
Einführung in die Robotik - tams.informatik.uni-hamburg.de · Universit¨at Hamburg MIN-Fakult¨at...
10
Universit¨ at Hamburg MIN-Fakult¨ at Department Informatik - Einf¨ uhrung in die Robotik Einf¨ uhrung in die Robotik Jianwei Zhang [email protected] Universit¨ at Hamburg Fakult¨ at f¨ ur Mathematik, Informatik und Naturwissenschaften Department Informatik Technische Aspekte Multimodaler Systeme 07. Juli 2009 J. Zhang 377 Universit¨ at Hamburg MIN-Fakult¨ at Department Informatik Programmierung auf Aufgabenebene und Bahnplanung Einf¨ uhrung in die Robotik Gliederung Allgemeine Informationen Einf¨ uhrung Koordinaten eines Manipulators Kinematik-Gleichungen Kinematik-Gleichungen Inverse Kinematik von Manipulatoren Differentielle Bewegungen mit homogenen Transformationen Jacobi-Matrix eines Manipulators Aufgabenbeschreibung Robotergrammierung auf drei Ebenen Trajektoriegenerierung Trajektoriengenerierung Einf¨ uhrung in RCCL J. Zhang 378 Universit¨ at Hamburg MIN-Fakult¨ at Department Informatik Programmierung auf Aufgabenebene und Bahnplanung Einf¨ uhrung in die Robotik Gliederung (cont.) Dynamik Roboterregelung Programmierung auf Aufgabenebene und Bahnplanung Programmierung auf Aufgabenebene und Bahnplanung Programmierung auf Aufgabenebene und Bahnplanung Potentialfeldmethode Probabilistische Ans¨ atze Anwendungsgebiete Erweiterungen des Basisproblems Architekturen sensorbasierter intelligenter Systeme Architekturen sensorbasierter intelligenter Systeme Das Perzeption-Aktion-Modell mit Ged¨ achtnis Das CMAC-Modell J. Zhang 379 Universit¨ at Hamburg MIN-Fakult¨ at Department Informatik Programmierung auf Aufgabenebene und Bahnplanung Einf¨ uhrung in die Robotik Gliederung (cont.) Die Subsumtions-Architektur Steuerungsarchitektur eines Fisches Verhaltensfusion Hierarchie Eine Architektur f¨ ur lernende Roboter Das AuRA-Modell - Arkin ’86 Aus- und R¨ uckblick J. Zhang 380
Transcript of Einführung in die Robotik - tams.informatik.uni-hamburg.de · Universit¨at Hamburg MIN-Fakult¨at...
Universitat Hamburg
MIN-FakultatDepartment Informatik
- Einfuhrung in die Robotik
Einfuhrung in die Robotik
Jianwei [email protected]
Universitat HamburgFakultat fur Mathematik, Informatik und NaturwissenschaftenDepartment Informatik
Technische Aspekte Multimodaler Systeme
07. Juli 2009
J. Zhang 377
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung Einfuhrung in die Robotik
Gliederung
Allgemeine InformationenEinfuhrungKoordinaten eines ManipulatorsKinematik-GleichungenKinematik-GleichungenInverse Kinematik von ManipulatorenDifferentielle Bewegungen mit homogenen TransformationenJacobi-Matrix eines ManipulatorsAufgabenbeschreibungRobotergrammierung auf drei EbenenTrajektoriegenerierungTrajektoriengenerierungEinfuhrung in RCCL
J. Zhang 378
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung Einfuhrung in die Robotik
Gliederung (cont.)
DynamikRoboterregelungProgrammierung auf Aufgabenebene und BahnplanungProgrammierung auf Aufgabenebene und BahnplanungProgrammierung auf Aufgabenebene und Bahnplanung
PotentialfeldmethodeProbabilistische AnsatzeAnwendungsgebieteErweiterungen des Basisproblems
Architekturen sensorbasierter intelligenter SystemeArchitekturen sensorbasierter intelligenter SystemeDas Perzeption-Aktion-Modell mit GedachtnisDas CMAC-Modell
J. Zhang 379
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung Einfuhrung in die Robotik
Gliederung (cont.)
