E- Maschinen im Antriebsstrang: Fachvortraege · 6 Frei-lauf Diesel-motor Überlast-rutschkupplung...
115
Vorwort Gerne bin ich dem Wunsch von Herrn Dr. Reik gefolgt, aus Anlaß seines 50. Geburtstages die nachfolgend dokumentierte Fachtagung zu unterstützen. Es sollen hier die vielfältigen Möglichkeiten diskutiert werden, die sich bei geschickter Kombination von Mechanik, Hydraulik, Elektrik und Elektronik bieten, um bei gutem Komfort Leistung und Verbrauch von Kraftfahrzeugen zu optimieren. Wir alle und besonders Herr Dr. Reik hoffen, daß sich als Ergebnis eine fruchtbare Diskussion ergibt, die eine Richtung im Nebel der Zukunft erkennen läßt, für die es sich lohnt, Anstrengung und Geld aufzuwenden. Ernst H. Kohlhage
Transcript of E- Maschinen im Antriebsstrang: Fachvortraege · 6 Frei-lauf Diesel-motor Überlast-rutschkupplung...
Vorwort
Gerne bin ich dem Wunsch von Herrn Dr. Reik gefolgt, aus Anlaß
seines 50. Geburtstages die nachfolgend dokumentierte Fachtagung zu
unterstützen. Es sollen hier die vielfältigen Möglichkeiten diskutiert
werden, die sich bei geschickter Kombination von Mechanik,
Hydraulik, Elektrik und Elektronik bieten, um bei gutem Komfort
Leistung und Verbrauch von Kraftfahrzeugen zu optimieren.
Wir alle und besonders Herr Dr. Reik hoffen, daß sich als Ergebnis
eine fruchtbare Diskussion ergibt, die eine Richtung im Nebel der
Zukunft erkennen läßt, für die es sich lohnt, Anstrengung und Geld
aufzuwenden.
Ernst H. Kohlhage

Inhalt
Rekuperation - eine "ewige" Herausforderung 5 - 19
Startergenerator: System, Funktion, Komponenten 21 - 35
Mögliche Anordnungen des Startergenerators im
Antriebsstrang 37 - 63
Integration automatisierter Schaltgetriebe
mit E-Maschine 65 - 85
Automatisiertes Fahrzeuggetriebe mit
elektrischer Regelung � Hybridgetriebe 87 -114

5
Rekuperation – eine „ewige“ Herausforderung
Prof. Dr. Gunter JürgensTU Graz
EinleitungDie Verminderung des Verbrauchs durch Wiedergewinnung der Brems-energie (Rekuperation) ist ein Thema, das die Automobilingenieure schonlange beschäftigt. Wenn man aus der Geschichte des Automobilbauseinige Beispiele herausgreift, dann haben diese nicht immer oder nicht nurdie Rückgewinnung der Bremsenergie beabsichtigt, sondern auch andereZiele verfolgt. Die gewählten Beispiele sollen außerdem einen Überblicküber verschiedenste Möglichkeiten der Energiezwischenspeicherunggeben. Immer ist aber in den gewählten Fällen der Energiespeicher parallelzum Verbrennungsmotor eingesetzt, so daß nur Parallelhybridantriebebetrachtet werden. Diese können im Gegensatz zum seriellen Hybrid jenach Ausführung und Fahrstrategie deutliche Verbrauchseinsparungenbewirken [1]. Auf die Möglichkeit abgasfrei nur mit dem zweiten Antrieb zufahren, wird im Rahmen dieses Vortrags nicht eingegangen.
BeispieleDas erste gewählte Beispiel ist aus dem Jahre 1978 und betrifft einenStadtlinienbus mit hydrostatischer Rückgewinnung der Bremsenergie [2].Bei den zu dieser Zeit noch häufig eingesetzten O-Bussen wurde dieBremsenergie elektrisch wieder in das Netz zurückgespeist. Es warnaheliegend, bei Stadtbussen mit Verbrennungsantrieb zur Reduktion desVerbrauchs sowie der Abgas- und Geräuschbelästigung an Haltestellen zuversuchen, ebenfalls die Bremsenergie des Anhaltevorgangs zwischen-zuspeichern und damit wieder anzufahren. Als Speichermedium wurden inden 70er Jahren verschiedene Formen wie Elektrospeicher und Schwung-räder untersucht und verglichen. Im zitierten Falle wurde ein Hydrospeichergewählt und die Aufladung bzw. Energieentnahme über ein stufenloseshydrostatisches Getriebe durchgeführt. Der Aufbau des Gesamtsystems istdem folgenden Bild zu entnehmen.
6
Frei-lauf
Diesel-motor
Überlast-rutschkupplung
Verteilerbremse
Differential-wandler
Nachschalt-getriebe
HydrostatischerWandler
Zusatz-getriebe
Konstantpumpe
BowexKupplung
Rücklaufsperre
Schalt-kupplung
Feststell-bremse
zurHinterachse
Befehle von der"Automatischen Kontrolleinrichtung"
Ringschieber
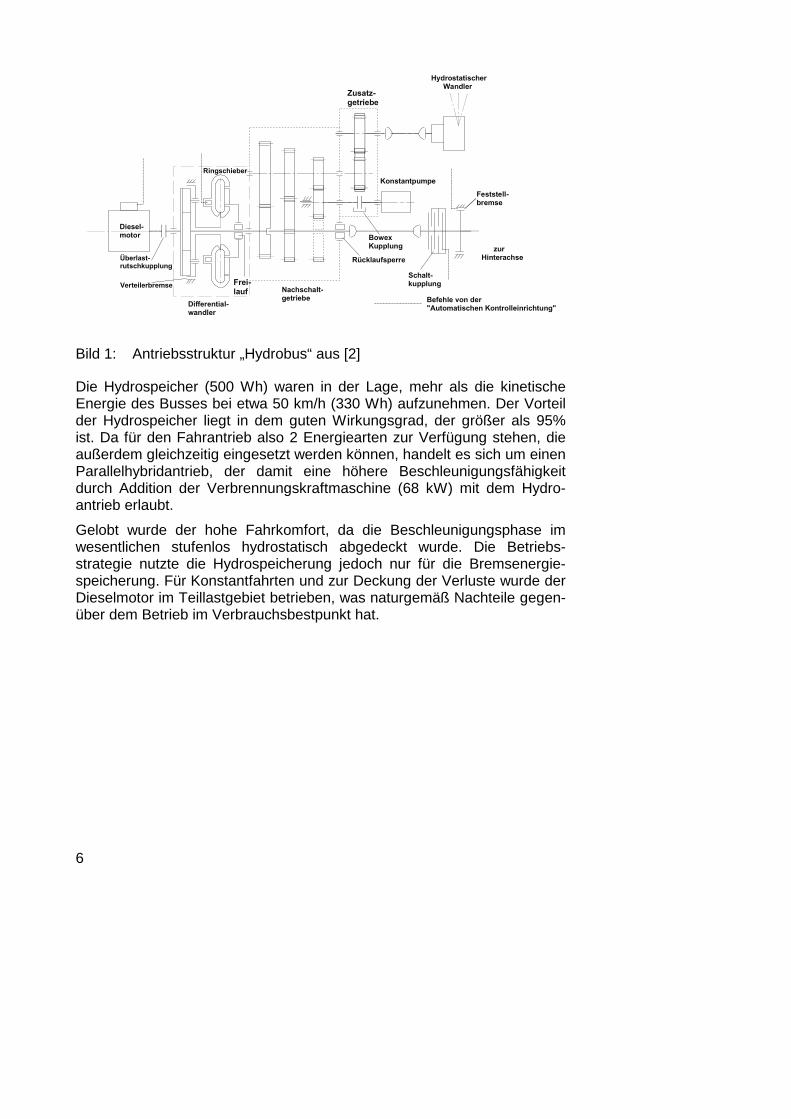
Bild 1: Antriebsstruktur „Hydrobus“ aus [2]
Die Hydrospeicher (500 Wh) waren in der Lage, mehr als die kinetischeEnergie des Busses bei etwa 50 km/h (330 Wh) aufzunehmen. Der Vorteilder Hydrospeicher liegt in dem guten Wirkungsgrad, der größer als 95%ist. Da für den Fahrantrieb also 2 Energiearten zur Verfügung stehen, dieaußerdem gleichzeitig eingesetzt werden können, handelt es sich um einenParallelhybridantrieb, der damit eine höhere Beschleunigungsfähigkeitdurch Addition der Verbrennungskraftmaschine (68 kW) mit dem Hydro-antrieb erlaubt.
Gelobt wurde der hohe Fahrkomfort, da die Beschleunigungsphase imwesentlichen stufenlos hydrostatisch abgedeckt wurde. Die Betriebs-strategie nutzte die Hydrospeicherung jedoch nur für die Bremsenergie-speicherung. Für Konstantfahrten und zur Deckung der Verluste wurde derDieselmotor im Teillastgebiet betrieben, was naturgemäß Nachteile gegen-über dem Betrieb im Verbrauchsbestpunkt hat.
7
� =0,92
Brems-phase
Stand-aufladung
� =0,99
HydrostPumpe
Anfahr-phase
Hinter-achseZusatz-
getriebeDIWAbus-getriebe
Dieselmotor
Hydrospeicher Hydrost.-Wandler
� =0,9
� =0,99
� =0,94
Konstant-fahrtphase
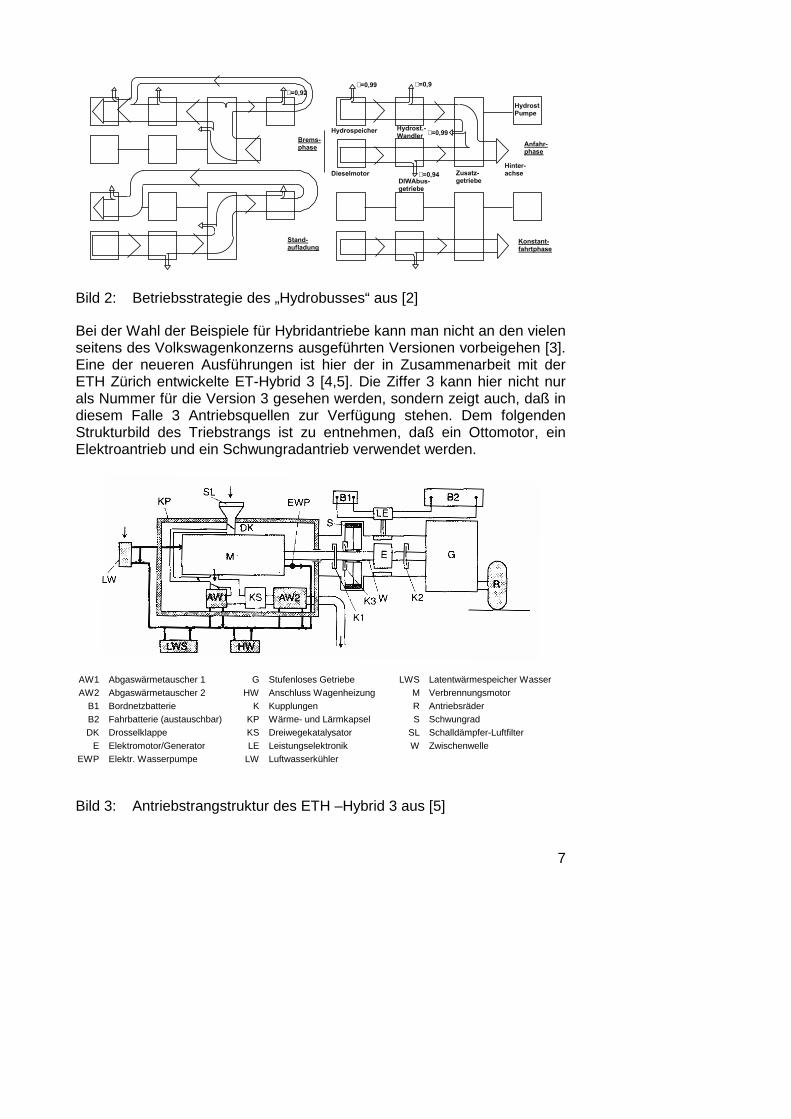
Bild 2: Betriebsstrategie des „Hydrobusses“ aus [2]
Bei der Wahl der Beispiele für Hybridantriebe kann man nicht an den vielenseitens des Volkswagenkonzerns ausgeführten Versionen vorbeigehen [3].Eine der neueren Ausführungen ist hier der in Zusammenarbeit mit derETH Zürich entwickelte ET-Hybrid 3 [4,5]. Die Ziffer 3 kann hier nicht nurals Nummer für die Version 3 gesehen werden, sondern zeigt auch, daß indiesem Falle 3 Antriebsquellen zur Verfügung stehen. Dem folgendenStrukturbild des Triebstrangs ist zu entnehmen, daß ein Ottomotor, einElektroantrieb und ein Schwungradantrieb verwendet werden.
AW1AW2
B1B2DK
EEWP
Abgaswärmetauscher 1Abgaswärmetauscher 2BordnetzbatterieFahrbatterie (austauschbar)DrosselklappeElektromotor/GeneratorElektr. Wasserpumpe
GHW
KKPKSLE
LW
Stufenloses GetriebeAnschluss WagenheizungKupplungenWärme- und LärmkapselDreiwegekatalysatorLeistungselektronikLuftwasserkühler
LWSMRS
SLW
Latentwärmespeicher WasserVerbrennungsmotorAntriebsräderSchwungradSchalldämpfer-LuftfilterZwischenwelle
Bild 3: Antriebstrangstruktur des ETH –Hybrid 3 aus [5]
8
Das Schwungrad (max. 60 Wh Energieinhalt) wird hier in erster Linie zurErgänzung der Abgabe und Aufnahme von Spitzenleistungen beimElektrobetrieb genutzt. Die max. Leistung des Elektroantriebes mit 6 kWgenügt für Geschwindigkeiten in der Ebene bis ca. 65 km/h. Der Einsatzder drei Antriebsmöglichkeiten erlaubt maßgeschneiderte Betriebs-strategien.
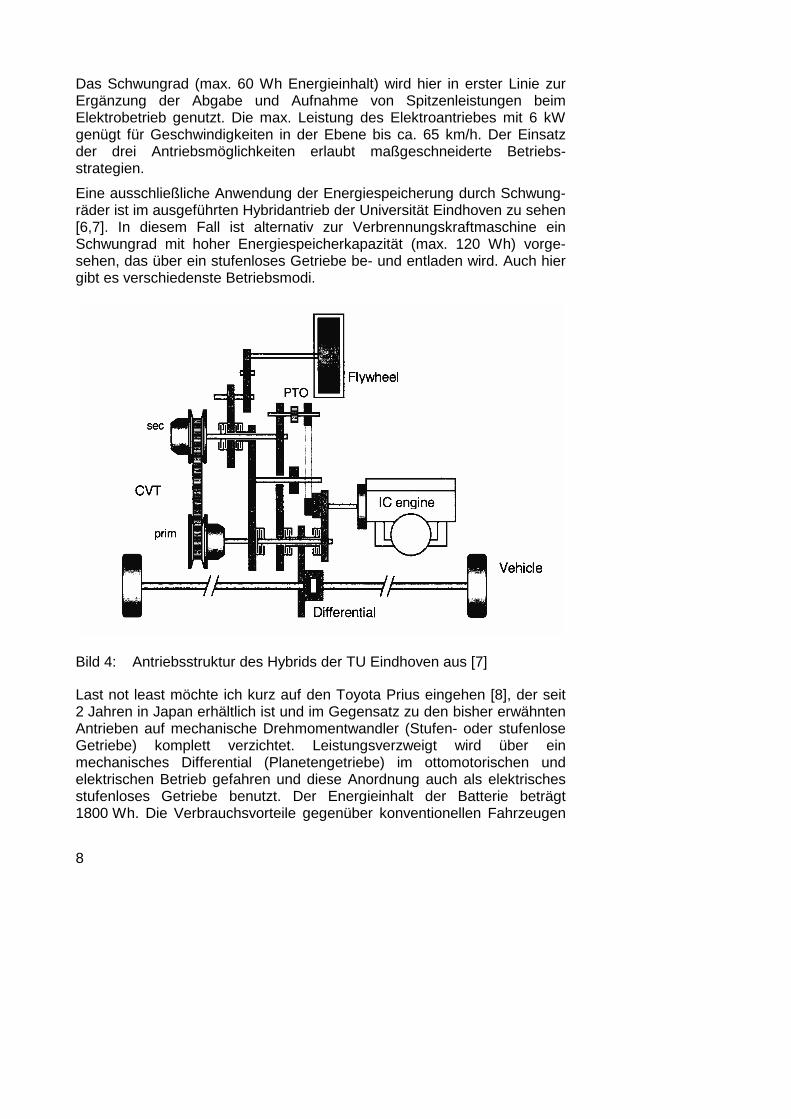
Eine ausschließliche Anwendung der Energiespeicherung durch Schwung-räder ist im ausgeführten Hybridantrieb der Universität Eindhoven zu sehen[6,7]. In diesem Fall ist alternativ zur Verbrennungskraftmaschine einSchwungrad mit hoher Energiespeicherkapazität (max. 120 Wh) vorge-sehen, das über ein stufenloses Getriebe be- und entladen wird. Auch hiergibt es verschiedenste Betriebsmodi.
Bild 4: Antriebsstruktur des Hybrids der TU Eindhoven aus [7]
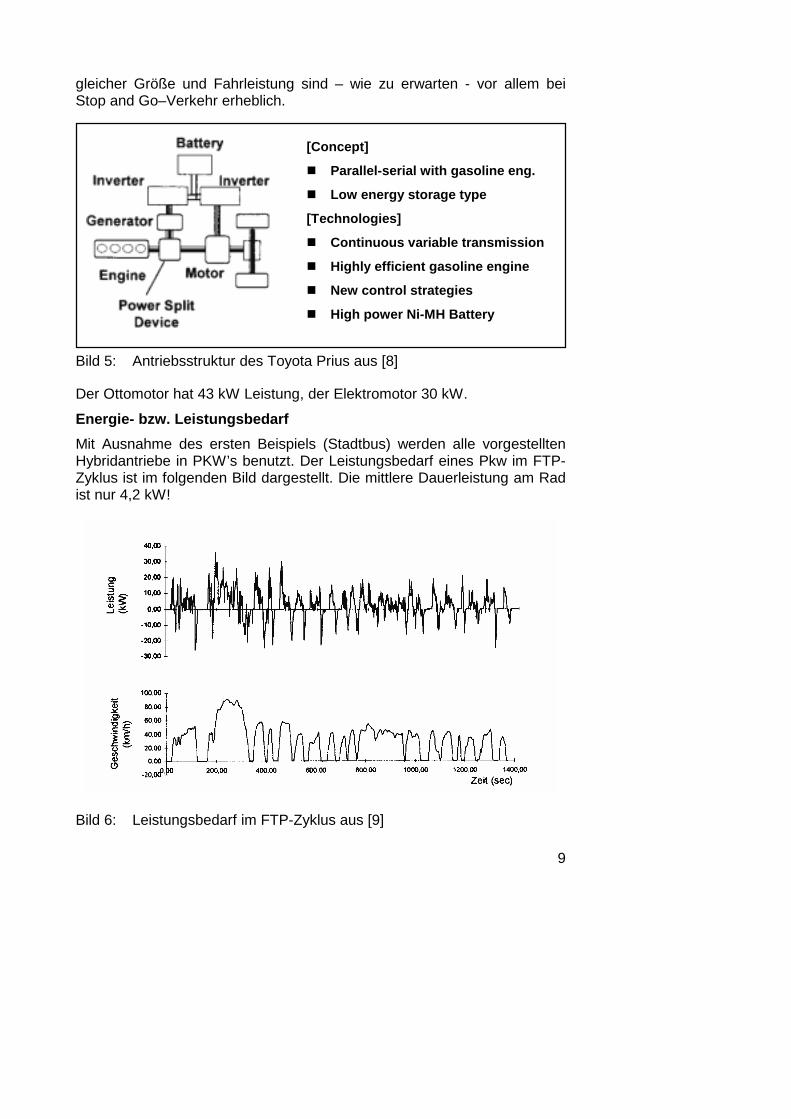
Last not least möchte ich kurz auf den Toyota Prius eingehen [8], der seit2 Jahren in Japan erhältlich ist und im Gegensatz zu den bisher erwähntenAntrieben auf mechanische Drehmomentwandler (Stufen- oder stufenloseGetriebe) komplett verzichtet. Leistungsverzweigt wird über einmechanisches Differential (Planetengetriebe) im ottomotorischen undelektrischen Betrieb gefahren und diese Anordnung auch als elektrischesstufenloses Getriebe benutzt. Der Energieinhalt der Batterie beträgt1800 Wh. Die Verbrauchsvorteile gegenüber konventionellen Fahrzeugen
9
gleicher Größe und Fahrleistung sind – wie zu erwarten - vor allem beiStop and Go–Verkehr erheblich.
Bild 5: Antriebsstruktur des Toyota Prius aus [8]
Der Ottomotor hat 43 kW Leistung, der Elektromotor 30 kW.
Energie- bzw. Leistungsbedarf
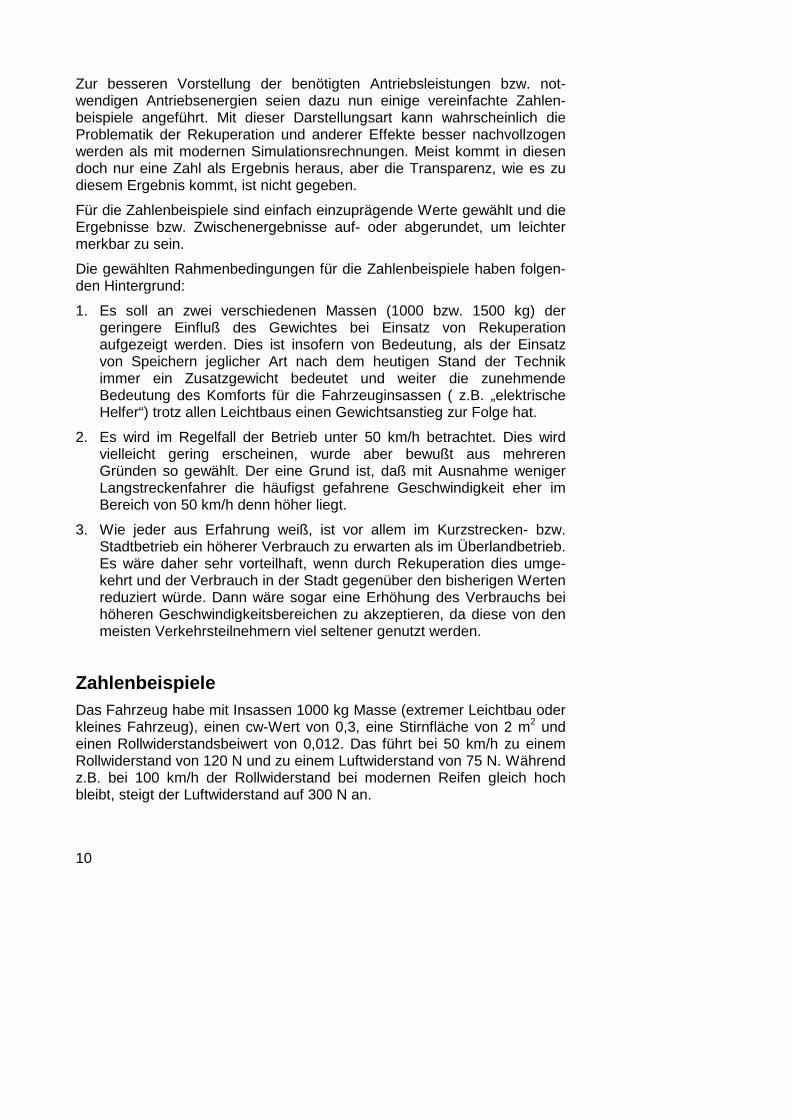
Mit Ausnahme des ersten Beispiels (Stadtbus) werden alle vorgestelltenHybridantriebe in PKW’s benutzt. Der Leistungsbedarf eines Pkw im FTP-Zyklus ist im folgenden Bild dargestellt. Die mittlere Dauerleistung am Radist nur 4,2 kW!
Bild 6: Leistungsbedarf im FTP-Zyklus aus [9]
[Concept]
� Parallel-serial with gasoline eng.
� Low energy storage type
[Technologies]
� Continuous variable transmission
� Highly efficient gasoline engine
� New control strategies
� High power Ni-MH Battery
10
Zur besseren Vorstellung der benötigten Antriebsleistungen bzw. not-wendigen Antriebsenergien seien dazu nun einige vereinfachte Zahlen-beispiele angeführt. Mit dieser Darstellungsart kann wahrscheinlich dieProblematik der Rekuperation und anderer Effekte besser nachvollzogenwerden als mit modernen Simulationsrechnungen. Meist kommt in diesendoch nur eine Zahl als Ergebnis heraus, aber die Transparenz, wie es zudiesem Ergebnis kommt, ist nicht gegeben.
Für die Zahlenbeispiele sind einfach einzuprägende Werte gewählt und dieErgebnisse bzw. Zwischenergebnisse auf- oder abgerundet, um leichtermerkbar zu sein.
Die gewählten Rahmenbedingungen für die Zahlenbeispiele haben folgen-den Hintergrund:
1. Es soll an zwei verschiedenen Massen (1000 bzw. 1500 kg) dergeringere Einfluß des Gewichtes bei Einsatz von Rekuperationaufgezeigt werden. Dies ist insofern von Bedeutung, als der Einsatzvon Speichern jeglicher Art nach dem heutigen Stand der Technikimmer ein Zusatzgewicht bedeutet und weiter die zunehmendeBedeutung des Komforts für die Fahrzeuginsassen ( z.B. „elektrischeHelfer“) trotz allen Leichtbaus einen Gewichtsanstieg zur Folge hat.
2. Es wird im Regelfall der Betrieb unter 50 km/h betrachtet. Dies wirdvielleicht gering erscheinen, wurde aber bewußt aus mehrerenGründen so gewählt. Der eine Grund ist, daß mit Ausnahme wenigerLangstreckenfahrer die häufigst gefahrene Geschwindigkeit eher imBereich von 50 km/h denn höher liegt.
3. Wie jeder aus Erfahrung weiß, ist vor allem im Kurzstrecken- bzw.Stadtbetrieb ein höherer Verbrauch zu erwarten als im Überlandbetrieb.Es wäre daher sehr vorteilhaft, wenn durch Rekuperation dies umge-kehrt und der Verbrauch in der Stadt gegenüber den bisherigen Wertenreduziert würde. Dann wäre sogar eine Erhöhung des Verbrauchs beihöheren Geschwindigkeitsbereichen zu akzeptieren, da diese von denmeisten Verkehrsteilnehmern viel seltener genutzt werden.
ZahlenbeispieleDas Fahrzeug habe mit Insassen 1000 kg Masse (extremer Leichtbau oderkleines Fahrzeug), einen cw-Wert von 0,3, eine Stirnfläche von 2 m2 undeinen Rollwiderstandsbeiwert von 0,012. Das führt bei 50 km/h zu einemRollwiderstand von 120 N und zu einem Luftwiderstand von 75 N. Währendz.B. bei 100 km/h der Rollwiderstand bei modernen Reifen gleich hochbleibt, steigt der Luftwiderstand auf 300 N an.
11
Das Fahrzeug hat aufgrund der angeführten Daten bei 50 km/h einekinetische Energie von 105 Nm oder zur besseren Vorstellung von 27 Wh.
Die bei 50 km/h benötigte Antriebsleistung liegt bei ungefähr 3 kW, was beieinem Antriebsstrangwirkungsgrad von 1 und einem angenommenenBetrieb im Bestpunkt des Motors mit 250g/kWh einen Benzinverbrauch von2 l auf 100 km/h bedeuten würde.
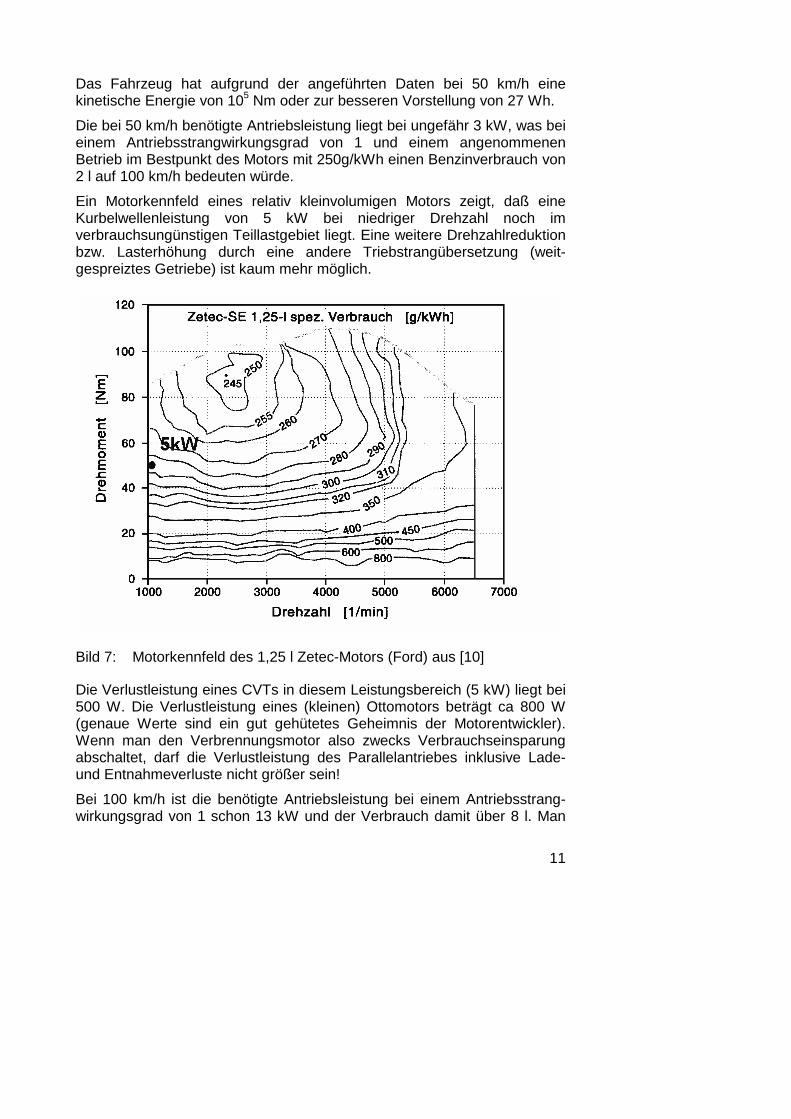
Ein Motorkennfeld eines relativ kleinvolumigen Motors zeigt, daß eineKurbelwellenleistung von 5 kW bei niedriger Drehzahl noch imverbrauchsungünstigen Teillastgebiet liegt. Eine weitere Drehzahlreduktionbzw. Lasterhöhung durch eine andere Triebstrangübersetzung (weit-gespreiztes Getriebe) ist kaum mehr möglich.
Bild 7: Motorkennfeld des 1,25 l Zetec-Motors (Ford) aus [10]
Die Verlustleistung eines CVTs in diesem Leistungsbereich (5 kW) liegt bei500 W. Die Verlustleistung eines (kleinen) Ottomotors beträgt ca 800 W(genaue Werte sind ein gut gehütetes Geheimnis der Motorentwickler).Wenn man den Verbrennungsmotor also zwecks Verbrauchseinsparungabschaltet, darf die Verlustleistung des Parallelantriebes inklusive Lade-und Entnahmeverluste nicht größer sein!
Bei 100 km/h ist die benötigte Antriebsleistung bei einem Antriebsstrang-wirkungsgrad von 1 schon 13 kW und der Verbrauch damit über 8 l. Man
12
sieht, daß dieser Wert sehr nahe den üblichen Verbräuchen liegt, wennman berücksichtigt, daß mit einer Stirnfläche von 2 m2 ein relativ großesFahrzeug gewählt wurde.
Im zweiten Zahlenbeispiel hat das Fahrzeug schon realistischere 1500 kg,wodurch sich die Werte für Energie, Widerstände etc. entsprechenderhöhen, wieder einen cw-Wert von 0,3, eine Stirnfläche von 2 m2 undeinen Rollwiderstandsbeiwert von 0,012. Das führt bei 50 km/h zu einemRollwiderstand von 180 N.
Das Fahrzeug hat aufgrund der angeführten Daten bei 50 km/h einekinetische Energie von 1,5.105 Nm oder zur besseren Vorstellung von40 Wh.
Die bei 50 km/h benötigte Antriebsleistung liegt bei ungefähr 3,5 kW, wasbei einem Antriebsstrangwirkungsgrad von 1 und einem angenommenenBetrieb im Bestpunkt des Motors mit 250 g/kWh einen Benzinverbrauchvon ca. 2,5 l auf 100 km/h bedeuten würde.
Man sieht, daß sich das Gewicht auf den Anteil des Rollwiderstands imVergleich zum Gesamtwiderstand sehr gering auswirkt, jedoch der Einflußauf die Bremsenergie erheblich wird.
Was hier auch gezeigt werden sollte, ist, daß Leichtbau im wesentlichennur zur Verringerung der Bremsverluste beiträgt, aber bei Einsatz vonRekuperation selbst unter Annahmen von realistischen Wirkungsgraden fürdie Zwischenspeicherung und Entnahme von kinetischer Energie das"Gewichtspönale" des zusätzlichen Aufwands nicht so hoch ist.
Als weiterer Anhaltswert soll genannt sein, daß der Leerlaufverbraucheines Mittelklasse Ottomotors bei 1 l Treibstoff pro Stunde liegt. Dasbedeutet, daß mit dem Verbrauch von einer Stunde Leerlaufbetrieb eineStrecke von 50 km mit 50 km/h (ohne Triebstrangverluste) gefahrenwerden könnte. Wenn man an den heutigen dichten Verkehr mitstop and go in den Städten denkt, so wird klar, daß die Reduzierung derStillstandsverluste ein wesentlicher Beitrag zur Verbrauchsverringerungund Abgasreduzierung ist.
Ein Beispiel dazu ist im folgenden Bild gezeigt. Um bei Bedarf unmittelbarAntriebsmoment zur Verfügung zu haben, ist ein Schwungrad über einCVT mit Abtrieb und Antrieb verbunden. Das Schwungrad selbst hat300 W Schleppverlust und das CVT hat im Mittel auch ca. 300 W Verlustebei dieser Betriebsart. Diese 600 W Verluste werden intermittierend durchden Motor im Bestverbrauchsbereich gedeckt. So reduzieren sich dieLeerlaufverluste deutlich.
13
Bild 8: Optimierung des Leerlaufverbrauchs aus [12]
Auch wenn Start-Stop-Systeme keine Hybridantriebssysteme im eigent-lichen Sinn sind, seien sie jedoch hier erwähnt. Gleichzeitig sieht man aberim Start-Stop-System auch einen wesentlichen Unterschied zum Hybrid.Steht der Verbrennungsmotor still, so ist eine endliche Wiederstartzeitnotwendig. Es kann zwar die Startphase durch ein bereits mit höhererDrehzahl drehendes Schwungrad sehr kurz sein, letztlich ist jedoch dieunmittelbare Reaktion auf den Losfahrwunsch des Fahrers nicht gegeben.Beim Hybridsystem kann die zweite Antriebsquelle Energie bis zurmöglichen Nutzung des Verbrennungsmotors während dessen Startsliefern.
Einen ähnlichen Effekt müssen wir bei dem Betrieb des Motors imverbrauchsgünstigen Niederdrehzahl–Hochlastbereich sehen.Im folgenden Bild ist dies dargestellt.
14
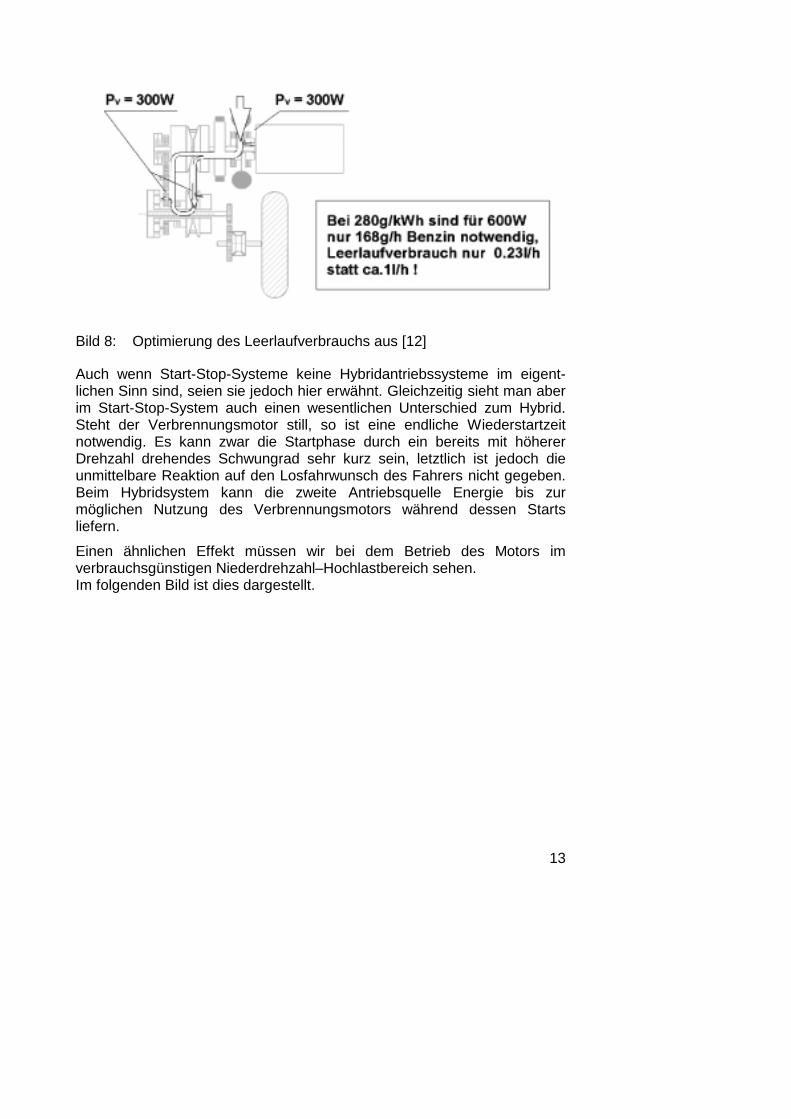
Bild 9: Dynamik einer Leistungssteigerung aus [12]
Bei einem Betrieb im Teillastbereich kann durch Gasgeben ohne Erhöhungder Motordrehzahl unmittelbar mehr Leistung abgefordert werden. Wird derMotor aber bei niederer Drehzahl und hoher Last betrieben, so kann einehöhere Leistungsanforderung nur durch ein Hochbeschleunigen desMotors auf ein anderes Drehzahlniveau erfüllt werden. Für diese Hoch-beschleunigung benötigt der Motor – wegen der Erhöhung seinerkinetischen Energie – einen Teil seines Antriebsmomentes, so daßvorübergehend für den Vortrieb des Fahrzeuges nur weniger Moment zurVerfügung steht. Dies ist der Hauptgrund, warum zu extreme Overdrive-übersetzungen nicht akzeptiert werden, da selbst bei sehr komfortablenRückschaltungen einfach eine zu lange Zeit verstreicht, bis die gewünschteVortriebsleistung zur Verfügung steht. Über dieses Manko bei einer Rück-schaltung kann man denken wie man will, die geringe Marktakzeptanz vonextremen Overdriveübersetzungen zeigt jedoch deutlich, daß dieser Wegso nicht gangbar ist. Auch hier bietet der Parallel-Hybridantrieb Vorteile.
Jeder Wechsel von Energieformen oder Energiespeicherorten ist mitVerlusten verbunden. Es ist daher naheliegend, mit möglichst wenigEnergieformen auszukommen.
Hierbei ist der nicht zu vernachlässigende Energiebedarf der Hilfs-aggregate eines Fahrzeuges zu berücksichtigen. Heizung und
15
Klimatisierung, Servolenkung, elektrische Scheibenheber, Sitz-verstellungen usw., Licht etc. benötigen Energie, die zwar in den offiziellenVerbrauchszyklen nicht berücksichtigt werden muß, jedoch im praktischenBetrieb eine nicht unerhebliche Rolle spielt. So ist z.B. zu bedenken, daßdie Fahrzeugheizung heute im Regelfall durch Verluste des Motors gedecktwird und bei Verringerung dieser Verluste die Heizleistung zurückgeht.Dies ist ja bereits schon bei teillastverbrauchsoptimierten, modernenMotoren spürbar.
Klimaanlage Servolenkung
Lüfter
Getriebe
Generator
Kühlwasser-pumpe
100%
1 P/P0
0
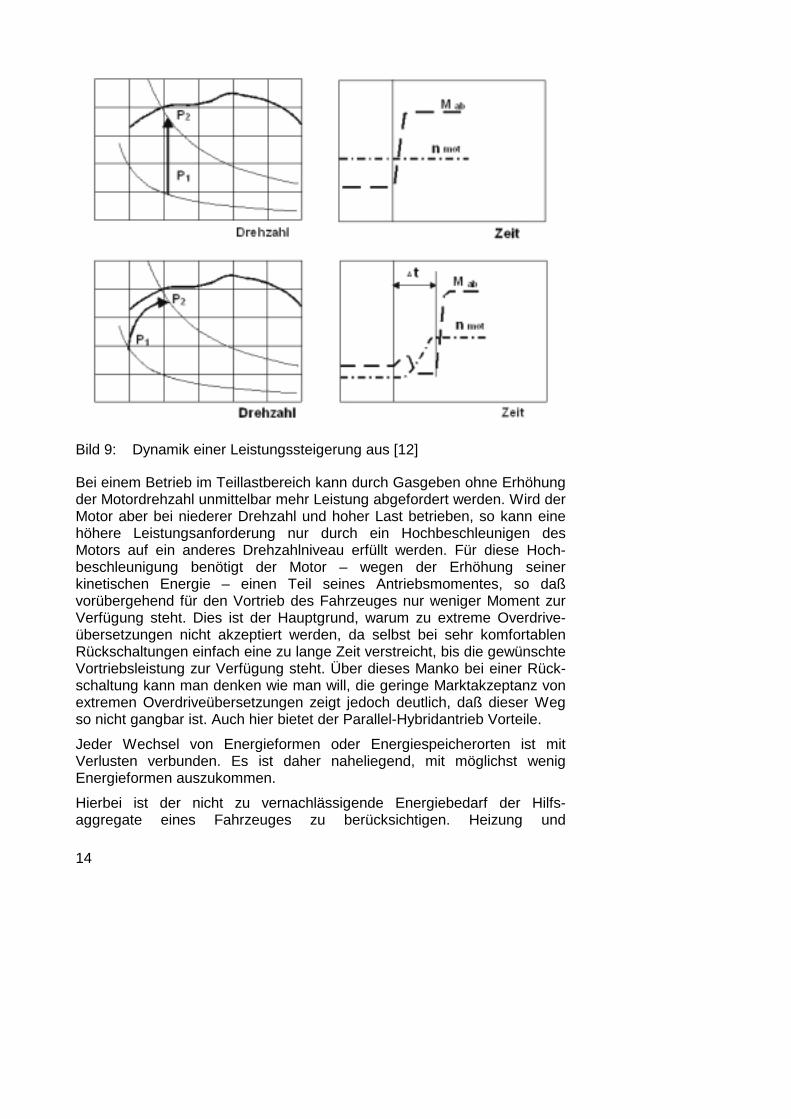
Bild 10: Summenhäufigkeit der Hilfsaggregatleistungen aus [11]
Setzt man also einen hydrostatischen Speicher mit hydrostatischemGetriebe ein, so wäre es durchaus zu überlegen, möglichst viele Servo-leistungen des Fahrzeuges durch Hydraulikaktoren verrichten zu lassen.Für die Servolenkung ist dies ein üblicher Weg, jedoch ist die Betätigungvon Scheiben etc. durch hydraulische Aktoren unüblich und nur vomMercedes 600 bekannt. (Die Servohydraulik für Cabrioverdecke sei hierbeiaußer Acht gelassen). Da wesentliche Hilfsdienste im Fahrzeug heuteelektrisch erbracht werden, wäre also die Elektrik als Energieträgerdurchaus naheliegend. Der Hauptnachteil der Elektrik für den Triebstrangliegt darin, daß Leistungsspitzen beim Bremsen und beim Beschleunigenvom üblichen Speicherkonzept schlecht abgedeckt werden.
Für den Leistungsbedarf der Servoaggregate gilt im übrigen das gleichewie für den Leistungsbedarf des Fahrzeugantriebes selbst. Die Spitzen-leistungen werden nur äußerst selten benötigt, jedoch wird derentsprechende Antrieb bzw. Triebstrang für diesen Spitzenbedarf
16
ausgelegt. Dies führt beim Motor bzw. Antriebsstrang selbst zu unnötighohen Schleppverlusten, die sich insbesondere im Teillastbetriebverheerend auswirken. Weiter kann bei einer Entkoppelung der Servo-aggregatdrehzahl von der Motordrehzahl das Servoaggregat kleiner unddamit mit geringeren Verlusten dimensioniert werden.
Ein Schwungrad ist als Speichermedium im Zusammenhang mit einemstufenlosen Getriebe als Kurzzeit-Energiespeicher vorteilhaft. Hier ist diemaximale Leistungseinspeisung bzw. Leistungsabgabe praktisch nur durchdie Drehmomentkapazität des stufenlosen Getriebes begrenzt. Diesbedeutet, daß kurzzeitige Beschleunigungsspitzen von einem Vielfachender heute möglichen Beschleunigung auch bei höheren Fahrgeschwindig-keiten denkbar sind.
