrichter. Anschließend schließt jeder Stromrichter das Lüfter- und das Hauptschütz, prüft die Versorgungsspannung und denStatus der Schütze und gibt die Regelung frei, wenn keine Fehlermeldungen anstehen. Dann werden die gleichen Aktionen, wie sie im Zusammenhang mitAbbildung 3.1/1 beschrieben sind, durchgeführt.Erkennt das Feldgerät einen Fehler, so sendet es eine Summenstörmeldung an den Ankerstromrichter, zeigt das auf seinem eigenen 7-Segment Displayan und setzt (wenn programmiert) einen binären Ausgang. Der Ankerstromrichter meldet das mit der Meldung F39. Wenn der Antrieb drehte wird er vomStromrichter abgeschaltet. Daraufhin sollte die Steuerung dem Ankerstromrichter einen Reset Befehl senden (zuvor sollten ON/OFF und RUN zurückgenommen werden). Dieser sollte dann die Fehlermeldung löschen. Wird ein erneuter Startbefehl gegeben, sendet der Ankerstromrichter zunächst einenReset Befehl an das Feldgerät, das dann, sofern die Ursachen für dessen Fehler nicht mehr vorliegen, seine Fehlermeldung löscht. Danach wird derStartbefehl vom Ankerstromrichter an das Feldgerät gesendet, das dann sein Netzschütz zuschaltet.Aufgrund dieses Verhaltens ist es nicht notwendig, Befehle, Istwerte oder Fehlermeldungen am Feldgerät zum Beispiel mittels einer seriellen Schnittstelle(PROFIBUS, usw) zu übertragen. Wenn die Diagnosemöglichkeiten des 3-phasigen Feldgerätes genutzt werden sollen, so ist eine Auswertung überHardware (Klemmenleiste) oder seriell möglich.
IN3
OUT3
IN1
OUT1
V5
V6
V1
V2
X96:
DO8
1 2 X99: 1 2 X2: 4 5 X2: 1 2 3 U1 W1V1 PE
K1.2
X96:1
X96:2
F1.2
M~
X33 AITAC AI1 AI2 AI3 AI4+10V -10V AO1 AO2 IACT DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V DO1 DO2 DO3 DO4 DO5 DO6 DO7_ _ _ _ _+ + + + +
0V0V0V0V0V
X3: 1 2 3 4 5 6 7 8 9 10 X4: 1 2 3 4 5 6 7 8 9 10 X6: 1 2 3 4 5 6 7 8 9 10 X7: 1 2 3 4 5 6 7 8 1...10X5:
K8.2
K1.2
S4
5 6
F5.21
2F8.2
1
2
K1.21 3 5
2 4 6
L1.2
1
2
3
C 1 D 1
+ _ +
X4:1
X4:2
_X11 X12
K8.2
X2:4
X2:5
X16:321
1
2
3
4K8.2
DCF 506
K10.2
K10.2
X16:
321
L1 L2 L3C
Kommunikations-karte (COM-x) Rechnerkarte (CON-2)
Netzteil(POW-1)
Stromrichter-modul
Überspannungs-schutz
abhängig vom Gerätetypevtl. andere Konfiguration
Einspeisung sieheBeschreibung
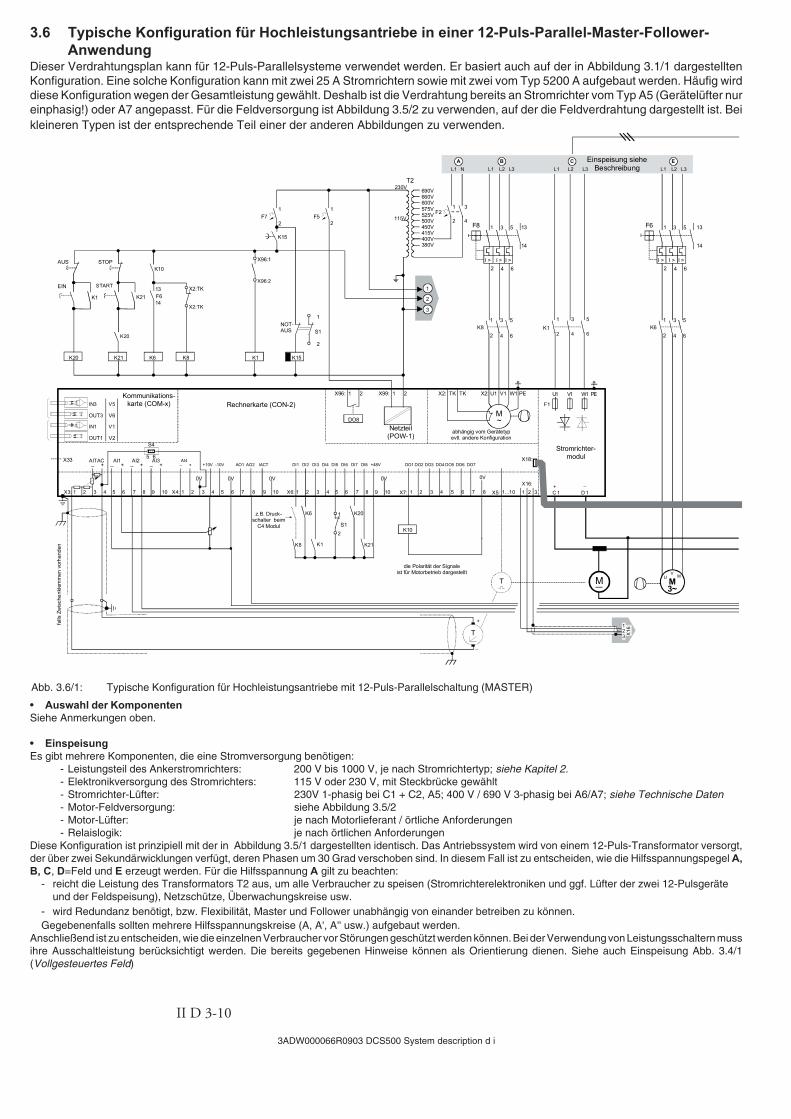
II D 3-10
3ADW000066R0903 DCS500 System description d i
• Auswahl der KomponentenSiehe Anmerkungen oben.
• EinspeisungEs gibt mehrere Komponenten, die eine Stromversorgung benötigen:
- Leistungsteil des Ankerstromrichters: 200 V bis 1000 V, je nach Stromrichtertyp; siehe Kapitel 2.- Elektronikversorgung des Stromrichters: 115 V oder 230 V, mit Steckbrücke gewählt- Stromrichter-Lüfter: 230V 1-phasig bei C1 + C2, A5; 400 V / 690 V 3-phasig bei A6/A7; siehe Technische Daten- Motor-Feldversorgung: siehe Abbildung 3.5/2- Motor-Lüfter: je nach Motorlieferant / örtliche Anforderungen- Relaislogik: je nach örtlichen Anforderungen
Diese Konfiguration ist prinzipiell mit der in Abbildung 3.5/1 dargestellten identisch. Das Antriebssystem wird von einem 12-Puls-Transformator versorgt,der über zwei Sekundärwicklungen verfügt, deren Phasen um 30 Grad verschoben sind. In diesem Fall ist zu entscheiden, wie die Hilfsspannungspegel A,B, C, D=Feld und E erzeugt werden. Für die Hilfsspannung A gilt zu beachten:
- reicht die Leistung des Transformators T2 aus, um alle Verbraucher zu speisen (Stromrichterelektroniken und ggf. Lüfter der zwei 12-Pulsgeräteund der Feldspeisung), Netzschütze, Überwachungskreise usw.
- wird Redundanz benötigt, bzw. Flexibilität, Master und Follower unabhängig von einander betreiben zu können.Gegebenenfalls sollten mehrere Hilfsspannungskreise (A, A', A'' usw.) aufgebaut werden.
Anschließend ist zu entscheiden, wie die einzelnen Verbraucher vor Störungen geschützt werden können. Bei der Verwendung von Leistungsschaltern mussihre Ausschaltleistung berücksichtigt werden. Die bereits gegebenen Hinweise können als Orientierung dienen. Siehe auch Einspeisung Abb. 3.4/1(Vollgesteuertes Feld)
3.6 Typische Konfiguration für Hochleistungsantriebe in einer 12-Puls-Parallel-Master-Follower-Anwendung
Dieser Verdrahtungsplan kann für 12-Puls-Parallelsysteme verwendet werden. Er basiert auch auf der in Abbildung 3.1/1 dargestelltenKonfiguration. Eine solche Konfiguration kann mit zwei 25 A Stromrichtern sowie mit zwei vom Typ 5200 A aufgebaut werden. Häufig wirddiese Konfiguration wegen der Gesamtleistung gewählt. Deshalb ist die Verdrahtung bereits an Stromrichter vom Typ A5 (Gerätelüfter nureinphasig!) oder A7 angepasst. Für die Feldversorgung ist Abbildung 3.5/2 zu verwenden, auf der die Feldverdrahtung dargestellt ist. Beikleineren Typen ist der entsprechende Teil einer der anderen Abbildungen zu verwenden.
Abb. 3.6/1: Typische Konfiguration für Hochleistungsantriebe mit 12-Puls-Parallelschaltung (MASTER)
IN3
OUT3
IN1
OUT1
V5
V6
V1
V2
X96:
DO8
1 2 X99: 1 2 X2: TK TK X2: U1 V1 W1 U1 W1V1 PE
K1 F6
K20
K21K20 K1
X96:1
X96:2
M~
F23
4
1
2
T2690V660V600V575V525V500V450V415V400V380V
115V
230V
K15
K15
S1
1
2
K6 K8
X2:TK
X2:TK
K10
K21
X33
C 1 D 1
AITAC AI1 AI2 AI3 AI4+10V -10V AO1 AO2 IACT DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V DO1 DO2 DO3 DO4 DO5 DO6 DO7_ _ _ _ _+ + + + +
0V0V0V0V0V
X3: 1 2 3 4 5 6 7 8 9 10 X4: 1 2 3 4 5 6 7 8 9 10 X6: 1 2 3 4 5 6 7 8 9 10 X7: 1 2 3 4 5 6 7 8 1...10X5:
T
T
+
_
K1
K20
K21
K6
K8
1
2
S1K10
S4
5 6
X16:321
X16
:
321
2 4 6
1 3 5K6
F51
2F7
1
2
2
1
4
3
6
5F6
I > I > I >
13
14
UV
WM3~
K11 3 5
2 4 6
13
14
2 4 6
1 3 5K8
2
1
4
3
6
5F8
I > I > I >
13
14
PE
1
2
3
M
X18:
F1
L1 L2 L3L1 N L1 L2 L3A B C E
L1 L2 L3
+ _
Kommunikations-karte (COM-x) Rechnerkarte (CON-2)
Netzteil(POW-1)
Stromrichter-modul
EIN
AUS STOP
START
NOT-AUS
abhängig vom Gerätetypevtl. andere Konfiguration
die Polarität der Signaleist für Motorbetrieb dargestellt
falls
Zw
isch
enkl
emm
en v
orha
nden
Einspeisung sieheBeschreibung
z.B. Druck-schalter beim
C4 Modul

II D 3-11
3ADW000066R0903 DCS500 System description d i
Abb. 3.6/2: Typische Konfiguration für Hochleistungsantriebe mit 12-Puls-Parallelschaltung (FOLLOWER)
• SteuerungDie Relaislogik kann in drei Teile untergliedert werden. Prinzipiell kann die in Abbildung 3.2/1 dargestellte Logik für diese Konfiguration verwendet werden.Wegen der Größe des Antriebs und seinem Wert wird die Verwendung der dargestellten Logik empfohlen:a: Erzeugung eines EIN/AUS- und eines START/STOP-Befehls: wie Abbildung 3.1/1b: Erzeugung von Steuer- und Überwachungssignalen: wie Abbildung 3.1/1
Jeder Stromrichter überwacht sein Hauptschütz und seine Lüfterversorgung selbst.c: Stopmodus zusätzlich zu EIN/AUS und START/STOP: wie Abbildung 3.1/1
Es wird empfohlen, bei diesem Antriebstyp die Funktion ELECTRICAL DISCONNECT, die eine zusätzliche Sicherheit bietet, zu verwenden.
• AblaufDas Schaltbild setzt voraus, dass beide Stromrichter immer im 12-Pulsbetrieb arbeiten, der Master die Feldregelung macht und keinerlei Vorkehrungenbezüglich Redundanz vorgesehen sind. Auch für diese Konfiguration gelten die Bemerkungen in Kapitel 3.5. Die Stromrichter tauschen Binärsignale zumBrückenwechsel und ggf. zur schnellen Überwachung über die Flachkabelverbindung X18: und den analogen Stromsoll- und Istwert über die KlemmleisteX3: / X4: aus. Für den Signalaustausch über die Flachkabelverbindung X18: sind die entsprechenden Ein- und Ausgänge sowohl im Master als auch im SlaveGerät in Parametergruppe 36 zu setzen. Für den Austausch der Stromwerte sind jeweils im Master und Slave je ein analoger Ein- und Ausgang überParametergruppe 1 und 2 zu aktivieren. Weitere Einzelheiten, sowie eine detailierte Parameterliste sind im Handbuch Planung und Inbetriebnahme für 12-Pulsantriebe verfügbar.
• ProjektierungshinweisWenn der Antrieb auch im Fehlerfall und somit redundant verfügbar sein soll, so ist das grundsätzlich möglich! Fehler können zwar grundsätzlich in allenbenutzten Komponenten auftreten, je nach betroffenem Bauteil sind sie unterschiedlich schwer. Deshalb müssen zunächst die Fehler festgelegt werden beidenen ein Notbetrieb erfolgen soll. Dazu zählen Fehler in der Einspeisung / Speisetrafo, in den Stromrichtern zur Ankerspeisung oder im Feldstromrichter,an der 12-Pulsdrossel oder gar am Motor. Wenn es die Lastbedingungen und die Motordaten zulassen, dass mit verringerter Leistung die Anlage betreibbarist, so können Maßnahmen getroffen werden, die Anlagenverfügbarkeit zu erhöhen. Das kann erreicht werden, wenn der 12-Pulstrafo in zwei Trafos aufgeteiltwird, die Ankerstromrichter auch im 6-Puls Mode (nur einer wird zugeschaltet, der andere nicht) konfiguriert sind, die Feldspeisung ggf. doppelt vorhandenist (Hardware Feldstromrichter) oder von beiden Stromrichtern aus erfolgen kann und die 12-Pulsdrossel unwirksam geschaltet werden kann.
1
2
3
IN3
OUT3
IN1
OUT1
V5
V6
V1
V2
AITAC AI1 AI2 AI3 AI4+10V -10V AO1 AO2 IACT DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +48V DO1 DO2 DO3 DO4 DO5 DO6 DO7_ _ _ _ _+ + + + +
0V0V0V0V0V
X3: 1 2 3 4 5 6 7 8 9 10 X4: 1 2 3 4 5 6 7 8 9 10 X6: 1 2 3 4 5 6 7 8 9 10 X7: 1 2 3 4 5 6 7 8 1...10X5:
K1.3
K20
K8.3
S4
5 6
K10.3
X16:
21
X96:
DO8
1 2 X99:
X96:1
X96:2
F5.31
2
K1.3K8.3
X2:TK
X2:TK
K10.3
2 4 6
1 3 5K8.3
2
1
4
3
6
5F8.3
I > I > I >
13
14
1 2 X2: TK TK X2: U1 V1 W1
M~
PE
X33
U1 W1V1 PE
K1.31 3 5
2 4 6
F1
L1 L2 L3 L2 L3BC
L1
C 1+
D 1_
X18:
∆
Y
∆
Stromrichter-modul
Rechnerkarte (CON-2)
Netzteil(POW-1)
abhängig vom Gerätetypevtl. andere Konfiguration
Einspeisung sieheBeschreibung
Druck-schalter
Kommunikations-karte (COM-x)

II D 3-12
3ADW000066R0903 DCS500 System description d i

II D 4-1
3ADW000066R0903 DCS500 System description d i
II D 4-1
Die Standard Struktur der DCS500 Geräte-Softwareist am Ende dieses Kapitels auf einer Ausklappseite alsDiagramm angehängt.Zusätzlich zu den dort dargestellten Funktionsblöcken(“Standard Funktionsblöcke” genannt) sind zusätzli-che Funktionsblöcke (“Applikationsblock” genannt)verfügbar. Dazu zählen ABSolut Wert, ADDierer mit2 und 4 Eingängen, AND Gatter mit 2 und 4 Eingän-gen, COMParatoren, CONVertierungsblöcke,COUNTer, DIVidierer, FILTer, FUNG (x-y Funkti-onsgenerator), LIMiter, MULtiplizierer, OR Gattermit 2 und 4 Eingängen, PARameter Funktionsblock,PI Regler, SR Speicher, SUBtrahierer, XOR Gatteru.s.w.Beide Typen werden im Stromrichter gespeichert undsind in jedem Stromrichter verfügbar. Die “Applikati-onsblöcke” wie die “Standard Funktionsblöcke” sindals Bibliothek im Fileformat verfügbar.Die Bibliothek wird zusammen mit dem StandardDiagramm geliefert und dient als Basis für kunden-spezifische Änderungen. Da eine Bibliothek immereine Kopie der im Stromrichter verfügbaren Blöcke ist,sind ältere Bibliotheken automatisch in neueren ent-halten.
Die Inbetriebnahme- und Wartungs-Tools für dasDCS500 (Bedienpanel und DDC/CMT-Tool) sindnun in der Lage Verknüpfungen dieser einzelnen Funk-tionsblöcke zu erzeugen oder aufzutrennen und somit
Abb. 4.1/1 Bei GAD verwendete Standard- und Applikationsblöcke
ApplikationsblockStandardfunktionsblock
4 Softwareübersicht (Version 21.2xx)4.1 GAD Engineering-Programm
Hinweis:Für das GAD PC Programm und die Bibliotheken sind separate Handbücher verfügbar, die die Möglichkeiten und die Bedienung beschreiben.
anwendungsspezifische Applikationen zu erzeugen. Daaber diese beiden Tools nicht in der Lage sind dieveränderten Strukturen zu dokumentieren, außer inListenform bietet ABB ein spezielles Tool an, das in derLage ist umfangreiche Strukturen grafisch darzustellenund so aufzubereiten, dass sie als Datenfile mithilfe desCMT-Tools in den Antrieb geladen werden können.Dieses Tool heisst GAD ( Graphical Application Desi-gner ). Es arbeitet offline und es wird immer ein CMT-Tool zusätzlich benötigt, um die vorbereitete Pro-grammstruktur in das Stromrichtergerät zu laden.
Das PC Programm GAD beinhaltet folgende Funkti-onen:• Planung und Strukturierung von zusätzlichen An-
wendungen.• Graphikeditor zum Zeichnen und Ändern der Pro-
grammstruktur.• Benutzerdefinierbare Dokumentbezeichnung.• Erzeugung eines Anwender Files, der mittels CMT
Tool in den Stromrichter geladen und dort abgear-beitet wird.
• Erzeugung eines Diagramm Files, der im CMTTool die Anzeige der Programmstruktur und vonIstwerten ermöglicht.
Systemvoraussetzungen / Empfehlungen:• min. 486 PC, 4 MB RAM, Festplatte mit 40MB
freiem Speicherplatz• Betriebssystem: Windows 3.x, 95, 98, NT, 2000
oder XP

II D 4-2
3ADW000066R0903 DCS500 System description d i
II D 4-2
4.2 Einführung in die Struktur und Verwendung
Hinweis:
• Darüber hinaus ist zu beachten, dass die auf dennächsten Seiten beschriebene Funktionalität einweiteres Mal für Motor Set 2 verfügbar ist. Es gibtzwei Parametersätze (Gruppen 1 bis 24). WeitereAnmerkungen hierzu finden Sie in zusätzlichenErläuterungen.
• Die Werte der Parameter entsprechen denjenigenwie sie im GAD-Tool erscheinen.
Die folgenden Seiten entsprechen einem Ausdruckmit dem GAD-Tool mit zusätzlichen Erläuterungen,basierend auf Software 21.233. Diese ist identischmit Software 21.234.
Wenn Verbindungen zwischen Funktionsbausteinengeändert werden sollen, gehen Sie, wie folgt, vor:• Wählen Sie den Eingang an• und verbinden Sie dann zum AusgangAlle Verbindungen mit einem Punkt am Anfang undEnde der Verbindungslinie können geändert werden.
Parameter zur Einstellung von Werten(wie Rampenzeiten, Reglerverstärkung, Sollwerte usw.)
Einen Eingang / Parameter auswählen:• Die beiden rechten Stellen ignorieren. Die restlichen
Stellen geben die Gruppe an und sind anzuwählen• Die beiden rechten Stellen geben das Element an und
sind anzuwählen
Die Anwahl kann mit der Bedien-/ und AnzeigeeinheitCDP312 erfolgen. Mit dem Doppelpfeil wird die Grup-pe und mit dem Einzelpfeil das Element angewählt oderes kann das PC-Tool CMT/DCS500B verwendet wer-den.
Die gesamte Software wird mit Hilfe von Funktions-bausteinen programmiert. Die einzelnen Funktions-bausteine repräsentieren jeweils eine Teilfunktion derGesamtfunktionalität. Die Funktionsbausteine kön-nen in zwei Kategorien unterteilt werden:
• Funktionsbausteine, die dauernd aktiv sind, wer-den fast ständig gebraucht; sie werden auf denfolgenden Seiten beschrieben.
• Funktionsbausteine die, obwohl sie in der Softwareals Standardfunktionen vorhanden sind, erst expli-zit aktiviert werden müssen, wenn sie für spezielleAnforderungen benötigt werden. Hierzu gehörenz.B.:
UND-Glieder mit 2 oder 4 Eingängen,ODER-Glieder mit 2 oder 4 Eingängen,Addierer mit 2 oder 4 Eingängen,Multiplizierer/Dividierer usw.
oder Regelfunktionen wieIntegrierer,P-Regler,D-T1-Element usw.
Alle Funktionsbausteine verfügen über nummerierteEin- und Ausgänge. Diese Eingänge/Ausgänge könnenebenfalls in zwei Kategorien unterteilt werden:
Eingänge zur Bezeichnung von Verbindungen
Standard-einstellung
901DI7 10713
Ausgang Eingang
Antriebs-logik
P6
P2
P4
1708
1709
1710
Wert
Wert
Wert
Rampengenerator
Parameter
Gruppe 107Element 13
DI7 10713
Auf den folgenden Seiten wird die Funktionalität, wie sie bei der Auslieferung verdrahtet ist, dargestellt. Wenn eingewünschtes Signal oder eine bestimmte Funktion scheinbar fehlt, ist eine Ergänzung auf einfache Weise möglich:
• Entweder existiert das Signal bereits, ist aber wegenseiner Komplexität nicht einfach darstellbar und er-scheint deshalb in einer Signalliste in der Software-Beschreibung.
• Oder es kann mit vorhandenen Signalen und zusätz-lich verfügbaren Funktionsbausteinen generiert wer-den.
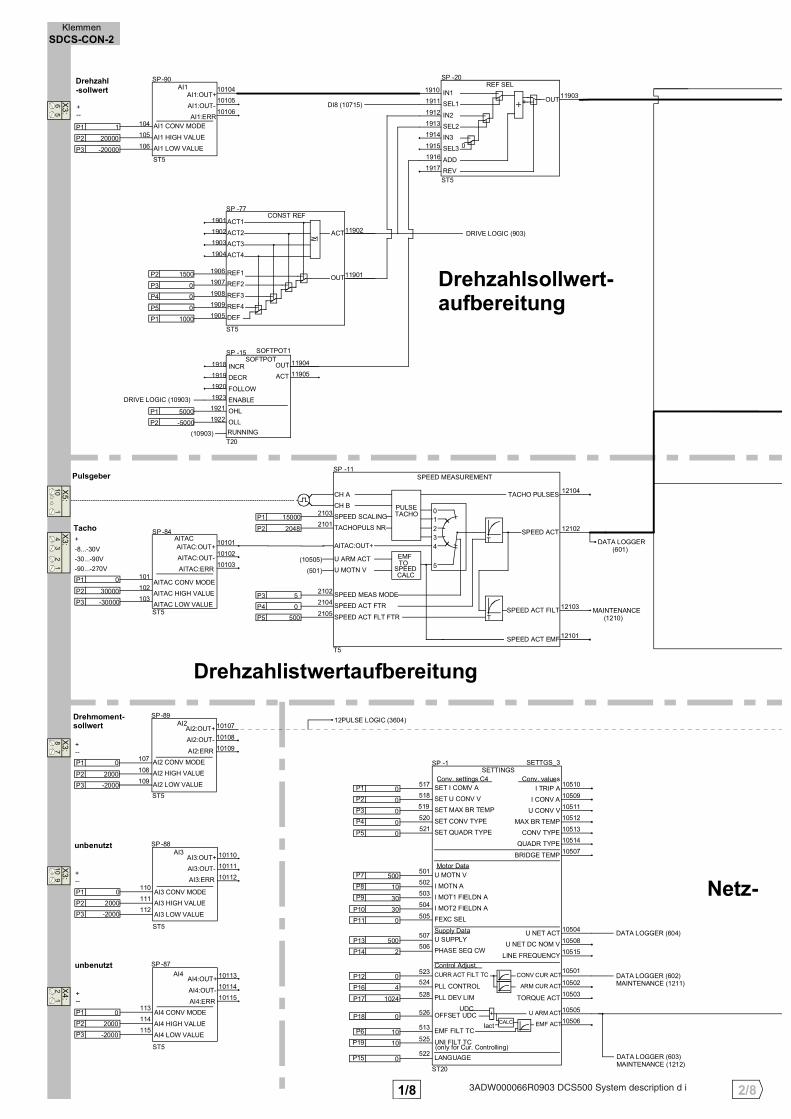
II D 4-3
3ADW000066R0803 DCS500 System description d h
2/81/8
AITAC LOW VALUE
AITAC HIGH VALUE
AITAC CONV MODE
SP
AITAC:OUT+
AITAC:OUT-
AITAC:ERR
AITAC
ST5
10101
10102
10103
P2
P3
P1
-84
101
102
103
0
30000
-30000
+
-8...-30V
-30...-90V
-90...-270V
TACHO PULSES
SPEED ACT FLT FTR
SPEED MEASUREMENT
SPEED ACT EMF
SPEED ACT FILT
SPEED ACT
SPEED ACT FTR
SPEED MEAS MODE
U MOTN V
U ARM ACT
TACHOPULS NR
SPEED SCALING
CH B
CH A
5
0
4
3
2
1
T
T
SPEEDTOEMF
CALC
(10505)
(501)
AITAC:OUT+
T5
SP
TACHOPULSE
12104
12102
12103
12101
P1
P2
P3
P4
P5
-11
2103
2101
2102
2104
2105
15000
2048
5
0
500MAINTENANCE (1210)
REF SELSP
ST5
0
SEL1
IN1
IN2
SEL2
IN3
SEL3
OUT
ADD
REV
1910
1911
1912
1913
1914
1915
1916
1917
11903
-20
CONST REF
ST5
1
REF4
DEF
REF3
REF1
REF2
ACT2
ACT3
ACT4
ACT
SP
OUT
ACT11901
1902
1903
1904
11902
11901
P5
P1
P4
P2
P3
-77
1905
1906
1907
1908
1909
1000
1500
0
0
0
SP
1923 ENABLE
FOLLOW1920
RUNNING(10903)
T20
OHL
OLL
P1
P2
INCR
DECR
OUT
ACT
SOFTPOT1918
1919
11904
11905
-15 SOFTPOT1
1921
19225000
-5000
DRIVE LOGIC (10903)
AI1 LOW VALUE
AI1 HIGH VALUE
AI1 CONV MODE
SP
AI1:OUT+
AI1:OUT-
AI1:ERR
AI1
ST5
10104
10105
10106
P2
P3
P1
-90
104
105
106
1
20000
-20000
+--
AI2 LOW VALUE
AI2 HIGH VALUE
AI2 CONV MODE
SP
AI2AI2:OUT+
AI2:OUT-
AI2:ERR
ST5
10107
10108
10109
P2
P3
P1
-89
107
108
109
0
2000
-2000
+--
Control Adjust.
