Der MPC Controller E1100 Das MPC Linearmodul …...Der MPC Controller E1100 LinMot® Option...
8
Multi Position Cylinder MPC LinMot ® Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind... Frei positionierbar Hoch dynamisch Einstellbare Kraft Ohne Luft Keine Verschleissteile Einfache Inbetriebnahme
Transcript of Der MPC Controller E1100 Das MPC Linearmodul …...Der MPC Controller E1100 LinMot® Option...

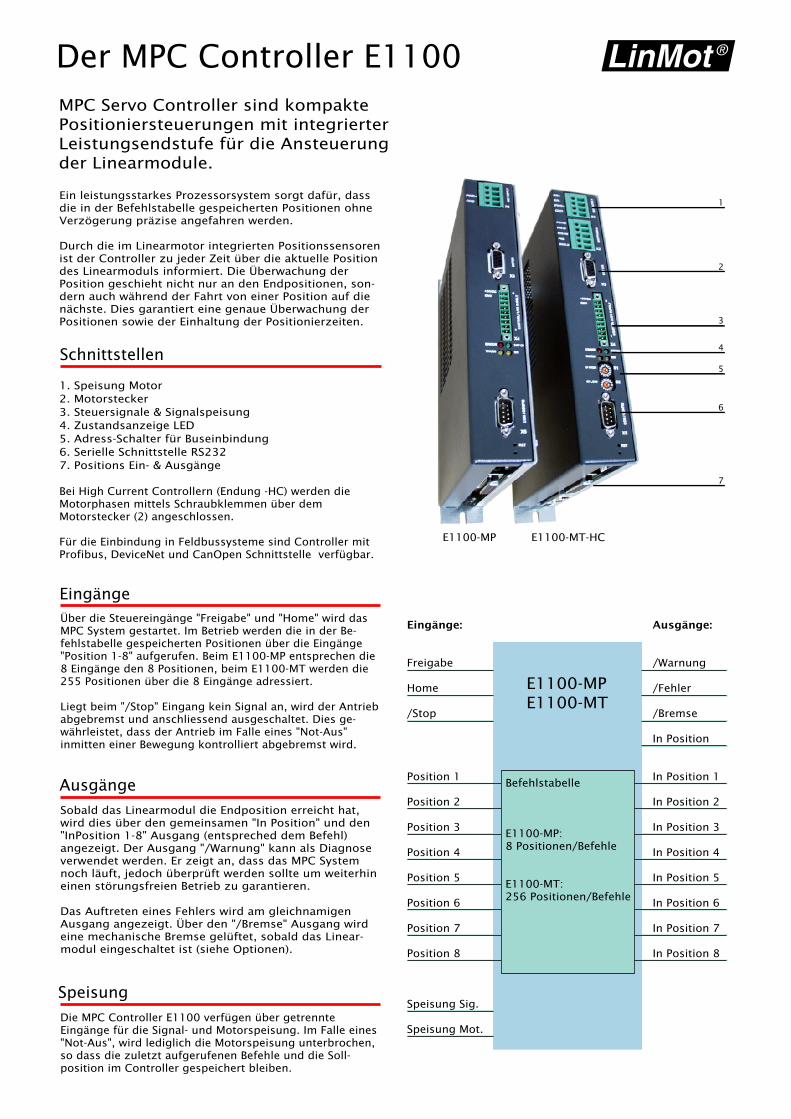
Ein leistungsstarkes Prozessorsystem sorgt dafür, dass die in der Befehlstabelle gespeicherten Positionen ohne Verzögerung präzise angefahren werden.
Durch die im Linearmotor integrierten Positionssensoren ist der Controller zu jeder Zeit über die aktuelle Position des Linearmoduls informiert. Die Überwachung der Position geschieht nicht nur an den Endpositionen, son-dern auch während der Fahrt von einer Position auf die nächste. Dies garantiert eine genaue Überwachung der Positionen sowie der Einhaltung der Positionierzeiten.
1. Speisung Motor 2. Motorstecker3. Steuersignale & Signalspeisung4. Zustandsanzeige LED 5. Adress-Schalter für Buseinbindung6. Serielle Schnittstelle RS232 7. Positions Ein- & Ausgänge
Bei High Current Controllern (Endung -HC) werden die Motorphasen mittels Schraubklemmen über dem Motorstecker (2) angeschlossen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
LinMot ® LinMot ®LinMot ®Das MPC System Bestechend: Multi-Funktional
Einfach: Inbetriebnahme & Konfiguration
Das MPC Linearmodul LM01
Frei positionierbar
Hoch Dynamisch
Presskraft einstellbar
Mechanisch Kompatibel
Teach-In
Linearführung
Linear Motor
Speisung
MPC Servo Controller
High Flex Motorkabel
IP67 Motorstecker
Motorkabel & Stecker
Speisung
Servo Controller
LinearführungLinearmotor
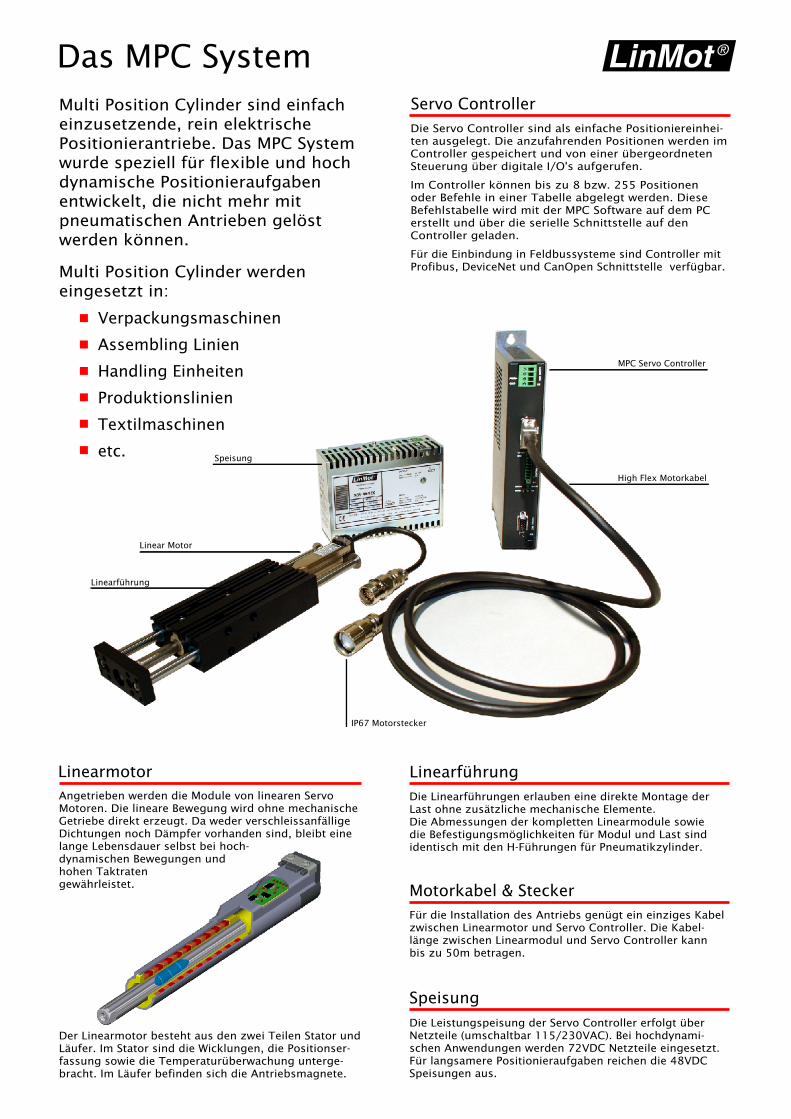
Die Servo Controller sind als einfache Positioniereinhei-ten ausgelegt. Die anzufahrenden Positionen werden im Controller gespeichert und von einer übergeordneten Steuerung über digitale I/O's aufgerufen. �
Im Controller können bis zu 8 bzw. 255 Positionen oder Befehle in einer Tabelle abgelegt werden. Diese Befehlstabelle wird mit der MPC Software auf dem PC erstellt und über die serielle Schnittstelle auf den Controller geladen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
Angetrieben werden die Module von linearen Servo Motoren. Die lineare Bewegung wird ohne mechanische Getriebe direkt erzeugt. Da weder verschleissanfällige Dichtungen noch Dämpfer vorhanden sind, bleibt eine lange Lebensdauer selbst bei hoch-dynamischen Bewegungen undhohen Taktraten gewährleistet.
Der Linearmotor besteht aus den zwei Teilen Stator und Läufer. Im Stator sind die Wicklungen, die Positionser-fassung sowie die Temperaturüberwachung unterge-bracht. Im Läufer befinden sich die Antriebsmagnete.
Für die Installation des Antriebs genügt ein einziges Kabel zwischen Linearmotor und Servo Controller. Die Kabel-länge zwischen Linearmodul und Servo Controller kann bis zu 50m betragen.
Die Linearführungen erlauben eine direkte Montage der Last ohne zusätzliche mechanische Elemente. Die Abmessungen der kompletten Linearmodule sowiedie Befestigungsmöglichkeiten für Modul und Last sind identisch mit den H-Führungen für Pneumatikzylinder.
Multi Position Cylinder sind einfach einzusetzende, rein elektrische Positionierantriebe. Das MPC System wurde speziell für flexible und hoch dynamische Positionieraufgaben entwickelt, die nicht mehr mit pneumatischen Antrieben gelöst werden können.
Multi Position Cylinder werden eingesetzt in:
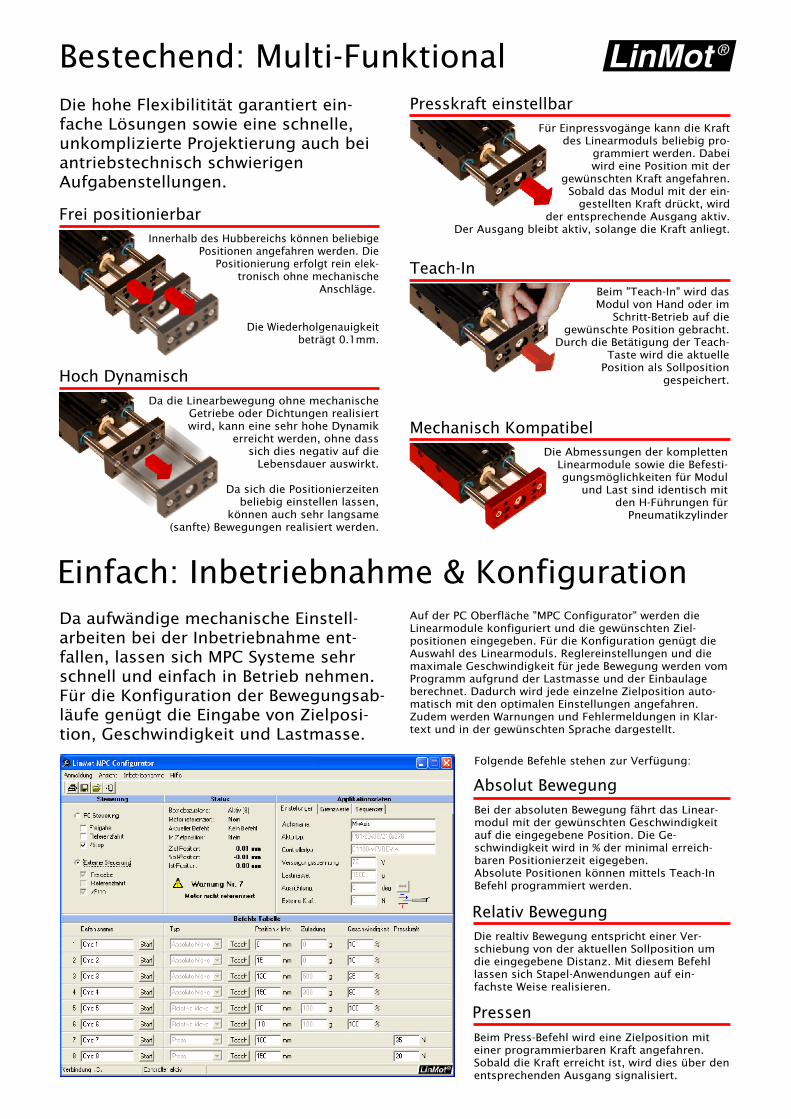
Die hohe Flexibilitität garantiert ein-fache Lösungen sowie eine schnelle, unkomplizierte Projektierung auch bei antriebstechnisch schwierigen Aufgabenstellungen.
Da aufwändige mechanische Einstell-arbeiten bei der Inbetriebnahme ent-fallen, lassen sich MPC Systeme sehr schnell und einfach in Betrieb nehmen.Für die Konfiguration der Bewegungsab-läufe genügt die Eingabe von Zielposi-tion, Geschwindigkeit und Lastmasse.
Flexibel: Modular erweiterbarDie Linearmodule lassen sich mittels verschiedenen Optionen modular erweitern. Dies erlaubt eine optimale Anpassung an die jeweilige Aufgabenstellung.
Die Leistungspeisung der Servo Controller erfolgt über Netzteile (umschaltbar 115/230VAC). Bei hochdynami-schen Anwendungen werden 72VDC Netzteile eingesetzt. Für langsamere Positionieraufgaben reichen die 48VDC Speisungen aus.
Relativ Bewegung
Pressen
Absolut Bewegung
Die realtiv Bewegung entspricht einer Ver-schiebung von der aktuellen Sollposition um die eingegebene Distanz. Mit diesem Befehl lassen sich Stapel-Anwendungen auf ein-fachste Weise realisieren.
Bei der absoluten Bewegung fährt das Linear-modul mit der gewünschten Geschwindigkeit auf die eingegebene Position. Die Ge-schwindigkeit wird in % der minimal erreich-baren Positionierzeit eigegeben. Absolute Positionen können mittels Teach-In Befehl programmiert werden.
Folgende Befehle stehen zur Verfügung:
Auf der PC Oberfläche "MPC Configurator" werden die Linearmodule konfiguriert und die gewünschten Ziel-positionen eingegeben. Für die Konfiguration genügt die Auswahl des Linearmoduls. Reglereinstellungen und die maximale Geschwindigkeit für jede Bewegung werden vom Programm aufgrund der Lastmasse und der Einbaulage berechnet. Dadurch wird jede einzelne Zielposition auto-matisch mit den optimalen Einstellungen angefahren. Zudem werden Warnungen und Fehlermeldungen in Klar-text und in der gewünschten Sprache dargestellt.
Beim Press-Befehl wird eine Zielposition mit einer programmierbaren Kraft angefahren. Sobald die Kraft erreicht ist, wird dies über den entsprechenden Ausgang signalisiert.
Die Abmessungen der komplettenLinearmodule sowie die Befesti-gungsmöglichkeiten für Modul
und Last sind identisch mit den H-Führungen für
Pneumatikzylinder
Beim "Teach-In" wird dasModul von Hand oder im
Schritt-Betrieb auf diegewünschte Position gebracht.
Durch die Betätigung der Teach-Taste wird die aktuelle
Position als Sollposition gespeichert.
Für Einpressvogänge kann die Kraftdes Linearmoduls beliebig pro-
grammiert werden. Dabeiwird eine Position mit der
gewünschten Kraft angefahren.Sobald das Modul mit der ein-
gestellten Kraft drückt, wird der entsprechende Ausgang aktiv.
Der Ausgang bleibt aktiv, solange die Kraft anliegt.Innerhalb des Hubbereichs können beliebige
Positionen angefahren werden. DiePositionierung erfolgt rein elek-
tronisch ohne mechanischeAnschläge.
Die Wiederholgenauigkeitbeträgt 0.1mm.
Da die Linearbewegung ohne mechanischeGetriebe oder Dichtungen realisiertwird, kann eine sehr hohe Dynamik
erreicht werden, ohne dasssich dies negativ auf die
Lebensdauer auswirkt.
Da sich die Positionierzeiten beliebig einstellen lassen,
können auch sehr langsame (sanfte) Bewegungen realisiert werden.
LinMot ®Der MPC Controller E1100
Option MagSpring
Option mechanische Bremse
Option Ventilator
Die Linearmodule der Serie LM01-37 verfügen über Auf-nahmebohrungen für pneumatisch öffnende Klemmpa-tronen zur Arretierung der Linearachse im stromlosen Zustand. Die Ventile der Klemmpatronen werden über den Servo Controller (Brems-Ausgang) angesteuert.
In Anwendungen mit vertikaler Einbaulage kann eine mag-netische Feder "MagSpring" zur Kompensation der Gewichtskraft oder als Ausfallsicherung bei Stromausfall seitlich am Linearmodul angebaut werden.
Bei erhöhtem Bedarf an Dauerkraft wird ein Ventilator auf das Linearmodul montiert. Durch die forcierte Kühlung ver-doppelt sich die Dauerkraft annähernd. Der Ventilator wird mit einer Spannung von 24VDC versorgt. Der Ventilator vergrösserte die Höhe des Moduls um 35mm resp. 40mm.
Ausgänge
Sobald das Linearmodul die Endposition erreicht hat, wird dies über den gemeinsamen "In Position" und den "InPosition 1-8" Ausgang (entspreched dem Befehl) angezeigt. Der Ausgang "/Warnung" kann als Diagnose verwendet werden. Er zeigt an, dass das MPC System noch läuft, jedoch überprüft werden sollte um weiterhin einen störungsfreien Betrieb zu garantieren.
Das Auftreten eines Fehlers wird am gleichnamigen Ausgang angezeigt. Über den "/Bremse" Ausgang wird eine mechanische Bremse gelüftet, sobald das Linear-modul eingeschaltet ist (siehe Optionen).
Eingänge
Schnittstellen
Über die Steuereingänge "Freigabe" und "Home" wird das MPC System gestartet. Im Betrieb werden die in der Be-fehlstabelle gespeicherten Positionen über die Eingänge "Position 1-8" aufgerufen. Beim E1100-MP entsprechen die 8 Eingänge den 8 Positionen, beim E1100-MT werden die 255 Positionen über die 8 Eingänge adressiert. �Liegt beim "/Stop" Eingang kein Signal an, wird der Antrieb abgebremst und anschliessend ausgeschaltet. Dies ge-währleistet, dass der Antrieb im Falle eines "Not-Aus" inmitten einer Bewegung kontrolliert abgebremst wird.
Speisung
Die MPC Controller E1100 verfügen über getrennte Eingänge für die Signal- und Motorspeisung. Im Falle eines "Not-Aus", wird lediglich die Motorspeisung unterbrochen, so dass die zuletzt aufgerufenen Befehle und die Soll-position im Controller gespeichert bleiben.
Verpackungsmaschinen
Assembling Linien
Handling Einheiten
Produktionslinien
Textilmaschinen
etc.
Daten und technische Angaben können jederzeit geändert werden.
1. Stirnplatte � mit Zentrierbohrungen für die � Befestigung der Last
2. Gehärtete Führungswellen für präzise Bewegungen und maximale � Laufruhe
3. Präzisions Kugelbüchsen� zur Lagerung der Führungswellen � garantieren eine hohe Lebensdauer
4. Führungsblock � mit Zentrierbohrungen für die schnelle� und genaue Montage des Moduls
5. Hinterer Endanschlag
6. Linearmotor Stator (IP67) mit Motorwicklungen und integrierter � Sensorik für Positionserfassung und � Übertemperaturabschaltung
7. Stator Befestigungschrauben für die Montage des Linearmotors 8. Nuten im Führungsblock für die Befestigung von Zubehör
9. Linearmotor Läufer� für genaue Positionierung und� maximale Kraft
10. Spielfreie Ausgleichskupplung gewärleistet eine unkomplizierte � Montage des Moduls
1 2
3 4 5
6
78
910
Optionmechanische Bremse
OptionMagSpring
Multi Position Cylinder MPC
LinMot ®
Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind...
Frei positionierbar
Hoch dynamisch
Einstellbare Kraft
Ohne Luft
Keine Verschleissteile
Einfache Inbetriebnahme 0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0 50 100 150 200 250 300
Auskragung [mm]
LM01-23
LM01-23 - 10N
LM01-37
LM01-37 - 10N
LinMot ®LinMot ® Die MPC KomponentenAbmessungen
Linearmodule
Servo Controller
Kabel, Speisungen & Optionen
Modultyp
LM01-23x80/60LM01-23x80/160LM01-23x80/260
LM01-23x160/80LM01-23x160/180LM01-23x160/280
LM01-37x120/80LM01-37x120/180LM01-37x120/280
LM01-37x240/60LM01-37x240/160LM01-37x240/260
LMx01....
