
Die neue Architektur der Fahrzeuge - automobil-elektronik.de · B 61060 · März 2019 ·...
60
03/2019 B 61060 · März 2019 · Einzelpreis 19,50 € · www.automobil-elektronik.de E/E-Entwicklung für Entscheider BUSSYSTEME Leistungsstarke Bordnetze: Nervenstränge für die autonomen Fahrzeuge 20 SECURITY Neue Regulierungen und Standardisierungen bei Cybersecurity 30 AUTOMATISIERT FAHREN Event Data Recorder: Rechtssicherheit und Datenschutz für alle 48 Die neue Architektur der Fahrzeuge Interview mit Dr. Thomas M. Müller, E/E-Leiter bei Audi 16
Transcript of Die neue Architektur der Fahrzeuge - automobil-elektronik.de · B 61060 · März 2019 ·...

03 / 2019 B 61060 · März 2019 · Einzelpreis 19,50 € · www.automobil-elektronik.de
E/E-Entwicklung für Entscheider
BUSSYSTEMELeistungsstarke Bordnetze: Nervenstränge für die autonomen Fahrzeuge 20
SECURITYNeue Regulierungen und Standardisierungen bei Cybersecurity 30
AUTOMATISIERT FAHRENEvent Data Recorder: Rechtssicherheit und Datenschutz für alle 48
Die neue Architektur der FahrzeugeInterview mit Dr. Thomas M. Müller, E/E-Leiter bei Audi 16
001_Titelseite.indd 2 12.03.2019 15:27:32

we are
Infotainment . Stromversorgungen . Internet der Dinge . Fertigungssteuerung . Baugruppenfertigung . Mul-timedia . Elektromechanik . Lichttechnik + LED . Engineering . Test + Qualität . Halbleiter . Laserbearbei-tung . Programmierbare Logik . Distribution . Steuerungen . Kabelbearbeitung . Safety & Security . Ana-log-/Mixed-Signal-ICs . Bildverarbeitung . Messtechnik + Sensorik . Antriebstechnik . Conformal Coating . Leistungselektronik . Embedded-Systeme . Kommunikation . Leiterplattenfertigung . Fahrerassistenz . Wireless ICs . EMV . Fernwartung . Mikromontage . Alternative Antriebe . Aktoren . Industrie-PC . Power . Schablonendrucker . Bussysteme/Protokolle . Digitale Marktübersichten . Steuerungen . HF-/Mikrowellen-technik . Fertigungssteuerung . Rework & Repair . Tools . Entwicklungssysteme . Human Machine Inter-face . Bauteilelagerung . Ethernet . Display-Technik . Quarze/Oszillatoren . Car-to-X . Wärmemanagement . Infotainment . Stromversorgungen . Internet der Dinge . Fertigungssteuerung . Baugruppenfertigung . Multimedia . Elektromechanik . Lichttechnik + LED . Engineering . Test + Qualität . Halbleiter . Laserbe-arbeitung . Programmierbare Logik . Distribution . Steuerungen . Kabelbearbeitung . Safety & Security . Analog-/Mixed-Signal-ICs . Bildverarbeitung . Messtechnik + Sensorik . Antriebstechnik . Conformal Coa-ting . Leistungselektronik . Embedded-Systeme . Kommunikation . Leiterplattenfertigung . Fahrerassistenz . Wireless ICs . EMV . Fernwartung . Mikromontage . Alternative Antriebe . Aktoren . Industrie-PC . Power . Schablonendrucker . Bussysteme/Protokolle . Digitale Marktübersichten . Steuerungen . HF-/Mikrowellen-technik . Fertigungssteuerung . Rework & Repair . Tools . Entwicklungssysteme . Human Machine Inter-face . Bauteilelagerung . Ethernet . Display-Technik . Quarze/Oszillatoren . Car-to-X . Wärmemanagement
. Infotainment . Stromversorgungen . Internet der Dinge . Fertigungssteuerung . Baugruppenfertigung . Multimedia . Elektromechanik . Lichttechnik + LED . Engineering . Test + Qualität . Halbleiter . Laserbe-arbeitung . Programmierbare Logik . Distribution . Steuerungen . Kabelbearbeitung . Safety & Security . Analog-/Mixed-Signal-ICs . Bildverarbeitung . Messtechnik + Sensorik . Antriebstechnik . Conformal Coa-ting . Leistungselektronik . Embedded-Systeme . Kommunikation . Leiterplattenfertigung . Fahrerassistenz . Wireless ICs . EMV . Fernwartung . Mikromontage . Alternative Antriebe . Aktoren . Industrie-PC . Power . Schablonendrucker . Bussysteme/Protokolle . Digitale Marktübersichten . Steuerungen . HF-/Mikrowellen-technik . Fertigungssteuerung . Rework & Repair . Tools . Entwicklungssysteme . Human Machine Inter-face . Bauteilelagerung . Ethernet . Display-Technik . Quarze/Oszillatoren . Car-to-X . Wärmemanagement . Infotainment . Stromversorgungen . Internet der Dinge . Fertigungssteuerung . Baugruppenfertigung . Multimedia . Elektromechanik . Lichttechnik + LED . Engineering . Test + Qualität . Halbleiter . Laserbe-arbeitung . Programmierbare Logik . Distribution . Steuerungen . Kabelbearbeitung . Safety & Security . Analog-/Mixed-Signal-ICs . Bildverarbeitung . Messtechnik + Sensorik . Antriebstechnik . Conformal Coa-ting . Leistungselektronik . Embedded-Systeme . Kommunikation . Leiterplattenfertigung . Fahrerassistenz
Besuchen Sie das
Branchenportal
all.electronics.de
und überzeugen
Sie sich!
Alles was sie über Entwicklung, FErtigung, AutomAtisiErung wissen müssen
all-electronics_image_2016_210x297.indd 1 01.03.2016 17:11:3602_U2.indd 2 11.03.2019 13:14:30

www.all-electronics.de
Wer jemals die Launch Control eines Porsches oder den Insa-ne Mode eines Tesla auf einem
sicheren Steckenabschnitt (zum Beispiel einem Testgelände) auf dem Fahrersitz erlebt hat, der vergisst das nicht so schnell, denn das macht einfach so richtig Spaß – eine Präferenz für derartige Späße einmal vorausgesetzt. Wohl die meisten von uns genießen es auch, wenn die Autobahn frei ist, einmal das Fahrpedal ganz runterzu-drücken und möglichst mit der Höchstge-schwindigkeit des Fahrzeugs dahin zu brausen. Leider (Umweltschützer sagen da: Gott sei Dank) geht das in Deutschland auf Grund des starken Verkehrs nur noch sehr selten, und im Rest der Welt ist sowie-so bei etwa maximal 130 km/h Schluss.
Vor diesem Hintergrund finde ich Volvos Vorstoß, die Höchstgeschwindigkeit der Neuwagen ab 2020 auf 180 km/h zu begrenzen, sehr erwägenswert. Wer ist denn in letzter Zeit im Auto wirklich ein-mal erheblich schneller als 180 km/h unter-wegs gewesen? Jetzt kommt bestimmt nicht nur aus Stuttgart, München und Ingolstadt ein Aufruf der Entrüstung, dass damit eines der Hauptargumente für den Verkauf diverser Premiumfahrzeuge ent-
fiele, aber das, was wir im Alltag wirklich nutzen und genießen, ist doch die hohe Beschleunigung – und die kann (und soll-te!) ja bis 180 km/h durchaus voll wirken.
Allerdings ergeben sich viele Vorteile aus einer freiwillig auf 180 km/h beschränkten Höchstgeschwindigkeit, denn in die Bewe-gungsenergie (½mv2) geht die Geschwin-digkeit nun mal quadratisch ein. Sowohl in mechanischer Hinsicht (inklusive Masse und damit CO2) als auch in punkto Ent-wicklungsaufwand ließe sich da so man-ches einsparen, und vielleicht lesen wir „maximal 180 km/h“ auch bald in den Euro-NCAP-Vorgaben – ein Horrorszenario?
Die Fahrzeuge müssen nicht nur in punkto Safety auf Top-Level sein, sondern auch bei der Security; darüber berichten wir ausführlich ab Seite 26. Und mit dem Trend zum automatisierten Fahren (ab Seite 36) wird sich die Höchstgeschwindigkeit sowieso ändern. Von daher leistet Volvo einen exzellenten Marketing-Job.
Editorial
EDITORIAL
Weniger ist mehr
Event Data Recorder: Rechtssicherheit und Datenschutz
für alleTH Ingolstadt
48
PCAN-MiniDiag FDHandheld zur grundlegenden Diagnose von CAN- und CAN-FD-Bussen. Messung der Bitrate, Terminierung, Buslast und Pegel am D-Sub-Anschluss.
290 €
PCAN-MiniDiag FD
PCAN-USB Pro FDHigh-Speed-USB 2.0-Interface für die Anbindung von bis zu 2 CAN-FD- und 2 LIN-Bussen mit galvanischer Trennung.
490 €
PCAN-Explorer 6Software zur Steuerung, Simulation und Überwachung von CAN-FD- und CAN-Bussen Aufzeichnung und Wiedergabe Verständliche Darstellung der ID und Daten Automatisierung mit VBScript
ab 510 €
You CAN get it...Hardware und Software für CAN-Bus-Anwendungen…
All
e P
reis
e ve
rste
hen
sic
h z
zgl.
Mw
St.
, Po
rto
un
d V
erp
acku
ng
. Irr
tüm
er u
nd
tec
hn
isch
e Ä
nd
eru
ng
en v
orb
ehal
ten
.
www.peak-system.com
Otto-Röhm-Str. 6964293 Darmstadt / Germany
Tel.: +49 6151 8173-20Fax: +49 6151 8173-29
von Chefredakteur Alfred Vollmer
03_Editorial.indd 3 12.03.2019 11:55:32

März 2019
4 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
MÄRKTE + TECHNOLOGIEN
06 ZVEI-StandpunktEs werde Licht!
08 News und Meldungen
12 Tokio: Trends der Automotive-BrancheACES-Technologien bei der Automotive World 2019
COVERSTORY
16 Die neue Architektur der FahrzeugeInterview mit Dr. Thomas M. Müller, E/E-Leiter bei Audi
BUSSYSTEME
20 Leistungsstarke BordnetzeNervenstränge autonomer Fahrzeuge
24 Funktionsentwicklung über das fahrzeugeigene Bordnetz hinaus, Teil 2V2X-Anwendungen per Simulation in flexibler Testumgebung absichern
CYBERSECURITY
26 Embedded-Security-Lösung für Blockchain im Automobil Mit leistungsfähigem Mikrocontroller und smartem Framework
30 Anforderungen an die Cybersecurity in der Fahrzeugentwicklung Neue Regulierungen und Standardisie-rungen
34 Die Wiege der SicherheitWie die Automotive Crypto Library die Implementierung effektiver Cyber- Security ermöglicht
AUTOMATISIERTES FAHREN
36 Fehleranalyse und Fernsteuerung per CloudTestflotten sicher ausstatten, kontrollieren und fernwarten
40 Zentrale Computerplattform für mehr SicherheitEin neuer Ansatz für das maschinelle Denken autonomer Fahrzeuge
44 Timing-Lösungen fürs Automobil MEMS-Oszillatoren unterstützen zeitkritische Anwendungen
46 Testumgebung autonomer Fahrzeuge Der Weg vom Embedded-Industrie-PC zum servertauglichen Datacenter
48 Event Data Recorder für automatisierte FahrzeugeRechtssicherheit und Datenschutz für alle
52 Datenplattform für künstliche Intelligenz Die Stärken komplexer neuronaler Architekturen nutzen
Messebericht 12 Automotive World Tokio
Die Messe in Japan zeigte es, dass ACES-Technologien die Zukunft der Branche bestimmen: Autonomy, Connectivity, Electricity, Sharing
16
04_Inhalt.indd 4 12.03.2019 15:32:05

www.all-electronics.de
RUBRIKEN
03 EditorialWeniger ist mehr
56 Neue Produkte
57 Impressum
57 VerzeichnisseInserenten-/Personen-/Unternehmensverzeichnis
58 Sagen, was nicht geht!?Dr. Lederers Management-Tipps
20 30
Automotive-Abkürzungen
Erklärungen zu mittlerweile über 1000 Abkürzungen rund um die Automobil-Elektronik finden Sie auf www.all- electronics.de im Bereich „Abkürzungen“ (oben Mitte).
MOBILITYELECTRONICSSUPPLIERS
expo
5.—7. NOVEMBER 2019Berlin ExpoCenter Citymobility-electronics.de
AUTOMOTIVE TECHNOLOGY UTILITY VEHICLE TECHNOLOGY RAILWAY TECHNOLOGY
expoINTERNATIONALE FACHMESSE FÜR ELEKTRONIKZULIEFERER DER MOBILITÄTSBRANCHE
Mit Unterstützung von
Veranstalter
Setzen Sie Impulse! Jetzt online anmelden.
AutomobilElektronik_mes2019_72x297_de.indd 1 19.02.2019 14:06:22
04_Inhalt.indd 5 12.03.2019 15:32:08

6 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Märkte + Technologien ZVEI-Standpunkt
ummodellen können es bis zu 1000 wer-den, so eine Prognose von BMW.
Doch die Pläne der Lichtdesigner gehen heute bereits weit über dieses Komfort- beziehungsweise Stimmungslicht hinaus. Gerade im selbstfahrenden Auto von mor-gen, wo der Fahrer nicht mehr ständig konzentriert auf die Fahrbahn oder ein Display sieht, muss es Möglichkeiten
geben, seine Aufmerksamkeit wieder auf das Fahrgeschehen zu lenken: etwa wenn der Computer bei einer unklaren Ver-kehrssituation an seine Grenzen kommt. Und Licht ist dafür – durch Farbe, Inten-sität und Bewegung in der Wahrnehmung sehr gut dosierbar – ein besonders guter Signalgeber, da es auch aus dem berühm-ten Augenwinkel heraus und selbst bei hoher Geräuschkulisse noch gut wahr-nehmbar ist, wie etwa das sogenannte Scheibenwurzeldisplay, ein LED-Streifen mit vielen RGB-LEDs am unteren Rand der Windschutzscheibe. Oder – viel präg-nanter – der „intuitive Innenblinker“ wie der Chefredakteur dieser Zeitschrift dieses „Display“ bei einem Interview mit dem CTO von Inova Semiconductors auf der Messe Electronica spontan nannte.
Licht mit Signalfunktion ist aber nicht nur ein Thema für den Fahrer: Gerade
Es werde Licht!
Robert Kraus ist CEO von Inova Semiconductors und Mitglied der Fachgruppe Halbleiter sowie der Themenplattform Automotive im ZVEI.Bil
d: ZV
EI
Beim ersten Fahrzeug des Autors, einem Fiat 128 Baujahr 1973, war das Innenlicht noch eine sehr
überschaubare Angelegenheit: eine 12-V-Soffittenlampe über der Fahrertür: Lichtkomfort im Auto vor rund 40 Jahren.
Heute zieren jetzt schmale Lichtstreifen Armaturenbrett und Türen, die den Fahr-zeuginnenraum dezent in der Farbe der Wahl beleuchten. Neben einer immer umfangreicheren Infotainment-Ausstat-tung legen die Kunden heute auch beim Innenlicht Wert auf eine individuelle Note. Bei einem deutschen Premiumhersteller wählen heute schon nahezu 100 Prozent der Käufer von Oberklassemodellen das Ausstattungspaket „Ambientes Licht“, selbst in der Mittelklasse sind es bereits 75 Prozent – Tendenz steigend.
Mit Anleihen aus dem Wohnraum- und Industriedesign wird Licht heute immer mehr zu einem zentralen Gestaltungsele-ment für das Innenraumdesign. Für Pre-miummodelle etwa ein mit hunderten von LEDs bestückter Dachhimmel, der, je nach Tageszeit und Stimmung den Sonnenauf-gang am Grand Canyon oder den abend-lichen Sternenhimmel simuliert. Dazu kommen neue Komfortfunktionen wie etwa das Matrix-Leselicht, das exakt gebündelt bei Bewegungen sogar automa-tisch nachgeführt wird. Nur zwei von vie-len Ideen aus dem großen Repertoire der Lichtdesigner, die allesamt eines gemein-sam haben: Die Anzahl der LEDs im Fahr-zeug wird buchstäblich explodieren: statt der heute üblichen rund 30 bis 40 LEDs werden es in Mittelklassefahrzeugen schon mehrere hundert sein, bei Premi-
beim autonomen Fahrzeug geht es auch um die Kommunikation nach außen zu Fußgängern und Radfahrern. Das heute so selbstverständliche Kopfnicken, Dau-men nach oben oder der freundliche Wink des Fahrers – ja, ich hab Dich gesehen und halte an, Du kannst die Straße überqueren – muss künftig durch eine andere Art der Kommunikation zwischen Auto und Mensch ersetzt werden.
Bei dem vom BMVI geförderten Projekt „Inmotion“, das Ford gemeinsam mit der TU Chemnitz und der Intenta GmbH gera-de in Deutschland durchführt und das noch bis Juni 2020 läuft, werden lichtba-sierte Kommunikationskonzepte zwischen automatisierten Fahrzeugen und anderen Verkehrsteilnehmern entwickelt – bereits mit erstaunlichen Ergebnissen: im Test-verlauf hat sich etwa gezeigt, dass Türkis – auffälliger als Weiß und weniger mit Rot zu verwechseln – die bevorzugte Signal-farbe ist und dass es dabei ein hohes Maß an Akzeptanz und Vertrauen in die Licht-signale gibt.
Licht wird also im Auto von morgen – innen und außen – eine immer größere Rolle spielen. Entscheidend wird dabei sein, dass neue Technologien die große Vielfalt und hohe Funktionalität all dieser Anwendungen überhaupt erst möglich machen. Ein Ziel, das sich etwa die Iseled-Allianz gesetzt hat: ein Verbund von mitt-lerweile 22 Unternehmen, führende Her-steller aber auch hochspezialisierte klei-nere Firmen, die rund um die „Digitale LED“ ein umfangreiches Ökosystem für das Licht von morgen entwickeln – und dies nicht nur für das Fahrzeug. (av) n
Licht wird im Auto von morgen – innen
und außen – eine immer größere Rolle
spielen.
06_ZVEI (av).indd 6 11.03.2019 16:28:25

Das Lear Intu System ist ein intelligentes Sitz Modul, welches sich Ihren persönlichen Präferenzen anpasst und eine Verbindung zur Welt herstellt. Mit einem vollständigen Angebot intelligenter Technologien – einschließlich BioBridge™, SoundZone™, Dynamic Safety, Modular Heat & Cool und ProActive™ Comfort – bringt das Intu™ System Komfort, Unterhaltung und Sicherheit von Passagieren auf ein ganz neues Niveau.
A N P A S S U N G A N I H R L E B E N .
Ihre Verbindung zur Welt...
W W W. L E A R . C O M
07_1_1 Anzeigenlayout.indd 7 08.03.2019 08:25:04

Märkte + Technologien Meldungen
8 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Top-FIVE
Thermal Runaways: So wird die Zukunft der E-Mobilität sicher899ael0319 3M
2
3
4
Das autonome Fahrzeug Ego Mover geht 2019 in Serie
303ael0219 ZF
Tesla übernimmt Maxwell Technologies
878ael0319 Tesla , Maxwell Technologies
So verlängern Superkondensatoren die Batterielebensdauer
898ael0319 Eaton
Die Zeitschrift AUTOMOBIL-ELEKTRONIK finden Sie jeweils als Komplett-PDF jeder Druckausgabe permanent archiviert unter www.automobil-elektronik.de. Zusätzlich stellen wir die einzel-nen Beiträge unter www.all-electronics.de online. Über den Filter „Automotive“ oder den Channel „Applikationen / Automotive“ fokussieren Sie die Auswahl auf Themen rund um die Automobil-
elektronik. Die folgenden neuen automotive-relevanten Beiträge wurden in den letzten beiden Monaten am häufigsten aufgeru-fen. Durch Eintippen des Info Direkt-Codes in die Suchmaske auf der Seite all-electronics.de gelangen Sie direkt zum Beitrag. Das Abkürzungsverzeichnis erreichen Sie jetzt ganz komfortabel, indem Sie ganz oben auf der Homepage „Abkürzungen“ anklicken.
1
Elektromobilität: High-Power-Charging in der Praxis 999ael0319 Phoenix Contact5
TERMINEHannover Messe 01. bis 05.04.2019, Hannover hannovermesse.de
Iseled-Konferenz 05.04.2019, München iseled-conference.com
PCIM 07. bis 09.05.2019, Nürnberg pcim.mesago.com
The Battery Show 07. bis 09.05.2019, Stuttgart thebatteryshow.eu
23. Automobil-Elektronik-Kongress in Ludwigsburg 25. bis 26.06.2019, Ludwigsburg automobil-elektronik-kongress.de
IAA Pkw 12. bis 22.09.2019, Frankfurt/Main, iaa.de
Produkte für die gesamte WertschöpfungsketteWas dSPACE, Micro-Sys und ITS mit ihrer Partnerschaft bezweckenAuf der Embedded World in Nürnberg haben der dSPACE-CEO Martin Goetzeler und der Ge-schäftsführer von Micro-Sys, Michael Rozmann, ihre im Januar geschlossene Partnerschaft er-läutert. Der Hersteller von Werkzeugen für die Entwicklung elektronischer Steuergeräte dSPACE hatte eine für den Automobilbereich exklusive Partnerschaft mit Micro-Sys und ITS geschlossen. Darüber hinaus gingen die Unter-nehmen eine Entwicklungskooperation ein, die auch den Erwerb von Intellectual Property (IP) durch den Werkzeugentwickler beinhaltet. Die neue Produktfamilie umfasst Angebote für die komplette Wertschöpfungskette vom Sensor-Test bei Chip-Herstellern über Hardware-in-the-Loop-Absicherungen bis zum Band-Ende-Test beim Automobilhersteller. „Wir haben schon seit einigen Jahren eine Entwicklungskoope- infoDIREKT 141ael0319
Bild:
Alfre
d Voll
mer
dSPACE-CEO Martin Goetzeler, Micro-Sys-Ge-schäftsführer Michael Rozmann und Frank Schütte, Section Manager Engineering bei dSPACE, erläuterten die Kooperation zwi-schen dSPACE, Micro-Sys und ITS.
ration mit ITS; jetzt haben wir auch die Rechte an der Technologie erworben“, erklärte Mar-tin Goetzeler im Gespräch mit AUTOMOBIL-ELEKTRONIK. „Wir haben zwar die IP gekauft, aber keine Beteiligung am Unternehmen ITS er-worben.“Der zweite Partner Micro-Sys ist spezialisiert auf die Anwendungsentwicklung, das Business De-velopment, den Vertrieb und Support von kun-denspezifischen schlüsselfertigen Systemen für Anwendungen im RF- und Millimeterwellenbe-reich. „Wir beliefern im Prinzip alle Chipherstel-ler und die Radarsenor-Hersteller“, erläuterte Michael Rozmann, Geschäftsführer von Micro-Sys. „Unser Simulator deckt Distanzen von 0,5 m bis 1000 m ab.“
08_News (gk).indd 8 12.03.2019 15:56:56

www.dspace.de/adas
www.dspace.com
Funktionen für autonomes Fahren – Schneller entwickeln mit dSPACE
Die Vision vom autonomen Fahren bietet wesentliches Innovationspotential.
Trotz hoher Komplexität muss der Entwicklungsaufwand aber beherrschbar
bleiben. Die Lösung: eine abgestimmte Werkzeugkette für Funktionsentwicklung,
virtuelle Absicherung, Hardware-in-the-Loop-Simulation und Datenaufzeichnung
im Fahrzeug. Profi tieren Sie von Tools aus einem Guss, die über alle Entwicklungs-
schritte hinweg reibungsfrei zusammenarbeiten. Egal ob es gilt, Software-
Funktionen zu entwickeln, Fahrzeuge, Umgebungssensoren und Verkehrs-
szenarien zu modellieren oder Testfahrten auf PC-Clustern virtuell zu simulieren.
Bringen Sie Ihre Funktionen für autonomes Fahren schnell und sicher auf die Straße!
Advert_ADAS_Hanser-automotive_D_210x297mm_01_190129.indd 1 29.01.2019 11:34:0909_1_1 Anzeigenlayout.indd 9 08.03.2019 09:28:24

Märkte + Technologien Meldungen
10 AUTOMOBIL ELEKTRONIK 03 / 2019 www.all-electronics.de
Offizielle Kooperation zweier OEMsDaimler und BMW arbeiten an einer gemeinsamen Plattform für automatisiertes Fahren
Bild:
BMW
BMW und Daimler kooperieren beim automati-sierten Fahren.
BMW und Daimler bauen gemeinsam eine ska-lierbare Plattform für das autonome Fahren auf. Erst kürzlich hatten sich die Unternehmen verständigt, ihre Mobilitätsdienste Drivenow und Car2go zusammenzulegen. Zunächst soll die Entwicklung von Fahrerassistenzsystemen sowie dem automatisierten Fahren auf Auto-bahnen und für automatisierte Parkfunktionen in der nächsten Technologiegeneration voran-getrieben werden. Die beiden Unternehmen unterzeichneten eine Absichtserklärung (MoU), um diese Technologie für die Mobilität in Zu-kunft zusammen weiterzuentwickeln. BMW Group und Daimler betrachten diesen Ansatz als langfristige und strategische Kooperation und streben an, die nächste Technologiestufe bereits vor Mitte des nächsten Jahrzehnts in der Breite verfügbar zu machen. Die gemeinsame Entwicklung soll über eine skalierbare Architek-tur mehrere Automatisierungsstufen bis Level 4 umfassen, wobei die Technologie der Level 3 und 4 sowohl in Europa als auch in den USA und China das automatisierte Fahren auf Autobah-
Trendwende Mitte der 2020er JahreVerkauf von Plug-in-Hybriden soll stagnierenNach dem starken Wachstum in den vergange-nen Jahren erfährt der Absatz von Plug-in-Hy-brid-Electric-Vehicle (PHEV) in Europa laut LMC Automotive im kommenden Jahrzehnt einen Dämpfer. Der Spezialist für Automobilmarkt-Da-ten und Prognosen rechnet schneller als erwar-tet mit einer sinkenden Nachfrage nach PHEV mit ihrer Kombination aus Batteriebetrieb und Verbrennungsmotor, weil Anreize und Kosten-strukturen kontinuierlich zugunsten reiner Elek-troautos (BEV) gestaltet werden. Als Übergangs-lösung auf dem Weg zu emissionsfreien Autos sollte die Glanzzeit der PHEV – in den vergange-nen Jahren mit Verkaufssteigerungen im höhe-ren zweistelligen Bereich – nur temporär sein. Doch obwohl PHEV noch etwas Momentum übrig hätten – mehrere neue Modelle sollen in den nächsten Jahren erscheinen – sei absehbar, dass BEV den Plug-in-Automarkt schneller als vorhergesehen dominieren werden.
infoDIREKT 132ael0319
Acoustic-Vehicle-Alerting-System2021 kommen akustische Warneinrichtungen für E-Autos
ToolsVector erwirbt Simulationsspezialisten Tesis
Verhaltene Aussichten für 2019Bosch will fünf Milliarden Euro mit Elektromobilität umsetzen
nen ermöglichen soll. Darüber hinaus streben die Partner auch Gespräche über eine Ausdeh-nung der Kooperation in der Zukunft auf höhere Automatisierungsgrade auf Autobahnen sowie für urbane Gegenden und Städte an. Der Süd-deutschen Zeitung zufolge wollen die Partner auch eine gemeinsame Plattform für kleine, frontgetriebene Elektroautos konzipieren. Diese Planung sei jedoch noch streng vertraulich.
infoDIREKT 144ael0319
Bild:
Bosc
h
Bosch-Chef Dr. Volkmar Denner will im Bereich Elektromobilität vor allem in China wachsen.
Vector Informatik, das von Geschäftsführer Thomas Riegraf geleitet wird, übernimmt Tesis.
Bild:
Vecto
r Infor
mati
Bild:
BMW
Ab Mitte 2021 schreibt der Gesetzgeber Warntöne für Elektrofahrzeuge vor.
Damit Fußgänger vor einem langsam heranrol-lenden Elektrofahrzeug gewarnt werden, müs-sen ab 1. Juli 2019 neue Elektroautotypen in Eu-ropa schrittweise mit einer akustischen Warn-einrichtung namens Acoustic-Vehicle-Alerting-System (AVAS) ausgerüstet werden. Der Gesetz-geber schreibt ab Sommer 2021 ein AVAS für al-le neu in den Verkehr gebrachten rein batterie-elektrischen Fahrzeuge, für Plugin-Hybride so-wie Brennstoffzellenfahrzeuge vor. Das schreibt der „Spiegel“. Vor allem Blindenverbände hat-ten sich für diese Warnsysteme eingesetzt, da Blinde auf die akustischen Signale von Autos zu ihrer Sicherheit angewiesen sind. Der Verband will auch dafür sorgen, dass andere Verkehrs-teilnehmer wie ältere Leute und Kinder besser geschützt sind. Eine EU-Verordnung sieht vor, dass die Fahrzeuge ein Geräusch bis zu einer Geschwindigkeit von 20 km/h erzeugen. Der Ton soll dem eines Verbrennungsmotors nach-empfunden werden.
infoDIREKT 131ael0319
Vector Informatik übernimmt das Münche-ner Unternehmen Tesis GmbH . Tesis ist spe-zialisiert auf Simulationslösungen für den virtuellen Fahrversuch, insbesondere echt-zeitfähige Motor- und Fahrzeugmodel-le. Tesis war Teil der 1992 in München ge-gründeten Tesis Firmengruppe und firmierte bis Mai 2018 als Tesis Dynaware. Sie hat sich die dynamische Simulation des virtuellen Fahrzeugs zum Ziel gesetzt und ergänzt dies mit Umfeld- und Sensor-Simulation für den virtuellen Fahrversuch von Fahrerassistenz-systemen und autonomen Fahrzeugen. Vec-tor verfügt über ein breites Produktportfolio zur Durchführung von Tests auf System-, Funktions- und Codeebene von verteilten eingebetteten Systemen. Mit der Übernah-me von Tesis will Vector sein Spektrum um Modelle zur dynamischen Simulation der Versuchsumgebung für Software, Steuerge-räte und Fahrzeugkomponenten erweitern.
infoDIREKT 130ael0319
Bosch will seinen Umsatz im Bereich der Elektromobilität bis 2025 auf fünf Milllarden Eu-ro verzehnfachen. Vor allem in China möchte das Unternehmen seine Technik in Elektroautos unterbringen. In dem Reich der Mitte beginnt in diesem Jahr die Serienfertigung für die E-Achse, einem kompakten Antrieb für Elektroautos. Und vor wenigen Wochen startete die Großserien-produktion einer neuartigen 48-Volt-Batterie. Auch von der Elektrifizierung von Nutzfahrzeu-gen will Bosch profitieren. Der Konzern geht da-von aus, dass 2030 jedes vierte neue Nutzfahr-zeug zumindest teilelektrisch angetrieben wird, in China nahezu jedes dritte. Zum Produktport-folio des Unternehmens für emissionsfreien Wa-renverkehr gehören 36-Volt-Antriebe für Cargo-Bikes, E-Antriebe für leichte Nutzfahrzeuge wie dem Streetscooter, E-Achsen für leichte und schwere Transporter, elektrifizierte Achsen für Lkw-Sattelanhänger sowie künftig Brennstoff-zellen-Antriebe für 40-Tonner.
infoDIREKT 126ael0319
10_News.indd 10 12.03.2019 12:52:58

