Erfassung des FFH-Lebensraumtyps 9150 „Mitteleuropäischer ...
Upload
trinhtuyenCategory
view
222download
0
Dr. Axel Schulz, Dr. Tobias Dittmann, Dr. Timothy Coppack
Im Auftrag des Bundesamts für Seeschifffahrt und Hydrographie (BSH) Rostock, August 2014
Erfassung von Ausweichbewegungen von Zugvögeln mittels Pencil Beam Radar
und
Erfassung von Vogelkollisionen mit Hilfe des Systems VARS
Schlussbericht zum Projekt
Ökologische Begleitforschung am Offshore-Testfeldvorhaben alpha ventus zur Evaluierung des
Standarduntersuchungskonzeptes des BSH (StUKplus)
© D
OT
I 2009 -
Matthia
s Ibele
r

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 2
Auftraggeber:
Bundesamt für Seeschifffahrt und Hydrographie (BSH)
Bernhard-Nocht-Straße 78
20359 Hamburg
Auftragnehmer:
Institut für Angewandte Ökosystemforschung GmbH
Alte Dorfstr. 11,
18184 Neu Broderstorf
Tel. 038204 618-0, Fax: 038204 618-10
Email: [email protected], www.ifaoe.de
Stand:
August 2014
Die diesem Bericht zugrunde liegenden Untersuchungen wurden im Rahmen des For-
schungsvorhabens „Ökologische Begleitforschung am Offshore-Testfeldvorhaben alpha ven-
tus zur Evaluierung des Standarduntersuchungskonzeptes des BSH“ (StUKplus) durchge-
führt. Das StUKplus-Vorhaben wird mit Mitteln des Bundesministeriums für Umwelt, Natur-
schutz und Reaktorsicherheit unter dem Förderkennzeichen 0327689A gefördert. Es ist Be-
standteil der Forschungsinitiative „Research at alpha ventus“ (RAVE).
Die Verantwortung für den Inhalt dieser Veröffentlichung liegt bei den Autoren.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 3
Erfassung von Ausweichbewegungen von Zugvögeln mittels Pencil
Beam Radar und Erfassung von Vogelkollisionen mit Hilfe des Sys-
tems VARS
Auftragnehmer
IfAÖ - Institut für angewandte Ökosystem-
forschung GmbH
Auftragsnummer
0327689A/IfAÖ1
0327689A/IfAÖ2
Projektbezeichnung
Erfassung von Ausweichbewegungen von Zugvögeln mittels Pencil Beam Radar und
Erfassung von Vogelkollisionen mit Hilfe des Systems VARS
Laufzeit des Projektes
01.10.2008 - 31.08.2013
Projektbeteiligte
Dr. Axel Schulz, Dr. Tobias Dittmann, Dr. Timothy Coppack
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 4
1. Zusammenfassung
Die Einschätzung der Effekte von Offshore-Windparks auf Zugvögel ist eine der relevantesten
naturschutzfachlichen Fragen im Zusammenhang mit der Nutzung regenerativer Energie auf
offener See. Bisher bestanden national und international kaum Kenntnisse über das nächtliche
Verhalten von Vögeln im Nahbereich von Windenergieanlagen, obwohl Nachtzieher einen
Großteil des Vogelzugaufkommens ausmachen. Im Rahmen der Evaluierung des Standardun-
tersuchungskonzepts (StUK3) des BSH und der Forschungen zum Offshore-Windpark alpha
ventus (RAVE - Research at alpha ventus) wurden neue Methoden und Ansätze für das Be-
triebsmonitoring von Offshore-Windparks entwickelt, um insbesondere Aussagen zur Gefähr-
dung von Zugvögeln durch Kollision zu ermöglichen. Die Ergebnisse der beiden in diesem
Kontext verwirklichten Projekte „Erfassung von Ausweichbewegungen von Zugvögeln mittels
Pencil Beam Radar“ und „Erfassung von Vogelkollisionen mit Hilfe des Systems VARS“ wer-
den im vorliegenden Bericht gemeinsam dargestellt. Dabei werden mit beiden Ansätzen erho-
bene Daten miteinander verschnitten.
In den Jahren 2010-2013 erfolgten in beiden Projekten kontinuierliche Dauermessungen mit
eigens hierfür entwickelten Messgeräten.
Ein für den Einsatz im Offshorebereich sowie für Messungen in verschiedenen Richtungen und
Höhenstufen modifiziertes Fixbeam- (= Pencil Beam-) Radar wurde auf der am Rand des
Offshore-Windparks alpha ventus gelegenen Forschungsplattform FINO1 installiert. Dieses
Radargerät erfasste den nächtlichen Vogelzug bis in eine Höhe von 3.400 m. Es erlaubte eine
Abschätzung absoluter Zugraten und ermöglichte weiterhin eine automatische Erkennung und
Unterscheidung ziehender Vögel auf Basis ihrer Flügelschlagmuster. Als mögliche großräumi-
ge Auswirkungen von Offshore-Windparks auf nachts ziehende Vögel werden einerseits
Scheuchwirkungen (macro-avoidance) und andererseits Lockeffekte durch die vorgeschriebe-
ne Beleuchtung der Anlagen und begleitende Strukturen diskutiert, die zu verringerten bzw. zu
erhöhten Vogelzahlen innerhalb des Offshore-Windparks führen könnten. Vor diesem Hinter-
grund wurden die mit dem Fixbeam-Radar in sieben Zugperioden im Windpark alpha ventus
gemessenen Zugraten mit solchen aus einem Referenzbereich außerhalb des Offshore-
Windparks verglichen. Dabei ergab sich eine starke Variation zwischen den einzelnen Zug-
nächten. Im Mittel wurden in fünf der sieben untersuchten Saisons innerhalb der untersten 200
Höhenmeter signifikant höhere Zugraten innerhalb des Offshore-Windparks ermittelt. Im
Herbst 2012 wurden außerhalb des Offshore-Windparks höhere Zugraten festgestellt, im
Herbst 2013 konnten keine Unterschiede registriert werden. Den größten Anteil der registrier-
ten Nachtzieher stellten Singvögel.
Weiterhin wurden zwei für den Offshore-Einsatz optimierte Kamerasysteme (VARS: Visual
Automatic Recording System) entwickelt, die sowohl tagsüber als auch nachts eine automati-
sche Erfassung fliegender Vögel gestatten. Eines dieser Kamerasysteme wurde auf der Gon-
del einer Windenergieanlage (AV4, REpower 5M) montiert und erfasste fliegende Vögel im
Rotorbereich. Ein weiteres VARS, das ein horizontales Blickfeld über das Plattformdeck in den
Offshore-Windpark besaß, wurde am Turmfuß derselben Turbine installiert. Vor allem die Ka-
mera auf der Gondel diente der Ermittlung von Kollisionsraten sowie über einen Abgleich mit
den mittels Radar erfassten Zugraten dem Nachweis von Ausweichbewegungen im unmittel-
baren Nahbereich des Rotors (micro-avoidance).

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 5
Zur Ermittlung von Kollisionsraten wurde das Modell von Band (2000, 2012) bzw. Band et al.
(2007) genutzt. Hierbei konnten sonst auf Annahmen basierende, kritische Größen (z. B.
avoidance rate) durch konkrete Messwerte aus dem Rotorbereich ersetzt werden. Die notwen-
digen Parameter lagen über die Betriebsdaten der Windenergieanlage und die Aufzeichnun-
gen von VARS für den Moment des Rotordurchflugs eines jeden Vogels vor. Die Summe aller
im oberen Rotorbereich beobachteten Einzelereignisse ergab eine Kollisionsrate von 8-14 In-
dividuen pro Anlage und Jahr. Rund 82 % der beobachteten Rotordurchflüge traten in der
Dunkelphase und entsprechend wenige bei Tageslicht auf. Um möglichen Verteilungsunter-
schieden von Vögeln in verschiedenen Höhenstufen des Rotors gerecht zu werden, wurden
zusätzlich zur Gondelkamera auch die Daten vom Turmfuß herangezogen. Danach ergab sich
eine potenzielle Kollisionsrate von 13-29 Kollisionsereignissen pro Anlage und Jahr.
Mit VARS wurden im Rotorbereich signifikant weniger Vögel beobachtet, wenn der Rotor dreh-
te. Dass dieser Sachverhalt ein tatsächliches Ausweichverhalten widerspiegelt, ließ sich auch
aus Vergleichen mit den Radardaten folgern. Das Verhältnis von Rotordurchflügen (ermittelt
mit VARS) und der mit Radar gemessenen Zugrate in der relevanten Höhenschicht ergab bei
Betrieb der Anlage eine nächtliche Ausweichrate im Nahbereich (micro-avoidance) von 95,62 –
98,03 %. Bei still stehendem Rotor verringerte sich die Ausweichrate auf 40,73 %.
Hiermit wurde erstmals eine Ausweichrate für nachts ziehende Vögel ermittelt, die auf gemes-
senen Durchflugraten im Rotorbereich und Flugraten im Offshore-Windpark alpha ventus ba-
siert. Ein solcher Wert ist wesentliche Voraussetzung für die Nutzung von Kollisionsmodellen.
Auch eine Kollisionsrate, die die besonders relevante Artengruppe der Singvögel einschließt,
und auf einer Dauermessung im Rotorbereich einer Offshore-Windenergieanlage basiert, war
bisher nicht verfügbar.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 6
2. Summary
The effects of offshore windfarms on migratory birds are among the most relevant conserva-
tion concerns related to the use of renewable energy at sea. Although night-time migrants
make up a large proportion of the overall migration volume, knowledge about their behaviour
in the vicinity of wind turbines was hitherto scant - both nationally and internationally. As part
of the evaluation process leading to the standard investigation concept (StUK, issued by
BSH) and within the research initiative RAVE at Germany’s first offshore wind farm alpha
ventus, new methods and approaches for monitoring birds at operational wind turbines were
specially developed to provide evidence on the risk of collision for migratory birds. The pre-
sent report summarizes results of two research projects, which included the development
and application of two remote sensing technologies: pencil beam radar and VARS (Visual
Automated Recording System). Results emerging from both projects are blended together in
this report.
Continuous long-term measurements using both technologies were carried out between
2010 and 2013.
A purpose-built and modified fixbeam (= pencil beam) radar was installed on the research
platform FINO1 near the offshore wind farm alpha ventus. This radar system automatically
detects nocturnal bird migration in elevations of up to 3.400 m and enables the calculation of
absolute migration rates and a differentiation of migrating bird taxa on the basis of their wing-
beat patterns. One possible large-scale impact of offshore wind farms on night migrating
birds is macro-avoidance (avoidance of the entire wind farm area). Furthermore, the attrac-
tion of birds through artificial lights on turbines and associated structures may locally reduce
or increase the number of birds flying within the wind farm. Against this backdrop, migration
rates as measured with fixbeam radar over seven seasons in the wind farm were compared
with values from a reference area outside the wind farm. Results showed strong variation
between migratory nights.
In five out of seven seasons, significantly higher migration rates were detected on average
inside the wind farm within the lowest 200 meters. In autumn 2012, higher migration rates
were found outside the wind farm; in autumn 2013, no differences were detected. The largest
share of detected nocturnal migrants included songbirds.
The camera system VARS (Visual Automatic Recording System; purpose-developed for off-
shore conditions) allows automatic detection of flying birds at day and night. One of these
camera systems was mounted on the nacelle of a wind turbine (AV4, Repower 5M) and cap-
tured birds flying in the rotor-swept zone. Another VARS with a horizontal field of view was
installed on the platform deck of the same turbine. The camera on the nacelle was deployed
to assess collision rates as well as micro-avoidance rates (avoidance of the rotor-swept
zone) through comparison with event rates measured at a larger spatial scale by radar.
Collision rates were determined on the basis of the Band model (Band 2000, 2012, Band et
al. 2007). The most critical input variable “avoidance rate”, which is usually based on broad
assumptions, was replaced by actual values measured at the operational wind turbine. All
necessary parameters, i.e. the operational state of the wind turbine and records of birds
passing the rotor-swept zone, were available. The sum of all single events observed in the
outermost rotor zone resulted in a collision rate of 8-14 individuals per year and turbine.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 7
Around 82 % of the observed flights through the rotor-swept zone occurred during the dark
phase and accordingly less in daylight. To account for variation in the distribution of birds
flying at different elevations, the data of the second camera on the platform deck were inte-
grated, resulting in a potential collision rate of 13-29 victims per year and turbine.
Significantly lower numbers of birds were observed within the rotor-swept zone when the
turbine was running. Comparisons with simultaneous radar data suggested that this relation-
ship reflects actual avoidance behaviour. The ratio of events determined with VARS within
the rotor-swept zone and migration rates measured with radar at relevant elevations yielded
nocturnal micro-avoidance rates that ranged from 95.62 to 98.03 %. The micro-avoidance
rate decreased to 40.73 % when the rotors were standing still.
We herein present for the first time avoidance rates for night-migrating birds based on actual
flight rates measured within the rotor-swept zone of a wind turbine and inside a wind farm.
These micro-avoidance values are an essential prerequisite for the effective use of collision
risk models. Moreover, a collision rate including the most relevant group of species of birds,
i.e. nocturnal passerine migrants, and which is based on continuous measurements in the
rotor-swept zone of an offshore wind turbine, was previously unavailable.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 8
3. Inhaltsverzeichnis
1. Zusammenfassung ................................................................................................ 4
2. Summary ............................................................................................................... 6
3. Inhaltsverzeichnis .................................................................................................. 8
4. Tabellenverzeichnis ............................................................................................. 10
5. Abbildungsverzeichnis ......................................................................................... 11
6. Abkürzungsverzeichnis ........................................................................................ 15
7. Einleitung ............................................................................................................. 16
8. Stand von Wissenschaft und Technik .................................................................. 18
8.1. Kollisionsrisiko ..................................................................................................... 18
8.2. Erfassung des Vogelzugs nach StUK mittels Radar ............................................ 19
9. Material und Methoden ........................................................................................ 21
9.1. Erfassung des Vogelzuges mit Radar ................................................................. 21
9.1.1. Messdesign .......................................................................................................... 22
9.1.2. Auswertung .......................................................................................................... 24
9.1.3. Datenauswahl für Darstellung allgemeiner Zugphänologien ................................ 25
9.1.4. Datenauswahl für Darstellung von Höhenklassen ................................................ 25
9.1.5. Wetterparameter .................................................................................................. 25
9.2. Erfassung von Vögeln mit dem Kamerasystem VARS ........................................ 26
9.3. Ermittlung von Kollisionsraten ............................................................................. 28
9.4. Ermittlung einer Ausweichrate für den Nahbereich (micro-avoidance) ................ 32
9.5. Methodenkritik ..................................................................................................... 33
9.5.1. Fixbeam-Radar ..................................................................................................... 33
9.5.2. VARS .................................................................................................................... 34
9.5.3. Band-Modell ......................................................................................................... 34
10. Ergebnisse ........................................................................................................... 35
10.1. Zeitliches Auftreten des Vogelzuges im Bereich des Windparks alpha ventus ... 35
10.2. Höhenverteilung ziehender Vögel über die Saison .............................................. 41
10.3. Verhalten der Vögel an der Offshore-Windenergieanlage AV4 ........................... 42
10.3.1. Erfassung von Vögeln im Rotorbereich der OWEA AV4 ...................................... 42
10.3.2. Erfassung von Vogelereignissen über dem Plattformdeck der AV4 ..................... 45
10.3.3. Differenzierung nach dem Betriebszustand der OWEA AV4 ............................... 47
10.3.4. Beteiligtes Artenspektrum .................................................................................... 50
10.4. Beispiele für besondere Locknächte .................................................................... 51
10.4.1. Betrachtungen zum Anlockereignis am 01.11.2010 ............................................. 51
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 9
10.4.2. Betrachtungen zum Anlockereignis in der Nacht vom 13.-14.04.2013 ................ 54
10.5. Kollisionsraten an der OWEA AV4 ...................................................................... 57
10.6. Großräumiges Ausweichen (macro-avoidance) .................................................. 58
10.7. Ausweichrate für den Nahbereich (micro-avoidance) .......................................... 59
11. Diskussion ........................................................................................................... 61
11.1. Phänologie und Intensität des Vogelzuges .......................................................... 61
11.2. Zugrate innerhalb und außerhalb von alpha ventus (macro-avoidance) ............. 63
11.3. Einordnung der Ergebnisse zu Kollisionsrate und Ausweichrate im Nahbereich (micro-avoidance) ................................................................................................ 65
11.4. Potenzielle Ursachen für Ausweichverhalten im Nahbereich von OWEA............ 67
11.5. Anwendung von VARS und Fixbeam-Radar im Rahmen von StUK4 .................. 69
12. Ausblick ............................................................................................................... 69
13. Publikationen zum Projekt ................................................................................... 71
14. Literaturverzeichnis .............................................................................................. 71
15. Anhang ................................................................................................................ 78
15.1. Jahreszeitliches Auftreten der mit Fixbeam-Radar erfassten Vögel .................... 78
15.2. Flughöhenverteilung der mit Fixbeam-Radar erfassten Vögel............................. 84

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 10
4. Tabellenverzeichnis
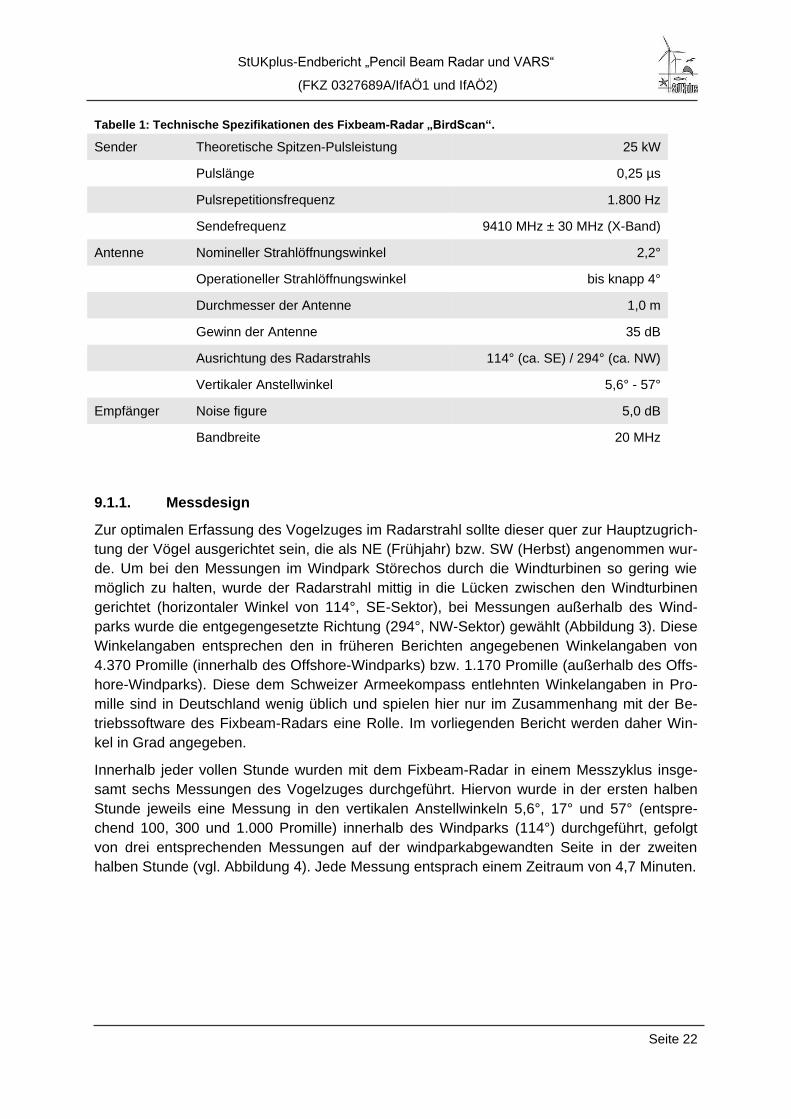
Tabelle 1: Technische Spezifikationen des Fixbeam-Radar „BirdScan“. ............................... 22
Tabelle 2: Termine der zehn stärksten mittleren stündlichen Zugraten pro Nacht
(Vögel/h*km) innerhalb und außerhalb des Windparks alpha ventus mit den herrschenden
Windbedingungen. Die Zugraten betreffen Vögel gesamt im Erfassungsbereich bis max.
3.400 m Höhe. SD = Standardabweichung, N = Anzahl der Stundenwerte. Das Datum gibt
jeweils den Termin der Abenddämmerung an, die angegebenen Werte beziehen sich auf
zusammenhängende Nächte. ................................................................................................ 39
Tabelle 3: Arten bzw. Artengruppen, die mit VARS an der OWEA AV4 erfasst wurden.
Dargestellt ist die Anzahl der Ereignisse ohne Großmöwen (mehrfaches Auftreten des
gleichen Individuums innerhalb einer Stunde entfernt). VARS Gondel: 2010-2013, VARS
Plattformdeck: 2012-2013 ...................................................................................................... 50
Tabelle 4: Kollisionsraten von Zugvögeln an der AV4 im Zeitraum 2010-2013, ermittelt aus
den mit VARS erfassten Vogelbewegungen im Rotorbereich und dem Kollisionsmodell von
Band (2012). ........................................................................................................................... 57

