DieterRaschund - download.e-bookshelf.de · Autoren DieterRasch [email protected] DieterSchott...
30
Transcript of DieterRaschund - download.e-bookshelf.de · Autoren DieterRasch [email protected] DieterSchott...



Dieter Rasch undDieter Schott
Mathematische Statistik

Beachten Sie bitte auchweitere interessante Titelzu diesemThema
van Emden, H.
Statistik ohne AlbträumeEine Einführung für Biowissenschaftler
2014ISBN 978-3-527-33388-2; auch als e-Bookerhältlich
Günther, M., Velten, K.
Mathematische Modellbildungund SimulationEine Einführung für Wissenschaftler,Ingenieure und Ökonomen
2014Print ISBN: 978-3-527-41217-4; auch alse-Book erhältlich
Jüngel, A., Zachmann, H.G.
Mathematik für Chemiker7. Auflage
2014Print ISBN: 978-3-527-33622-7; auch alse-Book erhältlich
Emmert-Streib, F., Dehmer, M. (Hrsg.)
Statistical Diagnostics forCancerAnalyzing High-Dimensional Data
2013Print ISBN: 978-3-527-33262-5; auch alse-Book erhältlich
Rowe, Philip
Statistik für Mediziner undPharmazeuten2012ISBN 978-3-527-33119-2, auch als e-Bookerhältlich
Dehmer, M., Varmuza, K., Bonchev, D.(Hrsg.)
Statistical Modelling ofMolecular Descriptors inQSAR/QSPR2012Print ISBN: 978-3-527-32434-7; auch alse-Book erhältlich
Dehmer, M., Emmert-Streib, F., Graber, A.,Salvador, A. (Hrsg.)
Applied Statistics for NetworkBiologyMethods in Systems Biology
2011Print ISBN: 978-3-527-32750-8; auch alse-Book erhältlich
Ziegler, A., König, I.R.
A Statistical Approach toGenetic EpidemiologyConcepts and Applications, with ane-learning platform2. Auflage
2010Print ISBN: 978-3-527-32389-0; auch alse-Book erhältlich
Emmert-Streib, F., Dehmer, M. (Hrsg.)
Medical Biostatistics forComplex Diseases2010Print ISBN: 978-3-527-32585-6; auch alse-Book erhältlich

Dieter Rasch und Dieter Schott
Mathematische Statistik
Für Mathematiker, Natur- und Ingenieurwissenschaftler

Autoren
Dieter [email protected]
Dieter [email protected]
Alle Bücher von Wiley-VCH werden sorgfältigerarbeitet. Dennoch übernehmen Autoren,Herausgeber und Verlag in keinem Fall,einschließlich des vorliegenden Werkes, für dieRichtigkeit von Angaben, Hinweisen undRatschlägen sowie für eventuelle Druckfehlerirgendeine Haftung.
Bibliografische Information derDeutschenNationalbibliothekDie Deutsche Nationalbibliothek verzeichnetdiese Publikation in der Deutschen Nationalbi-bliografie; detaillierte bibliografische Daten sindim Internet über http://dnb.d-nb.de abrufbar.
© 2016WILEY-VCHVerlag GmbH&Co. KGaA,Boschstr. 12, 69469 Weinheim, Germany
Alle Rechte, insbesondere die der Überset-zung in andere Sprachen, vorbehalten. KeinTeil dieses Buches darf ohne schriftliche Ge-nehmigung des Verlages in irgendeiner Form– durch Photokopie, Mikroverfilmung oderirgendein anderes Verfahren – reproduziertoder in eine von Maschinen, insbesondere vonDatenverarbeitungsmaschinen, verwendbareSprache übertragen oder übersetzt werden.Die Wiedergabe von Warenbezeichnungen,Handelsnamen oder sonstigen Kennzeichen indiesem Buch berechtigt nicht zu der Annahme,dass diese von jedermann frei benutzt werdendürfen. Vielmehr kann es sich auch dann umeingetragene Warenzeichen oder sonstige ge-setzlich geschützte Kennzeichen handeln, wennsie nicht eigens als solche markiert sind.
Umschlaggestaltung Wiley-VCHSatz le-tex publishing services GmbH, Leipzig,DeutschlandDruck und Bindung
Print ISBN 978-3-527-33884-9ePDF ISBN 978-3-527-69208-8ePub ISBN 978-3-527-69210-1Mobi ISBN 978-3-527-69211-8oBook ISBN 978-3-527-69209-5
Gedruckt auf säurefreiem Papier.
V
Inhaltsverzeichnis
Vorwort XI
1 Grundbegriffe der mathematischen Statistik 11.1 Grundgesamtheit und Stichprobe 21.1.1 Konkrete Stichproben und Grundgesamtheiten 21.1.2 Stichprobenverfahren 41.2 Mathematische Modelle für Grundgesamtheit und Stichprobe 71.3 Suffizienz und Vollständigkeit 91.4 Der Informationsbegriff in der Statistik 201.5 Statistische Entscheidungstheorie 271.6 Übungsaufgaben 31
Literatur 36
2 Punktschätzung 392.1 Optimale erwartungstreue Schätzfunktionen 412.2 Varianzinvariante Schätzung 522.3 Methoden zur Konstruktion und Verbesserung von
Schätzfunktionen 562.3.1 Maximum-Likelihood-Methode 562.3.2 Methode der kleinsten Quadrate 602.3.3 Minimum-χ2-Methode 612.3.4 Momentenmethode 622.3.5 Jackknife-Schätzungen 632.3.6 Auf Ordnungsmaßzahlen basierende Schätzfunktionen 642.4 Eigenschaften von Schätzfunktionen 682.4.1 Kleine Stichproben 692.4.2 Asymptotische Eigenschaften 712.5 Übungsaufgaben 75
Literatur 78
3 Statistische Tests und Konfidenzschätzungen 813.1 Grundbegriffe der Testtheorie 813.2 Das Neyman-Pearson-Lemma 89

VI Inhaltsverzeichnis
3.3 Tests für zusammengesetzte Alternativhypothesen undeinparametrische Verteilungsfamilien 98
3.3.1 Verteilungen mit monotonem Likelihood-Quotienten und gleichmäßigbeste Tests für einseitige Hypothesen 98
3.3.2 GBU-Tests für zweiseitige Alternativhypothesen 1063.4 Tests für mehrparametrische Verteilungsfamilien 1123.4.1 Allgemeine Theorie 1133.4.2 Das Zweistichprobenproblem – Eigenschaften verschiedener Tests
und Robustheit 1253.4.3 Tabellenanhang 1343.5 Konfidenzschätzungen 1353.5.1 Einseitige Konfidenzintervalle in einparametrischen
Verteilungsfamilien 1363.5.2 Zweiseitige Konfidenzintervalle in einparametrischen und
Konfidenzintervalle in mehrparametrischen Verteilungsfamilien 1393.5.3 Tabellenanhang 1423.6 Sequentielle Tests 1433.6.1 Einführung 1433.6.2 Walds sequentieller Likelihood-Quotienten-Test für einparametrische
Exponentialfamilien 1453.6.3 Test über Mittelwerte für unbekannte Varianzen 1493.6.4 Approximative Tests für das Zweistichprobenproblem 1553.6.5 Sequentielle Dreieckstests 1563.6.6 Ein sequentieller Dreieckstest für den Korrelationskoeffizienten 1583.7 Bemerkungen zur Interpretation 1663.8 Übungsaufgaben 167
Literatur 172
4 Lineare Modelle – Allgemeine Theorie 1754.1 Lineare Modelle mit festen Effekten 1754.1.1 Methode der kleinsten Quadrate 1764.1.2 Maximum-Likelihood-Methode 1804.1.3 Hypothesentests 1814.1.4 Konstruktion von Konfidenzbereichen 1864.1.5 Spezielle lineare Modelle 1874.1.6 Die verallgemeinerte Methode der kleinsten Quadrate (VMKQ) 1934.2 Lineare Modelle mit zufälligen Effekten – gemischte Modelle 1944.2.1 Beste lineare erwartungstreue Vorhersage (BLEV) 1954.2.2 Varianzkomponentenschätzung 1974.3 Übungsaufgaben 198
Literatur 198
5 Varianzanalyse – Modelle mit festen Effekten(Modell I der Varianzanalyse) 201
5.1 Einführung 201

