Einführung in die Robotik Aktoren - uni-ulm.de · Dr. Oubbati, Einführung in die Robotik...
32
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13 Einführung in die Robotik Aktoren 06. 11. 2012 Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 [email protected]
Transcript of Einführung in die Robotik Aktoren - uni-ulm.de · Dr. Oubbati, Einführung in die Robotik...
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Einführung in die Robotik
Aktoren
06. 11. 2012
Mohamed OubbatiInstitut für Neuroinformatik
Tel.: (+49) 731 / 50 [email protected]
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
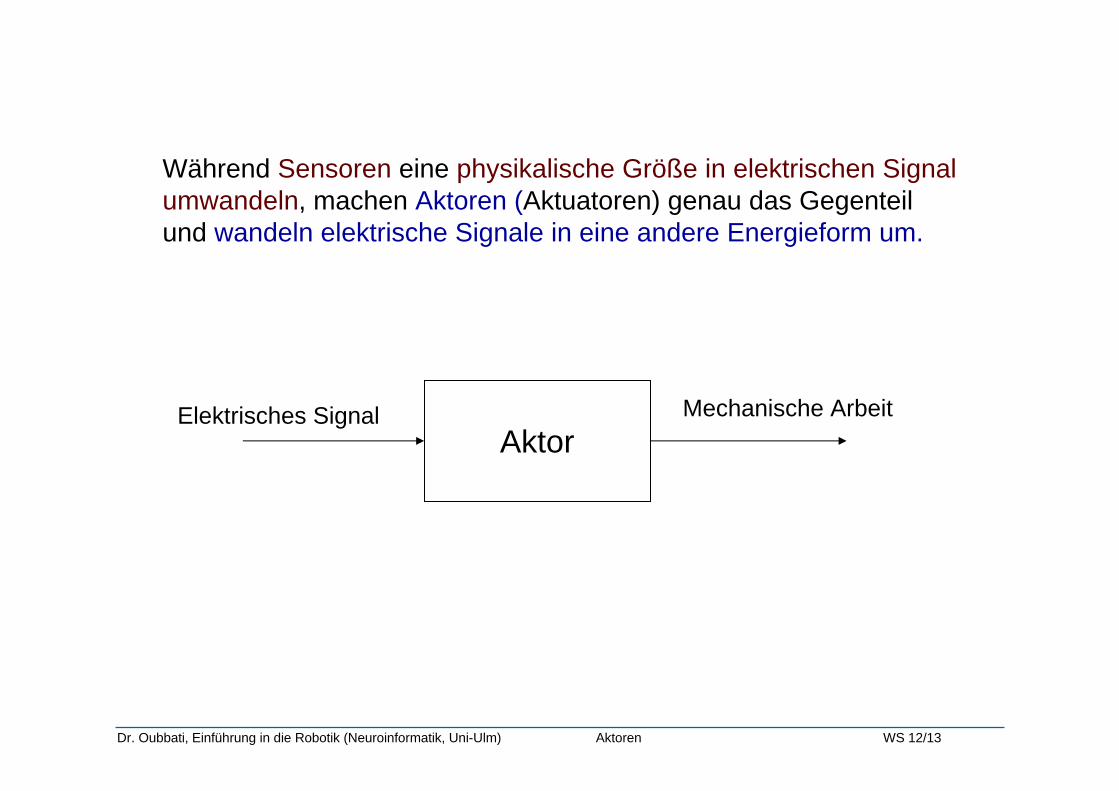
Während Sensoren eine physikalische Größe in elektrischen Signal umwandeln, machen Aktoren (Aktuatoren) genau das Gegenteil und wandeln elektrische Signale in eine andere Energieform um.
AktorElektrisches Signal Mechanische Arbeit

Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Um Vorwärts/Rückwärts fahren und sich drehen zu können, braucht der mobile Roboter Motoren + Räder
Aktor=Motor+Rad
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
In dieser Vorlesung betrachten wir die folgenden Fragen:
1. Wie steuert man einen Motor?
2. Was ist ein Rad?
3. Unter welchen Vorraussetzungen finden Bewegungenstatt?
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Wie steuert man einen Motor?
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
1. Energie: Ein Motor kann nicht direkt durch einen Mikrocontroller angetrieben werden, da dieser (meistens) nicht genügend Strom liefert.
2. Drehrichtung.
3. Geschwindigkeit: Ein Mikrocontroller kann nur die Steuersignale “1“ oder “0“senden, d.h. entweder eine maximale Geschwindigkeit oder gar keine!
Um einen Motor zu steuern, gibt es gibt 3 Punkte zu beachten:
Motoren
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
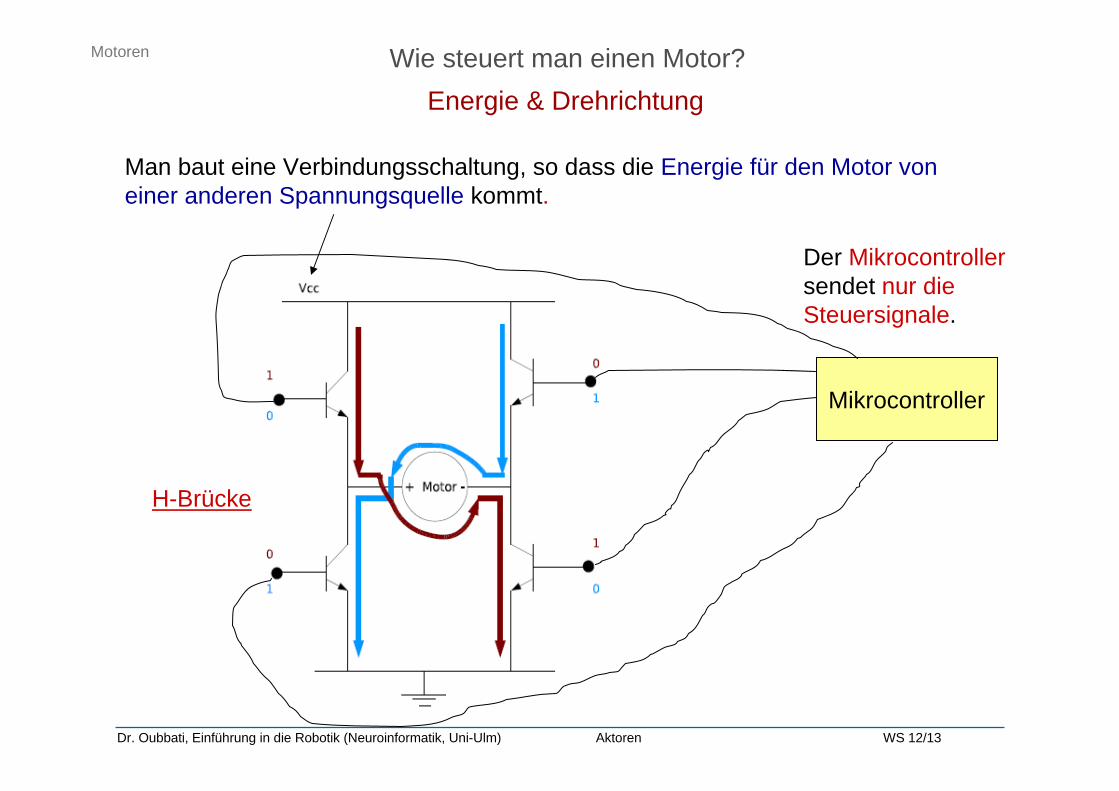
H-Brücke
Man baut eine Verbindungsschaltung, so dass die Energie für den Motor von einer anderen Spannungsquelle kommt.
