
Der Rang einer Matrix A - fbmn.h-da.deochs/mathe2/skript/matrizen13b.pdf · Der Rang einer Matrix A...
41
A (A) (A) A = - -
Transcript of Der Rang einer Matrix A - fbmn.h-da.deochs/mathe2/skript/matrizen13b.pdf · Der Rang einer Matrix A...
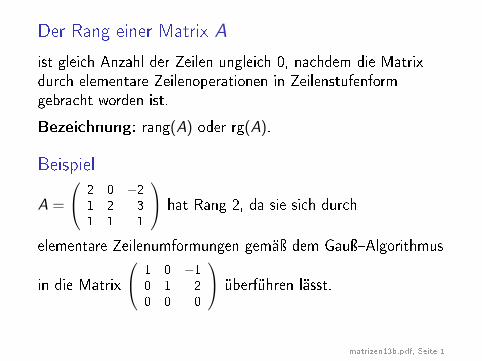
Der Rang einer Matrix A
ist gleich Anzahl der Zeilen ungleich 0, nachdem die Matrixdurch elementare Zeilenoperationen in Zeilenstufenformgebracht worden ist.
Bezeichnung: rang(A) oder rg(A).
Beispiel
A =
2 0 −21 2 31 1 1
hat Rang 2, da sie sich durch
elementare Zeilenumformungen gemäÿ dem Gauÿ�Algorithmus
in die Matrix
1 0 −10 1 20 0 0
überführen lässt.
matrizen13b.pdf, Seite 1

Eigenschaften
Der Rang einer m × n�Matrix A ...
I ist ≤ min(m, n), also kleiner gleich der Zahl der Zeilenund kleiner gleich der Zahl der Spalten,
I ändert sich nicht unter elementaren Zeilenoperationen,I ändert sich nicht unter elementaren Spaltenoperationen(Vertauschen zweier Spalten, Multiplikation einer Spaltemit einer Konstanten 6= 0, Addition einer Spalte zu eineranderen Spalte),
I ist gleich der maximalen Zahl linear unabhängiger Zeilen,I ist gleich der maximalen Zahl linear unabhängiger Spalten,I ist gleich dem Rang der Transponierten AT .I rg(AB) ≤ rg(A) und rg(AB) ≤ rg(B)
matrizen13b.pdf, Seite 2
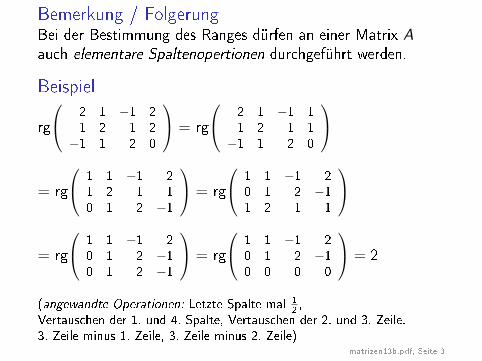
Bemerkung / FolgerungBei der Bestimmung des Ranges dürfen an einer Matrix Aauch elementare Spaltenopertionen durchgeführt werden.
Beispiel
rg
2 1 −1 21 2 1 2−1 1 2 0
= rg
2 1 −1 11 2 1 1−1 1 2 0
= rg
1 1 −1 21 2 1 10 1 2 −1
= rg
1 1 −1 20 1 2 −11 2 1 1
= rg
1 1 −1 20 1 2 −10 1 2 −1
= rg
1 1 −1 20 1 2 −10 0 0 0
= 2
(angewandte Operationen: Letzte Spalte mal 1
2,
Vertauschen der 1. und 4. Spalte, Vertauschen der 2. und 3. Zeile,3. Zeile minus 1. Zeile, 3. Zeile minus 2. Zeile)
matrizen13b.pdf, Seite 3
Warnung
Spaltenoperationen sind nur dann zulässig, wenn esausschlieÿlich um die Bestimmung des Ranges geht. Dieshängt damit zusammen, dass der Rang von A gleich dem derTransponierten AT ist.
Bei der Lösung von linearen Gleichungssystemen und derInvertierung von Matrizen (kommt später) dürfen dagegen diebetrachteten Koe�zientenmatrizen ausschlieÿlich zeilenweiseumgeformt werden.
matrizen13b.pdf, Seite 4
Rang und lineare Gleichungssysteme
Mit dem Rang einer m × n�Matrix A und dem Rang dererweiterten Koe�zienten�Matrix (A|b) (die dann einem × (n + 1)�Matrix ist) lassen sich Aussagen über die Anzahlder Lösungen des linearen Gleichungssystems Ax = b tre�en.
Der Rang von A gibt an, wie viele Unbekannte bei der Lösungdes Gleichungssystems Ax = b eindeutig festgelegt sind.
Hat man die erweiterte Koe�zientenmatrix (A|b) in dieZeilenstufenform (A, b) gebracht, so ist das LGS genau dannnicht lösbar, wenn es eine Zeile gibt, in der A nur Nullenenthält, aber der entsprechende Koe�zient von b ungleichNull ist. Das bedeutet aber, dass der Rang von (A|b) echtgröÿer dem Rang von A ist. Also gilt
Ax = b nicht lösbar ⇔ rg(A|b) > rg(A).
matrizen13b.pdf, Seite 5
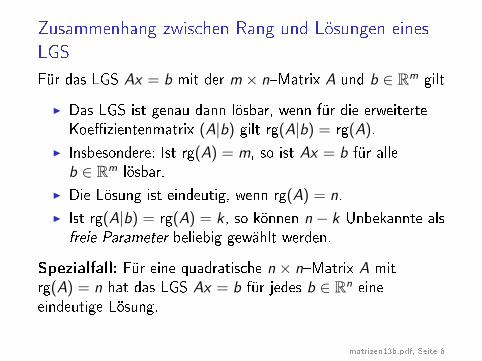
Zusammenhang zwischen Rang und Lösungen einesLGS
Für das LGS Ax = b mit der m × n�Matrix A und b ∈ Rm gilt
I Das LGS ist genau dann lösbar, wenn für die erweiterteKoe�zientenmatrix (A|b) gilt rg(A|b) = rg(A).