Märkte + Technologien Meldungen
AUTOMOBIL ELEKTRONIK 03/2019 11www.all-electronics.de
kurz & BÜNDIGAutotalks und Ceva kooperieren bei der Erstel-lung eines Chip-Satzes, der sowohl die DSRC- als auch die C-V2X-Direktkommunikati-on unterstützt.Audi bietet seinen neuen Lade-Service namens Audi E-Tron Charging zunächst in zehn Märkten an.BDEW und Prolytics haben in einer Umfrage herausgefunden: 65 Prozent der Deutschen würden ihr E-Auto am liebsten zu Hause laden.Brusa Elektronik wird sich in Zukunft zusätz-lich zu dem Ausbau des Geschäftsbereiches „Induktives Laden“ auf die Entwicklung von Brennstoffzellenanwendungen fokussieren.Continental und Vodafone haben erste Er-gebnisse ihrer Kooperation vorgestellt: Demnach helfen 5G, C-V2x und Mobile Edge Computing dabei, Verkehrsteilnehmer besser zu schützen.Escrypt und Marvell bieten eine Lösung für die sichere Ethernet-basierte Onboard-Kommuni-kation in Fahrzeugen an. Details per infoDI-REKT 145ael0319.Daimler hat seine Software-Factory Mbition in Berlin eröffnet, in der fast 200 Software-Spezi-alisten Lösungen für das gesamte Fahrzeug entwickeln sollen.
FCA Italy und die Groupe PSA haben eine Ver-einbarung zur Verlängerung ihrer vor 40 Jah-ren begonnenen Kooperation im Bereich leichte Nutzfahrzeuge bis 2023 unterzeichnet. Huf Hülsbeck & Fürst und die Shanghai Baolong Automotive Corporation haben das Joint-Venture BH Sens in China, Europa und den USA gegründet, um zu einem der größten Anbieter im Bereich Reifendruckkontroll-systeme zu werden.Automotive-Abkürzungsverzeichnis wächst: Auf all-electronics.de sind sind jetzt über 1000 Abkürzungen und Definitionen zu finden: Di-rekt auf der Website von all-electronics ganz oben auf „Abkürzungen“ klicken.EDAG Engineering wurde erneut als „Top Ar-beitgeber für sein ausgezeichnetes Personal-management ausgezeichnet – und zwar in der Kategorie „Ingenieure“.Elektrofahrzeuge können in Deutschland jetzt an 16.100 Ladepunkten aufgeladen werden. Innerhalb der vergangenen fünf Monate hat sich ihre Zahl um 20 Prozent erhöht.The Mobility House setzt seine Zusammenar-beit mit Audi fort: Käufer eines Audi E-Tron und eines Plug-in-Hybrides werden so weiter-hin bei Fragen zum Laden zu Hause beraten.
Erni Electronics hat nach erfolgreichem Audit durch den TÜV Rheinland Ende des Jahres 2018 die IATF-Zertifizierung erhalten.ESG Mobility hat eine neue Niederlassung in Gaimersheim bei Ingolstadt eröffnet.Karsan und BMW haben sich auf die Lieferung von Motoren und Energiespeichern für das elektrisch angetriebene Modell Jest Electric des türkischen Herstellers verständigt. Details per infoDIREKT 135ael0319.Mahle hat von Witricity eine Lizenz zum kabel-losen Laden von E-Fahrzeugen erworben. Mehr per infoDIREKT 134ael0319.Tom Tom hat einen bereits bestehenden euro-päischen Vertrag zur Bereitstellung seines Ver-kehrsdienstes für die Marken des Volkswagen-Konzerns um mehrere Jahre verlängert.Volkswagen will 700 Millionen Euro in das nordamerikanische Werk in Chattanooga in-vestieren, um seinen modularen E-Antriebs-Baukasten MEB zu etablieren. Einzelheiten er-halten Sie per infoDIREKT 128ael0319. ZF Friedrichshafen hat ein neues Prüf - z entrum eingeweiht, in dem sich elektrische, hybridisierte und verbrennungsmotorische Antriebe simulieren lassen. Details gibt es per infoDIREKT 142ael0319 auf all-electronics.de.
Zuliefer wächst nach Übernahme100. Geburtstag von Preh
Frost & Sullivan-Studie über E-Transporter2025 wird China 61 Prozent der E-Lkw weltweit verkaufenChina hat sich durch seine Förderung von E-Lkw mit Subventionen und einer großflächigen Ent-wicklung einer Schnelllade-Infrastruktur als un-angefochtener Marktführer im E-Truck-Markt etabliert, ergab eine Studie von Frost & Sullivan. 2025 wird China demnach für 61,1 Prozent der
weltweiten Verkäufe von E-Lkw verantwortlich sein. Trotz der rückläufigen Preise für Akkus sind die Anschaffungskosten für E-Lkw mehr als doppelt so hoch wie für einen Diesel-Lkw.
infoDIREKT 127ael0319
Preh hat sich immer wieder neu ausgerichtet. Nach der Übernahme durch Joyson 2011 verdreifachten sich Mitarbeiterzahl und Umsatz. Die ganze Story im Web per infoDIREKT:
infoDIREKT 400ael0319
Vom Halbleiterhersteller über die Tier-1s bis zum OEM2. Iseled-Konferenz: Automobilbranche diskutiert über digitale LED
Nachdem Inova Semiconductors die Iseled-Technologie als Basis für eine echte „Digitale LED“ zur Electronica 2016 vorgestellt hatte, er-fährt das Konzept mit Fokus auf Systemlösun-gen eine enorme Akzeptanz in der Branche. Das
findet Ausdruck in der Iseled Alliance, die mit fünf Mitgliedern startete und auf über 20 Unter-nehmen angewachsen ist: Das Spektrum reicht von Marktführern (Halbleiterhersteller und Tier1) bis zu spezialisierten Anbietern von Licht-lösungen. So wird die gesamte Wertschöp-fungskette abgedeckt, um Iseled als Standard in der Beleuchtungsindustrie zu etablieren. AUTO-MOBIL-ELEKTRONIK hat das Potenzial der Iseled-Technologie erkannt und organisiert mit Inova Semiconductors die Iseled-Konferenz, auf der Experten die Trends bei der Automobil-Beleuch-tung diskutieren. Licht wird dabei immer mehr zu einem Design-Element, übernimmt aber auch funktionelle Aufgaben. In Kombination mit Displays wird Licht zum integralen Bestand-teil für neue Visualisierungskonzepte für das hochgradig automatisierte und autonome Fah-ren. Details unter iseled-conference.com.
infoDIREKT 333ael0319
Bereits bei ihrer Premierenveranstaltung war die von Inova Semiconductors und AUTOMOBIL-ELEKTRONIK gemeinsam organisierte Iseled-Kon-ferenz zum Thema „Digitale LED“ ausgebucht. 2019 findet sie am 5. April in München statt.
Bild:
Alfre
d Voll
mer
Kontaktlose EnergieübertragungWitricity kauft Qualcomm Halo
Der Technologie-Anbieter für kontaktlose Ener-gieübertragung, Witricity, erwirbt Qualcomm Halo. Bereits zuvor hatten die Firmen mit globa-len Standardisierungsorganisationen zusam-mengearbeitet, die die Referenzdesigns unter-schiedlicher Anbieter prüfen. Die Übernahme soll die Ratifizierung der Standards und die Inter-operabilität mit Fahrzeugen verschiedener Her-steller vereinfachen.
infoDIREKT 137ael0319
Witricity übernimmt Qualcomm Halo.Bil
d: Al
fred V
ollm
er
10_News.indd 11 12.03.2019 12:52:59

12 AUTOMOBIL ELEKTRONIK 03/2019
Märkte + Technologien Automotive World
www.all-electronics.de
Tokio: Trends der Automotive-BrancheACES-Technologien bei der Automotive World 2019
Der japanische Elektronik-Journalist Kenji Tsuda hat für AUTOMOBIL-ELEKTRONIK die Messe Automotive World in Tokio besucht. Sein Fazit: ACES-Technologien (Autonomy, Connectivity, Electricity, Sharing) werden die Zukunft der Automobilbranche bestimmen. Er berichtet ganz individuell über Themen wie Bussysteme, Lidar, Radar, Licht, Power, Tools etc. Autor: Kenji Tsuda
kommen also Radar- und Lidar-Systeme zum Einsatz, um Objekte bei starkem Regen, dichtem Nebel oder Schneestür-men zu erkennen. Auf der Automotive World 2019 in Tokio präsentierten zahl-reiche Unternehmen ihre Ideen in diesem Bereich.
Kameras und BussystemeDer effektive Einsatz von Kameras erfor-dert mehr als nur den Blick nach vorne
Autonome Fahrzeuge eignen sich insbesondere für lange und wei-te Fahrten oder den stockenden
Verkehr im Stau, da sie den Fahrer hier von ermüdenden manuellen Tätigkeiten befreien können. Die Hauptidee hierbei ist, die Anzahl der Verkehrsunfälle zu senken. Um dies zu erreichen, benötigt das autonome Fahrzeug jedoch mehr als nur eine Kamera, die als Ersatz für das menschliche Auge fungiert. Zusätzlich
oder hinten. Es sind mindestens vier Ein-heiten für einen Rundumblick notwendig. Zusätzlich kann auch eine Kamera im Gehäuse der Außenspiegel eingebaut sein, um Fahrzeuge im toten Winkel zu erken-nen. Verbindungsleitungen mehrerer Kamerasysteme könnten teure Ethernet-Leitungen durch eine eigene Kommuni-kations-Busleitung ersetzen. Analog Devices zeigte auf der Messe in Tokio die Bussysteme namens C2B beziehungswei-
Bild 1: Die Automotive World 2019 in Tokio gehört zu den wichtigsten Automotive-Messen in Japan. Nicht nur bei der Eröffnung herrschte Action.
Bild:
Kenji
Tsud
a
12_Automotive World (aok).indd 12 12.03.2019 13:21:53

AUTOMOBIL ELEKTRONIK 03/2019 13
Märkte + Technologien Automotive World
www.all-electronics.de
se Car-Camera-Bus, um Video- und Audio daten von Kameras an Steuergeräte oder Anzeigegeräte zu senden.
Der C2B-Bus verwendet analoge NTSC-Videosignale, um Bilder mit einer Auflö-sung von bis zu 720p/1080i zu senden, wozu eine unabgeschirmte Twisted-Pair-Leitung (UTP) erforderlich ist. Auf dem Bus lassen sich zwar keine Full-HD-Bilder übertragen, aber er bietet dennoch genü-gend Auflösung für die kleinen Displays im Auto. Die Kommunikationsreichweite beträgt bis zu 30 m über ein Sideband-Signal mit I2C oder GPIO-Steuerung. Im C2B-Bussystem stellt ADI das C2B-Bus-IC für die Bildkommunikation zur Verfügung.
Auf der anderen Seite präsentierte Valens den HDBaseT-Bus für das Senden von hochaufgelösten Bildern und USB-2.0-Highspeed-Digitaldaten. HDBaseT ermöglicht die Übertragung vieler Arten von Video- und Audiodaten-, Ethernet-, USB-2.0- und anderen Steuersignalen mit einem einzigen LAN-Kabel von bis zu 100 Metern Länge. Der Signalbus kommt laut den Angaben eines Firmensprechers bei
Videoübertragungen im Automotive- oder industriellen Bereich zum Einsatz.
MEMS-LidarLidar- oder Lichterfassungs- und Entfer-nungssysteme, die aus dem Fahrzeug her-aus wie ein Auge in die Ferne sehen kön-nen, stellten einen der Schwerpunkte der Messe dar. Die Lidar-Technologie misst Entfernungen mittels der Zeitdifferenz zwischen dem Senden und Empfangen eines Laserstrahls, basierend auf der ToF-Technologie (Time-of-Flight). Während das Radar elektromagnetische Wellen ver-wendet, setzt Lidar Laserstrahlen ein.
Herkömmliche Lidarsysteme bestehen aus sperrigen Polygonspiegeln und einem Drehmechanismus zum Abtasten in hori-zontaler und vertikaler Richtung. Um das Volumen des Systems zu reduzieren, ent-wickelte Infineon Technologies ein Lidar-system, bestehend aus einem MEMS-Spiegel zum horizontalen Abtasten mit einem Erfassungswinkel von -15 bis +15 Grad sowie mehreren Lasern zum Abtas-ten der vertikalen Richtung (Bild 2). Das
Während der Automotive World 2019 in To-kio präsentierten zahlreiche Unternehmen Technologien, die für ACES (Autonomy, Con-nectivity, Electricity, Sharing) nützlich sind. Das Ziel hierbei ist, die Kosten der Elektronik im Automobil weiter zu senken und gleich-zeitig ein Höchstmaß an Sicherheit zu ge-währleisten. Neben DC/DC-Wandlern für 48-V-Systeme und Datenanalysetools, wur-den auch Systeme zur Kommunikation im Fahrzeug und zur Überwachung des Ge-sundheitszustands des Fahrers sowie MEMS-Lidar vorgestellt. All diese Anwen-dungen könnten Schlüsseltechnologien für zukünftige ACES-Systeme sein.
Eck-DATEN
MEMS-Lidar verkleinert also das System bei gleichzeitig sinkenden Kosten und trägt somit zur Einführung kleinerer und kostengünstigerer Fahrzeuge bei.
Infineon präsentierte ein Lidar-System mit integrierten MEMS-Spiegeln, zuge-hörigem Treiber-IC für die MEMS-Spiegel, Lasertreiber-IC, Fotodioden-Steuer-IC und Aurix-Mikrocontroller, welches das Unternehmen eigenständig entwickelt hat. Innoluce konstruierte den ursprünglichen MEMS-Spiegel, den Infineon im Jahr 2016 übernommen hat und dazu dann seine eigenen MEMS-Treiber entwickelte.
Vital-Sensor mit MIMO-RadarHerkömmliche 24-GHz-Radarsysteme kamen originär zur Erkennung von Objek-ten an der linken und rechten Rückseite von Fahrzeugen zum Einsatz. ADI hat nun eine neue Anwendung im Bereich Vital-Sensoren gefunden. Sie sollen den Gesundheitszustand von Autofahrern durch Messung von Herzfrequenz und Atmung in Echtzeit erfassen. Das Radar-system (Bild 3) erkennt die Vitalwerte durch Nutzung einer MIMO-Antenne (Multiple-Input-Multiple-Output). Das System besteht aus einem Radar und einer Kamera die über maschinelles Lernen in der Lage sind, einen Menschen zu erken-nen und seinen Gesundheitszustand zu analysieren. Außerdem kann das Radar geringe Abweichungen zwischen den Herzschlägen und den Atemzügen des Fahrers feststellen.
Das Radarmodul besteht aus einem zwei kana l igen Sender-IC , e inem 16-Kanal-Empfänger-IC und einem FPGA für die nötigen Berechnungen. Das System
Vertical line
Horizontal scanning
Bild:
Infine
on
Multiple lasers
Transmitter optics
1D MEMS mirror
Receiver optics
Multi column detector array Bild 2: Das Lidar-System besteht aus einem MEMS-
Spiegel zum horizontalen Abtasten mit einem Erfassungswinkel von -15 bis +15 Grad sowie mehreren Lasern für die vertikale Ausrichtung.
12_Automotive World (aok).indd 13 12.03.2019 13:21:55

14 AUTOMOBIL ELEKTRONIK 03/2019
Märkte + Technologien Automotive World
www.all-electronics.de
misst die Unterschiede des Blutvolumens des menschlichen Herzens bei Aufnahme und Abgabe von Blut. Das gleiche Prinzip kommt bei der Messung des Lungenvo-lumens zur Anwendung. Herkömmliche Techniken des Bio-Radarsystems wurden durch externe Geräusche wie Karosserie-vibrationen beeinflusst. Das vorgestellte System nutzt die MIMO-Antenne und die Strahlformungstechnologie, um die Strahlen auf das menschliche Herz und die Lunge zu fokussieren und so den Ein-fluss externer Geräusche zu minimieren. ADI bietet das Radarmodul in den Vari-anten „Miradar 32“ mit zwei Sendern und 16 Empfängern sowie das „Miradar 256/1024“ mit je 16 oder 32 Sendern und Empfängern an.
LED-Leuchte zur WarnungON Semiconductor schlägt die Möglich-keit vor, die nachfolgenden Fahrzeuge mittels einer durchgehend rot-leuchten-den LED zu warnen. Dabei werden her-kömmliche LED-Leuchten gleichzeitig ein- und ausgeschaltet. Eine aus mehreren einzelnen LEDs bestehende Lichtquelle lässt sich so wie eine einzige große LED-Leuchte betreiben.
In Japan beispielsweise schaltet sich bei einem überholenden Auto automatisch die Warnblinkleuchte nach dem Einscheren vor das überholte Fahrzeug kurz ein und aus, um auf diesem Wege „Danke“ für
einen problemlosen Überholvorgang zu sagen. Die LED-Rückleuchten bestehen aus vielen einzelnen LED-Chips und kön-nen das Licht auch nacheinander und nicht immer nur gleichzeitig einschalten. Die Lichtmuster sol len dabei durchaus bestimmte Botschaften enthalten. ON Semiconductor präsentierte zudem ver-schiedene sequenzielle Muster, die eine
bestimmte Information für das nachfol-gende Auto ausdrücken sollen, mit dem Ziel, einen weltweit einheitlichen Standard festzulegen.
Vielfalt an DC/DC-WandlernWährend Elektrofahrzeuge mit einer Spannung von annähernd 300 V bis 350 V arbeiten, nutzen Mild-Hybridfahrzeuge meist 48-V-Batterien für regeneratives Bremsen. Viele ECUs basieren auf 12-V-Batteriesystemen, so dass DC/DC-Buck-Wandler von 48 V auf 12 V wandeln müssen und daher in Mild-Hybrid-Syste-men zum Einsatz kommen.
Analog Devices hat einen DC/DC-Buck-Wandler mit einem Wirkungsgrad von mehr als 97,2 Prozent bei 20 A Last ent-wickelt, der in zwei Stufen von 48 V auf 12 V wandeln kann: Zuerst von 48 V auf 24 V und dann von 24 V auf 12 V. ADI zeigte außerdem den LTC7821, der mit 500 kHz Schaltfrequenz arbeitet sowie einem inte-grierten Induktor mit einer Ausgangs-spannung von 11,36 V und einem Ein-gangsstrom von 35,16 V (Bild 4).
Torex Semiconductor integrierte eben-so einen Induktor mit DC/DC-Wandler-Chip in einem einzigen Gehäuse. Die XDL-600-Serie benötigt hierfür nur Kon-densatoren als externe Komponenten und
Bild 3: Das Vital-Sensormodul überprüft den Gesundheitszustand des Fahrers in einem Auto.
Bild:
Kenji
Tsud
a
Bild 4: Der LTC7821 arbeitet mit 500 kHz Schaltfrequenz sowie einem integrierten Induktor mit einer Ausgangsspannung von 11,36 V.
Bild:
Kenji
Tsud
a
12_Automotive World (aok).indd 14 12.03.2019 13:21:57

AUTOMOBIL ELEKTRONIK 03 / 2019 15www.all-electronics.de
Autor Kenji Tsuda Freier Journalist in Tokio für Elek-tronik- und Automotive-Themen
infoDIREKT 408ael0319
bietet insgesamt drei verschiedene Modelle mit Ausgangsströmen von 1,5 A, 500 mA und 600 mA an.
Ideen zur haptischen BedienungEs ist natürlich nicht wünschenswert, wenn der Fahrer zur Bedienung des Dis-plays im Cockpit die Hand vom Lenkrad lösen muss. Um eine höhere Sicherheit zu gewährleisten, hat Nidec eine Anwendung mit haptischem Feedback für Automobile präsentiert, die das Unternehmen bereits in Serie für den Smartphone-Markt pro-duziert hat. Wenn das Auto von der weißen Fahrbahnlinie abweicht, warnt die einge-bettete haptische Vorrichtung den Fahrer durch Vibrationen.
DatenanalysetoolsDer ACES-Trend generiert eine Vielzahl an Daten im Auto, darunter Daten zu Geschwindigkeit, Motor- und Reifenum-drehungen, Lenkwinkel, Anzahl der Betä-tigungen der Gas- oder Bremspedale und andere. Um diese Daten zu nutzen, hat Aptpod drei neue Anwendungen, beste-hend aus Hard- und Software-Tools auf den Markt gebracht: Synchronized-CAN-Transceiver, Visual-M2M-Motion und Python-SDK.
Der Synchronized-CAN-Transceiver (Bild 5) erfasst hierbei zahlreiche analoge und digitale Daten, einschließlich der Karosserie-Daten, während parallel eine Synchronisation mit vielen weiteren Sensor daten erfolgt. Visual M2M-Motion wiederum ist eine Anwendungssoftware
für Smartphones mit neun Achsen-Sen-soren, GPS und Kamera im Smartphone. Die Daten vom CAN-Transceiver lassen sich in die Cloud senden und per Smart-phone abrufen. Das Unternehmen hat bereits eine IoT-Plattform für die Auto-mobilindustrie namens „Intdash-Auto-motive-Pro-Cloud“ bereitgestellt. Dort können Fahrzeugdaten gesammelt und gespeichert werden. Python-SDK ist eine Bibliothek zum Aufbau und zur Ausfüh-rung verschiedener Möglichkeiten der Datenverarbeitung, einschließlich einer Echtzeit-Datenanalyse, der Datenverar-beitung für Analysezwecke und Metho-den mit maschinellem Lernen.
FazitWährend der Automotive World 2019 wurden Technologien vorgestellt, die für ACES nützlich sind, darunter Kommuni-kationssysteme im Fahrzeug, MEMS-Lidar, Gesundheitszustandsüberwachung des Fahrers, 48-V-System-DC/DC-Wand-ler und Datenanalysetools. All diese Anwendungen können Schlüsseltechno-logien für die Entwicklung zukünftiger ACES-Systeme sein. (aok) ■
Bild 5: Der Synchronized-CAN-Transceivers erfasst zahlreiche analoge und digitale Daten, einschließ-lich der Karosserie-Daten
Bild:
Kenji
Tsud
a
Newsletter
Die Topnews aus der Elektronikwelt, zweimal in der Woche
Jetzt kostenlos abonnieren!
all-electronics.de/newsletter
Bild
: Vis
ual C
once
pts/
foto
lia.co
m
ae_fueller_nl_topnews_1_3_hoch_56x257.indd 1 26.07.2013 14:52:25
12_Automotive World (aok).indd 15 12.03.2019 13:21:59

Coverinterview Audi
16 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
INTERVIEW MIT DR. THOMAS M. MÜLLER, E / E-LE ITER BE I AUDI
Die neue Architektur der FahrzeugeDie Autos von morgen werden eine radikal andere Architektur haben als die aktuell üblichen Fahrzeuge. Mit Dr. Thomas M. Müller, E/E-Leiter bei Audi, sprach AUTOMOBIL-ELEKTRONIK über Details der neuen Architektur: Von den Grundlagen und Basisüberlegungen über Kabelbaum, Chips, Safety, Security, Cloud-Anbindung, Datenbusse und Integration bis zur Software-Wiederverwendung sowie der Neuordnung der Aufgabenver-teilung über die Lieferkette hinweg. Das Interview führte Alfred Vollmer
AUTOMOBIL-ELEKTRONIK: Was ändert sich grundlegend an der
Architektur der Fahrzeuge?
Dr. Thomas M. Müller: Wir sind dabei, eine neue Architektur zu entwerfen, die demnächst in die Serienentwicklung geht, und beginnen mit den neuen Premium-E-Fahrzeugen im Konzern, sodass zunächst einmal Audi und Porsche betroffen sind. Wir entwickeln eine gemeinsame Architektur, die dann auf der
Software ganz weit vorne unterwegs, ebenso wie bei der Soft-wareentwicklung in entkoppelten Modellen, zum Beispiel mit e.solutions, unserem Joint Venture mit Elektrobit, in dem wir unsere Infotainment-Software wirklich selber entwickeln, selbst integrieren und auf die Head-Unit aufspielen. Aber wir haben auch immer noch etliche Steuergeräte, die heute im Prinzip nur Lastenheftvergabe sind.
„Die Software der Zukunft ist nicht
mehr monolithisch und damit nicht
mehr als ein fortlaufender Code realisiert. Sie ist
vielmehr in kleine Einheiten unterteilt, die sich OvertheAir runterladen lassen.“
Dr. Thomas M. Müller
gemeinsamen PPE-Plattform erstmalig zum Einsatz kommen wird, wobei PPE für Premium Platform Electric steht. Porsche und Audi entwickeln PPE gemeinsam quasi als Premium-Pendant zum MEB, dem modularen Elektrifizierungs-Bau-kasten im Konzern.
Nicht nur das Thema E-Fahrzeuge bringt natürlich neue Herausforderungen mit sich, sondern insbesondere Themen wie autonomes Fahren, Digitalisierung, Update-fähige Secu-rity etc. Deshalb ist auch dort ein nächster Architekturhub erforderlich. Und in diesem Architekturhub sollen Security-by-Design und Update-by-Design fest verankert sein, während gleichzeitig die Entkopplung von Hardware und Software deutlich stärker gespielt werden soll als dies in den Fahrzeu-gen der Fall ist, die jetzt auf den Straßen unterwegs sind. Audi ist auf dem Markt zwar schon bei der Eigenentwicklung von
Welche Grundzüge weist die neue Archi-
tektur auf?
Dr. Thomas M. Müller: Wir müssen nicht nur Hardware und Software stärker trennen, sondern wir müssen uns auch stärker auf das Thema Applikation und damit Software konzentrieren – und zwar im Zusammenspiel mit den benö-tigten Hardware-Peripherien, die für eine Funktion notwendig sind. Damit wollen wir auch einen Teil der Wert-schöpfung stärker kontrollieren. Das heißt allerdings nicht, dass wir das zwingend alles selber machen. Wir werden zwar einen Teil der Software selbst entwickeln, aber wir werden dann auch einen Teil so mit Partnern entwickeln, dass uns dann vielleicht die IP gehört. Zusätzlich werden wir
einen Teil als Lizenzen einkaufen. Die Funktion und damit letztend-lich die Software steht hier ganz klar im Vordergrund – und nicht mehr so sehr das einzelne Steuergerät.
Wie sieht das konkret aus?
Dr. Thomas M. Müller: Wir werden das Bordnetz in einem Ebenen-modell mit einzelnen Domänen strukturieren. Die oberste Ebene bildet die sogenannte Rechnerebene, die derzeit aus fünf Hochleis-tungs-Computern für fünf Domänen besteht, aber das können in Zukunft auch weniger Einzelcomputer sein. Auf diesen High-Per-formance-Computern laufen im Wesentlichen die Logiken und Appli-kationen. Dieser Domänencontroller fungiert dann sozusagen als Gehirn seiner Domäne. Unterhalb der Rechenebene sind alle mög-lichen Peripherien angesiedelt – in erster Line Eingabe-/Ausgabe-steuergeräte für Sensoren, Bildschirme, Audiosysteme etc.
16_Coverstory Audi (av).indd 16 12.03.2019 15:33:06

Coverinterview Audi
AUTOMOBIL ELEKTRONIK 03/2019 17www.all-electronics.de
Derzeit arbeiten wir daran, die Logik möglichst aus den Peri-pherien herauszulösen und nach oben hin zu zentralisieren, sodass die Applikation beziehungsweise der Algorithmus in der Rechnerebene stattfindet. Zudem werden wir eine beachtliche Anzahl von Steuergeräten entfallen lassen; in der Body-Domäne gelingt das beispielsweise relativ einfach und ziemlich gut. Wir lösen die Funktion vom Steuergerät und rechnen sie zentral.
Wie wirkt sich das auf einen Kabelbaum aus?
Dr. Thomas M. Müller: Dafür nehmen wir nur vereinzelt mehr Verkabelung in Kauf. Teilweise sparen wir auch Kabel, weil zum Beispiel die Datenleitungen und Stromversorgungen der nicht mehr vorhandenen ECUs entfallen. Wir haben uns die Architek-tur bewusst weniger unter dem Aspekt der Verkabelungskom-plexität sondern mehr unter zwei anderen Leitfragen angeschaut. Es ging uns darum, Kosten zu sparen und damit einhergehend auch die Steuerungshoheit über Software, Logik und Algorith-mik zu verstärken.
Welche wesentlichen Features haben die Domänencontroller?
Dr. Thomas M. Müller: Nach aktuellem Stand, den wir in 2022 auf den Markt bringen werden, beinhaltet die Architektur fünf Domä-nen und damit fünf Domänencontroller. Auf diesen Domänen-rechnern läuft die Software-Umgebung. Damit das funktioniert, müssen wir noch einiges angleichen und anpassen. Wir können mit dieser Struktur auch ein einheitliches Security-Konzept
aufsetzen. Indem wir das Thema Security ganzheitlich und sys-tematisch angehen, erreichen wir eine viel höhere Ebene der Datensicherheit. Das gleiche gilt für das Update-Konzept, das als Querschnittsthema zentral einmal entwickelt wird, um es dann im gesamten Bordnetz zu applizieren. Wir können die Querschnittsthemen durch die Angleichung der Software-Umge-bung auf der Rechnerebene deutlich besser zentral – also nur einmal – entwickeln und dann verbauen.
Welche Auswirkungen hat das auf den Einkauf und die Zulieferer?
Dr. Thomas M. Müller: Mit diesem Architektur-Ansatz, der die Hardware und Software trennt, arbeiten wir deutlich stärker zentralisiert, denn wir wollen die Logik und damit das OEM-spezifische Verhalten möglichst aus den Peripherie-Steuerge-räten herauslösen. In der Praxis bedeutet das, dass wir in Zukunft nach Möglichkeit eher Standard-Sensoren und Stan-dard-Aktuatoren sowie standardisierte Bauteile einkaufen. Die Anzahl der Lastenhefte, in denen wir das genaue Verhalten eines Bauteils aus OEM-Sicht vorschreiben, wird sich somit verringern, weil die OEM-spezifische Ausprägung auf der Rech-nerebene passieren soll.
Was heißt das zum Beispiel für eine Frontkamera? Bisher sorgten
Chips von Mobileye etc. für eine gewisse Intelligenz und Vorverar-
beitung in der Kamera; sollen jetzt nur noch Rohdaten aus der
Kamera gelangen?
Dr. Thomas M. Müller (hier im Interview mit AUTOMOBIL-ELEKTRONIK): „Mittlerweile lautet die Frage weniger, mit welchem First-Tier ich eine Lösung reali-siere, sondern eher, welchen SoC-Hersteller ich auswähle. Eigentlich treffen wir auf Tier-2-Ebene eine Entscheidung, und dann suchen wir einen Tier-1, der diese Lösung implementiert.“
Bilder: Audi
16_Coverstory Audi (av).indd 17 12.03.2019 15:33:07