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 11
5. Abbildungsverzeichnis
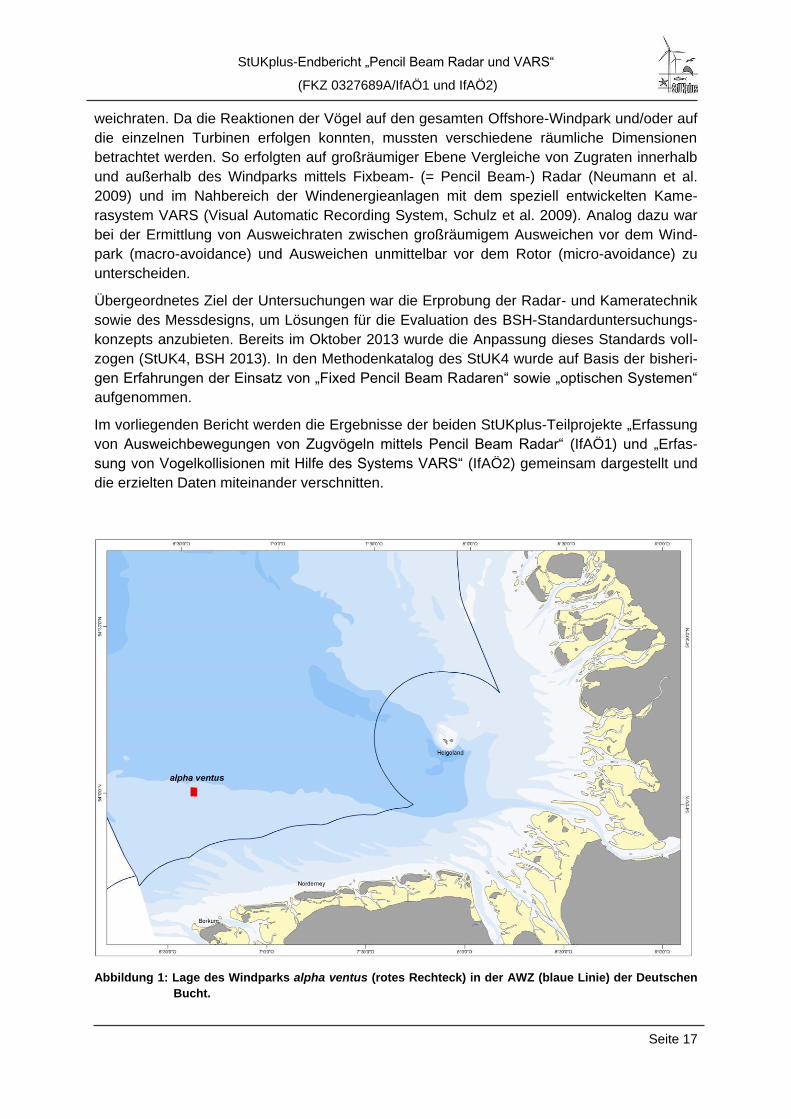
Abbildung 1: Lage des Windparks alpha ventus (rotes Rechteck) in der AWZ (blaue Linie)
der Deutschen Bucht. ............................................................................................................. 17
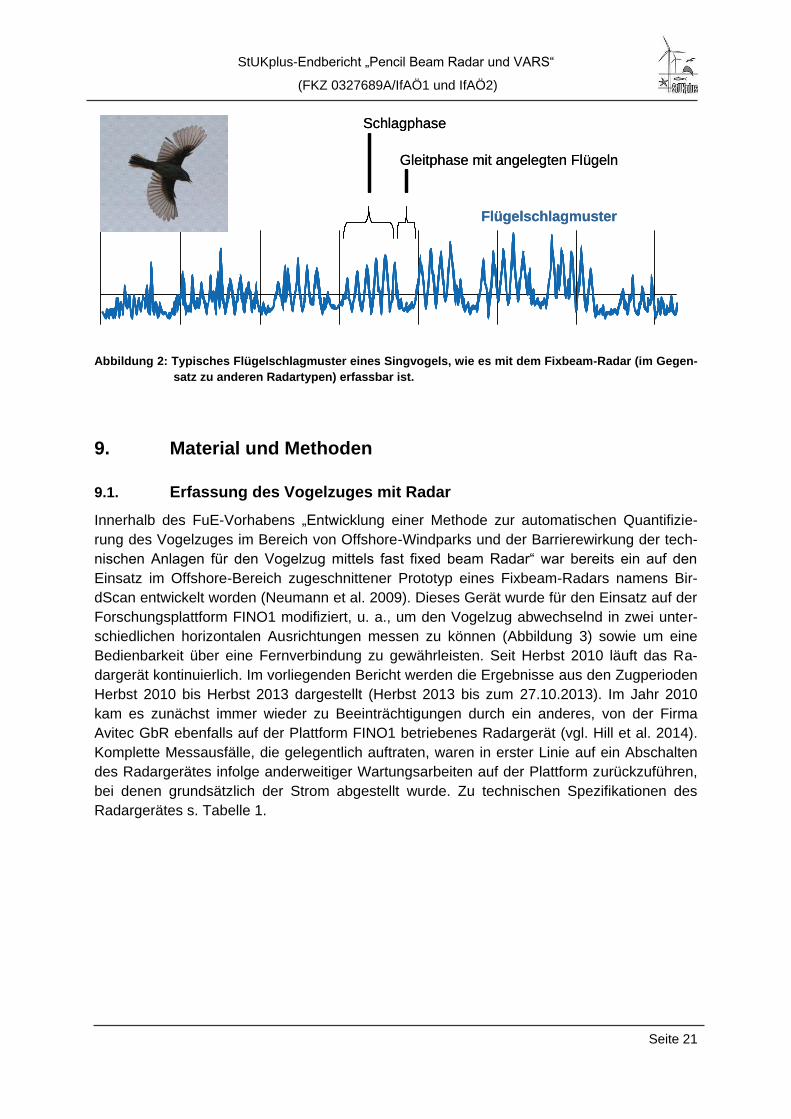
Abbildung 2: Typisches Flügelschlagmuster eines Singvogels, wie es mit dem Fixbeam-
Radar (im Gegensatz zu anderen Radartypen) erfassbar ist. ................................................ 21
Abbildung 3: Schema der alternierenden Messungen innerhalb und außerhalb des
Windparks alpha ventus mit dem Fixbeam-Radar. Die Pfeile geben die Hauptzugrichtungen
der Nachtzieher an. ................................................................................................................ 23
Abbildung 4: Schema der Messungen in drei verschiedenen Anstellwinkeln mit dem
Fixbeam-Radar. Innerhalb einer Stunde wurden drei dieser Messungen innerhalb und drei
Messungen außerhalb des Windparks durchgeführt. ............................................................. 23
Abbildung 5: VARS im Einsatz auf der Gondel der AV4 (links) und beim Test der
Infrarotstrahler vor der Installation (rechts, infrarotempfindliche Aufnahme). ......................... 27
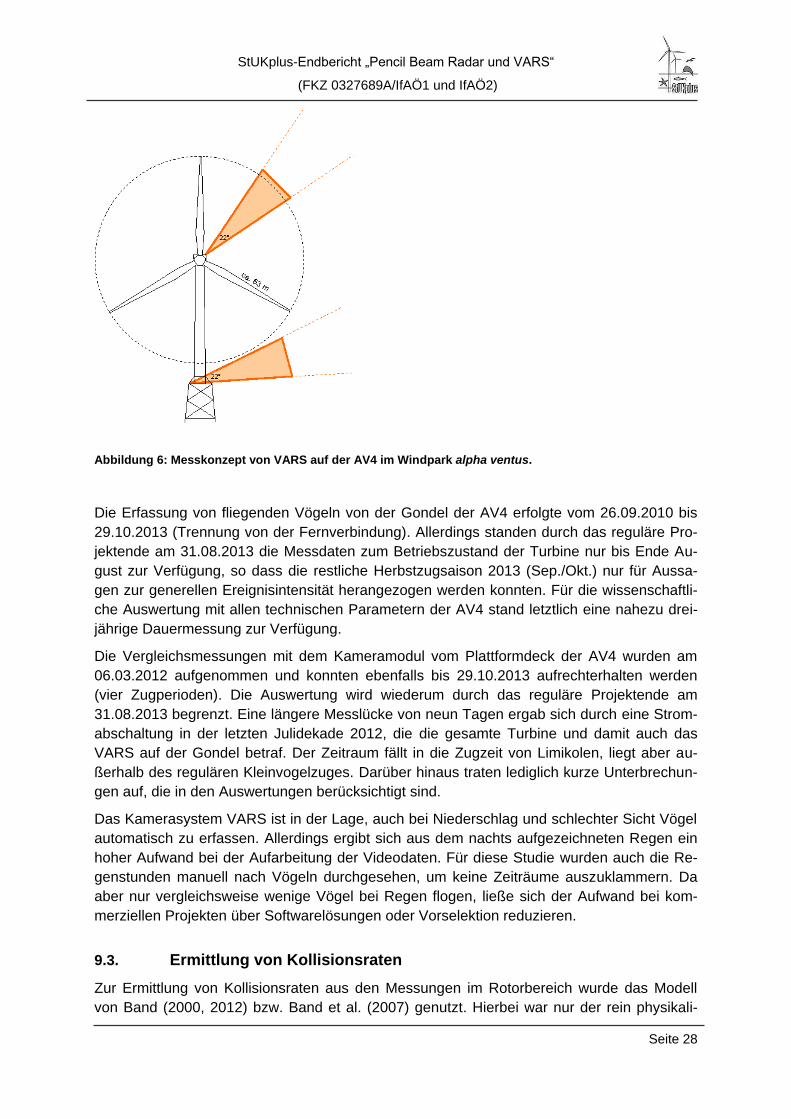
Abbildung 6: Messkonzept von VARS auf der AV4 im Windpark alpha ventus. .................... 28
Abbildung 7: Vergleich von rechnerischem Wert eines Testkörpers von 100 cm² (entspricht
kleinem Singvogel) und den gemessenen Pixeln. Unterschiede ergeben sich durch
Bewegungsunschärfe und Mischpixel am Körperrand. .......................................................... 30
Abbildung 8: Ausrichtung des VARS am Turmfuß der AV4 im Windpark alpha ventus und
Definition des Sektors, in dem der Rotor über dem Kameraausschnitt dreht (schematisch). 32
Abbildung 9: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des
Frühjahrszuges 2011 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung
mittels Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus
95%-Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das
Datum des Nachtbeginns an. Darstellung weiterer Saisons siehe Anhang. .......................... 40
Abbildung 10: Zugrate verschiedener Vogelgruppen während des Frühjahrszuges 2011 in
Höhen bis 200 m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha
ventus und außerhalb. Dargestellt sind mittlere stündliche Zugraten pro Nacht. Beachte
unterschiedliche Skalierungen. Das Datum gibt jeweils den Termin des Nachtbeginns an. .. 41
Abbildung 11: Verteilung der Vogelindividuen in der ersten Jahreshälfte 2011 bis 2013,
erfasst mit VARS von der Gondel der AV4 im Windpark alpha ventus (unabhängig vom
Betrieb der Anlage). Orange: Vögel im Rotorbereich, grau: außerhalb Rotorbereich, schwarz:
Messlücken. ........................................................................................................................... 43
Abbildung 12: Verteilung der Vogelindividuen in der zweiten Jahreshälfte 2010 bis 2013,
erfasst mit VARS von der Gondel der AV4 im Windpark alpha ventus (unabhängig vom
Betrieb der Anlage). Orange: Vögel im Rotorbereich, grau: außerhalb Rotorbereich, schwarz:
Messlücken. ........................................................................................................................... 44
Abbildung 13: Verteilung der Vogelindividuen in der ersten Jahreshälfte 2012 und 2013,
erfasst mit VARS vom Plattformdeck der AV4 (ohne Möwen und Kormorane). durchbrochene
Säulen: Einordnung als Vogel unsicher ................................................................................. 45
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 12
Abbildung 14: Verteilung der Vogelindividuen in der zweiten Jahreshälfte 2012 und 2013,
erfasst mit VARS vom Plattformdeck der AV4 (ohne Möwen und Kormorane). durchbrochene
Säulen: Einordnung als Vogel unsicher ................................................................................. 46
Abbildung 15: Jahreszeitliche Aktivität von Großmöwen im Windpark alpha ventus nahe der
AV4, erfasst mit VARS (Blickrichtung horizontal vom Plattformdeck der AV4). ..................... 47
Abbildung 16: Verteilung der Vogelaktivität (Individuen/Stunde) im Rotorbereich der AV4 in
Abhängigkeit vom Betrieb der Anlage und der Tageszeit (09/2010-08/2013). Als Grenze
zwischen Tag und Nacht wurde die bürgerliche (zivile) Dämmerung angesetzt. Die
Anlaufgeschwindigkeit betrifft eine Rotationsperiode von 7,76 - 8,31 Sekunden. .................. 48
Abbildung 17: Verteilung der Vogelaktivität (Individuen/Stunde) am Plattformdeck der AV4 in
Abhängigkeit vom Betrieb der Anlage und der Tageszeit (03/2012-08/2013). Als Grenze
zwischen Tag und Nacht wurde die bürgerliche (zivile) Dämmerung angesetzt. Die
Anlaufgeschwindigkeit betrifft eine Rotationsperiode von 7,76 - 8,31 Sekunden. .................. 49
Abbildung 18: Verteilung von Abbildung 17, abzüglich der Nacht vom 13.-14.04.2013 bei den
Vogelereignissen ohne Großmöwen und Kormorane (links) und dem 04.09.2012 bei den
Großmöwen und Kormoranen (rechts). .................................................................................. 49
Abbildung 19: Beispiele für Vogelaufzeichnungen mit VARS (links: Mauersegler bei Nacht,
rechts: Steinschmätzer am Tag). Einzelbilder aus Videosequenzen. .................................... 51
Abbildung 20: Anzahl der Vogelereignisse im Rotorbereich nach Aufzeichnungen von VARS
(orange) und zugehörige Leistung der AV4 (grau). Von 6:00 bis 8:00 Uhr (UTC) wurden nur
Vogelereignisse oberhalb des Rotors (nicht dargestellt) registriert. ....................................... 52
Abbildung 21: Mit Fixbeam-Radar ermittelter Zughöhenverlauf innerhalb und außerhalb des
Windparks alpha ventus in zwei aufeinander folgenden Herbstnächten mit hoher
Zugintensität, 31.10./01.11.2010 (oben) und 01./02.11.2010 (unten) mit den
Wetterparametern Rückenwindkomponente (= tailwind component TWC),
Seitenwindkomponente (crosswind component CWC) und Luftfeuchte. Niederschlag wurde
nicht festgestellt. Die Fläche der Kreise entspricht der Zugrate. In der Nacht
31.10./01.11.2010 wurde in den letzten Nachtstunden mit dem Kamerasystem VARS eine
starke Anlockung von Singvögeln an der Windturbine AV4 festgestellt, nicht aber in der
Folgenacht (s. o.). .................................................................................................................. 53
Abbildung 22: In den starken Zugnächten vom 13.-14.04.2013 und 14.-15.04.2013 hielt sich
ein stark beleuchtetes Schiff an der AV4 auf (Aufnahme des VARS am Plattformdeck der
AV4). Alle auf dem Bild erkennbaren Lichtquellen und Konstruktionen betreffen das Schiff. In
unbeeinflussten Nächten war der gleiche Bildausschnitt dunkel. ........................................... 55
Abbildung 23: Anzahl der Vogelbewegungen im Rotorbereich der AV4 nach Aufzeichnungen
von VARS. Die Zeiträume der beiden Nächte sind grau hinterlegt. Zeitangaben in UTC+1. . 55
Abbildung 24: Mit Fixbeam-Radar ermittelter Zughöhenverlauf innerhalb und außerhalb des
Windparks alpha ventus in zwei aufeinander folgenden Frühjahrsnächten hoher
Zugintensität, 13./14.04.2013 (oben) und 14./15.04.2013 (unten) mit
Rückenwindkomponente (TWC), Seitenwindkomponente (CWC), Luftfeuchte und
Niederschlag. Fläche der Kreise entspricht Zugrate. In der Nacht 13./14.04.2013 wurde mit
VARS eine starke Anlockung von Singvögeln an der Windturbine AV4 festgestellt, in der
Folgenacht in geringerem Maße (s. o.). ................................................................................. 56
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 13
Abbildung 25: Mittlere stündliche Zugraten + Standardfehler innerhalb und außerhalb des
Windparks alpha ventus nach Radarmessungen. Grundlage des Vergleichs sind die
Zugraten aller Nachtstunden, in denen Daten von beiden Seiten aus allen drei Anstellwinkeln
vorlagen und hierbei mindestens ein Echo registriert wurde. Wilcoxon-Tests. Zahlen über
den Säulenpaaren geben die Anzahl der betrachteten Nachtstunden an. *: p < 0,05, **: p <
0,01, ***: p < 0,001. ................................................................................................................ 59
Abbildung 26: Nächtliche Ansicht der OWEA AV2 im Windpark alpha ventus am 26.09.2012
um Mitternacht – aufgenommen mit VARS aus 1,15 km Entfernung. Die Rotorblätter und der
Turm der Anlage sind durch Mondlicht (Vollmond: 30.09., Halbmond: 22.09.) deutlich
erkennbar. .............................................................................................................................. 68
Abbildung 27: Nächtliche Ansicht der OWEA AV2 im Windpark alpha ventus am 29.09.2012
um Mitternacht – aufgenommen mit VARS aus 1,15 km Entfernung. Die Rotorblätter und der
Turm der Anlage sind durch Mondlicht (hellerer Wolkenhintergrund, Vollmond: 30.09.)
deutlich erkennbar. ................................................................................................................. 68
Abbildung 28: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des
Herbstzuges 2010 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung
mittels Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus
95%-Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das
Datum des Nachtbeginns an. ................................................................................................. 78
Abbildung 29: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des
Herbstzuges 2011 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung
mittels Fixbeam-Radar (Frühjahr 2011 wird bereits in Kapitel 4.1. präsentiert). Dargestellt
sind mittlere stündliche Zugraten pro Nacht plus/minus 95%-Konfidenzintervall. Beachte
unterschiedliche Skalierungen. Das Datum gibt jeweils das Datum des Nachtbeginns an.
Gelb: Messlücken. .................................................................................................................. 79
Abbildung 30: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des
Frühjahrszuges 2012 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung
mittels Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus
95%-Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das
Datum des Nachtbeginns an. Gelb: Messlücken . ................................................................. 80
Abbildung 31: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des
Herbstzuges 2012 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung
mittels Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus
95%-Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das
Datum des Nachtbeginns an. Gelb: Messlücken. .................................................................. 81
Abbildung 32: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des
Frühjahrszuges 2013 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung
mittels Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus
95%-Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das
Datum des Nachtbeginns an. Gelb: Messlücken. .................................................................. 82
Abbildung 33: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des
Herbstzuges 2013 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung
mittels Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 14
95%-Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das
Datum des Nachtbeginns an. ................................................................................................. 83
Abbildung 34: Zugrate verschiedener Vogelgruppen während des Herbstzuges 2010 in
Höhen bis 200 m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha
ventus und außerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere
stündliche Zugraten pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an. .. 84
Abbildung 35: Zugrate verschiedener Vogelgruppen während des Herbstzuges 2011 in
Höhen bis 200 m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha
ventus und außerhalb nach Messungen mit Fixbeam-Radar (Daten aus dem Frühjahr 2011
s. Kapitel 4.2). Dargestellt sind mittlere stündliche Zugraten pro Nacht. Das Datum gibt
jeweils den Termin des Nachtbeginns an. .............................................................................. 85
Abbildung 36: Zugrate verschiedener Vogelgruppen während des Frühjahrszuges 2012 in
Höhen bis 200 m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha
ventus und außerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere
stündliche Zugraten pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an. .. 86
Abbildung 37: Zugrate verschiedener Vogelgruppen während des Herbstzuges 2012 in
Höhen bis 200 m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha
ventus und außerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere
stündliche Zugraten pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an. .. 87
Abbildung 38: Zugrate verschiedener Vogelgruppen während des Frühjahrszuges 2013 in
Höhen bis 200 m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha
ventus und außerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere
stündliche Zugraten pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an. .. 88
Abbildung 39: Zugrate verschiedener Vogelgruppen während des Herbstzuges 2013 in
Höhen bis 200 m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha
ventus und außerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere
stündliche Zugraten pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an. .. 89
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 15
6. Abkürzungsverzeichnis
AV4 Windenergieanlage Nummer 4 im Offshore-Windpark alpha ventus
Bft. Beaufort
BMU Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit
BSH Bundesamt für Seeschifffahrt und Hydrographie
CWC crosswind component (Seitenwindkomponente)
dB (A) dem menschlichen Gehör angepasster Schalldruckpegel in Dezibel
dB Dezibel
FINO Forschungsplattform in Nord- und Ostsee
FKZ Förderkennzeichen
IfAÖ Institut für Angewandte Ökosystemforschung GmbH
Ind. Individuen
IR Infrarot
Kap. Kapitel
MTR migration traffic rate
MW Megawatt
N Größe der Stichprobe
NE Nordost
NERI National Environmental Research Institute, Dänemark
NW Nordwest
OWEA Offshore-Windenergieanlage
RAVE Research at Alpha VEntus
SE Südost
StUK Standarduntersuchungskonzept
SW Südwest
TWC tailwind component (Rückenwindkomponente)
UTC Universal Time Coordinated
VARS Visual Automatic Recording System
VPN Virtual Private Network
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 16
7. Einleitung
Die deutsche Bundesregierung strebt im Zuge der Energiewende einen verstärkten Ausbau
der erneuerbaren Energien an, bei dem die Erschließung der deutschen Meeresgebiete für
großflächige Windparks eine zentrale Stellung einnimmt. Bei einem solchen Ausbau der
Offshore-Windenergienutzung sind die möglichen Gefährdungen der Meeresumwelt, ein-
schließlich des Vogelzuges zu berücksichtigen. Am Beispiel des ersten deutschen Offshore-
Windparks in der Nordsee, alpha ventus, wurden derartige Umweltauswirkungen im Detail
untersucht. Alpha ventus liegt rund 45 km nordwestlich der Insel Borkum in der Deutschen
Bucht (Abbildung 1). Dieser Teil der Nordsee wird jährlich von Millionen von Zugvögeln über-
flogen, bei denen es sich zum größten Teil um Singvögel handelt, die in Skandinavien brüten
(Dierschke et al. 2011). Aber auch Wasser- und Watvögel queren in großer Zahl das Seege-
biet. Der Vogelzug über der Deutschen Bucht findet zu allen Jahreszeiten statt, konzentriert
sich aber in zwei Phasen mit besonders hohen Zugintensitäten, die sich von Anfang März bis
Ende Mai (Frühjahrszug) sowie von Mitte Juli bis Mitte November (Herbstzug) erstrecken
(Dierschke et al. 2011).
Damit stellt die Bewertung des Kollisionsrisikos für Zugvögel eine der relevantesten natur-
schutzfachlichen Fragen im Zusammenhang mit der Nutzung regenerativer Energie auf offe-
ner See dar. Nachtzieher spielen eine besondere Rolle, da sie den größten Teil der ziehen-
den Individuen ausmachen und nächtlicher Vogelschlag an beleuchteten Strukturen auf offe-
ner See infolge von Lichtanlockung vielfach belegt wurde (Gauthreaux & Belser 2006). Mit
den in der zweiten Fortschreibung des BSH-Standarduntersuchungskonzepts (StUK3; BSH
2007) beschriebenen Methoden zur Untersuchung der Auswirkungen von Offshore-
Windenergieanlagen auf die marine Umwelt ließ sich das nächtliche Verhalten von Vögeln im
unmittelbaren Rotorbereich von Windenergieanlagen jedoch nicht erfassen. Für Singvögel
gilt dies auch für die Hellphase, da die meist großen Entfernungen zwischen Ankerpositionen
(bzw. Plattform) und Turbinen keine Beobachtungen des Verhaltens kleiner Arten im direkten
Umfeld der Turbinen zulassen. Im Rahmen des StUKplus-Forschungsvorhabens, das Be-
standteil der Forschungsinitiative Research at alpha ventus (RAVE) ist, sollten Lösungen für
dieses Problemfeld gefunden werden, die letztlich auf eine Evaluierung des StUK ausgerich-
tet waren. Im Mittelpunkt standen die Fragen, welche Auswirkungen der aus 12 Anlagen der
5-MW-Klasse bestehende Offshore-Windpark alpha ventus auf den Vogelzug inklusive Kolli-
sionen mit den Rotoren besitzt und über welche Technologien ein Betriebsmonitoring von
Offshore-Windparks realisierbar ist.
Als zentraler Lösungsansatz wurden kontinuierliche Dauermessungen von festen Standorten
angesehen, da sich der Vogelzug an nur wenigen Tagen im Jahr konzentrieren kann und
damit bei den diskontinuierlich durchgeführten Erfassungen von Schiffen und Plattformen die
Gefahr besteht, entscheidende Ereignisse nicht zu registrieren. Dies betrifft in besonderem
Maße die Ermittlung des Kollisionsrisikos mit den Turbinen, aber auch die lückenlose Doku-
mentation des Zugverlaufs. Voraussetzung für kontinuierliche Dauermessungen war der Ein-
satz automatisierter Verfahren.
Der Schwerpunkt der Untersuchungen lag in der Erfassung des nächtlichen Vogelzugs, da
hier das größte Gefahrenpotenzial gesehen wird und die wesentlichen Wissenslücken be-
stehen (vgl. Cook et al. 2012). Dabei fokussiert der vorliegende Bericht auf die Kernfragen zu
Lichtanlockung und Ausweichverhalten, inklusive der Ermittlung von Kollisions- und Aus-
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 17
weichraten. Da die Reaktionen der Vögel auf den gesamten Offshore-Windpark und/oder auf
die einzelnen Turbinen erfolgen konnten, mussten verschiedene räumliche Dimensionen
betrachtet werden. So erfolgten auf großräumiger Ebene Vergleiche von Zugraten innerhalb
und außerhalb des Windparks mittels Fixbeam- (= Pencil Beam-) Radar (Neumann et al.
2009) und im Nahbereich der Windenergieanlagen mit dem speziell entwickelten Kame-
rasystem VARS (Visual Automatic Recording System, Schulz et al. 2009). Analog dazu war
bei der Ermittlung von Ausweichraten zwischen großräumigem Ausweichen vor dem Wind-
park (macro-avoidance) und Ausweichen unmittelbar vor dem Rotor (micro-avoidance) zu
unterscheiden.
Übergeordnetes Ziel der Untersuchungen war die Erprobung der Radar- und Kameratechnik
sowie des Messdesigns, um Lösungen für die Evaluation des BSH-Standarduntersuchungs-
konzepts anzubieten. Bereits im Oktober 2013 wurde die Anpassung dieses Standards voll-
zogen (StUK4, BSH 2013). In den Methodenkatalog des StUK4 wurde auf Basis der bisheri-
gen Erfahrungen der Einsatz von „Fixed Pencil Beam Radaren“ sowie „optischen Systemen“
aufgenommen.
Im vorliegenden Bericht werden die Ergebnisse der beiden StUKplus-Teilprojekte „Erfassung
von Ausweichbewegungen von Zugvögeln mittels Pencil Beam Radar“ (IfAÖ1) und „Erfas-
sung von Vogelkollisionen mit Hilfe des Systems VARS“ (IfAÖ2) gemeinsam dargestellt und
die erzielten Daten miteinander verschnitten.
Abbildung 1: Lage des Windparks alpha ventus (rotes Rechteck) in der AWZ (blaue Linie) der Deutschen
Bucht.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 18
8. Stand von Wissenschaft und Technik
Im Offshore-Windpark alpha ventus wurden Methoden zur automatischen Erfassung des
Vogelzugs eingesetzt, die dem aktuellen Stand der Technik entsprechen. Das Kamerasys-
tem VARS sowie entscheidende Modifikationen des Fixbeam-Radars „BirdScan“ wurden
eigens in Forschungsprojekten des BMU entwickelt. Mit diesen Geräten wurden Daten er-
zielt, die in Detailgrad und Vollständigkeit deutlich über die Anforderungen des zu Projektbe-
ginn maßgeblichen StUK3 (BSH 2007) hinausgehen (Neumann et al. 2009, Schulz et al.
2009). Die genannten Geräte sind im internationalen Kontext als zuverlässige Techniken
anerkannt (Coppack et al. 2011, Schulz et al. 2011b, Collier et al. 2012). Der Dauerbetrieb
eines Kamerasystems auf der Gondel einer Offshore-Windenergieanlage (VARS) und der
Einsatz eines Fixbeam-Radars an einem im Betrieb befindlichen Offshore-Windpark stellen
bislang Alleinstellungsmerkmale dieser Fernerkundungsmethoden innerhalb des Fachge-
biets dar.
8.1. Kollisionsrisiko
Bisherige Untersuchungen zu Kollisionsrisiken von Zugvögeln im Offshore-Bereich kon-
zentrierten sich vornehmlich auf den Tagzug von Wasservögeln und basieren im Wesentli-
chen auf Sichtbeobachtungen in Kombination mit Radarmessungen (Noer et al. 2000,
Desholm & Kahlert 2005, Larsen & Guillemette 2007, Krijgsveld et al. 2011, Cook et al. 2012,
Skov et al. 2012, Furness et al. 2013). Die Ergebnisse dieser Studien belegen vielfach ein
großräumiges Ausweichverhalten von Wasservögeln gegenüber den Offshore-Windparks.
Die Kollisionsraten werden nach derzeitigem Stand der Wissenschaft über Kollisionsmodelle
geschätzt, die eine Kombination aus der Flughöhenverteilung von tagziehenden Wasservö-
geln und deren Meideverhalten (avoidance rates) beinhalten. Jedoch sind die erforderlichen
Daten zum großräumigen Ausweichen (macro-avoidance) sehr inkonsistent und begrenzt
verfügbar, Daten zum kleinräumigen Ausweichen im unmittelbaren Rotorbereich (micro-
avoidance) liegen für Offshore-Windparks bisher kaum vor (Cook et al. 2012). Die Ausweich-
raten (avoidance rates) werden in den Modellrechnungen meist mit 98 % - 99,5 % angesetzt,
wobei Cook et al. (2012) aufgrund der bestehenden Kenntnislücken empfehlen, auch 95 %
zu nutzen. Mögliche Kollisionsrisiken, die mit echten Messdaten hinterlegt sind, können nur
für einzelne Arten und Standorte abgeschätzt werden, z.B. für die Eiderente (Desholm &
Kahlert 2005, Desholm et al. 2006).
Für die zahlenmäßig weitaus größere Gruppe ziehender Singvögel liegen aus Offshore-
Windparks vor allem aufgrund methodischer Probleme keine Daten aus der Literatur vor.
Lediglich eine vom NERI entwickelte Infrarotkamera war ein Jahr lang im dänischen Offsho-
re-Windpark Nysted I im Einsatz (Petersen et al. 2006). Die technischen Einschränkungen
des Systems (zu geringe Reichweite der Kamera) erlaubten jedoch keine Aussagen über
Kollisionsraten von Singvögeln mit der Turbine. Genaue Untersuchungen von Singvögeln in
der Nacht waren und sind besonders wesentlich, da schon kleine Variationen im Meidever-
halten großen Einfluss auf die berechneten Kollisionsraten ausüben (Chamberlain et al.
2006, Bellebaum et al. 2008). Die Übertragung von Untersuchungen an Land auf Offshore-
Standorte ist hierbei problematisch, weil Landvögel ihren Zug über See bei Eintritt schlechter
Wetterbedingungen nicht unterbrechen können und die Lichtattraktion wahrscheinlich stärker
ist (einzige Lichtquellen). Deshalb bestehen potenziell höhere Kollisionsrisiken über See.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 19
Zahlreiche Kollisionsopfer an Leuchttürmen und Offshore-Plattformen zeigen, dass Zugvögel
über der offenen See einer Kollisionsgefahr mit beleuchteten anthropogenen Strukturen aus-
gesetzt sind (Blasius 1890, 1891a, b, 1895, 1899, 1904, Hansen 1954, Müller 1981, Orejas
et al. 2005, Aumüller et al. 2011). Die jährlichen Kollisionsraten an Feuerschiffen lagen in der
Nord- und Ostsee im Bereich von 100 bis 200 Kollisionen pro Jahr (Hansen 1954). An mo-
dernen, hohen Offshore-Plattformen verunglückten ebenfalls mehrere Hundert Vögel pro
Jahr (Müller 1981, Orejas et al. 2005). Aufgrund der unterschiedlichen Konstruktionen und
Beleuchtungen ist die Übertragbarkeit der Kollisionsraten von Plattformen auf drehende
Windenergieanlagen nicht gegeben. Beispielsweise stellten Young et al. (2003) für Messtür-
me, die mit Stahlseilen abgespannt waren, drei- bis vierfach erhöhte Kollisionsraten im Ver-
gleich zu den Windenergieanlagen der Umgebung fest.
Über das nächtliche Verhalten von Vögeln gegenüber Offshore-Windparks ist wenig bekannt.
Eiderenten zeigten auch nachts Meideverhalten gegenüber Windparks (in kürzerer Entfer-
nung als am Tage) bzw. passten auch in der Dunkelheit ihre Flugrichtung dem Verlauf der
Turbinenreihen an (Christensen et al. 2004). Bei Kleinvögeln kann es an Küstenstandorten
zumindest in unmittelbarer Nähe der Anlage zu kurzfristigen Ausweichbewegungen kommen
(Winkelman 1992a).
8.2. Erfassung des Vogelzugs nach StUK mittels Radar
Im Rahmen der Risikobewertung der Errichtung von Offshore-Windenergieanlagen (OWEA)
im Hinblick auf ziehende Vögel werden zur Erfassung des Vogelzugs nach den Untersu-
chungsstandards des BSH (StUK3 bzw. StUK4) Schiffsradargeräte eingesetzt. Diese werden
überwiegend von Schiffen aus betrieben, sind vergleichsweise kostengünstig und ermögli-
chen durch ihre Mobilität eine Erreichbarkeit aller marinen Standorte. Bislang wurden vor
allem vertikal rotierende Geräte eingesetzt, um Erkenntnisse über das jahreszeitliche Auftre-
ten (Phänologie) des Vogelzugs sowie die Höhenverteilung zu gewinnen. Daneben werden
Schiffsradargeräte auch im horizontalen Betrieb verwendet, um Flugrichtungen zu registrie-
ren, doch ist dies nur bei sehr ruhiger See möglich. Grundsätzlich werden bei Verwendung
von Schiffsradargeräten im herkömmlichen Betrieb Echosignale registriert, die im Vorfeld
durch eine Software in nicht direkt nachvollziehbarer Form aufgearbeitet und in Form meist
gelber Flecken auf dem Radarschirm dargestellt werden. Diese Signale werden als Vögel
gewertet. Eine gewisse Validierung der Richtigkeit dieser Annahme kann durch den Abgleich
mit bei Tag visuell entdeckten Vögeln oder nachts erfassten Zugrufen erfolgen. Die Erfah-
rung zeigt jedoch, dass ein visuelles Auffinden der auf dem Radarschirm dargestellten und
als Vögel eingestuften Echos auch tagsüber nicht immer möglich ist. Hierbei ist zu berück-
sichtigen, dass Schiffsradargeräte mit relativ großen Öffnungswinkeln von meist ca. 20° ar-
beiten. Dadurch wird durch den rotierenden Radarstrahl ein recht großes Luftvolumen abge-
deckt, die registrierten Signale aber nur auf einem 2-dimensionalen Bildschirm dargestellt. In
Folge sind die auf dem Bildschirm dargestellten Signale in einem recht weiten Luftraum zu
suchen, die Entfernung zum Beobachter ist oft weit und der Hintergrund des Himmels oft
sehr hell und strukturarm, was ein Entdecken von Vögeln und damit die Validierung der Ein-
stufung der erfassten Signale erschwert. Grundsätzlich werden durch Schiffsradargeräte
aber auch andere Objekte im Luftraum wie Insekten, Feuchtigkeit, Staub, Luftmassengren-
zen etc. dargestellt (Cooper et al. 1991, Hüppop et al. 2009) und können mit Vögeln ver-
wechselt werden. Eine Erfassung von Vögeln ist bis in eine Entfernung von 1.000 bis
1.500 m sinnvoll möglich. Insbesondere in den untersten 100 m ist die Erfassung durch Stör-

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 20
signale von Bodenstrukturen, auf See durch Wellen, nur sehr eingeschränkt möglich (Orejas
et al. 2005, Hüppop et al. 2006).
Durch das Softwarebüro Steuri GmbH wurde in Kooperation mit der Schweizerischen Vo-
gelwarte Sempach ein anderer Weg der Radarerfassung von Vögeln entwickelt: In Anleh-
nung an die Erfassung des Vogelzugs mit einem umgebauten Zielfolgeradar der Schweizeri-
schen Armee („Superfledermaus“), mit dem die Vogelwarte Sempach jahrzehntelange Erfah-
rung besitzt (Bruderer 1997a, b), wurden Schiffsradargeräte umgebaut und mit einer Parabo-
lantenne versehen. Diese bündelt den Radarstrahl stark, so dass dieser einen Öffnungswin-
kel von nur etwas mehr als 2° besitzt. Durch die Bündelung reicht der Radarstrahl deutlich
weiter. Eine Erfassung der kleinsten Singvögel ist bis in eine Entfernung von über 4 km mög-
lich. Zudem besitzt der Strahl im Gegensatz zu Schiffsradargeräten herkömmlicher Verwen-
dung durch die Bündelung einen sehr viel schärfer begrenzten Rand, so dass er bei Mes-
sung in geringen Höhen weniger anfällig für Störsignale durch Bodenstrukturen wie eine be-
wegte Wasseroberfläche oder auch in der Nähe befindliche Windenergieanlagen ist. Der
Radarstrahl dreht nicht, sondern steht während der Messungen still. Aufgrund der Bündelung
des Radarstrahls wird für diesen Radartyp u. a. der Begriff „Pencilbeam-Radar“ verwendet.
Andere Bezeichnungen wie „fixed-beam-Radar“, „fast fixed-beam Radar“ oder „Fixbeam-
Radar“ beziehen sich auf den während der Messungen still stehenden Strahl. Im Folgenden
wird der Begriff „Fixbeam-Radar“ verwendet. Durch Eichung mit der „Superfledermaus“, die
Abgleich mit verschiedenen anderen Verfahren zur Vogelerfassung kalibriert wurde, erlaubt
das Fixbeam-Radar eine Abschätzung absoluter Zugraten (Liechti et al. 1995, Neumann et
al. 2009).
Im Gegensatz zu im herkömmlichen (oben beschriebenen) Betrieb verwendeten Schiffsra-
dargeräten werden durch ein Fixbeam-Radar direkt Rohsignale der erfassten Objekte abge-
griffen. Bei Objekten, die ihren Radarquerschnitt durch Bewegung verändern, wie dies bei
Vögeln, die mit den Flügeln schlagen, der Fall ist, können die so erzeugten Veränderungen
der Signale als Muster erkannt und zur Identifikation der Echos genutzt werden. Somit ist es
im Gegensatz zu herkömmlichen Schiffsradargeräten möglich, Echos direkt zu bestimmen
und Vogelechos von anderen Echos (Insekten, Feuchtigkeit etc.) zu unterscheiden (Schmal-
johann et al. 2008). Weiterhin ist es innerhalb der Vogelechos aufgrund gruppentypischer
Flügelschlagfrequenzen möglich, zwischen drei verschiedenen Flugtypen zu unterscheiden:
Singvogeltyp (Bogenflug: hochfrequente Schlagphase, gefolgt von einer Gleitphase, vgl. Ab-
bildung 2), Watvogeltyp (gleichmäßige Flügelschläge ohne Gleitphase: Hierunter fallen ne-
ben Watvögeln auch Tauben, Enten, Möwen, Greife etc.), Seglertyp (relativ niederfrequente
Schlagphase, gefolgt von einer längeren Gleitphase; vgl. Bruderer & Weitnauer 1972). Da es
aber auch Übergänge gibt, Vögel nicht immer optimal im Strahl erfasst werden, Vögel auch
in Gruppen fliegen können, wobei sich die Flügelschlagfrequenzen überlagern etc., ist ein
Teil der Vogelechos nicht näher bestimmbar. Für die hier zu beantwortenden Fragen ist die
Bestimmbarkeit von Singvogelechos von übergeordneter Bedeutung, da diese durch ihre
Populationsgrößen einen erheblichen Anteil des Zuggeschehens ausmachen und insbeson-
dere für nachtziehende Singvögel Lockwirkungen durch Lichtquellen mit der Folge von Mas-
senkollisionen belegt sind (Gauthreaux & Belser 2006, Aumüller et al. 2011).
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 21
Schlagphase
Gleitphase mit angelegten Flügeln
Flügelschlagmuster
Schlagphase
Gleitphase mit angelegten Flügeln
Flügelschlagmuster
Abbildung 2: Typisches Flügelschlagmuster eines Singvogels, wie es mit dem Fixbeam-Radar (im Gegen-
satz zu anderen Radartypen) erfassbar ist.
9. Material und Methoden
9.1. Erfassung des Vogelzuges mit Radar
Innerhalb des FuE-Vorhabens „Entwicklung einer Methode zur automatischen Quantifizie-
rung des Vogelzuges im Bereich von Offshore-Windparks und der Barrierewirkung der tech-
nischen Anlagen für den Vogelzug mittels fast fixed beam Radar“ war bereits ein auf den
Einsatz im Offshore-Bereich zugeschnittener Prototyp eines Fixbeam-Radars namens Bir-
dScan entwickelt worden (Neumann et al. 2009). Dieses Gerät wurde für den Einsatz auf der
Forschungsplattform FINO1 modifiziert, u. a., um den Vogelzug abwechselnd in zwei unter-
schiedlichen horizontalen Ausrichtungen messen zu können (Abbildung 3) sowie um eine
Bedienbarkeit über eine Fernverbindung zu gewährleisten. Seit Herbst 2010 läuft das Ra-
dargerät kontinuierlich. Im vorliegenden Bericht werden die Ergebnisse aus den Zugperioden
Herbst 2010 bis Herbst 2013 dargestellt (Herbst 2013 bis zum 27.10.2013). Im Jahr 2010
kam es zunächst immer wieder zu Beeinträchtigungen durch ein anderes, von der Firma
Avitec GbR ebenfalls auf der Plattform FINO1 betriebenes Radargerät (vgl. Hill et al. 2014).
Komplette Messausfälle, die gelegentlich auftraten, waren in erster Linie auf ein Abschalten
des Radargerätes infolge anderweitiger Wartungsarbeiten auf der Plattform zurückzuführen,
bei denen grundsätzlich der Strom abgestellt wurde. Zu technischen Spezifikationen des
Radargerätes s. Tabelle 1.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 22
Tabelle 1: Technische Spezifikationen des Fixbeam-Radar „BirdScan“.
Sender Theoretische Spitzen-Pulsleistung 25 kW
Pulslänge 0,25 µs
Pulsrepetitionsfrequenz 1.800 Hz
Sendefrequenz 9410 MHz ± 30 MHz (X-Band)
Antenne Nomineller Strahlöffnungswinkel 2,2°
Operationeller Strahlöffnungswinkel bis knapp 4°
Durchmesser der Antenne 1,0 m
Gewinn der Antenne 35 dB
Ausrichtung des Radarstrahls 114° (ca. SE) / 294° (ca. NW)
Vertikaler Anstellwinkel 5,6° - 57°
Empfänger Noise figure 5,0 dB
Bandbreite 20 MHz
9.1.1. Messdesign
Zur optimalen Erfassung des Vogelzuges im Radarstrahl sollte dieser quer zur Hauptzugrich-
tung der Vögel ausgerichtet sein, die als NE (Frühjahr) bzw. SW (Herbst) angenommen wur-
de. Um bei den Messungen im Windpark Störechos durch die Windturbinen so gering wie
möglich zu halten, wurde der Radarstrahl mittig in die Lücken zwischen den Windturbinen
gerichtet (horizontaler Winkel von 114°, SE-Sektor), bei Messungen außerhalb des Wind-
parks wurde die entgegengesetzte Richtung (294°, NW-Sektor) gewählt (Abbildung 3). Diese
Winkelangaben entsprechen den in früheren Berichten angegebenen Winkelangaben von
4.370 Promille (innerhalb des Offshore-Windparks) bzw. 1.170 Promille (außerhalb des Offs-
hore-Windparks). Diese dem Schweizer Armeekompass entlehnten Winkelangaben in Pro-
mille sind in Deutschland wenig üblich und spielen hier nur im Zusammenhang mit der Be-
triebssoftware des Fixbeam-Radars eine Rolle. Im vorliegenden Bericht werden daher Win-
kel in Grad angegeben.
Innerhalb jeder vollen Stunde wurden mit dem Fixbeam-Radar in einem Messzyklus insge-
samt sechs Messungen des Vogelzuges durchgeführt. Hiervon wurde in der ersten halben
Stunde jeweils eine Messung in den vertikalen Anstellwinkeln 5,6°, 17° und 57° (entspre-
chend 100, 300 und 1.000 Promille) innerhalb des Windparks (114°) durchgeführt, gefolgt
von drei entsprechenden Messungen auf der windparkabgewandten Seite in der zweiten
halben Stunde (vgl. Abbildung 4). Jede Messung entsprach einem Zeitraum von 4,7 Minuten.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 23
Abbildung 3: Schema der alternierenden Messungen innerhalb und außerhalb des Windparks alpha ven-
tus mit dem Fixbeam-Radar. Die Pfeile geben die Hauptzugrichtungen der Nachtzieher an.
Abbildung 4: Schema der Messungen in drei verschiedenen Anstellwinkeln mit dem Fixbeam-Radar. In-
nerhalb einer Stunde wurden drei dieser Messungen innerhalb und drei Messungen außer-
halb des Windparks durchgeführt.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 24
Für Aussagen zum Zuggeschehen im eigentlichen Bereich des Windparks alpha ventus wur-
den im vorliegenden Bericht ausschließlich diejenigen Bereiche des Radarstrahls herange-
zogen, mit denen dieser auf einer horizontalen Linie von 2.050 m Länge – entsprechend ei-
ner horizontalen Entfernung von ca. 250 bis 2.300 m von der Forschungsplattform FINO1 –
den Windpark durchschneidet. (vgl. Abbildung 3; Messungen in größerer horizontaler Dis-
tanz von der Forschungsplattform würden ausschließlich den Luftraum außerhalb des Wind-
parks betreffen und aufgrund der vertikalen Anstellwinkel auch keine Aussagen mehr zu den
hier besonders interessierenden niedrigen Höhenschichten erlauben. Bei Messungen im
direkten Nahbereich der Forschungsplattform wäre eine Beeinflussung des Vogelzugs durch
die Plattform selbst denkbar). Für Aussagen zum Zuggeschehen außerhalb von alpha ventus
wurden ausschließlich Daten verwendet, die in einem entsprechenden Raum in horizontaler
Gegenrichtung erhoben wurden.
9.1.2. Auswertung
Die Auswertung der erzielten Radarbilder war im Einzelnen eine Abfolge sehr vieler, teilwei-
se automatisch bzw. halbautomatisch über eine Spezialsoftware erfolgender Einzelschritte
(vgl. Zaugg et al. 2008, Neumann et al. 2009). Für eine Zuordnung der erfassten Echos zu
verschiedenen Vogeltypen mit spezifischen Flügelschlagmustern (vgl. Abbildung 2) wurde
ein automatischer Vorgang unter Verwendung je eines für Frühjahr bzw. Herbst jeweils
gleich bleibenden Trainingsdatensatzes durchgeführt. Auf die genaue Beschreibung der ver-
schiedenen Einzelschritte wird hier verzichtet, auf einige für das Verständnis der Daten we-
sentliche Prinzipien sei aber im Folgenden hingewiesen. So wurden für Angaben zur Vogel-
zugintensität zunächst die pro halber Stunde (entsprechend den beiden Horizontalausrich-
tungen) in den verschiedenen vertikalen Anstellwinkeln abgedeckten Flächen des Radar-
strahls – unter Abzug von Störbereichen durch die Windturbinen – aufsummiert und mit der
Summe der erfassten Vögel sowie einem Erfassungszeitraum von 4,7 Minuten pro Messung
in Beziehung gesetzt. Dies erfolgte zunächst getrennt für die verschiedenen Vogeltypen, da
die Erfassungsfläche im Radarstrahl in Abhängigkeit von ihrem typspezifischen Erfassungs-
winkel („operativer Öffnungswinkel“) unterschiedlich ist (vgl. Neumann et al. 2009). Die sich
heraus ergebenden Vogelsummen pro abgedeckter Fläche wurden auf einen Zeitraum von
einer Stunde sowie eine rechteckige Fläche mit einer 1.000 m langen Grundlinie und einer
der Erfassungshöhe entsprechenden Höhe hochgerechnet, um rechnerisch diejenige Anzahl
von Vögeln anzugeben, die innerhalb einer Stunde im betrachteten Bereich eine gedachte
horizontale Grundlinie von 1.000 m Länge überfliegen (vgl. Liechti & Schmaljohann 2007).
Dies entspricht der Einheit Vögel pro Stunde und Kilometer, die als Maß für eine Zugrate (=
migration traffic rate MTR) inzwischen international üblich ist.
Da der größte Teil des Vogelzuges bei Nacht stattfindet, gerade über Auswirkungen von
Windenergieanlagen auf nachts ziehende Vögel aufgrund der schlechten Beobachtbarkeit
mit herkömmlichen Mitteln wenig bekannt ist und eine Quantifizierung von Vögeln mit dem
Fixbeam-Radar durch eine wesentlich geringer ausgeprägte Truppbildung bei Nacht zuver-
lässiger möglich ist, wurde die Erfassung des Vogelzuges mittels Fixbeam-Radar auf die
Dunkelphase beschränkt. Zur Festlegung der Dunkelphase wurde der Zeitraum zwischen
bürgerlicher Abend- und Morgendämmerung herangezogen. Dabei wurden die mit dem Fix-
beam durchgeführten Messzyklen so ausgewählt, dass pro Nacht jeweils ein kompletter
Messzyklus den Zeitpunkt der Abend- bzw. Morgendämmerung einschloss.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 25
9.1.3. Datenauswahl für Darstellung allgemeiner Zugphänologien
Für die Darstellung allgemeiner Zugphänologien über die Frühjahrs- und Herbstzugperioden
hinweg wurden alle pro Nacht erhobenen und auswertbaren Daten verwendet. Dabei trat
gelegentlich der Fall ein, dass innerhalb einer Stunde nicht in allen Anstellwinkeln und bei-
den horizontalen Ausrichtungen Daten erhoben werden konnten. Solche Fälle traten z. B.
dann ein, wenn durch Niederschlag Messungen nicht auswertbar waren oder wenn bei star-
kem Seegang insbesondere im niedrigsten Anstellwinkel erzielte Radarbilder aufgrund star-
ker Störechos durch Wellen und Gischt nicht mit in die Auswertung einbezogen werden
konnten („unvollständiger Messzyklus“). Da innerhalb der hier sinnvollen Betrachtungsberei-
che mit einem Anstellwinkel des Radarstrahls von 5,6° Vögel bis in eine Höhe von 250 m, mit
einem Anstellwinkel von 17° bis in 700 m und mit einem Anstellwinkel von 57° bis in 3.400 m
Höhe erfasst werden konnten, wurden die erfassten Anzahlen bei Berechnung der entspre-
chenden Zugrate jeweils bis zur maximal verwendeten Messhöhe hochgerechnet. Eine ge-
nerelle Hochrechnung auf eine Messhöhe von 3.400 m verbietet sich, weil sich vor allem in
den untersten Höhenschichten der Vogelzug stark verdichtet und bei ausschließlichen Mes-
sungen in niedrigen Schichten daher eine Hochrechnung auf 3.400 m zu unrealistisch hohen
Zugraten führen würde. Insofern sind die in den Abbildung 28 bis Abbildung 33 präsentierten
Zugraten als Mindest-Zugraten zu verstehen.
9.1.4. Datenauswahl für Darstellung von Höhenklassen
Aus den in Kap. 3.1.2 angegebenen Gründen wurden Analysen zur Höhenverteilung der
Vögel ausschließlich solche Datensätze verwendet, in denen pro Stunde und Horizontalaus-
richtung Daten aus allen drei Anstellwinkeln vorhanden waren.
9.1.5. Wetterparameter
Zum Abgleich des Vogelzuggeschehens mit Wetterdaten wurden Messdaten verwendet, die
von der Forschungsplattform FINO1 bzw. von der Windturbine AV4 zur Verfügung standen.
Diese waren Windgeschwindigkeit [m/s], Windrichtung [°] und relative Luftfeuchte [%] in 90 m
Höhe sowie das Vorkommen von Niederschlag. Aus Windgeschwindigkeit und Windrichtung
wurden die für den Vogelzug bedeutenden Größen Rückenwindkomponente (= tailwind
component TWC) und Seitenwindkomponente (= crosswind component CWC) berechnet.
Dabei gilt:
TWC = cos (gemessene Windrichtung – Rückenwindrichtung) x Windgeschwindigkeit
Positive Werte für TWC drücken dabei Rückenwind, negative Werte Gegenwind aus.
CWC = sin (gemessene Windrichtung – Rückenwindrichtung) x Windgeschwindigkeit.
Positive Werte für CWC drücken vom fliegenden Vogel aus gesehen, Wind von links, negati-
ve Werte Wind von rechts aus. Dabei wurde hier von einer im Frühjahr nach NE, im Herbst
nach SW gerichteten Hauptzugrichtung ausgegangen. In den hier präsentierten Darstellun-
gen wurden für ein einfacheres Verständnis jedoch die im Frühjahr erzielten Werte mit einem
Faktor von -1 multipliziert, so dass negative CWC-Werte grundsätzlich Wind aus NW, positi-
ve Werte Wind aus SE anzeigen.
Aus den Werten für TWC, CWC sowie die Luftfeuchte wurden Mittelwerte pro Stunde gebil-
det, um einen Abgleich mit den hier auf Stunden bezogenen Messwerten zum Vogelzugge-

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 26
schehen zu gestatten. Für den Niederschlag wird die Anzahl der 10-Minuten-Intervalle pro
Stunde angegeben, in denen Niederschlag auftrat.
9.2. Erfassung von Vögeln mit dem Kamerasystem VARS
Das Kamerasystem VARS (Visual Automatic Recording System) wurde im Rahmen des vom
Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit (BMU) geförderten Pro-
jekts „Entwicklung und Einführung eines automatischen Erfassungssystems für die Ermitt-
lung des Vogelschlages unter Praxisbedingungen auf FINO2“ entwickelt (Schulz et al. 2009).
Es handelt sich um ein infrarotbasiertes Kamerasystem mit Bewegungsanalysesoftware, das
fliegende Vögel am Tag und in der Nacht in Echtzeit erkennt und als Videosequenz auf-
zeichnet. Die Kurzbezeichnung VARS umfasst sämtliche Hard- und Softwarekomponenten,
die zum automatischen Betrieb notwendig sind. Das System ist auch im internationalen
Maßstab anerkannt (Collier et al. 2011, 2012).
Auf der Gondel der Windenergieanlage AV4 (Anlagentyp: REpower 5M) erfasste ein VARS
die Flugbewegungen von Zugvögeln im Rotorbereich, um ihre Kollisionsgefährdung abschät-
zen zu können. Die Kamera überwachte am Tag und in der Nacht einen definierten Kreissek-
tor unmittelbar hinter dem Rotor (Abbildung 5). Diese Messanordnung ermöglichte die Do-
kumentation von Vögeln, die den Rotorkreis von vorn erfolgreich durchflogen und damit eine
Abschätzung der Anzahl der Kollisionsereignisse (s. Kap. 9.3). Individuen, die sich dem Ro-
tor von hinten näherten, konnten vollständig erfasst werden. Die Messung eines definierten
Kreissektors vor dem Rotor ist durch die Drehung der Gondel nicht umsetzbar. Wie die Un-
tersuchungen von Winkelman (1992b) belegen, stellt dies kein Nachteil dar, da die Vögel die
Rotoren der Windenergieanlagen am Tag und in der Nacht zu etwa gleichen Teilen mit dem
Wind bzw. gegen den Wind anflogen. Die Positionierung des VARS auf der Gondel besitzt
aber zwei wesentliche Vorteile. Durch die Installation auf der Gondel dreht sich das Kame-
ramodul beim Nachführen der Gondel in den Wind in gleichem Maße mit, so dass über den
gesamten Messzeitraum hinweg immer der gleiche, auf den Rotorkreis bezogene Bildaus-
schnitt abgedeckt wird. Zudem ermöglicht die Nähe zum Rotor, dass die Vögel auch bei
schlechter Sicht im Gefahrenbereich erfasst werden können.
Das Kameramodul auf der Gondel wurde etwa 45° nach oben ausgerichtet (Abbildung 5), um
die Flugbewegungen über Nabenhöhe zu erfassen. Als Kompromiss zwischen einem mög-
lichst großen Blickfeld und der notwendigen Auflösung zur Erkennbarkeit kleiner Singvögel
bis in den Bereich der Rotorblattspitzen kam ein Öffnungswinkel von 22° zur Anwendung.
Der hochempfindliche Sensor besaß eine Auflösung von 768 x 576 Pixeln. Die aufgezeich-
neten Videodaten wurden täglich vom VARS-Rechner in der Gondel zu einem Backup-
Rechner im Turmfuß verschoben, von dem wiederum der automatische Datentransfer über
eine Fernverbindung direkt ins IfAÖ realisiert wurde. Über die VPN-Verbindung waren auch
Direktzugriffe auf alle Computer möglich.
Das VARS auf der Gondel ermöglichte über mehr als drei Jahre eine durchgängige Datener-
hebung, ohne technische Ausfälle durch mechanische Belastungen (Vibrationen) oder die
Offshore-Bedingungen. Messlücken entstanden durch Stromabschaltungen/-ausfälle auf der
Windenergieanlage und in sehr geringem Umfang durch Unterbrechung des Eingangsignals
nach Rechnerzugriffen über die Fernverbindung. Nach Stromabschaltungen nimmt das
VARS die Messungen selbständig wieder auf. Solche abrupten Unterbrechungen trennten