VIIInhaltsverzeichnis
5.2 Varianzanalyse in einfaktoriellen Versuchen (einfacheVarianzanalyse) 209
5.2.1 Das Modell und Auswertungsverfahren 2095.2.2 Planung des Versuchsumfanges 2225.3 Klassifikation nach zwei Faktoren (zweifache Varianzanalyse) 2255.3.1 Kreuzklassifikation (A × B) 2275.3.2 Hierarchische Klassifikation (A ≻ B) 2535.4 Dreifache Klassifikation 2645.4.1 Vollständige Kreuzklassifikation (A × B × C) 2655.4.2 Hierarchische Klassifikation (C ≺ B ≺ A) 2725.4.3 Gemischte Klassifikation 2745.5 Übungsaufgaben 283
Literatur 284
6 Varianzanalyse – Schätzung von Varianzkomponenten(Modell II der Varianzanalyse) 285
6.1 Einführung – lineare Modelle mit zufälligen Effekten 2856.2 Einfache Klassifikation 2896.2.1 Schätzung der Varianzkomponenten 2926.2.2 Tests von Hypothesen und Konfidenzintervalle 3006.2.3 Varianzen und Eigenschaften der Schätzverfahrens für die
Varianzkomponenten 3026.3 Schätzfunktionen für Varianzkomponenten und ihre Spezialfälle
der zweifachen und dreifachen Klassifikation 3066.3.1 Allgemeine Beschreibung für den Fall gleicher und ungleicher
Klassenbesetzung 3076.3.2 Zweifache Kreuzklassifikation 3116.3.3 Zweifache hierarchische Klassifikation 3166.3.4 Dreifache Kreuzklassifikation mit gleicher Klassenbesetzung 3196.3.5 Dreifache hierarchische Klassifikation 3256.3.6 Dreifache gemischte Klassifikation 3286.4 Versuchsplanung 3296.5 Übungsaufgaben 331
Literatur 332
7 Varianzanalyse – Modelle mit endlichen Stufengesamtheitenund gemischte Modelle 335
7.1 Einführung – Modelle mit endlichen Stufengesamtheiten 3357.2 Regeln zur Ableitung von SQ, FG, DQ und E(DQ) im balancierten Fall
für beliebige Klassifikationen und Modelle 3387.3 Varianzkomponentenschätzung in gemischten Modellen 3437.3.1 Ein Beispiel für den balancierten Fall 3447.3.2 Der unbalancierte Fall 3467.4 Varianzkomponentenschätzung in speziellen gemischten
Modellen 348

VIII Inhaltsverzeichnis
7.4.1 Zweifache Kreuzklassifikation 3487.4.2 Zweifache hierarchische Klassifikation B ≺ A 3487.4.3 Dreifache Kreuzklassifikation 3527.4.4 Dreifache hierarchische Klassifikation 3557.4.5 Dreifache gemischte Klassifikation 3587.5 Tests für feste Effekte und Varianzkomponenten 3627.6 Übungsaufgaben 366
Literatur 366
8 Regressionsanalyse – Lineare Modelle mit nicht zufälligen Regressorenund zufälligen Regressoren 367
8.1 Einführung 3678.2 Parameterschätzung 3708.2.1 Methode der kleinsten Quadrate 3708.2.2 Optimale Versuchsplanung 3838.3 Hypothesenprüfung 3868.4 Konfidenzbereiche 3958.5 Modelle mit zufälligen Regressoren 3988.5.1 Auswertung 3988.5.2 Versuchsplanung 4048.6 Gemischte Modelle 4058.7 Abschließende Bemerkungen zu den Modellen
der Regressionsanalyse 4068.8 Übungsaufgaben 408
Literatur 409
9 Regressionsanalyse – Eigentlich nichtlineares Modell I 4119.1 Bestimmung der Schätzwerte nach der Methode der kleinsten
Quadrate 4149.1.1 Gauß-Newton-Verfahren 4159.1.2 Innere Regression 4199.1.3 Bestimmung von Anfangswerten für Iterationsverfahren 4219.2 Geometrische Betrachtungen 4229.2.1 Lösungsfläche und Tangentenebene 4229.2.2 Nichtlinearitätsmaße 4289.3 Asymptotische Eigenschaften und die Verzerrung der
MKQ-Schätzung 4329.4 Konfidenzschätzungen und Tests 4369.4.1 Einführung 4379.4.2 Auf der asymptotischen Kovarianzmatrix basierende Tests
und Konfidenzschätzungen 4409.4.3 Simulationsexperimente zur Überprüfung der Tests
und Konfidenzschätzungen 4419.5 Optimale Versuchsplanung 4439.6 Spezielle Regressionsfunktionen 448
IXInhaltsverzeichnis
9.6.1 Exponentielle Regression 4489.6.2 Die Bertalanffy-Funktion 4569.6.3 Die logistische (dreiparametrische
Tangens-hyperbolicus-)Funktion 4589.6.4 Die Gompertz-Funktion 4639.6.5 Die vierparametrische Tangens-hyperbolicus-Funktion 4649.6.6 Die vierparametrische Arcustangens-Funktion 4679.6.7 Die Richards-Funktion 4699.6.8 Fragen der Modellwahl 4699.7 Übungsaufgaben 471
Literatur 472
10 Kovarianzanalyse 47510.1 Einführung 47510.2 Allgemeines Modell I–I der Kovarianzanalyse 47610.3 Spezielle Modelle der Kovarianzanalyse für die einfache
Klassifikation 48310.3.1 Eine Kovariable mit konstantem γ 48510.3.2 Eine Kovariable mit von den Stufen des Klassifikationsfaktors
abhängigen Regressionskoeffizienten γi 48710.4 Übungsaufgaben 488
Literatur 488
11 Statistische Mehrentscheidungsprobleme 48911.1 Auswahlverfahren 49011.1.1 Grundbegriffe 49011.1.2 Indifferenzbereichsformulierung für Erwartungswerte 49311.1.3 Auswahl einer Untermenge, die die beste Grundgesamtheit
mit vorgegebener Wahrscheinlichkeit enthält 50511.2 Multiple Vergleichsprozeduren 51111.2.1 Konfidenzbereiche für alle Kontraste – die Scheffé-Methode 51511.2.2 Konfidenzintervalle für bestimmte Kontraste – die Methode
von Dunn 51811.2.3 Konfidenzbereiche für alle Kontraste für ni = n
– die Tukey-Methode 52011.2.4 Konfidenzintervalle für alle Kontraste – verallgemeinerte
Tukey-Methode 52311.2.5 Konfidenzintervalle für die Mittelwertdifferenzen zu einem Standard
– die Dunnett-Methode 52511.2.6 Multiple Vergleichsprozeduren und Konfidenzbereiche 52711.2.7 Vergleich multipler Vergleichsprozeduren 53011.3 Veranschaulichung der Methoden an einem Zahlenbeispiel 53111.4 Übungsaufgaben 536
Literatur 537

X Inhaltsverzeichnis
12 Versuchsanlagen 53912.1 Einführung 54012.2 Blockanlagen 54312.2.1 Vollständig balancierte unvollständige Blockanlagen 54712.2.2 Methoden zur Konstruktion von BUB 55412.2.3 Teilweise balancierte unvollständige Blockanlagen 56812.3 Zeilen-Spalten-Anlagen 57312.4 Programme zur Konstruktion von Versuchsanlagen 57712.5 Übungsaufgaben 577
Literatur 578
13 Lösungen und Lösungsansätze zu den Übungsaufgaben 581
Anhang A Symbolik 607
Anhang B Abkürzungen 611
Anhang C Wahrscheinlichkeits- bzw. Dichtefunktionenvon Verteilungen 613
Anhang D Tabellen 615
Sachverzeichnis 623
XI
Vorwort
„Mathematische Statistik“ hat nie an Attraktivität verloren, das gilt sowohl fürdas Fach als mathematische Disziplin, aber vor allem für ihre Anwendung infast allen Bereichen der empirischen Forschung. Nun hat sich in den letztenJahren auf einigen Teilgebieten herausgestellt, dass das, was unter gegebenenVoraussetzungen mathematisch optimal ist, praktisch nicht empfehlenswert ist,wenn man nicht sicher ist, ob solche Voraussetzungen gelten. Ein Beispiel ist derZweistichproben-t-Test, der unter der Voraussetzung gleicher Varianzen (undNormalverteilung) in den entsprechenden Grundgesamtheiten ein optimaler(gleichmäßig bester unverfälschter) Test ist. In Anwendungen, in denenman sichder Gleichheit beider Varianzen nicht sicher ist – und das ist fast immer der Fall–, ist allerdings der approximativeWelch-Test vorzuziehen. Derartige Ergebnissesind umfangreichen Simulationsuntersuchungen zu verdanken, die in letzter Zeiteine immer größere Rolle in der Praxis spielen (siehe die acht internationalenKonferenzen zu diesem Thema seit 1994 unter http://iws.boku.ac.at.).Deshalb habenwir uns derAufgabe gestellt, auf derGrundlage des 1995 erschie-
nenen Buches (Rasch, D. (1995)Mathematische Statistik, Joh. Ambrosius Barth,Berlin, Heidelberg) unter konsequenter Berücksichtigung der Entwicklungen derletzten Jahrzehnte ein neues Buch zu verfassen. In den Beispielen findet man ne-ben den Handrechnungen auch Hinweise zur Anwendung des frei verfügbarenProgrammpaketes R.Der erste Teil des oben erwähnten Buches enthielt eine Einführung in dieMaß-
theorie und in die Wahrscheinlichkeitsrechnung, die hier vorausgesetzt werdenbzw. bei Bauer,H. (2002)Wahrscheinlichkeitstheorie, deGruyter, Berlin, nachgele-sen werden können. Speziell werden Kenntnisse über Exponentialfamilien sowiezentrale und nichtzentrale t-, χ2- und F- Verteilungen vorausgesetzt. Die Defini-tion der Exponentialfamilien, die grundlegend für einige Kapitel ist, wurde jedochwiederholt.In derMathematischen Statistik gehen diemeistenAutorendavon aus, dassDa-
ten bereits vorliegen und auszuwerten sind. Wir meinen aber, dass die optimaleErfassung der Daten gleichberechtigt neben der Auswertung stehen sollte. Ne-ben der Beschreibung der statistischen Auswertungsverfahren wurde daher auchdie Versuchsplanung aufgenommen. Die Planung des Stichprobenumfanges fin-detman bei der Beschreibung derAuswertungsverfahren, die optimaleAllokation