IP67
-M-M-M
-M-M-M
-M-M-M
-M-M-M
-M
Max. Hub
60mm160mm260mm
80mm180mm280mm
80mm180mm280mm
60mm160mm260mm
...1'400mm
Max. Kraft
44N44N44N
60N60N60N
80N80N80N
160N160N160N
...500N
Dauerkraft
9/16*N9/16*N9/16*N
17/31*N17/31*N17/31*N
30/54*N30/54*N30/54*N
55/100*N55/100*N55/100*N
120/220*N
Max. Last
6.1kg6.1kg6.1kg
8.5kg8.5kg8.5kg
10.4kg10.4kg10.4kg
11.8kg11.8kg11.8kg
...25kg
Modulgewicht
1.1kg1.3kg1.6kg
1.9kg2.1kg2.4kg
3.3kg3.7kg4.1kg
5.2kg5.6kg6.0kg
Art.-Nr.
0150-50270150-50290150-5031
0150-50330150-50350150-5037
0150-50390150-50410150-5043
0150-50450150-50470150-5049
auf Anfrage
*mit Ventilator
Kabel
KS01-D/M-02KS01-D/M-04
Speisungen
S01-48/150S01-48/300S01-72/300S01-72/600
Option Ventilator
HV01-23HV01-37
Option mechanische Bremse
HB01-37
Option MagSpring
Art.-Nr.
0150-19800150-1981
andere Längen auf Anfrage
0150-19400150-19410150-19420150-1943
Eingang umschaltbar 115/230VAC
0150-50500150-5051
0150-5052
siehe Unterlagen MagSpring
Controller Typ
E1100-MPE1100-MT
E11xx
Beschreibung
8 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen 255 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen
Profibus, DeviceNet, CANOpen, Sercos
Beschreibung
2m Motorkabel mit IP67 Stecker (schleppketttauglich) 4m Motorkabel mit IP67 Stecker (schleppketttauglich)
48V/150W für ein Modul (langsame Bewegungen) 48V/300W für mehrere Module (langsame Bewegungen) 72V/300W für ein Modul (dynamische Bewegungen)72V/600W für mehrere Module (dynamische Bewegungen)
Ventilator für Linearmodul LM01-23Ventilator für Linearmodul LM01-37
Klemmpatrone für Linearmodul LM01-37
Speisung/Phasenstrom
48-72VDC/4A48-72VDC/4A
48-72VDC/15A
Art.-Nr.
0150-16610150-1663
auf Anfrage
Linearmodule LM01-23
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-23x160/280
280mm166mm500mm
LM01-23x160/180
180mm166mm440mm
LM01-23x160/80
80mm166mm310mm
LM01-23x80/260
260mm86mm
440mm
LM01-23x80/160
160mm86mm
290mm
LM01-23x80/60
60mm86mm
210mm
Linearmodule LM01-37
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-37x240/260
260mm286mm620mm
LM01-37x240/160
160mm286mm520mm
LM01-37x240/60
60mm286mm415mm
LM01-37x120/280
280mm166mm520mm
LM01-37x120/180
180mm166mm415mm
LM01-37x120/80
80mm166mm320mm
Art
. N
o. 0150-2
217/V
2.0
Änder
ungen
vorb
ehal
ten
Daten und technische Angaben können geändert werden.
NTI AGLinMotHaerdlistr.15CH-8957 Spreitenbach Schweiz
Tel.:+41(0)56 419 9191Fax.:+41(0)56 419 9192Mail:[email protected]:www.LinMot.com
LinMot Inc.N2444 Broad StreetDelavanWI 53115 USA
Tel.:+1877 546 3270Fax.: +1800 463 8708
Mail:[email protected]
LinMot Produkte erhalten Sie von über 80 Distributoren weltweit. Fragen Sie uns nach der nächsten Vertretung.
Überreicht von:
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
0 50 100 150 200 250 300Hub [mm]
6.0 kg4.5 kg3.0 kg1.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
2.0 kg1.5 kg1.0 kg0.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
8.0 kg6.0 kg4.0 kg2.0 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
0 50 100 150 200 250 300Hub [mm]
4.0 kg3.0 kg2.0 kg1.0 kg0.0 kg
0.0Kg
1.0Kg
2.0Kg
3.0Kg
4.0Kg
5.0Kg
6.0Kg
7.0Kg
8.0Kg
9.0Kg
10.0Kg
11.0Kg
12.0Kg
0 50 100 150 200 250 300 350 400
Auskragung [mm]
LM01-37x240/...
LM01-37x120/...
LM01-23x160/...
LM01-23x80/...
LinMot ®Mehr Leistung für Ihre Anwendungen
Positionierzeiten LM01-37x240
Positionierzeiten LM01-23x160
Positionierzeiten LM01-37x120
Positionierzeiten LM01-23x80
Lastmassen
Die Auskragung ist die Distanz zwischen dem Schwerpunkt der max. zulässigen Lastmasse an der äussersten Position und der Stirnfläche der vorderen Lagerbüchse.
Die in den Diagrammen ersichtlichen Positionierzeiten sind die minimalen Zeiten für eine horizontale Punkt zu Punkt Bewegung mit einer 72VDC Speisung.
Mit einer 48VDC Speisung erhöhen sich die oben aufge-führten Positionierzeiten um mind. 50%.
Max. Durchbiegung [mm] in vertikaler Richtung bei horizontaler Einbaulage durch Eigengewicht bzw. 10N Nutzlast in Abhängigkeit der Auskragung.
Daten und technische Angaben können geändert werden.
Speisungen S01
Controller E1100
40
Zentrum
235
Befestigungmit 2 x M5
Abmessungen in mm
216
X1
X5
X4
X3
Co
nfi
g. R
S23
2 L
og
ic S
up
ply
/Co
ntr
ol
Mo
tor
M
oto
r S
up
ply
D
C o
nly
X4.9
X4.8
X4.7
X4.6
X4.5
X4.3
+24VDC
DGND
250
180
Lin
Mo
t E
1100
Error
Warn.
+24V
En
RR-
RR+
PWR+
PGND
150Watt
300Watt
Die Kabellänge zwischen Linearmodul und IP67 Stecker beträgt 20cm. Das am Modul befestigte Kabel muss fest verlegt werden.
MPC Servo Controller sind kompakte Positioniersteuerungen mit integrierter Leistungsendstufe für die Ansteuerung der Linearmodule.
Eingänge:
Freigabe
Home
/Stop
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Speisung Sig.
Speisung Mot.
Ausgänge:
/Warnung
/Fehler
/Bremse
In Position
In Position 1
In Position 2
In Position 3
In Position 4
In Position 5
In Position 6
In Position 7
In Position 8
Befehlstabelle
E1100-MP:8 Positionen/Befehle
E1100-MT:256 Positionen/Befehle�
E1100-MP�E1100-MT
6
7
5
4
3
2
1
E1100-MP E1100-MT-HC
Ein leistungsstarkes Prozessorsystem sorgt dafür, dass die in der Befehlstabelle gespeicherten Positionen ohne Verzögerung präzise angefahren werden.
Durch die im Linearmotor integrierten Positionssensoren ist der Controller zu jeder Zeit über die aktuelle Position des Linearmoduls informiert. Die Überwachung der Position geschieht nicht nur an den Endpositionen, son-dern auch während der Fahrt von einer Position auf die nächste. Dies garantiert eine genaue Überwachung der Positionen sowie der Einhaltung der Positionierzeiten.
1. Speisung Motor 2. Motorstecker3. Steuersignale & Signalspeisung4. Zustandsanzeige LED 5. Adress-Schalter für Buseinbindung6. Serielle Schnittstelle RS232 7. Positions Ein- & Ausgänge
Bei High Current Controllern (Endung -HC) werden die Motorphasen mittels Schraubklemmen über dem Motorstecker (2) angeschlossen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
LinMot ® LinMot ®LinMot ®Das MPC System Bestechend: Multi-Funktional
Einfach: Inbetriebnahme & Konfiguration
Das MPC Linearmodul LM01
Frei positionierbar
Hoch Dynamisch
Presskraft einstellbar
Mechanisch Kompatibel
Teach-In
Linearführung
Linear Motor
Speisung
MPC Servo Controller
High Flex Motorkabel
IP67 Motorstecker
Motorkabel & Stecker
Speisung
Servo Controller
LinearführungLinearmotor
Die Servo Controller sind als einfache Positioniereinhei-ten ausgelegt. Die anzufahrenden Positionen werden im Controller gespeichert und von einer übergeordneten Steuerung über digitale I/O's aufgerufen. �
Im Controller können bis zu 8 bzw. 255 Positionen oder Befehle in einer Tabelle abgelegt werden. Diese Befehlstabelle wird mit der MPC Software auf dem PC erstellt und über die serielle Schnittstelle auf den Controller geladen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
Angetrieben werden die Module von linearen Servo Motoren. Die lineare Bewegung wird ohne mechanische Getriebe direkt erzeugt. Da weder verschleissanfällige Dichtungen noch Dämpfer vorhanden sind, bleibt eine lange Lebensdauer selbst bei hoch-dynamischen Bewegungen undhohen Taktraten gewährleistet.
Der Linearmotor besteht aus den zwei Teilen Stator und Läufer. Im Stator sind die Wicklungen, die Positionser-fassung sowie die Temperaturüberwachung unterge-bracht. Im Läufer befinden sich die Antriebsmagnete.
Für die Installation des Antriebs genügt ein einziges Kabel zwischen Linearmotor und Servo Controller. Die Kabel-länge zwischen Linearmodul und Servo Controller kann bis zu 50m betragen.
Die Linearführungen erlauben eine direkte Montage der Last ohne zusätzliche mechanische Elemente. Die Abmessungen der kompletten Linearmodule sowiedie Befestigungsmöglichkeiten für Modul und Last sind identisch mit den H-Führungen für Pneumatikzylinder.
Multi Position Cylinder sind einfach einzusetzende, rein elektrische Positionierantriebe. Das MPC System wurde speziell für flexible und hoch dynamische Positionieraufgaben entwickelt, die nicht mehr mit pneumatischen Antrieben gelöst werden können.
Multi Position Cylinder werden eingesetzt in:
Die hohe Flexibilitität garantiert ein-fache Lösungen sowie eine schnelle, unkomplizierte Projektierung auch bei antriebstechnisch schwierigen Aufgabenstellungen.
Da aufwändige mechanische Einstell-arbeiten bei der Inbetriebnahme ent-fallen, lassen sich MPC Systeme sehr schnell und einfach in Betrieb nehmen.Für die Konfiguration der Bewegungsab-läufe genügt die Eingabe von Zielposi-tion, Geschwindigkeit und Lastmasse.
Flexibel: Modular erweiterbarDie Linearmodule lassen sich mittels verschiedenen Optionen modular erweitern. Dies erlaubt eine optimale Anpassung an die jeweilige Aufgabenstellung.
Die Leistungspeisung der Servo Controller erfolgt über Netzteile (umschaltbar 115/230VAC). Bei hochdynami-schen Anwendungen werden 72VDC Netzteile eingesetzt. Für langsamere Positionieraufgaben reichen die 48VDC Speisungen aus.
Relativ Bewegung
Pressen
Absolut Bewegung
Die realtiv Bewegung entspricht einer Ver-schiebung von der aktuellen Sollposition um die eingegebene Distanz. Mit diesem Befehl lassen sich Stapel-Anwendungen auf ein-fachste Weise realisieren.
Bei der absoluten Bewegung fährt das Linear-modul mit der gewünschten Geschwindigkeit auf die eingegebene Position. Die Ge-schwindigkeit wird in % der minimal erreich-baren Positionierzeit eigegeben. Absolute Positionen können mittels Teach-In Befehl programmiert werden.
Folgende Befehle stehen zur Verfügung:
Auf der PC Oberfläche "MPC Configurator" werden die Linearmodule konfiguriert und die gewünschten Ziel-positionen eingegeben. Für die Konfiguration genügt die Auswahl des Linearmoduls. Reglereinstellungen und die maximale Geschwindigkeit für jede Bewegung werden vom Programm aufgrund der Lastmasse und der Einbaulage berechnet. Dadurch wird jede einzelne Zielposition auto-matisch mit den optimalen Einstellungen angefahren. Zudem werden Warnungen und Fehlermeldungen in Klar-text und in der gewünschten Sprache dargestellt.
Beim Press-Befehl wird eine Zielposition mit einer programmierbaren Kraft angefahren. Sobald die Kraft erreicht ist, wird dies über den entsprechenden Ausgang signalisiert.
Die Abmessungen der komplettenLinearmodule sowie die Befesti-gungsmöglichkeiten für Modul
und Last sind identisch mit den H-Führungen für
Pneumatikzylinder
Beim "Teach-In" wird dasModul von Hand oder im
Schritt-Betrieb auf diegewünschte Position gebracht.
Durch die Betätigung der Teach-Taste wird die aktuelle
Position als Sollposition gespeichert.
Für Einpressvogänge kann die Kraftdes Linearmoduls beliebig pro-
grammiert werden. Dabeiwird eine Position mit der
gewünschten Kraft angefahren.Sobald das Modul mit der ein-
gestellten Kraft drückt, wird der entsprechende Ausgang aktiv.
Der Ausgang bleibt aktiv, solange die Kraft anliegt.Innerhalb des Hubbereichs können beliebige
Positionen angefahren werden. DiePositionierung erfolgt rein elek-
tronisch ohne mechanischeAnschläge.
Die Wiederholgenauigkeitbeträgt 0.1mm.
Da die Linearbewegung ohne mechanischeGetriebe oder Dichtungen realisiertwird, kann eine sehr hohe Dynamik
erreicht werden, ohne dasssich dies negativ auf die
Lebensdauer auswirkt.
Da sich die Positionierzeiten beliebig einstellen lassen,
können auch sehr langsame (sanfte) Bewegungen realisiert werden.
LinMot ®Der MPC Controller E1100
Option MagSpring
Option mechanische Bremse
Option Ventilator
Die Linearmodule der Serie LM01-37 verfügen über Auf-nahmebohrungen für pneumatisch öffnende Klemmpa-tronen zur Arretierung der Linearachse im stromlosen Zustand. Die Ventile der Klemmpatronen werden über den Servo Controller (Brems-Ausgang) angesteuert.
In Anwendungen mit vertikaler Einbaulage kann eine mag-netische Feder "MagSpring" zur Kompensation der Gewichtskraft oder als Ausfallsicherung bei Stromausfall seitlich am Linearmodul angebaut werden.
Bei erhöhtem Bedarf an Dauerkraft wird ein Ventilator auf das Linearmodul montiert. Durch die forcierte Kühlung ver-doppelt sich die Dauerkraft annähernd. Der Ventilator wird mit einer Spannung von 24VDC versorgt. Der Ventilator vergrösserte die Höhe des Moduls um 35mm resp. 40mm.
Ausgänge
Sobald das Linearmodul die Endposition erreicht hat, wird dies über den gemeinsamen "In Position" und den "InPosition 1-8" Ausgang (entspreched dem Befehl) angezeigt. Der Ausgang "/Warnung" kann als Diagnose verwendet werden. Er zeigt an, dass das MPC System noch läuft, jedoch überprüft werden sollte um weiterhin einen störungsfreien Betrieb zu garantieren.
Das Auftreten eines Fehlers wird am gleichnamigen Ausgang angezeigt. Über den "/Bremse" Ausgang wird eine mechanische Bremse gelüftet, sobald das Linear-modul eingeschaltet ist (siehe Optionen).
Eingänge
Schnittstellen
Über die Steuereingänge "Freigabe" und "Home" wird das MPC System gestartet. Im Betrieb werden die in der Be-fehlstabelle gespeicherten Positionen über die Eingänge "Position 1-8" aufgerufen. Beim E1100-MP entsprechen die 8 Eingänge den 8 Positionen, beim E1100-MT werden die 255 Positionen über die 8 Eingänge adressiert. �Liegt beim "/Stop" Eingang kein Signal an, wird der Antrieb abgebremst und anschliessend ausgeschaltet. Dies ge-währleistet, dass der Antrieb im Falle eines "Not-Aus" inmitten einer Bewegung kontrolliert abgebremst wird.
Speisung
Die MPC Controller E1100 verfügen über getrennte Eingänge für die Signal- und Motorspeisung. Im Falle eines "Not-Aus", wird lediglich die Motorspeisung unterbrochen, so dass die zuletzt aufgerufenen Befehle und die Soll-position im Controller gespeichert bleiben.
Verpackungsmaschinen
Assembling Linien
Handling Einheiten
Produktionslinien
Textilmaschinen
etc.
Daten und technische Angaben können jederzeit geändert werden.
1. Stirnplatte � mit Zentrierbohrungen für die � Befestigung der Last
2. Gehärtete Führungswellen für präzise Bewegungen und maximale � Laufruhe
3. Präzisions Kugelbüchsen� zur Lagerung der Führungswellen � garantieren eine hohe Lebensdauer
4. Führungsblock � mit Zentrierbohrungen für die schnelle� und genaue Montage des Moduls
5. Hinterer Endanschlag
6. Linearmotor Stator (IP67) mit Motorwicklungen und integrierter � Sensorik für Positionserfassung und � Übertemperaturabschaltung
7. Stator Befestigungschrauben für die Montage des Linearmotors 8. Nuten im Führungsblock für die Befestigung von Zubehör
9. Linearmotor Läufer� für genaue Positionierung und� maximale Kraft
10. Spielfreie Ausgleichskupplung gewärleistet eine unkomplizierte � Montage des Moduls
1 2
3 4 5
6
78
910
Optionmechanische Bremse
OptionMagSpring
Multi Position Cylinder MPC
LinMot ®
Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind...
Frei positionierbar
Hoch dynamisch
Einstellbare Kraft
Ohne Luft
Keine Verschleissteile
Einfache Inbetriebnahme 0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0 50 100 150 200 250 300
Auskragung [mm]
LM01-23
LM01-23 - 10N
LM01-37
LM01-37 - 10N
LinMot ®LinMot ® Die MPC KomponentenAbmessungen
Linearmodule
Servo Controller
Kabel, Speisungen & Optionen
Modultyp
LM01-23x80/60LM01-23x80/160LM01-23x80/260
LM01-23x160/80LM01-23x160/180LM01-23x160/280
LM01-37x120/80LM01-37x120/180LM01-37x120/280
LM01-37x240/60LM01-37x240/160LM01-37x240/260
LMx01....
IP67
-M-M-M
-M-M-M
-M-M-M
-M-M-M
-M
Max. Hub
60mm160mm260mm
80mm180mm280mm
80mm180mm280mm
60mm160mm260mm
...1'400mm
Max. Kraft
44N44N44N
60N60N60N
80N80N80N
160N160N160N
...500N
Dauerkraft
9/16*N9/16*N9/16*N
17/31*N17/31*N17/31*N
30/54*N30/54*N30/54*N
55/100*N55/100*N55/100*N
120/220*N
Max. Last
6.1kg6.1kg6.1kg
8.5kg8.5kg8.5kg
10.4kg10.4kg10.4kg
11.8kg11.8kg11.8kg
...25kg
Modulgewicht
1.1kg1.3kg1.6kg
1.9kg2.1kg2.4kg
3.3kg3.7kg4.1kg
5.2kg5.6kg6.0kg
Art.-Nr.
0150-50270150-50290150-5031
0150-50330150-50350150-5037
0150-50390150-50410150-5043
0150-50450150-50470150-5049
auf Anfrage
*mit Ventilator
Kabel
KS01-D/M-02KS01-D/M-04
Speisungen
S01-48/150S01-48/300S01-72/300S01-72/600
Option Ventilator
HV01-23HV01-37
Option mechanische Bremse
HB01-37
Option MagSpring
Art.-Nr.
