Einleitung - Startseite: Hochschule Bremerhaven · 2013-05-29 · Teil 1: Exakte Linearisierung S...
73
Hochschule Bremerhaven / Uni Bremen Regelungstheorie 2 [ RT2 ] Revision: V1.0a Datum: Oktober 2008 S Teil 1: Exakte Linearisierung S Teil 3: Koprime Faktorisierung Unterlagen zur Lehrveranstaltung E---Mail: [email protected] D---27568 Bremerhaven Tel: +49 471 48 23 --- 415 FAX: +49 471 48 23 --- 418 Prof. Dr.-Ing. Kai Müller Hochschule Bremerhaven Institut für Automatisierungs- und Elektrotechnik An der Karlstadt 8 S Teil 4: H 2 -optimale Regelung S Teil 5: H ∞ -optimale Regelung S Teil 6: Norm-optimale Regelungen im Zustandraum S Teil 2: Stabiliätsanalyse nach Lyapunov Regelungstheorie 2 Hochschule Bremerhaven --- IAE I I Einleitung I.I Umdruck zur Vorlesung Über die Homepage der Vorlesung <http://www1.hs---bremerhaven.de/kmueller/> werden aktualisierte oder korrigierte Unterlagen im Verlauf der Vorlesung zur Verfügung gestellt. I.II Regelungstheorie 2 Die Regelungstheorie 2 besteht aus zwei Teilen. Der erste Teil befasst sich in der Tradition der bisherigen Veranstaltung mit nichtlinearen Systemen. Dies trägt der Tatsache Rechnung, dass ein Großteil der in der Praxis auftretenden Prozesse nichtlinearer Natur sind und sich nur sehr unzureichend mit linearen Systemen beschreiben lassen. Im Gegensatz zur Theorie der linearen Systeme existieren keine universell anwendbaren Verfahren. Es werden Ansätze vorgestellt, die für eine große Klasse an Prozessen eine Lösung ermöglichen. Der zweite Teil befasst sich mit modernen Verfahren zum Entwurf von Regelsystemen, die im wesentlichen auf meinem Buch “Entwurf robuster Regelungen” beruhen. Robuste Regler lassen sich auch für viele nichtlineare Prozesse einsetzen, da auch Parametervariationen der Strecke (in gewissen Grenzen) toleriert werden können. Ich wünsche allen Hörern der Veranstaltung “Regelungstheorie 2” viel Freude an dem faszinierenden Fachgebiet der Regelungstheorie. Bremerhaven, Oktober 2005 Kai Müller <[email protected]> Tel: (0471)4823 --- 415
Transcript of Einleitung - Startseite: Hochschule Bremerhaven · 2013-05-29 · Teil 1: Exakte Linearisierung S...

Hochschule Bremerhaven / Uni Bremen
Regelungstheorie 2[ RT2 ]
Revision: V1.0a
Datum: Oktober 2008
S Teil 1: Exakte Linearisierung
S Teil 3: Koprime Faktorisierung
Unterlagen zur Lehrveranstaltung
E---Mail: [email protected]
D---27568 Bremerhaven
Tel: +49 471 48 23 --- 415FAX: +49 471 48 23 --- 418
Prof. Dr.-Ing. Kai MüllerHochschule BremerhavenInstitut für Automatisierungs- und ElektrotechnikAn der Karlstadt 8
S Teil 4: H2-optimale Regelung
S Teil 5: H∞-optimale Regelung
S Teil 6: Norm-optimale Regelungen im Zustandraum
S Teil 2: Stabiliätsanalyse nach Lyapunov
Regelungstheorie 2 Hochschule Bremerhaven --- IAEI
I Einleitung
I.I Umdruck zur Vorlesung
Über die Homepage der Vorlesung <http://www1.hs---bremerhaven.de/kmueller/>werden aktualisierte oder korrigierte Unterlagen im Verlauf der Vorlesung zur Verfügunggestellt.
I.II Regelungstheorie 2
Die Regelungstheorie 2 besteht aus zwei Teilen. Der erste Teil befasst sich in der Traditionder bisherigen Veranstaltung mit nichtlinearen Systemen. Dies trägt der TatsacheRechnung, dass ein Großteil der in der Praxis auftretenden Prozesse nichtlinearer Natursind und sich nur sehr unzureichend mit linearen Systemen beschreiben lassen. ImGegensatz zur Theorie der linearen Systeme existieren keine universell anwendbarenVerfahren. Es werden Ansätze vorgestellt, die für eine große Klasse an Prozessen eineLösung ermöglichen.
Der zweite Teil befasst sichmit modernenVerfahren zumEntwurf vonRegelsystemen, dieim wesentlichen auf meinem Buch “Entwurf robuster Regelungen” beruhen. RobusteRegler lassen sich auch für viele nichtlineare Prozesse einsetzen, da auchParametervariationen der Strecke (in gewissen Grenzen) toleriert werden können.
Ich wünsche allen Hörern der Veranstaltung “Regelungstheorie 2” viel Freude an demfaszinierenden Fachgebiet der Regelungstheorie.
Bremerhaven, Oktober 2005 Kai Müller<[email protected]>
Tel: (0471) 4823 --- 415

Regelungstheorie 2 --- Inhalt Hochschule Bremerhaven --- IAEII
II Inhalt
1 Nichtlineare Systeme 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Linearisierung am Arbeitspunkt 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Linearisierung durch Zustandsrückführung(Feedback Linearization) 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Lie-Ableitung 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Transformation auf RNF mit Lie-Ableitungen 4. . . . . . . . . . . . . .
1.2.3 Exakte Linearisierung 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.4 Exakte Linearisierung für Systeme höherer Ordnung 7. . . . . . . .
1.3 Theorie der Transformation auf Regelungs-Normalform 9. . . . . . . . . . . .
1.3.1 Praktische Bestimmung einer Transformation aufRegelungs-Normalform 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Lineare Systeme 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.3 Beispiel: nichtlineares System 3. Ordnung 12. . . . . . . . . . . . . . . . .
2 Übungsbeispiel: Exakte Linearisierung eines Mehrtanksystems 15. . . . . . . . . . . .
3 Stabilitätsanalyse nichtlinearer Systeme 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Definitionen der Stabilität bei nichtlinearen Systemen 17. . . . . . . . . . . . .
3.1.1 Mathematische Definition der Stabilität (einfache Stabilität) 18.
3.1.2 Mathematische Definition der Stabilität(asymptotische Stabilität) 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Lyapunov-Stabilität 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Definition der Lyapunov-Funktion (Potenzial-Funktion) V(x) 20.
3.3 Lyapunov-Stabilität für lineare Systeme 22. . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Anwendung der Methode von Lyapunov auf ein nichtlineares System 23.
3.4.1 Numerische Auswertung 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Übungsbeispiel: Stabilitätsanalyse eines nichtlinearen System mit derMethode von Lyapunov 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Übungsbeispiel: Stabilität einer Positionsregelung mit Elektromagneten 31. . . .
6 Grundlegende Beziehungen des geschlossenen Kreises 33. . . . . . . . . . . . . . . . . . .
6.1 Berücksichtigung von Modellunsicherheiten 35. . . . . . . . . . . . . . . . . . . . . .
Regelungstheorie 2 --- Inhalt Hochschule Bremerhaven --- IAEIII
7 Motivierende Einführung: Youla-Parametrierung für stabileProzesse / Internal Model Control (IMC) 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Entwurf von Reglern über Youla-Parametrierung 39. . . . . . . . . . . . . . . . . .
7.2 Beispiel für den Eingrößenfall 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Übungsbeispiel: Youla-Parametrierung 41. . . . . . . . . . . . . . . . . . . . . . . . . .
8 Normen für Signale und Systeme 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Eigenschaften von Normen 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Normen für Signale 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.1 Endlichkeit von Normen für Signale 43. . . . . . . . . . . . . . . . . . . . . .
8.3 Normen für Systeme 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.1 Endlichkeit von Normen für Systeme 46. . . . . . . . . . . . . . . . . . . . .
8.3.2 Berechnung der 2-Norm 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.3 Berechnung der∞-Norm 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4 Eingangs-/Ausgangsbeziehungen 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.5 Übungsbeispiel: Berechnung der Normen von Systemen 55. . . . . . . . . . .
8.6 Übungsbeispiel: Optimierung der Parameter eines PI-Reglersüber die ∞-Norm 56. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Koprime Faktorisierung 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Berechnung von X(s) und Y(s) mit dem Algorithmus von Euklid 59. . .
9.2 Beispiel: koprime Faktorisierung einer instabilen Strecke 61. . . . . . . . . . .
9.3 Q-Parametrierung: der allgemeine Fall 61. . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.1 Interne Stabilität 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4 Die Menge aller G stabilisierenden Regler 63. . . . . . . . . . . . . . . . . . . . . .
9.4.1 Herleitung der internen Stabilität für den geschlossenen Kreis mitdem parametrierten Regler 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.5 Entwurf eines stabilisierenden Reglers mit vorgebbaren Eigenschaften durchkoprime Faktorisierung 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.5.1 Algorithmus 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Übungsbeispiel: Reglerentwurf für eine instabile Strecke durch koprimeFaktorisierung 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11 Modellabgleich 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.1 Problemstellung 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Regelungstheorie 2 --- Inhalt Hochschule Bremerhaven --- IAEIV
11.1.1 Beispiel für minimale R-Norm bei einer Nullstelle von U(s) in derrechten Halbebene 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12 Minimierung der 2-Norm 71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.1 Definition der Mengen und 71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.2 Berechnung des 2-Norm-optimalen Q(s) 73. . . . . . . . . . . . . . . . . . . . . . . . .
12.3 Beispiel für eine 2-Norm-optimale Regelung 74. . . . . . . . . . . . . . . . . . . . .
13 Übungsbeispiel: 2-Norm-optimale Regelung für eine instabile Strecke 77. . . . .
14 Minimierung der ∞-Norm 78. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.1 Nevannlinna-Pick-Interpolation 78. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.1.1 NP für ein Wertepaar a1, b1 79. . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.1.2 Beispiel für NP 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.1.3 NP für n Punkte 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.1.4 Beispiel: NP für 2 Wertepaare 82. . . . . . . . . . . . . . . . . . . . . . . . . . .
14.2 Lösung des Modellabgleich-Problems für durch NP 83. . . . . . . . . . . . . . .
14.2.1 Algorithmus zur Berechnung Q(s) für 84. . . . . . . . . . . . . . . . . . . .
15 Übungsbeispiel: ∞-Norm-optimale Regelung einer instabilen Strecke 86. . . . .
16 Berechnung 2- und∞-Norm-optimaler Regler im Zustandsraum(H2-/H∞-Regler) 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16.1 Berechnung der 2-Norm von Mehrgrößenstrecken 89. . . . . . . . . . . . . . . . .
16.2 Berechnung der∞-Norm von Mehrgrößenstrecken 91. . . . . . . . . . . . . . . .
16.3 Berechnung Norm-optimaler Regler im Zustandsraum 93. . . . . . . . . . . . .
16.3.1 Beispiel: PT1-Strecke mit proportionalenGewichtungsfunktionenW1 undW2 95. . . . . . . . . . . . . . . . . . . . . . .
16.3.2 Struktur des Blocks P 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16.4 Berechnung des 2-Norm-optimalen Reglers 96. . . . . . . . . . . . . . . . . . . . . .
16.4.1 Beispiel für eine 2-Norm-optimale Regelung mitdynamischer Stellgrößenbeschränkung 97. . . . . . . . . . . . . . . . . . . .
16.5 Bedingungen für die Existenz von Lösungen für den 2-Norm-Entwurf 99
16.6 Berechnung des ∞-Norm-optimalen Reglers 100. . . . . . . . . . . . . . . . . . . . .
16.7 Beispiel für eine ∞-Norm-optimale Regelung 102. . . . . . . . . . . . . . . . . . . .
16.8 Bedingungen für die Existenz von Lösungen für den∞-Norm-Entwurf 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Regelungstheorie 2 --- Inhalt Hochschule Bremerhaven --- IAEV
17 Reglerentwurf für Prozesse mit unsicheren Parametern und unstrukturiertenModellunsicherheiten 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17.1 Reglerentwurf für Prozesse mit unstrukturierter Modellunsicherheit 108. .
17.1.1 Beispiel: Entwurf eines Reglers für robuste Stabilität 109. . . . . . . .
17.2 Der strukturierte singuläre Wert μ (SSV) 110. . . . . . . . . . . . . . . . . . . . . . . .
17.2.1 Definition von μ 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17.2.2 Berechnung von μ 112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17.3 Analyse der robusten Stabilität bei strukturierter Modellunsicherheit 113.
17.3.1 Beispiel: Prüfmaschine 113. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17.4 Entwurf von Reglern für robuste Regelqualität (RP) 116. . . . . . . . . . . . . . .
17.4.1 Main-Loop-Theorem 116. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17.4.2 Analyse robuster Regelqualität 117. . . . . . . . . . . . . . . . . . . . . . . . . .
17.4.3 Berechnung von Reglern für RP 119. . . . . . . . . . . . . . . . . . . . . . . . .
17.4.4 Beispiel: Optimierung der robusten Regelqualität 122. . . . . . . . . . .
17.4.5 MATLAB-Befehle zum Beispiel 17.4.4(Entwurf eines Regles für robuste Regelqualität) 128. . . . . . . . . . .
18 Mathematischer Anhang 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Matrizenrechnung 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Rechenregeln für Transposition und Inversion 132. . . . . . . . . . . . . .
A.2 Rechenregeln für Determinanten 132. . . . . . . . . . . . . . . . . . . . . . . .
A.3 Matrix-Analysis 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Rechenregeln für Zustandsdarstellungen 132. . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Basistransformation der Zustandsgrößen 133. . . . . . . . . . . . . . . . . .
B.2 Inversion 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 Konjugiert komplexe Transposition 133. . . . . . . . . . . . . . . . . . . . . . .
B.4 Parallelschaltung 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.5 Addition 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.6 Multiplikation 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.7 Rückkopplung I (D1 = [0]) 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.8 Rückkopplung II (D1 = [0]) 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19 Literatur 135. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Regelungstheorie 2 Hochschule Bremerhaven --- IAE1
1 Nichtlineare Systeme
Einführende Veranstaltungen zur Regelungstechnik befassen sich ausschließlich mitsogenannten LTI-Systemen (Linear Time-Invariant-Systems). Diese Klasse von Systemensind durch folgende Merkmale gekennzeichnet:
S Lineare Differentialgleichungen mit konstanten Koeffizienten.
S Keine Zeitabhängigkeit in den Parametern.
S Es gilt das Überlagerungsprinzip.
S Die Eigenschaften des Systems hängt nicht von den Ein-/Ausgangssignalen ab.
Ein lineares System erfüllt algebraische und differentielle Gleichungen der Form
f (ax)= af (x) , ∀ a∈ < . (1.1)
Man erkennt, dass dies für System in Zustandsform
x. = Ax+ Bu , y= Cx+Du (1.2)
natürlich gegeben ist.
Für lineare Systeme existiert eine allgemein anwendbare geschlosseneTheorie zurAnalyseund zum Entwurf von Regelsystemen, da für LTI-Systeme die Laplace- bzw.z-Transformation existiert. Leider ist eine Vielzahl der in der Praxis auftretendenRegelstrecken nichtlinear.
Für nichtlineare Prozesse existiert keine universell anwendbare Theorie; eine Lösungmussalso stets im Einzelfall gefunden werden. Im Rahmen dieser Veranstaltung sollen dieAnsätze behandelt werden, die einen Entwurf von Regelungen für nichtlineare Systemeermöglichen oder zumindest die Stabilität des Systems nachweisen.
1.1 Linearisierung am Arbeitspunkt
Eine häufig angewandte Methode ist die Linearisierung eines Systems ein einemArbeitspunkt. Das System werde beschrieben durch
x. = F(x, u) . (1.3)
Falls der Prozess überwiegend an einem Gleichgewichtszustand
0= F(x0, u0) . (1.4)
betrieben wird und die Funktion F differenzierbar in x und u ist, so lässt sich das Systemlinearisieren. Der Gleichgewichtszustand x0 und die zugehörige Eingangsgröße u0charakterisieren denArbeitspunkt. Wichtige Voraussetzung ist, dass x0 und u0 konstanteGrößen sind.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE2
Mit den Definitionen für die Abweichungen vom Arbeitspunkt
z=∆ x− x0 , v=∆ u− u0 (1.5)
erhalten wir eine lineare Beschreibung des Systemverhalten “in der Nähe” desArbeitspunkts
z. = F(x, u)− F(x0, u0)= F∆(x, u)≈
∂F∂xx0,u0z+∂F∂ux0,u0v . (1.6)
Mit
A=∆ ∂F∂xx0,u0, B=∆ ∂F∂u
x0,u0
(1.7)
erhalten wir eine LTI-Form für das nichtlineare System
z. = Az+ Bv . (1.8)
Völlig unklar ist jedoch, wie sich das System bzw. das geregelte System verhält, wenn |z|und |v| nicht “klein” sind bzw. wie weit sich x und u vomArbeitspunkt entfernen dürfen,ohne die Funktion der Regelung zu gefährden.
Die Linearisierung am Arbeitspunkt ist somit nicht in allen Fällen eine zulässigeVereinfachung des Prozesses.
1.2 Linearisierung durch Zustandsrückführung(Feedback Linearization)
Ohne Näherungen kannman ein System auch exakt über eine spezielle Koordinatentrans-formation in ein lineares System überführen, für das sich dann alle bekanntenStandardverfahren zum Entwurf einer Regelung anwenden lassen. Als Rückblick sollzunächst die Transformation eines linearen Systems auf die Regelungsnormalform (RNF)in einer alternativen Form betrachtet werden.
Ein steuerbares System kann stets in die RNF überführt werden. Dabei ändern sich dieZustandsgrößen gemäß
x*= Tx . (1.9)
DerZustandsvektor x* ist dabei dieZustandsgröße inRNF, für die Transformation inRNFgilt
x. *= TAT−1x*+ TBu=∆ A*x*+ B*u . (1.10)
Die Transformationsmatrix T folgt aus einem Koeffizientenvergleich von Originalsystemund den Matrizen in RNF (s. “Regelungstheorie 1”) zu (alle Gleichungen für eine System3. Ordnung!)

Regelungstheorie 2 Hochschule Bremerhaven --- IAE3
T=
qqAqA2
. (1.11)
Dabei ist
q=∆ [ q1 q2 q3 ] (1.12)
die letzte Zeile der inversen Steuerbarkeitsmatrix
Q= B AB A2B , (1.13)
d.h. es gilt
q Q= [ 0 0 1 ] . (1.14)
Es entsteht die charakteristische Form der RNF
A*= TAT−1=
00
− a0
10
− a1
01
− a2, (1.15)
B*= TB=001. (1.16)
Jede Zustandsgröße xk+1 ist dabei identischmit derAbleitung derZustandsgröße xk (mitAusnahme natürlich der letzten Zustandsgröße xn).
1.2.1 Lie-Ableitung
Die gleiche Transformation kann in einer anderen Form geschriebenwerden, die sichdannauch auf nichtlineare Systeme anwenden lässt. Hierzu verwenden wir die sogenannteLie-Ableitung. Wie im vorangegangenen Kapitel wird zur Vereinfachung ein System3. Ordnung verwendet. Ist
f (x)=
f1(x)f2(x)f3(x)
∈ <3 , (1.17)
so bildet der Lie-Operator eine Abbildung einer skalaren Funktion auf eine skalareFunktion
Lf(Ô)=∆< dÔ, f>= ∂Ô∂x1 ∂Ô∂x2 ∂Ô∂x3
f1(x)f2(x)f3(x)
. (1.18)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE4
DieOperation < S, S> kennzeichnet dabei das skalare Vektorprodukt. Die Lie-Ableitungist definiert für alle unendlich oft differenzierbaren Funktionen f(x).
Lie-Ableitungen höherer Ordnung bildet man rekursiv; sie werden wie folgt geschrieben
L2f (Ô)= LfLf(Ô) =< dLfÔ, f> . (1.19)
Die Klammer (Ô) wird gelegentlich weggelassen, da es sich bei Lf um einen Operatorhandelt. Allgemein gilt für die k. Lie-Ableitung
Lkf (Ô)= LfLk−1f Ô =< dLk−1f Ô, f> . (1.20)
1.2.2 Transformation auf RNF mit Lie-Ableitungen
Man kann nun die Transformation auf die Regelungs-Normalform als mehrfacheLie-Ableitung angeben, wenn die skalare Funktion Ô geeignet gewählt wird
Ô= q1x1+ q2x2+ q3x3= qx (1.21)
(q ist wieder die letzte Zeile der inversen Steuerbarkeitsmatrix Q).
Die Funktion Ô ist gleichzeitig die Transformationsvorschrift T1 für die Zustandsgrößex*1 in Regelungs-Normalform
x*1= T1(x)= qx . (1.22)
DieLie-Ableitung (Ableitungnach derZeit) liefert die ersteDifferenzialgleichung inRNF
x. *1= Lf+gu(T1)=< dT1,Ax+ bu>= qAx+ qBu= qAx=
∆T2= x
*2 .(1.23)
Die Funktion T2 ist somitdie Transformationsvorschrift für x2*. DieweitereLie-Ableitungergibt
= qA2x=∆ T3= x*3 . (1.24)
x. *2= Lf+gu(T2)=< dT2,Ax+ bu>= qA
2x+ qABu
Die bei einem System 3. Ordnung letzte Ableitung liefert schließlich
(1.25)x. *3= Lf+gu(T3)=< dT3,Ax+ bu>= qA
3x+ qA2Bu
Mit
(1.26)x= T−1x*
aus (1.9) folgt aufgrund von
qA3T−1= [− a0 − a1 − a2 ] (1.27)

Regelungstheorie 2 Hochschule Bremerhaven --- IAE5
(1.28)x. *3= [− a0 − a1 − a2 ] x
*+ u
die letzte Zustandsgleichung inRNF. Zusammengefasst erhältman für die Transformation
x. *=
T1T2T3
=
qqA
qA2
x (1.29)
natürlich dasgleicheErgebniswieGleichung(1.11) inAbschnitt 1.2. Für das transformierteSystem gilt
x. *=
00
− a0
10
− a1
01
− a2x*+001u . (1.30)
Die Eingangsgröße u wirkt sich nun nur noch in der letzten Zustandsgröße aus. DieseEigenschaft nutzt man für die nichtlineare Transformation der Zustandsgrößen zu exaktenLinearisierung eines nichtlinearen Systems.
Man erzwingt, dass die ersten n-1 Zustandsgleichungen linear sind; die letztenZustandsgleichung lässt sich leicht durch Rückführungen exakt linearisieren.
1.2.3 Exakte Linearisierung
Nichtlineare Systeme 1. Ordnung der Form
dxdt= f (x)+ g(x, u) (1.31)
lassen sich exakt linearisieren, wenn nach der Eingangsgröße u aufgelöst werden kann.Beispielsweise lautet die Differenzialgleichung für einen Flüssigkeitstank (Bild 1.1)
dhdt= uA0−A1 2gA0
h (1.32)
Ersetzen wir die gesamte rechte Seite durch
v=∆ uA0−A1 2gA0
h , (1.33)
so entsteht die lineare DGL
dhdt= v . (1.34)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE6
u
h
q1
A1
A0
tank
pipe
Bild 1.1: Flüssigkeitstank mit Ablauf durch Gravitation
Die Eingangsgröße u folgt nun aus v
u= A0v+ A1 2gh . (1.35)
Das folgende Blockschaltbild zeigt nun eine exakte Beschreibung des nichtlinearenSystems. “Nach außen” erscheint das Gesamtsystem nun linear. Vereinfachungen wurdendabei nicht vorgenommen.
gravity flow tank(nonlinear real system)
hu
A1 2g h
A0controller
---
v
hvProcess “seen” bythe controller
href
control computer
Bild 1.2: Regelung eines nichtlinearen System mit exakter Linearisierung
Für das linearisierte System lassen sich nun Standard-Regler verwenden; dieNichtlinearität ist für den Regler nicht mehr “sichtbar”.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE7
1.2.4 Exakte Linearisierung für Systeme höherer Ordnung
Eine exakte Linearisierung Systeme höherer Ordnung kann durch eine nichtlineareTransformation der Zustandsgrößen erfolgen. Im Prinzip wird auch das nichtlineareSystem auf die “Regelungs-Normalform” transformiert. Die Nichtlinearitäten “verstek-ken” sich dann in den Transformationen und in der DGL für die letzte Zustandsgröße.
Für das Auffinden einer geeigneten Transformation existieren leider keine einfachenRegeln. Eine notwendige Voraussetzung für die Existenz der Transformation ist dieElimination der Eingangsgröße aus den ersten n-1 Zustandsgleichungen. Sofern dieSystemordnung klein ist, lassen sich auf diese Weise oft Transformationen mit Hilfe derLie-Ableitungen finden. Die Theorie zum systematischenAuffinden der Transformations-gleichungen sprengen den Rahmen dieser Veranstaltung.
Beispiel: Gleichstrom-Nebenschlussmaschine
u eRa L Re
ia ieω, ML
Bild 1.3: Gleichstrom-Nebenschlussmaschine
Aus dem Bild lassen sich die Differenzialgleichungen und die algebraische Beziehung fürden Ankerstrom ableiten
J dωdt= k1iaie− k2ω−ML , (1.36)
Ldiedt= u− Reie , (1.37)
ia= u− eRa, e= k3ωie . (1.38)
Mit ω = x1 und ie = x2 folgt mit entsprechenden Konstanten
x.1=− c1x1− c2x1x
22+ c3x2u− c6ML , (1.39)
x.2=− c4x2+ c5u . (1.40)
Da dieses System nur 2. Ordnung ist, lässt sich eine Transformation zur Linearisierungrelativ leicht finden.
Die obigen nichtlinearen Zustandsgleichungen lassen sich zusammenfassen zu
Regelungstheorie 2 Hochschule Bremerhaven --- IAE8
x. = f (x)+ g(x)u+ pML (1.41)
mit
f (x)=∆ − c1x1− c2x1x2x2− c4x2 , (1.42)
g(x)=∆ c3x2c5 , (1.43)
p=∆ − c60 . (1.44)
Die linearisierten DGLn lauten
x*1= T1 , (1.45)
x*2= T2= Lf+gu+pML(T1)=< dT1, f+ gu+ pML> , (1.46)
wobei einzig die Transformation T1 noch unbekannt ist. Man erkennt, dass
x. *1= x*2 (1.47)
erfüllt ist, was für die Regelungs-Normalform ja erforderlich ist. (1.47) darf aber nichtvon u abhängen, da sonst eine Linearisierung nicht möglich wäre (es wird angenommen,dass das Lastmoment ML messbar ist). Somit muss gelten
∂T1∂x g=
! 0 . (1.48)
Die ist für die nichtlineare Transformation
T1=− c5x1+ c3x222
(1.49)
erfüllt. Damit ist auch (1.46) festgelegt
= c1c5x1+ c2c5x1x22− c3c4x
22+ c5c6ML . (1.50)
x*2= T2= Lf+pML(T1)=< dT1, f+ pML>
=[− c5 c3x2] , − c1x1− c2x1x22− c6ML− c4x2
Die Ableitung von x2* ergibt schließlich
x. *2= Lf+gu+pML(T2)= α(x)+ β(x)u=
∆v . (1.51)
Eine längere Rechnerei ergibt die Funktionen

Regelungstheorie 2 Hochschule Bremerhaven --- IAE9
− c4x2(2c2c5x1x2− 2c3c4x2) , (1.52)
α(x)=− (c1c5+ c2c5x22)(c1x1+ c2x1x
22+ c6ML)
β(x)= c5x2(c1c3− 2c3c4+ 2c2c5x1+ c2c3x22) . (1.53)
Die Eingangsgröße des Prozesses wird dann einfach
u=v− α(x)β(x)
=∆ r(x, v) . (1.54)
Der linearisierte Prozess lautet dann in Zustandsform
x. *1
x. *2= 00 10
x*1x*2+01 v , (1.55)
also ein perfekt lineares System ohne jegliche Vereinfachungen.
Mit einer Zustandsregelung in den Koordinaten von (1.55) ermöglicht dann eine beliebigePolvorgabe. Eine mögliche Verwirklichung der Regelungmit dem linearisierten System istin Bild 1.4 dargestellt.
nicht-linearerProzess
r(x, v)Kxsoll
Tx*soll v u x
Tx*
lineares System
---
Bild 1.4: Regelung eines linearisierten Systems
1.3 Theorie der Transformation aufRegelungs-Normalform
Bisher wurde eine mögliche Transformation
x*= T(x) : <n → <n (1.56)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE10
“intuitiv” gefunden, was für ein System 2. Ordnung immer möglich ist. Hier ist nur dieBedingung
∂T1∂x g = dT1 g =
! 0 (1.57)
zu erfüllen. Das Eingangssignal u hat dann keine Einfluss mehr auf die ersteZustandsgröße x1* .
Für Systeme höherer Ordnung ist das Auffinden der Transformationen nicht trivial; es istnoch nicht einmal gewährleistet, dass eine Transformation überhaupt existiert. Da alleTransformationen aus der ersten Transformation T1 folgen, ist es sinnvoll, dieBedingungen für die Existenz einer Lösung auf T1 zu beziehen.
Mit
x*1= T1 (1.58)
gilt für die Ableitung (Lie-Ableitung)
x. *1= Lf+gu(T1)= Lf(T1)+ Lg(T1) u . (1.59)
Damit der Einfluss der Eingangsgröße verschwindet, muss folglich
Lg(T1)=! 0 (1.60)
erfüllt sein. Da alle Zustandsgrößen durch Ableitung jeweils aus einander hervorgehen,müssen auch höhere Lie-Ableitungen
x. *2= Lf+gu(T2)= Lf(T2)+ Lg(T2) u . (1.61)
für g verschwinden
Lg(T2)= Lg Lf(T1)=! 0 (1.62)
aufgrund von (1.60) kann man auch schreiben
L[f,g](T1)=∆Lg Lf(T1)− Lf Lg(T1)=
! 0 . (1.63)
Die nächsthöhere Ableitung lautet entsprechend
= Lg L2f (T1)− 2LfLgLf(T1)+ L2fLg(T1)=
! 0 . (1.64)
L[f,[f,g]](T1)=∆L[f,g] Lf(T1)− Lf L[f,g](T1)
Beliebige Ableitungen lassen sich nun wie folgt schreiben
L[adkf g](T1)= Σ
k
i=0(−1)iki LifLgLk−1f (T1) . (1.65)