XII Vorwort
in den Kapiteln zur Regressionsanalyse. Schließlich wurde noch ein Kapitel überVersuchsanlagen eingefügt. Das Kapitel über Stutzung und Zensur wurde dage-gen weggelassen.Wir haben uns bemüht, durchgängig Deutsch zu schreiben, Anglizismen wie
Bias oder gar Sprachmischungen wie Powerfunktion haben wir vermieden. Werfür Publikationen in Englisch die englischen Begriffe benötigt, kann diese in Else-vier’s Dictionary of Biometry (Rasch et al., 1994) finden, ein Werk, an dem zahl-reiche Statistiker aus Deutschland, Ungarn und Polen über viele Jahre gearbeitethaben. Eine Ausnahme bildet der Begriff Maximum Likelihood, den man zwar(wie ein österreichischer Kollege meint) mit maximale Plausibilität übersetzenkönnte – da aber der englische Ausdruck international allgemein verwendet wird,haben wir auf eine Übersetzung verzichtet.Wir danken ganz herzlich Herrn Prof. Dr. Rob Verdooren (Bennekom, Nieder-
lande), der das Manuskript gründlich durchgelesen und auf Fehler und Inkonsis-tenzen hingewiesen hat.
Rostock, im Frühjahr 2015 Dieter Rasch und Dieter Schott
1
1Grundbegriffe der mathematischen Statistik
Elementare statistische Berechnungenwerden schon seit Jahrtausenden durchge-führt. Das arithmetische Mittel aus einer Anzahl von Mess- oder Beobachtungs-werten ist schon sehr lange bekannt.Zuerst entstand die beschreibende Statistik mit dem Sammeln von Daten et-
wa bei Volkszählungen oder in Krankenregistern und deren Verdichtung in Formvon Maßzahlen oder Grafiken. Die mathematische Statistik entwickelte sich abEnde des 19. Jahrhunderts aufbauend auf der Wahrscheinlichkeitsrechnung. An-fang des 20. Jahrhunderts gehörten vor allemKarl Pearson und Sir Ronald AymlerFisher zu ihren Pionieren. Das Buch von Fisher (1925) ist ein Meilenstein, in ihmwerden die vom Autor mehrere Jahre zuvor entwickelten Grundlagen der Statis-tik wie die Maximum-Likelihood-Methode und die Varianzanalyse oder Begriffewie Suffizienz und Effizienz Versuchsanstellern nahegebracht. Ein wichtiges In-formationsmaß heißt noch heute Fisher-Information (siehe Abschn. 1.4).Wir wollen auf die Details der historischen Entwicklung nicht eingehen und
verweisen Interessierte auf Stigler (2000). Stattdessen beschreiben wir den heuti-gen Stand der Theorie. Wir wollen aber nicht vergessen, dass viele Anregungenaus Anwendungen kamen und bringen deshalb auch immer wieder Beispiele.Die Wahrscheinlichkeitsrechnung ist zwar die Grundlage der mathematischen
Statistik, aber viele praktische Probleme, in denenAussagen überZufallsvariablengemacht werden sollen, sind mit der Wahrscheinlichkeitsrechnung allein nichtzu lösen. Das liegt daran, dass über die Verteilungsfunktion der Zufallsvariablennicht alles bekannt ist und das Problem oft darin besteht, Aussagen über mindes-tens einen der Parameter einerVerteilungsfunktion zumachen oder dass sogar dieVerteilungsfunktion gänzlich unbekannt ist. Die mathematische Statistik wird invielen einführenden Texten als die Theorie der Auswertung von Versuchen oderErhebungen betrachtet, d. h., man geht davon aus, dass bereits eine Zufallsstich-probe (nach Abschn. 1.1) vorliegt. Wie man auf optimalem Weg zu dieser Zu-fallsstichprobe gelangt, bleibtmeist unberücksichtigt – dies wird gesondert in derstatistischen Versuchsplanung abgehandelt. In den Anwendungen ist es klar, dassman erst denVersuch (die Erhebung) plant und dann, wenn der Versuch durchge-führt wurde, mit der Auswertung beginnt. In der Theorie ist es aber zweckmäßig,zunächst die optimale Auswertung zu ermitteln, umdann für diese den optimalenVersuchsplan zu bestimmen, z. B. den kleinstenVersuchsumfang für eine varianz-
Mathematische Statistik, 1. Auflage. Dieter Rasch und Dieter Schott.©2016WILEY-VCHVerlagGmbH&Co.KGaA.Published2016byWILEY-VCHVerlagGmbH&Co.KGaA.

2 1 Grundbegriffe der mathematischen Statistik
optimale Schätzfunktion. Daher wird hier so verfahren, dass zunächst einmal dieoptimale Auswertung bestimmt wird und später für diese der Versuchsplan zu er-arbeiten ist. Eine Ausnahme bilden dabei die sequentiellen Verfahren, bei denenPlanung und Auswertung gemeinsam vorgenommen werden.Wir müssen uns darüber im Klaren sein, dass es sich bei der Behandlung der
mathematischen Statistik einerseits und bei ihrer Anwendung auf konkretes Da-tenmaterial andererseits um zwei völlig verschiedene Begriffssysteme handelt. Inbeiden treten oft die gleichen Termini auf, die es genau auseinanderzuhalten gilt.Wir sprechen davon, dass den Begriffen der empirischen Ebene (also denen derRealwelt) Modelle in der Theorie zugeordnet werden.
1.1Grundgesamtheit und Stichprobe
1.1.1Konkrete Stichproben und Grundgesamtheiten
In den empirischen Wissenschaften werden ein Merkmal oder auch mehrereMerkmale gleichzeitig (ein Merkmalsvektor) an bestimmten Objekten (oder In-dividuen) beobachtet. Aus den Beobachtungswerten sind Schlüsse auf die Ge-samtheit der Merkmalswerte aller Objekte einer Gesamtheit zu ziehen. Ursachedafür ist, dass es sachliche oder ökonomische Gesichtspunkte gibt, die eine voll-ständige Erfassung der Merkmale aller Objekte nicht ermöglichen. Hierzu einigeBeispiele:
∙ Die Kosten der Erfassung aller Merkmalswerte stehen in keinem Verhältniszum Wert der Aussage (z. B. Messung der Körpergröße aller zurzeit lebendenMenschen über 18 Jahren).
∙ Die Erfassung der Merkmalswerte ist mit der Zerstörung der Objekte verbun-den (nicht zerstörungsfreie Werkstoffprüfung wie Reißfestigkeit von Tauenoder Strümpfen).
∙ Die Gesamtheit der Objekte ist hypothetischer Natur, z. B. weil sie teilweisezumUntersuchungszeitpunkt nicht existieren (wie alle Produkte einerMaschi-ne).
Diewenigen praktischen Fälle, in denen alleObjekte einerGesamtheit beobach-tet werden und auf keine umfassendereGesamtheit geschlossenwerden soll, kön-nen wir vernachlässigen, für sie benötigt man die mathematische Statistik nicht.Wir gehen also davon aus, dass aus einer Gesamtheit nur eine Teilmenge ausge-wählt wird, um das Merkmal (den Merkmalsvektor) zu beobachten von dem aufdie gesamte Population geschlossen werden soll. Einen solchen Teil nennen wir(konkrete) Stichprobe (der Objekte). DieMenge der an diesenObjekten gemesse-nenMerkmalswerte nennen wir (konkrete) Stichprobe derMerkmalswerte. JedesObjekt der Population soll einen Merkmalswert besitzen (unabhängig davon, ob