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 27
den Rechner in der Gondel allein im Jahr 2012 an 21 Tagen von der Versorgung, ohne das
die Technik in der Folge versagte.
Abbildung 5: VARS im Einsatz auf der Gondel der AV4 (links) und beim Test der Infrarotstrahler vor der
Installation (rechts, infrarotempfindliche Aufnahme).
Das ursprüngliche Messkonzept sah vor, auf den Gondeln von mindestens zwei OWEA mit
VARS die Flugbewegungen von Zugvögeln im Windpark alpha ventus zu erfassen. Nachdem
durch Vorgaben des Betreibers nur noch die Möglichkeit bestand, auf einer der Offshore-
Windenergieanlagen (AV4) zu messen, wurde für ein VARS eine alternative Anordnung mit
einer Blickrichtung von unten in den Rotor entworfen. Eine Blickrichtung in den Rotorkreis
setzte eine Anpassung der Bewegungsanalysesoftware voraus, die die Rotorblätter als Aus-
löser von Videosequenzen ausschließt. Dazu mussten Videodateien mit unterschiedlichen
Positionen des Rotorblattes (entsprechend der Drehung der Gondel) aufgezeichnet werden.
Anhand der Videos stellte sich heraus, dass bei dieser Perspektive die Rotorblätter jeden
Teil des Bildausschnittes erreichen und dabei permanent einen zu großen Bereich umfas-
sen. Die Folge war selbst bei einer dynamischen Anpassung von Ausschlussregionen (aktu-
elle Stellung des Flügels) ein zu geringer Restbereich, in dem detektierte Vögel die Auf-
zeichnung auslösen können. Darüber hinaus bewirkten die hohe zeitliche Folge der Rotor-
fragmente und deren Auftreten im gesamten Videobild, dass die automatische Schwelle, die
ein Optimum zwischen Rauschunterdrückung und maximaler Empfindlichkeit einstellt, zu
stark heraufgesetzt wird. Eine uneingeschränkte Erkennung von fliegenden Vögeln wäre
damit nicht sichergestellt.
Da der Öffnungswinkel des Objektivs nicht beliebig erhöht werden kann (Reduzierung der
Reichweite bei gegebener Auflösung, seitliche Ausleuchtung durch die IR-Strahler begrenzt)
wurde der Kameraausschnitt knapp unter den Rotorbereich verlegt (Abbildung 6). Dadurch
konnte zumindest die Aktivität von Vögeln im Bereich des Plattformdecks der AV4 in Anhän-
gigkeit von Betriebszustand erfasst werden. Zwischen Deckoberfläche und Flügelspitzen
besteht lediglich eine Distanz von ca. 9 m. Somit ließen sich die Ergebnisse, die von der
Gondel aus erzielt wurden, vor allem in Hinblick auf die Häufigkeit des Auftretens von Vögeln
in den unterschiedlichen Höhenschichten absichern.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 28
Abbildung 6: Messkonzept von VARS auf der AV4 im Windpark alpha ventus.
Die Erfassung von fliegenden Vögeln von der Gondel der AV4 erfolgte vom 26.09.2010 bis
29.10.2013 (Trennung von der Fernverbindung). Allerdings standen durch das reguläre Pro-
jektende am 31.08.2013 die Messdaten zum Betriebszustand der Turbine nur bis Ende Au-
gust zur Verfügung, so dass die restliche Herbstzugsaison 2013 (Sep./Okt.) nur für Aussa-
gen zur generellen Ereignisintensität herangezogen werden konnten. Für die wissenschaftli-
che Auswertung mit allen technischen Parametern der AV4 stand letztlich eine nahezu drei-
jährige Dauermessung zur Verfügung.
Die Vergleichsmessungen mit dem Kameramodul vom Plattformdeck der AV4 wurden am
06.03.2012 aufgenommen und konnten ebenfalls bis 29.10.2013 aufrechterhalten werden
(vier Zugperioden). Die Auswertung wird wiederum durch das reguläre Projektende am
31.08.2013 begrenzt. Eine längere Messlücke von neun Tagen ergab sich durch eine Strom-
abschaltung in der letzten Julidekade 2012, die die gesamte Turbine und damit auch das
VARS auf der Gondel betraf. Der Zeitraum fällt in die Zugzeit von Limikolen, liegt aber au-
ßerhalb des regulären Kleinvogelzuges. Darüber hinaus traten lediglich kurze Unterbrechun-
gen auf, die in den Auswertungen berücksichtigt sind.
Das Kamerasystem VARS ist in der Lage, auch bei Niederschlag und schlechter Sicht Vögel
automatisch zu erfassen. Allerdings ergibt sich aus dem nachts aufgezeichneten Regen ein
hoher Aufwand bei der Aufarbeitung der Videodaten. Für diese Studie wurden auch die Re-
genstunden manuell nach Vögeln durchgesehen, um keine Zeiträume auszuklammern. Da
aber nur vergleichsweise wenige Vögel bei Regen flogen, ließe sich der Aufwand bei kom-
merziellen Projekten über Softwarelösungen oder Vorselektion reduzieren.
9.3. Ermittlung von Kollisionsraten
Zur Ermittlung von Kollisionsraten aus den Messungen im Rotorbereich wurde das Modell
von Band (2000, 2012) bzw. Band et al. (2007) genutzt. Hierbei war nur der rein physikali-

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 29
sche Ablauf beim Durchflug eines Vogels durch den Rotor relevant (Stage 2 in Band 2000,
Band et al. 2007 bzw. Stage C in Band 2012), da die mit VARS gemessenen Flugraten im
Rotorbereich bereits die Lockwirkungen durch das Licht des Windparks und Ausweichbewe-
gungen im Nahbereich der Rotoren quantitativ einschließen. Somit konnten die sonst im
Band-Modell mit erheblichen Unsicherheiten verbundenen Annahmen der „avoidance rates“
(Chamberlain et al. 2006, Bellebaum et al. 2008, Cook et al. 2012) durch Messwerte im Ge-
fährdungsbereich ersetzt werden. Diese Ausweichraten müssen sonst dazu genutzt werden,
aus den nächtlichen Zugraten (ermittelt mit Radar) eine Annäherung an die tatsächliche (hier
mit VARS gemessene) Durchflugrate durch den Rotorkreis abzuschätzen.
Die Wahrscheinlichkeit, mit der ein Vogel beim Durchfliegen der Rotorscheibe kollidiert,
hängt von den Abmaßen und der Drehgeschwindigkeit des Rotors, dem Anstellwinkel der
Rotorblätter, der Größe des Vogels und seiner Fluggeschwindigkeit ab (Band 2012). Ent-
sprechend fanden folgende Parameter Eingang in das Modell:
b = Anzahl der Rotorblätter
c = Maximale Blatttiefe [m]
γ = Anstellwinkel der Rotorblätter [Grad]
R = Rotorradius [m]
Ω = Rotordrehzahl [Umdrehungen pro Sekunde]
L = Körperlänge des Vogels [m]
W = Flügelspannweite des Vogels [m]
F = Flugverhalten: schlagend (1) oder gleitend (cos φ)
v = Fluggeschwindigkeit des Vogels [m/s]
β = L/W (“aspect ratio“)
α = v/rΩ
Die Kollisionswahrscheinlichkeit p eines Vogels, der an einem Punkt die Rotorebene durch-
fliegt (definiert durch die Koordinaten r, φ), ergibt sich dann nach folgendem Ansatz (Band
2012):
p (r, φ) = ( bΩ/2 πv ) [ I ± c sin γ + α c cos γ I + max ( L, WαF ) ]
r = Radius, bei dem der Vogel den Rotorkreis quert
φ = Winkel innerhalb der Rotorebene (relativ zur Vertikalen) am Punkt, an dem der Vogel
den Rotorkreis quert (φ = 0 beim obersten Punkt des Kreises, φ = π am untersten Punkt)
Als konstante Werte gingen die Anzahl der Rotorblätter (drei), der Rotorradius der OWEA
des Typs REpower 5M (63 m) und die maximale Blatttiefe von 4,6 m ein. Alle übrigen Para-
meter wurden für jeden Durchflug eines Vogels als Einzelfall ermittelt. Der jeweils aktuelle
Anstellwinkel der Rotorblätter der AV4 stand als Minutenwert über das SCADA-System der

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 30
Anlage zur Verfügung. Gleiches gilt für die Generatordrehzahl, aus der die Rotordrehzahl
(Übersetzung ~1:97) bzw. die Rotationsperiode berechnet wurde. Die Körperlänge und Flü-
gelspannweite des jeweils durchfliegenden Vogels musste vielfach anhand von Referenzar-
ten erfolgen, da oft nur eine Einordnung als Kleinvogel erfolgen konnte. Hierzu wurden ge-
mäß des Eindrucks auf dem Kamerabild und der Jahreszeit häufige, meist mittelgroße Sing-
vogelarten, wie Star, Sing-/Rotdrossel oder Amsel herangezogen. Bei stichprobenartigen
Tests ergaben die Größenunterschiede verschiedener Singvogelarten im Vergleich zu den
Einflüssen anderer Parameter nur marginale Auswirkungen auf das Rechenergebnis. Das
Flugverhalten der Vögel ließ sich anhand der Kamerabilder in schlagend oder gleitend unter-
teilen, während die Bestimmung der Fluggeschwindigkeit aus den Videos die Programmie-
rung eines zusätzlichen Tools in der Auswertesoftware erforderte. Über die bekannte Bildfre-
quenz und den in dieser Zeit zurückgelegten Weg (Pixelanzahl) konnte in Verbindung mit
einer auf 10 m-Schritte angelegten Entfernungsschätzung die Geschwindigkeit des jeweili-
gen Vogels ermittelt werden. Die Entfernungsschätzung beruhte auf Rückrechnung der Vo-
gelflächen und Vergleichen mit Testkörpern bekannter Größe am Tag und zusätzlich anhand
der abgebildeten Helligkeit des mit IR-Licht angestrahlten Vogels in der Nacht. Über die be-
kannte Vogelgröße ließ sich errechnen, mit welcher Pixelfläche sich diese im Videobild in
den einzelnen Entfernungsklassen abbilden müssen. Dass die theoretischen und die von der
Software angezeigten Pixelflächen in der Praxis nah beieinander liegen, zeigten Versuche
mit Testkörpern (Abbildung 7).
0
10
20
30
40
50
60
70
80
90
100
110
20 30 40 50 60 70 80 90
Entfernung zur Kamera [m]
Anzahl d
er
Pix
el
theoretischer Wert
Messwert mit Testkörper (Mittel der Trackpunkte)
Messwert mit Testkörper (Maximum der Trackpunkte)
Abbildung 7: Vergleich von rechnerischem Wert eines Testkörpers von 100 cm² (entspricht kleinem Sing-
vogel) und den gemessenen Pixeln. Unterschiede ergeben sich durch Bewegungsunschärfe
und Mischpixel am Körperrand.
Für die praktische Umsetzung der Kollisionsberechnung wurde das für eine 5 MW-Turbine
optimierte Modell (Band 2012), verfügbar unter www.bto.org/science/wetland-and-
marine/soss/projects, genutzt. Hierzu wurde der Teil, der die Kollisionswahrscheinlichkeit für
einen einzelnen Rotordurchflug betrifft, herausgelöst.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 31
Das Modell liefert bei der Berechnung ein Ergebnis für die Flugrichtung gegen den Wind (von
hinten) und eines mit dem Wind (von vorn). Durch die Aufzeichnungen mit VARS konnte
zwischen drei Szenarien unterschieden werden: (a) Der Vogel fliegt von vorn durch den Ro-
tor, (b) der Vogel fliegt von hinten zum Rotor, (c) der Vogel fliegt parallel hinter der Rotor-
scheibe. Die drei Situationen wurden unterschiedlich in die Modellierung einbezogen. Wäh-
rend parallel fliegende Vögel nicht in die Rechnungen eingingen (kein Rotordurchflug), wur-
den die Anflüge von hinten vollständig über die Modellvariante gegen den Wind errechnet.
Bei Rotordurchflügen von vorn können hinter der Rotorscheibe nur diejenigen Vögel mit dem
VARS erfasst werden, die den Durchflug ohne Kollision überstanden haben. Somit musste
die ursprüngliche Anzahl der auftreffenden Vögel über die Kollisionswahrscheinlichkeit für
den jeweiligen Durchflug korrigiert werden.
pkorr = p / (100-p), p = Kollisionswahrscheinlichkeit eines Durchflugs
Dadurch ergibt sich beispielsweise aus einer Kollisionswahrscheinlichkeit von 6,4 % für ei-
nen von vorn durch den Rotor fliegenden Vogel ein korrigierter Wert von 0,06838 kollidierten
Individuen.
Ein viertes, bisher nicht betrachtetes Szenario (d) betrifft den schrägen Durchflug von Vögeln
durch den Rotorbereich. Jede Abweichung vom rechten Winkel erhöht die Zeit in der Gefah-
renzone und damit die Kollisionswahrscheinlichkeit. Durch die zweidimensionale Abbildung
im Videobild ergibt ein schräger Anflugwinkel eine Stauchung der Strecke, die pro Zeiteinheit
vom Vogel zurückgelegt wurde. Da die Berechung der Vogelgeschwindigkeit auf Grundlage
des von Einzelbild zu Einzelbild zurückgelegten Weges (als Pixelanzahl) erfolgte, bewirkt
diese optische Verkürzung der Strecke eine Verringerung der errechneten Geschwindigkeit.
Eine geringere Fluggeschwindigkeit ergibt wiederum eine höhere Kollisionswahrscheinlich-
keit, so dass ein schräger Durchflug durch die Rotorscheibe über den Wert für die Ge-
schwindigkeit berücksichtigt ist.
Nach dem vorstehenden Verfahren wurde für jedes Einzelereignis der Szenarien (a) und (b)
die Wahrscheinlichkeit einer Kollision mit dem Rotor berechnet und als Individuenwert aus-
gedrückt (5 % Kollisionswahrscheinlichkeit für den Durchflug des Vogels = 0,05 kollidierte
Vögel). Diese Einzelwerte ergaben addiert für den Messzeitraum das Ergebnis für den Ka-
meraausschnitt von 22° Öffnungswinkel. Um eine Kollisionsrate pro Anlage und Jahr anzu-
geben, musste das Ergebnis mit dem Faktor 16,36 hochgerechnet und auf die Zeiteinheit
bezogen werden.
Um eine Absicherung der Hochrechnung für den gesamten Rotorkreis zu gewährleisten,
wurden die Messdaten der Kamera am Turmfuß herangezogen. Hintergrund war die poten-
ziell unterschiedliche Höhenverteilung der Vögel im Nahbereich der AV4, die z. B. durch die
Verteilung der Lichtquellen an der Anlage oder die besseren Landemöglichkeiten auf dem
Plattformdeck hervorgerufen werden können. Da die Blickrichtung der unteren Kamera nicht
direkt in den Rotorbereich reichte und damit keine Kollisionsraten errechnet werden konnten,
wurde lediglich die Anzahl an Flugbewegungen über und neben dem Plattformdeck (Rotor-
radius) ins Verhältnis zu den Ergebnissen der Gondelkamera gesetzt. Dazu wurden nur die
Vogelanzahlen bei Betrieb der Turbine im Vergleichszeitraum (03/2012-08/2013) genutzt.
Für die Kamera am Turmfuß erfolgte zusätzlich die Einschränkung nach der Ausrichtung des
Rotors, um nur die Flugbewegungen zum Vergleich heranzuziehen, bei denen eine erhöhte
Kollisionswahrscheinlichkeit angenommen werden kann (Abbildung 8). Im betreffenden Sek-
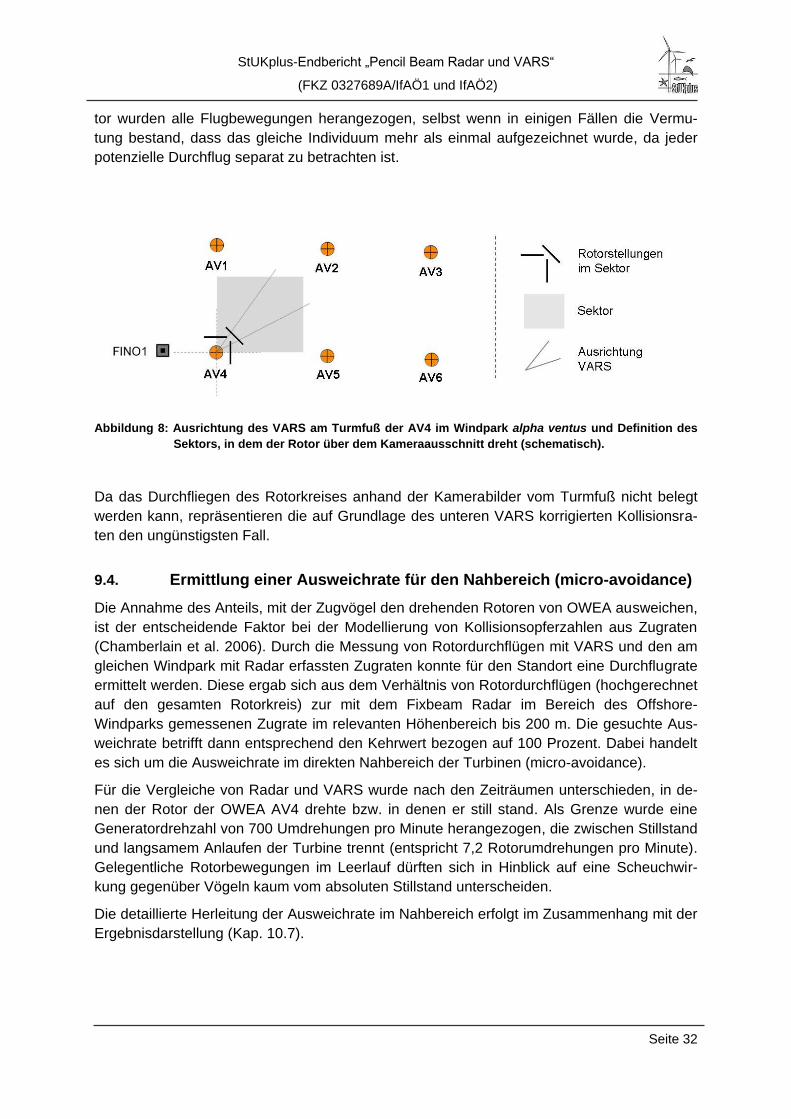
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 32
tor wurden alle Flugbewegungen herangezogen, selbst wenn in einigen Fällen die Vermu-
tung bestand, dass das gleiche Individuum mehr als einmal aufgezeichnet wurde, da jeder
potenzielle Durchflug separat zu betrachten ist.
Abbildung 8: Ausrichtung des VARS am Turmfuß der AV4 im Windpark alpha ventus und Definition des
Sektors, in dem der Rotor über dem Kameraausschnitt dreht (schematisch).
Da das Durchfliegen des Rotorkreises anhand der Kamerabilder vom Turmfuß nicht belegt
werden kann, repräsentieren die auf Grundlage des unteren VARS korrigierten Kollisionsra-
ten den ungünstigsten Fall.
9.4. Ermittlung einer Ausweichrate für den Nahbereich (micro-avoidance)
Die Annahme des Anteils, mit der Zugvögel den drehenden Rotoren von OWEA ausweichen,
ist der entscheidende Faktor bei der Modellierung von Kollisionsopferzahlen aus Zugraten
(Chamberlain et al. 2006). Durch die Messung von Rotordurchflügen mit VARS und den am
gleichen Windpark mit Radar erfassten Zugraten konnte für den Standort eine Durchflugrate
ermittelt werden. Diese ergab sich aus dem Verhältnis von Rotordurchflügen (hochgerechnet
auf den gesamten Rotorkreis) zur mit dem Fixbeam Radar im Bereich des Offshore-
Windparks gemessenen Zugrate im relevanten Höhenbereich bis 200 m. Die gesuchte Aus-
weichrate betrifft dann entsprechend den Kehrwert bezogen auf 100 Prozent. Dabei handelt
es sich um die Ausweichrate im direkten Nahbereich der Turbinen (micro-avoidance).
Für die Vergleiche von Radar und VARS wurde nach den Zeiträumen unterschieden, in de-
nen der Rotor der OWEA AV4 drehte bzw. in denen er still stand. Als Grenze wurde eine
Generatordrehzahl von 700 Umdrehungen pro Minute herangezogen, die zwischen Stillstand
und langsamem Anlaufen der Turbine trennt (entspricht 7,2 Rotorumdrehungen pro Minute).
Gelegentliche Rotorbewegungen im Leerlauf dürften sich in Hinblick auf eine Scheuchwir-
kung gegenüber Vögeln kaum vom absoluten Stillstand unterscheiden.
Die detaillierte Herleitung der Ausweichrate im Nahbereich erfolgt im Zusammenhang mit der
Ergebnisdarstellung (Kap. 10.7).
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 33
9.5. Methodenkritik
Die im Offshore-Windpark alpha ventus verwendeten Erfassungsmethoden für Zugvögel be-
sitzen trotz ihrer international anerkannten Qualitäten auch Einschränkungen, auf die sowohl
in den entsprechenden Abschnitten der Methodenbeschreibung als auch in der Diskussion
eingegangen wird. An dieser Stelle werden die relevantesten Aspekte und deren Konse-
quenzen als kurze Übersicht zusammengefasst.
9.5.1. Fixbeam-Radar
Die in Kap. 9.1.2 beschriebene halbautomatische Auswertung der mit dem Fixbeam-Radar
erzielten Rohdaten liefert Aussagen zu mehreren Artengruppen. Eine manuelle Aufarbeitung
der einzelnen Echos könnte noch genauere Angaben zu Flügelschlagmustern und damit
etwas weiter differenzierten Artengruppen liefern, wäre jedoch erheblich zeitaufwändiger und
stärker vom persönlichen Eindruck des Bearbeiters beeinflusst. Aus diesem Grund war eine
manuelle Auswertung für die hier durchgeführten Dauermessungen, die sehr große Daten-
mengen lieferten, nicht praktikabel (vgl. Neumann et al. 2009). Immer wieder traten auch
Echos auf, die nicht sicher bestimmt werden konnten – was beim Betrieb eines konventionel-
len Schiffsradargerätes allerdings grundsätzlich der Fall ist.
Im Vergleich zu einem im konventionellen Betrieb verwendeten Schiffsradargerät ist der
Strahl des Fixbeam-Radars wesentlich stärker gebündelt und dadurch a priori weniger anfäl-
lig für Störechos durch Strukturen, die sich am Rand des Strahls befinden, wie z. B. eine
bewegte Wasseroberfläche. Dennoch können auch bei Verwendung eines Fixbeam-Radars
Störechos auftreten. Dies ist hier vor allem bei Messungen im niedrigsten Anstellwinkel von
5,6° von Relevanz. Insbesondere bei starkem Wellengang sind in dieser Einstellung erzielte
Radarbilder oft nur teilweise verwertbar. Auf Messungen in niedrigen Anstellwinkeln kann
aber nicht grundsätzlich verzichtet werden, da hiermit die untersten 200 m, die im Kontext
der Windenergienutzung von besonderem Interesse sind, am besten abgedeckt werden.
Die Angaben der gemessenen Zugraten als Anzahl Vögel pro km und h in verschiedenen
Höhenklassen basieren auf Hochrechnungen. Hierbei wird einerseits von der Zeitdauer der
Erfassungen auf die ganze Stunde als auch von der mit dem Radarstrahl erfassten Fläche
auf eine Fläche hochgerechnet, die einem Rechteck der Ausmaße 1 km x Höhe der Höhen-
klasse entspricht. Dabei besteht die mit dem Radarstrahl abgedeckte Fläche pro Stunde und
Messrichtung aus maximal drei Teilflächen (je eine Teilfläche pro Anstellwinkel). Je kleiner
die absolut durch den Radarstrahl abgedeckte Fläche ist, desto geringer ist die Wahrschein-
lichkeit, innerhalb dieser Fläche mindestens einen Vogel zu erfassen und desto stärkeren
Einfluss besitzen die verwendeten Hochrechnungsfaktoren. Aufgrund der Kegelform des
Radarstrahls, der Verwendung von drei verschiedenen Anstellwinkeln und der Tatsache,
dass durch das Auftreten nicht auswertbarer Bilder nicht in allen Fällen die drei Teilflächen
gewertet werden können, variieren die pro Höhenklasse abgedeckten Flächen in ihrer Größe
und damit die Hochrechnungsfaktoren sowohl zwischen als auch innerhalb der Höhenklas-
sen. Um bei den o. g. Hochrechnungen bei annehmbaren Werten zu bleiben, wurde auf der
Basis von Höhenklassen von mindestens 100 m gearbeitet.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 34
9.5.2. VARS
Die Messungen mit dem Kamerasystem VARS ermöglichten eine realitätsnahe Schätzung
der durchschnittlichen Kollisionsrate pro OWEA und Jahr, die auf der Erfassung von Vögeln
im unmittelbaren Rotorbereich basiert. Die tatsächlichen Kollisionen von Vögeln mit den Ro-
torblättern der untersuchten OWEA konnten aber nicht erfasst werden. Dazu wäre ein Auf-
nahmesystem notwendig, das fliegende Vögel auch nachts automatisch und vollständig er-
fasst, ohne durch die Rotorbewegung ausgelöst zu werden. Dies ist angesichts der Dimensi-
onen zwischen den Zielobjekten (kleine Singvögel) und der Größe der Rotorscheibe mit
VARS bisher nicht möglich (s. Kap. 9.2). Alternative Aufnahmeverfahren, die nicht unmittel-
bar durch bewegte Objekte ausgelöst werden, besitzen hingegen das Problem, dass sich
Rotorblätter und Vögel durch vergleichbare Helligkeitseigenschaften überlagern, wenn keine
Einzelbildauflösung (wie bei Videos) vorliegt. Eine zuverlässige Vogelerkennung wäre dann
nicht mehr gegeben.
Die Dimensionen der Rotorblätter sind auch die Ursache für die geringe Abdeckung des Ro-
torkreises durch das VARS auf der Gondel der OWEA AV4. Der gewählte Öffnungswinkel
von 22° war der erforderliche Kompromiss zwischen einem möglichst großen Blickfeld und
der notwendigen Auflösung zur Erkennbarkeit kleiner Singvögel bis in den Bereich der Ro-
torblattspitzen. Daraus ergab sich die Konsequenz, einen Hochrechnungsfaktor von 16,36
(= 360°/22°) zu nutzen, um eine Kollisionsrate für den gesamten Rotorkreis der Anlage an-
geben zu können. Bei diesem Schritt werden die mit VARS ermittelten Werte auf die anderen
Sektoren übertragen, weil von dort keine Messwerte vorliegen. Der ursprüngliche Ansatz,
mehrere VARS auf verschiedenen OWEA zu installieren, ließ sich im Offshore-Windpark
alpha ventus nicht realisieren. Es ist aber zu erwarten, dass der lange Messzeitraum von drei
Jahren, die geringe Abdeckung zumindest teilweise kompensiert.
Ein großer Vorteil von VARS ist, dass fliegende Vögel auch bei Niederschlag und schlechter
Sicht automatisch erfasst werden können. Allerdings löst nächtlicher Regen die Aufzeich-
nung ebenso aus, so dass sich ein hoher Aufwand bei der Aufarbeitung der Videodateien
ergab. Bei zukünftigen Projekten ließe sich der Aufwand über Softwarelösungen reduzieren,
da das manuelle Durchsehen der Regenstunden ausreichend Vergleichsmaterial lieferte, um
technische Lösungen zu validieren.
Die mit VARS aufgezeichneten Vögel lassen sich in der Regel in bestimmte Artengruppen
einordnen, aber nur selten bis auf Artniveau bestimmen. Daher konnten keine artspezifi-
schen Kollisionsraten ermittelt werden. Selbst bei einer erfolgreichen Arterkennung wäre
eine sehr hohe Abdeckung mit optischen Messsystemen im Offshore-Windpark erforderlich,
um repräsentative Stichproben pro Art zu erreichen.
9.5.3. Band-Modell
Bei der Berechnung von Kollisionsraten mit dem Modell nach Band (2000, 2012) bzw. Band
et al. (2007) besitzt die angenommene Ausweichrate einen um Zehnerpotenzen höheren
Einfluss auf das Ergebnis als die übrigen Parameter (Chamberlain et al. 2006). Diese Unsi-
cherheit konnte durch direkte Messungen mit VARS vermieden werden, so dass nur noch
der Durchflug eines Vogels durch die Rotorscheibe betrachtet werden musste (vgl. Kap. 9.3).
Es verbleiben aber einige Vereinfachungen und Einschränkungen des Modells, die Einfluss
auf die ermittelte Kollisionsrate besitzen:

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 35
Gefährdung durch stationäre Strukturen
Mit dem Modell nach Band (2012) wird die Wahrscheinlichkeit ermittelt, mit der ein durch die
Rotorscheibe fliegender Vogel vom drehenden Rotor getroffen wird. Daher gingen in die
Rechnung nur Vögel aus Zeiträumen ein, in denen die OWEA AV4 laut Messungen des
SCADA-Systems drehte. Stand die Anlage still, wurde davon ausgegangen, dass keine
(kaum) Kollisionsgefahr vorlag. Letztlich ist die Kollisionswahrscheinlichkeit bei stehendem
Rotor aber unbekannt.
Turbulenzen und Nachlaufströmung
Der Effekt, den die Turbulenzen der Nachlaufströmung auf fliegende Vögel ausüben, ist mit
dem Modell nicht quantifizierbar, da nur der Kontakt zwischen Vogel und Rotorblättern be-
trachtet wird. Theoretisch sind auch Verluste durch Turbulenzen möglich (Bewusstlosigkeit,
Desorientierung, Kontakt mit der Wasseroberfläche), aber auch Effekte des Luftstroms über
der Rotorblattoberfläche, die ein Ablenken des Vogels vor einer Kollision in Einzelfall bewir-
ken könnten. Beides wird hier vernachlässigt.
Form der betrachteten Vögel
Die Form der Vögel wird im Modell von Band (2012) als fliegendes Kreuz aus Körperlänge
und Flügelspanne vereinfacht, so dass die wesentlichen Abmessungen betrachtet werden.
Echte Vögel sind größer als dieses Kreuz, so dass eine theoretische Unterschätzung der
Kollisionswahrscheinlichkeit vorliegen könnte. Diese Abweichung von der Realität hat aber in
der Praxis keinen nennenswerten Einfluss, da auch geringe Änderungen von Körperlänge
und Flügelspanne nur marginale Auswirkungen auf das Rechenergebnis besitzen.
Winkel bei der Querung des Rotorkreises
Die Berechnung mit dem Kollisionsmodell geht von einer Flugbahn des Vogels aus, der im
rechten Winkel durch den Rotorkreis führt. Bei Durchflügen im schrägen Winkel ist eine Stei-
gerung der Kollisionswahrscheinlichkeit durch den längeren Aufenthalt in der Gefahrenzone
gegeben. Wie bereits in Kap. 9.3 dargestellt, konnte dies bei den hier durchgeführten Be-
rechnungen über die Vogelgeschwindigkeit (optische Stauchung der Strecke im zweidimen-
sionalen Videobild) berücksichtigt werden.
10. Ergebnisse
10.1. Zeitliches Auftreten des Vogelzugs im Bereich des Windparks alpha ventus
Der mittels Fixbeam-Radar erfasste nächtliche Vogelzug im Bereich des Windparks alpha
ventus spielte sich in Schüben bzw. Wellen ab (Abbildung 9 sowie Abbildung 28 bis Abbil-
dung 33 im Anhang). Dabei folgten auf einzelne oder mehrere Tage umfassende Phasen
vergleichsweise starken Zuges solche mit sehr schwachem oder gar keinem Zug. Die Dauer
der Zugwellen und die dabei erreichten Zugintensitäten schwankten stark von Jahr zu Jahr.
Hervorzuheben sind z. B. im Frühjahr 2013 die vier Nächte 13./14.04., 14.04./15.04.,
20.04./21.04. und 21.04./22.04.. In diesen Nächten wurde ein besonders hoher Anteil der
insgesamt in der Saison registrierten Vögel festgestellt. Ähnliches galt auch für insgesamt
vier Nächte Anfang und Mitte Oktober. Insgesamt wurden im hier betrachteten Zeitraum von
Mitte Oktober 2010 bis Ende Oktober 2013 dreizehn Nächte mit mittleren nächtlichen Zugra-

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 36
ten von über 2.000 Vögeln pro Stunde und Kilometer erfasst. Im Allgemeinen wurden stärke-
re Zugschübe innerhalb einer Nacht sowohl innerhalb als auch außerhalb des Offshore-
Windparks registriert. Grundsätzlich schwankten die stündlichen Zugraten innerhalb der
Nacht sehr stark (vgl. 95 %-Konfidenzintervalle in Abbildung 9 sowie Abbildung 28 bis Abbil-
dung 33 im Anhang). Einen Überblick über die jeweils zehn stärksten mittleren stündlichen
Zugraten pro Nacht über den gesamten betrachteten Höhenbereich bis 3.400 m hinweg so-
wie innerhalb und außerhalb von alpha ventus gibt

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 37
Tabelle 2. Diese verteilten sich auf die Perioden Mitte April und Ende Mai sowie Ende Okto-
ber/Anfang November. Außerhalb des Offshore-Windparks wurde ein weiteres herausragend
starkes Zugereignis Ende Juni festgestellt. In acht bzw. neun der zehn stärksten Zugnächte
außerhalb bzw. innerhalb des Windparks herrschten zumindest zeitweise Winde mit Ost-
komponente. In jeweils fünf der Nächte trat Gegenwind einer Stärke von mindestens drei
Beaufort auf, in drei bzw. zwei der Nächte kam es im Laufe der Nacht zu einer Verschlechte-
rung der Wetterbedingungen im Sinne einer stärker werdenden Gegenwindkomponente (
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 38
Tabelle 2). Über die Saisons hinweg stellten Singvögel insgesamt den höchsten Anteil der
auf Basis der Flügelschlagfrequenzen bestimmten Vögel (vgl. Abbildung 9 sowie Abbildung
28 bis Abbildung 33 im Anhang).
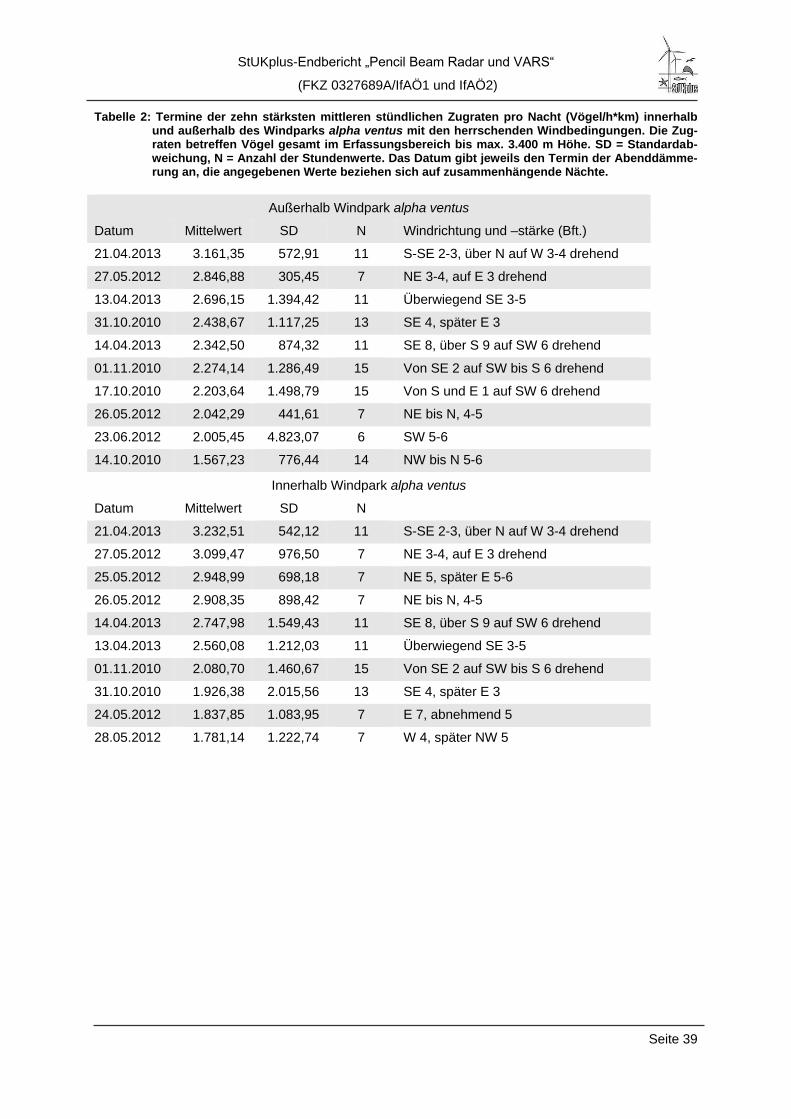
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 39
Tabelle 2: Termine der zehn stärksten mittleren stündlichen Zugraten pro Nacht (Vögel/h*km) innerhalb und außerhalb des Windparks alpha ventus mit den herrschenden Windbedingungen. Die Zug-raten betreffen Vögel gesamt im Erfassungsbereich bis max. 3.400 m Höhe. SD = Standardab-weichung, N = Anzahl der Stundenwerte. Das Datum gibt jeweils den Termin der Abenddämme-rung an, die angegebenen Werte beziehen sich auf zusammenhängende Nächte.
Außerhalb Windpark alpha ventus
Datum Mittelwert SD N Windrichtung und –stärke (Bft.)
21.04.2013 3.161,35 572,91 11 S-SE 2-3, über N auf W 3-4 drehend
27.05.2012 2.846,88 305,45 7 NE 3-4, auf E 3 drehend
13.04.2013 2.696,15 1.394,42 11 Überwiegend SE 3-5
31.10.2010 2.438,67 1.117,25 13 SE 4, später E 3
14.04.2013 2.342,50 874,32 11 SE 8, über S 9 auf SW 6 drehend
01.11.2010 2.274,14 1.286,49 15 Von SE 2 auf SW bis S 6 drehend
17.10.2010 2.203,64 1.498,79 15 Von S und E 1 auf SW 6 drehend
26.05.2012 2.042,29 441,61 7 NE bis N, 4-5
23.06.2012 2.005,45 4.823,07 6 SW 5-6
14.10.2010 1.567,23 776,44 14 NW bis N 5-6
Innerhalb Windpark alpha ventus
Datum Mittelwert SD N
21.04.2013 3.232,51 542,12 11 S-SE 2-3, über N auf W 3-4 drehend
27.05.2012 3.099,47 976,50 7 NE 3-4, auf E 3 drehend
25.05.2012 2.948,99 698,18 7 NE 5, später E 5-6
26.05.2012 2.908,35 898,42 7 NE bis N, 4-5
14.04.2013 2.747,98 1.549,43 11 SE 8, über S 9 auf SW 6 drehend
13.04.2013 2.560,08 1.212,03 11 Überwiegend SE 3-5
01.11.2010 2.080,70 1.460,67 15 Von SE 2 auf SW bis S 6 drehend
31.10.2010 1.926,38 2.015,56 13 SE 4, später E 3
24.05.2012 1.837,85 1.083,95 7 E 7, abnehmend 5
28.05.2012 1.781,14 1.222,74 7 W 4, später NW 5

