Digitale Signalverarbeitung Teil 4: Filter · Transponiert man die vorherige Struktur, d.h. man...
128
Seite IV-1 Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Technische Fakultät Elektrotechnik und Informationstechnik Digitale Signalverarbeitung und Systemtheorie Digitale Signalverarbeitung Teil 4: Filter
Transcript of Digitale Signalverarbeitung Teil 4: Filter · Transponiert man die vorherige Struktur, d.h. man...
Seite IV-1
Gerhard Schmidt
Christian-Albrechts-Universität zu KielTechnische FakultätElektrotechnik und InformationstechnikDigitale Signalverarbeitung und Systemtheorie
Digitale Signalverarbeitung
Teil 4: Filter
Seite IV-2Seite IV-2Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Gesamtübersicht
Inhalt der Vorlesung
❑ Einführung
❑ Signale
❑ Spektren
❑ Filter
❑ Beschreibungen
❑ Zustandsraumdarstellung
❑ Äquivalente Filterstrukturen
❑ Realisierungsaspekte
❑ Kalman-Filter
Seite IV-3Seite IV-3Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Beschreibungen – Teil 1
Grundlagen – Teil 1
Wir wollen hier diskrete (später auch digitale) Filter mit folgenden Eigenschaften betrachten:
❑ linear,
❑ verschiebungsinvariant,
❑ kausal,
❑ dynamisch und
❑ mit einem Eingang und einem Ausgang.
Wir werden das Ein-Ausgangsverhalten in verschiedenen Weisen (i.A. das Zeit- oder dasFrequenzverhalten) beschreiben. In der Vorlesung „Signale und Systeme“ haben wir dazuverschiedene Beschreibungsformen kennengelernt – diese werden auf den nächsten Folienkurz wiederholt.
Seite IV-4Seite IV-4Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Beschreibungen – Teil 2
Grundlagen – Teil 2
Wir können ein Filter mit Hilfe dessen Übertragungsfunktion
beschreiben. Ohne Beschränkung der Allgemeinheit können wir hier fordern, dass der Zählergradgleich dem Nennergrad sein soll. In diesem Fall können wir die Übertragungsfunktion so normieren,dass gilt . Durch Umformung kann daraus die sog. Produktform gewonnen werden, welche explizit die Pol- und Nullstellen beinhaltet:
Die Lage der Polstellen bestimmt dabei die Stabilität des Filters.
Seite IV-5Seite IV-5Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Beschreibungen – Teil 3
Grundlagen – Teil 3
Unter Kenntnis der Polstellen kann daraus wiederum die Summenform bestimmt werden.
bezeichnet dabei die Häufigkeit der -ten Polstelle. Gleichwertig zur Übertragungsfunktionkann man durch Betrachtung einer Exponentialanregung eine sog. Differenzengleichung
herleiten. Stellt man dies nach dem aktuellen Ausgangssignal um, so erhält man
Die Eingänge und die alten Ausgänge bezeichnen denSpeicher des Systems.
Summenform für verschiedene -fache Pole
Seite IV-6Seite IV-6Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Beschreibungen – Teil 4
Grundlagen – Teil 4
Um die Äquivalenz von Differenzialgleichung und Übertragungsfunktion zu zeigen, gehen wirvon folgendem Ansatz aus:
Wenn wir ein (LTI-) System mit einer gewichteten Eigenfunktion
anregen, so erhalten wir am Ausgang
Setzen wir dies in die Differenzengleichung ein, so erhalten wir
Lösen wir dies nach auf, so erhalten wir die Übertragungsfunktion.
… beschreibt die komplexe Amplitude des Anregungssignals ...
Seite IV-7Seite IV-7Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Beschreibungen – Teil 5
Grundlagen – Teil 5
Eine andere Beschreibungsform für Systeme stellt die sog. Zustandsraumdarstellung dar (vergleicheVorlesung „Signale und Systeme“). Diese Darstellung wird durch die System- und die Messgleichungbeschrieben:
Die oben dargestellte Form stellt dabei die allgemeine vektorielle Version dar. Für Systeme mit nur einem Eingang und einem Ausgang reduzieren sich einige der Parameter von Matrizen zu Vektoren. Die Parameter der Zustandsraumdarstellung können wie folgt in eine Matrix ausÜbertragungsfunktionen umgewandelt werden (siehe Vorlesung „Signale und Systeme“):
Hierbei stellt sich die Frage, ob dies auch (eindeutig) umkehrbar ist.
Seite IV-8Seite IV-8Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 1
Grundlagen – Teil 1
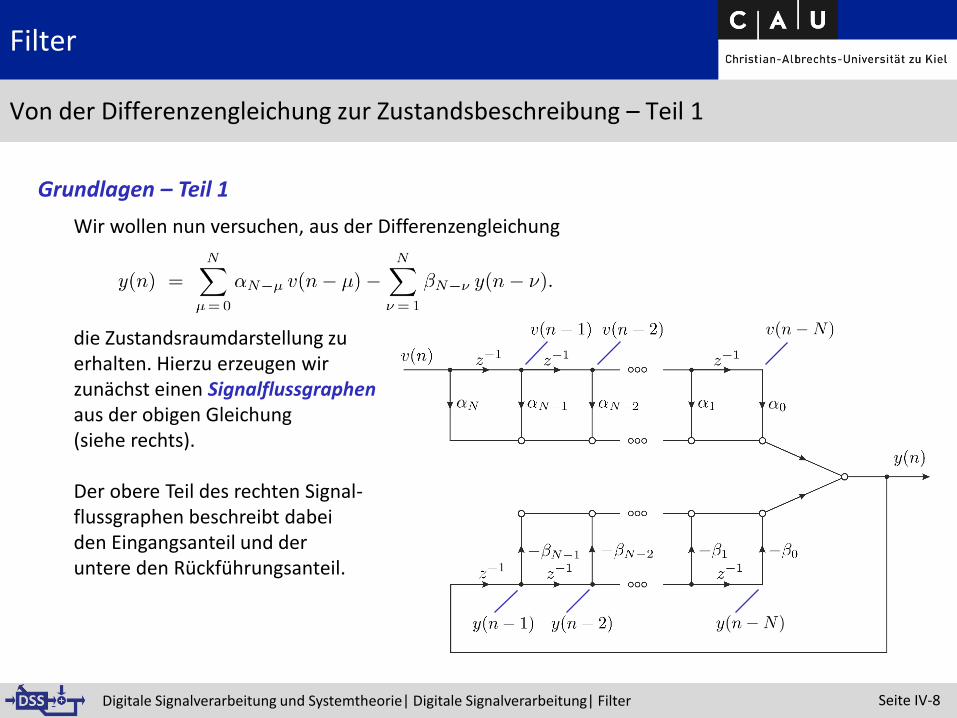
Wir wollen nun versuchen, aus der Differenzengleichung
die Zustandsraumdarstellung zu erhalten. Hierzu erzeugen wir zunächst einen Signalflussgraphenaus der obigen Gleichung(siehe rechts).
Der obere Teil des rechten Signal-flussgraphen beschreibt dabeiden Eingangsanteil und der untere den Rückführungsanteil.
Seite IV-9Seite IV-9Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 2
Grundlagen – Teil 2
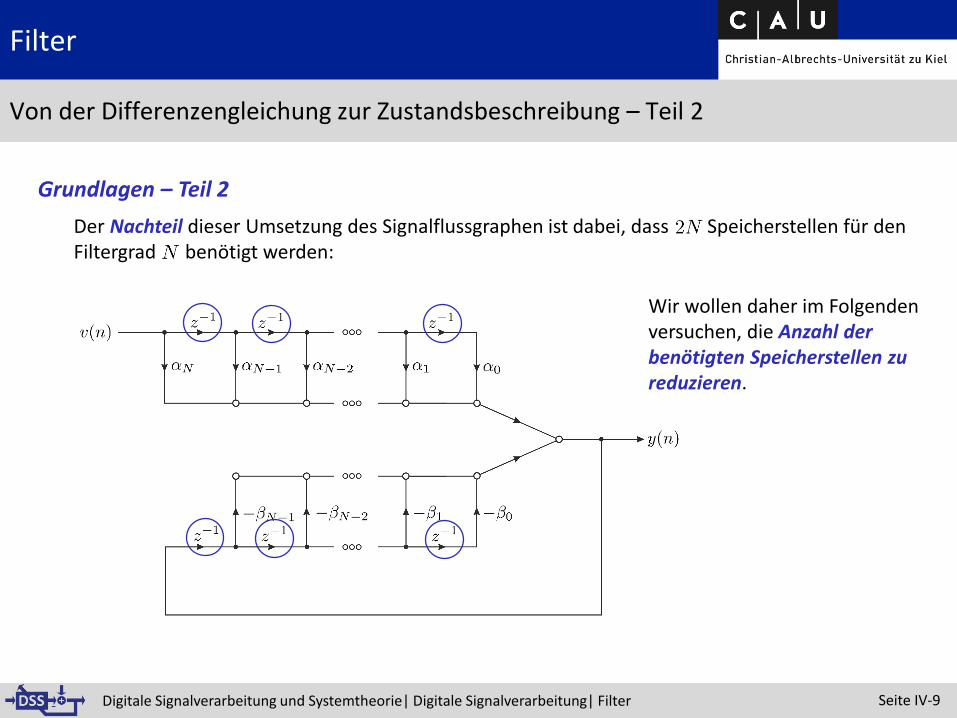
Der Nachteil dieser Umsetzung des Signalflussgraphen ist dabei, dass Speicherstellen für denFiltergrad benötigt werden:
Wir wollen daher im Folgendenversuchen, die Anzahl der benötigten Speicherstellen zureduzieren.
Seite IV-10Seite IV-10Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 3
Grundlagen – Teil 3
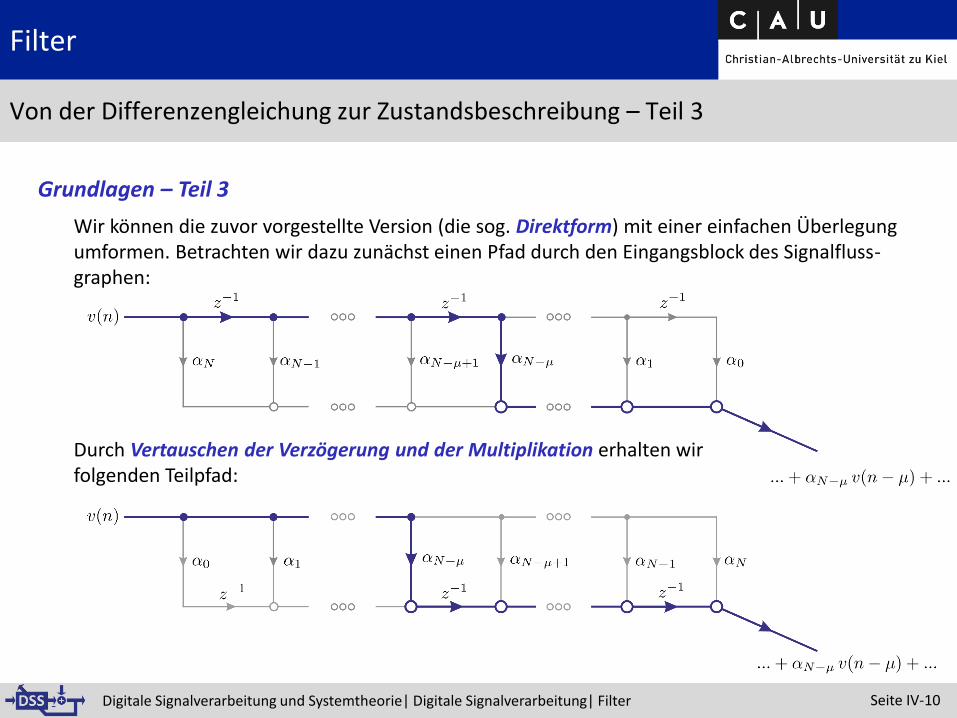
Wir können die zuvor vorgestellte Version (die sog. Direktform) mit einer einfachen Überlegungumformen. Betrachten wir dazu zunächst einen Pfad durch den Eingangsblock des Signalfluss-graphen:
Durch Vertauschen der Verzögerung und der Multiplikation erhalten wir folgenden Teilpfad:
Seite IV-11Seite IV-11Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 4
Grundlagen – Teil 4
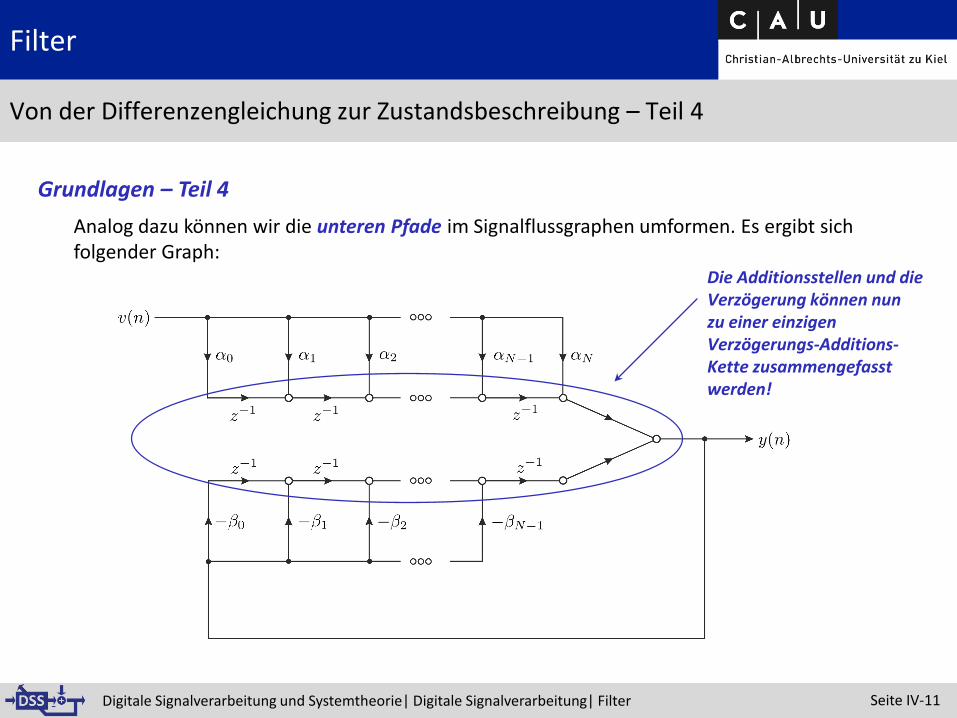
Analog dazu können wir die unteren Pfade im Signalflussgraphen umformen. Es ergibt sich folgender Graph:
Die Additionsstellen und die Verzögerung können nun zu einer einzigen Verzögerungs-Additions-Kette zusammengefasst werden!
Seite IV-12Seite IV-12Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
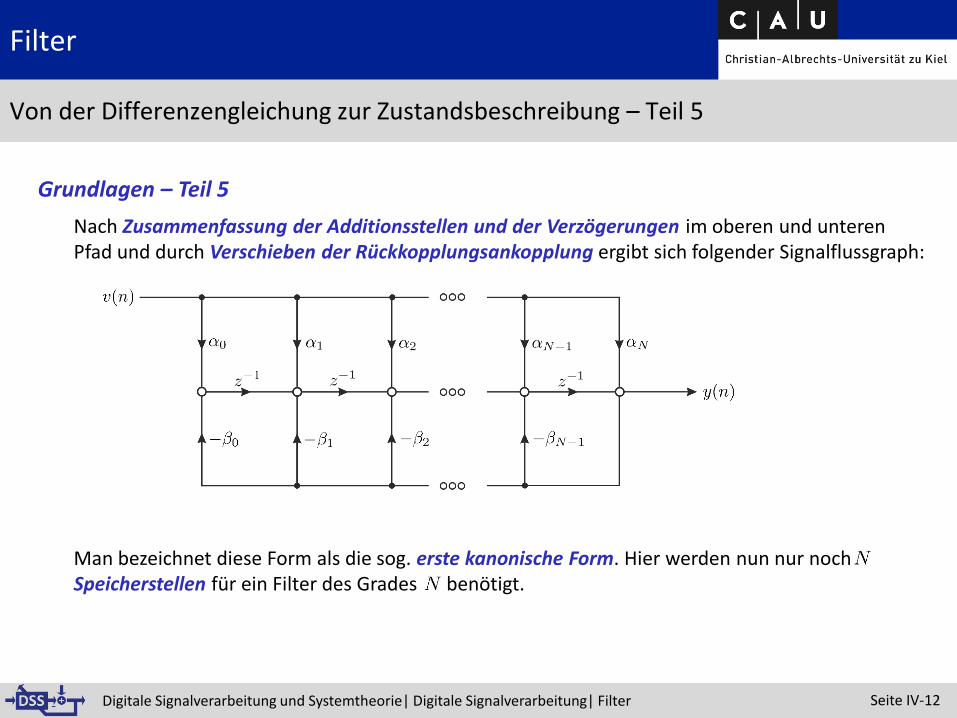
Nach Zusammenfassung der Additionsstellen und der Verzögerungen im oberen und unterenPfad und durch Verschieben der Rückkopplungsankopplung ergibt sich folgender Signalflussgraph:
Man bezeichnet diese Form als die sog. erste kanonische Form. Hier werden nun nur noch Speicherstellen für ein Filter des Grades benötigt.
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 5
Grundlagen – Teil 5
Seite IV-13Seite IV-13Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 6
Grundlagen – Teil 6
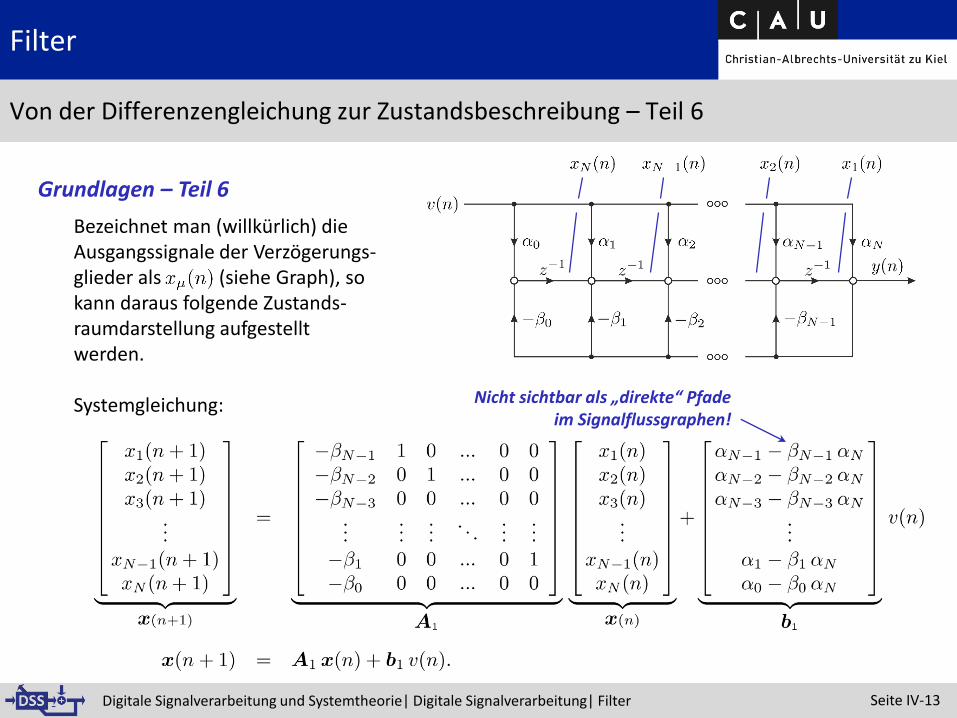
Bezeichnet man (willkürlich) die Ausgangssignale der Verzögerungs-glieder als (siehe Graph), sokann daraus folgende Zustands-raumdarstellung aufgestellt werden.
Systemgleichung: Nicht sichtbar als „direkte“ Pfadeim Signalflussgraphen!
Seite IV-14Seite IV-14Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 7
Grundlagen – Teil 7
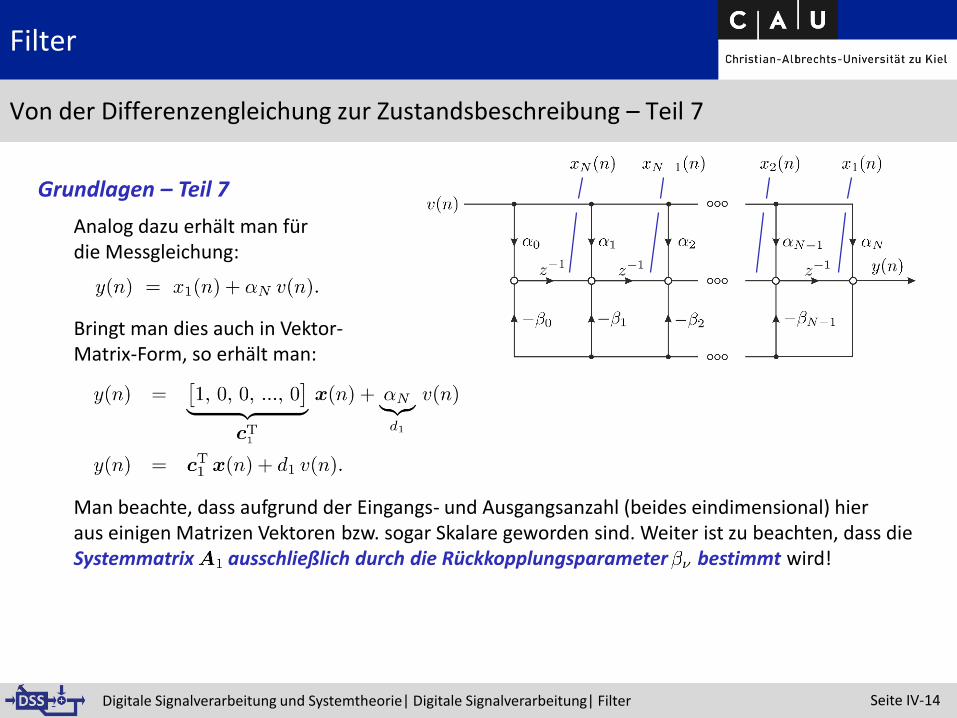
Analog dazu erhält man für die Messgleichung:
Bringt man dies auch in Vektor-Matrix-Form, so erhält man:
Man beachte, dass aufgrund der Eingangs- und Ausgangsanzahl (beides eindimensional) hieraus einigen Matrizen Vektoren bzw. sogar Skalare geworden sind. Weiter ist zu beachten, dass dieSystemmatrix ausschließlich durch die Rückkopplungsparameter bestimmt wird!
Seite IV-15Seite IV-15Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 8
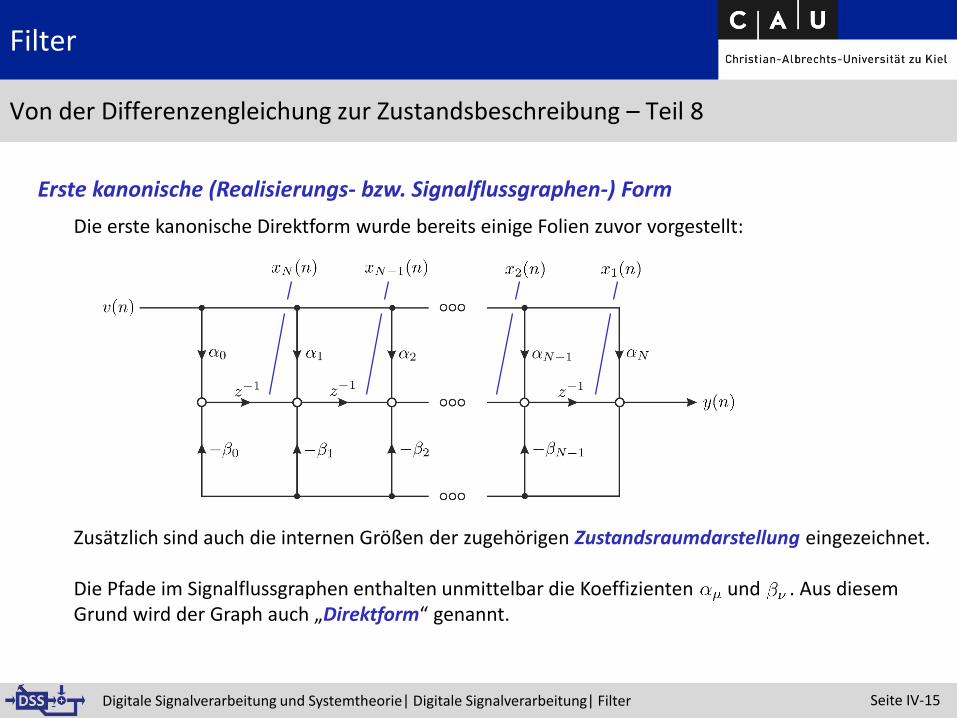
Erste kanonische (Realisierungs- bzw. Signalflussgraphen-) Form
Die erste kanonische Direktform wurde bereits einige Folien zuvor vorgestellt:
Zusätzlich sind auch die internen Größen der zugehörigen Zustandsraumdarstellung eingezeichnet.
Die Pfade im Signalflussgraphen enthalten unmittelbar die Koeffizienten und . Aus diesemGrund wird der Graph auch „Direktform“ genannt.
Seite IV-16Seite IV-16Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 9
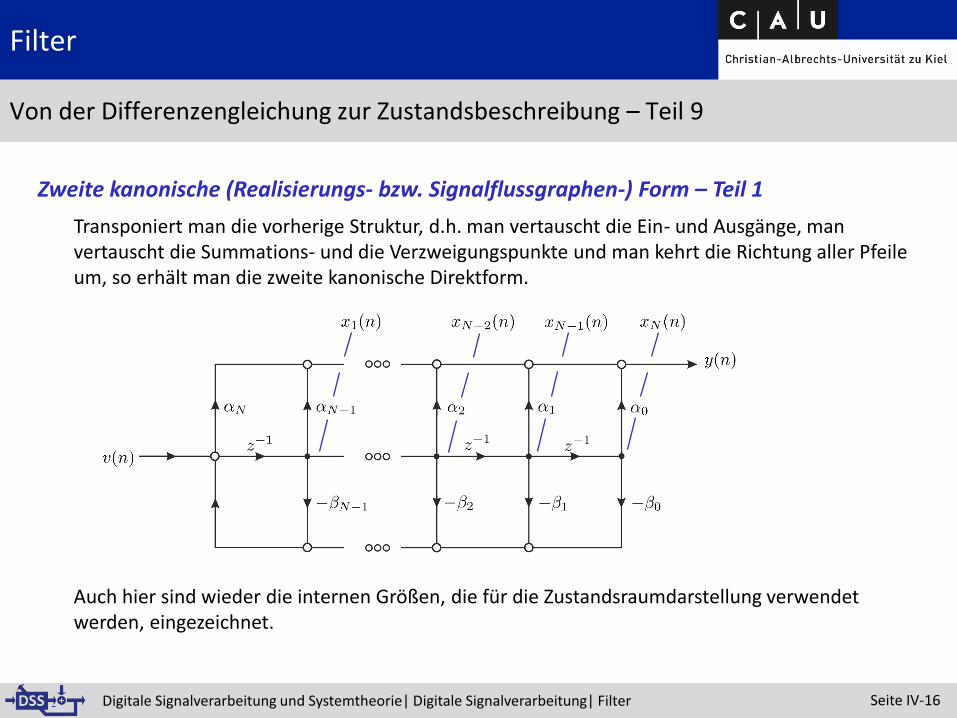
Zweite kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 1
Transponiert man die vorherige Struktur, d.h. man vertauscht die Ein- und Ausgänge, manvertauscht die Summations- und die Verzweigungspunkte und man kehrt die Richtung aller Pfeileum, so erhält man die zweite kanonische Direktform.