Energie & DrehrichtungWie steuert man einen Motor?
Der Mikrocontrollersendet nur die Steuersignale.
Mikrocontroller
Motoren
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Um die Geschwindigkeit des DC Motors zu regulieren, muss man Die Pulsweitenmodulation (engl. Pulse Width Modulation, abgekürzt PWM) nutzen.
Geschwindigkeit
Bei der PWM wird die Ein- und Ausschaltzeit eines Rechtecksignals bei fester Grundfrequenz variiert.
Je länger die Einschaltdauer, desto schneller dreht sich der Motor.
dieTafel…
Motoren Wie steuert man einen Motor?
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Das Rad
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
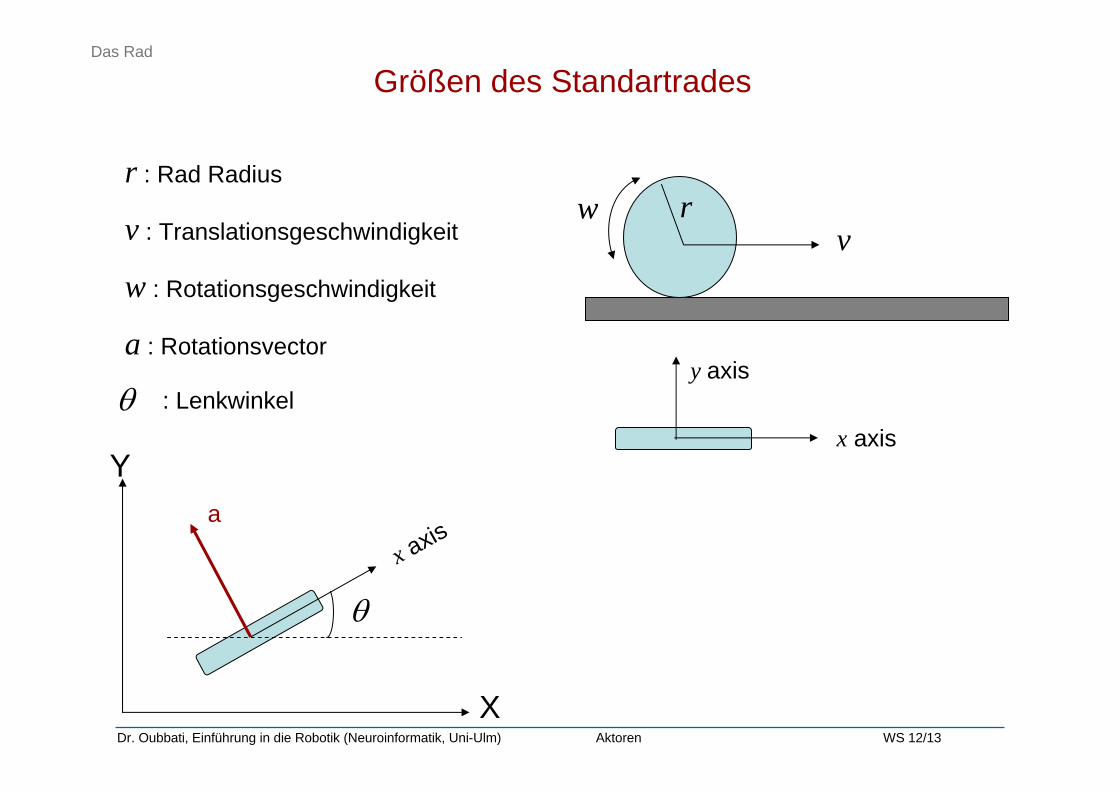
Größen des Standartrades
v
x axis
y axis
w rr : Rad Radius
v : Translationsgeschwindigkeit
w : Rotationsgeschwindigkeit
