Der Brouwersche Fixpunktsatz und seine …tdohnal/TEACH/Seminar_AnaIII_SS... · 0. Abstract 0.1...
20
Der Brouwersche Fixpunktsatz und seine Verallgemeinerungen Seminar Analysis III SS 2013 JP Dr. Tomas Dohnal Vortrag vom 10.06.2013 Denise Nicholls
Transcript of Der Brouwersche Fixpunktsatz und seine …tdohnal/TEACH/Seminar_AnaIII_SS... · 0. Abstract 0.1...
Der Brouwersche Fixpunktsatz und seineVerallgemeinerungen
Seminar Analysis III SS 2013JP Dr. Tomas Dohnal
Vortrag vom 10.06.2013
Denise Nicholls

Contents0. Abstract 1
0.1 Deutsch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.2 Englisch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1. Der Brouwersche Fixpunktsatz 21.1 Satz (Brouwer) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Lemma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Satz von Schwarz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Lemma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Lemma (Retraktion) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4.1 Gaußschen Integralsatz . . . . . . . . . . . . . . . . . . . . . . . . . 51.4.2 Satz (inverse Funktkionen) . . . . . . . . . . . . . . . . . . . . . . . 51.4.3 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5 Lemma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.6 Satz (Brouwerscher Fixpunktsatz) . . . . . . . . . . . . . . . . . . . . . . . 8
1.6.1 Satz (Approximationssatz Weierstraß) . . . . . . . . . . . . . . . . . 8
2. Ein Fixpunktsatz für konvexe, kompakte Mengen 102.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Approximationssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3 Fixpunktsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3. Anwendungsbeispiele 143.1 Beispiel (nicht lineares Gleichungssystem) . . . . . . . . . . . . . . . . . . . 14
3.1.1 Beispiel (Anwendung) . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2 Beispiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.1 (Perron-Frobenius) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4. Literaturverzeichnis 18