I Insbesondere: Ist rg(A) = m, so ist Ax = b für alleb ∈ Rm lösbar.
I Die Lösung ist eindeutig, wenn rg(A) = n.I Ist rg(A|b) = rg(A) = k , so können n − k Unbekannte als
freie Parameter beliebig gewählt werden.
Spezialfall: Für eine quadratische n × n�Matrix A mitrg(A) = n hat das LGS Ax = b für jedes b ∈ Rn eineeindeutige Lösung.
matrizen13b.pdf, Seite 6
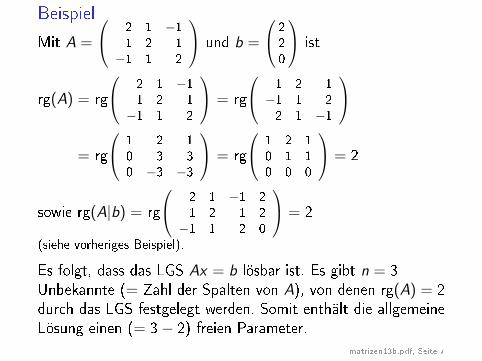
Beispiel
Mit A =
2 1 −11 2 1−1 1 2
und b =
220
ist
rg(A) = rg
2 1 −11 2 1−1 1 2
= rg
1 2 1−1 1 22 1 −1
= rg
1 2 10 3 30 −3 −3
= rg
1 2 10 1 10 0 0
= 2
sowie rg(A|b) = rg
2 1 −1 21 2 1 2−1 1 2 0
= 2
(siehe vorheriges Beispiel).
Es folgt, dass das LGS Ax = b lösbar ist. Es gibt n = 3Unbekannte (= Zahl der Spalten von A), von denen rg(A) = 2durch das LGS festgelegt werden. Somit enthält die allgemeineLösung einen (= 3− 2) freien Parameter.
matrizen13b.pdf, Seite 7
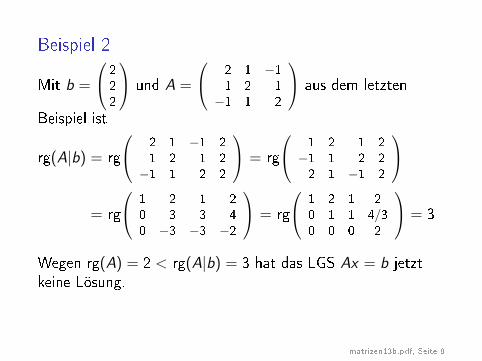
Beispiel 2
Mit b =
222
und A =
2 1 −11 2 1−1 1 2
aus dem letzten
Beispiel ist
rg(A|b) = rg
2 1 −1 21 2 1 2−1 1 2 2
= rg
1 2 1 2−1 1 2 22 1 −1 2
= rg
1 2 1 20 3 3 40 −3 −3 −2
= rg
1 2 1 20 1 1 4/30 0 0 2
= 3
Wegen rg(A) = 2 < rg(A|b) = 3 hat das LGS Ax = b jetztkeine Lösung.
matrizen13b.pdf, Seite 8

Beispiel 3
Mit A =
2 1 21 2 2−1 1 2
ist
rg(A) = rg
2 1 21 2 2−1 1 2
= rg
1 2 2−1 1 22 1 2
= rg
1 2 20 3 40 −3 −2
= rg
1 2 20 1 4/30 0 2
= 3
Ist b ∈ R3 nun ein beliebiger Vektor, so hat die erweiterteKoe�zientenmatrix (A|b) drei Zeilen, also ist rg(A|b) ≤ 3.
Damit ist das LGS Ax = b in jedem Fall lösbar. Wegenrg(A) = 3 werden dabei alle 3 Unbekannten eindeutigfestgelegt, d. h. das LGS ist für beliebiges b ∈ R3 eindeutiglösbar.
matrizen13b.pdf, Seite 9
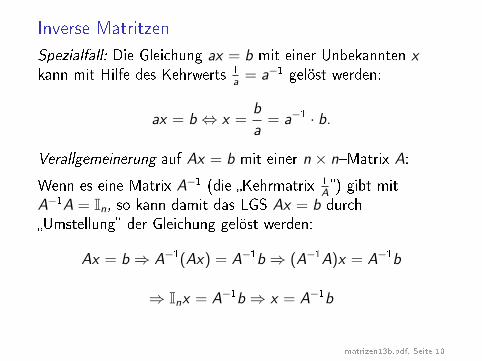
Inverse Matritzen
Spezialfall: Die Gleichung ax = b mit einer Unbekannten xkann mit Hilfe des Kehrwerts 1
a= a−1 gelöst werden:
ax = b ⇔ x =b
a= a−1 · b.
Verallgemeinerung auf Ax = b mit einer n × n�Matrix A:
Wenn es eine Matrix A−1 (die �Kehrmatrix 1
A�) gibt mit
A−1A = In, so kann damit das LGS Ax = b durch�Umstellung� der Gleichung gelöst werden:
Ax = b ⇒ A−1(Ax) = A−1b ⇒ (A−1A)x = A−1b
⇒ Inx = A−1b ⇒ x = A−1b
matrizen13b.pdf, Seite 10
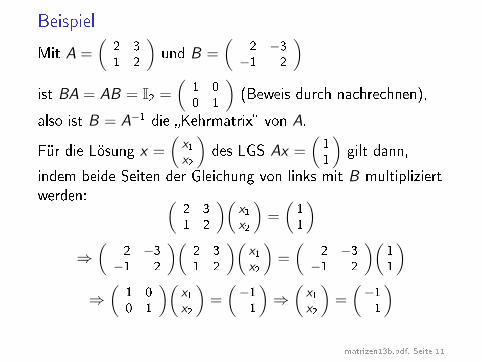
Beispiel
Mit A =(
2 31 2
)und B =
(2 −3−1 2
)ist BA = AB = I2 =
(1 00 1
)(Beweis durch nachrechnen),
also ist B = A−1 die �Kehrmatrix� von A.