a : Rotationsvector
X
x axis
Y
θ
θ : Lenkwinkel
a
Das Rad
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
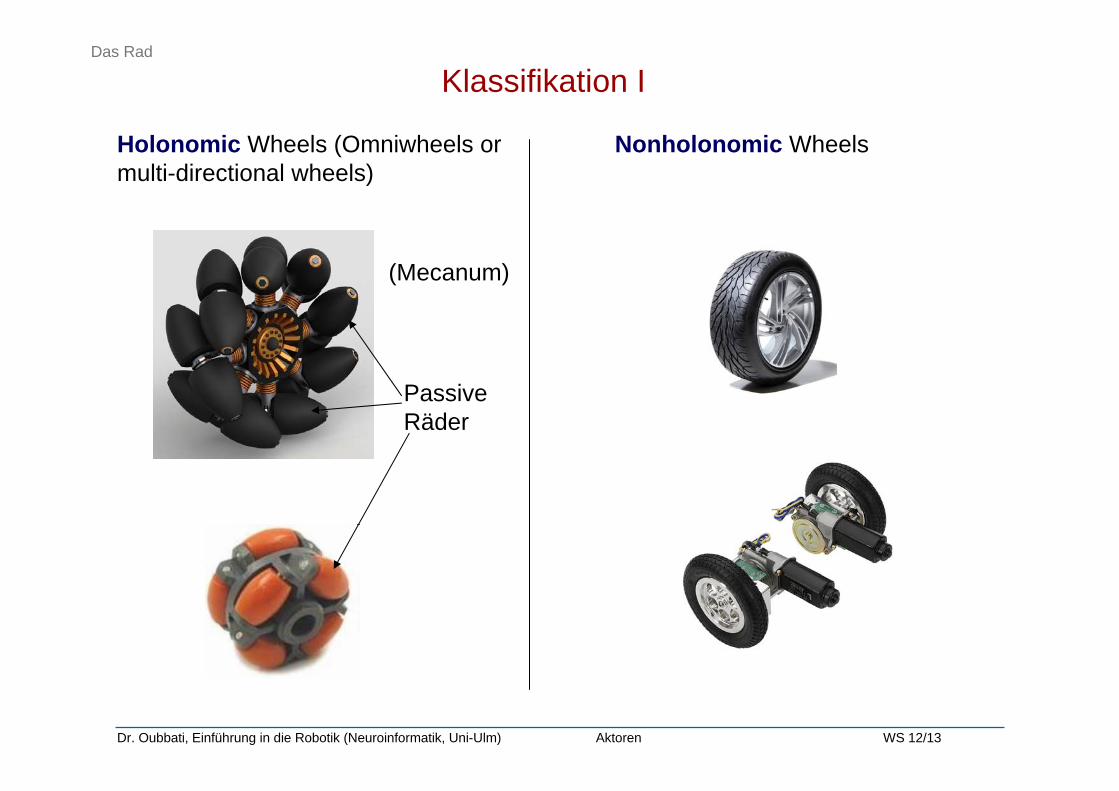
(Mecanum)
Das Rad
Klassifikation I
Holonomic Wheels (Omniwheels ormulti-directional wheels)
Nonholonomic Wheels
Passive Räder
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Das Rad
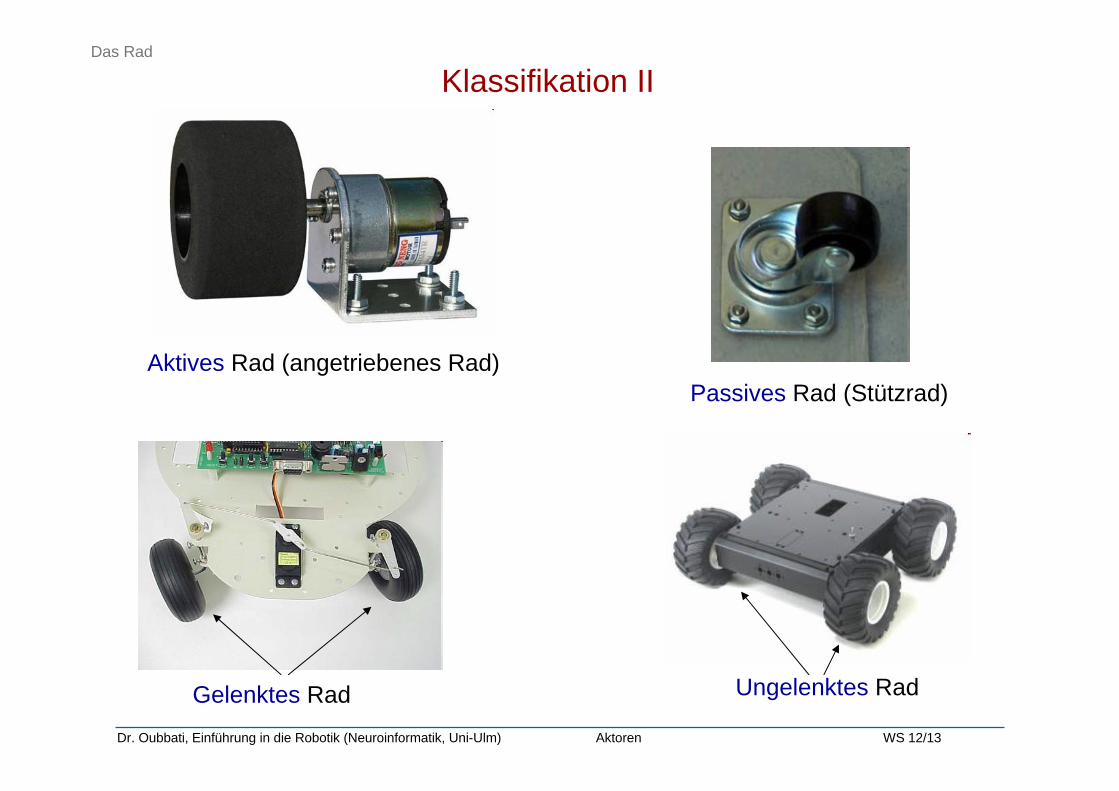
Klassifikation II
Aktives Rad (angetriebenes Rad)Passives Rad (Stützrad)
Gelenktes Rad Ungelenktes Rad
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Unter welchen Vorraussetzungen finden Bewegungen statt ?
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
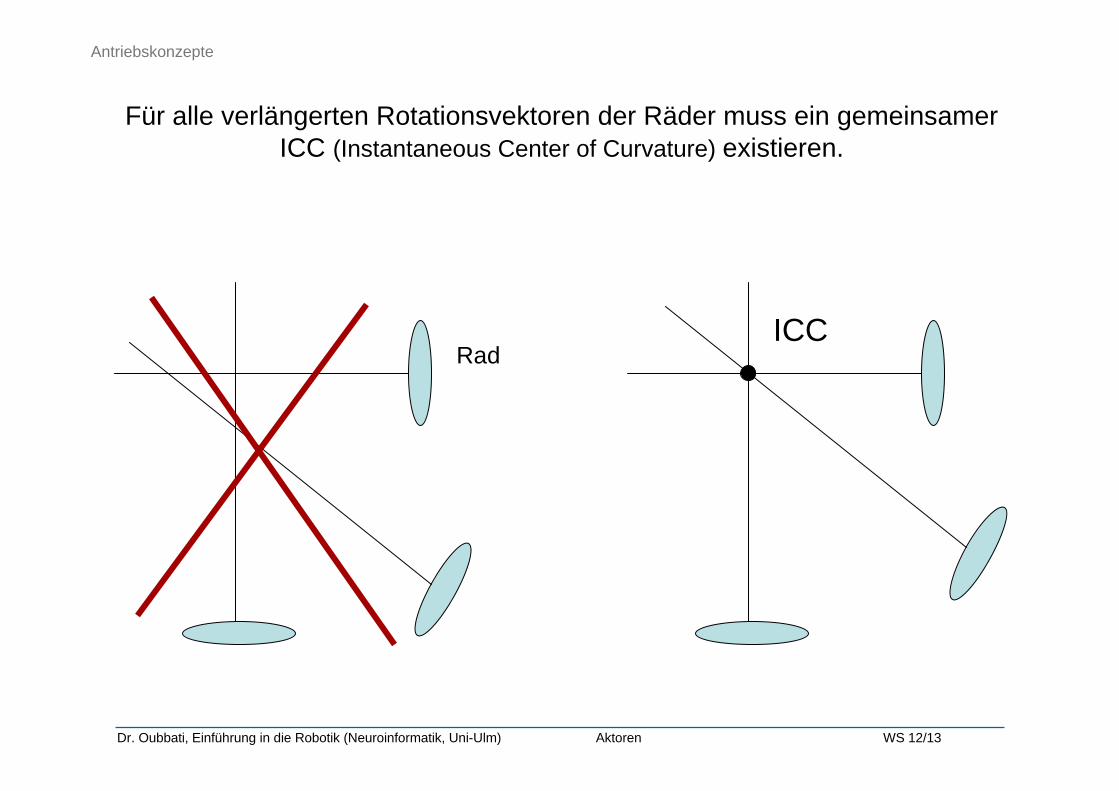
ICC
Für alle verlängerten Rotationsvektoren der Räder muss ein gemeinsamer ICC (Instantaneous Center of Curvature) existieren.
