Ein entscheidungstheoretischer Ansatz zu Planung, Wahrnehmung und Steuerung Hauptseminar...
79
Ein entscheidungstheoretisch er Ansatz zu Planung, Wahrnehmung und Steuerung Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl 4. Dezember 2002
-
Upload
leonore-bodenheimer -
Category
Documents
-
view
111 -
download
2
Transcript of Ein entscheidungstheoretischer Ansatz zu Planung, Wahrnehmung und Steuerung Hauptseminar...
Ein entscheidungstheoretischer Ansatz zu Planung,
Wahrnehmung und Steuerung
Hauptseminar Echtzeitsysteme WS 2002/2003
Tilmann Rabl4. Dezember 2002
Worum es geht...
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Was ist Entscheidungstheorie? Beschäftigt sich mit Entscheidungssituationen Normativ – deskriptiv Anwendungsbeispiel: Intelligente Steuerung
„Bietet einem Entscheider Hilfestellung, mit der er die Situation, in der er sich befindet, analysieren und zu einer
möglichst optimalen Entscheidung kommen kann“
Worum es geht...
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Intelligente Steuerung Einfache Handlungskette:
1. Messen2. Auswerten3. Reagieren
Normale KI oft zu sehr eingeschränkt Lösung: reaktive bzw. adaptive Systeme
Bayessche Netze
Worum es geht...
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Basye, Dean, Kirman und Lejter 1992: Auf Bayesschen Netzen basierendes System Steuerung eines Roboters Verfolgung eines beweglichen Ziels (MTL)
Überblick
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bayessche Netze
MTL Modell
Komplexitätsreduktion und Abstraktionen
Ergebnisse
Resümee
Grundlagen Bayesscher Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
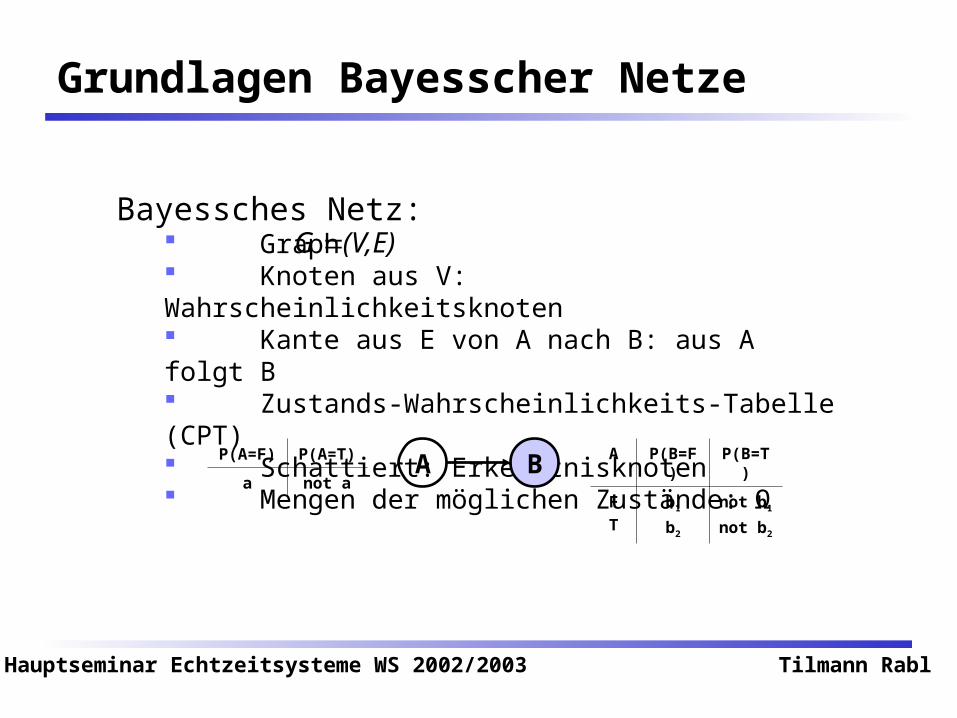
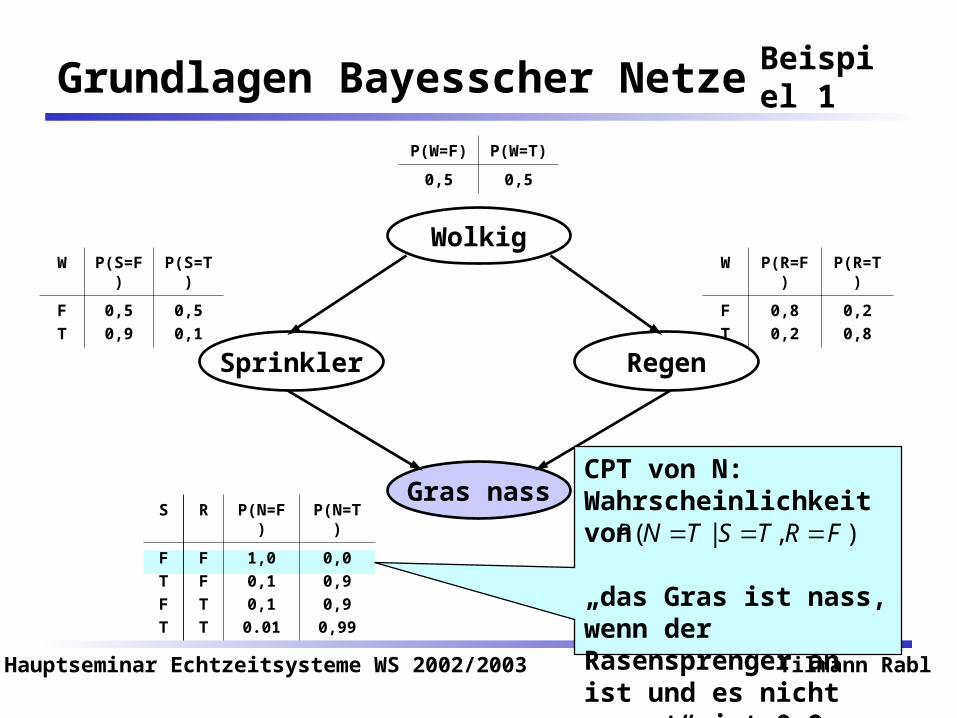
Bayessches Netz: Graph Knoten aus V: Wahrscheinlichkeitsknoten Kante aus E von A nach B: aus A folgt B Zustands-Wahrscheinlichkeits-Tabelle (CPT) Schattiert: Erkenntnisknoten Mengen der möglichen Zustände: Ω
(V,E)G
A BP(A=F) P(A=T)
a not a
A P(B=F) P(B=T)
F
T
b1
b2
not b1
not b2
Wolkig
Gras nass
RegenSprinkler
Grundlagen Bayesscher Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
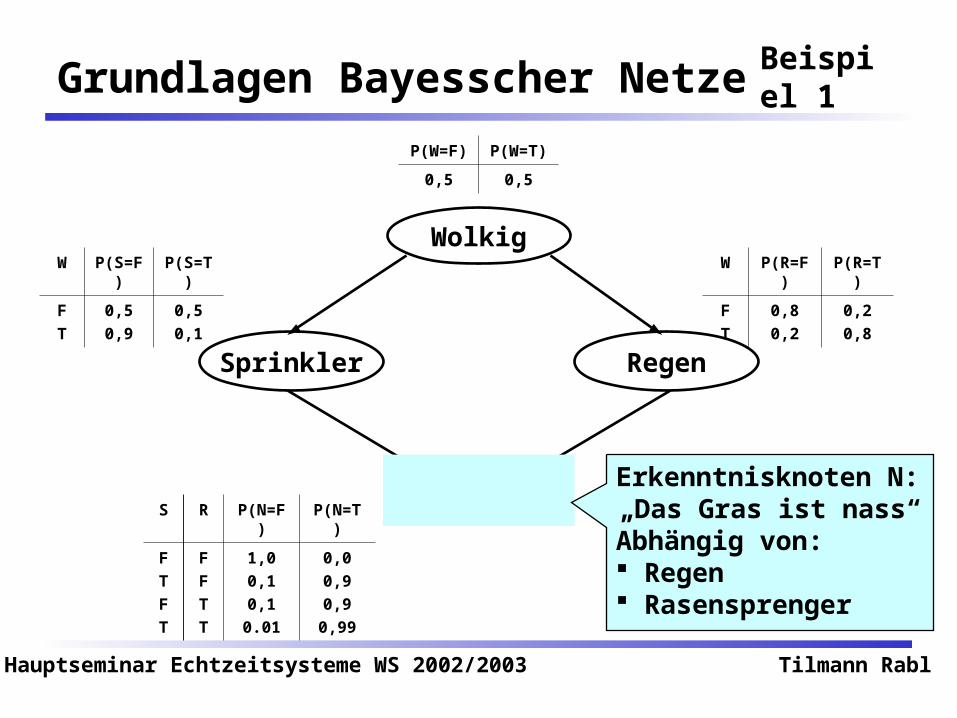
P(W=F) P(W=T)
0,5 0,5
W P(S=F) P(S=T)
F
T
0,5
0,9
0,5
0,1
W P(R=F) P(R=T)
F
T
0,8
0,2
0,2
0,8
S R P(N=F) P(N=T)
F
T
F
T
F
F
T
T
1,0
0,1
0,1
0.01
0,0
0,9
0,9
0,99
Beispiel 1
Erkenntnisknoten N:„Das Gras ist nass“
Abhängig von: Regen Rasensprenger
Wolkig
Gras nass
RegenSprinkler
Grundlagen Bayesscher Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
P(W=F) P(W=T)
0,5 0,5
W P(S=F) P(S=T)
F
T