Die Subsumtions-ArchitekturSteuerungsarchitektur eines FischesVerhaltensfusionHierarchieEine Architektur fur lernende RoboterDas AuRA-Modell - Arkin ’86
Aus- und Ruckblick
J. Zhang 380
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Potentialfeldmethode Einfuhrung in die Robotik
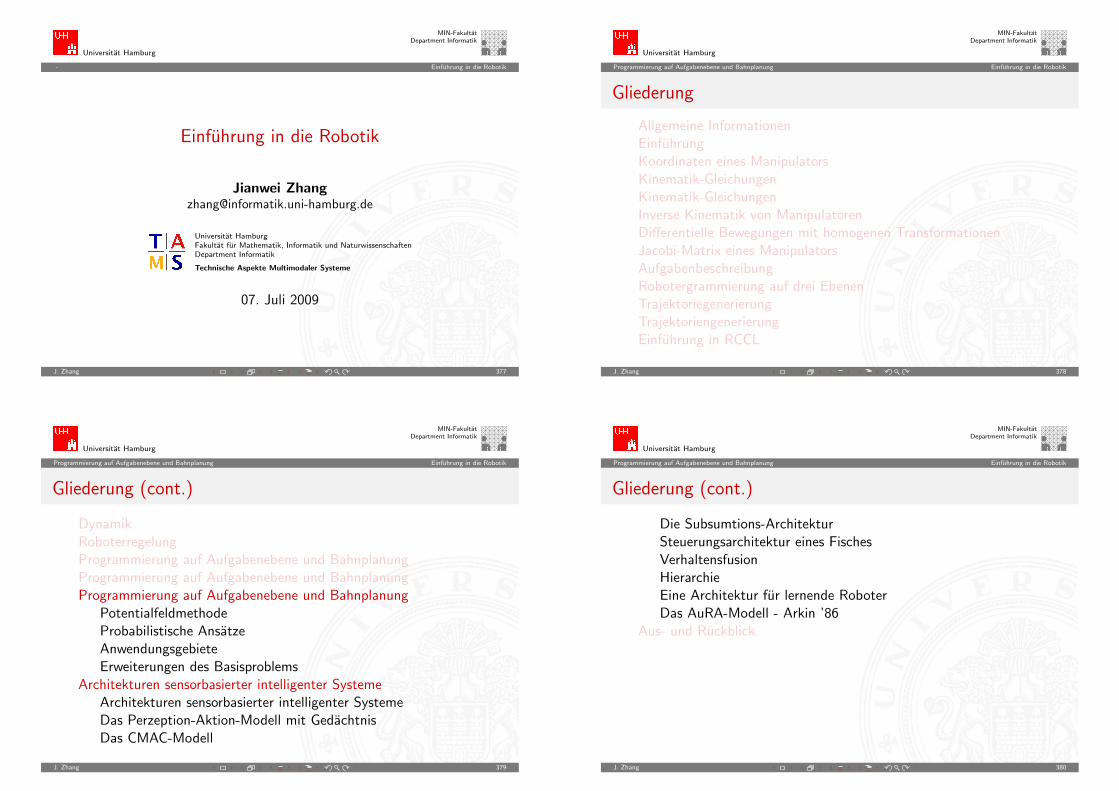
Potentialfeldmethode: Grundideen
Potentialfeldmethode wurde ursprunglich fur echtzeitKollisionsvermeidung entwickelt.Ein Potentialfeld ist eine Skalar-Funktion uber den Freiraum.Ein ideales Field als Navigationsfunktion soll glatt sein, und nur einglobales minimum am Ziel haben, und unendlich in der nahe einesHindernisses werden.Die auf den Roboter geubte Kraft ist der verneinte Gradient desPotentiellen Fieldes.Der Roboter bewegt sich immer entlang dieser Kraft.Eine Funktion uber den Freiraum wird definiert, welche ein globalesMinimum an der Zielkonfiguration hat. Die Bewegung soll entlangder steilsten Abstiegsrichtung bestimmt werden.
J. Zhang 381
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Potentialfeldmethode Einfuhrung in die Robotik
Potentialfeldmethode: Grundideen
J. Zhang 382
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Potentialfeldmethode Einfuhrung in die Robotik
Potentialfeldmethode: Grundideen
Die anziehende Kraft:
−→F Ziel(x) = −κρ(x− xziel)
Das Potentialfeld:
U(x) =
{12η( 1
ρ(x) −1ρ0
)2 wenn ρ(x) ≤ ρ0
0 sonst
Die abstoßende Kraft:
−→F Hindernis(x) =
η( 1ρ(x) −
1ρ0
) 1ρ(x)2
dρ(x)
dxwenn ρ(x) ≤ ρ0
0 wennρ(x) > ρ0
(Khatib 86)
J. Zhang 383
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Potentialfeldmethode Einfuhrung in die Robotik
Potentialfeldmethode: Vor- und Nachteile
Vorteile:
I Nutzung von Heuristik
I Echtzeit-Eigenschaft
Zwei grundsatzliche Nachteile:
I Sie kann nicht garantieren, daß eine Losung gefunden wird,wenn sie existiert, oder die Berechnung aufhort, wenn es keineLosung gibt.