Regelungstheorie 2 Hochschule Bremerhaven --- IAE11
Für die ersten drei Bedingungen erhält man beispielsweise
Lad0f g(T1)= Lg(T1)=
! 0 , (1.66)
Ladfg(T1)= LgLf(T1)− LfLg(T1)=
! 0 , (1.67)
Lad2f g(T1)= LgL
2f (T1)− 2LfLgLf(T1)+ L2fLg(T1)=
! 0 . (1.68)
Die letzte Gleichung muss ungleich null sein, damit das System steuerbar ist. Die rechteSeite von
Ladn−1f g(T1)= β(x)≠ 0 (1.69)
kann in weiten Teilen frei gewählt werden; es muss lediglich die Eingangsgröße u in β(x)enthalten sein. Man kann die Funktion β(x) so wählen, dass ein möglichst einfachesErgebnis entsteht.
Die vorstehenden Gleichungen lassen sich zur Bestimmung von T1 zu einerMatrizengleichung zusammenfassen. Die Bedingungen liefern allerdings nicht dieTransformation direkt sondern nur den Gradienten
dT1=∆ ∂T1∂x ,
(1.70)
der in allen Gleichungen vorkommt. Man erhält die kompakte Darstellung
dT1 g adf g ad2f g adn−1f g = 0 β(x) . (1.71)
Mit der Bezeichnung
ξ= g adf g ad2f g adn−1f g (1.72)
folgt für
dT1= 0 β(x) ξ−1 . (1.73)
Die Matrix ξ nennt man nichtlineare Steuerbarkeitsmatrix.
Analog zur Steuerbarkeit bei linearen Systemen ist eine exakte Linearisierung nichtmöglich, wenn sich ξ nicht invertieren lässt.
Eine Lösung existiert auch dann nicht, wenn aus dem Gradienten (1.73) T1 nichtbestimmt werden kann.
Wie im folgenden Abschnitt gezeigt wird, ist die bekannte Steuerbarkeitsmatrix einSonderfall von (1.72).
Regelungstheorie 2 Hochschule Bremerhaven --- IAE12
1.3.1 Praktische Bestimmung einer Transformation aufRegelungs-Normalform
Die Spalten von (1.72) bestimmt man häufig rekursiv. Mit der Symbolik
f1, f2 =∆ ∂f1∂x f2−∂f2∂x f1 (1.74)
erhält man
adf g= f, g , (1.75)
ad2f g= f, adf g , (1.76)
ad3f g= f, ad2f g , u.s.w. (1.77)
1.3.2 Lineare Systeme
Die Anwendung von (1.73) und folgende Gleichungen auf das lineare System
x. = Ax+ Bu ⇒ f= Ax , g= B (1.78)
führt auf die bekannte Transformation auf Regelungs-Normalform. Die einzelnen spaltenvon ξ lauten:
g= B , (1.79)
adf g= f, g =∂f∂x g−
∂g∂x f= AB− 0= AB , (1.80)
ad2f g= f, adf g = A2B− 0= A2B , u.s.w. (1.81)
In jeder Spalte kommt lediglich der Faktor A dazu. Wählt man schließlich β(x) = 1, soerhält man die bekannte Transformationsgleichung für die Regelungs-Normalform alsSonderfall der allgemeinen Transformation
ξ= QS= B AB A2B An−1B . (1.82)
Mit der rechten Seite [ 0 0 ... 1 ] (β(x) = 1 ist willkürlich gewählt) folgt schließlich
dT1= [ 0 0 1 ] Q−1S = q (1.83)
bzw.
T1= qx . (1.84)
1.3.3 Beispiel: nichtlineares System 3. Ordnung
Das nichtlineare System

Regelungstheorie 2 Hochschule Bremerhaven --- IAE13
x3. = x1+ x2+ x3 (1.85)
x2. =− 2x2x3 ,
x1. =− x1+ x1u ,
soll durch exakte Linearisierung in ein lineares System überführt werden. Es gilt
g(x)=
x100. (1.86)
f (x)=
− x1− 2x2x3
x1+ x2+ x3
,
Für die nichtlineare Steuerbarkeitsmatrix erhält man die Spalten (1.86), (1.75)
adf g= [f, g]=∂f∂x g−
∂g∂x f=00x1, (1.87)
sowie (1.76)
ad2f g= [f, adf g]=
0− 2x1x22x1
, (1.88)
Damit wird die nichtlineare Steuerbarkeitsmatrix
ξ=
x100
00x1
0− 2x1x22x1
. (1.89)
Zur Bestimmung von dT1 muss nur die letzte Zeile der invertierten Matrix (1.89)berechnet werden
[ 0 0 1 ] ξ−1= 0 − 12x1x2
0 . (1.90)
Mit der im Prinzip beliebigen Wahl von β(x) = ---2x1x2 folgt
dT1= 0 β(x) ξ−1= [ 0 1 0 ] . (1.91)
Die Zahl der Lösungen ist unendlich; eine sehr einfache Lösung stellt natürlich
T1= x2 (1.92)
dar. Das linearisierte System wird schließlich durch folgende Transformationenbeschrieben
Regelungstheorie 2 Hochschule Bremerhaven --- IAE14
x*1= T1= x2 , (1.93)
x. *1= x*2= T2=− 2x2x3 , (1.94)
x. *2= x*3= T3= 2x22x23− x1− x2− x3 , (1.95)
− 2x22− 2x2x3= v(x, u) . (1.96)
x. *3=− 2x1x2 u− 8x2x
33+ 12x1x2x3+ 16x
22x3+ 12x2x
23
Wie man leicht nachprüfen kann, sind sowohl
∂T1∂x g=
! 0 als auch∂T2∂x g=
! 0 (1.97)
erfüllt.
Die Stellgröße bestimmt man aus (1.96) gemäß
(1.98)u=−v+ 8x2x33− 12x1x2x3− 16x
22x3− 12x2x
23+ 2x
22+ 2x2x3
2x1x2
Es ist zu beachten, dass das linearisierte System für x1 = 0 oder x2 = 0 singulär wird. Ineiner praktischen Verwirklichung in einem Regelalgorithmus dürfen x1 und x2vorgegebeneMinimalbeträge nichtunterschreiten. EinBeispielprogrammzurBerechnungder Stellgröße zeigt eine mögliche Lösung des Problems:
minx = 1.0e-4;ur = v + 8*x2*x3^3 - 12*x2*x3*x1 - 16*x2^2*x3 - 12*x3^2*x2
+ 2*x2^2 + 2*x2*x3;if abs(x1) < minx
if x1 >= 0.0; x1 = minx; else x1 = -minx; endendif abs(x2) < minx
if x2 >= 0.0; x2 = minx; else x2 = -minx; endendu = -0.5 * ur / x1 / x2;
:::

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE15
Übung 1
2 Übungsbeispiel: Exakte Linearisierung einesMehrtanksystems
Für folgendesMehrtanksystem soll ein linearesModell durch nichtlineare Transformationerzeugt werden.
u
x1
q1
A1
A0
Tank 1
x2
q2
A1
A0
Tank 2
a) Stellen Sie die Differentialgleichungen des obigen Systems mit u alsEingangsgröße auf.
b) Finden Sie eine nichtlineare Transformation, die eine exakte Linearisierungermöglicht.
Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE16
c) BestimmenSie für das linearisierteSystemeine Zustandsrückführung, so dass einDoppelpol bei k1 entsteht.
d) Erläutern Sie das folgende Blockschaltbild der Regelung und diskutieren Sie dieErgebnisse (" “u1.zip”).
:::

Regelungstheorie 2 Hochschule Bremerhaven --- IAE17
3 Stabilitätsanalyse nichtlinearer Systeme
Für nichtlineare Systeme existieren unterschiedliche Stabilitätsbegriffe, die --- angewandtauf lineare Systeme --- stets auf die gleicheAnforderunghinauslaufen: allePole desSystemsmüssen negativen Realteil aufweisen. Dieser einfache Stabilitätsnachweis gilt fürnichtlineare Systeme nicht, hier ist im Einzelfall ein Nachweis für Stabilität zu führen.Besonders wichtig ist es Stabilität für Anlagen oder Geräte zu zeigen, von deren Betriebeine Gefahr für Personen ausgeht (Fahrzeuge, Geräte der Medizintechnik etc.).
Von allen bekannten Verfahren (z.B. Beschreibungsfunktion, Popov-Kriterium,Hyperstabilität) weist die direkteMethode vonLyapunov ein sehr großenAnwendungspo-tenzial auf, die hier lediglich die Differenzierbarkeit der Nichtlinearitäten vorausgesetztwird. Das Verfahren von Lyapunov lässt sich deshalb auf nahezu alle Systeme anwendenund liefert einen hinreichenden Nachweis der Stabilität. In der Praxis bedeutet das, dassbei nachgewiesener Lyapunov-Stabilität das System garantiert stabil ist; sollte derNachweis nicht gelingen, kann daraus aber keine Instabilität gefolgert werden.
3.1 Definitionen der Stabilität bei nichtlinearenSystemen
Die Stabilitätstheorie befasst sich mit dem “Verhalten eines Systems über einen langenZeitraum“, d.h. es interessiert nicht das dynamischeVerhalten, sonderndie Eigenschaft für“t→∞“. In der Regelungsregelungstechnik ist dies vorallem für die Stabilität vonGleichgewichtszuständen von Bedeutung, z.B. für einen konstanten Sollwert.
So lautet der Titel der Arbeit von Alexander Michailowitsch Lyapunov (1892):“Hinreichende Bedingung für Stabilität von Gleichgewichtszuständen ohne Lösung derDifferentialgleichungen”. Die Lösung der Differentialgleichungen würde auch keineAntwort auf die Frage nach Stabilität liefern, da ja nur ein spezieller Fall (bestimmteAnfangsbedingungen) erfasst wird.
Bild 1.5: Alexander Michailowitsch Lyapunov (1857---1918)
Man unterscheidet unterschiedlich strenge Definitionen der Stabilität:
Regelungstheorie 2 Hochschule Bremerhaven --- IAE18
Stabilität (im Lyapunovschen Sinn):Verbleiben eines Systems in einer Umgebung des Gleichgewichtszustands
Asymptotische Stabilität:Das System kehrt aus jedem Punkt einer Umgebung des Gleichgewichtszustands
wieder in den Gleichgewichtszustand zurück (für t→∞).
Wir betrachten autonome Systeme, d.h. Systeme der Form
x. = f (x) . (1.99)
Die Funktion f(x) darf dabei beliebig nichtlinear sein, sie muss lediglich nach xdifferenzierbar sein. Der Gleichgewichtszustand folgt dann aus
x=∆ f (x)=! 0 . (1.100)
Durch eine Koordinatentransformation dann o.B.d.A immer
x= 0 , f (0)= 0 (1.101)
vorausgesetzt werden.
3.1.1 Mathematische Definition der Stabilität (einfache Stabilität)
Für jeden Wert innerhalb eines Stabilitätsbereiches Ω verlässt das System nicht denBereich, der durch ε gegeben ist (Bild 1.6).
x1
x2
ε
δ(ε)
x(0)
x(t)
Stabilitätsbereich Ω
Bild 1.6: Zur Definition der einfachen Stabilität

Regelungstheorie 2 Hochschule Bremerhaven --- IAE19
Das System bleibt also auf einGebiet beschränkt, dass durch ε beschriebenwird, wenndieAnfangswerte der Zustandsgrößen innerhalb des Stabilitätsbereichs δ(ε) liegen
δ= δ(Á) , Á> 0, δ> 0 , Á, δ∈ R , (1.102)
‖ x(t= 0) ‖ ≤ δ(Á) ⇒ ‖ x(t) ‖ ≤ Á , t≥ 0 (1.103)
(einfache Stabilität). Das Symbol ‖ · ‖ kennzeichnet dabei die Euklidische Vektornorm.
3.1.2 Mathematische Definition der Stabilität (asymptotische Stabilität)
Die asymptotische Stabilität gewährleistet, dass der Endzustanddes Systems x = 0 ist, d.h.
‖ x(t= 0) ‖≤ δ ⇒ ‖ x(t) ‖= 0 , für t→∞ . (1.104)
Die strengste Form ist die globale asymptotische Stabilität, bei der der Endzustand x = 0für jeden beliebigen Anfangswert x(t=0) angenommen wird
‖ x(t) ‖= 0 , für t→∞ und für alle x∈ Rn . (1.105)
Da bei linearen Systemen die Eigenschaften nicht von x abhängen, ist ein stabileslineares System immer auch global asymptotisch stabil.
3.2 Lyapunov-Stabilität
Die Methode von Lyapunov ermöglicht die Bestimmung der Stabilität (einfach,asymptotisch und global asymptotisch) für lineare und nichtlineare Systeme, d.h. fürSysteme der Form
f (ax)≠ af (x) , für a∈ R , (1.106)
ohne Berechnung der Differentialgleichungen. Der Grundgedanke ist eine Analyse des“energetischen Zustands” eines Systems. Nimmt die Energie eines autonomen Systemsstetig ab, so muss dies auch für die Zustandsgrößen gelten. Dies entspricht exakt denStabilitätsdefinitionen der Abschnitte 3.1.1 und 3.1.2.
Zustandsgrößen stehen i.d.R. mit dem Energieinhalt eines Systems in Verbindung, z.B.
Strom i magnetische Energie 12Li2 ,
Spannung u Energie des elektrischen Feldes 12Cu2 ,
Position x Federenergie 12 cFx2 , potenzielle Energie mgx ,
Geschwindigkeit v kinetische Energie 12mv2 .
Regelungstheorie 2 Hochschule Bremerhaven --- IAE20
Das Verfahren hängt jedoch nicht davon ab, ob die Zustandsgrößen tatsächlich mit einerEnergie verknüpft sind.
3.2.1 Definition der Lyapunov-Funktion (Potenzial-Funktion) V(x)
Die Funktion V(x) ist eine verallgemeinerte Energiefunktion mit den Eigenschaften
V(x)> 0 für x≠ 0 , (1.107)
V(x)= 0 für x= 0 . (1.108)
Die Änderung der Energie als Funktion der Zeit, also
V.(x) , (1.109)
kann nun zur Beurteilung der Stabilität herangezogen werden:
V.(x)< 0 Dem System wird entzogen, z.B. durch Verlustleistung
in einem Widerstand (dissipative Energie)
V.(x)≥ 0 Der Energieinhalt eines Systems nimmt nicht ab. Die
Zustandsgrößen wachsen an oder behalten Ihren Wert.
Alle Werte von x für V(x) ≤ c, c > 0 bilden eine Umgebung Ω um den Ursprung(s. Bild 1.7).
---3 ---2 ---1 0 1 2 3---3
---2
---1
0
1
2
3
x1
x2
V(x)=c1
V(x)=c2 > c1
V(x)=c3 > c2
Bild 1.7: Definition der Umgebung Ω
Falls V.(x)< 0 für Ω erfüllt ist, so “bewegt” sich das System in Richtung Ursprung
(= asymptotische stabil).

Regelungstheorie 2 Hochschule Bremerhaven --- IAE21
Das sogenannte Lyapunov-Gebiet ΩC bestimmt den Bereich, in dem die Stabilitätnachgewiesen wird
Ωc= x : V(x)≤ c . (1.110)
Innerhalb dieses Gebietes muss bei nachgewiesener Stabilität die Funktion V(x) mit derZeit abnehmen, d.h. die Ableitung negativ werden. Nach der Kettenregel folgt
V.(x)= (∇V)T x
.= ∂V∂x1 ∂V∂x2 ∂V∂x3
x.1
x.2
x.3
. (1.111)
V(x) als auch V.(x) sind somit skalare Funktionen. Die Ableitung ist formal identisch mit
der Lie-Ableitung (Abschnitt 1.2.1). Falls V.(x)< 0 erfüllt ist, also
negativ semidefinit in ΩCV.(x)
gilt, ist das System asymptotisch stabil.
V(x) ist dann eine Lyapunov-Funktion.
Mit Hilfe der Lyapunov-Funktion lassen sich nun folgende Aussagen treffen:
S Stabilität: V.(x)< 0 (Ruhelage x = 0 ist stabil)
S asymptotische Stabilität: V.(x)< 0 (für jeden Punkt x∈ Ωc folgt x(t→∞)= 0)
S globale asymptotische Stabilität: Es muss für lim‖x‖→∞
V(x)=∞ gelten sowie
V.(x)< 0 (für jeden Punkt x∈ Rn folgt x(t→∞)= 0)
Ein Beispiel für globale asymptotische Stabilität zeigt das Bild 1.8.
Die wesentliche Schwierigkeit bei der Anwendung derMethode von Lyapunov ist dasAuffinden einer geeigneten Lyapunov-Funktion. Wird eine Funktion gefunden, diedie Kriterien erfüllt, so ist das nichtlineare System in ΩC stabil. Wird dagegen keineFunktion gefunden, so ist dies noch kein Nachweis, dass das nichtlineare Systeminstabil ist.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE22
Bild 1.8: Globale asymptotische Stabilität [ x1(t=0) = x2(t=0) = 0.75 ]
3.3 Lyapunov-Stabilität für lineare Systeme
Zur Analyse der Stabilität linearer System ist die Methode von Lyapunov natürlichebenfalls anwendbar. Die Nachweis der Stabilität kann hier jedoch einfacher über dieBerechnung der Pole eines System geführt werden. Wendet man Lyapunov auf einlinearisiertes System an, so kann die gefundene Lyapunov-Funktion ebenfalls für dieAnalyse des nichtlinearen Systems verwendet werden.
Für ein lineares System der Form
x. = Ax (1.112)
setzt man die allgemeine positiv definite (quadratische) Funktion
V(x)= xTPx , P> 0 positiv definit und symmetrisch (1.113)
an. Die Ableitung nach der Zeit lautet
= xTPA+ ATPx=− xTQx . (1.114)
V.(x)= (2Px)Tx
.= 2xTPx
.= xTPx
.+ x.TPx= xTPAx+ xTATPx
DieMatrix Q muss für ein stabiles System positiv definit (Q > 0) sein. Die Bedingung fürasymptotische Stabilität lautet damit:
Q> 0 : PA+ ATP=−Q hat Löung P> 0 . (1.115)
Die Forderung P > 0 folgt aus (1.113). Für jedes angenommene Q > 0 ergibt sich danneine andere Lösung P. Die Matrix Q kann ohne Einschränkungen symmetrisch gewählt

Regelungstheorie 2 Hochschule Bremerhaven --- IAE23
werden (damit lässt sich jede quadratischeGleichungbeschreiben). Dann ist die Lösung Pebenfalls symmetrisch [folgt durch Transponieren von (1.114)]. In diesem Fall lässt sich(1.115) in ein lineares Gleichungssystem überführen und so einfach lösen.
Beispiel:
A= 0− 1 1− 0.4 , Q= 10 01 ⇒ P= 2.70.5 0.52.5 (1.116)
P ist symmetrisch und seine Eigenwerte liegen bei 2.09 und 3.11, d.h. es gilt P> 0 undfolglich ist das obige System stabil.
3.4 Anwendung der Methode von Lyapunov auf einnichtlineares System
Das folgende System ist ein Abwandlung der bekannten Van-der-Pol-DGL. Während dieVan-der-Pol-Gleichung auf eine Grenzschwingung führt, besitzt das folgende System einestabile Ruhelage (Gleichgewichtszustand)
x.1=− x2 , (1.117)
x.2= x1+ (x
21− 1)x2 . (1.118)
------
x1 x2
Nichtlinearität
Bild 1.9: Blockschaltbild des nichtlinearen Systems
Das System besitzt eine eindeutige Ruhelage bei
x1= 0 , x2= 0 . (1.119)
Linearisiert man (1.117), (1.118) in der Ruhelage
A=dfdxx=0 = 01 − 1− 1 , (1.120)
so erhält man erwartungsgemäß eine Systemmatrix mit Eigenwerten in der linkenHalbebene (λ1 = -0.5+j0.866, λ2 = -0.5-j0.866).
Regelungstheorie 2 Hochschule Bremerhaven --- IAE24
Das folgende Bild zeigt in der Zustandsebene den Verlauf für zwei dich nebeneinanderliegende Anfangswerte.
---3 ---2 ---1 0 1 2 3---3
---2
---1
0
1
2
3
x1
x2
Anfangswerte
Bild 1.10: Verlauf der Zustandsgrößen für zwei Anfangswerte
Es existiert offensichtlich ein Bereich, in demdas System instabil ist und einGebiet, in demsich das System asymptotisch stabil verhält.
Wie in Abschnitt 3.3 können wir die Lyapunov-Gleichung für das linearisierte System mitQ als Einheitsmatrix lösen, um eine mögliche Lyapunov-Funktion zu bestimmen. DieLösung von
PA+ ATP=−10 01 (1.121)
lautet mit A gemäß (1.120)
P= 1.5− 0.5− 0.51 . (1.122)
Da P erwartungsgemäß symmetrisch ist, besitzt dieMatrix auch nur reelle Eigenwerte. Sieliegen bei λ1 = 0.691 und λ2 = 1.809. Damit gilt
P> 0 , (P ist positiv definit) . (1.123)
Diese Eigenschaft gewährleistet, dass die Energiefunktion

Regelungstheorie 2 Hochschule Bremerhaven --- IAE25
V(x)= xTPx= 1.5x21− x1x2+ x22
(1.124)
für beliebige Werte der Zustandsgrößen x1 und x2 stets positiv ist. Es bleibt nun zuüberprüfen, für welchen Bereich ΩC der Zustandsgrößen die Ableitung von V(x) negativist. Die Ableitung von V entlang der Trajektorien der Zustandsgrößen ergibt
V.= ∂V∂x1
x.1+∂V∂x2x.2=− x21+ x22 − x21x2x1− 2x2 . (1.125)
Leider kann dies nicht einfach beantwortet werden, da der zweite Term in (1.125) beliebigpositive Werte annehmen kann.
Mit Hilfe der euklidischen Vektornorm
‖ x ‖ = x21+ x22
(1.126)
lassen sich folgende Ungleichungen angeben
|x1|≤‖ x ‖ , (1.127)
|x1x2|≤12 ‖ x ‖
2 , (1.128)
|x1− 2x2|≤ 5 ‖ x ‖ . (1.129)
Das Maximum von |x1− 2x2|∕ ‖ x ‖ tritt jeweils für x2 = -2x1 auf und beträgt dann 5 .
Setzt man jeweils die Obergrenzen in (1.125) ein, so erhält man die konservative Aussage
V.<−‖ x ‖2+ 5
2 ‖ x ‖4 . (1.130)
Die Ableitung von V ist somit negativ für
V.<−‖ x ‖2+ 5
2 ‖ x ‖4< 0 (1.131)
bzw.
‖ x ‖ < 25 ≈ 0.9457 (1.132)
Dieser Bereich ist in Bild 1.11 eingezeichnet.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE26
---3 ---2 ---1 0 1 2 3---3
---2
---1
0
1
2
3
x1
x2ΩC
Bild 1.11: Lyapunov-Gebiet ΩC
Der tatsächliche Stabilitätsbereich ist aufgrund der Ungleichungen natürlich größer; erlässt sich jedoch nur numerisch ermitteln. Eine günstigere Lyapunov-Funktion könnteebenfalls einen größeren Stabilitätsbereich ergeben.
3.4.1 Numerische Auswertung
Mit der heute zur Verfügung stehenden numerischen Software bietet es sich an, dieLyapunov-Funktion numerisch auszuwerten. Die dreidimensionalen Diagramme desBeispiels aus Abschnitt 3.4 zeigen die Gültigkeit des Ergebnisses (1.132).

Regelungstheorie 2 Hochschule Bremerhaven --- IAE27
V(x)= xTPx= 1.5x21− x1x2+ x22
Bild 1.12: Verlauf der Funktion V(x)
V.(x)=− x21+ x22 − x21x2x1− 2x2
Bild 1.13: Verlauf der Funktion V.(x)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE28
Die obigenDarstellungen ist natürlich nur sinnvoll für Systeme 2. Ordnung.Man kann sich
damit leicht einenÜberblick verschaffen, ob einBereichmit V > 0 und V.< 0 überhaupt
existiert.
Für jede Lyapunov-Energiefunktion lassen sich Linien gleichen Potenzials
V(x)= c (1.133)
zeichnen. Die “Höhenlinien” können in Abhängigkeit von dem Wert der Ableitung inunterschiedlichen Farben dargestellt werden. Somit genügt prinzipiell eine Funktion, umdas Lyapunov-Gebiet ΩC zu bestimmen. Dieses Gebiet ist der größteWert c, für den dieAbleitung überall negativ ist. Zeichnet man die Bereiche mit negativer Ableitung mitgrüner Farbe, so ist ΩC der Bereich innerhalb der größten vollständig grünen Kurve.
Für die Lyapunov-Funktion (1.125) erhält man das Diagramm in Bild 1.14. Der maximaleBetrag liegt bei cmax = 2.5643.
Bild 1.14: Höhenlinien für V1(x)= 1.5x21− x1x2+ x
22= c
Man erkennt, dass die numerische Auswertung einen größeren Bereich für asymptotischeStabilität ausweist als bei der konservativen Abschätzung (1.132).
Eine sehr häufig verwendeter Kandidat für eine Lyapunov-Funktion ist
V2(x)=12x21+ x22 , (1.134)
da sie auf beliebige Systeme anwendbar ist. Man erhält für die Ableitung

Regelungstheorie 2 Hochschule Bremerhaven --- IAE29
V.= ∂V∂x1
x.1+∂V∂x2x.2= x
22x21− 1 . (1.135)
Für jedenWert x1 < 1 wird die Ableitung von V also negativ. Daraus folgt allerdings nicht
der Stabilitätsbereich, da Trajektorien natürlich auch wieder in Bereich mit V.> 0
verlaufen können. Aus x1 < 1 folgt aufgrund von (1.127) aber
ΩC= x : ‖ x ‖< 1 . (1.136)
:::
Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE30
Übung 2a
4 Übungsbeispiel: Stabilitätsanalyse einesnichtlinearen System mit der Methode vonLyapunov
Für das folgende nichtlineare, autonome System soll der Stabilitätsbereich ΩC bestimmtwerden.
sin
---
u=0 x1 x2
1) Geben Sie die Differenzialgleichungen an.
2) Berechnen Sie V.(x) für V(x)= 12
x21+ x22 .
3) GebenSie eine obereGrenze für ‖ x ‖ an, innerhalb der das System asymptotischstabil ist.
4) Überprüfen Sie das Ergebnis durch Simulation (File: u2_1.mdl).
:::

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE31
Übung 2b
5 Übungsbeispiel: Stabilität einerPositionsregelung mit Elektromagneten
Für das folgende Anordnung soll die Eisenmasse m mit Hilfe des Elektromagneten exaktaufdieMittedesLuftspaltes d geregeltwerden.Es soll untersuchtwerden, ob dieRegelungeine asymptotische Stabilität bei einer Auslenkung aus der Soll-Position gewährleistet.
i
δ
d
v
m
CF
A
A
1) Stellen Sie die Bewegungsgleichungen (Zustandsgleichungen) auf (Modellie-rung).
2) Geben Sie den Gleichgewichtszustand (i0, δ = d/2) an.
3) Transformieren Sie die Zustandsgrößen auf die neuen Variablen u und x, die dieAbweichung von Arbeitspunkt beschreiben
i=∆ i0+ u , δ=∆ δ0+ x . (2.1)
4) LinearisierenSiedasSystemamArbeitspunkt (u = 0, x = 0). Ist dasSystem inderUmgebung des Arbeitspunkts stabil?
5) Ersetzen Sie die Eingangsgröße u durch u = ---2v---x (Zustandsrückführung).Ist das am Arbeitspunkt linearisierte System nun stabil?
Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE32
6) Berechnen Sie V.(x) für V(x)= 12
x21+ x22 .
7) DiskutierenSiedienumerischenAuswertungVerlauf von V.(v) mit x als Parameter
und von V.(x) mit v als Parameter.
8) Überprüfen Sie die Ergebnisse anhand der Simulation.
:::

Regelungstheorie 2 Hochschule Bremerhaven --- IAE33
6 Grundlegende Beziehungen desgeschlossenen Kreises
Aus Bild 1.1 sollen die elementaren Beziehungen des geschlossenen Kreises hergeleitetwerden. Die Übertragungsfunktionen K und G sind von den Dimensionen herkompatibel, d.h. die Anzahl derAusgänge von K ist identischmit derAnzahl derEingängevon G, und die Zahl der Ausgänge von G ist mit der der Eingänge von K identisch.
eK G
ud
w y
--
m
Bild 1.1: Regelkreis mit Sollwert w, Störgröße d und Messwertstörung m
Für die Regelgröße y liest man aus Bild 1.1 ab
y(s)= d(s)+ G(s)K(s) [w(s)−m(s)− y(s)]
oder auch kürzer
y= d+ GK [w−m− y] .
Sortiert man nach der Regelgröße y, so erhält man[I+GK] y= d+GK [w−m] . (1.1)
Der in (1.1) auftretende Term I+GK wird als (Ausgangs-)Rückführungs-Differenz Fobezeichnet.
Rückführungs---Differenz (Ausgang, Output)Fo= I+GK
Eine der wichtigsten Übertragungsfunktionen des geschlossenen Kreises ist die
(1.2)S= F−1o = [I+ GK]−1
Empfindlichkeits---Funktion.
Die Empfindlichkeitsfunktion S ist ein wesentlichesMaß für dieQualität einerRegelung.Mit S aus (1.2) kann die Gleichung für die Regelgröße y in (1.1) folgendermaßengeschrieben werden:
(1.3)y= Sd+ SGK[w−m]
Der Term SGK ist die Übertragungsfunktion vom Sollwert w bis zur Regelgröße y undwird als
komplementäre Empfindlichkeits-Funktion(Übertragungsfunktion des geschlossenen Kreises)
T= SGK (1.4)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE34
bezeichnet. Der Zusammenhang zwischen T und S lautet einfach
(1.5)= I− S bzw. T+ S= I .
T= SGK= (I+GK)−1GK
= (I+GK)−1(GK+ I− I)= (I+GK)−1[(I+GK)− I]
Mit (1.4) und (1.5) lautet der Ausdruck (1.3)
y= Sd+ T[w−m]= Sd+ (I− S)[w−m] .
Störgröße Messwertstörung
Der Regelfehler w---y (nicht identisch mit e) folgt zu
w− y= w− Sd− T[w−m]
(1.6)
=− Sd+ (I− T)w+ Tm
= S[w− d]+ Tm .
Die Entwurfsaufgabe lässt sich nun folgendermaßen formulieren:
1. Gesucht wird ein Regler K, der zu einem stabilen geschlossenen Kreis führt,d.h. S und T müssen stabile Übertragungsfunktionen sein.
2. Da w bzw. d i.a. von Null verschiedene Funktionen sind, sollte der Betrag vonS über den gesamten Frequenzbereich möglichst kleine Beträge annehmen.
3. Da m i.a. eine vonNull verschiedene Funktion ist, sollte der Betrag von T überden gesamten Frequenzbereich möglichst kleine Beträge annehmen.
Die Forderungen 2. und 3. lassen sich aufgrund von (1.5) nicht gleichzeitig erfüllen undoffenbaren die Grenzen erreichbarer Regelgüte und die Notwendigkeit für einenKompromiss zwischen S und T.
Die Beziehung für die Stellgröße u lautet
u= K[w−m− d−Gu] ,
[I+ KG]u= K[w−m− d] . (1.7)
Der in (1.7) auftretende Term I+KG wird als
(1.8)
Rückführungs---Differenz (Eingang, Input)
Fi= I+ KG
bezeichnet. Löst man (1.7) mit (1.8) nach u auf, so folgt
u= F−1i K[w−m− d] . (1.9)
Bei Eingrößensystemen sind Fi und Fo gleich:

Regelungstheorie 2 Hochschule Bremerhaven --- IAE35
Fi= Fo= F .
Damit lautet das Produkt aus (1.9)
F−1K= K1+ KG=
KG1+ KG
1G=
TG .
Der Betrag dieser Funktion für s = jω ist
F−1K(jω) = |T(jω)||G(jω)|
.
Daes erstrebenswert ist, Verstell- undAusgleichsvorgängemitmöglichst kleinerStellgrößeauszuführen, folgt als Entwurfsrichtlinie:
Bei den Frequenzen, für die |G(jω)| große Werte annimmt, darf auch T(jω)große Werte annehmen. Die Frequenzbereiche, in denen |G(jω)| klein ist,können bei großem |T(jω)| zu großen Stellgrößen führen.
6.1 Berücksichtigung von Modellunsicherheiten
Wenn bisher von der Regelstrecke G gesprochen wurde, so ist eigentlich ein Modell deszu regelnden Prozesses gemeint. Ein mathematisches Modell G ist eine abstrakteBeschreibung des dynamischen Verhaltens einer Regelstrecke. Es ist unrealistischanzunehmen, dass ein Prozessmodell eine reale Strecke exakt beschreibt. Häufig sind dieParameter nicht genau bekannt, oder die Struktur des Modells (z.B. Ordnung) einerRegelstrecke ist vereinfacht.
Der Zusammenhang zwischen Prozessmodell und realer Strecke kann als
G= G0+ ∆A (1.10)
realerProzess
Modell Modellunsicherheit(additiv)
geschrieben werden. ∆A ist die sogenannte additive Modellunsicherheit. Häufig ist esgünstiger, die Modellunsicherheit in der multiplikativen Form anzugeben, da dieModellunsicherheit oft groß ist, wenn auch der Betrag |G0(jω)| große Werte annimmt.
G= G0(I+ ∆M) (1.11)
realerProzess
Modell Modellunsicherheit(multiplikativ)
Der Zusammenhang zwischen ∆A und ∆M ist damit ∆A= G0 ∆M.
Dabei ist zu beachten, dass ∆A, ∆M und damit G nicht exakt bekannteÜbertragungsfunktionen sind, für die lediglich obere oder untere Schranken angegebenwerden können. Die in Kap. 8 behandelten Normen sind hierfür geeigneteBeschreibungsformen.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE36
Durch die Einbeziehung dieser Übertragungsfunktionen in die Gleichungen für dengeschlossenen Regelkreis können wir Bedingungen herleiten, die Stabilität auch beiAnwesenheit vonModellunsicherheiten gewährleisten. DieseBedingungen gebendarüberAufschluss, wie sich dieModellunsicherheit auf Stabilität undEigenschaften derRegelungauswirkt.
Regelungen, die eine quantitative Aussage über die tolerierbareModellunsicherheit gestatten, werden als robuste Regelungenbezeichnet.
Durch iteratives Umzeichnen des Blockschaltbildes 1.2 wird eine hinreichende Bedingungfür robuste Stabilität hergeleitet.
K
∆Azu y
--G0
G
e∆y
y0
w
Bild 1.2: Regelkreis mit Modellunsicherheit I
Wir wollen davon ausgehen, dass der geschlossene Kreismit demProzessmodell G0 stabilist. Im ersten Schritt wird der rechte Summationspunkt aufgespalten und nach links verlegt(Bild 1.3).
K ∆A--
G0
e ∆y
y0
zu
--
w
Bild 1.3: Regelkreis mit Modellunsicherheit II
Die Regelgröße y taucht explizit nicht mehr auf; sie ist die Summe aus y0 (aus demStreckenmodell) und ∆y (aus der Modellunsicherheit). Die Elemente K und G0 des“inneren” geschlossenen Kreises sind bekannt, somit können die ÜbertragungsfunktionenS= (I+G0K)
−1 sowie (I+ KG0)−1 gebildet werden.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE37
KS--
z
∆y∆A
ξ
(I+KG0)---1
w
Bild 1.4: Regelkreis mit Modellunsicherheit III
Da die Übertragungsfunktionen S und (I+ KG0)−1 nach Voraussetzung stabil sind, kann
Instabilität nur durch ∆A verursacht werden. Folglich genügt es, die Wechselwirkung von∆A mit den übrigen Übertragungsfunktionen zu untersuchen. Sofern z ein beschränktesSignal ist, ist auch ξ beschränkt, da es sich bei (I+ KG0)
−1 ja um eine stabileÜbertragungsfunktionhandelt.Da nurdie FragenachStabilitätdesReglersmit demrealenProzess behandelt wird, kann ebenso die Größe ξ anstelle von z verwendet werden. Manerhält das folgende Blockschaltbild 1.5, das für die Herleitung der robusten Stabilitätverwendet werden kann.
KS
∆A
--
∆y ξ
w
Bild 1.5: Robuste Stabilität
DerMehrgrößenfall wird inKap. 16 behandelt. Für denSonderfall einerEingrößenstreckekann die Bedingung für robuste Stabilität mit Hilfe des Nyquist---Kriteriums angegebenwerden. Das Nyquist-Kriterium besagt, dass für Stabilität im geschlossenen Kreis dieOrtskurve des offenen Kreises den Punkt ---1 k-mal umlaufen muss (k ist die Anzahl derPole in der rechten Halbebene). Im Interesse einer allgemeingültigen und handhabbarenDarstellungwollenwir im folgendendavonausgehen, dass die additiveModellunsicherheit∆A eine stabileÜbertragungsfunktion ist (für G0 gilt dieseEinschränkungnatürlichnicht).Somit folgt aus dem Nyquist-Kriterium:
Die Ortskurve ∆AKS darf den Punkt ---1 nicht umlaufen.
In der multiplikativen Form geschrieben lautet die vorige Aussage:
Die Ortskurve ∆MG0KS = ∆MT darf den Punkt ---1 nicht umlaufen.
Diese Aussagen können aber nicht überprüft werden, da ∆A bzw. ∆M ja keine im DetailbekanntenÜbertragungsfunktionen sind. Eine handhabbare hinreichende Bedingung, die
Regelungstheorie 2 Hochschule Bremerhaven --- IAE38
sichauch elegantaufMehrgrößensystemeerweitern lässt, folgt unmittelbaraus denvorigenAussagen.
Wenn der Betrag |∆AKS| bzw. |∆MT| stets kleiner als Eins ist,so kann keine Instabilität durch ∆A bzw. ∆M auftreten.
(Small Gain Theorem für Eingrößensysteme)
Da in diesem Fall der Betrag der Ortskurve kleiner als Eins ist, kann der Punkt ---1 auchnicht umfahren werden. Man bezeichnet diese Aussage als “Small Gain Theorem”(Sandberg [55], Zames [72]).
Mit dem Small Gain Theorem kann nun eine Obergrenze angegeben werden, für die ∆Abzw. ∆M nicht zur Instabilität führen können.
|∆A(jω)| < 1|KS(jω)|
, (1.12)
|∆M(jω)| < 1|T(jω)|
(1.13)
Die Übertragungsfunktionen KS bzw. T bestehen nur aus dem Regler K und dembekannten Streckenmodell G0.
Wird bereits während des Entwurfs eine Obergrenze für Modellunsicherheitenberücksichtigt, so spricht man von einem Entwurf eines robusten Reglers.
Da bei ∆A bzw. ∆M nichts über die Ursache der Modellunsicherheit gesagt wird, sprichtman auch von unstrukturierter Modellunsicherheit. Wenn gezielt einzelne Parameterunsicher sind, so bezeichnet man dies als strukturierte Unsicherheit. Im Verlauf diesesBuches werden wir uns sowohl mit dem Problem der unstrukturierten als auch derstrukturierten Modellunsicherheiten (Parameterunsicherheiten) befassen.
:::

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE39
Übung 3
7 Motivierende Einführung:Youla-Parametrierung für stabile Prozesse /Internal Model Control (IMC)
Die Youla-Parametrierung, auch Q-Parametrierung genannt, ist ein Beispiel für einenmodernen Reglerentwurf. Das Verfahren geht auf Youla, Jabr und Bongiorno [70] (1976)zurück und lieferte wesentliche Impulse für weitere Methoden. Im Gegensatz zuklassischen Verfahren werden nicht die Parameter eines Reglers vorgegebener Strukturbestimmt, sondern die Übertragungsfunktion des Reglers einschließlich seiner Parameter.Der Regler in Bild 2.1 soll mit einer Youla-Parametrierung bestimmt werden.
eK G
ud
w = 0 y
--
Bild 2.1: Blockschaltbild zur Entwurfsaufgabe
7.1 Entwurf von Reglern über Youla-Parametrierung
Die Übertragungsfunktion der Ausgangsstörung d zur Regelgröße y ist
y= d− GKy ,
[I+GK]y= d ,
y= [I+GK]−1d= Sd . (2.1)
Der Zusammenhang zwischen den Übertragungsfunktionen S und K ist aufgrund derMatrixinversion in (2.1) sehr verwickelt. Anstelle von K(s) soll nun der Parameter
(2.2)Q= K[I+GK]−1= KS
bestimmt werden. Mit der Beziehung GKS=T=I---S folgt
S= I− GQ .GQ= I− S bzw. (2.3)
S ist nun eine lineare Funktion von Q geworden. Die Aufgabe, die Funktion Q(s) fürbestimmte Eigenschaften der Funktion S(s) zu entwerfen, ist wesentlich einfacher als
Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE40
direkt einen Regler K(s) nach (2.1) zu bestimmen. Fasst man (2.2) und (2.3) zusammen,so ergibt sich
Q= K[I−GQ] .
Auflösung der obigen Gleichung nach K liefert die Youla---Parametrierung für stabileStrecken
K= Q[I−GQ]−1 . (2.4)
Das entsprechende Blockschaltbild zeigt die Abbildung 2.2.
eQ G
u0 y
--
d
G
K
Bild 2.2: Youla-Parametrierung für stabile Strecken
Die Übertragungsfunktion S ist nach (2.3) nur von G und Q abhängig. Somit ist dieseFunktion des geschlossenen Kreises dann und nur dann stabil, wenn sowohl Q als auchG stabil sind. Daraus folgt auch umgekehrt:
Ist Q(s) eine stabile Übertragungsfunktion, sobeschreibt die Youla-Parametrierung die Menge allerG(s) stabilisierenden Regler K(s).
Der allgemeine Fall ist Gegenstand von einem späteren Kapitel.
7.2 Beispiel für den Eingrößenfall
Für die Strecke
G(s)= 1T1s+ 1
folgt aus (2.4) der Regler
K= Q1− GQ=
Q1− Q
T1s+1
= Q T1s+ 1T1s+ 1−Q
.
Die Stabilität der Übertragungsfunktion
S= 11+ GK=
11+ Q
T1s+1−Q
= T1s+ 1−QT1s+ 1

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE41
ist tatsächlich von Q unabhängig. Eine einfacheLösung ist ein reelles Q.Wähltman Q = 1(nur eine Möglichkeit), so folgt für S, T und K
S= T1sT1s+ 1
, K= T1s+ 1T1s.T= G= 1
T1s+ 1,
Wir erhalten einenPI-Reglermit derVerstärkung VR = 1 und der IntegrierzeitkonstantenTi = T1. Die Youla-Parametrierung liefert automatisch einen für eine gegebene Streckegeeigneten Regler. Für einfache Strecken ergeben sich die aus der klassischenRegelungstechnik bekannten PI- und PID-Strukturen. Für Mehrgrößensysteme undkomplexe Strecken entstehen völlig neue, leistungsfähige Reglerstrukturen.
7.3 Übungsbeispiel: Youla-Parametrierung
Für die Regelstrecke
G(s)= VS(T1s+ 1)(T2s+ 1)
sollen durch eine Youla-Parametrierung (Parameter Q(s)) geeignete Regler entworfenwerden.
a) Berechnen Sie K(s) mit Q(s) als Parameter.
b) Berechnen Sie S(s) und T(s).
c) Bestimmen Sie ein reelles Q und ein dynamisches Q(s), mit denen sichgewünschte Eigenschaften in S oder T realisieren lassen.
d) Berechnen Sie die Regler mit der Festlegung aus c)
e) Welcher Reglertyp entsteht für Q = 1/VS?
f) Wie lauten S(s), und T(s) mit der Festlegung in c)?
:::
Regelungstheorie 2 Hochschule Bremerhaven --- IAE42
8 Normen für Signale und SystemeEine Norm bewertet Elemente eines sogenannten metrischen Raumes durch eine reelle,positive Zahl, die ein Maß für die “Größe” dieses Elementes darstellt. In derRegelungstechnik werden Normen zur Beschreibung der Regelgüte verwendet. In diesemZusammenhang sprichtman auch von einem “Performance-Index”. Die Normen beziehensich bei Signalen auf vektorwertige, reelle Funktionen der Zeit t oder komplexeFunktionen in s. Bei Systemen betrachtet man matrixwertige komplexe Funktionen in s.Die betreffenden metrischen Räume sind dementsprechend Funktionen-Räume.
8.1 Eigenschaften von NormenDie hier betrachtetenNormen sindAbbildungen vonFunktionen im Intervall [---1,1] aufeine reelle, positive Zahl. Für eine Norm immathematischen Sinne müssen die folgendenEigenschaften erfüllt sein:
1. ‖ u ‖≥ 0
2. ‖ u ‖= 0 ⇔ u(t)= 0 ∀ t
3. ‖ au ‖= |a| ‖ u ‖, ∀ a∈ R
4. ‖ u+ v ‖≤‖ u ‖ +‖ v ‖, (Dreiecksungleichung)
8.2 Normen für SignaleEin beliebiger Signalverlauf kann durch die sogenannte P-Norm charakterisiert werden.Die Gültigkeit der oben angegebenen Eigenschaften folgt unmittelbar aus der Definitionfür die P-Norm:
‖ u ‖p :=∞
−∞
|u(t)|pdt
1∕p
(7.1)
Von Interesse für die Regelungstechnik sind aber nur diejenigen Normen, mit denen aucheine physikalische Bedeutung verknüpft ist oder für die leistungsfähige mathematischeWerkzeuge zur Verfügung stehen. Diese Normen sind die Integrale
(7.2)‖ u ‖1 := ∞
−∞
|u(t)|dt (1−Norm)
sowie
‖ u ‖2 := ∞
−∞
u(t)2dt (7.3)(2−Norm) .
u2 = Leistung, ‖ u ‖22 = Energie

Regelungstheorie 2 Hochschule Bremerhaven --- IAE43
Falls derEnergieinhalt eines Signals (2-Norm)unendlich ist, kanndiemittlere Leistung zurCharakterisierung herangezogen werden
(7.4)limT→∞
12TT
−T
u(t)2dt .
Wir können analog zu (7.3) eine der 2-Norm vergleichbare Größe
(7.5)pow(u) := limT→∞
12TT
−T
u2(t)dtdefinieren. Die Definition pow(u) ist jedoch im mathematischen Sinne keine Norm, daauch bei von Null verschiedenen Signalen u(t) die mittlere Leistung Null werden kann(Norm-Eigenschaft 2 ist nicht erfüllt).
Als Grenzübergang limp→∞folgt für die1---Norm
‖ u ‖∞ := supt|u(t)| . (7.6)
Für denWert der 1-Norm ist nur noch dasMaximumder Funktion im Intervall [---1,1]entscheidend.
Man kann leicht viele Funktionen erzeugen, die eine identische Norm aufweisen. Sofernman lediglich die Norm einer Funktion betrachtet, sind diese Funktionen einandergleichwertig. Beschreibt man also Signale durch ihre Norm, so erfasst man stets eine ganzeKlasse von Signalen und nicht nur einen bestimmten Verlauf. Aussagen überRegeleigenschaften, die mit Hilfe von Normen formuliert werden, haben somit größereAussagekraft als beispielsweise eine Simulation mit einem ganz bestimmten Signalverlauf(z.B. Sprungantwort).
Alle Funktionen mit gleicher Norm werden als gleichwertig angesehen.
8.2.1 Endlichkeit von Normen für Signale
Normen ermöglichen eine Bewertung verschiedener Funktionen mit einer reellen,positiven Zahl. Natürlich ist es nur sinnvoll, Funktionen zu betrachten, deren Norm einenendlichen Wert annimmt. Von besonderer Bedeutung sind deshalb Aussagen über dieBeschränktheit von Normen. Signale, für die eine endliche P---Norm existiert, werden alsP-Norm-Signale bezeichnet.
Satz 1: Wenn ‖ u ‖2<∞, dann folgt pow(u)= 0 .
Beweis: Da die 2-Norm endlich ist, gilt folgende Ungleichung
Regelungstheorie 2 Hochschule Bremerhaven --- IAE44
12TT
−T
u(t)2dt≤ 12T ‖ u ‖
22 .
Wird nun gemäß der Definitionsgleichung (7.5) für pow(u) der Limes von T→∞gebildet, so geht die rechte Seite gegen Null.
Satz 2: Wenn pow(u)<∞ und ‖ u ‖∞< ∞, so folgt pow(u)≤‖ u ‖∞ .
Beweis: Die1-Norm ist das Maximum der Funktion u(t). Somit ist die Ungleichung
12TT
−T
u(t)2dt≤‖ u ‖2∞ 12TT
−T
dt=‖ u ‖2∞
stets erfüllt. Lässt man T→∞ gehen, so folgt pow(u)≤‖ u ‖∞ .
Satz 3: Ist ‖ u ‖1<∞und ‖ u ‖∞< ∞, dann folgt ‖ u ‖2≤ ‖ u ‖∞ ‖ u ‖1 und somit natürlich auch‖ u ‖2<∞.
Beweis:
‖ u ‖22= ∞
−∞
u(t)2dt= ∞
−∞
|u(t)||u(t)|dt
≤‖ u ‖∞ ∞
−∞
|u(t)|dt=‖ u ‖∞ ‖ u ‖1 .
Die Aussagen über die Endlichkeit der beschriebenen Normen können in Bild 7.1zusammengefasst werden.
∞
pow
1
2
Bild 7.1: Mengenbeziehungen endlicher Normen
Tatsächlich existieren Beispiele für alle Felder des Mengen---Diagramms in Bild 7.1. DieFunktion

Regelungstheorie 2 Hochschule Bremerhaven --- IAE45
(7.7)u(t)=01∕ t0für
t≤ 00< t≤ 1t> 1.
ist ein Beispiel für ein Signal, für das nur die 1-Norm endlich ist (unterstes Feld).
1
1
t
u(t)
Bild 7.2: Beispiel für ein 1-Norm beschränktes Signal
Die 1-Norm beträgt
‖ u ‖1=1
0
1tdt= 2 .
Das Integral zur Berechnung der 2-Norm ist im Intervall [0, 1] divergent.
‖ u ‖2= 1
0
1t dt =∞
Da die Funktion für t→+0 gegen unendlich strebt, ist die1-Norm ebenfalls unendlich
‖ u ‖∞= limÁ→0u(Á)=∞.
Für die Funktion (7.7) ist also nur die 1-Norm endlich.
8.3 Normen für Systeme
Für ein lineares System beschreibt das Faltungsintegral denZusammenhang zwischenEin-und Ausgang im Zeitbereich
y= G * u= ∞
−∞
G(t− τ)u(τ)dτ .
Für kausale Systeme ist dabei die Impulsantwort G(t) = 0 für t < 0.Das Integral reduziertsich dann auf das Intervall [0, 1]. Im Frequenzbereich ergibt sich der Ausgang einerStrecke einfach durch Multiplikation der Übertragungsfunktion mit der Laplacetransfor-mierten des Eingangssignals u(t)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE46
y(s)= G(s) u(s) ,
wobei die Übertragungsfunktion G(s) die Laplace-Transformierte der ImpulsantwortG(t) ist.
Wir benötigen nun zwei Definitionen, die für die Existenz endlicher Normen vonÜbertragungsfunktionen wesentlich sind.
1. G(s) bezeichnet man als begrenzt, wenn G(j∞)<∞ gilt.
2. G(s) bezeichnet man als streng begrenzt, wenn G(j∞)= 0 gilt.
Für eine Übertragungsfunktion G(s) existieren zwei Normen, die physikalischeSachverhalte beschreiben. Diese Bedeutungen sollen jedoch erst in einem späterenAbschnitt über Ein-/Ausgangsbeziehungen diskutiert werden.
1. 2-Norm
(7.8)‖ G ‖2 := 12π∞
−∞
|G(jω)|2dωFür stabile Übertragungsfunktionen G(s) gilt das Parseval’sche Theorem, sodass (7.8) auch im Zeitbereich geschrieben werden kann.
‖ G ‖2= 12π∞
−∞
|G(jω)|2dω = ∞
−∞
G(t)2 dt (7.9)
2. 1-Norm
(7.10)‖ G ‖∞ := supω|G(jω)|
Die1-Norm ist damit einfach das Maximum des Betrags im Bode-Diagrammbzw. der am weitesten vom Ursprung entfernte Punkt im Nyquist-Diagramm(Ortskurve).
Im Gegensatz zur 2-Norm muss zur Bestimmung der 1-Norm kein Integral berechnetwerden. Der Verlauf der Funktion hat bis auf das Maximum keinen Einfluss auf die Norm.Dies ist der Grund für eine äußerst interessante Eigenschaft der1-Norm:
Die1-Norm ist submultiplikativ
‖ GH ‖∞ ≤ ‖ G ‖∞ ‖ H ‖∞
Die Submultiplikativität folgt unmittelbar aus der Definition (7.10).
8.3.1 Endlichkeit von Normen für Systeme
Die Endlichkeit der 2-Norm ist an zwei Voraussetzungen gebunden:

Regelungstheorie 2 Hochschule Bremerhaven --- IAE47
Die 2-Norm ist dann und nur dann endlich, wenn G strengbegrenzt ist und keine Pole auf der imaginären Achse bestehen.
Beweis: Für jede streng begrenzte Strecke ohne Pole auf der imaginären Achse existierteine Übertragungsfunktion
Cτs+ 1 , (7.11)
so dass bei hinreichend großem C und hinreichend kleinem τ
Cτjω+ 1 > |G(jω)| , ∀ω
gilt. Da die 2-Norm von (7.11) als obere Schranke für |G(jω)| endlich ist, mussdies auch für die Übertragungsfunktion G(s) gelten.
Ist andererseits G nicht streng begrenzt, so wird die 2-Norm nach (7.8) aufgrundder Integrationsgrenzen unendlich. Ein Pol auf der imaginären Achse lässt denIntegranden ebenfalls gegen unendlich gehen. In diesem Fall ist das Integral überdas Betragsquadrat von G(jω) auch unendlich.
Die Bedingungen für die1-Norm sind weniger einschränkend:
Die1-Norm ist dann und nur dann endlich, wenn G begrenzt istund keine Pole auf der imaginären Achse bestehen.
Beweis: Da die 1-Norm identisch mit dem Maximum des Betrages der Übertragungs-funktion ist, muss lediglich geprüft werden, ob |G(jω)| für irgendeine Frequenzunendlich werden kann. Sofern G begrenzt ist, folgt die Endlichkeit von |G(jω)|für die Frequenz unendlich. Besitzt G(s) auch keine Pole auf der imaginärenAchse, so kann |G(jω)| auch für alle anderen Frequenzen nicht unendlichwerden.
8.3.2 Berechnung der 2-Norm
Die Berechnung der 2-Norm aus der Definitionsgleichung
‖ G ‖22=12π∞
−∞
|G(jω)|2 dω
ist sehr aufwendig. Das Betragsquadrat kann mit s = jω wegen G(---s) = G*(s) auch inder Form
Regelungstheorie 2 Hochschule Bremerhaven --- IAE48
(7.12)‖ G ‖22=12πjj∞
−j∞
G(− s)G(s) ds
geschriebenwerden.Wir wollen von einer endlichen 2-Normvon G(s) ausgehen, d.h.G(s)ist streng begrenzt. Da in diesem Fall G(j1) = 0 gilt, kann der Integrationsweg in (7.12)um einen Halbkreis im Unendlichen zu einem Ringintegral (Halbkreis in der linkenHalbebene) erweitert werden, da das Integral auf diesem Wegstück sowoeso den Wert 0besitzt.
(7.13)‖ G ‖22=12πjL.H.
G(− s)G(s) ds
Nach dem Residuensatz (z.B. [9]) ist der Wert des Ringintegrals (7.13) die Summe allerResiduen der Pole in der linken Halbebene (der eingeschlossenen Fläche).
(7.14)‖ G ‖2= Re λi <0
ResG(− s)G(s)
Die Anwendung von (7.14) soll am Beispiel der Strecke
G(s)= αs+ α , α> 0
verdeutlicht werden. Das Produkt
G(− s)G(s)= α2(− s+ α)(s+ α)=
α2
− s+ α+α2
s+ α
besitzt für den Pol bei − α das Residuum R1= α2 . Andere Pole mit negativemRealteil sind
nicht vorhanden. Somit folgt für die 2-Norm
‖ G ‖2= R1 = α2 .
Auf das gleiche Ergebnis kommt man natürlich auch durch die Auswertung derDefinitionsgleichung (7.9) für die 2-Norm, indem man die Wurzel aus dem Integral derquadrierten Impulsantwort berechnet. Mit der Impulsantwort für die PT1-Strecke
G(t)= α e−αt , G(t)= 0 für t< 0 .
lautet der Ausdruck für die 2-Norm
‖ G ‖22=∞
0
G(t)2dt= α2∞
0
e−2αtdt=− α2 e−2αt ∞
0= α2
Bei Strecken hoher Ordnung ist die Berechnung der 2-Norm über die Residuen i.a.effizienter.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE49
8.3.3 Berechnung der∞-Norm
Zur Berechnung der 1-Norm muss das Maximum der Funktion |G(jω)| bestimmtwerden. Eine analytische Berechnung umfasst das Aufstellen der Funktion |G(jω)|, dieBestimmung aller Frequenzen ωi, bei denen die Ableitung
d|G(jω)|dω
verschwindet sowie das Einsetzen dieser Frequenzen in |G(jω)| zur Bestimmung desglobalen Maximums. Falls kein Maximum auftritt, muss der Randwert ω = 0 verwendetwerden. In praktischen Anwendungen erfolgt die Berechnung der1-Norm iterativ durchAuswertung einer Beziehung für die obere Schranke von ‖ G ‖∞[20].
Für die Strecke
G(s)= bs+ 1as+ 1
hat |G(jω)| den in Bild 7.3 dargestellten Verlauf.
ω lg
|G(jω)|
1
ba
1a
1b
Bild 7.3: Betrag von G(jω)
Manerkennt in diesemFall auchohneRechnungdasMaximumderFunktion |G(jω)| unddamit
‖ G ‖∞= b∕a für b≥ a1 für b< a .
8.4 Eingangs-/Ausgangsbeziehungen
Wir betrachten eine lineare Strecke G mit dem Eingangssignal u und derAusgangsgröße y (Bild 7.4).
uG
y
sup ‖ y ‖: ‖ u ‖≤ 1
Bild 7.4: System-Verstärkungen
Regelungstheorie 2 Hochschule Bremerhaven --- IAE50
Mit Hilfe der Normen von Systemen lassen sich nun Aussagen über das Verhältnis derNormen von Ein- und Ausgangssignal treffen. Diese Beziehungen nennt man auchSystemverstärkungen.
Die Tabelle 7.1 zeigt den Zusammenhang zwischen den Normen der Ausgangssignale undden Normen der Übertragungsfunktion oder Impulsantwort bei Anregung durch zweibestimmte Testfunktionen. G wird als streng begrenzt und stabil angenommen.
u= δ(t) u= sin(ωt)
‖ y ‖2
‖ y ‖∞
pow(y)
‖ G ‖2
‖ G(t) ‖∞
0
∞
|G(jω)|12|G(jω)|
Tabelle 7.1: Normen für Testfunktionen
Der Eintrag oben links kann z.B. wie folgt interpretiert werden: Bei Anregung mit derImpulsfunktion δ(t) beträgt die 2-Norm des Ausgangssignals ‖ y ‖2 gerade ‖ G ‖2.
Obwohl Übertragungsfunktion und Impulsantwort das Übertragungsverhalten vollständigbeschreiben, sind die Normen von G(t) bzw. G(jω) i.a. nicht identisch. Eine Ausnahmebildet die 2-Norm, die im Zeit- und Frequenzbereich identisch ist. (Die 2-Norm beschreibteine “Energie”, die sowohl im Zeit- als auch im Frequenzbereich berechnet werden kann.)Die Normen, die sich auf die Impulsantwort der Strecke beziehen, sind durch dasArgument t besonders gekennzeichnet.
Die einzelnen Einträge der Tabelle 7.1 lassen sich wie folgt begründen (die Tabelle wirddabei als Matrix der Dimension 3 x 2 aufgefasst):
Eintrag (1,1) Aufgrund von u(t)= δ(t) gilt y(t)= G(t). Somit ist ‖ y ‖2=‖ G ‖2. Die 2-Normist unabhängig vom Zeit- oder Frequenzbereich.
Eintrag (2,1) Wie bei (1,1) gilt auch hier y(t)= G(t). Die1-Normmuss hierbei jedoch vonder Impulsantwort G(t) bestimmtwerden, da sichdie1-Norm für Signale immerauf den Zeitbereich bezieht.
Eintrag (3,1) Die mittlere Leistung der Impulsantwort G(t) ist bei einer stabilen undstreng begrenzten Strecke immer Null, da die 2-Norm endlich ist (s. Satz 1 inAbschnitt 8.2.1).
Eintrag (1,2) Wenn die Strecke G(s) keine Nullstelle für die Anregungsfrequenz ωbesitzt, ist y(t) ebenfalls eine unendliche Sinusschwingung. Das Integral zurBerechnung der 2-Norm (7.3) konvergiert somit nicht.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE51
Eintrag (2,2) Die Amplitude von y bei einer Anregung von u(t) = sin(ωt) ist |G(jω)|.
Eintrag (3,2) Die folgendenUmformungenderBestimmungsgleichung für pow(y)2 führenauf das Ergebnis (3,2).
pow(y)2= limT→∞
12TT
−T
|G(jω)|2 sin2(ωt+ Ô) dt
= |G(jω)|2 limT→∞
12TT
−T
sin2(ωt+ Ô) dt
= |G(jω)|2 limT→∞
12ωTωT+Ô
−ωT+Ô
sin2(θ) dθ
= |G(jω)|2 1ππ
0
sin2(θ) dθ
ωt+ Ô= θ
= 12|G(jω)|2
Wesentlich allgemeinere Aussagen sind mit Hilfe der in Tabelle 7.2 angegebenenSystemverstärkungen möglich. Für jeden Eintrag in der Tabelle gilt die Bedingung
sup ‖ y ‖: ‖ u ‖≤ 1 .
Für das Element (1,1) der Tabelle 7.2 liest man also ab:
‖ G ‖∞= sup ‖ y ‖2: ‖ u ‖2≤ 1 = supu≠0
‖ y ‖2‖ u ‖2
Man spricht deshalb bei ‖ G ‖∞ auch von der 2-Norm/2-Norm Systemverstärkung. Die1---Norm von G ist also der größtmögliche Faktor, mit dem die “Energie” desEingangssignals u auf das Ausgangssignal y übertragen wird.
Eine typischeAufgabe einerRegelung istdieUnterdrückungvonunbekanntenStörgrößen.Eine Charakterisierung dieser Signale ist allerdings durch ihre Norm möglich (z.B.maximale Amplitude = 1-Norm). Wenn nun G das Übertragungsverhalten von einerStörung zu einem Regelfehler beschreibt, ist die Norm dieser Übertragungsfunktion einquantitativer Index für die erreichte Regelqualität.
‖ u ‖2 ‖ u ‖∞
‖ y ‖2
‖ y ‖∞
pow(y)
‖ G ‖∞
‖ G ‖2
0
∞
‖ G(t) ‖1
≤‖ G ‖∞
pow(u)
∞
∞
‖ G ‖∞
Tabelle 7.2: Systemverstärkungen
Regelungstheorie 2 Hochschule Bremerhaven --- IAE52
Der Eintrag (2,1) gibt das maximale Verhältnis zwischen 2---Norm des Eingangssignals uund der maximalen Amplitude des Ausgangs y an. Beschreibt das Eingangssignal eineStörung, von der nur die maximale 2-Norm (Energie) von 0.1 bekannt ist, so folgt für denAusgang (z.B. Regelfehler) mit
G(s)= 0.510s+ 1
die maximale1-Norm
‖ y ‖∞≤‖ G ‖2 ⋅‖ u ‖2= 0.520⋅ 0.1= 0.0112 .
Der Regelfehler kann also denWert 0.0112 bei beschränkter 2-Norm der Störung niemalsüberschreiten.
Die Einträge in der Tabelle 7.2 sollen nun im einzelnen erklärt werden. Dabei soll nur derGrundgedanke erläutert werden; es handelt sich nicht um Beweise im mathematischenSinne. Insbesondere wird darauf verzichtet, zu zeigen, dass die obere Grenze tatsächlichauftritt.
Eintrag (1,1) Die folgende Umformung zeigt, dass die Norm ‖ G ‖∞ tatsächlich eine obereGrenze für die 2-Norm/2-Norm Systemverstärkung ist.
‖ y ‖22=‖ y(t) ‖22=‖ y(jω) ‖22
= 12π∞
−∞
|G(jω)|2|u(jω)|2dω
≤‖ G ‖2∞ 12π ∞
−∞
|u(jω)|2dω
=‖ G ‖2∞‖ u ‖22
Eintrag (2,1) Die obere Schranke für die1---Norm/2---Norm Systemverstärkung folgt ausder sogenannten Cauchy-Schwarz’schen-Ungleichung:
|y(t)|=∞
−∞
G(t− τ)u(τ)dτ
≤ ∞
−∞
G(t− τ)2dτ ∞
−∞
u(τ)2dτ=‖ G ‖2 ‖ u ‖2
Da der maximale Betrag von y(t) der1-Norm entspricht, gilt natürlich auch
‖ y ‖∞≤‖ G ‖2 ‖ u ‖2 .