Rad
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Antriebskonzepte- Differentialantrieb
- Dreiradantrieb
- Ackermannlenkung
- SynchroDrive
- Omnidrive
- Laufmaschinen
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
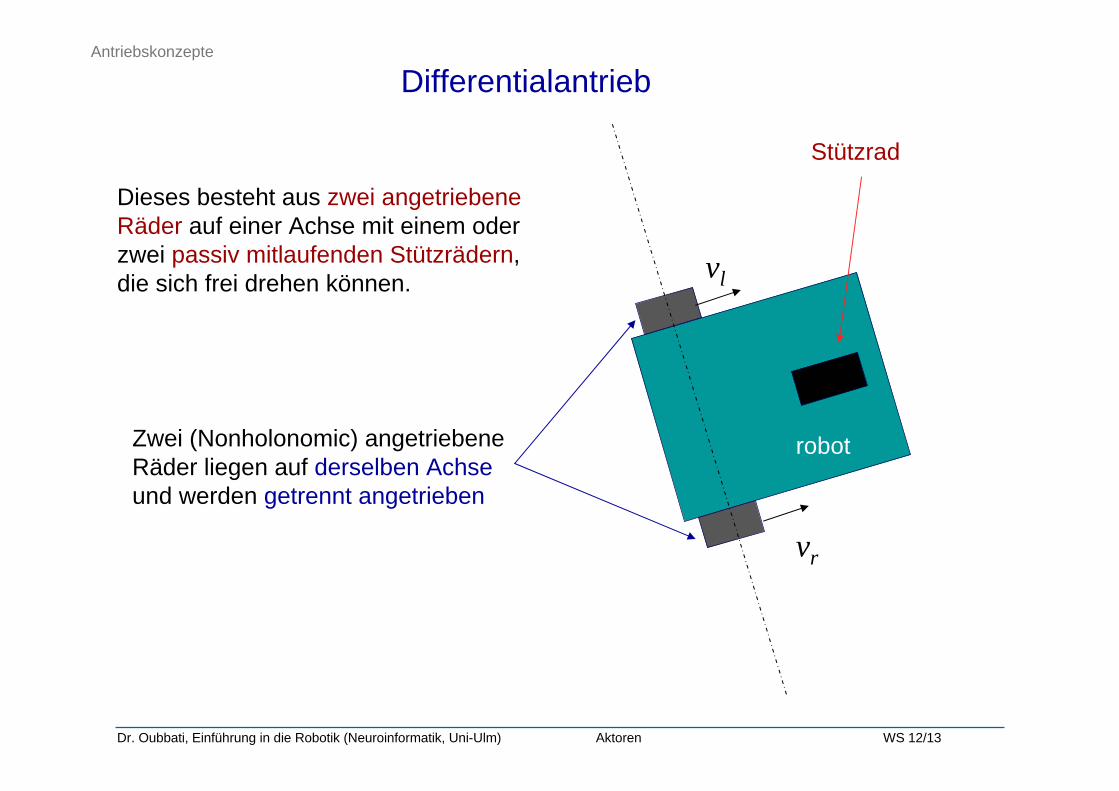
Differentialantrieb
Dieses besteht aus zwei angetriebene Räder auf einer Achse mit einem oder zwei passiv mitlaufenden Stützrädern, die sich frei drehen können.
Zwei (Nonholonomic) angetriebene Räder liegen auf derselben Achseund werden getrennt angetrieben
Stützrad
vr
vl
robot
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
• Hohes Moment für Kurvenfahrt
• Schwierige Positionsbestimmung
• Sehr starke Reibung auf dem Boden
Differentialantrieb
• Einfache Konstruktion
• Einfache Steuerung
• Auf der Stelle drehbar
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
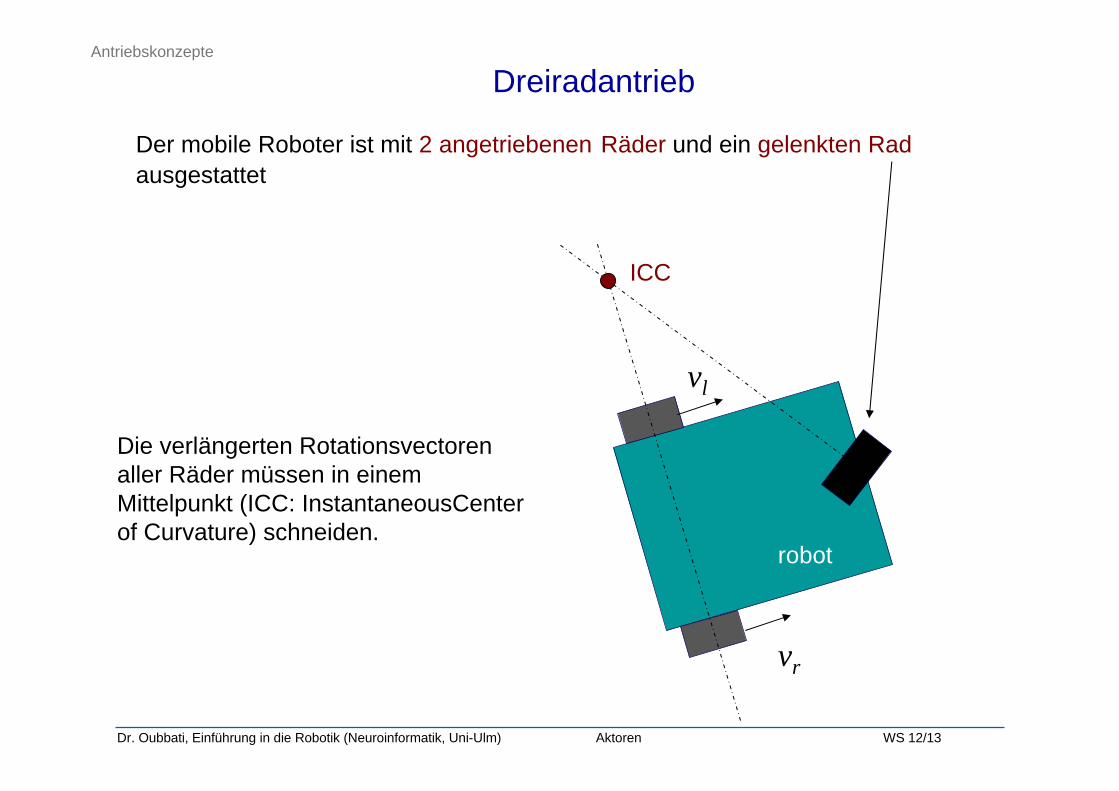
Dreiradantrieb
Der mobile Roboter ist mit 2 angetriebenen Räder und ein gelenkten Radausgestattet
Die verlängerten Rotationsvectorenaller Räder müssen in einem Mittelpunkt (ICC: InstantaneousCenterof Curvature) schneiden.