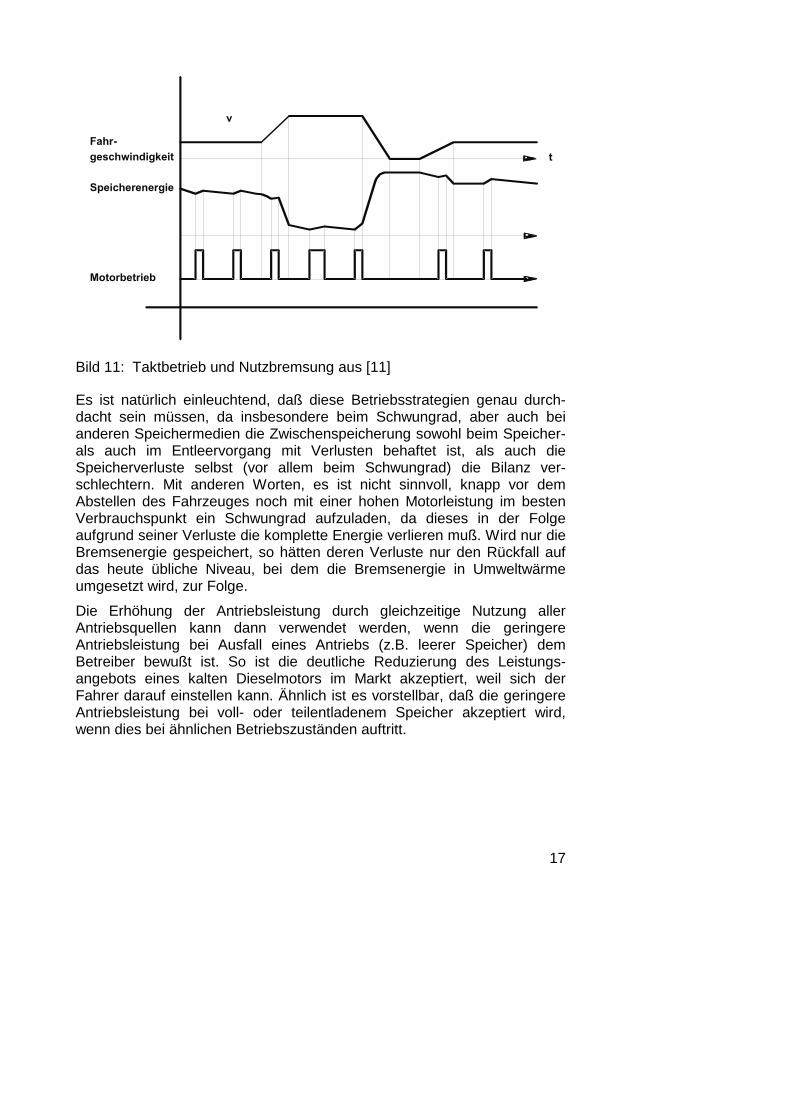
Die Forderung nach hohen Beschleunigungsreserven seitens des Marktes,sprich Autokunden, ist nicht wegzuleugnen und hat in der Vergangenheitzu einem immer geringeren Leistungsgewicht bzw. einer immer höhererLeistung pro Fahrzeugmasse geführt. Die Konsequenz ist, daß dasFahrzeug nun immer höhere Zeitanteile im immer extremeren Teillast-betrieb betrieben wird und der Verlust bei Teillast wegen der höherenMaximalleistung zu höheren Schleppverlusten, wie bereits erwähnt, führenmuß und damit eher zu einer Verschlechterung im Teillastgebiet führt.Auch mit stufenlosen Getrieben ist der Betrieb im Bestverbrauchsgebietnicht mehr möglich, da diese Bestpunkte im Muscheldiagramm bei relativhohen Leistungen liegen. Auch würde die zeitliche Verzögerung bis zumErreichen einer kurzzeitig geforderten hohen Leistung, wie schon vorherbeschrieben, nicht akzeptiert werden. Ein Weg aus dieser Problematik istmit Hybridantrieben möglich, wo bei Teillastanforderungen diese entwederaus dem Speicher allein oder aus der Verbrennungskraftmaschine beihöherer Leistung mit gleichzeitiger Speicherung der Überschußleistunggegenüber der geforderten Fahrleistung möglich ist. Ein Beispiel dieserBetriebsweise zeigt das folgende Bild.
17
Fahr-
geschwindigkeit
Speicherenergie
Motorbetrieb
v
t
Bild 11: Taktbetrieb und Nutzbremsung aus [11]
Es ist natürlich einleuchtend, daß diese Betriebsstrategien genau durch-dacht sein müssen, da insbesondere beim Schwungrad, aber auch beianderen Speichermedien die Zwischenspeicherung sowohl beim Speicher-als auch im Entleervorgang mit Verlusten behaftet ist, als auch dieSpeicherverluste selbst (vor allem beim Schwungrad) die Bilanz ver-schlechtern. Mit anderen Worten, es ist nicht sinnvoll, knapp vor demAbstellen des Fahrzeuges noch mit einer hohen Motorleistung im bestenVerbrauchspunkt ein Schwungrad aufzuladen, da dieses in der Folgeaufgrund seiner Verluste die komplette Energie verlieren muß. Wird nur dieBremsenergie gespeichert, so hätten deren Verluste nur den Rückfall aufdas heute übliche Niveau, bei dem die Bremsenergie in Umweltwärmeumgesetzt wird, zur Folge.
Die Erhöhung der Antriebsleistung durch gleichzeitige Nutzung allerAntriebsquellen kann dann verwendet werden, wenn die geringereAntriebsleistung bei Ausfall eines Antriebs (z.B. leerer Speicher) demBetreiber bewußt ist. So ist die deutliche Reduzierung des Leistungs-angebots eines kalten Dieselmotors im Markt akzeptiert, weil sich derFahrer darauf einstellen kann. Ähnlich ist es vorstellbar, daß die geringereAntriebsleistung bei voll- oder teilentladenem Speicher akzeptiert wird,wenn dies bei ähnlichen Betriebszuständen auftritt.
18
Die Anforderung an einen optimalen Hybridantrieb müssen also sein:
• Reduzierung der Triebstrangverluste, damit zum Roll- und Luftwider-stand des Fahrzeuges möglichst wenig zusätzliche Verluste kommen.Dies bedeutet, daß z.B. nicht zu aufwendige Getriebe mit vielenSchaltelementen und damit resultierenden hohen Schleppverlustennotwendig werden.
• Effiziente Speicherung der Energie-Niveaus und Leistungen, die häufigim praktischen Fahrbetrieb vorkommen.
• Keine Auslegung in Richtung „eierlegende Wollmilchsau“, die zwar demIngenieur eine gewisse Selbstbefriedigung bringt, jedoch für denKunden mit hohen Anschaffungspreisen und meist auch hohenBetriebsverlusten und Störungsrisiko wenig nützen.
• Verwendung der Energieformen, die auch für andere im Fahrzeugbenötigte Leistungen günstig Verwendung finden, wie es z.B. bei derElektrik der Fall ist,
• Eine Betriebsstrategie, die den Komfort eher verbessert alsverschlechtert (hier ist das hohe Niveau heutiger Automatikgetriebe inbezug auf Triebstrangdynamik als Mindestmaß zu sehen),
• Berücksichtigung der Betriebsarten, die die Summenhäufigkeits-verteilungen der Antriebsleistungen der meisten Autofahrerrepräsentieren (niedrige Fahrgeschwindigkeiten mit hohen Still-standsphasen und nicht der statistisch seltene Betrieb bei Autobahn-geschwindigkeit).
19
Literatur
[1] Flaig, Kunz, Lechner: Auslegung von Hybridantrieben nach energetischenGesichtspunkten mittels Fahrsimulation, VDI Berichte 1459
[2] Korkmaz, Willumeit, Benneter, Thier: Stadtlinienbus mit hydrostatischerBremsenergierückgewinnung („Hydro-Bus“), ölhydraulik und pneumatik 22 (1978) Nr.4
[3] Barske: Rationale Verwendung von Kraftstoff: Autos mit 3 Liter Benzinverbrauch, eineUtopie? Basel, 1991
[4] Dietrich, Eberle: Das ETH Hybrid III Antriebskonzept, VDI-Berichte 1225
[5] Dietrich, Eberle: Betriebsverhalten des ETH Hybrid III Antriebes – auf demdynamischen Prüfstand und im Fahrzeug, VDI-Berichte 1459
[6] van der Graaf: Ein Hybrid-Antrieb mit Schwungrad und stufenlosem Getriebe für Pkw,VDI-Berichte 1175
[7] van der Graaf, Kok, Spijker: Integration of Drive System, Subsystems and AuxiliarySystems of a Flywheel Hybrid Driveline with respect to Design Aspects and FuelEconomy, VDI-Berichte 1459
[8] Killmann, Yeagashi, Hirose, Takaoka: TOYOTA Prius-Development and marketexperiences, VDI-Berichte 1459
[9] Fischer, Götz, Michael: Anforderungen an die Auslegung von Hybridantrieben, VDI-Berichte 1459
[10] Menne, Heuser, Grünert: Die Entwicklung und der aktuelle technologische Stand desFord Zetec-SE, Fortschrittsberichte VDI, Reihe 12, Nr.267
[11] Jürgens: Moderne Triebwerkstechnik im Widerspruch zum Teillastwirkungsgrad? Motorund Umwelt 95, Graz
[12] Jürgens: Stufenlose Getriebe - erreichter Stand und zukünftige Potentiale,Fortschrittsberichte VDI, Reihe 12, Nr.267

21
Startergenerator: System, Funktion,Komponenten
Dr.-Ing. Hubert BischofDr.-Ing. Michael BorkDr.-Ing. Robert SchenkRobert Bosch GmbH, K9, Stuttgart
EinleitungDie Funktionen „Start des Verbrennungsmotors“ und „Stromerzeugung“werden im heutigen Kraftfahrzeug von zwei Einzelkomponenten sehrunterschiedlicher Bauform bereitgestellt, die spezifisch auf ihre jeweiligeFunktion optimiert sind. Die Tatsache, daß stets eine Maschine ruht, wenndie andere arbeitet, führte bei Bosch in der Vergangenheit immer wieder zudem Versuch, beide Aufgaben in einem Aggregat zu vereinen. Diesscheiterte bislang an der Kompromißauslegung des elektrischen Antriebsbeispielsweise aufgrund der sehr unterschiedlichen Drehzahlen im Starter-und Generatorbetrieb, deren Verhältnis etwa 1:50 beträgt.
Während in der Vergangenheit vorwiegend der Start- und der Genera-torbetrieb für sich den Kundennutzen prägten, ist es heute eine Vielzahlvon Funktionen, die den Systemkosten gegenübergestellt werden.
Getrieben durch Forderungen zum Startkomfort, zur Kraftstoffverbrauchs-und Emissionsreduzierung sowie aus Entwicklungstendenzen in Richtungelektromechanischer Triebstrang wird die Frage des Einsatzes vonStartergeneratoren gegenwärtig wieder grundsätzlich diskutiert, einigeKraftfahrzeughersteller haben ihre Serienabsichten bereits öffentlicherklärt.
Kundennutzen, SystemanforderungenDie Motivation zur Einführung des Startergenerators ergibt sich aus einerVielzahl von Systemmerkmalen, die im Themenfeld Komfort, Kraft-stoffverbrauch und Emissionen entsprechend der Systemkonfigurationunterschiedlich stark gewichtete Verbesserungen ermöglichen. Beispiels-weise kann der Startergenerator im Gegensatz zum heutigenEinrückstarter auch bei höheren Kurbelwellendrehzahlen noch einDrehmoment abgeben und damit dem Verbrennungsmotor eineHochlaufunterstützung bieten. Es ergibt sich zum einen ein schnellererStart, zum anderen werden die Startemissionen deutlich reduziert, die der
22
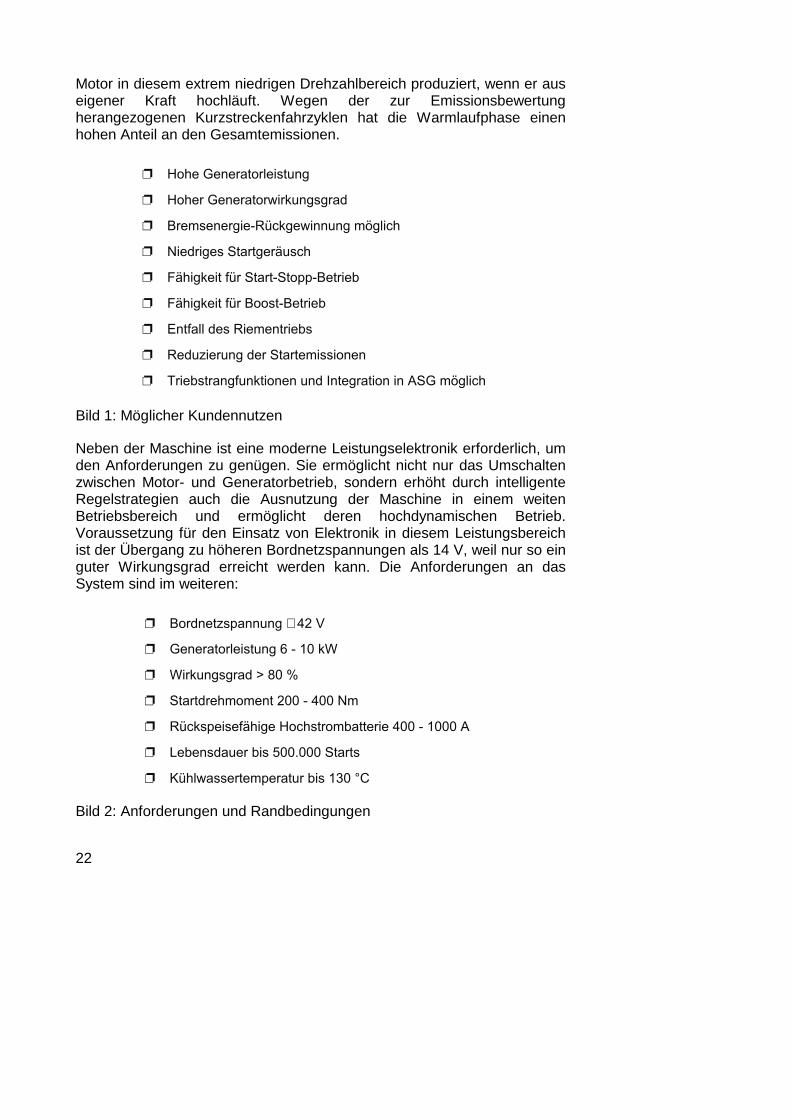
Motor in diesem extrem niedrigen Drehzahlbereich produziert, wenn er auseigener Kraft hochläuft. Wegen der zur Emissionsbewertungherangezogenen Kurzstreckenfahrzyklen hat die Warmlaufphase einenhohen Anteil an den Gesamtemissionen.
� Hohe Generatorleistung
� Hoher Generatorwirkungsgrad
� Bremsenergie-Rückgewinnung möglich
� Niedriges Startgeräusch
� Fähigkeit für Start-Stopp-Betrieb
� Fähigkeit für Boost-Betrieb
� Entfall des Riementriebs
� Reduzierung der Startemissionen
� Triebstrangfunktionen und Integration in ASG möglich
Bild 1: Möglicher Kundennutzen
Neben der Maschine ist eine moderne Leistungselektronik erforderlich, umden Anforderungen zu genügen. Sie ermöglicht nicht nur das Umschaltenzwischen Motor- und Generatorbetrieb, sondern erhöht durch intelligenteRegelstrategien auch die Ausnutzung der Maschine in einem weitenBetriebsbereich und ermöglicht deren hochdynamischen Betrieb.Voraussetzung für den Einsatz von Elektronik in diesem Leistungsbereichist der Übergang zu höheren Bordnetzspannungen als 14 V, weil nur so einguter Wirkungsgrad erreicht werden kann. Die Anforderungen an dasSystem sind im weiteren:
� Bordnetzspannung � 42 V
� Generatorleistung 6 - 10 kW
� Wirkungsgrad > 80 %
� Startdrehmoment 200 - 400 Nm
� Rückspeisefähige Hochstrombatterie 400 - 1000 A
� Lebensdauer bis 500.000 Starts
� Kühlwassertemperatur bis 130 °C
Bild 2: Anforderungen und Randbedingungen
23
Systemansätze
Topologie
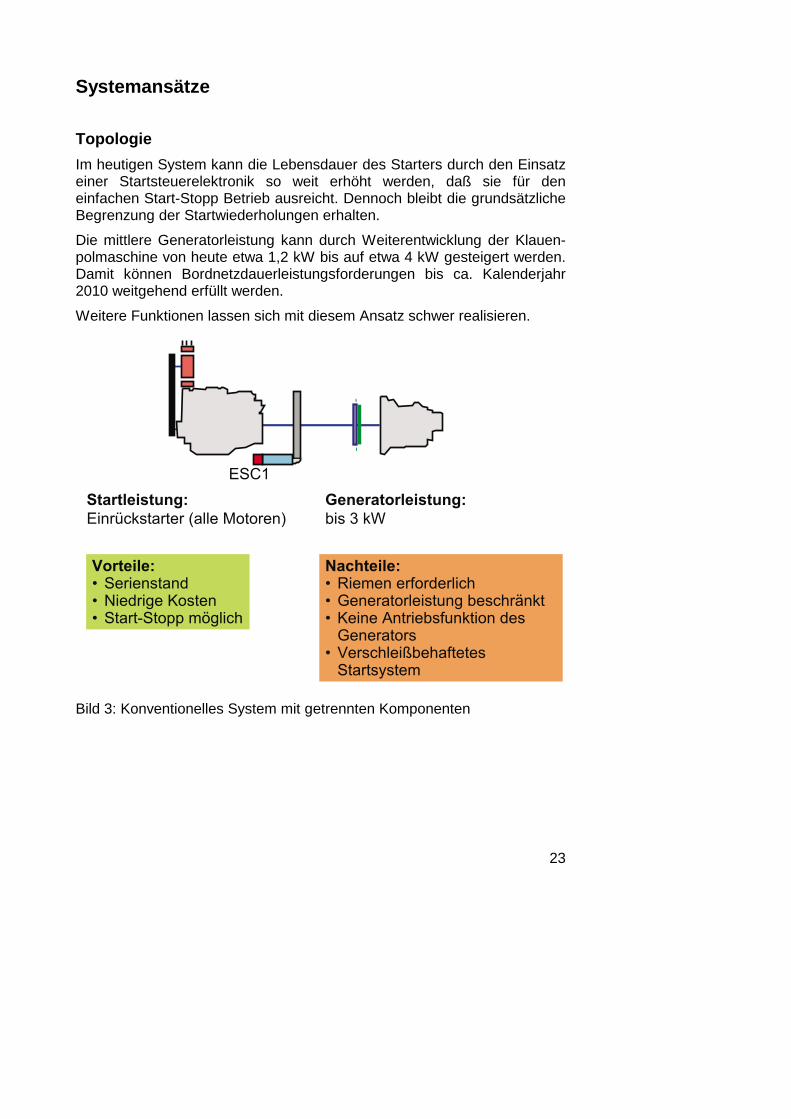
Im heutigen System kann die Lebensdauer des Starters durch den Einsatzeiner Startsteuerelektronik so weit erhöht werden, daß sie für deneinfachen Start-Stopp Betrieb ausreicht. Dennoch bleibt die grundsätzlicheBegrenzung der Startwiederholungen erhalten.
Die mittlere Generatorleistung kann durch Weiterentwicklung der Klauen-polmaschine von heute etwa 1,2 kW bis auf etwa 4 kW gesteigert werden.Damit können Bordnetzdauerleistungsforderungen bis ca. Kalenderjahr2010 weitgehend erfüllt werden.
Weitere Funktionen lassen sich mit diesem Ansatz schwer realisieren.
Startleistung:
Einrückstarter (alle Motoren)
Generatorleistung:
bis 3 kW
Vorteile:• Serienstand• Niedrige Kosten• Start-Stopp möglich
Nachteile:• Riemen erforderlich• Generatorleistung beschränkt• Keine Antriebsfunktion des
Generators• Verschleißbehaftetes
Startsystem
ESC1
Bild 3: Konventionelles System mit getrennten Komponenten
24
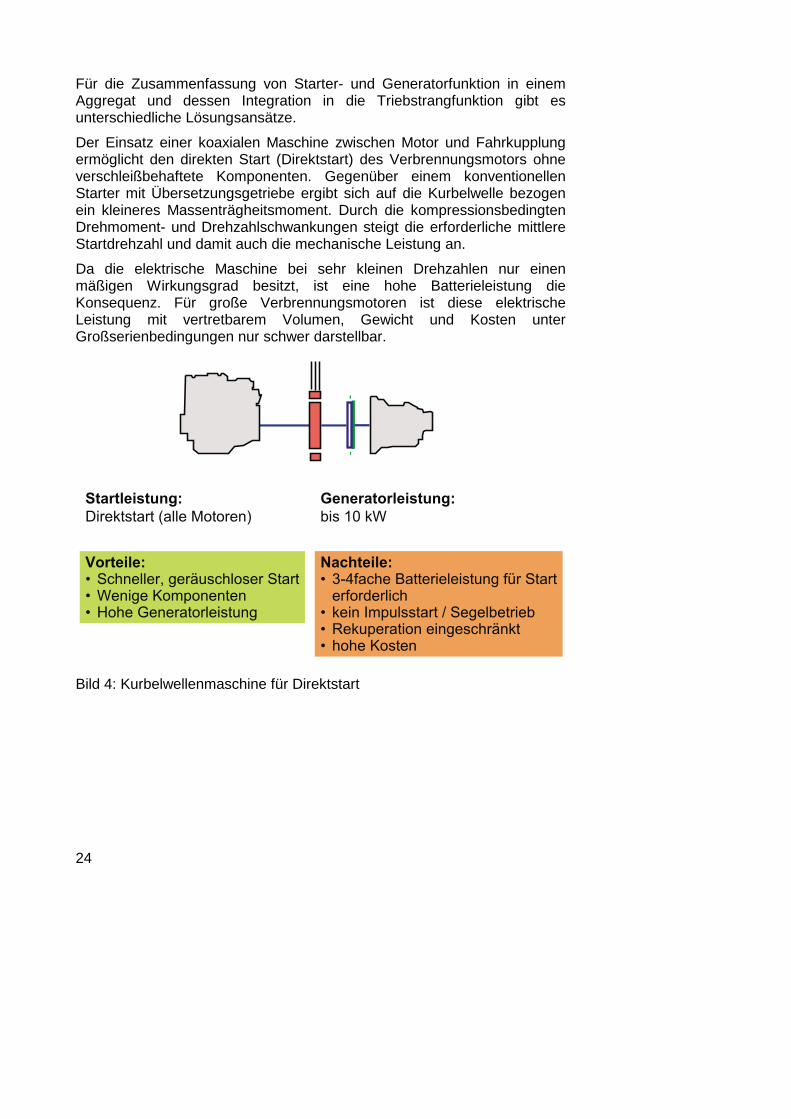
Für die Zusammenfassung von Starter- und Generatorfunktion in einemAggregat und dessen Integration in die Triebstrangfunktion gibt esunterschiedliche Lösungsansätze.
Der Einsatz einer koaxialen Maschine zwischen Motor und Fahrkupplungermöglicht den direkten Start (Direktstart) des Verbrennungsmotors ohneverschleißbehaftete Komponenten. Gegenüber einem konventionellenStarter mit Übersetzungsgetriebe ergibt sich auf die Kurbelwelle bezogenein kleineres Massenträgheitsmoment. Durch die kompressionsbedingtenDrehmoment- und Drehzahlschwankungen steigt die erforderliche mittlereStartdrehzahl und damit auch die mechanische Leistung an.
Da die elektrische Maschine bei sehr kleinen Drehzahlen nur einenmäßigen Wirkungsgrad besitzt, ist eine hohe Batterieleistung dieKonsequenz. Für große Verbrennungsmotoren ist diese elektrischeLeistung mit vertretbarem Volumen, Gewicht und Kosten unterGroßserienbedingungen nur schwer darstellbar.
Startleistung:
Direktstart (alle Motoren)
Generatorleistung:
bis 10 kW
Vorteile:• Schneller, geräuschloser Start• Wenige Komponenten• Hohe Generatorleistung
Nachteile:• 3-4fache Batterieleistung für Start
erforderlich• kein Impulsstart / Segelbetrieb• Rekuperation eingeschränkt• hohe Kosten
Bild 4: Kurbelwellenmaschine für Direktstart
25
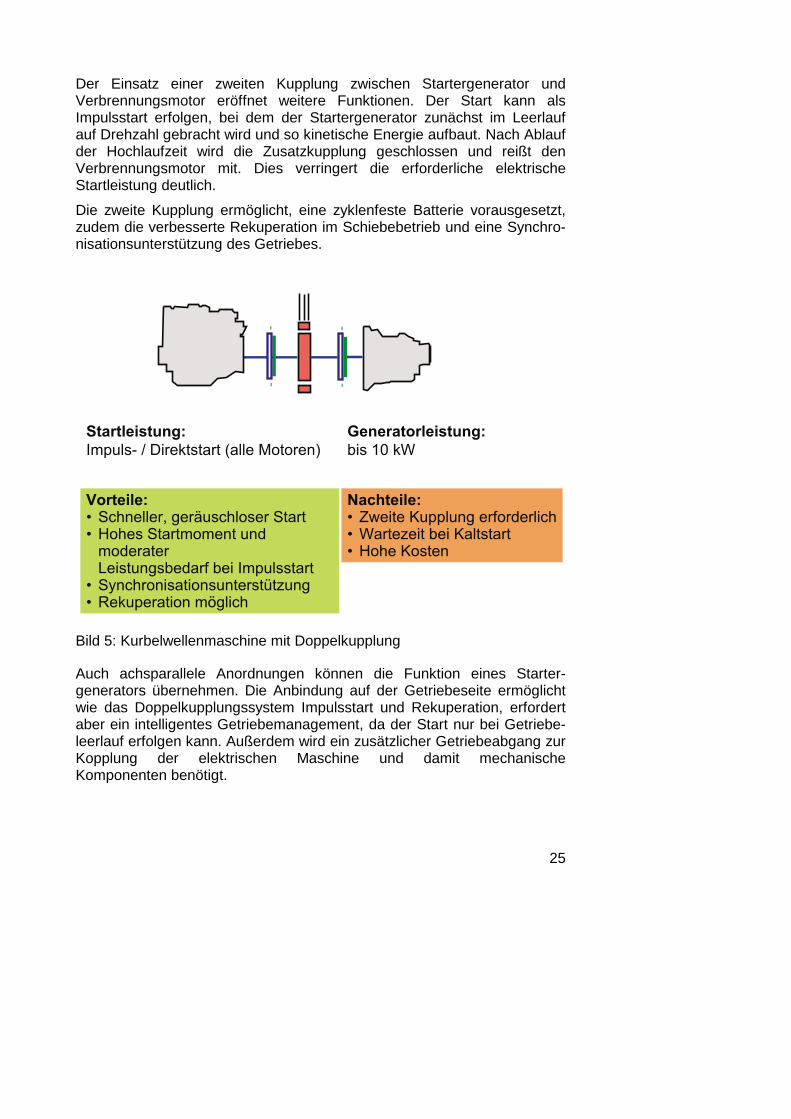
Der Einsatz einer zweiten Kupplung zwischen Startergenerator undVerbrennungsmotor eröffnet weitere Funktionen. Der Start kann alsImpulsstart erfolgen, bei dem der Startergenerator zunächst im Leerlaufauf Drehzahl gebracht wird und so kinetische Energie aufbaut. Nach Ablaufder Hochlaufzeit wird die Zusatzkupplung geschlossen und reißt denVerbrennungsmotor mit. Dies verringert die erforderliche elektrischeStartleistung deutlich.
Die zweite Kupplung ermöglicht, eine zyklenfeste Batterie vorausgesetzt,zudem die verbesserte Rekuperation im Schiebebetrieb und eine Synchro-nisationsunterstützung des Getriebes.
Startleistung:
Impuls- / Direktstart (alle Motoren)
Generatorleistung:
bis 10 kW
Vorteile:• Schneller, geräuschloser Start• Hohes Startmoment und
moderaterLeistungsbedarf bei Impulsstart
• Synchronisationsunterstützung• Rekuperation möglich
Nachteile:• Zweite Kupplung erforderlich• Wartezeit bei Kaltstart• Hohe Kosten
Bild 5: Kurbelwellenmaschine mit Doppelkupplung
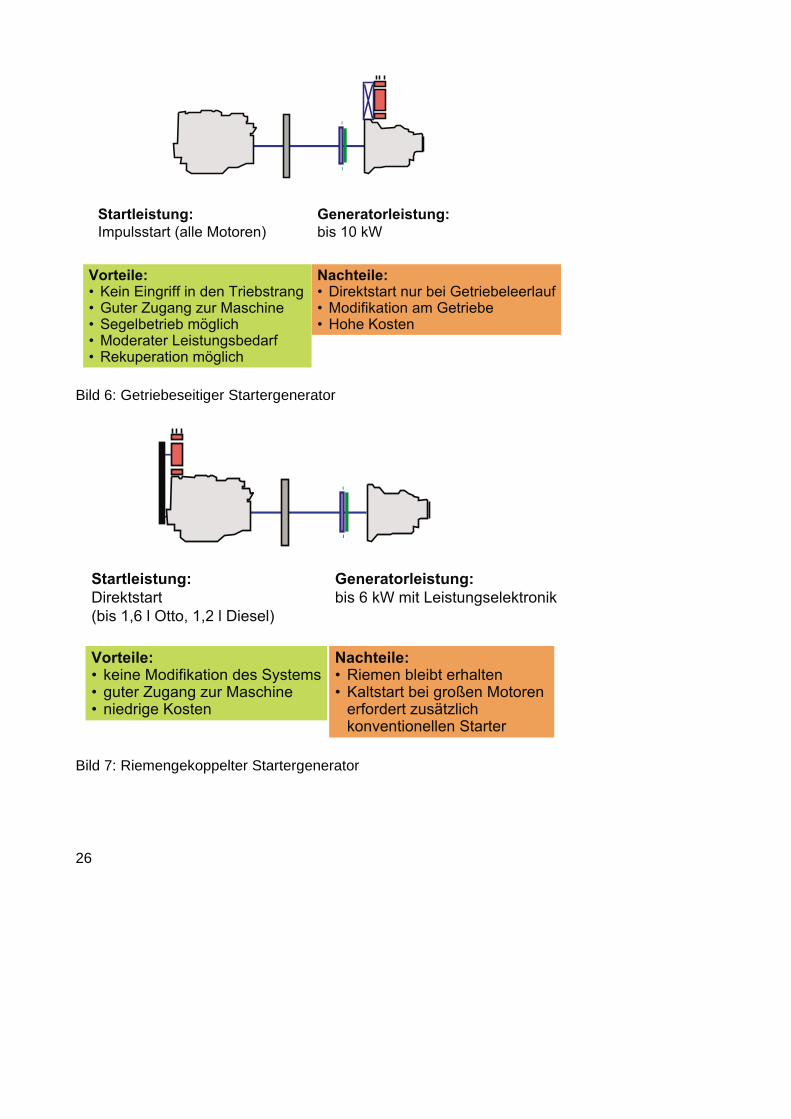
Auch achsparallele Anordnungen können die Funktion eines Starter-generators übernehmen. Die Anbindung auf der Getriebeseite ermöglichtwie das Doppelkupplungssystem Impulsstart und Rekuperation, erfordertaber ein intelligentes Getriebemanagement, da der Start nur bei Getriebe-leerlauf erfolgen kann. Außerdem wird ein zusätzlicher Getriebeabgang zurKopplung der elektrischen Maschine und damit mechanischeKomponenten benötigt.
26
Startleistung:
Impulsstart (alle Motoren)
Generatorleistung:
bis 10 kW
Vorteile:• Kein Eingriff in den Triebstrang• Guter Zugang zur Maschine• Segelbetrieb möglich• Moderater Leistungsbedarf• Rekuperation möglich
Nachteile:• Direktstart nur bei Getriebeleerlauf• Modifikation am Getriebe• Hohe Kosten
Bild 6: Getriebeseitiger Startergenerator
Startleistung:
Direktstart
(bis 1,6 l Otto, 1,2 l Diesel)
Generatorleistung:
bis 6 kW mit Leistungselektronik
Vorteile:• keine Modifikation des Systems• guter Zugang zur Maschine• niedrige Kosten
Nachteile:• Riemen bleibt erhalten• Kaltstart bei großen Motoren
erfordert zusätzlichkonventionellen Starter
Bild 7: Riemengekoppelter Startergenerator
27
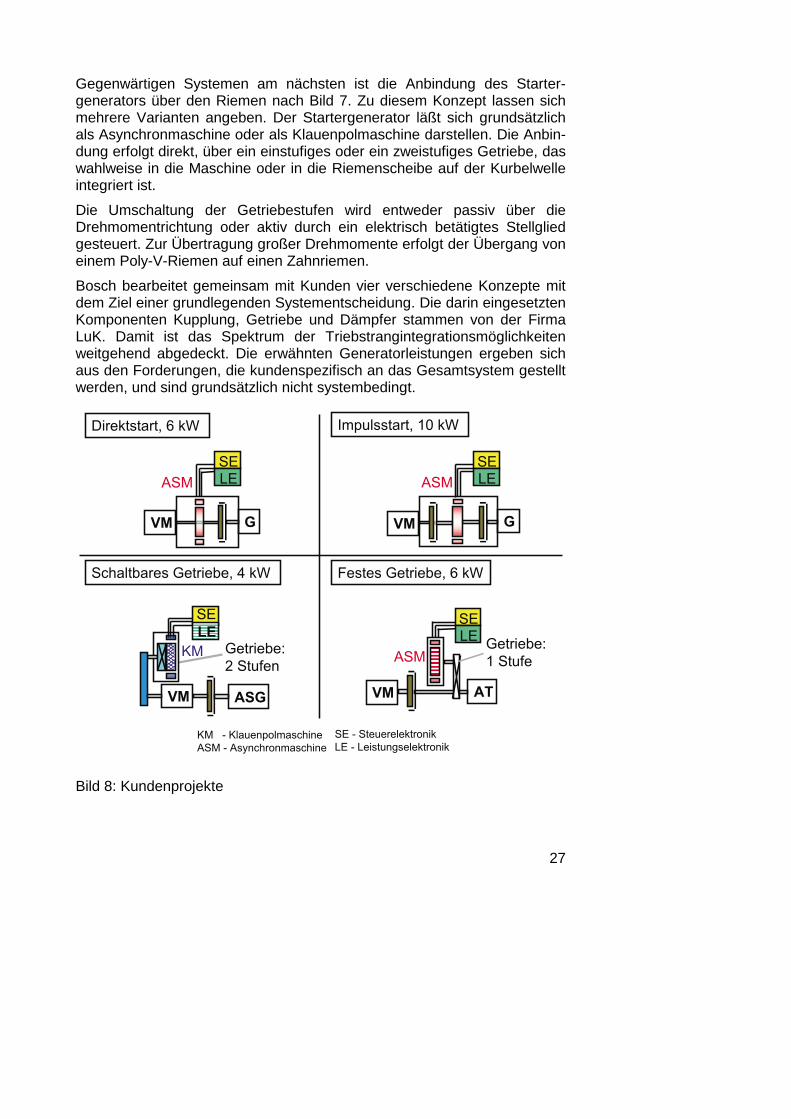
Gegenwärtigen Systemen am nächsten ist die Anbindung des Starter-generators über den Riemen nach Bild 7. Zu diesem Konzept lassen sichmehrere Varianten angeben. Der Startergenerator läßt sich grundsätzlichals Asynchronmaschine oder als Klauenpolmaschine darstellen. Die Anbin-dung erfolgt direkt, über ein einstufiges oder ein zweistufiges Getriebe, daswahlweise in die Maschine oder in die Riemenscheibe auf der Kurbelwelleintegriert ist.
Die Umschaltung der Getriebestufen wird entweder passiv über dieDrehmomentrichtung oder aktiv durch ein elektrisch betätigtes Stellgliedgesteuert. Zur Übertragung großer Drehmomente erfolgt der Übergang voneinem Poly-V-Riemen auf einen Zahnriemen.
Bosch bearbeitet gemeinsam mit Kunden vier verschiedene Konzepte mitdem Ziel einer grundlegenden Systementscheidung. Die darin eingesetztenKomponenten Kupplung, Getriebe und Dämpfer stammen von der FirmaLuK. Damit ist das Spektrum der Triebstrangintegrationsmöglichkeitenweitgehend abgedeckt. Die erwähnten Generatorleistungen ergeben sichaus den Forderungen, die kundenspezifisch an das Gesamtsystem gestelltwerden, und sind grundsätzlich nicht systembedingt.
Direktstart, 6 kW Impulsstart, 10 kW
Schaltbares Getriebe, 4 kW Festes Getriebe, 6 kW
SE - Steuerelektronik
LE - LeistungselektronikKM - Klauenpolmaschine
ASM - Asynchronmaschine
Getriebe:
1 Stufe
VM AT
SELE
ASM
VM G
SELEASM
VM G
SELEASM
Getriebe:
2 Stufen
VM ASG
SE
LE
KM
Bild 8: Kundenprojekte
28
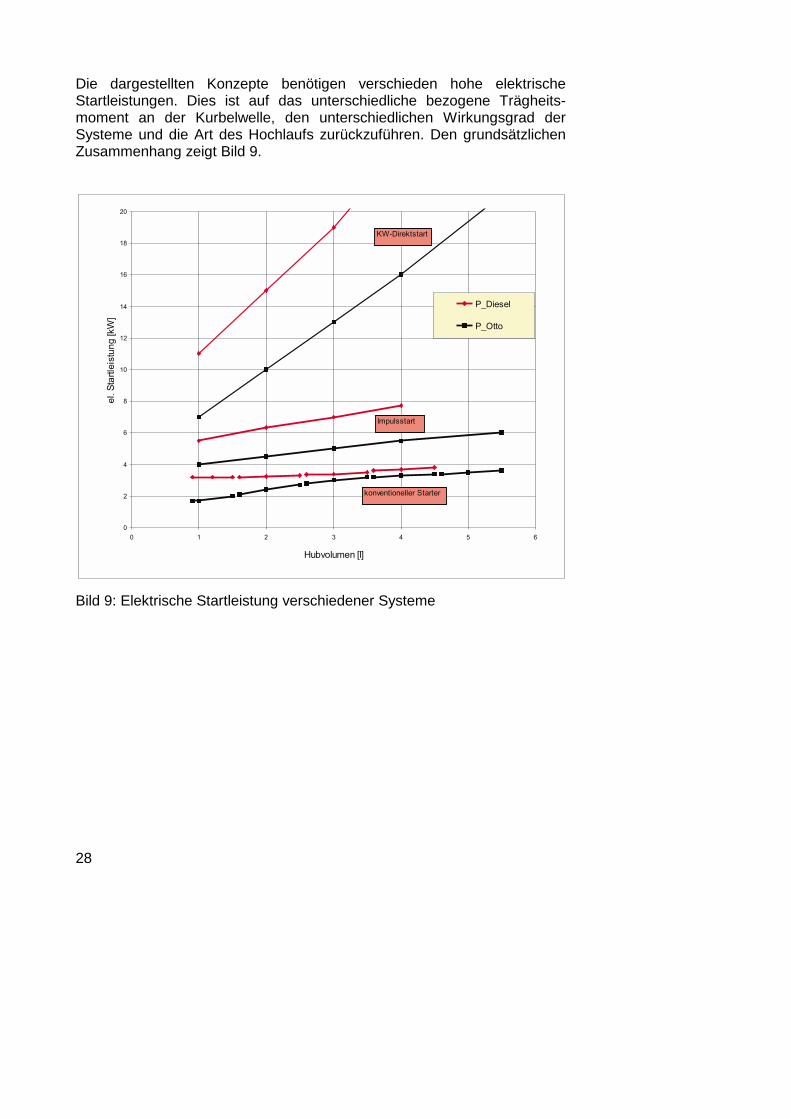
Die dargestellten Konzepte benötigen verschieden hohe elektrischeStartleistungen. Dies ist auf das unterschiedliche bezogene Trägheits-moment an der Kurbelwelle, den unterschiedlichen Wirkungsgrad derSysteme und die Art des Hochlaufs zurückzuführen. Den grundsätzlichenZusammenhang zeigt Bild 9.
0
2
4
6
8
10
12
14
16
18
20
0 1 2 3 4 5 6
P_Diesel
P_Otto
el.
Sta
rtle
istu
ng
[kW
]
Hubvolumen [l]
konventioneller Starter
Impulsstart
KW-Direktstart
Bild 9: Elektrische Startleistung verschiedener Systeme
29
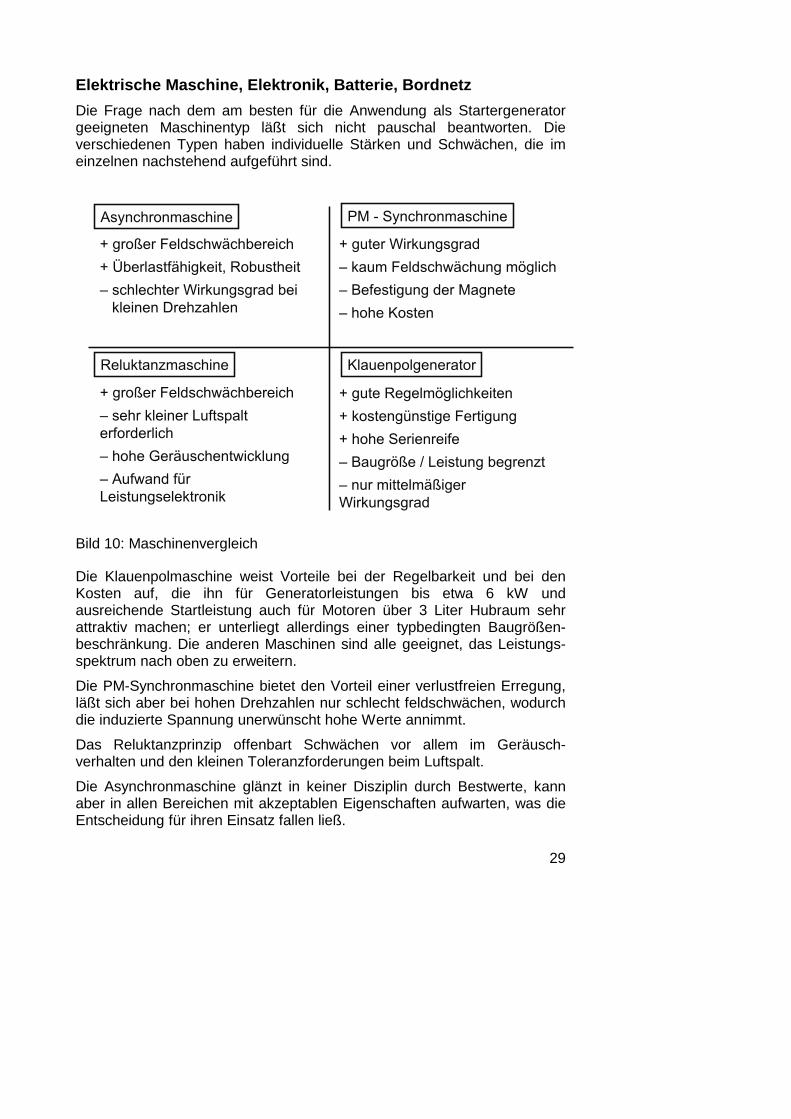
Elektrische Maschine, Elektronik, Batterie, Bordnetz
Die Frage nach dem am besten für die Anwendung als Startergeneratorgeeigneten Maschinentyp läßt sich nicht pauschal beantworten. Dieverschiedenen Typen haben individuelle Stärken und Schwächen, die imeinzelnen nachstehend aufgeführt sind.
Asynchronmaschine PM - Synchronmaschine
Reluktanzmaschine Klauenpolgenerator
+ großer Feldschwächbereich
– sehr kleiner Luftspalterforderlich
– hohe Geräuschentwicklung
– Aufwand fürLeistungselektronik
+ großer Feldschwächbereich
+ Überlastfähigkeit, Robustheit
– schlechter Wirkungsgrad beikleinen Drehzahlen
+ guter Wirkungsgrad
– kaum Feldschwächung möglich
– Befestigung der Magnete
– hohe Kosten
+ gute Regelmöglichkeiten
+ kostengünstige Fertigung
+ hohe Serienreife
– Baugröße / Leistung begrenzt
– nur mittelmäßigerWirkungsgrad
Bild 10: Maschinenvergleich
Die Klauenpolmaschine weist Vorteile bei der Regelbarkeit und bei denKosten auf, die ihn für Generatorleistungen bis etwa 6 kW undausreichende Startleistung auch für Motoren über 3 Liter Hubraum sehrattraktiv machen; er unterliegt allerdings einer typbedingten Baugrößen-beschränkung. Die anderen Maschinen sind alle geeignet, das Leistungs-spektrum nach oben zu erweitern.
Die PM-Synchronmaschine bietet den Vorteil einer verlustfreien Erregung,läßt sich aber bei hohen Drehzahlen nur schlecht feldschwächen, wodurchdie induzierte Spannung unerwünscht hohe Werte annimmt.
Das Reluktanzprinzip offenbart Schwächen vor allem im Geräusch-verhalten und den kleinen Toleranzforderungen beim Luftspalt.
Die Asynchronmaschine glänzt in keiner Disziplin durch Bestwerte, kannaber in allen Bereichen mit akzeptablen Eigenschaften aufwarten, was dieEntscheidung für ihren Einsatz fallen ließ.
30
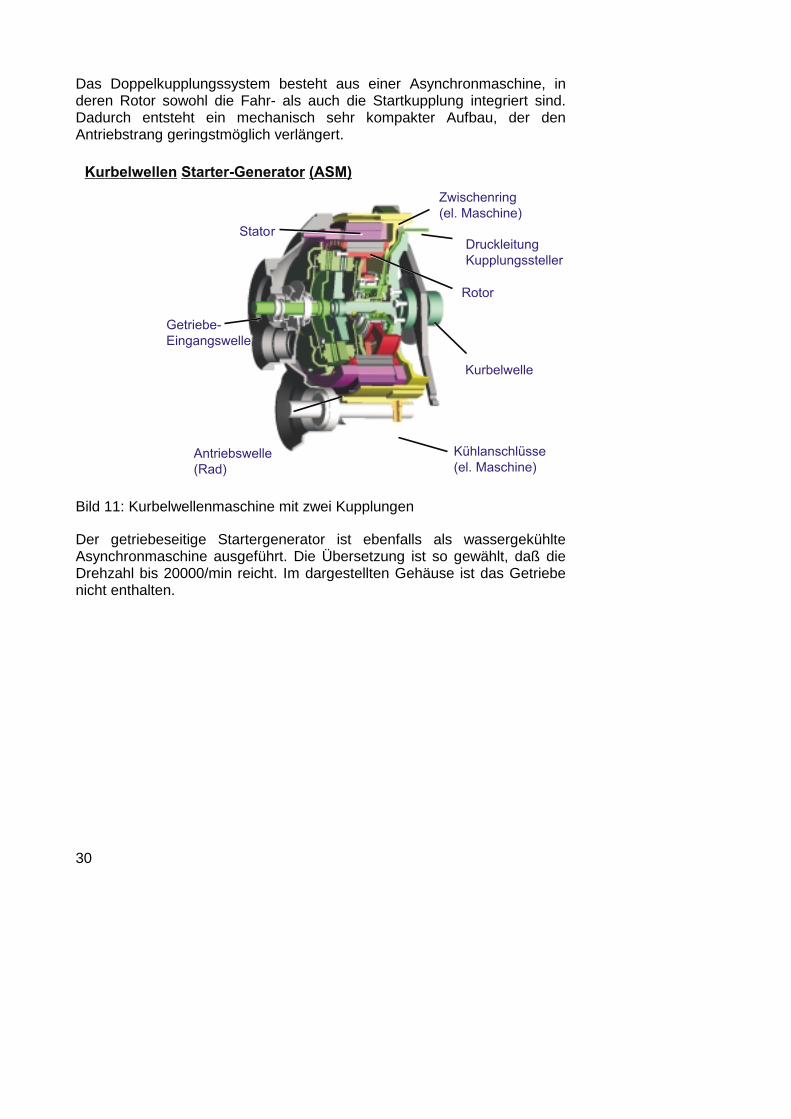
Das Doppelkupplungssystem besteht aus einer Asynchronmaschine, inderen Rotor sowohl die Fahr- als auch die Startkupplung integriert sind.Dadurch entsteht ein mechanisch sehr kompakter Aufbau, der denAntriebstrang geringstmöglich verlängert.