31.1 Grundgesamtheit und Stichprobe
wir ihn erfassen oder nicht). Die der Population entsprechende Gesamtheit derMerkmalswerte der Objekte dieser Population nennen wir Grundgesamtheit.Eine Population und das zu erfassende Merkmal und damit auch die Grund-
gesamtheit müssen eindeutig definiert sein. Populationen sind vor allem räum-lich und zeitlich abzugrenzen. Von einem beliebigen Objekt der Realwelt mussprinzipiell feststehen, ob es zur Population gehört oder nicht. Wir betrachten imFolgenden einige Beispiele:
Population Grundgesamtheit
A Färsen einer bestimmten Rasse A1 Jahresmilchmenge dieser Färseneines bestimmten Gebietes A2 180-Tage-Körpermasse dieser Färsenin einem bestimmten Jahr A3 Rückenhöhe dieser Färsen
B Bewohner einer Stadt B1 Blutdruck dieser Bewohner um 6:00 Uhran einem bestimmten Tag B2 Alter der Bewohner
Es ist einleuchtend, dass Schlüsse von der Stichprobe auf die Grundgesamtheitfalsch sein können.Wennman z. B. aus der Population B die Kinder einer Kinder-tagesstätte auswählt, ist möglicherweise der Blutdruck, aber ganz sicher das Alternicht auf die Population verallgemeinerbar. Generell sprechen wir von Merkma-len, sofern diese aber einen bestimmten Einfluss auf die Versuchsergebnisse ha-ben können, nennen wir sie auch Faktoren, die (meist wenigen) Merkmalswerteheißen dann Faktorstufen, die Kombination von Faktorstufen mehrerer Faktorenheißen Faktorstufenkombinationen.Hinsichtlich aller Faktoren, die das Merkmal in einer Grundgesamtheit beein-
flussen können, sollte die Stichprobe „repräsentativ“ sein. Das heißt, in der Stich-probe der Objekte sollte sich die Zusammensetzung der Population widerspie-geln. Das ist aber bei kleinen Stichproben und vielen Faktorstufenkombinationengar nichtmöglich. In Population B gibt es hinsichtlich der FaktorenAlter und Ge-schlecht schon etwa 200 Faktorstufenkombinationen, die sich unmöglich in einerStichprobe von 100 Einwohnernwiderspiegeln können.Wir empfehlen daher, denBegriff „repräsentative Stichprobe“ nicht zu verwenden, da er nicht sauber defi-niert werden kann.Stichproben sollen nicht danach beurteilt werden, welche Elemente sie enthal-
ten, sondern danach, wie sie erhalten (gezogen) wurden. Die Art und Weise, wieeine Stichprobe erhoben wird, heißt Stichprobenverfahren. Es kann entweder aufdie Objekte als Merkmalsträger oder auf die Grundgesamtheit der Merkmals-werte (z. B. in einer Datenbank) angewendet werden. Im letzteren Fall entstehtdie Stichprobe der Merkmalswerte unmittelbar. Im ersteren Fall muss das Merk-mal an den ausgewählten Objekten noch erfasst werden. Beide Vorgehensweisen(nicht unbedingt die entstehenden Stichproben) sind dann identisch, wenn für je-des ausgewählte Objekt der Merkmalswert erfasst wird. Davon gehen wir in die-sem Kapitel aus. In zensierten Stichproben ist das nicht der Fall. Eine Stichprobeheißt zensiert, wenn der Merkmalswert nicht an allen Versuchseinheiten erfasst

4 1 Grundbegriffe der mathematischen Statistik
werden konnte. Bricht man z. B. eine Lebensdauerermittlung (z. B. von elektro-nischen Bauteilen) nach einer bestimmten Zeit ab, liegen Messwerte für Objektemit längerer Lebensdauer (als die Beobachtungszeit) nicht vor.Im Folgendenwird nicht zwischen StichprobenderObjekte und derMerkmals-
werte unterschieden, die Definitionen gelten für beide.
Definition 1.1Ein Stichprobenverfahren ist eine Vorschrift für die Auswahl einer endlichenTeilmenge, genannt Stichprobe, aus einer wohldefinierten endlichen Population(Grundgesamtheit), es heißt zufällig, wenn jedes Element der Grundgesamtheitmit der gleichen Wahrscheinlichkeit p in die Stichprobe gelangen kann. Eine(konkrete) Stichprobe ist das Ergebnis der Anwendung eines Stichprobenverfah-rens. Stichproben, die das Ergebnis eines zufälligen Stichprobenverfahrens sind,heißen (konkrete) zufällige Stichproben oder (konkrete) Zufallsstichproben.
In der Stichprobentheorie (siehe z. B. Cochran und Boing 1972; Kauermann undKüchenhoff 2011 oder Quatember 2014) wird eine Vielzahl von zufälligen Stich-probenverfahren zur Verfügung gestellt. Wir verwenden ab jetzt die Begriffe Po-pulation und Grundgesamtheit synonym.
1.1.2Stichprobenverfahren
Bei Zufallsauswahlverfahren unterscheiden wir u. a.:
∙ die einfache oder reine Zufallsauswahl, bei der jedes Element der Grundge-samtheit die gleicheWahrscheinlichkeit hat, in die Stichprobe zu gelangen.
∙ die geschichtete Auswahl, bei der innerhalb zuvor festgelegter (disjunkter)Klassen eine zufällige Auswahl vorgenommen wird, sie ist nur dann insge-samt zufällig, wenn die Auswahlwahrscheinlichkeiten innerhalb der Klassenproportional zum Umfang der Klassen gewählt werden.
∙ die Klumpenauswahl, hier wird eine Grundgesamtheit in Gruppen (Klumpen)eingeteilt. Die Auswahl der Untersuchungsobjekte erfolgt nicht unter den Ele-menten der Grundgesamtheit, sondern unter den (disjunkten) Klumpen. Inden ausgewählten Klumpen werden dann alle Elemente erfasst. Sie findet häu-fig in Form der Flächenstichproben Anwendung. Sie ist nur dann zufällig imSinne der Definition 1.1, wenn die Klumpen gleich viele Elemente enthalten.
∙ die mehrstufige Auswahl, sie ist dadurch gekennzeichnet, dass mindestenszwei Auswahlstufen bestehen. Die Grundgesamtheit wird z. B. in zweistufigerAuswahl in Primäreinheiten in Form disjunkter Teilmengen zerlegt. Aus derMenge der Primäreinheiten erfolgt zunächst eine Zufallsauswahl. Aus jederausgewählten Primäreinheit erfolgt eine Zufallsauswahl von Untersuchungs-einheiten (Sekundäreinheiten). Eine mehrstufige Auswahl ist dann vorteilhaft,wenn die Grundgesamtheit hierarchisch gegliedert ist (Land, Provinzen, Städ-
51.1 Grundgesamtheit und Stichprobe
te in der Provinz). Sie ist nur dann zufällig im Sinne der Definition 1.1, wenndie Primäreinheiten gleich viele Sekundäreinheiten enthalten.
∙ die stets sequentielle Auswahl; hier liegt der Stichprobenumfang nicht vor Be-ginn des Auswahlprozesses fest, es wird zunächst eine kleine Stichprobe ge-zogen und analysiert. Es erfolgt dann eine Entscheidung, ob die vorliegendeInformation hinreichend ist, z. B. um eine Hypothese abzulehnen oder anzu-nehmen (siehe Kapitel 3), oder ob mehr Information durch Ziehung einer wei-teren Einheit beschafft werden soll.
Sowohl ein zufälliges Stichprobenverfahren als auch eine willkürliche Auswahlaufs Geratewohl können zur gleichenkonkreten Stichprobe führen.Ob einer kon-kreten Stichprobe eine zufällige oder eine willkürliche Auswahl zugrunde liegt,kann nicht anhand dieser Stichprobe beurteilt werden, sondern eben nur anhanddes verwendeten Auswahlverfahrens.Bei der reinen Zufallsauswahl wird Definition 1.1 direkt angewendet, jedes Ele-
ment einer Grundgesamtheit vom Umfang N wird mit der gleichenWahrschein-lichkeit p derGrundgesamtheit entnommen.Wir nennen die Anzahl der Elemen-te in einer Stichprobeden Stichprobenumfangund bezeichnen diesen in der Regelmit n.Der praktisch wichtige Fall einer reinen Zufallsauswahl ist der, dass entnom-
mene Elemente nicht in die Grundgesamtheit zurückgelegt werden, wie das etwabei der Ziehung der Lottozahlen der Fall ist. Hier werden in Deutschland n = 6Zahlen aus N = 49 gegebenen Zahlen gezogen. Bei einer uneingeschränkten Zu-fallsstichprobe vom Umfang n haben alle möglichen
(Nn
)Teilmengen die gleiche
Wahrscheinlichkeit 1(Nn)
dafür, in die Stichprobe zu gelangen.
Ob eine Stichprobe eine Zufallsstichprobe ist oder nicht, kann man ihr – wiegesagt – nicht ansehen. Man muss vielmehr das Verfahren betrachten, mit demsie gezogen wurde. Allerdings wirdman sofort misstrauisch, wenn extreme Stich-proben auftreten. Wird aus einer Grundgesamtheit mit 10 000 Losen der Haupt-gewinn während des Kaufs eines speziellen Loses gezogen, so ist das schon un-gewöhnlich, kann aber, wie man im Volksmund sagt, schon mit rechten Dingenzugegangen sein, in unserer Terminologie also das Ergebnis eines Zufallsstich-probenverfahrens sein. Zieht dieselbe Person an drei aufeinanderfolgenden Ver-losungen den Hauptgewinn und stellt sich dann noch heraus, dass es sich um denBruder des Losverkäufers handelt, stellen sich berechtigte Zweifel ein. Wir wei-gern uns, Ereignisse mit solch geringer Wahrscheinlichkeit zu akzeptieren undvermuten, dass das zugrunde gelegte Modell falsch ist. In diesem Fall nehmen wiran, dass kein Zufallsstichprobenverfahren zugrunde gelegt wurde und Betrug imSpiel ist. Trotzdem besteht eine ganz geringeWahrscheinlichkeit für dieses Ereig-nis als Ergebnis eines Zufallsstichprobenverfahrens, nämlich 1/1 000 000 000 000.Nebenbei bemerkt bildet diese Art, Modelle (Sachverhalte) zu verwerfen, unter
denen ein beobachtetes Ereignis eine sehr kleineWahrscheinlichkeit hat und stattdessen solche Modelle zu akzeptieren, bei denen die Wahrscheinlichkeit diesesEreignisses größer ist, die Basis für die statistischen Tests in Kapitel 3.