Für die Lösung x =(x1x2
)des LGS Ax =
(11
)gilt dann,
indem beide Seiten der Gleichung von links mit B multipliziertwerden: (
2 31 2
)(x1x2
)=(11
)⇒(
2 −3−1 2
)(2 31 2
)(x1x2
)=(
2 −3−1 2
)(11
)⇒(
1 00 1
)(x1x2
)=(−11
)⇒(x1x2
)=(−11
)
matrizen13b.pdf, Seite 11
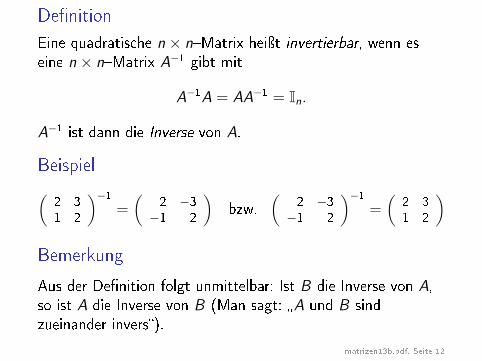
De�nition
Eine quadratische n × n�Matrix heiÿt invertierbar, wenn eseine n × n�Matrix A−1 gibt mit
A−1A = AA−1 = In.
A−1 ist dann die Inverse von A.
Beispiel(2 31 2
)−1
=(
2 −3−1 2
)bzw.
(2 −3−1 2
)−1
=(
2 31 2
)
Bemerkung
Aus der De�nition folgt unmittelbar: Ist B die Inverse von A,so ist A die Inverse von B (Man sagt: �A und B sindzueinander invers�).
matrizen13b.pdf, Seite 12
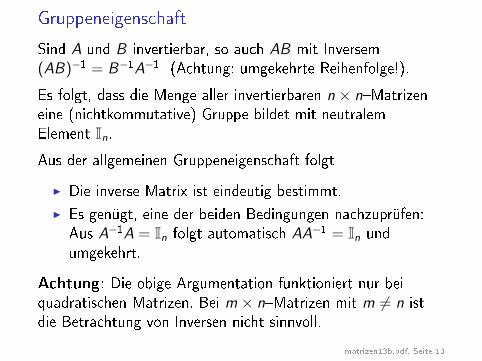
Gruppeneigenschaft
Sind A und B invertierbar, so auch AB mit Inversem(AB)−1 = B−1A−1 (Achtung: umgekehrte Reihenfolge!).
Es folgt, dass die Menge aller invertierbaren n × n�Matrizeneine (nichtkommutative) Gruppe bildet mit neutralemElement In.
Aus der allgemeinen Gruppeneigenschaft folgt
I Die inverse Matrix ist eindeutig bestimmt.I Es genügt, eine der beiden Bedingungen nachzuprüfen:Aus A−1A = In folgt automatisch AA−1 = In undumgekehrt.
Achtung: Die obige Argumentation funktioniert nur beiquadratischen Matrizen. Bei m × n�Matrizen mit m 6= n istdie Betrachtung von Inversen nicht sinnvoll.
matrizen13b.pdf, Seite 13
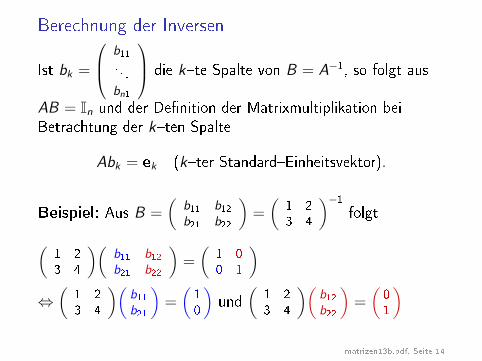
Berechnung der Inversen
Ist bk =
b11. . .
bn1
die k�te Spalte von B = A−1, so folgt aus
AB = In und der De�nition der Matrixmultiplikation beiBetrachtung der k�ten Spalte
Abk = ek (k�ter Standard�Einheitsvektor).
Beispiel: Aus B =(
b11 b12b21 b22
)=(
1 23 4
)−1
folgt
(1 23 4
)(b11 b12b21 b22
)=(
1 00 1
)⇔(
1 23 4
)(b11b21
)=(10
)und
(1 23 4
)(b12b22
)=(01
)
matrizen13b.pdf, Seite 14
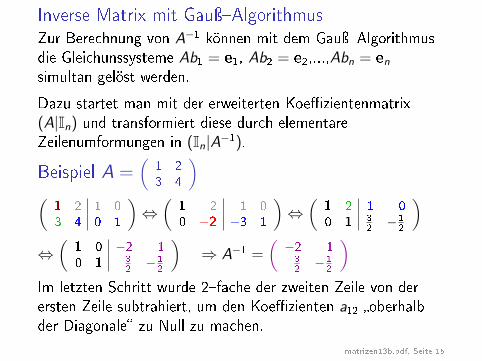
Inverse Matrix mit Gauÿ�AlgorithmusZur Berechnung von A−1 können mit dem Gauÿ�Algorithmusdie Gleichunssysteme Ab1 = e1, Ab2 = e2,...,Abn = ensimultan gelöst werden.
Dazu startet man mit der erweiterten Koe�zientenmatrix(A|In) und transformiert diese durch elementareZeilenumformungen in (In|A−1).