0150-19800150-1981
andere Längen auf Anfrage
0150-19400150-19410150-19420150-1943
Eingang umschaltbar 115/230VAC
0150-50500150-5051
0150-5052
siehe Unterlagen MagSpring
Controller Typ
E1100-MPE1100-MT
E11xx
Beschreibung
8 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen 255 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen
Profibus, DeviceNet, CANOpen, Sercos
Beschreibung
2m Motorkabel mit IP67 Stecker (schleppketttauglich) 4m Motorkabel mit IP67 Stecker (schleppketttauglich)
48V/150W für ein Modul (langsame Bewegungen) 48V/300W für mehrere Module (langsame Bewegungen) 72V/300W für ein Modul (dynamische Bewegungen)72V/600W für mehrere Module (dynamische Bewegungen)
Ventilator für Linearmodul LM01-23Ventilator für Linearmodul LM01-37
Klemmpatrone für Linearmodul LM01-37
Speisung/Phasenstrom
48-72VDC/4A48-72VDC/4A
48-72VDC/15A
Art.-Nr.
0150-16610150-1663
auf Anfrage
Linearmodule LM01-23
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-23x160/280
280mm166mm500mm
LM01-23x160/180
180mm166mm440mm
LM01-23x160/80
80mm166mm310mm
LM01-23x80/260
260mm86mm
440mm
LM01-23x80/160
160mm86mm
290mm
LM01-23x80/60
60mm86mm
210mm
Linearmodule LM01-37
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-37x240/260
260mm286mm620mm
LM01-37x240/160
160mm286mm520mm
LM01-37x240/60
60mm286mm415mm
LM01-37x120/280
280mm166mm520mm
LM01-37x120/180
180mm166mm415mm
LM01-37x120/80
80mm166mm320mm
Art
. N
o. 0150-2
217/V
2.0
Änder
ungen
vorb
ehal
ten
Daten und technische Angaben können geändert werden.
NTI AGLinMotHaerdlistr.15CH-8957 Spreitenbach Schweiz
Tel.:+41(0)56 419 9191Fax.:+41(0)56 419 9192Mail:[email protected]:www.LinMot.com
LinMot Inc.N2444 Broad StreetDelavanWI 53115 USA
Tel.:+1877 546 3270Fax.: +1800 463 8708
Mail:[email protected]
LinMot Produkte erhalten Sie von über 80 Distributoren weltweit. Fragen Sie uns nach der nächsten Vertretung.
Überreicht von:
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
0 50 100 150 200 250 300Hub [mm]
6.0 kg4.5 kg3.0 kg1.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
2.0 kg1.5 kg1.0 kg0.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
8.0 kg6.0 kg4.0 kg2.0 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
0 50 100 150 200 250 300Hub [mm]
4.0 kg3.0 kg2.0 kg1.0 kg0.0 kg
0.0Kg
1.0Kg
2.0Kg
3.0Kg
4.0Kg
5.0Kg
6.0Kg
7.0Kg
8.0Kg
9.0Kg
10.0Kg
11.0Kg
12.0Kg
0 50 100 150 200 250 300 350 400
Auskragung [mm]
LM01-37x240/...
LM01-37x120/...
LM01-23x160/...
LM01-23x80/...
LinMot ®Mehr Leistung für Ihre Anwendungen
Positionierzeiten LM01-37x240
Positionierzeiten LM01-23x160
Positionierzeiten LM01-37x120
Positionierzeiten LM01-23x80
Lastmassen
Die Auskragung ist die Distanz zwischen dem Schwerpunkt der max. zulässigen Lastmasse an der äussersten Position und der Stirnfläche der vorderen Lagerbüchse.
Die in den Diagrammen ersichtlichen Positionierzeiten sind die minimalen Zeiten für eine horizontale Punkt zu Punkt Bewegung mit einer 72VDC Speisung.
Mit einer 48VDC Speisung erhöhen sich die oben aufge-führten Positionierzeiten um mind. 50%.
Max. Durchbiegung [mm] in vertikaler Richtung bei horizontaler Einbaulage durch Eigengewicht bzw. 10N Nutzlast in Abhängigkeit der Auskragung.
Daten und technische Angaben können geändert werden.
Speisungen S01
Controller E1100
40
Zentrum
235
Befestigungmit 2 x M5
Abmessungen in mm
216
X1
X5
X4
X3
Co
nfi
g. R
S23
2 L
og
ic S
up
ply
/Co
ntr
ol
Mo
tor
M
oto
r S
up
ply
D
C o
nly
X4.9
X4.8
X4.7
X4.6
X4.5
X4.3
+24VDC
DGND
250
180
Lin
Mo
t E
1100
Error
Warn.
+24V
En
RR-
RR+
PWR+
PGND
150Watt
300Watt
Die Kabellänge zwischen Linearmodul und IP67 Stecker beträgt 20cm. Das am Modul befestigte Kabel muss fest verlegt werden.
MPC Servo Controller sind kompakte Positioniersteuerungen mit integrierter Leistungsendstufe für die Ansteuerung der Linearmodule.
Eingänge:
Freigabe
Home
/Stop
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Speisung Sig.
Speisung Mot.
Ausgänge:
/Warnung
/Fehler
/Bremse
In Position
In Position 1
In Position 2
In Position 3
In Position 4
In Position 5
In Position 6
In Position 7
In Position 8
Befehlstabelle
E1100-MP:8 Positionen/Befehle
E1100-MT:256 Positionen/Befehle�
E1100-MP�E1100-MT
6
7
5
4
3
2
1
E1100-MP E1100-MT-HC
Ein leistungsstarkes Prozessorsystem sorgt dafür, dass die in der Befehlstabelle gespeicherten Positionen ohne Verzögerung präzise angefahren werden.
Durch die im Linearmotor integrierten Positionssensoren ist der Controller zu jeder Zeit über die aktuelle Position des Linearmoduls informiert. Die Überwachung der Position geschieht nicht nur an den Endpositionen, son-dern auch während der Fahrt von einer Position auf die nächste. Dies garantiert eine genaue Überwachung der Positionen sowie der Einhaltung der Positionierzeiten.
1. Speisung Motor 2. Motorstecker3. Steuersignale & Signalspeisung4. Zustandsanzeige LED 5. Adress-Schalter für Buseinbindung6. Serielle Schnittstelle RS232 7. Positions Ein- & Ausgänge
Bei High Current Controllern (Endung -HC) werden die Motorphasen mittels Schraubklemmen über dem Motorstecker (2) angeschlossen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
LinMot ® LinMot ®LinMot ®Das MPC System Bestechend: Multi-Funktional
Einfach: Inbetriebnahme & Konfiguration
Das MPC Linearmodul LM01
Frei positionierbar
Hoch Dynamisch
Presskraft einstellbar
Mechanisch Kompatibel
Teach-In
Linearführung
Linear Motor
Speisung
MPC Servo Controller
High Flex Motorkabel
IP67 Motorstecker
Motorkabel & Stecker
Speisung
Servo Controller
LinearführungLinearmotor
Die Servo Controller sind als einfache Positioniereinhei-ten ausgelegt. Die anzufahrenden Positionen werden im Controller gespeichert und von einer übergeordneten Steuerung über digitale I/O's aufgerufen. �
Im Controller können bis zu 8 bzw. 255 Positionen oder Befehle in einer Tabelle abgelegt werden. Diese Befehlstabelle wird mit der MPC Software auf dem PC erstellt und über die serielle Schnittstelle auf den Controller geladen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
Angetrieben werden die Module von linearen Servo Motoren. Die lineare Bewegung wird ohne mechanische Getriebe direkt erzeugt. Da weder verschleissanfällige Dichtungen noch Dämpfer vorhanden sind, bleibt eine lange Lebensdauer selbst bei hoch-dynamischen Bewegungen undhohen Taktraten gewährleistet.
Der Linearmotor besteht aus den zwei Teilen Stator und Läufer. Im Stator sind die Wicklungen, die Positionser-fassung sowie die Temperaturüberwachung unterge-bracht. Im Läufer befinden sich die Antriebsmagnete.
Für die Installation des Antriebs genügt ein einziges Kabel zwischen Linearmotor und Servo Controller. Die Kabel-länge zwischen Linearmodul und Servo Controller kann bis zu 50m betragen.
Die Linearführungen erlauben eine direkte Montage der Last ohne zusätzliche mechanische Elemente. Die Abmessungen der kompletten Linearmodule sowiedie Befestigungsmöglichkeiten für Modul und Last sind identisch mit den H-Führungen für Pneumatikzylinder.
Multi Position Cylinder sind einfach einzusetzende, rein elektrische Positionierantriebe. Das MPC System wurde speziell für flexible und hoch dynamische Positionieraufgaben entwickelt, die nicht mehr mit pneumatischen Antrieben gelöst werden können.
Multi Position Cylinder werden eingesetzt in:
Die hohe Flexibilitität garantiert ein-fache Lösungen sowie eine schnelle, unkomplizierte Projektierung auch bei antriebstechnisch schwierigen Aufgabenstellungen.
Da aufwändige mechanische Einstell-arbeiten bei der Inbetriebnahme ent-fallen, lassen sich MPC Systeme sehr schnell und einfach in Betrieb nehmen.Für die Konfiguration der Bewegungsab-läufe genügt die Eingabe von Zielposi-tion, Geschwindigkeit und Lastmasse.
Flexibel: Modular erweiterbarDie Linearmodule lassen sich mittels verschiedenen Optionen modular erweitern. Dies erlaubt eine optimale Anpassung an die jeweilige Aufgabenstellung.
Die Leistungspeisung der Servo Controller erfolgt über Netzteile (umschaltbar 115/230VAC). Bei hochdynami-schen Anwendungen werden 72VDC Netzteile eingesetzt. Für langsamere Positionieraufgaben reichen die 48VDC Speisungen aus.
Relativ Bewegung
Pressen
Absolut Bewegung
Die realtiv Bewegung entspricht einer Ver-schiebung von der aktuellen Sollposition um die eingegebene Distanz. Mit diesem Befehl lassen sich Stapel-Anwendungen auf ein-fachste Weise realisieren.
Bei der absoluten Bewegung fährt das Linear-modul mit der gewünschten Geschwindigkeit auf die eingegebene Position. Die Ge-schwindigkeit wird in % der minimal erreich-baren Positionierzeit eigegeben. Absolute Positionen können mittels Teach-In Befehl programmiert werden.
Folgende Befehle stehen zur Verfügung:
Auf der PC Oberfläche "MPC Configurator" werden die Linearmodule konfiguriert und die gewünschten Ziel-positionen eingegeben. Für die Konfiguration genügt die Auswahl des Linearmoduls. Reglereinstellungen und die maximale Geschwindigkeit für jede Bewegung werden vom Programm aufgrund der Lastmasse und der Einbaulage berechnet. Dadurch wird jede einzelne Zielposition auto-matisch mit den optimalen Einstellungen angefahren. Zudem werden Warnungen und Fehlermeldungen in Klar-text und in der gewünschten Sprache dargestellt.
Beim Press-Befehl wird eine Zielposition mit einer programmierbaren Kraft angefahren. Sobald die Kraft erreicht ist, wird dies über den entsprechenden Ausgang signalisiert.
Die Abmessungen der komplettenLinearmodule sowie die Befesti-gungsmöglichkeiten für Modul
und Last sind identisch mit den H-Führungen für
Pneumatikzylinder
Beim "Teach-In" wird dasModul von Hand oder im
Schritt-Betrieb auf diegewünschte Position gebracht.
Durch die Betätigung der Teach-Taste wird die aktuelle
Position als Sollposition gespeichert.
Für Einpressvogänge kann die Kraftdes Linearmoduls beliebig pro-
grammiert werden. Dabeiwird eine Position mit der
gewünschten Kraft angefahren.Sobald das Modul mit der ein-
gestellten Kraft drückt, wird der entsprechende Ausgang aktiv.
Der Ausgang bleibt aktiv, solange die Kraft anliegt.Innerhalb des Hubbereichs können beliebige
Positionen angefahren werden. DiePositionierung erfolgt rein elek-
tronisch ohne mechanischeAnschläge.
Die Wiederholgenauigkeitbeträgt 0.1mm.
Da die Linearbewegung ohne mechanischeGetriebe oder Dichtungen realisiertwird, kann eine sehr hohe Dynamik
erreicht werden, ohne dasssich dies negativ auf die
Lebensdauer auswirkt.
Da sich die Positionierzeiten beliebig einstellen lassen,
können auch sehr langsame (sanfte) Bewegungen realisiert werden.
LinMot ®Der MPC Controller E1100
Option MagSpring
Option mechanische Bremse
Option Ventilator
Die Linearmodule der Serie LM01-37 verfügen über Auf-nahmebohrungen für pneumatisch öffnende Klemmpa-tronen zur Arretierung der Linearachse im stromlosen Zustand. Die Ventile der Klemmpatronen werden über den Servo Controller (Brems-Ausgang) angesteuert.
In Anwendungen mit vertikaler Einbaulage kann eine mag-netische Feder "MagSpring" zur Kompensation der Gewichtskraft oder als Ausfallsicherung bei Stromausfall seitlich am Linearmodul angebaut werden.
Bei erhöhtem Bedarf an Dauerkraft wird ein Ventilator auf das Linearmodul montiert. Durch die forcierte Kühlung ver-doppelt sich die Dauerkraft annähernd. Der Ventilator wird mit einer Spannung von 24VDC versorgt. Der Ventilator vergrösserte die Höhe des Moduls um 35mm resp. 40mm.
Ausgänge
Sobald das Linearmodul die Endposition erreicht hat, wird dies über den gemeinsamen "In Position" und den "InPosition 1-8" Ausgang (entspreched dem Befehl) angezeigt. Der Ausgang "/Warnung" kann als Diagnose verwendet werden. Er zeigt an, dass das MPC System noch läuft, jedoch überprüft werden sollte um weiterhin einen störungsfreien Betrieb zu garantieren.
Das Auftreten eines Fehlers wird am gleichnamigen Ausgang angezeigt. Über den "/Bremse" Ausgang wird eine mechanische Bremse gelüftet, sobald das Linear-modul eingeschaltet ist (siehe Optionen).
Eingänge
Schnittstellen
Über die Steuereingänge "Freigabe" und "Home" wird das MPC System gestartet. Im Betrieb werden die in der Be-fehlstabelle gespeicherten Positionen über die Eingänge "Position 1-8" aufgerufen. Beim E1100-MP entsprechen die 8 Eingänge den 8 Positionen, beim E1100-MT werden die 255 Positionen über die 8 Eingänge adressiert. �Liegt beim "/Stop" Eingang kein Signal an, wird der Antrieb abgebremst und anschliessend ausgeschaltet. Dies ge-währleistet, dass der Antrieb im Falle eines "Not-Aus" inmitten einer Bewegung kontrolliert abgebremst wird.
Speisung
Die MPC Controller E1100 verfügen über getrennte Eingänge für die Signal- und Motorspeisung. Im Falle eines "Not-Aus", wird lediglich die Motorspeisung unterbrochen, so dass die zuletzt aufgerufenen Befehle und die Soll-position im Controller gespeichert bleiben.
Verpackungsmaschinen
Assembling Linien
Handling Einheiten
Produktionslinien
Textilmaschinen
etc.
Daten und technische Angaben können jederzeit geändert werden.
1. Stirnplatte � mit Zentrierbohrungen für die � Befestigung der Last
2. Gehärtete Führungswellen für präzise Bewegungen und maximale � Laufruhe
3. Präzisions Kugelbüchsen� zur Lagerung der Führungswellen � garantieren eine hohe Lebensdauer
4. Führungsblock � mit Zentrierbohrungen für die schnelle� und genaue Montage des Moduls
5. Hinterer Endanschlag
6. Linearmotor Stator (IP67) mit Motorwicklungen und integrierter � Sensorik für Positionserfassung und � Übertemperaturabschaltung
7. Stator Befestigungschrauben für die Montage des Linearmotors 8. Nuten im Führungsblock für die Befestigung von Zubehör
9. Linearmotor Läufer� für genaue Positionierung und� maximale Kraft
10. Spielfreie Ausgleichskupplung gewärleistet eine unkomplizierte � Montage des Moduls
1 2
3 4 5
6
78
910
Optionmechanische Bremse
OptionMagSpring
Multi Position Cylinder MPC
LinMot ®
Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind...
Frei positionierbar
Hoch dynamisch
Einstellbare Kraft
Ohne Luft
Keine Verschleissteile
Einfache Inbetriebnahme 0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0 50 100 150 200 250 300
Auskragung [mm]
LM01-23
LM01-23 - 10N
LM01-37
LM01-37 - 10N
LinMot ®LinMot ® Die MPC KomponentenAbmessungen
Linearmodule
Servo Controller
Kabel, Speisungen & Optionen
Modultyp
LM01-23x80/60LM01-23x80/160LM01-23x80/260
LM01-23x160/80LM01-23x160/180LM01-23x160/280
LM01-37x120/80LM01-37x120/180LM01-37x120/280
LM01-37x240/60LM01-37x240/160LM01-37x240/260
LMx01....
IP67
-M-M-M
-M-M-M
-M-M-M
-M-M-M
-M
Max. Hub
60mm160mm260mm
80mm180mm280mm
80mm180mm280mm
60mm160mm260mm
...1'400mm
Max. Kraft
44N44N44N
60N60N60N
80N80N80N
160N160N160N
...500N
Dauerkraft
9/16*N9/16*N9/16*N
17/31*N17/31*N17/31*N
30/54*N30/54*N30/54*N
55/100*N55/100*N55/100*N
120/220*N
Max. Last
6.1kg6.1kg6.1kg
8.5kg8.5kg8.5kg
10.4kg10.4kg10.4kg
11.8kg11.8kg11.8kg
...25kg
Modulgewicht
1.1kg1.3kg1.6kg
1.9kg2.1kg2.4kg
3.3kg3.7kg4.1kg
5.2kg5.6kg6.0kg
Art.-Nr.
0150-50270150-50290150-5031
0150-50330150-50350150-5037
0150-50390150-50410150-5043
0150-50450150-50470150-5049
auf Anfrage
*mit Ventilator
Kabel
KS01-D/M-02KS01-D/M-04
Speisungen
S01-48/150S01-48/300S01-72/300S01-72/600
Option Ventilator
HV01-23HV01-37
Option mechanische Bremse
HB01-37
Option MagSpring
Art.-Nr.
0150-19800150-1981
andere Längen auf Anfrage
0150-19400150-19410150-19420150-1943
Eingang umschaltbar 115/230VAC
0150-50500150-5051
0150-5052
siehe Unterlagen MagSpring
Controller Typ
E1100-MPE1100-MT
E11xx
Beschreibung
8 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen 255 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen
Profibus, DeviceNet, CANOpen, Sercos
Beschreibung
2m Motorkabel mit IP67 Stecker (schleppketttauglich) 4m Motorkabel mit IP67 Stecker (schleppketttauglich)
48V/150W für ein Modul (langsame Bewegungen) 48V/300W für mehrere Module (langsame Bewegungen) 72V/300W für ein Modul (dynamische Bewegungen)72V/600W für mehrere Module (dynamische Bewegungen)
Ventilator für Linearmodul LM01-23Ventilator für Linearmodul LM01-37
Klemmpatrone für Linearmodul LM01-37
Speisung/Phasenstrom
48-72VDC/4A48-72VDC/4A
48-72VDC/15A
Art.-Nr.
0150-16610150-1663
auf Anfrage
Linearmodule LM01-23
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-23x160/280
280mm166mm500mm
LM01-23x160/180
180mm166mm440mm
LM01-23x160/80
80mm166mm310mm
LM01-23x80/260
260mm86mm
440mm
LM01-23x80/160
160mm86mm
290mm
LM01-23x80/60
60mm86mm
210mm
Linearmodule LM01-37
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-37x240/260
260mm286mm620mm
LM01-37x240/160
160mm286mm520mm
LM01-37x240/60
60mm286mm415mm
LM01-37x120/280
280mm166mm520mm
LM01-37x120/180
180mm166mm415mm
LM01-37x120/80
80mm166mm320mm
Art
. N
o. 0150-2
217/V
2.0
Änder
ungen
vorb
ehal
ten
Daten und technische Angaben können geändert werden.
NTI AGLinMotHaerdlistr.15CH-8957 Spreitenbach Schweiz
Tel.:+41(0)56 419 9191Fax.:+41(0)56 419 9192Mail:[email protected]:www.LinMot.com
LinMot Inc.N2444 Broad StreetDelavanWI 53115 USA
Tel.:+1877 546 3270Fax.: +1800 463 8708
Mail:[email protected]
LinMot Produkte erhalten Sie von über 80 Distributoren weltweit. Fragen Sie uns nach der nächsten Vertretung.