6 1 Grundbegriffe der mathematischen Statistik
Bei einer Zufallsstichprobemit Zurücklegen wird auch ein reines Stichproben-verfahren verwendet, also jedes Element hat die gleiche Wahrscheinlichkeit mitZurücklegen gezogen zu werden. Es wird jedes gezogene und beobachtete Ele-ment in die Grundgesamtheit zurückgelegt, bevor das nächste Element gezogenwird. Das geht nur bei zerstörungsfreier Beobachtung, d. h. in solchen Fällen, beidenen sich die Stichprobeneinheit durch die Beobachtung nicht verändert (Bei-spiele, bei denen ein Zurücklegen nicht möglich ist, sind Zerreißproben, Unter-suchungen an geschlachteten Tieren, Fällen von Bäumen, Abernten u. a.). Die-ses Verfahren heißt einfaches Zufallsstichprobenverfahren mit Zurücklegen. BeiZufallsstichprobenverfahren ohne Zurücklegen erhält man n < N verschiedeneElemente, beim Zufallsstichprobenverfahrenmit Zurücklegen kann dasselbe Ele-ment mehrfach in der Stichprobe auftauchen und es kann auch n > N sein.Eine mitunter praktisch einfacher zu realisierende Methode ist die systemati-
sche Auswahl mit Zufallsstart. Sie ist anwendbar, wenn die Elemente der endli-chen Auswahlgrundlage von 1 bis N durchnummeriert sind und die Folge nichtmit demMerkmal zusammenhängt.WennN∕n ganzzahlig ist, wähltman zufälligeine Zahl i zwischen 1 und N∕n aus und bildet die Stichprobe aus den Elementeni, N∕n+ i, 2N∕n + i,…, (n− 1)N∕n + i. Näheres hierzu und was zu tun ist, wennN∕n nicht ganzzahlig ist, findetman bei (Rasch et al., 2008),Verfahren 1/31/1210.Die oben erwähnte geschichtete Auswahl bietet sich dann an, wenn die Grund-
gesamtheit vom Umfang N auf inhaltlich relevante Weise in s TeilgesamtheitenvomUmfang N1, N2, . . . , Ns zerfällt. Insbesondere kann die Grundgesamtheit ge-legentlich nach den Stufen eines vermuteten Störfaktors in solche Teilgesamthei-ten unterteilt werden. Man bezeichnet diese Teilgesamtheiten als Schichten.Willman aus dieser Grundgesamtheit Stichproben vom Umfang n erheben, so mussman bei einem uneingeschränkten Zufallsstichprobenverfahren befürchten, dassnicht alle Schichten überhaupt bzw. zumindest nicht in angemessener Weise be-rücksichtigt werden. Dann ist es besser, ein geschichtetes Zufallsstichprobenver-fahren durchzuführen.Man erhebt dabei jeweils Teilstichproben vomUmfang ni(i = 1, 2,…, s) aus der i-ten Schicht. Die Teilstichproben werden aus der jewei-ligen Schicht nach einem reinen Zufallsstichprobenverfahren gezogen. Dies ent-spricht, wenn ni∕n proportional zu Ni∕N gewählt wird, auch insgesamt einemZufallsstichprobenverfahren.Während beim geschichteten Zufallsstichprobenverfahren aus jeder Teilmen-
ge Elemente erhoben werden, werden bei der mehrstufigen Auswahl wie obenbeschrieben auf jeder Stufe zufällig Teilmengen oder Elemente entnommen.Im zweistufigen Fall bestehe die Grundgesamtheit aus k disjunkten Teilmengenvom Umfang N0, den Primäreinheiten. Es wird nun vorausgesetzt, dass sich dieMerkmalswerte zwischen den Primäreinheiten nur zufällig unterscheiden, sodassnicht aus allen Primäreinheiten Elemente entnommen werdenmüssen. Ist der ge-wünschte Stichprobenumfang n = rn0 mit r < k, so wählt man zunächst nacheinem reinen Zufallsstichprobenverfahren r der k Primäreinheiten aus. Aus jederder r in der ersten Stufe erhobenen Primäreinheiten wählt man in der zweitenStufe nach einem reinen Zufallsstichprobenverfahren je n0 Objekte (Sekundär-
71.2 MathematischeModelle für Grundgesamtheit und Stichprobe
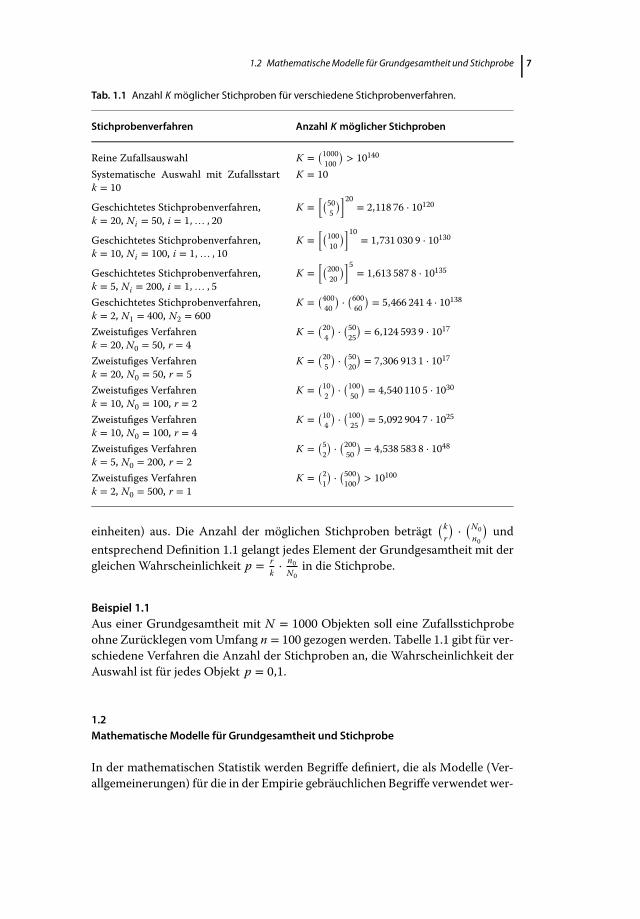
Tab. 1.1 Anzahl K möglicher Stichproben für verschiedene Stichprobenverfahren.
Stichprobenverfahren Anzahl K möglicher Stichproben
Reine Zufallsauswahl K =(1000100
)> 10140
Systematische Auswahl mit Zufallsstartk = 10
K = 10
Geschichtetes Stichprobenverfahren,k = 20, Ni = 50, i = 1,… , 20
K =[(50
5
)]20= 2,118 76 ⋅ 10120
Geschichtetes Stichprobenverfahren,k = 10, Ni = 100, i = 1,… , 10
K =[(100
10
)]10= 1,731 030 9 ⋅ 10130
Geschichtetes Stichprobenverfahren,k = 5, Ni = 200, i = 1,… , 5
K =[(200
20
)]5= 1,613 587 8 ⋅ 10135
Geschichtetes Stichprobenverfahren,k = 2, N1 = 400, N2 = 600
K =(40040
)⋅(60060
)= 5,466 241 4 ⋅ 10138
Zweistufiges Verfahrenk = 20, N0 = 50, r = 4
K =(204
)⋅(5025
)= 6,124 593 9 ⋅ 1017
Zweistufiges Verfahrenk = 20, N0 = 50, r = 5
K =(205
)⋅(5020
)= 7,306 913 1 ⋅ 1017
Zweistufiges Verfahrenk = 10, N0 = 100, r = 2
K =(102
)⋅(10050
)= 4,540 110 5 ⋅ 1030
Zweistufiges Verfahrenk = 10, N0 = 100, r = 4
K =(104
)⋅(10025
)= 5,092 904 7 ⋅ 1025
Zweistufiges Verfahrenk = 5, N0 = 200, r = 2
K =(52
)⋅(20050
)= 4,538 583 8 ⋅ 1048
Zweistufiges Verfahrenk = 2, N0 = 500, r = 1
K =(21
)⋅(500100
)> 10100
einheiten) aus. Die Anzahl der möglichen Stichproben beträgt(kr
)⋅(N0n0
)und
entsprechend Definition 1.1 gelangt jedes Element der Grundgesamtheit mit dergleichenWahrscheinlichkeit p = r
k⋅ n0N0
in die Stichprobe.
Beispiel 1.1Aus einer Grundgesamtheit mit N = 1000 Objekten soll eine Zufallsstichprobeohne Zurücklegen vomUmfang n = 100 gezogen werden. Tabelle 1.1 gibt für ver-schiedene Verfahren die Anzahl der Stichproben an, die Wahrscheinlichkeit derAuswahl ist für jedes Objekt p = 0,1.
1.2MathematischeModelle für Grundgesamtheit und Stichprobe
In der mathematischen Statistik werden Begriffe definiert, die als Modelle (Ver-allgemeinerungen) für die in der Empirie gebräuchlichenBegriffe verwendet wer-