Regelungstheorie 2 Hochschule Bremerhaven --- IAE53
Eintrag (3,1) Mit ‖ u ‖2<∞ und ‖ G ‖∞< ∞ folgt ‖ y ‖2<∞ und deswegen pow(u) = 0.
Eintrag (1,2) EinSignalmit der1-Norm1 ist das Signal u(t) = cos(ωt). SoferndieStreckeG keine Nullstelle bei dieser Frequenz aufweist, ist y(t) ein nichtverschwindendes Signal unendlicher Energie, also unendlicher 2-Norm.
Eintrag (2,2) Das Element (2,2) gibt unmittelbar die maximale Systemverstärkung fürAmplituden an. Die folgenden Ungleichungen zeigen, dass ‖ G(t) ‖1 hierfür eineobere Grenze darstellt.
|y(t)|=∞
−∞
G(τ)u(t− τ)dτ
≤ ∞
−∞
|G(τ)u(t− τ)|dτ
=‖ G ‖1 ‖ u ‖∞
≤‖ u ‖∞ ∞
−∞
|G(τ)|dτ
Eintrag (3,2) Aufgrund von Satz 2 in Kap. 8.2.1 folgt
suppow(y) :‖ u ‖∞≤ 1 ≤ suppow(y) : pow(u)≤ 1 .
Der letztere Fall wird aber in (3,3) behandelt. Die obere Grenze ist ‖ G ‖∞.
Eintrag (1,3) und (2,3) AufdiesewenigerwichtigenFälle soll hiernichtweiter eingegangenwerden. Es lassen sich jeweils Signalemit pow(u)<∞ erzeugen, so dass die 2- bzw.die1-Norm unendlich wird.
Eintrag (3,3) Die1-Norm kennzeichnet das Maximum von |G(jω)|. Die größte mittlereLeistung amAusgang ist bei Anregung mit der Frequenz ω0 zu erwarten, bei derdas Maximum von |G(jω)| erreicht wird. Mit dem Signal
u(t)= 2 sin(ω0t)
folgt für die mittlere Leistung am Ausgang der Strecke
pow(y)2= limT→∞
12TT
−T
|G(jω0)|22 sin2(ω0t+ Ô) dt
= |G(jω0)|2limT→∞
1TT
−T
sin2(ω0t+ Ô) dt
= |G(jω0)|2limT→∞
1ω0Tω0T+Ô
−ω0T+Ô
sin2(θ) dθ
ω0t+ Ô= θ
Regelungstheorie 2 Hochschule Bremerhaven --- IAE54
= |G(jω0)|2 2π
π
0
sin2(θ) dθ
= |G(jω0)|2=‖ G ‖2∞
Die obereGrenze tritt bei der sinusförmigenAnregungmit der Frequenz ω0 auf.
:::

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE55
Übung 6
8.5 Übungsbeispiel: Berechnung der Normen vonSystemen
Strecke 2. Ordnung
G(s)=ω20
s2+ 2Dω0s+ ω20, 0< D< 1
‖ G ‖2 , ‖ G ‖∞ ?
Wie lauten
a) die 2---Norm,
b) die1---Norm
von G(s)?
c) Wie könnte man einen Reglerentwurf durch Minimierung oder Beschränkung der2- oder der1-Norm formulieren?Eingang sei eine Störgröße, Ausgang sei die Regelabweichung.
:::
Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE56
Übung 6a
8.6 Übungsbeispiel: Optimierung der Parameter einesPI-Reglers über die ∞-Norm
Für die Strecke 2. Ordnung
G(s)= − 1.2s+ 3s2+ 4s+ 3
sollen über die ∞-Norm die Parameter eines PI-Reglers iterativ ermittelt werden.
Bedienoberfläche für Optimierung “pihinf”.
Hier kommt allerdings die Mehrgrößenversion der∞-Norm zu Einsatz. Der geschlosseneKreis besitzt folgende Struktur. Die Funktionen Wk sind Gewichtungsfunktionen zurBewertung des Regelfehlers bzw. der Stellgröße
W1=62.83s
s+ 0.06283 , W2=750s
s+ 62.83 .

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE57
K G
W1
W2
w e u y
v1
v2
---
Berechnet wird jeweils die Norm (mit Matlab “hinfnorm”) der Übertragungsfunktion vonw nach v.
W1SW2KS∞
a) Begründen Sie, warum die Wahl der Gewichtungsfunktionen W1 und W2 hiersinnvoll ist.
b) Ermitteln Sie P- und I-Anteil des PI-Reglers
K= kP+kIs ,
so dass die∞-Norm einMinimum annimmt. Ist der gefundene Regler brauchbar?
:::
Regelungstheorie 2 Hochschule Bremerhaven --- IAE58
9 Koprime Faktorisierung
Jede reell rationale Übertragungsfunktion lässt sich durch zwei stabile, begrenzteÜbertragungsfunktionendarstellen.Wir bezeichnen dieseÜbertragungsfunktionen als zurMenge φ zugehörig:
Menge φ : Menge aller stabilen, reell rationalen,begrenzten Übertragungsfunktionen
Die Menge φ ist abgeschlossen bezüglich Addition und Multiplikation.
F, G∈ φ → F+ G, F ⋅G∈ φ
Wirwollen zunächst denEingrößenfall behandeln, bei der eine beliebige rationale Streckeals Quotient zweier Übertragungsfunktionen in φ darstellbar ist.
G= NM , N,M∈ φ (8.1)
Im Mehrgrößenfall wird aus (8.1) G = NM---1. Die instabile Strecke
G= s− 2s− 1
kann beispielsweise als Quotient der Übertragungsfunktionen
N= s− 2s+ 1 , M=s− 1s+ 1
dargestellt werden. N und M sind Element von φ.
Wählt man für den Regler K die gleiche Darstellung
K= XY , X, Y∈ φ , (8.2)
so ergibt sich für die Empfindlichkeitsfunktion
(8.3)S= 11+ GK=
11+ N
MXY
= MYNX+MY .
Denkbar einfacheVerhältnisse ergeben sich, wenn X und Y sokonstruiertwerdenkönnen,dass
NX+MY= 1 ∀ ω (8.4)
gilt. In allen Übertragungsfunktionen des geschlossenen Kreises kann der NennerNX + MY dann keine Instabilitäten mehr verursachen. Die Empfindlichkeitsfunktion(8.3) wird damit einfach S = MY und ist aufgrund von M,Y∈ φ immer stabil. Mit anderenWorten: gelingt es, zu gegebenen N und M zwei Funktionen X und Y aus φ zukonstruieren, so dass (8.4) erfüllt ist, so ist
K= XY
ein stabilisierender Regler für G.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE59
Koprime Faktorisierung von G über φ :
Man bezeichnet N, M als koprim, wenn es zwei Funktio-nen X und Y gibt, so dass NX + MY = 1 gilt. Darausfolgt, dass X und Y ebenfalls koprim sind.
N und M bzw. X und Y haben keine gemeinsamen Nullstellen s0, da anderenfalls dieBedingung (8.4) nicht zu erfüllen wäre.
N(s0)X(s0)+M(s0)Y(s0)= 0≠ 1
Koprime Funktionen sind also immer teilerfremd.
9.1 Berechnung von X(s) und Y(s) mit demAlgorithmus von Euklid
Der Euklidische Algorithmus [9] ermöglicht die Bestimmung des größten gemeinsamenTeilers zweier Polynome. Man kann den Algorithmus aber auch verwenden, um vierteilerfremde Polynome zu erzeugen. Man geht davon aus, dass zwei Polynome n(s) undm(s) keine gemeinsamen Nullstellen aufweisen.
Algorithmus von Euklid:
1. Division des größeren Polynoms n(s) durch m(s):n= mq1+ r1
2. m= r1q2+ r2
3. r1= r2q3+ r3
3. r2= r3q4+ r4
. . .
. . .
Ende, wenn rk= const. ≠ 0
Berechnung von Polynomen x(λ) und y(λ), so dass nx + my = 1 gilt:
Der Algorithmus von Euklid wird durch folgendes System von Polynomglei-chungen beschrieben:
Regelungstheorie 2 Hochschule Bremerhaven --- IAE60
1
q2− 1
0 1− 1
1 0
q3 1
0 0 r1r2r3
rk
=
1
0
0
− q11
0
0
n
m
qk
rk ist in unseremFall eine vonNull verschiedeneKonstante. Löstman nunnachrk auf, so erhält man
rk= ()n+ ()m
bzw.
1= n 1rk()+m 1rk
() . (8.5)
x y
Die mit x und y bezeichneten Polynome zeigen gerade die gewünschten Eigenschaften.
Der Übergang von Polynomen auf stabile Übertragungsfunktionen kann durch Ersetzendes Arguments λ in x(λ) und y(λ) durch
(8.6)λ= 1s+ 1
erfolgen. Die entstehenden Übertragungsfunktionen sind dann X(s) und Y(s). Manbestimmt die Polynome n(λ) und m(λ) aus G(s), indem man (8.6) nach s auflöst undin G(s) einsetzt.
s= 1− λλ
(8.7)
G(s)= G~(λ) := n(λ)
m(λ)(8.8)
Zusammenfassung der koprimen Faktorisierung von G(s) über φ:
1. Beschreibung von G(s) durchkoprimePolynome in λ derOrdnung n mitHilfeder Abbildung
s= 1− λλ.
2. Berechnung der Polynome x(λ) und y(λ) mit dem Algorithmus von Euklid, sodass nx + my = 1 gilt.
3. Rücktransformation der Polynome n(λ), m(λ), x(λ), y(λ) mit
λ= 1s+ 1
führt auf die Übertragungsfunktionen N(s), M(s), X(s), Y(s).

Regelungstheorie 2 Hochschule Bremerhaven --- IAE61
9.2 Beispiel: koprime Faktorisierung einer instabilenStrecke
Gesucht wird eine koprime Faktorisierung für die Übertragungsfunktion
G(s)= 1(s− 1)(s− 2) .
Ersetzt man s durch λ gemäß (8.7), so erhält man nach (8.8) die Polynome
G~(λ)= λ2
6λ2− 5λ+ 1 , n(λ)= λ2, m(λ)= 6λ2− 5λ+ 1 .
Führt man die ersten beiden Polynomdivisionen durchn= mq1+ r1 ,m= r1q2+ r2 ,
so stelltman fest, dass derAlgorithmus bereits beendet ist, da r2 nichtmehr von λ abhängt:
λ2= 6λ2− 5λ+ 116+56 λ−
16 ,
6λ2− 5λ+ 1 = 56 λ− 16365 λ− 11425 + 625 .
Löst man das obige Gleichungssystem nach r2 auf, so folgtr2= m− r1q2= m− (n−mq1)q2= (1+ q1q2)m− q2n .
Ein Vergleich mit (8.5) führt auf die Polynome
x=− q2r2 =− 30λ+ 19,
sowie
y= 1+ q1q2r2 = 5λ+ 1 .
Ersetztman nun in n,m, x und y dasArgument λ gemäß (8.6), so erhältman die gesuchtekoprime Faktorisierung:
N(s)= 1(s+ 1)2
, M(s)=(s− 1)(s− 2)(s+ 1)2
,
X(s)= 19s− 11s+ 1 , Y(s)= s+ 6s+ 1 .
Die GleichungNX+MY= 1
ist für beliebige s immer erfüllt, und der Regler
K(s)= X(s)Y(s)=19s− 11s+ 6
stabilisiert die Strecke G(s).
9.3 Q---Parametrierung: der allgemeine FallFür eine begrenzte (|G(jω)| <1), sonst aber beliebige Übertragungsfunktion G(s)existiert eine koprime Faktorisierung über φ der Form
Regelungstheorie 2 Hochschule Bremerhaven --- IAE62
G= NM (koprime Faktorisierung über φ) ,
NX+MY= 1 (Bezout Identität) .
In diesem Kapitel soll die Menge aller G stabilisierenden Regler hergeleitet werden. Zudiesem Zweck benötigen wir den Begriff der internen Stabilität.
9.3.1 Interne Stabilität
EinRegelkreis, bestehend aus Regler K, Strecke G und Sensor/Messwertverarbeitung Fkann durch das folgende Blockschaltbild repräsentiert werden:
K G
F
w x1 x2 y
x3 n
--
d
Bild 8.1: Blockschaltbild zur Definition der internen Stabilität
Für die internen Größen xi gilt
x1= w− Fx3 , x2= d+ Kx1 , x3= n+Gx2 .
In Matrizenform ergibt sich
1− K0
01
−G
F01x1x2x3 = wd
n .
Die Gleichungen des geschlossenen Kreises folgen durch Auflösung des Gleichungssy-stems nach xi :
(8.9)
x1x2x3= 1
− K0
01
−G
F01−1
wdn
= 11+ FGK
1KGK
−GF1G
− F− KF1wdn
Mit (8.9) kann nun die interne Stabilität definiert werden.
Ein System ist intern stabil, wenn die 9Übertragungsfunktionen in (8.9) stabil sind.
Betrachten wir die Youla(Regler)-Parametrierung aus Kap. 7.1 mit dem Regler

Regelungstheorie 2 Hochschule Bremerhaven --- IAE63
K= Q1− GQ , (Q ist eine stabile Übertragungsfunktion) ,
so folgt für die Übertragungsfunktionen in (8.9) (mit F = 1)
(8.10)1−GQQGQ
− G(1−GQ)1− GQG(1− GQ)
− (1−GQ)−Q1−GQ
.
Man erkennt, dass der Regler K interne Stabilität bewirkt (alle Elemente in (8.10) sindstabil), sofern nur Q und G stabile Übertragungsfunktionen sind. Mit anderen Worten:jede beliebige Übertragungsfunktion des geschlossenen Kreises ist eine stabileÜbertragungsfunktion. So sind die Empfindlichkeitsfunktion
S= 11+ GK=
11+ GQ
1−GQ
= 1− GQ
sowie die komplementäre Empfindlichkeitsfunktion
T= 1− S= GQ
offensichtlich stabil.
9.4 Die Menge aller G stabilisierenden Regler
Mit der koprimen Faktorisierung N(s),M(s),X(s),Y(s) ∈ φ, NX+MY= 1 lautet die Menge
aller G= NM stabilisierenden Regler (Herleitung siehe Kap. 9.4.1):
(8.11)
Die Menge aller Regler für interne Stabilität ist
K= X+MQY− NQ : Q∈ φ .
Ein Sonderfall ist das erwähnte Beispiel aus Kap. NO TAG, bei dem G bereits Elementvon φ ist. Die denkbar einfachste Faktorisierung ist dann
N= G, M= 1, X= 0, Y= 1, N,M, X, Y∈ φ .
Setzt man diese Übertragungsfunktionen in (8.11) ein, so folgt die bereits bekannteBeziehung
K= Q1− GQ .
9.4.1 Herleitung der internen Stabilität für den geschlossenen Kreis mitdem parametrierten Regler
Setzen wir für den Regler
Regelungstheorie 2 Hochschule Bremerhaven --- IAE64
K= NKMK, NK, MK ∈ φ
bzw. für die Strecke
G= NM , N, M ∈ φ
ein, so folgen mit F(s) = 1 die Übertragungsfunktionen für interne Stabilität
(8.12)11+GK1KGK
− G1G
− 1− K1=
1NNK+MMK
MMKMNKNNK
− NMKMMKNMK
−MMK−MNKMMK.
Da alle Übertragungsfunktionen in der rechtenMatrix stabil sind, ist die interne Stabilitätmit der Forderung
(8.13)1NNK+MMK
∈ φ
identisch. Definieren wir nun
NK= X+MQ
und
MK= Y− NQ ,
so folgt aufgrund der koprimen Eigenschaften von N, M, X und Y
(8.14)
NNK+MMK= N(X+MQ)+M(Y− NQ)
= NX+MY= 1
Somit sind auch N,M,NK = X+MQ und MK = Y---NQ koprim, und die Bedingung (8.13)ist erfüllt. Der Regler (8.11) führt also im geschlossenen Kreis mit der Strecke G aufinterne Stabilität. Mit der Beziehung (8.14) ergeben sich die Übertragungsfunktionen(8.12) für interne Stabilität zu
(8.15)MMKMNKNNK
− NMKMMKNMK
−MMK−MNKMMK=M(Y− NQ)M(X+MQ)N(X+MQ)
− N(Y− NQ)M(Y− NQ)N(Y− NQ)
−M(Y− NQ)−M(X+MQ)M(Y− NQ)
.
Da Q linear in allen Übertragungsfunktionen in (8.15) vorkommt, gilt der Satz:
Der Regler
führt dann und nur dann auf interne Stabilität im geschlossenenKreis, wenn Q eine stabile Übertragungsfunktion ist.
K= X+MQY− NQ

Regelungstheorie 2 Hochschule Bremerhaven --- IAE65
9.5 Entwurf eines stabilisierenden Reglers mitvorgebbaren Eigenschaften durch koprimeFaktorisierung
Anforderungen an eine Regelung können leicht durch bestimmte Eigenschaften vonÜbertragungsfunktionen des geschlossenen Kreises beschrieben werden. Man erkenntan (8.15), wie der Parameter Q die einzelnen Übertragungsfunktionen beeinflusst.
Die Übertragungsfunktionen des geschlossenen Kreisessind lineare Funktionen des Parameters Q.
Die Eigenschaften einzelner Übertragungsfunktionen lassensich somit leicht über Q festlegen (Q---Parametrierung).
Wichtige Übertragungsfunktionen sind die Empfindlichkeitsfunktion
S= M(Y− NQ) (8.16)
und die komplementäre Empfindlichkeitsfunktion
T= 1− S= N(X+MQ) . (8.17)
Die Aufgabe, diese Übertragungsfunktionen über den linearen Parameter Q festzulegen,ist wesentlich einfacher, als direkt einen Regler K zu bestimmen, so dass beispielsweise
S= 11+ GK
eine stabile Funktionwirdund in bestimmten Frequenzbereichenkleine Beträge annimmt.Bei der Q-Parametrierung ist die Stabilität automatisch gewährleistet, sofern Q selbst einestabile Übertragungsfunktion ist. Die Vorgabe von bestimmten Regeleigenschaften unddie Gewährleistung von Stabilität im geschlossenen Kreis sind bei diesem Verfahrenvollständig getrennt.
9.5.1 Algorithmus
Die Zusammenfassung von koprimer Faktorisierung und der Ergebnisse aus diesemKapitel führt auf den Algorithmus zur Bestimmung eines stabilisierenden Reglers mitvorgebbaren Eigenschaften des geschlossenen Kreises:
1. Wenn G stabil: N= G, M= 1, X= 0, Y= 1, weiter mit Schritt 5:
2. Transformation von G(s) nach G~(λ) mit der Abbildung s= 1− λλ.
G ist dann das Verhältnis der koprimen Polynome
G~(λ)= n(λ)m(λ) .
3. Mit dem Algorithmus von Euklid lassen sich Polynome x(λ) und y(λ) finden, sodass gilt
Regelungstheorie 2 Hochschule Bremerhaven --- IAE66
nx+my= 1.
4. Rücktransformation von n(λ), m(λ), x(λ), y(λ) nach N(s), M(s), X(s), Y(s) mit der
Abbildung λ= 1s+ 1.
5. Berechnung der Übertragungsfunktionen des geschlossenen Kreises, für diebestimmte Eigenschaften erfüllt sein müssen. Diese Übertragungsfunktionenenthalten Q(s) als linearen Parameter.
6. Entwurf einer stabilenÜbertragungsfunktion Q(s), mit der alle Eigenschaftender Übertragungsfunktionen in 5. erfüllt werden.
7. Der Regler ergibt sich nun aus
K(s)= X+MQY− NQ , Q∈ φ .
Dies ist die Menge aller G stabilisierenden Regler, d.h. Q(s)= 0 ist dieeinfachste Lösung.
:::

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE67
Übung 7
10 Übungsbeispiel: Reglerentwurf für eineinstabile Strecke durch koprime Faktorisierung
Instabile Strecke G(s)= s− 1s(s− 2)
d
GKw ye
--
a) Berechnen Sie eine koprime Faktorisierung von G(s) über φ.
b) Der Regelfehler e soll für d = sin(3t) verschwinden.Wie lautet K(s)?
c) Entwerfen Sie einen Regler K(s), der stationäre Genauigkeit (ω = 0)gewährleistet.
:::
Regelungstheorie 2 Hochschule Bremerhaven --- IAE68
11 Modellabgleich
Bisher blieb die Frage unbeantwortet, wie man auf systematische Weise dieÜbertragungsfunktion Q(s) bestimmen kann. In diesem Kapitel werden optimaleLösungen vorgestellt, die Normen vonÜbertragungsfunktionen des geschlossenenKreisesminimieren. Da mit Q(s) die Gesamtheit aller stabilisierenden Regler erfasst wird, führtdie optimale Lösung für Q(s) auch auf die optimale Lösung für K(s).
11.1 Problemstellung
Die Übertragungsfunktionen des geschlossenen Kreises sind lineare Funktionen desParameters Q. Wir werden im folgenden zeigen, dass sich jede Übertragungsfunktion desgeschlossenen Kreises auf die Struktur von Bild 9.1 bringen lässt.
T
UQ
T = Modell
U = Strecke---
Bild 9.1: Modellabgleich-Problem
Für gegebene T, U∈ φ (stabil, begrenzt) wird das Q gesucht, für das
‖ T− UQ ‖
minimal wird. Auch für Q(s) wird Stabilität gefordert. Wir können T als “Modell”auffassen, für das die bestmögliche Approximation UQ gesucht wird. Ein Beispiel ist dieEmpfindlichkeitsfunktion S. Mit den Beziehungen
G= NM , K=X+MQY− NQ , NX+MY= 1
folgt für
S= 11+ GK=
11+ N
MX+MQY−NQ
= M(Y− NQ) .
Die Minimierung von ‖ S ‖ entspricht also der Aufgabe, eine Übertragungsfunktion Q zubestimmen, so dass ‖ T−UQ ‖minimal wird. T und U ergeben sich in diesem Fall zu
T= MY , U= MN .
Das optimale Q führt auf den Restfehler
γopt= min ‖ T− UQ ‖ . (9.1)
Der triviale Fall tritt ein, wenn TU∈ φ ist. Dann ist natürlich Q=TU die (eindeutige) Lösung
des Problems (9.1) mit γopt= 0. Leider ist bei fast allen technischen Problemen TU nicht
Element von φ.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE69
Sofern U(s) Nullstellen in der rechtenHalbebene besitzt, ist die Lösung nicht mehr trivialund γopt≠ 0. Der einfachste nicht-triviale Fall ist eine einfache Nullstelle von U in derrechten Halbebene an der Stelle s0. Betrachten wir die1-Norm von T --- UQ, so liefertuns das sogenannte Maximum-Modulus-Theorem eine untere Grenze für γopt.
Re
Im
Ω
s0
Bild 9.2: Definition des Gebietes Ω
Maximum-Modulus-Theorem:Ω sei ein nicht-leeres Gebiet in der komplexen Ebene, und F seieine analytische Funktion in Ω. Dann wird das Maximum von|F| nicht in einem Punkt innerhalb von Ω erreicht.
F sei eine komplexe Funktion, die analytisch für das in Bild 9.2 eingezeichnete Gebiet Ωist (F enthält keine Singularitäten in Ω). Weiterhin sei γ = |F(s0)|. Dann ist der Betragvon F auf dem Rand von Ω größer oder gleich γ, denn nur dort kann das Maximumauftreten.
Die uns interessierendenÜbertragungsfunktionen sind Element von φ, d.h. das Gebiet Ωumfasst die gesamte rechte Halbebene (die Übertragungsfunktionen haben keineSingularitäten in der r.H.). Besitzt nun die Übertragungsfunktion U eine einzelneNullstelle in der rechten Halbebene, so ist der Betrag von T --- UQ an der Stelle s0
|T(s0)− U(s0)Q(s0)|= |T(s0)| .
Da sich s0 innerhalb des Gebiets Ω befindet, muss der maximale Betrag von
|T(jω)− U(jω)Q(jω)|
aufgrund desMaximum-Modulus-Theorems größer oder gleich |T(s0)| sein (jω befindetsich ja auf einer Randkurve von Ω). Somit ist |T(s0)| eine echte untere Grenze für die1-Norm
‖ T− UQ ‖∞≥ |T(s0)|
bzw. den bestmöglichen Wert
γopt≥ |T(s0)| .
Setzt man
(9.2)Q= T− T(s0)U ,
Regelungstheorie 2 Hochschule Bremerhaven --- IAE70
so ist Q stabil und γ = |T(s0)|. Tatsächlich ist (9.2) die optimale Lösung.
11.1.1 Beispiel für minimale ∞-Norm bei einer Nullstelle von U(s) in derrechten Halbebene
Gesucht wird die Übertragungsfunktion Q(s), für die die Norm
‖ T− UQ ‖∞
das Minimum γopt annimmt. Die einzelnen Übertragungsfunktionen seien
T= 4s+ 3 , U=
s− 2(s+ 1)3
.
Man erkennt, dass U eine einzelne Nullstelle bei s0 = 2 besitzt. Das Minimum liegt alsobei
γ0= T(2)= 42+ 3=
45 .
Eine optimale Lösung ist nach (9.2)
Q=4s+3−
45
s−2(s+1)3
=45− s−2
s+3
s−2(s+1)3
=− 45(s+ 1)3
s+ 3 .
In der Tat erhält man für die Übertragungsfunktion
T− UQ= 4s+ 3+
45s− 2s+ 3=
45= const.
die Konstante γ0 = 4/5. Man beachte, dass Q(s) aufgrund der gegenüber dem Nennergrößeren Zählerordnung nicht begrenzt ist. Das Minimum von γ0 = 4/5 kann also nurnäherungsweise, d.h. in einemeingeschränktenFrequenzbereich, erreichtwerden, danichtbegrenzte Übertragungsfunktionen nicht verwirklicht werden können.
:::