Überreicht von:
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
0 50 100 150 200 250 300Hub [mm]
6.0 kg4.5 kg3.0 kg1.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
2.0 kg1.5 kg1.0 kg0.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
8.0 kg6.0 kg4.0 kg2.0 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
0 50 100 150 200 250 300Hub [mm]
4.0 kg3.0 kg2.0 kg1.0 kg0.0 kg
0.0Kg
1.0Kg
2.0Kg
3.0Kg
4.0Kg
5.0Kg
6.0Kg
7.0Kg
8.0Kg
9.0Kg
10.0Kg
11.0Kg
12.0Kg
0 50 100 150 200 250 300 350 400
Auskragung [mm]
LM01-37x240/...
LM01-37x120/...
LM01-23x160/...
LM01-23x80/...
LinMot ®Mehr Leistung für Ihre Anwendungen
Positionierzeiten LM01-37x240
Positionierzeiten LM01-23x160
Positionierzeiten LM01-37x120
Positionierzeiten LM01-23x80
Lastmassen
Die Auskragung ist die Distanz zwischen dem Schwerpunkt der max. zulässigen Lastmasse an der äussersten Position und der Stirnfläche der vorderen Lagerbüchse.
Die in den Diagrammen ersichtlichen Positionierzeiten sind die minimalen Zeiten für eine horizontale Punkt zu Punkt Bewegung mit einer 72VDC Speisung.
Mit einer 48VDC Speisung erhöhen sich die oben aufge-führten Positionierzeiten um mind. 50%.
Max. Durchbiegung [mm] in vertikaler Richtung bei horizontaler Einbaulage durch Eigengewicht bzw. 10N Nutzlast in Abhängigkeit der Auskragung.
Daten und technische Angaben können geändert werden.
Speisungen S01
Controller E1100
40
Zentrum
235
Befestigungmit 2 x M5
Abmessungen in mm
216
X1
X5
X4
X3
Co
nfi
g. R
S23
2 L
og
ic S
up
ply
/Co
ntr
ol
Mo
tor
M
oto
r S
up
ply
D
C o
nly
X4.9
X4.8
X4.7
X4.6
X4.5
X4.3
+24VDC
DGND
250
180
Lin
Mo
t E
1100
Error
Warn.
+24V
En
RR-
RR+
PWR+
PGND
150Watt
300Watt
Die Kabellänge zwischen Linearmodul und IP67 Stecker beträgt 20cm. Das am Modul befestigte Kabel muss fest verlegt werden.
MPC Servo Controller sind kompakte Positioniersteuerungen mit integrierter Leistungsendstufe für die Ansteuerung der Linearmodule.
Eingänge:
Freigabe
Home
/Stop
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Speisung Sig.
Speisung Mot.
Ausgänge:
/Warnung
/Fehler
/Bremse
In Position
In Position 1
In Position 2
In Position 3
In Position 4
In Position 5
In Position 6
In Position 7
In Position 8
Befehlstabelle
E1100-MP:8 Positionen/Befehle
E1100-MT:256 Positionen/Befehle�
E1100-MP�E1100-MT
6
7
5
4
3
2
1
E1100-MP E1100-MT-HC
Ein leistungsstarkes Prozessorsystem sorgt dafür, dass die in der Befehlstabelle gespeicherten Positionen ohne Verzögerung präzise angefahren werden.
Durch die im Linearmotor integrierten Positionssensoren ist der Controller zu jeder Zeit über die aktuelle Position des Linearmoduls informiert. Die Überwachung der Position geschieht nicht nur an den Endpositionen, son-dern auch während der Fahrt von einer Position auf die nächste. Dies garantiert eine genaue Überwachung der Positionen sowie der Einhaltung der Positionierzeiten.
1. Speisung Motor 2. Motorstecker3. Steuersignale & Signalspeisung4. Zustandsanzeige LED 5. Adress-Schalter für Buseinbindung6. Serielle Schnittstelle RS232 7. Positions Ein- & Ausgänge
Bei High Current Controllern (Endung -HC) werden die Motorphasen mittels Schraubklemmen über dem Motorstecker (2) angeschlossen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
LinMot ® LinMot ®LinMot ®Das MPC System Bestechend: Multi-Funktional
Einfach: Inbetriebnahme & Konfiguration
Das MPC Linearmodul LM01
Frei positionierbar
Hoch Dynamisch
Presskraft einstellbar
Mechanisch Kompatibel
Teach-In
Linearführung
Linear Motor
Speisung
MPC Servo Controller
High Flex Motorkabel
IP67 Motorstecker
Motorkabel & Stecker
Speisung
Servo Controller
LinearführungLinearmotor
Die Servo Controller sind als einfache Positioniereinhei-ten ausgelegt. Die anzufahrenden Positionen werden im Controller gespeichert und von einer übergeordneten Steuerung über digitale I/O's aufgerufen. �
Im Controller können bis zu 8 bzw. 255 Positionen oder Befehle in einer Tabelle abgelegt werden. Diese Befehlstabelle wird mit der MPC Software auf dem PC erstellt und über die serielle Schnittstelle auf den Controller geladen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
Angetrieben werden die Module von linearen Servo Motoren. Die lineare Bewegung wird ohne mechanische Getriebe direkt erzeugt. Da weder verschleissanfällige Dichtungen noch Dämpfer vorhanden sind, bleibt eine lange Lebensdauer selbst bei hoch-dynamischen Bewegungen undhohen Taktraten gewährleistet.
Der Linearmotor besteht aus den zwei Teilen Stator und Läufer. Im Stator sind die Wicklungen, die Positionser-fassung sowie die Temperaturüberwachung unterge-bracht. Im Läufer befinden sich die Antriebsmagnete.
Für die Installation des Antriebs genügt ein einziges Kabel zwischen Linearmotor und Servo Controller. Die Kabel-länge zwischen Linearmodul und Servo Controller kann bis zu 50m betragen.
Die Linearführungen erlauben eine direkte Montage der Last ohne zusätzliche mechanische Elemente. Die Abmessungen der kompletten Linearmodule sowiedie Befestigungsmöglichkeiten für Modul und Last sind identisch mit den H-Führungen für Pneumatikzylinder.
Multi Position Cylinder sind einfach einzusetzende, rein elektrische Positionierantriebe. Das MPC System wurde speziell für flexible und hoch dynamische Positionieraufgaben entwickelt, die nicht mehr mit pneumatischen Antrieben gelöst werden können.
Multi Position Cylinder werden eingesetzt in:
Die hohe Flexibilitität garantiert ein-fache Lösungen sowie eine schnelle, unkomplizierte Projektierung auch bei antriebstechnisch schwierigen Aufgabenstellungen.
Da aufwändige mechanische Einstell-arbeiten bei der Inbetriebnahme ent-fallen, lassen sich MPC Systeme sehr schnell und einfach in Betrieb nehmen.Für die Konfiguration der Bewegungsab-läufe genügt die Eingabe von Zielposi-tion, Geschwindigkeit und Lastmasse.
Flexibel: Modular erweiterbarDie Linearmodule lassen sich mittels verschiedenen Optionen modular erweitern. Dies erlaubt eine optimale Anpassung an die jeweilige Aufgabenstellung.
Die Leistungspeisung der Servo Controller erfolgt über Netzteile (umschaltbar 115/230VAC). Bei hochdynami-schen Anwendungen werden 72VDC Netzteile eingesetzt. Für langsamere Positionieraufgaben reichen die 48VDC Speisungen aus.
Relativ Bewegung
Pressen
Absolut Bewegung
Die realtiv Bewegung entspricht einer Ver-schiebung von der aktuellen Sollposition um die eingegebene Distanz. Mit diesem Befehl lassen sich Stapel-Anwendungen auf ein-fachste Weise realisieren.
Bei der absoluten Bewegung fährt das Linear-modul mit der gewünschten Geschwindigkeit auf die eingegebene Position. Die Ge-schwindigkeit wird in % der minimal erreich-baren Positionierzeit eigegeben. Absolute Positionen können mittels Teach-In Befehl programmiert werden.
Folgende Befehle stehen zur Verfügung:
Auf der PC Oberfläche "MPC Configurator" werden die Linearmodule konfiguriert und die gewünschten Ziel-positionen eingegeben. Für die Konfiguration genügt die Auswahl des Linearmoduls. Reglereinstellungen und die maximale Geschwindigkeit für jede Bewegung werden vom Programm aufgrund der Lastmasse und der Einbaulage berechnet. Dadurch wird jede einzelne Zielposition auto-matisch mit den optimalen Einstellungen angefahren. Zudem werden Warnungen und Fehlermeldungen in Klar-text und in der gewünschten Sprache dargestellt.
Beim Press-Befehl wird eine Zielposition mit einer programmierbaren Kraft angefahren. Sobald die Kraft erreicht ist, wird dies über den entsprechenden Ausgang signalisiert.
Die Abmessungen der komplettenLinearmodule sowie die Befesti-gungsmöglichkeiten für Modul
und Last sind identisch mit den H-Führungen für
Pneumatikzylinder
Beim "Teach-In" wird dasModul von Hand oder im
Schritt-Betrieb auf diegewünschte Position gebracht.
Durch die Betätigung der Teach-Taste wird die aktuelle
Position als Sollposition gespeichert.
Für Einpressvogänge kann die Kraftdes Linearmoduls beliebig pro-
grammiert werden. Dabeiwird eine Position mit der
gewünschten Kraft angefahren.Sobald das Modul mit der ein-
gestellten Kraft drückt, wird der entsprechende Ausgang aktiv.
Der Ausgang bleibt aktiv, solange die Kraft anliegt.Innerhalb des Hubbereichs können beliebige
Positionen angefahren werden. DiePositionierung erfolgt rein elek-
tronisch ohne mechanischeAnschläge.
Die Wiederholgenauigkeitbeträgt 0.1mm.
Da die Linearbewegung ohne mechanischeGetriebe oder Dichtungen realisiertwird, kann eine sehr hohe Dynamik
erreicht werden, ohne dasssich dies negativ auf die
Lebensdauer auswirkt.
Da sich die Positionierzeiten beliebig einstellen lassen,
können auch sehr langsame (sanfte) Bewegungen realisiert werden.
LinMot ®Der MPC Controller E1100
Option MagSpring
Option mechanische Bremse
Option Ventilator
Die Linearmodule der Serie LM01-37 verfügen über Auf-nahmebohrungen für pneumatisch öffnende Klemmpa-tronen zur Arretierung der Linearachse im stromlosen Zustand. Die Ventile der Klemmpatronen werden über den Servo Controller (Brems-Ausgang) angesteuert.
In Anwendungen mit vertikaler Einbaulage kann eine mag-netische Feder "MagSpring" zur Kompensation der Gewichtskraft oder als Ausfallsicherung bei Stromausfall seitlich am Linearmodul angebaut werden.
Bei erhöhtem Bedarf an Dauerkraft wird ein Ventilator auf das Linearmodul montiert. Durch die forcierte Kühlung ver-doppelt sich die Dauerkraft annähernd. Der Ventilator wird mit einer Spannung von 24VDC versorgt. Der Ventilator vergrösserte die Höhe des Moduls um 35mm resp. 40mm.
Ausgänge
Sobald das Linearmodul die Endposition erreicht hat, wird dies über den gemeinsamen "In Position" und den "InPosition 1-8" Ausgang (entspreched dem Befehl) angezeigt. Der Ausgang "/Warnung" kann als Diagnose verwendet werden. Er zeigt an, dass das MPC System noch läuft, jedoch überprüft werden sollte um weiterhin einen störungsfreien Betrieb zu garantieren.
Das Auftreten eines Fehlers wird am gleichnamigen Ausgang angezeigt. Über den "/Bremse" Ausgang wird eine mechanische Bremse gelüftet, sobald das Linear-modul eingeschaltet ist (siehe Optionen).
Eingänge
Schnittstellen
Über die Steuereingänge "Freigabe" und "Home" wird das MPC System gestartet. Im Betrieb werden die in der Be-fehlstabelle gespeicherten Positionen über die Eingänge "Position 1-8" aufgerufen. Beim E1100-MP entsprechen die 8 Eingänge den 8 Positionen, beim E1100-MT werden die 255 Positionen über die 8 Eingänge adressiert. �Liegt beim "/Stop" Eingang kein Signal an, wird der Antrieb abgebremst und anschliessend ausgeschaltet. Dies ge-währleistet, dass der Antrieb im Falle eines "Not-Aus" inmitten einer Bewegung kontrolliert abgebremst wird.
Speisung
Die MPC Controller E1100 verfügen über getrennte Eingänge für die Signal- und Motorspeisung. Im Falle eines "Not-Aus", wird lediglich die Motorspeisung unterbrochen, so dass die zuletzt aufgerufenen Befehle und die Soll-position im Controller gespeichert bleiben.
Verpackungsmaschinen
Assembling Linien
Handling Einheiten
Produktionslinien
Textilmaschinen
etc.
Daten und technische Angaben können jederzeit geändert werden.
1. Stirnplatte � mit Zentrierbohrungen für die � Befestigung der Last
2. Gehärtete Führungswellen für präzise Bewegungen und maximale � Laufruhe
3. Präzisions Kugelbüchsen� zur Lagerung der Führungswellen � garantieren eine hohe Lebensdauer
4. Führungsblock � mit Zentrierbohrungen für die schnelle� und genaue Montage des Moduls
5. Hinterer Endanschlag
6. Linearmotor Stator (IP67) mit Motorwicklungen und integrierter � Sensorik für Positionserfassung und � Übertemperaturabschaltung
7. Stator Befestigungschrauben für die Montage des Linearmotors 8. Nuten im Führungsblock für die Befestigung von Zubehör
9. Linearmotor Läufer� für genaue Positionierung und� maximale Kraft
10. Spielfreie Ausgleichskupplung gewärleistet eine unkomplizierte � Montage des Moduls
1 2
3 4 5
6
78
910
Optionmechanische Bremse
OptionMagSpring
Multi Position Cylinder MPC
LinMot ®
Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind...
Frei positionierbar
Hoch dynamisch
Einstellbare Kraft
Ohne Luft
Keine Verschleissteile
Einfache Inbetriebnahme 0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0 50 100 150 200 250 300
Auskragung [mm]
LM01-23
LM01-23 - 10N
LM01-37
LM01-37 - 10N
LinMot ®LinMot ® Die MPC KomponentenAbmessungen
Linearmodule
Servo Controller
Kabel, Speisungen & Optionen
Modultyp
LM01-23x80/60LM01-23x80/160LM01-23x80/260
LM01-23x160/80LM01-23x160/180LM01-23x160/280
LM01-37x120/80LM01-37x120/180LM01-37x120/280
LM01-37x240/60LM01-37x240/160LM01-37x240/260
LMx01....
IP67
-M-M-M
-M-M-M
-M-M-M
-M-M-M
-M
Max. Hub
60mm160mm260mm
80mm180mm280mm
80mm180mm280mm
60mm160mm260mm
...1'400mm
Max. Kraft
44N44N44N
60N60N60N
80N80N80N
160N160N160N
...500N
Dauerkraft
9/16*N9/16*N9/16*N
17/31*N17/31*N17/31*N
30/54*N30/54*N30/54*N
55/100*N55/100*N55/100*N
120/220*N
Max. Last
6.1kg6.1kg6.1kg
8.5kg8.5kg8.5kg
10.4kg10.4kg10.4kg
11.8kg11.8kg11.8kg
...25kg
Modulgewicht
1.1kg1.3kg1.6kg
1.9kg2.1kg2.4kg
3.3kg3.7kg4.1kg
5.2kg5.6kg6.0kg
Art.-Nr.
0150-50270150-50290150-5031
0150-50330150-50350150-5037
0150-50390150-50410150-5043
0150-50450150-50470150-5049
auf Anfrage
*mit Ventilator
Kabel
KS01-D/M-02KS01-D/M-04
Speisungen
S01-48/150S01-48/300S01-72/300S01-72/600
Option Ventilator
HV01-23HV01-37
Option mechanische Bremse
HB01-37
Option MagSpring
Art.-Nr.
0150-19800150-1981
andere Längen auf Anfrage
0150-19400150-19410150-19420150-1943
Eingang umschaltbar 115/230VAC
0150-50500150-5051
0150-5052
siehe Unterlagen MagSpring
Controller Typ
E1100-MPE1100-MT
E11xx
Beschreibung
8 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen 255 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen
Profibus, DeviceNet, CANOpen, Sercos
Beschreibung
2m Motorkabel mit IP67 Stecker (schleppketttauglich) 4m Motorkabel mit IP67 Stecker (schleppketttauglich)
48V/150W für ein Modul (langsame Bewegungen) 48V/300W für mehrere Module (langsame Bewegungen) 72V/300W für ein Modul (dynamische Bewegungen)72V/600W für mehrere Module (dynamische Bewegungen)
Ventilator für Linearmodul LM01-23Ventilator für Linearmodul LM01-37
Klemmpatrone für Linearmodul LM01-37
Speisung/Phasenstrom
48-72VDC/4A48-72VDC/4A
48-72VDC/15A
Art.-Nr.
0150-16610150-1663
auf Anfrage
Linearmodule LM01-23
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-23x160/280
280mm166mm500mm
LM01-23x160/180
180mm166mm440mm
LM01-23x160/80
80mm166mm310mm
LM01-23x80/260
260mm86mm
440mm
LM01-23x80/160
160mm86mm
290mm
LM01-23x80/60
60mm86mm
210mm
Linearmodule LM01-37
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-37x240/260
260mm286mm620mm
LM01-37x240/160
160mm286mm520mm
LM01-37x240/60
60mm286mm415mm
LM01-37x120/280
280mm166mm520mm
LM01-37x120/180
180mm166mm415mm
LM01-37x120/80
80mm166mm320mm
Art
. N
o. 0150-2
217/V
2.0
Änder
ungen
vorb
ehal
ten
Daten und technische Angaben können geändert werden.
NTI AGLinMotHaerdlistr.15CH-8957 Spreitenbach Schweiz
Tel.:+41(0)56 419 9191Fax.:+41(0)56 419 9192Mail:[email protected]:www.LinMot.com
LinMot Inc.N2444 Broad StreetDelavanWI 53115 USA
Tel.:+1877 546 3270Fax.: +1800 463 8708
Mail:[email protected]
LinMot Produkte erhalten Sie von über 80 Distributoren weltweit. Fragen Sie uns nach der nächsten Vertretung.
Überreicht von:
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
0 50 100 150 200 250 300Hub [mm]
6.0 kg4.5 kg3.0 kg1.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
2.0 kg1.5 kg1.0 kg0.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
8.0 kg6.0 kg4.0 kg2.0 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
0 50 100 150 200 250 300Hub [mm]
4.0 kg3.0 kg2.0 kg1.0 kg0.0 kg
0.0Kg
1.0Kg
2.0Kg
3.0Kg
4.0Kg
5.0Kg
6.0Kg
7.0Kg
8.0Kg
9.0Kg
10.0Kg
11.0Kg
12.0Kg
0 50 100 150 200 250 300 350 400
Auskragung [mm]
LM01-37x240/...
LM01-37x120/...
LM01-23x160/...
LM01-23x80/...
LinMot ®Mehr Leistung für Ihre Anwendungen
Positionierzeiten LM01-37x240
Positionierzeiten LM01-23x160
Positionierzeiten LM01-37x120
Positionierzeiten LM01-23x80
Lastmassen
Die Auskragung ist die Distanz zwischen dem Schwerpunkt der max. zulässigen Lastmasse an der äussersten Position und der Stirnfläche der vorderen Lagerbüchse.
Die in den Diagrammen ersichtlichen Positionierzeiten sind die minimalen Zeiten für eine horizontale Punkt zu Punkt Bewegung mit einer 72VDC Speisung.
Mit einer 48VDC Speisung erhöhen sich die oben aufge-führten Positionierzeiten um mind. 50%.
Max. Durchbiegung [mm] in vertikaler Richtung bei horizontaler Einbaulage durch Eigengewicht bzw. 10N Nutzlast in Abhängigkeit der Auskragung.
Daten und technische Angaben können geändert werden.