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 40
Watvogeltyp
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
28.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vö
ge
l/h
*km
)
150
100
50
0
50
100
150
Windpark
außerhalb Windpark
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
28.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vö
ge
l/h
*km
)
800
600
400
200
0
200
400
600
800
Windpark
außerhalb Windpark
Singvogeltyp
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
28.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vö
ge
l/h
*km
)
1200
800
400
0
400
800
1200
Windpark
außerhalb Windpark
Unbestimmte Vögel
Frühjahr 2011
Datum
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
28.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vö
ge
l/h
*km
)
1200
800
400
0
400
800
1200
außerhalb Windpark
Windpark Alle Vögel
Abbildung 9: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des Frühjahrszuges
2011 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung mittels Fixbe-
am-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus 95%-
Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das Da-
tum des Nachtbeginns an. Darstellung weiterer Saisons siehe Anhang.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 41
10.2. Höhenverteilung ziehender Vögel über die Saison
Die Höhenverteilung ziehender Vögel zeigte von Nacht zu Nacht erhebliche Unterschiede
(Abbildung 10).
Watvogeltyp
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
01
.03
.
05
.03
.
10
.03
.
15
.03
.
20
.03
.
25
.03
.
31
.03
.
05
.04
.
10
.04
.
15
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
10
.06
.
15
.06
.
20
.06
.
25
.06
.
30
.06
.
Zu
gra
te (
Vö
ge
l/h
/km
)
80
60
40
20
0
20
40
60
80
im Windpark
außerhalb Windpark
Frühjahr 2011
Singvogeltyp
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
01
.03
.
05
.03
.
10
.03
.
15
.03
.
20
.03
.
25
.03
.
31
.03
.
05
.04
.
10
.04
.
15
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
10
.06
.
15
.06
.
20
.06
.
25
.06
.
30
.06
.
Zu
gra
te (
Vö
ge
l/h
/km
)
500
400
300
200
100
0
100
200
300
400
500
außerhalb Windpark
im Windpark
unbestimmte Vögel
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
01
.03
.
05
.03
.
10
.03
.
15
.03
.
20
.03
.
25
.03
.
31
.03
.
05
.04
.
10
.04
.
15
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
10
.06
.
15
.06
.
20
.06
.
25
.06
.
30
.06
.
Zu
gra
te (
Vö
ge
l/h
/km
)
400
300
200
100
0
100
200
300
400
im Windpark
außerhalb Windpark
Datum
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
01
.03
.
05
.03
.
10
.03
.
15
.03
.
20
.03
.
25
.03
.
31
.03
.
05
.04
.
10
.04
.
15
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
10
.06
.
15
.06
.
20
.06
.
25
.06
.
30
.06
.
Zu
gra
te (
Vö
ge
l/h
/km
)
600
400
200
0
200
400
600
im Windpark
außerhalb Windpark
alle Vögel
> 200m
bis 200 m
Flughöhe
Abbildung 10: Zugrate verschiedener Vogelgruppen während des Frühjahrszuges 2011 in Höhen bis 200
m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha ventus und
außerhalb. Dargestellt sind mittlere stündliche Zugraten pro Nacht. Beachte unterschiedli-
che Skalierungen. Das Datum gibt jeweils den Termin des Nachtbeginns an.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 42
Während typischer Zugwellen wurden regelmäßig auch in den untersten 200 Höhenmetern,
die im Hinblick auf das im Zusammenhang mit der Errichtung von Windenergieanlagen be-
stehende Konfliktpotenzial von besonderem Interesse sind, beträchtliche Anteile des Zugvo-
lumens festgestellt. Dies galt insbesondere für die Ende Mai 2012, Mitte April 2013 und Ende
April 2013 registrierte Wellen starken Zuges, in denen deutlich über die Hälfte bis die über-
wiegende Menge aller Vögel in den untersten 200 m registriert wurden. Während weiterer
Zugwellen Ende Oktober/Anfang November 2010, Ende März 2011 sowie Anfang Oktober
2011 wurde immer noch mehr als ein Fünftel des Zugvolumens in Flughöhen bis 200 m fest-
gestellt (vgl. Abbildung 10 sowie Abbildung 34 bis Abbildung 39).
10.3. Verhalten der Vögel an der Offshore-Windenergieanlage AV4
10.3.1. Erfassung von Vögeln im Rotorbereich der OWEA AV4
Vom 26.09.2010 bis zum 29.10.2013 wurden mit dem VARS auf der Gondel der OWEA AV4
rund 1.200 Vögel aufgezeichnet. In dieser Anzahl sind sowohl einzeln fliegende Vögel als
auch Trupps enthalten, wobei 90 % der 922 Ereignisse jeweils ein Individuum betrafen. Die
jahreszeitliche Verteilung zeigt keine klassische Phänologie, sondern Flugbewegungen in
allen Monaten (Abbildung 11, Abbildung 12). Dies resultiert vor allem aus der ganzjährigen
Anwesenheit von Großmöwen, die in unregelmäßigen Abständen den Bildausschnitt in grö-
ßerer Höhe durchflogen. Die Artengruppe stellte den überwiegenden Teil der aufgezeichne-
ten Individuen, die außerhalb des Rotorkreises der AV4 erfasst wurden. Spitzen in dieser
Höhenschicht erklären sich vielfach durch verstärkte Flugaktivität der Möwen, was durch das
Auftreten von Trupps an einzelnen Tagen noch verstärkt wird. Einzige Ausnahme stellte der
Morgen des 01.11.2010 dar, als sich viele nachts vom Licht angelockte Singvögel bis in die
Vormittagsstunden über der Gondel aufhielten und dabei auch Höhen oberhalb des Rotors
durchflogen.
Besonders relevant sind die Flugbewegungen von Vögeln innerhalb des Rotorkreises, da sie
den Aufenthalt in der Gefahrenzone dokumentieren. Das mit Abstand stärkste Ereignis in
diesem Bereich betraf die Nacht vom 13.-14.04.2013, als nach einem Zugstau mehr als 100
Individuen bei Stillstand der Turbine aufgezeichnet wurden (vgl. Kap. 10.4.2). Die folgende
Nacht zum 15.04.2013 erreichte unter gleichen Rahmenbedingungen ebenfalls überdurch-
schnittliche Anzahlen. Diese Doppelnacht war das erste auffällige Ereignis seit dem
01.11.2010 (vgl. Kap. 10.4.2). In den dazwischen liegenden Jahren 2011 und 2012 traten nur
geringe, gleichmäßig verteilte Flugaktivitäten im Rotorbereich auf (Abbildung 11, Abbildung
12). Das jahreszeitlich ungewöhnliche Auftreten von Vögeln am 19.06.2013 betraf primär
Mauersegler, die sich im Luftraum über der AV4 aufhielten.
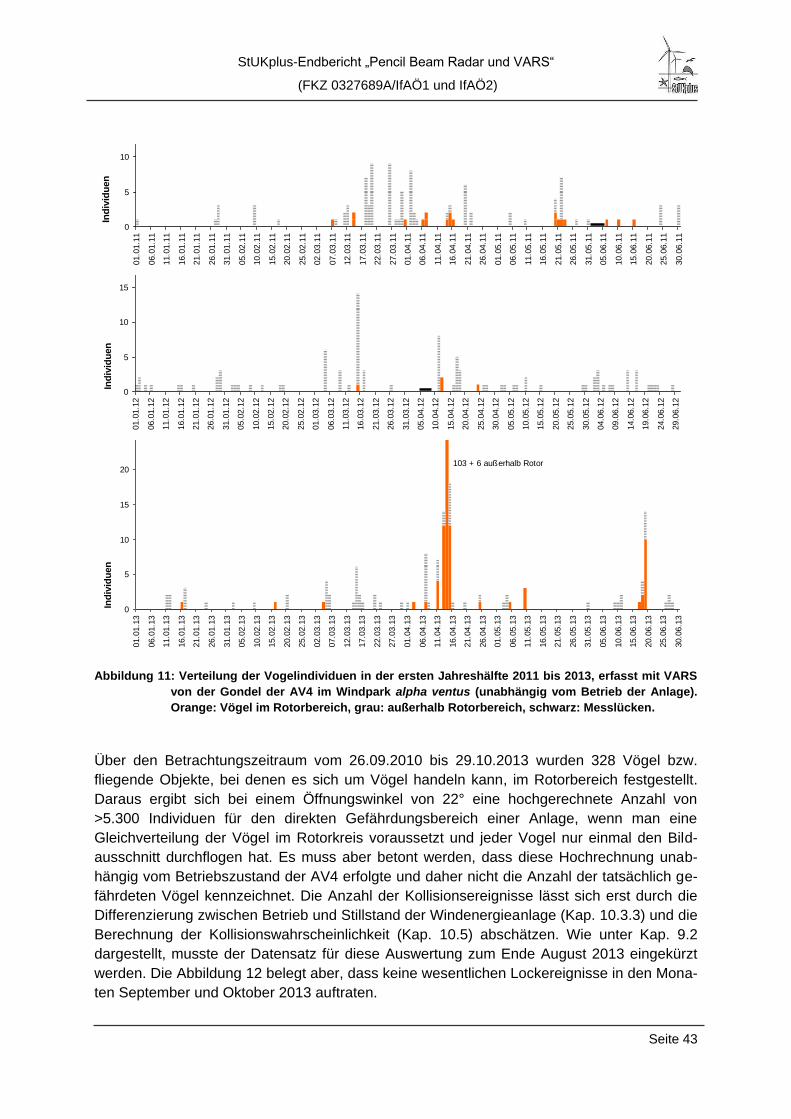
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 43
0
5
10
15
20
25
30
01.0
1.1
1
06.0
1.1
1
11.0
1.1
1
16.0
1.1
1
21.0
1.1
1
26.0
1.1
1
31.0
1.1
1
05.0
2.1
1
10.0
2.1
1
15.0
2.1
1
20.0
2.1
1
25.0
2.1
1
02.0
3.1
1
07.0
3.1
1
12.0
3.1
1
17.0
3.1
1
22.0
3.1
1
27.0
3.1
1
01.0
4.1
1
06.0
4.1
1
11.0
4.1
1
16.0
4.1
1
21.0
4.1
1
26.0
4.1
1
01.0
5.1
1
06.0
5.1
1
11.0
5.1
1
16.0
5.1
1
21.0
5.1
1
26.0
5.1
1
31.0
5.1
1
05.0
6.1
1
10.0
6.1
1
15.0
6.1
1
20.0
6.1
1
25.0
6.1
1
30.0
6.1
1
Ind
ivid
uen
0
5
10
15
20
25
30
01.0
1.1
2
06.0
1.1
2
11.0
1.1
2
16.0
1.1
2
21.0
1.1
2
26.0
1.1
2
31.0
1.1
2
05.0
2.1
2
10.0
2.1
2
15.0
2.1
2
20.0
2.1
2
25.0
2.1
2
01.0
3.1
2
06.0
3.1
2
11.0
3.1
2
16.0
3.1
2
21.0
3.1
2
26.0
3.1
2
31.0
3.1
2
05.0
4.1
2
10.0
4.1
2
15.0
4.1
2
20.0
4.1
2
25.0
4.1
2
30.0
4.1
2
05.0
5.1
2
10.0
5.1
2
15.0
5.1
2
20.0
5.1
2
25.0
5.1
2
30.0
5.1
2
04.0
6.1
2
09.0
6.1
2
14.0
6.1
2
19.0
6.1
2
24.0
6.1
2
29.0
6.1
2
Ind
ivid
uen
0
5
10
15
20
25
30
01.0
1.1
3
06.0
1.1
3
11.0
1.1
3
16.0
1.1
3
21.0
1.1
3
26.0
1.1
3
31.0
1.1
3
05.0
2.1
3
10.0
2.1
3
15.0
2.1
3
20.0
2.1
3
25.0
2.1
3
02.0
3.1
3
07.0
3.1
3
12.0
3.1
3
17.0
3.1
3
22.0
3.1
3
27.0
3.1
3
01.0
4.1
3
06.0
4.1
3
11.0
4.1
3
16.0
4.1
3
21.0
4.1
3
26.0
4.1
3
01.0
5.1
3
06.0
5.1
3
11.0
5.1
3
16.0
5.1
3
21.0
5.1
3
26.0
5.1
3
31.0
5.1
3
05.0
6.1
3
10.0
6.1
3
15.0
6.1
3
20.0
6.1
3
25.0
6.1
3
30.0
6.1
3
Ind
ivid
uen
103 + 6 außerhalb Rotor
Abbildung 11: Verteilung der Vogelindividuen in der ersten Jahreshälfte 2011 bis 2013, erfasst mit VARS
von der Gondel der AV4 im Windpark alpha ventus (unabhängig vom Betrieb der Anlage).
Orange: Vögel im Rotorbereich, grau: außerhalb Rotorbereich, schwarz: Messlücken.
Über den Betrachtungszeitraum vom 26.09.2010 bis 29.10.2013 wurden 328 Vögel bzw.
fliegende Objekte, bei denen es sich um Vögel handeln kann, im Rotorbereich festgestellt.
Daraus ergibt sich bei einem Öffnungswinkel von 22° eine hochgerechnete Anzahl von
>5.300 Individuen für den direkten Gefährdungsbereich einer Anlage, wenn man eine
Gleichverteilung der Vögel im Rotorkreis voraussetzt und jeder Vogel nur einmal den Bild-
ausschnitt durchflogen hat. Es muss aber betont werden, dass diese Hochrechnung unab-
hängig vom Betriebszustand der AV4 erfolgte und daher nicht die Anzahl der tatsächlich ge-
fährdeten Vögel kennzeichnet. Die Anzahl der Kollisionsereignisse lässt sich erst durch die
Differenzierung zwischen Betrieb und Stillstand der Windenergieanlage (Kap. 10.3.3) und die
Berechnung der Kollisionswahrscheinlichkeit (Kap. 10.5) abschätzen. Wie unter Kap. 9.2
dargestellt, musste der Datensatz für diese Auswertung zum Ende August 2013 eingekürzt
werden. Die Abbildung 12 belegt aber, dass keine wesentlichen Lockereignisse in den Mona-
ten September und Oktober 2013 auftraten.
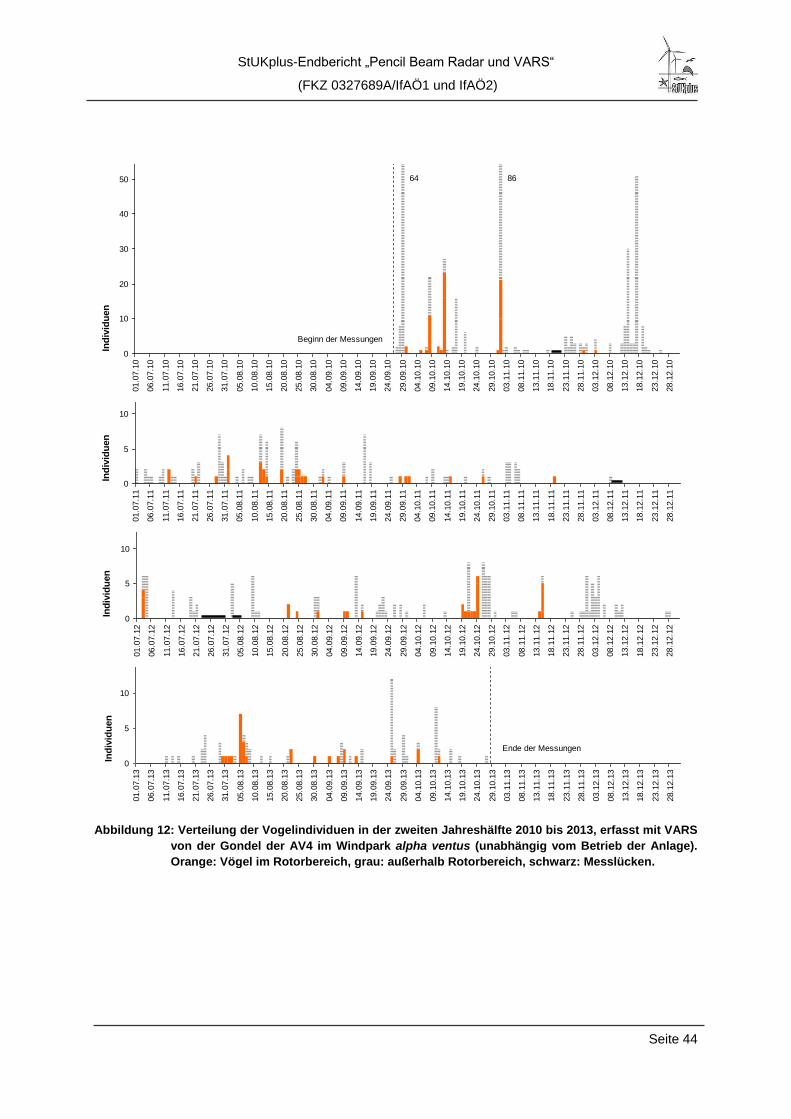
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 44
0
10
20
30
40
50
60
01.0
7.1
0
06.0
7.1
0
11.0
7.1
0
16.0
7.1
0
21.0
7.1
0
26.0
7.1
0
31.0
7.1
0
05.0
8.1
0
10.0
8.1
0
15.0
8.1
0
20.0
8.1
0
25.0
8.1
0
30.0
8.1
0
04.0
9.1
0
09.0
9.1
0
14.0
9.1
0
19.0
9.1
0
24.0
9.1
0
29.0
9.1
0
04.1
0.1
0
09.1
0.1
0
14.1
0.1
0
19.1
0.1
0
24.1
0.1
0
29.1
0.1
0
03.1
1.1
0
08.1
1.1
0
13.1
1.1
0
18.1
1.1
0
23.1
1.1
0
28.1
1.1
0
03.1
2.1
0
08.1
2.1
0
13.1
2.1
0
18.1
2.1
0
23.1
2.1
0
28.1
2.1
0
Ind
ivid
uen
64 86
Beginn der Messungen
0
5
10
15
20
25
30
01.0
7.1
1
06.0
7.1
1
11.0
7.1
1
16.0
7.1
1
21.0
7.1
1
26.0
7.1
1
31.0
7.1
1
05.0
8.1
1
10.0
8.1
1
15.0
8.1
1
20.0
8.1
1
25.0
8.1
1
30.0
8.1
1
04.0
9.1
1
09.0
9.1
1
14.0
9.1
1
19.0
9.1
1
24.0
9.1
1
29.0
9.1
1
04.1
0.1
1
09.1
0.1
1
14.1
0.1
1
19.1
0.1
1
24.1
0.1
1
29.1
0.1
1
03.1
1.1
1
08.1
1.1
1
13.1
1.1
1
18.1
1.1
1
23.1
1.1
1
28.1
1.1
1
03.1
2.1
1
08.1
2.1
1
13.1
2.1
1
18.1
2.1
1
23.1
2.1
1
28.1
2.1
1
Ind
ivid
uen
0
5
10
15
20
25
30
01.0
7.1
2
06.0
7.1
2
11.0
7.1
2
16.0
7.1
2
21.0
7.1
2
26.0
7.1
2
31.0
7.1
2
05.0
8.1
2
10.0
8.1
2
15.0
8.1
2
20.0
8.1
2
25.0
8.1
2
30.0
8.1
2
04.0
9.1
2
09.0
9.1
2
14.0
9.1
2
19.0
9.1
2
24.0
9.1
2
29.0
9.1
2
04.1
0.1
2
09.1
0.1
2
14.1
0.1
2
19.1
0.1
2
24.1
0.1
2
29.1
0.1
2
03.1
1.1
2
08.1
1.1
2
13.1
1.1
2
18.1
1.1
2
23.1
1.1
2
28.1
1.1
2
03.1
2.1
2
08.1
2.1
2
13.1
2.1
2
18.1
2.1
2
23.1
2.1
2
28.1
2.1
2
Ind
ivid
uen
0
5
10
15
20
25
30
01.0
7.1
3
06.0
7.1
3
11.0
7.1
3
16.0
7.1
3
21.0
7.1
3
26.0
7.1
3
31.0
7.1
3
05.0
8.1
3
10.0
8.1
3
15.0
8.1
3
20.0
8.1
3
25.0
8.1
3
30.0
8.1
3
04.0
9.1
3
09.0
9.1
3
14.0
9.1
3
19.0
9.1
3
24.0
9.1
3
29.0
9.1
3
04.1
0.1
3
09.1
0.1
3
14.1
0.1
3
19.1
0.1
3
24.1
0.1
3
29.1
0.1
3
03.1
1.1
3
08.1
1.1
3
13.1
1.1
3
18.1
1.1
3
23.1
1.1
3
28.1
1.1
3
03.1
2.1
3
08.1
2.1
3
13.1
2.1
3
18.1
2.1
3
23.1
2.1
3
28.1
2.1
3
Ind
ivid
uen
Ende der Messungen
Abbildung 12: Verteilung der Vogelindividuen in der zweiten Jahreshälfte 2010 bis 2013, erfasst mit VARS
von der Gondel der AV4 im Windpark alpha ventus (unabhängig vom Betrieb der Anlage).
Orange: Vögel im Rotorbereich, grau: außerhalb Rotorbereich, schwarz: Messlücken.
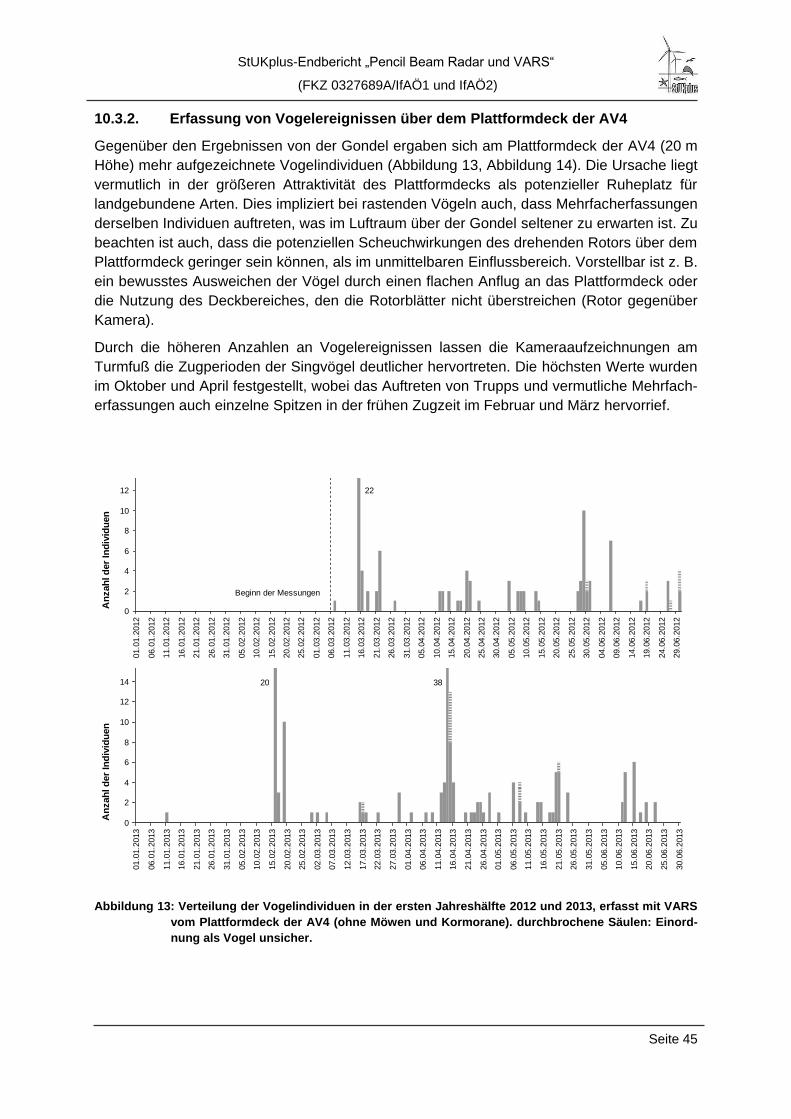
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 45
10.3.2. Erfassung von Vogelereignissen über dem Plattformdeck der AV4
Gegenüber den Ergebnissen von der Gondel ergaben sich am Plattformdeck der AV4 (20 m
Höhe) mehr aufgezeichnete Vogelindividuen (Abbildung 13, Abbildung 14). Die Ursache liegt
vermutlich in der größeren Attraktivität des Plattformdecks als potenzieller Ruheplatz für
landgebundene Arten. Dies impliziert bei rastenden Vögeln auch, dass Mehrfacherfassungen
derselben Individuen auftreten, was im Luftraum über der Gondel seltener zu erwarten ist. Zu
beachten ist auch, dass die potenziellen Scheuchwirkungen des drehenden Rotors über dem
Plattformdeck geringer sein können, als im unmittelbaren Einflussbereich. Vorstellbar ist z. B.
ein bewusstes Ausweichen der Vögel durch einen flachen Anflug an das Plattformdeck oder
die Nutzung des Deckbereiches, den die Rotorblätter nicht überstreichen (Rotor gegenüber
Kamera).
Durch die höheren Anzahlen an Vogelereignissen lassen die Kameraaufzeichnungen am
Turmfuß die Zugperioden der Singvögel deutlicher hervortreten. Die höchsten Werte wurden
im Oktober und April festgestellt, wobei das Auftreten von Trupps und vermutliche Mehrfach-
erfassungen auch einzelne Spitzen in der frühen Zugzeit im Februar und März hervorrief.
0
2
4
6
8
10
12
14
16
18
20
01.0
1.2
012
06.0
1.2
012
11.0
1.2
012
16.0
1.2
012
21.0
1.2
012
26.0
1.2
012
31.0
1.2
012
05.0
2.2
012
10.0
2.2
012
15.0
2.2
012
20.0
2.2
012
25.0
2.2
012
01.0
3.2
012
06.0
3.2
012
11.0
3.2
012
16.0
3.2
012
21.0
3.2
012
26.0
3.2
012
31.0
3.2
012
05.0
4.2
012
10.0
4.2
012
15.0
4.2
012
20.0
4.2
012
25.0
4.2
012
30.0
4.2
012
05.0
5.2
012
10.0
5.2
012
15.0
5.2
012
20.0
5.2
012
25.0
5.2
012
30.0
5.2
012
04.0
6.2
012
09.0
6.2
012
14.0
6.2
012
19.0
6.2
012
24.0
6.2
012
29.0
6.2
012
An
zah
l d
er
Ind
ivid
uen
Beginn der Messungen
22
0
2
4
6
8
10
12
14
16
18
20
01.0
1.2
013
06.0
1.2
013
11.0
1.2
013
16.0
1.2
013
21.0
1.2
013
26.0
1.2
013
31.0
1.2
013
05.0
2.2
013
10.0
2.2
013
15.0
2.2
013
20.0
2.2
013
25.0
2.2
013
02.0
3.2
013
07.0
3.2
013
12.0
3.2
013
17.0
3.2
013
22.0
3.2
013
27.0
3.2
013
01.0
4.2
013
06.0
4.2
013
11.0
4.2
013
16.0
4.2
013
21.0
4.2
013
26.0
4.2
013
01.0
5.2
013
06.0
5.2
013
11.0
5.2
013
16.0
5.2
013
21.0
5.2
013
26.0
5.2
013
31.0
5.2
013
05.0
6.2
013
10.0
6.2
013
15.0
6.2
013
20.0
6.2
013
25.0
6.2
013
30.0
6.2
013
An
zah
l d
er
Ind
ivid
uen
20 38
Abbildung 13: Verteilung der Vogelindividuen in der ersten Jahreshälfte 2012 und 2013, erfasst mit VARS
vom Plattformdeck der AV4 (ohne Möwen und Kormorane). durchbrochene Säulen: Einord-
nung als Vogel unsicher.
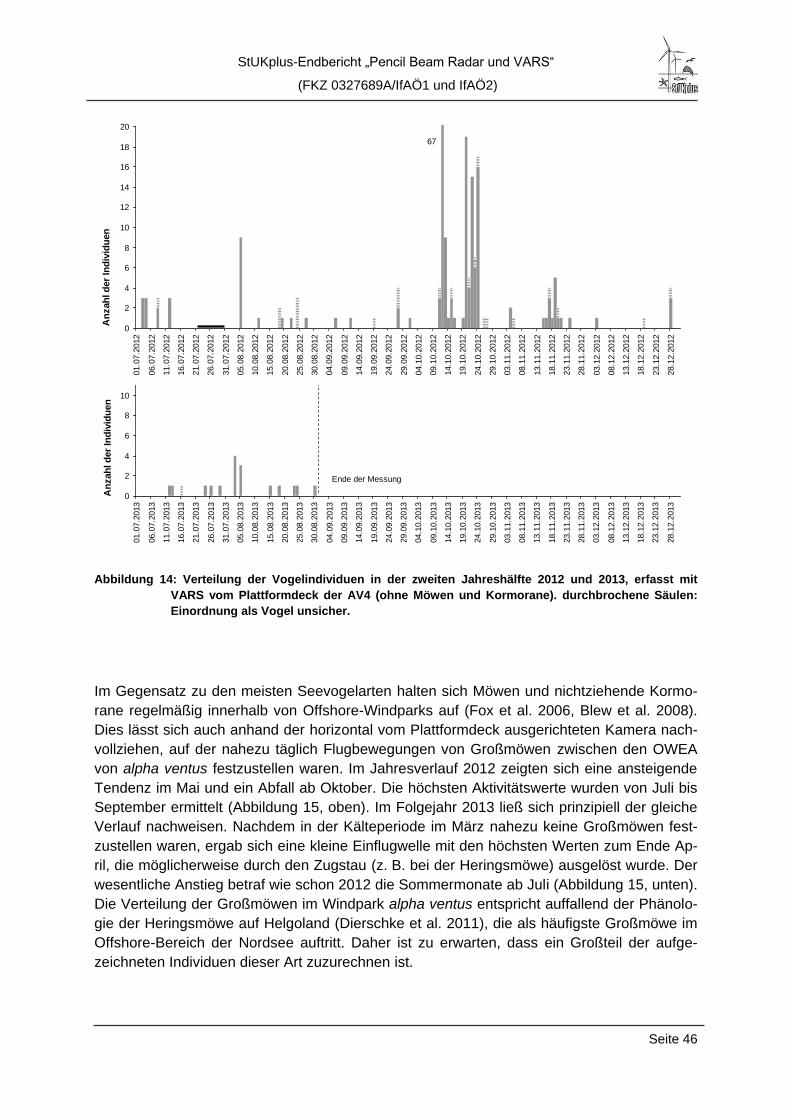
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 46
0
2
4
6
8
10
12
14
16
18
2001.0
7.2
012
06.0
7.2
012
11.0
7.2
012
16.0
7.2
012
21.0
7.2
012
26.0
7.2
012
31.0
7.2
012
05.0
8.2
012
10.0
8.2
012
15.0
8.2
012
20.0
8.2
012
25.0
8.2
012
30.0
8.2
012
04.0
9.2
012
09.0
9.2
012
14.0
9.2
012
19.0
9.2
012
24.0
9.2
012
29.0
9.2
012
04.1
0.2
012
09.1
0.2
012
14.1
0.2
012
19.1
0.2
012
24.1
0.2
012
29.1
0.2
012
03.1
1.2
012
08.1
1.2
012
13.1
1.2
012
18.1
1.2
012
23.1
1.2
012
28.1
1.2
012
03.1
2.2
012
08.1
2.2
012
13.1
2.2
012
18.1
2.2
012
23.1
2.2
012
28.1
2.2
012
An
zah
l d
er
Ind
ivid
uen
67
0
2
4
6
8
10
12
14
16
18
20
01.0
7.2
013
06.0
7.2
013
11.0
7.2
013
16.0
7.2
013
21.0
7.2
013
26.0
7.2
013
31.0
7.2
013
05.0
8.2
013
10.0
8.2
013
15.0
8.2
013
20.0
8.2
013
25.0
8.2
013
30.0
8.2
013
04.0
9.2
013
09.0
9.2
013
14.0
9.2
013
19.0
9.2
013
24.0
9.2
013
29.0
9.2
013
04.1
0.2
013
09.1
0.2
013
14.1
0.2
013
19.1
0.2
013
24.1
0.2
013
29.1
0.2
013
03.1
1.2
013
08.1
1.2
013
13.1
1.2
013
18.1
1.2
013
23.1
1.2
013
28.1
1.2
013
03.1
2.2
013
08.1
2.2
013
13.1
2.2
013
18.1
2.2
013
23.1
2.2
013
28.1
2.2
013
An
zah
l d
er
Ind
ivid
uen
Ende der Messung
Abbildung 14: Verteilung der Vogelindividuen in der zweiten Jahreshälfte 2012 und 2013, erfasst mit
VARS vom Plattformdeck der AV4 (ohne Möwen und Kormorane). durchbrochene Säulen:
Einordnung als Vogel unsicher.
Im Gegensatz zu den meisten Seevogelarten halten sich Möwen und nichtziehende Kormo-
rane regelmäßig innerhalb von Offshore-Windparks auf (Fox et al. 2006, Blew et al. 2008).
Dies lässt sich auch anhand der horizontal vom Plattformdeck ausgerichteten Kamera nach-
vollziehen, auf der nahezu täglich Flugbewegungen von Großmöwen zwischen den OWEA
von alpha ventus festzustellen waren. Im Jahresverlauf 2012 zeigten sich eine ansteigende
Tendenz im Mai und ein Abfall ab Oktober. Die höchsten Aktivitätswerte wurden von Juli bis
September ermittelt (Abbildung 15, oben). Im Folgejahr 2013 ließ sich prinzipiell der gleiche
Verlauf nachweisen. Nachdem in der Kälteperiode im März nahezu keine Großmöwen fest-
zustellen waren, ergab sich eine kleine Einflugwelle mit den höchsten Werten zum Ende Ap-
ril, die möglicherweise durch den Zugstau (z. B. bei der Heringsmöwe) ausgelöst wurde. Der
wesentliche Anstieg betraf wie schon 2012 die Sommermonate ab Juli (Abbildung 15, unten).
Die Verteilung der Großmöwen im Windpark alpha ventus entspricht auffallend der Phänolo-
gie der Heringsmöwe auf Helgoland (Dierschke et al. 2011), die als häufigste Großmöwe im
Offshore-Bereich der Nordsee auftritt. Daher ist zu erwarten, dass ein Großteil der aufge-
zeichneten Individuen dieser Art zuzurechnen ist.
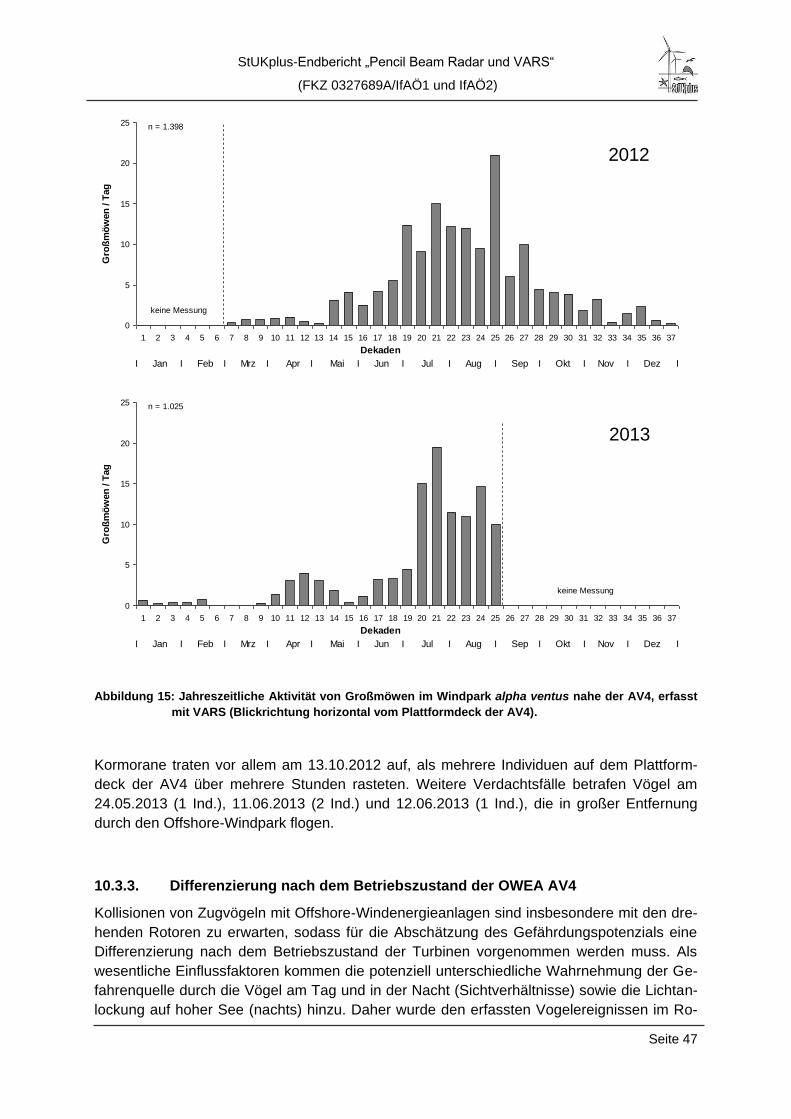
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 47
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37
Dekaden
Gro
ßm
öw
en
/ T
ag
I Jan I Feb I Mrz I Apr I Mai I Jun I Jul I Aug I Sep I Okt I Nov I Dez I
n = 1.398
keine Messung
2012
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37
Dekaden
Gro
ßm
öw
en
/ T
ag
I Jan I Feb I Mrz I Apr I Mai I Jun I Jul I Aug I Sep I Okt I Nov I Dez I
n = 1.025
keine Messung
2013
Abbildung 15: Jahreszeitliche Aktivität von Großmöwen im Windpark alpha ventus nahe der AV4, erfasst
mit VARS (Blickrichtung horizontal vom Plattformdeck der AV4).
Kormorane traten vor allem am 13.10.2012 auf, als mehrere Individuen auf dem Plattform-
deck der AV4 über mehrere Stunden rasteten. Weitere Verdachtsfälle betrafen Vögel am
24.05.2013 (1 Ind.), 11.06.2013 (2 Ind.) und 12.06.2013 (1 Ind.), die in großer Entfernung
durch den Offshore-Windpark flogen.
10.3.3. Differenzierung nach dem Betriebszustand der OWEA AV4
Kollisionen von Zugvögeln mit Offshore-Windenergieanlagen sind insbesondere mit den dre-
henden Rotoren zu erwarten, sodass für die Abschätzung des Gefährdungspotenzials eine
Differenzierung nach dem Betriebszustand der Turbinen vorgenommen werden muss. Als
wesentliche Einflussfaktoren kommen die potenziell unterschiedliche Wahrnehmung der Ge-
fahrenquelle durch die Vögel am Tag und in der Nacht (Sichtverhältnisse) sowie die Lichtan-
lockung auf hoher See (nachts) hinzu. Daher wurde den erfassten Vogelereignissen im Ro-