Regelungstheorie 2 Hochschule Bremerhaven --- IAE71
12 Minimierung der 2-Norm
In diesem Kapitel wird der Reglerentwurf durch Minimierung der 2-Norm einerÜbertragungsfunktion des geschlossenen Kreises beschrieben. Jedes Entwurfsproblemkann dabei auf die “Modellabgleich”-Struktur aus Kapitel 11.1 zurückgeführt werden. Diebetreffenden Übertragungsfunktionen sind linear von dem zu bestimmenden ParameterQ abhängig.
Die 2-Norm einer Übertragungsfunktion ist die1/2-Norm-Systemverstärkung (s. Tabelle7.2 in Kap. 8.4), d.h. die Minimierung der 2-Norm führt auf minimale Amplituden derFehlersignale bezogen auf den “Energieinhalt” der externen Anregungen.
Als Entwurfsparameter dienen sogenannte Gewichtungsfunktionen, die einefrequenzabhängige Gewichtung der Fehlersignale ermöglichen. Ein typisches Entwurfs-problem ist in Bild 10.1 dargestellt.
d
GKw ye
--
WGS
W
Bild 10.1: Definition der Übertragungsfunktion WGS
Die Gewichtungsfunktion W ist gleichzeitig auch der einzige Entwurfsparameter, da mitder formalenMinimierung der 2-Norm kein Freiheitsgrad verbunden ist. Die Funktion Wwird auch als Kosten- oder Straffunktion bezeichnet. Nimmt der Betrag derÜbertragungsfunktion W in einem bestimmten Frequenzbereich großeWerte an, so führtdies in diesem Frequenzbereich auf kleine Werte der Fehlergröße.
12.1 Definition der Mengen φ0 und φ⊥0Die 2-Norm wird unendlich bei Strecken, die nicht streng begrenzt sind (Kap. 8.3.1). Es istim Zusammenhang mit der 2-Norm für Systeme deshalb nur sinnvoll, streng begrenzteÜbertragungsfunktionen zu betrachten.
Definition φ0 :
Untermenge von φ aller streng begrenzten,stabilen Übertragungsfunktionen.
Definition φ⊥0 :
Menge aller streng begrenzten Übertragungsfunktionen,die analytisch für Res≤ 0 sind.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE72
Die Vereinigungsmenge φ0 φ⊥0 ist die Menge aller streng begrenztenÜbertragungsfunkti-onen ohne Pole auf der imaginären Achse. Jede Funktion F∈ φ0 φ⊥0 kann als
F= Fst+ Fun , Fst∈ φ0 , Fun∈ φ⊥0 (10.1)
geschriebenwerden. Die Aufspaltung in einen stabilen (Fst) und einen instabilen Teil (Fun)kann beispielsweise durch Partialbruchzerlegung erfolgen und ist immer eindeutig, da Poleauf der imaginären Achse ausgeschlossen sind.
Für
F= 1(s+ 1)(s− 2) ∈ φ0 φ
⊥0
erhält man durch Partialbruchzerlegung für
Fst=− 131s+ 1 ∈ φ0
und für
Fun= 131s− 2 ∈ φ
⊥0 .
Bezüglich der Addition von zwei Funktionen der Mengen φ0 und φ⊥0 gilt folgendesTheorem:
(10.2)
Wenn F∈ φ0 und G∈ φ⊥0 :
‖ F+G ‖22=‖ F ‖22+‖ G ‖22
Beweis: Setzt man F + G in die Definitionsgleichung der 2-Norm ein, so erhält man
‖ F+G ‖22=12π∞
−∞
|F(jω)+G(jω)|2dω
= 12π∞
−∞
|F(jω)|2dω+ 12π|G(jω)|2dω
+ 2Re12π∞
−∞
F(jω)G(jω)dω.
Falls der letzte TermNull ist, gilt die Gleichung (10.2). Da die Funktionen F undG streng begrenzt sind, kann der Integrationsweg entlang der imaginären Achseum einen Halbkreis im Unendlichen zu einem Ringintegral (um die linkeHalbebene) erweitert werden, ohne den Wert des Integrals zu verändern.
(10.3)12πjj∞
−j∞
F(jω)G(jω)djω= 12πjL.H.
F(− s)G(s)ds= 0
Da sowohl F(---s) als auch G(s) keine Pole in der linken Halbebene haben(F(− s), G(s)∈ φ⊥0 ), ist nach dem Integralsatz von Cauchy [9] der Wert von (10.3)Null.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE73
12.2 Berechnung des 2-Norm-optimalen Q(s)
Die Übertragungsfunktion WGS gemäß Bild 10.1 lautet mit
G= NM , K=X+MQY− NQ , S= M
(Y− NQ)
(10.4)WGS= WN(Y− NQ)= WNY−WN2Q .
Setzen wir T = WNY und U = WN2, so erkennen wir, dass (10.4) demModellabgleich---Problem
‖ T− UQ ‖2
entspricht, bei dem der Parameter Q so zu bestimmen ist, dass das Modell T durch dasProdukt UQ bestmöglich approximiert wird.
Die Nullstellen mit positivem Realteil bestimmen die Komplexität der Lösung. Nur wennU(s) keine Nullstellen in der rechten Halbebene besitzt, ist Q = T/U die optimale(triviale) Lösung. Es ist für die allgemeine Lösung deshalb vorteilhaft, dieÜbertragungsfunktion U in einen Allpass und eine Minimalphasenfunktion zu zerlegen.
U := UapUmp (10.5)
Man kann leicht erkennen, dass diese Zerlegung immer möglich ist und bis auf dieVorzeichen von Uap und Ump eindeutig ist. Für Uap gilt dann
|Uap(jω)|= 1 ∀ ω .
Die folgenden Umformungen verwenden die Allpass-/Minimalphasen-Zerlegung (10.5)sowie das Theorem (10.2).
(10.6)
‖ WNY−WN2Q ‖22=‖ T− UQ ‖22
=‖ T− UapUmpQ ‖22
=‖ UapU−1ap T− UmpQ ‖22
=‖ U−1ap T− UmpQ ‖22
=‖ U−1ap Tun+ U−1ap Tst− UmpQ ‖
22
=‖ U−1ap Tun ‖22+‖ U−1ap Tst− UmpQ ‖
22
∈ φ⊥0 ∈ φ0
Die optimale (stabile) Lösung lautet damit
(10.7)Qopt= U−1mpU−1ap Tst ,
da der Term
Regelungstheorie 2 Hochschule Bremerhaven --- IAE74
(10.8)‖ U−1ap Tun ‖22
durch Q nicht beeinflusst werden kann. DerWert von (10.8) ist damit auch dasMinimumder 2---Norm von
‖ WNY−WN2Q ‖2=‖ T− UQ ‖2 .
Die optimale Lösung Qopt(s) ist häufig keine begrenzte Funktion und kann somit nichtverwirklicht werden. Man kann jedoch stets die optimale Lösung approximieren, indemman
Q(s)=Qopt
(τs+ 1)k
setzt. Der Wert k ist die Differenz zwischen Zähler- und Nennergrad von Qopt . Mit demGrenzübergang τ→ 0 wird die optimale Lösung beliebig genau erreicht.
12.3 Beispiel für eine 2-Norm-optimale Regelung
Gesucht wird der 2-Norm-optimale Regler für die Strecke
G= 1− ss2+ s+ 2
mit der Gewichtungsfunktion
W= 1s .
Da es sich bei G um eine stabile Übertragungsfunktion handelt, kann eine koprimeZerlegung ohne Rechnung angegeben werden:
N= G, M= 1, X= 0, Y= 1
Die Reglerparametrierung lautet damit
(10.9)K= Q1− GQ , (G,Q stabil) .
Damit ‖ WGS ‖2 endlich wird, muss der von der Gewichtungsfunktion W herrührende Polbei s = 0 durch eine entsprechende Nullstelle in der Funktion GS kompensiert werden.
Es muss an der Stelle s = 0 folglich gelten
GS(0)= G(0)1+ G(0) Q(0)
1−G(0)Q(0)
= G(0)(1−G(0)Q(0))=! 0 .
Man erkennt, dass mit Q(0) = 1/G(0) = 2 die obige Forderung erfüllt wird. DieseRandbedingung für Q(s) lässt sich leicht durch
(10.10)Q= Q0+ sQ1= 2+ sQ1
einhalten. Fordert man für Q1 lediglich Stabilität, so wird mit Q die Gesamtheit allerÜbertragungsfunktionen erfasst, die für s = 0 den Wert 2 annehmen. Setzt man (10.10)in die Gleichung für WGS ein, so folgt mit (10.4)

Regelungstheorie 2 Hochschule Bremerhaven --- IAE75
WGS= WG(1− G(2+ sQ1))
= WG(1− 2G)− sWG2Q1
= WG(1− 2G)−G2Q1
:= T− UQ1 .
Wir erhalten wieder die Struktur des Modellabgleich-Problems mit:
T= WG(1− 2G)
T=(1− s)(s+ 3)(s2+ s+ 2)2
Uap=(1− s)2
(1+ s)2
Q1, opt= U−1mpU−1ap Tst
U= G2
U=(1− s)2
(s2+ s+ 2)2
Ump=(1+ s)2
(s2+ s+ 2)2
Der einzige Unterschied zu der bisherigen Vorgehensweise besteht darin, dass hier Q1,optbestimmtwirdund Q anschließend gemäß (10.10) berechnet werdenmuss. Bestimmenwiralso zunächst Q1,opt .
Q1,opt=(s2+ s+ 2)2
(s+ 1)2(1+ s)2(1− s)2
(1− s)(s+ 3)(s2+ s+ 2)2
st
(1+ s)2(s+ 3)(1− s)(s2+ s+ 2)2
= 11− s +
∈ φ⊥0 ∈ φ(un) (st)
Mit einer Zwischenrechnung wird [...]st ermittelt:
(1+ s)2(s+ 3)(1− s)(s2+ s+ 2)2
− 11− s=
(s2+ 2s+ 1)(s+ 3)− (s2+ s+ 2)(s2+ s+ 2)(1− s)(s2+ s+ 2)2
= s3+ 5s2+ 7s+ 3− (s4+ 2s3+ 5s2+ 4s+ 4)
(1− s)(s2+ s+ 2)2
= s4+ s3− 3s+ 1(s− 1)(s2+ s+ 2)2
= s3+ 2s2+ 2s− 1(s2+ s+ 2)2
= []st
Es folgt schließlich
Q1,opt= s3+ 2s2+ 2s− 1(s+ 1)2
.
Durch Erweiterung von Q1,opt mit einer Tiefpassfunktion hoher Grenzfrequenz kannQ1realisiert werden.
Q1= s3+ 2s2+ 2s− 1(τs+ 1)2(s+ 1)2
Regelungstheorie 2 Hochschule Bremerhaven --- IAE76
Nun muss nur noch Q1 in (10.10) eingesetzt werden, um Q zu erhalten.
Q= Q0+ sQ1= 2+ sQ1= 2+ s s3+ 2s2+ 2s− 1(τs+ 1)2(s+ 1)2
Eine Simulation der Störantwortmit dem gemäß (10.9) berechnetenRegler K(s) (τ = 0.1)ist in Bild 10.2 gezeigt.
---0.8
---0.6
---0.4
---0.2
0
0.2
0.4
0.6
0.8
0 2 4 6 8 10 12 14 16 18 20
Sprungantwort der ungeregelten Strecke
Störverhalten
Bild 10.2: Simulation der 2-Norm-optimalen Regelung
:::

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE77
Übung 9
13 Übungsbeispiel: 2-Norm-optimale Regelungfür eine instabile Strecke
2-Norm-optimaler Regler für die instabile Strecke G(s)= s− 1s(s− 2)
d
GKw ye
--
N(s)= s− 1(s+ 1)2
, M(s)= s(s− 2)(s+ 1)2
, X(s)= 14s− 1s+ 1 , Y(s)=s− 9s+ 1
W(s)= 1s
a) Formulieren Sie das Modellabgleich-Problem für die Minimierung von ‖ WGS ‖2,d.h. wie lauten T und U in WGS= T− UQ.
b) Bestimmen Sie Qopt für ‖ T− UQopt ‖2= Min.
c) WelcheMaßnahme ist geeignet, umaus Qopteine begrenzteÜbertragungsfunktionzu erzeugen?
d) Wie lautet dann der (suboptimale) Regler K(s)?
:::
Regelungstheorie 2 Hochschule Bremerhaven --- IAE78
14 Minimierung der ∞-Norm
In diesem Kapitel wird ein Algorithmus zur Lösung des Modellabgleich-Problems
γ0= min ‖ T− UQ ‖∞
vorgestellt. Die1-Norm minimiert gemäß Tabelle 7.2 in Kap. 8.3.1 die 2-Norm/2-Norm-Systemverstärkung und damit das maximal mögliche Verhältnis der Energien bzw.Leistungen von Fehlergrößen zu Eingangsgrößen. Das Problem besteht darin, eine stabileFunktion Q(s) zu ermitteln, die auf das Minimum der obigen1-Norm führt.
Von Tannenbaum [62] wurde 1981 gezeigt, dass sich das Minimierungsproblem auf eineInterpolationsaufgabe reduzieren lässt. Wir benötigen für die Lösung eine stabile,komplexe Funktion G, die an bestimmten Stellen vorgegebene Funktionswerte annimmtmit der Randbedingung
‖ G ‖∞≤ 1 .
Diese Teilaufgabe wird im folgenden Kapitel gelöst.
14.1 Nevannlinna-Pick-Interpolation
Die von den Mathematikern R. Nevannlinna und G. Pick entwickelte Interpolation wirdim folgendenmit NP bezeichnet. Um von der eigentlichenOptimierungsaufgabe nicht zuweit abzuschweifen, soll derAlgorithmus für die NP ohne Beweise angegeben werden.Wirbenötigen zur Formulierung der Interpolationsaufgabe die Definitionen:
φC Menge aller stabilen, begrenzten, gebrochen rationalen Funktionen mitkomplexen Koeffizienten.
a1, ..., an Menge von Punkten in C mit Reai > 0, i = 1, ..., n
b1, ..., bn Menge von beliebigen Punkten in C mit |bi|± 1
Die NP löst das Problem:
G∈ φC ,
Bestimmung einer Funktion
so dass‖ G ‖∞≤ 1 ,
G(ai)= bi , i= 1, , n
‖ G ‖∞≤ 1 ist natürlich nur möglich, wenn für alle bi die Ungleichung |bi|≤ 1 erfüllt ist.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE79
Die n Wertepaare
a1, , anb1, , bn
beschreiben das NP-Problem vollständig. Man definiert eine sogenannte Pick-MatrixP∈ Cn×n mit den Elementen
(11.1)pij=1− bibjai+ aj
.
Wie man leicht zeigen kann ist P eine hermitesche Matrix, d.h. es gilt M = M*
( * = konjugiert komplex transponiert). Alle Eigenwerte einer hermiteschen Matrix sindreell [31]. Die Pick-Matrix bestimmt die Lösbarkeit des NP-Problems:
(11.2)
Die NP-Interpolation ist dann und nur dann lösbar, wenn alleEigenwerte von P positiven Realteil haben (P ist positiv definit).Man bezeichnet diese Forderung auch mit
P>!0.
14.1.1 NP für ein Wertepaar a1, b1
Grundsätzlich müssen zwei Fälle unterschieden werden:
1. |b1| = 1Die einzige und eindeutige Lösung besteht in der Funktion G(s) = b1 = const.
2. |b1| < 1Es existieren unendlich viele Lösungen.
Im letzteren Fall lautet die Menge aller Lösungen
(11.3)G : G(s)= M−b1G1(s)Aa1(s),G1∈ φc, ‖ G1 ‖∞≤ 1
Das Produkt G1(s)Aa1(s) bildet das Argument von M−b1.
Hierbei ist Mb(z) die Möbius-Transformation
(11.4)Mb(z) := z− b1− zb
und Aa(s) die Allpass-Funktion
(11.5)Aa(s) := s− as+ a , Rea> 0 .
Eine wichtige Eigenschaft der Lösungsmenge (11.3) besteht darin, dass dieAllpasseigenschaft der Funktion G1 in G erhalten bleibt:
Regelungstheorie 2 Hochschule Bremerhaven --- IAE80
Wenn G1(s) eine Allpass-Funktion ist, so ist G(s)ebenfalls eine Allpass-Funktion.
Die Gleichung (11.3) besteht aus zwei aufeinanderfolgenden Abbildungen:
s→ G1(s)Aa1(s)= z1.
2.
z→ M−b1(z)
Die Abbildung 1 bildet die gesamte rechte Halbebene (= Definitionsbereich von s) in dasInnere des Einheitskreises ab. Mit der zweiten Abbildung, der Möbius-Transformation,wird das Innere des Einheitskreises auf sich selbst abgebildet.
Die Abbildung in das Innere des Einheitskreises gewährleistet die Einhaltung derForderung ‖ G ‖∞≤ 1. Die Interpolation der Funktion an der Stelle a1 ist eine Folge derspeziellen Eigenschaften von Aa1 und M−b1:
(11.6)G(a1)= M−b1G1(a1)Aa1(a1) = M−b1[0]= b1
Das Argument von M−b1 ist immer Null, da Aa1(a1)= 0 gilt und G1(a1) für alleangenommenen ai mit Reai > 0 endlich ist.
14.1.2 Beispiel für NP
Gesucht wird eine Funktion G(s) mit den Eigenschaften:
‖ G ‖∞< 1 ,
G(a1)= b1 .
Die NP-Daten lauten:
a1= 2 ,
b1= 0.6 .
Wir wählen willkürlich
G1= s− 1s+ 1 , ‖ G1 ‖∞= 1 .
Aus (11.3) folgt:

Regelungstheorie 2 Hochschule Bremerhaven --- IAE81
G(s)=G1 s−2s+2+ 0.61+ G1 s−2s+2 0.6
=s−1s+1
s−2s+2+ 0.6
1+ s−1s+1
s−2s+2 0.6
= s2− 3s+ 2+ 0.6(s2+ 3s+ 2)s2+ 3s+ 2+ 0.6(s2− 3s+ 2)=
1.6s2− 1.2s+ 3.21.6s2+ 1.2s+ 3.2
= s2− 0.75s+ 2s2+ 0.75s+ 2
Wie man leicht überprüfen kann, ist ‖G‖1 = 1 und G(2) = 0.6 .
Eine einfachere Lösung erhält man, wenn man für G1 eine Konstante, beispielsweiseG1 = 1, einsetzt:
G(s)=G1 s−2s+2+ 0.61+ G1 s−2s+2 0.6
=s−2s+2+ 0.61+ s−2
s+2 0.6
= s− 2+ 0.6(s+ 2)
s+ 2+ 0.6(s− 2)=1.6s− 0.81.6s+ 0.8
= 2s− 12s+ 1
14.1.3 NP für n Punkte
NachdemdasNP-Problemmit einemWertepaar gelöst wurde, soll nun gezeigt werden, wiesich ein Satz von n Wertepaaren auf n-1 Wertepaare reduzieren lässt. Durch fortgesetzteReduktion folgt daraus die Lösung für beliebig viele Datensätze. Auch hier sind zwei Fällezu unterscheiden:
1. |b1| = 1Die einzige und eindeutige Lösung besteht in der Funktion G(s) = b1 = const.Folglich muss für alle bi gelten: b1 = b2 = ... = bn . Dies folgt eindeutig ausdem Maximum-Modulus-Theorem (s. Kap. 11.1).
2. |b1| < 1Das Problem kann auf n-1 Punkte reduziert werden. Die reduzierteInterpolation soll mit NP’ bezeichnet werden und umfasst die Wertemenge
a2, , an
b2′, , bn′ .
Die Werte bi ’ berechnen sich wie folgt:
(11.7)bi′ =Mb1(bi)Aa1(ai)
.
(11.8)
Die Menge aller Lösungen für das NP-Problem ist
G1(s) ist dabei die Lösung für NP’.
G(s)= M−b1G1(s)Aa1(s) .
Regelungstheorie 2 Hochschule Bremerhaven --- IAE82
Gilt für G1(ai)= bi′ =Mb1(bi)
Aa1(ai), so folgt durch Einsetzen in (11.8) G(ai)= bi, da
Mb1 die inverse Möbius---Transformation zu M−b1 ist:
Mb1= M−b1−1= z− b1
1− zb1. (11.9)
14.1.4 Beispiel: NP für 2 Wertepaare
Gesucht wird eine (möglichst einfache) Funktion G(s), die mit den bekanntenRandbedingungen die Wertepaare
(a1, b1)= 1, 12 (a2, b2)= 2, 13interpoliert. Aus Gründen der einfacheren Rechenbarkeit soll auf ein Beispiel mitkomplexen Werten verzichtet werden. Man erhält für die Pick-Matrix gemäß (11.1)
P=
38518
51829.
Die Eigenwerte von P lauten 0.5867 und 0.0105. Da der kleinste Eigenwert größer alsNull ist, ist in diesem Fall NP lösbar. Zunächst reduzieren wir das Problem auf einWertepaar
a2 2
b2′ =Mb1(b2)Aa1(a2)
=
b2−b11−b2b1a2−a1a2+a1
=− 0.6 .
=
Die denkbar einfachste Funktion G2(s) ist G2 = 1 ( G2 ist Allpass mit ‖ G2 ‖∞= 1). Manerhält nach (11.8)
G1(s)= M−b2′G2Aa2(s)
=s−a2s+a2+ b2′
1+s−a2s+a2b2′=
s−2s+2− 0.61− s−2
s+2 0.6= s− 8s+ 8 .
Setzt man G1 in die Interpolationsformel für die Punkte a1, b1 ein, so folgt
G(s)= M−b1G1Aa1(s) =G1
s−a1s+a1+ b1
1+G1s−a1s+a1b1
=s−8s+8
s−1s+1+
12
1+ s−8s+8
s−1s+1
12
= s2− 3s+ 8s2+ 3s+ 8 .
Offensichtlich gilt ‖ G2 ‖∞=‖ G1 ‖∞=‖ G ‖∞= 1 . Dem skeptischen Leser bleibt es überlassen,die Funktionswerte an den Interpolationspunkten 1 und 2 zu überprüfen.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE83
14.2 Lösung des Modellabgleich-Problems für ‖ T− UQ ‖∞durch NP
Die Berechnung eines 1-Norm-optimalenReglers kann auf dasModellabgleich-Problem
‖ T− UQ ‖∞≤ γ
zurückgeführt werden. Gesucht wird eine stabile Übertragungsfunktion Q(s), die die1-Norm der Differenz T - UQ minimiert. Der minimale Modellfehler wird als γoptbezeichnet. Wir definieren die Funktion
(11.10)G := 1γ (T− UQ) ,
die aufgrund der als stabil angenommenen Funktionen T, U und Q ebenfalls stabil seinmuss.Umgekehrt ist die zubestimmendeFunktion Q (inAbhängigkeit vondenNullstellenvon U) aber nur dann eine stabile Übertragungsfunktion, wenn G ganz bestimmteBedingungen erfüllt:
(11.11)G(zi)= 1γ T(zi), i= 1,..., n
zi : i = 1, ..., n seien die Nullstellen mit Rezi > 0 vonU. Dann muss für G(s) an allen Punkten zi gelten:
Da mit der NP jeweils nur Funktionen G bestimmt werden können, für die ‖ G ‖∞≤ 1 gilt,erfolgt die Skalierung bzw. Normierung der Gleichungen (11.10) und (11.11) mit demFaktor γ. Die Berechnung der optimalen Funktion Q für
γopt=‖ T− UQ ‖∞
erfolgt in zwei Schritten:
1. Berechnung des minimalen Wertes der Norm ‖ T−UQ ‖∞ , γopt .
2. Berechnung der optimalen Funktion Q bei bekanntem γopt .
Man erkennt, dass (11.11) exakt der NP-Aufgabe entspricht.
(11.12)
Nevannlinna-Pick-Interpolation mit den Wertepaaren
a1, , anb1γ ,...,
bnγ
Dabei sind die ai = zi (Nullstellen von U) und die bi = T(zi).
Die Pick Matrix lässt sich als
(11.13)P= A− γ−2B , (A,B hermitesch)
schreiben (s. Definition (11.1) ). Dabei sind die Elemente von A bzw. B
Regelungstheorie 2 Hochschule Bremerhaven --- IAE84
(11.14)aij=1
ai+ ajbzw. bij=
bibjaj+ aj
.
Für dieNullstellen ai gilt grundsätzlich Reai > 0. Wennwir zusätzlich fordern, dass alleai verschieden sind, so gilt A > 0 (A ist positiv definit). Für dieseMatrix ist auchdieMatrix
A12 (der “Wurzel” aus A) positiv definit. Die Berechnung von A12 kann z.B. mit Hilfe derEigenvektor/Eigenwert---Zerlegung
A= VDV−1
erfolgen. Dabei ist V die Matrix der Eigenvektoren und D eine Diagonalmatrix mit denEigenwerten.DieWurzel einerDiagonalmatrixberechnet sicheinfach ausdenWurzelnder
Diagonalelemente. Durch Vergleich der Definition von A12 mit den Umformungen
A12A12 := A= VDV−1= VD
12D12V−1= VD
12V−1VD
12V−1
folgt für
A12= VD
12V−1 .
Aufgrund der Struktur von P = A - γ---2B folgen die Aussagen:
1. Für γ→∞ gilt P= A und somit P> 0.
2. Es gibt eine untere Grenze für γ, ab der P nicht mehr positiv definit ist.
Diese Grenze ist das optimale γ (Pick-Theorem (11.2) ):
(11.15)
γopt, der minimale Wert für A− γ−2B≥ 0, lautet
γopt= λmaxA− 12BA− 12(ohne Beweis)
λmax bezeichnet den größten (reellen) Eigenwert.
14.2.1 Algorithmus zur Berechnung Q(s) für min ‖ T− UQ ‖∞
Mit der Kenntnis von γopt lässt sich der Algorithmus zur Berechnung des optimalen Q(s)angeben:
1. Bestimmung der Nullstellen mit positivem Realteil von U
zi, i= 1, , n .
2. Berechnung der (komplexen) Funktionswerte von T an den Stellen zibi= T(zi), i= 1, , n .
3. Die n x n---Matrizen A und B ergeben sich nach der Berechnungsvorschrift
A : aij=1
zi+ zj, B : bij=
bibjzi+ zj
.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE85
4. Der minimale Wert der Norm ‖ T−UQ ‖∞ lautet
γopt= λmaxA− 12BA− 12 .
5. Lösung des NP-Problems für die Daten
z1 zn
γ−1optb1 γ−1optbn
Die Interpolation liefert G(s) mit
‖ G ‖∞≤ 1, G∈ φ .
6. Die optimale Funktion Q(s) lautet
Q=T− γoptGU .
Da sowohl T− γoptG als auch U die gleichen Nullstellen mit positivemRealteilbesitzen, erfüllt Q(s) die Forderung nach Stabilität (durch Pol-/Nullstellenkür-zung). Man kann Q als die beste stabile Approximation von T durch UQ imSinne der1-Norm auffassen.
:::
Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE86
Übung 10
15 Übungsbeispiel: ∞-Norm-optimale Regelungeiner instabilen Strecke
1-Norm-Minimierung der gewichteten Empfindlichkeitsfunktion WS für die instabileStrecke G(s)= s− 2
(s+ 2)(s− 1)
GKw ye
--
W(s)= 10010s+ 1W
Bild 11.1: Geschlossener Kreis mit Gewichtungsfunktion W
a) Welche Eigenschaften werden mit der Straffunktion W(s) festgelegt?
b) Stellen Sie eine koprime Zerlegung von G(s) auf.
c) Wie lauten T(s) und U(s) in der Gleichung WS = T---UQ?
d) Bestimmen Sie den minimalen Wert γopt für ‖ T− UQ ‖∞= Min.
e) Berechnen Sie die optimale Funktion G(s) := T --- UQ und damit Qopt(s) durchNevannlinna-Pick-Interpolation.
f) Wie lautet der (realisierbare) Regler K(s) für ‖ WS ‖∞= Min.K(s)?
g) Erläutern Sie die Unterschiede zwischen γoptW−1(jω) und S(jω) in dem folgendenBode-Diagramm (Bild 11.2) .

Regelungstheorie 2 Übung Hochschule Bremerhaven --- IAE87
Frequency (rad/sec)
GaindB
γopt ⋅W−1(jω)
S(jω)
Bild 11.2: Bode---Diagramme von S(jω) und der inversen Gewichtungsfunktion
:::
Regelungstheorie 2 Hochschule Bremerhaven --- IAE88
16 Berechnung 2- und∞-Norm-optimaler Reglerim Zustandsraum (H2-/H∞-Regler)
Die durch Minimierung der 2- und1-Normen entstandenen Regelungen werden häufigauch als H2- bzw. H1-optimale Regelungen bezeichnet. Der Buchstabe “H” steht fürHardy-Raum [22]. DerRaumbesteht aus derMenge aller Funktionen F(s) der komplexenVariable s, die analytisch in der rechten Halbebene sind und deren 2-Norm (für H2) bzw.1-Norm (für den Raum H1) endlich sind. Sofern Übertragungsfunktionen Element vonH2 bzw. H1 sind, bezeichnet man Ihre Normen auch als H2-Norm bzw. H1-Norm.
Wendetmandie in den vorangegangenenKapiteln beschriebenen2- und1-Norm-optima-len Regler für Eingrößenstrecken auf die Minimierung von S(s) für die Strecke
G(s)= 1s+ 1
an, so entstehen Regler mit unendlicher Verstärkung.
Die koprime Faktorisierung liefert
N= G , M= 1 , X= 0 , Y= 1 .
Die Übertragungsfunktion S lautet mit dem Parameter Q geschrieben
S= M(Y− NQ)= 1− 1s+ 1Q .
Auf die Form T - UQ gebracht erhält man
T= 1 , U= 1s+ 1 .
Der optimale Parameter Qopt ist gemäß (10.7) aus Kap. 12:
Qopt= U−1mpU−1ap Tst= U−1T= s+ 1 , (Uap= 1 , Ump= U) .
Dies ist auch der optimale Parameter für die 1-Norm-optimale Regelung, da U keineNullstellen in der rechten Halbebene aufweist. Für beide Regler folgt
K= Q1− GQ=
s+ 11− 1 ⇒ ∞ .
Die Lösung ist plausibel, da ja mit einem Regler unendlicher Verstärkung die Normen derÜbertragungsfunktion S gegen Null gehen und der geschlossene Kreis stabil ist. DiesesBeispiel zeigt, dass nicht für alle Strecken die Lösung für den Eingrößenfall zu einerbrauchbaren Lösung führt.
Für Regelstrecken ohne Nullstellen in der rechten Halbebeneführen die Norm-optimalen Reglerentwürfe im Eingrößenfallauf Regler mit unendlicher Verstärkung.
Ein realistischer Reglerentwurf muss die Stellgröße und/oder die Empfindlichkeit aufMesswertstörungen berücksichtigen.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE89
Die Einbeziehung von Stellgrößen und anderen Entwurfszie-len in den Entwurf führt auch bei SISO-Strecken aufMehrgrößenstrukturen.
Somit unterscheidet sich der Entwurf von Ein- und Mehrgrößenstrecken nicht mehrvoneinander. Der Entwurf erfolgt zweckmäßigerweise im Zustandsraum, daMehrgrößen-systeme durch die Zustandsraumbeschreibung effizienter beschrieben werden als in FormvonÜbertragungsmatrizen. Darüber hinaus basieren alle numerisch stabilenAlgorithmenzur Berechnung 2- und 1-Norm-optimaler Regler auf einer Beschreibung imZustandsraum. Zunächst wird jedoch auf die Definition der Normen im Mehrgrößenfallund ihre Berechnung eingegangen.
16.1 Berechnung der 2-Norm von Mehrgrößenstrecken
Im Mehrgrößenfall wird G(t) eine Matrix (=Matrix der Impulsantworten). Es bestehenmehrere Möglichkeiten, die Definition der 2-Norm auf Mehrgrößensysteme zu erweitern[67].
(12.1)‖ G ‖2 := Spur∞
−∞
GGTdt(12.2)oder ‖ G ‖2 := λmax
∞
−∞
GGTdt(12.3)oder ‖ G ‖2 := dmax
∞
−∞
GGTdt(dmax=maximales Element
der Hauptdiagonalen)
Die Matrix GGT ist eine quadratische Matrix, deren Elemente aus Produkten derImpulsantworten bestehen. Die Definition (12.1) bezeichnet man als 2-Norm von G,obwohl es sich immathematischen Sinn nicht um eine sogenannteOperator-Norm handelt[67]. Die 2-Norm ist anschaulich die Summe der Energien aller Impulsantworten. DieDefinitionen (12.2) und (12.3) stellen ebenfalls sinnvolle Normen dar, jedoch existierenkeine einfachen Lösungen für deren Minimierung.
Die Impulsantwort für eine Mehrgrößenstrecke lautet
G(t)= CeAtB . (12.4)
Dabei ist eAt die sogenannte Transitionsmatrix, die den Verlauf der Zustandsgrößen beieiner gegebenen Anfangsbedingung ohne äußere Einwirkungen x(t=0) = x0 beschreibt.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE90
x(t)= eAtx0
Die Matrix eAt lässt sich leicht über eine Reihenentwicklung der Exponentialfunktionberechnen
eAt= I+ 11!At+12! (At)
2+ 13! (At)3+ .
Die Transponierte von (12.4) ist
GT(t)= CeAtBT= BTCeAt
T= BTeATtCT . (12.5)
Mit (12.4) und (12.5) kann die Definition (12.1) wie folgt geschrieben werden:
‖ G ‖22= Spur∞
−∞
GGTdt= Spur∞
−∞
CeAtBBTeATtCTdt
(12.6)= SpurC
∞
−∞
eAtBBTeATtdt CTSteuerbarkeits---Gramsche GS
Die Spur von GGT ist mit der Spur von GTG identisch. Somit existiert eine duale Formzu (12.6).
‖ G ‖22= Spur∞
−∞
GTGdt= Spur∞
−∞
BTeATtCTCeAtBdt
(12.7)= SpurBT
∞
−∞
eATtCTCeAtdt BBeobachtbarkeits---Gramsche GB
Die Steuerbarkeits- und Beobachbarkeits-Gramschen sind die Lösungen der Lyapunov-Gleichungen
AGS+GSAT+ BBT= 0 , (12.8)
ATGB+ GBA+ CTC= 0 . (12.9)
Zur Lösung der Lyapunov-Gleichungen existieren effiziente Algorithmen in mathemati-schen und regelungstechnischen Bibliotheken (z.B. [46]). Die 2-Norm imMehrgrößenfallberechnet sich dann wie folgt:
‖ G ‖2= SpurCGSCT (12.10)
‖ G ‖2= SpurBTGBB (12.11)