Auch hier sind wieder die internen Größen, die für die Zustandsraumdarstellung verwendetwerden, eingezeichnet.
Seite IV-17Seite IV-17Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Verständnisfragen – Teil 1
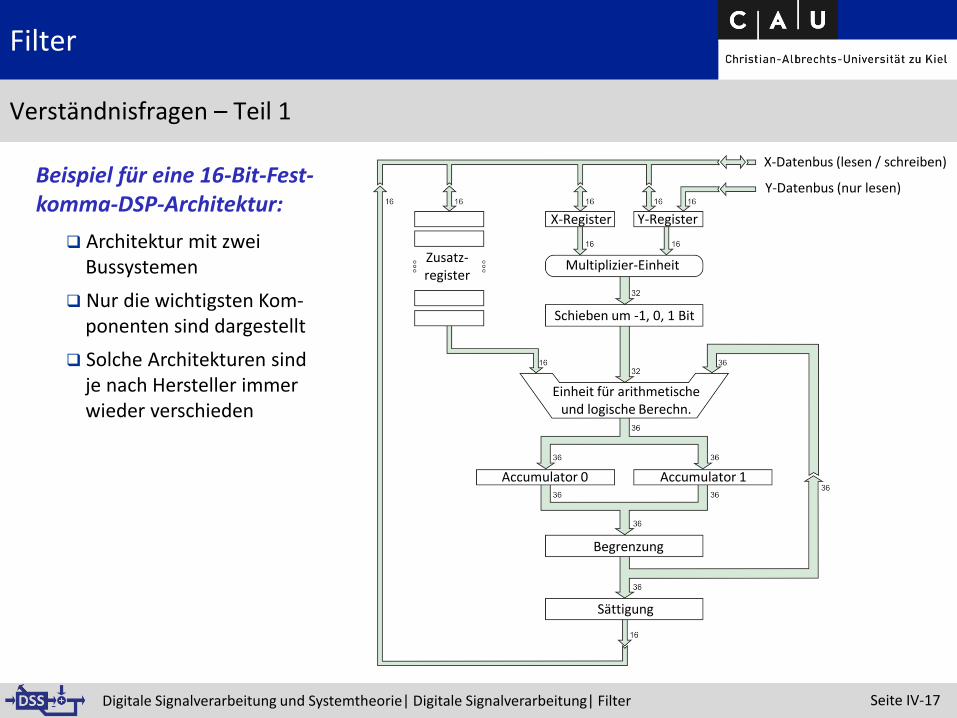
Beispiel für eine 16-Bit-Fest-komma-DSP-Architektur:
❑ Architektur mit zweiBussystemen
❑ Nur die wichtigsten Kom-ponenten sind dargestellt
❑ Solche Architekturen sindje nach Hersteller immer wieder verschieden
Zusatz-register
X-Register Y-Register
X-Datenbus (lesen / schreiben)
Y-Datenbus (nur lesen)
Multiplizier-Einheit
Schieben um -1, 0, 1 Bit
Einheit für arithmetische und logische Berechn.
Accumulator 0 Accumulator 1
Begrenzung
Sättigung
Seite IV-18Seite IV-18Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Verständnisfragen – Teil 2
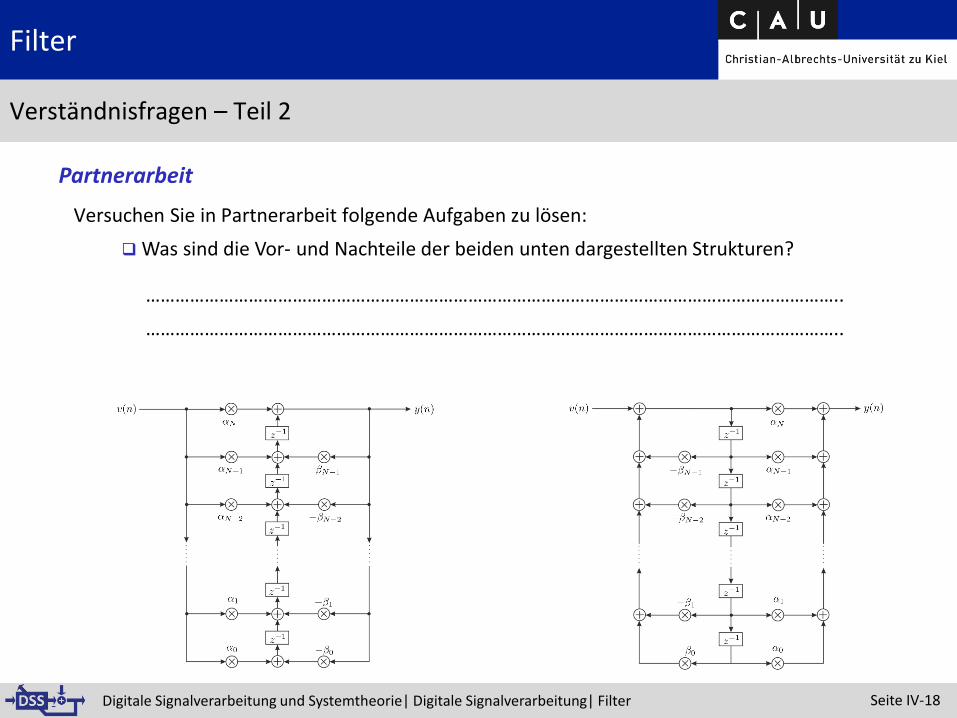
Versuchen Sie in Partnerarbeit folgende Aufgaben zu lösen:
❑ Was sind die Vor- und Nachteile der beiden unten dargestellten Strukturen?
……………………………………………………………………………………………………………………………..
……………………………………………………………………………………………………………………………..
Partnerarbeit
Seite IV-19Seite IV-19Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Zur Motivation der folgenden Überlegungen
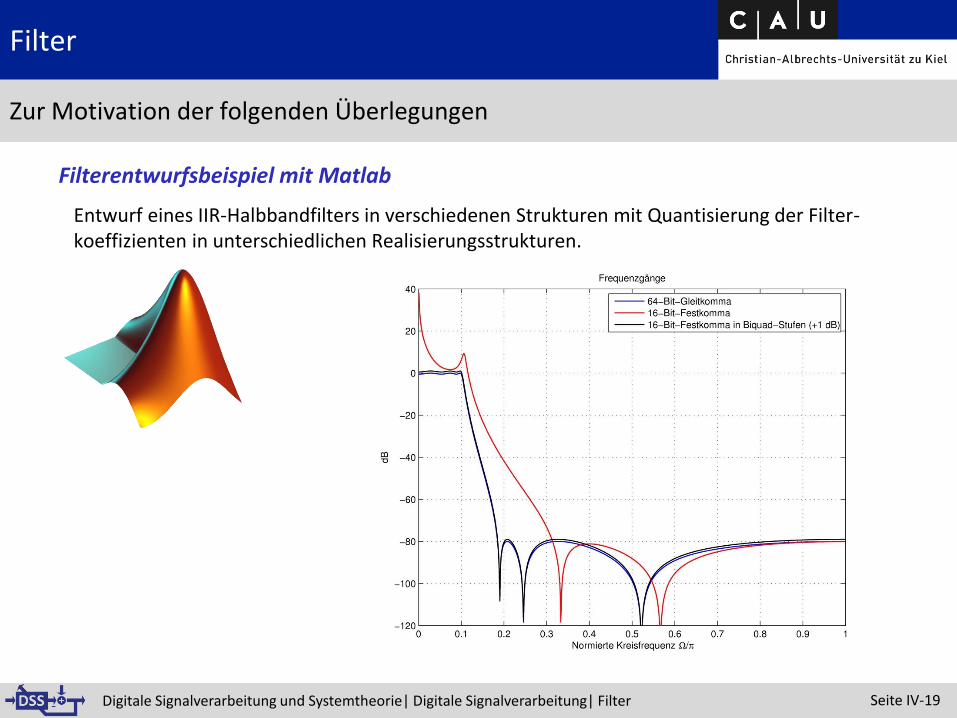
Filterentwurfsbeispiel mit Matlab
Entwurf eines IIR-Halbbandfilters in verschiedenen Strukturen mit Quantisierung der Filter-koeffizienten in unterschiedlichen Realisierungsstrukturen.
Seite IV-20Seite IV-20Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 10
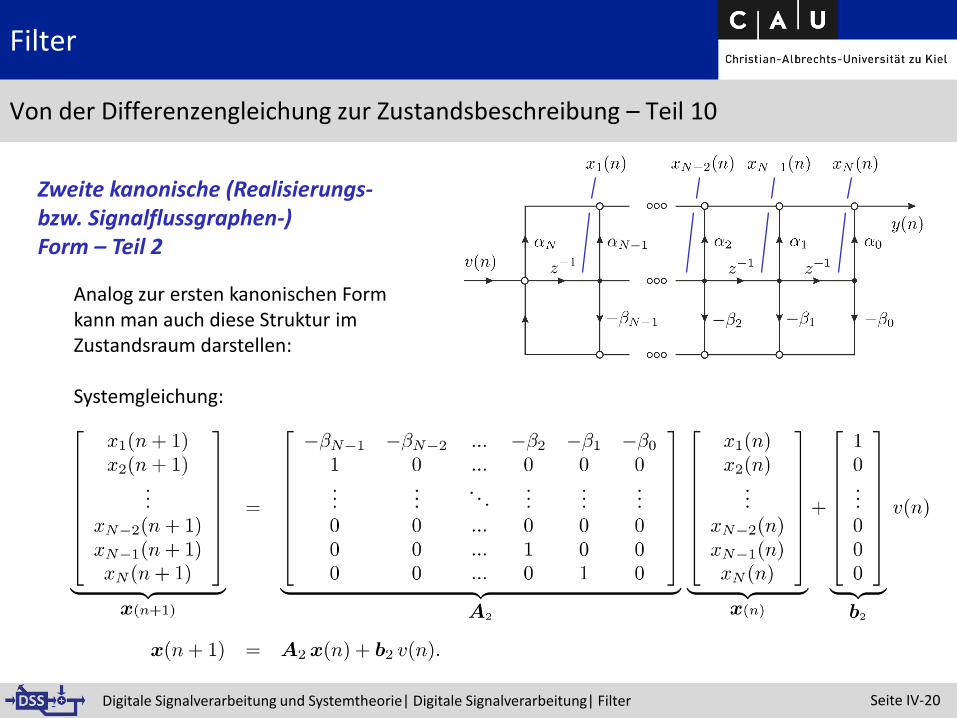
Zweite kanonische (Realisierungs-bzw. Signalflussgraphen-) Form – Teil 2
Analog zur ersten kanonischen Formkann man auch diese Struktur imZustandsraum darstellen:
Systemgleichung:
Seite IV-21Seite IV-21Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 11
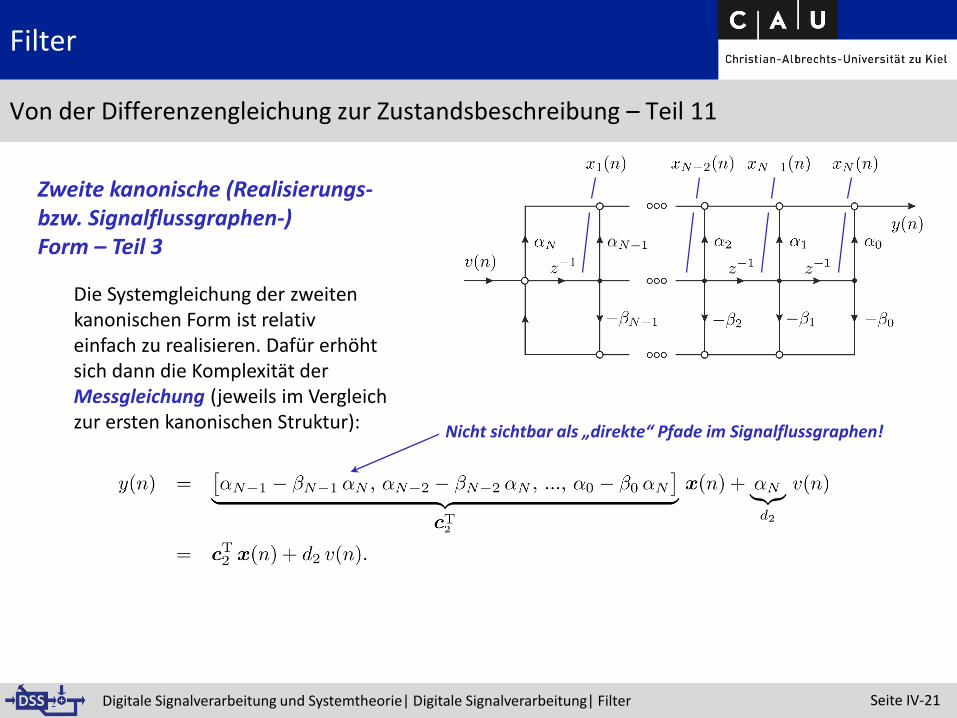
Zweite kanonische (Realisierungs-bzw. Signalflussgraphen-) Form – Teil 3
Die Systemgleichung der zweitenkanonischen Form ist relativ einfach zu realisieren. Dafür erhöhtsich dann die Komplexität derMessgleichung (jeweils im Vergleichzur ersten kanonischen Struktur): Nicht sichtbar als „direkte“ Pfade im Signalflussgraphen!
Seite IV-22Seite IV-22Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 12
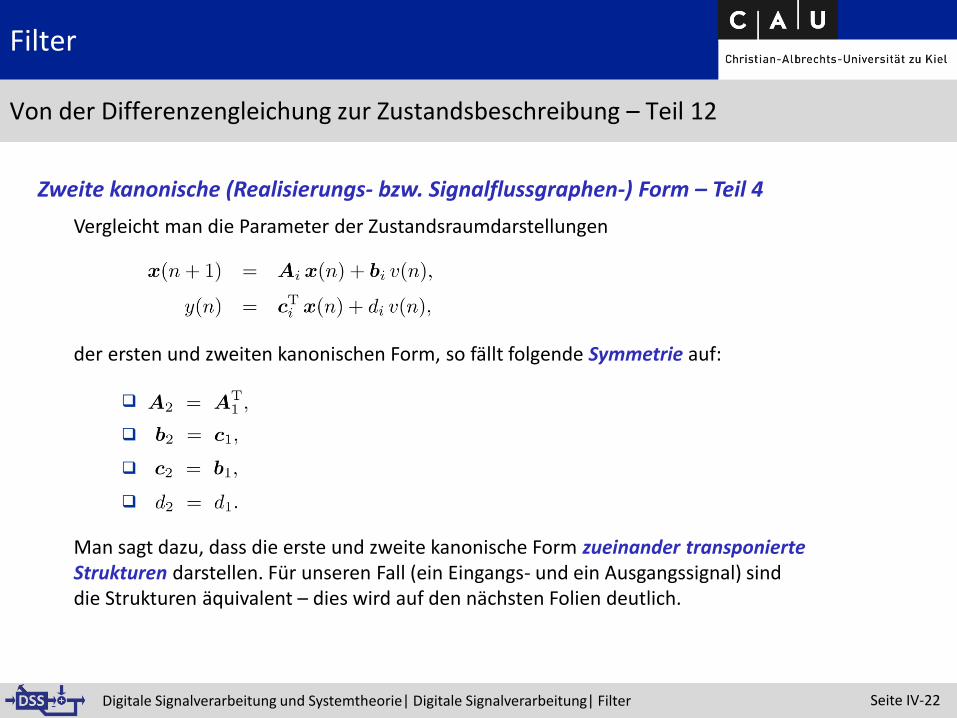
Zweite kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 4
Vergleicht man die Parameter der Zustandsraumdarstellungen
der ersten und zweiten kanonischen Form, so fällt folgende Symmetrie auf:
❑
❑
❑
❑
Man sagt dazu, dass die erste und zweite kanonische Form zueinander transponierteStrukturen darstellen. Für unseren Fall (ein Eingangs- und ein Ausgangssignal) sinddie Strukturen äquivalent – dies wird auf den nächsten Folien deutlich.
Seite IV-23Seite IV-23Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 13
Zweite kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 5
Die Verläufe der Zustandsparameter sind in den beiden ersten kanonischen Strukturenunterschiedlich. Dies kann man leicht überprüfen, wenn man z.B. einen Impuls auf beideStrukturen gibt und die Verläufe verfolgt. Beide Strukturen besitzen das gleiche Eingangs-/Aus-gangsverhalten, d.h. es gilt
Man kann dies leicht überprüfen, indem man aus den Parametern die Übertragungsfunktionberechnet:
… Einsetzen von …
… Ausnutzen von …
Seite IV-24Seite IV-24Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Umrechnung der Übertragungsfunktion (Fortsetzung):
Für den Fall mit mehreren Eingängen und Ausgängen hätte sich hier ergeben:
Man kann hieraus erkennen, dass der Weg von der Differenzengleichung zur Zustandsraumdar-stellung nicht eindeutig ist. Es gibt bzgl. des Eingangs-/Ausgangsverhaltens äquivalente Strukturen.
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 14
Zweite kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 6
… Ausnutzen von und …
… Ausnutzen, dass ein Skalar ist, den man transponieren darf …
… Einsetzen der Definition für …
Seite IV-25Seite IV-25Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 15
Dritte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 1
Bestimmt man für die Übertragungsfunktion
die Zähler- und Nennernullstellen, so kann die o.g. Form in eine Produktform überführt werden:
Hierbei wurde angenommen, dass gilt:
Die einzelnen Funktionen stellen dabei Teilfilter ersten Grades dar, die alle hintereinander geschaltet werden. Jede dieser Teilübertragungsfunktionen kann wieder in erster oder zweiter kanonischer Form realisiert werden.
Seite IV-26Seite IV-26Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 16
Dritte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 2
Falls konjugiert komplexe Pol- oder Nullstellen vorliegen, so kann man diese zusammenfassen und es entstehen Teilfilter zweiten Grades, deren Filterkoeffizienten reellwertig sind:
Bei der Realisierung muss man die einzelnen Null- bzw. Polstellen (bzw. Paare davon) in geeigneterWeise zu Teilfiltern zusammenfassen. Hier werden vor allem Robustheitsaspekte, die für Fest-kommarealisierungen eine Rolle spielen, berücksichtigt.
Seite IV-27Seite IV-27Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 17
Dritte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 3
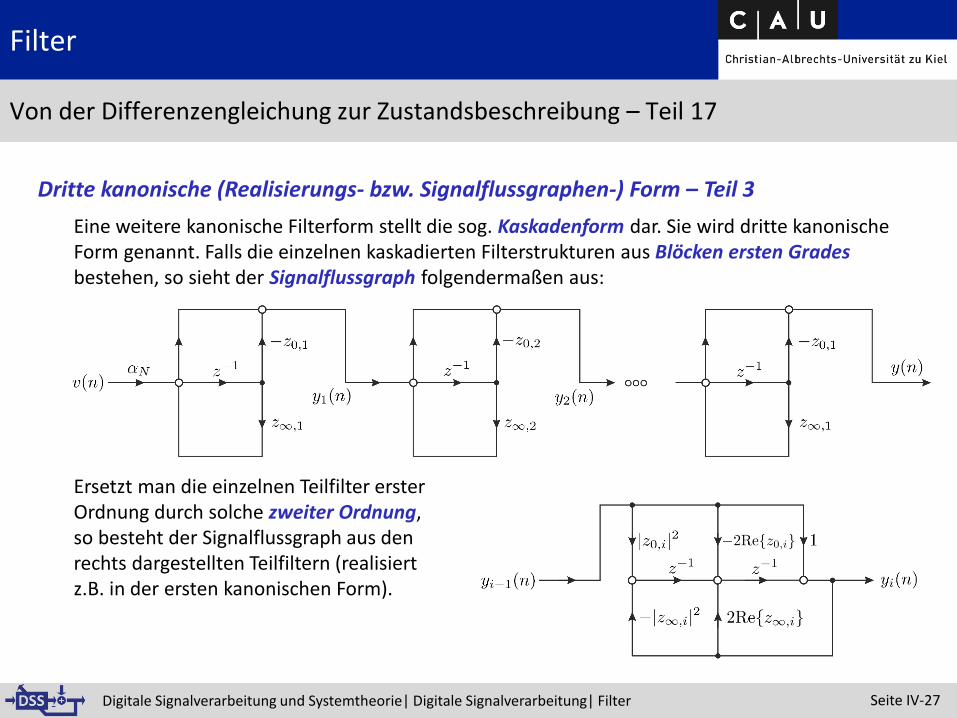
Eine weitere kanonische Filterform stellt die sog. Kaskadenform dar. Sie wird dritte kanonische Form genannt. Falls die einzelnen kaskadierten Filterstrukturen aus Blöcken ersten Grades bestehen, so sieht der Signalflussgraph folgendermaßen aus:
Ersetzt man die einzelnen Teilfilter erster Ordnung durch solche zweiter Ordnung, so besteht der Signalflussgraph aus den rechts dargestellten Teilfiltern (realisiertz.B. in der ersten kanonischen Form).
Seite IV-28Seite IV-28Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 18
Dritte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 4
Zustandsraumdarstellungen von Filtern in der dritten kanonischen Form sind sehr unhandlichund finden daher kaum Anwendung (die Zustandsraumdarstellung, nicht die Kaskadenform!).
Seite IV-29Seite IV-29Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 19
Vierte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 1
Die vierte kanonische Form entsteht durch Umstellung der Übertragungsfunktion (z.B. mittelsPartialbruchzerlegung) in folgende Form
Hierbei wurde davon ausgegangen, dass alle Polstellen verschieden sind. Sollte dies nicht derFall sein, so ergibt sich folgende allgemeine Lösung:
gibt hierbei die Anzahl unterschiedlicher Polstellen an, mit beschreibt dann die Häufigkeit der einzelnen Polstellen.
Auch hier kann wieder auf Teilstrukturen höherer Ordnung zurückgegriffen werden, falls eskonjugiert komplexe Pol- oder Nullstellenpaare gibt.
Seite IV-30Seite IV-30Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 20
Vierte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 2
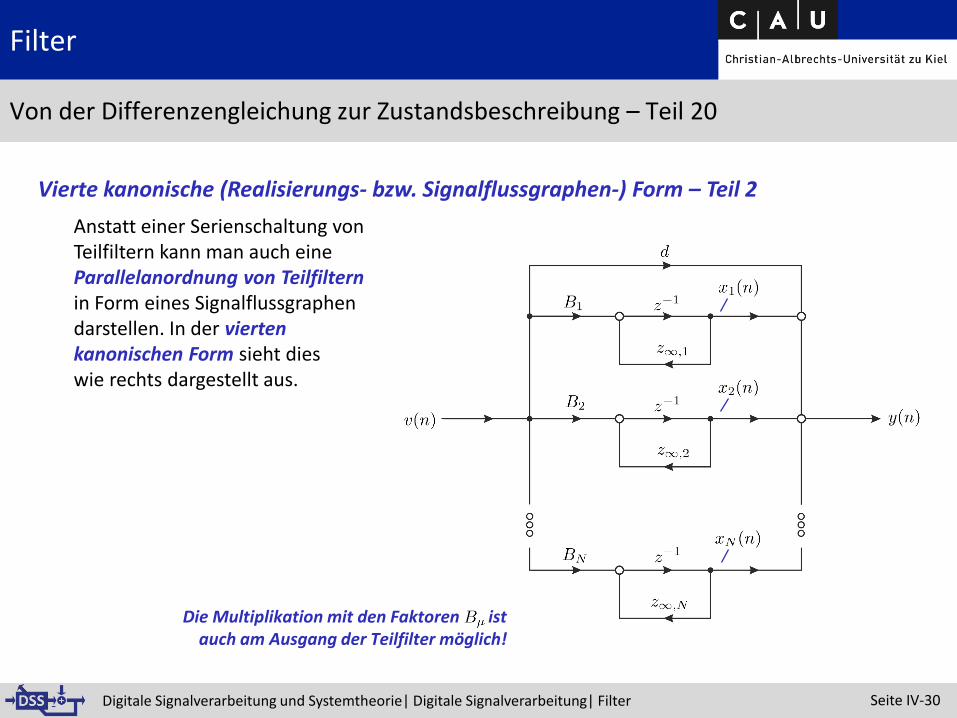
Anstatt einer Serienschaltung von Teilfiltern kann man auch eine Parallelanordnung von Teilfilternin Form eines Signalflussgraphen darstellen. In der vierten kanonischen Form sieht dies wie rechts dargestellt aus.
Die Multiplikation mit den Faktoren ist auch am Ausgang der Teilfilter möglich!
Seite IV-31Seite IV-31Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
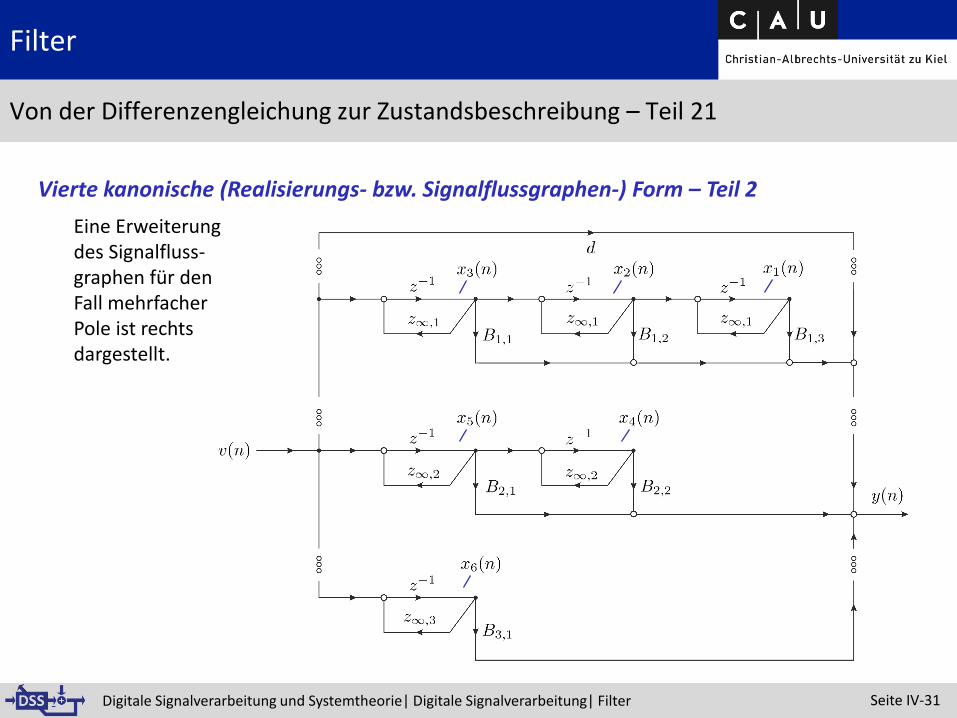
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 21
Vierte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 2
Eine Erweiterung des Signalfluss-graphen für den Fall mehrfacher Pole ist rechts dargestellt.