Speisungen S01
Controller E1100
40
Zentrum
235
Befestigungmit 2 x M5
Abmessungen in mm
216
X1
X5
X4
X3
Co
nfi
g. R
S23
2 L
og
ic S
up
ply
/Co
ntr
ol
Mo
tor
M
oto
r S
up
ply
D
C o
nly
X4.9
X4.8
X4.7
X4.6
X4.5
X4.3
+24VDC
DGND
250
180
Lin
Mo
t E
1100
Error
Warn.
+24V
En
RR-
RR+
PWR+
PGND
150Watt
300Watt
Die Kabellänge zwischen Linearmodul und IP67 Stecker beträgt 20cm. Das am Modul befestigte Kabel muss fest verlegt werden.
MPC Servo Controller sind kompakte Positioniersteuerungen mit integrierter Leistungsendstufe für die Ansteuerung der Linearmodule.
Eingänge:
Freigabe
Home
/Stop
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Speisung Sig.
Speisung Mot.
Ausgänge:
/Warnung
/Fehler
/Bremse
In Position
In Position 1
In Position 2
In Position 3
In Position 4
In Position 5
In Position 6
In Position 7
In Position 8
Befehlstabelle
E1100-MP:8 Positionen/Befehle
E1100-MT:256 Positionen/Befehle�
E1100-MP�E1100-MT
6
7
5
4
3
2
1
E1100-MP E1100-MT-HC

Ein leistungsstarkes Prozessorsystem sorgt dafür, dass die in der Befehlstabelle gespeicherten Positionen ohne Verzögerung präzise angefahren werden.
Durch die im Linearmotor integrierten Positionssensoren ist der Controller zu jeder Zeit über die aktuelle Position des Linearmoduls informiert. Die Überwachung der Position geschieht nicht nur an den Endpositionen, son-dern auch während der Fahrt von einer Position auf die nächste. Dies garantiert eine genaue Überwachung der Positionen sowie der Einhaltung der Positionierzeiten.
1. Speisung Motor 2. Motorstecker3. Steuersignale & Signalspeisung4. Zustandsanzeige LED 5. Adress-Schalter für Buseinbindung6. Serielle Schnittstelle RS232 7. Positions Ein- & Ausgänge
Bei High Current Controllern (Endung -HC) werden die Motorphasen mittels Schraubklemmen über dem Motorstecker (2) angeschlossen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
LinMot ® LinMot ®LinMot ®Das MPC System Bestechend: Multi-Funktional
Einfach: Inbetriebnahme & Konfiguration
Das MPC Linearmodul LM01
Frei positionierbar
Hoch Dynamisch
Presskraft einstellbar
Mechanisch Kompatibel
Teach-In
Linearführung
Linear Motor
Speisung
MPC Servo Controller
High Flex Motorkabel
IP67 Motorstecker
Motorkabel & Stecker
Speisung
Servo Controller
LinearführungLinearmotor
Die Servo Controller sind als einfache Positioniereinhei-ten ausgelegt. Die anzufahrenden Positionen werden im Controller gespeichert und von einer übergeordneten Steuerung über digitale I/O's aufgerufen. �
Im Controller können bis zu 8 bzw. 255 Positionen oder Befehle in einer Tabelle abgelegt werden. Diese Befehlstabelle wird mit der MPC Software auf dem PC erstellt und über die serielle Schnittstelle auf den Controller geladen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
Angetrieben werden die Module von linearen Servo Motoren. Die lineare Bewegung wird ohne mechanische Getriebe direkt erzeugt. Da weder verschleissanfällige Dichtungen noch Dämpfer vorhanden sind, bleibt eine lange Lebensdauer selbst bei hoch-dynamischen Bewegungen undhohen Taktraten gewährleistet.
Der Linearmotor besteht aus den zwei Teilen Stator und Läufer. Im Stator sind die Wicklungen, die Positionser-fassung sowie die Temperaturüberwachung unterge-bracht. Im Läufer befinden sich die Antriebsmagnete.
Für die Installation des Antriebs genügt ein einziges Kabel zwischen Linearmotor und Servo Controller. Die Kabel-länge zwischen Linearmodul und Servo Controller kann bis zu 50m betragen.
Die Linearführungen erlauben eine direkte Montage der Last ohne zusätzliche mechanische Elemente. Die Abmessungen der kompletten Linearmodule sowiedie Befestigungsmöglichkeiten für Modul und Last sind identisch mit den H-Führungen für Pneumatikzylinder.
Multi Position Cylinder sind einfach einzusetzende, rein elektrische Positionierantriebe. Das MPC System wurde speziell für flexible und hoch dynamische Positionieraufgaben entwickelt, die nicht mehr mit pneumatischen Antrieben gelöst werden können.
Multi Position Cylinder werden eingesetzt in:
Die hohe Flexibilitität garantiert ein-fache Lösungen sowie eine schnelle, unkomplizierte Projektierung auch bei antriebstechnisch schwierigen Aufgabenstellungen.
Da aufwändige mechanische Einstell-arbeiten bei der Inbetriebnahme ent-fallen, lassen sich MPC Systeme sehr schnell und einfach in Betrieb nehmen.Für die Konfiguration der Bewegungsab-läufe genügt die Eingabe von Zielposi-tion, Geschwindigkeit und Lastmasse.
Flexibel: Modular erweiterbarDie Linearmodule lassen sich mittels verschiedenen Optionen modular erweitern. Dies erlaubt eine optimale Anpassung an die jeweilige Aufgabenstellung.
Die Leistungspeisung der Servo Controller erfolgt über Netzteile (umschaltbar 115/230VAC). Bei hochdynami-schen Anwendungen werden 72VDC Netzteile eingesetzt. Für langsamere Positionieraufgaben reichen die 48VDC Speisungen aus.
Relativ Bewegung
Pressen
Absolut Bewegung
Die realtiv Bewegung entspricht einer Ver-schiebung von der aktuellen Sollposition um die eingegebene Distanz. Mit diesem Befehl lassen sich Stapel-Anwendungen auf ein-fachste Weise realisieren.
Bei der absoluten Bewegung fährt das Linear-modul mit der gewünschten Geschwindigkeit auf die eingegebene Position. Die Ge-schwindigkeit wird in % der minimal erreich-baren Positionierzeit eigegeben. Absolute Positionen können mittels Teach-In Befehl programmiert werden.
Folgende Befehle stehen zur Verfügung:
Auf der PC Oberfläche "MPC Configurator" werden die Linearmodule konfiguriert und die gewünschten Ziel-positionen eingegeben. Für die Konfiguration genügt die Auswahl des Linearmoduls. Reglereinstellungen und die maximale Geschwindigkeit für jede Bewegung werden vom Programm aufgrund der Lastmasse und der Einbaulage berechnet. Dadurch wird jede einzelne Zielposition auto-matisch mit den optimalen Einstellungen angefahren. Zudem werden Warnungen und Fehlermeldungen in Klar-text und in der gewünschten Sprache dargestellt.
Beim Press-Befehl wird eine Zielposition mit einer programmierbaren Kraft angefahren. Sobald die Kraft erreicht ist, wird dies über den entsprechenden Ausgang signalisiert.
Die Abmessungen der komplettenLinearmodule sowie die Befesti-gungsmöglichkeiten für Modul
und Last sind identisch mit den H-Führungen für
Pneumatikzylinder
Beim "Teach-In" wird dasModul von Hand oder im
Schritt-Betrieb auf diegewünschte Position gebracht.
Durch die Betätigung der Teach-Taste wird die aktuelle
Position als Sollposition gespeichert.
Für Einpressvogänge kann die Kraftdes Linearmoduls beliebig pro-
grammiert werden. Dabeiwird eine Position mit der
gewünschten Kraft angefahren.Sobald das Modul mit der ein-
gestellten Kraft drückt, wird der entsprechende Ausgang aktiv.
Der Ausgang bleibt aktiv, solange die Kraft anliegt.Innerhalb des Hubbereichs können beliebige
Positionen angefahren werden. DiePositionierung erfolgt rein elek-
tronisch ohne mechanischeAnschläge.
Die Wiederholgenauigkeitbeträgt 0.1mm.
Da die Linearbewegung ohne mechanischeGetriebe oder Dichtungen realisiertwird, kann eine sehr hohe Dynamik
erreicht werden, ohne dasssich dies negativ auf die
Lebensdauer auswirkt.
Da sich die Positionierzeiten beliebig einstellen lassen,
können auch sehr langsame (sanfte) Bewegungen realisiert werden.
LinMot ®Der MPC Controller E1100
Option MagSpring
Option mechanische Bremse
Option Ventilator
Die Linearmodule der Serie LM01-37 verfügen über Auf-nahmebohrungen für pneumatisch öffnende Klemmpa-tronen zur Arretierung der Linearachse im stromlosen Zustand. Die Ventile der Klemmpatronen werden über den Servo Controller (Brems-Ausgang) angesteuert.
In Anwendungen mit vertikaler Einbaulage kann eine mag-netische Feder "MagSpring" zur Kompensation der Gewichtskraft oder als Ausfallsicherung bei Stromausfall seitlich am Linearmodul angebaut werden.
Bei erhöhtem Bedarf an Dauerkraft wird ein Ventilator auf das Linearmodul montiert. Durch die forcierte Kühlung ver-doppelt sich die Dauerkraft annähernd. Der Ventilator wird mit einer Spannung von 24VDC versorgt. Der Ventilator vergrösserte die Höhe des Moduls um 35mm resp. 40mm.
Ausgänge
Sobald das Linearmodul die Endposition erreicht hat, wird dies über den gemeinsamen "In Position" und den "InPosition 1-8" Ausgang (entspreched dem Befehl) angezeigt. Der Ausgang "/Warnung" kann als Diagnose verwendet werden. Er zeigt an, dass das MPC System noch läuft, jedoch überprüft werden sollte um weiterhin einen störungsfreien Betrieb zu garantieren.
Das Auftreten eines Fehlers wird am gleichnamigen Ausgang angezeigt. Über den "/Bremse" Ausgang wird eine mechanische Bremse gelüftet, sobald das Linear-modul eingeschaltet ist (siehe Optionen).
Eingänge
Schnittstellen
Über die Steuereingänge "Freigabe" und "Home" wird das MPC System gestartet. Im Betrieb werden die in der Be-fehlstabelle gespeicherten Positionen über die Eingänge "Position 1-8" aufgerufen. Beim E1100-MP entsprechen die 8 Eingänge den 8 Positionen, beim E1100-MT werden die 255 Positionen über die 8 Eingänge adressiert. �Liegt beim "/Stop" Eingang kein Signal an, wird der Antrieb abgebremst und anschliessend ausgeschaltet. Dies ge-währleistet, dass der Antrieb im Falle eines "Not-Aus" inmitten einer Bewegung kontrolliert abgebremst wird.
Speisung
Die MPC Controller E1100 verfügen über getrennte Eingänge für die Signal- und Motorspeisung. Im Falle eines "Not-Aus", wird lediglich die Motorspeisung unterbrochen, so dass die zuletzt aufgerufenen Befehle und die Soll-position im Controller gespeichert bleiben.
Verpackungsmaschinen
Assembling Linien
Handling Einheiten
Produktionslinien
Textilmaschinen
etc.
Daten und technische Angaben können jederzeit geändert werden.
1. Stirnplatte � mit Zentrierbohrungen für die � Befestigung der Last
2. Gehärtete Führungswellen für präzise Bewegungen und maximale � Laufruhe
3. Präzisions Kugelbüchsen� zur Lagerung der Führungswellen � garantieren eine hohe Lebensdauer
4. Führungsblock � mit Zentrierbohrungen für die schnelle� und genaue Montage des Moduls
5. Hinterer Endanschlag
6. Linearmotor Stator (IP67) mit Motorwicklungen und integrierter � Sensorik für Positionserfassung und � Übertemperaturabschaltung
7. Stator Befestigungschrauben für die Montage des Linearmotors 8. Nuten im Führungsblock für die Befestigung von Zubehör
9. Linearmotor Läufer� für genaue Positionierung und� maximale Kraft
10. Spielfreie Ausgleichskupplung gewärleistet eine unkomplizierte � Montage des Moduls
1 2
3 4 5
6
78
910
Optionmechanische Bremse
OptionMagSpring
Multi Position Cylinder MPC
LinMot ®
Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind...
Frei positionierbar
Hoch dynamisch
Einstellbare Kraft
Ohne Luft
Keine Verschleissteile
Einfache Inbetriebnahme 0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0 50 100 150 200 250 300
Auskragung [mm]
LM01-23
LM01-23 - 10N
LM01-37
LM01-37 - 10N
LinMot ®LinMot ® Die MPC KomponentenAbmessungen
Linearmodule
Servo Controller
Kabel, Speisungen & Optionen
Modultyp
LM01-23x80/60LM01-23x80/160LM01-23x80/260
LM01-23x160/80LM01-23x160/180LM01-23x160/280
LM01-37x120/80LM01-37x120/180LM01-37x120/280
LM01-37x240/60LM01-37x240/160LM01-37x240/260
LMx01....
IP67
-M-M-M
-M-M-M
-M-M-M
-M-M-M
-M
Max. Hub
60mm160mm260mm
80mm180mm280mm
80mm180mm280mm
60mm160mm260mm
...1'400mm
Max. Kraft
44N44N44N
60N60N60N
80N80N80N
160N160N160N
...500N
Dauerkraft
9/16*N9/16*N9/16*N
17/31*N17/31*N17/31*N
30/54*N30/54*N30/54*N
55/100*N55/100*N55/100*N
120/220*N
Max. Last
6.1kg6.1kg6.1kg
8.5kg8.5kg8.5kg
10.4kg10.4kg10.4kg
11.8kg11.8kg11.8kg
...25kg
Modulgewicht
1.1kg1.3kg1.6kg
1.9kg2.1kg2.4kg
3.3kg3.7kg4.1kg
5.2kg5.6kg6.0kg
Art.-Nr.
0150-50270150-50290150-5031
0150-50330150-50350150-5037
0150-50390150-50410150-5043
0150-50450150-50470150-5049
auf Anfrage
*mit Ventilator
Kabel
KS01-D/M-02KS01-D/M-04
Speisungen
S01-48/150S01-48/300S01-72/300S01-72/600
Option Ventilator
HV01-23HV01-37
Option mechanische Bremse
HB01-37
Option MagSpring
Art.-Nr.
0150-19800150-1981
andere Längen auf Anfrage
0150-19400150-19410150-19420150-1943
Eingang umschaltbar 115/230VAC
0150-50500150-5051
0150-5052
siehe Unterlagen MagSpring
Controller Typ
E1100-MPE1100-MT
E11xx
Beschreibung
8 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen 255 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen
Profibus, DeviceNet, CANOpen, Sercos
Beschreibung
2m Motorkabel mit IP67 Stecker (schleppketttauglich) 4m Motorkabel mit IP67 Stecker (schleppketttauglich)
48V/150W für ein Modul (langsame Bewegungen) 48V/300W für mehrere Module (langsame Bewegungen) 72V/300W für ein Modul (dynamische Bewegungen)72V/600W für mehrere Module (dynamische Bewegungen)
Ventilator für Linearmodul LM01-23Ventilator für Linearmodul LM01-37
Klemmpatrone für Linearmodul LM01-37
Speisung/Phasenstrom
48-72VDC/4A48-72VDC/4A
48-72VDC/15A
Art.-Nr.
0150-16610150-1663
auf Anfrage
Linearmodule LM01-23
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-23x160/280
280mm166mm500mm
LM01-23x160/180
180mm166mm440mm
LM01-23x160/80
80mm166mm310mm
LM01-23x80/260
260mm86mm
440mm
LM01-23x80/160
160mm86mm
290mm
LM01-23x80/60
60mm86mm
210mm
Linearmodule LM01-37
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-37x240/260
260mm286mm620mm
LM01-37x240/160
160mm286mm520mm
LM01-37x240/60
60mm286mm415mm
LM01-37x120/280
280mm166mm520mm
LM01-37x120/180
180mm166mm415mm
LM01-37x120/80
80mm166mm320mm
Art
. N
o. 0150-2
217/V
2.0
Änder
ungen
vorb
ehal
ten
Daten und technische Angaben können geändert werden.
NTI AGLinMotHaerdlistr.15CH-8957 Spreitenbach Schweiz
Tel.:+41(0)56 419 9191Fax.:+41(0)56 419 9192Mail:[email protected]:www.LinMot.com
LinMot Inc.N2444 Broad StreetDelavanWI 53115 USA
Tel.:+1877 546 3270Fax.: +1800 463 8708
Mail:[email protected]
LinMot Produkte erhalten Sie von über 80 Distributoren weltweit. Fragen Sie uns nach der nächsten Vertretung.
Überreicht von:
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
0 50 100 150 200 250 300Hub [mm]
6.0 kg4.5 kg3.0 kg1.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
2.0 kg1.5 kg1.0 kg0.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
8.0 kg6.0 kg4.0 kg2.0 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
0 50 100 150 200 250 300Hub [mm]
4.0 kg3.0 kg2.0 kg1.0 kg0.0 kg
0.0Kg
1.0Kg
2.0Kg
3.0Kg
4.0Kg
5.0Kg
6.0Kg
7.0Kg
8.0Kg
9.0Kg
10.0Kg
11.0Kg
12.0Kg
0 50 100 150 200 250 300 350 400
Auskragung [mm]
LM01-37x240/...
LM01-37x120/...
LM01-23x160/...
LM01-23x80/...
LinMot ®Mehr Leistung für Ihre Anwendungen
Positionierzeiten LM01-37x240
Positionierzeiten LM01-23x160
Positionierzeiten LM01-37x120
Positionierzeiten LM01-23x80
Lastmassen
Die Auskragung ist die Distanz zwischen dem Schwerpunkt der max. zulässigen Lastmasse an der äussersten Position und der Stirnfläche der vorderen Lagerbüchse.
Die in den Diagrammen ersichtlichen Positionierzeiten sind die minimalen Zeiten für eine horizontale Punkt zu Punkt Bewegung mit einer 72VDC Speisung.
Mit einer 48VDC Speisung erhöhen sich die oben aufge-führten Positionierzeiten um mind. 50%.
Max. Durchbiegung [mm] in vertikaler Richtung bei horizontaler Einbaulage durch Eigengewicht bzw. 10N Nutzlast in Abhängigkeit der Auskragung.
Daten und technische Angaben können geändert werden.
Speisungen S01
Controller E1100
40
Zentrum
235
Befestigungmit 2 x M5
Abmessungen in mm
216
X1
X5
X4
X3
Co
nfi
g. R
S23
2 L
og
ic S
up
ply
/Co
ntr
ol
Mo
tor
M
oto
r S
up
ply
D
C o
nly
X4.9
X4.8
X4.7
X4.6
X4.5
X4.3
+24VDC
DGND
250
180
Lin
Mo
t E
1100
Error
Warn.
+24V
En
RR-
RR+
PWR+
PGND
150Watt
300Watt
Die Kabellänge zwischen Linearmodul und IP67 Stecker beträgt 20cm. Das am Modul befestigte Kabel muss fest verlegt werden.
MPC Servo Controller sind kompakte Positioniersteuerungen mit integrierter Leistungsendstufe für die Ansteuerung der Linearmodule.
Eingänge:
Freigabe
Home
/Stop
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Speisung Sig.
Speisung Mot.
Ausgänge:
/Warnung
/Fehler
/Bremse
In Position
In Position 1
In Position 2
In Position 3
In Position 4
In Position 5
In Position 6
In Position 7
In Position 8
Befehlstabelle
E1100-MP:8 Positionen/Befehle
E1100-MT:256 Positionen/Befehle�
E1100-MP�E1100-MT
6
7
5
4
3
2
1
E1100-MP E1100-MT-HC

Ein leistungsstarkes Prozessorsystem sorgt dafür, dass die in der Befehlstabelle gespeicherten Positionen ohne Verzögerung präzise angefahren werden.
Durch die im Linearmotor integrierten Positionssensoren ist der Controller zu jeder Zeit über die aktuelle Position des Linearmoduls informiert. Die Überwachung der Position geschieht nicht nur an den Endpositionen, son-dern auch während der Fahrt von einer Position auf die nächste. Dies garantiert eine genaue Überwachung der Positionen sowie der Einhaltung der Positionierzeiten.