0. Abstract
0.1 DeutschIn dieser Seminararbeit geht es um den Fixpunktsatz von Brouwer, der einen besonderenStellenwert in der Mathematik einnimmt. Dieser stammt von dem niederländischen Math-ematiker Luitzen E. J. Brouwer (1881-1966). Er hat einige bedeutende topoligische Sätzebewiesen.
Der Brouwersche Fixpunktsatz verzichtet im Gegensatz zum Banachschen Fixpunktsatzauf die Existenz einer Kontraktion. Aber bei diesem Satz geht die Eindeutigkeit unddas Iterationsverfahren verloren und er beschränkt sich auf endlichdimensionale Räume.Es gibt aber die Verallgemeinerung von Schauder für unendlichdimensionale Räume.
Die Beweisführung des Satzes wird in dieser Seminararbeit indirekt durchgeführt. Erberuht auf den Gaußschen Integralsatz, sowie den Satz über inversen Funktionen.Damit dieser angewandt werden kann, müssen am Anfang zwei Lemma zurVorbereitung bewiesen werden. Im zweiten Abschnitt dieser Arbeit wird eineVerallgemeinerung des Brouwerschen Fixpunktsatzes auf konvexe und kompakteMengen des Rn bewiesen. Hierbei ist es sehr nahliegend, dass jede stetigeSelbstabbildung einer konvexen, kompakten und nicht leeren Teilmengen des Rn
mindestens einen Fixpunkt besitzt. Der Beweis wird auf den BrouwerschenFixpunktsatz mittels eines Approximationssatzes zurück geführt.
Zum Abschluss dieser Arbeit werden noch zwei Anwendungen des BrouwerschenFixpunktsatzes vorgestellt. Zum einen findet dieser bei nicht linearenGleichungssystemen seine Anwendung und zum anderen eine Anwendung im Bereich derLinearen Algebra.
0.2 EnglischThis seminar work is about the contraction mapping theorem of Brouwer, which takes aspecial value in the mathematics. It comes from the Dutch mathematician Luitzen E. J.Brouwer (1881-1966). He has proved some important topological theorems.
Brouwers contraction mapping renounces, in contrast to the one of Banach, theexistence of a contraction. But in this theorem, the uniqueness and the iterationmethod gets lost and it’s limited to finite-dimensional affine spaces.
The proof of this theorem is conducted in this seminar work indirectly. It’s based on theGauss’ theorem, as well as on the theorem of inverse functions. So that these can beapplied, two lemma have to be proved at the beginning for the preparation. In thesecond paragraph a generalisation of Brouwers contraction mapping theorem on convexand compact amounts of Rn is proved. On this occasion, it is very close-recumbent thatevery steady self-mapping convex, compact and not empty subset of Rn owns at leastone fixed-point. The proof is led back on Brouwers contraction mapping theorem bymeans of an approximation proposition.
At the end of this work another two applications of Brouwers contraction mappingtheorem are introduced. On the one hand it finds its application in nonlinear equationsystems and on the other hand an application in the section of the linear algebra.
1
1. Der Brouwersche Fixpunktsatz
1.1. Satz (Brouwer)Jede stetige Abbildung f :K 7→ K dereuklidischen Einheitskugel des Rn in sich besitzteinen Fixpunkt, das heißt es gibt
x εK mit f (x ) = x .
Zum Einstieg ein kleine Motivation, wo dieser Satz Anwendung findet, anhand eineseinfachen Beispiels.
Beispiel:
Dieses Beispiel stammt von dem Mathematiker John L. Casti. Er nennt dies dasFixpunktspiel.
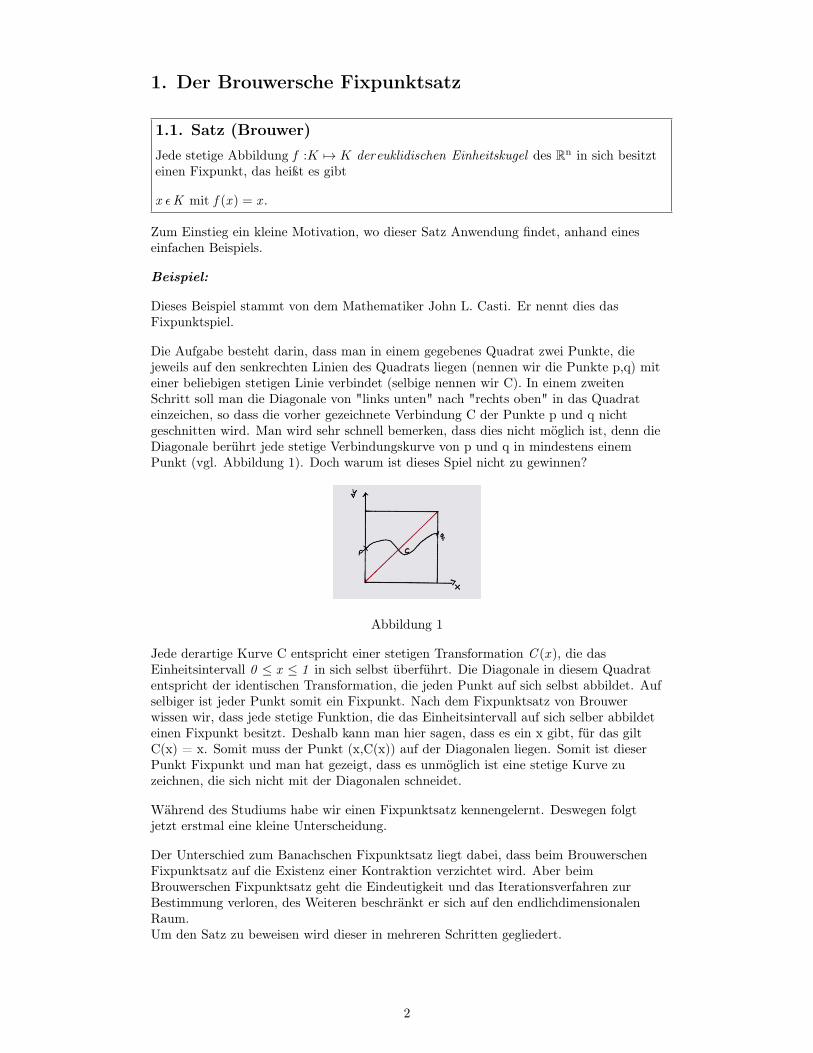
Die Aufgabe besteht darin, dass man in einem gegebenes Quadrat zwei Punkte, diejeweils auf den senkrechten Linien des Quadrats liegen (nennen wir die Punkte p,q) miteiner beliebigen stetigen Linie verbindet (selbige nennen wir C). In einem zweitenSchritt soll man die Diagonale von "links unten" nach "rechts oben" in das Quadrateinzeichen, so dass die vorher gezeichnete Verbindung C der Punkte p und q nichtgeschnitten wird. Man wird sehr schnell bemerken, dass dies nicht möglich ist, denn dieDiagonale berührt jede stetige Verbindungskurve von p und q in mindestens einemPunkt (vgl. Abbildung 1). Doch warum ist dieses Spiel nicht zu gewinnen?
Abbildung 1
Jede derartige Kurve C entspricht einer stetigen Transformation C (x ), die dasEinheitsintervall 0 ≤ x ≤ 1 in sich selbst überführt. Die Diagonale in diesem Quadratentspricht der identischen Transformation, die jeden Punkt auf sich selbst abbildet. Aufselbiger ist jeder Punkt somit ein Fixpunkt. Nach dem Fixpunktsatz von Brouwerwissen wir, dass jede stetige Funktion, die das Einheitsintervall auf sich selber abbildeteinen Fixpunkt besitzt. Deshalb kann man hier sagen, dass es ein x gibt, für das giltC(x) = x. Somit muss der Punkt (x,C(x)) auf der Diagonalen liegen. Somit ist dieserPunkt Fixpunkt und man hat gezeigt, dass es unmöglich ist eine stetige Kurve zuzeichnen, die sich nicht mit der Diagonalen schneidet.
Während des Studiums habe wir einen Fixpunktsatz kennengelernt. Deswegen folgtjetzt erstmal eine kleine Unterscheidung.
Der Unterschied zum Banachschen Fixpunktsatz liegt dabei, dass beim BrouwerschenFixpunktsatz auf die Existenz einer Kontraktion verzichtet wird. Aber beimBrouwerschen Fixpunktsatz geht die Eindeutigkeit und das Iterationsverfahren zurBestimmung verloren, des Weiteren beschränkt er sich auf den endlichdimensionalenRaum.Um den Satz zu beweisen wird dieser in mehreren Schritten gegliedert.
2
Beweisskizze:
Wir führen eine indirekte Beweisführung durch. Hierzu benötigen wir zum einen denGaußschen Integralsatz und zum anderen den Satz über inverse Funktionen.
Aber um diese anzuwenden bedarf es einiger Vorbereitungen:
1.2 LemmaEs seien D ⊆ Rn offen, vεC 2 (D ,Rn) und
Cij (x ) = (−1 )i+jdet
∂1v1 · · · | · · · ∂nv1...
... |...
...− − (i, j) − −...
... |...
...∂1vn · · · | · · · ∂nvn
(x ) (1)
der Kofaktor von ∂jvi(x) in Jv(x ), wobei also die Matrix in (1) durch Streichen der i-tenZeile und der j-ten Spalte aus Dv(x ) entsteht. Dann gilt
n∑j=1
∂jCij (x ) = 0 für xεD und i = 1 , ...,n. (2)
Bevor wir den Beweis durchführen noch einmal ein der Satz von Schwarz zurWiederholung, da dieser für den Beweis benötigt wird.
1.2.1 Satz von Schwarz
Sei f : U → R zweimal stetig partiell differenzierbar in U .
Dann gilt
∂i∂j f(x) = ∂j∂i f(x)
für alle i , j =1, ..., n und alle x εU .
Proof:
Es sei i = {1 , ...,n} fest. Mit den Spaltenvektoren
wj :=(∂jv1, ..., ∂jvi−1, ∂jvi+1, ..., ∂jvn)T . Da die Jacobi-Matrix von v
Dv(x ) =
∂1v1 ∂2v1 · · · ∂j−1v1 ∂jv1 ∂j+1v1 · · · ∂nv1...
......
......
......
...∂1vn ∂2vn · · · ∂j−1vn ∂jvn ∂j+1vn · · · ∂nvn
ist.
Streichen wir nun den i-ten Eintrag in der roten Spalte, erhalten wir dann unser wj .Deshalb können wir auch Cij schreiben als
Cij = (−1 )i+jdet(w1 , ...,wj−1 , wj ,wj+1 , ...,wn),
wobei die Notation wj bedeutet, dass das Argument wj wegzulassen ist. DieProduktregel liefert
∂jCij = (−1)i+j∑k 6=j
Akj mit
3