Seite IV-32Seite IV-32Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 20
Vierte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 3
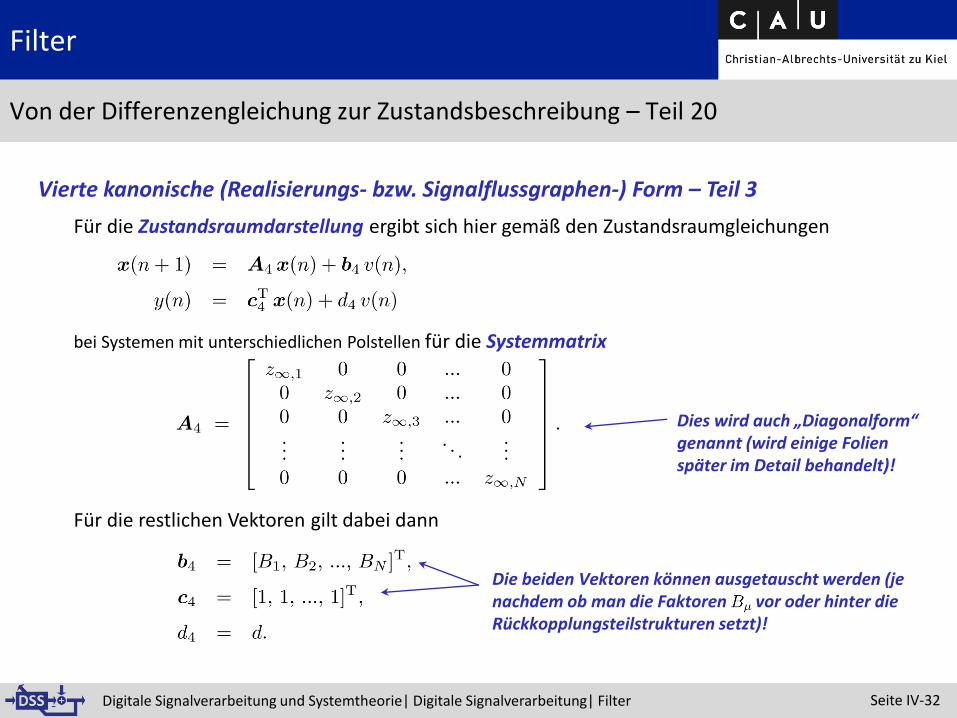
Für die Zustandsraumdarstellung ergibt sich hier gemäß den Zustandsraumgleichungen
bei Systemen mit unterschiedlichen Polstellen für die Systemmatrix
Für die restlichen Vektoren gilt dabei dann
Die beiden Vektoren können ausgetauscht werden (jenachdem ob man die Faktoren vor oder hinter dieRückkopplungsteilstrukturen setzt)!
Dies wird auch „Diagonalform“ genannt (wird einige Folien später im Detail behandelt)!
Seite IV-33Seite IV-33Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 21
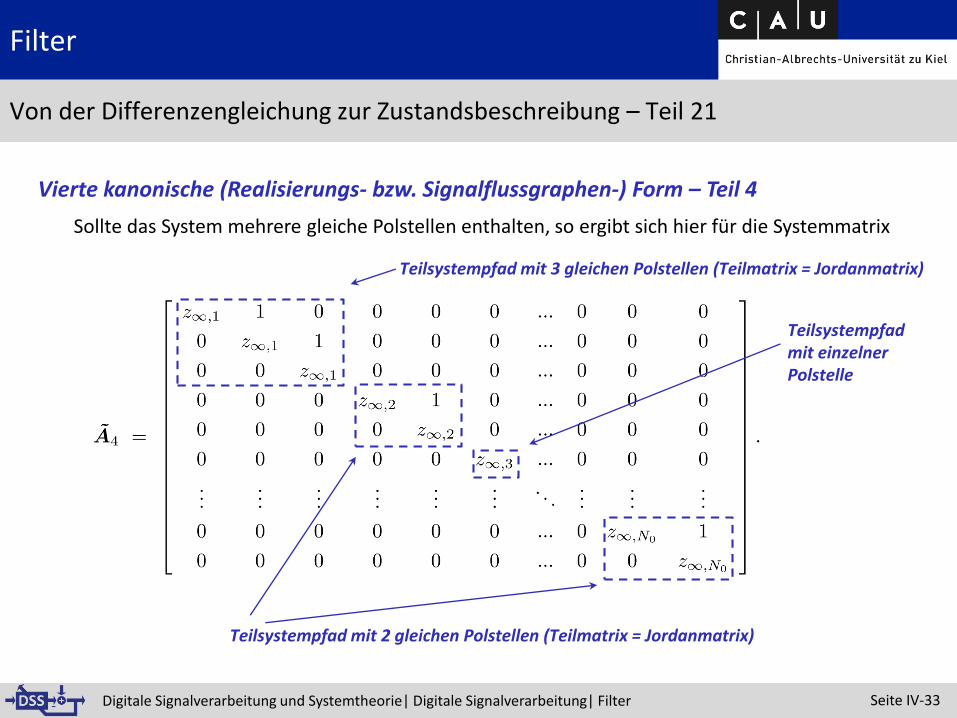
Vierte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 4
Sollte das System mehrere gleiche Polstellen enthalten, so ergibt sich hier für die Systemmatrix
Teilsystempfad mit 2 gleichen Polstellen (Teilmatrix = Jordanmatrix)
Teilsystempfad mit 3 gleichen Polstellen (Teilmatrix = Jordanmatrix)
Teilsystempfad mit einzelner Polstelle
Seite IV-34Seite IV-34Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 22
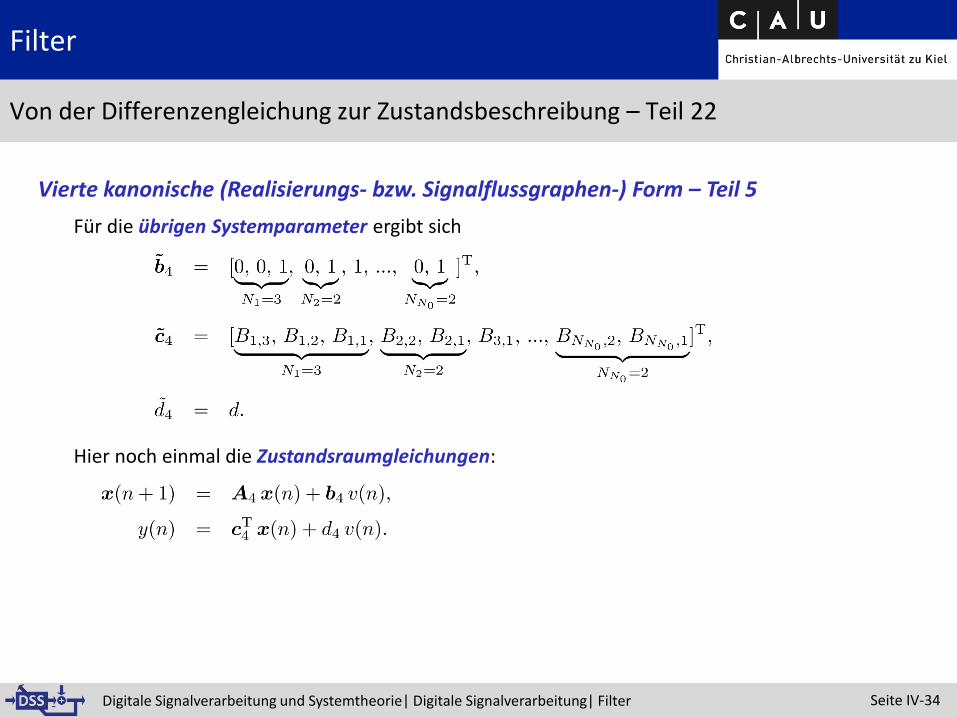
Vierte kanonische (Realisierungs- bzw. Signalflussgraphen-) Form – Teil 5
Für die übrigen Systemparameter ergibt sich
Hier noch einmal die Zustandsraumgleichungen:
Seite IV-35Seite IV-35Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Von der Differenzengleichung zur Zustandsbeschreibung – Teil 23
Abschließende Bemerkungen:
❑ Offenbar enthält als Sonderfall (alle Polstellen unterschiedlich) mit .
❑ Alle vier Zustandsbeschreibungen (und damit auch Signalflussgraphen bzw. Realisierungen [Schaltungen]) sind „innerlich“ verschieden trotz eines nach außen hin gleichen Verhaltens(Eingangs-Ausgangs-Verhalten).
Daraus ergibt sich die Frage, ob es einen Zusammenhang zwischen den Zustandsvariablender einzelnen Varianten gibt (äquivalente Realisierungen).
Die Antwort auf diese Frage werden wir auf den nächsten Folien behandeln, d.h. wir werdenversuchen, den Zustandsvektor einer Variante mit Matrixoperationen in den Zustandsvektoreiner anderen Variante zu transformieren.
Seite IV-36Seite IV-36Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 1
Ähnlichkeitstransformation – Teil 1
Um die Frage der letzten Folie zu klären, sei folgendes gegeben:
❑ Eine erste Realisierung mit
❑ Eine zweite Realisierung mit
Hierbei soll gleiches Eingangs-Ausgangs-Verhalten gelten, d.h. es gilt auch
Seite IV-37Seite IV-37Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 2
Ähnlichkeitstransformation – Teil 2
Um der Forderung nach gleichem Eingangs-Ausgangs-Verhalten nachzukommen, wählen wirfolgenden Ansatz:
Das heißt, jede Zustandskomponente setzt sich aus einer Linearkombination aller zu-sammen:
Der Zweck dieses Ansatzes ist das Erreichen eines besseren (d.h. gleichmäßigeren) Aussteuerungs-verhaltens. Dies ist wichtig für das numerische Verhalten bei digitalen Systemen.
Seite IV-38Seite IV-38Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 3
Ähnlichkeitstransformation – Teil 3
Die geforderte Äquivalenz der beiden Zustandsraumdarstellungen verlangt, dass durch die Trans-formation keine Information verloren geht. Aus diesem Grund muss der Ansatz (siehe letzte Folie)umkehrbar sein, d.h. es muss gelten:
Damit muss die Transformationsmatrix regulär sein:
Seite IV-39Seite IV-39Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 4
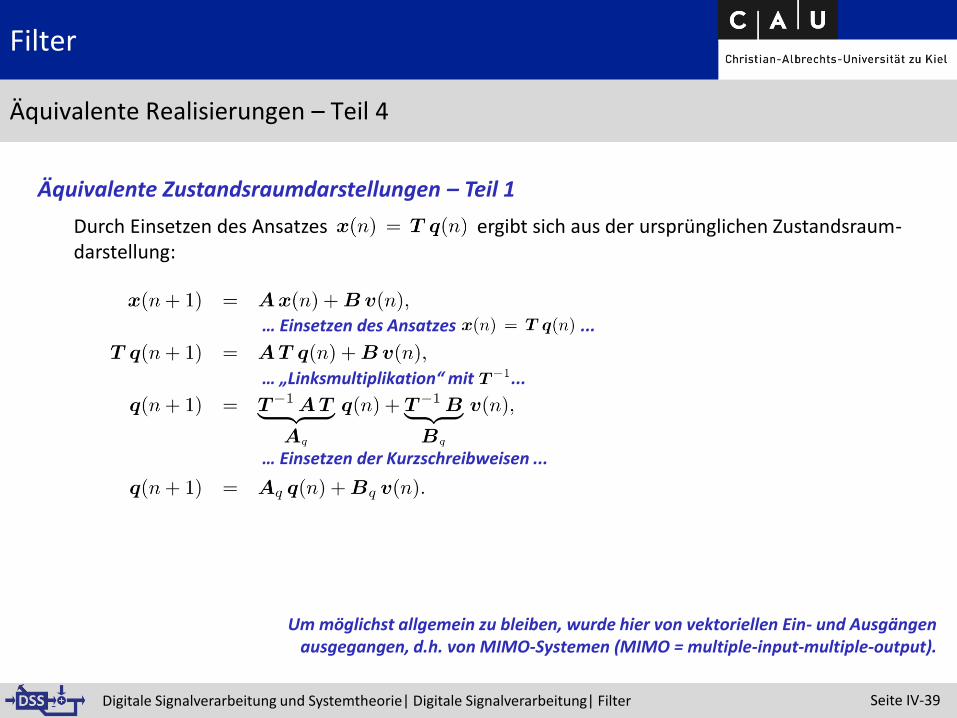
Äquivalente Zustandsraumdarstellungen – Teil 1
Durch Einsetzen des Ansatzes ergibt sich aus der ursprünglichen Zustandsraum-darstellung:
Um möglichst allgemein zu bleiben, wurde hier von vektoriellen Ein- und Ausgängen ausgegangen, d.h. von MIMO-Systemen (MIMO = multiple-input-multiple-output).
… Einsetzen des Ansatzes ...
… „Linksmultiplikation“ mit ...
… Einsetzen der Kurzschreibweisen ...
Seite IV-40Seite IV-40Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 5
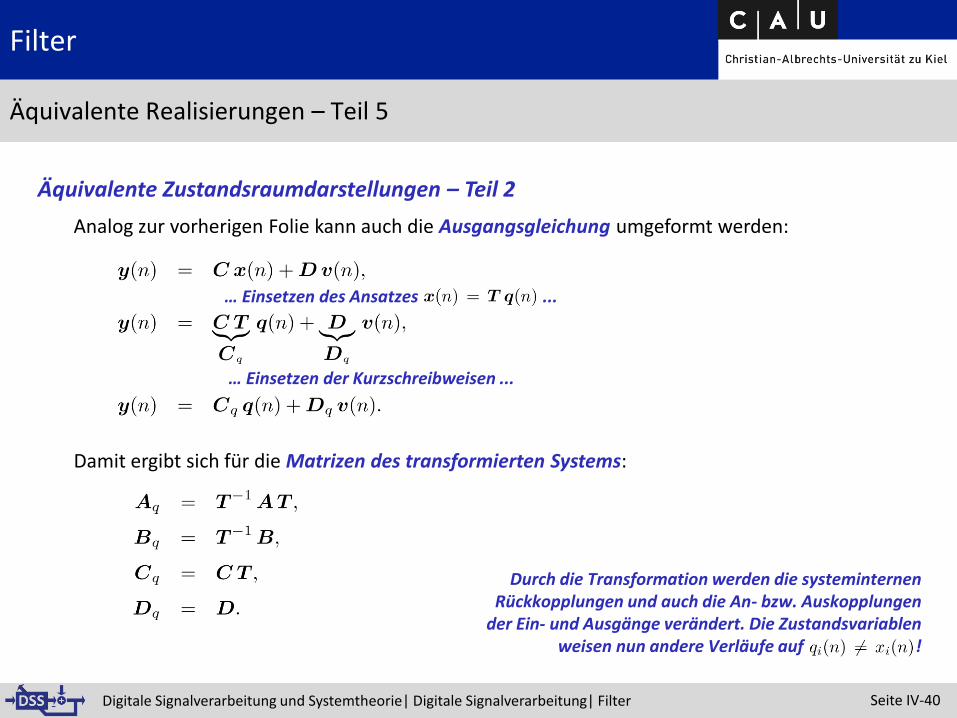
Äquivalente Zustandsraumdarstellungen – Teil 2
Analog zur vorherigen Folie kann auch die Ausgangsgleichung umgeformt werden:
Damit ergibt sich für die Matrizen des transformierten Systems:
Durch die Transformation werden die systeminternenRückkopplungen und auch die An- bzw. Auskopplungen
der Ein- und Ausgänge verändert. Die Zustandsvariablenweisen nun andere Verläufe auf !
… Einsetzen des Ansatzes ...
… Einsetzen der Kurzschreibweisen ...
Seite IV-41Seite IV-41Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 6
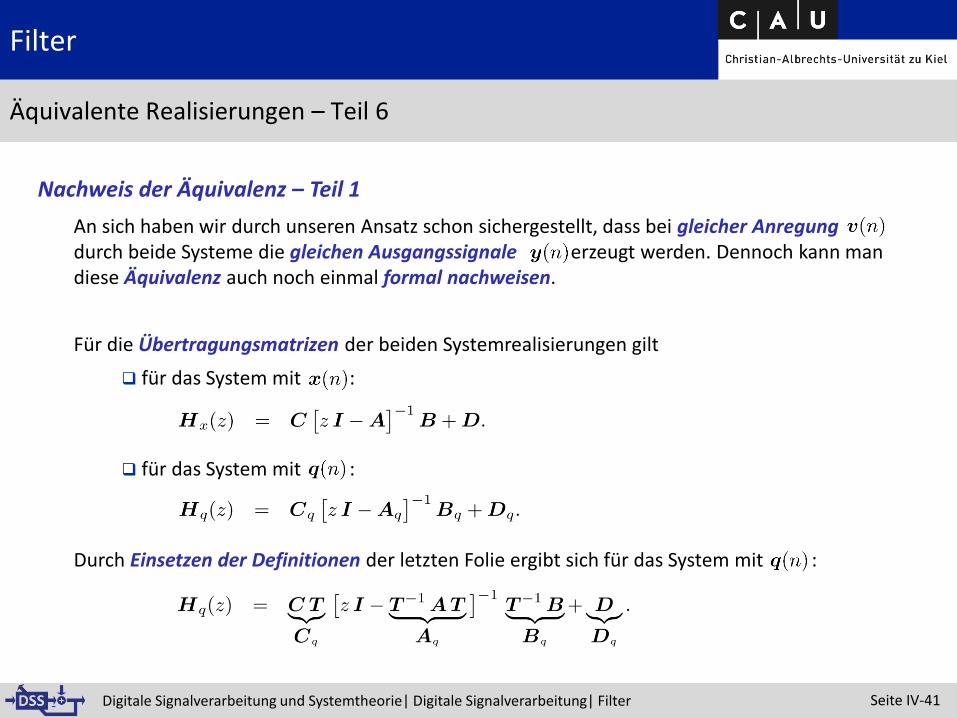
Nachweis der Äquivalenz – Teil 1
An sich haben wir durch unseren Ansatz schon sichergestellt, dass bei gleicher Anregung durch beide Systeme die gleichen Ausgangssignale erzeugt werden. Dennoch kann man diese Äquivalenz auch noch einmal formal nachweisen.
Für die Übertragungsmatrizen der beiden Systemrealisierungen gilt
❑ für das System mit :
❑ für das System mit :
Durch Einsetzen der Definitionen der letzten Folie ergibt sich für das System mit :
Seite IV-42Seite IV-42Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 7
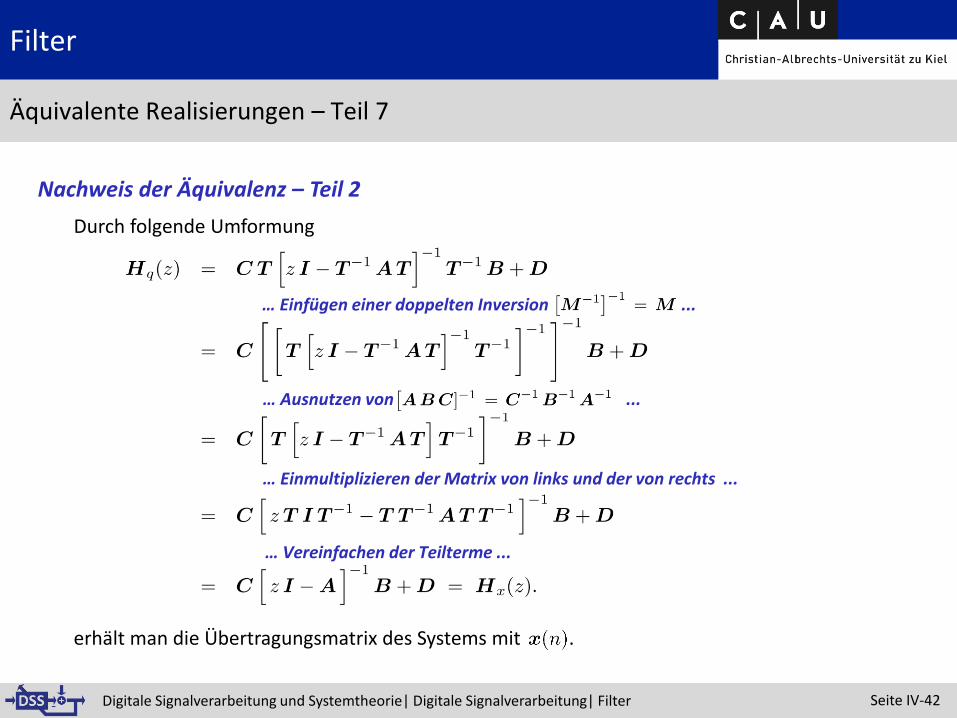
Nachweis der Äquivalenz – Teil 2
Durch folgende Umformung
erhält man die Übertragungsmatrix des Systems mit .
… Einfügen einer doppelten Inversion ...
… Ausnutzen von ...
… Einmultiplizieren der Matrix von links und der von rechts ...
… Vereinfachen der Teilterme ...
Seite IV-43Seite IV-43Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 8
Nachweis der Äquivalenz – Teil 3
Zur Erinnerung:
Aus der Vorlesung „Signale und Systeme II“ wissen wir, dass die Polstellen des Systems auchdie Nullstellen des sog. Charakteristischen Polynoms
sind. Diese Nullstellen sind gleich den Eigenwerten der Systemmatrix , d.h. es gilt
Dabei sind die zu den Eigenwerten gehörenden Eigenvektoren. Sollten alle Eigenwerteunterschiedlich sein, gilt für die Eigenvektoren außerdem
Dies werden wir im folgenden für eine äquivalente Systemtransformation ausnutzen.
Seite IV-44Seite IV-44Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 11
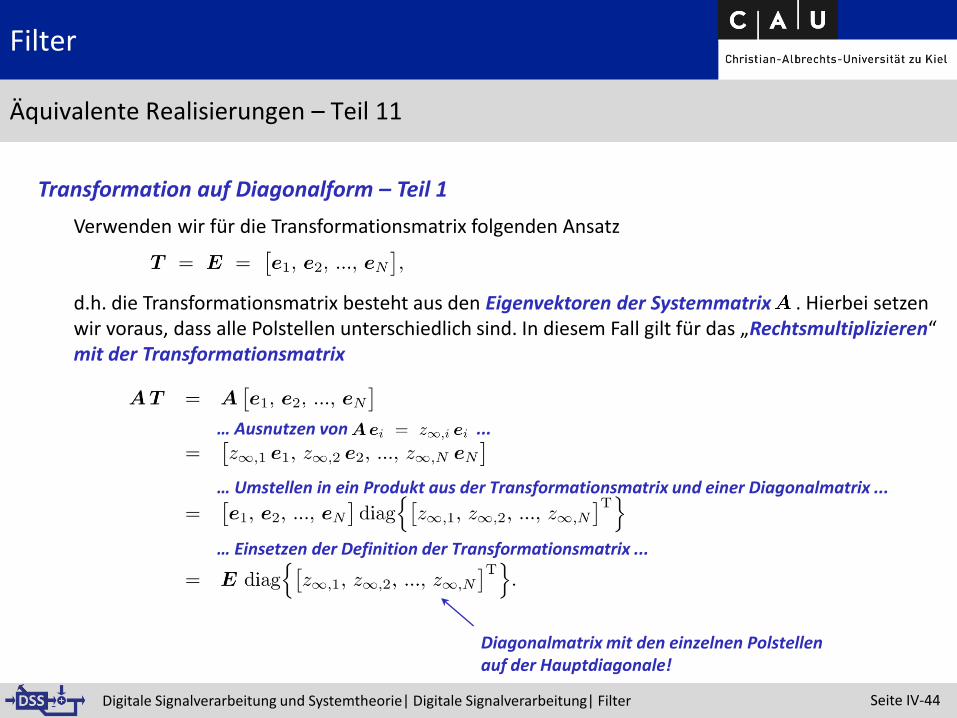
Transformation auf Diagonalform – Teil 1
Verwenden wir für die Transformationsmatrix folgenden Ansatz
d.h. die Transformationsmatrix besteht aus den Eigenvektoren der Systemmatrix . Hierbei setzenwir voraus, dass alle Polstellen unterschiedlich sind. In diesem Fall gilt für das „Rechtsmultiplizieren“mit der Transformationsmatrix
… Ausnutzen von ...
… Umstellen in ein Produkt aus der Transformationsmatrix und einer Diagonalmatrix ...
Diagonalmatrix mit den einzelnen Polstellenauf der Hauptdiagonale!
… Einsetzen der Definition der Transformationsmatrix ...
Seite IV-45Seite IV-45Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 12
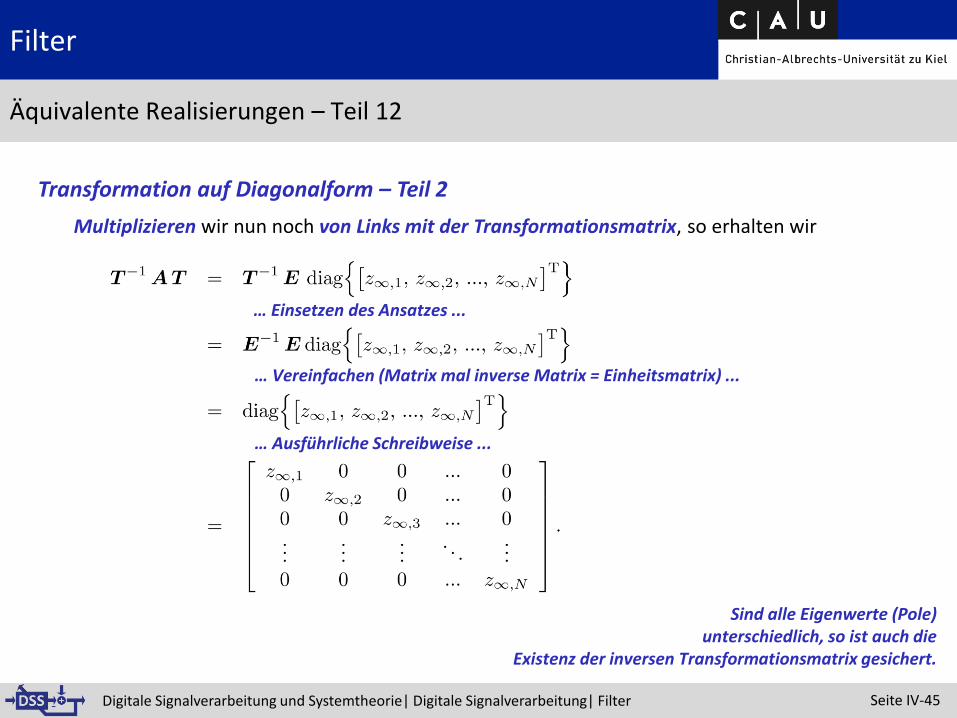
Transformation auf Diagonalform – Teil 2
Multiplizieren wir nun noch von Links mit der Transformationsmatrix, so erhalten wir
… Einsetzen des Ansatzes ...