Kurbelwellen Starter-Generator (ASM)
Zwischenring
(el. Maschine)
Getriebe-
Eingangswelle
Druckleitung
Kupplungssteller
Kühlanschlüsse
(el. Maschine)Antriebswelle
(Rad)
Kurbelwelle
Stator
Rotor
Bild 11: Kurbelwellenmaschine mit zwei Kupplungen
Der getriebeseitige Startergenerator ist ebenfalls als wassergekühlteAsynchronmaschine ausgeführt. Die Übersetzung ist so gewählt, daß dieDrehzahl bis 20000/min reicht. Im dargestellten Gehäuse ist das Getriebenicht enthalten.
31
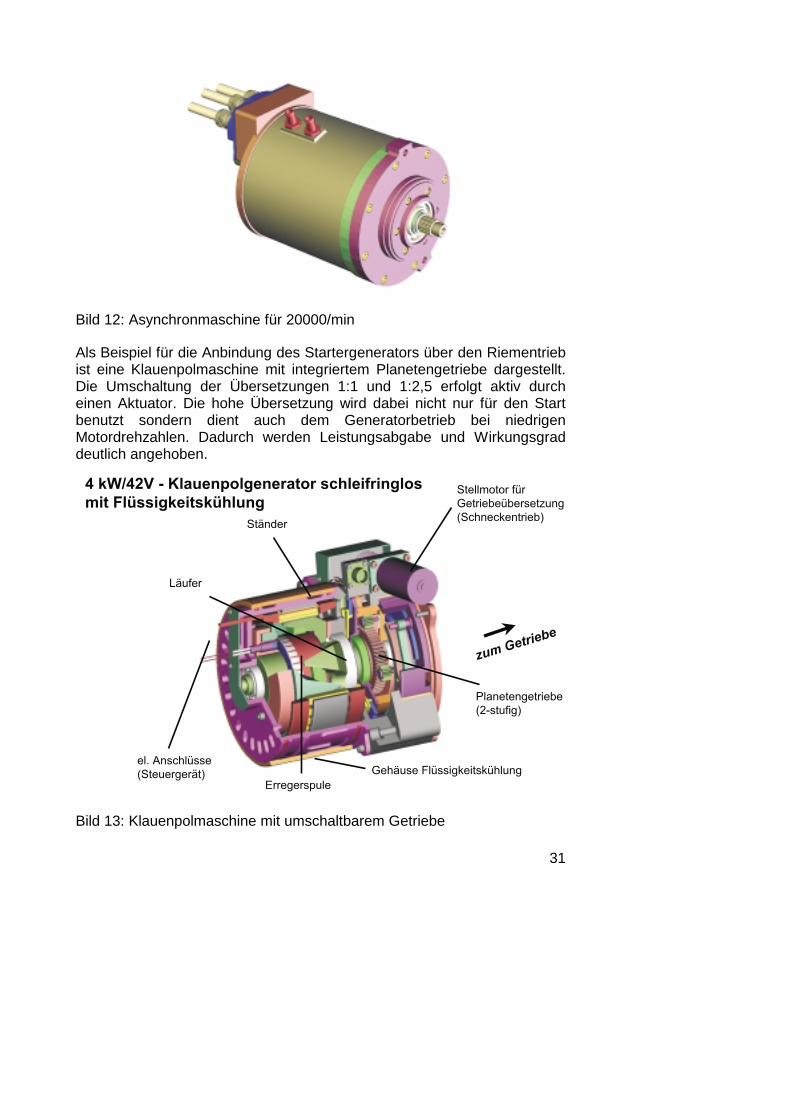
Bild 12: Asynchronmaschine für 20000/min
Als Beispiel für die Anbindung des Startergenerators über den Riementriebist eine Klauenpolmaschine mit integriertem Planetengetriebe dargestellt.Die Umschaltung der Übersetzungen 1:1 und 1:2,5 erfolgt aktiv durcheinen Aktuator. Die hohe Übersetzung wird dabei nicht nur für den Startbenutzt sondern dient auch dem Generatorbetrieb bei niedrigenMotordrehzahlen. Dadurch werden Leistungsabgabe und Wirkungsgraddeutlich angehoben.
4 kW/42V - Klauenpolgenerator schleifringlos
mit FlüssigkeitskühlungStellmotor für
Getriebeübersetzung
(Schneckentrieb)
Planetengetriebe
(2-stufig)
Ständer
Erregerspule
zum Getriebe
Läufer
Gehäuse Flüssigkeitskühlungel. Anschlüsse
(Steuergerät)
Bild 13: Klauenpolmaschine mit umschaltbarem Getriebe
32
Alle Startergeneratoren erfordern eine Leistungselektronik. Die Haupt-anforderungen sind Hochstromfähigkeit bei Kaltstart für Ströme um 1000 Aund guter Wirkungsgrad im Generatorbetrieb. Zur Unterbringung derElektronik im Motorraum wird eine kompakte Bauweise gewünscht. Wegender dadurch bedingten großen Leistungsdichte lassen sich die Verluste desLeistungsteils von einigen 100 W nur mit Hilfe einer Flüssigkeitskühlungabführen. Hierzu wird üblicherweise der Wasserkreislauf des Verbren-nungsmotors mitbenutzt, dessen Vorlauftemperaturen bis zu 130°Cbetragen können. Daraus ergeben sich hohe Anforderungen an diethermische Belastbarkeit der Halbleiter. Die räumliche Nähe zwischenLeistungselektronik und Maschine ist aus EMV-Gründen sehr zuempfehlen.
Bild 14: MOSFET-Wechselrichter
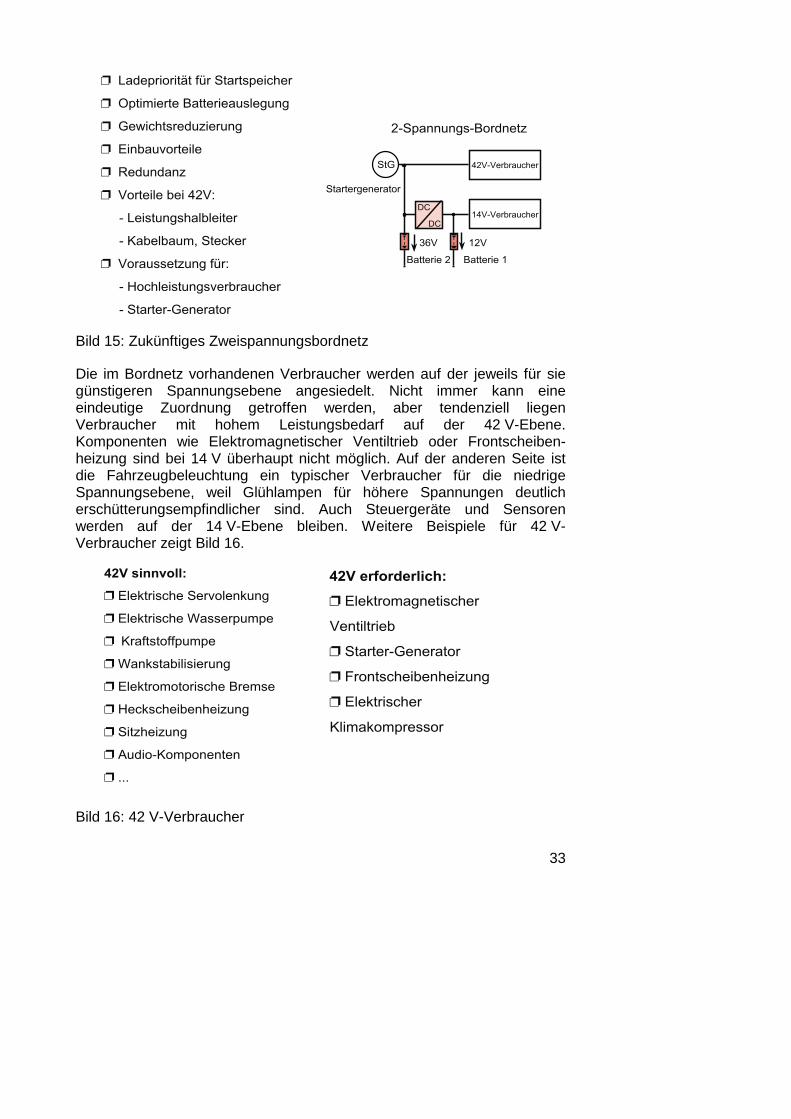
Die hohen Leistungsanforderungen zukünftiger Bordnetze lassen sich mitden heutigen 14 V-Systemen nicht mehr wirtschaftlich versorgen. In denHochleistungsbordnetzen wird es zwei Versorgungsspannungen geben,14 V und 42 V, die jeweils angepaßte Verbraucher versorgen. DerGenerator speist nur auf der 42 V-Seite Leistung ein, die Aufladung der14 V-Batterie erfolgt über einen DC/DC-Gleichspannungswandler.
33
2-Spannungs-Bordnetz
� Ladepriorität für Startspeicher
� Optimierte Batterieauslegung
� Gewichtsreduzierung
� Einbauvorteile
� Redundanz
� Vorteile bei 42V:
- Leistungshalbleiter
- Kabelbaum, Stecker
� Voraussetzung für:
- Hochleistungsverbraucher
- Starter-Generator
StG
Batterie 2
36V 12V
Batterie 1
Startergenerator
DC
DC
42V-Verbraucher
14V-Verbraucher
Bild 15: Zukünftiges Zweispannungsbordnetz
Die im Bordnetz vorhandenen Verbraucher werden auf der jeweils für siegünstigeren Spannungsebene angesiedelt. Nicht immer kann eineeindeutige Zuordnung getroffen werden, aber tendenziell liegenVerbraucher mit hohem Leistungsbedarf auf der 42 V-Ebene.Komponenten wie Elektromagnetischer Ventiltrieb oder Frontscheiben-heizung sind bei 14 V überhaupt nicht möglich. Auf der anderen Seite istdie Fahrzeugbeleuchtung ein typischer Verbraucher für die niedrigeSpannungsebene, weil Glühlampen für höhere Spannungen deutlicherschütterungsempfindlicher sind. Auch Steuergeräte und Sensorenwerden auf der 14 V-Ebene bleiben. Weitere Beispiele für 42 V-Verbraucher zeigt Bild 16.
42V sinnvoll:
� Elektrische Servolenkung
� Elektrische Wasserpumpe
� Kraftstoffpumpe
� Wankstabilisierung
� Elektromotorische Bremse
� Heckscheibenheizung
� Sitzheizung
� Audio-Komponenten
� ...
42V erforderlich:
� Elektromagnetischer
Ventiltrieb
� Starter-Generator
� Frontscheibenheizung
� Elektrischer
Klimakompressor
Bild 16: 42 V-Verbraucher
34
BewertungAusgehend von der Annahme, daß der elektromechanische Triebstrangbzw. das Hybridfahrzeug künftig an Bedeutung gewinnen wird, ist demEinsatz des im Triebstrang koaxial angeordneten Asynchronantriebs großeBedeutung beizumessen. Die diesem Konzept zuzuordnenden hohenSystemkosten können nur dann über Kraftstoffverbrauchseinsparungamortisiert werden, wenn geeignete Batteriekonzepte zur Verfügungstehen, die eine umfassende Rekuperation ermöglichen. Bei großenVerbrennungsmotoren sind bei Direktstart die geforderten Startdreh-momente hoch, was aufgrund der damit verbundenen Motorströme vonüber 1000 A bezüglich der technischen und wirtschaftlichen Realisierungeine interessante Herausforderung darstellt.
Der Impulsstart ist mit einer Kupplung zwischen Kurbelwelle undStartergenerator möglich. Bei kaltem Motor (<0OC) werden dienotwendigen Startströme reduziert, was sich auf Antriebsdesign und damitKosten auswirkt. Die Kaltstartzeit wird dabei unter Umständen verlängert.
Die erwähnte Kupplung erhöht das Rekuperationspotential und ermöglichtdem beschriebenen Konzept in Verbindung mit einer zyklenfesten Hoch-leistungsbatterie den stufenlosen Übergang zum Hybridantrieb.
Der Startergenerator im Nebentrieb kann ähnlich wie der heutigeGenerator in geringer Varianz mit dem Verbrennungsmotor kombiniertwerden. Außerdem stellt dieses Konzept keine wesentlichenZusatzforderungen an die axiale Triebstranglänge, was besonders beiquereingebauten Motoren vorteilhaft ist. Die begrenzten übertragbarenKräfte schränken dieses Konzept auf die Startergeneratorfunktion ein. Vorallem für kleine und mittelgroße Fahrzeugmotorisierungen stellt diesesStartergeneratorkonzept eine vergleichsweise kostengünstige Lösung dar.Dies gilt vor allem dann, wenn die großserientechnisch gefertigteKlauenpolmaschine eingesetzt wird.
35
ZusammenfassungDie Forderungen nach gesteigerter Bordnetzleistung bei besserem Erzeu-gerwirkungsgrad und Komfort auf der einen Seite und geringerenEmissionen auf der anderen Seite haben die Diskussion um denStartergenerator neu belebt. In letzter Zeit wurde eine Reihe von neuenKonzepten entwickelt, die sich sowohl in ihrer Topologie als auch in ihrerFunktionalität deutlich voneinander unterscheiden. Die Ergebnisse reichenvom leistungsgesteigerten Generator mit Warmstartfunktion bis hin zukleinen Hybridantrieben. Gemeinsam ist allen Ansätzen der Übergang zum42 V-Bordnetz, weil sich die großen Verbraucherleistungen nur mit diesemerhöhten Spannungsniveau wirtschaftlich versorgen lassen.
Die koaxialen Lösungen zwischen Verbrennungsmotor und Getriebegreifen in einer bisher nicht gekannten Weise in das Systemlayout ein. DieIntegration erfordert fahrzeugspezifische Konstruktionen mit entsprechen-den Auswirkungen auf die Variantenvielfalt. Durch die mechanisch robusteAnbindung bietet diese Lösung aber gleichzeitig das höchste Funktions-potential.
Die achsparallen Konzepte können sowohl über Zahnradgetriebe als auchüber Riemen an den Triebstrang gekoppelt werden. Durch den Einsatzeiner zweistufigen Übersetzung kann die Startleistung erhöht und dermittlere Wirkungsgrad im Generatorbetrieb verbessert werden. DasGetriebe kann wahlweise auf der Kurbelwellenseite oder auf derMaschinenseite angeordnet sein und über eine aktive oder passiveUmschaltung verfügen. Die Anbindung über den vorhandenen Riementriebgestattet eine sanfte Migration vom heutigen System zum Startergeneratorbei geringem Entwicklungsrisiko.
Die Weiterentwicklung der bestehenden Batterietechnologie zu höherenLeistungsdichten wird zukünftig die Möglichkeit bieten, auch bei großenMotoren und niedrigen Temperaturen einen Kurbelwellendirektstart zurealisieren und größere Leistungen zu rekuperieren. Außerdem werden dieZusatzfunktionen des Startergenerators als elektrischer Antrieb anBedeutung gewinnen. Sie bieten die Perspektive, den Kraftstoffverbrauchund die Emissionen der Fahrzeuge weiter zu reduzieren.

37
Startergenerator im Antriebsstrang
Dr.-Ing. Wolfgang ReikLuK GmbH & Co., Bühl
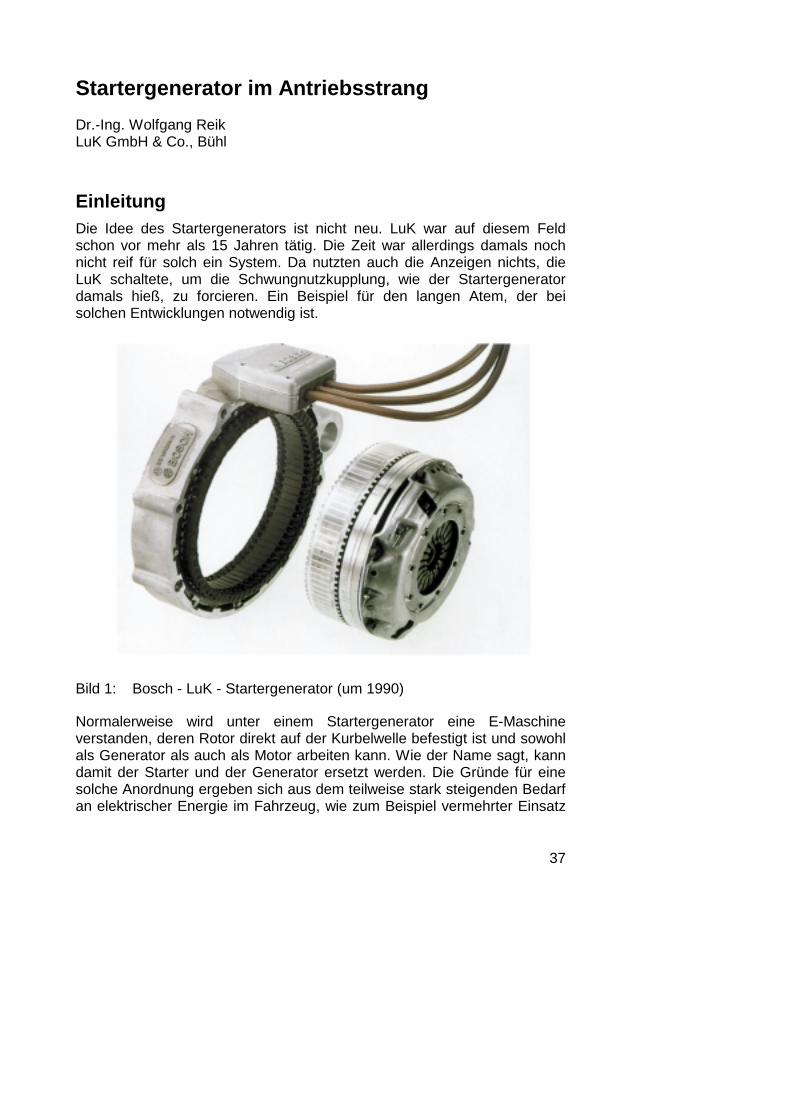
EinleitungDie Idee des Startergenerators ist nicht neu. LuK war auf diesem Feldschon vor mehr als 15 Jahren tätig. Die Zeit war allerdings damals nochnicht reif für solch ein System. Da nutzten auch die Anzeigen nichts, dieLuK schaltete, um die Schwungnutzkupplung, wie der Startergeneratordamals hieß, zu forcieren. Ein Beispiel für den langen Atem, der beisolchen Entwicklungen notwendig ist.
Bild 1: Bosch - LuK - Startergenerator (um 1990)
Normalerweise wird unter einem Startergenerator eine E-Maschineverstanden, deren Rotor direkt auf der Kurbelwelle befestigt ist und sowohlals Generator als auch als Motor arbeiten kann. Wie der Name sagt, kanndamit der Starter und der Generator ersetzt werden. Die Gründe für einesolche Anordnung ergeben sich aus dem teilweise stark steigenden Bedarfan elektrischer Energie im Fahrzeug, wie zum Beispiel vermehrter Einsatz
38
von elektrisch angetriebenen Komponenten. Die fordern teilweise höhereSpannungen im Bordnetz, um den Wirkungsgrad zu verbessern, wie zumBeispiel elektrische Ventilbetätigungen [1]. Außerdem sollte konsequenteine Start-Stopp-Funktion integriert werden, die ein Abstellen des Motorsbeim Stillstand des Fahrzeugs und einen geräuschlosen und schnellenNeustart erlaubt. Dazu muß allerdings die E-Maschine so starkdimensioniert werden, daß auch bei sehr tiefen Temperaturen noch sichergestartet werden kann. Je nach Motor sind dazu kurzzeitig selbst im PKW-Bereich Momente bis über 400 Nm erforderlich.
Wenn man sich schon für den Einbau eines solch teuren Systemsentschließt, wird man versuchen, weitere Zusatzfunktionen zu integrieren.Der Kreativität der Ingenieure sind hier kaum Grenzen gesetzt.
Im Bild 2 sind einige weitere Forderungen aufgelistet, die von Fall zu Fallsogar noch von größerer Bedeutung werden können als die ursprünglicheMotivation, nämlich nur Starter und Generator in einer leistungsfähigenE-Maschine zu vereinen.
• Hohe Generatorleistung bei gutem Wirkungsgrad
• Freie Wahl der Generatorleistung
• Start/Stopp-Funktion bei leisem Start(Motorstopp im Schub und Fahrzeugstillstand)
• Direktstart
• Impulsstart
• Booster
• Energierückgewinnung im Schub
• Aktive Synchronisation
• Zugkraftunterbrechung bei automatisierten Schaltgetriebenauffüllen
• Gleichartiges Konzept bei allen Getriebearten
• Torsionsschwingungsdämpfung
Bild 2: Mögliche Forderungen an E-Maschine im Antriebsstang
Wie bereits erwähnt, erfordern die heutzutage viel diskutiertenStartergeneratoren für den Start bei tiefen Temperaturen eineMindestleistung der E-Maschine. Beim Impulsstart, bei dem dieE-Maschine zunächst auf Schwung gebracht und erst danach der Motor
39
ausgekuppelt wird, kann die Leistung der E-Maschine alleine nach dererforderlichen Generatorleistung dimensioniert werden.
Wenn schon eine relativ große E-Maschine mit einer Leistung von bis zu10 KW eingesetzt wird, sollte diese auch noch, zumindest kurzfristig, denVerbrennungsmotor unterstützen und damit als Booster wirken.
In Zukunft vielleicht noch interessanter wird die Aufgabe, Bremsenergiezurückzugewinnen. In vielen Konzepten rückt deshalb die Rekuperation inden Mittelpunkt.
In mehreren Ansätzen wurde versucht, die E-Maschine auch zurSynchronisation des Getriebes einzusetzen, was jedoch kaum möglich ist,da extrem hohe elektrische Leistungen benötigt werden, um das eigeneMassenträgheitsmoment schnell genug auf eine neue Drehzahl zu bringen.
In die gleiche Kategorie sind die Bemühungen einzustufen, dieUngleichförmigkeit des Motors durch eine aktive Gegenkopplung zueliminieren. Ein schöner Gedanke, der leider zu einem deutlichenKraftstoffmehrverbrauch führen würde [2].
Eine weitere Idee ist, die automatisierten Schaltgetriebe, die ja bei denSchaltungen unter der Zugkraftunterbrechung leiden, so geschickt miteiner E-Maschine zu kombinieren, daß diese Unterbrechung zumindestteilweise aufgefüllt werden kann. Dies erscheint so interessant, daß dafürein eigener Beitrag vorgesehen ist [3].
Bei der Entscheidung für ein Konzept wird sicher auch die Frage eine Rollespielen, ob ein gleichartiges Konzept für alle Getriebearten möglich ist.
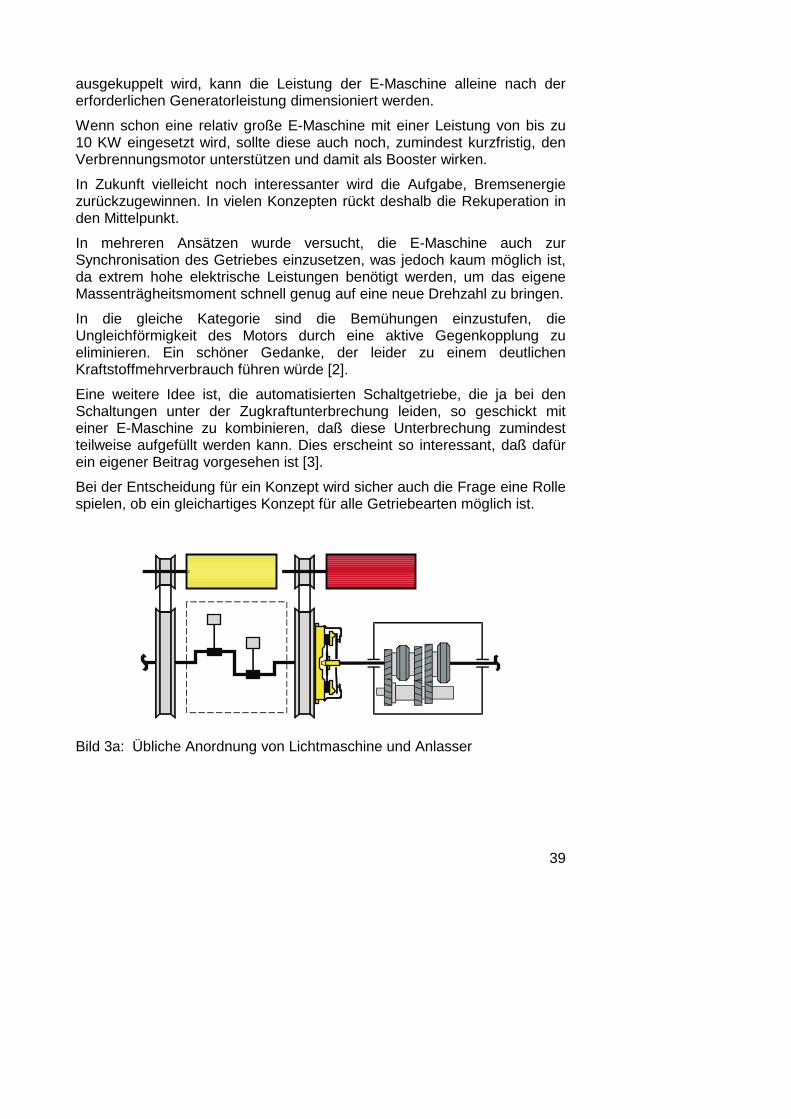
Bild 3a: Übliche Anordnung von Lichtmaschine und Anlasser
40
Kurbelwelle
Zwischen zwei Kupplungen
Getriebeeingang
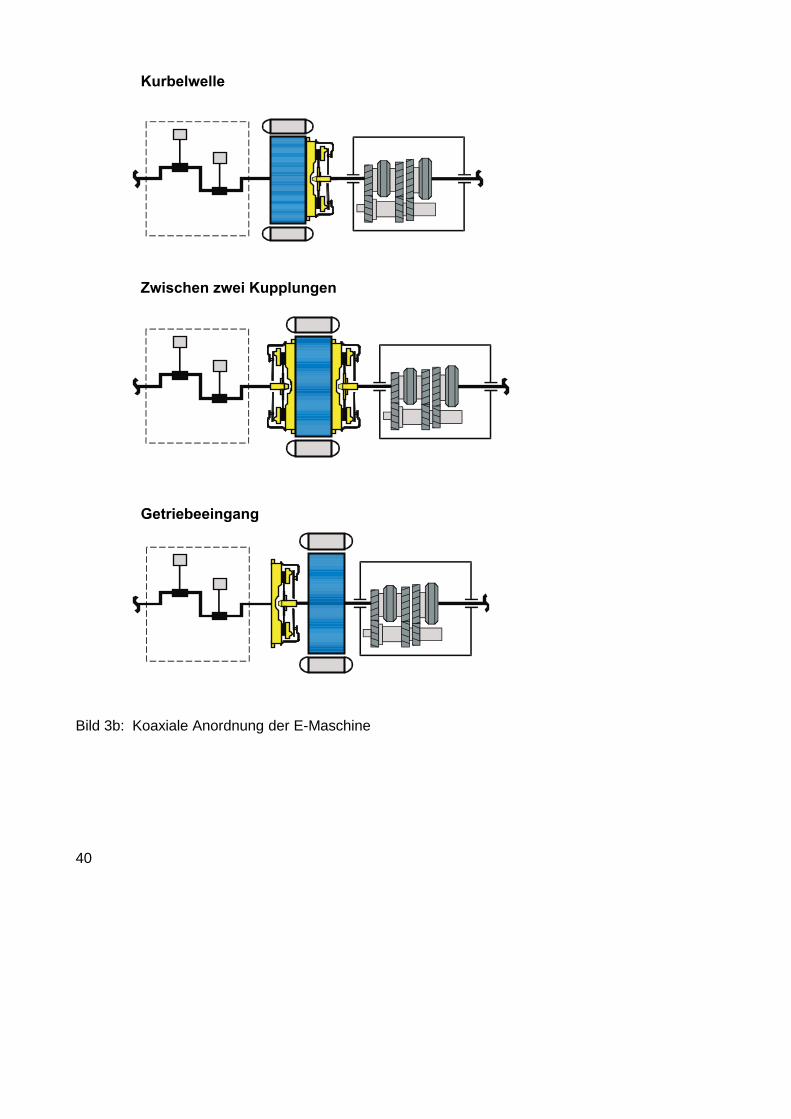
Bild 3b: Koaxiale Anordnung der E-Maschine
41
Schwungrad
Zwischen zwei Kupplungen
Getriebeeingang
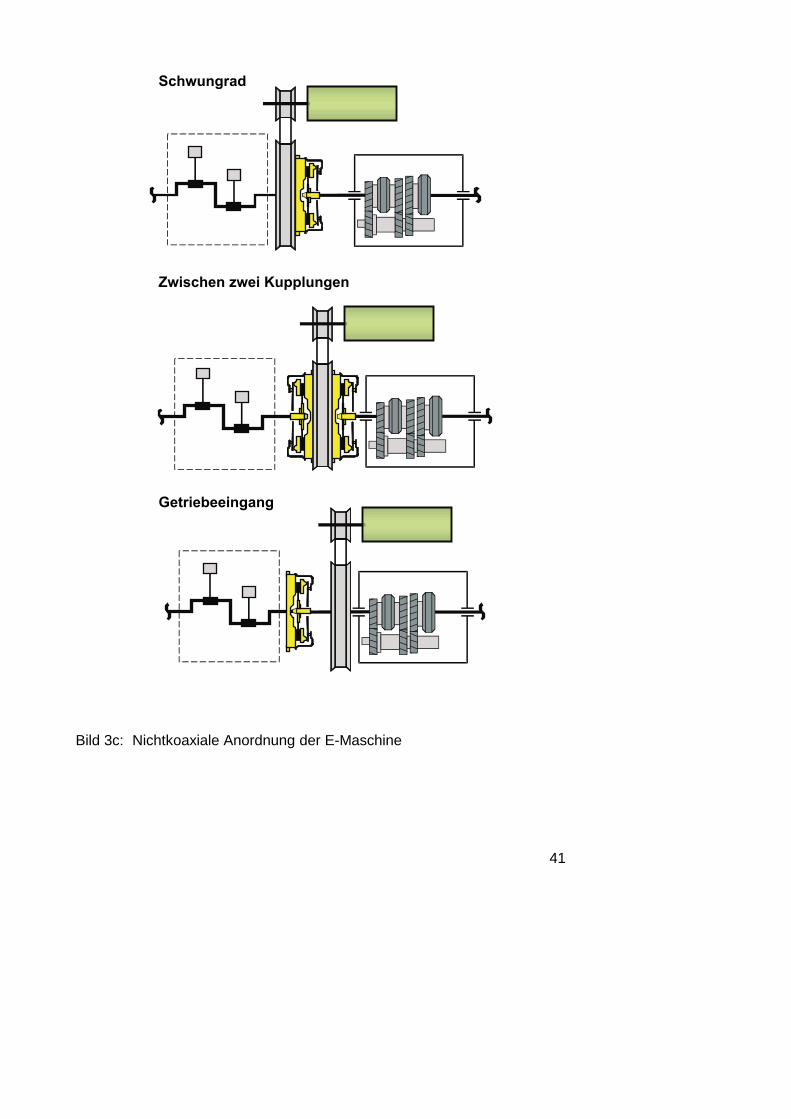
Bild 3c: Nichtkoaxiale Anordnung der E-Maschine
42
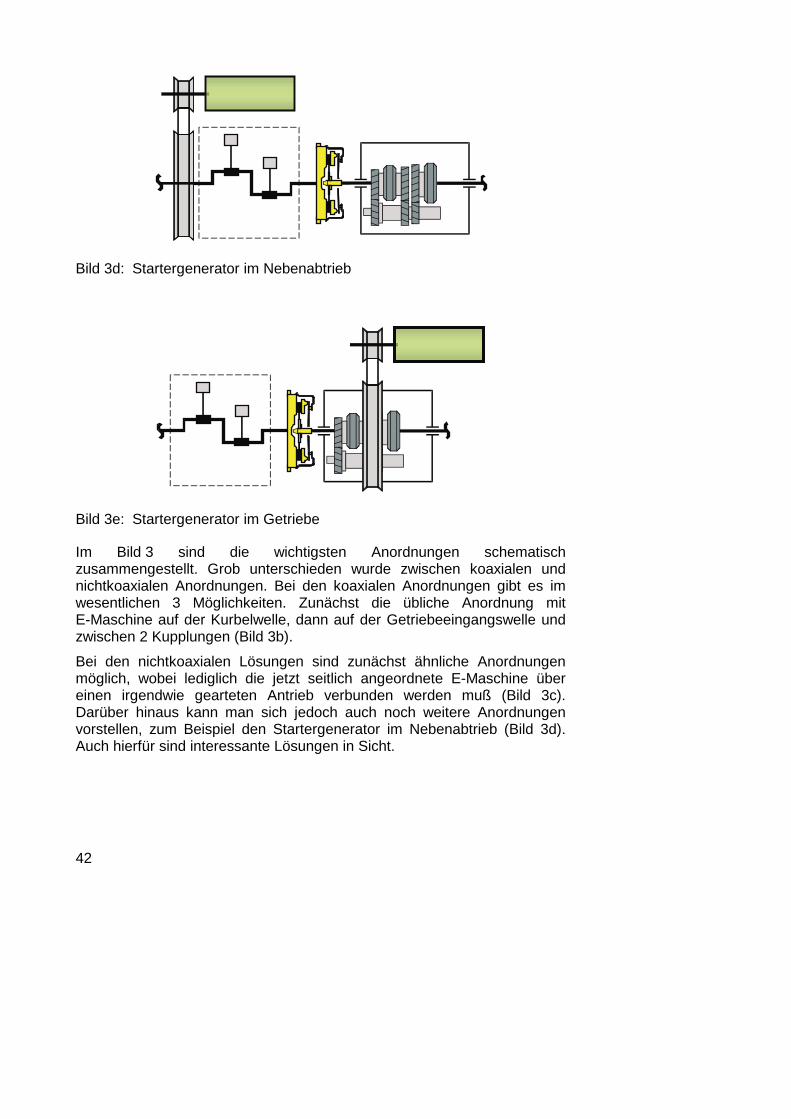
Bild 3d: Startergenerator im Nebenabtrieb
Bild 3e: Startergenerator im Getriebe
Im Bild 3 sind die wichtigsten Anordnungen schematischzusammengestellt. Grob unterschieden wurde zwischen koaxialen undnichtkoaxialen Anordnungen. Bei den koaxialen Anordnungen gibt es imwesentlichen 3 Möglichkeiten. Zunächst die übliche Anordnung mitE-Maschine auf der Kurbelwelle, dann auf der Getriebeeingangswelle undzwischen 2 Kupplungen (Bild 3b).
Bei den nichtkoaxialen Lösungen sind zunächst ähnliche Anordnungenmöglich, wobei lediglich die jetzt seitlich angeordnete E-Maschine übereinen irgendwie gearteten Antrieb verbunden werden muß (Bild 3c).Darüber hinaus kann man sich jedoch auch noch weitere Anordnungenvorstellen, zum Beispiel den Startergenerator im Nebenabtrieb (Bild 3d).Auch hierfür sind interessante Lösungen in Sicht.
43
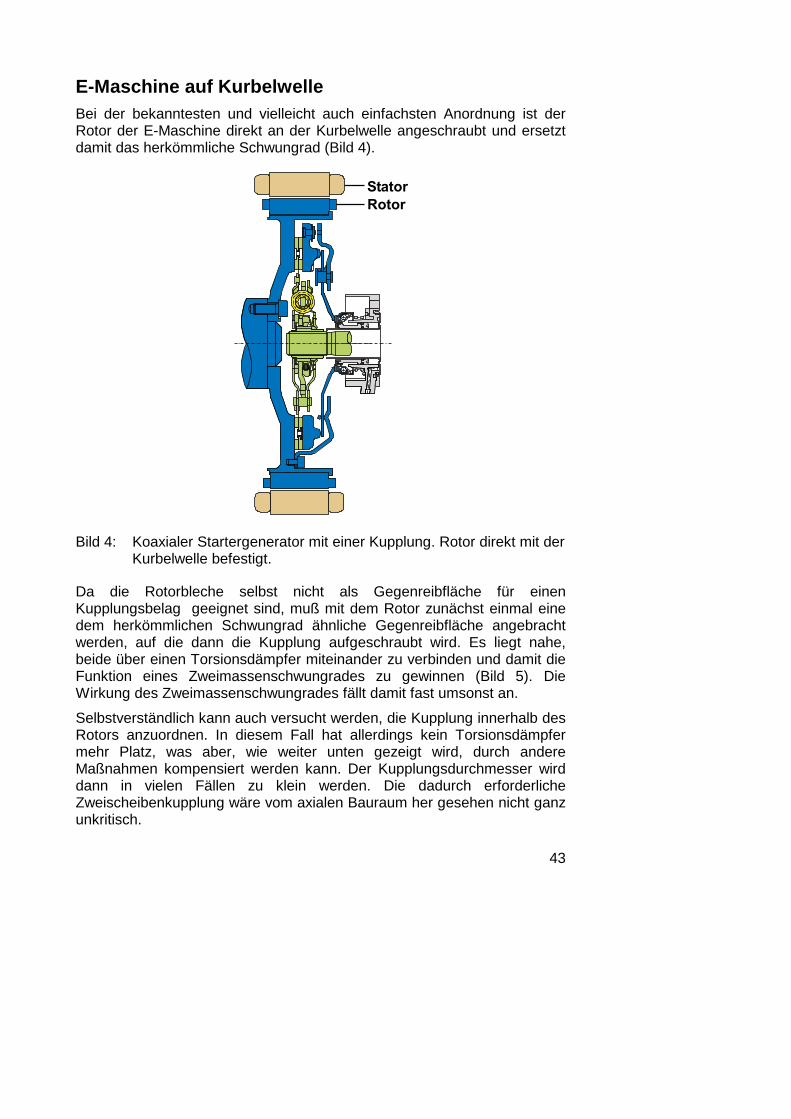
E-Maschine auf KurbelwelleBei der bekanntesten und vielleicht auch einfachsten Anordnung ist derRotor der E-Maschine direkt an der Kurbelwelle angeschraubt und ersetztdamit das herkömmliche Schwungrad (Bild 4).
Stator
Rotor
Bild 4: Koaxialer Startergenerator mit einer Kupplung. Rotor direkt mit derKurbelwelle befestigt.
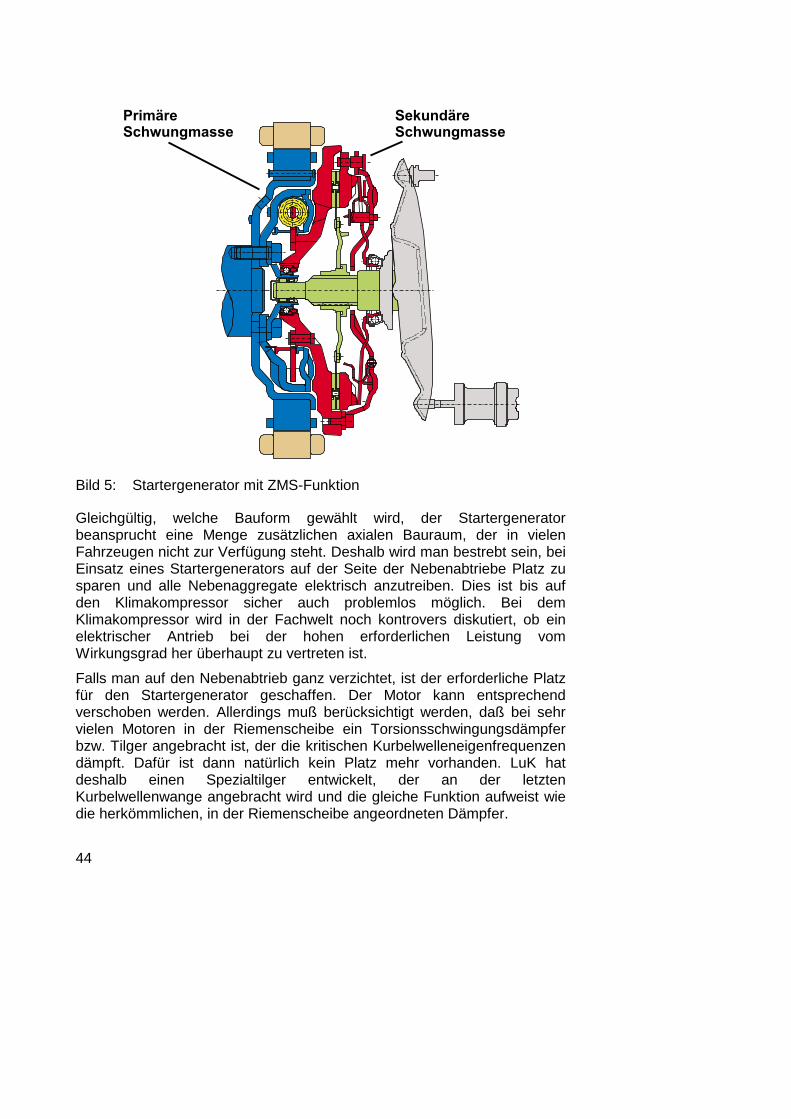
Da die Rotorbleche selbst nicht als Gegenreibfläche für einenKupplungsbelag geeignet sind, muß mit dem Rotor zunächst einmal einedem herkömmlichen Schwungrad ähnliche Gegenreibfläche angebrachtwerden, auf die dann die Kupplung aufgeschraubt wird. Es liegt nahe,beide über einen Torsionsdämpfer miteinander zu verbinden und damit dieFunktion eines Zweimassenschwungrades zu gewinnen (Bild 5). DieWirkung des Zweimassenschwungrades fällt damit fast umsonst an.
Selbstverständlich kann auch versucht werden, die Kupplung innerhalb desRotors anzuordnen. In diesem Fall hat allerdings kein Torsionsdämpfermehr Platz, was aber, wie weiter unten gezeigt wird, durch andereMaßnahmen kompensiert werden kann. Der Kupplungsdurchmesser wirddann in vielen Fällen zu klein werden. Die dadurch erforderlicheZweischeibenkupplung wäre vom axialen Bauraum her gesehen nicht ganzunkritisch.
44
SekundäreSchwungmasse
PrimäreSchwungmasse
Bild 5: Startergenerator mit ZMS-Funktion
Gleichgültig, welche Bauform gewählt wird, der Startergeneratorbeansprucht eine Menge zusätzlichen axialen Bauraum, der in vielenFahrzeugen nicht zur Verfügung steht. Deshalb wird man bestrebt sein, beiEinsatz eines Startergenerators auf der Seite der Nebenabtriebe Platz zusparen und alle Nebenaggregate elektrisch anzutreiben. Dies ist bis aufden Klimakompressor sicher auch problemlos möglich. Bei demKlimakompressor wird in der Fachwelt noch kontrovers diskutiert, ob einelektrischer Antrieb bei der hohen erforderlichen Leistung vomWirkungsgrad her überhaupt zu vertreten ist.
Falls man auf den Nebenabtrieb ganz verzichtet, ist der erforderliche Platzfür den Startergenerator geschaffen. Der Motor kann entsprechendverschoben werden. Allerdings muß berücksichtigt werden, daß bei sehrvielen Motoren in der Riemenscheibe ein Torsionsschwingungsdämpferbzw. Tilger angebracht ist, der die kritischen Kurbelwelleneigenfrequenzendämpft. Dafür ist dann natürlich kein Platz mehr vorhanden. LuK hatdeshalb einen Spezialtilger entwickelt, der an der letztenKurbelwellenwange angebracht wird und die gleiche Funktion aufweist wiedie herkömmlichen, in der Riemenscheibe angeordneten Dämpfer.
45
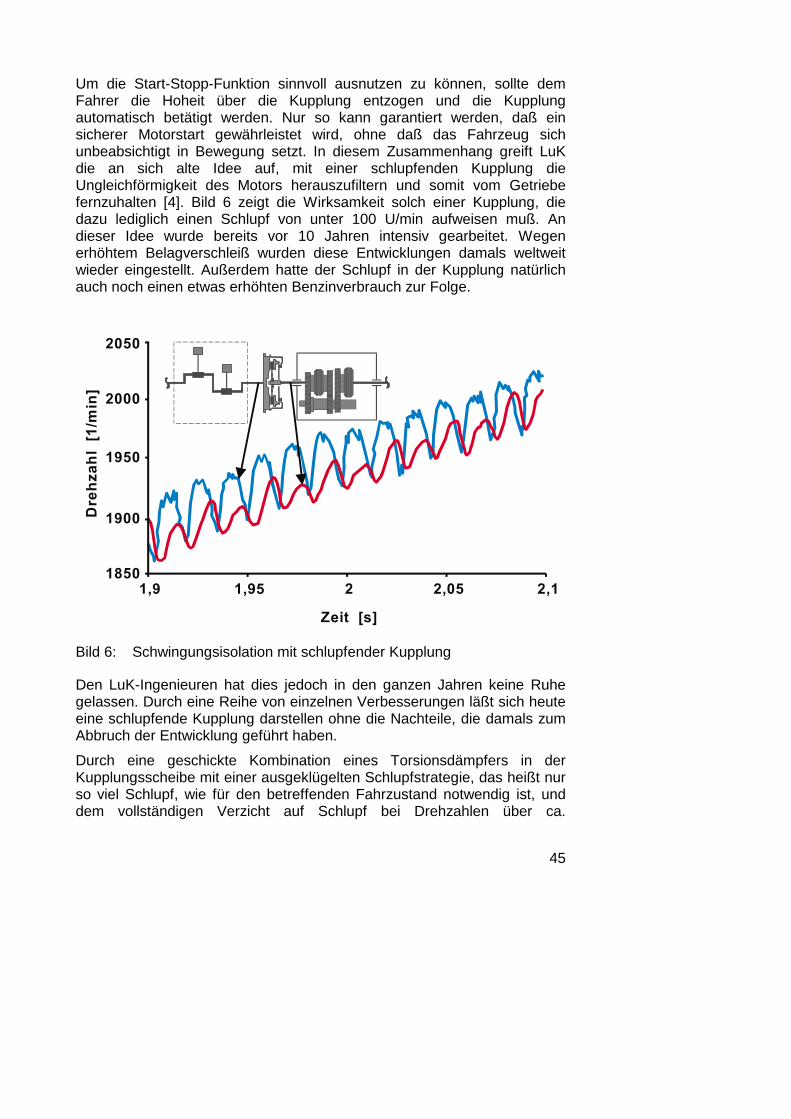
Um die Start-Stopp-Funktion sinnvoll ausnutzen zu können, sollte demFahrer die Hoheit über die Kupplung entzogen und die Kupplungautomatisch betätigt werden. Nur so kann garantiert werden, daß einsicherer Motorstart gewährleistet wird, ohne daß das Fahrzeug sichunbeabsichtigt in Bewegung setzt. In diesem Zusammenhang greift LuKdie an sich alte Idee auf, mit einer schlupfenden Kupplung dieUngleichförmigkeit des Motors herauszufiltern und somit vom Getriebefernzuhalten [4]. Bild 6 zeigt die Wirksamkeit solch einer Kupplung, diedazu lediglich einen Schlupf von unter 100 U/min aufweisen muß. Andieser Idee wurde bereits vor 10 Jahren intensiv gearbeitet. Wegenerhöhtem Belagverschleiß wurden diese Entwicklungen damals weltweitwieder eingestellt. Außerdem hatte der Schlupf in der Kupplung natürlichauch noch einen etwas erhöhten Benzinverbrauch zur Folge.