Beispiel A =(
1 23 4
)(
1 2 1 03 4 0 1
)⇔(
1 2 1 00 −2 −3 1
)⇔(
1 2 1 00 1
3
2− 1
2
)⇔(
1 0 −2 10 1
3
2− 1
2
)⇒ A−1 =
(−2 13
2− 1
2
)Im letzten Schritt wurde 2�fache der zweiten Zeile von derersten Zeile subtrahiert, um den Koe�zienten a12 �oberhalbder Diagonale� zu Null zu machen.
matrizen13b.pdf, Seite 15
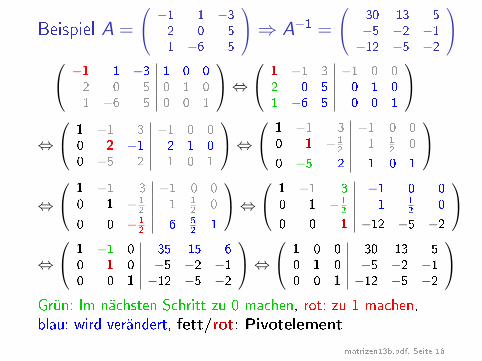
Beispiel A =
−1 1 −32 0 51 −6 5
⇒ A−1 =
30 13 5−5 −2 −1−12 −5 −2
−1 1 −3 1 0 0
2 0 5 0 1 01 −6 5 0 0 1
⇔ 1 −1 3 −1 0 0
2 0 5 0 1 01 −6 5 0 0 1
⇔ 1 −1 3 −1 0 0
0 2 −1 2 1 00 −5 2 1 0 1
⇔ 1 −1 3 −1 0 0
0 1 − 1
21 1
20
0 −5 2 1 0 1
⇔ 1 −1 3 −1 0 0
0 1 − 1
21 1
20
0 0 − 1
26 5
21
⇔ 1 −1 3 −1 0 0
0 1 − 1
21 1
20
0 0 1 −12 −5 −2
⇔ 1 −1 0 35 15 6
0 1 0 −5 −2 −10 0 1 −12 −5 −2
⇔ 1 0 0 30 13 5
0 1 0 −5 −2 −10 0 1 −12 −5 −2
Grün: Im nächsten Schritt zu 0 machen, rot: zu 1 machen,blau: wird verändert, fett/rot: Pivotelement
matrizen13b.pdf, Seite 16
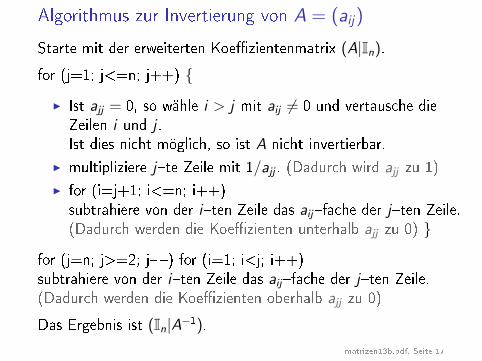
Algorithmus zur Invertierung von A = (aij)
Starte mit der erweiterten Koe�zientenmatrix (A|In).for (j=1; j<=n; j++) {
I Ist ajj = 0, so wähle i > j mit aij 6= 0 und vertausche dieZeilen i und j .Ist dies nicht möglich, so ist A nicht invertierbar.
I multipliziere j�te Zeile mit 1/ajj . (Dadurch wird ajj zu 1)I for (i=j+1; i<=n; i++)subtrahiere von der i�ten Zeile das aij�fache der j�ten Zeile.(Dadurch werden die Koe�zienten unterhalb ajj zu 0) }
for (j=n; j>=2; j� �) for (i=1; i<j; i++)subtrahiere von der i�ten Zeile das aij�fache der j�ten Zeile.(Dadurch werden die Koe�zienten oberhalb ajj zu 0)
Das Ergebnis ist (In|A−1).
matrizen13b.pdf, Seite 17
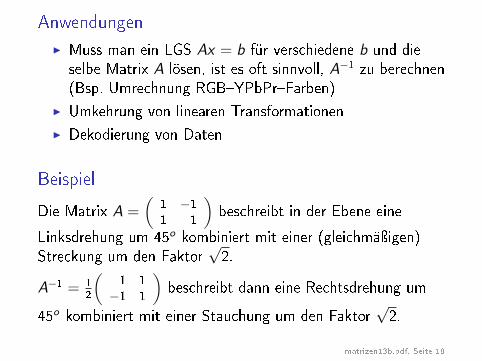
Anwendungen
I Muss man ein LGS Ax = b für verschiedene b und dieselbe Matrix A lösen, ist es oft sinnvoll, A−1 zu berechnen(Bsp. Umrechnung RGB�YPbPr�Farben)
I Umkehrung von linearen TransformationenI Dekodierung von Daten
Beispiel
Die Matrix A =(
1 −11 1
)beschreibt in der Ebene eine
Linksdrehung um 45o kombiniert mit einer (gleichmäÿigen)Streckung um den Faktor
√2.
A−1 = 1
2
(1 1−1 1
)beschreibt dann eine Rechtsdrehung um
45o kombiniert mit einer Stauchung um den Faktor√2.
matrizen13b.pdf, Seite 18
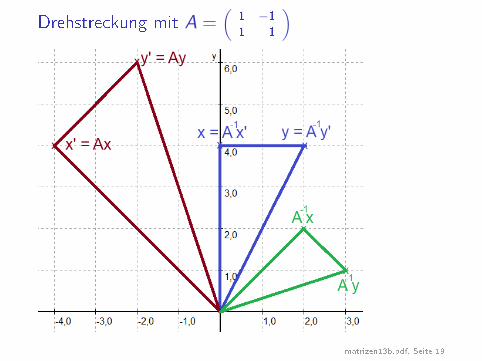
Drehstreckung mit A =(
1 −11 1
)
matrizen13b.pdf, Seite 19
Bemerkung
Nicht jede quadratische Matrix A, die ungleich der Nullmatrix0n,n ist, ist invertierbar.
Es gilt: A ist invertierbar⇔ Das LGS Ax = b ist für jedes b ∈ Rn eindeutig lösbar
Begründung für �⇐�: Ist das LGS immer eindeutig lösbar, sokann die inverse Matrix mit dem Gauÿ�Algorithmus berechnetwerden.
Für �⇒�: Existiert A−1, so ist die Lösung des LGS gegebendurch x = A−1b.
matrizen13b.pdf, Seite 20
Invertierbarkeit und Rang
Weiterhin gilt für eine n × n�Matrix:
Das LGS Ax = b ist für jedes b ∈ Rn eindeutig lösbar genaudann, wenn rg(A) = n.
Das heiÿt, eine n× n�Matrix ist genau dann invertierbar, wennsie vollen Rang (= n) hat.
Matrizen mit dieser Eigenschaft (quadratisch, invertierbar,voller Rang) werden auch als regulär bezeichnet.