0,5
0,9
0,5
0,1
W P(R=F) P(R=T)
F
T
0,8
0,2
0,2
0,8
S R P(N=F) P(N=T)
F
T
F
T
F
F
T
T
1,0
0,1
0,1
0.01
0,0
0,9
0,9
0,99
Beispiel 1
CPT von N:Wahrscheinlichkeit von
„das Gras ist nass, wenn der Rasensprenger an ist und es nicht regnet“ ist 0,9
),|( FRTSTNP
Wolkig
Gras nass
RegenSprinkler
Grundlagen Bayesscher Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
P(W=F) P(W=T)
0,5 0,5
W P(S=F) P(S=T)
F
T
0,5
0,9
0,5
0,1
W P(R=F) P(R=T)
F
T
0,8
0,2
0,2
0,8
S R P(N=F) P(N=T)
F
T
F
T
F
F
T
T
1,0
0,1
0,1
0.01
0,0
0,9
0,9
0,99
Beispiel 1
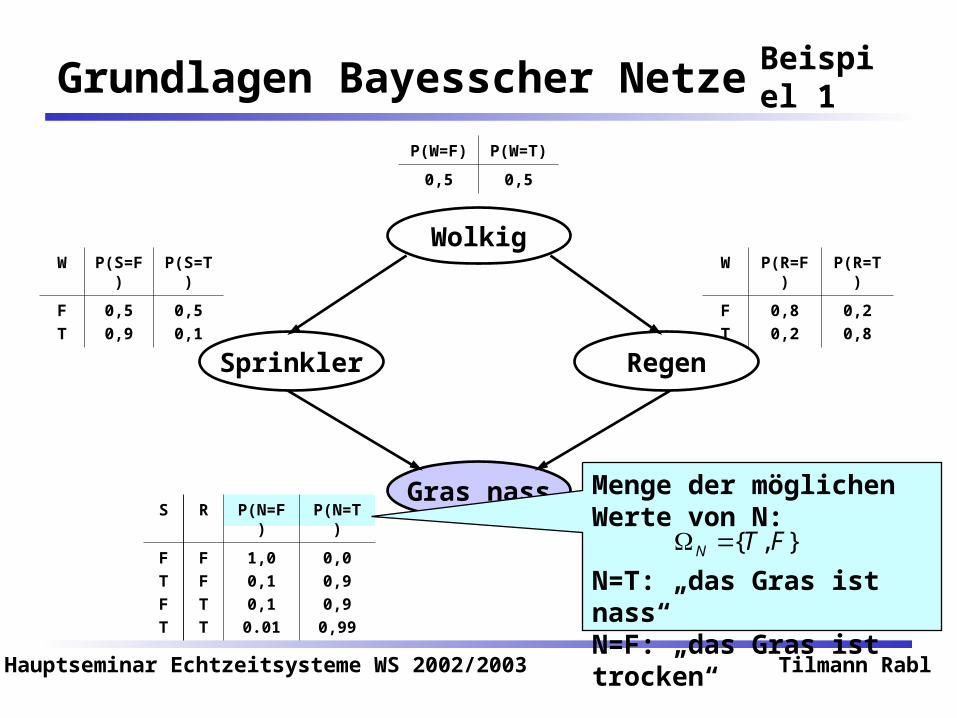
Menge der möglichen Werte von N:
N=T: „das Gras ist nass“N=F: „das Gras ist trocken“
},{ FTN
Grundlagen Bayesscher Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Beispiel 2
LR LT
OT
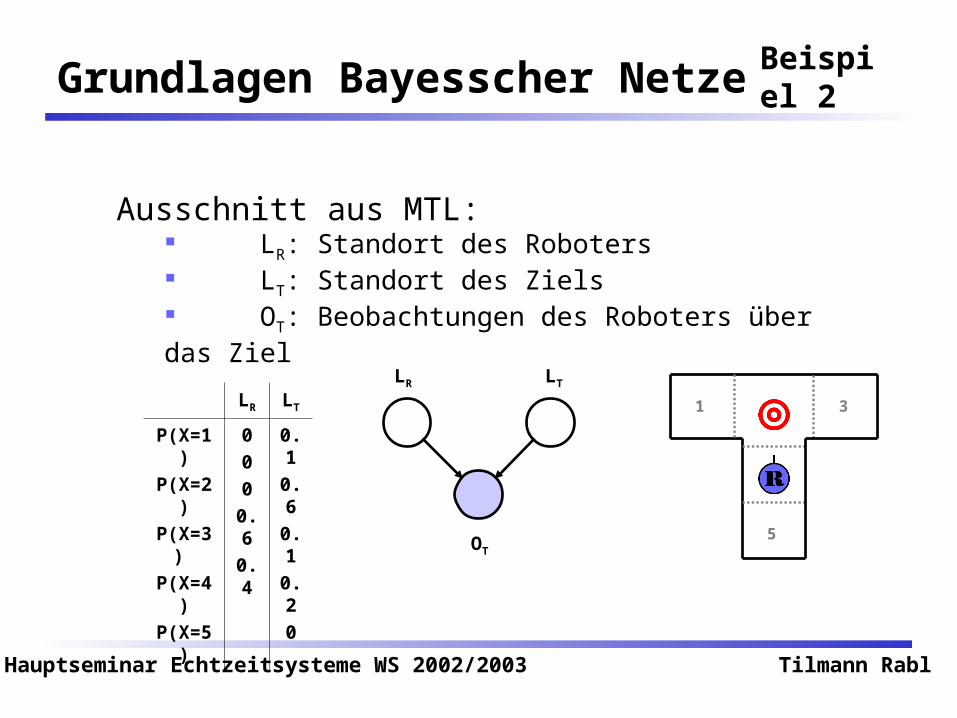
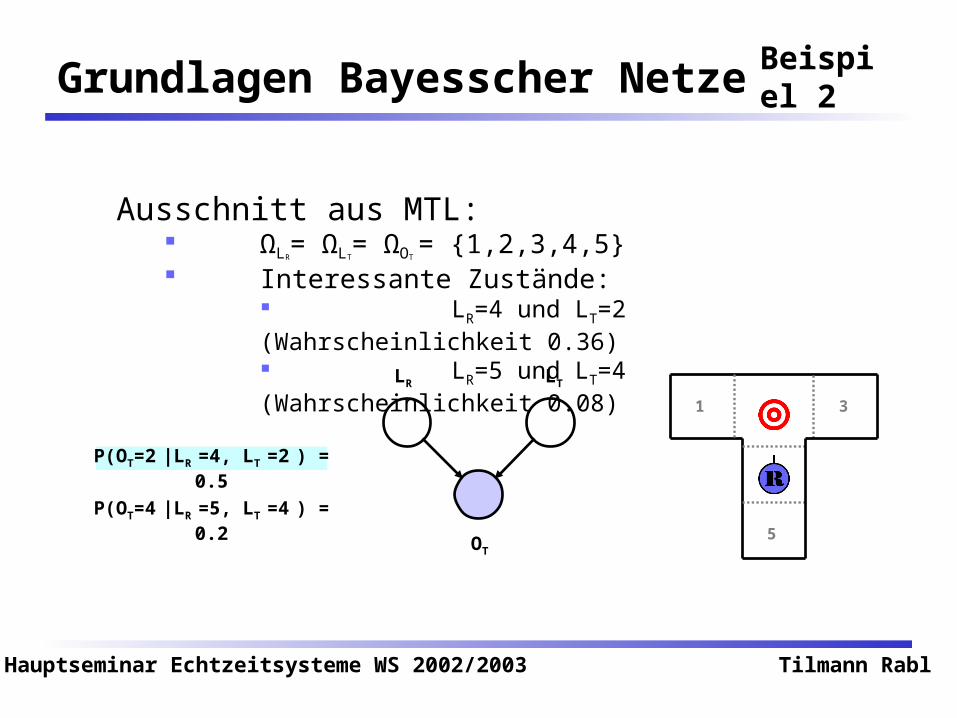
Ausschnitt aus MTL: LR: Standort des Roboters LT: Standort des Ziels OT: Beobachtungen des Roboters über das Ziel
LR LT
P(X=1)
P(X=2)
P(X=3)
P(X=4)
P(X=5)
0
0
0
0.6
0.4
0.1
0.6
0.1
0.2
0
1 3
5
Grundlagen Bayesscher Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Beispiel 2
LR LT
OT
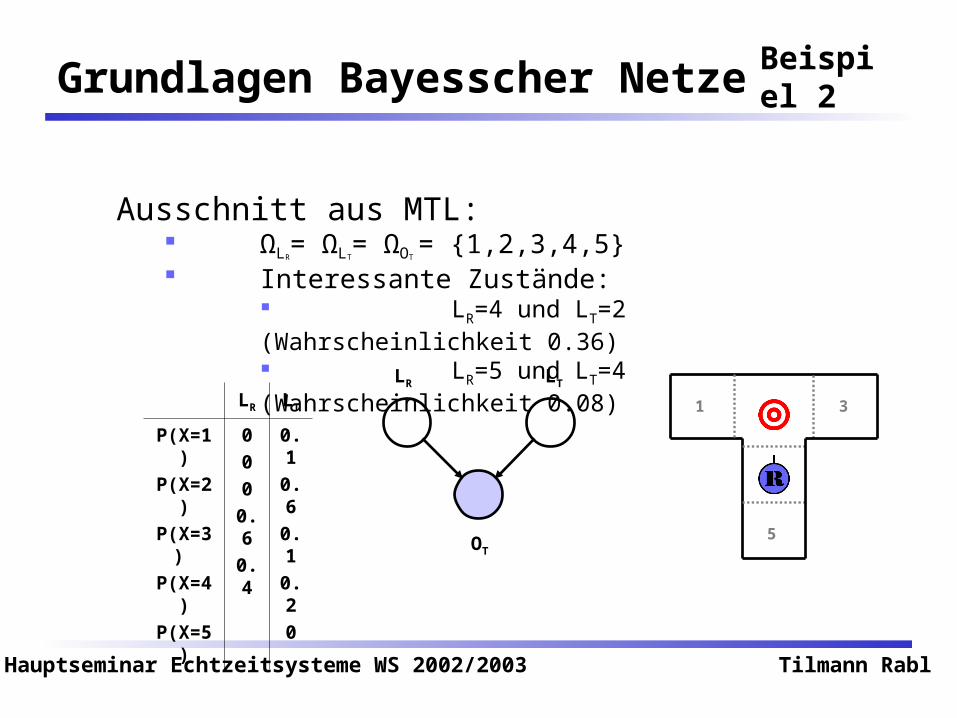
Ausschnitt aus MTL: ΩLR
= ΩLT= ΩOT
= {1,2,3,4,5} Interessante Zustände:
LR=4 und LT=2 (Wahrscheinlichkeit 0.36) LR=5 und LT=4 (Wahrscheinlichkeit 0.08) 1 3
5
LR LT
P(X=1)
P(X=2)
P(X=3)
P(X=4)
P(X=5)
0
0
0
0.6
0.4
0.1
0.6
0.1
0.2
0
Grundlagen Bayesscher Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Beispiel 2
LR LT
OT
Ausschnitt aus MTL: ΩLR
= ΩLT= ΩOT
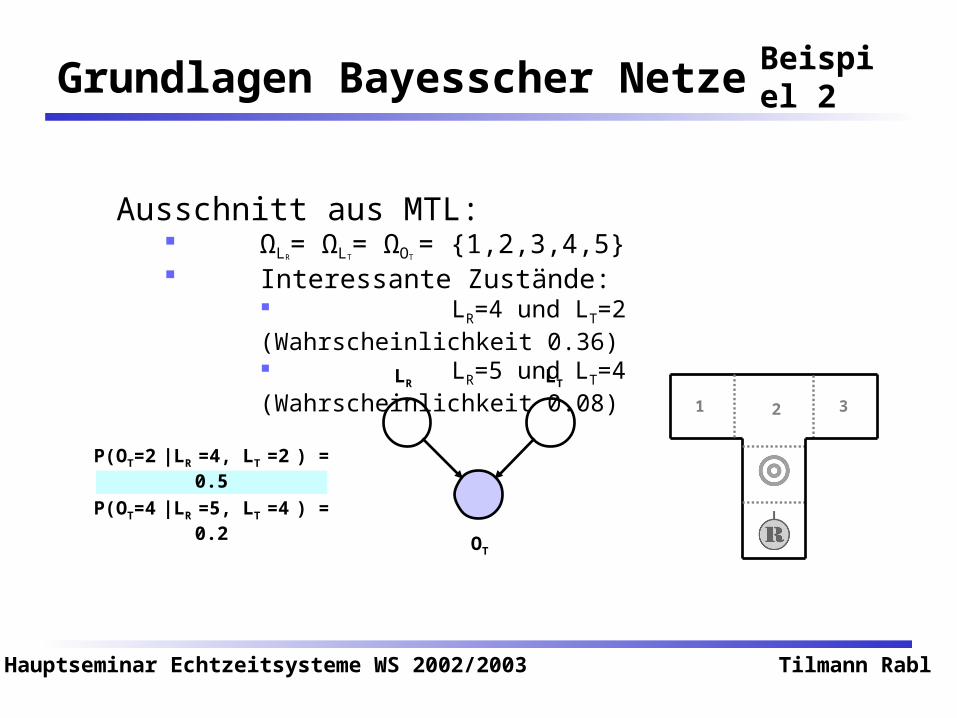
= {1,2,3,4,5} Interessante Zustände:
LR=4 und LT=2 (Wahrscheinlichkeit 0.36) LR=5 und LT=4 (Wahrscheinlichkeit 0.08)
P(OT=2 |LR =4, LT =2 ) = 0.5
P(OT=4 |LR =5, LT =4 ) = 0.2
1 3
5
Grundlagen Bayesscher Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Beispiel 2
LR LT
OT
Ausschnitt aus MTL: ΩLR
= ΩLT= ΩOT
= {1,2,3,4,5} Interessante Zustände:
LR=4 und LT=2 (Wahrscheinlichkeit 0.36) LR=5 und LT=4 (Wahrscheinlichkeit 0.08)
P(OT=2 |LR =4, LT =2 ) = 0.5
P(OT=4 |LR =5, LT =4 ) = 0.2
1 32
Zeitliche Bayessche Netze
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
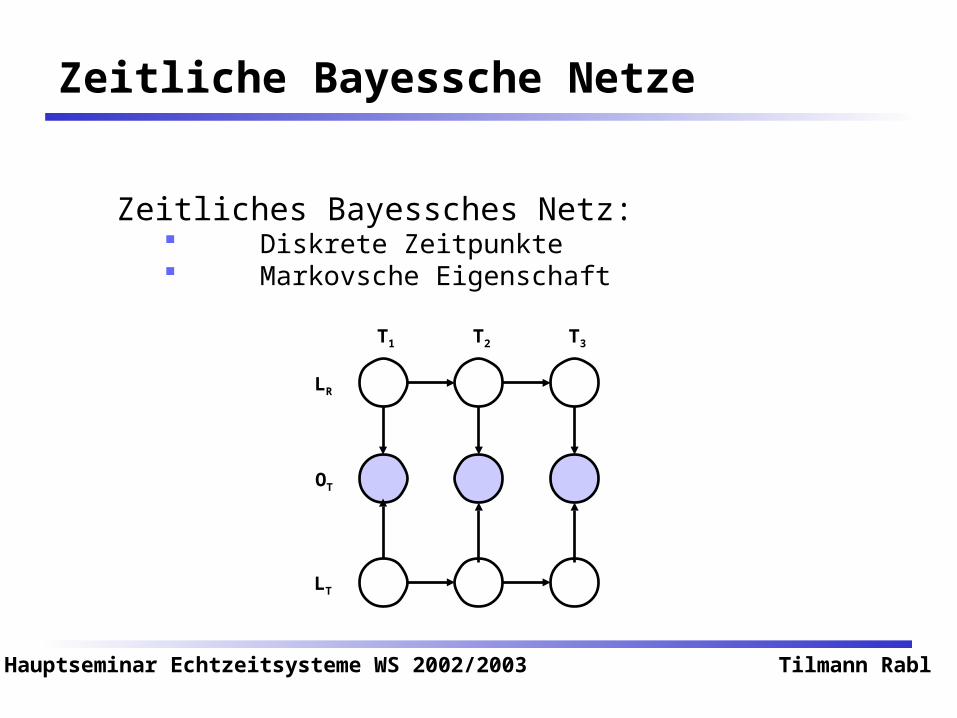
Zeitliches Bayessches Netz: Diskrete Zeitpunkte Markovsche Eigenschaft
LR
LT
OT
T1 T2 T3
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Entwicklung eines Modells: Abwägung zwischen Genauigkeit und Effizienz Zuviel Information: System zu langsam Zuwenig Information: System wird zu ungenau
Problemstellung: Errechnung des Standorts des Roboters Verfolgung eines beweglichen Ziels