I Sie kann keine weiteren wichtigen Randbedingungen in sichaufnehmen.
J. Zhang 384
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Potentialfeldmethode Einfuhrung in die Robotik
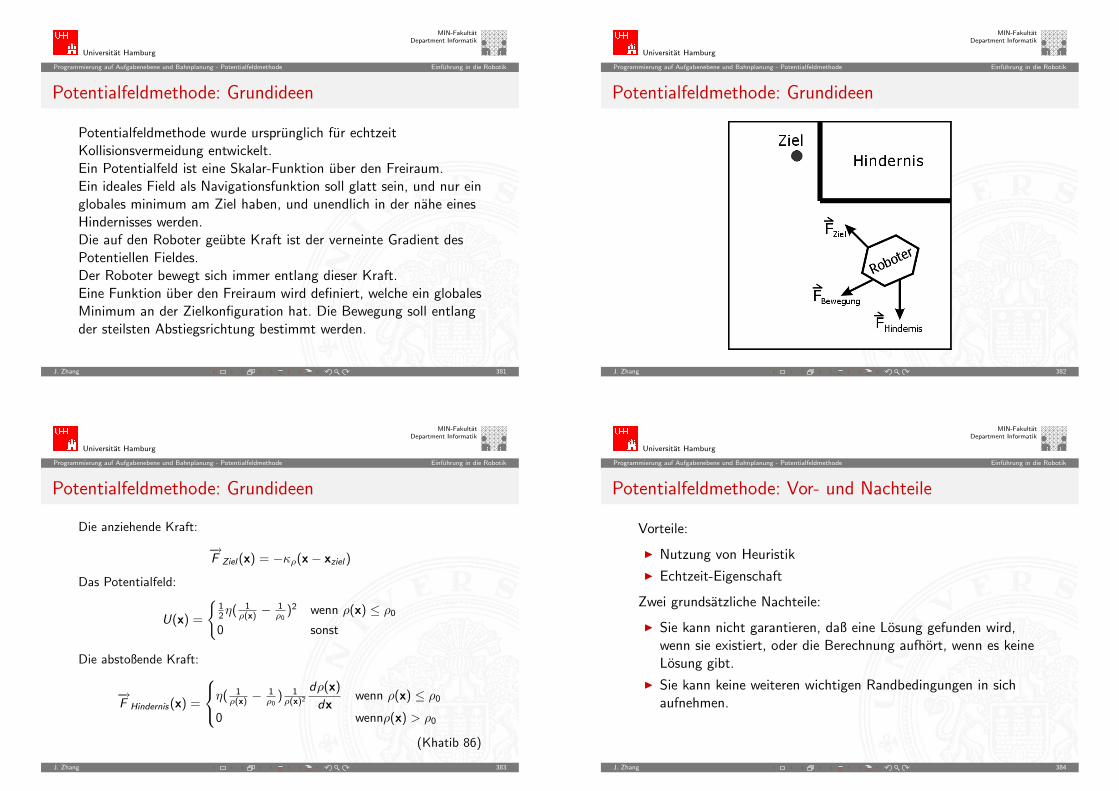
Potentialfeldmethode - Lokale Minima
J. Zhang 385
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
Probabilistische Ansatze
Der Bedarf an einem effektiven, d.h, schnellen, robusten, leicht zuimplmentierenden Berechnungsframework zur PlanungRoboterbewegungen mit einer großen Anzahl von FreiheitsgradenIdeen:
1. zufallige Stichprobe im Raum des Interesses2. Gewahre Kollisionsfreiheit der Stichproben3. Verbinde Stichpunkte uber einfache Bahnen4. Suche in dem entstandenen Graphen