10507
10514
10513
10512
10511
10509
10510
BRIDGE TEMP
QUADR TYPE
CONV TYPE
MAX BR TEMP
Conv. valuesConv. settings C4
SET QUADR TYPE
SET CONV TYPE
SET MAX BR TEMP
SET U CONV V
SET I COMV A
U CONV V
I CONV A
I TRIP A
SETTINGSSP
P5
P4
P3
P1
P2
Motor Data
I MOTN A
U MOTN V
I MOT1 FIELDN A
I MOT2 FIELDN A
FEXC SELP11
P10
P9
P8
P7
10508
10515U NET DC NOM V
U SUPPLYP13
PHASE SEQ CWP14
10504U NET ACT
LINE FREQUENCY
Supply Data
ST20
LANGUAGEP15
(only for Cur. Controlling)UNI FILT TCP19
P6
P18
P12
P16
P17
CURR ACT FILT TC
PLL CONTROL
PLL DEV LIM
CONV CUR ACT
ARM CUR ACT
TORQUE ACT
10501
10502
10503
U ARM ACT
EMF ACTCALCIact
+-
OFFSET UDCUDC 10505
10506
EMF FILT TC
-1 SETTGS_3
517
518
519
520
521
513
501
502
503
504
505
523
507
506
522
524
528
526
525
0
0
0
0
0
10
500
10
30
30
0
0
500
2
0
4
1024
0
10
DATA LOGGER (604)
DATA LOGGER (602)MAINTENANCE (1211)
DATA LOGGER (603)MAINTENANCE (1212)
AI4 LOW VALUE
AI4 HIGH VALUE
AI4 CONV MODE
SP
AI4:OUT+
AI4:OUT-
AI4:ERR
AI4
ST5
10113
10114
10115
P2
P3
P1
-87
113
114
115
0
2000
-2000
AI3 LOW VALUE
AI3 HIGH VALUE
AI3 CONV MODE
SP
AI3:OUT+
AI3:OUT-
AI3:ERR
AI3
ST5
10110
10111
10112
P2
P3
P1
-88
110
111
112
0
2000
-2000
+--
+--
12PULSE LOGIC (3604)
DATA LOGGER (601)
DI8 (10715)
DRIVE LOGIC (903)
65
X3
:2
1X
3:
43
10
9X
3:
87
X3
:2
1X
4:
1X
5:
10
Netz-
Drehzahlistwertaufbereitung
Drehzahlsollwert-aufbereitung
Drehzahl-sollwert
Klemmen
SDCS-CON-2
Pulsgeber
Drehmoment-sollwert
unbenutzt
unbenutzt
Tacho
3ADW000066R0903 DCS500 System description d i
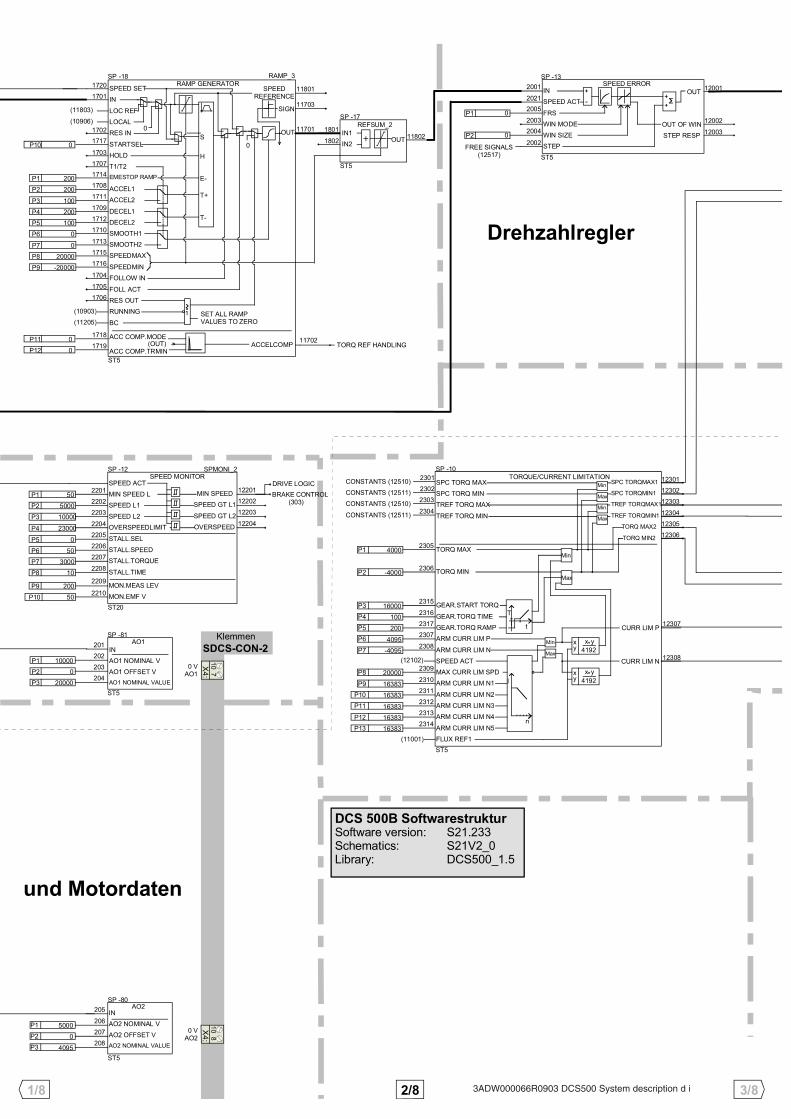
II D 4-4
3ADW000066R0903 DCS500 System description d i
1/8 3/82/8
AO1 NOMINAL VALUE
AO1 OFFSET V
AO1 NOMINAL V
201IN
SPAO1
ST5
P2
P3
P1
-81
202
203
204
10000
0
20000
WIN SIZE
WIN MODE
2002
2021
2003FRS
STEP
ST5
2005
2004
0
0
SPEED ERROR
STEP RESP
OUT OF WIN
OUT
SPEED ACT
12001
12002
12003
2001
P1
P2
IN
SP -13
FREE SIGNALS (12517)
CURR LIM N
CURR LIM P
TORQ MIN2
TORQ MAX2
TREF TORQMIN1
TREF TORQMAX1
SPC TORQMIN1
SPC TORQMAX1
FLUX REF1
ARM CURR LIM N5
ARM CURR LIM N4
ARM CURR LIM N3
ARM CURR LIM N2
ARM CURR LIM N1
MAX CURR LIM SPD
SPEED ACT
ARM CURR LIM N
ARM CURR LIM P
GEAR.TORQ RAMP
GEAR.TORQ TIME
GEAR.START TORQ
TORQ MIN
TORQ MAX
TREF TORQ MIN
TREF TORQ MAX
SPC TORQ MIN
SPC TORQ MAXTORQUE/CURRENT LIMITATION
4192
yxxy
Min
Max
T
t
I
n
Max
Min
Min
Max
Min
Max
SP
(12102)
(11001)
ST5
P1
P2
P7
P6
P5
P4
P3
P8
P9
P11
P10
P12
P13
12308
12307
12301
12302
12303
12304
12305
12306
2301
2302
2303
2304
-10
2305
2306
2315
2316
2317
2307
2308
2309
2310
2311
2312
2313
2314
4000
-4000
16000
100
200
4095
-4095
20000
16383
16383
16383
16383
16383
4192
yxxy
CONSTANTS (12510)
CONSTANTS (12511)
CONSTANTS (12510)
CONSTANTS (12511)
ACCELCOMPACC COMP.TRMIN
ACC COMP.MODE
EMESTOP RAMP
SPEED SET
SPRAMP GENERATOR
11801SPEED REFERENCE
11703SIGN(11803)
(10906)0
LOCAL
LOC REF
1701IN
1720
P12
P11
P9
P8
P7
P6
P5
P4
P3
P2
P1
P10
SET ALL RAMP VALUES TO ZERO
OUT
11702(OUT)
11701
S
H
E-
T+
T-
0STARTSEL
RES IN
ST5
BC
HOLD
SMOOTH2
SMOOTH1
DECEL2
DECEL1
ACCEL2
ACCEL1
T1/T2
SPEEDMIN
SPEEDMAX
FOLLOW IN
FOLL ACT
RES OUT
RUNNING
1707
1703
1706
1705
1704
(10903)
(11205)
1702
-18 RAMP_3
1714
1708
1711
1709
1712
1710
1713
1715
1716
1717
1718
1719
200
200
100
200
100
0
0
20000
-20000
0
0
0TORQ REF HANDLING
MIN SPEED
SPEED MONITOR
SPEED GT L2
SPEED GT L1
OVERSPEED
MON.EMF V
MON.MEAS LEV
SPEED L2
SPEED L1
MIN SPEED L
SPEED ACT
P8
P7
P6
P5
P4
P3
P2
P1
P10
P9
ST20
STALL.TIME
SP
OVERSPEEDLIMIT
STALL.SEL
STALL.SPEED
STALL.TORQUE
12201
12202
12203
12204
-12 SPMONI_2
2201
2202
2203
2204
2205
2206
2207
2208
2209
2210
50
5000
10000
23000
0
50
3000
10
200
50
ST5
SP
IN211802
OUT1802
1801IN1
-17
REFSUM_2
AO2 NOMINAL VALUE
AO2 OFFSET V
AO2 NOMINAL V
205IN
SPAO2
ST5
P2
P3
P1
-80
206
207
208
5000
0
4095
DRIVE LOGIC
BRAKE CONTROL (303)
71
0X4
:
0 VAO1
81
0X4
:
0 VAO2
Drehzahlregler
und Motordaten
Klemmen
SDCS-CON-2
DCS 500B SoftwarestrukturSoftware version: S21.233Schematics: S21V2_0Library: DCS500_1.5
3ADW000066R0903 DCS500 System description d i

II D 4-5
3ADW000066R0803 DCS500 System description d h
1/82/8 4/83/8
SPEED CONTROL
IN LIM
SPC TORQMIN1
SPC TORQMAX1
12005
12004
2007
2012
2011
2010
2009
2008
2006
SET OUT TO ZEROBC
ST5
TF
TD
KI
DROOPING
KPSMIN
KPSPOINT
KPSWEAKFILT
KP
Torque ref
SET1
VAL1
SET2
VAL2
HOLD
CLEAR
RUNNING
(11205)
(10903)
IN
SP
OUTKPDROOPING
HOLD
BALREF
BAL
BAL2
BAL2REF
RINT
P3
P1
P2
P4
P8
P7
P5
P6
-14
2014
2015
2016
2017
2018
2013
2019
2020
500
0
0
500
5000
0
0
50
TORQ REF HANDLING (12403)TORQ REF HANDLING (12402)
FREE SIGNALS (12521)
FREE SIGNALS (12519)
SEL1:OUT
TORQ REF SELECTION
TREF TORQMIN1
TREF TORQMAX1
TREF B SLOPE
TREF B
TREF A FTC
LOAD SHARE
TREF A
SETS SEL1:OUT TO ZERO-1RUNNING
ST5
SP
P2
P1
2401
2403
2404
12401
-8
2402
24050
0
(10903)
SEL2:TORQ/SPEED
TORQ MIN2
TORQ MAX2
ACCELCOMP
SEL2.TREF SEL
SEL2.TORQ STEP
SP ERR
SEL2.TREF EXT
TORQ REF HANDLING
SEL2.TREF SPC
SP
(11702)
0 0
1
RUNNING SET OUTPUTS TO ZERO
ST5
-1(10903)
SEL2:IN_LIM
SEL2:OUT
4
3
Max
Min
5
2
P1
2409
2407
2408
12403
12402
12404
-9 TREFHND2
24061
FREE SIGNALS (12520)
(12001)
SPEED CONTROL (2010)
SPEED ACT(12102)
907040
100%
EMESTOP ACT(10907)
cal
EMF CONTROL
0
100%
F CURR REF
FLUX REF SUM
FLUX REF 1
11003
11002
EMF REF
EMF REF SEL
EMESTOP ACT
FIELD WEAK DELAY
GENER.WEAK POINT
FIELD WEAK POINT
FLUX REF
FLUX REF SEL
FIELD MODE
11001
ST10
P9
P10
P8
FIELD CONST 2
FIELD CONST 1
FIELD CONST 3
P6
P7
EMF REG LIM P
EMF REG LIM N
P5
P3
P4
EMF KP
EMF KI
EMF REL LEV
EMF ACT(10506)
TRef2
1201=10
&
GENER.EMF REFP12
P1 LOCAL EMF REF
1003
1005
(1201)
(10907)
generatoricP14
P13
P2
1004
1002
1001=1,3,5P11
SP -34 EMFCONT2
1006
1012
1007
1008
1011
1009
1010
1013
1014
1015
1001
1016
1017
1018
100
20000
150
4905
50
410
-4095
1187
2190
3255
0
160
23100
0
CONSTANTS (12512)
DRIVE MODE
CONSTANTS (12509)
Motorspannungsregler
Drehmoment- / Strombegrenzung
3ADW000066R0903 DCS500 System description d i
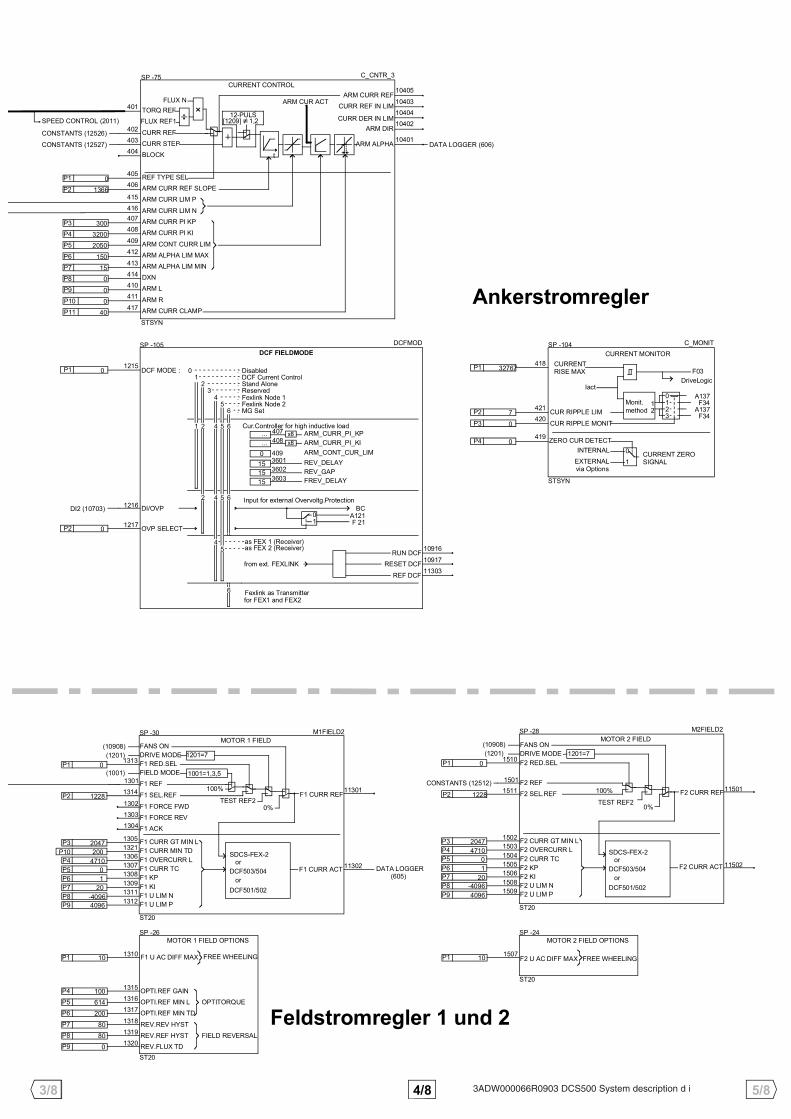
II D 4-6
3ADW000066R0903 DCS500 System description d i
1/83/8 5/84/8
via Options
CURRENT MONITOR
CURRENT ZERO SIGNAL
DriveLogic
F03
F34
F34A137
A137
EXTERNAL
INTERNAL
1
0
Monit.
method 21
3210
Iact
STSYN
P4 ZERO CUR DETECT
CURRENT RISE MAX
P1
CUR RIPPLE MONITP3
CUR RIPPLE LIMP2
SP -104 C_MONIT
418
421
420
419
32767
7
0
0
ARM ALPHA
CURRENT CONTROL
CURR REF IN LIM
CURR DER IN LIM
ARM DIR
ARM CURR REF
ARM CONT CURR LIM
ARM CURR LIM N
ARM CURR LIM P
ARM CURR REF SLOPE
ARM CURR CLAMP
ARM R
ARM L
ARM ALPHA LIM MIN
ARM ALPHA LIM MAX
ARM CURR PI KI
ARM CURR PI KP
REF TYPE SEL
ARM CUR ACT
CURR STEP
CURR REF
FLUX REF1
TORQ REF
FLUX N
10405
SP
10403
10402
10404
10401
401
402
403
404t
STSYN
P11
P10
P9
416
415
1,2[1209]12-PULS
DXN
BLOCK
P1
P2
P6
P5
P4
P3
P8
P7
-75 C_CNTR_3
405
406
407
408
409
412
413
414
410
411
417
0
1366
300
3200
2050
150
15
0
0
0
40
OVP SELECT
REF DCF
RUN DCF
RESET DCF
DI/OVP
F 21A121
DCF FIELDMODE
as FEX 2 (Receiver)as FEX 1 (Receiver)
6542
65421
54
Fexlink as Transmitterfor FEX1 and FEX2
6
Input for external Overvoltg.Protection
Cur.Controller for high inductive load
1216
P2
BC01
65
43
21
from ext. FEXLINK
x8 ARM_CURR_PI_KP...
x8 ARM_CURR_PI_KI... 408
407
ARM_CONT_CUR_LIM
3601 REV_DELAY
409
153602 REV_GAP153603 FREV_DELAY15
0
DCF Current ControlStand Alone
Fexlink Node 1Fexlink Node 2MG Set
Disabled
Reserved
:
:::::
:0
11303
10916
10917
SP
P1 DCF MODE :
-105 DCFMOD
1215
1217
0
0
DI2 (10703)
CONSTANTS (12526)
CONSTANTS (12527)
F2 CURR ACT
F2 CURR REF
F2 U LIM P
F2 U LIM N
F2 KI
F2 KP
F2 CURR TC
F2 OVERCURR L
F2 CURR GT MIN L
FANS ON
TEST REF2
F2 SEL.REF
F2 REF
F2 RED.SEL
DRIVE MODE
MOTOR 2 FIELD
1201=7
11502
11501
1501
ST20
DCF501/502
DCF503/504
SDCS-FEX-2or
or
0%
100%
(10908)
(1201)
SP
P1
P2
P8
P7
P6
P5
P4
P3
P9
-28 M2FIELD2
1510
1511
1502
1503
1504
1505
1506
1508
1509
0
1228
2047
4710
0
1
20
-4096
4096
FREE WHEELING
MOTOR 2 FIELD OPTIONS
F2 U AC DIFF MAXP1
ST20
SP -24
150710
CONSTANTS (12512)
REV.FLUX TD
REV.REF HYST
REV.REV HYST
OPTI.REF MIN TD
OPTI.REF MIN L
OPTI.REF GAIN
MOTOR 1 FIELD OPTIONS
F1 U AC DIFF MAX
SP
ST20
FREE WHEELING
FIELD REVERSAL
OPTITORQUE
P1
P4
P5
P6
P7
P8
P9
-26
1310
1315
1316
1317
1318
1319
1320
10
100
614
200
80
80
0
SPEED CONTROL (2011)
DATA LOGGER (606)
F1 CURR MIN TDP10
F1 U LIM P
F1 U LIM N
F1 KI
F1 KP
F1 CURR TC
F1 OVERCURR L
P8
P7
P6
P5
P4
P9
ST20
F1 CURR ACT
F1 CURR REF
F1 CURR GT MIN L
TEST REF2
F1 ACK
F1 FORCE REV
F1 FORCE FWD
F1 SEL.REF
F1 REF
FIELD MODE
F1 RED.SEL
DRIVE MODE
FANS ONMOTOR 1 FIELD
1001=1,3,5
1201=7
DCF501/502
DCF503/504
SDCS-FEX-2or
or
0%
100%
(10908)
(1201)
SP
P1
P2
P3
1301
1302
1303
1304
11302
11301
-30 M1FIELD2
1313
1314
1305
1306
1307
1308
1309
1311
1312
1321
0
1228
2047
4710
0
1
20
-4096
4096
200
DATA LOGGER (605)
(1001)
Ankerstromregler
Feldstromregler 1 und 2
3ADW000066R0903 DCS500 System description d i
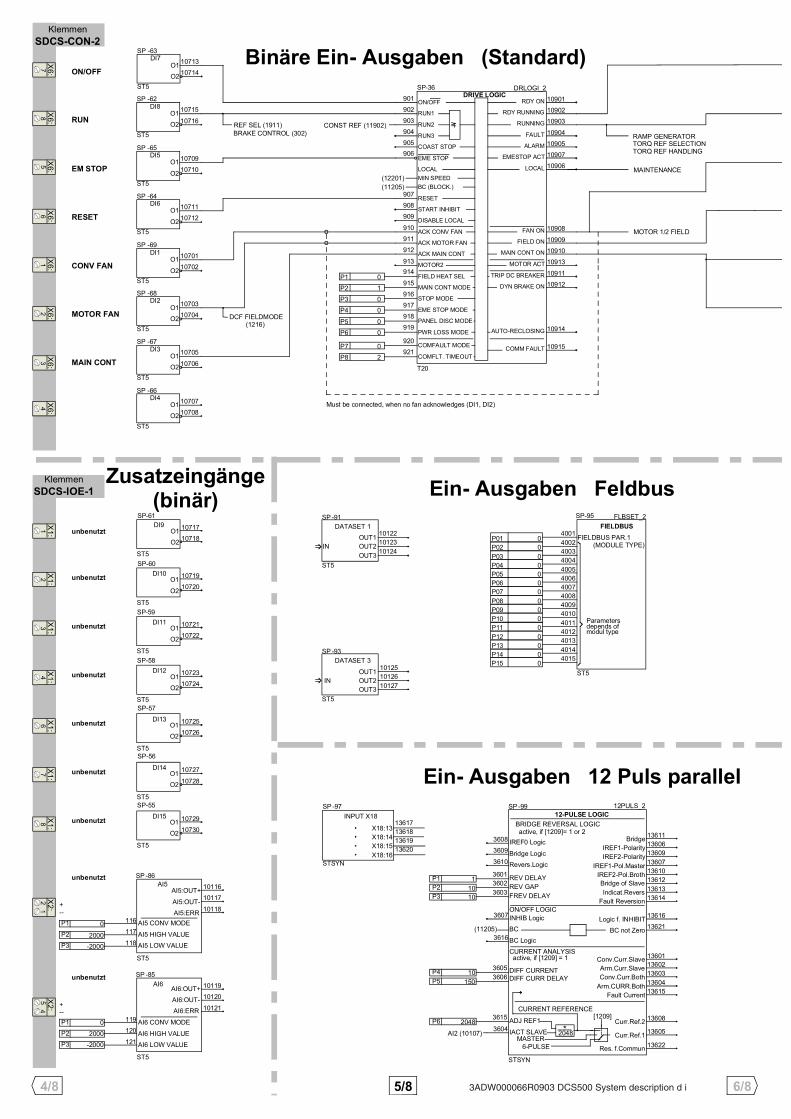
II D 4-7
3ADW000066R0803 DCS500 System description d h
O1
O2
ST5
DI15 10729
10730
SP-55
O1
O2
ST5
DI14 10727
10728
SP-56
O1
O2
ST5
DI13 10725
10726
SP-57
O1
O2
ST5
DI12 10723
10724
SP-58
O1
O2
ST5
DI11 10721
10722
SP-59
O1
O2
ST5
DI10 10719
10720
SP-60
O1
O2
SP-61
ST5
DI9 10717
10718
AI5 LOW VALUE
AI5 HIGH VALUE
AI5 CONV MODE
SP
AI5AI5:OUT+
AI5:OUT-
AI5:ERR
ST5
10116
10117
10118
P2
P3
P1
-86
116
117
118
0
2000
-2000
AI6 LOW VALUE
AI6 HIGH VALUE
AI6 CONV MODE
SP
AI6AI6:OUT+
AI6:OUT-
AI6:ERR
ST5
10119
10120
10121
P2
P3
P1
-85
119
120
121
0
2000
-2000
COMFLT. TIMEOUT
COMM FAULT
DYN BRAKE ON
TRIP DC BREAKER
MOTOR ACT
MAIN CONT ON
FIELD ON
FAN ON
COMFAULT MODE
PWR LOSS MODE
PANEL DISC MODE
EME STOP MODE
STOP MODE
MAIN CONT MODE
FIELD HEAT SEL
ACK MAIN CONT
ACK MOTOR FAN
ACK CONV FAN
DISABLE LOCAL
START INHIBIT
EMESTOP ACT
RDY RUNNING
RDY ON
MIN SPEED
EME STOP
COAST STOP
DRIVE LOGIC
AUTO-RECLOSING 10914
10912
10901
10902
10903
10904
10905
10907
10906
10908
10909
10910
10913
10911
10915
913
912
911
910
909
908
907
905
904
903
902
901
P5
P4
P3
P2
P1
P6
P7
P8
906
LOCAL
SP
ALARM
FAULT
RUNNING1
RUN3
RUN2
RUN1
ON/OFF
MOTOR2
RESET
LOCAL
(12201)
(11205) BC (BLOCK.)