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
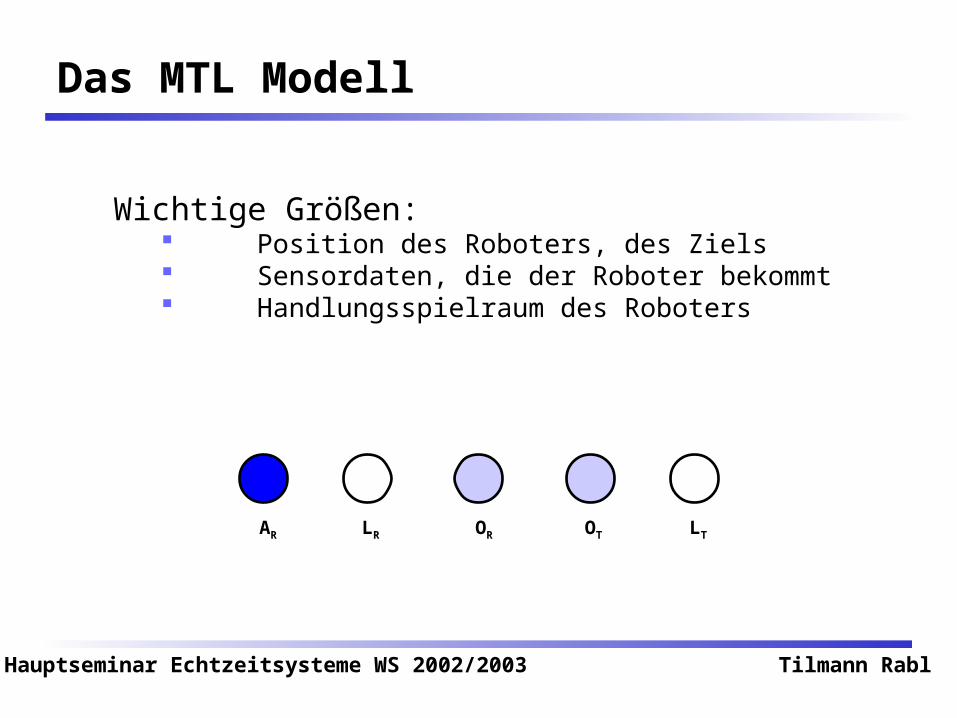
Wichtige Größen: Position des Roboters, des Ziels Sensordaten, die der Roboter bekommt Handlungsspielraum des Roboters
LR LTOTORAR
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
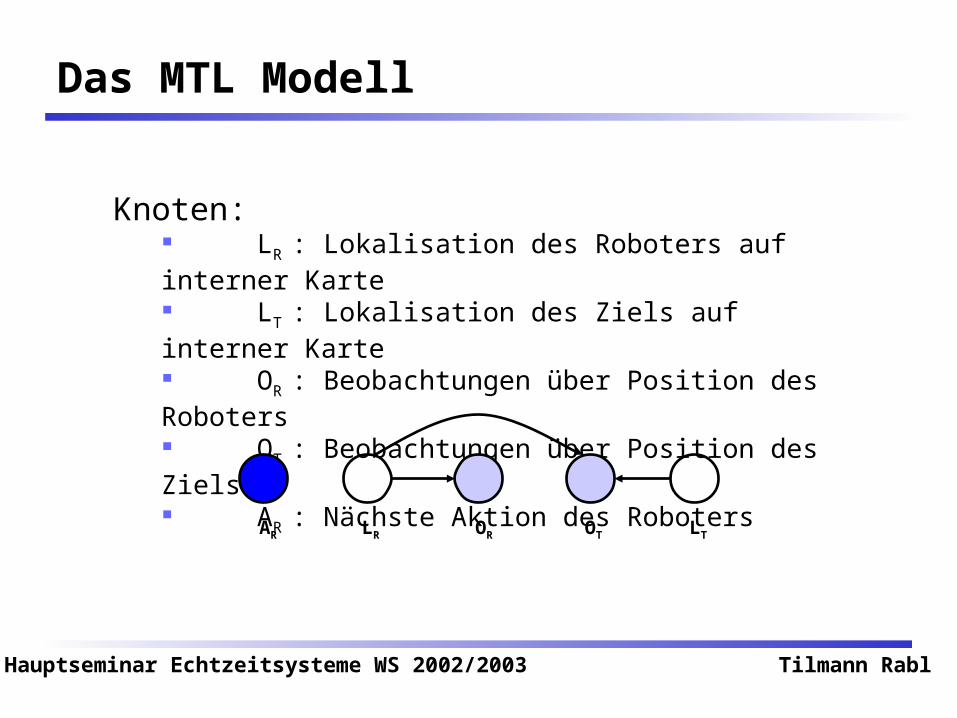
Knoten: LR : Lokalisation des Roboters auf interner Karte LT : Lokalisation des Ziels auf interner Karte OR : Beobachtungen über Position des Roboters OT : Beobachtungen über Position des Ziels AR : Nächste Aktion des Roboters
LR LTOTORAR
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
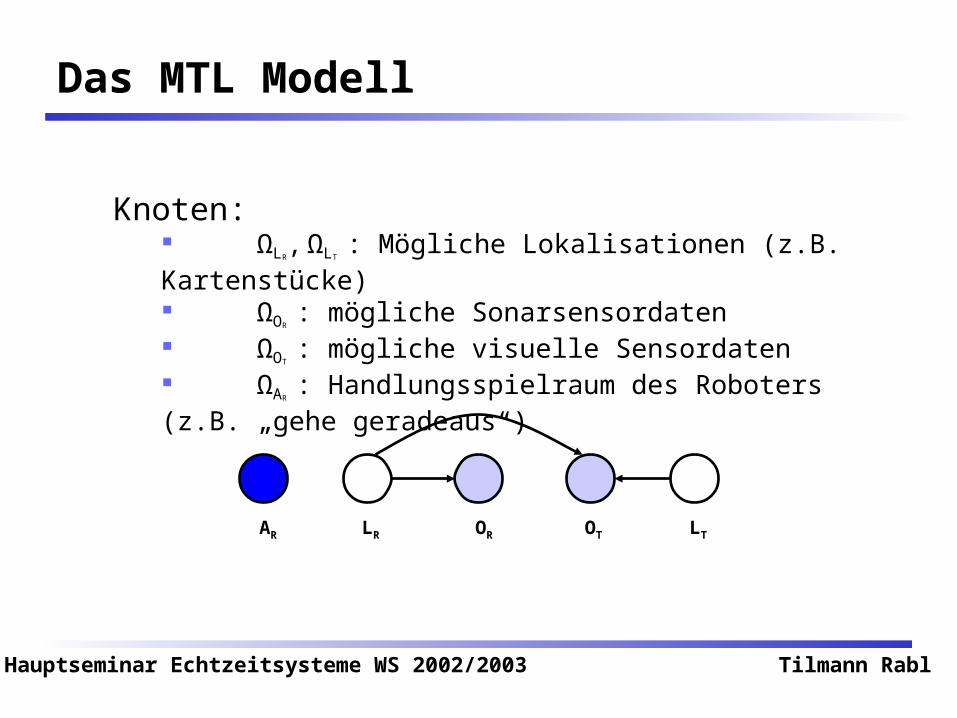
Knoten: ΩLR
, ΩLT : Mögliche Lokalisationen (z.B. Kartenstücke)
ΩOR : mögliche Sonarsensordaten ΩOT : mögliche visuelle Sensordaten ΩAR : Handlungsspielraum des Roboters (z.B. „gehe geradeaus“)
LR LTOTORAR
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
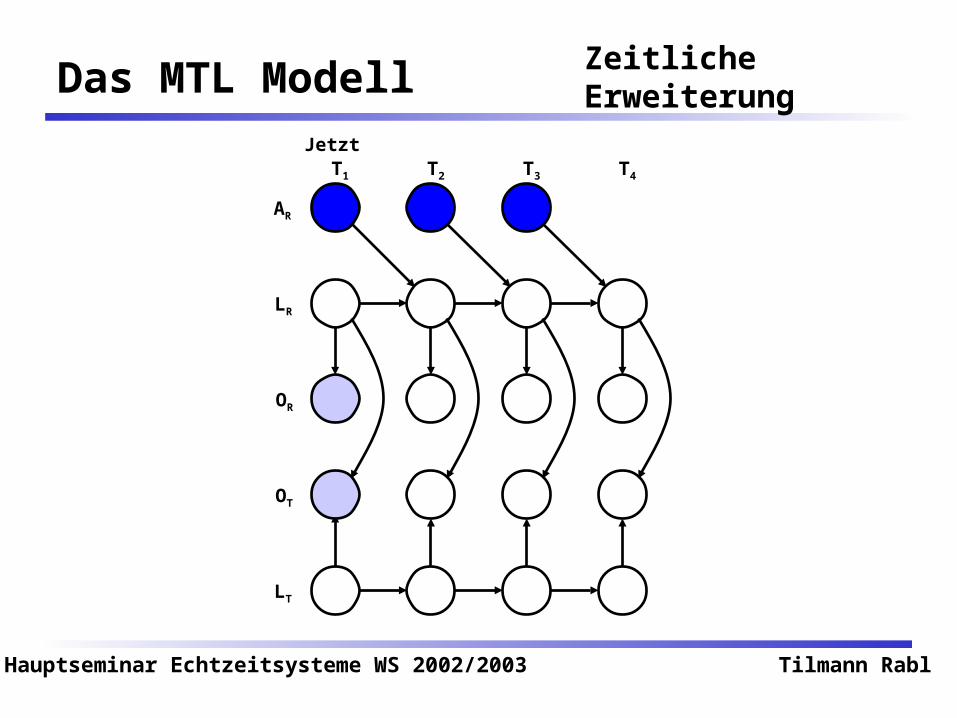
T1 T2 T3 T4
Jetzt
LR
LT
OT
OR
AR
Zeitliche Erweiterung
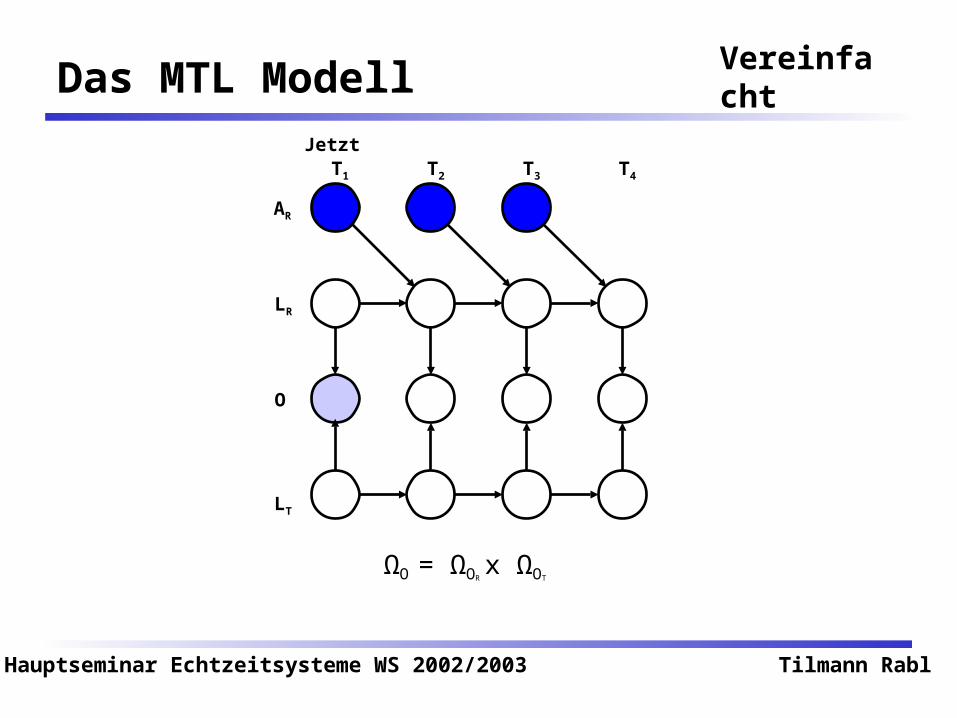
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
T1 T2 T3 T4
Jetzt
LR
LT
O
AR
Vereinfacht
ΩO = ΩOR x ΩOT
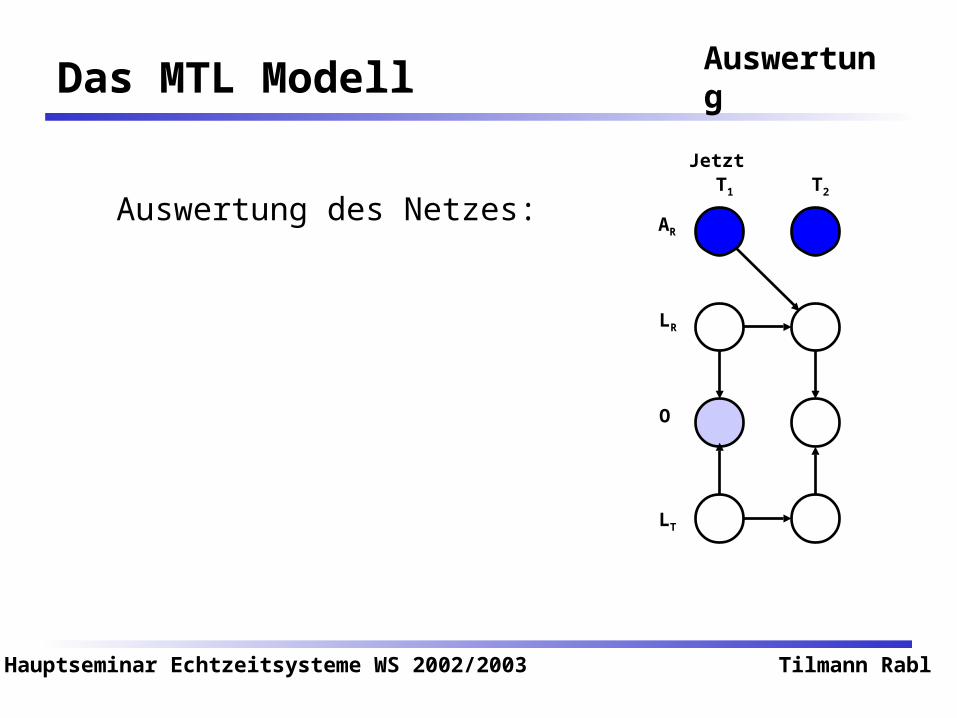
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Auswertung
T1 T2
Jetzt
LR
LT
O
AR
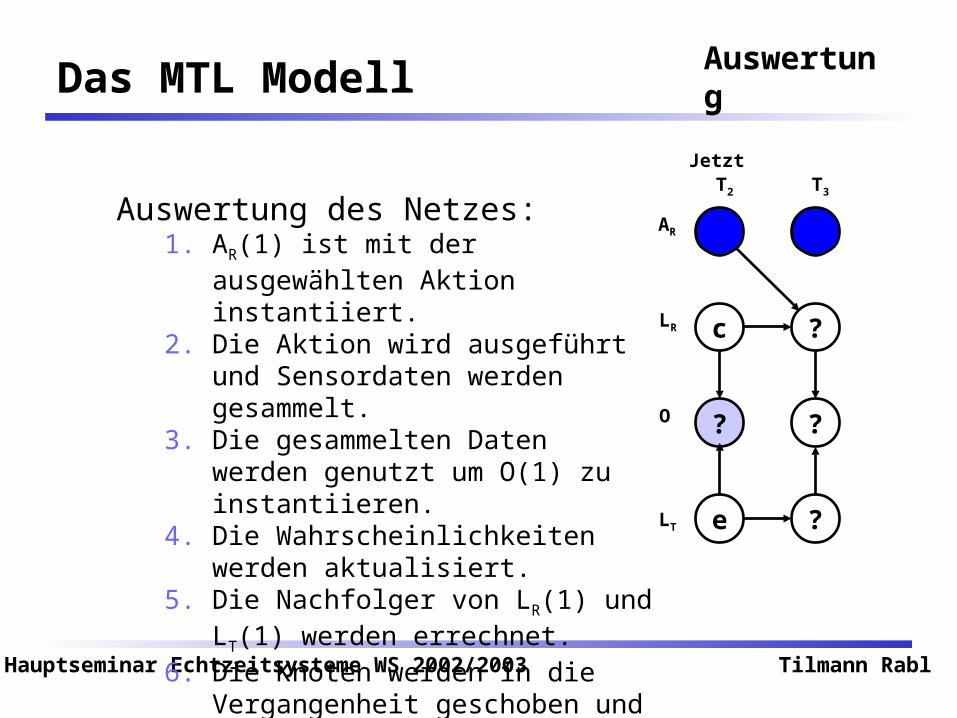
Auswertung des Netzes:
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Auswertung
T1 T2
Jetzt
LR
LT
O
AR
?a
? ?
?b
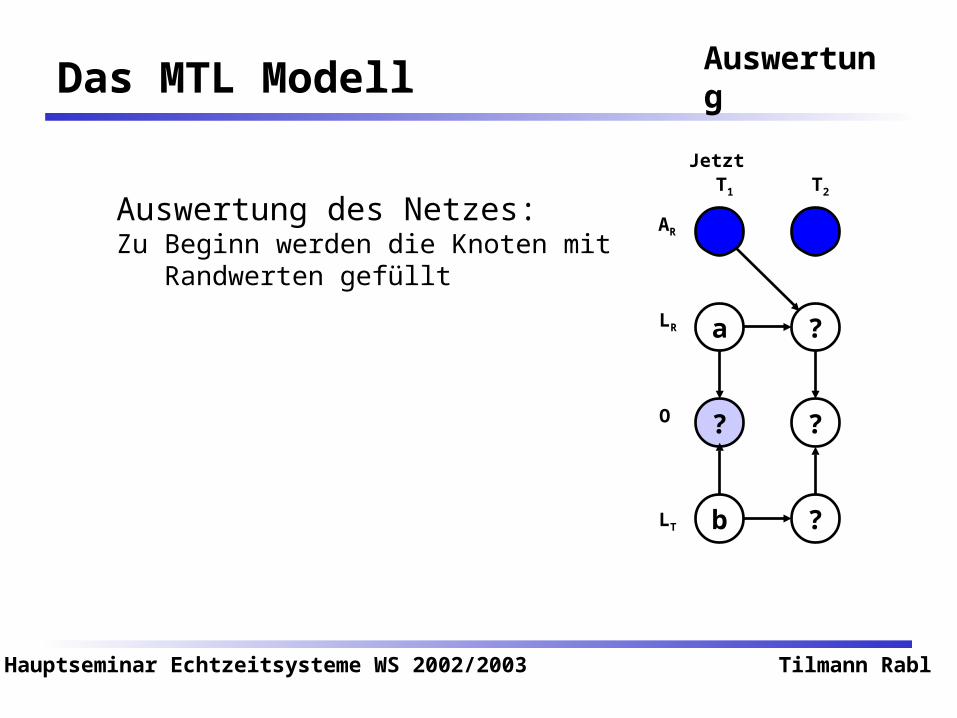
Auswertung des Netzes:Zu Beginn werden die Knoten mit Randwerten
gefüllt
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Auswertung
T1 T2
Jetzt
LR
LT
O
AR
?a
? ?
?b
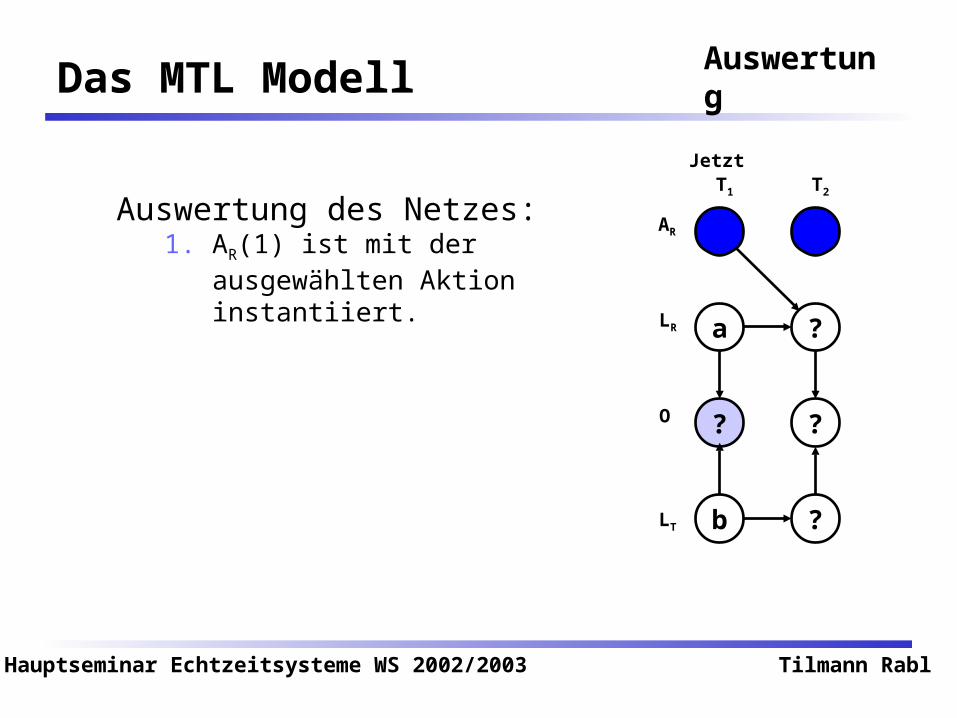
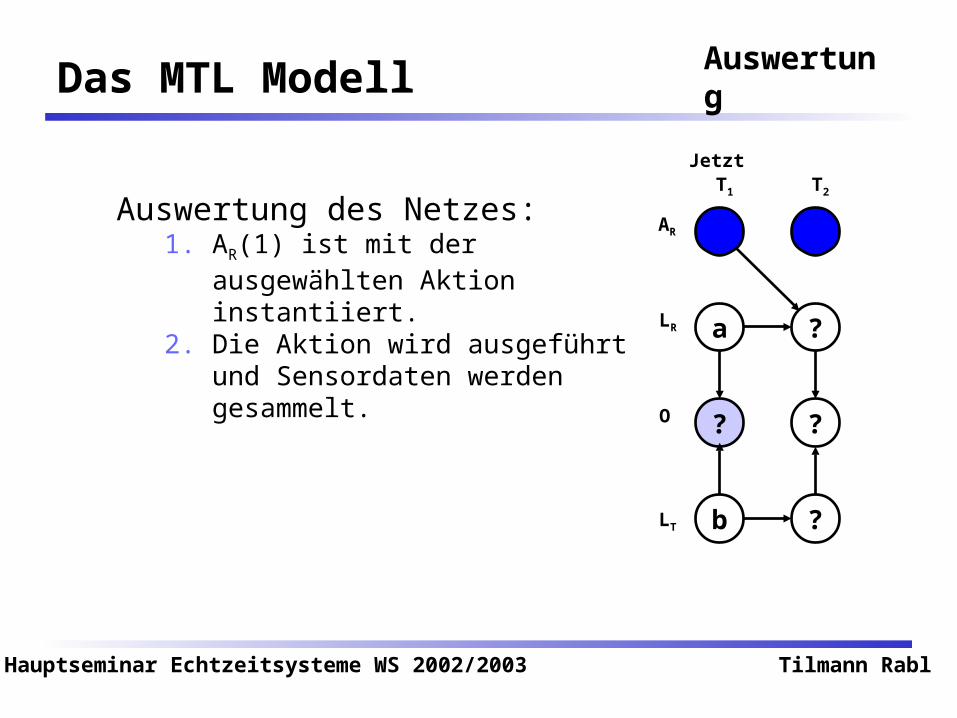
Auswertung des Netzes:1. AR(1) ist mit der ausgewählten Aktion
instantiiert.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Auswertung
T1 T2
Jetzt
LR
LT
O
AR
?a
? ?
?b
Auswertung des Netzes:1. AR(1) ist mit der ausgewählten Aktion
instantiiert.2. Die Aktion wird ausgeführt und
Sensordaten werden gesammelt.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Auswertung
T1 T2
Jetzt
LR
LT
O
AR
?a
o ?
?b
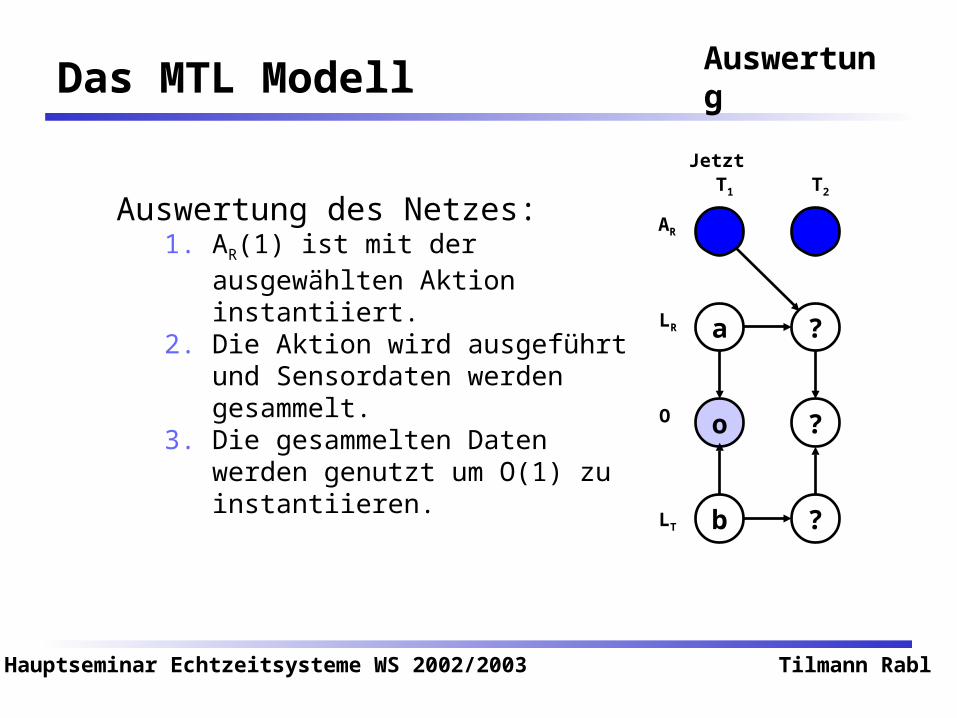
Auswertung des Netzes:1. AR(1) ist mit der ausgewählten Aktion
instantiiert.2. Die Aktion wird ausgeführt und
Sensordaten werden gesammelt.3. Die gesammelten Daten werden genutzt
um O(1) zu instantiieren.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Auswertung
T1 T2
Jetzt
LR
LT
O
AR
?a‘
o ?