Motivation: Die Kollisionsdetektion sowie Abstandsberechnungsind schneller als die Erstellung einer expliziten Reprasentation desFreiraums⇒: Probabilistische Straßenkarten (Barraquand, Kavraki &Latombe)
J. Zhang 386
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
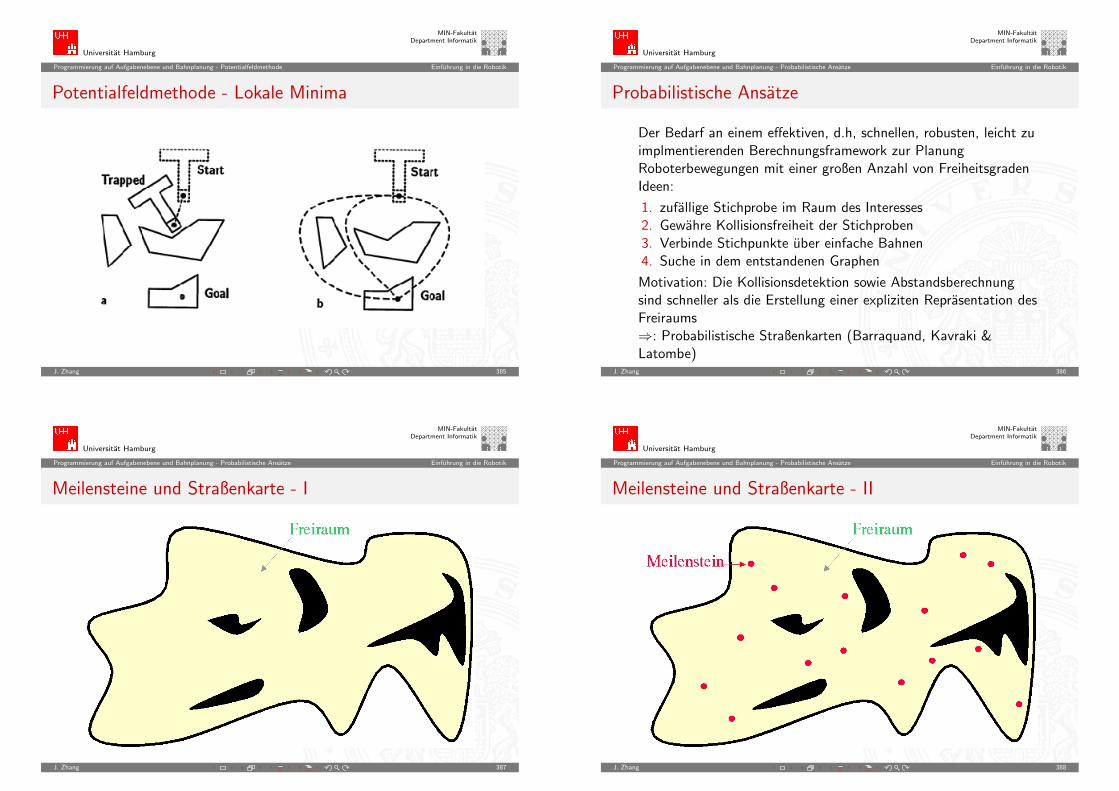
Meilensteine und Straßenkarte - I
J. Zhang 387
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
Meilensteine und Straßenkarte - II
J. Zhang 388
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
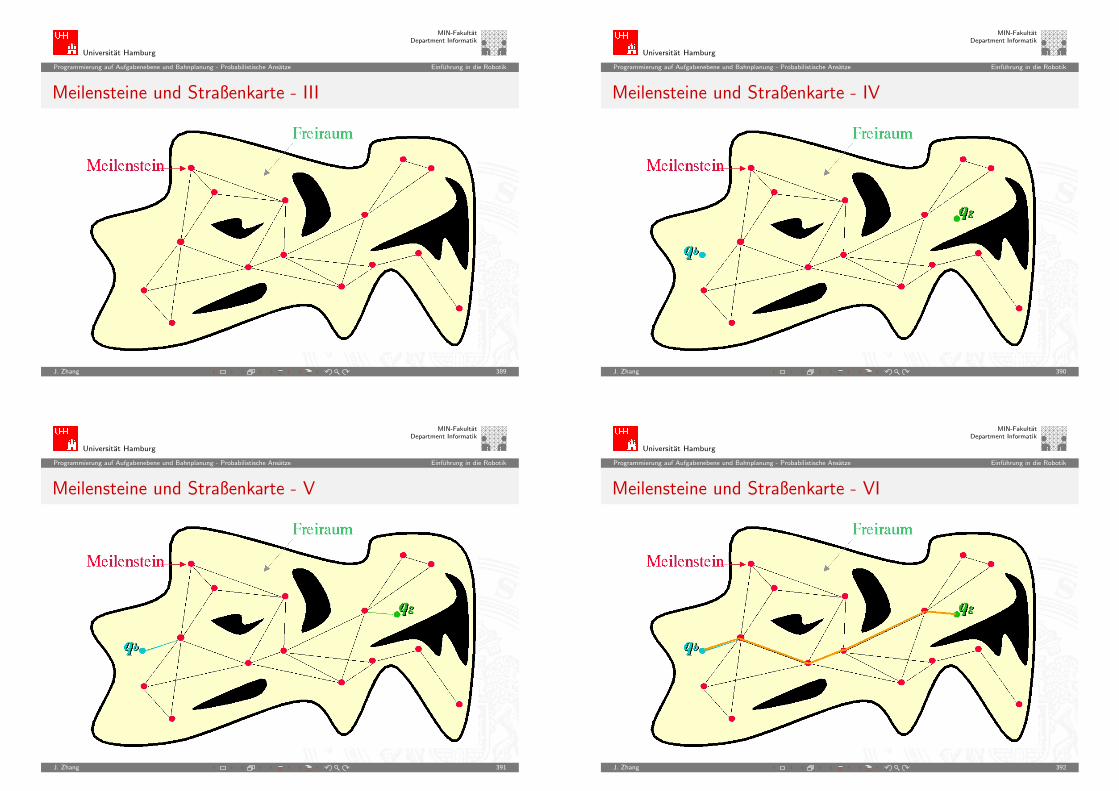
Meilensteine und Straßenkarte - III
J. Zhang 389
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
Meilensteine und Straßenkarte - IV
J. Zhang 390