Coverinterview Audi
18 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Dr. Thomas M. Müller: In 2022 werden wir noch nicht mit den rei-nen Sensor-Rohdaten arbeiten, denn sie erzeugen noch eine zu große Buslast. Aber die Grundidee besteht darin, nur die Vorver-arbeitung durchzuführen, die zwingend notwendig ist. Die Objekterkennung selbst könnte lokal erfolgen, aber das Reagieren und Auslösen einer Aktion, also das Plan-and-React, das soll zentral erfolgen. Analog dazu verfahren wir in der Body-Domä-ne, wo der Body-Controller deutlich stärker zentralisiert wird.
Im Infotainment gehen wir so weit, einen einzigen Cockpit-rechner zu nutzen. Das heutige FPK, frei programmierbare Kom-biinstrument, wird damit im Wesentlichen ein reines Anzeige-instrument, während die Intelligenz auf einer erweiterten Head-Unit stattfindet. Der zentrale Cockpitcomputer wird dann alle Displays ansteuern: das Beifahrerdisplay, Rearseat etc.
Wie garantieren Sie dabei die Einhaltung der Safety gemäß ISO
26262?
Dr. Thomas M. Müller: Die Head-Unit arbeitet mit mehreren Par-titionen, von denen einige ASIL-konform arbeiten. So läuft die Tacho-Funktion dann in einer eigenen Partition, um sozusagen als zentrales Steuergerät das Display im Cockpit mit anzusteuern. Die Ansteuerung des Displays erfolgt dann über eine schnelle Punkt-zu-Punkt-Datenautobahn.
Damit rücken die Themen Integration und Softwarekompe-tenzen viel stärker in den Vordergrund, denn durch den Wechsel
auf diese Quasi-Großrechner müssen wir deutlich stärker als Integrator auf den Rechner fungieren.
Wie soll die Integration in der Praxis erfolgen?
Dr. Thomas M. Müller: Die Integration könnte der OEM mit einem First-Tier machen; beim Cockpitrechner hat e.solutions diese Aufgabe übernommen. Es kann aber auch ein externer Partner sein. Entscheidend für uns ist, dass wir als OEM deutlich tiefer einsteigen, uns auch damit beschäftigen, welche Software bezie-hungsweise welche Applikation wir denn für welche Lösung haben wollen. Dabei fokussieren wir uns deutlich stärker auf das, was letztlich die Kundenfunktion ausmacht, nämlich die Soft-ware und die Applikation. Damit sind wir dann auch darauf vor-bereitet, in einem nächsten Schritt vielleicht auch noch einmal stärker zu integrieren.
Noch weniger Steuergeräte sozusagen?
Dr. Thomas M. Müller: Noch weniger von den Rechnern auf der Rechnerebene. Man könnte ja auch eine sicherheitskritische Domä-ne wie Fahrwerk und ADAS bilden und zusätzlich eine Komfort-Infotainment-Connectivity-Domäne, um so statt fünf nur noch zwei, drei Domänen zu haben, wenn die Rechenkapazität deutlich steigt. Eine derartige Hochintegration funktioniert allerdings nur dann, wenn man die Software-Bausteine wiederverwenden kann, ohne sie jedes Mal komplett neu zu qualifizieren.
Solange wir ein Lastenheft vergeben, müssen wir im Prinzip ja immer alles noch einmal nachprogrammieren – insbesondere die OEM-spezifischen Elemente. Wenn wir Software getrennt sourcen oder getrennt entwickeln lassen oder vielleicht mit eige-ner IP arbeiten oder Lizenzen zukaufen, dann können wir die Softwarebausteine in Zukunft wiederverwenden. Wenn wir dann die Hardware ändern, upgraden etc., können wir die Software, die bereits auf einem anderen Produkt integriert funktioniert, wiederverwenden und auf einer ganz anderen Absicherungs-qualität aufsetzen. Selbst wenn wir die Software um 5 oder 10 % erweitern hätten wir bereits ein Basispaket, das stabil läuft.
Wie soll die Software-Wiederverwendung funktionieren?
Dr. Thomas M. Müller: Wir müssen bei der Software mit neuen Architekturen arbeiten, wobei hier besonders Docker-Konzepte interessant sind, bei denen man Container ein- und auschecken kann: Die Software ist dabei in einzelne Container, im Prinzip sind das kleine Executables, verpackt, die dann gegen definierte Schnittstellen in der Umgebung eine bestimmte Aufgabe erfüllen beziehungsweise eine bestimmte Funktion abbilden. Die Software der Zukunft ist nicht mehr monolithisch und damit nicht mehr als ein fortlaufender Code realisiert. Sie ist vielmehr in kleine Einheiten unterteilt, die sich Over-the-Air runterladen lassen. Weil die Schnittstellen schon im Vorfeld stehen, ist die Software off-Board testbar – auch in sehr vielen automatisierten Tests.
Auch Microsoft Windows nutzt das Dockerkonzept. In punkto Blue-
Screen war die Lernkurve da sehr lang. Wie sorgen Sie dafür, dass
so etwas im Auto nicht passiert?
Dr. Thomas M. Müller: Wir gehen natürlich nur dort den Weg, wo wir es letztlich auch realisieren können. Deshalb springen wir
„Wir gehen in Richtung Ethernet- Kommunikation im Fahrzeug und
beginnen mit Gigabit-Ethernet. Diese erste Migrationsstufe steht für 2022 auf
unserem Zeitplan.“Dr. Thomas M. Müller
16_Coverstory Audi (av).indd 18 12.03.2019 15:33:09

Coverinterview Audi
AUTOMOBIL ELEKTRONIK 03/2019 19www.all-electronics.de
InterviewerAlfred VollmerChefredakteur AUTOMOBIL-ELEKTRONIK
infoDIREKT 300ael0319
gewiss nicht von 0 auf 100, um morgen alles dockerfähig zu haben. Wenn wir neue Aspekte angehen, können wir das Dockerkon-zept von Anfang an nutzen, aber in Summe ist es ein Migrati-onspfad. Derzeit schauen wir gerade, an welcher Stelle wir wie und wann ansetzen.
Was ist in Zukunft jenseits des Dockerkonzepts wichtig?
Dr. Thomas M. Müller: Wir müssen und wollen serviceorientiert kommunizieren; dazu gilt es, die Kommunikation auch deutlich stärker zu abstrahieren. Die dedizierten Matritzen werden ent-fallen und stattdessen werden mehr Service-Aufrufe erfolgen, sodass es den Partnern auf dem Bordnetz letztlich egal ist, von wo aus der Service bedient wird. Da erfolgt dann zum Beispiel nur eine Anfrage „Gib mir die Systemzeit und die Position“, um diese Info zu bekommen, aber es erfolgt dann keine Anfrage mehr bei einem ganz bestimmten Bordnetzteilnehmer.
Auf welchen Datenbus setzen Sie?
Dr. Thomas M. Müller: Wir gehen in Richtung Ethernet-Kommu-nikation im Fahrzeug und beginnen mit Gigabit-Ethernet. Die-se erste Migrationsstufe steht für 2022 auf unserem Zeitplan.
Bei Flexray laufen wir teilweise in eine Kosten- und Leistungs-Situation, die wir intensiv überdenken müssen. Dass MOST sehr teuer ist, wissen wir auch alle. Trotz der starken Konzentration auf Ethernet wird es noch den einen oder anderen CAN- oder CAN-FD Anschluss geben. Wir versuchen, eine größere Verein-heitlichung bei den Bussen zu erzielen.
Welche Zukunft hat dabei LIN?
Dr. Thomas M. Müller: Low-Cost-Busse wie LIN werden zunächst im Fahrzeug bleiben, denn wir können nicht alles von heute auf morgen komplett revolutionieren. Es stellt sich nämlich die Fra-ge, ob die Hersteller von Low-Cost-Steuergeräten überhaupt ein Gerät mit Ethernet-Anschluss liefern können und zu welchem Preis. Da wird es durchaus noch einen Mischverbau geben, aber bei den schnellen Datenverbindungen werden wir aufräumen wo immer wir können.
Das klingt wie das längerfristige Aus für MOST und Flexray…
Dr. Thomas M. Müller: Ja. Wir werden da aussteigen in den nächs-ten Jahren. Allein aus Kosten- und aus Übernahmegründen werden wir CAN und LIN wohl noch länger sehen.
Wo spielen CAN und LIN dann noch eine Rolle?
Dr. Thomas M. Müller: CAN und LIN kommen dann bei relativ einfachen Funktionen zum Einsatz, wo man Low-Cost, fast mit Commodities unterwegs ist, denn auf solchen Steuergeräten läuft ja in aller Regel nicht sehr viel Logik. Wir müssen eher schauen, dass wir an anderen Stellen aus den Steuergeräten Logiken raus-nehmen, zentralisieren, und dann auch dort eine stärkere Com-modity-Schnittstelle schaffen.
Hier Höchstintegration, dort Peripherie mit möglichst wenig eige-
ner Intelligenz.
Dr. Thomas M. Müller: Genau. Die Funktionalität integrieren wir hoch, und dann bleibt außen quasi noch ein Aktuator, im Wesent-
lichen ein Stellmotor mit Endanschlag etc., der mir im Prinzip die erforderlichen mechatronischen Dinge als Signale wieder zurückmeldet. So wird die Hardwareseite inklusive Aktoren und deren Ansteuerung stärker austauschbar und damit günstiger. Es soll wirklich eine Art Commodity werden, wo es dann nur noch um die Leistungsklasse geht, aber der OEM muss sich da nicht mehr selbst drum kümmern, dass das Lastenheft richtig umgesetzt ist, dass alles überall angepasst wird.
Was bedeutet das dann für die Zusammenarbeit mit den Tier-1,
Tier-2 und Ingenieursdienstleistern?
Dr. Thomas M. Müller: Bis dato hat ein Tier-1 gegen Spezifikation in vielen Fällen eine Gesamtlösung als Blackbox oder Silverbox geliefert, bei der er sich um Software-Integration, Hardware-Erstellung und in vielen Fällen auch die Auswahl der SoCs und der Halbleiterbausteine selbst gekümmert hat, wobei Audi da schon auch aktiv mitgeredet hat.
Jetzt preschen die Chiphersteller massiv nach vorne, denn gera-de bei den komplexeren Chips machen die SoCs den entscheiden-den Unterschied zwischen zwei Steuergeräten aus. Es ist nun einmal ein grundlegender Unterschied, ob Sie einen Intel- oder einen Nvidia-Chip beim automatisierten Fahren nutzen.
Außerdem bestimmt der Chip die Software-Umgebung mit. Deshalb lautet die Frage mittlerweile weniger, mit welchem First-Tier ich eine Lösung realisiere sondern eher, welchen SoC-Hersteller ich auswähle. Eigentlich treffen wir auf Tier-2-Ebene eine Entscheidung, und dann suchen wir einen Tier-1, der die-se Lösung implementiert. Die Wertschöpfungskette hat sich bereits verändert.
Gleichermaßen sehen wir das nach oben. Mit den in Software gegossenen Funktionen kommen da ja auch neue Player auf den Markt; entsprechend haben sich auch viele First-Tiers bereits verstärkt, zum Beispiel durch Zukäufe in den Bereichen Securi-ty oder Updates. Von unten wirken die Tier-2, also die Chipher-steller, stärker mit und von oben die Software- und Applikati-onsanbieter, sodass den First-Tiers im Wesentlichen die Integ-rationsaufgabe bleibt – und zwar mit geringerer eigener Entschei-dungsfreiheit, weil der OEM deutlich mehr Rahmenbedingungen setzen wird. Gleichzeitig muss sich der OEM deutlich stärker um die Halbleiter kümmern.
Bordnetz, Dienstleister, Cloud, Backend und mehr
Weitere Infos über das veränderte Bordnetz, die Zusammenarbeit mit Halbleiterherstellern, die Rolle der Ingenieursdienstleister, Function-on-Demand, das Backend-Konzept, den Entwicklungs-aufwand zur Cloud-Anbindung und andere Aspekte erfahren Sie in der Langversion dieses Interviews, die Sie per infoDIREKT 300ael0319 auf www.all-electronics.de aufrufen können.� n
16_Coverstory Audi (av).indd 19 12.03.2019 15:33:10
20 AUTOMOBIL ELEKTRONIK 03 / 2019
Bussysteme Bordnetz
www.all-electronics.de
unterstützt nunmehr Kameras hinsichtlich Auflösung (4 k bis 8 k), Frameraten (etwa 60 fps) und Farbtiefen (bis 24 Bit). Derzei-tige Entwicklungen gehen dabei von bis zu 12 Gbit/s aus. Das digitale Dashboard verzichtet zunehmend auf Knöpfe und inte-griert Funktionen in Touch-Panels. Bei Displays mit mittleren Auflösungen ist mit LVDS aufgrund vergleichsweise moderatem Aufwand der Implementierung weiterhin zu rechnen, wohinge-gen bei höheren Auflösungen zunehmend (e)DP und HDMI zum Tragen kommen. Über Multimediaanwendungen hinaus ist zukünftig mit bis zu zehn Displays oder mehr zu rechnen. Hin-sichtlich PHYs hat sich der relevante Halbleitermarkt für Auto-motive dabei längst in Richtung Highspeed-Consumer-Standards
Zukünftige automobile Anwendungen und der richtungsweisende Wechsel zu serviceorientierten Architekturen führen zu steigenden Anforderungen an Bordnetz-Komponenten hinsichtlich Modularität, Skalierbarkeit und Bandbreite. Der Beitrag von TE Connectivity geht dabei im besonderen Maße auf die zukünftigen Punkt-zu-Punkt-Ver-bindungen für die Sensor-Datenfusion sowie die Bereitstellung der Daten in das automobile Netzwerk Ethernet ein.
Eck-DATEN
Die heterogene Landschaft von Halbleitern zum einen, sowie die serviceorientierte Bereitstellung von Funkti-onen und Diensten zum anderen führen gleichermaßen
zu drastischen Änderungen in der Bordnetzarchitektur und flie-ßen elementar in die Anforderungen an aktuelle Steckverbin-derkomponenten ein. Dabei sind leistungsstarke SoC-Systeme durch ihren Aufbau für millionenfache Paralleloperationen in der Lage, alle wesentlichen und sicherheits relevanten Informa-tionen in einem Bauteil zu verarbeiten. Für einen Fahrzeugher-steller ergeben sich damit völlig neue Möglichkeiten im Aufbau der Elektronik und Bordnetzarchitektur, da es nicht länger nötig ist, die physische und signaltechnische Ebene in die Domänen Netzwerk, Infotainment und Safety zu trennen.
Die Einführung von Automotive Ethernet und die Integration in Halbleiterlösungen ist derweil längst im Gange. Für automo-bile Anwender wie einen Stecksystemhersteller ergeben sich dadurch völlig neue Fragestellungen hinsichtlich der Signalver-arbeitung (als I/O gekennzeichnet, Bild 1).
MIPI-CSI-2-Protokoll unterstützt KamerasDas MIPI-CSI-2-Protokoll etabliert mit aktuellen D-PHY-Versi-onen Standards mit bis zu vier Lanes mit jeweils 4,5 Gbit/s und
Leistungsstarke BordnetzeNervenstränge autonomer Fahrzeuge
Eine sichere Umfeld-Erkennung durch multiple Sensoren, ein leistungsstarkes Backend zur Vernetzung sowie die fehlertolerante Systemauslegung sind Schlüsselelemente eines autonomen Fahrzeugs. Steigende Anforderungen an Bordnetzkomponenten ergeben sich hinsichtlich Bandbreite, Skalierbarkeit und Miniaturisierung und finden Einzug ins Fahrzeug. Autor: Jens Wülfing
Bild:
o_du
_van
– A
dobe
Stock
20_TE Connectivity (aok).indd 20 11.03.2019 16:33:15

AUTOMOBIL ELEKTRONIK 03 / 2019 21
Bussysteme Bordnetz
www.all-electronics.de
orientiert und benötigt detaillierte Highspeed-Kenntnisse für sämtliche Design-ins. Integrierte PHY-Lösungen, bei denen dis-krete Elemente wie ESD-Schutz, Filter und Drosseln direkt auf dem Silizium integriert sind, reduzieren dabei wiederrum Desi-gnkomplexität der HF-Pfade und verkürzen Entwicklungszeiten. Durch einheitliche Herstellungsprozesse sind R, L, C einstellbar und PHY-Schnittstellen besser in der Signalübertragung. Der gesamte Halbleitermarkt ist dabei hinsichtlich der Spezifikation zur Implementierung von Leitungssätzen entscheidend für das Bordnetz der Zukunft. Zu guter Letzt kommt es auch auf die konkrete Architektur des Gerätes an. Durch die zuvor erwähnte, nicht mehr vollständig trennbare, serviceorientierte Architektur kommen bisweilen von niederfrequenten Signalen hoher Leis-tung bis zu hochfrequenten Signalen verschiedene Leitungen an einem Gerät an. Modulare und skalierbare Stecksysteme können die Variantenvielfalt geringhalten. Das Augenmerk liegt weiter-hin auf der Auswahl geeigneter Leiterplattenmaterialien und dem Fokus auf entkoppelten Highspeed-Signalpfaden, um Daten sicher ans Ziel zu bringen.
Bei den Chip-to-Chip-Verbindungen im Gerät sind bereits heute Protokolle wie PCIe der Standard. Dabei ist naheliegend, dass es für zukünftige komplexe Architekturen auf ultraschnelle Datennetze zur Lösung komplexer Aufgaben ankommen wird. Die Entscheidung, welche PHY-Technologien zum Tragen kom-men, soll im Zeitraum 2022 bis 2024 fallen. Bild 2 zeigt ein Beispiel mit Schwerpunkt auf Highspeed-Links mit Datenraten über 12 GBit/s. Das System bietet Redundanz für den ausfallsicheren Betrieb sowie besonders geringe Latenzzeiten bei höherer Band-breite. Auch auf das Bordnetz wirken sich die ultrahohen Daten-raten aus, denn sie erfordern in beide Richtungen stringente Kanalllimits oder setzen separate Leitungen voraus (Multilane-Konzepte). Niedrige Querschnitte haben dabei hohe Einfüge-dämpfungen zur Folge, und bei verdrillten Paarleitungen kommt es zu Resonanzeffekten.
Zusammenfassend lässt sich die aktuelle Halbleiterlandschaft in diesem Kontext in Netzwerke/Bussysteme (CAN, Flexray, Ethernet), Punkt-zu-Punkt- (Serializer/Deserializer) sowie Chip-
to-Chip-Verbindungen unterteilen. Aktuell ziehen dabei 1-Gbit/s-Ethernet als das zukünftige automobile Netzwerk, sowie hochperformante Ser/Des-Anwendungen mit Datenraten von 6 bis 12 Gbit/s in Fahrzeuge ein. Neuentwicklungen auf Bordnetzseite gehen dabei mittelfristig von Datenraten über 10 Gbit/s aus und sollen insbesondere die steigendenden Erwar-tungen nach hochauflösenden Displays sowie dem hochauto-matisierten Fahren erfüllen.
Simulationsgestützte KanalanalyseKoaxiale Übertragungskanäle (Leitungen und Stecker) haben sich in den vergangenen Jahren hinsichtlich ihrer Übertragungs-parameter stetig verbessert und erreichen nunmehr Schirmdämp-fungen im Bereich von 60 bis 70 dB. Für die Komponentenauswahl und -spezifizierung sowie die Abschätzung sicherer Übertra-gungseigenschaften an miniaturisierten Koax-Systemen (Bild 3), spielt die simulationsgestützte Kanalanalyse eine wichtige Rolle. Basis der Analyse ist das Highspeed-Stecksystem MATE-AX, welches eine Bandbreite von mindestens 9 GHz bietet.Nach der kanalbasierten Analyse ist für den MATE-AX-Kanal nach vorgeschlagenem TE-Limit eine sichere Übertragung von
Bild 1: Die Elemente leistungsstarker Hochperformance-Computer (links) und die abgeleitete heterogene Signalverarbeitungsebene (rechts).
Bild 2: Neuentwicklungen auf Bordnetzseite gehen mittelfristig von Datenraten über 10 Gbit/s aus und sollen insbesondere die steigendenden Erwartungen nach
hochauflösenden Displays sowie dem hochautomatisierten Fahren erfüllen.
Bild 3: Das miniaturisierte Koax-System kann im Vergleich zu konventionel-len Fakra-Anwendungen bis zu 75 Prozent Platz und 34 Prozent Gewicht einsparen.
20_TE Connectivity (aok).indd 21 11.03.2019 16:33:19

22 AUTOMOBIL ELEKTRONIK 03/2019
Bussysteme Bordnetz
www.all-electronics.de
bis zu 12 Gbit/s möglich. Gleichzeitig lässt sich durch die Aus-wahl jeweils geeigneter Komponenten eine Reserve für schnel-lere Systeme feststellen und damit auch eine Abschätzung für schnellere Systeme treffen.
Bei einer Integration von vier Koax-Kanälen im Bauraum von 4 × 4 mm² lässt sich ein deutlicher Zugewinn hinsichtlich Platz und Gewicht realisieren. Da hierbei ein besonderes Augenmerk auf dem Nebensprechen liegen sollte, ist ein geeignetes Leiter-plattenlayout Voraussetzung.
Netzwerkstrukturen erweiternDie Einführung der nächsten Ethernet-Generation steht mit Geschwindigkeiten von bis zu 1 Gbit/s für die Serieneinführung bereit und erweitert somit die automobile Netzwerkstruktur um einen weiteren Standard. Durch den frühen Abschluss der Spezifizierung in der IEEE-Arbeitsgruppe 802.3bp im Jahre 2015, konnte das Open-Alliance-Komitee allumfassend einen Industriestandard erarbeiten, der als Basis für die Implemen-tierung ins Fahrzeug dient. Für die Anforderungen an die Bord-netzkomponenten konnte das Technische Komitee TC9 die Spezifikation für ungeschirmte, verdrillte Leitungen fertigstel-len, während die Erweiterung bezüglich geschirmter Leitungen in vollem Gange ist. Somit können durch richtige Auswahl von
Halbleiter, Gleichtaktdrosseln sowie Stecker- und Lei-tungsauswahl ungeschirmte Übertragungssysteme freige-geben werden. TEs Matenet-Verbindungsanwendung konn-te hierbei alle relevanten Tests, zum Beispiel EMV nach CISPR25, erfüllen und steht damit bereit zur Einführung. Die Qualifikation und Freigabe nach gültigen automobilen Standards ist nunmehr an Serienprodukten abgeschlossen.
Bild 4 zeigt eine weitere Möglichkeit der Verwendung optionaler STP-Module bei gleichem Gerätestecker. Auf diese Weise ist es möglich, bei schwierigen Bauräumen auf eine hinsichtlich EMV angepasste Anwendung zu wechseln, ohne dabei aufwendige Hardwareänderungen am Gerät
vornehmen zu müssen. Zur Feststellung der EMV-Verbes-serung lässt sich hierzu der Gleichtaktanteil am Ausgang
der Stripline im Verhältnis zum diffe-renziellen Nutzsignal als Transferfunk-tion charakterisieren (Bild 5). Hierbei kann laut Herstellerangaben die Mate-net-STP-Anwendung eine gegenüber UTP um circa 15 dB bessere Störunter-drückung erreichen.
Redundanz durch Lichtwellen-leiter schaffenAls zentrale Netzwerktechnologie muss Ethernet in allen Applikationsbereichen und allen Bauräumen, die in dieses Netzwerk eingebunden sind, zuverläs-sig und fehlerfrei funktionieren. Hierzu sind die Erweiterung hinsichtlich Geschwindigkeit (10 Mbit/s und Multi-Gigabit) und Auswahl alternativer Übertragungsmedien zu erwähnen.
Um auch bei der physikalischen Übertragung ein Höchstmaß an Sicherheit zu erreichen (dies gilt insbesondere für Computing-Cluster für autonome Fahrentscheidungen), setzen Hersteller auf eine redundante Vernetzung. Diskussionen über mögliche Ansät-ze hinsichtlich der Verkabelung im Fahrzeug finden derzeit statt. Eine optische Anwendung als Alternative zur kupferbasierten Übertragung könnte eine passende Lösung sein. Lichtwellenlei-ter haben hier gegenüber elektrischen Leitungen wesentliche Vorteile hinsichtlich elektromagnetischen Störungen. Im Zusam-menhang mit Hochvolt-Antriebselektronik kann die galvanische Trennung ein zusätzlicher Aspekt für den Einsatz optischer Über-tragungsstrecken sein.
Übertragungsfehler reduzierenDas in der IEEE standardisierte 1000Base-RHC nutzt dabei bewährte Kunststoff-LWLs und kombiniert diese mit einem aus-geklügelten Modulationsverfahren, das die limitierte Übertra-gungsbandbreite der Stufen-Index-POF maximal ausnutzt. Bild 6 zeigt die entsprechende Steckverbindung. Hierzu kommt eine PAM-16-Modulation zum Einsatz, während gleichzeitig die Codierung so gewählt wurde, dass sich direkt nacheinander übertragene Symbole immer gut unterscheiden lassen und somit zur Reduzierung von Übertragungsfehlern beitragen. Eine FEC
Bild 4: Weitere Anwendungsmöglichkeiten ergeben sich durch Verwendung optionaler STP-Module bei gleichem Gerätestecker.
Bild 5: Frequenzgang der EMV-Messung nach CISPR25. Zur Feststellung der EMV- Verbesserung lässt sich der Gleichtaktanteil (Common Mode) am Ausgang der Stripline im Verhältnis zum differenziellen Nutz-signal als Transferfunktion charakterisieren.
20_TE Connectivity (aok).indd 22 11.03.2019 16:33:21

www.all-electronics.de
Steckverbinder
Rosenberger steht für innovative Steckverbinder-Systeme, die in modernen Fahrzeugen unverzicht-bar sind – heute und in Zukunft:
Ob FAKRA- oder High-Speed-FAKRA-Mini-Steck verbinder, High-Power- oder High-Speed-Daten-Steckverbinder, Hochvolt- oder Magnet-steckverbinder – Qualität und Zuverlässigkeit unserer Automotive-Systeme sind konzipiert für vielfältige Anwendungen:
■ Fahrerassistenzsysteme ■ Autonomes Fahren ■ Navigation und Telematik ■ Infotainment und Fond-Entertainment ■ Internet und Mobilkommunikation ■ Batterielade-Applikationen und Stromver-
sorgung in Elektro- und Hybridfahrzeugen.
www.rosenberger.com
AUTOMOTIVE
nz_Automotive_105x303_180913.indd 1 13.09.2018 11:37:02
Autor Jens Wülfing Field Application Engineer Data Connectivity, TE Connectivity Automotive
infoDIREKT 407ael0319
(Forward Error Correction) im PHY korrigiert hierbei die letzten verbleibenden Übertragungsfehler aus.
FazitSchnelle ADAS-Sensoren, wie zum Beispiel Kameras, favorisie-ren koaxiale Anwendungen wie das miniaturisierte Koax- System MATE-AX wegen seiner Bandbreite für Übertragungen. Dabei lässt sich über die kanalbasierte Analyse die Kompatibilität für Datenraten über 10 Gbit/s ermitteln und eine Reserve zur Abschät-zung schnellerer Systeme bestimmen. Leitungsauswahl und geräteseitige Implementierungen lassen hier durchaus noch Luft für schnellere Systeme.
Für die Zukunft des automobilen Netzwerks Ethernet ist es durch Abschluss der Qualifikation nach gültigen automobilen Standards wie auch Open-TC9 sowie gültigen EMV-Normen wie CISPR25 nun möglich, das ungeschirmte Matenet-System für 100 Mbit/s und 1 Gbit/s freizugeben. Dies ist auch das Startsignal für den Beginn der Implementierung von 100Base-T1 und 1000Base-T1 in Fahrzeuge. Als alternative Übertragungslösung kann eine optische Übertragung für besonders kritische Einbausituationen oder als Redundanz zu einem kupferbasierten System eine wichtige Rolle im Portfolio verschiedener Nutzer spielen.
Auch im Zusammenhang mit Verbindungen zwischen Hoch-volt- und Niedervoltkreis im Bereich E-Mobilität kann die gal-vanische Trennung ein weiteres Argument für den Einsatz optischer Komponenten sein. TE bietet hierbei eine Anwendung für das sogenannte GEPOF (Gigabit Ethernet over Plastic Opti-cal Fiber) auf Basis bewährter Automotive-Komponenten für 1 Gbit/s an. Dabei konnten relevante Tests nach Open-Alliance und auch EMV-Messungen mit realer Steuergeräte-Hardware abgeschlossen werden.
Es bleibt spannend zu beobachten, welche Systeme sich letztlich, sowohl für das hochautomatisierte Fahren, wie auch die Unterstüt-zung hochauflösender Displays, in Zukunft etablieren. (aok) ■
Bild 6: TEs GEPOF-Anwendung (Gigabit Ethernet over Plastic Optical Fibers), basierend auf freigegebenen Automotive-Komponenten.
Bilde
r: TE C
onne
ctivit
y
20_TE Connectivity (aok).indd 23 11.03.2019 16:33:23

24 AUTOMOBIL ELEKTRONIK 03/2019
Bussysteme Tools
www.all-electronics.de
Funktionsentwicklung über das fahrzeugeigene Bordnetz hinaus, Teil 2V2X-Anwendungen per Simulation in flexibler Testumgebung absichern
Eine durchdachte V2X-Softwarearchitektur hilft dem Entwickler, die funktionalen Aspekte im Fokus zu behal-ten und sich nicht in sich wandelnden Standards zu verlieren. In diesem zweiten Teil des Beitrags geht es um die Standardisierung der V2X-Kommunikation und die passenden Architekturen. Autor: Manfred Miller
definiert sein, ab wann ein Fahrzeug als stehendes Hindernis zu betrachten ist und bis zu welcher Geschwindigkeit es als langsam gilt. Die Bedingun-gen, unter denen dann die entsprechende Warn-nachricht in Form einer DENM erzeugt und gesen-det werden darf, sind entsprechend standardisiert. Die DENM selbst muss als Nachricht natürlich auch standardisiert sein.
Noch mehr StandardsDie Standardisierung auf Applikationsebene, sprich die Beschreibung der Auslösebedingungen und die daraus resultierenden zu sendenden Nachrichtenin-halte (Payload) ist beim Car-to-Car-Communication-Consortium (C2C-CC) angesiedelt. Da die oben beschriebene SSVW-Nachricht auch von Infrastruk-turkomponenten ausgesendet werden kann, etwa durch die Auslösung aus einer Verkehrsleitzentrale, erfordert die Standardisierung eine enge Abstimmung
Zum Testen seiner V2X-Anwendung in solch einer Kreu-zungssituation fehlen dem Entwickler die erforderlichen Infra-strukturkomponen-ten wie auch andere Verkehrsteilnehmer. Smarte Testsysteme mit simulierten V2X-Daten helfen ihm bei Labortests wie auch bei Tests auf einem Prüfgelände.
Selbstredend ist für eine funktionierende V2X-Kommunikation die Standardisierung der Kommunikation unerlässlich. Naheliegend ist
die Standardisierung nach dem OSI-Referenzmodell auf den Schichten 1-5. In Wirklichkeit geht die erfor-derliche Standardisierung jedoch noch weiter und umfasst neben allen sieben OSI-Schichten noch zusätzlich die auf Schicht 7 aufsetzende ITS-Anwen-dungsebene (Intelligent Transportation Systems). Voriges gilt zumindest für den Fall, ereignisgetrig-gerte Daten zu erzeugen und auszusenden. Auf Seite des Empfängers ist die ITS-Anwendungsebene dage-gen nicht näher standardisiert. Somit kann der Emp-fänger weitgehend selbst entscheiden, ob und wie er die empfangenen Daten verarbeitet.
Ein vereinfachtes Beispiel soll den beschriebenen Sachverhalt verdeutlichen: Die ITS-Anwendung SSVW soll vor langsam fahrenden oder stehenden Fahrzeugen warnen. Hierzu muss unter anderem
Bild:
Nord
sys
24_Nordsys (jwa).indd 24 11.03.2019 16:34:35