?b‘
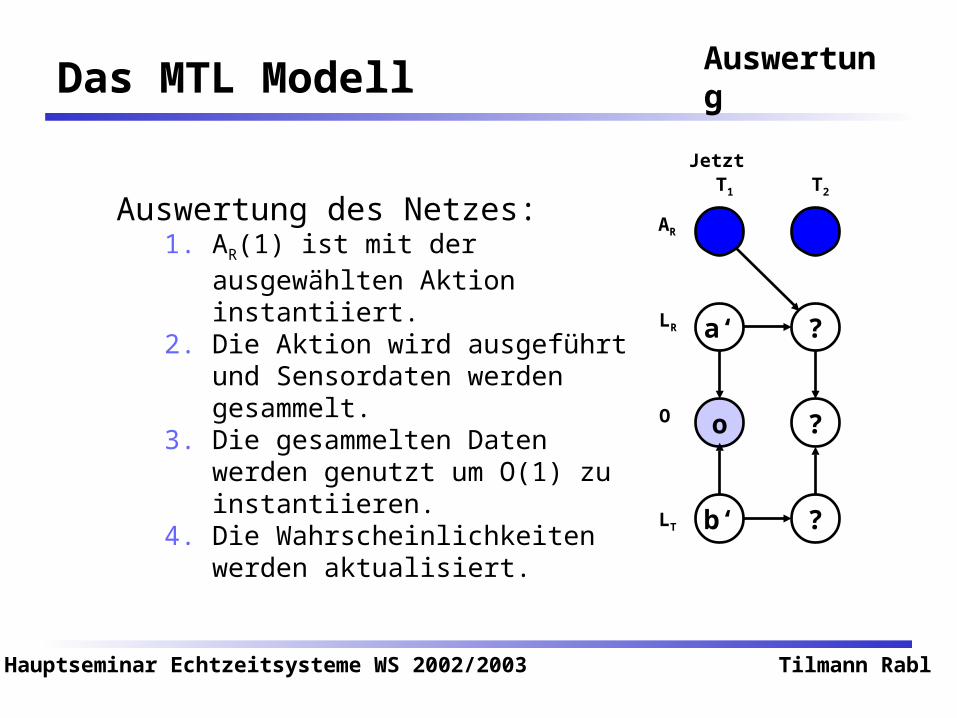
Auswertung des Netzes:1. AR(1) ist mit der ausgewählten Aktion
instantiiert.2. Die Aktion wird ausgeführt und
Sensordaten werden gesammelt.3. Die gesammelten Daten werden genutzt
um O(1) zu instantiieren.4. Die Wahrscheinlichkeiten werden
aktualisiert.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Auswertung
T1 T2
Jetzt
LR
LT
O
AR
ca‘
o ?
eb‘
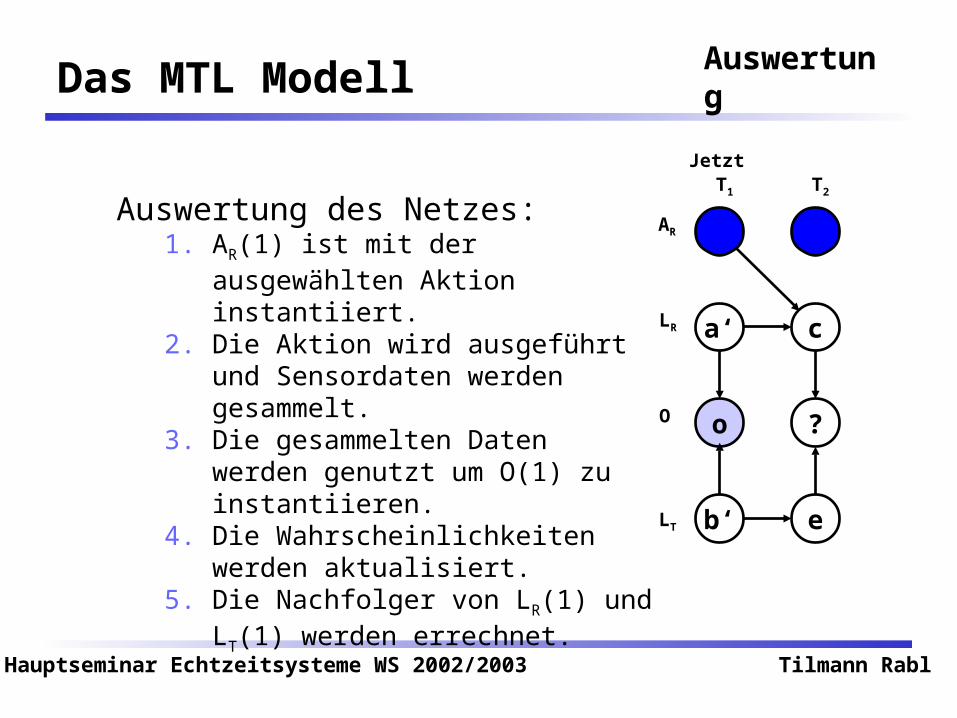
Auswertung des Netzes:1. AR(1) ist mit der ausgewählten Aktion
instantiiert.2. Die Aktion wird ausgeführt und
Sensordaten werden gesammelt.3. Die gesammelten Daten werden genutzt
um O(1) zu instantiieren.4. Die Wahrscheinlichkeiten werden
aktualisiert.5. Die Nachfolger von LR(1) und LT(1)
werden errechnet.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Auswertung
T2 T3
Jetzt
LR
LT
O
AR
?c
? ?
?e
Auswertung des Netzes:1. AR(1) ist mit der ausgewählten Aktion
instantiiert.2. Die Aktion wird ausgeführt und
Sensordaten werden gesammelt.3. Die gesammelten Daten werden genutzt
um O(1) zu instantiieren.4. Die Wahrscheinlichkeiten werden
aktualisiert.5. Die Nachfolger von LR(1) und LT(1)
werden errechnet.6. Die Knoten werden in die Vergangenheit
geschoben und der Prozess beginnt von vorne.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion
Funktion zur Bewertung einer Situation: Im Idealfall:
1. Handlungskette für Roboter vorgeben.2. Reaktionen des Ziels überlegen.3. Daraus Situation konstruieren und bewerten.
Verhalten des Ziels kann nicht gemessen werden. Beobachtungen des Roboters werden verwendet. Situation wird anhand der Beobachtung und der
Wahrscheinlichkeit sie zu machen bewertet.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion
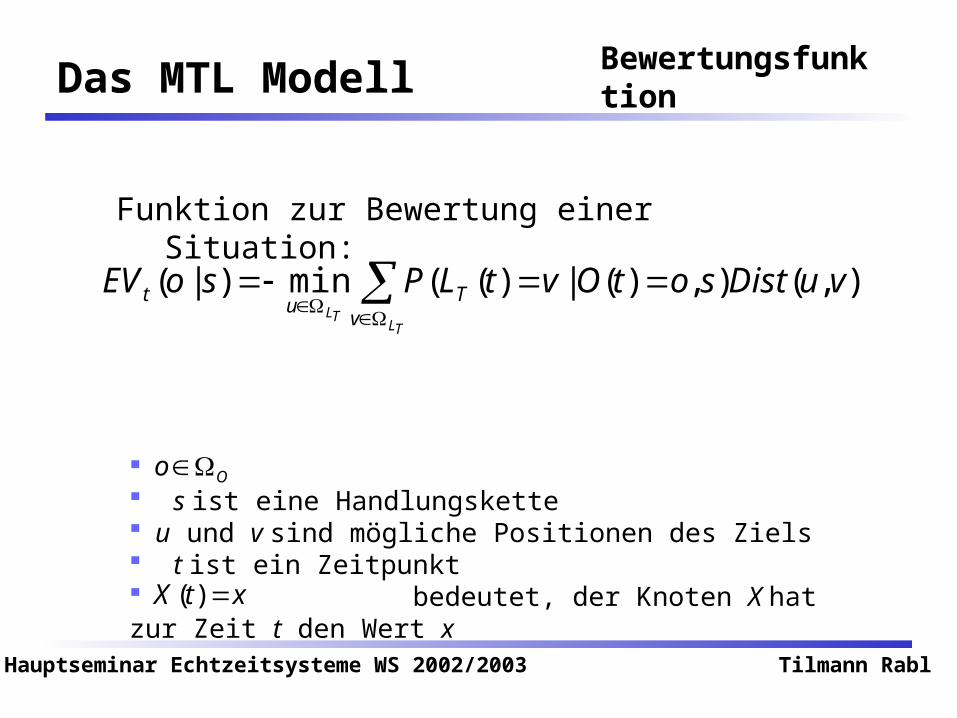
Funktion zur Bewertung einer Situation:
),(),)(|)((min)|( vuDistsotOvtLPsoEVTL
TL vT
ut
s ist eine Handlungskette u und v sind mögliche Positionen des Ziels t ist ein Zeitpunkt bedeutet, der Knoten X hat zur Zeit t den Wert x
Oo
xtX )(
),(),)(|)((min)|( vuDistsotOvtLPsoEVTL
TL vT
ut
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion
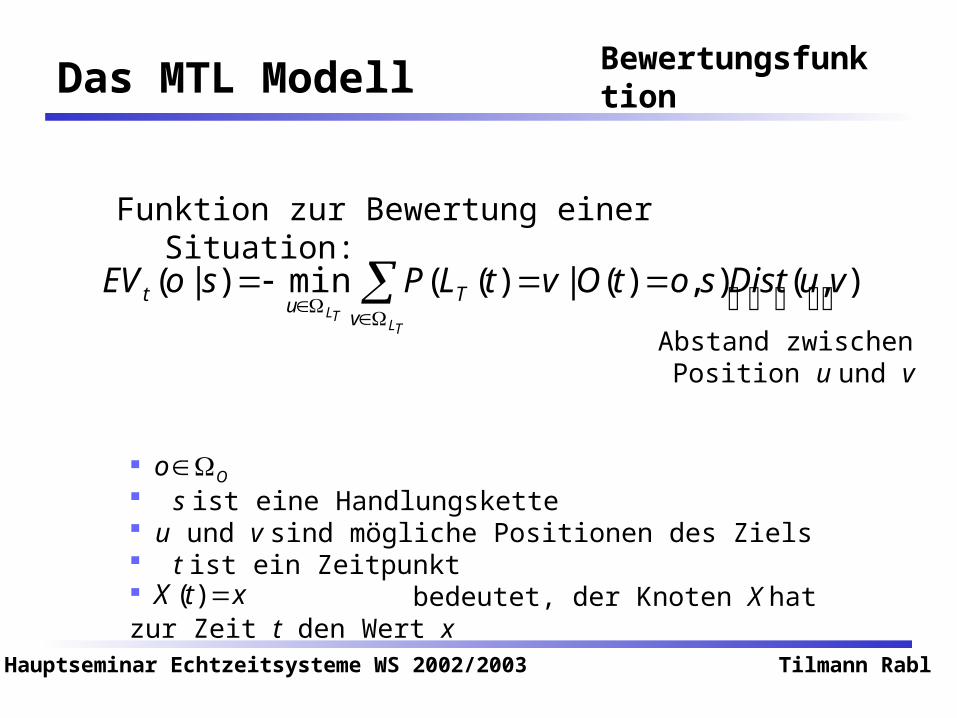
Funktion zur Bewertung einer Situation:
Abstand zwischen Position u und v
s ist eine Handlungskette u und v sind mögliche Positionen des Ziels t ist ein Zeitpunkt bedeutet, der Knoten X hat zur Zeit t den Wert x
Oo
xtX )(
),(),)(|)((min)|( vuDistsotOvtLPsoEVTL
TL vT
ut
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion
Funktion zur Bewertung einer Situation:
Wahrscheinlichkeit, dass dasZiel auf Position v ist
s ist eine Handlungskette u und v sind mögliche Positionen des Ziels t ist ein Zeitpunkt bedeutet, der Knoten X hat zur Zeit t den Wert x
Oo
xtX )(
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion
Funktion zur Bewertung einer Situation:
),(),)(|)((min)|( vuDistsotOvtLPsoEV
TLTL v
Tu
t
Wahrscheinlicher Fehler für eine Position u
s ist eine Handlungskette u und v sind mögliche Positionen des Ziels t ist ein Zeitpunkt bedeutet, der Knoten X hat zur Zeit t den Wert x
Oo
xtX )(
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion
Funktion zur Bewertung einer Situation:
),(),)(|)((min)|( vuDistsotOvtLPsoEV
TLTL v
Tu
t
Ermittelt den minimalen Fehler
s ist eine Handlungskette u und v sind mögliche Positionen des Ziels t ist ein Zeitpunkt bedeutet, der Knoten X hat zur Zeit t den Wert x
Oo
xtX )(
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion
Funktion zur Bewertung einer Situation:
),(),)(|)((min)|( vuDistsotOvtLPsoEVTL
TL vT
ut
Beschreibt den Wert gegebener Handlungsketten und Beobachtungen des Roboters.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion II
Funktion zur Bewertung einer Handlungskette:
)|()|)(()( soEVsotOPsEV to
t
O
Misst den Wert einer Handlungskette, wenn sie für die nächsten n Zeitschritte ausgeführt wird, wobei n die Länge der Sequenz ist.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Bewertungsfunktion III
Gewichtete Bewertung einer Handlungskette:
)()()( sEVtsEV tTt
Die Funktion γ spezifiziert das Gewicht zukünftiger Werte. Dabei wird der Einfluss späterer Konsequenzen herabgesetzt.
Das MTL Modell
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Problem
Wegen der hohen Komplexität sind die Funktionen nur für triviale Fälle anwendbar.
Komplexitätsreduktion
Komplexitätsreduktion und Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Möglichkeiten für Komplexitätsreduktion: Diskretheit der Bewertungsfunktion erlaubt branch and bound Algorithmen und dynamische Programmierung. Dynamische Verkleinerung des Bereichs der räumlichen Variablen. Bibliotheken von Handlungssequenzen, dynamische Reduktion von Möglichkeiten für Aktionen. Anpassung der räumlichen Repräsentation an sensorische Fähigkeiten des Roboters. Berücksichtigung von indirekten Beobachtungen. Sinnvolle Abstraktionen.
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Abstraktion: Aufteilung eines Zustandsraums in eine diskrete Wertemenge. Abwägung:
Zu geringe Genauigkeit => Keine Basis für vernünftige Entscheidung
Zu große Wertemenge => zu hohe Berechnungskosten
Abstraktionsmöglichkeiten: Lokalisationsabstraktion Sensorabstraktion Aktionsabstraktion
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Lokalisation: Repräsentation von nicht direkt messbaren, räumlichen Aspekten. Position des Roboters lässt sich aus Sensordaten und Abschätzungen über die alte Position herleiten. Lokalisationsknoten hängen von vorhergehenden Lokalisationsknoten, Sensorknoten und Aktionsknoten ab. Wichtigste Informationen kommen von Sensoren.
Lokalisationsabstraktion
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
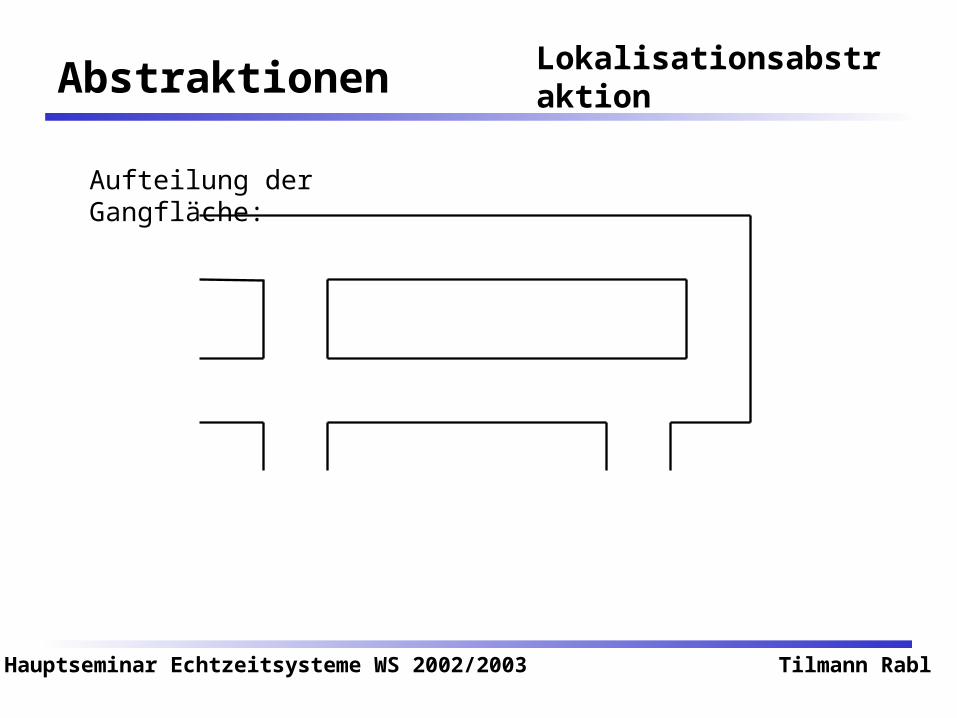
Lokalisationsabstraktion
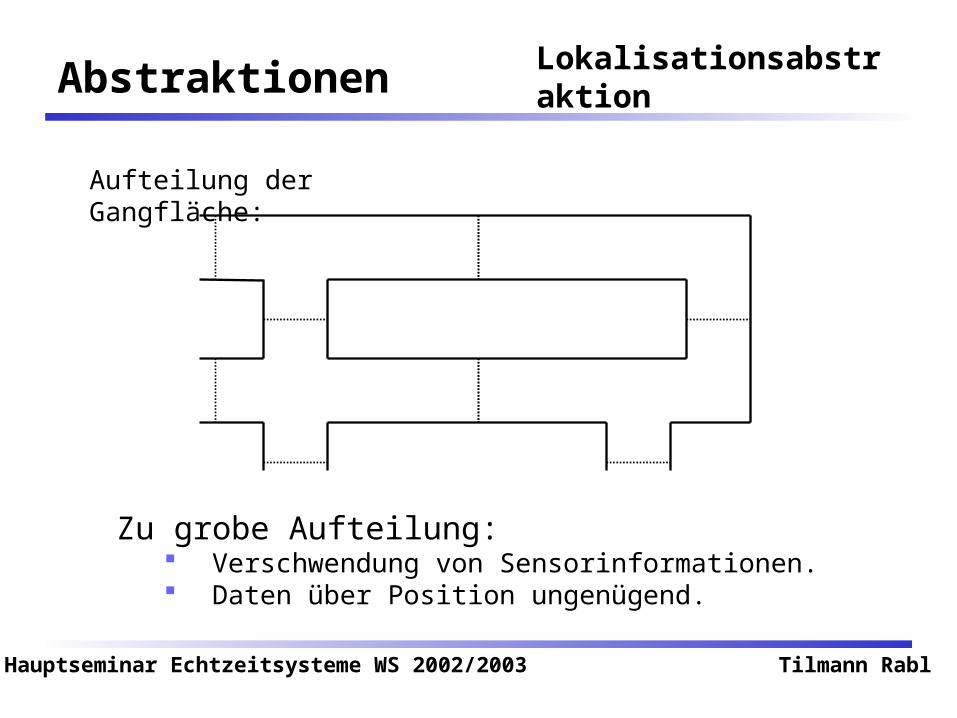
Aufteilung der Gangfläche:
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
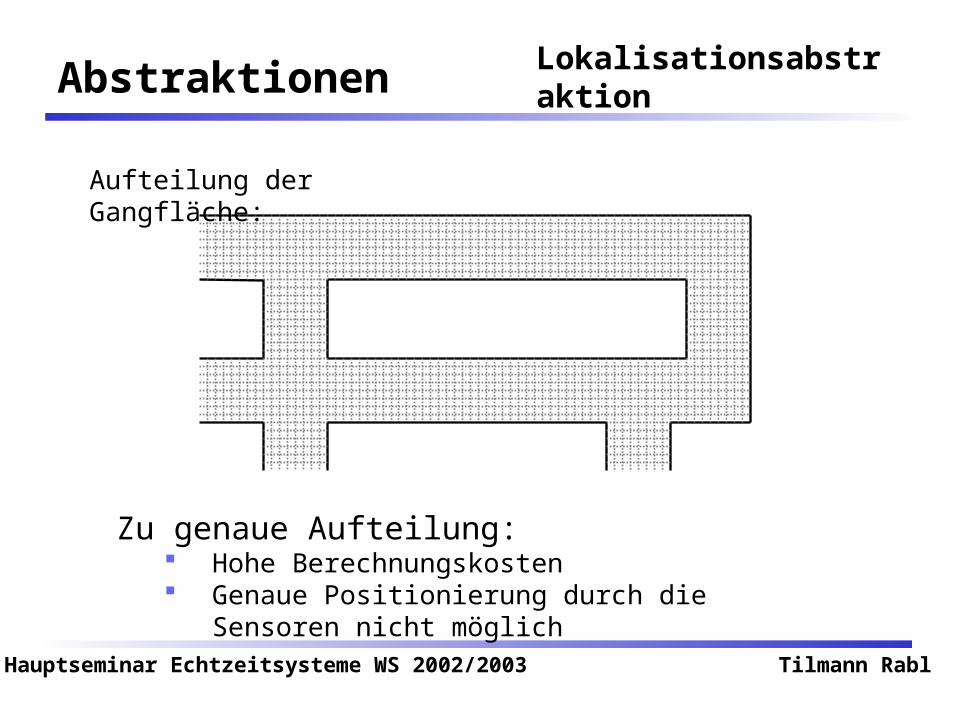
Lokalisationsabstraktion
Aufteilung der Gangfläche:
Zu genaue Aufteilung: Hohe Berechnungskosten Genaue Positionierung durch die Sensoren nicht möglich
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Lokalisationsabstraktion
Aufteilung der Gangfläche:
Zu grobe Aufteilung: Verschwendung von Sensorinformationen. Daten über Position ungenügend.