Akj := det(w1 , ..., wj , ...,wk−1 , ∂jwk ,wk+1 , ...,wn).zu zeigen: ∂jCij = (−1)i+j
∑k 6=j
Akj
Beweis:
Zum besseren Verständnis schauen wir uns ersteinmal beispielhaft die partielleAbleitung der Determinante für eine 3x3 Matrix an.
Sei also
A =
a1 a2 a3a4 a5 a6a7 a8 a9
dann ist det(A)
Sarrus= a1a5a9 + a2a6a7 + a3a4a8 − a3a5a7 − a2a4a9 − a1a6a8,
und ∂j det(A) ist dann gleich
∂j det(A)Produktregel
= [(∂ja1)a5a9 + a1(∂ja5)a9 + a1a5(∂ja9)]
+ [(∂ja2a6a7 + a2 (∂ja6 )a7 + a2a6 (∂ja7 )] + . . .+
+[− (∂ja1 ) a6a8 − a1 (∂ja6 )a8 − a1a6 (∂ja8 )]
=det
∂ja1 a2 a3∂ja4 a5 a6∂ja7 a8 a9
+ det
a1 ∂ja2 a3a4 ∂ja5 a6a7 ∂ja8 a9
+ det
a1 a2 ∂ja3a4 a5 ∂ja6a7 a8 ∂ja9
(3)
Nun kann man mit der Leibniz-Formel für die Determinanten induktiv zeigen, dass∂jCij = (−1)i+j
∑k 6=j
Akj für beliebige n × n−Matrizen gilt.
Oben haben wir gezeigt, wie wir ein Differential der Determinante einer Matrix bildenkönnen, dies ist vor allem eine Summe, deshalb ist ∂jCij eine Summe. Die SummandenAkj sind hierbei unsere einzelnen Determinanten nach (3). Hierzu sollte noch angemerktwerden, dass wir nicht über j summieren, da wir ja die j-te Spalte streichen.
Wir haben ja gesagt, dass die Akj Determinanten sind und diese partiell differenzierbarsind und nach den Satz von Schwarz gilt ∂jwk = ∂kwj , somit müssen die Einträge in denMatrizen permutiert werden. Wir müssen die Spalten genau k − j − 1 mal permutierenbis zum wj , da unser wk an diese Stelle permutieren muss. Für die Determinantenbedeutet dies, dass der Vorfaktor (−1 )k−j−1 nicht vergessen werden darf.
und somit Akj = (−1 )k−j−1Ajk nach dem Satz von Schwarz.
Akj = det(w1 , ..., wj , ...,wk−1 , ∂jwk ,wk+1 , ...,wn)Ajk = det(w1 , ..., wk , ...,wj−1 , ∂kwj ,wj+1 , ...,wn)
Somit folgt
(−1 )in∑
j=1
∂jCij = (−1 )in∑
j=1
(−1)i+j∑k 6=j
Akj
=
n∑j=1
(−1 )j∑k 6=j
Akj
einzelne Summe=
n∑j=1
∑k<j
(−1 )jAkj +
n∑j=1
∑k>j
(−1 )jAkj =:S1 + S2 und
S2 =
n∑j=1
∑k>j
(−1 )k−1Ajk =∑
1≤j ,k≤n,k<j
(−1 )j−1Akj = −S1
also die Behauptung (2). �
4