AUTOMOBIL ELEKTRONIK 03/2019 25
Bussysteme Tools
www.all-electronics.de
zwischen der Fahrzeugseite (also dem C2C-CC) und der Infrastrukturseite. Letztere wird durch die euro-päische ITS-Plattform C-ROADS repräsentiert, wel-che sich die Harmonisierung von ITS-Diensten und das Deployment in den Mitgliedsstaaten der EU (und darüber hinaus) zum Ziel gemacht hat.
Bei der Standardisierung der Nachrichtentypen und des Routings nimmt ETSI, das European Telecommu-nications Standards Institute, die führende Rolle ein. Der Anwendungsentwickler sieht sich somit mit dem Problem konfrontiert, dass er im schlimmsten Fall mehrere Spezifikationsquellen für seine Applikation beachten muss. Erschwerend kommt hinzu, dass zahl-reiche Spezifikationsdokumente nach wie vor Ände-rungen unterliegen. So ist mit dem erst kürzlich ver-öffentlichten Basic System Profile (BSP) in der Versi-on 1.3.0 des C2C-CC lediglich eine weitere Etappe in der Spezifikation erreicht worden. Das BSP in der Version 1.4.0 ist für das Jahr 2019 bereits abzusehen.
Anwendungsentwickler müssen sehr viele Einzelpunkte beachtenAuch hinsichtlich der Spezifikationen für die essen-ziellen Nachrichtentypen CAM (Cooperative Awar-ness Message) und DENM sind im Jahr 2019 Ände-rungen und Fehlerbereinigungen bereits absehbar. Noch umfangreichere Änderungen sind in den Nach-richtentypen SPAT (Signal Phase and Timing) und MAP zu erwarten. Die letzten Aktualisierungen des Geo-Networking (EN 302 636-4-1) sind erst im Jahr 2018 erfolgt, weitere sind nicht auszuschließen – ins-besondere hinsichtlich der derzeit heftig diskutierten LTE-basierten Lösungen und Erweiterungen.
Die oben angeführten Beispiele betrachten nur die rein europäische Situation. Im globalen Kontext hat der Anwendungsentwickler eine noch weitergehende Fülle von Normen zu beachten, um Anwendungen zu programmieren, die den jeweiligen Standards ent-sprechen. Die Diskussion um hybride V2X-Kommu-nikation, wie etwa bei LTE-V, führt zu noch mehr Dokumentationen, die der Entwickler beachten muss.
Es kommt auf die richtige Softwarearchitektur anDer Entwickler von V2X-Anwendungen sieht sich derzeit einem dynamisch ändernden Umfeld aus Stan-dards und Spezifikationen gegenüber. Auf der reinen Applikationsebene haben Spezifikationsänderungen, wie durch das C2C-CC, direkte Auswirkungen. Ände-rungen der technischen Standards und Normen in den darunter liegenden Schichten – angefangen von Facilities über Networking bis hin zum Physical Lay-er – können den Anwendungsentwickler ebenfalls betreffen. Inwieweit beispielsweise Änderungen der CAM, der DENM oder des Geo-Networking Einfluss
auf seine bereits entwickelten Applikationen haben, hängt in erster Linie von der verwendeten Software-Architektur ab. Idealerweise sind alle Schichten strikt voneinander getrennt und über Services miteinander verbunden.
Die aufgezeigte Problemstellung macht deutlich, wie wichtig die Wahl der richtigen V2X-Softwarearchi-tektur ist. Eine stabile serviceorientierte Architektur ist hierbei das Mittel der Wahl. Ein Beispiel für eine strikt serviceorientierte Softwarearchitektur ist der V2X-Stack von WaveBEE. Dem Anwendungsentwick-ler präsentiert sich eine einheitliche Schnittstelle (WDS, Wireless Distribution System) zu allen essen-ziellen V2X-Funktionen, unabhängig vom lokalen Markt oder der verwendeten Übertragungstechnik. Die vorausschauend geplante, stabile API ermöglicht eine nachhaltige Entwicklung von Anwendungen im sonst so unruhigen Fahrwasser der neuen Kerntech-nologie V2X-Kommunikation. Änderungen der Spe-zifikationen unterhalb der Applikationsebene im Schichtenmodell werden vom V2X-Stack komplett abstrahiert. Somit kann sich der Funktionsentwickler voll und ganz auf seine Kernaufgabe fokussieren: die funktionalen Aspekte seiner Anwendung. Die rich-tige Software-Architektur trägt zudem durch eine sinnvolle Kapselung der unter der Anwendungs-schicht liegenden V2X-Funktionen maßgeblich dazu bei, Fehler bei der Implementierung der Funktion zu vermeiden, indem sich der Anwendungsentwickler nicht mit den Details der Spezifikation der unter-schiedlichen Nachrichtentypen beschäftigen muss.
Funktionale Aspekte im Fokus behaltenMit der V2X-Kommunikation verlässt der Anwen-dungsentwickler seine abgeschlossene Bordnetzwelt und hat sich mit einer Vielzahl von Standards ausei-nander zu setzen. Erschwerend kommt für ihn hinzu, dass sich die Standards in einem stetigen Wandel befinden und neue Spezifikation hinzukommen. Die Wahl einer gut durchdachten V2X-Softwarearchitek-tur hilft dem Entwickler, sich auf die funktionalen Aspekte seiner Implementierung zu konzentrieren, unabhängig von Region oder Übertragungstechnik. Im Zusammenspiel mit gut durchdachten und flexi-blen Testlösungen steht einer strukturierten Serie-nentwicklung nichts mehr entgegen. (jwa)� n
AutorManfred MillerGeschäftsführender Gesellschafter und Gründer von Nordsys
infoDIREKT 272ael0219
24_Nordsys (jwa).indd 25 11.03.2019 16:34:36

26 AUTOMOBIL ELEKTRONIK 03 / 2019 www.all-electronics.de
Cybersecurity Blockchain
Embedded-Security-Lösung für Blockchain im AutomobilMit leistungsfähigem Mikrocontroller und smartem Framework
Wie lässt sich Cybersicherheit für vernetzte Fahrzeuge umsetzen? Die Unternehmen Infineon und Xain stellen im folgenden Beitrag eine automotive-taugliche Embedded-Security-Lösung als Kombination aus Mikrocontroller und Framework vor, die den sicheren V2X-Datentransfer per Blockchain realisiert. Autoren: Michael Machold, Leif-Nissen Lundbæk
Auf dem Weg zum elektrischen, autonomen und voll vernetzten Fahren muss sich die Automobilindustrie mit den Aspekten Safe-
ty, Security und Schutz der Privatsphäre auseinan-dersetzen. Viele neue Geschäftsmodelle basieren auf dem Zugriff auf Daten und Ressourcen. Cybersicher-heit ist daher eine zentrale Grundlage für die daten-getriebene Mobilität der Zukunft. Technologische Herausforderungen entstehen dabei unter anderem dadurch, dass sich Kontrollmechanismen für Daten-Zugriffe in der Regel nicht direkt dort befinden, wo
Eine automotive-taugliche Embedded-Security-Lösung als Kombination aus Mikro-controller und Framework realisiert den sicheren V2X-Datentransfer per Blockchain. Mikrocontroller der Aurix-Familie von Infineon bieten dafür geeignete Kryptobe-schleuniger, Multicore-Architektur, integrierte Sicherheitsfunktionen sowie um-fangreichen Daten- und Programm-Speicher. Xain liefert den entsprechenden Technologie-Stack für das smarte und stabile Zugriffsmanagement auf Daten und Ressourcen, sowohl on- als auch offline.
Eck-DATEN
die Daten generiert werden. Hier bietet die Block-chain-Technologie großes Potenzial. Ihr Einsatz setzt aber voraus, dass die verwendete Blockchain-Metho-dik und die eingesetzte Security-Hardware gut auf-einander abgestimmt sind. Vor diesem Hintergrund arbeiten Infineon und Xain gemeinsam am Einsatz der Blockchain-Technologie im Automobil.
Was ist eine Blockchain?Eine Blockchain ist eine dezentrale Datenbank, durch deren Einsatz sich Transaktionen schnell abwickeln und besonders fälschungssicher speichern lassen. Die Transaktions-Daten werden in Blöcken zusammen-gefasst gespeichert. Die Blöcke sind chronologisch miteinander verkettet und bauen inhaltlich aufein-ander auf. Im Falle einer Manipulation einzelner Daten im Nachhinein, ist dies mit einfachen Mitteln anhand der nachfolgenden Blöcke feststellbar.
Außerdem kann die Blockchain dezentral an vielen Orten gleichzeitig abgelegt sein. Auch das schützt sie vor Manipulation, denn mehrere der anderen Teil-
26_Infineon_Xain (av, jwa).indd 26 11.03.2019 16:36:51

AUTOMOBIL ELEKTRONIK 03 / 2019 27www.all-electronics.de
Cybersecurity Blockchain
nehmer können neue hinzugefügte Blöcke überprü-fen. In ihrer Zusammenarbeit testen Infineon und Xain verschiedene Anwendungsmöglichkeiten für die Blockchain rund um das Automobil. Zum Beispiel ist sie bei Bezahlvorgängen, dem schlüssellosen Zugang zum Auto beim Carsharing oder bei On-Demand-Diensten, beim Tuning-Schutz oder bei automatisier-ten Fahrfunktionen denkbar. Auch der Zugriff auf Fahrdaten durch Kfz-Versicherer, die vom Fahrver-halten abhängige Prämien anbieten, könnte über eine Blockchain erfolgen.
Ein wichtiges Ziel der Kooperationspartner ist es, das Fahrzeug als Full Node zu einem vollwertigen Teilnehmer von Blockchains zu machen. Dies ist ent-scheidend für die Offline- und Echtzeit-Fähigkeit. Außerdem ermöglicht es beim Einsatz von KI-Tech-nologien einen besonders hohen Schutz der Privat-sphäre. Denn das ermöglicht es, private Daten für maschinelles Lernen ausschließlich lokal zu speichern. Technische Basis für die Zusammenarbeit sind die Mikrocontroller der Aurix-Familie von Infineon sowie das Software-Framework von Xain.
Leistungsfähige MikrocontrollerAurix-Mikrocontroller der zweiten Generation sind prädestiniert für die Kombination mit der Xain-Tech-nologie und der Implementierung von Blockchain. Sie sind hoch skalierbar und bieten bis zu sechs CPU-Cores mit einem Takt von bis zu 300 MHz. Außerdem ist reichlich Flash-Speicher (16 MByte Program- und 1 MByte Daten-Speicher) vorhanden. Darüber hinaus verfügt das integrierte HSM (Hardware Security Modul) über Beschleuniger für kryptografische Ver-fahren (Bild 2). Die Aurix-Mikrocontroller finden viel-fach Verwendung in Automobilen, angefangen von klassischen Motor- und Getriebesteuerungen über Elektro- und Hybridsteuergeräte bis hin zu ADAS-Anwendungen. Zusätzlich sind in Aurix-Controllern
bereits in bestehende Autosar-Frameworks integriert und sie bieten umfangreiche Schnittstellen wie CAN FD, SPI und weitere. Alle Aurix-Mikrocontroller der neuesten Generation unterstützen bereits heute Block-chain-Funktionen im Automobil. Basis ist das integ-rierte HSM mit der höchsten Stufe des EVITA-Sicher-heitsstandards. Mit dem HSM bieten die Mikrocon-troller einen gesicherten Speicher für den digitalen Schlüssel zur Identifikation in der Blockchain. Zudem können sie Blockchain-Operationen, wie Hashing oder digitales Signieren, schnell und gut gesichert durchführen.
Ein noch höheres Sicherheitsniveau als allein mit dem Aurix-Mikrocontroller bieten zertifizierten Security-Controller wie der Optiga TPM 2.0 für Auto-mobilanwendungen. Dieser fungiert wie ein Tresor, der für Sicherheitsfunktionen notwendige kryptogra-fische Schlüssel sicher verwahrt. Die kryptografischen Schlüssel bringt Infineon in einer speziell zertifizier-
Bild 2: Vereinfachtes Blockschaltbild des Aurix T3xx-Control-lers mit Hardware- Security-Modul und Kryptobeschleuniger.
Bild 1: Ein erster ge-meinsamer Demon-s trator von Infineon und Xain zeigt, wie Zugangsrechte dezentral per Smart-phone vergeben werden können, beispielsweise für Carsharing.
Bilde
r: Infi
neo
n
26_Infineon_Xain (av, jwa).indd 27 11.03.2019 16:36:52

28 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Cybersecurity Blockchain
ten Sicherheitsumgebung ein. Weitere Schlüssel las-sen sich innerhalb des TPMs (Trusted Platform Modu-le) erzeugen, benutzen und speichern. Somit müssen sie dieses nie verlassen und sind gegen ein Ausspähen über das Netz geschützt. Auch gegen physikalische Angriffe ist das TPM gewappnet.
Das Erzeugen neuer Datenblöcke ist heute jedoch noch eine Herausforderung für herkömmliche in Autos verwendete Mikroprozessoren. Aufgrund des hohen Rechenaufwandes ist dieser Schritt bislang meist speziellen Prozessoren vorbehalten. Xain arbei-tet jedoch an einem neuen Verfahren, das auf Geräten einsetzbar sein soll, die sehr energieeffizient arbeiten müssen – wie beispielsweise auf den Mikrocontrollern im Automobil.
Kollaborative Ecosysteme per Framework steuernDie Xain AG entstand 2014 als Forschungsprojekt an der Universität Oxford mit der Vision, ein Proto-koll zu entwickeln, das verteilte, energieeffiziente, intelligente Systeme für die Kollaboration von Mensch und Maschine ermöglicht und dabei die Privatsphäre wahrt. In Zusammenarbeit mit einer Vielzahl von OEMs und anderen Global Players eva-luierte Xain unter anderem die automatisierte Ertei-lung von Zugriffsrechten in Fahrzeugen und Pro-duktionsmaschinen oder die Automatisierung von internen Prozessen.
Die Kern-Technologie von Xain (eXpandable Arti-ficial Intelligence Network) ist FROST – ein Software-Entwicklungskit (SDK), das als Framework für die Programmierung von Ecosystemen dient, wobei Aktoren den Austausch wie auch die Nutzung von Daten und Ressourcen (wie Maschinen oder IoT-Endpunke) koordinieren können. Die dafür neu ent-wickelte Datenstruktur (Xain Embedded) für hybride Clients ist direkt in Embedded-Systeme wie Mikro-controller integrierbar.
FROST ist ein Technologie-Stack, mit dem sich Daten in kollaborativen Ecosystemen freischalten und
die Zugangskontrolle für gemeinsame Ressourcen verwalteten lassen. Dafür nutzt der Stack intelligen-te Regeln. Der Stack ist eine Kombination aus einer Domain Specific Language für die Zugangskontrol-le, Cyber-Security-Protokollen für die Zugriffs-Dele-gation sowie einem energieeffizienten, zweistufigem Konsens-Mechanismus für verteilte Systeme. Die Firmware fungiert als Lightweight-Software-Layer, die plattformunabhängig zu den in seinem Host-System gespeicherten Daten ist. Darüber hinaus stehen zusätzlich zu den Applikationen Program-mier-Primitives bereit, um neue Produkte oder Ser-vices zu entwickeln – mit flexibler und intelligenter Zugangs-Kontrolle.
Verteilte Zugriffsrechte verwaltenDie Cybersecurity-Protokolle ermöglichen die Dele-gation von Zugriffsrechten und von einzelnen Zugriffsbedingungen – beispielsweise, wer das gefer-tigte Auto mieten kann. FROST kompiliert die Regeln in Boolesche Funktionen – eine ausführbare Form für Mikrocontroller – und zwar in der Art, dass die Funk-tionen formal verifizierbar sind, wodurch die Richt-linien korrekt repräsentiert und deren Authentizität dann etwa in einer Blockchain gespeichert werden kann. FROST lässt sich in Host-Sprachen und Ent-wicklungstools einbetten, wie sie üblicherweise in Automotive- oder anderen Systemen zum Einsatz kommen. Die Programme sind zudem validierbar, etwa über eine Dead-Code-Analyse.
Xain Embedded ist eine digitale Infrastruktur für das Management von Zugriffsrechten in Maschinen-Netzwerken. Damit kann der Anwender den Zugriff auf seine Daten kontrollieren, indem er feingranu-lierte Regeln (Policies) erzeugt, die die genauen Bedin-gungen spezifizieren, unter denen Dritte auf bestimm-te Assets zugreifen dürfen. Nutzer können so nicht nur grundsätzliche Zugriffs- und Benutzungs-Rech-te delegieren, sondern auch das Recht, eine Zugriffs-kontroll-Policy für einen Mikrocontroller zu entwi-ckeln und auszuführen.
Über einen Embedded-System-Client kann Xain Embedded eine sehr flexible und vertrauenswürdige Brücke zwischen der physikalischen und digitalen Welt bereitstellen. Dabei verfolgt ein einfaches Inter-face intuitiv die Zugriffsregeln über die gesamte Lebenszeit. So kann der Endanwender die Zugriffs-rechte auf Daten und Ressourcen auf transparente Art und Weise delegieren und sie auf Smartphones und andere Geräte übertragen.
Eine Programmiersprache für Endknoten und ServerRust ist eine leistungsfähige Programmiersprache, mit der Entwickler ihren Code auf einer hohen Abs-traktionsebene schreiben können, während der
Bild 3: Über ein Block-chain-Netzwerk dele-giert eine Smartpho-ne-App den Fahr-zeugzugang für einen weiteren Fahrer.
26_Infineon_Xain (av, jwa).indd 28 11.03.2019 16:36:54

www.all-electronics.de
Cybersecurity Blockchain
DIG
ITA
L V
ISIO
ND
IGIT
AL
VIS
ION
DIG
ITA
L V
ISIO
ND
IGIT
AL
VIS
ION
DIG
ITA
L V
ISIO
ND
IGIT
AL
VIS
ION
DIG
ITA
L V
ISIO
N
Die neue Generation des Full Display Mirrors® (FDM®)
von Gentex macht die Verknüpfung unterschiedlicher
digitaler Bildverarbeitungssysteme jetzt noch einfacher.
Und bietet jede Menge Vorteile für jeden Fahrzeugtyp:
» Optimale Sicht nach hinten dank des
hochau� ösenden Panoramadisplays. Auch
bei schlechtem Wetter.
» Erweitertes Sichtfeld statt totem Winkel durch
das Multi-Kamera-System.
» Die Hybridtechnologie lässt den Fahrer zwischen
dem Display und dem konventionellen Spiegel
wählen. Je nach Situation und Präferenz.
» Bild-im-Bild-Modus, Turn-by-Turn-Navigation
und die Rückfahrkamera sind nur ein paar
Beispiele für ergänzende Fahrerassistenzfunk-
tionen im FDM.
Der nächste Schritt im Displayspiegel
Today’s Features » Tomorrow’s Technologygentextech.com
ZUSATZFUNKTIONEN
FULL DISPLAY MIRROR
Spiegelmodus
Displaymodus
MULTI-KAMERA-SYSTEM
2018-Gentex-Automobil-Elektronik2.indd 1 10/30/18 9:24 AM
Autoren Michael Machold Product Marketing Manager Automotive Microcontroller bei Infineon
Leif-Nissen Lund-bæk CEO und Co-Founder der Xain AG
infoDIREKT 270ael0319
erzeugte Maschinencode sehr effizient ist. Die Spra-che kombiniert Vorteile bei der Programmierung von Embedded-Systemen mit denen der Applikationsent-wicklung auf Basis objektorientierter und funktiona-ler Programmiersprachen. Xain empfiehlt Rust für eine schnelle, speichereffiziente und funktional siche-re Entwicklung. Der entsprechende Compiler bietet leistungsfähige Test-Möglichkeiten, während der Code sowohl auf Mikrocontrollern als auch auf Ser-vern läuft. Die sichere Entwicklungsumgebung ver-wendet nur eine Sprache sowohl für IoT-Endpunkte, als auch für Server, was Kosten wie auch Wartungs-aufwand klein hält und die Einstandskosten mehr als ausgleicht.
Anwendungen im AutomobilXain Embedded ermöglicht die Erstellung von gemeinsamen V2X-Ecosystemen mit einem sehr siche-ren und stabilen Management der Zugriffsrechte. Damit lassen sich anwenderzentrierte, kollaborative und intelligente Transportsysteme oder Infrastrukturen errichten. Auf dem Automotive-Cybersecurity-Forum stellten Infineon und Xain einen ersten Demonstrator (Bild 1) vor. Er zeigt, wie Zugriffsrechte schnell, sicher und dezentral per Smartphone-App vergeben werden können (Bild 3). Dies könnte zum Beispiel Carsharing ohne Plattform oder Backoffice ermöglichen, bei dem jeder Teilnehmer spontan sein Auto mit anderen teilen kann.
Ob OEM, Autohändler oder Lea-singfirma, jeder möchte seine eige-nen Policies spezifizieren, um den Zugriff auf die Fahrzeuge zu kont-rollieren. So könnte der OEM einen speziellen Ausweis für das Fahr-zeug erstellen, der Händler oder die Leasingfirma aber eine Policy sch-reiben, die die Leasingbedingungen definiert und die Weitergabe an andere Nutzer (Lieferpersonal, Familienmitglieder) regelt.
Als Embedded-System auslegt, ermöglicht FROST den jeweiligen Agenten eine zielgerichtete Defini-tion der verschiedenen Policies.
FazitInfineon bietet über Aurix eine leistungsfähige Mikrocontroller-Familie mit Kryptobeschleunigern,
Multicore-Architektur, integrierten Sicherheitsfunk-tionen sowie umfangreichen Daten- und Programm-Speichern. Xain liefert den entsprechenden Techno-logie-Stack für das smarte und stabile Zugriffs-Management auf Daten und Ressourcen, sowohl on- als auch offline. Die Kombination beider Tech-nologien ist eine ideale Basis für ein künftiges V2X-Ecosystem für Embedded-Systeme in vernetzten und autonomen Fahrzeugen und prädestiniert für den Einsatz der Blockchain-Methodik. (jwa) ■
26_Infineon_Xain (av, jwa).indd 29 11.03.2019 16:36:55

30 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Cybersecurity Standardisierung
In den letzten Jahren ist die Aufmerksamkeit für Cybersecu-rity in der Automobilbranche stark gestiegen. Insbesondere für das hochautomatisierte Fahren hält sowohl die Industrie
als auch die Regulierung Cybersecurity für eine der wichtigsten Schlüsseltechnologien, die entlang der gesamten Wertschöp-fungskette zu gewährleisten ist.
Ein Rahmen für Cybersecurity braucht einen RahmenDas Vorgaben von technischen Anforderungen im Sinne von Bauvorschriften ist im dynamischen Umfeld der Cybersecurity nicht praktikabel. Es muss jedoch sichergestellt sein, dass Daten-sicherheit von vernetzten Fahrzeugen über ihren gesamten Lebenszyklus adressiert ist. Eine horizontale, systematische Berücksichtigung von Cybersecurity in der Konzeptentwicklung, Produktentwicklung und Produktion, wie auch die notwendigen Software-Updates im Feld entsprechend des aktuellen Stands der Technik, ist dafür sicherzustellen. Darüber hinaus ist auch
Anforderungen an die Cybersecurity in der FahrzeugentwicklungNeue Regulierungen und Standardisierungen
Den gegenwärtigen Anforderungen an die Entwicklung der Cybersecurity von Fahrzeugen fehlt es an einheit-lichen internationalen Regulierungen und Standardisierungen. Der Beitrag gibt diesbezüglich einen Überblick zu den wichtigsten Aktivitäten auf dem europäischen Markt und erläuterte deren Zusammenhänge wie auch einen Zeitplan. Autor: Dr. Markus Tschersich
Neue Regulierungen und Standardisierungen definieren derzeit Anforderungen an die Entwicklung der Cybersecurity von Fahrzeugen. Viele der seit 2016 gestartet Aktivitäten laufen parallel und stellen teils unabhängig voneinander Anforderungen auf, die von Unternehmen der Wertschöpfungskette gleichermaßen umzusetzen sind. Parallele Strukturen und verschiedene Vorgehensweisen sind zu vermeiden. Um den Aufwand der internen Implementierung gering zu halten, bedürfen die verschiedenen Aktivitäten einer klugen Verknüpfung miteinander. Der Beitrag stellt die für den europäischen Markt wichtigsten Aktivitä-ten vor, zeigt deren Zusammenhänge auf beschreibt den Zeitplan.
Eck-DATEN
eine vertikale Betrachtung notwendig, die über die Wertschöp-fungskette hinweg und insbesondere in der verteilten Entwick-lung eine Abstimmung bei der Cybersecurity gewährleistet.
Sowohl Industrie als auch Regulierung haben die Notwendig-keit von Standards und Regularien erkannt, um diesem komple-
Bilde
r und
Tabe
llen:
Cont
inent
al
30_Conti (jwa, av).indd 30 11.03.2019 16:44:40
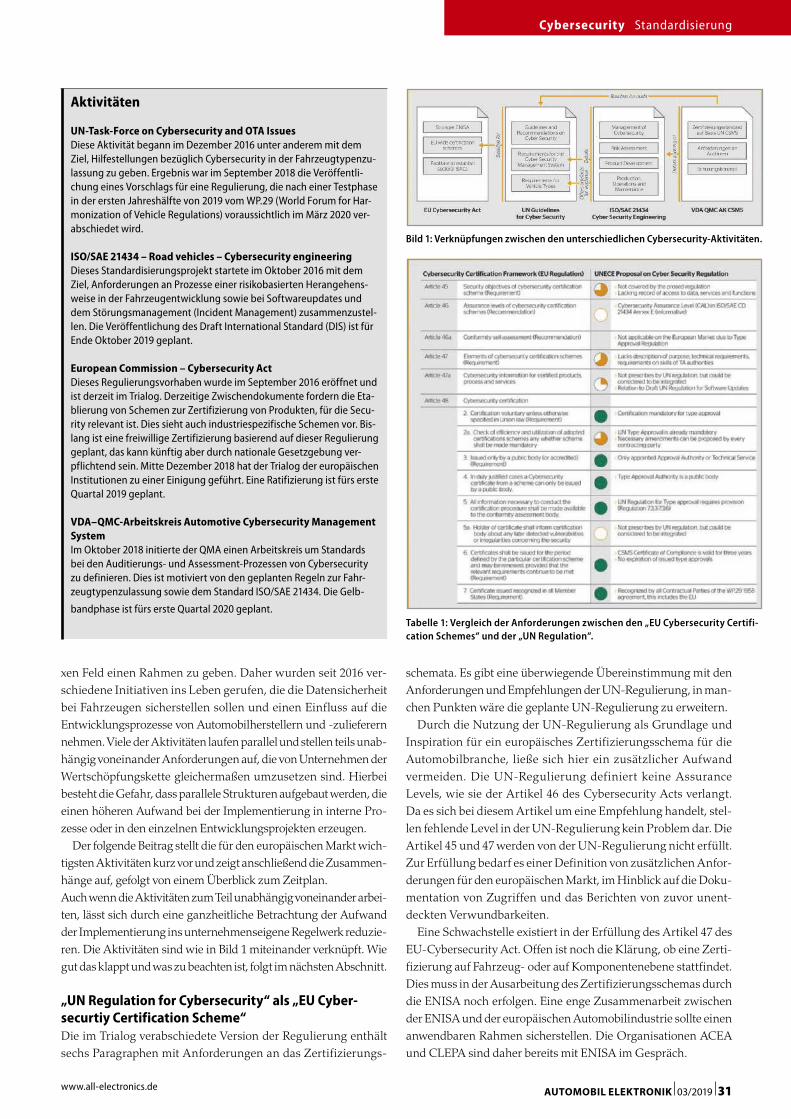
AUTOMOBIL ELEKTRONIK 03/2019 31www.all-electronics.de
Cybersecurity Standardisierung
xen Feld einen Rahmen zu geben. Daher wurden seit 2016 ver-schiedene Initiativen ins Leben gerufen, die die Datensicherheit bei Fahrzeugen sicherstellen sollen und einen Einfluss auf die Entwicklungsprozesse von Automobilherstellern und -zulieferern nehmen. Viele der Aktivitäten laufen parallel und stellen teils unab-hängig voneinander Anforderungen auf, die von Unternehmen der Wertschöpfungskette gleichermaßen umzusetzen sind. Hierbei besteht die Gefahr, dass parallele Strukturen aufgebaut werden, die einen höheren Aufwand bei der Implementierung in interne Pro-zesse oder in den einzelnen Entwicklungsprojekten erzeugen.
Der folgende Beitrag stellt die für den europäischen Markt wich-tigsten Aktivitäten kurz vor und zeigt anschließend die Zusammen-hänge auf, gefolgt von einem Überblick zum Zeitplan.Auch wenn die Aktivitäten zum Teil unabhängig voneinander arbei-ten, lässt sich durch eine ganzheitliche Betrachtung der Aufwand der Implementierung ins unternehmenseigene Regelwerk reduzie-ren. Die Aktivitäten sind wie in Bild 1 miteinander verknüpft. Wie gut das klappt und was zu beachten ist, folgt im nächsten Abschnitt.
„UN Regulation for Cybersecurity“ als „EU Cybersecurtiy Certification Scheme“Die im Trialog verabschiedete Version der Regulierung enthält sechs Paragraphen mit Anforderungen an das Zertifizierungs-
Tabelle 1: Vergleich der Anforderungen zwischen den „EU Cybersecurity Certifi-cation Schemes“ und der „UN Regulation“.
Bild 1: Verknüpfungen zwischen den unterschiedlichen Cybersecurity-Aktivitäten.
Aktivitäten UNTaskForce on Cybersecurity and OTA IssuesDiese Aktivität begann im Dezember 2016 unter anderem mit dem Ziel, Hilfestellungen bezüglich Cybersecurity in der Fahrzeugtypenzu-lassung zu geben. Ergebnis war im September 2018 die Veröffentli-chung eines Vorschlags für eine Regulierung, die nach einer Testphase in der ersten Jahreshälfte von 2019 vom WP.29 (World Forum for Har-monization of Vehicle Regulations) voraussichtlich im März 2020 ver-abschiedet wird. ISO/SAE 21434 – Road vehicles – Cybersecurity engineeringDieses Standardisierungsprojekt startete im Oktober 2016 mit dem Ziel, Anforderungen an Prozesse einer risikobasierten Herangehens-weise in der Fahrzeugentwicklung sowie bei Softwareupdates und dem Störungsmanagement (Incident Management) zusammenzustel-len. Die Veröffentlichung des Draft International Standard (DIS) ist für Ende Oktober 2019 geplant. European Commission – Cybersecurity ActDieses Regulierungsvorhaben wurde im September 2016 eröffnet und ist derzeit im Trialog. Derzeitige Zwischendokumente fordern die Eta-blierung von Schemen zur Zertifizierung von Produkten, für die Secu-rity relevant ist. Dies sieht auch industriespezifische Schemen vor. Bis-lang ist eine freiwillige Zertifizierung basierend auf dieser Regulierung geplant, das kann künftig aber durch nationale Gesetzgebung ver-pflichtend sein. Mitte Dezember 2018 hat der Trialog der europäischen Institutionen zu einer Einigung geführt. Eine Ratifizierung ist fürs erste Quartal 2019 geplant. VDA–QMCArbeitskreis Automotive Cybersecurity Management SystemIm Oktober 2018 initierte der QMA einen Arbeitskreis um Standards bei den Auditierungs- und Assessment-Prozessen von Cybersecurity zu definieren. Dies ist motiviert von den geplanten Regeln zur Fahr-zeugtypenzulassung sowie dem Standard ISO/SAE 21434. Die Gelb-
bandphase ist fürs erste Quartal 2020 geplant.
schemata. Es gibt eine überwiegende Übereinstimmung mit den Anforderungen und Empfehlungen der UN-Regulierung, in man-chen Punkten wäre die geplante UN-Regulierung zu erweitern.
Durch die Nutzung der UN-Regulierung als Grundlage und Inspiration für ein europäisches Zertifizierungsschema für die Automobilbranche, ließe sich hier ein zusätzlicher Aufwand vermeiden. Die UN-Regulierung definiert keine Assurance Levels, wie sie der Artikel 46 des Cybersecurity Acts verlangt. Da es sich bei diesem Artikel um eine Empfehlung handelt, stel-len fehlende Level in der UN-Regulierung kein Problem dar. Die Artikel 45 und 47 werden von der UN-Regulierung nicht erfüllt. Zur Erfüllung bedarf es einer Definition von zusätzlichen Anfor-derungen für den europäischen Markt, im Hinblick auf die Doku-mentation von Zugriffen und das Berichten von zuvor unent-deckten Verwundbarkeiten.
Eine Schwachstelle existiert in der Erfüllung des Artikel 47 des EU-Cybersecurity Act. Offen ist noch die Klärung, ob eine Zerti-fizierung auf Fahrzeug- oder auf Komponentenebene stattfindet. Dies muss in der Ausarbeitung des Zertifizierungsschemas durch die ENISA noch erfolgen. Eine enge Zusammenarbeit zwischen der ENISA und der europäischen Automobilindustrie sollte einen anwendbaren Rahmen sicherstellen. Die Organisationen ACEA und CLEPA sind daher bereits mit ENISA im Gespräch.
30_Conti (jwa, av).indd 31 11.03.2019 16:44:41
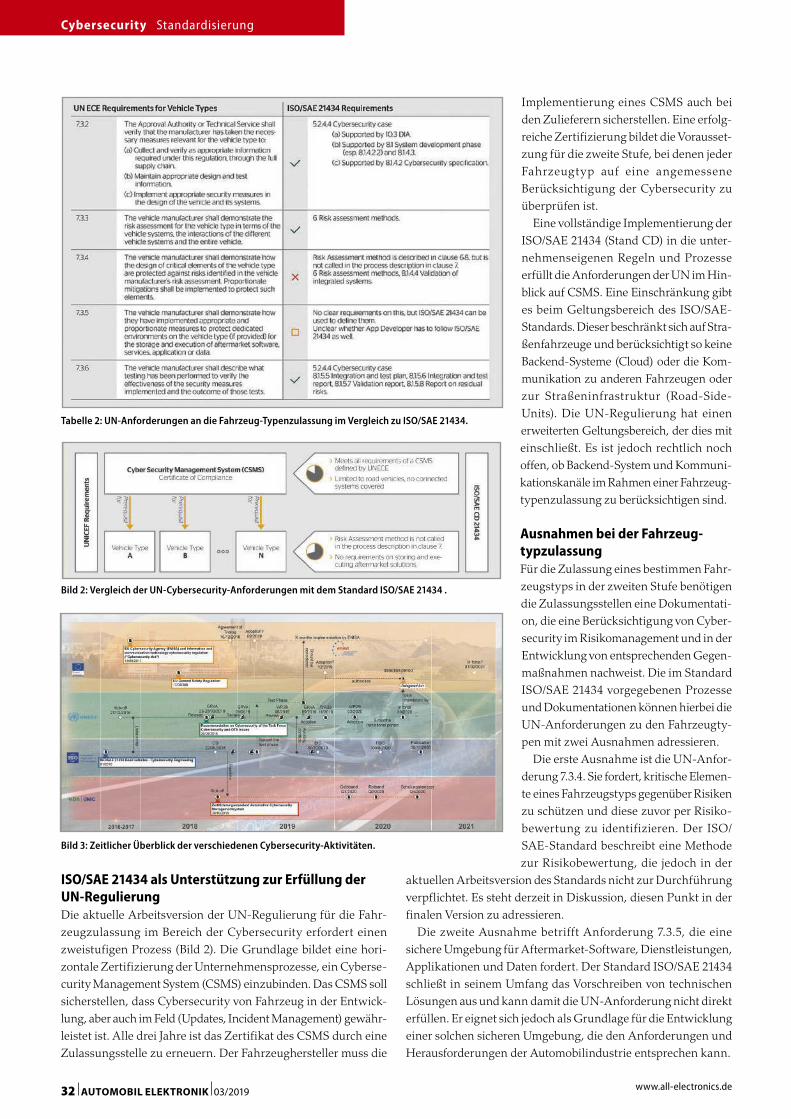
32 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Cybersecurity Standardisierung
ISO/SAE 21434 als Unterstützung zur Erfüllung der UN-RegulierungDie aktuelle Arbeitsversion der UN-Regulierung für die Fahr-zeugzulassung im Bereich der Cybersecurity erfordert einen zweistufigen Prozess (Bild 2). Die Grundlage bildet eine hori-zontale Zertifizierung der Unternehmensprozesse, ein Cyberse-curity Management System (CSMS) einzubinden. Das CSMS soll sicherstellen, dass Cybersecurity von Fahrzeug in der Entwick-lung, aber auch im Feld (Updates, Incident Management) gewähr-leistet ist. Alle drei Jahre ist das Zertifikat des CSMS durch eine Zulassungsstelle zu erneuern. Der Fahrzeughersteller muss die
Tabelle 2: UN-Anforderungen an die Fahrzeug-Typenzulassung im Vergleich zu ISO/SAE 21434.
Implementierung eines CSMS auch bei den Zulieferern sicherstellen. Eine erfolg-reiche Zertifizierung bildet die Vorausset-zung für die zweite Stufe, bei denen jeder Fahrzeugtyp auf eine angemessene Berücksichtigung der Cybersecurity zu überprüfen ist.
Eine vollständige Implementierung der ISO/SAE 21434 (Stand CD) in die unter-nehmenseigenen Regeln und Prozesse erfüllt die Anforderungen der UN im Hin-blick auf CSMS. Eine Einschränkung gibt es beim Geltungsbereich des ISO/SAE-Standards. Dieser beschränkt sich auf Stra-ßenfahrzeuge und berücksichtigt so keine Backend-Systeme (Cloud) oder die Kom-munikation zu anderen Fahrzeugen oder zur Straßeninfrastruktur (Road-Side-Units). Die UN-Regulierung hat einen erweiterten Geltungsbereich, der dies mit einschließt. Es ist jedoch rechtlich noch offen, ob Backend-System und Kommuni-kationskanäle im Rahmen einer Fahrzeug-typenzulassung zu berücksichtigen sind.
Ausnahmen bei der Fahrzeug-typzulassungFür die Zulassung eines bestimmen Fahr-zeugstyps in der zweiten Stufe benötigen die Zulassungsstellen eine Dokumentati-on, die eine Berücksichtigung von Cyber-security im Risikomanagement und in der Entwicklung von entsprechenden Gegen-maßnahmen nachweist. Die im Standard ISO/SAE 21434 vorgegebenen Prozesse und Dokumentationen können hierbei die UN-Anforderungen zu den Fahrzeugty-pen mit zwei Ausnahmen adressieren.
Die erste Ausnahme ist die UN-Anfor-derung 7.3.4. Sie fordert, kritische Elemen-te eines Fahrzeugstyps gegenüber Risiken zu schützen und diese zuvor per Risiko-bewertung zu identifizieren. Der ISO/SAE-Standard beschreibt eine Methode zur Risikobewertung, die jedoch in der
aktuellen Arbeitsversion des Standards nicht zur Durchführung verpflichtet. Es steht derzeit in Diskussion, diesen Punkt in der finalen Version zu adressieren.
Die zweite Ausnahme betrifft Anforderung 7.3.5, die eine sichere Umgebung für Aftermarket-Software, Dienstleistungen, Applikationen und Daten fordert. Der Standard ISO/SAE 21434 schließt in seinem Umfang das Vorschreiben von technischen Lösungen aus und kann damit die UN-Anforderung nicht direkt erfüllen. Er eignet sich jedoch als Grundlage für die Entwicklung einer solchen sicheren Umgebung, die den Anforderungen und Herausforderungen der Automobilindustrie entsprechen kann.
Bild 2: Vergleich der UN-Cybersecurity-Anforderungen mit dem Standard ISO/SAE 21434 .
Bild 3: Zeitlicher Überblick der verschiedenen Cybersecurity-Aktivitäten.
30_Conti (jwa, av).indd 32 11.03.2019 16:44:43