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 48
torbereich der OWEA AV4 der zugehörige Betriebszustand der Anlage zugeordnet und nach
der Tageszeit getrennt dargestellt (Abbildung 16). Als Grenze zwischen Tag und Nacht wur-
de der Beginn bzw. das Ende der bürgerlichen (zivilen) Dämmerung angesetzt (Sonne 6°
unter Horizont).
0
0,1
0,2
0,3
0,4
0,5
Betrieb Anlaufgeschwindigkeit außer Betrieb
Vögel / h
Tag
Nacht
n = 289
0
0,1
0,2
0,3
0,4
0,5
Betrieb Anlaufgeschwindigkeit außer Betrieb
Vögel / h
Tag
Nacht
ohne
1.11.2010 und
13.-14.04.2013 n = 155
Abbildung 16: Verteilung der Vogelaktivität (Individuen/Stunde) im Rotorbereich der AV4 in Abhängigkeit
vom Betrieb der Anlage und der Tageszeit (09/2010-08/2013). Als Grenze zwischen Tag und
Nacht wurde die bürgerliche (zivile) Dämmerung angesetzt. Die Anlaufgeschwindigkeit be-
trifft eine Rotationsperiode von 7,76 - 8,31 Sekunden.
Das Verhältnis zwischen den Vogelindividuen im Rotorbereich und den Stunden der einzel-
nen Betriebszustände zeigt am Tag und in der Nacht signifikante Unterschiede (Chi²-Tests:
Nacht: Chi²=658,92, df=2, p<0.001, N=190; Tag: Chi²=203.88, df=2, p<0.001, N=99) zwi-
schen Betrieb und Stillstand der AV4 (Abbildung 16, linke Seite). Der gesamte Datensatz
wird von zwei Nächten, einschließlich der Morgenstunden, dominiert. Vor allem die Nacht
vom 13.-14.04.2013 ergab nach einem Zugstau im Frühjahr 2013 (vgl. Gelpke et al. 2013)
eine Anzahl von mehr als hundert Individuen, die den Rotorbereich querten (vgl. Abbildung
11). In geringerem Umfang trifft dies auch für die Nacht zum 01.11.2010 und die nachfolgen-
den Morgenstunden zu. Aber auch ohne diese beiden Spitzenereignisse verbleiben signifi-
kante Unterschiede zwischen den Flugraten der Vögel bei den drei Betriebszuständen der
untersuchten Windenergieanlage (Chi²-Tests: Nacht: Chi²=134,83, df=2, p<0.001, N=75;
Tag: Chi²=161.15, df=2, p<0.001, N=80; Abbildung 16, rechte Seite). Es bestand kein prinzi-
pieller Unterschied zwischen dem Verhalten der Vögel am Tag und in der Nacht. Sowohl in
der Hellphase als auch in der Dunkelheit traten mehr Individuen im Rotorbereich auf, wenn
die Turbine stand, wobei nachts etwa die doppelte Anzahl an Vögeln nachgewiesen wurde.
Durch das VARS am Turmfuß der AV4 lassen sich die Erkenntnisse aus dem Rotorkreis für
den Bereich über und neben dem Plattformdeck prüfen. Dazu musste der Datensatz zwi-
schen den ständig im Seegebiet anwesenden Großmöwen (und rastenden Kormoranen) und
den übrigen Arten getrennt betrachtet werden, da die Möwen quantitativ zu stark dominieren
und sie sich im Gegensatz zu den meisten Seevogelarten regelmäßig in Offshore-Windparks
aufhalten (u. a. Fox et al. 2006, Blew et al. 2008).
Trotz der Differenzierung ergeben sich ähnliche Verteilungen bei Großmöwen (und Kormo-
ranen) und den sonstigen Arten. Beide Gruppen näherten sich dem Plattformdeck in der
Nacht bevorzugt dann, wenn die Turbine stand (Abbildung 17). Letztlich zeigt sich die glei-
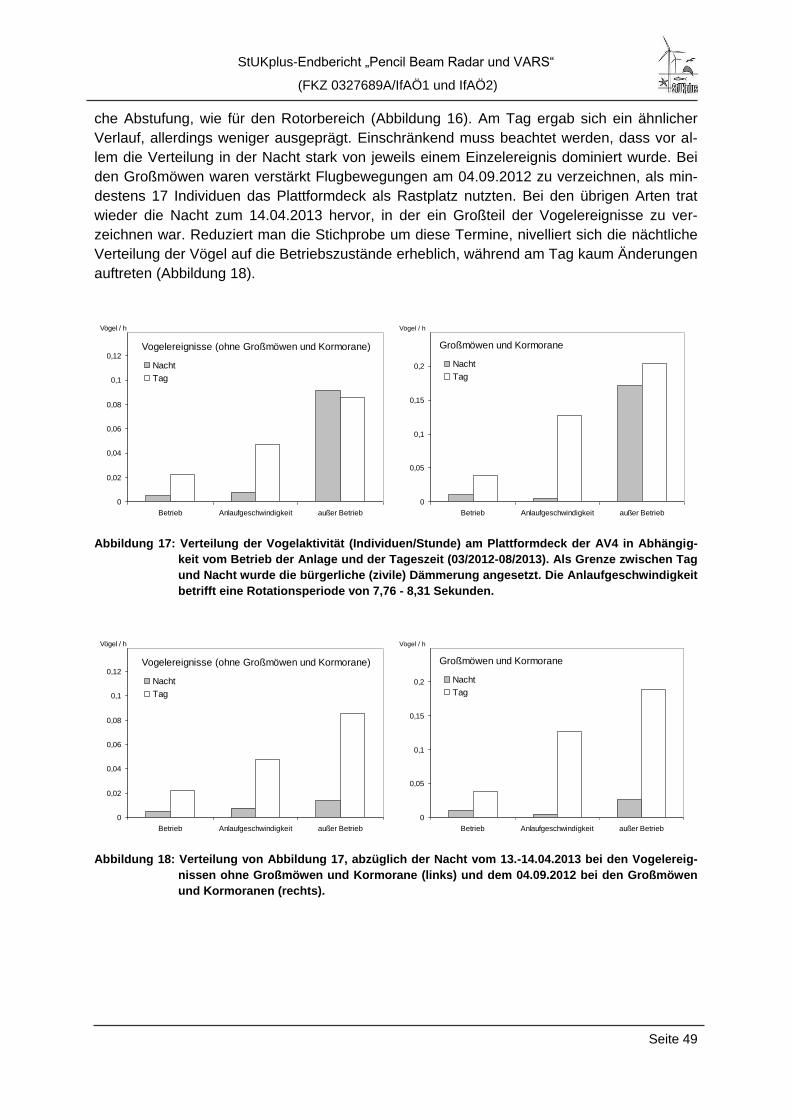
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 49
che Abstufung, wie für den Rotorbereich (Abbildung 16). Am Tag ergab sich ein ähnlicher
Verlauf, allerdings weniger ausgeprägt. Einschränkend muss beachtet werden, dass vor al-
lem die Verteilung in der Nacht stark von jeweils einem Einzelereignis dominiert wurde. Bei
den Großmöwen waren verstärkt Flugbewegungen am 04.09.2012 zu verzeichnen, als min-
destens 17 Individuen das Plattformdeck als Rastplatz nutzten. Bei den übrigen Arten trat
wieder die Nacht zum 14.04.2013 hervor, in der ein Großteil der Vogelereignisse zu ver-
zeichnen war. Reduziert man die Stichprobe um diese Termine, nivelliert sich die nächtliche
Verteilung der Vögel auf die Betriebszustände erheblich, während am Tag kaum Änderungen
auftreten (Abbildung 18).
0
0,02
0,04
0,06
0,08
0,1
0,12
Betrieb Anlaufgeschwindigkeit außer Betrieb
Vögel / h
Nacht
Tag
Vogelereignisse (ohne Großmöwen und Kormorane)
0
0,05
0,1
0,15
0,2
Betrieb Anlaufgeschwindigkeit außer Betrieb
Vögel / h
Nacht
Tag
Großmöwen und Kormorane
Abbildung 17: Verteilung der Vogelaktivität (Individuen/Stunde) am Plattformdeck der AV4 in Abhängig-
keit vom Betrieb der Anlage und der Tageszeit (03/2012-08/2013). Als Grenze zwischen Tag
und Nacht wurde die bürgerliche (zivile) Dämmerung angesetzt. Die Anlaufgeschwindigkeit
betrifft eine Rotationsperiode von 7,76 - 8,31 Sekunden.
0
0,02
0,04
0,06
0,08
0,1
0,12
Betrieb Anlaufgeschwindigkeit außer Betrieb
Vögel / h
Nacht
Tag
Vogelereignisse (ohne Großmöwen und Kormorane)
0
0,05
0,1
0,15
0,2
Betrieb Anlaufgeschwindigkeit außer Betrieb
Vögel / h
Nacht
Tag
Großmöwen und Kormorane
Abbildung 18: Verteilung von Abbildung 17, abzüglich der Nacht vom 13.-14.04.2013 bei den Vogelereig-
nissen ohne Großmöwen und Kormorane (links) und dem 04.09.2012 bei den Großmöwen
und Kormoranen (rechts).
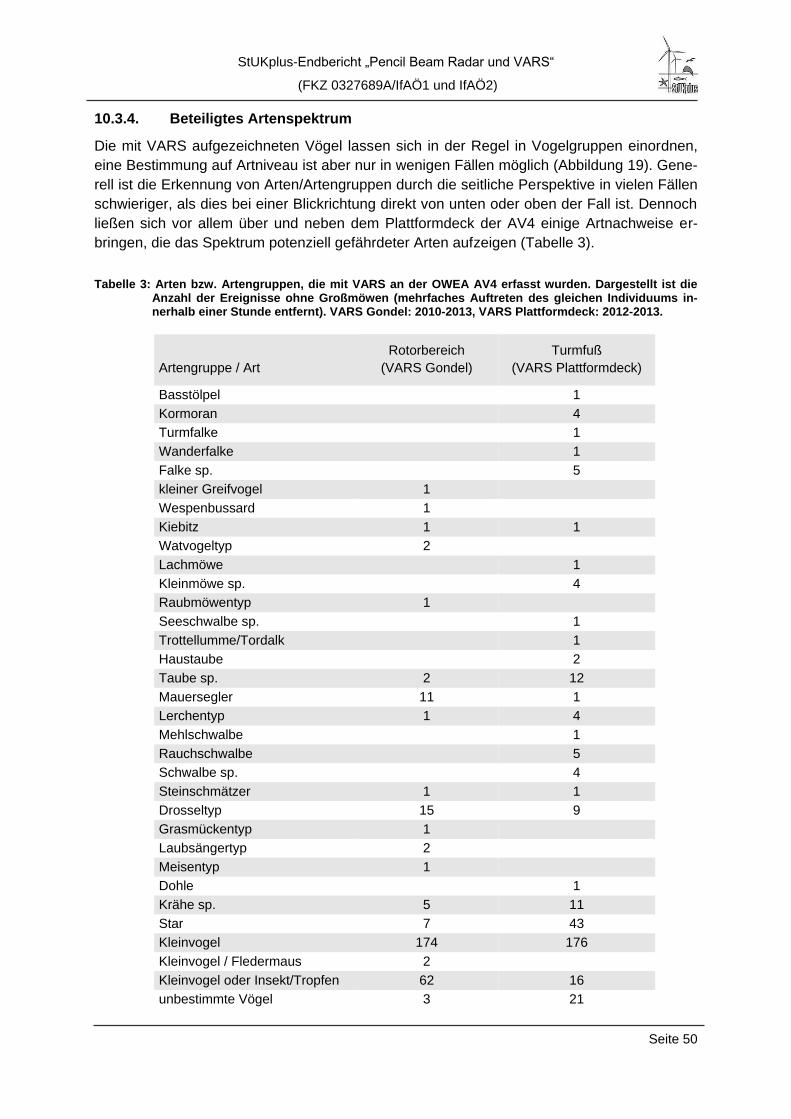
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 50
10.3.4. Beteiligtes Artenspektrum
Die mit VARS aufgezeichneten Vögel lassen sich in der Regel in Vogelgruppen einordnen,
eine Bestimmung auf Artniveau ist aber nur in wenigen Fällen möglich (Abbildung 19). Gene-
rell ist die Erkennung von Arten/Artengruppen durch die seitliche Perspektive in vielen Fällen
schwieriger, als dies bei einer Blickrichtung direkt von unten oder oben der Fall ist. Dennoch
ließen sich vor allem über und neben dem Plattformdeck der AV4 einige Artnachweise er-
bringen, die das Spektrum potenziell gefährdeter Arten aufzeigen (Tabelle 3).
Tabelle 3: Arten bzw. Artengruppen, die mit VARS an der OWEA AV4 erfasst wurden. Dargestellt ist die Anzahl der Ereignisse ohne Großmöwen (mehrfaches Auftreten des gleichen Individuums in-nerhalb einer Stunde entfernt). VARS Gondel: 2010-2013, VARS Plattformdeck: 2012-2013.
Artengruppe / Art
Rotorbereich
(VARS Gondel)
Turmfuß
(VARS Plattformdeck)
Basstölpel 1
Kormoran 4
Turmfalke 1
Wanderfalke 1
Falke sp. 5
kleiner Greifvogel 1
Wespenbussard 1
Kiebitz 1 1
Watvogeltyp 2
Lachmöwe 1
Kleinmöwe sp. 4
Raubmöwentyp 1
Seeschwalbe sp. 1
Trottellumme/Tordalk 1
Haustaube 2
Taube sp. 2 12
Mauersegler 11 1
Lerchentyp 1 4
Mehlschwalbe 1
Rauchschwalbe 5
Schwalbe sp. 4
Steinschmätzer 1 1
Drosseltyp 15 9
Grasmückentyp 1
Laubsängertyp 2
Meisentyp 1
Dohle 1
Krähe sp. 5 11
Star 7 43
Kleinvogel 174 176
Kleinvogel / Fledermaus 2
Kleinvogel oder Insekt/Tropfen 62 16
unbestimmte Vögel 3 21

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 51
Unter Ausschluss der ständig im Seegebiet anwesenden Großmöwen dominieren die Klein-
vögel. Von Seevögeln konnte ein Basstölpel und ein Alkenvogel erkannt werden, die sich bei
Stillstand der Anlage näherten. Von den Greifvögeln traten vor allem Falken am Plattform-
deck der AV4 auf und im freien Luftraum über der Gondel flogen mehrfach Mauersegler.
Abbildung 19: Beispiele für Vogelaufzeichnungen mit VARS (links: Mauersegler bei Nacht, rechts: Stein-
schmätzer am Tag). Einzelbilder aus Videosequenzen.
Als problematisch stellten sich zeitweise Insekten heraus, die besonders in den Sommermo-
naten erschienen. Vor allem nachts konnten bei einem Teil kleiner Objekte (größere Entfer-
nung, geringe Pixelanzahl) keine sichere Trennung zwischen Vogel und Insekt vorgenom-
men werden. Dies gilt besonders vor dem Hintergrund eindeutiger Nachweise von Großin-
sekten (Tagfalter, Hautflügler, Großlibelle) anhand der Kameraaufzeichnungen. Unter man-
chen Bedingungen (z. B. Nieselregen) konnten auch große Wassertropfen, die sich von der
Konstruktion lösten, durch Verwirbelungen hinter dem Rotor ungewöhnliche Flugbahnen
durch den Bildausschnitt nehmen. An der Erfassungsgrenze (geringe Pixelanzahl) entstan-
den dadurch einzelne Fälle, bei denen Unsicherheiten verblieben. Es ist daher nicht auszu-
schließen, dass ein Teil der Ereignisse, die in Tabelle 3 als „Kleinvogel oder Insekt/Tropfen“
ausgewiesen sind, größere Insekten oder Tropfen betreffen.
10.4. Beispiele für besondere Locknächte
10.4.1. Betrachtungen zum Anlockereignis am 01.11.2010
In Aumüller et al. (2011) wird über ein Vogelschlagereignis an der Forschungsplattform FI-
NO1 am Rand des Offshore-Windparks alpha ventus berichtet und in den Kontext zum Ab-
lauf des Vogelzuges und den zugehörigen Witterungsbedingungen in der betreffenden Nacht
gestellt (vgl. hierzu auch Hill et al. 2014). Über verschiedene Ansätze identifizierten die Auto-
ren nachträglich die Nacht vom 01.11. zum 02.11.2010 als Zeitraum des Kollisionsereignis-
ses. An dieser Stelle sollen diese Ergebnisse in Bezug zu den Messungen des IfAÖ mit dem
Fixbeam-Radar sowie den Aufzeichnungen mit VARS im Rotorbereich der Windenergieanla-
ge AV4 gesetzt werden, die nur 400 m östlich von FINO1 liegt.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 52
Die Messungen des IfAÖ mit dem Fixbeam-Radar ergaben für die betreffende Nacht vom
01.11. zum 02.11.2010 starken Vogelzug in niedrigen Höhen bis 400 m. Hierbei wurden so-
wohl im Bereich von alpha ventus als auch außerhalb des Offshore-Windparks hohe Zugin-
tensitäten festgestellt. Innerhalb des Offshore-Windparks zogen mehr Vögel in den untersten
200 m (Abbildung 21), was eine Beeinflussung durch die beleuchteten Offshore-
Windenergieanlagen nahe legt. Dennoch wurden mittels VARS in dieser Nacht keine Vögel
im direkten Nahbereich der OWEA AV4 festgestellt. Im Gegensatz dazu konnten in der vor-
hergehenden Nacht (31.10. / 01.11.2010), in der laut Fixbeam-Radar ähnlich hohe Zuginten-
sitäten im Offshore-Windpark herrschten, an der OWEA AV4 sehr viele Vögel mit VARS
festgestellt werden, was auf eine massive Lockwirkung von alpha ventus hindeutet.
Wahrscheinlich waren Unterschiede im Betriebszustand der OWEA AV4 für die erhebliche
Diskrepanz bei den im Rotorbereich mit VARS erfassten Vogelzahlen in den beiden Nächten
verantwortlich. In der ersten Nacht stellte die Turbine den Betrieb gegen 03:10 Uhr (UTC) ein
und lief erst gegen 19:00 Uhr wieder dauerhaft an. In der Phase zwischen 5:55 Uhr und 8:30
Uhr drehte sie nochmals in geringem Umfang. Ab 19:00 Uhr steigerte sich die Leistung der
Anlage kontinuierlich bis dann gegen 4:00 Uhr für den Rest des 02.11.2010 Volllast erreicht
wurde (Abbildung 20). Somit war während der Nacht vom 01.11. zum 02.11.2010, der
Aumüller et al. (2011) das Kollisionsereignis auf FINO1 zuordnen, ein kontinuierlicher Betrieb
der AV4 zu verzeichnen.
0
1
2
3
4
5
6
7
0:0
0
1:0
0
2:0
0
3:0
0
4:0
0
5:0
0
6:0
0
7:0
0
8:0
0
9:0
0
10:0
0
11:0
0
12:0
0
13:0
0
14:0
0
15:0
0
16:0
0
17:0
0
18:0
0
19:0
0
20:0
0
21:0
0
22:0
0
23:0
0
0:0
0
1:0
0
2:0
0
3:0
0
4:0
0
5:0
0
6:0
0
7:0
0
8:0
0
9:0
0
10:0
0
11:0
0
12:0
0
1.11.2010 2.11.2010
Vö
gel
/ L
eis
tun
g d
er
An
lag
e (
Ind
ikato
r 0-6
)
Beginn der Bügerlichen Dämmerung
Abbildung 20: Anzahl der Vogelereignisse im Rotorbereich nach Aufzeichnungen von VARS (orange) und
zugehörige Leistung der AV4 (grau). Von 6:00 bis 8:00 Uhr (UTC) wurden nur Vogelereig-
nisse oberhalb des Rotors (nicht dargestellt) registriert.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 53
Vögel außerhalb Windpark
Zeit (UTC)
18 19 20 21 22 23 0 1 2 3 4 5 6 7
Flu
gh
öh
e (
m)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
Nacht 31.10./01.11.2010
Vögel innerhalb Windpark
Zeit (UTC)
19 20 21 22 23 0 1 2 3 4 5 6 7
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
ZugrateVögel/h*km
100
500
1000
2000
4000
19 20 21 22 23 0 1 2 3 4 5 6 7
0
20
40
60
80
100
Win
dstä
rke
[m
/s]
-10
-5
0
5
10
Gegenw
ind
Rückenw
ind
NW
-Win
dS
E-W
ind
Lu
ftfe
uch
te [%
]
TWC
CWC
Vögel außerhalb Windpark
Zeit (UTC)
16 17 18 19 20 21 22 23 0 1 2 3 4 5 6 7
Flu
gh
öh
e (
m)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
Nacht 01./02.11.2010
Vögel innerhalb Windpark
Zeit (UTC)
16 17 18 19 20 21 22 23 0 1 2 3 4 5 6 7
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
ZugrateVögel/h*km
100
500
1000
2000
4000
16 17 18 19 20 21 22 23 0 1 2 3 4 5 6 7
0
20
40
60
80
100
Win
dstä
rke [m
/s]
-15
-10
-5
0
5
10
15
Gegenw
ind
Rückenw
ind
NW
-Win
dS
E-W
ind
Luftfe
uchte
[%
]
TWC
CWC
Abbildung 21: Mit Fixbeam-Radar ermittelter Zughöhenverlauf innerhalb und außerhalb des Windparks
alpha ventus in zwei aufeinander folgenden Herbstnächten mit hoher Zugintensität,
31.10./01.11.2010 (oben) und 01./02.11.2010 (unten) mit den Wetterparametern Rücken-
windkomponente (= tailwind component TWC), Seitenwindkomponente (crosswind com-
ponent CWC) und Luftfeuchte. Niederschlag wurde nicht festgestellt. Die Fläche der Kreise
entspricht der Zugrate. In der Nacht 31.10./01.11.2010 wurde in den letzten Nachtstunden
mit dem Kamerasystem VARS eine starke Anlockung von Singvögeln an der Windturbine
AV4 festgestellt, nicht aber in der Folgenacht (s. o.).
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 54
Das Ergebnis deutet darauf hin, dass der Betriebszustand von Offshore-Windenergieanlagen
den Umfang des Auftretens von Vögeln im Rotorbereich stark beeinflussen kann. Die beo-
bachteten Unterschiede in beiden betrachteten Nächten können als Indizien für ein erhöhtes
Meideverhalten im Nahbereich der Anlagen interpretiert werden, wenn die Rotoren drehen.
Letzteres bedeutet jedoch nicht, dass in den untersuchten Nächten keine Kollisionen von
Vögeln an den Offshore-Windenergieanlagen stattgefunden haben. Es ist vielmehr davon
auszugehen, dass das Kollisionsrisiko aufgrund der hohen Zugraten in Rotorhöhe im Ver-
gleich zu anderen Nächten stark erhöht war. Die Ergebnisse geben aber einen Hinweis da-
rauf, dass die von beleuchteten Offshore-Windenergieanlagen ausgehende Lockwirkung auf
nachtziehende Vögel in Kombination mit der Meidung durch die drehenden Rotoren deutlich
geringer ist, als die von OWEA mit stehenden Rotoren und wahrscheinlich auch anderen
unbewegten, beleuchteten Strukturen wie Offshore-Plattformen. In welchem Umfang die Kol-
lisionswahrscheinlichkeit an drehenden Rotoren trotz des Ausweichverhaltens im Vergleich
zu still stehenden Anlagen erhöht ist, muss offen bleiben.
Die Art der Konstruktion der Forschungsplattform FINO1 mit drahtverspannten Auslegern bis
in 100 m Höhe könnte neben der Beleuchtung eine weitere Ursache für die hohe Anzahl an
Totfunden sein. Am baugleichen Mast von FINO2 in der Ostsee wurden sowohl Kollisionen
mit den Stahlseilen zur Abspannung der Ausleger (vorwiegend in der Morgendämmerung vor
Sonnenaufgang), aber auch mit der Stahlgitterkonstruktion (in der Nacht) mit VARS doku-
mentiert (Schulz et al. 2011 a, b). Daher sind Vogelkollisionen mit der FINO1-Plattform selbst
für statische Bauteile wahrscheinlich nicht direkt auf die fest stehenden Komponenten von
Offshore-Windenergieanlagen (z. B. den Turm) übertragbar, wenn sich diese in ihrer Kon-
struktion stark von der Forschungsplattform unterscheiden.
10.4.2. Betrachtungen zum Anlockereignis in der Nacht vom 13.-14.04.2013
In der Nacht vom 13.-14.04.2013 wurde mit VARS die mit Abstand höchste Anzahl an Vö-
geln im Rotorbereich der OWEA AV4 innerhalb des Untersuchungszeitraums von drei Jah-
ren erfasst (vgl. Abbildung 11). In dieser Nacht lagen mehrere Besonderheiten vor, die in
Kombination zu dieser Ansammlung an der Turbine führten. Vor allem die Auflösung eines
sehr ausgeprägten Zugstaus im Frühjahr 2013 (vgl. Gelpke et al. 2013) führte nach Ende
einer lang anhaltenden Schlechtwetterperiode auch über der Nordsee zu Massenzug (vgl.
Abbildung 32). In den ersten beiden dieser starken Zugnächte hielt sich ein stark erleuchte-
tes Bauschiff an der Anlage auf (Abbildung 22) und es fanden nachts Arbeiten auf der Turbi-
ne statt. Dementsprechend war die OWEA AV4 über den gesamten Zeitraum außer Betrieb,
so dass ein Zustand ohne potenzielle Scheuchwirkungen durch den drehenden Rotor, aber
möglicherweise gesteigerte Lockwirkung durch die zusätzliche Lichtquelle vorlag.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 55
Abbildung 22:
In den starken Zugnächten vom 13.-14.04.2013 und 14.-15.04.2013 hielt sich ein stark beleuchtetes Schiff an der AV4 auf (Aufnahme des VARS am Plattformdeck der AV4). Alle auf dem Bild erkennbaren Lichtquellen und Konstruktionen betreffen das Schiff. In unbeeinflussten Nächten war der gleiche Bildausschnitt dunkel.
Der Ablauf des starken Lockereignisses in der Nacht vom 13.-14.04.2013 und der Folge-
nacht ist in Abbildung 23 dargestellt. Danach setzten die mit VARS erfassten Vogelbewe-
gungen im Rotorbereich der AV4 rund zwei Stunden nach Einbruch der Dunkelheit am
13.04.2013 ein, steigerten sich über fünf Stunden bis 2:00 Uhr UTC+1, um dann innerhalb
von zwei Stunden zügig abzunehmen. Mit dem Sonnenaufgang wurden keine Vögel mehr
festgestellt. In der Folgenacht wurden deutlich weniger Vögel an der Turbine registriert.
0
5
10
15
20
25
30
35
40
12:0
0
13:0
0
14:0
0
15:0
0
16:0
0
17:0
0
18:0
0
19:0
0
20:0
0
21:0
0
22:0
0
23:0
0
0:0
0
1:0
0
2:0
0
3:0
0
4:0
0
5:0
0
6:0
0
7:0
0
8:0
0
9:0
0
10:0
0
11:0
0
12:0
0
13:0
0
14:0
0
15:0
0
16:0
0
17:0
0
18:0
0
19:0
0
20:0
0
21:0
0
22:0
0
23:0
0
0:0
0
1:0
0
2:0
0
3:0
0
4:0
0
5:0
0
6:0
0
7:0
0
8:0
0
9:0
0
10:0
0
11:0
0
12:0
0
An
zah
l d
er
Vo
gele
reig
nis
se
13.04.2013 14.04.2013 15.04.2013
Abbildung 23: Anzahl der Vogelbewegungen im Rotorbereich der AV4 nach Aufzeichnungen von VARS.
Die Zeiträume der beiden Nächte sind grau hinterlegt. Zeitangaben in UTC+1.
In der Nacht vom 13.-14.04.2013 nahm die Luftfeuchtigkeit bis Mitternacht ab, danach aber
zu und verdichtete sich ab ca. 1:00 Uhr UTC zu leichtem Regen. In der Folgenacht, in der
ebenfalls das hell erleuchtete Bauschiff an der AV4 lag und die Turbine still stand, war die
Luftfeuchtigkeit durchweg deutlich niedriger und der Himmel war, wie auf VARS zu erken-
nen, sternenklar. Dadurch war den Messungen mit dem Fixbeam-Radar zufolge der Anteil
niedrig fliegender Vögel zwar geringer als in der Nacht zuvor, die absolute Zugintensität in
den untersten 200 m jedoch in den meisten Nachtstunden ähnlich hoch (Abbildung 24). Die
mit VARS erfasste Lichtanlockung im Rotorbereich war demnach trotz ähnlicher Zugintensi-
tät bei sternenklarem Himmel geringer, als in der vorherigen Nacht mit hoher Luftfeuchte und
einsetzendem Regen (s. Kap. 11.2).

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 56
Vögel außerhalb Windpark
Zeit (UTC)
18 19 20 21 22 23 0 1 2 3 4
Flu
gh
öh
e (
m)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
Nacht 13./14.04.2013
Vögel innerhalb Windpark
Zeit (UTC)
18 19 20 21 22 23 0 1 2 3
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
ZugrateVögel/h*km
100
500
1000
2000
4000
18 19 20 21 22 23 0 1 2 3
0
20
40
60
80
100
Win
dstä
rke
[m
/s]
-10
-5
0
5
10
Gegenw
ind
Rückenw
ind
NW
-Win
dS
E-W
ind
Lu
ftfe
uch
te [%
]
10-Minuten-Intervalle mit Niederschlag
18 19 20 21 22 23 0 1 2 3
An
za
hl
0
2
4
6
TWC
CWC
Vögel außerhalb Windpark
Zeit (UTC)
18 19 20 21 22 23 0 1 2 3 4 5
Flu
gh
öh
e (
m)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
Nacht 14./15.04.2013
Vögel innerhalb Windpark
Zeit (UTC)
18 19 20 21 22 23 0 1 2 3 4 5
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
ZugrateVögel/h*km
100
500
1000
2000
4000
18 19 20 21 22 23 0 1 2 3 4 5
0
20
40
60
80
100
Win
dstä
rke [m
/s]
-20
-10
0
10
20
Gegenw
ind
Rückenw
ind
NW
-Win
dS
E-W
ind
Luftfe
uchte
[%
]
TWC
CWC
Abbildung 24: Mit Fixbeam-Radar ermittelter Zughöhenverlauf innerhalb und außerhalb des Windparks
alpha ventus in zwei aufeinander folgenden Frühjahrsnächten hoher Zugintensität,
13./14.04.2013 (oben) und 14./15.04.2013 (unten) mit Rückenwindkomponente (TWC), Sei-
tenwindkomponente (CWC), Luftfeuchte und Niederschlag. Fläche der Kreise entspricht
Zugrate. In der Nacht 13./14.04.2013 wurde mit VARS eine starke Anlockung von Singvö-
geln an der Windturbine AV4 festgestellt, in der Folgenacht in geringerem Maße (s. o.).
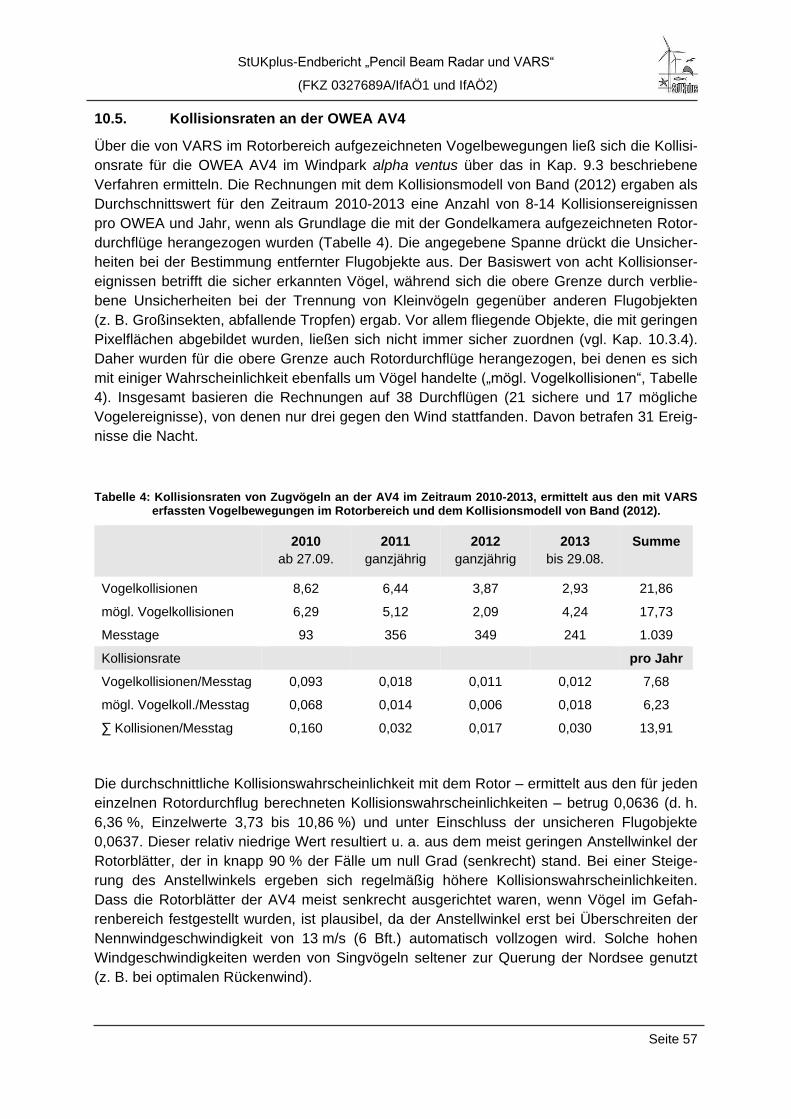
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 57
10.5. Kollisionsraten an der OWEA AV4
Über die von VARS im Rotorbereich aufgezeichneten Vogelbewegungen ließ sich die Kollisi-
onsrate für die OWEA AV4 im Windpark alpha ventus über das in Kap. 9.3 beschriebene
Verfahren ermitteln. Die Rechnungen mit dem Kollisionsmodell von Band (2012) ergaben als
Durchschnittswert für den Zeitraum 2010-2013 eine Anzahl von 8-14 Kollisionsereignissen
pro OWEA und Jahr, wenn als Grundlage die mit der Gondelkamera aufgezeichneten Rotor-
durchflüge herangezogen wurden (Tabelle 4). Die angegebene Spanne drückt die Unsicher-
heiten bei der Bestimmung entfernter Flugobjekte aus. Der Basiswert von acht Kollisionser-
eignissen betrifft die sicher erkannten Vögel, während sich die obere Grenze durch verblie-
bene Unsicherheiten bei der Trennung von Kleinvögeln gegenüber anderen Flugobjekten
(z. B. Großinsekten, abfallende Tropfen) ergab. Vor allem fliegende Objekte, die mit geringen
Pixelflächen abgebildet wurden, ließen sich nicht immer sicher zuordnen (vgl. Kap. 10.3.4).
Daher wurden für die obere Grenze auch Rotordurchflüge herangezogen, bei denen es sich
mit einiger Wahrscheinlichkeit ebenfalls um Vögel handelte („mögl. Vogelkollisionen“, Tabelle
4). Insgesamt basieren die Rechnungen auf 38 Durchflügen (21 sichere und 17 mögliche
Vogelereignisse), von denen nur drei gegen den Wind stattfanden. Davon betrafen 31 Ereig-
nisse die Nacht.
Tabelle 4: Kollisionsraten von Zugvögeln an der AV4 im Zeitraum 2010-2013, ermittelt aus den mit VARS erfassten Vogelbewegungen im Rotorbereich und dem Kollisionsmodell von Band (2012).
2010
ab 27.09.
2011
ganzjährig
2012
ganzjährig
2013
bis 29.08.
Summe
Vogelkollisionen 8,62 6,44 3,87 2,93 21,86
mögl. Vogelkollisionen 6,29 5,12 2,09 4,24 17,73
Messtage 93 356 349 241 1.039
Kollisionsrate pro Jahr
Vogelkollisionen/Messtag 0,093 0,018 0,011 0,012 7,68
mögl. Vogelkoll./Messtag 0,068 0,014 0,006 0,018 6,23
∑ Kollisionen/Messtag 0,160 0,032 0,017 0,030 13,91
Die durchschnittliche Kollisionswahrscheinlichkeit mit dem Rotor – ermittelt aus den für jeden
einzelnen Rotordurchflug berechneten Kollisionswahrscheinlichkeiten – betrug 0,0636 (d. h.
6,36 %, Einzelwerte 3,73 bis 10,86 %) und unter Einschluss der unsicheren Flugobjekte
0,0637. Dieser relativ niedrige Wert resultiert u. a. aus dem meist geringen Anstellwinkel der
Rotorblätter, der in knapp 90 % der Fälle um null Grad (senkrecht) stand. Bei einer Steige-
rung des Anstellwinkels ergeben sich regelmäßig höhere Kollisionswahrscheinlichkeiten.
Dass die Rotorblätter der AV4 meist senkrecht ausgerichtet waren, wenn Vögel im Gefah-
renbereich festgestellt wurden, ist plausibel, da der Anstellwinkel erst bei Überschreiten der
Nennwindgeschwindigkeit von 13 m/s (6 Bft.) automatisch vollzogen wird. Solche hohen
Windgeschwindigkeiten werden von Singvögeln seltener zur Querung der Nordsee genutzt
(z. B. bei optimalen Rückenwind).
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 58
Die ermittelte Kollisionsrate von 8-14 Individuen bezieht sich primär auf Singvögel, da bei
Betrieb der Anlage nahezu ausschließlich Kleinvögel mit dem VARS auf der Gondel nach-
gewiesen wurden. Die einzigen Nicht-Singvögel betrafen einen Watvogeltyp und eine mögli-
che Spatelraubmöwe. Rund 82 % der Ereignisse traten in der Dunkelheit und entsprechend
wenige bei Tageslicht auf.
Um möglichen Verteilungsunterschieden von Vögeln in verschienen Höhenstufen des Rotors
gerecht zu werden, wurden zusätzlich zur Gondelkamera auch die Daten vom Turmfuß her-
angezogen (vgl. Kap. 9.3). Die Rotordurchflüge oberhalb der Gondel und die Vogelbewe-
gungen im Kamerasektor über dem Plattformdeck (vgl. Abbildung 8) standen für Zeiträume,
in denen die AV4 in Betrieb war, in einem Verhältnis von 1:3,67 zugunsten der unteren Ka-
mera. Unter Ausklammerung der Großmöwen, die im Rotorbereich über der Gondel bei Be-
trieb der Anlage nicht auftraten, reduzierte sich der Wert auf 1:1,67. Überträgt man dieses
Verhältnis auf die ermittelten Kollisionsraten, ergibt sich eine Spanne von 13-23 Kollisionser-
eignissen pro OWEA und Jahr. Unter Einschluss der Großmöwen, die sich bevorzugt in un-
teren Höhenschichten aufhielten, steigt der errechnete Wert für die Kollisionsrate entspre-
chend des oben genannten Verhältniswertes auf 29 Individuen pro Anlage und Jahr. Ein
Hochrechnen der „möglichen Vogelereignisse“ von der Gondelkamera um das genannte
Verhältnis ist nicht sinnvoll, da bei Großmöwen keine Bestimmungsunsicherheiten im Rotor-
bereich bestehen. Da mit der Kamera am Turmfuß keine Rotordurchflüge, sondern nur Flüge
im Nahbereich der Gefahrenzone dokumentiert werden, sind diese Schätzungen ohnehin
unter diesem Vorbehalt zu interpretieren.
10.6. Großräumiges Ausweichen (macro-avoidance)
In fünf der sieben untersuchten Saisons wurden in Höhen bis 200 m innerhalb des Wind-
parks im Mittel höhere Zugraten gemessen als außerhalb, im Herbst 2012 war dies umge-
kehrt, im Herbst 2013 konnten keine Unterschiede gefunden werden (Abbildung 25).
Damit wurden keine Hinweise auf ein generelles großräumiges Ausweichen gegenüber dem
Offshore-Windpark gefunden. Vielmehr deuten die Ergebnisse an, dass es zu Lockwirkun-
gen von alpha ventus auf nachts ziehende Vögel kommt. Besonders deutlich erhöhte Zugra-
ten innerhalb des Parks in den untersten 200 m gegenüber außerhalb wurden während
Zugwellen im Oktober/November 2010 und Ende Mai 2012 festgestellt. Sehr ähnliche Zugra-
ten in diesem Höhenbereich innerhalb und außerhalb des Offshore-Windparks wurden wäh-
rend insgesamt vier starker Zugnächte Mitte und Ende April 2013 registriert (Abbildung 38).
Für zwei dieser Nächte wurde der Zugverlauf über die Nacht sowie über alle erfassten Hö-
henschichten hinweg und unter Betrachtung von Wetterparametern bereits in Abbildung 24
dargestellt.
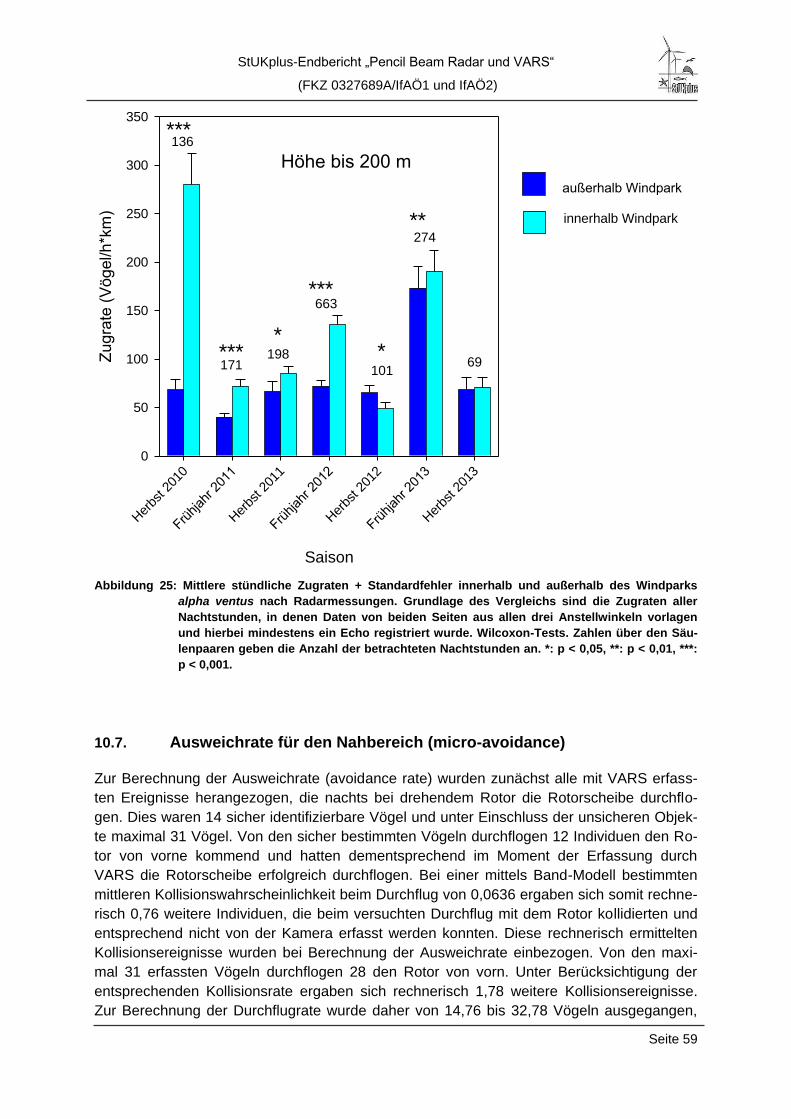
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 59
Höhe bis 200 m
Saison
Her
bst 2
010
Frühjah
r 201
1
Her
bst 2
011
Frühjah
r 201
2
Her
bst 2
012
Frühjah
r 201
3
Her
bst 2
013
Zugra
te (
Vögel/h*k
m)
0
50
100
150
200
250
300
350
außerhalb Windpark
innerhalb Windpark
136
171198
663
101
274
69***
***
*
***
*
**
Abbildung 25: Mittlere stündliche Zugraten + Standardfehler innerhalb und außerhalb des Windparks
alpha ventus nach Radarmessungen. Grundlage des Vergleichs sind die Zugraten aller
Nachtstunden, in denen Daten von beiden Seiten aus allen drei Anstellwinkeln vorlagen
und hierbei mindestens ein Echo registriert wurde. Wilcoxon-Tests. Zahlen über den Säu-
lenpaaren geben die Anzahl der betrachteten Nachtstunden an. *: p < 0,05, **: p < 0,01, ***:
p < 0,001.
10.7. Ausweichrate für den Nahbereich (micro-avoidance)
Zur Berechnung der Ausweichrate (avoidance rate) wurden zunächst alle mit VARS erfass-
ten Ereignisse herangezogen, die nachts bei drehendem Rotor die Rotorscheibe durchflo-
gen. Dies waren 14 sicher identifizierbare Vögel und unter Einschluss der unsicheren Objek-
te maximal 31 Vögel. Von den sicher bestimmten Vögeln durchflogen 12 Individuen den Ro-
tor von vorne kommend und hatten dementsprechend im Moment der Erfassung durch
VARS die Rotorscheibe erfolgreich durchflogen. Bei einer mittels Band-Modell bestimmten
mittleren Kollisionswahrscheinlichkeit beim Durchflug von 0,0636 ergaben sich somit rechne-
risch 0,76 weitere Individuen, die beim versuchten Durchflug mit dem Rotor kollidierten und
entsprechend nicht von der Kamera erfasst werden konnten. Diese rechnerisch ermittelten
Kollisionsereignisse wurden bei Berechnung der Ausweichrate einbezogen. Von den maxi-
mal 31 erfassten Vögeln durchflogen 28 den Rotor von vorn. Unter Berücksichtigung der
entsprechenden Kollisionsrate ergaben sich rechnerisch 1,78 weitere Kollisionsereignisse.
Zur Berechnung der Durchflugrate wurde daher von 14,76 bis 32,78 Vögeln ausgegangen,