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
Meilensteine und Straßenkarte - V
J. Zhang 391
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
Meilensteine und Straßenkarte - VI
J. Zhang 392
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
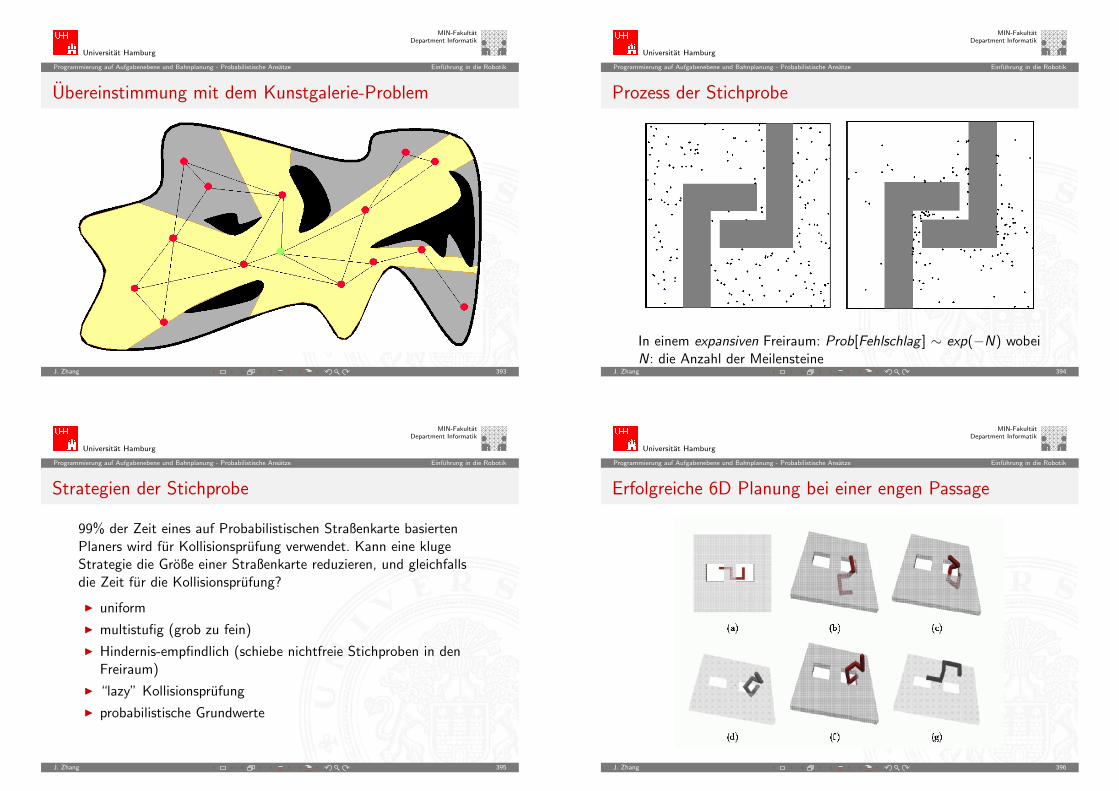
Ubereinstimmung mit dem Kunstgalerie-Problem
J. Zhang 393
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
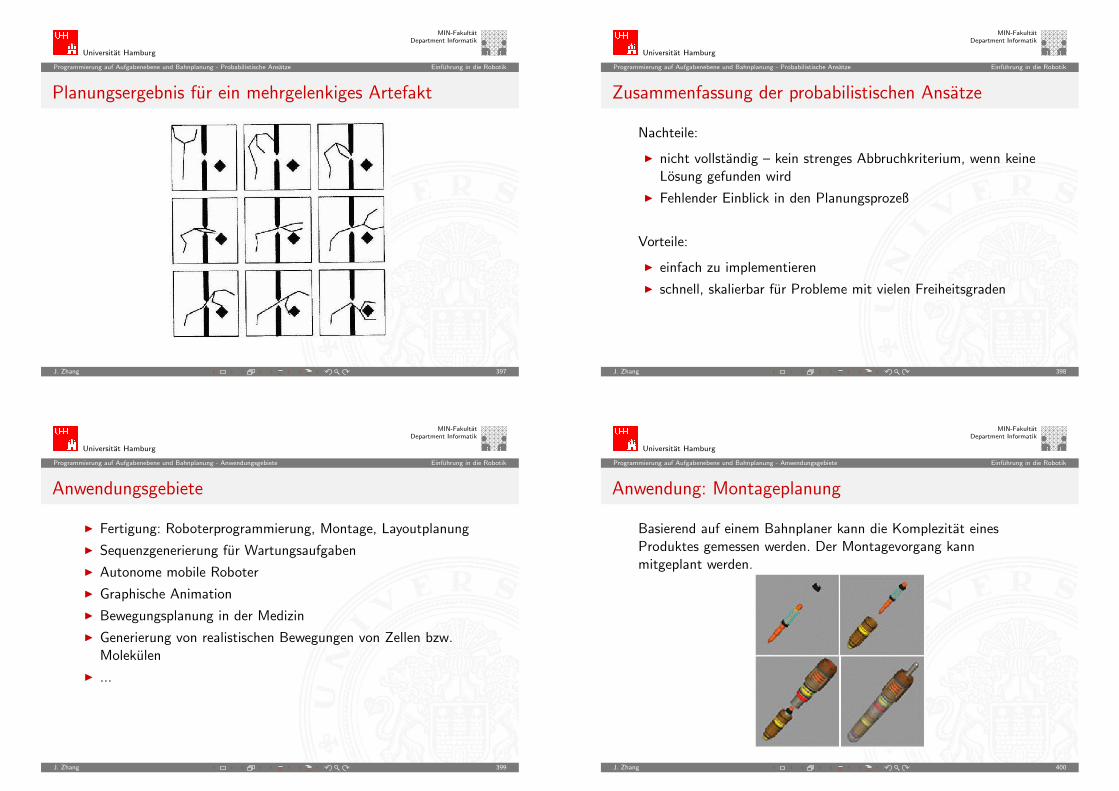
Prozess der Stichprobe
In einem expansiven Freiraum: Prob[Fehlschlag ] ∼ exp(−N) wobeiN: die Anzahl der Meilensteine
J. Zhang 394
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
Strategien der Stichprobe