1850
1900
1950
2000
2050
1,9 1,95 2 2,05 2,1
Zeit [s]
Dre
hza
hl
[1/m
in]
Bild 6: Schwingungsisolation mit schlupfender Kupplung
Den LuK-Ingenieuren hat dies jedoch in den ganzen Jahren keine Ruhegelassen. Durch eine Reihe von einzelnen Verbesserungen läßt sich heuteeine schlupfende Kupplung darstellen ohne die Nachteile, die damals zumAbbruch der Entwicklung geführt haben.
Durch eine geschickte Kombination eines Torsionsdämpfers in derKupplungsscheibe mit einer ausgeklügelten Schlupfstrategie, das heißt nurso viel Schlupf, wie für den betreffenden Fahrzustand notwendig ist, unddem vollständigen Verzicht auf Schlupf bei Drehzahlen über ca.
46
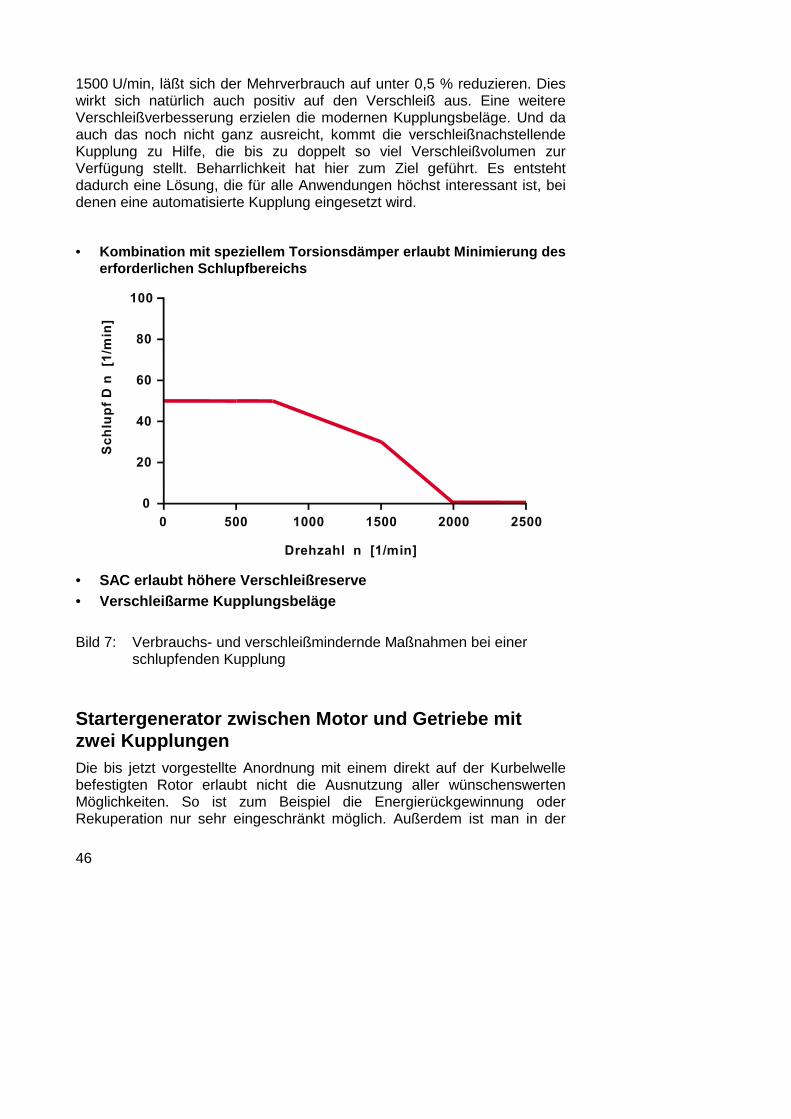
1500 U/min, läßt sich der Mehrverbrauch auf unter 0,5 % reduzieren. Dieswirkt sich natürlich auch positiv auf den Verschleiß aus. Eine weitereVerschleißverbesserung erzielen die modernen Kupplungsbeläge. Und daauch das noch nicht ganz ausreicht, kommt die verschleißnachstellendeKupplung zu Hilfe, die bis zu doppelt so viel Verschleißvolumen zurVerfügung stellt. Beharrlichkeit hat hier zum Ziel geführt. Es entstehtdadurch eine Lösung, die für alle Anwendungen höchst interessant ist, beidenen eine automatisierte Kupplung eingesetzt wird.
• Kombination mit speziellem Torsionsdämper erlaubt Minimierung deserforderlichen Schlupfbereichs
0
20
40
60
80
100
0 500 1000 1500 2000 2500
Drehzahl n [1/min]
Sc
hlu
pf
Dn
[1/m
in]
• SAC erlaubt höhere Verschleißreserve• Verschleißarme Kupplungsbeläge
Bild 7: Verbrauchs- und verschleißmindernde Maßnahmen bei einerschlupfenden Kupplung
Startergenerator zwischen Motor und Getriebe mitzwei KupplungenDie bis jetzt vorgestellte Anordnung mit einem direkt auf der Kurbelwellebefestigten Rotor erlaubt nicht die Ausnutzung aller wünschenswertenMöglichkeiten. So ist zum Beispiel die Energierückgewinnung oderRekuperation nur sehr eingeschränkt möglich. Außerdem ist man in der
47
Wahl der Größe der E-Maschine nicht frei, da ein Direktstart auch beitiefsten Temperaturen möglich sein muß.
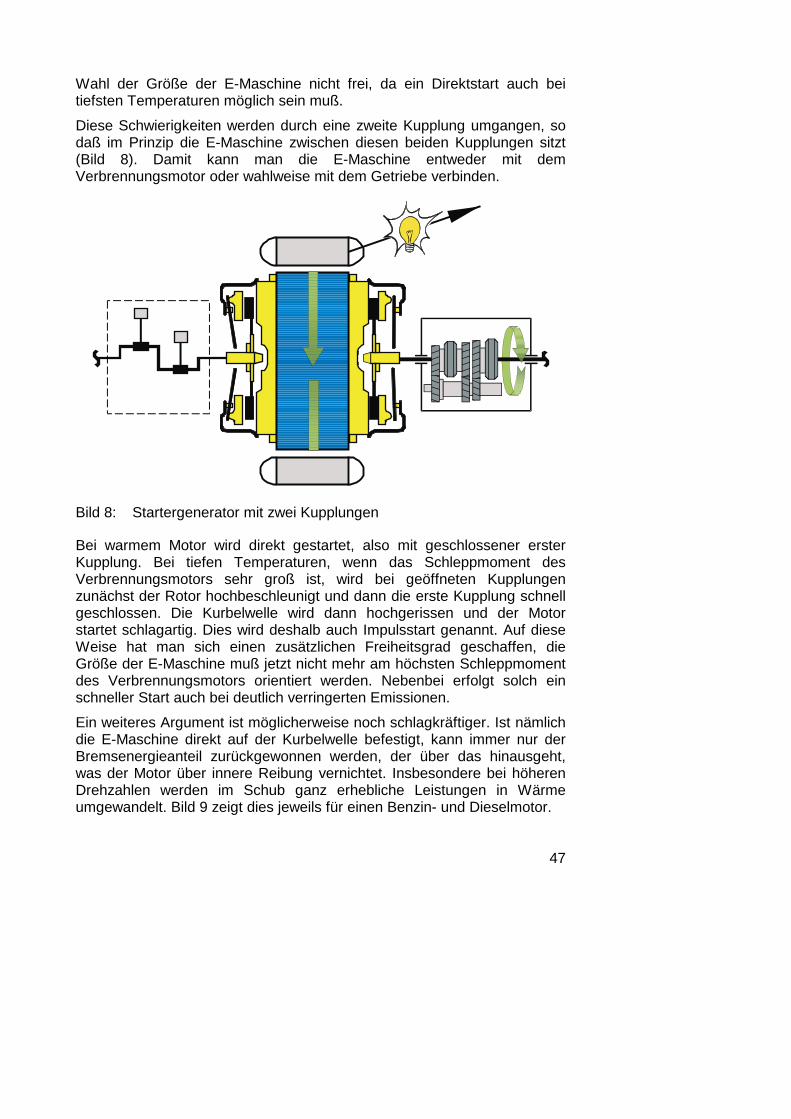
Diese Schwierigkeiten werden durch eine zweite Kupplung umgangen, sodaß im Prinzip die E-Maschine zwischen diesen beiden Kupplungen sitzt(Bild 8). Damit kann man die E-Maschine entweder mit demVerbrennungsmotor oder wahlweise mit dem Getriebe verbinden.
Bild 8: Startergenerator mit zwei Kupplungen
Bei warmem Motor wird direkt gestartet, also mit geschlossener ersterKupplung. Bei tiefen Temperaturen, wenn das Schleppmoment desVerbrennungsmotors sehr groß ist, wird bei geöffneten Kupplungenzunächst der Rotor hochbeschleunigt und dann die erste Kupplung schnellgeschlossen. Die Kurbelwelle wird dann hochgerissen und der Motorstartet schlagartig. Dies wird deshalb auch Impulsstart genannt. Auf dieseWeise hat man sich einen zusätzlichen Freiheitsgrad geschaffen, dieGröße der E-Maschine muß jetzt nicht mehr am höchsten Schleppmomentdes Verbrennungsmotors orientiert werden. Nebenbei erfolgt solch einschneller Start auch bei deutlich verringerten Emissionen.
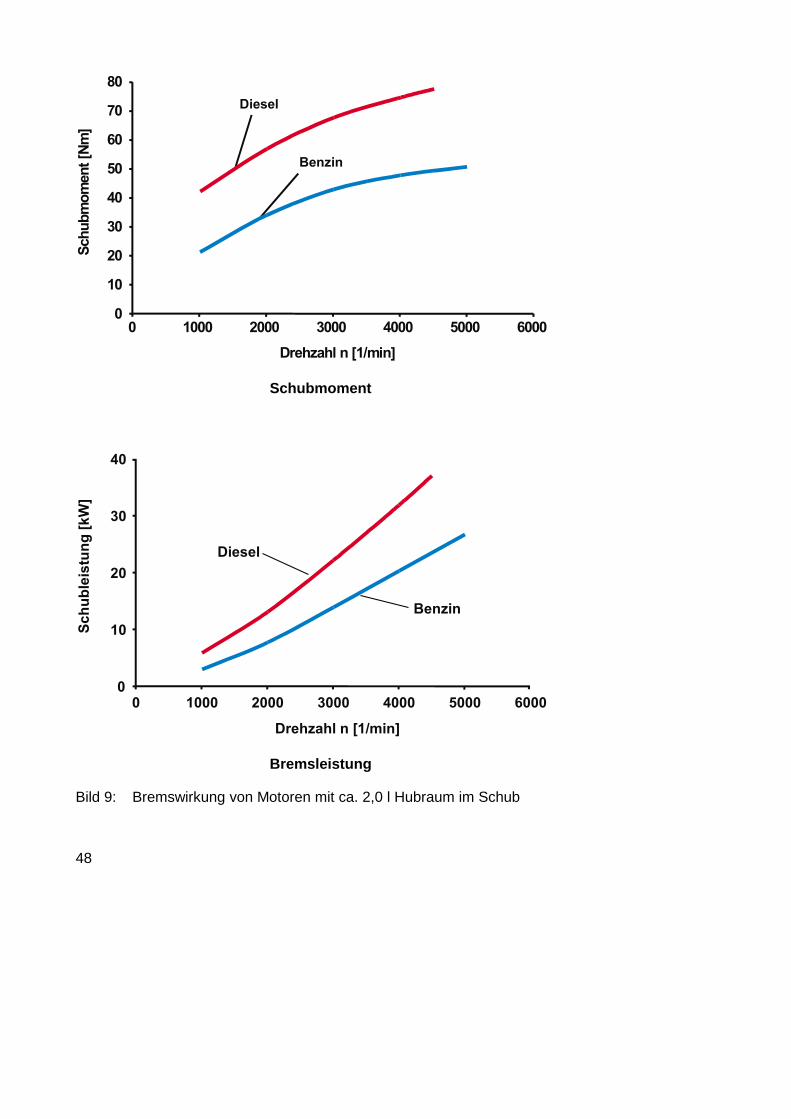
Ein weiteres Argument ist möglicherweise noch schlagkräftiger. Ist nämlichdie E-Maschine direkt auf der Kurbelwelle befestigt, kann immer nur derBremsenergieanteil zurückgewonnen werden, der über das hinausgeht,was der Motor über innere Reibung vernichtet. Insbesondere bei höherenDrehzahlen werden im Schub ganz erhebliche Leistungen in Wärmeumgewandelt. Bild 9 zeigt dies jeweils für einen Benzin- und Dieselmotor.
48
0
10
20
30
40
50
60
70
0 1000 2000 3000 4000 5000 6000
Drehzahl n [1/min]
Sch
ub
mo
men
t[N
m]
Benzin
Diesel
80
Schubmoment
0
10
20
30
40
0 1000 2000 3000 4000 5000 6000
Drehzahl n [1/min]
Sc
hu
ble
istu
ng
[kW
]
Benzin
Diesel
Bremsleistung
Bild 9: Bremswirkung von Motoren mit ca. 2,0 l Hubraum im Schub
49
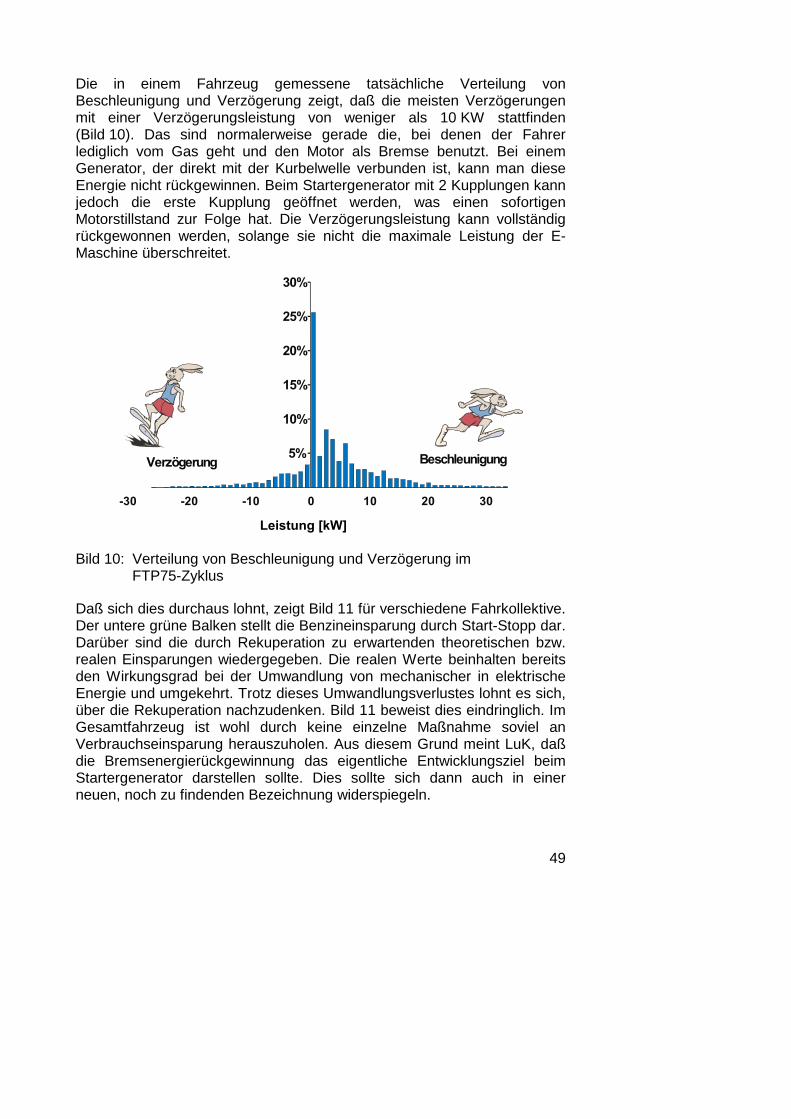
Die in einem Fahrzeug gemessene tatsächliche Verteilung vonBeschleunigung und Verzögerung zeigt, daß die meisten Verzögerungenmit einer Verzögerungsleistung von weniger als 10 KW stattfinden(Bild 10). Das sind normalerweise gerade die, bei denen der Fahrerlediglich vom Gas geht und den Motor als Bremse benutzt. Bei einemGenerator, der direkt mit der Kurbelwelle verbunden ist, kann man dieseEnergie nicht rückgewinnen. Beim Startergenerator mit 2 Kupplungen kannjedoch die erste Kupplung geöffnet werden, was einen sofortigenMotorstillstand zur Folge hat. Die Verzögerungsleistung kann vollständigrückgewonnen werden, solange sie nicht die maximale Leistung der E-Maschine überschreitet.
5%
10%
15%
20%
25%
30%
-30 -20 -10 0 10 20 30
Verzögerung Beschleunigung
Leistung [kW]
Bild 10: Verteilung von Beschleunigung und Verzögerung imFTP75-Zyklus
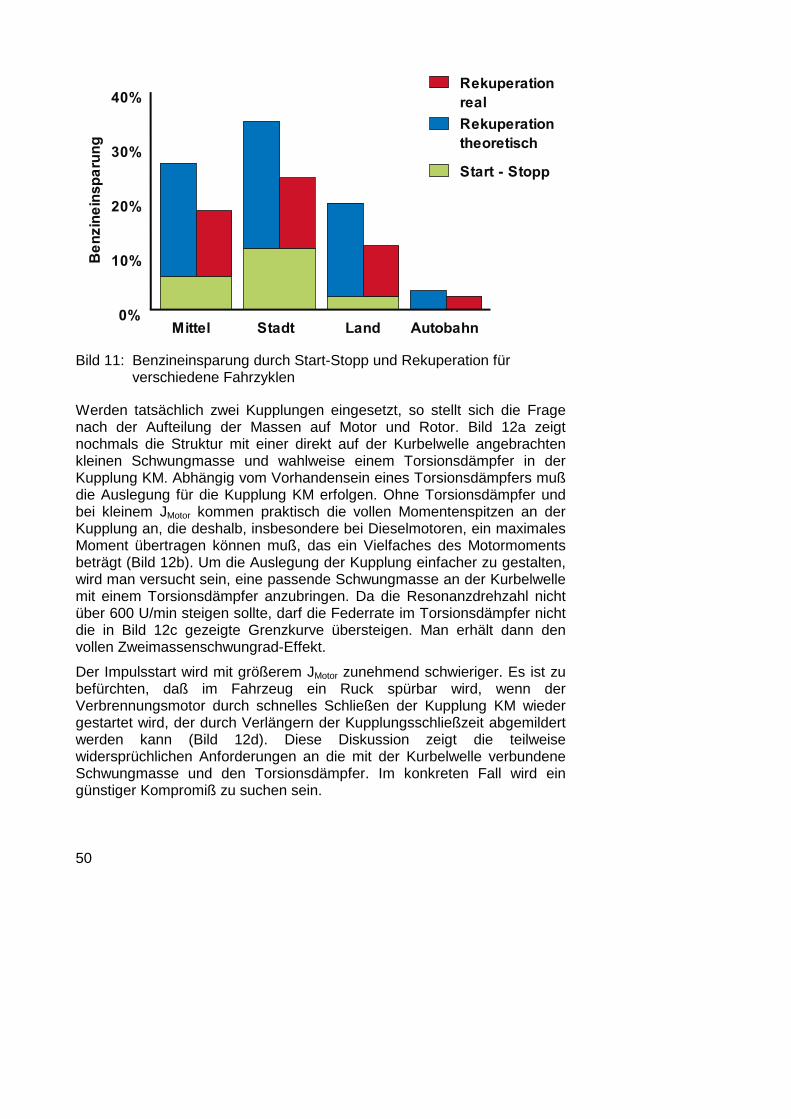
Daß sich dies durchaus lohnt, zeigt Bild 11 für verschiedene Fahrkollektive.Der untere grüne Balken stellt die Benzineinsparung durch Start-Stopp dar.Darüber sind die durch Rekuperation zu erwartenden theoretischen bzw.realen Einsparungen wiedergegeben. Die realen Werte beinhalten bereitsden Wirkungsgrad bei der Umwandlung von mechanischer in elektrischeEnergie und umgekehrt. Trotz dieses Umwandlungsverlustes lohnt es sich,über die Rekuperation nachzudenken. Bild 11 beweist dies eindringlich. ImGesamtfahrzeug ist wohl durch keine einzelne Maßnahme soviel anVerbrauchseinsparung herauszuholen. Aus diesem Grund meint LuK, daßdie Bremsenergierückgewinnung das eigentliche Entwicklungsziel beimStartergenerator darstellen sollte. Dies sollte sich dann auch in einerneuen, noch zu findenden Bezeichnung widerspiegeln.
50
Mittel Stadt Land Autobahn0%
10%
20%
30%
40%
Start - Stop
Rekuperation
real
Rekuperation
theoretisch
Be
nzin
ein
sp
aru
ng
p
Bild 11: Benzineinsparung durch Start-Stopp und Rekuperation fürverschiedene Fahrzyklen
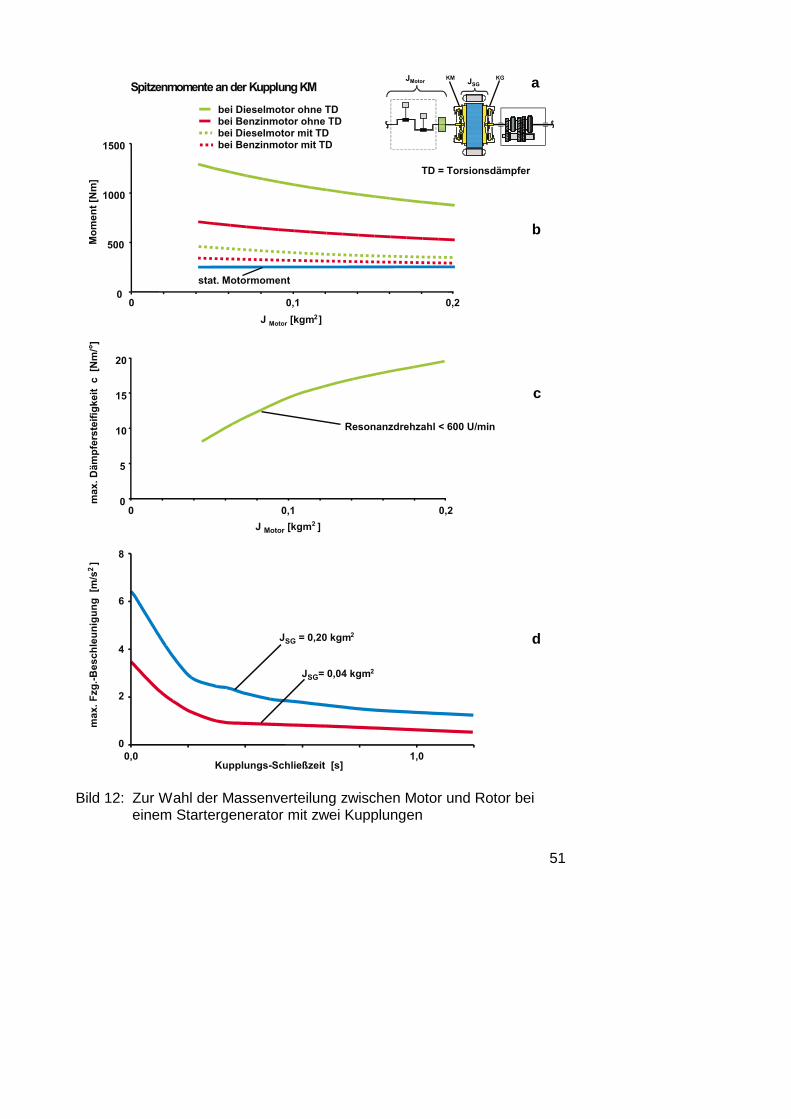
Werden tatsächlich zwei Kupplungen eingesetzt, so stellt sich die Fragenach der Aufteilung der Massen auf Motor und Rotor. Bild 12a zeigtnochmals die Struktur mit einer direkt auf der Kurbelwelle angebrachtenkleinen Schwungmasse und wahlweise einem Torsionsdämpfer in derKupplung KM. Abhängig vom Vorhandensein eines Torsionsdämpfers mußdie Auslegung für die Kupplung KM erfolgen. Ohne Torsionsdämpfer undbei kleinem JMotor kommen praktisch die vollen Momentenspitzen an derKupplung an, die deshalb, insbesondere bei Dieselmotoren, ein maximalesMoment übertragen können muß, das ein Vielfaches des Motormomentsbeträgt (Bild 12b). Um die Auslegung der Kupplung einfacher zu gestalten,wird man versucht sein, eine passende Schwungmasse an der Kurbelwellemit einem Torsionsdämpfer anzubringen. Da die Resonanzdrehzahl nichtüber 600 U/min steigen sollte, darf die Federrate im Torsionsdämpfer nichtdie in Bild 12c gezeigte Grenzkurve übersteigen. Man erhält dann denvollen Zweimassenschwungrad-Effekt.
Der Impulsstart wird mit größerem JMotor zunehmend schwieriger. Es ist zubefürchten, daß im Fahrzeug ein Ruck spürbar wird, wenn derVerbrennungsmotor durch schnelles Schließen der Kupplung KM wiedergestartet wird, der durch Verlängern der Kupplungsschließzeit abgemildertwerden kann (Bild 12d). Diese Diskussion zeigt die teilweisewidersprüchlichen Anforderungen an die mit der Kurbelwelle verbundeneSchwungmasse und den Torsionsdämpfer. Im konkreten Fall wird eingünstiger Kompromiß zu suchen sein.
51
0
500
1000
1500
0 0,1 0,2
J Motor [kgm2]
Mo
men
t[N
m]
stat. Motormoment
Spitzenmomente ander KupplungKMKGKMJMotor JSG
max.D
äm
pfe
rste
ifig
keit
c[N
m/°
]
0
5
10
15
20
0 0,1 0,2
J Motor [kgm2 ]
Resonanzdrehzahl < 600 U/min
TD = Torsionsdämpfer
bei Dieselmotor ohne TDbei Benzinmotor ohne TDbei Dieselmotor mit TDbei Benzinmotor mit TD
ma
x.F
zg
.-B
es
ch
leu
nig
un
g[m
/s2
]
JSG = 0,20 kgm2
JSG= 0,04 kgm2
0
2
4
6
8
0,0Kupplungs-Schließzeit [s]
1,0
Bild 12: Zur Wahl der Massenverteilung zwischen Motor und Rotor beieinem Startergenerator mit zwei Kupplungen
a
b
c
d
52
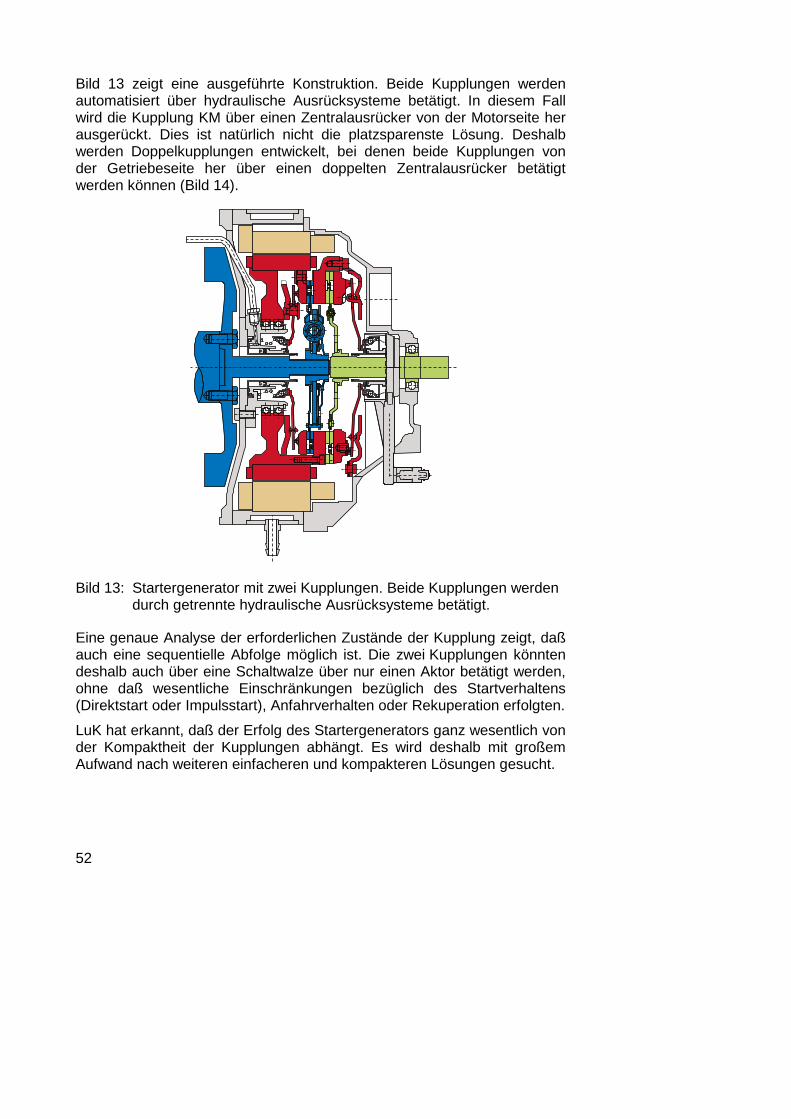
Bild 13 zeigt eine ausgeführte Konstruktion. Beide Kupplungen werdenautomatisiert über hydraulische Ausrücksysteme betätigt. In diesem Fallwird die Kupplung KM über einen Zentralausrücker von der Motorseite herausgerückt. Dies ist natürlich nicht die platzsparenste Lösung. Deshalbwerden Doppelkupplungen entwickelt, bei denen beide Kupplungen vonder Getriebeseite her über einen doppelten Zentralausrücker betätigtwerden können (Bild 14).
Bild 13: Startergenerator mit zwei Kupplungen. Beide Kupplungen werdendurch getrennte hydraulische Ausrücksysteme betätigt.
Eine genaue Analyse der erforderlichen Zustände der Kupplung zeigt, daßauch eine sequentielle Abfolge möglich ist. Die zwei Kupplungen könntendeshalb auch über eine Schaltwalze über nur einen Aktor betätigt werden,ohne daß wesentliche Einschränkungen bezüglich des Startverhaltens(Direktstart oder Impulsstart), Anfahrverhalten oder Rekuperation erfolgten.
LuK hat erkannt, daß der Erfolg des Startergenerators ganz wesentlich vonder Kompaktheit der Kupplungen abhängt. Es wird deshalb mit großemAufwand nach weiteren einfacheren und kompakteren Lösungen gesucht.
53
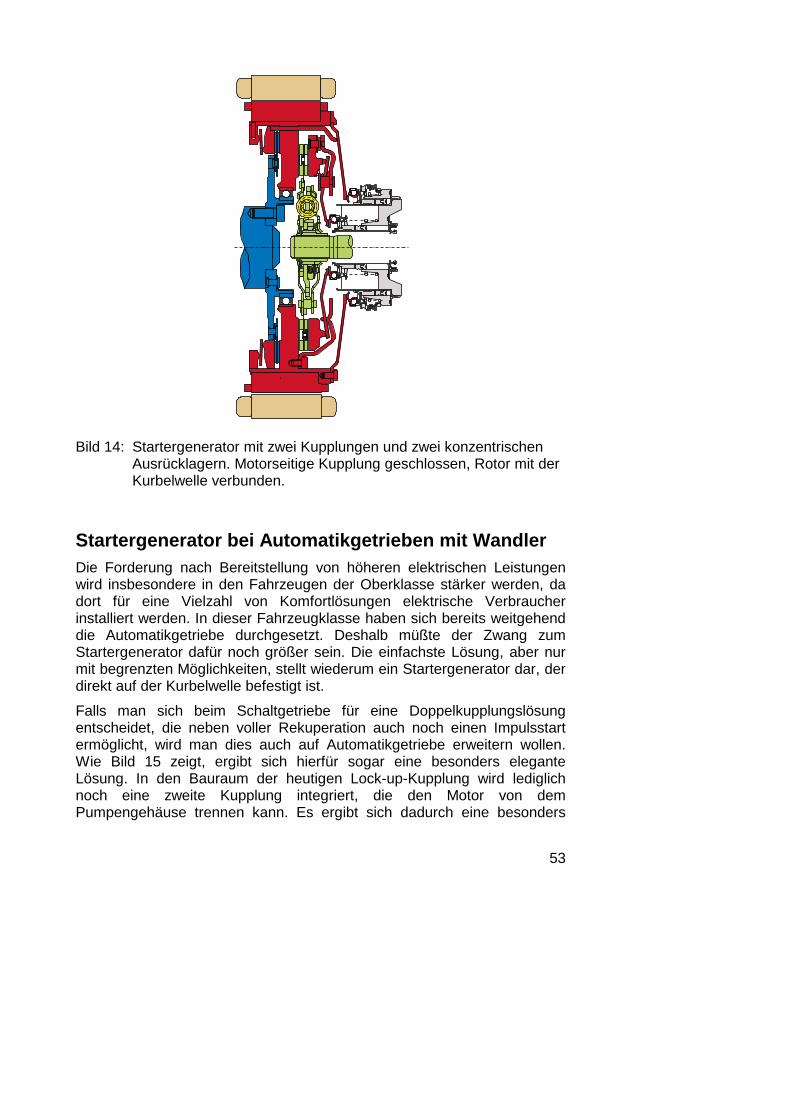
Bild 14: Startergenerator mit zwei Kupplungen und zwei konzentrischenAusrücklagern. Motorseitige Kupplung geschlossen, Rotor mit derKurbelwelle verbunden.
Startergenerator bei Automatikgetrieben mit WandlerDie Forderung nach Bereitstellung von höheren elektrischen Leistungenwird insbesondere in den Fahrzeugen der Oberklasse stärker werden, dadort für eine Vielzahl von Komfortlösungen elektrische Verbraucherinstalliert werden. In dieser Fahrzeugklasse haben sich bereits weitgehenddie Automatikgetriebe durchgesetzt. Deshalb müßte der Zwang zumStartergenerator dafür noch größer sein. Die einfachste Lösung, aber nurmit begrenzten Möglichkeiten, stellt wiederum ein Startergenerator dar, derdirekt auf der Kurbelwelle befestigt ist.
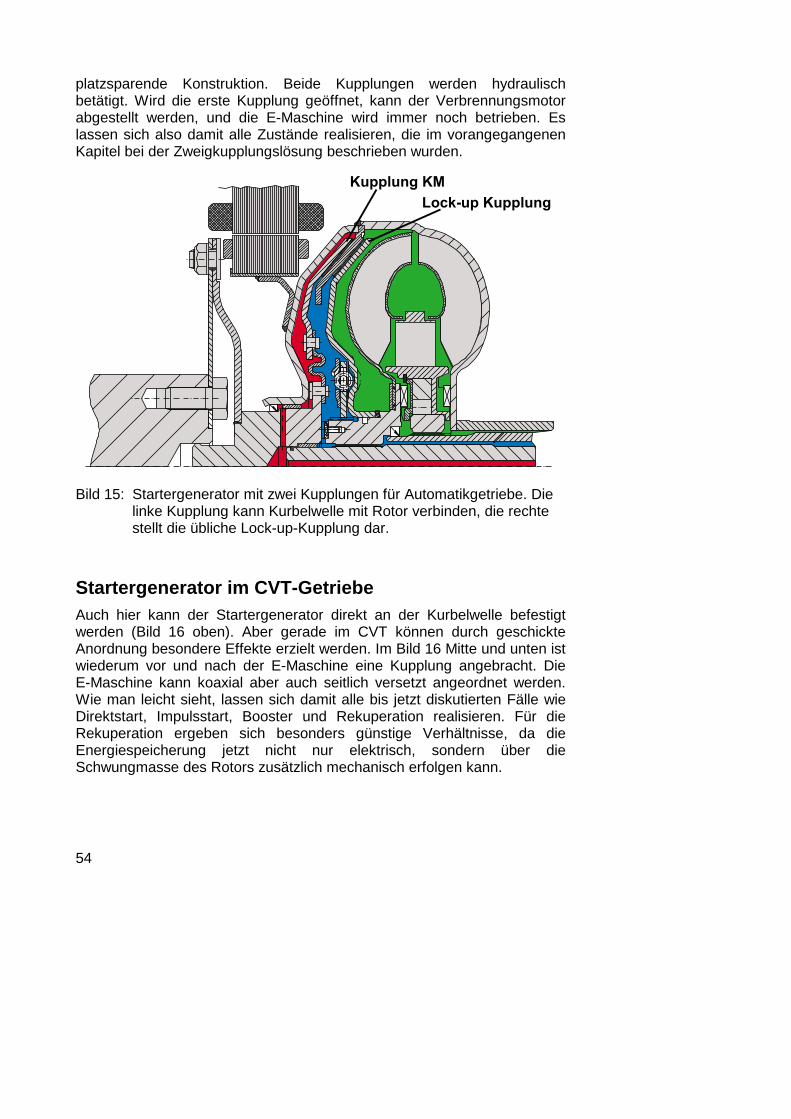
Falls man sich beim Schaltgetriebe für eine Doppelkupplungslösungentscheidet, die neben voller Rekuperation auch noch einen Impulsstartermöglicht, wird man dies auch auf Automatikgetriebe erweitern wollen.Wie Bild 15 zeigt, ergibt sich hierfür sogar eine besonders eleganteLösung. In den Bauraum der heutigen Lock-up-Kupplung wird lediglichnoch eine zweite Kupplung integriert, die den Motor von demPumpengehäuse trennen kann. Es ergibt sich dadurch eine besonders
54
platzsparende Konstruktion. Beide Kupplungen werden hydraulischbetätigt. Wird die erste Kupplung geöffnet, kann der Verbrennungsmotorabgestellt werden, und die E-Maschine wird immer noch betrieben. Eslassen sich also damit alle Zustände realisieren, die im vorangegangenenKapitel bei der Zweigkupplungslösung beschrieben wurden.
Kupplung KM
Lock-up Kupplung
Bild 15: Startergenerator mit zwei Kupplungen für Automatikgetriebe. Dielinke Kupplung kann Kurbelwelle mit Rotor verbinden, die rechtestellt die übliche Lock-up-Kupplung dar.
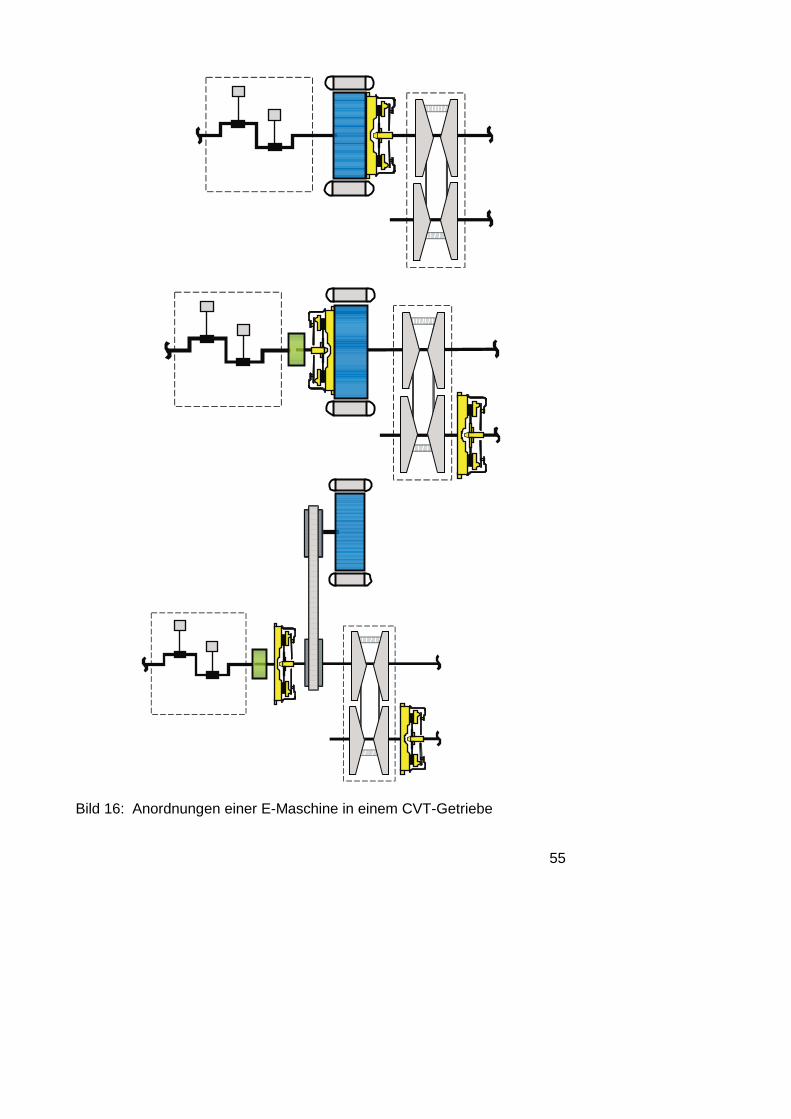
Startergenerator im CVT-GetriebeAuch hier kann der Startergenerator direkt an der Kurbelwelle befestigtwerden (Bild 16 oben). Aber gerade im CVT können durch geschickteAnordnung besondere Effekte erzielt werden. Im Bild 16 Mitte und unten istwiederum vor und nach der E-Maschine eine Kupplung angebracht. DieE-Maschine kann koaxial aber auch seitlich versetzt angeordnet werden.Wie man leicht sieht, lassen sich damit alle bis jetzt diskutierten Fälle wieDirektstart, Impulsstart, Booster und Rekuperation realisieren. Für dieRekuperation ergeben sich besonders günstige Verhältnisse, da dieEnergiespeicherung jetzt nicht nur elektrisch, sondern über dieSchwungmasse des Rotors zusätzlich mechanisch erfolgen kann.
55
Bild 16: Anordnungen einer E-Maschine in einem CVT-Getriebe
56
Bei der mechanischen Rekuperation wird man die Kupplung KM öffnen unddann den Variator in Richtung Underdrive verstellen, so daß der Rotorschneller dreht. Er entzieht dem Antriebsstrang dadurch kinetische Energieund verzögert das Fahrzeug. Bei der nächsten Beschleunigung wird derVariator wieder in Richtung Overdrive verstellt und beschleunigt wiederumdas Fahrzeug. Die kurzzeitige Speicherung von mechanischer Energie wirdmit deutlich weniger Verlusten erfolgen können als bei einer elektrischenSpeicherung. Man wird sich deshalb an die in Bild 11 dargestelltetheoretische Verbrauchseinsparung annähern, also auf über 20 %Einsparungen im Kraftstoffverbrauch kommen.
Daß auch tatsächlich nennenswerte Energien mechanisch gespeichertwerden können, zeigt ein Vergleich der Schwungenergie eines fahrendenFahrzeugs mit einer rotierenden Schwungmasse.
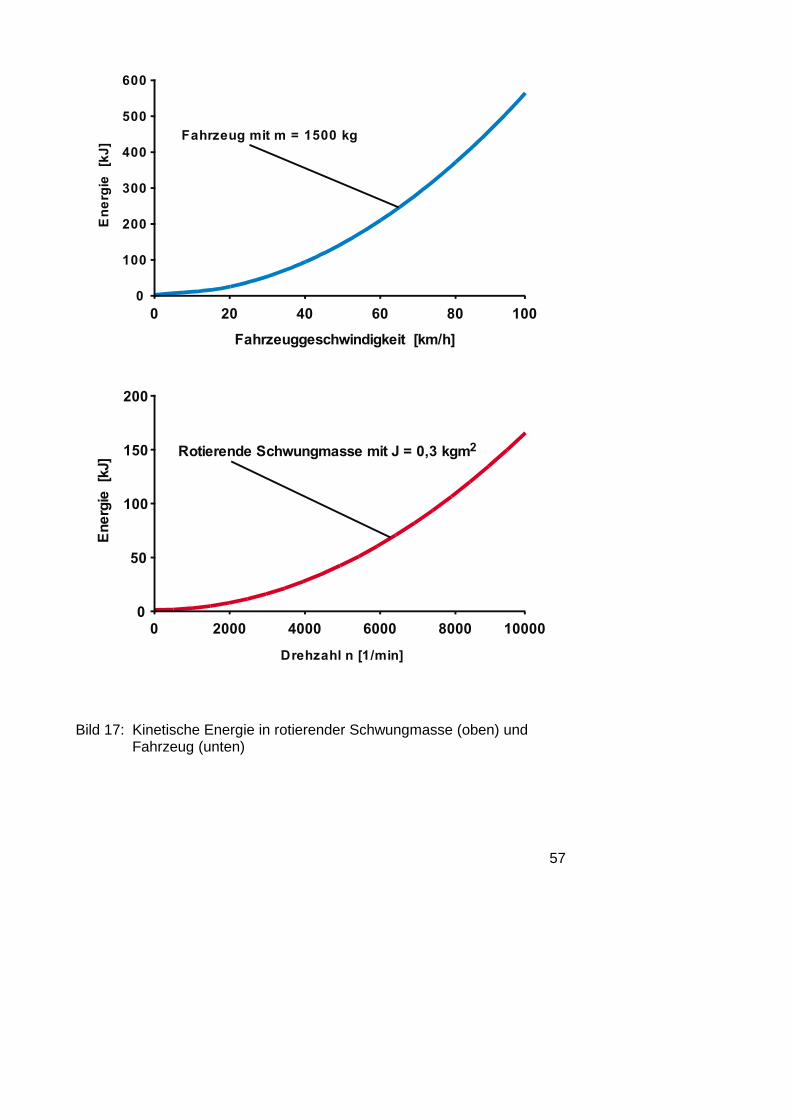
Bild 17 oben zeigt die kinetische Energie eines Fahrzeuges mit einerMasse von 1500 kg als Funktion der Geschwindigkeit, dazu im unteren Bilddie kinetische Energie einer Schwungmasse mit J = 0,3 kgm² als Funktionder Drehzahl. Nimmt man für den Rotor der E-Maschine eine maximaleDrehzahl von 10.000 U/min an, stellt man fest, daß in einer solch schnelldrehenden Schwungmasse soviel kinetische Energie steckt wie in einemFahrzeug mit einer Geschwindigkeit von 50 km/h. Daraus wird ersichtlich,daß viele der im praktischen Fahrbetrieb auftretenden Verzögerungs-vorgänge mechanisch rekuperiert werden können.