8 1 Grundbegriffe der mathematischen Statistik
den. Der Grundgesamtheit, die einer Häufigkeitsverteilung der Merkmalswerteentspricht, wird als Modell die Wahrscheinlichkeitsverteilung gegenübergestellt.Die durch ein Zufallsstichprobenverfahrenentstandene konkrete Stichprobewirddurch die realisierte (theoretische) Zufallsstichprobe modelliert. Diese Modell-vorstellungen sind dann adäquat, wenn der Umfang N der Grundgesamtheit sehrgroß im Vergleich zum Umfang n der Stichprobe ist.
Definition 1.2Eine n-dimensionale Zufallsvariable
Y = (y1, y2,… , yn)T , n ≥ 1
mit den Komponenten yi heißt Zufallsstichprobe, wenn
∙ die yi die gleiche durch die Verteilungsfunktion F(yi , θ) = F(y, θ) charakteri-sierte Verteilung mit dem Parameter(vektor) θ ∈ Ω ⊆ Rp haben und
∙ die yi voneinander stochastisch unabhängig sind, sodass für die Verteilungs-funktion F(Y, θ) von Y
F(Y, θ) =n∏i=1
F(yi , θ), θ ∈ Ω ⊆ Rp
gilt.
DieWerte Y = (y1 , y2 ,… , yn)T einer Zufallsstichprobe Y heißenRealisationen.Die Gesamtheit {Y} allermöglichen Realisationen von Y heißt Stichprobenraum.In diesem Buch werden Zufallsvariablen fett gedruckt, und der Stichproben-
raum {Y} liegt stets im n-dimensionalen euklidischen Raum, d. h. {Y} ⊂ Rn .Die Funktion
L(Y, θ) =
{f (Y, θ) = 𝜕F(Y,θ)
𝜕Y, für kontinuierliche y
p(Y, θ) , für diskrete y
mit derWahrscheinlichkeitsfunktion p(Y, θ) bzw. der Dichtefunktion f (Y, θ) beigegebenem Y als Funktion von θ heißt Likelihood-Funktion.
Das Wort Zufallsstichprobe kann nun folgendes bedeuten:
∙ Zufallsstichprobe als Zufallsvariable Y nach Definition 1.2,∙ (konkrete) Zufallsstichprobe als Teilmenge einer Population (Grundgesamt-
heit), die nach einem Zufallsstichprobenverfahren ausgewählt wurde.
Die Realisationen Y einer Zufallsstichprobe Y werden wir dagegen stets realisier-te Zufallsstichprobe nennen.Eine ZufallsstichprobeY ist das mathematischeModell des reinen Zufallsstich-
probenverfahrens, konkrete Zufallsstichprobe und realisierte Zufallsstichprobeentsprechen einander auch in der Symbolik.

91.3 Suffizienz und Vollständigkeit
Wir beschreiben in diesem Buch das „klassische“ Vorgehen, nach dem Y mitder Verteilungsfunktion F(Y, θ) mit dem festen (nicht zufälligen) Parameter θ ∈Ω ⊆ Rp verteilt ist. Daneben gibt es das Bayessche Vorgehen, bei dem man einzufälliges θ annimmt, das mit einer a-priori-Verteilung mit einem als bekanntvorausgesetztem Parameter 𝜑 verteilt ist. Beim empirischen Bayesschen Vorge-hen wird die a-priori-Verteilung aus bereits ermittelten Daten geschätzt.
1.3Suffizienz und Vollständigkeit
Eine Zufallsgröße enthält gewisse Informationen über die Verteilung und derenParameter. Vor allem für große n (etwa n> 100)möchtemandie Elemente der Zu-fallsstichprobe so verdichten, dass möglichst wenige neue Zufallsvariablen mög-lichst viel von dieser Information enthalten.Diese unklar formulierteWunschvor-stellung soll jetzt schrittweise bis zum Konzept der minimal suffizientenMaßzahlpräzisiert werden. Zunächst wiederholen wir hier die Definition einer Exponen-tialfamilie.Die Verteilung einer Zufallsvariablen y mit dem Parametervektor θ = (θ1, θ2 ,
… , θp)T gehört zu einer k-parametrischen Exponentialfamilie, wenn ihre Likeli-hood-Funktion in der Form
f (y, θ) = h(y)e∑k
i=1 ηi(θ)⋅Ti (y)−B(θ)
geschrieben werden kann, wobei folgendes gilt:
∙ ηi und B sind reelle Funktionen von θ und B hängt nicht von y ab.∙ Die Funktion h(y) ist nichtnegativ und hängt nicht von θ ab.
Die Exponentialfamilie ist in kanonischer Formmit den sogenannten natürlichenParametern ηi , falls ihre Elemente als
f (y, η) = h(y)e∑k
i=1 ηi ⋅Ti (y)−A(η) mit η = (η1,… , ηk )T
geschrieben werden können.Wir gehen von einer Verteilungsfamilie (Pθ , θ ∈ Ω) von Zufallsvariablen ymit
der Verteilungsfunktion F(y, θ), θ ∈ Ω aus. Die Realisationen Y = (y1 ,… , yn)Tder Zufallsstichprobe
Y = (y1, y2,… , yn)T
mit wie y verteilten Komponenten liegen im Stichprobenraum {Y}. Nach Defi-nition 1.2 ist mit F(y, θ) auch die Verteilungsfunktion F(Y, θ) einer Zufallsstich-probe Y eindeutig festgelegt.