1.3 LemmaEs seien D ⊆ Rn offen und vεC 2 ([0 , 1 ]×D ,Rn). Mit den Kofaktoren Cij (t , x ) gemäß(1) definiert man Ci = (Ci1 , ...,Cin)
T für i = 1 , ...,n.
Für Jv = detDv gilt dann
∂∂t Jv =
n∑i=1
div(viCi).
Proof :
∂∂tJv =
n∑j=1
det(∂1v, ..., ∂j v, ..., ∂nv)Jacobi−det
=
n∑j=1
n∑i=1
(∂j vi)Cij
endl. Summe=
n∑i=1
n∑j=1
∂j ˙(viCij )Produktregel
=
n∑i=1
n∑j=1
(∂j viCij + vi∂jCij )
=
n∑i=1
n∑j=1
(∂j viCij)︸ ︷︷ ︸+n∑
i=1
vi
n∑j=1
∂jCij︸ ︷︷ ︸=
∑ni=1 div(viCi) + 0 . �
1.4 Lemma (Retraktion)Es seien δ > 0, D = K1+δ(0) und K := K1 (0 ) ⊂ Rn die abgeschlossene Einheitskugel.Es gibt keine Abbildung (“Retraktion”) gεC 2 (D ,Rn) mit g(D) ⊆ ∂K und
g(x ) = x ∀x ε ∂K.
Beweisskizze:
Wir gehen davon aus das eine Retraktion existiere. Hierzu benutzen wir im Folgendenden Gaußschen Integralsatz, sowie den Satz über inverse Funktionen. Zu Beginn zurWiederholung die wichtigsten Sätze, die hier zum Einsatz kommen.
1.4.1 Gaußschen Integralsatz
Es seien G εP1(Rn) ein C 1 − Polyeder mit äußerem Normalenvektorfeld
n = na εC (∂rG ,Rn) und v εC (G∪∂rG,Rn) ein beschränktes Vektorfeld mitv |G εC 1 (G ,Rn). Gilt 〈v, n〉 εL1(G) und div v εL1 (G), so ist
´G
div v(x )dnx =´∂G
〈v , n〉 (x ) dσn−1 (x ) (4)
1.4.2 Satz (inverse Funktionen)
Sei U eine offene Teilmenge des Rn und f :U → Rn glatt. Sei x0 ε U und
(Df )x0 :Rn → Rn invertierbar. Dann ist f ein lokaler Diffeomorphismus in x0 , d.h. fbildet eine hinreichend kleine offene Menge U um x0 diffemorph auf eine offene Mengef (U ) ab.
1.4.3 Definition
Eine Abbildung f heißt lokaler Diffeomorphismus in einem Punkt x , wenn eine offeneUmgebung U von x existiert, so dass die Restriktion von f auf U ein Diffeomorphismusvon U auf f (U ) ist.
5

Proof :
Wir definieren uns eine Funktion
v(t , x ) := (1 − t)x + tg(x ) und betrachten
F (t) :=´KJv(t , x )dnx für tε [0 , 1 ].
Dann ist
F ′(t) = ∂∂tF (t)
= ∂∂t
´KJv(t, x)dnx
Satz 5 .14 [1 ]=
´K
∂∂t Jv(t , x )d
nx
Lemma 1 .3=
´K
n∑i=1
div (viCi)(t , x )dnx
endl.∑
=
n∑i=1
ˆK
div (viCi)(t, x)dnx
Weiter gilt nun nach den Gaußschen Integralsatz.
=n∑
i=1
´∂K
〈viCi, n〉 (t, x)dσn−1(x)
˙(∗)=
n∑i=1
´∂K
〈0, n〉 (t, x)dσn−1(x)
= 0 ∀xεKund ∀ t ε [0, 1]⇔ F (t) konstant ∀xεKund ∀ t ε [0, 1]⇒ F (0) = F (1)
Als nächstes muss noch die Gleichung (*) gezeigt werden, dass
v(0 , x ) = x
v(0 , x ) = (1 − 0 )x + 0g(x ) = x ∧ v(1 , x ) = (1 − 1 )x + 1g(x ) = g(x ) somit gilt
Dv(0 , x ) = I
Dv(t , x ) =
(g(x)− x
(1− t) + tg′(x)
).
Des Weiteren ist v(t, x) = (g(x)− x) = 0 auf dem Rand von K .
6

Somit muss F (1 ) = F (0 ) = wn sein.Da
v(0 , x ) = x ⇒F (0 ) =´KJv(0, x)dnx
=´K1dnx = wn(Volumen der Kugel) und
v(1 , x ) = g(x) ⇒ F (1) =´KJv(t, x)dnx =
´Kg′(x)dnx
Satz 1 .4 .2=
´K0dnx = 0
Somit ist v(1 , x ) = g(x ), und wegen g(D) ⊆ ∂K gilt Jv(1 , x ) = 0 auf D aufgrund desSatzes 1.4.2 über inverse Funktionen. Denn aufgrund der Retraktionseigenschaften istdie nicht injektiv und hat mit K keine offene Wertemenge, d. h. ist keinDiffeomorphismus. Dies impliziert F (1 ) = 0 ,
⇒ F (0) 6= F (1) und man hat einen Widerspruch zum ersten Teil.
1.5 LemmaEs seien δ > 0, D = K1+δ(0) und K := K1 (0 ) ⊆ Rn . Jede Abbildung hεC 2 (D ,Rn) mith(D) ⊆ K hat einen Fixpunkt d.h. es gibt xεK mit h(x ) = x .
Proof :
Wir gehen davon aus, dass h keinen Fixpunkt besitzt, somit ist es uns möglich eineeindeutige Retraktion zu konstruieren. Diese existiert aber nach Lemma 1.4 nicht.
Annahme:
h :D → Rn habe keinen Fixpunkt, das heißt h(x ) 6= x ∀xεK.
Abbildung 2
Somit ist für alle xεD der Strahl von h(x) durch x definiert; g(x ) sei sein Schnittpunktmit ∂K (siehe Abbildung 2).
Wir wählen für den Richtungsvektor h(x ) nach x , x − h(x ), als Ortsvektor wählen wirh(x ).
Nun gilt
g(x ) = h(x ) + t(x )(x − h(x )), (5)
wobei
t(x ) die eindeutig bestimmte Lösung der quadratischen Gleichung
|x − h(x )|2 t2 + 2t 〈h(x ), x − h(x )〉+ |h(x )|2 = 1 ist. (**)
7