AUTOMOBIL ELEKTRONIK 03 / 2019 33www.all-electronics.de
Cybersecurity Standardisierung
Audit und Assessment der ProzesseProzesse zur Auditierung und zur Begutachtung von Cyberse-curity-Aktivitäten sind bisher nur rudimentär adressiert. Der Standard ISO/SAE 21434 spricht diesen Punkt nur oberflächlich an. Die Regulierung, insbesondere die UN-Regeln zur Fahrzeug-typenzulassung, benötigen aber eine konkretere Aufführung zu diesem Punkt.
Der VDA–QMC hat diese Lücke identifiziert und einen Arbeits-kreis gegründet, um diese zu schließen. Der Arbeitskreis „Auto-motive Cybersecurity Management Systems“ hat das Ziel, CSMS auditierbar und zertifizierbar zu machen, um den Anforderungen der UN-Regulierung Sorge zu tragen und um weiteren Standards zu entsprechen. Da der Standard ISO/SAE 21434 als Grundlage für die Fahrzeugtypenzulassung dient, ist es notwendig, dass Anforderungen an das Auditieren und Zertifizieren der Cyber-security auch in der internationalen Standardisierungslandschaft zu adressieren.
Nationale VDA-QMC-Aktivitäten könnten daher kurzfristig als Teil eines ISO-PAS-Dokuments international öffentlich erscheinen und mittelfristig als Ergänzung in der zweiten Edi-tion der ISO/SAE 21434 hinzukommen. Ein international abge-stimmtes Vorgehen ist für die global agierende Automobilbran-che essenziell, um Mehraufwände durch regionale Unterschiede möglichst gering zu halten.
Die nächsten SchritteBisher ist noch keine der angesprochenen Aktivitäten in einem finalen Stand verfügbar. Ein direktes Implementieren in organi-sationsspezifische Regeln und Prozesse birgt daher ein gewisses Risiko von erneuten Änderungen zu einem späteren Zeitpunkt. Die ersten finalen Ergebnisse sind sowohl für den ISO/SAE-Standard, als auch die UN-Regulierung nicht vor Ende 2019 zu erwarten.
Die für Ende Oktober geplante Veröffentlichung des ISO/SAE 21434 DIS (Draft International Standard) kann den Startschuss für die Implementierung in interne Prozesse und Regeln geben. Was das für die Praxis bedeutet und was damit auf die ENSIA sowie auf die Automobilhersteller und ihre Zulieferer zukommt, das erfahren Sie in der Langversion dieses Beitrags per infoDI-REKT auf all-electronics.de. (jwa) ■
AutorDr. Markus Tschersich Manager Security & Privacy Standardization & Regulatory Affairs im Security & Privacy Competence Center (SCC) bei Continental
infoDIREKT 274ael0319
30_Conti (jwa, av).indd 33 11.03.2019 16:44:44

34 AUTOMOBIL ELEKTRONIK 03 / 2019
Cybersecurity Krypto-Bibliothek
www.all-electronics.de
Cases bedienen zu können. Allerdings werden selten sämtliche verfügbaren Algorithmen benötigt. Ist die Krypto-Bib-liothek modular aufgebaut, dann lässt sie sich von vorne herein so konfigurieren, dass sie nur die tatsächlich benötigten Algorithmen vorhält und keinen unnöti-gen Speicherplatz blockiert.
Code-OptimierungIm fahrzeuginternen Netz kommt es dar-auf an, Algorithmen zu implementieren, die mit möglichst geringem Speicherbe-darf auskommen und gleichzeitig kurze Laufzeiten aufweisen. Erreichen lässt sich das durch die Optimierung des Codes in die eine oder andere Richtung.
Die Automotive Crypto Library bietet dem Anwender idealerweise die Möglich-keit, für einzelne Algorithmen beim Ein-satz in einer Anwendung mit erhöhten Performanceanforderungen eine Speed-optimierte Variante zu konfigurieren beziehungsweise bei einem kleineren Controller auf eine Größen-optimierte Variante zu setzen.
Tatsächlich sind kryptografische Bibliotheken so etwas wie die „Wiege der Sicherheit“. Die in
ihnen vorgehaltenen Algorithmen bilden nach wie vor die Grundlage vieler Secu-rity-Maßnahmen. Im Automotive-Bereich unterliegen Krypto-Bibliotheken indes besonderen Anforderungen: Zum einen findet eine Automotive Crypto Library im Fahrzeug auf vielfältige Weise Verwen-dung. Für viele verschiedene Use-Cases unterliegt sie zum Teil ganz unterschied-lichen Leistungsanforderungen. Zugleich ist der Speicherplatz in den Fahrzeug-Steuergeräten äußerst limitiert, und die Geschwindigkeit der Kommunikation im fahrzeuginternen Netzwerk darf nicht signifikant beeinträchtigt werden. Fol-gende sechs Attribute sollte eine gute Automotive Crypto Library mitbringen:
Hohe KonfigurierbarkeitEinerseits müssen die Algorithmen somit der Krypto-Bibliothek die für den Anwen-dungsfall erforderliche Performance erbringen, andererseits müssen sie auf
möglichst geringen Speicherbedarf und optimale Geschwindigkeit hin ausgerich-tet sein. Dies lässt sich durch verschiede-ne Compiler-Einstellungen allein nicht bewerkstelligen, sondern erfordert eine individuell bedarfsgerechte Konfiguration. Es braucht für das ressourcen-beschränk-te fahrzeuginterne Netz eine speziell angepasste Implementierung der Crypto Library: Je nach Einzelfall müssen sich ihre verschiedenen Algorithmen entweder auf eine geschwindigkeits- oder eine speicher-platzoptimierte Lösung oder einen ange-messenen Mittelweg zwischen Geschwin-digkeit und Speicherbedarf hin konfigu-rieren lassen. Die Automotive Crypto Lib-rary bietet hier idealerweise Anpassungs-möglichkeiten auf zwei Ebenen – über modulare Auswahl und mittels Code-Optimierung.
Modulares Design der Automotive Crypto LibraryEine kryptografische Bibliothek muss vie-le verschiedene Algorithmen zur Verfü-gung stellen, um die vielfältigen Use-
Kyptografische Bibliotheken sind so etwas wie die „Wiege der Sicherheit“. Daher kommt der Automotive Crypto Library eine ganz besondere Bedeutung zu.
Die Wiege der SicherheitWie die Automotive Crypto Library die Implementierung effektiver Cyber-Security ermöglicht
Welche Anforderungen sollte eine gute Automotive Crypto Library erfül-len, warum ist der Einsatz von Freeware hier mit sehr vielen Fragezeichen behaftet und warum eignet sich eine Automotive Crypto Library wirklich für zukunftsorientierte Anwendungen? Antworten hierauf gibt dieser Bei-trag, indem er die sechs essenziellen Attribute einer Krypto-Bibliothek für das Automotive-Umfeld erklärt. Autoren: Sandra Weigl, Dennis Hotze
34_Escrypt (av).indd 34 11.03.2019 16:48:01

AUTOMOBIL ELEKTRONIK 03/2019 35
Cybersecurity Krypto-Bibliothek
www.all-electronics.de
Plattform-Unabhängigkeit und Autosar-KompatibilitätEine Automotive Crypto Library kommt je nach Anwendungsfall auf unterschied-lichen Plattformen zum Einsatz; die Zahl der zu unterstützenden Plattformen wird in Zukunft tendenziell weiter steigen. Es ist daher unabdingbar, dass die Krypto-Bibliothek plattformunabhängig imple-mentiert ist. Sie sollte auf keinen Fall von einzelnen Betriebssystemen oder anderen Software-Bibliotheken abhängig sein. Gleichzeitig ist für den Automotive-Bereich die Autosar-Kompatibilität der kryptografischen Bibliothek ein wichtiger Pluspunkt: Sie lässt sich dadurch sehr viel einfacher in bestehende Software-Kom-ponenten integrieren. Das spart wertvol-le Entwicklungszeit und -kosten.
Qualitätsgesicherte EntwicklungEine Automotive Crypto Library ist im Idealfall gemäß ASPICE, entlang agiler Prozesse sowie MISRA-konform entwi-ckelt. Die ASPICE-gemäße Entwicklung liefert eine verifizierbare Qualität der Soft-ware durch eine nachweisliche und voll-ständige Dokumentation der Software-Requirements, der Software-Architektur, Integrations- und Qualifikationstests. Agile Prozesse ermöglichen zudem ein kundenorientiertes Software-Enginee-ring, bei dem schnell auf neue Anforde-rungen reagiert werden kann. Die Einhal-tung von MISRA-Standards verbessert darüber hinaus die Zuverlässigkeit, aber auch die Wartbarkeit der Software.
Kontinuierlicher SupportAufgrund der geforderten Langlebigkeit von Bauteilen im Automotive-Bereich ist ein nachhaltiger Support kryptografischer Bibliotheken durch den Anbieter äußerst wichtig. Schon allein deshalb, weil kryp-tografische Algorithmen und leider auch die Cyberangriffstechniken stetig weiter-entwickelt werden.
So ist beispielsweise bei einer Schwach-stelle in einem Algorithmus, insbeson-dere aber auch bei möglichen Schwach-stellen in der Implementierung eine schnelle Lieferung von Patches jeweils unbedingt erforderlich. Qualität und Schnelligkeit des Supports entscheiden hier unter Umständen über mögliche Pro-
duktionsausfälle, finanziellen Schaden und Produktsicherheit.
Freeware hat bei der Automotive Crypto Library ihre SchattenseitenAm Markt gibt es eine große Anzahl frei verfügbarer kryptografischer Bibliothe-ken. Auf den ersten Blick scheinen diese den Zweck ebenso zu erfüllen wie die kostenpflichtigen Krypto-Bibliotheken professioneller Anbieter und nutzen die scheinbar gleichen standardisierten Algo-rithmen.
Bei genauerer Betrachtung indes zeigen sich einige Schattenseiten: So verpflichtet sich der Nutzer bei manchen Open- Source-Bibliotheken, seinen eigenen Code frei verfügbar zu machen, wenn er die Bib-liothek integriert (Copyleft). Auch ist bei frei verfügbaren Open-Source-Lösungen oftmals kein schneller, zuverlässiger Sup-port gewährleistet. Zudem sind die meis-ten Open-Source-Anbieter nicht im steti-gen Austausch mit ihren Kunden und wissen wenig darüber, auf welchen Platt-formen und in welcher Umgebung ihre Bibliotheken zum Einsatz kommen. Vor allem aber sind solche Freeware-Krypto-Bibliotheken für keinen speziellen Anwen-dungsfall und schon gar nicht auf die spe-ziellen Anforderungen im Automotive-Bereich hin entwickelt worden.
Die Verwendung von Freeware-Biblio-theken im Fahrzeug ist demnach technisch zwar durchaus möglich, genügt aber mit-unter nicht den spezifischen Erfordernis-sen, zum Beispiel in punkto ressourcen-begrenzte Onboard-Kommunikation, und bringt unter Verzicht auf kompetenten Support und qualitätsgesicherte Software-Entwicklung womöglich erhöhte Sicher-heitsrisiken mit sich (Bild 1).
AutorenSandra WeiglProduct Manager bei der Escrypt GmbH.
Dennis HotzeSecurity Project Manager bei der Smart Mechatronics GmbH
infoDIREKT 311ael0319
Kryptografische Bibliothek als ZukunftsmodellDie Anforderungen bezüglich Security-Maßnahmen im Fahrzeug steigen stetig und unterliegen zugleich einem Wandel. Zentrale ECUs wie Motorsteuergerät oder Infotainment-System kommen mittlerwei-le kaum mehr ohne ein automotive-gerech-tes HSM (Hardware-Security-Modul) aus. Algorithmen die nicht direkt von der HSM-Hardware unterstützt werden, müssen hier intern von der HSM-Firmware bereitge-stellt werden; der wiederum kann eine Krypto-Bibliothek zu Grunde liegen. Aber auch immer kleinere ECUs müssen Secu-rity-Maßnahmen wie Secure-Communi-cation umsetzen. Viele dieser Steuergerä-te verfügen über kein HSM und müssen daher auf Software-Implementierungen der nötigen Algorithmen zurückgreifen, die ihnen über eine kryptografische Bib-liothek bereitgestellt werden.
So wird durch den Vormarsch der HSM der Bedarf an Krypto-Library-Software zwar auf den ersten Blick sinken, sie wird jedoch weiterhin in genügend ECUs und Funktionen im Fahrzeug ihren Platz fin-den. Die kryptografische Bibliothek wird auch in Zukunft ein Grundstein der Auto-motive Cyber Security bleiben. (av)� n
Vergleich zwischen einer Freeware-Krypto-Bibliothek und einer Automotive Crypto Library.Bil
der: E
scry
pt
34_Escrypt (av).indd 35 11.03.2019 16:48:04

36 AUTOMOBIL ELEKTRONIK 03 / 2019 www.all-electronics.de
Automatisiertes Fahren Tools
Fehleranalyse und Fernsteuerung per CloudTest-Flotten sicher ausstatten, kontrollieren und fernwarten
Bevor sich autonome Fahrzeuge auf öffentlichen Straßen bewegen dürfen, müssen sie viele Validierun-gen und Verifikationen bestehen. B-Plus stellt im folgenden Beitrag eine komplette Automotive-Validati-on-Toolchain vor, die den Entwickler über den gesamten Entwicklungsprozess begleitet und auch einen sicheren Zugriff aus der Ferne erlaubt.
Autonom fahrende Carsharing-Lösungen werden wir höchstwahrscheinlich schneller erleben, als eine Men-ge an autonom fahrenden Privatfahrzeugen“, behaup-
tet B-Plus-Marketingleiter Josef Behammer . Diese Aussage unterstreichen auch aktuelle, große Zusammenschlüsse wie etwa der von Daimler und BMW : Dabei präsentieren sich die beiden Automobilhersteller mit der Vereinigung von Car2Go und Drive-Now bei dem Kampf um Daten, Kunden und Stand-orte nun als verstärktes Team. Des Weiteren rechnen Automo-tive-Spezialisten der Branche nach dem großen Rechtsstreit zwischen Uber und Waymo nun mit einer Partnerschaft zwi-schen den beiden großen Carsharing-Mächten. Sowohl Uber als auch Waymo sind in der Entwicklung autonomer Fahrzeu-
Bild 1: Ein mehrschichtiges Schutzkonzept ermöglicht die sichere Kommunikation von Testfahrzeugen in die Cloud und wieder zurück.
ge bereits sehr weit und können sich sowohl technisch als auch mit etablieren Service-Diensten ergänzen.
Datenspeicherung für Messtechnik in Testfahrzeugen ermöglichenInsbesondere Sensor-Steuergeräte übernehmen im autonomen Fahrzeug eine wichtige Rolle – die hochauflösenden Aufnahmen des Fahrzeugumfelds, kombiniert mit den informativen Bus-Daten des Fahrzeugs, bestimmen einen entscheidenden Anteil über die Entscheidungsfähigkeit des Steuergerätes.
Bei den ganzen High-Tech Zukunftsplänen der Automotive-Welt darf man allerdings eines nicht vergessen: die Sicherheit jedes einzelnen Passagiers. So setzten nun auch progressive
36_B-Plus (jwa_av).indd 36 12.03.2019 08:23:16

AUTOMOBIL ELEKTRONIK 03/2019 37
Automatisiertes Fahren Tools
www.all-electronics.de
Marktteilnehmer den Fokus spezifisch auf ausgiebige Testver-fahren. Dazu gehört während der Entwicklung eines neuen Sen-sor-Steuergerätes eine Vielfalt unterschiedlicher Testverfahren, wie beispielsweise Testfahrten über sehr viele Kilometer unter dem Einfluss verschiedenster Umweltbedingungen, aber auch eine Reihe zusätzlicher Simulationsvarianten. Hier kommt B-Plus ins Spiel: Ob es um die Sensorbilddaten-Konvertierung geht, die zeitsynchrone, schnelle Aufnahme der großen Datenflut mithil-fe von Messtechnik, den Transfer dieser Daten in die Rechen-zentren oder auch die anschließende Reinjektion dieser Rohda-ten zurück ins Steuergerät, B-Plus bietet sowohl die passende Hardware und auch begleitende Software-Tools für verschie-denste Test-Systeme eines Steuergerätes.
Für einen möglichst reibungslosen Übergang von den Ent-wicklungsmustern und deren Validierungsergebnissen zur Serie, empfiehlt es sich in die Serien- Steuergeräte eine Schnittstelle für Messtechnik zu verbauen, um einen reibungslosen Validie-rungsprozess im Fahrzeug realisieren zu können. Die Auswahl der passenden Messtechnikschnittstelle ist entscheidend für den Validierungserfolg. Die Umsetzung auf eine Standardschnitt-stelle bietet hierbei viele Vorteile. So lässt sich zum Beispiel eine 10-GBit-Ethernet-Schnittstelle in gesonderten Messdaten-Kon-vertern realisieren.
Diese Messdaten-Konverter setzen beispielsweise bei Kame-rasensoren typische Formate CSI-2, GMSL, FPD-Link auf 10-GBit-Ethernet um. Damit braucht das Steuergerät minimale Hardware oder Software, um die Sensorrohdaten für die Mess-technik verfügbar zu machen. Dies ermöglicht eine verlässliche Übertragung von hohen Bandbreiten aus dem Steuergerät und durch 10-GBit-Ethernet den sicheren Transport ohne Verlust über längere Distanzen zu Datenloggern im Fahrzeug (Bild 3).
Recording-Systeme für den FahrzeugkofferraumDie immer kürzer werdenden Projektphasen erschweren eine fundierte Durchführung der Validierung. Zur Unterstützung in
Die Entwicklung von neuen Fahrzeugen in Richtung Autonomie-Level 3, 4 und 5 bringt in der Test- und Validierungsphase höhere Anforderungen an die Datenmengen mit sich. B-Plus bietet mit der Automotive-Vali-dation-Toolchain Aveto Hard- und Software-Komponenten an, die den Entwicklungspro-zess begleiten, einen sicheren Zugriff auf Testfahrzeuge per Cloud erlauben und so ein optimiertes Flottenmanagement ermög-lichen. Damit reduziert sich die aufkommen-de Komplexität bei Testfahrten, während die gesamte Entwicklung zügiger verläuft.
Eck-DATEN
der Vorentwicklung, Entwicklung und der Validierungsphase eines Steuergeräts, benötigen die Ingenieure hoch performante Messtechniklösungen für das Rohdaten-Recording von aktuell bis zu 60 GBit/s. Um eine solch hohe Datenmenge verarbeiten zu können, ist neben der hohen Logging-Geschwindigkeit (bei B-Plus aktuell bis zu 16 Gbit/s pro System) auch die Skalierbar-keit dieser Systeme von großer Bedeutung.
Diese Anforderung bezieht sich auch auf die gegebenen Spei-cherlösungen im Messtechniksystem, welche möglichst kompakt, skalierbar und natürlich möglichst aufnahmefähig sein müssen. Die Leistungsfähigkeit eines solchen Systems soll auch unter verschiedensten kritischen Umweltbedingungen in einem Fahr-zeug unbeeinflusst bleiben (Bild 4). Die Lieferung konstanter Ergebnisse ist essenziell, um für weitere Validierungsprozesse hochwertige, abgesicherte Daten zur Verfügung zu stellen. Nur wenn dieser Prozess reibungslos funktioniert, kann die anschlie-ßende Bewertung und Optimierung der Algorithmen erfolgen.
Datenintegrität vom Sensor bis zur AufzeichnungZu den Voraussetzungen eines Serien-Steuergeräts gehört beim Validierungsprozess die Berücksichtigung der ISO-Norm 26262 für sicherheitsrelevante elektronische Komponenten zur Gewährleistung der funktionalen Sicherheit. Aktuelle Validie-rungstools für den Automotive-Bereich müssen somit einerseits in der Lage sein, enorme Datenströme der Multi-Sensor- Systeme zu behandeln. Auf der anderen Seite müssen sie ebenfalls Methoden zur Verfügung stellen, um die Dokumentationspflicht in der Messung nach ISO-Norm 26262 rundum gewährleisten zu können.
Um den Datenstrom abzusichern, müssen Prüfsummen und Botschaftszähler zum Einsatz kommen. Je nach Ansatzpunkt lässt sich die Signalkette komplett vom Steuergerät bis zum Messdaten-Konverter abdecken. Auch ein Messdatenservice direkt am Steu-ergerät ist realisierbar. Alternativ ist es möglich, Prüfsummen und Botschaftszähler am Messdateninterface zu realisieren. Damit
Bild 2: Ein Flottenmanagementsystem ermöglicht die Überprüfung der Messtechnik per Cloud-Anbindung; die Recorder-Analyse und Health-Monitoring informieren den Test-fahrt-Verantwortlichen über den aktuellen Be-triebsstatus. Bil
der: B
-Plus
36_B-Plus (jwa_av).indd 37 12.03.2019 08:23:18

38 AUTOMOBIL ELEKTRONIK 03/2019
Automatisiertes Fahren Tools
www.all-electronics.de
infoDIREKT 273ael0319
lässt sich der resultierende Datenstrom absichern und beim Emp-fang, bei der Aufzeichnung und beim Abspielen auf Integrität prüfen. Ein Übertragungsfehler in der Toolkette kann beim Öff-nen des Datensatzes eine Fehlermeldung auslösen – eine Grundfunktion für eine erfolgreiche Absicherung.
Flottenmanagementsystem minimiert Fehler bei TestfahrtenPrototypen-Fahrzeugflotten reisen in andere Länder, um dort Tausende von Kilometern einzufahren. In diesen Fahrzeugen befinden sich nicht selten auch Messtechnikaufbauten von B-Plus. Diese sind auf die hohe Datenraten zukunftsorientierter Multisensorik-Systeme und deren Anwendungsgebiete optimiert. Solche Test-fahrten sind für Automobilhersteller allerdings äußerst kosten-aufwendig. Wird ein Messtechniksystem aus Versehen nicht gestartet oder erkennt ein Testfahrer den vollen Speicher zu spät, liefert eine solche Testfahrt als Leerfahrt keine Daten.
Mit einem Flottenmanagementsystem ist es nun möglich, solche Fehler zu vermeiden und die Flotten über die Messtechnik-Cloud-Anbindung zu überprüfen. Bei dieser Recorder-Analyse erhält der Testfahrt-Verantwortliche über ein Online-Dashboard immer den aktuellen Status sowie das Health-Monitoring der Messtechnik, auch wenn er sich gerade am anderen Ende der Welt aufhält (Bild 2).
Eine kundenspezifische Web-Oberfläche erlaubt es, Metada-ten des Fahrzeug-Prototypen wie beispielsweise Geschwindig-keit, Temperatur, geografische Position, Tankstatus, Speicherka-pazität der Messtechnik und weitere relevante Daten für einen effizienten Messtechnikbetrieb, einfach zu überprüfen. Zeigen sich hierbei Fehler, ist eine Reaktion darauf sofort möglich.
Steuerung und Update sicher über die CloudMan kann aber nicht nur Analyse-Daten abrufen, sondern auch Kommandos und Daten über die Cloud verschicken. Damit sind bestimmte Aktionen auf der Messtechnik zu steuern, wie etwa Start-Stop-Recording oder Momentaufnahmen.
Des Weiteren kann dieser Mechanismen Updates für das Mess-techniksystem oder die Messtechnikkonfiguration gezielt ver-teilen. Auch Messtechnikgeräte bedürfen hin und wieder eine
Anpassung und Aktualisierung. Um unnö-tige Servicezeiten zu vermeiden, können Updates mit dem neuen Cloud-System nun ohne Probleme erfolgen.
Gerade der Sicherheitsaspekt spielt bei sensiblen Forschungs- und Vorentwick-lungsdaten, im Zusammenhang mit einem cloud-basierten Flottenmanagementsys-
tems, eine große Rolle. Bereits in der Entwicklungsphase liegt der Fokus auf mehrschichtigen Schutzkonzepten. Dazu gehören mehrere Bausteine wie Transportsicherheit, Zugangskontrolle mit signierten Access-Token sowie zusätzlich die Möglichkeit die Datenpakete selbst asymmetrisch zu verschlüsseln. Beim Schlüs-selmanagement wurde viel Aufwand betrieben, um einen mög-lichst sicheren und dennoch komfortablen Weg zu implementie-ren. Dabei kann man beispielsweise bereits ausgerollte Access Token annullieren oder Zertifikate während der Laufzeit auszu-tauschen (Bild 1).
Mehr Überblick, weniger KomplexitätGerade bei der Entwicklung von neuen Fahrzeugen in Richtung Autonomie-Level 3, 4 und 5 ist der Test- und Validierungspfad mit deutlich erhöhten Anforderungen an die Datenmengen ver-bunden. Um hier entwicklungsbegleitend einen Überblick zu erhalten, können verschiedenste, aufeinander abgestimmte Vali-dierungsmethoden inklusive optimierter Flottenmanagement-Systeme die aufkommende Komplexität bei Testfahrten reduzie-ren und die Entwicklung somit beschleunigen. (jwa)� n
Der Beitrag basiert auf Unterlagen von B-Plus.
Bild 3: Messdaten-Konverter setzten Kamera-Sensorformate auf 10-GBit-Ethernet um, entlasten Steuergeräte bei der Aufbereitung von Rohdaten für die Messtechnik und übertragen Daten bei hohen Bandbreiten ver-lustfrei auch über längere Distanzen zu Datenloggern.
ECU Camera
MDI Link
10GB Ethernet
CSI-2
CSI-2
Bild 4: Im Kofferraum eines Testfahrzeugs verbaute Recording-Systeme sparen Platz in der Fahrgastzelle, lenken den Fahrer nicht ab und sind be-dingt unfallgeschützt sowie diebstahlsicher.
16 GBit/sbeträgt die aktuelle
Logging-Geschwindigkeit pro System
36_B-Plus (jwa_av).indd 38 12.03.2019 08:23:19