10 1 Grundbegriffe der mathematischen Statistik
Definition 1.3Eine messbare Abbildung M = M(Y ) = [M1(Y ),… ,Mr (Y )]T, r ≤ n von {Y} aufeinen Raum {M}, die nicht von θ ∈ Ω abhängt, heißt (statistische) Maßzahl oderauch Statistik.
Definition 1.4Eine Maßzahl M heißt suffizient oder erschöpfend bezüglich einer Verteilungs-familie (Pθ , θ ∈ Ω) bzw. bezüglich θ ∈ Ω, falls die bedingte Verteilung einer Zu-fallsstichprobe Y bei gegebenem M = M(Y ) = M(Y ) von θ unabhängig ist.
Beispiel 1.2Die Komponenten einer Zufallsstichprobe Y mögen einer Zweipunktverteilungmit denWerten 1 und 0 folgen. Dabei sei P(yi = 1) = p und P(yi = 0) = 1− pmit0 < p < 1. Dann istM = M(Y ) =
∑ni=1 yi suffizient bezüglich θ ∈ (0, 1) = Ω. Um
das zu zeigen, müssen wir nachweisen, dass P(Y = Y |∑ni=1 yi = M) von p un-
abhängig ist. Nun ist P(Y = Y |M) = P(Y=Y,M=M)P(M=M)
, M = 0, 1,… , n. Aus der Wahr-scheinlichkeitsrechnung wissen wir, dass M = M(Y ) =
∑ni=1 yi binomialverteilt
ist mit den Parametern n und p, also gilt:
P(M = M) =(nM
)pM(1 − p)n−M , M = 0, 1,…, n
Ferner ist mit yi = 0 oder yi = 1 und A(M) = {Y |M(Y ) = M}
P[Y = Y,M(Y ) = M] = P(y1 = y1,… , yn = yn)IA(M)(Y )
=n∏i=1
((1yi
)pyi (1 − p)1−yi
)IA(M)(Y )
= p∑n
i=1 yi (1 − p)n−∑n
i=1 yi IA(M)(Y )
= pM(1 − p)n−M
Daher ist P(Y = Y |M) = 1( nM)
und das ist unabhängig von p.
Auf diese Weise ist der Nachweis der Suffizienz recht mühsam, er gelingt aberauch für kontinuierliche Verteilungen, wie das nächste Beispiel zeigt.
Beispiel 1.3Die Komponenten yi einer ZufallsstichprobeY vomUmfang n seien nachN(μ, 1)mit Erwartungswert μ und Varianz σ2 = 1 verteilt. Dann ist M =
∑yi suffizient
bezüglich μ ∈ R1 = Ω. Um das zu zeigen, vermerken wir zunächst, dass Y nachN(μen , En) verteilt ist. Nun führen wir die eineindeutige Transformation
Z = AY = (z1 =∑
yi , y2− y1,… , yn − y1) mit A =
(1 eTn−1
−en−1 En−1
)

111.3 Suffizienz und Vollständigkeit
durch, es gilt |A| = n. Wir schreiben Z = (z1, Z2) = (∑
yi , y2 − y1,… , yn − y1)und sehen, dass
cov(Z2, z1) = cov(Z2,M) = cov((−en−1 , En−1)Y , eTnY
)= 0n−1
gilt.Wegen der Normalverteilungsannahme sind damit M und Z2 stochastisch un-
abhängig. Damit sind Z2, aber auch Z2|M und auch Z|M von μ unabhängig. We-gen der Eineindeutigkeit der Abbildung Z = AY ist auch Y |M von μ unabhängigund damit ist M =
∑yi suffizient bezüglich μ ∈ R1. Mit M =
∑yi und einer
reellen Zahl c ≠ 0 ist stets auch cM also z. B. 1n
∑yi = y suffizient.
Die Suffizienz spielt nun aber in dermathematischen Statistik eine so große Rolle,dass wir einfachere Methoden zum Nachweis der Suffizienz und vor allem zumAuffinden suffizienter Maßzahlen benötigen. Der nachfolgende Satz hilft uns daweiter.
Satz 1.1 ZerlegungssatzGegeben sei eine Verteilungsfamilie (Pθ , θ ∈ Ω) einer Zufallsstichprobe Y , dievon einem endlichen Maß ν dominiert wird. Die Maßzahl M(Y ) ist genau dannbezüglich θ suffizient, wenn die Radon-Nikodyn-Dichte fθ von Pθ bezüglich ν inder Form
fθ(Y ) = gθ[M(Y )]h(Y ) (1.1)
ν- fast überall geschrieben werden kann, wobei gilt: die v-integrierbare Funkti-on gθ ist nichtnegativ und messbar, h ist nichtnegativ und h(Y ) = 0 nur für einePθ-Nullmenge.
Der allgemeine Beweis stammt von Halmos und Savage (1949), man findet ihnauch z. B. bei Bahadur (1955) oder Lehmann (1959).Wir beschäftigen uns in diesem Buch nur mit diskreten und kontinuierlichen
Wahrscheinlichkeitsverteilungen, die die Voraussetzungen dieses Satzes erfüllen.Den Beweis des Satzes für solche Verteilungen gibt Rasch (1995). Wir verzichtenhier auf dessenWiederholung.Für diskrete Verteilungen bedeutet dieser Satz, dass die Wahrscheinlichkeits-
funktion die Form
p(Y, θ) = g[M(Y ), θ]h(Y ) (1.2)
hat. Für kontinuierliche Verteilungen hat die Dichtefunktion die Form
f (Y, θ) = g[M(Y ), θ]h(Y ) (1.3)

12 1 Grundbegriffe der mathematischen Statistik
Korollar 1.1Ist die Verteilungsfamilie (P∗(θ), θ ∈ Ω) der Zufallsvariablen y eine k-parametri-sche Exponentialfamilie mit natürlichem Parameter η und der Likelihood-Funk-tion
L∗(y, η) = h∗(y)e∑k
j=1 M∗j (y)−A(η) (1.4)
so ist mit der Zufallsstichprobe Y = (y1, y2,… , yn)T
M(Y ) =
( n∑i=1
M∗1(yi),… ,
n∑i=1
M∗k (yi)
)T
(1.5)
suffizient bezüglich θ.
Beweis: Es gilt
L(y, η) =n∏i=1
h∗(yi)e∑k
j=1 η j∑n
i=1 M∗j (yi)−nA(η) (1.6)
und das hat die Form (1.2) bzw. (1.3) mit h(Y ) =∏n
i=1 h∗(yi) und θ = η.
Definition 1.5Zwei Likelihood-Funktionen L1(Y1 , θ) und L2(Y2 , θ) heißen äquivalent, L1 ∼ L2,wenn
L1(Y1 , θ) = a(Y1 , Y2)L2(Y2 , θ) (1.7)
mit einer von θ unabhängigen Funktion a(Y1 , Y2) ist.
Dann folgt aus Satz 1.1
Korollar 1.2M(Y ) ist genau dann suffizient bezüglich θ, wenn die Likelihood-FunktionLM(M, θ) vonM = M(Y ) äquivalent zur Likelihood-Funktion einer Zufallsstich-probe Y ist.
Beweis: IstM(Y ) suffizient, so hat mit L(Y, η) wegen
LM(M, θ) = a(Y )L(Y, θ), a(Y ) > 0 (1.8)
auch LM(M, θ) die Form (1.1). Gilt andererseits (1.8), so folgt, dass die bedingteVerteilung einer ZufallsstichprobeY bei gegebenemM(Y ) =M von θ unabhängigist.

131.3 Suffizienz und Vollständigkeit
Beispiel 1.4Die Komponenten yi einer Zufallsstichprobe Y = (y1, y2,… , yn)T seien nachN(μ, 1) verteilt. Es gilt:
L(Y, μ) = 1(√2π)n e
− 12 (Y−μen )
T(Y−μeN ) = 1(√2π)n e
− 12∑n
i=1 (yi− y)2e−n2 ( y−μ)
2
(1.9)
Da M(Y ) = y nach N(μ, 1n) verteilt ist, ist
LM( y, μ) =√n√2π
e−n2 ( y−μ)
2(1.10)
und damit gilt LM( y, μ) ∼ L(Y, μ) und y ist suffizient bezüglich μ.
Allgemein folgt unmittelbar aus Definition 1.4
Korollar 1.3Ist c > 0 eine von θ unabhängig gewählte reelle Zahl und M(Y ) suffizient bezüg-lich θ, so ist auch cM(Y ) suffizient bezüglich θ.
So ist also z. B. mit M =∑
yi und c = 1nauch 1
n
∑yi = y suffizient.
Man kann nun die Frage stellen, ob es unter den suffizientenMaßzahlen bezüg-lich einer Verteilungsfamilie P∗(θ), θ ∈ Ω solche Maßzahlen gibt, die in einemnoch zu definierenden Sinne minimal sind, also möglichst wenige Komponentenenthalten. Wie das folgende Beispiel zeigt, ist diese Frage nicht abwegig.
Beispiel 1.5Es sei P∗(θ), θ ∈ Ω die Familie der N(μ, σ2)-Normalverteilungen (σ > 0). Wirbetrachten die Maßzahlen einer Zufallsstichprobe Y vom Umfang n:
M1(Y ) = Y
M2(Y ) =(y21,… , y2n
)TM3(Y ) =
( r∑i=1
y2i ,n∑
i=r+1y2i ,
)T
, r = 1,… , n − 1
M4(Y ) =
( n∑i=1
y2i
)die alle bezüglich σ2 suffizient sind. Das zeigt man sehr einfach mithilfe von Ko-rollar 1.1 zum Zerlegungssatz. Die Likelihood-Funktion von M1(Y ) und Y sindidentisch (und damit äquivalent). Da mit den yi auch die y2i unabhängig sind und