T20
-36 DRLOGI_2
914
915
916
917
918
919
920
921
0
1
0
0
0
0
0
2
O1
O2
SPDI8
ST5
10715
10716
-62
O1
O2
SPDI7
ST5
10713
10714
-63
O1
O2
SP
ST5
DI610711
10712
-64
O1
O2
SP
ST5
DI510709
10710
-65
O1
O2
SP
ST5
DI410707
10708
-66
O1
O2
SP
ST5
DI310705
10706
-67
O1
O2
SP
ST5
DI210703
10704
-68
O1
O2
DI1SP
ST5
10701
10702
-69
REF SEL (1911) CONST REF (11902)
RAMP GENERATORTORQ REF SELECTIONTORQ REF HANDLING
DCF FIELDMODE (1216)
MAIN CONT
MOTOR FAN
CONV FAN
RESET
EM STOP
RUN
ON/OFF
MOTOR 1/2 FIELD
Must be connected, when no fan acknowledges (DI1, DI2)
MAINTENANCE
BRAKE CONTROL (302)
DATASET 3
OUT3
OUT2
OUT1
IN
SP
ST5
10125
10126
10127
-93
DATASET 1
IN
OUT3
OUT2
OUT1
SP
ST5
10122
10123
10124
-91
FIELDBUS PAR.1(MODULE TYPE)
SP
FIELDBUS
modul typedepends ofParameters
P15
P14
P13
P12
P11
ST5
P10
P09
P08
P07
P06
P05
P04
P03
P02
P01
-95 FLBSET_2
4001
4002
4003
4004
4005
4006
4007
4008
4009
4010
4011
4012
4013
4014
4015
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
BC Logic
Revers.Logic
Bridge Logic
IREF0 Logic
Res. f.Commun
BC not Zero
Logic f. INHIBIT
Fault Current
Bridge of Slave
Bridge
IREF2-Pol.Broth
IREF2-Polarity
Curr.Ref.2
IREF1-Pol.Master
IREF1-Polarity
Curr.Ref.1
Arm.CURR.Both
Conv.Curr.Both
Arm.Curr.Slave
Conv.Curr.Slave
Fault Reversion
Indicat.Revers
[1209]
*2048
ADJ REF1
INHIB Logic
DIFF CURR DELAY
DIFF CURRENT
IACT SLAVE
FREV DELAY
REV GAP
REV DELAY
13622
13605
STSYN
BC
6-PULSE
MASTER
CURRENT REFERENCE
P63604
13608
P5
P4
active, if [1209] = 1CURRENT ANALYSIS
13601
13602
13603
13604
13615
13621
3616
ON/OFF LOGIC
(11205)
136163607
P3
P2
P1
active, if [1209]= 1 or 2BRIDGE REVERSAL LOGIC
SP
12-PULSE LOGIC
3608
3609
3610
13611
13606
13609
13607
13610
13612
13613
13614
-99 12PULS_2
3601
3602
3603
3605
3606
3615
1
10
10
10
150
2048
X18:16
X18:15
X18:14
X18:1313618
STSYN
SP
INPUT X1813617
13619
13620
-97
AI2 (10107)
+--
+--
3X
6:
2X
6:
1X
6:
6X
6:
5X
6:
8X
6:
7X
6:
4X
6:
7X
1:
6X
1:
4X
1:
3X
1:
2X
1:
1X
1:
21
X2
:5
4X
2:
8X
1:
4/8 6/85/8
Zusatzeingänge(binär)
Binäre Ein- Ausgaben (Standard)
Ein- Ausgaben Feldbus
Ein- Ausgaben 12 Puls parallel
Klemmen
SDCS-CON-2
Klemmen
SDCS-IOE-1
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
3ADW000066R0903 DCS500 System description d i
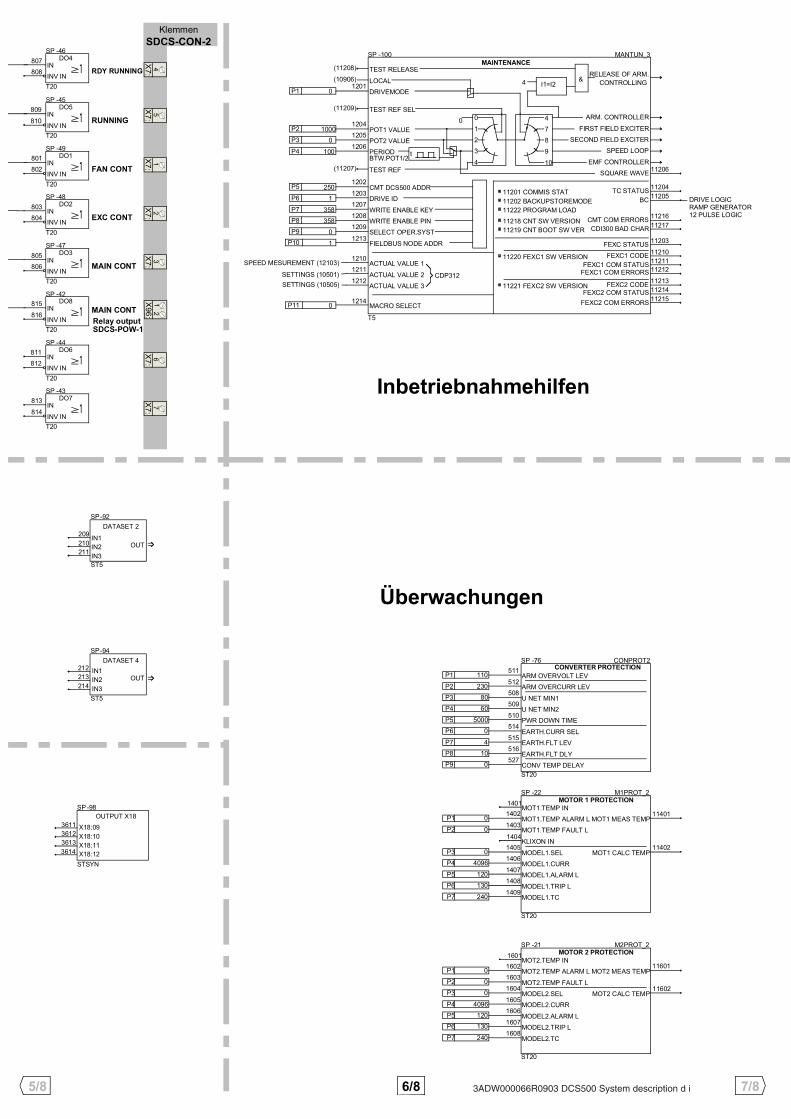
II D 4-8
3ADW000066R0903 DCS500 System description d i
CONVERTER PROTECTION
EARTH.FLT DLY
EARTH.FLT LEV
EARTH.CURR SEL
ARM OVERVOLT LEV
ARM OVERCURR LEV
U NET MIN1
U NET MIN2
PWR DOWN TIME
CONV TEMP DELAYP9
P8
ST20
SP
P1
P2
P3
P4
P5
P6
P7
-76 CONPROT2
511
512
508
509
510
514
515
516
527
110
230
80
60
5000
0
4
10
0
MOT2 CALC TEMP
MOT2 MEAS TEMP
MOTOR 2 PROTECTION
MODEL2.TRIP L
MODEL2.ALARM L
MOT2.TEMP FAULT L
MOT2.TEMP ALARM L
MOT2.TEMP IN
P7
P6
P5
P4
P3
P1
P2
11601
11602
1601
ST20
SP
MODEL2.SEL
MODEL2.CURR
MODEL2.TC
-21 M2PROT_2
1602
1603
1604
1605
1606
1607
1608
0
0
0
4096
120
130
240
MOTOR 1 PROTECTION
MOT1 CALC TEMP
MOT1 MEAS TEMP
MOT1.TEMP IN1401
MODEL1.TRIP L
MODEL1.ALARM L
KLIXON IN
MOT1.TEMP FAULT L
MOT1.TEMP ALARM L
P2
P111401
P7
P6
P5
P4
P311402
ST20
SP
MODEL1.SEL
MODEL1.CURR
MODEL1.TC
1404
-22 M1PROT_2
1402
1403
1405
1406
1407
1408
1409
0
0
0
4096
120
130
240
BTW.POT1/2
MACRO SELECT
ACTUAL VALUE 3
ACTUAL VALUE 2
ACTUAL VALUE 1
FIELDBUS NODE ADDR
tPERIOD
DRIVEMODEP1
MAINTENANCE
11220 FEXC1 SW VERSION
11221 FEXC2 SW VERSION
11215FEXC2 COM ERRORS
FEXC2 COM STATUS 11214
11213FEXC2 CODE
11212
11211
FEXC1 COM ERRORSFEXC1 COM STATUS
FEXC1 CODE11210
FEXC STATUS11203
11217
11216CMT COM ERRORS
CDI300 BAD CHAR
11205BC
11219 CNT BOOT SW VER
11218 CNT SW VERSION
11222 PROGRAM LOAD
11202 BACKUPSTOREMODE
11201 COMMIS STAT11204
TC STATUS
11206SQUARE WAVE
CDP3121212
1211
1210
P11
P9
P8
P7
P6
P5
P4
P3
P2
P10
T5
SELECT OPER.SYST
WRITE ENABLE PIN
WRITE ENABLE KEY
CMT DCS500 ADDR
DRIVE ID
(11207) TEST REF
0 4
7
8
9
10
0
1
2
3
4 EMF CONTROLLER
SPEED LOOP
SECOND FIELD EXCITER
FIRST FIELD EXCITER
ARM. CONTROLLER
RELEASE OF ARM.
CONTROLLING&
4 I1=I2
POT2 VALUE
POT1 VALUE
TEST REF SEL(11209)
(11208)
(10906)
TEST RELEASE
LOCAL
SP -100 MANTUN_3
1201
1204
1205
1206
1202
1203
1207
1208
1209
1213
1214
0
1000
0
100
250
1
358
358
0
1
0
SPEED MESUREMENT (12103)
SETTINGS (10501)
SETTINGS (10505)
DRIVE LOGICRAMP GENERATOR12 PULSE LOGIC
DO4
INV IN
IN807
808
T20
SP -46
DO8
INV IN
IN815
816
T20
SP -42
DO7
INV IN
IN813
814
T20
SP -43
DO6
INV IN
IN811
812
T20
SP -44
DO5
INV IN
IN809
810
T20
SP -45
DO3805
INV IN
IN806
T20
SP -47
DO2
INV IN
IN803
804
T20
SP -48
DO1
INV IN
IN801
802
T20
SP -49
SDCS-POW-1Relay output
MAIN CONT
MAIN CONT
EXC CONT
FAN CONT
RUNNING
RDY RUNNING
DATASET 4
214
213
212
OUT
IN3
IN2
IN1
SP
ST5
-94
DATASET 2
211
210
209
OUT
IN3
IN2
IN1
SP
ST5
-92
X18:12
X18:11
X18:10
X18:09
OUTPUT X18
SP
STSYN
3611
3612
3613
3614
-98
5
X7
:1
X7
:2
X7
:3
X7
:6
X7
:7
X7
:4
X7
:2
1X9
6:
5/8 7/86/8
Inbetriebnahmehilfen
Überwachungen
Klemmen
SDCS-CON-2
3ADW000066R0903 DCS500 System description d i

II D 4-9
3ADW000066R0803 DCS500 System description d h
DLY
TEXT
TYPE
INUSER EVENT 6
SP
ST20
P3
P1
"EXT. IND. 6"
1121
1123
-2
1122
1124
0
0
DLY
TEXT
TYPE
INUSER EVENT 5
SP
ST20
1117
1119
P3
P1
"EXT. IND. 5"
-3
1118
1120
0
0
DLY
TEXT
TYPE
INUSER EVENT 4
SP
ST20
P3
P1
"EXT. IND. 4"
1113
1115
-4
1114
1116
0
0
DLY
TEXT
TYPE
INUSER EVENT 3
SP
ST20
1109
1111
P3
P1
"EXT. IND. 3"
-5
1110
1112
0
0
DLY
TEXT
TYPE
INUSER EVENT 2
SP
ST20
P3
P1
"EXT. IND. 2"
1105
1107
-6
1106
1108
0
0
DLY
TEXT
TYPE
INUSER EVENT 1
SP
ST20
P3
P1
"EXT. IND. 1"
1101
1103
-7
1102
1104
0
0
DLOG STATUS
DLOG.SAMPL INT
DLOG.TRIGG DELAY
DLOG.TRIGG VALUE
DLOG.TRIGG COND
0
0
0
DATA LOGGER
SP
RESTART
STOP
TRIG
613
611
612
DLOG.RESTART
DLOG.STOP
DLOG.TRIG
T1ms
IN5 Ch.5
10601
STOP RESTART
CMT-TOOL
TRIG
P4
P3
P2
P1
IN6 Ch.6606
605IN4 Ch.4
604
IN3 Ch.3603
IN2 Ch.2602
IN1 Ch.1601
-102 DATALOG
607
608
609
610
1
20000
200
3
SPEED MEASUREMENT (12102)
SETTINGS (10501)
SETTINGS (10505)
SETTINGS (10504)
MOTOR 1 FIELD (11302)
CURRENT CONTROL (10401)
BRAKE CONTROL
ACT BRAKE
BRAKE RUN
LIFT BRAKE
DECEL CMND
TREF ENABLE
TREF OUT
EMESTOP BRAKE
HOLD TORQ
STOP DELAY
START DELAY
MIN SP IND
BR RELEASE
HOLD REF
TORQUE ACT
10305
10304
10303
10302
10301
304
303
302
301
P1
P2
P3
P4
LOCAL
(10503)
RESET
SP
(10902)
ST20
-32
305
306
307
308
0
0
0
0
DI8 (10715)
SPEED MONITOR (12201)
FAULT WORD 1
OPERATING HOURS
LATEST ALARM
ALARM WORD 3
ALARM WORD 2
ALARM WORD 1
LATEST FAULT
FAULT WORD 3
FAULT WORD 2
T20
11109
11108
11107
11106
11105
11103
11102
SP
FAULT HANDLING
11104
11101
-103 FLTHNDL
0
-1
SPEED: 100%
CUR,FLX,VLT:-100%
CUR,FLX,VLT: 100%
12509
12508
12507
12506
12505
12504
12503
12510
12511
12513
12512
12515
12514
12502
12501CONSTANTS
SP
ST
SPEED:-100%
TORQ:-100%
TORQ:100%
EMF:100%
31416
1000
100
10
2
1
-73
CONST_0
CONST_M1_TRUE
CONST_1
CONST_2
CONST_10
CONST_100
CONST_1000
CONST_31416
EMF_MAX
TORQ_MAX
TORQ_MAX_N
CONST_4095
CONST_M4095
CONST_20000
CONST_M20000
SIG12(CURR._STEP)
SIG11(CURR. REF)
SIG10(FORCE REV)
SIG9(FORCE_FWD)
SIG8(EMF REF)
SIG7(FLUX REF)
SIG6(LOAD SHARE)
SIG5(TORQUE STEP)
SIG4(TORQ. REF B)
SIG3(TORQ. REF A)
SIG2(SPEED STEP)
SIG1(SPEED REF)FREE SIGNALS
12527
12526
12525
12524
12523
12522
12521
12520
12519
12518
12517
12516
ST
SP -74
SPEED_STEP
TORQ_REF_B
TORQ_STEP
LOAD_SHARE
CUR_REF
CUR_STEP
6/8 8/87/8
Bremsensteuerung
Benutzerdefinierbare Ereignismeldungen
Datenspeicher
Zusatzausgaben(frei verfügbar)
3ADW000066R0903 DCS500 System description d i
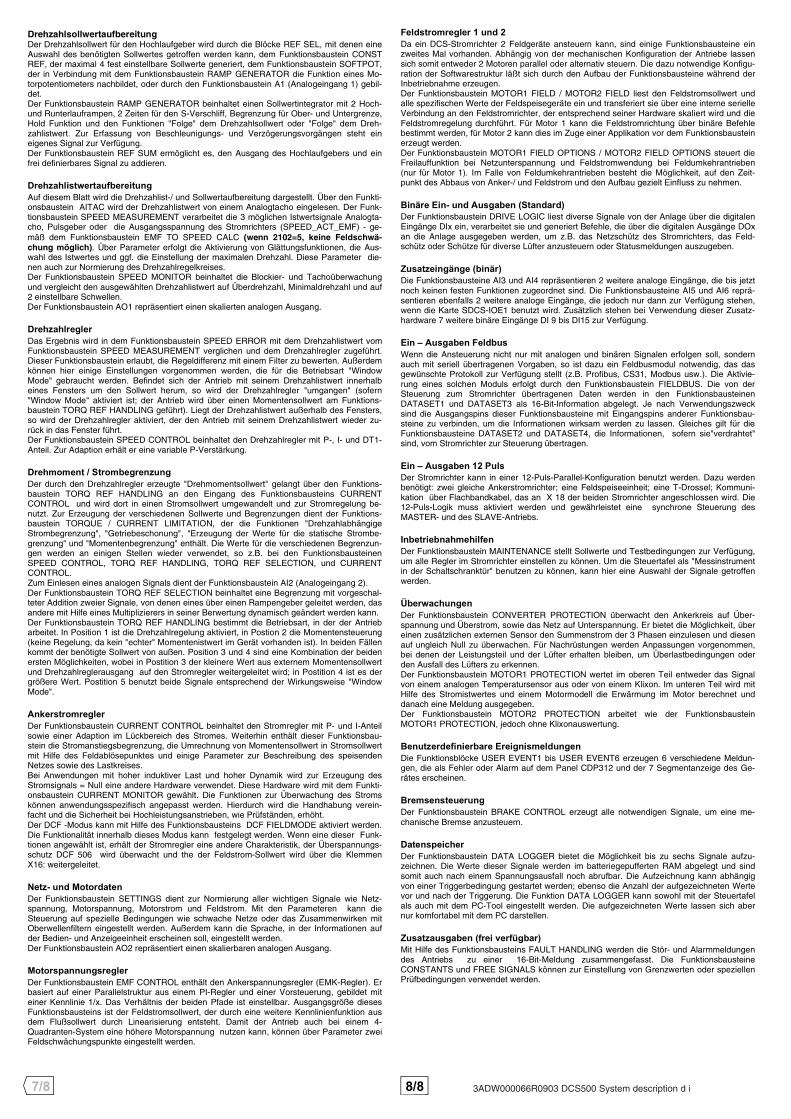
II D 4-10
3ADW000066R0903 DCS500 System description d i
7/8 8/8
DrehzahlsollwertaufbereitungDer Drehzahlsollwert für den Hochlaufgeber wird durch die Blöcke REF SEL, mit denen eineAuswahl des benötigten Sollwertes getroffen werden kann, dem Funktionsbaustein CONSTREF, der maximal 4 fest einstellbare Sollwerte generiert, dem Funktionsbaustein SOFTPOT,der in Verbindung mit dem Funktionsbaustein RAMP GENERATOR die Funktion eines Mo-torpotentiometers nachbildet, oder durch den Funktionsbaustein A1 (Analogeingang 1) gebil-det.Der Funktionsbaustein RAMP GENERATOR beinhaltet einen Sollwertintegrator mit 2 Hoch-und Runterlauframpen, 2 Zeiten für den S-Verschliff, Begrenzung für Ober- und Untergrenze,Hold Funktion und den Funktionen "Folge" dem Drehzahlsollwert oder "Folge" dem Dreh-zahlistwert. Zur Erfassung von Beschleunigungs- und Verzögerungsvorgängen steht eineigenes Signal zur Verfügung.Der Funktionsbaustein REF SUM ermöglicht es, den Ausgang des Hochlaufgebers und einfrei definierbares Signal zu addieren.
DrehzahlistwertaufbereitungAuf diesem Blatt wird die Drehzahlist-/ und Sollwertaufbereitung dargestellt. Über den Funkti-onsbaustein AITAC wird der Drehzahlistwert von einem Analogtacho eingelesen. Der Funk-tionsbaustein SPEED MEASUREMENT verarbeitet die 3 möglichen Istwertsignale Analogta-cho, Pulsgeber oder die Ausgangsspannung des Stromrichters (SPEED_ACT_EMF) - ge-mäß dem Funktionsbaustein EMF TO SPEED CALC (wenn 2102=5, keine Feldschwä-chung möglich). Über Parameter erfolgt die Aktivierung von Glättungsfunktionen, die Aus-wahl des Istwertes und ggf. die Einstellung der maximalen Drehzahl. Diese Parameter die-nen auch zur Normierung des Drehzahlregelkreises.Der Funktionsbaustein SPEED MONITOR beinhaltet die Blockier- und Tachoüberwachungund vergleicht den ausgewählten Drehzahlistwert auf Überdrehzahl, Minimaldrehzahl und auf2 einstellbare Schwellen.Der Funktionsbaustein AO1 repräsentiert einen skalierten analogen Ausgang.
DrehzahlreglerDas Ergebnis wird in dem Funktionsbaustein SPEED ERROR mit dem Drehzahlistwert vomFunktionsbaustein SPEED MEASUREMENT verglichen und dem Drehzahlregler zugeführt.Dieser Funktionsbaustein erlaubt, die Regeldifferenz mit einem Filter zu bewerten. Außerdemkönnen hier einige Einstellungen vorgenommen werden, die für die Betriebsart "WindowMode" gebraucht werden. Befindet sich der Antrieb mit seinem Drehzahlistwert innerhalbeines Fensters um den Sollwert herum, so wird der Drehzahlregler "umgangen" (sofern"Window Mode" aktiviert ist; der Antrieb wird über einen Momentensollwert am Funktions-baustein TORQ REF HANDLING geführt). Liegt der Drehzahlistwert außerhalb des Fensters,so wird der Drehzahlregler aktiviert, der den Antrieb mit seinem Drehzahlistwert wieder zu-rück in das Fenster führt.Der Funktionsbaustein SPEED CONTROL beinhaltet den Drehzahlregler mit P-, I- und DT1-Anteil. Zur Adaption erhält er eine variable P-Verstärkung.
Drehmoment / StrombegrenzungDer durch den Drehzahlregler erzeugte "Drehmomentsollwert" gelangt über den Funktions-baustein TORQ REF HANDLING an den Eingang des Funktionsbausteins CURRENTCONTROL und wird dort in einen Stromsollwert umgewandelt und zur Stromregelung be-nutzt. Zur Erzeugung der verschiedenen Sollwerte und Begrenzungen dient der Funktions-baustein TORQUE / CURRENT LIMITATION, der die Funktionen "DrehzahlabhängigeStrombegrenzung", "Getriebeschonung", "Erzeugung der Werte für die statische Strombe-grenzung" und "Momentenbegrenzung" enthält. Die Werte für die verschiedenen Begrenzun-gen werden an einigen Stellen wieder verwendet, so z.B. bei den FunktionsbausteinenSPEED CONTROL, TORQ REF HANDLING, TORQ REF SELECTION, und CURRENTCONTROL.Zum Einlesen eines analogen Signals dient der Funktionsbaustein AI2 (Analogeingang 2).Der Funktionsbaustein TORQ REF SELECTION beinhaltet eine Begrenzung mit vorgeschal-teter Addition zweier Signale, von denen eines über einen Rampengeber geleitet werden, dasandere mit Hilfe eines Multiplizierers in seiner Berwertung dynamisch geändert werden kann.Der Funktionsbaustein TORQ REF HANDLING bestimmt die Betriebsart, in der der Antriebarbeitet. In Position 1 ist die Drehzahlregelung aktiviert, in Postion 2 die Momentensteuerung(keine Regelung, da kein "echter" Momentenistwert im Gerät vorhanden ist). In beiden Fällenkommt der benötigte Sollwert von außen. Position 3 und 4 sind eine Kombination der beidenersten Möglichkeiten, wobei in Postition 3 der kleinere Wert aus externem Momentensollwertund Drehzahlreglerausgang auf den Stromregler weitergeleitet wird; in Postition 4 ist es dergrößere Wert. Postition 5 benutzt beide Signale entsprechend der Wirkungsweise "WindowMode".
AnkerstromreglerDer Funktionsbaustein CURRENT CONTROL beinhaltet den Stromregler mit P- und I-Anteilsowie einer Adaption im Lückbereich des Stromes. Weiterhin enthält dieser Funktionsbau-stein die Stromanstiegsbegrenzung, die Umrechnung von Momentensollwert in Stromsollwertmit Hilfe des Feldablösepunktes und einige Parameter zur Beschreibung des speisendenNetzes sowie des Lastkreises.Bei Anwendungen mit hoher induktiver Last und hoher Dynamik wird zur Erzeugung desStromsignals = Null eine andere Hardware verwendet. Diese Hardware wird mit dem Funkti-onsbaustein CURRENT MONITOR gewählt. Die Funktionen zur Überwachung des Stromskönnen anwendungsspezifisch angepasst werden. Hierdurch wird die Handhabung verein-facht und die Sicherheit bei Hochleistungsanstrieben, wie Prüfständen, erhöht.Der DCF -Modus kann mit Hilfe des Funktionsbausteins DCF FIELDMODE aktiviert werden.Die Funktionalität innerhalb dieses Modus kann festgelegt werden. Wenn eine dieser Funk-tionen angewählt ist, erhält der Stromregler eine andere Charakteristik, der Überspannungs-schutz DCF 506 wird überwacht und the der Feldstrom-Sollwert wird über die KlemmenX16: weitergeleitet.
Netz- und MotordatenDer Funktionsbaustein SETTINGS dient zur Normierung aller wichtigen Signale wie Netz-spannung, Motorspannung, Motorstrom und Feldstrom. Mit den Parameteren kann dieSteuerung auf spezielle Bedingungen wie schwache Netze oder das Zusammenwirken mitOberwellenfiltern eingestellt werden. Außerdem kann die Sprache, in der Informationen aufder Bedien- und Anzeigeeinheit erscheinen soll, eingestellt werden.Der Funktionsbaustein AO2 repräsentiert einen skalierbaren analogen Ausgang.
MotorspannungsreglerDer Funktionsbaustein EMF CONTROL enthält den Ankerspannungsregler (EMK-Regler). Erbasiert auf einer Parallelstruktur aus einem PI-Regler und einer Vorsteuerung, gebildet miteiner Kennlinie 1/x. Das Verhältnis der beiden Pfade ist einstellbar. Ausgangsgröße diesesFunktionsbausteins ist der Feldstromsollwert, der durch eine weitere Kennlinienfunktion ausdem Flußsollwert durch Linearisierung entsteht. Damit der Antrieb auch bei einem 4-Quadranten-System eine höhere Motorspannung nutzen kann, können über Parameter zweiFeldschwächungspunkte eingestellt werden.