Nach der Definition des Punktes folgt, dass g(x ) der Schnittpunkt mit der Gerade und∂K ist.
Mit Hilfe Der Kosinus-Regel erhalten wir dann die obige Gleichung (**).
Kosinus Regel:
1 2 = |h(x )|2 + |g(x )− h(x )|2 − 2 |h(x)| |g(x)− h(x)|︸ ︷︷ ︸t(x)|x−h(x)|
cosα︸ ︷︷ ︸=
〈x−h(x), h(x)〉|h(x)||x−h(x)|
1 = |h(x )|2 +∣∣∣h(x ) + t(x )(x − h(x ))− h(x )
∣∣∣2 − 2∣∣∣h(x )∣∣∣ t(x ) ∣∣∣x − h(x )
∣∣∣ 〈x−h(x), h(x)〉|h(x)||x−h(x)|
1 = |h(x )|2 + t(x )2 |(x − h(x ))|2 − 2t(x ) 〈x − h(x ), h(x )〉 //
Die Glattheit für t(x ) folgt, da t(x) eine Lösung der quadratischen Gleichung mit C2
Koeffizienten ist. Außerdem existiert eine Abbildung g :D → Rn existiert
g(x ) = h(x ) + t(x )(x − h(x ))
die alle Schnittpunkte von g und ∂K beschreibt und dadurch auf den Rand ∂K abbildet.
Es bleibt noch zu zeigen, dass dies endeutig ist. Nach Konstruktion der Abbildung 2 istsofort ersichtlich, dass t(x) entweder nur positive oder negative Lösungen haben kann.Da wir uns nur die positven anschauen ist diese eindeutig. Des Weiteren wissen wir,dass sowohl g(x)undh(x) aus C2.
Daraus folgt, dass g(x ) eine Retraktion ist diese existiert nach Lemma 1.5 nur wennh(x ) 6= x ∀x εD erfüllt ist. Aber durch Lemma 1.5 wissen wir, dass eine solcheRetraktion nicht existieren kann und somit erhält man den Widerspruch.
Also hat h : D → Rn mindestens einen Fixpunkt. �
Wiederholung Brouwerscher Fixpunktsatz
1.6 Satz (Brouwerscher Fixpunktsatz)Jede stetige Abbildung f :K → K der euklidischen Einheitskugel des Rn in sich besitzteinen Fixpunkt das heißt es gibt x εK mit f (x ) = x .
Bevor wir den Beweis durchführen noch einmal eine kleine Erinnerung zumAproximationssatz von Weierstraß.
1.6.1 Approximationssatz Weierstraß
Sei f εC [a, b], −∞ < a < b < +∞ beliebig, dann gilt
∀ ε > 0, ∃n εN : p ε Pn : ‖f − p‖∞ < ε auf [a, b]
Die stetige Funktion f kann also auf [a, b] durch Polynome beliebig genau approximiertwerden.
Proof :
Da K selbst die abgeschlossene Einheitskugel
gilt auch für alle x εK ‖f (x )‖ ≤ 1 .
Nach dem Weierstaßschen Approximationssatz angewendet auf die Komponenten von fgibt es zu jedem ε > 0 Polynome p1 , ..., pn so, dass mit der Abbildungp : K → K ∀x εK
‖f(x)− p(x)‖ < ε gilt.
p∗(x ) := p(x)1+ε bildet dann K wegen f (K ) ⊂ K ebenfalls in K ab.
8