1. Speisung Motor 2. Motorstecker3. Steuersignale & Signalspeisung4. Zustandsanzeige LED 5. Adress-Schalter für Buseinbindung6. Serielle Schnittstelle RS232 7. Positions Ein- & Ausgänge
Bei High Current Controllern (Endung -HC) werden die Motorphasen mittels Schraubklemmen über dem Motorstecker (2) angeschlossen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
LinMot ® LinMot ®LinMot ®Das MPC System Bestechend: Multi-Funktional
Einfach: Inbetriebnahme & Konfiguration
Das MPC Linearmodul LM01
Frei positionierbar
Hoch Dynamisch
Presskraft einstellbar
Mechanisch Kompatibel
Teach-In
Linearführung
Linear Motor
Speisung
MPC Servo Controller
High Flex Motorkabel
IP67 Motorstecker
Motorkabel & Stecker
Speisung
Servo Controller
LinearführungLinearmotor
Die Servo Controller sind als einfache Positioniereinhei-ten ausgelegt. Die anzufahrenden Positionen werden im Controller gespeichert und von einer übergeordneten Steuerung über digitale I/O's aufgerufen. �
Im Controller können bis zu 8 bzw. 255 Positionen oder Befehle in einer Tabelle abgelegt werden. Diese Befehlstabelle wird mit der MPC Software auf dem PC erstellt und über die serielle Schnittstelle auf den Controller geladen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
Angetrieben werden die Module von linearen Servo Motoren. Die lineare Bewegung wird ohne mechanische Getriebe direkt erzeugt. Da weder verschleissanfällige Dichtungen noch Dämpfer vorhanden sind, bleibt eine lange Lebensdauer selbst bei hoch-dynamischen Bewegungen undhohen Taktraten gewährleistet.
Der Linearmotor besteht aus den zwei Teilen Stator und Läufer. Im Stator sind die Wicklungen, die Positionser-fassung sowie die Temperaturüberwachung unterge-bracht. Im Läufer befinden sich die Antriebsmagnete.
Für die Installation des Antriebs genügt ein einziges Kabel zwischen Linearmotor und Servo Controller. Die Kabel-länge zwischen Linearmodul und Servo Controller kann bis zu 50m betragen.
Die Linearführungen erlauben eine direkte Montage der Last ohne zusätzliche mechanische Elemente. Die Abmessungen der kompletten Linearmodule sowiedie Befestigungsmöglichkeiten für Modul und Last sind identisch mit den H-Führungen für Pneumatikzylinder.
Multi Position Cylinder sind einfach einzusetzende, rein elektrische Positionierantriebe. Das MPC System wurde speziell für flexible und hoch dynamische Positionieraufgaben entwickelt, die nicht mehr mit pneumatischen Antrieben gelöst werden können.
Multi Position Cylinder werden eingesetzt in:
Die hohe Flexibilitität garantiert ein-fache Lösungen sowie eine schnelle, unkomplizierte Projektierung auch bei antriebstechnisch schwierigen Aufgabenstellungen.
Da aufwändige mechanische Einstell-arbeiten bei der Inbetriebnahme ent-fallen, lassen sich MPC Systeme sehr schnell und einfach in Betrieb nehmen.Für die Konfiguration der Bewegungsab-läufe genügt die Eingabe von Zielposi-tion, Geschwindigkeit und Lastmasse.
Flexibel: Modular erweiterbarDie Linearmodule lassen sich mittels verschiedenen Optionen modular erweitern. Dies erlaubt eine optimale Anpassung an die jeweilige Aufgabenstellung.
Die Leistungspeisung der Servo Controller erfolgt über Netzteile (umschaltbar 115/230VAC). Bei hochdynami-schen Anwendungen werden 72VDC Netzteile eingesetzt. Für langsamere Positionieraufgaben reichen die 48VDC Speisungen aus.
Relativ Bewegung
Pressen
Absolut Bewegung
Die realtiv Bewegung entspricht einer Ver-schiebung von der aktuellen Sollposition um die eingegebene Distanz. Mit diesem Befehl lassen sich Stapel-Anwendungen auf ein-fachste Weise realisieren.
Bei der absoluten Bewegung fährt das Linear-modul mit der gewünschten Geschwindigkeit auf die eingegebene Position. Die Ge-schwindigkeit wird in % der minimal erreich-baren Positionierzeit eigegeben. Absolute Positionen können mittels Teach-In Befehl programmiert werden.
Folgende Befehle stehen zur Verfügung:
Auf der PC Oberfläche "MPC Configurator" werden die Linearmodule konfiguriert und die gewünschten Ziel-positionen eingegeben. Für die Konfiguration genügt die Auswahl des Linearmoduls. Reglereinstellungen und die maximale Geschwindigkeit für jede Bewegung werden vom Programm aufgrund der Lastmasse und der Einbaulage berechnet. Dadurch wird jede einzelne Zielposition auto-matisch mit den optimalen Einstellungen angefahren. Zudem werden Warnungen und Fehlermeldungen in Klar-text und in der gewünschten Sprache dargestellt.
Beim Press-Befehl wird eine Zielposition mit einer programmierbaren Kraft angefahren. Sobald die Kraft erreicht ist, wird dies über den entsprechenden Ausgang signalisiert.
Die Abmessungen der komplettenLinearmodule sowie die Befesti-gungsmöglichkeiten für Modul
und Last sind identisch mit den H-Führungen für
Pneumatikzylinder
Beim "Teach-In" wird dasModul von Hand oder im
Schritt-Betrieb auf diegewünschte Position gebracht.
Durch die Betätigung der Teach-Taste wird die aktuelle
Position als Sollposition gespeichert.
Für Einpressvogänge kann die Kraftdes Linearmoduls beliebig pro-
grammiert werden. Dabeiwird eine Position mit der
gewünschten Kraft angefahren.Sobald das Modul mit der ein-
gestellten Kraft drückt, wird der entsprechende Ausgang aktiv.
Der Ausgang bleibt aktiv, solange die Kraft anliegt.Innerhalb des Hubbereichs können beliebige
Positionen angefahren werden. DiePositionierung erfolgt rein elek-
tronisch ohne mechanischeAnschläge.
Die Wiederholgenauigkeitbeträgt 0.1mm.
Da die Linearbewegung ohne mechanischeGetriebe oder Dichtungen realisiertwird, kann eine sehr hohe Dynamik
erreicht werden, ohne dasssich dies negativ auf die
Lebensdauer auswirkt.
Da sich die Positionierzeiten beliebig einstellen lassen,
können auch sehr langsame (sanfte) Bewegungen realisiert werden.
LinMot ®Der MPC Controller E1100
Option MagSpring
Option mechanische Bremse
Option Ventilator
Die Linearmodule der Serie LM01-37 verfügen über Auf-nahmebohrungen für pneumatisch öffnende Klemmpa-tronen zur Arretierung der Linearachse im stromlosen Zustand. Die Ventile der Klemmpatronen werden über den Servo Controller (Brems-Ausgang) angesteuert.
In Anwendungen mit vertikaler Einbaulage kann eine mag-netische Feder "MagSpring" zur Kompensation der Gewichtskraft oder als Ausfallsicherung bei Stromausfall seitlich am Linearmodul angebaut werden.
Bei erhöhtem Bedarf an Dauerkraft wird ein Ventilator auf das Linearmodul montiert. Durch die forcierte Kühlung ver-doppelt sich die Dauerkraft annähernd. Der Ventilator wird mit einer Spannung von 24VDC versorgt. Der Ventilator vergrösserte die Höhe des Moduls um 35mm resp. 40mm.
Ausgänge
Sobald das Linearmodul die Endposition erreicht hat, wird dies über den gemeinsamen "In Position" und den "InPosition 1-8" Ausgang (entspreched dem Befehl) angezeigt. Der Ausgang "/Warnung" kann als Diagnose verwendet werden. Er zeigt an, dass das MPC System noch läuft, jedoch überprüft werden sollte um weiterhin einen störungsfreien Betrieb zu garantieren.
Das Auftreten eines Fehlers wird am gleichnamigen Ausgang angezeigt. Über den "/Bremse" Ausgang wird eine mechanische Bremse gelüftet, sobald das Linear-modul eingeschaltet ist (siehe Optionen).
Eingänge
Schnittstellen
Über die Steuereingänge "Freigabe" und "Home" wird das MPC System gestartet. Im Betrieb werden die in der Be-fehlstabelle gespeicherten Positionen über die Eingänge "Position 1-8" aufgerufen. Beim E1100-MP entsprechen die 8 Eingänge den 8 Positionen, beim E1100-MT werden die 255 Positionen über die 8 Eingänge adressiert. �Liegt beim "/Stop" Eingang kein Signal an, wird der Antrieb abgebremst und anschliessend ausgeschaltet. Dies ge-währleistet, dass der Antrieb im Falle eines "Not-Aus" inmitten einer Bewegung kontrolliert abgebremst wird.
Speisung
Die MPC Controller E1100 verfügen über getrennte Eingänge für die Signal- und Motorspeisung. Im Falle eines "Not-Aus", wird lediglich die Motorspeisung unterbrochen, so dass die zuletzt aufgerufenen Befehle und die Soll-position im Controller gespeichert bleiben.
Verpackungsmaschinen
Assembling Linien
Handling Einheiten
Produktionslinien
Textilmaschinen
etc.
Daten und technische Angaben können jederzeit geändert werden.
1. Stirnplatte � mit Zentrierbohrungen für die � Befestigung der Last
2. Gehärtete Führungswellen für präzise Bewegungen und maximale � Laufruhe
3. Präzisions Kugelbüchsen� zur Lagerung der Führungswellen � garantieren eine hohe Lebensdauer
4. Führungsblock � mit Zentrierbohrungen für die schnelle� und genaue Montage des Moduls
5. Hinterer Endanschlag
6. Linearmotor Stator (IP67) mit Motorwicklungen und integrierter � Sensorik für Positionserfassung und � Übertemperaturabschaltung
7. Stator Befestigungschrauben für die Montage des Linearmotors 8. Nuten im Führungsblock für die Befestigung von Zubehör
9. Linearmotor Läufer� für genaue Positionierung und� maximale Kraft
10. Spielfreie Ausgleichskupplung gewärleistet eine unkomplizierte � Montage des Moduls
1 2
3 4 5
6
78
910
Optionmechanische Bremse
OptionMagSpring
Multi Position Cylinder MPC
LinMot ®
Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind...
Frei positionierbar
Hoch dynamisch
Einstellbare Kraft
Ohne Luft
Keine Verschleissteile
Einfache Inbetriebnahme 0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0 50 100 150 200 250 300
Auskragung [mm]
LM01-23
LM01-23 - 10N
LM01-37
LM01-37 - 10N
LinMot ®LinMot ® Die MPC KomponentenAbmessungen
Linearmodule
Servo Controller
Kabel, Speisungen & Optionen
Modultyp
LM01-23x80/60LM01-23x80/160LM01-23x80/260
LM01-23x160/80LM01-23x160/180LM01-23x160/280
LM01-37x120/80LM01-37x120/180LM01-37x120/280
LM01-37x240/60LM01-37x240/160LM01-37x240/260
LMx01....
IP67
-M-M-M
-M-M-M
-M-M-M
-M-M-M
-M
Max. Hub
60mm160mm260mm
80mm180mm280mm
80mm180mm280mm
60mm160mm260mm
...1'400mm
Max. Kraft
44N44N44N
60N60N60N
80N80N80N
160N160N160N
...500N
Dauerkraft
9/16*N9/16*N9/16*N
17/31*N17/31*N17/31*N
30/54*N30/54*N30/54*N
55/100*N55/100*N55/100*N
120/220*N
Max. Last
6.1kg6.1kg6.1kg
8.5kg8.5kg8.5kg
10.4kg10.4kg10.4kg
11.8kg11.8kg11.8kg
...25kg
Modulgewicht
1.1kg1.3kg1.6kg
1.9kg2.1kg2.4kg
3.3kg3.7kg4.1kg
5.2kg5.6kg6.0kg
Art.-Nr.
0150-50270150-50290150-5031
0150-50330150-50350150-5037
0150-50390150-50410150-5043
0150-50450150-50470150-5049
auf Anfrage
*mit Ventilator
Kabel
KS01-D/M-02KS01-D/M-04
Speisungen
S01-48/150S01-48/300S01-72/300S01-72/600
Option Ventilator
HV01-23HV01-37
Option mechanische Bremse
HB01-37
Option MagSpring
Art.-Nr.
0150-19800150-1981
andere Längen auf Anfrage
0150-19400150-19410150-19420150-1943
Eingang umschaltbar 115/230VAC
0150-50500150-5051
0150-5052
siehe Unterlagen MagSpring
Controller Typ
E1100-MPE1100-MT
E11xx
Beschreibung
8 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen 255 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen
Profibus, DeviceNet, CANOpen, Sercos
Beschreibung
2m Motorkabel mit IP67 Stecker (schleppketttauglich) 4m Motorkabel mit IP67 Stecker (schleppketttauglich)
48V/150W für ein Modul (langsame Bewegungen) 48V/300W für mehrere Module (langsame Bewegungen) 72V/300W für ein Modul (dynamische Bewegungen)72V/600W für mehrere Module (dynamische Bewegungen)
Ventilator für Linearmodul LM01-23Ventilator für Linearmodul LM01-37
Klemmpatrone für Linearmodul LM01-37
Speisung/Phasenstrom
48-72VDC/4A48-72VDC/4A
48-72VDC/15A
Art.-Nr.
0150-16610150-1663
auf Anfrage
Linearmodule LM01-23
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-23x160/280
280mm166mm500mm
LM01-23x160/180
180mm166mm440mm
LM01-23x160/80
80mm166mm310mm
LM01-23x80/260
260mm86mm
440mm
LM01-23x80/160
160mm86mm
290mm
LM01-23x80/60
60mm86mm
210mm
Linearmodule LM01-37
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-37x240/260
260mm286mm620mm
LM01-37x240/160
160mm286mm520mm
LM01-37x240/60
60mm286mm415mm
LM01-37x120/280
280mm166mm520mm
LM01-37x120/180
180mm166mm415mm
LM01-37x120/80
80mm166mm320mm
Art
. N
o. 0150-2
217/V
2.0
Änder
ungen
vorb
ehal
ten
Daten und technische Angaben können geändert werden.
NTI AGLinMotHaerdlistr.15CH-8957 Spreitenbach Schweiz
Tel.:+41(0)56 419 9191Fax.:+41(0)56 419 9192Mail:[email protected]:www.LinMot.com
LinMot Inc.N2444 Broad StreetDelavanWI 53115 USA
Tel.:+1877 546 3270Fax.: +1800 463 8708
Mail:[email protected]
LinMot Produkte erhalten Sie von über 80 Distributoren weltweit. Fragen Sie uns nach der nächsten Vertretung.
Überreicht von:
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
0 50 100 150 200 250 300Hub [mm]
6.0 kg4.5 kg3.0 kg1.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
2.0 kg1.5 kg1.0 kg0.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
8.0 kg6.0 kg4.0 kg2.0 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
0 50 100 150 200 250 300Hub [mm]
4.0 kg3.0 kg2.0 kg1.0 kg0.0 kg
0.0Kg
1.0Kg
2.0Kg
3.0Kg
4.0Kg
5.0Kg
6.0Kg
7.0Kg
8.0Kg
9.0Kg
10.0Kg
11.0Kg
12.0Kg
0 50 100 150 200 250 300 350 400
Auskragung [mm]
LM01-37x240/...
LM01-37x120/...
LM01-23x160/...
LM01-23x80/...
LinMot ®Mehr Leistung für Ihre Anwendungen
Positionierzeiten LM01-37x240
Positionierzeiten LM01-23x160
Positionierzeiten LM01-37x120
Positionierzeiten LM01-23x80
Lastmassen
Die Auskragung ist die Distanz zwischen dem Schwerpunkt der max. zulässigen Lastmasse an der äussersten Position und der Stirnfläche der vorderen Lagerbüchse.
Die in den Diagrammen ersichtlichen Positionierzeiten sind die minimalen Zeiten für eine horizontale Punkt zu Punkt Bewegung mit einer 72VDC Speisung.
Mit einer 48VDC Speisung erhöhen sich die oben aufge-führten Positionierzeiten um mind. 50%.
Max. Durchbiegung [mm] in vertikaler Richtung bei horizontaler Einbaulage durch Eigengewicht bzw. 10N Nutzlast in Abhängigkeit der Auskragung.
Daten und technische Angaben können geändert werden.
Speisungen S01
Controller E1100
40
Zentrum
235
Befestigungmit 2 x M5
Abmessungen in mm
216
X1
X5
X4
X3
Co
nfi
g. R
S23
2 L
og
ic S
up
ply
/Co
ntr
ol
Mo
tor
M
oto
r S
up
ply
D
C o
nly
X4.9
X4.8
X4.7
X4.6
X4.5
X4.3
+24VDC
DGND
250
180
Lin
Mo
t E
1100
Error
Warn.
+24V
En
RR-
RR+
PWR+
PGND
150Watt
300Watt
Die Kabellänge zwischen Linearmodul und IP67 Stecker beträgt 20cm. Das am Modul befestigte Kabel muss fest verlegt werden.
MPC Servo Controller sind kompakte Positioniersteuerungen mit integrierter Leistungsendstufe für die Ansteuerung der Linearmodule.
Eingänge:
Freigabe
Home
/Stop
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Speisung Sig.
Speisung Mot.
Ausgänge:
/Warnung
/Fehler
/Bremse
In Position
In Position 1
In Position 2
In Position 3
In Position 4
In Position 5
In Position 6
In Position 7
In Position 8
Befehlstabelle
E1100-MP:8 Positionen/Befehle
E1100-MT:256 Positionen/Befehle�
E1100-MP�E1100-MT
6
7
5
4
3
2
1
E1100-MP E1100-MT-HC
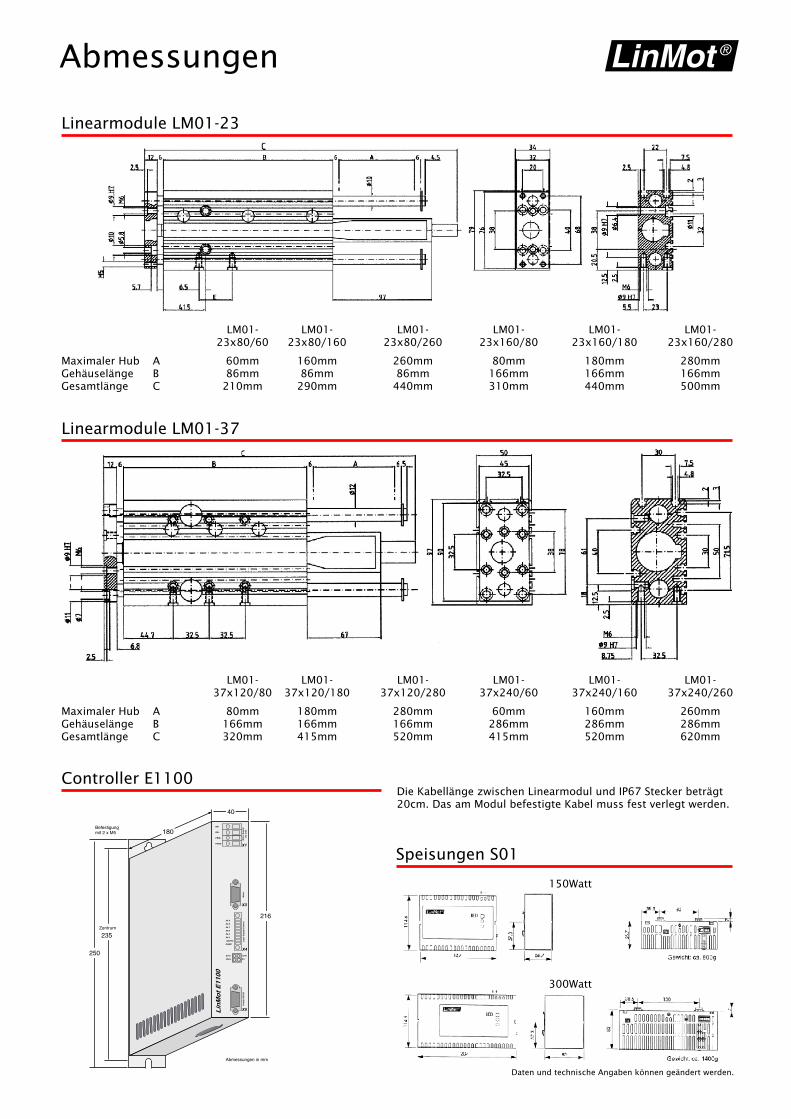
Ein leistungsstarkes Prozessorsystem sorgt dafür, dass die in der Befehlstabelle gespeicherten Positionen ohne Verzögerung präzise angefahren werden.