Feldstromregler 1 und 2Da ein DCS-Stromrichter 2 Feldgeräte ansteuern kann, sind einige Funktionsbausteine einzweites Mal vorhanden. Abhängig von der mechanischen Konfiguration der Antriebe lassensich somit entweder 2 Motoren parallel oder alternativ steuern. Die dazu notwendige Konfigu-ration der Softwarestruktur läßt sich durch den Aufbau der Funktionsbausteine während derInbetriebnahme erzeugen.Der Funktionsbaustein MOTOR1 FIELD / MOTOR2 FIELD liest den Feldstromsollwert undalle spezifischen Werte der Feldspeisegeräte ein und transferiert sie über eine interne serielleVerbindung an den Feldstromrichter, der entsprechend seiner Hardware skaliert wird und dieFeldstromregelung durchführt. Für Motor 1 kann die Feldstromrichtung über binäre Befehlebestimmt werden, für Motor 2 kann dies im Zuge einer Applikation vor dem Funktionsbausteinerzeugt werden.Der Funktionsbaustein MOTOR1 FIELD OPTIONS / MOTOR2 FIELD OPTIONS steuert dieFreilauffunktion bei Netzunterspannung und Feldstromwendung bei Feldumkehrantrieben(nur für Motor 1). Im Falle von Feldumkehrantrieben besteht die Möglichkeit, auf den Zeit-punkt des Abbaus von Anker-/ und Feldstrom und den Aufbau gezielt Einfluss zu nehmen.
Binäre Ein- und Ausgaben (Standard)Der Funktionsbaustein DRIVE LOGIC liest diverse Signale von der Anlage über die digitalenEingänge DIx ein, verarbeitet sie und generiert Befehle, die über die digitalen Ausgänge DOxan die Anlage ausgegeben werden, um z.B. das Netzschütz des Stromrichters, das Feld-schütz oder Schütze für diverse Lüfter anzusteuern oder Statusmeldungen auszugeben.
Zusatzeingänge (binär)Die Funktionsbausteine AI3 und AI4 repräsentieren 2 weitere analoge Eingänge, die bis jetztnoch keinen festen Funktionen zugeordnet sind. Die Funktionsbausteine AI5 und AI6 reprä-sentieren ebenfalls 2 weitere analoge Eingänge, die jedoch nur dann zur Verfügung stehen,wenn die Karte SDCS-IOE1 benutzt wird. Zusätzlich stehen bei Verwendung dieser Zusatz-hardware 7 weitere binäre Eingänge DI 9 bis DI15 zur Verfügung.
Ein – Ausgaben FeldbusWenn die Ansteuerung nicht nur mit analogen und binären Signalen erfolgen soll, sondernauch mit seriell übertragenen Vorgaben, so ist dazu ein Feldbusmodul notwendig, das dasgewünschte Protokoll zur Verfügung stellt (z.B. Profibus, CS31, Modbus usw.). Die Aktivie-rung eines solchen Moduls erfolgt durch den Funktionsbaustein FIELDBUS. Die von derSteuerung zum Stromrichter übertragenen Daten werden in den FunktionsbausteinenDATASET1 und DATASET3 als 16-Bit-Information abgelegt. Je nach Verwendungszwecksind die Ausgangspins dieser Funktionsbausteine mit Eingangspins anderer Funktionsbau-steine zu verbinden, um die Informationen wirksam werden zu lassen. Gleiches gilt für dieFunktionsbausteine DATASET2 und DATASET4, die Informationen, sofern sie"verdrahtet"sind, vom Stromrichter zur Steuerung übertragen.
Ein – Ausgaben 12 PulsDer Stromrichter kann in einer 12-Puls-Parallel-Konfiguration benutzt werden. Dazu werdenbenötigt: zwei gleiche Ankerstromrichter; eine Feldspeiseeinheit; eine T-Drossel; Kommuni-kation über Flachbandkabel, das an X 18 der beiden Stromrichter angeschlossen wird. Die12-Puls-Logik muss aktiviert werden und gewährleistet eine synchrone Steuerung desMASTER- und des SLAVE-Antriebs.
InbetriebnahmehilfenDer Funktionsbaustein MAINTENANCE stellt Sollwerte und Testbedingungen zur Verfügung,um alle Regler im Stromrichter einstellen zu können. Um die Steuertafel als "Messinstrumentin der Schaltschranktür" benutzen zu können, kann hier eine Auswahl der Signale getroffenwerden.
ÜberwachungenDer Funktionsbaustein CONVERTER PROTECTION überwacht den Ankerkreis auf Über-spannung und Überstrom, sowie das Netz auf Unterspannung. Er bietet die Möglichkeit, übereinen zusätzlichen externen Sensor den Summenstrom der 3 Phasen einzulesen und diesenauf ungleich Null zu überwachen. Für Nachrüstungen werden Anpassungen vorgenommen,bei denen der Leistungsteil und der Lüfter erhalten bleiben, um Überlastbedingungen oderden Ausfall des Lüfters zu erkennen.Der Funktionsbaustein MOTOR1 PROTECTION wertet im oberen Teil entweder das Signalvon einem analogen Temperatursensor aus oder von einem Klixon. Im unteren Teil wird mitHilfe des Stromistwertes und einem Motormodell die Erwärmung im Motor berechnet unddanach eine Meldung ausgegeben.Der Funktionsbaustein MOTOR2 PROTECTION arbeitet wie der FunktionsbausteinMOTOR1 PROTECTION, jedoch ohne Klixonauswertung.
Benutzerdefinierbare EreignismeldungenDie Funktionsblöcke USER EVENT1 bis USER EVENT6 erzeugen 6 verschiedene Meldun-gen, die als Fehler oder Alarm auf dem Panel CDP312 und der 7 Segmentanzeige des Ge-rätes erscheinen.
BremsensteuerungDer Funktionsbaustein BRAKE CONTROL erzeugt alle notwendigen Signale, um eine me-chanische Bremse anzusteuern.
DatenspeicherDer Funktionsbaustein DATA LOGGER bietet die Möglichkeit bis zu sechs Signale aufzu-zeichnen. Die Werte dieser Signale werden im batteriegepufferten RAM abgelegt und sindsomit auch nach einem Spannungsausfall noch abrufbar. Die Aufzeichnung kann abhängigvon einer Triggerbedingung gestartet werden; ebenso die Anzahl der aufgezeichneten Wertevor und nach der Triggerung. Die Funktion DATA LOGGER kann sowohl mit der Steuertafelals auch mit dem PC-Tool eingestellt werden. Die aufgezeichneten Werte lassen sich abernur komfortabel mit dem PC darstellen.
Zusatzausgaben (frei verfügbar)Mit Hilfe des Funktionsbausteins FAULT HANDLING werden die Stör- und Alarmmeldungendes Antriebs zu einer 16-Bit-Meldung zusammengefasst. Die FunktionsbausteineCONSTANTS und FREE SIGNALS können zur Einstellung von Grenzwerten oder speziellenPrüfbedingungen verwendet werden.
3ADW000066R0903 DCS500 System description d i

II D 4-11
3ADW000066R0803 DCS500 System description d h
No. Parameter name101 AITAC_CONV_MODE102 AITAC_HIGH_VALUE103 AITAC_LOW_VALUE104 AI1_CONV_MODE105 AI1_HIGH_VALUE106 AI1_LOW_VALUE107 AI2_CONV_MODE108 AI2_HIGH_VALUE109 AI2_LOW_VALUE110 AI3_CONV_MODE111 AI3_HIGH_VALUE112 AI3_LOW_VALUE113 AI4_CONV_MODE114 AI4_HIGH_VALUE115 AI4_LOW_VALUE116 AI5_CONV_MODE117 AI5_HIGH_VALUE118 AI5_LOW_VALUE119 AI6_CONV_MODE120 AI6_HIGH_VALUE121 AI6_LOW_VALUE201 AO1.[IN]202 AO1_NOMINAL_V203 AO1_OFFSET_V204 AO1_NOMINAL_VAL205 AO2.[IN]206 AO2_NOMINAL_V207 AO2_OFFSET_V208 AO2_NOMINAL_VAL209 DATASET2.[IN1]210 DATASET2.[IN2]211 DATASET2.[IN3]212 DATASET4.[IN1]213 DATASET4.[IN2]214 DATASET4.[IN3]301 [HOLD_REF]302 [BR_RELEASE]303 [MIN_SP_IND]304 [ACT_BRAKE]305 START_DELAY306 STOP_DELAY307 HOLD_TORQ308 EMESTOP_BRAKE401 [TORQ_REF]402 [CURR_REF]403 [CURR_STEP]404 [BLOCK]405 REF_TYPE_SEL406 ARM_CURR_REF_SLOPE407 ARM_CURR_PI_KP408 ARM_CURR_PI_KI409 ARM_CONT_CURR_LIM410 ARM_L411 ARM_R412 ARM_ALPHA_LIM_MAX413 ARM_ALPHA_LIM_MIN414 DXN415 [ARM_CURR_LIM_P]416 [ARM_CURR_LIM_N]417 ARM_CURR_CLAMP418 CURRENT_RISE_MAX419 ZERO_CUR_DETECT420 CUR_RIPPLE_MONIT421 CUR_RIPPLE_LIM501 U_MOTN_V502 I_MOTN_A503 I_MOT1_FIELDN_A504 I_MOT2_FIELDN_A505 FEXC_SEL506 PHASE_SEQ_CW
No. Parameter name507 U_SUPPLY508 U_NET_MIN1509 U_NET_MIN2510 PWR_DOWN_TIME511 ARM_OVERVOLT_LEV512 ARM_OVERCURR_LEV513 EMF_FILT_TC514 EARTH.CURR_SEL515 EARTH.FLT_LEV516 EARTH.FLT_DLY517 SET_I_CONV_A518 SET_U_CONV_V519 SET_MAX_BR_TEMP520 SET_CONV_TYPE521 SET_QUADR_TYPE522 LANGUAGE523 CURR_ACT_FILT_TC524 PLL_CONTROL525 UNI_FILT_TC526 OFFSET_UDC527 CONV_TEMP_DELAY528 PLL_DEV_LIM601 DLOG.[IN1]602 DLOG.[IN2]603 DLOG.[IN3]604 DLOG.[IN4]605 DLOG.[IN5]606 DLOG.[IN6]607 DLOG.TRIGG_COND608 DLOG.TRIGG_VALUE609 DLOG.TRIGG_DELAY610 DLOG.SAMPL_INT611 DLOG.TRIG612 DLOG.STOP613 DLOG.RESTART801 DO1.[IN]802 DO1.[INV_IN]803 DO2.[IN]804 DO2.[INV_IN]805 DO3.[IN]806 DO3.[INV_IN]807 DO4.[IN]808 DO4.[INV_IN]809 DO5.[IN]810 DO5.[INV_IN]811 DO6.[IN]812 DO6.[INV_IN]813 DO7.[IN]814 DO7.[INV_IN]815 DO8.[IN]816 DO8.[INV_IN]901 [ON/OFF]902 [RUN1]903 [RUN2]904 [RUN3]905 [COAST_STOP]906 [EME_STOP]907 [RESET]908 [START_INHIBIT]909 [DISABLE_LOCAL]910 [ACK_CONV_FAN]911 [ACK_MOTOR_FAN]912 [ACK_MAIN_CONT]913 [MOTOR 2]914 FIELD_HEAT_SEL915 MAIN_CONT_MODE916 STOP_MODE917 EME_STOP_MODE918 PANEL_DISC_MODE919 PWR_LOSS_MODE
No. Parameter name920 COMFAULT_MODE921 COMFAULT_TIMEOUT
1001 FIELD_MODE1002 [FLUX_REF]1003 [EMF_REF]1004 [FLUX_REF_SEL]1005 [EMF_REF_SEL]1006 LOCAL_EMF_REF1007 EMF_KP1008 EMF_KI1009 EMF_REG_LIM_P1010 EMF_REG_LIM_N1011 EMF_REL_LEV1012 FIELD_WEAK_POINT1013 FIELD_CONST_11014 FIELD_CONST_21015 FIELD_CONST_31016 GENER.EMF_REF1017 GENER.WEAK_POINT1018 FIELD_WEAK_DELAY1101 USER_EVENT1.[IN]1102 USER_EVENT1.TYPE1103 USER_EVENT1.TEXT1104 USER_EVENT1.DLY1105 USER_EVENT2.[IN]1106 USER_EVENT2.TYPE1107 USER_EVENT2.TEXT1108 USER_EVENT2.DLY1109 USER_EVENT3.[IN]1110 USER_EVENT3.TYPE1111 USER_EVENT3.TEXT1112 USER_EVENT3.DLY1113 USER_EVENT4.[IN]1114 USER_EVENT4.TYPE1115 USER_EVENT4.TEXT1116 USER_EVENT4.DLY1117 USER_EVENT5.[IN]1118 USER_EVENT5.TYPE1119 USER_EVENT5.TEXT1120 USER_EVENT5.DLY1121 USER_EVENT6.[IN]1122 USER_EVENT6.TYPE1123 USER_EVENT6.TEXT1124 USER_EVENT6.DLY1201 DRIVEMODE1202 CMT_DCS500_ADDR1203 DRIVE_ID1204 POT1_VALUE1205 POT2_VALUE1206 PERIOD_BTW.POT1/21207 WRITE_ENABLE_KEY1208 WRITE_ENABLE_PIN1209 SELECT_OPER.SYST.1210 ACTUAL VALUE 11211 ACTUAL VALUE 21212 ACTUAL VALUE 31213 FIELDBUS NODE ADDR1214 MACRO_SELECT1215 DCF MODE1216 DI/OVP1217 OVP_SELECT1301 [F1_REF]1302 [F1_FORCE_FWD]1303 [F1_FORCE_REV]1304 [F1_ACK]1305 F1_CURR_GT_MIN_L1306 F1_OVERCURR_L1307 F1_CURR_TC1308 F1_KP1309 F1_KI
Parameterliste (mit Spalte für kundenspezifische Werte)
3ADW000066R0903 DCS500 System description d i

II D 4-12
3ADW000066R0903 DCS500 System description d i
No. Parameter name1310 F1_U_AC_DIFF_MAX1311 F1_U_LIM_N1312 F1_U_LIM_P1313 F1_RED.SEL1314 F1_RED.REF1315 OPTI.REF_GAIN1316 OPTI.REF_MIN_L1317 OPTI.REF_MIN_TD1318 REV.REV_HYST1319 REV.REF_HYST1320 REV.FLUX_TD1321 F1_CURR_MIN_TD1401 MOT1.[TEMP_IN]1402 MOT1.TEMP_ALARM_L1403 MOT1.TEMP_FAULT_L1404 [KLIXON_IN]1405 MODEL1.SEL1406 MODEL1.CURR1407 MODEL1.ALARM_L1408 MODEL1.TRIP_L1409 MODEL1.TC1501 [F2_REF]1502 F2_CURR_GT_MIN_L1503 F2_OVERCURR_L1504 F2_CURR_TC1505 F2_KP1506 F2_KI1507 F2_U_AC_DIFF_MAX1508 F2_U_LIM_N1509 F2_U_LIM_P1510 F2_RED.SEL1511 F2_RED.REF1601 MOT2.[TEMP_IN]1602 MOT2.TEMP_ALARM_L1603 MOT2.TEMP_FAULT_L1604 MODEL2.SEL1605 MODEL2.CURR1606 MODEL2.ALARM_L1607 MODEL2.TRIP_L1608 MODEL2.TC1701 RAMP.[IN]1702 RAMP.[RES_IN]1703 RAMP.[HOLD]1704 RAMP.[FOLLOW_IN]1705 RAMP.[FOLL_ACT]1706 RAMP.[RES_OUT]1707 RAMP.[T1/T2]1708 ACCEL11709 DECEL11710 SMOOTH11711 ACCEL21712 DECEL21713 SMOOTH21714 EMESTOP_RAMP1715 SPEEDMAX1716 SPEEDMIN1717 STARTSEL1718 ACC_COMP.MODE1719 ACC_COMP.TRMIN1720 RAMP.[SPEED_SET]1801 REF_SUM.[IN1]1802 REF_SUM.[IN2]1901 CONST_REF.[ACT1]1902 CONST_REF.[ACT2]1903 CONST_REF.[ACT3]1904 CONST_REF.[ACT4]1905 CONST_REF.DEF1906 CONST_REF.REF11907 CONST_REF.REF21908 CONST_REF.REF3
No. Parameter name1909 CONST_REF.REF41910 REFSEL.[IN1]1911 REFSEL.[SEL1]1912 REFSEL.[IN2]1913 REFSEL.[SEL2]1914 REFSEL.[IN3]1915 REFSEL.[SEL3]1916 REFSEL.[ADD]1917 REFSEL.[REV]1918 SOFTPOT.[INCR]1919 SOFTPOT.[DECR]1920 SOFTPOT.[FOLLOW]1921 SOFTPOT.OHL1922 SOFTPOT.OLL1923 SOFTPOT.[ENABLE]2001 ERR.[IN]2002 ERR.[STEP]2003 ERR.[WIN_MODE]2004 ERR.WIN_SIZE2005 ERR.FRS2006 SPC.[IN]2007 SPC.[RINT]2008 SPC.[BAL]2009 SPC.[BALREF]2010 SPC.[BAL2]2011 SPC.[BAL2REF]2012 SPC.[HOLD]2013 SPC.DROOPING2014 SPC.KP2015 SPC.KPSMIN2016 SPC.KPSPOINT2017 SPC.KPSWEAKFILT2018 SPC.KI2019 SPC.TD2020 SPC.TF2021 ERR. [SPEED_ACT]2101 TACHOPULS_NR2102 SPEED_MEAS_MODE2103 SPEED_SCALING2104 SPEED_ACT_FTR2105 SPEED_ACT_FLT_FTR2201 MIN_SPEED_L2202 SPEED_L12203 SPEED_L22204 OVERSPEEDLIMIT2205 STALL.SEL2206 STALL.SPEED2207 STALL.TORQUE2208 STALL.TIME2209 MON.MEAS_LEV2210 MON.EMF_V2301 [SPC_TORQ_MAX]2302 [SPC_TORQ_MIN]2303 [TREF_TORQ_MAX]2304 [TREF_TORQ_MIN]2305 TORQ_MAX2306 TORQ_MIN2307 ARM_CURR_LIM_P2308 ARM_CURR_LIM_N2309 MAX_CURR_LIM_SPD2310 MAX_CURR_LIM_N12311 MAX_CURR_LIM_N22312 MAX_CURR_LIM_N32313 MAX_CURR_LIM_N42314 MAX_CURR_LIM_N52315 GEAR.START_TORQ2316 GEAR.TORQ_TIME2317 GEAR.TORQ_RAMP2401 SEL1.[TREF_A]2402 SEL1.TREF_A_FTC
No. Parameter name2403 SEL1.[LOAD_SHARE]2404 SEL1.[TREF_B]2405 SEL1.TREF_B_SLOPE2406 SEL2.TREF_SEL2407 SEL2.[TREF_SPC]2408 SEL2.[TREF_EXT]2409 SEL2.[TORQ_STEP]2501 TASK1_EXEC_ORDER2502 TASK2_EXEC_ORDER2503 TASK3_EXEC_ORDER2504 FB_APPL_ENABLE2505 FB_TASK_LOCK2601-Par. f. appl. func. blocks2701-Par. f. appl. func. blocks2801-Par. f. appl. func. blocks2901-Par. f. appl. func. blocks3001-Par. f. appl. func. blocks3101-Par. f. appl. func. blocks3201-Par. f. appl. func. blocks3301-Par. f. appl. func. blocks3401-Par. f. appl. func. blocks3601 REV_DELAY3602 REV_GAP3603 FREV_DELAY3604 IACT_SLAVE3605 DIFF_CURRENT3606 DIFF_CURR_DELAY3607 INHIB_Logic3608 IREF0_Logic3609 Bridge_Logic3610 Reverse.Logic3611 [X18:09]3612 [X18:10]3613 [X18:11]3614 [X18:12]3615 ADJ_REF13616 BC-Logic3701-Par. f. appl. func. blocks3801-Par. f. appl. func. blocks3901-Par. f. appl. func. blocks4001 FIELDBUS_PAR.14002 FIELDBUS_PAR.24003 FIELDBUS_PAR.34004 FIELDBUS_PAR.44005 FIELDBUS_PAR.54006 FIELDBUS_PAR.64007 FIELDBUS_PAR.74008 FIELDBUS_PAR.84009 FIELDBUS_PAR.94010 FIELDBUS_PAR.104011 FIELDBUS_PAR.114012 FIELDBUS_PAR.124013 FIELDBUS_PAR.134014 FIELDBUS_PAR.144015 FIELDBUS_PAR.15
Parameterliste (mit Spalte für kundenspezifische Werte)
3ADW000066R0903 DCS500 System description d i

II D 4-13
3ADW000066R0803 DCS500 System description d h
No. Parameter name10101 AITAC:OUT+10102 AITAC:OUT-10103 AITAC:ERR10104 AI1:OUT+10105 AI1:OUT-10106 AI1:ERR10107 AI2:OUT+10108 AI2:OUT-10109 AI2:ERR10110 AI3:OUT+10111 AI3:OUT-10112 AI3:ERR10113 AI4:OUT+10114 AI4:OUT-10115 AI4:ERR10116 AI5:OUT+10117 AI5:OUT-10118 AI5:ERR10119 AI6:OUT+10120 AI6:OUT-10121 AI6:ERR10122 DATASET1:OUT110123 DATASET1:OUT210124 DATASET1:OUT310125 DATASET3:OUT110126 DATASET3:OUT210127 DATASET3:OUT310301 TREF_OUT10302 TREF_ENABLE10303 DECEL_CMND10304 LIFT_BRAKE10305 BRAKE_RUN10401 ARM_ALPHA10402 ARM_DIR10403 CURR_REF_IN_LIM10404 CURR_DER_IN_LIM10405 ARM_CURR_REF10501 CONV_CURR_ACT10502 ARM_CURR_ACT10503 TORQUE_ACT10504 U_NET_ACT10505 U_ARM_ACT10506 EMF_ACT10507 BRIDGE_TEMP10508 U_NET_DC_NOM_V10509 I_CONV_A10510 I_TRIP_A10511 U_CONV_V10512 MAX_BR_TEMP10513 CONV_TYPE10514 QUADR_TYPE10515 LINE_FREQUENCY10601 DLOG_STATUS10701 DI1:O110702 DI1:O210703 DI2:O110704 DI2:O210705 DI3:O110706 DI3:O210707 DI4:O110708 DI4:O210709 DI5:O110710 DI5:O210711 DI6:O110712 DI6:O210713 DI7:O110714 DI7:O210715 DI8:O110716 DI8:O210717 DI9:O110718 DI9:O210719 DI10:O110720 DI10:O210721 DI11:O110722 DI11:O210723 DI12:O110724 DI12:O210725 DI13:O110726 DI13:O210727 DI14:O110728 DI14:O210729 DI15:O1
No. Parameter name10730 DI15:O210901 RDY_ON10902 RDY_RUNNING10903 RUNNING10904 FAULT10905 ALARM10906 LOCAL10907 EMESTOP_ACT10908 FAN_ON10909 FIELD_ON10910 MAIN_CONT_ON10911 TRIP_DC_BREAKER10912 DYN_BRAKE_ON10913 MOTOR_ACT10914 AUTO-RECLOSING10915 COMM_FAULT10916 RUN_DCF10917 RESET_DCF11001 FLUX_REF111002 FLUX_REF_SUM11003 F_CURR_REF11101 FAULT_WORD_111102 FAULT_WORD_211103 FAULT_WORD_311104 ALARM_WORD_111105 ALARM_WORD_211106 ALARM_WORD_311107 LATEST_FAULT11108 LATEST_ALARM11109 OPERATING_HOURS11201 COMMIS_STAT11202 BACKUPSTOREMODE11203 FEXC_STATUS11204 TC_STATUS11205 BC11206 SQUARE_WAVE11207 TEST_REF11208 TEST_RELEASE11209 TEST_REF_SEL11210 FEXC1_CODE11211 FEXC1_COM_STATUS11212 FEXC1_COM_ERRORS11213 FEXC2_CODE11214 FEXC2_COM_STATUS11215 FEXC2_COM_ERRORS11216 CMT_COM_ERRORS11217 CDI300_BAD_CHAR11218 CNT_SW_VERSION11219 CNT_BOOT_SW_VERSION11220 FEXC1_SW_VERSION11221 FEXC2_SW_VERSION11222 PROGRAM_LOAD11301 F1_CURR_REF11302 F1_CURR_ACT11303 REF_DCF11401 MOT1_MEAS_TEMP11402 MOT1_CALC_TEMP11501 F2_CURR_REF11502 F2_CURR_ACT11601 MOT2_MEAS_TEMP11602 MOT2_CALC_TEMP11701 RAMP:OUT11702 ACCELCOMP:OUT11703 RAMP:SIGN11801 SPEED_REFERENCE11802 REF_SUM:OUT11803 LOCAL_SPEED_REF11901 CONST_REF:OUT11902 CONST_REF:ACT11903 REF_SEL:OUT11904 SOFT_POT:OUT11905 SOFT_POT:ACT12001 ERR:OUT12002 ERR:OUT_OF_WIN12003 ERR:STEP_RESP12004 SPC:OUT12005 SPC:IN_LIM12101 SPEED_ACT_EMF12102 SPEED_ACT12103 SPEED_ACT_FILT12104 TACHO_PULSES12201 MIN_SPEED
No. Parameter name12202 SPEED_GT_L112203 SPEED_GT_L212204 OVERSPEED12301 SPC_TORQMAX112302 SPC_TORQMIN112303 TREF_TORQMAX112304 TREF_TORQMIN112305 TORQMAX212306 TORQMIN212307 CURR_LIM_P12308 CURR_LIM_N12401 SEL1:OUT12402 SEL2:OUT12403 SEL2:TORQ/SPEED12404 SEL2:IN_LIM12501 CONSTANT 012502 CONSTANT -112503 CONSTANT 112504 CONSTANT 212505 CONSTANT 1012506 CONSTANT 10012507 CONSTANT 100012508 CONSTANT 3141612509 EMF: 100%12510 TORQ: 100%12511 TORQ -100%12512 CUR,FLX,VLT 100%12513 CUR,FLX,VLT -100%12514 SPEED: 100%12515 SPEED: -100%12516 SIG1(SPEED REF)12517 SIG2(SPEED STEP)12518 SIG3(TORQ. REF A)12519 SIG4(TORQ. REF B)12520 SIG5(TORQUE STEP)12521 SIG6(LOAD SHARE)12522 SIG7(FLUX REF)12523 SIG8(EMF REF)12524 SIG9(FORCE FWD)12525 SIG10(FORCE REV)12526 SIG11(CURR. REF)12527 SIG12(CURR. STEP)12601-12699
Signals for application function blocks
12701-12799
Signals for application function blocks
12801-12899
Signals for application function blocks
12901-12999
Signals for application function blocks
13001-13013
Signals for application function blocks
13501 STATUS_WORD13502 LTIME13503 LDATE13601 Conv.Curr.Slave13602 Arm.Curr.Slave13603 Conv.Curr.Both13604 Arm.CURR.Both13605 Curr.-Ref.113606 IREF1-Polarity13607 IREF1-Pol.Master13608 Curr.-Ref.213609 IREF2-Polarity13610 IREF2-Pol.Broth.13611 Bridge13612 Bridge of Slave13613 Indicat.Revers.13614 Fault Reversion13615 Fault Current13616 Logik f.INHIBIT13617 Input X18:1313618 Input X18:1413619 Input X18:1513620 Input X18:1613621 BC not Zero13622 Reserved f.Commun13801-13819
Function for application winder
13901-13912
Function for application winder
Signalliste
3ADW000066R0903 DCS500 System description d i

II D 4-14
3ADW000066R0903 DCS500 System description d i
Da wird immer bestrebt sind, mit unseren Produktenden neuesten Stand der Technik zu bieten, werden Siesicher verstehen, dass wir uns Änderungen der Ausfüh-rung, der Daten, Größen, Gewichte für unsere Gerätevorbehalten.