vr
vl
robot
ICC
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
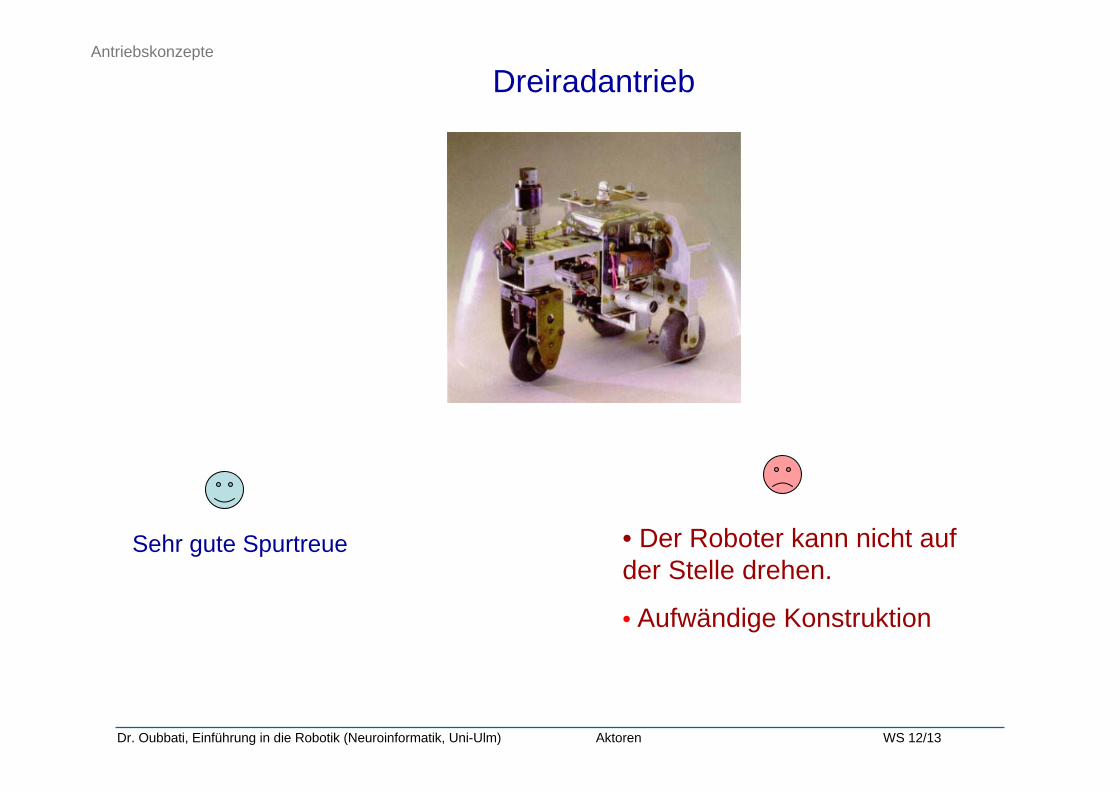
Sehr gute Spurtreue • Der Roboter kann nicht auf der Stelle drehen.
• Aufwändige Konstruktion
DreiradantriebAntriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
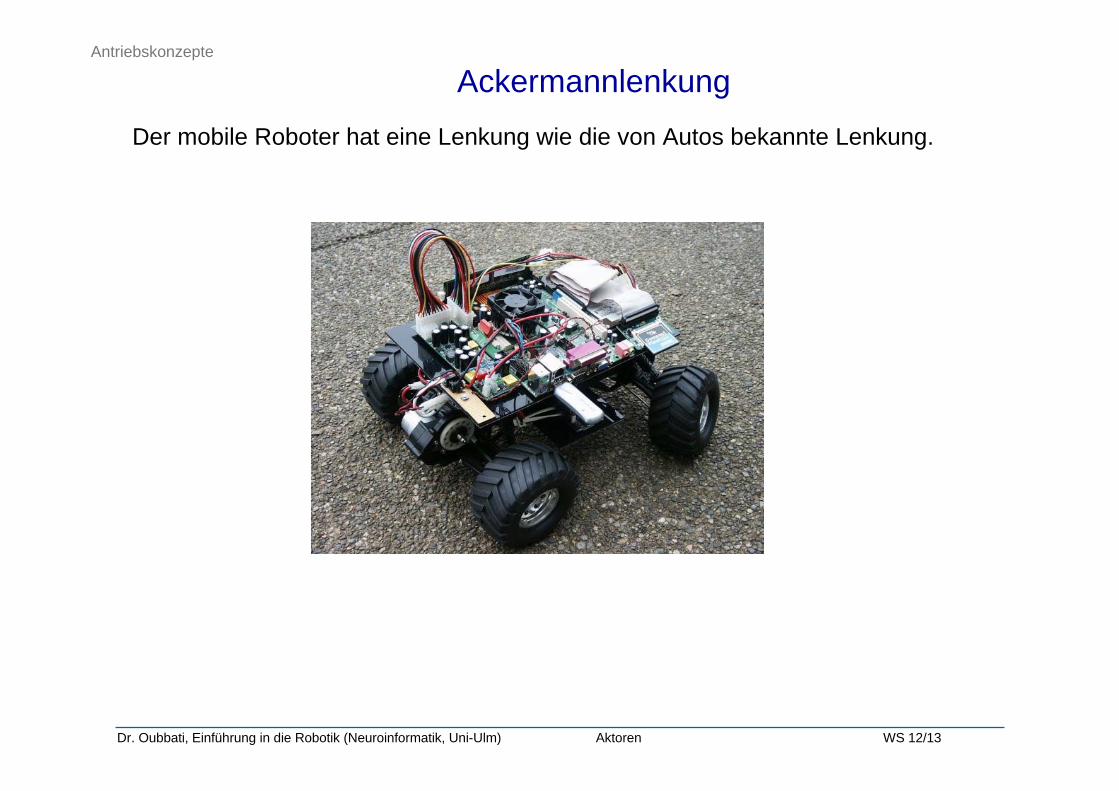
Der mobile Roboter hat eine Lenkung wie die von Autos bekannte Lenkung.
AckermannlenkungAntriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
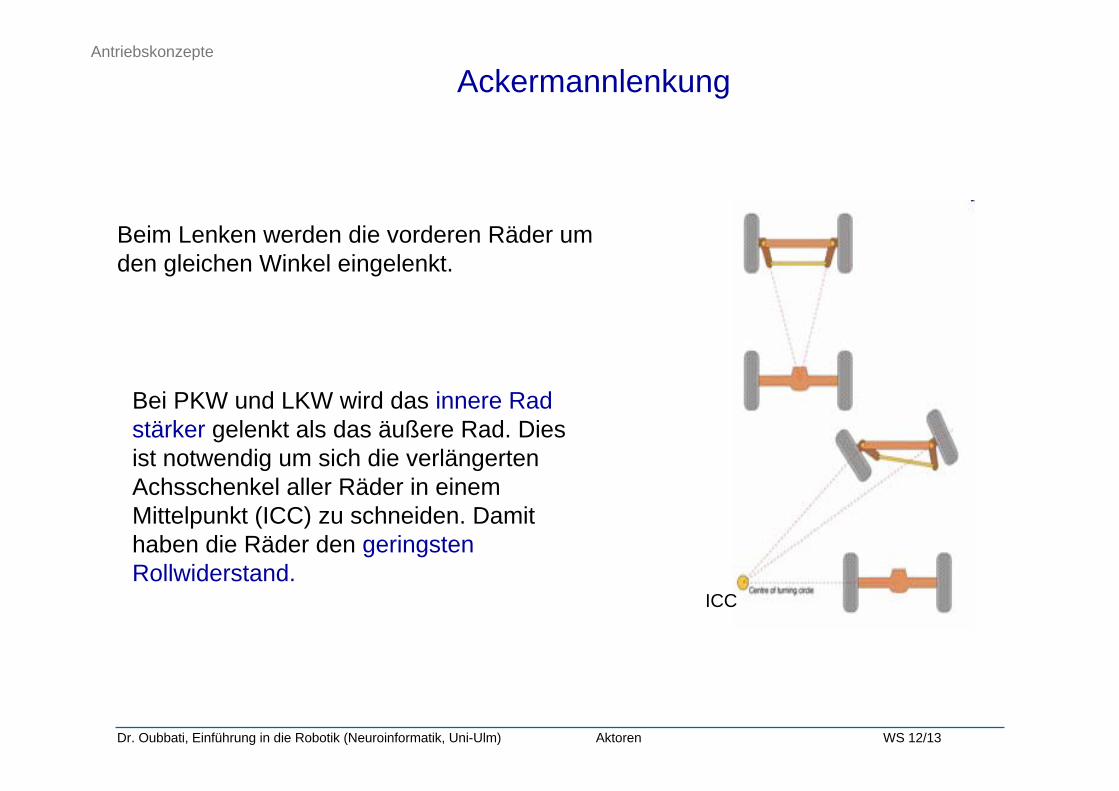
Ackermannlenkung
Beim Lenken werden die vorderen Räder um den gleichen Winkel eingelenkt.
Bei PKW und LKW wird das innere Rad stärker gelenkt als das äußere Rad. Dies ist notwendig um sich die verlängerten Achsschenkel aller Räder in einem Mittelpunkt (ICC) zu schneiden. Damit haben die Räder den geringsten Rollwiderstand.
ICC
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
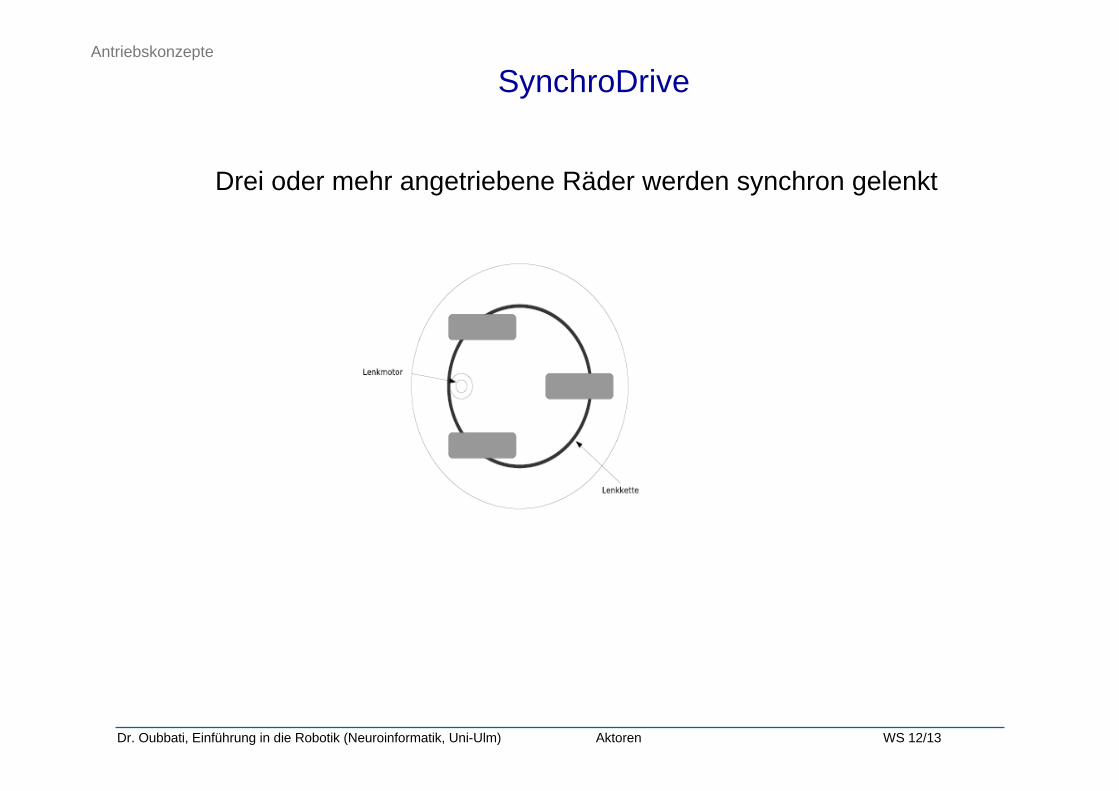
Drei oder mehr angetriebene Räder werden synchron gelenkt
SynchroDriveAntriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
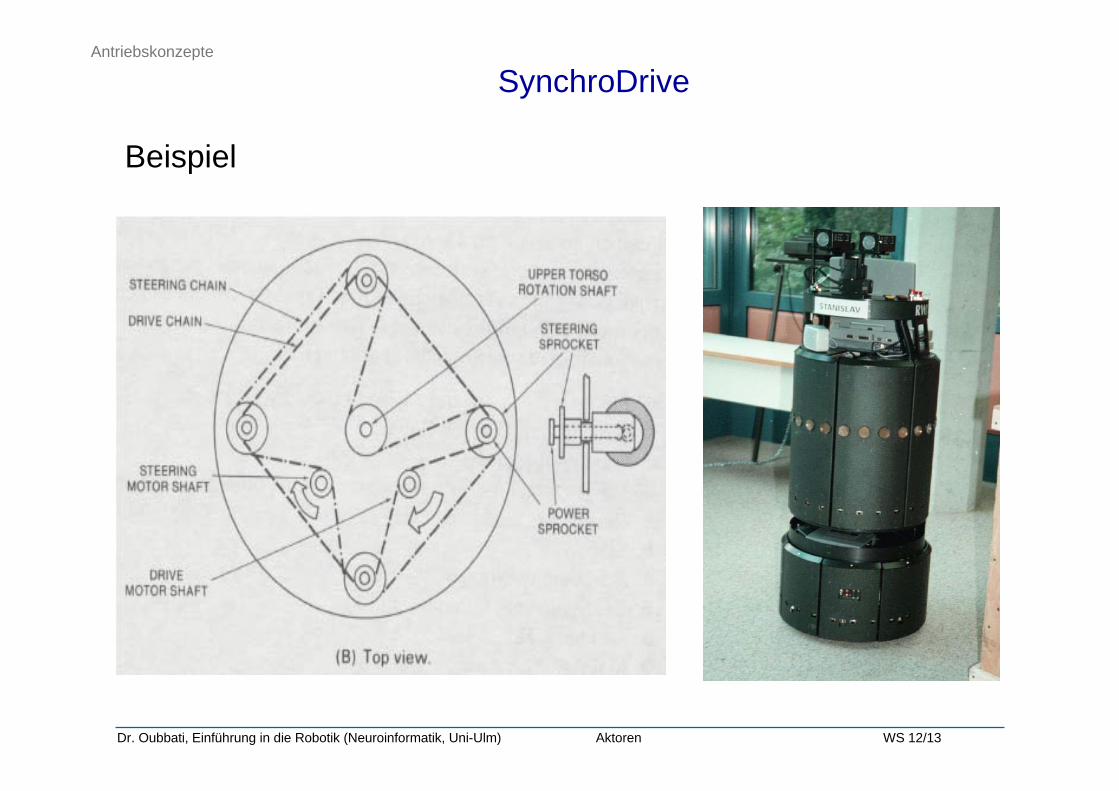
SynchroDrive
Beispiel