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Lokalisationsabstraktion
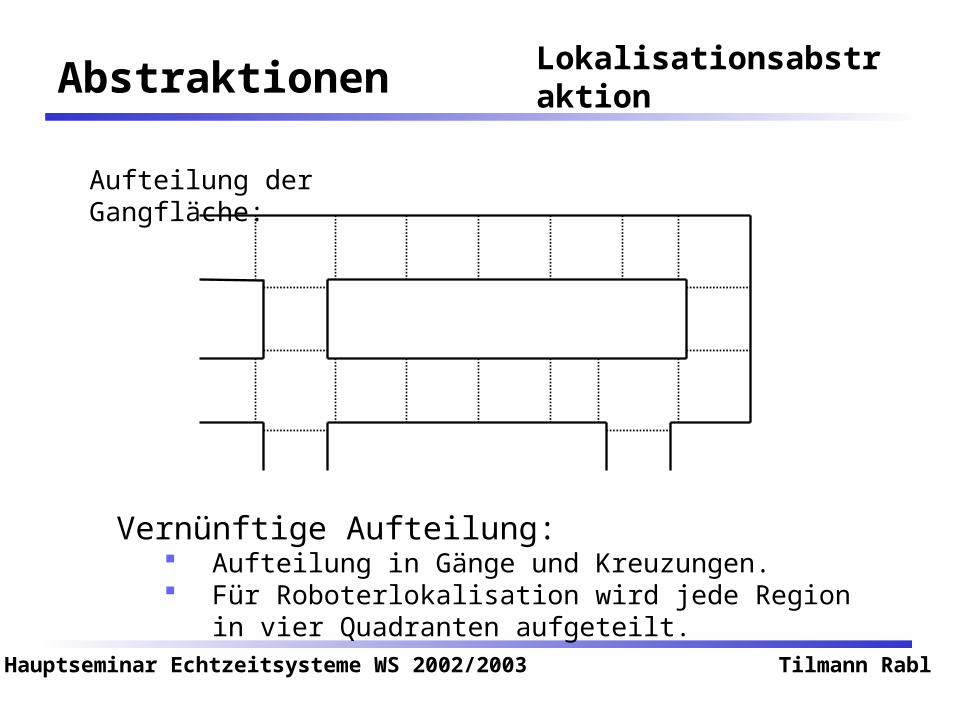
Aufteilung der Gangfläche:
Vernünftige Aufteilung: Aufteilung in Gänge und Kreuzungen. Für Roboterlokalisation wird jede Region in vier
Quadranten aufgeteilt.
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Sensoren: Sensorknoten sind Schnittstelle zwischen der äußeren Welt und dem Modell. Die rohen Sensordaten liegen normalerweise in einem zu großen Wertebereich. Die Sensordaten müssen auf den Beobachtungsraum abgebildet werden.
Sensorabstraktion
Sensoren im Modell: 8 Sonarsensoren, die Werte zwischen 30 und 5999 Millimetern liefern. Eine einfache Kamera zur für die Zielortung.
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Sensorabstraktion
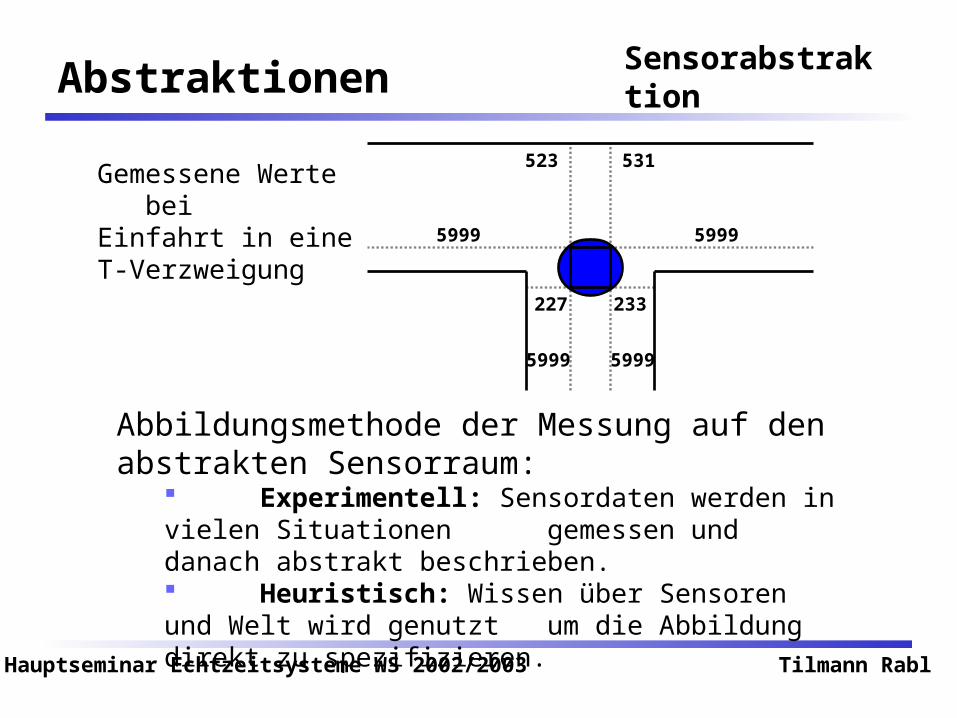
5999 5999
5999 5999
227 233
523 531
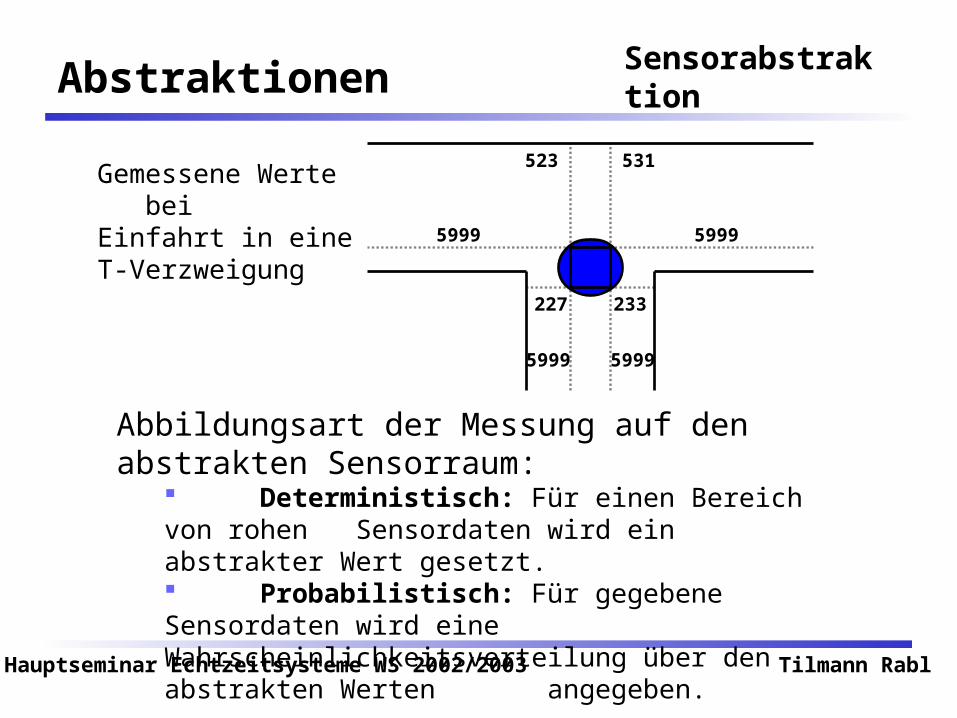
Abbildungsart der Messung auf den abstrakten Sensorraum:
Deterministisch: Für einen Bereich von rohen Sensordaten wird ein abstrakter Wert gesetzt. Probabilistisch: Für gegebene Sensordaten wird eine
Wahrscheinlichkeitsverteilung über den abstrakten Werten angegeben.
Gemessene Werte beiEinfahrt in eine T-Verzweigung
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Sensorabstraktion
5999 5999
5999 5999
227 233
523 531
Abbildungsmethode der Messung auf den abstrakten Sensorraum:
Experimentell: Sensordaten werden in vielen Situationen gemessen und danach abstrakt beschrieben. Heuristisch: Wissen über Sensoren und Welt wird genutzt um die Abbildung direkt zu spezifizieren.
Gemessene Werte beiEinfahrt in eine T-Verzweigung
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Aktionen: Anzahl der vom Roboter ausführbaren Aktionen ist |ΩA|. Kosten der Entscheidung über die nächste Handlungskette ist proportional zu |ΩA|h (h ist die Tiefe des Ereignishorizonts). Reduktion der Größe von ΩA bringt viel Kostenersparnis. Anzahl von Aktionen kann durch Einführung von komplexen Handlungen erreicht werden.
Aktionsabstraktion
Abstraktionen
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Beispiel: Simple Handlungen:
„ein cm nach vorne“ „ein Grad nach links“
Komplexere Handlungen: „Gang entlang gehen“ „nächste Kreuzung links“
Nachteil: Gehen nicht auf Einflüsse aus der Umwelt ein und werden so bei Veränderungen evtl. sinnlos.
Aktionsabstraktion
Im MTL Problem: Handlungen sind der räumliche Repräsentation angepasst. Aktionen: Gang entlang, in oder aus Kreuzung fahren. Unpassende Handlungen werden nicht in die Bewertung aufgenommen.
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Testlauf
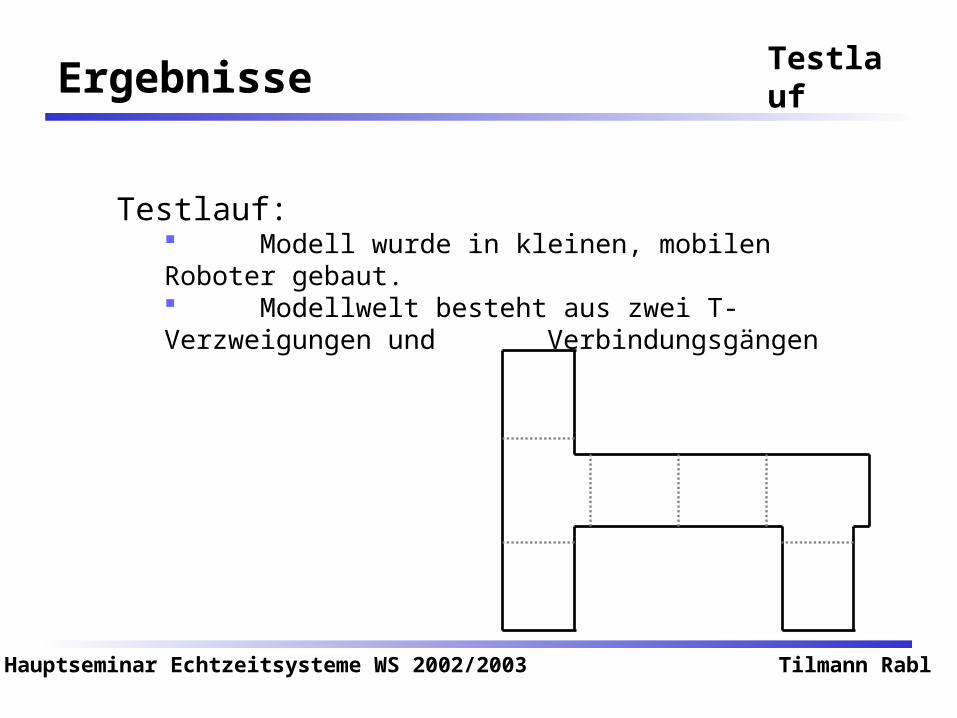
Testlauf: Modell wurde in kleinen, mobilen Roboter gebaut.
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Testlauf
Testlauf: Modell wurde in kleinen, mobilen Roboter gebaut. Modellwelt besteht aus zwei T-Verzweigungen und Verbindungsgängen
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Testlauf
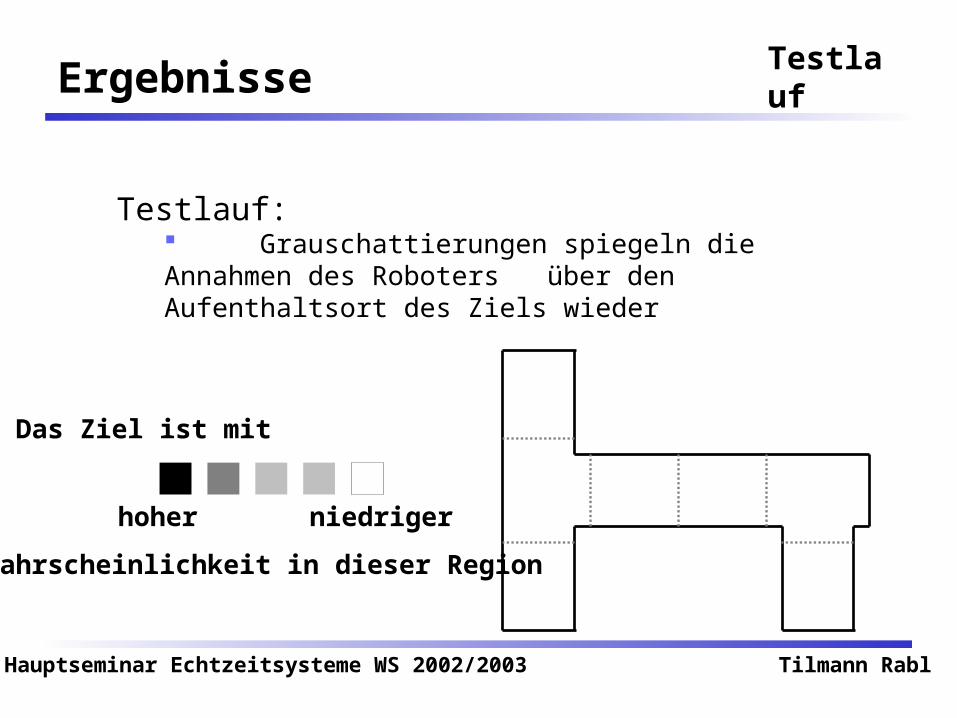
Testlauf: Grauschattierungen spiegeln die Annahmen des Roboters über den Aufenthaltsort des Ziels wieder
Das Ziel ist mit
Wahrscheinlichkeit in dieser Region
hoher niedriger
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Testlauf
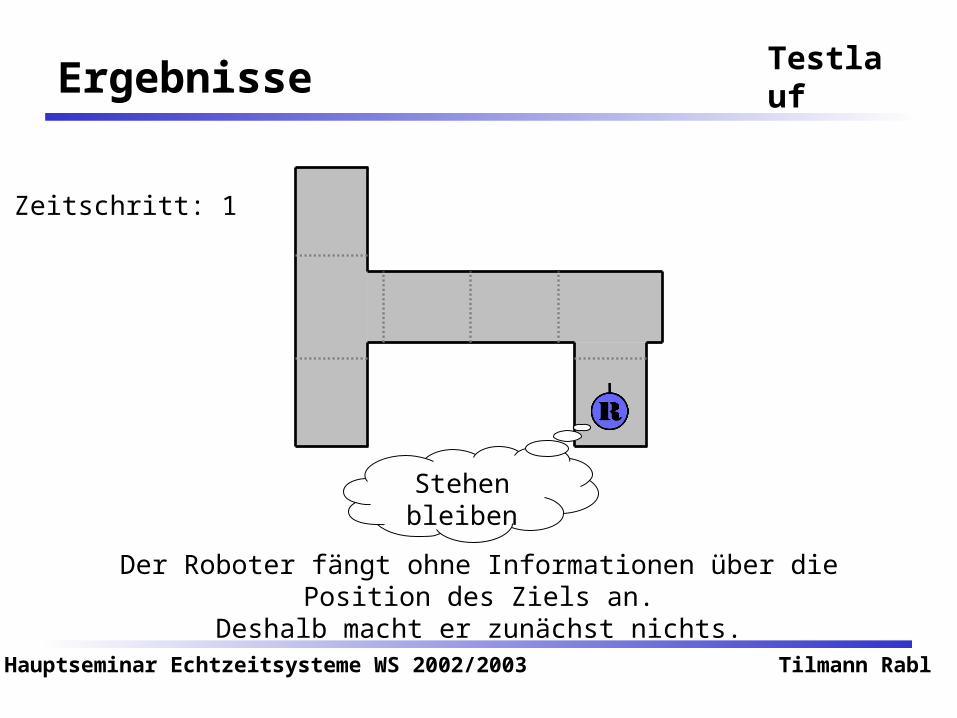
Der Roboter fängt ohne Informationen über die Position des Ziels an.Deshalb macht er zunächst nichts.