… Vereinfachen (Matrix mal inverse Matrix = Einheitsmatrix) ...
… Ausführliche Schreibweise ...
Sind alle Eigenwerte (Pole) unterschiedlich, so ist auch die
Existenz der inversen Transformationsmatrix gesichert.
Seite IV-46Seite IV-46Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 13
Transformation auf Diagonalform – Teil 3
Für das so transformierte äquivalente System gilt damit:
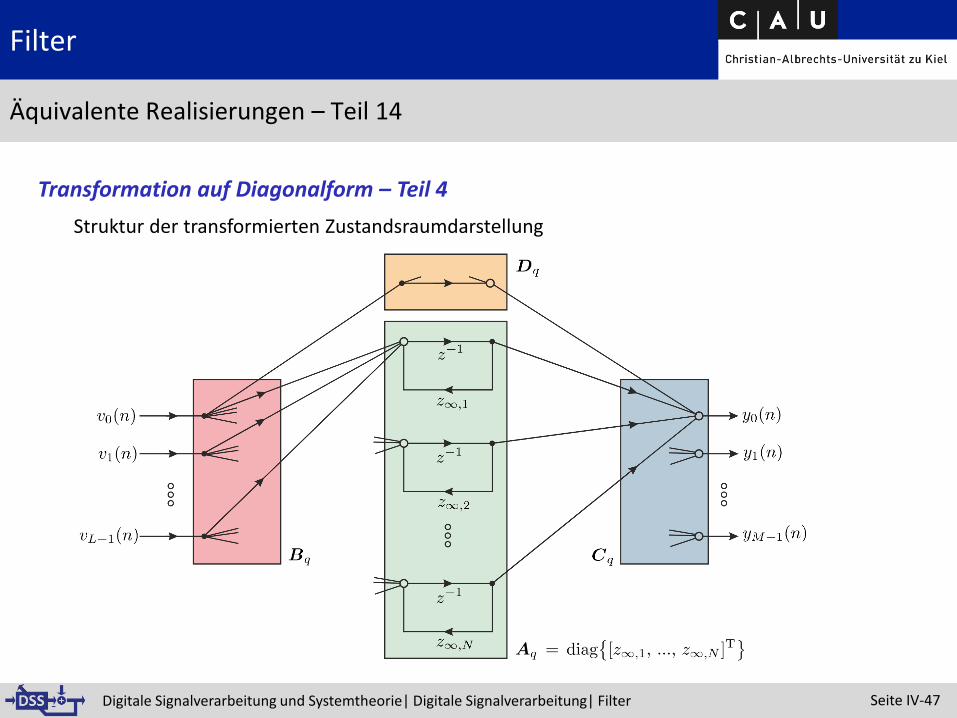
❑ Systemmatrix:
❑ Steuermatrix:
❑ Beobachtungsmatrix:
❑ Durchgriffsmatrix:
Die Diagonalisierung der Systemmatrix durch Transformation mit der Eigenvektormatrix bzw.deren Inversen führt auf die Parallelform (4. kanonische Struktur). Diese wird auch Diagonalformgenannt.
In dieser Struktur sind alle Eigenwerte / alle Einschwingvorgänge entkoppelt. Dies führt im Allgemeinen zu einer Verbesserung der Robustheit.
Seite IV-47Seite IV-47Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Äquivalente Realisierungen – Teil 14
Transformation auf Diagonalform – Teil 4
Struktur der transformierten Zustandsraumdarstellung
Seite IV-48Seite IV-48Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Bei der Umsetzung der Zustandsraumbeschreibungen bzw. der entsprechenden Signalflussgraphenals Programme oder Schaltungen (mit fließendem Übergang, z.B. auf einem DSP mit Assembler)müssen alle Größen
digital, d.h. als Zahlen im Rechner mit begrenzter Wortlänge umgesetzt werden. In vielen Fällengeschieht dies mittels Festkommaarithmetik, d.h. alle Größen müssen wertdiskretisiert werden. Damit besitzen die Größen folgende Form:
Dadurch entstehen Quantisierungsfehler gegenüber den „richtigen“ Werten (man beachte hierbei die verschiedenen Quantisierungskennlinien, die wir zu Beginn der Vorlesung behandelt haben). Diese Fehler führen zu bestimmten Realisierungsfehlern, die wir im folgenden näher betrachten werden.
Filter
Realisierungsaspekte – Teil 1
Grundlagen
Vorzeichenbit Betragsbits:
In Summe werden damit Bitsverwendet!
Seite IV-49Seite IV-49Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 2
Eingangsfehler – Teil 1
Das Eingangssignal wird wertdiskretisiert, d.h. die wertkontinuierliche Größe (bzw. Repräsentiert mit unendlich vielen Bits) wird wie folgt „aufgeteilt“:
Dies entspricht einer Eingangsquantisierung mit Bits, wobei bei geeigneter Kennlinie (siehe Anfang der Vorlesung) als additives, gleichverteiltes, weißes Rauschen mit
modelliert werden kann. Hierbei wird vom Filter wie behandelt, d.h. es gibt einen additiven Anteil im Ausgangssignal, der gemäß
modellierbar ist.
Seite IV-50Seite IV-50Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 3
Eingangsfehler – Teil 2
Man kann sich dies wie ein gefärbtes Rauschen am Systemausgang vorstellen, wobei die Art der „Färbung“ vom jeweiligen Filter abhängt. Das Rauschen wird zumeist nicht unmittelbarüber sein Spektrum, sondern über die Größen Korrelation bzw. Leistungsdichtespektrumbeschrieben:
mit der sog. Autokorrelierten des Filters
Seite IV-51Seite IV-51Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 4
Arithmetikfehler – Teil 1
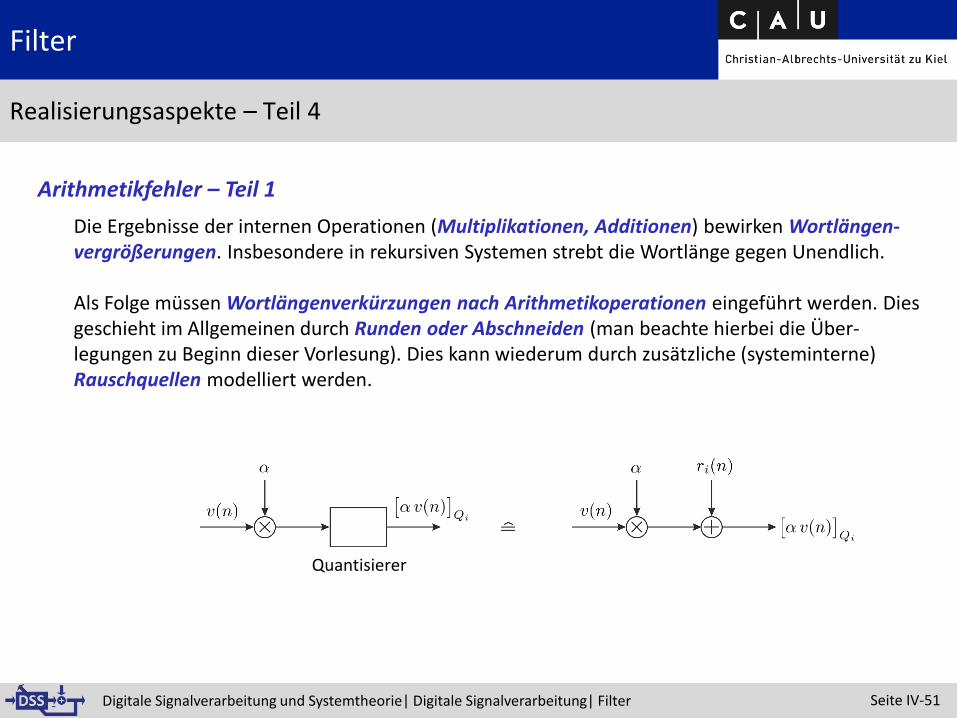
Die Ergebnisse der internen Operationen (Multiplikationen, Additionen) bewirken Wortlängen-vergrößerungen. Insbesondere in rekursiven Systemen strebt die Wortlänge gegen Unendlich.
Als Folge müssen Wortlängenverkürzungen nach Arithmetikoperationen eingeführt werden. Diesgeschieht im Allgemeinen durch Runden oder Abschneiden (man beachte hierbei die Über-legungen zu Beginn dieser Vorlesung). Dies kann wiederum durch zusätzliche (systeminterne)Rauschquellen modelliert werden.
Quantisierer
Seite IV-52Seite IV-52Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 5
Arithmetikfehler – Teil 2
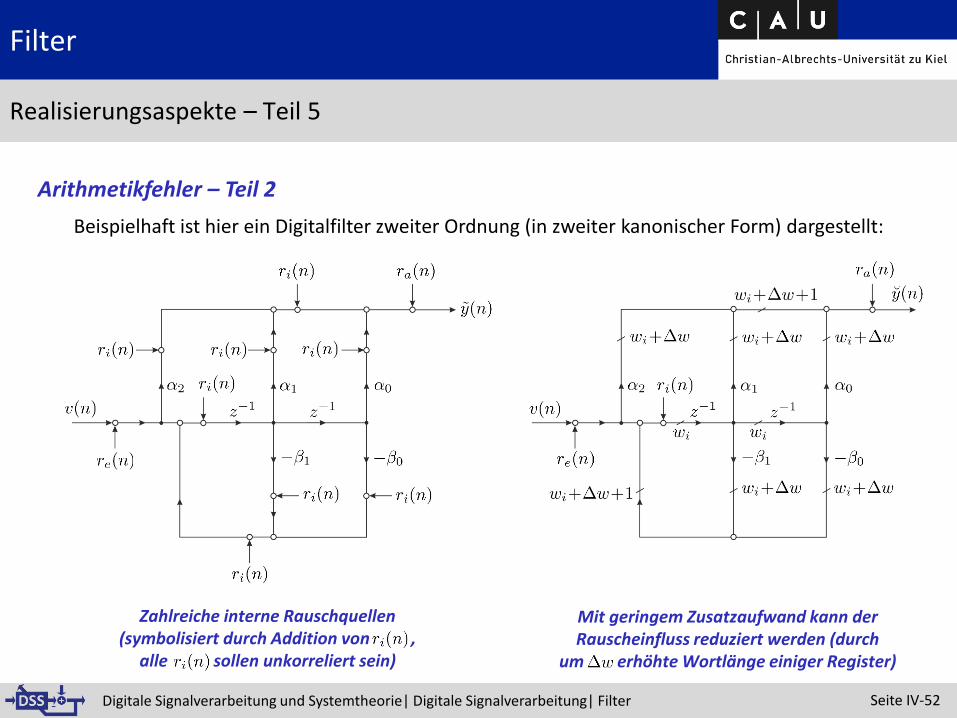
Beispielhaft ist hier ein Digitalfilter zweiter Ordnung (in zweiter kanonischer Form) dargestellt:
Zahlreiche interne Rauschquellen (symbolisiert durch Addition von ,
alle sollen unkorreliert sein)
Mit geringem Zusatzaufwand kann derRauscheinfluss reduziert werden (durch
um erhöhte Wortlänge einiger Register)
Seite IV-53Seite IV-53Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 6
Arithmetikfehler – Teil 3
Arithmetikfehler können durch Einspeisung von weißen Rauschquellen modelliert werden. Umdie Auswirkungen zu erfassen, müssen die Übertragungsfunktionen (bzw. die Leistungsüber-tragungfunktionen) vom Einspeisepunkt zum Ausgang bestimmt werden. Diese Übertragungs-funktionen bestimmen die Färbung (Korrelation) der einzelnen Rauschanteile, die am Ausgangadditiv überlagert werden.
Abgesehen von der Färbung durch die einzelnen Übertragungsfunktionen kann dieGesamtrauschleistung am Ausgang durch Integration der einzelnen Leistungsübertragungs-funktionen und anschließende Addition bestimmt werden.
Dies wirkt sich vor allem bei Filtern bzw. Schaltungen mit vielen Multipliziereinheiten aus. Abhilfe kann hier die Einführung von höheren Wortbreiten sein. Bei einigen Filterarten (z.B. bei hochqualitativen Audioanwendungen) wird intern mit sog. Doppelwortgenauigkeitgerechnet.
Seite IV-54Seite IV-54Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 7
Arithmetikfehler – Teil 4
Die Wortlängenverkürzungen werden als Rauschquellen modelliert. Eigentlich sind dies jedochNichtlinearitäten!
Bekannt ist hierbei, dass ein stabiles, lineares System durch die Einführung einer Nichtlinearitätinstabil werden kann.
Die Folge davon sind sog. Grenzzyklen. Hierbei schwingt der Ausgang eines Filters dauerhaft, obwohl der Eingang zu Null gesetzt wurde.
Seite IV-55Seite IV-55Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 8
Arithmetikfehler – Teil 5
Beispielhaft sei hier ein Filter mit folgender (nichtlinearer) Differenzengleichung gegeben:
soll hier eine sog. Zweierkomplementsrundung bezeichnen. Weiterhin gelte:
Dann ergibt sich:
Dieser konstante Wert wird für am Ausgang erzeugt. Für erhält man alternierendund . Ein solches Verhalten wird als Grenzzyklus bezeichnet.
Seite IV-56Seite IV-56Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 9
Koeffizientenfehler
Sollten die Koeffizienten
nur mit endlicher Genauigkeit dargestellt werden, so führt das zu einer Verfälschung von bzw. . Und damit natürlich auch der entsprechenden Zeitbereichsgrößen , usw. Unterschiedliche Strukturen sind hier unterschiedlich empfindlich gegenüber solchen Effekten.
Es bleibt aber anzumerken, dass ein Filter mit gerundeten Koeffizienten nach wie vor ein lineares,verschiebungsinvariantes Filter bleibt, d.h. die Beschreibungsart ist unverändert. Man bekommt aber u. U. Probleme mit der Stabilität. Hier gilt:
❑ Bei Realisierungen mit als unmittelbare Koeffizienten (z.B. in der Kaskaden- oder Parallelform) ist Stabilität problemlos zu kontrollieren:
❑ Bei anderen Realisierungen (z.B. mittels der Direktformen) ist eine solche Prüfung deutlichschwieriger.
Seite IV-57Seite IV-57Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Realisierungsaspekte – Teil 10
„Günstige“ Realisierung
Mit den bisherigen Überlegungen sollte der Zweck der Angabe von äquivalenten Realisierungs-möglichkeiten motiviert werden:
❑ Identisches ideales Verhalten, aber
❑ unterschiedliche Empfindlichkeiten gegenüber
❑ Arithmetik-Rauschen
❑ Grenzzyklen,
❑ Instabilitäten des linearen Systems und
❑ Frequenzgangverzerrungen.
Deshalb wurden zahlreiche weitere Strukturen vorgeschlagen und untersucht, z.B. sog. lattice-Filter, Normalformen, Zustandsstrukturen oder Wellendigitalfilter.
Seite IV-58Seite IV-58Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 1
❑ Einführung
❑ Signale
❑ Spektren
❑ Filter
❑ Beschreibungen
❑ Zustandsraumdarstellung
❑ Äquivalente Filterstrukturen
❑ Realisierungsaspekte
❑ Kalman-Filter
❑ Ein wenig Geschichte
❑ „Zutaten“
❑ Herleitung des Filters
❑ Anwendungsbeispiel
Seite IV-59Seite IV-59Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 2
Ein wenig Geschichte – Teil 1
Erste Entwurfsverfahren zur Minimierung des mittleren quadratischen Fehlers stammen (unabhängig entwickelt) von:
❑ A. Kolmogorov: Interpolation und Extrapolation von stationären zufälligen Folgen, Izv. Akad. Nauk SSSR Ser. Mat. 5, pp. 3 – 14, 1941 (in Russisch)
❑ N. Wiener: The Extrapolation, Interpolation, and Smoothing of Stationary Time Series with Engineering Applications, J. Wiley, New York, USA, 1949 (zuerst publiziert 1942 als MIT Radiation Laboratory Report)
Seite IV-60Seite IV-60Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 3
Ein wenig Geschichte – Teil 2
Norbert Wiener (geboren am 26. November 1894 in Columbia, Missouri; gestorben am 18. März 1964 in Stockholm) war ein US-amerikanischer Mathematiker.
Er ist als Begründer der Kybernetik bekannt, ein Ausdruck, den er in seinem Werk „Cybernetics orControl and Communication in the Animal and theMachine“ (1948) prägte.
(Quelle: Wikipedia)
Seite IV-61Seite IV-61Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 4
Ein wenig Geschichte – Teil 3
Andrei Nikolajewitsch Kolmogorow (geboren 1903, gestorben 1987 in Moskau) war einer der bedeutendsten Mathematiker des 20. Jahrhunderts.
Kolmogorow leistete wesentliche Beiträge auf den Gebieten der Wahrscheinlichkeitstheorie und der Topologie, er gilt als Begründer der Algorithmischen Komplexitätstheorie. Seine bekannteste mathematische Leistung war die Axiomatisierungder Wahrscheinlichkeitstheorie.
Als Student arbeitete (und publizierte) er außerdem über Logik und Fourierreihen, später über die Anwendung der Wahrscheinlichkeitstheorie in der Turbulenz und der klassischen Mechanik.
(Quelle: Wikipedia)
Seite IV-62Seite IV-62Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 5
Ein wenig Geschichte – Teil 4
Wiener und Kolmogorow entwarfen zunächst ein Opimalfilter auf der Basis einer Minimierung des mittleren quadratischen Fehlers. Hierfür wurden aber noch Stationarität vorausgesetzt. Kalman et al. konnten dann später ein Filter entwerfen, was diese Randbedingung (eingeschwungene Zustände) nicht mehr benötigte.
Relevante Publikationen:
❑ R. E. Kalman: A new approach to linear filtering and prediction problems, Trans. ASME, J, Basic Eng., 82, 35-45, 1960.
❑ R. E. Kalman, R. S. Bucy: New results in linear filtering and prediction theory, Trans. ASME, J, Basic Eng., 83, 95-108, 1961.
(Wikipedia: The American Society of Mechanical Engineers (ASME) is a professional body, specifically an engineering society, focused on mechanical engineering.)
Seite IV-63Seite IV-63Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 6
Ein wenig Geschichte – Teil 5
Rudolf Emil Kálmán (ungarisch Kálmán Rudolf Emil, geb. 19. Mai 1930 in Budapest) ist ein ungarisch-US-amerikanischer Mathematiker. Er entwickelte 1960 das nach ihm benannte Kalman-Filter.
Kálmán wurde in Budapest geboren, wanderte jedoch 1943 mit seinen Eltern in die USA aus und studierte dort am Massachusetts Institute ofTechnology, wo er 1954 seinen Master-Titel erhielt. Einen Doktortitel erhielt er 1957 an der Columbia University, zu der er nach seinem Abschluss am MIT wechselte.
Er arbeitete von 1958 bis 1964 am Institute for Advanced Study und erhielt 1964 eine Professur an der Stanford University. 1971 wechselte er als Direktor des Zentrums für mathematische Systemtheorie an die University of Florida. Gleichzeitig übernahm er die Leitung des Zentrums für mathematische Systemtheorie an der ETH Zürich. 1997 wurde er an der ETH Zürich emeritiert.
(Quelle: Wikipedia)
Seite IV-64Seite IV-64Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 7
Ein wenig Geschichte – Teil 6
Das Kalman-Filter ist ein nach seinem Entdecker Rudolf E. Kálmán benannter Satz von mathe-matischen Gleichungen. Mittels dieses Filters sind bei Vorliegen fehlerbehafteter Beobachtungen Rückschlüsse auf den Zustand von vielen der Technik, Wissenschaft oder der Wirtschaft zugeordne-ten Systemen möglich. Vereinfacht gesprochen dient das Kalman-Filter zum Entfernen der von den Messgeräten verursachten Störungen. Dabei müssen sowohl die mathematische Struktur des zugrundeliegenden dynamischen Systems als auch die der Messverfälschungen bekannt sein.
Im Rahmen der mathematischen Schätztheorie spricht man auch von einem Bayes'schen Minimum-Varianz-Schätzer für lineare stochastische Systeme in Zustandsraumdarstellung.
Obgleich die Benennung des Filters nach Rudolf E. Kálmán erfolgte, wurden bereits zuvor nahezu identische Verfahren durch Thorvald N. Thiele und Peter Swerling veröffentlicht. Auch existierten zur selben Zeit bereits allgemeinere, nichtlineare Filter von Ruslan L. Stratonovich, die das Kalman-Filter und weitere lineare Filter als Spezialfälle enthalten. Ebenso erwähnenswert sind Vorarbeiten und gemeinsame Publikationen von Kálmán mit Richard S. Bucy, insbesondere für den Fall zeitkontinuierlicher dynamischer Systeme.
Quelle: Wikipedia
Seite IV-65Seite IV-65Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 8
Ein wenig Geschichte – Teil 7
Erste Anwendungen des Kalman-Filters:
Apollo Guidance Computer (AGC)
Die auf dem AGC laufende Leitsoftware benutzte Kalman-Filter, um anhand der Daten mehrerer Positionsmessungen eine optimale Positionsbestimmung durchzuführen. Als Grundlage diente dabei eine Koordinatentransformation zwischen der Kreiselplattform des IMU und zwei Referenzkoordinatensystemen, eines mit der Erde als Zentrum und eines mit dem Mond als Zentrum.
(Quelle: Wikipedia)
Seite IV-66Seite IV-66Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 9
❑ Einführung
❑ Signale
❑ Spektren
❑ Filter
❑ Beschreibungen
❑ Zustandsraumdarstellung
❑ Äquivalente Filterstrukturen
❑ Realisierungsaspekte
❑ Kalman-Filter
❑ Ein wenig Geschichte
❑ „Zutaten“
❑ Herleitung des Filters
❑ Anwendungsbeispiel
Seite IV-67Seite IV-67Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 10
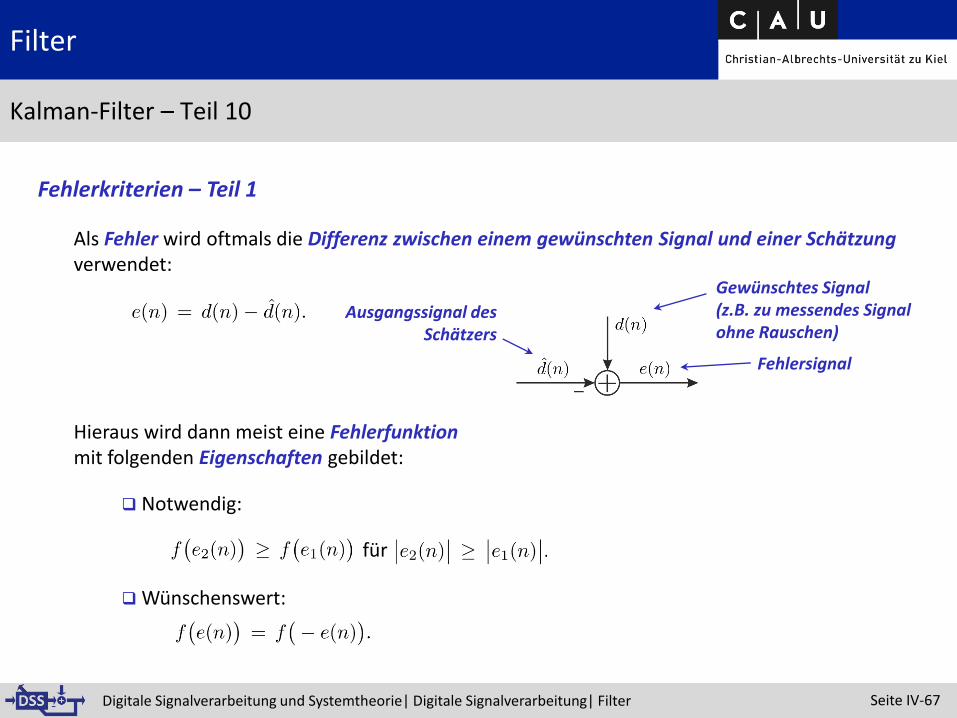
Fehlerkriterien – Teil 1
Als Fehler wird oftmals die Differenz zwischen einem gewünschten Signal und einer Schätzungverwendet:
Hieraus wird dann meist eine Fehlerfunktionmit folgenden Eigenschaften gebildet:
❑ Notwendig:
für
❑ Wünschenswert:
Ausgangssignal desSchätzers
Gewünschtes Signal(z.B. zu messendes Signal ohne Rauschen)
Fehlersignal
Seite IV-68Seite IV-68Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 11
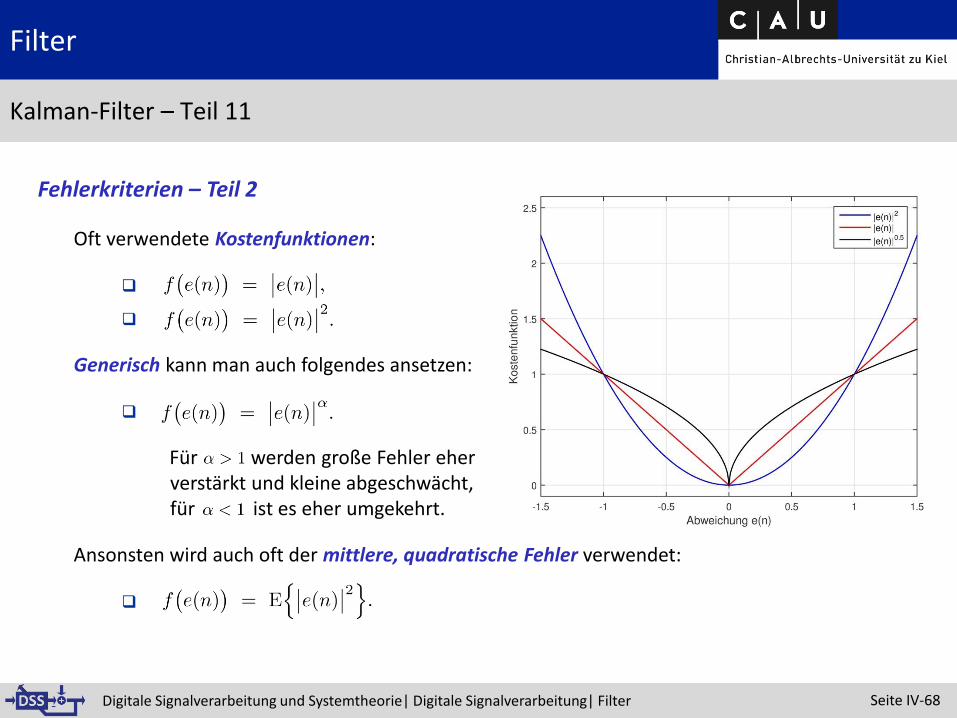
Fehlerkriterien – Teil 2
Oft verwendete Kostenfunktionen:
❑
❑
Generisch kann man auch folgendes ansetzen:
❑
Für werden große Fehler eher verstärkt und kleine abgeschwächt, für ist es eher umgekehrt.