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
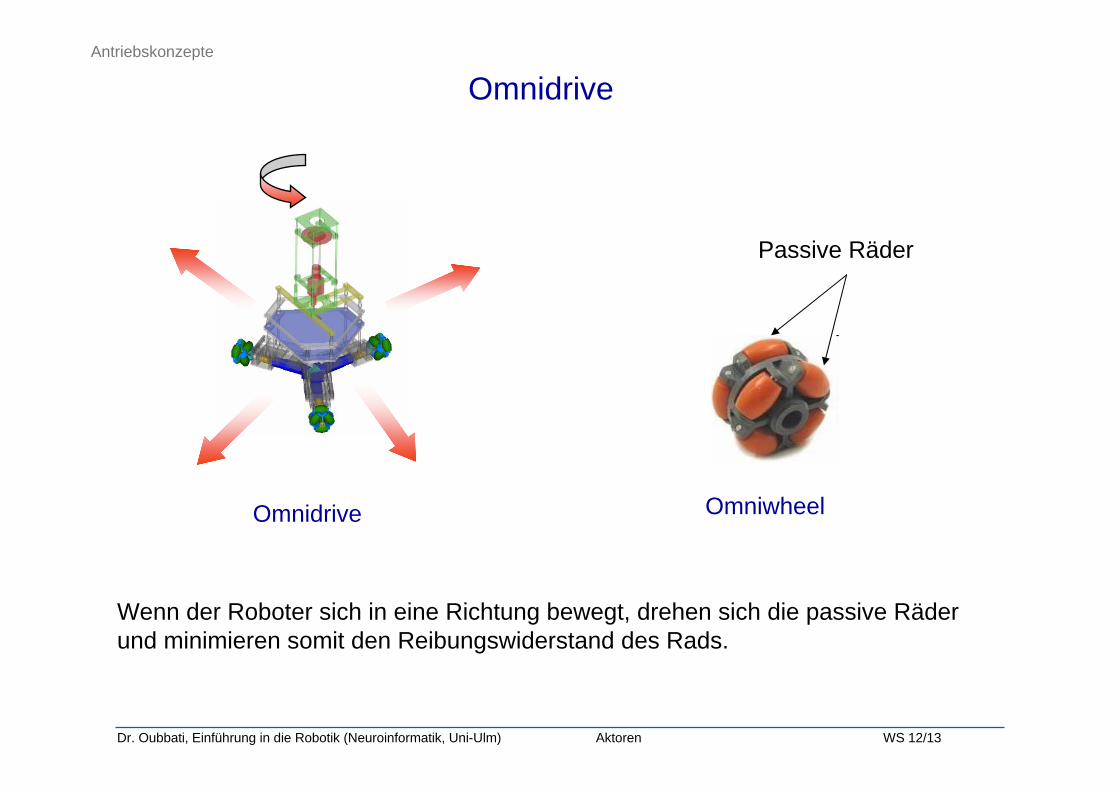
Wenn der Roboter sich in eine Richtung bewegt, drehen sich die passive Räder und minimieren somit den Reibungswiderstand des Rads.
Omniwheel
Passive Räder
OmnidriveAntriebskonzepte
Omnidrive
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
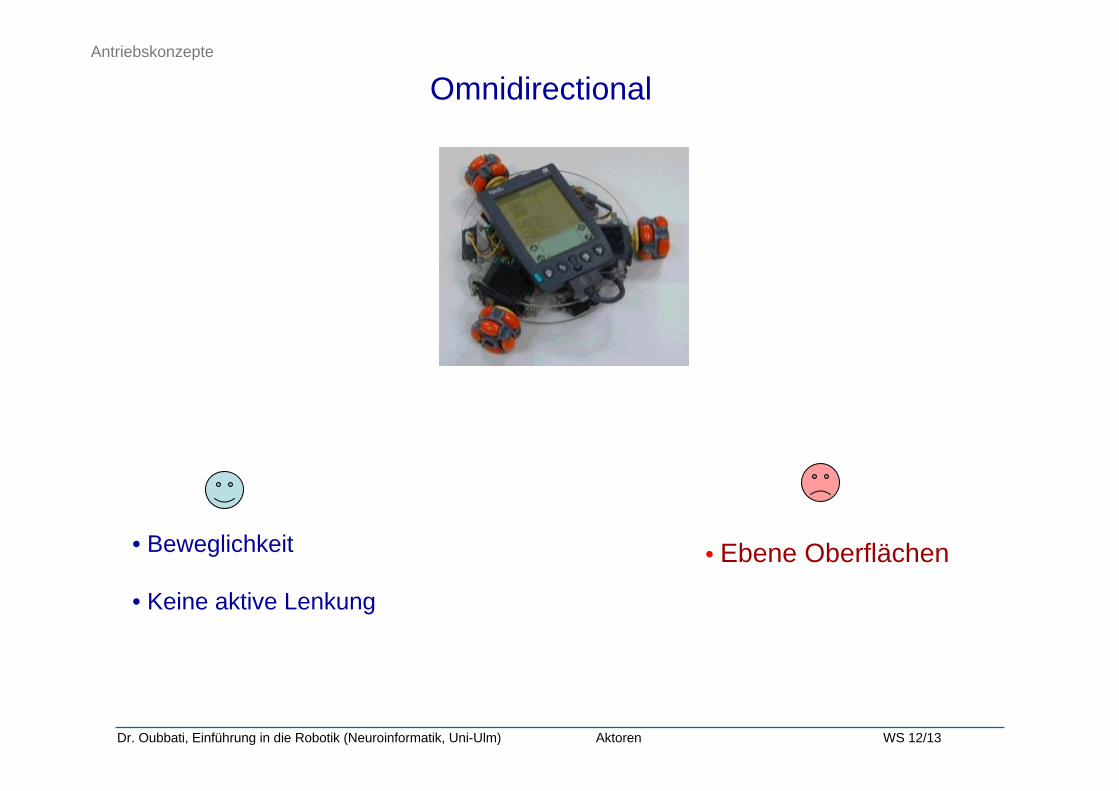
• Beweglichkeit
• Keine aktive Lenkung
• Ebene Oberflächen
OmnidirectionalAntriebskonzepte

Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
LaufmaschinenAntriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
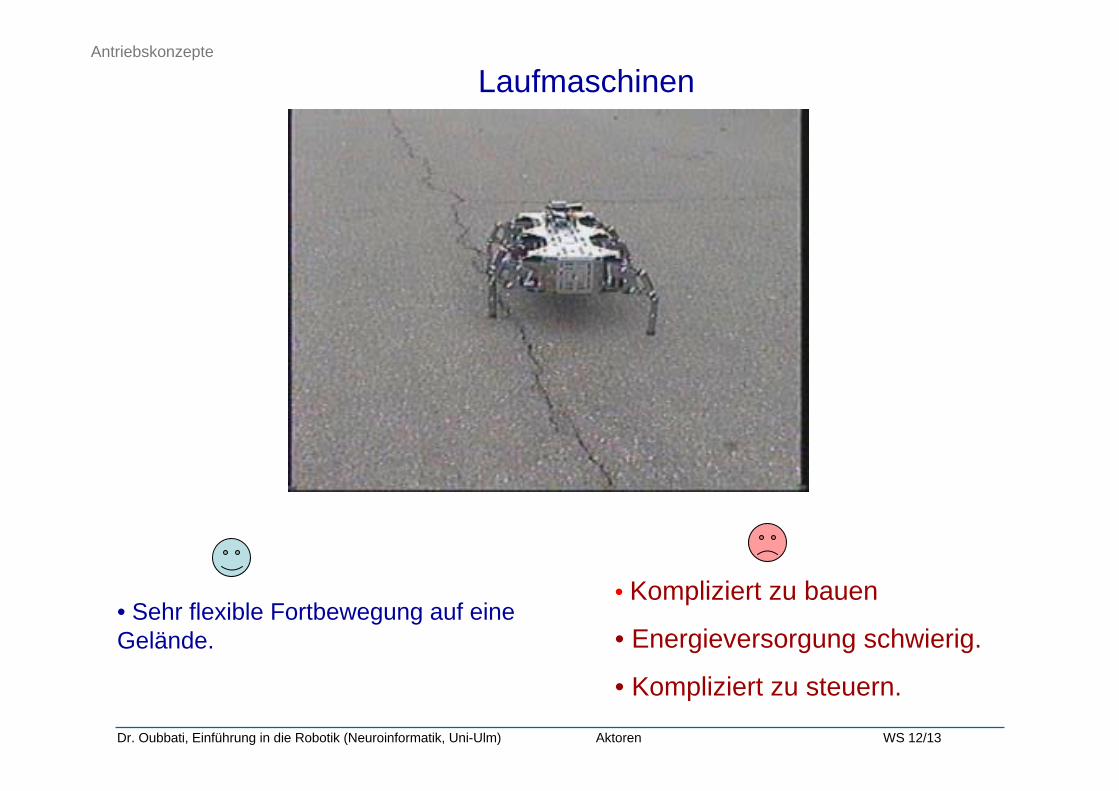
Laufmaschinen
• Kompliziert zu bauen
• Energieversorgung schwierig.
• Kompliziert zu steuern.