14 1 Grundbegriffe der mathematischen Statistik
die y2iσ2
= χ2i nach CQ(1) χ2-verteilt sind, folgt nach der Transformation y2i = σ2χ2i
LM(M2(Y ), σ2) ∼ L(Y, σ2) = 1(2πσ2)
n2
e−1
2σ2∑n
i=1 y2i (1.11)
Analog verfährt man mit M3(Y ) und M4(Y ).
Sicher stellt M4(Y ) die weitestgehende Zusammenfassung der Komponenten ei-ner Zufallsstichprobe Y dar und ist gegenüber den anderenMaßzahlen vorzuzie-hen.
Definition 1.6Eine bezüglich θ suffizienteMaßzahlM∗(Y ) heißt minimal suffizient bezüglich θ,wenn sie sich als eine Funktion jeder anderen suffizientenMaßzahlM(Y ) darstel-len lässt.
Betrachten wir Beispiel 1.5, so ist
M4(Y ) = MT1 (Y )M1(Y ) = eTnM2 =
(1 1
)M3 , r = 1,… , n − 1
Damit kann M4(Y ) als Funktion aller suffizienten Maßzahlen des Beispiels ge-schrieben werden. Für M1(Y ), M2(Y ) und M3(Y ) gilt das nicht, sie sind keineFunktionen von M4(Y ). M4(Y ) ist die einzige Maßzahl des Beispiels 1.5, die mi-nimal suffizient bezüglich σ2 sein könnte. Wir werden sehen, dass sie tatsächlichdiese Eigenschaft besitzt. Wie kann man nun aber die Minimalsuffizienz feststel-len?Wir überlegen uns, dass manmithilfe einerMaßzahlM(Y ) den Stichproben-raum in elementefremde Teilmengen derart zerlegen kann, dass alle Y , für dieM(Y ) den gleichen Wert M ergibt, derselben Teilmenge angehören. Umgekehrtist durch eine gegebene Zerlegung auch dieMaßzahl definiert.Wir definieren nuneine Zerlegung, von derwir zeigenwerden, dass durch sie eineminimal suffizienteMaßzahl gegeben ist.
Definition 1.7Es sei Y0 ∈ {Y} ein fester Punkt im Stichprobenraum (ein bestimmter Wert ei-ner realisierten Zufallsstichprobe), der die Realisationen einer ZufallsstichprobeY mit Komponenten aus einer Familie (P∗(θ), θ ∈ Ω) von Wahrscheinlichkeits-verteilungen enthält. Über die Likelihood-Funktion L(Y, θ) wird durch
M(Y0) = {Y : L(Y, θ) ∼ L(Y0 , θ)} (1.12)
eine Teilmenge in {Y} definiert. Lassen wir Y0 den ganzen Stichprobenraum {Y}durchlaufen, so wird eine Zerlegung erzeugt. Diese Zerlegung heißt Likelihood-Zerlegung, die ihr entsprechendeMaßzahlML(Y ) für dieML(Y ) = konst. für alleY ∈ M(Y 0) und für jedes Y 0 gilt, heißt Likelihood-Maßzahl.

151.3 Suffizienz und Vollständigkeit
Bevorwir mit dieserMethodeminimal suffizienteMaßzahlen für einige Beispielekonstruieren, formulieren wir den
Satz 1.2Die Likelihood-MaßzahlML(Y ) ist minimal suffizient bezüglich θ.
Beweis: Für die Likelihood-MaßzahlML(Y ) gilt mit Y1 , Y2 ∈ {Y}
ML(Y 1) = ML(Y 2)
genau dann, wenn L(Y1 , θ) ∼ L(Y2 , θ) ist. Damit ist L(Y, θ) eine Funktion vonML(Y ) der Form
L(Y, θ) = a(Y )g∗(ML(Y ), θ) (1.13)
und nach dem Zerlegungssatz istML(Y ) suffizient bezüglich θ. IstM(Y ) eine be-liebige andere bezüglich θ suffiziente Maßzahl und gilt für zwei Punkte Y1, Y2 ∈{Y} die BeziehungM(Y 1) = M(Y 2) sowie L(Yi , θ) > 0 mit i = 1, 2, so folgt eben-falls aus dem Zerlegungssatz
L(Y1, θ) = h(Y1)g(M(Y 1), θ) = h(Y2)g(M(Y 2), θ)
wegen M(Y 1) = M(Y 2) und L(Y2 , θ) = h(Y2)g(M(Y 2), θ) bzw. g(M(Y 2), θ) =L(Y2 ,θ)h(Y2)
.Damit wird L(Y1, θ) zu
L(Y1, θ) =h(Y1)h(Y2)
L(Y2 , θ), h(Y2) > 0
sodass L(Y1 , θ) ∼ L(Y2, θ) ist. Das ist aber gerade die Bedingung dafür, dassM(Y 1) = M(Y 2) ist. Folglich ist ML(Y ) eine Funktion von M(Y ), wie M(Y ) auchgewählt wird und damit minimal suffizient.
Wir demonstrieren das Verfahren an zwei Beispielen.
Beispiel 1.6Die Komponenten yi einer Zufallsstichprobe Y seien nach B(N , p), N fest, 0 <p < 1 binomialverteilt. Es ist eine bezüglich p minimal suffiziente Maßzahl ge-sucht. Die Likelihood-Funktion ist
L(Y, p) =n∏i=1
(Nyi
)pyi (1 − p)(N−yi) , yi = 0, 1,… ,N
Für alle Y0 = (y01 ,… , y0N )T ∈ {Y}mit L(Y0 , p) > 0 ist
L(Y, p)L(Y0, p)
=
∏ni=1
(Nyi
)∏n
i=1( Ny0i
) ( p1 − p
)∑ni=1 (yi−y0i)

16 1 Grundbegriffe der mathematischen Statistik
Damit istM(Y0) auch durchM(Y0) = {Y :∑n
i=1 yi =∑n
i=1 y0i} definiert, da geradedort L(Y, p) ∼ L(Y0, p) gilt. Folglich istM(Y ) =
∑ni=1 yi eine minimal suffiziente
Maßzahl.
Beispiel 1.7Die Komponenten yi einer Zufallsstichprobe Y = (y1, y2,… , yn)T seien gamma-verteilt. Dann ist für yi > 0
L(Y, a , k) = ank
[Γ(k)]ne−a
∑ni=1 yi
n∏i=1
yk−1i
Für alle Y0 = (y01 ,… , y0N )T ∈ {Y}mit L(Y0 , a , k) > 0 ist
L(Y, a , k)L(Y0 , a , k)
= e−a(∑n
i=1 yi−∑n
i=1 y0i)∏n
i=1 yk−1i∏n
i=1 yk−10i
Ist a vorgegeben, so ist∏n
i=1 yi minimal suffizient bezüglich k. Ist k bekannt, soist
∑yi minimal suffizient bezüglich a. Sind a und k unbekannte Parameter, so
ist (∏n
i=1 yi ,∑n
i=1 yi) minimal suffizient bezüglich (a , k).
Allgemein gilt:
Satz 1.3Ist (P∗(θ), θ ∈ Ω) eine k-parametrische Exponentialfamilie mit der Likelihood-Funktion in kanonischer Form
L(y, θ) = e∑k
i=0 ηiMi(y)−A(η)h(y)
wobei die Dimension des Parameterraumes gleich k ist (d. h., die η1,… , ηk linearunabhängig sind), dann ist
M(Y ) =
( n∑i=1
M1(yi),… ,n∑i=1
Mk (yi)
)T
minimal suffizient bezüglich (P∗(θ), θ ∈ Ω).
Beweis: Die Suffizienz von M(Y ) folgt aus Korollar 1.1 zum Zerlegungssatz, unddie Minimalsuffizienz folgt aus der Tatsache, dass M(Y ) die Likelihood-Maßzahlist, denn es ist genau dann L(Y, θ) ∼ L(Y0 , θ), wenn
k∑j=1
η j
n∑i=1
[Mj(yi) −Mj(y0i)] = 0
gilt, undwegen der linearenUnabhängigkeit der ηi ist das nur dann der Fall, wennM(Y ) = M(Y 0) gilt.