23rd International Automobil-Elektronik Kongress in Ludwigsburg25 and 26 June 2019, Forum am Schlosspark, Ludwigsburg
KONGRESS25 AND 26 JUNE 2019
www.automobil-elektronik-kongress.de
© A
UD
I AG
ANNOUNCEMENT
Challenges of E/E for tomorrow:• Megatrends • Automated Driving • E-Mobility
Organized by:
Top speakers from OEMs and suppliersStatements on trends from top electronics division managersInformation and communications for the E/E sector
Dr. Christoph Grote Head of Electronics Development BMW Group
Dr. Dirk Hoheisel Member of the Board of Management Robert Bosch GmbH
Wolf-Henning Scheider CEO ZF Friedrichshafen AG
Chuck Gray Global Director Electrical and Electronic Systems Engineering Ford Motor Company
Dr. Carsten Breitfeld Co-Founder & Chairman of the Board BYTON
Takashi Yoshizawa Vice President Nissan Motor Co., Ltd.
Uwe Michael Vice President Electric/Electronic Systems Dr. Ing. h.c. F. Porsche AG
Fei Hao CEO Banma Network Technology Co. Ltd.
• End2End Architecture • Connected Mobility
Highly interesting speeches by
KONGRESS25 AND 26 JUNE 2019
Anzeige_AEL-Kongress_201x297mm.indd 1 18.02.2019 09:44:4339_1_1 Anzeigenlayout.indd 39 08.03.2019 09:30:01

40 AUTOMOBIL ELEKTRONIK 03/2019
Automatisiertes Fahren Plattform
www.all-electronics.de
Zentrale Computerplattform für mehr SicherheitEin neuer Ansatz für das maschinelle Denken autonomer Fahrzeuge
Viel Rechenleistung allein kann den Aspekt der Sicherheit beim autonomen Fahren nicht bewäl-tigen. Ein neuer strategischer Ansatz von NXP und Kalray unterteilt den maschinellen Denkpro-zess in zwei Komponenten. Erfahren Sie im folgenden Beitrag mehr dazu und über die geplante Gemeinschaftsentwicklung einer zentralen Computerplattform für autonome Fahrzeuge. Autor: Kamal Khouri
NXP und Kalray wollen in neuer Partnerschaft eine zent-rale Automotive-Computerplattform entwickeln, bei der Sicherheit die Grundlage bildet. Diese Plattform ermög-licht mit spezialisierten Mikrocontrollern beider Unter-nehmen (S32-Prozessor von NXP und MPPA-Prozessoren von Kalray) genau die Aufteilung des maschinellen Den-kens, die für autonomes Fahrens entscheidend ist. Ein erstes Integrationsprojekt ist die NXP-Bluebox, eine ein-gebettete Plattform für autonomes Fahren.
Eck-DATENZahlreiche Ankündigungen rund um das auto-nome Fahren haben in der Öffentlichkeit inzwischen zu einer gewissen Ermüdung und
Verwirrung geführt. Die Wurzeln für diese Verwir-rung liegen sicherlich in den Anfängen des Hypes: Einige Automobil- und Chiphersteller stellten damals fast schon haarsträubende Behauptungen über die kurzfristige Umsetzbarkeit autonomer Systeme auf. Meinungsbildner, beflügelt von den Aussichten auf ein neues, goldenes Zeitalter computerbasierter Mög-lichkeiten, trugen die Diskussion um eine nahe bevorstehende Auslieferung autonomer Fahrzeuge schnell in die ganze Welt.
Sicherheit: entscheidender AusgangspunktDie Entwickler bei NXP haben seit diesen ersten Tagen viel dazugelernt: Zum einen, wie sich die für autono-mes Fahren erforderliche Rechenleistung verbessern lässt und zum anderen, wie diese Technologien dann in der Fahrzeugproduktion umsetzbar ist – vom Klein-wagen bis zu High-End- und Oberklassemodellen.
SMART VEHICLE ENTWICKLUNG by FEVweitere Informationen auf: smart-vehicle.fev.com/demonstrator
SICHER VON A NACH B – LÖSUNGEN FÜR DAS AUTONOME FAHREN VON MORGEN.NUTZEN SIE UNSERE EXPERTISE BEI DER INTEGRATION UND ABSICHERUNG VON ASSISTENZ-SYSTEMEN UND CONNECTIVITYLÖSUNGEN
Ihr Vorteil – unsere Kompetenzen:> Gezielte Nutzung von XiL-Lösungen für automatisierte
Tests in einem frühen Entwicklungsstadium> Sicherheitsmanagement in der Entwicklung > Verifizierung und Validierung sicherheitskritischer
Software und Systeme nach ISO 26262 und EN 61508> End-to-End-Absicherung > Automatisierte Testsysteme
www.fev.com
Entwurf-FEV-Anzeige-Automobil-Elektronik-Nr3-1-3-Seite-216x105mm-2019_de.indd 1 1/22/2019 9:34:55 AM
Beide Bereiche sind für Automobilhersteller von ent-scheidender Bedeutung. Was aber all diesen Überle-gungen zugrunde liegt, ist das Thema Sicherheit. Sie ist ein entscheidender Ausgangspunkt und hätte eigentlich schon von Anfang an im Mittelpunkt der autonomen Revolution stehen sollen.
1,3 Millionen Menschen sterben jährlich bei Ver-kehrsunfällen. 90 Prozent dieser Unfälle sind auf menschliches Versagen zurückzuführen. Diese mehr als ernüchternden Zahlen gehören zu den Gründen die Entwicklung des autonomen Fahrens voranzu-treiben. Doch in gewisser Weise verfehlen sie einen grundlegenden Punkt: Trotz all dem Schmerz und dem Leid, das durch diese Statistiken deutlich wird, machen menschliche Autofahrer ihre Sache im Kon-text heutiger Verkehrsbedingungen gut. Wird dabei berücksichtigt, wie viel die Menschen fahren, und wie hoch die Menge an Fahrzeugen auf unseren Straßen ist, könnten die Unfallraten noch wesentlich höher sein. Die eigentliche Frage ist also nicht, wie ein Auto-mobilroboter besser werden kann als ein Mensch, sondern wie er dessen Niveau an Sicherheit überhaupt erstmal erreichen kann.
Funktionale Sicherheit allein genügt nicht In den letzten 30 Jahren haben Automobilhersteller, Chiphersteller und andere führende Unternehmen die Disziplin der funktionalen Sicherheit geschaffen. Das war ein erster Schritt, um die Einführung von
Bild 1: Für den Durch-bruch zum autono-men Fahren muss der Automobilroboter zunächst einmal mindestens genauso sicher unterwegs sein wie ein Mensch.
Bild:
NXP
, Kalr
ay
40_NXP (jwa_av).indd 40 11.03.2019 16:50:58

Automatisiertes Fahren Plattform
Elektronik im Fahrzeug sicher zu machen. Im Großen und Ganzen geht es bei der funktionalen Sicherheit darum, dass jede elektronische Komponente in einem Fahrzeug eine eigene Funktion hat und dass, wenn diese Komponente ausfällt, das System diesen Fehler erkennen und an das Fahrzeug melden muss. Wenn jemals eine orangefarbene oder rote Anzeige im Fahr-zeug aufleuchtet und den Fahrer auffordert, den Motor, eine Komponente oder ein Steuergerät zu über-prüfen, hat dies das funktionale Sicherheitssystem veranlasst.
In der Welt des autonomen Fahrens beinhaltet Sicherheit immer diese funktionale Komponente. Sie bewegt sich aber rasend schnell in Richtung noch komplexerer Sicherheitsbereiche. Hier beschäftigen
wir uns nicht mehr mit dem vergleichbar einfachen Konzept des Funktionierens oder Nicht-Funktionie-rens. Neue und sich entwickelnde Denkweisen zum Thema Sicherheit nehmen immer mehr Raum in der Diskussion um autonomes Fahren ein. Hierzu gehö-ren Konzepte wie Verhaltenssicherheit oder Umwelt-sicherheit.
Verhaltens- und UmweltsicherheitBei der Verhaltenssicherheit geht es zunächst einmal um die Frage, ob sich das Fahrzeug korrekt fortbewegt: Fährt es auf dem Bordstein oder auf der Straße, ist das Tempo an den Verkehr angepasst, ist sein Fahrver-halten an alle Regeln und Vorschriften seiner direkten Umgebung angepasst? Noch fortschrittlichere und
SMART VEHICLE ENTWICKLUNG by FEVweitere Informationen auf: smart-vehicle.fev.com/demonstrator
SICHER VON A NACH B – LÖSUNGEN FÜR DAS AUTONOME FAHREN VON MORGEN.NUTZEN SIE UNSERE EXPERTISE BEI DER INTEGRATION UND ABSICHERUNG VON ASSISTENZ-SYSTEMEN UND CONNECTIVITYLÖSUNGEN
Ihr Vorteil – unsere Kompetenzen:> Gezielte Nutzung von XiL-Lösungen für automatisierte
Tests in einem frühen Entwicklungsstadium> Sicherheitsmanagement in der Entwicklung > Verifizierung und Validierung sicherheitskritischer
Software und Systeme nach ISO 26262 und EN 61508> End-to-End-Absicherung > Automatisierte Testsysteme
www.fev.com
Entwurf-FEV-Anzeige-Automobil-Elektronik-Nr3-1-3-Seite-216x105mm-2019_de.indd 1 1/22/2019 9:34:55 AM
Bild 2: Autonome Wahrnehmung und Verarbeitung unter-teilt sich in die Berei-che Sinne, Denken und Handeln. Das Denken erfolgt zwei-stufig, zuerst die Wahrnehmung und Modellierung der Um-gebung, dann die si-chere Planung eines Fahrweges.
Bild:
NXP
40_NXP (jwa_av).indd 41 11.03.2019 16:50:59

42 AUTOMOBIL ELEKTRONIK 03 / 2019
Automatisiertes Fahren Plattform
www.all-electronics.de
YOUR PARTNER FORMECHATRONIC SOLUTIONSOptimizing current technologies while innovating for the future? Our engineers will bring you a tailor-made solution.
• 0 ppm often approached, always improving• 1.5 billion actuators already at your service• Designed for harsh environments
FROM MIND TO MOTION
Get in touch! We are ready for your challenge!
sonceboz.com/git
EXTREME TEMPERATURE
SMARTCOMPACTNESSEXTREME TEMPERATURE
SMARTCOMPACTNESS
komplexere Konzepte der Verhaltenssicherheit befas-sen sich zudem auch damit, ob ein Fahrzeug sich zum Beispiel in bestimmten Situationen angemessen aggressiv oder defensiv verhält.
Die Umweltsicherheit befasst sich dagegen mit der Frage, wie ein Fahrzeug angemessen auf Verände-rungen in der dynamischen Umgebung reagieren soll: Was würde passieren, wenn eine Kiste von der Ladefläche eines Kurierfahrzeugs direkt auf die Stra-ße und vor das eigene Auto fällt? Wie wird ein auto-nomes Fahrzeug reagieren und wie lässst sich ein geeigneter Weg definieren, um dieser unerwarteten Herausforderung zu begegnen?
Ein weiterer Aspekt der Umweltsicherheit ist der angepasste Umgang mit Wetterbedingungen wie Regen, Nebel oder Eis und anderen besonders anspruchsvollen Verkehrssituationen. Es ist sicher-zustellen, dass die elektronischen Systeme und die Software, die dem autonomen Fahren zugrunde lie-gen, stets so funktionieren, dass das Fahrzeug ein-wandfrei auf jede mögliche Situation reagieren kann.
Berechnungsanforderungen für autonome SystemeUm autonome Funktionen sicher handhaben zu kön-nen, müssen die Systeme im Fahrzeug massive Rechenanforderungen erfüllen. Bei Betrachtung des Kontinuums der Anforderungen an die autonome Berechnung ist der Bereich der fortgeschrittenen Fahrassistenz typischerweise Level 1 und 2 der SAE-Autonomiestufen zuzuordnen. Die autonome Fahras-sistenz beginnt bei Level 3 und erstreckt sich bis Level 5. Mit jeder weiteren Stufe der Autonomie steigen die Anforderungen an die Berechnung von Millionen von Anweisungen pro Sekunde bis hin zu Tera-Operati-onen pro Sekunde für Anwendungen wie das maschi-nelle Lernen.
NXP teilt die autonome Wahrnehmung und Verar-beitung in die konzeptionellen Bereiche Sinne, Den-ken und Handeln auf. Innerhalb des Bereichs Sinne erzeugen Technologien wie Radar, Lidar, Vision und
V2X riesige Mengen an Rohdaten. Diese Daten werden dann durch das System im Rahmen des Denkens verarbeitet. So bewertet das System was gerade geschieht, um abschließend eine Entscheidung zu treffen und sein Handeln auf diese Entscheidung aus-zulegen. Diese Struktur ist in allen Arten von Robo-terkonstruktionen gängig.
Die erste Welle von Entwicklern autonomer Fahr-zeuge, die vor allem mit High-Performance-Consu-mer-GPUs und -CPUs arbeitete, versuchte, die Pro-bleme der Autonomie mit einer Kombination aus massiver Rechenleistung und einem monolithischen Ansatz anzugehen. Sie kombinierten größte GPUs und CPUs und begannen mit der Analyse der Daten. Das Problem bei einem solchen Ansatz ist allerdings, dass der Nachweis von Sicherheit und Energieeffizi-enz dabei eine große Herausforderung ist. Deshalb entscheidet sich NXP, die Herausforderung mithilfe des Denk-Ansatzes anzugehen.
Erste Denkstufe: Wahrnehmung und ModellierungDer hohen Leistungsanforderungen beim autonomen Fahren ergeben sich aus dem Bereich des Denkens. Weil hier gleich zwei wichtige Dinge passieren, hat NXP diesen Bereich unterteilt. Das erleichtert es den Kunden, Sicherheit umzusetzen.
Die erste Komponente konzentriert sich auf die Wahrnehmung und Modellierung der Umgebung um das Fahrzeug herum. Die zweite konzentriert sich auf die sichere Planung eines Fahrweges (Bild 2). Ein Grund für diese Aufteilung ist, dass die Skalierung der verschiedenen Teile der Anwendung oder Unter-funktionen an die Anforderungen an ein spezifisches Fahrzeug angepasst werden muss. Genauer gesagt, die Wahrnehmung und Modellierung hängt ab von der Anzahl der Sensoren und verschiedenen Sensor-typen im Fahrzeug. Die Wegplanung ist abhängig von der Komplexität der vorhandenen Fahrfunktionen.
Die Wahrnehmung und Modellierung konzentriert sich auf die Identifizierung der Umgebung eines Fahr-
Bild 3: Kalrays MPPA-Prozessoren sollen Aspekte des maschi-nellen Lernens bei der Wahrnehmungsicher abdecken.
Bild 4: Die Embed-ded-Plattform Blue-box von NXP fürsautonome Fahrenintegriert Kalrays MPPA-Prozessoren für die maschinelle Wahrnehmung.
3 4
Bild:
Kalra
y
Bild:
NXP
40_NXP (jwa_av).indd 42 11.03.2019 16:51:00

Automatisiertes Fahren Plattform
YOUR PARTNER FORMECHATRONIC SOLUTIONSOptimizing current technologies while innovating for the future? Our engineers will bring you a tailor-made solution.
• 0 ppm often approached, always improving• 1.5 billion actuators already at your service• Designed for harsh environments
FROM MIND TO MOTION
Get in touch! We are ready for your challenge!
sonceboz.com/git
EXTREME TEMPERATURE
SMARTCOMPACTNESSEXTREME TEMPERATURE
SMARTCOMPACTNESS
Autor Kamal Khouri VP & General Mana-ger Advanced Driver Assistance Systems, NXP Semiconductors
infoDIREKT 271ael0319
zeugs, einschließlich umliegender Objekte. Das Sys-tem modelliert die Umgebung um das Auto herum, sodass es Objekte wie zum Beispiel einen Baum iden-tifizieren und schließlich klassifizieren kann. Die Fähigkeit, ein Objekt um das Fahrzeug herum zu sehen, wahrzunehmen und zu identifizieren, wird teilweise durch Sensoren ermöglicht und bewegt sich dann in Bereiche, die eine Hochleistungsverarbeitung erfordern. Auch behält das System Objekte im Auge und bestimmt dabei Werte wie den Kurs ihrer Bewe-gung oder ihre Geschwindigkeit, um diese dann mit der restlichen Umgebung direkt um das Fahrzeug herum abzugleichen. So stellt es fest, ob es sich bei den Objekten um Fahrspuren, andere Fahrzeuge oder Fußgänger handelt.
Zweite Denkstufe: Planung eines FahrwegesSobald das System auf diesem Wege ein Modell der Fahrzeugumgebung gebildet hat, muss es Entschei-dungen auf der Grundlage seiner Wahrnehmung tref-fen. Diese Entscheidungen drehen sich um die siche-re Routenplanung und sie beantworten die Frage, was das Auto tun wird. Wird es nach links abbiegen, lang-samer oder schneller werden? Dies alles ist Bestand-teil eines sicheren Manövrierens des Fahrzeugs, der Planung seiner Bewegung, der Vorhersage des Ver-kehrs und der verhaltensorientierten Planung der Route, um voranzukommen und das endgültige Stre-ckenziel zu erreichen.
Die für die Routenplanung notwendige Leistung hängt also nicht ab von den Sensoren, sondern von der Komplexität des gewählten Entscheidungsalgo-rithmus und vom Umfang der Fahrfunktionen (vom Stauassistenten bis zum Autobahnpiloten, mit oder ohne Baustelle, mit oder ohne Zusammenführung der Fahrspur). Die Fähigkeit, diese beiden Dinge unab-hängig voneinander zu skalieren, ist extrem bedeut-sam. Sie hilft dem System, seine Effizienz erheblich
zu steigern, wenn es um Leistung pro Watt geht. Außerdem ermöglicht sie auch einen leichteren Sicher-heitsnachweis, da Hard- und Software isoliert von-einander arbeiten.
Entwicklung einer zentralen Automotive-ComputerplattformAuf der diesjährigen CES in Las Vegas haben NXP und Kalray eine Partnerschaft zur gemeinsamen Ent-wicklung einer zentralen Computerplattform geschlossen, bei der Sicherheit die Grundlage bildet. Diese Plattform ermöglicht genau die Aufteilung des Denkens, die für die Industrialisierung des autono-men Fahrens entscheidend ist.
Für die neue Automotive-Computerplattform stellt NXP beispielsweise mit seinem leistungsstarken S32-Prozessor den Host-Prozessor, womit gleichzei-tig auch die besonders sicherheitsrelevanten Systeme ASIL-D und ASIL-B integriert sein werden. Diese Eigenschaften sollen die Plattform dabei unterstützen, die hohen Anforderungen des zentralen Computer-baus im Automobilbereich zu erfüllen und die Funk-tionen anzugehen, die für eine optimale Routenpla-nung wichtig sind. Kalray stellt seine bewährten MPPA-Prozessoren zur Verfügung, um Aspekte des maschinellen Lernens bei der Wahrnehmung sicher abzudecken (Bild 3).
Das erste konkrete Anwendungs-Beispiel für die-se Partnerschaft ist die Integration der MPPA-Pro-zessoren von Kalray in die NXP-Bluebox, eine ein-gebettete Plattform für das autonome Fahren (Bild 4). Diese Plattform addressiert die Herausforderun-gen des autonomen Fahrens in Bezug auf Energie und Sicherheit mit ARM-basierter Technologie und ist so konzipiert, dass sie offene Standards unter-stützen wird. (jwa) ■
40_NXP (jwa_av).indd 43 11.03.2019 16:51:02

44 AUTOMOBIL ELEKTRONIK 03/2019
Automatisiertes Fahren Bauelemen-
www.all-electronics.de
Timing-Lösungen fürs AutomobilMEMS-Oszillatoren unterstützen zeitkritische Anwendungen
Altbewährte Technologien durch aktuellere Konzepte auszutauschen kann oft unerwartete Möglichkeiten er-öffnen. Ein Beispiel dafür ist der Umstieg vom Quarz- auf den MEMS-Oszillator in Automotive-Anwendungen. Der Beitrag erläutert diesen neuen Bedarf, erklärt Unterschiede und stellt eine Klasse von MEMS-Oszillatoren für zeitkritische Anwendungen vor. Autor: Song Li
in einem IC-Fertigungsbetrieb unter hohen Reinheitsbedingungen. Damit kön-nen MEMS-Oszillatoren eine zwanzigmal höhere Zuverlässigkeit, um den Faktor 500 bessere Stabilität gegen Stoßbelastungen und eine fünfmal bessere Vibrationsbe-ständigkeit bieten als herkömmliche Quartz-Oszillatorbausteine.
Konstruktionsbedingt sind MEMS-Oszil-latoren sehr klein und robust. Kristalle haben eine endliche Größe und ihr Preis steigt mit zunehmender Miniaturisierung. In den ers-ten Automotive-Anwendungen, bei denen es sehr strenge Platzbegrenzungen gab, war es notwendig, einige der Kameras in den Fahrzeugen aufgrund der Größe der Quart-zbausteine nachzurüsten. Hier bietet sich der Einsatz von MEMS-Bausteinen als natürliche Lösung an.
Stabilität bei hohen TemperaturenEin weiterer Aspekt der MEMS-Oszilla-toren ist ihre Fähigkeit, ihre Frequenzsta-bilität auch bei sehr hohen Temperaturen beizubehalten. Quartz-Bausteine besitzen ein stark nichtlineares Temperaturverhal-ten und haben in diesem Bereich mehr
Bei Halbleiter-Bausteinen war die klassische Rechtfertigung des „kleiner, schneller, preisgünstiger“
beziehungsweise höhere Leistung, mehr Zuverlässigkeit für mehr als 50 Jahre die treibende Kraft. Heutige Digitalschaltun-gen in Automotive-Anwendungen mit kritischen Timing-Anforderungen benö-tigen mehr denn je MEMS-Oszillatoren (Micro Electrical Mechanical Systems).
Anforderungen des Kfz-EinsatzesZuverlässigkeit ist ein zentrales Kriterium für Autohersteller und die Lieferanten ihrer elektronischen Systeme. Quartz-Oszillatoren werden mechanisch aus Kris-tallmaterial geschnitten und abgeschlif-fen, um die richtige Frequenz zu erzielen und anschließend in hermetisch versie-gelte Gehäuse verkapselt. Wegen ihrer dünnen Kristallstrukturen sind diese Bau-steine empfindlich gegenüber Vibrations-schäden und außerdem auf eine feste Fre-quenz beschränkt. Die Reinheitsanforde-rungen in der Fertigung für diese Baustei-ne sind nicht besonders hoch. Die Her-stellung von MEMS-Oszillatoren erfolgt
Schwier igkeiten. Heute verfügbare MEMS-Oszillatoren erfüllen die Tempe-raturklasse 1 (40 bis +125 °C Umgebungs-temperatur entsprechend AEC-Q100). MEMS-Oszillatoren der nächsten Gene-ration eignen sich auch für noch höhere Temperaturen, sodass sie sich auch in Bereichen des Fahrzeugs einsetzen lassen, in denen Temperaturklasse 0 (-40 bis +150 °C) erforderlich ist.
Im Automotive-Einsatz können hohe Temperaturen aufgrund der Umgebungs-temperaturen am Installationsort und/oder der geforderten Platzierung des Oszillators auf der gedruckten Leiterplat-te auftreten. Ein höheres Maß an Konnek-tivität in Fahrzeugen erfordert auch ICs mit höherem Leistungsbedarf. Die Ver-lustwärme dieser ICs steigert die lokale Umgebungstemperatur für die in ihrer Nähe angeordneten Komponenten. Für gute Systemstabilität ist es ratsam, den Quarzoszillator in der Nähe des zugehö-rigen ICs zu platzieren. Hier war lediglich Temperaturklasse 3 notwendig, aber die-se Anforderungen sind aktuell starken Änderungen ausgesetzt.
Steigende WärmebelastungMikroprozessoren in Infotainment-Sys-temen geben erhebliche Mengen an Wär-me ab, und obwohl die meisten Kompo-nenten im Fahrzeuginneren für Tempera-turklasse 2 (bis 105 °C) spezifiziert sind, müssen Taktgeneratoren in physikalischer Nähe von Prozessoren die Temperatur-klasse 1 (bis 125 °C) unterstützen. Hier ist ein MEMS-Oszillator die beste Lösung, da diese leistungsfähigen Prozessoren den Quarzkristall problemlos so aufheizen können, dass er genug Temperatur- und Frequenzverschiebung aufweist, um außerhalb des benötigten Frequenzbe-reichs zu arbeiten. Eine Möglichkeit, wei-terhin einen Quarzoszillator zu nutzen
Bild: fotomatrix - AdobeStock
44_Microchip Song Li (na).indd 44 11.03.2019 16:55:35

AUTOMOBIL ELEKTRONIK 03/2019 45
Automatisiertes Fahren Bauelemen-
www.all-electronics.de
besteht darin, ihn weiter entfernt vom Pro-zessor anzubringen. Dies wirkt sich jedoch negativ auf den Flächenbedarf auf der Lei-terplatte aus.
Ein MEMS-Oszillator besitzt eine akti-ve Temperaturkompensationschaltung. Die MEMS-Oszillatorschaltung kann bis zu 30 Mal pro Sekunde eine Echtzeit-Kor-rektur bei Temperaturveränderungen aus-führen, wobei sie die Temperatur erfasst und eine Nachregelung zur Wahrung einer konstanten Ausgangsfrequenz vornimmt. Dies ermöglicht eine äußerst hohe Tem-peraturstabilität (bis hinab zu ±20 ppm) für Hochtemperatur-Anwendungen, und kann gegenüber den Kosten eines hoch-stabilen Quartz-Oszillators Kostensen-kungen ermöglichen.
MEMS-TiminglösungenDie kürzlich eingeführten Bausteine DSA11x1 und DSA11x5 sind MEMS-Oszillatoren und Taktgeneratoren für den
AutorSong LiProduct Marketing Manager bei Microchip Technology
infoDIREKT 805ael0219
Bild 1: Der DSA1105/25 hat im Vergleich zum DSA1101/21 zur Verringerung elektromagnetischer Störungen längere Anstiegs- und Abfallzeiten.
Automotive-Einsatz. Die AEC-Q100 qua-lifizierten Bausteine besitzen eine Fre-quenzstabilität von ±20 ppm über einen Temperaturbereich von -40 bis +125 °C und sind für Anwendungen der AEC-Klas-sen 1, 2 und 3 ausgelegt. Mit einem Pha-sen-Jitter von weniger als 1 ps (typisch) arbeiten diese MEMS-Oszillatoren in einem Frequenzbereich von 2,3 bis 170 MHz. Die AEC-qualifizierten Baustei-ne sind erhältlich in Gehäusen mit kleinen Industriestandard-Abmessungen von 2,5 mm × 2,0 mm, 3,2 mm × 2,5 mm und 5,0 mm × 3,2 mm; alle sind 0,85 mm dick. Der DSA1105/25 bietet die gleichen Funk-tionen wie der DSA1101/21, hat aber zur Verringerung elektromagnetischen Stö-rungen längere Anstiegs- und Abfallzeiten (Bild 1). Mit weiterer Schaltungstechnik erzeugt der Temperatursensor im MEMS-Oszillator eine digitale Darstellung der Die-Temperatur, die an den PLL weiter-geleitet wird, um natürliche Variationen
Bild 2: Der MEMS-Oszillator kann zwei Quarze auf einer Platine ersetzen. Die beiden Ausgänge liefern Frequenzen im Bereich von 2,3 MHz bis 170 MHz.
Bild 3: Ein PLL korrigiert natürliche Variationen der absoluten Frequenz des Resonators sowie den Temperaturkoeffizienten. Das Bild zeigt die damit erreichbare Temperaturstabilität.
der absoluten Frequenz des Resonators sowie seinen Temperaturkoeffizienten zu korrigieren (Bild 3).
Oszis mit mehreren AusgängenBeim AEC-Q100-qualifizierten MEMS-Oszillator DSA2311 der Temperaturklasse 1 handelt es sich um ein Bauelement mit zwei Ausgängen. Der in einem 2,5 × 2,0 mm² großen Gehäuse erhältliche Bau-stein kann zwei Quarze oder Oszillatoren auf einer Platine ersetzen (Bild 2). Die zwei simultan arbeitenden CMOS-Ausgänge des Bausteins liefern Frequenzen im Bereich von 2,3 MHz bis 170 MHz. Dies spart Platz auf der Leiterplatte, senkt Ein-kaufs-, Lagerhaltungs- und Bestückungs-kosten, und ermöglicht letztendlich eine noch höhere Integration.
Der Zweifach-MEMS-Oszillator ersetzt zwei Quartz-Kristalle durch ein einziges Bauteil, was eine Senkung der Stücklisten-kosten ermöglicht. Ein Infotainment-Sys-tem besteht aus einem Motherboard und vielen Prozessoren, wobei jeder eine Refe-renzfrequenz benötigt. Hier kann der MEMS-Oszillator mit zwei Ausgängen mehrere Taktgeneratoren ersetzen. Da Platz auf der Leiterplatte wertvoll und knapp ist, bietet dieser Oszillator dem Ent-wickler neue Möglichkeiten und kann vie-le Probleme lösen. Details zur MEMS-Oszillatortechnik erfahren Sie in der Lang-version des Beitrags auf all-electronics.de unter Info-Direkt 805ael0219 (na)� n
Bilde
r: Micr
ochip
Block DiagramFunctional Block Diagram
Pin 1 Enable
Pin 2 NC
Pin 3 GND
Pin 5 NC
Pin 6 VDD
Pin 4 OutputPLL Divider Driver
MEMS Oscillator
Temperature Sensor & Compensation Circuitry
OE
PLLMEMS
Control Circuitry
Output Control
& Divider
FOUT1
FOUT2
PPM
Stability (PPM) vs. Temperature (°C) (devices compliant to 125 °C max)
70,00
60,00
250-20-400,00
10,00
20,00
30,00
40,00
50,00
-10,00
-20,00
45 55 65 75 85 95 105 115 125
44_Microchip Song Li (na).indd 45 11.03.2019 16:55:39

46 AUTOMOBIL ELEKTRONIK 03/2019
Automatisiertes Fahren Embedded-Rechner
www.all-electronics.de
bereits verändert wurden. Die Aufnahme der Rohdatenströme muss dabei unter Bedingungen der harten Echtzeit erfolgen und ist zeitlich mit anderen Quellen oder bereits bearbeiteten Daten zu synchroni-sieren. Dadurch kann sich der Entwickler im Anschluss an eine Testsituation bereits im Fahrzeug schnell und unkompliziert einen guten Überblick über die gesam-melten Daten verschaffen und im Millise-kunden-Bereich Situationen auflösen und analysieren. Anschließend sollten die Algorithmen auch direkt auf dem einge-setzten Computersystem angepasst und unter realen Bedingungen auf ihre Funk-tion erneut geprüft werden.
Ganz nach Modellen aus dem Rapid-Control-Prototyping, wie dem V-Modell, sind Neuentwicklungen dabei mit unter-
Die steigende Anzahl an hochent-wickelter Sensorik im Fahrzeug führt zu einem immer höheren
Komplexitätsgrad bei der erfolgreichen Integration und Absicherung ihrer Funk-tionen und dem Zusammenspiel mit wei-teren Sensorsystemen innerhalb des Fahrzeugs. Um neue Advanced Driver Assistance Systems (ADAS) und AD-Ent-wicklungen (Autonomous Driving) bis Automotive Safety Integrity Level-D (ASIL-D) zu validieren, sind in den Test-läufen möglichst realitätsnahe Datensätze notwendig. Entsprechend hoch sind die Anforderungen an die Aufnahmequalität der Signale, deren Übertragung am bes-ten in Echtzeit erfolgen soll – so entstehen durch hohe Datenschreibraten in kürzes-ter Zeit extrem umfangreiche Datensätze.
Gängige Branchen-AnsätzeDer optimale Weg der Sensordaten zum Test unterschiedlichster Fahrzeugsysteme müsste folgendermaßen aussehen: Über die Hochgeschwindigkeitsschnittstelle der Sensorik, wie zum Beispiel CSI-2, LVDS oder im Idealfall über Ethernet, werden die Sensordaten im Netzwerk verbreitet, gespeichert, visualisiert und bearbeitet. Dabei ist zur Absicherung und Validierung der Anforderungen und neuen Funktionen (getrieben durch die Vorgehensmodelle aus der DIN ISO 26262) häufig der unkom-primierte Rohdatenstrom notwendig beziehungsweise vorteilhaft.
Dieser ermöglicht nachfolgend einen Abgleich zwischen realitätsnäheren Roh-datensätzen und Sensordatensätzen, die durch Kompression und Algorithmen
Testumgebung autonomer FahrzeugeDer Weg vom Embedded-Industrie-PC zum servertauglichen Datacenter
Auf dem Weg zum autonomen Fahren fallen immer umfangreiche Datenmengen an. Dies erfordert Hardwarelösungen, die eine konstante Hochgeschwindigkeits-Datenaufnahme auch unter extremen Umweltbedingungen ermöglichen. Hier bietet sich hoch-performante Servertechnologie an, die den Einsatz im Fahrzeug jedoch nur durch ausgefeilte Adaption überstehen kann. Autor: Korbinian Hecker
46_Ino-Net (na).indd 46 11.03.2019 16:57:33