3AD
W 0
00 0
66 R
0903
RE
V I
09_2
005
ABB Automation Products GmbHPostfach 118068619 Lampertheim • DEUTSCHLANDTelefon +49(0) 62 06 5 03-0Telefax +49(0) 62 06 5 03-6 09www.abb.com/dc
*066R0903A5360000**066R0903A5360000*
DCS 400
DCS 500B / DCS 600
DCS 400 / DCS 500Easy Drive
DCA 500 / DCA 600
DCE 500 / DCE 600
Stromrichtermodule für Standardanwendungen Integrierte Feldversorgung (max. 20 A) Genaue Drehzahl - und Drehmomentenrege-
lung Extrem kleine und kompakte Bauweise Sehr einfache Installation und Inbetriebnahme Sehr kurze Lieferzeit Leistungsbereich: 10...500 kW
Stromrichtermodule für höchsteAnforderungen Frei programmierbar 6 - und 12 - Pulsanwendungen bis 10 MW und
höher Bedien - und Anzeigeeinheit (Panel) mit Klar-
textanzeige Leistungsbereich: 10...5000 kW
Hochintegrierter, kompletterGleichstromantrieb Ausgezeichnete Erweiterungs- oder Moderni-
sierungslösung Enthält:
DCS 500B / DCS 600 Stromrichtermodul Wechselstromseitige Halbleitersicherungen Hilfstransformator Starter für Motorlüfter mit Motorschutzschalter Hauptschütz
Leistungsbereich: 10...130 kW
Die Komplettlösung für Standardschränke Standardisiert Einfache Installation und Inbetriebnahme Schutzart: IP 21 Bedien - und Anzeigeeinheit (Panel) mit Klar-
textanzeige Kurze Lieferzeit Leistungsbereich: 50...1350 kW
Komplexe, komplett geplanteAntriebssysteme in Common CabinetBauweise Flexible und modular aufgebaute Hardware 6- und 12-Pulsanwendungen bis 18 MW und
höher Vorgefertigte Standartprogramme für: Metal,
Krane, Papier, Bergbau Leistungsbereich: 10...18000 kW
Produktpalette Gleichstromantriebe
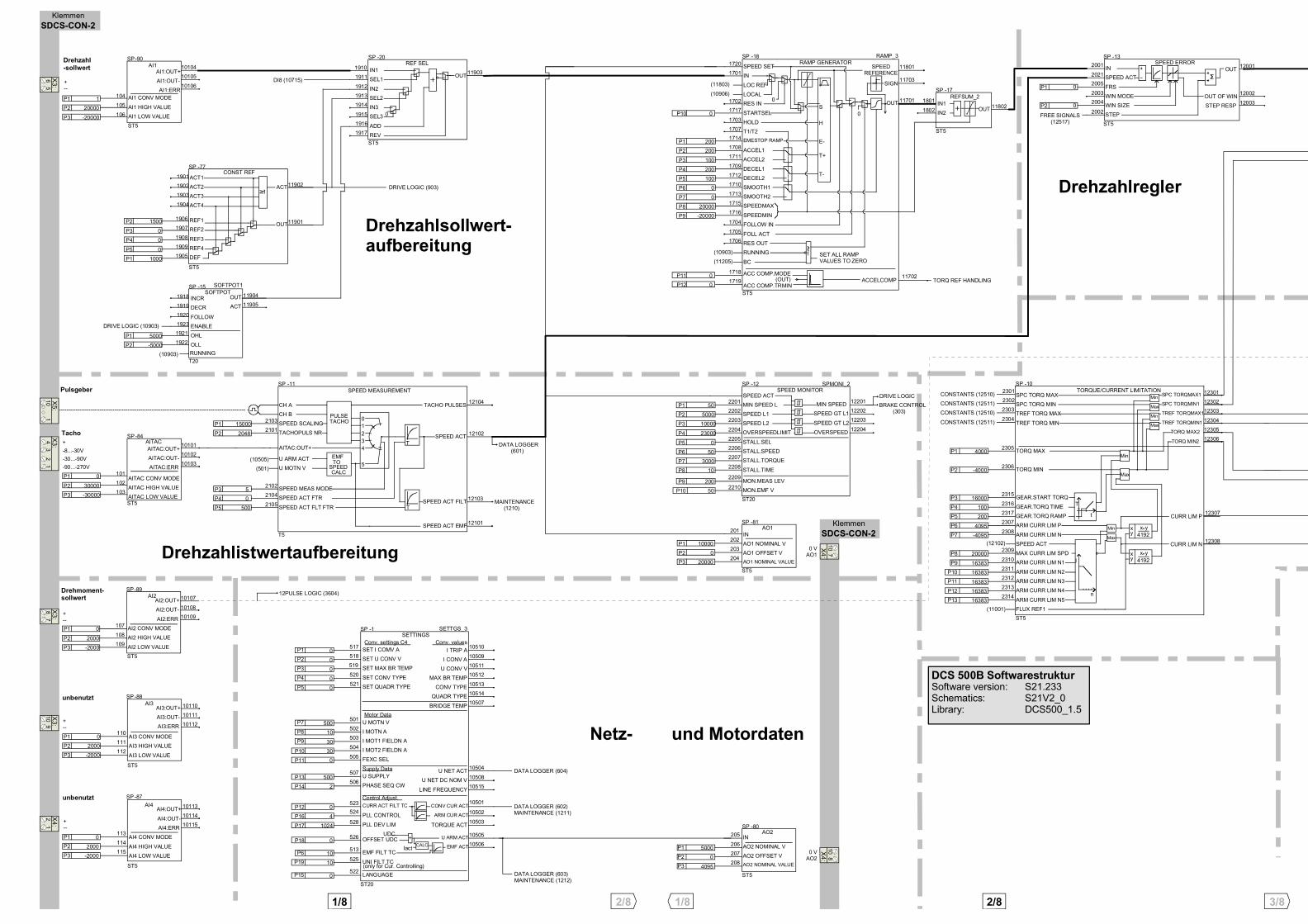
2/81/8 1/8 3/82/8
AITAC LOW VALUEAITAC HIGH VALUEAITAC CONV MODE
SP
AITAC:OUT+AITAC:OUT-AITAC:ERR
AITAC
ST5
101011010210103
P2P3
P1
-84
101102103
0
30000-30000
+-8...-30V-30...-90V-90...-270V
TACHO PULSES
SPEED ACT FLT FTR
SPEED MEASUREMENT
SPEED ACT EMF
SPEED ACT FILT
SPEED ACT
SPEED ACT FTRSPEED MEAS MODE
U MOTN VU ARM ACT
TACHOPULS NRSPEED SCALINGCH BCH A
5
0
4321
T
T
SPEEDTOEMF
CALC
(10505)(501)
AITAC:OUT+
T5
SP
TACHOPULSE
12104
12102
12103
12101
P1
P2
P3P4P5
-11
21032101
21022104
2105
15000
2048
50
500MAINTENANCE (1210)
AO1 NOMINAL VALUE
AO1 OFFSET VAO1 NOMINAL V
201IN
SPAO1
ST5
P2P3
P1
-81
202203204
100000
20000
WIN SIZEWIN MODE
2002
2021
2003FRS
STEPST5
2005
2004
0
0
SPEED ERROR
STEP RESPOUT OF WIN
OUTSPEED ACT
12001
12002
12003
2001
P1
P2
IN
SP -13
FREE SIGNALS (12517)
CURR LIM N
CURR LIM P
TORQ MIN2
TORQ MAX2
TREF TORQMIN1
TREF TORQMAX1
SPC TORQMIN1
SPC TORQMAX1
FLUX REF1ARM CURR LIM N5
ARM CURR LIM N4ARM CURR LIM N3ARM CURR LIM N2
ARM CURR LIM N1MAX CURR LIM SPDSPEED ACTARM CURR LIM N
ARM CURR LIM PGEAR.TORQ RAMPGEAR.TORQ TIME
GEAR.START TORQ
TORQ MIN
TORQ MAX
TREF TORQ MIN
TREF TORQ MAXSPC TORQ MINSPC TORQ MAX
TORQUE/CURRENT LIMITATION
4192yxx
yMin
Max
T
t
I
n
Max
Min
Min
Max
Min
Max
SP
(12102)
(11001)ST5
P1
P2
P7
P6P5P4P3
P8
P9
P11P10
P12P13
12308
12307
123011230212303
123041230512306
230123022303
2304
-10
2305
2306
2315
231623172307
2308
2309
23102311231223132314
4000
-4000
16000100200
4095-4095
20000
1638316383
163831638316383
4192yxx
y
CONSTANTS (12510)CONSTANTS (12511)CONSTANTS (12510)
CONSTANTS (12511)
REF SELSP
ST5
0
SEL1IN1
IN2SEL2IN3SEL3
OUT
ADDREV
19101911
191219131914
191519161917
11903
-20
CONST REF
ST5
1
REF4DEF
REF3
REF1REF2
ACT2ACT3ACT4
ACT
SP
OUT
ACT1190119021903
1904
11902
11901
P5P1
P4
P2
P3
-77
1905
19061907
19081909
1000
1500
00
0
SP
1923 ENABLEFOLLOW1920
RUNNING(10903)T20
OHLOLL
P1P2
INCRDECR
OUTACT
SOFTPOT19181919
1190411905
-15 SOFTPOT1
19211922
5000-5000
DRIVE LOGIC (10903)
ACCELCOMPACC COMP.TRMIN
ACC COMP.MODE
EMESTOP RAMP
SPEED SET
SPRAMP GENERATOR
11801SPEED REFERENCE
11703SIGN(11803)
(10906)0
LOCALLOC REF
1701 IN
1720
P12P11
P9P8P7
P6P5P4P3
P2P1
P10
SET ALL RAMP VALUES TO ZERO
OUT
11702(OUT)
11701S
H
E-
T+
T-
0STARTSEL
RES IN
ST5
BC
HOLD
SMOOTH2SMOOTH1DECEL2DECEL1
ACCEL2ACCEL1
T1/T2
SPEEDMIN
SPEEDMAX
FOLLOW IN
FOLL ACTRES OUTRUNNING
17071703
17061705
1704
(10903)(11205)
1702
-18 RAMP_3
171417081711
170917121710
171317151716
1717
17181719
200200
100200100
0
020000
-20000
0
00
TORQ REF HANDLING
AI1 LOW VALUEAI1 HIGH VALUE
AI1 CONV MODE
SP
AI1:OUT+AI1:OUT-AI1:ERR
AI1
ST5
1010410105
10106
P2
P3
P1
-90
104105
106
120000
-20000
+--
MIN SPEED
SPEED MONITOR
SPEED GT L2
SPEED GT L1
OVERSPEED
MON.EMF VMON.MEAS LEV
SPEED L2SPEED L1MIN SPEED LSPEED ACT
P8P7P6P5
P4
P3P2P1
P10P9
ST20
STALL.TIME
SP
OVERSPEEDLIMIT
STALL.SELSTALL.SPEEDSTALL.TORQUE
122011220212203
12204
-12 SPMONI_2
220122022203
2204220522062207
2208
2209
2210
50500010000
23000
050
300010
20050
AI2 LOW VALUE
AI2 HIGH VALUEAI2 CONV MODE
SPAI2
AI2:OUT+AI2:OUT-
AI2:ERR
ST5
10107
1010810109
P2P3
P1
-89
107
108109
0
2000-2000
+--
ST5
SP
IN211802OUT1802
1801 IN1
-17REFSUM_2
Control Adjust.
105071051410513
105121051110509
10510
BRIDGE TEMP
QUADR TYPECONV TYPE
MAX BR TEMP
Conv. valuesConv. settings C4
SET QUADR TYPESET CONV TYPE
SET MAX BR TEMPSET U CONV VSET I COMV A
U CONV VI CONV A
I TRIP A
SETTINGSSP
P5
P4P3
P1P2
Motor Data
I MOTN AU MOTN V
I MOT1 FIELDN AI MOT2 FIELDN AFEXC SELP11
P10
P9P8
P7
1050810515
U NET DC NOM VU SUPPLYP13PHASE SEQ CWP14
10504U NET ACT
LINE FREQUENCY
Supply Data
ST20
LANGUAGEP15(only for Cur. Controlling)UNI FILT TCP19
P6
P18
P12P16
P17
CURR ACT FILT TC
PLL CONTROL
PLL DEV LIM
CONV CUR ACT
ARM CUR ACT
TORQUE ACT
10501
10502
10503
U ARM ACT
EMF ACTCALCIact
+-OFFSET UDC
UDC 1050510506
EMF FILT TC
-1 SETTGS_3
517518519
520521
513
501502503
504
505
523
507506
522
524
528
526
525
000
00
10
50010
30300
0
5002
0
4
1024
0
10 AO2 NOMINAL VALUE
AO2 OFFSET VAO2 NOMINAL V
205 IN
SPAO2
ST5
P2P3
P1
-80
206207208
50000
4095
DATA LOGGER (604)
DATA LOGGER (602)MAINTENANCE (1211)
DATA LOGGER (603)MAINTENANCE (1212)
AI4 LOW VALUEAI4 HIGH VALUE
AI4 CONV MODE
SP
AI4:OUT+
AI4:OUT-AI4:ERR
AI4
ST5
101131011410115
P2P3
P1
-87
113114115
02000
-2000
AI3 LOW VALUE
AI3 HIGH VALUEAI3 CONV MODE
SP
AI3:OUT+AI3:OUT-AI3:ERR
AI3
ST5
101101011110112
P2P3
P1
-88
110111112
02000
-2000
+--
+--
12PULSE LOGIC (3604)
DRIVE LOGICBRAKE CONTROL (303)
DATA LOGGER (601)
DI8 (10715)
DRIVE LOGIC (903)
65
X3:2
1X3:
43
109
X3:8
7X3:
21
X4:
710X4:
0 VAO1
810X4:
0 VAO2
1X5:10
Drehzahlregler
Netz- und Motordaten
Drehzahlistwertaufbereitung
Drehzahlsollwert-aufbereitung
Drehzahl-sollwert
KlemmenSDCS-CON-2
Pulsgeber
Drehmoment-sollwert
unbenutzt
unbenutzt
KlemmenSDCS-CON-2
Tacho
DCS 500B SoftwarestrukturSoftware version: S21.233Schematics: S21V2_0Library: DCS500_1.5
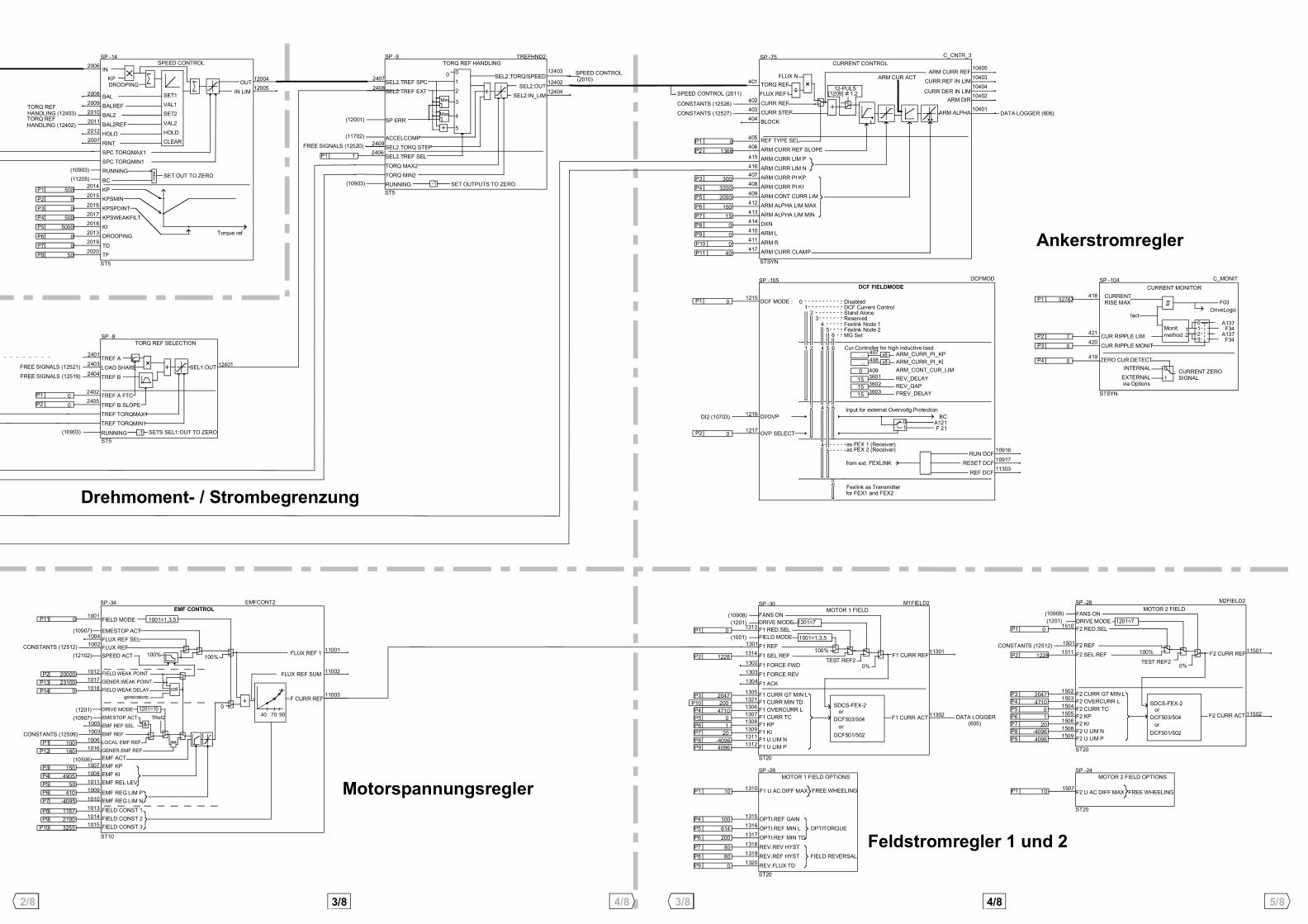
1/82/8 4/83/8 1/83/8 5/84/8
via Options
CURRENT MONITOR
CURRENT ZERO SIGNAL
DriveLogicF03
F34
F34A137
A137
EXTERNALINTERNAL
10
Monit.method 2
1
3210
Iact
STSYN
P4 ZERO CUR DETECT
CURRENT RISE MAXP1
CUR RIPPLE MONITP3
CUR RIPPLE LIMP2
SP -104 C_MONIT
418
421420
419
32767
7
0
0
ARM ALPHA
CURRENT CONTROL
CURR REF IN LIM
CURR DER IN LIMARM DIR
ARM CURR REF
ARM CONT CURR LIM
ARM CURR LIM N
ARM CURR LIM PARM CURR REF SLOPE
ARM CURR CLAMPARM R
ARM L
ARM ALPHA LIM MINARM ALPHA LIM MAX
ARM CURR PI KIARM CURR PI KP
REF TYPE SEL
ARM CUR ACT
CURR STEPCURR REF
FLUX REF1TORQ REF
FLUX N10405
SP
10403
1040210404
10401
401
402403404 t
STSYNP11P10
P9
416415
1,2[1209]12-PULS
DXN
BLOCK
P1
P2
P6
P5P4P3
P8P7
-75 C_CNTR_3
405406
407408
409412
413414410411
417
01366
30032002050
15015
0
00
40
OVP SELECT
REF DCF
RUN DCFRESET DCF
DI/OVP
F 21A121
DCF FIELDMODE
as FEX 2 (Receiver)as FEX 1 (Receiver)
6542
65421
54
Fexlink as Transmitterfor FEX1 and FEX2
6
Input for external Overvoltg.Protection
Cur.Controller for high inductive load
1216
P2
BC01
65
43
21
from ext. FEXLINK
x8 ARM_CURR_PI_KP...x8 ARM_CURR_PI_KI... 408
407
ARM_CONT_CUR_LIM3601 REV_DELAY409
153602 REV_GAP153603 FREV_DELAY15
0
DCF Current ControlStand Alone
Fexlink Node 1Fexlink Node 2MG Set
Disabled
Reserved
:
:::::
:0
11303
10916
10917
SP
P1 DCF MODE :
-105 DCFMOD
1215
1217
0
0
DI2 (10703)
CONSTANTS (12526)
CONSTANTS (12527)
F2 CURR ACT
F2 CURR REF
F2 U LIM PF2 U LIM NF2 KIF2 KPF2 CURR TCF2 OVERCURR LF2 CURR GT MIN L
FANS ON
TEST REF2F2 SEL.REFF2 REF
F2 RED.SELDRIVE MODE
MOTOR 2 FIELD
1201=7
11502
115011501
ST20
DCF501/502
DCF503/504
SDCS-FEX-2or
or
0%
100%
(10908)(1201)
SP
P1
P2
P8P7P6P5P4P3
P9
-28 M2FIELD2
1510
1511
1502150315041505150615081509
0
1228
20474710
01
20-40964096
FREE WHEELING
MOTOR 2 FIELD OPTIONS
F2 U AC DIFF MAXP1
ST20
SP -24
150710
CONSTANTS (12512)
REV.FLUX TDREV.REF HYSTREV.REV HYST
OPTI.REF MIN TDOPTI.REF MIN LOPTI.REF GAIN
MOTOR 1 FIELD OPTIONS
F1 U AC DIFF MAX
SP
ST20
FREE WHEELING
FIELD REVERSAL
OPTITORQUE
P1
P4P5P6
P7P8P9
-26
1310
131513161317
131813191320
10
100614200
80800
SPEED CONTROL (2011)
DATA LOGGER (606)
F1 CURR MIN TDP10
F1 U LIM PF1 U LIM NF1 KIF1 KPF1 CURR TCF1 OVERCURR L
P8P7P6P5P4
P9
ST20
F1 CURR ACT
F1 CURR REF
F1 CURR GT MIN L
TEST REF2
F1 ACKF1 FORCE REVF1 FORCE FWD
F1 SEL.REF
F1 REFFIELD MODEF1 RED.SELDRIVE MODEFANS ON
MOTOR 1 FIELD
1001=1,3,5
1201=7
DCF501/502
DCF503/504
SDCS-FEX-2or
or
0%
100%
(10908)(1201)
SP
P1
P2
P3
1301
130213031304
11302
11301
-30 M1FIELD2
1313
1314
1305
130613071308130913111312
1321
0
1228
2047
471001
20-40964096
200
DATA LOGGER (605)
(1001)
SPEED CONTROL
IN LIM
SPC TORQMIN1SPC TORQMAX1
1200512004
20072012
2011201020092008
2006
SET OUT TO ZEROBC
ST5TFTD
KIDROOPING
KPSMIN
KPSPOINTKPSWEAKFILT
KP
Torque ref
SET1VAL1SET2
VAL2HOLDCLEAR
RUNNING(11205)(10903)
IN
SP
OUTKPDROOPING
HOLD
BALREFBAL
BAL2
BAL2REF
RINT
P3
P1
P2
P4
P8P7
P5
P6
-14
2014
2015
20162017201820132019
2020
5000
0500
5000
00
50
TORQ REF HANDLING (12403)TORQ REF HANDLING (12402)
FREE SIGNALS (12521)
FREE SIGNALS (12519)SEL1:OUT
TORQ REF SELECTION
TREF TORQMIN1TREF TORQMAX1TREF B SLOPE
TREF B
TREF A FTC
LOAD SHARETREF A
SETS SEL1:OUT TO ZERO-1RUNNINGST5
SP
P2P1
2401
2403
240412401
-8
24022405
00
(10903)
SEL2:TORQ/SPEED
TORQ MIN2TORQ MAX2
ACCELCOMP
SEL2.TREF SELSEL2.TORQ STEP
SP ERR
SEL2.TREF EXT
TORQ REF HANDLING
SEL2.TREF SPC
SP
(11702)
0 0
1
RUNNING SET OUTPUTS TO ZEROST5
-1(10903)
SEL2:IN_LIM
SEL2:OUT
4
3
Max
Min
5
2
P1
2409
2407
2408
12403
1240212404
-9 TREFHND2
24061
FREE SIGNALS (12520)
(12001)
SPEED CONTROL (2010)
SPEED ACT(12102)
907040
100%
EMESTOP ACT(10907)
cal
EMF CONTROL
0
100%
F CURR REF
FLUX REF SUM
FLUX REF 1
11003
11002
EMF REFEMF REF SELEMESTOP ACT
FIELD WEAK DELAYGENER.WEAK POINTFIELD WEAK POINT
FLUX REFFLUX REF SEL
FIELD MODE
11001
ST10
P9P10
P8FIELD CONST 2FIELD CONST 1
FIELD CONST 3
P6P7
EMF REG LIM PEMF REG LIM N
P5
P3P4
EMF KPEMF KIEMF REL LEV
EMF ACT(10506)
TRef2
1201=10
&
GENER.EMF REFP12P1 LOCAL EMF REF
10031005
(1201)(10907)
generatoricP14P13P2
10041002
1001=1,3,5P11
SP -34 EMFCONT2
1006
1012
10071008101110091010101310141015
1001
1016
10171018
100
20000
1504905
50410
-4095
118721903255
0
160
231000
CONSTANTS (12512)
DRIVE MODE
CONSTANTS (12509)
Ankerstromregler
Motorspannungsregler
Drehmoment- / Strombegrenzung
Feldstromregler 1 und 2
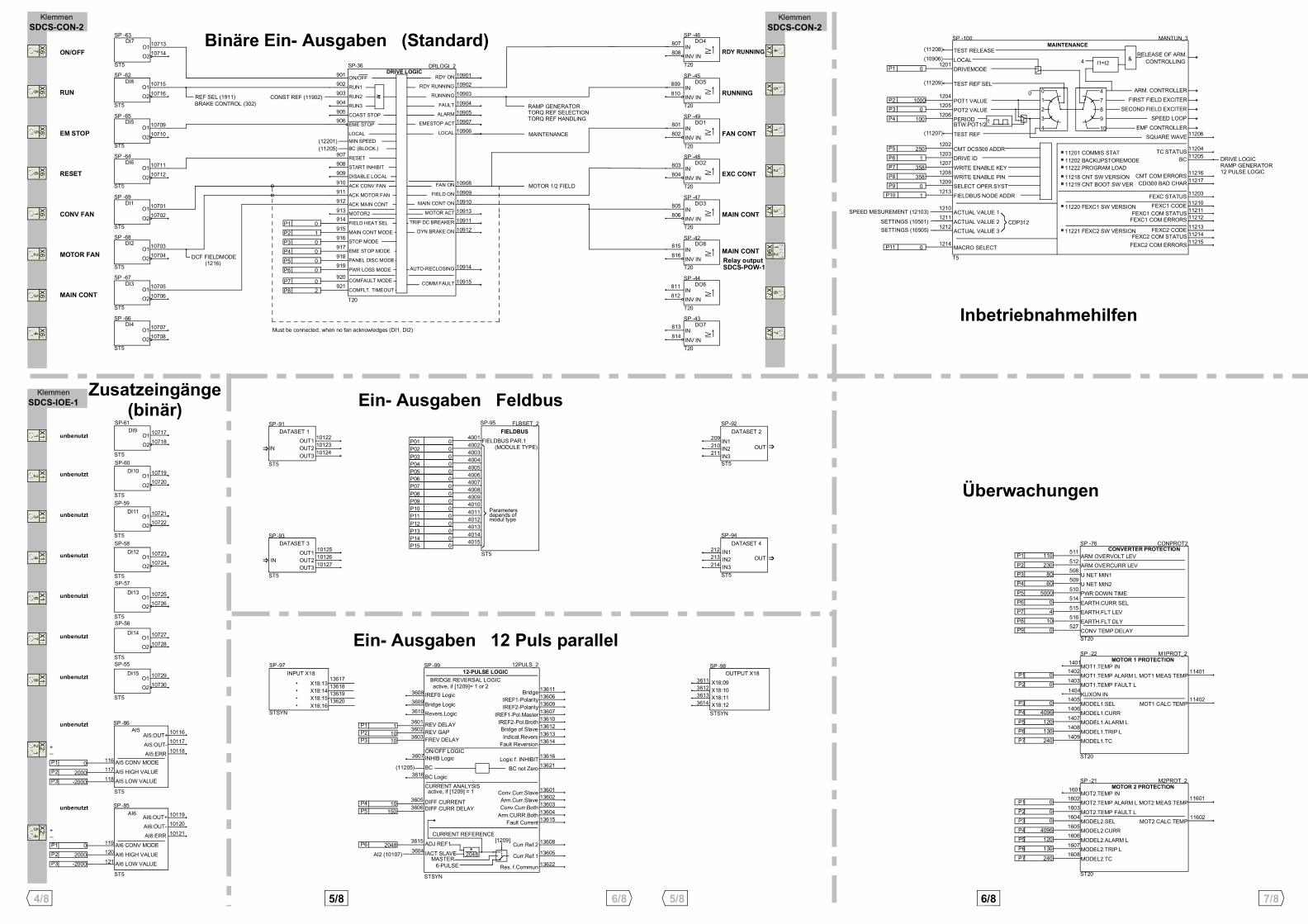
O1O2
ST5
DI15 1072910730
SP-55
O1O2
ST5
DI14 10727
10728
SP-56
O1O2
ST5
DI13 1072510726
SP-57
O1O2
ST5
DI12 1072310724
SP-58
O1O2
ST5
DI11 1072110722
SP-59
O1
O2
ST5
DI10 1071910720
SP-60
O1O2
SP-61
ST5
DI9 1071710718
AI5 LOW VALUEAI5 HIGH VALUE
AI5 CONV MODE
SPAI5
AI5:OUT+
AI5:OUT-AI5:ERR
ST5
1011610117
10118
P2P3
P1
-86
116117
118
0
2000-2000
AI6 LOW VALUEAI6 HIGH VALUE
AI6 CONV MODE
SPAI6
AI6:OUT+AI6:OUT-AI6:ERR
ST5
1011910120
10121
P2P3
P1
-85
119120
121
02000
-2000
CONVERTER PROTECTION
EARTH.FLT DLY
EARTH.FLT LEVEARTH.CURR SEL
ARM OVERVOLT LEVARM OVERCURR LEV
U NET MIN1U NET MIN2PWR DOWN TIME
CONV TEMP DELAYP9P8
ST20
SP
P1
P2P3P4
P5P6
P7
-76 CONPROT2511
512508509
510514
515516527
110
2308060
50000
4100
MOT2 CALC TEMP
MOT2 MEAS TEMP
MOTOR 2 PROTECTION
MODEL2.TRIP LMODEL2.ALARM L