Beispiel A =(
1 22 4
)ist nicht regulär und damit auch nicht invertierbar, da
rg(A) = rg(
1 22 4
)= rg
(1 20 0
)= 1 < 2.
matrizen13b.pdf, Seite 21
Beispiel: Inverse Matrix in Z32
Daten werden in Bitfolgen mit jeweils 3 Bit unterteilt, die alsVektoren x ∈ Z3
2aufgefasst werden.
Die Daten werden verschlüsselt, indem x mit der MatrixA =
1 1 0
1 0 1
0 1 0
multipliziert wird, d. h. die verschlüsselten
Daten haben die Form y = Ax ∈ Z3
2, z. B. wird
x = 1
1
0
zu y = Ax = 1 1 0
1 0 1
0 1 0
1
1
0
= 0
1
1
verschlüsselt.
Da Entschlüsselung erfolgt nun mit der inversen Matrix A−1:Aus y = Ax folgt x = A−1y .
Die Berechnung von A−1 erfolgt wie bei einer Matrix mitreelllen Koe�zienten mit dem Gauÿ�Algorithmus. Man erhältA−1 =
1 0 1
0 0 1
1 1 1
und damit z. B. 1 0 1
0 0 1
1 1 1
0
1
1
= 1
1
0
matrizen13b.pdf, Seite 22
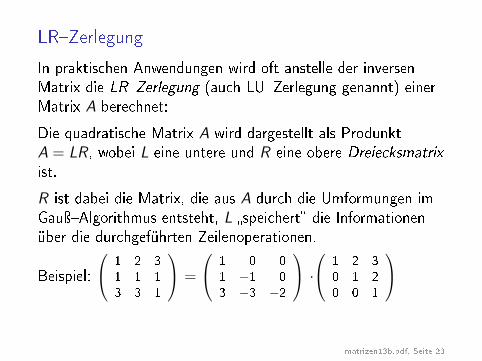
LR�Zerlegung
In praktischen Anwendungen wird oft anstelle der inversenMatrix die LR�Zerlegung (auch LU�Zerlegung genannt) einerMatrix A berechnet:
Die quadratische Matrix A wird dargestellt als ProdunktA = LR , wobei L eine untere und R eine obere Dreiecksmatrix
ist.
R ist dabei die Matrix, die aus A durch die Umformungen imGauÿ�Algorithmus entsteht, L �speichert� die Informationenüber die durchgeführten Zeilenoperationen.
Beispiel:
1 2 31 1 13 3 1
=
1 0 01 −1 03 −3 −2
· 1 2 3
0 1 20 0 1
matrizen13b.pdf, Seite 23
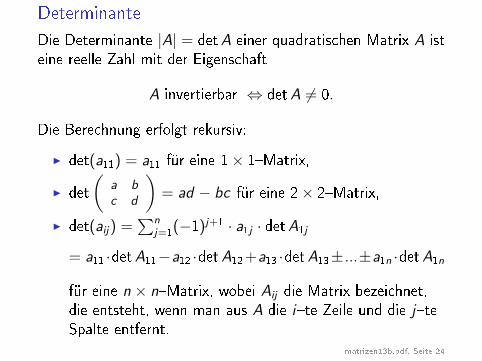
Determinante
Die Determinante |A| = detA einer quadratischen Matrix A isteine reelle Zahl mit der Eigenschaft
A invertierbar ⇔ detA 6= 0.
Die Berechnung erfolgt rekursiv:
I det(a11) = a11 für eine 1× 1�Matrix,
I det
(a bc d
)= ad − bc für eine 2× 2�Matrix,
I det(aij) =∑n
j=1(−1)j+1 · a1j · detA1j
= a11 ·detA11−a12 ·detA12+a13 ·detA13±...±a1n ·detA1n
für eine n × n�Matrix, wobei Aij die Matrix bezeichnet,die entsteht, wenn man aus A die i�te Zeile und die j�teSpalte entfernt.
matrizen13b.pdf, Seite 24
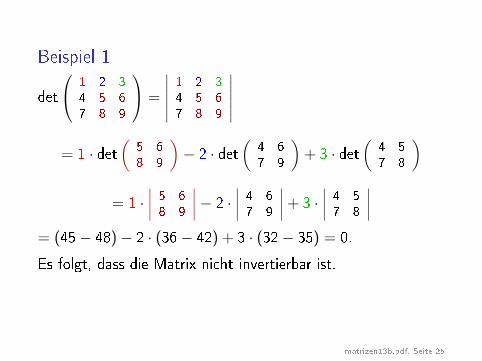
Beispiel 1
det
1 2 34 5 67 8 9
=
∣∣∣∣∣∣1 2 34 5 67 8 9
∣∣∣∣∣∣= 1 · det
(5 68 9
)− 2 · det
(4 67 9
)+ 3 · det
(4 57 8
)
= 1 ·∣∣∣∣ 5 68 9
∣∣∣∣− 2 ·∣∣∣∣ 4 67 9
∣∣∣∣+ 3 ·∣∣∣∣ 4 57 8
∣∣∣∣= (45− 48)− 2 · (36− 42) + 3 · (32− 35) = 0.
Es folgt, dass die Matrix nicht invertierbar ist.
matrizen13b.pdf, Seite 25

Beispiel 2
Für welche Werte des Parameters p ∈ R ist die Matrix
Ap =
(p 1 11 p −11 1 p
)
invertierbar bzw. das LGS Apx = b für alle b ∈ R3 eindeutiglösbar?