99% der Zeit eines auf Probabilistischen Straßenkarte basiertenPlaners wird fur Kollisionsprufung verwendet. Kann eine klugeStrategie die Große einer Straßenkarte reduzieren, und gleichfallsdie Zeit fur die Kollisionsprufung?
I uniform
I multistufig (grob zu fein)
I Hindernis-empfindlich (schiebe nichtfreie Stichproben in denFreiraum)
I “lazy” Kollisionsprufung
I probabilistische Grundwerte
J. Zhang 395
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
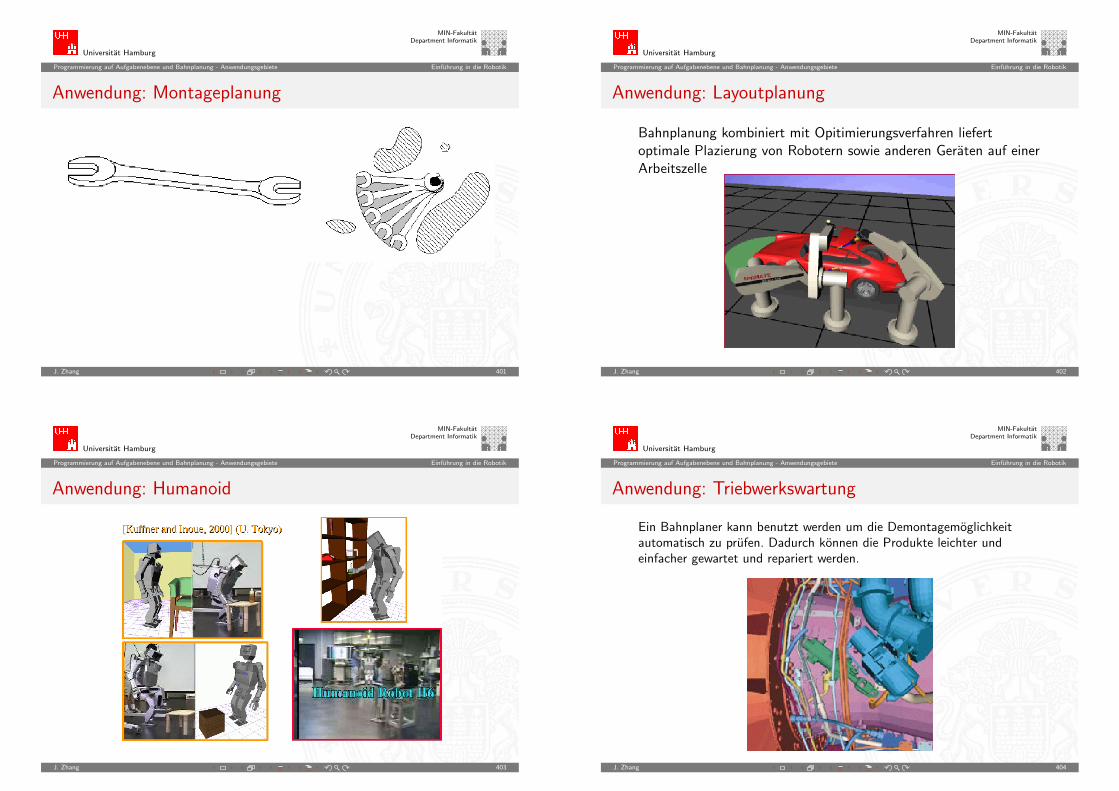
Erfolgreiche 6D Planung bei einer engen Passage
J. Zhang 396
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
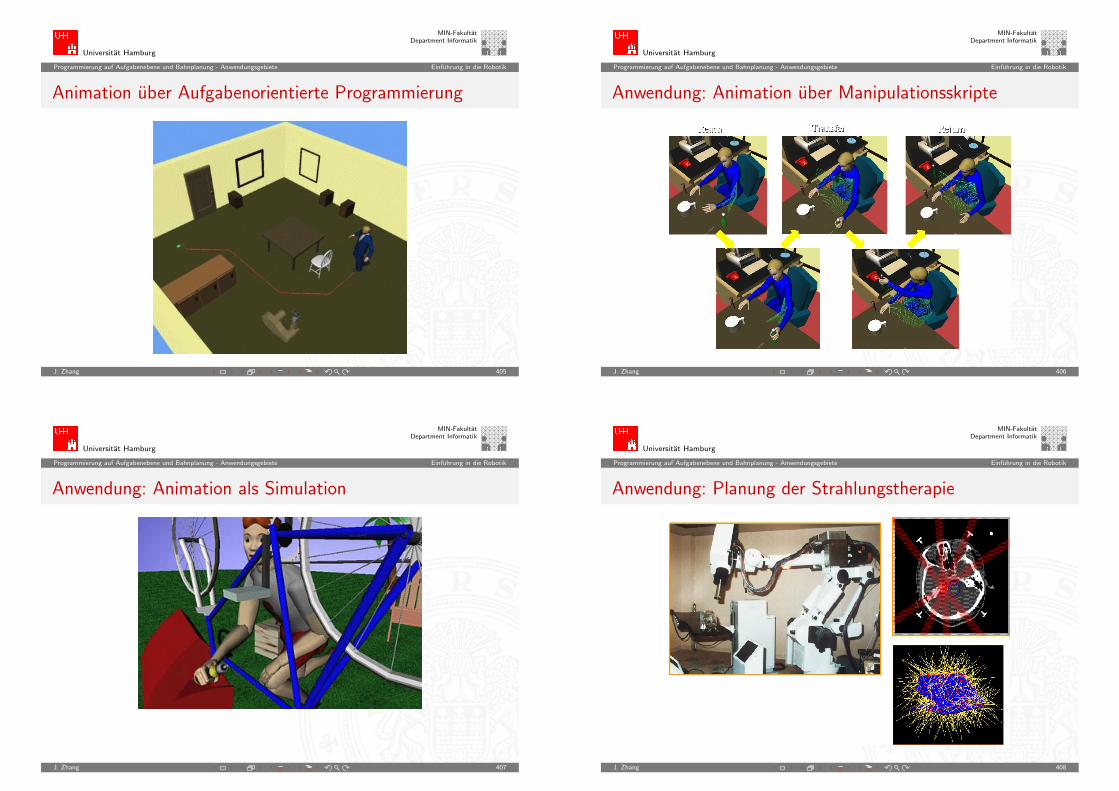
Planungsergebnis fur ein mehrgelenkiges Artefakt
J. Zhang 397
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Probabilistische Ansatze Einfuhrung in die Robotik
Zusammenfassung der probabilistischen Ansatze
Nachteile:
I nicht vollstandig – kein strenges Abbruchkriterium, wenn keineLosung gefunden wird
I Fehlender Einblick in den Planungsprozeß
Vorteile:
I einfach zu implementieren
I schnell, skalierbar fur Probleme mit vielen Freiheitsgraden
J. Zhang 398
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendungsgebiete
I Fertigung: Roboterprogrammierung, Montage, Layoutplanung
I Sequenzgenerierung fur Wartungsaufgaben
I Autonome mobile Roboter
I Graphische Animation
I Bewegungsplanung in der Medizin
I Generierung von realistischen Bewegungen von Zellen bzw.Molekulen
I ...