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 60
die beim Betrieb der Anlage den Kameraausschnitt durchflogen bzw. bereits zuvor beim
Durchflug durch die Rotorebene kollidierten. Bei einem Öffnungswinkel von 22° entspricht
dies 241,53 bis 536,40 Vögeln, die den gesamten Rotorkreis in der betrachteten Erfassungs-
zeit von 8.741,45 Stunden querten, entsprechend einer Durchflugrate von 0,028-0,061 Indi-
viduen pro Stunde .
Zur Berechnung der Ausweichrate (avoidance rate) wurde als Bezugsgröße eine allgemeine
Zugrate im Bereich des Windparks alpha ventus mit dem Fixbeam-Radar ermittelt. Hierfür
wurden aus dem Zeitraum von Januar 2011 bis August 2013 die Radardaten verwendet, die
innerhalb des Windparks in Höhen bis 200 m gemessen wurden. Radardaten aus dem
Herbst 2010 wurden nicht mit einbezogen, weil es in diesem Zeitraum noch Probleme durch
Störechos infolge des Betriebes eines weiteren Radars auf der Forschungsplattform FINO1
gab und insgesamt nur ein recht geringer Zeitraum mit überdurchschnittlich hohen Zugraten
abgedeckt wurde. Der genannte Höhenbereich bis 200 m (und nicht eine geringere Ober-
grenze) wurde gewählt, um einerseits den Höhenbereich der Rotoren gut abzudecken, ande-
rerseits aber auch, um eine gewisse Mindestfläche des Radarstrahls im Betrachtungsbereich
zu garantieren. Aufgrund des schlanken Strahls, der verwendeten Anstellwinkel und der rela-
tiv geringen Dichte fliegender Vögel konnten so hinreichend robuste Werte berechnet wer-
den. Es wurden ausschließlich diejenigen Bereiche des Radarstrahls herangezogen, mit de-
nen dieser auf einer horizontalen Linie von 2.050 m Länge – entsprechend einer Entfernung
von 250 bis 2.300 m von der Forschungsplattform FINO1 – den Offshore-Windpark durch-
schneidet. Die bei allen Einzelmessungen im Betrachtungszeitraum abgedeckten Flächen
des Radarstrahls wurden aufsummiert und mit der Summe der erfassten Vögel und einem
Erfassungszeitraum von 4,7 Minuten pro Messung in Beziehung gesetzt. Dies erfolgte zu-
nächst getrennt für die vier verschiedenen Vogeltypen, da die Erfassungsfläche im Radar-
strahl in Abhängigkeit von ihrem typspezifischen Erfassungswinkel („operativer Öffnungswin-
kel“) unterschiedlich ist. Die ermittelten Werte wurden anschließend auf die Fläche des Ro-
torkreises von 0,012 km² (entsprechend 126 Meter Durchmesser) und einen Zeitraum pro
Stunde bezogen, der für alle vier Vogeltypen aufsummiert eine Zugrate durch den Rotorkreis
von 1,40 Vögeln pro Stunde ergab.
Aus dem Quotienten der mit VARS gemessenen Rotordurchflüge und der mittels Radar er-
mittelten Zugrate errechnete sich ein Anteil von 1,97 – 4,37 %, was eine Ausweichrate von
95,62 – 98,03 % ergab.
Nach dem gleichen Schema wurde auch die Ausweichrate gegenüber dem stehenden Rotor
ermittelt, wobei potenzielle Kollisionen mit den unbewegten Rotorblättern vernachlässigt
wurden. Bei Stillstand der Turbine wurden in insgesamt 1.722,2 Stunden, in denen VARS
lief, 163 Flüge von Vögeln durch den mit der Kamera abgedeckten Bereich registriert. Hie-
raus ergab sich eine Flugrate durch die gesamte Rotorscheibe von 1,55 Vögeln pro Stunde.
Dem gegenüber errechnete sich aus den Radardaten für einen Ausschnitt entsprechender
Fläche im Offshore-Windpark eine Zugrate von 2,61 Vögeln pro Stunde.
Hieraus ergab sich, dass ein Anteil von 59,27 % der Vögel den Rotorbereich bei stehender
Anlage durchflog, was einer Ausweichrate von 40,73 % entspricht. Damit wurde bei Stillstand
der Turbine ein 13,6 bis 30-mal höherer Anteil an Vögeln im Rotorbereich festgestellt als bei
drehendem Rotor.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 61
11. Diskussion
11.1. Phänologie und Intensität des Vogelzuges
Das Auftreten von Nachtziehern in Schüben relativ hoher Zugintensitäten, die eine oder
mehrere Nächte umfassen können und sich mit Phasen ohne oder nur schwachem Zugge-
schehen abwechseln, wurde auch in anderen Untersuchungen auf der offenen Nordsee be-
legt (Orejas et al. 2006, Hüppop et al. 2009, Dierschke et al. 2011). In der vorliegenden Un-
tersuchung wurden insbesondere im Frühjahr 2013 und im Herbst 2011 hohe Anteile des in
der Saison erfassten Vogelzuges innerhalb von jeweils nur vier Nächten erfasst. Eine dieser
Zugwellen in den Nächten 13./14.04. und 14./15.04.2013 war sehr wahrscheinlich das Er-
gebnis eines markanten Wetterwechsels, der inzwischen auch Eingang in die ornithologische
Literatur gefunden hat (Gelpke et al. 2013). Nach dem Ende einer sehr langen Kälteperiode
in Deutschland, begleitet von anhaltenden Gegenwinden, was zu einem sehr ausgeprägten
Zugstau führte, kam es im April infolge einer plötzlichen Wetterbesserung zu einem massen-
haften Aufbruch von Zugvögeln nach Norden. Insbesondere Windrichtung und –stärke
kommt – oft in Kombination mit weiteren Faktoren – grundsätzlich eine Schlüsselrolle als
Auslöser für Zugwellen zu (Liechti 2006). Beide Größen können für die individuelle Entschei-
dung von Landvögeln, große Strecken über See zurückzulegen oder nicht, entscheidend
sein (Schmaljohann & Naef-Daenzer 2011). U. a. durch Schwankungen der Wetterbedin-
gungen, Variation in der genauen Terminierung von Abzugsentscheidungen in der Nacht
(Schaub et al. 2003) sowie durch Durchzug von Vögeln aus unterschiedlich weit von der FI-
NO1 entfernten Aufbruchsgebieten lassen sich die in der vorliegenden Untersuchung festge-
stellten erheblichen Schwankungen der stündlichen Zugintensitäten im Verlauf der Nacht
erklären.
In neun bzw. acht der zehn Nächte stärkster Zugintensität innerhalb und außerhalb des
Windparks alpha ventus wurden zumindest zeitweise Winde mit Ostkomponente registriert.
Dies unterstreicht die Rolle der Winddrift für das Auftreten von Landvögeln über der Deut-
schen Bucht (vgl. Dierschke et al. 2011) bzw. die Rolle von Winddrift für die Route ziehender
Vögel generell (Liechti et al. 2006; Newton et al. 2008). Vor dem Hintergrund, dass Vögel
vorzugsweise bei günstigen Windbedingungen starten (Newton et al. 2008), ist bemerkens-
wert, dass jeweils in der Hälfte der zehn Nächte Gegenwinde der Stärke 3 Bft. und höher
auftraten. In mehreren Nächten waren Verschlechterungen der Windbedingungen im Sinne
eines stärker werdenden Gegenwinds zu verzeichnen. Beides deutet darauf hin, dass die
Vögel einen Teil ihres Weges über Wasser unter relativ guten Zugbedingungen zurückgelegt
haben und dass es durch unterwegs eintretende Wetterverschlechterung zu einer Verringe-
rung der Fluggeschwindigkeit und damit einher gehenden Stauungseffekten und entspre-
chend erhöhten Zugdichten kam. Wirklich bewiesen werden könnte ein derartiger Zusam-
menhang über einen Vergleich der gemessenen Zugmuster mit großräumig angelegten Wet-
termodellen, was jedoch über den Rahmen der hier vorgestellten Studie hinausgeht. Die
Untersuchungen von Karlsson et al. (2011) zeigen, dass viele Nachtzieher auch ohne Unter-
stützung durch Rückenwinde ziehen, obwohl dies für eine energetische Optimierung des
Zuges vorteilhaft wäre (Liechti et al. 2006). Es wird vermutet, dass es sich Vögel in vielen
Fällen nicht leisten können, auf optimale Windbedingungen zu warten, da entsprechende
Phasen vergleichsweise selten sind, für den Zug ein großer Teil der Nacht gebraucht wird
und die Nachteile des Wartens zu groß wären (Karlsson et al. 2011).
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 62
Im Hinblick auf das von Offshore-Windparks ausgehende Gefährdungspotenzial für Zugvögel
bedeuten die genannten starken Schwankungen der Zugintensität, dass sich dies innerhalb
sehr kurzer Zeit stark erhöhen kann. Des Weiteren hat der geschilderte Ablauf des Vogelzu-
ges zur Folge, dass für die Abschätzung der eigentlichen Bedeutung eines Seegebietes für
den Vogelzug oft nur relativ kurze Zeitintervalle zur Verfügung stehen. Bei schiffsgestützten
Untersuchungen des Vogelzuges, wie sie derzeit nach dem Standarduntersuchungskonzept
des BSH (StUK4, BSH 2013) vorgesehen sind, kommt daher der Wahl der Erfassungstermi-
ne, die in der Summe zeitlich ungefähr ein Viertel der Hauptzugperioden abdecken, beson-
dere Bedeutung für die Aussagekraft der erhobenen Daten zu. Die in der vorliegenden Un-
tersuchung registrierten Zugmuster unterstreichen den besonderen Wert kontinuierlicher
Erfassungen des Vogelzuges im Kontext von Windparkplanungen, wie auch im Standardun-
tersuchungskonzept des BSH (2013) dargelegt. Denn kontinuierliche Messungen können die
Wahrscheinlichkeit, Zugwellen hinreichend zu erfassen, entscheidend erhöhen. Solche Dau-
erbeobachtungen erfordern i. d. R. feste Plattformen. Da Forschungsplattformen künstliche
Strukturen im Meer darstellen und infolge ihrer Struktur und Beleuchtung ihrerseits eine Ge-
fahr für ziehende Vögel darstellen können (Aumüller et al. 2011, Schulz et al. 2013), kann
empfohlen werden, vorrangig bereits im Windparkbereich vorhandene Strukturen wie Um-
spannplattformen, andere Plattformen oder die Offshore-Windenergieanlagen selbst als
Standort für stationäre Messgeräte zu nutzen.
Teilweise zeitgleich zu den hier durchgeführten Untersuchungen wurden auf der For-
schungsplattform FINO2 im zentralen Teil der südwestlichen Ostsee durch das IfAÖ eben-
falls Erfassungen des Vogelzuges mittels Fixbeam-Radar durchgeführt (Schulz et al. 2013).
Dabei gelang insbesondere im Herbst 2011 eine fast lückenlose Erfassung des nächtlichen
Vogelzuges über der Ostsee. Während bei den hier dargestellten Erfassungen des Vogelzu-
ges auf FINO1 mittels Radar im Zeitraum von Mitte Oktober 2010 bis Ende Oktober 2013 in
insgesamt zehn Nächten vergleichsweise hohe Zugraten von im Mittel 2.000 Vögeln/h*km
und mehr (Maximum 3.161 Vögel/h*km in der Nacht 21./22.04.2013) gemessen werden
konnten (vgl.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 63
Tabelle 2), wurde eine Zugrate von 2.000 Vögeln/h*km bei FINO2 alleine im Herbst 2011
bereits sechsmal, z. T. um ein Mehrfaches, überschritten (bei FINO1 im Herbst 2011 kein
einziges Mal). Weiterhin zeigen die Erfassungen auf FINO2 auch in den – durch allerdings
größere Messlücken unterbrochenen – Zugsaisons Frühjahr und Herbst 2012 eine deutlich
größere Anzahl mittlerer oder kleiner Zugwellen, so dass über der Ostsee bei FINO2 insge-
samt von einem deutlich stärker ausgeprägten Nachtzug ausgegangen werden muss als im
Seegebiet bei FINO1, das zur offenen Nordsee zu rechnen ist. Wahrscheinliche Gründe für
den schwächer ausgeprägten Nachtzug über der offenen Nordsee bei FINO1 sind
das (im Gegensatz zur Ostsee) fehlende Vorhandensein von sich in Zugrichtung ver-
jüngenden Landmassen, die auch nachts als Leitlinien wirken können (vgl. Bruderer
& Liechti 1998, Schulz et al. 2013),
die Alternative, die Nordsee in der östlichen Deutschen Bucht auf kürzerer Strecke zu
queren (vgl. Orejas et al. 2005) sowie
ein für die Masse ziehender Landvögel kleinerer Einzugsbereich (vgl. BirdLife Interna-
tional 2004, Hüppop & Hüppop 2009).
Sowohl Radaruntersuchungen aus dem Offshorebereich der Nordsee (Orejas et al. 2005,
Hüppop et al. 2008) als auch die erwähnte, mit ähnlicher Methodik von der Forschungsplatt-
form FINO2 aus durchgeführte Studie (Schulz et al. 2013) belegen ebenso wie die hier vor-
gestellte Untersuchung eine regelmäßig starke Verdichtung des Vogelzuges in den untersten
Höhenschichten.
11.2. Zugrate innerhalb und außerhalb von alpha ventus (macro-
avoidance)
Bislang liegen aufgrund der schlechten Beobachtbarkeit von Nachtziehern mit herkömmli-
chen Methoden kaum Kenntnisse zu ihrer Verteilung im Bereich von Offshore-Windparks
vor. Lediglich für Tauch- bzw. Meeresenten konnte bisher nachts ein regelmäßiges groß-
räumiges Ausweichen vor den OWEA (Dirksen et al. 1998, Kahlert et al. 2004), aber auch
Durchflüge durch die zwischen den Turbinenreihen bestehenden Gassen belegt werden
(Christensen et al. 2004, Desholm & Kahlert 2005). Krijgsveld et al. (2011) erfassten fliegen-
de Vögel mit horizontal und vertikal betriebenen Schiffsradargeräten im Bereich eines Offs-
hore-Windparks in der niederländischen Nordsee. Ein eigentlicher Vergleich von Zugraten
innerhalb und außerhalb des Windparkareals fand jedoch nicht statt. Mit dem Horizontalradar
beobachtete Ausweichbewegungen gegenüber dem Offshore-Windpark, die bei Nacht aus-
geprägter waren als am Tag, werden vor allem auf Flugbewegungen vor Ort rastender Was-
servögel zurückgeführt, doch berichten die Autoren von erheblichen Beeinträchtigungen
durch Störsignale durch die OWEA. Aussagen zur Verteilung von Vögeln bei eigentlichen
Zugereignissen innerhalb und außerhalb des Offshore-Windparks waren für den Höhenbe-
reich der OWEA nicht möglich, da das Horizontalradar keine Informationen zur Flughöhe
liefert. Blew et al. (2008) erfassten den allgemeinen Vogelzug im Bereich von zwei däni-
schen Offshore-Windparks in Nord- bzw. Ostsee mit herkömmlichen Schiffsradargeräten, die
von einem am Rand der Windparks ankernden Schiff aus betrieben wurden. Hierbei wurden
mit dem vertikal rotierenden Radar nachts im Schnitt etwas höhere Anzahlen ziehender Vö-
gel auf der dem Offshore-Windpark abgewandten Seite festgestellt. Blew et al. (2008) wei-
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 64
sen jedoch auf die Problematik hin, dass die im Radarbild ebenfalls dargestellten OWEA zu
erheblichen Störechos und Abschattungseffekten auf der Windparkseite führten, was einen
beidseitigen Vergleich von Zugraten erschwert. Krijgsveld et al. (2011) berichten ebenfalls
von deutlichen Abschattungseffekten im Offshore-Windpark, die nicht auswertbare Zonen zur
Folge hatten. Bei der Verwendung herkömmlicher Schiffsradargeräte sind die genannten
Störeffekte durch den relativ breiten Öffnungswinkel des Radarstrahls bedingt, der für Stör-
signale durch randständige Strukturen anfällig ist und eine Ausrichtung in die Gassen von
Offshore-Windparks erschwert (vgl. Schmaljohann et al. 2008). Zudem waren Störsignale
durch die Bewegungen des ankernden Schiffes variabel in ihrer Ausdehnung und der eigent-
liche Erfassungsbereich nicht klar definierbar.
Bei den hier vorgestellten Untersuchungen mittels Fixbeam-Radar waren die erzielten Ra-
darbilder trotz des im Vergleich zum herkömmlichen Schiffsradar wesentlich schlankeren und
am Rand stärker begrenzten Radarstrahls ebenfalls durch gewisse von den OWEA ausge-
hende Störsignale gekennzeichnet. Diese waren jedoch klarer begrenzt und aufgrund der
festen Messplattform (FINO1) in ihrer Ausdehnung wesentlich einheitlicher. Dementspre-
chend war es hier möglich, den eigentlichen Erfassungsbereich klar zu definieren, Störzonen
klar von einer Auswertung auszuschließen und entsprechend flächenbezogene Zugraten zu
berechnen. In der vorliegenden Studie wurden in fünf der sieben untersuchten Saisons
nachts im Mittel leicht bis deutlich höhere Zugraten innerhalb von alpha ventus im Vergleich
zum Referenzbereich außerhalb des Offshore-Windparks gemessen. In einer Saison (Herbst
2012) wurde außerhalb von alpha ventus eine leicht erhöhte Zugrate festgestellt, im Herbst
2013 konnten keine Unterschiede ermittelt werden. Somit ergaben sich keine Hinweise auf
großräumige Ausweichbewegungen von Nachtziehern, welche sich in generell höheren Zug-
raten außerhalb von alpha ventus niederschlagen. Vielmehr deuten die Ergebnisse auf eine
Lockwirkung des Offshore-Windparks auf Nachtzieher hin. Für solche Lockeffekte ist die Be-
feuerung der Anlagen als Hauptursache anzunehmen. Lockeffekte von Lichtquellen auf Vö-
gel bei Nacht sind vielfach und seit über hundert Jahren belegt (Blasius 1890, Gätke 1891,
Gauthreaux & Belser 2006, Ballasus et al. 2009, Dierschke et al. 2011). Für eine von Offsho-
re-Windparks ausgehende Lockwirkung durch Licht ist vermutlich sehr viel weniger die der
Flugsicherheit dienende rote Blinkbefeuerung auf der Gondel als vielmehr die stehende wei-
ße Beleuchtung im Bereich der Gründungen verantwortlich. Nach bisherigen Erkenntnissen
reagieren Vögel bei Nacht wesentlich stärker auf stehendes als auf blinkendes Licht. Zur
Wirkung der Lichtfarbe ist ein einheitliches Bild schwieriger zu zeichnen (Ballasus et al.
2009).
Lockwirkungen durch Licht im Offshorebereich treten vor allem dann ein, wenn sich Wetter-
bedingungen verschlechtern und die Sichtweite abnimmt (Gauthreaux & Belser 2006, Balla-
sus et al. 2009, Hüppop & Hilgerloh 2012, Schulz et al. 2013). Bei Eintreten von Gegenwind,
geringer Sichtweite oder Regen bzw. deren Kombination verringern Vögel in der Regel ihre
Zughöhe (Alerstam 1990, Gruber & Nehls 2003, Hüppop et al. 2012) und geraten dabei auch
ohnehin in den Höhenbereich, in denen sich OWEA befinden. Messwerte zum Auftreten von
Nebel im Bereich der Forschungsplattform FINO1 standen für die hier durchgeführten Unter-
suchungen nicht zur Verfügung, wohl aber Angaben zur Luftfeuchte. Sehr hohe Luftfeuchtig-
keit kann als Hinweis auf schlechte Sichtverhältnisse gewertet werden (Hüppop & Hilgerloh
2012). Für die starken Zugnächte 31.10./01.11.2010 sowie 01./02.11.2010 wurden in der
vorliegenden Untersuchung bei hoher Luftfeuchte bzw. auch nachfolgendem Regen mit der
Kamera starke Lockwirkungen an einer OWEA nachgewiesen. Radaranalysen für diesen

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 65
Zeitraum zeigen, dass die Vögel innerhalb von alpha ventus vorwiegend in Höhen bis 200 m,
außerhalb des Offshore-Windparks aber in etwas größeren Höhen flogen (s. Kap. 10.4). Dies
spricht dafür, dass die Vögel durch die Lichtanlockung der beleuchteten OWEA regelrecht
„heruntergezogen“ wurden. In den beiden anderen, hier im Detail dargestellten starken Zug-
nächten im April 2013 konnte ein solcher Effekt nicht festgestellt werden, da die Vögel hier
von vornherein in den untersten 200 m flogen.
Wissenschaftliche Untersuchungen, über welche Entfernungen hinweg Lockeffekte von Licht
auf Zugvögel stattfinden, fehlen weitgehend (Ballasus et al 2009). Bruderer et al. (1999) stell-
ten an Land in Israel mit einem Zielfolgeradar fest, dass die Reaktionen auf eine starke
Lichtquelle bis zu einem Kilometer weit reichten. Für die Verhältnisse auf See fehlen Daten
dieser Art bisher, könnten für eine Beurteilung, inwieweit beleuchtete Offshore-Windparks
Zugwege über Wasser durch Lockwirkung beeinflussen, aber wesentlich sein.
11.3. Einordnung der Ergebnisse zu Kollisionsrate und Ausweichrate im
Nahbereich (micro-avoidance)
Auch wenn Kollisionen von Vögeln mit der OWEA AV4 nicht direkt dokumentiert werden
konnten, so ermöglichte der hier verfolgte Ansatz die Angabe einer realitätsnahen Schätzung
der durchschnittlichen Kollisionsrate je OWEA und Jahr und - in Kombination mit den Ra-
darmessungen - auch einer Ausweichrate. Zumindest konnte die Dimension des Problems
umrissen werden, die vor dieser Untersuchung auch international nicht einzugrenzen war.
Als Einschränkung verbleibt die geringe Abdeckung des Rotorkreises durch das Kamerasys-
tem VARS, was durch den langen Messzeitraum möglicherweise kompensiert wird. Zudem
wurde allein der Bereich des drehenden Rotors als Gefährdungsbereich definiert, während
feststehende Anlagenteile (Pylon, Rotorblätter bei Stillstand) ausgeklammert blieben.
Bei der Interpretation der Ergebnisse muss vor allem darauf hingewiesen werden, dass die
hier ermittelte Kollisionsrate nur für die OWEA AV4 im Windpark alpha ventus gilt. Für Offs-
hore-Windenergieanlagen mit anderer Lage im Windpark, zur Küste oder in anderen Mee-
resgebieten könnten abweichende Zugraten und Mechanismen zutreffend sein. Die Möglich-
keiten reichen von unterschiedlichen Vogeldichten am Rand bzw. innerhalb eines Offshore-
Windparks (hier auch in Bezug auf die starken Lichtquellen FINO1 und Umspannwerk) bis
hin zu höheren Zugraten in Küstennähe bzw. über der Ostsee. Dagegen lässt sich die in der
vorliegenden Untersuchung ermittelte Ausweichrate (vgl. Kap. 10.7) potenziell auf andere
Standorte übertragen, wenn Messungen mit Radar exakte Zugraten aus dem zu beurteilen-
den Offshore-Windpark liefern. Unsicherheiten bzgl. der Übertragbarkeit der Ergebnisse re-
sultieren aus der Lage der OWEA AV4 am Rand von alpha ventus und aus der unmittelbaren
Nähe zu einer stärkeren Lichtquelle (FINO1, Entfernung: 400 m). Daher ist nicht sicher, ob
die ermittelte Ausweichrate als Durchschnittswert für einen gesamten Offshore-Windpark
anwendbar ist. Im Gegensatz zu allen anderen, bisher in der Literatur verwendeten
„avoidance rates“ basiert der hier ermittelte Wert aber auf tatsächlichen Messungen in der
Meeresumwelt und schließt die besonders relevante Gruppe der Singvögel mit ein. Sowohl
die durchgängige Langzeiterfassung in der Nacht (drei Jahre) als auch die optische Erfas-
sung von kleinen Singvögeln im Rotorbereich wurden erstmals durchgeführt (vgl. Cook et al.
2012).
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 66
Die bisher in den Modellrechnungen für den Tagzug angesetzten „avoidance rates“ betragen
meist 98% - 99,5%, wobei Cook et al. (2012) aufgrund der Unsicherheiten empfehlen, auch
95% zu nutzen. Trotz der Verschiedenheit der Ansätze hinsichtlich der Tageszeit (Tag ge-
genüber Nacht) und der Erfassungsmethode (visuelle Beobachtungen / Schiffsradar gegen-
über Dauermessungen mit VARS und Fixbeam-Radar) erreichten die Ausweichraten im
Windpark alpha ventus vergleichbare Werte. Mit 95,6 % bis 98,0 % liegen die nächtlichen
„avoidance rates“, die hier als „micro-avoidance“ im unmittelbaren Nahbereich verstanden
werden müssen, in der Spanne der publizierten Werte. Alle früheren Untersuchungen zu
nächtlichen avoidance rates erfolgten mit Schiffsradaren. Da diese Radare durch die dre-
henden Rotoren der OWEA massiv gestört werden, ist im Nahbereich keine Detektion von
Vögeln mit dieser Methode möglich. Somit sind die in Cook et al. (2012) aufgeführten Bei-
spiele zur nächtlichen micro-avoidance eher als „meso-avoidance“ zu interpretieren (z. B.
Durchfliegen des Parks zwischen Anlagenreihen).
Kollisionsraten von Offshore-Standorten, die auf Messungen im Rotorbereich basieren, lie-
gen bisher nur für die Eiderente vor. Über eine Modellrechnung kalkulierte Desholm (2006)
für den Offshore-Windpark „Nysted“ das Kollisionsrisiko dieser Art auf 1,4 Vögel pro OWEA
und Jahr. Da dieser Wert nur für eine Art gilt, sind Vergleiche mit der im Windpark alpha ven-
tus ermittelten Rate nicht möglich. Im Gegensatz zu Offshore-Windparks liegen für Land-
standorte eine Vielzahl an Studien vor, die vor allem auf der Auswertung von Totfunden ba-
sieren. Nach einer Literaturauswertung lagen die weltweit ermittelten Kollisionsraten im Be-
reich von 0 bis 64 Vögeln (Mittel 6,9; Median 1,8) pro Onshore-Windenergieanlage und Jahr,
wobei Kollisionsraten von mehr als fünf Vögeln pro Windenergieanlage und Jahr vorrangig
bei Windparks in ungünstigen Standorten ermittelt wurden (Hötker 2006). Bei einer Auswer-
tung von europäischen Studien, die Sucheffizienz und Abtrag durch Aasfresser mit berück-
sichtigen, lagen die berechneten Kollisionsraten an Küstenstandorten zwischen 1,34 und 58
Vögel pro Turbine und Jahr (Witte & van Lieshout 2003). Damit fügt sich der im Windpark
alpha ventus ermittelte Wert von 8-14 (max. 29) Individuen in die von Landstudien bekannten
Szenarien ein, obwohl andere Einflüsse (keine Gewöhnungseffekte, keine Landemöglichkeit
für Landvögel) in der Offshore-Umgebung wirken. Auch die an der OWEA AV4 errechnete
Kollisionswahrscheinlichkeit eines Vogels, der durch die Rotorscheibe fliegt, lag mit durch-
schnittlich 0,064 (6,4 %) in der Spanne von 0,02 bis 0,16, die bei Modellrechnungen für ver-
schiedene Szenarien ermittelt wurden (Bellebaum et al. 2008). Die daraus ermittelten Kollisi-
onsraten weichen allerdings deutlich voneinander ab, da in der genannten Studie eine Aus-
weichrate von 0-90 % angenommen werden musste und die jährlichen Zugraten über der
südwestlichen Ostsee als wesentlich höher einzuschätzen sind, als am Standort alpha ven-
tus. Setzt man die mit VARS und Fixbeam-Radar für die OWEA AV4 im Offshore-Windpark
alpha ventus ermittelte Ausweichrate von 95,6 % bis 98,0 % an, reduziert sich die in Belle-
baum et al. (2008) angegebene Kollisionsrate von ca. 100-1.000 Vögeln pro Anlage und Jahr
(90-0 % Ausweichrate) rechnerisch auf 20-44 Individuen pro Anlage und Jahr. Die verblei-
bende Differenz zum Standort alpha ventus (8-14 Ind. / Anlage und Jahr) resultiert zum
Großteil aus der höheren jährlichen Zugrate über der südwestlichen Ostsee.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 67
11.4. Potenzielle Ursachen für Ausweichverhalten im Nahbereich von
OWEA
Die Vergleiche der Flugbewegungen im Rotorbereich bei Betrieb und Stillstand der OWEA
AV4 zeigten deutliche Unterschiede zwischen den Betriebszuständen. Sowohl am Tag als
auch in der Nacht hielten sich mehr Vögel im Rotorbereich auf, wenn die Turbine stand (vgl.
Kap. 10.3.3). Darüber hinaus wurde eine große Diskrepanz zwischen der mit Radar gemes-
senen nächtlichen Zugrate in der betreffenden Höhenschicht und den mit VARS erfassten
Flugbewegungen an der OWEA AV4 registriert (vgl. Kap. 10.7). Aufgrund dieser Fakten lässt
das Verhalten der Vögel auf Meideverhalten im Nahbereich des Rotors schließen. Wenn
man dies voraussetzt, müssen die Vögel die Turbinen wahrnehmen und ihr Flugverhalten
anpassen. Drei Möglichkeiten der Wahrnehmung erscheinen potenziell möglich:
1. Optische Wahrnehmung
2. Akustische Wahrnehmung
3. Wahrnehmung von Infraschall (Druckunterschiede)
Optische Wahrnehmung
Die optische Wahrnehmung der drehenden Rotorblätter ist bei ausreichender Sicht als der
wahrscheinlichste Grund für Meideverhalten am Tag anzusehen. Im Gegensatz zu Brutplät-
zen und längerfristig genutzten Rasthabitaten an Landstandorten erfolgt wahrscheinlich kei-
ne Gewöhnung der Zugvögel gegenüber den Windenergieanlagen auf See. Lediglich für
Großmöwen und Kormorane, die die Konstruktionen als Teil ihres Lebensraumes nutzen und
auch regelmäßig auf den Gründungen rasten, ist dies zu erwarten.
Im Gegensatz zum Tag ist die optische Wahrnehmung in der Nacht weniger offensichtlich,
aber unter bestimmten Bedingungen wahrscheinlich. Das Restlicht z. B. durch Mondschein
bietet in klaren Nächten ausreichend Beleuchtung, um das Hindernis selbst aus größerer
Entfernung wahrzunehmen (Abbildung 26). Bei lockerer Bewölkung bestand sogar die Vari-
ante, dass sich die OWEA AV2 im Windpark dunkel vor einer erleuchteten Wolkenschicht
abbildete (Abbildung 27). Bei Mondlicht wird eine maximale Ausleuchtung von 0,25 Lux er-
reicht, bei sternenklarem Himmel und Neumond 0,001 Lux. Da nachtziehende Singvogelar-
ten selbst kleine Objekte bis mindestens 0,07 Lux erkennen können (Donner 1951), ist durch
die großen hellen Flächen der Rotorblätter eine noch bessere Wahrnehmbarkeit in der Nacht
zu erwarten. Dass die Anlagenreihen selbst aus größerer Entfernung durch Vögel erkannt
werden können, belegen weiträumige Verhaltensreaktionen von Wasservögeln (van der
Winden et al. 1999, Dirksen et al. 2000, Christensen et al. 2004). So wurden in mondhellen
Nächten signifikant mehr Flugbewegungen von Tauchenten zwischen den OWEA festge-
stellt, während sie den Offshore-Windpark bei weniger Licht häufiger umflogen (van der Win-
den et al. 1999, Dirksen et al. 2000). Auch Eiderenten passten nachts ihre Flugrichtung dem
Verlauf der Reihen an (Christensen et al. 2004).
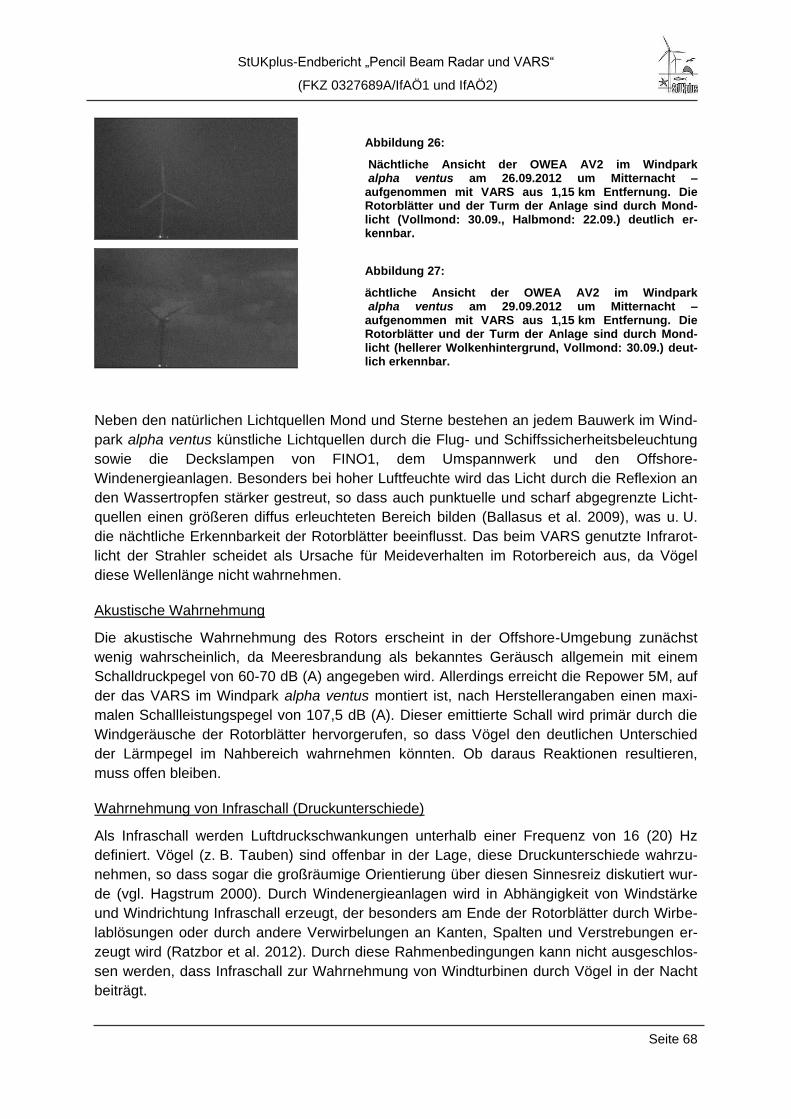
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 68
Abbildung 26:
Nächtliche Ansicht der OWEA AV2 im Windpark alpha ventus am 26.09.2012 um Mitternacht – aufgenommen mit VARS aus 1,15 km Entfernung. Die Rotorblätter und der Turm der Anlage sind durch Mond-licht (Vollmond: 30.09., Halbmond: 22.09.) deutlich er-kennbar.
Abbildung 27:
ächtliche Ansicht der OWEA AV2 im Windpark alpha ventus am 29.09.2012 um Mitternacht – aufgenommen mit VARS aus 1,15 km Entfernung. Die Rotorblätter und der Turm der Anlage sind durch Mond-licht (hellerer Wolkenhintergrund, Vollmond: 30.09.) deut-lich erkennbar.
Neben den natürlichen Lichtquellen Mond und Sterne bestehen an jedem Bauwerk im Wind-
park alpha ventus künstliche Lichtquellen durch die Flug- und Schiffssicherheitsbeleuchtung
sowie die Deckslampen von FINO1, dem Umspannwerk und den Offshore-
Windenergieanlagen. Besonders bei hoher Luftfeuchte wird das Licht durch die Reflexion an
den Wassertropfen stärker gestreut, so dass auch punktuelle und scharf abgegrenzte Licht-
quellen einen größeren diffus erleuchteten Bereich bilden (Ballasus et al. 2009), was u. U.
die nächtliche Erkennbarkeit der Rotorblätter beeinflusst. Das beim VARS genutzte Infrarot-
licht der Strahler scheidet als Ursache für Meideverhalten im Rotorbereich aus, da Vögel
diese Wellenlänge nicht wahrnehmen.
Akustische Wahrnehmung
Die akustische Wahrnehmung des Rotors erscheint in der Offshore-Umgebung zunächst
wenig wahrscheinlich, da Meeresbrandung als bekanntes Geräusch allgemein mit einem
Schalldruckpegel von 60-70 dB (A) angegeben wird. Allerdings erreicht die Repower 5M, auf
der das VARS im Windpark alpha ventus montiert ist, nach Herstellerangaben einen maxi-
malen Schallleistungspegel von 107,5 dB (A). Dieser emittierte Schall wird primär durch die
Windgeräusche der Rotorblätter hervorgerufen, so dass Vögel den deutlichen Unterschied
der Lärmpegel im Nahbereich wahrnehmen könnten. Ob daraus Reaktionen resultieren,
muss offen bleiben.
Wahrnehmung von Infraschall (Druckunterschiede)
Als Infraschall werden Luftdruckschwankungen unterhalb einer Frequenz von 16 (20) Hz
definiert. Vögel (z. B. Tauben) sind offenbar in der Lage, diese Druckunterschiede wahrzu-
nehmen, so dass sogar die großräumige Orientierung über diesen Sinnesreiz diskutiert wur-
de (vgl. Hagstrum 2000). Durch Windenergieanlagen wird in Abhängigkeit von Windstärke
und Windrichtung Infraschall erzeugt, der besonders am Ende der Rotorblätter durch Wirbe-
lablösungen oder durch andere Verwirbelungen an Kanten, Spalten und Verstrebungen er-
zeugt wird (Ratzbor et al. 2012). Durch diese Rahmenbedingungen kann nicht ausgeschlos-
sen werden, dass Infraschall zur Wahrnehmung von Windturbinen durch Vögel in der Nacht
beiträgt.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 69
Im Zusammenhang mit Druckunterschieden müssen auch die Nachlaufströmungen hinter
den Rotoren betrachtet werden, da sie einen wesentlichen Einfluss auf das Anfliegen der
Vögel gegen die Windrichtung besitzen könnten. Solche Verwirbelungen der Luftschichten
sind noch mehrere hundert Meter hinter den Turbinen nachweisbar (vgl. Hasager et al. 2013)
und müssten zumindest im Nahbereich von den fliegenden Vögeln wahrzunehmen sein.
Nach Beobachtungen von WINKELMAN (1992b) konnten Vögel weiterfliegen, wenn sie von
Nachlaufströmungen erfasst wurden, so dass eine Annäherung an eine Windenergieanlage
von hinten möglich ist. Dies belegen auch die drei Rotordurchflüge und weitere Annäherun-
gen, die mit VARS auf der OWEA AV4 festzustellen waren. Allerdings wird die Kollisions-
wahrscheinlichkeit beim Anflug gegen den Wind möglicherweise dadurch gemindert, dass
die Vögel bei Gegenwind eher Reaktionen und Ausweichbewegungen zeigen, als bei Rü-
ckenwind (Bellebaum et al. 2008). Bei Rückenwind waren 29 % der Vögel, die durch einen
Windpark flogen, irritiert (stark flatternder Flug), während bei Gegenwind mit 87 % eine deut-
lich höhere Quote erreicht wurde (Winkelman 1992 c, d). Neben einer besseren akustischen
Wahrnehmung ermöglicht der langsamere Flug bei Gegenwind eine längere Reaktionszeit
und eine bessere Manövrierfähigkeit bei der Annäherung an die Anlage (Bellebaum et al.
2008). Dies trägt möglicherweise zu der Diskrepanz zwischen Rotordurchflügen mit und ge-
gen den Wind bei, die an der OWEA AV4 mit VARS festgestellt wurde (vgl. Kap. 10.5).
11.5. Anwendung von VARS und Fixbeam-Radar im Rahmen von StUK4
Das Kamerasystem VARS und das Fixbeam-Radar sowie das eingesetzte Messdesign ha-
ben sich als tauglich erwiesen, über Jahre hinweg unter Offshore-Bedingungen auf verschie-
denen räumlichen Ebenen eine kontinuierliche Erfassung von Zugvögeln im Bereich eines
bestehenden Windparks zu gewährleisten. Damit ist die eingesetzte Technik geeignet, die
bisher diskontinuierlichen, vorwiegend schiffsgestützten Erfassungen zu ergänzen und ver-
bleibende Wissenslücken zu schließen. Bereits im Oktober 2013 wurde eine Überarbeitung
des bisherigen Untersuchungsstandards StUK3 (BSH 2007) vollzogen und das aktualisierte
Untersuchungskonzept StUK4 veröffentlicht (BSH 2013). In den Methodenkatalog dieses
neuen Standards wurde auf Basis der bisherigen Erfahrungen der Einsatz von Fixbeam-
Radaren sowie optischen Systemen aufgenommen.
12. Ausblick
Die hier durchgeführten Messungen liefern auf der Basis jahrelanger, kontinuierlicher Mes-
sungen konkrete Zahlen zum Aufkommen von Zugvögeln im Bereich des im Betrieb befindli-
chen Offshore-Windparks alpha ventus und decken dabei verschiedene räumliche Ebenen
sowie die Dunkelphase ab. Vergleichbares war bisher auch auf internationaler Ebene kaum
möglich. Die vorliegenden Ergebnisse schaffen eine neue Grundlage für eine Abschätzung
des Eintretens von Scheuch- bzw. Lockwirkungen durch Offshore-Windparks auf Nachtzie-
her. Weiterhin wurden erstmalig anhand von Messdaten aus dem unmittelbaren Rotorbe-
reich Kollisionsraten im Offshorebereich sowie Ausweichraten berechnet. Die Ausweichrate
liefert auch für andere, aber im Grundsatz ähnliche Offshore-Standorte eine aktualisierte
Basis, das von Offshore-Windparks ausgehende Gefährdungspotenzial für ziehende Vögel
mit Hilfe existierender Modelle zu ermitteln. Es ist zu beachten, dass die hier eingesetzten
Messgeräte jeweils nur einen begrenzten Erfassungsbereich abdecken konnten und viele