Dazu muss gelten
detAp = p · det(
p −11 p
)− det
(1 −11 p
)+ det
(1 p1 1
)= p(p2 + 1)− (p + 1) + (1− p) = p3 − p 6= 0
⇔ p 6∈ {−1, 0, 1}.Es folgt, dass Ap für alle p mit p 6= 0 und p 6= ±1 invertierbarist.
matrizen13b.pdf, Seite 26
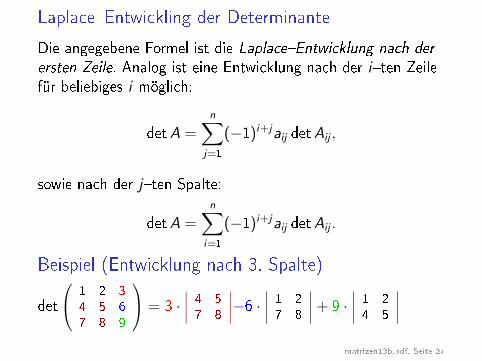
Laplace�Entwickling der Determinante
Die angegebene Formel ist die Laplace�Entwicklung nach der
ersten Zeile. Analog ist eine Entwicklung nach der i�ten Zeilefür beliebiges i möglich:
detA =n∑
j=1
(−1)i+jaij detAij ,
sowie nach der j�ten Spalte:
detA =n∑
i=1
(−1)i+jaij detAij .
Beispiel (Entwicklung nach 3. Spalte)
det
1 2 34 5 67 8 9
= 3 ·∣∣∣∣ 4 57 8
∣∣∣∣−6 · ∣∣∣∣ 1 27 8
∣∣∣∣+ 9 ·∣∣∣∣ 1 24 5
∣∣∣∣matrizen13b.pdf, Seite 27
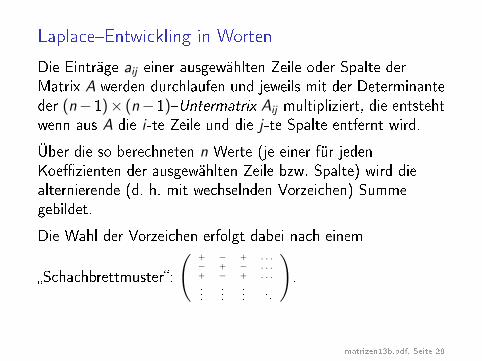
Laplace�Entwickling in Worten
Die Einträge aij einer ausgewählten Zeile oder Spalte derMatrix A werden durchlaufen und jeweils mit der Determinanteder (n− 1)× (n− 1)�Untermatrix Aij multipliziert, die entstehtwenn aus A die i -te Zeile und die j-te Spalte entfernt wird.
Über die so berechneten n Werte (je einer für jedenKoe�zienten der ausgewählten Zeile bzw. Spalte) wird diealternierende (d. h. mit wechselnden Vorzeichen) Summegebildet.
Die Wahl der Vorzeichen erfolgt dabei nach einem
�Schachbrettmuster�:
(+ − + . . .− + − . . .+ − + . . .
.
.
.
.
.
.
.
.
.
...
).
matrizen13b.pdf, Seite 28
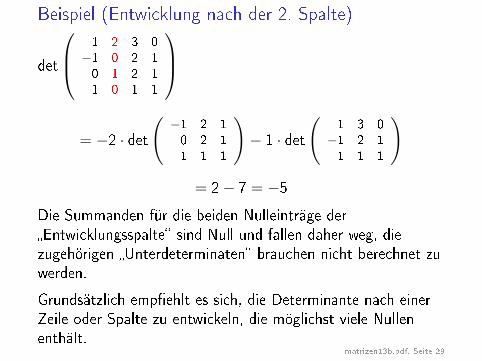
Beispiel (Entwicklung nach der 2. Spalte)
det
1 2 3 0−1 0 2 10 1 2 11 0 1 1
= −2 · det
(−1 2 10 2 11 1 1
)− 1 · det
(1 3 0−1 2 11 1 1
)
= 2− 7 = −5
Die Summanden für die beiden Nulleinträge der�Entwicklungsspalte� sind Null und fallen daher weg, diezugehörigen �Unterdeterminaten� brauchen nicht berechnet zuwerden.
Grundsätzlich emp�ehlt es sich, die Determinante nach einerZeile oder Spalte zu entwickeln, die möglichst viele Nullenenthält.
matrizen13b.pdf, Seite 29

Dreiecksmatrizen
Besonders einfach wird die Berechnung der Determinante beieiner oberen Dreiecksmatrix (aij) mit aij = 0 für j < i
In diesem Fall ist (folgt aus der Entwicklung nach der1. Spalte)
det
a11 a12 . . . a1n
0. . .
......
. . .. . .
...0 . . . 0 ann
= a11 · ... · ann =n∏
i=1
aii .
Analog ist det(aij) =∏n
i=1aii auch für eine untere
Dreiecksmatrix mit aij = 0 für i > j .
Insbesondere ist det In = 1.
matrizen13b.pdf, Seite 30
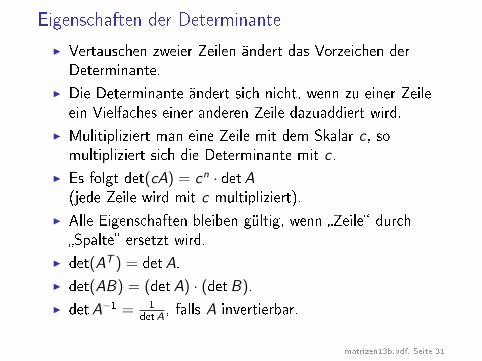
Eigenschaften der Determinante
I Vertauschen zweier Zeilen ändert das Vorzeichen derDeterminante.
I Die Determinante ändert sich nicht, wenn zu einer Zeileein Vielfaches einer anderen Zeile dazuaddiert wird.
I Mulitipliziert man eine Zeile mit dem Skalar c , somultipliziert sich die Determinante mit c .
I Es folgt det(cA) = cn · detA(jede Zeile wird mit c multipliziert).
I Alle Eigenschaften bleiben gültig, wenn �Zeile� durch�Spalte� ersetzt wird.
I det(AT ) = detA.I det(AB) = (detA) · (detB).I detA−1 = 1
detA, falls A invertierbar.
matrizen13b.pdf, Seite 31
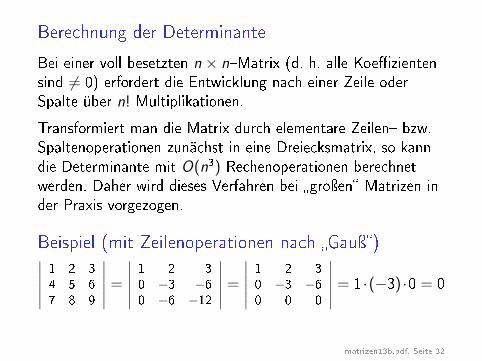
Berechnung der Determinante
Bei einer voll besetzten n × n�Matrix (d. h. alle Koe�zientensind 6= 0) erfordert die Entwicklung nach einer Zeile oderSpalte über n! Multiplikationen.