‖p(x)‖ − ‖f(x)‖ ≤ ‖p(x)− f(x)‖1.6< ε
Und da ‖f(x)‖ ≤ 1 folgt
‖p(x)− 1‖ < ε
‖p(x)‖ < 1 + ε und somit ist
p∗(x ) := p(x)1+ε p∗Abbildung der Einheitskugel in sich.
Dabei gilt für alle x εK
‖f(x)− p∗(x)‖4−Ugl.
≤ ‖f(x)− p(x)‖+ ‖p(x)− p∗(x)‖
< ε+∥∥∥p(x )− p(x)
1+ε
∥∥∥< ε+ ‖p(x )‖
∣∣∣1 − 11+ε
∣∣∣< ε+ (1 + ε) ε
1+ε = 2ε
Daraus folgt unsere Approximation
‖f(x)− p∗(x)‖ ≤ 2ε.Als nächstes nehmen wir an, dass f keinen Fixpunkt besitzt, das heißt
f (x ) 6= x ∀x εK.
Somit hätte ‖f(x)− x‖ ein positives Minimum µ in K . für das gilt
‖f(x)− x‖ > µ ∀x εK
Man wähle nun p und p∗ zu ε = 12µ.
Dann hätte diese einen Fixpunkt x in K , weil p∗ eine C2 Selbstabbildung ist, für diedann
‖f(x)− x‖ =‖f(x)− p∗(x)‖ < µ
gelten müsste. Das wäre ein Widerspruch zur Definition von µ. Somit hat dieseAbbildung einen Fixpunkt und der Fixpunktsatz von Brouwer wurde mit Hilfe einesWiderspruchsbeweises bewiesen. �
9
Im Folgenden wird jetzt eine Verallgemeinerung desBrouwerschen Fixpunktsatz f ur konvexe, kompakte Menge im Rnvorgestellt. Hierbei istes sehr naheliegend, dass jede stetige Selbstabbildung einer konvexen, kompakten undnicht leeren Teilmenge des Rn mindestens einen Fixpunkt besitzt. Dieser wird auf denBrouwerschen Satz mittels eines Approximationssatzes zurück geführt. Am Anfangwerden einige Notationen eingeführt.
2. Ein Fixpunktsatz für konvexe, kompakte
Mengen im Rn
2.1 DefinitionSei Rn ein normierter Raum, M eine nichtleere, konvexe Teilmenge von Rn und xεRn
ein beliebiger Punkt.
yεM heißt Bestapproximation des Punktes x in M , wenn gilt:
‖x− y‖ ≤ ‖x− z‖ für alle z εM oder mit
‖x− y‖ = infzεM
‖x− z‖.
Besitzt jedes xεRn eine eindeutige Bestapproximation y(x ) in M , so ist die Abbildung
PM : Rn → M mit x 7→ y(x ) wohldefiniert und wird der Lotoperator von M genannt.
2.2 ApproximationssatzSei M ⊂ Rn eine abgeschlossene und nichtleere Teilmenge des euklidisch normierten Rn ,so besitzt jedes xεRn genau eine Bestapproximation in M und der
Lotoperator PM ist stetig.
Beweisskizze:
Wir überprüfen im folgenden die Axiome des Approximatonssatzes. Der besagt, dasseine Bestapproximation von x in M existiert, sowie die Eindeutigkeit derBestapproxiamtion, also der Lotoperator und zum Schluss muss noch die Stetigkeit desLotoperators gezeigt werden.
Proof :
Zuerst zeigen wir nun die Existenz des Lotoperators.
Hierbei wird der Parallelogrammsatz genutzt, der Folgendes besagt:
|u+ v|2 + |u− v|2 = 2 |u|2 + 2 |v|2
⇔ |u− v|2 = 2 |u|2 + 2 |v|2 − |u+ v|2 für beliebige u, vεRn . (6)
Dieser Beweis folgt, indem die Betragsquadrate durch Innenprodukte ausdrückt.
Sei nun für ein xεRn
γ := infzεM
|x− z| (7)
10

Aufgrund der Infininumsdefinition gibt es dann in M eine Folge (zn) mit
|x− zn| → γ.
Jede derartige Folge nennen wir eine Minimalfolge. Als nächstes setzen wir in (6)
u := x − zm und v := x − zn .
Dann ist
|u− v|2 = |(x− zm)− (x− zn)|2 = |zn − zm|2 und
|u+ v|2 = |(x− zm) + (x− zn)|2 = |2x− zm − zn|2 =∣∣∣2(x− (zm+zn)
2
)∣∣∣2= 4
∣∣∣x − (zm+zn)2
∣∣∣(6) geht also über in die Gleichung
|zn − zm|2 = 2 |x− zm|2+2 |x− zn|2−4∣∣∣x− (zm+zn)
2
∣∣∣2 . (8)
Da (zm+zn)2 wegen der Konvexität von M zu M gehört und daher∣∣∣x − (zm+zn)2
∣∣∣ ≥ γ ∀m,nεN ist, (9)
erhalten wir aus (8) die Abschätzung
|zn − zm|2(9)
≤ 2 |x− zm|2 + 2 |x− zn|2 − 4γ2
→m,n→∞
2γ2 + 2γ2 − 4γ2 = 0
Daraus folgt:
|zn − zm|2 →n,m→∞
0
⇒ Jede Minimalfolge (zn) ist auch eine Cauchyfolge, das heißt (10)
∀ε > 0 ∃n0εN ∀m,n ≥ n0 : |zn − zm| < ε.
Aus der Vollständigkeit von Rn und der Abgeschlossenheit von M , dass die Cauchyfolge(zn) in M gegen einen Grenzwert yεM konvergiert, das heißt (zn) → y, yεM
Somit haben wir folgende Situation gegeben:
|x− zn| → γ und |x− zn| → |x− y| , dies gilt, da der Betrag stetig ist undzn → y ⇔ x − zn → x − y .
Infolgedessen muss |x− y| = γ und daraus folgt, dass y eine Bestapproximation desPunktes x in M ist.
Die Eindeutigkeit der Bestapproximation lässt sich nun leicht zeigen.
Seien nun u und v zwei Bestapproximationen von x in M . Dann gilt:
|x− u| = |x− v| = γ.
Dann ist die Folge (u, v, u, v, ...) trivialerweise eine Minimalfolge in M und somit aucheine Cauchyfolge nach (10).
Dies gilt aber nur wenn u = v ist.
11