Es ergibt sich aber noch ein weiterer Vorteil. Soll nach der Phase derRekuperation der Verbrennungsmotor wieder angeworfen werden, kannman sich jetzt dafür die passende Drehzahl am Rotor heraussuchen.Sinnvollerweise wird man also zunächst einen großen Teil des Schwungeszur Beschleunigung des Fahrzeuges nutzen und dann bei niedrigerRotordrehzahl die Kupplung KM schnell schließen. Um dabei einenVerzögerungsruck auf das Fahrzeug zu vermeiden, wird gleichzeitig derVariator schnell ein wenig in Overdrive verstellt, was einen kleinenBeschleunigungsruck erzeugt, der den Verzögerungsruck ausgleichenkann. Zusätzlich kann kurzzeitig noch die E-Maschine regulierendeingreifen. Ein Ruck beim Anlassen des Motors müßte sich damitzuverlässig vermeiden lassen.
Eine Kombination eines CVT-Getriebes mit E-Maschine verspricht nahezuideales Verhalten. Die durch die Kombination mit der mechanischenRekuperation verbesserte Energierückgewinnung wird bei weitem denetwas schlechteren Wirkungsgrad eines stufenlosen Variators ausgleichen.Gesamtwirkungsgrad und Komfort müßten unübertroffen sein.
57
0
50
100
150
200
Drehzahl n [1/min]
En
erg
ie[k
J]
0 2000 4000 6000 8000 10000
Rotierende Schwungmasse mit J = 0,3 kgm2
0
100
200
300
400
500
600
0 20 40 60 80 100
Fahrzeuggeschwindigkeit [km/h]
En
erg
ie[k
J]
Fahrzeug mit m = 1500 kg
Bild 17: Kinetische Energie in rotierender Schwungmasse (oben) undFahrzeug (unten)
58
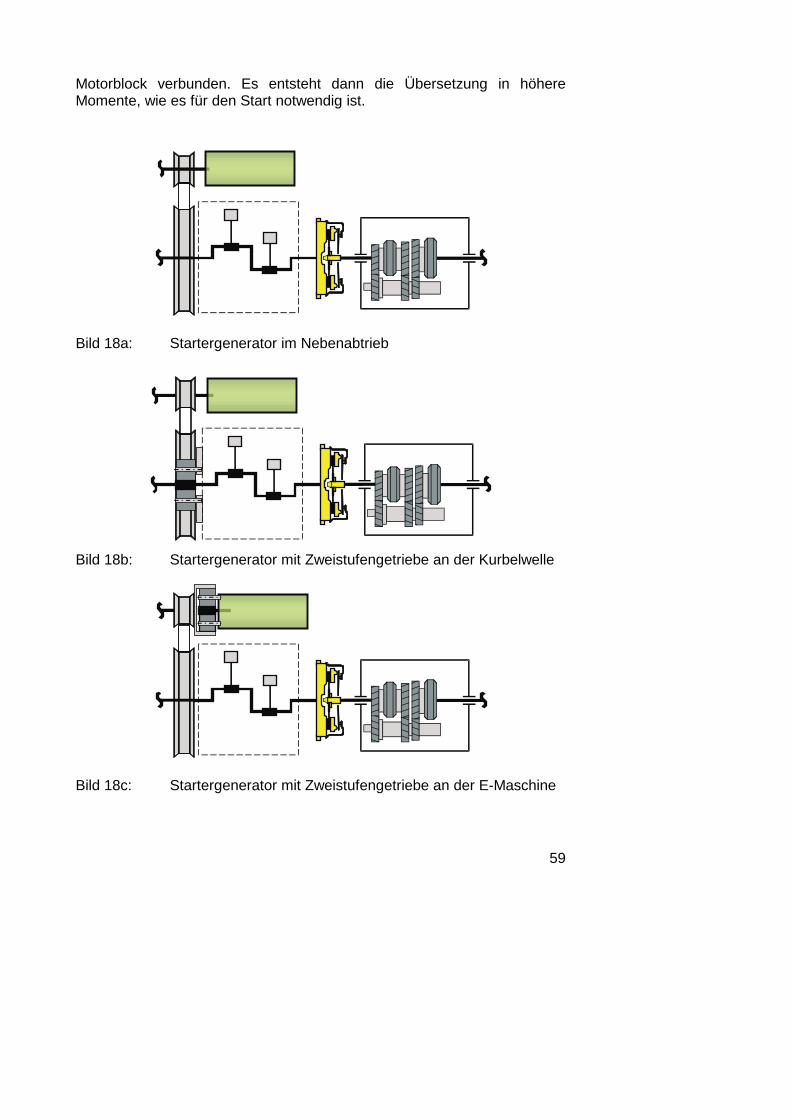
Startergenerator im NebenabtriebDie bis jetzt vorgestellten Konzepte erfordern gravierende Änderungen amAntriebsstrang (z. B. Getriebeverlängerungen). Falls dieser Schritt zu großerscheint, bietet sich auch noch eine andere Lösung an, die bis jetzt aberkaum beachtet wurde. Dabei wird die Lichtmaschine durch einen etwasgrößeren Startergenerator ersetzt, der nur geringfügig mehr Bauraumbenötigt. Um einen sicheren Start des Verbrennungsmotors zugewährleisten, ist ein Zweistufengetriebe vorteilhaft, das entweder direkt inder Riemenscheibe an der Kurbelwelle oder am Startergenerator eingreift.Bild 18 zeigt die möglichen Anordnungen, die Vor- und Nachteile haben.Die Getriebe sind dabei so ausgebildet, daß sie sich entweder abhängigvon der Momentenrichtung, die sich zwischen Generator- undStarterbetrieb ändert, oder von außen betätigt zwischen den 2 Stufenumschalten lassen.
Wird das Zweistufengetriebe an der Kurbelwelle angebracht, ergeben sichgünstige Belastungen für den Riementrieb. Im Generatorfall ändert sichgegenüber der heutigen Situation nichts, da das Zweistufengetriebe aufdirekten Durchtrieb geschaltet ist. Beim Starten braucht der Riementriebnur verhältnismäßig kleine Momente zu übertragen, weil das hohe, zumStarten erforderliche Moment erst im Zweistufengetriebe mit einerÜbersetzung von ca. 3 - 4 erzeugt wird.
Läuft das Getriebe dagegen auf dem Startergenerator, erfolgt beimStartvorgang erst eine Übersetzung auf hohe Momente und darauf dieÜbertragung über den Riementrieb. An den Riementrieb sind deshalberhöhte Forderungen zu stellen. Nach jetzigen Erkenntnissen wird dies nurfür relativ kleine Fahrzeuge mit den üblichen Keilrippenriemen gehen. Beigrößeren erforderlichen Startmomenten müßten evtl. Zahnriemeneingesetzt werden, bei denen allerdings die Geräuschsituation kritisch seindürfte. Vorteilhaft wäre natürlich, daß wegen der höheren Drehzahl dasGetriebe am Startergenerator auf wesentlich kleinere Momente ausgelegtwerden kann als bei einem Getriebe auf der Kurbelwelle.
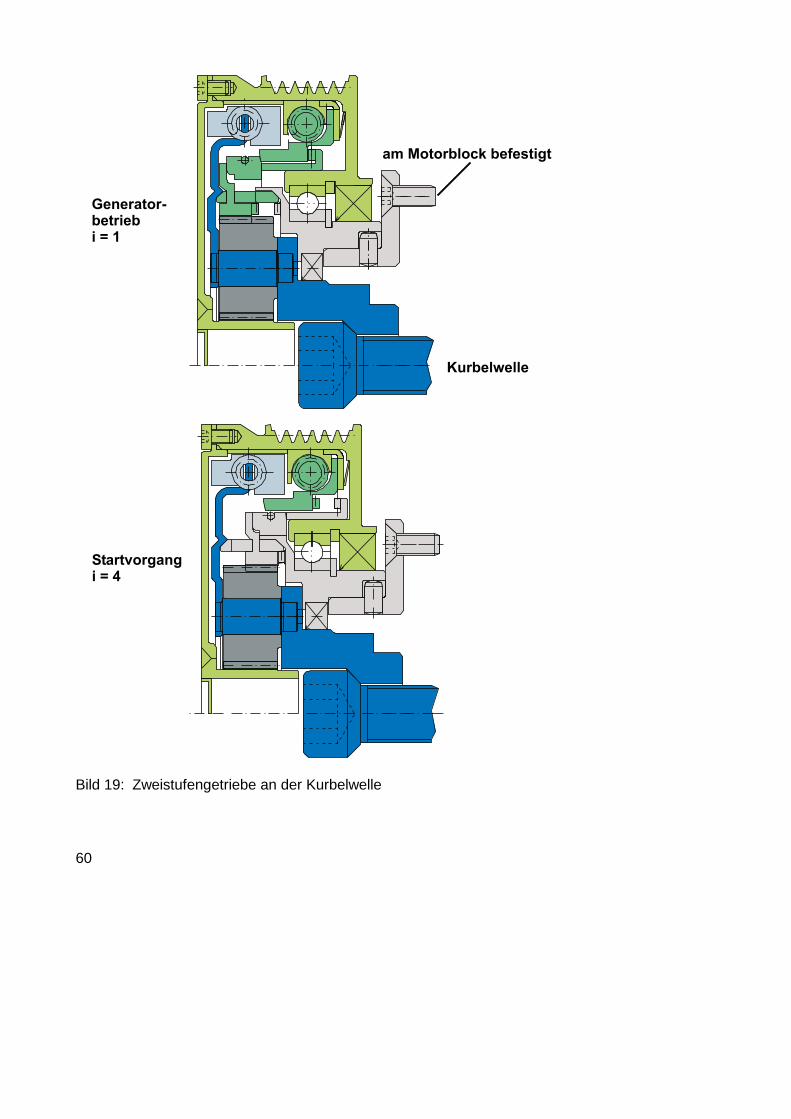
Bild 19 zeigt solch ein Zweistufengetriebe für den Anbau an dieKurbelwelle. Ein integriertes, umschaltbares Planetengetriebe erlaubt imGeneratorfall einen direkten Durchtrieb und im Anlasserfall eineUntersetzung um ca. Faktor 4. Die Umschaltung erfolgt abhängig von derMomentenrichtung. Dazu ist das Planetengetriebe stark schrägverzahnt.Auf das Hohlrad wirken deshalb je nach Momentenrichtung Axialkräfte inentgegengesetzter Richtung. Das Hohlrad ist axial verschiebbar. In derlinken Stellung (oberes Teilbild) erfolgt der direkte Durchtrieb, alle Teiledes Planetengetriebes drehen sich mit der gleichen Drehzahl. In derrechten Stellung (unteres Teilbild) ist das Hohlrad mit dem feststehenden
59
Motorblock verbunden. Es entsteht dann die Übersetzung in höhereMomente, wie es für den Start notwendig ist.
Bild 18a: Startergenerator im Nebenabtrieb
Bild 18b: Startergenerator mit Zweistufengetriebe an der Kurbelwelle
Bild 18c: Startergenerator mit Zweistufengetriebe an der E-Maschine
60
am Motorblock befestigt
Kurbelwelle
Startvorgangi = 4
Generator-betriebi = 1
Bild 19: Zweistufengetriebe an der Kurbelwelle
61
Im Fahrbetrieb soll stets die direkte Übersetzung eingestellt bleiben. Wennder Verbrennungsmotor schnell abgebremst wird, treten ebenfallsMomentenwechsel auf. Eine Fliehkraftsperre verhindert dann dieUmschaltung.
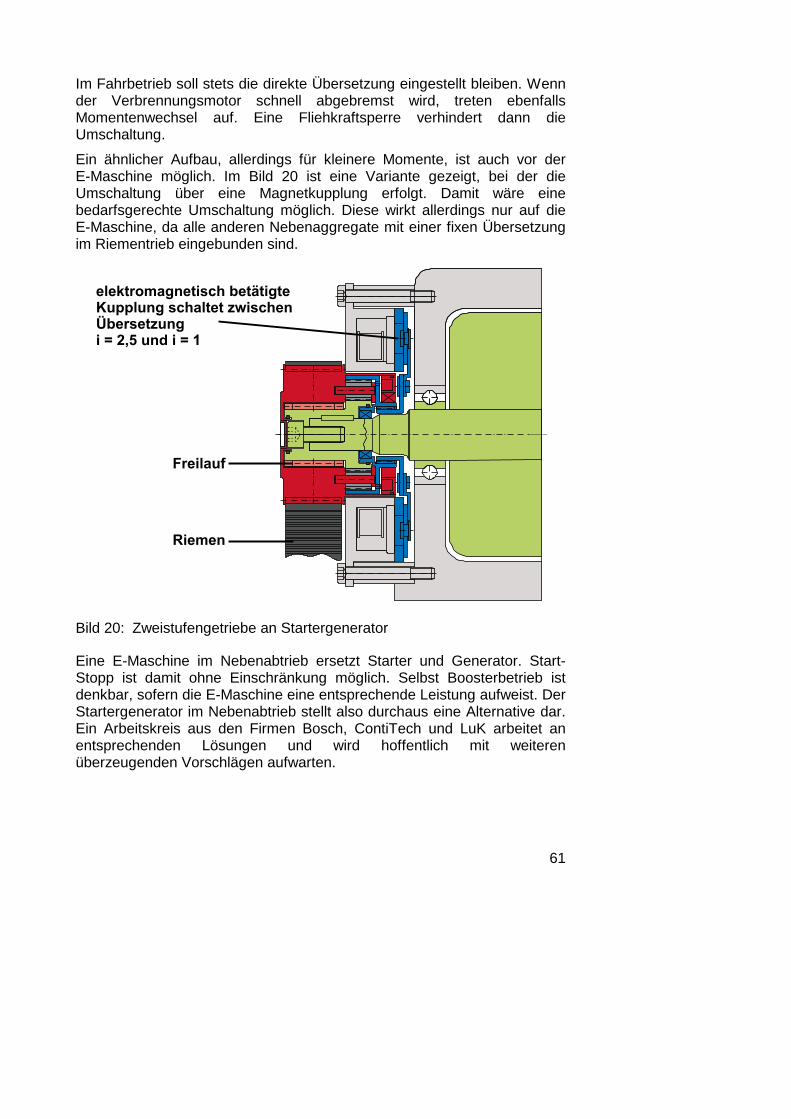
Ein ähnlicher Aufbau, allerdings für kleinere Momente, ist auch vor derE-Maschine möglich. Im Bild 20 ist eine Variante gezeigt, bei der dieUmschaltung über eine Magnetkupplung erfolgt. Damit wäre einebedarfsgerechte Umschaltung möglich. Diese wirkt allerdings nur auf dieE-Maschine, da alle anderen Nebenaggregate mit einer fixen Übersetzungim Riementrieb eingebunden sind.
elektromagnetisch betätigteKupplung schaltet zwischenÜbersetzungi = 2,5 und i = 1
Freilauf
Riemen
Bild 20: Zweistufengetriebe an Startergenerator
Eine E-Maschine im Nebenabtrieb ersetzt Starter und Generator. Start-Stopp ist damit ohne Einschränkung möglich. Selbst Boosterbetrieb istdenkbar, sofern die E-Maschine eine entsprechende Leistung aufweist. DerStartergenerator im Nebenabtrieb stellt also durchaus eine Alternative dar.Ein Arbeitskreis aus den Firmen Bosch, ContiTech und LuK arbeitet anentsprechenden Lösungen und wird hoffentlich mit weiterenüberzeugenden Vorschlägen aufwarten.
62
Get
rieb
e-ei
ng
ang
ES
G
[3]
+ 0 + + + + + + + + - - +
Get
rieb
e-ei
ng
ang
CV
T2
Ku
pp
lun
gen
+ 0 + + + + 0 + - - -
Get
rieb
e-ei
ng
ang
Au
tom
atik
-g
etri
ebe
2 L
ock
-up
+ 0 + + + + 0 + - - 0
Get
rieb
e-ei
ng
ang
AS
G
+ 0 + + + + + + - - - - +
Zw
isch
enM
oto
r u
nd
Get
rieb
e2
Ku
pp
lun
gen
+ 0 + + + + + + - - - - -
Ku
rbel
-w
elle
+ + - + - + 0 + - - - + 0
Neb
en-
abtr
ieb + + - + - - - 0 - - + + 0
Ho
he
Gen
erat
orl
eist
un
g b
ei g
ute
mW
irku
ng
sgra
d
Dir
ekts
tart
Imp
uls
star
t d
urc
h R
oto
rmas
se(K
alts
tart
kei
n A
usl
egu
ng
skri
teri
um
)
Sta
rt-S
top
p(l
eise
un
d e
mis
sio
nsa
rm)
En
erg
ierü
ckg
ewin
nu
ng
im S
chu
b
Bo
ost
en
Ele
ktri
sch
An
fah
ren
un
d R
ang
iere
n
An
tiru
ckel
däm
pfu
ng
Akt
ive
Syn
chro
nis
atio
n b
eiau
tom
atis
iert
en S
chal
tget
rieb
en
Au
tom
atis
iert
e S
chal
tget
rieb
eo
hn
e Z
ug
kraf
tun
terb
rech
un
g
Wen
ig V
erän
der
un
gen
am
Tri
ebst
ran
g
Gle
ich
arti
ges
Ko
nze
pt
bei
alle
nG
etri
ebea
rten
Sys
tem
kost
en
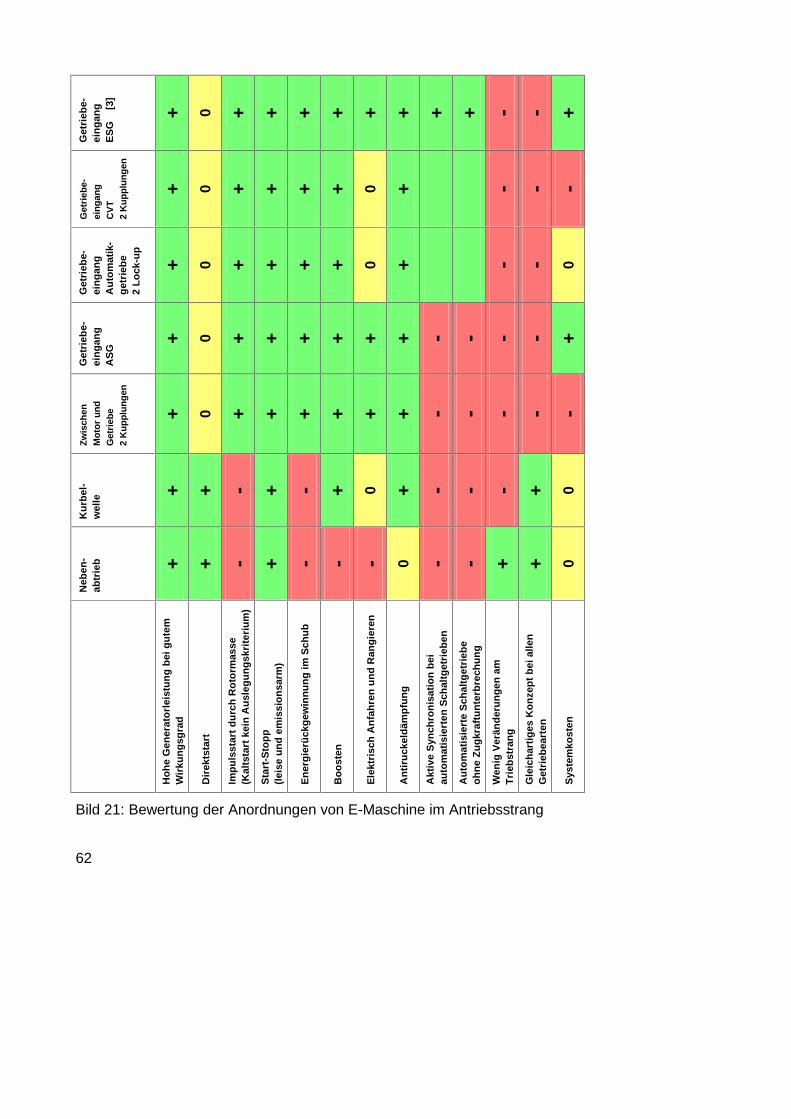
Bild 21: Bewertung der Anordnungen von E-Maschine im Antriebsstrang
63
ZusammenfassungEs wurde gezeigt, daß es nicht nur eine Art von Startergenerator gibt. EineVielzahl von Varianten bieten sich heute dem Antriebsstrangentwickler an.Je nach Entwicklungsziel wird man sich für die eine oder andere Lösungentscheiden. Bild 21 soll dafür eine Hilfestellung ein. Die wichtigstenArgumente im Zusammenhang mit dem Einsatz einer E-Maschine imAntriebsstrang sind für die verschiedenen Ausführungsformen bewertet.Leider fehlen zur Zeit noch verläßliche Angaben über die Kosten. Es istdeshalb noch etwas zu früh, zuverlässige Vorhersagen darüber zumachen, welche Systeme sich am Ende durchsetzen werden.
Interessant erscheint der Startergenerator im Nebenabtrieb, weil damit diegeringsten Änderungen am Gesamtfahrzeug möglich werden. Wird dasSchwergewicht auf die Rekuperation gelegt, wird man sich für eineZweikupplungslösung entscheiden. Das CVT-Getriebe bietet durch eineKombination von mechanischer und elektrischer Rekuperation einebesonders vorteilhafte Getriebestruktur.
Der nachfolgende Beitrag zeigt, welche zusätzlichen Vorteile eineE-Maschine im automatisierten Handschaltgetriebe bringen kann [3].
64
Literatur[1] Ehlers, K.: Konsequenzen des 3-Liter-Autos auf die Architektur des elektrischen
Bordnetzes, Technische Mitteilungen 91 (1998), S. 116 - 124
[2] Reik W.: Das Zweimassenschwungrad, 6. LuK-Kolloquium 1998, S. 69 - 94
[3] Fischer, R. und Hirt, G.: Integration automatisierter Schaltgetriebe mit E-Maschine,LuK-Fachtagung E-Maschine im Antriebsstrang, 1999
[4] Fischer, R. und Berger R.: Automatisierung von Schaltgetrieben, 6. LuK-Kolloquium1998, S. 95 - 121
65
Integration automatisierter Schaltgetriebemit E-Maschine
Dr. techn. Robert FischerGunter HirtLuK Getriebe-Systeme, Bühl
EinleitungTotgesagte leben länger – das gilt ganz sicher für das Handschaltgetriebe,das heute in Europa immer noch über 80 % Marktanteil besitzt. Ursachenfindet man im hohen Wirkungsgrad, dem geringen Bauraum bei niedrigemGewicht und günstigem Preis.
Inzwischen zeigen sich Möglichkeiten, das Handschaltgetriebe erfolgreichzu automatisieren und dabei mit geringem Aufwand zusätzliche Vorteile zugewinnen.
Zunächst kam die automatische Kupplung auf den Markt, wie sie LuK undBosch für die Mercedes-Benz A-Klasse liefern. Inzwischen gibt es dieersten automatisierten Schaltgetriebe (ASG), die als Basis ein Handschalt-getriebe verwenden [1], [2]. Ein großes Verbesserungspotential bleibt dieBeseitigung der Zugkraftunterbrechung.
Wie in anderen Vorträgen aufgezeigt, können mit einem Startergeneratornicht nur die Anforderungen zukünftiger Bordnetze erfüllt, sondern auchgroße energetische Vorteile erreicht werden. Die Energieeinsparung kannnach Simulationsrechnungen von LuK ca. 20 % gegenüber einem heutigenHandschaltgetriebe betragen, dank Start-Stopp-Automatik undRekuperation von Brems- und Schubenergie [3] bis [7].
LuK hat sich zum Ziel gesetzt, durch intelligente Kombination von ASG undStartergenerator mehr als nur die Summe der Vorteile dieser Systeme zuerreichen – nämlich darüber hinaus die Zugkraftunterbrechung zubeseitigen. Ein derartiges elektrisches Schaltgetriebe bezeichnet LuK alsESG.
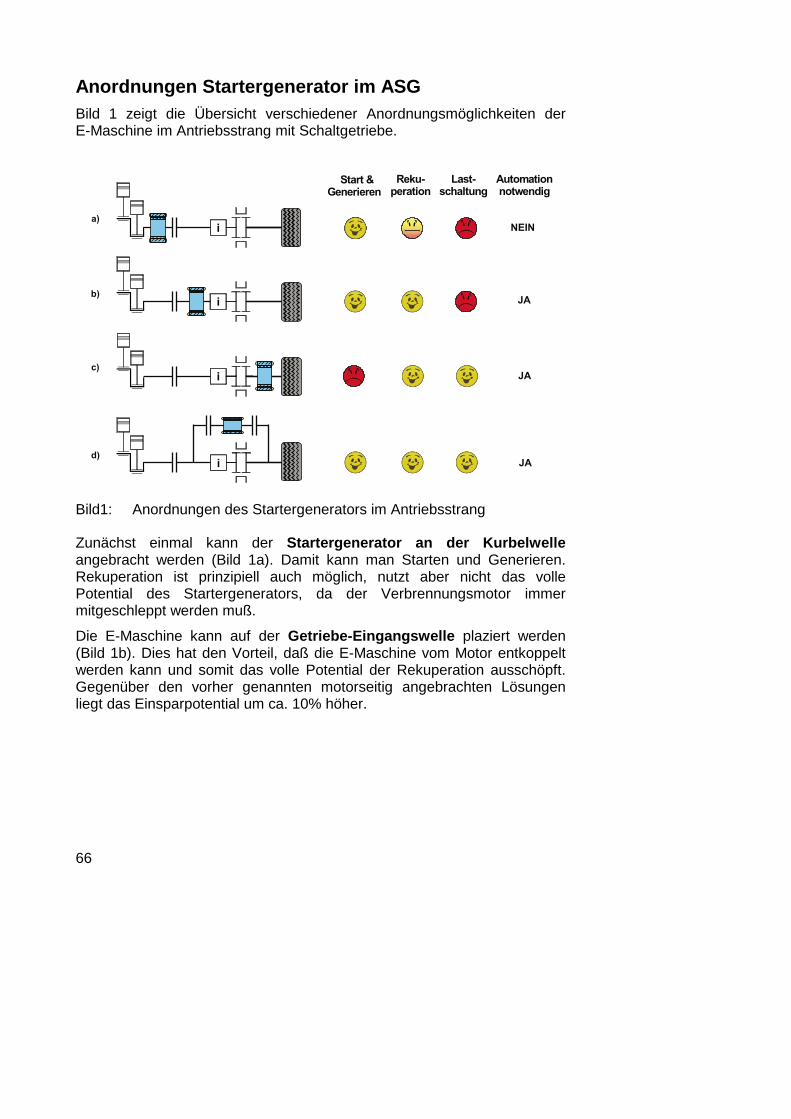
66
Anordnungen Startergenerator im ASGBild 1 zeigt die Übersicht verschiedener Anordnungsmöglichkeiten derE-Maschine im Antriebsstrang mit Schaltgetriebe.
Start &Generieren
Reku-peration
Last-schaltung
Automationnotwendig
NEIN
JA
JA
JA
a)i
b)i
c)i
d)i
Bild1: Anordnungen des Startergenerators im Antriebsstrang
Zunächst einmal kann der Startergenerator an der Kurbelwelleangebracht werden (Bild 1a). Damit kann man Starten und Generieren.Rekuperation ist prinzipiell auch möglich, nutzt aber nicht das vollePotential des Startergenerators, da der Verbrennungsmotor immermitgeschleppt werden muß.
Die E-Maschine kann auf der Getriebe-Eingangswelle plaziert werden(Bild 1b). Dies hat den Vorteil, daß die E-Maschine vom Motor entkoppeltwerden kann und somit das volle Potential der Rekuperation ausschöpft.Gegenüber den vorher genannten motorseitig angebrachten Lösungenliegt das Einsparpotential um ca. 10% höher.
67
Der Start des Verbrennungsmotors erfolgt wahlweise mit geschlossenerAnfahrkupplung direkt oder durch Impulsstart, indem erst derStartergenerator beschleunigt und dann die Kupplung geschlossen wird.Somit muß die E-Maschine nicht für die maximalen Schleppmomente beitiefen Temperaturen ausgelegt werden.
Für diese Lösung ist eine Automatisierung des Schaltgetriebes fastzwingend notwendig, da zum Starten der Gang herausgenommen und dieKupplung geschlossen werden muß, und zum Rekuperieren der Gangeingelegt und die Kupplung geöffnet werden muß.
Mit der E-Maschine auf der Eingangswelle bleibt der Schwachpunkt desASG – die Zugkraftunterbrechung während der Schaltung – erhalten.
Will man dies ändern, dann muß die E-Maschine auf den Abtrieb wirken(Bild 1c). In diesem Fall ist Rekuperation ebenfalls möglich. Auch hier istdie Verbindung mit automatisierter Kupplung oder automatisiertemSchaltgetriebe erforderlich. Mit dieser Anordnung läßt sich derVerbrennungsmotor aber nicht mehr durch den E-Motor starten undGenerieren ist nur noch während der Fahrt möglich.
Um alle Anforderungen, d.h. Starten, Generieren, Rekuperieren und Last-schaltung zu erfüllen, muß die E-Maschine wahlweise auf dieEingangswelle und auf den Abtrieb wirken können (Bild 1d).
Die angestrebten Verbrauchsvorteile und Startergeneratorfunktionenlassen sich also nur erzielen, wenn die E-Maschine auf den Getriebe-eingang wirken kann. Deshalb werden im weiteren nur die Varianten 1bund 1d behandelt.
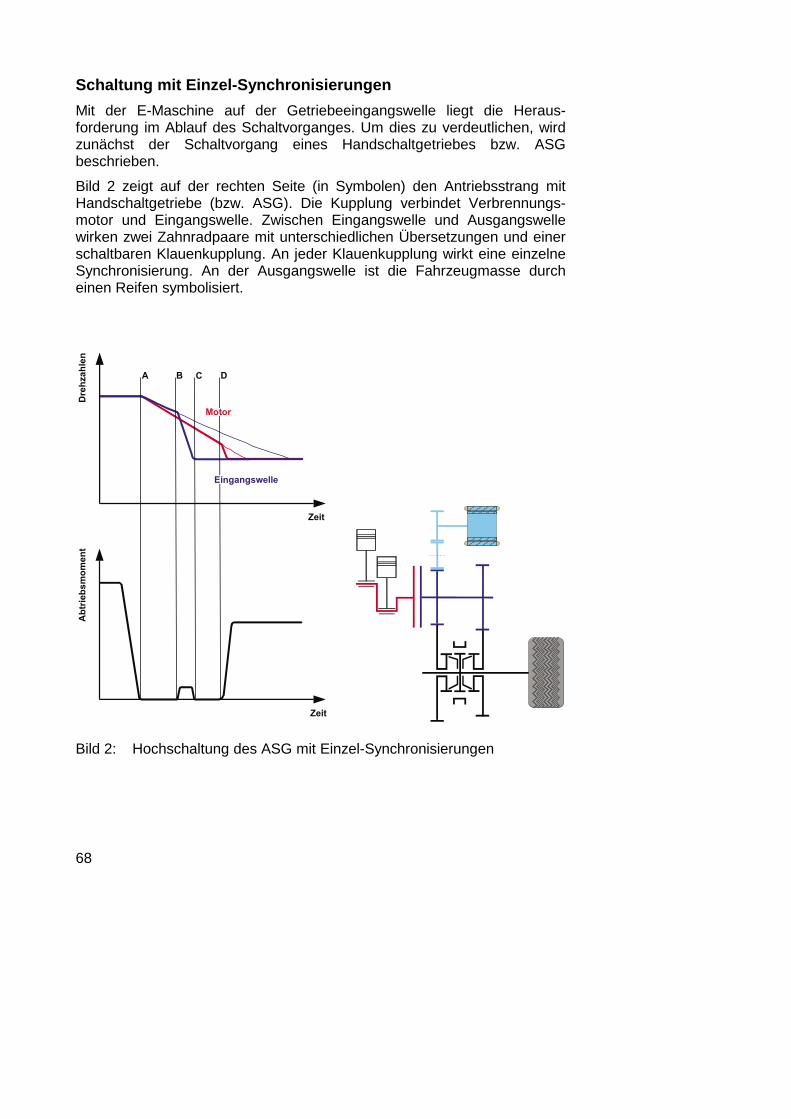
68
Schaltung mit Einzel-Synchronisierungen
Mit der E-Maschine auf der Getriebeeingangswelle liegt die Heraus-forderung im Ablauf des Schaltvorganges. Um dies zu verdeutlichen, wirdzunächst der Schaltvorgang eines Handschaltgetriebes bzw. ASGbeschrieben.
Bild 2 zeigt auf der rechten Seite (in Symbolen) den Antriebsstrang mitHandschaltgetriebe (bzw. ASG). Die Kupplung verbindet Verbrennungs-motor und Eingangswelle. Zwischen Eingangswelle und Ausgangswellewirken zwei Zahnradpaare mit unterschiedlichen Übersetzungen und einerschaltbaren Klauenkupplung. An jeder Klauenkupplung wirkt eine einzelneSynchronisierung. An der Ausgangswelle ist die Fahrzeugmasse durcheinen Reifen symbolisiert.
A B C D
Dre
hza
hle
nA
btr
ieb
sm
om
en
t
Zeit
Zeit
Eingangswelle
Motor
Bild 2: Hochschaltung des ASG mit Einzel-Synchronisierungen
69
Auf der linken Seite werden im oberen Diagramm Drehzahlverläufe vonMotor und Eingangswelle über der Zeit und im unteren Diagramm dasdementsprechende Moment an der Abtriebswelle gezeigt.
Was passiert nun während des Gangwechsels? Betrachten wir zunächstden Ablauf ohne Startergenerator.
Um die Klauenkupplung des alten Ganges lösen zu können, wird dasDrehmoment am Getriebeeingang auf Null reduziert (Zeitpunkt A). Hierzuwurde das Motormoment abgebaut und die Anfahrkupplung geöffnet. Daswirkt sich direkt auf das Abtriebsmoment aus. Sowohl dieGetriebeeingangswelle als auch der Verbrennungsmotor werden sehrlangsam verzögert. Durch die Synchronisierung an der Klauenkupplungdes neuen Ganges wird nun die Eingangswelle sehr schnell auf dasDrehzahlniveau für den folgenden Gang gebracht (Bereich von Punkt B bisC). Anschließend kann die neue Klauenkupplung eingespurt werden (PunktD). Am Ende muß noch die Drehzahlgleichheit zwischen Motor undGetriebeeingangswelle mit Hilfe der Anfahrkupplung hergestellt werden.Danach wirkt am Abtrieb das Moment des neuen Ganges. Die dünnenLinien zeigen die Drehzahlverläufe, die sich ohne die Anpassung durch dieSynchronsierung und das Wiedereinkuppeln ergeben würden.
Verbindet man nun den Startergenerator mit der Eingangswelle, so mußwährend der Synchronisierungsphase (Bereich von Punkt B bis C) nichtnur die Drehmasse der Eingangswelle, sondern auch die der E-Maschinebeschleunigt werden. Dadurch würde diese Phase länger dauern und dieSynchronisierung stärker belastet. Zur Unterstützung kann man dieE-Maschine bestromen. Jedoch ist der Leistungsbedarf sehr hoch, wenndie gleiche Schaltzeit wie ohne diese zusätzliche Drehmasse erreichtwerden soll. An dieser Problematik sind einige Integrationsversuche desStartergenerators in das ASG gescheitert.
Gesucht ist also eine Synchronisierung, welche der Masse der E-MaschineRechnung trägt. Die folgenden zwei Abschnitte zeigen hier Ansatz undLösung.
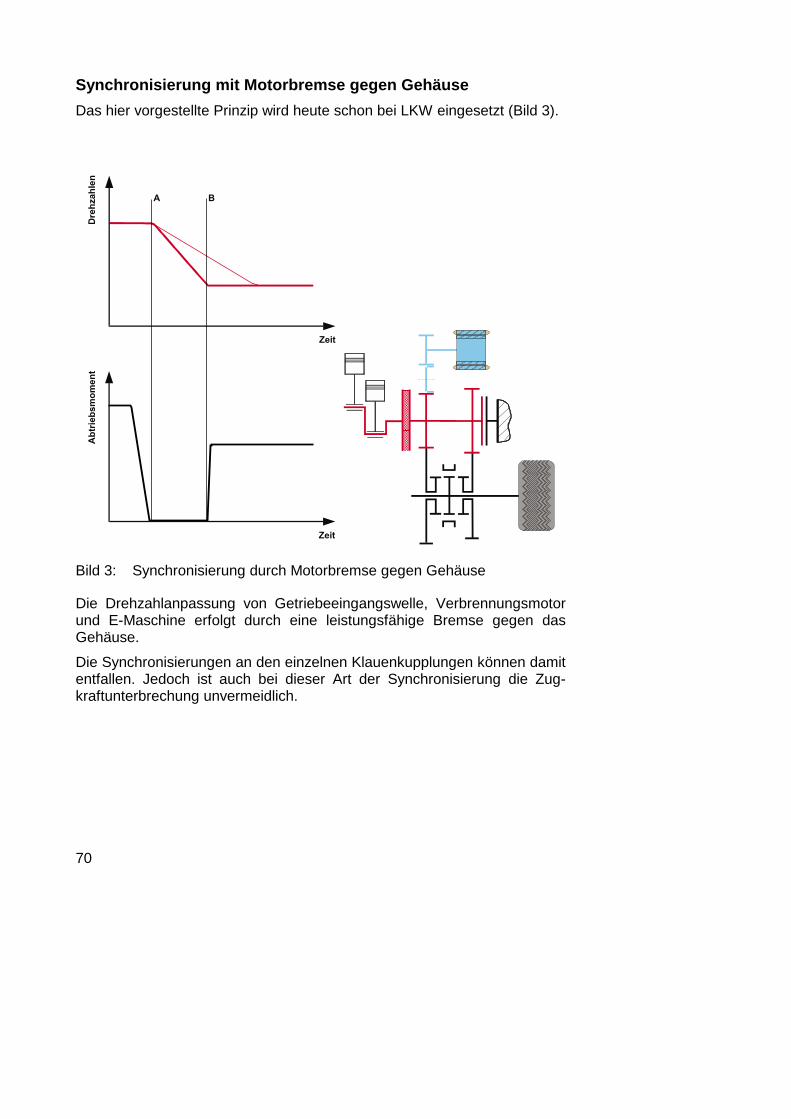
70
Synchronisierung mit Motorbremse gegen Gehäuse
Das hier vorgestellte Prinzip wird heute schon bei LKW eingesetzt (Bild 3).
Dre
hza
hle
nA
btr
ieb
sm
om
en
t
Zeit
Zeit
A B
Bild 3: Synchronisierung durch Motorbremse gegen Gehäuse
Die Drehzahlanpassung von Getriebeeingangswelle, Verbrennungsmotorund E-Maschine erfolgt durch eine leistungsfähige Bremse gegen dasGehäuse.
Die Synchronisierungen an den einzelnen Klauenkupplungen können damitentfallen. Jedoch ist auch bei dieser Art der Synchronisierung die Zug-kraftunterbrechung unvermeidlich.
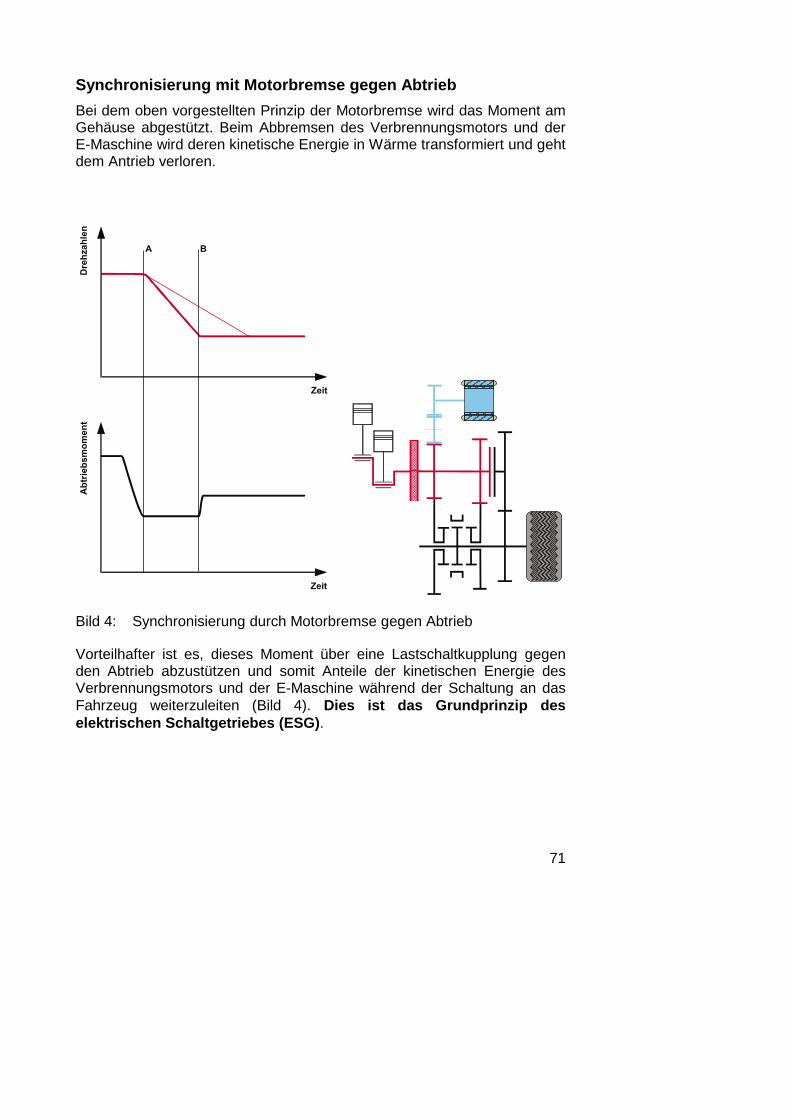
71
Synchronisierung mit Motorbremse gegen Abtrieb
Bei dem oben vorgestellten Prinzip der Motorbremse wird das Moment amGehäuse abgestützt. Beim Abbremsen des Verbrennungsmotors und derE-Maschine wird deren kinetische Energie in Wärme transformiert und gehtdem Antrieb verloren.
Dre
hza
hle
nA
btr
ieb
sm
om
en
t
Zeit
Zeit
A B
Bild 4: Synchronisierung durch Motorbremse gegen Abtrieb
Vorteilhafter ist es, dieses Moment über eine Lastschaltkupplung gegenden Abtrieb abzustützen und somit Anteile der kinetischen Energie desVerbrennungsmotors und der E-Maschine während der Schaltung an dasFahrzeug weiterzuleiten (Bild 4). Dies ist das Grundprinzip deselektrischen Schaltgetriebes (ESG).
72
Hierbei erfüllt die Lastschaltkupplung zwei Funktionen:
• Synchronisieren von Getriebeeingangswelle, Verbrennungsmotor undE-Maschine
• Vermeiden der Zugkraftunterbrechung durch Momentenabstützung amTriebstrang
Im Vergleich zum ASG fallen bei diesem Prinzip zur Drehzahlanpassungdie Totzeiten zwischen dem Ausspuren der Klauenkupplung und demSynchronisierungsbeginn sowie zwischen dem Synchronisierungsende unddem Wiedereinspuren weg. Die Bewegung der Schaltelemente erfolgt inder Phase ohne Formschluß zeitgleich und unabhängig zurSynchronisierung durch die Lastschaltkupplung. Der Gradient derGetriebeeingangsdrehzahl während der Synchronisierung darf nun deshalbgeringer als beim ASG (Bild 2) sein, ohne daß dadurch die Schaltzeitverlängert wird. Somit vereinfachen sich die Anforderungen an die E-Maschine.
Die dünne Linie in Bild 4 zeigt im Vergleich wieder den Verlauf der Dreh-zahl, wie er sich ohne die Synchrosierung durch die Lastschaltkupplungergeben würde.
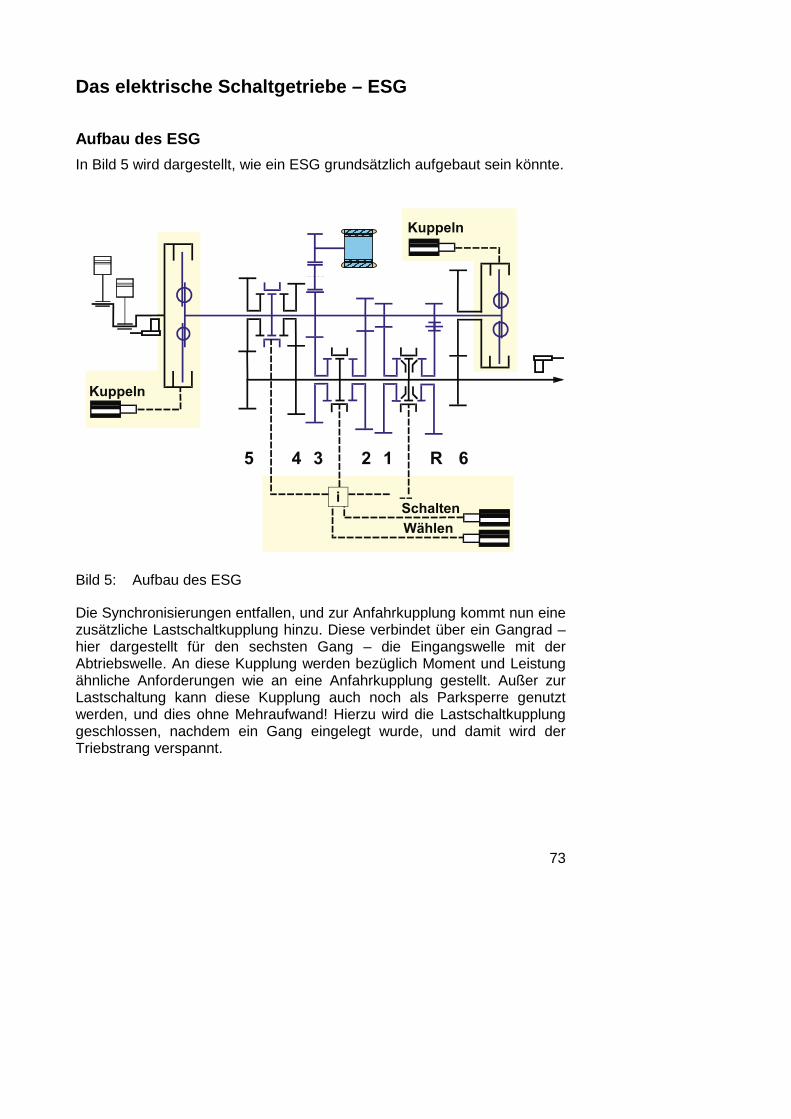
73
Das elektrische Schaltgetriebe – ESG
Aufbau des ESG
In Bild 5 wird dargestellt, wie ein ESG grundsätzlich aufgebaut sein könnte.
5 4 3 2 1 R 6
Wählen
Schalten
Kuppeln
i
Kuppeln
Bild 5: Aufbau des ESG
Die Synchronisierungen entfallen, und zur Anfahrkupplung kommt nun einezusätzliche Lastschaltkupplung hinzu. Diese verbindet über ein Gangrad –hier dargestellt für den sechsten Gang – die Eingangswelle mit derAbtriebswelle. An diese Kupplung werden bezüglich Moment und Leistungähnliche Anforderungen wie an eine Anfahrkupplung gestellt. Außer zurLastschaltung kann diese Kupplung auch noch als Parksperre genutztwerden, und dies ohne Mehraufwand! Hierzu wird die Lastschaltkupplunggeschlossen, nachdem ein Gang eingelegt wurde, und damit wird derTriebstrang verspannt.