Transformiert man die Matrix durch elementare Zeilen� bzw.Spaltenoperationen zunächst in eine Dreiecksmatrix, so kanndie Determinante mit O(n3) Rechenoperationen berechnetwerden. Daher wird dieses Verfahren bei �groÿen� Matrizen inder Praxis vorgezogen.
Beispiel (mit Zeilenoperationen nach �Gauÿ�)∣∣∣∣∣∣1 2 34 5 67 8 9
∣∣∣∣∣∣ =∣∣∣∣∣∣1 2 30 −3 −60 −6 −12
∣∣∣∣∣∣ =∣∣∣∣∣∣1 2 30 −3 −60 0 0
∣∣∣∣∣∣ = 1 ·(−3) ·0 = 0
matrizen13b.pdf, Seite 32
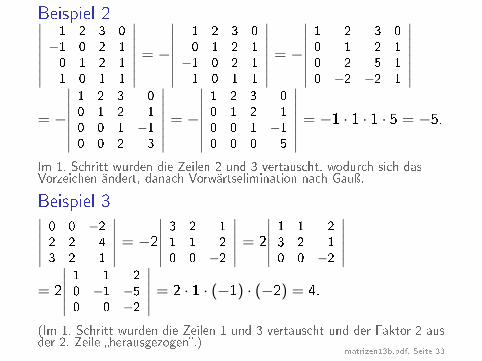
Beispiel 2∣∣∣∣∣∣∣∣1 2 3 0−1 0 2 10 1 2 11 0 1 1
∣∣∣∣∣∣∣∣ = −∣∣∣∣∣∣∣∣
1 2 3 00 1 2 1−1 0 2 11 0 1 1
∣∣∣∣∣∣∣∣ = −∣∣∣∣∣∣∣∣1 2 3 00 1 2 10 2 5 10 −2 −2 1
∣∣∣∣∣∣∣∣= −
∣∣∣∣∣∣∣∣1 2 3 00 1 2 10 0 1 −10 0 2 3
∣∣∣∣∣∣∣∣ = −∣∣∣∣∣∣∣∣1 2 3 00 1 2 10 0 1 −10 0 0 5
∣∣∣∣∣∣∣∣ = −1 · 1 · 1 · 5 = −5.
Im 1. Schritt wurden die Zeilen 2 und 3 vertauscht, wodurch sich dasVorzeichen ändert, danach Vorwärtselimination nach Gauÿ.
Beispiel 3∣∣∣∣∣∣0 0 −22 2 43 2 1
∣∣∣∣∣∣ = −2∣∣∣∣∣∣3 2 11 1 20 0 −2
∣∣∣∣∣∣ = 2
∣∣∣∣∣∣1 1 23 2 10 0 −2
∣∣∣∣∣∣= 2
∣∣∣∣∣∣1 1 20 −1 −50 0 −2
∣∣∣∣∣∣ = 2 · 1 · (−1) · (−2) = 4.
(Im 1. Schritt wurden die Zeilen 1 und 3 vertauscht und der Faktor 2 ausder 2. Zeile �herausgezogen�.)
matrizen13b.pdf, Seite 33
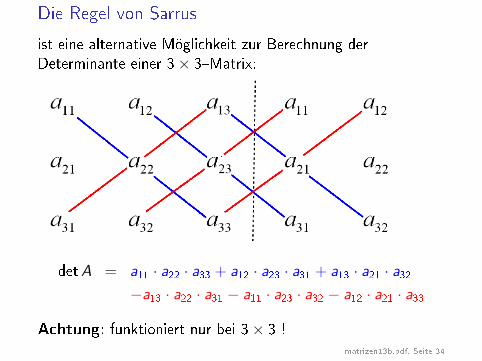
Die Regel von Sarrus
ist eine alternative Möglichkeit zur Berechnung derDeterminante einer 3× 3�Matrix:
detA = a11 · a22 · a33 + a12 · a23 · a31 + a13 · a21 · a32−a13 · a22 · a31 − a11 · a23 · a32 − a12 · a21 · a33
Achtung: funktioniert nur bei 3× 3 !matrizen13b.pdf, Seite 34
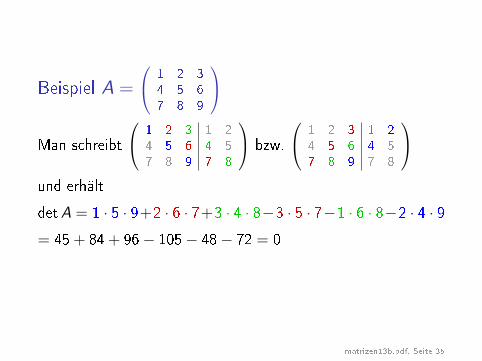
Beispiel A =
1 2 34 5 67 8 9
Man schreibt
1 2 3 1 24 5 6 4 57 8 9 7 8
bzw.
1 2 3 1 24 5 6 4 57 8 9 7 8
und erhält
detA = 1 · 5 · 9+2 · 6 · 7+3 · 4 · 8−3 · 5 · 7−1 · 6 · 8−2 · 4 · 9= 45+ 84+ 96− 105− 48− 72 = 0
matrizen13b.pdf, Seite 35
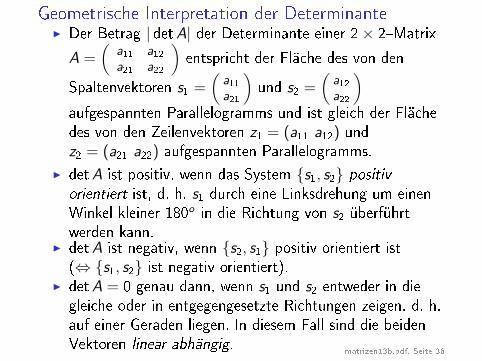
Geometrische Interpretation der DeterminanteI Der Betrag | detA| der Determinante einer 2× 2�Matrix
A =(
a11 a12a21 a22
)entspricht der Fläche des von den
Spaltenvektoren s1 =(a11a21
)und s2 =
(a12a22
)aufgespannten Parallelogramms und ist gleich der Flächedes von den Zeilenvektoren z1 = (a11 a12) undz2 = (a21 a22) aufgespannten Parallelogramms.