Nachdem wir gezeigt haben, dass der Lotoperator existiert, zeigen wir zum Schlussnoch, dass dieser stetig ist.
Wir zeigen nun, dass aus
xn → x folgt stets PM (xn) → PM (x ).
Es gilt:
∀ε > 0 ∃n0 εN : |xn − x | < ε ∀n > n0 .
Für diese n ist dann
γn := infzεM
|xn − z|
= infzεM
|xn − x+ x− z|
≤ infzεM
(|xn − x|+ |x− z|
= infzεM
|xn − x |+ infzεM
|x − z |
= |xn − x|︸ ︷︷ ︸=ε
+ infzεM
|x− z|︸ ︷︷ ︸=γ
< ε+ γ mit dem γ aus (7).
Da ferner für n > n0 offenbar auch
γ ≤ |x− PM (xn)|
= |x − xn + xn − PM (xn)|
≤ |x− xn|+ |xn − PM (xn)|
< ε+ γn , somit gewinnen wir aus den letzten beiden Ungleichungen die Abschätzung
γ ≤ |x− PM (xn)| < γ + 2ε für n < n0 .
Daraus folgt, dass |x− PM (xn)| → γ konvergiert.
Anders audgedrückt ist (PM (xn)) eine Minimalfolge für x in M , also strebt diese Folgenotwendig gegen die Bestapproximation PM (x ) des Punktes x .
Somit folgt nun auch die Behauptung, dass PM stetig ist.
Als nächstes werden wir jetzt den Fixpunktsatz beweisen, dies wird leicht durchführbarsein, da wir im Vorfeld durch den Satz 2.2 sehr viel Vorbereitung geleistet haben.
2.3 FixpunktsatzSei Rn normiert, C ⊂ Rn und konvex, kompakt und eine nichtleere Teilmenge, dann hatjede stetige Selbstabbildung f einer konvexen, kompakten und nichtleeren Teilmengemindestens einen Fixpunkt, d.h.
∃ x εC : f(x) = x.
12

Proof :
Zunächst wissen wir, dass C als kompakte Menge beschränkt ist. Somit können wir denRadius r der abgeschlossenen Kugel Kr ⊂ Rn um den Mittelpunkt 0 so groß wählen,dass C ganz in Kr liegt.
Nach Satz 2.2 existiert der stetige Lotoperator PM :Rn → C von C .
Definiere P := PM |Kr: Kr → C . Es gilt dann P(x ) εC ∀ x εKr und
P(x ) = x ∀ xεC . (11)
Aus der Stetigkeit der Abbildung f und P folgt, dass auch deren Komposition
(f ◦ P) : Kr → C ⊂ Kr
stetig ist und nach Satz 1.6 Brouwerschen Fixpunktsatz diese mindestens einenFixpunkt hat, das heißt
∃x εKr mit (f ◦ P)(x ) = x. (12)
Da aber die Selbstabbildung f und P(x ) in C abbildet liegt offenbar auch(f ◦ P)(x ) = f (P(x )) in C , d.h.
f (P(x )) εC ∀x εKr.
Dann gilt auch für den Fixpunkt x aus (12):
x = (f ◦ P )(x) = f(P (x)) εC
⇒ x ε C
(11)⇒ P (x) = x
⇒ f(P (x)) = f(x).
Zusammenfassend kann gesagt werden:
∃ x εKr : x = (f ◦ P )(x) = f(P (x)) = f(x) = ˜x εC
⇒ ∃ x ε C : f(x) = x. �
Der letzte Fixpunktsatz wurde aus den Brouwerschen Fixpunktsatz gewonnen.Demzufolge ist ersichtlich, dass es sich beim Satz 2.3 um einen Spezialfall zum erstenhandelt.
In Wirklichkeit sind beide Fixpunktsätze äquivalent.
Im Folgenden werden noch ein Anwendungsbeispiele vorgestellt.
13

3. AnwendungsbeispieleIm Folgenden werde ich zwei Anwendungsbeispiele vorstellen, zum einen ist es möglichmit den Brouwerschen Fixpunktsatz nicht lineare Gleichunssystems zu lösen und zumanderen findet dieser auch in der Linearen Algebra seine Anwendung.
3.1 Beispiel (nicht lineares Gleichungssystem)Nun betrachten wir ein nichtlineares Gleichungssystem (GLS) , bestehend aus zwei Gle-ichungen, diese sind durch Polynome in zwei Variablen gegeben.
Diese sehen wie folgt aus:
n∑i=0
m∑j=0
aij xi1 x
j2 = 0
(13)n∑
i=0
m∑j=0
bij xi1 x
j2 = 0 ,
wobei x1, x2 εR zwei gesuchte Variablen sind. Des Weiteren sind aij , bij εR. Wirnehmen an, dass a10 6= 0 ∧ b10 6= 0 sind.
Aus Gründen der Übersichtlichkeit führen wir folgende Notation ein:
∑ ∗ :=
n∑i=0
m∑j=0
.
Das GLS lässt sich jetzt wie folgt umschreiben:
a10 x1 +
∗∑(i,j )6=(1 ,0)
aij xi1 x
j2 = 0
(14)
b01 x2 +
∗∑(i,j ) 6=(0 ,)
bij xi1 x
j2 = 0
diese sind äquvalent zu
x1 = − 1a10
n∑i=0
m∑j=1
aijxi1x
j2
(15)
x2 = − 1b01
n∑i=1
m∑j=0
bijxi1x
j2.
Nach dem Brouwerschen Fixpunktsatz lässt sich jetzt das GLS (15) auffassen als
(x1
x2
)= x = f(x) =
− 1
a10
n∑i=0
m∑j=1
aijxi1x
j2
− 1b01
n∑i=1
m∑j=0
bijxi1x
j2.
.
Daraus folgt, dass das Gleichungssystem (13) mindestens eine Lösung hat, wenn dieAbbildung f eine Fixpunkt besitzt.
14