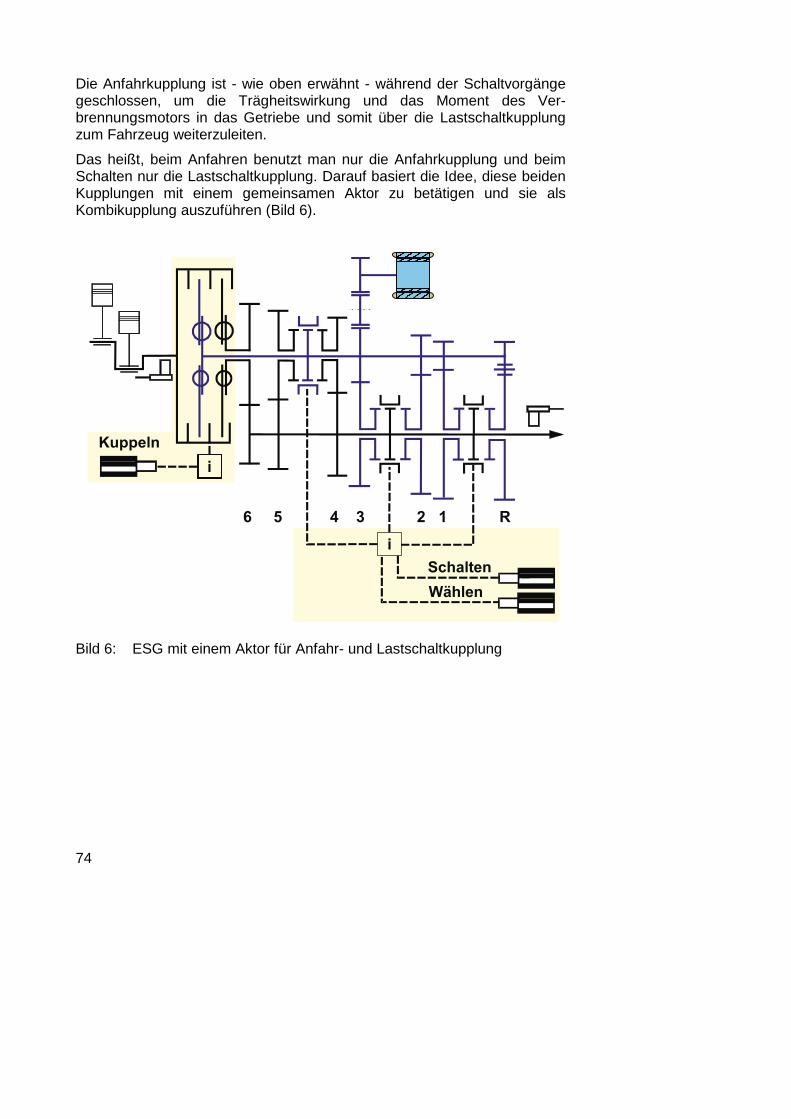
74
Die Anfahrkupplung ist - wie oben erwähnt - während der Schaltvorgängegeschlossen, um die Trägheitswirkung und das Moment des Ver-brennungsmotors in das Getriebe und somit über die Lastschaltkupplungzum Fahrzeug weiterzuleiten.
Das heißt, beim Anfahren benutzt man nur die Anfahrkupplung und beimSchalten nur die Lastschaltkupplung. Darauf basiert die Idee, diese beidenKupplungen mit einem gemeinsamen Aktor zu betätigen und sie alsKombikupplung auszuführen (Bild 6).
6 5 4 3 2 1 R
Kuppeln
Schalten
Wählen
i
i
Bild 6: ESG mit einem Aktor für Anfahr- und Lastschaltkupplung
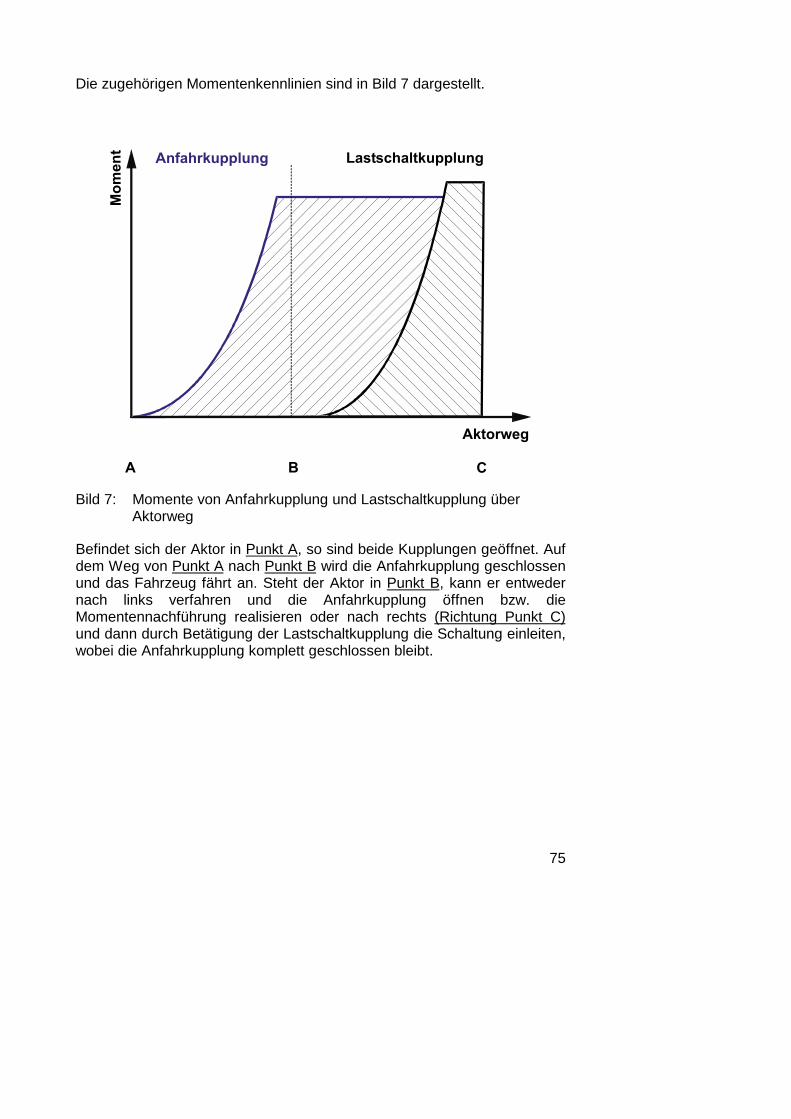
75
Die zugehörigen Momentenkennlinien sind in Bild 7 dargestellt.
Anfahrkupplung Lastschaltkupplung
Aktorweg
CBA
Mo
me
nt
Bild 7: Momente von Anfahrkupplung und Lastschaltkupplung überAktorweg
Befindet sich der Aktor in Punkt A, so sind beide Kupplungen geöffnet. Aufdem Weg von Punkt A nach Punkt B wird die Anfahrkupplung geschlossenund das Fahrzeug fährt an. Steht der Aktor in Punkt B, kann er entwedernach links verfahren und die Anfahrkupplung öffnen bzw. dieMomentennachführung realisieren oder nach rechts (Richtung Punkt C)und dann durch Betätigung der Lastschaltkupplung die Schaltung einleiten,wobei die Anfahrkupplung komplett geschlossen bleibt.
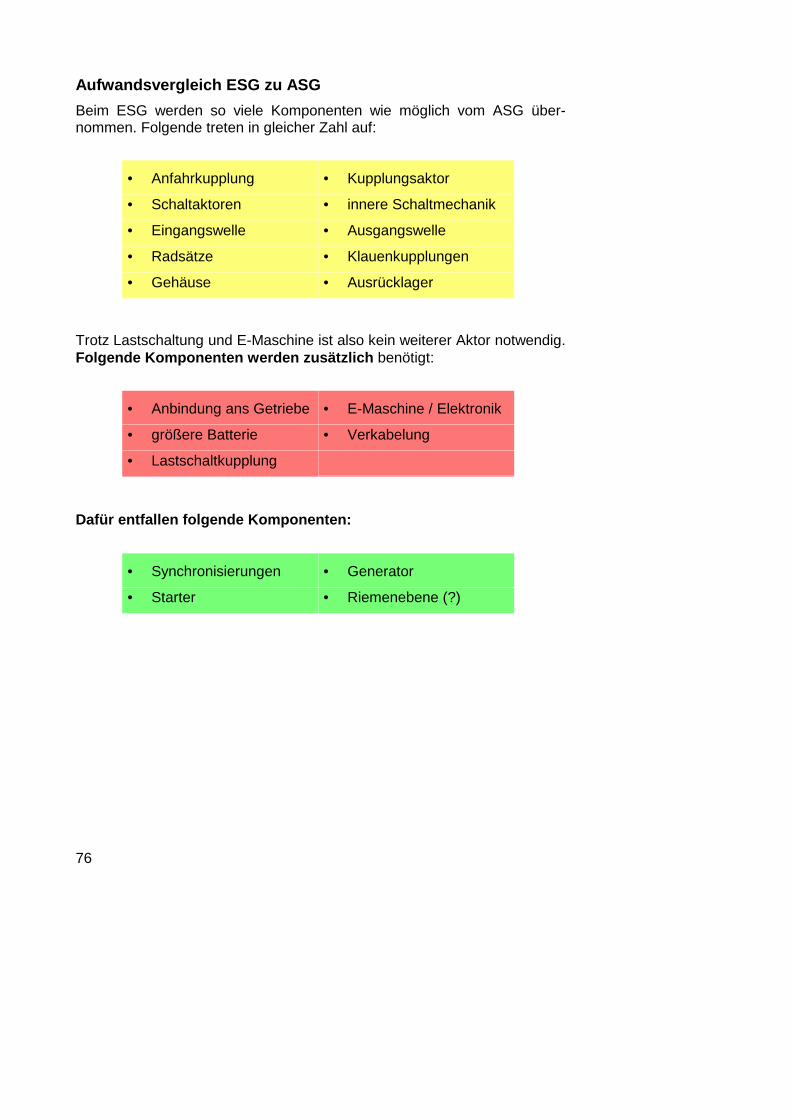
76
Aufwandsvergleich ESG zu ASG
Beim ESG werden so viele Komponenten wie möglich vom ASG über-nommen. Folgende treten in gleicher Zahl auf:
• Anfahrkupplung • Kupplungsaktor
• Schaltaktoren • innere Schaltmechanik
• Eingangswelle • Ausgangswelle
• Radsätze • Klauenkupplungen
• Gehäuse • Ausrücklager
Trotz Lastschaltung und E-Maschine ist also kein weiterer Aktor notwendig.Folgende Komponenten werden zusätzlich benötigt:
• Anbindung ans Getriebe • E-Maschine / Elektronik
• größere Batterie • Verkabelung
• Lastschaltkupplung
Dafür entfallen folgende Komponenten:
• Synchronisierungen • Generator
• Starter • Riemenebene (?)
77
Systemanforderungen des ESG
Steuerung
Die Ansteuerung des Systems und insbesondere der Kupplungen ist einewesentliche Herausforderung beim ESG.
Die Lastschaltkupplung, der Verbrennungsmotor und die E-Maschinemüssen koordiniert angesteuert werden, um die Synchronisierfunktion zuerfüllen. Neben den Schaltstrategien müssen die zusätzlichen Funktionender elektrischen Maschine (Starten, Versorgung Bordnetz usw.) sicher-gestellt werden.
Während der Schaltphase schlupft die Lastschaltkupplung und bestimmtdamit dominierend das Abtriebsmoment. Dies erfordert eine feinfühligeAnsteuerung.
Eine weitere Herausforderung ist das Aus- und Einspuren der Klauen-kupplungen. Beim Ausspuren muß genau der Augenblick getroffenwerden, in dem die Klauenkupplung momentenfrei ist. Beim Einspurenmuß Drehzahlgleichheit erreicht sein, aber gleichzeitig sollten auch dieDrehzahlgradienten möglichst gleich groß sein.
Für diese Koordinierung von Motor, Kupplungen und Getriebe ist einumfangreiches Gesamtsystemwissen notwendig. Hier hat sich LuK schonbei der ASG-Entwicklung viel Know-how erarbeitet.
Konstruktion der Lastschaltkupplung
Wie von der Anfahrkupplung werden auch von der Lastschaltkupplunghohe Reibleistungen und gute Modulierbarkeit gefordert. Der Energie-eintrag kann sogar noch höher als jener der Anfahrkupplung sein, was eineVerschleißnachstellung sinnvoll erscheinen läßt. Werden die Kupplungenals Kombikupplung ausgeführt - also Anfahrkupplung und Lastschalt-kupplung in einer Baueinheit -, stellt dies eine besonders hohe Heraus-forderung dar. Zudem müssen beide Kupplungen kraftreduziert sein, umeinen kleinen Kupplungsaktor verwenden zu können. Das ist sicherlich dierichtige Aufgabe für den Kupplungsentwicklungsbereich von LuK.
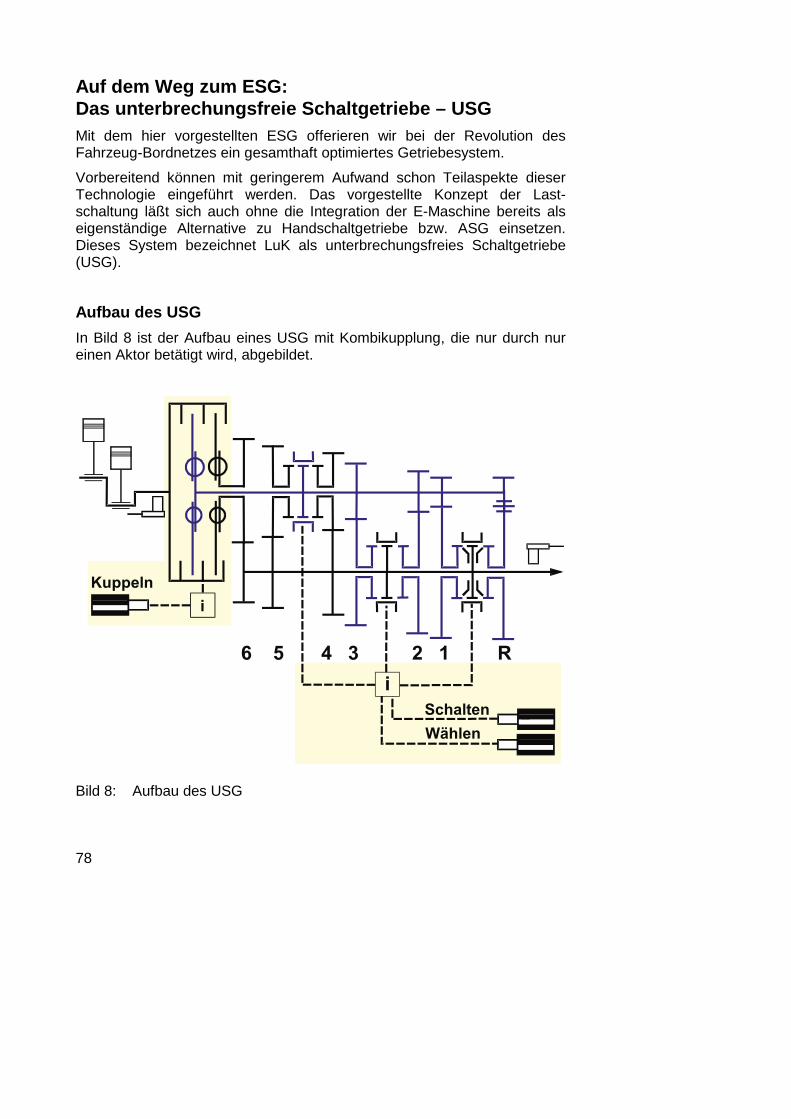
78
Auf dem Weg zum ESG:Das unterbrechungsfreie Schaltgetriebe – USGMit dem hier vorgestellten ESG offerieren wir bei der Revolution desFahrzeug-Bordnetzes ein gesamthaft optimiertes Getriebesystem.
Vorbereitend können mit geringerem Aufwand schon Teilaspekte dieserTechnologie eingeführt werden. Das vorgestellte Konzept der Last-schaltung läßt sich auch ohne die Integration der E-Maschine bereits alseigenständige Alternative zu Handschaltgetriebe bzw. ASG einsetzen.Dieses System bezeichnet LuK als unterbrechungsfreies Schaltgetriebe(USG).
Aufbau des USG
In Bild 8 ist der Aufbau eines USG mit Kombikupplung, die nur durch nureinen Aktor betätigt wird, abgebildet.
6 5 4 3 2 1 R
Kuppeln
Schalten
Wählen
i
i
Bild 8: Aufbau des USG
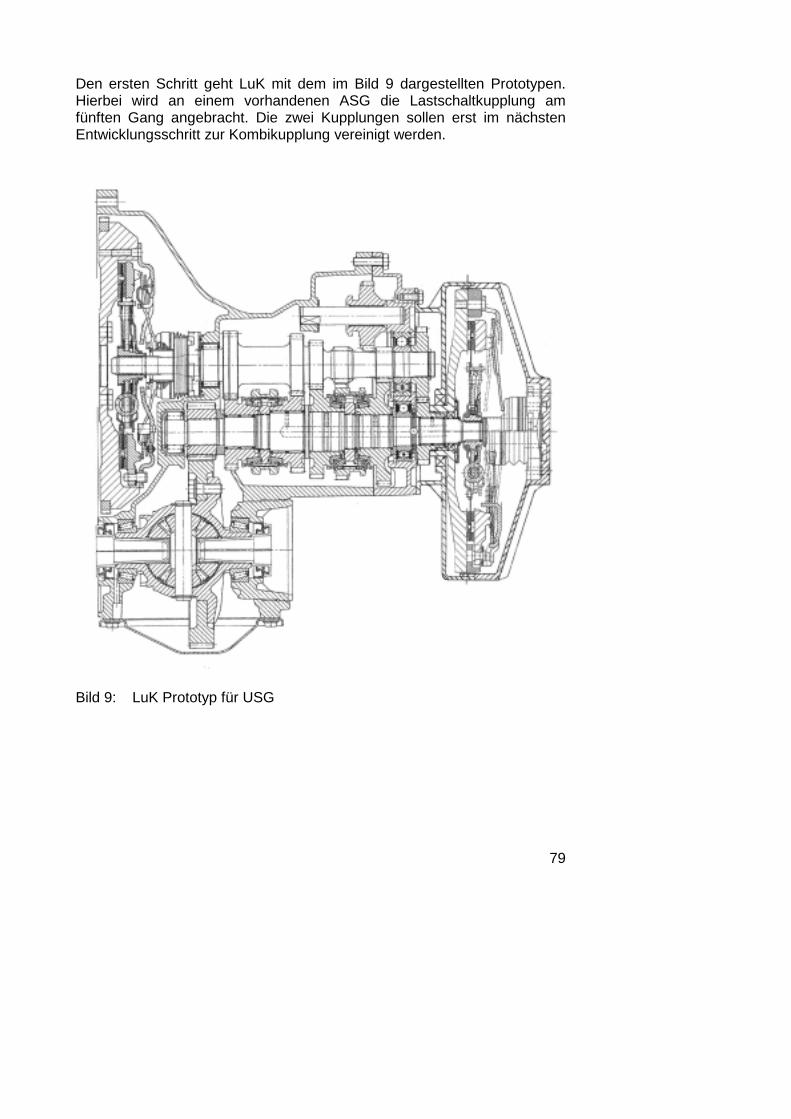
79
Den ersten Schritt geht LuK mit dem im Bild 9 dargestellten Prototypen.Hierbei wird an einem vorhandenen ASG die Lastschaltkupplung amfünften Gang angebracht. Die zwei Kupplungen sollen erst im nächstenEntwicklungsschritt zur Kombikupplung vereinigt werden.
Bild 9: LuK Prototyp für USG
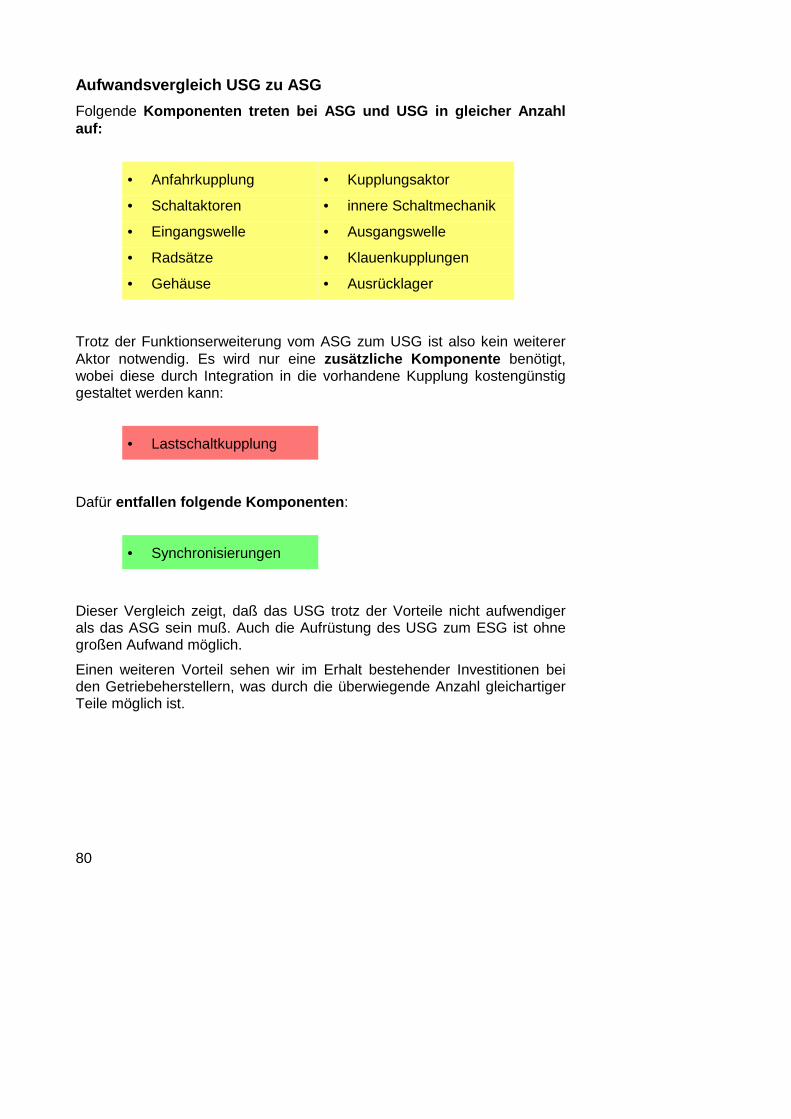
80
Aufwandsvergleich USG zu ASG
Folgende Komponenten treten bei ASG und USG in gleicher Anzahlauf:
• Anfahrkupplung • Kupplungsaktor
• Schaltaktoren • innere Schaltmechanik
• Eingangswelle • Ausgangswelle
• Radsätze • Klauenkupplungen
• Gehäuse • Ausrücklager
Trotz der Funktionserweiterung vom ASG zum USG ist also kein weitererAktor notwendig. Es wird nur eine zusätzliche Komponente benötigt,wobei diese durch Integration in die vorhandene Kupplung kostengünstiggestaltet werden kann:
• Lastschaltkupplung
Dafür entfallen folgende Komponenten:
• Synchronisierungen
Dieser Vergleich zeigt, daß das USG trotz der Vorteile nicht aufwendigerals das ASG sein muß. Auch die Aufrüstung des USG zum ESG ist ohnegroßen Aufwand möglich.
Einen weiteren Vorteil sehen wir im Erhalt bestehender Investitionen beiden Getriebeherstellern, was durch die überwiegende Anzahl gleichartigerTeile möglich ist.
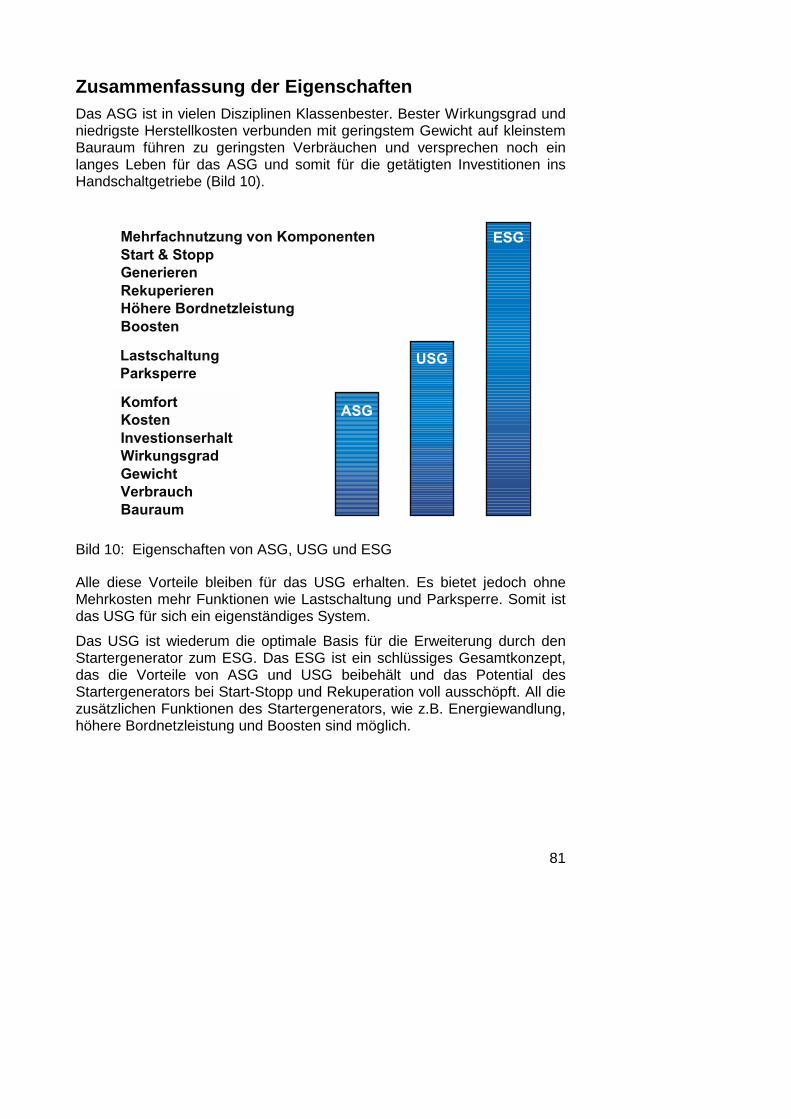
81
Zusammenfassung der EigenschaftenDas ASG ist in vielen Disziplinen Klassenbester. Bester Wirkungsgrad undniedrigste Herstellkosten verbunden mit geringstem Gewicht auf kleinstemBauraum führen zu geringsten Verbräuchen und versprechen noch einlanges Leben für das ASG und somit für die getätigten Investitionen insHandschaltgetriebe (Bild 10).
ESG
ASG
USG
Automation
Start & Stopp
Schlupf
Bauraum
Wirkungsgrad
Gewicht
Verbrauch
Komfort
Kosten
Investionserhalt
Lastschaltung
Parksperre
Mehrfachnutzung von Komponenten
Start & Stopp
Generieren
Rekuperieren
Höhere Bordnetzleistung
Boosten
Bild 10: Eigenschaften von ASG, USG und ESG
Alle diese Vorteile bleiben für das USG erhalten. Es bietet jedoch ohneMehrkosten mehr Funktionen wie Lastschaltung und Parksperre. Somit istdas USG für sich ein eigenständiges System.
Das USG ist wiederum die optimale Basis für die Erweiterung durch denStartergenerator zum ESG. Das ESG ist ein schlüssiges Gesamtkonzept,das die Vorteile von ASG und USG beibehält und das Potential desStartergenerators bei Start-Stopp und Rekuperation voll ausschöpft. All diezusätzlichen Funktionen des Startergenerators, wie z.B. Energiewandlung,höhere Bordnetzleistung und Boosten sind möglich.
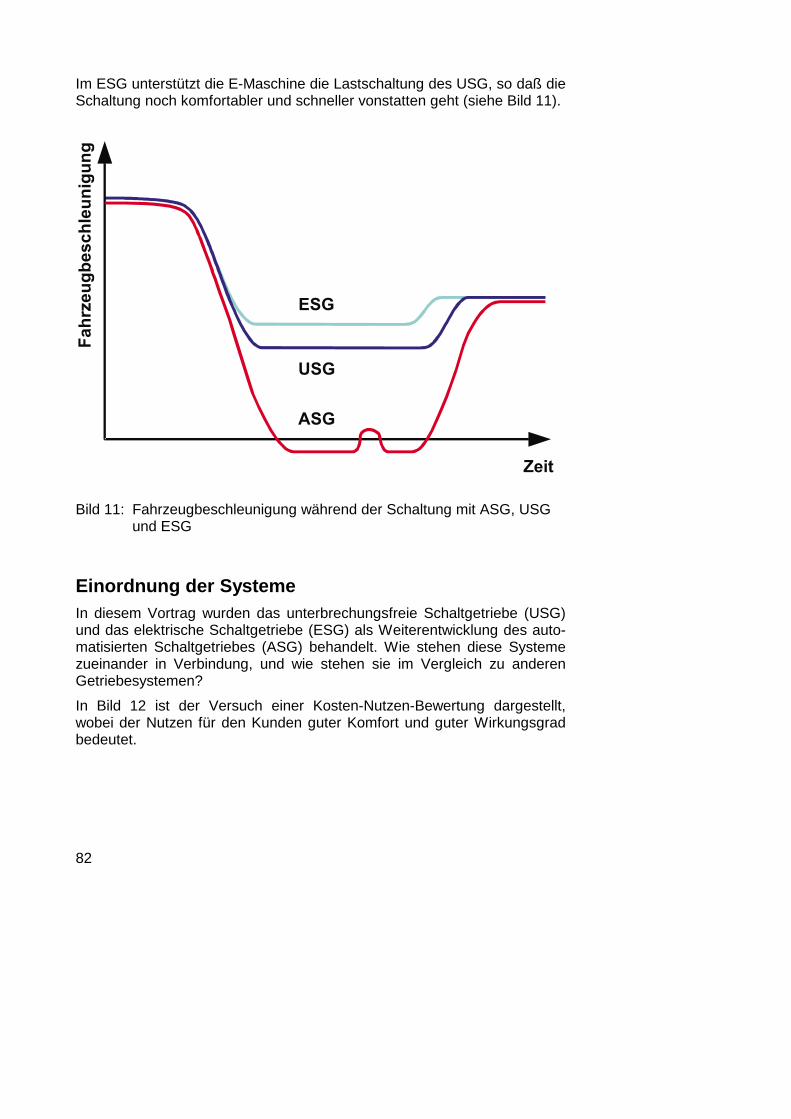
82
Im ESG unterstützt die E-Maschine die Lastschaltung des USG, so daß dieSchaltung noch komfortabler und schneller vonstatten geht (siehe Bild 11).
ASG
USG
ESG
Fa
hrz
eu
gb
es
ch
leu
nig
un
g
Zeit
Bild 11: Fahrzeugbeschleunigung während der Schaltung mit ASG, USGund ESG
Einordnung der SystemeIn diesem Vortrag wurden das unterbrechungsfreie Schaltgetriebe (USG)und das elektrische Schaltgetriebe (ESG) als Weiterentwicklung des auto-matisierten Schaltgetriebes (ASG) behandelt. Wie stehen diese Systemezueinander in Verbindung, und wie stehen sie im Vergleich zu anderenGetriebesystemen?
In Bild 12 ist der Versuch einer Kosten-Nutzen-Bewertung dargestellt,wobei der Nutzen für den Kunden guter Komfort und guter Wirkungsgradbedeutet.
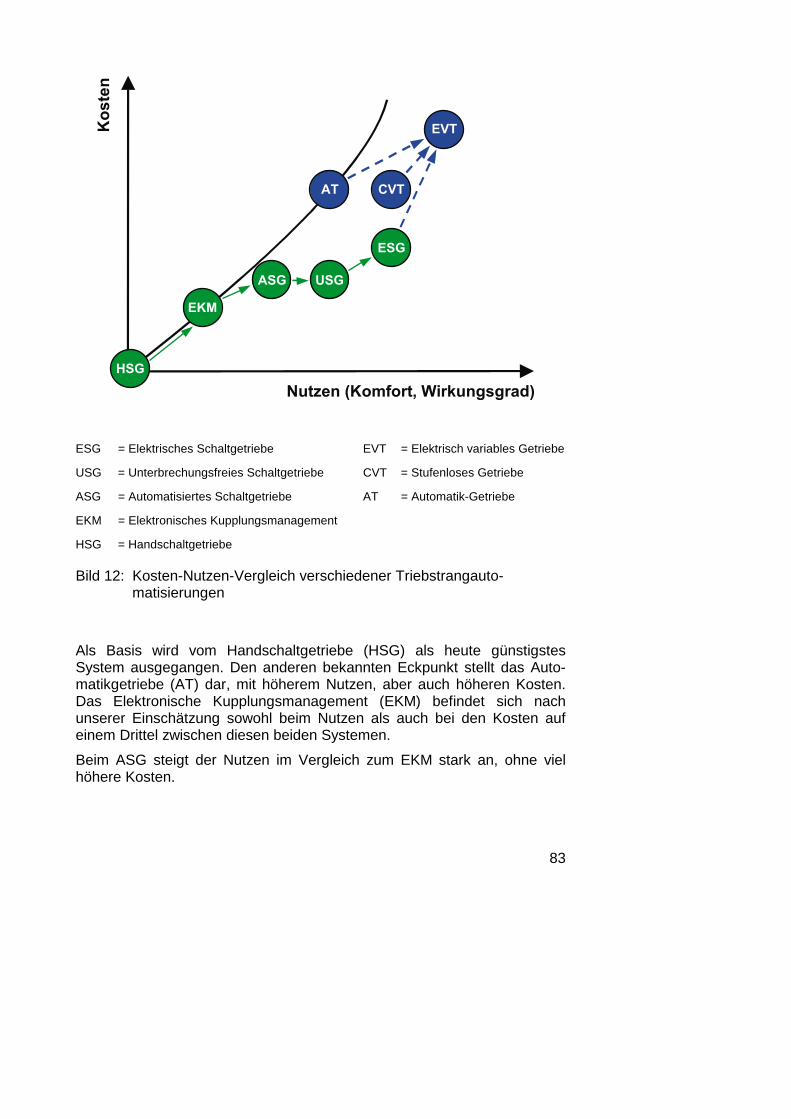
83
HSG
EKM
ASG USG
ESG
CVTAT
EVTKo
ste
n
Nutzen (Komfort, Wirkungsgrad)
ESG = Elektrisches Schaltgetriebe EVT = Elektrisch variables Getriebe
USG = Unterbrechungsfreies Schaltgetriebe CVT = Stufenloses Getriebe
ASG = Automatisiertes Schaltgetriebe AT = Automatik-Getriebe
EKM = Elektronisches Kupplungsmanagement
HSG = Handschaltgetriebe
Bild 12: Kosten-Nutzen-Vergleich verschiedener Triebstrangauto-matisierungen
Als Basis wird vom Handschaltgetriebe (HSG) als heute günstigstesSystem ausgegangen. Den anderen bekannten Eckpunkt stellt das Auto-matikgetriebe (AT) dar, mit höherem Nutzen, aber auch höheren Kosten.Das Elektronische Kupplungsmanagement (EKM) befindet sich nachunserer Einschätzung sowohl beim Nutzen als auch bei den Kosten aufeinem Drittel zwischen diesen beiden Systemen.
Beim ASG steigt der Nutzen im Vergleich zum EKM stark an, ohne vielhöhere Kosten.
84
Das USG dürfte so preiswert wie das ASG sein. Allerdings steigt derKomfort weiter, da die Zugkraftunterbrechung eliminiert wird. LuK schätztden Nutzen des USG gleichwertig zum Automatikgetriebe ein, allerdingsmit dem Fokus auf andere Fahrzeugklassen. Der Schaltkomfort desAutomatikgetriebes wird mit dem USG zwar nicht ganz erreicht, derVerbrauch ist jedoch viel geringer.
Das ESG ist die Weiterentwicklung des USG. Die zusätzlichen Kosten fürdie elektrische Maschine und die Leistungselektronik dürfen nicht alleindem Getriebe zugeordnet werden, da die vielen Vorteile eines Starter-generators zum Teil unabhängig vom Antriebsstrang zu bewerten sind.Den großen Vorteil sehen wir im Kraftstoffeinsparpotential.
Das CVT kostet ungefähr soviel wie ein Automatikgetriebe, bietet aberdeutlich mehr Komfort.
Steht bei der Entwicklung der bestmögliche Komfort im Vordergrund,werden Nachfolger für Automatikgetriebe und CVT gesucht. Es werdenSysteme - wie sie zum Beispiel auch Herr Prof. Tenberge in seinemBeitrag vorstellt [8] - zum Einsatz kommen. Wie man in Bild 12 erkennenkann, handelt es sich hier aber um ein anderes Marktsegment als beimESG.
ASG, USG und ESG sind Weiterentwicklungen des Handschaltgetriebes.Daran arbeitet die LuK!
85
Literatur
[1] Fischer, R.; Berger, R.: Automatisierung von Schaltgetrieben, 6. LuK-Kolloquium 1998
[2] Berger, R.; Fischer, R.; Salecker, M.: Von der Automatisierten Kupplung zumAutomatisierten Schaltgetriebe; VDI-Bericht 1393
[3] Reik, W.: Startergenerator im Antriebstrang, LuK-Fachtagung E-Maschine imAntriebsstrang 1999
[4] Boll, W.; Antony P.: Der Parallel-Hybridantrieb von Mercedes-Benz, VDI-Bericht 1225
[5] Kerschl, S.; Höhn, B.; Pflaum, H.: Einsparpotentiale des Autarken Hybrid-Fahrzeugs,VDI-Bericht 1459
[6] Buschhaus, W.; Jaura, A.; Tamor, M: P2000 LSR – Fords Systematic and IntegratedHEV Development Program, VDI-Bericht 1459
[7] Dietrich P., Eberle M.: Betriebsverhalten des ETH-Hybrid III Antriebes auf demdynamischen Prüfstand und im Fahrzeug, VDI-Bericht 1459
[8] Tenberge, P.: Automatisiertes Fahrzeuggetriebe mit elektrischener Regelung� Hybridgetriebe, LuK-Fachtagung E-Maschine im Antriebsstrang 1999
87
Automatisiertes Fahrzeuggetriebe mitelektrischer Regelung ��Hybridgetriebe
Prof. Dr.-Ing. Peter TenbergeProf. Dr.-Ing. Wilfried HofmannTU Chemnitz
EinleitungKombiniert man einen Planetenradsatz aus einem Automatgetriebe mitSchaltelementen aus Handschaltgetrieben und automatisiert dieÜbersetzungsverstellung über ein elektrisches Stellgetriebe mitangeschlossenem Energiespeicher, dann erhält man ein Hybridgetriebe.Mit seinem unendlich großen, stufenlos regelbaren Stellbereich kann dasHybridgetriebe die Starterfunktion für den Verbrennungsmotor und dieGeneratorfunktion für das Bordnetz mit übernehmen. OhneAnfahrkupplung oder Wandler hängen V-Motor und Getriebe immerzusammen. Durch Energierekuperation über den Speicher läßt sich derKraftstoffverbrauch weiter reduzieren.
Zielsetzung für neue FahrzeuggetriebeDas Getriebe als Leistungswandler zwischen Verbrennungsmotor undAntriebsrädern eines Fahrzeugs war für die Forschung zwar immer vonInteresse. Im Markt konnten sich neue Getriebesysteme bislang jedoch nurin kleinen Stückzahlen oder Sonderanwendungen gegenüberHandschaltgetrieben und Automatgetrieben durchsetzen. Denn diesezeichnen sich durch hohe Wirkungsgrade, zuverlässige Funktionen,nahezu Wartungsfreiheit und durch geringe Herstellkosten als Folgeausgereifter Fertigungstechnologien aus. Ihr Übersetzungsbereich und dieStufung der Gänge erlauben ein Anfahren unter höchstenLastanforderungen und eine gute Ausnutzung der Vollastkurve desVerbrennungsmotors zum Beschleunigen bis zur Höchstgeschwindigkeit.Handschaltgetriebe gelten als sportlich, Automatgetriebe als komfortabel.Verbrauchsbewußte Autofahrer fahren Diesel, die durch Pumpe-Düse,Common-Rail, etc. niedrigsten Kraftstoffverbrauch mit Laufruhe undhöchster Kraft so vereinigen, daß selbst verwöhnte Fahrer zufrieden sind.
Wozu dann noch andere Getriebe ? Was fehlt uns denn noch ?
Nachteilig bei Handschaltgetrieben ist die Beschränkung auf 5 bis 6Vorwärtsgänge und die Zugkraftunterbrechung beim Gangwechsel. Aus
88
Kostengründen wird in Handschaltgetrieben meist eine vom Fahrer zubetätigende Reibungskupplung zum Anfahren des Fahrzeugs eingesetzt.Nur in Verbindung mit einer großen Übersetzung des 1. Ganges kann danndas erforderliche max. Abtriebsdrehmoment erzeugt werden. Selbst wennman von diesem 1. Gang aus 5 weitere Gänge gut schaltbar stuft, reichtder Übersetzungsbereich nicht aus, um den V-Motor bei Konstantfahrt imBereich höchster Wirkungsgrade zu betreiben. Aus diesem Grunde werdenSchaltgetriebe mit 6 und mehr Gängen entwickelt. Um den Fahrer von dendann vielen Gangwechseln zu entlasten, werden diese Getriebeautomatisierte Kupplungsbetätigungen und Gangwechsel haben.
Nachteilig bei Automatgetrieben sind die vielen reibschlüssigenSchaltelemente, von denen in jedem Betriebszustand die meisten offensind. Je nach Relativdrehzahl erzeugen diese SchaltelementeSchleppverluste. Zum Anfahren und zum Schalten ohneZugkraftunterbrechung werden in Automatgetrieben heute fastausschließlich hydrodynamische Wandler eingesetzt, die nach demAnfahren und nach Schaltvorgängen mittels einer Kupplung überbrücktwerden. Die Schaltelemente und der Wandler erfordern eine hydraulischeDruckölversorgung mit einer direkt mit dem V-Motor verbundenenÖlpumpe. Die Antriebsleistung der Ölpumpe und die Verluste in denSchaltelementen sind hauptsächlich für den schlechteren Wirkungsgradder Automatgetriebe im Vergleich zu Handschaltgetrieben verantwortlich.Heutige Automatgetriebe decken ebenfalls einen zu kleinenÜbersetzungsbereich ab, um den Verbrennungsmotor hinsichtlichKraftstoffverbrauch optimal zu betreiben. Deshalb arbeitet man anKonzepten mit 6 und mehr Fahrstufen für den Einsatz in Pkws.
Als Alternative zu Getrieben mit gestuften Übersetzungen gibt esstufenlose Getriebe. Reibradgetriebe und Umschlingungsgetriebeermöglichen schon im Variator selbst Übersetzungsspreizungen zwischen5 bis 6. Durch mehrfache Nutzung der Variatoren in mehreren Fahr-bereichen [4, 5, 6], zum Teil mittels Leistungsverzweigung, lassen sichSpreizungen bis unendlich (geared neutral) erreichen.
Mit elektrischen und mit hydrostatischen Getrieben sind unendlich großeStellbereiche auch ohne weitere Zusatzeinrichtungen erreichbar. Sie habenjedoch niedrigere Wirkungsgrade als mechanische stufenlose Getriebe.Deshalb verwendet man mechanische Überlagerungsgetriebe zurLeistungsverzweigung in sogenannten Koppelgetrieben[1, 2, 9, 12, 13, 14]. Die Antriebsleistung vom V-Motor wird dadurch in eineTeilleistung aufgeteilt, die rein mechanisch zum Abtrieb übertragen wird,und eine Teilleistung, die über das stufenlos elektrische oderhydrostatische Stellgetriebe fließt. Je kleiner die stufenlos übertrageneTeilleistung wird, desto kleiner wird der Stellbereich, den dann dasKoppelgetriebe im Verhältnis zum Stellbereich des Stellgetriebes aufweist.
89
Das TOYOTA-Hybridsystem [1, 2] ist so ein Getriebe, bei dem derunendlich große Stellbereich des elektrischen Stellgetriebes in einem sehreinfachen Koppelgetriebe, das nur ein dreiwelliges Planetengetriebe undkeine Schaltelemente aufweist, auf den für einen Pkw-Einsatz nötigen Wertreduziert wird. Das elektrische Stellgetriebe baut jedoch noch relativ groß.
Die Antriebswelle dieses TOYOTA-Getriebes ist ohne Schaltelement mitdem V-Motor verbunden und treibt die Stegwelle eines Planetengetriebes.An der Hohlradwelle des Planetengetriebes hängt eine erste, großeelektrische Maschine und an der Sonnenradwelle eine zweite, kleineelektrische Maschine des Stellgetriebes. Die Leistungssteuerung ist nochmit einer Batterie als Energiespeicher verbunden. Beim Anfahren treibt diegroße E-Maschine zuerst alleine mit Energie aus dem Speicher denAbtrieb. Der Verbrennungsmotor steht dabei still. Erst ab einer bestimmtenGeschwindigkeit wird über die kleine E-Maschine der Verbrennungsmotorbeschleunigt und gestartet. Ab diesem Betriebszustand wird das Fahrzeugleistungsverzweigt weiter beschleunigt. Über die kleine E-Maschine undEnergie aus dem Speicher kann auch bei stehendem Abtrieb der V-Motorbeschleunigt und gestartet werden. Aus diesem Betriebszustand (geared-neutral) heraus wird dann das Fahrzeug leistungsverzweigt angefahren. Jenach Ladezustand des Speichers ist die eine oder andere Anfahrstrategiezu bevorzugen. Beim leistungverzweigten Fahren kann über den Speicherund das Stellgetriebe kurzzeitig zusätzlich Leistung zum Fahrenbereitgestellt werden, oder auch der Speicher geladen werden. Auch beimBremsen kann man mit einem Teil der kinetischen Fahrzeugenergie denSpeicher laden. Durch die Rekuperation der Bremsenergie wird gerade ininstationären Fahrzyklen der Kraftstoffverbrauch des Fahrzeugs nochwesentlich gesenkt. Im Stadtverkehr hat TOYOTA sehr niedrigeKraftstoffverbräuche gemessen.
Der wesentliche Nachteil des Getriebes nach [1, 2] ist die sehr großezweite E-Maschine auf der Getriebeabtriebswelle, die das volleAnfahrdrehmoment bereitstellen muß. Um die gleiche Fahrdynamik wie miteinem Fahrzeug mit Handschaltgetriebe zu erreichen, muß diese großeE-Maschine ein kurzzeitiges Anfahrdrehmoment (z.B. Tabmax=700 Nm)erreichen, das dem Maximalmoment des V-Motors (z.B. Tanmax=200 Nm)multipliziert mit der Übersetzung des 1. Ganges (z.B. i1=3,5) desHandschaltgetriebes entspricht. Aus diesem Grunde ist das TOYOTAHybridsystem in dieser Form nicht für leistungsstarke Fahrzeuge geeignet.