I detA ist positiv, wenn das System {s1, s2} positivorientiert ist, d. h. s1 durch eine Linksdrehung um einenWinkel kleiner 180o in die Richtung von s2 überführtwerden kann.
I detA ist negativ, wenn {s2, s1} positiv orientiert ist(⇔ {s1, s2} ist negativ orientiert).
I detA = 0 genau dann, wenn s1 und s2 entweder in diegleiche oder in entgegengesetzte Richtungen zeigen, d. h.auf einer Geraden liegen. In diesem Fall sind die beidenVektoren linear abhängig.
matrizen13b.pdf, Seite 36
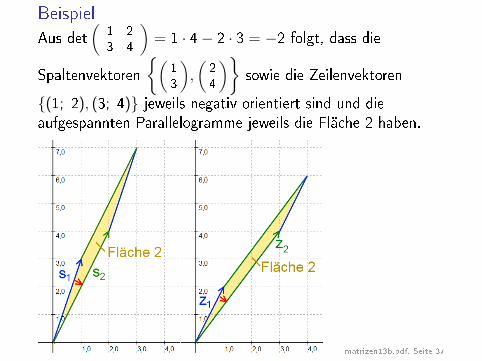
BeispielAus det
(1 23 4
)= 1 · 4− 2 · 3 = −2 folgt, dass die
Spaltenvektoren
{(13
),(24
)}sowie die Zeilenvektoren
{(1; 2), (3; 4)} jeweils negativ orientiert sind und dieaufgespannten Parallelogramme jeweils die Fläche 2 haben.
matrizen13b.pdf, Seite 37
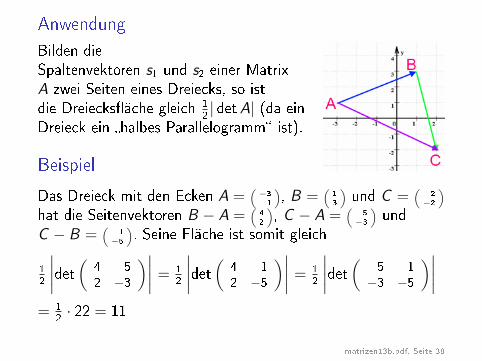
Anwendung
Bilden dieSpaltenvektoren s1 und s2 einer MatrixA zwei Seiten eines Dreiecks, so istdie Dreiecks�äche gleich 1
2| detA| (da ein
Dreieck ein �halbes Parallelogramm� ist).
Beispiel
Das Dreieck mit den Ecken A =(
−3
1
), B =
(1
3
)und C =
(2
−2
)hat die Seitenvektoren B − A =
(4
2
), C − A =
(5
−3
)und
C − B =(
1
−5
). Seine Fläche ist somit gleich
1
2
∣∣∣∣det( 4 52 −3
)∣∣∣∣ = 1
2
∣∣∣∣det( 4 12 −5
)∣∣∣∣ = 1
2
∣∣∣∣det( 5 1−3 −5
)∣∣∣∣= 1
2· 22 = 11
matrizen13b.pdf, Seite 38
Geometrische Interpretation einer3× 3�Determinante
Der Betrag | detA| der Determinante einer 3× 3�Matrix A istgleich dem Volumen des von den Spaltenvektoren von Aaufgespannten Parallelepipeds (Spats) sowie gleich demVolumen des von den Zeilenvektoren aufgespannten Spats.
Sie ist positiv wenn die Spaltenvektoren sowie dieZeilenvektoren jeweils positiv orientiert sind (ein Rechtssystem
bilden) und negativ, wenn die Spalten- und Zeilenvektorennegativ orientiert sind.
Die Determinate ist 0, wenn die Spaltenvektoren in einerEbene liegen (linear abhängig sind). In diesem Fall liegen auchdie Zeilenvektoren in einer Ebene.
matrizen13b.pdf, Seite 39

Lineare AbbildungenBei der linearen Abbildung x 7→ y = Ax mit einer 2× 2�MatrixA gibt | detA| den Faktor an, um den Flächeninhalte ändern.
Die Determinante einer 3× 3�Matrix A gibt entsprechend dieÄnderung dreidimensionaler Volumina an.
Die Abbildung ist x 7→ Ax orientierungstreu, wenn detA > 0.Ist detA < 0, so werden geometrische Objekte nach derAbbildung �seitenverkehrt� dargestellt.
Multiplikation mit A =(
0 31 −1
): Vergröÿerung der Fläche
um den Faktor | detA| = 3 und seitenverkehrte Darstellungmatrizen13b.pdf, Seite 40
Die Cramersche Regel
ist eine Formel zur Lösung von linearen Gleichungssystemenund zur Berechnung von inversen Matrizen mit Hilfe vonDeterminanten.
Zum Beispiel gilt für eine invertierbare 2× 2�Matrix A(a bc d
)−1
=1
detA
(d −b−c a
)=
1ad − bc
·(
d −b−c a
)Beispiel:(
1 23 4
)−1
= 11·4−2·3 ·
(4 −2−3 1
)= 1
2
(−4 23 −1
)Die Cramersche Regel ist jedoch vom Rechenaufwand her nurfür kleine n (= 2 oder 3) sinnvoll einsetzbar.
Zudem löst sie das LGS Ax = b nur in solchen Fallen, wo Aeine invertierbare quadratische Matrix ist.
matrizen13b.pdf, Seite 41












![]Matrix Tablet](https://static.fdokument.com/doc/165x107/577ccf211a28ab9e788ef4c9/matrix-tablet.jpg)