Ansonsten wird auch oft der mittlere, quadratische Fehler verwendet:
❑
Seite IV-69Seite IV-69Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 12
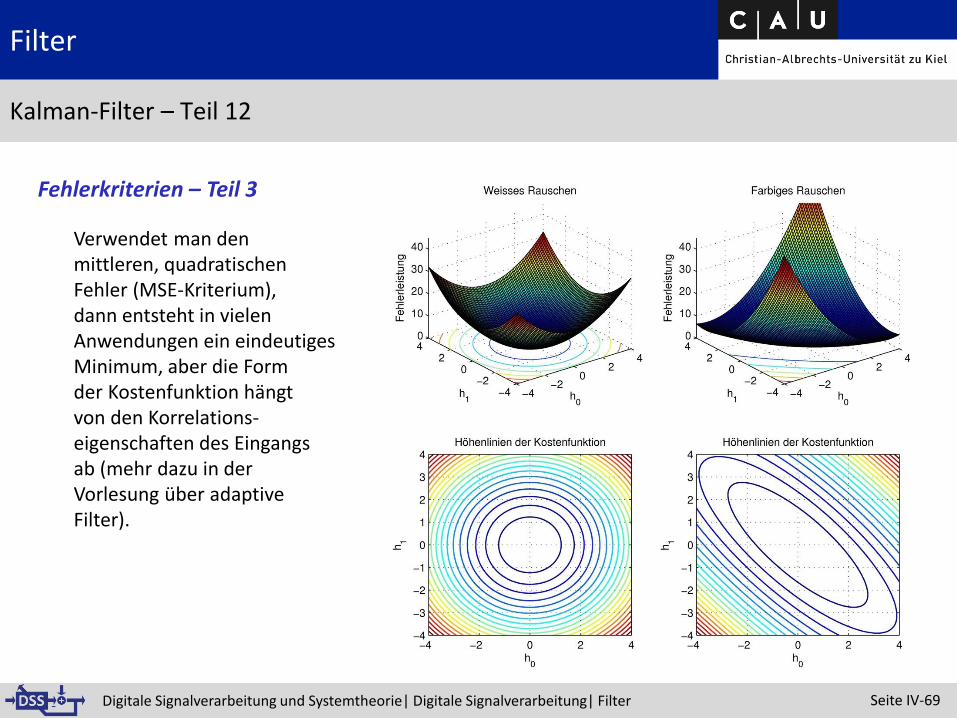
Fehlerkriterien – Teil 3
Verwendet man den mittleren, quadratischen Fehler (MSE-Kriterium),dann entsteht in vielenAnwendungen ein eindeutigesMinimum, aber die Formder Kostenfunktion hängtvon den Korrelations-eigenschaften des Eingangsab (mehr dazu in der Vorlesung über adaptiveFilter).
Seite IV-70Seite IV-70Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 13
Gauß‘sche Zufallsprozesse und Kalman-Filter
Johann Car Friedrich Gauß(30.04.1777 – 23.02.1855)
Für ein Filter / ein Schätzverfahren, das den mittleren quadratischen Fehler minimiert, gelten folgende Eigenschaften:
❑ Wenn alle Eingänge gaußverteilt sind, dann ist ein lineares Kalman-Filter das optimale Filter.
❑ Sind nur die Mittelwerte und Varianzen bekannt, dann ist ein Kalman-Filter der beste lineareSchätzer. Nichtlineare Ansätze können aber bessere Ergebnisse erzielen.
Seite IV-71Seite IV-71Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
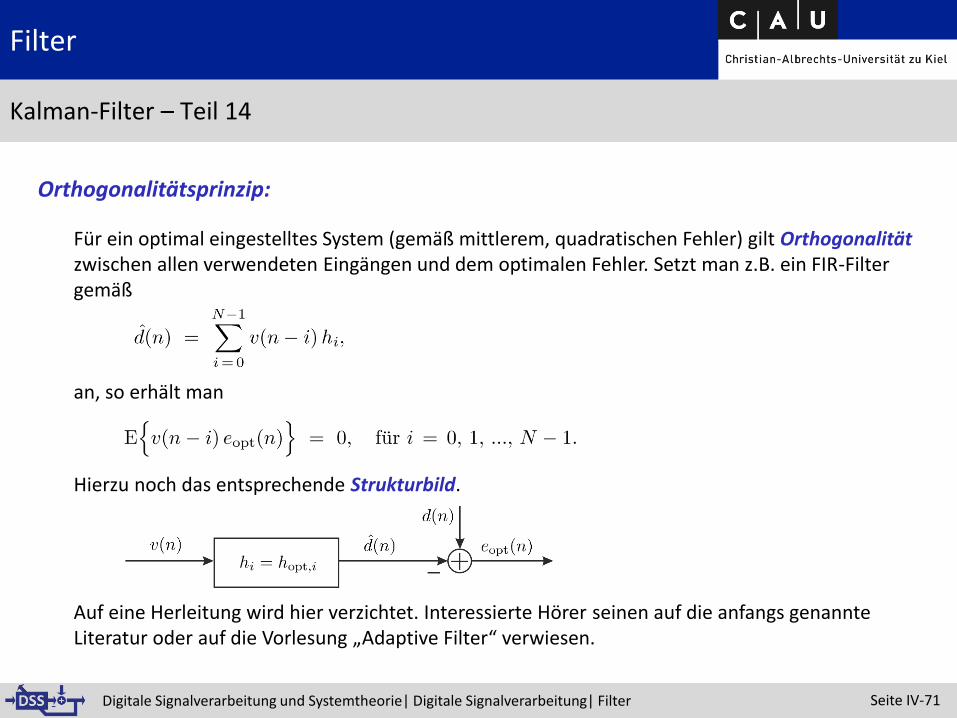
Für ein optimal eingestelltes System (gemäß mittlerem, quadratischen Fehler) gilt Orthogonalitätzwischen allen verwendeten Eingängen und dem optimalen Fehler. Setzt man z.B. ein FIR-Filter gemäß
an, so erhält man
Hierzu noch das entsprechende Strukturbild.
Auf eine Herleitung wird hier verzichtet. Interessierte Hörer seinen auf die anfangs genannteLiteratur oder auf die Vorlesung „Adaptive Filter“ verwiesen.
Filter
Kalman-Filter – Teil 14
Orthogonalitätsprinzip:
Seite IV-72Seite IV-72Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 15
Ein einfacher rekursiver Schätzer – Teil 1
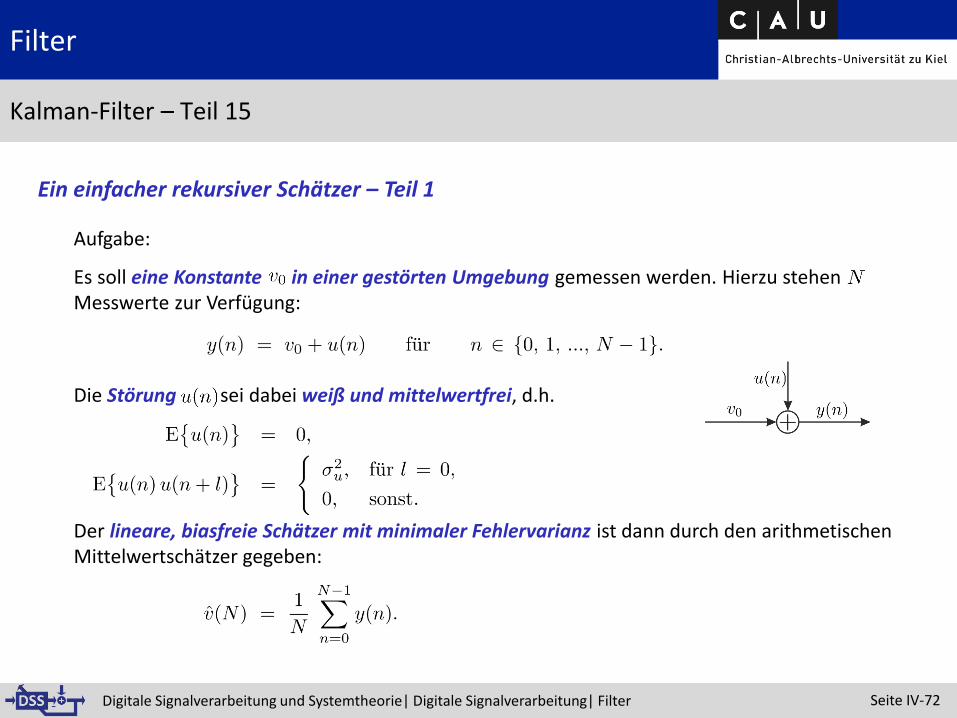
Aufgabe:
Es soll eine Konstante in einer gestörten Umgebung gemessen werden. Hierzu stehen Messwerte zur Verfügung:
Die Störung sei dabei weiß und mittelwertfrei, d.h.
Der lineare, biasfreie Schätzer mit minimaler Fehlervarianz ist dann durch den arithmetischenMittelwertschätzer gegeben:
Seite IV-73Seite IV-73Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 16
Ein einfacher rekursiver Schätzer – Teil 2
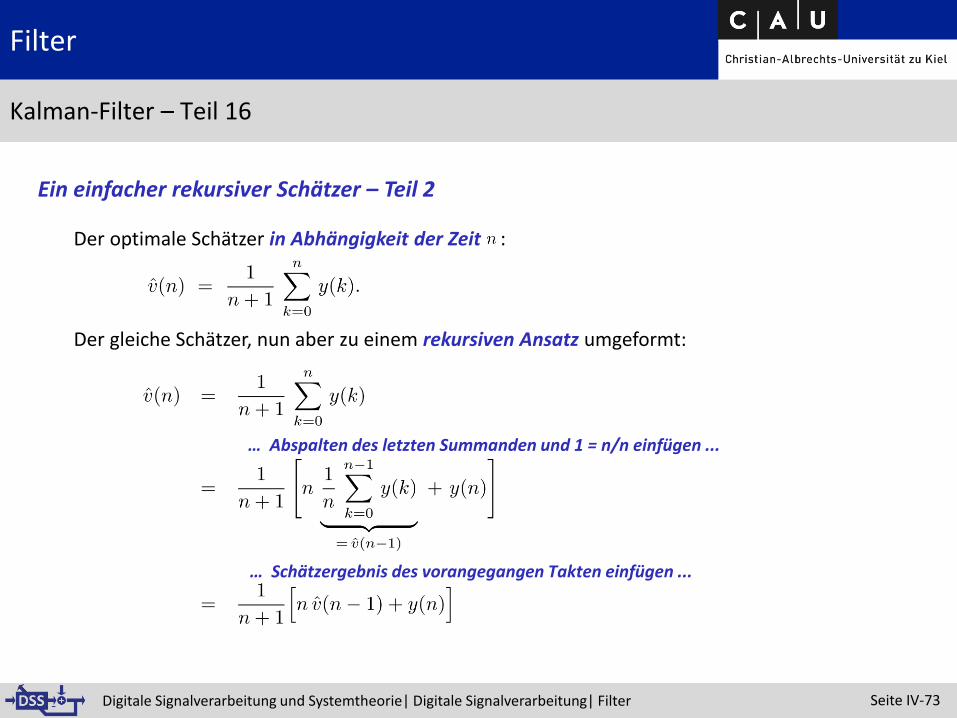
Der optimale Schätzer in Abhängigkeit der Zeit :
Der gleiche Schätzer, nun aber zu einem rekursiven Ansatz umgeformt:
… Abspalten des letzten Summanden und 1 = n/n einfügen ...
… Schätzergebnis des vorangegangen Takten einfügen ...
Seite IV-74Seite IV-74Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 17
Ein einfacher rekursiver Schätzer – Teil 3
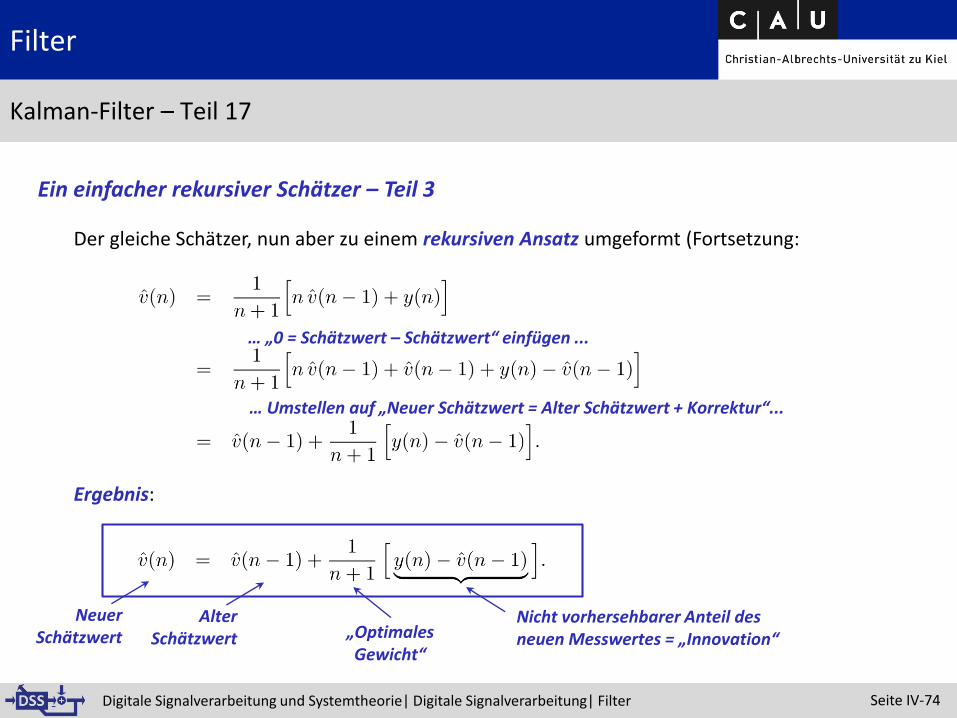
Der gleiche Schätzer, nun aber zu einem rekursiven Ansatz umgeformt (Fortsetzung:
Ergebnis:
… „0 = Schätzwert – Schätzwert“ einfügen ...
… Umstellen auf „Neuer Schätzwert = Alter Schätzwert + Korrektur“...
Neuer Schätzwert
AlterSchätzwert
Nicht vorhersehbarer Anteil des neuen Messwertes = „Innovation“„Optimales
Gewicht“

Seite IV-75Seite IV-75Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 18
Ein einfacher rekursiver Schätzer – Teil 4
Signalmodell
Schätzer
Seite IV-76Seite IV-76Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 19
❑ Einführung
❑ Signale
❑ Spektren
❑ Filter
❑ Beschreibungen
❑ Zustandsraumdarstellung
❑ Äquivalente Filterstrukturen
❑ Realisierungsaspekte
❑ Kalman-Filter
❑ Ein wenig Geschichte
❑ „Zutaten“
❑ Herleitung des Filters
❑ Anwendungsbeispiel
Seite IV-77Seite IV-77Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 20
“What usually is called ‘Kalman Filter’ is not a filter in the traditional sense, it is rather an estimation algorithm.”
Was ist ein Kalman-Filter:
Eberhard Hänsler, Kalman-Filter-Vortrag an der CAU,
2013
Seite IV-78Seite IV-78Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 21
Bilgin‘s Blog überKalman-Filter:
“When I started doing my homework for Optimal Filtering for Signal Processing class, I said to myself: ’How hard can it be?’. Soon I realized that it was a fatal mistake.
The whole thing was like a nightmare. Nothing made sense. …”
Seite IV-79Seite IV-79Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 22
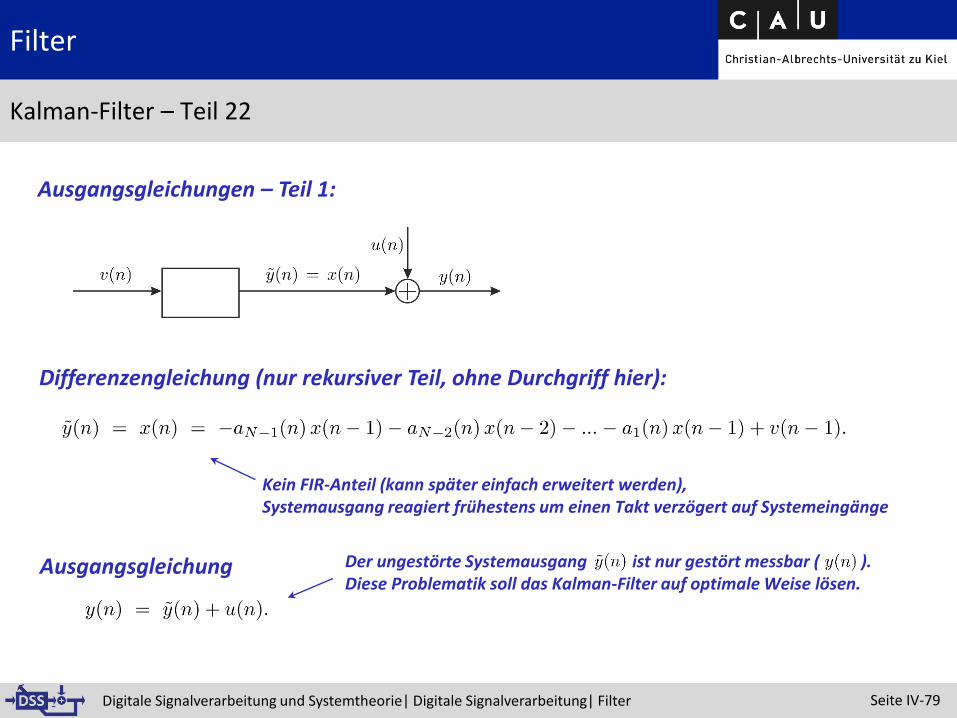
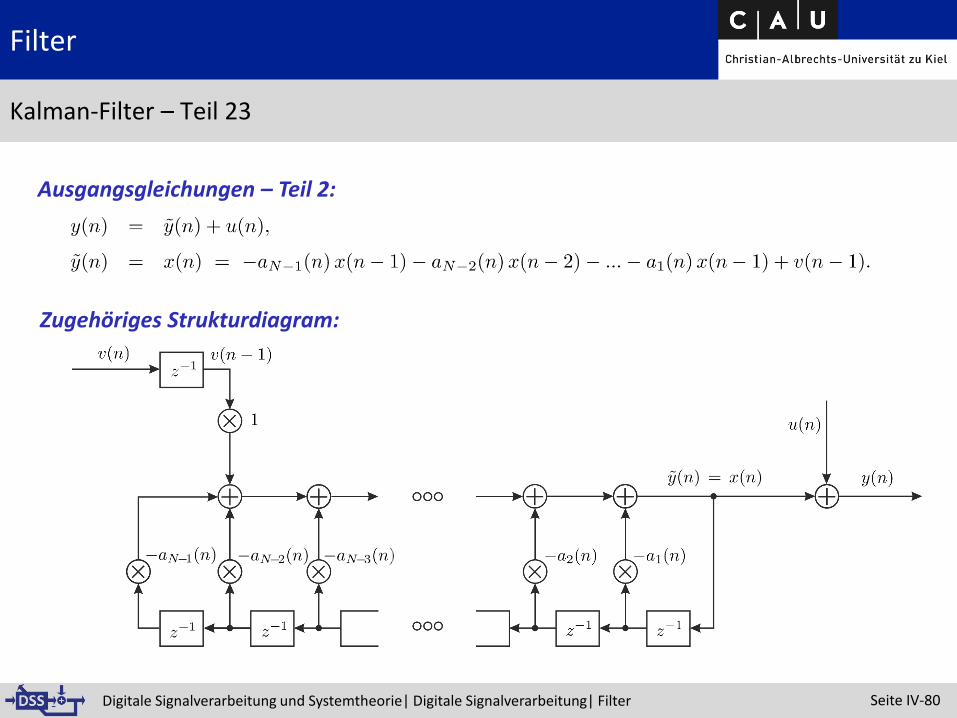
Ausgangsgleichungen – Teil 1:
Differenzengleichung (nur rekursiver Teil, ohne Durchgriff hier):
Ausgangsgleichung
Kein FIR-Anteil (kann später einfach erweitert werden), Systemausgang reagiert frühestens um einen Takt verzögert auf Systemeingänge
Der ungestörte Systemausgang ist nur gestört messbar ( ).Diese Problematik soll das Kalman-Filter auf optimale Weise lösen.
Seite IV-80Seite IV-80Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 23
Ausgangsgleichungen – Teil 2:
Zugehöriges Strukturdiagram:
Seite IV-81Seite IV-81Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
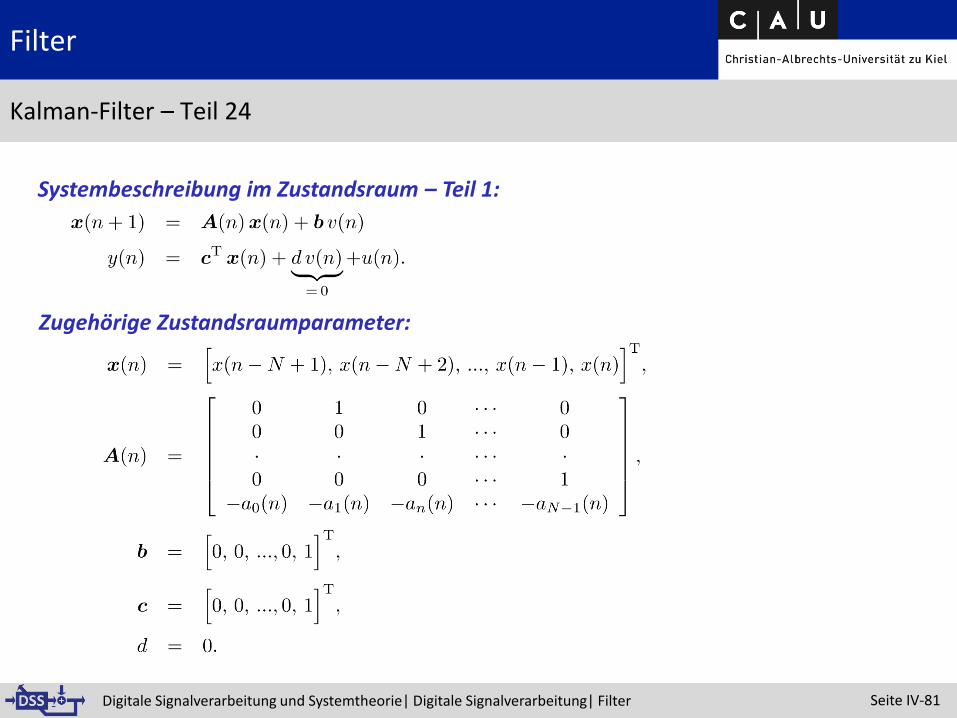
Kalman-Filter – Teil 24
Systembeschreibung im Zustandsraum – Teil 1:
Zugehörige Zustandsraumparameter:
Seite IV-82Seite IV-82Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
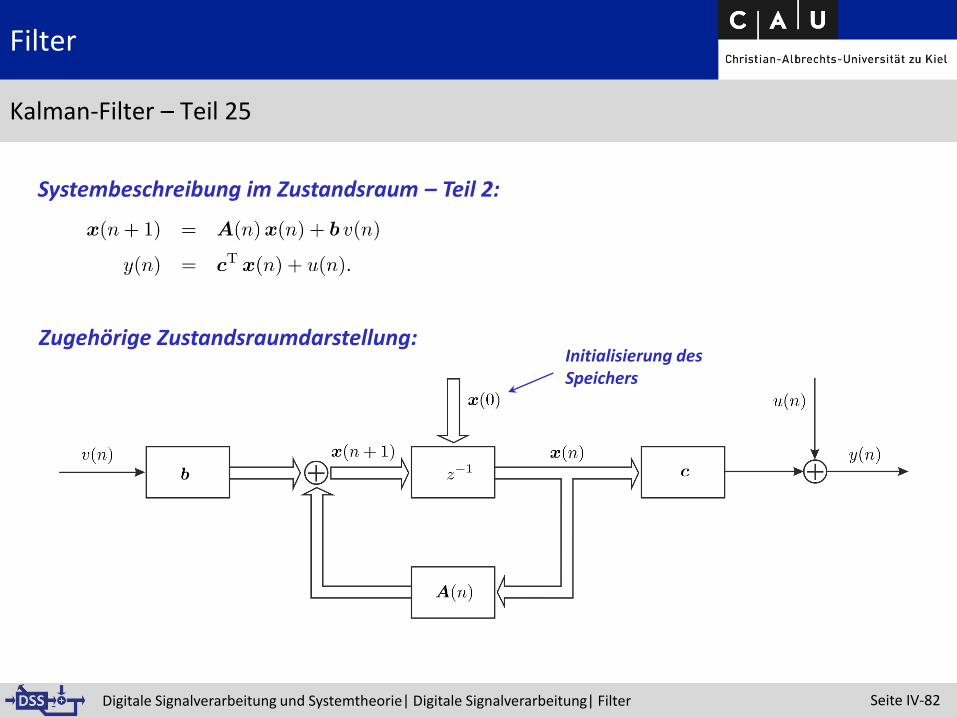
Kalman-Filter – Teil 25
Systembeschreibung im Zustandsraum – Teil 2:
Zugehörige Zustandsraumdarstellung:Initialisierung desSpeichers
Seite IV-83Seite IV-83Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 26
Formulierung der Randbedingungen des Schätzverfahrens:
Wir wollen einen Schätzwert für den Zustandsvektor mit folgenden Eigenschaften finden:
❑ linear,
❑ biasfrei,
❑ mit minimaler Fehlervarianz und
❑ rekursiv.
Seite IV-84Seite IV-84Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 27
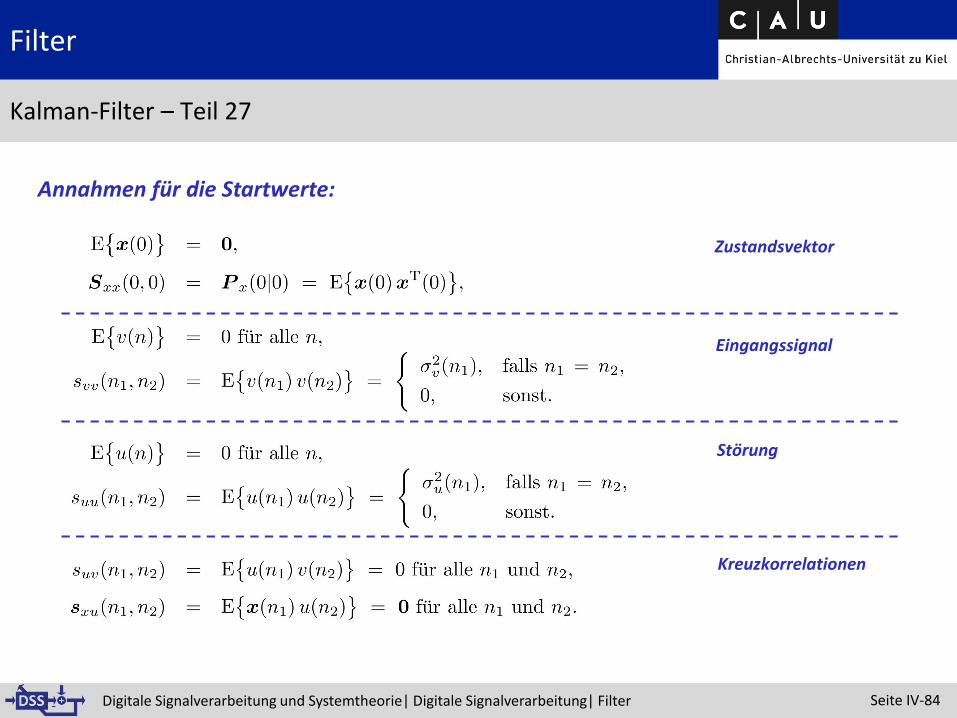
Annahmen für die Startwerte:
Zustandsvektor
Eingangssignal
Störung
Kreuzkorrelationen
Seite IV-85Seite IV-85Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 28
Ansatz:
Wir versuchen im Folgenden eine Lösung in drei Schritten:
❑ eine möglichst gute Initialisierung,
❑ eine Prädiktion auf der Basis des bisherigen Wissens (der bisherigen Daten) und
❑ eine Korrektur, sobald ein neuer Messwert eingetroffen ist.