Regelungstheorie 2 Hochschule Bremerhaven --- IAE91
16.2 Berechnung der∞-Norm von Mehrgrößenstrecken
Die Bestimmung der 1-Norm für Systeme mit mehreren Ein- und Ausgangsgrößenerfordert eine Erweiterung des Betragsbegriffes aufMatrizen. Für jedeMatrix K∈ Cmxn
existieren orthogonale Matrizen U∈ Cmxm und V∈ Cnxn (UTU = Im , VTV = In), sodass das Produkt
UTKV= (12.12), σ i∈ R
σ1σ2
σ3
σp0
0
σ1≥ σ2≥ σ3≥ σp , p= minm, n
eine reelle Diagonalmatrix ergibt. Die reellen Werte σi sind die singulären Werte derMatrix K. Sie bilden die Radien eines Hyperelypsoids
E= |y| | y= Kx, |x|= 1 .
Man bezeichnet (12.12) als SVD (Singular Value Decomposition). Die singulären Wertegeben an, um welchen Faktor sich ein Vektor x durch die Abbildung an der Matrix Ax inder Länge ändert. ImGegensatz zu den Eigenwerten λi kann sich dabei die Richtung desVektors ändern.Wie auch bei den Eigenwerten gilt:
|det[A]|=ni=1
σ i=n
i=1
|λi| . (12.13)
Die singulärenWerte charakterisierendas “Verstärkungsverhalten” einerMatrix besser alsdie Eigenwerte, denn die größte bzw. kleinste Längenänderung erfolgt nicht zwangsläufigauch in der Richtung des Eingangsvektors x. Dies kommt durch die Eigenschaft
σ1≥ |λmax| , σp≤ |λmin| (12.14)
zum Ausdruck. σ1 ist der größte Singularwert von K und wird mit σ bezeichnet. Erbeschreibt diemaximalmöglicheLängenänderung einesVektors durchAbbildung aneinerMatrix und kann als Verallgemeinerung des Betrags von Skalaren aufgefasst werden.
Der größte singuläre Wert einer Matrix ist das Supremum
‖ K ‖∞:= σ [K]=|Kx||x|
(12.15)
Mit (12.15) kann die 1-Norm analog zum Eingrößenfall als das Supremum über alleFrequenzen definiert werden:
‖ G ‖∞ := supωσ [G(jω)] . (12.16)
Obwohl G(jω) eine komplexe Matrix ist, sind alle Singulärwerte von G(jω) reell.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE92
Man könnte σ [G(jω)] für viele Werte von ω ausrechnen und das Maximum als ‖ G ‖∞annehmen. Es besteht dannallerdings dieGefahr, dassmandenFrequenzbereich auslässt,in demdasMaximum von |G(jω)| tatsächlich auftritt. Das Supremummuss zwar in einemiterativen Prozess bestimmt werden; es ist allerdings vorteilhaft, direkt den größtensingulärenWert zubestimmen.Das vonBoyd [7]bzw.Doyle [20] vorgeschlageneVerfahrenbestimmt die Norm einer Übertragungsfunktion iterativ über einen Parameter γ, der mitdem Wert der1-Norm identisch ist.
Man geht von einer Zustandsdarstellung einer stabilen, begrenztenÜbertragungsfunktion
G= [A,B,C,D]
aus und skaliert G mit γ:
γ−1G= A, γ−1B,C, γ−1D . (12.17)
Es wird die folgende Beziehung
σ [K]= λmaxKTK (12.18)
zwischen maximalem Eigenwert und dem größten singulären Wert ausgenutzt, um σ vonG zu finden. Wenn γ= sup
∀ωσ G(jω) gilt, so muss es irgendeinen Eigenvektor x geben, so
dass
(12.19)
xλmax= G*(jω)G(jω)x ,
xγ2= G*(jω)G(jω)x
erfüllt ist. Da G*(jω)G(jω) immer positiv semidefinit ist, muss Reλmax > 0 sein. DieGl. (12.19) kann man in der Form
I− γ−2G*Gx= 0 (12.20)
schreiben.Damit (12.20) für irgendein x≠ 0 erfüllt wird,muss γ2I−G*Gauf der imaginärenAchse (jω) singulär werden. Gleichbedeutend damit ist die Aussage, dass
γ2I−G*G−1
(12.21)
einen Pol auf der imaginären Achse aufweisenmuss. Es lässt sich zeigen (z.B. aus (12.22)),dass für γ! 1 alle Pole von (12.21) bei denen von A und -A liegen. Verkleinert manγ, so wird bei γ = σ [G(jω)] der Realteil mindestens eines Pols von (12.21) gleich Null. Esgenügt also, die Realteile der Pole von (12.21) zu überprüfen.
Der kleinste Wert von γ, für den alle Pole einenRealteil ungleich Null aufweisen, ist damit identischmit der1-Norm von G.
Mit den im Anhang B aufgeführtenGleichungen zur Rechnung mit Zustandsbeschreibun-gen folgt für die A---Matrix A
γ2I−G*G von (12.21):

Regelungstheorie 2 Hochschule Bremerhaven --- IAE93
Aγ2I−G*G= A+ BR−1DTCCTI+ DR−1DTC
− BR−1BT
− A+ BR−1DTC T . (12.22)
R= γ2I− DTD
DieseMatrix ist eine Hamilton-Matrix, die Eigenwerte liegen also spiegelsymmetrisch zurimaginären Achse. Die Berechnung der Eigenwerte von (12.22) und damit der Pole von(12.21) ist ein Standardproblem der numerischen Mathematik.
Das Diagramm in Bild 12.1 zeigt für das Beispiel
G= 0− 39.478
1− 1.257, 0
39.478, 1 0, [0](schwingungsfähige PT2-Strecke) den stetigen Verlauf des Abstands der Eigenwerte zurimaginären Achse als Funktion des Parameters γ.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 2 4 6 8 10 12 14 16 18 20γA
bstandzurimaginärenAchse
‖ G ‖∞= 5.0252
| Reλ [A] |= 0.6283
Bild 12.1: Abstand der Eigenwerte zur imaginären Achse
Man erkennt, dass sich die1-Norm leicht anhand des stetigen Verlaufs des Abstands vonder imaginären Achse ermitteln lässt.
16.3 Berechnung Norm-optimaler Regler imZustandsraum
Man kann die Entwurfsaufgabe unabhängig von der gewählten Norm darstellen.
z v
u y
P
K---
Bild 12.2: Formulierung der Entwurfsaufgabe
Regelungstheorie 2 Hochschule Bremerhaven --- IAE94
Jedes Entwurfsproblem kann auf die Form von Bild 12.2 gebracht werden. Die Größen y,v, u und z können nun beliebige Dimensionen haben. Die Signale haben folgendeBedeutung:
z: Anregung, Störung, Sollwertev: Fehlergrößen, die möglichst kleine Werte
annehmen sollen:Regelfehler, Stellgrößen usw.
u, y: Aus- bzw. Eingangsgrößen des Reglers
Die Entwurfsaufgabe wird gemäß Bild 12.2 definiert:
Gesucht wird der Regler K, der die Auswirkungender Anregung z auf die Fehlergrößen v bezüglicheiner bestimmten Norm minimiert.
Der Block P enthält neben demModell der Strecke auchGewichtungsfunktionen, um dieAnforderungenandieRegelungzubeschreiben.Dies soll an einemtypischenBeispiel (Bild12.3 und 12.4) gezeigt werden.
K G W1
W2
w=0 u yz
--
Tiefpass
Hochpass
Bild 12.3: Strecke mit Gewichtungsfunktionen (Beispiel)
Durch Umzeichnen von Bild 12.3 erhält man die P-Struktur (Bild 12.4).
P
K
zW1
W2
G
v1
v2
v
---
y
u
Bild 12.4: Synthese der Übertragungsfunktion P (Beispiel)
Mankann P in vierBlöcke P11,P12,P21 und P22 zerlegen, die dieÜbertragungsfunktionenvon z und u nach v und y beschreiben.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE95
v= P11z+ P12u (12.23)
y= P21z+ P22u (12.24)
Die resultierende Übertragungsfunktion von z nach v ergibt sich zu
Tvz := P11+ P12K(I+ P22K)−1P21 . (12.25)
Man bezeichnet (12.25) als LFT (lineare Fraktionaltransformation) von K mit P alsKoeffizientenmatrix der LFT.
16.3.1 Beispiel: PT1-Strecke mit proportionalen Gewichtungsfunktionen W1und W2
Die vier Übertragungsfunktionen aus (12.23) bzw. (12.24) lauten
P= P11P21 P12P22 =
W10 I
W1GW2 G
.
In Zustandsform erhält man
P=[A], 0 B,
W1C0C,W101
0W20.
Mit der Strecke und den Gewichtungsfunktionen
G(s)= 1s+ 1=
[− 1, 1, 1, 0] , W1= 2 , W2= 3
lauten die Zahlenwerte für P
P=[− 1] , 0 1 , 20
1 , 20
1
030.
Obwohl es sich bei G um eine Eingrößenstrecke handelt, führt die gleichzeitigeBerücksichtigung von Regelgröße und Stellgröße auf ein Mehrgrößenproblem. Die“erweiterte” Strecke P besitzt 2 Ein- und 3 Ausgangsgrößen.
16.3.2 Struktur des Blocks P
Um in Zustandsform die Eingänge z und u bzw. v und y unterscheiden zu können,erhalten die B-, C- und D-Matrizen die Indizes 1 bzw. 2. Die Teilübertragungsfunktionen
P11= [A, B1, C1, D11] (12.26)
P12= [A, B2, C1, D12] (12.27)
P21= [A, B1, C2, D21] (12.28)
P22= [A, B2, C2, D22] (12.29)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE96
bilden das Gesamtsystem
(12.30)P= P11P21 P12P22 = A, B1 B2, C1C2, D11D21 D12D22 .Mit Hilfe der Matrizen in (12.30) lassen sich die 2-Norm- und1-Norm-optimalen Reglersowie notwendige und hinreichende Bedingungen für die Existenz von Lösungen angeben.
16.4 Berechnung des 2-Norm-optimalen Reglers
Die Lösung des Mehrgrößensystems
‖ Tzv ‖2→ Min. (12.31)
lässt sich sehr elegant im Zustandsraum angeben. Da die Herleitung der Gleichungen zurBerechnung des Reglers im Zustandsraum sehr aufwendig ist, sollen an dieser Stelle nurdie Ergebnisse vorgestellt werden. Dabei wird nach Bild 12.2 derjenige Regler bestimmt,der die 2---Norm der Übertragungsfunktion Tzv zu einem Minimum macht. Der2-Norm-optimale Regler lautet
K2= [A+ B2F2+ H2C2 , H2 , F2 , 0] (12.32)
Während der Index “2” in B2 und C2 Matrizen des Systems P kennzeichnet, bedeutetdieser Index in K2,F2 und H2, dass es sichumLösungen für den 2-Norm-optimalenReglerhandelt.
Die Matrizen F2 und H2 berechnen sich aus den Lösungen zweier algebraischerMatrix-Riccati-Gleichungen:
F2=− BT2X2 , (12.33)
X2 : ATX2+ X2A− X2B2BT2X2+ CT1C1= 0 , (12.34)
H2=− Y2CT2 ,
Y2 : AY2+ Y2AT− Y2CT2C2Y2+ B1BT1= 0 .
(12.35)
(12.36)
Vergleichtmandie Lösungmit demLQG-Regler ausKap.NO TAG, so stelltman fest, dassLQG eine spezielle Lösung des 2-Norm-Problems darstellt.
Die 2-Norm-optimale Regelung ist von der Struktursomit also eine Zustandsregelung mit Beobachter/Kalman-Filter.
Setzt man in der algebraischen Regler-Riccati-Gleichung (CARE) R = I und C1 = Q1/2,so gelangt man auf die gleiche Lösung für F2. Entsprechendes gilt für die algebraischeFilter-Riccati-Gleichung (FARE), die sich aus Θ = I und B1 = Ξ1/2 ergibt. Das Bild 12.5zeigt LQG als Sonderfall des 2-Norm-optimalen Reglers.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE97
K
B C
Q1/2Ξ1/2
A
--
u y
vz
P
Bild 12.5: Zusammenhang zwischen LQG und 2-Norm-optimaler Regelung
2-Norm und LQG sind eng verwandt. Jedoch bietet die 2-Norm-optimale Regelung vielmehr Freiheitsgrade für den Entwurf, da nun auch frequenzabhängige Gewichtungsfunk-tionen einsetzbar sind. LQG erlaubt lediglich die Spezifikation der reellenMatrizen Q,R,Ξ und Θ.
16.4.1 Beispiel für eine 2-Norm-optimale Regelung mit dynamischerStellgrößenbeschränkung
Bei der Strecke
G= 1s+ 1= [A, B, C, D]= [− 1, 1, 1, 0]
soll sowohl der Regelfehler als auch die Stellgröße frequenzabhängig bewertet werden. ImBereich tiefer Frequenzen ist es sinnvoll, den Regelfehler klein zu halten, d.h. mit einerrelativ großen Gewichtungsfunktion zu bewerten. Die Stellgröße soll im hohenFrequenzbereich kleine Werte annehmen. Diese Anforderungen können mit der Strukturin Bild 12.6 für P beschrieben werden.
Die Gewichtungsfunktion W1 bewertet die Auswirkungen der Störgröße z auf dieRegelgröße y. Zu einer hohen Bewertung von y bei tiefen Frequenzen muss W1 alsTiefpass ausgelegt werden. Entsprechend ist für W2 ein Hochpass anzusetzen, um denEinfluss der Stellgröße für hohe Frequenzen zu gewichten.
P
G
z
u
v1
y
vv2
W1
W2
Bild 12.6: Spezifikation der Entwurfsziele durch Gewichtungsfunktionen
Regelungstheorie 2 Hochschule Bremerhaven --- IAE98
1e---4
1e---3
1e---2
0.1
1
10
100
1e---4 1e---3 1e---2 0.1 1 10 100 1000 10000
W1
W2
Bild 12.7: Gewichtungsfunktionen W1 und W2
DieGewichtungsfunktionen nehmen in unterschiedlichen Frequenzbereichen hoheWertean. Die Grenzfrequenz beschreibt die Bandbreite der Regelung. Diese Gewichtungsfunk-tionen lassen sich durch folgende Zustandsdarstellungen beschreiben:
W1= [− 0.0628, 0.0628, 38, 0]
W2= [− 0.0628, − 0.0628, 0.38, 0.38]
Die D-Matrix von W1 muss Null sein, da die 2-Norm aufgrund des direkten Einflusses vonz sonst unendlich würde. Für P ergibt sich damit ein System 3. Ordnung (Strecke und zweiGewichtungsfunktionen 1. Ordnung).
P= − 1− 0.0628
0
0− 0.06280
00
− 0.0628, 0
− 0.06280
10
− 0.0628 ,
001
− 3800
0380, 00
1
00.380
Die Auswertung der Gleichungen (12.32)---(12.36) liefert den folgenden Regler:
K=− 3.62100.1647
96.39− 0.0628− 6.065
− 0.0100
− 0.062, 00.0628
0 ,
− 2.6211 96.39 − 0.0102, [0] .
Die Ordnung des Reglers ergibt sich aus der Summe der Ordnungen von Strecke (1) undder zwei Gewichtungsfunktionen (je 1). Die Simulation von Stör- und Führungsverhaltenzeigt das Bild 12.8.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE99
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 2 4 6 8 10 12 14 16 18 20
Stellgröße u
Regelgröße y
Störgröße am Eingang der Strecke
Bild 12.8: Führungs- und Störverhalten des 2-Norm-optimalen Reglers
Aufgrund der endlichenGewichtungsfunktion W1 bei tiefenFrequenzen verschwindet derRegelfehler im stationären Zustand nicht. Stationäre Genauigkeit erhält man für denGrenzfall |W1(jω=0)|! 1. Dies bedeutet jedoch, dass W1 einen Pol im Ursprungbesitzenmüsste, der durchdenRegler nicht beseitigtwerdenkann. Pole auf der imaginärenAchse außerhalb des geschlossenen Regelkreises verletzen die Lösbarkeitsbedingungen,auf die im folgenden Kapitel eingegangen wird.
16.5 Bedingungen für die Existenz von Lösungen für den2-Norm-Entwurf
Notwendige und hinreichende Bedingungen für die Existenz von 2-Norm-optimalenReglern lassen sich mit Hilfe der einzelnenMatrizen von P (12.30) angeben, da mit Hilfevon P der Entwurf vollständig spezifiziert ist.
Die Existenz einer Lösung hängt von der positiv semidefiniten Lösung der zweialgebraischen Matrix-Riccati-Gleichungen (12.34), (12.36) ab. Es genügt also zu zeigen,wann eine solche Lösung existiert. Da die Gewichtungsfunktionen beliebig kompliziertwerden dürfen, lassen sich keine einfachen Voraussetzungen wie für den LQG-Entwurf(Kap. NO TAG, NO TAG) angeben. Anhand der den Riccati-Gleichungen zugeordnetenHamilton-Matrizen (Kap. NO TAG bzw. NO TAG) können die Lösbarkeitsbedingungenangegeben werden.
Die den Riccati---Gleichungen zugeordneten Hamilton-Matrizen lauten für X2:
HX2= A− CT1C1
− B2BT2− AT (12.37)
und für Y2:
HY2= AT− B1BT1− CT2C2− A . (12.38)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE100
Die folgende Bedingung ist notwendig:
Die Hamilton-Matrizen HX2 und HY2 dürfen keine Eigenwerte aufder imaginären Achse aufweisen [68].
Die Algorithmen zur Lösung der Riccati-Gleichung erfordern eine Aufteilung in positiveund negative Eigenwerte. Bestehen Eigenwerte auf der imaginären Achse, so ist dieseAufteilung nicht eindeutig möglich.
Sind zusätzlich die beiden folgendenBedingungen erfüllt, so ist dies für die Existenz positivsemidefiniter Lösungen der Riccati-Gleichungen hinreichend:
B2B2T positiv oder negativ semidefinit bzw. C2TC2 positiv odernegativ semidefinit [20].
(A, B2B2T) stabilisierbar bzw. (AT, C2TC2) stabilisierbar [20].
Die imZusammenhangmit derLösung vonRiccati-Gleichungen gebräuchliche Forderungnach Steuerbarkeit bzw. Beobachtbarkeit ist hier nicht anwendbar, da sichGewichtungsfunktionen außerhalb des geschlossenen Kreises befinden. Die Zustandsgrö-ßen der Gewichtungsfunktionen sind somit entweder nicht steuerbar oder nichtbeobachtbar. Daraus folgt jedoch, dass Gewichtungsfunktionen grundsätzlich stabil seinmüssen, um die letztgenannten Bedingungen zu erfüllen.
16.6 Berechnung des ∞-Norm-optimalen Reglers
Wie auch bei der Berechnung der 1-Norm (Kap. 16.2) muss der Entwurf des1-Norm-optimalen Reglers ebenfalls iterativ erfolgen. Man gibt eine Grenze γ für die1-Norm der zuminimierendenÜbertragungsfunktion Tvz vor undkann dannüberprüfen,ob alle Bedingungen zur Berechnung des zugehörigen Reglers erfüllt sind.
Inzwischen existieren verschiedene Lösungsverfahren. Das historisch erste wurde um 1984entwickelt und basierte auf derQ-Parametrierung [19], [57]. Für den Eingrößenfall wurdedie Lösung nach diesem Verfahren in Kap. 14 hergeleitet. Ein numerisch robustes undzuverlässiges Verfahren wurde von Safonov [58] angegeben. Es beruht auf der Lösungzweier Riccati-Gleichungen und einer Systembeschreibung in Deskriptor-Form.
Wirwollendas häufig eingesetzte undebenfalls numerisch sehr robusteGlover-Doyle-Ver-fahren [20], [30] zur Lösung des1-Norm-Problems einsetzen. Die Struktur nach Bild 12.2können wir auch für die Minimierung der1-Norm anwenden.
Der1-Norm-suboptimale Regler ist nach [20]:
K∞ = [ A∞, Z∞H∞, F∞, 0 ] , (12.39)
A∞ = A+ γ−2B1BT1X∞+ B2F∞+ Z∞H∞C2 . (12.40)

Regelungstheorie 2 Hochschule Bremerhaven --- IAE101
Suboptimal bedeutet in diesem Zusammenhang, dass nur ein Regler bestimmt werdenkann, der auf eine1-Norm von ‖ Tvz ‖∞< γ führt, sofern eine solche Lösung existiert. Derminimale Wert für ‖ Tvz ‖∞, für den noch eine Lösung existiert, liefert den1-Norm-optimalen Regler. Man kann somit die optimale Lösung beliebig genauannähern.
DieBerechnungderMatrizen Z1, H1 sowie F1 erfordertwiebei der2-NormdieLösungzweier algebraischer Riccati-Gleichungen.
X∞ : ATX∞+ X∞A− X∞B2BT2− γ−2B1BT1X∞+ CT1C1 , (12.41)
Y∞ : AY∞+ Y∞AT− Y∞CT2C2− γ−2CT1C1Y∞+ B1BT1 . (12.42)
Die einzelnen Matrizen des Reglers berechnen sich wie folgt:
F∞ = − BT2X∞ , (12.43)
H∞ = − Y∞CT2 , (12.44)
Z∞ = − I− γ−2Y∞X∞−1. (12.45)
Die Struktur des 1-Norm-optimalen Reglers unterscheidet sich deutlich von der2-Norm-optimalenRegelung bzw. vonLQG.Der1-Norm optimale Regler minimiert dengrößten singulären Wert
σ [Tzv(jω)] ∀ω .
Es ist verständlich, dass dieses Kriterium nicht mit einer Beobachter/Zustandsrückfüh-rungs---Struktur erfüllt werden kann. Die Gleichungen (12.39) und (12.40) ergeben dasBlockschaltbild 12.9.
An zwei Stellen unterscheidet sich die Struktur des 1-Norm-optimalen Reglers von derBeobachter/Zustandsrückführungs-Struktur:
1. Die Reglermatrix A1 ist um den Term γ−2B1BT1X∞ erweitert.
2. Die Filterverstärkung ist um die Matrix Z1 erweitert.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE102
B2 C2
Z1H1
F1
A+ γ−2B1BT1X∞
K1
u y
--
Bild 12.9: Struktur des1-Norm-optimalen Reglers
Für γ!1 geht der 1-Norm-optimale Regler exakt in den 2-Norm-optimalen Reglerüber. Mit kleiner werdendem γ gewinnen der Term γ−2B1BT1X∞ und die Matrix Z1 immermehr an Einfluss. Man kann diese Terme als Erweiterung des Beobachters auffassen, derjeweils (im Sinne der 1-Norm) die “ungünstigste” Störung z berücksichtigt. DieMinimierung der 1-Norm bewirkt ja eine Minimierung des größten singulären Wertesüber der Frequenz. Die Erweiterungen (12.40) und (12.45) sorgen dafür, dass dasÜbertragungsverhalten für alle Frequenzen (einschließlich Gewichtungsfunktionen)gleich gut ist.
16.7 Beispiel für eine ∞-Norm-optimale Regelung
Für die gleiche Strecke wie im Kap. 16.4.1 (2-Norm-optimale Regelung) soll ein1-Norm-optimalerRegler entworfenwerden.WirkönnendieGewichtungsfunktionen W1und W2 und damit auch P unverändert übernehmen.
Die frequenzabhängigen Gewichtungsfunktionen beeinflussen nun unmittelbar denFrequenzgang der Übertragungsfunktion des geschlossenen Kreises
Tzv= W1SW2KS .Tzv besteht aus zwei Eingrößenstrecken. Folglich setzt sich σ aus den Beträgen |W1S(jω)|und |W2KS(jω)| zusammen. Da W1 und W2 in unterschiedlichen Frequenzbereichengroße Beträge aufweisen, bestimmt bei tiefen Frequenzen W1 und bei hohen FrequenzenW2 den größten singulären Wert σ [Tzv].
Die iterative Optimierung nach den Gln. (12.39)---(12.45) führte bei einem minimalenγ = 0.9805 auf den Regler

Regelungstheorie 2 Hochschule Bremerhaven --- IAE103
K∞ =− 1326083.27
54514− 0.06− 3425
113.90
− 7.218, 00.239
0,
− 348.7 14345 29.97, [0] .
Wie zu erwarten, führen die Beträge |W1S(jω)| und |W2KS(jω)| auf einen maximalensingulären Wert, dessen Verlauf über der Frequenz keine Maxima mehr aufweist.
1e---03
1e---02
0.1
1
10
1e---041e---031e---02 0.1 1 10 100 1000 10000
|W1S|
|W2KS|
σ [Tzv]
Bild 12.10: Singuläre Werte
In der Simulation der Sprung- und Störantwort (Bild 12.11) erkennt man keinewesentlichen Unterschiede im Vergleich zum 2-Norm-optimalen Regler (Bild 12.8). Fürnicht-sprungförmige Signale ist jedoch mit besseren Eigenschaften des1-Norm-optima-len Reglers zu rechnen, da die singulären Werte von Tzv über den gesamtenFrequenzbereich die kleinstmöglichen Werte annehmen, d.h. |S|≈ 1∕|W1| und|KS|≈ 1∕|W2|.
00.2
0.40.6
0.81
1.21.4
1.61.8
2
0 2 4 6 8 10 12 14 16 18 20
Regelgröße y
Störgröße am Eingang der Strecke
Stellgröße u
Bild 12.11: Führungs- und Störverhalten des1-Norm-optimalen Reglers
Regelungstheorie 2 Hochschule Bremerhaven --- IAE104
In dem gezeigten Beispiel ist γ0 = 0.9805, d.h. etwa eins. Da die1-Norm das Maximumdes größten singulären Wertes von Tzv darstellt, gilt somit
σ [Tzv]≤ γ0 .
Diese Ungleichung kann nur erfüllt werden, wenn die singulären Werte derTeilübertragungsfunktionen W1S und W2KS ebenfalls kleiner als γ0 sind:
σ [W1S]= | W1S(jω) |≤ γ0 ,
σ [W2KS]= | W2KS(jω) |≤ γ0 .
Eingrößenfall
Die beiden letztenUngleichungen zeigen, wie durch Vorgabe der Gewichtungsfunktionenbeim1---Norm---Entwurf quantitativ Entwurfsziele spezifiziert werden können:
| S(jω) |≤ γ0|W1(jω)|
< 1|W1(jω)|
,
| KS(jω) |≤ γ0|W2(jω)|
< 1|W2(jω)|
.
16.8 Bedingungen für die Existenz von Lösungen für den∞-Norm-Entwurf
Die Berechnung des 1-Norm-(sub)optimalen Reglers erfordert die Lösung von zweialgebraischen Matrix-Riccati-Gleichungen und die Berechnung von
Z∞ = I− γ−2Y∞X∞−1. (12.46)
Die Lösbarkeit der Riccati-Gleichungen wurde inKap. 16.5 behandelt. Betrachtet werdenmüssen die den Riccati-Gleichungen (12.41) und (12.42) zugeordneten Hamilton-Matri-zen
HX∞ = A− CT1C1
− B2BT2− γ−2B1BT1− AT (12.47)
und
HY∞ = AT− B1BT1− CT2C2− γ−2CT1C1
− A . (12.48)
Notwendig sind wieder die Bedingungen:
Die Hamilton-Matrizen HX1 und HY1 dürfen keine Eigenwerteauf der imaginären Achse aufweisen [68].
Aufgrund der von γ abhängigen Terme

Regelungstheorie 2 Hochschule Bremerhaven --- IAE105
(12.49)B2BT2− γ−2B1BT1
sowie
(12.50)CT2C2− γ−2BT1C1
kann nicht von vornherein bestimmt werden, ob (12.49) oder (12.50) positiv oder negativsemidefinit ist. Es ist deshalb einfacher, bei Erfüllung der Eigenwertbedingung zuüberprüfen, ob die Lösungen X1 bzw. Y1 der Riccati-Gleichungen tatsächlich positivsemidefinit sind. Sofern positiv semidefinite X1 und Y1 existieren, bleibt nachzuweisen,wann U = I --- γ---2Y1X1 invertierbar ist und somit Z1 berechnet werden kann. Wenndie Determinante von U Null wird, muss mindesten ein Eigenwert von U Null werden,d.h. es gilt
Uxe= xe− γ−2Y∞X∞xe= 0
(xe ist Eigenvektor zumEigenwert 0 von U). Damit muss aber xe gleichzeitig Eigenvektorvon Y1X1 sein. Da wir an der oberen Schranke von γ interessiert sind, für die U singulärwird, erhalten wir als Bedingung für die Lösbarkeit von (12.46):
à [Y∞X∞]< γ2 . (12.51)
à [Y∞X∞] ist der Spektralradius (Betrag des größten Eigenwertes) von Y∞X∞.
In einem iterativen Prozess ist das kleinste γ zu bestimmen, für das alleLösbarkeitsbedingungen erfüllt sind. Diesen Wert bezeichnet man als γ0; er bildet daserreichbare Minimum der Norm ‖ Tzv ‖∞ und führt auf den optimalen Regler K1.
:::
Regelungstheorie 2 Hochschule Bremerhaven --- IAE106
17 Reglerentwurf für Prozesse mit unsicherenParametern und unstrukturiertenModellunsicherheiten
Das Problem, einen Regler für Prozesse mit Parameter- oder Modellunsicherheiten zuentwerfen, kann mit Bild 13.1 beschrieben werden.
∆
K
Pz v
Bild 13.1: Entwurf von Reglern für robuste Stabilität / robuste Regelqualität
JedeEntwurfsaufgabe lässt sichauf dieStruktur vonBild 13.1bringen.OhneBeschränkungder Allgemeinheit kann die Matrix ∆ in Blockdiagonalform aufgestellt werden.
∆= diag (∆1, ∆2, , ∆S) (13.1)
∆i können Matrizen oder Skalare sein. Man bezeichnet Skalare zur Unterscheidung mitδi . Die Elemente sind im allgemeinen komplex, sie können in einzelnen Fällen zurBeschreibung von Parameterunsicherheiten auch reell sein. Reelle Elemente in ∆ führenallerdings häufig zu numerischen Schwierigkeiten bei der Robustheitsanalyse.
Die ∆i bzw. δi sindunbekannt.Durch entsprechende SkalierungderMatrizen von P kannman als Obergrenze immer
|δ i|≤ 1 , σ [∆i]≤ 1 (13.2)
voraussetzen.
Grundsätzlich kann man vier Entwurfsaufgaben mit aufsteigendem Schwierigkeitsgradunterscheiden:
1. NS (nominelle Stabilität, nominal stability) ∆ = 0Die Regelung mit dem Prozessmodell ist stabil. Dies ist eine Voraussetzung füralle folgenden Anforderungen. LQG und die koprime Faktorisierung sindBeispiele für die Gewährleistung von NS.
2. NP (nominelle Regelqualität, nominal performance) ∆ = 0Die Regelung mit dem Prozessmodell als Regelstrecke gewährleistet einevorgegebene Qualität (z.B. ‖ WS ‖2≤ 1 oder ‖ WS ‖∞≤ 1). Die Q-Parametrierungeines Norm-optimalen Reglers stellt beispielsweise NP sicher.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE107
3. RS (robuste Stabilität, robust stability) ∆≠ 0.Das geregelte System ist für einen definierten Unsicherheitsbereich stabil(worst case stability).Hier müssen wir zwischen unstrukturierter und strukturierter (Parameter-)Unsicherheit unterscheiden.Der Fall unstrukturierterModellunsicherheit (∆A ,∆M) wurde bereits in Kap. 6.1 behandelt. Die Bedingungen können wir mit denErgebnissen aus Kap. 16 für denMehrgrößenfall verallgemeinern (Small GainTheorem [55],[72], siehe auch Kap. 6.1):
σ [∆AKS]< 1 , (13.3)
σ [∆MT]< 1 . (13.4)
Die im einzelnen unbekannten Unsicherheiten ∆A bzw. ∆M werden durchGewichtungsfunktionen beschrieben, die eine obere Schranke für ∆ bilden. Esist somit zu fordern
σ [WKS]=‖ WKS ‖∞< 1 , (13.5)
σ [WT]=‖ WT ‖∞< 1 . (13.6)
Umrobuste Stabilität und eine bestimmteRegelqualität zu erreichen, wirdmanalso einen Regler entwerfen, der auf
W1TW2S < 1 (für ∆M) bzw. (13.7)
∞
W1KSW2S
< 1 (für ∆A) (13.8)∞
führt. W1 spezifiziert die Modellunsicherheit, während mit W2 dieAnforderungen andieRegelqualität über denVerlauf von |S(jω)| beschriebenwird. Die Regelqualität kann sich jedoch beliebig verschlechtern, wenn ∆Abzw. ∆M vorhanden ist. Die Regelung ist lediglich robust stabil.
Die effiziente Behandlung robuster Stabilität bei Anwesenheit vonParameterunsicherheiten erfordert die Einführung einer neuen Norm, derNorm ‖ M ‖μ. Diese Norm ist das Supremum über alle Frequenzen dessogenannten strukturierten singulären Wertes μ (structured singular value,SSV). Der strukturierte singuläreWert soll im folgenden ausführlich behandeltwerden.
4. RP (robuste Regelqualität, robust performance) ∆≠ 0.Eine vorgebbare Regelqualität wird bei Anwesenheit von Unsicherheiten ∆eingehalten. Die systematische und effiziente Analyse und Synthese robusterRegelqualität erfordert die Verwendung der SSV.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE108
17.1 Reglerentwurf für Prozesse mit unstrukturierterModellunsicherheit
Unstrukturierte Modellunsicherheiten lassen sich im Blockschaltbild wie folgt darstellen.
u yG0
∆M
Bild 13.2: Multiplikative Modellunsicherheit
u yG0
∆A
Bild 13.3: Additive Modellunsicherheit
Gibt man als Spezifikation der Regelqualität eine Gewichtungsfunktion W2 für dieÜbertragungsfunktion S an, so erhält man als Struktur für den Block P dasBlockschaltbild 13.4.
P
z1z2
v1
v2
vz
W1
W2G
K ---
Bild 13.4: Berücksichtigung additiver und multiplikativer Modellunsicherheit durchdie Gewichtungsfunktion W1
Die Übertragungsfunktion von z1 nach v1
v1= W1KG(I+GK)−1z1
eignet sich zur Beschreibung der multiplikativen Unsicherheit, da ja
‖ ∆MKG(I+ KG)−1 ‖∞< 1
eine hinreichende Bedingung für robuste Stabilität bei Anwesenheit einer multiplikativenModellunsicherheit am Eingang der Strecke ist. W1 beschreibt damit die multiplikativeModellunsicherheit ∆M .