Stehen bleiben
Zeitschritt: 1
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Testlauf
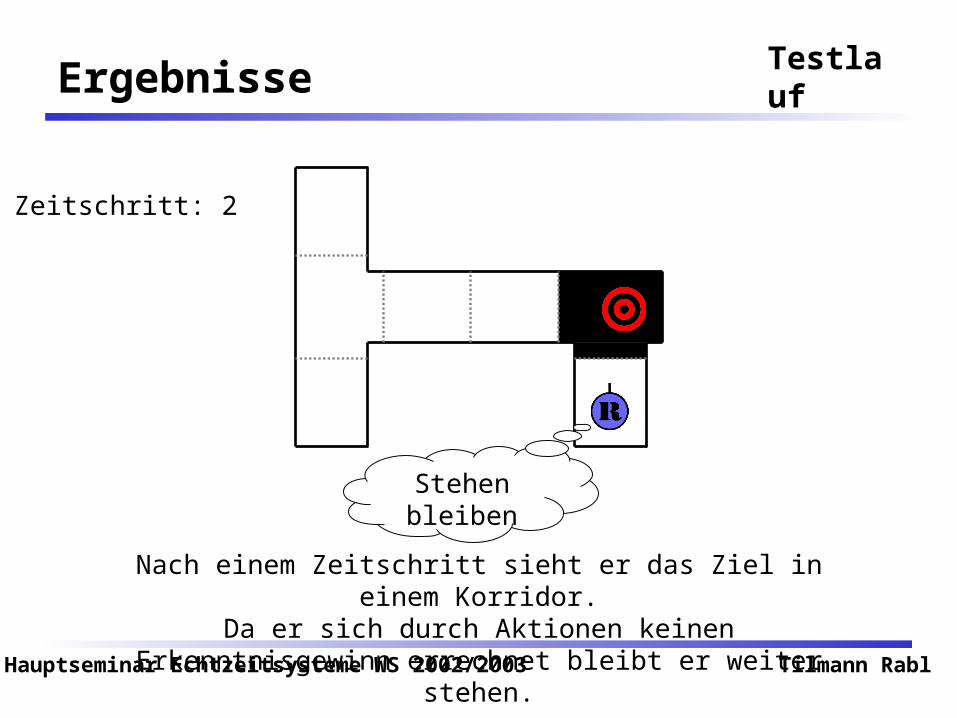
Nach einem Zeitschritt sieht er das Ziel in einem Korridor.Da er sich durch Aktionen keinen Erkenntnisgewinn errechnet bleibt
er weiter stehen.
Stehen bleiben
Zeitschritt: 2
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
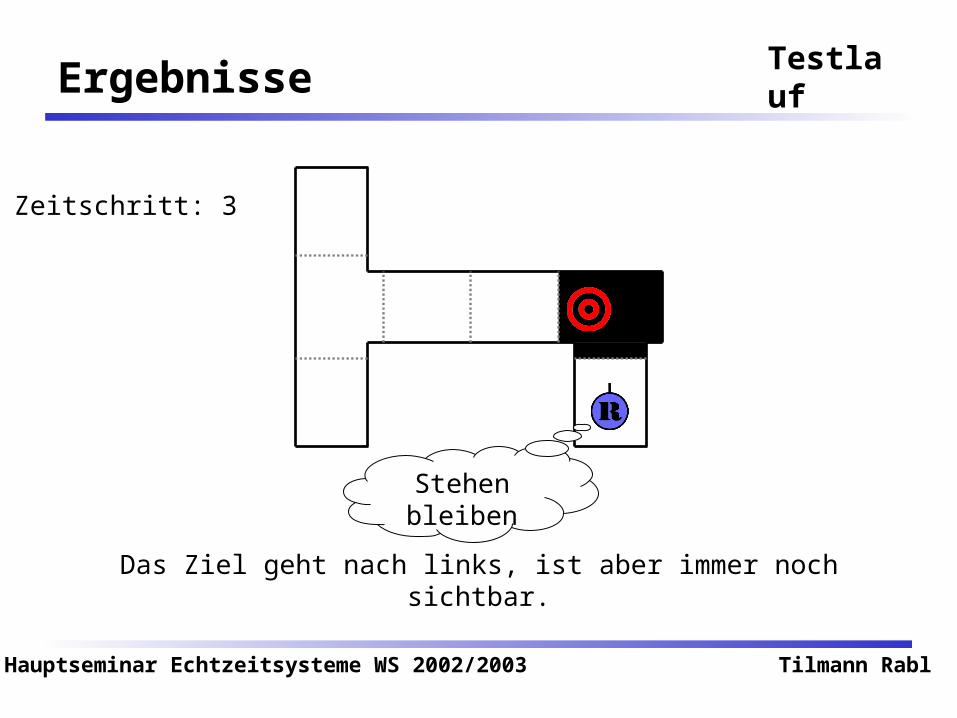
Testlauf
Das Ziel geht nach links, ist aber immer noch sichtbar.
Stehen bleiben
Zeitschritt: 3
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
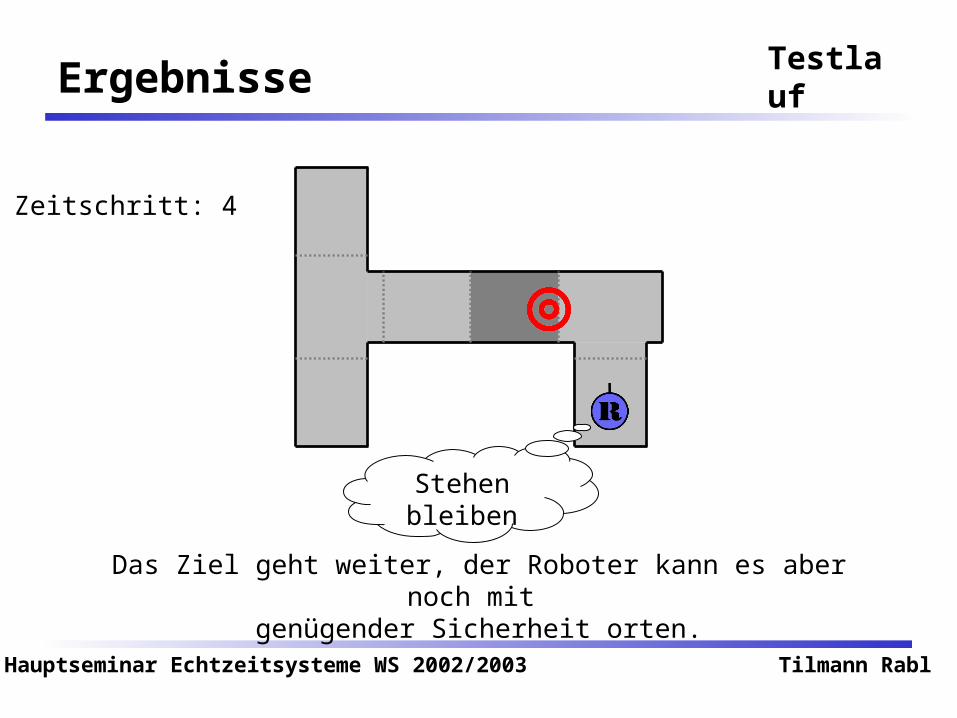
Testlauf
Das Ziel geht weiter, der Roboter kann es aber noch mit genügender Sicherheit orten.
Stehen bleiben
Zeitschritt: 4
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
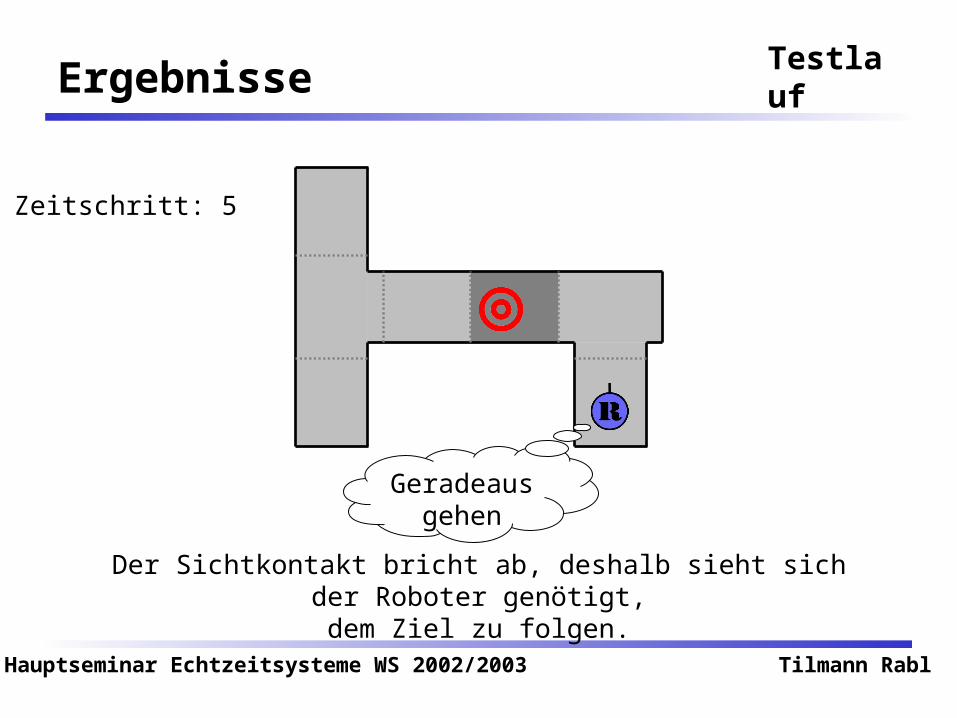
Testlauf
Der Sichtkontakt bricht ab, deshalb sieht sich der Roboter genötigt,dem Ziel zu folgen.
Geradeausgehen
Zeitschritt: 5
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
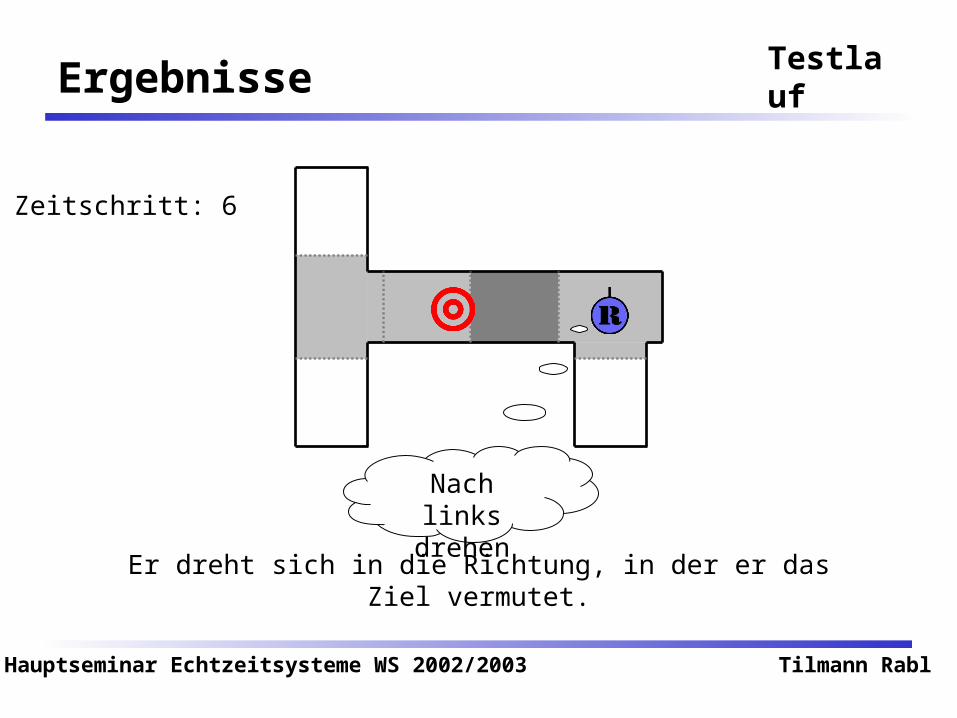
Testlauf
Er dreht sich in die Richtung, in der er das Ziel vermutet.
Nach links drehen
Zeitschritt: 6
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
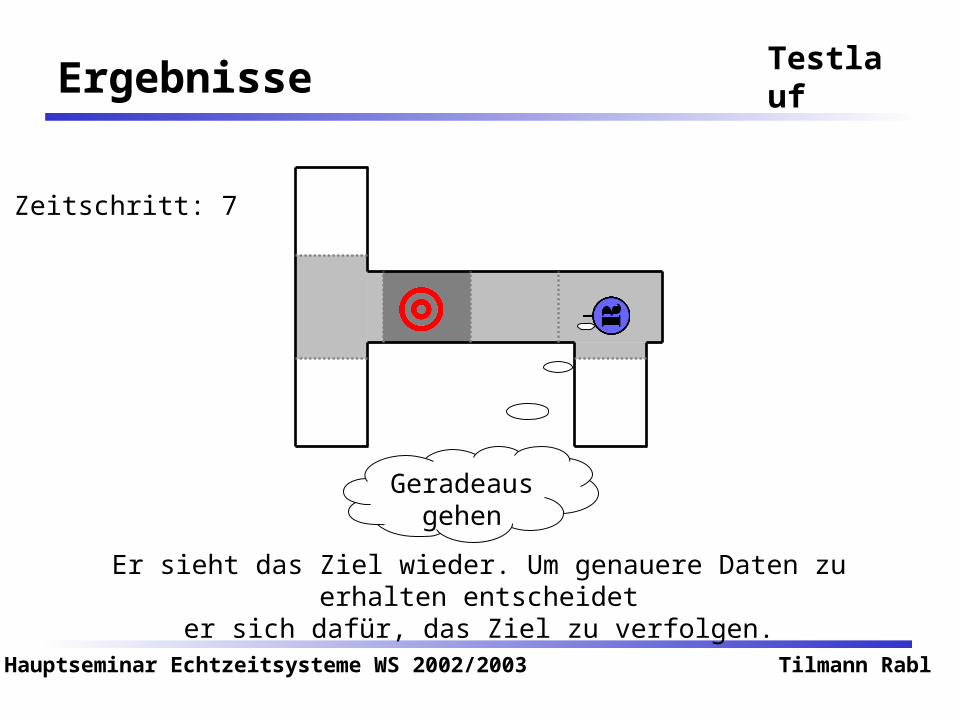
Testlauf
Er sieht das Ziel wieder. Um genauere Daten zu erhalten entscheideter sich dafür, das Ziel zu verfolgen.
Geradeaus gehen
Zeitschritt: 7
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
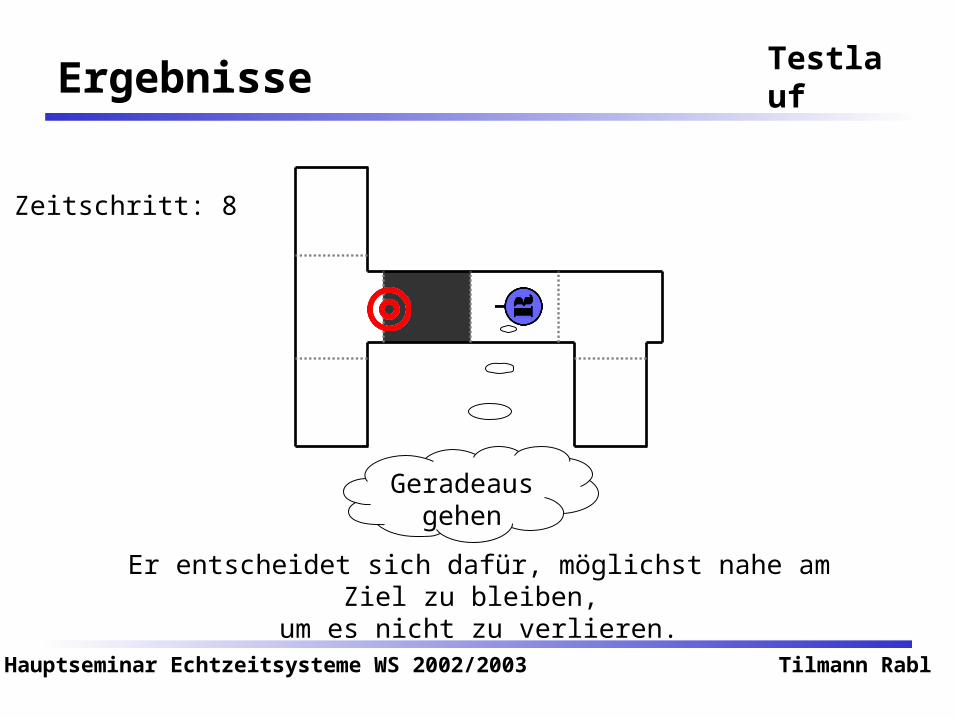
Testlauf
Er entscheidet sich dafür, möglichst nahe am Ziel zu bleiben, um es nicht zu verlieren.