MOT2.TEMP FAULT L
MOT2.TEMP ALARM LMOT2.TEMP IN
P7
P6P5P4
P3
P1
P2
11601
11602
1601
ST20
SP
MODEL2.SELMODEL2.CURR
MODEL2.TC
-21 M2PROT_2
160216031604
16051606
16071608
0
00
4096120130
240
MOTOR 1 PROTECTION
MOT1 CALC TEMP
MOT1 MEAS TEMPMOT1.TEMP IN
1401
MODEL1.TRIP L
MODEL1.ALARM L
KLIXON IN
MOT1.TEMP FAULT LMOT1.TEMP ALARM L
P2
P1 11401
P7
P6P5
P4P3 11402
ST20
SP
MODEL1.SELMODEL1.CURR
MODEL1.TC
1404
-22 M1PROT_2
1402
1403
14051406
14071408
1409
0
0
04096
120130
240
BTW.POT1/2
MACRO SELECT
ACTUAL VALUE 3ACTUAL VALUE 2
ACTUAL VALUE 1
FIELDBUS NODE ADDR
tPERIOD
DRIVEMODEP1
MAINTENANCE
11220 FEXC1 SW VERSION
11221 FEXC2 SW VERSION
11215FEXC2 COM ERRORSFEXC2 COM STATUS 11214
11213FEXC2 CODE
1121211211
FEXC1 COM ERRORSFEXC1 COM STATUS
FEXC1 CODE 11210FEXC STATUS 11203
1121711216CMT COM ERRORS
CDI300 BAD CHAR
11205BC
11219 CNT BOOT SW VER11218 CNT SW VERSION11222 PROGRAM LOAD11202 BACKUPSTOREMODE11201 COMMIS STAT
11204TC STATUS
11206SQUARE WAVE
CDP3121212
12111210
P11
P9P8P7
P6
P5
P4
P3P2
P10
T5
SELECT OPER.SYSTWRITE ENABLE PINWRITE ENABLE KEY
CMT DCS500 ADDRDRIVE ID
(11207) TEST REF
0 4789
10
0123
4 EMF CONTROLLER
SPEED LOOPSECOND FIELD EXCITER
FIRST FIELD EXCITER
ARM. CONTROLLER
RELEASE OF ARM.CONTROLLING&4 I1=I2
POT2 VALUEPOT1 VALUE
TEST REF SEL(11209)
(11208)
(10906)TEST RELEASE
LOCAL
SP -100 MANTUN_3
1201
12041205
1206
1202
12031207
12081209
1213
1214
0
10000
100
2501
358358
0
1
0
SPEED MESUREMENT (12103)
SETTINGS (10501)SETTINGS (10505)
DRIVE LOGICRAMP GENERATOR12 PULSE LOGIC
COMFLT. TIMEOUTCOMM FAULT
DYN BRAKE ON
TRIP DC BREAKER
MOTOR ACT
MAIN CONT ON
FIELD ON
FAN ON
COMFAULT MODE
PWR LOSS MODE
PANEL DISC MODE
EME STOP MODE
STOP MODE
MAIN CONT MODE
FIELD HEAT SEL
ACK MAIN CONT
ACK MOTOR FAN
ACK CONV FAN
DISABLE LOCAL
START INHIBIT
EMESTOP ACT
RDY RUNNING
RDY ON
MIN SPEED
EME STOP
COAST STOP
DRIVE LOGIC
AUTO-RECLOSING 10914
10912
109011090210903
10904109051090710906
10908
109091091010913
10911
10915
913
912911910
909908907
905904903902901
P5
P4P3P2P1
P6
P7P8
906
LOCAL
SP
ALARM
FAULT
RUNNING1RUN3
RUN2
RUN1
ON/OFF
MOTOR2
RESET
LOCAL(12201)(11205) BC (BLOCK.)
T20
-36 DRLOGI_2
914
915916917918919
920921
0100
00
02
DO4
INV ININ807
808
T20
SP -46
DO8
INV IN
IN815
816
T20
SP -42
DO7
INV IN
IN813
814
T20
SP -43
DO6
INV ININ
811812
T20
SP -44
DO5
INV IN
IN809
810
T20
SP -45
DO3805
INV ININ
806
T20
SP -47
DO2
INV ININ803
804
T20
SP -48
DO1
INV ININ
801802
T20
SP -49
O1O2
SPDI8
ST5
10715
10716
-62
O1O2
SPDI7
ST5
1071310714
-63
O1
O2
SP
ST5
DI6 1071110712
-64
O1
O2
SP
ST5
DI5 1070910710
-65
O1O2
SP
ST5
DI4 1070710708
-66
O1O2
SP
ST5
DI3 10705
10706
-67
O1O2
SP
ST5
DI2 1070310704
-68
O1
O2
DI1SP
ST5
1070110702
-69
REF SEL (1911) CONST REF (11902)RAMP GENERATORTORQ REF SELECTIONTORQ REF HANDLING
DCF FIELDMODE (1216) SDCS-POW-1
Relay outputMAIN CONT
MAIN CONT
EXC CONT
FAN CONT
RUNNING
RDY RUNNING
MAIN CONT
MOTOR FAN
CONV FAN
RESET
EM STOP
RUN
ON/OFF
MOTOR 1/2 FIELD
Must be connected, when no fan acknowledges (DI1, DI2)
MAINTENANCE
BRAKE CONTROL (302)
DATASET 4
214 213 212
OUTIN3IN2IN1
SP
ST5
-94DATASET 3
OUT3OUT2OUT1
IN
SP
ST5
101251012610127
-93
DATASET 2
211 210209
OUTIN3IN2IN1
SP
ST5
-92DATASET 1
INOUT3OUT2OUT1
SP
ST5
101221012310124
-91
FIELDBUS PAR.1(MODULE TYPE)
SPFIELDBUS
modul typedepends ofParameters
P15P14P13P12P11
ST5
P10P09P08P07P06P05P04P03P02P01
-95 FLBSET_2
400140024003400440054006400740084009401040114012401340144015
000000000000000
BC Logic
Revers.LogicBridge Logic
IREF0 Logic
Res. f.Commun
BC not ZeroLogic f. INHIBIT
Fault Current
Bridge of Slave
Bridge
IREF2-Pol.Broth
IREF2-Polarity
Curr.Ref.2
IREF1-Pol.Master
IREF1-Polarity
Curr.Ref.1
Arm.CURR.BothConv.Curr.BothArm.Curr.Slave
Conv.Curr.Slave
Fault ReversionIndicat.Revers
[1209]
*2048
ADJ REF1
INHIB Logic
DIFF CURR DELAYDIFF CURRENT
IACT SLAVE
FREV DELAYREV GAPREV DELAY
13622
13605
STSYN
BC
6-PULSEMASTER
CURRENT REFERENCE
P63604
13608
P5P4
active, if [1209] = 1CURRENT ANALYSIS 13601
13602136031360413615
136213616
ON/OFF LOGIC
(11205)
136163607
P3P2P1
active, if [1209]= 1 or 2BRIDGE REVERSAL LOGIC
SP12-PULSE LOGIC
36083609
3610
1361113606136091360713610136121361313614
-99 12PULS_2
360136023603
36053606
3615
11010
10150
2048
X18:12X18:11X18:10X18:09
OUTPUT X18SP
STSYN
3611361236133614
-98
X18:16X18:15X18:14X18:13 13618
STSYN
SPINPUT X18
13617
1361913620
-97
AI2 (10107)
+--
+--
5X7:1X7:
2X7:3X7:
6X7:7X7:
4X7:2
1X96:
3X6:
2X6:
1X6:
6X6:
5 X6:8
X6:7
X6:4 X6:
7 X1:6 X1:
4X1:
3X1:
2X1:
1X1:
21
X2:5
4X2:
8X1:
4/8 6/85/8 5/8 7/86/8
Inbetriebnahmehilfen
Überwachungen
Zusatzeingänge(binär)
Binäre Ein- Ausgaben (Standard)
Ein- Ausgaben Feldbus
Ein- Ausgaben 12 Puls parallel
KlemmenSDCS-CON-2
KlemmenSDCS-IOE-1
KlemmenSDCS-CON-2
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
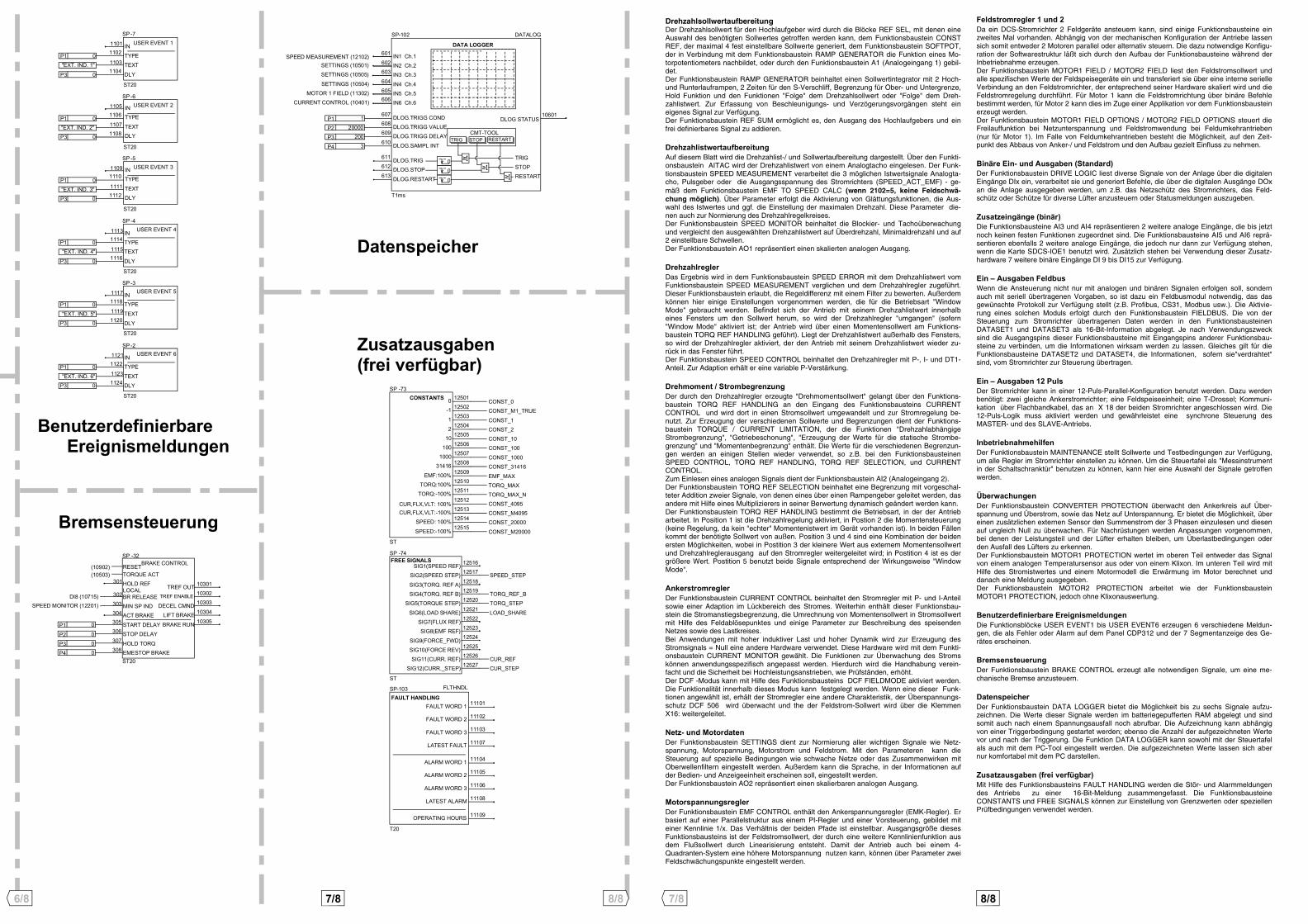
DLYTEXT
TYPEIN USER EVENT 6
SP
ST20
P3
P1"EXT. IND. 6"
1121
1123
-2
1122
1124
0
0
DLY
TEXT
TYPEIN USER EVENT 5
SP
ST20
1117
1119
P3
P1"EXT. IND. 5"
-3
1118
1120
0
0
DLY
TEXTTYPEIN USER EVENT 4
SP
ST20
P3
P1"EXT. IND. 4"
1113
1115
-4
1114
1116
0
0
DLYTEXT
TYPEIN USER EVENT 3
SP
ST20
1109
1111
P3
P1"EXT. IND. 3"
-5
1110
1112
0
0
DLYTEXT
TYPEIN USER EVENT 2
SP
ST20
P3
P1"EXT. IND. 2"
1105
1107
-6
1106
1108
0
0
DLY
TEXTTYPE
IN USER EVENT 1SP
ST20
P3
P1"EXT. IND. 1"
1101
1103
-7
1102
1104
0
0
DLOG STATUS
DLOG.SAMPL INT
DLOG.TRIGG DELAYDLOG.TRIGG VALUEDLOG.TRIGG COND
0
00
DATA LOGGER
SP
RESTARTSTOPTRIG
613
611612
DLOG.RESTART
DLOG.STOPDLOG.TRIG
T1ms
IN5 Ch.5
10601
STOP RESTARTCMT-TOOL
TRIGP4
P3P2P1
IN6 Ch.6606605
IN4 Ch.4604IN3 Ch.3603IN2 Ch.2602IN1 Ch.1601
-102 DATALOG
607608609
610
120000
200
3
SPEED MEASUREMENT (12102)SETTINGS (10501)SETTINGS (10505)
SETTINGS (10504)MOTOR 1 FIELD (11302)
CURRENT CONTROL (10401)
BRAKE CONTROL
ACT BRAKEBRAKE RUN
LIFT BRAKEDECEL CMND
TREF ENABLE
TREF OUT
EMESTOP BRAKEHOLD TORQ
STOP DELAYSTART DELAY
MIN SP INDBR RELEASE
HOLD REFTORQUE ACT
10305
10304
103031030210301
304303302
301
P1
P2P3P4
LOCAL
(10503)RESET
SP
(10902)
ST20
-32
305306
307308
0
000
DI8 (10715)SPEED MONITOR (12201)
FAULT WORD 1
OPERATING HOURS
LATEST ALARM
ALARM WORD 3
ALARM WORD 2
ALARM WORD 1
LATEST FAULT
FAULT WORD 3
FAULT WORD 2
T20
11109
11108
11107
11106
11105
11103
11102
SPFAULT HANDLING
11104
11101
-103 FLTHNDL
0-1
SPEED: 100%CUR,FLX,VLT:-100%CUR,FLX,VLT: 100%
12509
125081250712506
125051250412503
1251012511
1251312512
1251512514
1250212501CONSTANTS
SP
ST
SPEED:-100%
TORQ:-100%TORQ:100%
EMF:100%
314161000
100102
1
-73
CONST_0CONST_M1_TRUE
CONST_1CONST_2CONST_10CONST_100
CONST_1000CONST_31416
EMF_MAXTORQ_MAXTORQ_MAX_NCONST_4095CONST_M4095CONST_20000
CONST_M20000
SIG12(CURR._STEP)SIG11(CURR. REF)
SIG10(FORCE REV)SIG9(FORCE_FWD)
SIG8(EMF REF)SIG7(FLUX REF)
SIG6(LOAD SHARE)
SIG5(TORQUE STEP)SIG4(TORQ. REF B)SIG3(TORQ. REF A)
SIG2(SPEED STEP)SIG1(SPEED REF)
FREE SIGNALS
125271252612525
12524125231252212521
125201251912518
1251712516
ST
SP -74
SPEED_STEP
TORQ_REF_BTORQ_STEP
LOAD_SHARE
CUR_REFCUR_STEP
6/8 8/87/8 7/8 8/8
Bremsensteuerung
Benutzerdefinierbare Ereignismeldungen
Datenspeicher
Zusatzausgaben(frei verfügbar)
DrehzahlsollwertaufbereitungDer Drehzahlsollwert für den Hochlaufgeber wird durch die Blöcke REF SEL, mit denen eineAuswahl des benötigten Sollwertes getroffen werden kann, dem Funktionsbaustein CONSTREF, der maximal 4 fest einstellbare Sollwerte generiert, dem Funktionsbaustein SOFTPOT,der in Verbindung mit dem Funktionsbaustein RAMP GENERATOR die Funktion eines Mo-torpotentiometers nachbildet, oder durch den Funktionsbaustein A1 (Analogeingang 1) gebil-det.Der Funktionsbaustein RAMP GENERATOR beinhaltet einen Sollwertintegrator mit 2 Hoch-und Runterlauframpen, 2 Zeiten für den S-Verschliff, Begrenzung für Ober- und Untergrenze,Hold Funktion und den Funktionen "Folge" dem Drehzahlsollwert oder "Folge" dem Dreh-zahlistwert. Zur Erfassung von Beschleunigungs- und Verzögerungsvorgängen steht eineigenes Signal zur Verfügung.Der Funktionsbaustein REF SUM ermöglicht es, den Ausgang des Hochlaufgebers und einfrei definierbares Signal zu addieren.
DrehzahlistwertaufbereitungAuf diesem Blatt wird die Drehzahlist-/ und Sollwertaufbereitung dargestellt. Über den Funkti-onsbaustein AITAC wird der Drehzahlistwert von einem Analogtacho eingelesen. Der Funk-tionsbaustein SPEED MEASUREMENT verarbeitet die 3 möglichen Istwertsignale Analogta-cho, Pulsgeber oder die Ausgangsspannung des Stromrichters (SPEED_ACT_EMF) - ge-mäß dem Funktionsbaustein EMF TO SPEED CALC (wenn 2102=5, keine Feldschwä-chung möglich). Über Parameter erfolgt die Aktivierung von Glättungsfunktionen, die Aus-wahl des Istwertes und ggf. die Einstellung der maximalen Drehzahl. Diese Parameter die-nen auch zur Normierung des Drehzahlregelkreises.Der Funktionsbaustein SPEED MONITOR beinhaltet die Blockier- und Tachoüberwachungund vergleicht den ausgewählten Drehzahlistwert auf Überdrehzahl, Minimaldrehzahl und auf2 einstellbare Schwellen.Der Funktionsbaustein AO1 repräsentiert einen skalierten analogen Ausgang.
DrehzahlreglerDas Ergebnis wird in dem Funktionsbaustein SPEED ERROR mit dem Drehzahlistwert vomFunktionsbaustein SPEED MEASUREMENT verglichen und dem Drehzahlregler zugeführt.Dieser Funktionsbaustein erlaubt, die Regeldifferenz mit einem Filter zu bewerten. Außerdemkönnen hier einige Einstellungen vorgenommen werden, die für die Betriebsart "WindowMode" gebraucht werden. Befindet sich der Antrieb mit seinem Drehzahlistwert innerhalbeines Fensters um den Sollwert herum, so wird der Drehzahlregler "umgangen" (sofern"Window Mode" aktiviert ist; der Antrieb wird über einen Momentensollwert am Funktions-baustein TORQ REF HANDLING geführt). Liegt der Drehzahlistwert außerhalb des Fensters,so wird der Drehzahlregler aktiviert, der den Antrieb mit seinem Drehzahlistwert wieder zu-rück in das Fenster führt.Der Funktionsbaustein SPEED CONTROL beinhaltet den Drehzahlregler mit P-, I- und DT1-Anteil. Zur Adaption erhält er eine variable P-Verstärkung.
Drehmoment / StrombegrenzungDer durch den Drehzahlregler erzeugte "Drehmomentsollwert" gelangt über den Funktions-baustein TORQ REF HANDLING an den Eingang des Funktionsbausteins CURRENTCONTROL und wird dort in einen Stromsollwert umgewandelt und zur Stromregelung be-nutzt. Zur Erzeugung der verschiedenen Sollwerte und Begrenzungen dient der Funktions-baustein TORQUE / CURRENT LIMITATION, der die Funktionen "DrehzahlabhängigeStrombegrenzung", "Getriebeschonung", "Erzeugung der Werte für die statische Strombe-grenzung" und "Momentenbegrenzung" enthält. Die Werte für die verschiedenen Begrenzun-gen werden an einigen Stellen wieder verwendet, so z.B. bei den FunktionsbausteinenSPEED CONTROL, TORQ REF HANDLING, TORQ REF SELECTION, und CURRENTCONTROL.Zum Einlesen eines analogen Signals dient der Funktionsbaustein AI2 (Analogeingang 2).Der Funktionsbaustein TORQ REF SELECTION beinhaltet eine Begrenzung mit vorgeschal-teter Addition zweier Signale, von denen eines über einen Rampengeber geleitet werden, dasandere mit Hilfe eines Multiplizierers in seiner Berwertung dynamisch geändert werden kann.Der Funktionsbaustein TORQ REF HANDLING bestimmt die Betriebsart, in der der Antriebarbeitet. In Position 1 ist die Drehzahlregelung aktiviert, in Postion 2 die Momentensteuerung(keine Regelung, da kein "echter" Momentenistwert im Gerät vorhanden ist). In beiden Fällenkommt der benötigte Sollwert von außen. Position 3 und 4 sind eine Kombination der beidenersten Möglichkeiten, wobei in Postition 3 der kleinere Wert aus externem Momentensollwertund Drehzahlreglerausgang auf den Stromregler weitergeleitet wird; in Postition 4 ist es dergrößere Wert. Postition 5 benutzt beide Signale entsprechend der Wirkungsweise "WindowMode".