Regelungstheorie 2 Hochschule Bremerhaven --- IAE109
Die Übertragungsfunktion von z2 nach v1 lautet
v1= W1KSz2 .
Somit ist W1 auch eine Beschreibung der additiven Modellunsicherheit ∆A , da
‖ ∆AKS ‖∞< 1
eine hinreichende Bedingung für robuste Stabilität bei additiver Modellunsicherheitdarstellt. Bei additiver Modellunsicherheit kann der Eingang z1 entfallen.
Nach Bild 13.4 wird der Ausdruck
(13.9)W1KG(I+ KG)−1
W2SGW1KSW2S ∞
minimiert. Man bezeichnet einenEntwurf, dermitHilfe verschiedenerÜbertragungsfunk-tionen Robustheit und Regelgüte berücksichtigt, als Mixed-Sensitivity-Entwurf.
17.1.1 Beispiel: Entwurf eines Reglers für robuste Stabilität
Das Bild 13.5 zeigt ein vereinfachtes Modell einer Prüfmaschine.
m
F
x
cd
Bild 13.5: Modell einer Prüfmaschine
Mit den Zustandsgrößen x und v= x. erhält man
v.x. = − d∕m1 − c∕m0 vx + 1∕m0 F ,
x= 0 1vx+ [0]F .Es wird angenommen, dass sowohl Parameterunsicherheiten als auch unstrukturierteModellunsicherheiten bestehen. Die unstrukturiertenUnsicherheiten entstehen durch dienicht im Modell berücksichtigte Dynamik des Stellgliedes. Es wird eine zehnprozentigeModellunsicherheit angenommen, die für hohe Frequenzen auf 100% anwächst. ImBereich tiefer Frequenzen soll der Regelfehler kleiner als 1% sein. Diese Vorgabenentsprechen den Gewichtungsfunktionen W1 (Robustheit) und W2 (Regelqualität) inBild 13.4.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE110
1.e---04
1.e---03
1.e---02
0.1
1
10
100
1.e---03 1.e---02 0.1 1 10 100 1000 10000
W1
W2
Bild 13.6: Gewichtungsfunktionen W1 und W2
Die Minimierung von (13.9) führt auf eine 1-Norm von 0,99. Damit werden alleAnforderungen erfüllt, da für alle Teilübertragungsfunktionen die 1-Normen ebenfallskleiner als 1werdenmüssen. InBild 13.7 sinddie Sprungantworten fürSollwertänderungenund Störgrößen dargestellt.
---1
0
1
2
3
4
5
0 1 2 3 4 5 6 7 8
Stellgröße u
Regelgröße y
Bild 13.7: Führungs- und Störverhalten des robusten Reglers
Die Regelung ist nun robust stabil bezogen auf multiplikative Modellunsicherheiten, diekleiner als |W1(jω)| sind. Der Zusammenhang zwischen Parameterschwankungen undder unstrukturierten Modellunsicherheit ist jedoch kompliziert und die Frage, ob dieRegelung auch bei bestimmten Parameterschwankungen stabil ist, kann mit Hilfe derbisher behandelten Form nicht beantwortet werden. Das folgende Kapitel widmet sichdiesem Problem.
17.2 Der strukturierte singuläre Wert μ (SSV)
Der strukturierte singuläre Wert ermöglicht eine elegante und effiziente Analyse vonRegelungen auf strukturierte und unstrukturierte Modellunsicherheiten sowie dieSynthese vonReglern für robuste Regelqualität (RP). Das Verfahren geht imwesentlichen

Regelungstheorie 2 Hochschule Bremerhaven --- IAE111
zurück aufDoyle [16], [17], [52].Wichtige Impulse erhielt der SSVauchdurchSafonov [56],der den BegriffMSM (multivariable stability margin) verwendet. Der Kehrwert vonMSMist jedoch mit μ identisch. Da es wichtige Zusammenhänge zwischen μ, Spektralradius ρund dem größten singulären Wert σ gibt, werden wir den Begriff MSM nicht weiterverwenden.
17.2.1 Definition von μ
Es sei ∆ eine quadratische Diagonalmatrix und Element der Menge
∆ := diag δ1Ir1δSIrS , ∆1∆F (13.10)
δ i∈ C , ∆j∈ Cmj×mj
∆ repräsentiert die Unsicherheiten und wird als Perturbation bezeichnet. ∆ könntebeispielsweise wie folgt aussehen:
∆=
δ10000
0δ1000
00δ200
000∆11∆21
000∆12∆22
, r1= 2, r2= 1, m1= 2 .
Mit einer Matrix M∈ Cn×n kann die Funktion μ∆(M) definiert werden:
μ∆(M)= 1minσ(∆) : ∆∈∆ , det(I−M∆)= 0 (13.11)
μ ist somit der Kehrwert des größten singulären Wertes der “kleinsten” Perturbation ∆,die I --- M∆ singulär macht. Damit M und ∆ kompatibel sind, muss
Si=1
ri+F
j=1
mj= n
gelten. Betrachtetmandas SystemausBild 13.8, so erkenntman, dass dieStabilität vondenPolen der Übertragungsfunktion (I --- G∆)---1 abhängt.
∆
G
Bild 13.8: Veranschaulichung der Bedeutung von μ
Gleichbedeutend ist die Forderung, dass die Determinante von I --- G(jω)∆ für alleFrequenzen ω nicht Null werden darf. Natürlich lässt sich ein ∆ konstruieren, so dass derkleinstmögliche größte singuläreWert von ∆ auf det(I --- G(jω)∆) = 0 und damit auf denStabilitätsgrenzfall führt.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE112
Die Matrix M ist also mit der Matrix G(jω) gleichzusetzen.μ wird dann eine Funktion der Frequenz
Je größer der Wert μ, desto “kleiner” ist eine Perturbation ∆,d.h. σ[∆], die ein System instabil werden lässt.
Geben wir als Obergrenze der Perturbation ∆ die Menge
B∆ := δi∈ C : |δ i|≤ 1 , ∆∈∆ : σ [∆]≤ 1 (13.12)
vor, so folgt die Aussage:
Ein System gemäß Bild 13.8 ist für alle Perturbationen∆∈ B∆ dann und nur dann stabil, wenn
erfüllt ist.
μ∆[G(jω)]< 1
DieMengen ∆ (13.10) und B∆(13.12) bestehen aus komplexen Elementen. Insbesonderebei Parameterunsicherheiten kann es sinnvoll sein, einzelne Elemente reell zu wählen.Dies führt jedoch auf erhebliche numerische Schwierigkeiten (Konvergenz-Probleme) beider Berechnung von μ. Wir werden deshalb bei der komplexen Definition von ∆ und B∆bleiben.
17.2.2 Berechnung von μ
μ kann nicht exakt und auch nicht direkt berechnet werden. Es existieren aber obere unduntere Grenzen, die iterativ bestimmt werden können. Je näher diese Wertezusammenliegen, desto genauer ist μ bestimmt.
Aus der Definition von μ (13.11) kann man unmittelbar die Grenzen
à [M]≤ μ∆ [M]≤ σ [M] (13.13)
ableiten. Die untereGrenze tritt exakt für ∆ = δIn auf, die Obere für ∆∈ Cnxn. Da aberder Spektralradius und der größte singuläre Wert einer Matrix beliebig weitauseinanderliegen können, eignet sich (13.13) nicht zur Berechnung von μ. Die Grenzenlassen sich aber noch enger fassen. Hierzu definiert man folgende Mengen:
Q := Q∈∆ : Q*Q= In (13.14)
D :=diag D1, ,DS, d1Im1, , dF−1ImF−1, ImF :Di∈ Cri×ri, Di= D*i > 0, dj∈ R, dj> 0
(13.15)
Der letzte Block dF kann o.B.d.A. auf 1 normiert werden. Für Q∈ Q und D∈ D sind diefolgenden Operationen invariant bezüglich μ∆(M):

Regelungstheorie 2 Hochschule Bremerhaven --- IAE113
μ∆(MQ)= μ∆(QM)= μ∆(M)= μ∆DMD−1 (13.16)
Daraus und aus (13.13) folgen obere und untere Grenzen, die eine recht genaueBerechnung von μ erlauben.
maxQ∈Q
à [QM]≤ μ∆(M)≤ infD∈D σDMD−1 (13.17)
Der Algorithmus wird in [71] beschrieben. Die Minimierung der oberen Schranke erweistsich als konvexesOptimierungsproblem.Es existieren jedochBeispiele, in denen μ kleinerals das Minimum der oberen Schranke ist. Es lässt sich nicht vermeiden, dass bei derBerechnung der unteren Schranke nur ein lokalesMaximumgefundenwird. Bei denbisheruntersuchtenBeispielen traten jedochkaumKonvergenzprobleme auf, und beideGrenzenlagen stets eng beieinander.
17.3 Analyse der robusten Stabilität bei strukturierterModellunsicherheit
Soll eineRegelungauf robusteStabilität untersuchtwerden, somuss derRegelkreismitdenModellunsicherheiten auf die Struktur von Bild 13.1 gebracht werden. Die Blöcke P undK können dabei zu M zusammengefasst werden (s. Bild 13.9).
∆
M
Bild 13.9: Analyse robuster Stabilität
Durch entsprechende Wahl der Struktur von M kann ∆∈ B∆ gewählt werden, so dassrobuste Stabilität für μ∆(M)< 1 gewährleistet ist.
17.3.1 Beispiel: Prüfmaschine
Bei dem inKap. 17.1.1beschriebenenModell einer Prüfmaschinekannmaneine obereunduntere Schranke für die Masse m, die Reibung d und die Federsteifigkeit c angeben.Diese Parameterunsicherheiten wirken sich ausschließlich auf die Ableitung derGeschwindigkeit v aus. Von den Parametervariationen kann man nur schwer auf eineadditive odermultiplikativeModellunsicherheit schließen, sodass einedirekteAnalysederrobustenStabilität inBezug auf diese strukturiertenUnsicherheiten sinnvoll ist.Wirwollenannehmen, dass die Parameter ummaximal 30% nach oben und unten abweichen können.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE114
(13.18)
d∈ 0.1+ 0.03δ1 : |δ1|≤ 1
c∈ 1+ 0.3δ2 : |δ2|≤ 1
m∈ 0.1+ 0.03δ3 : |δ3|≤ 1
Da dieMasse m imNenner der Elemente in A und B auftritt, ist es günstiger, dieGrößen
dm= d
~, cm= c
~ und 1m= m~
zu verwenden. Wir erhalten damit das Gleichungssystem
v.x. = − d~1 − c~0 vx + m~0F . (13.19)
Um auf die gleichen Parameterschwankungen wie bei (13.18) zu gelangen, muss
(13.20)
d~∈ 1.7978+ 0.6593δ1 : |δ1|≤ 1
c~∈ 11.978+ 6.5934δ2 : |δ2|≤ 1
m~ ∈ 10.989+ 3.2967δ3 : |δ3|≤ 1
gewählt werden. Die Matrix ∆ lautet damit
∆=δ100
0δ20
00δ3. (13.21)
Den Einfluss der Perturbation auf die Dynamik des geschlossenen Regelkreises zeigt Bild13.10.
DieMatrizen B2, C2 und D2 beschreiben die Auswirkungen der Perturbation ∆ auf denRegelkreis. Sie lauten nach Bild 13.10 sowie (13.19), (13.20) und (13.21)
B2= 0.65930 6.59430
3.29670 ,
C2= 100
010 ,
D2= 001 .

Regelungstheorie 2 Hochschule Bremerhaven --- IAE115
∆
D2
B2 C2
B C
A
DK
AK
CK BK
---1
G
K
M
u2 y2
x
xk
Bild 13.10: Einfluss der Perturbation auf die Dynamik des geschlossenen Regelkreises
Aus dem Bild 13.10 liest man die Zustandsgleichungen für das System mit dem Eingangu2 und dem Ausgang y2 ab:
M= A− BDKC− BkCBCKAK, B20 , C2− D2DKC D2CK, [0] (13.22)
M hat in diesem Beispiel 3 Ein- und 3 Ausgänge. Die Gleichung (13.22) giltselbstverständlich allgemein für beliebige Strecken und Regler.
Im Frequenzbereich ω [10---4 ... 104] wurden obere und untere Grenze von μ berechnet.Da der Unterschied 3.5.10---6 beträgt, kann man davon ausgehen, dass μ relativ exaktbestimmt wurde.
0
0.2
0.4
0.6
0.8
1
1.e---02 0.1 1 10 100
Bild 13.11: Verlauf der Funktion μ∆M(jω)
Regelungstheorie 2 Hochschule Bremerhaven --- IAE116
Da die Funktion μ(ω) immer kleiner als 1 ist, folgt die robuste Stabilität für beliebigeParameterschwankungen innerhab der Grenzen von 30%.
Aus zwei Gründen ist die Analyse etwas konservativ:
1. Die Formulierung der Unsicherheiten (13.18) in Gestalt der Mengen (13.20)ermöglicht etwas größere SchwankungenderParameter in m, d und c als 30%,da nicht berücksichtigt wird, dass m in allen Parametern m~ , d~, und c~ in gleicherWeise eingeht.
2. Die Perturbationen δ1 ... δ3 werden als komplex angenommen. Da dieParameter m~ , d~, und c~ jedoch nur reell und somit mögliche Perturbationen ∆aus physikalischen Gründen auch nur reell sein können, führt der Ansatzkomplexer Perturbationen zu einer möglicherweise konservativen Berechnungvon μ. Die Wahl komplexer Perturbationen ∆ hat in diesem Fall numerischeGründe.
Auch mit diesen Einschränkungen bietet die Berechnung von μ eine effiziente Analyserobuster Stabilität bei strukturierten Modellunsicherheiten.
17.4 Entwurf von Reglern für robuste Regelqualität (RP)
Auch wenn ein Regelkreis robust stabil ist, so kann sich die Regelqualität durchUnsicherheiten in unakzeptabler Weise verschlechtern. Häufig ist es jedoch wünschens-wert, dassbeiAnwesenheit vonPerturbationen ∆ beispielsweisederRegelfehler innerhalbbestimmter Grenzen bleibt. Die Analyse dieser Eigenschaft sowie der Entwurf einesReglers für robuste Regelqualität sind Anwendungsfelder des strukturierten singulärenWertes μ.
17.4.1 Main-Loop-Theorem
Für die Struktur in Bild 13.12 mit den zwei Perturbationen ∆1 und ∆2 existiert einePartitionierung der Matrix M der Form
M= M11M21 M12M22 , M∈ Cn×nmit entsprechenden Dimensionen.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE117
∆1
M
∆2
y1u1
y2u2
Bild 13.12: Struktur für Main-Loop-Theorem
Die gesamte Perturbation sei
∆= ∆10 0∆2 ,
so dass μ∆(M) definiert ist. Trennt man in Bild 13.12 an den mit “t” gekennzeichnetenStellen auf, so folgt für den Zusammenhang zwischen y1 und u1 (LFT s. Kap. 16.3)
y1= Lu1 ,
(13.23)L := LFT(M,∆2)= M11+M12∆2(I−M22∆2)−1M21 .
Die Matrix L kann nur dann berechnet werden, wenn die Determinante von I --- M22∆2ungleich Null ist. Dies entspricht jedoch wegen ∆1, ∆2∈ B∆ der Forderung
μ∆2(M22)< 1 . (13.24)
Wenn ∆2 Null ist, folgt aus (13.23) L = M11. Wir können M11 als “ideales”Übertragungsverhalten ansehen, von dem nach Maßgabe von ∆2 abgewichen wird. DieBlöcke M12, M21 und M22 geben an, wie sich ∆2 auf die Änderung auswirkt.
Das Main-Loop-Theorem besagt die Äquivalenz der folgenden Ungleichungen [52]:
μ∆(M)< 1 ⇔ μ∆2(M22)< 1 und
max∀∆2: σ [∆2]≤1
μ∆1(L)< 1. (13.25)
Es genügt also, μ∆(M) zu bestimmen, um μ∆2(M22) und μ∆1(L) zu überprüfen. Auf demMain-Loop-Theorem beruht die Analyse und Synthese von Regelungen für RP.
Die komplexe Matrix M ist dann der Wert einer Übertragungsfunktion bei einerFrequenz ω, und μ wird eine Funktion von ω.
17.4.2 Analyse robuster Regelqualität
Wir gehen von der allgemeingültigen Struktur in Bild 13.13 aus.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE118
Die Diagonalmatrix ∆ besteht aus unbekannten, aber durch ‖ ∆i ‖∞≤ 1 beschränktenkomplexenMatrizen bzw. Skalaren. Der Regler K lässt sich in die ÜbertragungsfunktionP integrieren (LFT(P, K), Bild 13.14).
∆
K
Pz v
Bild 13.13: Struktur für robuste Regelqualität
∆
Gz v
Bild 13.14: Zusammenhang zwischen RP und Main-Loop-Theorem
Die Matrix ∆ entspricht der Matrix ∆2 des Main-Loop-Theorems. ∆ bestimmt dieAbweichung der Übertragungsfunktion von z nach v bei Anwesenheit vonModellunsicherheiten. Wenn die Dimensionen von z und v gleich sind, lässt sich ∆ umden Block ∆P erweitern. Die Dimension von z und v seien nzv
∆G := ∆0 0∆P , ∆P∈ Cnzv×nzv , (13.26)
so dass die Struktur nach Bild 13.15 konstruiert werden kann.
∆
Gz v
∆P00
Bild 13.15: Struktur zur Berechnung von μ
G kann man entsprechend partitionieren:
G= G11G21 G12G22 .Wenn nun
supω∈R
μ∆G(G(jω))< 1 (13.27)

Regelungstheorie 2 Hochschule Bremerhaven --- IAE119
erfüllt ist, folgen aus dem Main-Loop-Theorem gleichzeitig die Aussagen
supω∈R
μ∆(G11(jω))< 1 (13.28)
sowie mit der Übertragungsfunktion
L := G22+G21∆(I−G11∆)−1G12 (13.29)
von z nach v gemäß Bild 13.14
supω∈R
max∀∆: σ [∆]≤1
μ∆P(L(jω))< 1 (13.30)
Die Ungleichung (13.28) ist die Bedingung für robuste Stabilität. Die Übertragungsfunkti-on L beschreibt, wie sich das Übertragungsverhalten von z nach v durch ∆ ändert.Aufgrund von (13.28) ist L für alle σ [∆]≤ 1 immer stabil.
Je größer die1-Norm von L wird, desto mehr verschlechtert sich die Regelqualität.
Ist ∆ ein komplexer und quadratischer Block (∆∈ Cn×n), so folgt aus derDefinitionsgleichung (13.11) und aus (13.13)
μ∆ (M)∆∈Cn×n
= σ [M] . (13.31)
Wird also der Block ∆P als ∆P∈ Cnzv×nzv gewählt, so kann ‖ L ‖∞ nach (13.30) denWert 1 füralle Perturbationen ∆ nicht überschreiten.Dies gewährleistet damit robusteRegelqualitätim Sinne der1-Norm.
17.4.3 Berechnung von Reglern für RP
Da der Verlauf von μ∆G[G(jω)] maßgeblich für robuste Regelqualität ist, liegt es nahe, dasMaximum von μ zuminimieren. Bis heute ist keinVerfahren bekannt, das direkt auf einenminimalen Verlauf von μ über der Frequenz führt. Es gibt allerdings einen intuitivenAnsatz, dieses Problem zu lösen. Die Existenz einer Lösung bzw. die Konvergenz desVerfahrens kann nicht garantiert werden; der Ansatz hat sich allerdings in der Praxis gutbewährt.
Der 1-Norm-optimale Regler minimiert den größten singulären Wert einerÜbertragungsfunktion. Über die Obergrenze von μ kann dieMinimierung von μ auf denEntwurf einer Folge von 1-Norm-optimalen Reglern zurückgeführt werden. Das imfolgendenbeschriebeneVerfahrender diagonalenSkalierunggeht aufSafonov [56] zurück.
Die Obergrenze zur Berechnung von μ∆(M) folgt aus (s. (13.15) und (13.16))
μ∆(M)≤ infD∈D σDMD−1 . (13.32)
Wertet man (13.32) mit M = G(jω) für alle Frequenzen ω aus, so ist
Regelungstheorie 2 Hochschule Bremerhaven --- IAE120
supω∈R
σ D(jω)G(jω)D−1(jω) =‖ DGD−1 ‖∞
die1-Norm von DGD---1. DieserWert kann erheblich kleiner als ‖ G ‖∞ sein. Manmöchtenun versuchen, das Maximum des Verlaufs von μ∆G[G] mit G := LFT(P(jω),K(jω))(s.Bild 13.16) über der Frequenz ω zu minimieren (μ ---Synthese).
∆G
K
P
G
Bild 13.16: Struktur für robuste Regelqualität
Aufgrund der besonderen Struktur von D∈ D ändert sich die1-Norm von ∆G nicht,d.h. es gilt
‖ D∆GD−1 ‖∞=‖ ∆G ‖∞ . (13.33)
Die Transformation mit D ändert den Bereich der möglichen Unsicherheiten somit nicht(Bild 13.17).
∆G D---1
D
D
D---1
Keinen Einfluss auf den Be-reich der Unsicherheiten
K
P
Bild 13.17: Skalierung von P und ∆G
Man versucht nun, die μ-Synthese auf eine Folge von 1-Norm-optimalen Entwürfenzurückzuführen, indemman dieÜbertragungsfunktion P mit D bzw. D---1 “skaliert”.Wieman aus Bild 13.17 erkennt, muss P für jedenReglerentwurf durch die “skalierte”Versionvon P ersetzt werden.
D---1P
D
u y
Bild 13.18: Skalierung für μ-Synthese
Wird die Diagonalmatrix D um Einheitsmatrizen Inu bzw. Iny (nu Anzahl derStellgrößen, ny Anzahl derMessgrößen) erweitert, so kannman auch P gegen DLPDR ---1
ersetzen.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE121
DR---1
DL P
Pμ
≡
Bild 13.19: Skalierung für μ-Synthese mit DL und DR
Dabei ist
(13.34)DL := D0 0Inu
und
(13.35)DR := D0 0InyD kann sowohl eine reelle Matrix als auch eine stabile Übertragungsfunktion sein, die dieoptimale Skalierung frequenzabhängig approximiert.
Die μ-Synthese kann mit folgendem Ansatz (D-K-Iteration) versucht werden:
1. D0(s)= I , i= 0.
2. DiL(s)= Di(s)0 0Inu , DiR= Di(s)0 0
Iny.3. Pμ= DiLPDi
−1R .
4. Berechnung des 1-Norm-optimalen Reglers Ki mit Pμ als Spezifikation desEntwurfs.
5. Berechnung von μ∆GLFT(Pμ,Ki). Dieser Schritt liefert optimale SkalierungenD aus der oberen Grenze von μ. Der Frequenzbereich und die Anzahl N vondiskreten Frequenzstützstellen ωk zur Berechnung von μ müssen vorgegebenwerden. Für jeden dieser Frequenzpunkte erhält man einen Wert Dk(k = 1...N).
6. Wenn der Verlauf von μ(ω) kleiner als 1 wird oder in aufeinanderfolgendenIterationen sich nicht weiter vermindert: *ENDE*
7. Für alle k = 1...N Berechnung von Di+1k = Di(jωk)Dk(Dk ist aus Schritt 5, Di+1k und Dk sind reelle Matrizen, Di(s) ist eineÜbertragungsfunktion).i := i + 1.
8. Approximationder optimalenSkalierungen Dik durch eine stabile, rationale undinvertierbare Übertragungsfunktion Di(s) vorgebbarer Ordnung.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE122
Weiter mit Schritt 2.
Im ersten Durchlauf erfolgt ein normaler 1-Norm-Entwurf (Skalierung mit derEinheitsmatrix).
Bis auf Schritt 8 wurden alle Algorithmen zur μ-Synthese bereits behandelt. Das Problembesteht also nur noch in der Bestimmung der Skalierungsfunktion D(s). In Schritt 7 wirdderVerlauf von μ∆Gals Funktionder Frequenz berechnet. In diesemZusammenhang fallenbei der Berechnung der oberen Grenzen für μ∆G die Skalierungen Dk für jede berechneteFrequenz an. Man muss nun eine stabile, rationale und invertierbare Übertragungsfunkti-on D(s) finden, die die Beträge der einzelnen Elemente möglichst gut approximiert.
Die Wahl der Ordnung der Approximation beeinflusst wesentlich den jeweiligen ReglerKi . Wählt man eine kleine Ordnung n, so ist möglicherweise die Approximation schlecht,und μ∆wird nicht im gewünschtenMaße abgesenkt. Da sichmit der Ordnung n derReglerum die Ordnung 2nxdim(∆) erhöht (P wird mit D(s) und D---1(s) multipliziert), sollten aber möglichst klein gewählt werden. Die Ordnung des Reglers erhöht sich nur um2nxdim(∆) undnicht um 2nxdim(∆G), da die Skalierung von ∆P immer dieEinheitsmatrixist (13.15). Falls μ nur eine einzelne Spitze aufweist, kann auch eine reelle Matrix D diegünstigste Lösung darstellen. In diesem Fall erhöht sich die Ordnung des Reglers natürlichnicht.
Die Ordnung des Reglers erhöht sich nicht mit jeder Iteration. Dies ist eine Folge derMultiplikation
Di+1k = Di(jωk)Dk
die für jede Frequenz einzeln ausgeführt wird. Für die diskretenWerte Di+1k wird dann eineÜbertragungsfunktion Di+1(s) erzeugt, die diese Werte approximiert.
17.4.4 Beispiel: Optimierung der robusten Regelqualität
Die Regelung der Flugzeuglängsbewegung einer Boeing 707-321 soll vorgegebeneRegeleigenschaften bei einem als unsicher angenommenen Streckenmodell einhalten. AlsBeschreibung des Prozesses wird das Modell 4. Ordnung aus Kap. NO TAG verwendet.Eingangsgrößen sind der Schub f sowie derHöhenruderwinkel η. Die Ausgangsgrößen sinddie Vortriebsgeschwindigkeit u und der Nickwinkel θ.
Die Berechnung des 1-Norm-Reglers sowie der μ-Synthese kann nur noch mit Hilferegelungstechnischer Software erfolgen. In diesem Fall wird MATLAB [46] mit denToolboxen “Control System”, “Mu-Analysis and Synthesis” sowie der “Signal ProcessingToolbox” (für die Approximation der Skalierungen D) verwendet. Die zu diesem Beispielgehörenden Befehle sind in Kap. 17.4.5 aufgelistet. Entsprechende Stellen sind mit denZiffern¡ ---¡¥markiert. Bild 13.20 zeigt die Sprungantwort der ungeregelten Strecke¡.