Geradeaus gehen
Zeitschritt: 8
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
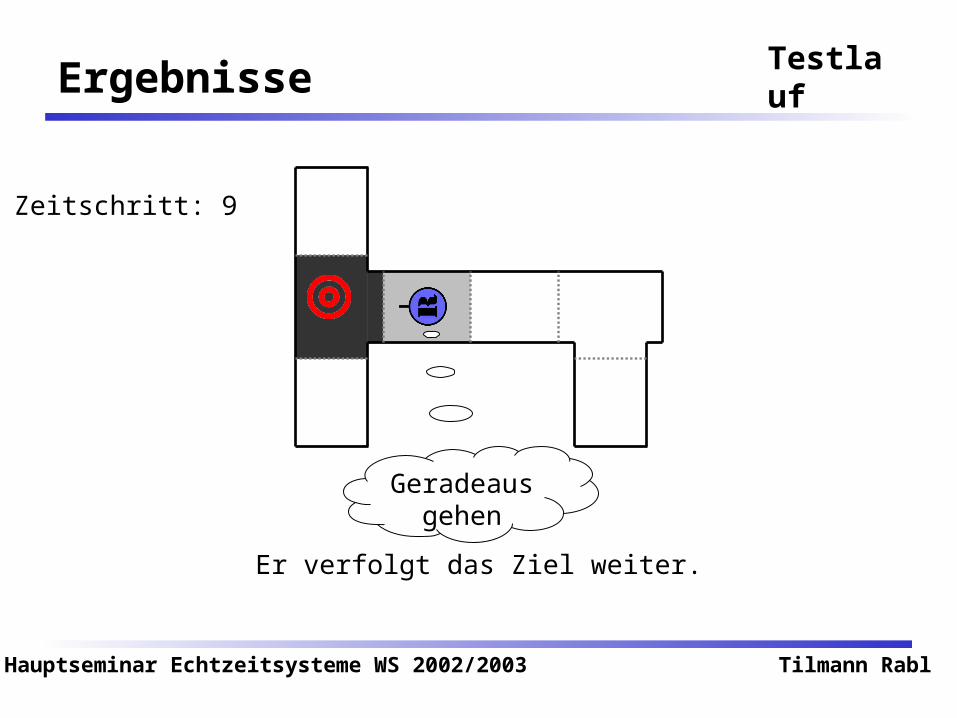
Testlauf
Er verfolgt das Ziel weiter.
Geradeaus gehen
Zeitschritt: 9
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
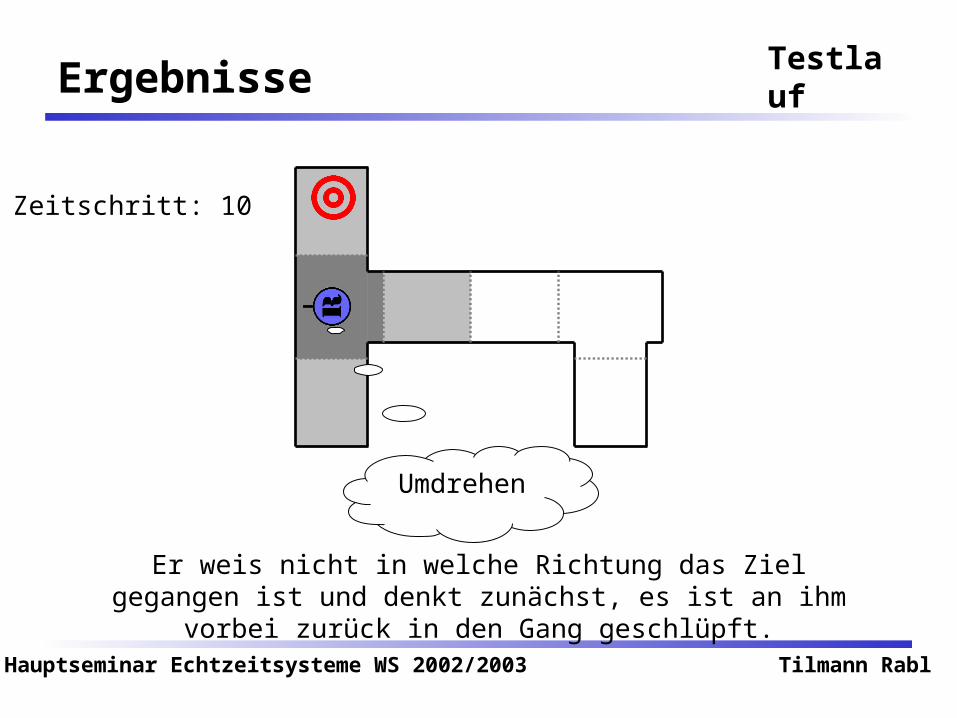
Testlauf
Er weis nicht in welche Richtung das Ziel gegangen ist und denkt zunächst, es ist an ihm vorbei zurück in den Gang geschlüpft.
Umdrehen
Zeitschritt: 10
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Testlauf
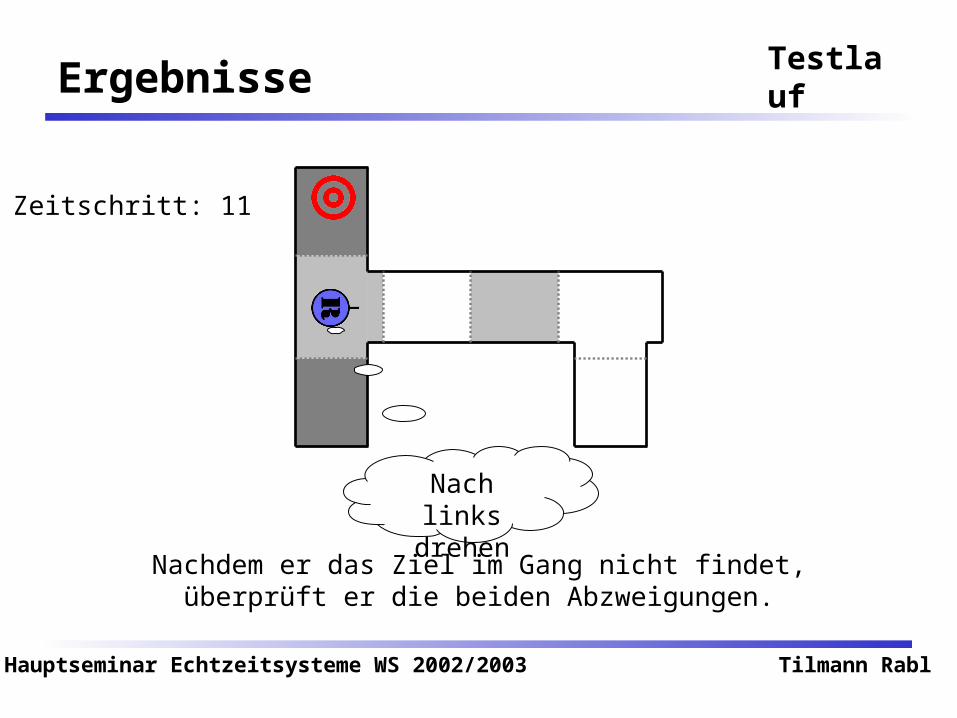
Nachdem er das Ziel im Gang nicht findet, überprüft er die beiden Abzweigungen.
Nach links drehen
Zeitschritt: 11
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
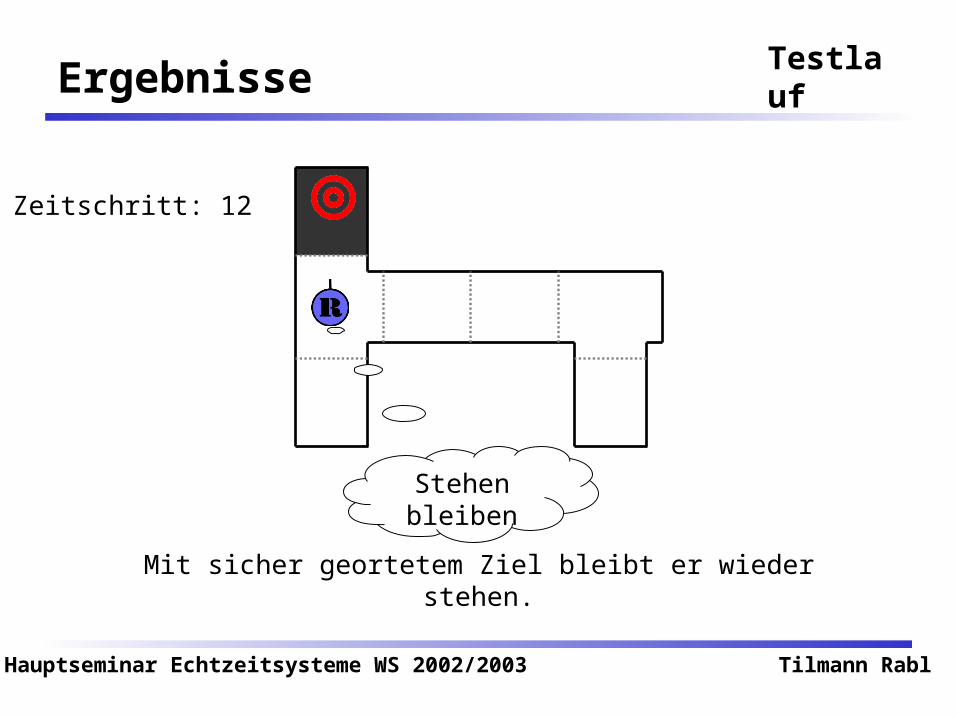
Testlauf
Mit sicher geortetem Ziel bleibt er wieder stehen.
Stehen bleiben
Zeitschritt: 12
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
Unerwartetes Verhalten in entscheidungstheoretischen Modellen:
Entwickler stellen nur Erwartungen, Aktionen und Dienstprogramme zur Verfügung. Verhalten resultiert aus Suche nach bester Lösung. Es treten unvorhergesehene Verhaltensweisen auf.
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
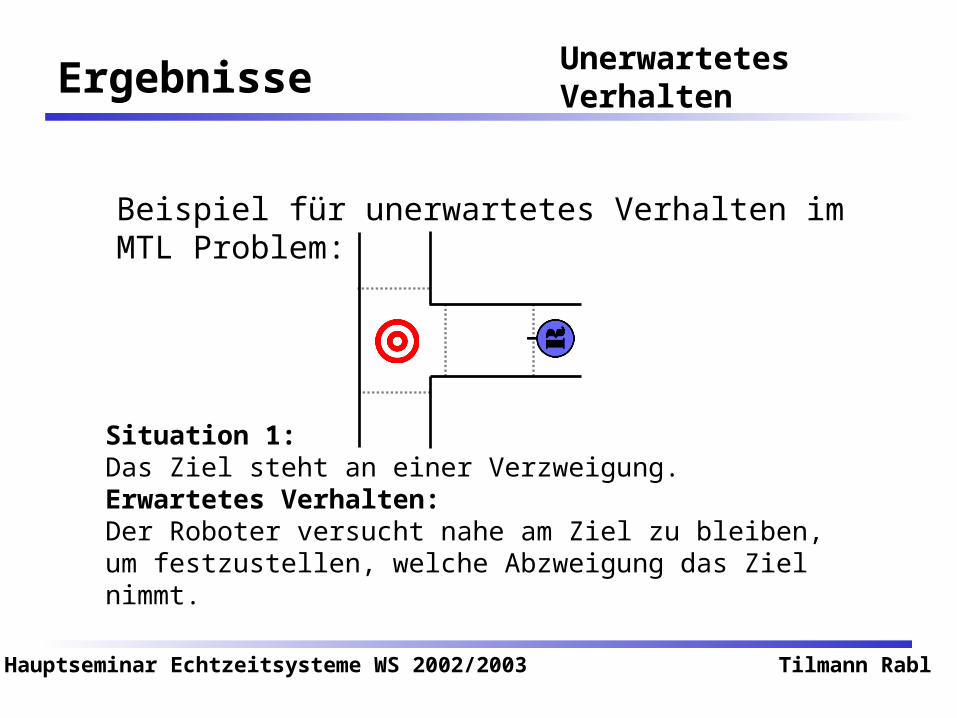
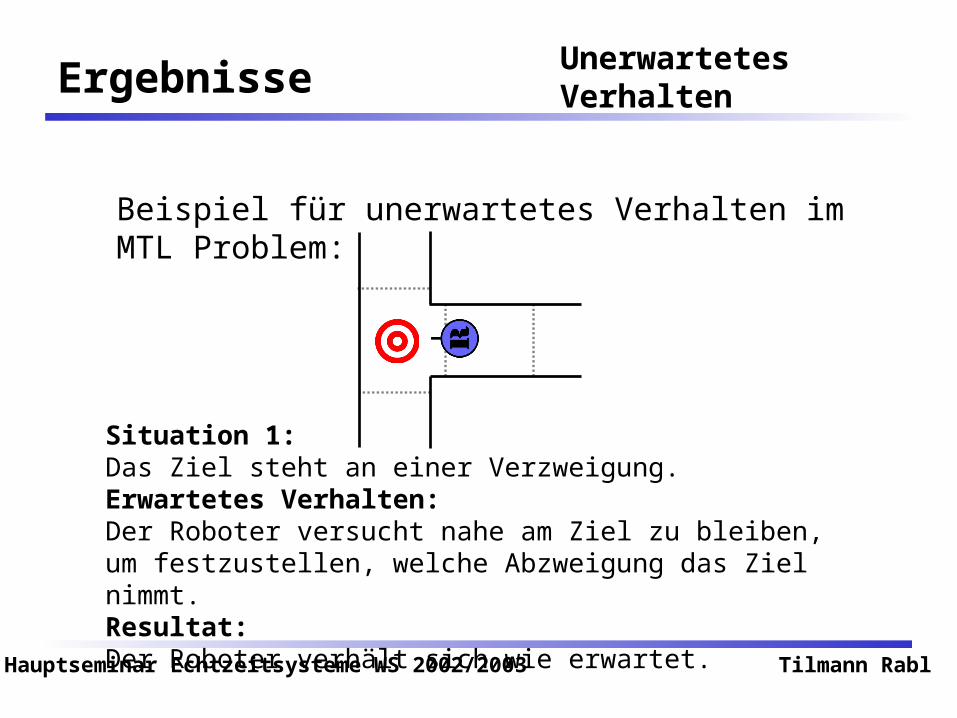
Beispiel für unerwartetes Verhalten im MTL Problem:
Situation 1:Das Ziel steht an einer Verzweigung.Erwartetes Verhalten:Der Roboter versucht nahe am Ziel zu bleiben, um festzustellen, welche Abzweigung das Ziel nimmt.
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
Beispiel für unerwartetes Verhalten im MTL Problem:
Situation 1:Das Ziel steht an einer Verzweigung.Erwartetes Verhalten:Der Roboter versucht nahe am Ziel zu bleiben, um festzustellen, welche Abzweigung das Ziel nimmt.Resultat:Der Roboter verhält sich wie erwartet.
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
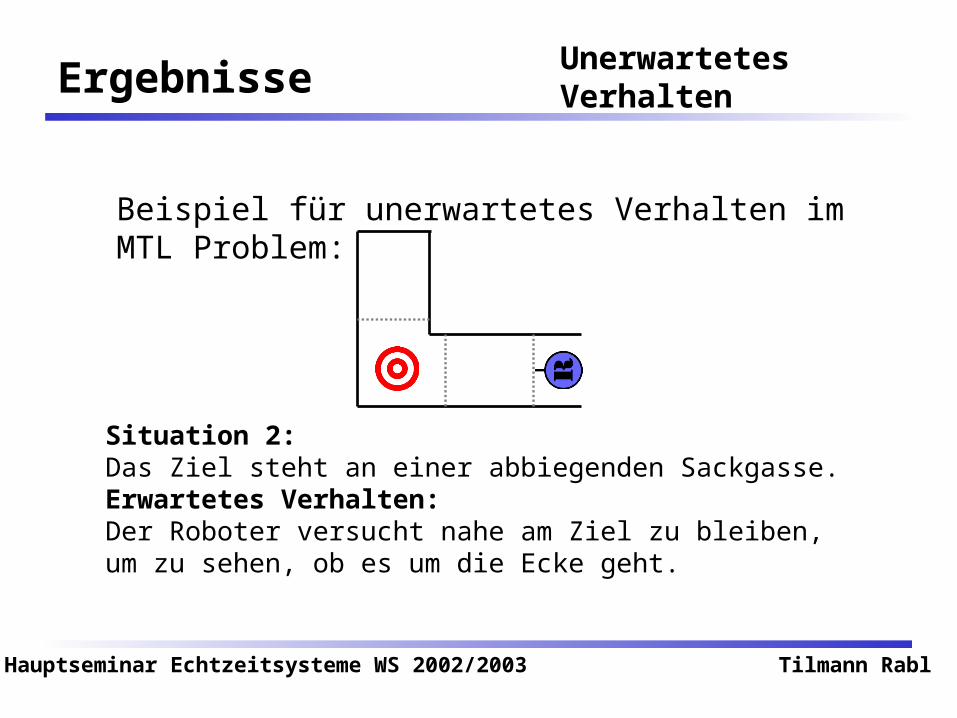
Beispiel für unerwartetes Verhalten im MTL Problem:
Situation 2:Das Ziel steht an einer abbiegenden Sackgasse.Erwartetes Verhalten:Der Roboter versucht nahe am Ziel zu bleiben, um zu sehen, ob es um die Ecke geht.