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 70
der vorgestellten Zahlen auf Hochrechnungen basieren. Insbesondere die Ergebnisse zu
Kollisions- und Ausweichraten beruhen vorwiegend auf Messungen, die im Rotorbereich ei-
ner einzigen OWEA durchgeführt wurden. Terrestrische Untersuchungen haben jedoch ge-
zeigt, dass die Platzierung einer Windturbine im Park erheblichen Einfluss auf das Gefähr-
dungspotenzial besitzen kann. Für eine Absicherung der Allgemeingültigkeit der hier erziel-
ten Aussagen sind daher weitere Messungen notwendig, die einen insgesamt vergrößerten,
zeitlich-räumlichen Erfassungsbereich sowie Messungen an weiteren Stationen umfassen.
Während der Offshore-Windpark alpha ventus die Nachtzieher offenbar eher anlockt als ver-
scheucht, wurden im Nahbereich der Rotoren auch nachts Meidungsreaktionen festgestellt.
Dennoch muss nach den hier durchgeführten Messungen davon ausgegangen werden, dass
in einem gewissen Rahmen Kollisionsereignisse stattgefunden haben. Im Hinblick auf die
Effektivität möglicher Minderungsmaßnahmen ist von besonderem Interesse, in welchem
Maße die Kollisionsrate bei drehenden Rotorblättern eine grundsätzlich denkbare Kollisions-
rate an unbewegten Windturbinen übersteigt. Zu Letzterer liegen bisher noch keine konkre-
ten Untersuchungen aus dem Offshore-Bereich vor. Nach wie vor sind die Mechanismen, auf
denen die Wahrnehmung von OWEA durch ziehende Vögel bei Nacht beruht und die letztlich
zu den gemessenen Lock- und Meidungsreaktionen führen, noch unzureichend bekannt. Es
erscheint jedoch als wahrscheinlich, dass durch Anpassung von Lichtregime und evtl. auch
Schallregime eine effektive Reduzierung des Kollisionsrisikos erfolgen kann. Die hier einge-
setzten Techniken erfordern feste Plattformen. Da auch von beleuchteten Plattformen in der
marinen Umwelt eine Gefahr für ziehende Vögel ausgeht, sind Messungen von bereits exis-
tierenden Strukturen (z. B. Umspannplattformen, OWEA) aus gegenüber eigens dafür errich-
teten vorzuziehen, sofern deren Positionierung ein sinnvolles Messdesign gestattet.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 71
13. Publikationen zum Projekt
Coppack, T., Kulemeyer, C., Schulz, A. (2010). Zugvogelerfassung mittels Fixed Pencil
Beam Radar und Infrarotvideographie im Windpark „alpha ventus“. In: Ökologische
Begleitforschung bei „alpha ventus“ – erste Ergebnisse, Bundesamt für Seeschifffahrt
und Hydrographie (BSH), Hamburg.
Coppack, T. (2011). Windfarm impacts on wildlife over (and under) water: evidence from FI-
NO1 and FINO2. Fino Conference 2011, Hamburg.
Coppack, T., Kulemeyer, C., Schulz, A., Steuri, T., Liechti, F. (2011a). Automated in situ
monitoring of migratory birds at Germany’s first offshore wind farm. International Con-
ference on wind energy and wildlife impacts, Trondheim, Norway. NINA Report 693:
20.
Coppack, T., Schulz, A., Steuri, T., Liechti, F., Kulemeyer, C. (2011b). Mit Windmühlen ge-
gen Klimawandel und Vogelzug – Phototaktische Anlockung von nachts ziehenden
Vögeln durch einen Offshore-Windpark. 144. Jahresversammlung der Deutschen Orni-
thologen-Gesellschaft. Vogelwarte 49: 300-301.
Kulemeyer, C., Schulz, A., Steuri, F., Liechti, F., Coppack, T. (2011). Nocturnal bird migration
near offshore wind farms – from visual perception to phototactic reactions. Vortrag auf
der 8.ten internationalen Tagung der European Ornithologists’ Union.
Coppack T, Hill R (2012a). Detecting effects on migratory birds: new results and perspec-
tives. Session 2: Environmental monitoring International Conference RAVE 2012, May
8, Bremerhaven, Germany
Coppack T, Schulz A, Kulemeyer C (2012b) Effects of offshore wind farms on birds: first em-
pirical evidence. Session 2B: Bats, birds and blades: the coexistence of wildlife and
offshore projects. 9th Annual EnergyOcean International Conference & Exhibition, June
19, Boston MA, USA
14. Literaturverzeichnis
Alerstam, T. 1990. Bird migration. Cambridge University Press, Cambridge.
Aumüller, R., Boos, K., Freienstein, S., Hill, K., Hill, R. (2011). Beschreibung eines Vogel-
schlagereignisses und seiner Ursachen an einer Forschungsplattform in der Deutschen
Bucht. Vogelwarte 49, 9-16.
Ballasus H., Hill K. & O. Hüppop 2009. Gefahren künstlicher Beleuchtung für ziehende Vögel
und Fledermäuse. Ber Vogelschutz 46, 127-157.
Band, W. (2000). Guidance WINDFARMS AND BIRDS: calculating a theoretical collision risk
assuming no avoidance action. Guidance notes series 2000. Scottish Natural Heritage,
Battleby.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 72
Band, W. (2012). Using a collision risk model to assess bird collision risks for offshore wind-
farms. SOSS-02 Project Report to The Crown Estate.
Band, W., Madders, M., Whitfield, D.P. (2007). Developing field and analytical methods to
assess avian collision risk at wind farms. In: de Lucas, M., Janss, G.F.E. & Ferrer, M.
(eds.) Birds and Wind Farms: Risk Assessment and Mitigation, pp. 259-275. Quercus,
Madrid.
Bellebaum, J., Grieger, C., Klein, R., Köppen, U., Kube, J., Neumann, R., Schulz, A., Sordyl,
H., Wendeln, H. (2008). Ermittlung artbezogener Erheblichkeitsschwellen von Zugvö-
geln für das Seegebiet der südwestlichen Ostsee bezüglich der Gefährdung des Vo-
gelzuges im Zusammenhang mit dem Kollisionsrisiko an Windenergieanlagen. Ab-
schlußbericht. Forschungsvorhaben des Bundesministeriums für Umwelt, Naturschutz
und Reaktorsicherheit (FKZ 0329948). Neu Broderstorf.
BirdLife International 2004. Birds in Europe: population estimates, trends and conservation
status. BirdLife International, Cambridge.
Blasius, R. (1890). Vogelleben an den deutschen Leuchtthürmen. I. 1885. Ornis VI: 547-590.
Blasius, R. (1891a). Vogelleben an den deutschen Leuchtthürmen. II und IIII. 1886-1887.
Ornis VII: 1-112.
Blasius, R. (1891b). Vogelleben an den deutschen Leuchtthürmen. IV, V und VI. 1888,1889,
1890. Ornis VII: 189-280.
Blasius, R. (1895). Vogelleben an den deutschen Leuchtthürmen. 1891, 1892, 1893. Ornis
VI/VIII: 33-138.
Blasius, R. (1899). Vogelleben an den deutschen Leuchtthürmen. 1895, 1896, 1897, 1898
und 1899. Ornis X: 293-476.
Blasius, R. (1904). Vogelleben an den deutschen Leuchtthürmen. 1900, 1901, 1902 und
1903. Ornis XII: 257-380.
Blew, J., Hoffmann, M., Nehls, G. & V. Hennig (2008). Investigations of the bird collision risk
and the responses of harbour porpoises in the offshore wind farms Horns Rev, North
Sea, and Nysted, Baltic Sea, in Denmark Part I: Birds. Final report from the University
of Hamburg and BioConsult SH. BMU Berlin, PTJ, Jülich. p.
Bruderer, B. (1997a). The study of bird migration by radar. Part 1: The technical basis.
Naturwissenschaften 84: 1-8.
Bruderer, B. (1997b). The study of bird migration by radar. Part 2: Major achievments. Na-
turwissenschaften 84: 45-54.
Bruderer, B. & E. Weitnauer 1972. Radarbeobachtungen über Zug und Nachtflüge des Mau-
erseglers (Apus apus). Rev. Suisse Zool. 79: 1190–1200.
Bruderer, B., Peter D. & T. Steuri 1999. Behaviour of migrating birds exposed to X-band ra-
dar and a bright light beam. J. Exp. Biol. 202: 1015-1022.
BSH (Bundesamt für Seeschifffahrt und Hydrografie) (2007). Standard: Untersuchung der
Auswirkungen von Offshore-Windenergieanlagen auf die Meeresumwelt (StUK 3).
Stand: Februar 2007, Hamburg und Rostock.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 73
BSH (2013). Standard: Untersuchung der Auswirkungen von Offshore-Windenergieanlagen
auf die Meeresumwelt (StUK 4). Stand: Oktober 2013, Hamburg und Rostock.
Chamberlain, D.E., Rehfisch, M.R., Fox, A.D., Desholm, M., Anthony, S.A. (2006). The effect
of avoidance rates on bird mortality predictions made by wind turbine collision risk
models. Ibis 148: 198-202.
Christensen, T.K., Hounisen J.P., Clausager I. & I.K. Petersen 2004. Visual and radar obser-
vations of birds in relation to collision risk at the Horns Rev offshore wind farm. Annual
status report 2003. National Environmental Research Institute, Denmark.
Coppack T, Kulemeyer C, Schulz A, Steuri T, Liechti F (2011). Automated in situ monitoring
of migratory birds at Germany’s first offshore windfarm. International Conference on
wind energy and wildlife impacts, Trondheim, Norway. NINA Report 693: 20.
Cook A.S.C.P., Johnston A., Wright L. J. & N.H.K. Burton (2012). A review of flight heights
and avoidance rates of birds in relation to offshore wind farms. BTO Research Report
Number 618.
Cooper, B.A., Day, R.H., Ritchie, J., Cranor, C.L. 1991. An improved marine radar system for
studies of bird migration. Journal of Field Ornithology 62: 367-377.
Collier, M.P., Dirksen S. & K.L. Krijgsveld (2011, 2012). A review of methods to monitor colli-
sions or micro-avoidance of birds with offshore wind turbines: Part 1: Review (2011).
Part 2: Feasibility study of systems to monitor collisions (2012). Strategic Ornithological
Support Services Project SOSS-03A. commissioned by: The Crown Estate, SOSS,
through the British Trust for Ornithology. Final reports
Desholm, M., Fox, A.D., Beasley, P.D.L. & J. Kahlert (2006). Remote techniques for counting
and estimating the number of bird-wind turbine collisions at sea: a review. Ibis 148: 76-
89.
Desholm, M. & J. Kahlert (2005). Avian collision risk at an offshore wind farm. Biol. Lett. 1
(3): 296-298.
Dierschke, J., Dierschke, V., Hüppop, K., Hüppop, O. & K. F. Jachmann (2011): Die Vogel-
welt der Insel Helgoland. OAG Helgoland, Helgoland.
Dirksen, S., Spaans, A., van der Winden, J. & M.J. van den Berg (1998). Nachtelijke vlieg-
patronen en vlieghoogtes van duikeenden in het Ijsselmeergebied. Limosa 71: 57-68.
Dirksen, S., Spaans, A.L. & Van Der Winden, J. (2000). Studies on Nocturnal Flight Paths
and Altitudes of Waterbirds in Relation to Wind Turbines: A Review of Current Re-
search in the Netherlands. In Proceedings of the National Avian Wind Power Planning
Meeting III, San Diego, California, May 2000. Prepared for the National Wind Coordi-
nating Committee. Ontario: LGL Ltd.
Donner, K. O. (1951). The visual acuity of some passerine birds. Acta Zoologica Fennica, 66:
1-40.
Fox, T., Christensen, T.K., Desholm M., Kahlert J. & I.K. Petersen (2006). Birds – Avoidance
responses and displacement. In: Dong Energy, Vattenfall, Danish Energy Authority &
Danish Forest and Nature Agency (eds.): Danish offshore wind. Key environmental is-
sues.
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 74
Furness R.W., Wade H.M. & E.A. Masden (2013). Assessing vulnerability of marine bird
populations to offshore wind farms. Journal of Environmental Management 119, 56-66.
Gauthreaux, S.A. & Belser, C.G. 2006. Effects of Artificial Night Lighting on Migrating Birds.
In: Rich, C. & Longcore, T. (Hrsg.): Ecological Consequences of Artificial Night Light-
ing. Island Press, London: 67-93.
Gätke, H. (1891): Die Vogelwarte Helgoland. Joh. Heinr. Meyer, Braunschweig.
Gelpke, C., S. Stübing, C. König & J. Wahl (2013): Märzwinter 2013: bemerkenswerter Zug-
stau und Vögel in Not. Falke 60: 180-185.
Gruber, S. & G. Nehls (2003). Charakterisierung des offshore Vogelzuges vor Sylt mittels
schiffsgestützer Radaruntersuchungen. Vogelkundliche Berichte Niedersachsen 35:
151-156.
Hagstrum J. T. (2000). Infrasound and the avian navigational map. J. Exp. Biol. 203, 1103–
1111.
Hansen, L. (1954). Birds killed at lights in Denmark 1886-1939. Vidensk. Medd. Dan. Naturh.
Foren. 116: 269-368.
Hasager C. B., Rasmussen L., Peña A., Jensen L. E. & Réthoré P.-E. (2013). Wind Farm
Wake: The Horns Rev Photo Case. Energies 2013, 6(2), 696-716.
Hill, R., Hill, K., Aumüller, R., Boos, K. & S. Freienstein (2014). Testfeldforschung zum Vo-
gelzug am Offshore-Pilotpark alpha ventus und Auswertung der kontinuierlich auf FI-
NO1 erhobenen Daten zum Vogelzug der Jahre 2008 bis 2012. Schlussbericht zum
Forschungsvorhaben Ökologische Begleitforschung am Offshore-Testfeldvorhaben al-
pha ventus zur Evaluierung des Standarduntersuchungskonzeptes des BSH (StUK-
plus). Gefördert durch das Bundesministerium für Umwelt, Naturschutz und Reaktorsi-
cherheit (FKZ 0327689A).
Hötker, H. 2006. Auswirkungen des „Repowering“ von Windkraftanlagen auf Vögel und Fle-
dermäuse. Michael-Otto-Institut, Bergenhusen.
Hüppop, O. & G. Hilgerloh 2012. Flight call rates of migrating thrushes: effects of wind condi-
tions, humidity and time of day at an illuminated offshore platform. J Avian Biol. 43: 85-
90.
Hüppop, O., Dierschke, J., Exo, K.-M., Fredrich, E. & R. Hill (2006). Bird migration studies
and potential collision risk with offshore wind turbines. Ibis 148: 90-109.
Hüppop, O. & K. Hüppop (2009). Atlas zur Vogelberingung auf Helgoland. Teil 5: Ringfunde
von 1909 bis 2008. Vogelwarte 47: 189-249.
Hüppop O., Hill R., Jachmann F. & K. Hüppop (2009). Auswirkungen auf den Vogelzug –
Begleitforschung im Offshore-Bereich auf Forschungsplattformen in der Nordsee
„FINOBIRD“. Abschlussbericht. Forschungsvorhaben des Bundesministeriums für
Umwelt, Naturschutz und Reaktorsicherheit (FKZ 0329983).
Hüppop K., Dierschke J., Hill R. & O. Hüppop (2012). Jahres- und tageszeitliche Phänologie
der Vogelrufaktivität über der Deutschen Bucht. Vogelwarte 50 (2):87-108.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 75
Kahlert, J., Petersen, I.K., Fox, A.D., Desholm, M. & I. Clausager (2004). Investigations of
birds during construction and operation of Nysted offshore wind farm at Rødsand. An-
nual status report 2003. National Environmental Research Institute, Ministry of the En-
vironment.
Karlsson, H., Nilsson, C., Bäckman, J. & T. Alerstam (2011). Nocturnal passerine migration
without tailwind assistance. Ibis 153: 485-493.
Krijgsveld K.L., Fljn R.C., Japink M., van Horssen P.W., Heunks C., Collier M.P., Poot
M.J.M., Beuker D. & S. Birksen (2011). Effect Studies Offshore Wind Farm Egmond
aan Zee. Bureau Waardenburg Report 10-219.
Larsen J. K. & M. Guillemette (2007). Effects of wind turbines on flight behaviour of wintering
common eiders: implications for habitat use and collision risk. Journal of Applied Eco-
logy 44, 516–522.
Liechti, F. & H. Schmaljohann ( 2007). Vogelzug über der westlichen Sahara. Der Ornithol-
ogische Beobachter, 104: 33-44.
Liechti, F., Bruderer, B. & H. Paproth (1995). Quantification of nocturnal bird migration by
moon-watching: comparison with radar and infrared observation. Journal of Field Orni-
thology 66, 457-468.
Müller, H.H. (1981). Vogelschlag in einer starken Zugnacht auf der Offshore-
Forschungsplattform „Nordsee“ im Oktober 1979. Seevögel 2: 33-37.
Neumann, R., Kube, J., Liechti, F., Steuri, T., Wendeln, H. & H. Sordyl (2009). Entwicklung
einer Methode zur automatischen Quantifizierung des Vogelzuges im Bereich von
Offshore-Windparks und der Barrierewirkung der technischen Anlagen für den Vogel-
zug mittels fast fixed beam Radar. Abschlußbericht. Forschungsvorhaben des Bun-
desministeriums für Umwelt, Naturschutz und Reaktorsicherheit (FKZ 0327632). Neu
Broderstorf.
Newton, I. (2008). The migration ecology of birds. Elsevier, London.
Noer, H., Christensen, T.K., Clausager, I. & I.K. Petersen (2000). Effects on birds of an off-
shore windpark at Horns Rev: Environmental Impact Assessment. National Environ-
mental Research Institute, Denmark.
Orejas, C., Joschko, T., Schröder, A., Dierschke, J., Exo, M., Friedrich, E., Hill, R., Hüppop,
O., Pollehne, F., Zettler, M.L. & R. Bochert (2005). Ökologische Begleitforschung zur
Windenergienutzung im Offshore-Bereich auf Forschungsplattformen in der Nord- und
Ostsee (BeoFINO). Endbericht (FKZ BMU 327526).
Petersen, I.K., Christensen, T.K., Kahlert, J., Desholm, M., Fox, A.D. (2006). Final results of
bird studies at the offshore wind farms at Nysted and Horns Rev, Denmark. NERI Re-
port.
Ratzbor G., Wollenweber D., Schmal G., Lindemann K. & T. Fröhlich (2012). Grundlagenar-
beit für eine Informationskampagne "Umwelt- und naturverträgliche Windenergienut-
zung in Deutschland (onshore)”: Analyseteil. Gefördert vom Bundesministerium für
Umwelt, Naturschutz und Reaktorsicherheit (Fkz: 03MAP191).