Regelungstheorie 2 Hochschule Bremerhaven --- IAE123
---2
---1
0
1
2
3
4
0 50 100 150 200 250 300 350 400 450 500
Schub f
Geschwindigkeit u
Nickwinkel θ
Höhenruderwinkel η
Bild 13.20: Sprungantwort der ungeregelten Strecke
Mit Hilfe der Gewichtungsfunktionen W1 und W2 (Bild 13.21) werden die Entwurfszielefestgelegt ©. Die Bezeichnung der Gewichtungsfunktionen entspricht der Notation inBild 13.4.
1.e---06
1.e---05
1.e---04
1.e---03
1.e---02
0.1
1
10
100
1.e---041.e---03 1.e---02 0.1 1 10 100 1000 10000
W11 (f)
W12 (η)
W21 = W22
W1= W11W12 W2= W21W22
Bild 13.21: Gewichtungsfunktionen
DieGewichtungsfunktionen W11 und W12 beschreibenmultiplikativeModellunsicherhei-ten für den Schub bzw. die Dynamik der Höhenruderverstellung. Für den Schubkanal wirdeine Unsicherheit von 25% bei tiefen Frequenzen und 400% bei hohen Frequenzen(Grenzfrequenz 0.1 Hz) angenommen. Die Höhenruder---Dynamik ist genauer bekannt(10%Unsicherheit bei tiefen Frequenzen bis 1 Hz). W2 beschreibt die Anforderungen andie Regelqualität (1% Fehler bis 0.00012 Hz). Das Ziel des Entwurfes ist die Einhaltungder Regelqualität unter Berücksichtigung der angenommenen Modellunsicherheiten.
Die Gewichtungsfunktionen und die Regelstrecke werden zu der ÜbertragungsfunktionP verbunden¢. Dieses System hat 6 Eingänge (je 2 Störgrößen amEingang undAusgangder Strecke sowie die Stellgrößen f und η) und 6 Ausgänge (Ausgänge derGewichtungsfunktionen W1, W2 und die Regelgrößen u und θ).
Regelungstheorie 2 Hochschule Bremerhaven --- IAE124
Mit P ist der1-Norm-optimale-Entwurf bereits festgelegt, und der optimale Regler Kkann berechnet werden£. Die Regelung wird mit einem System mit der Eingangsgrößew und den Ausgangsgrößen y und u simuliert ¤,¥. Das Ergebnis ist in Bild 13.22dargestellt.
---1
---0.5
0
0.5
1
1.5
2
0 10 20 30 40 50 60 70 80 90 100
fu
θ
η
wu= s(t) wθ= s(t− 50s)
Bild 13.22: 1---Norm---Entwurf (robuste Stabilität, nominelle Regelqualität)
Umentscheiden zu können, ob die Regelung robuste Regelqualität gewährleistet, muss dieFunktion μ∆G(M) aufgetragen werden. ∆G hat dabei die Form¦
∆G=
δ1000
0δ200
00∆P11∆P21
00∆P12∆P22
.
Die Skalare δ1 und δ2 stehen für die Unsicherheiten an den Eingängen u und η derStrecke. Der komplexe Block ∆P ist nach (13.26) eine 2x2-Matrix. Der strukturiertesinguläreWert μ§ ist in Bild 13.23 über der Frequenz (rad/s) aufgetragen. Es werden stetsuntere und obereGrenze von μ aufgetragen.Wie man erkennt, liegen beide Grenzen sehreng beieinander.
0
0.2
0.4
0.6
0.8
1
1.2
1.e---03 1.e---02 0.1 1
Bild 13.23: μ-Plot für1-Norm Entwurf (robuste Regelqualität)
Da μ in einemweitenFrequenzbereich größer als 1 verläuft, ist robusteRegelqualitätnichtgegeben (13.30). Mit Hilfe der μ-Synthese, d.h. einer Folge von Skalierungen und

Regelungstheorie 2 Hochschule Bremerhaven --- IAE125
1-Norm-optimalen Reglerentwürfen kann der Verlauf von μ geglättet und damitabgesenkt werden. Wenn es gelingt, dass der Verlauf von μ nicht größer als 1 wird, istRegelqualität für alle angenommenen Unsicherheiten gewährleistet.
Es schließen sich 5 D-K-Iterationen an (¨ ---¡¦). Wie anhand der 1. Iteration erläutertwird, umfasst jede Iteration die Approximation der Beträge der Skalierungen D durchrationale Übertragungsfunktionen DL und DR . Diese Übertragungsfunktionenunterscheiden sich nur durch die Dimension der Einheitsmatrix in der rechten unterenEcke von DL bzw. DR (13.34), (13.35). Die Übertragungsfunktionen sind nur identisch,wenn die Anzahl der Messgrößen ny gleich der Anzahl der Stellgrößen nu ist. DieseEinschränkung besteht aber nicht.
Es schließt sich die Skalierung der Übertragungsfunktion P mit DL(s) bzw. mit DR ---1(s)an ¡¡. Für die so skalierte Übertragungsfunktion wird ein neuer1-Norm-optimalerRegler bestimmt¡©. Die sich aus diesemEntwurf ergebende Funktion μ∆GLFT(P,K) alsFunktion der Frequenz ¡¢ ist in Bild 13.24 dargestellt.
0
0.2
0.4
0.6
0.8
1
1.2
1.e---03 1.e---02 0.1 1
Bild 13.24: μ-Plot, D-K-Iteration #1
Man erkennt, dass μ nun flacher verläuft. Der Regler gewährleistet jedoch noch nichtrobuste Regelqualität, da die Funktion in einem weiten Bereich größer als 1 ist. Vierweitere Iterationsschritte führen zu folgenden Ergebnissen.
0
0.2
0.4
0.6
0.8
1
1.2
1.e---03 1.e---02 0.1 1
Bild 13.25: μ-Plot, D-K-Iteration #2
Regelungstheorie 2 Hochschule Bremerhaven --- IAE126
0
0.2
0.4
0.6
0.8
1
1.2
1.e---03 1.e---02 0.1 1
Bild 13.26: μ-Plot, D-K-Iteration #3
0
0.2
0.4
0.6
0.8
1
1.2
1.e---03 1.e---02 0.1 1
Bild 13.27: μ-Plot, D-K-Iteration #4
0
0.2
0.4
0.6
0.8
1
1.2
1.e---03 1.e---02 0.1 1
Bild 13.28: μ-Plot, D-K-Iteration #5
Nach 5 Iterationen lässt sich der Verlauf von μ nicht weiter vermindern, das Verfahrenkann somit abgebrochen werden.
Der Verlauf von μ ist nun über den gesamten Frequenzbereich kleiner als 1. Damitgewährleistet der Regler robuste Regelqualität bezogen auf die in der Gewichtungsfunk-tion W1 spezifizierten Modellunsicherheiten.
In Bild 13.29 wurde die Sprungantwort des geschlossenen Kreises bezogen aufSollwertänderungen simuliert. Gegenüber dem1-Norm-Entwurf mit P (Bild 13.22) fälltauf, dass die Stellgrößenaktivität wesentlich stärker ausgeprägt ist. Die Gewichtungsfunk-tion W1 (Bild 13.4) hat eine doppelte Bedeutung. Zum einen beschreibt W1 dieModellunsicherheiten, zum zweiten bewirkt W1 eine Bewertung der Stellgröße. Die

Regelungstheorie 2 Hochschule Bremerhaven --- IAE127
Skalierung mit D hebt die Stellgrößenbewertung zugunsten der robusten Regelqualitätauf. DurchEinsatz eines Führungsgrößenfilters 1. Ordnung©¡ kannder Effekt erhöhterStellgrößen jedoch einfach vermieden werden (Bild 13.30).
---1
---0.5
0
0.5
1
1.5
2
0 10 20 30 40 50 60 70 80 90 100
f
u θ
η
wu= s(t) wθ= s(t− 50s)
Bild 13.29: Verhalten des Reglers für robuste Regelqualität
---0.4---0.200.20.40.60.811.21.41.6
0 20 40 60 80 100 120 140 160
f
u
θη
wu= s(t) wθ= s(t− 75s)
θ
Bild 13.30: Regelung mit Vorfilter (Tiefpass 1. Ordnung)
Die μ-Synthese führt auf Regler hoher Ordnung. Die Ordnung des Reglers setzt sich indiesem Beispiel wie folgt zusammen:
Ordnung der Strecke 4Ordnung vonW1 2Ordnung vonW2 2Ordnung von DL(s) 2Ordnung von DR(s) 2
Ordnung des Reglers 12
Häufig ist es möglich durch Ordnungsreduktions-Verfahren die Ordnung des Reglers beiannähernd gleichen Eigenschaften erheblich zu reduzieren. Die Anzahl der notwendigenRechenoperationen kann auch durch Transformation auf Normalformen erheblichreduziert werden, da die meisten Elemente der Systemmatrix Null oder Eins sind.
Regelungstheorie 2 Hochschule Bremerhaven --- IAE128
Bei vielen Entwurfsaufgaben ist robuste Regelqualität eine elementare Forderung. MitHilfe der μ-Synthese kann dieses Problem systematisch behandelt werden.
Auch wenn der Einsatz dieser Art von Regelungen in vielen Fällen für die Praxis zuaufwendig ist, der Umgang mit diesen Verfahren gibt jedoch darüber Aufschluss, welcheErgebnisse mit modernen Methoden erreichbar sind.
17.4.5 MATLAB-Befehle zum Beispiel 17.4.4(Entwurf eines Regles für robuste Regelqualität)
>> % Frequenzbereich, Zeitachse, Anregung>> om=logspace(-4,4,100)’;>> t=linspace(0,99.5,100)’;>> u=ones(100,2);>> u(1:50,2)=zeros(50,1);
>> % Regelstrecke>> [a,b,c,d]=b1l;>> G=pck(a,b,c,d);>> seesys(G)
-4.6e-02 1.1e-01 0.0e+00 -1.7e-01 | 1.6e-01 2.1e-03-1.7e-01 -5.2e-01 1.0e+00 6.4e-03 | 8.2e-03 -3.0e-02
1.5e-01 -5.5e-01 -9.1e-01 -1.5e-03 | 9.2e-02 -7.5e-010.0e+00 0.0e+00 1.0e+00 0.0e+00 | 0.0e+00 0.0e+00
-------------------------------------|------------------1.0e+00 0.0e+00 0.0e+00 0.0e+00 | 0.0e+00 0.0e+000.0e+00 0.0e+00 0.0e+00 1.0e+00 | 0.0e+00 0.0e+00
>> minfo(G)system: 4 states 2 outputs 2 inputs
>> y=lsim(a,b,c,d,u,5*t); ¡>> plot(5*t,y) [ Bild 13.20 ]
>> % Gewichtungsfunktion W1 (Robustheit)>> [a,b,c,d]=wgt1o(0.25,4.0,1.0E-1);>> Wx1=pck(a,b,c,d);>> [a,b,c,d]=wgt1o(0.1,4.0,1.0E0);>> Wx2=pck(a,b,c,d);>> W1=daug(Wx1,Wx2);>> [a,b,c,d]=wgt1o(100,0,1.2E-4);>> Wx1=pck(a,b,c,d);>> W2=daug(Wx1,Wx1);>> fw1=frsp(W1,om);>> fw2=frsp(W2,om);>> fw=sbs(fw1,fw2); ©>> vplot(’liv,lm’,fw) [ Bild 13.21 ]>> clear Wx1 Wx2 fw1 fw2
>> % Aufbau der Struktur P>> systemnames = ’G W1 W2’;>> inputvar = ’[ z1(2); z2(2); u(2) ]’;

Regelungstheorie 2 Hochschule Bremerhaven --- IAE129
>> outputvar = ’[ W1; W2; G + z2 ]’;>> input_to_G = ’[ u + z1 ]’;>> input_to_W1 = ’[ u ]’;>> input_to_W2 = ’[ G + z2 ]’;>> sysoutname = ’PP’;>> cleanupsysic = ’yes’;>> sysic ¢
>> % ######### D-K-Iteration 0 ###############>> % Entwurf des Inf-Norm-Reglers fuer nominelle
Regelqualitaet und robuste Stabilitaet.>> [K,GW]=hinfsyn(PP,2,2,0.75,1.25,0.01); £
Gamma value achieved: 1.1719
>> % Geschlossener Kreis mit den Ausgangsgroessen y und u.>> systemnames = ’ K G ’;>> inputvar = ’[ w(2) ]’;>> outputvar = ’[ G; -K ]’;>> input_to_K = ’[ w - G ]’;>> input_to_G = ’[ -K ]’;>> sysoutname = ’GCL’;>> cleanupsysic = ’yes’;>> sysic ¤
>> [A,B,C,D]=unpck(GCL);>> y=lsim(A,B,C,D,u,t); ¥>> plot(t,y) [ Bild 13.22 ]
>> K0=K;>> GCL0=GCL;>> GW0=GW;>> w=logspace(-3,0,30);>> blk=[1 1; 1 1; 2 2]; ¦>> fg=frsp(GW,w);>> [bnds,dvec,sens,pvec]=mu(fg,blk); §>> vplot(’liv,d’,bnds) [ Bild 13.23 ]
>> % ######### D-K-Iteration 1 ###############>> [dL1,dR1]=musynfit(’first’,dvec,sens,blk,2,2); ¨>> PP1=mmult(dL1,PP,minv(dR1)); ¡¡>> minfo(dL1),minfo(dR1)
system: 2 states 6 outputs 6 inputssystem: 2 states 6 outputs 6 inputs
>> minfo(PP1)system: 12 states 6 outputs 6 inputs
>> [K,GW]=hinfsyn(PP1,2,2,0.75,1.25,0.01); ¡©Gamma value achieved: 1.0349
>> fg=frsp(GW,w);>> bnds0=bnds;>> [bnds,dvec,sens,pvec]=mu(fg,blk); ¡¢>> vplot(’liv,d’,bnds) [ Bild 13.24 ]
>> % ######### D-K-Iteration 2 ###############>> [dL2,dR2]=musynfit(dL1,dvec,sens,blk,2,2); ¡£>> PP2=mmult(dL2,PP,minv(dR2));
Regelungstheorie 2 Hochschule Bremerhaven --- IAE130
>> [K,GW]=hinfsyn(PP2,2,2,0.75,1.25,0.01);Gamma value achieved: 0.9784
>> fg=frsp(GW,w);>> [bnds,dvec,sens,pvec]=mu(fg,blk);>> vplot(’liv,d’,bnds) [ Bild 13.25 ]
>> % ######### D-K-Iteration 3 ###############>> [dL3,dR3]=musynfit(dL2,dvec,sens,blk,2,2); ¡¤>> PP3=mmult(dL3,PP,minv(dR3));>> [K,GW]=hinfsyn(PP3,2,2,0.75,1.25,0.01);
Gamma value achieved: 0.9650>> fg=frsp(GW,w);>> [bnds,dvec,sens,pvec]=mu(fg,blk);>> vplot(’liv,d’,bnds) [ Bild 13.26 ]
>> % ######### D-K-Iteration 4 ###############>> [dL4,dR4]=musynfit(dL3,dvec,sens,blk,2,2); ¡¥>> PP4=mmult(dL4,PP,minv(dR4));>> minfo(PP4)
system: 12 states 6 outputs 6 inputs>> [K,GW]=hinfsyn(PP4,2,2,0.75,1.25,0.01);
Gamma value achieved: 0.9750>> fg=frsp(GW,w);>> [bnds,dvec,sens,pvec]=mu(fg,blk);>> vplot(’liv,d’,bnds) [ Bild 13.27 ]
>> % ######### D-K-Iteration 5 ###############>> [dL5,dR5]=musynfit(dL4,dvec,sens,blk,2,2); ¡¦>> PP5=mmult(dL5,PP,minv(dR5));>> minfo(PP5)
system: 12 states 6 outputs 6 inputs>> [K,GW]=hinfsyn(PP5,2,2,0.75,1.25,0.01);
Gamma value achieved: 0.9750>> fg=frsp(GW,w);>> [bnds,dvec,sens,pvec]=mu(fg,blk); ¡§>> vplot(’liv,d’,bnds) [ Bild 13.28 ]
>> Geschlossener Kreis mit den Ausgangsgroessen y und u.>> systemnames = ’ K G ’;>> inputvar = ’[ w(2) ]’;>> outputvar = ’[ G; -K ]’;>> input_to_K = ’[ w - G ]’;>> input_to_G = ’[ -K ]’;>> sysoutname = ’GCL’;>> cleanupsysic = ’yes’;>> sysic ¡¨
>> [A,B,C,D]=unpck(GCL);>> y=lsim(A,B,C,D,u,t);>> plot(t,y) [ Bild 13.29 ]
>> [a,b,c,d]=wgt1o(1.0, 0.0, 0.05);>> F=pck(a,b,c,d);>> pf=daug(F, F);>> [a,b,c,d]=unpck(pf);

Regelungstheorie 2 Hochschule Bremerhaven --- IAE131
>> u2=lsim(a,b,c,d,u,t); ©¡>> y=lsim(A,B,C,D,u2,1.5*t);>> plot(1.5*t,y) [ Bild 13.30 ]
:::
Regelungstheorie 2 --- Anhang Hochschule Bremerhaven --- IAE132
18 Mathematischer Anhang
A Matrizenrechnung
A.1 Rechenregeln für Transposition und Inversion
(AB)T= BTAT
(AB)−1= B−1A−1
A.2 Rechenregeln für Determinanten
det[A]= det[AT]=ni=1
λi [A]
| det[A] |=ni=1
σ i [A]
det[AB]= det[A] det[B] , (A, B, quadratisch)
detAn×nCm×n0n×mBm×m = det[An×n] det[Bm×m]
A.3 Matrix-Analysis
Die Vektoren x und a haben gleiche Dimension. Die Matrix S sei symmetrisch. Danngelten folgende Gleichungen für die Ableitung nach x:
ddx (x
Ta)= a
ddx (a
Tx)= a
ddx (x
TSx)= 2Sx
B Rechenregeln für Zustandsdarstellungen
Die für Übertragungsfunktionen bekannten Operationen wie Serien---, Parallelschaltung,Inversion oder Rückkopplung können auch einfach mit Zustandsdarstellungendurchgeführt werden. Die Darstellung von G(s) in der Form
G(s)= [A] , [B] , [C] , [D]

Regelungstheorie 2 --- Anhang Hochschule Bremerhaven --- IAE133
ist dabei eine andere Schreibweise für
G(s)= C(sI− A)−1B+ D .
Die Übertragungsfunktion G1 und G2 werden entsprechend bezeichnet.
G1(s)= [A1] , [B1] , [C1] , [D1]
G2(s)= [A2] , [B2] , [C2] , [D2]
B.1 Basistransformation der Zustandsgrößen
G(s)= T−1AT , T−1B , [CT] , [D]
B.2 Inversion
G−1(s)= A− BD−1C , BD−1 , − D−1C , D−1
B.3 Konjugiert komplexe Transposition
G*(s)= − AT , − CT , BT , DT
B.4 Parallelschaltung
u1
u2
y1
y2
G1
G2
u y
G
G(s)= G10 0G2
= A10 0A2 , B10 0
B2 , C10 0C2 , D10 0
D2
B.5 Addition
G1
G2
u y
Regelungstheorie 2 --- Anhang Hochschule Bremerhaven --- IAE134
G(s)= G1(s)+G2(s)
= A10 0A2 , B1B2 , C1 C2 , [D1+ D2]
B.6 Multiplikation
G1 G2u y
G(s)= G2(s)G1(s)
= A20 B2C1A1 , B2D1B1 , C2 D2C1 , [D2D1] = A1B2C1 0A2 , B1B2D1 , D2C1 C2 , [D2D1]
B.7 Rückkopplung I (D1 = [0])
u y
G1
G(s)= (I G1)−1
= [A1 B1C1] , [B1] , [ C1] , [ I ]
B.8 Rückkopplung II (D1 = [0])
u yG1
G(s)= G1(I G1)−1
= [A1 B1C1] , [B1] , [C1] , [0]
:::

Regelungstheorie 2 Hochschule Bremerhaven --- IAE135
19 Literatur
[1] Ackermann. J.: Abtastregelung --- Band I: Analyse und Synthese.Springer, Berlin, 1983
[2] Ackermann. J.: Robuste Regelung --- Analyse und Entwurf con linearenRegelungssystemen mit unsicheren physikalischen Parametern.Springer Verlag, 1993
[3] Ackermann. J.: Uncertainty and Control.Springer Verlag, 1995
[4] Adams, D.: The Hitchhikers’s Guide to the Galaxy.Pocket, New York, 1982
[5] Bode, H. W.: Network Analysis and Feedback Amplifier Design.Van Nostrand, New York, 1945
[6] Robert Bosch GmbH: Kraftfahrtechnisches Taschenbuch.VDI---Verlag, 1987
[7] Boyd, S., V. Balakrishnan und P. Kabamba. On Computing the H1-Norm of aTransfer Matrix.Mathematics of Control, Signals, and Systems, 1988
[8] Brockhaus, R.: Entwurf von Mehrgrößenregelsystemen.Vorlesungsmanuskript, TU Braunschweig, Institut für Flugführung, 1985
[9] Bronstein, I. N., K. A. Semendjajew, G. Musiol und H. Mühlig: Taschenbuchder Mathematik.Verlag Harri Deutsch, Frankfurt/Main, 1993
[10] Callier, F. M. und C. A. Desoer: Multivariable Feedback Systems.Springer, Berlin, 1982
[11] Chiang, R. Y., M. G. Safonov, K. Haiges, K. Madden und J. Tekawy:A Fixed H1 Controller for a Supermaneuverable Fighter Performing theHerbst Maneuver.Automatica, Vol. 29, S. 111---127, 1993
[12] Chiang, R. Y. und M. G. Safonov: Robust Control Toolbox.The Mathworks, Inc., 1993
[13] Desoer, C. A., R. W. Liu, J. Murray und R. Saeks: Feedback System Design:The Fractional Representation Approach to Analysis and Synthesis.IEEE Trans. Auto. Control, Vol. AC---25, S. 399---412, 1980
Regelungstheorie 2 Hochschule Bremerhaven --- IAE136
[14] Dongarra, J., C. Moler und G. Steward: LINPACK User’s Guide.SIAM, Philadelphia, 1979
[15] Doyle, J. C.: Guaranteed Margins for LQG regulators.IEEE Trans. Auto. Control, Vol. AC---23, S. 756---757, 1978
[16] Doyle, J. C.: Analysis of Feedback Systems with Structured Uncertainties.IEE Proceedings, Vol. 129, Part D, Nr. 6, S. 242---250, 1982
[17] Doyle, J. C.: A Review of μ for Case Studies in Robust Control.10th IFAC World Congress on Autom. Contr., Vol. 8, S. 395---402, 1987
[18] Doyle, J. C. und G. Stein: Multivariable Feedback Design: Concepts for aClassical Modern Synthesis.IEEE Trans. Auto. Control, Vol. AC---26, S. 4---16, 1981
[19] Doyle, J. C.: Advances in Multivariable Control.Lecture Notes at ONR/Honeywell Workshop, Minneapolis, 1884
[20] Doyle, J. C., K. Glover, P. Khargonekar und B. A. Francis: State-SpaceSolutions to Standard H2 and H1 Control Problems.IEEE Trans. Auto. Control, Vol. AC---34, S. 831---847, 1989
[21] Doyle, J. C., B. A. Francis und A. R. Tannenbaum: Feedback Control Theory.Macmillan, New York, 1992
[22] Duren P.: Theory of Hp Spaces.Academic Press, New York, 1970
[23] Enns, D. F.: Rocket Stabilization as a Structured Singular Value SynthesisDesign Example.IEEE Control Systems, June 1991
[24] Föllinger. O.: Regelungstechnik.Hüthig, Heidelberg, 1985
[25] Francis, B. A. und G. Zames: On H1-Optimal Sensitivity Theory for SISOFeedback Systems.IEEE Trans. Auto. Control, Vol. AC---29, S. 9---16, 1984
[26] Francis, B. A.: A Course on H1 Control Theory.Lecture Notes in Control and Inform. Sciences, Vol. 88, 1987
[27] Garbow, B. J. Boyle, J. Dongarra und C. Moler:Matrix Eigensystem Routines --- EISPACK Guide Externsion.Springer, Berlin, 1977

Regelungstheorie 2 Hochschule Bremerhaven --- IAE137
[28] Garcia, E. C. und M. Morari: Internal Model Control: 1. A Unifying Reviewand Some New Results.Industr. and Eng. Chemistry Process Design and Development,Vol. 21, S. 308---323, 1982
[29] Geering, H.: Regelungstechnik.Springer, Heidelberg, 1994
[30] Glover, K., D. J. N. Limebeer, J. C. Doyle, E. M. Kasenally und M. G. Safonov:State Space Formulae for All Stabilizing Controllers that Satisfy an H1---NormBound and Relations to Risk Sensitivity.Systems and Control Letters, Vol. 11, S. 167---172, 1988
[31] Golub, G. H. und C. F. van Loan: Matrix Computations.John Hopkins Univ. Press, Baltimore, 1983
[32] Horowitz, I. M.: Synthesis of Feedback Systems.Academic Press, New York, 1964
[33] IEEE Trans. Auto. Control: Special Issue on Linear-Quadratic-GaussianEstimation and Control Problem.IEEE Trans. Auto. Control, Vol. AC---16, S. 527---869, 1971
[34] Isermann, R.: Digitale Regelsysteme --- Band I: Grundlagen, DeterministischeRegelungen.Springer, Berlin, 1987
[35] Johnson M. A. und M. J. Grimble: Recent Trends in Linear Optimal QuadraticMutlivariable Control System Desgin.IEE Proceedings. Vol. 134, Pt. D., 1987
[36] Kalman R. E.: When is a Linear Control System Optimal?Transaction of the A.S.M.E. D, 86, S. 51---60, 1964
[37] Koosis, P.: Introduction to Hp Spaces.Cambridge University Press, Cambridge MA, 1980
[38] Kwakernaak, H. und R. Sivan: Linear Optimal Control Systems.Wiley, New York, 1972
[39] Leonhard, W.: Statistische Analyse linearer Regelsysteme.Teubner, Stuttgart, 1973
[40] Leonhard, W.: Digitale Signalverarbeitung in der Mess- und Regelungstechnik.Teubner, Stuttgart, 1989
Regelungstheorie 2 Hochschule Bremerhaven --- IAE138
[41] Leonhard, W.: Einführung in die Regelungstechnik.Vieweg, Braunschweig, 1981
[42] Linnemann, A: Numerische Methoden für lineare Regelungssysteme.BI---Wissenschafts---Verlag, Mannheim, 1993
[43] Little, J. N. und A. J. Laub: Control Systems Toolbox User’s Guide.The Mathworks, Inc., 1990
[44] Luenberger, D. G.: Observing the State of a Linear System.IEEE Transactions on Military Electronics, Nr. 8, S. 74---80, 1964
[45] Maciejowski, J. M.: Multivariable Feedback Design.Addison---Wesley, Wokingham, England, 1989
[46] Matlab User’s Guide.The Mathworks, Inc., 1989
[47] Michels, K., F. Klawonn, R. Kruse und A. Nürnberger: Fuzzy-Regelung.Springer, 2002
[48] Morari, M. und E. Zafiriou: Robust Process Control.Prentice-Hall, London, 1989
[49] Müller, K. und W. Leonhard: Computer Control of a Robotic Driver.Proceedings of IECON 92, San Diego, 1992
[50] Müller, K.: Minimale Realisierung von stationär genauen H2/H1-Reglern.Automatisierungstechnik, 41, S. 205---214, 1993
[51] Nett, C. N., C. A. Jacobson und M. J. Balas: A Connection between state spaceand doubly coprime fractional representations.IEEE Trans. Auto. Control, Vol. AC---29, S. 831---832, 1984
[52] Packard, A. und J. C. Doyle: The Complex Structured Singular Value.Automatica, Vol. 29, S. 71---109, 1993
[53] Postlethwaite, I und A. G. MacFarlane: A Complex Variable Approach to theAnalysis of Linear Multivariable Feedback Systems.Springer, Berlin, 1979
[54] Rosenbrock, H. H.: State---Space and Multivariable Theory.Nelson, London, 1970
[55] Sandberg, I. W.: A Frequency-Domain Condition for the Stability of FeedbackSystems Containing a Sngle Time-Varying Nonlinear Element.Bell Systems Technical Journal, Vol. 43, S. 1581---1599

Regelungstheorie 2 Hochschule Bremerhaven --- IAE139
[56] Safonov, M.: Stability Margins of Diagonally Perturbed Multivariable FeedbackSystems.IEE Proc., Vol. 129, Part D, No. 2, S. 252---255, 1982
[57] Safonov, M., E. A. Jonckhere, M. Verma und D. J. N. Limebeer: Synthesis ofPositive Real Multivariable Feedback Systems.Int. Journal of Control, Vol. 45, Nr. 3, S. 817---842, 1987
[58] Safonov, M., D.J.N. Limebeer und R.Y. Chiang: Simplifying the H1 Theory viaLoop Shifting, Matrix Pencil and Descriptor Concepts.Int. J. of Control, Vol. 50, Nr.. 6, S. 2467---2488, 1989
[59] Siemens AG: Technische Tabellen, Größen, Formeln, Begriffe.Siemens AG, 1993
[60] Smith, B., J. Boyle, J. Dongarra, B. Garbow, Y. Ikube, V. Klema und C. Moler:Matrix Eigensystem Routines --- EISPACK Guide.Springer, Berlin, 1976
[61] Stein, G. und M. Athans: The LQG/LTR Procedure for Multivariable FeedbackControl Design.IEEE Trans. Auto. Control, Vol. AC---32, S. 105---114, 1987
[62] Tannenbaum, A.: Invariance and System Theory. Algebraic and GeometricAspects.Lecture Notes in Mathematics, Vol. 845, Springer Verlag, Berlin, 1981
[63] Unbehauen, H.: Regelungstechnik III. Indentifikation, Adaption, Optimierung.Vieweg, Braunschweig, 1985
[64] Vidyasagar, M.: Control System Synthesis: A Factorization Approach.MIT Press, Cambridge, MA, 1985
[65] Wendt, L.: Taschenbuch der Regelungstechnik.Verlag Harri Deutsch, 1998
[66] Wiener, N.: Cybernetics.M.I.T., Boston, 1948
[67] Wilson, D.: Convolution and Hankel Operator Norms for Linear Systems.IEEE Trans. Auto. Control, Vol. AC---34, S. 94---97, 1989
[68] Wonham, M.: Linear Multivariable Systems.Springer, Berlin, 1974
[69] Youla, D. C., H. A. Jabr und J. J. Bongiorno, Jr.: Modern Wiener-Hopf Designof Optimal Controllers --- Part I: The Single Input-Output Case.IEEE Trans. Auto. Control, Vol. AC---21, S. 3---13, 1976
Regelungstheorie 2 Hochschule Bremerhaven --- IAE140
[70] Youla, D. C., H. A. Jabr und J. J. Bongiorno, Jr.: Modern Wiener-Hopf Designof Optimal Controllers --- Part II: The Multivariable Case.IEEE Trans. Auto. Control, Vol. AC---21, S. 319---338, 1976
[71] Young, P. M. und J. C. Doyle: Computation of μ with Real and ComplexUncertainties.Proc. of the 29th IEE Conf. on Decision and Control, S. 1230---1235, 1990
[72] Zames, G.: On the Input---Output Stability of Time-Varying NonlinearFeedback Systems.Part I, IEEE Trans. Auto. Control, Vol. AC---11, S. 228---238, 1966,Part II, IEEE Trans. Auto. Control, Vol. AC---11, S. 465---476, 1966
[73] Ziegler, J. G. und N. B. Nichols: Process Lags in Automatic-Controlled Circuits.Transaction of the A.S.M.E., 65, S. 433---444, 1943
:::



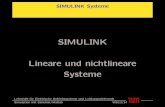
![Vorlesung: Pädiatrie Infektiologie Teil I · (Microsoft PowerPoint - 1. Vorlesung Infekt.NETZ.ppt [Schreibgesch tzt] [Kompatibilit tsmodus]) Vorlesung Infekt.NETZ.ppt [Schreibgesch](https://static.fdokument.com/doc/165x107/5d4b913888c99388658b7be4/vorlesung-paediatrie-infektiologie-teil-i-microsoft-powerpoint-1-vorlesung.jpg)