Dabei gehen wir mit folgender Strategie vor:
❑ Zunächst stellen wir einen Ansatz für das Schätzverfahren auf,
❑ bestimmen dann die sog. Kalman-Verstärkung und
❑ berechnen/erneuern dann die Kovarianzmatrix des Schätzfehlers.
Prädiktion
Korrektur
Seite IV-86Seite IV-86Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 29
Herleitung des Kalman-Filters:
❑ Initialisierung
❑ Prädiktion
❑ Korrektur
Seite IV-87Seite IV-87Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 30
Startwerte – Teil 1:
Wir starten zunächst mit einem affin linearen Ansatz:
Aufgrund der Forderung nach Biasfreiheit des Schätzers muss gelten:
Da wir Mittelwertfreiheit für den Startwert des Zustandsvektors angenommen haben, mussebenfalls gelten:
Seite IV-88Seite IV-88Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 31
Startwerte – Teil 2:
Bisherige Lösung:
Da sowohl das Systemrauschen ( ) als auch das Messrauschen ( )mittelwertfrei sind, sind auch die gestörten Messwerte mittelwertfrei, d.h. es gilt:
Damit gilt für den konstanten Anteil unseres Ansatzes:
Somit vereinfacht sich unser Ansatz zu:
Seite IV-89Seite IV-89Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 32
Startwerte – Teil 3:
Als nächstes definieren wir den a posteriori Fehler des geschätzten Zustandsvektors:
Da wir einen Schätzer mit minimaler Fehlervarianz haben wollen, muss der Schätzfehler orthogonalzu allen verwendeten Eingangsprozessen sein, d.h. es muss gelten:
… Einsetzen der Definition des a posteriori Schätzfehlers ...
… Einsetzen des Ansatzes für den geschätzten Zustandsvektor ...
… Auflösen nach der Kalman-Verstärkung ...
Seite IV-90Seite IV-90Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 33
Startwerte – Teil 4:
Bisherige Lösung:
Um Zähler und Nenner dieser Lösung auf bekannte Annahmen zurückzuführen, kann die Messgleichung
verwendet werden. So gilt zunächst für die Leistung des gestörten Messsignals:
… Einsetzen der Orthogonalitätsannahme zwischen x(0) und u(0) ...
… Einsetzen der Abkürzungen [und Verwendung der Mittelwertfreiheit von u(n)] ...
Seite IV-91Seite IV-91Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Vereinfachung der bisherigen Lösung:
Auch der Zähler kann unter Verwendung der Messgleichung umgestellt werden:
Damit ergibt sich schließlich für die Kalman-Verstärkung:
Filter
Kalman-Filter – Teil 34
Startwerte – Teil 5:
… Einsetzen der Orthogonalitätsannahme zwischen x und u ...
… Einsetzen der Abkürzungen ...
Seite IV-92Seite IV-92Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Als letztes benötigen wir noch einen Startwert für die Kovarianzmatrix des Schätzfehlers. Dieseist wie folgt definiert:
Diese Größe kann wie folgt auf bekannte Größen zurückgeführt werden:
Filter
Kalman-Filter – Teil 35
Startwerte – Teil 6:
… Einsetzen der Definition des a posteriori Fehlers ...
… Aufteilen der beiden Erwartungswertanteile ...
… Einsetzen der Orthogonalität zwischen Schätzfehler und zugehöriger Eingänge ...
Seite IV-93Seite IV-93Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Bisheriges Ergebnis:
Damit ergibt sich:
Filter
Kalman-Filter – Teil 36
Startwerte – Teil 7:
… Einsetzen der Definition des a posteriori Fehlers ...
… Ausklammern von ( stellt die Einheitsmatrix dar) ...
… Aufteilen der beiden Erwartungswertanteile und Einsetzen der Abkürzungen ...
… Einsetzen des bisherigen Ergebnisses ...
Seite IV-94Seite IV-94Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Zusammengefasst ergibt sich also für die Startwerte:
❑ Schätzwert für den Zustandsvektor
❑ Kalman-Verstärkung
❑ Fehlerkovarianzmatrix
Filter
Kalman-Filter – Teil 37
Startwerte – Teil 8:
Seite IV-95Seite IV-95Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 38
Herleitung des Kalman-Filters:
❑ Initialisierung
❑ Prädiktion
❑ Korrektur
Seite IV-96Seite IV-96Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 39
Zustandsraumdarstellung (zur Erinnerung):
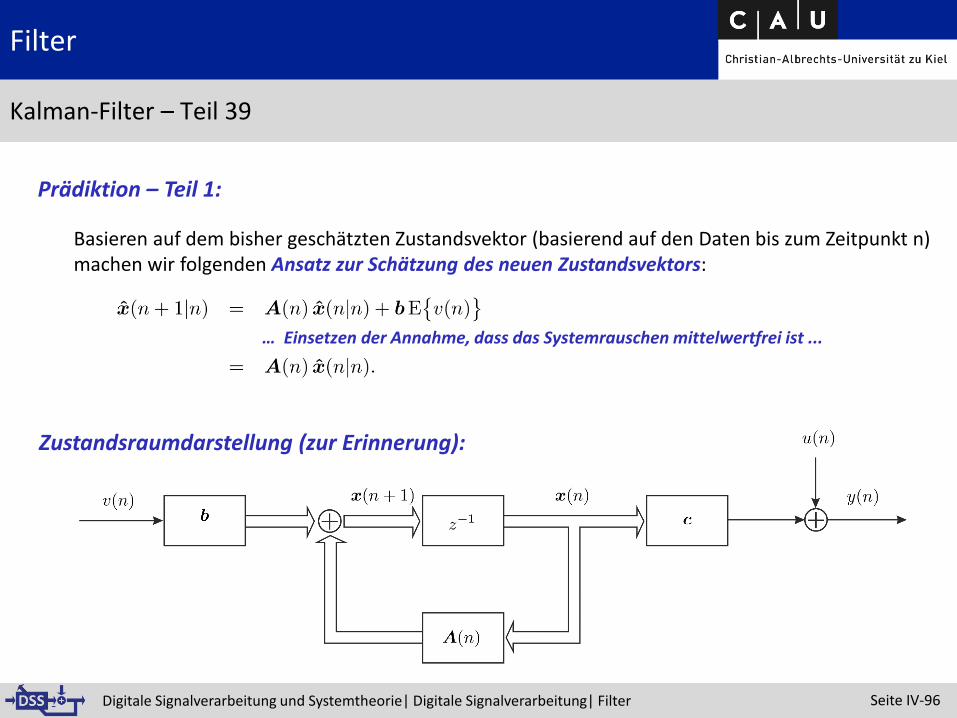
Prädiktion – Teil 1:
Basieren auf dem bisher geschätzten Zustandsvektor (basierend auf den Daten bis zum Zeitpunkt n)machen wir folgenden Ansatz zur Schätzung des neuen Zustandsvektors:
… Einsetzen der Annahme, dass das Systemrauschen mittelwertfrei ist ...
Seite IV-97Seite IV-97Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 40
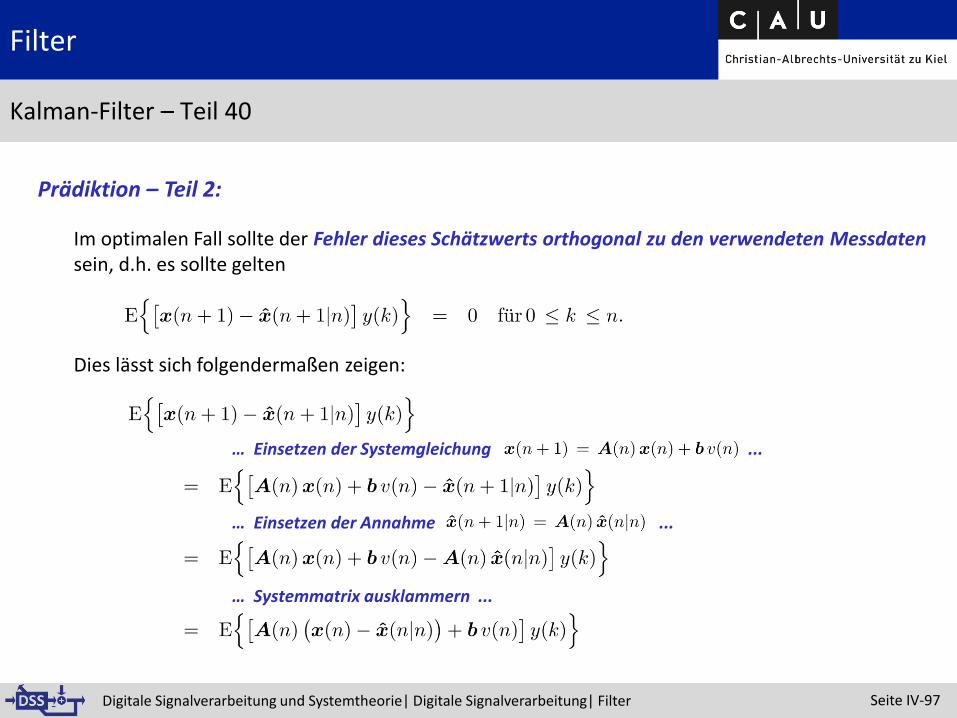
Prädiktion – Teil 2:
Im optimalen Fall sollte der Fehler dieses Schätzwerts orthogonal zu den verwendeten Messdatensein, d.h. es sollte gelten
Dies lässt sich folgendermaßen zeigen:
… Einsetzen der Systemgleichung ...
… Einsetzen der Annahme ...
… Systemmatrix ausklammern ...
Seite IV-98Seite IV-98Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
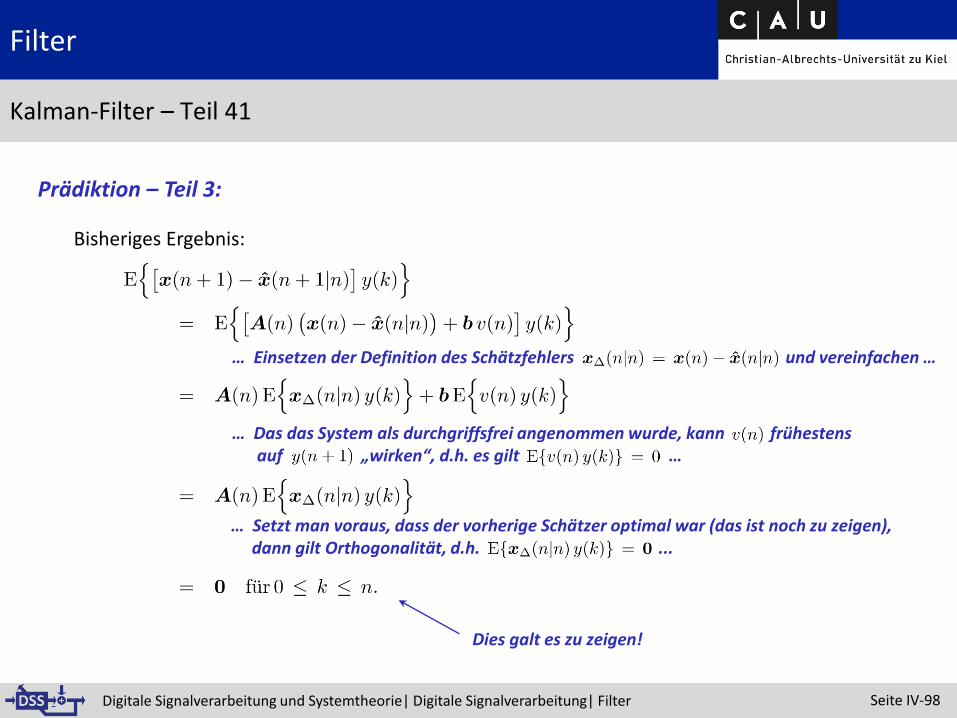
Bisheriges Ergebnis:
Filter
Kalman-Filter – Teil 41
Prädiktion – Teil 3:
… Einsetzen der Definition des Schätzfehlers und vereinfachen …
… Setzt man voraus, dass der vorherige Schätzer optimal war (das ist noch zu zeigen),dann gilt Orthogonalität, d.h. ...
… Das das System als durchgriffsfrei angenommen wurde, kann frühestens auf „wirken“, d.h. es gilt …
Dies galt es zu zeigen!
Seite IV-99Seite IV-99Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
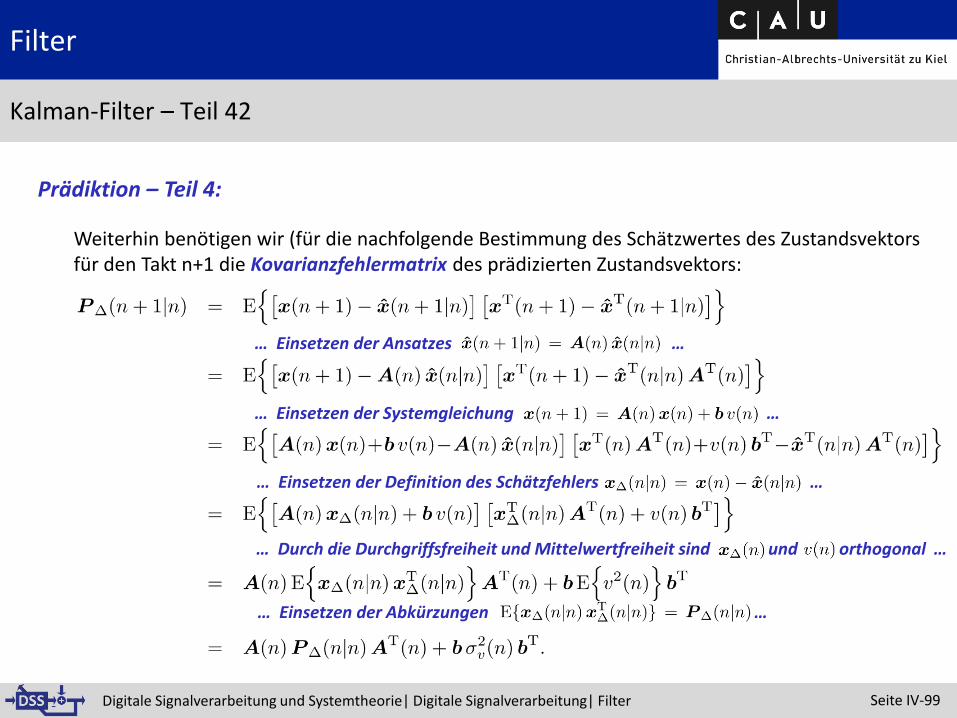
Weiterhin benötigen wir (für die nachfolgende Bestimmung des Schätzwertes des Zustandsvektorsfür den Takt n+1 die Kovarianzfehlermatrix des prädizierten Zustandsvektors:
Filter
Kalman-Filter – Teil 42
Prädiktion – Teil 4:
… Einsetzen der Ansatzes …
… Einsetzen der Systemgleichung …
… Einsetzen der Definition des Schätzfehlers …
… Durch die Durchgriffsfreiheit und Mittelwertfreiheit sind und orthogonal …
… Einsetzen der Abkürzungen und …
Seite IV-100Seite IV-100Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
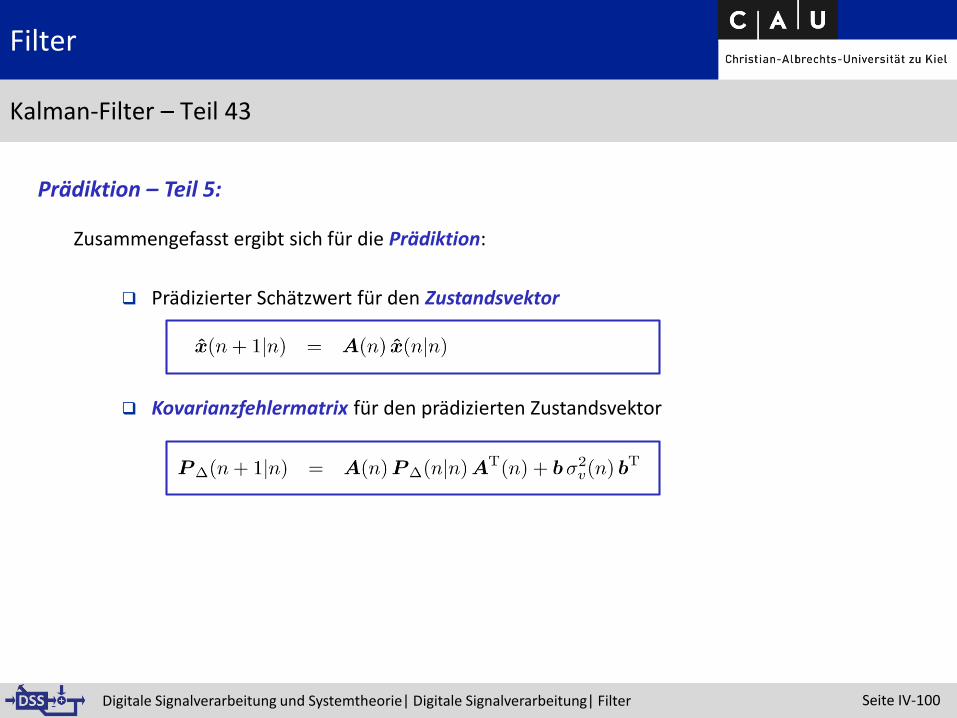
Zusammengefasst ergibt sich für die Prädiktion:
❑ Prädizierter Schätzwert für den Zustandsvektor
❑ Kovarianzfehlermatrix für den prädizierten Zustandsvektor
Filter
Kalman-Filter – Teil 43
Prädiktion – Teil 5:
Seite IV-101Seite IV-101Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 44
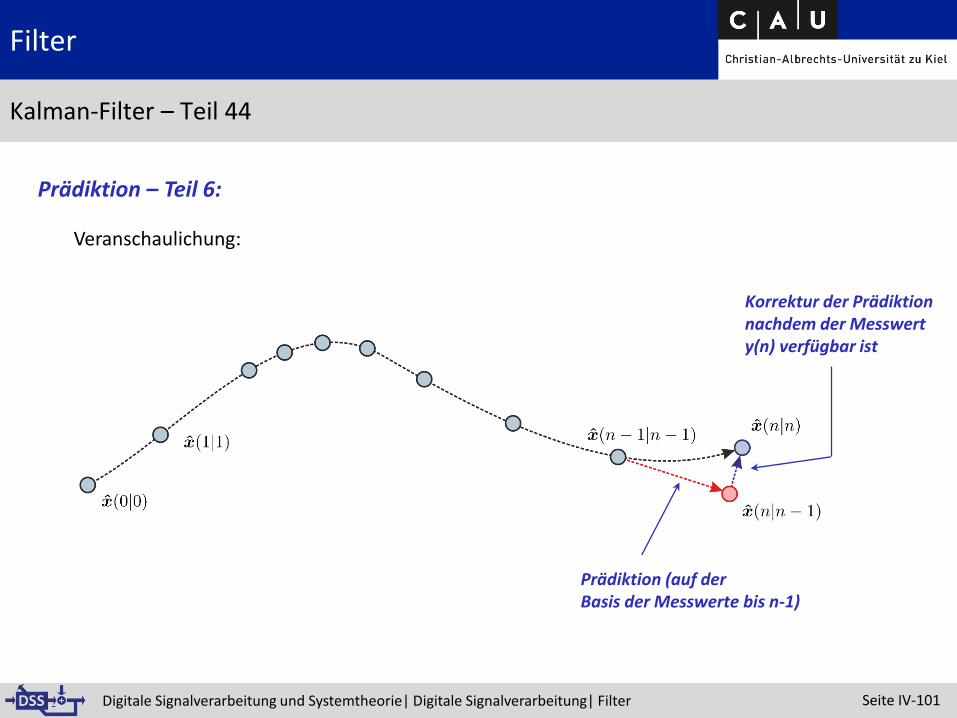
Veranschaulichung:
Prädiktion – Teil 6:
Prädiktion (auf derBasis der Messwerte bis n-1)
Korrektur der Prädiktionnachdem der Messwert y(n) verfügbar ist
Seite IV-102Seite IV-102Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 45
Herleitung des Kalman-Filters:
❑ Initialisierung
❑ Prädiktion
❑ Korrektur
Seite IV-103Seite IV-103Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Wir wollen nun die Schätzung, d.h. , so korrigieren, dass die Varianz des Systemfehlervektors minimal wird, d.h. es muss Orthogonalität zwischen allen verwendeten Eingängen des Schätzers und dem Schätzfehler gelten:
Hierzu machen wir folgenden Ansatz:
Dabei bezeichnet den sog. Kalman-Verstärkungsvektor. Sollte dieser Ansatz richtig sein, so muss sich zeigen lassen, dass die oben geforderte Orthogonalitätsbedingung gilt.
Filter
Kalman-Filter – Teil 46
Korrektur – Teil 1:
… Einsetzen der Messgleichung mit dem geschätzten Zustandsvektor…
Seite IV-104Seite IV-104Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
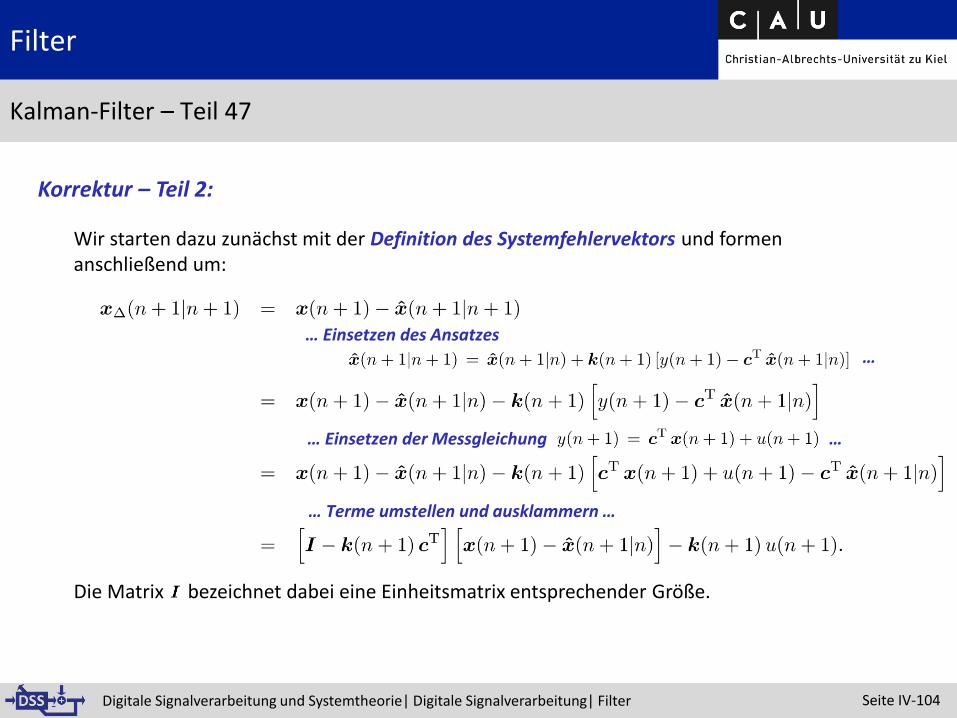
Wir starten dazu zunächst mit der Definition des Systemfehlervektors und formen anschließend um:
Die Matrix bezeichnet dabei eine Einheitsmatrix entsprechender Größe.
Filter
Kalman-Filter – Teil 47
Korrektur – Teil 2:
… Einsetzen des Ansatzes …
… Einsetzen der Messgleichung …
… Terme umstellen und ausklammern …
Seite IV-105Seite IV-105Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
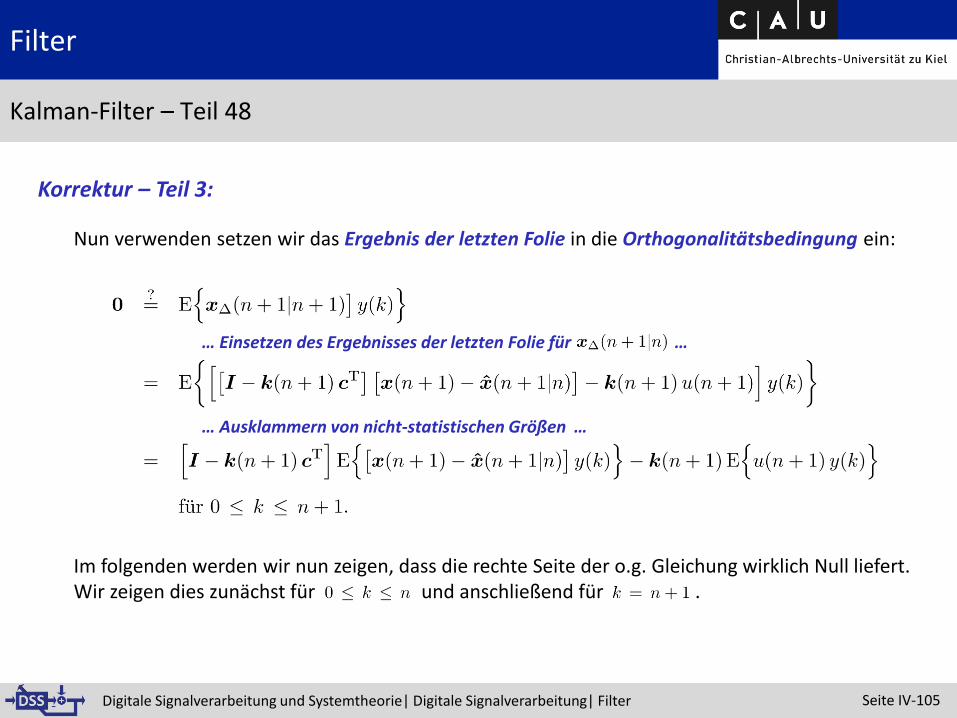
Nun verwenden setzen wir das Ergebnis der letzten Folie in die Orthogonalitätsbedingung ein:
Im folgenden werden wir nun zeigen, dass die rechte Seite der o.g. Gleichung wirklich Null liefert.Wir zeigen dies zunächst für und anschließend für .