AnkerstromreglerDer Funktionsbaustein CURRENT CONTROL beinhaltet den Stromregler mit P- und I-Anteilsowie einer Adaption im Lückbereich des Stromes. Weiterhin enthält dieser Funktionsbau-stein die Stromanstiegsbegrenzung, die Umrechnung von Momentensollwert in Stromsollwertmit Hilfe des Feldablösepunktes und einige Parameter zur Beschreibung des speisendenNetzes sowie des Lastkreises.Bei Anwendungen mit hoher induktiver Last und hoher Dynamik wird zur Erzeugung desStromsignals = Null eine andere Hardware verwendet. Diese Hardware wird mit dem Funkti-onsbaustein CURRENT MONITOR gewählt. Die Funktionen zur Überwachung des Stromskönnen anwendungsspezifisch angepasst werden. Hierdurch wird die Handhabung verein-facht und die Sicherheit bei Hochleistungsanstrieben, wie Prüfständen, erhöht.Der DCF -Modus kann mit Hilfe des Funktionsbausteins DCF FIELDMODE aktiviert werden.Die Funktionalität innerhalb dieses Modus kann festgelegt werden. Wenn eine dieser Funk-tionen angewählt ist, erhält der Stromregler eine andere Charakteristik, der Überspannungs-schutz DCF 506 wird überwacht und the der Feldstrom-Sollwert wird über die KlemmenX16: weitergeleitet.
Netz- und MotordatenDer Funktionsbaustein SETTINGS dient zur Normierung aller wichtigen Signale wie Netz-spannung, Motorspannung, Motorstrom und Feldstrom. Mit den Parameteren kann dieSteuerung auf spezielle Bedingungen wie schwache Netze oder das Zusammenwirken mitOberwellenfiltern eingestellt werden. Außerdem kann die Sprache, in der Informationen aufder Bedien- und Anzeigeeinheit erscheinen soll, eingestellt werden.Der Funktionsbaustein AO2 repräsentiert einen skalierbaren analogen Ausgang.
MotorspannungsreglerDer Funktionsbaustein EMF CONTROL enthält den Ankerspannungsregler (EMK-Regler). Erbasiert auf einer Parallelstruktur aus einem PI-Regler und einer Vorsteuerung, gebildet miteiner Kennlinie 1/x. Das Verhältnis der beiden Pfade ist einstellbar. Ausgangsgröße diesesFunktionsbausteins ist der Feldstromsollwert, der durch eine weitere Kennlinienfunktion ausdem Flußsollwert durch Linearisierung entsteht. Damit der Antrieb auch bei einem 4-Quadranten-System eine höhere Motorspannung nutzen kann, können über Parameter zweiFeldschwächungspunkte eingestellt werden.
Feldstromregler 1 und 2Da ein DCS-Stromrichter 2 Feldgeräte ansteuern kann, sind einige Funktionsbausteine einzweites Mal vorhanden. Abhängig von der mechanischen Konfiguration der Antriebe lassensich somit entweder 2 Motoren parallel oder alternativ steuern. Die dazu notwendige Konfigu-ration der Softwarestruktur läßt sich durch den Aufbau der Funktionsbausteine während derInbetriebnahme erzeugen.Der Funktionsbaustein MOTOR1 FIELD / MOTOR2 FIELD liest den Feldstromsollwert undalle spezifischen Werte der Feldspeisegeräte ein und transferiert sie über eine interne serielleVerbindung an den Feldstromrichter, der entsprechend seiner Hardware skaliert wird und dieFeldstromregelung durchführt. Für Motor 1 kann die Feldstromrichtung über binäre Befehlebestimmt werden, für Motor 2 kann dies im Zuge einer Applikation vor dem Funktionsbausteinerzeugt werden.Der Funktionsbaustein MOTOR1 FIELD OPTIONS / MOTOR2 FIELD OPTIONS steuert dieFreilauffunktion bei Netzunterspannung und Feldstromwendung bei Feldumkehrantrieben(nur für Motor 1). Im Falle von Feldumkehrantrieben besteht die Möglichkeit, auf den Zeit-punkt des Abbaus von Anker-/ und Feldstrom und den Aufbau gezielt Einfluss zu nehmen.
Binäre Ein- und Ausgaben (Standard)Der Funktionsbaustein DRIVE LOGIC liest diverse Signale von der Anlage über die digitalenEingänge DIx ein, verarbeitet sie und generiert Befehle, die über die digitalen Ausgänge DOxan die Anlage ausgegeben werden, um z.B. das Netzschütz des Stromrichters, das Feld-schütz oder Schütze für diverse Lüfter anzusteuern oder Statusmeldungen auszugeben.
Zusatzeingänge (binär)Die Funktionsbausteine AI3 und AI4 repräsentieren 2 weitere analoge Eingänge, die bis jetztnoch keinen festen Funktionen zugeordnet sind. Die Funktionsbausteine AI5 und AI6 reprä-sentieren ebenfalls 2 weitere analoge Eingänge, die jedoch nur dann zur Verfügung stehen,wenn die Karte SDCS-IOE1 benutzt wird. Zusätzlich stehen bei Verwendung dieser Zusatz-hardware 7 weitere binäre Eingänge DI 9 bis DI15 zur Verfügung.
Ein – Ausgaben FeldbusWenn die Ansteuerung nicht nur mit analogen und binären Signalen erfolgen soll, sondernauch mit seriell übertragenen Vorgaben, so ist dazu ein Feldbusmodul notwendig, das dasgewünschte Protokoll zur Verfügung stellt (z.B. Profibus, CS31, Modbus usw.). Die Aktivie-rung eines solchen Moduls erfolgt durch den Funktionsbaustein FIELDBUS. Die von derSteuerung zum Stromrichter übertragenen Daten werden in den FunktionsbausteinenDATASET1 und DATASET3 als 16-Bit-Information abgelegt. Je nach Verwendungszwecksind die Ausgangspins dieser Funktionsbausteine mit Eingangspins anderer Funktionsbau-steine zu verbinden, um die Informationen wirksam werden zu lassen. Gleiches gilt für dieFunktionsbausteine DATASET2 und DATASET4, die Informationen, sofern sie"verdrahtet"sind, vom Stromrichter zur Steuerung übertragen.
Ein – Ausgaben 12 PulsDer Stromrichter kann in einer 12-Puls-Parallel-Konfiguration benutzt werden. Dazu werdenbenötigt: zwei gleiche Ankerstromrichter; eine Feldspeiseeinheit; eine T-Drossel; Kommuni-kation über Flachbandkabel, das an X 18 der beiden Stromrichter angeschlossen wird. Die12-Puls-Logik muss aktiviert werden und gewährleistet eine synchrone Steuerung desMASTER- und des SLAVE-Antriebs.
InbetriebnahmehilfenDer Funktionsbaustein MAINTENANCE stellt Sollwerte und Testbedingungen zur Verfügung,um alle Regler im Stromrichter einstellen zu können. Um die Steuertafel als "Messinstrumentin der Schaltschranktür" benutzen zu können, kann hier eine Auswahl der Signale getroffenwerden.
ÜberwachungenDer Funktionsbaustein CONVERTER PROTECTION überwacht den Ankerkreis auf Über-spannung und Überstrom, sowie das Netz auf Unterspannung. Er bietet die Möglichkeit, übereinen zusätzlichen externen Sensor den Summenstrom der 3 Phasen einzulesen und diesenauf ungleich Null zu überwachen. Für Nachrüstungen werden Anpassungen vorgenommen,bei denen der Leistungsteil und der Lüfter erhalten bleiben, um Überlastbedingungen oderden Ausfall des Lüfters zu erkennen.Der Funktionsbaustein MOTOR1 PROTECTION wertet im oberen Teil entweder das Signalvon einem analogen Temperatursensor aus oder von einem Klixon. Im unteren Teil wird mitHilfe des Stromistwertes und einem Motormodell die Erwärmung im Motor berechnet unddanach eine Meldung ausgegeben.Der Funktionsbaustein MOTOR2 PROTECTION arbeitet wie der FunktionsbausteinMOTOR1 PROTECTION, jedoch ohne Klixonauswertung.
Benutzerdefinierbare EreignismeldungenDie Funktionsblöcke USER EVENT1 bis USER EVENT6 erzeugen 6 verschiedene Meldun-gen, die als Fehler oder Alarm auf dem Panel CDP312 und der 7 Segmentanzeige des Ge-rätes erscheinen.
BremsensteuerungDer Funktionsbaustein BRAKE CONTROL erzeugt alle notwendigen Signale, um eine me-chanische Bremse anzusteuern.
DatenspeicherDer Funktionsbaustein DATA LOGGER bietet die Möglichkeit bis zu sechs Signale aufzu-zeichnen. Die Werte dieser Signale werden im batteriegepufferten RAM abgelegt und sindsomit auch nach einem Spannungsausfall noch abrufbar. Die Aufzeichnung kann abhängigvon einer Triggerbedingung gestartet werden; ebenso die Anzahl der aufgezeichneten Wertevor und nach der Triggerung. Die Funktion DATA LOGGER kann sowohl mit der Steuertafelals auch mit dem PC-Tool eingestellt werden. Die aufgezeichneten Werte lassen sich abernur komfortabel mit dem PC darstellen.
Zusatzausgaben (frei verfügbar)Mit Hilfe des Funktionsbausteins FAULT HANDLING werden die Stör- und Alarmmeldungendes Antriebs zu einer 16-Bit-Meldung zusammengefasst. Die FunktionsbausteineCONSTANTS und FREE SIGNALS können zur Einstellung von Grenzwerten oder speziellenPrüfbedingungen verwendet werden.

AITAC LOW VALUEAITAC HIGH VALUEAITAC CONV MODE
SP
AITAC:OUT+AITAC:OUT-AITAC:ERR
AITAC
ST5
101011010210103
P2P3
P1
-84
101102103
0
30000-30000
+-8...-30V-30...-90V-90...-270V
TACHO PULSES
SPEED ACT FLT FTR
SPEED MEASUREMENT
SPEED ACT EMF
SPEED ACT FILT
SPEED ACT
SPEED ACT FTRSPEED MEAS MODE
U MOTN VU ARM ACT
TACHOPULS NRSPEED SCALINGCH BCH A
5
0
4321
T
T
SPEEDTOEMF
CALC
(10505)(501)
AITAC:OUT+
T5
SP
TACHOPULSE
12104
12102
12103
12101
P1
P2
P3P4P5
-11
21032101
21022104
2105
15000
2048
50
500MAINTENANCE (1210)
AO1 NOMINAL VALUE
AO1 OFFSET VAO1 NOMINAL V
201IN
SPAO1
ST5
P2P3
P1
-81
202203204
100000
20000
WIN SIZEWIN MODE
2002
2021
2003FRS
STEPST5
2005
2004
0
0
SPEED ERROR
STEP RESPOUT OF WIN
OUTSPEED ACT
12001
12002
12003
2001
P1
P2
IN
SP -13
FREE SIGNALS (12517)
CURR LIM N
CURR LIM P
TORQ MIN2
TORQ MAX2
TREF TORQMIN1
TREF TORQMAX1
SPC TORQMIN1
SPC TORQMAX1
FLUX REF1ARM CURR LIM N5
ARM CURR LIM N4ARM CURR LIM N3ARM CURR LIM N2
ARM CURR LIM N1MAX CURR LIM SPDSPEED ACTARM CURR LIM N
ARM CURR LIM PGEAR.TORQ RAMPGEAR.TORQ TIME
GEAR.START TORQ
TORQ MIN
TORQ MAX
TREF TORQ MIN
TREF TORQ MAXSPC TORQ MINSPC TORQ MAX
TORQUE/CURRENT LIMITATION
4192yxx
yMin
Max
T
t
I
n
Max
Min
Min
Max
Min
Max
SP
(12102)
(11001)ST5
P1
P2
P7
P6P5P4P3
P8
P9
P11P10
P12P13
12308
12307
123011230212303
123041230512306
230123022303
2304
-10
2305
2306
2315
231623172307
2308
2309
23102311231223132314
4000
-4000
16000100200
4095-4095
20000
1638316383
163831638316383
4192yxx
y
CONSTANTS (12510)CONSTANTS (12511)CONSTANTS (12510)
CONSTANTS (12511)
via Options
CURRENT MONITOR
CURRENT ZERO SIGNAL
DriveLogicF03
F34
F34A137
A137
EXTERNALINTERNAL
10
Monit.method 2
1
3210
Iact
STSYN
P4 ZERO CUR DETECT
CURRENT RISE MAXP1
CUR RIPPLE MONITP3
CUR RIPPLE LIMP2
SP -104 C_MONIT
418
421420
419
32767
7
0
0
ARM ALPHA
CURRENT CONTROL
CURR REF IN LIM
CURR DER IN LIMARM DIR
ARM CURR REF
ARM CONT CURR LIM
ARM CURR LIM N
ARM CURR LIM PARM CURR REF SLOPE
ARM CURR CLAMPARM R
ARM L
ARM ALPHA LIM MINARM ALPHA LIM MAX
ARM CURR PI KIARM CURR PI KP
REF TYPE SEL
ARM CUR ACT
CURR STEPCURR REF
FLUX REF1TORQ REF
FLUX N10405
SP
10403
1040210404
10401
401
402403404 t
STSYNP11P10
P9
416415
1,2[1209]12-PULS
DXN
BLOCK
P1
P2
P6
P5P4P3
P8P7
-75 C_CNTR_3
405406
407408
409412
413414410411
417
01366
30032002050
15015
0
00
40
OVP SELECT
REF DCF
RUN DCFRESET DCF
DI/OVP
F 21A121
DCF FIELDMODE
as FEX 2 (Receiver)as FEX 1 (Receiver)
6542
65421
54
Fexlink as Transmitterfor FEX1 and FEX2
6
Input for external Overvoltg.Protection
Cur.Controller for high inductive load
1216
P2
BC01
65
43
21
from ext. FEXLINK
x8 ARM_CURR_PI_KP...x8 ARM_CURR_PI_KI... 408
407
ARM_CONT_CUR_LIM3601 REV_DELAY409
153602 REV_GAP153603 FREV_DELAY15
0
DCF Current ControlStand Alone
Fexlink Node 1Fexlink Node 2MG Set
Disabled
Reserved
:
:::::
:0
11303
10916
10917
SP
P1 DCF MODE :
-105 DCFMOD
1215
1217
0
0
DI2 (10703)
CONSTANTS (12526)
CONSTANTS (12527)
REF SELSP
ST5
0
SEL1IN1
IN2SEL2IN3SEL3
OUT
ADDREV
19101911
191219131914
191519161917
11903
-20
CONST REF
ST5
1
REF4DEF
REF3
REF1REF2
ACT2ACT3ACT4
ACT
SP
OUT
ACT1190119021903
1904
11902
11901
P5P1
P4
P2
P3
-77
1905
19061907
19081909
1000
1500
00
0
SP
1923 ENABLEFOLLOW1920
RUNNING(10903)T20
OHLOLL
P1P2
INCRDECR
OUTACT
SOFTPOT19181919
1190411905
-15 SOFTPOT1
19211922
5000-5000
DRIVE LOGIC (10903)
ACCELCOMPACC COMP.TRMIN
ACC COMP.MODE
EMESTOP RAMP
SPEED SET
SPRAMP GENERATOR
11801SPEED REFERENCE
11703SIGN(11803)
(10906)0
LOCALLOC REF
1701 IN
1720
P12P11
P9P8P7
P6P5P4P3
P2P1
P10
SET ALL RAMP VALUES TO ZERO
OUT
11702(OUT)
11701S
H
E-
T+
T-
0STARTSEL
RES IN
ST5
BC
HOLD
SMOOTH2SMOOTH1DECEL2DECEL1
ACCEL2ACCEL1
T1/T2
SPEEDMIN
SPEEDMAX
FOLLOW IN
FOLL ACTRES OUTRUNNING
17071703
17061705
1704
(10903)(11205)
1702
-18 RAMP_3
171417081711
170917121710
171317151716
1717
17181719
200200
100200100
0
020000
-20000
0
00
TORQ REF HANDLING
AI1 LOW VALUEAI1 HIGH VALUE
AI1 CONV MODE
SP
AI1:OUT+AI1:OUT-AI1:ERR
AI1
ST5
1010410105
10106
P2
P3
P1
-90
104105
106
120000
-20000
+--
MIN SPEED
SPEED MONITOR
SPEED GT L2
SPEED GT L1
OVERSPEED
MON.EMF VMON.MEAS LEV
SPEED L2SPEED L1MIN SPEED LSPEED ACT
P8P7P6P5
P4
P3P2P1
P10P9
ST20
STALL.TIME
SP
OVERSPEEDLIMIT
STALL.SELSTALL.SPEEDSTALL.TORQUE
122011220212203
12204
-12 SPMONI_2
220122022203
2204220522062207
2208
2209
2210
50500010000
23000
050
300010
20050
AI2 LOW VALUE
AI2 HIGH VALUEAI2 CONV MODE
SPAI2
AI2:OUT+AI2:OUT-
AI2:ERR
ST5
10107
1010810109
P2P3
P1
-89
107
108109
0
2000-2000
+--
ST5
SP
IN211802OUT1802
1801 IN1
-17REFSUM_2
F2 CURR ACT
F2 CURR REF
F2 U LIM PF2 U LIM NF2 KIF2 KPF2 CURR TCF2 OVERCURR LF2 CURR GT MIN L
FANS ON
TEST REF2F2 SEL.REFF2 REF
F2 RED.SELDRIVE MODE
MOTOR 2 FIELD
1201=7
11502
115011501
ST20
DCF501/502
DCF503/504
SDCS-FEX-2or
or
0%
100%
(10908)(1201)
SP
P1
P2
P8P7P6P5P4P3
P9
-28 M2FIELD2
1510
1511
1502150315041505150615081509
0
1228
20474710
01
20-40964096
FREE WHEELING
MOTOR 2 FIELD OPTIONS
F2 U AC DIFF MAXP1
ST20
SP -24
150710
CONSTANTS (12512)
REV.FLUX TDREV.REF HYSTREV.REV HYST
OPTI.REF MIN TDOPTI.REF MIN LOPTI.REF GAIN
MOTOR 1 FIELD OPTIONS
F1 U AC DIFF MAX
SP
ST20
FREE WHEELING
FIELD REVERSAL
OPTITORQUE
P1
P4P5P6
P7P8P9
-26
1310
131513161317
131813191320
10
100614200
80800
Control Adjust.
105071051410513
105121051110509
10510
BRIDGE TEMP
QUADR TYPECONV TYPE
MAX BR TEMP
Conv. valuesConv. settings C4
SET QUADR TYPESET CONV TYPE
SET MAX BR TEMPSET U CONV VSET I COMV A
U CONV VI CONV A
I TRIP A
SETTINGSSP
P5
P4P3
P1P2
Motor Data
I MOTN AU MOTN V
I MOT1 FIELDN AI MOT2 FIELDN AFEXC SELP11
P10
P9P8
P7
1050810515
U NET DC NOM VU SUPPLYP13PHASE SEQ CWP14
10504U NET ACT
LINE FREQUENCY
Supply Data
ST20
LANGUAGEP15(only for Cur. Controlling)UNI FILT TCP19
P6
P18
P12P16
P17
CURR ACT FILT TC
PLL CONTROL
PLL DEV LIM
CONV CUR ACT
ARM CUR ACT
TORQUE ACT
10501
10502
10503
U ARM ACT
EMF ACTCALCIact
+-OFFSET UDC
UDC 1050510506
EMF FILT TC
-1 SETTGS_3
517518519
520521
513
501502503
504
505
523
507506
522
524
528
526
525
000
00
10
50010
30300
0
5002
0
4
1024
0
10 AO2 NOMINAL VALUE
AO2 OFFSET VAO2 NOMINAL V
205 IN
SPAO2
ST5
P2P3
P1
-80
206207208
50000
4095
DATA LOGGER (604)
DATA LOGGER (602)MAINTENANCE (1211)
DATA LOGGER (603)MAINTENANCE (1212)
AI4 LOW VALUEAI4 HIGH VALUE
AI4 CONV MODE
SP
AI4:OUT+
AI4:OUT-AI4:ERR
AI4
ST5
101131011410115
P2P3
P1
-87
113114115
02000
-2000
AI3 LOW VALUE
AI3 HIGH VALUEAI3 CONV MODE
SP
AI3:OUT+AI3:OUT-AI3:ERR
AI3
ST5
101101011110112
P2P3
P1
-88
110111112
02000
-2000
+--
+ --
12PULSE LOGIC (3604)
DRIVE LOGICBRAKE CONTROL (303)
DATA LOGGER (601)
DI8 (10715)
DRIVE LOGIC (903)
SPEED CONTROL (2011)
DATA LOGGER (606)
F1 CURR MIN TDP10
F1 U LIM PF1 U LIM NF1 KIF1 KPF1 CURR TCF1 OVERCURR L
P8P7P6P5P4
P9
ST20
F1 CURR ACT
F1 CURR REF
F1 CURR GT MIN L
TEST REF2
F1 ACKF1 FORCE REVF1 FORCE FWD
F1 SEL.REF
F1 REFFIELD MODEF1 RED.SELDRIVE MODEFANS ON
MOTOR 1 FIELD
1001=1,3,5
1201=7
DCF501/502
DCF503/504
SDCS-FEX-2or
or
0%
100%
(10908)(1201)
SP
P1
P2
P3
1301
130213031304
11302
11301
-30 M1FIELD2
1313
1314
1305
130613071308130913111312
1321
0
1228
2047
471001
20-40964096
200
DATA LOGGER (605)
(1001)
SPEED CONTROL
IN LIM
SPC TORQMIN1SPC TORQMAX1
1200512004
20072012
2011201020092008
2006
SET OUT TO ZEROBC
ST5TFTD
KIDROOPING
KPSMIN
KPSPOINTKPSWEAKFILT
KP
Torque ref
SET1VAL1SET2
VAL2HOLDCLEAR
RUNNING(11205)(10903)
IN
SP
OUTKPDROOPING
HOLD
BALREFBAL
BAL2
BAL2REF
RINT
P3
P1
P2
P4
P8P7
P5
P6
-14
2014
2015
20162017201820132019
2020
5000
0500
5000
00
50
TORQ REF HANDLING (12403)TORQ REF HANDLING (12402)
FREE SIGNALS (12521)
FREE SIGNALS (12519)SEL1:OUT
TORQ REF SELECTION
TREF TORQMIN1TREF TORQMAX1TREF B SLOPE
TREF B
TREF A FTC
LOAD SHARETREF A
SETS SEL1:OUT TO ZERO-1RUNNINGST5
SP
P2P1
2401
2403
240412401
-8
24022405
00
(10903)
SEL2:TORQ/SPEED
TORQ MIN2TORQ MAX2
ACCELCOMP
SEL2.TREF SELSEL2.TORQ STEP
SP ERR
SEL2.TREF EXT
TORQ REF HANDLING
SEL2.TREF SPC
SP
(11702)
0 0
1
RUNNING SET OUTPUTS TO ZEROST5
-1(10903)
SEL2:IN_LIM
SEL2:OUT
4
3
Max
Min
5
2
P1
2409
2407
2408
12403
1240212404
-9 TREFHND2
24061
FREE SIGNALS (12520)
(12001)
SPEED CONTROL (2010)
SPEED ACT(12102)
907040
100%
EMESTOP ACT(10907)
cal
EMF CONTROL
0
100%
F CURR REF
FLUX REF SUM
FLUX REF 1
11003
11002
EMF REFEMF REF SELEMESTOP ACT
FIELD WEAK DELAYGENER.WEAK POINTFIELD WEAK POINT
FLUX REFFLUX REF SEL
FIELD MODE
11001
ST10
P9P10
P8FIELD CONST 2FIELD CONST 1
FIELD CONST 3
P6P7
EMF REG LIM PEMF REG LIM N
P5
P3P4
EMF KPEMF KIEMF REL LEV
EMF ACT(10506)
TRef2
1201=10
&
GENER.EMF REFP12P1 LOCAL EMF REF
10031005
(1201)(10907)
generatoricP14P13P2
10041002
1001=1,3,5P11
SP -34 EMFCONT2
1006
1012
10071008101110091010101310141015
1001
1016
10171018
100
20000
1504905
50410
-4095
118721903255
0
160
231000
CONSTANTS (12512)
DRIVE MODE
CONSTANTS (12509)
65
X3:2
1X3:
43
109
X3:8
7X3:
21
X4:
710X4:
0 VAO1
810X4:
0 VAO2
1X5:10
Ankerstromregler
Motorspannungsregler
Drehmoment- / Strombegrenzung
Drehzahlregler
Netz- und Motordaten
Drehzahlistwertaufbereitung
Drehzahlsollwert-aufbereitung
Feldstromregler 1 und 2
Drehzahl-sollwert
KlemmenSDCS-CON-2
Pulsgeber
Drehmoment-sollwert
unbenutzt
unbenutzt
KlemmenSDCS-CON-2
Tacho
DCS 500B SoftwarestrukturSoftware version: S21.233Schematics: S21V2_0Library: DCS500_1.5
O1O2
ST5
DI15 1072910730
SP-55
O1O2
ST5
DI14 10727
10728
SP-56
O1O2
ST5
DI13 1072510726
SP-57
O1O2
ST5
DI12 1072310724
SP-58
O1O2
ST5
DI11 1072110722
SP-59
O1
O2
ST5
DI10 1071910720
SP-60
O1O2
SP-61
ST5
DI9 1071710718
AI5 LOW VALUEAI5 HIGH VALUE
AI5 CONV MODE
SPAI5
AI5:OUT+
AI5:OUT-AI5:ERR
ST5
1011610117
10118
P2P3
P1
-86
116117
118
0
2000-2000
AI6 LOW VALUEAI6 HIGH VALUE
AI6 CONV MODE
SPAI6
AI6:OUT+AI6:OUT-AI6:ERR
ST5
1011910120
10121
P2P3
P1
-85
119120
121
02000
-2000
DLYTEXT
TYPEIN USER EVENT 6
SP
ST20
P3
P1"EXT. IND. 6"
1121
1123
-2
1122
1124
0
0
DLY
TEXT
TYPEIN USER EVENT 5
SP
ST20
1117
1119
P3
P1"EXT. IND. 5"
-3
1118
1120
0
0
DLY
TEXTTYPEIN USER EVENT 4
SP
ST20
P3
P1"EXT. IND. 4"
1113
1115
-4
1114
1116
0
0
DLYTEXT
TYPEIN USER EVENT 3
SP
ST20
1109
1111
P3
P1"EXT. IND. 3"
-5
1110
1112
0
0
DLYTEXT
TYPEIN USER EVENT 2
SP
ST20
P3
P1"EXT. IND. 2"
1105
1107
-6
1106
1108
0
0
DLY
TEXTTYPE
IN USER EVENT 1SP
ST20
P3
P1"EXT. IND. 1"
1101
1103
-7
1102
1104
0
0
CONVERTER PROTECTION
EARTH.FLT DLY
EARTH.FLT LEVEARTH.CURR SEL
ARM OVERVOLT LEVARM OVERCURR LEV
U NET MIN1U NET MIN2PWR DOWN TIME
CONV TEMP DELAYP9P8
ST20
SP
P1
P2P3P4
P5P6
P7
-76 CONPROT2511
512508509
510514
515516527
110
2308060
50000
410
0
MOT2 CALC TEMP
MOT2 MEAS TEMP
MOTOR 2 PROTECTION
MODEL2.TRIP LMODEL2.ALARM L
MOT2.TEMP FAULT L
MOT2.TEMP ALARM LMOT2.TEMP IN
P7
P6P5P4
P3
P1
P2
11601
11602
1601
ST20
SP
MODEL2.SELMODEL2.CURR
MODEL2.TC
-21 M2PROT_2
160216031604
16051606
16071608
0
00
4096120130
240
MOTOR 1 PROTECTION
MOT1 CALC TEMP
MOT1 MEAS TEMPMOT1.TEMP IN
1401
MODEL1.TRIP L
MODEL1.ALARM L
KLIXON IN
MOT1.TEMP FAULT LMOT1.TEMP ALARM L
P2
P1 11401
P7
P6P5
P4P3 11402
ST20
SP
MODEL1.SELMODEL1.CURR
MODEL1.TC
1404
-22 M1PROT_2
1402
1403
14051406
14071408
1409
0
0
04096
120130
240
DLOG STATUS
DLOG.SAMPL INT
DLOG.TRIGG DELAYDLOG.TRIGG VALUEDLOG.TRIGG COND
0
00
DATA LOGGER
SP
RESTARTSTOPTRIG
613
611612
DLOG.RESTART
DLOG.STOPDLOG.TRIG
T1ms
IN5 Ch.5
10601
STOP RESTARTCMT-TOOL
TRIGP4
P3P2P1
IN6 Ch.6606605
IN4 Ch.4604IN3 Ch.3603IN2 Ch.2602IN1 Ch.1601
-102 DATALOG
607608609
610
120000
200
3
SPEED MEASUREMENT (12102)SETTINGS (10501)SETTINGS (10505)
SETTINGS (10504)MOTOR 1 FIELD (11302)
CURRENT CONTROL (10401)
BRAKE CONTROL
ACT BRAKEBRAKE RUN
LIFT BRAKEDECEL CMND
TREF ENABLE
TREF OUT
EMESTOP BRAKEHOLD TORQ
STOP DELAYSTART DELAY
MIN SP INDBR RELEASE
HOLD REFTORQUE ACT
10305
10304
103031030210301
304303302
301
P1
P2P3P4
LOCAL
(10503)RESET
SP
(10902)
ST20
-32
305306
307308
0
000
DI8 (10715)SPEED MONITOR (12201)
BTW.POT1/2
MACRO SELECT
ACTUAL VALUE 3ACTUAL VALUE 2
ACTUAL VALUE 1
FIELDBUS NODE ADDR
tPERIOD
DRIVEMODEP1
MAINTENANCE
11220 FEXC1 SW VERSION
11221 FEXC2 SW VERSION
11215FEXC2 COM ERRORSFEXC2 COM STATUS 11214
11213FEXC2 CODE
1121211211
FEXC1 COM ERRORSFEXC1 COM STATUS
FEXC1 CODE 11210FEXC STATUS 11203
1121711216CMT COM ERRORS
CDI300 BAD CHAR
11205BC
11219 CNT BOOT SW VER11218 CNT SW VERSION11222 PROGRAM LOAD11202 BACKUPSTOREMODE11201 COMMIS STAT
11204TC STATUS
11206SQUARE WAVE
CDP3121212
12111210
P11
P9P8P7
P6
P5
P4
P3P2
P10
T5
SELECT OPER.SYSTWRITE ENABLE PINWRITE ENABLE KEY
CMT DCS500 ADDRDRIVE ID
(11207) TEST REF
0 4789
10
0123
4 EMF CONTROLLER
SPEED LOOPSECOND FIELD EXCITER
FIRST FIELD EXCITER
ARM. CONTROLLER
RELEASE OF ARM.CONTROLLING&4 I1=I2
POT2 VALUEPOT1 VALUE
TEST REF SEL(11209)
(11208)
(10906)TEST RELEASE
LOCAL
SP -100 MANTUN_3
1201
12041205
1206
1202
12031207
12081209
1213
1214
0
10000
100
2501
358358
0
1
0
SPEED MESUREMENT (12103)
SETTINGS (10501)SETTINGS (10505)
DRIVE LOGICRAMP GENERATOR12 PULSE LOGIC
COMFLT. TIMEOUTCOMM FAULT
DYN BRAKE ON
TRIP DC BREAKER
MOTOR ACT
MAIN CONT ON
FIELD ON
FAN ON
COMFAULT MODE
PWR LOSS MODE
PANEL DISC MODE
EME STOP MODE
STOP MODE
MAIN CONT MODE
FIELD HEAT SEL
ACK MAIN CONT
ACK MOTOR FAN
ACK CONV FAN
DISABLE LOCAL
START INHIBIT
EMESTOP ACT
RDY RUNNING
RDY ON
MIN SPEED
EME STOP
COAST STOP
DRIVE LOGIC
AUTO-RECLOSING 10914
10912
109011090210903
10904109051090710906
10908
109091091010913
10911
10915
913
912911910
909908907
905904903902901
P5
P4P3P2P1
P6
P7P8
906
LOCAL
SP
ALARM
FAULT
RUNNING1RUN3
RUN2
RUN1
ON/OFF
MOTOR2
RESET
LOCAL(12201)(11205) BC (BLOCK.)