Der Brouwersche Fixpunktsatz liefert hierbei eine Aussage über die Existenz einerLösung, falls folgende Bedinungen erfüllt sind:
• x aus einer konvexen, abgeschlossenen und beschränkten, nichtleeren Menge K ⊂ R2
stammt und
• f :K → K stetig sind.
Die Stetigkeit der Funktion f ist offensichtlich, da die Einträge von f Polynome in zweiVariblen sind und damit ihrerseits stetig sind.
Falls es zwei positive Zahlen r1 , r2 gibt, so dass
1|a10|
n∑i=0
m∑j=1
|aij | ri1rj2 ≤ r1
und
1
|b01 |
n∑i=1
m∑j=0
|bij | r i1 rj2 ≤ r2 gilt,
bildet f das abgeschlossene Rechteck
K = {(x1 , x2 ) : |x1 | ≤ r1und |x2 | ≤ r2}
in sich selbst ab. Damit ist eine hinreichende Bedingung für die Existenz einer Lösungdes GLS gegeben. Eine Herleitung hierzu gibt es in (Nass, Josef;Tutschke, Woflgang:Große Sätze und schöne Beweise der Mathematik).
Es sollte noch erwähnt werden, dass der Spezialfall a10 6= 0 ∧ b10 6= 0 nicht geltenmuss. Eine allgemeine Herleitung wäre durchaus komplexer. Aber anhand einesPraixisbeispiel wird deutlich, wie sinnvoll diese Einschränkung jedoch ist.
15

3.1.1 Beispiel (Anwendung)
Es sei das nicht lineare Gleichungssystem
2x21 − x2
2 − 8x1 = 0 x21 + x1 x2 − 4x2 + 1 = 0
⇔ 14x
21 − 1
8x22 = x1 ⇔ 1
4x21 +
14x1x2 +
14 = x2
Nun ist eine geeignete Menge K zu wählen, so dass f : K → K . Als nächstes zeigen wir,dass K als Einheitskugel bezüglich der Supermumsnorm gewählt werden kann, alsosprich
K = {(x1 , x2 ) : |x1 | ≤ 1 und |x2| ≤ 1}.
Sei also (x1, x2) εK, dann gilt∣∣ 14
∣∣ |x1|2 +∣∣− 1
8
∣∣ |x2|2 ≤ 14 + 1
8 = 38 ≤ 1
und∣∣ 14
∣∣ |x1|2 +∣∣ 14
∣∣ |x1| |x2|+∣∣ 14
∣∣ ≤ 14 + 1
4 + 14 ≤ 1.
Damit liegt das Bild f (K ) wieder in K .
Zum Schluss würde bei diesem Beispiel noch eine Approximation von x1 , x2 erfolgden,damit der Nachweis der einer Lösung gegeben ist. Dies kann durch mathematischeComputerprogramme gelöst werden.
16

3.2 BeispielIm Folgenden wird jetzt eine weitere motivierende Anwendung gezeigt, die Aussagen überpositive Eigenwerte und Eigenvektoren von nichtnegativen Matrizen liefert.
3.2.1 Satz (Perron-Frobenius)
Eine MatrixA = aij εMR(n) mit aij ≥ 0 für i , j = 1 , ...,n besitzt einen Eigenwert λ ≥ 0zu einem Eigenvektor x = (xj ) εRn mit xj ≥ 0 für j = 1 , ...,n.
Proof :
Es bezeichne ‖‖1 die 1-Norm auf dem Rn ferner sei die Menge C = 4 das (n− 1)dimensionale Simplex.
C :=
{y = (yi) εRn | yi ≥ 0 und
n∑j=1
yj = ‖y‖1 = 1
}ist kompakt und konvex.
Gibt es x εC mit Ax = 0 , so ist der Satz bereits bewiesen.
Andernfalls für y εC ist Ay 6= 0 und durch
f (y) := Ay‖Ay‖1
wird eine stetige Abbildung f :C → C definiert. Nach dem Brouwerschen Fixpunktsatzbesitzt diese einen Fixpunkt x εC . Wegen Ax = ‖Ax‖1 x ist x ein Eigenvektor zu A undλ = ‖Ax‖1 > 0 der dazugehörige Eigenwert. �
17

4. Literaturverzeichnis[1] Winfried Kaballo. Einführung in die Analysis III. Spektrum Akademischer Verlag,Berlin/Heidelberg, 1999
[2] Harro Heuser. Lehrbuch der Analysis Teil 2 (14. akualisierte Auflage). ViewegVerlag, Wiesbaden, 2008.
[3] Josef Naas and Wolfgang Tutschke. Große Sätze und schöne Beweise derMathematik. Harri Deutsch, Frankfurt am Main, 2009.
[4] Konrad Königsberger. Analysis 2 (5. korrigierte Auflage). Springer Verlag,Berlin/Heidelberg, 2004.
18