J. Zhang 399
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Montageplanung
Basierend auf einem Bahnplaner kann die Komplezitat einesProduktes gemessen werden. Der Montagevorgang kannmitgeplant werden.
J. Zhang 400
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Montageplanung
J. Zhang 401
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Layoutplanung
Bahnplanung kombiniert mit Opitimierungsverfahren liefertoptimale Plazierung von Robotern sowie anderen Geraten auf einerArbeitszelle
J. Zhang 402
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Humanoid
J. Zhang 403
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Triebwerkswartung
Ein Bahnplaner kann benutzt werden um die Demontagemoglichkeitautomatisch zu prufen. Dadurch konnen die Produkte leichter undeinfacher gewartet und repariert werden.
J. Zhang 404
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Animation uber Aufgabenorientierte Programmierung
J. Zhang 405
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Animation uber Manipulationsskripte
J. Zhang 406
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Animation als Simulation
J. Zhang 407
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Planung der Strahlungstherapie
J. Zhang 408

Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Anwendungsgebiete Einfuhrung in die Robotik
Anwendung: Generierung von Andockbewegungen vonMolekulen
J. Zhang 409
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Erweiterungen des Basisproblems Einfuhrung in die Robotik
Anwendung: Generierung von Andockbewegungen vonMolekulen
I bewegliche Hindernisse
I mehrere sich bewegende Objekte
I deformierbare Objekte
I nicht spezifizierte Ziele
I nicht holonome Randbedingungen
I dynamische Randbedingungen
I zeitoptimale Planung
I unsichere Wahrnehmung und Planausfuhrung
I hochkomplexe Artefakte
J. Zhang 410
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Erweiterungen des Basisproblems Einfuhrung in die Robotik
Neue Anwendungen: Protein-Falten
Behandlung von uber 1000 Freiheitsgraden:
J. Zhang 411
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Erweiterungen des Basisproblems Einfuhrung in die Robotik
Planung einer minimalen invasiven Chirurgie
bei weichen Objekten
J. Zhang 412
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Erweiterungen des Basisproblems Einfuhrung in die Robotik
Autonome virtuelle Schauspieler
J. Zhang 413
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Zusammenfassung Einfuhrung in die Robotik
Zusammenfassung
I Die explizite Reprasentation des Konfigurationsraums bietet einevollstandige Losung bei ausreichender Genauigkeit, ist aber nureingeschrankt anwendbar. Der verteilte probabilistische Ansatz istpraktisch bei einer großen Anzahl von Freiheitsgraden.
I Die Bahnplanung stammt aus der Robotik, findet aber z.Z. breiteAnwendung in vielen anderen Bereichen: Fertigung, Virtuelle Realitat,Animation, Video-Spiele, Biologie, Chemie, usw.
I Simulierte Umgebungen erfullen genau die Voraussetzung dergeometrischen Bahnplanung: bekannte Umweltmodelle,spezifizierbare Start- und Zielkonfiguration und ideale Ausfuhrung.Die rapide Erhohung der Rechengeschwindigkeit ermoglichtEchtzeit-Anwendungen.
J. Zhang 414
Universitat Hamburg
MIN-FakultatDepartment Informatik
Programmierung auf Aufgabenebene und Bahnplanung - Zusammenfassung Einfuhrung in die Robotik
Zusammenfassung
I Reale Roboter werden mit vielen Unsicherheiten in der realen Weltkonfrontiert. Die Erweiterungen des Basisproblems erfordern weitereUntersuchungen.
I Embedded-Systeme werden uber immer mehr on-boardRechenleistungen verfugen. Modellierung und Berechnung vonBewegungen der intelligenten Gerate werden weitere Forschungsfeldererschließen.
J. Zhang 415


