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
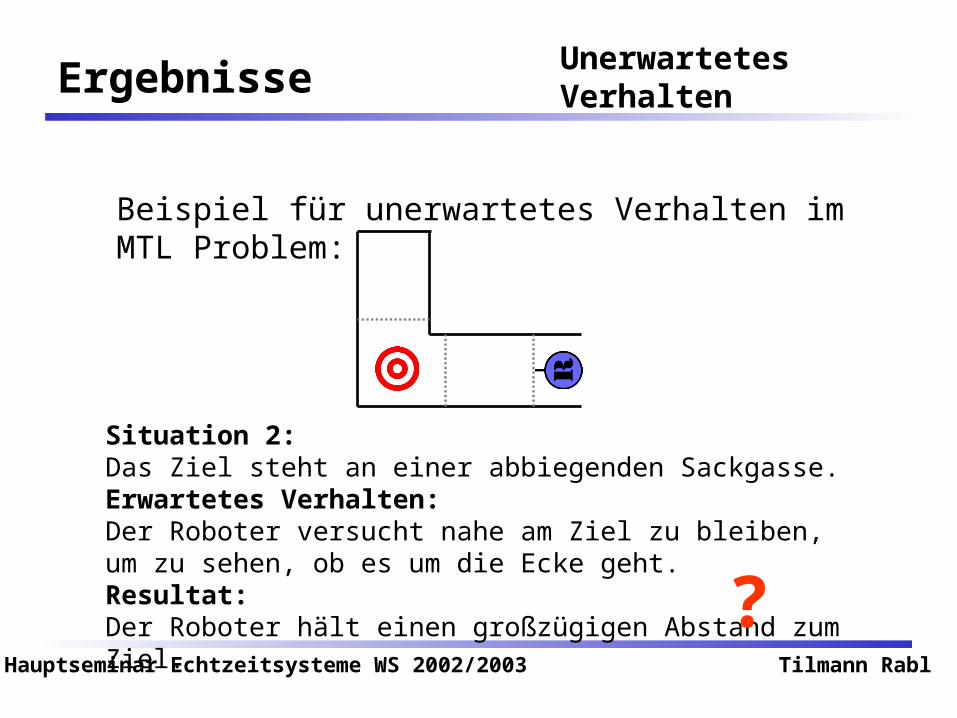
Beispiel für unerwartetes Verhalten im MTL Problem:
Situation 2:Das Ziel steht an einer abbiegenden Sackgasse.Erwartetes Verhalten:Der Roboter versucht nahe am Ziel zu bleiben, um zu sehen, ob es um die Ecke geht.Resultat:Der Roboter hält einen großzügigen Abstand zum Ziel. ?
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
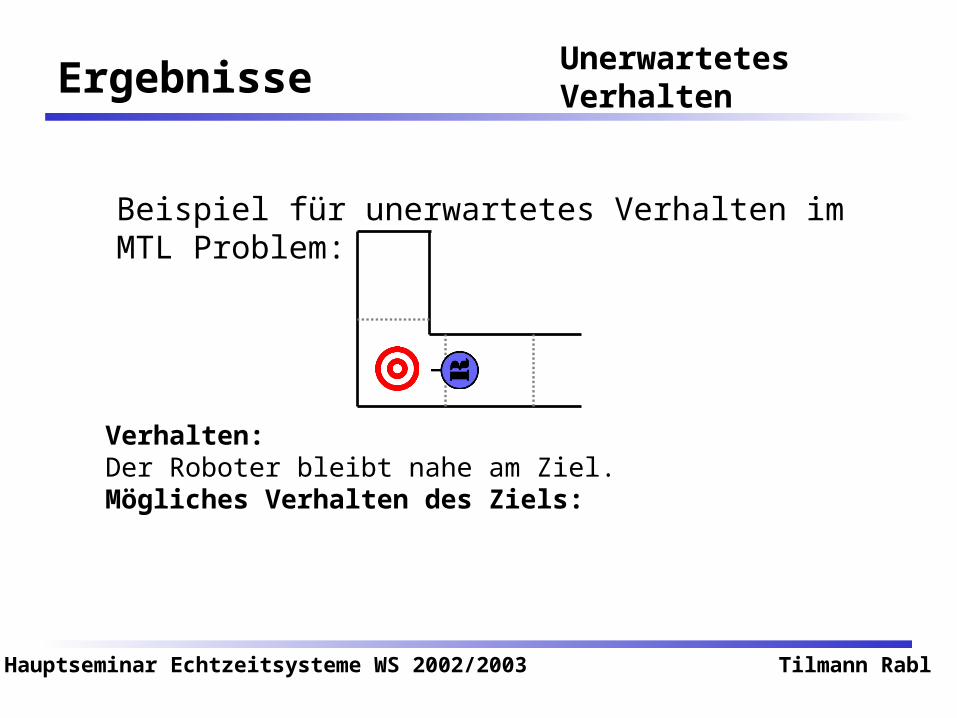
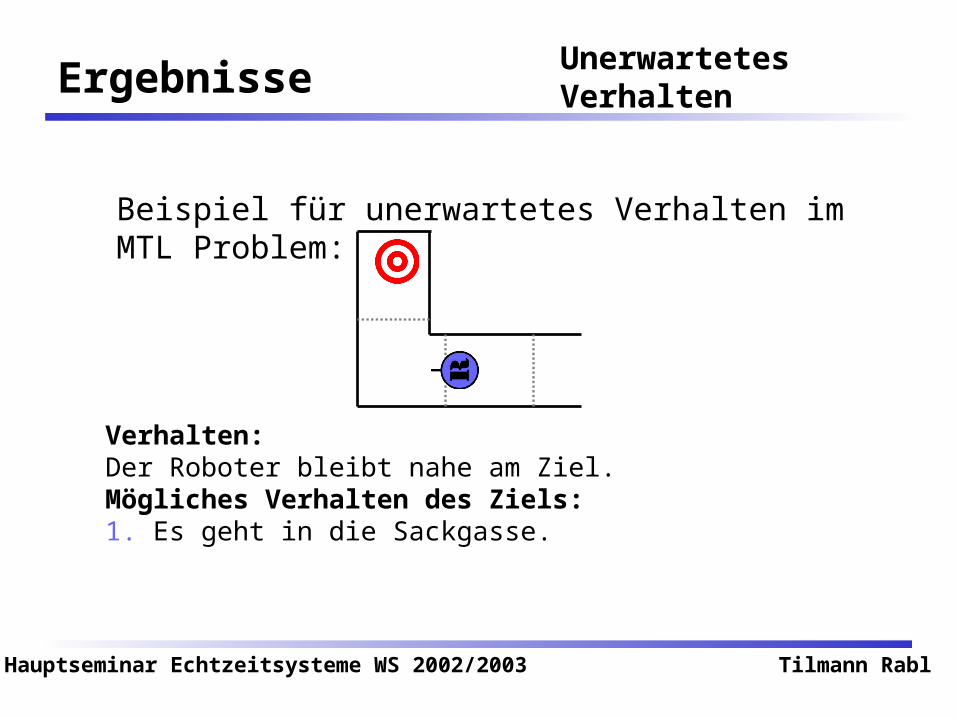
Beispiel für unerwartetes Verhalten im MTL Problem:
Verhalten:Der Roboter bleibt nahe am Ziel.Mögliches Verhalten des Ziels:
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
Beispiel für unerwartetes Verhalten im MTL Problem:
Verhalten:Der Roboter bleibt nahe am Ziel.Mögliches Verhalten des Ziels:1. Es geht in die Sackgasse.
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
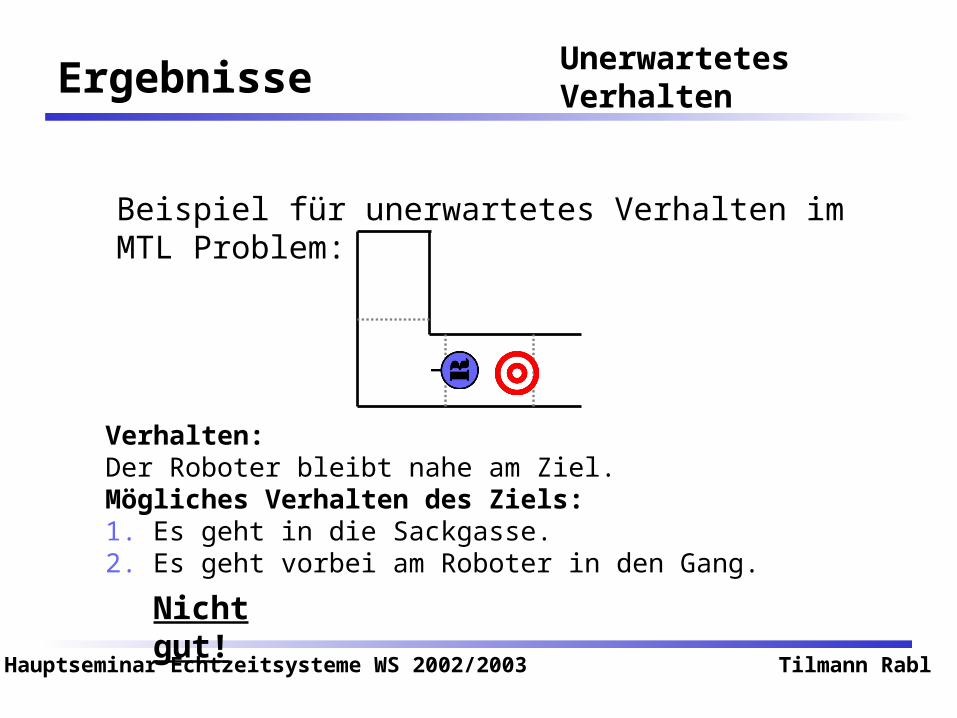
Beispiel für unerwartetes Verhalten im MTL Problem:
Verhalten:Der Roboter bleibt nahe am Ziel.Mögliches Verhalten des Ziels:1. Es geht in die Sackgasse.2. Es geht vorbei am Roboter in den Gang.
Nicht gut!
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
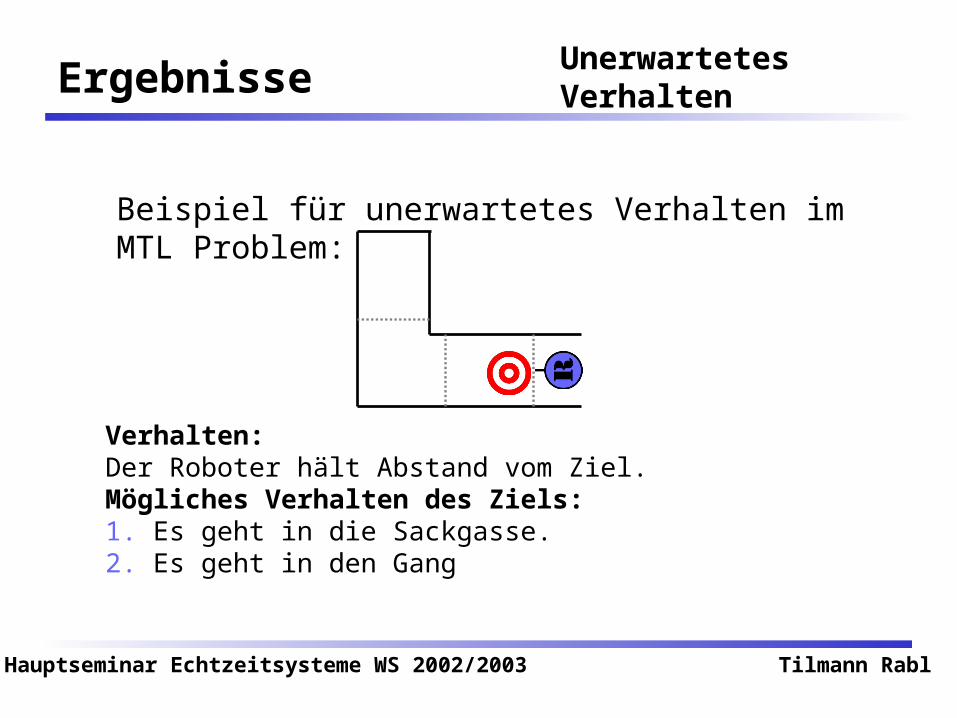
Unerwartetes Verhalten
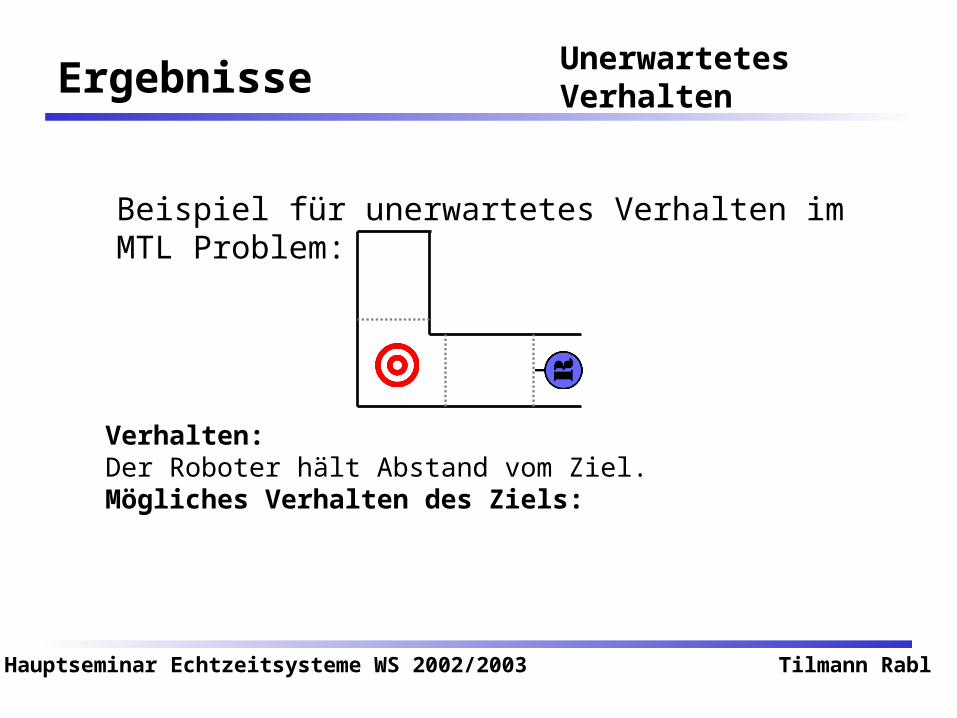
Beispiel für unerwartetes Verhalten im MTL Problem:
Verhalten:Der Roboter hält Abstand vom Ziel.Mögliches Verhalten des Ziels:
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
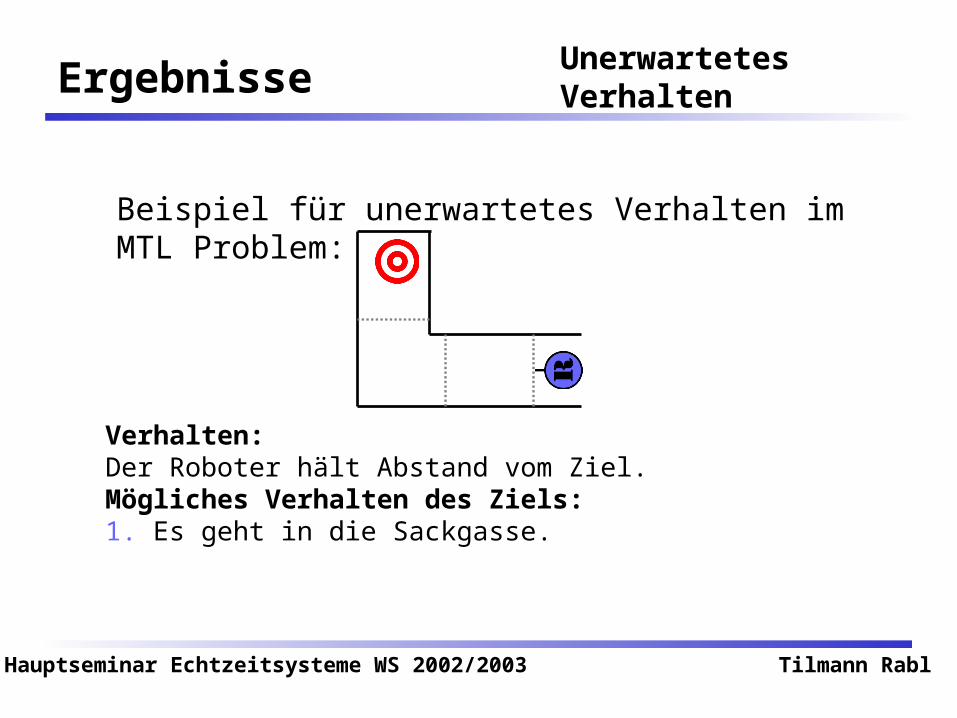
Beispiel für unerwartetes Verhalten im MTL Problem:
Verhalten:Der Roboter hält Abstand vom Ziel.Mögliches Verhalten des Ziels:1. Es geht in die Sackgasse.
Ergebnisse
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Unerwartetes Verhalten
Beispiel für unerwartetes Verhalten im MTL Problem:
Verhalten:Der Roboter hält Abstand vom Ziel.Mögliches Verhalten des Ziels:1. Es geht in die Sackgasse.2. Es geht in den Gang
Resümee
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Vorteile von Entscheidungstheorie und Bayesschen Netzen:
Unsicherheit: Entscheidungstheorie und Bayessche Netze sind ein natürlicher Ansatz für KI Systeme. Eindeutigkeit: Die Annahmen, die in diesem Ansatz gemacht werden, um Wissen wiederzuspiegeln, sind explizit und klar. Entwicklung: Entscheidungstheorie und Wahrscheinlichkeitstheorie sind gut entwickelt. Einfachheit: Bayessche Netze sind einfach zu erstellen, benutzen und analysieren.
Resümee
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl
Und jetzt? Ihre Vorteile haben zur Verbreitung von Entscheidungstheorie und Bayesschen Netzen beigetragen. Es existiert ein breites Anwendungsfeld.
Kleines Beispiel:
Der Microsoft Office Assistent stützt sich auf Bayessche Netze
Weitere Infos: http://www.fmi.uni-passau.de/~rabl
Vielen Dank für Ihre
Aufmerksamkeit
Hauptseminar Echtzeitsysteme WS 2002/2003 Tilmann Rabl




![Grundlagen der Rechnerarchitektur - Universität Ulm · Grundlagen der Rechnerarchitektur [CS3100.010] Wintersemester 2014/15 Heiko Falk Institut für Eingebettete Systeme/Echtzeitsysteme](https://static.fdokument.com/doc/165x107/5e0c3136118dc0188b1d56b3/grundlagen-der-rechnerarchitektur-universitt-ulm-grundlagen-der-rechnerarchitektur.jpg)






![Grundlagen der Betriebssysteme - Ulm · Grundlagen der Betriebssysteme [CS2100] Sommersemester 2014 Heiko Falk Institut für Eingebettete Systeme/Echtzeitsysteme Ingenieurwissenschaften](https://static.fdokument.com/doc/165x107/605ab9258828d1718b22d2b6/grundlagen-der-betriebssysteme-ulm-grundlagen-der-betriebssysteme-cs2100-sommersemester.jpg)