Durch die im Linearmotor integrierten Positionssensoren ist der Controller zu jeder Zeit über die aktuelle Position des Linearmoduls informiert. Die Überwachung der Position geschieht nicht nur an den Endpositionen, son-dern auch während der Fahrt von einer Position auf die nächste. Dies garantiert eine genaue Überwachung der Positionen sowie der Einhaltung der Positionierzeiten.
1. Speisung Motor 2. Motorstecker3. Steuersignale & Signalspeisung4. Zustandsanzeige LED 5. Adress-Schalter für Buseinbindung6. Serielle Schnittstelle RS232 7. Positions Ein- & Ausgänge
Bei High Current Controllern (Endung -HC) werden die Motorphasen mittels Schraubklemmen über dem Motorstecker (2) angeschlossen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
LinMot ® LinMot ®LinMot ®Das MPC System Bestechend: Multi-Funktional
Einfach: Inbetriebnahme & Konfiguration
Das MPC Linearmodul LM01
Frei positionierbar
Hoch Dynamisch
Presskraft einstellbar
Mechanisch Kompatibel
Teach-In
Linearführung
Linear Motor
Speisung
MPC Servo Controller
High Flex Motorkabel
IP67 Motorstecker
Motorkabel & Stecker
Speisung
Servo Controller
LinearführungLinearmotor
Die Servo Controller sind als einfache Positioniereinhei-ten ausgelegt. Die anzufahrenden Positionen werden im Controller gespeichert und von einer übergeordneten Steuerung über digitale I/O's aufgerufen. �
Im Controller können bis zu 8 bzw. 255 Positionen oder Befehle in einer Tabelle abgelegt werden. Diese Befehlstabelle wird mit der MPC Software auf dem PC erstellt und über die serielle Schnittstelle auf den Controller geladen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
Angetrieben werden die Module von linearen Servo Motoren. Die lineare Bewegung wird ohne mechanische Getriebe direkt erzeugt. Da weder verschleissanfällige Dichtungen noch Dämpfer vorhanden sind, bleibt eine lange Lebensdauer selbst bei hoch-dynamischen Bewegungen undhohen Taktraten gewährleistet.
Der Linearmotor besteht aus den zwei Teilen Stator und Läufer. Im Stator sind die Wicklungen, die Positionser-fassung sowie die Temperaturüberwachung unterge-bracht. Im Läufer befinden sich die Antriebsmagnete.
Für die Installation des Antriebs genügt ein einziges Kabel zwischen Linearmotor und Servo Controller. Die Kabel-länge zwischen Linearmodul und Servo Controller kann bis zu 50m betragen.
Die Linearführungen erlauben eine direkte Montage der Last ohne zusätzliche mechanische Elemente. Die Abmessungen der kompletten Linearmodule sowiedie Befestigungsmöglichkeiten für Modul und Last sind identisch mit den H-Führungen für Pneumatikzylinder.
Multi Position Cylinder sind einfach einzusetzende, rein elektrische Positionierantriebe. Das MPC System wurde speziell für flexible und hoch dynamische Positionieraufgaben entwickelt, die nicht mehr mit pneumatischen Antrieben gelöst werden können.
Multi Position Cylinder werden eingesetzt in:
Die hohe Flexibilitität garantiert ein-fache Lösungen sowie eine schnelle, unkomplizierte Projektierung auch bei antriebstechnisch schwierigen Aufgabenstellungen.
Da aufwändige mechanische Einstell-arbeiten bei der Inbetriebnahme ent-fallen, lassen sich MPC Systeme sehr schnell und einfach in Betrieb nehmen.Für die Konfiguration der Bewegungsab-läufe genügt die Eingabe von Zielposi-tion, Geschwindigkeit und Lastmasse.
Flexibel: Modular erweiterbarDie Linearmodule lassen sich mittels verschiedenen Optionen modular erweitern. Dies erlaubt eine optimale Anpassung an die jeweilige Aufgabenstellung.
Die Leistungspeisung der Servo Controller erfolgt über Netzteile (umschaltbar 115/230VAC). Bei hochdynami-schen Anwendungen werden 72VDC Netzteile eingesetzt. Für langsamere Positionieraufgaben reichen die 48VDC Speisungen aus.
Relativ Bewegung
Pressen
Absolut Bewegung
Die realtiv Bewegung entspricht einer Ver-schiebung von der aktuellen Sollposition um die eingegebene Distanz. Mit diesem Befehl lassen sich Stapel-Anwendungen auf ein-fachste Weise realisieren.
Bei der absoluten Bewegung fährt das Linear-modul mit der gewünschten Geschwindigkeit auf die eingegebene Position. Die Ge-schwindigkeit wird in % der minimal erreich-baren Positionierzeit eigegeben. Absolute Positionen können mittels Teach-In Befehl programmiert werden.
Folgende Befehle stehen zur Verfügung:
Auf der PC Oberfläche "MPC Configurator" werden die Linearmodule konfiguriert und die gewünschten Ziel-positionen eingegeben. Für die Konfiguration genügt die Auswahl des Linearmoduls. Reglereinstellungen und die maximale Geschwindigkeit für jede Bewegung werden vom Programm aufgrund der Lastmasse und der Einbaulage berechnet. Dadurch wird jede einzelne Zielposition auto-matisch mit den optimalen Einstellungen angefahren. Zudem werden Warnungen und Fehlermeldungen in Klar-text und in der gewünschten Sprache dargestellt.
Beim Press-Befehl wird eine Zielposition mit einer programmierbaren Kraft angefahren. Sobald die Kraft erreicht ist, wird dies über den entsprechenden Ausgang signalisiert.
Die Abmessungen der komplettenLinearmodule sowie die Befesti-gungsmöglichkeiten für Modul
und Last sind identisch mit den H-Führungen für
Pneumatikzylinder
Beim "Teach-In" wird dasModul von Hand oder im
Schritt-Betrieb auf diegewünschte Position gebracht.
Durch die Betätigung der Teach-Taste wird die aktuelle
Position als Sollposition gespeichert.
Für Einpressvogänge kann die Kraftdes Linearmoduls beliebig pro-
grammiert werden. Dabeiwird eine Position mit der
gewünschten Kraft angefahren.Sobald das Modul mit der ein-
gestellten Kraft drückt, wird der entsprechende Ausgang aktiv.
Der Ausgang bleibt aktiv, solange die Kraft anliegt.Innerhalb des Hubbereichs können beliebige
Positionen angefahren werden. DiePositionierung erfolgt rein elek-
tronisch ohne mechanischeAnschläge.
Die Wiederholgenauigkeitbeträgt 0.1mm.
Da die Linearbewegung ohne mechanischeGetriebe oder Dichtungen realisiertwird, kann eine sehr hohe Dynamik
erreicht werden, ohne dasssich dies negativ auf die
Lebensdauer auswirkt.
Da sich die Positionierzeiten beliebig einstellen lassen,
können auch sehr langsame (sanfte) Bewegungen realisiert werden.
LinMot ®Der MPC Controller E1100
Option MagSpring
Option mechanische Bremse
Option Ventilator
Die Linearmodule der Serie LM01-37 verfügen über Auf-nahmebohrungen für pneumatisch öffnende Klemmpa-tronen zur Arretierung der Linearachse im stromlosen Zustand. Die Ventile der Klemmpatronen werden über den Servo Controller (Brems-Ausgang) angesteuert.
In Anwendungen mit vertikaler Einbaulage kann eine mag-netische Feder "MagSpring" zur Kompensation der Gewichtskraft oder als Ausfallsicherung bei Stromausfall seitlich am Linearmodul angebaut werden.
Bei erhöhtem Bedarf an Dauerkraft wird ein Ventilator auf das Linearmodul montiert. Durch die forcierte Kühlung ver-doppelt sich die Dauerkraft annähernd. Der Ventilator wird mit einer Spannung von 24VDC versorgt. Der Ventilator vergrösserte die Höhe des Moduls um 35mm resp. 40mm.
Ausgänge
Sobald das Linearmodul die Endposition erreicht hat, wird dies über den gemeinsamen "In Position" und den "InPosition 1-8" Ausgang (entspreched dem Befehl) angezeigt. Der Ausgang "/Warnung" kann als Diagnose verwendet werden. Er zeigt an, dass das MPC System noch läuft, jedoch überprüft werden sollte um weiterhin einen störungsfreien Betrieb zu garantieren.
Das Auftreten eines Fehlers wird am gleichnamigen Ausgang angezeigt. Über den "/Bremse" Ausgang wird eine mechanische Bremse gelüftet, sobald das Linear-modul eingeschaltet ist (siehe Optionen).
Eingänge
Schnittstellen
Über die Steuereingänge "Freigabe" und "Home" wird das MPC System gestartet. Im Betrieb werden die in der Be-fehlstabelle gespeicherten Positionen über die Eingänge "Position 1-8" aufgerufen. Beim E1100-MP entsprechen die 8 Eingänge den 8 Positionen, beim E1100-MT werden die 255 Positionen über die 8 Eingänge adressiert. �Liegt beim "/Stop" Eingang kein Signal an, wird der Antrieb abgebremst und anschliessend ausgeschaltet. Dies ge-währleistet, dass der Antrieb im Falle eines "Not-Aus" inmitten einer Bewegung kontrolliert abgebremst wird.
Speisung
Die MPC Controller E1100 verfügen über getrennte Eingänge für die Signal- und Motorspeisung. Im Falle eines "Not-Aus", wird lediglich die Motorspeisung unterbrochen, so dass die zuletzt aufgerufenen Befehle und die Soll-position im Controller gespeichert bleiben.
Verpackungsmaschinen
Assembling Linien
Handling Einheiten
Produktionslinien
Textilmaschinen
etc.
Daten und technische Angaben können jederzeit geändert werden.
1. Stirnplatte � mit Zentrierbohrungen für die � Befestigung der Last
2. Gehärtete Führungswellen für präzise Bewegungen und maximale � Laufruhe
3. Präzisions Kugelbüchsen� zur Lagerung der Führungswellen � garantieren eine hohe Lebensdauer
4. Führungsblock � mit Zentrierbohrungen für die schnelle� und genaue Montage des Moduls
5. Hinterer Endanschlag
6. Linearmotor Stator (IP67) mit Motorwicklungen und integrierter � Sensorik für Positionserfassung und � Übertemperaturabschaltung
7. Stator Befestigungschrauben für die Montage des Linearmotors 8. Nuten im Führungsblock für die Befestigung von Zubehör
9. Linearmotor Läufer� für genaue Positionierung und� maximale Kraft
10. Spielfreie Ausgleichskupplung gewärleistet eine unkomplizierte � Montage des Moduls
1 2
3 4 5
6
78
910
Optionmechanische Bremse
OptionMagSpring
Multi Position Cylinder MPC
LinMot ®
Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind...
Frei positionierbar
Hoch dynamisch
Einstellbare Kraft
Ohne Luft
Keine Verschleissteile
Einfache Inbetriebnahme 0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0 50 100 150 200 250 300
Auskragung [mm]
LM01-23
LM01-23 - 10N
LM01-37
LM01-37 - 10N
LinMot ®LinMot ® Die MPC KomponentenAbmessungen
Linearmodule
Servo Controller
Kabel, Speisungen & Optionen
Modultyp
LM01-23x80/60LM01-23x80/160LM01-23x80/260
LM01-23x160/80LM01-23x160/180LM01-23x160/280
LM01-37x120/80LM01-37x120/180LM01-37x120/280
LM01-37x240/60LM01-37x240/160LM01-37x240/260
LMx01....
IP67
-M-M-M
-M-M-M
-M-M-M
-M-M-M
-M
Max. Hub
60mm160mm260mm
80mm180mm280mm
80mm180mm280mm
60mm160mm260mm
...1'400mm
Max. Kraft
44N44N44N
60N60N60N
80N80N80N
160N160N160N
...500N
Dauerkraft
9/16*N9/16*N9/16*N
17/31*N17/31*N17/31*N
30/54*N30/54*N30/54*N
55/100*N55/100*N55/100*N
120/220*N
Max. Last
6.1kg6.1kg6.1kg
8.5kg8.5kg8.5kg
10.4kg10.4kg10.4kg
11.8kg11.8kg11.8kg
...25kg
Modulgewicht
1.1kg1.3kg1.6kg
1.9kg2.1kg2.4kg
3.3kg3.7kg4.1kg
5.2kg5.6kg6.0kg
Art.-Nr.
0150-50270150-50290150-5031
0150-50330150-50350150-5037
0150-50390150-50410150-5043
0150-50450150-50470150-5049
auf Anfrage
*mit Ventilator
Kabel
KS01-D/M-02KS01-D/M-04
Speisungen
S01-48/150S01-48/300S01-72/300S01-72/600
Option Ventilator
HV01-23HV01-37
Option mechanische Bremse
HB01-37
Option MagSpring
Art.-Nr.
0150-19800150-1981
andere Längen auf Anfrage
0150-19400150-19410150-19420150-1943
Eingang umschaltbar 115/230VAC
0150-50500150-5051
0150-5052
siehe Unterlagen MagSpring
Controller Typ
E1100-MPE1100-MT
E11xx
Beschreibung
8 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen 255 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen
Profibus, DeviceNet, CANOpen, Sercos
Beschreibung
2m Motorkabel mit IP67 Stecker (schleppketttauglich) 4m Motorkabel mit IP67 Stecker (schleppketttauglich)
48V/150W für ein Modul (langsame Bewegungen) 48V/300W für mehrere Module (langsame Bewegungen) 72V/300W für ein Modul (dynamische Bewegungen)72V/600W für mehrere Module (dynamische Bewegungen)
Ventilator für Linearmodul LM01-23Ventilator für Linearmodul LM01-37
Klemmpatrone für Linearmodul LM01-37
Speisung/Phasenstrom
48-72VDC/4A48-72VDC/4A
48-72VDC/15A
Art.-Nr.
0150-16610150-1663
auf Anfrage
Linearmodule LM01-23
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-23x160/280
280mm166mm500mm
LM01-23x160/180
180mm166mm440mm
LM01-23x160/80
80mm166mm310mm
LM01-23x80/260
260mm86mm
440mm
LM01-23x80/160
160mm86mm
290mm
LM01-23x80/60
60mm86mm
210mm
Linearmodule LM01-37
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-37x240/260
260mm286mm620mm
LM01-37x240/160
160mm286mm520mm
LM01-37x240/60
60mm286mm415mm
LM01-37x120/280
280mm166mm520mm
LM01-37x120/180
180mm166mm415mm
LM01-37x120/80
80mm166mm320mm
Art
. N
o. 0150-2
217/V
2.0
Änder
ungen
vorb
ehal
ten
Daten und technische Angaben können geändert werden.
NTI AGLinMotHaerdlistr.15CH-8957 Spreitenbach Schweiz
Tel.:+41(0)56 419 9191Fax.:+41(0)56 419 9192Mail:[email protected]:www.LinMot.com
LinMot Inc.N2444 Broad StreetDelavanWI 53115 USA
Tel.:+1877 546 3270Fax.: +1800 463 8708
Mail:[email protected]
LinMot Produkte erhalten Sie von über 80 Distributoren weltweit. Fragen Sie uns nach der nächsten Vertretung.
Überreicht von:
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
0 50 100 150 200 250 300Hub [mm]
6.0 kg4.5 kg3.0 kg1.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
2.0 kg1.5 kg1.0 kg0.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
8.0 kg6.0 kg4.0 kg2.0 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
0 50 100 150 200 250 300Hub [mm]
4.0 kg3.0 kg2.0 kg1.0 kg0.0 kg
0.0Kg
1.0Kg
2.0Kg
3.0Kg
4.0Kg
5.0Kg
6.0Kg
7.0Kg
8.0Kg
9.0Kg
10.0Kg
11.0Kg
12.0Kg
0 50 100 150 200 250 300 350 400
Auskragung [mm]
LM01-37x240/...
LM01-37x120/...
LM01-23x160/...
LM01-23x80/...
LinMot ®Mehr Leistung für Ihre Anwendungen
Positionierzeiten LM01-37x240
Positionierzeiten LM01-23x160
Positionierzeiten LM01-37x120
Positionierzeiten LM01-23x80
Lastmassen
Die Auskragung ist die Distanz zwischen dem Schwerpunkt der max. zulässigen Lastmasse an der äussersten Position und der Stirnfläche der vorderen Lagerbüchse.
Die in den Diagrammen ersichtlichen Positionierzeiten sind die minimalen Zeiten für eine horizontale Punkt zu Punkt Bewegung mit einer 72VDC Speisung.
Mit einer 48VDC Speisung erhöhen sich die oben aufge-führten Positionierzeiten um mind. 50%.
Max. Durchbiegung [mm] in vertikaler Richtung bei horizontaler Einbaulage durch Eigengewicht bzw. 10N Nutzlast in Abhängigkeit der Auskragung.
Daten und technische Angaben können geändert werden.
Speisungen S01
Controller E1100
40
Zentrum
235
Befestigungmit 2 x M5
Abmessungen in mm
216
X1
X5
X4
X3
Co
nfi
g. R
S23
2 L
og
ic S
up
ply
/Co
ntr
ol
Mo
tor
M
oto
r S
up
ply
D
C o
nly
X4.9
X4.8
X4.7
X4.6
X4.5
X4.3
+24VDC
DGND
250
180
Lin
Mo
t E
1100
Error
Warn.
+24V
En
RR-
RR+
PWR+
PGND
150Watt
300Watt
Die Kabellänge zwischen Linearmodul und IP67 Stecker beträgt 20cm. Das am Modul befestigte Kabel muss fest verlegt werden.
MPC Servo Controller sind kompakte Positioniersteuerungen mit integrierter Leistungsendstufe für die Ansteuerung der Linearmodule.
Eingänge:
Freigabe
Home
/Stop
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Speisung Sig.
Speisung Mot.
Ausgänge:
/Warnung
/Fehler
/Bremse
In Position
In Position 1
In Position 2
In Position 3
In Position 4
In Position 5
In Position 6
In Position 7
In Position 8
Befehlstabelle
E1100-MP:8 Positionen/Befehle
E1100-MT:256 Positionen/Befehle�
E1100-MP�E1100-MT
6
7
5
4
3
2
1
E1100-MP E1100-MT-HC
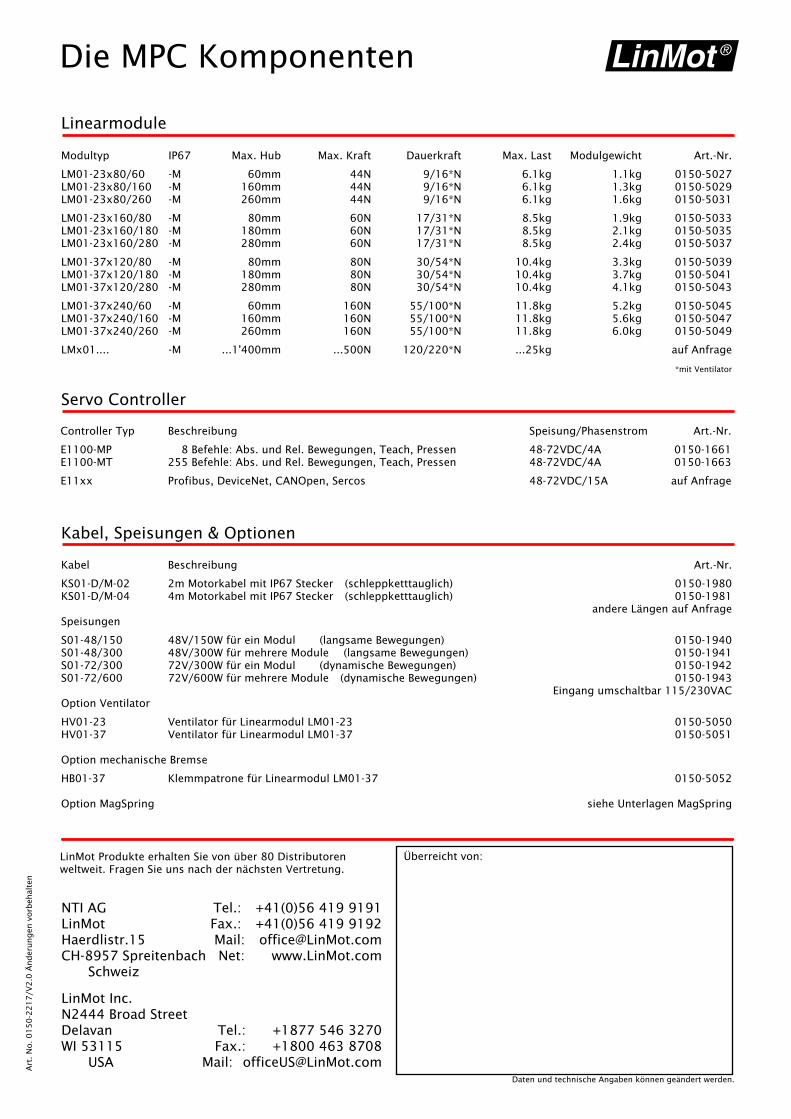
Ein leistungsstarkes Prozessorsystem sorgt dafür, dass die in der Befehlstabelle gespeicherten Positionen ohne Verzögerung präzise angefahren werden.