Filter
Kalman-Filter – Teil 48
Korrektur – Teil 3:
… Einsetzen des Ergebnisses der letzten Folie für …
… Ausklammern von nicht-statistischen Größen …
Seite IV-106Seite IV-106Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
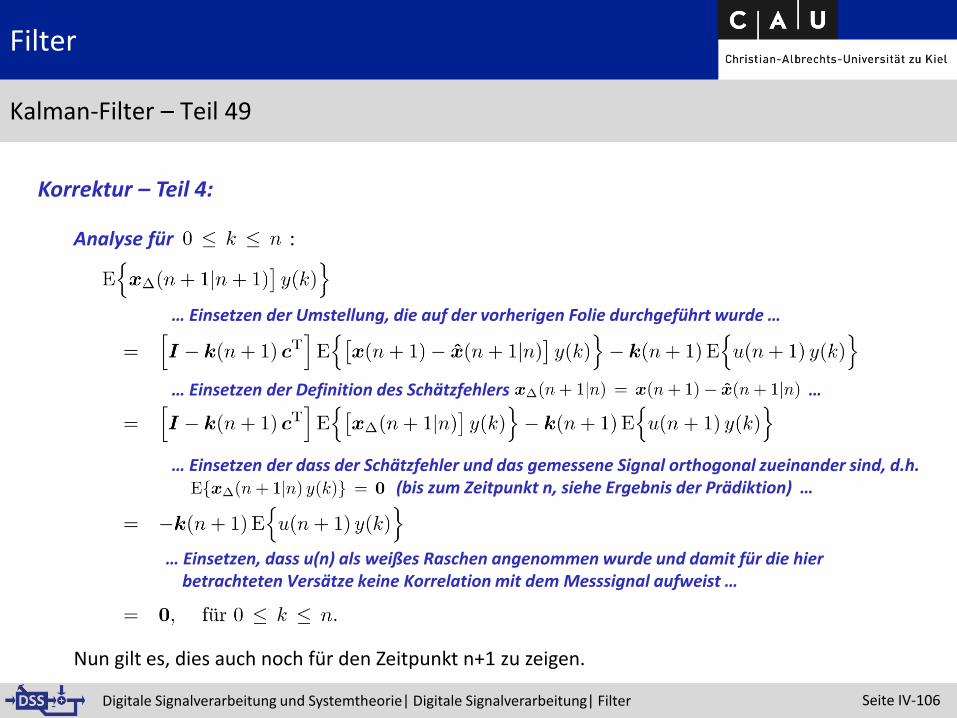
Analyse für :
Nun gilt es, dies auch noch für den Zeitpunkt n+1 zu zeigen.
Filter
Kalman-Filter – Teil 49
Korrektur – Teil 4:
… Einsetzen der Definition des Schätzfehlers …
… Einsetzen der dass der Schätzfehler und das gemessene Signal orthogonal zueinander sind, d.h.(bis zum Zeitpunkt n, siehe Ergebnis der Prädiktion) …
… Einsetzen, dass u(n) als weißes Raschen angenommen wurde und damit für die hier betrachteten Versätze keine Korrelation mit dem Messsignal aufweist …
… Einsetzen der Umstellung, die auf der vorherigen Folie durchgeführt wurde …
Seite IV-107Seite IV-107Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
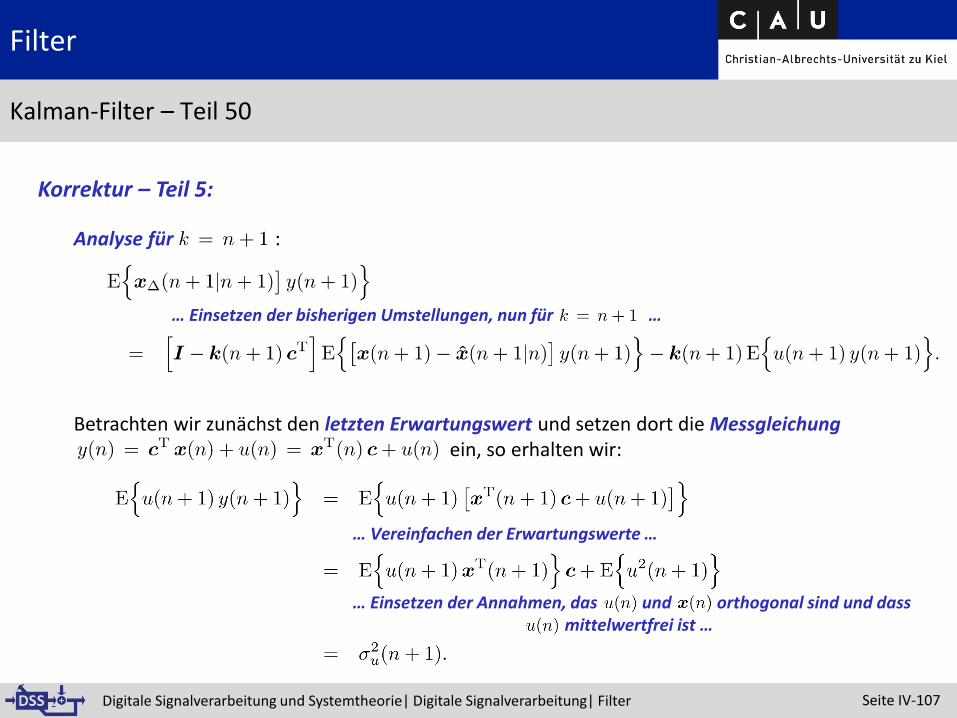
Analyse für :
Betrachten wir zunächst den letzten Erwartungswert und setzen dort die Messgleichungein, so erhalten wir:
Filter
Kalman-Filter – Teil 50
Korrektur – Teil 5:
… Einsetzen der bisherigen Umstellungen, nun für …
… Vereinfachen der Erwartungswerte …
… Einsetzen der Annahmen, das s und orthogonal sind und dass mittelwertfrei ist …
Seite IV-108Seite IV-108Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
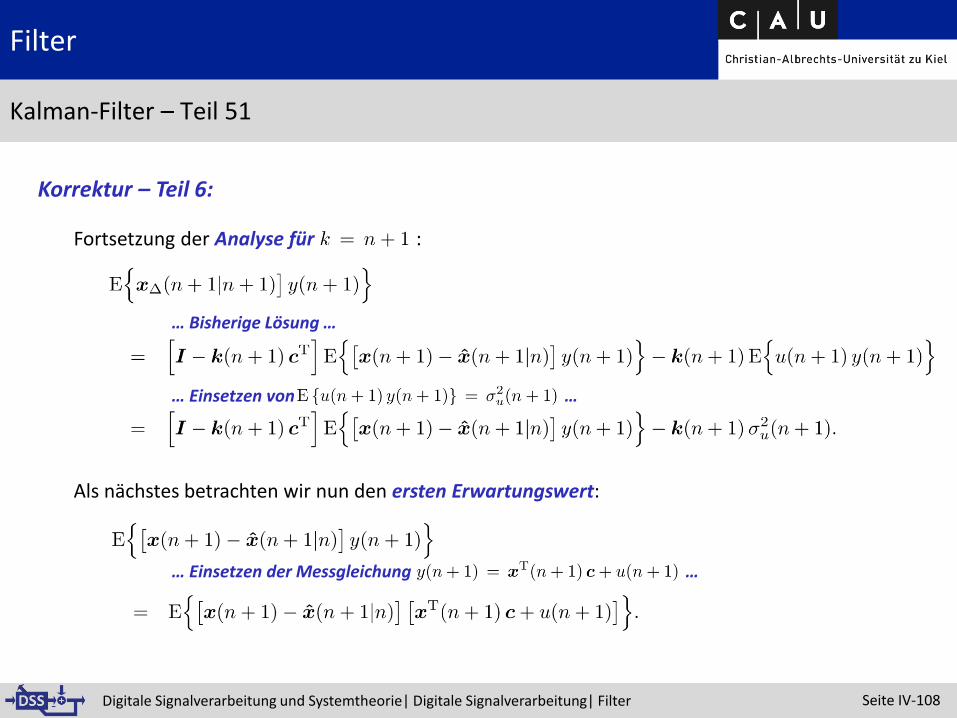
Kalman-Filter – Teil 51
Fortsetzung der Analyse für :
Als nächstes betrachten wir nun den ersten Erwartungswert:
Korrektur – Teil 6:
… Bisherige Lösung …
… Einsetzen von …
… Einsetzen der Messgleichung …
Seite IV-109Seite IV-109Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
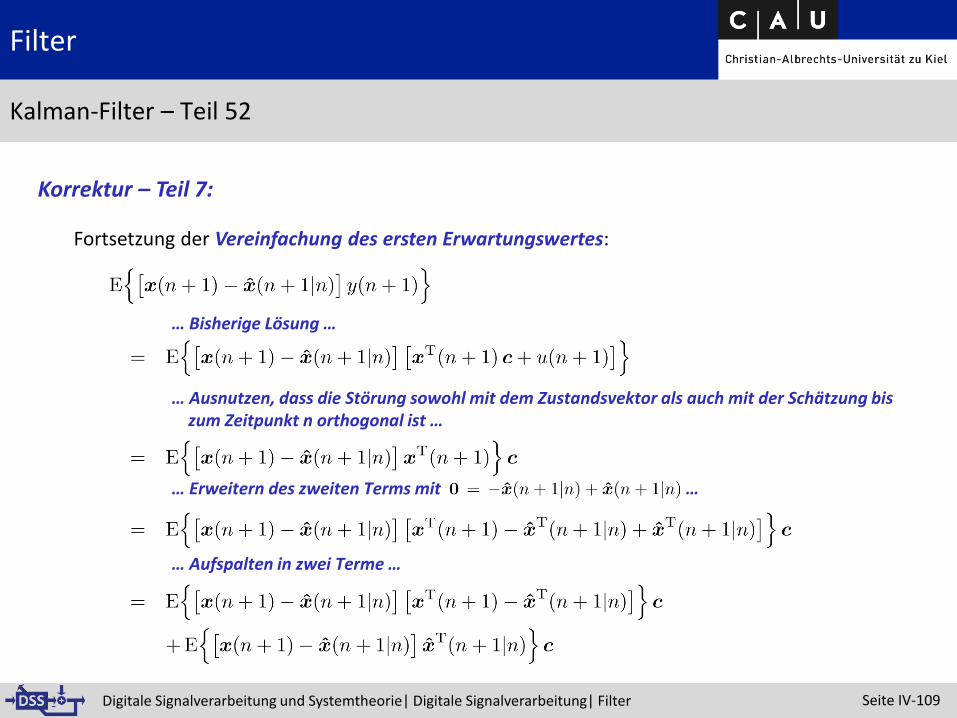
Filter
Kalman-Filter – Teil 52
Fortsetzung der Vereinfachung des ersten Erwartungswertes:
Korrektur – Teil 7:
… Bisherige Lösung …
… Ausnutzen, dass die Störung sowohl mit dem Zustandsvektor als auch mit der Schätzung bis zum Zeitpunkt n orthogonal ist …
… Erweitern des zweiten Terms mit …
… Aufspalten in zwei Terme …
Seite IV-110Seite IV-110Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
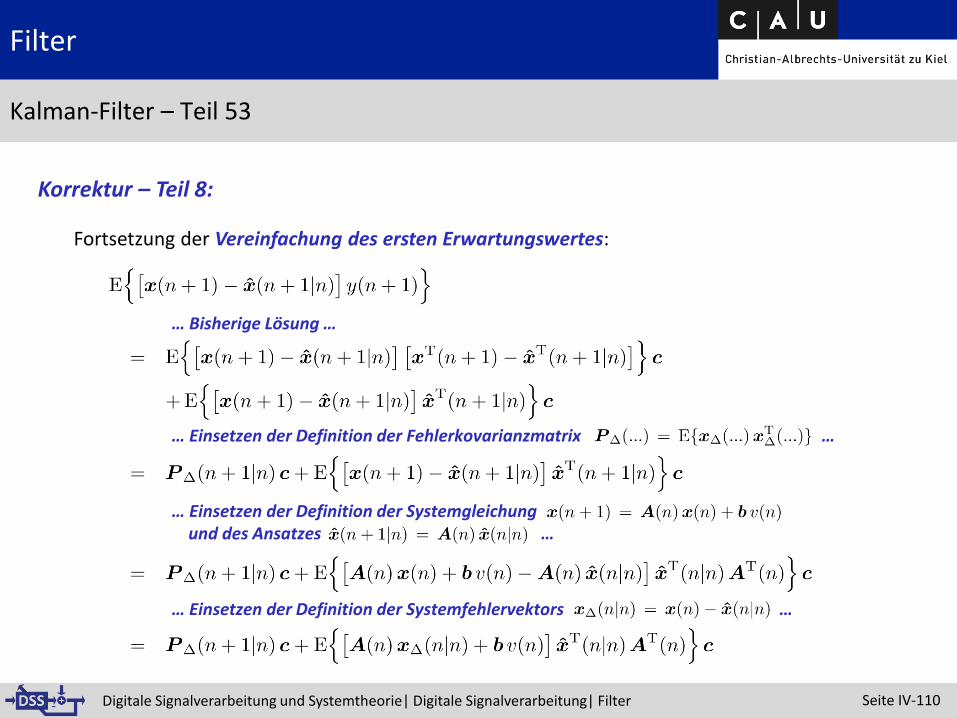
Kalman-Filter – Teil 53
Fortsetzung der Vereinfachung des ersten Erwartungswertes:
Korrektur – Teil 8:
… Bisherige Lösung …
… Einsetzen der Definition der Fehlerkovarianzmatrix …
… Einsetzen der Definition der Systemgleichung und des Ansatzes …
… Einsetzen der Definition der Systemfehlervektors …
Seite IV-111Seite IV-111Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 54
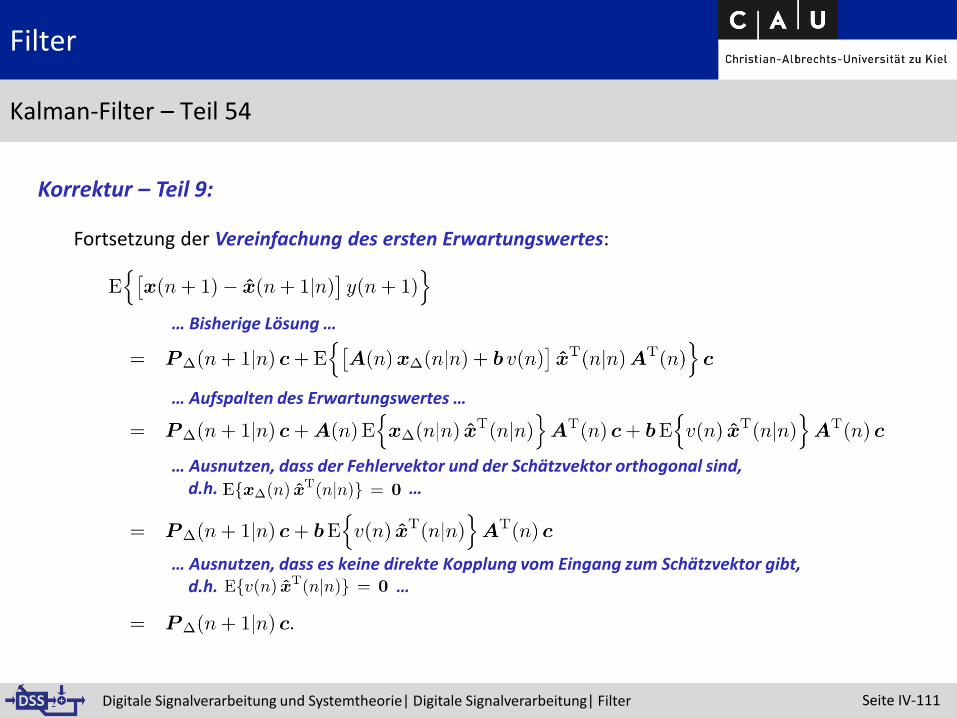
Fortsetzung der Vereinfachung des ersten Erwartungswertes:
Korrektur – Teil 9:
… Bisherige Lösung …
… Aufspalten des Erwartungswertes …
… Ausnutzen, dass der Fehlervektor und der Schätzvektor orthogonal sind, d.h. …
… Ausnutzen, dass es keine direkte Kopplung vom Eingang zum Schätzvektor gibt, d.h. …
Seite IV-112Seite IV-112Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
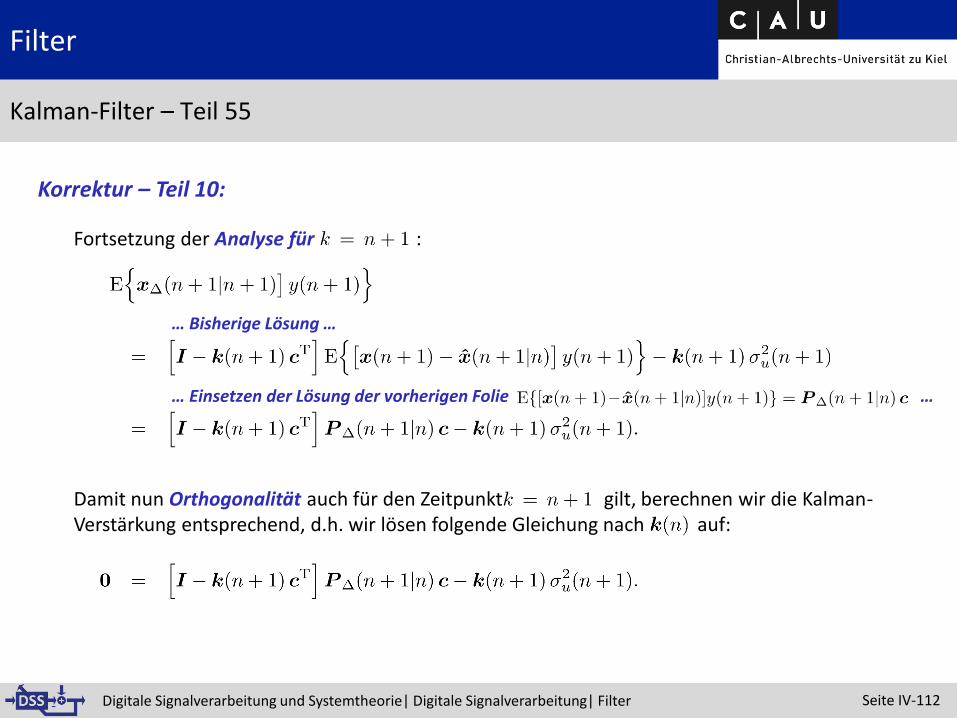
Fortsetzung der Analyse für :
Damit nun Orthogonalität auch für den Zeitpunkt gilt, berechnen wir die Kalman-Verstärkung entsprechend, d.h. wir lösen folgende Gleichung nach auf:
Filter
Kalman-Filter – Teil 55
Korrektur – Teil 10:
… Bisherige Lösung …
… Einsetzen der Lösung der vorherigen Folie …
Seite IV-113Seite IV-113Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
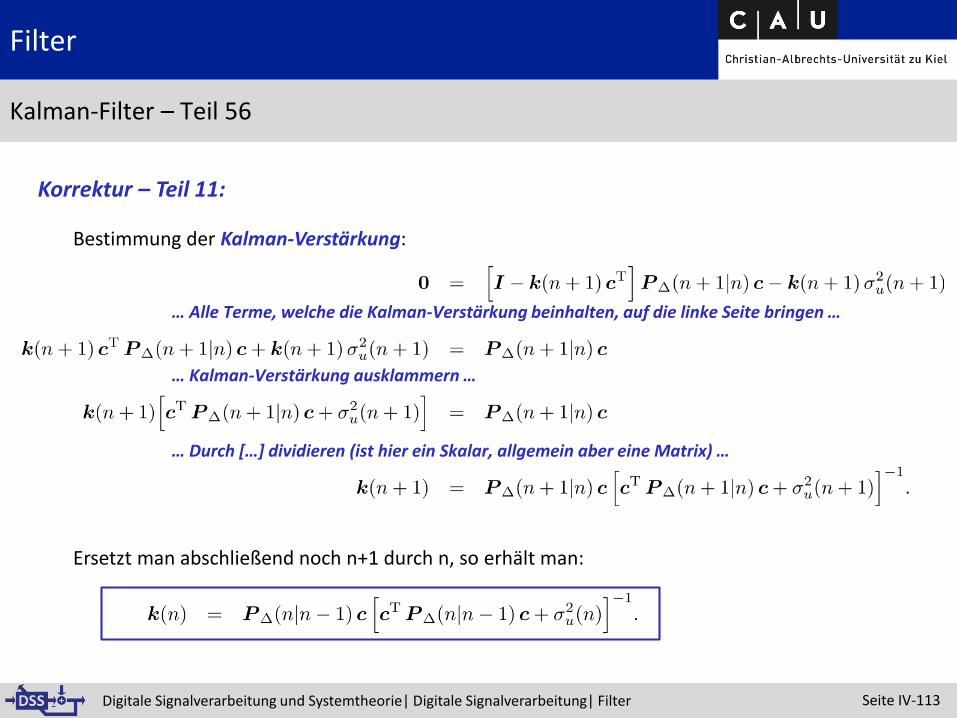
Bestimmung der Kalman-Verstärkung:
Ersetzt man abschließend noch n+1 durch n, so erhält man:
Filter
Kalman-Filter – Teil 56
Korrektur – Teil 11:
… Alle Terme, welche die Kalman-Verstärkung beinhalten, auf die linke Seite bringen …
… Kalman-Verstärkung ausklammern …
… Durch […] dividieren (ist hier ein Skalar, allgemein aber eine Matrix) …
Seite IV-114Seite IV-114Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 57
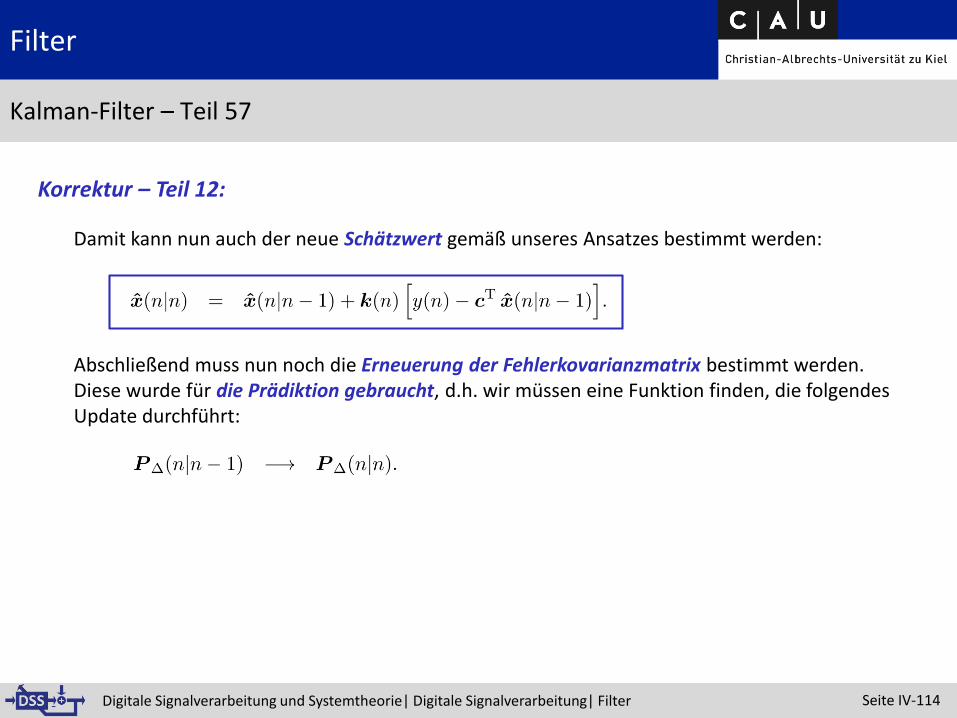
Damit kann nun auch der neue Schätzwert gemäß unseres Ansatzes bestimmt werden:
Abschließend muss nun noch die Erneuerung der Fehlerkovarianzmatrix bestimmt werden. Diese wurde für die Prädiktion gebraucht, d.h. wir müssen eine Funktion finden, die folgendes Update durchführt:
Korrektur – Teil 12:
Seite IV-115Seite IV-115Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 58
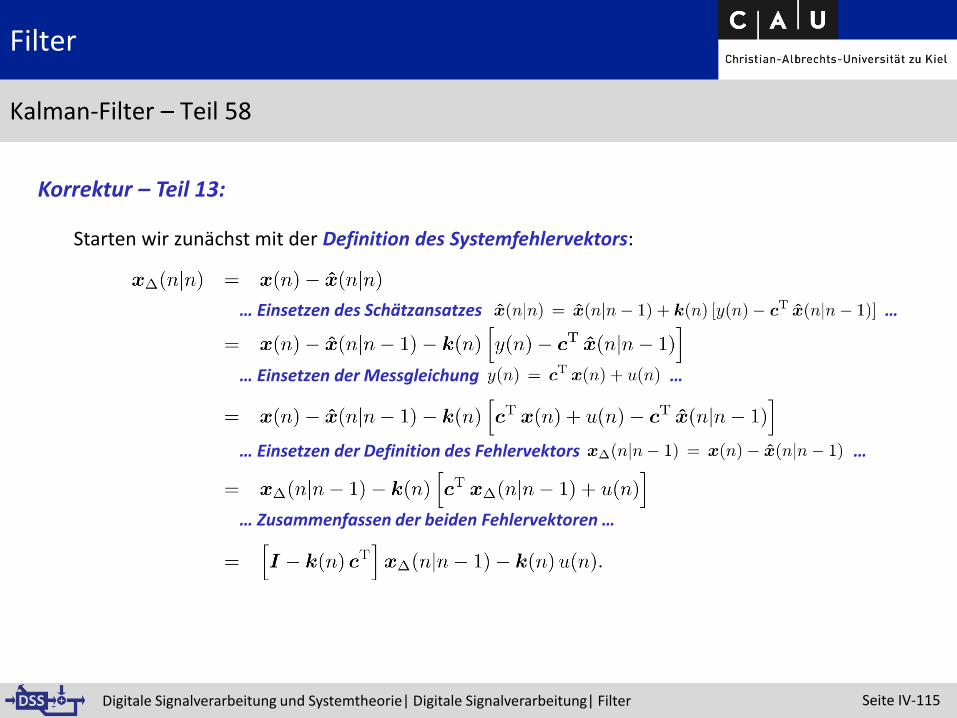
Starten wir zunächst mit der Definition des Systemfehlervektors:
Korrektur – Teil 13:
… Einsetzen des Schätzansatzes …
… Einsetzen der Messgleichung …
… Einsetzen der Definition des Fehlervektors …
… Zusammenfassen der beiden Fehlervektoren …
Seite IV-116Seite IV-116Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 59
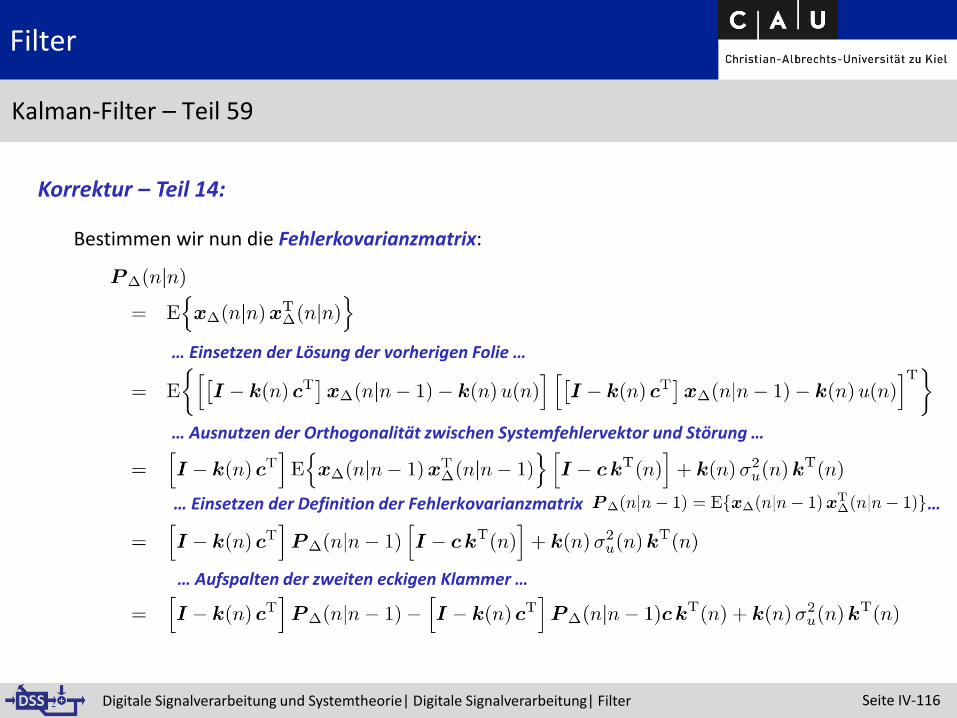
Bestimmen wir nun die Fehlerkovarianzmatrix:
Korrektur – Teil 14:
… Einsetzen der Lösung der vorherigen Folie …
… Ausnutzen der Orthogonalität zwischen Systemfehlervektor und Störung …
… Einsetzen der Definition der Fehlerkovarianzmatrix …
… Aufspalten der zweiten eckigen Klammer …
Seite IV-117Seite IV-117Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 60
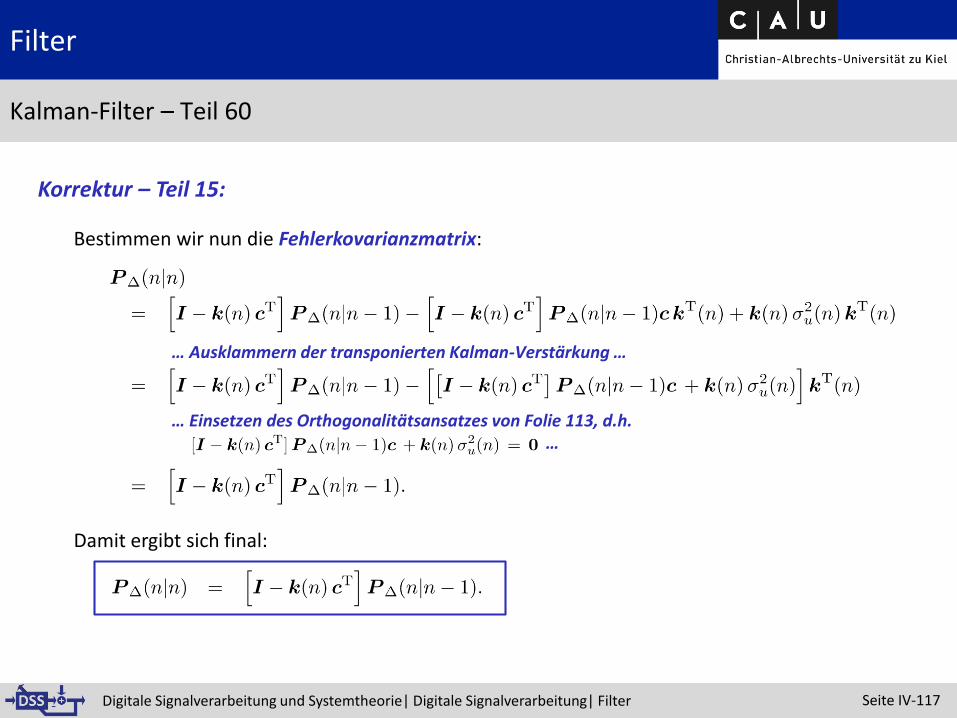
Bestimmen wir nun die Fehlerkovarianzmatrix:
Damit ergibt sich final:
Korrektur – Teil 15:
… Ausklammern der transponierten Kalman-Verstärkung …
… Einsetzen des Orthogonalitätsansatzes von Folie 113, d.h. …
Seite IV-118Seite IV-118Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
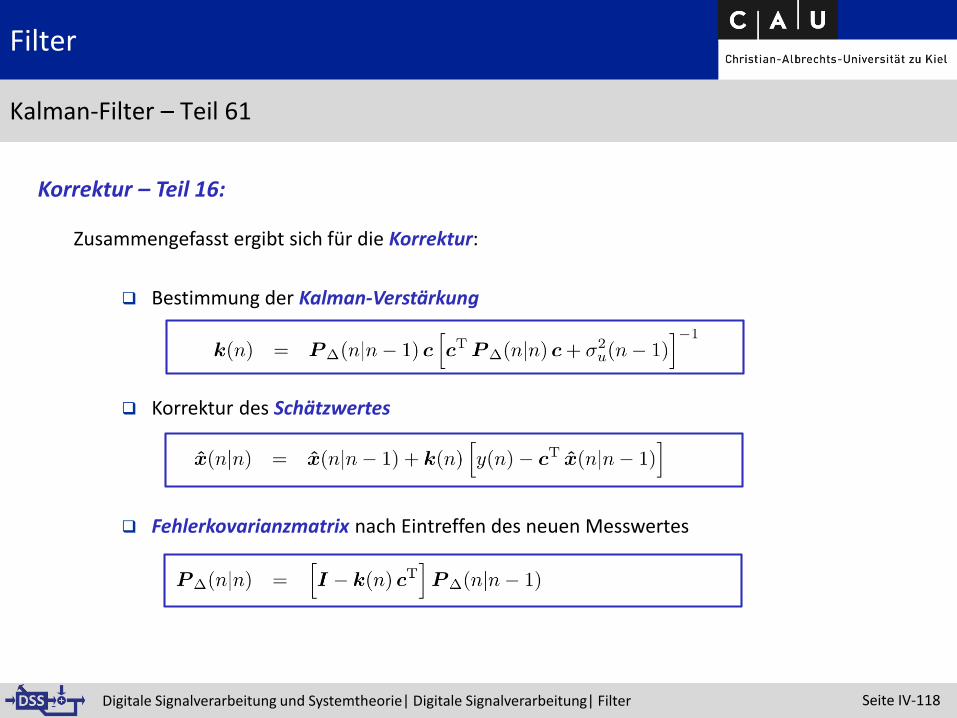
Zusammengefasst ergibt sich für die Korrektur:
❑ Bestimmung der Kalman-Verstärkung
❑ Korrektur des Schätzwertes
❑ Fehlerkovarianzmatrix nach Eintreffen des neuen Messwertes
Filter
Kalman-Filter – Teil 61
Korrektur – Teil 16:
Seite IV-119Seite IV-119Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 62
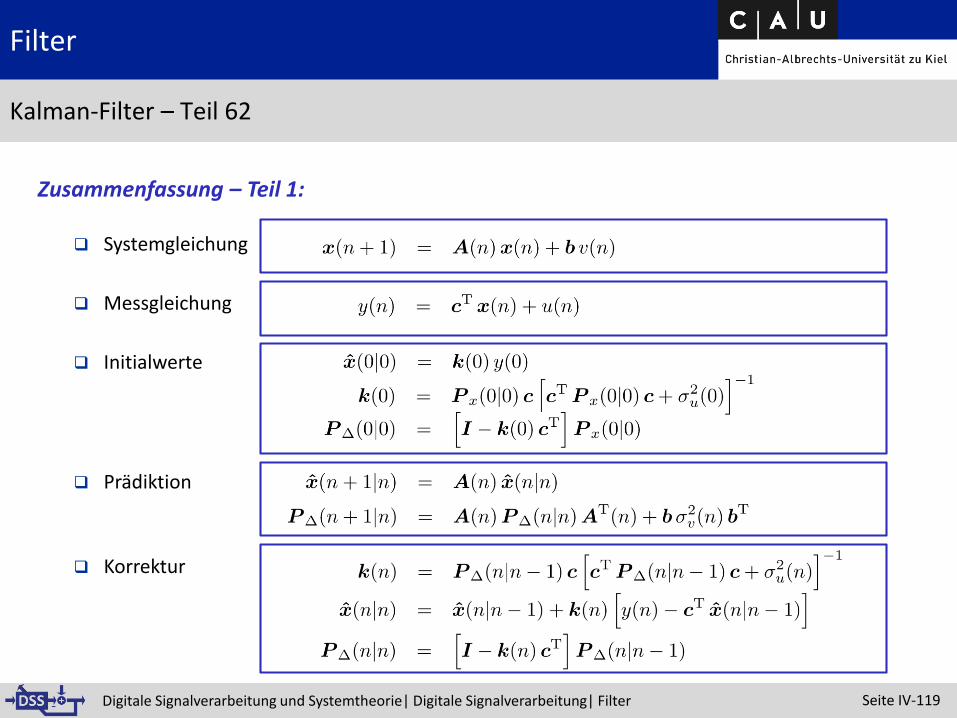
Zusammenfassung – Teil 1:
❑ Systemgleichung
❑ Messgleichung
❑ Initialwerte
❑ Prädiktion
❑ Korrektur
Seite IV-120Seite IV-120Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 63
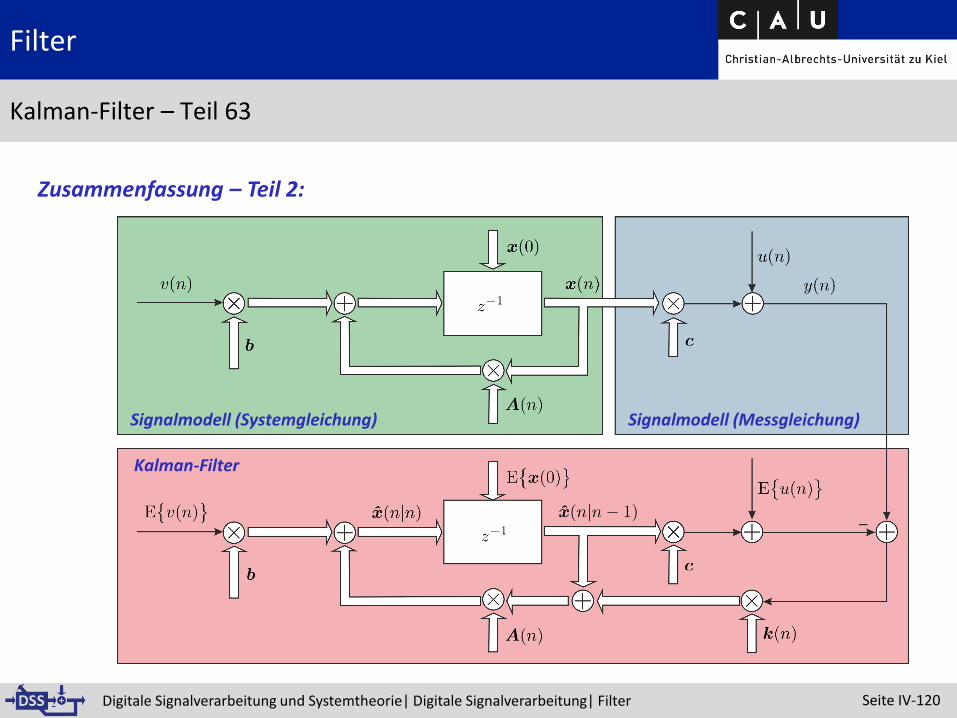
Zusammenfassung – Teil 2:
Signalmodell (Systemgleichung) Signalmodell (Messgleichung)
Kalman-Filter
Seite IV-121Seite IV-121Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 64
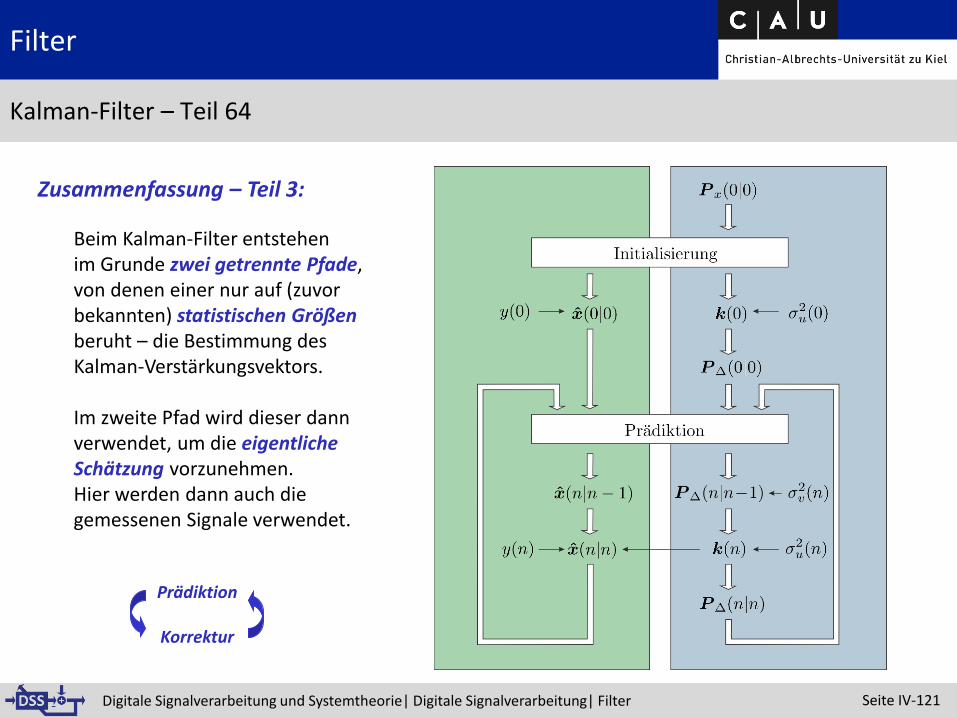
Zusammenfassung – Teil 3:
Prädiktion
Korrektur
Beim Kalman-Filter entstehenim Grunde zwei getrennte Pfade,von denen einer nur auf (zuvorbekannten) statistischen Größenberuht – die Bestimmung desKalman-Verstärkungsvektors.
Im zweite Pfad wird dieser dann verwendet, um die eigentliche Schätzung vorzunehmen.Hier werden dann auch die gemessenen Signale verwendet.
Seite IV-122Seite IV-122Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 65
❑ Einführung
❑ Signale
❑ Spektren
❑ Filter
❑ Beschreibungen
❑ Zustandsraumdarstellung
❑ Äquivalente Filterstrukturen
❑ Realisierungsaspekte
❑ Kalman-Filter
❑ Ein wenig Geschichte
❑ „Zutaten“
❑ Herleitung des Filters
❑ Anwendungsbeispiel
Seite IV-123Seite IV-123Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 66
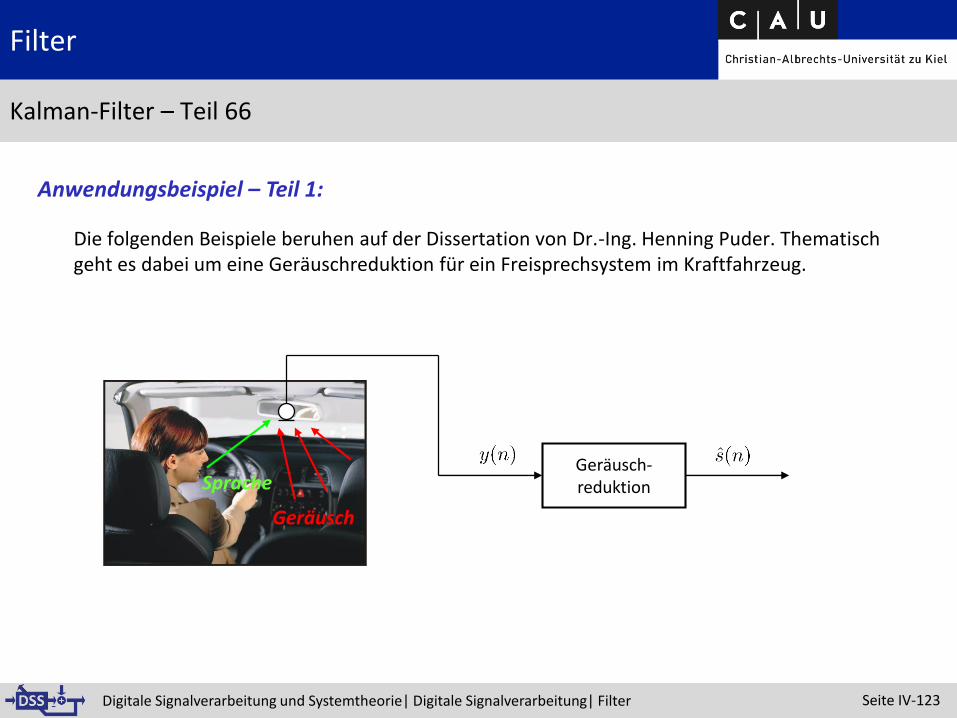
Geräusch-reduktionSprache
Geräusch
Die folgenden Beispiele beruhen auf der Dissertation von Dr.-Ing. Henning Puder. Thematischgeht es dabei um eine Geräuschreduktion für ein Freisprechsystem im Kraftfahrzeug.
Anwendungsbeispiel – Teil 1:
Seite IV-124Seite IV-124Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 67
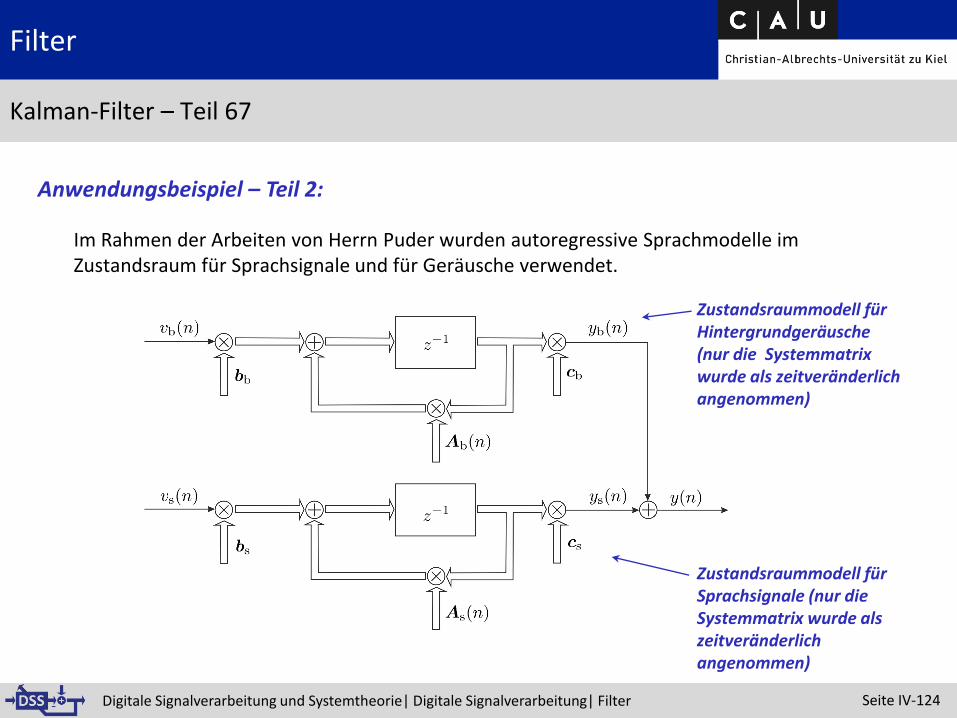
Im Rahmen der Arbeiten von Herrn Puder wurden autoregressive Sprachmodelle im Zustandsraum für Sprachsignale und für Geräusche verwendet.
Zustandsraummodell für Hintergrundgeräusche(nur die Systemmatrix wurde als zeitveränderlich angenommen)
Zustandsraummodell für Sprachsignale (nur die Systemmatrix wurde alszeitveränderlich angenommen)
Anwendungsbeispiel – Teil 2:
Seite IV-125Seite IV-125Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 68
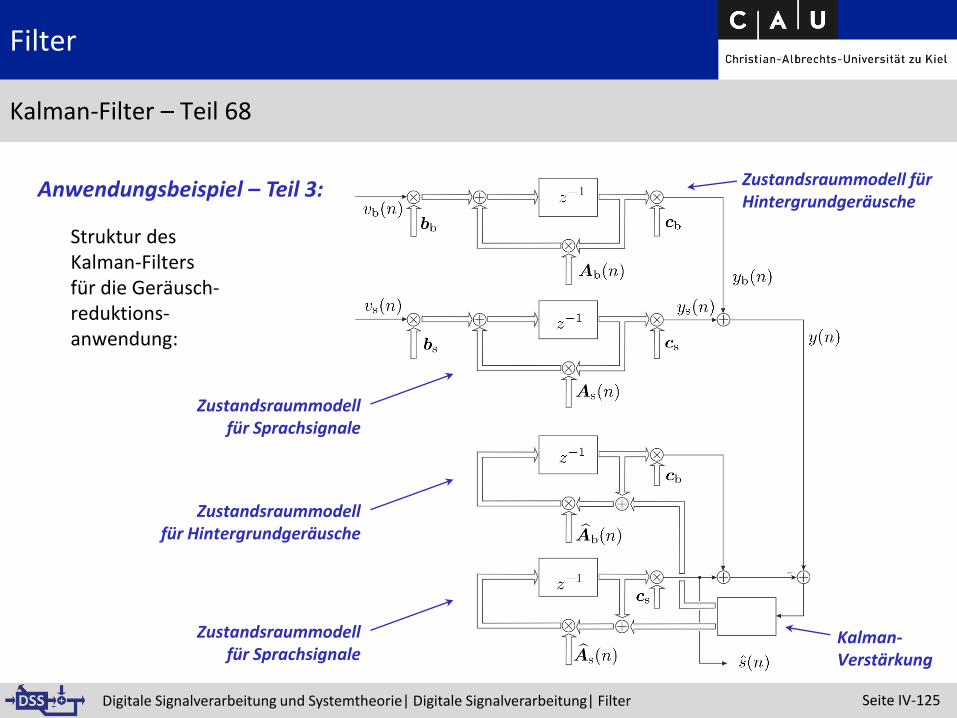
Struktur des Kalman-Filters für die Geräusch-reduktions-anwendung:
Zustandsraummodell für Hintergrundgeräusche
Zustandsraummodell für Sprachsignale
Zustandsraummodell für Sprachsignale
Zustandsraummodell für Hintergrundgeräusche
Anwendungsbeispiel – Teil 3:
Kalman-Verstärkung
Seite IV-126Seite IV-126Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 69
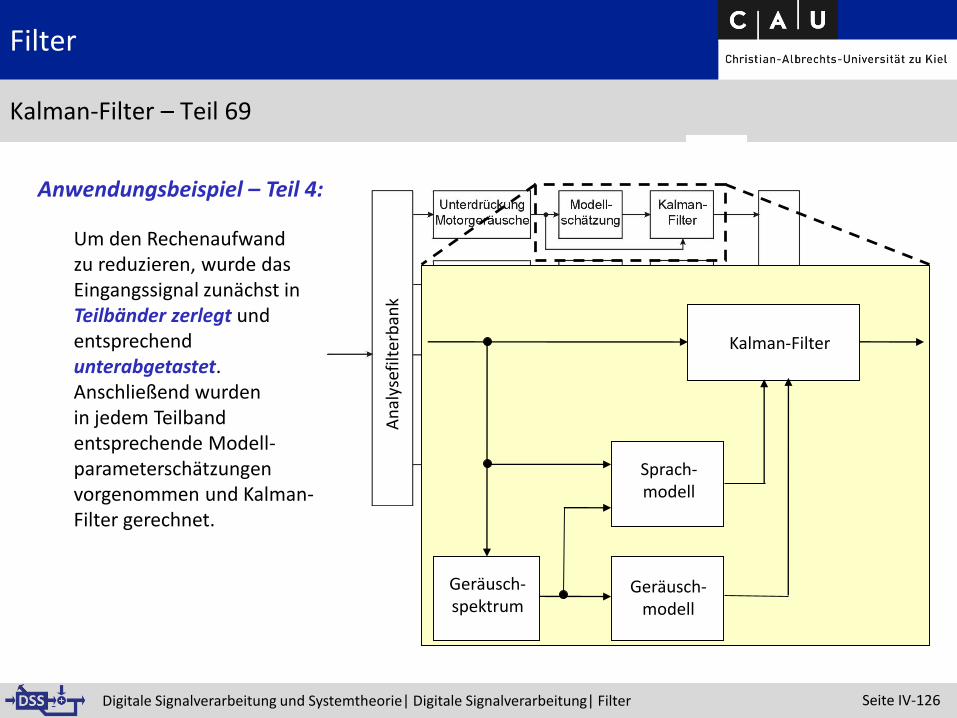
Kalman-Filter
Sprach-modell
Geräusch-modell
Geräusch-spektrum
An
alys
efilt
erb
ank
Um den Rechenaufwand zu reduzieren, wurde dasEingangssignal zunächst in Teilbänder zerlegt undentsprechend unterabgetastet.Anschließend wurdenin jedem Teilbandentsprechende Modell-parameterschätzungenvorgenommen und Kalman-Filter gerechnet.
Anwendungsbeispiel – Teil 4:
Seite IV-127Seite IV-127Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Kalman-Filter – Teil 70
Beispiel 1: Stationäres Fahrzeugrauschen
Beispiel 2: Instationäres Fahrzeugrauschen (Beschleunigungsvorgang)
Sprache einer Frau Sprache eines Mannes
Gestörtes Sprachsignal
Klassischer Ansatz (Wiener-Filter)
Kalman-Filter
Gestörtes Sprachsignal
Klassischer Ansatz (Wiener-Filter)
Kalman-Filter
Gestörtes Sprachsignal
Klassisches Wiener-Filter
Kalman-Filter
Nach Unterdrückung der Motorharmonischen
Audiobeispiele mit Erlaubnis von H. Puder, TU Darmstadt
Anwendungsbeispiel – Teil 4:
Seite IV-128Seite IV-128Digitale Signalverarbeitung und Systemtheorie| Digitale Signalverarbeitung| Filter
Filter
Abschließende Zusammenfassung
❑ Einführung
❑ Signale
❑ Spektren
❑ Filter
❑ Beschreibungen
❑ Zustandsraumdarstellung
❑ Äquivalente Filterstrukturen
❑ Realisierungsaspekte
❑ Kalman-Filter