Aus der Analyse der Vor- und Nachteile des Standes der Technik ergebensich folgende Anforderungen an ein neuartiges Fahrzeuggetriebe. Umeinen hohen Wirkungsgrad zu erreichen, soll der wesentlicheLeistungsanteil wie in Stufengetrieben mechanisch über wenige Zahnräderund Schaltelemente geleitet werden. Bei jeder Übersetzung sollen auchnur wenige Zahnräder und Schaltelemente ohne Last geschleppt mitlaufen.
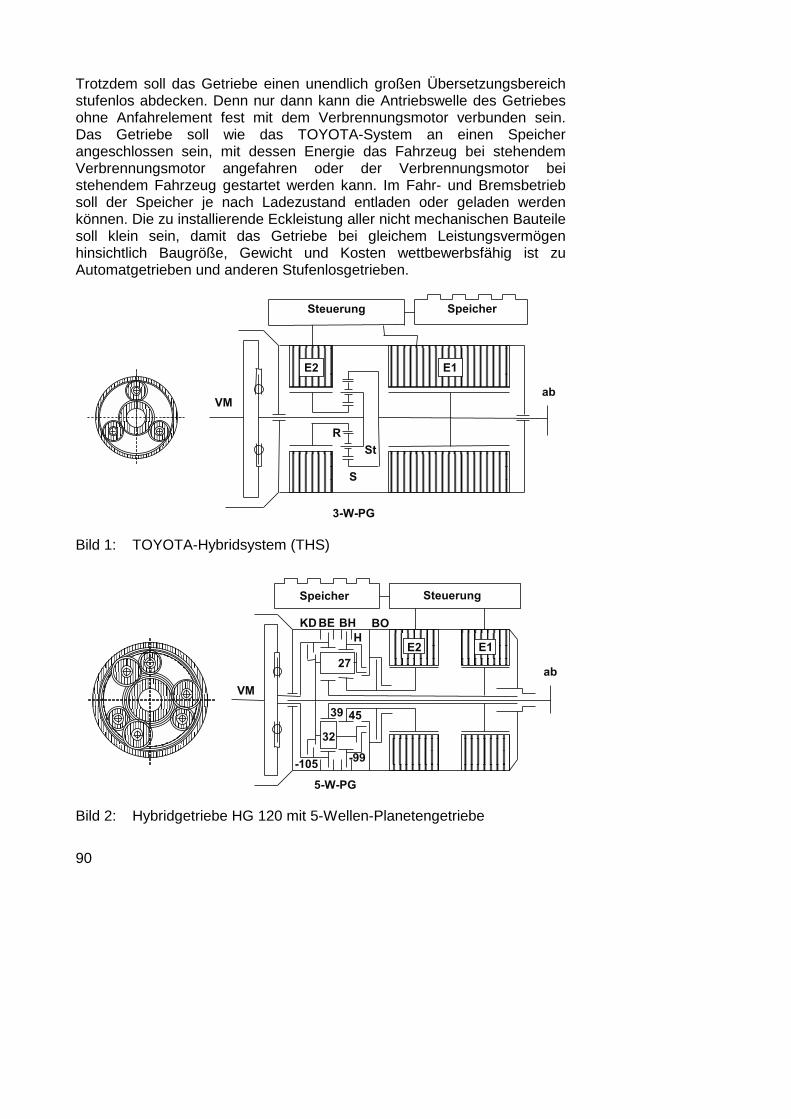
90
Trotzdem soll das Getriebe einen unendlich großen Übersetzungsbereichstufenlos abdecken. Denn nur dann kann die Antriebswelle des Getriebesohne Anfahrelement fest mit dem Verbrennungsmotor verbunden sein.Das Getriebe soll wie das TOYOTA-System an einen Speicherangeschlossen sein, mit dessen Energie das Fahrzeug bei stehendemVerbrennungsmotor angefahren oder der Verbrennungsmotor beistehendem Fahrzeug gestartet werden kann. Im Fahr- und Bremsbetriebsoll der Speicher je nach Ladezustand entladen oder geladen werdenkönnen. Die zu installierende Eckleistung aller nicht mechanischen Bauteilesoll klein sein, damit das Getriebe bei gleichem Leistungsvermögenhinsichtlich Baugröße, Gewicht und Kosten wettbewerbsfähig ist zuAutomatgetrieben und anderen Stufenlosgetrieben.
3-W-PG
S
R
St
Speicher
VM
Steuerung
ab
E2 E1
Bild 1: TOYOTA-Hybridsystem (THS)
5-W-PG
-105-99
BO
27
39
32
45
KD BE
H
BH
Steuerung
VM
Speicher
ab
E2 E1
Bild 2: Hybridgetriebe HG 120 mit 5-Wellen-Planetengetriebe
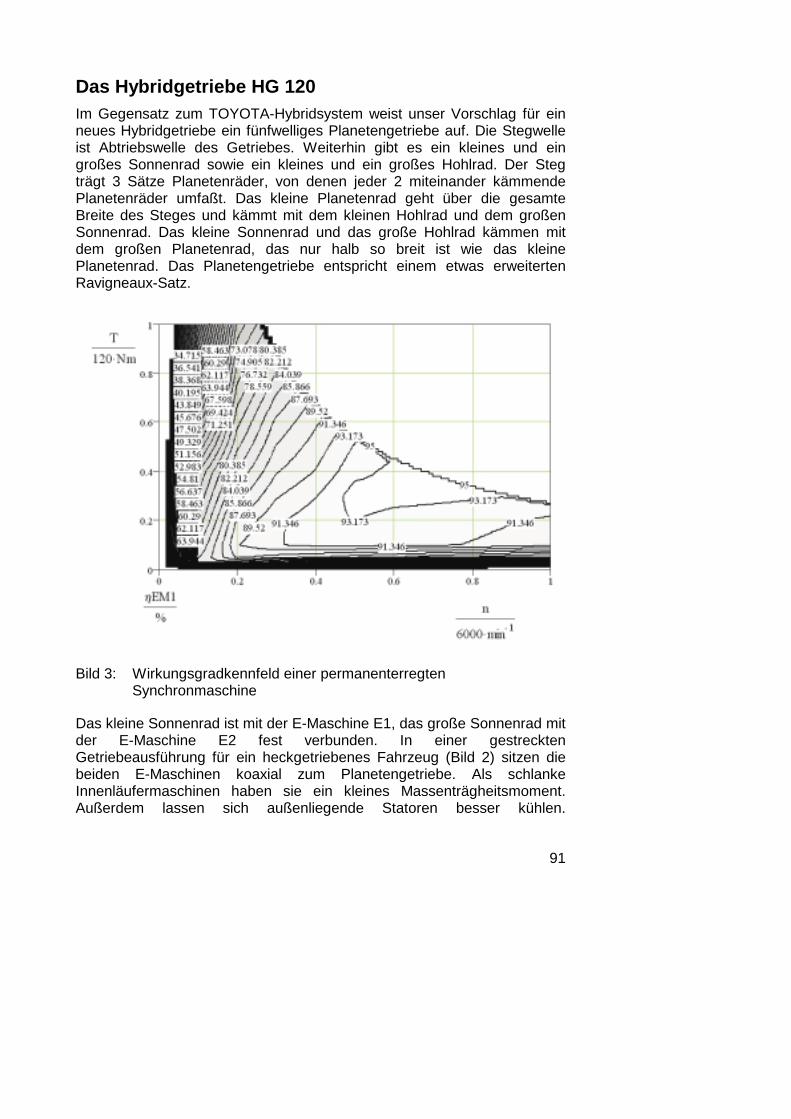
91
Das Hybridgetriebe HG 120Im Gegensatz zum TOYOTA-Hybridsystem weist unser Vorschlag für einneues Hybridgetriebe ein fünfwelliges Planetengetriebe auf. Die Stegwelleist Abtriebswelle des Getriebes. Weiterhin gibt es ein kleines und eingroßes Sonnenrad sowie ein kleines und ein großes Hohlrad. Der Stegträgt 3 Sätze Planetenräder, von denen jeder 2 miteinander kämmendePlanetenräder umfaßt. Das kleine Planetenrad geht über die gesamteBreite des Steges und kämmt mit dem kleinen Hohlrad und dem großenSonnenrad. Das kleine Sonnenrad und das große Hohlrad kämmen mitdem großen Planetenrad, das nur halb so breit ist wie das kleinePlanetenrad. Das Planetengetriebe entspricht einem etwas erweitertenRavigneaux-Satz.
Bild 3: Wirkungsgradkennfeld einer permanenterregtenSynchronmaschine
Das kleine Sonnenrad ist mit der E-Maschine E1, das große Sonnenrad mitder E-Maschine E2 fest verbunden. In einer gestrecktenGetriebeausführung für ein heckgetriebenes Fahrzeug (Bild 2) sitzen diebeiden E-Maschinen koaxial zum Planetengetriebe. Als schlankeInnenläufermaschinen haben sie ein kleines Massenträgheitsmoment.Außerdem lassen sich außenliegende Statoren besser kühlen.
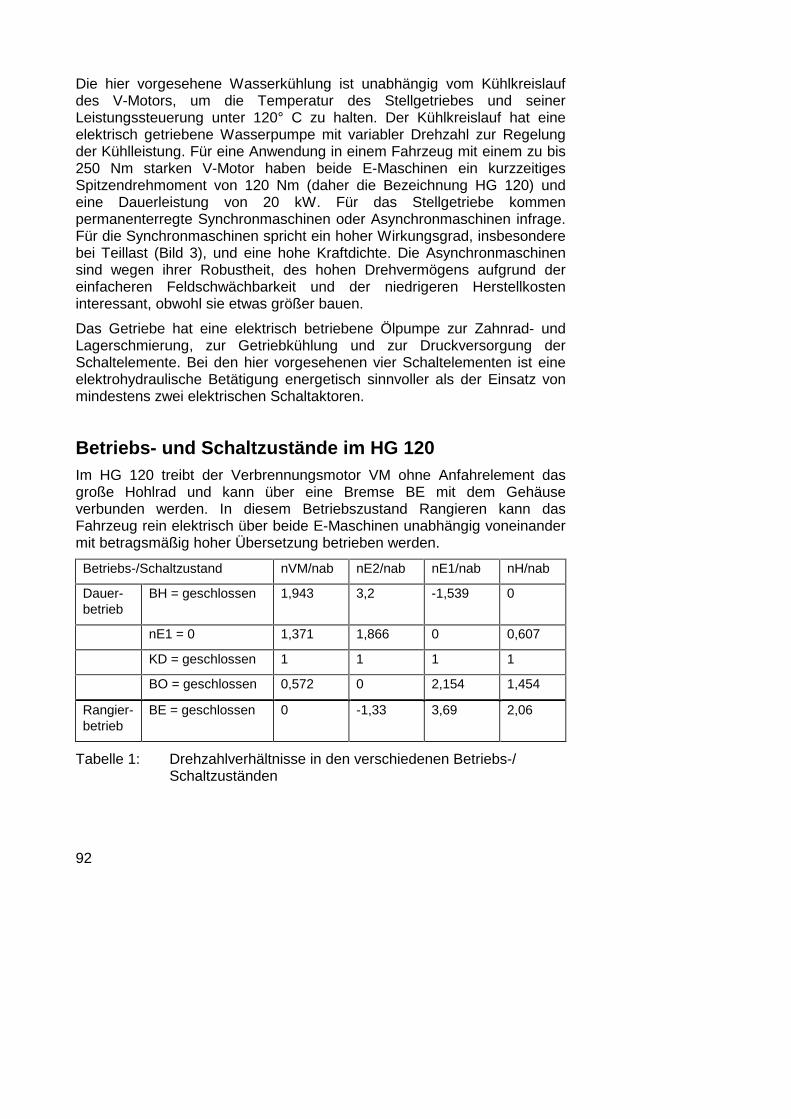
92
Die hier vorgesehene Wasserkühlung ist unabhängig vom Kühlkreislaufdes V-Motors, um die Temperatur des Stellgetriebes und seinerLeistungssteuerung unter 120° C zu halten. Der Kühlkreislauf hat eineelektrisch getriebene Wasserpumpe mit variabler Drehzahl zur Regelungder Kühlleistung. Für eine Anwendung in einem Fahrzeug mit einem zu bis250 Nm starken V-Motor haben beide E-Maschinen ein kurzzeitigesSpitzendrehmoment von 120 Nm (daher die Bezeichnung HG 120) undeine Dauerleistung von 20 kW. Für das Stellgetriebe kommenpermanenterregte Synchronmaschinen oder Asynchronmaschinen infrage.Für die Synchronmaschinen spricht ein hoher Wirkungsgrad, insbesonderebei Teillast (Bild 3), und eine hohe Kraftdichte. Die Asynchronmaschinensind wegen ihrer Robustheit, des hohen Drehvermögens aufgrund dereinfacheren Feldschwächbarkeit und der niedrigeren Herstellkosteninteressant, obwohl sie etwas größer bauen.
Das Getriebe hat eine elektrisch betriebene Ölpumpe zur Zahnrad- undLagerschmierung, zur Getriebkühlung und zur Druckversorgung derSchaltelemente. Bei den hier vorgesehenen vier Schaltelementen ist eineelektrohydraulische Betätigung energetisch sinnvoller als der Einsatz vonmindestens zwei elektrischen Schaltaktoren.
Betriebs- und Schaltzustände im HG 120Im HG 120 treibt der Verbrennungsmotor VM ohne Anfahrelement dasgroße Hohlrad und kann über eine Bremse BE mit dem Gehäuseverbunden werden. In diesem Betriebszustand Rangieren kann dasFahrzeug rein elektrisch über beide E-Maschinen unabhängig voneinandermit betragsmäßig hoher Übersetzung betrieben werden.
Betriebs-/Schaltzustand nVM/nab nE2/nab nE1/nab nH/nab
Dauer-betrieb
BH = geschlossen 1,943 3,2 -1,539 0
nE1 = 0 1,371 1,866 0 0,607
KD = geschlossen 1 1 1 1
BO = geschlossen 0,572 0 2,154 1,454
Rangier-betrieb
BE = geschlossen 0 -1,33 3,69 2,06
Tabelle 1: Drehzahlverhältnisse in den verschiedenen Betriebs-/Schaltzuständen
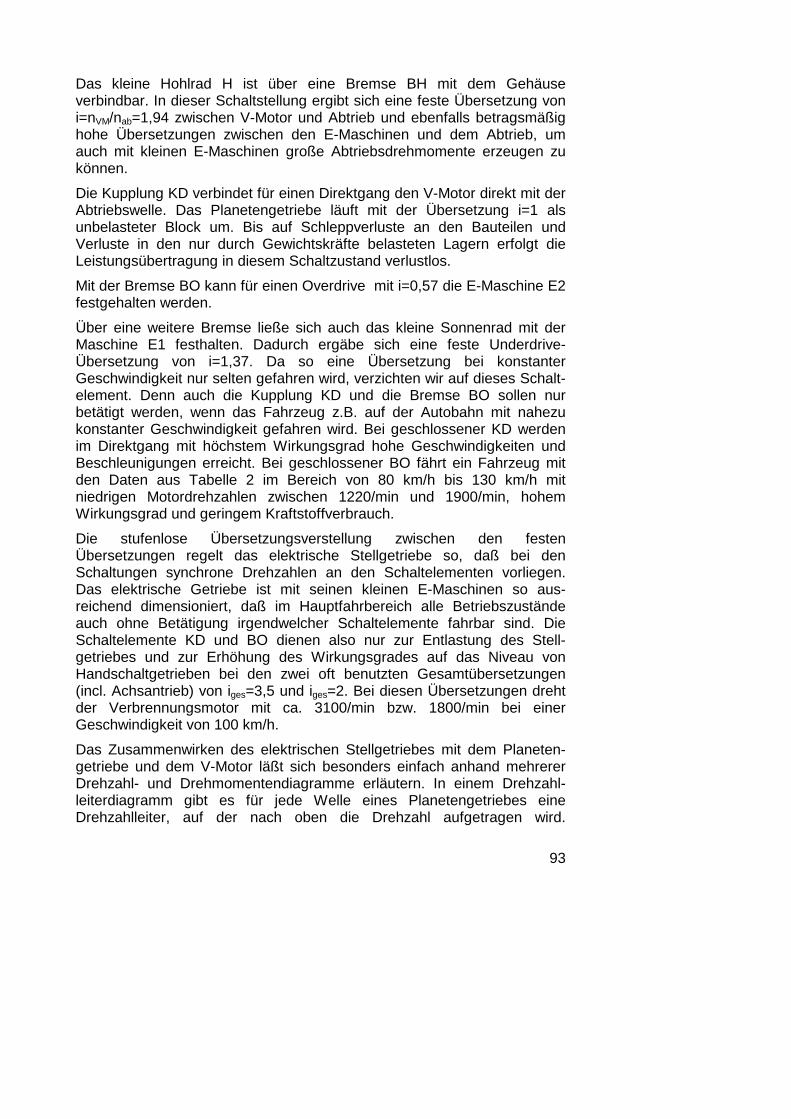
93
Das kleine Hohlrad H ist über eine Bremse BH mit dem Gehäuseverbindbar. In dieser Schaltstellung ergibt sich eine feste Übersetzung voni=nVM/nab=1,94 zwischen V-Motor und Abtrieb und ebenfalls betragsmäßighohe Übersetzungen zwischen den E-Maschinen und dem Abtrieb, umauch mit kleinen E-Maschinen große Abtriebsdrehmomente erzeugen zukönnen.
Die Kupplung KD verbindet für einen Direktgang den V-Motor direkt mit derAbtriebswelle. Das Planetengetriebe läuft mit der Übersetzung i=1 alsunbelasteter Block um. Bis auf Schleppverluste an den Bauteilen undVerluste in den nur durch Gewichtskräfte belasteten Lagern erfolgt dieLeistungsübertragung in diesem Schaltzustand verlustlos.
Mit der Bremse BO kann für einen Overdrive mit i=0,57 die E-Maschine E2festgehalten werden.
Über eine weitere Bremse ließe sich auch das kleine Sonnenrad mit derMaschine E1 festhalten. Dadurch ergäbe sich eine feste Underdrive-Übersetzung von i=1,37. Da so eine Übersetzung bei konstanterGeschwindigkeit nur selten gefahren wird, verzichten wir auf dieses Schalt-element. Denn auch die Kupplung KD und die Bremse BO sollen nurbetätigt werden, wenn das Fahrzeug z.B. auf der Autobahn mit nahezukonstanter Geschwindigkeit gefahren wird. Bei geschlossener KD werdenim Direktgang mit höchstem Wirkungsgrad hohe Geschwindigkeiten undBeschleunigungen erreicht. Bei geschlossener BO fährt ein Fahrzeug mitden Daten aus Tabelle 2 im Bereich von 80 km/h bis 130 km/h mitniedrigen Motordrehzahlen zwischen 1220/min und 1900/min, hohemWirkungsgrad und geringem Kraftstoffverbrauch.
Die stufenlose Übersetzungsverstellung zwischen den festenÜbersetzungen regelt das elektrische Stellgetriebe so, daß bei denSchaltungen synchrone Drehzahlen an den Schaltelementen vorliegen.Das elektrische Getriebe ist mit seinen kleinen E-Maschinen so aus-reichend dimensioniert, daß im Hauptfahrbereich alle Betriebszuständeauch ohne Betätigung irgendwelcher Schaltelemente fahrbar sind. DieSchaltelemente KD und BO dienen also nur zur Entlastung des Stell-getriebes und zur Erhöhung des Wirkungsgrades auf das Niveau vonHandschaltgetrieben bei den zwei oft benutzten Gesamtübersetzungen(incl. Achsantrieb) von iges=3,5 und iges=2. Bei diesen Übersetzungen drehtder Verbrennungsmotor mit ca. 3100/min bzw. 1800/min bei einerGeschwindigkeit von 100 km/h.
Das Zusammenwirken des elektrischen Stellgetriebes mit dem Planeten-getriebe und dem V-Motor läßt sich besonders einfach anhand mehrererDrehzahl- und Drehmomentendiagramme erläutern. In einem Drehzahl-leiterdiagramm gibt es für jede Welle eines Planetengetriebes eineDrehzahlleiter, auf der nach oben die Drehzahl aufgetragen wird.
94
Der Abstand der Drehzahlleitern wird durch die Standübersetzungen bzw.Zähnezahlen im Getriebe bestimmt. Jeder Betriebszustand läßt sich durcheine gerade Linie beschreiben, deren Schnittpunkte mit den Drehzahl-leitern den momentanen Drehzahlzustand wiedergibt.
Die Drehmomentverhältnisse werden deutlich, wenn man die Linie desBetriebszustandes als einen Hebel auffaßt und die Drehmomente an denGetriebewellen als Kräfte an diesem Hebel. Während bei einemdreiwelligen Planetengetriebe feste Beziehungen zwischen den Dreh-momenten der drei Wellen vorliegen, sind in einem fünfwelligen Planeten-getriebe vielfältige Drehmomentverhältnisse möglich. Die folgenden Bilderverdeutlichen, wie der V-Motor, die E-Maschinen und der Speicher in denverschiedenen Betriebszuständen zusammenarbeiten.
Um ein Fahrzeug mit dem HG 120 aus dem Stillstand zu beschleunigen,versuchen zuerst beide E-Maschinen alleine die Abtriebslast zu stützenund die Beschleunigungsleistung aufzubringen (Bild 4). Eine der beidenE-Maschinen (z.B. E2) wird dabei über das Fahrpedal lastgeregelt. Dieandere (E1) wird drehzahlgeregelt, und zwar so, daß das große Hohlradsteht (nH=0/min). Die Übersetzungen sind so gewählt, daß das Getriebedann mit nVM/nab ca. 2 läuft und daß die Drehzahlleiter desSteges=Abtriebswelle ziemlich genau in der Mitte zwischen den Drehzahl-leitern der beiden E-Maschinen steht. Das Abtriebsdrehmoment belastetdie E-Maschinen daher nahezu gleichmäßig. Wenn die beidenE-Maschinen, wie in diesem Beispiel max. jeweils 120 Nm aufbringen,kann so ein Abtriebsdrehmoment von ca. 240 Nm abgestützt werden. DaE2 eine positive Drehzahl aufweist, fließt von E2 eine Leistung über dasPlanetengetriebe zum Abtrieb. Ein Teil dieser Leistung fließt jedoch überdas kleine Sonnenrad, E1 und die Leistungssteuerung im Kreis wieder E2zu, solange E1 eine negative Drehzahl hat.
Reicht ein Abtriebsdrehmoment von 240 Nm zum Anfahren nicht aus, sowird das bereits stehende große Hohlrad H mit der Bremse BH ansGehäuse gekoppelt (Bild 5). Für BH wäre somit auch ein formschlüssigesSchaltelement geeignet. Nun kann hier ebenfalls ein Drehmoment ab-gestützt und E1 entlastet werden. Sobald die Bremse BH Momentüberträgt, wird auch E1 lastgeregelt, da nun beide E-Maschinenunabhängig voneinander arbeiten. Je mehr E1 entlastet wird, desto mehrLast übernimmt BH, bis sich bei E1 das Drehmoment sogar umkehrt(Bild 6). Dann treiben beide E-Maschinen den Abtrieb. Mit BH alsAbstützpunkt des Hebels erzeugen die je 120 Nm der E-Maschinen dasmax. erforderliche Abtriebsdrehmoment von ca. 600 Nm. Das reicht sicherzum Beschleunigen des Fahrzeuges und des V-Motors. Sobald der V-Motor seine Mindestdrehzahl erreicht, wird er gestartet (Bild 7). Nach derFahrpedalstellung gibt er ein bestimmtes Drehmoment ab.
95
Um den V-Motor möglichst ruckfrei zuzuschalten, werden mit demDrehmomentaufbau des V-Motors die Momente in den E-Maschinenreduziert, und zwar hauptsächlich an E1.
Bei TE1=TE2=0Nm werden beide E-Maschinen geschleppt. Das Fahrzeugfährt rein verbrennungsmotorisch mit einer Übersetzung von ca. 2. So kannz.B. bei einer längeren Paßfahrt das elektrische Getriebe entlastet werdenund nur noch bei kurzzeitigen Lastspitzen als „Booster” wirken. DasMoment am Hohlrad H entspricht dann ungefähr dem Motormoment.
Wirkt das Drehmoment TE1 wie in Bild 8 nach oben und das DrehmomentTE2 nach unten, so wird Welle H immer weiter entlastet. Sobald TH=0Nmist, kann die Bremse BH lastfrei geöffnet werden. Sofort wird E1 wiederdrehzahlgeregelt und E2 lastgeregelt. Damit ist der Anfahrvorgang unterVollast beendet.
Die häufigen Anfahrvorgänge mit Abtriebsdrehmomenten kleiner 240 Nmkommen ohne Schaltung von BH aus. Über die beiden E-Maschinenwerden das Fahrzeug und der V-Motor beschleunigt. Nach dem Startendes V-Motors befindet sich das Getriebe sofort im Zustand HybridesFahren mit Speicherbetrieb (Bild 8) .
Über die Drehzahlregelung von E1 kann nun stufenlos die Übersetzungeingestellt werden. Dabei fließt von E1 Leistung ins Getriebe zum Abtrieb.Über die Lastregelung von E2 wird die Lade- oder Entladeleistung derBatterie eingestellt. Je nach den Erfordernissen kann während der Fahrtder Speicher geladen werden, oder Speicherleistung als „Booster”zusätzlich zum V-Motor wirken. Der maximale „Booster”-Effekt hängt vonden momentan möglichen Vollastdrehmomenten der beiden E-Maschinenab, die mit den Maschinendrehzahlen abnehmen. Bei mittlerenÜbersetzungen um i=1 kann über alle o.a. Antriebe zusammen einAbtriebsdrehmoment erzeugt werden wie bei einem konventionellenFahrzeug mit einem über 400 Nm starken V-Motor. Wenn die Summe derLeistungen beider E-Maschinen und der elektrischen Verlustleistung Nullist, wird der Speicher momentan nicht benutzt.
Ein Mindestladezustand in der Batterie darf durch den Fahrbetrieb nichtunterschritten werden, um ausreichend Energie für andere Verbraucherund für einen Notstart zu haben. Sollte beim Anfahren der Speicher einmalfast leer sein, kann das Getriebe auch in einem geared neutral-Modus(Bild 10) beschleunigt werden. Dazu wird im Fahrzeugstillstand über E2drehzahlgeregelt der V-Motor auf seine Leerlaufdrehzahl beschleunigtund gestartet. E1 wird dabei so drehzahlgeregelt, daß der Abtriebstehenbleibt. Sobald das Fahrpedal betätigt wird, wird der Speichergeladen und das Fahrzeug beschleunigt bis i=2. Danach wird in denbekannten Hybridmodus umgeschaltet.
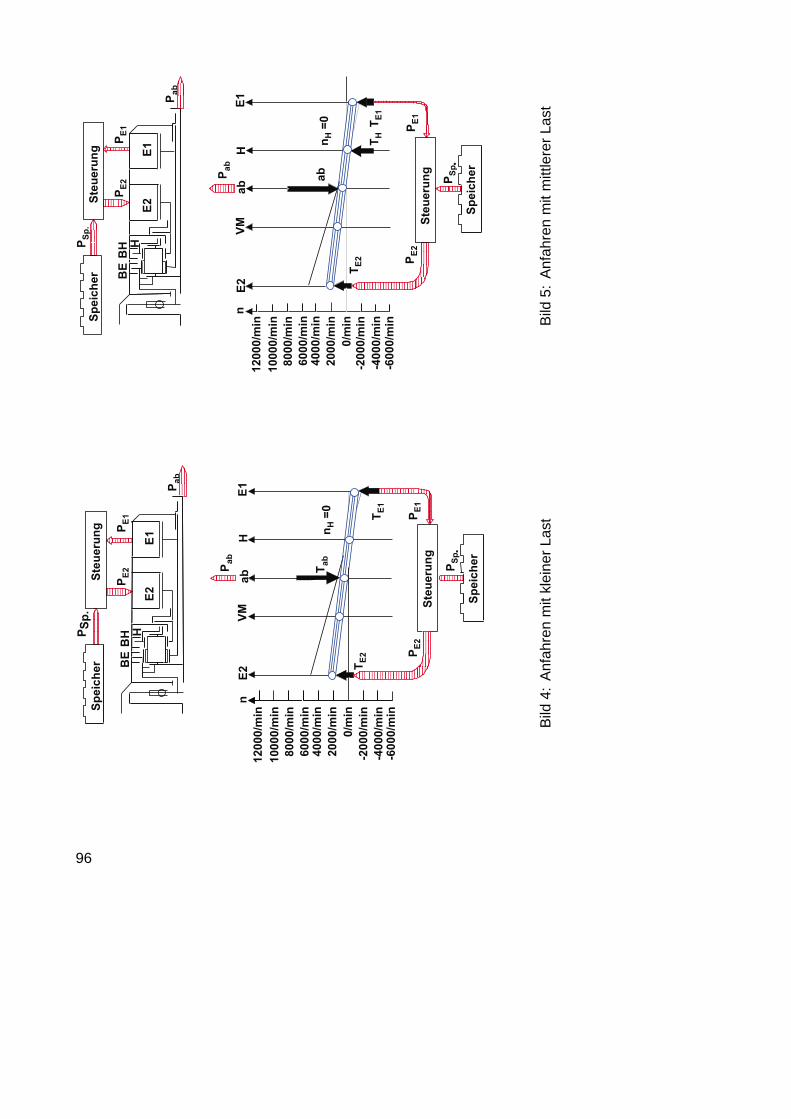
96
E1
Pa
b
PS
p..
Ste
ue
run
g
PE
2P
E1
TE
2
TE
1
nH
=0
ab
Ha
bV
ME
2n
TH
Sp
eic
he
rP
Sp
.S
teu
eru
ng
Sp
eic
he
r
12000/m
in
2000/m
in
-6000/m
in-4
000/m
in
-2000/m
in
0/m
in
4000/m
in6000/m
in
8000/m
in
10000/m
in
BE
BH
H
Pa
b
PE
2
E2
PE
1
E1
Ste
ue
run
g
PS
p..
PE
2P
E1
TE
2
Ta
bn
H=
0
TE
1
nE
2V
Ma
bH
E1
12000/m
in
2000/m
in
-6000/m
in-4
000/m
in
-2000/m
in
0/m
in
4000/m
in6000/m
in
8000/m
in
10000/m
in
Sp
eic
he
r
Sp
eic
he
rS
teu
eru
ng
PS
p.
Pa
b
BE
BH
H
PE
2
E2
PE
1
E1
Pa
b
Bild
5:
Anf
ahre
n m
it m
ittle
rer
Last
Bild
4:
Anf
ahre
n m
it kl
eine
r La
st
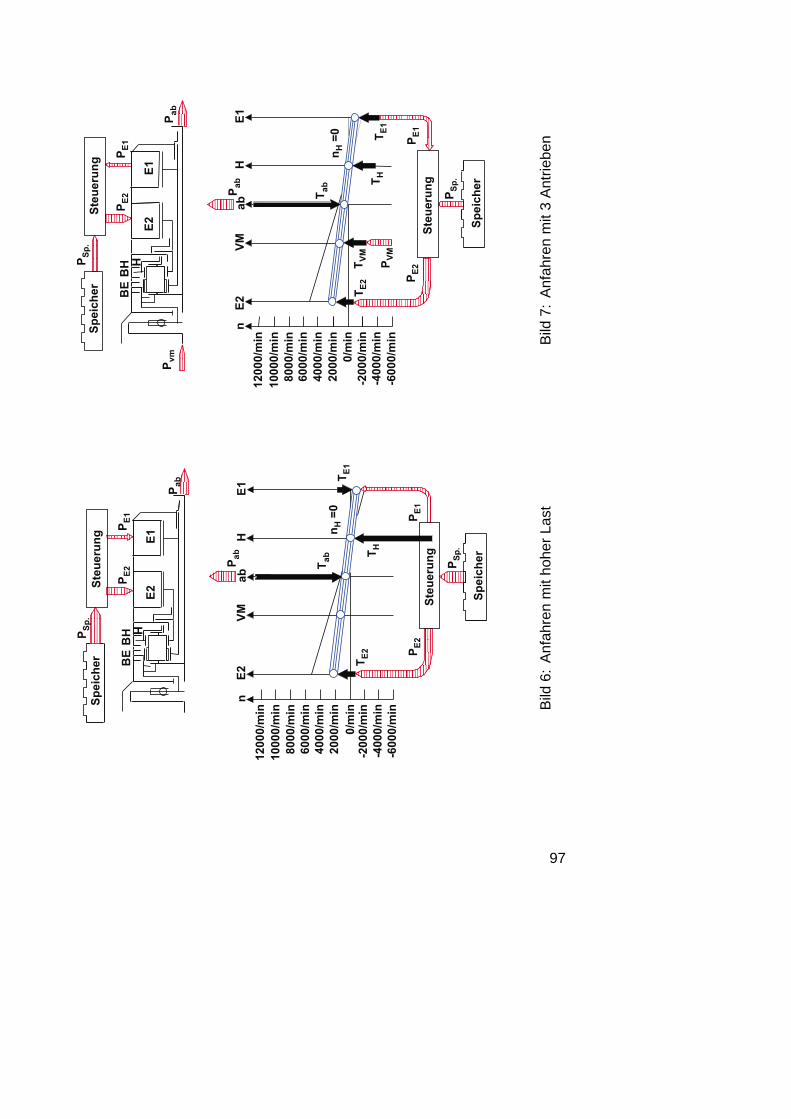
97
Ste
ue
run
g
Pa
bn
E2
VM
ab
HE
1
Sp
eic
he
r
Sp
eic
he
rS
teu
eru
ng
Pv
m
PS
p.
TE
2
TH
TV
M
PV
M
PE
2
Ta
b
TE
1
PE
1
PS
p.
12000/m
in
2000/m
in
-6000/m
in
-4000/m
in
-2000/m
in
0/m
in
4000/m
in
6000/m
in
8000/m
in
10000/m
in
Pa
b
nH
=0
BE
BH
H
PE
2
E2
PE
1
E1
Ste
ue
run
g
PS
p.
nE
2V
Ma
bH
E1
Sp
eic
he
rP
Sp
.
Ste
ue
run
g
Pa
b
PE
2P
E1
TE
1
Ta
b
TE
2T
H
Sp
eic
he
r
12000/m
in
2000/m
in
-6000/m
in
-4000/m
in
-2000/m
in0/m
in
4000/m
in
6000/m
in
8000/m
in
10000/m
in
Pa
b
nH
=0
BE
BH
H
PE
2
E2
PE
1
E1
Bild
7:
Anf
ahre
n m
it 3
Ant
riebe
nB
ild 6
:A
nfah
ren
mit
hohe
r La
st
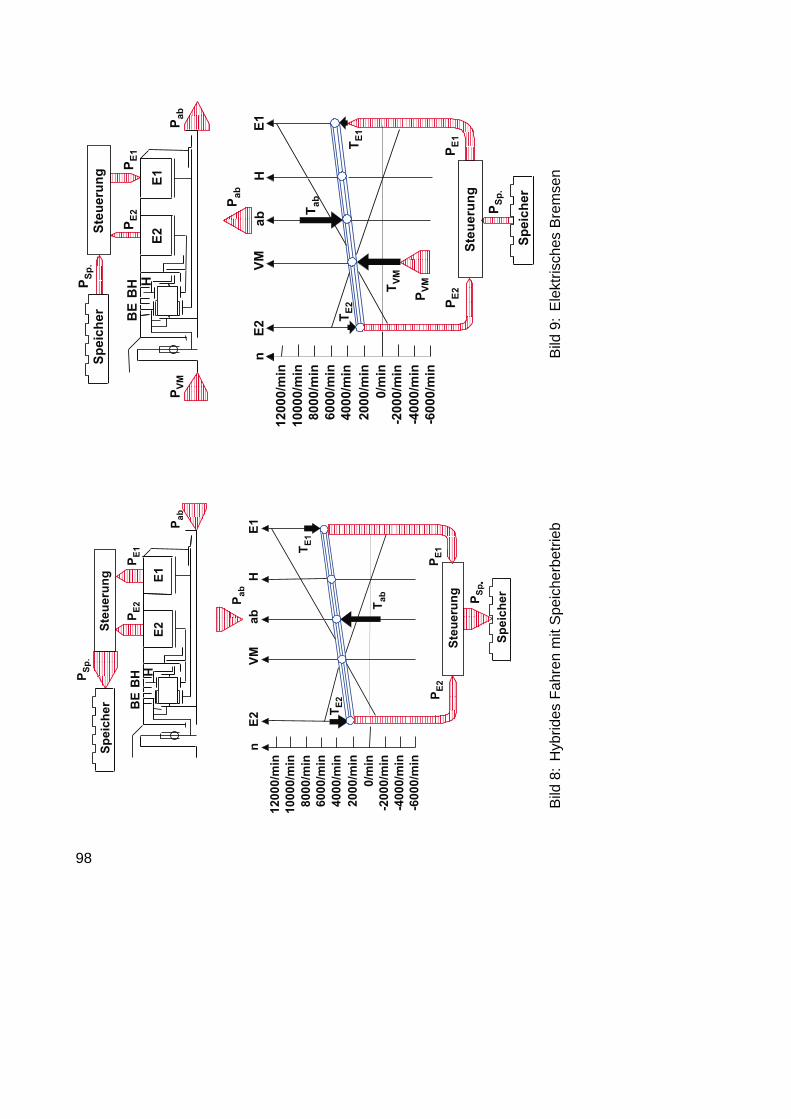
98
nE
2V
Ma
bH
E1
12000/m
in
2000/m
in
-6000/m
in
-4000/m
in
-2000/m
in
0/m
in
4000/m
in
6000/m
in
8000/m
in
10000/m
in
PV
M
Ste
ue
run
gP
Sp
.
Sp
eic
he
r
Pa
b
TE
1
TE
2
TV
M
PV
M
PE
2P
E1
Ste
ue
run
g
PS
p.
Sp
eic
he
r
Ta
b
Pa
b
BE
BH
H
PE
2
E2
PE
1
E1
nSp
eic
he
r
PS
p.
Ste
ue
run
g
Pa
b
12000/m
in
2000/m
in
-6000/m
in
-4000/m
in
-2000/m
in
0/m
in
4000/m
in
6000/m
in
8000/m
in
10000/m
in
E2
VM
ab
HE
1
TE
1
TE
2
Ta
b
PE
2P
E1
PS
p..
Sp
eic
he
r
Ste
ue
run
g
Pa
b
BE
BH
H
PE
2
E2
PE
1
E1
Bild
9:
Ele
ktris
ches
Bre
mse
nB
ild 8
:H
ybrid
es F
ahre
n m
it S
peic
herb
etrie
b
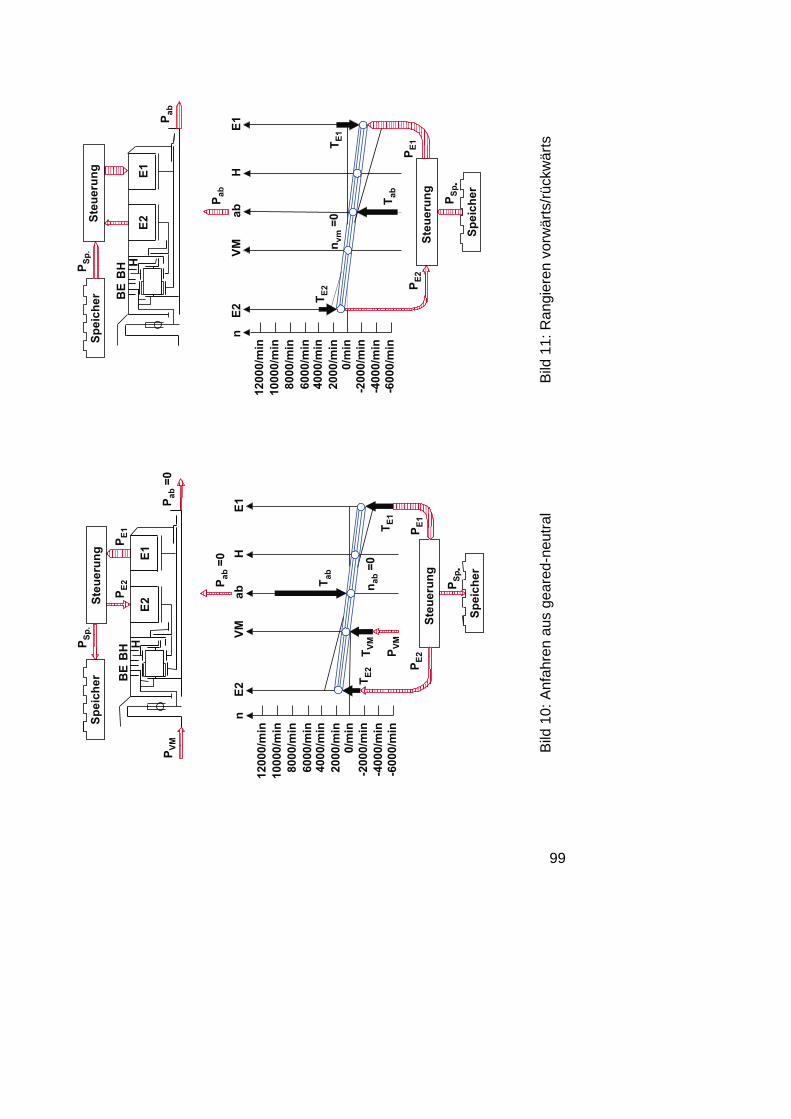
99
nE
2
nv
m=
0
Ste
ue
run
g
PS
p..
ab
VM
HE
1Pa
b
Sp
eic
he
rS
teu
eru
ng
PS
p.
Pa
b
Sp
eic
he
r
PE
2
TE
1
Ta
b
PE
1
TE
2
BE
BH
H
E2
E1
12000/m
in
2000/m
in
-6000/m
in
-4000/m
in
-2000/m
in
0/m
in
4000/m
in6000/m
in
8000/m
in
10000/m
in
E2
Ste
ue
run
g
ab
VM
Pa
b=
0 HE
1
Sp
eic
he
rS
teu
eru
ng
PS
p.
PV
MP
ab
=0
n
12000/m
in
2000/m
in
-6000/m
in
-4000/m
in
-2000/m
in
0/m
in
4000/m
in6000/m
in
8000/m
in
10000/m
in
Ta
b
PE
2
Sp
eic
he
r
TE
2
TE
1
TV
M
PV
M
na
b=
0
PS
p..
PE
2P
E1
BE
BH
H
E2
E1
PE
1
Bild
11:
Ran
gier
en v
orw
ärts
/rüc
kwär
tsB
ild 1
0: A
nfah
ren
aus
gear
ed-n
eutr
al
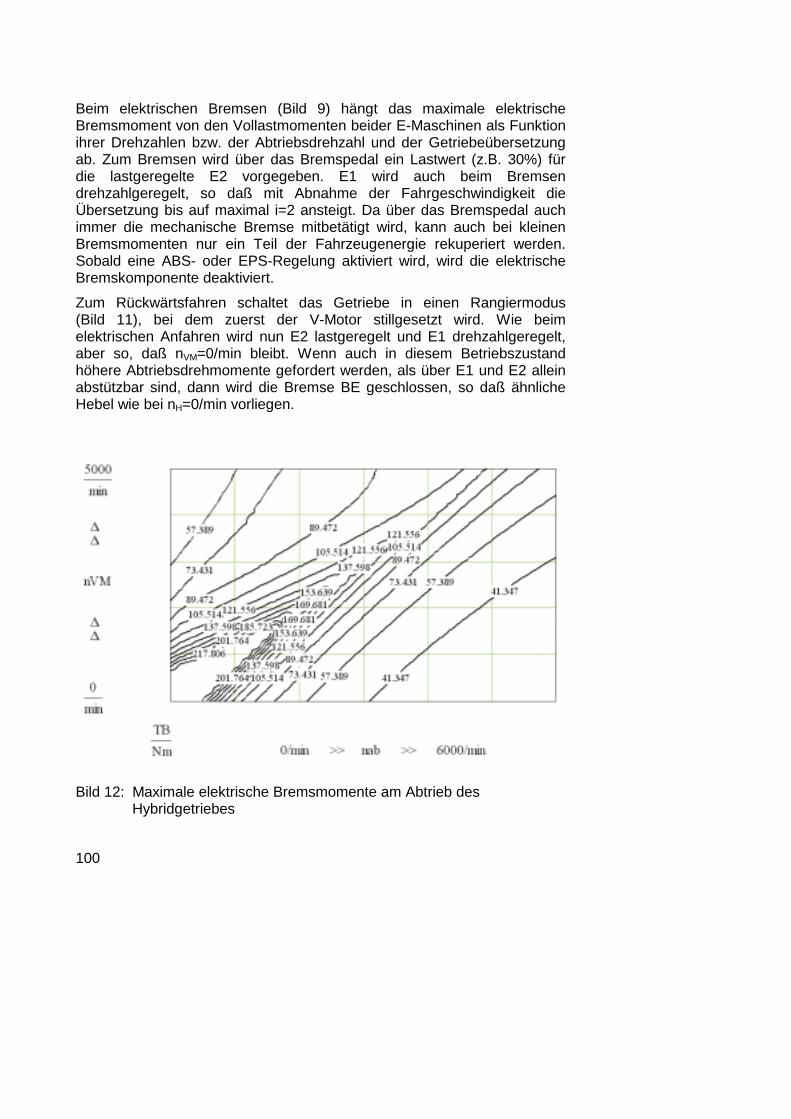
100
Beim elektrischen Bremsen (Bild 9) hängt das maximale elektrischeBremsmoment von den Vollastmomenten beider E-Maschinen als Funktionihrer Drehzahlen bzw. der Abtriebsdrehzahl und der Getriebeübersetzungab. Zum Bremsen wird über das Bremspedal ein Lastwert (z.B. 30%) fürdie lastgeregelte E2 vorgegeben. E1 wird auch beim Bremsendrehzahlgeregelt, so daß mit Abnahme der Fahrgeschwindigkeit dieÜbersetzung bis auf maximal i=2 ansteigt. Da über das Bremspedal auchimmer die mechanische Bremse mitbetätigt wird, kann auch bei kleinenBremsmomenten nur ein Teil der Fahrzeugenergie rekuperiert werden.Sobald eine ABS- oder EPS-Regelung aktiviert wird, wird die elektrischeBremskomponente deaktiviert.
Zum Rückwärtsfahren schaltet das Getriebe in einen Rangiermodus(Bild 11), bei dem zuerst der V-Motor stillgesetzt wird. Wie beimelektrischen Anfahren wird nun E2 lastgeregelt und E1 drehzahlgeregelt,aber so, daß nVM=0/min bleibt. Wenn auch in diesem Betriebszustandhöhere Abtriebsdrehmomente gefordert werden, als über E1 und E2 alleinabstützbar sind, dann wird die Bremse BE geschlossen, so daß ähnlicheHebel wie bei nH=0/min vorliegen.