T20
-36 DRLOGI_2
914
915916917918919
920921
0100
00
02
DO4
INV ININ807
808
T20
SP -46
DO8
INV IN
IN815
816
T20
SP -42
DO7
INV IN
IN813
814
T20
SP -43
DO6
INV ININ
811812
T20
SP -44
DO5
INV IN
IN809
810
T20
SP -45
DO3805
INV ININ
806
T20
SP -47
DO2
INV ININ803
804
T20
SP -48
DO1
INV ININ
801802
T20
SP -49
O1O2
SPDI8
ST5
10715
10716
-62
O1O2
SPDI7
ST5
1071310714
-63
O1
O2
SP
ST5
DI6 1071110712
-64
O1
O2
SP
ST5
DI5 1070910710
-65
O1O2
SP
ST5
DI4 1070710708
-66
O1O2
SP
ST5
DI3 10705
10706
-67
O1O2
SP
ST5
DI2 1070310704
-68
O1
O2
DI1SP
ST5
1070110702
-69
REF SEL (1911) CONST REF (11902)RAMP GENERATORTORQ REF SELECTIONTORQ REF HANDLING
DCF FIELDMODE (1216) SDCS-POW-1
Relay outputMAIN CONT
MAIN CONT
EXC CONT
FAN CONT
RUNNING
RDY RUNNING
MAIN CONT
MOTOR FAN
CONV FAN
RESET
EM STOP
RUN
ON/OFF
MOTOR 1/2 FIELD
Must be connected, when no fan acknowledges (DI1, DI2)
MAINTENANCE
BRAKE CONTROL (302)
FAULT WORD 1
OPERATING HOURS
LATEST ALARM
ALARM WORD 3
ALARM WORD 2
ALARM WORD 1
LATEST FAULT
FAULT WORD 3
FAULT WORD 2
T20
11109
11108
11107
11106
11105
11103
11102
SPFAULT HANDLING
11104
11101
-103 FLTHNDL
0-1
SPEED: 100%CUR,FLX,VLT:-100%CUR,FLX,VLT: 100%
12509
125081250712506
125051250412503
1251012511
1251312512
1251512514
1250212501CONSTANTS
SP
ST
SPEED:-100%
TORQ:-100%TORQ:100%
EMF:100%
314161000
100102
1
-73
CONST_0CONST_M1_TRUE
CONST_1CONST_2CONST_10CONST_100
CONST_1000CONST_31416
EMF_MAXTORQ_MAXTORQ_MAX_NCONST_4095CONST_M4095CONST_20000
CONST_M20000
SIG12(CURR._STEP)SIG11(CURR. REF)
SIG10(FORCE REV)SIG9(FORCE_FWD)
SIG8(EMF REF)SIG7(FLUX REF)
SIG6(LOAD SHARE)
SIG5(TORQUE STEP)SIG4(TORQ. REF B)SIG3(TORQ. REF A)
SIG2(SPEED STEP)SIG1(SPEED REF)
FREE SIGNALS
125271252612525
12524125231252212521
125201251912518
1251712516
ST
SP -74
SPEED_STEP
TORQ_REF_BTORQ_STEP
LOAD_SHARE
CUR_REFCUR_STEP
DATASET 4
214 213 212
OUTIN3IN2IN1
SP
ST5
-94DATASET 3
OUT3OUT2OUT1
IN
SP
ST5
101251012610127
-93
DATASET 2
211 210209
OUTIN3IN2IN1
SP
ST5
-92DATASET 1
INOUT3OUT2OUT1
SP
ST5
101221012310124
-91
FIELDBUS PAR.1(MODULE TYPE)
SPFIELDBUS
modul typedepends ofParameters
P15P14P13P12P11
ST5
P10P09P08P07P06P05P04P03P02P01
-95 FLBSET_2
400140024003400440054006400740084009401040114012401340144015
000000000000000
BC Logic
Revers.LogicBridge Logic
IREF0 Logic
Res. f.Commun
BC not ZeroLogic f. INHIBIT
Fault Current
Bridge of Slave
Bridge
IREF2-Pol.Broth
IREF2-Polarity
Curr.Ref.2
IREF1-Pol.Master
IREF1-Polarity
Curr.Ref.1
Arm.CURR.BothConv.Curr.BothArm.Curr.Slave
Conv.Curr.Slave
Fault ReversionIndicat.Revers
[1209]
*2048
ADJ REF1
INHIB Logic
DIFF CURR DELAYDIFF CURRENT
IACT SLAVE
FREV DELAYREV GAPREV DELAY
13622
13605
STSYN
BC
6-PULSEMASTER
CURRENT REFERENCE
P63604
13608
P5P4
active, if [1209] = 1CURRENT ANALYSIS 13601
13602136031360413615
136213616
ON/OFF LOGIC
(11205)
136163607
P3P2P1
active, if [1209]= 1 or 2BRIDGE REVERSAL LOGIC
SP12-PULSE LOGIC
36083609
3610
1361113606136091360713610136121361313614
-99 12PULS_2
360136023603
36053606
3615
11010
10150
2048
X18:12X18:11X18:10X18:09
OUTPUT X18SP
STSYN
3611361236133614
-98
X18:16X18:15X18:14X18:13 13618
STSYN
SPINPUT X18
13617
1361913620
-97
AI2 (10107)
+ --
+ --
5X7:1X7:
2X7:3X7:
6X7:7X7:
4X7:2
1X96:
3X6:
2X6:
1X6:
6X6:
5 X6:8
X6:7
X6:4 X6:
7 X1:6 X1:
4X1:
3X1:
2X1:
1X1:
21
X2:5
4X2:
8X1:
Bremsensteuerung
Inbetriebnahmehilfen
Überwachungen
Zusatzeingänge(binär)
Binäre Ein- Ausgaben (Standard)
Ein- Ausgaben Feldbus
Ein- Ausgaben 12 Puls parallel
Benutzerdefinierbare Ereignismeldungen
Datenspeicher
Zusatzausgaben(frei verfügbar)
KlemmenSDCS-CON-2
KlemmenSDCS-IOE-1
KlemmenSDCS-CON-2
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
unbenutzt
DrehzahlsollwertaufbereitungDer Drehzahlsollwert für den Hochlaufgeber wird durch die Blöcke REF SEL, mit denen eineAuswahl des benötigten Sollwertes getroffen werden kann, dem Funktionsbaustein CONSTREF, der maximal 4 fest einstellbare Sollwerte generiert, dem Funktionsbaustein SOFTPOT,der in Verbindung mit dem Funktionsbaustein RAMP GENERATOR die Funktion eines Mo-torpotentiometers nachbildet, oder durch den Funktionsbaustein A1 (Analogeingang 1) gebil-det.Der Funktionsbaustein RAMP GENERATOR beinhaltet einen Sollwertintegrator mit 2 Hoch-und Runterlauframpen, 2 Zeiten für den S-Verschliff, Begrenzung für Ober- und Untergrenze,Hold Funktion und den Funktionen "Folge" dem Drehzahlsollwert oder "Folge" dem Dreh-zahlistwert. Zur Erfassung von Beschleunigungs- und Verzögerungsvorgängen steht eineigenes Signal zur Verfügung.Der Funktionsbaustein REF SUM ermöglicht es, den Ausgang des Hochlaufgebers und einfrei definierbares Signal zu addieren.
DrehzahlistwertaufbereitungAuf diesem Blatt wird die Drehzahlist-/ und Sollwertaufbereitung dargestellt. Über den Funkti-onsbaustein AITAC wird der Drehzahlistwert von einem Analogtacho eingelesen. Der Funk-tionsbaustein SPEED MEASUREMENT verarbeitet die 3 möglichen Istwertsignale Analogta-cho, Pulsgeber oder die Ausgangsspannung des Stromrichters (SPEED_ACT_EMF) - ge-mäß dem Funktionsbaustein EMF TO SPEED CALC (wenn 2102=5, keine Feldschwä-chung möglich). Über Parameter erfolgt die Aktivierung von Glättungsfunktionen, die Aus-wahl des Istwertes und ggf. die Einstellung der maximalen Drehzahl. Diese Parameter die-nen auch zur Normierung des Drehzahlregelkreises.Der Funktionsbaustein SPEED MONITOR beinhaltet die Blockier- und Tachoüberwachungund vergleicht den ausgewählten Drehzahlistwert auf Überdrehzahl, Minimaldrehzahl und auf2 einstellbare Schwellen.Der Funktionsbaustein AO1 repräsentiert einen skalierten analogen Ausgang.
DrehzahlreglerDas Ergebnis wird in dem Funktionsbaustein SPEED ERROR mit dem Drehzahlistwert vomFunktionsbaustein SPEED MEASUREMENT verglichen und dem Drehzahlregler zugeführt.Dieser Funktionsbaustein erlaubt, die Regeldifferenz mit einem Filter zu bewerten. Außerdemkönnen hier einige Einstellungen vorgenommen werden, die für die Betriebsart "WindowMode" gebraucht werden. Befindet sich der Antrieb mit seinem Drehzahlistwert innerhalbeines Fensters um den Sollwert herum, so wird der Drehzahlregler "umgangen" (sofern"Window Mode" aktiviert ist; der Antrieb wird über einen Momentensollwert am Funktions-baustein TORQ REF HANDLING geführt). Liegt der Drehzahlistwert außerhalb des Fensters,so wird der Drehzahlregler aktiviert, der den Antrieb mit seinem Drehzahlistwert wieder zu-rück in das Fenster führt.Der Funktionsbaustein SPEED CONTROL beinhaltet den Drehzahlregler mit P-, I- und DT1-Anteil. Zur Adaption erhält er eine variable P-Verstärkung.
Drehmoment / StrombegrenzungDer durch den Drehzahlregler erzeugte "Drehmomentsollwert" gelangt über den Funktions-baustein TORQ REF HANDLING an den Eingang des Funktionsbausteins CURRENTCONTROL und wird dort in einen Stromsollwert umgewandelt und zur Stromregelung be-nutzt. Zur Erzeugung der verschiedenen Sollwerte und Begrenzungen dient der Funktions-baustein TORQUE / CURRENT LIMITATION, der die Funktionen "DrehzahlabhängigeStrombegrenzung", "Getriebeschonung", "Erzeugung der Werte für die statische Strombe-grenzung" und "Momentenbegrenzung" enthält. Die Werte für die verschiedenen Begrenzun-gen werden an einigen Stellen wieder verwendet, so z.B. bei den FunktionsbausteinenSPEED CONTROL, TORQ REF HANDLING, TORQ REF SELECTION, und CURRENTCONTROL.Zum Einlesen eines analogen Signals dient der Funktionsbaustein AI2 (Analogeingang 2).Der Funktionsbaustein TORQ REF SELECTION beinhaltet eine Begrenzung mit vorgeschal-teter Addition zweier Signale, von denen eines über einen Rampengeber geleitet werden, dasandere mit Hilfe eines Multiplizierers in seiner Berwertung dynamisch geändert werden kann.Der Funktionsbaustein TORQ REF HANDLING bestimmt die Betriebsart, in der der Antriebarbeitet. In Position 1 ist die Drehzahlregelung aktiviert, in Postion 2 die Momentensteuerung(keine Regelung, da kein "echter" Momentenistwert im Gerät vorhanden ist). In beiden Fällenkommt der benötigte Sollwert von außen. Position 3 und 4 sind eine Kombination der beidenersten Möglichkeiten, wobei in Postition 3 der kleinere Wert aus externem Momentensollwertund Drehzahlreglerausgang auf den Stromregler weitergeleitet wird; in Postition 4 ist es dergrößere Wert. Postition 5 benutzt beide Signale entsprechend der Wirkungsweise "WindowMode".
AnkerstromreglerDer Funktionsbaustein CURRENT CONTROL beinhaltet den Stromregler mit P- und I-Anteilsowie einer Adaption im Lückbereich des Stromes. Weiterhin enthält dieser Funktionsbau-stein die Stromanstiegsbegrenzung, die Umrechnung von Momentensollwert in Stromsollwertmit Hilfe des Feldablösepunktes und einige Parameter zur Beschreibung des speisendenNetzes sowie des Lastkreises.Bei Anwendungen mit hoher induktiver Last und hoher Dynamik wird zur Erzeugung desStromsignals = Null eine andere Hardware verwendet. Diese Hardware wird mit dem Funkti-onsbaustein CURRENT MONITOR gewählt. Die Funktionen zur Überwachung des Stromskönnen anwendungsspezifisch angepasst werden. Hierdurch wird die Handhabung verein-facht und die Sicherheit bei Hochleistungsanstrieben, wie Prüfständen, erhöht.Der DCF -Modus kann mit Hilfe des Funktionsbausteins DCF FIELDMODE aktiviert werden.Die Funktionalität innerhalb dieses Modus kann festgelegt werden. Wenn eine dieser Funk-tionen angewählt ist, erhält der Stromregler eine andere Charakteristik, der Überspannungs-schutz DCF 506 wird überwacht und the der Feldstrom-Sollwert wird über die KlemmenX16: weitergeleitet.
Netz- und MotordatenDer Funktionsbaustein SETTINGS dient zur Normierung aller wichtigen Signale wie Netz-spannung, Motorspannung, Motorstrom und Feldstrom. Mit den Parameteren kann dieSteuerung auf spezielle Bedingungen wie schwache Netze oder das Zusammenwirken mitOberwellenfiltern eingestellt werden. Außerdem kann die Sprache, in der Informationen aufder Bedien- und Anzeigeeinheit erscheinen soll, eingestellt werden.Der Funktionsbaustein AO2 repräsentiert einen skalierbaren analogen Ausgang.
MotorspannungsreglerDer Funktionsbaustein EMF CONTROL enthält den Ankerspannungsregler (EMK-Regler). Erbasiert auf einer Parallelstruktur aus einem PI-Regler und einer Vorsteuerung, gebildet miteiner Kennlinie 1/x. Das Verhältnis der beiden Pfade ist einstellbar. Ausgangsgröße diesesFunktionsbausteins ist der Feldstromsollwert, der durch eine weitere Kennlinienfunktion ausdem Flußsollwert durch Linearisierung entsteht. Damit der Antrieb auch bei einem 4-Quadranten-System eine höhere Motorspannung nutzen kann, können über Parameter zweiFeldschwächungspunkte eingestellt werden.
Feldstromregler 1 und 2Da ein DCS-Stromrichter 2 Feldgeräte ansteuern kann, sind einige Funktionsbausteine einzweites Mal vorhanden. Abhängig von der mechanischen Konfiguration der Antriebe lassensich somit entweder 2 Motoren parallel oder alternativ steuern. Die dazu notwendige Konfigu-ration der Softwarestruktur läßt sich durch den Aufbau der Funktionsbausteine während derInbetriebnahme erzeugen.Der Funktionsbaustein MOTOR1 FIELD / MOTOR2 FIELD liest den Feldstromsollwert undalle spezifischen Werte der Feldspeisegeräte ein und transferiert sie über eine interne serielleVerbindung an den Feldstromrichter, der entsprechend seiner Hardware skaliert wird und dieFeldstromregelung durchführt. Für Motor 1 kann die Feldstromrichtung über binäre Befehlebestimmt werden, für Motor 2 kann dies im Zuge einer Applikation vor dem Funktionsbausteinerzeugt werden.Der Funktionsbaustein MOTOR1 FIELD OPTIONS / MOTOR2 FIELD OPTIONS steuert dieFreilauffunktion bei Netzunterspannung und Feldstromwendung bei Feldumkehrantrieben(nur für Motor 1). Im Falle von Feldumkehrantrieben besteht die Möglichkeit, auf den Zeit-punkt des Abbaus von Anker-/ und Feldstrom und den Aufbau gezielt Einfluss zu nehmen.
Binäre Ein- und Ausgaben (Standard)Der Funktionsbaustein DRIVE LOGIC liest diverse Signale von der Anlage über die digitalenEingänge DIx ein, verarbeitet sie und generiert Befehle, die über die digitalen Ausgänge DOxan die Anlage ausgegeben werden, um z.B. das Netzschütz des Stromrichters, das Feld-schütz oder Schütze für diverse Lüfter anzusteuern oder Statusmeldungen auszugeben.
Zusatzeingänge (binär)Die Funktionsbausteine AI3 und AI4 repräsentieren 2 weitere analoge Eingänge, die bis jetztnoch keinen festen Funktionen zugeordnet sind. Die Funktionsbausteine AI5 und AI6 reprä-sentieren ebenfalls 2 weitere analoge Eingänge, die jedoch nur dann zur Verfügung stehen,wenn die Karte SDCS-IOE1 benutzt wird. Zusätzlich stehen bei Verwendung dieser Zusatz-hardware 7 weitere binäre Eingänge DI 9 bis DI15 zur Verfügung.
Ein – Ausgaben FeldbusWenn die Ansteuerung nicht nur mit analogen und binären Signalen erfolgen soll, sondernauch mit seriell übertragenen Vorgaben, so ist dazu ein Feldbusmodul notwendig, das dasgewünschte Protokoll zur Verfügung stellt (z.B. Profibus, CS31, Modbus usw.). Die Aktivie-rung eines solchen Moduls erfolgt durch den Funktionsbaustein FIELDBUS. Die von derSteuerung zum Stromrichter übertragenen Daten werden in den FunktionsbausteinenDATASET1 und DATASET3 als 16-Bit-Information abgelegt. Je nach Verwendungszwecksind die Ausgangspins dieser Funktionsbausteine mit Eingangspins anderer Funktionsbau-steine zu verbinden, um die Informationen wirksam werden zu lassen. Gleiches gilt für dieFunktionsbausteine DATASET2 und DATASET4, die Informationen, sofern sie"verdrahtet"sind, vom Stromrichter zur Steuerung übertragen.
Ein – Ausgaben 12 PulsDer Stromrichter kann in einer 12-Puls-Parallel-Konfiguration benutzt werden. Dazu werdenbenötigt: zwei gleiche Ankerstromrichter; eine Feldspeiseeinheit; eine T-Drossel; Kommuni-kation über Flachbandkabel, das an X 18 der beiden Stromrichter angeschlossen wird. Die12-Puls-Logik muss aktiviert werden und gewährleistet eine synchrone Steuerung desMASTER- und des SLAVE-Antriebs.
InbetriebnahmehilfenDer Funktionsbaustein MAINTENANCE stellt Sollwerte und Testbedingungen zur Verfügung,um alle Regler im Stromrichter einstellen zu können. Um die Steuertafel als "Messinstrumentin der Schaltschranktür" benutzen zu können, kann hier eine Auswahl der Signale getroffenwerden.
ÜberwachungenDer Funktionsbaustein CONVERTER PROTECTION überwacht den Ankerkreis auf Über-spannung und Überstrom, sowie das Netz auf Unterspannung. Er bietet die Möglichkeit, übereinen zusätzlichen externen Sensor den Summenstrom der 3 Phasen einzulesen und diesenauf ungleich Null zu überwachen. Für Nachrüstungen werden Anpassungen vorgenommen,bei denen der Leistungsteil und der Lüfter erhalten bleiben, um Überlastbedingungen oderden Ausfall des Lüfters zu erkennen.Der Funktionsbaustein MOTOR1 PROTECTION wertet im oberen Teil entweder das Signalvon einem analogen Temperatursensor aus oder von einem Klixon. Im unteren Teil wird mitHilfe des Stromistwertes und einem Motormodell die Erwärmung im Motor berechnet unddanach eine Meldung ausgegeben.Der Funktionsbaustein MOTOR2 PROTECTION arbeitet wie der FunktionsbausteinMOTOR1 PROTECTION, jedoch ohne Klixonauswertung.
Benutzerdefinierbare EreignismeldungenDie Funktionsblöcke USER EVENT1 bis USER EVENT6 erzeugen 6 verschiedene Meldun-gen, die als Fehler oder Alarm auf dem Panel CDP312 und der 7 Segmentanzeige des Ge-rätes erscheinen.
BremsensteuerungDer Funktionsbaustein BRAKE CONTROL erzeugt alle notwendigen Signale, um eine me-chanische Bremse anzusteuern.
DatenspeicherDer Funktionsbaustein DATA LOGGER bietet die Möglichkeit bis zu sechs Signale aufzu-zeichnen. Die Werte dieser Signale werden im batteriegepufferten RAM abgelegt und sindsomit auch nach einem Spannungsausfall noch abrufbar. Die Aufzeichnung kann abhängigvon einer Triggerbedingung gestartet werden; ebenso die Anzahl der aufgezeichneten Wertevor und nach der Triggerung. Die Funktion DATA LOGGER kann sowohl mit der Steuertafelals auch mit dem PC-Tool eingestellt werden. Die aufgezeichneten Werte lassen sich abernur komfortabel mit dem PC darstellen.
Zusatzausgaben (frei verfügbar)Mit Hilfe des Funktionsbausteins FAULT HANDLING werden die Stör- und Alarmmeldungendes Antriebs zu einer 16-Bit-Meldung zusammengefasst. Die FunktionsbausteineCONSTANTS und FREE SIGNALS können zur Einstellung von Grenzwerten oder speziellenPrüfbedingungen verwendet werden.