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 76
Schmaljohann, H., Liechti, F., Bächler, E., Steuri, T. & B. Bruderer (2008). Quantification of
bird migration by radar – a detection probability problem. Ibis 150: 342-355.
Schmaljohann, H. & B. Naef-Daenzer (2011). Body condition and wind support initiate the
shift of migratory direction and timing of nocturnal departure in a songbird. Journal of
Animal Ecology 80: 1115-1122.
Schulz A., Kube J., Kellner T., Schleicher K., Sordyl H. (2009). Entwicklung und Einführung
eines automatischen Erfassungssystems für die Ermittlung des Vogelschlages unter
Praxisbedingungen auf FINO2. Abschlußbericht. Forschungsvorhaben des Bundesmi-
nisteriums für Umwelt, Naturschutz und Reaktorsicherheit (FKZ 0327560). Neu Bro-
derstorf.
Schulz, A., Kulemeyer C., Brosda K., Schleicher K., Röhrbein V., Coppack, T. (2011a). Öko-
logische Begleitforschung zur Windenergienutzung im Offshore-Bereich auf der For-
schungsplattform FINO2 - Ergebnisse 2009. Bestandteil des Verbundprojekts „Wissen-
schaftlich-technische Ausrüstung der Forschungsmessplattform zur Erforschung der
westlichen Ostsee FINO2 – Equipment“ des BMU (FKZ: 0329990A). Neu Broderstorf.
Schulz A, Kulemeyer C, Röhrbein V, Coppack T (2011b). The extent of phototactic attraction
of night-migrating birds passing an illuminated steel mast in the western Baltic Sea. In-
ternational Conference on wind energy and wildlife impacts, Trondheim, Norway. NINA
Report 693: 102.
Schulz A, Dittmann T, Weidauer A, Kilian M, Löffler T, Röhrbein V, Schleicher K & T Co-
ppack 2013. Weiterentwicklung der Technik für Langzeituntersuchungen der Vögel mit-
tels Radar und automatischer Kamerabeobachtung am Standort FINO2 und Durchfüh-
rung von Langzeitmessungen am Standort für den Zeitraum 2010 bis 2012. Ab-
schlussbericht Teilprojekt Vogelzug. Bestandteil des Forschungsvorhabens „Betrieb
der Forschungsplattform FINO2“ (BMU; FKZ 0329905D). Neu Broderstorf
Skov H., Leonhard S.B., Heinänen S., Zydelis R., Jensen N.E., Durinck J., Johansen T.W.,
Jensen B.P., Hansen B.L., Piper W. & P.N. Grøn (2012). Horns Rev 2 Offshore Wind
Farm Bird Monitoring Program 2010-2012. www.orbicon.dk
Winkelman, J.E. (1992a). De invloed van de Sep-proefwindcentrale te Oosterbierum (Fr.) op
vogels: 1: aanvaringsslachtoffers. DLO-Instituut voor Bos- en Natuuronderzoek, Arn-
ehem. Rin-rapport 92/2.
Winkelman, J.E. (1992b). De invloed van de Sep-proefwindcentrale te Oosterbierum (Fr.) op
vogels: 2: nachtelijke aanvaringskansen. DLO-Instituut voor Bos- en Natuuronderzoek,
Arnhem. Rin-rapport 92/3.
Winkelman, J.E. (1992c). De invloed van de Sep-proefwindcentrale te Oosterbierum (Fr.) op
vogels: 3: aanvlieggedrag overdag. DLO-Instituut voor Bos- en Natuuronderzoek, Arn-
hem. Rin-rapport 92/4.
Winkelman, J.E. (1992d). De invloed van de Sep-proefwindcentrale te Oosterbierum (Fr.) op
vogels: 4: verstoringsonderzoek. DLO-Instituut voor Bos- en Natuuronderzoek, Arn-
hem. Rin-rapport 92/5.
Witte, R.H. & S.M.J. van Lieshout 2003. Effecten van windturbines op vogels: Een overzicht
van bestaande literatuur. Bureau Waardenburg, Culemborg. Rapport Nr. 03-046.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 77
van der Winden, J., Spaans, A. & S. Dirksen (1999). Nocturnal collision risk of local wintering
birds with wind turbines in wetlands. Bremer Beitr. Nat.kunde Nat.sch. 4: 33-38.
Young, Jr., D.P., Erickson W.P., Good R.E., Strickland M.D. & G.D. Johnson (2003). Avian
and Bat Mortality Associated with the Initial Phase of the Foote Creek Rim Windpower
Project, Carbon County, Wyoming (November 1998 - June 2002). Report prepared for
Pacificorp, Inc., Portland, Oregon; SeaWest Windpower Inc., San Diego, California;
and Bureau of Land Management. http://www.west-inc.com/reports/fcr_final_mortality.pdf.
Zaugg, S., Saporta, G., van Loon, E., Schmaljohann, H. & F. Liechti (2008). Automatic identi-
fication of bird targets with radar via patterns produced by wing flapping. J. R. Soc. In-
terface 5: 1041-1053.
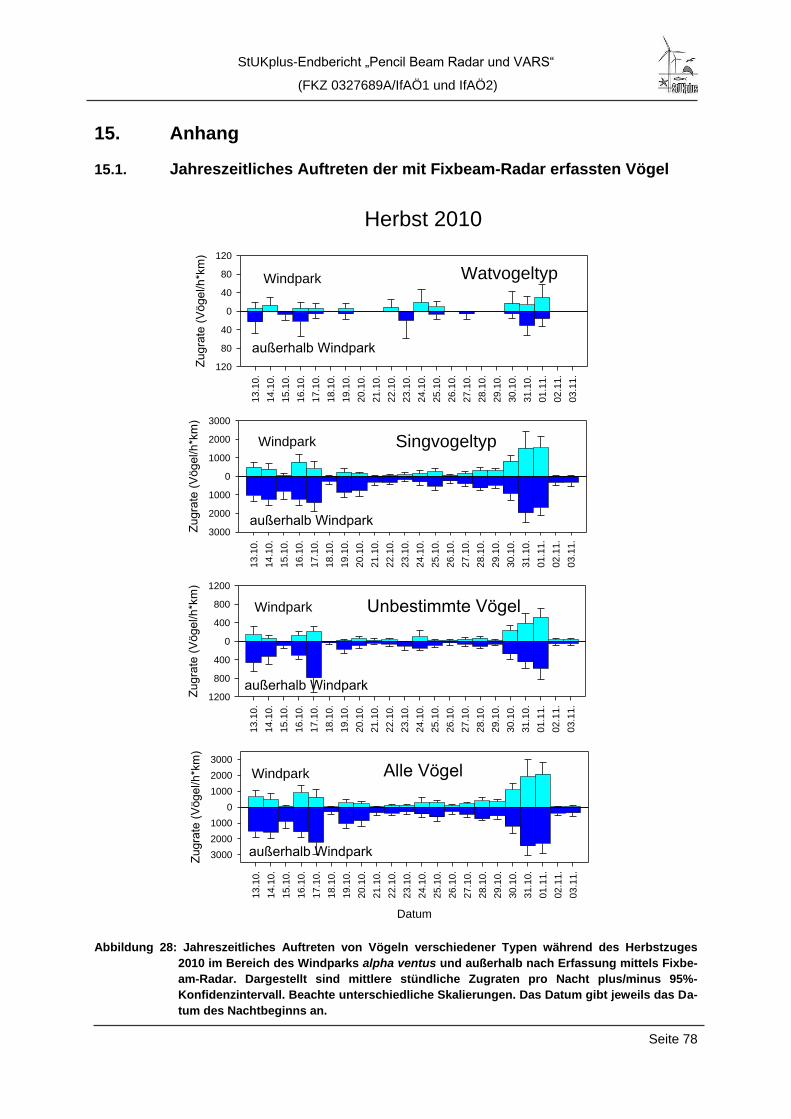
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 78
15. Anhang
15.1. Jahreszeitliches Auftreten der mit Fixbeam-Radar erfassten Vögel
Watvogeltyp
13
.10
.
14
.10
.
15
.10
.
16
.10
.
17
.10
.
18
.10
.
19
.10
.
20
.10
.
21
.10
.
22
.10
.
23
.10
.
24
.10
.
25
.10
.
26
.10
.
27
.10
.
28
.10
.
29
.10
.
30
.10
.
31
.10
.
01
.11
.
02
.11
.
03
.11
.
Zu
gra
te (
Vö
ge
l/h
*km
)
120
80
40
0
40
80
120
Windpark
außerhalb Windpark
13
.10
.
14
.10
.
15
.10
.
16
.10
.
17
.10
.
18
.10
.
19
.10
.
20
.10
.
21
.10
.
22
.10
.
23
.10
.
24
.10
.
25
.10
.
26
.10
.
27
.10
.
28
.10
.
29
.10
.
30
.10
.
31
.10
.
01
.11
.
02
.11
.
03
.11
.
Zu
gra
te (
Vö
ge
l/h
*km
)
3000
2000
1000
0
1000
2000
3000
Windpark
außerhalb Windpark
Singvogeltyp
13
.10
.
14
.10
.
15
.10
.
16
.10
.
17
.10
.
18
.10
.
19
.10
.
20
.10
.
21
.10
.
22
.10
.
23
.10
.
24
.10
.
25
.10
.
26
.10
.
27
.10
.
28
.10
.
29
.10
.
30
.10
.
31
.10
.
01
.11
.
02
.11
.
03
.11
.
Zu
gra
te (
Vö
ge
l/h
*km
)
1200
800
400
0
400
800
1200
Windpark
außerhalb Windpark
Unbestimmte Vögel
Datum
13
.10
.
14
.10
.
15
.10
.
16
.10
.
17
.10
.
18
.10
.
19
.10
.
20
.10
.
21
.10
.
22
.10
.
23
.10
.
24
.10
.
25
.10
.
26
.10
.
27
.10
.
28
.10
.
29
.10
.
30
.10
.
31
.10
.
01
.11
.
02
.11
.
03
.11
.
Zu
gra
te (
Vö
ge
l/h
*km
)
3000
2000
1000
0
1000
2000
3000
Windpark
außerhalb Windpark
Alle Vögel
Herbst 2010
Abbildung 28: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des Herbstzuges
2010 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung mittels Fixbe-
am-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus 95%-
Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das Da-
tum des Nachtbeginns an.
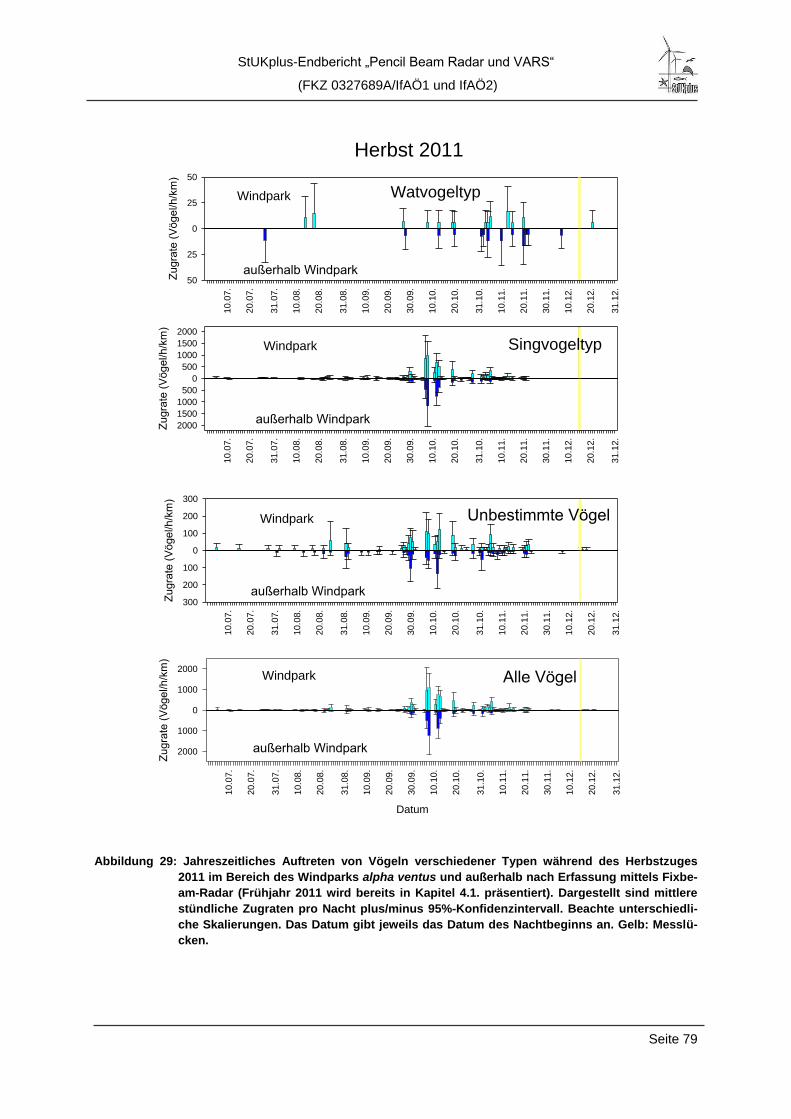
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 79
Watvogeltyp
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
31.1
0.
10.1
1.
20.1
1.
30.1
1.
10.1
2.
20.1
2.
31.1
2.
Zugra
te (
Vögel/h/k
m)
50
25
0
25
50
Windpark
außerhalb Windpark
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
31.1
0.
10.1
1.
20.1
1.
30.1
1.
10.1
2.
20.1
2.
31.1
2.
Zugra
te (
Vögel/h/k
m)
2000
1500
1000
500
0
500
1000
1500
2000
Windpark
außerhalb Windpark
Singvogeltyp
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
31.1
0.
10.1
1.
20.1
1.
30.1
1.
10.1
2.
20.1
2.
31.1
2.
Zugra
te (
Vögel/h/k
m)
300
200
100
0
100
200
300
Windpark
außerhalb Windpark
Unbestimmte Vögel
Herbst 2011
Datum
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
31.1
0.
10.1
1.
20.1
1.
30.1
1.
10.1
2.
20.1
2.
31.1
2.
Zugra
te (
Vögel/h/k
m)
2000
1000
0
1000
2000Windpark
außerhalb Windpark
Alle Vögel
Abbildung 29: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des Herbstzuges
2011 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung mittels Fixbe-
am-Radar (Frühjahr 2011 wird bereits in Kapitel 4.1. präsentiert). Dargestellt sind mittlere
stündliche Zugraten pro Nacht plus/minus 95%-Konfidenzintervall. Beachte unterschiedli-
che Skalierungen. Das Datum gibt jeweils das Datum des Nachtbeginns an. Gelb: Messlü-
cken.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 80
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
29.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vög
el/h*k
m)
500
250
0
250
500
Windpark
außerhalb Windpark
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
29.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vög
el/h*k
m)
3000
2000
1000
0
1000
2000
3000
Windpark
außerhalb Windpark
Singvogeltyp
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
29.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vög
el/h*k
m)
3000
2000
1000
0
1000
2000
3000
Windpark
außerhalb Windpark
Unbestimmte Vögel
Frühjahr 2012
Watvogeltyp
Datum
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
29.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vög
el/h*k
m)
6000
4000
2000
0
2000
4000
6000
Windpark
außerhalb Windpark
Alle Vögel
Abbildung 30: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des Frühjahrszuges
2012 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung mittels Fixbe-
am-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus 95%-
Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das Da-
tum des Nachtbeginns an. Gelb: Messlücken .
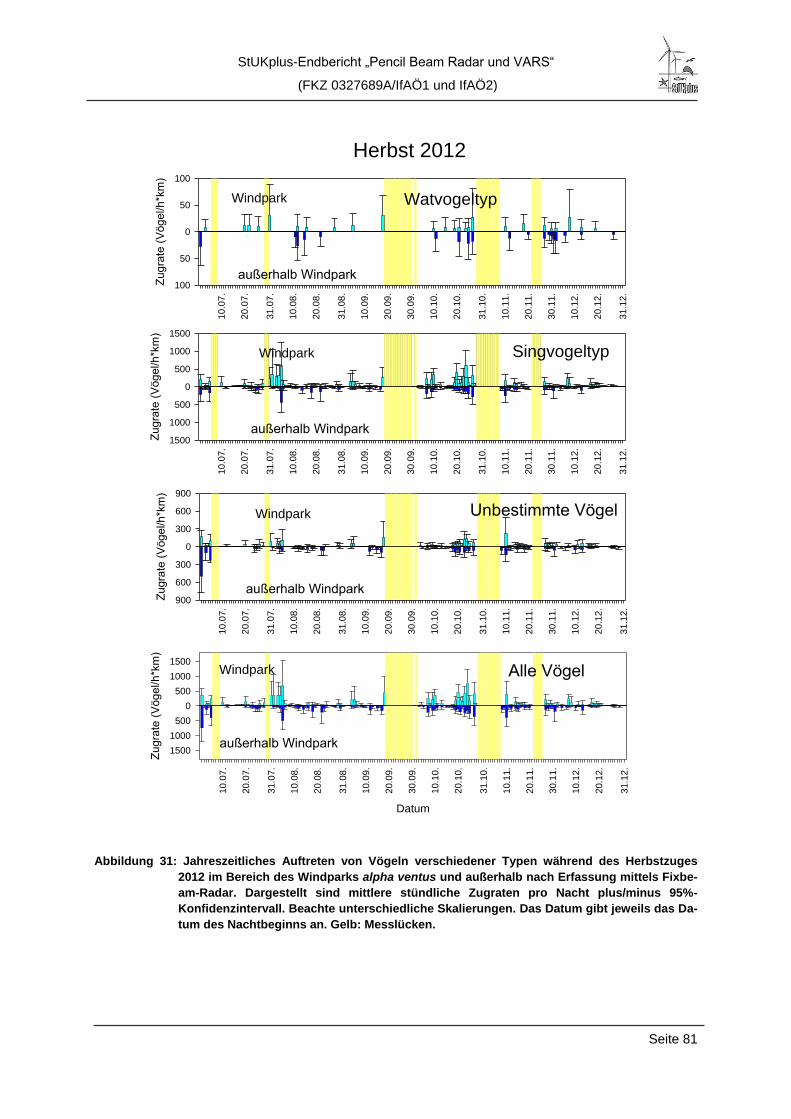
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 81
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
31.1
0.
10.1
1.
20.1
1.
30.1
1.
10.1
2.
20.1
2.
31.1
2.
Zugra
te (
Vögel/h*k
m)
100
50
0
50
100
Windpark
außerhalb Windpark
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
31.1
0.
10.1
1.
20.1
1.
30.1
1.
10.1
2.
20.1
2.
31.1
2.
Zugra
te (
Vögel/h*k
m)
1500
1000
500
0
500
1000
1500
Windpark
außerhalb Windpark
Singvogeltyp
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
31.1
0.
10.1
1.
20.1
1.
30.1
1.
10.1
2.
20.1
2.
31.1
2.
Zugra
te (
Vögel/h*k
m)
900
600
300
0
300
600
900
Windpark
außerhalb Windpark
Unbestimmte Vögel
Herbst 2012
Watvogeltyp
Datum
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
31.1
0.
10.1
1.
20.1
1.
30.1
1.
10.1
2.
20.1
2.
31.1
2.
Zugra
te (
Vögel/h*k
m)
1500
1000
500
0
500
1000
1500Windpark
außerhalb Windpark
Alle Vögel
Abbildung 31: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des Herbstzuges
2012 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung mittels Fixbe-
am-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus 95%-
Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das Da-
tum des Nachtbeginns an. Gelb: Messlücken.
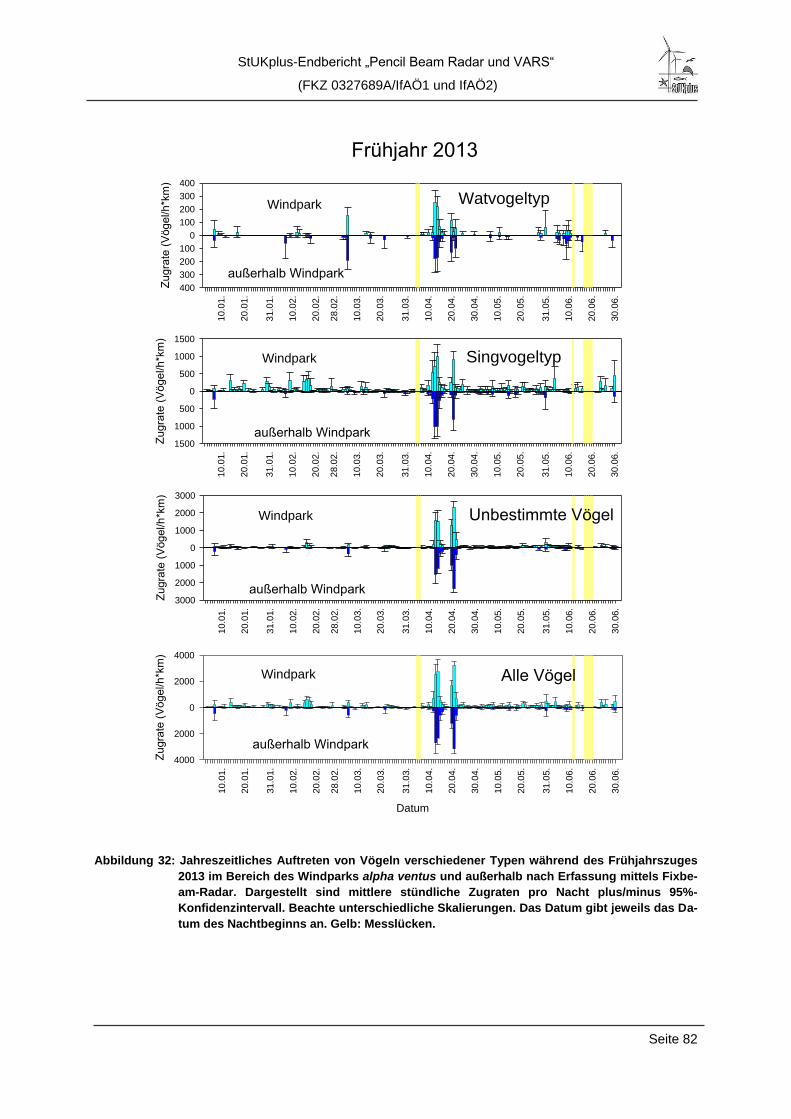
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 82
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
28.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vö
ge
l/h
*km
)
400
300
200
100
0
100
200
300
400
Windpark
außerhalb Windpark
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
28.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vö
ge
l/h
*km
)
1500
1000
500
0
500
1000
1500
Windpark
außerhalb Windpark
Singvogeltyp
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
28.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vö
ge
l/h
*km
)
3000
2000
1000
0
1000
2000
3000
Windpark
außerhalb Windpark
Unbestimmte Vögel
Frühjahr 2013
Watvogeltyp
Datum
10.0
1.
20.0
1.
31.0
1.
10.0
2.
20.0
2.
28.0
2.
10.0
3.
20.0
3.
31.0
3.
10.0
4.
20.0
4.
30.0
4.
10.0
5.
20.0
5.
31.0
5.
10.0
6.
20.0
6.
30.0
6.
Zu
gra
te (
Vö
ge
l/h
*km
)
4000
2000
0
2000
4000
Windpark
außerhalb Windpark
Alle Vögel
Abbildung 32: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des Frühjahrszuges
2013 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung mittels Fixbe-
am-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus 95%-
Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das Da-
tum des Nachtbeginns an. Gelb: Messlücken.
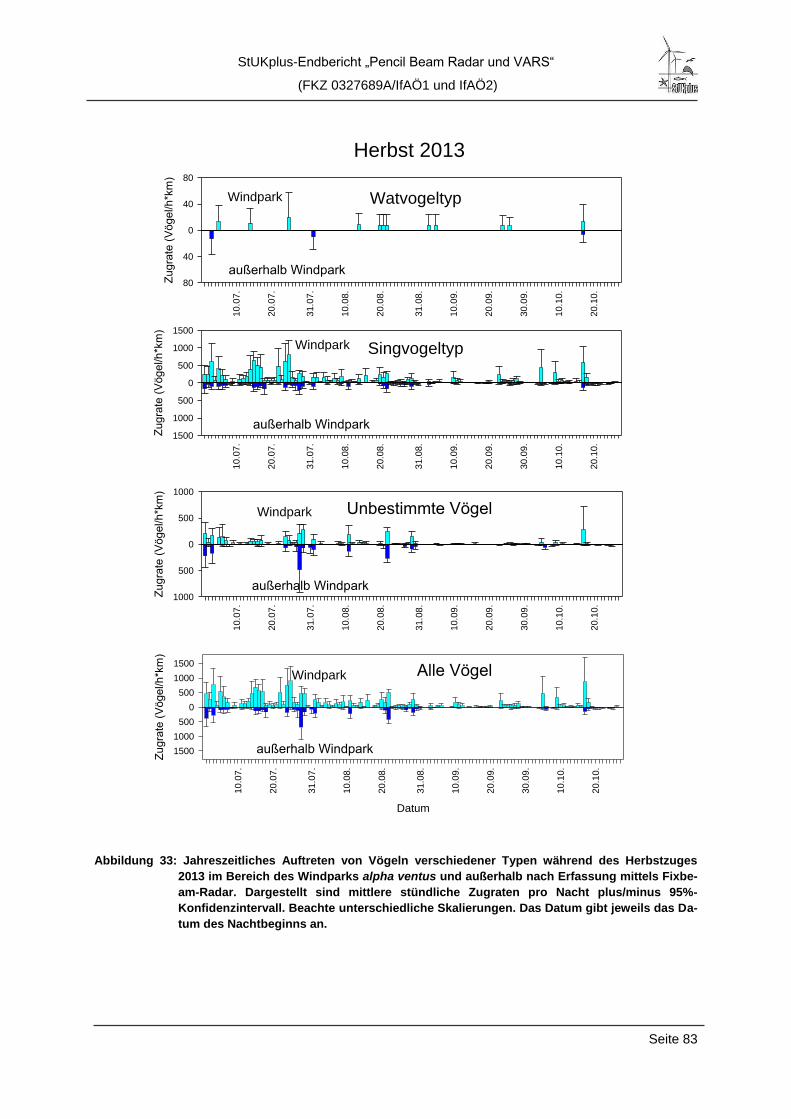
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 83
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
Zu
gra
te (
Vö
ge
l/h
*km
)
80
40
0
40
80
Windpark
außerhalb Windpark
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
Zu
gra
te (
Vö
ge
l/h
*km
)
1500
1000
500
0
500
1000
1500
Windpark
außerhalb Windpark
Singvogeltyp
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
Zu
gra
te (
Vö
ge
l/h
*km
)
1000
500
0
500
1000
Windpark
außerhalb Windpark
Unbestimmte Vögel
Herbst 2013
Watvogeltyp
Datum
10.0
7.
20.0
7.
31.0
7.
10.0
8.
20.0
8.
31.0
8.
10.0
9.
20.0
9.
30.0
9.
10.1
0.
20.1
0.
Zu
gra
te (
Vö
ge
l/h
*km
)
1500
1000
500
0
500
1000
1500
Windpark
außerhalb Windpark
Alle Vögel
Abbildung 33: Jahreszeitliches Auftreten von Vögeln verschiedener Typen während des Herbstzuges
2013 im Bereich des Windparks alpha ventus und außerhalb nach Erfassung mittels Fixbe-
am-Radar. Dargestellt sind mittlere stündliche Zugraten pro Nacht plus/minus 95%-
Konfidenzintervall. Beachte unterschiedliche Skalierungen. Das Datum gibt jeweils das Da-
tum des Nachtbeginns an.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 84
15.2. Flughöhenverteilung der mit Fixbeam-Radar erfassten Vögel
Watvogeltyp
13.1
0.
14.1
0.
15.1
0.
16.1
0.
17.1
0.
18.1
0.
19.1
0.
20.1
0.
21.1
0.
22.1
0.
23.1
0.
24.1
0.
25.1
0.
26.1
0.
27.1
0.
28.1
0.
29.1
0.
30.1
0.
31.1
0.
01.1
1.
02.1
1.
03.1
1.
Zugra
te (
Vögel/h*k
m)
60
40
20
0
20
40
60
im Windpark
außerhalb Windpark
Herbst 2010
Singvogeltyp
13.1
0.
14.1
0.
15.1
0.
16.1
0.
17.1
0.
18.1
0.
19.1
0.
20.1
0.
21.1
0.
22.1
0.
23.1
0.
24.1
0.
25.1
0.
26.1
0.
27.1
0.
28.1
0.
29.1
0.
30.1
0.
31.1
0.
01.1
1.
02.1
1.
03.1
1.
Zugra
te (
Vögel/h*k
m)
2500
2000
1500
1000
500
0
500
1000
1500
2000
2500
außerhalb Windpark
im Windpark
unbestimmte Vögel
13.1
0.
14.1
0.
15.1
0.
16.1
0.
17.1
0.
18.1
0.
19.1
0.
20.1
0.
21.1
0.
22.1
0.
23.1
0.
24.1
0.
25.1
0.
26.1
0.
27.1
0.
28.1
0.
29.1
0.
30.1
0.
31.1
0.
01.1
1.
02.1
1.
03.1
1.
Zugra
te (
Vögel/h*k
m)
1000
800
600
400
200
im Windpark
außerhalb Windpark
Datum
13.1
0.
14.1
0.
15.1
0.
16.1
0.
17.1
0.
18.1
0.
19.1
0.
20.1
0.
21.1
0.
22.1
0.
23.1
0.
24.1
0.
25.1
0.
26.1
0.
27.1
0.
28.1
0.
29.1
0.
30.1
0.
31.1
0.
01.1
1.
02.1
1.
03.1
1.
Zugra
te (
Vögel/h*k
m)
3000
2000
1000
0
1000
2000
3000
alle Vögelim Windpark
außerhalb Windpark
> 200m
bis 200 m
Flughöhe
Abbildung 34: Zugrate verschiedener Vogelgruppen während des Herbstzuges 2010 in Höhen bis 200 m
(schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha ventus und au-
ßerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten
pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an.
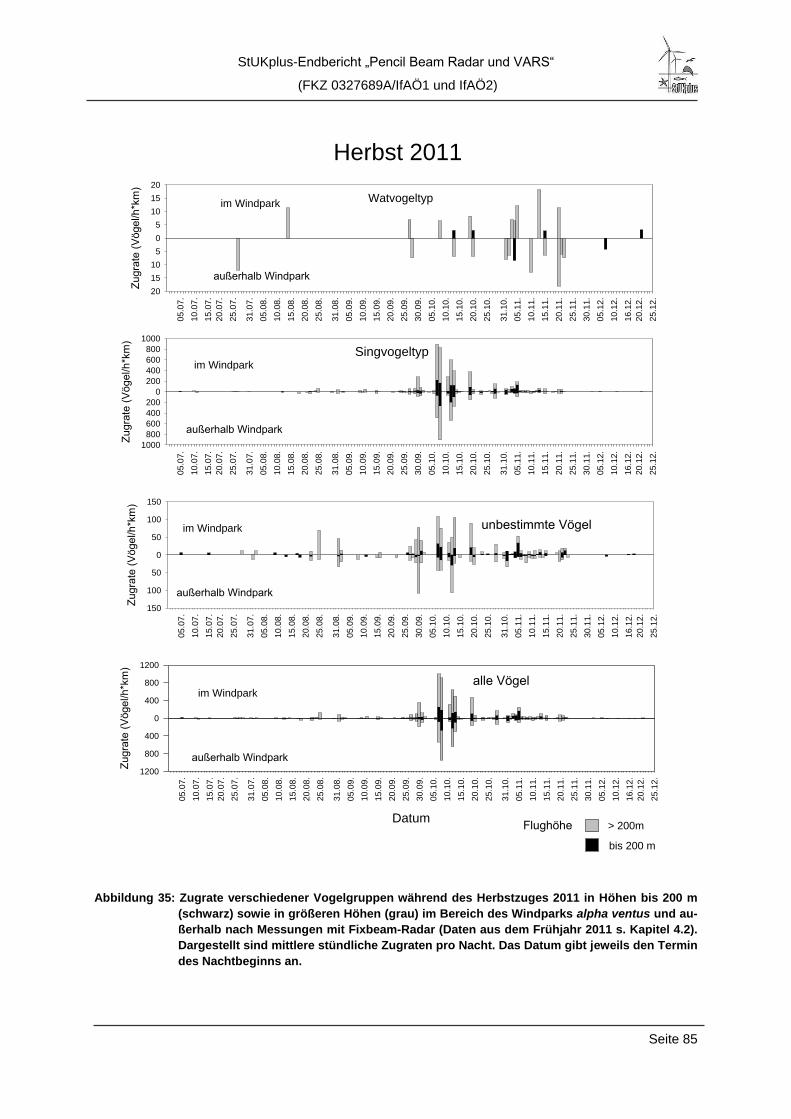
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 85
Watvogeltyp
05
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
25
.08
.
31
.08
.
05
.09
.
10
.09
.
15
.09
.
20
.09
.
25
.09
.
30
.09
.
05
.10
.
10
.10
.
15
.10
.
20
.10
.
25
.10
.
31
.10
.
05
.11
.
10
.11
.
15
.11
.
20
.11
.
25
.11
.
30
.11
.
05
.12
.
10
.12
.
16
.12
.
20
.12
.
25
.12
.
Zu
gra
te (
Vö
ge
l/h
*km
)
20
15
10
5
0
5
10
15
20
im Windpark
außerhalb Windpark
Herbst 2011
Singvogeltyp
05
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
25
.08
.
31
.08
.
05
.09
.
10
.09
.
15
.09
.
20
.09
.
25
.09
.
30
.09
.
05
.10
.
10
.10
.
15
.10
.
20
.10
.
25
.10
.
31
.10
.
05
.11
.
10
.11
.
15
.11
.
20
.11
.
25
.11
.
30
.11
.
05
.12
.
10
.12
.
16
.12
.
20
.12
.
25
.12
.
Zu
gra
te (
Vö
ge
l/h
*km
)
1000
800
600
400
200
0
200
400
600
800
1000
außerhalb Windpark
im Windpark
unbestimmte Vögel
05
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
25
.08
.
31
.08
.
05
.09
.
10
.09
.
15
.09
.
20
.09
.
25
.09
.
30
.09
.
05
.10
.
10
.10
.
15
.10
.
20
.10
.
25
.10
.
31
.10
.
05
.11
.
10
.11
.
15
.11
.
20
.11
.
25
.11
.
30
.11
.
05
.12
.
10
.12
.
16
.12
.
20
.12
.
25
.12
.
Zu
gra
te (
Vö
ge
l/h
*km
)
150
100
50
0
50
100
150
im Windpark
außerhalb Windpark
Datum
05
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
25
.08
.
31
.08
.
05
.09
.
10
.09
.
15
.09
.
20
.09
.
25
.09
.
30
.09
.
05
.10
.
10
.10
.
15
.10
.
20
.10
.
25
.10
.
31
.10
.
05
.11
.
10
.11
.
15
.11
.
20
.11
.
25
.11
.
30
.11
.
05
.12
.
10
.12
.
16
.12
.
20
.12
.
25
.12
.
Zu
gra
te (
Vö
ge
l/h
*km
)
1200
800
400
0
400
800
1200
alle Vögelim Windpark
außerhalb Windpark
> 200m
bis 200 m
Flughöhe
Abbildung 35: Zugrate verschiedener Vogelgruppen während des Herbstzuges 2011 in Höhen bis 200 m
(schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha ventus und au-
ßerhalb nach Messungen mit Fixbeam-Radar (Daten aus dem Frühjahr 2011 s. Kapitel 4.2).
Dargestellt sind mittlere stündliche Zugraten pro Nacht. Das Datum gibt jeweils den Termin
des Nachtbeginns an.
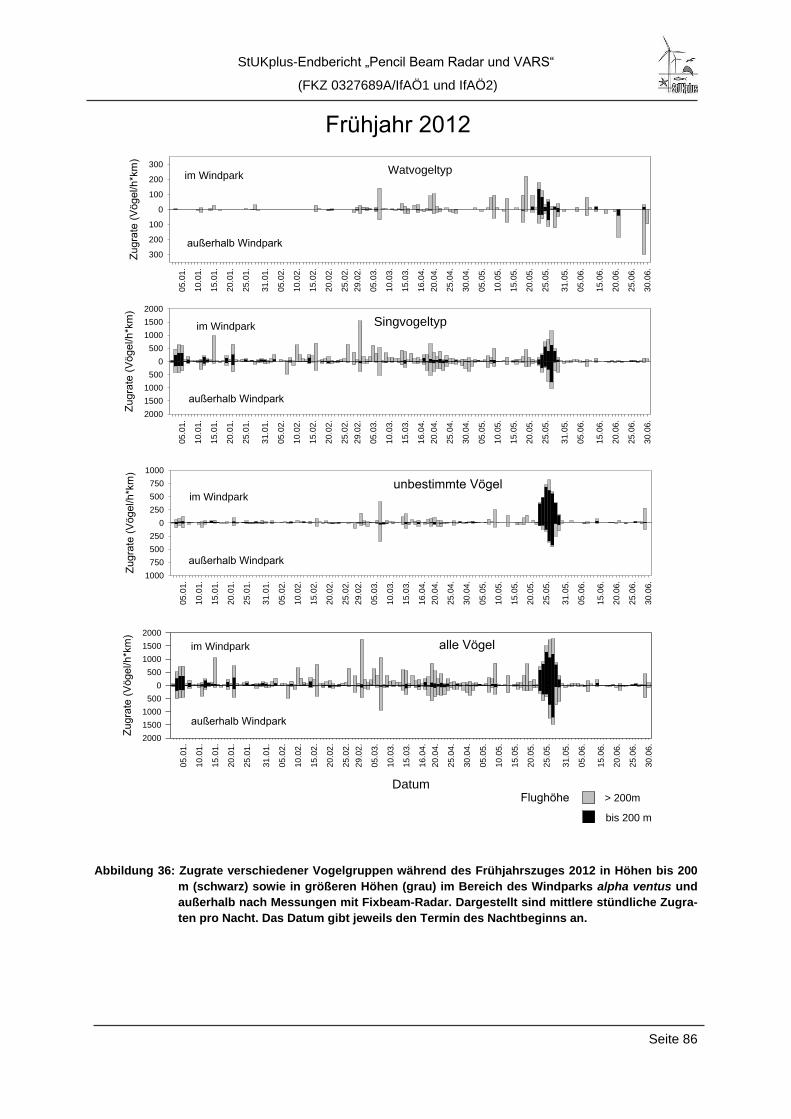
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 86
Watvogeltyp0
5.0
1.
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
29
.02
.
05
.03
.
10
.03
.
15
.03
.
16
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
15
.06
.
20
.06
.
25
.06
.
30
.06
.
Zu
gra
te (
Vö
gel/h*k
m)
300
200
100
0
100
200
300
im Windpark
außerhalb Windpark
Frühjahr 2012
Singvogeltyp
05
.01
.
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
29
.02
.
05
.03
.
10
.03
.
15
.03
.
16
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
15
.06
.
20
.06
.
25
.06
.
30
.06
.
Zug
rate
(V
ögel/h
*km
)
2000
1500
1000
500
0
500
1000
1500
2000
außerhalb Windpark
im Windpark
unbestimmte Vögel
05
.01
.
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
29
.02
.
05
.03
.
10
.03
.
15
.03
.
16
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
15
.06
.
20
.06
.
25
.06
.
30
.06
.
Zugra
te (
Vögel/h*k
m)
1000
750
500
250
0
250
500
750
1000
im Windpark
außerhalb Windpark
Datum
05
.01
.
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
29
.02
.
05
.03
.
10
.03
.
15
.03
.
16
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
15
.06
.
20
.06
.
25
.06
.
30
.06
.
Zugra
te (
Vög
el/h*k
m)
2000
1500
1000
500
0
500
1000
1500
2000
alle Vögelim Windpark
außerhalb Windpark
> 200m
bis 200 m
Flughöhe
Abbildung 36: Zugrate verschiedener Vogelgruppen während des Frühjahrszuges 2012 in Höhen bis 200
m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha ventus und
außerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugra-
ten pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 87
Watvogeltyp0
1.0
7.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
26
.08
.
30
.08
.
05
.09
.
10
.09
.
15
.09
.0
4.1
0.
10
.10
.1
5.1
0.
20
.10
.
25
.10
.
10
.11
.
15
.11
.
19
.11
.
30
.11
.
07
.12
.
15
.12
.
31
.12
.
Zu
gra
te (
Vö
gel/h
*km
)
100
75
50
25
0
25
50
75
100
im Windpark
außerhalb Windpark
Herbst 2012
Singvogeltyp
01
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
26
.08
.
30
.08
.
05
.09
.
10
.09
.
15
.09
.0
4.1
0.
10
.10
.1
5.1
0.
20
.10
.
25
.10
.
10
.11
.
15
.11
.
19
.11
.
30
.11
.
07
.12
.
15
.12
.
31
.12
.
Zug
rate
(V
ög
el/h*k
m)
1000
800
600
400
200
0
200
400
600
800
1000
außerhalb Windpark
im Windpark
unbestimmte Vögel
01
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
26
.08
.
30
.08
.
05
.09
.
10
.09
.
15
.09
.0
4.1
0.
10
.10
.1
5.1
0.
20
.10
.
25
.10
.
10
.11
.
15
.11
.
19
.11
.
30
.11
.
07
.12
.
15
.12
.
31
.12
.
Zu
gra
te (
Vö
gel/h
*km
)
500
400
300
200
100
0
100
200
300
400
500
im Windpark
außerhalb Windpark
Datum
01
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
26
.08
.
30
.08
.
05
.09
.
10
.09
.
15
.09
.0
4.1
0.
10
.10
.1
5.1
0.
20
.10
.
25
.10
.
10
.11
.
15
.11
.
19
.11
.
30
.11
.
07
.12
.
15
.12
.
31
.12
.
Zu
gra
te (
Vö
gel/h
*km
)
1200
800
400
0
400
800
1200
alle Vögelim Windpark
außerhalb Windpark
> 200m
bis 200 m
Flughöhe
Abbildung 37: Zugrate verschiedener Vogelgruppen während des Herbstzuges 2012 in Höhen bis 200 m
(schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha ventus und au-
ßerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten
pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an.

StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 88
Watvogeltyp0
5.0
1.
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
01
.03
.
05
.03
.
10
.03
.
15
.03
.
20
.03
.
25
.03
.
31
.03
.
07
.04
.1
0.0
4.
15
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
10
.06
.
15
.06
.
24
.06
.
30
.06
.
Zugra
te (
Vögel/h*k
m)
300
200
100
0
100
200
300
im Windpark
außerhalb Windpark
Frühjahr 2013
Singvogeltyp
05
.01
.
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
01
.03
.
05
.03
.
10
.03
.
15
.03
.
20
.03
.
25
.03
.
31
.03
.
07
.04
.1
0.0
4.
15
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
10
.06
.
15
.06
.
24
.06
.
30
.06
.
Zugra
te (
Vögel/h*k
m)
1000
750
500
250
0
250
500
750
1000
außerhalb Windpark
im Windpark
unbestimmte Vögel
05
.01
.
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
01
.03
.
05
.03
.
10
.03
.
15
.03
.
20
.03
.
25
.03
.
31
.03
.
07
.04
.1
0.0
4.
15
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
10
.06
.
15
.06
.
24
.06
.
30
.06
.
Zugra
te (
Vögel/h*k
m)
1200
800
400
0
400
800
1200
im Windpark
außerhalb Windpark
Datum
05
.01
.
10
.01
.
15
.01
.
20
.01
.
25
.01
.
31
.01
.
05
.02
.
10
.02
.
15
.02
.
20
.02
.
25
.02
.
01
.03
.
05
.03
.
10
.03
.
15
.03
.
20
.03
.
25
.03
.
31
.03
.
07
.04
.1
0.0
4.
15
.04
.
20
.04
.
25
.04
.
30
.04
.
05
.05
.
10
.05
.
15
.05
.
20
.05
.
25
.05
.
31
.05
.
05
.06
.
10
.06
.
15
.06
.
24
.06
.
30
.06
.
Zugra
te (
Vögel/h*k
m)
2000
1500
1000
500
0
500
1000
1500
2000
alle Vögelim Windpark
außerhalb Windpark
> 200m
bis 200 m
Flughöhe
Abbildung 38: Zugrate verschiedener Vogelgruppen während des Frühjahrszuges 2013 in Höhen bis 200
m (schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha ventus und
außerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugra-
ten pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an.
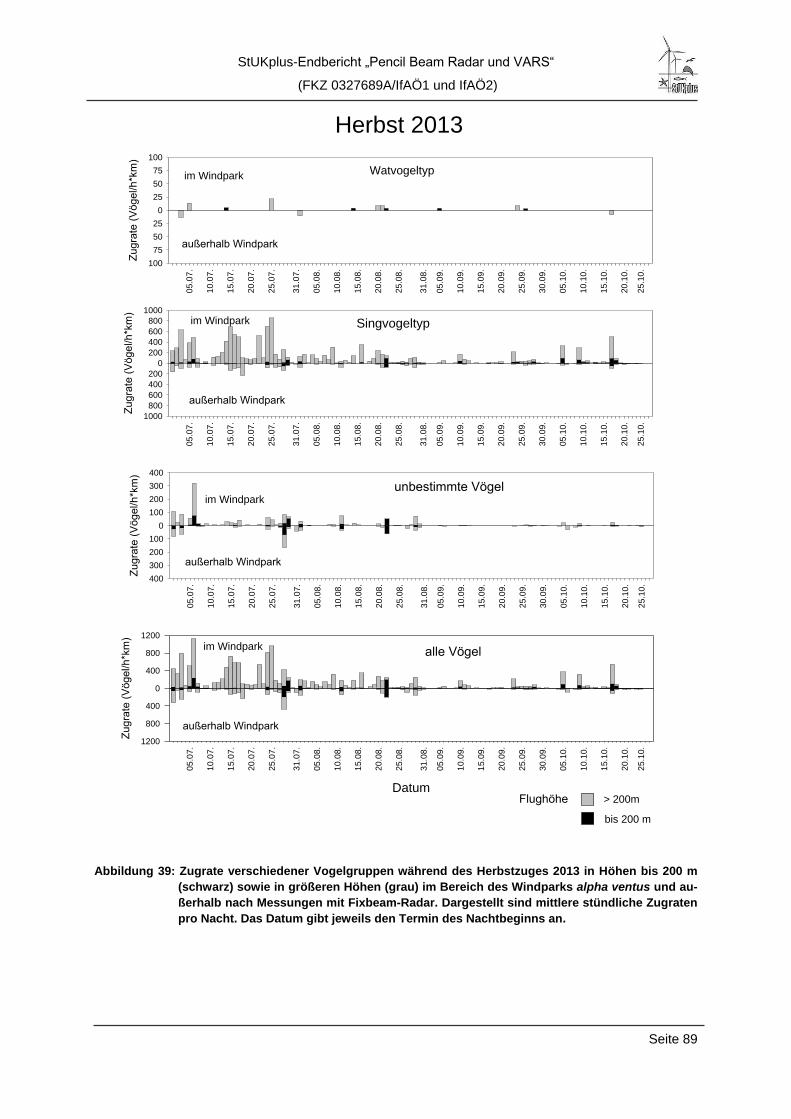
StUKplus-Endbericht „Pencil Beam Radar und VARS“
(FKZ 0327689A/IfAÖ1 und IfAÖ2)
Seite 89
Watvogeltyp
05
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
25
.08
.
31
.08
.
05
.09
.
10
.09
.
15
.09
.
20
.09
.
25
.09
.
30
.09
.
05
.10
.
10
.10
.
15
.10
.
20
.10
.
25
.10
.
Zu
gra
te (
Vö
gel/h
*km
)
100
75
50
25
0
25
50
75
100
im Windpark
außerhalb Windpark
Herbst 2013
Singvogeltyp
05
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
25
.08
.
31
.08
.
05
.09
.
10
.09
.
15
.09
.
20
.09
.
25
.09
.
30
.09
.
05
.10
.
10
.10
.
15
.10
.
20
.10
.
25
.10
.
Zu
gra
te (
Vö
ge
l/h
*km
)
1000
800
600
400
200
0
200
400
600
800
1000
außerhalb Windpark
im Windpark
unbestimmte Vögel
05
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
25
.08
.
31
.08
.
05
.09
.
10
.09
.
15
.09
.
20
.09
.
25
.09
.
30
.09
.
05
.10
.
10
.10
.
15
.10
.
20
.10
.
25
.10
.
Zu
gra
te (
Vöge
l/h*k
m)
400
300
200
100
0
100
200
300
400
im Windpark
außerhalb Windpark
Datum
05
.07
.
10
.07
.
15
.07
.
20
.07
.
25
.07
.
31
.07
.
05
.08
.
10
.08
.
15
.08
.
20
.08
.
25
.08
.
31
.08
.
05
.09
.
10
.09
.
15
.09
.
20
.09
.
25
.09
.
30
.09
.
05
.10
.
10
.10
.
15
.10
.
20
.10
.
25
.10
.
Zu
gra
te (
Vö
ge
l/h
*km
)
1200
800
400
0
400
800
1200
alle Vögelim Windpark
außerhalb Windpark
> 200m
bis 200 m
Flughöhe
Abbildung 39: Zugrate verschiedener Vogelgruppen während des Herbstzuges 2013 in Höhen bis 200 m
(schwarz) sowie in größeren Höhen (grau) im Bereich des Windparks alpha ventus und au-
ßerhalb nach Messungen mit Fixbeam-Radar. Dargestellt sind mittlere stündliche Zugraten
pro Nacht. Das Datum gibt jeweils den Termin des Nachtbeginns an.