Bild 12: Maximale elektrische Bremsmomente am Abtrieb desHybridgetriebes
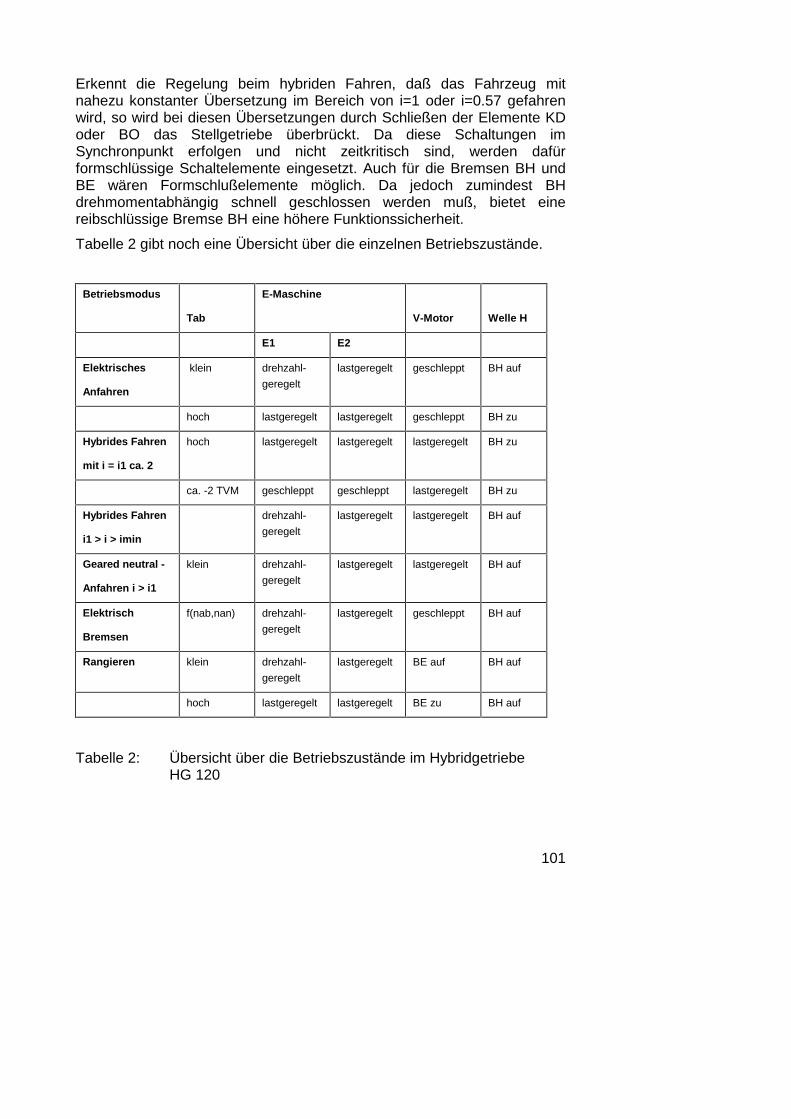
101
Erkennt die Regelung beim hybriden Fahren, daß das Fahrzeug mitnahezu konstanter Übersetzung im Bereich von i=1 oder i=0.57 gefahrenwird, so wird bei diesen Übersetzungen durch Schließen der Elemente KDoder BO das Stellgetriebe überbrückt. Da diese Schaltungen imSynchronpunkt erfolgen und nicht zeitkritisch sind, werden dafürformschlüssige Schaltelemente eingesetzt. Auch für die Bremsen BH undBE wären Formschlußelemente möglich. Da jedoch zumindest BHdrehmomentabhängig schnell geschlossen werden muß, bietet einereibschlüssige Bremse BH eine höhere Funktionssicherheit.
Tabelle 2 gibt noch eine Übersicht über die einzelnen Betriebszustände.
Betriebsmodus
Tab
E-Maschine
V-Motor Welle H
E1 E2
Elektrisches
Anfahren
klein drehzahl-
geregelt
lastgeregelt geschleppt BH auf
hoch lastgeregelt lastgeregelt geschleppt BH zu
Hybrides Fahren
mit i = i1 ca. 2
hoch lastgeregelt lastgeregelt lastgeregelt BH zu
ca. -2 TVM geschleppt geschleppt lastgeregelt BH zu
Hybrides Fahren
i1 > i > imin
drehzahl-
geregelt
lastgeregelt lastgeregelt BH auf
Geared neutral -
Anfahren i > i1
klein drehzahl-
geregelt
lastgeregelt lastgeregelt BH auf
Elektrisch
Bremsen
f(nab,nan) drehzahl-
geregelt
lastgeregelt geschleppt BH auf
Rangieren klein drehzahl-
geregelt
lastgeregelt BE auf BH auf
hoch lastgeregelt lastgeregelt BE zu BH auf
Tabelle 2: Übersicht über die Betriebszustände im HybridgetriebeHG 120
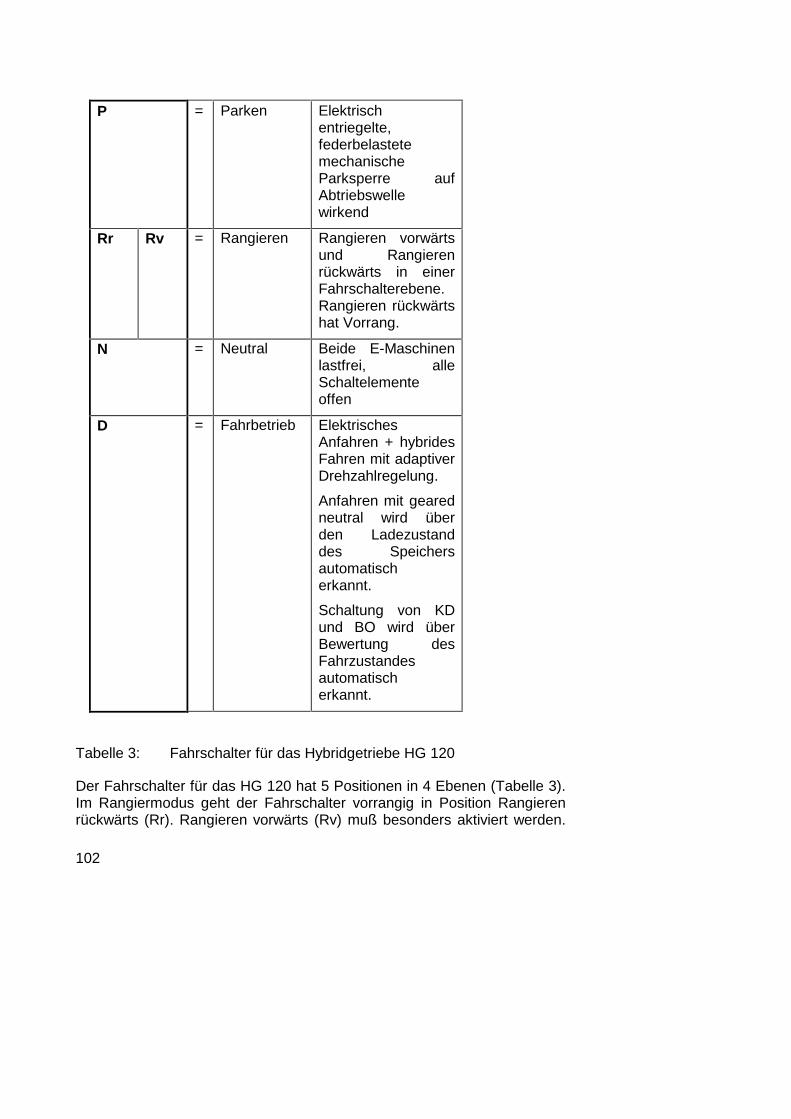
102
P = Parken Elektrischentriegelte,federbelastetemechanischeParksperre aufAbtriebswellewirkend
Rr Rv = Rangieren Rangieren vorwärtsund Rangierenrückwärts in einerFahrschalterebene.Rangieren rückwärtshat Vorrang.
N = Neutral Beide E-Maschinenlastfrei, alleSchaltelementeoffen
D = Fahrbetrieb ElektrischesAnfahren + hybridesFahren mit adaptiverDrehzahlregelung.
Anfahren mit gearedneutral wird überden Ladezustanddes Speichersautomatischerkannt.
Schaltung von KDund BO wird überBewertung desFahrzustandesautomatischerkannt.
Tabelle 3: Fahrschalter für das Hybridgetriebe HG 120
Der Fahrschalter für das HG 120 hat 5 Positionen in 4 Ebenen (Tabelle 3).Im Rangiermodus geht der Fahrschalter vorrangig in Position Rangierenrückwärts (Rr). Rangieren vorwärts (Rv) muß besonders aktiviert werden.
103
In diesem rein elektrischen Fahrbetrieb kann das FahrzeugGeschwindigkeiten bis ca. 100 km/h erreichen. Im Dauerbetrieb erkenntdie Regelung über den Ladezustand des Speichers, in welchem Modusangefahren werden soll und wann feste Übersetzungen zu schalten sind.
Regelung des Hybridgetriebes und Simulation desBetriebsverhaltensWie heute bereits von Automatgetrieben bekannt, erhält dasHybridgetriebe eine adaptive Regelung. Die Zuordnung der Solldrehzahldes V-Motors zur Fahrgeschwindigkeit hängt dabei vom momentanenStreckenprofil und der Fahrweise des Fahrers (Geschwindigkeitsprofil) ab.Aus Fahrgeschwindigkeit, Beschleunigung und Steigung wird in einemBeobachtungszeitfenster ein mittlerer Dynamikleistungswert bestimmt. DasBeobachtungsfenster ist geschwindigkeitsabhängig und beträgt imStadtverkehr mit max. Geschwindigkeiten bis 70 km/h nur einigeSekunden. Je höher die Geschwindigkeit außerstädtisch ist, desto größerwird das Beobachtungsfenster, um das Regelverhalten nicht zu schnell zuverändern.
Die mittlere Dynamikleistung wird zum Leistungsbedarf für die momentane,als konstant angenommene Fahrgeschwindigkeit addiert. Über dieMinimalverbrauchskennlinie ergibt sich so eine Solldrehzahl für denV-Motor.
Der Dynamikwert hat nicht nur Einfluß auf die RegelkennlinieSolldrehzahl/Fahrgeschwindigkeit, sondern er beeinflußt auch diezulässigen Übersetzungsgradienten. Bei einem hohen Dynamikanspruchsoll die Motordrehzahl bei einer Lastforderung durch Erhöhung derÜbersetzung schnell steigen können, sie soll aber bei Lastrücknahme nichtdurch Übersetzungsverringerung zu schnell sinken. Im Gegensatz dazuverlangt eine kraftstoffsparende Fahrweise eine schnelleDrehzahlabnahme, wann immer die Last dies zuläßt, und eine etwaslangsamere Drehzahlsteigerung bei Lasterhöhung. Die zulässigenDrehzahlgradienten hängen dabei nicht nur vom Dynamikwert ab, sondernauch noch von der Fahrgeschwindigkeit und der momentanenÜbersetzung. Mit steigender Fahrgeschwindigkeit und fallenderÜbersetzung nehmen alle Gradienten ab.
Um Fahrern, die bisher gestufte Getriebe gewohnt sind, ein bekanntesFahrgefühl zu vermitteln, soll eine mit der Fahrzeuggeschwindigkeitprogressiv steigende Mindestdrehzahl des V-Motors nicht unterschrittenwerden. Später können auch andere, noch mehr auf Kraftstoffsparenorientierte CVT-Regelungen verwendet werden. Durch den Hybridaufbaumit Energiespeicher sind sogar getaktete Betriebsweisen möglich, bei
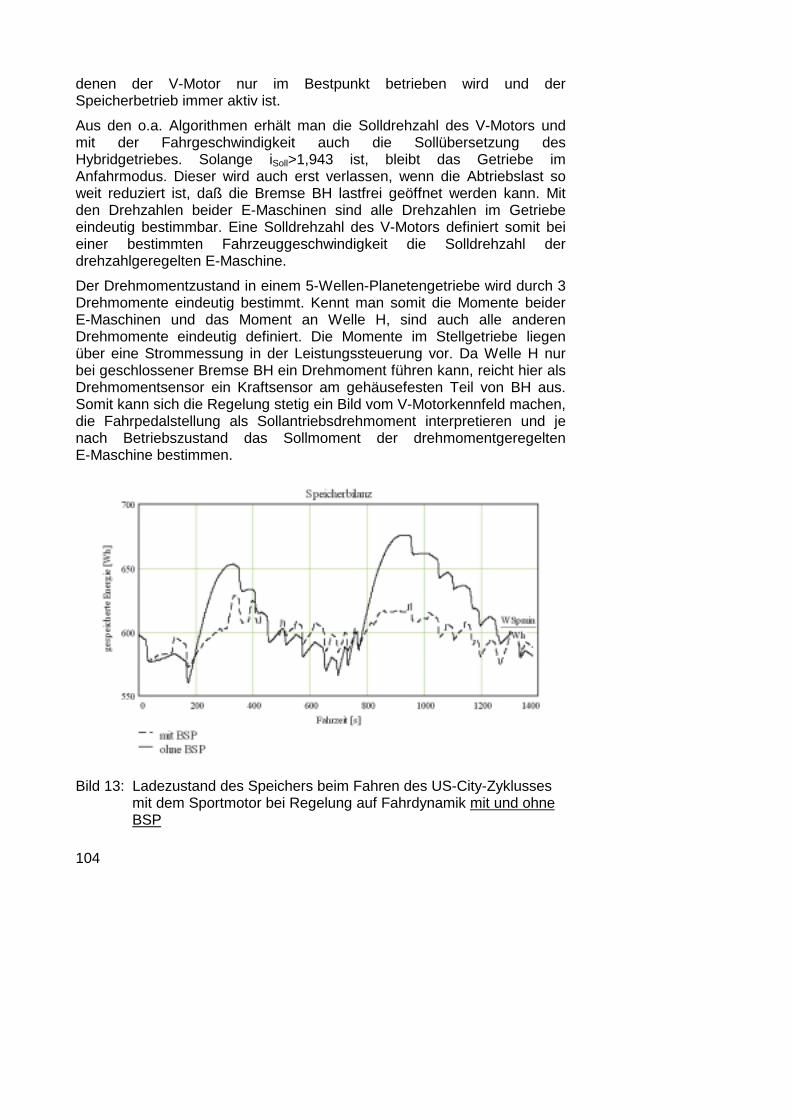
104
denen der V-Motor nur im Bestpunkt betrieben wird und derSpeicherbetrieb immer aktiv ist.
Aus den o.a. Algorithmen erhält man die Solldrehzahl des V-Motors undmit der Fahrgeschwindigkeit auch die Sollübersetzung desHybridgetriebes. Solange iSoll>1,943 ist, bleibt das Getriebe imAnfahrmodus. Dieser wird auch erst verlassen, wenn die Abtriebslast soweit reduziert ist, daß die Bremse BH lastfrei geöffnet werden kann. Mitden Drehzahlen beider E-Maschinen sind alle Drehzahlen im Getriebeeindeutig bestimmbar. Eine Solldrehzahl des V-Motors definiert somit beieiner bestimmten Fahrzeuggeschwindigkeit die Solldrehzahl derdrehzahlgeregelten E-Maschine.
Der Drehmomentzustand in einem 5-Wellen-Planetengetriebe wird durch 3Drehmomente eindeutig bestimmt. Kennt man somit die Momente beiderE-Maschinen und das Moment an Welle H, sind auch alle anderenDrehmomente eindeutig definiert. Die Momente im Stellgetriebe liegenüber eine Strommessung in der Leistungssteuerung vor. Da Welle H nurbei geschlossener Bremse BH ein Drehmoment führen kann, reicht hier alsDrehmomentsensor ein Kraftsensor am gehäusefesten Teil von BH aus.Somit kann sich die Regelung stetig ein Bild vom V-Motorkennfeld machen,die Fahrpedalstellung als Sollantriebsdrehmoment interpretieren und jenach Betriebszustand das Sollmoment der drehmomentgeregeltenE-Maschine bestimmen.
Bild 13: Ladezustand des Speichers beim Fahren des US-City-Zyklussesmit dem Sportmotor bei Regelung auf Fahrdynamik mit und ohneBSP
105
Um mit einem Mittelklassefahrzeug innerstädtisch noch eine Strecke von20 km rein elektrisch fahren zu können, reicht eine Batteriekapazität von 2bis 2,5 kWh aus. Möchte man nur den Rangierbetrieb rein elektrischabdecken, so reicht für einen Startvorgang unter Extrembedingung und füreinen effektiven Bremsbetrieb eine Speicherkapazität von max. 1 kWh aus.Bei jedem elektrischen Anfahren, jedem „Booster”-Betrieb und durchweitere elektrische Verbraucher wird die Batterie entladen. Sinkt derLadezustand z.B. unter 60%, wird im Hybridmodus die Batterie geladen.Somit bleibt immer eine ausreichende Kapazität für einen plötzlichgrößeren rein elektrischen Leistungsbedarf. Sinkt der Ladezustandtrotzdem einmal unter 30%, fährt das Fahrzeug nur im geared neutral-Modus an, bis wieder ein Ladezustand von min. 50% erreicht ist. Steigt derLadezustand durch Bremsrekuperation über z.B. 75%, wird auch imHybridbetrieb aus der Batterie Leistung entnommen, um immer freieKapazität für anfallende Bremsenergie zu haben. In den bekanntengenormten Fahrzyklen treten speicherbare Bremsenergien und reinelektrische Beschleunigungsenergien von max. 100 Wh pro Bremsungbzw. Beschleunigung auf. Somit bleibt der Ladezustand der Batteriezwischen 55% und 80%. Bild 13 verdeutlicht den Verlauf desLadezustandes beim Fahren eines Stadtzyklusses. Bei Ladezuständenunterhalb von Wspmin wird der Speicher auch im Zugbetrieb beilaufendem V-Motor geladen. Oberhalb von Wspmax wird der Speicherauch im Zugbetrieb entladen.
Simulation des BetriebsverhaltensIn den letzten Jahren haben wir an der TU Chemnitz einSimulationsprogramm entwickelt, mit dem wir das Betriebsverhalten einesGetriebes in jedem Fahrzeug in Verbindung mit jedem Motor beim Fahrenbeliebiger Strecken bis ins Detail beschreiben können. Gemessene odergerechnete Wirkungsgradkennfelder jeder Antriebskomponente könnendabei ebenso berücksichtigt werden wie die Dynamik aller Teilsysteme. DieErfahrung zeigt, daß erst bei einem sehr hohen Aufwand zur Berechnungdes Leistungsbedarfes und der Wirkungsgrade im Teillastbereich und einergenauen Abbildung der Regelung einigermaßen mit Versuchsergebnissenübereinstimmende Kraftstoffverbräuche berechnet werden können.
Im Rahmen dieses Beitrags war das Ziel der Simulationen, denunterschiedlichen Einfluß des Verbrennungsmotors, der Getrieberegelungund der Bremsenergierückgewinnung auf den Kraftstoffverbrauch zugewichten. Dazu wurde in der Simulation ein Fahrzeug mit einer fahr-bereiten Masse von 1545 kg einmal mit einem direkteinspritzenden 81 kWTurbodieselmotor oder mit einem 150 kW Sportwagenmotor über denUS-City-Zyklus und den US-Highway-Zyklus geschickt.
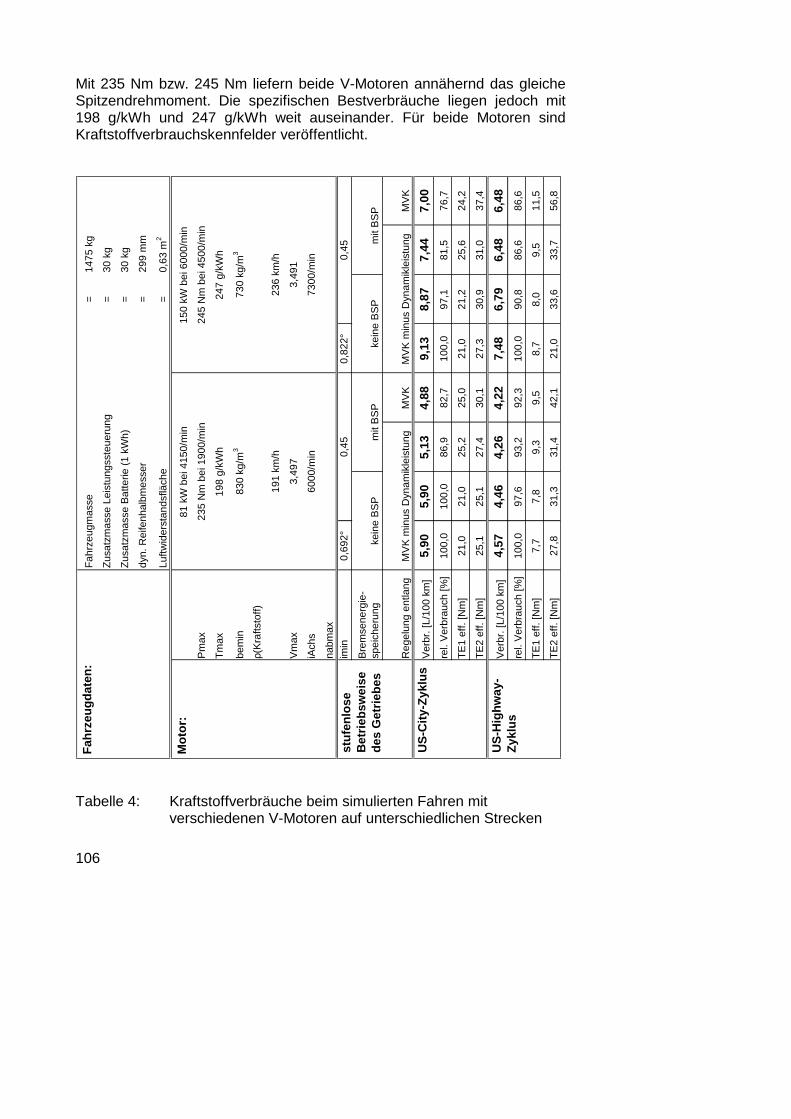
106
Mit 235 Nm bzw. 245 Nm liefern beide V-Motoren annähernd das gleicheSpitzendrehmoment. Die spezifischen Bestverbräuche liegen jedoch mit198 g/kWh und 247 g/kWh weit auseinander. Für beide Motoren sindKraftstoffverbrauchskennfelder veröffentlicht.
Tabelle 4: Kraftstoffverbräuche beim simulierten Fahren mitverschiedenen V-Motoren auf unterschiedlichen Strecken
MV
K
7,00
76,7
24,2
37,4
6,48
86,6
11,5
56,8
7,44
81,5
25,6
31,0
6,48
86,6
9,5
33,7
= = = = =
8,87
97,1
21,2
30,9
6,79
90,8
8,0
33,6
0,82
2°
9,13
100,
0
21,0
27,3
7,48
100,
0
8,7
21,0
MV
K
4,88
82,7
25,0
30,1
4,22
92,3
9,5
42,1
5,13
86,9
25,2
27,4
4,26
93,2
9,3
31,4
5,90
100,
0
21,0
25,1
4,46
97,6
7,8
31,3
0,69
2°
5,90
100,
0
21,0
25,1
4,57
100,
0
7,7
27,8
Pm
ax
Tm
ax
bem
in
ρ(K
rafts
toff)
Vm
ax
iAch
s
nabm
axim
in
Bre
mse
nerg
ie-
spei
cher
ung
Reg
elun
g en
tlang
Ver
br. [
L/10
0 km
]
rel.
Ver
brau
ch [%
]
TE
1 ef
f. [N
m]
TE
2 ef
f. [N
m]
Ver
br. [
L/10
0 km
]
rel.
Ver
brau
ch [%
]
TE
1 ef
f. [N
m]
TE
2 ef
f. [N
m]
Fah
rzeu
gd
aten
:
Mo
tor:
299
mm
30 k
g
30 k
g
stu
fen
lose
Bet
rieb
swei
se d
es G
etri
ebes
US
-Cit
y-Z
yklu
s
US
-Hig
hw
ay-
Zyk
lus
0,45
MV
K m
inus
Dyn
amik
leis
tung
Fah
rzeu
gmas
se
245
Nm
bei
450
0/m
in
247
g/kW
h
730
kg/m
3
Luftw
ider
stan
dsflä
che
dyn.
Rei
fenh
albm
esse
r
Zus
atzm
asse
Bat
terie
(1
kWh)
Zus
atzm
asse
Lei
stun
gsst
euer
ung
1475
kg
0,63
m2
236
km/h
81 k
W b
ei 4
150/
min
150
kW b
ei 6
000/
min
191
km/h
830
kg/m
3
198
g/kW
h
235
Nm
bei
190
0/m
in
0,45
6000
/min
3,49
73,
491
7300
/min
MV
K m
inus
Dyn
amik
leis
tung
kein
e B
SP
mit
BS
Pke
ine
BS
Pm
it B
SP
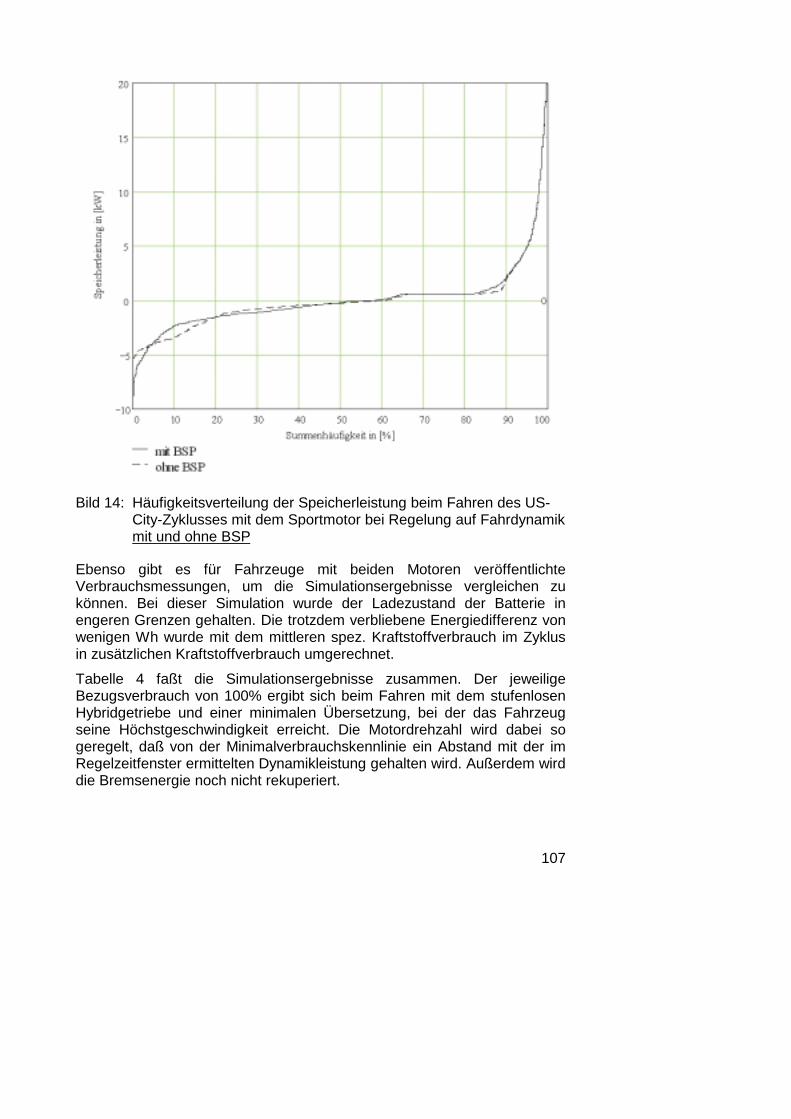
107
Bild 14: Häufigkeitsverteilung der Speicherleistung beim Fahren des US-City-Zyklusses mit dem Sportmotor bei Regelung auf Fahrdynamikmit und ohne BSP
Ebenso gibt es für Fahrzeuge mit beiden Motoren veröffentlichteVerbrauchsmessungen, um die Simulationsergebnisse vergleichen zukönnen. Bei dieser Simulation wurde der Ladezustand der Batterie inengeren Grenzen gehalten. Die trotzdem verbliebene Energiedifferenz vonwenigen Wh wurde mit dem mittleren spez. Kraftstoffverbrauch im Zyklusin zusätzlichen Kraftstoffverbrauch umgerechnet.
Tabelle 4 faßt die Simulationsergebnisse zusammen. Der jeweiligeBezugsverbrauch von 100% ergibt sich beim Fahren mit dem stufenlosenHybridgetriebe und einer minimalen Übersetzung, bei der das Fahrzeugseine Höchstgeschwindigkeit erreicht. Die Motordrehzahl wird dabei sogeregelt, daß von der Minimalverbrauchskennlinie ein Abstand mit der imRegelzeitfenster ermittelten Dynamikleistung gehalten wird. Außerdem wirddie Bremsenergie noch nicht rekuperiert.
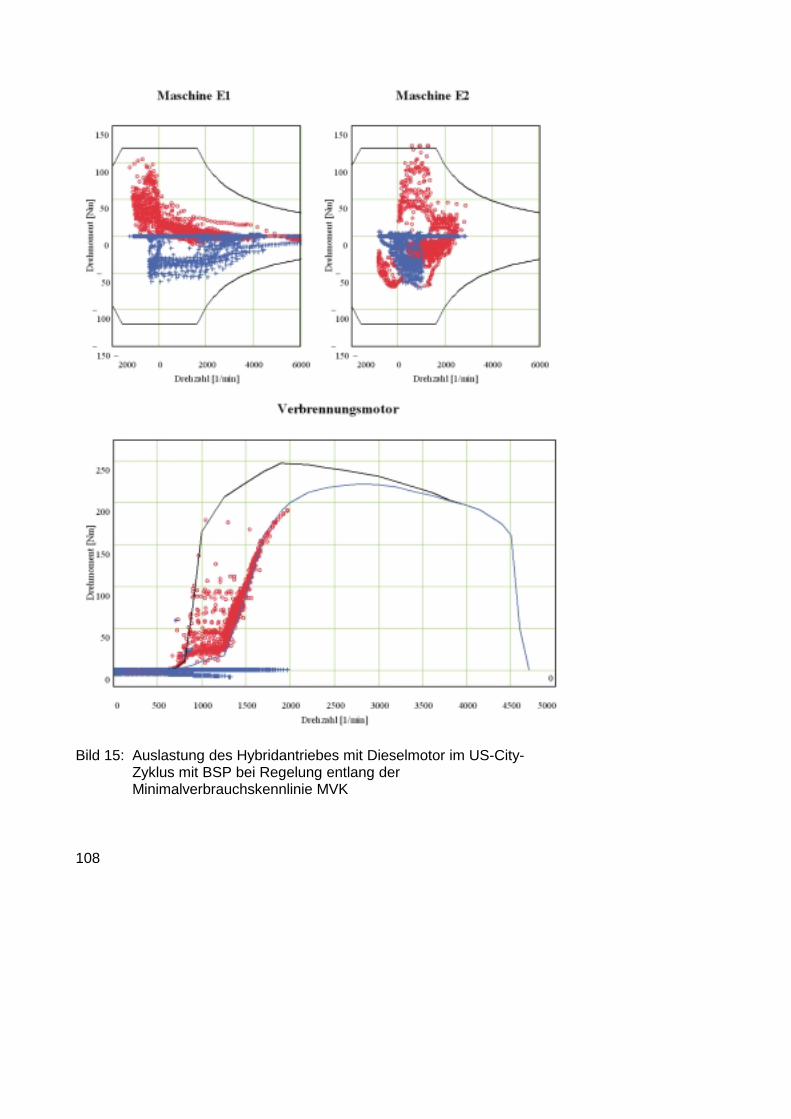
108
Bild 15: Auslastung des Hybridantriebes mit Dieselmotor im US-City-Zyklus mit BSP bei Regelung entlang derMinimalverbrauchskennlinie MVK
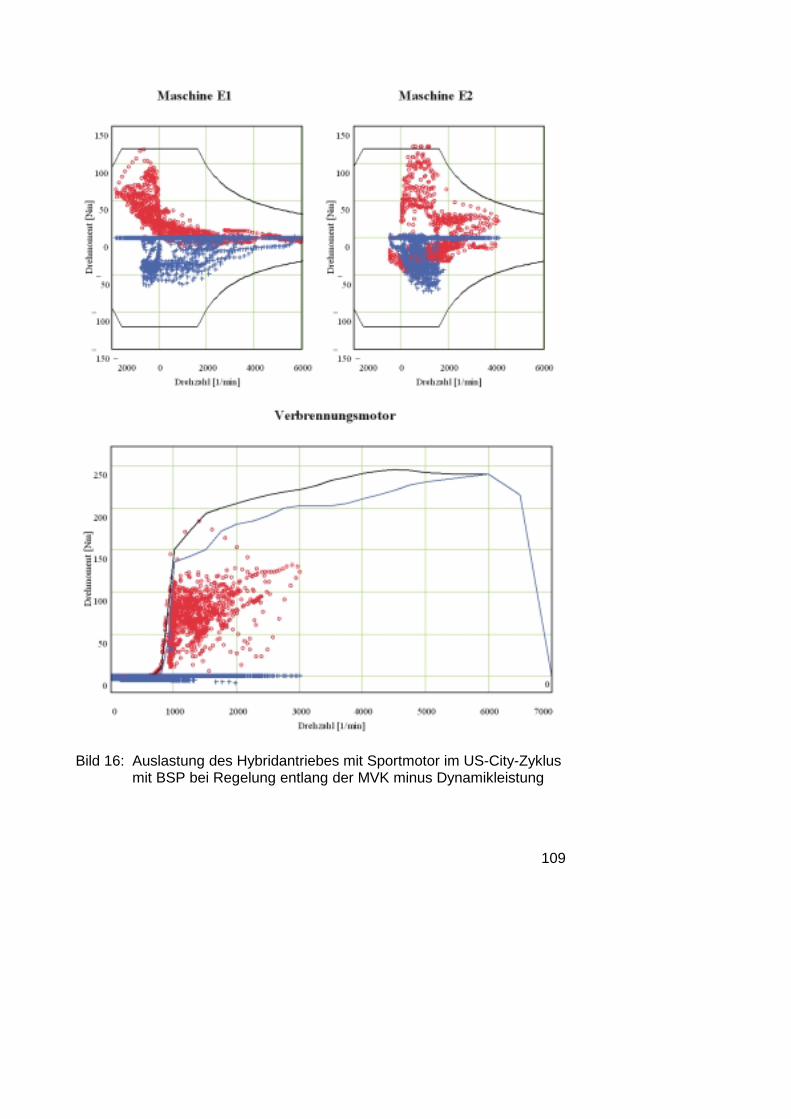
109
Bild 16: Auslastung des Hybridantriebes mit Sportmotor im US-City-Zyklusmit BSP bei Regelung entlang der MVK minus Dynamikleistung
110
Mit dem Sportmotor stellt sich in der Stadt ein Verbrauch von9,13 L/100 km ein und mit dem Dieselmotor einer von 5,9 L/100 km. Auchdiese Rechnungen zeigen, daß der Verbrennungsmotor nach wie vor dengrößten Einfluß auf den Kraftstoffverbrauch hat. Mit einem gestuftenGetriebe wäre der Verbrauch des Dieselfahrzeugs um 0,2 L/100 km undder der Sportwagen um 0,4 L/100 km höher. Dies resultiert aus demEnergiebedarf für die häufig zu beschleunigenden Antriebsdrehmassenund der etwas schlechteren Kennfeldausnutzung.
Eine Vergrößerung des Overdrivebereiches bringt beim Dieselmotor in derStadt auch bei stufenloser Übersetzungsänderung fast nichts, weil eine aufFahrbarkeit ausgelegte Regelung extremen Overdrive nur kurz zuläßt wiedie Häufigkeitsverteilung der Getriebeübersetzung zeigt. Beim Sportwagenmit seiner höheren Drive-Übersetzung bringt der große Overdrive nocheine Kraftstoffeinsparung von 0,26 L/100 km.
Erst die Bremsenergiespeicherung (BSP) führt in beiden Fahrzeugen imStadtzyklus zu einer wesentlichen Kraftstoffeinsparung von 0,77 L/100 kmbeim Dieselfahrzeug bzw. 1,69 l/100 km beim Sportwagen im Vergleichzum Fahren ohne Overdrive. Die Häufigkeitsverteilung der Batterieleistung(Bild 14) verdeutlicht die selbst bei Bremsenergienutzung (BSP) geringemittlere Belastung der elektrischen Komponenten. Ohne BSP wird derSpeicher im verbrennungsmotorischen Betrieb geladen, um bei jedemAnfahren belastet werden zu können.
Regelt man den V-Motor entlang der MVK, kann der Verbrauch in der Stadtnoch weiter gesenkt werden. Dies beeinträchtigt die Fahrbarkeit einesFahrzeugs mit einem Hybridgetriebe kaum, weil der Hybridantrieb durchseine „Booster”-Möglichkeit einen Beschleunigungswunsch des Fahrerssofort umsetzen kann.
Im US-Highway-Zyklus erreicht das Dieselfahrzeug mit einem gut gestuftenSchaltgetriebe ähnlich gute Verbrauchswerte wie mit einem stufenlosemGetriebe mit geringerem Wirkungsgrad und ohne extreme CVT-Regelung.Ein großer Overdrive spart hier 0,1 L/100 km. Da in diesem Zyklus wenigergebremst wird, kann selbst mit Bremsenergiespeicherung nur ein weitererVerbrauchsvorteil von 0,2 L/100km erreicht werden. Da dieDynamikanforderungen in diesem Zyklus gering sind, wird der V-Motorimmer entlang der MVK geregelt. Beim Sportwagen bewirkt schon derlange Overdrive eine Verbrauchssenkung von ca. 0,7 L/100km. DurchBremsenergiespeicherung kann die Einsparung sogar auf 1 L/100kmgesteigert werden.
Die Bilder 15 und 16 verdeutlichen die Auslastungen der E-Maschinen unddes V-Motors beim Fahren des US-City-Zyklusses. Man erkennt deutlichdie Teillastigkeit des Betriebes und wie sehr die Regelung bemüht ist, denV-Motor im Bereich niedriger Kraftstoffverbräuche zu halten.
111
Kreise kennzeichnen die Betriebspunkte im Zugbetrieb, Kreuze solche imSchubbetrieb. Die Bilder verdeutlichen auch den Unterschied zwischeneiner Regelung in Hinblick auf eine gute dynamische Fahrbarkeit desFahrzeugs (Bild 15) und einer CVT-Regelung entlang der Minimal-verbrauchskennlinie (Bild 16).
Ein getakteter V-Motorbetrieb immer nur im Bestpunkt des Kennfeldeswürde den Verbrauch noch weiter reduzieren, aber den Speicher extrembelasten. Gleiches gilt für eine Betriebsweise, bei der beim Anfahrenmöglichst lange rein elektrisch gefahren wird, um dann im verbrennungs-motorischen Betrieb bei höherem Motorwirkungsgrad den Speicher wiederzu laden.
Tabelle 4 nennt noch die effektiven Belastungen des Stellgetriebes in deneinzelnen Fahrzyklen und Regelungen. Ein höherer Overdrive-Anteil unddie Regelung entlang der MVK belasten hauptsächlich die E-Maschine 2zusätzlich. Die höhere Driveübersetzung des Sportwagen führt wegen deshöheren Overdrive-Anteils deshalb zu einer höheren Belastung desStellgetriebes. Bremsenergiespeicherung belastet hauptsächlich dieE-Maschine 1 zusätzlich. Bei Bedarf liefert das Simulationsprogrammdetailliert alle Belastungen jedes Getriebeelementes.
ZusammenfassungBeim TOYOTA Hybridsystem und dem hier vorgestellten HybridgetriebeHG120 ist eine weitgehende Systemintegration des elektrischen Antriebesin einen überwiegend verbrennungsmotorischen Antriebsstrang gelungen.Beide Systeme kommen mit einer sehr einfachen Mechanik aus, weil hierdas hohe Drehmoment zum Anfahren und Beschleunigen nicht wie beibekannten Antrieben über mechanische Übersetzungen aufgebaut wird,sondern über eine Addition von Drehmomenten aus dem V-Motor und 2E-Maschinen. Da solche Betriebszustände in Pkws immer nur kurze Zeitdauern und kleine Energiebeträge erfordern, reicht dafür eine noch relativkleine Batterie als Energiespeicher aus. Das 5-Wellen-Planetengetriebedes HG 120 erlaubt überdies mehrere feste Übersetzungen. Zum einenkann damit das Fahrzeug auch eine längere Strecke mit hohemDrehmoment ohne Belastung des elektrischen Zweiges fahren. Zumanderen kann auch auf der Landstraße oder der Autobahn beiKonstantfahrt das Stellgetriebe überbrückt werden. Dadurch steigt derWirkungsgrad und die thermische Belastung des elektrischen Zweigessinkt.
Als Mehraufwand gegenüber einem Standardantrieb sind bei denHybridgetrieben die Leistungssteuerung, die Batterie und die zusätzlicheWasserkühlung des elektrischen Stellgetriebes mit ca. 150 W max.
112
Pumpenleistung zu nennen. Die Leistungssteuerung versorgt neben demelektrischen Stellgetriebe das Bordnetz mit sehr stabilen Spannungen undvielleicht zukünftig verschiedenen Spannungsniveaus. Die gegenüber demStandardantrieb größere Batterie bringt den wesentlichen Zusatznutzender Bremsenergierekuperation. Über den elektrischen Zweig ist außerdemjederzeit ein „Booster”-Effekt möglich, als ob das Fahrzeug über einenwesentlich größeren V-Motor verfügen würde. Gegenüber bekanntenElektrofahrzeugen ist die Batterie jedoch relativ klein, weil auf eine großeelektrisch fahrbare Reichweite bewußt verzichtet wird. Auch bei niedrigemLadezustand der Batterie läßt sich das Fahrzeug in einem geared neutral -Modus ohne weitere Batteriebelastung anfahren.
Gegenüber dem Standardantrieb entfallen Starter (Anlasser) undGenerator (Lichtmaschine). Ohne Lichtmaschine wird der Aggregatetriebdes V-Motors wesentlich entlastet und das Motorpackaging erleichtert.Über das elektrische Stellgetriebe läßt sich der V-Motor komfortablerstarten als über einen Anlasser. Da die zusätzlichen Komponentenschwerer sind als die entfallenden, wurde in den Simulationsrechnungenvon einem Mehrgewicht von 70 kg gegenüber einem Fahrzeug mitAutomatgetriebe ausgegangen.
Das HG120 hat ein sehr kompakt bauendes 5-Wellen-Planetengetriebe mitdrei jeweils im Stillstand zu schaltenden Bremsen und einer Kupplung. Beidiesem Getriebe sind keine Wechselschaltungen mit zwei beteiligtenSchaltelementen nötig, sondern nur Einfachschaltungen, um ein bereits aufDrehzahl 0 oder Synchrondrehzahl geregeltes Getriebeelement mit demGegenteil zu verbinden. Eine elektrisch angetriebene Ölpumpe versorgt dieSchmierung und die Schaltaktoren mit Druck. Der Wirkungsgrad dieserMechanik allein liegt über dem von Handschaltgetrieben.
Die E-Maschinen des elektrischen Stellgetriebes liegen koaxial zumPlanetengetriebe und sind wegen ihrer Spitzendrehzahlen von 11000/min(E1) und 8000/min (E2) schlank ausgeführt. Für diesen Fahrzeugeinsatzsind sowohl permanenterregte Synchronmaschinen, als auch Asynchron-maschinen geeigent. Wegen des hohen mechanischen Leistungsanteilesund der festen Übersetzungen mit rein mechanischerLeistungsübertragung erreicht das Hybridgetriebe trotz des elektrischenZweiges Spitzenwirkungsgrade auf dem Niveau von Automatgetrieben.
Der große Stellbereich des Hybridgetriebes ermöglicht den optimalenBetrieb des V-Motors. Der in den Simulationen errechneteKraftstoffverbrauchsvorteil ergibt sich jedoch bei einem schon sparsamenDieselfahrzeug hauptsächlich aus der Bremsenergienutzung. Bei einemsportlichen Ottomotor überwiegt im instationären Betrieb der Effekt derBremsenergienutzung und in fast stationären Zyklen der Effekt der großenÜbersetzungsspreizung.
113
Nur durch einen in allen Details optimierten Verbrennungsmotor und einGetriebe, daß diesen Motor optimal zur Geltung bringt, Energie verlustarmund stufenlos wandelt und speichern kann, sind wirklich sparsameFahrzeuge darstellbar. Automatisierte Fahrzeuggetriebe mit elektrischerRegelung => Hybridgetriebe bieten dafür interessante Alternativen.
114
Literatur
[1] T. Yaegashi: Toyota Hybrid System THS.
Toyota Motor Corporation (1997)
[2] J. Yamaguchi: Toyota readies gasoline/electric hybrid system.
Automotive Engineeing (1997), 55 ... 58
[3] M. Lehna: Audi duo, ein Hybridfahrzeug für die City-Logistik
VDI-Berichte 1378 (1998), 119 ... 128
[4] T. Vollmer, B.-R. Höhn, S. Kerschl, B. Pinnekamp: Der Autarke Hybrid: Auslegung desGesamtsystems. VDI-Berichte 1225 (1995), 9 ... 26
[5] B.-R. Höhn, B. Pinnekamp, S. Kerschl: Fahrsimulation und Verbrauchsberechnung fürden Autarken Hybrid. VDI-Berichte 1175 (1995), 621 ... 636
[6] T. Vollmer, T. Mayer, B.-R. Höhn, D. Schröder: Betriebsstrategie und Regelung desAutarken Hybridfahrzeugs. VDI-Berichte 1393 (1998), 725 ... 742
[7] P. Dietrich, M.K. Eberle: Das ETH-Hybrid III-Antriebskonzept.
VDI-Berichte 1225 (1995), 27 ... 44
[8] W. Boll, P. Antony: Der Parallelhybrid-Antrieb von Mercedes-Benz.
VDI-Berichte 1225 (1995), 64 ... 82
[9] F. Jarchow: Stufenlos wirkende hydrostatisch-mechanische Lastschaltgetriebe. VDI-Berichte 878 (1991), 623 ... 647
[10] W. Buschhaus: Entwicklung eines leistungsorientierten Hybridantriebs mit voll-automatischer Betriebsstrategie. Dissertation RWTH Aachen (1995)
[11] R. Busch: Entwicklung und Realisierung einer vollautomatischen Betriebsstrategie füreinen leistungsorientierten Hybridantrieb. Diss. RWTH Aachen (1996)
[12] P. Tenberge: Stufenloses Fahrzeuggetriebe mit elektrischer Leistungsverzweigung.VDI-Berichte 1346 (1997), 83 ... 114
[13] P. Tenberge, W. Hofmann: Mechanisch elektrische Fahrzeuggetriebe im Vergleich.VDI-Berichte 1393 (1998), 551 ... 578
[14] P. Tenberge, W. Hofmann: Elektromechanisches Hybridgetriebe.
VDI-Berichte 1459 (1999), 307 ...330
[15] K. Greubel, J. Brandes: Systemvergleich Synchron-/Asynchronantrieb fürElektroautos. VDI-Berichte 1225 (1995), 179 ... 200

Der vorliegende BandE-Maschine im Antriebsstrangist nur für Ihren persönlichen Gebrauch bestimmt!