Durch die im Linearmotor integrierten Positionssensoren ist der Controller zu jeder Zeit über die aktuelle Position des Linearmoduls informiert. Die Überwachung der Position geschieht nicht nur an den Endpositionen, son-dern auch während der Fahrt von einer Position auf die nächste. Dies garantiert eine genaue Überwachung der Positionen sowie der Einhaltung der Positionierzeiten.
1. Speisung Motor 2. Motorstecker3. Steuersignale & Signalspeisung4. Zustandsanzeige LED 5. Adress-Schalter für Buseinbindung6. Serielle Schnittstelle RS232 7. Positions Ein- & Ausgänge
Bei High Current Controllern (Endung -HC) werden die Motorphasen mittels Schraubklemmen über dem Motorstecker (2) angeschlossen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
LinMot ® LinMot ®LinMot ®Das MPC System Bestechend: Multi-Funktional
Einfach: Inbetriebnahme & Konfiguration
Das MPC Linearmodul LM01
Frei positionierbar
Hoch Dynamisch
Presskraft einstellbar
Mechanisch Kompatibel
Teach-In
Linearführung
Linear Motor
Speisung
MPC Servo Controller
High Flex Motorkabel
IP67 Motorstecker
Motorkabel & Stecker
Speisung
Servo Controller
LinearführungLinearmotor
Die Servo Controller sind als einfache Positioniereinhei-ten ausgelegt. Die anzufahrenden Positionen werden im Controller gespeichert und von einer übergeordneten Steuerung über digitale I/O's aufgerufen. �
Im Controller können bis zu 8 bzw. 255 Positionen oder Befehle in einer Tabelle abgelegt werden. Diese Befehlstabelle wird mit der MPC Software auf dem PC erstellt und über die serielle Schnittstelle auf den Controller geladen.
Für die Einbindung in Feldbussysteme sind Controller mit Profibus, DeviceNet und CanOpen Schnittstelle verfügbar.
Angetrieben werden die Module von linearen Servo Motoren. Die lineare Bewegung wird ohne mechanische Getriebe direkt erzeugt. Da weder verschleissanfällige Dichtungen noch Dämpfer vorhanden sind, bleibt eine lange Lebensdauer selbst bei hoch-dynamischen Bewegungen undhohen Taktraten gewährleistet.
Der Linearmotor besteht aus den zwei Teilen Stator und Läufer. Im Stator sind die Wicklungen, die Positionser-fassung sowie die Temperaturüberwachung unterge-bracht. Im Läufer befinden sich die Antriebsmagnete.
Für die Installation des Antriebs genügt ein einziges Kabel zwischen Linearmotor und Servo Controller. Die Kabel-länge zwischen Linearmodul und Servo Controller kann bis zu 50m betragen.
Die Linearführungen erlauben eine direkte Montage der Last ohne zusätzliche mechanische Elemente. Die Abmessungen der kompletten Linearmodule sowiedie Befestigungsmöglichkeiten für Modul und Last sind identisch mit den H-Führungen für Pneumatikzylinder.
Multi Position Cylinder sind einfach einzusetzende, rein elektrische Positionierantriebe. Das MPC System wurde speziell für flexible und hoch dynamische Positionieraufgaben entwickelt, die nicht mehr mit pneumatischen Antrieben gelöst werden können.
Multi Position Cylinder werden eingesetzt in:
Die hohe Flexibilitität garantiert ein-fache Lösungen sowie eine schnelle, unkomplizierte Projektierung auch bei antriebstechnisch schwierigen Aufgabenstellungen.
Da aufwändige mechanische Einstell-arbeiten bei der Inbetriebnahme ent-fallen, lassen sich MPC Systeme sehr schnell und einfach in Betrieb nehmen.Für die Konfiguration der Bewegungsab-läufe genügt die Eingabe von Zielposi-tion, Geschwindigkeit und Lastmasse.
Flexibel: Modular erweiterbarDie Linearmodule lassen sich mittels verschiedenen Optionen modular erweitern. Dies erlaubt eine optimale Anpassung an die jeweilige Aufgabenstellung.
Die Leistungspeisung der Servo Controller erfolgt über Netzteile (umschaltbar 115/230VAC). Bei hochdynami-schen Anwendungen werden 72VDC Netzteile eingesetzt. Für langsamere Positionieraufgaben reichen die 48VDC Speisungen aus.
Relativ Bewegung
Pressen
Absolut Bewegung
Die realtiv Bewegung entspricht einer Ver-schiebung von der aktuellen Sollposition um die eingegebene Distanz. Mit diesem Befehl lassen sich Stapel-Anwendungen auf ein-fachste Weise realisieren.
Bei der absoluten Bewegung fährt das Linear-modul mit der gewünschten Geschwindigkeit auf die eingegebene Position. Die Ge-schwindigkeit wird in % der minimal erreich-baren Positionierzeit eigegeben. Absolute Positionen können mittels Teach-In Befehl programmiert werden.
Folgende Befehle stehen zur Verfügung:
Auf der PC Oberfläche "MPC Configurator" werden die Linearmodule konfiguriert und die gewünschten Ziel-positionen eingegeben. Für die Konfiguration genügt die Auswahl des Linearmoduls. Reglereinstellungen und die maximale Geschwindigkeit für jede Bewegung werden vom Programm aufgrund der Lastmasse und der Einbaulage berechnet. Dadurch wird jede einzelne Zielposition auto-matisch mit den optimalen Einstellungen angefahren. Zudem werden Warnungen und Fehlermeldungen in Klar-text und in der gewünschten Sprache dargestellt.
Beim Press-Befehl wird eine Zielposition mit einer programmierbaren Kraft angefahren. Sobald die Kraft erreicht ist, wird dies über den entsprechenden Ausgang signalisiert.
Die Abmessungen der komplettenLinearmodule sowie die Befesti-gungsmöglichkeiten für Modul
und Last sind identisch mit den H-Führungen für
Pneumatikzylinder
Beim "Teach-In" wird dasModul von Hand oder im
Schritt-Betrieb auf diegewünschte Position gebracht.
Durch die Betätigung der Teach-Taste wird die aktuelle
Position als Sollposition gespeichert.
Für Einpressvogänge kann die Kraftdes Linearmoduls beliebig pro-
grammiert werden. Dabeiwird eine Position mit der
gewünschten Kraft angefahren.Sobald das Modul mit der ein-
gestellten Kraft drückt, wird der entsprechende Ausgang aktiv.
Der Ausgang bleibt aktiv, solange die Kraft anliegt.Innerhalb des Hubbereichs können beliebige
Positionen angefahren werden. DiePositionierung erfolgt rein elek-
tronisch ohne mechanischeAnschläge.
Die Wiederholgenauigkeitbeträgt 0.1mm.
Da die Linearbewegung ohne mechanischeGetriebe oder Dichtungen realisiertwird, kann eine sehr hohe Dynamik
erreicht werden, ohne dasssich dies negativ auf die
Lebensdauer auswirkt.
Da sich die Positionierzeiten beliebig einstellen lassen,
können auch sehr langsame (sanfte) Bewegungen realisiert werden.
LinMot ®Der MPC Controller E1100
Option MagSpring
Option mechanische Bremse
Option Ventilator
Die Linearmodule der Serie LM01-37 verfügen über Auf-nahmebohrungen für pneumatisch öffnende Klemmpa-tronen zur Arretierung der Linearachse im stromlosen Zustand. Die Ventile der Klemmpatronen werden über den Servo Controller (Brems-Ausgang) angesteuert.
In Anwendungen mit vertikaler Einbaulage kann eine mag-netische Feder "MagSpring" zur Kompensation der Gewichtskraft oder als Ausfallsicherung bei Stromausfall seitlich am Linearmodul angebaut werden.
Bei erhöhtem Bedarf an Dauerkraft wird ein Ventilator auf das Linearmodul montiert. Durch die forcierte Kühlung ver-doppelt sich die Dauerkraft annähernd. Der Ventilator wird mit einer Spannung von 24VDC versorgt. Der Ventilator vergrösserte die Höhe des Moduls um 35mm resp. 40mm.
Ausgänge
Sobald das Linearmodul die Endposition erreicht hat, wird dies über den gemeinsamen "In Position" und den "InPosition 1-8" Ausgang (entspreched dem Befehl) angezeigt. Der Ausgang "/Warnung" kann als Diagnose verwendet werden. Er zeigt an, dass das MPC System noch läuft, jedoch überprüft werden sollte um weiterhin einen störungsfreien Betrieb zu garantieren.
Das Auftreten eines Fehlers wird am gleichnamigen Ausgang angezeigt. Über den "/Bremse" Ausgang wird eine mechanische Bremse gelüftet, sobald das Linear-modul eingeschaltet ist (siehe Optionen).
Eingänge
Schnittstellen
Über die Steuereingänge "Freigabe" und "Home" wird das MPC System gestartet. Im Betrieb werden die in der Be-fehlstabelle gespeicherten Positionen über die Eingänge "Position 1-8" aufgerufen. Beim E1100-MP entsprechen die 8 Eingänge den 8 Positionen, beim E1100-MT werden die 255 Positionen über die 8 Eingänge adressiert. �Liegt beim "/Stop" Eingang kein Signal an, wird der Antrieb abgebremst und anschliessend ausgeschaltet. Dies ge-währleistet, dass der Antrieb im Falle eines "Not-Aus" inmitten einer Bewegung kontrolliert abgebremst wird.
Speisung
Die MPC Controller E1100 verfügen über getrennte Eingänge für die Signal- und Motorspeisung. Im Falle eines "Not-Aus", wird lediglich die Motorspeisung unterbrochen, so dass die zuletzt aufgerufenen Befehle und die Soll-position im Controller gespeichert bleiben.
Verpackungsmaschinen
Assembling Linien
Handling Einheiten
Produktionslinien
Textilmaschinen
etc.
Daten und technische Angaben können jederzeit geändert werden.
1. Stirnplatte � mit Zentrierbohrungen für die � Befestigung der Last
2. Gehärtete Führungswellen für präzise Bewegungen und maximale � Laufruhe
3. Präzisions Kugelbüchsen� zur Lagerung der Führungswellen � garantieren eine hohe Lebensdauer
4. Führungsblock � mit Zentrierbohrungen für die schnelle� und genaue Montage des Moduls
5. Hinterer Endanschlag
6. Linearmotor Stator (IP67) mit Motorwicklungen und integrierter � Sensorik für Positionserfassung und � Übertemperaturabschaltung
7. Stator Befestigungschrauben für die Montage des Linearmotors 8. Nuten im Führungsblock für die Befestigung von Zubehör
9. Linearmotor Läufer� für genaue Positionierung und� maximale Kraft
10. Spielfreie Ausgleichskupplung gewärleistet eine unkomplizierte � Montage des Moduls
1 2
3 4 5
6
78
910
Optionmechanische Bremse
OptionMagSpring
Multi Position Cylinder MPC
LinMot ®
Wenn mehr als zwei Positionen, hohe Dynamik und lange Lebensdauer gefragt sind...
Frei positionierbar
Hoch dynamisch
Einstellbare Kraft
Ohne Luft
Keine Verschleissteile
Einfache Inbetriebnahme 0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0 50 100 150 200 250 300
Auskragung [mm]
LM01-23
LM01-23 - 10N
LM01-37
LM01-37 - 10N
LinMot ®LinMot ® Die MPC KomponentenAbmessungen
Linearmodule
Servo Controller
Kabel, Speisungen & Optionen
Modultyp
LM01-23x80/60LM01-23x80/160LM01-23x80/260
LM01-23x160/80LM01-23x160/180LM01-23x160/280
LM01-37x120/80LM01-37x120/180LM01-37x120/280
LM01-37x240/60LM01-37x240/160LM01-37x240/260
LMx01....
IP67
-M-M-M
-M-M-M
-M-M-M
-M-M-M
-M
Max. Hub
60mm160mm260mm
80mm180mm280mm
80mm180mm280mm
60mm160mm260mm
...1'400mm
Max. Kraft
44N44N44N
60N60N60N
80N80N80N
160N160N160N
...500N
Dauerkraft
9/16*N9/16*N9/16*N
17/31*N17/31*N17/31*N
30/54*N30/54*N30/54*N
55/100*N55/100*N55/100*N
120/220*N
Max. Last
6.1kg6.1kg6.1kg
8.5kg8.5kg8.5kg
10.4kg10.4kg10.4kg
11.8kg11.8kg11.8kg
...25kg
Modulgewicht
1.1kg1.3kg1.6kg
1.9kg2.1kg2.4kg
3.3kg3.7kg4.1kg
5.2kg5.6kg6.0kg
Art.-Nr.
0150-50270150-50290150-5031
0150-50330150-50350150-5037
0150-50390150-50410150-5043
0150-50450150-50470150-5049
auf Anfrage
*mit Ventilator
Kabel
KS01-D/M-02KS01-D/M-04
Speisungen
S01-48/150S01-48/300S01-72/300S01-72/600
Option Ventilator
HV01-23HV01-37
Option mechanische Bremse
HB01-37
Option MagSpring
Art.-Nr.
0150-19800150-1981
andere Längen auf Anfrage
0150-19400150-19410150-19420150-1943
Eingang umschaltbar 115/230VAC
0150-50500150-5051
0150-5052
siehe Unterlagen MagSpring
Controller Typ
E1100-MPE1100-MT
E11xx
Beschreibung
8 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen 255 Befehle: Abs. und Rel. Bewegungen, Teach, Pressen
Profibus, DeviceNet, CANOpen, Sercos
Beschreibung
2m Motorkabel mit IP67 Stecker (schleppketttauglich) 4m Motorkabel mit IP67 Stecker (schleppketttauglich)
48V/150W für ein Modul (langsame Bewegungen) 48V/300W für mehrere Module (langsame Bewegungen) 72V/300W für ein Modul (dynamische Bewegungen)72V/600W für mehrere Module (dynamische Bewegungen)
Ventilator für Linearmodul LM01-23Ventilator für Linearmodul LM01-37
Klemmpatrone für Linearmodul LM01-37
Speisung/Phasenstrom
48-72VDC/4A48-72VDC/4A
48-72VDC/15A
Art.-Nr.
0150-16610150-1663
auf Anfrage
Linearmodule LM01-23
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-23x160/280
280mm166mm500mm
LM01-23x160/180
180mm166mm440mm
LM01-23x160/80
80mm166mm310mm
LM01-23x80/260
260mm86mm
440mm
LM01-23x80/160
160mm86mm
290mm
LM01-23x80/60
60mm86mm
210mm
Linearmodule LM01-37
Maximaler HubGehäuselängeGesamtlänge
ABC
LM01-37x240/260
260mm286mm620mm
LM01-37x240/160
160mm286mm520mm
LM01-37x240/60
60mm286mm415mm
LM01-37x120/280
280mm166mm520mm
LM01-37x120/180
180mm166mm415mm
LM01-37x120/80
80mm166mm320mm
Art
. N
o. 0150-2
217/V
2.0
Änder
ungen
vorb
ehal
ten
Daten und technische Angaben können geändert werden.
NTI AGLinMotHaerdlistr.15CH-8957 Spreitenbach Schweiz
Tel.:+41(0)56 419 9191Fax.:+41(0)56 419 9192Mail:[email protected]:www.LinMot.com
LinMot Inc.N2444 Broad StreetDelavanWI 53115 USA
Tel.:+1877 546 3270Fax.: +1800 463 8708
Mail:[email protected]
LinMot Produkte erhalten Sie von über 80 Distributoren weltweit. Fragen Sie uns nach der nächsten Vertretung.
Überreicht von:
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
0 50 100 150 200 250 300Hub [mm]
6.0 kg4.5 kg3.0 kg1.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
2.0 kg1.5 kg1.0 kg0.5 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
0 50 100 150 200 250 300Hub [mm]
8.0 kg6.0 kg4.0 kg2.0 kg0.0 kg
0ms
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
0 50 100 150 200 250 300Hub [mm]
4.0 kg3.0 kg2.0 kg1.0 kg0.0 kg
0.0Kg
1.0Kg
2.0Kg
3.0Kg
4.0Kg
5.0Kg
6.0Kg
7.0Kg
8.0Kg
9.0Kg
10.0Kg
11.0Kg
12.0Kg
0 50 100 150 200 250 300 350 400
Auskragung [mm]
LM01-37x240/...
LM01-37x120/...
LM01-23x160/...
LM01-23x80/...
LinMot ®Mehr Leistung für Ihre Anwendungen
Positionierzeiten LM01-37x240
Positionierzeiten LM01-23x160
Positionierzeiten LM01-37x120
Positionierzeiten LM01-23x80
Lastmassen
Die Auskragung ist die Distanz zwischen dem Schwerpunkt der max. zulässigen Lastmasse an der äussersten Position und der Stirnfläche der vorderen Lagerbüchse.
Die in den Diagrammen ersichtlichen Positionierzeiten sind die minimalen Zeiten für eine horizontale Punkt zu Punkt Bewegung mit einer 72VDC Speisung.
Mit einer 48VDC Speisung erhöhen sich die oben aufge-führten Positionierzeiten um mind. 50%.
Max. Durchbiegung [mm] in vertikaler Richtung bei horizontaler Einbaulage durch Eigengewicht bzw. 10N Nutzlast in Abhängigkeit der Auskragung.
Daten und technische Angaben können geändert werden.
Speisungen S01
Controller E1100
40
Zentrum
235
Befestigungmit 2 x M5
Abmessungen in mm
216
X1
X5
X4
X3
Co
nfi
g. R
S23
2 L
og
ic S
up
ply
/Co
ntr
ol
Mo
tor
M
oto
r S
up
ply
D
C o
nly
X4.9
X4.8
X4.7
X4.6
X4.5
X4.3
+24VDC
DGND
250
180
Lin
Mo
t E
1100
Error
Warn.
+24V
En
RR-
RR+
PWR+
PGND
150Watt
300Watt
Die Kabellänge zwischen Linearmodul und IP67 Stecker beträgt 20cm. Das am Modul befestigte Kabel muss fest verlegt werden.
MPC Servo Controller sind kompakte Positioniersteuerungen mit integrierter Leistungsendstufe für die Ansteuerung der Linearmodule.
Eingänge:
Freigabe
Home
/Stop
Position 1
Position 2
Position 3
Position 4
Position 5
Position 6
Position 7
Position 8
Speisung Sig.
Speisung Mot.
Ausgänge:
/Warnung
/Fehler
/Bremse
In Position
In Position 1
In Position 2
In Position 3
In Position 4
In Position 5
In Position 6
In Position 7
In Position 8
Befehlstabelle
E1100-MP:8 Positionen/Befehle
E1100-MT:256 Positionen/Befehle�
E1100-MP�E1100-MT
6
7
5
4
3
2
1
E1100-MP E1100-MT-HC