AUTOMOBIL ELEKTRONIK 03/2019 47
Automatisiertes Fahren Embedded-Rechner
www.all-electronics.de
schiedl ichsten Systemgrenzen und -schnittstellen mit möglichst wenig Test-hardware zu validieren und die Testergeb-nisse zu dokumentieren. Nach erfolgrei-chen Tests lassen sich die vorherrschenden Situationen dem Datenspeicher entneh-men und für eine Virtualisierung, zum Beispiel innerhalb eins Hardware-in-the-Loop-Systems (HiL), verwenden.
Bei dieser Vorgehensweise sind jedoch schnell Datenmengen erreicht, die nur noch mit Big-Data-A nwendungen beherrschbar sind. Hier erfolgt die Durch-suchung bestenfalls mit Datenmining-Modellen, um die passenden Situationen für unterschiedlichste Fahrsituationen herauszufiltern und damit die angewand-ten Algorithmen und Funktionen zu bestä-tigen und abzusichern. Des Weiteren soll-ten die gewonnenen Daten auch als Grundlage zur Anlernung von neuronalen Netzen dienen, um durch Deep Learning eine künstliche Intelligenz zu entwickeln. Diese wird dann in der Lage sein, die auf-gezeichneten Situationen auch real zu meistern. Diese Art von Datengewinnung spart Zeit, Ressourcen und finanzielle Mit-tel durch eine schnelle und einfache Repli-kation von Testfällen mit definierten oder beeinflussbaren Sand-Box-Umgebungen für die Serienabsicherung.
An sich folgt das vorgestellte Szenario der typischen Entwicklungsanwendung im sich schnell wandelnden Automotive-Bereich. Als Hersteller für industrielle Computersysteme mit Erfahrung im Auto-motive-Markt kann Inonet durch die Ent-wicklung von Validierungshardware mit Servertechnologie für das Fahrzeug den Alltag für Fahrzeugentwickler wesentlich einfacher gestalten und ist bereits jetzt in der Lage, Lösungen für die steigenden Entwicklungsanforderungen anzubieten.
Automotive-Computing-EcosystemUm den großen Herausforderungen der steigenden Datendurchsätze, vor allem in der Validierung und Absicherung neuer Entwicklungen im Automotive-Bereich, gerecht werden zu können, reichen Con-sumer-Hardware und einfache Industrie-computer nicht mehr aus. Um die Leis-tungsanforderungen zu erfüllen, benöti-gen übliche Embedded-PCs die Integrati-on performanter Servertechnik. Diese Technik ist jedoch ursprünglich nicht für
einen Einsatz in rauen Umgebungen, wie beispielsweise bedingt durch Schock und Vibrationen oder dem stark variierenden Temperaturbereich in Fahrzeugen ausge-legt. Inonet hat genau das mit seinem Automotive-Produktportfolio umgesetzt und baut dieses stetig aus: Durch innova-tive Produktentwicklung wurden Kühl-konzepte und Servertechnologien in den Embedded-Bereich übertragen, die so eine Synergie der Vorteile aus beiden Welten bilden. Hohe Schreibraten auf Massen-speicher von über 8 Gbyte/s (64 Gbit/s) in nur einem System sind im NVMe-Raid-0-Verbund bereits jetzt möglich.
Hohe Bandbreiten sichern auch in Burst-Phasen (zeitlich begrenzte Phasen mit besonders hohem Datenaufkommen) die Datenaufnahme und eine sinnvolle Ver-teilung der Daten im Netzwerk unter har-ten Echtzeitbedingungen. Dabei wird aktuell ein Datenvolumen von bis zu 96 TByte unterstützt, das in aufgesetzten und austauschbaren Storage-Lösungen unter-gebracht ist.
Die Skalierbarkeit der Systeme ermög-licht eine einfache Integration der Hard-ware innerhalb des gezeigten Automotive-Computing-Ecosystems. Durch die Unter-stützung von Time-Sensitive-Network Schnittstellen ist es auch möglich, die Daten mit Zeitstempeln zu versehen und sie so mit unterschiedlichen Systemen zu synchronisieren. Dies ist vor allem für ver-schiedene Testanwendungen im Fahrzeug erforderlich, die unterschiedliche Hard-
AutorKorbinian HeckerProduct Manager Automotive bei Inonet
infoDIREKT 801ael0319
ware-Komponenten zur Aufnahme, Berechnung und Auswertung der Sensor-daten benötigen.
Hardware und WärmemanagementUm dem stetig wechselnden und steigen-den Leistungsanforderungen der Entwick-lungsanwendungen gerecht zu werden, ist das Inonet-Automotive-Produktportfolio in die Kategorien Data Acquisition, Embed-ded Performance und AI & GPU-Compu-ting unterteilt. Dabei kommen sowohl leis-tungsstarke Dual-Intel-Xeon-Gold-Server-CPUs der aktuellen Generation, als auch stromsparendere Prozessoren der Intel-Core-i7-Klasse zum Einsatz. Für weitere Anwendungsfälle, wie dem GPU-Compu-ting, werden auch Grafikkarten von Nvidia und AMD verbaut. Die innovativen Kühl-lösungen der hitzeempfindlichen Bereiche des Computers erfolgen wahlweise über eine Hybridkühlung in Form eines Ther-mal Tunnels oder auch über abkoppelbare Wasserkühlsysteme. Die Hitze lässt sich durch die vorgestellten Lösungen somit an unterschiedlichen Stellen im Fahrzeug abführen, falls die direkte Umgebung kei-ne Wärmeabfuhr zulässt. (na)� n
Die Skalierbarkeit der Systeme aus dem Inonet-Portfolio ermöglicht eine einfache Integration der Hardware innerhalb des Automotive-Computing-Ecosystems.
Bild:
Inone
t
46_Ino-Net (na).indd 47 11.03.2019 16:57:35

48 AUTOMOBIL ELEKTRONIK 03 / 2019
Automatisiertes Fahren Blackbox
www.all-electronics.de
Event Data Recorder für automatisierte FahrzeugeRechtssicherheit und Datenschutz für alle
Die heutige Rechtsunsicherheit bei der Schuldklärung von Verkehrsunfällen wird durch die Verbrei-tung von Assistenzsystemen verschärft und könnte im automatisierten Fahrmodus die Hersteller mit-verantwortlich machen. Ein möglicher Ausweg ist die verpflichtende Einführung eines ereignisbasier-ten, standardisierten Unfalldatenspeichers, der einen manipulationssicheren und diskriminierungs-freien Zugang für unabhängige Dritte erlaubt. Autoren: Prof. Dr. Hans-Georg Schweiger, Christoph Fothen, Klaus Böhm
Sachverständigen in der Regel nicht zur Verfügung und sind oft nicht belastbar oder nachvollziehbar. Die Qualität der Rekonst-ruktion leidet darunter stark, während die Gerechtigkeit vielfach auf der Strecke bleibt.
In Bezug auf Produkthaftungsfälle ist diese Situation für Fahr-zeughersteller bislang ausgesprochen komfortabel, da dies auch mit sich führt, dass Fehlfunktionen aktiv eingreifender Systeme praktisch nicht nachweisbar sind. Die Fahrt im hochautomati-sierten Modus wird jedoch absehbar zu einer Beweislastumkehr führen. Bislang galt: Ist kein technischer Mangel nachweisbar, so steht der Fahrer in voller Verantwortung. Spätestens ab SAE-Autonomie-Level 3 würde bei einem Unfall im automatisierten Fahrzustand diese Verantwortung denklogisch auf den Herstel-ler übergehen (Bild 1).
Beispielsweise läuft ein Kind unvermittelt auf die Straße vor ein automatisiert fahrendes Fahrzeug. Physikalisch ist ein Unfall, mit eventuell tödlichen Folgen, nicht mehr vermeidbar. Die sich im Rahmen einer Unfallrekonstruktion ergebenden Toleranzen sollten, im Eigeninteresse der Fahrzeughersteller, so klein sein,
Ein modernes Fahrzeug, ausgestattet mit zahlreichen Assistenzsystemen, ist in einen Verkehrsunfall verwickelt. Trotz vieler elektronischer Helfer gibt es physikalische
Grenzen. So etwas passiert jeden Tag und weltweit. Vision Zero wird auf absehbare Zeit eine Vision bleiben. Betrachtet man die Situation in Europa und damit auch in Deutschland, so ist es derzeit für eine unfallbeteiligte Partei, selbst wenn für diese der Unfall unvermeidbar war, sehr schwierig bis unmöglich, den Unfallhergang rechtssicher nachzuweisen.
Fahrzeughersteller sind künftig mitverantwortlichDurch deutsche Gerichte werden häufig unfallanalytische Sach-verständige mit der Verkehrsunfallrekonstruktion beauftragt, die jedoch mit klassischen Rekonstruktionsmethoden, unter zu Hilfenahme von fahr- und kollisionsdynamischen Analyse-Tools und teilweise ungenauen Schätzmethoden, im seriösen Fall sehr große Lösungsbandbreiten angeben und in unseriösem Fall fal-sche Ergebnisse liefern. Digitale Spuren, die in solchen Fahrzeu-gen in großer Komplexität zweifellos vorhanden sind, stehen dem
Bild 1: Aufgezeichnete Fahrt-Daten klä-ren den Unfallhergang deutlich genauer auf als nachträgliche Rekonstruktionen von Sachverständigen, ziehen beim au-tonomen Fahren aber auch den Herstel-ler in die Mitverantwortung.
48_TH Ingolstadt (jwa_av).indd 48 11.03.2019 17:00:34

AUTOMOBIL ELEKTRONIK 03 / 2019 49
Automatisiertes Fahren Blackbox
www.all-electronics.de
dass auch eine Unvermeidbarkeit des Unfalls für das System sicher und unabhängig nachweisbar ist. Ansonsten könnte ein derartiger Fall die ohnehin in weiten Teilen der Bevölkerung vorherrschende Skepsis gegenüber automatisierten Systemen befeuern und im Extremfall die gesamte Technologie ins Wanken bringen oder zumindest verzögern.
Akzeptanz für vollautomatisiertes Fahren ist kritischDamit hoch- und vollautomatisiertes Fahren von der Gesellschaft dauerhaft Akzeptanz findet, müssen Unfälle mit diesen Fahr-zeugen zwingend ohne Verbleib von Restzweifeln durch neut-rale Stellen aufklärbar sein. Öffentliche Stellen müssen in der Lage sein, die Sicherheit der automatisierten Systeme unabhän-gig beobachten und bewerten zu können. Auch als Lehre aus dem Abgasskandal empfiehlt es sich, strukturelle Schwächen bei der gesetzlichen Überwachung zu beseitigen.
Deshalb wäre eine Kompetenzbündelung bei einer unabhän-gigen, zentralen Stelle für die Aufklärung von Unfällen mit auto-matisierten und vernetzten Systemen zielführend. Die Aufgabe sollte zum einen in der fachlichen Unterstützung regionaler Stellen bestehen. Zum anderen müssen Verkehrsunfälle unter Beteiligung hoch- und vollautomatisierter Fahrzeuge konsequent auf Besonderheiten, die sich aus der Automatisierungstechnik
Insbesondere beim autonomen Fahren genügen die Daten des Fahr-modusspeichers (DSSAD) nicht aus, um Unfallursachen belastbar und rechtlich sicher aufzuklären. Ein zusätzlicher Datenrecorder (EDR) zeichnet in außergewöhnlichen Ereignisfällen zusätzliche Fahrzeugda-ten auf und verbessert die Unfallanlyse wie auch die Rechtslage zur Verantwortung. Damit unüberschaubare, schwer zu interpretierende Datenmengen durch Fehlinterpretationen nicht zu fehlerhafter Unfall-aufklärung führen und damit negativ auf das Vertrauen ins automati-sierte Fahren wirken, ist die Arbeitsgruppe AHEAD engagiert, hier eine möglichst internationale Standardisierung zu schaffen.
Eck-DATEN
(vielleicht auch in Verbindung mit künstlicher Intelligenz) erge-ben, ausgewertet werden, um bei Fehlentwicklungen frühzeitig gegensteuern zu können.
Der Ausweg aus dem Dilemma von nicht vollumfänglich auf-klärbaren Verkehrsunfällen ist das Speichern standardisierter Datensätze, also das Aufzeichnen von digitalen Spuren, die vom Fahrzeug ohnehin selbst generiert werden.
Status quo für den Fahrzeug-DatenloggerIn Deutschland ist nach § 63a StVG für hoch- und vollautoma-tisierte Fahrzeuge bislang nur die Ausstattung mit einem Fahr-modusspeicher (DSSAD, Data Storage System for Automated Driving) vorgeschrieben. Dieser dient nicht der Verkehrsunfal-laufklärung, sondern lediglich der Möglichkeit retrograd nach-vollziehen zu können, wer zu einem bestimmten Zeitpunkt die Verantwortung für die Fahrzeugsteuerung trug: Mensch oder System. Aus unfallanalytischer Sicht ist der sehr schlanke Fahr-modusdatensatz nicht ausreichend. Er ist, im Falle detektierter Auslöseereignisse, wie beispielsweise (Beinahe-) Kollisionen, durch fahrdynamische Werte aus einem EDR zu ergänzen. Der Ereignisdatensatz aus dem EDR muss alle relevanten Daten, die zu einer beweissicheren Verkehrsunfallaufklärung notwendig sind, aufzeichnen. Obgleich er damit deutlich mehr Daten bein-haltet als der Fahrmodusdatensatz, dürfte er datenschutzrecht-lich als recht unproblematisch zu bewerten sein, da er ausschließ-lich anlassbezogen eine Speicherung auslöst.
Ein DSSAD im Sinne des § 63a StVG muss hingegen per Gesetz permanent jeglichen Wechsel der Fahrzeugführerverantwortung zwischen Mensch und Maschine, jede systemseitige Aufforderung an den Fahrzeugführer, die Verantwortung zu übernehmen sowie Systemstörungen aufzeichnen. Ein weiterer datenschutzrechtli-cher Vorteil liegt darin, dass ereignisbasierte Daten sinnhaft nur für die Aufklärung des jeweiligen Ereignisses, sprich zweckge-bunden verwendbar sind. Der Speicherprozess des EDR erfüllt damit eine regelmäßig wiederkehrende Forderung des Bundes-
Bild 2: Weltweiter Status quo: Datenspeicher für automatisiertes Fahren (DAF). Neben Deutschland sind vor allem in China verstärkte Anstrengungen fest-zustellen (Bildmitte).
AD*
vorgeschrieben
freiwillig
Nicht AD
*Automated Driving** UNECE noch in Arbeit
Legende:
48_TH Ingolstadt (jwa_av).indd 49 11.03.2019 17:00:35

50 AUTOMOBIL ELEKTRONIK 03/2019
Automatisiertes Fahren Blackbox
www.all-electronics.de
verfassungsgerichts, nämlich die strikt anlassbezogene und zweckgebundene Datenspeicherung und -nutzung.
Als Zwischenfazit lässt sich festhalten, dass, wenn man eine beweissichere Differenzierung der Fahrzeugführerverantwortung gesetzlich regeln will, dies nur durch die Kombination von Fahr-modus-und Ereignisdatenspeicher gelingen wird. Diese dürfte aus den genannten Gründen auch aus datenschutzrechtlicher Perspektive heraus durchsetzbar sein.
Problem: fehlende Standardisierung und unüberschaubare DatenmengenDie Notwendigkeit eines EDR schon für Fahrzeuge unter SAE-Level 3 besteht international. Dass in den USA im Vergleich zu Europa, teilweise bei baugleichen Fahrzeugen desselben Her-stellers, deutlich mehr digitale Spuren für Analytiker zur Auf-klärung eines Unfalls zur Verfügung stehen, ist aus Sicht des Verbraucherschutzes und der Rechtssicherheit nicht nachvoll-ziehbar. Zahlreiche asiatische OEMs differenzieren bezüglich des diskriminierungsfreien Zugangs zu EDR-Daten bereits seit Langem nicht mehr zwischen den unterschiedlichen Absatz-märkten. Auch der VW-Konzern, als einer der ersten europäi-schen Hersteller, beschreitet seit dem Modelljahr 2018 mit eini-gen Baureihen diesen Weg.
Im Hinblick auf das assistierte oder hoch- und vollautomati-sierte Fahren ist tendenziell zu beobachten, dass immer mehr Fahrzeughersteller dazu übergehen, zusätzliche Daten aufzu-zeichnen, auf die zunächst nur sie zugreifen können (Tesla, bei Audi: Assistenz System Monitor). Die Daten werden dabei zum Teil im Fahrzeug selbst und zum anderen Teil auf Backend-Ser-vern der Hersteller gespeichert, wobei bis dato jeder Hersteller seinen eigenen Weg geht. Die nicht standardisierte Speicherung der relevanten Unfalldaten wirkt sich im Sinne der beweissiche-ren Unfallaufklärung kontraproduktiv aus. Wo vor wenigen Jah-ren für gerichtlich bestellte Sachverständige noch überhaupt keine digitalen Unfallspuren zur Verfügung standen, ist man mittlerweile mit einem wahren Datenwust konfrontiert.
Neben den OEM-spezifischen Daten, die nur über diesen und damit nicht unabhängig zur Verfügung stehen, werden zuneh-mend Daten aus Smartphones, Überwachungs- und Dashboard-Kameras, sowie von intelligenter Infrastruktur in den Gerichts-prozess eingeführt. Dieser schier unüberschaubare Daten-Wald,
mit sich teilweise widersprechenden, schwer zu interpretierenden Daten, öffnet Fehlinterpretationen und damit fehlerhafter Unfal-laufklärung Tür und Tor. Zudem führt dies zu finanziell und zeitlich unkalkulierbaren Endlos-Gerichtsverfahren. Auch um verloren gegangenes Vertrauen in die Automobilindustrie wie-deraufzubauen, dürfte es zielführend sein, wenn Fahrzeugher-steller beim Thema sicheres automatisiertes Fahren auf einen standardisierten EDR mit erweiterter Datenbasis zum Zwecke der unabhängigen Unfallaufklärung setzen würden.
Internationale Abstimmungsprozesse sind dringend notwendigEs ist zudem evident, dass die Länder, die als erste einen prak-tikablen und rechtssicheren, regulatorischen Rahmen zum auto-matisierten Fahren schaffen, einen erheblichen Standortvorteil für die heimische Automobilindustrie generieren. Deshalb sind die Bestrebungen, vor allem der deutschen Gesetzgebung, ein modernes Straßenverkehrsrecht auf den Weg zu bringen, nur zu begrüßen. Letztendlich muss dieses Problem jedoch mindestens im europäischen Maßstab angegangen werden. Notwendige internationale Abstimmungsprozesse müssen dabei effektiv und in gebotener Eile erfolgen, denn auch der Rest der Welt und vor allem China schläft auf diesem Gebiet nicht.
Vor diesem Hintergrund wurde die Arbeitsgruppe AHEAD (Aggregated Homologation-proposal for Event-Recorder-Data for Automated Driving), bestehend aus wesentlichen Stakehol-dern bezüglich der Thematik „EDR für automatisierte Fahrzeu-ge“ ins Leben gerufen. An AHEAD sind Allianz, Axa, Carissma, Continental und Dekra beteiligt, wobei die Arbeitsgruppe vor-schlägt, die gespeicherten Daten in die vier standardisierten Datenkategorien Driving-Data, Driver-Activity, Surroundings and Object Recognition sowie Crash zu gruppieren. Diese Daten-basis wird mittlerweile durch namhafte Persönlichkeiten und Organisationen in einem erweiterten Beraterkreis vorangetrieben.
Basierend auf den Vorarbeiten der VERONICA-Projekte wur-de durch AHEAD mittlerweile eine detaillierte Datenliste mit Angaben zur Zeitdauer der Speicherung, der Aufnahmefrequenz, -Genauigkeit und -Auflösung erarbeitet. Diese Liste soll in 2019 durch den Abgleich mit realen Unfällen unter Beteiligung von automatisierten Fahrzeugen und passend designten Laborver-suchen evaluiert werden. Auch interessierte Fahrzeughersteller
Bild 3: Gegenüberstellung der realen Spurenlage mit Sensorfusionsdaten als erweiterte Unfallrekonstruktion (auch im Fahrzeuginnenraum); die Verschie-bung des blauen Rahmens um das Object Vehicle könnte auf fehlerhafte Sensoreinstellungen hindeuten.
Bilde
r: TH
Ingols
tadt
77 - 81 GHz
24 - 24,25 GHz
76 - 77 GHz
Automotive
Testen Sie die Radarsensoren von heute und morgen. Der neue R&S®AREG100A Automotive Radar Echo Generator. Der führende Messtechnikexperte Rohde & Schwarz bietet Ingenieuren eine intelligente und robuste Lösung zum Testen von Automotive-Radarsensoren in der Produktion.❙ Zuverlässige und flexible Echogenerierung❙ Testen von aktuellen und zukünftigen Radarsensoren❙ Unterstützung der Testanforderungen aus der RED Richtlinie❙ Einfache Bedienung und stabiler Betrieb
Weitere Informationen unter www.rohde-schwarz.com/automotive-radar-testing
27531-005_AUT_AREG_Automobil-Elektronik_210x143_d.indd 1 27.02.19 14:3848_TH Ingolstadt (jwa_av).indd 50 11.03.2019 17:00:37

Automatisiertes Fahren Blackbox
AutorenProf. Dr. Hans-Georg Schweiger Forschungsprofessor Batteriesysteme an der TH Ingolstadt , Lehrgebiet: Fahrzeugelektronik und Elektromobilität
Christoph Fothen Polizeibeamter in Rheinland-Pfalz und bis 31.01.2019 Mitglied der Projekt-gruppe „Automatisiertes Fahren – verkehrspolizeiliche Auswirkungen“
Klaus Böhm Wissenschaftlicher Mitarbeiter an der TH Ingolstadt sowie Unfallanalytiker und Prüfingenieur bei DEKRA
infoDIREKT 272ael0319
77 - 81 GHz
24 - 24,25 GHz
76 - 77 GHz
Automotive
Testen Sie die Radarsensoren von heute und morgen. Der neue R&S®AREG100A Automotive Radar Echo Generator. Der führende Messtechnikexperte Rohde & Schwarz bietet Ingenieuren eine intelligente und robuste Lösung zum Testen von Automotive-Radarsensoren in der Produktion.❙ Zuverlässige und flexible Echogenerierung❙ Testen von aktuellen und zukünftigen Radarsensoren❙ Unterstützung der Testanforderungen aus der RED Richtlinie❙ Einfache Bedienung und stabiler Betrieb
Weitere Informationen unter www.rohde-schwarz.com/automotive-radar-testing
27531-005_AUT_AREG_Automobil-Elektronik_210x143_d.indd 1 27.02.19 14:38
werden die Gelegenheit erhalten, diese Datenliste vor der Ver-öffentlichung konstruktiv zu begleiten. AHEAD engagiert sich bereits jetzt im Gesetzgebungsprozess zur General Safety Regu-lation (GSR) auf EU-Ebene und in den Gremien der UNECE.
Bild- und Videodaten als Schlüssel zur AufklärungDie bisherigen Untersuchungen zeigen unter anderem, dass der Speicherung von Fotos oder Videos, die durch die Systeme selbst generiert werden, ein erhebliches Potenzial zur Unfallaufklärung zukommt. Dabei gilt das Motto „Ein Bild sagt mehr als tausend Terabyte“.
Das reale Bild könnte dabei durch virtuelle, perspektivische Einblendung der Objekt- und Sensorfusionsdaten, die im Daten-modell nach AHEAD aufgezeichnet werden, eine Kontrollinstanz darstellen. Damit ließe sich, in Verbindung mit einer genauen Vermessung der Unfallörtlichkeit und der dort vorgefunden klas-sischen Kollisionsspuren (zum Beispiel Schlagmarken, Reifen-spuren oder ähnliches) überprüfen, ob das Bild, dass das Fahrzeug zum Unfallzeitpunkt intern von sich, der Umgebung und allen beteiligten Verkehrsteilnehmern hatte, mit der Realität überein-stimmt oder ob Hinweise auf fehlerhaft eingestellte Sensoren oder Systemfehler gegeben sind. Zudem stellt ein derart aufbereitetes Mixed-Reality-Bild eine optimale Möglichkeit dar, einem Laien, wie es in der Regel beispielsweise ein Richter ist, einen technisch komplexen Sachverhalt anschaulich darzustellen (Bild 3).
Da diese Bilddaten nur ereignisbezogen gespeichert werden, ist nach Ansicht von AHEAD dies datenrechtlich zulässig und notwendig. Die Datenaufzeichnung sollte in guter Bildqualität erfolgen, um möglichst geringe Toleranzen bei der Rekonstruk-tion zu erzielen. AHEAD ist mit dem Anspruch angetreten, ein Datenkonzept zu entwickeln, dass Rechtssicherheit und gelebten Datenschutz für alle bringt. (jwa) ■
48_TH Ingolstadt (jwa_av).indd 51 11.03.2019 17:00:38

52 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Datenplattform für künstliche IntelligenzDie Stärken komplexer neuronaler Architekturen nutzen
Komplexe neuronale Netze können helfen, die Flut von Umweltdaten zu interpretieren und den Kontext zu verstehen wie auch zu prognostizieren, in dem sich automatisierte Fahrzeuge bewegen. Elektrobit stellt eine Datenplattform für den Entwurf von KI-Regelwerken vor und erklärt, wie der Deep-Grid-Net-Algorithmus eine rasterbasierte Darstellung der Verkehrssituation lernt und prognostiziert. Autoren: Sorin M. Grigorescu, Liviu Marina, Bogdan Trasnea, Tiberiu Cocias, Andrei Vasilcoi
Datenwissenschaft und künstliche Intelligenz prägen heute die Zukunft der Automobilindu-strie, in welcher der Traum vom selbstfahren-
den Auto in immer größerem Umfang zur Realität wird. Die Umsetzung dieses Traums benötigt gezielt entwi-ckelte Systeme, die es ermöglichen, neuartige Spitzen-technologien zuverlässig und sicher in der Automo-bilbranche einzusetzen.
Elektrobit (EB) konzipierte eine wissenschaftliche Datenplattform, die den Entwurf künstlich intelligenter Regelwerke für die verschiedenen Fahrzeugbereiche, wie beispielsweise das automatisierte Fahren, verein-facht.
Dieser Beitrag soll zur laufenden Debatte über die Rolle der künstlichen Intelligenz in der Automobilindu-
strie beitragen und die Notwendigkeit eines soliden Rahmens für die Entwicklung solcher Systeme aufzeigen.
Das digitale KI-ZeitalterDie künstliche Intelligenz (KI) beschreibt eine Maschi-ne, die menschliche kognitive Funktionen wie Lernen und Problemlösen nachahmt. Sie wurde erstmals defi-niert, nachdem der Mensch digitale Rechner entwickelt hatte, die diese Intelligenz ermöglichten. Auch sie ist, wie jede andere digitale Technologie, durch Höhen und Tiefen gegangen.
Gegenwärtig ist die künstliche Intelligenz im Begriff, die nächste Welle digitaler Umwälzungen auszulösen, da heute bereits reale Vorteile in verschiedenen Berei-chen wie maschinelles Sehen, Robotik, Automobilent-
Automatisiertes Fahren Künstliche Intelligenz
52_Elektrobit (jwa_av).indd 52 11.03.2019 17:02:04

AUTOMOBIL ELEKTRONIK 03/2019 53www.all-electronics.de
Automatisiertes Fahren Künstliche Intelligenz
wicklung und Sprachverarbeitung den Alltag begleiten. Maschinen mit künstlicher Intelligenz können nun vie-le Aufgaben erfüllen, wie etwa komplexe Muster erken-nen, Informationen synthetisieren, Schlussfolgerungen ziehen und Prognosen erstellen.
Obwohl die Erfolge der KI signifikant sind, sollte man nicht vergessen, dass es auch hier Grenzen gibt. Ein Hauptkritikpunkt vieler KI-Systeme ist beispielsweise, dass sie oft als Black Boxes erscheinen, die nur eine Bezie-hung zwischen Ein- und Ausgangsvariablen auf der Grundlage eines Trainingsdatensatzes abbilden. Dies wirft einige Bedenken auf, speziell hinsichtlich der Fähig-keit des Systems zur Verallgemeinerung von Situationen, die nicht im Trainingsdatensatz vorhanden waren. Hin-sichtlich des Umstandes, dass es oft schwierig ist, einen wirklichen Einblick in das Problem und die Art der Lösung zu gewinnen.
Das Interesse an KI stieg im 21. Jahrhundert wieder an, was auf Fortschritte in Bereichen wie maschinelles Lernen (Deep Learning) zurückzuführen ist. Unterstützung sind
Für die Entwickler von künstlicher Intelligenz im Bereich automatisiertes Fahren bietet Elektrobit eine KI-Datenplattform an. Das „Highly Automated Driving Software Framework“ namens Robinos nutzt einen Deep-Grid-Net-Algorith-mus, um aus der Flut von Umweltdaten eine rasterbasierte Darstellung der Ver-kehrssituation zu erlernen. Daraus erstellt dieses Deep-Learning-System Prog-nosen für den Fahrkontext und unterstützt damit verschiedene autonome Fahr-aufgaben. Dabei machen die Plattform und ein V-Modell den Entwicklungszyk-lus von Inferenzmaschinen auf Basis des Automotive-Frameworks berechenbar.
Eck-DATEN
dabei schnellere Computer und die Verfügbarkeit von Big Data. Die ständig steigende Rechenleistung der klassi-schen Prozessoreinheiten, aber noch mehr die leistungs-starken Grafikprozessoren (Graphics Processing Unit, GPU), die Bilder 40 bis 80 Mal schneller verarbeiten kön-nen als ein normaler Prozessor, ermöglichten all diese Fortschritte. Dadurch konnte sich die Trainingsgeschwin-digkeit von künstlichen Intelligenz-Systemen in den letz-ten zwei Jahren jeweils fünf bis sechs Mal verbessern.
Architektur einer wissenschaftlichen KI-DatenplattformDie in Bild 1 gezeigte Architektur folgt den zwei wichtigs-ten Arbeitsschritten aus einer Designlösung für maschi-nelles Lernen: Training und Inferenz, zusammen mit den zusätzlichen Schichten zur Hardware-Integration und Leistungssteigerung. Die Workbench ist für das Training, das Prototyping und die Entwicklung des Systems verant-wortlich, indem sie bestehende Methoden und Tools wirk-sam einsetzt und KI-Algorithmen als Toolbox innerhalb der Plattform betrachtet. Das Training selbst speist die zuvor definierten Daten in das Netzwerk ein und ermög-licht es ihm, eine neue Fähigkeit zu erlernen, indem es korrekte Vorhersagen verstärkt und die falschen korrigiert. Hier einige Beispiele für auf der Plattform verfügbare Tool-boxen:
• Synthetischer Datengenerator: Künstliche Generierung synthetischer Daten mit dem Generativen One-Shot-Learning-Algorithmus
• Fahrkontextverständnis: Klassifizierung des Fahrkon-textes aus Grid-Fusion-Informationen
Bild 1: Blockschaltbild von EBs wissenschaft-licher Datenplattform
für künstlich intelli-gente Regelwerke.
Bilde
r: Elek
trobit
52_Elektrobit (jwa_av).indd 53 11.03.2019 17:02:06