• Sehr flexible Fortbewegung auf eine Gelände.
Antriebskonzepte
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
Student project, Bachelor and Master/Diplom
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13
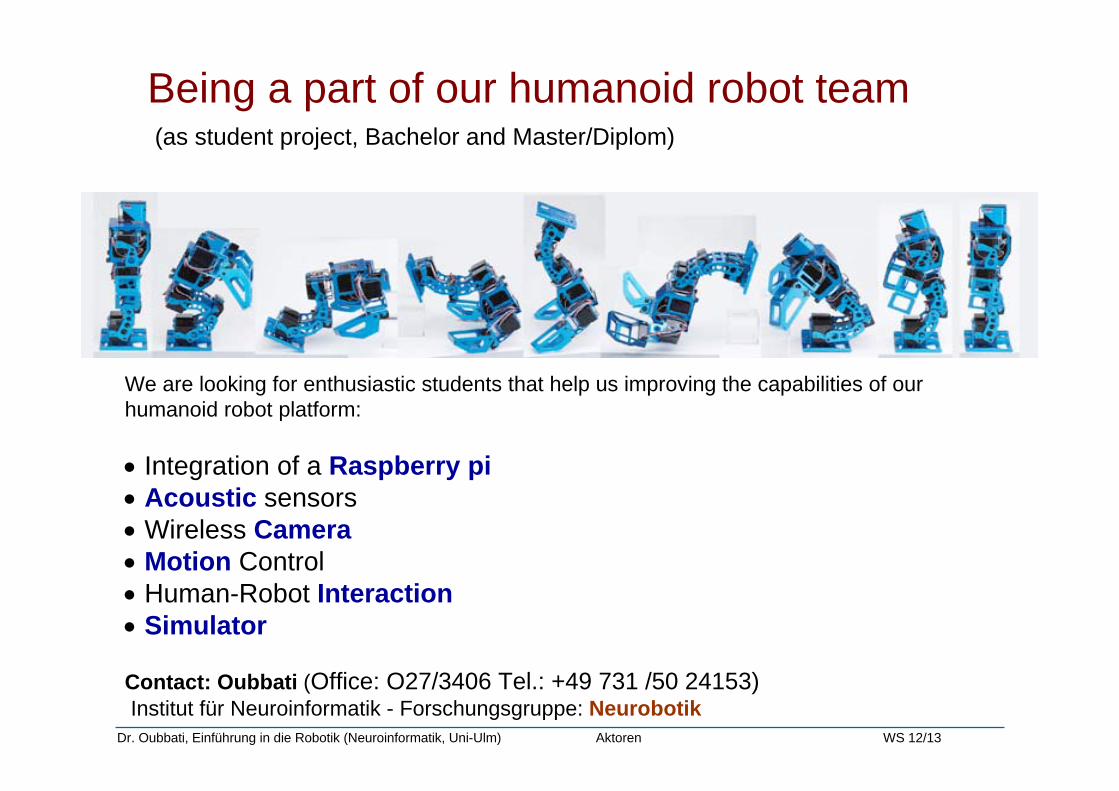
Being a part of our humanoid robot team
We are looking for enthusiastic students that help us improving the capabilities of ourhumanoid robot platform:
• Integration of a Raspberry pi• Acoustic sensors• Wireless Camera• Motion Control• Human-Robot Interaction• Simulator
Contact: Oubbati (Office: O27/3406 Tel.: +49 731 /50 24153)Institut für Neuroinformatik - Forschungsgruppe: Neurobotik
(as student project, Bachelor and Master/Diplom)
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Aktoren WS 12/13