54 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Automatisiertes Fahren Künstliche Intelligenz
• Verhaltensarbitration: Fahrkontextverständnis und Strategieoptimierung aus realen Grid-Darstellungen
• Fahrsimulationsumgebung: Training, Bewertung und Test von KI-Algorithmen in einem virtuellen Simulator wie Air-Sim von Microsoft
• ADTF-/ROS-/Cloud-Schnittstellen: Anbindung an Automobil- und Robotik-Frameworks (EB Assist ADTF oder das Robotics Operating System (ROS)) sowie die Möglichkeit, Trainings- und Auswer-tungsaufgaben in Cloud-Umgebungen einzusetzen
Die Inferenzmaschinen stellen Wrapper für die Anwen-dungsbereitstellung von trainierten Modellen dar. Ein solcher Wrapper ist beispielsweise die EB Assist ADTF-Komponente (Automotive Data and Time-triggered Framework) zum Fahrkontextverständnis.
Die von EB als Basis verwendeten KI-Open-Sour-ce-Softwarebibliotheken sind Caffe2, Tensorflow und das Cognitive Neural Toolkit (CNTK). Diese haben sich bei einem Leistungsvergleich als die drei besten Performer gestellt.
Kreation von künstlichen intelligenten RegelwerkenEiner der wichtigsten Aspekte beim Aufbau von Software-Modulen in der Automobilindustrie ist die
Möglichkeit der Code-Industrialisierung sowie deren Integration in die jeweiligen Embedded-Plattformen von Fahrzeugen.
Die Entwicklung von KI-Algorithmen in EBs Platt-form folgt dem in Bild 2 dargestellten Ablauf. Die ersten Schritte bestehen darin, den Problemraum zu definieren und die notwendigen Daten für den Trai-ningsprozess zu sammeln. Die Daten wurden vorher vorverarbeitet, kommentiert, normiert und gefiltert.
Die Datenvorverarbeitung ist ein wichtiger Schritt, der ein korrektes Prototyping der KI-Algorithmen ermöglicht. Eine Entwurfsphase für das komplexe neuronale Netzwerk (Deep Neural Network, DNN) ist ebenfalls notwendig, gefolgt von einem Trainings- und Evaluierungsprozess. Sobald der KI-Algorith-mus getestet und für gültig erklärt ist, kann er auf dem Edge-Gerät als KI-Inferenzmaschine zum Ein-satz kommen.
Als Anwendungsbeispiel dient solch ein Regelwerk zur Entwicklung von Inferenzmaschinen auf Basis von ADTF, wie sie Robinos als Plattform für hoch-automatisiertes Fahren integriert. Jeder Filter enthält dabei einen KI-Algorithmus, wie beispielsweise Fahrkontextverständnis, synthetische Datengene-rierung, Objekterfassung und -erkennung oder semantische Segmentierung der Verkehrssituation. Exportiert als dynamisch verknüpfte Bibliotheken stehen die Wrapper innerhalb der implementierten Filter zur Verfügung.
Eine Kernidee hinter EBs Plattform ist die Modu-larisierung, bei der jede KI-Komponente als separater Baustein vorhanden ist. Dieser Ansatz beinhaltet Deep-Learning-Funktionen innerhalb des Automo-tive-Frameworks und unterstützt Entwickler auch dabei, auf bereits bestehende Methoden zuzugreifen, diese zu testen oder eigene Lösungen für ihre spezi-fischen Probleme zu implementieren.
Das Konzept der Inferenzmaschinen für künstli-che Intelligenz berücksichtigte bereits in der Ent-wicklung eine Optimierung der Algorithmen. Um die Leistung in Bezug auf die Rechengeschwindigkeit zu verbessern, stellt die Parallelisierung der Arbeits-last mit KI-eigenen grafischen Recheneinheiten mit untergeordneten Beschleunigungsbibliotheken den
Bild 2: Entwicklungsablauf innerhalb der KI-Datenplattform.
Bild 3: Das Paradigma der Softwareentwicklung für das V-Modell für Prototyping und Entwicklung innerhalb von EBs KI-Datenplattform.
52_Elektrobit (jwa_av).indd 54 11.03.2019 17:02:07

AUTOMOBIL ELEKTRONIK 03/2019 55www.all-electronics.de
Automatisiertes Fahren Künstliche Intelligenz
AutorenSorin M. GrigorescuLeiter des Bereichs künstliche Intelligenz bei Elektrobit und Professor für Robotik an der Universität Transilvania Brașov, Rumänien
Liviu MarinaSoftware-Entwickler für Highly Automated Driving bei Elektrobit
Tiberiu CociasSystemingenieur für Highly Automated Driving bei Elektrobit
Weitere Autoren Bogdan Trasnea, Student im Bereich KI, Machine Learning + Computer Vision bei EBAndrei Vasilcoi, Student bei Elektrobit
infoDIREKT 275ael0319
besten Ansatz dar. So hat beispielsweise Nvidia mit cuDNNN eine Bibliothek für komplexe neuronale Netze eingeführt.
Entwicklungszyklus berechenbar machenDie Automobil-Softwareentwicklung erfordert nach wie vor einen robusten und berechenbaren Entwick-lungszyklus. Der Softwareentwicklungsprozess für den Automobilsektor unterliegt mehreren internati-onalen Normen, namentlich Automotive SPICE und ISO 26262. Akzeptierte Standards setzen bei der Soft-ware konzeptionell auf den traditionellen Lebenszy-klus der V-Modell-Entwicklung.
Es ist wichtig, Deep Learning aus einer stärker kon-trollierten V-Modell-Perspektive anzugehen, um eine lange Liste von Herausforderungen zu bewältigen, wie zum Beispiel die Anforderungen an die Trainings-, Validierungs- und Testdatensätze, die Kriterien für die Datendefinition und Vorverarbeitung sowie die Auswirkungen auf die Parametereinstellung.
Bild 3 ist ein Vorschlag, das V-Modell für Prototy-ping und Entwicklung innerhalb der Plattform anzu-wenden. Die Datendefinition – Normalisierung und Bereinigung – sowie deren Nutzung durch die KI-Inferenzmaschinenarchitektur sind entscheidende Entwicklungsphasen, da das Funktionsverhalten des DNN das kombinierte Ergebnis seiner Architektur-struktur und seiner automatischen Anpassung durch das Training ist. Die Integration der erhaltenen Infe-renzmaschinen, die mit dem Einsatz der Testszena-rien und der statistischen Auswertung verbunden sind, liefert die erforderlichen Bewertungswerkzeuge für ein solches Architekturmodell.
Die Verkehrssituation als Rasterdarstellung erlernenEine mit der Plattform und dem entsprechenden V-Modell entwickelte Inferenzmaschine auf Basis des Automotive-Frameworks (ADTF) ist das Deep Grid Net (DGN). Bild 4 veranschaulicht das Konzept DGN,
welches als Deep-Learning-System den Kontext ver-steht, in dem sich ein autonomes Fahrzeug bewegt.
Der Deep-Grid-Net-Algorithmus prognostiziert diesen Kontext, indem er lokale Occupancy Grids (OG) analysiert, die aus fusionierten sensorischen Rohdaten aufgebaut sind.
Der in diesem Beitrag vorgeschlagene DGN-Ansatz nutzt die Stärken komplexer neuronaler Architektu-ren, um eine rasterbasierte Darstellung der Verkehrs-situation zu erlernen. Durch die Verwendung von Occupancy Grids anstelle von Rohbilddaten lassen sich häufige Unsicherheiten in autonomen Fahrsitu-ationen bewältigen, wie zum Beispiel Änderungen in der Sensorkalibrierung, Pose, Zeit und Latenz. Diese erlernte Darstellung kann verschiedene autonome Fahraufgaben unterstützen, wie etwa das Verständnis des Fahrkontextes. Der DGN-Algorithmus kommt innerhalb von Elektrobits HAD-Software-Framework (Highly Automated Driving) namens Robinos zum Einsatz. (jwa)� n
Bild 4: Schema der Deep-Grid-Net-Archi-tektur (DGN). Das Deep-Learning-Sys-tem versteht den Kontext, in dem sich ein autonomes Fahr-zeug bewegt.
52_Elektrobit (jwa_av).indd 55 11.03.2019 17:02:08

Neue Produkte
56 AUTOMOBIL ELEKTRONIK 03/2019 www.all-electronics.de
Geringere Systemkosten bei AutomobilanwendungenEmbedded-Power-ICs für den Relaisersatz Infineon stellt mit der TLE985x-Serie hochintegrierete, AEC-Q-100-qualifizier-te H-Brückentreiber-Steuerungslösungen für zweiphasige Gleichstrom- und einphasige bürstenlose Gleichstrommotoren vor. In Motorsteuerungen sol-len die Bausteine Entwicklern beim Ersetzen von Relais unterstützen. Auf-
grund des höheren Integrationsgrads ermöglicht die Umstellung von Relais auf MOSFETs geringere Systemkosten sowie weitere Vorteile: Durch PWM-Ansteuerung und den integrierten und kalibrierten Strommessverstärker lassen sich die Motorströme anpassen und somit die Mechanik und der Mo-
tor besser auf die jeweilige Applikation hin ausrichten. Die TLE985x-Bausteine integrieren einen ARM-Cortex-M0-Prozessor und Peripheriemodule für Mo-torsteuerung, Stromversorgung und Kommunikation in einem Chip. Ein neu-es Merkmal der TLE985x-Familie ist ihr adaptiver MOSFET-Treiber.
infoDIREKT 805ael0319
Längenreduzierung von bis 50 ProzentAntennen für Passive-Keyless-EntryDie magnetischen Mid-Range-Senderantennen (Diabolo-Shape) von Premo ermöglichen eine Längenreduzierung von bis zu 40 bis 50 Prozent. Die Mid-Range-Antennen eignen sich für den passiven, schlüssellosen Zugang zum Fahrzeug und für allgemeinde RFID-LF-und RTLS-Anwendungen. Mid-Ran-
ge-Antennen, die eine etwa dreimal so große Empfindlichkeit wie Standard-Antennen besitzen, werden immer be-liebter und bringen es auf eine Distanz von etwa 4 bis 5 m. Die Antennen im neuen Design entsprechen in der Re-gel dem AEC-Q200-Standard und den Wasserdichte-Spezifikationen IP54 bis IP69K aufgrund ihrer spezifischen Ver-
packung. Sie weisen außerdem höhere Grenzen in Fall-, Biege und Torions-tests auf. Die LFAD-Serie umfasst Modelle von 160 µH bis 600 µH, für 20 kHz, 125 kHz und 134,2 kHz.
infoDIREKT 877ael0319
Video-, Audio- und Dateninhalte im FahrzeugSerdes-Bauteile zur Echtzeit-DatenübertragungVon Inova stehen jetzt zwei neue Twin-Transmitter der Apix3-Serdes-Bauteile zur Verfügung. Typische Anwendungen für die Apix3-Bausteine sind Infotain-ment- und Entertainment-Systeme sowie Kombi-Instrumente und Head-up-Displays. Die Bausteine ermöglichen es, mehrere Display-Verbindungen mit
einer Bandbreite von bis zu 12 Gbit/s aufzubauen und unterstützen HD- so-wie Ultra-HD-Displays. Zu den Mitglie-dern der Familie gehören die Transmit-ter INAP562TAQ mit HDMI 1.4a und DSI-1.2-Videoschnittstelle sowie der INAP564TAQ mit zwei DSI-1.2- Video-schnittstellen. Beide Transmitter unter-scheiden sich nur bei den Videoeingän-
gen und sind ansonsten kompatibel. Jeder dieser Transmitter kann mit dem bereits verfügbaren Receiver INAP562R zwei Apix3-Links über STP- oder Ko-axialkabel bilden. Die Bauteile unterstützen verschiedene EMV-freundliche Betriebsmodi bei fest eingestellten Bandbreiten von 1,5; 3 oder 6 Gbit/s im Single-Lane-Betrieb, bei einem festeingestellten Rückkanal von 187,5 Mbit/s.
infoDIREKT 806ael0319
Onboard-Kommunikation in FahrzeugenEthernet-Lösung von Marvell und EscryptEscrypt und Marvell bieten eine Lösung für die sichere Ethernet-basierte On-board-Kommunikation in Fahrzeugen an. Auf dem Automotive-Secure-Switch 88Q5050 von Marvell sind die Firewall Cycur Gate und das Angriffser-kennungssystem von Escrypt integriert. Kunden im Automobilsektor sollen
dadurch eine bessere End-to-End-Si-cherheit erhalten. Der Marvell 88Q5050 ist ein Automotive-Ethernet-Gigabit-Switch mit IT-Security-Merk-malen, die manipulativen Zugriff auf den Datenverkehr im Fahrzeug ver-hindern sollen. Mittels Deep-Packet-Inspection und Trusted-Boot-Funktio-nalität soll der Switch die Sicherheit
von Automotive-Ethernet-Netzwerken erhöhen. Er unterstützt Black- und Whitelisting an allen Ethernet-Ports. Als integrierter Bestandteil des Switches unterstützt die Automotive-Firewall Cycur Gate alle Filtermechanismen.
infoDIREKT 145ael0319
Leadless SMD-BauelementeLogikbausteine mit Automotive-ZulassungMehr als 20 Logikbauteile im Leadless-Micropak-Gehäuse und mit AEC-Q100-Qualifizierung stellt Nexperia vor. Diese sollen um bis zu 64 Pro-zent kleiner sein als herkömmmliche SMD-Bauelemente.Die Micropak-Ge-häuse sind mit demselben Silizium-Die wie Picogate-Optionen ausgestattet,
wodurch die elektrischen Eigenschaf-ten identisch zu den größeren Pico-gate-Gehäusen mit seitlich herausge-führten Anschlüssen sind. Neben der Platzersparnis auf der Leiterplatte bieten sie dank des erhöhten Pad-zu-Gehäusefootprint-Verhältnisses auch eine zuverlässigere Verbindung zwi-schen Bauteil und Platine. Zum Ge-
samtangebot gehören neben Gattern, analogen Schaltern auch Puffer und Busschalter sowie Flip-Flops, Multiplexer, Latches und Schmitt-Trigger. Die Bauteile sind in den Gehäuseformen XSON6 und XSON8 erhältlich.
infoDIREKT 804ael0319
Scheinwerfer auf LED-BasisEverlight erweitert Automotive-PortfolioEverlight erweitert sein Portfolio an Automotive-LEDs. Verschiedene LED-Serien kommen in ADB-Scheinwerfern und Rückleuchten zum Einsatz. Bei-spielsweise eignen sich die LEDs von Everlight für intelligente ADB-LED-Frontscheinwerfer, die automatisch bestimmte Lichtquellen abschalten, um
Blendung durch Fernlicht zu vermeiden. Zum Einsatz kom-men dabei 24 LEDs der Serie EVL-EL-ALFS 1×1, mit jeweils 245 lm pro LED bei einer Be-triebsspannung von 700 mA. Kombiniert mit intelligenter
Regelungstechnik, Steuermodul und einem CCD arbeitet der Scheinwerfer präziser hinsichtlich Erkennung und Beleuchtung. Hinzu kommt auch die Mini Rear Lamp, die auf Everlights Fine-Pitch-Display-LEDS beruht und ein flexibles, adaptives Rückleuchtensystem ermöglicht. Die neue Smart-Multi-Array-Rückleuchte mit eingebauten Treiber- und Steuerungs-ICs nutzt LEDs der Smart-Multi-Serie von Everlight zur Informationsübertragung und Dar-stellung diversifizierter Anzeigen auf komfortable Weise.
infoDIREKT 900ael0318
Bild: Premo
Bild: Infineon
Bild:
Inova
Sem
icond
ucto
rs
Bild:
Nexp
eria
Bild:
Escry
ptBil
d: Ev
erligh
t
56_PBs.indd 56 11.03.2019 17:03:05

Impressum/Verzeichnisse
AUTOMOBIL ELEKTRONIK 03/2019 57www.all-electronics.de
Audi TitelseitedSPACE 9FEV Europe 41
Gentex 29LEAR 7Messe Berlin 5
PEAK-System 3Rohde & Schwarz 51Rosenberger 23
Rutronik BeilageSonceboz 43Süddeutscher Verlag 39, Beilage
Synopsys 33Vector 4. US
3M 8Allianz 48AMD 46Analog Devices 12Aptpod 12Audi 11, 16, 48Autotalks 11Axa 48BDEW 11BH Sens 11BMW 6, 10, 36Bosch 10Brusa Elektronik 11Car2Go 36Carissma 48Ceva 11Continental 11, 30, 48
Daimler 10, 11, 36Dekra 48Drive-Now 36dSPACE 8e.solutions 16Eaton 8EDAG Engineering 11Elektrobit 16, 52Erni Electronics 11Escrypt 11, 34, 56ESG Mobility 11ETSI 24Everlight 56FCA Italy 11Frost & Sullivan 11Groupe PSA 11Huf Hülsbeck & Fürst 11
Infineon 12, 26, 56Innoluce 12Inonet 46Inova Semiconductors 6, 56Intel 16, 46Intenta 6ITS 8Kalray 40Karsan 11LMC Automotive 10Mahle 11Marvell 11, 56Maxwell Technologies 8Mesago 8Microchip Technology 44Microsoft 16, 52Micro-Sys 8
Mobileye 16Nexperia 56Nidec 12Nordsys 24Nvidia 16, 46, 52NXP 40ON Semiconductor 12Phoenix Contact 8Porsche 3, 16Premo 56Prolytics 11Qualcomm Halo 11Shanghai Baolong Automot. 11Smart Mechatronics 34TE Connectivity 20Tesis 10Tesla 3. 8, 48
The Mobility House 11TH Ingolstadt 48Tom Tom 11Torex Semiconductor 12TU Chemnitz 6TÜV Rheinland 11Uber 36Valens 12Vector Informatik 10Vodafone 11Volkswagen 11Volvo 3Waymo 36Witricity 11Xain 26ZF 8, 11ZVEI 6
Unternehmen
Inserenten
Impressum
REDAKTION
Chefredaktion: Dipl.-Ing. Alfred Vollmer (av) (v.i.S.d.P.) Tel: +49 (0) 8191 125-206, E-Mail: [email protected]: Dr.-Ing. Nicole Ahner (na) Tel: +49 (0) 8191 125-494, E-Mail: [email protected]. Hans Jaschinski (jj) Tel: +49 (0) 8191 125-830, E-Mail: [email protected]. Gunnar Knüpffer (gk) Tel: +49 (0) 8191 125-145, E-Mail: [email protected] Probst (prm) Tel: +49 (0) 8191 125-214, E-Mail: [email protected]é Oliver Klein (aok), Volontär Tel: +49 (0) 8191 125-403, E-Mail: [email protected] Mitarbeiter: Jens Wallmann (jwa)
Office Manager und Sonderdruckservice: Waltraud Müller, Tel: +49 (0) 8191 125-408, E-Mail: [email protected]
ANZEIGEN
Anzeigenleitung: Frank Henning, Tel: +49 (0) 6221 489-363, E-Mail: [email protected]: Angelika Scheffler, Tel: +49 (0) 6221 489-392, E-Mail: [email protected] Zeit gilt die Anzeigenpreisliste Nr. 17 vom 01.10.2018
VERTRIEB
Vertriebsleitung: Hermann WeixlerAbonnement: http://www.automobil-elelektronik.de/abo/ Inland € 94,00 (zzgl. € 7,00 Euro Versandkosten + Mwst. = € 108,07) Ausland € 94,00 ( zzgl. € 14,00 Versandkosten + Mwst. = € 115,56)Einzelverkaufspreis € 19,50 ( incl. Mwst. + zzgl. Versand) Der Studentenrabatt beträgt 35 %. Alle Preise verstehen sich inkl. MwSt.Kündigungsfrist: Jederzeit mit einer Frist von 4 Wochen zum Monatsende.
Abonnement und Leser-Service: Hüthig GmbH, Leserservice, 86894 Landsberg Tel: +49 (0) 8191 125-777, Fax: +49 (0) 8191 125-799 E-Mail: [email protected]
Erscheinungsweise: 8 × jährlich
VERLAG
Hüthig GmbH, Im Weiher 10, 69121 Heidelberg www.huethig.de, Amtsgericht Mannheim HRB 703044Geschäftsführung: Fabian MüllerVerlagsleitung: Rainer SimonLeitung Zentrale Herstellung: Hermann WeixlerProduktmanager Online: Philip FischerHerstellung: Herbert SchiffersArt Director: Jürgen ClausLayout und Druckvorstufe: Cornelia Roth, Susanne Brenneis Druck: BWH GmbH, 30457 Hannover© Copyright Hüthig GmbH 2019, Heidelberg.Eine Haftung für die Richtigkeit der Veröffentlichung kann trotz sorgfälti-ger Prüfung durch die Redaktion, vom Ver leger und Herausgeber nicht übernommen werden. Die Zeitschriften, alle in ihr enthaltenen Beiträge und Abbildungen, sind urheberrechtlich geschützt. Jede Verwertung au-ßerhalb der engen Grenzen des Urheberrechtsgesetzes ist ohne Zustim-mung des Verlages unzulässig und strafbar. Dies gilt insbesondere für Vervielfältigungen, Übersetzungen, Mikroverfilmungen und die Einspei-cherung und Bearbeitung in elektronischen Systemen.Mit der Annahme des Manuskripts und seiner Veröffent lichung in dieser Zeitschrift geht das umfassende, ausschließliche, räumlich, zeitlich und inhaltlich unbeschränkte Nutzungsrecht auf den Verlag über. Dies umfasst insbesondere das Printmediarecht zur Veröffentlichung in Printmedien aller Art sowie entsprechender Vervielfältigung und Verbreitung, das Recht zur Bearbeitung, Umgestaltung und Übersetzung, das Recht zur Nutzung für eigene Werbezwecke, das Recht zur elektronischen/digitalen Verwertung, z. B. Einspeicherung und Bearbeitung in elektronischen Systemen, zur Veröffentlichung in Datennetzen sowie Datenträger jedweder Art, wie z. B. die Darstellung im Rahmen von Internet- und Online-Dienstleistungen, CD-ROM, CD und DVD und der Datenbanknutzung und das Recht, die vorge-nannten Nutzungsrechte auf Dritte zu übertragen, d. h. Nachdruckrechte
einzuräumen. Die Wiedergabe von Gebrauchsnamen, Handelsnamen, Warenbezeichnungen und dergleichen in dieser Zeitschrift berechtigt auch ohne besondere Kennzeichnung nicht zur Annahme, dass solche Namen im Sinne des Warenzeichen- und Markenschutzgesetzgebung als frei zu be-trachten wären und daher von jedermann benutzt werden dürfen. Für unverlangt eingesandte Manuskripte wird keine Haftung übernommen. Mit Namen oder Zeichen des Verfassers gekennzeichnete Beiträge stellen nicht unbedingt die Meinung der Redaktion dar. Es gelten die allgemeinen Geschäftsbedingungen für Autorenbeiträge.
AUSLANDSVERTRETUNGEN
Schweiz, Liechtenstein: Katja Hammelbeck, Interpress Ermatinger Straße 14, CH-8268 Salenstein, Tel: +41 (0) 71 552 02 12, Fax: +41 (0) 71 552 02 10, E-Mail: [email protected], Kanada, Großbritannien, Österreich: Marion Taylor-Hauser, Max-Böhm-Ring 3, 95488 Eckersdorf, Tel: +49 (0) 921 316 63, Fax: +49 (0) 921 328 75, E-Mail: [email protected] VR China, Taiwan, Singapur, Thailand, Philippinen, Indonesien und Vietnam: Judy Wang, Tel: +86 138 103 251 71, E-Mail: [email protected]
Angeschlossen der Informationsgemeinschaft zur Feststellung der Verbreitung von Werbeträgern (IVW), (Printed in Germany)
DATENSCHUTZ
Ihre Angaben werden von uns für die Vertragsabwicklung und für interne Marktforschung gespeichert, verarbeitet und genutzt und um von uns und per Post von unseren Kooperationspartnern über Produkte und Dienstleistungen informiert zu werden. Wenn Sie dies nicht mehr wünschen, können Sie dem jederzeit mit Wirkung für die Zukunft unter [email protected] widersprechen. Ausführliches zum Datenschutz und den Informationspflichten finden Sie unter www.huethig.de/datenschutz
www.automobil-elektronik.dewww.all-electronics.deISSN 0939-532617. Jahrgang 2019
IHRE KONTAKTE: Redaktion: Tel: +49 (0) 8191 125-206, Fax: -141 Anzeigen: Tel: +49 (0) 6221 489-363, Fax: -482 Abonnement- und Leser-Service: Tel: +49 (0) 8191 125-777, Fax: +49 (0) 8191 125-799 E-Mail: [email protected]
Behammer, Josef 36Böhm, Klaus 48Cocias, Tiberiu 52Denner, Volkmar 10Fothen, Christoph 48Goetzeler, Martin 8
Grigorescu, Sorin M. 52Hecker, Korbinian 46Hotze, Dennis 34Khouri, Kamal 40Kraus, Robert 6Li, Song 44
Lundbæk, Leif-Nissen 26Machold, Michael 26Marina, Liviu 52Miller, Manfred 24Müller, Thomas M. 16Rozmann, Michael 8
Riegraf, Thomas 10Scheider, Wolf-Henning 11Schütte, Frank 8Schweiger, Hans-Georg 48Trasnea, Bogdan 52Tschersich, Markus 30
Tsuda, Kenji 12Vasilcoi, Andrei 52Weigl, Sandra 34Wülfing, Jens 20
Personen
57_Verzeichnisse.indd 57 12.03.2019 12:12:46

58 AUTOMOBIL ELEKTRONIK 03 / 2019 www.all-electronics.de
Da ist er wieder, der alte Reflex: Bloß nicht zu weit nach vorne schauen. Und falls doch, dann
bloß nicht die Vergangenheit aus dem Blick verlieren. Es könnte ja sein, dass die Tradition unter die Räder kommt, was auf keinen Fall passieren darf. Also lieber eine bescheidene Zukunftsperspektive geben. Ein Beispiel dafür kam jüngst von einem Top-Manager der Automobilindustrie. Seine Thesen zur Elektrifizierung sind: Kleinwagen werden teurer und sind bei niedrigem Einkommen nicht mehr erschwinglich; die geringe Reichweite von 300 bis 400 km und die unzufriedenstel-lende Ladeinfrastruktur bedeuten klare Abstriche; aufgrund der sinkenden CO2-Grenzwerte ist man geradezu gezwungen, Elektroautos für die breite Masse zu bauen.
Was, um Gottes Willen, sollen diese Botschaften? Wäre es nicht an der Zeit, Aufbruchstimmung und Optimismus in die gesellschaftliche Debatte und ins eige-ne Unternehmen zu tragen, anstatt mit Bedenken und Jammerei die Angst zu
schüren? Eine tragfähige Vision zu haben, scheint zu viel verlangt, auch wenn sich die Batterietechnik gerade anschickt, einen veritablen Sprung zu machen.
Besagter Top-Manager ist übrigens in guter Gesellschaft. Der CEO eines anderen OEM lässt wissen, dass über die nächsten zehn Jahre hinweg keine Prognose mög-lich sei und man deshalb auf Sicht fahre. Zudem befinde man sich in zwei Kriegen: in einem um die Technologie und in einem anderen um die Schnittstelle zum Kunden. Das klingt doch mal wieder verdächtig nach all dem, was nicht geht und wovor gewarnt werden muss. Die Folge sind auch hier Bedenken und Ängste.
So geht FührungskommunikationDamit sind wir bei der Führungskommu-nikation und der Frage danach, wie diese gelingt. Das Muster ist einfach, jedoch höchst wirkungsvoll. Es geht um vier Prin-zipien:
• Sagen, wo es hingeht, also das Ziel set-zen und damit bestimmen.
• Sagen, wie das funktioniert, also für Unterstützung sorgen und damit einladen.
• Verzichten auf Begründungen, Bedenken und Jammerei, also eine glasklare Haupt-botschaft senden.
• Kongruent auftreten, also dafür sorgen, dass der Körper dasselbe ausdrückt wie die Worte.
Die unabdingbare Basis dafür ist zwei-felsfreie innere Klarheit über die anvi-sierten unternehmerischen Ziele und den Weg dorthin. Ohne sie kann die Kom-munikation nach außen nicht funktionie-ren. Diese Klarheit für sich zu gewinnen, ist die eigentliche Nuss, die es zu knacken gilt – im Rahmen eines funktionierenden Selbstmanagements. Genau daran schei-den sich am Ende die Geister: Kongruenz und Wirksamkeit auf der einen Seite, Inkongruenz und Zweifel auf der ande-ren. Sie haben die Wahl. (av) ■
Sagen, was nicht geht!?Dr. Lederers Management-Tipps
Karik
atur: H
einric
h Sch
warze
-Blan
ke
Management Frisch vom Lederer
AutorDr. Dieter Lederer Unternehmensberater, Keynote-Speaker und Veränderungsexperte.
58_Lederer.indd 58 11.03.2019 16:46:34

Hüthig GmbHIm Weiher 10 D-69121 Heidelbergwww.huethig.de
Eier suchen – iPad finden!
Sponsored by:
Machen Sie mit beim
Ostereier-Gewinnspielauf www.all-electronics.de und gewinnen Sie einApple iPad 6. Generation, Wi-Fi, 32 GB, Space Grau, 24,6 cm/9,7 Zoll im Wertvon € 309,–!
ae_ostereier_2019_210x297.indd 1 07.03.2019 14:28:5359_U3.indd 3 11.03.2019 09:42:50

> Schnelle Entwicklung von Multisensor-Applikationen mit Datenfusion mehrerer Sensoren
> Zuverlässige Objektverifikation> Hoher Datendurchsatz beim Erfassen von Sensor-
daten aus dem Steuergerät
> Rapid-Prototyping (Bypassing) für OEM-spezifische Entwicklung
> AUTOSAR-Basissoftware für das einfache Über- tragen von Audio- und Videodaten
Mehr Infos: www.vector.com/adas
Entwickeln Sie Fahrerassistenzsysteme schnell und effizient mit den Lösungen von Vector.
Bei der Entwicklung von Fahrerassistenzsystemen profitieren Sie von einer durchgängigen Lösung aus Software- und Hardware-Tools sowie Embedded-Komponenten:
ADAS-Projekteschnell und sicher auf die Straße bringen
Alles aus einer Hand
Vector Informatik GmbH | Stuttgart · Braunschweig · Hamburg · Karlsruhe · München · Regensburg | www.vector.com
Autonomous Vehicle Technology Expo, 21. – 23. Mai in StuttgartInformieren Sie sich direkt: Stand AV7010
60_U4.indd 4 08.03.2019 08:14:56



![CAN - Bus.ppt [Kompatibilit tsmodus])ln.iuk.fh-dortmund.de/~gebhard/STA/vortraege/CAN-Bus__Bensch__Boehme.pdf · CAN -BUS 12.06.2008 Arnd Bensch, Bastian Böhme 3 Übersicht Bussysteme](https://static.fdokument.com/doc/165x107/5d4e074088c99351698bd2dc/can-busppt-kompatibilit-tsmoduslniukfh-gebhardstavortraegecan-busbenschboehmepdf.jpg)













