ETF PLI de 0705 - Siemens
270
Listenhandbuch Ausgabe 07/2005 simatic Frequenzumrichter ET 200S FC Leistungsteil IPM25 Regelungsbaugruppe ICU24 / ICU24F
Transcript of ETF PLI de 0705 - Siemens

Listenhandbuch Ausgabe 07/2005
simatic Frequenzumrichter ET 200S FC Leistungsteil IPM25 Regelungsbaugruppe ICU24 / ICU24F

s
SIMATIC
Frequenzumrichter ET 200S FC mit Leistungsteil IPM25 und Regelungsbaugruppen ICU24 / ICU24F
Listenhandbuch SW-Version 1.0
Diese Dokumentation gehört zu den Dokumentationspaketen: 6SL3298-0CA12-0AP0 und 6SL3298-0CA12-1AP0 Diese Dokumentation ist außerdem auf CD-ROM erhältlich 6SL3298-0CA11-1MG0 Ausgabe 07/2005
Wichtige Hinweise
Parameter 1
Funktionspläne 2
Fehlermeldungen und Alarme 3
Abkürzungen
Wichtige Hinweise Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 4 A5E00348653A-AA
Wichtige Hinweise Diese Parameterliste ist nur in Verbindung mit der Betriebsanleitung des Frequenzumrichter ET 200S FC zu verwenden.
Warnung Beachten Sie alle Warnungen und Sicherheitshinweise der Betriebsanleitung für den Frequenzumrichter ET 200S FC. Sie finden die Betriebsanleitung im Internet unter http://support.automation.siemens.com/WW/view/de/12834637/133300 oder auf der CD-ROM mit der Bestell-Nr. 6SL3298-0CA11-1MG0.
Ständig aktuelle Informationen
Bei Fragen zum Frequenzumrichter ET 200S FC stehen Ihnen die Ansprechpartner für kommunikationsfähige Niederspannungs-Schaltgeräte Ihrer Region zur Verfügung. Eine Ansprechpartnerliste finden Sie im Internet unter: http://siemens.com/automation/partners
Weitere Informationsquellen finden Sie unter: http://support.automation.siemens.com/WW/view/de/10804985/133100 http://www4.ad.siemens.de/WW/view/de/18686824/133100
Zielgruppe
Dieses Listenhandbuch beschreibt die Parameter des Frequenzumrichter ET 200S FC und stellt funktionale Zusammenhänge anhand von Funktionsplänen dar. Es richtet sich an Projekteure, Inbetriebsetzer und Maschinenbediener sowie an Service- und Wartungspersonal.
Marken SINAMICS®, SIMATIC®, SIMATIC HMI® und SIMATIC NET® sind eingetragene Marken der Siemens AG. Die übrigen Bezeichnungen in dieser Schrift können Marken sein, deren Benutzung durch Dritte für deren Zwecke die Rechte der Inhaber verletzen können.
Copyright Siemens AG 2004 All rights reserved Die Vervielfältigung, Weitergabe oder Benutzung dieser Dokumentation oder ihres Inhalts ist nur mit schriftlicher Genehmigung zulässig. Zuwiderhand-lungen sind schadensersatzpflichtig. Alle Rechte vorbehalten, einschließlich solcher, die durch Patenterteilung oder Eintragung eines Gebrauchs-musters oder der Konstruktion entstehen. Siemens Handbücher werden auf chlorfreiem Papier gedruckt, das aus verwalteten, nachgeforsteten Waldbeständen stammt. Für den Druck- oder Binde-vorgang wurden keine Lösungsmittel verwendet.
Haftungsausschluß Gegebenenfalls stehen weitere Funktionen zur Verfügung, die nicht in diesem Dokument beschrieben sind. Diese Tatsache stellt jedoch nicht die Verpflichtung dar, solche Funktionen mit einer neuen Steuerung oder bei der Wartung zur Verfügung zu stellen.Die Übereinstimmung dieses Unterlageninhalts mit der beschriebenen Hardware und Software wurde geprüft. Dennoch können Abweichungen vorliegen; für eine voll-ständige Übereinstimmung wird keine Gewähr übernommen. Die in diesen Unterlagen enthaltenen Informationen werden regelmäßig einer Revision unterzogen, und gegebenenfalls erforderliche Änderungen werden in die nächste Ausgabe aufgenommen. Verbesserungsvorschläge sind willkommen.
Siemens AG Bereich Automation and Drives Geschäftsgebiet Standard Drives 91050 Erlangen
© Siemens AG 2004, 2005 Änderungen vorbehalten.
Siemens-Aktiengesellschaft

Ausgabe 07/2005 Inhaltsverzeichnis
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 5
Inhaltsverzeichnis
Wichtige Hinweise ...............................................................................................................................4
1 Parameter ......................................................................................................................6 1.1 Darstellung der Parameterattribute.................................................................................6 1.2 Schreibweisen (Beispiele) ..............................................................................................7 1.3 Schnell-Inbetriebnahme (P0010 = 1)..............................................................................8 1.4 Übersicht über Motor- und Befehlsdatensätze ...............................................................9 1.5 Binector Input Parameter..............................................................................................13 1.6 Connector Input Parameter ..........................................................................................14 1.7 Binector Output Parameter ...........................................................................................14 1.8 Connector Output Parameter........................................................................................15 1.9 Connector/Binector Output Parameter .........................................................................16 1.10 Parameterbeschreibung ...............................................................................................17
2 Funktionspläne ........................................................................................................ 205
3 Fehlermeldungen und Alarme................................................................................ 241 3.1 Fehlermeldungen....................................................................................................... 241 3.2 Alarmmeldungen........................................................................................................ 257 Abkürzungen .................................................................................................................................. 265
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 6 A5E00348653A-AA
Parameter 1
1.1 Darstellung der Parameterattribute
Eine detailierte Beschreibung finden Sie im Kapitel "Inbetriebnahme und Betrieb" der Betriebsanleitung.
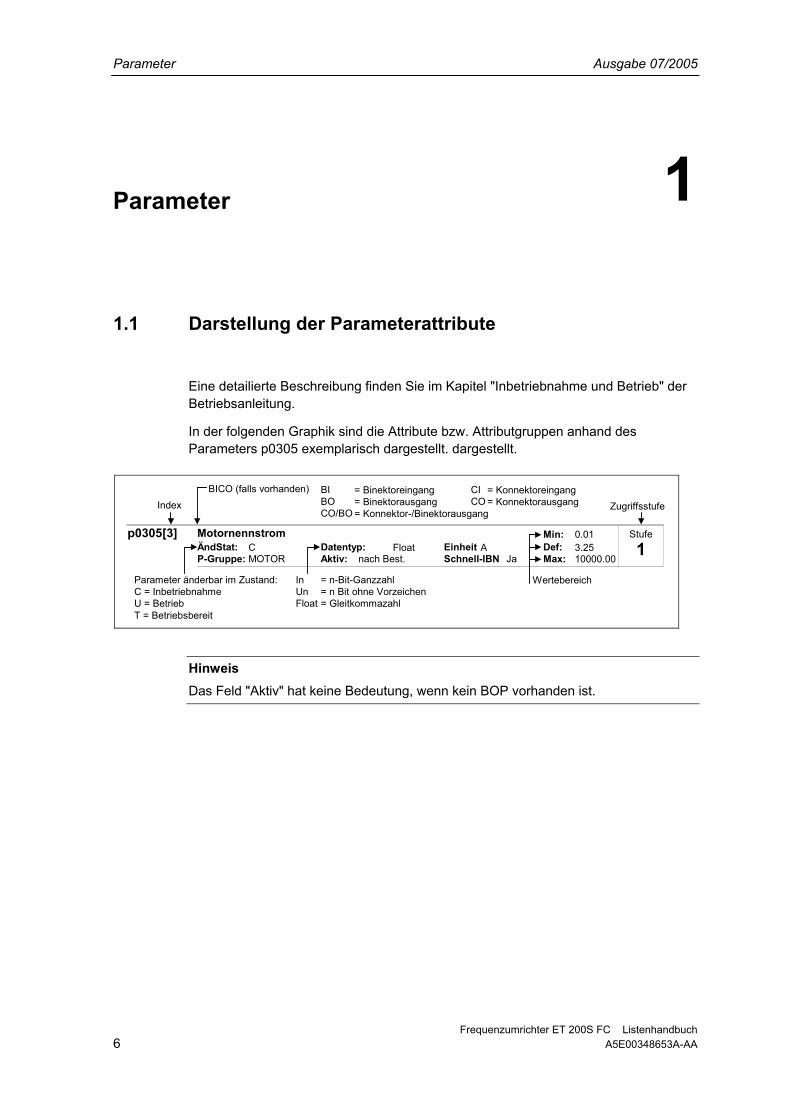
In der folgenden Graphik sind die Attribute bzw. Attributgruppen anhand des Parameters p0305 exemplarisch dargestellt. dargestellt.
Motornennstrom 0.01C Float A 3.25
10000.001
p0305[3]ÄndStat:P-Gruppe:
Datentyp:Aktiv:
Einheit Def:Max:
Min:
Wertebereich
BICO (falls vorhanden)
ZugriffsstufeIndex
MOTOR nach Best.
Stufe
Schnell-IBN Ja
Parameter änderbar im Zustand:C = InbetriebnahmeU = BetriebT = Betriebsbereit
InUnFloat
= n-Bit-Ganzzahl= n Bit ohne Vorzeichen= Gleitkommazahl
BIBOCO/BO
= Binektoreingang= Binektorausgang= Konnektor-/Binektorausgang
CICO
= Konnektoreingang= Konnektorausgang
Hinweis Das Feld "Aktiv" hat keine Bedeutung, wenn kein BOP vorhanden ist.
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 7
1.2 Schreibweisen (Beispiele)
Einstellparameter
p0927 Einstellparameter 927
p1750.1 Einstellparameter 1750 Bit 01
p0719[1] Einstellparameter 719 Index 1
p0013[20] Einstellparameter 13 mit 20 Indizes (Index 0 bis 19)
Beobachtungsparameter
r0002 Beobachtungsparameter 2
r0052.3 Beobachtungsparameter 52 Bit 03
r0947[2] Beobachtungsparameter 947 Index 2
r0964[5] Beobachtungsparameter 964 mit 5 Indizes (Index 0 bis 4)
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 8 A5E00348653A-AA
1.3 Schnell-Inbetriebnahme (P0010 = 1)
Die nachfolgenden Parameter werden für die Schnell-Inbetriebnahme (P0010 = 1) benötigt:
Schnell-Inbetriebnahme (P0010 = 1)
Wenn P0010 = 1 gewählt wird, kann P0003 (Benutzer-Zugriffsstufe) verwendet werden (wenn ein BOP vorhanden ist), um die Parameter auszuwählen, auf die zugegriffen werden soll. Dieser Parameter ermöglicht auch die Auswahl einer benutzerdefinierten Parameterliste für die Schnell-Inbetriebnahme.
Am Ende der Schnell-Inbetriebnahme setzen Sie P3900 = 1, um die erforderlichen Motorberechnungen durchzuführen, und setzen Sie alle anderen Parameter (nicht in P0010 = 1 enthaltene) auf ihre Voreinstellungen zurück.
Anmerkung Dies gilt nur für die Schnell-Inbetriebnahme.
P0100 Europa / Nordamerika
P0300 Auswahl Motortyp
P0304 Motornennspannung
P0305 Motornennstrom
P0307 Motornennleistung
P0308 Motornennleistungsfaktor
P0309 Motornennwirkungsgrad
P0310 Motornennfrequenz
P0311 Motornenndrehzahl
P0314 Anzahl Motorpolpaare
P0320 Motormagnetisierungsstrom
P0335 Motorkühlung
P0500 Technische Anwendung
P0640 Motorüberlastfaktor
P0700 Auswahl Befehlsquelle
P1000 Auswahl Frequenzsollwertquelle
P1080 Minimal-Frequenz
P1082 Max. Frequenz
P1120 Hochlaufzeit
P1121 Rücklaufzeit
P1135 AUS3- Rücklaufzeit
P1300 Regelungsart
P1500 Anwahl-Drehmomentsollwertquelle
P1910 Anwahl- Motordaten-Identifikation
P1960 Drehzahlregleroptimierung
P3900 Ende Schnellinbetriebnahme
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 9
1.4 Übersicht über Motor- und Befehlsdatensätze
Befehlsdatensätze (CDS)
P0700[3] Auswahl Befehlsquelle
P0701[3] Funktion Digitaleingang 0
P0702[3] Funktion Digitaleingang 1
P0719[3] Auswahl Befehls-/Sollwertquelle
P0731[3] BI: Funktion Digitalausgang 0
P0732[3] BI: Funktion Digitalausgang 1
P0840[3] BI: EIN/AUS1
P0842[3] BI: EIN/AUS1 mit reversieren
P0844[3] BI: 1. AUS2
P0845[3] BI: 2. AUS2
P0848[3] BI: 1. AUS3
P0849[3] BI: 2. AUS3
P0852[3] BI: Impulsfreigabe
P1000[3] Auswahl Frequenzsollwertquelle
P1055[3] BI: Auswahl JOG rechts
P1056[3] BI: Auswahl JOG links
P1070[3] CI: Auswahl Hauptsollwert (HSW)
P1071[3] CI: Auswahl HSW-Skalierung
P1074[3] BI: Zusatzsollwert-Sperre
P1075[3] CI: Auswahl Zusatzsollwert
P1076[3] CI: Auswahl ZUSW-Skalierung
P1110[3] BI: Negative Sollwertsperre
P1113[3] BI: Auswahl Reversieren
P1124[3] BI: Auswahl JOG Hochlaufzeiten
P1140[3] BI: Auswahl HLG Freigabe
P1141[3] BI: Auswahl HLG Start
P1142[3] BI: Auswahl HLG Sollwertfreigabe
P1330[3] CI: Spannungssollwert
P1477[3] BI: Integrator Drehz.reg. setzen
P1478[3] CI: Integrator Drehz.reg. setzen
P1492[3] BI: Freigabe Statik
P1500[3] Anwahl Drehmomentsollwertquelle
P1501[3] BI: Drehzahl <-> Momentregelung
P1503[3] CI: Drehmomentsollwert
P1511[3] CI: Drehmoment-Zusatzsollwert
P1522[3] CI: Oberer Drehmoment-Grenzwert
P1523[3] CI: Unterer Drehmoment-Grenzwert
P2103[3] BI: Quelle 1. Fehlerquittung
P2104[3] BI: Quelle 2. Fehlerquittung
P2106[3] BI: Externer Fehler
P2151[3] CI: Drehzahlsollwert für Meldung
P2152[3] CI: Ist-Drehzahl für Meldung
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 10 A5E00348653A-AA
Motordatensätze (DDS)
r0035[3] CO: Motortemperatur
P0291[3] Konfiguration Umrichter-Schutz
P0300[3] Auswahl Motortyp
P0304[3] Motornennspannung
P0305[3] Motornennstrom
P0307[3] Motornennleistung
P0308[3] Motornennleistungsfaktor
P0309[3] Motornennwirkungsgrad
P0310[3] Motornennfrequenz
P0311[3] Motornenndrehzahl
r0313[3] Motorpolpaare
P0314[3] Anzahl Motorpolpaare
P0320[3] Motormagnetisierungsstrom
r0330[3] Motornennschlupf
r0331[3] Nennmagnetisierungsstrom
r0332[3] Nennleistungsfaktor
r0333[3] Motornenndrehmoment
P0335[3] Motorkühlung
P0340[3] Berechnung der Motorparameter
P0341[3] Motorträgheitsmoment [kg*m^2]
P0342[3] Trägheitsverhältnis Gesamt/Motor
P0344[3] Motorgewicht
r0345[3] Motor-Anlaufzeit
P0346[3] Magnetisierungszeit
P0347[3] Entmagnetisierungszeit
P0350[3] Ständerwiderstand (Phase-Phase)
P0352[3] Kabelwiderstand
P0354[3] Läuferwiderstand
P0356[3] Ständerstreuinduktivität
P0358[3] Läuferstreuinduktivität
P0360[3] Hauptinduktivität
P0362[3] Magnetisierungskennlinie Fluss 1
P0363[3] Magnetisierungskennlinie Fluss 2
P0364[3] Magnetisierungskennlinie Fluss 3
P0365[3] Magnetisierungskennlinie Fluss 4
P0366[3] Magnetisierungskennlinie Strom 1
P0367[3] Magnetisierungskennlinie Strom 2
P0368[3] Magnetisierungskennlinie Strom 3
P0369[3] Magnetisierungskennlinie Strom 4
r0370[3] Ständerwiderstand [%]
r0372[3] Kabelwiderstand [%]
r0373[3] Ständernennwiderstand [%]
r0374[3] Läuferwiderstand [%]
r0376[3] Läufernennwiderstand [%]
r0377[3] Gesamt-Streureaktanz [%]
r0382[3] Hauptreaktanz [%]
r0384[3] Läuferzeitkonstante
r0386[3] Gesamtstreuung Zeitkonstante
P0400[3] Auswahl Gebertyp
P0405[3] Freigabe Pulsmuster
P0408[3] Anzahl Geberimpulse
P0410[3] Inv. int. Drehrichtungssignal
P0491[3] Reaktion Drehzahlsignalverlust
P0492[3] Zulässige Drehzahldifferenz
P0494[3] Verzög Drehzahlverlustreaktion
P0500[3] Technische Anwendung
P0601[3] Motor-Temperaturfühler
P0604[3] Warnschwelle Motorübertemperatur
P0625[3] Umgebungstemperatur Motor
P0626[3] Übertemperatur Ständereisen
P0627[3] Übertemperatur Ständerwicklung
P0628[3] Übertemperatur Läuferwicklung
r0630[3] CO: Umgebungstemperatur
r0631[3] CO: Ständereisen-Temperatur
r0632[3] CO: Ständerwicklung-Temperatur
r0633[3] CO: Läuferwicklung-Temperatur
P0640[3] Motorüberlastfaktor [%]
P1058[3] JOG Frequenz
P1059[3] JOG Frequenz links
P1060[3] JOG Hochlaufzeit
P1061[3] JOG Rücklaufzeit
P1080[3] Minimal Frequenz
P1082[3] Max. Frequenz
P1091[3] Ausblendfrequenz
P1092[3] Ausblendfrequenz 2
P1093[3] Ausblendfrequenz 3
P1094[3] Ausblendfrequenz 4
P1101[3] Bandbreite Ausblendfrequenz
P1120[3] Hochlaufzeit
P1121[3] Rücklaufzeit
P1130[3] Anfangsverrundungszeit Hochlauf
P1131[3] Endverrundungszeit Hochlauf
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 11
P1132[3] Anfangsverrundungszeit Rücklauf
P1133[3] Endverrundungszeit Rücklauf
P1134[3] Verrundungstyp
P1135[3] AUS3 Rücklaufzeit
P1202[3] Motorstrom: Fangen
P1203[3] Suchgeschwindigkeit: Fangen
P1253[3] Vdc- od. I-max Grenze b.Rücksp
P1300[3] Regelungsart
P1310[3] Konstante Spannungsanhebung
P1311[3] Spannungsanheb. bei Beschleunig.
P1312[3] Spannungsanhebung beim Anlauf
P1316[3] Endfrequenz Spannungsanhebung
P1320[3] Programmierb. U/f Freq. Koord. 1
P1321[3] Programmierb. U/f Spg. Koord. 1
P1322[3] Programmierb. U/f Freq. Koord. 2
P1323[3] Programmierb. U/f Spg. Koord. 2
P1324[3] Programmierb. U/f Freq. Koord. 3
P1325[3] Programmierb. U/f Spg. Koord. 3
P1333[3] Anfahrfrequenz für FCC
P1335[3] Schlupfkompensation
P1336[3] Schlupfgrenze
P1338[3] Resonanzdämpfung Verstärkung U/f
P1340[3] Imax Regler Prop. Verstärkung
P1341[3] Imax Regler Integrationszeit
P1345[3] Imax Spannungsregler Kp
P1346[3] Imax Spannungsregler Ti
P1350[3] Spannung Sanftanlauf
P1400[3] Konfig. Drehzahlregelung
P1442[3] Filterzeit für Ist-Drehzahl
P1452[3] Filterz. f. Ist- Drehzahl (SLVC)
P1460[3] Verstärkungsfaktor Drehzahlregl.
P1462[3] Integrationszeit Drehzahlregler
P1470[3] Verstärkung Drehzahlregl. (SLVC)
P1472[3] Integrationszeit Drehz.r. (SLVC)
P1488[3] Quelle Statik
P1489[3] Skalierung Statik
P1496[3] Skal. Beschleunig. Vorsteuerung
P1499[3] Skal. Beschl. Drehmomentregelung
P1520[3] CO: Oberer Drehmoment-Grenzwert
P1521[3] CO: Unterer Drehmoment-Grenzwert
P1525[3] Skal. unt. Drehmoment-Grenzwert
P1530[3] Grenzwert motorische Leistung
P1531[3] Grenzw. generatorische Leistung
P1570[3] CO: Festsollwert Motorfluss
P1574[3] Dynamische Spannungs-Reserve
P1580[3] Optimierung Wirkungsgrad
P1582[3] Glättungszeit Fluss-Sollwert
P1596[3] Integrationsz. Feldschw. Regler
P1610[3] Konst. Drehmomentanhebung (SLVC)
P1611[3] Drehmomentanheb. b. Beschleunig.
P1654[3] Glättungszeit Isq-Sollwert
P1715[3] Verstärkungsfaktor Stromregler
P1717[3] Integrationszeit Stromregler
P1745[3] Grenze Flussabweichung - Kippen
P1750[3] Steuerwort Motormodell
P1755[3] Start-freq. motor model (SLVC)
P1756[3] Hysterese-Freq. Motormod. (SLVC)
P1758[3] Wartezeit nach SLVC gesteuert
P1759[3] T(warten) bis Ende n-Adaption
P1764[3] Kp n-Adaption (SLVC)
P1767[3] Tn n-Adaption (SLVC)
P1780[3] Steuerwort Rs/Rr-Adaption
P1781[3] Tn Rs-Adaption
P1786[3] Tn Xm-Adaption
P1803[3] Max. Modulation
P1820[3] Umgekehrte Ausgangs-Phasenfolge
P1909[3] Steuerwort Motoridentifikation
P2000[3] Bezugsfrequenz
P2001[3] Bezugsspannung
P2002[3] Bezugsstrom
P2003[3] Bezugsdrehmoment
r2004[3] Bezugsleistung
P2150[3] Hysterese-Frequenz f_hys
P2153[3] Zeitkonstante Drehzahlfilter
P2155[3] Frequenzschwellwert f_1
P2156[3] Verzög.zeit Frequenzschwelle f_1
P2157[3] Frequenzschwellwert f_2
P2158[3] Verzög.zeit Frequenzschwelle f_2
P2159[3] Frequenzschwellwert f_3
P2160[3] Verzög.zeit Frequenzschwelle f_3
P2161[3] Minimaler Frequenzschwellwert
P2162[3] Hysteresefreq. bei Überdrehzahl
P2163[3] Zulässige Frequenzabweichung
P2164[3] Hysterese Frequenzabweichung
P2165[3] Verzög.zeit zulässige Abweichung
P2166[3] Verzög.zeit Hochlauf beendet
P2167[3] Abschaltfrequenz f_off
P2168[3] Verzögerungszeit T_aus
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 12 A5E00348653A-AA
P2170[3] Stromschwellwert I_Schwelle
P2171[3] Verzögerungszeit Stromschwellw.
P2172[3] Zwischenkr.spannungsschwellwert
P2173[3] Verzögerungszeit Vdc
P2174[3] Oberer Drehmoment-Schwellwert 1
P2176[3] Verzög.zeit Drehmom.schwellwert
P2177[3] Verzögerungszeit Motor blockiert
P2178[3] Verzögerungszeit Motor gekippt
P2181[3] Lastmomentüberwachung
P2182[3] Lastmomentüberw. Freq.schwelle 1
P2183[3] Lastmomentüberw. Freq.schwelle 2
P2184[3] Lastmomentüberw. Freq.schwelle 3
P2185[3] Oberer Lastmomentschwelle M_o1
P2186[3] Unterer Lastmomentschwelle M_u1
P2187[3] Oberer Lastmomentschwelle M_o2
P2188[3] Unterer Lastmomentschwelle M_u2
P2189[3] Oberer Lastmomentschwelle M_o3
P2190[3] Unterer Lastmomentschwelle M_u3
P2192[3] Verzög.zeit Lastmomentüberw.
P2480[3] Positionierbetrieb
P2481[3] Übersetzungsverhältnis Eingang
P2482[3] Übersetzungsverhältnis Ausgang
P2484[3] Anz. Wellendrehungen = 1 Einheit
P2487[3] Korr Positionierungsfehler
P2488[3] Weg / Anzahl der Umdrehungen

Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 13
1.5 Binector Input Parameter
P0731[3] BI: Funktion Digitalausgang 0
P0732[3] BI: Funktion Digitalausgang 1
P0810 BI: CDS Bit0 (Hand/Auto)
P0811 BI: CDS Bit1
P0820 BI: Antriebsdatensatz (DDS) Bit0
P0821 BI: Antriebsdatensatz (DDS) Bit1
P0840[3] BI: EIN/AUS1
P0842[3] BI: EIN/AUS1 mit reversieren
P0844[3] BI: 1. AUS2
P0845[3] BI: 2. AUS2
P0848[3] BI: 1. AUS3
P0849[3] BI: 2. AUS3
P0852[3] BI: Impulsfreigabe
P1055[3] BI: Auswahl JOG rechts
P1056[3] BI: Auswahl JOG links
P1074[3] BI: Zusatzsollwert-Sperre
P1110[3] BI: Negative Sollwertsperre
P1113[3] BI: Auswahl Reversieren
P1124[3] BI: Auswahl JOG Hochlaufzeiten
P1140[3] BI: Auswahl HLG Freigabe
P1141[3] BI: Auswahl HLG Start
P1142[3] BI: Auswahl HLG Sollwertfreigabe
P1477[3] BI: Integrator Drehz.reg. setzen
P1492[3] BI: Freigabe Statik
P1501[3] BI: Drehzahl <-> Momentregelung
P2103[3] BI: Quelle 1. Fehlerquittung
P2104[3] BI: Quelle 2. Fehlerquittung
P2106[3] BI: Externer Fehler
P2810[2] BI: AND 1
P2812[2] BI: AND 2
P2814[2] BI: AND 3
P2816[2] BI: OR 1
P2818[2] BI: OR 2
P2820[2] BI: OR 3
P2822[2] BI: XOR 1
P2824[2] BI: XOR 2
P2826[2] BI: XOR 3
P2828 BI: NOT 1
P2830 BI: NOT 2
P2832 BI: NOT 3
P2834[4] BI: D-FF 1
P2837[4] BI: D-FF 2
P2840[2] BI: RS-FF 1
P2843[2] BI: RS-FF 2
P2846[2] BI: RS-FF 3
P2849 BI: Timer 1
P2854 BI: Timer 2
P2859 BI: Timer 3
P2864 BI: Timer 4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 14 A5E00348653A-AA
1.6 Connector Input Parameter
P0095[10] CI: Auswahl PZD-Signale
P1071[3] CI: Auswahl HSW-Skalierung
P1076[3] CI: Auswahl ZUSW-Skalierung
P1330[3] CI: Spannungssollwert
P1478[3] CI: Integrator Drehz.reg. setzen
P1503[3] CI: Drehmomentsollwert
P1511[3] CI: Drehmoment-Zusatzsollwert
P1522[3] CI: Oberer Drehmoment-Grenzwert
P1523[3] CI: Unterer Drehmoment-Grenzwert
P2016[8] CI: PZD an USS on RS232
P2051[8] CI: PZD an Fieldbus
P2869[2] CI: ADD 1
P2871[2] CI: ADD 2
P2873[2] CI: SUB 1
P2875[2] CI: SUB 2
P2877[2] CI: MUL 1
P2879[2] CI: MUL 2
P2881[2] CI: DIV 1
P2883[2] CI: DIV 2
P2885[2] CI: CMP 1
P2887[2] CI: CMP 2
1.7 Binector Output Parameter
r2032 BO: Steuerwort1 v. USS on RS232
r2033 BO: Steuerwort2 v. USS on RS232
r2090 BO: Steuerwort 1 von Fieldbus
r2091 BO: Steuerwort 2 von Fieldbus
r2811 BO: AND 1
r2813 BO: AND 2
r2815 BO: AND 3
r2817 BO: OR 1
r2819 BO: OR 2
r2821 BO: OR 3
r2823 BO: XOR 1
r2825 BO: XOR 2
r2827 BO: XOR 3
r2829 BO: NOT 1
r2831 BO: NOT 2
r2833 BO: NOT 3
r2835 BO: Q D-FF 1
r2836 BO: NOT-Q D-FF 1
r2838 BO: Q D-FF 2
r2839 BO: NOT-Q D-FF 2
r2841 BO: Q RS-FF 1
r2842 BO: NOT-Q RS-FF 1
r2844 BO: Q RS-FF 2
r2845 BO: NOT-Q RS-FF 2
r2847 BO: Q RS-FF 3
r2848 BO: NOT-Q RS-FF 3
r2852 BO: Timer 1
r2853 BO: NOT-Ausgang Timer 1
r2857 BO: Timer 2
r2858 BO: NOT-Ausgang Timer 2
r2862 BO: Timer 3
r2863 BO: NOT-Ausgang Timer 3
r2867 BO: Timer 4
r2868 BO: NOT-Ausgang Timer 4
r2886 BO: CMP 1
r2888 BO: CMP 2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 15
1.8 Connector Output Parameter
r0020 CO: Sollwert vor Hochlaufgeber
r0021 CO: Ausgangsfrequenz
r0024 CO: Umrichter-Ausgangsfrequenz
r0025 CO: Ausgangsspannung
r0026[2] CO: Gegl. Zwischenkreisspannung
r0027 CO: Ausgangsstrom
r0029 CO: Flussbildender Strom (Isd)
r0030 CO: Momentbildender Strom Isq
r0031 CO: Geglättetes Drehmoment
r0032 CO: Geglättete Wirkleistung
r0035[3] CO: Motortemperatur
r0036 CO: Umrichter Auslastung
r0037[2] CO: Umrichter Temperatur [°C]
r0038 CO: Wirkleistungsfaktor
r0039 CO: Energieverbrauchszähler[kWh]
r0051[2] CO: Aktiver Antriebsdatensatz
r0061 CO: Läuferdrehzahl
r0062 CO: Drehzahlsollwert
r0063 CO: Drehzahl
r0064 CO: Regeldifferenz n-Regler
r0065 CO: Schlupffrequenz
r0066 CO: Umrichter-Ausgangsfrequenz
r0067 CO: Begrenzter Ausgangsstrom
r0068 CO: Ungefilteter Ausgangsstrom
r0069[6] CO: Phasenströme
r0070 CO: Ungefilterte ZWK-Spannung
r0071 CO: Max. Ausgangsspannung
r0072 CO: Ausgangsspannung
r0074 CO: Modulationsgrad
r0075 CO: Stromsollwert Isd
r0076 CO: Strom Isd
r0077 CO: Stromsollwert Isq
r0078 CO: Strom Isq
r0079 CO: Drehmomentsollwert (gesamt)
r0080 CO: Drehmoment
r0084 CO: Luftspaltfluss
r0085 CO: Blindstrom
r0086 CO: Wirkstrom
r0090 CO: Läuferwinkel
r0394 CO: Ständerwiderstand IGBT [%]
r0395 CO: Ständerwiderstand gesamt [%]
r0396 CO: Läuferwiderstand
r0630[3] CO: Umgebungstemperatur
r0631[3] CO: Ständereisen-Temperatur
r0632[3] CO: Ständerwicklung-Temperatur
r0633[3] CO: Läuferwicklung-Temperatur
r1078 CO: Anzeige Gesamtsollwert
r1079 CO: Sollwert-Auswahl
r1114 CO: Sollwert nach Reversiereinh.
r1119 CO: Sollwert vor Hochlaufgeber
r1170 CO: Sollwert nach HLG
r1315 CO: Gesamte Spannungsanhebung
r1337 CO: U/f Schlupffrequenz
r1343 CO: Imax Freq.-Regler Ausgang
r1344 CO: Imax Spannungsregler Ausgang
r1438 CO: Frequenzsollwert zum Regler
r1445 CO: Gefilterte Ist-Frequenz
r1482 CO: Integ.anteil Drehz.reg.ausg.
r1490 CO: Statik Frequenz
r1508 CO: Drehmomentsollwert
r1515 CO: Drehmoment-Zusatzsollwert
r1518 CO: Beschleunigngsdrehmoment
P1520[3] CO: Oberer Drehmoment-Grenzwert
P1521[3] CO: Unterer Drehmoment-Grenzwert
r1526 CO: Oberer Drehmoment-Grenzwert
r1527 CO: Unterer Drehmoment-Grenzwert
r1536 CO: Max. drehmomentbild. Strom
r1537 CO: Max. Isq b. generat. Betrieb
r1538 CO: Ob. Drehmom.-Grenzwert(ges.)
r1539 CO: Unt. Drehmom.Grenzwert (ges)
P1570[3] CO: Festsollwert Motorfluss
r1583 CO: Fluss-Sollwert (geglättet)
r1597 CO: Ausgang Feldschwächung Regl.
r1598 CO: Fluss-Sollwert (gesamt)
r1718 CO: Ausgang Isq-Regler
r1719 CO: Integralanteil Isq-Regler
r1723 CO: Ausgang Isd-Regler
r1724 CO: Integralanteil Isd-Regler
r1725 CO: Max. I-Anteil Isd-Regler
r1728 CO: Enkopplungsspannung
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 16 A5E00348653A-AA
r1746 CO: Flussabweichung
r1770 CO: Prop.-Ausgang n-Adaption
r1771 CO: Int.-Ausgang n-Adaption
r1778 CO:Flusswinkeldifferenz
r1801 CO: Aktuelle Pulsfrequenz
r2015[8] CO: PZD von USS on RS232
r2050[8] CO: PZD von Fieldbus
r2059[5] CO: Anzeige SOL-Status
r2169 CO: gefilterte Ist-Frequenz
r2870 CO: ADD 1
r2872 CO: ADD 2
r2874 CO: SUB 1
r2876 CO: SUB 2
r2878 CO: MUL 1
r2880 CO: MUL 2
r2882 CO: DIV 1
r2884 CO: DIV 2
P2889 CO: Festsollwert 1 in [%]
P2890 CO: Festsollwert 2 in [%]
P3952[5] CO: Speicherwert (Festpunkt)
P3953 CO: Speicherwert (Gleitpunkt)
P3999 CO: Erst-Laden
r9660 CO: SI Zeit bis nächstem Selbsttest
1.9 Connector/Binector Output Parameter
r0050 CO/BO: Aktiver Befehlsdatensatz
r0052 CO/BO: Zustandswort 1
r0053 CO/BO: Zustandswort 2
r0054 CO/BO: Steuerwort 1
r0055 CO/BO: Zusatzsteuerwort
r0056 CO/BO: ZSW - Motorregelung
r0403 CO/BO: Akt. Geberzustandswort
r0722 CO/BO: Status Digitaleingänge
r0747 CO/BO: Zustand Digitalausgänge
r1407 CO/BO: Status 2 Motorregelung
r2197 CO/BO: Meldungen 1
r2198 CO/BO: Meldungen 2
r9771 CO/BO: SI Hardware-Funktionen
r9772 CO/BO: SI Status Wort
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 17
1.10 Parameterbeschreibung
Hinweis Parameter der Stufe 4 dürfen nicht verändert werden!
r0000 Betriebsanzeige Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: ALWAYS Max: -
Zeigt den in P0005 eingestellten Parameter im Zustand BETRIEB an (nur mit BOP!). Hinweis:
Wird die "Fn" Taste mindestens 2 Sekunden betätigt, werden die aktuellen Werte der Zwischenkreisspannung, des Ausgangsstromes, der Ausgangsfrequenz, der Ausgangsspannung und des in P0005 eingestellten Parameters angezeigt.
r0002 Antriebszustand Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt den aktuellen Zustand des Antriebs an. Mögliche Einstellungen:
0 Inbetriebnahmemodus (P0010 != 0) 1 Betriebsbereit 2 Fehler aktiv 3 Zwischenkreis-Vorladung 4 Betrieb 5 Rücklauf an Hochlaufgeberrampe
Abhängigkeit: Der Zustand 3 ist nur während der Vorladung des Zwischenkreises sichtbar.
P0003 Zugriffsstufe Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 1 P-Gruppe: ALWAYS Aktiv: nach Best. Schnell-IBN: Nein Max: 4
Legt die Stufe für den Parameterzugriff fest. Für die meisten einfachen Anwendungen ist die Voreinstellung (Standard) ausreichend.
Mögliche Einstellungen: 0 Anwenderdef. Parameterliste 1 Standard 2 Erweitert 3 Experte 4 Service: Kennwortschutz
P0004 Parameterfilter Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALWAYS Aktiv: nach Best. Schnell-IBN: Nein Max: 22
Filtert verfügbare Parameter entsprechend der Funktionalität, um eine zielgerichtete Vorgehensweise bei der Inbetriebnahme zu ermöglichen.
Mögliche Einstellungen: 0 Alle Parameter 2 Umrichter 3 Motor 4 Drehzahlsensor 7 Befehle, Binar-I/O 8 DAC 10 Sollwert Kanal / HLG 11 Safety-Funktionen 12 Antriebseigenschaften 13 Motorregelung 20 Kommunikation 21 Alarme / Warnungen / Überwachung 22 Technologie-Regler (z.B. PID)
Stufe
1
Stufe
2
Stufe
1
Stufe
1
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 18 A5E00348653A-AA
P0010 Inbetriebnahmeparameter Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALWAYS Aktiv: nach Best. Schnell-IBN: Nein Max: 95
Filtert Parameter, so dass nur die zum Menü (z.B. P0010 = 1 "Schnellinbetriebnahme") zugeordneten Parameter ausgewählt werden.
Mögliche Einstellungen: 0 Bereit 1 Schnellinbetriebnahme 2 Umrichter 29 Download 30 Werkseinstellung 95 Safety IBN (nur mit ICU24F)
Abhängigkeit: Die Umrichterimpulse werden nach einem EIN-Befehl erst dann freigegeben, wenn Parameter P0010 zurückgesetzt wird (P0010 = 0). P0003 (Zugriffsstufe) legt auch Zugriff auf Parameter fest.
Hinweis: P0010 = 1 Der Umrichter kann sehr schnell und problemlos in Betrieb genommen werden, indem P0010 auf 1 gesetzt wird. Anschließend sind auf dem BOP nur die wichtigen Parameter (z. B. P0304, P0305 usw.) sichtbar. Die einzelnen Parameterwerte müssen nacheinander eingegeben werden. Die Schnellinbetriebnahme wird beendet und die interne Berechnung gestartet, wenn P3900 auf 1 - 3 gesetzt wird. Anschließend werden die Parameter P0010, P3900 automatisch auf Null zurückgesetzt. P0010 = 2 Nur zu Servicezwecken. P0010 = 29 Zum Übertragen einer Parameterdatei mittels PC-Tool (z. B.: STARTER) wird der Parameter P0010 durch das PC-Tool auf 29 gesetzt. Sobald die Daten heruntergeladen worden sind, setzt das PC-Tool den Parameter P0010 auf Null zurück. P0010 = 30 Beim Zurücksetzen der Parameter des Umrichters muss P0010 auf 30 gesetzt werden. Die Zurücksetzung der Parameter wird gestartet, sobald der Parameter P0970 auf 1 gesetzt worden ist. Der Umrichter setzt alle eigenen Parameter automatisch auf die Standardeinstellung zurück. Dies kann von Vorteil sein, wenn sich während der Parameterkonfiguration Probleme ergeben und die Konfiguration erneut durchgeführt werden soll. Zum Zurücksetzen auf die Werkseinstellungen werden etwa 60 s benötigt. P0010 = 95 (nur für ICU24F) Safety-Parameter werden wie folgt geändert: 1. p0003 = 3 setzen 2. p0010 = 95 3. in p9761 Passwort eingeben 4. Safety-Parameter ändern 5. Safety-Inbetriebnahme mit p3900 beenden. p3900 = 10 ==> Änderungen übernehmen, p3900 = 11 ==>
Änderungen nicht übernehmen.
P0011 Parametersperre für P0013 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 65535
Details: Siehe Parameter P0013 (anwenderdefinierter Parameter).
P0012 Parameterschlüssel für P0013 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 65535
Details: Siehe Parameter P0013 (anwenderdefinierter Parameter).
Stufe
1
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 19
P0013[20] Anwender-Parameterliste Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 65535
Legt eine Auswahl von Parametern fest, auf die der Endbenutzer Zugriff hat. Verwendung: 1. P0003 = 3 (Experte) setzen. 2. Über die P0013-Indizes 0 bis 16 wird die Anwenderliste festgelegt. D.h., entsprechender Index
anwählen. 3. Im P0013-Index 0 bis 16 die Parameternummer eingeben, die in der anwenderdefinierten Liste
angezeigt werden sollen. Folgende Werte sind voreingestellt und können nicht geändert werden:
- P0013-Index 19 = 12 (Parameterschlüssel für anwenderdefinierten Parameter) - P0013-Index 18 = 10 (Filter für Inbetriebnahmeparameter) - P0013-Index 17 = 3 (Anwenderzugangsstufe)
4. P0003 = 0 setzen, um die anwenderdefinierten Parameter zu aktivieren. Index:
P0013[0] : 1. Anwenderparameter P0013[1] : 2. Anwenderparameter P0013[2] : 3. Anwenderparameter P0013[3] : 4. Anwenderparameter P0013[4] : 5. Anwenderparameter P0013[5] : 6. Anwenderparameter P0013[6] : 7. Anwenderparameter P0013[7] : 8. Anwenderparameter P0013[8] : 9. Anwenderparameter P0013[9] : 10. Anwenderparameter P0013[10] : 11. Anwenderparameter P0013[11] : 12. Anwenderparameter P0013[12] : 13. Anwenderparameter P0013[13] : 14. Anwenderparameter P0013[14] : 15. Anwenderparameter P0013[15] : 16. Anwenderparameter P0013[16] : 17. Anwenderparameter P0013[17] : 18. Anwenderparameter P0013[18] : 19. Anwenderparameter P0013[19] : 20. Anwenderparameter
Abhängigkeit: Zunächst P0011 ("Parametersperre") auf einen anderen Wert als P0012 ("Parameterschlüssel") setzen, um Änderungen an dem anwenderdefinierten Parameter zu verhindern. Dann p003 auf 0 setzen, um die anwenderdefinierte Liste zu aktivieren. Wenn die Liste gesperrt und der anwenderdefinierte Parameter aktiviert ist, kann der anwenderdefinierte Parameter nur beendet - und andere Parameter angezeigt - werden, wenn für P0012 ("Parameterschlüssel") der Wert von P0011 ("Parametersperre") eingegeben wird.
Hinweis: Alternativ dazu können für alle Parameter wieder die werkseitigen Voreinstellungen aktiviert werden; hierfür P0010 = 30 (Filter für Inbetriebnahmeparameter = Werkseinstellungen) und P0970 = 1 (Werkseinstellungen) setzen." Die Voreinstellungen von P0011 ("Parametersperre") und P0012 ("Parameterschlüssel") sind identisch."
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 20 A5E00348653A-AA
P0014[3] Speichermode Min: 0 ÄndStat: UT Datentyp: U16 Einheit - Def: 0 P-Gruppe: - Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Legt die Speichermethode für Parameter fest. Die Speichermethode kann für alle Schnittstellen eingestellt werden, die unter "Index" aufgeführt sind.
Mögliche Einstellungen: 0 Flüchtig (RAM) 1 Nicht flüchtig (EEPROM)
Index: P0014[0] : reserviert P0014[1] : USS on RS232 P0014[2] : Fieldbus
Hinweis: Eine unabhängige Speicheranforderung durch eine überlagerte Steuerung oder ein PC-Tool wie STARTER kann Teil der seriellen Kommunikation sein (z.B. die PKE-Bits des USS-Protokolls 15-12). 1. P0014 selbst wird immer im EEPROM gespeichert. 2. P0014 wird nicht geändert, wenn Rücksetzen auf Werkseinstellungen durchgeführt wird (P0010 = 30
und P0971 = 1). 3. P0014 kann mit einem DOWNLOAD übertragen werden. 4. Bei "Speichern über USS = flüchtig (RAM)" und "P0014[x] = flüchtig (RAM)" können alle Daten über
P0971 im EEPROM (permanent) gespeichert werden. 5. Wenn "Speichern über USS" und P0014[x] widersprüchlich sind, hat die Einstellung "P0014[x] =
nichtflüchtig speichern (EEPROM)" stets die höhere Priorität. Speicheranforderung über USS
EEPROM
Wert von p0014[x] Ergebnis
EEPROM
EEPROM
EEPROM
EEPROM EEPROM
EEPROM
RAM
RAM
RAM
RAMRAM
Beim Übertragen des Parameters p0014 ist der ET 200S FC mit internen Berechnungen beschäftigt, und die Kommunikation - sowohl über USS als auch über PROFIBUS DP - ist für die Dauer der Berechnungen unterbrochen. Dies kann an der angeschlossen SIMATIC S7-Steuerung (Kommunikation über PROFIBUS DP) zu folgenden Fehlermeldungen führen: - Parametrierfehler 30 - Antriebsfehler 70 - Antriebsfehler 75 Bei der Inbetriebnahme über STARTER (USS) sind während der Berechnungen keine Eingaben möglich. Die Fehler können quittiert werden, sobald die Berechnungen im Umrichter beendet sind. Die Berechungnen können bis zu 1 Minute dauern.
r0018 Firmware-Version Min: - Datentyp: Float Einheit - Def: - P-Gruppe: INVERTER Max: -
Zeigt die Versionsnummer der installierten Firmware an.
r0020 CO: Sollwert vor Hochlaufgeber Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt den aktuellen Frequenzsollwert am Eingang des Hochlaufgebers.
r0021 CO: Ausgangsfrequenz Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle Umrichter-Ausgangsfrequenz (r0024) ohne Schlupfkompensation, Resonanzdämpfung und Frequenzbegrenzung an.
r0022 Geglättete Läuferdrehzahl Min: - Datentyp: Float Einheit 1/min Def: - P-Gruppe: CONTROL Max: -
Zeigt die berechnete Läuferdrehzahl entsprechend der Umrichter-Ausgangsfrequenz [Hz] x 120 / Anzahl Pole an.
Hinweis: Bei dieser Berechnung wird der lastabhängige Schlupf nicht berücksichtigt.
Stufe
3
Stufe
1
Stufe
3
Stufe
2
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 21
r0024 CO: Umrichter-Ausgangsfrequenz Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle Umrichter-Ausgangsfrequenz an ( einschließlich Schlupfkompensation, Resonanzdämpfung und Frequenzbegrenzung ).
r0025 CO: Ausgangsspannung Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt den Effektivwert der an den Motor angelegten Spannung an.
r0026[2] CO: Gegl. Zwischenkreisspannung Min: - Datentyp: Float Einheit V Def: - P-Gruppe: INVERTER Max: -
Zeigt die aktuelle Zwischenkreisspannung an. Index:
P0026[0] : Zwischenkreis-Komp. P0026[1] : Zwischenkreisüberwachung
r0027 CO: Ausgangsstrom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den Effektivwert des Motorstroms an [A].
r0029 CO: Flussbildender Strom (Isd) Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den flusserzeugenden Stromanteil an. Der flussbildende Stromanteil basiert auf dem Nennfluss, der über die Motorparameter (P0340 - Berechnung der Motorparameter) berechnet wird.
Abhängigkeit: Gilt nur, wenn in P1300 (Regelungsart) die Vektorregelung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
Hinweis: Der flussbildende Stromanteil ist in der Regel bis zur Grunddrehzahl des Motors konstant; oberhalb der Grunddrehzahl wird dieser Anteil schwächer (Feldschwächung), wodurch sich eine Steigerung der Motordrehzahl bei reduziertem Drehmoment ergibt.
r0030 CO: Momentbildender Strom Isq Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den drehmomentbildenden Stromanteil an. Der drehmomentbildende Stromanteil wird über die Drehmomentsollwerte berechnet, die durch den Drehzahlregler geliefert werden.
Abhängigkeit: Gilt nur, wenn in P1300 (Regelungsart) die Vektorregelung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
Hinweis: Bei Asynchronmotoren wird für den drehmomentbildenden Stromanteil (in Verbindung mit der maximal zulässigen Ausgangsspannung (r0071), der Motorverlustleistung und der aktuellen Feldschwächung (r0377)) ein Grenzwert berechnet, der das Kippen des Motors verhindert.
r0031 CO: Geglättetes Drehmoment Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt das Motordrehmoment an. Wenn die Stromeinprägung aktiv ist (r1751.4 = 1), ist dieser Wert bei kleinen Drehzahlen = 0
Hinweis: Auf Grund von Luftwiderstands- und Reibungsverlusten ist das elektrische Moment ist nicht gleich dem mechanischem Drehmoment, das an der Motorwelle gemessen wird.
Stufe
3
Stufe
2
Stufe
2
Stufe
2
Stufe
3
Stufe
3
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 22 A5E00348653A-AA
r0032 CO: Geglättete Wirkleistung Min: - Datentyp: Float Einheit - Def: - P-Gruppe: CONTROL Max: -
Zeigt die Motorleistung an.
Motorω, M
M f 2 M Pmech ⋅⋅π⋅=⋅ω=⇒
[Nm] r0031 [1/min] 60
r0022 π 2 1000
1 [kW] r0032 ⋅⋅⋅⋅=
[kW] r0032 0.75 [hp] r0032 ⋅=
Abhängigkeit: Der Wert wird in [kW] oder [hp] angezeigt; dies ist abhängig von der Einstellung für P0100 (Betrieb in Europa / Nordamerika).
r0035[3] CO: Motortemperatur Min: - Datentyp: Float Einheit °C Def: - P-Gruppe: MOTOR Max: -
Zeigt die gemessene Motortemperatur an. Index:
P0035[0] : 1. Antriebsdatensatz (DDS) P0035[1] : 2. Antriebsdatensatz (DDS) P0035[2] : 3. Antriebsdatensatz (DDS)
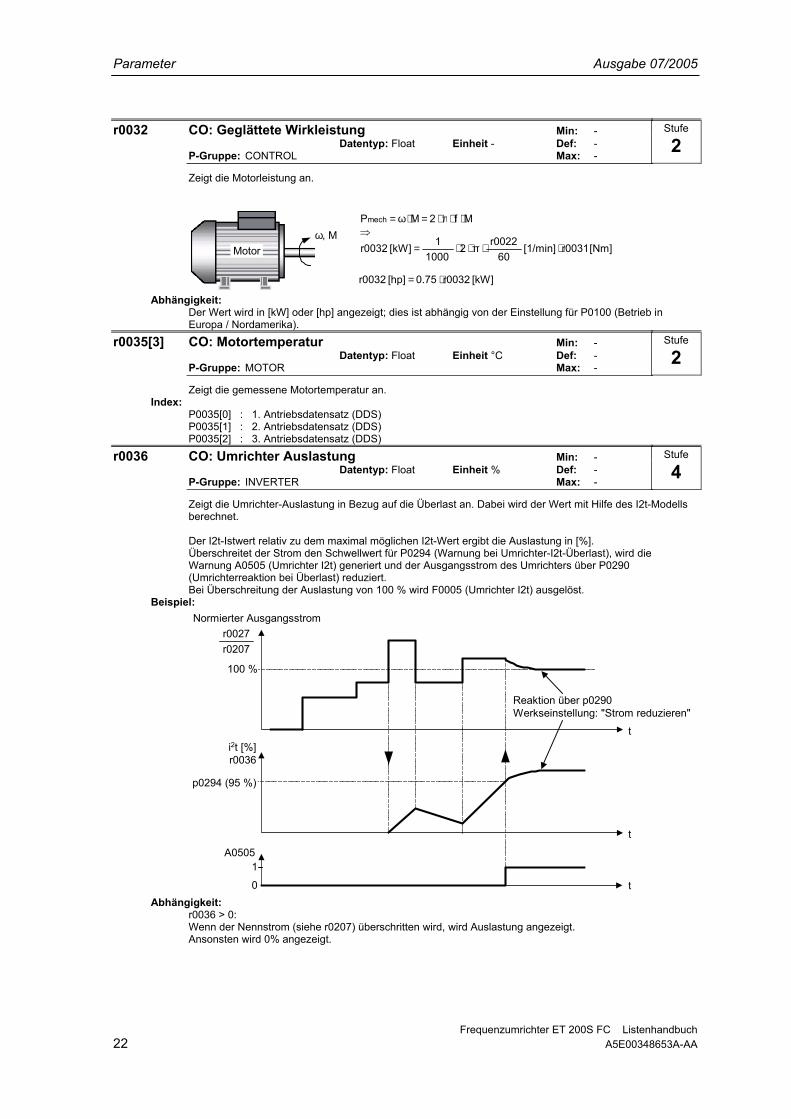
r0036 CO: Umrichter Auslastung Min: - Datentyp: Float Einheit % Def: - P-Gruppe: INVERTER Max: -
Zeigt die Umrichter-Auslastung in Bezug auf die Überlast an. Dabei wird der Wert mit Hilfe des I2t-Modells berechnet. Der I2t-Istwert relativ zu dem maximal möglichen I2t-Wert ergibt die Auslastung in [%]. Überschreitet der Strom den Schwellwert für P0294 (Warnung bei Umrichter-I2t-Überlast), wird die Warnung A0505 (Umrichter I2t) generiert und der Ausgangsstrom des Umrichters über P0290 (Umrichterreaktion bei Überlast) reduziert. Bei Überschreitung der Auslastung von 100 % wird F0005 (Umrichter I2t) ausgelöst.
Beispiel: Normierter Ausgangsstrom
t
100 %
Reaktion über p0290Werkseinstellung: "Strom reduzieren"
r0207 r0027
p0294 (95 %)
ti2t [%]r0036
1
0
A0505
t Abhängigkeit:
r0036 > 0: Wenn der Nennstrom (siehe r0207) überschritten wird, wird Auslastung angezeigt. Ansonsten wird 0% angezeigt.
Stufe
2
Stufe
2
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 23
r0037[2] CO: Umrichter Temperatur [°C] Min: - Datentyp: Float Einheit °C Def: - P-Gruppe: INVERTER Max: -
Zeigt die gemessene Kühlkörpertemperatur und die berechnete Sperrschichttemperatur von IGBTs auf der Grundlage des thermischen Modells an.
Index: P0037[0] : Gemessene Kühlkörpertemperatur P0037[1] : Chip-Temperatur
r0038 CO: Wirkleistungsfaktor Min: - Datentyp: Float Einheit - Def: - P-Gruppe: CONTROL Max: -
Zeigt den Leistungsfaktor an. Abhängigkeit:
Gilt nur, wenn in P1300 (Regelungsart) die U/f-Steuerung ausgewählt ist; andernfalls wird der Wert 1 (Eins) angezeigt.
r0039 CO: Energieverbrauchszähler[kWh] Min: - Datentyp: Float Einheit kWh Def: - P-Gruppe: INVERTER Max: -
Zeigt die elektrische Energie an, die von dem Umrichter seit dem letzten Zurücksetzen der Anzeige verbraucht wurde (siehe P0040 - Energieverbrauchszähler zurücksetzen).
Abhängigkeit: Der Wert wird zurückgesetzt, wenn P0040 = 1 Energieverbrauchszähler zurücksetzen.
P0040 Energiezähler P0039 rücksetzen Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: INVERTER Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Setzt den Wert von Parameter r0039 (Energieverbrauchszähler) auf 0 (Null) zurück. Mögliche Einstellungen:
0 Kein Reset 1 r0039: Reset auf 0
r0050 CO/BO: Aktiver Befehlsdatensatz Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt den aktuell ausgewählten und aktiven BICO-Datensatz (Binektor und Konnektor) an. Mögliche Einstellungen:
0 1. Befehlsdatensatz (CDS) 1 2. Befehlsdatensatz (CDS) 2 3. Befehlsdatensatz (CDS)
Details: Siehe Parameter P0810.
r0051[2] CO: Aktiver Antriebsdatensatz Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt den aktuell ausgewählten und aktiven Antriebsdatensatz an. Mögliche Einstellungen:
0 1. Antriebsdatensatz (DDS) 1 2. Antriebsdatensatz (DDS) 2 3. Antriebsdatensatz (DDS)
Index: P0051[0] : Ausgewählt.Antriebsdatensatz P0051[1] : Aktiver Antriebsdatensatz
Details: Siehe Parameter P0820.
Stufe
3
Stufe
3
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 24 A5E00348653A-AA
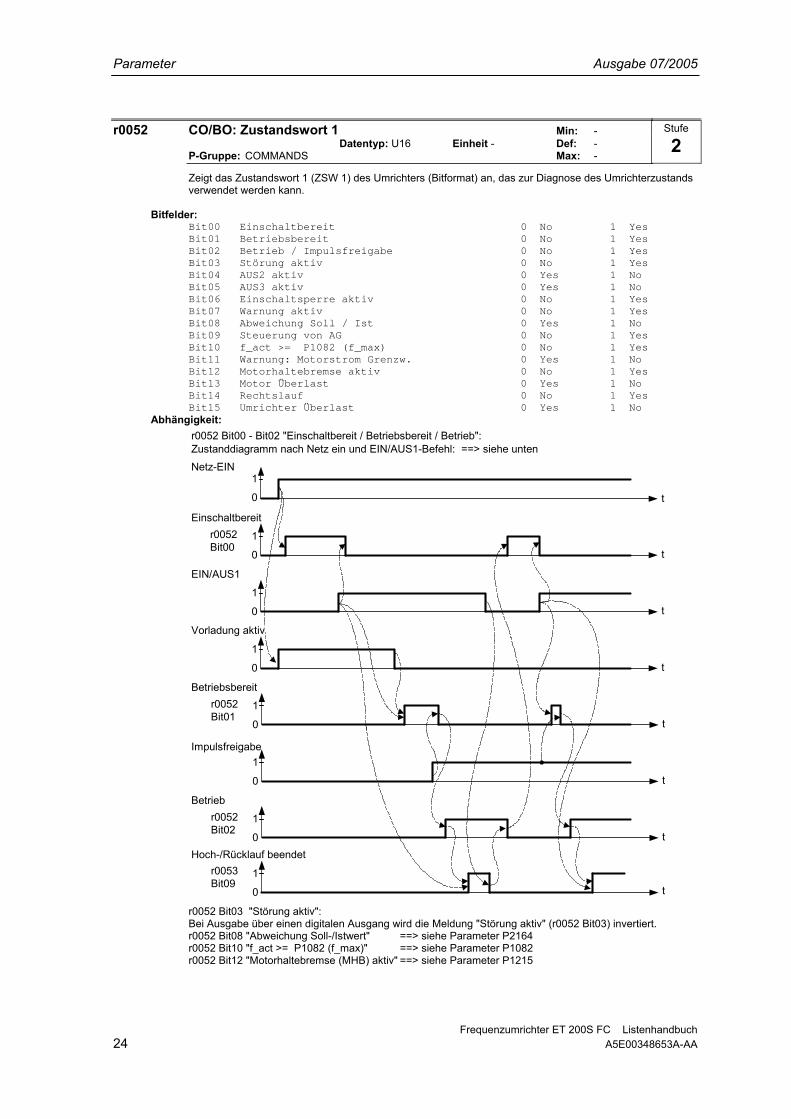
r0052 CO/BO: Zustandswort 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt das Zustandswort 1 (ZSW 1) des Umrichters (Bitformat) an, das zur Diagnose des Umrichterzustands verwendet werden kann.
Bitfelder: Bit00 Einschaltbereit 0 No 1 Yes Bit01 Betriebsbereit 0 No 1 Yes Bit02 Betrieb / Impulsfreigabe 0 No 1 Yes Bit03 Störung aktiv 0 No 1 Yes Bit04 AUS2 aktiv 0 Yes 1 No Bit05 AUS3 aktiv 0 Yes 1 No Bit06 Einschaltsperre aktiv 0 No 1 Yes Bit07 Warnung aktiv 0 No 1 Yes Bit08 Abweichung Soll / Ist 0 Yes 1 No Bit09 Steuerung von AG 0 No 1 Yes Bit10 f_act >= P1082 (f_max) 0 No 1 Yes Bit11 Warnung: Motorstrom Grenzw. 0 Yes 1 No Bit12 Motorhaltebremse aktiv 0 No 1 Yes Bit13 Motor Überlast 0 Yes 1 No Bit14 Rechtslauf 0 No 1 Yes Bit15 Umrichter Überlast 0 Yes 1 No
Abhängigkeit:
t0
Netz-EIN
t
r0052Bit00
Einschaltbereit
1
0
1
t
EIN/AUS1
0
1
t0
1
t
r0052Bit01
Betriebsbereit
0
1
t
Impulsfreigabe
0
1
t
r0052Bit02
Betrieb
0
1
t
r0053Bit09
0
1
Vorladung aktiv
Hoch-/Rücklauf beendet
r0052 Bit00 - Bit02 "Einschaltbereit / Betriebsbereit / Betrieb":Zustanddiagramm nach Netz ein und EIN/AUS1-Befehl: ==> siehe unten
r0052 Bit03 "Störung aktiv": Bei Ausgabe über einen digitalen Ausgang wird die Meldung "Störung aktiv" (r0052 Bit03) invertiert. r0052 Bit08 "Abweichung Soll-/Istwert" ==> siehe Parameter P2164 r0052 Bit10 "f_act >= P1082 (f_max)" ==> siehe Parameter P1082 r0052 Bit12 "Motorhaltebremse (MHB) aktiv" ==> siehe Parameter P1215
Stufe
2

Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 25
tr0054Bit00
ON/OFF1
ON
tr0054Bit11
Reversieren
0 t
fist
tr0052Bit02
Betrieb
tr0052Bit14
Motor läuftrechts
links nicht definiertletzter Zustand wird ausgegeben
r0052 Bit14 "Rechtslauf" ==> siehe unten
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 26 A5E00348653A-AA
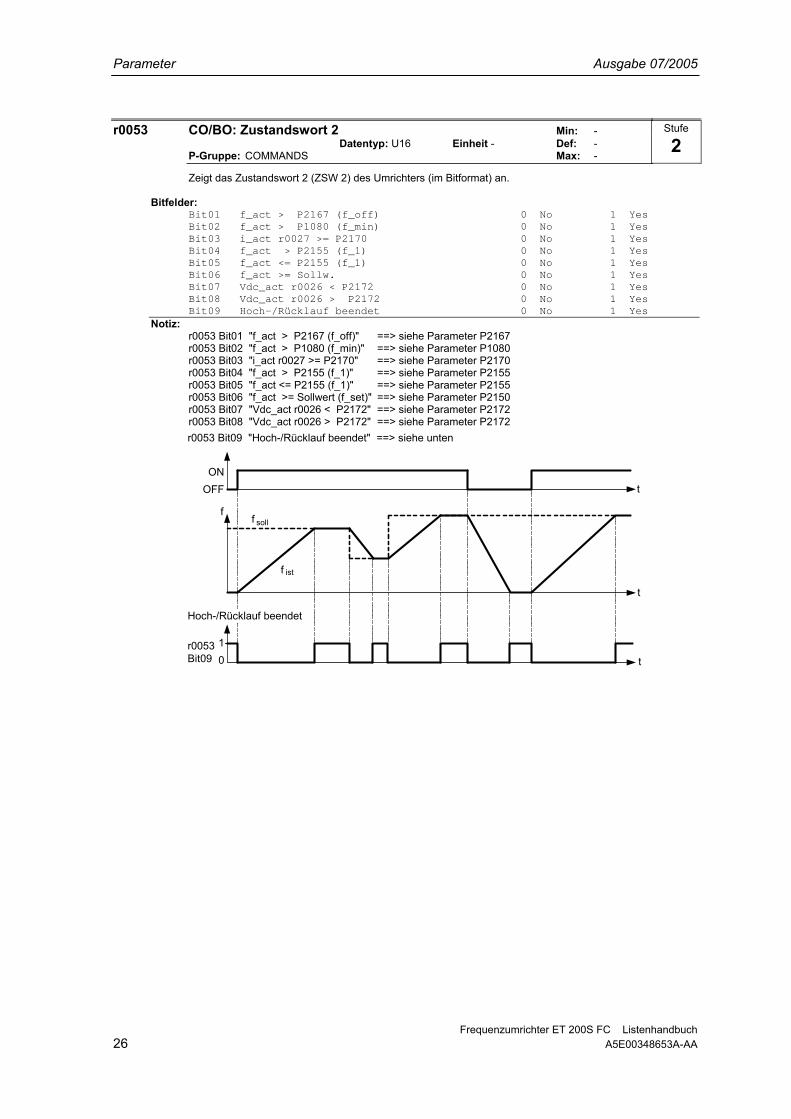
r0053 CO/BO: Zustandswort 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt das Zustandswort 2 (ZSW 2) des Umrichters (im Bitformat) an.
Bitfelder: Bit01 f_act > P2167 (f_off) 0 No 1 Yes Bit02 f_act > P1080 (f_min) 0 No 1 Yes Bit03 i_act r0027 >= P2170 0 No 1 Yes Bit04 f_act > P2155 (f_1) 0 No 1 Yes Bit05 f_act <= P2155 (f_1) 0 No 1 Yes Bit06 f_act >= Sollw. 0 No 1 Yes Bit07 Vdc_act r0026 < P2172 0 No 1 Yes Bit08 Vdc_act r0026 > P2172 0 No 1 Yes Bit09 Hoch-/Rücklauf beendet 0 No 1 Yes
Notiz: r0053 Bit01 "f_act > P2167 (f_off)" ==> siehe Parameter P2167 r0053 Bit02 "f_act > P1080 (f_min)" ==> siehe Parameter P1080 r0053 Bit03 "i_act r0027 >= P2170" ==> siehe Parameter P2170 r0053 Bit04 "f_act > P2155 (f_1)" ==> siehe Parameter P2155 r0053 Bit05 "f_act <= P2155 (f_1)" ==> siehe Parameter P2155 r0053 Bit06 "f_act >= Sollwert (f_set)" ==> siehe Parameter P2150 r0053 Bit07 "Vdc_act r0026 < P2172" ==> siehe Parameter P2172 r0053 Bit08 "Vdc_act r0026 > P2172" ==> siehe Parameter P2172
f
t
t
f
OFFON
t
istf
soll
01r0053
Bit09
Hoch-/Rücklauf beendet
r0053 Bit09 "Hoch-/Rücklauf beendet" ==> siehe unten
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 27
r0054 CO/BO: Steuerwort 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt das Steuerwort 1 (STW 1) des Umrichters an, das zur Diagnose der aktiven Befehle verwendet werden kann.
Bitfelder: Bit00 EIN / AUS1 0 No 1 Yes Bit01 AUS2: Elektr. Halt 0 Yes 1 No Bit02 AUS3: Schnellhalt 0 Yes 1 No Bit03 Impulsfreigabe 0 No 1 Yes Bit04 HLG Freigabe 0 No 1 Yes Bit05 HLG Start 0 No 1 Yes Bit06 Sollwert-Freigabe 0 No 1 Yes Bit07 Fehler-Quittierung 0 No 1 Yes Bit08 JOG rechts 0 No 1 Yes Bit09 JOG links 0 No 1 Yes Bit10 Steuerung von AG 0 No 1 Yes Bit11 Reversieren 0 No 1 Yes Bit15 CDS Bit 0 (Hand/Auto) 0 No 1 Yes
Notiz: Identisch zu r2036 wenn USS mittels P0700 oder P0719 als Kommandoquelle ausgewählt wurde.
Vorsicht: Wenn Bit 10 auf 0 gesetzt wird, reagiert der Umrichter auf keine Befehle oder Sollwerte. D.h. insbesondere, er kann in diesem Zustand weder Aus- noch Eingeschaltet werden.
r0055 CO/BO: Zusatzsteuerwort Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt das Zusatzsteuerwort (Zusatz-STW) des Umrichters an, das zur Diagnose der aktiven Befehle verwendet werden kann.
Bitfelder: Bit04 Antriebsdatensatz (DDS) Bit 0 0 No 1 Yes Bit05 Antriebsdatensatz (DDS) Bit 1 0 No 1 Yes Bit11 Statik 0 No 1 Yes Bit12 Drehmomentregelung 0 No 1 Yes Bit13 Externer Fehler 1 0 Yes 1 No Bit15 Befehlsdatensatz (CDS) Bit1 0 No 1 Yes
Notiz: Identisch zu r2037 wenn USS als Kommandoquelle mittels P0700 oder P0719 ausgewählt wurde.
r0056 CO/BO: ZSW - Motorregelung Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: CONTROL Max: -
Zeigt das Zustandswort (ZSW) der Motorregelung an und kann zur Anzeige des Umrichterzustands verwendet werden.
Bitfelder: Bit00 Initialisierung beendet 0 No 1 Yes Bit01 Entmagnetisierung abgeschl. 0 No 1 Yes Bit02 Impulsfreigabe 0 No 1 Yes Bit03 Sanftanlauf angewählt 0 No 1 Yes Bit04 Aufmagnetisierung beendet 0 No 1 Yes Bit05 Spannungsanhebung aktiv 0 No 1 Yes Bit06 Spg.anh. bei Beschl.aktiv 0 No 1 Yes Bit07 Frequenz ist negativ 0 No 1 Yes Bit08 Feldschwächung aktiv 0 No 1 Yes Bit09 Spannungssollwert begrenzt 0 No 1 Yes Bit10 Schlupffrequenz begrenzt 0 No 1 Yes Bit11 F_aus > F_max Freq. begrenzt 0 No 1 Yes Bit12 Phasenumkehr angewählt 0 No 1 Yes Bit13 I-max Regler aktiv 0 No 1 Yes
Notiz: Der I-max Regler (r0056 Bit13) wird aktiviert, wenn der Ausgangsstrom (r0027) den zulässigen Ausgangsstrom (r0067) überschreitet.
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 28 A5E00348653A-AA
r0061 CO: Läuferdrehzahl Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle durch den Geber erfasste Drehzahl an.
r0062 CO: Drehzahlsollwert Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt den Geschwindigkeitssollwert der Vektorregelung an.
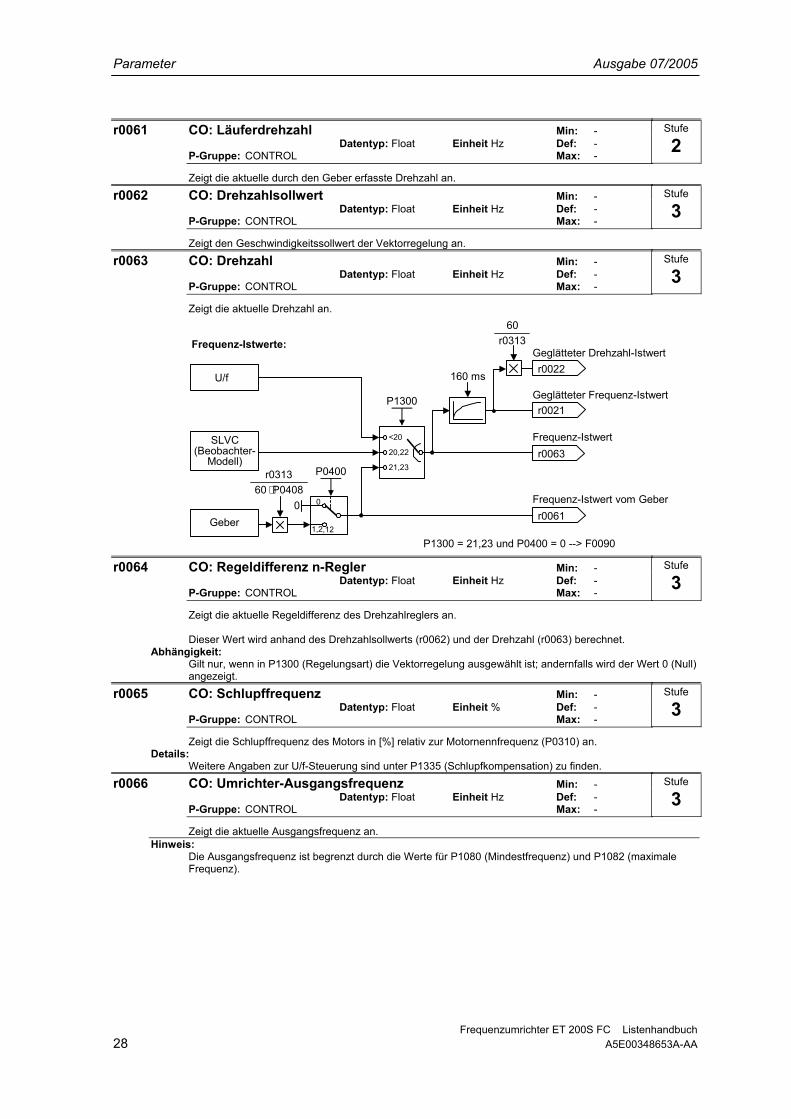
r0063 CO: Drehzahl Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle Drehzahl an.
U/f
0
1,2
SLVC(Beobachter-
Modell)
Geber
P0400
P1300
160 ms
Frequenz-Istwerte:
Geglätteter Frequenz-Istwert
Frequenz-Istwert
Frequenz-Istwert vom Geber
21,23
20,22
<20
0
P1300 = 21,23 und P0400 = 0 --> F0090
P0408 60 r0313⋅
Geglätteter Drehzahl-Istwert r0313
60
r0022
r0021
r0063
r0061,12
r0064 CO: Regeldifferenz n-Regler Min: -
Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle Regeldifferenz des Drehzahlreglers an. Dieser Wert wird anhand des Drehzahlsollwerts (r0062) und der Drehzahl (r0063) berechnet.
Abhängigkeit: Gilt nur, wenn in P1300 (Regelungsart) die Vektorregelung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
r0065 CO: Schlupffrequenz Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt die Schlupffrequenz des Motors in [%] relativ zur Motornennfrequenz (P0310) an. Details:
Weitere Angaben zur U/f-Steuerung sind unter P1335 (Schlupfkompensation) zu finden.
r0066 CO: Umrichter-Ausgangsfrequenz Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle Ausgangsfrequenz an. Hinweis:
Die Ausgangsfrequenz ist begrenzt durch die Werte für P1080 (Mindestfrequenz) und P1082 (maximale Frequenz).
Stufe
2
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 29
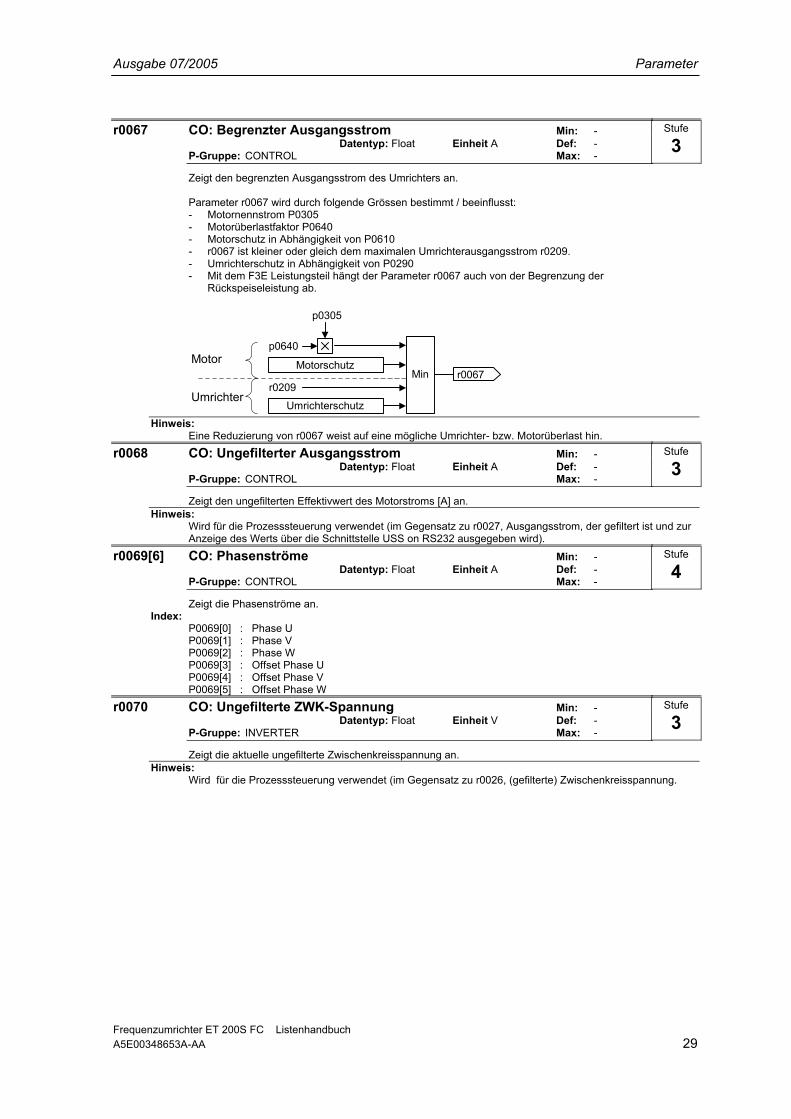
r0067 CO: Begrenzter Ausgangsstrom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den begrenzten Ausgangsstrom des Umrichters an. Parameter r0067 wird durch folgende Grössen bestimmt / beeinflusst: - Motornennstrom P0305 - Motorüberlastfaktor P0640 - Motorschutz in Abhängigkeit von P0610 - r0067 ist kleiner oder gleich dem maximalen Umrichterausgangsstrom r0209. - Umrichterschutz in Abhängigkeit von P0290 - Mit dem F3E Leistungsteil hängt der Parameter r0067 auch von der Begrenzung der
Rückspeiseleistung ab.
Motor
Umrichter
Motorschutz
p0640
r0067
p0305
Umrichterschutz
r0209Min
Hinweis:
Eine Reduzierung von r0067 weist auf eine mögliche Umrichter- bzw. Motorüberlast hin.
r0068 CO: Ungefilterter Ausgangsstrom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den ungefilterten Effektivwert des Motorstroms [A] an. Hinweis:
Wird für die Prozesssteuerung verwendet (im Gegensatz zu r0027, Ausgangsstrom, der gefiltert ist und zur Anzeige des Werts über die Schnittstelle USS on RS232 ausgegeben wird).
r0069[6] CO: Phasenströme Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt die Phasenströme an. Index:
P0069[0] : Phase U P0069[1] : Phase V P0069[2] : Phase W P0069[3] : Offset Phase U P0069[4] : Offset Phase V P0069[5] : Offset Phase W
r0070 CO: Ungefilterte ZWK-Spannung Min: - Datentyp: Float Einheit V Def: - P-Gruppe: INVERTER Max: -
Zeigt die aktuelle ungefilterte Zwischenkreisspannung an. Hinweis:
Wird für die Prozesssteuerung verwendet (im Gegensatz zu r0026, (gefilterte) Zwischenkreisspannung.
Stufe
3
Stufe
3
Stufe
4
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 30 A5E00348653A-AA
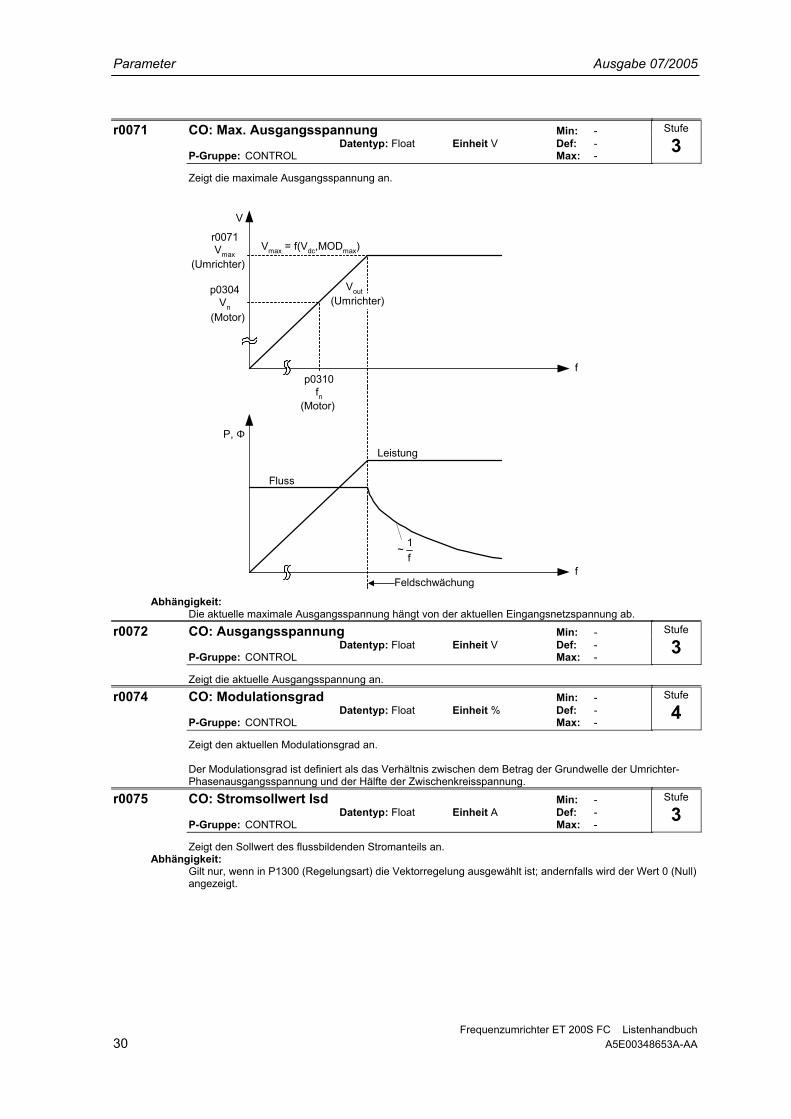
r0071 CO: Max. Ausgangsspannung Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt die maximale Ausgangsspannung an.
Vmax = f(Vdc,MODmax)
(Umrichter)
(Motor)
r0071Vmax
Leistung
Feldschwächung
f
ff1~
Fluss
P, Φ
p0304Vn
p0310fn
V
(Motor)
(Umrichter)Vout
Abhängigkeit:
Die aktuelle maximale Ausgangsspannung hängt von der aktuellen Eingangsnetzspannung ab.
r0072 CO: Ausgangsspannung Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle Ausgangsspannung an.
r0074 CO: Modulationsgrad Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt den aktuellen Modulationsgrad an. Der Modulationsgrad ist definiert als das Verhältnis zwischen dem Betrag der Grundwelle der Umrichter-Phasenausgangsspannung und der Hälfte der Zwischenkreisspannung.
r0075 CO: Stromsollwert Isd Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den Sollwert des flussbildenden Stromanteils an. Abhängigkeit:
Gilt nur, wenn in P1300 (Regelungsart) die Vektorregelung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
Stufe
3
Stufe
3
Stufe
4
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 31
r0076 CO: Strom Isd Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den flussbildenden Stromanteil an. Abhängigkeit:
Gilt nur, wenn in P1300 (Regelungsart) die Vektorregelung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
r0077 CO: Stromsollwert Isq Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den Sollwert für den drehmomentbildenden Stromanteil an. Abhängigkeit:
Gilt nur, wenn in P1300 (Regelungsart) die Vektorregelung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
r0078 CO: Strom Isq Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den drehmomentbildenden Stromanteil an.
r0079 CO: Drehmomentsollwert (gesamt) Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt den Sollwert für das Gesamtdrehmoment an. Abhängigkeit:
Gilt nur, wenn in P1300 (Regelungsart) die Vektorregelung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
r0080 CO: Drehmoment Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt das aktuelle Drehmoment an. Wenn die Stromeinprägung aktiv ist (r1751.4 = 1), ist dieser Wert bei kleinen Drehzahlen = 0.
r0084 CO: Luftspaltfluss Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt den aktuellen Luftspaltfluss in [%] relativ zum Motornennfluss an.
r0085 CO: Blindstrom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den ungefilterten Blindstromanteil an. Abhängigkeit:
Gilt nur, wenn in P1300 (Regelungsart) die U/f-Steuerung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
r0086 CO: Wirkstrom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt den Wirkanteil des Motorstroms an. Abhängigkeit:
Gilt nur, wenn in P1300 (Regelungsart) die U/f-Steuerung ausgewählt ist; andernfalls wird der Wert 0 (Null) angezeigt.
r0090 CO: Läuferwinkel Min: - Datentyp: Float Einheit ° Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle, durch den Geber erfasste Position an. Die Funktion ist bei Impulsgebern, die nur eine Spur besitzen, nicht verfügbar.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
4
Stufe
4
Stufe
3
Stufe
3
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 32 A5E00348653A-AA
P0095[10] CI: Auswahl PZD-Signale Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt die Quellen von PZD-Signalen aus. Index:
P0095[0] : 1. PZD-Signal P0095[1] : 2. PZD-Signal P0095[2] : 3. PZD-Signal P0095[3] : 4. PZD-Signal P0095[4] : 5. PZD-Signal P0095[5] : 6. PZD-Signal P0095[6] : 7. PZD-Signal P0095[7] : 8. PZD-Signal P0095[8] : 9. PZD-Signal P0095[9] : 10. PZD-Signal
r0096[10] Anzeige PZD-Signale Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt PZD-Signale in [%] an. Index:
P0096[0] : 1. PZD-Signal P0096[1] : 2. PZD-Signal P0096[2] : 3. PZD-Signal P0096[3] : 4. PZD-Signal P0096[4] : 5. PZD-Signal P0096[5] : 6. PZD-Signal P0096[6] : 7. PZD-Signal P0096[7] : 8. PZD-Signal P0096[8] : 9. PZD-Signal P0096[9] : 10. PZD-Signal
Hinweis: r0096 = 100 % entspricht 4000 hex
P0100 Europa / Nordamerika Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 0 P-Gruppe: QUICK Aktiv: nach Best. Schnell-IBN: Ja Max: 2
Bestimmt, ob die Parameter für die Leistung in [kW] oder [hp] ausgedrückt werden (z. B. Motornennleistung P0307). Die Voreinstellungen für die Motornennfrequenz P0310, maximale Frequenz P1082 und die Bezugsfrequenz P2000 werden ebenfalls an dieser Stelle automatisch eingestellt.
Mögliche Einstellungen: 0 Europa [kW], 50 Hz 1 Nordamerika [hp], 60 Hz 2 Nordamerika [kW], 60 Hz
Abhängigkeit: Es gilt: - Vor Änderung dieses Parameters zunächst den Antrieb anhalten (d. h. Impulse sperren). - Parameter P0100 kann nur mittels P0010 = 1 (Inbetriebnahmemodus) über die entsprechende
Parameterschnittstelle (z.B. BOP) geändert werden. - Bei Änderung von P0100 werden alle Motornennparameter sowie alle anderen Parameter, die von den
Motornennparametern abhängen, zurückgesetzt (siehe P0340 - Berechnung der Motorparameter).
P0191 ICU-Konfiguration Min: 0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 27238853 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 4294967295
Zeigt die Konfiguration der Regelungsbaugruppe an.
P0192 PM-Konfiguration Min: 0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 4294967295
Zeigt die Konfiguration des Umrichter-Power-Moduls an.
Stufe
3
Stufe
3
Stufe
1
Stufe
4
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 33
P0199 Gerätenummer Min: 0 ÄndStat: UT Datentyp: U16 Einheit - Def: 0 P-Gruppe: - Aktiv: nach Best. Schnell-IBN: Nein Max: 255
Gerätenummer Dieser Parameter wirkt sich nicht auf den Betrieb aus.
P0201[2] Ist-Leistungsteil Codenummer Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Kennzeichnet das aktuelle Leistungsteil (LT) entsprechend der nachfolgenden Tabelle. Index:
P0201[0] : Leistungsteil-Code P0201[1] : Versionsstand - Letzte Stelle MLFB
Notiz: Parameter P0201 = 0 zeigt an, dass kein Leistungsteil gefunden wurde.
r0203 Umrichtertyp Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: INVERTER Max: -
Zeigt den Umrichter-Typ (siehe Tabelle) an. Mögliche Einstellungen:
0 Keine LT-Daten/Modul 1 MICROMASTER 420 2 MICROMASTER 440 3 MICRO- / COMBIMASTER 411 4 MICROMASTER 410 5 reserviert 6 MICROMASTER 440 PX 7 MICROMASTER 430 110 SINAMICS G110 111 SINAMICS IPM25 114 SINAMICS PM240
r0204 Leistungsteil - Merkmale Min: - Datentyp: U32 Einheit - Def: - P-Gruppe: INVERTER Max: -
Zeigt die Hardwareeigenschaften des Leistungsteils (LT) an.
Bitfelder: Bit00 DC/AC-Umrichter 0 No 1 Yes Bit01 Funk Entstörfilter 0 No 1 Yes Bit02 F3E-Leistungsteil 0 No 1 Yes
Hinweis: Parameter r0204 = 0 zeigt an, dass kein Leistungsteil gefunden wurde.
r0206 Umrichternennleistung kW/hp Min: - Datentyp: Float Einheit - Def: - P-Gruppe: INVERTER Max: -
Zeigt die Nennleistung des Umrichters an. Abhängigkeit:
Der Wert wird in [kW] oder [hp] angezeigt; dies ist abhängig von der Einstellung für P0100 (Betrieb in Europa / Nordamerika).
[kW] r0206 0.75 [hp] r0206 ⋅=
Stufe
2
Stufe
3
Stufe
3
Stufe
3
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 34 A5E00348653A-AA
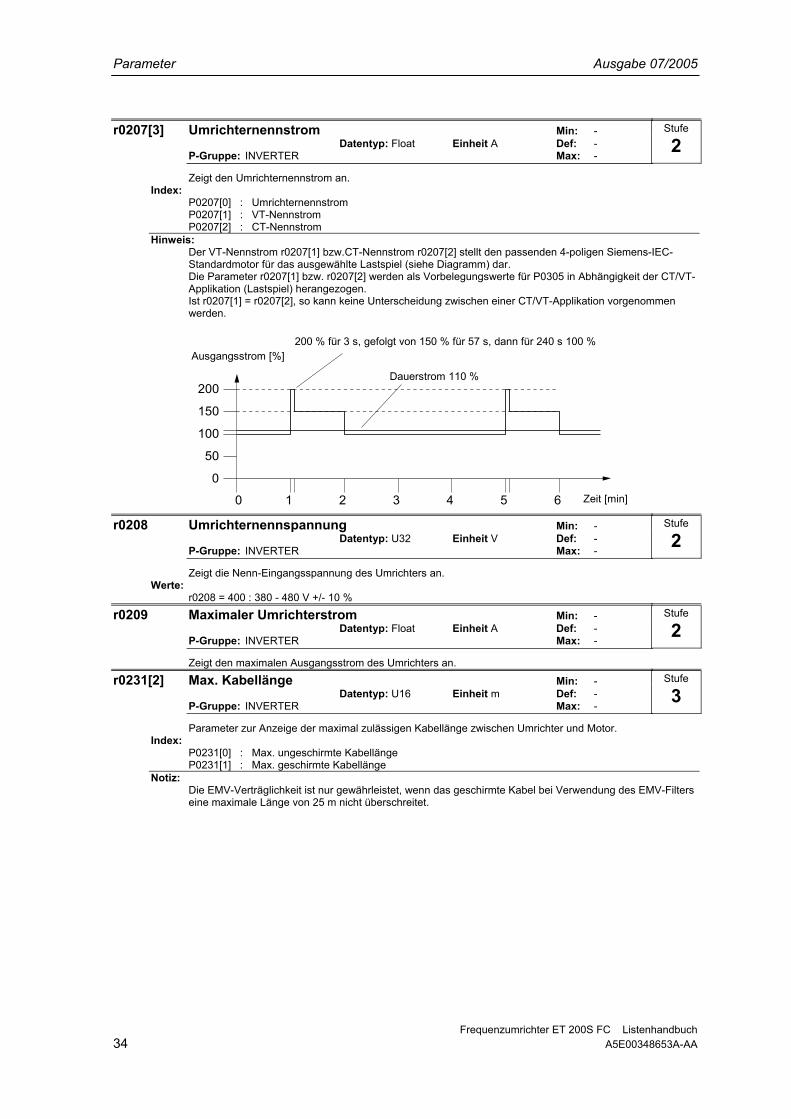
r0207[3] Umrichternennstrom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: INVERTER Max: -
Zeigt den Umrichternennstrom an. Index:
P0207[0] : Umrichternennstrom P0207[1] : VT-Nennstrom P0207[2] : CT-Nennstrom
Hinweis: Der VT-Nennstrom r0207[1] bzw.CT-Nennstrom r0207[2] stellt den passenden 4-poligen Siemens-IEC-Standardmotor für das ausgewählte Lastspiel (siehe Diagramm) dar. Die Parameter r0207[1] bzw. r0207[2] werden als Vorbelegungswerte für P0305 in Abhängigkeit der CT/VT-Applikation (Lastspiel) herangezogen. Ist r0207[1] = r0207[2], so kann keine Unterscheidung zwischen einer CT/VT-Applikation vorgenommen werden.
200
150
100
50
0
0 1 2 3 4 5 6
200 % für 3 s, gefolgt von 150 % für 57 s, dann für 240 s 100 %Ausgangsstrom [%]
Dauerstrom 110 %
Zeit [min]
r0208 Umrichternennspannung Min: - Datentyp: U32 Einheit V Def: - P-Gruppe: INVERTER Max: -
Zeigt die Nenn-Eingangsspannung des Umrichters an. Werte:
r0208 = 400 : 380 - 480 V +/- 10 %
r0209 Maximaler Umrichterstrom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: INVERTER Max: -
Zeigt den maximalen Ausgangsstrom des Umrichters an.
r0231[2] Max. Kabellänge Min: - Datentyp: U16 Einheit m Def: - P-Gruppe: INVERTER Max: -
Parameter zur Anzeige der maximal zulässigen Kabellänge zwischen Umrichter und Motor. Index:
P0231[0] : Max. ungeschirmte Kabellänge P0231[1] : Max. geschirmte Kabellänge
Notiz: Die EMV-Verträglichkeit ist nur gewährleistet, wenn das geschirmte Kabel bei Verwendung des EMV-Filters eine maximale Länge von 25 m nicht überschreitet.
Stufe
2
Stufe
2
Stufe
2
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 35
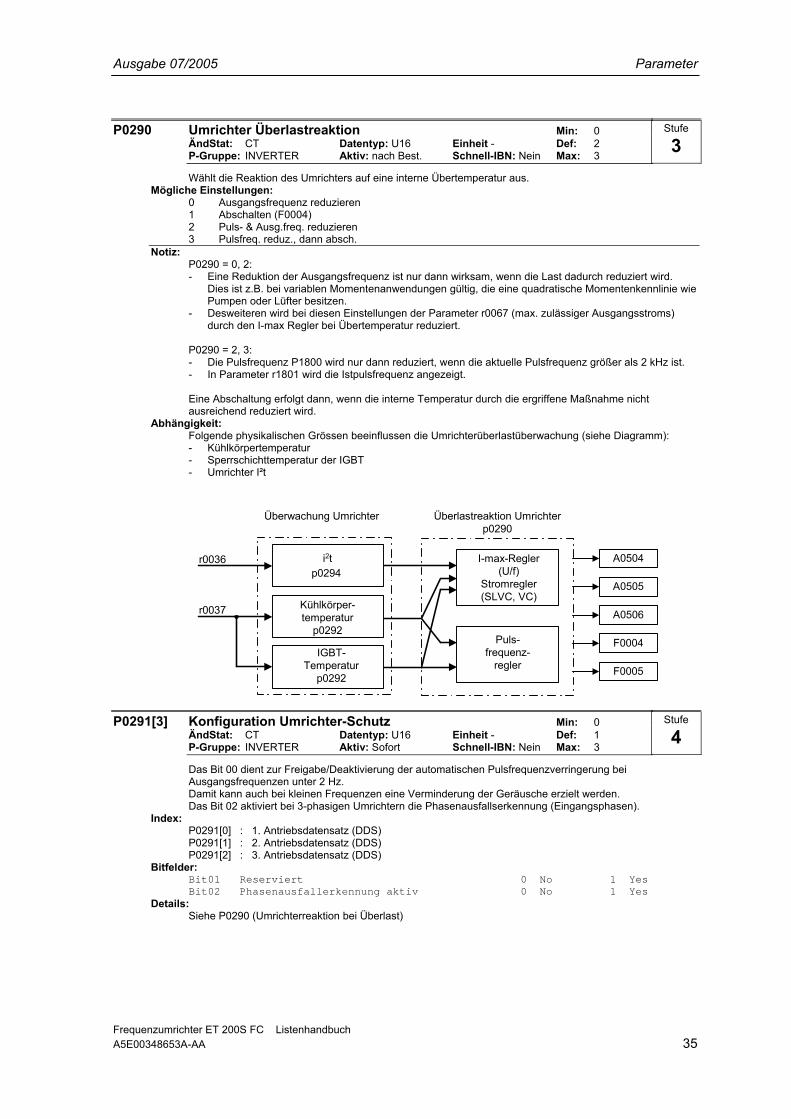
P0290 Umrichter Überlastreaktion Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 2 P-Gruppe: INVERTER Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Wählt die Reaktion des Umrichters auf eine interne Übertemperatur aus. Mögliche Einstellungen:
0 Ausgangsfrequenz reduzieren 1 Abschalten (F0004) 2 Puls- & Ausg.freq. reduzieren 3 Pulsfreq. reduz., dann absch.
Notiz: P0290 = 0, 2: - Eine Reduktion der Ausgangsfrequenz ist nur dann wirksam, wenn die Last dadurch reduziert wird. Dies ist z.B. bei variablen Momentenanwendungen gültig, die eine quadratische Momentenkennlinie wie
Pumpen oder Lüfter besitzen. - Desweiteren wird bei diesen Einstellungen der Parameter r0067 (max. zulässiger Ausgangsstroms)
durch den I-max Regler bei Übertemperatur reduziert. P0290 = 2, 3: - Die Pulsfrequenz P1800 wird nur dann reduziert, wenn die aktuelle Pulsfrequenz größer als 2 kHz ist. - In Parameter r1801 wird die Istpulsfrequenz angezeigt. Eine Abschaltung erfolgt dann, wenn die interne Temperatur durch die ergriffene Maßnahme nicht ausreichend reduziert wird.
Abhängigkeit: Folgende physikalischen Grössen beeinflussen die Umrichterüberlastüberwachung (siehe Diagramm): - Kühlkörpertemperatur - Sperrschichttemperatur der IGBT - Umrichter I²t
A0504
A0505
A0506
F0004
F0005
Überlastreaktion Umrichterp0290
Puls-frequenz-
regler
I-max-Regler(U/f)
Stromregler(SLVC, VC)
r0036
r0037 Kühlkörper-temperatur
p0292
IGBT-Temperatur
p0292
i2tp0294
Überwachung Umrichter
P0291[3] Konfiguration Umrichter-Schutz Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 1 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 3
Das Bit 00 dient zur Freigabe/Deaktivierung der automatischen Pulsfrequenzverringerung bei Ausgangsfrequenzen unter 2 Hz. Damit kann auch bei kleinen Frequenzen eine Verminderung der Geräusche erzielt werden. Das Bit 02 aktiviert bei 3-phasigen Umrichtern die Phasenausfallserkennung (Eingangsphasen).
Index: P0291[0] : 1. Antriebsdatensatz (DDS) P0291[1] : 2. Antriebsdatensatz (DDS) P0291[2] : 3. Antriebsdatensatz (DDS)
Bitfelder: Bit01 Reserviert 0 No 1 Yes Bit02 Phasenausfallerkennung aktiv 0 No 1 Yes
Details: Siehe P0290 (Umrichterreaktion bei Überlast)
Stufe
3
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 36 A5E00348653A-AA
P0292 Umrichter-Temperaturwarnung Min: 0 ÄndStat: CUT Datentyp: U16 Einheit °C Def: 5 P-Gruppe: INVERTER Aktiv: nach Best. Schnell-IBN: Nein Max: 25
Legt die Temperaturdifferenz (in [°C]) zwischen der Übertemperaturabschaltschwelle (F0004) und der Übertemperaturwarnschwelle (A0504) des Umrichters fest. Die Abschaltschwelle ist dabei im Umrichter hinterlegt und kann vom Anwender nicht geändert werden.
P0294 Umrichter I2t-Warnung Min: 10.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 95.0 P-Gruppe: INVERTER Aktiv: nach Best. Schnell-IBN: Nein Max: 100.0
Legt den Wert [%] fest, bei dem die Warnung A0505 (Umrichter I2t-Warnung) generiert wird. Die maximal zulässige Dauer der Umrichter-Überlastung wird mit Hilfe der Umrichter-I2t-Berechnung abgeschätzt. Der I2t-Berechnungswert = 100 %, wenn diese maximal zulässige Dauer erreicht ist.
Abhängigkeit: - Der Ausgangsstrom des Umrichters wurde reduziert. - Der Wert von I2t übersteigt nicht 100 %.
Hinweis: P0294 = 100 % entspricht stationärer Nennlast.
P0295 Verzögerung Lüfterabschaltung Min: 0 ÄndStat: CUT Datentyp: U16 Einheit s Def: 0 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 3600
Legt die Verzögerungszeit für die Lüfterabschaltung in Sekunden nach dem Ausschalten des Antriebs fest. Hinweis:
Bei der Einstellung 0 wird der Lüfter bei Stillstand des Antriebs sofort, d. h. ohne Verzögerung, abgeschaltet.
Stufe
3
Stufe
4
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 37
P0300[3] Auswahl Motortyp Min: 1 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 2
Wählt den Motortyp aus. Dieser Parameter wird während der Inbetriebnahme zur Auswahl des Motortyps und zur Optimierung des Umrichter-Betriebsverhaltens benötigt. Die meisten Motoren sind Asynchronmotoren; verwenden Sie im Zweifelsfall nachstehende Formel.
p0311 60 p0310 x ⋅=
Synchronmotorx = 1, 2, ..., n :
x ≠ 1, 2, ..., n : Asynchronmotor
Ist das Ergebnis eine ganze Zahl, dann handelt es sich um einen Synchronmotor.
Mögliche Einstellungen: 1 Asynchronmotor 2 Synchronmotor
Index: P0300[0] : 1. Antriebsdatensatz (DDS) P0300[1] : 2. Antriebsdatensatz (DDS) P0300[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Nur änderbar bei P0010 = 1 (Schnellinbetriebnahme). Wird der Synchronmotor gewählt, stehen folgende Funktionen nicht zur Verfügung: P0308 Leistungsfaktor P0309 Motorwirkungsgrad P0346 Magnetisierungszeit P0347 Entmagnetisierungszeit P1335 Schlupfkompensation P1336 Schlupfgrenze P0320 Motormagnetisierungsstrom P0330 Motornennschlupf P0331 Nennmagnetisierungsstrom P0332 Nennleistungsfaktor P0384 Läuferzeitkonstante P1200, P1202, P1203 Fangen
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 38 A5E00348653A-AA
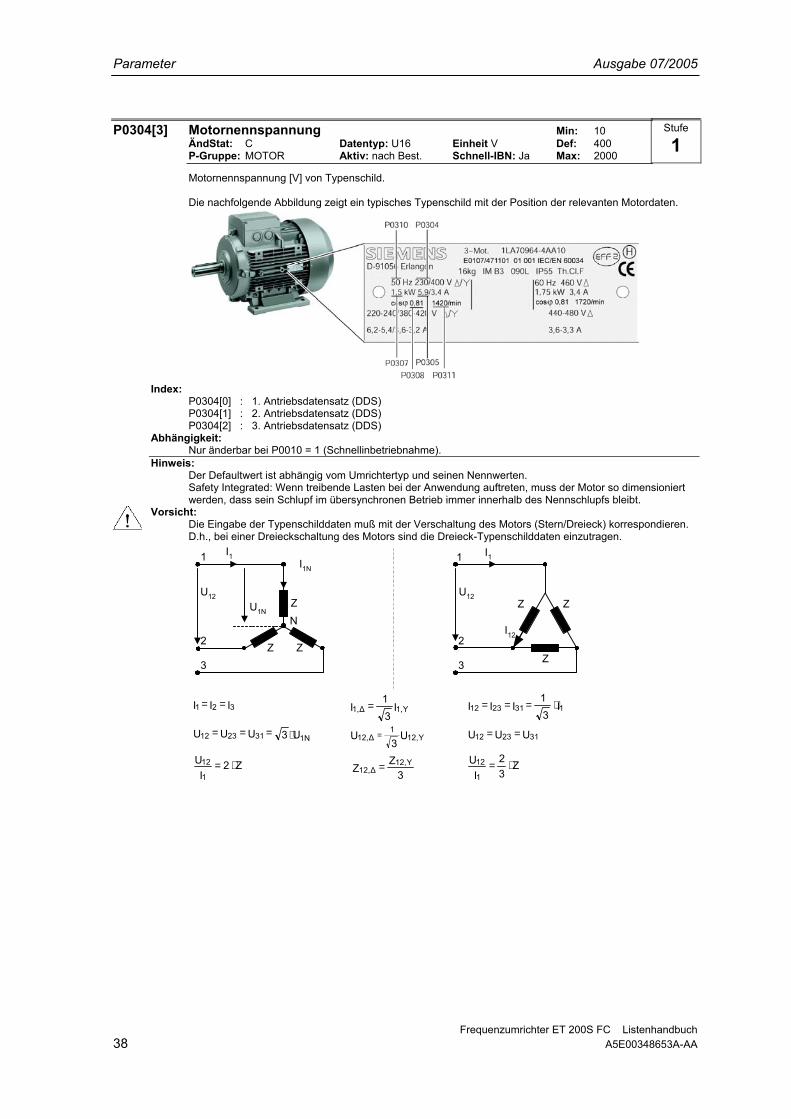
P0304[3] Motornennspannung Min: 10 ÄndStat: C Datentyp: U16 Einheit V Def: 400 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 2000
Motornennspannung [V] von Typenschild. Die nachfolgende Abbildung zeigt ein typisches Typenschild mit der Position der relevanten Motordaten.
Index:
P0304[0] : 1. Antriebsdatensatz (DDS) P0304[1] : 2. Antriebsdatensatz (DDS) P0304[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Nur änderbar bei P0010 = 1 (Schnellinbetriebnahme).
Hinweis: Der Defaultwert ist abhängig vom Umrichtertyp und seinen Nennwerten. Safety Integrated: Wenn treibende Lasten bei der Anwendung auftreten, muss der Motor so dimensioniert werden, dass sein Schlupf im übersynchronen Betrieb immer innerhalb des Nennschlupfs bleibt.
Vorsicht: Die Eingabe der Typenschilddaten muß mit der Verschaltung des Motors (Stern/Dreieck) korrespondieren. D.h., bei einer Dreieckschaltung des Motors sind die Dreieck-Typenschilddaten einzutragen.
I11
2
U12
3
U1N
I1N
ZN
Z Z
III 321 ==
U 3UUU 1Ν312312 ⋅===
Z2I
U1
12 ⋅=3
ZZ Y12,
∆12, =
U3
U Y12,1
∆12, =
I11
2
U12
3
I12
Z Z
Z
I31
III 1312312 ⋅===
UUU 312312 ==
I31
I Y1,∆1, =
Z32
IU
1
12 ⋅=
Stufe
1
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 39
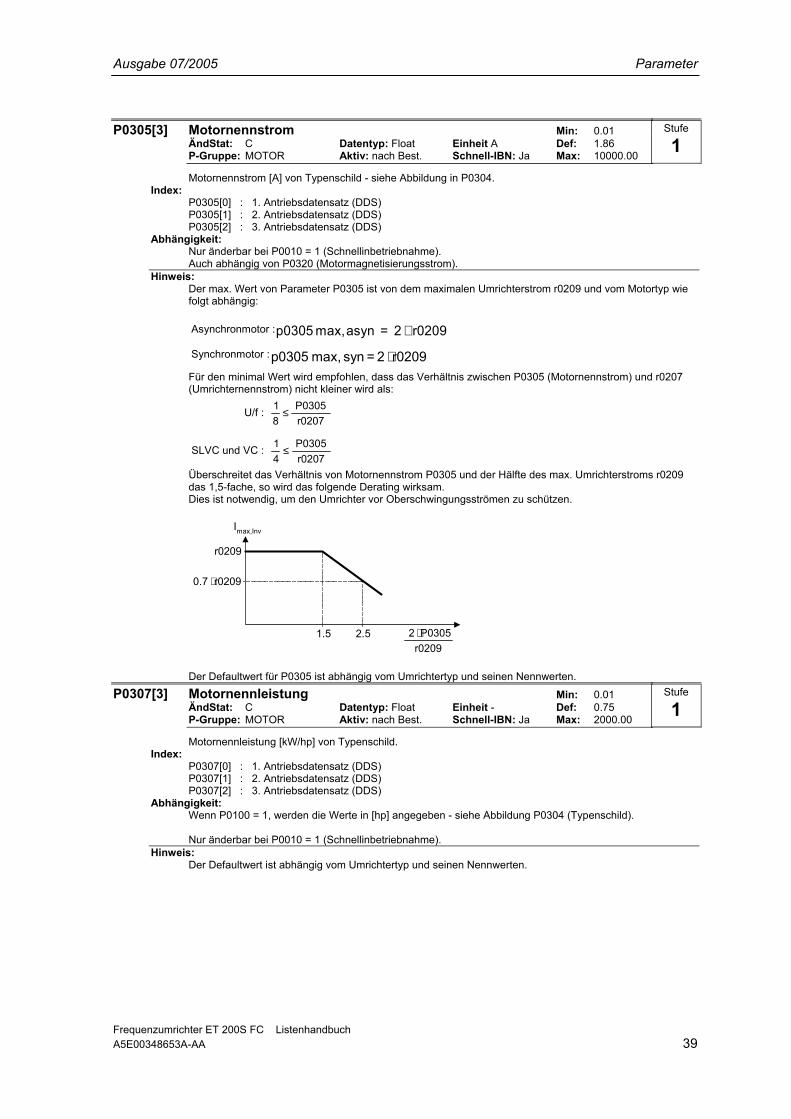
P0305[3] Motornennstrom Min: 0.01 ÄndStat: C Datentyp: Float Einheit A Def: 1.86 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 10000.00
Motornennstrom [A] von Typenschild - siehe Abbildung in P0304. Index:
P0305[0] : 1. Antriebsdatensatz (DDS) P0305[1] : 2. Antriebsdatensatz (DDS) P0305[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Nur änderbar bei P0010 = 1 (Schnellinbetriebnahme). Auch abhängig von P0320 (Motormagnetisierungsstrom).
Hinweis: Der max. Wert von Parameter P0305 ist von dem maximalen Umrichterstrom r0209 und vom Motortyp wie folgt abhängig: Asynchronmotor : r0209 2 = asyn max, p0305 ⋅
Synchronmotor : r0209 2 = syn max, p0305 ⋅
Für den minimal Wert wird empfohlen, dass das Verhältnis zwischen P0305 (Motornennstrom) und r0207 (Umrichternennstrom) nicht kleiner wird als:
U/f :
SLVC und VC :
r0207 P0305
81 ≤
r0207 P0305
41 ≤
Überschreitet das Verhältnis von Motornennstrom P0305 und der Hälfte des max. Umrichterstroms r0209 das 1,5-fache, so wird das folgende Derating wirksam. Dies ist notwendig, um den Umrichter vor Oberschwingungsströmen zu schützen.
Imax,Inv
r0209
r0209 P0305 2 ⋅
r0209 0.7 ⋅
1.5 2.5
Der Defaultwert für P0305 ist abhängig vom Umrichtertyp und seinen Nennwerten.
P0307[3] Motornennleistung Min: 0.01 ÄndStat: C Datentyp: Float Einheit - Def: 0.75 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 2000.00
Motornennleistung [kW/hp] von Typenschild. Index:
P0307[0] : 1. Antriebsdatensatz (DDS) P0307[1] : 2. Antriebsdatensatz (DDS) P0307[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Wenn P0100 = 1, werden die Werte in [hp] angegeben - siehe Abbildung P0304 (Typenschild). Nur änderbar bei P0010 = 1 (Schnellinbetriebnahme).
Hinweis: Der Defaultwert ist abhängig vom Umrichtertyp und seinen Nennwerten.
Stufe
1
Stufe
1
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 40 A5E00348653A-AA
P0308[3] Motornennleistungsfaktor Min: 0.000 ÄndStat: C Datentyp: Float Einheit - Def: 0.000 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 1.000
Motornennleistungsfaktor (cosPhi) von Typenschild - siehe Abbildung P0304. Index:
P0308[0] : 1. Antriebsdatensatz (DDS) P0308[1] : 2. Antriebsdatensatz (DDS) P0308[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Nur änderbar bei P0010 = 1 (Schnellinbetriebnahme). Auf BOP nur sichtbar bei P0100 = 0 oder 2 (Motorleistung eingegeben in [kW]). Bei Einstellung 0 wird der Wert intern berechnet.
P0309[3] Motornennwirkungsgrad Min: 0.0 ÄndStat: C Datentyp: Float Einheit % Def: 0.0 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 99.9
Motornennwirkungsgrad in [%] von Typenschild. Index:
P0309[0] : 1. Antriebsdatensatz (DDS) P0309[1] : 2. Antriebsdatensatz (DDS) P0309[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Nur änderbar bei P0010 = 1 (Schnellinbetriebnahme). Auf BOP nur sichtbar bei P0100 = 1 (Motorleistung eingegeben in [hp]). Bei Einstellung 0 wird der Wert intern berechnet.
Hinweis: P0309 = 100 % supraleitend
Details: Siehe Abbildung in P0304 (Typenschild)
P0310[3] Motornennfrequenz Min: 12.00 ÄndStat: C Datentyp: Float Einheit Hz Def: 50.00 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 650.00
Motornennfrequenz [Hz] von Typenschild. Index:
P0310[0] : 1. Antriebsdatensatz (DDS) P0310[1] : 2. Antriebsdatensatz (DDS) P0310[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Nur änderbar bei P0010 = 1 (Schnellinbetriebnahme). Die Anzahl der Polpaare wird bei Änderung des Parameters automatisch neu berechnet.
Details: Siehe Abbildung in P0304 (Typenschild)
Stufe
2
Stufe
2
Stufe
1
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 41
P0311[3] Motornenndrehzahl Min: 0 ÄndStat: C Datentyp: U16 Einheit 1/min Def: 1395 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 40000
Motornenndrehzahl [1/min] von Typenschild. Index:
P0311[0] : 1. Antriebsdatensatz (DDS) P0311[1] : 2. Antriebsdatensatz (DDS) P0311[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Nur änderbar bei P0010 = 1 (Schnellinbetriebnahme). Bei Einstellung 0 wird der Wert intern berechnet. Erforderlich bei Vektorregelung und U/f-Steuerung mit Drehzahlregler. Die Funktionsfähigkeit der Schlupfkompensation bei der U/f-Steuerung ist nur bei parametrierter Motornenndrehzahl gewährleistet. Die Anzahl der Polpaare wird bei Änderung des Parameters automatisch neu berechnet.
Hinweis: Der Defaultwert ist abhängig vom Umrichtertyp und seinen Nennwerten.
Details: Siehe Abbildung in P0304 (Typenschild)
r0313[3] Motorpolpaare Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt die Anzahl der Motorpolpaare an, die der Umrichter aktuell für interne Berechnungen verwendet. Index:
P0313[0] : 1. Antriebsdatensatz (DDS) P0313[1] : 2. Antriebsdatensatz (DDS) P0313[2] : 3. Antriebsdatensatz (DDS)
Werte: r0313 = 1 : 2-poliger Motor r0313 = 2 : 4-poliger Motor usw.
Abhängigkeit: Wird bei Änderung von P0310 (Motornennfrequenz) oder P0311 (Motornenndrehzahl) automatisch neu berechnet.
p0311 p0310 60 r0313 ⋅=
P0314[3] Anzahl Motorpolpaare Min: 0
ÄndStat: C Datentyp: U16 Einheit - Def: 0 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 99
Gibt die Anzahl der Polpaare des Motors an: Index:
P0314[0] : 1. Antriebsdatensatz (DDS) P0314[1] : 2. Antriebsdatensatz (DDS) P0314[2] : 3. Antriebsdatensatz (DDS)
Werte: P0314 = 1 : 2-poliger Motor P0314 = 2 : 4-poliger Motor usw.
Abhängigkeit: Wird bei Änderung von P0310 (Motornennfrequenz) oder P0311 (Motornenndrehzahl) automatisch neu berechnet.
Stufe
1
Stufe
3
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 42 A5E00348653A-AA
P0320[3] Motormagnetisierungsstrom Min: 0.0 ÄndStat: CT Datentyp: Float Einheit % Def: 0.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Ja Max: 99.0
Legt den Motormagnetisierungsstrom in [%] relativ zu P0305 (Motornennstrom) an. Index:
P0320[0] : 1. Antriebsdatensatz (DDS) P0320[1] : 2. Antriebsdatensatz (DDS) P0320[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: P0320 = 0: Der Motormagnetisierungsstrom wird durch P0340 = 1 oder durch P3900 = 1 - 3 (Ende Schnellinbetriebnahme) berechnet. Der berechnete Wert wird in r0331 angezeigt.
r0330[3] Motornennschlupf Min: - Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den Motornennschlupf in [%] relativ zu P0310 (Motornennfrequenz) und P0311 (Motornenndrehzahl) an.
% 100 p0310
r0313 60
p0311 p0310 [%] r0330 ⋅
⋅−=
Index:
P0330[0] : 1. Antriebsdatensatz (DDS) P0330[1] : 2. Antriebsdatensatz (DDS) P0330[2] : 3. Antriebsdatensatz (DDS)
r0331[3] Nennmagnetisierungsstrom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: MOTOR Max: -
Zeigt den berechneten Magnetisierungsstrom des Motors in [A] an. Index:
P0331[0] : 1. Antriebsdatensatz (DDS) P0331[1] : 2. Antriebsdatensatz (DDS) P0331[2] : 3. Antriebsdatensatz (DDS)
r0332[3] Nennleistungsfaktor Min: - Datentyp: Float Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt den Leistungsfaktor für den Motor an. Index:
P0332[0] : 1. Antriebsdatensatz (DDS) P0332[1] : 2. Antriebsdatensatz (DDS) P0332[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Der Wert wird intern berechnet, wenn P0308 (Motornennleistungsaktor) auf 0 gesetzt ist; andernfalls wird der in P0308 eingegebene Wert angezeigt.
r0333[3] Motornenndrehmoment Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: MOTOR Max: -
Zeigt das Motornennmoment an. Index:
P0333[0] : 1. Antriebsdatensatz (DDS) P0333[1] : 2. Antriebsdatensatz (DDS) P0333[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Der Wert wird über P0307 (Motornennleistung) und P0311 (Motornenndrehzahl) berechnet.
260
[1/min] p0311 1000 [kW] p0307 [Nm] r0333
⋅
⋅=π
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3

Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 43
P0335[3] Motorkühlung Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 3
Wählt das verwendete Motorkühlsystem aus. Mögliche Einstellungen:
0 Eigenbelüftet 1 Fremdgekühlt 2 Eigenbelüftet und int. Lüfter 3 Fremdgekühlt und interner Lüfter
Index: P0335[0] : 1. Antriebsdatensatz (DDS) P0335[1] : 2. Antriebsdatensatz (DDS) P0335[2] : 3. Antriebsdatensatz (DDS)
Stufe
2
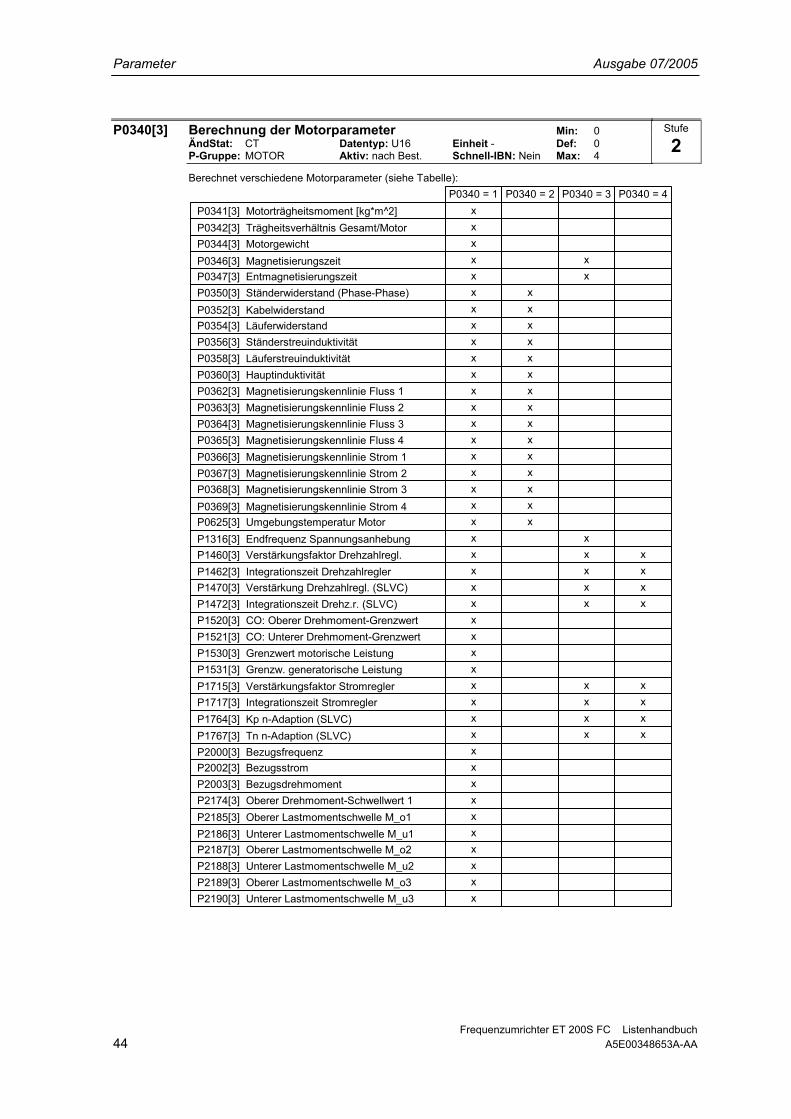
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 44 A5E00348653A-AA
P0340[3] Berechnung der Motorparameter Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Nein Max: 4
Berechnet verschiedene Motorparameter (siehe Tabelle):
P0341[3] Motorträgheitsmoment [kg*m^2]
P0344[3] MotorgewichtP0342[3] Trägheitsverhältnis Gesamt/Motor
P0350[3] Ständerwiderstand (Phase-Phase)
P0354[3] Läuferwiderstand
P0358[3] Läuferstreuinduktivität
P0362[3] Magnetisierungskennlinie Fluss 1
P0364[3] Magnetisierungskennlinie Fluss 3
P0366[3] Magnetisierungskennlinie Strom 1
P0368[3] Magnetisierungskennlinie Strom 3
P0352[3] Kabelwiderstand
P0356[3] Ständerstreuinduktivität
P0360[3] Hauptinduktivität
P0363[3] Magnetisierungskennlinie Fluss 2
P0365[3] Magnetisierungskennlinie Fluss 4
P0367[3] Magnetisierungskennlinie Strom 2
P0369[3] Magnetisierungskennlinie Strom 4P0625[3] Umgebungstemperatur Motor
P0346[3] MagnetisierungszeitP0347[3] Entmagnetisierungszeit
xxx
xx
xxx
xx
xxx
xx
xxx
xx
P0340 = 1
xxx
xx
xxx
xx
xxx
xx
P0340 = 2
xx
P0340 = 3 P0340 = 4
P1521[3] CO: Unterer Drehmoment-Grenzwert
P1531[3] Grenzw. generatorische Leistung
P2002[3] Bezugsstrom
P2174[3] Oberer Drehmoment-Schwellwert 1
P2186[3] Unterer Lastmomentschwelle M_u1
P1520[3] CO: Oberer Drehmoment-Grenzwert
P1530[3] Grenzwert motorische Leistung
P2000[3] Bezugsfrequenz
P2003[3] Bezugsdrehmoment
P2185[3] Oberer Lastmomentschwelle M_o1
P2187[3] Oberer Lastmomentschwelle M_o2
P1316[3] Endfrequenz SpannungsanhebungP1460[3] Verstärkungsfaktor Drehzahlregl.
P1470[3] Verstärkung Drehzahlregl. (SLVC)
P1715[3] Verstärkungsfaktor Stromregler
P1764[3] Kp n-Adaption (SLVC)
P1462[3] Integrationszeit Drehzahlregler
P1472[3] Integrationszeit Drehz.r. (SLVC)
P1717[3] Integrationszeit Stromregler
P1767[3] Tn n-Adaption (SLVC)
xxx
xxx
xx
xxx
xxx
xx
xxxx
xxx
xx
xx
xx
xx
xx
xx
xx
P2188[3] Unterer Lastmomentschwelle M_u2 xP2189[3] Oberer Lastmomentschwelle M_o3P2190[3] Unterer Lastmomentschwelle M_u3
xx
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 45
Mögliche Einstellungen: 0 Keine Berechnung 1 Komplette Parametrierung 2 Ersatzschaltbilddaten berechnen 3 U/f und Vektorregelung berechnen 4 Reglereinstellung berechnen
Index: P0340[0] : 1. Antriebsdatensatz (DDS) P0340[1] : 2. Antriebsdatensatz (DDS) P0340[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Dieser Parameter wird bei der Inbetriebnahme für die Optimierung des Umrichter-Betriebsverhaltens benötigt. Bei einem großen Ungleichgewicht zwischen Umrichter- und Motorleistung könnten r0384 und r0386 nicht richtig berechnet werden. In diesem Fall ist p1910 (Motordatenidentifikation) zu verwenden. Beim Übertragen des Parameters p0340 ist der ET 200S FC mit internen Berechnungen beschäftigt, und die Kommunikation - sowohl über USS als auch über PROFIBUS DP - ist für die Dauer der Berechnungen unterbrochen. Dies kann an der angeschlossen SIMATIC S7-Steuerung (Kommunikation über PROFIBUS DP) zu folgenden Fehlermeldungen führen: - Parametrierfehler 30 - Antriebsfehler 70 - Antriebsfehler 75 Bei der Inbetriebnahme über STARTER (USS) sind während der Berechnungen keine Eingaben möglich. Die Fehler können quittiert werden, sobald die Berechnungen im Umrichter beendet sind. Die Berechungnen können bis zu 1 Minute dauern.
P0341[3] Motorträgheitsmoment [kg*m^2] Min: 0.00010 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.00180 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 1000.00000
Gibt das Massenträgheitsmoment des Motors an. Dieser Wert ergibt zusammen mit P0342 (Trägheitsverhältnis gesamt/Motor) und P1496 (Skalierungsfaktor Beschleunigung) das Beschleunigungsdrehmoment (r1517), das zu jedem beliebigen, über eine BICO-Quelle (P1511) produzierten Drehmoment hinzugefügt und in die Drehmomentregelungsfunktion integriert werden kann.
Index: P0341[0] : 1. Antriebsdatensatz (DDS) P0341[1] : 2. Antriebsdatensatz (DDS) P0341[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Das Ergebnis von: (P0341 * P0342 (Trägheitsverhältnis Gesamt/Motor) = Motorträgheit gesamt) wird in der Drehzahlreglerberechnung berücksichtigt. P1496 (Skalierungsfaktor Beschleunigung) = 100 % aktiviert die Beschleunigungsvorsteuerung für den Drehzahlregler und berechnet das Drehmoment auf der Basis von P0341 (Motorträgheit) und P0342 (Trägheitsverhältnis gesamt/Motor).
P0342[3] Trägheitsverhältnis Gesamt/Motor Min: 1.000 ÄndStat: CUT Datentyp: Float Einheit - Def: 1.000 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 400.000
Gibt das Verhältnis zwischen der Gesamtträgheit (Last + Motor) und der Motorträgheit alleine an. Index:
P0342[0] : 1. Antriebsdatensatz (DDS) P0342[1] : 2. Antriebsdatensatz (DDS) P0342[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 46 A5E00348653A-AA
P0344[3] Motorgewicht Min: 1.0 ÄndStat: CUT Datentyp: Float Einheit kg Def: 9.4 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 6500.0
Gibt das Motorgewicht [kg] an. Index:
P0344[0] : 1. Antriebsdatensatz (DDS) P0344[1] : 2. Antriebsdatensatz (DDS) P0344[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Dieser Wert wird im thermischen Motormodell verwendet. Der Wert wird normalerweise über P0340 (Motorparameter) automatisch berechnet, er kann jedoch auch manuell eingegeben werden. Der Defaultwert ist abhängig vom Umrichtertyp und seinen Nennwerten.
r0345[3] Motor-Anlaufzeit Min: - Datentyp: Float Einheit s Def: - P-Gruppe: MOTOR Max: -
Zeigt die Motor-Anlaufzeit an. Diese Zeit entspricht dem standardisierten Motor-Massenträgheitsmoment. Die Anfahrzeit ist die Zeit bis zum Erreichen der Motornenndrehzahl aus dem Stillstand bei einer Beschleunigung mit dem Motornennmoment (r0333).
Index: P0345[0] : 1. Antriebsdatensatz (DDS) P0345[1] : 2. Antriebsdatensatz (DDS) P0345[2] : 3. Antriebsdatensatz (DDS)
P0346[3] Magnetisierungszeit Min: 0.000 ÄndStat: CUT Datentyp: Float Einheit s Def: 1.000 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 20.000
Legt die Magnetisierungszeit [s] fest, d. h. die Wartezeit zwischen der Impulsfreigabe und dem Start des Hochlaufs. Während dieser Zeit wird die Motormagnetisierung aufgebaut. Die Magnetisierungszeit wird normalerweise über die Motordaten automatisch berechnet und entspricht der Läuferzeitkonstanten.
Index: P0346[0] : 1. Antriebsdatensatz (DDS) P0346[1] : 2. Antriebsdatensatz (DDS) P0346[2] : 3. Antriebsdatensatz (DDS)
Notiz: Eine zu starke Verkürzung dieser Zeit kann jedoch zu einer unzureichenden Motormagnetisierung führen.
Hinweis: Bei einer Spannungsanhebung über 100 % kann die Magnetisierungszeit reduziert werden. Der Defaultwert ist abhängig vom Umrichtertyp und seinen Nennwerten.
P0347[3] Entmagnetisierungszeit Min: 0.000 ÄndStat: CUT Datentyp: Float Einheit s Def: 1.000 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 20.000
Ändert die Wartezeit nach AUS2 / bzw. Umrichterfehler bis zur erneuten Impulsfreigabe. Index:
P0347[0] : 1. Antriebsdatensatz (DDS) P0347[1] : 2. Antriebsdatensatz (DDS) P0347[2] : 3. Antriebsdatensatz (DDS)
Notiz: Nicht aktiv nach einem normal abgeschlossenen Rücklauf, d. h. nach AUS1, AUS3 oder JOG. Bei zu starker Verkürzung dieser Zeit kommt es zu Überstromabschaltungen.
Hinweis: Die Entmagnetisierungszeit beträgt etwa das 2,5-fache der Läuferzeitkonstanten in Sekunden. Der Defaultwert ist abhängig vom Umrichtertyp und seinen Nennwerten.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 47
P0350[3] Ständerwiderstand (Phase-Phase) Min: 0.00001 ÄndStat: CUT Datentyp: Float Einheit Ohm Def: 4.00000 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 2000.00000
Ständerwiderstandswert in [Ohm] bei angeschlossenem Motor (von Phase-zu-Phase). Der Parameterwert enthält auch den Kabelwiderstand. Zur Bestimmung des Werts dieses Parameters stehen drei Möglichkeiten zur Verfügung: 1. Berechnung mit
- P0340 = 1 (Dateneingabe von Typenschild) oder - P3900 = 1,2 oder 3 (Ende Schnellinbetriebnahme).
2. Messung mit P1910 = 1 (Motordatenbestimmung - Wert für Ständerwiderstand wird überschrieben). 3. Manuelle Messung mit Ohmmeter.
Index: P0350[0] : 1. Antriebsdatensatz (DDS) P0350[1] : 2. Antriebsdatensatz (DDS) P0350[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Da die Messung von Phase zu Phase erfolgt, erscheint dieser Wert unter Umständen höher als erwartet (bis zu doppelt so hoch). Der in P0350 (Ständerwiderstand) eingegebene Wert ist der Wert, der mit der zuletzt verwendeten Methode ermittelt wurde. Der Defaultwert ist abhängig vom Umrichtertyp und seinen Nennwerten.
P0352[3] Kabelwiderstand Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit Ohm Def: 0.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 120.0
Gibt den Kabelwiderstand zwischen dem Umrichter und dem Motor für eine Phase an. Der Wert entspricht dem Widerstand des Kabels zwischen dem Umrichter und dem Motor relativ zur Nennimpedanz.
Index: P0352[0] : 1. Antriebsdatensatz (DDS) P0352[1] : 2. Antriebsdatensatz (DDS) P0352[2] : 3. Antriebsdatensatz (DDS)
P0354[3] Läuferwiderstand Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit Ohm Def: 10.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 300.0
Legt den Läuferwiderstand des Motorersatzschaltbildes fest (Strangwert). Index:
P0354[0] : 1. Antriebsdatensatz (DDS) P0354[1] : 2. Antriebsdatensatz (DDS) P0354[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Wird automatisch mit Hilfe des Motormodells berechnet oder über P1910 (Motoridentifikation) bestimmt.
P0356[3] Ständerstreuinduktivität Min: 0.00001 ÄndStat: CUT Datentyp: Float Einheit - Def: 10.00000 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 1000.00000
Legt die Ständerstreuinduktivität des Motorersatzschaltbildes in [mH] fest (Strangwert). Index:
P0356[0] : 1. Antriebsdatensatz (DDS) P0356[1] : 2. Antriebsdatensatz (DDS) P0356[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Wird automatisch mit Hilfe des Motormodells berechnet oder über P1910 (Motoridentifikation) bestimmt.
Stufe
2
Stufe
3
Stufe
4
Stufe
4
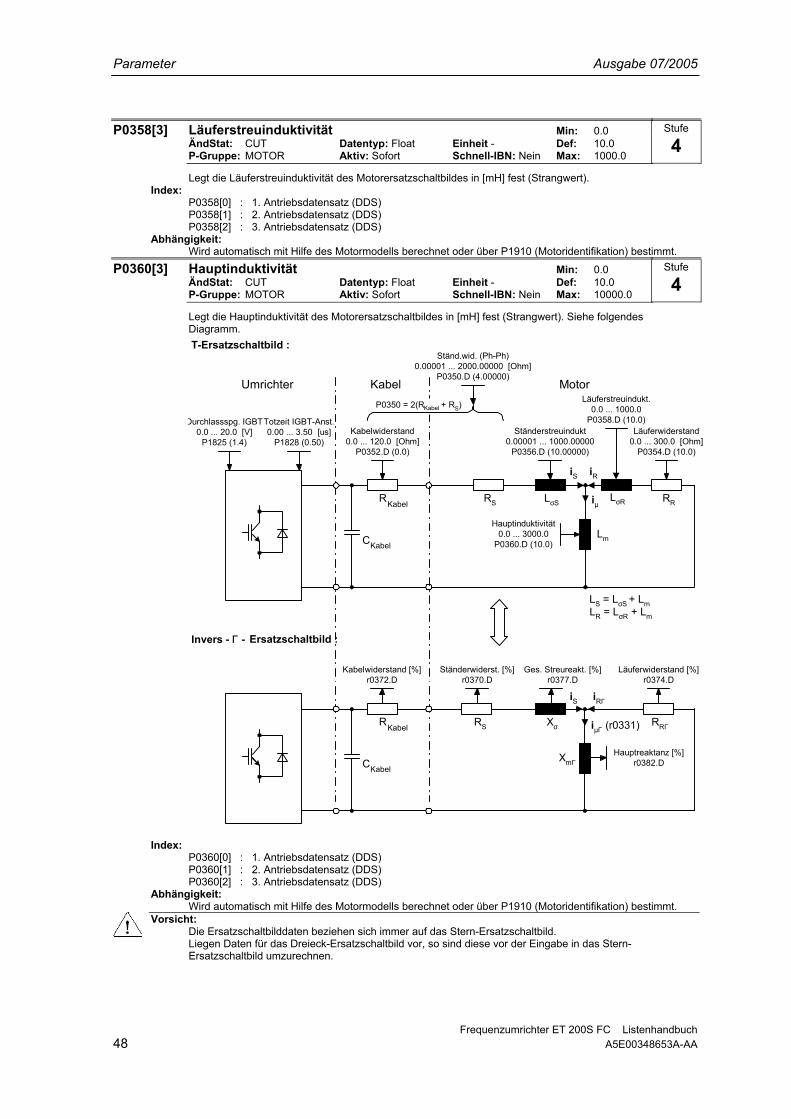
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 48 A5E00348653A-AA
P0358[3] Läuferstreuinduktivität Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit - Def: 10.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 1000.0
Legt die Läuferstreuinduktivität des Motorersatzschaltbildes in [mH] fest (Strangwert). Index:
P0358[0] : 1. Antriebsdatensatz (DDS) P0358[1] : 2. Antriebsdatensatz (DDS) P0358[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Wird automatisch mit Hilfe des Motormodells berechnet oder über P1910 (Motoridentifikation) bestimmt.
P0360[3] Hauptinduktivität Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit - Def: 10.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 10000.0
Legt die Hauptinduktivität des Motorersatzschaltbildes in [mH] fest (Strangwert). Siehe folgendes Diagramm.
Kabelwiderstand0.0 ... 120.0 [Ohm]
P0352.D (0.0)
Ständerstreuindukt0.00001 ... 1000.00000
P0356.D (10.00000)
LσS
Läuferstreuindukt.0.0 ... 1000.0
P0358.D (10.0)
LσR
Lm
Hauptinduktivität0.0 ... 3000.0
P0360.D (10.0)
Läuferwiderstand0.0 ... 300.0 [Ohm]
P0354.D (10.0)
RR
Durchlassspg. IGBT0.0 ... 20.0 [V]
P1825 (1.4)
Totzeit IGBT-Anst.0.00 ... 3.50 [us]
P1828 (0.50)
RS Xσ
XmΓ
RRΓ
Kabelwiderstand [%]r0372.D
Ständerwiderst. [%]r0370.D
Ges. Streureakt. [%]r0377.D
Läuferwiderstand [%]r0374.D
Hauptreaktanz [%]r0382.D
MotorKabelUmrichter
Ständ.wid. (Ph-Ph)0.00001 ... 2000.00000 [Ohm]
P0350.D (4.00000)
C
R
P0350 = 2(R + RS)
Kabel
Kabel
Kabel
RS
C
R
Kabel
Kabel
T-Ersatzschaltbild :
LR = LσR + Lm
LS = LσS + Lm
Ersatzschaltbild :
iS iR
iµ
iS iRΓ
iµΓ (r0331)
Invers - Γ -
Index:
P0360[0] : 1. Antriebsdatensatz (DDS) P0360[1] : 2. Antriebsdatensatz (DDS) P0360[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Wird automatisch mit Hilfe des Motormodells berechnet oder über P1910 (Motoridentifikation) bestimmt.
Vorsicht: Die Ersatzschaltbilddaten beziehen sich immer auf das Stern-Ersatzschaltbild. Liegen Daten für das Dreieck-Ersatzschaltbild vor, so sind diese vor der Eingabe in das Stern-Ersatzschaltbild umzurechnen.
Stufe
4
Stufe
4
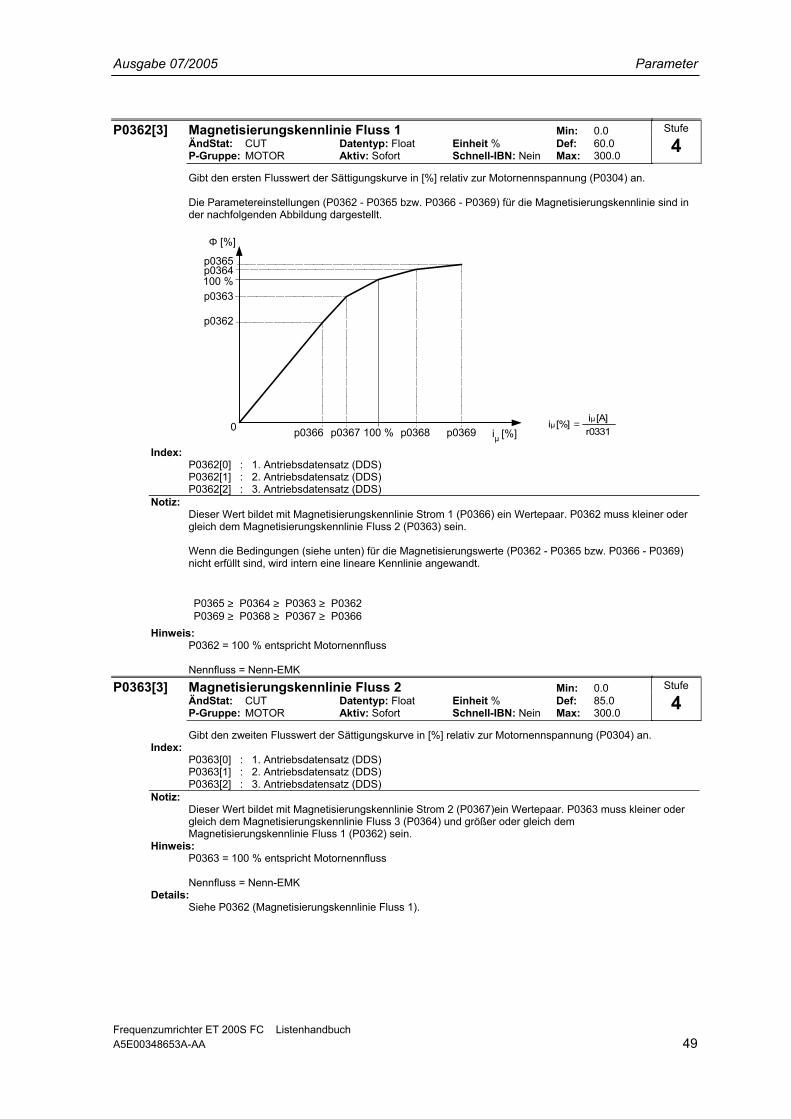
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 49
P0362[3] Magnetisierungskennlinie Fluss 1 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 60.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 300.0
Gibt den ersten Flusswert der Sättigungskurve in [%] relativ zur Motornennspannung (P0304) an. Die Parametereinstellungen (P0362 - P0365 bzw. P0366 - P0369) für die Magnetisierungskennlinie sind in der nachfolgenden Abbildung dargestellt.
0 p0366 p0367 100 % p0368 p0369 iµ [%]
p0362
p0363100 %p0364p0365
Φ [%]
r0331 [A]i [%]i µ
µ =
Index:
P0362[0] : 1. Antriebsdatensatz (DDS) P0362[1] : 2. Antriebsdatensatz (DDS) P0362[2] : 3. Antriebsdatensatz (DDS)
Notiz: Dieser Wert bildet mit Magnetisierungskennlinie Strom 1 (P0366) ein Wertepaar. P0362 muss kleiner oder gleich dem Magnetisierungskennlinie Fluss 2 (P0363) sein. Wenn die Bedingungen (siehe unten) für die Magnetisierungswerte (P0362 - P0365 bzw. P0366 - P0369) nicht erfüllt sind, wird intern eine lineare Kennlinie angewandt. P0365 ≥ P0364 ≥ P0363 ≥ P0362P0369 ≥ P0368 ≥ P0367 ≥ P0366
Hinweis:
P0362 = 100 % entspricht Motornennfluss Nennfluss = Nenn-EMK
P0363[3] Magnetisierungskennlinie Fluss 2 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 85.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 300.0
Gibt den zweiten Flusswert der Sättigungskurve in [%] relativ zur Motornennspannung (P0304) an. Index:
P0363[0] : 1. Antriebsdatensatz (DDS) P0363[1] : 2. Antriebsdatensatz (DDS) P0363[2] : 3. Antriebsdatensatz (DDS)
Notiz: Dieser Wert bildet mit Magnetisierungskennlinie Strom 2 (P0367)ein Wertepaar. P0363 muss kleiner oder gleich dem Magnetisierungskennlinie Fluss 3 (P0364) und größer oder gleich dem Magnetisierungskennlinie Fluss 1 (P0362) sein.
Hinweis: P0363 = 100 % entspricht Motornennfluss Nennfluss = Nenn-EMK
Details: Siehe P0362 (Magnetisierungskennlinie Fluss 1).
Stufe
4
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 50 A5E00348653A-AA
P0364[3] Magnetisierungskennlinie Fluss 3 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 115.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 300.0
Gibt den dritten Flusswert der Sättigungskurve in [%] relativ zur Motornennspannung (P0304) an. Index:
P0364[0] : 1. Antriebsdatensatz (DDS) P0364[1] : 2. Antriebsdatensatz (DDS) P0364[2] : 3. Antriebsdatensatz (DDS)
Notiz: Dieser Wert bildet mit Magnetisierungskennlinie Strom 3 (P0368) ein Wertepaar. P0364 muss kleiner oder gleich dem Magnetisierungskennlinie Fluss 4 (P0365) und größer oder gleich dem Magnetisierungskennlinie Fluss 2 (P0363) sein.
Hinweis: P0364 = 100 % entspricht Motornennfluss Nennfluss = Nenn-EMK
Details: Siehe P0362 (Magnetisierungskennlinie Fluss 1).
P0365[3] Magnetisierungskennlinie Fluss 4 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 125.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 300.0
Gibt den vierten Flusswert der Sättigungskurve in [%] relativ zur Motornennspannung (P0304) an. Index:
P0365[0] : 1. Antriebsdatensatz (DDS) P0365[1] : 2. Antriebsdatensatz (DDS) P0365[2] : 3. Antriebsdatensatz (DDS)
Notiz: Dieser Wert bildet mit Magnetisierungskennlinie Strom 4 (P0369) ein Wertepaar. P0365 muss größer oder gleich dem Magnetisierungskennlinie Fluss 3 (P0364) sein.
Hinweis: P0365 = 100 % entspricht Motornennfluss Nennfluss = Nenn-EMK
Details: Siehe P0362 (Magnetisierungskennlinie Fluss 1).
P0366[3] Magnetisierungskennlinie Strom 1 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 50.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 500.0
Gibt den ersten Magnetisierungsstromwert der Sättigungskurve in [%] relativ zu dem Nennmagnetisierungsstrom (P0331) an.
Index: P0366[0] : 1. Antriebsdatensatz (DDS) P0366[1] : 2. Antriebsdatensatz (DDS) P0366[2] : 3. Antriebsdatensatz (DDS)
Notiz: Der Wert gehört zu dem ersten Flusswert und muss kleiner oder gleich dem Magnetisierungskennlinie Strom 2 (P0367) sein.
Abhängigkeit: Beeinflusst P0320 (Motormagnetisierungsstrom).
Details: Siehe P0362 (Magnetisierungskennlinie Fluss 1).
Stufe
4
Stufe
4
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 51
P0367[3] Magnetisierungskennlinie Strom 2 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 75.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 500.0
Gibt den zweiten Magnetisierungsstromwert der Sättigungskurve in [%] relativ zu dem Nennmagnetisierungsstrom (P0331) an.
Index: P0367[0] : 1. Antriebsdatensatz (DDS) P0367[1] : 2. Antriebsdatensatz (DDS) P0367[2] : 3. Antriebsdatensatz (DDS)
Notiz: Der Wert gehört zu dem zweiten Flusswert und muss kleiner oder gleich dem Magnetisierungskennlinie Strom 3 (P0368) und größer oder gleich dem Magnetisierungskennlinie Strom 1 (P0366) sein.
Abhängigkeit: Beeinflusst P0320 (Motormagnetisierungsstrom).
Details: Siehe P0362 (Magnetisierungskennlinie Fluss 1).
P0368[3] Magnetisierungskennlinie Strom 3 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 135.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 500.0
Gibt den dritten Magnetisierungsstromwert der Sättigungskurve in [%] relativ zu dem Nennmagnetisierungsstrom (P0331) an.
Index: P0368[0] : 1. Antriebsdatensatz (DDS) P0368[1] : 2. Antriebsdatensatz (DDS) P0368[2] : 3. Antriebsdatensatz (DDS)
Notiz: Der Wert gehört zu dem dritten Flusswert und muss kleiner oder gleich dem Magnetisierungskennlinie Strom 4 (P0369) und größer oder gleich dem Magnetisierungskennlinie Strom 2 (P0367) sein.
Abhängigkeit: Beeinflusst P0320 (Motormagnetisierungsstrom).
Details: Siehe P0362 (Magnetisierungskennlinie Fluss 1).
P0369[3] Magnetisierungskennlinie Strom 4 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 170.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 500.0
Gibt den vierten Magnetisierungsstromwert der Sättigungskurve in [%] relativ zu dem Nennmagnetisierungsstrom (P0331) an.
Index: P0369[0] : 1. Antriebsdatensatz (DDS) P0369[1] : 2. Antriebsdatensatz (DDS) P0369[2] : 3. Antriebsdatensatz (DDS)
Notiz: Der Wert gehört zu dem dritten Flusswert und muss kleiner oder gleich dem Magnetisierungskennlinie Strom 3 (P0368) sein.
Abhängigkeit: Beeinflusst P0320 (Motormagnetisierungsstrom).
Details: Siehe P0362 (Magnetisierungskennlinie Fluss 1).
r0370[3] Ständerwiderstand [%] Min: - Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den normierten Ständerwiderstand des Motorersatzschaltbildes (Strangwert) in [%] an. Index:
P0370[0] : 1. Antriebsdatensatz (DDS) P0370[1] : 2. Antriebsdatensatz (DDS) P0370[2] : 3. Antriebsdatensatz (DDS)
Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 52 A5E00348653A-AA
r0372[3] Kabelwiderstand [%] Min: - Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den normierten Kabelwiderstand des Motorersatzschaltbildes (Strangwert) in [%] an. Dieser beträgt schätzungsweise 20 % des Ständerwiderstands.
Index: P0372[0] : 1. Antriebsdatensatz (DDS) P0372[1] : 2. Antriebsdatensatz (DDS) P0372[2] : 3. Antriebsdatensatz (DDS)
Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
r0373[3] Ständernennwiderstand [%] Min: -
Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den Ständernennwiderstand des Motorersatzschaltbildes (Strangwert) in [%] an. Index:
P0373[0] : 1. Antriebsdatensatz (DDS) P0373[1] : 2. Antriebsdatensatz (DDS) P0373[2] : 3. Antriebsdatensatz (DDS)
Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
r0374[3] Läuferwiderstand [%] Min: -
Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den normierten Läuferwiderstand des Motorersatzschaltbildes (Strangwert) in [%] an. Index:
P0374[0] : 1. Antriebsdatensatz (DDS) P0374[1] : 2. Antriebsdatensatz (DDS) P0374[2] : 3. Antriebsdatensatz (DDS)
Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
r0376[3] Läufernennwiderstand [%] Min: -
Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den Läufernennwiderstand des Motorersatzschaltbildes (Strangwert) in [%] an. Index:
P0376[0] : 1. Antriebsdatensatz (DDS) P0376[1] : 2. Antriebsdatensatz (DDS) P0376[2] : 3. Antriebsdatensatz (DDS)
Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 53
r0377[3] Gesamt-Streureaktanz [%] Min: - Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt die normierte Gesamtstreureaktanz des Motorersatzschaltbildes (Strangwert) in [%] an. Index:
P0377[0] : 1. Antriebsdatensatz (DDS) P0377[1] : 2. Antriebsdatensatz (DDS) P0377[2] : 3. Antriebsdatensatz (DDS)
Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
r0382[3] Hauptreaktanz [%] Min: -
Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt die normierte Hauptreaktanz des Motorersatzschaltbildes (Strangwert) in [%] an. Index:
P0382[0] : 1. Antriebsdatensatz (DDS) P0382[1] : 2. Antriebsdatensatz (DDS) P0382[2] : 3. Antriebsdatensatz (DDS)
Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
r0384[3] Läuferzeitkonstante Min: -
Datentyp: Float Einheit ms Def: - P-Gruppe: MOTOR Max: -
Zeigt die berechnete Läuferzeitkonstante [ms] an. Index:
P0384[0] : 1. Antriebsdatensatz (DDS) P0384[1] : 2. Antriebsdatensatz (DDS) P0384[2] : 3. Antriebsdatensatz (DDS)
r0386[3] Gesamtstreuung Zeitkonstante Min: - Datentyp: Float Einheit ms Def: - P-Gruppe: MOTOR Max: -
Zeigt die Gesamtstreuzeitkonstante des Motors an. Index:
P0386[0] : 1. Antriebsdatensatz (DDS) P0386[1] : 2. Antriebsdatensatz (DDS) P0386[2] : 3. Antriebsdatensatz (DDS)
r0394 CO: Ständerwiderstand IGBT [%] Min: - Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den Ständerwiderstand bezogen auf den Bahnwiderstand R des IGBT in [%] an. Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
Stufe
4
Stufe
4
Stufe
3
Stufe
4
Stufe
4
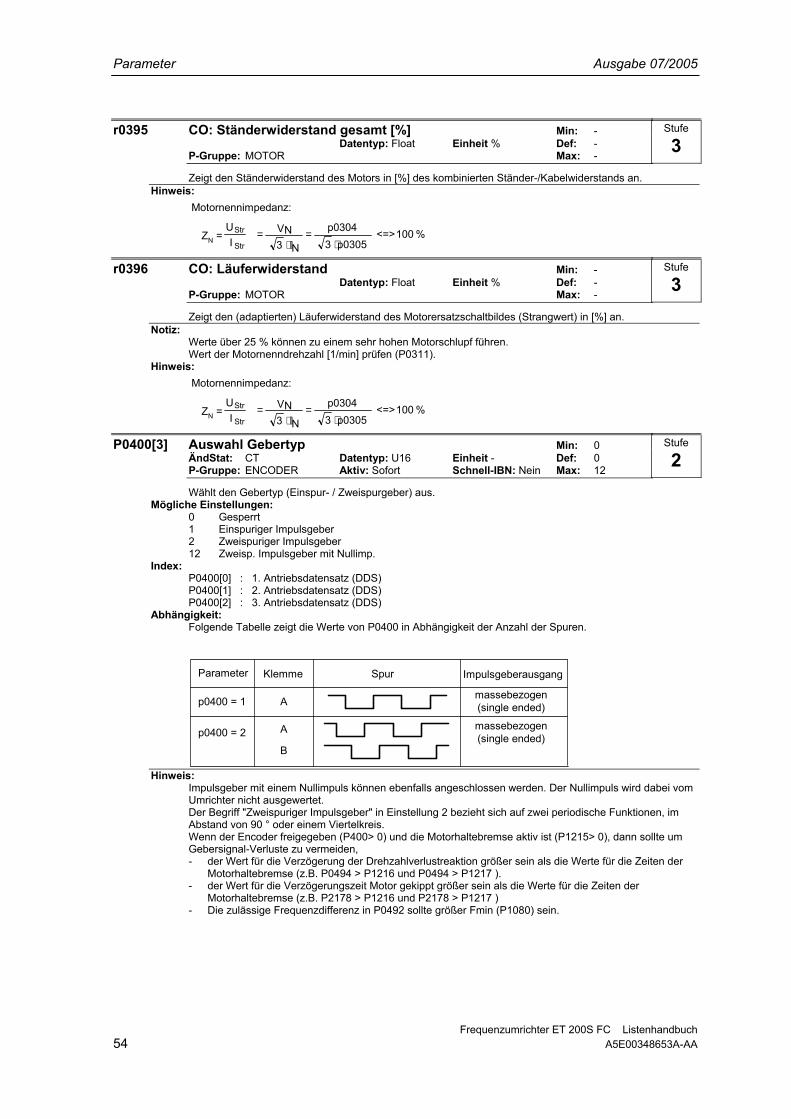
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 54 A5E00348653A-AA
r0395 CO: Ständerwiderstand gesamt [%] Min: - Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den Ständerwiderstand des Motors in [%] des kombinierten Ständer-/Kabelwiderstands an. Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
r0396 CO: Läuferwiderstand Min: -
Datentyp: Float Einheit % Def: - P-Gruppe: MOTOR Max: -
Zeigt den (adaptierten) Läuferwiderstand des Motorersatzschaltbildes (Strangwert) in [%] an. Notiz:
Werte über 25 % können zu einem sehr hohen Motorschlupf führen. Wert der Motornenndrehzahl [1/min] prüfen (P0311).
Hinweis:
% 100 <=> p03053
p0304I 3 N
VN⋅
=⋅
=ZN = StrU
StrI
Motornennimpedanz:
P0400[3] Auswahl Gebertyp Min: 0
ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ENCODER Aktiv: Sofort Schnell-IBN: Nein Max: 12
Wählt den Gebertyp (Einspur- / Zweispurgeber) aus. Mögliche Einstellungen:
0 Gesperrt 1 Einspuriger Impulsgeber 2 Zweispuriger Impulsgeber 12 Zweisp. Impulsgeber mit Nullimp.
Index: P0400[0] : 1. Antriebsdatensatz (DDS) P0400[1] : 2. Antriebsdatensatz (DDS) P0400[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Folgende Tabelle zeigt die Werte von P0400 in Abhängigkeit der Anzahl der Spuren.
Parameter Klemme Spur Impulsgeberausgang
massebezogen(single ended)p0400 = 1 A
A
B
p0400 = 2 massebezogen(single ended)
Hinweis:
Impulsgeber mit einem Nullimpuls können ebenfalls angeschlossen werden. Der Nullimpuls wird dabei vom Umrichter nicht ausgewertet. Der Begriff "Zweispuriger Impulsgeber" in Einstellung 2 bezieht sich auf zwei periodische Funktionen, im Abstand von 90 ° oder einem Viertelkreis. Wenn der Encoder freigegeben (P400> 0) und die Motorhaltebremse aktiv ist (P1215> 0), dann sollte um Gebersignal-Verluste zu vermeiden, - der Wert für die Verzögerung der Drehzahlverlustreaktion größer sein als die Werte für die Zeiten der
Motorhaltebremse (z.B. P0494 > P1216 und P0494 > P1217 ). - der Wert für die Verzögerungszeit Motor gekippt größer sein als die Werte für die Zeiten der
Motorhaltebremse (z.B. P2178 > P1216 und P2178 > P1217 ) - Die zulässige Frequenzdifferenz in P0492 sollte größer Fmin (P1080) sein.
Stufe
3
Stufe
3
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 55
Vorsicht: Der Richtungssinn von Encoder und Motor muß bei der Verwendung der Vektorregelung mit Geber übereinstimmen. Wird diese Vorschrift nicht beachtet, so ist eine funktionstüchtige Vektorregelung mit Geber nicht gewährleistet (Mitkopplung statt Gegenkopplung). Aus diesem Grund ist eine hohe Sorgfalt beim Anschließen des Motors am Umrichter bzw. des Gebers am Geberoptionsmodul erforderlich (Motorleitungen bzw. Gebersignalleitungen dürfen nicht verdreht werden!). Bei der Inbetriebnahme der Vektorregelung mit Geber (VC), sollte der Umrichter zuerst mit U/f-Steuerung (siehe P1300) aktiviert werden. Bei drehendem Motor und angeschlossenem Geber / Geberbaugruppe (aktiviert über P0400) müssen die Parameter r0061 und r0021 übereinstimmen, und zwar - im Vorzeichen und - im Betrag (eine Abweichung von wenigen Prozenten ist o.k.) . Nur wenn beide Bedingungen erfüllt sind, darf die Vektorregelung mit Sensor (P1300 = 21 oder 23) aktiviert werden. P0400 = 1 (Einspuriger Impulsgeber) liefert nur ein vorzeichenloses Signal und erlaubt daher den Betrieb nur in eine Richtung. Wird der Betrieb in beiden Richtungen benötigt, so ist ein Impulsgeber mit 2 Kanälen (A und B) und die Parametereinstellung P0400 = 2 erforderlich. Zur Änderung der Drehrichtung mit einem einspurigen Impulsgeber (P0400 = 1) kann der Drehzahlistwert über p0410=1 invertiert werden. Weitere Information können aus der Betriebsanleitung entnommen werden.
r0403 CO/BO: Akt. Geberzustandswort Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt das Zustandswort des Gebers (im Bitformat) an.
Bitfelder: Bit00 Gebermodul aktiv 0 No 1 Yes Bit01 Geberfehler 0 No 1 Yes Bit02 Signal o.k. 0 No 1 Yes Bit03 Verlust des Gebersignals 0 No 1 Yes Bit04 Drehzahlmessung mit Geberflanke 0 No 1 Yes
Details: Die 7-Segmentanzeige - nur bei BOP relevant - für Bit-Parameter (binäre Parameter) ist in der Parameterliste unter dem Abschnitt "Einführung" dargestellt.
P0405[3] Freigabe Pulsmuster Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 511
Freigabe für die Anwahl unterschiedlicher Pulsmuster. Nur Bits 4 und 5 werden für den Sinamics G120/ET200S FC verwendet.
Index: P0405[0] : 1. Antriebsdatensatz (DDS) P0405[1] : 2. Antriebsdatensatz (DDS) P0405[2] : 3. Antriebsdatensatz (DDS)
Bitfelder: Bit00 reserviert 0 No 1 Yes Bit01 reserviert 0 No 1 Yes Bit02 reserviert 0 No 1 Yes Bit03 reserviert 0 No 1 Yes Bit04 invertiert Z-pulse 0 No 1 Yes Bit05 Z-pulse = Z & A & B 0 No 1 Yes Bit06 reserviert 0 No 1 Yes Bit07 reserviert 0 No 1 Yes Bit08 reserviert 0 No 1 Yes
Stufe
2
Stufe
2
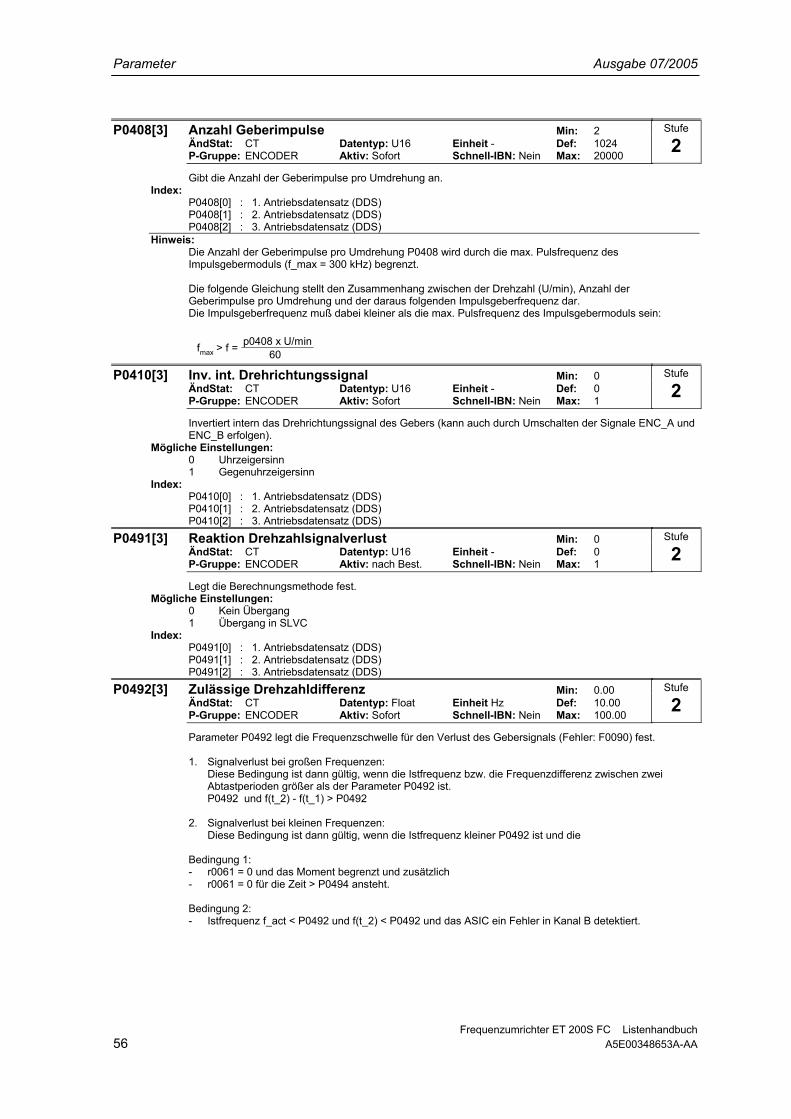
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 56 A5E00348653A-AA
P0408[3] Anzahl Geberimpulse Min: 2 ÄndStat: CT Datentyp: U16 Einheit - Def: 1024 P-Gruppe: ENCODER Aktiv: Sofort Schnell-IBN: Nein Max: 20000
Gibt die Anzahl der Geberimpulse pro Umdrehung an. Index:
P0408[0] : 1. Antriebsdatensatz (DDS) P0408[1] : 2. Antriebsdatensatz (DDS) P0408[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Die Anzahl der Geberimpulse pro Umdrehung P0408 wird durch die max. Pulsfrequenz des Impulsgebermoduls (f_max = 300 kHz) begrenzt. Die folgende Gleichung stellt den Zusammenhang zwischen der Drehzahl (U/min), Anzahl der Geberimpulse pro Umdrehung und der daraus folgenden Impulsgeberfrequenz dar. Die Impulsgeberfrequenz muß dabei kleiner als die max. Pulsfrequenz des Impulsgebermoduls sein:
p0408 x U/minfmax > f = 60 P0410[3] Inv. int. Drehrichtungssignal Min: 0
ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ENCODER Aktiv: Sofort Schnell-IBN: Nein Max: 1
Invertiert intern das Drehrichtungssignal des Gebers (kann auch durch Umschalten der Signale ENC_A und ENC_B erfolgen).
Mögliche Einstellungen: 0 Uhrzeigersinn 1 Gegenuhrzeigersinn
Index: P0410[0] : 1. Antriebsdatensatz (DDS) P0410[1] : 2. Antriebsdatensatz (DDS) P0410[2] : 3. Antriebsdatensatz (DDS)
P0491[3] Reaktion Drehzahlsignalverlust Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ENCODER Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Legt die Berechnungsmethode fest. Mögliche Einstellungen:
0 Kein Übergang 1 Übergang in SLVC
Index: P0491[0] : 1. Antriebsdatensatz (DDS) P0491[1] : 2. Antriebsdatensatz (DDS) P0491[2] : 3. Antriebsdatensatz (DDS)
P0492[3] Zulässige Drehzahldifferenz Min: 0.00 ÄndStat: CT Datentyp: Float Einheit Hz Def: 10.00 P-Gruppe: ENCODER Aktiv: Sofort Schnell-IBN: Nein Max: 100.00
Parameter P0492 legt die Frequenzschwelle für den Verlust des Gebersignals (Fehler: F0090) fest. 1. Signalverlust bei großen Frequenzen: Diese Bedingung ist dann gültig, wenn die Istfrequenz bzw. die Frequenzdifferenz zwischen zwei
Abtastperioden größer als der Parameter P0492 ist. P0492 und f(t_2) - f(t_1) > P0492 2. Signalverlust bei kleinen Frequenzen: Diese Bedingung ist dann gültig, wenn die Istfrequenz kleiner P0492 ist und die Bedingung 1: - r0061 = 0 und das Moment begrenzt und zusätzlich - r0061 = 0 für die Zeit > P0494 ansteht. Bedingung 2: - Istfrequenz f_act < P0492 und f(t_2) < P0492 und das ASIC ein Fehler in Kanal B detektiert.
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 57
Abhängigkeit: Dieser Parameter wird aktualisiert, nachdem die Motoranlaufzeit P0345 geändert oder die Drehzahloptimierung (P1960 = 1) ausgeführt wird. Im Umrichter ist eine feste Verzögerungszeit von 40 ms hinterlegt.
Hinweis: Wenn der Geber (p0400>0) und die Motorhaltebremse freigegeben sind (P1215 > 0), sollte - um Drehzahlverlustmeldungen zu vermeiden, wenn die Bremse aktiv ist - die zulässige Drehzahldifferenz (P0492) kleiner Fmin (P1080) sein.
Vorsicht: P0492 = 0 (keine Überwachung): Mit P0492 = 0 wird sowohl der Verlust des Gebersignals bei hoher Drehzahl als auch bei kleiner Drehzahl deaktiviert. Folglich wird kein Verlust des Gebersignals überwacht. Falls der Verlust des Gebersignals deaktiviert wird und der Fehler eintritt, so kann die Motorregelung instabil werden.
P0494[3] Verzög Drehzahlverlustreaktion Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ENCODER Aktiv: nach Best. Schnell-IBN: Nein Max: 65000
Wählt die Verzögerungszeit nach Erkennen des Drehzahlsignalverlusts bis zum Einleiten der entsprechenden Reaktion aus. Ist die Läuferdrehzahl kleiner als der Wert in Parameter P0492, so wird Verlust des Gebersignals mittels eines Algorithmus festgestellt. Über diesen Parameter wird die Verzögerungszeit zwischen Drehzahlsignalverlust und der Reaktion darauf eingestellt.
Index: P0494[0] : 1. Antriebsdatensatz (DDS) P0494[1] : 2. Antriebsdatensatz (DDS) P0494[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Dieser Parameter wird aktualisiert, nachdem die Motoranlaufzeit P0345 geändert oder die Drehzahloptimierung (P1960 = 1) ausgeführt wird.
Hinweis: Wenn der Geber (p0400 > 0) und die Motorhaltebremse freigegeben sind (P1215> 0), sollte - um Drehzahlverlustmeldungen zu vermeiden, wenn die Bremse aktiv ist - die Verzögerung Drehzahlverlustreaktion größer sein als die Freigabeverzögerung und die Rücklaufhaltezeit der Haltebremse (z.B.: P0494 > P1216 und P0494 > P1217 )
Vorsicht: P0494 = 0 (keine Überwachung): Mit P0492 = 0 wird der Verlust des Gebersignals bei niedriger Drehzahl deaktiviert. Folglich wird kein Verlust des Gebersignals bei kleiner Drehzahl überwacht (Verlust des Gebersignals bei hoher Drehzahl bleibt aktiv, sofern Parameter P0492 > 0). Falls der Verlust des Gebersignals deaktiviert wird und der Fehler eintritt, so kann die Motorregelung instabil werden.
P0500[3] Technische Anwendung Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: QUICK Aktiv: nach Best. Schnell-IBN: Ja Max: 3
Wählt die technische Anwendung aus. Legt die Regelungsart fest (P1300).
Mögliche Einstellungen: 0 Konst. Drehmoment 3 Pos. Rücklauframpe
Index: P0500[0] : 1. Antriebsdatensatz (DDS) P0500[1] : 2. Antriebsdatensatz (DDS) P0500[2] : 3. Antriebsdatensatz (DDS)
Stufe
2
Stufe
3
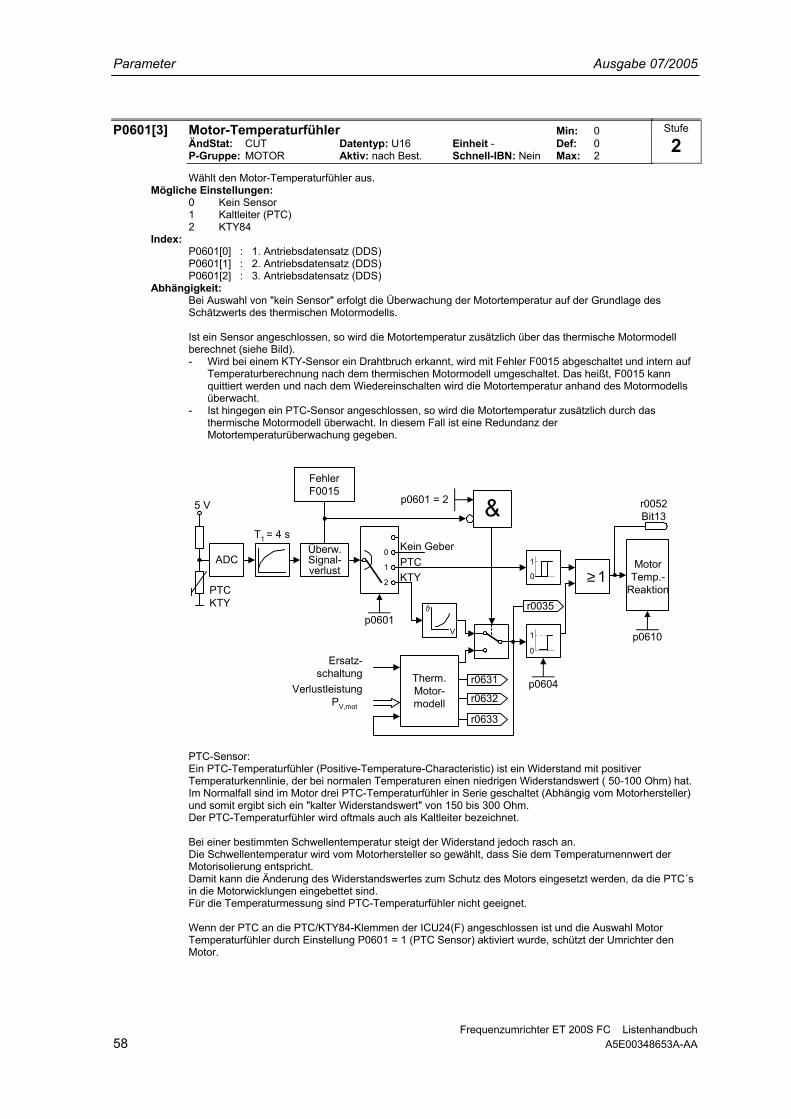
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 58 A5E00348653A-AA
P0601[3] Motor-Temperaturfühler Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Nein Max: 2
Wählt den Motor-Temperaturfühler aus. Mögliche Einstellungen:
0 Kein Sensor 1 Kaltleiter (PTC) 2 KTY84
Index: P0601[0] : 1. Antriebsdatensatz (DDS) P0601[1] : 2. Antriebsdatensatz (DDS) P0601[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Bei Auswahl von "kein Sensor" erfolgt die Überwachung der Motortemperatur auf der Grundlage des Schätzwerts des thermischen Motormodells. Ist ein Sensor angeschlossen, so wird die Motortemperatur zusätzlich über das thermische Motormodell berechnet (siehe Bild). - Wird bei einem KTY-Sensor ein Drahtbruch erkannt, wird mit Fehler F0015 abgeschaltet und intern auf
Temperaturberechnung nach dem thermischen Motormodell umgeschaltet. Das heißt, F0015 kann quittiert werden und nach dem Wiedereinschalten wird die Motortemperatur anhand des Motormodells überwacht.
- Ist hingegen ein PTC-Sensor angeschlossen, so wird die Motortemperatur zusätzlich durch das thermische Motormodell überwacht. In diesem Fall ist eine Redundanz der Motortemperaturüberwachung gegeben.
r0631
ADC
5 V
Überw.Signal-verlust
T1 = 4 s
2
1
Kein GeberPTCKTY
0
p0604
FehlerF0015
&p0601 = 2
Therm.Motor-modell
r0633
r0632
r0035
1≥Motor
Temp.-Reaktion
p0610p0601
Ersatz-schaltung
PV,mot
Verlustleistung
V
ϑ
0
1
0
1
r0052Bit13
PTCKTY
PTC-Sensor: Ein PTC-Temperaturfühler (Positive-Temperature-Characteristic) ist ein Widerstand mit positiver Temperaturkennlinie, der bei normalen Temperaturen einen niedrigen Widerstandswert ( 50-100 Ohm) hat. Im Normalfall sind im Motor drei PTC-Temperaturfühler in Serie geschaltet (Abhängig vom Motorhersteller) und somit ergibt sich ein "kalter Widerstandswert" von 150 bis 300 Ohm. Der PTC-Temperaturfühler wird oftmals auch als Kaltleiter bezeichnet. Bei einer bestimmten Schwellentemperatur steigt der Widerstand jedoch rasch an. Die Schwellentemperatur wird vom Motorhersteller so gewählt, dass Sie dem Temperaturnennwert der Motorisolierung entspricht. Damit kann die Änderung des Widerstandswertes zum Schutz des Motors eingesetzt werden, da die PTC´s in die Motorwicklungen eingebettet sind. Für die Temperaturmessung sind PTC-Temperaturfühler nicht geeignet. Wenn der PTC an die PTC/KTY84-Klemmen der ICU24(F) angeschlossen ist und die Auswahl Motor Temperaturfühler durch Einstellung P0601 = 1 (PTC Sensor) aktiviert wurde, schützt der Umrichter den Motor.
Stufe
2
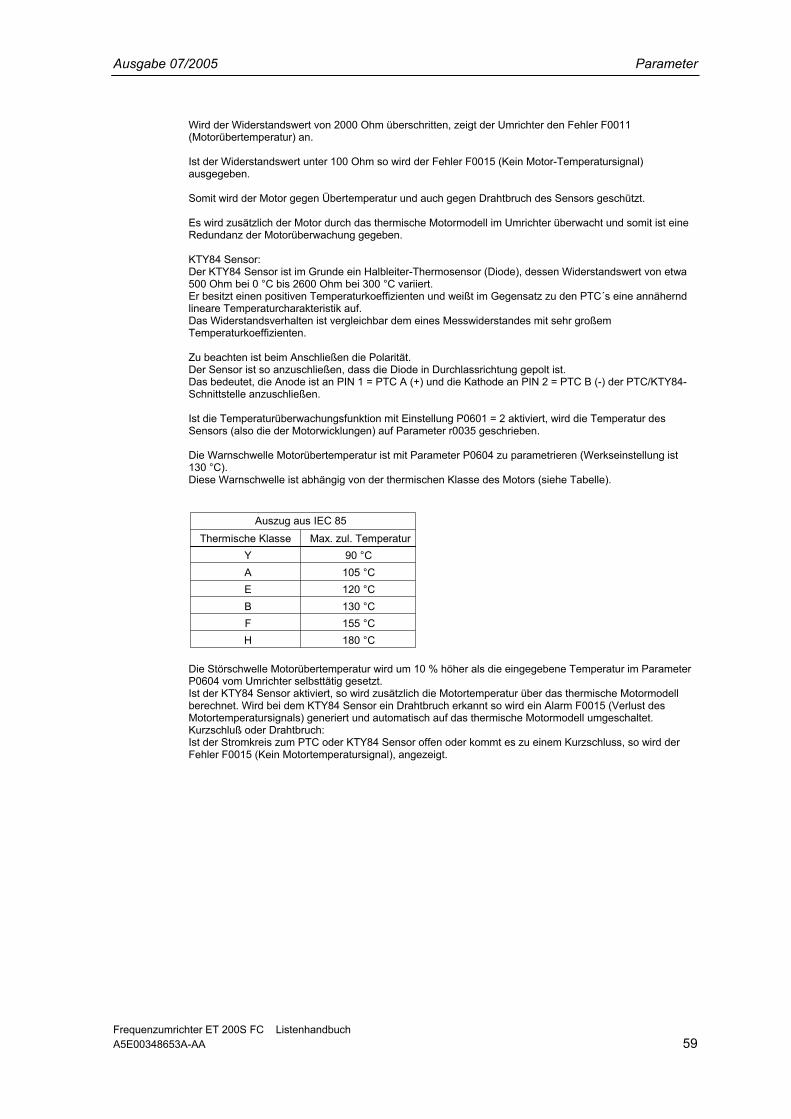
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 59
Wird der Widerstandswert von 2000 Ohm überschritten, zeigt der Umrichter den Fehler F0011 (Motorübertemperatur) an. Ist der Widerstandswert unter 100 Ohm so wird der Fehler F0015 (Kein Motor-Temperatursignal) ausgegeben. Somit wird der Motor gegen Übertemperatur und auch gegen Drahtbruch des Sensors geschützt. Es wird zusätzlich der Motor durch das thermische Motormodell im Umrichter überwacht und somit ist eine Redundanz der Motorüberwachung gegeben. KTY84 Sensor: Der KTY84 Sensor ist im Grunde ein Halbleiter-Thermosensor (Diode), dessen Widerstandswert von etwa 500 Ohm bei 0 °C bis 2600 Ohm bei 300 °C variiert. Er besitzt einen positiven Temperaturkoeffizienten und weißt im Gegensatz zu den PTC´s eine annähernd lineare Temperaturcharakteristik auf. Das Widerstandsverhalten ist vergleichbar dem eines Messwiderstandes mit sehr großem Temperaturkoeffizienten. Zu beachten ist beim Anschließen die Polarität. Der Sensor ist so anzuschließen, dass die Diode in Durchlassrichtung gepolt ist. Das bedeutet, die Anode ist an PIN 1 = PTC A (+) und die Kathode an PIN 2 = PTC B (-) der PTC/KTY84-Schnittstelle anzuschließen. Ist die Temperaturüberwachungsfunktion mit Einstellung P0601 = 2 aktiviert, wird die Temperatur des Sensors (also die der Motorwicklungen) auf Parameter r0035 geschrieben. Die Warnschwelle Motorübertemperatur ist mit Parameter P0604 zu parametrieren (Werkseinstellung ist 130 °C). Diese Warnschwelle ist abhängig von der thermischen Klasse des Motors (siehe Tabelle).
Max. zul. TemperaturThermische KlasseYAEBF
90 °C105 °C120 °C130 °C155 °C
H 180 °C
Auszug aus IEC 85
Die Störschwelle Motorübertemperatur wird um 10 % höher als die eingegebene Temperatur im Parameter P0604 vom Umrichter selbsttätig gesetzt. Ist der KTY84 Sensor aktiviert, so wird zusätzlich die Motortemperatur über das thermische Motormodell berechnet. Wird bei dem KTY84 Sensor ein Drahtbruch erkannt so wird ein Alarm F0015 (Verlust des Motortemperatursignals) generiert und automatisch auf das thermische Motormodell umgeschaltet. Kurzschluß oder Drahtbruch: Ist der Stromkreis zum PTC oder KTY84 Sensor offen oder kommt es zu einem Kurzschluss, so wird der Fehler F0015 (Kein Motortemperatursignal), angezeigt.
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 60 A5E00348653A-AA
P0604[3] Warnschwelle Motorübertemperatur Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit °C Def: 130.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 200.0
Legt die Warnschwelle für den Motorübertemperaturschutz fest. Ausgehend von der Warnschwelle P0604 wird intern die Abschaltschwelle berechnet (siehe Formel). Bei Überschreitung der Abschaltschwelle erfolgt in Abhängigkeit von P0610 entweder eine Abschaltung oder Imax-Reduktion.
ϑwarn :ϑ trip : Abschaltschwelle (max. zul. Temperatur)
p0604 1.1 1.1 warntrip
⋅=⋅= ϑϑWarnschwelle (p0604)
Index:
P0604[0] : 1. Antriebsdatensatz (DDS) P0604[1] : 2. Antriebsdatensatz (DDS) P0604[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Die Warnschwelle sollte mindestens 40 °C größer als die Umgebungstemperatur P0625. p0604 ≥ p0625 + 40 °C
Hinweis: Standardwert hängt von P0300 (Auswahl Motortyp) ab.
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 61
P0610[3] Reaktion bei Motorübertemp. I2t Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 2 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Nein Max: 2
Legt die Reaktion bei Erreichen der Warnschwelle für die Motortemperatur fest. Mögliche Einstellungen:
0 Keine Reaktion, nur Warnung 1 Warnung und Imax-Reduktion 2 Warnung und Störung (F0011)
Index: P0610[0] : 1. Antriebsdatensatz (DDS) P0610[1] : 2. Antriebsdatensatz (DDS) P0610[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Abschaltschwelle = P0604 (Motortemperatur-Warnschwelle) * 105 %
Hinweis: Die I2t-Überwachung des Motors dient dazu, die Motortemperatur zu berechnen oder zu messen und den Umrichter zu schützen, wenn eine Überhitzung des Motors zu befürchten ist. Die Motortemperatur hängt von zahlreichen Faktoren ab, darunter die Größe des Motors, die Umgebungstemperatur, die vorausgehende Motorlast und natürlich der Laststrom. (Das Quadrat der Stromstärke bestimmt die Erwärmung des Motors und die Temperatur steigt im Laufe der Zeit an, daher I2t). Da die meisten Motoren von Lüftern, die bei Motorgeschwindigkeit laufen, gekühlt werden, spielt auch die Motordrehzahl eine wichtige Rolle. Natürlich wird sich ein Motor, der mit hoher Stromstärke (evtl. verstärkt) und niedriger Drehzahl läuft, schneller erwärmen als ein Motor, der bei 50 oder 60 Hz und Volllast läuft. Diese Faktoren werden im Umrichter berücksichtigt. Die Umrichter schließen auch Umrichter-I2t-Schutz ein (d.h. Überhitzungsschutz, siehe P0290), um die Geräte selbst zu schützen. Diese Funktion ist unabhängig vom I2t des Motors und wird hier nicht beschrieben. I2t Wirkungsweise: Die gemessene Motorstromstärke wird in r0027 angezeigt. Die Motortemperatur wird aber weiterhin in r0035 in °C angezeigt. Diese Temperatur wird entweder von einem im Motor installierten Temperatursensor KTY84 erfasst oder es wird ein berechneter Wert verwendet. Der Wert vom KTY84 wird nur verwendet, wenn P0601 = 2; in allen anderen Fällen (einschließlich Signalverlust vom KTY84) wird der berechnete Wert angezeigt. Parameter P0604 kann hier auf die Einstellung der Schwellentemperatur im Vergleich zu r0035 verändert werden. P0610 ändert die Reaktion wie oben beschrieben. Die Überwachung von Parameter r0034 ist besonders nützlich, wenn die berechnete Motortemperatur sehr stark ansteigt.
Stufe
3
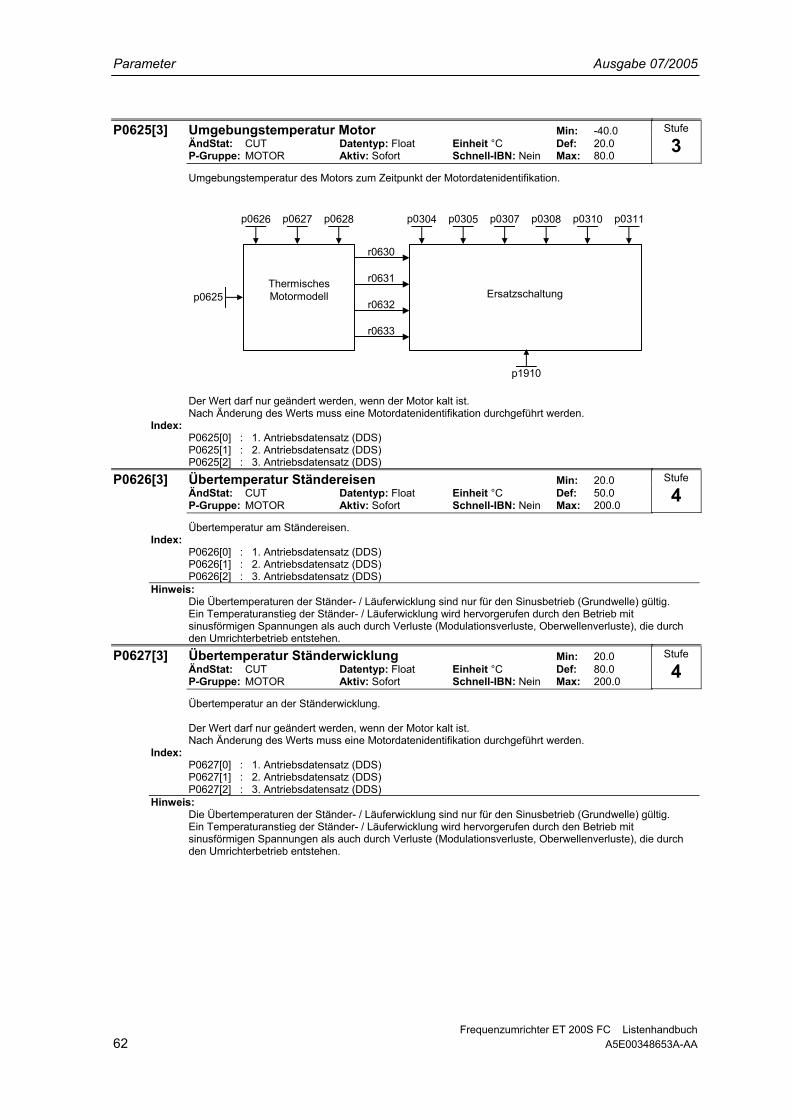
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 62 A5E00348653A-AA
P0625[3] Umgebungstemperatur Motor Min: -40.0 ÄndStat: CUT Datentyp: Float Einheit °C Def: 20.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 80.0
Umgebungstemperatur des Motors zum Zeitpunkt der Motordatenidentifikation.
p0626
p0625
p0627 p0628 p0308
ThermischesMotormodell
r0630
r0633
r0632
r0631
p0304 p0305 p0307
Ersatzschaltung
p0310 p0311
p1910 Der Wert darf nur geändert werden, wenn der Motor kalt ist. Nach Änderung des Werts muss eine Motordatenidentifikation durchgeführt werden.
Index: P0625[0] : 1. Antriebsdatensatz (DDS) P0625[1] : 2. Antriebsdatensatz (DDS) P0625[2] : 3. Antriebsdatensatz (DDS)
P0626[3] Übertemperatur Ständereisen Min: 20.0 ÄndStat: CUT Datentyp: Float Einheit °C Def: 50.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 200.0
Übertemperatur am Ständereisen. Index:
P0626[0] : 1. Antriebsdatensatz (DDS) P0626[1] : 2. Antriebsdatensatz (DDS) P0626[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Die Übertemperaturen der Ständer- / Läuferwicklung sind nur für den Sinusbetrieb (Grundwelle) gültig. Ein Temperaturanstieg der Ständer- / Läuferwicklung wird hervorgerufen durch den Betrieb mit sinusförmigen Spannungen als auch durch Verluste (Modulationsverluste, Oberwellenverluste), die durch den Umrichterbetrieb entstehen.
P0627[3] Übertemperatur Ständerwicklung Min: 20.0 ÄndStat: CUT Datentyp: Float Einheit °C Def: 80.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 200.0
Übertemperatur an der Ständerwicklung. Der Wert darf nur geändert werden, wenn der Motor kalt ist. Nach Änderung des Werts muss eine Motordatenidentifikation durchgeführt werden.
Index: P0627[0] : 1. Antriebsdatensatz (DDS) P0627[1] : 2. Antriebsdatensatz (DDS) P0627[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Die Übertemperaturen der Ständer- / Läuferwicklung sind nur für den Sinusbetrieb (Grundwelle) gültig. Ein Temperaturanstieg der Ständer- / Läuferwicklung wird hervorgerufen durch den Betrieb mit sinusförmigen Spannungen als auch durch Verluste (Modulationsverluste, Oberwellenverluste), die durch den Umrichterbetrieb entstehen.
Stufe
3
Stufe
4
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 63
P0628[3] Übertemperatur Läuferwicklung Min: 20.0 ÄndStat: CUT Datentyp: Float Einheit °C Def: 100.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Nein Max: 200.0
Übertemperatur an der Läuferwicklung. Index:
P0628[0] : 1. Antriebsdatensatz (DDS) P0628[1] : 2. Antriebsdatensatz (DDS) P0628[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Die Übertemperaturen der Ständer- / Läuferwicklung sind nur für den Sinusbetrieb (Grundwelle) gültig. Ein Temperaturanstieg der Ständer- / Läuferwicklung wird hervorgerufen durch den Betrieb mit sinusförmigen Spannungen als auch durch Verluste (Modulationsverluste, Oberwellenverluste), die durch den Umrichterbetrieb entstehen.
r0630[3] CO: Umgebungstemperatur Min: - Datentyp: Float Einheit °C Def: - P-Gruppe: MOTOR Max: -
Zeigt die Umgebungstemperatur des Motormassenmodells an. Index:
P0630[0] : 1. Antriebsdatensatz (DDS) P0630[1] : 2. Antriebsdatensatz (DDS) P0630[2] : 3. Antriebsdatensatz (DDS)
r0631[3] CO: Ständereisen-Temperatur Min: - Datentyp: Float Einheit °C Def: - P-Gruppe: MOTOR Max: -
Zeigt die Eisentemperatur des Motormassenmodells an. Index:
P0631[0] : 1. Antriebsdatensatz (DDS) P0631[1] : 2. Antriebsdatensatz (DDS) P0631[2] : 3. Antriebsdatensatz (DDS)
r0632[3] CO: Ständerwicklung-Temperatur Min: - Datentyp: Float Einheit °C Def: - P-Gruppe: MOTOR Max: -
Zeigt die Ständerwicklungstemperatur des Motormassenmodells an. Index:
P0632[0] : 1. Antriebsdatensatz (DDS) P0632[1] : 2. Antriebsdatensatz (DDS) P0632[2] : 3. Antriebsdatensatz (DDS)
r0633[3] CO: Läuferwicklung-Temperatur Min: - Datentyp: Float Einheit °C Def: - P-Gruppe: MOTOR Max: -
Zeigt die Läuferwicklungstemperatur des Motormassenmodells an. Index:
P0633[0] : 1. Antriebsdatensatz (DDS) P0633[1] : 2. Antriebsdatensatz (DDS) P0633[2] : 3. Antriebsdatensatz (DDS)
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 64 A5E00348653A-AA
P0640[3] Motorüberlastfaktor [%] Min: 10.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 150.0 P-Gruppe: MOTOR Aktiv: Sofort Schnell-IBN: Ja Max: 400.0
Bestimmt den Motorüberlastfaktor in [%] relativ zu P0305 (Motornennstrom). Index:
P0640[0] : 1. Antriebsdatensatz (DDS) P0640[1] : 2. Antriebsdatensatz (DDS) P0640[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Begrenzt auf den maximalen Umrichterstrom oder auf 400 % des Motornennstroms (P0305), wobei der niedrigere Wert angesetzt wird.
100 p0305
p0305) 4 (r0209, min p0640max ⋅⋅=
Details: Siehe Funktionsplan für Strombegrenzung.
P0700[3] Auswahl Befehlsquelle Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 6 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Ja Max: 6
Wählt die digitale Befehlsquelle aus. Mögliche Einstellungen:
0 Werksseitige Voreinstellung 2 Klemmenleiste 4 USS on RS232 6 Fieldbus
Index: P0700[0] : 1. Befehlsdatensatz (CDS) P0700[1] : 2. Befehlsdatensatz (CDS) P0700[2] : 3. Befehlsdatensatz (CDS)
Abhängigkeit: Parameter P0719 hat höhere Priorität als P0700. Bei Änderung von P0700 = x auf P0700 = 2 werden alle Digitaleingänge auf die Standardeinstellungen gesetzt. USS on RS485 wird nicht unterstützt
Vorsicht: Wird der Parameter P0700 geändert, so werden die dazugehörigen BI-Parameter automatisch auf die erforderlichen Werte eingestellt. Die Klemmen dürfen nur für Servicezwecke verwendet werden - die Verwendung im normalen Betrieb ist nicht zulässig!
Stufe
2
Stufe
1
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 65
P0701[3] Funktion Digitaleingang 0 Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 99
Wählt die Funktion von Digitaleingang 0 aus. Mögliche Einstellungen:
0 Digitaleingang gesperrt 1 EIN / AUS1 2 EIN+Reversieren / AUS1 3 AUS2 - Austrudeln 4 AUS3 - schneller Rücklauf 9 Fehler-Quittierung 10 JOG rechts 11 JOG links 12 Reversieren 29 Externer Fehler 33 Zus. Frequenzsollwert sperren 99 BICO Parametrierung freigeben
Index: P0701[0] : 1. Befehlsdatensatz (CDS) P0701[1] : 2. Befehlsdatensatz (CDS) P0701[2] : 3. Befehlsdatensatz (CDS)
Abhängigkeit: Einstellung 99, Service, kann nur zurückgesetzt werden, wenn - P0700 Befehlsquelle oder - P0010 = 1, P3900 = 1 - 3 Schnellinbetriebnahme oder - P0010 = 30, P0970 = 1 Werkseinstellung.
Hinweis: "EIN/AUS1" kann nur über einen digitalen Eingang (z.B. P0700 = 2 und P0701 = 1) angewählt werden. Wird anschliessend DIN1 mit P0702 = 1 konfiguriert, so wird der Parameter P0701 zurückgesetzt (P0701 = 0). Eine Kombination von "EIN/AUS1" und "EIN+Reversieren / AUS1" an verschiedenen digitalen Eingängen ist gleichzeitig möglich. Der 1. aktive EIN-Befehl behält dabei die Steuerungshoheit.
Details: JOG ==> siehe p1058
P0702[3] Funktion Digitaleingang 1 Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 99
Wählt die Funktion von Digitaleingang 1 aus. Mögliche Einstellungen:
0 Digitaleingang gesperrt 1 EIN / AUS1 2 EIN+Reversieren / AUS1 3 AUS2 - Austrudeln 4 AUS3 - schneller Rücklauf 9 Fehler-Quittierung 10 JOG rechts 11 JOG links 12 Reversieren 29 Externer Fehler 33 Zus. Frequenzsollwert sperren 99 BICO Parametrierung freigeben
Index: P0702[0] : 1. Befehlsdatensatz (CDS) P0702[1] : 2. Befehlsdatensatz (CDS) P0702[2] : 3. Befehlsdatensatz (CDS)
Details: Siehe P0701 (Funktion Digitaleingang 0).
Stufe
4
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 66 A5E00348653A-AA
P0719[3] Auswahl Befehls-/Sollwertquelle Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 66
Zentraler Schalter zur Auswahl der Befehls- und Sollwertquelle für den Umrichter. Zum Umschalten der Befehls- und Sollwertquelle zwischen frei programmierbaren BICO-Parametern und festen Befehls-/Sollwertprofilen. Die Befehls- und die Sollwertquelle können unabhängig voneinander ausgewählt werden. Mit der Zehnerstelle wird die Befehlsquelle ausgewählt, mit der Einerstelle die Sollwertquelle.
Mögliche Einstellungen: 0 Cmd=BICO Param. Sollw=BICO Param 4 Cmd=BICO Param. Sollw=USS on RS232 6 Cmd=Default Sollw=Fieldbus 40 Cmd=USS on RS232 Sollw=BICO Par. 44 Cmd=USS on RS232 Sollw=USS on RS232 46 Cmd=USS on RS232 Sollw=Fieldbus 60 Cmd=Fieldbus Sollw=BICO Par. 64 Cmd=Fieldbus Sollw=USS on RS232 66 Cmd=Fieldbus Sollw=Fieldbus
Index: P0719[0] : 1. Befehlsdatensatz (CDS) P0719[1] : 2. Befehlsdatensatz (CDS) P0719[2] : 3. Befehlsdatensatz (CDS)
Notiz: Parameter P0719 ist z.B. insbesondere hilfreich, wenn temporär die Befehlsquelle von P0700 = 6 geändert werden soll. Im Gegensatz zu einer P0700-Parameteränderung werden bei P0719 die Einstellungen für die BICO-Parameter nicht geändert.
Abhängigkeit: Parameter P0719 hat höhere Priorität als P0700 bzw. P1000. Bei Festlegung eines anderen Werts als 0 (d. h. der BICO-Parameter wird nicht als Sollwertquelle verwendet) sind P0844 / P0848 (erste Quelle von AUS2 / AUS3) nicht aktiv; stattdessen sind P0845 / P0849 (zweite Quelle von AUS2 / AUS3) aktiv, und die AUS-Befehle werden über die festgelegte Quelle bereitgestellt. Zuvor eingerichtete BICO-Verdrahtungen bleiben unverändert.
r0720 Anzahl Digitaleingänge Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt die Anzahl der Digitaleingänge an.
r0722 CO/BO: Status Digitaleingänge Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt den Status der Digitaleingänge an.
Bitfelder: Bit00 Digitaleingang 0 0 Off 1 On Bit01 Digitaleingang 1 0 Off 1 On
Hinweis: Bei aktivem Signal leuchtet das Segment.
P0724 Entprellzeit für Digitaleingänge Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 3 P-Gruppe: COMMANDS Aktiv: Sofort Schnell-IBN: Nein Max: 3
Legt die Entprellzeit (Filterzeit) für Digitaleingänge fest. Mögliche Einstellungen:
0 Entprellung ausgeschaltet 1 2,5 ms Entprellzeit 2 8,2 ms Entprellzeit 3 12,3 ms Entprellzeit
r0730 Anzahl Digitalausgänge Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt die Anzahl der Digitalausgänge (Relais) an.
Stufe
3
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 67
P0731[3] BI: Funktion Digitalausgang 0 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 52:3 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Legt die Quelle für Digitalausgang 0 fest. Index:
P0731[0] : 1. Befehlsdatensatz (CDS) P0731[1] : 2. Befehlsdatensatz (CDS) P0731[2] : 3. Befehlsdatensatz (CDS)
Notiz: Durch Invertieren der Digitalausgänge in p0748 kann die Logik umgekehrt werden.
Häufigste Einstellungen: 52.0 Einschaltbereit 0 Geschlossen 52.1 Betriebsbereit 0 Geschlossen 52.2 Antrieb läuft 0 Geschlossen 52.3 Störung aktiv 0 Geschlossen 52.4 AUS2 aktiv 1 Geschlossen 52.5 AUS3 aktiv 1 Geschlossen 52.6 Einschaltsperre aktiv 0 Geschlossen 52.7 Warnung aktiv 0 Geschlossen 52.8 Abweichung Soll- / Istwert 1 Geschlossen 52.9 Steuerung von AG (PZD-Steuerung) 0 Geschlossen 52.A Ist-Frequenz f_act >= P1082 (f_max) 0 Geschlossen 52.B Warnung: Motorstrombegrenzung 1 Geschlossen 52.C Motorhaltebremse (MHB) aktiv 0 Geschlossen 52.D Motorüberlast 1 Geschlossen 52.E Motorlaufrichtung rechts 0 Geschlossen 52.F Umrichterüberlast 1 Geschlossen 53.1 Ist-Frequenz f_act > P2167 (f_off) 0 Geschlossen 53.2 Ist-Frequenz f_act > P1080 (f_min) 0 Geschlossen 53.3 Ist-Strom r0027 >= P2170 0 Geschlossen 53.4 Ist-Frequenz f_act > P2155 (f_1) 0 Geschlossen 53.5 Ist-Frequenz f_act <= P2155 (f_1) 0 Geschlossen 53.6 Ist-Frequenz f_act >= Sollwert 0 Geschlossen 53.8 Ist-Zwischenkreisspannung r0026 > P2172 0 Geschlossen
Details: Meldefunktionen ==> Siehe Parameter r0052, r0053 Motorhaltebremse ==> Siehe Parameter P1215
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 68 A5E00348653A-AA
P0732[3] BI: Funktion Digitalausgang 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 52:7 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Legt die Quelle für Digitalausgang 1 fest. Index:
P0732[0] : 1. Befehlsdatensatz (CDS) P0732[1] : 2. Befehlsdatensatz (CDS) P0732[2] : 3. Befehlsdatensatz (CDS)
Häufigste Einstellungen: 52.0 Einschaltbereit 0 Geschlossen 52.1 Betriebsbereit 0 Geschlossen 52.2 Antrieb läuft 0 Geschlossen 52.3 Störung aktiv 0 Geschlossen 52.4 AUS2 aktiv 1 Geschlossen 52.5 AUS3 aktiv 1 Geschlossen 52.6 Einschaltsperre aktiv 0 Geschlossen 52.7 Warnung aktiv 0 Geschlossen 52.8 Abweichung Soll- / Istwert 1 Geschlossen 52.9 Steuerung von AG (PZD-Steuerung) 0 Geschlossen 52.A Ist-Frequenz f_act >= P1082 (f_max) 0 Geschlossen 52.B Warnung: Motorstrombegrenzung 1 Geschlossen 52.C Motorhaltebremse (MHB) aktiv 0 Geschlossen 52.D Motorüberlast 1 Geschlossen 52.E Motorlaufrichtung rechts 0 Geschlossen 52.F Umrichterüberlast 1 Geschlossen 53.1 Ist-Frequenz f_act > P2167 (f_off) 0 Geschlossen 53.2 Ist-Frequenz f_act > P1080 (f_min) 0 Geschlossen 53.3 Ist-Strom r0027 >= P2170 0 Geschlossen 53.4 Ist-Frequenz f_act > P2155 (f_1) 0 Geschlossen 53.5 Ist-Frequenz f_act <= P2155 (f_1) 0 Geschlossen 53.6 Ist-Frequenz f_act >= Sollwert 0 Geschlossen 53.7 Ist-Zwischenkreisspannung r0026 < P2172 0 Geschlossen 53.8 Ist-Zwischenkreisspannung r0026 > P2172 0 Geschlossen
r0747 CO/BO: Zustand Digitalausgänge Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMMANDS Max: -
Zeigt den Status der Digitalausgänge an (inklusive Umkehrung von Digitalausgängen über P0748).
Bitfelder: Bit00 Digitalausgang 0 aktiv 0 No 1 Yes Bit01 Digitalausgang 1 aktiv 0 No 1 Yes
Abhängigkeit: Bit 0 = 0 : Optokopplerkontakt geöffnet Bit 0 = 1 : Optokopplerkontakt geschlossen
P0748 Digitalausgänge invertieren Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Ermöglicht eine Invertierung der auszugebenden Signale.
Bitfelder: Bit00 Digitalausgang 0 invertieren 0 No 1 Yes Bit01 Digitalausgang 1 invertieren 0 No 1 Yes
r0770 DAC-Anzahl Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TERMINAL Max: -
Zeigt die Anzahl der verfügbaren Analogausgänge an.
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 69
P0771[2] CI: DAC Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 21:0 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Legt die Funktion des 0 - 20 mA-Analogausgangs fest. Index:
P0771[0] : Analogausgang 0 (DAC 0) P0771[1] : Analogausgang 1 (DAC 1)
Häufigste Einstellungen: 21 CO: Ausgangsfrequenz (skaliert nach P2000) 24 CO: Umrichter-Ausgangsfrequenz (skaliert nach P2000) 25 CO: Ausgangsspannung (skaliert nach P2001) 26 CO: Zwischenkreisspannung (skaliert nach P2001) 27 CO: Ausgangsstrom (skaliert nach P2002)
P0773[2] DAC-Glättungszeit Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 2 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 1000
Bestimmt die Glättungszeit [ms] für Analogausgangssignale. Dieser Parameter gibt die Glättung für den DAC mit einem PT1-Filter frei.
Index: P0773[0] : Analogausgang 0 (DAC 0) P0773[1] : Analogausgang 1 (DAC 1)
Abhängigkeit: P0773 = 0: Filter deaktiviert.
r0774[2] DAC-Werte [V] oder [mA] Min: - Datentyp: Float Einheit - Def: - P-Gruppe: TERMINAL Max: -
Zeigt den Wert des Analogausgangs in [mA] nach dem Filter- und Skaliervorgang an. Index:
P0774[0] : Analogausgang 0 (DAC 0) P0774[1] : Analogausgang 1 (DAC 1)
P0776[2] DAC-Typ Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 0
Bestimmt den Typ des Analogausgangs. Mögliche Einstellungen:
0 Spannungsausgang Index:
P0776[0] : Analogausgang 0 (DAC 0) P0776[1] : Analogausgang 1 (DAC 1)
Hinweis: Der Analogausgang ist als Spannungsausgang von 0 bis 0 – 3.3 V ausgelegt.
Stufe
4
Stufe
4
Stufe
4
Stufe
4
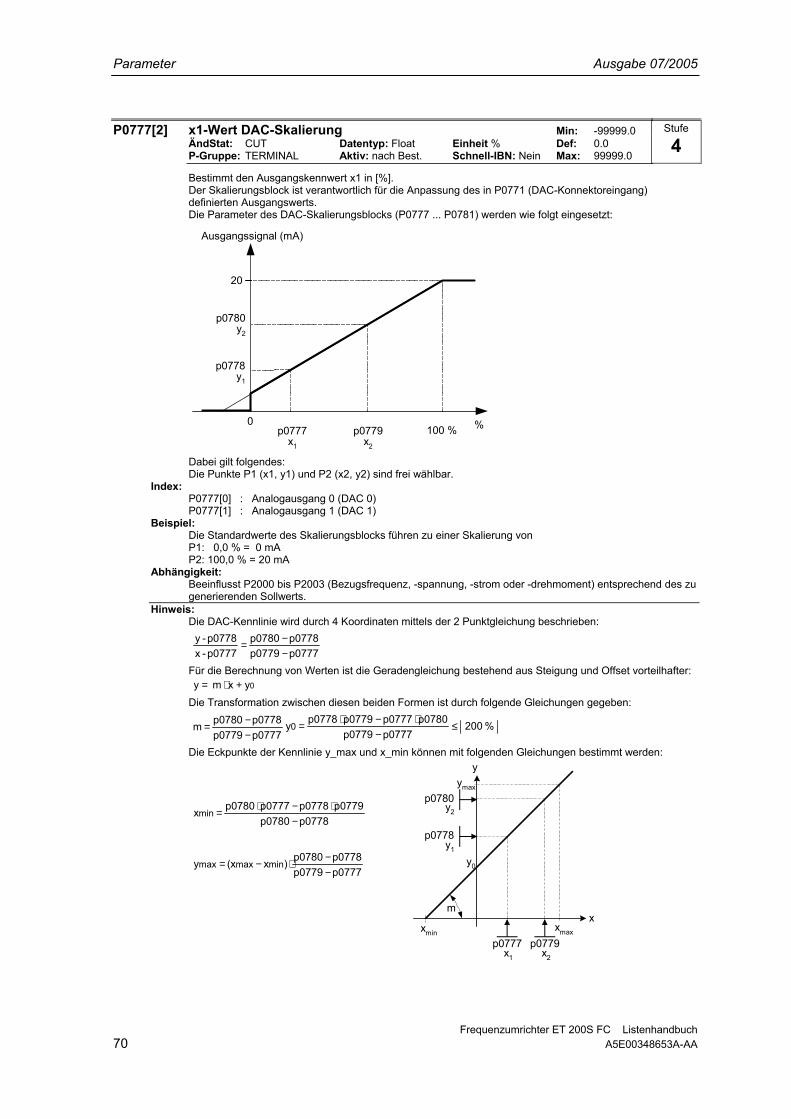
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 70 A5E00348653A-AA
P0777[2] x1-Wert DAC-Skalierung Min: -99999.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 0.0 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 99999.0
Bestimmt den Ausgangskennwert x1 in [%]. Der Skalierungsblock ist verantwortlich für die Anpassung des in P0771 (DAC-Konnektoreingang) definierten Ausgangswerts. Die Parameter des DAC-Skalierungsblocks (P0777 ... P0781) werden wie folgt eingesetzt:
0
20
p0780y2
p0778y1
p0777x1
p0779x2
100 %
Ausgangssignal (mA)
%
Dabei gilt folgendes: Die Punkte P1 (x1, y1) und P2 (x2, y2) sind frei wählbar.
Index: P0777[0] : Analogausgang 0 (DAC 0) P0777[1] : Analogausgang 1 (DAC 1)
Beispiel: Die Standardwerte des Skalierungsblocks führen zu einer Skalierung von P1: 0,0 % = 0 mA P2: 100,0 % = 20 mA
Abhängigkeit: Beeinflusst P2000 bis P2003 (Bezugsfrequenz, -spannung, -strom oder -drehmoment) entsprechend des zu generierenden Sollwerts.
Hinweis: Die DAC-Kennlinie wird durch 4 Koordinaten mittels der 2 Punktgleichung beschrieben:
p0777p0779p0778p0780
p0777-xp0778-y
−−=
Für die Berechnung von Werten ist die Geradengleichung bestehend aus Steigung und Offset vorteilhafter:
0yx m y +⋅=
Die Transformation zwischen diesen beiden Formen ist durch folgende Gleichungen gegeben:
p0777p0779p0778p0780m
−−= % 200
p0777p0779p0780p0777p0779p0778y0 ≤
−⋅−⋅=
Die Eckpunkte der Kennlinie y_max und x_min können mit folgenden Gleichungen bestimmt werden:
p0778p0780p0779p0778p0777p0780xmin
−⋅−⋅=
p0777p0779p0778p0780)x(xy minmaxmax
−−⋅−=
x
y0
xmin xmax
ymax
y
m
y1
y2
p0780
p0778
p0777x1
p0779x2
Stufe
4
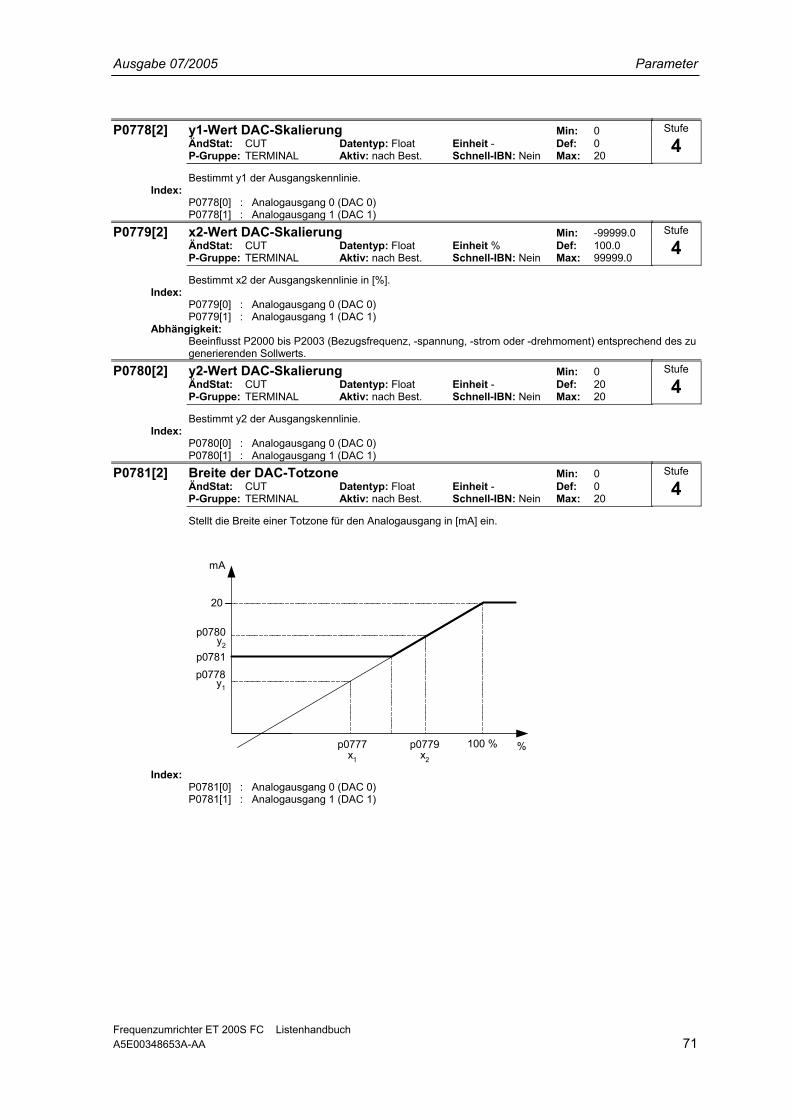
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 71
P0778[2] y1-Wert DAC-Skalierung Min: 0 ÄndStat: CUT Datentyp: Float Einheit - Def: 0 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 20
Bestimmt y1 der Ausgangskennlinie. Index:
P0778[0] : Analogausgang 0 (DAC 0) P0778[1] : Analogausgang 1 (DAC 1)
P0779[2] x2-Wert DAC-Skalierung Min: -99999.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 100.0 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 99999.0
Bestimmt x2 der Ausgangskennlinie in [%]. Index:
P0779[0] : Analogausgang 0 (DAC 0) P0779[1] : Analogausgang 1 (DAC 1)
Abhängigkeit: Beeinflusst P2000 bis P2003 (Bezugsfrequenz, -spannung, -strom oder -drehmoment) entsprechend des zu generierenden Sollwerts.
P0780[2] y2-Wert DAC-Skalierung Min: 0 ÄndStat: CUT Datentyp: Float Einheit - Def: 20 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 20
Bestimmt y2 der Ausgangskennlinie. Index:
P0780[0] : Analogausgang 0 (DAC 0) P0780[1] : Analogausgang 1 (DAC 1)
P0781[2] Breite der DAC-Totzone Min: 0 ÄndStat: CUT Datentyp: Float Einheit - Def: 0 P-Gruppe: TERMINAL Aktiv: nach Best. Schnell-IBN: Nein Max: 20
Stellt die Breite einer Totzone für den Analogausgang in [mA] ein.
20
p0780y2
p0778y1
p0777x1
p0779x2
100 %
mA
p0781
%
Index:
P0781[0] : Analogausgang 0 (DAC 0) P0781[1] : Analogausgang 1 (DAC 1)
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 72 A5E00348653A-AA
P0802 Daten übertragen von EEPROM Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: PAR_RESET Aktiv: nach Best. Schnell-IBN: Nein Max: 2
Übertragen der Werte vom Umrichter auf einen MMC-PS (Upload). Erzeugen einer Klondatei. Die Übertragung läuft ab wie folgt: RAM -> EEPROM -> MMC-PS. Der Name der Klondatei kann über p0804 modifiziert werden ("clone00.bin" bis "clone99.bin").
Mögliche Einstellungen: 0 Gesperrt 2 Start MMC-Übertragung
Index: P0802[0] : 1. Antriebsdatensatz (DDS) P0802[1] : 2. Antriebsdatensatz (DDS) P0802[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Für den Upload muss Parameter p0010 = 30 gesetzt sein. Die Parameter P0010 und P0802 werden nach erfolgreichem Upload automatisch auf 0 zurückgesetzt. Vor dem Datentransfer (8kb) ist sicher zu stellen, dass ausreichend Platz auf dem MMC-PS vorhanden ist. Details siehe Betriebsanleitung.
P0803 Daten übertragen nach EEPROM Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: PAR_RESET Aktiv: nach Best. Schnell-IBN: Nein Max: 2
Übertragen der Werte von einem MMC-PS in den Umrichter (Download). Mögliche Einstellungen:
0 Gesperrt 2 Start MMC-Übertragung
Index: P0803[0] : 1. Antriebsdatensatz (DDS) P0803[1] : 2. Antriebsdatensatz (DDS) P0803[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Für den Download muss Parameter p0010 = 30 gesetzt sein. Die Parameter P0010 und P0802 werden nach erfolgreichem Download automatisch auf 0 zurückgesetzt. Details siehe Betriebsanleitung.
P0804 Anwahl Parametersatz klonen Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: PAR_RESET Aktiv: nach Best. Schnell-IBN: Nein Max: 99
Auswahl der Klondatei für Up-/Download. - wenn p0804 = 0, dann ist der Dateiname clone00.bin - wenn p0804 = 1, dann ist der Dateiname clone01.bin - usw.
Index: P0804[0] : 1. Antriebsdatensatz (DDS) P0804[1] : 2. Antriebsdatensatz (DDS) P0804[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 73
P0809[3] Befehlsdatensatz kopieren Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 2
Ruft die Funktion "Befehlsdatensatz (CDS) kopieren" auf. Die Liste aller Befehlsdatenparameter (CDS) kann aus der Einleitung der Parameterliste entnommen werden.
Index: P0809[0] : Von CDS kopieren P0809[1] : In CDS kopieren P0809[2] : Kopieren starten
Beispiel: Kopieren aller 1. CDS-Werte nach 3. CDS kann wie folgt vorgenommen werden: p0809[0] = 0p0809[1] = 2p0809[2] = 1
2. CDS 3. CDS
p0700p0701p0702p0703p0704.....p2253p2254p2264
..........
.....
[0] [1] [2]
1. CDS
1. CDS3. CDSKopieren starten
Hinweis:
Der Startwert in Index 2 wird nach Ausführung der Funktion automatisch auf 0 zurückgesetzt.
Stufe
2
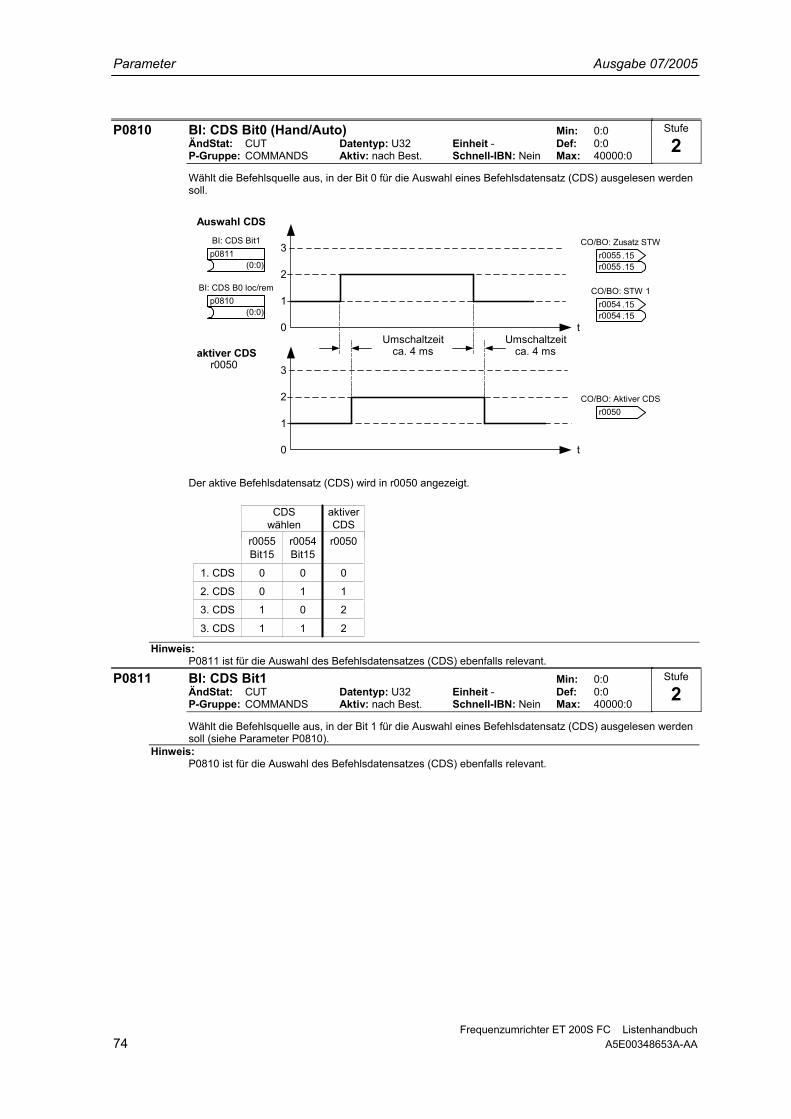
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 74 A5E00348653A-AA
P0810 BI: CDS Bit0 (Hand/Auto) Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt die Befehlsquelle aus, in der Bit 0 für die Auswahl eines Befehlsdatensatz (CDS) ausgelesen werden soll.
t0
1
2
3
(0:0)
BI: CDS B0 loc/remp0810
(0:0)
BI: CDS Bit1p0811
t0
1
2
3
CO/BO: Zusatz STW
r0055r0055
CO/BO: STW 1
r0054r0054
.15
.15
.15
.15
r0050aktiver CDS
Auswahl CDS
ca. 4 ms ca. 4 ms
r0050CO/BO: Aktiver CDS
UmschaltzeitUmschaltzeit
Der aktive Befehlsdatensatz (CDS) wird in r0050 angezeigt.
r0055Bit15
r0054Bit15
1. CDS 0 0
2. CDS 0 1
3. CDS 1 0
3. CDS 1 1
r0050
0
1
2
2
CDSwählen
aktiverCDS
Hinweis:
P0811 ist für die Auswahl des Befehlsdatensatzes (CDS) ebenfalls relevant.
P0811 BI: CDS Bit1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt die Befehlsquelle aus, in der Bit 1 für die Auswahl eines Befehlsdatensatz (CDS) ausgelesen werden soll (siehe Parameter P0810).
Hinweis: P0810 ist für die Auswahl des Befehlsdatensatzes (CDS) ebenfalls relevant.
Stufe
2
Stufe
2
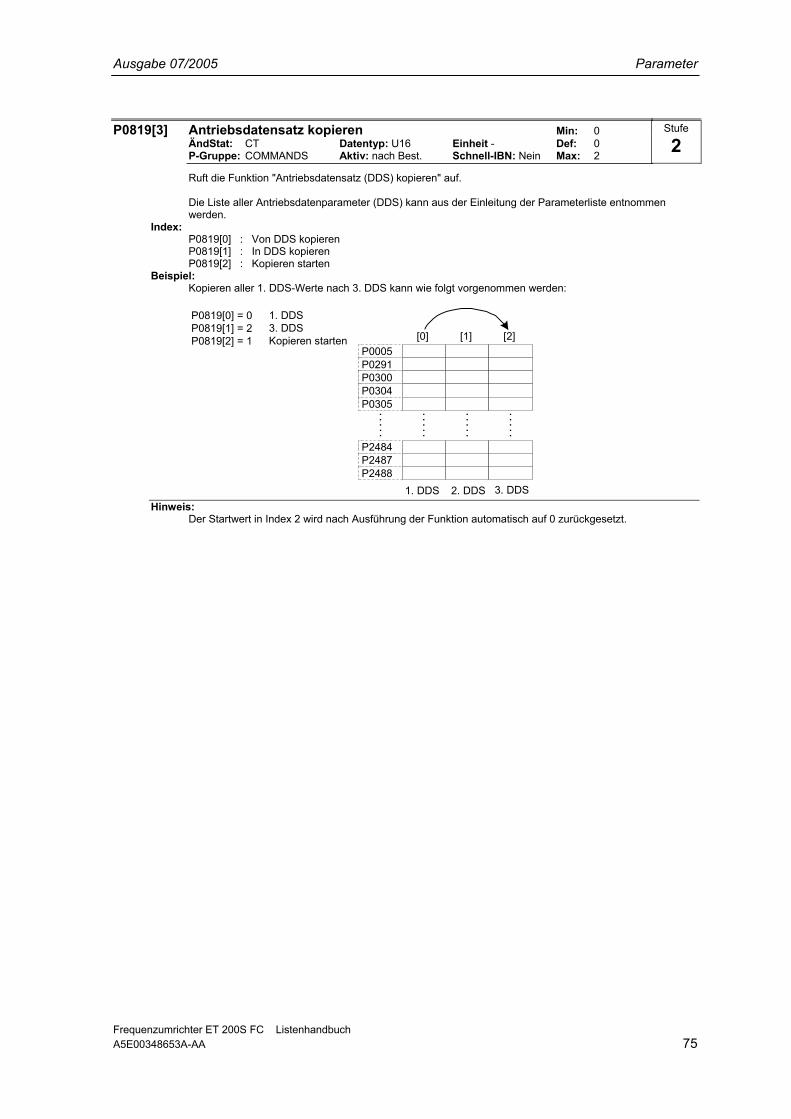
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 75
P0819[3] Antriebsdatensatz kopieren Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 2
Ruft die Funktion "Antriebsdatensatz (DDS) kopieren" auf. Die Liste aller Antriebsdatenparameter (DDS) kann aus der Einleitung der Parameterliste entnommen werden.
Index: P0819[0] : Von DDS kopieren P0819[1] : In DDS kopieren P0819[2] : Kopieren starten
Beispiel: Kopieren aller 1. DDS-Werte nach 3. DDS kann wie folgt vorgenommen werden: P0819[0] = 0P0819[1] = 2P0819[2] = 1
2. DDS 3. DDS
P0005P0291P0300P0304P0305.....P2484P2487P2488
..........
.....
[0] [1] [2]
1. DDS
1. DDS3. DDSKopieren starten
Hinweis:
Der Startwert in Index 2 wird nach Ausführung der Funktion automatisch auf 0 zurückgesetzt.
Stufe
2
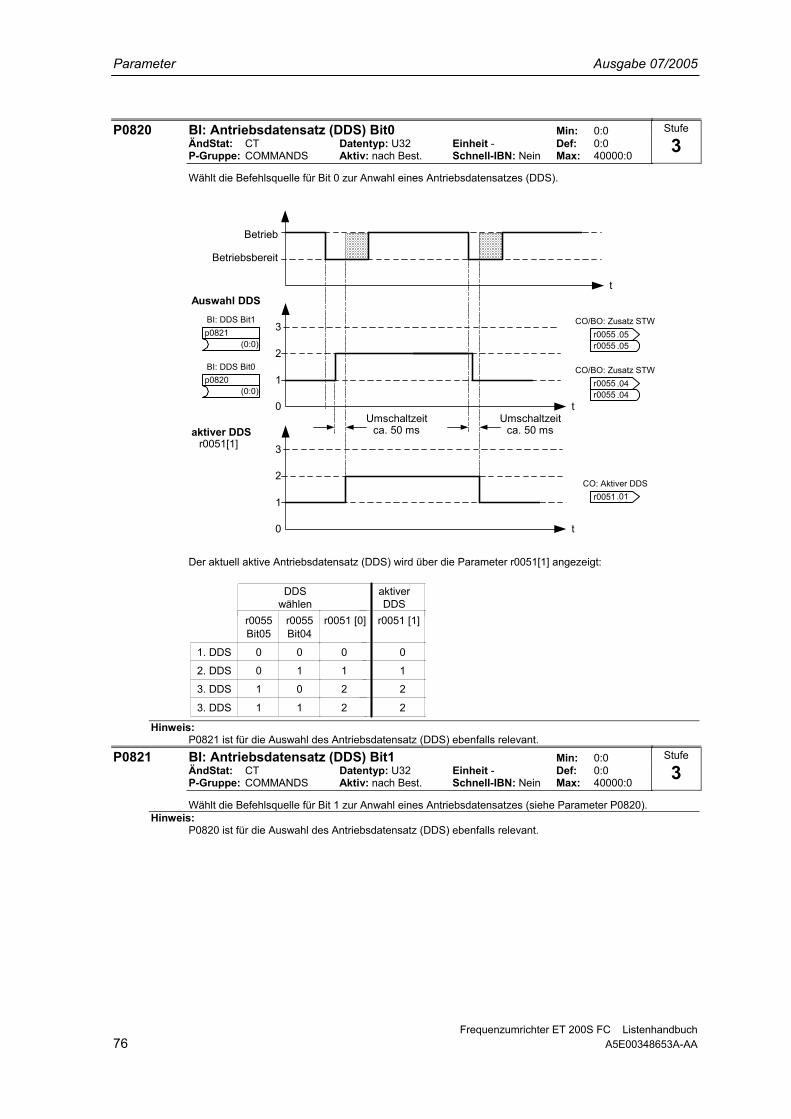
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 76 A5E00348653A-AA
P0820 BI: Antriebsdatensatz (DDS) Bit0 Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt die Befehlsquelle für Bit 0 zur Anwahl eines Antriebsdatensatzes (DDS).
t0
1
2
3
(0:0)
BI: DDS Bit0p0820
(0:0)
BI: DDS Bit1p0821
t0
1
2
3
CO/BO: Zusatz STW
r0055r0055
CO/BO: Zusatz STW
r0055r0055
.04
.04
.05
.05
r0051[1]aktiver DDS
Auswahl DDS
ca. 50 ms ca. 50 msUmschaltzeitUmschaltzeit
Betrieb
Betriebsbereit
t
r0051 [2]CO: Aktiver DDS
.01
Der aktuell aktive Antriebsdatensatz (DDS) wird über die Parameter r0051[1] angezeigt:
r0055Bit05
r0055Bit04
1. DDS 0 0
2. DDS 0 1
3. DDS 1 0
3. DDS 1 1
r0051 [0]
0
1
2
2
r0051 [1]
0
1
2
2
DDSwählen
aktiverDDS
Hinweis:
P0821 ist für die Auswahl des Antriebsdatensatz (DDS) ebenfalls relevant.
P0821 BI: Antriebsdatensatz (DDS) Bit1 Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt die Befehlsquelle für Bit 1 zur Anwahl eines Antriebsdatensatzes (siehe Parameter P0820). Hinweis:
P0820 ist für die Auswahl des Antriebsdatensatz (DDS) ebenfalls relevant.
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 77
P0840[3] BI: EIN/AUS1 Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 2090:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Ermöglicht die Auswahl, der EIN/AUS-Quelle über BICO. Die ersten Stellen stellen die Parameternummer der Befehlsquelle dar, die letzte Stelle bezieht sich auf die Biteinstellung für den Parameter.
Index: P0840[0] : 1. Befehlsdatensatz (CDS) P0840[1] : 2. Befehlsdatensatz (CDS) P0840[2] : 3. Befehlsdatensatz (CDS)
P0842[3] BI: EIN/AUS1 mit reversieren Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Ermöglicht die Auswahl der EIN/AUS1-Befehlsquelle mit reversieren über BICO. Dabei wird i.a. bei einem positiven Frequenzsollwert dieser entgegen dem Uhrzeigersinn (negative Frequenz) angefahren. Die ersten Stellen stellen die Parameternummer der Befehlsquelle dar, die letzte Stelle bezieht sich auf die Biteinstellung für den Parameter.
Index: P0842[0] : 1. Befehlsdatensatz (CDS) P0842[1] : 2. Befehlsdatensatz (CDS) P0842[2] : 3. Befehlsdatensatz (CDS)
P0844[3] BI: 1. AUS2 Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die erste Quelle von AUS2 bei P0719 = 0 (BICO). Die ersten Stellen stellen die Parameternummer der Befehlsquelle dar, die letzte Stelle bezieht sich auf die Biteinstellung für den Parameter.
Index: P0844[0] : 1. Befehlsdatensatz (CDS) P0844[1] : 2. Befehlsdatensatz (CDS) P0844[2] : 3. Befehlsdatensatz (CDS)
Abhängigkeit: Der Umrichter kann nur betrieben werden, wenn die Quelle für AUS2 aktiv ist.
Hinweis: AUS2 bedeutet sofortige Impulssperre; der Motor trudelt aus. AUS2 ist low-aktiv, d. h. : 0 = Impulssperre. 1 = Betriebsbereitschaft.
P0845[3] BI: 2. AUS2 Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die zweite Quelle von AUS2. Die ersten Stellen stellen die Parameternummer der Befehlsquelle dar, die letzte Stelle bezieht sich auf die Biteinstellung für den Parameter.
Index: P0845[0] : 1. Befehlsdatensatz (CDS) P0845[1] : 2. Befehlsdatensatz (CDS) P0845[2] : 3. Befehlsdatensatz (CDS)
Abhängigkeit: Im Gegensatz zu P0844 (erste Quelle von AUS2) ist dieser Parameter unabhängig von P0719 (Auswahl von Befehls- und Frequenzsollwert) immer aktiv. Der Umrichter kann nur betrieben werden, wenn auch die zweite Quelle für AUS2 aktiv ist.
Hinweis: AUS2 bedeutet sofortige Impulssperre; der Motor trudelt aus. AUS2 ist low-aktiv, d. h. : 0 = Impulssperre. 1 = Betriebsbereitschaft.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 78 A5E00348653A-AA
P0848[3] BI: 1. AUS3 Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die erste Quelle von AUS3 bei P0719 = 0 (BICO). Die ersten Stellen stellen die Parameternummer der Befehlsquelle dar, die letzte Stelle bezieht sich auf die Biteinstellung für den Parameter.
Index: P0848[0] : 1. Befehlsdatensatz (CDS) P0848[1] : 2. Befehlsdatensatz (CDS) P0848[2] : 3. Befehlsdatensatz (CDS)
Abhängigkeit: Der Umrichter kann nur betrieben werden, wenn auch die Quelle für AUS3 aktiv ist.
Hinweis: AUS3 bedeutet schneller Rücklauf bis 0. AUS3 ist low-aktiv, d. h. : 0 = Rampenstopp bei U/f bzw. Bremsen an der Stromgrenze bei FOC. 1 = Betriebsbereitschaft.
P0849[3] BI: 2. AUS3 Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die zweite Quelle von AUS3. Die ersten Stellen stellen die Parameternummer der Befehlsquelle dar, die letzte Stelle bezieht sich auf die Biteinstellung für den Parameter.
Index: P0849[0] : 1. Befehlsdatensatz (CDS) P0849[1] : 2. Befehlsdatensatz (CDS) P0849[2] : 3. Befehlsdatensatz (CDS)
Abhängigkeit: Im Gegensatz zu P0848 (erste Quelle von AUS3) ist dieser Parameter unabhängig von P0719 (Auswahl von Befehls- und Frequenzsollwert) immer aktiv. Der Umrichter kann nur betrieben werden, wenn auch die zweite Quelle für AUS3 aktiv ist.
Hinweis: AUS3 bedeutet schneller Rücklauf bis 0. AUS3 ist low-aktiv, d. h. : 0 = Rampenstopp bei U/f bzw. Bremsen an der Stromgrenze bei FOC. 1 = Betriebsbereitschaft.
P0852[3] BI: Impulsfreigabe Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die Quelle des Impulsfreigabe-/Impulssperresignals. Index:
P0852[0] : 1. Befehlsdatensatz (CDS) P0852[1] : 2. Befehlsdatensatz (CDS) P0852[2] : 3. Befehlsdatensatz (CDS)
Stufe
3
Stufe
3
Stufe
3
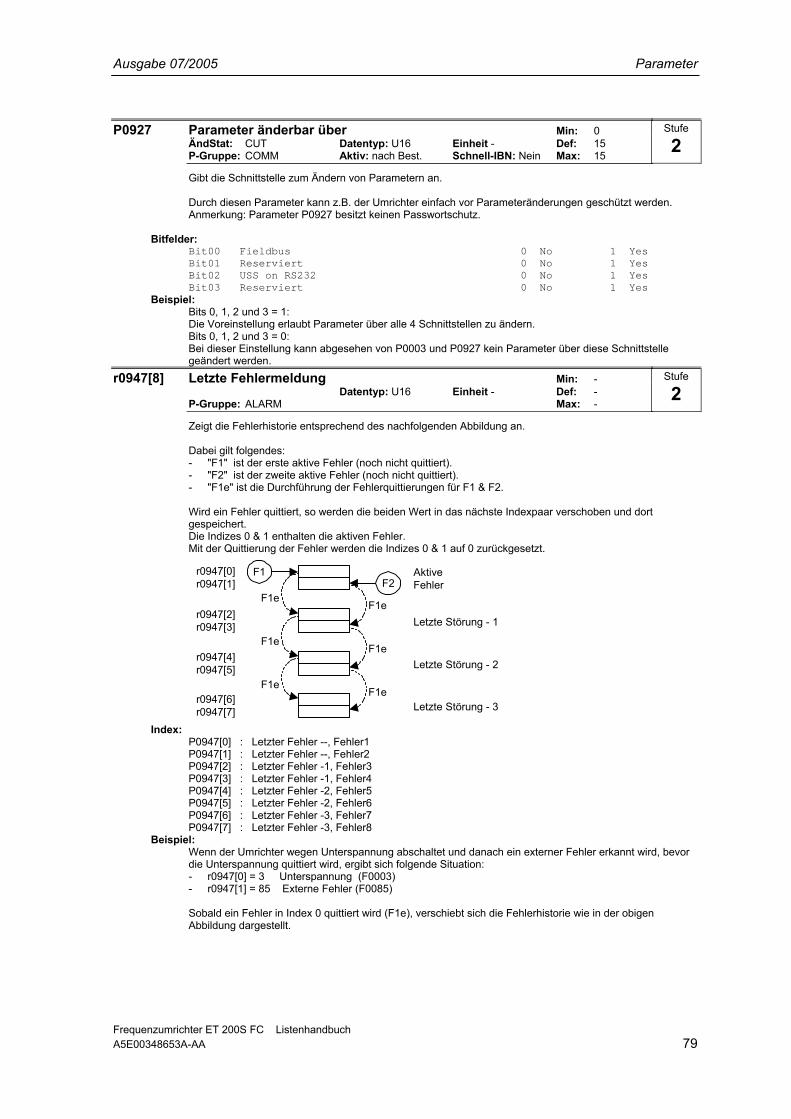
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 79
P0927 Parameter änderbar über Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 15 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 15
Gibt die Schnittstelle zum Ändern von Parametern an. Durch diesen Parameter kann z.B. der Umrichter einfach vor Parameteränderungen geschützt werden. Anmerkung: Parameter P0927 besitzt keinen Passwortschutz.
Bitfelder: Bit00 Fieldbus 0 No 1 Yes Bit01 Reserviert 0 No 1 Yes Bit02 USS on RS232 0 No 1 Yes Bit03 Reserviert 0 No 1 Yes
Beispiel: Bits 0, 1, 2 und 3 = 1: Die Voreinstellung erlaubt Parameter über alle 4 Schnittstellen zu ändern. Bits 0, 1, 2 und 3 = 0: Bei dieser Einstellung kann abgesehen von P0003 und P0927 kein Parameter über diese Schnittstelle geändert werden.
r0947[8] Letzte Fehlermeldung Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: ALARM Max: -
Zeigt die Fehlerhistorie entsprechend des nachfolgenden Abbildung an. Dabei gilt folgendes: - "F1" ist der erste aktive Fehler (noch nicht quittiert). - "F2" ist der zweite aktive Fehler (noch nicht quittiert). - "F1e" ist die Durchführung der Fehlerquittierungen für F1 & F2. Wird ein Fehler quittiert, so werden die beiden Wert in das nächste Indexpaar verschoben und dort gespeichert. Die Indizes 0 & 1 enthalten die aktiven Fehler. Mit der Quittierung der Fehler werden die Indizes 0 & 1 auf 0 zurückgesetzt.
F1e
Letzte Störung - 1
r0947[0]r0947[1]
F1F2
r0947[2]r0947[3]
AktiveFehler
Letzte Störung - 2r0947[4]r0947[5]
Letzte Störung - 3r0947[6]r0947[7]
F1e
F1eF1e
F1eF1e
Index:
P0947[0] : Letzter Fehler --, Fehler1 P0947[1] : Letzter Fehler --, Fehler2 P0947[2] : Letzter Fehler -1, Fehler3 P0947[3] : Letzter Fehler -1, Fehler4 P0947[4] : Letzter Fehler -2, Fehler5 P0947[5] : Letzter Fehler -2, Fehler6 P0947[6] : Letzter Fehler -3, Fehler7 P0947[7] : Letzter Fehler -3, Fehler8
Beispiel: Wenn der Umrichter wegen Unterspannung abschaltet und danach ein externer Fehler erkannt wird, bevor die Unterspannung quittiert wird, ergibt sich folgende Situation: - r0947[0] = 3 Unterspannung (F0003) - r0947[1] = 85 Externe Fehler (F0085) Sobald ein Fehler in Index 0 quittiert wird (F1e), verschiebt sich die Fehlerhistorie wie in der obigen Abbildung dargestellt.
Stufe
2
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 80 A5E00348653A-AA
Notiz: Es ist möglich, daß dieser Parameter leer ist, aber der Fehler im Umrichter noch angezeigt wird. Ursache dafür ist vermutlich, dass noch eine Safety-Funktion aktiv ist. In diesem Fall wird der Alarm über diesen Parameter quittiert aber der Umrichter geht nicht in den Zustand Betriebsbereit zurück. Zuerst muss der Ursache für die aktive Safety-Funktion entfernt werden, danach geht der Antrieb den Zustand Betriebsbereit. (Beispiel für sicheren Zustand: G1 und G6 inaktiv).
Abhängigkeit: Index 1 wird nur verwendet, wenn der zweite Fehler vor der Quittierung des ersten Fehlers eintritt.
Details: Siehe "Fehler und Alarme".
r0948[12] Fehlerzeit Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: ALARM Max: -
Zeitstempel, der den Zeitpunkt des Auftretens eines Fehlers anzeigt. Die möglichen Quellen des Zeitstempels sind P2114 (Laufzeitzähler) und P2115 (Echtzeituhr).
Index: P0948[0] : Abschaltung --, Zeit Sek./Min. P0948[1] : Abschaltung --, Zeit Stun./Tage P0948[2] : Abschaltung --, Zeit Mon./Jahr P0948[3] : Abschaltung -1, Zeit Sek./Min. P0948[4] : Abschaltung -1, Zeit Stun./Tage P0948[5] : Abschaltung -1, Zeit Mon./Jahr P0948[6] : Abschaltung -2, Zeit Sek./Min. P0948[7] : Abschaltung -2, Zeit Stun./Tage P0948[8] : Abschaltung -2, Zeit Mon./Jahr P0948[9] : Abschaltung -3, Zeit Sek./Min. P0948[10] : Abschaltung -3, Zeit Stun./Tage P0948[11] : Abschaltung -3, Zeit Mon./Jahr
Beispiel: P2115 wird als Quelle verwendet, wenn dieser Parameter über Echtzeit aktualisiert wurde. Andernfalls wird P2114 verwendet.
r0949[8] Fehlerwert Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: ALARM Max: -
Zeigt für Servicezwecke den Fehlerwert des entsprechenden Fehlers an. Index:
P0949[0] : Letzter Fehler --, Fehlerwert 1 P0949[1] : Letzter Fehler --, Fehlerwert 2 P0949[2] : Letzter Fehler -1, Fehlerwert 3 P0949[3] : Letzter Fehler -1, Fehlerwert 4 P0949[4] : Letzter Fehler -2, Fehlerwert 5 P0949[5] : Letzter Fehler -2, Fehlerwert 6 P0949[6] : Letzter Fehler -3, Fehlerwert 7 P0949[7] : Letzter Fehler -3, Fehlerwert 8
P0952 Summe der gespeicherten Fehler Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALARM Aktiv: nach Best. Schnell-IBN: Nein Max: 8
Zeigt die Anzahl der in P0947 (letzter Fehlercode) gespeicherten Fehler an. Abhängigkeit:
Bei Einstellung 0 wird die Fehlerhistorie zurückgesetzt (bei Änderung auf 0 wird auch der Parameter P0948, Fehlerzeit, zurückgesetzt).
Stufe
3
Stufe
3
Stufe
3
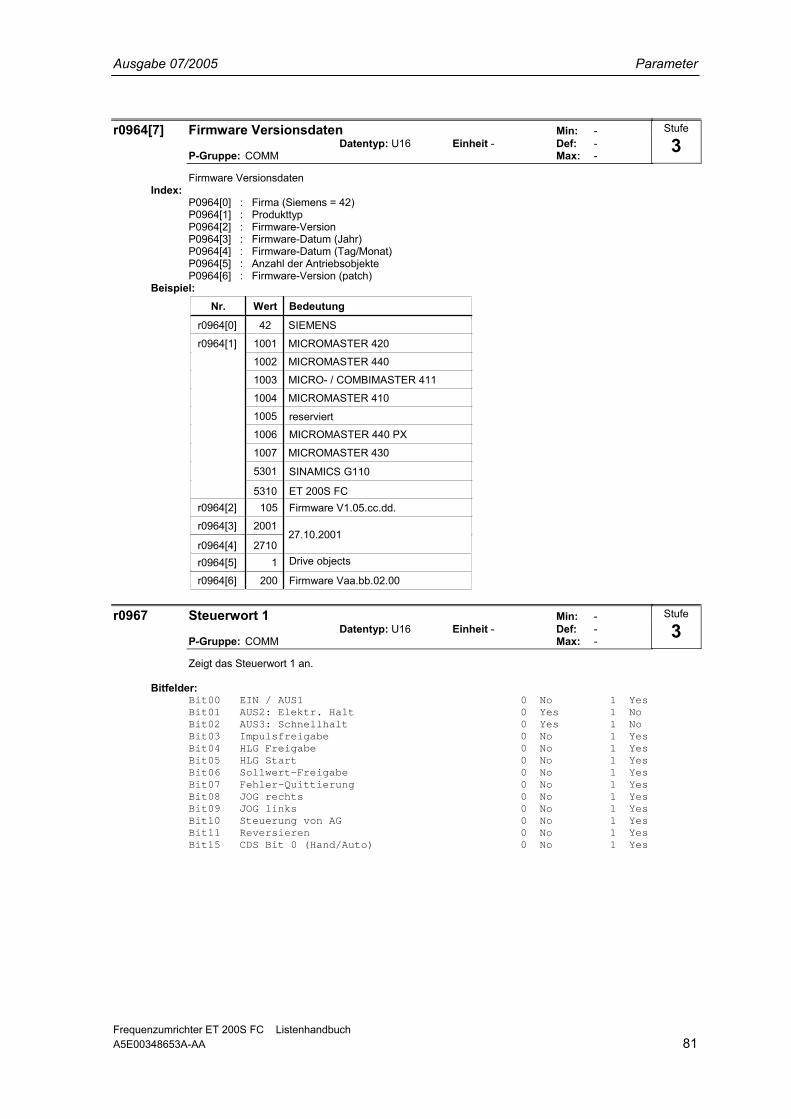
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 81
r0964[7] Firmware Versionsdaten Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Firmware Versionsdaten Index:
P0964[0] : Firma (Siemens = 42) P0964[1] : Produkttyp P0964[2] : Firmware-Version P0964[3] : Firmware-Datum (Jahr) P0964[4] : Firmware-Datum (Tag/Monat) P0964[5] : Anzahl der Antriebsobjekte P0964[6] : Firmware-Version (patch)
Beispiel:
reserviert
r0964[0] 42 SIEMENS
1001 MICROMASTER 420
1002 MICROMASTER 440
1003 MICRO- / COMBIMASTER 411
1004 MICROMASTER 410
1005
1006
r0964[1]
MICROMASTER 440 PX
Nr. Wert Bedeutung
1007 MICROMASTER 430
5301 SINAMICS G110
r0964[2] 105
r0964[3] 2001
r0964[4] 271027.10.2001
Firmware V1.05.cc.dd.
r0964[5] 1 Drive objects
r0964[6] 200 Firmware Vaa.bb.02.00
5310 ET 200S FC
r0967 Steuerwort 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt das Steuerwort 1 an.
Bitfelder: Bit00 EIN / AUS1 0 No 1 Yes Bit01 AUS2: Elektr. Halt 0 Yes 1 No Bit02 AUS3: Schnellhalt 0 Yes 1 No Bit03 Impulsfreigabe 0 No 1 Yes Bit04 HLG Freigabe 0 No 1 Yes Bit05 HLG Start 0 No 1 Yes Bit06 Sollwert-Freigabe 0 No 1 Yes Bit07 Fehler-Quittierung 0 No 1 Yes Bit08 JOG rechts 0 No 1 Yes Bit09 JOG links 0 No 1 Yes Bit10 Steuerung von AG 0 No 1 Yes Bit11 Reversieren 0 No 1 Yes Bit15 CDS Bit 0 (Hand/Auto) 0 No 1 Yes
Stufe
3
Stufe
3

Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 82 A5E00348653A-AA
r0968 Zustandswort 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt das aktive Zustandswort des Umrichters (im Binärformat) an und kann zur Anzeige der aktiven Befehle verwendet werden.
Bitfelder: Bit00 Einschaltbereit 0 No 1 Yes Bit01 Betriebsbereit 0 No 1 Yes Bit02 Betrieb / Impulsfreigabe 0 No 1 Yes Bit03 Störung aktiv 0 No 1 Yes Bit04 AUS2 aktiv 0 Yes 1 No Bit05 AUS3 aktiv 0 Yes 1 No Bit06 Einschaltsperre aktiv 0 No 1 Yes Bit07 Warnung aktiv 0 No 1 Yes Bit08 Abweichung Soll / Ist 0 Yes 1 No Bit09 Steuerung von AG 0 No 1 Yes Bit10 f_act >= P1082 (f_max) 0 No 1 Yes Bit11 Warnung: Motorstrom Grenzw. 0 Yes 1 No Bit12 Motorhaltebremse aktiv 0 No 1 Yes Bit13 Motor Überlast 0 Yes 1 No Bit14 Rechtslauf 0 No 1 Yes Bit15 Umrichter Überlast 0 Yes 1 No
P0970 Rücksetzen auf Werkseinstellung Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 0 P-Gruppe: PAR_RESET Aktiv: nach Best. Schnell-IBN: Nein Max: 10
Bei P0970 = 1 werden alle Parameter auf ihre Standardwerte zurückgesetzt. Mögliche Einstellungen:
0 Gesperrt 1 Parameter reset (ohne safety) 10 Parameter reset (nur safety)
Abhängigkeit: Zunächst P0010 = 30 (Werkseinstellung) setzen. Die Parameter können nur auf ihre Standardwerte zurückgesetzt werden, wenn zuvor der Antrieb angehalten wurde, d. h. alle Impulse gesperrt wurden.
Hinweis: Bestimmte Parameter werden bei Rücksetzen auf Werkseinstellung nicht zurückgesetzt. Folgende Parameter werden bei Rücksetzen auf Werkseinstellung nicht geändert: - P0014 Speicher (RAM/EEPROM) - P0100 Europa / N-Amerika - P2010 USS-Baudrate - P2011 USS-Adresse - r0039 CO: Energieverbrauchszähler[kWh] Auf der ICU24F steht die Einstellung 10 zur Verfügung, um die Safety-Parameter auf Werkseinstellung zurückzusetzen. Nur die Safety-Parameter werden zurückgesetzt. Vorher p0010 = 30 einstellen und das Safety-Passwort einzugeben. Beim Übertragen des Parameters p0970 ist der ET 200S FC mit internen Berechnungen beschäftigt, und die Kommunikation - sowohl über USS als auch über PROFIBUS DP - ist für die Dauer der Berechnungen unterbrochen. Dies kann an der angeschlossen SIMATIC S7-Steuerung (Kommunikation über PROFIBUS DP) zu folgenden Fehlermeldungen führen: - Parametrierfehler 30 - Antriebsfehler 70 - Antriebsfehler 75 Bei der Inbetriebnahme über STARTER (USS) sind während der Berechnungen keine Eingaben möglich. Die Fehler können quittiert werden, sobald die Berechnungen im Umrichter beendet sind. Die Berechungen können bis zu 1 Minute dauern.
Stufe
3
Stufe
1
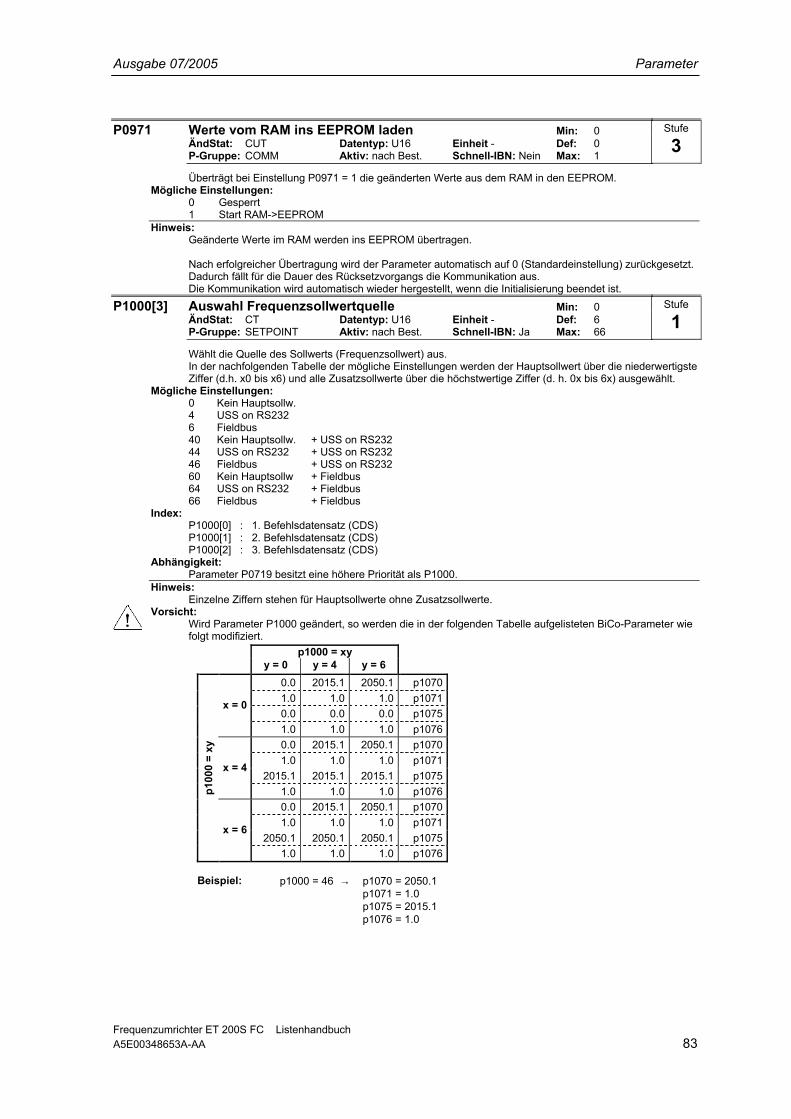
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 83
P0971 Werte vom RAM ins EEPROM laden Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Überträgt bei Einstellung P0971 = 1 die geänderten Werte aus dem RAM in den EEPROM. Mögliche Einstellungen:
0 Gesperrt 1 Start RAM->EEPROM
Hinweis: Geänderte Werte im RAM werden ins EEPROM übertragen. Nach erfolgreicher Übertragung wird der Parameter automatisch auf 0 (Standardeinstellung) zurückgesetzt. Dadurch fällt für die Dauer des Rücksetzvorgangs die Kommunikation aus. Die Kommunikation wird automatisch wieder hergestellt, wenn die Initialisierung beendet ist.
P1000[3] Auswahl Frequenzsollwertquelle Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 6 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Ja Max: 66
Wählt die Quelle des Sollwerts (Frequenzsollwert) aus. In der nachfolgenden Tabelle der mögliche Einstellungen werden der Hauptsollwert über die niederwertigste Ziffer (d.h. x0 bis x6) und alle Zusatzsollwerte über die höchstwertige Ziffer (d. h. 0x bis 6x) ausgewählt.
Mögliche Einstellungen: 0 Kein Hauptsollw. 4 USS on RS232 6 Fieldbus 40 Kein Hauptsollw. + USS on RS232 44 USS on RS232 + USS on RS232 46 Fieldbus + USS on RS232 60 Kein Hauptsollw + Fieldbus 64 USS on RS232 + Fieldbus 66 Fieldbus + Fieldbus
Index: P1000[0] : 1. Befehlsdatensatz (CDS) P1000[1] : 2. Befehlsdatensatz (CDS) P1000[2] : 3. Befehlsdatensatz (CDS)
Abhängigkeit: Parameter P0719 besitzt eine höhere Priorität als P1000.
Hinweis: Einzelne Ziffern stehen für Hauptsollwerte ohne Zusatzsollwerte.
Vorsicht: Wird Parameter P1000 geändert, so werden die in der folgenden Tabelle aufgelisteten BiCo-Parameter wie folgt modifiziert.
Beispiel:
p1000 = xy y = 0 y = 4 y = 6
0.0 2015.1 2050.1 p10701.0 1.0 1.0 p10710.0 0.0 0.0 p1075
x = 0
1.0 1.0 1.0 p10760.0 2015.1 2050.1 p10701.0 1.0 1.0 p1071
2015.1 2015.1 2015.1 p1075x = 4
1.0 1.0 1.0 p10760.0 2015.1 2050.1 p10701.0 1.0 1.0 p1071
2050.1 2050.1 2050.1 p1075
p100
0 =
xy
x = 6
1.0 1.0 1.0 p1076
p1000 = 46 → p1070 = 2050.1p1071 = 1.0p1075 = 2015.1p1076 = 1.0
Stufe
3
Stufe
1
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 84 A5E00348653A-AA
P1055[3] BI: Auswahl JOG rechts Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 2090:8 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die Quelle von JOG rechts (Tippen rechts). Index:
P1055[0] : 1. Befehlsdatensatz (CDS) P1055[1] : 2. Befehlsdatensatz (CDS) P1055[2] : 3. Befehlsdatensatz (CDS)
P1056[3] BI: Auswahl JOG links Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 2090:9 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die Quelle von JOG links (Tippen links). Index:
P1056[0] : 1. Befehlsdatensatz (CDS) P1056[1] : 2. Befehlsdatensatz (CDS) P1056[2] : 3. Befehlsdatensatz (CDS)
P1058[3] JOG Frequenz Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 5.00 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Tippen steigert die Motordrehzahl in kleinen Schritten. Die JOG-Funktion wird über das Steuerwort aktiviert. Während der JOG-Funktion aktiv ist, legt Parameter P1058 die Umrichterfrequenz fest. Der JOG-Modus ermöglicht dem Bediener eine bestimmte Drehzahl einzugeben und den Rotor manuell zu positionieren. Ist JOG rechts (Tippen rechts) oder JOG links gewählt, wird die Drehzahl erhöht, bis der Wert für JOG links oder JOG rechts erreicht ist.
Index: P1058[0] : 1. Antriebsdatensatz (DDS) P1058[1] : 2. Antriebsdatensatz (DDS) P1058[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: P1060 und P1061 erhöhen bzw. verringern die Rampenzeiten für den Tippbetrieb. Die Verrundungszeiten P1130 - P1134, Verrundungstyp P1134 und P2167 haben ebenfalls einen Einfluss auf den Tippbetrieb (JOG).
P1059[3] JOG Frequenz links Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 5.00 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Ist JOG links (Tippen links) gewählt, dann bestimmt dieser Parameter die Frequenz, mit der der Motor angesteuert wird.
Index: P1059[0] : 1. Antriebsdatensatz (DDS) P1059[1] : 2. Antriebsdatensatz (DDS) P1059[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: P1060 und P1061 erhöhen bzw. verringern die Rampenzeiten für den Tippbetrieb.
Stufe
3
Stufe
3
Stufe
2
Stufe
2
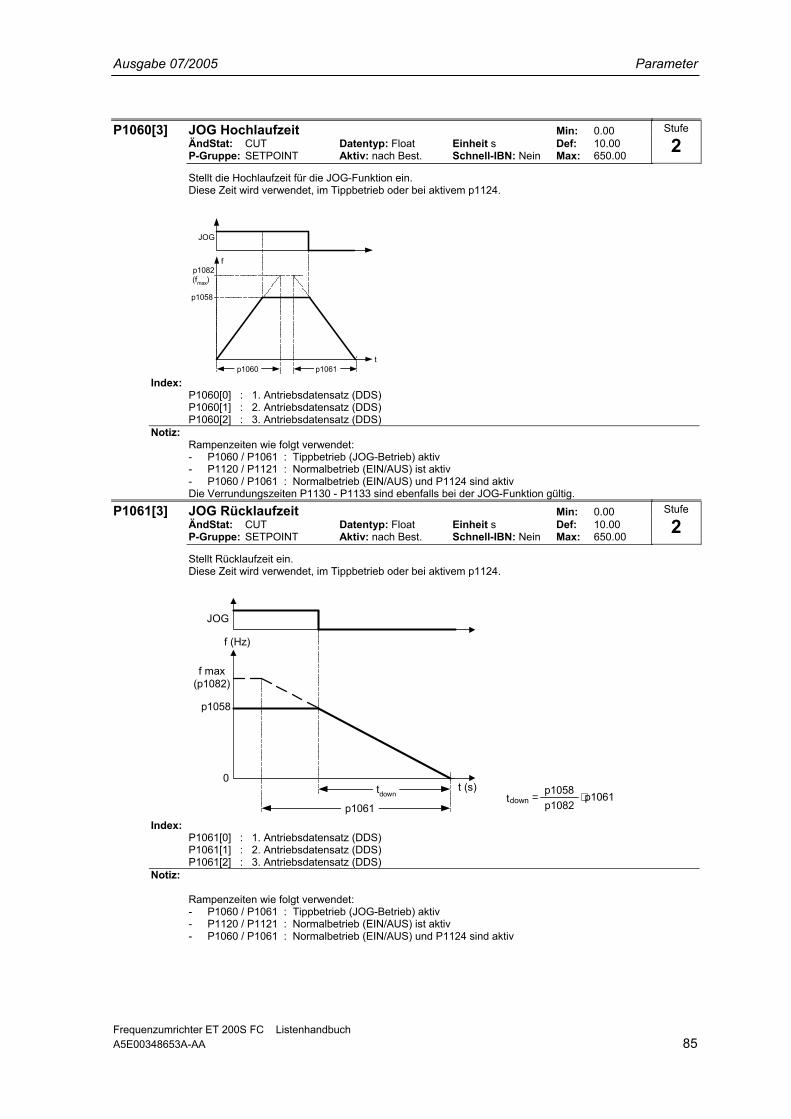
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 85
P1060[3] JOG Hochlaufzeit Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 10.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 650.00
Stellt die Hochlaufzeit für die JOG-Funktion ein. Diese Zeit wird verwendet, im Tippbetrieb oder bei aktivem p1124.
p1082(fmax)
p1058
tp1060 p1061
f
JOG
Index:
P1060[0] : 1. Antriebsdatensatz (DDS) P1060[1] : 2. Antriebsdatensatz (DDS) P1060[2] : 3. Antriebsdatensatz (DDS)
Notiz: Rampenzeiten wie folgt verwendet: - P1060 / P1061 : Tippbetrieb (JOG-Betrieb) aktiv - P1120 / P1121 : Normalbetrieb (EIN/AUS) ist aktiv - P1060 / P1061 : Normalbetrieb (EIN/AUS) und P1124 sind aktiv Die Verrundungszeiten P1130 - P1133 sind ebenfalls bei der JOG-Funktion gültig.
P1061[3] JOG Rücklaufzeit Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 10.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 650.00
Stellt Rücklaufzeit ein. Diese Zeit wird verwendet, im Tippbetrieb oder bei aktivem p1124.
f (Hz)
t (s)
f max(p1082)
p1061 p1082
p1058tdown ⋅=
p1061
tdown
JOG
p1058
0
Index:
P1061[0] : 1. Antriebsdatensatz (DDS) P1061[1] : 2. Antriebsdatensatz (DDS) P1061[2] : 3. Antriebsdatensatz (DDS)
Notiz: Rampenzeiten wie folgt verwendet: - P1060 / P1061 : Tippbetrieb (JOG-Betrieb) aktiv - P1120 / P1121 : Normalbetrieb (EIN/AUS) ist aktiv - P1060 / P1061 : Normalbetrieb (EIN/AUS) und P1124 sind aktiv
Stufe
2
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 86 A5E00348653A-AA
P1070[3] CI: Auswahl Hauptsollwert (HSW) Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 2050:1 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die Quelle des Hauptsollwerts (HSW). Index:
P1070[0] : 1. Befehlsdatensatz (CDS) P1070[1] : 2. Befehlsdatensatz (CDS) P1070[2] : 3. Befehlsdatensatz (CDS)
P1071[3] CI: Auswahl HSW-Skalierung Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die Quelle der Hauptsollwertskalierung (HSW-Skalierung). Index:
P1071[0] : 1. Befehlsdatensatz (CDS) P1071[1] : 2. Befehlsdatensatz (CDS) P1071[2] : 3. Befehlsdatensatz (CDS)
P1074[3] BI: Zusatzsollwert-Sperre Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Deaktiviert den Zusatzsollwert (ZUSW). Index:
P1074[0] : 1. Befehlsdatensatz (CDS) P1074[1] : 2. Befehlsdatensatz (CDS) P1074[2] : 3. Befehlsdatensatz (CDS)
P1075[3] CI: Auswahl Zusatzsollwert Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die Quelle des Zusatzsollwerts (ZUSW), der zusätzlich zum Hauptsollwert (HSW, siehe P1070) verwendet werden soll.
Index: P1075[0] : 1. Befehlsdatensatz (CDS) P1075[1] : 2. Befehlsdatensatz (CDS) P1075[2] : 3. Befehlsdatensatz (CDS)
P1076[3] CI: Auswahl ZUSW-Skalierung Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Bestimmt die Quelle der Skalierung des Zusatzsollwerts (ZUSW), der zusätzlich zum Hauptsollwert (HSW, siehe P1070) verwendet werden soll.
Index: P1076[0] : 1. Befehlsdatensatz (CDS) P1076[1] : 2. Befehlsdatensatz (CDS) P1076[2] : 3. Befehlsdatensatz (CDS)
Häufigste Einstellungen: 1 = Skalierung mit 1,0 (100%)
r1078 CO: Anzeige Gesamtsollwert Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: SETPOINT Max: -
Zeigt die Summe des Haupt- und des Zusatzsollwerts in [Hz] an.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3

Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 87
r1079 CO: Sollwert-Auswahl Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: SETPOINT Max: -
Zeigt den ausgewählten Frequenzsollwert an. Folgende Frequenzsollwerte werden angezeigt: r1078 Gesamtsollwert (HSW + ZUSW) P1058 JOG-Frequenz rechts P1059 JOG-Frequenz links
Abhängigkeit: P1055 (BI: Freigabe JOG rechts) oder P1056 (BI: Freigabe JOG links) bestimmt die Befehlsquelle von JOG rechts bzw. JOG links.
Hinweis: P1055 = 0 und P1056 = 0 ==> Gesamtfrequenzsollwert wird ausgewählt.
Stufe
3
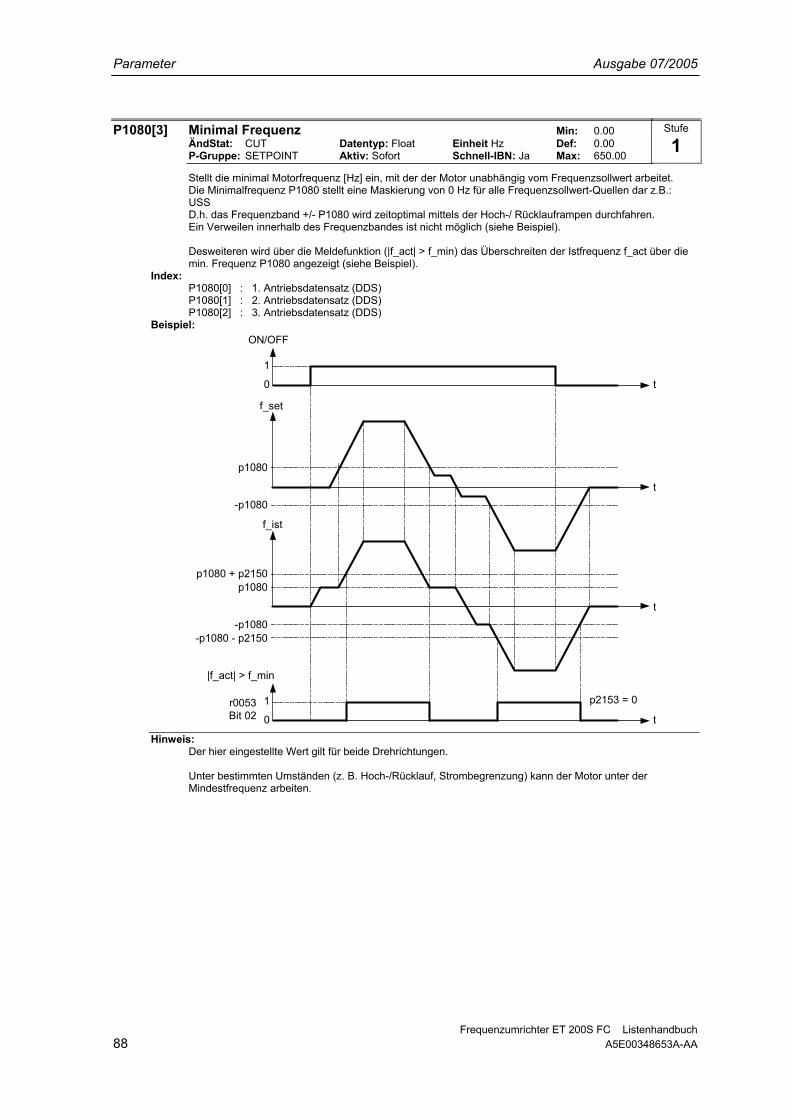
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 88 A5E00348653A-AA
P1080[3] Minimal Frequenz Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 0.00 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Ja Max: 650.00
Stellt die minimal Motorfrequenz [Hz] ein, mit der der Motor unabhängig vom Frequenzsollwert arbeitet. Die Minimalfrequenz P1080 stellt eine Maskierung von 0 Hz für alle Frequenzsollwert-Quellen dar z.B.: USS D.h. das Frequenzband +/- P1080 wird zeitoptimal mittels der Hoch-/ Rücklauframpen durchfahren. Ein Verweilen innerhalb des Frequenzbandes ist nicht möglich (siehe Beispiel). Desweiteren wird über die Meldefunktion (|f_act| > f_min) das Überschreiten der Istfrequenz f_act über die min. Frequenz P1080 angezeigt (siehe Beispiel).
Index: P1080[0] : 1. Antriebsdatensatz (DDS) P1080[1] : 2. Antriebsdatensatz (DDS) P1080[2] : 3. Antriebsdatensatz (DDS)
Beispiel:
0 t
1
t
r0053Bit 02
|f_act| > f_min
p1080
-p1080 - p2150
p1080 + p2150
-p1080
t
p1080
-p1080
0 t
1
ON/OFF
p2153 = 0
f_set
f_ist
Hinweis:
Der hier eingestellte Wert gilt für beide Drehrichtungen. Unter bestimmten Umständen (z. B. Hoch-/Rücklauf, Strombegrenzung) kann der Motor unter der Mindestfrequenz arbeiten.
Stufe
1
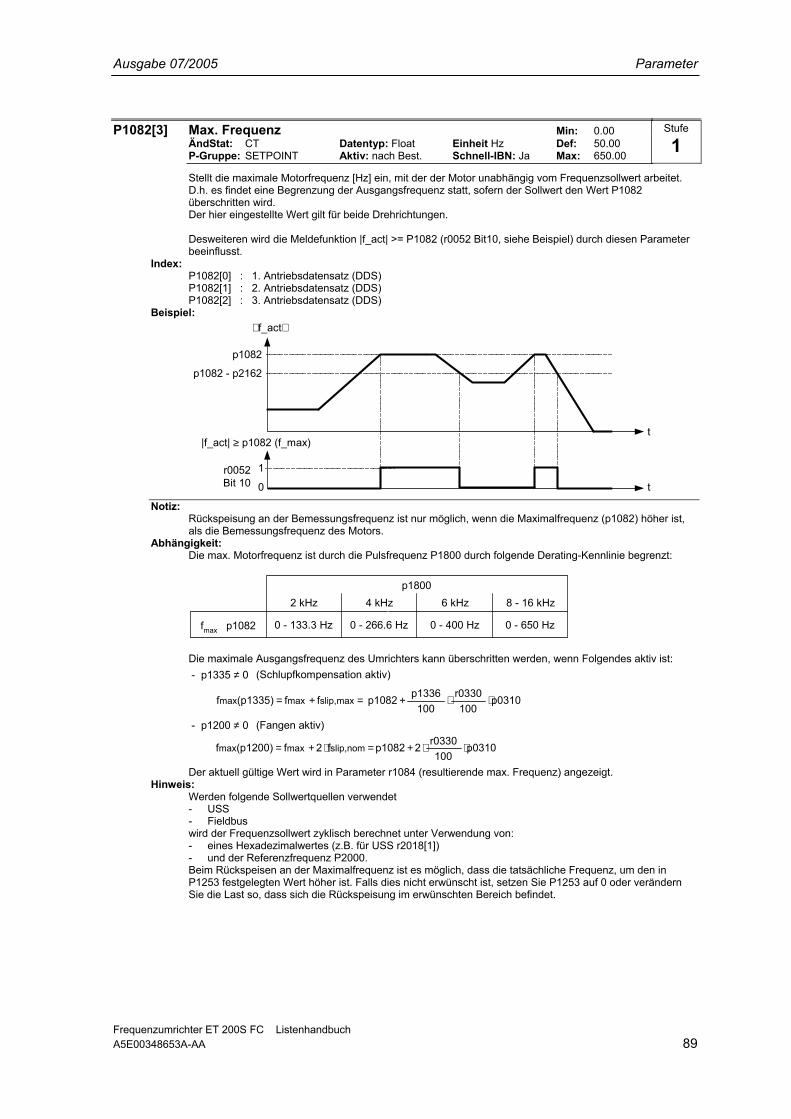
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 89
P1082[3] Max. Frequenz Min: 0.00 ÄndStat: CT Datentyp: Float Einheit Hz Def: 50.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Ja Max: 650.00
Stellt die maximale Motorfrequenz [Hz] ein, mit der der Motor unabhängig vom Frequenzsollwert arbeitet. D.h. es findet eine Begrenzung der Ausgangsfrequenz statt, sofern der Sollwert den Wert P1082 überschritten wird. Der hier eingestellte Wert gilt für beide Drehrichtungen. Desweiteren wird die Meldefunktion |f_act| >= P1082 (r0052 Bit10, siehe Beispiel) durch diesen Parameter beeinflusst.
Index: P1082[0] : 1. Antriebsdatensatz (DDS) P1082[1] : 2. Antriebsdatensatz (DDS) P1082[2] : 3. Antriebsdatensatz (DDS)
Beispiel:
0 t
1
t
f_act
r0052Bit 10
|f_act| ≥ p1082 (f_max)
p1082
p1082 - p2162
Notiz:
Rückspeisung an der Bemessungsfrequenz ist nur möglich, wenn die Maximalfrequenz (p1082) höher ist, als die Bemessungsfrequenz des Motors.
Abhängigkeit: Die max. Motorfrequenz ist durch die Pulsfrequenz P1800 durch folgende Derating-Kennlinie begrenzt:
2 kHz
0 - 133.3 Hzfmax p1082
4 kHz
0 - 266.6 Hz
6 kHz
0 - 400 Hz
8 - 16 kHz
0 - 650 Hz
p1800
Die maximale Ausgangsfrequenz des Umrichters kann überschritten werden, wenn Folgendes aktiv ist:
(Fangen aktiv)
(Schlupfkompensation aktiv)
p0310100
r0330 100
p1336 p1082 ff(p1335)f max,slipmaxmax ⋅⋅+=+=
- p1335 ≠ 0
- p1200 ≠ 0
p0310100
r0330 2p1082 f2f(p1200)f nom,slipmaxmax ⋅⋅+=⋅+=
Der aktuell gültige Wert wird in Parameter r1084 (resultierende max. Frequenz) angezeigt. Hinweis:
Werden folgende Sollwertquellen verwendet - USS - Fieldbus wird der Frequenzsollwert zyklisch berechnet unter Verwendung von: - eines Hexadezimalwertes (z.B. für USS r2018[1]) - und der Referenzfrequenz P2000. Beim Rückspeisen an der Maximalfrequenz ist es möglich, dass die tatsächliche Frequenz, um den in P1253 festgelegten Wert höher ist. Falls dies nicht erwünscht ist, setzen Sie P1253 auf 0 oder verändern Sie die Last so, dass sich die Rückspeisung im erwünschten Bereich befindet.
Stufe
1
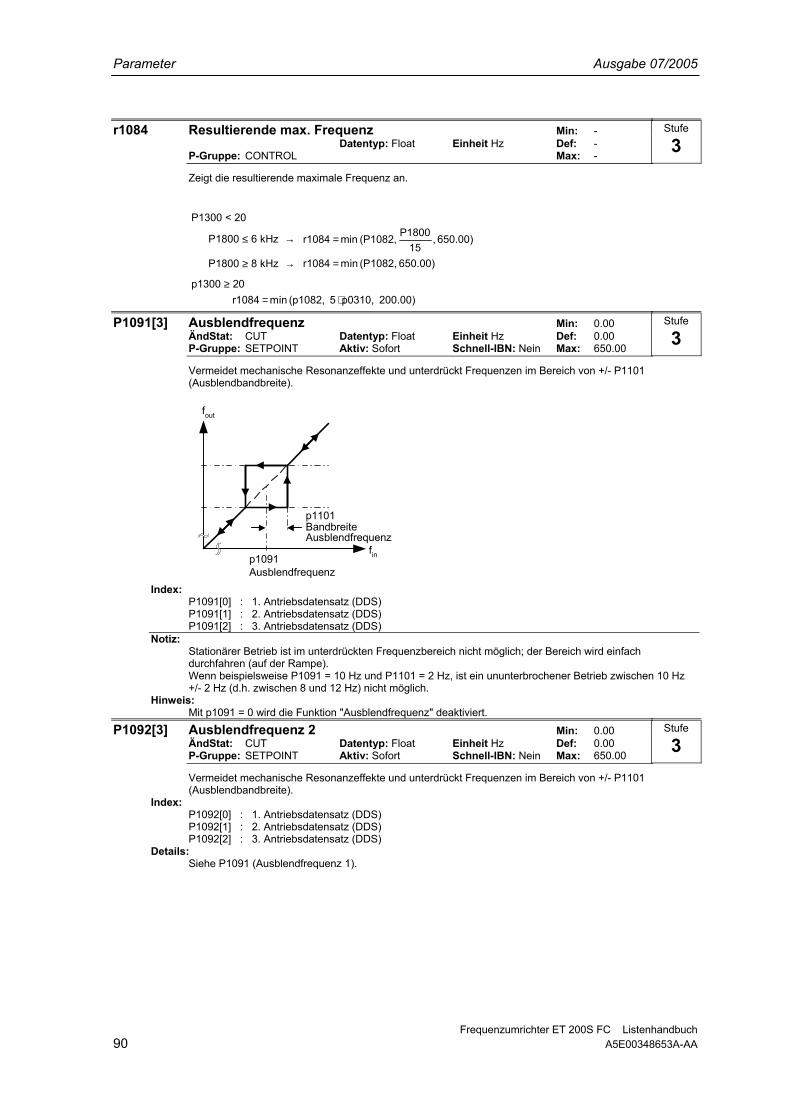
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 90 A5E00348653A-AA
r1084 Resultierende max. Frequenz Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt die resultierende maximale Frequenz an. P1300 < 20
P1800 ≤ 6 kHz → 650.00) ,15
P1800 (P1082, min r1084 =
P1800 ≥ 8 kHz → 650.00) (P1082, min r1084 =
200.00) p0310, 5 (p1082, min r1084 ⋅=p1300 ≥ 20
P1091[3] Ausblendfrequenz Min: 0.00
ÄndStat: CUT Datentyp: Float Einheit Hz Def: 0.00 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Vermeidet mechanische Resonanzeffekte und unterdrückt Frequenzen im Bereich von +/- P1101 (Ausblendbandbreite).
p1101
p1091fin
fout
BandbreiteAusblendfrequenz
Ausblendfrequenz
Index: P1091[0] : 1. Antriebsdatensatz (DDS) P1091[1] : 2. Antriebsdatensatz (DDS) P1091[2] : 3. Antriebsdatensatz (DDS)
Notiz: Stationärer Betrieb ist im unterdrückten Frequenzbereich nicht möglich; der Bereich wird einfach durchfahren (auf der Rampe). Wenn beispielsweise P1091 = 10 Hz und P1101 = 2 Hz, ist ein ununterbrochener Betrieb zwischen 10 Hz +/- 2 Hz (d.h. zwischen 8 und 12 Hz) nicht möglich.
Hinweis: Mit p1091 = 0 wird die Funktion "Ausblendfrequenz" deaktiviert.
P1092[3] Ausblendfrequenz 2 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 0.00 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Vermeidet mechanische Resonanzeffekte und unterdrückt Frequenzen im Bereich von +/- P1101 (Ausblendbandbreite).
Index: P1092[0] : 1. Antriebsdatensatz (DDS) P1092[1] : 2. Antriebsdatensatz (DDS) P1092[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe P1091 (Ausblendfrequenz 1).
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 91
P1093[3] Ausblendfrequenz 3 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 0.00 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Vermeidet mechanische Resonanzeffekte und unterdrückt Frequenzen im Bereich von +/- P1101 (Ausblendbandbreite).
Index: P1093[0] : 1. Antriebsdatensatz (DDS) P1093[1] : 2. Antriebsdatensatz (DDS) P1093[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe P1091 (Ausblendfrequenz 1).
P1094[3] Ausblendfrequenz 4 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 0.00 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Vermeidet mechanische Resonanzeffekte und unterdrückt Frequenzen im Bereich von +/- P1101 (Ausblendbandbreite).
Index: P1094[0] : 1. Antriebsdatensatz (DDS) P1094[1] : 2. Antriebsdatensatz (DDS) P1094[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe P1091 (Ausblendfrequenz 1).
P1101[3] Bandbreite Ausblendfrequenz Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 2.00 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Nein Max: 10.00
Liefert Frequenzbandbreite, die auf Ausblendfrequenzen (P1091 - P1094) angewandt werden (in [Hz]). Index:
P1101[0] : 1. Antriebsdatensatz (DDS) P1101[1] : 2. Antriebsdatensatz (DDS) P1101[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe P1091 (Ausblendfrequenz 1).
P1110[3] BI: Negative Sollwertsperre Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Unterdrückt negative Sollwerte und verhindert somit eine Änderung der Drehrichtung des Motors im Sollwertkanal. Wird eine minimale Frequenz P1080 und ein negativer Sollwert vorgegeben, so wird bei aktiver Sperre der Motor auf die minimale Frequenz in positiver Drehrichtung beschleunigt.
Index: P1110[0] : 1. Befehlsdatensatz (CDS) P1110[1] : 2. Befehlsdatensatz (CDS) P1110[2] : 3. Befehlsdatensatz (CDS)
Häufigste Einstellungen: 0 = Deaktiviert 1 = Aktiviert
P1113[3] BI: Auswahl Reversieren Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 2090:11 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Quelle des Reversierbefehls, der verwendet wird, wenn P0719 = 0. Index:
P1113[0] : 1. Befehlsdatensatz (CDS) P1113[1] : 2. Befehlsdatensatz (CDS) P1113[2] : 3. Befehlsdatensatz (CDS)
r1114 CO: Sollwert nach Reversiereinh. Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: SETPOINT Max: -
Zeigt die Sollfrequenz nach dem Funktionsblock zur Drehrichtungsumkehr.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
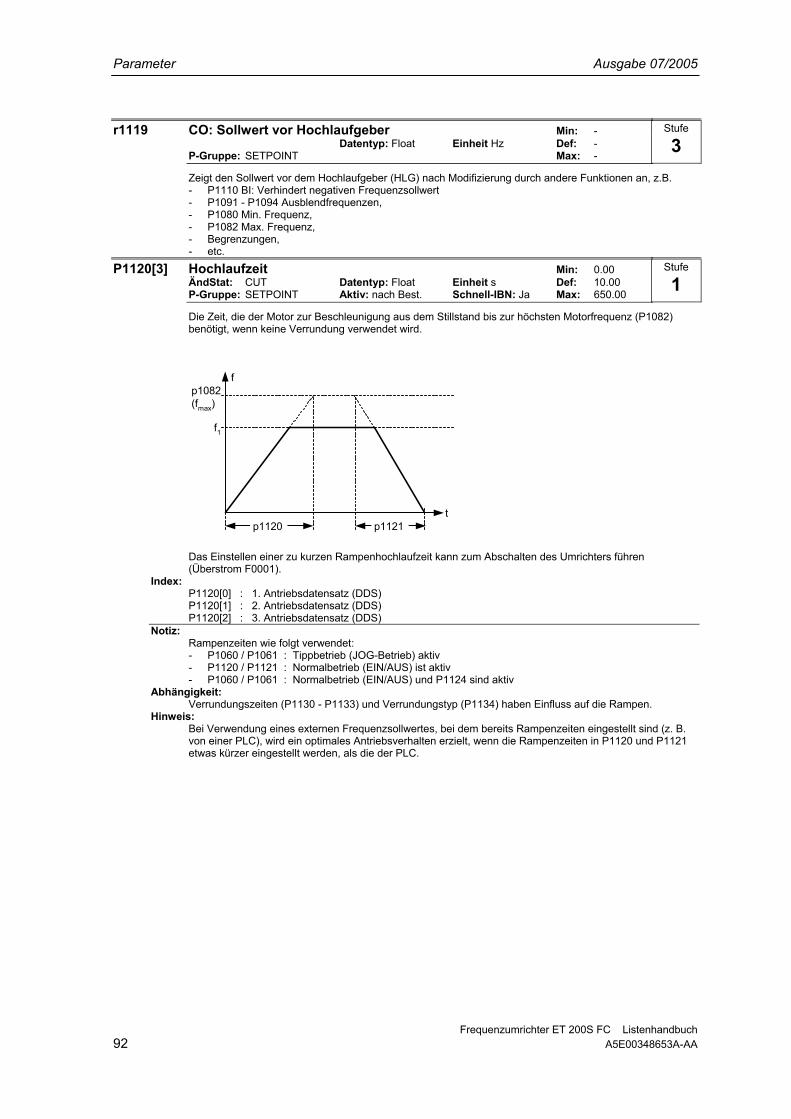
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 92 A5E00348653A-AA
r1119 CO: Sollwert vor Hochlaufgeber Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: SETPOINT Max: -
Zeigt den Sollwert vor dem Hochlaufgeber (HLG) nach Modifizierung durch andere Funktionen an, z.B. - P1110 BI: Verhindert negativen Frequenzsollwert - P1091 - P1094 Ausblendfrequenzen, - P1080 Min. Frequenz, - P1082 Max. Frequenz, - Begrenzungen, - etc.
P1120[3] Hochlaufzeit Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 10.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Ja Max: 650.00
Die Zeit, die der Motor zur Beschleunigung aus dem Stillstand bis zur höchsten Motorfrequenz (P1082) benötigt, wenn keine Verrundung verwendet wird.
fp1082(fmax)
f1
tp1120 p1121
Das Einstellen einer zu kurzen Rampenhochlaufzeit kann zum Abschalten des Umrichters führen (Überstrom F0001).
Index: P1120[0] : 1. Antriebsdatensatz (DDS) P1120[1] : 2. Antriebsdatensatz (DDS) P1120[2] : 3. Antriebsdatensatz (DDS)
Notiz: Rampenzeiten wie folgt verwendet: - P1060 / P1061 : Tippbetrieb (JOG-Betrieb) aktiv - P1120 / P1121 : Normalbetrieb (EIN/AUS) ist aktiv - P1060 / P1061 : Normalbetrieb (EIN/AUS) und P1124 sind aktiv
Abhängigkeit: Verrundungszeiten (P1130 - P1133) und Verrundungstyp (P1134) haben Einfluss auf die Rampen.
Hinweis: Bei Verwendung eines externen Frequenzsollwertes, bei dem bereits Rampenzeiten eingestellt sind (z. B. von einer PLC), wird ein optimales Antriebsverhalten erzielt, wenn die Rampenzeiten in P1120 und P1121 etwas kürzer eingestellt werden, als die der PLC.
Stufe
3
Stufe
1
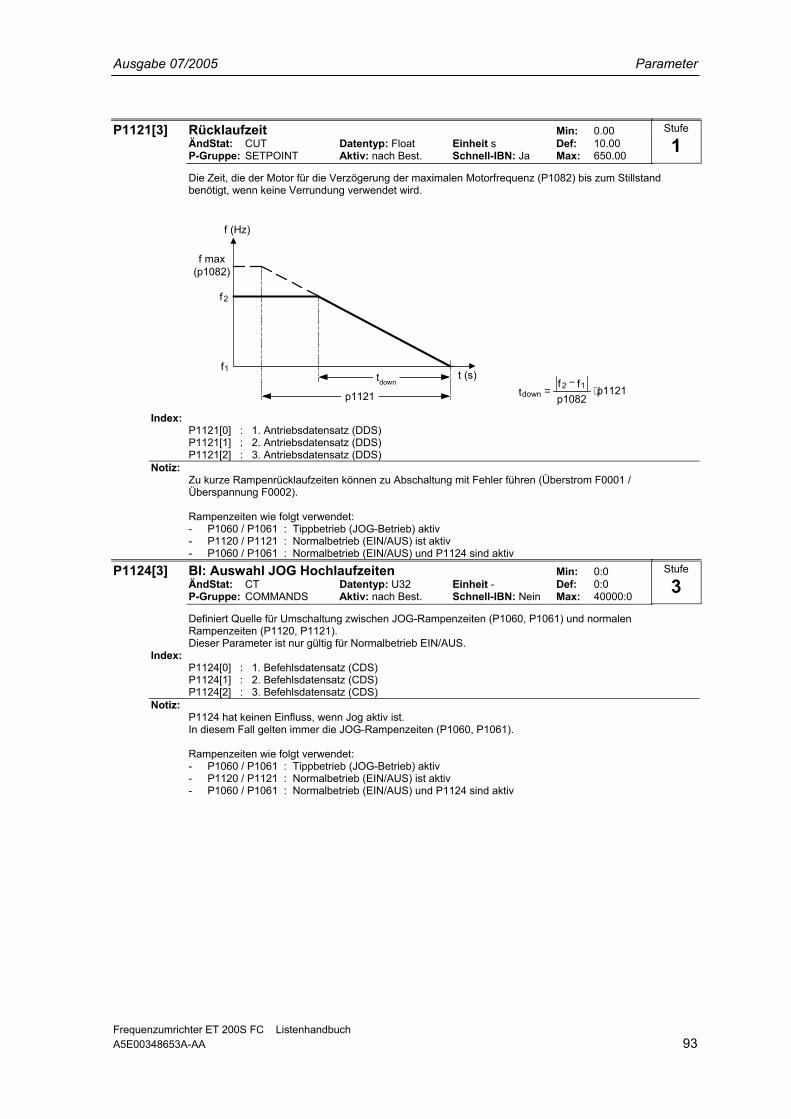
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 93
P1121[3] Rücklaufzeit Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 10.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Ja Max: 650.00
Die Zeit, die der Motor für die Verzögerung der maximalen Motorfrequenz (P1082) bis zum Stillstand benötigt, wenn keine Verrundung verwendet wird.
f (Hz)
t (s)
f max(p1082)
p1121 p1082
fft
12down ⋅
−=
f 2
f1
p1121
tdown
Index:
P1121[0] : 1. Antriebsdatensatz (DDS) P1121[1] : 2. Antriebsdatensatz (DDS) P1121[2] : 3. Antriebsdatensatz (DDS)
Notiz: Zu kurze Rampenrücklaufzeiten können zu Abschaltung mit Fehler führen (Überstrom F0001 / Überspannung F0002). Rampenzeiten wie folgt verwendet: - P1060 / P1061 : Tippbetrieb (JOG-Betrieb) aktiv - P1120 / P1121 : Normalbetrieb (EIN/AUS) ist aktiv - P1060 / P1061 : Normalbetrieb (EIN/AUS) und P1124 sind aktiv
P1124[3] BI: Auswahl JOG Hochlaufzeiten Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert Quelle für Umschaltung zwischen JOG-Rampenzeiten (P1060, P1061) und normalen Rampenzeiten (P1120, P1121). Dieser Parameter ist nur gültig für Normalbetrieb EIN/AUS.
Index: P1124[0] : 1. Befehlsdatensatz (CDS) P1124[1] : 2. Befehlsdatensatz (CDS) P1124[2] : 3. Befehlsdatensatz (CDS)
Notiz: P1124 hat keinen Einfluss, wenn Jog aktiv ist. In diesem Fall gelten immer die JOG-Rampenzeiten (P1060, P1061). Rampenzeiten wie folgt verwendet: - P1060 / P1061 : Tippbetrieb (JOG-Betrieb) aktiv - P1120 / P1121 : Normalbetrieb (EIN/AUS) ist aktiv - P1060 / P1061 : Normalbetrieb (EIN/AUS) und P1124 sind aktiv
Stufe
1
Stufe
3
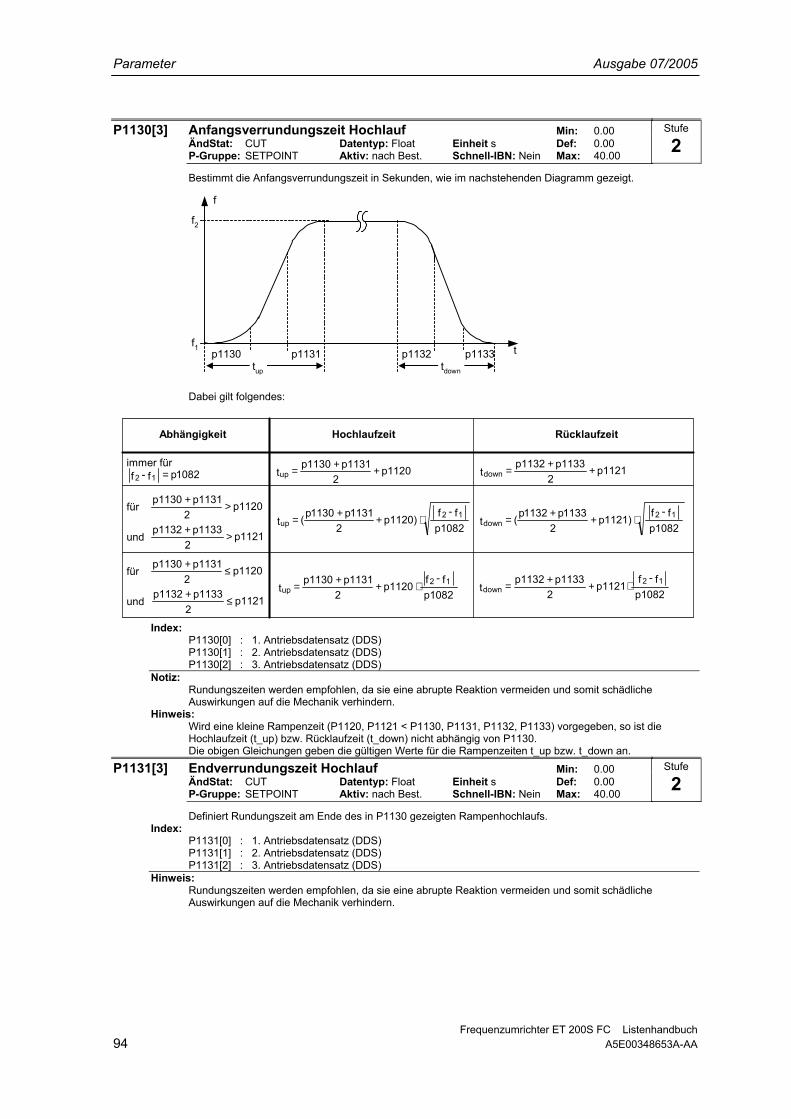
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 94 A5E00348653A-AA
P1130[3] Anfangsverrundungszeit Hochlauf Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 40.00
Bestimmt die Anfangsverrundungszeit in Sekunden, wie im nachstehenden Diagramm gezeigt.
p1133p1132p1131p1130 t
f
f2
f1
tup tdown Dabei gilt folgendes:
p1082
f - f p1120 2
p1131p1130t
12up ⋅++=
p1082 f - f p1120)
21131p1130p(t
12up ⋅++=
immer fürp1120
2p1131p1130
tup ++=
p1082 f - f p1121
2p1133p1132
t12
down ⋅++=
p1121 2
p1133p1132tdown ++=
Abhängigkeit Hochlaufzeit Rücklaufzeit
für p1120 2
p1131p1130 >+
und p1121 2
p1133p1132 >+ p1082 f - f p1121)
21133p1132p(t
12down ⋅++=
für p1120 2
p1131p1130 ≤+
und p1121 2
p1133p1132 ≤+
1082p f - f 12 =
Index:
P1130[0] : 1. Antriebsdatensatz (DDS) P1130[1] : 2. Antriebsdatensatz (DDS) P1130[2] : 3. Antriebsdatensatz (DDS)
Notiz: Rundungszeiten werden empfohlen, da sie eine abrupte Reaktion vermeiden und somit schädliche Auswirkungen auf die Mechanik verhindern.
Hinweis: Wird eine kleine Rampenzeit (P1120, P1121 < P1130, P1131, P1132, P1133) vorgegeben, so ist die Hochlaufzeit (t_up) bzw. Rücklaufzeit (t_down) nicht abhängig von P1130. Die obigen Gleichungen geben die gültigen Werte für die Rampenzeiten t_up bzw. t_down an.
P1131[3] Endverrundungszeit Hochlauf Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 40.00
Definiert Rundungszeit am Ende des in P1130 gezeigten Rampenhochlaufs. Index:
P1131[0] : 1. Antriebsdatensatz (DDS) P1131[1] : 2. Antriebsdatensatz (DDS) P1131[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Rundungszeiten werden empfohlen, da sie eine abrupte Reaktion vermeiden und somit schädliche Auswirkungen auf die Mechanik verhindern.
Stufe
2
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 95
P1132[3] Anfangsverrundungszeit Rücklauf Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 40.00
Definiert Rundungszeit am Anfang des in P1130 gezeigten Rampenrücklaufs. Index:
P1132[0] : 1. Antriebsdatensatz (DDS) P1132[1] : 2. Antriebsdatensatz (DDS) P1132[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Rundungszeiten werden empfohlen, da sie eine abrupte Reaktion vermeiden und somit schädliche Auswirkungen auf die Mechanik verhindern.
P1133[3] Endverrundungszeit Rücklauf Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Nein Max: 40.00
Definiert Rundungszeit am Ende des in P1130 gezeigten Rampenrücklaufs. Index:
P1133[0] : 1. Antriebsdatensatz (DDS) P1133[1] : 2. Antriebsdatensatz (DDS) P1133[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Rundungszeiten werden empfohlen, da sie eine abrupte Reaktion vermeiden und somit schädliche Auswirkungen auf die Mechanik verhindern.
P1134[3] Verrundungstyp Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: SETPOINT Aktiv: Sofort Schnell-IBN: Nein Max: 1
Definiert Verrundung, welche bei einer Sollwertänderung während des Beschleunigungs- bzw. Abbremsvorgangs (z.B. neuer Sollwert, AUS1, AUS3, REV) durchgeführt wird. Eine Verrundung wird durchgeführt, wenn der Antrieb in der Beschleunigungs- bzw. Abbremsphase ist und: - P1134 = 0, - P1132 > 0 (Anfangsverrundungszeit Rücklauf) bzw. P1133 > 0 (Endverrundungszeit Rücklauf), - Sollwert noch nicht erreicht ist.
Stufe
2
Stufe
2
Stufe
2
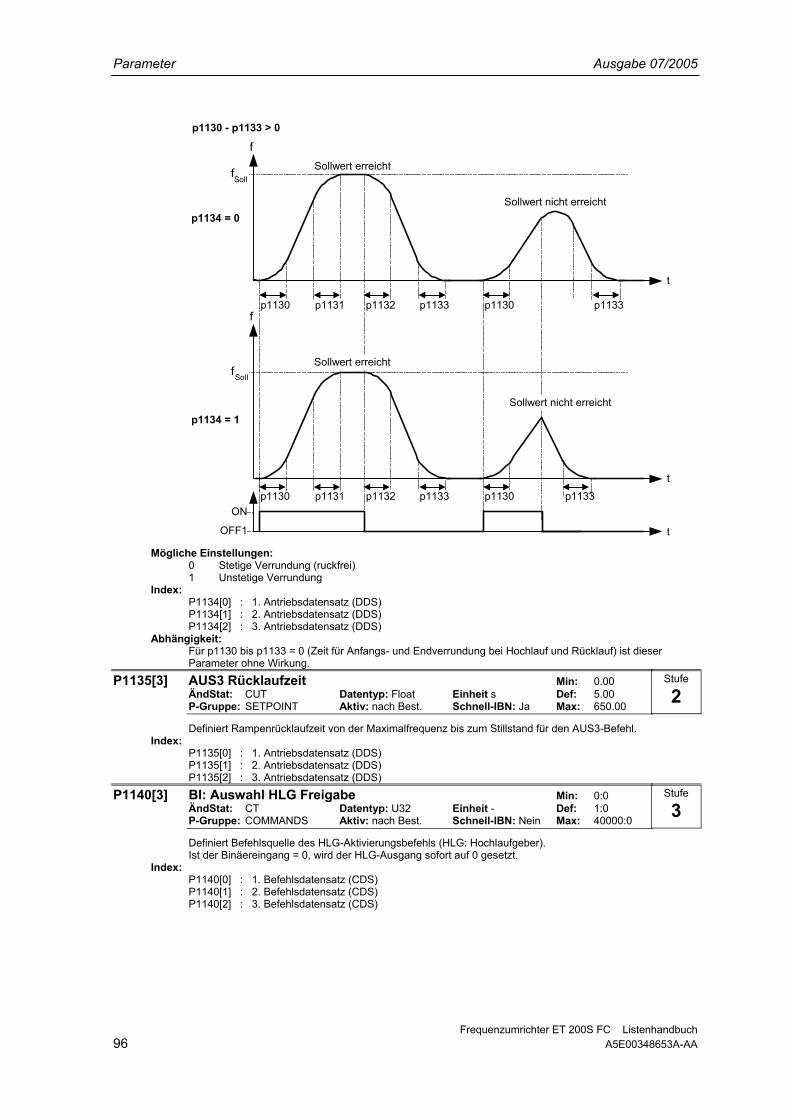
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 96 A5E00348653A-AA
f
OFF1
ON
Sollwert erreichtfSoll
t
fp1130 - p1133 > 0
Sollwert erreicht
Sollwert nicht erreicht
fSoll
t
Sollwert nicht erreicht
p1134 = 0
p1134 = 1
t
p1133
p1133
p1130 p1131 p1132 p1133 p1130
p1130p1133p1132p1131p1130
Mögliche Einstellungen:
0 Stetige Verrundung (ruckfrei) 1 Unstetige Verrundung
Index: P1134[0] : 1. Antriebsdatensatz (DDS) P1134[1] : 2. Antriebsdatensatz (DDS) P1134[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Für p1130 bis p1133 = 0 (Zeit für Anfangs- und Endverrundung bei Hochlauf und Rücklauf) ist dieser Parameter ohne Wirkung.
P1135[3] AUS3 Rücklaufzeit Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit s Def: 5.00 P-Gruppe: SETPOINT Aktiv: nach Best. Schnell-IBN: Ja Max: 650.00
Definiert Rampenrücklaufzeit von der Maximalfrequenz bis zum Stillstand für den AUS3-Befehl. Index:
P1135[0] : 1. Antriebsdatensatz (DDS) P1135[1] : 2. Antriebsdatensatz (DDS) P1135[2] : 3. Antriebsdatensatz (DDS)
P1140[3] BI: Auswahl HLG Freigabe Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert Befehlsquelle des HLG-Aktivierungsbefehls (HLG: Hochlaufgeber). Ist der Binäereingang = 0, wird der HLG-Ausgang sofort auf 0 gesetzt.
Index: P1140[0] : 1. Befehlsdatensatz (CDS) P1140[1] : 2. Befehlsdatensatz (CDS) P1140[2] : 3. Befehlsdatensatz (CDS)
Stufe
2
Stufe
3

Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 97
P1141[3] BI: Auswahl HLG Start Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert Befehlsquelle des HLG-Startbefehls (HLG: Hochlaufgeber). Ist der Binäereingang = 0, behält der HLG-Ausgang seinen aktuellen Wert.
Index: P1141[0] : 1. Befehlsdatensatz (CDS) P1141[1] : 2. Befehlsdatensatz (CDS) P1141[2] : 3. Befehlsdatensatz (CDS)
P1142[3] BI: Auswahl HLG Sollwertfreigabe Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert Befehlsquelle des HLG-Sollwertbefehls (HLG: Hochlaufgeber). Ist der Binäereingang = 0, wird der HLG-Eingang auf 0 gesetzt und der HLG-Ausgang fährt auf 0.
Index: P1142[0] : 1. Befehlsdatensatz (CDS) P1142[1] : 2. Befehlsdatensatz (CDS) P1142[2] : 3. Befehlsdatensatz (CDS)
r1170 CO: Sollwert nach HLG Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: SETPOINT Max: -
Zeigt den Gesamtfrequenzsollwert nach Hochlaufgeber (HLG) an.
Stufe
3
Stufe
3
Stufe
3
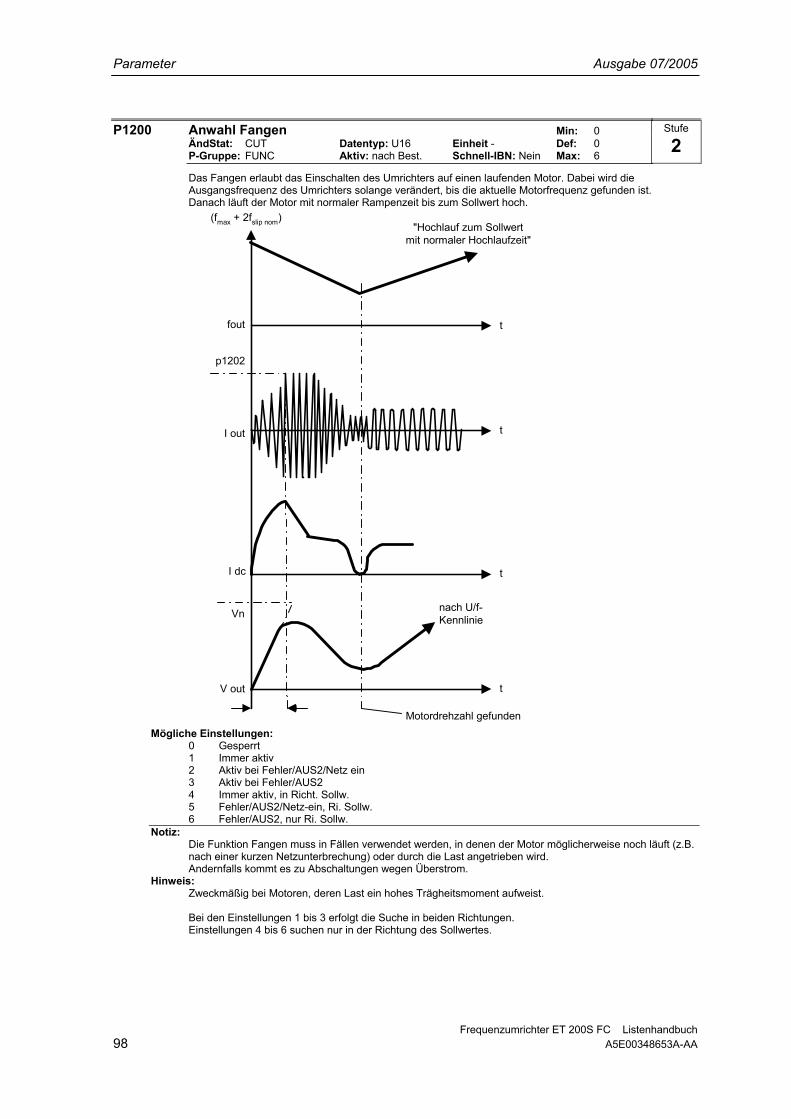
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 98 A5E00348653A-AA
P1200 Anwahl Fangen Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 6
Das Fangen erlaubt das Einschalten des Umrichters auf einen laufenden Motor. Dabei wird die Ausgangsfrequenz des Umrichters solange verändert, bis die aktuelle Motorfrequenz gefunden ist. Danach läuft der Motor mit normaler Rampenzeit bis zum Sollwert hoch.
V out
I dc
I out
Vn
p1202
fout t
(fmax + 2fslip nom)
Motordrehzahl gefunden
"Hochlauf zum Sollwertmit normaler Hochlaufzeit"
nach U/f-Kennlinie
t
t
t
Mögliche Einstellungen:
0 Gesperrt 1 Immer aktiv 2 Aktiv bei Fehler/AUS2/Netz ein 3 Aktiv bei Fehler/AUS2 4 Immer aktiv, in Richt. Sollw. 5 Fehler/AUS2/Netz-ein, Ri. Sollw. 6 Fehler/AUS2, nur Ri. Sollw.
Notiz: Die Funktion Fangen muss in Fällen verwendet werden, in denen der Motor möglicherweise noch läuft (z.B. nach einer kurzen Netzunterbrechung) oder durch die Last angetrieben wird. Andernfalls kommt es zu Abschaltungen wegen Überstrom.
Hinweis: Zweckmäßig bei Motoren, deren Last ein hohes Trägheitsmoment aufweist. Bei den Einstellungen 1 bis 3 erfolgt die Suche in beiden Richtungen. Einstellungen 4 bis 6 suchen nur in der Richtung des Sollwertes.
Stufe
2
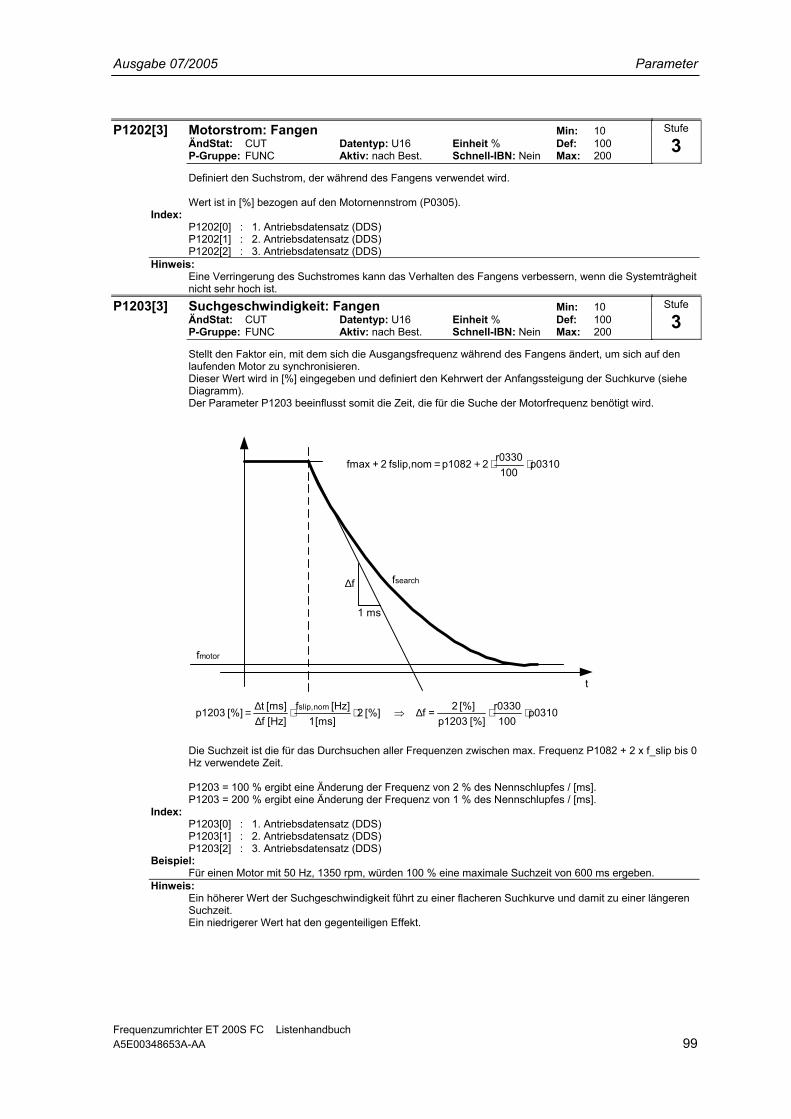
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 99
P1202[3] Motorstrom: Fangen Min: 10 ÄndStat: CUT Datentyp: U16 Einheit % Def: 100 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 200
Definiert den Suchstrom, der während des Fangens verwendet wird. Wert ist in [%] bezogen auf den Motornennstrom (P0305).
Index: P1202[0] : 1. Antriebsdatensatz (DDS) P1202[1] : 2. Antriebsdatensatz (DDS) P1202[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Eine Verringerung des Suchstromes kann das Verhalten des Fangens verbessern, wenn die Systemträgheit nicht sehr hoch ist.
P1203[3] Suchgeschwindigkeit: Fangen Min: 10 ÄndStat: CUT Datentyp: U16 Einheit % Def: 100 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 200
Stellt den Faktor ein, mit dem sich die Ausgangsfrequenz während des Fangens ändert, um sich auf den laufenden Motor zu synchronisieren. Dieser Wert wird in [%] eingegeben und definiert den Kehrwert der Anfangssteigung der Suchkurve (siehe Diagramm). Der Parameter P1203 beeinflusst somit die Zeit, die für die Suche der Motorfrequenz benötigt wird.
fmotor
t
1 ms
0310p100
r0330 [%] p1203
[%] 2 = f [%] 2 [ms] 1
[Hz] f [Hz] f[ms] t [%] p1203 nomslip, ⋅⋅∆⇒⋅⋅
∆∆=
fsearch∆f
p0310100
r0330 2 p1082 nomfslip, 2 +fmax ⋅⋅+=
Die Suchzeit ist die für das Durchsuchen aller Frequenzen zwischen max. Frequenz P1082 + 2 x f_slip bis 0 Hz verwendete Zeit. P1203 = 100 % ergibt eine Änderung der Frequenz von 2 % des Nennschlupfes / [ms]. P1203 = 200 % ergibt eine Änderung der Frequenz von 1 % des Nennschlupfes / [ms].
Index: P1203[0] : 1. Antriebsdatensatz (DDS) P1203[1] : 2. Antriebsdatensatz (DDS) P1203[2] : 3. Antriebsdatensatz (DDS)
Beispiel: Für einen Motor mit 50 Hz, 1350 rpm, würden 100 % eine maximale Suchzeit von 600 ms ergeben.
Hinweis: Ein höherer Wert der Suchgeschwindigkeit führt zu einer flacheren Suchkurve und damit zu einer längeren Suchzeit. Ein niedrigerer Wert hat den gegenteiligen Effekt.
Stufe
3
Stufe
3
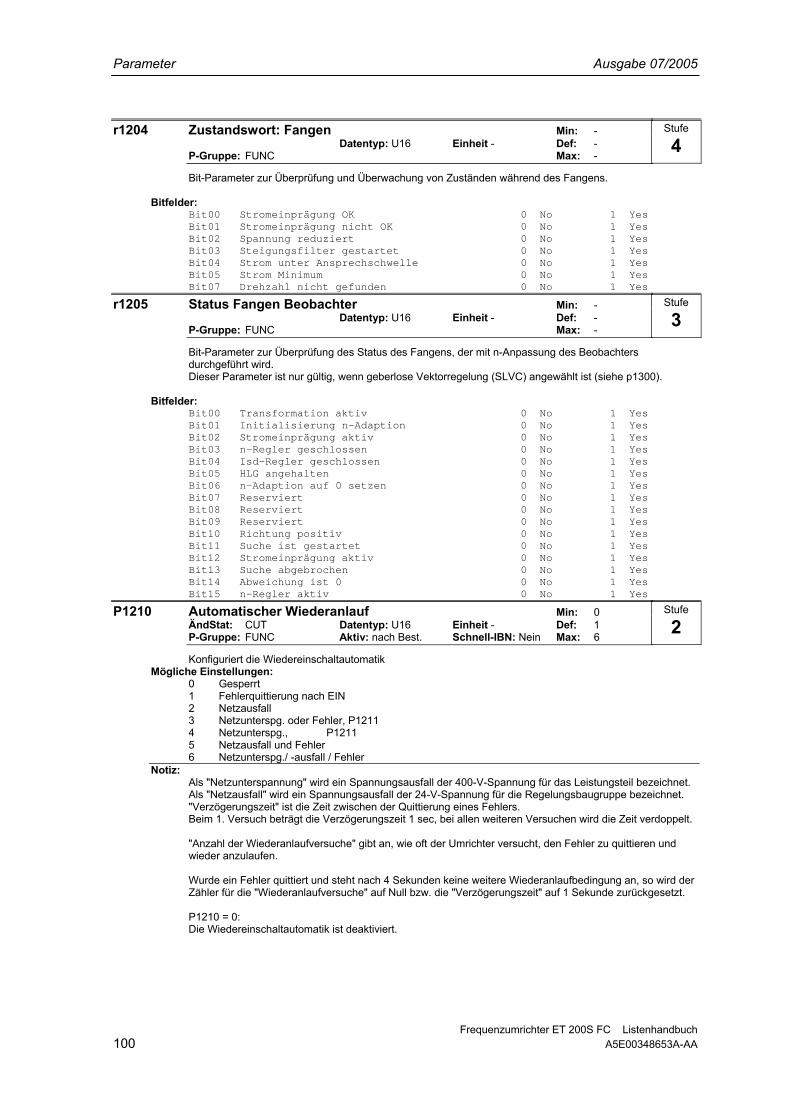
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 100 A5E00348653A-AA
r1204 Zustandswort: Fangen Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: FUNC Max: -
Bit-Parameter zur Überprüfung und Überwachung von Zuständen während des Fangens.
Bitfelder: Bit00 Stromeinprägung OK 0 No 1 Yes Bit01 Stromeinprägung nicht OK 0 No 1 Yes Bit02 Spannung reduziert 0 No 1 Yes Bit03 Steigungsfilter gestartet 0 No 1 Yes Bit04 Strom unter Ansprechschwelle 0 No 1 Yes Bit05 Strom Minimum 0 No 1 Yes Bit07 Drehzahl nicht gefunden 0 No 1 Yes
r1205 Status Fangen Beobachter Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: FUNC Max: -
Bit-Parameter zur Überprüfung des Status des Fangens, der mit n-Anpassung des Beobachters durchgeführt wird. Dieser Parameter ist nur gültig, wenn geberlose Vektorregelung (SLVC) angewählt ist (siehe p1300).
Bitfelder: Bit00 Transformation aktiv 0 No 1 Yes Bit01 Initialisierung n-Adaption 0 No 1 Yes Bit02 Stromeinprägung aktiv 0 No 1 Yes Bit03 n-Regler geschlossen 0 No 1 Yes Bit04 Isd-Regler geschlossen 0 No 1 Yes Bit05 HLG angehalten 0 No 1 Yes Bit06 n-Adaption auf 0 setzen 0 No 1 Yes Bit07 Reserviert 0 No 1 Yes Bit08 Reserviert 0 No 1 Yes Bit09 Reserviert 0 No 1 Yes Bit10 Richtung positiv 0 No 1 Yes Bit11 Suche ist gestartet 0 No 1 Yes Bit12 Stromeinprägung aktiv 0 No 1 Yes Bit13 Suche abgebrochen 0 No 1 Yes Bit14 Abweichung ist 0 0 No 1 Yes Bit15 n-Regler aktiv 0 No 1 Yes
P1210 Automatischer Wiederanlauf Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 1 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 6
Konfiguriert die Wiedereinschaltautomatik Mögliche Einstellungen:
0 Gesperrt 1 Fehlerquittierung nach EIN 2 Netzausfall 3 Netzunterspg. oder Fehler, P1211 4 Netzunterspg., P1211 5 Netzausfall und Fehler 6 Netzunterspg./ -ausfall / Fehler
Notiz: Als "Netzunterspannung" wird ein Spannungsausfall der 400-V-Spannung für das Leistungsteil bezeichnet. Als "Netzausfall" wird ein Spannungsausfall der 24-V-Spannung für die Regelungsbaugruppe bezeichnet. "Verzögerungszeit" ist die Zeit zwischen der Quittierung eines Fehlers. Beim 1. Versuch beträgt die Verzögerungszeit 1 sec, bei allen weiteren Versuchen wird die Zeit verdoppelt. "Anzahl der Wiederanlaufversuche" gibt an, wie oft der Umrichter versucht, den Fehler zu quittieren und wieder anzulaufen. Wurde ein Fehler quittiert und steht nach 4 Sekunden keine weitere Wiederanlaufbedingung an, so wird der Zähler für die "Wiederanlaufversuche" auf Null bzw. die "Verzögerungszeit" auf 1 Sekunde zurückgesetzt. P1210 = 0: Die Wiedereinschaltautomatik ist deaktiviert.
Stufe
4
Stufe
3
Stufe
2
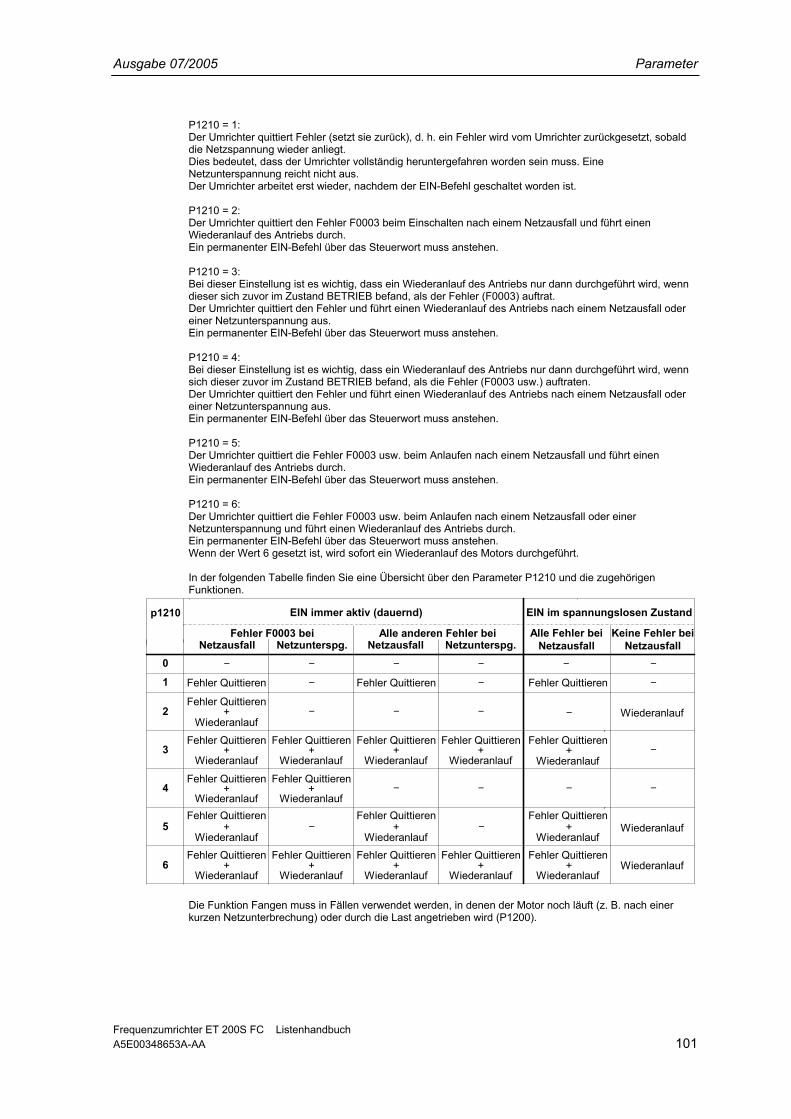
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 101
P1210 = 1: Der Umrichter quittiert Fehler (setzt sie zurück), d. h. ein Fehler wird vom Umrichter zurückgesetzt, sobald die Netzspannung wieder anliegt. Dies bedeutet, dass der Umrichter vollständig heruntergefahren worden sein muss. Eine Netzunterspannung reicht nicht aus. Der Umrichter arbeitet erst wieder, nachdem der EIN-Befehl geschaltet worden ist. P1210 = 2: Der Umrichter quittiert den Fehler F0003 beim Einschalten nach einem Netzausfall und führt einen Wiederanlauf des Antriebs durch. Ein permanenter EIN-Befehl über das Steuerwort muss anstehen.
P1210 = 3: Bei dieser Einstellung ist es wichtig, dass ein Wiederanlauf des Antriebs nur dann durchgeführt wird, wenn dieser sich zuvor im Zustand BETRIEB befand, als der Fehler (F0003) auftrat. Der Umrichter quittiert den Fehler und führt einen Wiederanlauf des Antriebs nach einem Netzausfall oder einer Netzunterspannung aus. Ein permanenter EIN-Befehl über das Steuerwort muss anstehen. P1210 = 4: Bei dieser Einstellung ist es wichtig, dass ein Wiederanlauf des Antriebs nur dann durchgeführt wird, wenn sich dieser zuvor im Zustand BETRIEB befand, als die Fehler (F0003 usw.) auftraten. Der Umrichter quittiert den Fehler und führt einen Wiederanlauf des Antriebs nach einem Netzausfall oder einer Netzunterspannung aus. Ein permanenter EIN-Befehl über das Steuerwort muss anstehen. P1210 = 5: Der Umrichter quittiert die Fehler F0003 usw. beim Anlaufen nach einem Netzausfall und führt einen Wiederanlauf des Antriebs durch. Ein permanenter EIN-Befehl über das Steuerwort muss anstehen. P1210 = 6: Der Umrichter quittiert die Fehler F0003 usw. beim Anlaufen nach einem Netzausfall oder einer Netzunterspannung und führt einen Wiederanlauf des Antriebs durch. Ein permanenter EIN-Befehl über das Steuerwort muss anstehen. Wenn der Wert 6 gesetzt ist, wird sofort ein Wiederanlauf des Motors durchgeführt. In der folgenden Tabelle finden Sie eine Übersicht über den Parameter P1210 und die zugehörigen Funktionen.
0 − − − − −
1 − −
2 + − − −
3 + + + +
4 + + − − −
5 + − + +
6 + + + + +
Fehler Quittieren
Fehler Quittieren
Fehler Quittieren
Fehler Quittieren
Fehler Quittieren
Fehler Quittieren
Wiederanlauf
Wiederanlauf
Wiederanlauf
Wiederanlauf
Wiederanlauf
Fehler Quittieren
Fehler Quittieren
Fehler Quittieren
Wiederanlauf
Wiederanlauf
Fehler Quittieren
Fehler Quittieren
Fehler Quittieren
Wiederanlauf
Wiederanlauf
Wiederanlauf
Fehler Quittieren
Fehler Quittieren
Wiederanlauf
Wiederanlauf
Fehler Quittieren
Fehler Quittieren
Fehler Quittieren
Wiederanlauf
Wiederanlauf
Wiederanlauf
EIN immer aktiv (dauernd)p1210 EIN im spannungslosen Zustand
Fehler F0003 bei Alle anderen Fehler beiNetzunterspg.Netzausfall Netzunterspg.Netzausfall
Alle Fehler beiNetzausfall
−
−
−
Wiederanlauf
Keine Fehler beiNetzausfall
−
+Fehler Quittieren
Wiederanlauf
−
−
Fehler Quittieren
Wiederanlauf
Wiederanlauf
Die Funktion Fangen muss in Fällen verwendet werden, in denen der Motor noch läuft (z. B. nach einer kurzen Netzunterbrechung) oder durch die Last angetrieben wird (P1200).
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 102 A5E00348653A-AA
Abhängigkeit: Bei der Wiedereinschaltautomatik muss ein EIN-Befehl kontinuierlich anstehen.
Vorsicht: Sofern P1210 > 2 gesetzt ist, kann ein Wiederanlauf des Motors automatisch durchgeführt werden, ohne dass der EIN-Befehl umgeschaltet wird!
P1211 Anzahl der Wiederanlaufversuche Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 3 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 10
Legt fest, wie oft der Umrichter versucht, neu zu starten, wenn automatischer Wiederanlauf P1210 aktiviert ist.
P1215 Freigabe Motorhaltebremse Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Aktiviert/deaktiviert die Motorhaltebremse (MHB). Weitere Einzelheiten siehe Betriebsanleitung. Mögliche Einstellungen:
0 Motor Haltebremse gesperrt 1 Motor Haltebremse freigegeben
Hinweis: Bei U/f-Steuerung (p1300 < 20) ist die Schlupffrequenz des Motors (r0330) ein typischer Wert für die Minimalfrequenz p1080 für die Motorhaltebremse. Bei Vektorregelung (p1300 = 20 oder p1300 = 21): - Sollte die Minimalfrequenz p1080 = 0 sein. - Sollte die Verzögerung der Drehzahlverlustreaktion > Freigabeverzögerung und Rücklaufhaltezeit der
Haltebremse sein (z.B. p0494 > p1216 und p0494 > p1217). - Sollte die Verzögerungszeit für Motor gekippt > Freigabeverzögerung und Rücklaufhaltezeit der
Haltebremse sein (z.B. p2178 > p1216 und p2178 > p1217). Anderenfalls können Drehzahlverlustmeldungen auftreten, wenn die Bremse aktiviert wird und Impulsfreigabe vorhanden ist.
Vorsicht: In Safety-Anwendungen wird die Motorhaltebremse immer geschlossen, wenn ein Sicherer Halt aktiv ist - auch wenn die Motorhaltebremse über p1215 deaktiviert ist. Der Einsatz der Motorhaltebremse als Arbeitsbremse ist nicht zulässig, da sie im allgemeinen nur für eine begrenzte Anzahl von Notbremsungen ausgelegt ist.
P1216 Freigabeverzögerung Haltebremse Min: 0.0 ÄndStat: CT Datentyp: Float Einheit s Def: 1.0 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 20.0
Definiert die Zeitspanne, während der der Umrichter mit der min. Frequenz P1080 läuft, bevor er auf die Sollfrequenz hochläuft (siehe Betriebsanleitung).
Hinweis: Ein typischer Wert der min. Frequenz P1080 für Anwendungen dieser Art ist die Schlupffrequenz des Motors. Die Nenn-Schlupffrequenz kann nach folgender Formel berechnet werden:
fnnnsy
nn nnsy p0310 100
r0330 fSlip[Hz] ⋅−=⋅=
Details: Siehe Betriebsanleitung
P1217 Rücklaufhaltezeit Haltebremse Min: 0.0 ÄndStat: CT Datentyp: Float Einheit s Def: 1.0 P-Gruppe: FUNC Aktiv: nach Best. Schnell-IBN: Nein Max: 20.0
Definiert die Zeit, während der der Umrichter mit Minimalfrequenz (P1080) läuft, nachdem ein Rampenrücklauf erfolgt ist.
Details: Siehe Betriebsanleitung
Stufe
3
Stufe
2
Stufe
2
Stufe
2
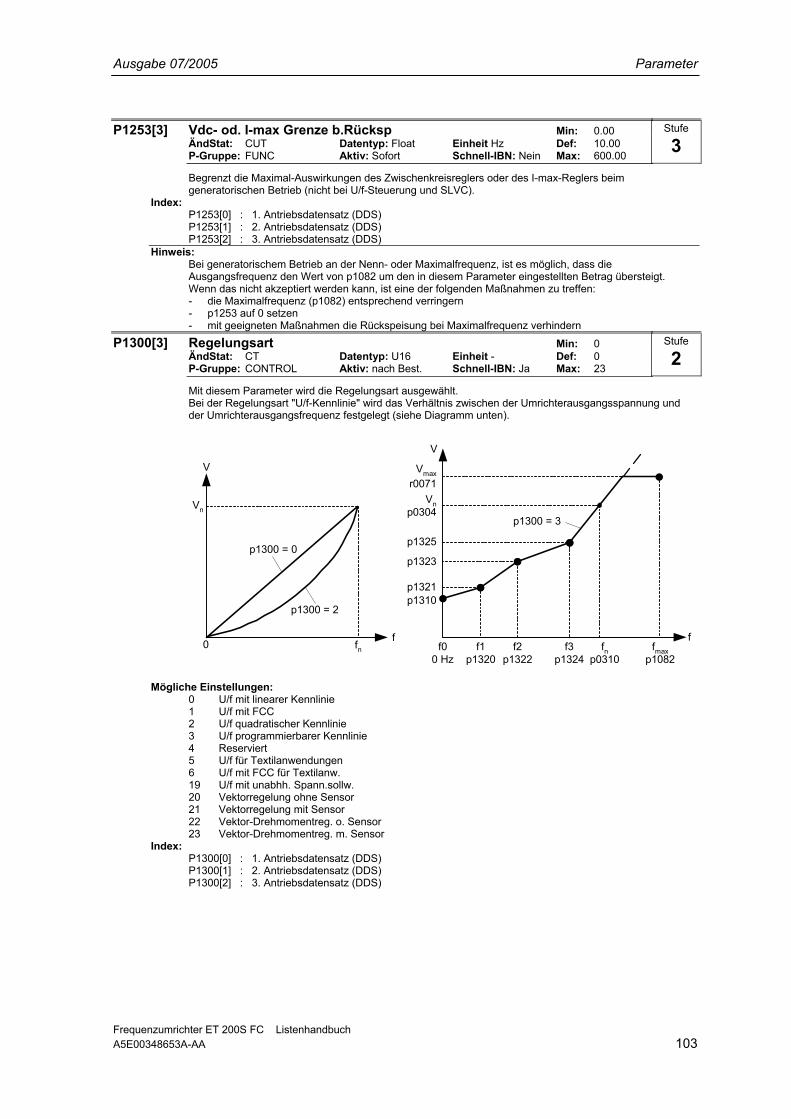
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 103
P1253[3] Vdc- od. I-max Grenze b.Rücksp Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 10.00 P-Gruppe: FUNC Aktiv: Sofort Schnell-IBN: Nein Max: 600.00
Begrenzt die Maximal-Auswirkungen des Zwischenkreisreglers oder des I-max-Reglers beim generatorischen Betrieb (nicht bei U/f-Steuerung und SLVC).
Index: P1253[0] : 1. Antriebsdatensatz (DDS) P1253[1] : 2. Antriebsdatensatz (DDS) P1253[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Bei generatorischem Betrieb an der Nenn- oder Maximalfrequenz, ist es möglich, dass die Ausgangsfrequenz den Wert von p1082 um den in diesem Parameter eingestellten Betrag übersteigt. Wenn das nicht akzeptiert werden kann, ist eine der folgenden Maßnahmen zu treffen: - die Maximalfrequenz (p1082) entsprechend verringern - p1253 auf 0 setzen - mit geeigneten Maßnahmen die Rückspeisung bei Maximalfrequenz verhindern
P1300[3] Regelungsart Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Ja Max: 23
Mit diesem Parameter wird die Regelungsart ausgewählt. Bei der Regelungsart "U/f-Kennlinie" wird das Verhältnis zwischen der Umrichterausgangsspannung und der Umrichterausgangsfrequenz festgelegt (siehe Diagramm unten).
Vn
0 fn
V
f
V
p1325
f1p1320
fmaxp1082
Vmaxr0071
Vnp0304
p1323
p1321
p1300 = 0
f00 Hz
f2p1322
f3p1324
fnp0310
f
p1300 = 3
p1310p1300 = 2
Mögliche Einstellungen:
0 U/f mit linearer Kennlinie 1 U/f mit FCC 2 U/f quadratischer Kennlinie 3 U/f programmierbarer Kennlinie 4 Reserviert 5 U/f für Textilanwendungen 6 U/f mit FCC für Textilanw. 19 U/f mit unabhh. Spann.sollw. 20 Vektorregelung ohne Sensor 21 Vektorregelung mit Sensor 22 Vektor-Drehmomentreg. o. Sensor 23 Vektor-Drehmomentreg. m. Sensor
Index: P1300[0] : 1. Antriebsdatensatz (DDS) P1300[1] : 2. Antriebsdatensatz (DDS) P1300[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
2
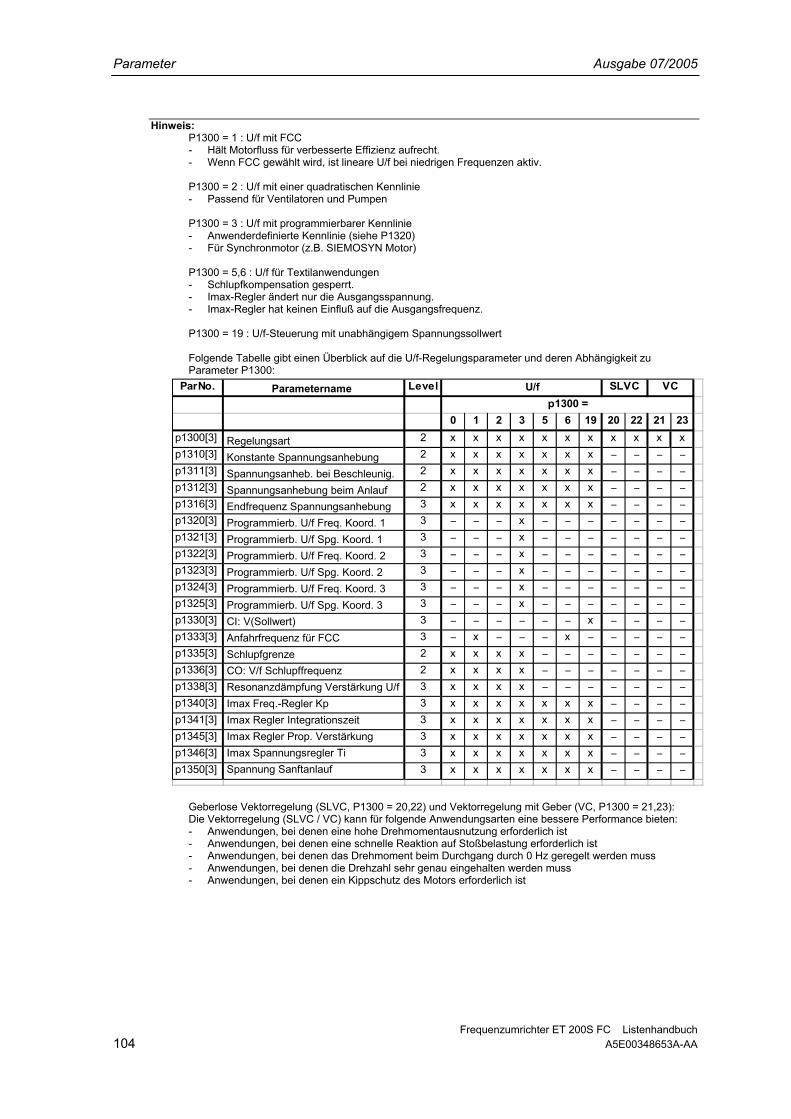
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 104 A5E00348653A-AA
Hinweis: P1300 = 1 : U/f mit FCC - Hält Motorfluss für verbesserte Effizienz aufrecht. - Wenn FCC gewählt wird, ist lineare U/f bei niedrigen Frequenzen aktiv. P1300 = 2 : U/f mit einer quadratischen Kennlinie - Passend für Ventilatoren und Pumpen P1300 = 3 : U/f mit programmierbarer Kennlinie - Anwenderdefinierte Kennlinie (siehe P1320) - Für Synchronmotor (z.B. SIEMOSYN Motor) P1300 = 5,6 : U/f für Textilanwendungen - Schlupfkompensation gesperrt. - Imax-Regler ändert nur die Ausgangsspannung. - Imax-Regler hat keinen Einfluß auf die Ausgangsfrequenz. P1300 = 19 : U/f-Steuerung mit unabhängigem Spannungssollwert Folgende Tabelle gibt einen Überblick auf die U/f-Regelungsparameter und deren Abhängigkeit zu Parameter P1300:
ParNo. Level
0 1 2 3 5 6 19 20 22 21 23p1300[3] 2 x x x x x x x x x x xp1310[3] 2 x x x x x x x − − − −p1311[3] 2 x x x x x x x − − − −p1312[3] 2 x x x x x x x − − − −p1316[3] 3 x x x x x x x − − − −p1320[3] 3 − − − x − − − − − − −p1321[3] 3 − − − x − − − − − − −p1322[3] 3 − − − x − − − − − − −p1323[3] 3 − − − x − − − − − − −p1324[3] 3 − − − x − − − − − − −p1325[3] 3 − − − x − − − − − − −p1330[3] 3 − − − − − − x − − − −p1333[3] 3 − x − − − x − − − − −p1335[3] 2 x x x x − − − − − − −p1336[3] 2 x x x x − − − − − − −p1338[3] 3 x x x x − − − − − − −p1340[3] 3 x x x x x x x − − − −p1341[3] 3 x x x x x x x − − − −p1345[3] 3 x x x x x x x − − − −p1346[3] 3 x x x x x x x − − − −p1350[3] 3 x x x x x x x − − − −
SLVC VCp1300 =
Parametername
RegelungsartKonstante SpannungsanhebungSpannungsanheb. bei Beschleunig.Spannungsanhebung beim AnlaufEndfrequenz SpannungsanhebungProgrammierb. U/f Freq. Koord. 1Programmierb. U/f Spg. Koord. 1Programmierb. U/f Freq. Koord. 2Programmierb. U/f Spg. Koord. 2Programmierb. U/f Freq. Koord. 3
CI: V(Sollwert)Anfahrfrequenz für FCCSchlupfgrenzeCO: V/f SchlupffrequenzResonanzdämpfung Verstärkung U/fImax Freq.-Regler KpImax Regler IntegrationszeitImax Regler Prop. VerstärkungImax Spannungsregler TiSpannung Sanftanlauf
Programmierb. U/f Spg. Koord. 3
U/f
Geberlose Vektorregelung (SLVC, P1300 = 20,22) und Vektorregelung mit Geber (VC, P1300 = 21,23): Die Vektorregelung (SLVC / VC) kann für folgende Anwendungsarten eine bessere Performance bieten: - Anwendungen, bei denen eine hohe Drehmomentausnutzung erforderlich ist - Anwendungen, bei denen eine schnelle Reaktion auf Stoßbelastung erforderlich ist - Anwendungen, bei denen das Drehmoment beim Durchgang durch 0 Hz geregelt werden muss - Anwendungen, bei denen die Drehzahl sehr genau eingehalten werden muss - Anwendungen, bei denen ein Kippschutz des Motors erforderlich ist
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 105
Einschränkungen: Die Vektorregelung (SLVC / VC) hängt von der Genauigkeit des verwendeten Motormodells und der vom Umrichter durchgeführten Messungen ab. Aus diesem Grund bestehen bestimmte Einschränkungen für die Verwendung der Vektorregelung (SLVC / VC):
(Maximalfrequenz)fmax = min(200 Hz, 5 p0310)
r0207r0209
r0207 p0305
41 ≤≤ (Verhältnis von Motor-Nennstrom zu Umrichter-Nennstrom)
kein Synchronmotor Inbetriebnahmeempfehlung: Zum ordnungsgemäßen Betrieb bei Vektorregelung müssen die Typenschilddaten des Motors (P0304 - P0310) unbedingt richtig eingegeben und die Motordaten (P1910) an einem kalten Motor erfasst werden. Darüber hinaus muss die Umgebungstemperatur des Motors ebenfalls richtig in den Parameter P0625 eingegeben werden, sofern diese Umgebungstemperatur deutlich vom Standardwert 20 °C abweicht. Dies muss nach Abschluss der Schnellinbetriebnahme (P3900), aber vor den Messungen zur Motordatenerfassung durchgeführt werden. Optimierung: Die folgenden Parameter können vom Benutzer zur Leistungssteigerung angepasst werden. - P0003 = 3 - P0342: Trägheitsverhältnis Gesamtsystem/Motor Sensorlose Vektorregelung (SLVC): - P1470: P-Verstärkung (SLVC) - P1472: I-Anteil (SLVC) - P1610: Konstante Drehmomentanhebung (SLVC) - P1750: Steuerwort Motormodell Vektorregelung (VC): - P1460: P-Verstärkung (VC) - P1462: I-Anteil (VC) Folgende Tabelle gibt einen Überblick auf die Vektorregelungsparameter (SLVC, VC) und deren Abhängigkeit zu Parameter P1300:
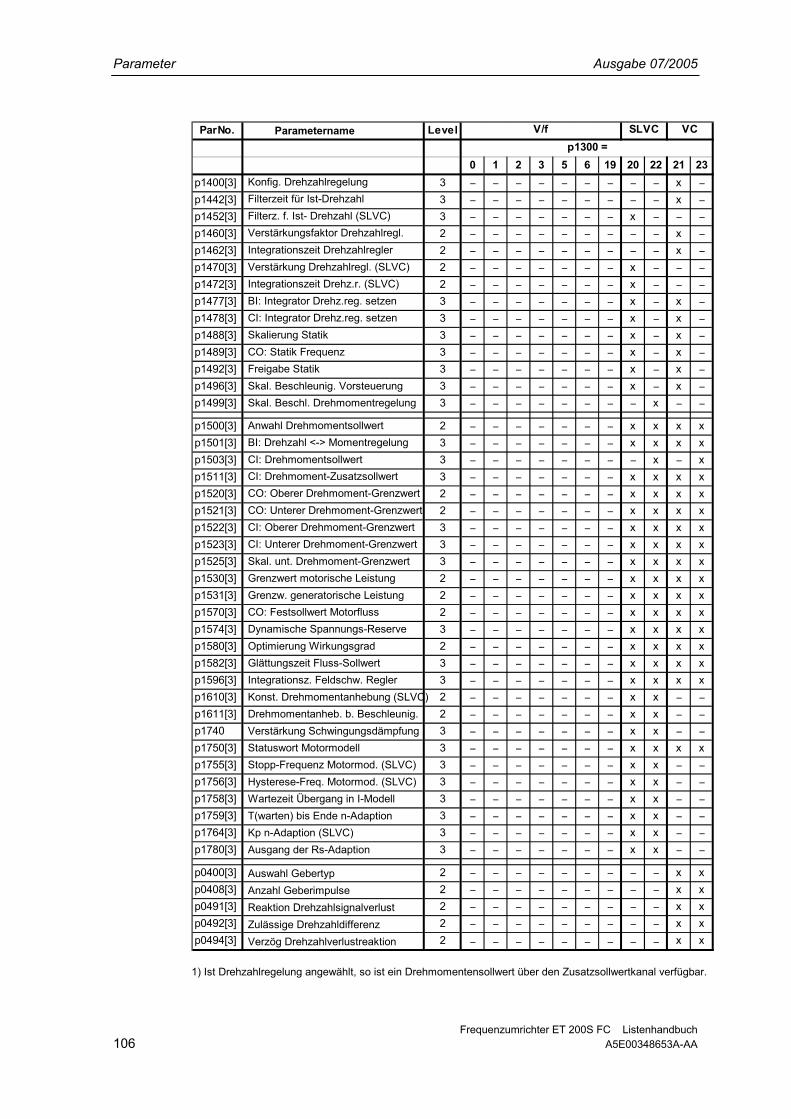
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 106 A5E00348653A-AA
1) Ist Drehzahlregelung angewählt, so ist ein Drehmomentensollwert über den Zusatzsollwertkanal verfügbar.
ParNo. Level
0 1 2 3 5 6 19 20 22 21 23p1400[3] 3 − − − − − − − − − x −p1442[3] 3 − − − − − − − − − x −p1452[3] 3 − − − − − − − x − − −p1460[3] 2 − − − − − − − − − x −p1462[3] 2 − − − − − − − − − x −p1470[3] 2 − − − − − − − x − − −p1472[3] 2 − − − − − − − x − − −p1477[3] 3 − − − − − − − x − x −p1478[3] 3 − − − − − − − x − x −p1488[3] 3 − − − − − − − x − x −p1489[3] 3 − − − − − − − x − x −p1492[3] 3 − − − − − − − x − x −p1496[3] 3 − − − − − − − x − x −p1499[3] 3 − − − − − − − − x − −
p1500[3] 2 − − − − − − − x x x xp1501[3] 3 − − − − − − − x x x xp1503[3] 3 − − − − − − − − x − xp1511[3] 3 − − − − − − − x x x xp1520[3] 2 − − − − − − − x x x xp1521[3] 2 − − − − − − − x x x xp1522[3] 3 − − − − − − − x x x xp1523[3] 3 − − − − − − − x x x xp1525[3] 3 − − − − − − − x x x xp1530[3] 2 − − − − − − − x x x xp1531[3] 2 − − − − − − − x x x xp1570[3] 2 − − − − − − − x x x xp1574[3] 3 − − − − − − − x x x xp1580[3] 2 − − − − − − − x x x xp1582[3] 3 − − − − − − − x x x xp1596[3] 3 − − − − − − − x x x xp1610[3] 2 − − − − − − − x x − −p1611[3] 2 − − − − − − − x x − −p1740 3 − − − − − − − x x − −p1750[3] 3 − − − − − − − x x x xp1755[3] 3 − − − − − − − x x − −p1756[3] 3 − − − − − − − x x − −p1758[3] 3 − − − − − − − x x − −p1759[3] 3 − − − − − − − x x − −p1764[3] 3 − − − − − − − x x − −p1780[3] 3 − − − − − − − x x − −
p0400[3] 2 − − − − − − − − − x xp0408[3] 2 − − − − − − − − − x xp0491[3] 2 − − − − − − − − − x xp0492[3] 2 − − − − − − − − − x xp0494[3] 2 − − − − − − − − − x x
VCV/f SLVCp1300 =
Parametername
Konfig. DrehzahlregelungFilterzeit für Ist-DrehzahlFilterz. f. Ist- Drehzahl (SLVC)Verstärkungsfaktor Drehzahlregl.Integrationszeit DrehzahlreglerVerstärkung Drehzahlregl. (SLVC)Integrationszeit Drehz.r. (SLVC)BI: Integrator Drehz.reg. setzenCI: Integrator Drehz.reg. setzenSkalierung StatikCO: Statik FrequenzFreigabe StatikSkal. Beschleunig. VorsteuerungSkal. Beschl. Drehmomentregelung
Anwahl DrehmomentsollwertBI: Drehzahl <-> MomentregelungCI: DrehmomentsollwertCI: Drehmoment-ZusatzsollwertCO: Oberer Drehmoment-GrenzwertCO: Unterer Drehmoment-GrenzwertCI: Oberer Drehmoment-GrenzwertCI: Unterer Drehmoment-GrenzwertSkal. unt. Drehmoment-GrenzwertGrenzwert motorische LeistungGrenzw. generatorische LeistungCO: Festsollwert MotorflussDynamische Spannungs-ReserveOptimierung WirkungsgradGlättungszeit Fluss-SollwertIntegrationsz. Feldschw. ReglerKonst. Drehmomentanhebung (SLVC)Drehmomentanheb. b. Beschleunig.Verstärkung SchwingungsdämpfungStatuswort MotormodellStopp-Frequenz Motormod. (SLVC)Hysterese-Freq. Motormod. (SLVC)Wartezeit Übergang in I-ModellT(warten) bis Ende n-AdaptionKp n-Adaption (SLVC)Ausgang der Rs-Adaption
Auswahl GebertypAnzahl GeberimpulseReaktion DrehzahlsignalverlustZulässige DrehzahldifferenzVerzög Drehzahlverlustreaktion
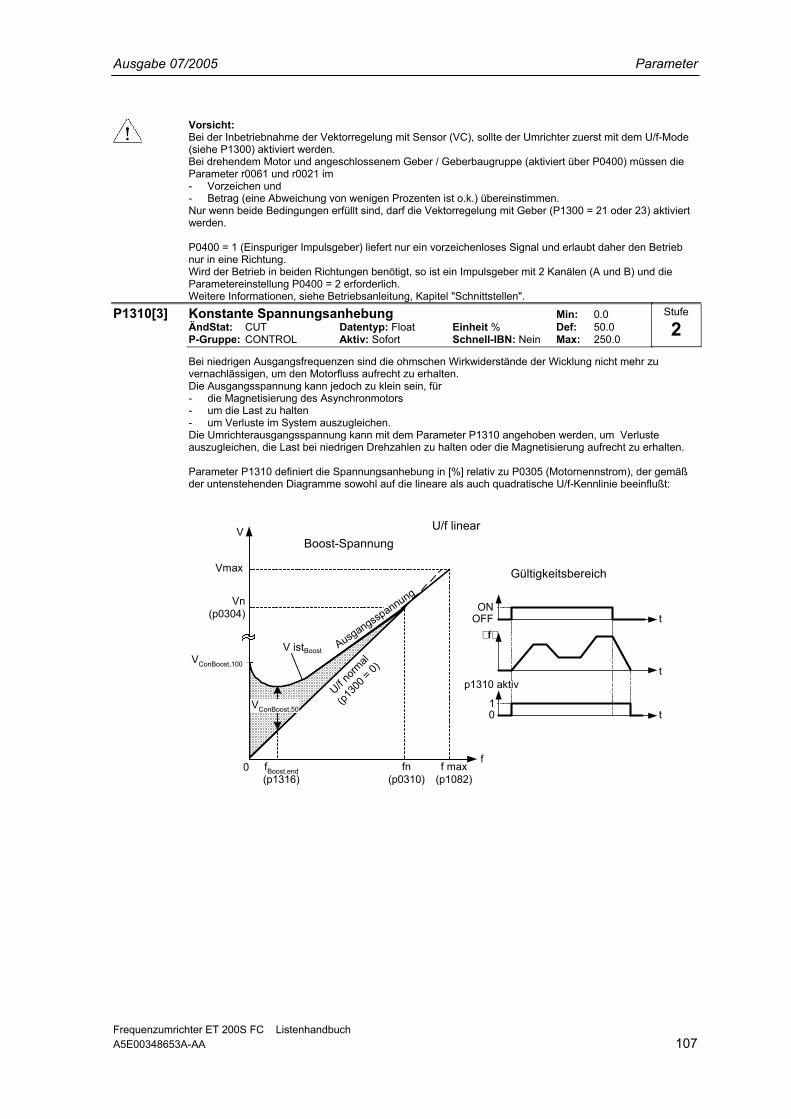
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 107
Vorsicht: Bei der Inbetriebnahme der Vektorregelung mit Sensor (VC), sollte der Umrichter zuerst mit dem U/f-Mode (siehe P1300) aktiviert werden. Bei drehendem Motor und angeschlossenem Geber / Geberbaugruppe (aktiviert über P0400) müssen die Parameter r0061 und r0021 im - Vorzeichen und - Betrag (eine Abweichung von wenigen Prozenten ist o.k.) übereinstimmen. Nur wenn beide Bedingungen erfüllt sind, darf die Vektorregelung mit Geber (P1300 = 21 oder 23) aktiviert werden. P0400 = 1 (Einspuriger Impulsgeber) liefert nur ein vorzeichenloses Signal und erlaubt daher den Betrieb nur in eine Richtung. Wird der Betrieb in beiden Richtungen benötigt, so ist ein Impulsgeber mit 2 Kanälen (A und B) und die Parametereinstellung P0400 = 2 erforderlich. Weitere Informationen, siehe Betriebsanleitung, Kapitel "Schnittstellen".
P1310[3] Konstante Spannungsanhebung Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 50.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 250.0
Bei niedrigen Ausgangsfrequenzen sind die ohmschen Wirkwiderstände der Wicklung nicht mehr zu vernachlässigen, um den Motorfluss aufrecht zu erhalten. Die Ausgangsspannung kann jedoch zu klein sein, für - die Magnetisierung des Asynchronmotors - um die Last zu halten - um Verluste im System auszugleichen. Die Umrichterausgangsspannung kann mit dem Parameter P1310 angehoben werden, um Verluste auszugleichen, die Last bei niedrigen Drehzahlen zu halten oder die Magnetisierung aufrecht zu erhalten. Parameter P1310 definiert die Spannungsanhebung in [%] relativ zu P0305 (Motornennstrom), der gemäß der untenstehenden Diagramme sowohl auf die lineare als auch quadratische U/f-Kennlinie beeinflußt:
f
U/f linear
OFFON
t
t
f
p1310 aktiv
t01
GültigkeitsbereichVmax
Vn(p0304)
VConBoost,100
0 fn(p0310)
f max(p1082)
V
fBoost,end(p1316)
Boost Ausgangsspannung
V ist
U/f norm
al
(p130
0 = 0)
VConBoost,50
Boost-Spannung
Stufe
2
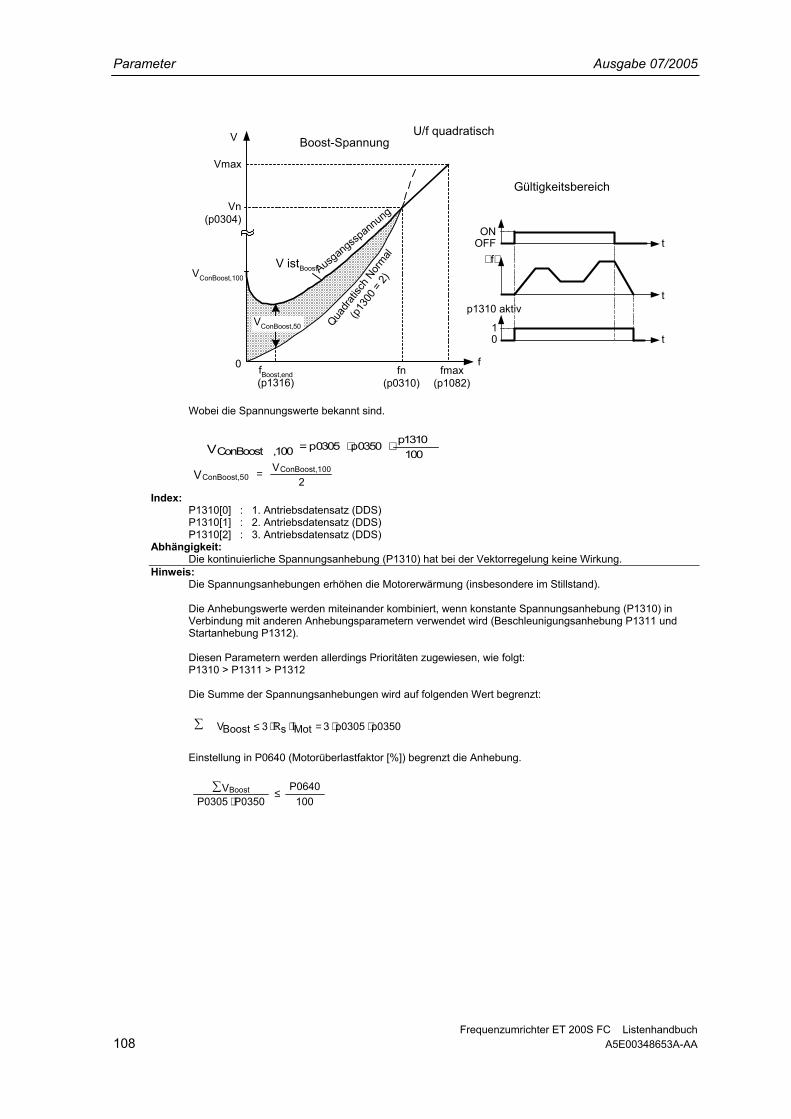
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 108 A5E00348653A-AA
VConBoost,100
V
Vn(p0304)
Vmax
fBoost,end(p1316)
f0
OFFON
t
t
f
p1310 aktiv
t01
Gültigkeitsbereich
fn(p0310)
fmax(p1082)
Boost
U/f quadratisch
Quadr
atisc
h Nor
mal
(p13
00 =
2)
VConBoost,50
V ist Ausgangssp
annung
Boost-Spannung
Wobei die Spannungswerte bekannt sind.
100 p1310 0350p0305p100,ConBoostV ⋅⋅=
2V 00ConBoost,1
0ConBoost,5V =
Index: P1310[0] : 1. Antriebsdatensatz (DDS) P1310[1] : 2. Antriebsdatensatz (DDS) P1310[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Die kontinuierliche Spannungsanhebung (P1310) hat bei der Vektorregelung keine Wirkung.
Hinweis: Die Spannungsanhebungen erhöhen die Motorerwärmung (insbesondere im Stillstand). Die Anhebungswerte werden miteinander kombiniert, wenn konstante Spannungsanhebung (P1310) in Verbindung mit anderen Anhebungsparametern verwendet wird (Beschleunigungsanhebung P1311 und Startanhebung P1312). Diesen Parametern werden allerdings Prioritäten zugewiesen, wie folgt: P1310 > P1311 > P1312 Die Summe der Spannungsanhebungen wird auf folgenden Wert begrenzt:
∑ p0350 p0305 3 MotIsR3BoostV ⋅⋅=⋅⋅≤
Einstellung in P0640 (Motorüberlastfaktor [%]) begrenzt die Anhebung.
∑100
P0640 P0350 P0305
V Boost ≤⋅
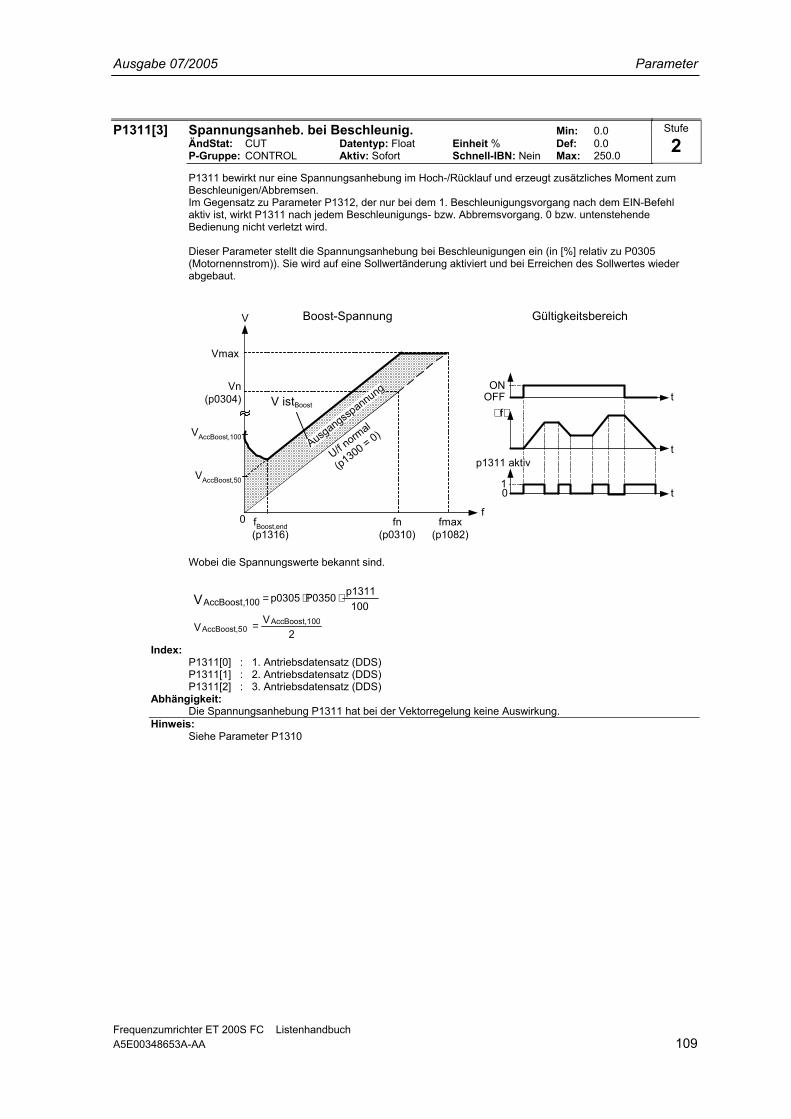
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 109
P1311[3] Spannungsanheb. bei Beschleunig. Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 0.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 250.0
P1311 bewirkt nur eine Spannungsanhebung im Hoch-/Rücklauf und erzeugt zusätzliches Moment zum Beschleunigen/Abbremsen. Im Gegensatz zu Parameter P1312, der nur bei dem 1. Beschleunigungsvorgang nach dem EIN-Befehl aktiv ist, wirkt P1311 nach jedem Beschleunigungs- bzw. Abbremsvorgang. 0 bzw. untenstehende Bedienung nicht verletzt wird. Dieser Parameter stellt die Spannungsanhebung bei Beschleunigungen ein (in [%] relativ zu P0305 (Motornennstrom)). Sie wird auf eine Sollwertänderung aktiviert und bei Erreichen des Sollwertes wieder abgebaut.
Vmax
Vn(p0304)
VAccBoost,100
0 fn(p0310)
fmax(p1082)
f
V
fBoost,end(p1316)
VAccBoost,50
Boost
U/f norm
al
(p1300 = 0)
V ist
Ausgangsspannung
OFFON
t
t
f
p1311 aktiv
t01
Boost-Spannung Gültigkeitsbereich
Wobei die Spannungswerte bekannt sind.
100 p1311 0350P0305pV 100,AccBoost ⋅⋅=
2V
V 00AccBoost,1 0AccBoost,5 =
Index:
P1311[0] : 1. Antriebsdatensatz (DDS) P1311[1] : 2. Antriebsdatensatz (DDS) P1311[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Die Spannungsanhebung P1311 hat bei der Vektorregelung keine Auswirkung.
Hinweis: Siehe Parameter P1310
Stufe
2
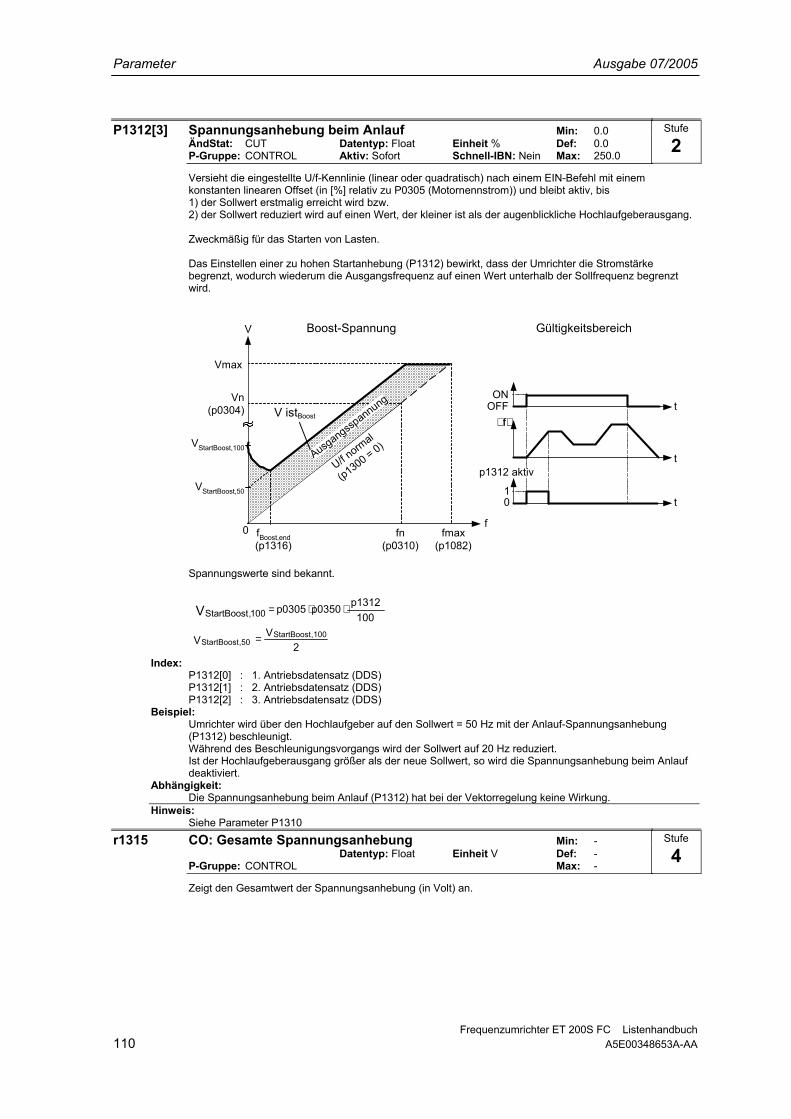
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 110 A5E00348653A-AA
P1312[3] Spannungsanhebung beim Anlauf Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 0.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 250.0
Versieht die eingestellte U/f-Kennlinie (linear oder quadratisch) nach einem EIN-Befehl mit einem konstanten linearen Offset (in [%] relativ zu P0305 (Motornennstrom)) und bleibt aktiv, bis 1) der Sollwert erstmalig erreicht wird bzw. 2) der Sollwert reduziert wird auf einen Wert, der kleiner ist als der augenblickliche Hochlaufgeberausgang. Zweckmäßig für das Starten von Lasten. Das Einstellen einer zu hohen Startanhebung (P1312) bewirkt, dass der Umrichter die Stromstärke begrenzt, wodurch wiederum die Ausgangsfrequenz auf einen Wert unterhalb der Sollfrequenz begrenzt wird.
OFFON
t
t
f
p1312 aktiv
t01
Vmax
Vn(p0304)
VStartBoost,100
0 fn(p0310)
fmax(p1082)
f
V
fBoost,end(p1316)
VStartBoost,50
Boost
Boost-Spannung
U/f norm
al
(p1300 = 0)
V ist
Ausgangsspannung
Gültigkeitsbereich
Spannungswerte sind bekannt.
100 p1312 0350p0305pV 100,StartBoost ⋅⋅=
2V
V ,100StartBoost ,50StartBoost =
Index:
P1312[0] : 1. Antriebsdatensatz (DDS) P1312[1] : 2. Antriebsdatensatz (DDS) P1312[2] : 3. Antriebsdatensatz (DDS)
Beispiel: Umrichter wird über den Hochlaufgeber auf den Sollwert = 50 Hz mit der Anlauf-Spannungsanhebung (P1312) beschleunigt. Während des Beschleunigungsvorgangs wird der Sollwert auf 20 Hz reduziert. Ist der Hochlaufgeberausgang größer als der neue Sollwert, so wird die Spannungsanhebung beim Anlauf deaktiviert.
Abhängigkeit: Die Spannungsanhebung beim Anlauf (P1312) hat bei der Vektorregelung keine Wirkung.
Hinweis: Siehe Parameter P1310
r1315 CO: Gesamte Spannungsanhebung Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt den Gesamtwert der Spannungsanhebung (in Volt) an.
Stufe
2
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 111
P1316[3] Endfrequenz Spannungsanhebung Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 20.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 100.0
Gibt die Frequenz an, bei der die programmierte Anhebung 50 % ihres parametrierten Spannungswertes beträgt. Dieser Wert wird in [%] relativ zu P0310 (Motornennfrequenz) angegeben. Diese Frequenz wird folgendermaßen definiert:
)3P153( 2 = f
motormin Boost +⋅
Index:
P1316[0] : 1. Antriebsdatensatz (DDS) P1316[1] : 2. Antriebsdatensatz (DDS) P1316[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Erfahrene Anwender können diesen Wert ändern, um die Form der Kurve zu verändern, z.B. um das Drehmoment bei einer bestimmten Frequenz zu erhöhen. Der Defaultwert ist abhängig vom Umrichtertyp und seinen Nennwerten.
Details: Siehe Diagramm in P1310 (stetige Anhebung)
Stufe
3
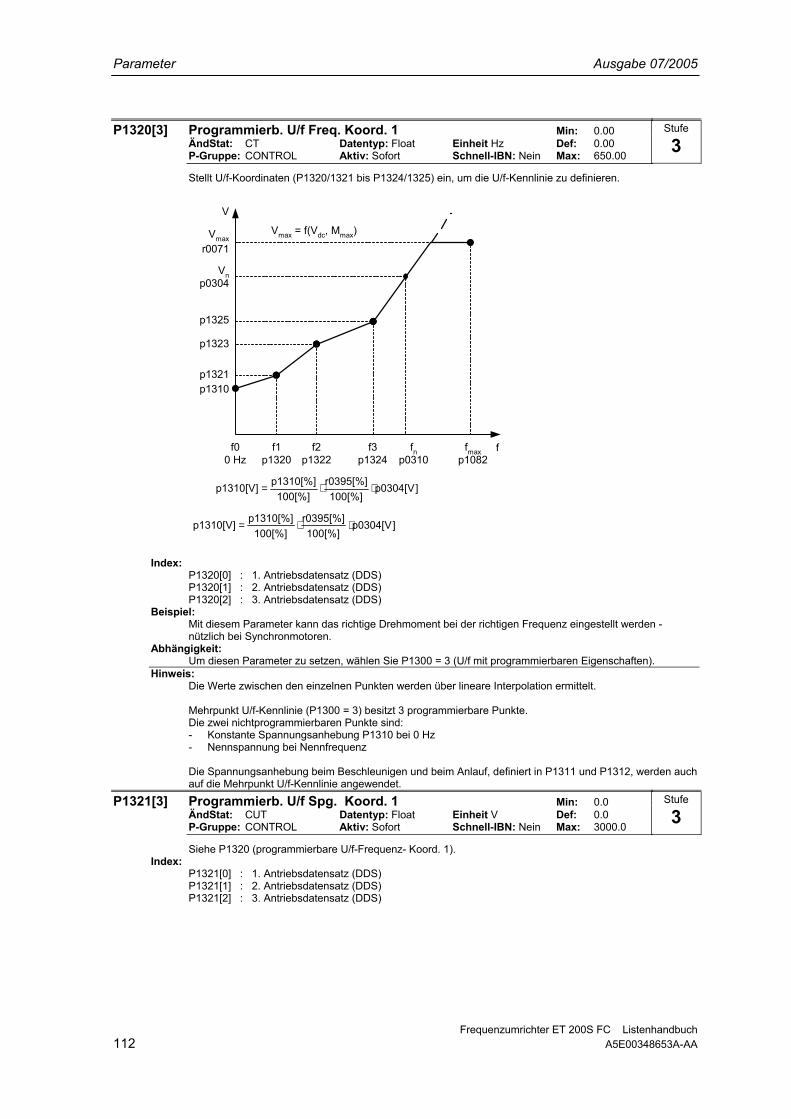
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 112 A5E00348653A-AA
P1320[3] Programmierb. U/f Freq. Koord. 1 Min: 0.00 ÄndStat: CT Datentyp: Float Einheit Hz Def: 0.00 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Stellt U/f-Koordinaten (P1320/1321 bis P1324/1325) ein, um die U/f-Kennlinie zu definieren.
]p0304[V100[%]
r0395[%]100[%]
p1310[%]p1310[V] ⋅⋅=
V
p1325
f1p1320
fmaxp1082
Vmaxr0071
Vnp0304
p1323
p1321p1310
f00 Hz
f2p1322
f3p1324
fnp0310
f
Vmax = f(Vdc, Mmax)
]p0304[V100[%]
r0395[%]100[%]
p1310[%]p1310[V] ⋅⋅=
Index:
P1320[0] : 1. Antriebsdatensatz (DDS) P1320[1] : 2. Antriebsdatensatz (DDS) P1320[2] : 3. Antriebsdatensatz (DDS)
Beispiel: Mit diesem Parameter kann das richtige Drehmoment bei der richtigen Frequenz eingestellt werden - nützlich bei Synchronmotoren.
Abhängigkeit: Um diesen Parameter zu setzen, wählen Sie P1300 = 3 (U/f mit programmierbaren Eigenschaften).
Hinweis: Die Werte zwischen den einzelnen Punkten werden über lineare Interpolation ermittelt. Mehrpunkt U/f-Kennlinie (P1300 = 3) besitzt 3 programmierbare Punkte. Die zwei nichtprogrammierbaren Punkte sind: - Konstante Spannungsanhebung P1310 bei 0 Hz - Nennspannung bei Nennfrequenz Die Spannungsanhebung beim Beschleunigen und beim Anlauf, definiert in P1311 und P1312, werden auch auf die Mehrpunkt U/f-Kennlinie angewendet.
P1321[3] Programmierb. U/f Spg. Koord. 1 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit V Def: 0.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 3000.0
Siehe P1320 (programmierbare U/f-Frequenz- Koord. 1). Index:
P1321[0] : 1. Antriebsdatensatz (DDS) P1321[1] : 2. Antriebsdatensatz (DDS) P1321[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 113
P1322[3] Programmierb. U/f Freq. Koord. 2 Min: 0.00 ÄndStat: CT Datentyp: Float Einheit Hz Def: 0.00 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Siehe P1320 (programmierbare U/f-Frequenz- Koord. 1). Index:
P1322[0] : 1. Antriebsdatensatz (DDS) P1322[1] : 2. Antriebsdatensatz (DDS) P1322[2] : 3. Antriebsdatensatz (DDS)
P1323[3] Programmierb. U/f Spg. Koord. 2 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit V Def: 0.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 3000.0
Siehe P1320 (programmierbare U/f-Frequenz- Koord. 1). Index:
P1323[0] : 1. Antriebsdatensatz (DDS) P1323[1] : 2. Antriebsdatensatz (DDS) P1323[2] : 3. Antriebsdatensatz (DDS)
P1324[3] Programmierb. U/f Freq. Koord. 3 Min: 0.00 ÄndStat: CT Datentyp: Float Einheit Hz Def: 0.00 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Siehe P1320 (programmierbare U/f-Frequenz- Koord. 1). Index:
P1324[0] : 1. Antriebsdatensatz (DDS) P1324[1] : 2. Antriebsdatensatz (DDS) P1324[2] : 3. Antriebsdatensatz (DDS)
P1325[3] Programmierb. U/f Spg. Koord. 3 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit V Def: 0.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 3000.0
Siehe P1320 (programmierbare U/f-Frequenz- Koord. 1). Index:
P1325[0] : 1. Antriebsdatensatz (DDS) P1325[1] : 2. Antriebsdatensatz (DDS) P1325[2] : 3. Antriebsdatensatz (DDS)
P1330[3] CI: Spannungssollwert Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
BICO-Parameter zum Auswählen der Quelle des Spannungssollwertes für freie U/f-Steuerung. Index:
P1330[0] : 1. Befehlsdatensatz (CDS) P1330[1] : 2. Befehlsdatensatz (CDS) P1330[2] : 3. Befehlsdatensatz (CDS)
P1333[3] Anfahrfrequenz für FCC Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 10.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 100.0
Definiert die Startfrequenz in Prozent der Motornennfrequenz (P0310) der die FCC (Flux-Current-Control) aktiviert wird.
Index: P1333[0] : 1. Antriebsdatensatz (DDS) P1333[1] : 2. Antriebsdatensatz (DDS) P1333[2] : 3. Antriebsdatensatz (DDS)
Notiz: Ein zu niedriger Wert kann zu Instabilitäten führen.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
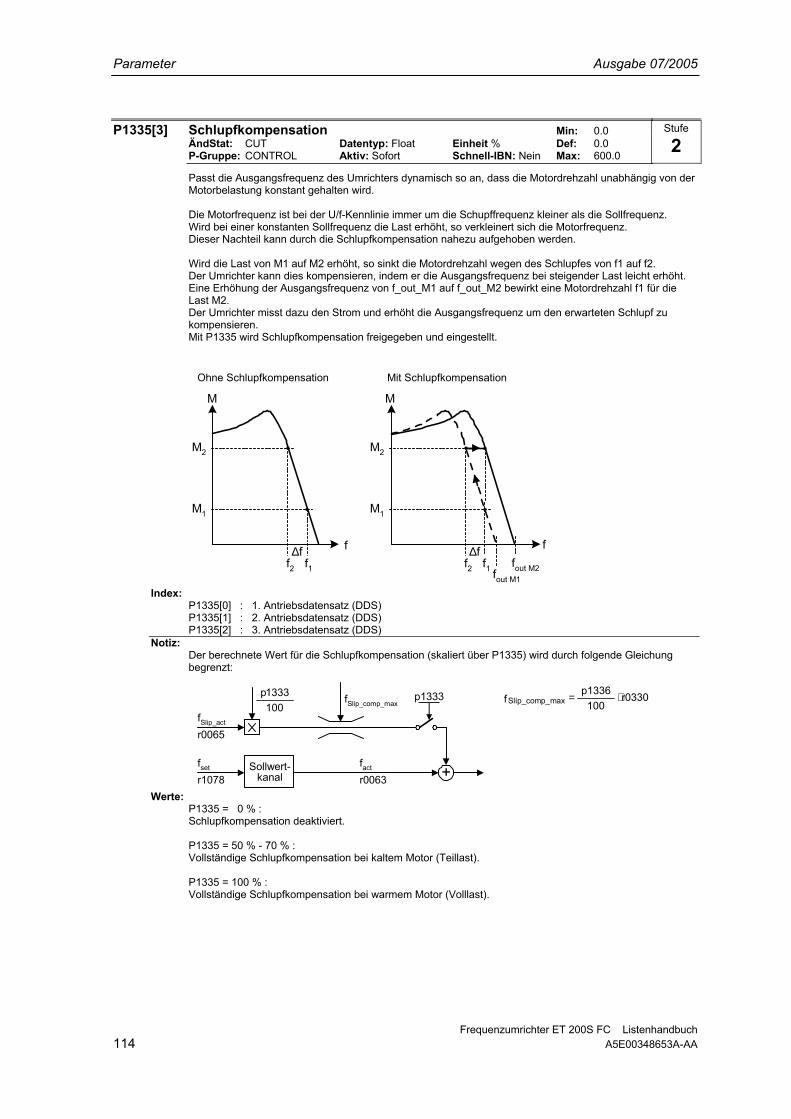
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 114 A5E00348653A-AA
P1335[3] Schlupfkompensation Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 0.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 600.0
Passt die Ausgangsfrequenz des Umrichters dynamisch so an, dass die Motordrehzahl unabhängig von der Motorbelastung konstant gehalten wird. Die Motorfrequenz ist bei der U/f-Kennlinie immer um die Schupffrequenz kleiner als die Sollfrequenz. Wird bei einer konstanten Sollfrequenz die Last erhöht, so verkleinert sich die Motorfrequenz. Dieser Nachteil kann durch die Schlupfkompensation nahezu aufgehoben werden. Wird die Last von M1 auf M2 erhöht, so sinkt die Motordrehzahl wegen des Schlupfes von f1 auf f2. Der Umrichter kann dies kompensieren, indem er die Ausgangsfrequenz bei steigender Last leicht erhöht. Eine Erhöhung der Ausgangsfrequenz von f_out_M1 auf f_out_M2 bewirkt eine Motordrehzahl f1 für die Last M2. Der Umrichter misst dazu den Strom und erhöht die Ausgangsfrequenz um den erwarteten Schlupf zu kompensieren. Mit P1335 wird Schlupfkompensation freigegeben und eingestellt.
Ohne Schlupfkompensation
M
f∆ff2 f1
M2
M1
Mit Schlupfkompensation
M
f∆ff2 f1
M2
M1
fout M1
fout M2
Index:
P1335[0] : 1. Antriebsdatensatz (DDS) P1335[1] : 2. Antriebsdatensatz (DDS) P1335[2] : 3. Antriebsdatensatz (DDS)
Notiz: Der berechnete Wert für die Schlupfkompensation (skaliert über P1335) wird durch folgende Gleichung begrenzt:
Sollwert-kanal
100 1333p
fSlip_act
fset
fSlip_comp_maxp1333
fact
r0065
r1078 r0063
r0330100
p1336 f maxSlip_comp_ ⋅=
+
Werte: P1335 = 0 % : Schlupfkompensation deaktiviert. P1335 = 50 % - 70 % : Vollständige Schlupfkompensation bei kaltem Motor (Teillast). P1335 = 100 % : Vollständige Schlupfkompensation bei warmem Motor (Volllast).
Stufe
2
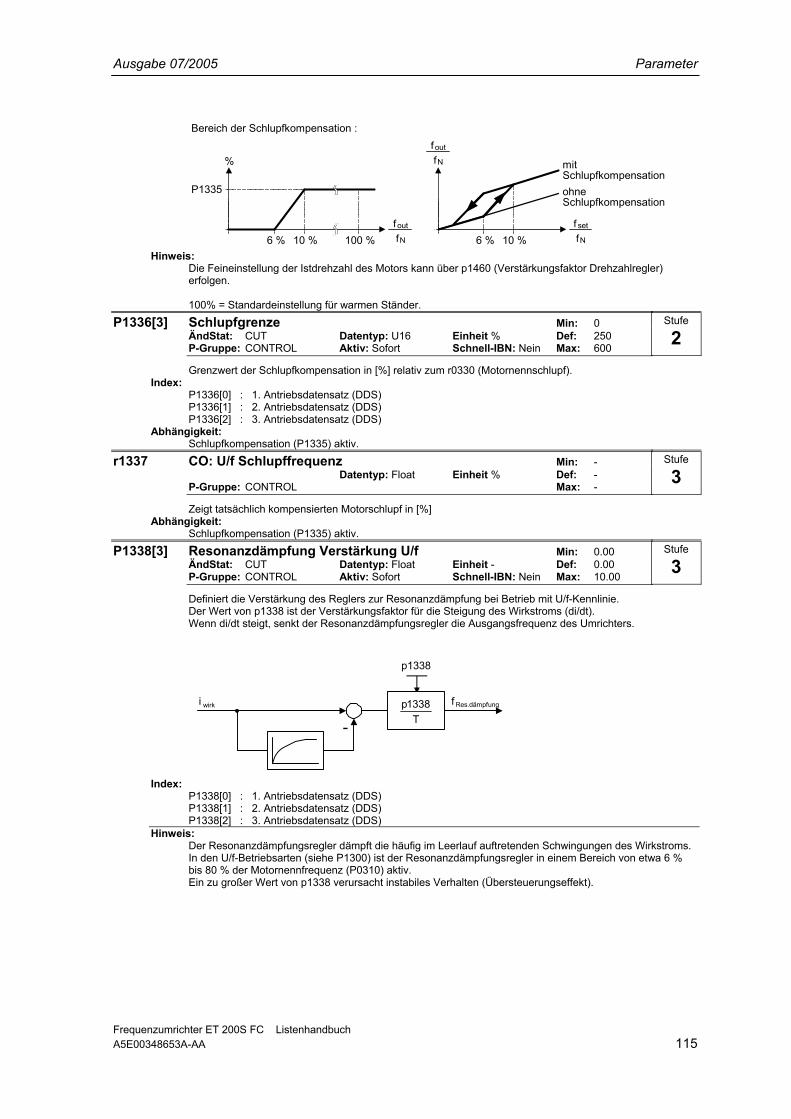
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 115
ff
N
out
6 % 10 %
P1335
100 %
%
ff
N
set
6 % 10 %
ff
N
out
Bereich der Schlupfkompensation :
ohneSchlupfkompensation
mitSchlupfkompensation
Hinweis:
Die Feineinstellung der Istdrehzahl des Motors kann über p1460 (Verstärkungsfaktor Drehzahlregler) erfolgen. 100% = Standardeinstellung für warmen Ständer.
P1336[3] Schlupfgrenze Min: 0 ÄndStat: CUT Datentyp: U16 Einheit % Def: 250 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 600
Grenzwert der Schlupfkompensation in [%] relativ zum r0330 (Motornennschlupf). Index:
P1336[0] : 1. Antriebsdatensatz (DDS) P1336[1] : 2. Antriebsdatensatz (DDS) P1336[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Schlupfkompensation (P1335) aktiv.
r1337 CO: U/f Schlupffrequenz Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt tatsächlich kompensierten Motorschlupf in [%] Abhängigkeit:
Schlupfkompensation (P1335) aktiv.
P1338[3] Resonanzdämpfung Verstärkung U/f Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.00 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 10.00
Definiert die Verstärkung des Reglers zur Resonanzdämpfung bei Betrieb mit U/f-Kennlinie. Der Wert von p1338 ist der Verstärkungsfaktor für die Steigung des Wirkstroms (di/dt). Wenn di/dt steigt, senkt der Resonanzdämpfungsregler die Ausgangsfrequenz des Umrichters.
p1338
T1338p fi
-wirk Res.dämpfung
Index:
P1338[0] : 1. Antriebsdatensatz (DDS) P1338[1] : 2. Antriebsdatensatz (DDS) P1338[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Der Resonanzdämpfungsregler dämpft die häufig im Leerlauf auftretenden Schwingungen des Wirkstroms. In den U/f-Betriebsarten (siehe P1300) ist der Resonanzdämpfungsregler in einem Bereich von etwa 6 % bis 80 % der Motornennfrequenz (P0310) aktiv. Ein zu großer Wert von p1338 verursacht instabiles Verhalten (Übersteuerungseffekt).
Stufe
2
Stufe
3
Stufe
3
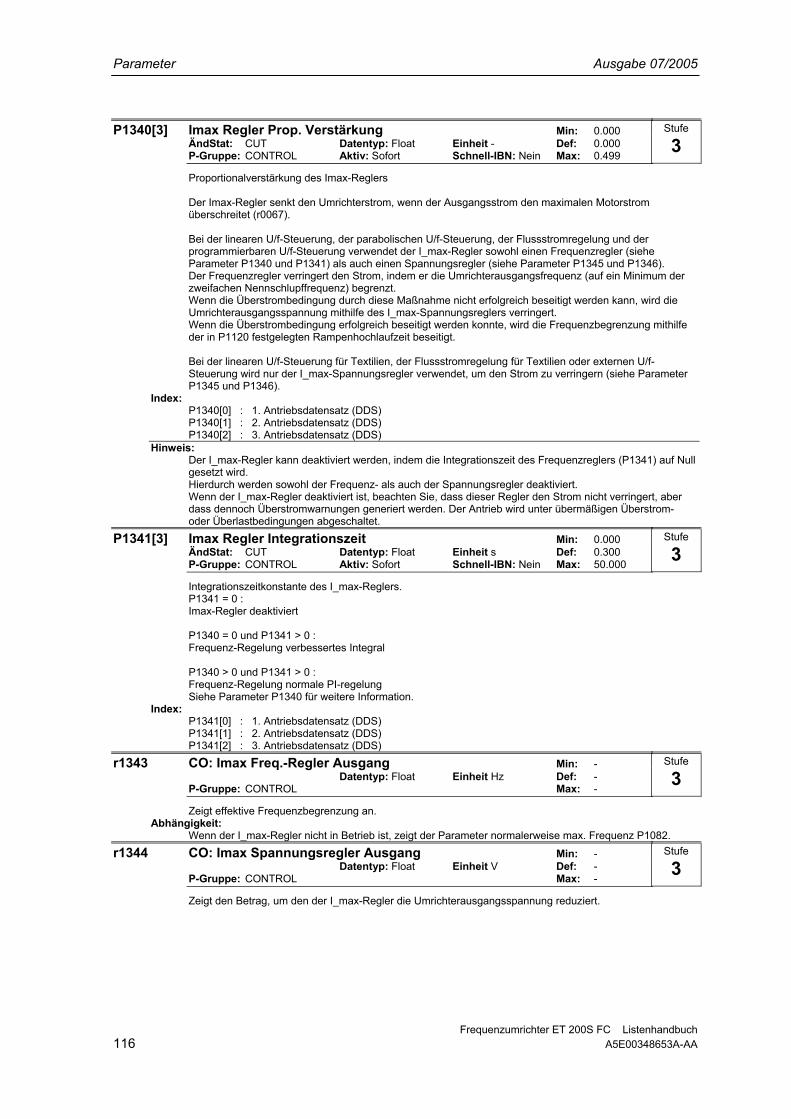
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 116 A5E00348653A-AA
P1340[3] Imax Regler Prop. Verstärkung Min: 0.000 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.000 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 0.499
Proportionalverstärkung des Imax-Reglers Der Imax-Regler senkt den Umrichterstrom, wenn der Ausgangsstrom den maximalen Motorstrom überschreitet (r0067). Bei der linearen U/f-Steuerung, der parabolischen U/f-Steuerung, der Flussstromregelung und der programmierbaren U/f-Steuerung verwendet der I_max-Regler sowohl einen Frequenzregler (siehe Parameter P1340 und P1341) als auch einen Spannungsregler (siehe Parameter P1345 und P1346). Der Frequenzregler verringert den Strom, indem er die Umrichterausgangsfrequenz (auf ein Minimum der zweifachen Nennschlupffrequenz) begrenzt. Wenn die Überstrombedingung durch diese Maßnahme nicht erfolgreich beseitigt werden kann, wird die Umrichterausgangsspannung mithilfe des I_max-Spannungsreglers verringert. Wenn die Überstrombedingung erfolgreich beseitigt werden konnte, wird die Frequenzbegrenzung mithilfe der in P1120 festgelegten Rampenhochlaufzeit beseitigt. Bei der linearen U/f-Steuerung für Textilien, der Flussstromregelung für Textilien oder externen U/f-Steuerung wird nur der I_max-Spannungsregler verwendet, um den Strom zu verringern (siehe Parameter P1345 und P1346).
Index: P1340[0] : 1. Antriebsdatensatz (DDS) P1340[1] : 2. Antriebsdatensatz (DDS) P1340[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Der I_max-Regler kann deaktiviert werden, indem die Integrationszeit des Frequenzreglers (P1341) auf Null gesetzt wird. Hierdurch werden sowohl der Frequenz- als auch der Spannungsregler deaktiviert. Wenn der I_max-Regler deaktiviert ist, beachten Sie, dass dieser Regler den Strom nicht verringert, aber dass dennoch Überstromwarnungen generiert werden. Der Antrieb wird unter übermäßigen Überstrom- oder Überlastbedingungen abgeschaltet.
P1341[3] Imax Regler Integrationszeit Min: 0.000 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.300 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 50.000
Integrationszeitkonstante des I_max-Reglers. P1341 = 0 : Imax-Regler deaktiviert P1340 = 0 und P1341 > 0 : Frequenz-Regelung verbessertes Integral P1340 > 0 und P1341 > 0 : Frequenz-Regelung normale PI-regelung Siehe Parameter P1340 für weitere Information.
Index: P1341[0] : 1. Antriebsdatensatz (DDS) P1341[1] : 2. Antriebsdatensatz (DDS) P1341[2] : 3. Antriebsdatensatz (DDS)
r1343 CO: Imax Freq.-Regler Ausgang Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt effektive Frequenzbegrenzung an. Abhängigkeit:
Wenn der I_max-Regler nicht in Betrieb ist, zeigt der Parameter normalerweise max. Frequenz P1082.
r1344 CO: Imax Spannungsregler Ausgang Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt den Betrag, um den der I_max-Regler die Umrichterausgangsspannung reduziert.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
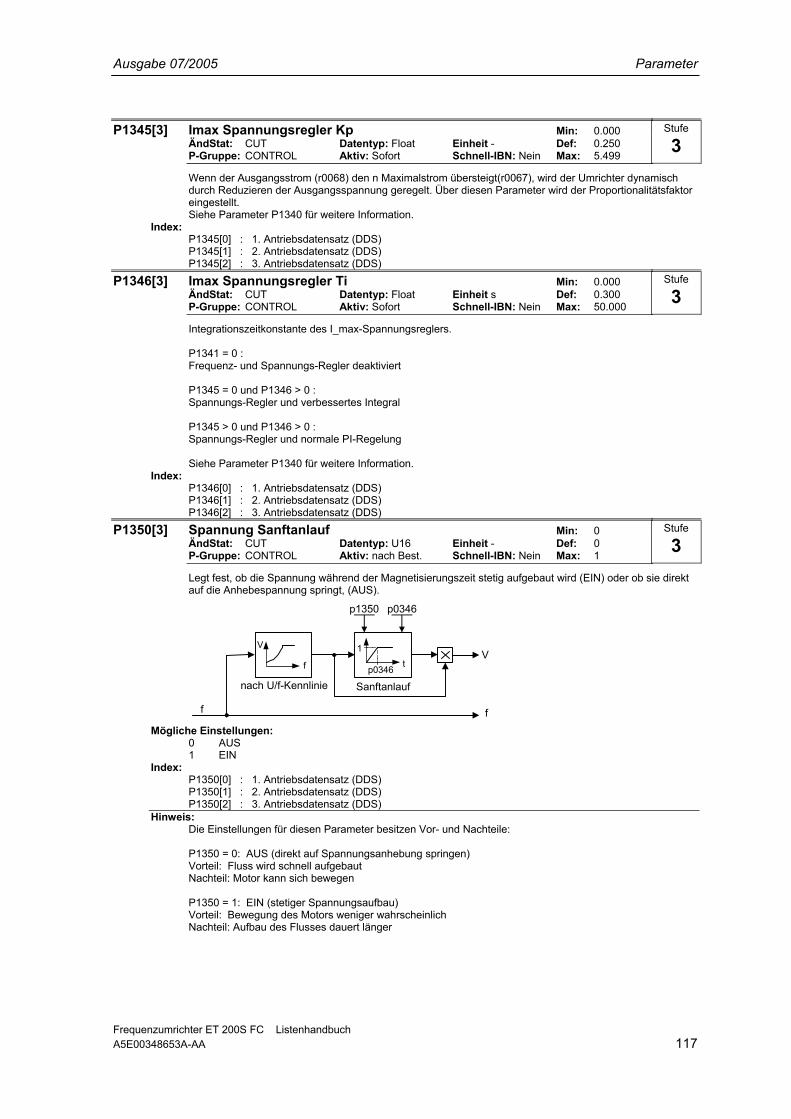
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 117
P1345[3] Imax Spannungsregler Kp Min: 0.000 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.250 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 5.499
Wenn der Ausgangsstrom (r0068) den n Maximalstrom übersteigt(r0067), wird der Umrichter dynamisch durch Reduzieren der Ausgangsspannung geregelt. Über diesen Parameter wird der Proportionalitätsfaktor eingestellt. Siehe Parameter P1340 für weitere Information.
Index: P1345[0] : 1. Antriebsdatensatz (DDS) P1345[1] : 2. Antriebsdatensatz (DDS) P1345[2] : 3. Antriebsdatensatz (DDS)
P1346[3] Imax Spannungsregler Ti Min: 0.000 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.300 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 50.000
Integrationszeitkonstante des I_max-Spannungsreglers. P1341 = 0 : Frequenz- und Spannungs-Regler deaktiviert P1345 = 0 und P1346 > 0 : Spannungs-Regler und verbessertes Integral P1345 > 0 und P1346 > 0 : Spannungs-Regler und normale PI-Regelung Siehe Parameter P1340 für weitere Information.
Index: P1346[0] : 1. Antriebsdatensatz (DDS) P1346[1] : 2. Antriebsdatensatz (DDS) P1346[2] : 3. Antriebsdatensatz (DDS)
P1350[3] Spannung Sanftanlauf Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Legt fest, ob die Spannung während der Magnetisierungszeit stetig aufgebaut wird (EIN) oder ob sie direkt auf die Anhebespannung springt, (AUS).
f
V
t1
p0346
p1350 p0346
nach U/f-Kennlinie Sanftanlauf
V
ff
Mögliche Einstellungen: 0 AUS 1 EIN
Index: P1350[0] : 1. Antriebsdatensatz (DDS) P1350[1] : 2. Antriebsdatensatz (DDS) P1350[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Die Einstellungen für diesen Parameter besitzen Vor- und Nachteile: P1350 = 0: AUS (direkt auf Spannungsanhebung springen) Vorteil: Fluss wird schnell aufgebaut Nachteil: Motor kann sich bewegen P1350 = 1: EIN (stetiger Spannungsaufbau) Vorteil: Bewegung des Motors weniger wahrscheinlich Nachteil: Aufbau des Flusses dauert länger
Stufe
3
Stufe
3
Stufe
3

Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 118 A5E00348653A-AA
P1400[3] Konfig. Drehzahlregelung Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 1 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 3
Konfiguration der Drehzahlregelung. Index:
P1400[0] : 1. Antriebsdatensatz (DDS) P1400[1] : 2. Antriebsdatensatz (DDS) P1400[2] : 3. Antriebsdatensatz (DDS)
Bitfelder: Bit00 Automatische Kp-Adaption 0 No 1 Yes Bit01 Integrator anhalten (SLVC) 0 No 1 Yes
Hinweis: P1400 Bit 00 = 1: Die Adaption der Drehzahlreglerverstärkung P1460 bzw. P1470 ist aktiviert. Dabei wird die Drehzahlreglerverstärkung kp im Feldschwächbereich in Abhängigkeit des Flusses reduziert (siehe Diagramm). Kp
fN
f(Φ)
P1400 Bit01 =1: Der Integrator des Drehzahlreglers wird beim Übergang von geregelt nach gesteuert angehalten / eingefroren, wenn die sensorlose Vektorregelung (SLVC) angewählt ist. Vorteil: Der richtige Betrag der Schlupfkompensation wird berechnet und bei den Steuerungsfunktionen für einen Motor unter Last angewendet.
r1407 CO/BO: Status 2 Motorregelung Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: CONTROL Max: -
Zeigt den Status der Motorregelung an, der zur Diagnose des Antriebs verwenden kann.
Bitfelder: Bit00 U/F-Steuerung freigeben 0 No 1 Yes Bit01 Freigabe SLVC 0 No 1 Yes Bit02 Drehmomentregelung freigeben 0 No 1 Yes Bit05 I-Ant. Drehzahlreg. anhalten 0 No 1 Yes Bit06 I-Ant. Drehzahlreg. setzen 0 No 1 Yes Bit08 Obere Drehmomentgrenze aktiv 0 No 1 Yes Bit09 Unt. Drehmomentgrenze aktiv 0 No 1 Yes Bit10 Freigabe Statik 0 No 1 Yes Bit15 DDS-Wechsel aktiv 0 No 1 Yes
Details: Siehe P052 (CO/BO: Statuswort 1)
r1438 CO: Frequenzsollwert zum Regler Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt Sollwert des Drehzahlreglers an.
Stufe
3
Stufe
3
Stufe
3
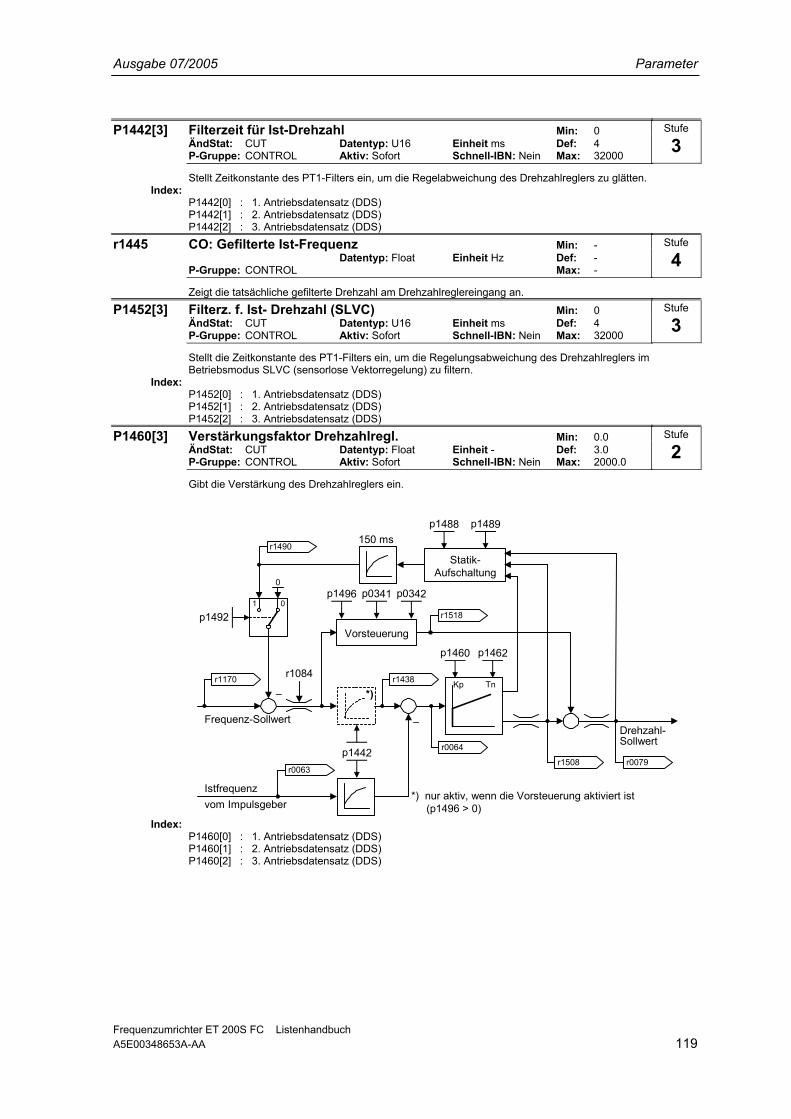
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 119
P1442[3] Filterzeit für Ist-Drehzahl Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 4 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 32000
Stellt Zeitkonstante des PT1-Filters ein, um die Regelabweichung des Drehzahlreglers zu glätten. Index:
P1442[0] : 1. Antriebsdatensatz (DDS) P1442[1] : 2. Antriebsdatensatz (DDS) P1442[2] : 3. Antriebsdatensatz (DDS)
r1445 CO: Gefilterte Ist-Frequenz Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt die tatsächliche gefilterte Drehzahl am Drehzahlreglereingang an.
P1452[3] Filterz. f. Ist- Drehzahl (SLVC) Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 4 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 32000
Stellt die Zeitkonstante des PT1-Filters ein, um die Regelungsabweichung des Drehzahlreglers im Betriebsmodus SLVC (sensorlose Vektorregelung) zu filtern.
Index: P1452[0] : 1. Antriebsdatensatz (DDS) P1452[1] : 2. Antriebsdatensatz (DDS) P1452[2] : 3. Antriebsdatensatz (DDS)
P1460[3] Verstärkungsfaktor Drehzahlregl. Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit - Def: 3.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 2000.0
Gibt die Verstärkung des Drehzahlreglers ein.
Vorsteuerung
Frequenz-Sollwert
r1438r1084
–
Kp Tn
p1460 p1462
r0064
Drehzahl-Sollwert
p1496 p0341 p0342
p1442
Istfrequenzvom Impulsgeber
r0063
r1170
–
p1492
p1489p1488
Statik-Aufschaltung
r1490150 ms
r1518
0
1 0
r0079r1508
*) nur aktiv, wenn die Vorsteuerung aktiviert ist (p1496 > 0)
*)
Index:
P1460[0] : 1. Antriebsdatensatz (DDS) P1460[1] : 2. Antriebsdatensatz (DDS) P1460[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
4
Stufe
3
Stufe
2
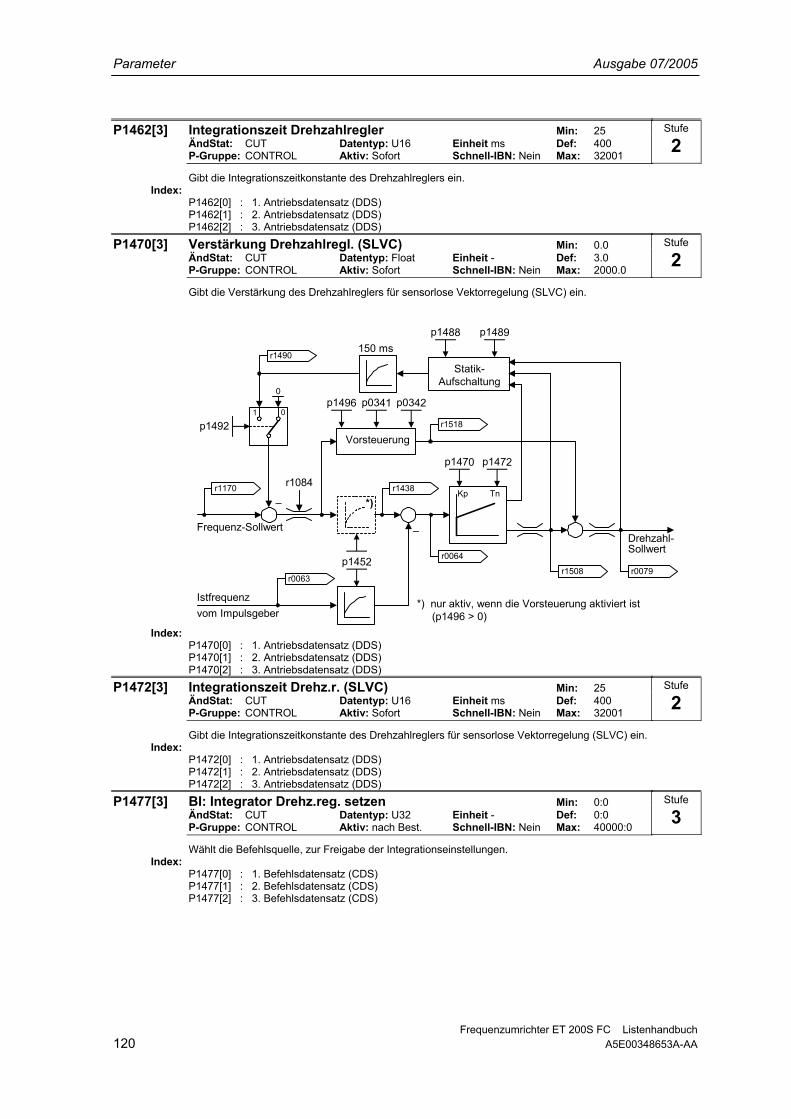
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 120 A5E00348653A-AA
P1462[3] Integrationszeit Drehzahlregler Min: 25 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 400 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 32001
Gibt die Integrationszeitkonstante des Drehzahlreglers ein. Index:
P1462[0] : 1. Antriebsdatensatz (DDS) P1462[1] : 2. Antriebsdatensatz (DDS) P1462[2] : 3. Antriebsdatensatz (DDS)
P1470[3] Verstärkung Drehzahlregl. (SLVC) Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit - Def: 3.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 2000.0
Gibt die Verstärkung des Drehzahlreglers für sensorlose Vektorregelung (SLVC) ein.
r1438r1084
–
Kp Tn
p1470 p1472
r0064
p1496 p0341 p0342
p1489p1488
p1452
Istfrequenzvom Impulsgeber
r0063
r1170
–
Vorsteuerung
Frequenz-SollwertDrehzahl-Sollwert
Statik-Aufschaltung
150 ms
r1518p1492
r1490
0
1 0
r0079r1508
*)
*) nur aktiv, wenn die Vorsteuerung aktiviert ist (p1496 > 0)
Index: P1470[0] : 1. Antriebsdatensatz (DDS) P1470[1] : 2. Antriebsdatensatz (DDS) P1470[2] : 3. Antriebsdatensatz (DDS)
P1472[3] Integrationszeit Drehz.r. (SLVC) Min: 25 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 400 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 32001
Gibt die Integrationszeitkonstante des Drehzahlreglers für sensorlose Vektorregelung (SLVC) ein. Index:
P1472[0] : 1. Antriebsdatensatz (DDS) P1472[1] : 2. Antriebsdatensatz (DDS) P1472[2] : 3. Antriebsdatensatz (DDS)
P1477[3] BI: Integrator Drehz.reg. setzen Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt die Befehlsquelle, zur Freigabe der Integrationseinstellungen. Index:
P1477[0] : 1. Befehlsdatensatz (CDS) P1477[1] : 2. Befehlsdatensatz (CDS) P1477[2] : 3. Befehlsdatensatz (CDS)
Stufe
2
Stufe
2
Stufe
2
Stufe
3
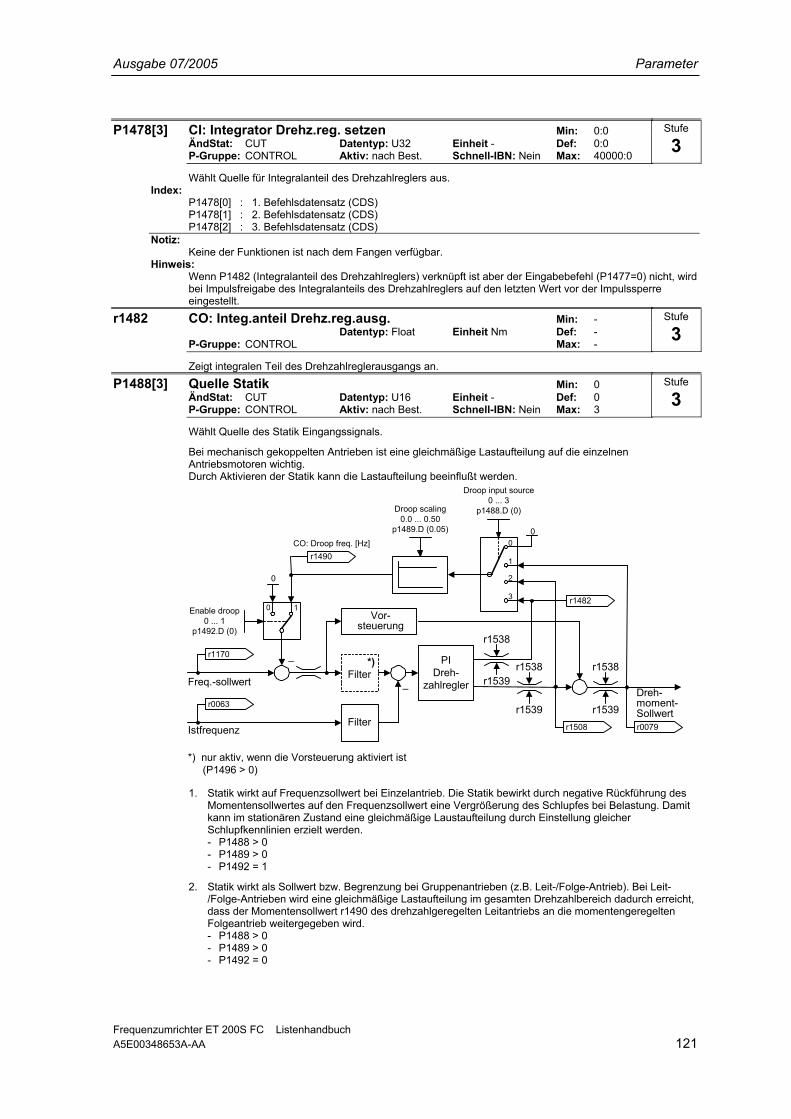
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 121
P1478[3] CI: Integrator Drehz.reg. setzen Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt Quelle für Integralanteil des Drehzahlreglers aus. Index:
P1478[0] : 1. Befehlsdatensatz (CDS) P1478[1] : 2. Befehlsdatensatz (CDS) P1478[2] : 3. Befehlsdatensatz (CDS)
Notiz: Keine der Funktionen ist nach dem Fangen verfügbar.
Hinweis: Wenn P1482 (Integralanteil des Drehzahlreglers) verknüpft ist aber der Eingabebefehl (P1477=0) nicht, wird bei Impulsfreigabe des Integralanteils des Drehzahlreglers auf den letzten Wert vor der Impulssperre eingestellt.
r1482 CO: Integ.anteil Drehz.reg.ausg. Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt integralen Teil des Drehzahlreglerausgangs an.
P1488[3] Quelle Statik Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Wählt Quelle des Statik Eingangssignals.
Bei mechanisch gekoppelten Antrieben ist eine gleichmäßige Lastaufteilung auf die einzelnen Antriebsmotoren wichtig. Durch Aktivieren der Statik kann die Lastaufteilung beeinflußt werden.
– Dreh-moment-Sollwert
Istfrequenz
–Filter
r1538
r1539
Vor-steuerung
Freq.-sollwert
Filter
PIDreh-
zahlregler
Droop input source0 ... 3
p1488.D (0)Droop scaling0.0 ... 0.50
p1489.D (0.05)0
2
1
3
0
0 1
r1490CO: Droop freq. [Hz]
0
Enable droop0 ... 1
p1492.D (0)r1538
r1539r1538
r1539r0079r1508
r1482
r0063
r1170*)
*) nur aktiv, wenn die Vorsteuerung aktiviert ist (P1496 > 0)
1. Statik wirkt auf Frequenzsollwert bei Einzelantrieb. Die Statik bewirkt durch negative Rückführung des Momentensollwertes auf den Frequenzsollwert eine Vergrößerung des Schlupfes bei Belastung. Damit kann im stationären Zustand eine gleichmäßige Laustaufteilung durch Einstellung gleicher Schlupfkennlinien erzielt werden. - P1488 > 0 - P1489 > 0 - P1492 = 1
2. Statik wirkt als Sollwert bzw. Begrenzung bei Gruppenantrieben (z.B. Leit-/Folge-Antrieb). Bei Leit-/Folge-Antrieben wird eine gleichmäßige Lastaufteilung im gesamten Drehzahlbereich dadurch erreicht, dass der Momentensollwert r1490 des drehzahlgeregelten Leitantriebs an die momentengeregelten Folgeantrieb weitergegeben wird. - P1488 > 0 - P1489 > 0 - P1492 = 0
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 122 A5E00348653A-AA
Mögliche Einstellungen: 0 Statik gesperrt 1 Quelle Statik:Drehmomentsollwert 2 Quelle Statik:Drehzahlreglerausg 3 Quelle Statik:I-Ant. d. n-Regler
Index: P1488[0] : 1. Antriebsdatensatz (DDS) P1488[1] : 2. Antriebsdatensatz (DDS) P1488[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Statik Skalierung (P1489) muss für Statik > 0 sein, damit sie wirksam ist.
P1489[3] Skalierung Statik Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.05 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 0.50
Definiert Grad der Statik pro Einheit bei voller Belastung in [%]. Index:
P1489[0] : 1. Antriebsdatensatz (DDS) P1489[1] : 2. Antriebsdatensatz (DDS) P1489[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Wenn 0 als Wert eingegeben wird, wird keine Statik verwendet.
r1490 CO: Statik Frequenz Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt Ausgangssignal der Statik Funktion. Dieses Ergebnis der Statik Berechnung wird vom Drehzahlreglersollwert subtrahiert.
P1492[3] BI: Freigabe Statik Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Aktiviert Statik. Index:
P1492[0] : 1. Befehlsdatensatz (CDS) P1492[1] : 2. Befehlsdatensatz (CDS) P1492[2] : 3. Befehlsdatensatz (CDS)
Abhängigkeit: Nur wirksam bei Statik-Skalierung (P1489) > 0.
Stufe
3
Stufe
3
Stufe
3
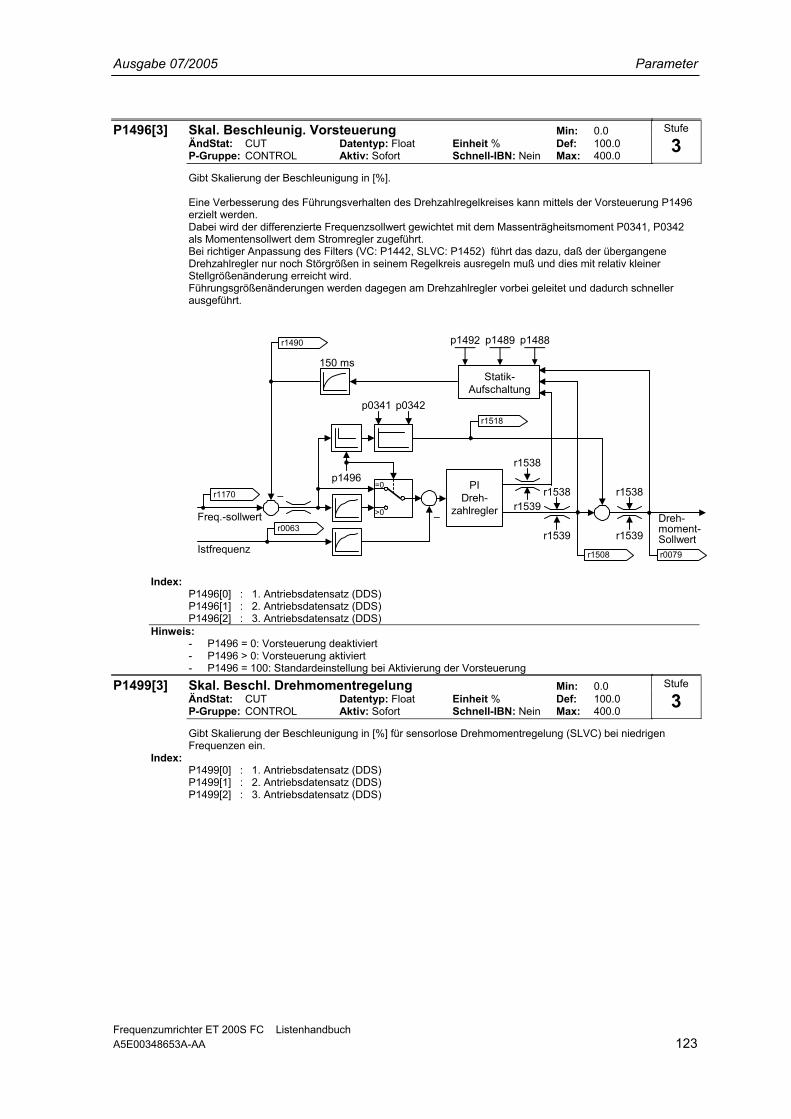
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 123
P1496[3] Skal. Beschleunig. Vorsteuerung Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 100.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 400.0
Gibt Skalierung der Beschleunigung in [%]. Eine Verbesserung des Führungsverhalten des Drehzahlregelkreises kann mittels der Vorsteuerung P1496 erzielt werden. Dabei wird der differenzierte Frequenzsollwert gewichtet mit dem Massenträgheitsmoment P0341, P0342 als Momentensollwert dem Stromregler zugeführt. Bei richtiger Anpassung des Filters (VC: P1442, SLVC: P1452) führt das dazu, daß der übergangene Drehzahlregler nur noch Störgrößen in seinem Regelkreis ausregeln muß und dies mit relativ kleiner Stellgrößenänderung erreicht wird. Führungsgrößenänderungen werden dagegen am Drehzahlregler vorbei geleitet und dadurch schneller ausgeführt.
Dreh-moment-Sollwert
–
Freq.-sollwert
PIDreh-
zahlregler
r1538
r1539
r1538
r1539
r1538
r1539
p1496
p1492 p1489 p1488
Statik-Aufschaltung
r1490
150 ms
r1518
–
Istfrequenz
=0
>0
r0063
r1170
r0079r1508
p0341 p0342
Index:
P1496[0] : 1. Antriebsdatensatz (DDS) P1496[1] : 2. Antriebsdatensatz (DDS) P1496[2] : 3. Antriebsdatensatz (DDS)
Hinweis: - P1496 = 0: Vorsteuerung deaktiviert - P1496 > 0: Vorsteuerung aktiviert - P1496 = 100: Standardeinstellung bei Aktivierung der Vorsteuerung
P1499[3] Skal. Beschl. Drehmomentregelung Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 100.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 400.0
Gibt Skalierung der Beschleunigung in [%] für sensorlose Drehmomentregelung (SLVC) bei niedrigen Frequenzen ein.
Index: P1499[0] : 1. Antriebsdatensatz (DDS) P1499[1] : 2. Antriebsdatensatz (DDS) P1499[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
3
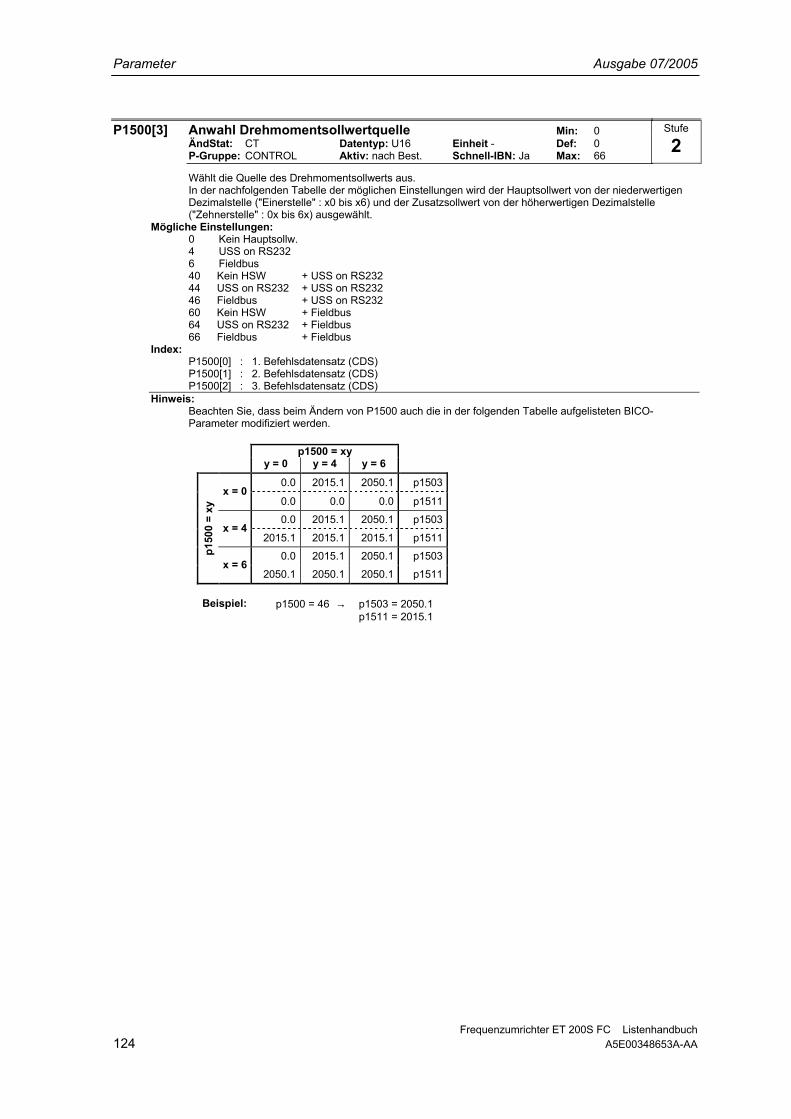
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 124 A5E00348653A-AA
P1500[3] Anwahl Drehmomentsollwertquelle Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Ja Max: 66
Wählt die Quelle des Drehmomentsollwerts aus. In der nachfolgenden Tabelle der möglichen Einstellungen wird der Hauptsollwert von der niederwertigen Dezimalstelle ("Einerstelle" : x0 bis x6) und der Zusatzsollwert von der höherwertigen Dezimalstelle ("Zehnerstelle" : 0x bis 6x) ausgewählt.
Mögliche Einstellungen: 0 Kein Hauptsollw. 4 USS on RS232 6 Fieldbus 40 Kein HSW + USS on RS232 44 USS on RS232 + USS on RS232 46 Fieldbus + USS on RS232 60 Kein HSW + Fieldbus 64 USS on RS232 + Fieldbus 66 Fieldbus + Fieldbus
Index: P1500[0] : 1. Befehlsdatensatz (CDS) P1500[1] : 2. Befehlsdatensatz (CDS) P1500[2] : 3. Befehlsdatensatz (CDS)
Hinweis: Beachten Sie, dass beim Ändern von P1500 auch die in der folgenden Tabelle aufgelisteten BICO-Parameter modifiziert werden.
p1500 = xy y = 0 y = 4 y = 6
0.0 2015.1 2050.1 p1503x = 0
0.0 0.0 0.0 p1511
0.0 2015.1 2050.1 p1503x = 4
2015.1 2015.1 2015.1 p1511
0.0 2015.1 2050.1 p1503p150
0 =
xy
x = 6 2050.1 2050.1 2050.1 p1511
Beispiel: p1500 = 46 → p1503 = 2050.1
p1511 = 2015.1
Stufe
2

Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 125
P1501[3] BI: Drehzahl <-> Momentregelung Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt Befehlsquelle aus, von der es möglich ist, zwischen Master (Drehzahlregelung) und Slave (Drehmomentregelung) umzuschalten.
–Dreh-moment-Sollwert
"Statik-Aufschaltung"
Istfrequenz
–r1538 r1538
r1539 r1539
0
CI: M-Sollw
(0:0)p1503.C
(0:0)
BI:n<>M-Regp1501.C
Vor-steuerung
Freq.-sollwert
PIDreh-
zahlregler
SLVC:VC:
p1452p1442
p1470p1460
p1472p1462
Ti
Kp Tn
Ti Kp Tn
*)
*) nur aktiv, wenn die Vorsteuerung aktiviert ist (p1496 > 0)
r0079r1508
r0063
r1170
r1518
Index:
P1501[0] : 1. Befehlsdatensatz (CDS) P1501[1] : 2. Befehlsdatensatz (CDS) P1501[2] : 3. Befehlsdatensatz (CDS)
Details: Drehzahlregler mit Geberrückführung siehe P1460 Drehzahlregler ohne Geberrückführung siehe P1470
Vorsicht: Der AUS1-Befehl wird nicht erkannt, wenn die Drehmomentregelung indirekt angewählt wird. (P1300=20, 21 und P1501=1). Er wird aber als AUS2 erkannt, wenn die Drehmomentregelung direkt angewählt wird (P1300=22, 23) wird. Bei indirekter Anwahl der Drehmomentregelung, wird empfohlen, einen AUS2-Befehl über Profibus zu verschalten oder die nachfolgende Schaltung mit freien Funktionsbausteinen (FFB) einzurichten:
QuelleEIN/AUS1
1&
QuelleDrehmoment-Umschaltung
p1501
p0844
p0840
OFF2
ON/OFF1
1
Stufe
3

Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 126 A5E00348653A-AA
P1503[3] CI: Drehmomentsollwert Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt Quelle des Drehmomentsollwertes für Drehmomentregelung. Index:
P1503[0] : 1. Befehlsdatensatz (CDS) P1503[1] : 2. Befehlsdatensatz (CDS) P1503[2] : 3. Befehlsdatensatz (CDS)
r1508 CO: Drehmomentsollwert Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt den Drehmomentsollwert vor der Begrenzung an.
P1511[3] CI: Drehmoment-Zusatzsollwert Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt Quelle des Drehmoment-Zusatzsollwertes. Index:
P1511[0] : 1. Befehlsdatensatz (CDS) P1511[1] : 2. Befehlsdatensatz (CDS) P1511[2] : 3. Befehlsdatensatz (CDS)
r1515 CO: Drehmoment-Zusatzsollwert Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt Drehmoment-Zusatzsollwert an.
r1518 CO: Beschleunigungsdrehmoment Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt Beschleunigungsdrehmoment an.
P1520[3] CO: Oberer Drehmoment-Grenzwert Min: -99999.00 ÄndStat: CUT Datentyp: Float Einheit Nm Def: 5.13 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 99999.00
Gibt obere Drehmomentbegrenzung an.
p1520max
p1520def r0333 1.5 ⋅=r0333 4 ⋅±=
Index:
P1520[0] : 1. Antriebsdatensatz (DDS) P1520[1] : 2. Antriebsdatensatz (DDS) P1520[2] : 3. Antriebsdatensatz (DDS)
P1521[3] CO: Unterer Drehmoment-Grenzwert Min: -99999.00 ÄndStat: CUT Datentyp: Float Einheit Nm Def: -5.13 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 99999.00
Gibt untere Drehmomentbegrenzung an.
p1521max
p1521def r0333 1.5 ⋅−=r0333 4 ⋅±=
Index:
P1521[0] : 1. Antriebsdatensatz (DDS) P1521[1] : 2. Antriebsdatensatz (DDS) P1521[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
2
Stufe
3
Stufe
2
Stufe
3
Stufe
2
Stufe
2
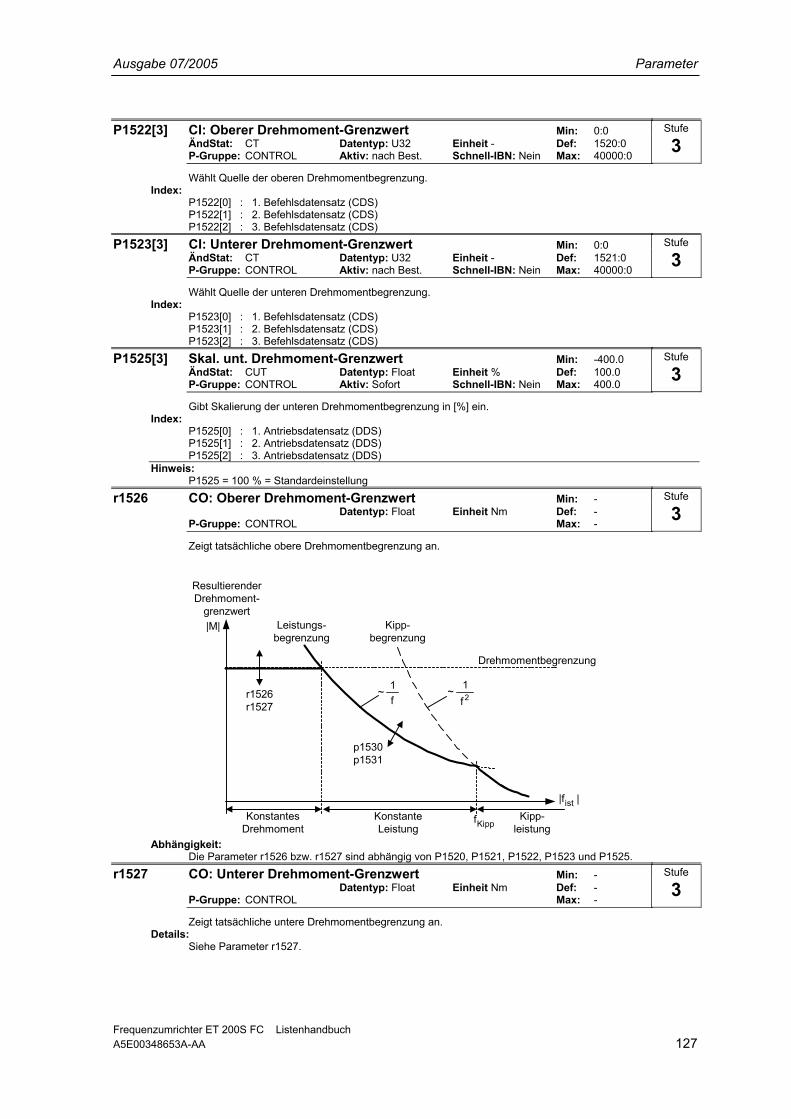
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 127
P1522[3] CI: Oberer Drehmoment-Grenzwert Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1520:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt Quelle der oberen Drehmomentbegrenzung. Index:
P1522[0] : 1. Befehlsdatensatz (CDS) P1522[1] : 2. Befehlsdatensatz (CDS) P1522[2] : 3. Befehlsdatensatz (CDS)
P1523[3] CI: Unterer Drehmoment-Grenzwert Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1521:0 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt Quelle der unteren Drehmomentbegrenzung. Index:
P1523[0] : 1. Befehlsdatensatz (CDS) P1523[1] : 2. Befehlsdatensatz (CDS) P1523[2] : 3. Befehlsdatensatz (CDS)
P1525[3] Skal. unt. Drehmoment-Grenzwert Min: -400.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 100.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 400.0
Gibt Skalierung der unteren Drehmomentbegrenzung in [%] ein. Index:
P1525[0] : 1. Antriebsdatensatz (DDS) P1525[1] : 2. Antriebsdatensatz (DDS) P1525[2] : 3. Antriebsdatensatz (DDS)
Hinweis: P1525 = 100 % = Standardeinstellung
r1526 CO: Oberer Drehmoment-Grenzwert Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt tatsächliche obere Drehmomentbegrenzung an.
f 1 ~
Drehmomentbegrenzung
ResultierenderDrehmoment-
grenzwertLeistungs-
begrenzung
|fist
r1526r1527
Kipp-begrenzung
p1530p1531
f 1 ~ 2
KonstantesDrehmoment
fKippKonstanteLeistung
|
|M|
Kipp-leistung
Abhängigkeit: Die Parameter r1526 bzw. r1527 sind abhängig von P1520, P1521, P1522, P1523 und P1525.
r1527 CO: Unterer Drehmoment-Grenzwert Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt tatsächliche untere Drehmomentbegrenzung an. Details:
Siehe Parameter r1527.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
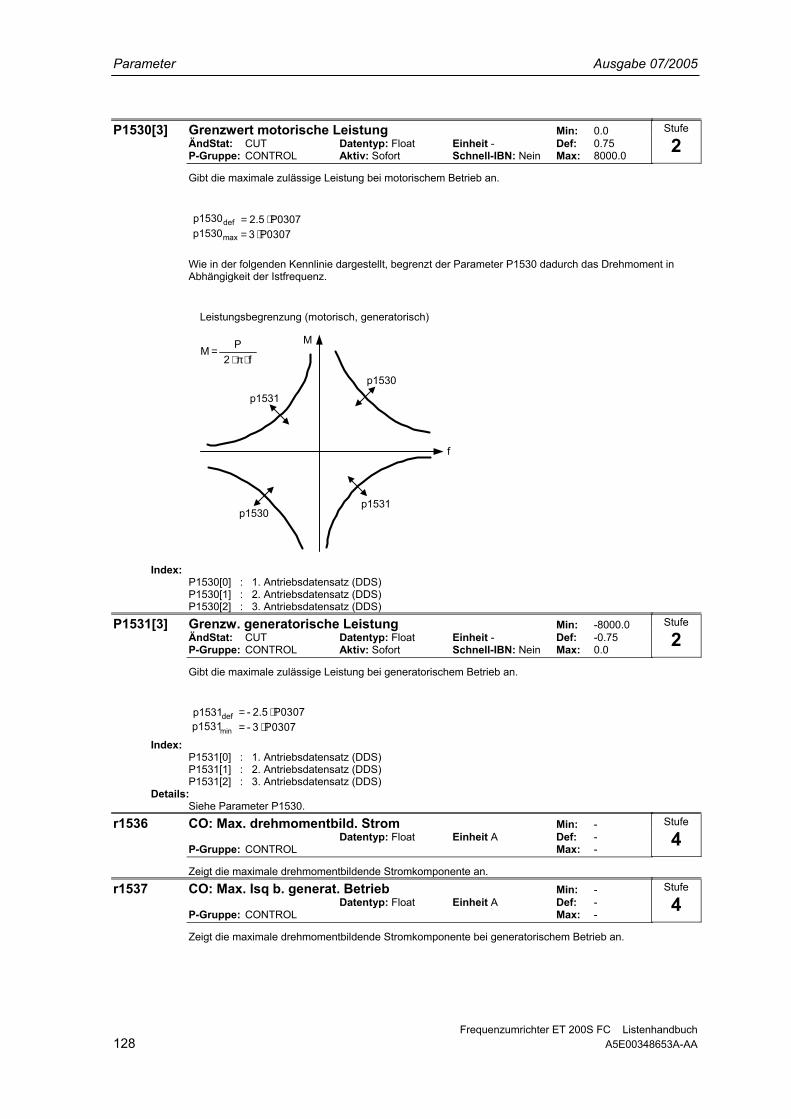
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 128 A5E00348653A-AA
P1530[3] Grenzwert motorische Leistung Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.75 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 8000.0
Gibt die maximale zulässige Leistung bei motorischem Betrieb an. p1530defp1530max 0307P3 ⋅=
0307P5.2 ⋅=
Wie in der folgenden Kennlinie dargestellt, begrenzt der Parameter P1530 dadurch das Drehmoment in Abhängigkeit der Istfrequenz.
M
f
f 2 P M
⋅π⋅=
Leistungsbegrenzung (motorisch, generatorisch)
p1530
p1531p1530
p1531
Index:
P1530[0] : 1. Antriebsdatensatz (DDS) P1530[1] : 2. Antriebsdatensatz (DDS) P1530[2] : 3. Antriebsdatensatz (DDS)
P1531[3] Grenzw. generatorische Leistung Min: -8000.0 ÄndStat: CUT Datentyp: Float Einheit - Def: -0.75 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 0.0
Gibt die maximale zulässige Leistung bei generatorischem Betrieb an.
p1531min P0307 3- ⋅=p1531def P0307 2.5- ⋅=
Index:
P1531[0] : 1. Antriebsdatensatz (DDS) P1531[1] : 2. Antriebsdatensatz (DDS) P1531[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe Parameter P1530.
r1536 CO: Max. drehmomentbild. Strom Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt die maximale drehmomentbildende Stromkomponente an.
r1537 CO: Max. Isq b. generat. Betrieb Min: - Datentyp: Float Einheit A Def: - P-Gruppe: CONTROL Max: -
Zeigt die maximale drehmomentbildende Stromkomponente bei generatorischem Betrieb an.
Stufe
2
Stufe
2
Stufe
4
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 129
r1538 CO: Ob. Drehmom.-Grenzwert(ges.) Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt die gesamte obere Drehmomentbegrenzung an.
r1539 CO: Unt. Drehmom.Grenzwert (ges) Min: - Datentyp: Float Einheit Nm Def: - P-Gruppe: CONTROL Max: -
Zeigt die gesamte untere Drehmomentbegrenzung an.
P1570[3] CO: Festsollwert Motorfluss Min: 50.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 100.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 200.0
Zeigt den Fluss-Sollwert in [%] relativ zum Motornennfluss an. Index:
P1570[0] : 1. Antriebsdatensatz (DDS) P1570[1] : 2. Antriebsdatensatz (DDS) P1570[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Wenn P1570 > 100%, steigt der Fluss-Sollwert gemäß der Last von 100 % auf den Wert von P1570 zwischen Leerlauf und normaler Belastung an.
P1574[3] Dynamische Spannungs-Reserve Min: 0 ÄndStat: CUT Datentyp: U16 Einheit V Def: 10 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 150
Stellt dynamische Spannungsübersteuerungsreserve für Vektorregelung ein. Index:
P1574[0] : 1. Antriebsdatensatz (DDS) P1574[1] : 2. Antriebsdatensatz (DDS) P1574[2] : 3. Antriebsdatensatz (DDS)
P1580[3] Optimierung Wirkungsgrad Min: 0 ÄndStat: CUT Datentyp: U16 Einheit % Def: 0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 100
Gibt Grad der Effizienzoptimierung in [%] an. Index:
P1580[0] : 1. Antriebsdatensatz (DDS) P1580[1] : 2. Antriebsdatensatz (DDS) P1580[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Ist P1580 > 0, wird die Dynamik der Drehzahlregelung (P1470, P1472) beschränkt, um Schwingungen zu vermeiden. Bei Leerlauf stellt ein Wert von 100 % volle Fluss-Reduzierung her (d.h. 50 % der Motornennfluss). Bei Verwendung der Optimierung ist es notwendig, die Glättungszeit des Fluss-Sollwertes (P1582) zu erhöhen.
P1582[3] Glättungszeit Fluss-Sollwert Min: 4 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 15 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 500
Stellt die Zeitkonstante des PT1-Filters ein, um den Fluss-Sollwert zu glätten. Index:
P1582[0] : 1. Antriebsdatensatz (DDS) P1582[1] : 2. Antriebsdatensatz (DDS) P1582[2] : 3. Antriebsdatensatz (DDS)
r1583 CO: Fluss-Sollwert (geglättet) Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt geglätteten Wert des Fluss-Sollwertes in [%] relativ zur Motornennfluss an.
Stufe
2
Stufe
2
Stufe
2
Stufe
3
Stufe
2
Stufe
3
Stufe
4
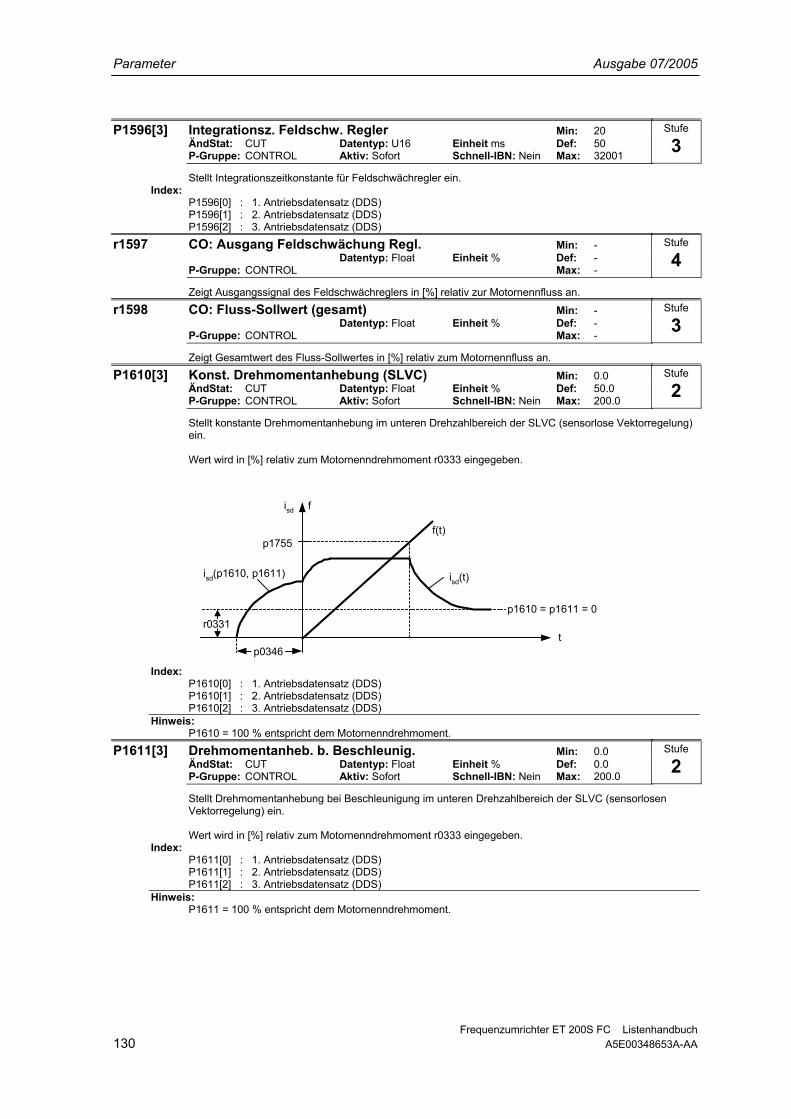
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 130 A5E00348653A-AA
P1596[3] Integrationsz. Feldschw. Regler Min: 20 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 50 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 32001
Stellt Integrationszeitkonstante für Feldschwächregler ein. Index:
P1596[0] : 1. Antriebsdatensatz (DDS) P1596[1] : 2. Antriebsdatensatz (DDS) P1596[2] : 3. Antriebsdatensatz (DDS)
r1597 CO: Ausgang Feldschwächung Regl. Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt Ausgangssignal des Feldschwächreglers in [%] relativ zur Motornennfluss an.
r1598 CO: Fluss-Sollwert (gesamt) Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt Gesamtwert des Fluss-Sollwertes in [%] relativ zum Motornennfluss an.
P1610[3] Konst. Drehmomentanhebung (SLVC) Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 50.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 200.0
Stellt konstante Drehmomentanhebung im unteren Drehzahlbereich der SLVC (sensorlose Vektorregelung) ein. Wert wird in [%] relativ zum Motornenndrehmoment r0333 eingegeben.
f
t
p1755
isd
f(t)
isd(t)isd(p1610, p1611)
p1610 = p1611 = 0r0331
p0346
Index: P1610[0] : 1. Antriebsdatensatz (DDS) P1610[1] : 2. Antriebsdatensatz (DDS) P1610[2] : 3. Antriebsdatensatz (DDS)
Hinweis: P1610 = 100 % entspricht dem Motornenndrehmoment.
P1611[3] Drehmomentanheb. b. Beschleunig. Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 0.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 200.0
Stellt Drehmomentanhebung bei Beschleunigung im unteren Drehzahlbereich der SLVC (sensorlosen Vektorregelung) ein. Wert wird in [%] relativ zum Motornenndrehmoment r0333 eingegeben.
Index: P1611[0] : 1. Antriebsdatensatz (DDS) P1611[1] : 2. Antriebsdatensatz (DDS) P1611[2] : 3. Antriebsdatensatz (DDS)
Hinweis: P1611 = 100 % entspricht dem Motornenndrehmoment.
Stufe
3
Stufe
4
Stufe
3
Stufe
2
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 131
P1654[3] Glättungszeit Isq-Sollwert Min: 2.0 ÄndStat: CUT Datentyp: Float Einheit ms Def: 6.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 20.0
Stellt die Zeitkonstante des PT1-Filters zur Glättung der drehmomentbildenden Stromkomponente im Feldschwächbereich ein.
Index: P1654[0] : 1. Antriebsdatensatz (DDS) P1654[1] : 2. Antriebsdatensatz (DDS) P1654[2] : 3. Antriebsdatensatz (DDS)
P1715[3] Verstärkungsfaktor Stromregler Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.25 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 5.00
Gibt die Verstärkung des Stromreglers ein. Index:
P1715[0] : 1. Antriebsdatensatz (DDS) P1715[1] : 2. Antriebsdatensatz (DDS) P1715[2] : 3. Antriebsdatensatz (DDS)
P1717[3] Integrationszeit Stromregler Min: 1.0 ÄndStat: CUT Datentyp: Float Einheit ms Def: 4.1 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 50.0
Gibt die Integrationszeitkonstante des Stromreglers ein. Index:
P1717[0] : 1. Antriebsdatensatz (DDS) P1717[1] : 2. Antriebsdatensatz (DDS) P1717[2] : 3. Antriebsdatensatz (DDS)
r1718 CO: Ausgang Isq-Regler Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt aktuellen Ausgang des Isq-Stromes(drehmomentbildender Strom)-Reglers (PI-Regler) an. Enthält den proportionalen und integralen Teil des PI-Reglers.
r1719 CO: Integralanteil Isq-Regler Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt Integralanteil des Isq-Stromes (drehmomentbildender Strom)-Reglers (PI-Regler) an.
r1723 CO: Ausgang Isd-Regler Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt den aktuellen Ausgang des Isd-Stromstärke (flussbildender Strom)-Reglers (PI-Regler) an. Enthält den proportionalen und integralen Teil des PI-Reglers.
r1724 CO: Integralanteil Isd-Regler Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt den Integralanteil des Isd-Stromes (flussbildender Strom)-Reglers (PI-Regler) an.
r1725 CO: Max. I-Anteil Isd-Regler Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt den Grenzwert des Integralanteils des Isd-Stromreglers an.
r1728 CO: Entkopplungsspannung Min: - Datentyp: Float Einheit V Def: - P-Gruppe: CONTROL Max: -
Zeigt den aktuellen Ausgang der Querkanalentkopplung an.
P1740 Verstärkung Schwingungsdämpfung Min: 0.000 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.000 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 10.000
Stellt Verstärkung des Reglers zur Dämpfung von Schwingungen in der geberlosen Vektorregelung bei niedrigen Frequenzen ein.
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Stufe
3
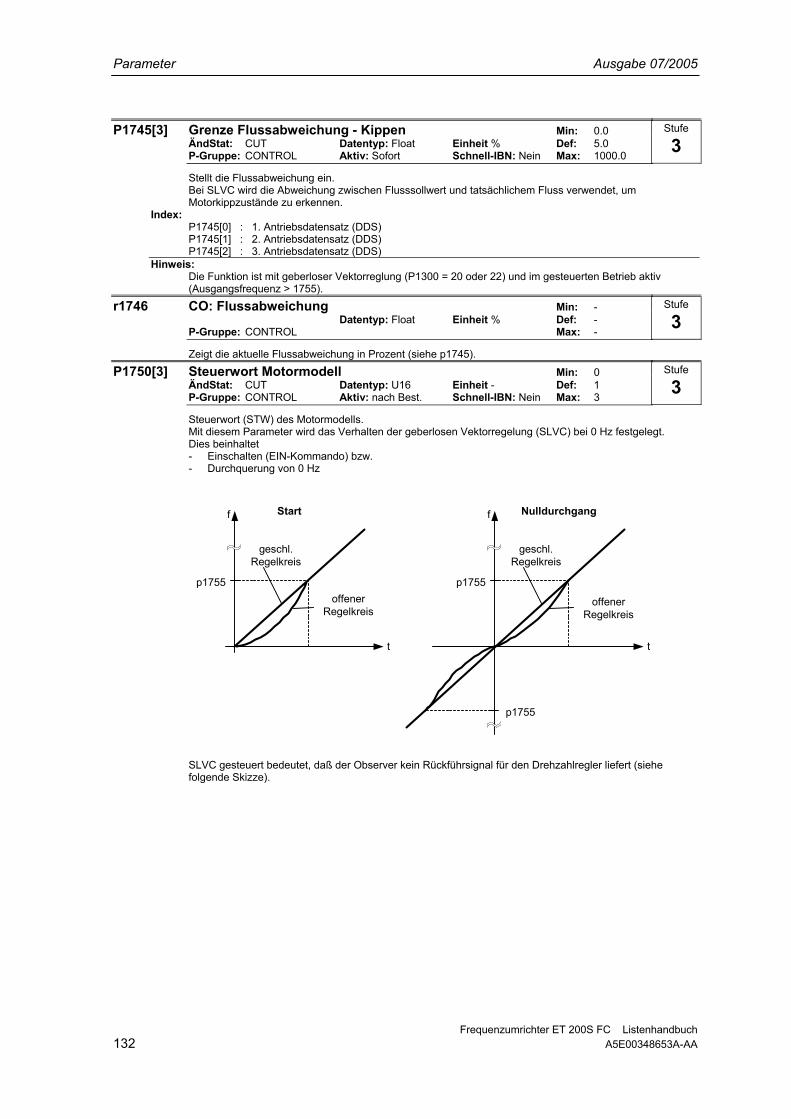
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 132 A5E00348653A-AA
P1745[3] Grenze Flussabweichung - Kippen Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 5.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 1000.0
Stellt die Flussabweichung ein. Bei SLVC wird die Abweichung zwischen Flusssollwert und tatsächlichem Fluss verwendet, um Motorkippzustände zu erkennen.
Index: P1745[0] : 1. Antriebsdatensatz (DDS) P1745[1] : 2. Antriebsdatensatz (DDS) P1745[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Die Funktion ist mit geberloser Vektorreglung (P1300 = 20 oder 22) und im gesteuerten Betrieb aktiv (Ausgangsfrequenz > 1755).
r1746 CO: Flussabweichung Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt die aktuelle Flussabweichung in Prozent (siehe p1745).
P1750[3] Steuerwort Motormodell Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 1 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Steuerwort (STW) des Motormodells. Mit diesem Parameter wird das Verhalten der geberlosen Vektorregelung (SLVC) bei 0 Hz festgelegt. Dies beinhaltet - Einschalten (EIN-Kommando) bzw. - Durchquerung von 0 Hz
f
t
p1755
geschl.Regelkreis
offenerRegelkreis
Start f
t
geschl.Regelkreis
offenerRegelkreis
Nulldurchgang
p1755
p1755
SLVC gesteuert bedeutet, daß der Observer kein Rückführsignal für den Drehzahlregler liefert (siehe folgende Skizze).
Stufe
3
Stufe
3
Stufe
3
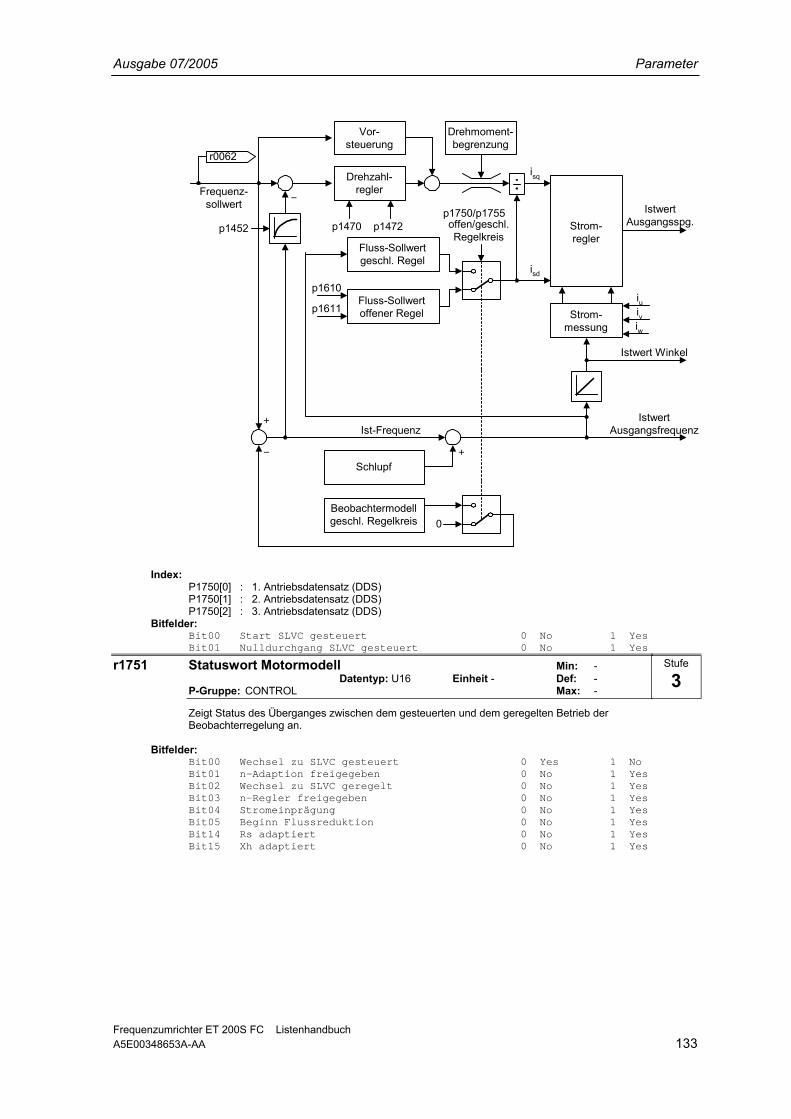
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 133
.
.
r0062
Drehzahl-regler
Vor-steuerung
Drehmoment-begrenzung
Strom-regler
isq
−
offen/geschl.Regelkreis
Fluss-Sollwertgeschl. Regel
Fluss-Sollwertoffener Regel
isd
p1610
p1611
−
+
+
0
IstwertAusgangsspg.
IstwertAusgangsfrequenzIst-Frequenz
Strom-messung
Istwert Winkel
Beobachtermodellgeschl. Regelkreis
Schlupf
Frequenz-sollwert
iu
iwiv
p1452 p1470 p1472p1750/p1755
Index:
P1750[0] : 1. Antriebsdatensatz (DDS) P1750[1] : 2. Antriebsdatensatz (DDS) P1750[2] : 3. Antriebsdatensatz (DDS)
Bitfelder: Bit00 Start SLVC gesteuert 0 No 1 Yes Bit01 Nulldurchgang SLVC gesteuert 0 No 1 Yes
r1751 Statuswort Motormodell Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: CONTROL Max: -
Zeigt Status des Überganges zwischen dem gesteuerten und dem geregelten Betrieb der Beobachterregelung an.
Bitfelder: Bit00 Wechsel zu SLVC gesteuert 0 Yes 1 No Bit01 n-Adaption freigegeben 0 No 1 Yes Bit02 Wechsel zu SLVC geregelt 0 No 1 Yes Bit03 n-Regler freigegeben 0 No 1 Yes Bit04 Stromeinprägung 0 No 1 Yes Bit05 Beginn Flussreduktion 0 No 1 Yes Bit14 Rs adaptiert 0 No 1 Yes Bit15 Xh adaptiert 0 No 1 Yes
Stufe
3
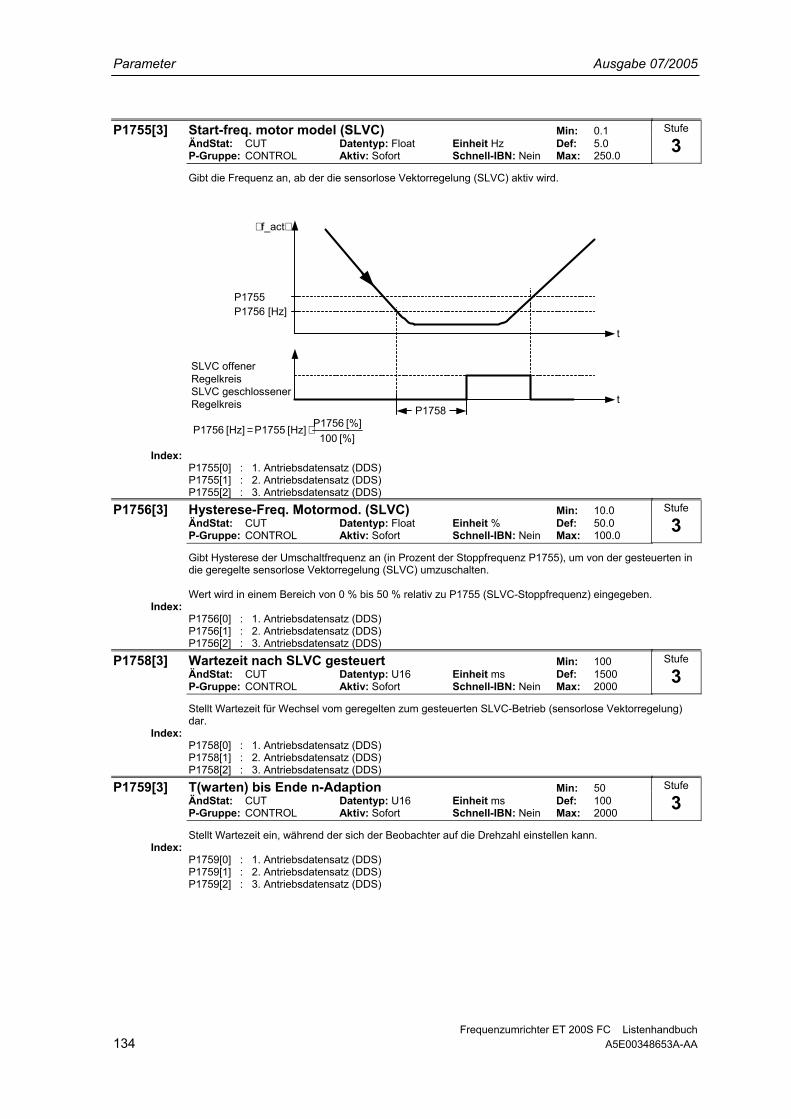
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 134 A5E00348653A-AA
P1755[3] Start-freq. motor model (SLVC) Min: 0.1 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 5.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 250.0
Gibt die Frequenz an, ab der die sensorlose Vektorregelung (SLVC) aktiv wird.
SLVC offenerRegelkreisSLVC geschlossenerRegelkreis P1758
t
[%] 100[%] P1756 [Hz] P1755 [Hz] P1756 ⋅=
f_act
t
P1755P1756 [Hz]
Index:
P1755[0] : 1. Antriebsdatensatz (DDS) P1755[1] : 2. Antriebsdatensatz (DDS) P1755[2] : 3. Antriebsdatensatz (DDS)
P1756[3] Hysterese-Freq. Motormod. (SLVC) Min: 10.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 50.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 100.0
Gibt Hysterese der Umschaltfrequenz an (in Prozent der Stoppfrequenz P1755), um von der gesteuerten in die geregelte sensorlose Vektorregelung (SLVC) umzuschalten. Wert wird in einem Bereich von 0 % bis 50 % relativ zu P1755 (SLVC-Stoppfrequenz) eingegeben.
Index: P1756[0] : 1. Antriebsdatensatz (DDS) P1756[1] : 2. Antriebsdatensatz (DDS) P1756[2] : 3. Antriebsdatensatz (DDS)
P1758[3] Wartezeit nach SLVC gesteuert Min: 100 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 1500 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 2000
Stellt Wartezeit für Wechsel vom geregelten zum gesteuerten SLVC-Betrieb (sensorlose Vektorregelung) dar.
Index: P1758[0] : 1. Antriebsdatensatz (DDS) P1758[1] : 2. Antriebsdatensatz (DDS) P1758[2] : 3. Antriebsdatensatz (DDS)
P1759[3] T(warten) bis Ende n-Adaption Min: 50 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 100 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 2000
Stellt Wartezeit ein, während der sich der Beobachter auf die Drehzahl einstellen kann. Index:
P1759[0] : 1. Antriebsdatensatz (DDS) P1759[1] : 2. Antriebsdatensatz (DDS) P1759[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 135
P1764[3] Kp n-Adaption (SLVC) Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.2 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 2.5
Gibt die Verstärkung des Drehzahl-Anpassungsreglers für die sensorlose Vektorregelung ein. Index:
P1764[0] : 1. Antriebsdatensatz (DDS) P1764[1] : 2. Antriebsdatensatz (DDS) P1764[2] : 3. Antriebsdatensatz (DDS)
P1767[3] Tn n-Adaption (SLVC) Min: 1.0 ÄndStat: CUT Datentyp: Float Einheit ms Def: 4.0 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 200.0
Gibt die Integrationszeitkonstante des Drehzahlanpassungsreglers ein. Index:
P1767[0] : 1. Antriebsdatensatz (DDS) P1767[1] : 2. Antriebsdatensatz (DDS) P1767[2] : 3. Antriebsdatensatz (DDS)
r1770 CO: Prop.-Ausgang n-Adaption Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt P-Anteil des Drehzahlanpassungsreglers an.
r1771 CO: Int.-Ausgang n-Adaption Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: CONTROL Max: -
Zeigt I-Anteil des Drehzahlanpassungsreglers an.
r1778 CO:Flusswinkeldifferenz Min: - Datentyp: Float Einheit ° Def: - P-Gruppe: CONTROL Max: -
Zeigt Flusswinkeldifferenz zwischen Motormodell und Stromtransformation an, bevor das Motormodell aktiv ist.
P1780[3] Steuerwort Rs/Rr-Adaption Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 3 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Das Steuerwort (STW) aktiviert Anpassung von Ständer- und Rotorwiderstand aufgrund von Temperaturerhöhungen, um Drehmomentfehler in der Drehzahl-/Drehmomentregelung mit Drehzahlsensor oder Drehzahlfehler in der Drehzahl-/Drehmomentregelung ohne Drehzahlsensor zu reduzieren.
Index: P1780[0] : 1. Antriebsdatensatz (DDS) P1780[1] : 2. Antriebsdatensatz (DDS) P1780[2] : 3. Antriebsdatensatz (DDS)
Bitfelder: Bit00 Thermische Rs/Rr-Adaption 0 No 1 Yes Bit01 Beobachter Rs/Xm-Adaption 0 No 1 Yes
Hinweis: Für Sychronmotoren wird nur der Ständerwiderstand angepasst.
P1781[3] Tn Rs-Adaption Min: 10 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 100 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 2000
Gibt die Integrationszeitkonstante des Anpassungsreglers für den Ständerwiderstand ein. Index:
P1781[0] : 1. Antriebsdatensatz (DDS) P1781[1] : 2. Antriebsdatensatz (DDS) P1781[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
4
Stufe
3
Stufe
3
Stufe
4
Stufe
3
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 136 A5E00348653A-AA
r1782 Ausgang der Rs-Adaption Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt den Ausgang des Reglers zur Anpassung des Ständerwiderstands in [%] relativ zum Motornennwiderstand an.
Hinweis: Der Motornennwiderstand ergibt sich aus der Formel:
% 100 <=> 0305p3
0304pI 3
VZ N
NN⋅
=⋅
=
Motornennimpedanz:
P1786[3] Tn Xm-Adaption Min: 10
ÄndStat: CUT Datentyp: U16 Einheit ms Def: 100 P-Gruppe: CONTROL Aktiv: Sofort Schnell-IBN: Nein Max: 2000
Gibt die Integrationszeitkonstante des Xm-Anpassungsreglers ein. Index:
P1786[0] : 1. Antriebsdatensatz (DDS) P1786[1] : 2. Antriebsdatensatz (DDS) P1786[2] : 3. Antriebsdatensatz (DDS)
r1787 Ausgabe Xm-Adaption Min: - Datentyp: Float Einheit % Def: - P-Gruppe: CONTROL Max: -
Zeigt den Ausgang des Reglers zur Anpassung der Hauptreaktanz in [%] relativ zur Nennimpedanz an. Hinweis:
Der Motornennwiderstand ergibt sich aus der Formel:
% 100 <=> 0305p3
0304pI 3
VZ N
NN⋅
=⋅
=
Motornennimpedanz:
P1800 Pulsfrequenz Min: 2
ÄndStat: CUT Datentyp: U16 Einheit KHz Def: 8 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 16
Stellt die Pulsfrequenz des Umrichters ein. Die Pulsfrequenz kann in Stufen von 2 kHz verändert werden.
Abhängigkeit: Die minimale Pulsfrequenz hängt von P1082 (Maximalfrequenz) und P0310 (Motornennfrequenz) ab. Die max. Frequenz P1082 ist durch die Pulsfrequenz P1800 begrenzt (siehe Derating-Kennlinie in P1082).
Hinweis: Bei Erhöhung der Pulsfrequenz P1800 wird der max. Umrichterausgangsstrom r0067 reduziert (Derating). Das Derating hängt dabei von dem Umrichtertyp als auch von der Umrichterleistung ab (siehe Betriebsanleitung (OPI)). Ist ein geräuscharmer Betrieb nicht unbedingt erforderlich, dann können die Umrichterverluste und die hochfrequente Störaussendung des Umrichters durch die Wahl niedrigerer Pulsfrequenzen verringert werden. Unter bestimmten Umständen kann der Umrichter die Pulsfrequenz verringern, um sich selbsttätig vor Überhitzung zu schützen (siehe P0290 und P0291 Bit00).
r1801 CO: Aktuelle Pulsfrequenz Min: - Datentyp: U16 Einheit KHz Def: - P-Gruppe: INVERTER Max: -
Zeigt die tatsächliche Pulsfrequenz des Umrichters an. Notiz:
Unter bestimmten Bedingungen (Schutz vor Umrichterüberhitzung, siehe P0290), kann sich diese von den in P1800 (Pulsfrequenz) ausgewählten Werten unterscheiden.
Stufe
3
Stufe
4
Stufe
3
Stufe
2
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 137
P1802 Betriebsart Modulator Min: 1 ÄndStat: CUT Datentyp: U16 Einheit - Def: 3 P-Gruppe: INVERTER Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Wählt Betriebsart des Modulators aus. Mögliche Einstellungen:
1 Asym. Raumzeigermodulation (ASVM) 2 Raumzeigermodulation (SVM) 3 SVM/ASVM-Regelung
Notiz: ASVM-Modulation (asymmetrische Raumzeigermodulation) erzeugt geringere Umschaltverluste als SVM (space vector modulation), kann jedoch bei sehr niedrigen Drehzahlen die Qualität des Rundlaufs beeinträchtigen. SVM mit Übermodulation kann bei hohen Ausgangsspannungen zu Verzerrung der Kurvenform des Stroms führen. SVM ohne Übermodulation reduziert die für den Motor verfügbare maximale Ausgangsspannung.
P1803[3] Max. Modulation Min: 20.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 106.0 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 150.0
Stellt maximalen Modulationsgrad ein. Index:
P1803[0] : 1. Antriebsdatensatz (DDS) P1803[1] : 2. Antriebsdatensatz (DDS) P1803[2] : 3. Antriebsdatensatz (DDS)
Hinweis: P1803 = 100 % : Grenze für Übersteuerung (für einen idealen Umrichter ohne Schaltverzug). Für die Vektorregelung wird die Modulationsgrenze automatisch auf 4 % reduziert.
P1820[3] Umgekehrte Ausgangs-Phasenfolge Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: INVERTER Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Ändert die Motordrehrichtung ohne den Sollwerts zu invertieren. Mögliche Einstellungen:
0 Vorwärts 1 Rückwärts
Index: P1820[0] : 1. Antriebsdatensatz (DDS) P1820[1] : 2. Antriebsdatensatz (DDS) P1820[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Wenn positive und negative Drehrichtung freigegeben sind, wird der Frequenzsollwert direkt verwendet. Wenn sowohl positive als auch negative Drehrichtung gesperrt sind, wird der Sollwert auf Null gesetzt.
Details: Siehe P1000 (Frequenzsollwert auswählen)
P1825 Durchlassspannung IGBT Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit V Def: 1.4 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 20.0
Korrigiert Spannungsfehler hervorgerufen durch die Durchlassspannung der IGBTs.
P1828 Kompensation IGBT-Verriegelung Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit us Def: 0.50 P-Gruppe: INVERTER Aktiv: nach Best. Schnell-IBN: Nein Max: 3.50
Stellt Kompensationszeit zur Korrektur der Verriegelungszeiten der IGBT-Treiber ein.
Stufe
3
Stufe
3
Stufe
2
Stufe
4
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 138 A5E00348653A-AA
P1909[3] Steuerwort Motoridentifikation Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 1 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Steuerwort (STW) für die Identifikation der Motordaten. Index:
P1909[0] : 1. Antriebsdatensatz (DDS) P1909[1] : 2. Antriebsdatensatz (DDS) P1909[2] : 3. Antriebsdatensatz (DDS)
Bitfelder: Bit00 Xs Bestimmung 0 No 1 Yes
P1910 Anwahl Motordaten-Identifikation Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 20
Führt eine Motordatenidentifikation durch. Nimmt die Messung des Ständerwiderstandes vor.
Mögliche Einstellungen: 0 Gesperrt 1 Alle Param. mit Param.änd. 2 Alle Param. ohne Param.änd. 3 Sätt.kurve mit Param.änd. 4 Sätt.kurve ohne Param.änd 5 XsigDyn-Ident. ohne Param.änd. 6 T_totz.-Ident. ohne Param.änd. 7 Rs-Ident. ohne Param.änd. 8 Xs-Ident. ohne Param.änd. 9 Tr-Ident. ohne Param.änd. 10 Xsig-Ident. ohne Param.änd 20 Spannungsvektor einstellen
Notiz: Bei der Auswahl der Einstellung für den Messvorgang, beobachten Sie Folgendes: 1. "mit Parameteränderung" bedeutet, dass die Werte als Pxxxx-Parametereinstellungen (siehe allgemeine Einstellungen oben)
angenommen und auch auf den Regler angewandt wurden, wie bei den schreibgeschützten Parametern unten gezeigt.
2. "ohne Parameteränderung" bedeutet, dass die Werte nur angezeigt, d.h. zum Überprüfen in den schreibgeschützten Parametern
r1912 (identifizierter Ständerwiderstand), r1913 (identifizierte Rotorzeitkonstante), r1914 (identifizierte Gesamtstreureaktanz), r1915/r1916/r1917/r1918/r1919 (identifizierte Nennständerreaktanz/identifizierte Ständerreaktanz 1 bis 4) und r1926 (identifizierte Totzeit-Gate-Einheit) gezeigt werden.
Diese Werte werden nicht auf den Regler angewandt. Bei der Auswahl der Einstellung für den Messvorgang, beobachten Sie Folgendes:
Abhängigkeit: P1910 = 2 : Bereits berechnete Werte werden nicht überschrieben.
Hinweis: Die "Schnellinbetriebnahme" muss abgeschlossen sein, bevor die Motordatenidentifikation angewählt wird. Mit der Anwahl (P1910 = 1) wird der Alarm A0541 ausgegeben, dass mit dem nächsten EIN-Befehl die Bestimmung der Motorparameter begonnen wird. Beim Übertragen des Parameters p1910 ist der ET 200S FC mit internen Berechnungen beschäftigt, und die Kommunikation - sowohl über USS als auch über Fieldbus - ist für die Dauer der Berechnungen unterbrochen. Dies kann an der angeschlossen SIMATIC S7-Steuerung (Kommunikation über Fieldbus) zu folgenden Fehlermeldungen führen: - Parametrierfehler 30 - Antriebsfehler 70 - Antriebsfehler 75 Bei der Inbetriebnahme über STARTER (USS) sind während der Berechnungen keine Eingaben möglich. Die Fehler können quittiert werden, sobald die Berechnungen im Umrichter beendet sind. Die Berechungnen können bis zu 1 Minute dauern.
Stufe
4
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 139
Vorsicht: Die Motordatenidentifikation sollte normalerweise mit kaltem Motor durchgeführt werden. Die Motordatenidentifikation sollte nur durchgeführt werden, wenn die Motortemperatur weniger als 5 °C von der gemessenen Umgebungstemperatur (p0625) abweicht. Wird die Motordatenidentifikation außerhalb der 5-°C-Grenzen durchgeführt, ist eine einwandfrei Funktion der Vektorregelung (VC, SLVC) nicht gesichert. Die Motor-Typenschilddaten müssen unter Beachtung der Motorschaltung (Stern oder Dreieck) korrekt eingegeben worden sein, um richtige Ersatzschaltbilddaten zu erhalten. Die Motordatenidentifikation berechnet diese Daten aufgrund eines Stern-Ersatzschaltbilds P0350 - P0360, unabhängig davon, ob der Motor in Stern- oder Dreieckschaltung ausgeführt ist. Dieses ist zu berücksichtigen, wenn die Motordaten direkt eingegeben werden.
P1911 Anzahl Motorphasen (Motorident.) Min: 1 ÄndStat: CT Datentyp: U16 Einheit - Def: 3 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 3
Wählt die Anzahl der bei der Motoridentifikation zu betrachtenden Phasen aus.
r1912[3] Identifizierter Ständerwiderst. Min: - Datentyp: Float Einheit Ohm Def: - P-Gruppe: MOTOR Max: -
Zeigt den gemessenen Ständerwiderstandswert (verketteter Wert) in [Ohm] an Index:
P1912[0] : U-Phase P1912[1] : V-Phase P1912[2] : W-Phase
Hinweis: Dieser Wert wird unter Verwendung von P1910 = 1 oder 2 gemessen, d. h. Erkennung aller Parameter mit/ohne Änderung.
r1913[3] Identifizierte Läuferzeitkonst. Min: - Datentyp: Float Einheit ms Def: - P-Gruppe: MOTOR Max: -
Zeigt die identifizierte Läuferzeitkonstante an. Index:
P1913[0] : U-Phase P1913[1] : V-Phase P1913[2] : W-Phase
r1914[3] Ident. Gesamt-Streuinduktivität Min: - Datentyp: Float Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt die identifizierte Gesamtstreuinduktivität in [mH] an. Index:
P1914[0] : U-Phase P1914[1] : V-Phase P1914[2] : W-Phase
r1915[3] Ident. Ständernenninduktivität Min: - Datentyp: Float Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt die identifizierte Ständerinduktivität in [mH] an. Index:
P1915[0] : U-Phase P1915[1] : V-Phase P1915[2] : W-Phase
Notiz: Wenn der identifizierte Wert (Ls = Ständerinduktivität) nicht innerhalb des Bereichs 50 < Xs [p. u.] < 500 % liegt, wird die Störmeldung F0041 (Fehler Motordatenidentifikation) abgesetzt. P0949 bietet weitere Informationen (Störwert = 4 in diesem Fall).
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 140 A5E00348653A-AA
r1916[3] Ident. Ständerinduktivität 1 Min: - Datentyp: Float Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt die identifizierte Ständerinduktivität in [mH] an. Index:
P1916[0] : U-Phase P1916[1] : V-Phase P1916[2] : W-Phase
Details: Siehe P1915 (identifizierte nominale Ständerinduktivität).
r1917[3] Ident. Ständerinduktivität 2 Min: - Datentyp: Float Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt die identifizierte Ständerinduktivität in [mH] an. Index:
P1917[0] : U-Phase P1917[1] : V-Phase P1917[2] : W-Phase
Details: Siehe P1915 (identifizierte nominale Ständerinduktivität).
r1918[3] Ident. Ständerinduktivität 3 Min: - Datentyp: Float Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt die identifizierte Ständerinduktivität in [mH] an. Index:
P1918[0] : U-Phase P1918[1] : V-Phase P1918[2] : W-Phase
Details: Siehe P1915 (identifizierte nominale Ständerinduktivität).
r1919[3] Ident. Ständerinduktivität 4 Min: - Datentyp: Float Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt die identifizierte Ständerinduktivität in [mH] an. Index:
P1919[0] : U-Phase P1919[1] : V-Phase P1919[2] : W-Phase
Details: Siehe P1915 (identifizierte nominale Ständerinduktivität).
r1920[3] Ident. dyn. Streuinduktivität Min: - Datentyp: Float Einheit - Def: - P-Gruppe: MOTOR Max: -
Zeigt die identifizierte dynamische Streuinduktivität in [mH] an. Index:
P1920[0] : U-Phase P1920[1] : V-Phase P1920[2] : W-Phase
r1925 Identifizierte Durchlassspannung Min: - Datentyp: Float Einheit V Def: - P-Gruppe: INVERTER Max: -
Zeigt die identifizierte Durchlass-Spannung der IGBTs an.
r1926 Ident. Totzeit IGBT-Ansteuerung Min: - Datentyp: Float Einheit us Def: - P-Gruppe: INVERTER Max: -
Zeigt die identifizierte Totzeit der IGBT-Ansteuerung an.
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 141
P1930 Spannungssollw. für Kalibrierung Min: 0 ÄndStat: CUT Datentyp: Float Einheit V Def: 0 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 1000
Gibt den Sollwert eines Prüfspannungsvektors (z. B. für Kalibrierung der Shunts verwendet) an.
P1931 Phase Min: 1 ÄndStat: CUT Datentyp: U16 Einheit - Def: 1 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 6
Definiert die Phase in der die Prüfspannung erzeugt wird.
P1960 Drehzahlregleroptimierung Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: MOTOR Aktiv: nach Best. Schnell-IBN: Ja Max: 1
Um die Drehzahlregleroptimierung durchzuführen muß die Vektorregelung (P1300 = 20 oder 21) aktiviert werden. Nach der Anwahl der Optimierung (P1960 = 1) wird die Warnung A0542 angezeigt. Mit dem nächsten EIN-Kommando wird die Optimierung durchgeführt. Der Umrichter wird den Motor auf 20 % von p0310 (Motornennfrequenz) mit der Hochlaufzeit p1120 und dann mit Momentenregelung auf 50 % von p0310 (Motornennfrequenz) beschleunigen. Der Antrieb wird dann mit der Rücklaufzeit p1121 auf 20 % von p0310 abgebremst. Dieser Vorgang wird mehrmals wiederholt, für die weiteren Schritte wird der Mittelwert verwendet. Von den Meßwerten kann anschließend das Lastträgheitsmoment geschätzt werden. Ausgehend von diesem Wert werden das Trägheitsverhältnis Gesamt/Motor P0342 und die Drehzahlreglerverstärkung der Vektorreglung (VC) P1460 bzw. sensorlosen Vektorreglung P1470 bestimmt.
Mögliche Einstellungen: 0 Gesperrt 1 Freigegeben
Notiz: Wenn eine Instabilität auftritt, kann der Antrieb mit F0042 abschalten, falls er keinen stabilen Wert beim Hochlauf innerhalb einer vernünftigen Zeit bekommen hat. Die generatorische Energie hängt dabei von Rücklauframpe und Systemträgheitsmoment ab. Die Drehzahlregleroptimierung ist für Applikationen nicht geeignet, die z.B. das Beschleunigen von 20 % auf 50 % der Motornennfrequenz unter Momentenregelung nicht erlauben.
Hinweis: Wenn die Optimierungsprozedur abgeschlossen ist, wird der P1960 auf 0 zurückgesetzt.
P2000[3] Bezugsfrequenz Min: 1.00 ÄndStat: CT Datentyp: Float Einheit Hz Def: 50.00 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 650.00
Parameter P2000 stellt die Bezugsfrequenz dar, für Frequenzwerte die prozentual bzw. hexadezimal dargestellt / übertragen werden. Es gilt: - hexadezimal 4000 H ==> P2000 (z.B.: USS-PZD) - prozentual 100 % ==> P2000
Index: P2000[0] : 1. Antriebsdatensatz (DDS) P2000[1] : 2. Antriebsdatensatz (DDS) P2000[2] : 3. Antriebsdatensatz (DDS)
Stufe
4
Stufe
4
Stufe
3
Stufe
2
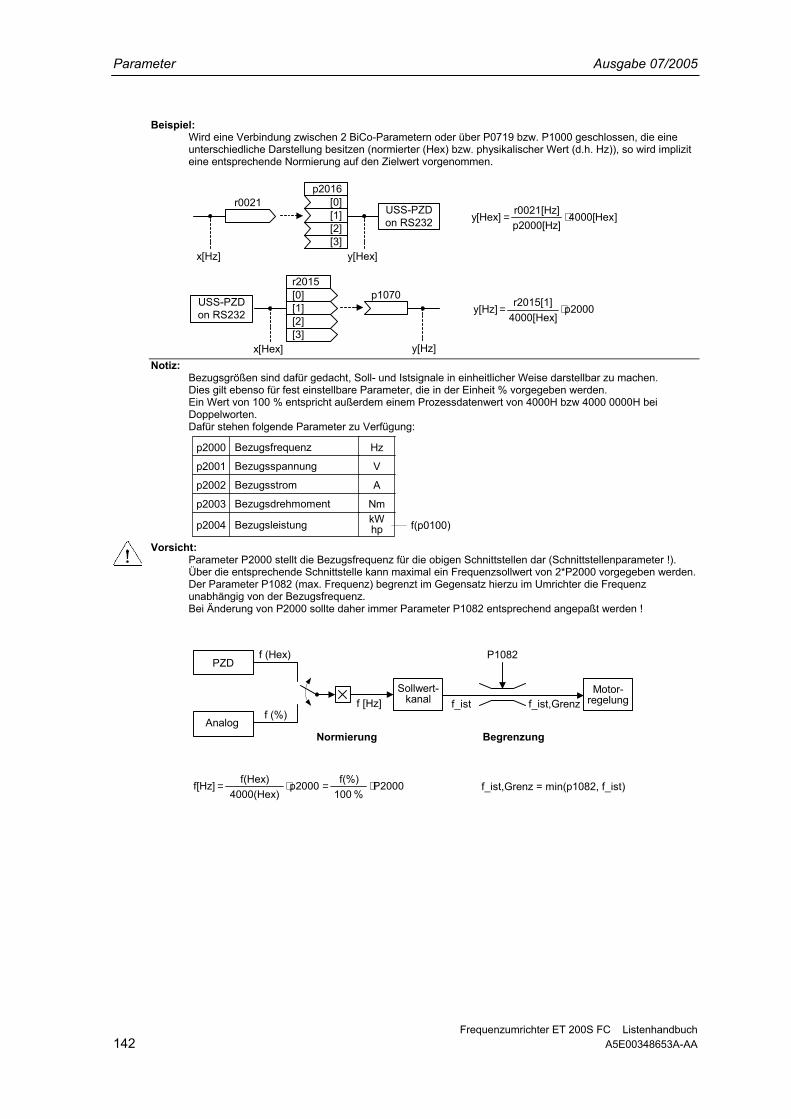
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 142 A5E00348653A-AA
Beispiel: Wird eine Verbindung zwischen 2 BiCo-Parametern oder über P0719 bzw. P1000 geschlossen, die eine unterschiedliche Darstellung besitzen (normierter (Hex) bzw. physikalischer Wert (d.h. Hz)), so wird implizit eine entsprechende Normierung auf den Zielwert vorgenommen.
p1070
y[Hz]
2000p4000[Hex]r2015[1] y[Hz] ⋅=
r2015[0][1][2][3]
p2016[0][1][2][3]
r0021
x[Hz] y[Hex]
x[Hex]
]Hex[4000p2000[Hz]r0021[Hz] y[Hex] ⋅=
USS-PZDon RS232
USS-PZDon RS232
Notiz:
Bezugsgrößen sind dafür gedacht, Soll- und Istsignale in einheitlicher Weise darstellbar zu machen. Dies gilt ebenso für fest einstellbare Parameter, die in der Einheit % vorgegeben werden. Ein Wert von 100 % entspricht außerdem einem Prozessdatenwert von 4000H bzw 4000 0000H bei Doppelworten. Dafür stehen folgende Parameter zu Verfügung:
Bezugsfrequenz
Bezugsspannung
Bezugsstrom
Bezugsdrehmoment
Hz
V
A
Nm
p2000
p2001
p2002
p2003
Bezugsleistung kWhpp2004 f(p0100)
Vorsicht:
Parameter P2000 stellt die Bezugsfrequenz für die obigen Schnittstellen dar (Schnittstellenparameter !). Über die entsprechende Schnittstelle kann maximal ein Frequenzsollwert von 2*P2000 vorgegeben werden. Der Parameter P1082 (max. Frequenz) begrenzt im Gegensatz hierzu im Umrichter die Frequenz unabhängig von der Bezugsfrequenz. Bei Änderung von P2000 sollte daher immer Parameter P1082 entsprechend angepaßt werden !
PZDf (Hex)
f [Hz]Sollwert-
kanalMotor-
regelungf_ist f_ist,Grenz
P1082
2000P % 100
f(%) 2000p 4000(Hex)
f(Hex) f[Hz] ⋅=⋅= f_ist,Grenz = min(p1082, f_ist)
f (%)
Normierung BegrenzungAnalog

Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 143
P2001[3] Bezugsspannung Min: 10 ÄndStat: CT Datentyp: U16 Einheit V Def: 1000 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 2000
Die Bezugsspannung (Ausgangsspannung) entspricht einem Wert von 100% in der Normierung 4000H, wie sie z.B. bei den seriellen Schnittstellen verwendet wird.
Index: P2001[0] : 1. Antriebsdatensatz (DDS) P2001[1] : 2. Antriebsdatensatz (DDS) P2001[2] : 3. Antriebsdatensatz (DDS)
Beispiel: P2001 = 230 gibt an, dass 4000H, über USS empfangen, 230 V bedeutet. Wird eine Verbindung zwischen 2 BiCo-Parametern geschlossen, die eine unterschiedliche Darstellung besitzen (normierter (Hex) bzw. physikalischer Wert (d.h. V)), so wird implizit eine entsprechende Normierung auf den Zielwert vorgenommen.
p2051[0][1][2][3]
r0026
x[V] y[Hex]
]Hex[4000p2001[V]r0026[V] y[Hex] ⋅=Fieldbus
P2002[3] Bezugsstrom Min: 0.10
ÄndStat: CT Datentyp: Float Einheit A Def: 0.10 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 10000.00
Der Bezugsstrom (Ausgangsstrom) entspricht einem Wert von 100 % in der Normierung 4000H, wie sie z.B. bei den seriellen Schnittstellen verwendet wird.
Index: P2002[0] : 1. Antriebsdatensatz (DDS) P2002[1] : 2. Antriebsdatensatz (DDS) P2002[2] : 3. Antriebsdatensatz (DDS)
Beispiel: Wird eine Verbindung zwischen 2 BiCo-Parametern geschlossen, die eine unterschiedliche Darstellung besitzen (normierter (Hex) bzw. physikalischer Wert (d.h. A)), so wird implizit eine entsprechende Normierung auf den Zielwert vorgenommen.
p2051[0][1][2][3]
r0027
x[A] y[Hex]
]Hex[4000p2002[A]r0027[A] y[Hex] ⋅=Fieldbus
Stufe
3
Stufe
3
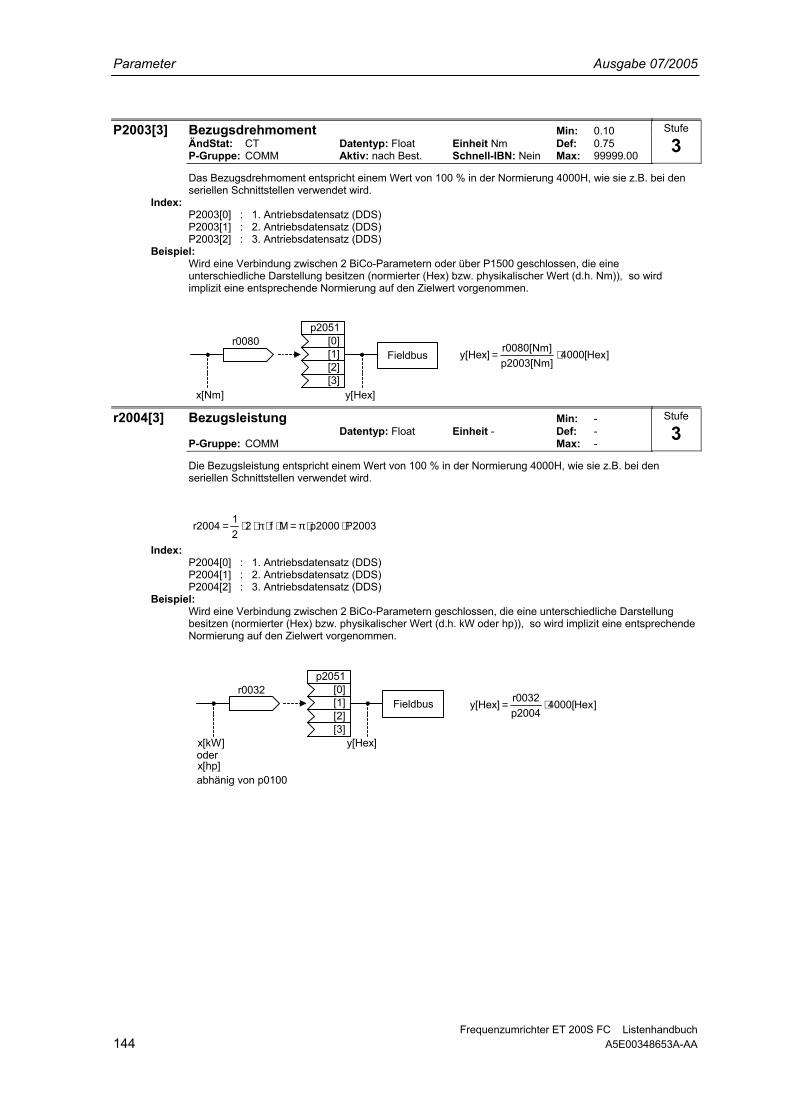
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 144 A5E00348653A-AA
P2003[3] Bezugsdrehmoment Min: 0.10 ÄndStat: CT Datentyp: Float Einheit Nm Def: 0.75 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 99999.00
Das Bezugsdrehmoment entspricht einem Wert von 100 % in der Normierung 4000H, wie sie z.B. bei den seriellen Schnittstellen verwendet wird.
Index: P2003[0] : 1. Antriebsdatensatz (DDS) P2003[1] : 2. Antriebsdatensatz (DDS) P2003[2] : 3. Antriebsdatensatz (DDS)
Beispiel: Wird eine Verbindung zwischen 2 BiCo-Parametern oder über P1500 geschlossen, die eine unterschiedliche Darstellung besitzen (normierter (Hex) bzw. physikalischer Wert (d.h. Nm)), so wird implizit eine entsprechende Normierung auf den Zielwert vorgenommen.
p2051[0]
Fieldbus[1][2][3]
r0080
x[Nm] y[Hex]
]Hex[4000p2003[Nm]r0080[Nm] y[Hex] ⋅=
r2004[3] Bezugsleistung Min: -
Datentyp: Float Einheit - Def: - P-Gruppe: COMM Max: -
Die Bezugsleistung entspricht einem Wert von 100 % in der Normierung 4000H, wie sie z.B. bei den seriellen Schnittstellen verwendet wird.
P2003 p2000 M f 221 r2004 ⋅⋅π=⋅⋅π⋅⋅=
Index:
P2004[0] : 1. Antriebsdatensatz (DDS) P2004[1] : 2. Antriebsdatensatz (DDS) P2004[2] : 3. Antriebsdatensatz (DDS)
Beispiel: Wird eine Verbindung zwischen 2 BiCo-Parametern geschlossen, die eine unterschiedliche Darstellung besitzen (normierter (Hex) bzw. physikalischer Wert (d.h. kW oder hp)), so wird implizit eine entsprechende Normierung auf den Zielwert vorgenommen.
x[kW] y[Hex]
]Hex[4000p2004r0032 y[Hex] ⋅=
oderx[hp]abhänig von p0100
p2051[0]
Fieldbus[1][2][3]
r0032
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 145
P2010[2] USS Baudrate Min: 4 ÄndStat: CUT Datentyp: U16 Einheit - Def: 8 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 12
Stellt die Baudrate für die USS-Datenübertragung ein. Mögliche Einstellungen:
4 2400 Baud 5 4800 Baud 6 9600 Baud 7 19200 Baud 8 38400 Baud 9 57600 Baud 10 76800 Baud 11 93750 Baud 12 115200 Baud
Index: P2010[0] : Reserviert P2010[1] : USS on RS232
P2011[2] USS Adresse Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 31
Stellt die USS-Adresse des Umrichters ein. Index:
P2011[0] : Reserviert P2011[1] : USS on RS232
Stufe
2
Stufe
4
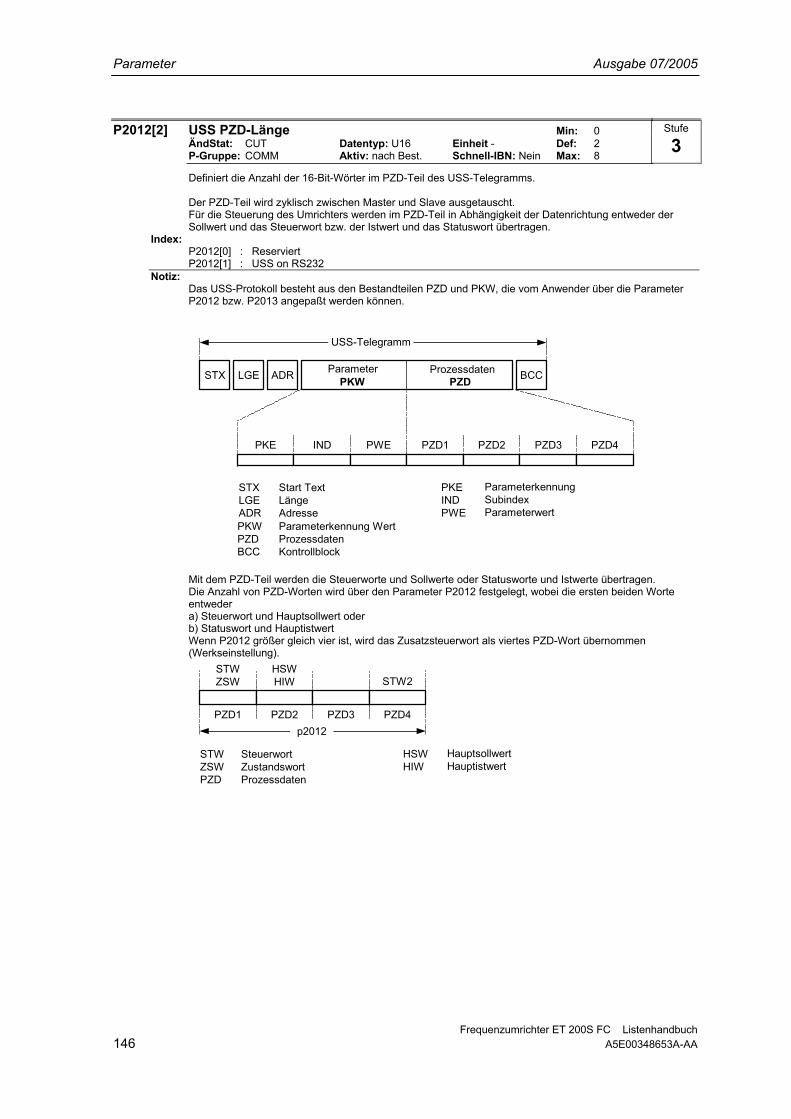
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 146 A5E00348653A-AA
P2012[2] USS PZD-Länge Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 2 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 8
Definiert die Anzahl der 16-Bit-Wörter im PZD-Teil des USS-Telegramms. Der PZD-Teil wird zyklisch zwischen Master und Slave ausgetauscht. Für die Steuerung des Umrichters werden im PZD-Teil in Abhängigkeit der Datenrichtung entweder der Sollwert und das Steuerwort bzw. der Istwert und das Statuswort übertragen.
Index: P2012[0] : Reserviert P2012[1] : USS on RS232
Notiz: Das USS-Protokoll besteht aus den Bestandteilen PZD und PKW, die vom Anwender über die Parameter P2012 bzw. P2013 angepaßt werden können.
PKE IND PWE
STXLGEADR
STX LGE ADR BCC
PZD1 PZD2 PZD3 PZD4
PKEINDPWE
ParameterkennungSubindexParameterwert
PKW PZD
PKWPZDBCC
Start TextLängeAdresseParameterkennung WertProzessdatenKontrollblock
ProzessdatenParameter
USS-Telegramm
Mit dem PZD-Teil werden die Steuerworte und Sollwerte oder Statusworte und Istwerte übertragen. Die Anzahl von PZD-Worten wird über den Parameter P2012 festgelegt, wobei die ersten beiden Worte entweder a) Steuerwort und Hauptsollwert oder b) Statuswort und Hauptistwert Wenn P2012 größer gleich vier ist, wird das Zusatzsteuerwort als viertes PZD-Wort übernommen (Werkseinstellung).
STWZSW
STWZSWPZD
SteuerwortZustandswortProzessdaten
STW2
HSWHIW
HauptsollwertHauptistwert
HSWHIW
p2012PZD1 PZD2 PZD3 PZD4
Stufe
3
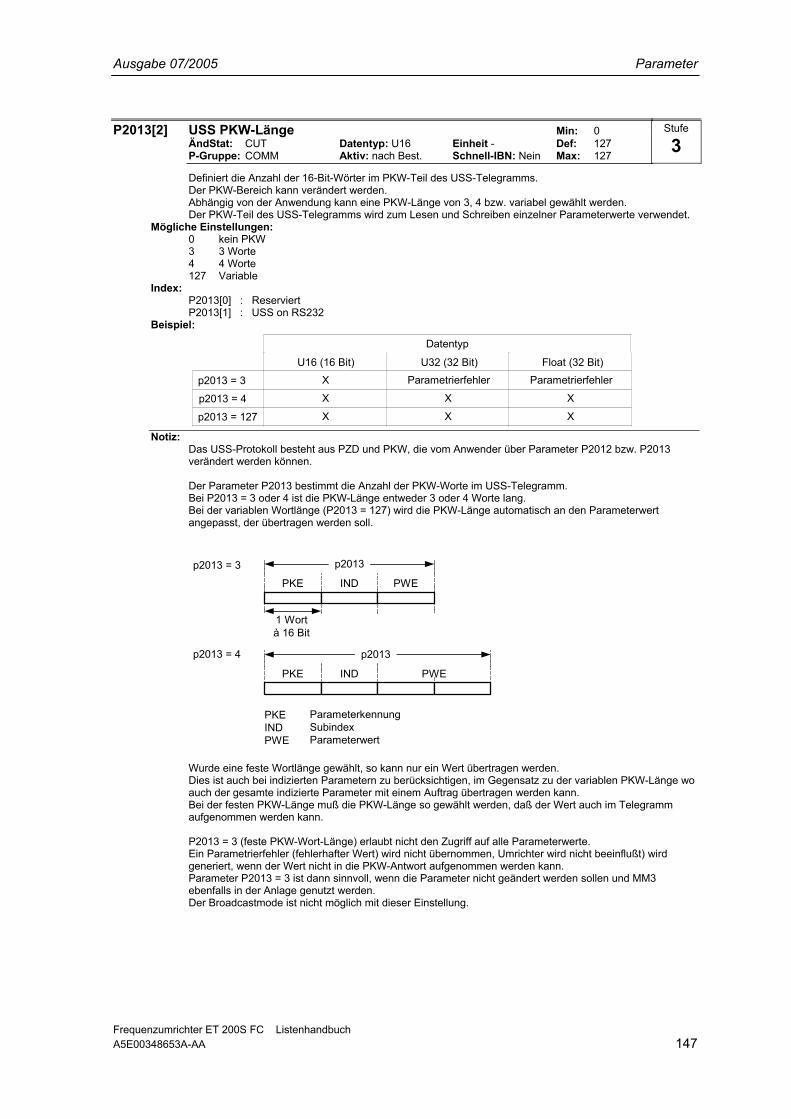
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 147
P2013[2] USS PKW-Länge Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 127 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 127
Definiert die Anzahl der 16-Bit-Wörter im PKW-Teil des USS-Telegramms. Der PKW-Bereich kann verändert werden. Abhängig von der Anwendung kann eine PKW-Länge von 3, 4 bzw. variabel gewählt werden. Der PKW-Teil des USS-Telegramms wird zum Lesen und Schreiben einzelner Parameterwerte verwendet.
Mögliche Einstellungen: 0 kein PKW 3 3 Worte 4 4 Worte 127 Variable
Index: P2013[0] : Reserviert P2013[1] : USS on RS232
Beispiel:
ParametrierfehlerU16 (16 Bit) U32 (32 Bit) Float (32 Bit)
p2013 = 3 X
p2013 = 4 X X X
p2013 = 127 X X X
Parametrierfehler
Datentyp
Notiz:
Das USS-Protokoll besteht aus PZD und PKW, die vom Anwender über Parameter P2012 bzw. P2013 verändert werden können. Der Parameter P2013 bestimmt die Anzahl der PKW-Worte im USS-Telegramm. Bei P2013 = 3 oder 4 ist die PKW-Länge entweder 3 oder 4 Worte lang. Bei der variablen Wortlänge (P2013 = 127) wird die PKW-Länge automatisch an den Parameterwert angepasst, der übertragen werden soll.
p2013 = 3
p2013 = 4
1 Wortà 16 Bit
PKE IND PWE
p2013
PKE IND PWE
p2013
PKEINDPWE
ParameterkennungSubindexParameterwert
Wurde eine feste Wortlänge gewählt, so kann nur ein Wert übertragen werden. Dies ist auch bei indizierten Parametern zu berücksichtigen, im Gegensatz zu der variablen PKW-Länge wo auch der gesamte indizierte Parameter mit einem Auftrag übertragen werden kann. Bei der festen PKW-Länge muß die PKW-Länge so gewählt werden, daß der Wert auch im Telegramm aufgenommen werden kann. P2013 = 3 (feste PKW-Wort-Länge) erlaubt nicht den Zugriff auf alle Parameterwerte. Ein Parametrierfehler (fehlerhafter Wert) wird nicht übernommen, Umrichter wird nicht beeinflußt) wird generiert, wenn der Wert nicht in die PKW-Antwort aufgenommen werden kann. Parameter P2013 = 3 ist dann sinnvoll, wenn die Parameter nicht geändert werden sollen und MM3 ebenfalls in der Anlage genutzt werden. Der Broadcastmode ist nicht möglich mit dieser Einstellung.
Stufe
3
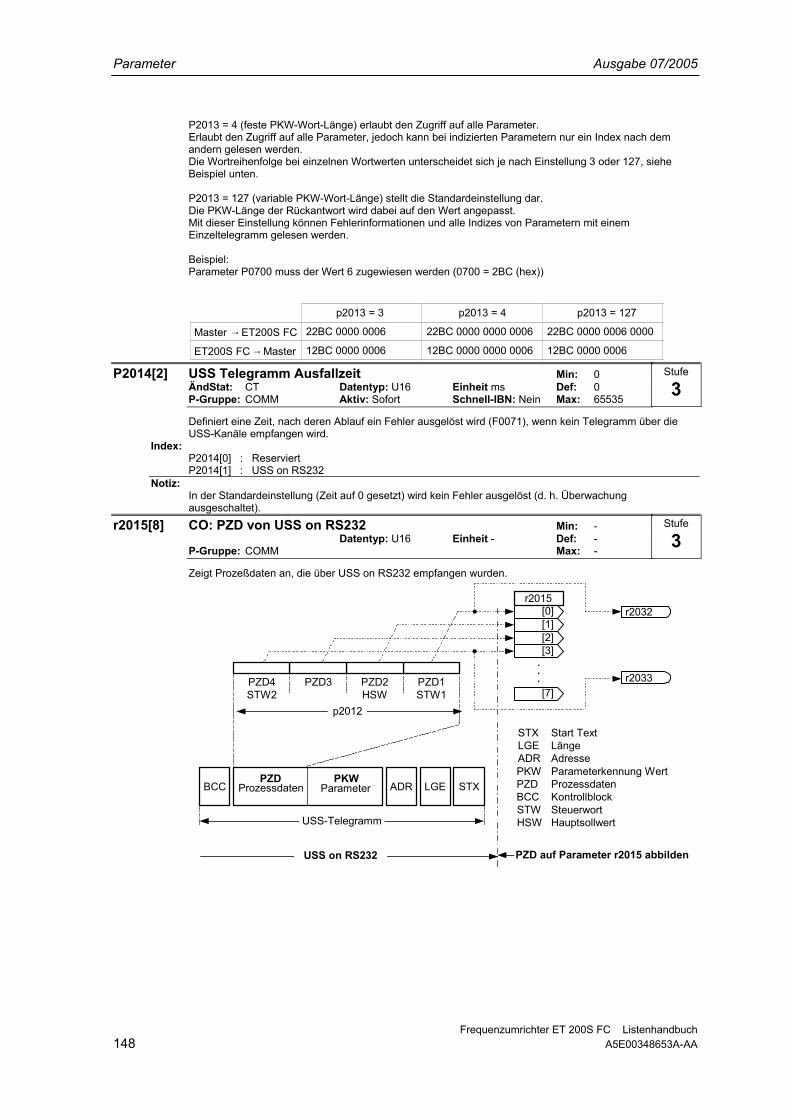
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 148 A5E00348653A-AA
P2013 = 4 (feste PKW-Wort-Länge) erlaubt den Zugriff auf alle Parameter. Erlaubt den Zugriff auf alle Parameter, jedoch kann bei indizierten Parametern nur ein Index nach dem andern gelesen werden. Die Wortreihenfolge bei einzelnen Wortwerten unterscheidet sich je nach Einstellung 3 oder 127, siehe Beispiel unten. P2013 = 127 (variable PKW-Wort-Länge) stellt die Standardeinstellung dar. Die PKW-Länge der Rückantwort wird dabei auf den Wert angepasst. Mit dieser Einstellung können Fehlerinformationen und alle Indizes von Parametern mit einem Einzeltelegramm gelesen werden. Beispiel: Parameter P0700 muss der Wert 6 zugewiesen werden (0700 = 2BC (hex))
p2013 = 3
Master →ET200S FC 22BC 0000 0006 22BC 0000 0000 0006 22BC 0000 0006 0000
→ Master 12BC 0000 0006 12BC 0000 0000 0006 12BC 0000 0006
p2013 = 4 p2013 = 127
ET200S FC P2014[2] USS Telegramm Ausfallzeit Min: 0
ÄndStat: CT Datentyp: U16 Einheit ms Def: 0 P-Gruppe: COMM Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Definiert eine Zeit, nach deren Ablauf ein Fehler ausgelöst wird (F0071), wenn kein Telegramm über die USS-Kanäle empfangen wird.
Index: P2014[0] : Reserviert P2014[1] : USS on RS232
Notiz: In der Standardeinstellung (Zeit auf 0 gesetzt) wird kein Fehler ausgelöst (d. h. Überwachung ausgeschaltet).
r2015[8] CO: PZD von USS on RS232 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt Prozeßdaten an, die über USS on RS232 empfangen wurden.
STXLGEADR
Start TextLängeAdresse
PKWPZDBCC
Parameterkennung WertProzessdatenKontrollblock
USS-Telegramm
PZD auf Parameter r2015 abbilden
... r2033
r2032
STWHSW
SteuerwortHauptsollwert
[0]r2015
[1][2][3]
[7]PZD1STW1
PZD2HSW
PZD3PZD4STW2
p2012
STXLGEADRBCCPKWPZD
Prozessdaten Parameter
USS on RS232
Stufe
3
Stufe
3
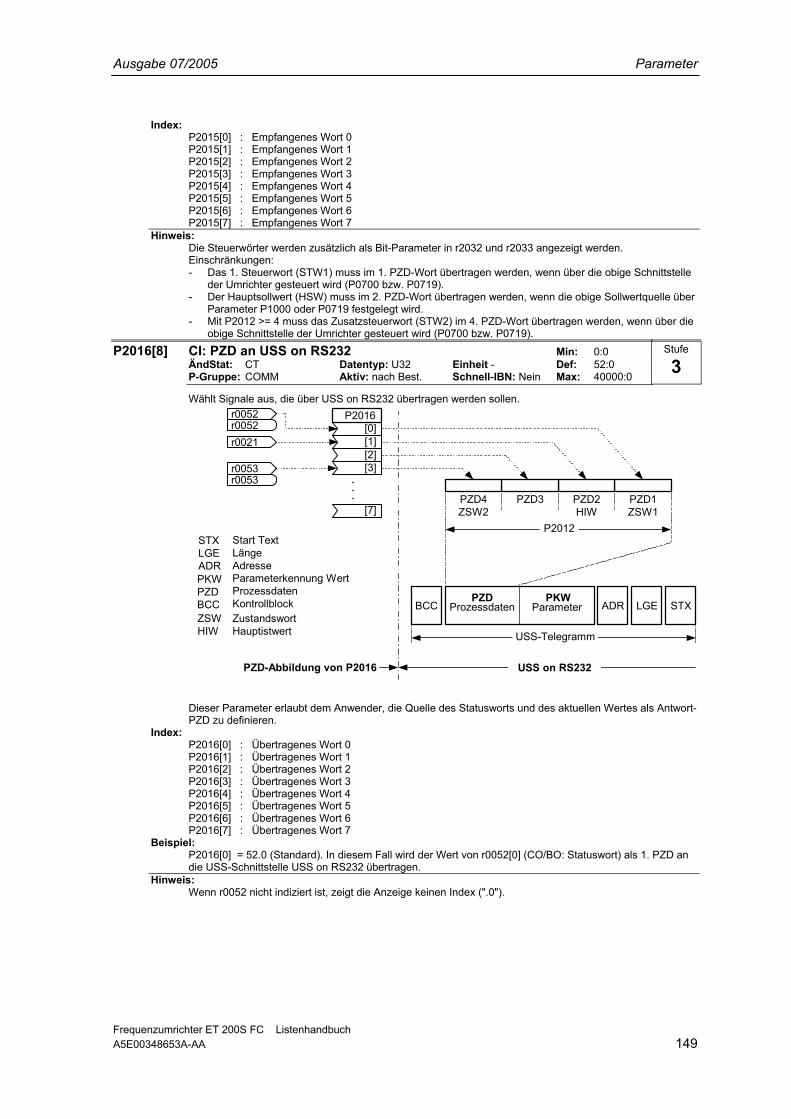
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 149
Index: P2015[0] : Empfangenes Wort 0 P2015[1] : Empfangenes Wort 1 P2015[2] : Empfangenes Wort 2 P2015[3] : Empfangenes Wort 3 P2015[4] : Empfangenes Wort 4 P2015[5] : Empfangenes Wort 5 P2015[6] : Empfangenes Wort 6 P2015[7] : Empfangenes Wort 7
Hinweis: Die Steuerwörter werden zusätzlich als Bit-Parameter in r2032 und r2033 angezeigt werden. Einschränkungen: - Das 1. Steuerwort (STW1) muss im 1. PZD-Wort übertragen werden, wenn über die obige Schnittstelle
der Umrichter gesteuert wird (P0700 bzw. P0719). - Der Hauptsollwert (HSW) muss im 2. PZD-Wort übertragen werden, wenn die obige Sollwertquelle über
Parameter P1000 oder P0719 festgelegt wird. - Mit P2012 >= 4 muss das Zusatzsteuerwort (STW2) im 4. PZD-Wort übertragen werden, wenn über die
obige Schnittstelle der Umrichter gesteuert wird (P0700 bzw. P0719).
P2016[8] CI: PZD an USS on RS232 Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 52:0 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt Signale aus, die über USS on RS232 übertragen werden sollen.
P2012
PZD-Abbildung von P2016
... PZD1ZSW1
PZD2HIW
PZD3PZD4ZSW2
[0]P2016
[1][2][3]
[7]
STXLGEADRPKWPZDBCCZSWHIW
r0021r0052r0052
r0053r0053
Start TextLängeAdresseParameterkennung WertProzessdatenKontrollblock
USS-Telegramm
STXLGEADRBCCPKWPZD
Prozessdaten ParameterZustandswortHauptistwert
USS on RS232
Dieser Parameter erlaubt dem Anwender, die Quelle des Statusworts und des aktuellen Wertes als Antwort-PZD zu definieren.
Index: P2016[0] : Übertragenes Wort 0 P2016[1] : Übertragenes Wort 1 P2016[2] : Übertragenes Wort 2 P2016[3] : Übertragenes Wort 3 P2016[4] : Übertragenes Wort 4 P2016[5] : Übertragenes Wort 5 P2016[6] : Übertragenes Wort 6 P2016[7] : Übertragenes Wort 7
Beispiel: P2016[0] = 52.0 (Standard). In diesem Fall wird der Wert von r0052[0] (CO/BO: Statuswort) als 1. PZD an die USS-Schnittstelle USS on RS232 übertragen.
Hinweis: Wenn r0052 nicht indiziert ist, zeigt die Anzeige keinen Index (".0").
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 150 A5E00348653A-AA
r2024[2] USS fehlerfreie Telegramme Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Anzahl der fehlerfrei empfangenen USS-Telegramme an. Index:
P2024[0] : Reserviert P2024[1] : USS on RS232
r2025[2] USS abgelehnte Telegramme Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Anzahl der verworfenen USS-Telegramme an. Index:
P2025[0] : Reserviert P2025[1] : USS on RS232
r2026[2] USS Framefehler Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Anzahl der USS-Framefehler an. Index:
P2026[0] : Reserviert P2026[1] : USS on RS232
r2027[2] USS Overrun-Fehler Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Anzahl der USS-Telegramme mit Overrun-Fehler an. Index:
P2027[0] : Reserviert P2027[1] : USS on RS232
r2028[2] USS Paritätsfehler Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Anzahl der USS-Telegramme mit Paritätsfehler an. Index:
P2028[0] : Reserviert P2028[1] : USS on RS232
r2029[2] USS Telegr. Start nicht erkannt Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Anzahl der USS-Telegramme mit nicht erkanntem Anfang an. Index:
P2029[0] : Reserviert P2029[1] : USS on RS232
r2030[2] BCC-Fehler Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Anzahl der USS-Telegramme mit BCC-Fehler an. Index:
P2030[0] : Reserviert P2030[1] : USS on RS232
r2031[2] USS Längenfehler Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Anzahl der USS-Telegramme mit falscher Länge an. Index:
P2031[0] : Reserviert P2031[1] : USS on RS232
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 151
r2032 BO: Steuerwort1 v. USS on RS232 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt Steuerwort 1 der USS on RS232-Schnittstelle (Wort 1 innerhalb von USS) an.
Bitfelder: Bit00 EIN / AUS1 0 No 1 Yes Bit01 AUS2: Elektr. Halt 0 Yes 1 No Bit02 AUS3: Schnellhalt 0 Yes 1 No Bit03 Impulsfreigabe 0 No 1 Yes Bit04 HLG Freigabe 0 No 1 Yes Bit05 HLG Start 0 No 1 Yes Bit06 Sollwert-Freigabe 0 No 1 Yes Bit07 Fehler-Quittierung 0 No 1 Yes Bit08 JOG rechts 0 No 1 Yes Bit09 JOG links 0 No 1 Yes Bit10 Steuerung von AG 0 No 1 Yes Bit11 Reversieren 0 No 1 Yes Bit15 CDS Bit 0 (Hand/Auto) 0 No 1 Yes
r2033 BO: Steuerwort2 v. USS on RS232 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt Steuerwort 2 der USS on RS232-Schnittstelle (Wort 4 innerhalb von USS) an.
Bitfelder: Bit04 Antriebsdatensatz (DDS) Bit 0 0 No 1 Yes Bit05 Antriebsdatensatz (DDS) Bit 1 0 No 1 Yes Bit11 Statik 0 No 1 Yes Bit12 Drehmomentregelung 0 No 1 Yes Bit13 Externer Fehler 1 0 Yes 1 No Bit15 Befehlsdatensatz (CDS) Bit1 0 No 1 Yes
Abhängigkeit: P0700 = 4 (USS on RS232) und P0719 = 0 (Befehl / Sollwert = BICO-Parameter).
P2040 Telegramm Ausfallzeit Fieldbus Min: 0 ÄndStat: CT Datentyp: U16 Einheit ms Def: 500 P-Gruppe: COMM Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Definiert die Zeit, nach deren Ablauf ein Fehler ausgelöst wird (F0070). Abhängigkeit:
Einstellung 0 = Überwachung ausgeschaltet.
P2041[5] CB-Parameter Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 65535
Konfiguriert die Steuerung. Index:
P2041[0] : CB-Parameter 0 P2041[1] : CB-Parameter 1 P2041[2] : CB-Parameter 2 P2041[3] : CB-Parameter 3 P2041[4] : CB-Parameter 4
Details: Informationen zur Protokolldefinition und den erforderlichen Einstellungen, siehe SIMATIC S7-Anbindung.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
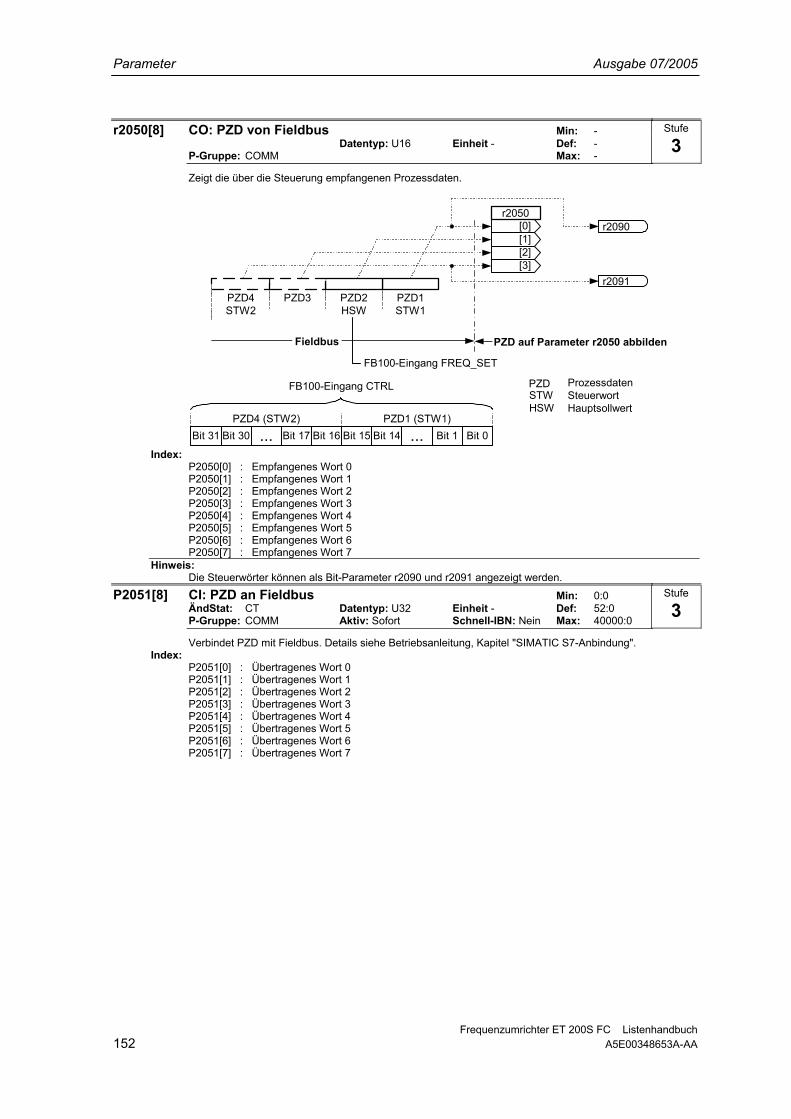
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 152 A5E00348653A-AA
r2050[8] CO: PZD von Fieldbus Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die über die Steuerung empfangenen Prozessdaten.
r2091
r2090[0]r2050
[1][2][3]
PZD1STW1
PZD2HSW
PZD3PZD4STW2
PZDSTWHSW
Fieldbus PZD auf Parameter r2050 abbilden
ProzessdatenSteuerwortHauptsollwert
PZD4 (STW2)
FB100-Eingang CTRL
Bit 31 Bit 30 Bit 1 Bit 0...PZD1 (STW1)
Bit 15 Bit 14 ...Bit 17 Bit 16
FB100-Eingang FREQ_SET
Index:
P2050[0] : Empfangenes Wort 0 P2050[1] : Empfangenes Wort 1 P2050[2] : Empfangenes Wort 2 P2050[3] : Empfangenes Wort 3 P2050[4] : Empfangenes Wort 4 P2050[5] : Empfangenes Wort 5 P2050[6] : Empfangenes Wort 6 P2050[7] : Empfangenes Wort 7
Hinweis: Die Steuerwörter können als Bit-Parameter r2090 und r2091 angezeigt werden.
P2051[8] CI: PZD an Fieldbus Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 52:0 P-Gruppe: COMM Aktiv: Sofort Schnell-IBN: Nein Max: 40000:0
Verbindet PZD mit Fieldbus. Details siehe Betriebsanleitung, Kapitel "SIMATIC S7-Anbindung". Index:
P2051[0] : Übertragenes Wort 0 P2051[1] : Übertragenes Wort 1 P2051[2] : Übertragenes Wort 2 P2051[3] : Übertragenes Wort 3 P2051[4] : Übertragenes Wort 4 P2051[5] : Übertragenes Wort 5 P2051[6] : Übertragenes Wort 6 P2051[7] : Übertragenes Wort 7
Stufe
3
Stufe
3
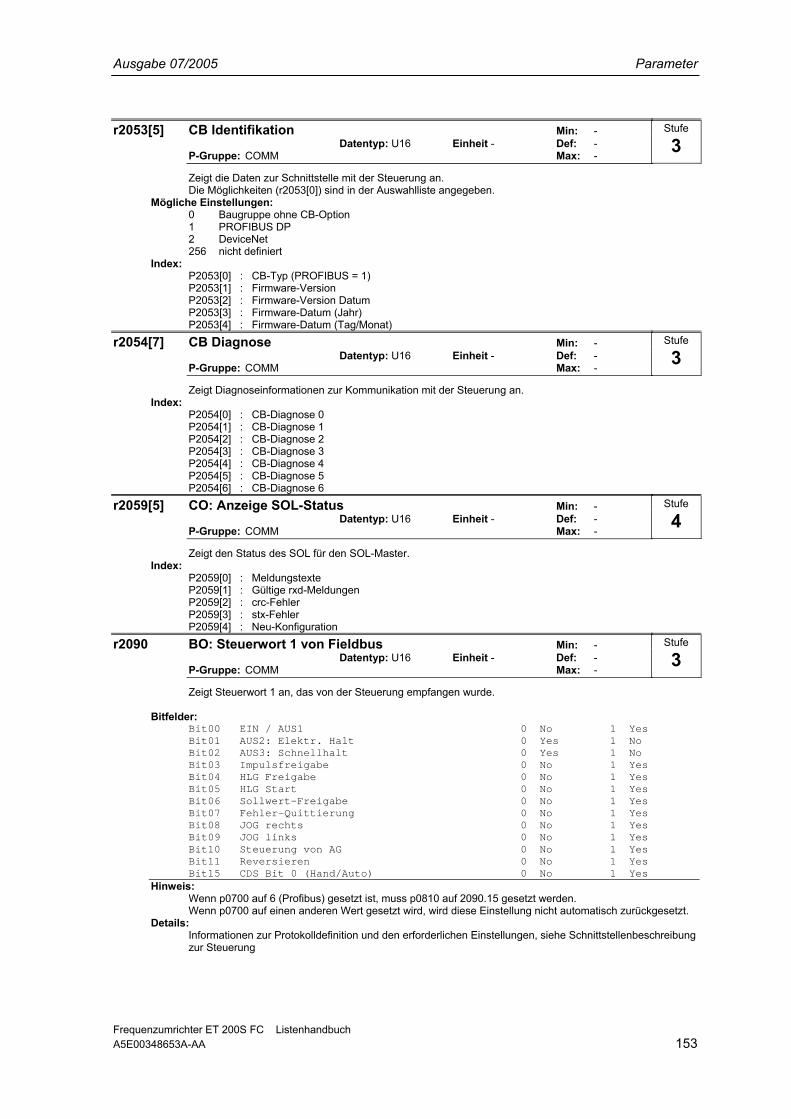
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 153
r2053[5] CB Identifikation Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt die Daten zur Schnittstelle mit der Steuerung an. Die Möglichkeiten (r2053[0]) sind in der Auswahlliste angegeben.
Mögliche Einstellungen: 0 Baugruppe ohne CB-Option 1 PROFIBUS DP 2 DeviceNet 256 nicht definiert
Index: P2053[0] : CB-Typ (PROFIBUS = 1) P2053[1] : Firmware-Version P2053[2] : Firmware-Version Datum P2053[3] : Firmware-Datum (Jahr) P2053[4] : Firmware-Datum (Tag/Monat)
r2054[7] CB Diagnose Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt Diagnoseinformationen zur Kommunikation mit der Steuerung an. Index:
P2054[0] : CB-Diagnose 0 P2054[1] : CB-Diagnose 1 P2054[2] : CB-Diagnose 2 P2054[3] : CB-Diagnose 3 P2054[4] : CB-Diagnose 4 P2054[5] : CB-Diagnose 5 P2054[6] : CB-Diagnose 6
r2059[5] CO: Anzeige SOL-Status Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt den Status des SOL für den SOL-Master. Index:
P2059[0] : Meldungstexte P2059[1] : Gültige rxd-Meldungen P2059[2] : crc-Fehler P2059[3] : stx-Fehler P2059[4] : Neu-Konfiguration
r2090 BO: Steuerwort 1 von Fieldbus Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt Steuerwort 1 an, das von der Steuerung empfangen wurde.
Bitfelder: Bit00 EIN / AUS1 0 No 1 Yes Bit01 AUS2: Elektr. Halt 0 Yes 1 No Bit02 AUS3: Schnellhalt 0 Yes 1 No Bit03 Impulsfreigabe 0 No 1 Yes Bit04 HLG Freigabe 0 No 1 Yes Bit05 HLG Start 0 No 1 Yes Bit06 Sollwert-Freigabe 0 No 1 Yes Bit07 Fehler-Quittierung 0 No 1 Yes Bit08 JOG rechts 0 No 1 Yes Bit09 JOG links 0 No 1 Yes Bit10 Steuerung von AG 0 No 1 Yes Bit11 Reversieren 0 No 1 Yes Bit15 CDS Bit 0 (Hand/Auto) 0 No 1 Yes
Hinweis: Wenn p0700 auf 6 (Profibus) gesetzt ist, muss p0810 auf 2090.15 gesetzt werden. Wenn p0700 auf einen anderen Wert gesetzt wird, wird diese Einstellung nicht automatisch zurückgesetzt.
Details: Informationen zur Protokolldefinition und den erforderlichen Einstellungen, siehe Schnittstellenbeschreibung zur Steuerung
Stufe
3
Stufe
3
Stufe
4
Stufe
3
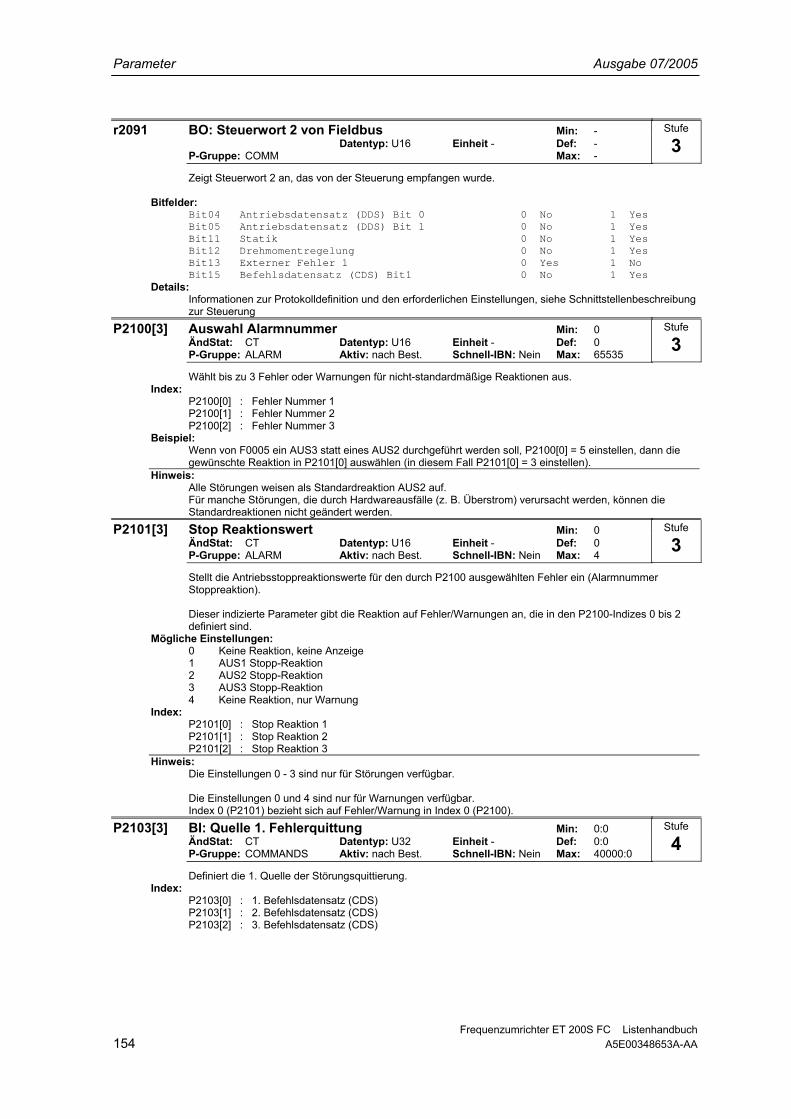
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 154 A5E00348653A-AA
r2091 BO: Steuerwort 2 von Fieldbus Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: COMM Max: -
Zeigt Steuerwort 2 an, das von der Steuerung empfangen wurde.
Bitfelder: Bit04 Antriebsdatensatz (DDS) Bit 0 0 No 1 Yes Bit05 Antriebsdatensatz (DDS) Bit 1 0 No 1 Yes Bit11 Statik 0 No 1 Yes Bit12 Drehmomentregelung 0 No 1 Yes Bit13 Externer Fehler 1 0 Yes 1 No Bit15 Befehlsdatensatz (CDS) Bit1 0 No 1 Yes
Details: Informationen zur Protokolldefinition und den erforderlichen Einstellungen, siehe Schnittstellenbeschreibung zur Steuerung
P2100[3] Auswahl Alarmnummer Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALARM Aktiv: nach Best. Schnell-IBN: Nein Max: 65535
Wählt bis zu 3 Fehler oder Warnungen für nicht-standardmäßige Reaktionen aus. Index:
P2100[0] : Fehler Nummer 1 P2100[1] : Fehler Nummer 2 P2100[2] : Fehler Nummer 3
Beispiel: Wenn von F0005 ein AUS3 statt eines AUS2 durchgeführt werden soll, P2100[0] = 5 einstellen, dann die gewünschte Reaktion in P2101[0] auswählen (in diesem Fall P2101[0] = 3 einstellen).
Hinweis: Alle Störungen weisen als Standardreaktion AUS2 auf. Für manche Störungen, die durch Hardwareausfälle (z. B. Überstrom) verursacht werden, können die Standardreaktionen nicht geändert werden.
P2101[3] Stop Reaktionswert Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALARM Aktiv: nach Best. Schnell-IBN: Nein Max: 4
Stellt die Antriebsstoppreaktionswerte für den durch P2100 ausgewählten Fehler ein (Alarmnummer Stoppreaktion). Dieser indizierte Parameter gibt die Reaktion auf Fehler/Warnungen an, die in den P2100-Indizes 0 bis 2 definiert sind.
Mögliche Einstellungen: 0 Keine Reaktion, keine Anzeige 1 AUS1 Stopp-Reaktion 2 AUS2 Stopp-Reaktion 3 AUS3 Stopp-Reaktion 4 Keine Reaktion, nur Warnung
Index: P2101[0] : Stop Reaktion 1 P2101[1] : Stop Reaktion 2 P2101[2] : Stop Reaktion 3
Hinweis: Die Einstellungen 0 - 3 sind nur für Störungen verfügbar. Die Einstellungen 0 und 4 sind nur für Warnungen verfügbar. Index 0 (P2101) bezieht sich auf Fehler/Warnung in Index 0 (P2100).
P2103[3] BI: Quelle 1. Fehlerquittung Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die 1. Quelle der Störungsquittierung. Index:
P2103[0] : 1. Befehlsdatensatz (CDS) P2103[1] : 2. Befehlsdatensatz (CDS) P2103[2] : 3. Befehlsdatensatz (CDS)
Stufe
3
Stufe
3
Stufe
3
Stufe
4
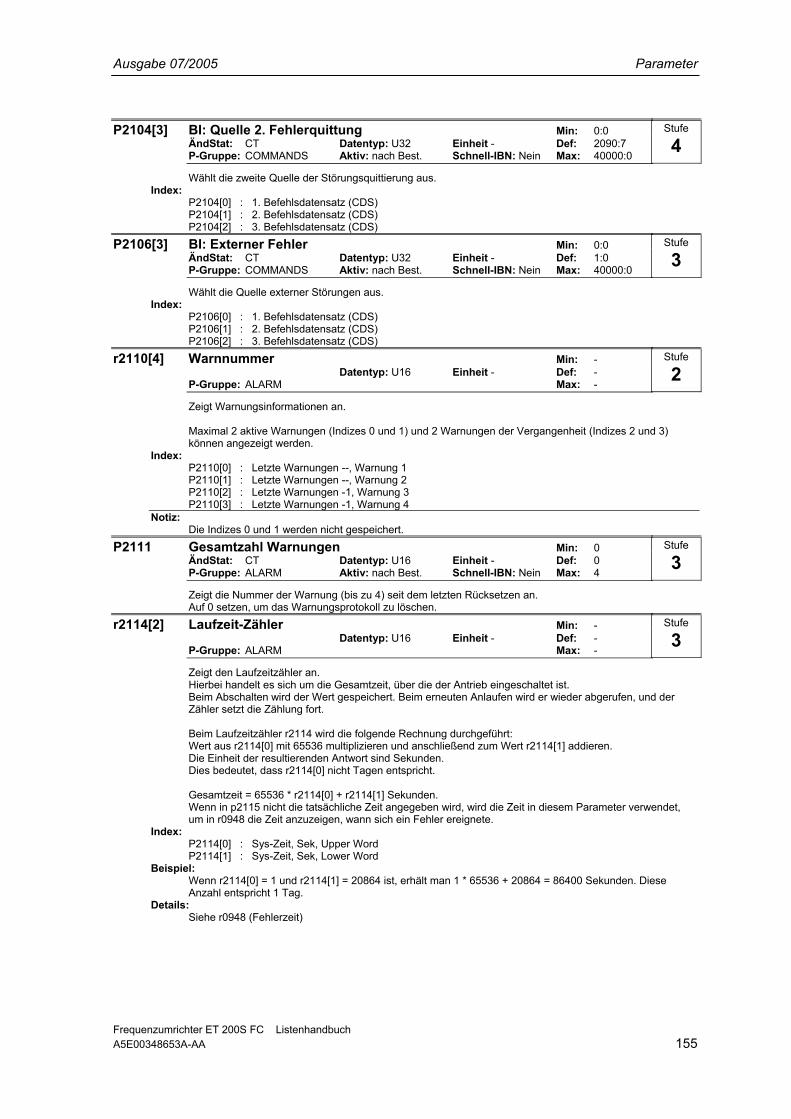
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 155
P2104[3] BI: Quelle 2. Fehlerquittung Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 2090:7 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt die zweite Quelle der Störungsquittierung aus. Index:
P2104[0] : 1. Befehlsdatensatz (CDS) P2104[1] : 2. Befehlsdatensatz (CDS) P2104[2] : 3. Befehlsdatensatz (CDS)
P2106[3] BI: Externer Fehler Min: 0:0 ÄndStat: CT Datentyp: U32 Einheit - Def: 1:0 P-Gruppe: COMMANDS Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Wählt die Quelle externer Störungen aus. Index:
P2106[0] : 1. Befehlsdatensatz (CDS) P2106[1] : 2. Befehlsdatensatz (CDS) P2106[2] : 3. Befehlsdatensatz (CDS)
r2110[4] Warnnummer Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: ALARM Max: -
Zeigt Warnungsinformationen an. Maximal 2 aktive Warnungen (Indizes 0 und 1) und 2 Warnungen der Vergangenheit (Indizes 2 und 3) können angezeigt werden.
Index: P2110[0] : Letzte Warnungen --, Warnung 1 P2110[1] : Letzte Warnungen --, Warnung 2 P2110[2] : Letzte Warnungen -1, Warnung 3 P2110[3] : Letzte Warnungen -1, Warnung 4
Notiz: Die Indizes 0 und 1 werden nicht gespeichert.
P2111 Gesamtzahl Warnungen Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALARM Aktiv: nach Best. Schnell-IBN: Nein Max: 4
Zeigt die Nummer der Warnung (bis zu 4) seit dem letzten Rücksetzen an. Auf 0 setzen, um das Warnungsprotokoll zu löschen.
r2114[2] Laufzeit-Zähler Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: ALARM Max: -
Zeigt den Laufzeitzähler an. Hierbei handelt es sich um die Gesamtzeit, über die der Antrieb eingeschaltet ist. Beim Abschalten wird der Wert gespeichert. Beim erneuten Anlaufen wird er wieder abgerufen, und der Zähler setzt die Zählung fort. Beim Laufzeitzähler r2114 wird die folgende Rechnung durchgeführt: Wert aus r2114[0] mit 65536 multiplizieren und anschließend zum Wert r2114[1] addieren. Die Einheit der resultierenden Antwort sind Sekunden. Dies bedeutet, dass r2114[0] nicht Tagen entspricht. Gesamtzeit = 65536 * r2114[0] + r2114[1] Sekunden. Wenn in p2115 nicht die tatsächliche Zeit angegeben wird, wird die Zeit in diesem Parameter verwendet, um in r0948 die Zeit anzuzeigen, wann sich ein Fehler ereignete.
Index: P2114[0] : Sys-Zeit, Sek, Upper Word P2114[1] : Sys-Zeit, Sek, Lower Word
Beispiel: Wenn r2114[0] = 1 und r2114[1] = 20864 ist, erhält man 1 * 65536 + 20864 = 86400 Sekunden. Diese Anzahl entspricht 1 Tag.
Details: Siehe r0948 (Fehlerzeit)
Stufe
4
Stufe
3
Stufe
2
Stufe
3
Stufe
3
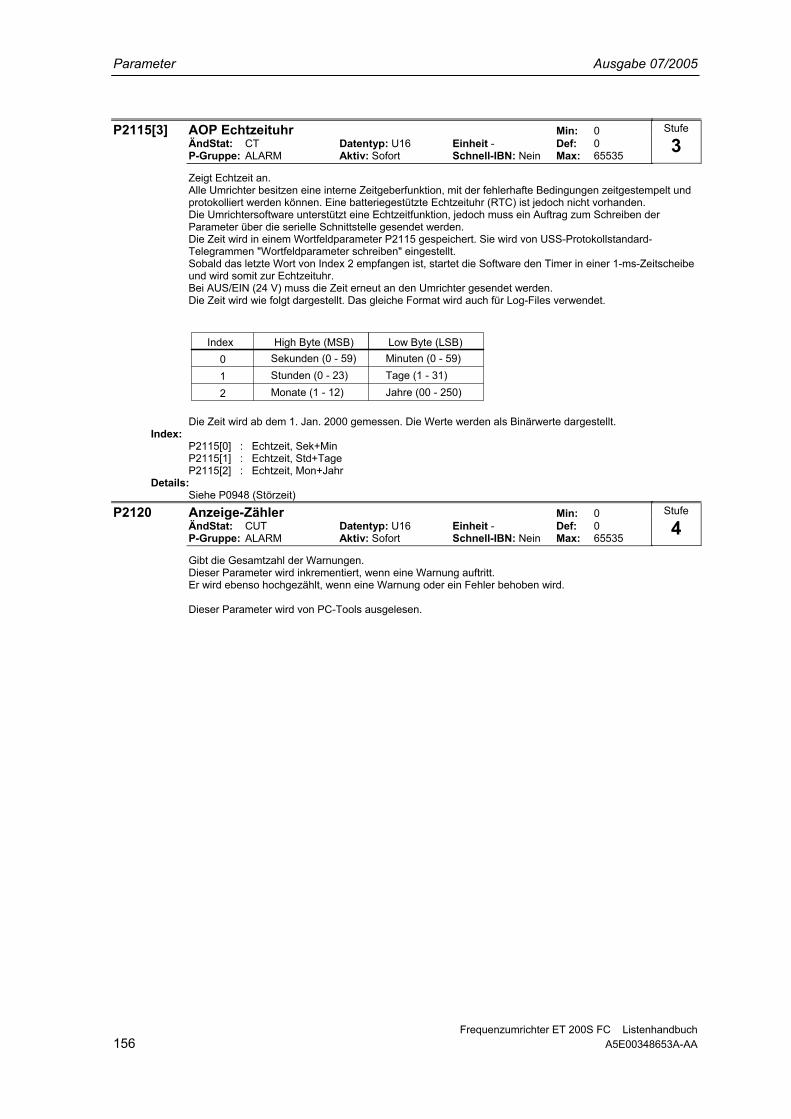
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 156 A5E00348653A-AA
P2115[3] AOP Echtzeituhr Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Zeigt Echtzeit an. Alle Umrichter besitzen eine interne Zeitgeberfunktion, mit der fehlerhafte Bedingungen zeitgestempelt und protokolliert werden können. Eine batteriegestützte Echtzeituhr (RTC) ist jedoch nicht vorhanden. Die Umrichtersoftware unterstützt eine Echtzeitfunktion, jedoch muss ein Auftrag zum Schreiben der Parameter über die serielle Schnittstelle gesendet werden. Die Zeit wird in einem Wortfeldparameter P2115 gespeichert. Sie wird von USS-Protokollstandard-Telegrammen "Wortfeldparameter schreiben" eingestellt. Sobald das letzte Wort von Index 2 empfangen ist, startet die Software den Timer in einer 1-ms-Zeitscheibe und wird somit zur Echtzeituhr. Bei AUS/EIN (24 V) muss die Zeit erneut an den Umrichter gesendet werden. Die Zeit wird wie folgt dargestellt. Das gleiche Format wird auch für Log-Files verwendet.
High Byte (MSB)Index012
Low Byte (LSB)Sekunden (0 - 59)Stunden (0 - 23)Monate (1 - 12)
Minuten (0 - 59)Tage (1 - 31)Jahre (00 - 250)
Die Zeit wird ab dem 1. Jan. 2000 gemessen. Die Werte werden als Binärwerte dargestellt.
Index: P2115[0] : Echtzeit, Sek+Min P2115[1] : Echtzeit, Std+Tage P2115[2] : Echtzeit, Mon+Jahr
Details: Siehe P0948 (Störzeit)
P2120 Anzeige-Zähler Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Gibt die Gesamtzahl der Warnungen. Dieser Parameter wird inkrementiert, wenn eine Warnung auftritt. Er wird ebenso hochgezählt, wenn eine Warnung oder ein Fehler behoben wird. Dieser Parameter wird von PC-Tools ausgelesen.
Stufe
3
Stufe
4
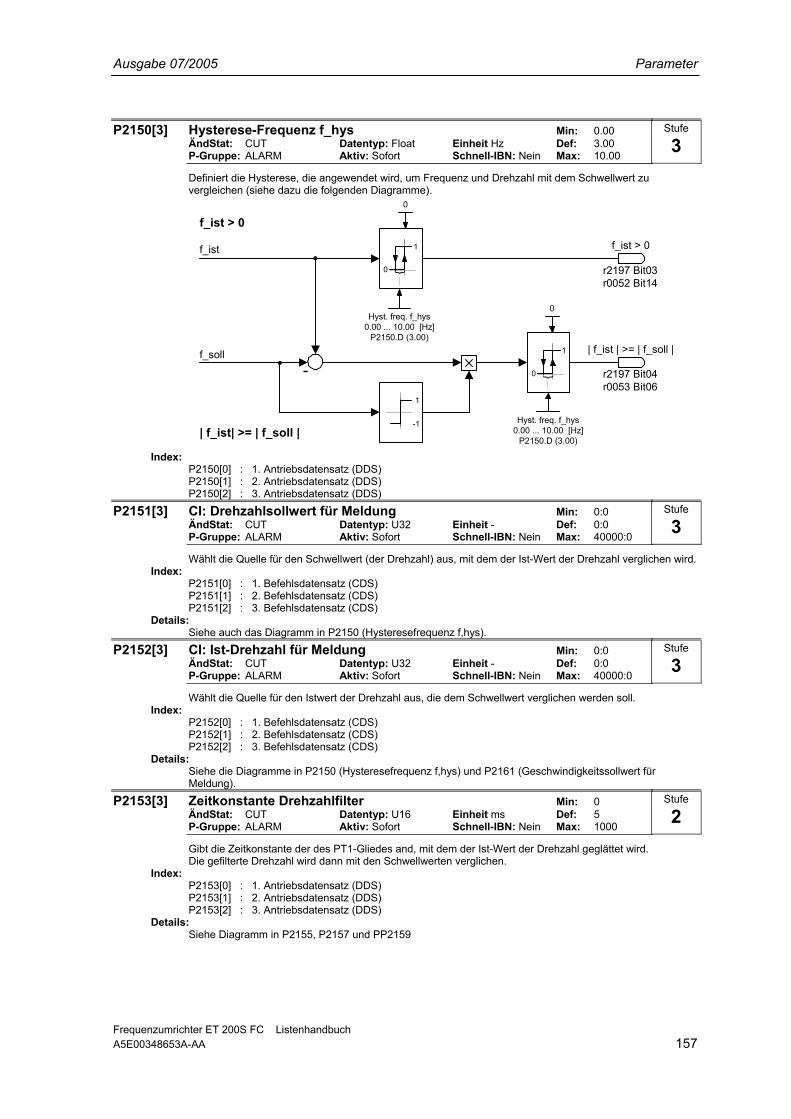
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 157
P2150[3] Hysterese-Frequenz f_hys Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 3.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10.00
Definiert die Hysterese, die angewendet wird, um Frequenz und Drehzahl mit dem Schwellwert zu vergleichen (siehe dazu die folgenden Diagramme).
-1
1
0
0
1
{-
0
1
{
0
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
P2150.D (3.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
P2150.D (3.00)
f_ist > 0
| f_ist | >= | f_soll |
f_ist > 0
| f_ist| >= | f_soll |
f_ist
f_soll
r2197 Bit03r0052 Bit14
r2197 Bit04r0053 Bit06
Index:
P2150[0] : 1. Antriebsdatensatz (DDS) P2150[1] : 2. Antriebsdatensatz (DDS) P2150[2] : 3. Antriebsdatensatz (DDS)
P2151[3] CI: Drehzahlsollwert für Meldung Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 40000:0
Wählt die Quelle für den Schwellwert (der Drehzahl) aus, mit dem der Ist-Wert der Drehzahl verglichen wird. Index:
P2151[0] : 1. Befehlsdatensatz (CDS) P2151[1] : 2. Befehlsdatensatz (CDS) P2151[2] : 3. Befehlsdatensatz (CDS)
Details: Siehe auch das Diagramm in P2150 (Hysteresefrequenz f,hys).
P2152[3] CI: Ist-Drehzahl für Meldung Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 40000:0
Wählt die Quelle für den Istwert der Drehzahl aus, die dem Schwellwert verglichen werden soll. Index:
P2152[0] : 1. Befehlsdatensatz (CDS) P2152[1] : 2. Befehlsdatensatz (CDS) P2152[2] : 3. Befehlsdatensatz (CDS)
Details: Siehe die Diagramme in P2150 (Hysteresefrequenz f,hys) und P2161 (Geschwindigkeitssollwert für Meldung).
P2153[3] Zeitkonstante Drehzahlfilter Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 5 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 1000
Gibt die Zeitkonstante der des PT1-Gliedes and, mit dem der Ist-Wert der Drehzahl geglättet wird. Die gefilterte Drehzahl wird dann mit den Schwellwerten verglichen.
Index: P2153[0] : 1. Antriebsdatensatz (DDS) P2153[1] : 2. Antriebsdatensatz (DDS) P2153[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe Diagramm in P2155, P2157 und PP2159
Stufe
3
Stufe
3
Stufe
3
Stufe
2
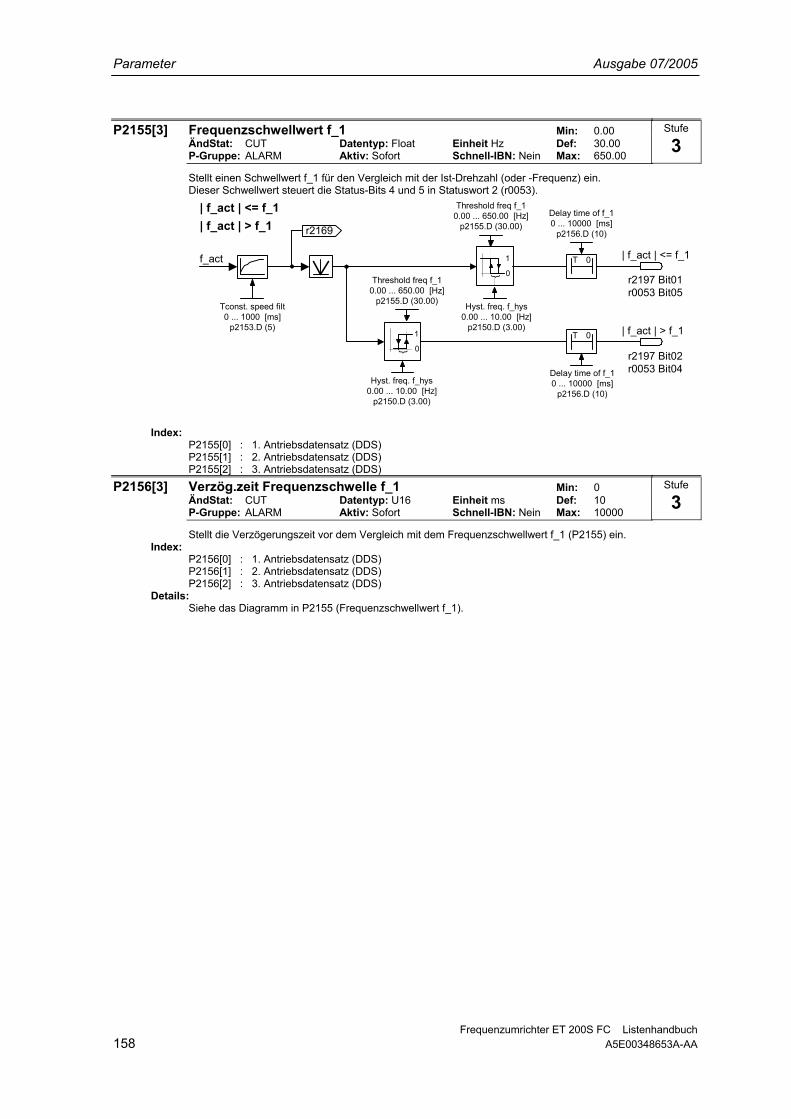
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 158 A5E00348653A-AA
P2155[3] Frequenzschwellwert f_1 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 30.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Stellt einen Schwellwert f_1 für den Vergleich mit der Ist-Drehzahl (oder -Frequenz) ein. Dieser Schwellwert steuert die Status-Bits 4 und 5 in Statuswort 2 (r0053).
Tconst. speed filt0 ... 1000 [ms]
p2153.D (5)
Threshold freq f_10.00 ... 650.00 [Hz]
p2155.D (30.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
p2150.D (3.00)
Delay time of f_10 ... 10000 [ms]
p2156.D (10)
Delay time of f_10 ... 10000 [ms]
p2156.D (10)
| f_act | <= f_1
| f_act | > f_1T 0
T 0f_act
| f_act | <= f_1
Threshold freq f_10.00 ... 650.00 [Hz]
p2155.D (30.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
p2150.D (3.00)
0
1
{
0
1
{
| f_act | > f_1
r2197 Bit02r0053 Bit04
r2197 Bit01r0053 Bit05
r2169
Index:
P2155[0] : 1. Antriebsdatensatz (DDS) P2155[1] : 2. Antriebsdatensatz (DDS) P2155[2] : 3. Antriebsdatensatz (DDS)
P2156[3] Verzög.zeit Frequenzschwelle f_1 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Stellt die Verzögerungszeit vor dem Vergleich mit dem Frequenzschwellwert f_1 (P2155) ein. Index:
P2156[0] : 1. Antriebsdatensatz (DDS) P2156[1] : 2. Antriebsdatensatz (DDS) P2156[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe das Diagramm in P2155 (Frequenzschwellwert f_1).
Stufe
3
Stufe
3
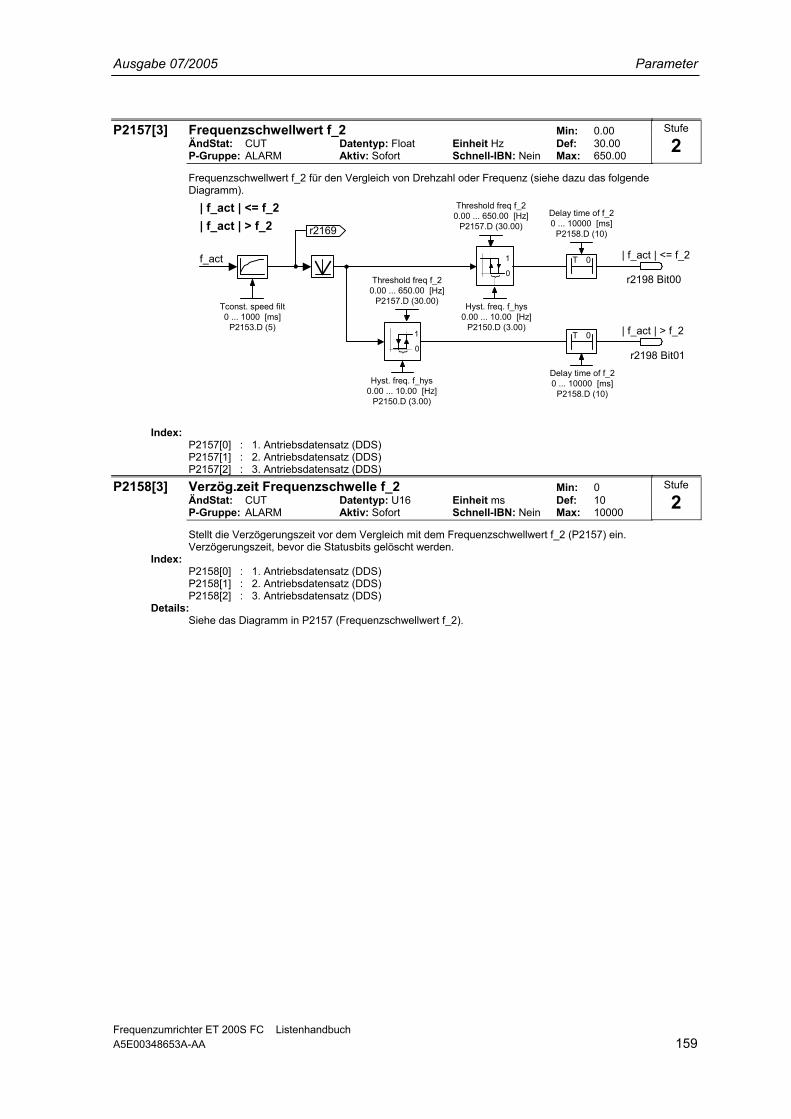
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 159
P2157[3] Frequenzschwellwert f_2 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 30.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Frequenzschwellwert f_2 für den Vergleich von Drehzahl oder Frequenz (siehe dazu das folgende Diagramm).
Tconst. speed filt0 ... 1000 [ms]
P2153.D (5)
Threshold freq f_20.00 ... 650.00 [Hz]
P2157.D (30.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
P2150.D (3.00)
Delay time of f_20 ... 10000 [ms]
P2158.D (10)
Delay time of f_20 ... 10000 [ms]
P2158.D (10)
| f_act | <= f_2
| f_act | > f_2T 0
T 0f_act
r2198 Bit01
r2198 Bit00
| f_act | <= f_2
Threshold freq f_20.00 ... 650.00 [Hz]
P2157.D (30.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
P2150.D (3.00)
0
1
{
0
1
{
| f_act | > f_2 r2169
Index:
P2157[0] : 1. Antriebsdatensatz (DDS) P2157[1] : 2. Antriebsdatensatz (DDS) P2157[2] : 3. Antriebsdatensatz (DDS)
P2158[3] Verzög.zeit Frequenzschwelle f_2 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Stellt die Verzögerungszeit vor dem Vergleich mit dem Frequenzschwellwert f_2 (P2157) ein. Verzögerungszeit, bevor die Statusbits gelöscht werden.
Index: P2158[0] : 1. Antriebsdatensatz (DDS) P2158[1] : 2. Antriebsdatensatz (DDS) P2158[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe das Diagramm in P2157 (Frequenzschwellwert f_2).
Stufe
2
Stufe
2
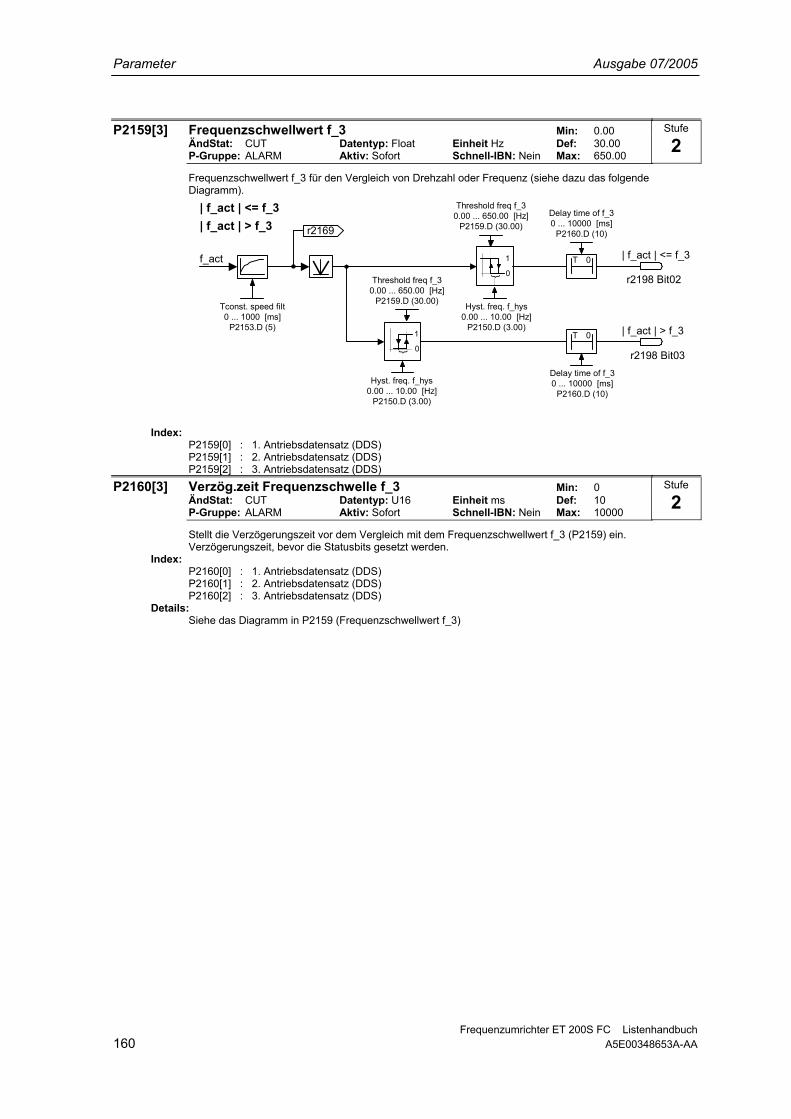
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 160 A5E00348653A-AA
P2159[3] Frequenzschwellwert f_3 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 30.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Frequenzschwellwert f_3 für den Vergleich von Drehzahl oder Frequenz (siehe dazu das folgende Diagramm).
Tconst. speed filt0 ... 1000 [ms]
P2153.D (5)
Threshold freq f_30.00 ... 650.00 [Hz]
P2159.D (30.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
P2150.D (3.00)
Delay time of f_30 ... 10000 [ms]
P2160.D (10)
Delay time of f_30 ... 10000 [ms]
P2160.D (10)
| f_act | <= f_3
| f_act | > f_3T 0
T 0f_act
r2198 Bit03
r2198 Bit02
| f_act | <= f_3
Threshold freq f_30.00 ... 650.00 [Hz]
P2159.D (30.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
P2150.D (3.00)
0
1
{
0
1
{
| f_act | > f_3 r2169
Index:
P2159[0] : 1. Antriebsdatensatz (DDS) P2159[1] : 2. Antriebsdatensatz (DDS) P2159[2] : 3. Antriebsdatensatz (DDS)
P2160[3] Verzög.zeit Frequenzschwelle f_3 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Stellt die Verzögerungszeit vor dem Vergleich mit dem Frequenzschwellwert f_3 (P2159) ein. Verzögerungszeit, bevor die Statusbits gesetzt werden.
Index: P2160[0] : 1. Antriebsdatensatz (DDS) P2160[1] : 2. Antriebsdatensatz (DDS) P2160[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe das Diagramm in P2159 (Frequenzschwellwert f_3)
Stufe
2
Stufe
2
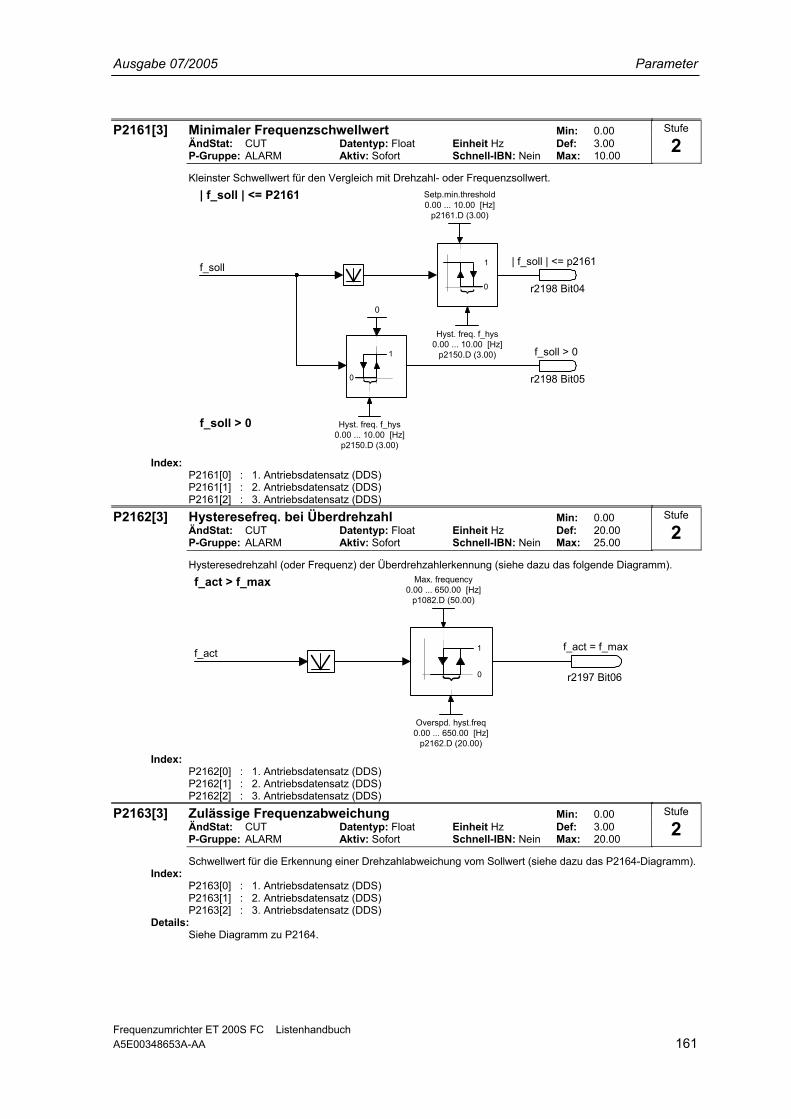
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 161
P2161[3] Minimaler Frequenzschwellwert Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 3.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10.00
Kleinster Schwellwert für den Vergleich mit Drehzahl- oder Frequenzsollwert.
0
1
{
0
1
{
0
Setp.min.threshold0.00 ... 10.00 [Hz]
p2161.D (3.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
p2150.D (3.00)
Hyst. freq. f_hys0.00 ... 10.00 [Hz]
p2150.D (3.00)
| f_soll | <= P2161
| f_soll | <= p2161
f_soll > 0
f_soll > 0
f_soll
r2198 Bit04
r2198 Bit05
Index:
P2161[0] : 1. Antriebsdatensatz (DDS) P2161[1] : 2. Antriebsdatensatz (DDS) P2161[2] : 3. Antriebsdatensatz (DDS)
P2162[3] Hysteresefreq. bei Überdrehzahl Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 20.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 25.00
Hysteresedrehzahl (oder Frequenz) der Überdrehzahlerkennung (siehe dazu das folgende Diagramm).
0
1
{
Max. frequency0.00 ... 650.00 [Hz]
p1082.D (50.00)
Overspd. hyst.freq0.00 ... 650.00 [Hz]
p2162.D (20.00)
f_act > f_max
f_act f_act = f_max
r2197 Bit06
Index:
P2162[0] : 1. Antriebsdatensatz (DDS) P2162[1] : 2. Antriebsdatensatz (DDS) P2162[2] : 3. Antriebsdatensatz (DDS)
P2163[3] Zulässige Frequenzabweichung Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 3.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 20.00
Schwellwert für die Erkennung einer Drehzahlabweichung vom Sollwert (siehe dazu das P2164-Diagramm). Index:
P2163[0] : 1. Antriebsdatensatz (DDS) P2163[1] : 2. Antriebsdatensatz (DDS) P2163[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe Diagramm zu P2164.
Stufe
2
Stufe
2
Stufe
2
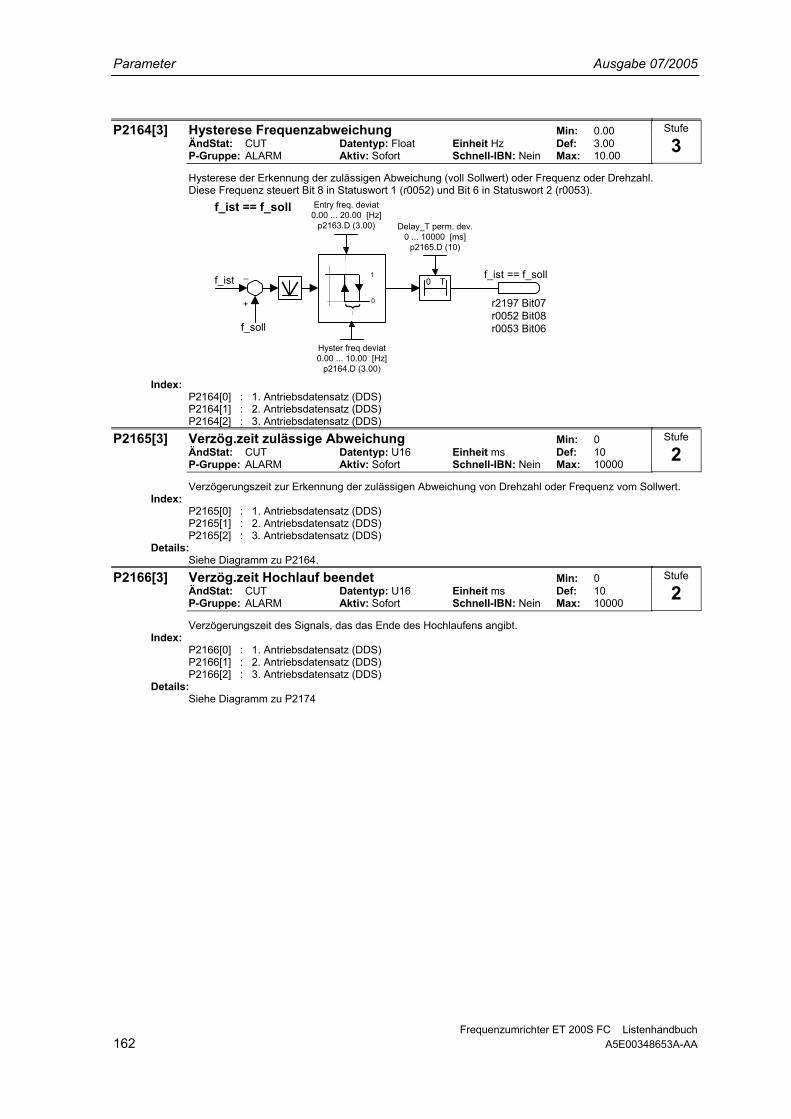
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 162 A5E00348653A-AA
P2164[3] Hysterese Frequenzabweichung Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 3.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10.00
Hysterese der Erkennung der zulässigen Abweichung (voll Sollwert) oder Frequenz oder Drehzahl. Diese Frequenz steuert Bit 8 in Statuswort 1 (r0052) und Bit 6 in Statuswort 2 (r0053).
–
+ 0
1
{
Entry freq. deviat0.00 ... 20.00 [Hz]
p2163.D (3.00) Delay_T perm. dev.0 ... 10000 [ms]
p2165.D (10)
Hyster freq deviat0.00 ... 10.00 [Hz]
p2164.D (3.00)
f_ist
f_ist == f_soll
f_soll
f_ist == f_soll0 T
r2197 Bit07r0052 Bit08r0053 Bit06
Index:
P2164[0] : 1. Antriebsdatensatz (DDS) P2164[1] : 2. Antriebsdatensatz (DDS) P2164[2] : 3. Antriebsdatensatz (DDS)
P2165[3] Verzög.zeit zulässige Abweichung Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Verzögerungszeit zur Erkennung der zulässigen Abweichung von Drehzahl oder Frequenz vom Sollwert. Index:
P2165[0] : 1. Antriebsdatensatz (DDS) P2165[1] : 2. Antriebsdatensatz (DDS) P2165[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe Diagramm zu P2164.
P2166[3] Verzög.zeit Hochlauf beendet Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Verzögerungszeit des Signals, das das Ende des Hochlaufens angibt. Index:
P2166[0] : 1. Antriebsdatensatz (DDS) P2166[1] : 2. Antriebsdatensatz (DDS) P2166[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe Diagramm zu P2174
Stufe
3
Stufe
2
Stufe
2
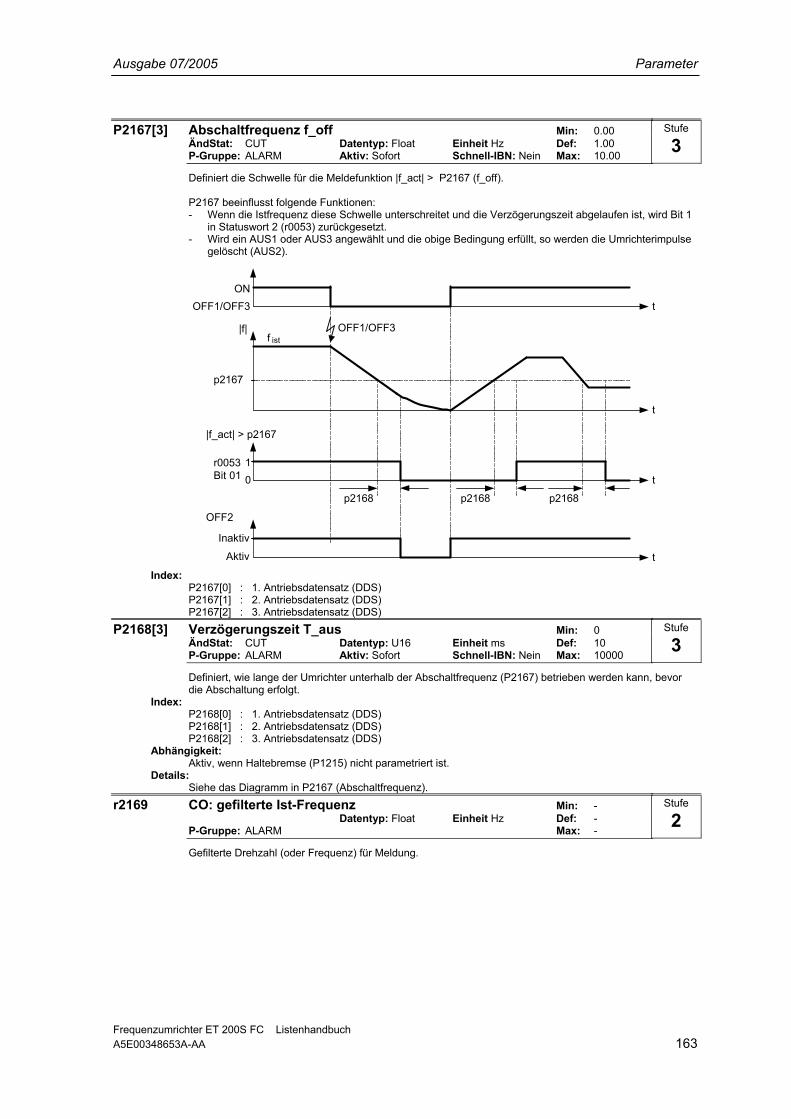
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 163
P2167[3] Abschaltfrequenz f_off Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 1.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10.00
Definiert die Schwelle für die Meldefunktion |f_act| > P2167 (f_off). P2167 beeinflusst folgende Funktionen: - Wenn die Istfrequenz diese Schwelle unterschreitet und die Verzögerungszeit abgelaufen ist, wird Bit 1
in Statuswort 2 (r0053) zurückgesetzt. - Wird ein AUS1 oder AUS3 angewählt und die obige Bedingung erfüllt, so werden die Umrichterimpulse
gelöscht (AUS2).
|f|
t
01
p2168
t
t
r0053Bit 01
OFF2
p2167
Aktiv
Inaktiv
istf
p2168 p2168
OFF1/OFF3
|f_act| > p2167
OFF1/OFF3ON
t
Index:
P2167[0] : 1. Antriebsdatensatz (DDS) P2167[1] : 2. Antriebsdatensatz (DDS) P2167[2] : 3. Antriebsdatensatz (DDS)
P2168[3] Verzögerungszeit T_aus Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Definiert, wie lange der Umrichter unterhalb der Abschaltfrequenz (P2167) betrieben werden kann, bevor die Abschaltung erfolgt.
Index: P2168[0] : 1. Antriebsdatensatz (DDS) P2168[1] : 2. Antriebsdatensatz (DDS) P2168[2] : 3. Antriebsdatensatz (DDS)
Abhängigkeit: Aktiv, wenn Haltebremse (P1215) nicht parametriert ist.
Details: Siehe das Diagramm in P2167 (Abschaltfrequenz).
r2169 CO: gefilterte Ist-Frequenz Min: - Datentyp: Float Einheit Hz Def: - P-Gruppe: ALARM Max: -
Gefilterte Drehzahl (oder Frequenz) für Meldung.
Stufe
3
Stufe
3
Stufe
2
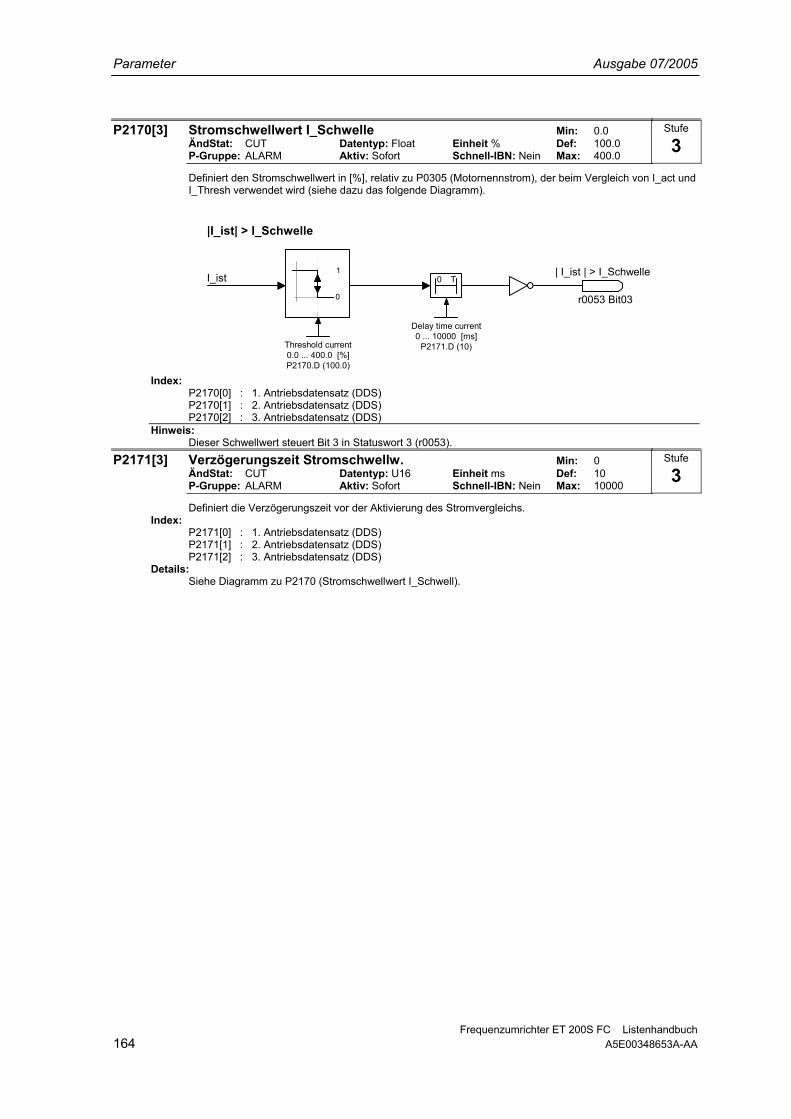
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 164 A5E00348653A-AA
P2170[3] Stromschwellwert I_Schwelle Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 100.0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 400.0
Definiert den Stromschwellwert in [%], relativ zu P0305 (Motornennstrom), der beim Vergleich von I_act und I_Thresh verwendet wird (siehe dazu das folgende Diagramm).
0
1
Threshold current0.0 ... 400.0 [%]P2170.D (100.0)
Delay time current0 ... 10000 [ms]
P2171.D (10)
I_ist | I_ist | > I_Schwelle
|I_ist| > I_Schwelle
0 T
r0053 Bit03
Index:
P2170[0] : 1. Antriebsdatensatz (DDS) P2170[1] : 2. Antriebsdatensatz (DDS) P2170[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Dieser Schwellwert steuert Bit 3 in Statuswort 3 (r0053).
P2171[3] Verzögerungszeit Stromschwellw. Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Definiert die Verzögerungszeit vor der Aktivierung des Stromvergleichs. Index:
P2171[0] : 1. Antriebsdatensatz (DDS) P2171[1] : 2. Antriebsdatensatz (DDS) P2171[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe Diagramm zu P2170 (Stromschwellwert I_Schwell).
Stufe
3
Stufe
3
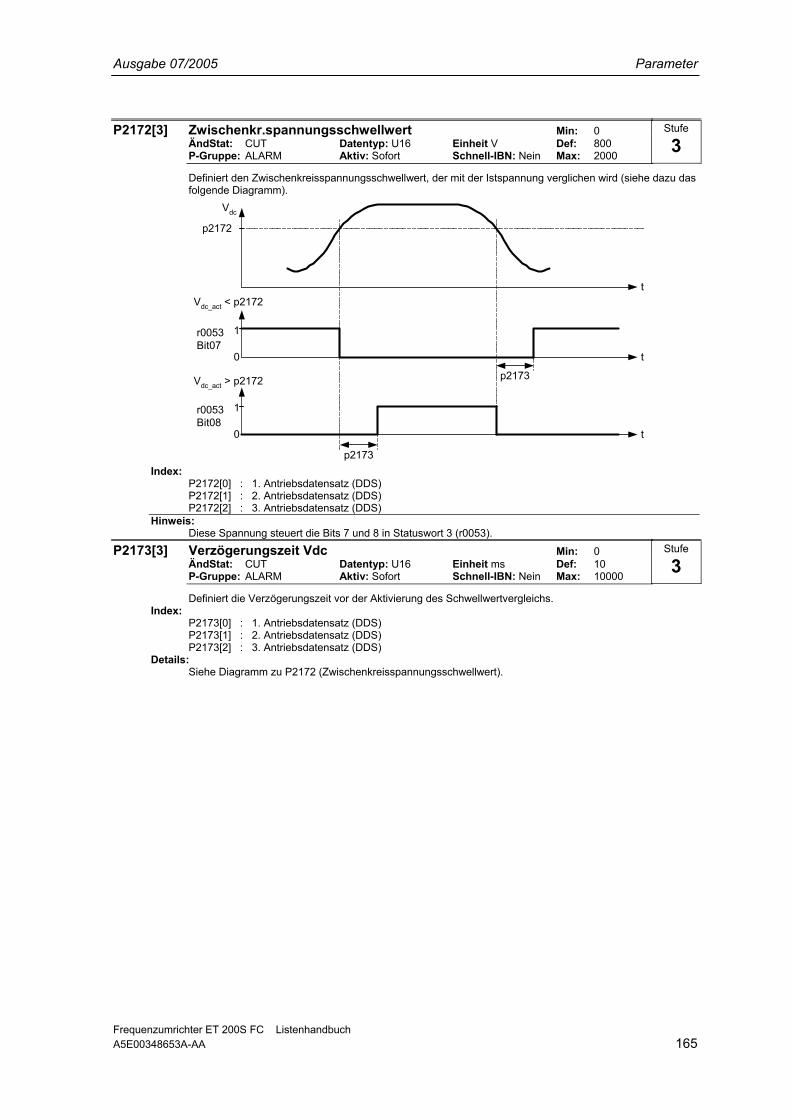
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 165
P2172[3] Zwischenkr.spannungsschwellwert Min: 0 ÄndStat: CUT Datentyp: U16 Einheit V Def: 800 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 2000
Definiert den Zwischenkreisspannungsschwellwert, der mit der Istspannung verglichen wird (siehe dazu das folgende Diagramm).
Vdc
t
0
1
0
1
p2173
t
t
r0053Bit07
r0053Bit08
p2172
p2173
Vdc_act < p2172
Vdc_act > p2172
Index:
P2172[0] : 1. Antriebsdatensatz (DDS) P2172[1] : 2. Antriebsdatensatz (DDS) P2172[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Diese Spannung steuert die Bits 7 und 8 in Statuswort 3 (r0053).
P2173[3] Verzögerungszeit Vdc Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Definiert die Verzögerungszeit vor der Aktivierung des Schwellwertvergleichs. Index:
P2173[0] : 1. Antriebsdatensatz (DDS) P2173[1] : 2. Antriebsdatensatz (DDS) P2173[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe Diagramm zu P2172 (Zwischenkreisspannungsschwellwert).
Stufe
3
Stufe
3
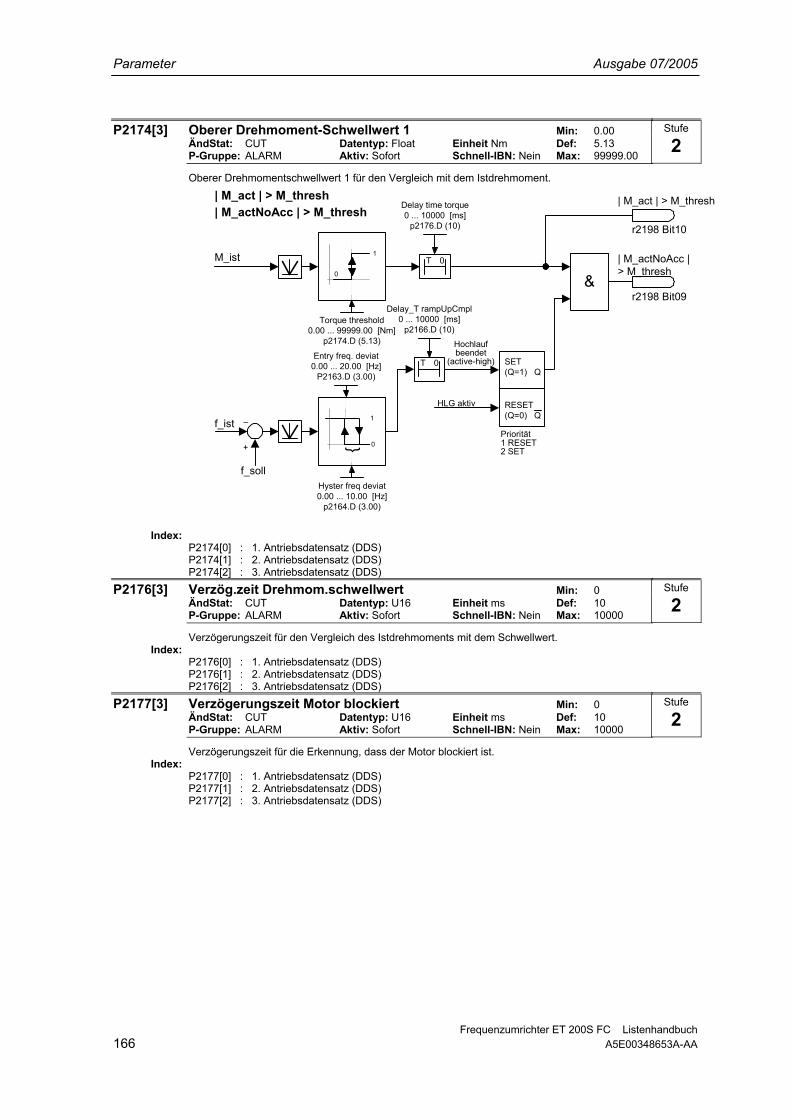
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 166 A5E00348653A-AA
P2174[3] Oberer Drehmoment-Schwellwert 1 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Nm Def: 5.13 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 99999.00
Oberer Drehmomentschwellwert 1 für den Vergleich mit dem Istdrehmoment.
–
+ 0
1
{
0
1
SET(Q=1) Q
RESET(Q=0) Q
&
Entry freq. deviat0.00 ... 20.00 [Hz]
P2163.D (3.00)
Hyster freq deviat0.00 ... 10.00 [Hz]
p2164.D (3.00)
Delay_T rampUpCmpl0 ... 10000 [ms]
p2166.D (10)Torque threshold
0.00 ... 99999.00 [Nm]p2174.D (5.13)
Delay time torque0 ... 10000 [ms]
p2176.D (10)
f_ist
HLG aktiv
f_soll
Hochlaufbeendet
(active-high)
| M_actNoAcc |> M_thresh
| M_act | > M_thresh| M_act | > M_thresh| M_actNoAcc | > M_thresh
Priorität1 RESET2 SET
T 0
T 0
r2198 Bit10
r2198 Bit09
M_ist
Index:
P2174[0] : 1. Antriebsdatensatz (DDS) P2174[1] : 2. Antriebsdatensatz (DDS) P2174[2] : 3. Antriebsdatensatz (DDS)
P2176[3] Verzög.zeit Drehmom.schwellwert Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Verzögerungszeit für den Vergleich des Istdrehmoments mit dem Schwellwert. Index:
P2176[0] : 1. Antriebsdatensatz (DDS) P2176[1] : 2. Antriebsdatensatz (DDS) P2176[2] : 3. Antriebsdatensatz (DDS)
P2177[3] Verzögerungszeit Motor blockiert Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Verzögerungszeit für die Erkennung, dass der Motor blockiert ist. Index:
P2177[0] : 1. Antriebsdatensatz (DDS) P2177[1] : 2. Antriebsdatensatz (DDS) P2177[2] : 3. Antriebsdatensatz (DDS)
Stufe
2
Stufe
2
Stufe
2
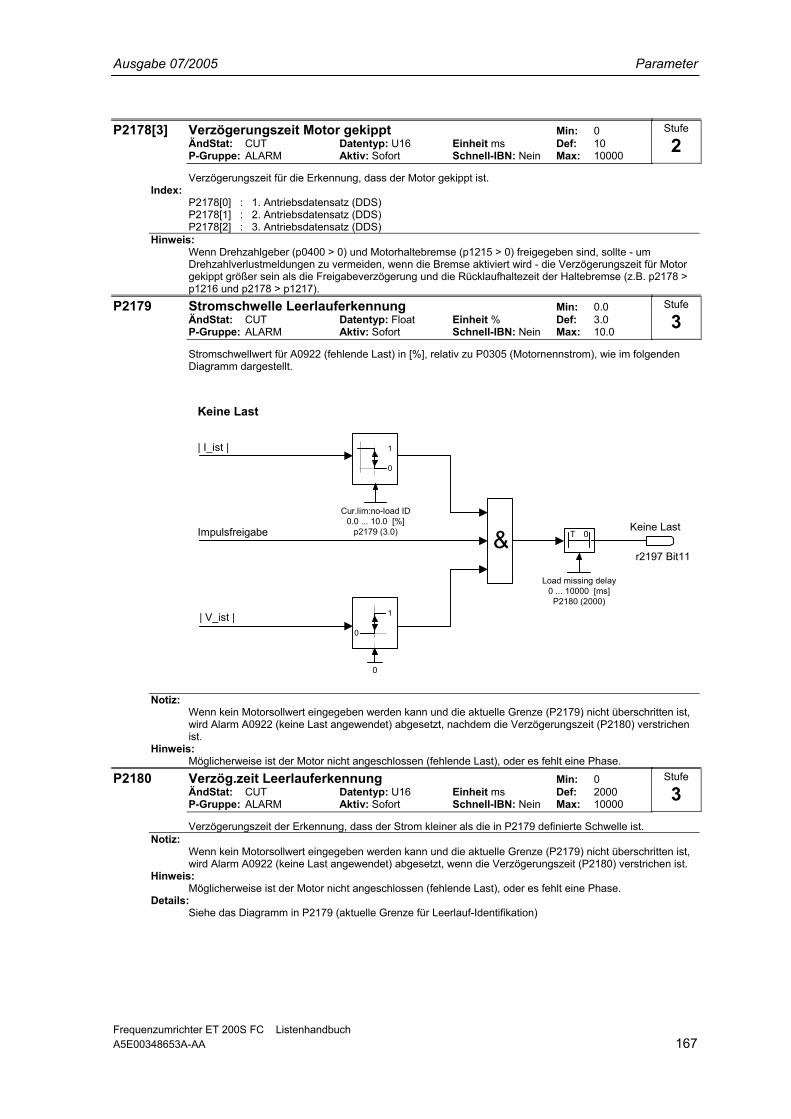
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 167
P2178[3] Verzögerungszeit Motor gekippt Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Verzögerungszeit für die Erkennung, dass der Motor gekippt ist. Index:
P2178[0] : 1. Antriebsdatensatz (DDS) P2178[1] : 2. Antriebsdatensatz (DDS) P2178[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Wenn Drehzahlgeber (p0400 > 0) und Motorhaltebremse (p1215 > 0) freigegeben sind, sollte - um Drehzahlverlustmeldungen zu vermeiden, wenn die Bremse aktiviert wird - die Verzögerungszeit für Motor gekippt größer sein als die Freigabeverzögerung und die Rücklaufhaltezeit der Haltebremse (z.B. p2178 > p1216 und p2178 > p1217).
P2179 Stromschwelle Leerlauferkennung Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit % Def: 3.0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10.0
Stromschwellwert für A0922 (fehlende Last) in [%], relativ zu P0305 (Motornennstrom), wie im folgenden Diagramm dargestellt.
0
1
r2197 Bit11
0
1
0
&Cur.lim:no-load ID
0.0 ... 10.0 [%]p2179 (3.0)
Load missing delay0 ... 10000 [ms]P2180 (2000)
| V_ist |
Impulsfreigabe
| I_ist |
Keine Last
Keine LastT 0
Notiz:
Wenn kein Motorsollwert eingegeben werden kann und die aktuelle Grenze (P2179) nicht überschritten ist, wird Alarm A0922 (keine Last angewendet) abgesetzt, nachdem die Verzögerungszeit (P2180) verstrichen ist.
Hinweis: Möglicherweise ist der Motor nicht angeschlossen (fehlende Last), oder es fehlt eine Phase.
P2180 Verzög.zeit Leerlauferkennung Min: 0 ÄndStat: CUT Datentyp: U16 Einheit ms Def: 2000 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 10000
Verzögerungszeit der Erkennung, dass der Strom kleiner als die in P2179 definierte Schwelle ist. Notiz:
Wenn kein Motorsollwert eingegeben werden kann und die aktuelle Grenze (P2179) nicht überschritten ist, wird Alarm A0922 (keine Last angewendet) abgesetzt, wenn die Verzögerungszeit (P2180) verstrichen ist.
Hinweis: Möglicherweise ist der Motor nicht angeschlossen (fehlende Last), oder es fehlt eine Phase.
Details: Siehe das Diagramm in P2179 (aktuelle Grenze für Leerlauf-Identifikation)
Stufe
2
Stufe
3
Stufe
3

Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 168 A5E00348653A-AA
P2181[3] Lastmomentüberwachung Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALARM Aktiv: nach Best. Schnell-IBN: Nein Max: 6
Legt die Lastmomentüberwachung fest. Mit dieser Funktion kann ein mechanischer Ausfall des Triebstrangs erkannt werden, z. B. ein defekter Antriebsriemen. Es können auch Bedingungen erkannt werden, aus denen eine Überlastung entsteht, z. B. eine Blockierung. Die Parameter p2182 - P2190 werden auf Werkseinstellung zurückgesetzt, wenn dieser Parameter auf einen Wert ungleich 0 gesetzt wird. Bei diesem Verfahren wird die Istfrequenz-/-drehmomentkurve mit einer programmierten Hüllkurve verglichen (siehe P2182 - P2190). Wenn die Kurve außerhalb der Hüllkurve liegt, wird eine Warnung generiert oder eine Abschaltung durchgeführt.
Mögliche Einstellungen: 0 Ausfallüberwachung deaktiviert 1 Warn.:Drehmoment/Drehzahl tief 2 Warn.:Drehmoment/Drehzahl hoch 3 Warn.:Drehm./Drehz. außer Tol. 4 Fehler:Drehm./Drehzahl tief 5 Fehler:Drehm./Drehzahl hoch 6 Fehler:Drehm./Drehz außer Tol.
Index: P2181[0] : 1. Antriebsdatensatz (DDS) P2181[1] : 2. Antriebsdatensatz (DDS) P2181[2] : 3. Antriebsdatensatz (DDS)
Stufe
2
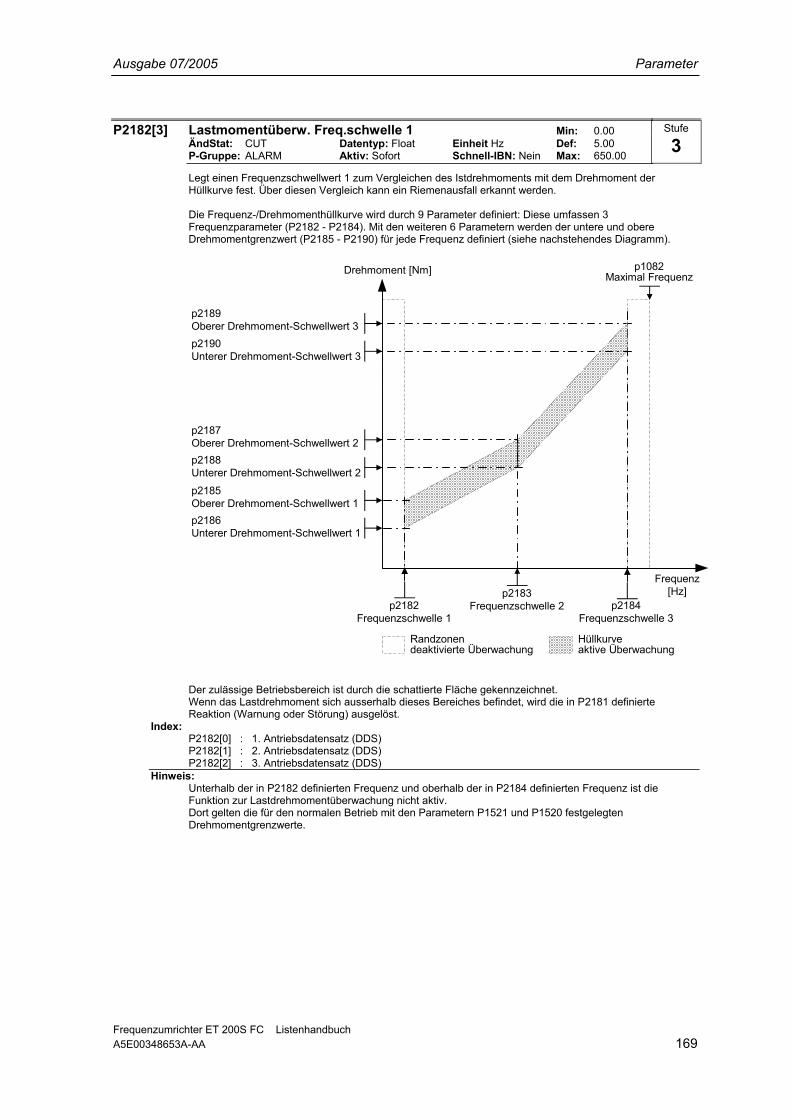
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 169
P2182[3] Lastmomentüberw. Freq.schwelle 1 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 5.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Legt einen Frequenzschwellwert 1 zum Vergleichen des Istdrehmoments mit dem Drehmoment der Hüllkurve fest. Über diesen Vergleich kann ein Riemenausfall erkannt werden. Die Frequenz-/Drehmomenthüllkurve wird durch 9 Parameter definiert: Diese umfassen 3 Frequenzparameter (P2182 - P2184). Mit den weiteren 6 Parametern werden der untere und obere Drehmomentgrenzwert (P2185 - P2190) für jede Frequenz definiert (siehe nachstehendes Diagramm).
p2189Oberer Drehmoment-Schwellwert 3p2190Unterer Drehmoment-Schwellwert 3
p2187Oberer Drehmoment-Schwellwert 2p2188Unterer Drehmoment-Schwellwert 2
p2185Oberer Drehmoment-Schwellwert 1p2186Unterer Drehmoment-Schwellwert 1
p2182Frequenzschwelle 1
p2183Frequenzschwelle 2 p2184
Frequenzschwelle 3
Drehmoment [Nm]
Frequenz[Hz]
p1082Maximal Frequenz
Randzonendeaktivierte Überwachung
Hüllkurveaktive Überwachung
Der zulässige Betriebsbereich ist durch die schattierte Fläche gekennzeichnet. Wenn das Lastdrehmoment sich ausserhalb dieses Bereiches befindet, wird die in P2181 definierte Reaktion (Warnung oder Störung) ausgelöst.
Index: P2182[0] : 1. Antriebsdatensatz (DDS) P2182[1] : 2. Antriebsdatensatz (DDS) P2182[2] : 3. Antriebsdatensatz (DDS)
Hinweis: Unterhalb der in P2182 definierten Frequenz und oberhalb der in P2184 definierten Frequenz ist die Funktion zur Lastdrehmomentüberwachung nicht aktiv. Dort gelten die für den normalen Betrieb mit den Parametern P1521 und P1520 festgelegten Drehmomentgrenzwerte.
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 170 A5E00348653A-AA
P2183[3] Lastmomentüberw. Freq.schwelle 2 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 30.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Gibt die Frequenz f_2 an, bei der das aktuelle Lastdrehmoment mit dem oberen Drehmomentschwellwert M_o2 und dem unteren Drehmomentschwellwert M_u2 verglichen wird.
Index: P2183[0] : 1. Antriebsdatensatz (DDS) P2183[1] : 2. Antriebsdatensatz (DDS) P2183[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe auch P2182 (Lastmomentüberw. Freq.schwelle 1).
P2184[3] Lastmomentüberw. Freq.schwelle 3 Min: 0.00 ÄndStat: CUT Datentyp: Float Einheit Hz Def: 50.00 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 650.00
Gibt die Frequenz f_3 an, bei der das aktuelle Lastdrehmoment mit dem oberen Drehmomentschwellwert M_o3 und dem unteren Drehmomentschwellwert M_u3 verglichen wird.
Index: P2184[0] : 1. Antriebsdatensatz (DDS) P2184[1] : 2. Antriebsdatensatz (DDS) P2184[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe auch P2182 (Lastmomentüberw. Freq.schwelle 1).
P2185[3] Oberer Lastmomentschwelle M_o1 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit Nm Def: 99999.0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 99999.0
Gibt den Drehmomentschwellwert M_o1 an, der bei der Frequenz f_1 mit dem Lastdrehmoment verglichen wird.
Index: P2185[0] : 1. Antriebsdatensatz (DDS) P2185[1] : 2. Antriebsdatensatz (DDS) P2185[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe auch P2182 (Lastmomentüberw. Freq.schwelle 1).
P2186[3] Unterer Lastmomentschwelle M_u1 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit Nm Def: 0.0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 99999.0
Gibt den Drehmomentschwellwert M_u1 an, der bei der Frequenz f_1 mit dem Lastdrehmoment verglichen wird.
Index: P2186[0] : 1. Antriebsdatensatz (DDS) P2186[1] : 2. Antriebsdatensatz (DDS) P2186[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe auch P2182 (Lastmomentüberw. Freq.schwelle 1).
P2187[3] Oberer Lastmomentschwelle M_o2 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit Nm Def: 99999.0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 99999.0
Gibt den Drehmomentschwellwert M_o2 an, der bei der Frequenz f_2 mit dem Lastdrehmoment verglichen wird.
Index: P2187[0] : 1. Antriebsdatensatz (DDS) P2187[1] : 2. Antriebsdatensatz (DDS) P2187[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe auch P2182 (Lastmomentüberw. Freq.schwelle 1).
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 171
P2188[3] Unterer Lastmomentschwelle M_u2 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit Nm Def: 0.0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 99999.0
Gibt den Drehmomentschwellwert M_u2 an, der bei der Frequenz f_2 mit dem Lastdrehmoment verglichen wird.
Index: P2188[0] : 1. Antriebsdatensatz (DDS) P2188[1] : 2. Antriebsdatensatz (DDS) P2188[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe auch P2182 (Lastmomentüberw. Freq.schwelle 1).
P2189[3] Oberer Lastmomentschwelle M_o3 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit Nm Def: 99999.0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 99999.0
Gibt den Drehmomentschwellwert M_o3 an, der bei der Frequenz f_3 mit dem Lastdrehmoment verglichen wird.
Index: P2189[0] : 1. Antriebsdatensatz (DDS) P2189[1] : 2. Antriebsdatensatz (DDS) P2189[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe auch P2182 (Lastmomentüberw. Freq.schwelle 1).
P2190[3] Unterer Lastmomentschwelle M_u3 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit Nm Def: 0.0 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 99999.0
Gibt den Drehmomentschwellwert M_u3 an, der bei der Frequenz f_3 mit dem Lastdrehmoment verglichen wird.
Index: P2190[0] : 1. Antriebsdatensatz (DDS) P2190[1] : 2. Antriebsdatensatz (DDS) P2190[2] : 3. Antriebsdatensatz (DDS)
Details: Siehe auch P2182 (Lastmomentüberw. Freq.schwelle 1).
P2192[3] Verzög.zeit Lastmomentüberw. Min: 0 ÄndStat: CUT Datentyp: U16 Einheit s Def: 10 P-Gruppe: ALARM Aktiv: Sofort Schnell-IBN: Nein Max: 65
Mit P2192 wird eine Verzögerung definiert, die verstreichen muss, bevor die Warnung generiert bzw. die Abschaltung durchgeführt wird. Die Verzögerung wird verwendet, um Ereignisse herauszufiltern, die durch nichtstationäre Zustände verursacht werden. Sie wird für beide Fehlererkennungsverfahren eingesetzt.
Index: P2192[0] : 1. Antriebsdatensatz (DDS) P2192[1] : 2. Antriebsdatensatz (DDS) P2192[2] : 3. Antriebsdatensatz (DDS)
Stufe
2
Stufe
2
Stufe
2
Stufe
2
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 172 A5E00348653A-AA
r2197 CO/BO: Meldungen 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: ALARM Max: -
Das Überwachungswort 1 gibt den Zustand der Überwachungsfunktionen an. Jedes Bit stellt eine Überwachungsfunktion dar.
Bitfelder: Bit00 f_act > P1080 (f_min) 0 No 1 Yes Bit01 f_act <= P2155 (f_1) 0 No 1 Yes Bit02 f_act > P2155 (f_1) 0 No 1 Yes Bit03 f_act > Null 0 No 1 Yes Bit04 f_act >= Sollw (f_set) 0 No 1 Yes Bit05 f_act > P2167 (f_off) 0 No 1 Yes Bit06 f_act >= P1082 (f_max) 0 No 1 Yes Bit07 f_act == Sollw (f_set) 0 No 1 Yes Bit08 i_act r0068 <= P2170 0 No 1 Yes Bit09 Ungef. Vdc_act < P2172 0 No 1 Yes Bit10 Ungef. Vdc_act > P2172 0 No 1 Yes Bit11 Keine Last 0 No 1 Yes
r2198 CO/BO: Meldungen 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: ALARM Max: -
Das Überwachungswort 2 gibt den Zustand der Überwachungsfunktionen an. Jedes Bit stellt eine Überwachungsfunktion dar.
Bitfelder: Bit00 |f_act| <= P2157 (f_2) 0 No 1 Yes Bit01 |f_act| > P2157 (f_2) 0 No 1 Yes Bit02 |f_act| <= P2159 (f_3) 0 No 1 Yes Bit03 |f_act| > P2159 (f_3) 0 No 1 Yes Bit04 |f_set| <P2161 0 No 1 Yes Bit05 f_set > 0 0 No 1 Yes Bit06 Motor blockiert 0 No 1 Yes Bit07 Motor gekippt 0 No 1 Yes Bit08 |i_act r0068 |<P2170 0 No 1 Yes Bit09 |m_act|>P2174 + Sollw. err. 0 No 1 Yes Bit10 |m_act|>P2174 0 No 1 Yes Bit11 Lastmomentüberw.: Warnung 0 No 1 Yes Bit12 Lastmomentüberw.: Fehler 0 No 1 Yes
P2480[3] Positionierbetrieb Min: 1 ÄndStat: CT Datentyp: U16 Einheit - Def: 1 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Legt den Positionierbetrieb fest. Mögliche Einstellungen:
1 Gesteuert Index:
P2480[0] : 1. Antriebsdatensatz (DDS) P2480[1] : 2. Antriebsdatensatz (DDS) P2480[2] : 3. Antriebsdatensatz (DDS)
Stufe
2
Stufe
2
Stufe
3
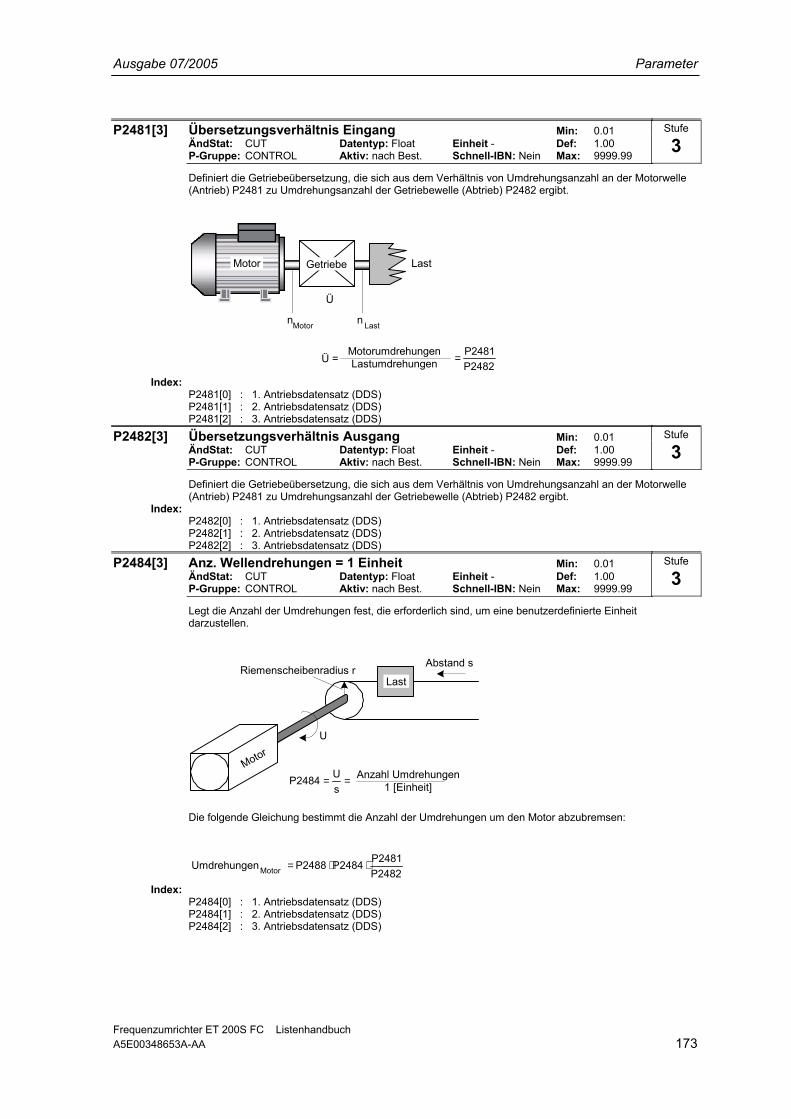
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 173
P2481[3] Übersetzungsverhältnis Eingang Min: 0.01 ÄndStat: CUT Datentyp: Float Einheit - Def: 1.00 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 9999.99
Definiert die Getriebeübersetzung, die sich aus dem Verhältnis von Umdrehungsanzahl an der Motorwelle (Antrieb) P2481 zu Umdrehungsanzahl der Getriebewelle (Abtrieb) P2482 ergibt.
n nMotor Last
Last
Ü
Ü =P2482P2481 =Motorumdrehungen
Lastumdrehungen
Motor Getriebe
Index:
P2481[0] : 1. Antriebsdatensatz (DDS) P2481[1] : 2. Antriebsdatensatz (DDS) P2481[2] : 3. Antriebsdatensatz (DDS)
P2482[3] Übersetzungsverhältnis Ausgang Min: 0.01 ÄndStat: CUT Datentyp: Float Einheit - Def: 1.00 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 9999.99
Definiert die Getriebeübersetzung, die sich aus dem Verhältnis von Umdrehungsanzahl an der Motorwelle (Antrieb) P2481 zu Umdrehungsanzahl der Getriebewelle (Abtrieb) P2482 ergibt.
Index: P2482[0] : 1. Antriebsdatensatz (DDS) P2482[1] : 2. Antriebsdatensatz (DDS) P2482[2] : 3. Antriebsdatensatz (DDS)
P2484[3] Anz. Wellendrehungen = 1 Einheit Min: 0.01 ÄndStat: CUT Datentyp: Float Einheit - Def: 1.00 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 9999.99
Legt die Anzahl der Umdrehungen fest, die erforderlich sind, um eine benutzerdefinierte Einheit darzustellen.
==sUP2484
Last
Motor
Riemenscheibenradius r
Anzahl Umdrehungen1 [Einheit]
U
Abstand s
Die folgende Gleichung bestimmt die Anzahl der Umdrehungen um den Motor abzubremsen:
2482P2481P2484P2488P ⋅⋅=UmdrehungenMotor
Index:
P2484[0] : 1. Antriebsdatensatz (DDS) P2484[1] : 2. Antriebsdatensatz (DDS) P2484[2] : 3. Antriebsdatensatz (DDS)
Stufe
3
Stufe
3
Stufe
3
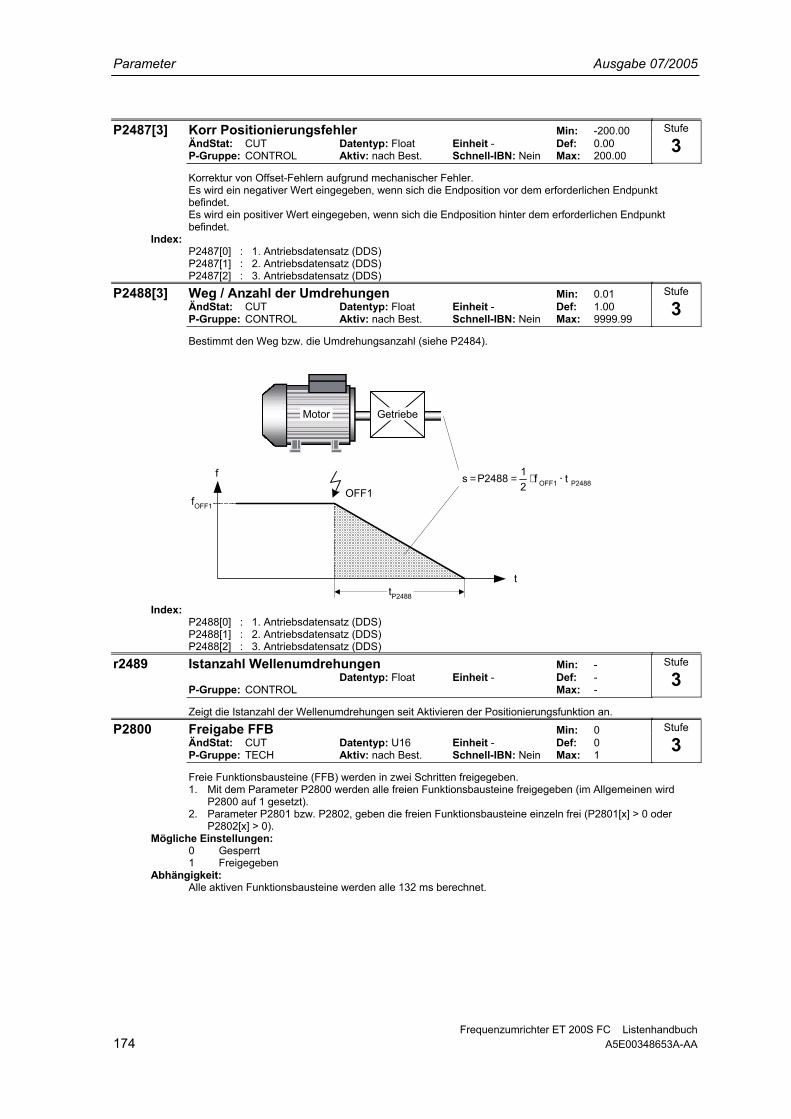
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 174 A5E00348653A-AA
P2487[3] Korr Positionierungsfehler Min: -200.00 ÄndStat: CUT Datentyp: Float Einheit - Def: 0.00 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 200.00
Korrektur von Offset-Fehlern aufgrund mechanischer Fehler. Es wird ein negativer Wert eingegeben, wenn sich die Endposition vor dem erforderlichen Endpunkt befindet. Es wird ein positiver Wert eingegeben, wenn sich die Endposition hinter dem erforderlichen Endpunkt befindet.
Index: P2487[0] : 1. Antriebsdatensatz (DDS) P2487[1] : 2. Antriebsdatensatz (DDS) P2487[2] : 3. Antriebsdatensatz (DDS)
P2488[3] Weg / Anzahl der Umdrehungen Min: 0.01 ÄndStat: CUT Datentyp: Float Einheit - Def: 1.00 P-Gruppe: CONTROL Aktiv: nach Best. Schnell-IBN: Nein Max: 9999.99
Bestimmt den Weg bzw. die Umdrehungsanzahl (siehe P2484).
Motor Getriebe
f ⋅==21 P2488 s
t
OFF1f OFF1
. t P2488
.
tP2488
fOFF1
Index:
P2488[0] : 1. Antriebsdatensatz (DDS) P2488[1] : 2. Antriebsdatensatz (DDS) P2488[2] : 3. Antriebsdatensatz (DDS)
r2489 Istanzahl Wellenumdrehungen Min: - Datentyp: Float Einheit - Def: - P-Gruppe: CONTROL Max: -
Zeigt die Istanzahl der Wellenumdrehungen seit Aktivieren der Positionierungsfunktion an.
P2800 Freigabe FFB Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Freie Funktionsbausteine (FFB) werden in zwei Schritten freigegeben. 1. Mit dem Parameter P2800 werden alle freien Funktionsbausteine freigegeben (im Allgemeinen wird
P2800 auf 1 gesetzt). 2. Parameter P2801 bzw. P2802, geben die freien Funktionsbausteine einzeln frei (P2801[x] > 0 oder
P2802[x] > 0). Mögliche Einstellungen:
0 Gesperrt 1 Freigegeben
Abhängigkeit: Alle aktiven Funktionsbausteine werden alle 132 ms berechnet.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
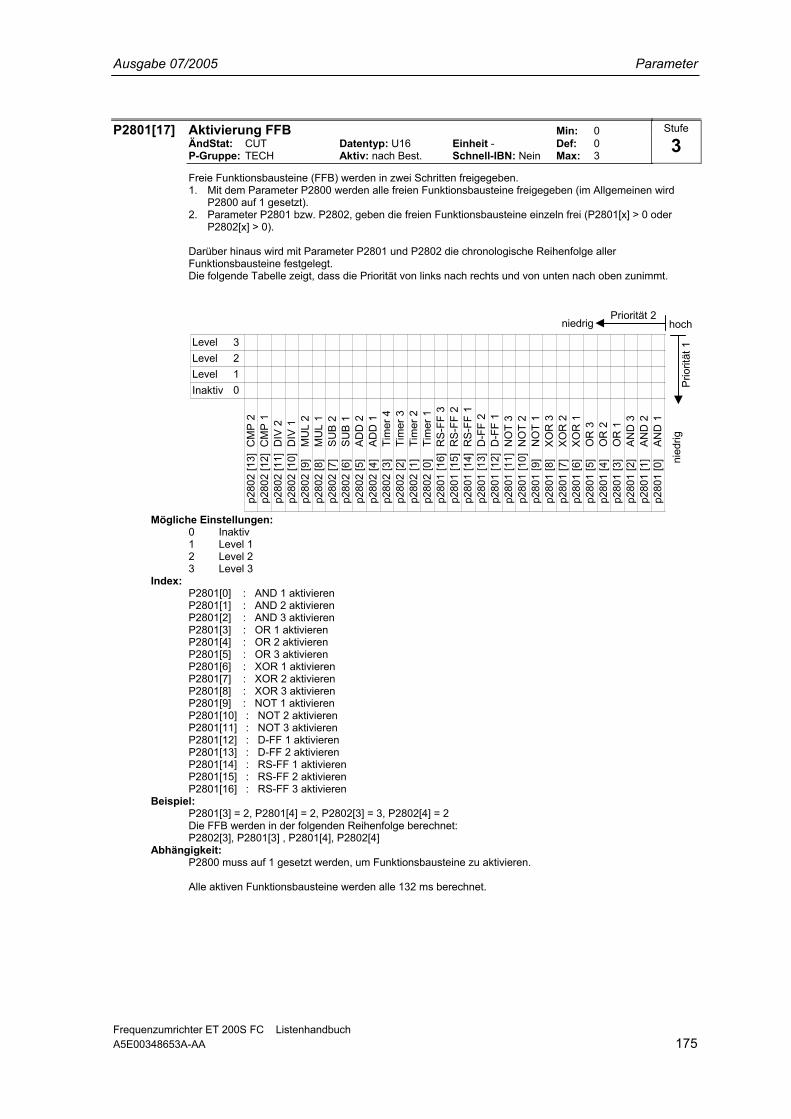
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 175
P2801[17] Aktivierung FFB Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Freie Funktionsbausteine (FFB) werden in zwei Schritten freigegeben. 1. Mit dem Parameter P2800 werden alle freien Funktionsbausteine freigegeben (im Allgemeinen wird
P2800 auf 1 gesetzt). 2. Parameter P2801 bzw. P2802, geben die freien Funktionsbausteine einzeln frei (P2801[x] > 0 oder
P2802[x] > 0). Darüber hinaus wird mit Parameter P2801 und P2802 die chronologische Reihenfolge aller Funktionsbausteine festgelegt. Die folgende Tabelle zeigt, dass die Priorität von links nach rechts und von unten nach oben zunimmt.
3210
p280
2 [1
3] C
MP
2p2
802
[12]
CM
P 1
p280
2 [1
1] D
IV 2
p280
2 [1
0] D
IV 1
p280
2 [9
] M
UL
2p2
802
[8]
MU
L 1
p280
2 [7
] S
UB
2p2
802
[6]
SU
B 1
p280
2 [5
] A
DD
2p2
802
[4]
AD
D 1
p280
2 [3
] T
imer
4p2
802
[2]
Tim
er 3
p280
2 [1
] T
imer
2p2
802
[0]
Tim
er 1
p280
1 [1
6] R
S-F
F 3
p280
1 [1
5] R
S-F
F 2
p280
1 [1
4] R
S-F
F 1
p280
1 [1
3] D
-FF
2p2
801
[12]
D-F
F 1
p280
1 [1
1] N
OT
3p2
801
[10]
NO
T 2
p280
1 [9
] N
OT
1p2
801
[8]
XO
R 3
p280
1 [7
] X
OR
2p2
801
[6]
XO
R 1
p280
1 [5
] O
R 3
p280
1 [4
] O
R 2
p280
1 [3
] O
R 1
p280
1 [2
] A
ND
3p2
801
[1]
AN
D 2
p280
1 [0
] A
ND
1
LevelLevelLevelInaktiv
niedrig hoch
Prio
rität
1
Priorität 2
nied
rig
Mögliche Einstellungen:
0 Inaktiv 1 Level 1 2 Level 2 3 Level 3
Index: P2801[0] : AND 1 aktivieren P2801[1] : AND 2 aktivieren P2801[2] : AND 3 aktivieren P2801[3] : OR 1 aktivieren P2801[4] : OR 2 aktivieren P2801[5] : OR 3 aktivieren P2801[6] : XOR 1 aktivieren P2801[7] : XOR 2 aktivieren P2801[8] : XOR 3 aktivieren P2801[9] : NOT 1 aktivieren P2801[10] : NOT 2 aktivieren P2801[11] : NOT 3 aktivieren P2801[12] : D-FF 1 aktivieren P2801[13] : D-FF 2 aktivieren P2801[14] : RS-FF 1 aktivieren P2801[15] : RS-FF 2 aktivieren P2801[16] : RS-FF 3 aktivieren
Beispiel: P2801[3] = 2, P2801[4] = 2, P2802[3] = 3, P2802[4] = 2 Die FFB werden in der folgenden Reihenfolge berechnet: P2802[3], P2801[3] , P2801[4], P2802[4]
Abhängigkeit: P2800 muss auf 1 gesetzt werden, um Funktionsbausteine zu aktivieren. Alle aktiven Funktionsbausteine werden alle 132 ms berechnet.
Stufe
3
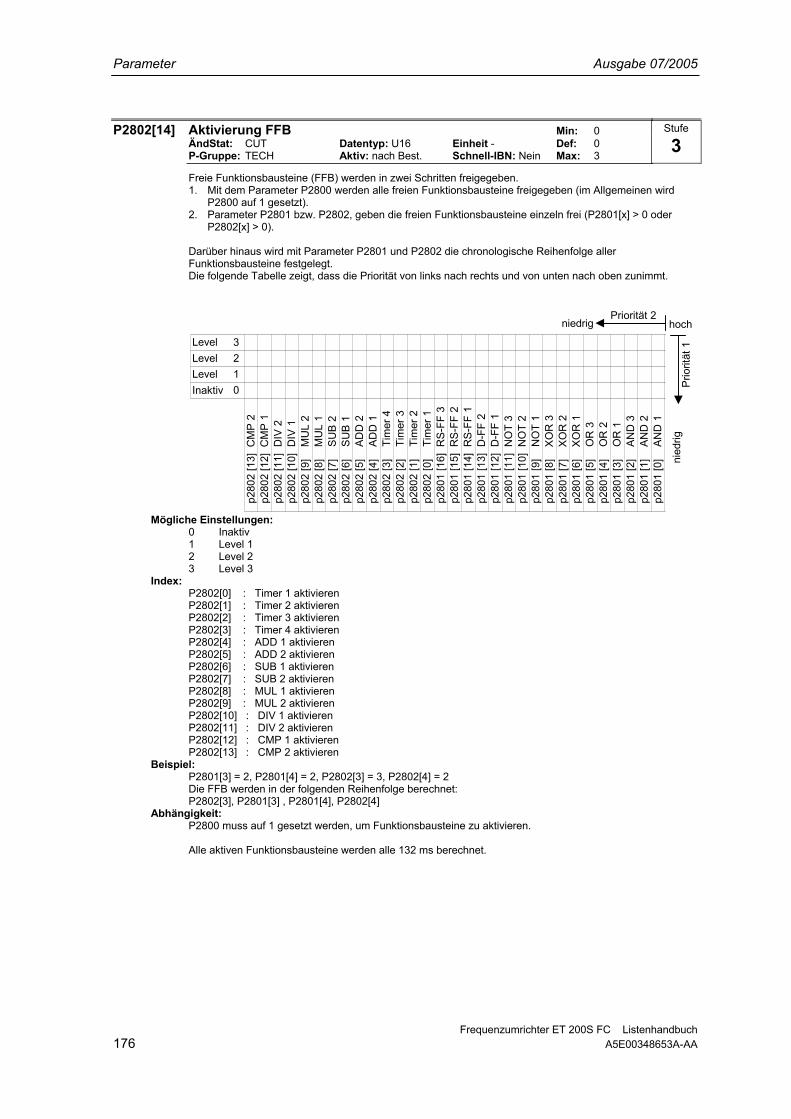
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 176 A5E00348653A-AA
P2802[14] Aktivierung FFB Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Freie Funktionsbausteine (FFB) werden in zwei Schritten freigegeben. 1. Mit dem Parameter P2800 werden alle freien Funktionsbausteine freigegeben (im Allgemeinen wird
P2800 auf 1 gesetzt). 2. Parameter P2801 bzw. P2802, geben die freien Funktionsbausteine einzeln frei (P2801[x] > 0 oder
P2802[x] > 0). Darüber hinaus wird mit Parameter P2801 und P2802 die chronologische Reihenfolge aller Funktionsbausteine festgelegt. Die folgende Tabelle zeigt, dass die Priorität von links nach rechts und von unten nach oben zunimmt.
3210
p280
2 [1
3] C
MP
2p2
802
[12]
CM
P 1
p280
2 [1
1] D
IV 2
p280
2 [1
0] D
IV 1
p280
2 [9
] M
UL
2p2
802
[8]
MU
L 1
p280
2 [7
] S
UB
2p2
802
[6]
SU
B 1
p280
2 [5
] A
DD
2p2
802
[4]
AD
D 1
p280
2 [3
] T
imer
4p2
802
[2]
Tim
er 3
p280
2 [1
] T
imer
2p2
802
[0]
Tim
er 1
p280
1 [1
6] R
S-F
F 3
p280
1 [1
5] R
S-F
F 2
p280
1 [1
4] R
S-F
F 1
p280
1 [1
3] D
-FF
2p2
801
[12]
D-F
F 1
p280
1 [1
1] N
OT
3p2
801
[10]
NO
T 2
p280
1 [9
] N
OT
1p2
801
[8]
XO
R 3
p280
1 [7
] X
OR
2p2
801
[6]
XO
R 1
p280
1 [5
] O
R 3
p280
1 [4
] O
R 2
p280
1 [3
] O
R 1
p280
1 [2
] A
ND
3p2
801
[1]
AN
D 2
p280
1 [0
] A
ND
1
LevelLevelLevelInaktiv
niedrig hoch
Prio
rität
1
Priorität 2
nied
rig
Mögliche Einstellungen:
0 Inaktiv 1 Level 1 2 Level 2 3 Level 3
Index: P2802[0] : Timer 1 aktivieren P2802[1] : Timer 2 aktivieren P2802[2] : Timer 3 aktivieren P2802[3] : Timer 4 aktivieren P2802[4] : ADD 1 aktivieren P2802[5] : ADD 2 aktivieren P2802[6] : SUB 1 aktivieren P2802[7] : SUB 2 aktivieren P2802[8] : MUL 1 aktivieren P2802[9] : MUL 2 aktivieren P2802[10] : DIV 1 aktivieren P2802[11] : DIV 2 aktivieren P2802[12] : CMP 1 aktivieren P2802[13] : CMP 2 aktivieren
Beispiel: P2801[3] = 2, P2801[4] = 2, P2802[3] = 3, P2802[4] = 2 Die FFB werden in der folgenden Reihenfolge berechnet: P2802[3], P2801[3] , P2801[4], P2802[4]
Abhängigkeit: P2800 muss auf 1 gesetzt werden, um Funktionsbausteine zu aktivieren. Alle aktiven Funktionsbausteine werden alle 132 ms berechnet.
Stufe
3
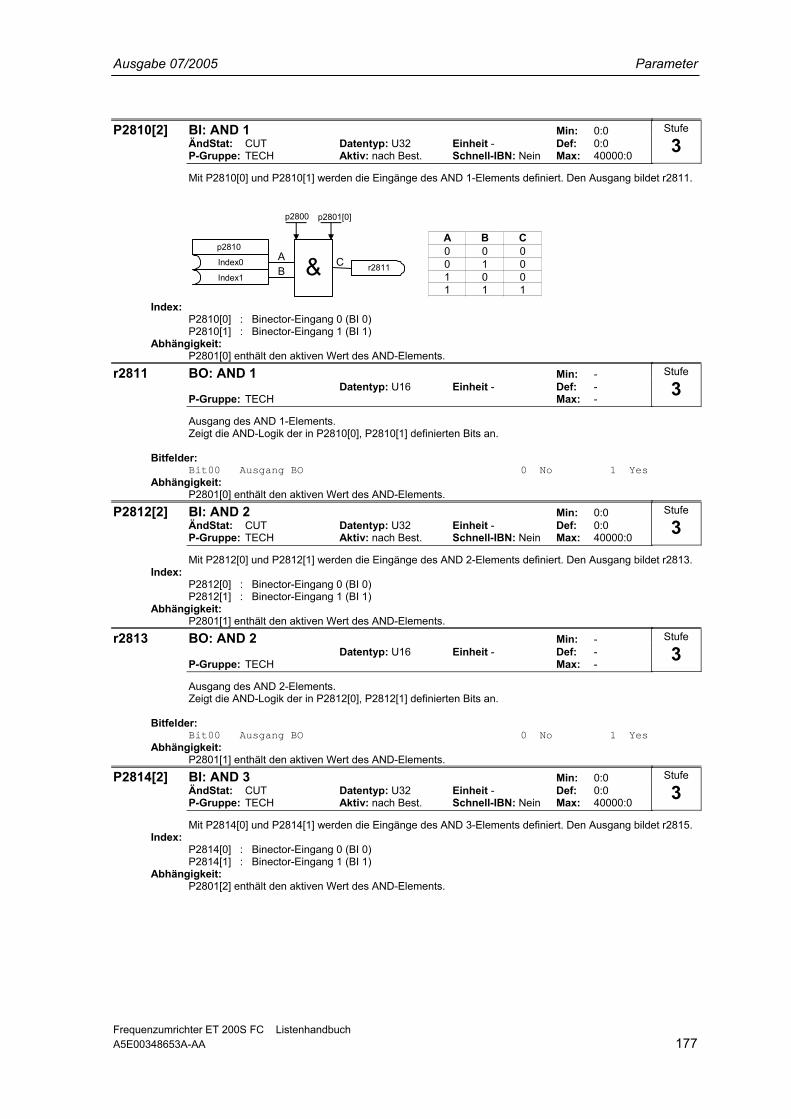
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 177
P2810[2] BI: AND 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2810[0] und P2810[1] werden die Eingänge des AND 1-Elements definiert. Den Ausgang bildet r2811.
p2800 p2801[0]
AB
C&p2810
r2811
A B C0 0 00 1 01 0 01 1 1
Index0
Index1
Index:
P2810[0] : Binector-Eingang 0 (BI 0) P2810[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[0] enthält den aktiven Wert des AND-Elements.
r2811 BO: AND 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des AND 1-Elements. Zeigt die AND-Logik der in P2810[0], P2810[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[0] enthält den aktiven Wert des AND-Elements.
P2812[2] BI: AND 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2812[0] und P2812[1] werden die Eingänge des AND 2-Elements definiert. Den Ausgang bildet r2813. Index:
P2812[0] : Binector-Eingang 0 (BI 0) P2812[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[1] enthält den aktiven Wert des AND-Elements.
r2813 BO: AND 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des AND 2-Elements. Zeigt die AND-Logik der in P2812[0], P2812[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[1] enthält den aktiven Wert des AND-Elements.
P2814[2] BI: AND 3 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2814[0] und P2814[1] werden die Eingänge des AND 3-Elements definiert. Den Ausgang bildet r2815. Index:
P2814[0] : Binector-Eingang 0 (BI 0) P2814[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[2] enthält den aktiven Wert des AND-Elements.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
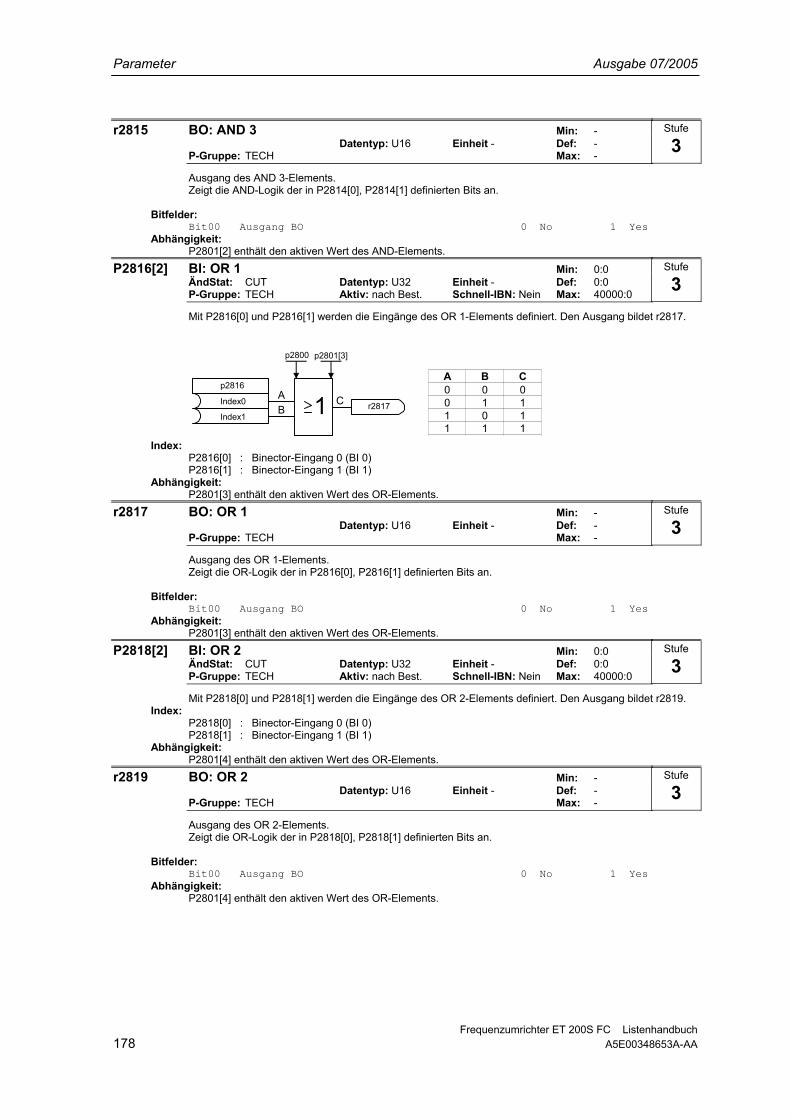
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 178 A5E00348653A-AA
r2815 BO: AND 3 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des AND 3-Elements. Zeigt die AND-Logik der in P2814[0], P2814[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[2] enthält den aktiven Wert des AND-Elements.
P2816[2] BI: OR 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2816[0] und P2816[1] werden die Eingänge des OR 1-Elements definiert. Den Ausgang bildet r2817.
AB
Cp2816
r2817
A B C0 0 00 1 11 0 11 1 1
1
p2800 p2801[3]
Index0
Index1
Index:
P2816[0] : Binector-Eingang 0 (BI 0) P2816[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[3] enthält den aktiven Wert des OR-Elements.
r2817 BO: OR 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des OR 1-Elements. Zeigt die OR-Logik der in P2816[0], P2816[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[3] enthält den aktiven Wert des OR-Elements.
P2818[2] BI: OR 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2818[0] und P2818[1] werden die Eingänge des OR 2-Elements definiert. Den Ausgang bildet r2819. Index:
P2818[0] : Binector-Eingang 0 (BI 0) P2818[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[4] enthält den aktiven Wert des OR-Elements.
r2819 BO: OR 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des OR 2-Elements. Zeigt die OR-Logik der in P2818[0], P2818[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[4] enthält den aktiven Wert des OR-Elements.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
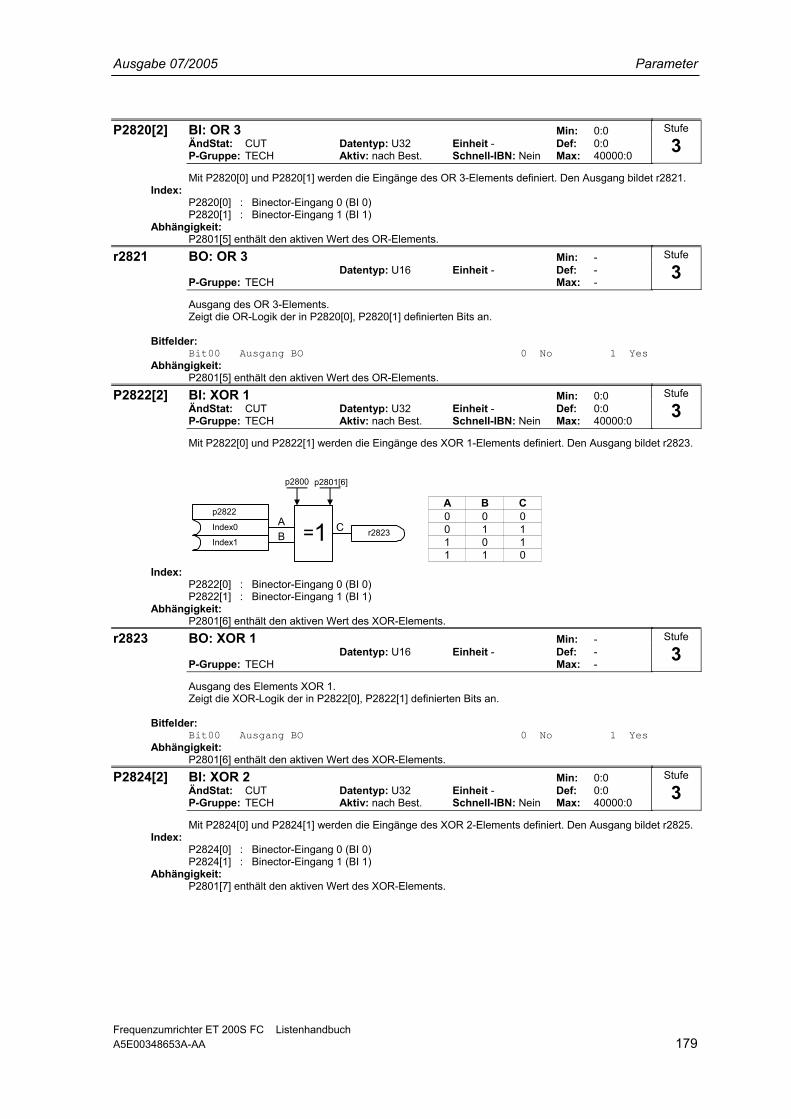
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 179
P2820[2] BI: OR 3 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2820[0] und P2820[1] werden die Eingänge des OR 3-Elements definiert. Den Ausgang bildet r2821. Index:
P2820[0] : Binector-Eingang 0 (BI 0) P2820[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[5] enthält den aktiven Wert des OR-Elements.
r2821 BO: OR 3 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des OR 3-Elements. Zeigt die OR-Logik der in P2820[0], P2820[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[5] enthält den aktiven Wert des OR-Elements.
P2822[2] BI: XOR 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2822[0] und P2822[1] werden die Eingänge des XOR 1-Elements definiert. Den Ausgang bildet r2823.
AB
Cp2822
r2823
A B C0 0 00 1 11 0 11 1 0
1=
p2800 p2801[6]
Index0
Index1
Index:
P2822[0] : Binector-Eingang 0 (BI 0) P2822[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[6] enthält den aktiven Wert des XOR-Elements.
r2823 BO: XOR 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des Elements XOR 1. Zeigt die XOR-Logik der in P2822[0], P2822[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[6] enthält den aktiven Wert des XOR-Elements.
P2824[2] BI: XOR 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2824[0] und P2824[1] werden die Eingänge des XOR 2-Elements definiert. Den Ausgang bildet r2825. Index:
P2824[0] : Binector-Eingang 0 (BI 0) P2824[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[7] enthält den aktiven Wert des XOR-Elements.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
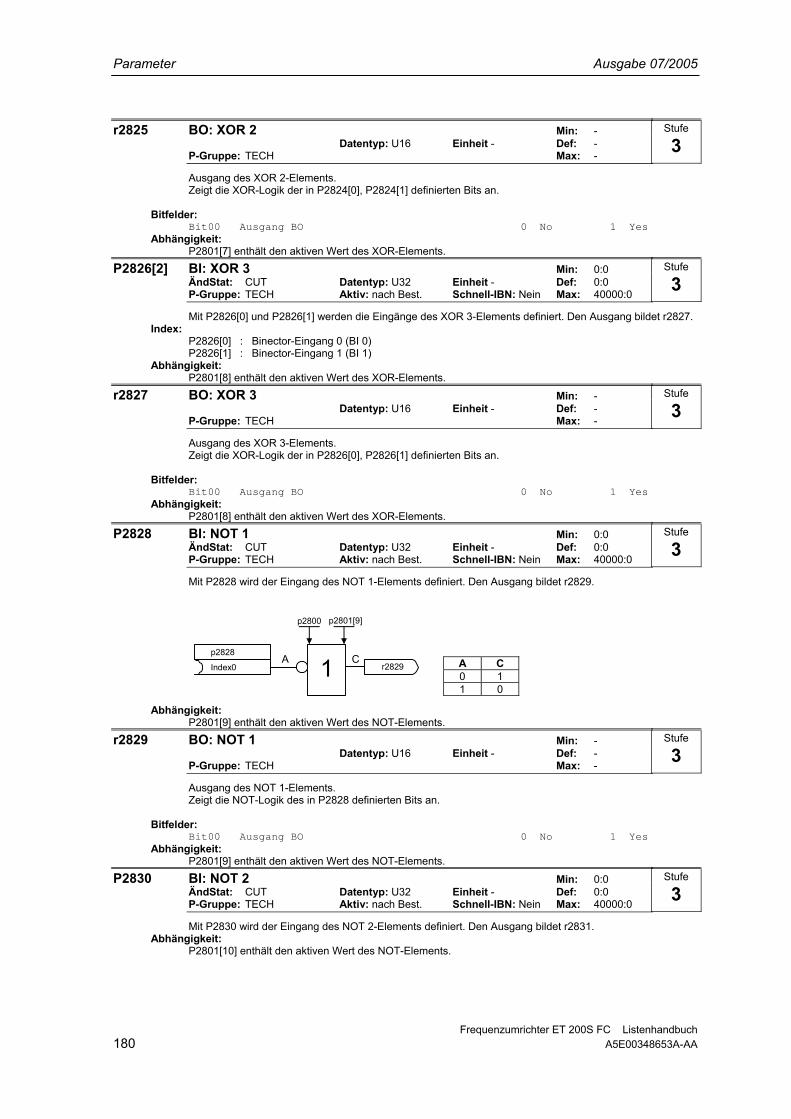
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 180 A5E00348653A-AA
r2825 BO: XOR 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des XOR 2-Elements. Zeigt die XOR-Logik der in P2824[0], P2824[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[7] enthält den aktiven Wert des XOR-Elements.
P2826[2] BI: XOR 3 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2826[0] und P2826[1] werden die Eingänge des XOR 3-Elements definiert. Den Ausgang bildet r2827. Index:
P2826[0] : Binector-Eingang 0 (BI 0) P2826[1] : Binector-Eingang 1 (BI 1)
Abhängigkeit: P2801[8] enthält den aktiven Wert des XOR-Elements.
r2827 BO: XOR 3 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des XOR 3-Elements. Zeigt die XOR-Logik der in P2826[0], P2826[1] definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[8] enthält den aktiven Wert des XOR-Elements.
P2828 BI: NOT 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2828 wird der Eingang des NOT 1-Elements definiert. Den Ausgang bildet r2829.
p2828
r28291 CA A C0 11 0
p2800 p2801[9]
Index0
Abhängigkeit:
P2801[9] enthält den aktiven Wert des NOT-Elements.
r2829 BO: NOT 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des NOT 1-Elements. Zeigt die NOT-Logik des in P2828 definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[9] enthält den aktiven Wert des NOT-Elements.
P2830 BI: NOT 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2830 wird der Eingang des NOT 2-Elements definiert. Den Ausgang bildet r2831. Abhängigkeit:
P2801[10] enthält den aktiven Wert des NOT-Elements.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 181
r2831 BO: NOT 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des NOT 2-Elements. Zeigt die NOT-Logik des in P2830 definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[10] enthält den aktiven Wert des NOT-Elements.
P2832 BI: NOT 3 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2832 wird der Eingang des NOT 3-Elements definiert. Den Ausgang bildet r2833. Abhängigkeit:
P2801[11] enthält den aktiven Wert des NOT-Elements.
r2833 BO: NOT 3 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Ausgang des NOT 3-Elements. Zeigt die NOT-Logik des in P2832 definierten Bits an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[11] enthält den aktiven Wert des NOT-Elements.
Stufe
3
Stufe
3
Stufe
3
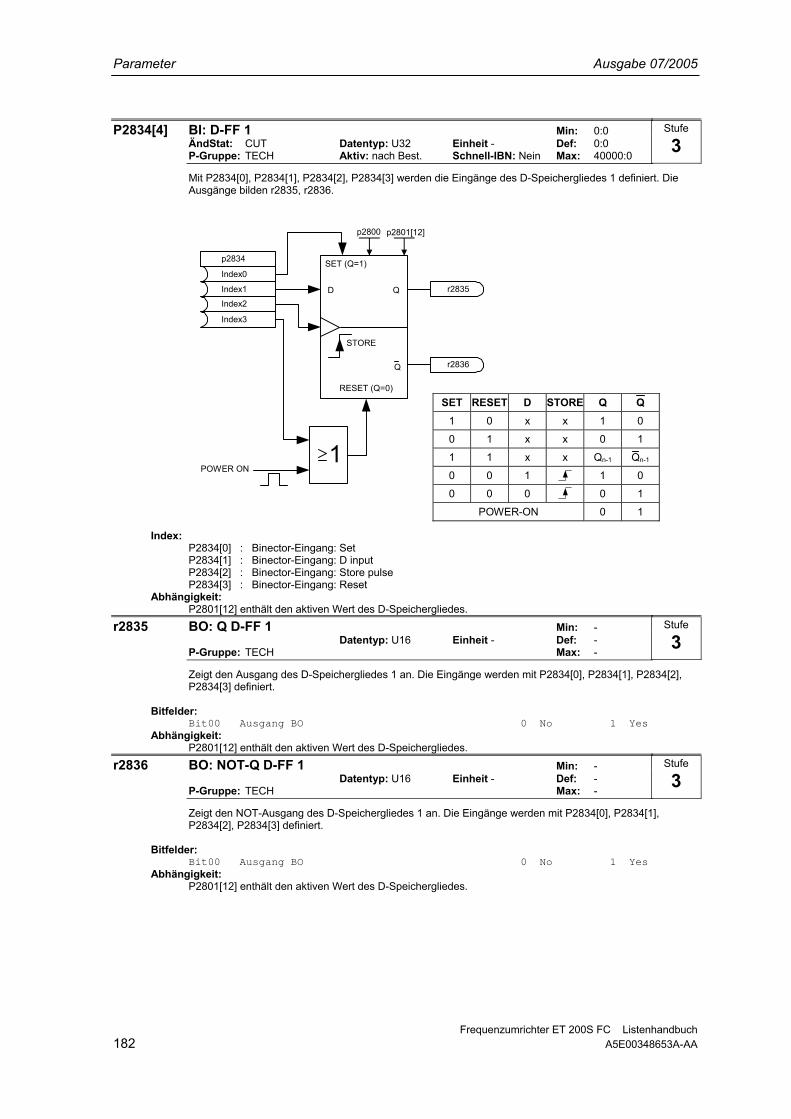
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 182 A5E00348653A-AA
P2834[4] BI: D-FF 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2834[0], P2834[1], P2834[2], P2834[3] werden die Eingänge des D-Speichergliedes 1 definiert. Die Ausgänge bilden r2835, r2836.
1
p2834 SET (Q=1)
RESET (Q=0)
D
STORE
POWER ON
r2835
r2836
Q
Q
SET RESET D STORE Q Q1 0 x x 1 0
0 1 x x 0 1
1 1 x x Qn-1 Qn-1
0 0 1 1 0
0 0 0 0 1
POWER-ON 0 1
p2800 p2801[12]
Index0
Index1
Index2
Index3
Index:
P2834[0] : Binector-Eingang: Set P2834[1] : Binector-Eingang: D input P2834[2] : Binector-Eingang: Store pulse P2834[3] : Binector-Eingang: Reset
Abhängigkeit: P2801[12] enthält den aktiven Wert des D-Speichergliedes.
r2835 BO: Q D-FF 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des D-Speichergliedes 1 an. Die Eingänge werden mit P2834[0], P2834[1], P2834[2], P2834[3] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[12] enthält den aktiven Wert des D-Speichergliedes.
r2836 BO: NOT-Q D-FF 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des D-Speichergliedes 1 an. Die Eingänge werden mit P2834[0], P2834[1], P2834[2], P2834[3] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[12] enthält den aktiven Wert des D-Speichergliedes.
Stufe
3
Stufe
3
Stufe
3
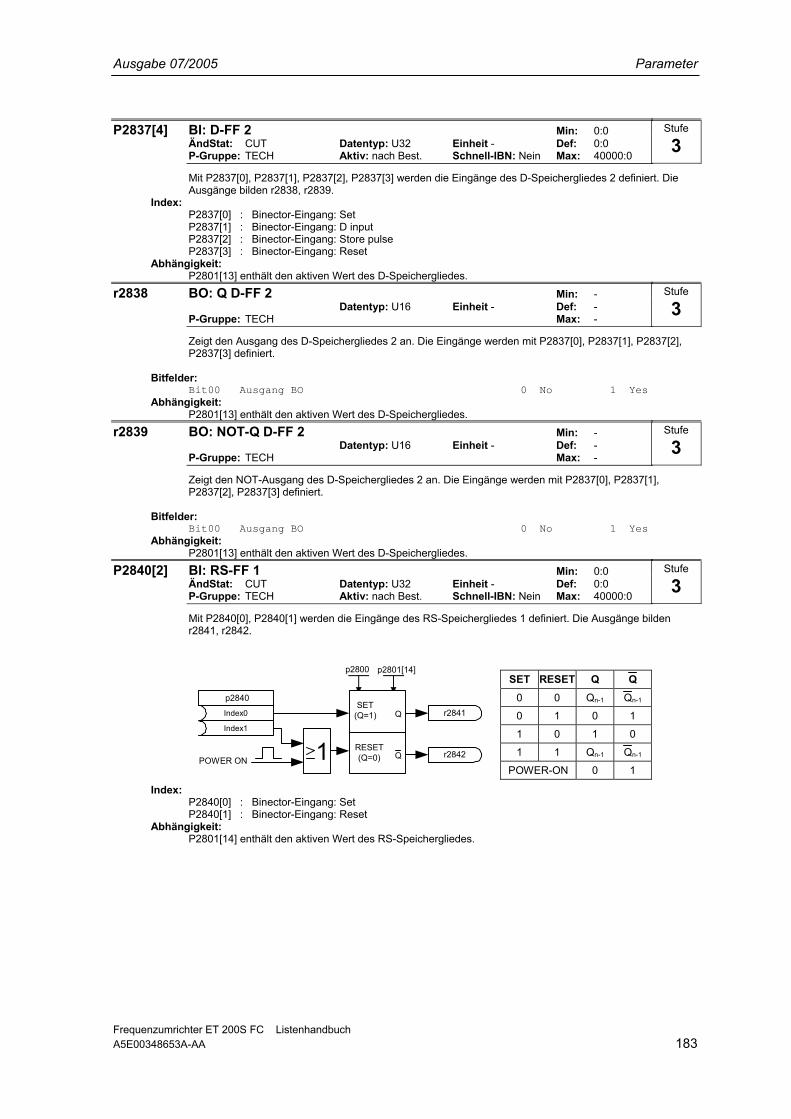
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 183
P2837[4] BI: D-FF 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2837[0], P2837[1], P2837[2], P2837[3] werden die Eingänge des D-Speichergliedes 2 definiert. Die Ausgänge bilden r2838, r2839.
Index: P2837[0] : Binector-Eingang: Set P2837[1] : Binector-Eingang: D input P2837[2] : Binector-Eingang: Store pulse P2837[3] : Binector-Eingang: Reset
Abhängigkeit: P2801[13] enthält den aktiven Wert des D-Speichergliedes.
r2838 BO: Q D-FF 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des D-Speichergliedes 2 an. Die Eingänge werden mit P2837[0], P2837[1], P2837[2], P2837[3] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[13] enthält den aktiven Wert des D-Speichergliedes.
r2839 BO: NOT-Q D-FF 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des D-Speichergliedes 2 an. Die Eingänge werden mit P2837[0], P2837[1], P2837[2], P2837[3] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[13] enthält den aktiven Wert des D-Speichergliedes.
P2840[2] BI: RS-FF 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2840[0], P2840[1] werden die Eingänge des RS-Speichergliedes 1 definiert. Die Ausgänge bilden r2841, r2842.
SET RESET Q Q0 0 Qn-1 Qn-1
0 1 0 1
1 0 1 0
1 1 Qn-1 Qn-1
POWER-ON 0 1
p2800 p2801[14]
SET(Q=1)
RESET(Q=0)
Q
Q
p2840
POWER ON 1
r2841
r2842
Index0
Index1
Index:
P2840[0] : Binector-Eingang: Set P2840[1] : Binector-Eingang: Reset
Abhängigkeit: P2801[14] enthält den aktiven Wert des RS-Speichergliedes.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 184 A5E00348653A-AA
r2841 BO: Q RS-FF 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des RS-Speichergliedes 1 an. Die Eingänge werden mit P2840[0], P2840[1] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[14] enthält den aktiven Wert des RS-Speichergliedes.
r2842 BO: NOT-Q RS-FF 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des RS-Speichergliedes 1 an. Die Eingänge werden mit P2840[0], P2840[1] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[14] enthält den aktiven Wert des RS-Speichergliedes.
P2843[2] BI: RS-FF 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2843[0], P2843[1] werden die Eingänge des RS-Speichergliedes 2 definiert. Die Ausgänge bilden r2844, r2845.
Index: P2843[0] : Binector-Eingang: Set P2843[1] : Binector-Eingang: Reset
Abhängigkeit: P2801[15] enthält den aktiven Wert des RS-Speichergliedes.
r2844 BO: Q RS-FF 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des RS-Speichergliedes 2 an. Die Eingänge werden mit P2843[0], P2843[1] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[15] enthält den aktiven Wert des RS-Speichergliedes.
r2845 BO: NOT-Q RS-FF 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des RS-Speichergliedes 2 an. Die Eingänge werden mit P2843[0], P2843[1] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[15] enthält den aktiven Wert des RS-Speichergliedes.
P2846[2] BI: RS-FF 3 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Mit P2846[0], P2846[1] werden die Eingänge des RS-Speichergliedes 3 definiert. Die Ausgänge bilden r2847, r2848.
Index: P2846[0] : Binector-Eingang: Set P2846[1] : Binector-Eingang: Reset
Abhängigkeit: P2801[16] enthält den aktiven Wert des RS-Speichergliedes.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 185
r2847 BO: Q RS-FF 3 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des RS-Speichergliedes 3 an. Die Eingänge werden mit P2846[0], P2846[1] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[16] enthält den aktiven Wert des RS-Speichergliedes.
r2848 BO: NOT-Q RS-FF 3 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des RS-Speichergliedes 3 an. Die Eingänge werden mit P2846[0], P2846[1] definiert.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2801[16] enthält den aktiven Wert des RS-Speichergliedes.
Stufe
3
Stufe
3
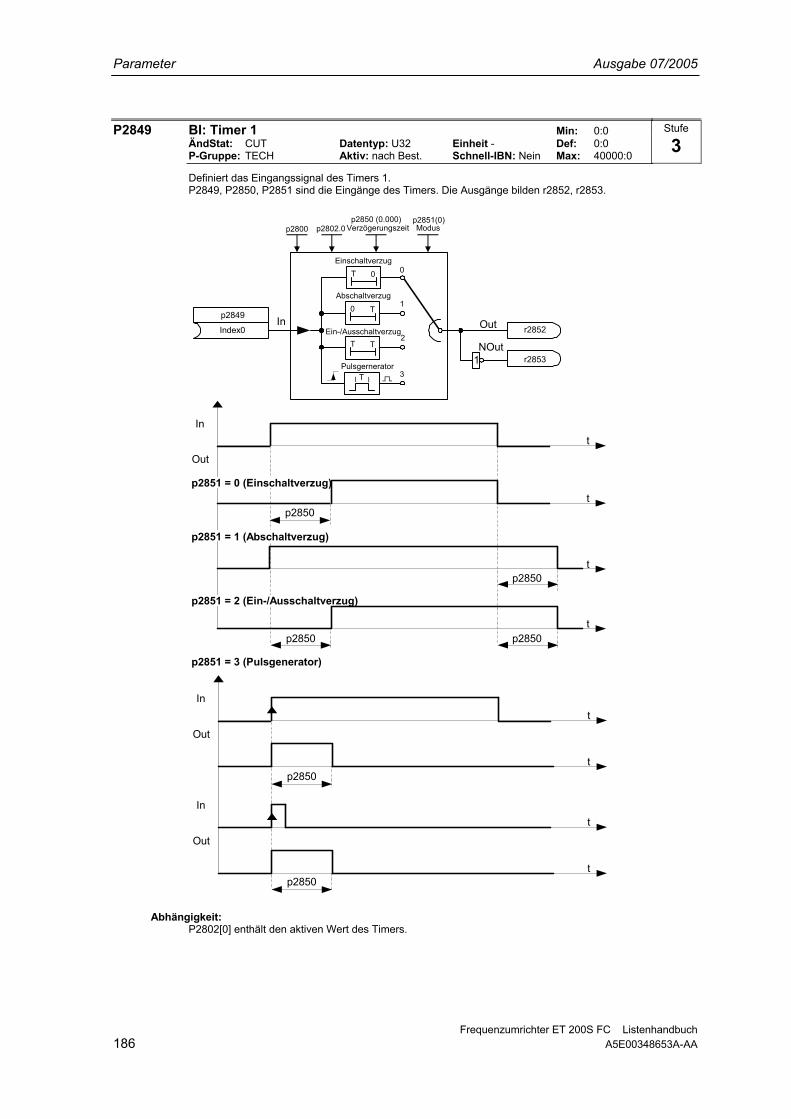
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 186 A5E00348653A-AA
P2849 BI: Timer 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert das Eingangssignal des Timers 1. P2849, P2850, P2851 sind die Eingänge des Timers. Die Ausgänge bilden r2852, r2853.
T 0
0 T
T T
r2852
1 r2853
p2849
0
1
2
3
In Out
NOut
p2851(0)p2850 (0.000)
p2850
In
Out
t
t
t
tp2850 p2850
p2850
p2850
In
Out
t
t
In
Out
t
tp2850
p2800 p2802.0
p2851 = 0 (Einschaltverzug)
p2851 = 1 (Abschaltverzug)
p2851 = 2 (Ein-/Ausschaltverzug)
p2851 = 3 (Pulsgenerator)
Verzögerungszeit Modus
Einschaltverzug
Abschaltverzug
Ein-/Ausschaltverzug
Pulsgernerator
Index0
T
Abhängigkeit:
P2802[0] enthält den aktiven Wert des Timers.
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 187
P2850 Verzögerung des Timers 1 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 6000.0
Definiert die Verzögerung des Timers 1. P2849, P2850, P2851 sind die Eingänge des Timers. Die Ausgänge bilden r2852, r2853.
Abhängigkeit: P2802[0] enthält den aktiven Wert des Timers.
P2851 Mode des Timers 1 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Wählt den Mode des Timers 1 aus. P2849, P2850, P2851 sind die Eingänge des Timers. Die Ausgänge bilden r2852, r2853.
Mögliche Einstellungen: 0 Einschaltverzögerung 1 Ausschaltverzögerung 2 Ein-/Ausschaltverzögerung 3 Pulsgenerator
Abhängigkeit: P2802[0] enthält den aktiven Wert des Timers.
r2852 BO: Timer 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des Timers 1 an. P2849, P2850, P2851 sind die Eingänge des Timers.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[0] enthält den aktiven Wert des Timers.
r2853 BO: NOT-Ausgang Timer 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des Timers 1 an. P2849, P2850, P2851 sind die Eingänge des Timers.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[0] enthält den aktiven Wert des Timers.
P2854 BI: Timer 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert das Eingangssignal des Timers 2. P2854, P2855, P2856 sind die Eingänge des Timers. Die Ausgänge bilden r2857, r2858.
Abhängigkeit: P2802[1] enthält den aktiven Wert des Timers.
P2855 Verzögerung des Timers 2 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 6000.0
Definiert die Verzögerung des Timers 2. P2854, P2855, P2856 sind die Eingänge des Timers. Die Ausgänge bilden r2857, r2858.
Abhängigkeit: P2802[1] enthält den aktiven Wert des Timers.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 188 A5E00348653A-AA
P2856 Mode des Timers 2 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Wählt den Mode des Timers 2 aus. P2854, P2855, P2856 sind die Eingänge des Timers. Die Ausgänge bilden r2857, r2858.
Mögliche Einstellungen: 0 Einschaltverzögerung 1 Ausschaltverzögerung 2 Ein-/Ausschaltverzögerung 3 Pulsgenerator
Abhängigkeit: P2802[1] enthält den aktiven Wert des Timers.
r2857 BO: Timer 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des Timers 2 an. P2854, P2855, P2856 sind die Eingänge des Timers.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[1] enthält den aktiven Wert des Timers.
r2858 BO: NOT-Ausgang Timer 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des Timers 2 an. P2854, P2855, P2856 sind die Eingänge des Timers.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[1] enthält den aktiven Wert des Timers.
P2859 BI: Timer 3 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert das Eingangssignal des Timers 3. P2859, P2860, P2861 sind die Eingänge des Timers. Die Ausgänge bilden r2862, r2863.
Abhängigkeit: P2802[2] enthält den aktiven Wert des Timers.
P2860 Verzögerung des Timers 3 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 6000.0
Definiert die Verzögerung des Timers 3. P2859, P2860, P2861 sind die Eingänge des Timers. Die Ausgänge bilden r2862, r2863.
Abhängigkeit: P2802[2] enthält den aktiven Wert des Timers.
P2861 Mode des Timers 3 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Wählt den Mode des Timers 3 aus. P2859, P2860, P2861 sind die Eingänge des Timers. Die Ausgänge bilden r2862, r2863.
Mögliche Einstellungen: 0 Einschaltverzögerung 1 Ausschaltverzögerung 2 Ein-/Ausschaltverzögerung 3 Pulsgenerator
Abhängigkeit: P2802[2] enthält den aktiven Wert des Timers.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 189
r2862 BO: Timer 3 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des Timers 3 an. P2859, P2860, P2861 sind die Eingänge des Timers.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[2] enthält den aktiven Wert des Timers.
r2863 BO: NOT-Ausgang Timer 3 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des Timers 3 an. P2859, P2860, P2861 sind die Eingänge des Timers.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[2] enthält den aktiven Wert des Timers.
P2864 BI: Timer 4 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert das Eingangssignal des Timers 4. P2864, P2865, P2866 sind die Eingänge des Timers. Die Ausgänge bilden r2867, r2868.
Abhängigkeit: P2802[3] enthält den aktiven Wert des Timers.
P2865 Verzögerung des Timers 4 Min: 0.0 ÄndStat: CUT Datentyp: Float Einheit s Def: 0.0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 6000.0
Definiert die Verzögerung des Timers 4. P2864, P2865, P2866 sind die Eingänge des Timers. Die Ausgänge bilden r2867, r2868.
Abhängigkeit: P2802[3] enthält den aktiven Wert des Timers.
P2866 Mode des Timers 4 Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Wählt den Mode des Timers 4 aus. P2864, P2865, P2866 sind die Eingänge des Timers. Die Ausgänge bilden r2867, r2868.
Mögliche Einstellungen: 0 Einschaltverzögerung 1 Ausschaltverzögerung 2 Ein-/Ausschaltverzögerung 3 Pulsgenerator
Abhängigkeit: P2802[3] enthält den aktiven Wert des Timers.
r2867 BO: Timer 4 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den Ausgang des Timers 4 an. P2864, P2865, P2866 sind die Eingänge des Timers.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[3] enthält den aktiven Wert des Timers.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
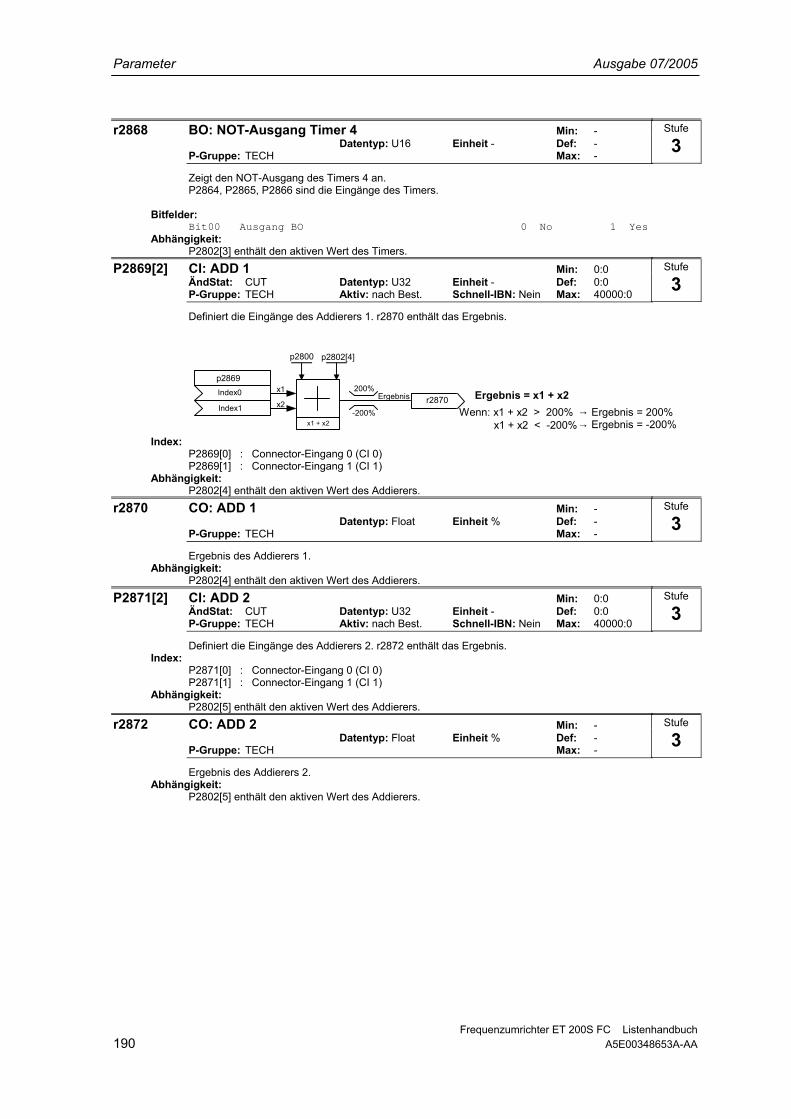
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 190 A5E00348653A-AA
r2868 BO: NOT-Ausgang Timer 4 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt den NOT-Ausgang des Timers 4 an. P2864, P2865, P2866 sind die Eingänge des Timers.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[3] enthält den aktiven Wert des Timers.
P2869[2] CI: ADD 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Addierers 1. r2870 enthält das Ergebnis.
r2870x1
x2
200%
-200%
p2800 p2802[4]
Ergebnis = x1 + x2Wenn: x1 + x2 > 200% →
x1 + x2 < -200%→ Ergebnis = 200% Ergebnis = -200%
Ergebnis
p2869
x1 + x2
Index0
Index1
Index:
P2869[0] : Connector-Eingang 0 (CI 0) P2869[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[4] enthält den aktiven Wert des Addierers.
r2870 CO: ADD 1 Min: - Datentyp: Float Einheit % Def: - P-Gruppe: TECH Max: -
Ergebnis des Addierers 1. Abhängigkeit:
P2802[4] enthält den aktiven Wert des Addierers.
P2871[2] CI: ADD 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Addierers 2. r2872 enthält das Ergebnis. Index:
P2871[0] : Connector-Eingang 0 (CI 0) P2871[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[5] enthält den aktiven Wert des Addierers.
r2872 CO: ADD 2 Min: - Datentyp: Float Einheit % Def: - P-Gruppe: TECH Max: -
Ergebnis des Addierers 2. Abhängigkeit:
P2802[5] enthält den aktiven Wert des Addierers.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3

Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 191
P2873[2] CI: SUB 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Subtrahierers 1. r2874 enthält das Ergebnis.
P2873
r2874x1
x2
200%
-200%x1 - x2
P2800 P2802[6]
x1 - x2 > 200% → x1 - x2 < -200% →
Ergebnis = 200% Ergebnis = -200%
Index0
Index1 Ergebnis = x1 - x2
Wenn:
Ergebnis
Index:
P2873[0] : Connector-Eingang 0 (CI 0) P2873[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[6] enthält den aktiven Wert des Subtrahierers.
r2874 CO: SUB 1 Min: - Datentyp: Float Einheit % Def: - P-Gruppe: TECH Max: -
Ergebnis des Subtrahierers 1. Abhängigkeit:
P2802[6] enthält den aktiven Wert des Subtrahierers.
P2875[2] CI: SUB 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Subtrahierers 2. r2876 enthält das Ergebnis. Index:
P2875[0] : Connector-Eingang 0 (CI 0) P2875[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[7] enthält den aktiven Wert des Subtrahierers.
r2876 CO: SUB 2 Min: - Datentyp: Float Einheit % Def: - P-Gruppe: TECH Max: -
Ergebnis des Subtrahierers 2. Abhängigkeit:
P2802[7] enthält den aktiven Wert des Subtrahierers.
P2877[2] CI: MUL 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Multiplizierers 1. r2878 enthält das Ergebnis.
r2878x1
x2
200%
-200%
100%x2x1∗
> 200% →
< -200%→
%1002x1x
%1002x1x
∗
∗ Ergebnis = 200%
Ergebnis = -200%
Wenn:
p2877
Index0
Index1
%100
2x1x ∗
p2800 p2802[8]
Ergebnis =Ergebnis
Index:
P2877[0] : Connector-Eingang 0 (CI 0) P2877[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[8] enthält den aktiven Wert des Multiplizierers.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
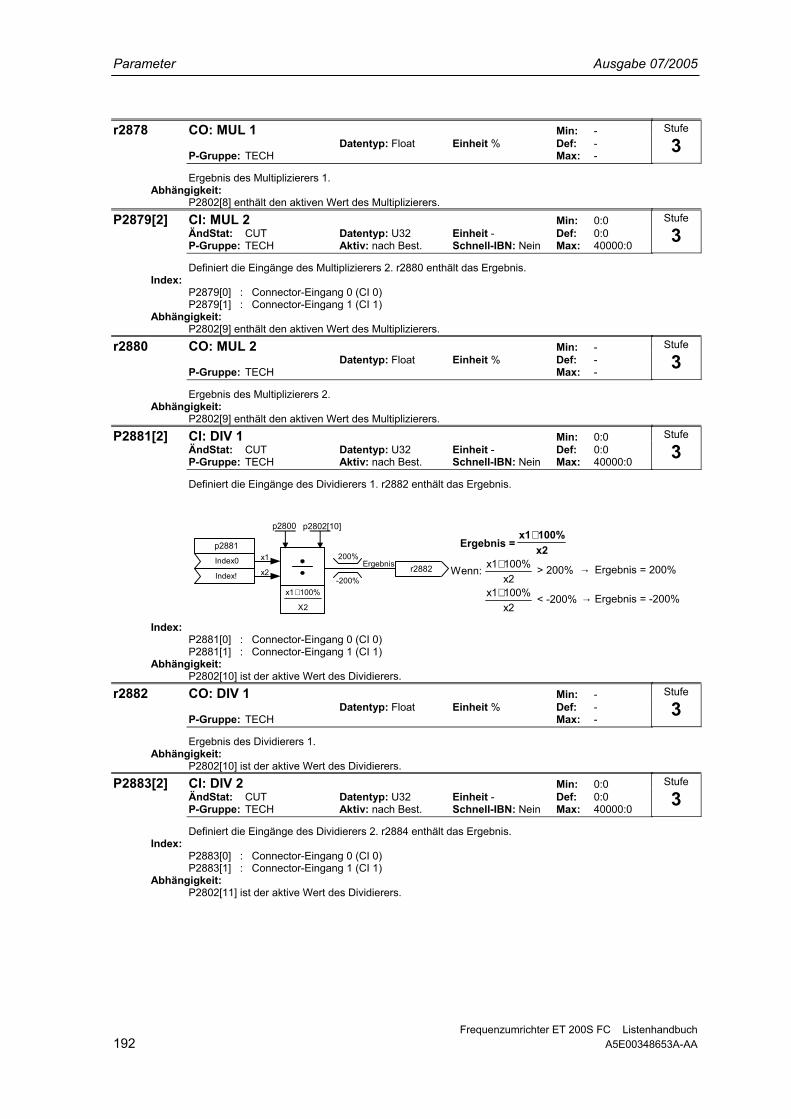
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 192 A5E00348653A-AA
r2878 CO: MUL 1 Min: - Datentyp: Float Einheit % Def: - P-Gruppe: TECH Max: -
Ergebnis des Multiplizierers 1. Abhängigkeit:
P2802[8] enthält den aktiven Wert des Multiplizierers.
P2879[2] CI: MUL 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Multiplizierers 2. r2880 enthält das Ergebnis. Index:
P2879[0] : Connector-Eingang 0 (CI 0) P2879[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[9] enthält den aktiven Wert des Multiplizierers.
r2880 CO: MUL 2 Min: - Datentyp: Float Einheit % Def: - P-Gruppe: TECH Max: -
Ergebnis des Multiplizierers 2. Abhängigkeit:
P2802[9] enthält den aktiven Wert des Multiplizierers.
P2881[2] CI: DIV 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Dividierers 1. r2882 enthält das Ergebnis.
r2882x1
x2
200%
-200%
2X
%1001x ∗
x2100%x1∗
p2800 p2802[10]
> 200% →
< -200% → x2100%x1
x2100%x1
∗
∗ Ergebnis = 200%
Ergebnis = -200%
Wenn:
p2881
Index!
Index0
Ergebnis =
Ergebnis
Index:
P2881[0] : Connector-Eingang 0 (CI 0) P2881[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[10] ist der aktive Wert des Dividierers.
r2882 CO: DIV 1 Min: - Datentyp: Float Einheit % Def: - P-Gruppe: TECH Max: -
Ergebnis des Dividierers 1. Abhängigkeit:
P2802[10] ist der aktive Wert des Dividierers.
P2883[2] CI: DIV 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Dividierers 2. r2884 enthält das Ergebnis. Index:
P2883[0] : Connector-Eingang 0 (CI 0) P2883[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[11] ist der aktive Wert des Dividierers.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
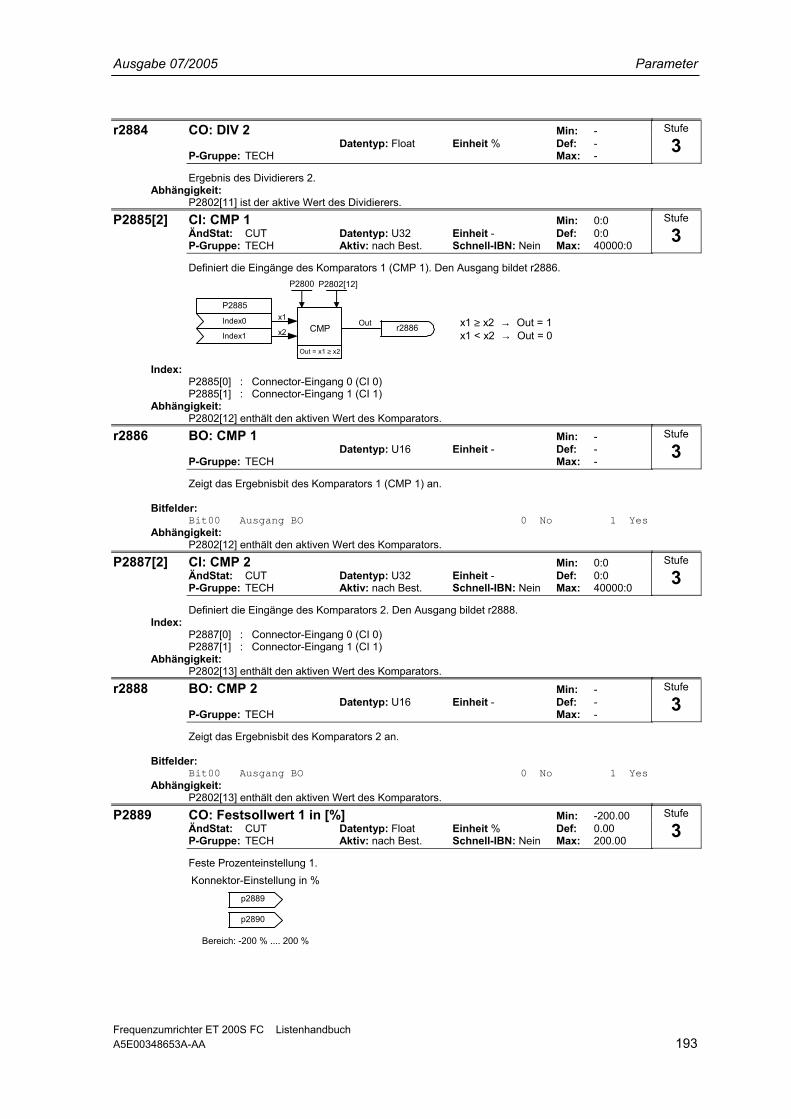
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 193
r2884 CO: DIV 2 Min: - Datentyp: Float Einheit % Def: - P-Gruppe: TECH Max: -
Ergebnis des Dividierers 2. Abhängigkeit:
P2802[11] ist der aktive Wert des Dividierers.
P2885[2] CI: CMP 1 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Komparators 1 (CMP 1). Den Ausgang bildet r2886.
P2885
r2886x1
x2Out x1 ≥ x2 → Out = 1
x1 < x2 → Out = 0
P2800 P2802[12]
Out = x1 ≥ x2
CMPIndex0
Index1
Index:
P2885[0] : Connector-Eingang 0 (CI 0) P2885[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[12] enthält den aktiven Wert des Komparators.
r2886 BO: CMP 1 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt das Ergebnisbit des Komparators 1 (CMP 1) an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[12] enthält den aktiven Wert des Komparators.
P2887[2] CI: CMP 2 Min: 0:0 ÄndStat: CUT Datentyp: U32 Einheit - Def: 0:0 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 40000:0
Definiert die Eingänge des Komparators 2. Den Ausgang bildet r2888. Index:
P2887[0] : Connector-Eingang 0 (CI 0) P2887[1] : Connector-Eingang 1 (CI 1)
Abhängigkeit: P2802[13] enthält den aktiven Wert des Komparators.
r2888 BO: CMP 2 Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: TECH Max: -
Zeigt das Ergebnisbit des Komparators 2 an.
Bitfelder: Bit00 Ausgang BO 0 No 1 Yes
Abhängigkeit: P2802[13] enthält den aktiven Wert des Komparators.
P2889 CO: Festsollwert 1 in [%] Min: -200.00 ÄndStat: CUT Datentyp: Float Einheit % Def: 0.00 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 200.00
Feste Prozenteinstellung 1.
p2889
p2890
Konnektor-Einstellung in %
Bereich: -200 % .... 200 %
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 194 A5E00348653A-AA
P2890 CO: Festsollwert 2 in [%] Min: -200.00 ÄndStat: CUT Datentyp: Float Einheit % Def: 0.00 P-Gruppe: TECH Aktiv: nach Best. Schnell-IBN: Nein Max: 200.00
Feste Prozenteinstellung 2.
P3900 Ende Schnellinbetriebnahme Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 0 P-Gruppe: QUICK Aktiv: nach Best. Schnell-IBN: Ja Max: 11
Führt Berechnungen durch, die für einen optimierten Motorbetrieb erforderlich sind. Nach Abschluss der Berechnung werden P3900 und P0010 (Parametergruppen für die Inbetriebnahme) automatisch auf den ursprünglichen Wert 0 zurückgesetzt.
Mögliche Einstellungen: 0 Keine Schnell-IBN 1 Schnell-IBN & Werkseinst. 2 Schnellinbetriebnahme 3 Schnell-IBN: nur Motordaten 10 Safety Änderungen übernehmen 11 Safety Änderungen nicht übernehmen
Abhängigkeit: Eine Änderung ist nur möglich, wenn P0010 > 0 gestzt ist.
Details: P3900 = 1: Bei P3900 = 1 werden nur die Parametereinstellungen beibehalten, die über das Menü "Schnellinbetriebnahme" geändert wurden. Alle anderen Parameter einschließlich der E/A-Einstellungen werden auf die Werkseinstellung zurückgesetzt. Nach Abschluß der Werkseinstellung wird die Berechnung der Motordaten durchgeführt. P3900 = 2: Wenn Einstellung 2 ausgewählt wird, werden nur die Parameter berechnet, die von den Parametern im Menü "Schnellinbetriebnahme" abhängen (P0010 = 1). Die E/A-Einstellungen werden auch auf den Standardwert zurückgesetzt, und die Motorberechnungen werden durchgeführt. P3900 = 3 : Wenn Einstellung 3 ausgewählt wird, werden nur die Motor- und Reglerberechnungen durchgeführt. Wenn die Schnellinbetriebnahme mit dieser Einstellung beendet wird, kann Zeit gespart werden (beispielsweise dann, wenn nur Motortypenschilddaten geändert wurden). Berechnet eine Vielzahl von Motorparametern. Hierbei werden ältere Werte überschrieben. Hierzu gehören P0344 (Motorgewicht), P0350 (Entmagnetisierungszeit), P2000 (Bezugsfrequenz) und P2002 (Bezugsstrom). p3900 = 10 (nur für ICU24F) Beendet die Safety-Inbetriebnahme mit Übernahme der Änderungen in den Safety-Parametern. P3900 = 11 (nur für ICU24F) Beendet die Safety-Inbetriebnahme ohne Übernahme der Änderungen in den Safety-Parametern. Die alten Safety-Einstellungen werden wieder übernommen.
Hinweis: Beim Übertragen des Parameters p3900 ist der ET 200S FC mit internen Berechnungen beschäftigt, und die Kommunikation - sowohl über USS als auch über PROFIBUS DP - ist für die Dauer der Berechnungen unterbrochen. Dies kann an der angeschlossen SIMATIC S7-Steuerung (Kommunikation über PROFIBUS DP) zu folgenden Fehlermeldungen führen: - Parametrierfehler 30 - Antriebsfehler 70 - Antriebsfehler 75 Bei der Inbetriebnahme über STARTER (USS) sind während der Berechnungen keine Eingaben möglich. Die Fehler können quittiert werden, sobald die Berechnungen im Umrichter beendet sind. Die Berechungnen können bis zu 1 Minute dauerm.
P3950 Serviceparameter Min: 0 ÄndStat: CUT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALWAYS Aktiv: nach Best. Schnell-IBN: Nein Max: 255
Greift auf spezielle Entwicklungs- und Betriebsfunktionalität zu.
Stufe
3
Stufe
1
Stufe
4
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 195
r3954[13] CM Version und GUI ID Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: - Max: -
Dienst zur Einordnung der Firmware (nur für SIEMENS-interne Zwecke). Index:
P3954[0] : CM Label (Ink./Branch) P3954[1] : CM Label (Zaehler) P3954[2] : CM Label P3954[3] : GUI-ID P3954[4] : GUI-ID P3954[5] : GUI-ID P3954[6] : GUI-ID P3954[7] : GUI-ID P3954[8] : GUI-ID P3954[9] : GUI-ID P3954[10] : GUI-ID P3954[11] : GUI-ID Hauptversion P3954[12] : GUI-ID Unterversion
r3978 BICO Zaehler Min: - Datentyp: U32 Einheit - Def: - P-Gruppe: - Max: -
Zeigt die Anzahl der geänderten BICO-Verknüpfungen
P3980 IBN-Befehl Anwahl Min: 0 ÄndStat: T Datentyp: U16 Einheit - Def: 0 P-Gruppe: - Aktiv: nach Best. Schnell-IBN: Nein Max: 66
Schaltet Befehls- und Sollwertquellen zwischen frei programmierbaren BICO-Parametern und festen Befehls-/Sollwertprofilen für die Inbetriebnahme um. Die Befehls- und Sollwertquellen können separat geändert werden. Die Zehnerziffer wählt die Befehlsquelle, die Einserziffer die Sollwertquelle.
Mögliche Einstellungen: 0 Cmd=BICO Param. Sollw=BICO Param 4 Cmd=BICO Param. Sollw=USS on RS232 6 Cmd=Default Sollw=Fieldbus 40 Cmd=USS on RS232 Sollw=BICO Par. 44 Cmd=USS on RS232 Sollw=USS on RS232 46 Cmd=USS on RS232 Sollw=Fieldbus 60 Cmd=Fieldbus Sollw=BICO Par. 64 Cmd=Fieldbus Sollw=USS on RS232 66 Cmd=Fieldbus Sollw=Fieldbus
Hinweis: USS on RS485 wird nicht unterstützt.
P3981 Reset aktiver Fehler Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: ALARM Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Setzt aktive Fehler zurück, wenn der Wert von 0 in 1 geändert wird. Mögliche Einstellungen:
0 kein Fehler Reset 1 Fehler Reset
Hinweis: Automatisch auf 0 zurückgesetzt.
Details: siehe P0947 (letzter Störcode)
r3986[2] Anzahl Parameter Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: - Max: -
Anzahl der Parameter beim Antrieb Index:
P3986[0] : Nur Lesen P3986[1] : Lesen & Schreiben
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Stufe
4
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 196 A5E00348653A-AA
P7840 Steuerwort für Hot Swapping Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 1 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 33
Beschreibt das Verhalten des Umrichters nach einem CU-Hot Swap oder einem PM-Hot Swap. Falls ein Hot Swap erfolgreich ist, kann der Umrichter anlaufen, andernfalls tritt Fehler F399 auf. Weitere Informationen, siehe auch Betriebsanleitung, Kapitel "Inbetriebnahme und Betrieb". 0 = kein CU oder PM-Hot Swap zugelassen. 1 = kein CU zugelassen, PM zugelassen, wenn MLFB mit vorigem PM übereinstimmt. 2 = kein CU zugelassen, PM zugelassen, wenn PM Code (im Leistungsteil gespeichert) mit vorigem PM
übereinstimmt. 3 = kein CU zugelassen, PM ist ohne Einschränkung zugelassen. 1x = CU nur zugelassen wenn MLFB mit voriger übereinstimmt. 2x = CU nur zugelassen wenn PM Code mit vorigem übereinstimmt. 3x = CU ist ohne Einschränkung zugelassen. Wobei x für Einschränkungen beim Leistungsteil steht; zum Beispiel Einstellung 33 ist für CU und PM ohne jede Einschränkung; 30 ist für CU ohne Einschränkung, wohingegen PM nicht zulässig ist
Mögliche Einstellungen: 0 F0399 bei jedem Hot Swap 1 Run nach PM-HS wenn MLFB ok 2 Run nach PM-HS wenn PScode ok 3 Run PM-HS, F0399 nach CU-HS 10 Run nach CU-HS wenn MLFB ok 11 Run nach PM-, CU-HS wenn MLFB ok 12 PM-HS - PSc ok , CU-HS - MLFB ok 13 Run n PM-HS, n CU-HS - MLFB ok 20 PM-HS - F0399, run CU-HS - PSc ok 21 PM-HS - MLFB ok, CU-HS - PSc ok 22 Run nach PM-, CU-HS wenn PSc ok 23 Run n PM-HS, run CU-HS - PSc ok 30 PM-HS - F0399, run nach CU-HS 31 PM-HS - MLFB ok, r n CU-HS 32 R n PM-HS - PSc ok, r n CU-HS 33 Run n. jedem HS
Hinweis: Den Umrichter nach einem CU-Hot Swap anlaufen zu lassen kann einige Schäden verursachen, da es keinen Test gibt um zu vergleichen ob der Parametersatz der alten CU mit dem der neuen übereinstimmt.
P7841[5] Seriennr.d. PM für Hot Swap-Test Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: INVERTER Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Liest die Seriennummer des Leistungsteils, die in der Steuerung gespeichert ist. Beim Hochfahren wird anhand dieser Seriennummern geprüft, ob ein Hot Swap stattgefunden hat.
Index: P7841[0] : Herstellungsort P7841[1] : Herstellungsjahr P7841[2] : Herstellungsmonat P7841[3] : Herstellungstag P7841[4] : Stücknummer/Tag
Hinweis: Der Parameter kann vom Anwender nicht verändert werden.
P8450 Wartezeit bei Parametrierfehler Min: 0 ÄndStat: CT Datentyp: U16 Einheit ms Def: 500 P-Gruppe: COMM Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Maximale Wartezeit in ms bevor ein Parametrierfehler an den FB 100 gemeldet wird. Details:
Dieser Parameter wird nur nach AUS/EIN (24 V) der ICU24(F) gelesen. Siehe dazu im ET 200S FC-Handbuch "Inbetriebnahme und Betrieb", sowie "SIMATIC S7-Anbindung".
P8451 Zykl. Timeout Min: 0 ÄndStat: CT Datentyp: U16 Einheit ms Def: 300 P-Gruppe: COMM Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Maximale Wartezeit in ms um einen Kommunikationsfehler zwischen ICU24(F) und FB100 zu erkennen. Details:
Dieser Parameter wird nur nach AUS/EIN der ICU24(F) gelesen. Siehe dazu im ET 200S FC-Handbuch "Inbetriebnahme und Betrieb", sowie "SIMATIC S7-Anbindung".
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 197
P8452 Diagnose sperren Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 0 P-Gruppe: COMM Aktiv: Sofort Schnell-IBN: Nein Max: 65535
Freigeben oder sperren der Diagnosemeldung in SIMATIC S7.
Bitfelder: Bit00 Diagnose EIN 0 No 1 Yes Bit01 Par-Fehler EIN 0 No 1 Yes
Details: Bit00 - Gruppendiagnose AUS 1 YES - Gruppendiagnose EIN 0 NO Dieser Parameter wird nur nach AUS/EIN (24 V) der ICU24(F) gelesen.
P8455[2] SI slot ID Min: -1 ÄndStat: CT Datentyp: I32 Einheit - Def: -1 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 65535
Die Steckplatz-ID ist in der Steuerung gespeichert. Sie wird von ihr an den Umrichter geschickt. Über die Steckplatz-ID wird verhindert, dass ein Umrichter versehentlich in einen falschen Steckplatz gesteckt und damit mit einem anderen Motor verbunden wird.
Index: P8455[0] : Wert von EEPROM P8455[1] : Reserviert
Hinweis: Die Steckplatz-ID kann nur geändert werden, wenn sie noch die Werkseinstellung hat oder wenn der Umrichter den Status Virgin hat (P8457 = 1). Wenn die Steckplatz-ID in der Steuerung nicht mit der im Umrichter übereinstimmt, schaltet der Umrichter mit Fehler ab. Vorgehensweise, um den Steckplatz des Umrichters im ET 200S Rack für ICU24 (nicht Safety) zu ändern. 1. p8457 = 1 setzen 2. p8455 = Steckplatzkennung eingeben Vorgehensweise, um den Steckplatz des Umrichters im ET 200S Rack für ICU24F (Safety), bei aktivierter Sicherheitsfunktionalität, zu ändern. 1. p0010 = 95 Inbetriebnahmemodus einstellen 2. p9761 anwählen und Passwort eingeben 3. p8457 = 1 setzen 4. p3900 = 11 Inbetriebnahmemodus beenden 5. p8455 = Steckplatzkennung eingeben
P8456[2] SI EEPROM Start-Art Min: 0 ÄndStat: CT Datentyp: I16 Einheit - Def: 0 P-Gruppe: COMM Aktiv: nach Best. Schnell-IBN: Nein Max: 5
PMMC ist in der Steuerung gespeichert. Gibt an, ob ein MMC-PS erforderlich ist und ob Safety aktiviert ist. PMMC wird bei der Hardware-Konfiguration der ET 200S-Station in SIMATIC S7 festgelegt und über das PRM-Telegramm an die Regelungsbaugruppe geschickt. Die einzelnen Möglichkeiten werden im p8456 wie folgt abgespeichert: 0 - MMC-PS nicht erforderlich
- Safety deaktiviert 1 - MMC-PS erforderlich
- Safety deaktiviert 4 - MMC-PS nicht erforderlich
- Safety aktiviert 5 - MMC-PS erforderlich
- Safety aktiviert Wenn ein MMC-PS gesteckt, aber nicht erforderlich ist, wird er ignoriert. Wenn ein MMC-PS erforderlich ist, werden die Parameter beim Hochlauf automatisch vom MMC-PS übernommen (Clone00.bin). Ist das nicht möglich schaltet der Umrichter mit Fehlermeldung ab.
Index: P8456[0] : Wert von EEPROM P8456[1] : Reserviert
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 198 A5E00348653A-AA
Hinweis: Der PMMC-Parameter kann nur über das PRM-Telegramm der Steuerung geändert werden. Wenn der gesendete PMMC-Parameterwert nicht mit dem im Umrichter übereinstimmt, schaltet der Umrichter mit Fehler ab. Vorgehensweise, um den PMMC-Parameter zu ändern: 1. Wechseln in HW-Konifg 2. Umrichter einschalten - schaltet mit Fehler ab, weil er bereits mit der früheren Einstellung hochgelaufen
ist. 3. AUS/EIN (24 V)
P8457 Umrichter auf virgin setzen Min: 0 ÄndStat: CT Datentyp: U16 Einheit - Def: 1 P-Gruppe: PAR_RESET Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Dieser Parameter zeigt an, ob der Umrichter in den Zustand "neu" ('virgin') zurückgesetzt wurde. In diesem Zustand wird ein MMC-PS aus einer anderen Regelungsbaugruppe akzeptiert.
Hinweis: Wenn Safety Integrated freigegeben ist, muss das Safety-Passwort eingegeben werden, um diesen Parameter zu ändern.
P9601 SI Safety-Parameter freigeben Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Safety-Parameter zur Freigabe der Safety-Funktionen. (siehe r9771). Wenn die Safety-Funktionen freigegeben sind, können die Abschaltgruppen über SG1 - SG5 ausgewählt werden (siehe p9603/p9803). - Mit Bit00 können alle Safety-Funktionen freigegeben und gesperrt werden. Bei Freigabe reagiert die
ICU24F auf Befehle von der Abschaltgruppe und prüft die Konsistenz der Safety-Software und -Hardware. Bit00 muss mit der Konfiguration in der PLC konsistent sein (siehe p8456 Bit02).
- Bit01 aktiviert die Zwangsdynamisierung bei Anwahl des "Sicheren Halts". Bit00 muss gesetzt sein. Die Warnung A1699 wird zurückgesetzt, wenn die Zwangsdynamisierung erfolgreich durchgeführt wurde. Die Impulsfreigabe ist während der Zwangdynamisierung (d.h. r00052 Bit06 = 1) für ca. 2,4 sec gesperrt.
Notiz: Der Ausschaltkreis der mechanischen Bremse wird bei der Zwangsdynamisierung getestet. Für eine kurze Zeit (2 ms - 16 ms) wird die Bremse geöffnet. Im allgemeinen benötigen mechanische Bremsen ein Signal länger als 20ms. Es ist Vorsicht geboten, wenn eine Bremse mit einer Reaktionszeit kürzer als 20 ms eingesetzt wird.
Hinweis: Auf Standard-Regelungsbaugruppen (ICU24 - nicht Safety) ist p9601 auf 0 voreingestellt und kann nicht geändert werden. Der Parameter p9601 kann nur auf Safety-Regelungsbaugruppen geändert werden.
P9602 SI Bremsansteuerung freigeben Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Reserviert ohne Funktion. Mögliche Einstellungen:
0 Anst. Sichere Bremse gesperrt 1 MHB mit Sicherem Halt beenden
Hinweis: Die Haltebremse muss so ausgelegt sein, dass sie im Fehlerfall den Antrieb aus jeder möglichen Drehzahl auf Null abbremsen kann. Falls keine Haltebremse vorhanden ist, muss der Maschinenhersteller andere geeignete Maßnahmen treffen, um nach Abschalten der Energiezufuhr zum Motor ein Drehen zu verhindern (z.B. um hängende Lasten zu sichern)
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 199
P9603 SI Abschaltgruppe für SH wählen Min: 1 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 5
Auswahl der Abschaltgruppe über den Safety-Multiplexer. Es stehen fünf Abschaltgruppen zur Verfügung. Die ICU24F muss einer dieser Gruppen zugeordnet sein. Die Abschaltgruppe bestimmt, welche Abschaltgruppe zum Aktivieren des Sicheren Halts (SH) konfiguriert wird. Die Signallogik der Abschaltgruppe ist low-aktiv (24 V = inaktiv, 0 V = aktiv). Wenn z.B. die Abschaltgruppe 2 mit p9603 = p9803 = 2 konfiguriert ist, ignoriert der Antrieb ein 0 V (low) Signal auf den Abschaltgruppen SG1, SG3, SG4 und SG5. Nur wenn die Abschaltgruppe 2 auf 0 V (low) ist, wird die Anforderung für SH angenommen. Wenn eine Abschaltgruppe konfiguriert, aber inaktiv ist, leuchtet die entsprechende LED. Die entsprechende LED blinkt, wenn die Abschaltgruppe konfiguriert und aktiv (d.h. auf 0V) ist. Die LED ist aus, wenn die entsprechende Abschaltgruppe nicht konfiguriert ist.
Hinweis: Die Abschaltgruppe 6 (SG6) ist für sicher reduzierte Geschwindigkeit (SG) reserviert. Um die SBR zu aktivieren, muss SG6 auf low sein, bevor die SH-Abschaltgruppe (die mit p9603/p9803 konfiguriert ist) auf low gesetzt wird. Die Verzögerungszeit sollte > 16 ms betragen. Weitere Einzelheiten siehe Betriebsanleitung.
P9659 SI Maximal-Zeit bis Selbsttest Min: 0.1 ÄndStat: C Datentyp: Float Einheit h Def: 8.0 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 8760.0
Spezifiziert den zeitlichen Abstand der Selbsttests. Die verbleibende Zeit bis zum nächsten erforderlichen Selbsttest wird in r9660 angegeben. Wenn r9660 den Wert Null erreicht, ist die Zeit abgelaufen und ein Warnung A1699 wird ausgegeben. Die Warnung informiert lediglich, dass eine Zwangsdynamisierung erforderlich ist. Bei nächster Gelegenheit sollte der Betreiber eine Zwangsdynamisierung aktivieren. Die Funktion des Antriebs wird durch die Warnung nicht beeinträchtigt. Die Zwangsdynamisierung wird in folgenden Fällen aktiviert: - nach jedem Einschalten (24 V) - bei Aufheben von SH, wenn Bit01 in p9601/p9801 gesetzt ist, - bei Aufheben des SH, der aufgrund eines Umrichterfehlers erzeugt wurde. Während der Zwangsdynamisierung werden die Abschaltkreise geprüft und ein Prozessor-Selbsttest wird durchgeführt. Das Zeitglied für die Zwangsdynamisierung (siehe r9660) wird auf die in P9659 angegebene Voreinstellung zurückgesetzt und die Warnung A1699 wird unter folgenden Bedingungen aufgehoben: - nach jedem Einschalten (24 V) - bei Anwahl von SH, wenn Bit01 in p9601/p9801 gesetzt und der Selbsttest beendet ist, - bei Aufheben des SH, der aufgrund eines Umrichterfehlers erzeugt wurde. Der Maximalwert von 8760 Stunden entspricht 365 Tagen. Weitere Informationen, siehe ET 200S FC-Handbuch, Inbetriebnahme und Betrieb, Abschnitt "Betriebsfunktionen Safety Integrated".
r9660 CO: SI Zeit bis nächstem Selbsttest Min: - Datentyp: Float Einheit h Def: - P-Gruppe: SAFETY Max: -
Parameter r9660 zeigt die verbleibende Zeit bis zu einem erforderlichen Selbsttest an. Wenn r9660 den Wert Null erreicht hat, wird die Warnung A1699 ausgegeben und das Zustandsbit 06 im Parameter r9772 gesetzt.
Hinweis: Die Warnung A1699 und das Bit06 in r9772 wird erst dann zurückgesetzt, wenn die Dynamisierung abgeschlossen ist (siehe Beschreibung von p9659). r9660 wird auf den Wert in p9659 zurückgesetzt, sobald die Dynamisierung beendet ist. Die Auflösung von r9660 beträgt 0,1 Stunde oder 6 Minuten.
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 200 A5E00348653A-AA
P9680 SI Verzug SBR Min: 10 ÄndStat: C Datentyp: U32 Einheit ms Def: 150 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 99000
Zeit [ms] zwischen der Anwahl der SBR und der Aktivierung der Rampenüberwachung. Wenn die SBR aktiv ist, wird der Frequenzistwert mit der Frequenz der Rampenüberwachung verglichen. Falls der Istwert der Frequenz den der Rampenüberwachung überschreitet, wird ein SH (speichernd) ausgelöst. Bei Anwendungen mit Wechsellast wird ein Hochsetzen von p9680/p9880 oder p9691/p9891 empfohlen. Damit wird eine größere Abweichung der Momentanfrequenz vom Sollwert zugelassen. Siehe auch ET 200S FC-Handbuch, Inbetriebnahme und Betrieb, Abschnitt "Betriebsfunktionen Safety Integrated".
Hinweis: Mit einem Wert von 99000 wird die SBR-Überwachung deaktiviert. p9880 muss entsprechend gesetzt werden. Bei Anwahl von SG oder SBR wird das Herunterlaufen trotzdem gemäß der Rampenzeit von p9681/p9881 erfolgen.
P9681 SI SBR-Zeit Min: 100 ÄndStat: C Datentyp: U32 Einheit ms Def: 10000 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 99000
Definiert die Bremsrampenzeit für die SBR in Sekunden. Die Rücklaufzeit wird für SBR und die Rampenüberwachung benutzt. Die Gesamt-Bremszeit Tx kann mit folgenden Formeln ermittelt werden, wobei fx die momentane Frequenz ist: - bei Aktivierung von SG: Tx = p9681 * (fx - p9690) / 200Hz - bei Aktivierung der Sicheren Bremsrampe: Tx= p9681 * (fx - p9682) / 200Hz
Hinweis: Im Gegensatz zu anderen Rampenzeiten (z.B. p1120, p1121) ist die sichere Bremszeit auf 200Hz bezogen und nicht auf p1082. siehe obige Formeln.
P9682 SI Schwelle für Stillstandserke Min: 1.0 ÄndStat: C Datentyp: Float Einheit Hz Def: 5.0 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 20.0
Eine Drehzahl unterhalb der Schwelle in p9682/p9882 wird als Stillstand angenommen. Wenn die SBR angewählt wurde, wird Sicherer Halt (SH) aktiviert.
Hinweis: Gilt nur, wenn die Sichere Bremsrampe (SBR) aktiviert wird.
P9690 SI Sollwert für SG Min: 1.0 ÄndStat: C Datentyp: Float Einheit Hz Def: 10.0 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 300.0
Drehzahlsollwert, der benutzt wird, wenn Sicher reduzierte Geschwindigkeit (SG) gewählt ist. Bei Aktivierung der Abschaltgruppe 6 (SG6) wird die Frequenz gemäß der SBR (siehe p9681/p9881) vermindert, bis die Frequenz von p9690/p9890 errecht ist. Wenn die SG aktiv ist und die mit dem Geschwindigkeitsgrenzwert p9691/p9891 festgelegte Frequenz überschritten wird, wird ein SH (speichernd) eingeleitet. Abhängig von der Einstellung in p9692/p9892 kann die Frequenz von p9790/p9890 auch als Geschwindigkeitsgrenzwert anstelle eines Sollwerts eingesetzt werden. Wenn bei Anwahl einer SG der Drehzahlistwert höher als diese Schwelle ist, wird ein SH mit Antriebsstörung ausgelöst. Falls der Drehzahlistwert kleiner ist als der Frequenzsollwert von p9690/p9890 ist und die SG aktiviert ist, wird die momentane Drehzahl beibehalten und kann nicht geändert werden bis die SG deaktiviert wird. Sind SBR oder SG aktiv, wird der Frequenzsollwert z.B. von einer PLC (über Profibus DP) oder STARTER (über USS) ignoriert.
Hinweis: Für Anwendungen mit Wechsellast wird ein Hochsetzen von p9680/p9880 oder p9691/p9891 empfohlen. Wenn "Sicher reduzierte Geschwindigkeit" (SG) gewählt wird, werden Bit04 und Bit05 gleichzeitig in r9772 gesetzt. Weitere Informationen, siehe ET 200S FC-Handbuch, Inbetriebnahme und Betrieb, Abschnitt "Betriebsfunktionen Safety Integrated".
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 201
P9691 SI Toleranz für SG Min: 5.0 ÄndStat: C Datentyp: Float Einheit Hz Def: 12.0 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 302.0
Oberer Toleranzbereich für die SG. Wenn der Frequenzistwert den Wert in p9691/p9891 überschreitet, wird ein SH (speichernd) eingeleitet. SG muss aktiv sein. Für Anwendungen mit Wechsellast wird ein Hochsetzen von p9691/p9891 empfohlen.
Hinweis: Der Wert von p9691 muss größer sein als der Wert in p9690. Diese Bedingung wird beim Beenden der Sicherheits-IBN geprüft.
P9692 SI Reaktion auf SG anwählen Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Definiert nach Einleiten der Sicher reduzierten Geschwindigkeit (SG) die Reaktion, wenn der Drehzahlistwert höher als der Wert in p9690 ist.
Mögliche Einstellungen: 0 SBR+SH+Fehler,da f > f_SG 1 SBR aktivieren, da f > f_SG
Hinweis: Diese Einstellung ist auch dann wirksam, wenn SBR durch Schalten von zuerst SG6 und - nach kurzer Verzögerung der SH-Schiene - angewählt wird.
r9760 SI internes Passwort Min: - Datentyp: U32 Einheit - Def: - P-Gruppe: SAFETY Max: -
Enthält das momentane Passwort. Zur Sicherheits-IBN und zum Zurücksetzen von Safety muss der Wert von r9760 in p9761 eingetragen werden. Falls das Passwort in p9761 nicht korrekt auf den Wert in r9760 gesetzt wurde, kann keiner der Sicherheitsparameter geschrieben werden und ein Fehler F1659 wird ausgegeben. Dieser Parameter wird automatisch auf das Passwort in p9763 geändert, wenn der neue Wert von p9762 mit dem Bestätigungspasswort in p9763 übereinstimmt.
P9761 SI Passwort-Eingabe Min: 1000 ÄndStat: C Datentyp: U32 Einheit - Def: - P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 99999
In diesen Parameter wird das Sicherheitspasswort von r9760 eingetragen, um die Änderung von Sicherheitsparametern zuzulassen. Falls p9761 nicht mit r9760 identisch ist, wird der Fehler F1659 ausgegeben.
P9762 SI Passwort ändern Min: 1000 ÄndStat: C Datentyp: U32 Einheit - Def: - P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 99999
Parameter zur Passwortänderung. Das neue Passwort wird in p9762 eingetragen und bestätigt durch Eintragung des gleichen Wertes in p9763
P9763 SI Passwort ändern bestätigen Min: 1000 ÄndStat: C Datentyp: U32 Einheit - Def: - P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 99999
Bestätigt eine Passwortänderung. Der Parameter muss auf den gleichen Wert wie in p9762 gesetzt werden. Nur dann wird die Passwortänderung von p9762 in r9760 als neues Passwort gespeichert. Falls p9763 nicht mit p9762 identisch ist, werden beide Werte gelöscht und r9760 wird nicht aktualisiert.
Hinweis: Die Werte von p9762 und p9763 werden automatisch auf Null gesetzt, wenn ein neues Passwort akzeptiert wurde.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 202 A5E00348653A-AA
r9770[3] FW Failsafe-Version Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: SAFETY Max: -
Anzeige der Failsafe-Version. Index 0: Failsafe-Hauptversion Index 1: Failsafe-(Unterversion) Index 2: Failsafe-Hotfix oder Patch Beispiel: r9770[0] = 2, r9770[1] = 1, r9770[2] = 3 -> Failsafe-Version V02.01.03
Index: P9770[0] : Failsafe, H-Level P9770[1] : Failsafe U1 P9770[2] : Failsafe U2
r9771 CO/BO: SI Hardware-Funktionen Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: SAFETY Max: -
Zeigt (bit-kodiert) die verfügbaren Sicherheitsgerichteten Funktionen des Umrichters an.
Bitfelder: Bit00 SH anwählbar 0 No 1 Yes Bit01 SG anwählbar 0 No 1 Yes
Hinweis: Wenn r9771 = 255 ist oder alle nicht genutzten Bits gesetzt sind, ist beim Initialisieren dieses Parameters ein Fehler aufgetreten.
r9772 CO/BO: SI Status Wort Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: SAFETY Max: -
Zeigt den Safety-Zustand an.
Bitfelder: Bit00 SH über SGx angewählt 0 No 1 Yes Bit01 Sicherer Halt (SH) aktiv 0 No 1 Yes Bit02 SH wegen Antriebsfehler auf P1 0 No 1 Yes Bit03 SH wegen Antriebsfehler auf P2 0 No 1 Yes Bit04 SG über SGx angewählt 0 No 1 Yes Bit05 SG erreicht 0 No 1 Yes Bit06 Dynamisierung nötig 0 No 1 Yes Bit07 Bremsrückmeldung freigegeben 0 No 1 Yes Bit08 Sichere Bremsrampe (SBR) aktiv 0 No 1 Yes
Hinweis: Die Anwahl eines Safety-Funktion (SH, SBR oder SG) erfolgt über die Abschaltgruppe. Der SH kann durch eine Anwahl über die Abschaltgruppen oder durch einen Safety-Fehler im Antrieb erfolgen. Siehe r0947 und r0949 für weitere Informationen über den Fehler. Wenn die SG gewählt wurde, kann die SBR im Eingriff sein (Bit08) bis die SG-Soll-Drehzahl (siehe p9690/p9890) erreicht ist.
r9798 SI Prüfsumme Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: SAFETY Max: -
Zeigt die Safety-Prüfsumme für P1 an. Die Prüfsumme ändert sich, wenn CRC-relevante Safety-Parameter von P1 geändert werden (Parameterbereich p9600 - p9699, ausgenommen p9659).
Hinweis: Diese Prüfsumme muss mit dem Wert in r9898 identisch sein, damit die Safety-IBN über p3900 = 10 beendet werden kann. Falls r9798 von r9898 abweicht, sind die CRC-relevanten Safety-Parameter von P1 unterschiedlich zu denen von P2. Prüfen Sie die Parameter von P1 und P2 und korrigieren Sie den Fehler. Wenn r9798 und r9898 voneinander abweichen, kann die Safety-IBN jederzeit über p3900 = 11 unter Verwerfung der letzten Änderungen verlassen werden
Stufe
3
Stufe
3
Stufe
3
Stufe
3
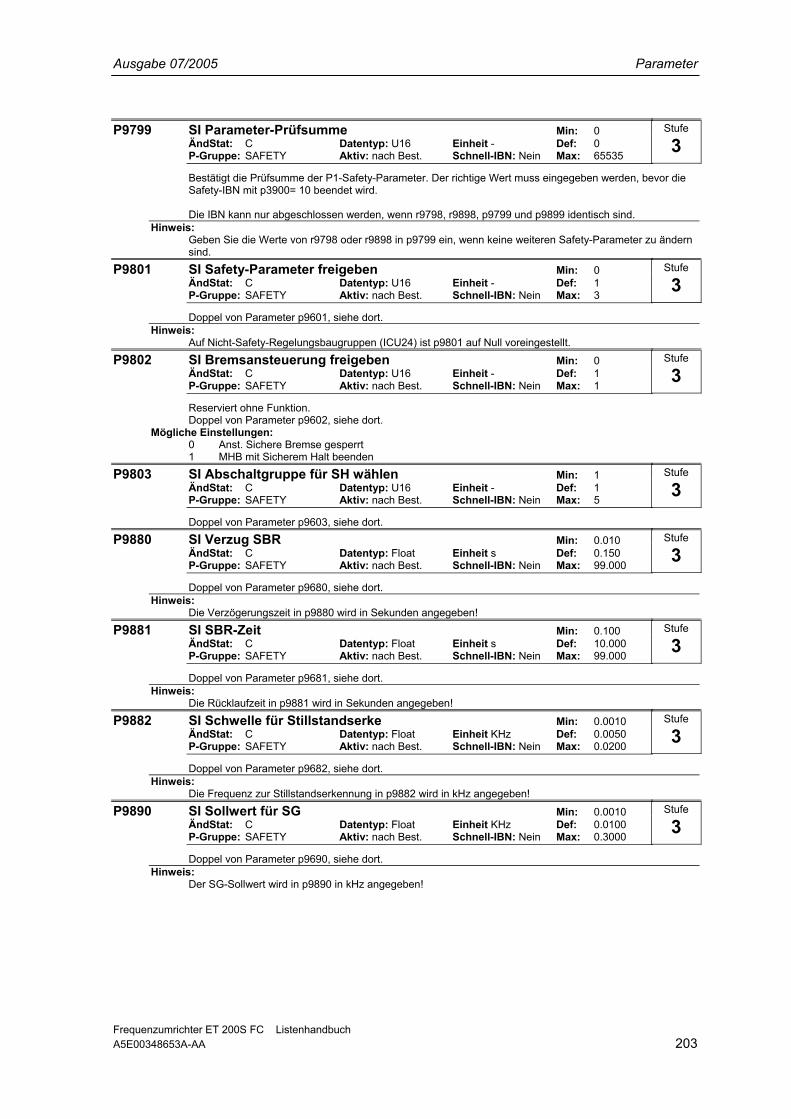
Ausgabe 07/2005 Parameter
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 203
P9799 SI Parameter-Prüfsumme Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 0 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 65535
Bestätigt die Prüfsumme der P1-Safety-Parameter. Der richtige Wert muss eingegeben werden, bevor die Safety-IBN mit p3900= 10 beendet wird. Die IBN kann nur abgeschlossen werden, wenn r9798, r9898, p9799 und p9899 identisch sind.
Hinweis: Geben Sie die Werte von r9798 oder r9898 in p9799 ein, wenn keine weiteren Safety-Parameter zu ändern sind.
P9801 SI Safety-Parameter freigeben Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 3
Doppel von Parameter p9601, siehe dort. Hinweis:
Auf Nicht-Safety-Regelungsbaugruppen (ICU24) ist p9801 auf Null voreingestellt.
P9802 SI Bremsansteuerung freigeben Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Reserviert ohne Funktion. Doppel von Parameter p9602, siehe dort.
Mögliche Einstellungen: 0 Anst. Sichere Bremse gesperrt 1 MHB mit Sicherem Halt beenden
P9803 SI Abschaltgruppe für SH wählen Min: 1 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 5
Doppel von Parameter p9603, siehe dort.
P9880 SI Verzug SBR Min: 0.010 ÄndStat: C Datentyp: Float Einheit s Def: 0.150 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 99.000
Doppel von Parameter p9680, siehe dort. Hinweis:
Die Verzögerungszeit in p9880 wird in Sekunden angegeben!
P9881 SI SBR-Zeit Min: 0.100 ÄndStat: C Datentyp: Float Einheit s Def: 10.000 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 99.000
Doppel von Parameter p9681, siehe dort. Hinweis:
Die Rücklaufzeit in p9881 wird in Sekunden angegeben!
P9882 SI Schwelle für Stillstandserke Min: 0.0010 ÄndStat: C Datentyp: Float Einheit KHz Def: 0.0050 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 0.0200
Doppel von Parameter p9682, siehe dort. Hinweis:
Die Frequenz zur Stillstandserkennung in p9882 wird in kHz angegeben!
P9890 SI Sollwert für SG Min: 0.0010 ÄndStat: C Datentyp: Float Einheit KHz Def: 0.0100 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 0.3000
Doppel von Parameter p9690, siehe dort. Hinweis:
Der SG-Sollwert wird in p9890 in kHz angegeben!
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Stufe
3

Parameter Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 204 A5E00348653A-AA
P9891 SI Toleranz für SG Min: 0.0050 ÄndStat: C Datentyp: Float Einheit KHz Def: 0.0120 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 0.3020
Doppel von Parameter p9691, siehe dort. Hinweis:
Die SG-Toleranz wird in p9891 in kHz angegeben!
P9892 SI Reaktion auf SG wählen Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 1 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 1
Doppel von Parameter p9692, siehe dort. Mögliche Einstellungen:
0 SBR+SH+Fehler,da f > f_SG 1 SBR aktivieren, da f > f_SG
r9898 SI Prüfsumme Min: - Datentyp: U16 Einheit - Def: - P-Gruppe: SAFETY Max: -
Anzeige der Safety-Prüfsumme für P2-Parameter. Die Prüfsumme ändert sich, wenn Safety-Parameter für P2 geändert werden (Parameterbereich p9800 - p9892).
Hinweis: Diese Prüfsumme muss mit dem Wert in r9798 identisch sein, damit die Safety-IBN über p3900= 10 beendet werden kann. Falls r9898 von r9798 abweicht, unterscheiden sich sie Safety-Parameter von P2 von denen von P1. Prüfen Sie die Safety-Parameter und korrigieren Sie den Fehler. Die Safety-IBN kann jederzeit über p3900= 11 unter Verwerfung der letzten Änderungen verlassen werden
P9899 SI Parameter-Prüfsumme Min: 0 ÄndStat: C Datentyp: U16 Einheit - Def: 0 P-Gruppe: SAFETY Aktiv: nach Best. Schnell-IBN: Nein Max: 65535
Bestätigen Sie die Prüfsumme der Safety-Parameter Hinweis:
Geben Sie den in r9798 oder r9898 angezeigten Wert in p9899 ein, wenn die Safety-Parametrierung abgeschlossen ist.
Stufe
3
Stufe
3
Stufe
3
Stufe
3
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 205
Funktionspläne 2
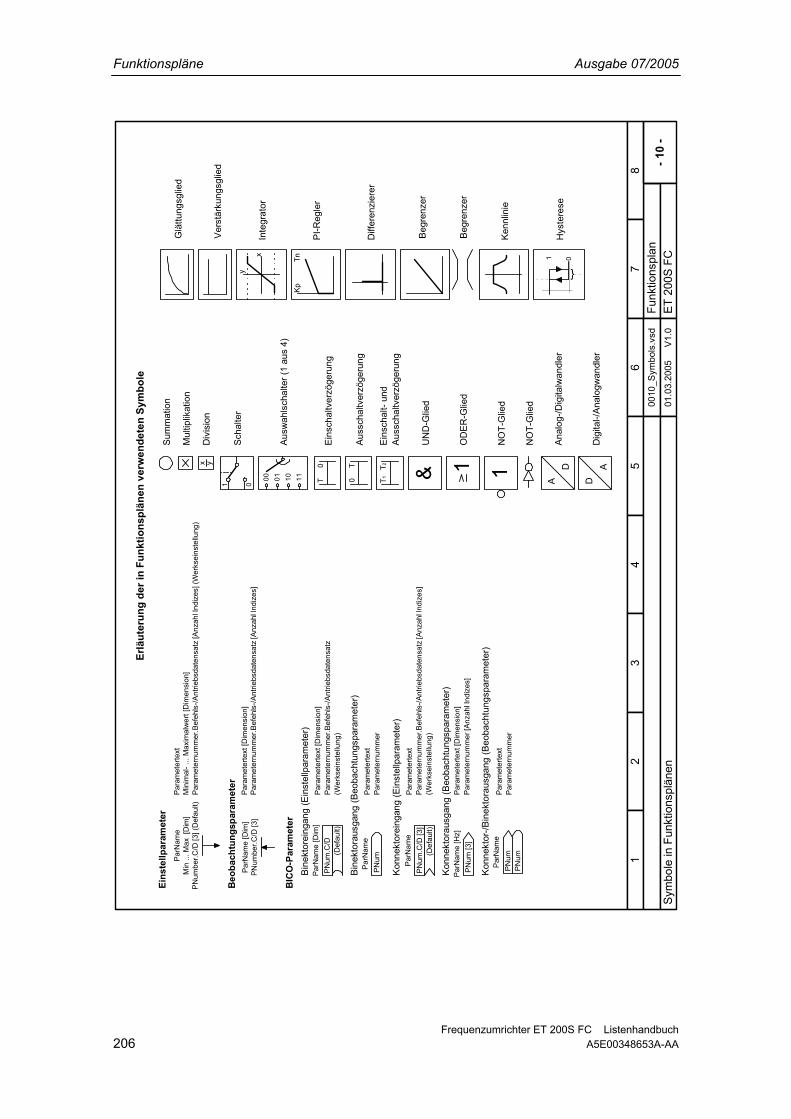
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 206 A5E00348653A-AA
- 10
-Fu
nktio
nspl
an8
76
54
32
100
10_S
ymbo
ls.v
sd
ET 2
00S
FC01
.03.
2005
V
1.0
Sym
bole
in F
unkt
ions
plän
en
ParN
ame
[Dim
]PN
umbe
r.C/D
[3]
(Def
ault)
ParN
ame
[Dim
]P
Num
.C/D
Par
Nam
e
(Def
ault)
PN
um.C
/D [3
]
PN
um [3
]Pa
rNam
e [H
z]
Par
Nam
e
PN
umP
NumP
arN
ame
Min
... M
ax [
Dim
]P
Num
ber.C
/D [3
] (D
efau
lt)
Erlä
uter
ung
der i
n Fu
nktio
nspl
änen
ver
wen
dete
n Sy
mbo
le
Eins
tellp
aram
eter
Par
amet
erte
xtM
inim
al- .
.. M
axim
alw
ert [
Dim
ensi
on]
Par
amet
ernu
mm
er.B
efeh
ls-/A
ntrie
bsda
tens
atz
[Anz
ahl I
ndiz
es] (
Wer
ksei
nste
llung
)
Beo
bach
tung
spar
amet
erP
aram
eter
text
[Dim
ensi
on]
Par
amet
ernu
mm
er.B
efeh
ls-/A
ntrie
bsda
tens
atz
[Anz
ahl I
ndiz
es]
BIC
O-P
aram
eter
Bin
ekto
rein
gang
(Ein
stel
lpar
amet
er)
Par
amet
erte
xt [D
imen
sion
]P
aram
eter
num
mer
.Bef
ehls
-/Ant
riebs
date
nsat
z(W
erks
eins
tellu
ng)
Bin
ekto
raus
gang
(Beo
bach
tung
spar
amet
er)
Par
amet
erte
xtP
aram
eter
num
mer
Par
Nam
eP
Num
Kon
nekt
orei
ngan
g (E
inst
ellp
aram
eter
)P
aram
eter
text
Par
amet
ernu
mm
er.B
efeh
ls-/A
ntrie
bsda
tens
atz
[Anz
ahl I
ndiz
es]
(Wer
ksei
nste
llung
)
Kon
nekt
orau
sgan
g (B
eoba
chtu
ngsp
aram
eter
)P
aram
eter
text
[Dim
ensi
on]
Par
amet
ernu
mm
er [A
nzah
l Ind
izes
]
Kon
nekt
or-/B
inek
tora
usga
ng (B
eoba
chtu
ngsp
aram
eter
)P
aram
eter
text
Par
amet
ernu
mm
er
Kp
Tn
x
y
T0
0T
T1T2 & 1
11100100
01
{
1 0 AD
DAx y
Sum
mat
ion
Mul
tiplik
atio
n
Div
isio
n
Sch
alte
r
Aus
wah
lsch
alte
r (1
aus
4)
Ein
scha
ltver
zöge
rung
Aus
scha
ltver
zöge
rung
Ein
scha
lt- u
ndA
ussc
haltv
erzö
geru
ng
UN
D-G
lied
OD
ER
-Glie
d
Ana
log-
/Dig
italw
andl
er
Dig
ital-/
Ana
logw
andl
er
Ver
stär
kung
sglie
d
Glä
ttung
sglie
d
Beg
renz
er
Beg
renz
er
PI-R
egle
r
Hys
tere
se
Inte
grat
or
1N
OT-
Glie
d
NO
T-G
lied
Ken
nlin
ie
Diff
eren
zier
er

Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 207
- 110
0 -
Funk
tions
plan
87
65
43
21
1100
_Ove
rvie
w.v
sdÜ
bers
icht
ET 2
00S
FC01
.03.
2005
V
1.0
Allg
emei
ne Ü
bers
icht
Ext
erne
Sch
nitts
telle
nIn
tern
eS
ollw
ertq
uelle
Tech
nolo
gie-
funt
ktio
nen
Sol
lwer
tkan
alM
otor
rege
lung
Ste
uers
atz
US
S o
nR
S23
2
Impu
lsge
ber
Par
amet
rieru
ngAbl
aufs
teue
rung
SU
M-S
ollw
ert
Mot
orm
odel
l
Dre
hzah
l-/D
rehm
omen
t-re
gelu
ng
Stro
m-
rege
lung
U/f-
Ste
ueru
ng
JOG
AFM
RFG
MOD
SUM/JOG-Auswahl
Mot
or- u
nd U
mric
hter
schu
tz, A
npas
sung
der
Mot
orpa
ram
eter
Mot
orid
entif
ikat
ion
Flus
s-S
ollw
ert
7500
- 77
00
7800
7900
7900
6100
5200
5000
5000
5300
Übe
rwac
hung
Bre
msu
ng
Aut
omat
isch
erW
iede
ranl
auf
Fang
en
Frei
e Fu
nk-
tions
baus
tein
eD
OU
T
4800
- 48
30
Fiel
dbus
DIN
2000
DA
C23
00
4100
- 41
80
2500
- 25
10
2700
- 27
10
Pos
ition
iere
nde
Rüc
klau
fram
pe
2100
(nur
für
Ser
vice
zwec
ke)
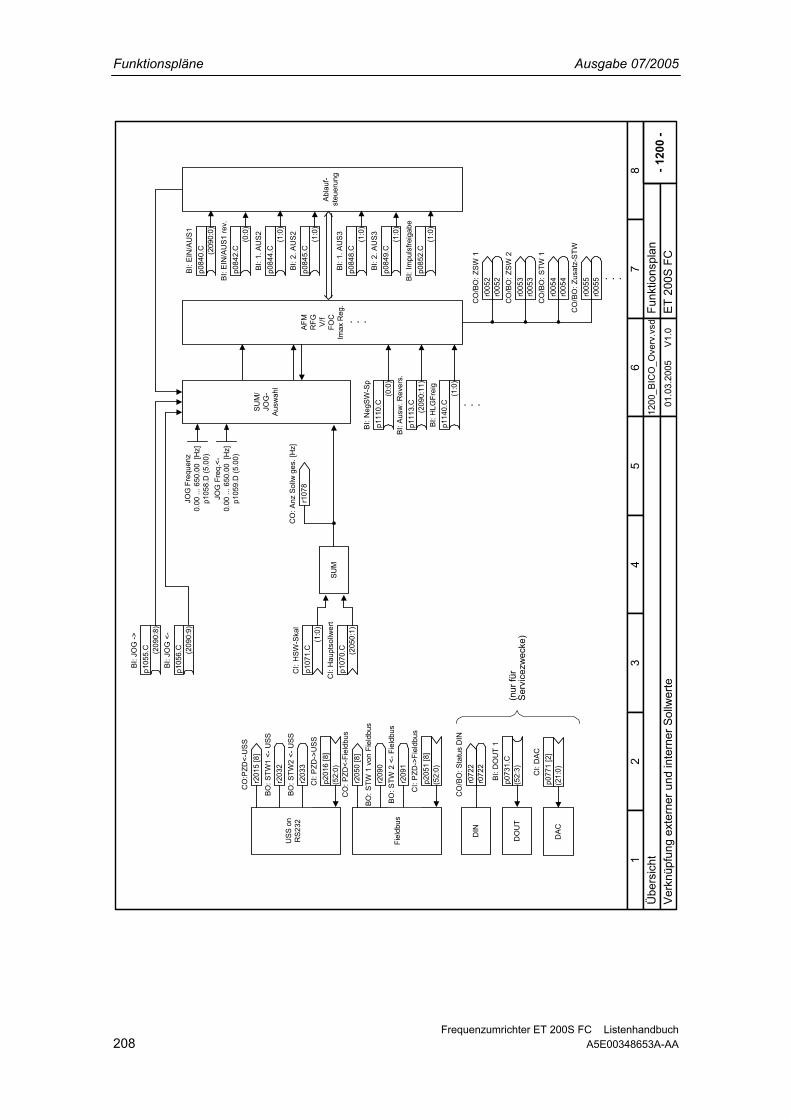
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 208 A5E00348653A-AA
- 120
0 -
Funk
tions
plan
87
65
43
21
1200
_BIC
O_O
verv
.vsd
Übe
rsic
htET
200
S FC
01.0
3.20
05
V1.
0Ve
rknü
pfun
g ex
tern
er u
nd in
tern
er S
ollw
erte
CO
/BO
: Sta
tus
DIN
r072
2r0
722
(52:
3)
BI:
DO
UT
1p0
731.
C
r201
5 [8
]C
O:P
ZD<-
US
S
BO
: STW
1 <-
USS
r203
2B
O: S
TW2
<- U
SSr2
033
r205
0 [8
]C
O: P
ZD<-
Fiel
dbus
BO: S
TW 1
von
Fie
ldbu
sr2
090
BO
: STW
2 <
- Fie
ldbu
sr2
091
CI:
PZD
->Fi
eldb
us
(52:
0)p2
051
[8]
CI:
PZD
->U
SS
(52:
0)p2
016
[8]
(209
0:8)
BI:
JOG
->p1
055.
C (209
0:9)
BI:
JOG
<-
p105
6.C
JOG
Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p105
8.D
(5.0
0)JO
G F
req.
<-0.
00 ..
. 650
.00
[Hz]
p105
9.D
(5.0
0)
(0:0
)
BI:
Neg
SW
-Sp
p111
0.C
(209
0:11
)
BI:
Aus
w. R
ever
s.p1
113.
C
(1:0
)
BI:
HLG
Frei
gp1
140.
C
CO
/BO
: Zus
atz-
STW
r005
5r0
055
CO
/BO
: STW
1
r005
4r0
054
CO
/BO
: ZSW
2
r005
3r0
053
CO
/BO
: ZSW
1
r005
2r0
052
Abl
auf-
steu
erun
g
(209
0:0)
BI:
EIN
/AU
S1
p084
0.C
(0:0
)
BI:
EIN
/AU
S1 re
v.p0
842.
C
(1:0
)
BI: 1
. AU
S2p0
844.
C
(1:0
)
BI: 2
. AU
S2p0
845.
C
(1:0
)
BI: 1
. AU
S3p0
848.
C
(1:0
)
BI: 2
. AU
S3p0
849.
C
(1:0
)
BI: I
mpu
lsfre
igab
ep0
852.
C
SU
M/
JOG
-A
usw
ahl
AFM
RFG V/f
FOC
Imax
Reg
.. . .
. . .
. . .
r107
8C
O: A
nz S
ollw
ges
. [H
z]
SUM
CI:
HSW
-Ska
l
(1:0
)p1
071.
C
CI:
Hau
ptso
llwer
t
(205
0:1)
p107
0.C
DO
UT
DIN
CI:
DA
C
(21:
0)p0
771
[2]
DA
C
US
S on
RS
232
Fiel
dbus
(nur
für
Ser
vice
zwec
ke)
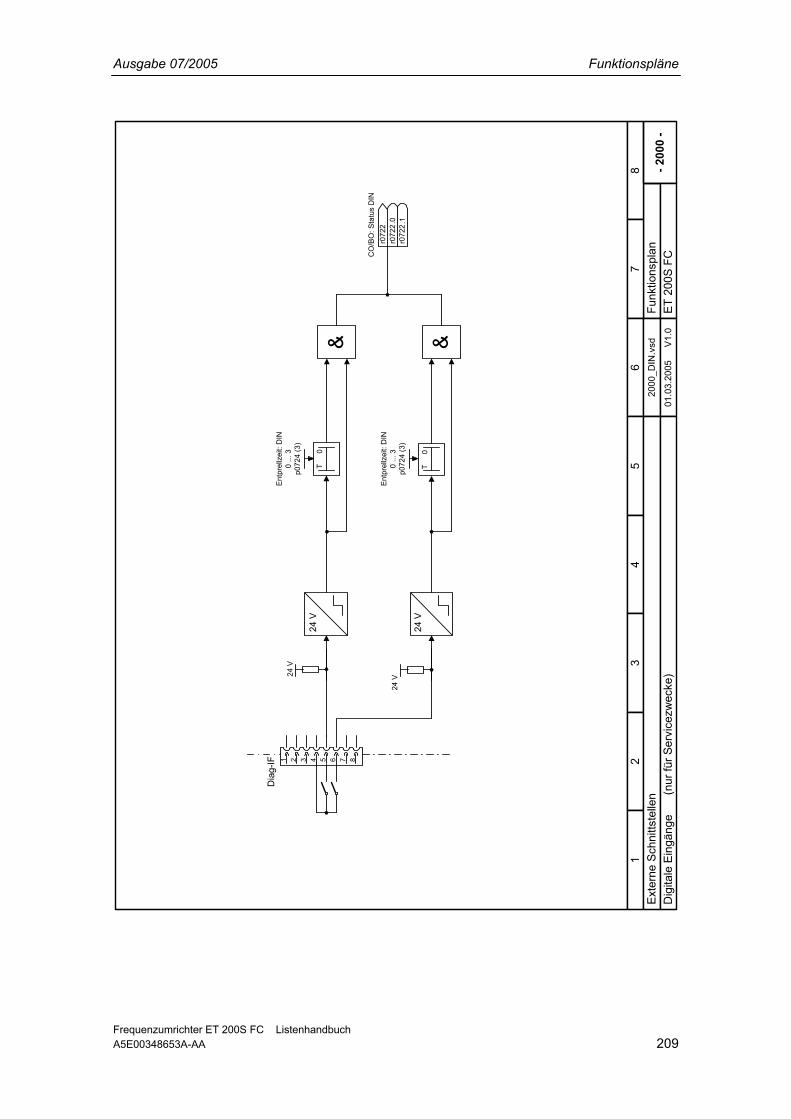
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 209
- 200
0 -
Funk
tions
plan
87
65
43
21
2000
_DIN
.vsd
Exte
rne
Schn
ittst
elle
nET
200
S FC
01.0
3.20
05
V1.
0D
igita
le E
ingä
nge
24 V
T0
&
24 V
Entp
rellz
eit:
DIN
0 ...
3p0
724
(3)
24 V
T0
&
24 V
Entp
rellz
eit:
DIN
0 ...
3p0
724
(3)
CO
/BO
: Sta
tus
DIN
r072
2r0
722
r072
2.0 .1
4321 5 6 7 8
Dia
g-IF
(nur
für S
ervi
cezw
ecke
)
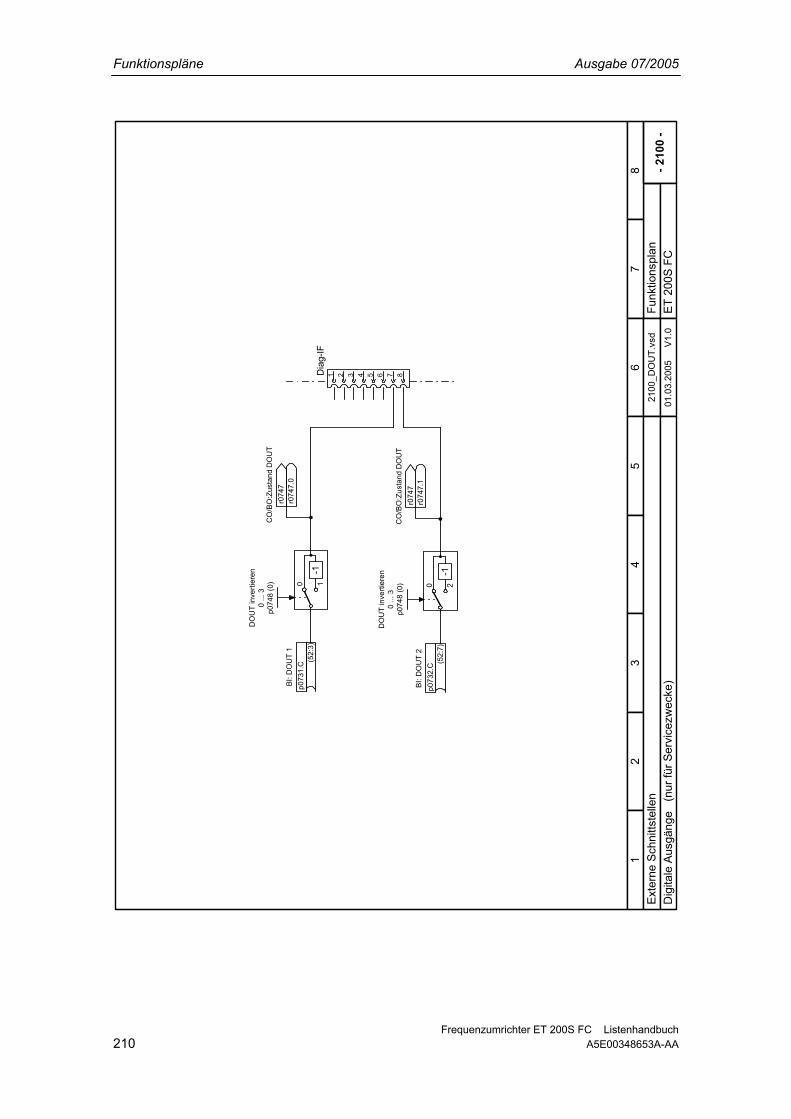
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 210 A5E00348653A-AA
- 210
0 -
Funk
tions
plan
87
65
43
21
2100
_DO
UT.
vsd
Exte
rne
Schn
ittst
elle
nET
200
S FC
01.0
3.20
05
V1.
0D
igita
le A
usgä
nge
(52:
3)
BI: D
OU
T 1
p073
1.C
-1
0 1
DO
UT
inve
rtier
en0
... 3
p074
8 (0
)C
O/B
O:Z
usta
nd D
OU
T
r074
7r0
747
(52:
7)
BI:
DO
UT
2p0
732.
C
-1
0 2
DO
UT
inve
rtier
en0
... 3
p074
8 (0
)C
O/B
O:Z
usta
nd D
OU
T
r074
7r0
747
.0 .1
4321 5 6 7 8Dia
g-IF
(nur
für S
ervi
cezw
ecke
)
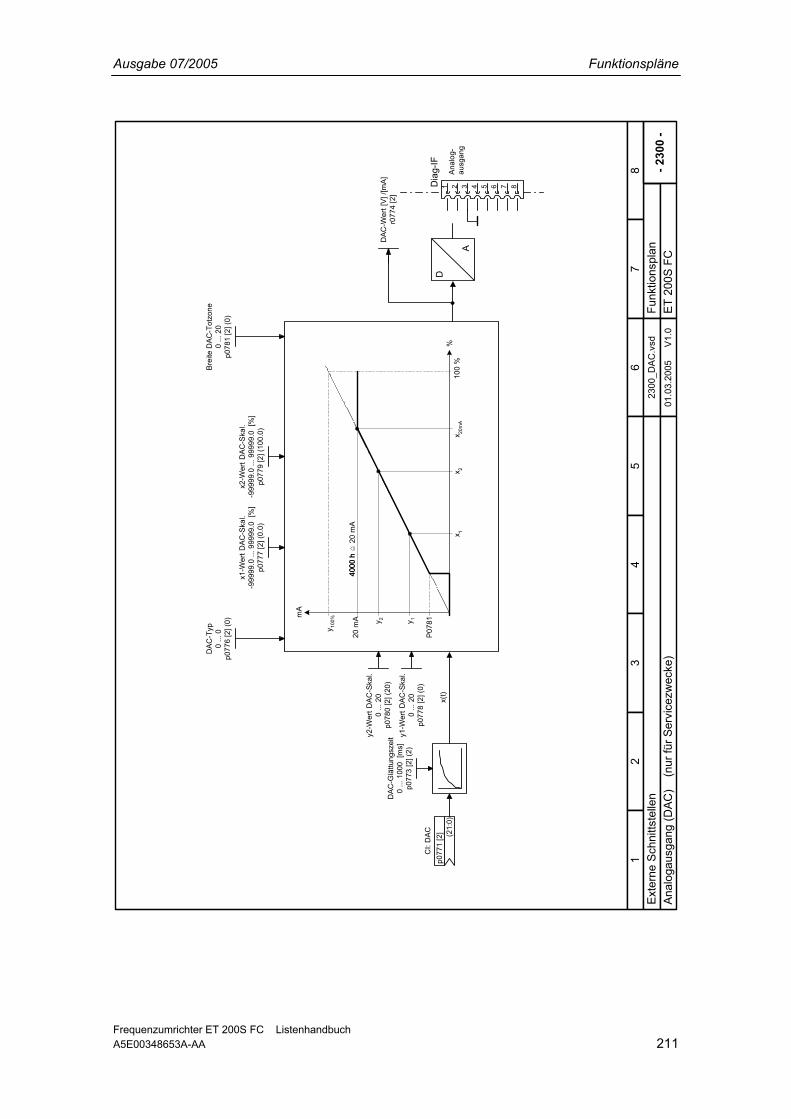
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 211
- 230
0 -
Funk
tions
plan
87
65
43
21
2300
_DA
C.v
sdEx
tern
e Sc
hnitt
stel
len
ET 2
00S
FC01
.03.
2005
V
1.0
Anal
ogau
sgan
g (D
AC)
DAC
-Typ
0 ...
0p0
776
[2] (
0)
A
Dx(
t)
x1-W
ert D
AC
-Ska
l.-9
9999
.0 ..
. 999
99.0
[%
]p0
777
[2] (
0.0)
y1-W
ert D
AC-S
kal.
0 ...
20
p077
8 [2
] (0)
x2-W
ert D
AC
-Ska
l.-9
9999
.0 ..
. 999
99.0
[%
]p0
779
[2] (
100.
0)
y2-W
ert D
AC-S
kal.
0 ...
20
p078
0 [2
] (20
)
Bre
ite D
AC-T
otzo
ne0
... 2
0p0
781
[2] (
0)
x 2x 1
y 2 y 1
4000
h40
00 h
20 m
A
x 20m
A10
0 %
20 m
A mA
y 100%
%
P078
1
DAC
-Glä
ttung
szei
t0
... 1
000
[ms]
p077
3 [2
] (2)
CI:
DA
C (21:
0)p0
771
[2]
DAC
-Wer
t [V]
/[m
A]
r077
4 [2
]
4321 5 6 7 8Dia
g-IF
Ana
log-
ausg
ang
(nur
für S
ervi
cezw
ecke
)
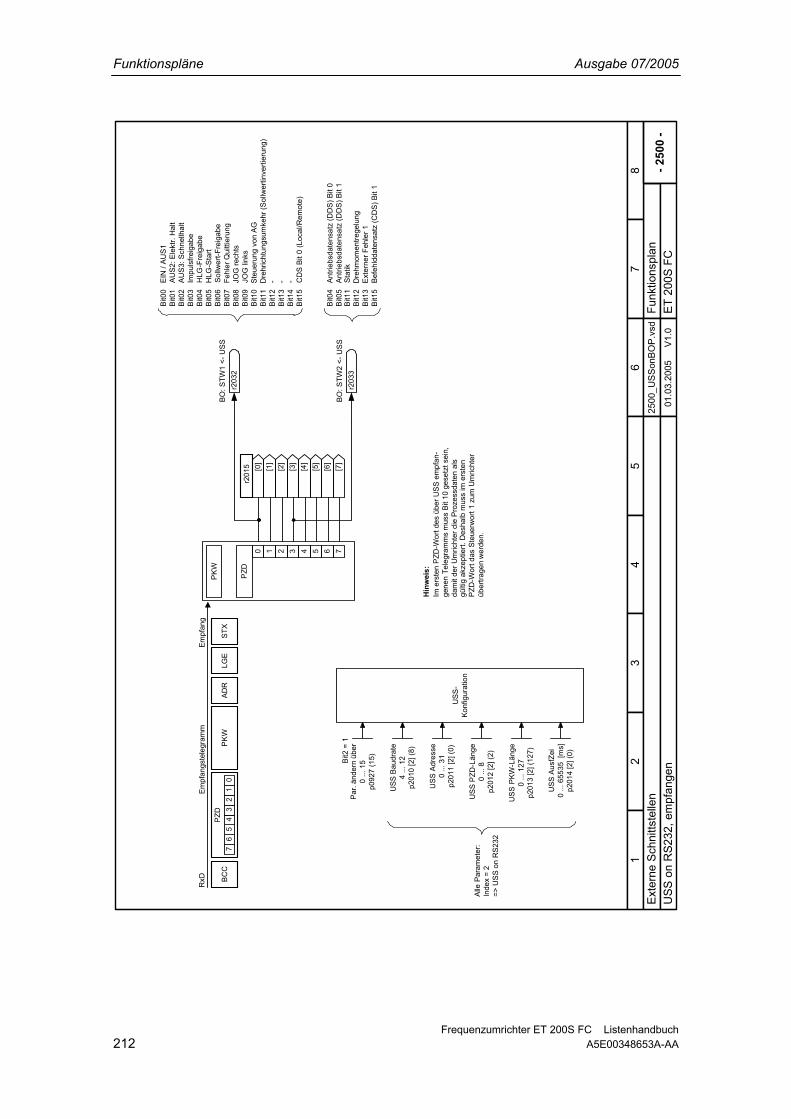
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 212 A5E00348653A-AA
- 250
0 -
Funk
tions
plan
87
65
43
21
2500
_US
Son
BO
P.v
sdEx
tern
e Sc
hnitt
stel
len
ET 2
00S
FC01
.03.
2005
V
1.0
USS
on
RS2
32, e
mpf
ange
n
Alle
Par
amet
er:
Inde
x =
2=>
US
S o
n R
S232
PK
W
PZD
1[0
]r2
015 [1]
[2]
[3]
2 3 4 5 6 70
[4]
[5]
[6]
[7]
USS
Bau
drat
e4
... 1
2p2
010
[2] (
8)
BO
: STW
1 <-
USS
r203
2
BO
: STW
2 <-
USS
r203
3
STX
LGE
AD
RB
CC
PZD
PK
W0
76
54
32
1Empf
angs
tele
gram
mR
xDEm
pfan
g
US
S-
Kon
figur
atio
n
Par
. änd
ern
über
0 ...
15
p092
7 (1
5)
USS
Adr
esse
0 ...
31
p201
1 [2
] (0)
US
S P
KW-L
änge
0 ...
127
p201
3 [2
] (12
7)
USS
PZD
-Län
ge0
... 8
p201
2 [2
] (2)
USS
Aus
fZei
0 ...
655
35 [
ms]
p201
4 [2
] (0)
Bit2
= 1
Hin
wei
s:Im
ers
ten
PZD
-Wor
t des
übe
r US
S em
pfan
-ge
nen
Tele
gram
ms
mus
s B
it 10
ges
etzt
sei
n,da
mit
der U
mric
hter
die
Pro
zess
date
n al
sgü
ltig
akze
ptie
rt. D
esha
lb m
uss
im e
rste
nP
ZD-W
ort d
as S
teue
rwor
t 1 z
um U
mric
hter
über
trage
n w
erde
n.
Bit0
0 E
IN /
AU
S1
Bit0
1 A
US2
: Ele
ktr.
Hal
tB
it02
AU
S3:
Sch
nellh
alt
Bit0
3 I
mpu
lsfre
igab
eB
it04
HLG
-Fre
igab
eB
it05
HLG
-Sta
rtB
it06
Sol
lwer
t-Fre
igab
eB
it07
Feh
ler Q
uitti
erun
gB
it08
JO
G re
chts
Bit0
9 J
OG
link
sB
it10
Ste
ueru
ng v
on A
GB
it11
Dre
hric
htun
gsum
kehr
(Sol
lwer
tinve
rtier
ung)
Bit1
2 -
Bit1
3 -
Bit1
4 -
Bit1
5 C
DS
Bit
0 (L
ocal
/Rem
ote)
Bit0
4 A
ntrie
bsda
tens
atz
(DD
S) B
it 0
Bit0
5 A
ntrie
bsda
tens
atz
(DD
S) B
it 1
Bit1
1 S
tatik
Bit1
2 D
rehm
omen
trege
lung
Bit1
3 E
xter
ner F
ehle
r 1B
it15
Bef
ehld
date
nsat
z (C
DS
) Bit
1
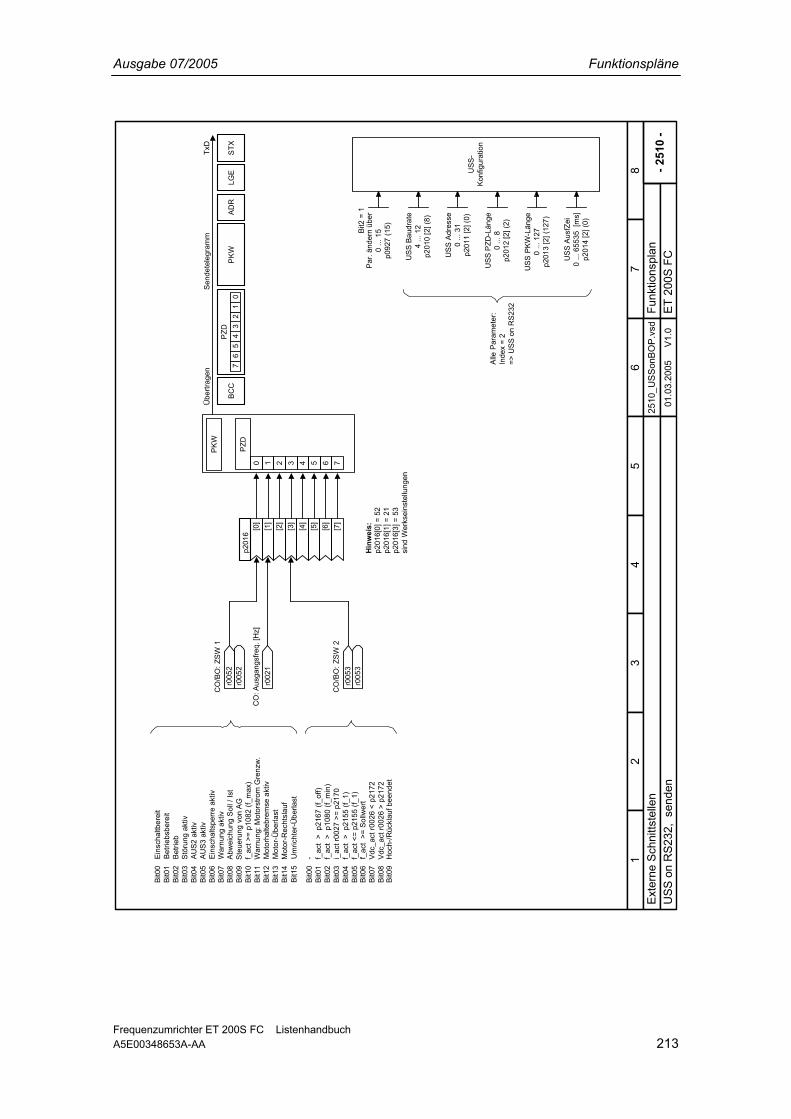
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 213
- 251
0 -
Funk
tions
plan
87
65
43
21
2510
_US
Son
BO
P.v
sdEx
tern
e Sc
hnitt
stel
len
ET 2
00S
FC01
.03.
2005
V
1.0
USS
on
RS2
32,
send
en
PK
W
PZD
1 2 3 4 5 6 70
AD
RB
CC
PZD
PK
W0
76
54
32
1
Sen
dete
legr
amm
[0]
p201
6
[2]
[3]
[4]
[1]
[5]
[6]
[7]
CO
/BO
: ZS
W 1
r005
2r0
052
r002
1C
O: A
usga
ngsf
req.
[Hz]
CO
/BO
: ZS
W 2
r005
3r0
053
LGE
STXTxD
Bit0
0 E
insc
haltb
erei
tB
it01
Bet
riebs
bere
itB
it02
Bet
rieb
Bit0
3 S
töru
ng a
ktiv
Bit0
4 A
US2
akt
ivB
it05
AU
S3 a
ktiv
Bit0
6 E
insc
halts
perre
akt
ivB
it07
War
nung
akt
ivB
it08
Abw
eich
ung
Sol
l / Is
tB
it09
Ste
ueru
ng v
on A
GB
it10
f_a
ct >
= p1
082
(f_m
ax)
Bit1
1 W
arnu
ng: M
otor
stro
m G
renz
w.
Bit1
2 M
otor
halte
brem
se a
ktiv
Bit1
3 M
otor
-Übe
rlast
Bit1
4 M
otor
-Rec
htsl
auf
Bit0
0 -
Bit0
1 f
_act
> p
2167
(f_o
ff)B
it02
f_a
ct >
p10
80 (f
_min
)B
it03
i_a
ct r0
027
>= p
2170
Bit0
4 f
_act
> p
2155
(f_1
)B
it05
f_a
ct <
= p2
155
(f_1)
Bit0
6 f
_act
>=
Sol
lwer
tB
it07
Vdc
_act
r002
6 <
p217
2B
it08
Vdc
_act
r002
6 >
p217
2
Übe
rtrag
en
Bit0
9 H
och-
/Rüc
klau
f bee
ndet
Alle
Par
amet
er:
Inde
x =
2=>
USS
on
RS
232
US
S Ba
udra
te4
... 1
2p2
010
[2] (
8)
USS
-K
onfig
urat
ion
Par
. änd
ern
über
0 ...
15
p092
7 (1
5)
USS
Adr
esse
0 ...
31
p201
1 [2
] (0)
USS
PK
W-L
änge
0 ...
127
p201
3 [2
] (12
7)
USS
PZD
-Län
ge0
... 8
p201
2 [2
] (2)
US
S A
usfZ
ei0
... 6
5535
[m
s]p2
014
[2] (
0)
Bit2
= 1
Hin
wei
s:p2
016[
0] =
52
p201
6[1]
= 2
1p2
016[
3] =
53
sind
Wer
ksei
nste
llung
en
Bit1
5 U
mric
hter
-Übe
rlast
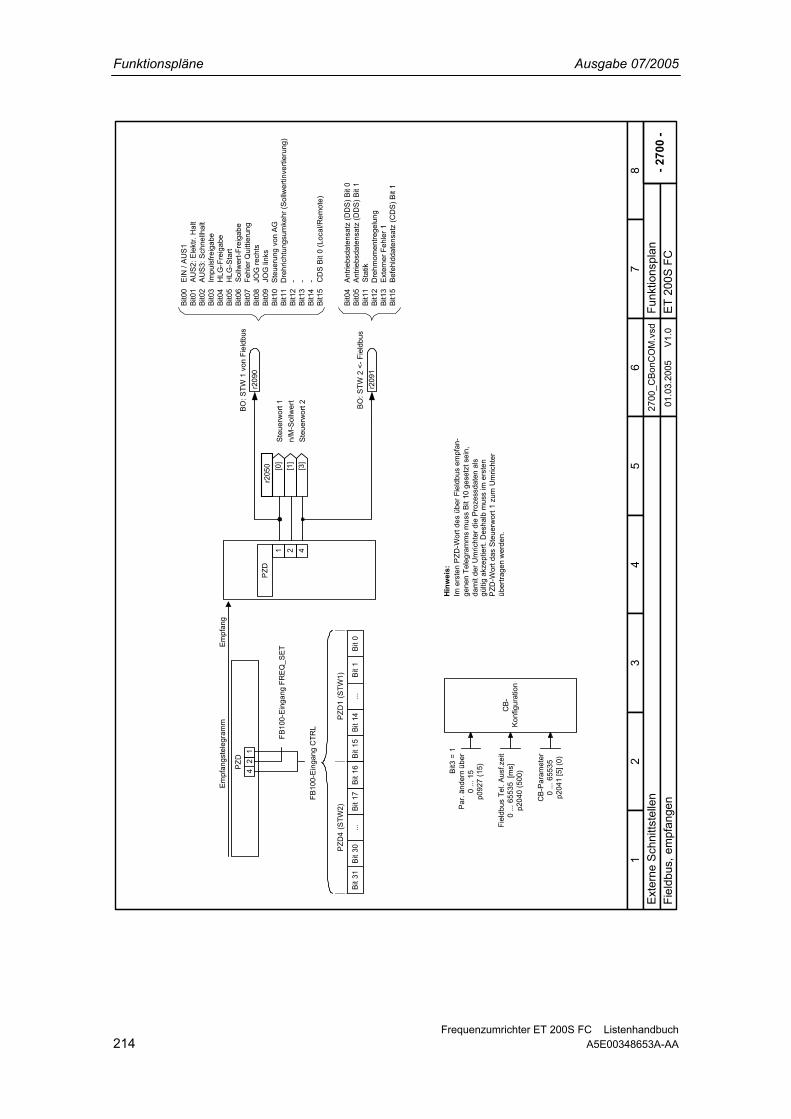
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 214 A5E00348653A-AA
- 270
0 -
Funk
tions
plan
87
65
43
21
2700
_CB
onC
OM
.vsd
Exte
rne
Schn
ittst
elle
nET
200
S FC
01.0
3.20
05
V1.
0Fi
eldb
us, e
mpf
ange
n
PZD
2[0
]r2
050 [1]
[3]
4
Fiel
dbus
Tel
. Aus
f.zei
t0
... 6
5535
[m
s]p2
040
(500
)
BO: S
TW 1
von
Fie
ldbu
sr2
090
BO
: STW
2 <
- Fie
ldbu
sr2
091
PZD
42
Empf
angs
tele
gram
mEm
pfan
g
CB
-K
onfig
urat
ion
Par
. änd
ern
über
0 ...
15
p092
7 (1
5)
CB
-Par
amet
er0
... 6
5535
p204
1 [5
] (0)
Bit3
= 1
Hin
wei
s:Im
ers
ten
PZD
-Wor
t des
übe
r Fie
ldbu
s em
pfan
-ge
nen
Tele
gram
ms
mus
s B
it 10
ges
etzt
sei
n,da
mit
der U
mric
hter
die
Pro
zess
date
n al
s
Bit0
0 E
IN /
AU
S1
Bit0
1 A
US2
: Ele
ktr.
Hal
tB
it02
AU
S3: S
chne
llhal
tB
it03
Im
puls
freig
abe
Bit0
4 H
LG-F
reig
abe
Bit0
5 H
LG-S
tart
Bit0
6 S
ollw
ert-F
reig
abe
Bit0
7 F
ehle
r Qui
ttier
ung
Bit0
8 J
OG
rech
tsB
it09
JO
G li
nks
Bit1
0 S
teue
rung
von
AG
Bit1
1 D
rehr
icht
ungs
umke
hr (S
ollw
ertin
verti
erun
g)B
it12
-B
it13
-B
it14
-B
it15
CD
S Bi
t 0 (L
ocal
/Rem
ote)
Bit0
4 A
ntrie
bsda
tens
atz
(DD
S) B
it 0
Bit0
5 A
ntrie
bsda
tens
atz
(DD
S) B
it 1
Bit1
1 S
tatik
Bit1
2 D
rehm
omen
trege
lung
Bit1
3 E
xter
ner F
ehle
r 1B
it15
Bef
ehld
date
nsat
z (C
DS)
Bit
1
1
1
gülti
g ak
zept
iert.
Des
halb
mus
s im
ers
ten
PZD
-Wor
t das
Ste
uerw
ort 1
zum
Um
richt
erüb
ertra
gen
wer
den.
Steu
erw
ort 1
n/M
-Sol
lwer
tSt
euer
wor
t 2
PZD
4 (S
TW2)
Bit
31B
it 30
Bit
1B
it 0
...
PZD
1 (S
TW1)
Bit
15B
it 14
...B
it 17
Bit
16
FB10
0-E
inga
ng F
RE
Q_S
ET
FB10
0-Ei
ngan
g C
TRL
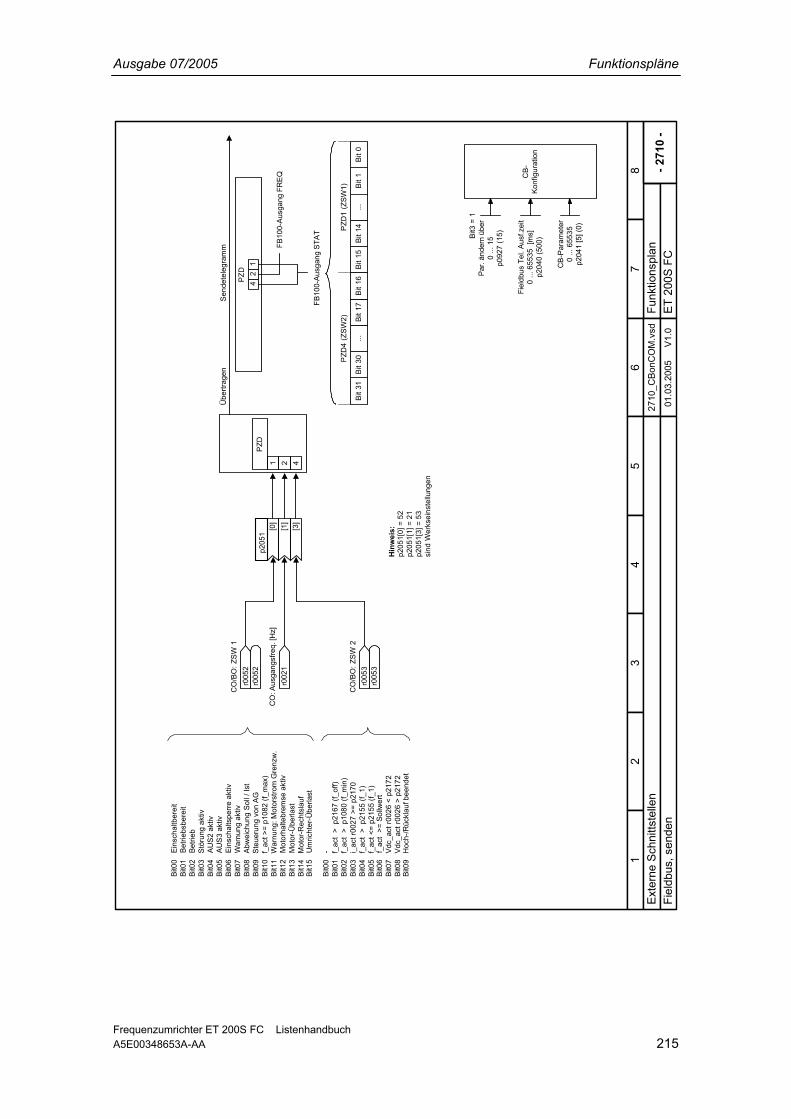
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 215
- 271
0 -
Funk
tions
plan
87
65
43
21
2710
_CB
onC
OM
.vsd
Exte
rne
Schn
ittst
elle
nET
200
S FC
01.0
3.20
05
V1.
0Fi
eldb
us, s
ende
n
PZD
2 41
Sen
dete
legr
amm
[0]
p205
1
[3]
[1]
CO
/BO
: ZS
W 1
r005
2r0
052
r002
1C
O: A
usga
ngsf
req.
[Hz]
CO
/BO
: ZS
W 2
r005
3r0
053
Bit0
0 E
insc
haltb
erei
tBi
t01
Bet
riebs
bere
itBi
t02
Bet
rieb
Bit0
3 S
töru
ng a
ktiv
Bit0
4 A
US
2 ak
tivBi
t05
AU
S3
aktiv
Bit0
6 E
insc
halts
perr
e ak
tivBi
t07
War
nung
akt
ivBi
t08
Abw
eich
ung
Sol
l / Is
tBi
t09
Ste
ueru
ng v
on A
GBi
t10
f_a
ct >
= p1
082
(f_m
ax)
Bit1
1 W
arnu
ng: M
otor
stro
m G
renz
w.
Bit1
2 M
otor
halte
brem
se a
ktiv
Bit1
3 M
otor
-Übe
rlast
Bit1
4 M
otor
-Rec
htsl
auf
Bit0
0 -
Bit0
1 f
_act
> p
2167
(f_o
ff)Bi
t02
f_a
ct >
p10
80 (f
_min
)Bi
t03
i_a
ct r0
027
>= p
2170
Bit0
4 f
_act
> p
2155
(f_1
)Bi
t05
f_a
ct <
= p2
155
(f_1)
Bit0
6 f
_act
>=
Sollw
ert
Bit0
7 V
dc_a
ct r0
026
< p2
172
Bit0
8 V
dc_a
ct r0
026
> p2
172
Übe
rtrag
en
Bit0
9 H
och-
/Rüc
klau
f bee
ndet
Fiel
dbus
Tel
. Aus
f.zei
t0
... 6
5535
[m
s]p2
040
(500
)
CB
-K
onfig
urat
ion
Par
. änd
ern
über
0 ...
15
p092
7 (1
5)
CB
-Par
amet
er0
... 6
5535
p204
1 [5
] (0)
Bit3
= 1
PZD
42
1
Hin
wei
s:p2
051[
0] =
52
p205
1[1]
= 2
1p2
051[
3] =
53
sind
Wer
ksei
nste
llung
en
Bit1
5 U
mric
hter
-Übe
rlast
PZD
4 (Z
SW
2)
Bit
31B
it 30
Bit
1B
it 0
...
PZD
1 (Z
SW1)
Bit 1
5Bi
t 14
...B
it 17
Bit 1
6
FB10
0-A
usga
ng S
TAT
FB10
0-A
usga
ng F
RE
Q
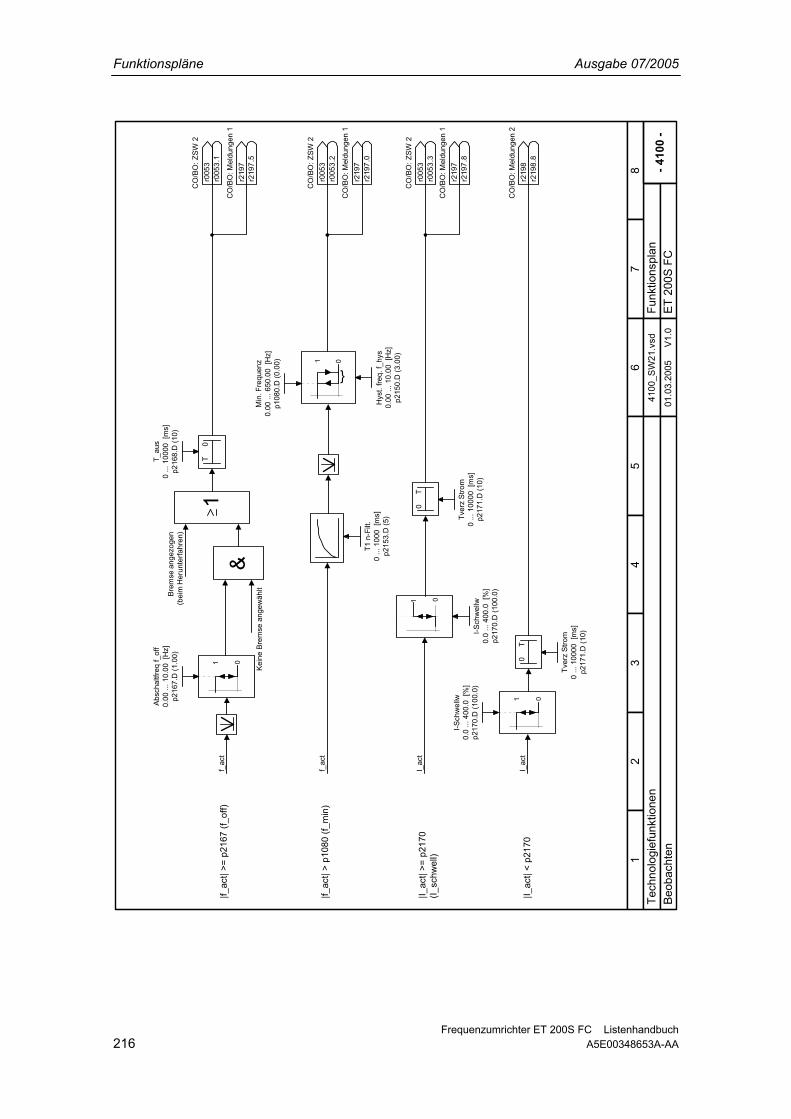
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 216 A5E00348653A-AA
- 410
0 -
Funk
tions
plan
87
65
43
21
4100
_SW
21.v
sdTe
chno
logi
efun
ktio
nen
ET 2
00S
FC01
.03.
2005
V
1.0
Beob
acht
en
Abs
chal
tfreq
f_of
f0.
00 ..
. 10.
00 [
Hz]
p216
7.D
(1.0
0)
|f_ac
t| >=
p21
67 (f
_off)
01
&1
f_ac
t
T_au
s0
... 1
0000
[m
s]p2
168.
D (1
0)
CO
/BO
: ZSW
2
r005
3r0
053
|I_ac
t| >=
p21
70(I_
schw
ell)
T0
Kei
ne B
rem
se a
ngew
ählt
Bre
mse
ang
ezog
en(b
eim
Her
unte
rfahr
en)
|f_ac
t| >
p108
0 (f_
min
)f_
act
T1 n
-Filt
.0
... 1
000
[ms]
p215
3.D
(5)
01
{
Min
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
0.D
(0.0
0)
Hys
t. fre
q. f_
hys
0.00
... 1
0.00
[H
z]p2
150.
D (3
.00)
CO
/BO
: ZSW
2
r005
3r0
053.1 .2
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .5
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .0
|I_ac
t| <
p217
0
I-Sch
wel
lw0.
0 ...
400
.0 [
%]
p217
0.D
(100
.0)
0T
01I_
act
Tver
z S
trom
0 ...
100
00 [
ms]
p217
1.D
(10)
CO
/BO
: ZSW
2
r005
3r0
053 .3
I-Sch
wel
lw0.
0 ...
400
.0 [
%]
p217
0.D
(100
.0)
0T
01I_
act
Tver
z St
rom
0 ...
100
00 [
ms]
p217
1.D
(10)
CO
/BO
: Mel
dung
en 2
r219
8r2
198 .8
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .8
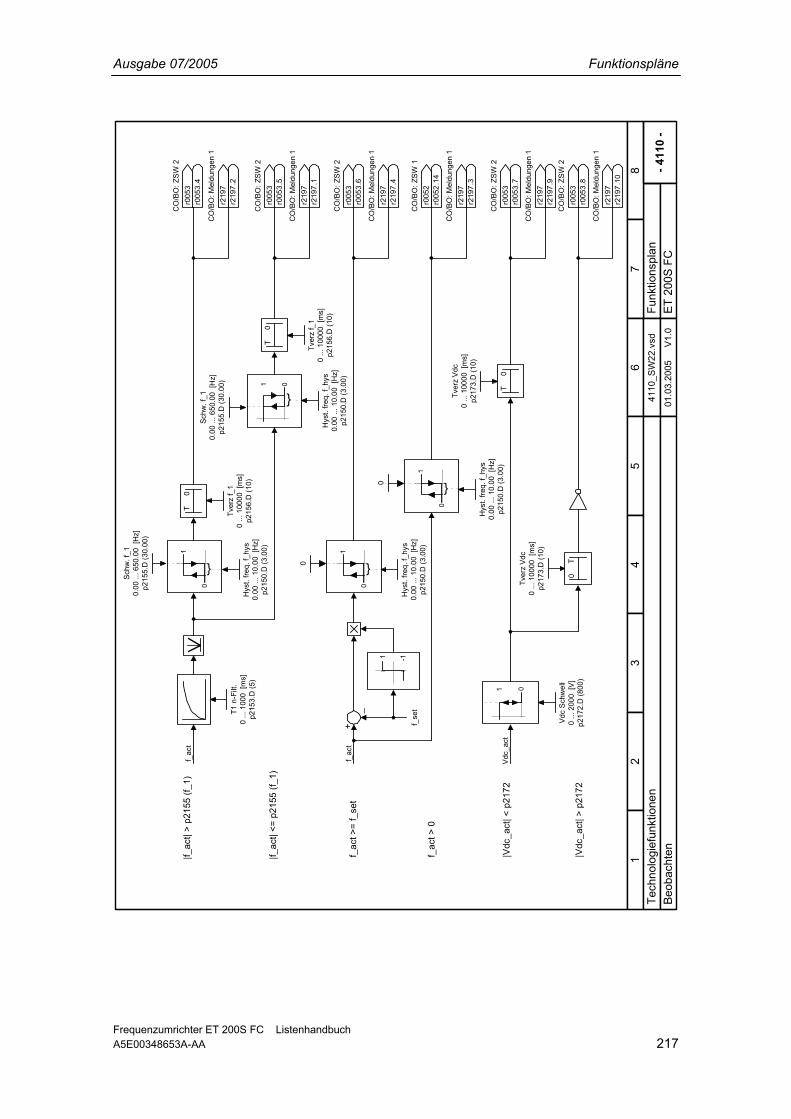
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 217
- 411
0 -
Funk
tions
plan
87
65
43
21
4110
_SW
22.v
sdTe
chno
logi
efun
ktio
nen
ET 2
00S
FC01
.03.
2005
V
1.0
Beob
acht
enf_ac
t >=
f_se
t
T1 n
-Filt
.0
... 1
000
[ms]
p215
3.D
(5)
Sch
w. f
_10.
00 ..
. 650
.00
[Hz]
p215
5.D
(30.
00)
Hys
t. fre
q. f_
hys
0.00
... 1
0.00
[H
z]p2
150.
D (3
.00)
Tver
z f_
10
... 1
0000
[m
s]p2
156.
D (1
0)
CO
/BO
: ZS
W 2
r005
3r0
053
|f_ac
t| >
p215
5 (f_
1)
|f_ac
t| <=
p21
55 (f
_1)
T0
CO
/BO
: ZS
W 2
r005
3r0
053
Schw
. f_1
0.00
... 6
50.0
0 [H
z]p2
155.
D (3
0.00
)
Hys
t. fre
q. f_
hys
0.00
... 1
0.00
[H
z]p2
150.
D (3
.00)
Tver
z f_
10
... 1
0000
[m
s]p2
156.
D (1
0)
T0
01
{
0
1
{
.4 .5
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .2
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .1
f_ac
t
|Vdc
_act
| < p
2172
|Vdc
_act
| > p
2172
f_ac
t
f_se
t
0
+_
-11
Hys
t. fre
q. f_
hys
0.00
... 1
0.00
[H
z]p2
150.
D (3
.00)
0
1
{
CO
/BO
: ZS
W 2
r005
3r0
053 .6
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .4
0
Hys
t. fre
q. f_
hys
0.00
... 1
0.00
[H
z]p2
150.
D (3
.00)
0
1
{
CO
/BO
: ZS
W 1
r005
2r0
052 .1
4
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .3
Vdc
_act
Vdc
Sch
wel
l0
... 2
000
[V]
p217
2.D
(800
)
01
Tver
z V
dc0
... 1
0000
[m
s]p2
173.
D (1
0)
T0
Tver
z V
dc0
... 1
0000
[m
s]p2
173.
D (1
0)
0T
CO
/BO
: ZS
W 2
r005
3r0
053 .8
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .1
0
CO
/BO
: ZS
W 2
r005
3r0
053 .7
CO
/BO
: Mel
dung
en 1
r219
7r2
197 .9
f_ac
t > 0
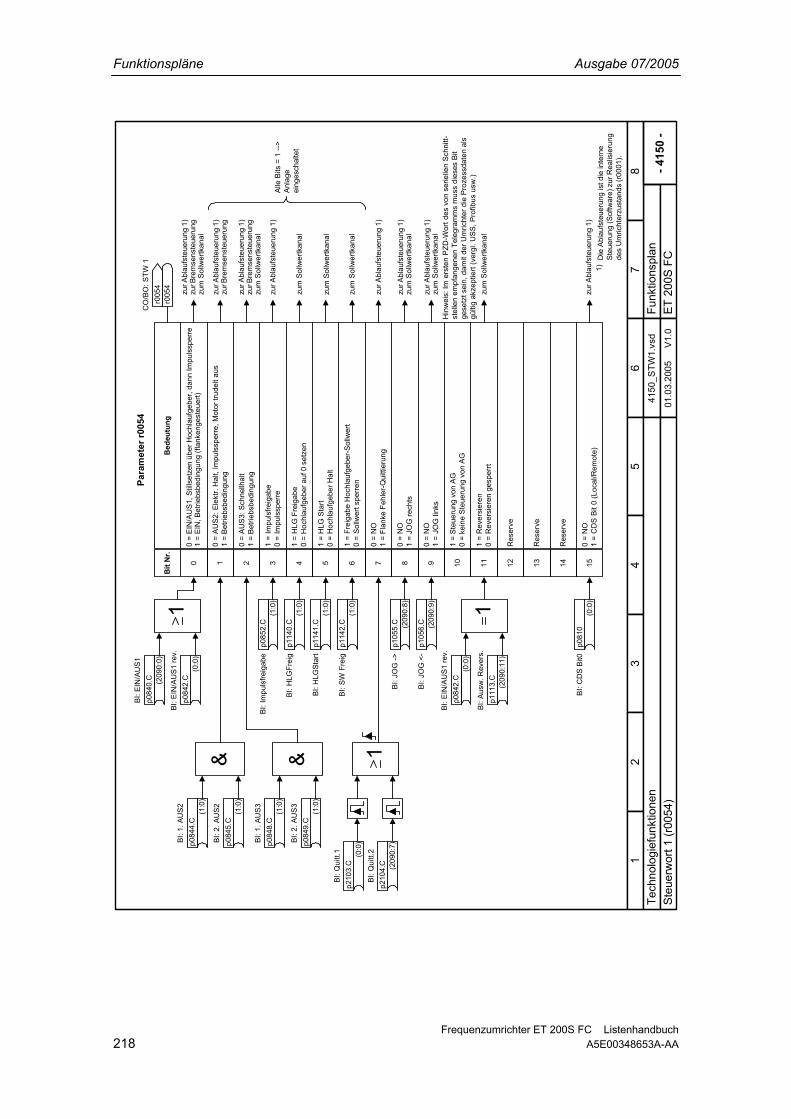
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 218 A5E00348653A-AA
- 415
0 -
Funk
tions
plan
87
65
43
21
4150
_STW
1.vs
dTe
chno
logi
efun
ktio
nen
ET 2
00S
FC01
.03.
2005
V
1.0
Steu
erw
ort 1
(r00
54)
1)
(1:0
)
BI:
1. A
US
2p0
844.
C
(1:0
)
BI:
2. A
US
2p0
845.
C
(1:0
)B
I: Im
puls
freig
abe
p085
2.C
(1:0
)B
I: H
LGFr
eig
p114
0.C
(1:0
)BI
: HLG
Star
tp1
141.
C
(1:0
)BI
: SW
Fre
igp1
142.
C
(0:0
)
BI:
Qui
tt.1
p210
3.C (209
0:7)
BI:
Qui
tt.2
p210
4.C
(209
0:8)
BI:
JOG
->p1
055.
C (209
0:9)
BI:
JOG
<-
p105
6.C
(0:0
)B
I: C
DS
Bit0
p081
0
Die
Abl
aufs
teue
rung
ist d
ie in
tern
eS
teue
rung
(Sof
twar
e) z
ur R
ealis
ieru
ngde
s U
mric
hter
zust
ands
(r00
01).
CO
/BO
: STW
1
r005
4r0
054
zur A
blau
fste
ueru
ng 1
)zu
r Bre
mse
nste
ueru
ngzu
m S
ollw
ertk
anal
zur A
blau
fste
ueru
ng 1
)zu
r Bre
mse
nste
ueru
ng
zur A
blau
fste
ueru
ng 1
)zu
r Bre
mse
nste
ueru
ngzu
m S
ollw
ertk
anal
zur A
blau
fste
ueru
ng 1
)
zur A
blau
fste
ueru
ng 1
)
zum
Sol
lwer
tkan
al
zum
Sol
lwer
tkan
al
zum
Sol
lwer
tkan
al
zur A
blau
fste
ueru
ng 1
)zu
m S
ollw
ertk
anal
zur A
blau
fste
ueru
ng 1
)zu
m S
ollw
ertk
anal
zum
Sol
lwer
tkan
al
zur A
blau
fste
ueru
ng 1
)
Hin
wei
s: Im
ers
ten
PZD
-Wor
t des
von
ser
ielle
n S
chni
tt-st
elle
n em
pfan
gene
n Te
legr
amm
s m
uss
dies
es B
itge
setz
t sei
n, d
amit
der U
mric
hter
die
Pro
zess
date
n al
sgü
ltig
akze
ptie
rt (v
ergl
. US
S, P
rofib
us u
sw.)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
Bit
Nr.
(209
0:0)
BI:
EIN
/AU
S1
p084
0.C
(0:0
)
BI:
EIN
/AU
S1 re
v.p0
842.
C1
(1:0
)
BI:
1. A
US
3p0
848.
C
(1:0
)
BI:
2. A
US
3p0
849.
C
(0:0
)
BI:
EIN
/AU
S1 re
v.p0
842.
C
(209
0:11
)
BI: A
usw
. Rev
ers.
p111
3.C
1
Alle
Bits
= 1
-->
Anla
geei
nges
chal
tet
Bed
eutu
ng
0 =
EIN
/AU
S1,
Stil
lset
zen
über
Hoc
hlau
fgeb
er, d
ann
Impu
lssp
erre
1 =
EIN
, Bet
riebs
bedi
ngun
g (fl
anke
nges
teue
rt)
0 =
AU
S2: E
lekt
r. H
alt,
Impu
lssp
erre
, Mot
or tr
udel
t aus
1 =
Bet
riebs
bedi
ngun
g
0 =
AU
S3: S
chne
llhal
t1
= B
etrie
bsbe
ding
ung
Para
met
er r0
054
1 =
Impu
lsfre
igab
e0
= Im
puls
sper
re
1 =
HLG
Fre
igab
e0
= H
ochl
aufg
eber
auf
0 s
etze
n
1 =
HLG
Sta
rt0
= H
ochl
aufg
eber
Hal
t
1 =
Frei
gabe
Hoc
hlau
fgeb
er-S
ollw
ert
0 =
Sol
lwer
t spe
rren
0 =
NO
1 =
Flan
ke F
ehle
r-Qui
ttier
ung
0 =
NO
1 =
JOG
rech
ts
0 =
NO
1 =
JOG
link
s
1 =
Steu
erun
g vo
n A
G0
= ke
ine
Ste
ueru
ng v
on A
G
1 =
Rev
ersi
eren
0 =
Rev
ersi
eren
ges
perr
t
Res
erve
0 =
NO
1 =
CD
S Bi
t 0 (L
ocal
/Rem
ote)
Res
erve
Res
erve
1& &
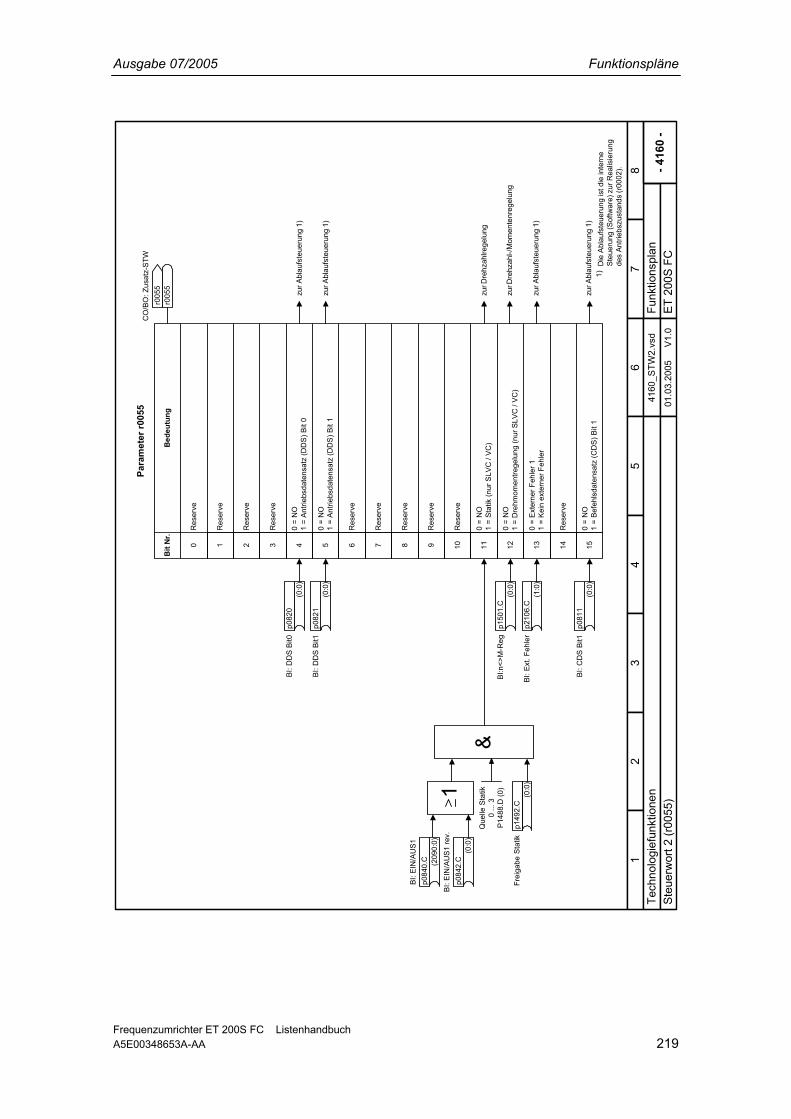
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 219
- 416
0 -
Funk
tions
plan
87
65
43
21
4160
_STW
2.vs
dTe
chno
logi
efun
ktio
nen
ET 2
00S
FC01
.03.
2005
V
1.0
Steu
erw
ort 2
(r00
55)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
1)
(0:0
)BI
: DD
S B
it0p0
820
(0:0
)BI
: DD
S B
it1p0
821
(1:0
)B
I: E
xt. F
ehle
rp2
106.
C
(0:0
)B
I:n<>
M-R
egp1
501.
C
(0:0
)BI
: CD
S B
it1p0
811
Die
Abl
aufs
teue
rung
ist d
ie in
tern
eS
teue
rung
(Sof
twar
e) z
ur R
ealis
ieru
ngde
s An
trieb
szus
tand
s (r
0002
).
CO
/BO
: Zus
atz-
STW
r005
5r0
055
Bit
Nr.
Bed
eutu
ng
Para
met
er r0
055
0 =
NO
1 =
Ant
riebs
date
nsat
z (D
DS
) Bit
0
0 =
NO
1 =
Ant
riebs
date
nsat
z (D
DS
) Bit
1
Res
erve
Res
erve
Res
erve
0 =
NO
1 =
Stat
ik (n
ur S
LVC
/ V
C)
0 =
Ext
erne
r Feh
ler 1
1 =
Kei
n ex
tern
er F
ehle
r
Res
erve
0 =
NO
1 =
Befe
hlsd
aten
satz
(CD
S) B
it 1
zur A
blau
fste
ueru
ng 1
)
zur D
rehz
ahlre
gelu
ng
zur A
blau
fste
ueru
ng 1
)
zur A
blau
fste
ueru
ng 1
)
Que
lle S
tatik
0 ...
3P
1488
.D (0
)0
= N
O1
= D
rehm
omen
trege
lung
(nur
SLV
C /
VC
)
zur A
blau
fste
ueru
ng 1
)
zur D
rehz
ahl-/
Mom
ente
nreg
elun
g
&
(209
0:0)
BI: E
IN/A
US
1p0
840.
C
(0:0
)
BI:
EIN
/AU
S1
rev.
p084
2.C
1
Res
erve
Res
erve
Res
erve
Res
erve
Res
erve
Res
erve
(0:0
)Fr
eiga
be S
tatik
p149
2.C
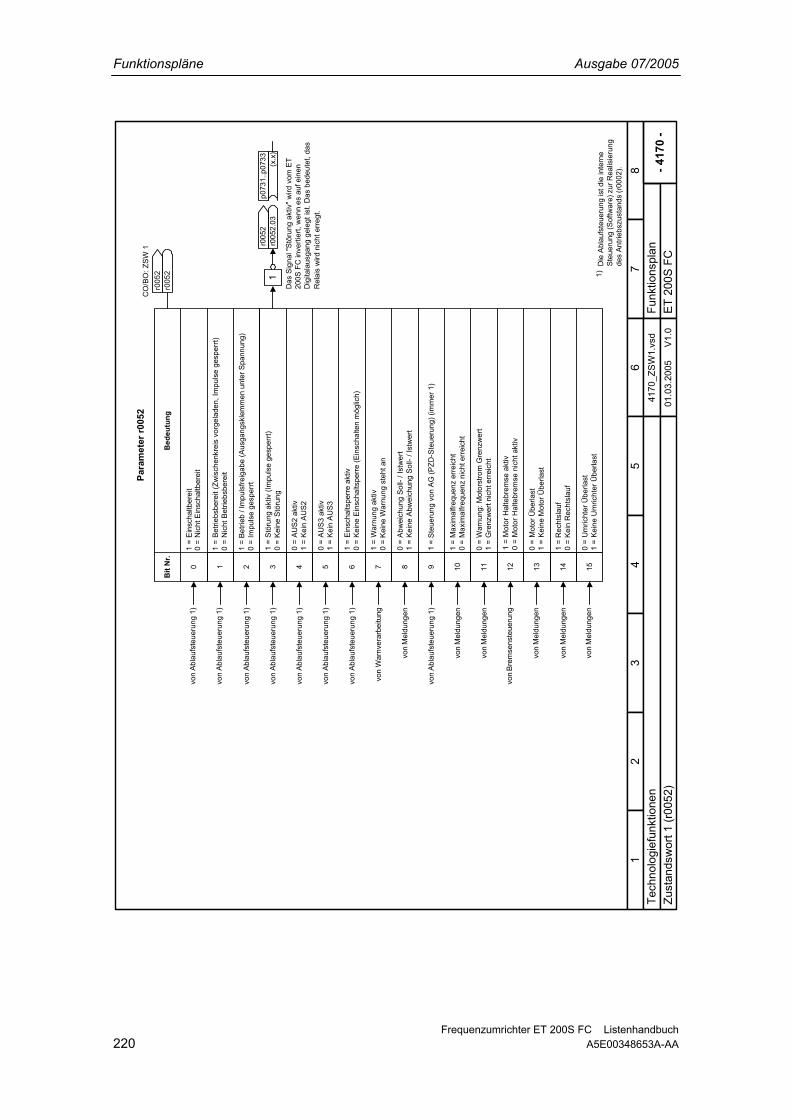
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 220 A5E00348653A-AA
- 417
0 -
Funk
tions
plan
87
65
43
21
4170
_ZS
W1.
vsd
Tech
nolo
gief
unkt
ione
nET
200
S FC
01.0
3.20
05
V1.
0Zu
stan
dsw
ort 1
(r00
52)
1)
Die
Abl
aufs
teue
rung
ist d
ie in
tern
eS
teue
rung
(Sof
twar
e) z
ur R
ealis
ieru
ngde
s An
trieb
szus
tand
s (r
0002
).
CO
/BO
: ZS
W 1
r005
2r0
052
von
Abla
ufst
euer
ung
1)
von
Abla
ufst
euer
ung
1)
von
Mel
dung
en
von
Mel
dung
en
von
Mel
dung
en
von
Mel
dung
en
von
Abla
ufst
euer
ung
1)
von
Abla
ufst
euer
ung
1)
von
Abla
ufst
euer
ung
1)
von
Abla
ufst
euer
ung
1)
von
Abla
ufst
euer
ung
1)
von
Bre
mse
nste
ueru
ng
von
Abla
ufst
euer
ung
1)
von
War
nver
arbe
itung
von
Mel
dung
en
von
Mel
dung
en
1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
Bit
Nr.
Bed
eutu
ng
1 =
Ein
scha
ltber
eit
0 =
Nic
ht E
insc
haltb
erei
t
1 =
Bet
riebs
bere
it (Z
wis
chen
krei
s vo
rgel
aden
, Im
puls
e ge
sper
rt)0
= N
icht
Bet
riebs
bere
it
1 =
Betri
eb /
Impu
lsfre
igab
e (A
usga
ngsk
lem
men
unt
er S
pann
ung)
0 =
Impu
lse
gesp
errt
Para
met
er r0
052
1 =
Stö
rung
akt
iv (I
mpu
lse
gesp
errt)
0 =
Kei
ne S
töru
ng
0 =
AUS
2 ak
tiv1
= K
ein
AU
S2
0 =
AUS
3 ak
tiv1
= K
ein
AU
S3
1 =
Eins
chal
tspe
rre
aktiv
0 =
Kei
ne E
insc
halts
perr
e (E
insc
halte
n m
öglic
h)
1 =
War
nung
akt
iv0
= K
eine
War
nung
ste
ht a
n
0 =
Abw
eich
ung
Sol
l- / I
stw
ert
1 =
Kei
ne A
bwei
chun
g S
oll-
/ Ist
wer
t
1 =
Ste
ueru
ng v
on A
G (P
ZD-S
teue
rung
) (im
mer
1)
1 =
Max
imal
frequ
enz
erre
icht
0 =
Max
imal
frequ
enz
nich
t err
eich
t
0 =
War
nung
: Mot
orst
rom
Gre
nzw
ert
1 =
Gre
nzw
ert n
icht
err
eich
t
0 =
Mot
or Ü
berla
st1
= Ke
ine
Mot
or Ü
berla
st
1 =
Rec
htsl
auf
0 =
Kei
n R
echt
slau
f
0 =
Um
richt
er Ü
berla
st1
= Ke
ine
Um
richt
er Ü
berla
st
1 =
Mot
or H
alte
brem
se a
ktiv
0 =
Mot
or H
alte
brem
se n
icht
akt
iv
1(x
.x)
p073
1..p
0733
r005
2.03
r005
2
Das
Sig
nal "
Stö
rung
akt
iv" w
ird v
om E
T20
0S F
C in
verti
ert,
wen
n es
auf
ein
enD
igita
laus
gang
gel
egt i
st. D
as b
edeu
tet,
das
Rel
ais
wird
nic
ht e
rregt
.
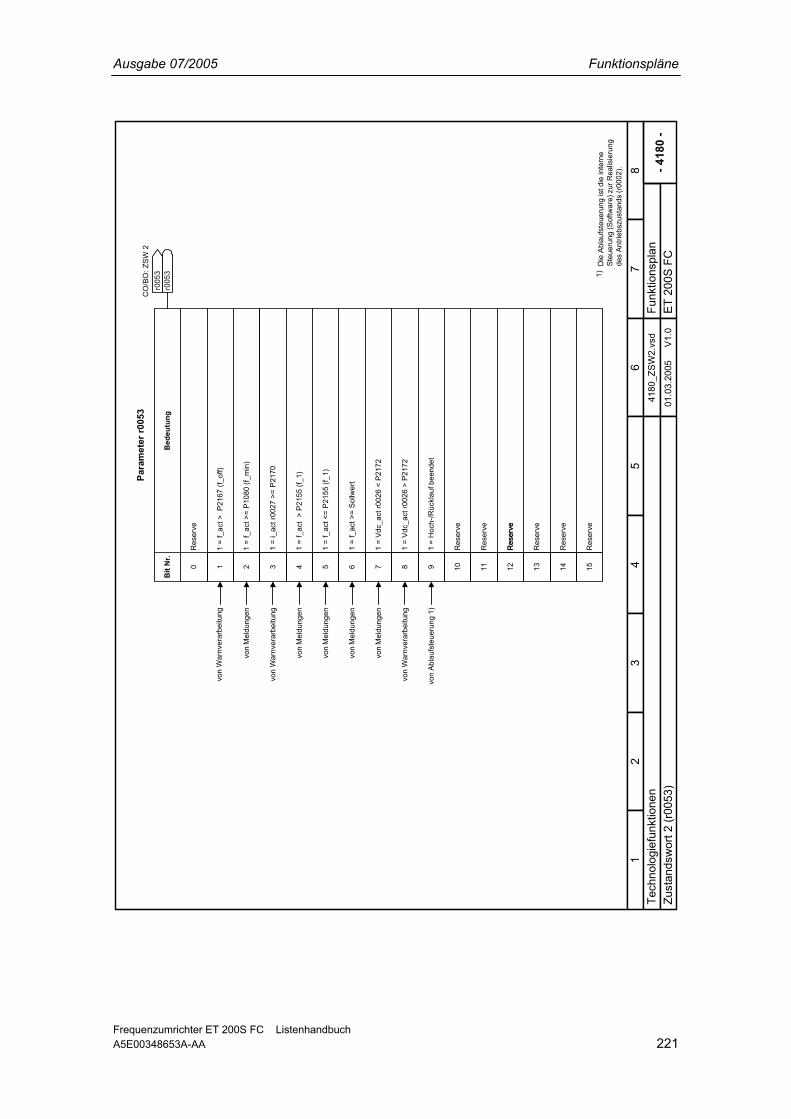
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 221
- 418
0 -
Funk
tions
plan
87
65
43
21
4180
_ZS
W2.
vsd
Tech
nolo
gief
unkt
ione
nET
200
S FC
01.0
3.20
05
V1.
0Zu
stan
dsw
ort 2
(r00
53)
1)
Die
Abl
aufs
teue
rung
ist d
ie in
tern
eS
teue
rung
(Sof
twar
e) z
ur R
ealis
ieru
ngde
s An
trieb
szus
tand
s (r
0002
).
CO
/BO
: ZS
W 2
r005
3r0
053
von
Mel
dung
en
von
War
nver
arbe
itung
von
War
nver
arbe
itung
von
Mel
dung
en
von
War
nver
arbe
itung
von
Mel
dung
en
von
Abla
ufst
euer
ung
1)
von
Mel
dung
en
von
Mel
dung
en
1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
Bit
Nr.
Bed
eutu
ng
1 =
f_ac
t > P
2167
(f_o
ff)
1 =
f_ac
t >=
P10
80 (f
_min
)
Para
met
er r0
053
1 =
i_ac
t r00
27 >
= P
2170
1 =
f_ac
t >
P215
5 (f_
1)
1 =
f_ac
t <=
P21
55 (f
_1)
1 =
f_ac
t >=
Sollw
ert
1 =
Vdc
_act
r002
6 <
P217
2
1 =
Vdc
_act
r002
6 >
P217
2
1 =
Hoc
h-/R
ückl
auf b
eend
et
Res
erve
Res
erve
Res
erve
Res
erve
Res
erve
Res
erve
Res
erve
Res
erve

Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 222 A5E00348653A-AA
- 480
0 -
Funk
tions
plan
87
65
43
21
4800
_Fre
eBlo
cks1
.vsd
Frei
e Bl
öcke
ET 2
00S
FC01
.03.
2005
V
1.0
AND
-, O
R-,
XOR
- und
NO
T- E
lem
ente
3 A
ND
-Ele
men
te m
it 2
Ein
gäng
en
p280
0p2
801[
0]
&p2
810
Inde
x0
Inde
x1r2
811
p280
0p2
801[
1]
&p2
812
Inde
x0
Inde
x1r2
813
p280
0p2
801[
2]
&p2
814
Inde
x0
Inde
x1r2
815
3 O
R-E
lem
ente
mit
2 E
ingä
ngen
p281
6
Inde
x0
Inde
x1r2
817
1
p280
0p2
801[
3]
p281
8
Inde
x0
Inde
x1r2
819
1
p280
0p2
801[
4]
p282
0
Inde
x0
Inde
x1r2
821
1
p280
0p2
801[
5]
3 X
OR
-Ele
men
te m
it 2
Ein
gäng
en
p282
2
Inde
x0
Inde
x1r2
823
1=p280
1[6]
p280
0
p280
0
p282
4
Inde
x0
Inde
x1r2
825
1=p280
1[7]
p282
6
Inde
x0
Inde
x1r2
827
1=
p280
0p2
801[
8]
3 N
OT-
Ele
men
te m
it 1
Ein
gang
p282
8In
dex0
r282
91
p280
0p2
801[
9]
p283
0In
dex0
r283
11
p280
0p2
801[
10]
p283
2In
dex0
r283
31
p280
0p2
801[
11]
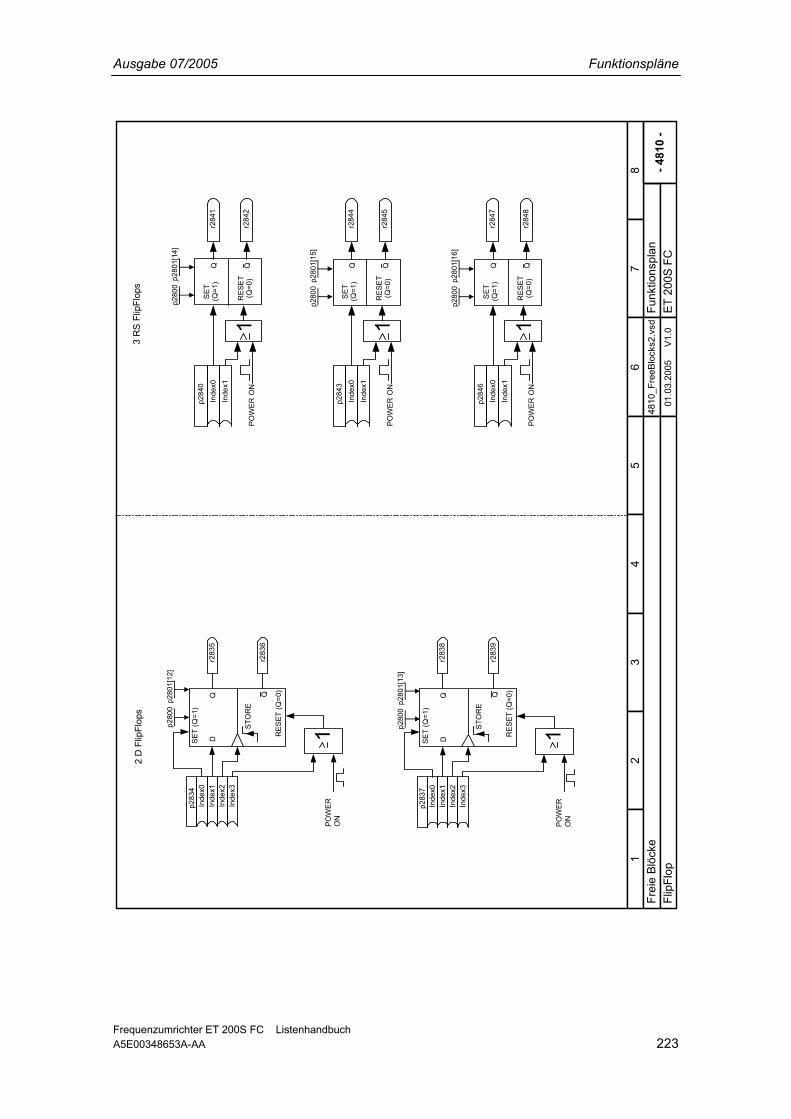
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 223
- 481
0 -
Funk
tions
plan
87
65
43
21
4810
_Fre
eBlo
cks2
.vsd
Frei
e Bl
öcke
ET 2
00S
FC01
.03.
2005
V
1.0
Flip
Flop
1
p283
4In
dex0
Inde
x1In
dex2
Inde
x3
SE
T (Q
=1)
RES
ET (Q
=0)
D
STO
RE
POW
ER
ON
r283
5
r283
6
Q Q
1
p283
7In
dex0
Inde
x1In
dex2
Inde
x3
SET
(Q=1
)
RE
SET
(Q=0
)
D
STO
RE
PO
WER
ON
r283
8
r283
9
Q Q
2 D
Flip
Flop
s3
RS
Flip
Flop
s
SET
(Q=1
)
RE
SET
(Q=0
)
Q Q
p284
0In
dex0
Inde
x1
PO
WE
R O
N1
r284
1
r284
2
p280
0p2
801[
14]
SET
(Q=1
)
RE
SET
(Q=0
)
Q Q
p284
3In
dex0
Inde
x1
PO
WE
R O
N1
r284
4
r284
5
p280
0p2
801[
15]
SET
(Q=1
)
RE
SET
(Q=0
)
Q Q
p284
6In
dex0
Inde
x1
PO
WE
R O
N1
r284
7
r284
8
p280
0p2
801[
16]
p280
0p2
801[
12]
p280
0p2
801[
13]
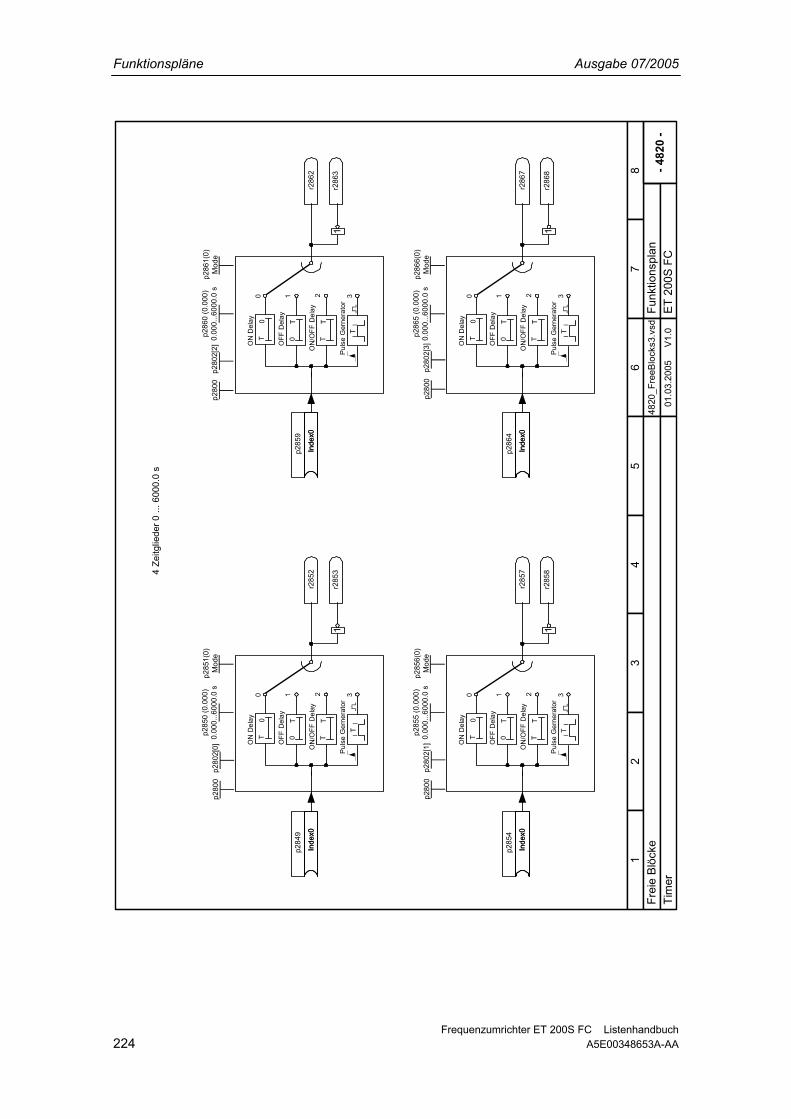
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 224 A5E00348653A-AA
- 482
0 -
Funk
tions
plan
87
65
43
21
4820
_Fre
eBlo
cks3
.vsd
Frei
e Bl
öcke
ET 2
00S
FC01
.03.
2005
V
1.0
Tim
er
T0
ON
Del
ay
0T
OFF
Del
ay
TT
ON
/OFF
Del
ay
Pul
se G
erne
rato
r
r285
2
1r2
853
p284
9
Inde
x0In
dex0
0 1 2 3
p285
1(0)
Mod
ep2
850
(0.0
00)
0.00
0...6
000.
0 s
p280
0p2
802[
0]
T
T0
ON
Del
ay
0T
OFF
Del
ay
TT
ON
/OFF
Del
ay
Pul
se G
erne
rato
r
r285
7
1r2
858
p285
4
Inde
x0In
dex0
0 1 2 3
p285
6(0)
Mod
ep2
855
(0.0
00)
0.00
0...6
000.
0 s
p280
0p2
802[
1]
T
4 Ze
itglie
der 0
... 6
000.
0 s
T0
ON
Del
ay
0T
OFF
Del
ay
TT
ON
/OFF
Del
ay
Pul
se G
erne
rato
r
r286
2
1r2
863
p285
9
Inde
x0In
dex0
0 1 2 3
p286
1(0)
Mod
ep2
860
(0.0
00)
0.00
0...6
000.
0 s
p280
0p2
802[
2]
T
T0
ON
Del
ay
0T
OFF
Del
ay
TT
ON
/OFF
Del
ay
Pul
se G
erne
rato
r
r286
7
1r2
868
p286
4
Inde
x0In
dex0
0 1 2 3
p286
6(0)
Mod
ep2
865
(0.0
00)
0.00
0...6
000.
0 s
p280
0p2
802[
3]
T
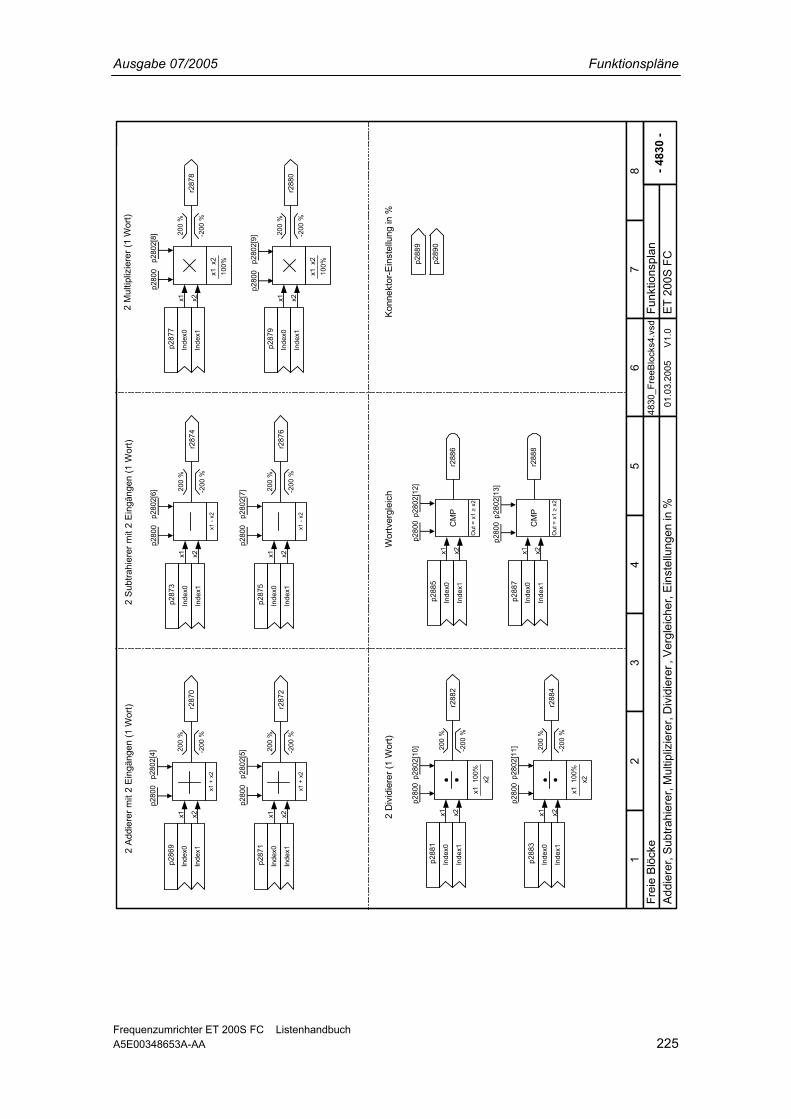
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 225
- 483
0 -
Funk
tions
plan
87
65
43
21
4830
_Fre
eBlo
cks4
.vsd
Frei
e Bl
öcke
ET 2
00S
FC01
.03.
2005
V
1.0
Addi
erer
, Sub
trahi
erer
, Mul
tipliz
iere
r, D
ivid
iere
r
2 A
ddie
rer m
it 2
Ein
gäng
en (1
Wor
t)2
Sub
trahi
erer
mit
2 E
ingä
ngen
(1 W
ort)
p286
9
r287
0x1 x2
Inde
x0
Inde
x1
200
%
-200
%x1
+ x
2
p280
0p2
802[
4]
p287
1
r287
2x1 x2
Inde
x0
Inde
x1
200
%
-200
%x1
+ x
2
p280
0p2
802[
5]
p287
3
r287
4x1 x2
Inde
x0
Inde
x1
200
%
-200
%x1
- x2
p280
0p2
802[
6]
p287
5
r287
6x1 x2
Inde
x0
Inde
x1
200
%
-200
%x1
- x2
p280
0p2
802[
7]
2 M
ultip
lizie
rer (
1 W
ort)
p287
7
r287
8x1 x2
Inde
x0
Inde
x1
200
%
-200
%
p280
0p2
802[
8]
p287
9
r288
0x1 x2
Inde
x0
Inde
x1
200
%
-200
%
p280
0p2
802[
9]
2 D
ivid
iere
r (1
Wor
t)
p288
1
r288
2x1 x2
Inde
x0
Inde
x1
200
%
-200
%
p280
0p2
802[
10]
p288
3
r288
4x1 x2
Inde
x0
Inde
x1
200
%
-200
%
p280
0p2
802[
11]
Kon
nekt
or-E
inst
ellu
ng in
%
p288
9
p289
0
Wor
tver
glei
ch
p288
5
r288
6x1 x2
Inde
x0
Inde
x1
Out
= x
1 ≥
x2
CM
P
p280
0p2
802[
12]
p288
7
r288
8x1 x2
Inde
x0
Inde
x1
Out
= x
1 ≥
x2
CM
P
p280
0p2
802[
13]
, Ver
glei
cher
, Ein
stel
lung
en in
%
x2x1
100
%
100%
x1 x
2
x2x1
100
%
100%
x1 x
2
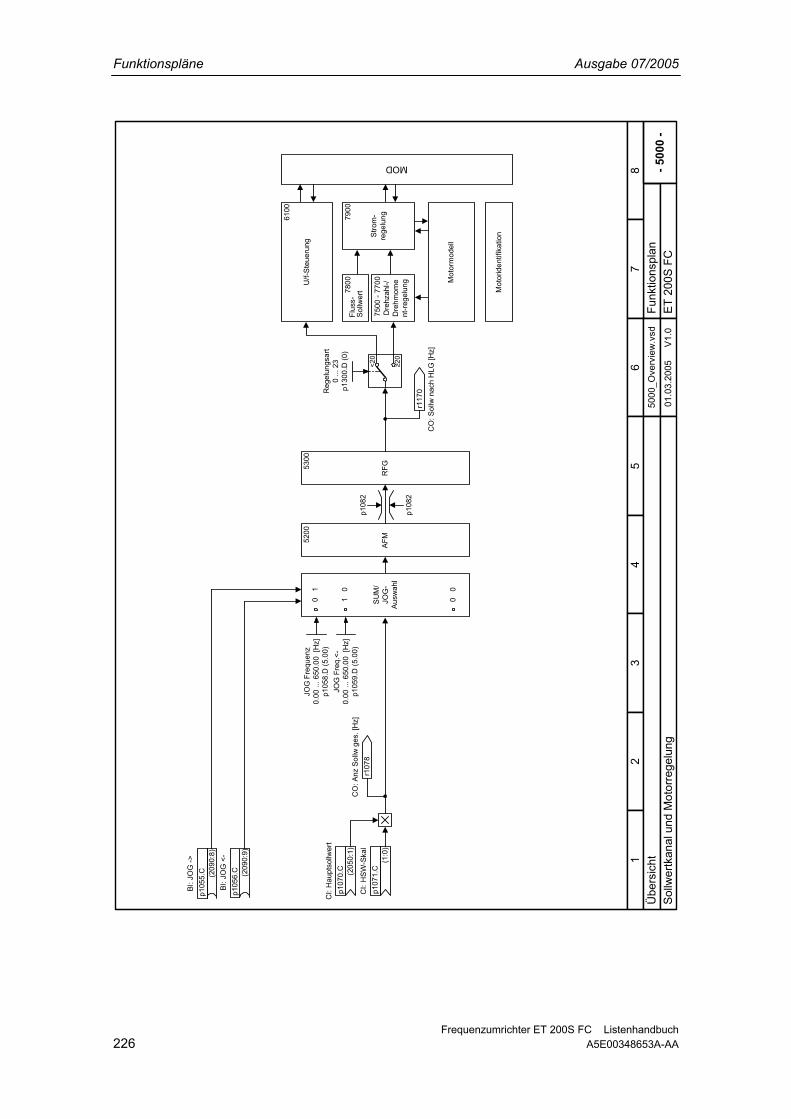
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 226 A5E00348653A-AA
- 500
0 -
Funk
tions
plan
87
65
43
21
5000
_Ove
rvie
w.v
sdÜ
bers
icht
ET 2
00S
FC01
.03.
2005
V
1.0
Sollw
ertk
anal
und
Mot
orre
gelu
ng
r107
8C
O: A
nz S
ollw
ges
. [H
z]
AFM
RFG
MOD
6100
Reg
elun
gsar
t0
... 2
3p1
300.
D (0
)
<20
≥20
CI:
HS
W-S
kal
(1:0
)p1
071.
C
CI:
Hau
ptso
llwer
t
(205
0:1)
p107
0.C
(209
0:8)
BI: J
OG
->p1
055.
C (209
0:9)
BI:
JOG
<-
p105
6.C
JOG
Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p105
8.D
(5.0
0)JO
G F
req.
<-0.
00 ..
. 650
.00
[Hz]
p105
9.D
(5.0
0)
SU
M/
JOG
-Au
swah
l
0 1
1 0
0 0
Mot
orid
entif
ikat
ion
Mot
orm
odel
l
5300
Dre
hzah
l-/D
rehm
ome
nt-r
egel
ung
7500
- 77
00
Flus
s-S
ollw
ert78
00
Stro
m-
rege
lung79
00
U/f-
Ste
ueru
ng
p108
2
p108
2r1
170
CO
: Sol
lw n
ach
HLG
[Hz]
5200
6100
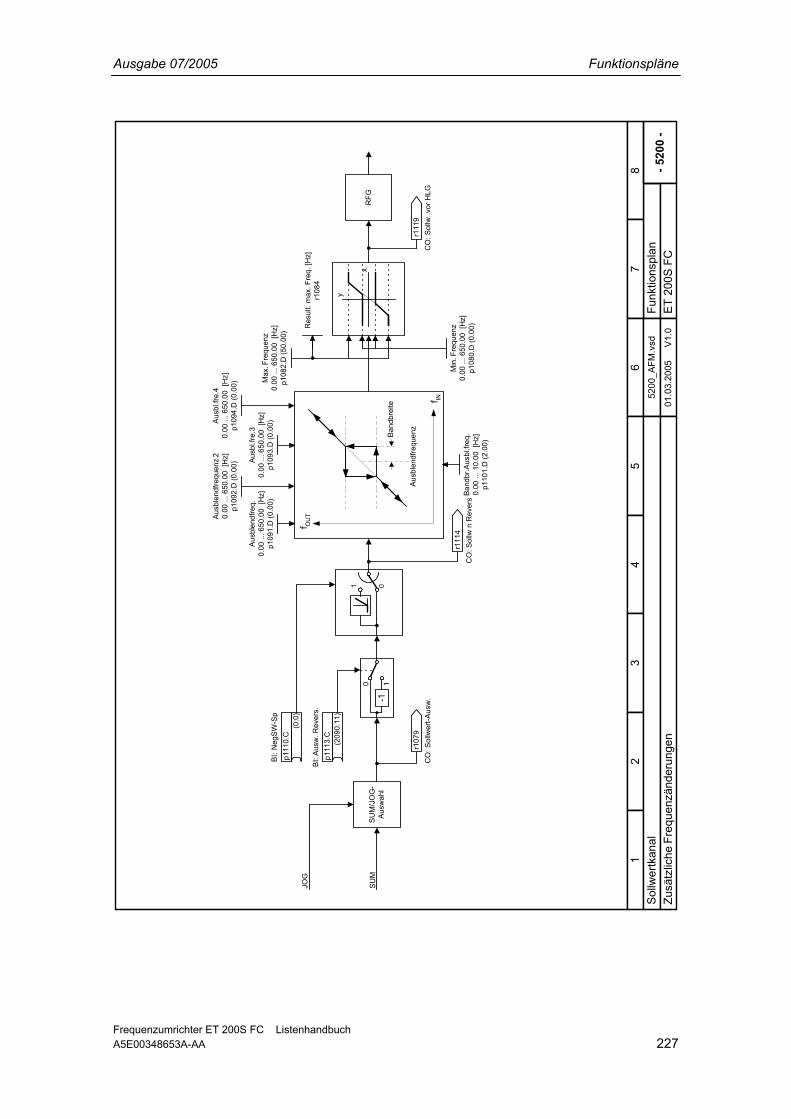
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 227
- 520
0 -
Funk
tions
plan
87
65
43
21
5200
_AFM
.vsd
Sollw
ertk
anal
ET 2
00S
FC01
.03.
2005
V
1.0
Zusä
tzlic
he F
requ
enzä
nder
unge
n
(0:0
)
BI:
Neg
SW
-Sp
p111
0.C
(209
0:11
)
BI:
Aus
w. R
ever
s.p1
113.
C
-1
0 101
r111
4C
O: S
ollw
n R
ever
s
Aus
blen
dfre
q.0.
00 ..
. 650
.00
[Hz]
p109
1.D
(0.0
0)
Aus
blen
dfre
quen
z 2
0.00
... 6
50.0
0 [H
z]p1
092.
D (0
.00) Au
sbl.f
re.3
0.00
... 6
50.0
0 [H
z]p1
093.
D (0
.00)A
usbl
.fre.
40.
00 ..
. 650
.00
[Hz]
p109
4.D
(0.0
0)
Band
br.A
usbl
.freq
.0.
00 ..
. 10.
00 [
Hz]
p110
1.D
(2.0
0)
x
y
Max
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
2.D
(50.
00)
Band
brei
te
Ausb
lend
frequ
enz
f IN
f OU
T
r107
9C
O: S
ollw
ert-A
usw
.
Min
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
0.D
(0.0
0)Res
ult.
max
. Fre
q. [H
z]r1
084
SU
M/J
OG
-A
usw
ahl
JOG
SUM
r111
9C
O: S
ollw
. vor
HLG
RFG
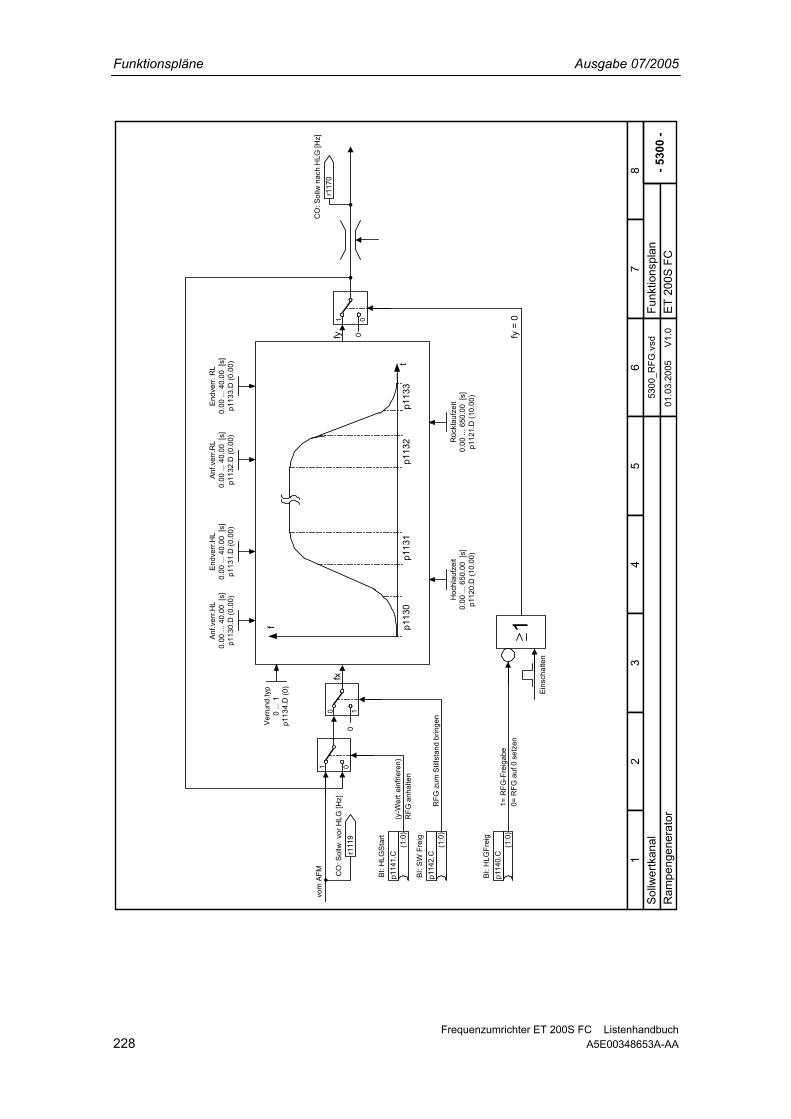
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 228 A5E00348653A-AA
vom
AFM
Ein
scha
lten
(y-W
ert e
infri
eren
)R
FG a
nhal
ten
- 530
0 -
Funk
tions
plan
87
65
43
21
5300
_RFG
.vsd
Sollw
ertk
anal
ET 2
00S
FC01
.03.
2005
V
1.0
Ram
peng
ener
ator
p113
3p1
132
(1:0
)
BI:
HLG
Sta
rtp1
141.
C
(1:0
)
BI: S
W F
reig
p114
2.Cr1
119
CO
: Sol
lw. v
or H
LG [H
z]
1 0
0 10
RFG
zum
Stil
lsta
nd b
ringe
n
(1:0
)
BI:
HLG
Frei
gp1
140.
C1=
RFG
-Fre
igab
e0=
RFG
auf
0 s
etze
n1
fy =
0
fxfy
p113
1p1
130
Anf.v
err.H
L0.
00 ..
. 40.
00 [
s]p1
130.
D (0
.00)
End
verr.
HL
0.00
... 4
0.00
[s]
p113
1.D
(0.0
0)
Anf
.ver
r.RL
0.00
... 4
0.00
[s]
p113
2.D
(0.0
0)
End
verr.
RL
0.00
... 4
0.00
[s]
p113
3.D
(0.0
0)
Verru
nd.ty
p0
... 1
p113
4.D
(0)
t
f
1 0
r117
0C
O: S
ollw
nac
h H
LG [H
z]
0
Hoc
hlau
fzei
t0.
00 ..
. 650
.00
[s]
p112
0.D
(10.
00)
Rüc
klau
fzei
t0.
00 ..
. 650
.00
[s]
p112
1.D
(10.
00)
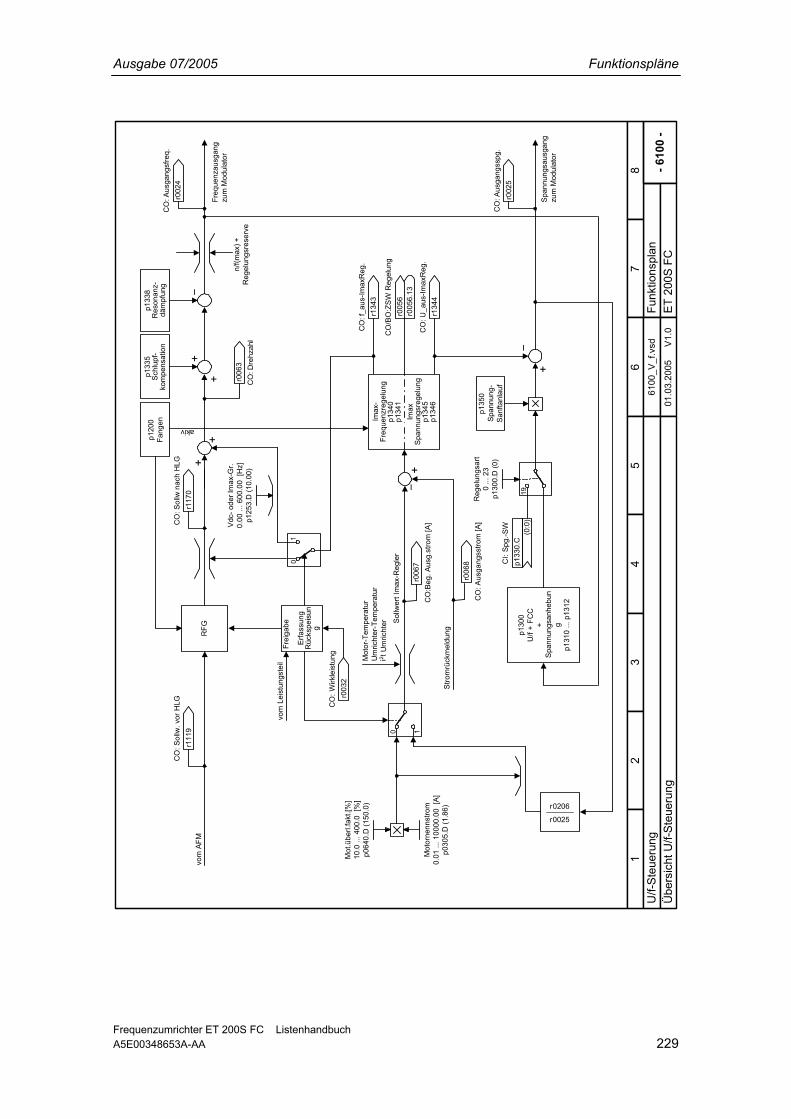
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 229
akiv
vom
AFM
Freq
uenz
ausg
ang
zum
Mod
ulat
orn/
f(max
) +R
egel
ungs
rese
rve
- 610
0 -
Funk
tions
plan
87
65
43
21
6100
_V_f
.vsd
U/f-
Steu
erun
gET
200
S FC
01.0
3.20
05
V1.
0Ü
bers
icht
U/f-
Ste
ueru
ng
Sol
lwer
t Im
ax-R
egle
r
+−
r134
3C
O: f
_aus
-Imax
Reg
.
r134
4C
O: U
_aus
-Imax
Reg
.
p120
0Fa
ngen
++p1
335
Sch
lupf
-ko
mpe
nsat
ion
r006
3C
O: D
rehz
ahl
p133
8R
eson
anz-
däm
pfun
g
r002
4C
O: A
usga
ngsf
req.
−
+
p135
0Sp
annu
ng-
San
ftanl
auf
Span
nung
saus
gang
zum
Mod
ulat
or
RFG
Imax
-Fr
eque
nzre
gelu
ngp1
340
p134
1
Stro
mrü
ckm
eldu
ng
r002
5C
O: A
usga
ngss
pg.
−+
p130
0U
/f +
FCC
+Sp
annu
ngsa
nheb
ung
p131
0 ...
p13
12
19
Reg
elun
gsar
t0
... 2
3p1
300.
D (0
)
r111
9C
O: S
ollw
. vor
HLG
r006
7C
O:B
eg. A
usg.
stro
m [A
]
r006
8C
O: A
usga
ngss
trom
[A]
CI:
Spg.
-SW
(0:0
)p1
330.
C
Mot
.übe
rl.fa
kt.[%
]10
.0 ..
. 400
.0 [
%]
p064
0.D
(150
.0)
Mot
orne
nnst
rom
0.01
... 1
0000
.00
[A]
p030
5.D
(1.8
6)
Mot
or-T
empe
ratu
rU
mric
hter
-Tem
pera
tur
i2 tU
mric
hter
Imax
Spa
nnun
gsre
gelu
ngp1
345
p134
6
CO
/BO
:ZS
W R
egel
ung
r005
6r0
056 .1
3
Erfa
ssun
gR
ücks
peis
ung
r003
2C
O: W
irkle
istu
ng
0 1
01
+V
dc- o
der I
max
-Gr.
0.00
... 6
00.0
0 [H
z]p1
253.
D (1
0.00
)
Frei
gabe
vom
Lei
stun
gste
il
r117
0C
O: S
ollw
nac
h H
LG
0025r
0206r

Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 230 A5E00348653A-AA
vom
Sol
lwer
tkan
al
**) s
etzb
ar ü
ber p
1000
*) n
ur in
Zug
riffs
stuf
e 4
- 700
0 -
Funk
tions
plan
87
65
43
21
7000
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0D
rehz
ahlre
gelu
ng o
hne
Impu
lsge
ber (
SLVC
):
–
Asyc
.M
ot. 3
~
++
4
2
Max
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
2.D
(50.
00)
Max
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
2.D
(50.
00)
r117
0C
O: S
ollw
nac
h H
LG [H
z]
Ska
l.Vor
st.
0.0
... 4
00.0
[%
]p1
496.
D (1
00.0
)
Mot
orträ
ghei
tsm
om.
0.00
010
... 1
000.
0000
0p0
341.
D (0
.001
80)
Träg
heits
verh
ält.
1.00
0 ...
400
.000
p034
2.D
(1.0
00)
−
Kp
n-R
egle
r (S
LVC
)0.
0 ...
200
0.0
p147
0.D
(3.0
)
Tn n
-Reg
ler S
LVC
25 ..
. 320
01 [
ms]
p147
2.D
(400
)
nIst
T1 S
LVC
0 ...
320
00 [
ms]
p145
2.D
(4)
r006
3C
O: D
rehz
ahl [
Hz]
Hin
wei
sD
ie S
trom
einp
rägu
ng v
onp1
610
wird
nur
ber
echn
et,
wen
n da
s B
eoba
chte
rmod
ell
ausg
esch
alte
t ist
.
CO
: Ob.
M-G
r.-9
9999
.00
... 9
9999
.00
[Nm
]p1
520.
D (5
.13) C
I: O
b.M
-Gr.
(152
0:0)
p152
2.C
Dre
h-m
omen
t-B
egre
nzun
g
x y
Opt
. Wirk
ungs
grad
0 ...
100
[%
]p1
580.
D (0
)
CO
: Flu
ssFS
W50
.0 ..
. 200
.0 [
%]
p157
0.D
(100
.0)
Pmax
mot
.0.
0 ...
800
0.0
p153
0.D
(0.7
5)P
max
gen
.-8
000.
0 ...
0.0
p153
1.D
(-0.
75)
M-A
nh.S
LVC
0.0
... 2
00.0
[%
]p1
610.
D (5
0.0)
M-B
esch
SLVC
0.0
... 2
00.0
[%
]p1
611.
D (0
.0)
30 m
s
r003
0C
O: S
trom
Isq
[A]
Vers
t. S
trom
regl
er0.
00 ..
. 5.0
0p1
715.
D (0
.25)
I-Zei
t Stro
m.re
gl.
1.0
... 5
0.0
[ms]
p171
7.D
(4.1
)
Kp
Tn
– – r002
9C
O: S
trom
Isd
[A]
Spa
n-nu
ng
r006
5C
O: S
chlu
pffre
q. [%
]
r006
6C
O: A
usga
ngsf
req.
[Hz]
Kp n
-Ada
pt. (
SLV
C)
0.0
... 2
.5p1
764.
D (0
.2)
Tn n
-Ada
pt. (
SLV
C)
1.0
... 2
00.0
[m
s]p1
767.
D (4
.0)
Beo-
bach
ter-
Mod
ell
Stro
m-
mod
ell
6
Puls
frequ
enz
2 ...
16
[kH
z]p1
800
(4)
r006
8C
O: A
usga
ngss
trom
[A]
5 3r0
050
= ak
t. Bi
Co-
Dat
ensa
tz (C
DS
)r0
051.
1 =
akt.
Ant
riebs
date
nsat
z(D
DS)
*)
*)
*)
*)
Bla
tt75
00
Dre
hzah
lregl
er
Bla
tt77
00
Dre
hmom
ent-/
Stro
mgr
enze
Flus
ssol
lwer
tBl
att
7900
r007
1C
O: M
ax. A
usg.
spg.
[V]
Bla
tt78
00
r007
0C
O: U
ngef
. ZW
K-S
pg [V
]
r007
2C
O: A
usga
ngss
pg. [
V]
p130
0 =
20 u
nd p
1501
= 0
Stro
mre
gler
,Be
obac
hter
mod
ell
Steu
ersa
tz
CO
: Unt
.M-G
r-9
9999
.00
... 9
9999
.00
[Nm
]P
1521
.D (-
5.13
)C
I: U
nt.M
-Gr
(152
1:0)
P152
3.C
Mot
.übe
rl.fa
kt.[%
]10
.0 ..
. 400
.0 [
%]
P06
40.D
(150
.0)
Skal
. M-G
r.-4
00.0
... 4
00.0
[%
]P1
525.
D (1
00.0
)
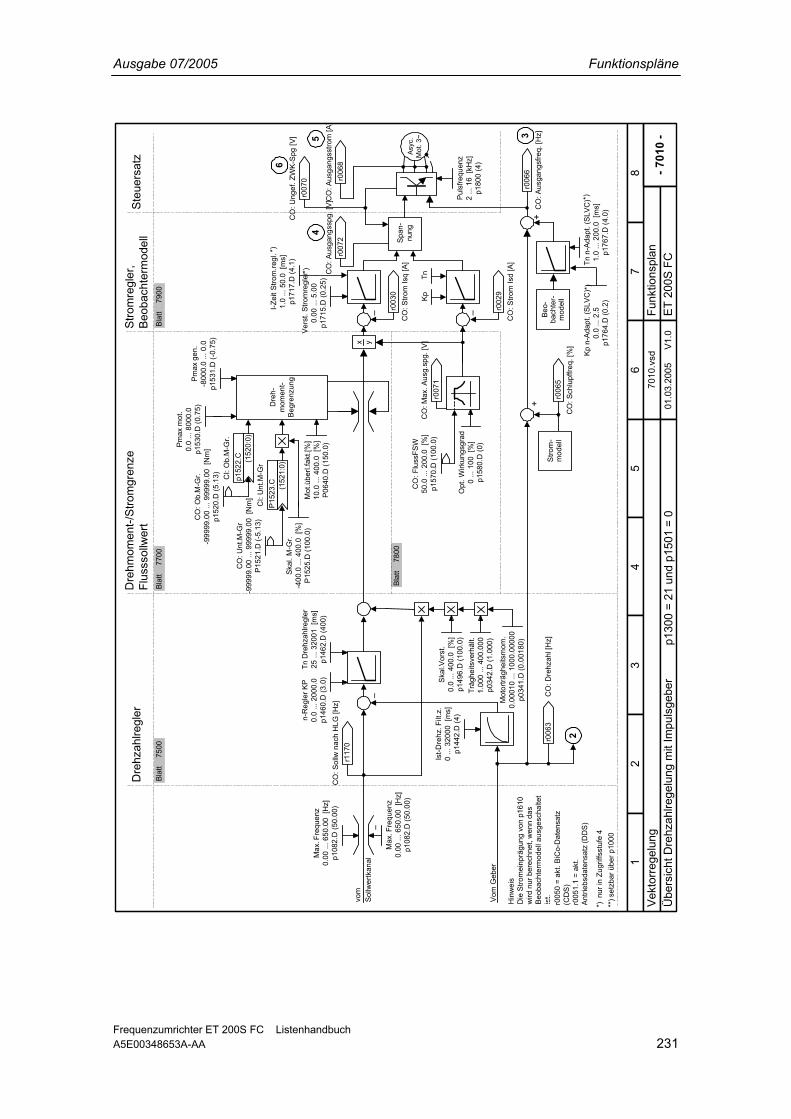
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 231
Vom
Geb
er
vom
Sol
lwer
tkan
al–
Asyc
.M
ot. 3
~
++
4
2
Max
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
2.D
(50.
00)
Max
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
2.D
(50.
00)
r117
0C
O: S
ollw
nac
h H
LG [H
z]
Ska
l.Vor
st.
0.0
... 4
00.0
[%
]p1
496.
D (1
00.0
)
Mot
orträ
ghei
tsm
om.
0.00
010
... 1
000.
0000
0p0
341.
D (0
.001
80)
Träg
heits
verh
ält.
1.00
0 ...
400
.000
p034
2.D
(1.0
00)
−
n-R
egle
r KP
0.0
... 2
000.
0p1
460.
D (3
.0)
Tn D
rehz
ahlre
gler
25 ..
. 320
01 [
ms]
p146
2.D
(400
)
Ist-D
rehz
. Filt
.z.
0 ...
320
00 [
ms]
p144
2.D
(4)
r006
3C
O: D
rehz
ahl [
Hz]
Hin
wei
sD
ie S
trom
einp
rägu
ng v
on p
1610
wird
nur
ber
echn
et, w
enn
das
Beob
acht
erm
odel
l aus
gesc
halte
tis
t.
CO
: Ob.
M-G
r.-9
9999
.00
... 9
9999
.00
[Nm
]p1
520.
D (5
.13) CI:
Ob.
M-G
r.
(152
0:0)
p152
2.C
Dre
h-m
omen
t-B
egre
nzun
g
x y
Opt
. Wirk
ungs
grad
0 ...
100
[%
]p1
580.
D (0
)
CO
: Flu
ssFS
W50
.0 ..
. 200
.0 [
%]
p157
0.D
(100
.0)
Pmax
mot
.0.
0 ...
800
0.0
p153
0.D
(0.7
5)P
max
gen
.-8
000.
0 ...
0.0
p153
1.D
(-0.
75)
r003
0C
O: S
trom
Isq
[A]
Vers
t. S
trom
regl
er0.
00 ..
. 5.0
0p1
715.
D (0
.25)
I-Zei
t Stro
m.re
gl.
1.0
... 5
0.0
[ms]
p171
7.D
(4.1
)
Kp
Tn
– – r002
9C
O: S
trom
Isd
[A]
Span
-nu
ng
r006
5C
O: S
chlu
pffre
q. [%
]
r006
6C
O: A
usga
ngsf
req.
[Hz]
Kp n
-Ada
pt. (
SLV
C)
0.0
... 2
.5p1
764.
D (0
.2)
Tn n
-Ada
pt. (
SLV
C)
1.0
... 2
00.0
[m
s]p1
767.
D (4
.0)
Beo-
bach
ter-
mod
ell
Stro
m-
mod
ell
6
Puls
frequ
enz
2 ...
16
[kH
z]p1
800
(4)
r006
8C
O: A
usga
ngss
trom
[A]
5 3
r005
0 =
akt.
BiC
o-D
aten
satz
(CD
S)
r005
1.1
= ak
t.A
ntrie
bsda
tens
atz
(DD
S)
*)
*)
*)
*)
Bla
tt75
00
Dre
hzah
lregl
er
Bla
tt77
00
Dre
hmom
ent-/
Stro
mgr
enze
Flus
ssol
lwer
tBl
att
7900
r007
1C
O: M
ax. A
usg.
spg.
[V]
Bla
tt78
00
r007
0C
O: U
ngef
. ZW
K-S
pg [V
]
r007
2C
O: A
usga
ngss
pg. [
V]
Stro
mre
gler
,Be
obac
hter
mod
ell
**) s
etzb
ar ü
ber p
1000
*) n
ur in
Zug
riffs
stuf
e 4
- 701
0 -
Funk
tions
plan
87
65
43
21
7010
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0Ü
bers
icht
Dre
hzah
lrege
lung
mit
Impu
lsge
ber
p130
0 =
21 u
nd p
1501
= 0
Steu
ersa
tz
CO
: Unt
.M-G
r-9
9999
.00
... 9
9999
.00
[Nm
]P
1521
.D (-
5.13
)C
I: U
nt.M
-Gr
(152
1:0)
P15
23.C
Mot
.übe
rl.fa
kt.[%
]10
.0 ..
. 400
.0 [
%]
P064
0.D
(150
.0)
Ska
l. M
-Gr.
-400
.0 ..
. 400
.0 [
%]
P15
25.D
(100
.0)
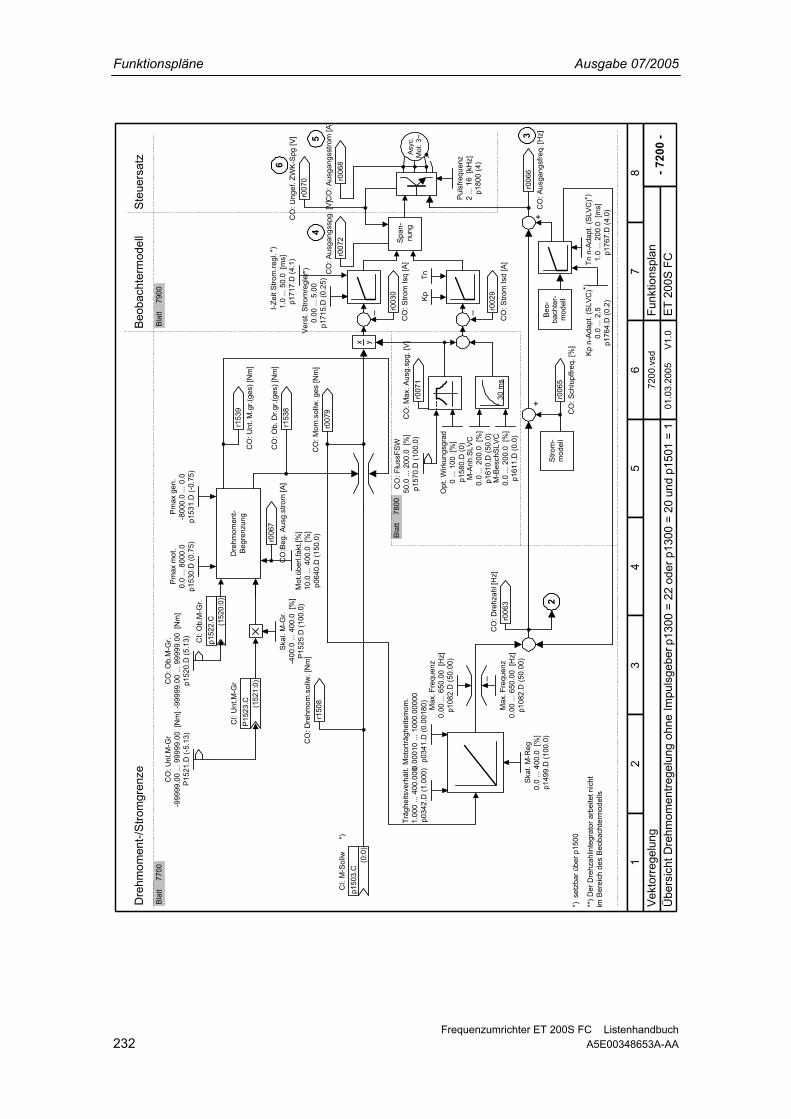
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 232 A5E00348653A-AA
**) D
er D
rehz
ahlin
tegr
ator
arb
eite
t nic
htim
Ber
eich
des
Beo
bach
term
odel
ls
*) s
etzb
ar ü
ber p
1500
- 720
0 -
Funk
tions
plan
87
65
43
21
7200
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0Ü
bers
icht
Dre
hmom
entre
gelu
ng o
hne
Impu
lsge
ber
2
CI:
M-S
ollw (0:0
)p1
503.
C
r150
8C
O: D
rehm
om.s
ollw
. [N
m]
Mot
orträ
ghei
tsm
om.
0.00
010
... 1
000.
0000
0p0
341.
D (0
.001
80)
Ska
l. M
-Reg
0.0
... 4
00.0
[%
]p1
499.
D (1
00.0
)
r006
3C
O: D
rehz
ahl [
Hz]
*)
CO
: Ob.
M-G
r.-9
9999
.00
... 9
9999
.00
[Nm
]p1
520.
D (5
.13) C
I: O
b.M
-Gr.
(152
0:0)
p152
2.C
Dre
hmom
ent-
Begr
enzu
ng
r153
8C
O: O
b. D
r.gr.(
ges)
[Nm
]
r007
9C
O: M
om.s
ollw
. ges
[Nm
]
x y
Opt
. Wirk
ungs
grad
0 ...
100
[%
]p1
580.
D (0
)
CO
: Flu
ssFS
W50
.0 ..
. 200
.0 [
%]
p157
0.D
(100
.0)
r153
9C
O: U
nt. M
.gr.(
ges)
[Nm
]
Mot
.übe
rl.fa
kt.[%
]10
.0 ..
. 400
.0 [
%]
p064
0.D
(150
.0)
Pm
ax m
ot.
0.0
... 8
000.
0p1
530.
D (0
.75)
Pm
ax g
en.
-800
0.0
... 0
.0p1
531.
D (-
0.75
)
M-A
nh.S
LVC
0.0
... 2
00.0
[%
]p1
610.
D (5
0.0)
M-B
esch
SLVC
0.0
... 2
00.0
[%
]p1
611.
D (0
.0)
30 m
s
Bla
tt77
00
Dre
hmom
ent-/
Stro
mgr
enze
Blat
t79
00
r007
1C
O: M
ax. A
usg.
spg.
[V]
Blat
t78
00
p130
0 =
22 o
der p
1300
= 2
0 un
d p1
501
= 1
Beob
acht
erm
odel
l
r006
7C
O:B
eg. A
usg.
stro
m [A
]
Träg
heits
verh
ält.
1.00
0 ...
400
.000
p034
2.D
(1.0
00)
Max
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
2.D
(50.
00)
Max
. Fre
quen
z0.
00 ..
. 650
.00
[Hz]
p108
2.D
(50.
00)
–
Asyc
.M
ot. 3
~
4
r003
0C
O: S
trom
Isq
[A]
Vers
t. S
trom
regl
er0.
00 ..
. 5.0
0p1
715.
D (0
.25)
I-Zei
t Stro
m.re
gl.
1.0
... 5
0.0
[ms]
p171
7.D
(4.1
)
Kp
Tn
– – r002
9C
O: S
trom
Isd
[A]
Span
-nu
ng
6
Puls
frequ
enz
2 ...
16
[kH
z]p1
800
(4)
r006
8C
O: A
usga
ngss
trom
[A]
5
*)
*)r0
070
CO
: Ung
ef. Z
WK
-Spg
[V]
r007
2C
O: A
usga
ngss
pg. [
V]
++
r006
5C
O: S
chlu
pffre
q. [%
]
r006
6C
O: A
usga
ngsf
req.
[Hz]
Kp n
-Ada
pt. (
SLV
C)
0.0
... 2
.5p1
764.
D (0
.2)
Tn n
-Ada
pt. (
SLV
C)
1.0
... 2
00.0
[m
s]p1
767.
D (4
.0)
Beo-
bach
ter-
mod
ell
Stro
m-
mod
ell
3
*)*)
Steu
ersa
tz
CO
: Unt
.M-G
r-9
9999
.00
... 9
9999
.00
[Nm
]P1
521.
D (-
5.13
)
CI:
Unt
.M-G
r
(152
1:0)
P15
23.C
Ska
l. M
-Gr.
-400
.0 ..
. 400
.0 [
%]
P15
25.D
(100
.0)
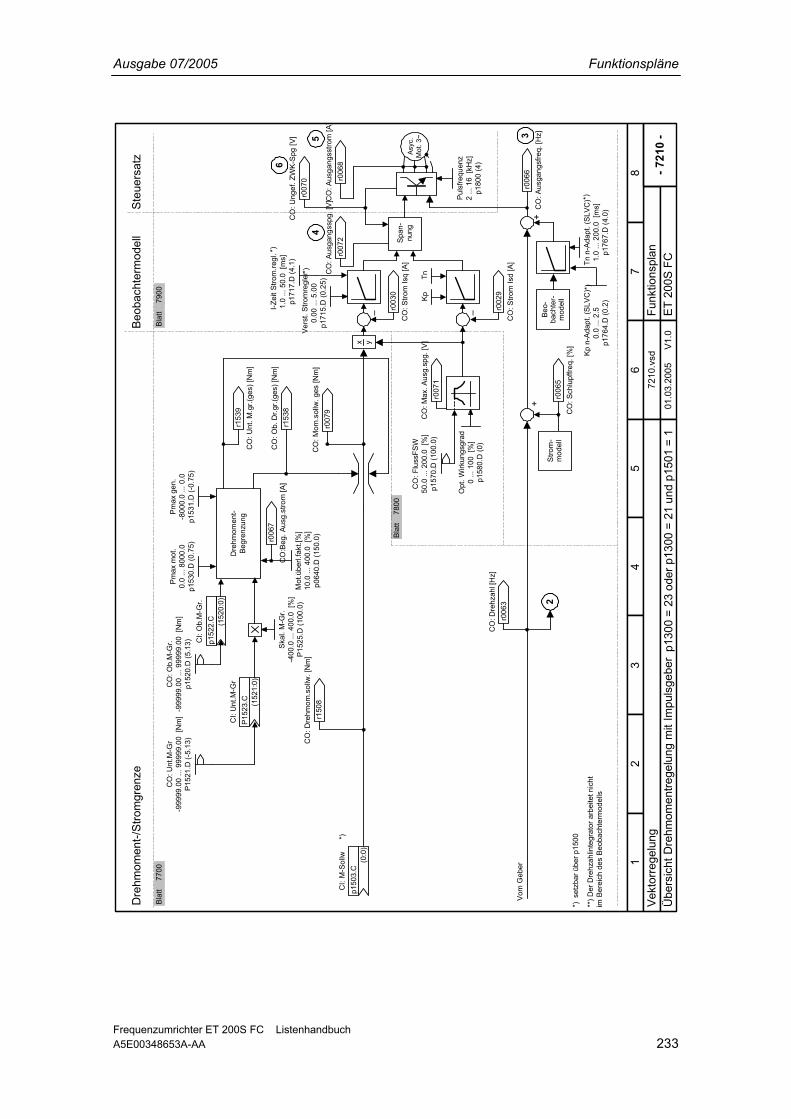
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 233
Vom
Geb
er
**) D
er D
rehz
ahlin
tegr
ator
arb
eite
t nic
htim
Ber
eich
des
Beo
bach
term
odel
ls
*) s
etzb
ar ü
ber p
1500
- 721
0 -
Funk
tions
plan
87
65
43
21
7210
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0Ü
bers
icht
Dre
hmom
entre
gelu
ng m
it Im
puls
gebe
r
2
CI:
M-S
ollw (0:0
)p1
503.
C
r150
8C
O: D
rehm
om.s
ollw
. [N
m]
r006
3C
O: D
rehz
ahl [
Hz]
*)
CO
: Ob.
M-G
r.-9
9999
.00
... 9
9999
.00
[Nm
]p1
520.
D (5
.13) C
I: O
b.M
-Gr.
(152
0:0)
p152
2.C
Dre
hmom
ent-
Begr
enzu
ng
r153
8C
O: O
b. D
r.gr.(
ges)
[Nm
]
r007
9C
O: M
om.s
ollw
. ges
[Nm
]
x y
Opt
. Wirk
ungs
grad
0 ...
100
[%
]p1
580.
D (0
)
CO
: Flu
ssFS
W50
.0 ..
. 200
.0 [
%]
p157
0.D
(100
.0)
r153
9C
O: U
nt. M
.gr.(
ges)
[Nm
]
Mot
.übe
rl.fa
kt.[%
]10
.0 ..
. 400
.0 [
%]
p064
0.D
(150
.0)
Pm
ax m
ot.
0.0
... 8
000.
0p1
530.
D (0
.75)
Pm
ax g
en.
-800
0.0
... 0
.0p1
531.
D (-
0.75
)
Bla
tt77
00
Dre
hmom
ent-/
Stro
mgr
enze
Blat
t79
00
r007
1C
O: M
ax. A
usg.
spg.
[V]
Blat
t78
00
p130
0 =
23 o
der p
1300
= 2
1 un
d p1
501
= 1
Beob
acht
erm
odel
l
r006
7C
O:B
eg. A
usg.
stro
m [A
]
Asyc
.M
ot. 3
~
++
4
r003
0C
O: S
trom
Isq
[A]
Vers
t. S
trom
regl
er0.
00 ..
. 5.0
0p1
715.
D (0
.25)
I-Zei
t Stro
m.re
gl.
1.0
... 5
0.0
[ms]
p171
7.D
(4.1
)
Kp
Tn
– – r002
9C
O: S
trom
Isd
[A]
Span
-nu
ng
r006
5C
O: S
chlu
pffre
q. [%
]
r006
6C
O: A
usga
ngsf
req.
[Hz]
Kp n
-Ada
pt. (
SLV
C)
0.0
... 2
.5p1
764.
D (0
.2)
Tn n
-Ada
pt. (
SLV
C)
1.0
... 2
00.0
[m
s]p1
767.
D (4
.0)
Beo-
bach
ter-
mod
ell
Stro
m-
mod
ell
6
Puls
frequ
enz
2 ...
16
[kH
z]p1
800
(4)
r006
8C
O: A
usga
ngss
trom
[A]
5 3
*)
*)
*)
*)
r007
0C
O: U
ngef
. ZW
K-S
pg [V
]
r007
2C
O: A
usga
ngss
pg. [
V]Steu
ersa
tz
CO
: Unt
.M-G
r-9
9999
.00
... 9
9999
.00
[Nm
]P
1521
.D (-
5.13
)
CI:
Unt
.M-G
r
(152
1:0)
P15
23.C
Ska
l. M
-Gr.
-400
.0 ..
. 400
.0 [
%]
P152
5.D
(100
.0)
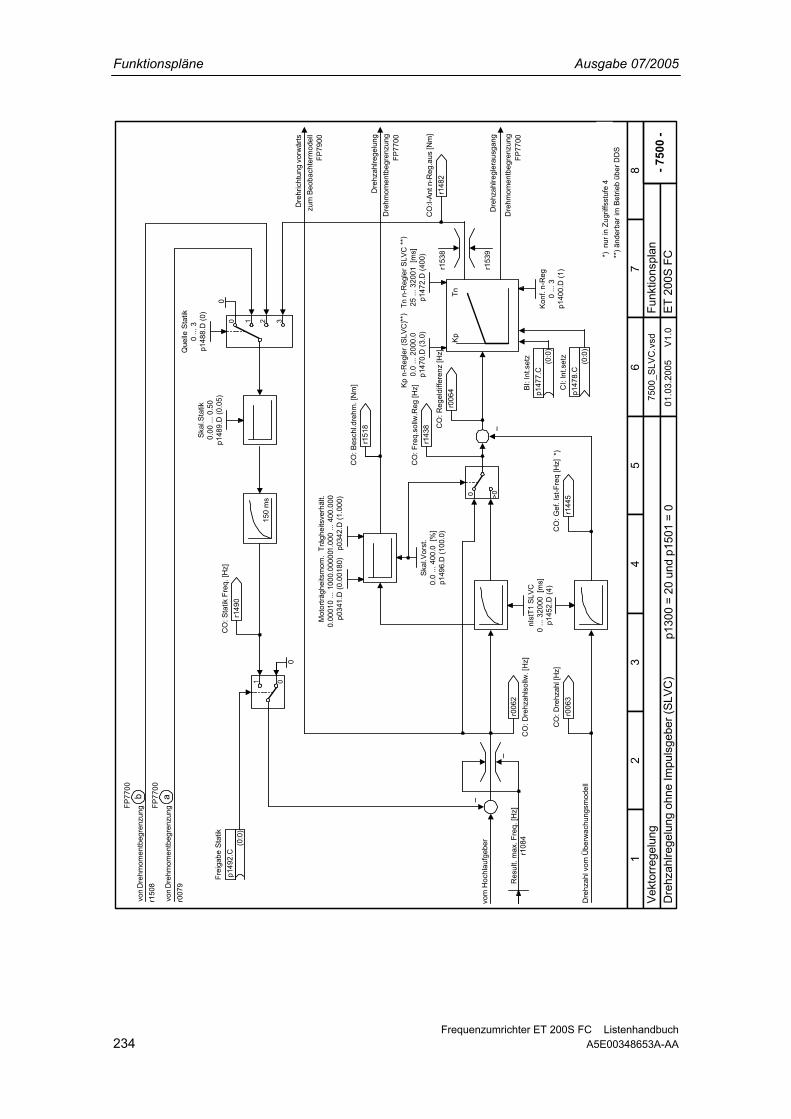
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 234 A5E00348653A-AA
Dre
hric
htun
g vo
rwär
ts
Dre
hzah
lrege
lung
Dre
hzah
lregl
erau
sgan
g
von
Dre
hmom
entb
egre
nzun
g
von
Dre
hmom
entb
egre
nzun
g
**) ä
nder
bar i
m B
etrie
b üb
er D
DS
zum
Beo
bach
term
odel
l
Dre
hmom
entb
egre
nzun
g
Dre
hmom
entb
egre
nzun
g
Dre
hzah
l vom
Übe
rwac
hung
smod
ell
vom
Hoc
hlau
fgeb
er
- 750
0 -
Funk
tions
plan
87
65
43
21
7500
_SLV
C.v
sdVe
ktor
rege
lung
ET 2
00S
FC01
.03.
2005
V
1.0
Dre
hzah
lrege
lung
ohn
e Im
puls
gebe
r (SL
VC)
−r0
062
CO
: Dre
hzah
lsol
lw. [
Hz]
−0 >0
nIst
T1 S
LVC
0 ...
320
00 [
ms]
p145
2.D
(4)
Mot
orträ
ghei
tsm
om.
0.00
010
... 1
000.
0000
0p0
341.
D (0
.001
80)
Träg
heits
verh
ält.
1.00
0 ...
400
.000
p034
2.D
(1.0
00)
Skal
.Vor
st.
0.0
... 4
00.0
[%
]p1
496.
D (1
00.0
)
r151
8C
O: B
esch
l.dre
hm. [
Nm
]
r143
8C
O: F
req.
sollw
.Reg
[Hz]
r006
4C
O: R
egel
diffe
renz
[Hz]
Kp
Tn
Kon
f. n-
Reg
0 ...
3p1
400.
D (1
)
Kp
n-R
egle
r (S
LVC
)0.
0 ...
200
0.0
p147
0.D
(3.0
)
Tn n
-Reg
ler S
LVC
25 ..
. 320
01 [
ms]
p147
2.D
(400
)
**)
**)
(0:0
)
BI:
Int.s
etz
p147
7.C
CI:
Int.s
etz
(0:0
)p1
478.
C
r153
8
r153
9
r148
2C
O:I-
Ant
n-R
eg.a
us [N
m]
r006
3C
O: D
rehz
ahl [
Hz]
r144
5C
O: G
ef. I
st-F
req
[Hz]
−
Que
lle S
tatik
0 ...
3p1
488.
D (0
)S
kal.S
tatik
0.00
... 0
.50
p148
9.D
(0.0
5)
150
ms
0 21 3
0
0
r149
0C
O: S
tatik
Fre
q. [H
z]
*)
*) n
ur in
Zug
riffs
stuf
e 4
p130
0 =
20 u
nd p
1501
= 0
1 0
Res
ult.
max
. Fre
q. [H
z]r1
084
aFP
7700
bFP
7700
FP77
00
FP77
00
r007
9
r150
8
FP79
00
(0:0
)
Frei
gabe
Sta
tikp1
492.
C
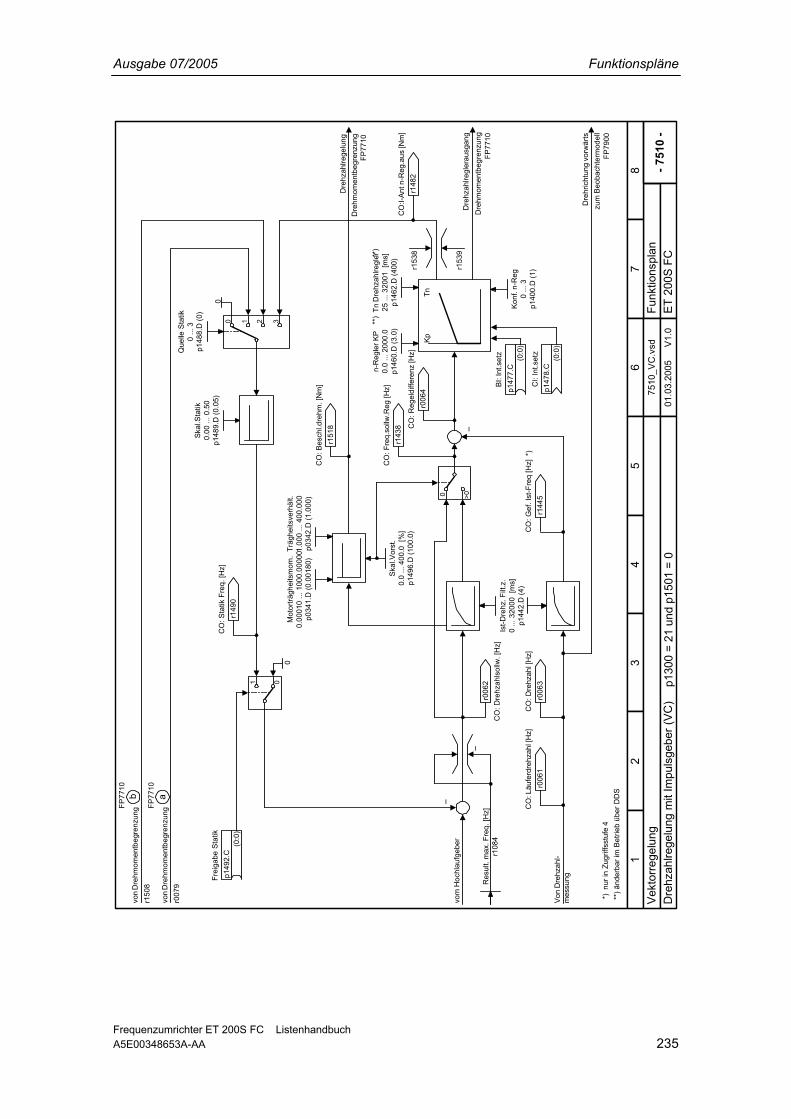
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 235
Dre
hric
htun
g vo
rwär
ts
Dre
hzah
lrege
lung
Dre
hzah
lregl
erau
sgan
g
von
Dre
hmom
entb
egre
nzun
g
von
Dre
hmom
entb
egre
nzun
g
**) ä
nder
bar i
m B
etrie
b üb
er D
DS
zum
Beo
bach
term
odel
l
Dre
hmom
entb
egre
nzun
g
Dre
hmom
entb
egre
nzun
g
Von
Dre
hzah
l-m
essu
ng
vom
Hoc
hlau
fgeb
er
- 751
0 -
Funk
tions
plan
87
65
43
21
7510
_VC
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0D
rehz
ahlre
gelu
ng m
it Im
puls
gebe
r (VC
)
−r0
062
CO
: Dre
hzah
lsol
lw. [
Hz]
−0 >0
Ist-D
rehz
. Filt
.z.
0 ...
320
00 [
ms]
p144
2.D
(4)
Mot
orträ
ghei
tsm
om.
0.00
010
... 1
000.
0000
0p0
341.
D (0
.001
80)
Träg
heits
verh
ält.
1.00
0 ...
400
.000
p034
2.D
(1.0
00)
Ska
l.Vor
st.
0.0
... 4
00.0
[%
]p1
496.
D (1
00.0
)
r151
8C
O: B
esch
l.dre
hm. [
Nm
]
r143
8C
O: F
req.
sollw
.Reg
[Hz]
r006
4C
O: R
egel
diffe
renz
[Hz]
KpTn
Konf
. n-R
eg0
... 3
p140
0.D
(1)
n-R
egle
r KP
0.0
... 2
000.
0p1
460.
D (3
.0)
Tn D
rehz
ahlre
gler
25 ..
. 320
01 [
ms]
p146
2.D
(400
)
**)
**)
(0:0
)
BI:
Int.s
etz
p147
7.C
CI:
Int.s
etz
(0:0
)p1
478.
C
r153
8
r153
9
r148
2C
O:I-
Ant n
-Reg
.aus
[Nm
]
r006
3C
O: D
rehz
ahl [
Hz]
r144
5C
O: G
ef. I
st-F
req
[Hz]
−
Que
lle S
tatik
0 ...
3p1
488.
D (0
)S
kal.S
tatik
0.00
... 0
.50
p148
9.D
(0.0
5)0 21 3
0
0
r149
0C
O: S
tatik
Fre
q. [H
z]
*)
*) n
ur in
Zug
riffs
stuf
e 4
p130
0 =
21 u
nd p
1501
= 0
1 0
aFP
7710
bFP
7710
r007
9
r150
8
FP77
10
FP77
10
Res
ult.
max
. Fre
q. [H
z]r1
084
r006
1C
O: L
äufe
rdre
hzah
l [H
z]
FP79
00
(0:0
)
Frei
gabe
Sta
tikp1
492.
C
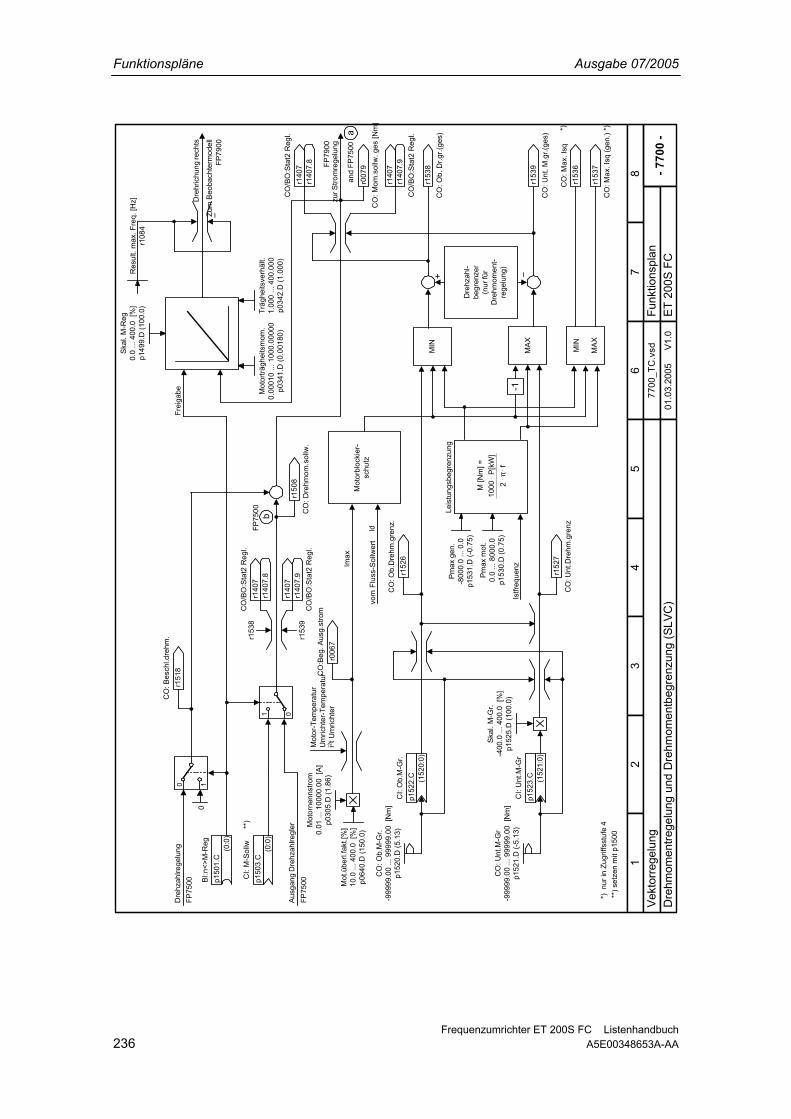
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 236 A5E00348653A-AA
zur S
trom
rege
lung
Zum
Beo
bach
term
odel
l
Dre
hric
hung
rech
ts
**) s
etze
n m
it p1
500
Frei
gabe
vom
Flu
ss-S
ollw
ert
- 770
0 -
Funk
tions
plan
87
65
43
21
7700
_TC
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0D
rehm
omen
trege
lung
und
Dre
hmom
entb
egre
nzun
g (S
LVC
)
Dre
hzah
lrege
lung
Aus
gang
Dre
hzah
lregl
er
r151
8C
O: B
esch
l.dre
hm.
1 0r1
508
CO
: Dre
hmom
.sol
lw.
Ska
l. M
-Gr.
-400
.0 ..
. 400
.0 [
%]
p152
5.D
(100
.0)
r152
7C
O: U
nt.D
rehm
.gre
nz
r152
6C
O: O
b.D
rehm
.gre
nz.
-1
MIN
MA
Xr1
539
CO
: Unt
. M.g
r.(ge
s)
r153
8C
O: O
b. D
r.gr.(
ges)
+ −
Dre
hzah
l-be
gren
zer
(nur
für
Dre
hmom
ent-
rege
lung
)
Imax
0 1
CI:
M-S
ollw (0:0
)p1
503.
C
(0:0
)
BI:n
<>M
-Reg
p150
1.C
0
CI:
Ob.
M-G
r.
(152
0:0)
p152
2.C
CI:
Unt
.M-G
r
(152
1:0)
p152
3.C
Mot
orbl
ocki
er-
schu
tz
CO
: Ob.
M-G
r.-9
9999
.00
... 9
9999
.00
[Nm
]p1
520.
D (5
.13)
CO
: Unt
.M-G
r-9
9999
.00
... 9
9999
.00
[Nm
]p1
521.
D (-
5.13
)
CO
/BO
:Sta
t2 R
egl.
r140
7r1
407
CO
/BO
:Sta
t2 R
egl.
r140
7r1
407
r007
9C
O: M
om.s
ollw
. ges
[Nm
]
MIN
MA
X
r153
6C
O: M
ax. I
sq
r153
7C
O: M
ax. I
sq (g
en.)
Mot
orträ
ghei
tsm
om.
0.00
010
... 1
000.
0000
0p0
341.
D (0
.001
80)
Träg
heits
verh
ält.
1.00
0 ...
400
.000
p034
2.D
(1.0
00)
Skal
. M-R
eg0.
0 ...
400
.0 [
%]
p149
9.D
(100
.0)
−
**)
Res
ult.
max
. Fre
q. [H
z]r1
084
*)*)
*) n
ur in
Zug
riffs
stuf
e 4
Id
r153
8
r153
9.8 .9
bFP
7500
aan
d FP
7500
CO
/BO
:Sta
t2 R
egl.
r140
7r1
407
CO
/BO
:Sta
t2 R
egl.
r140
7r1
407.8 .9
FP75
00
FP75
00
FP79
00
FP79
00
Mot
.übe
rl.fa
kt.[%
]10
.0 ..
. 400
.0 [
%]
p064
0.D
(150
.0)
Mot
orne
nnst
rom
0.01
... 1
0000
.00
[A]
p030
5.D
(1.8
6)
Mot
or-T
empe
ratu
rU
mric
hter
-Tem
pera
tur
i2 tU
mric
hter
r006
7C
O:B
eg. A
usg.
stro
m
Istfr
eque
nz
Leis
tung
sbeg
renz
ung
Pmax
mot
.0.
0 ...
800
0.0
p153
0.D
(0.7
5)
Pmax
gen
.-8
000.
0 ...
0.0
p153
1.D
(-0.
75)
M [N
m] =
1000
. P[k
W]
2 . π
. f
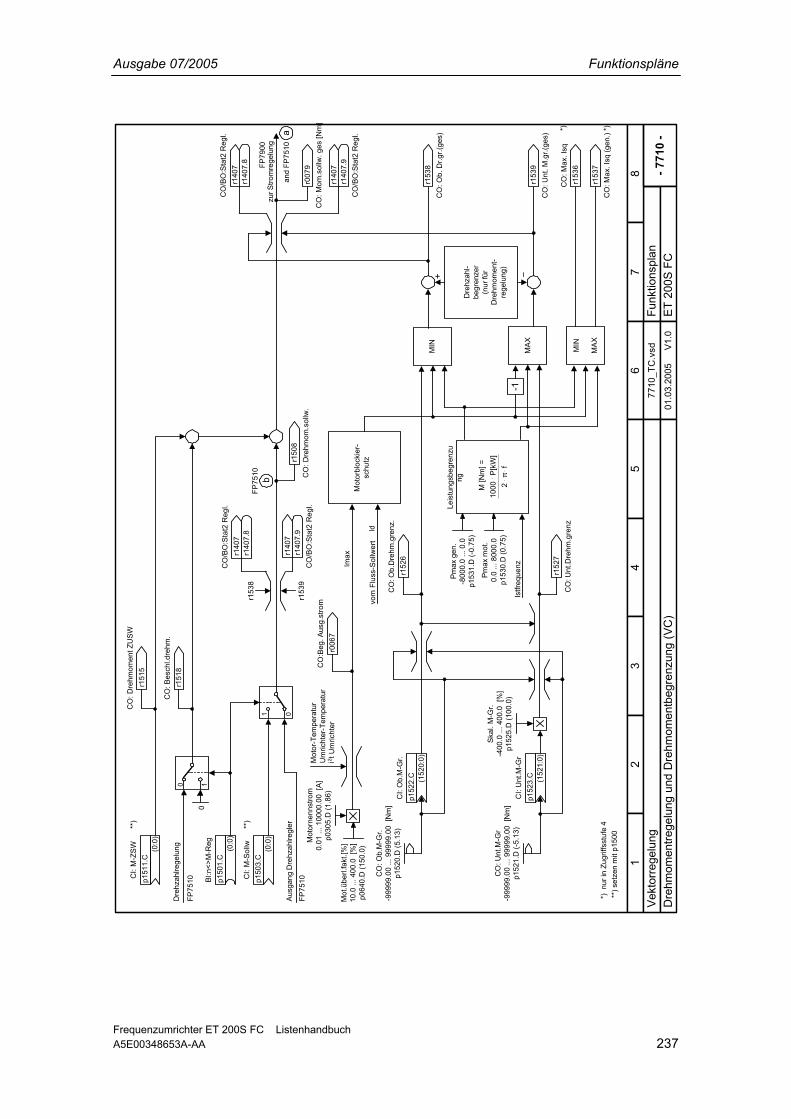
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 237
Mot
orbl
ocki
er-
schu
tz
zur S
trom
rege
lung
**) s
etze
n m
it p1
500
Istfr
eque
nz
vom
Flu
ss-S
ollw
ert
- 771
0 -
Funk
tions
plan
87
65
43
21
7710
_TC
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0D
rehm
omen
trege
lung
und
Dre
hmom
entb
egre
nzun
g (V
C)
Leis
tung
sbeg
renz
ung
Dre
hzah
lrege
lung
Aus
gang
Dre
hzah
lregl
er
r151
8C
O: B
esch
l.dre
hm.
r151
5C
O: D
rehm
omen
t ZU
SW
1 0r1
508
CO
: Dre
hmom
.sol
lw.
Ska
l. M
-Gr.
-400
.0 ..
. 400
.0 [
%]
p152
5.D
(100
.0)
r152
7C
O: U
nt.D
rehm
.gre
nz
r152
6C
O: O
b.D
rehm
.gre
nz.
Pmax
mot
.0.
0 ...
800
0.0
p153
0.D
(0.7
5)
Pmax
gen
.-8
000.
0 ...
0.0
p153
1.D
(-0.
75)
-1
MIN
MA
Xr1
539
CO
: Unt
. M.g
r.(ge
s)
r153
8C
O: O
b. D
r.gr.(
ges)
+ −
Dre
hzah
l-be
gren
zer
(nur
für
Dre
hmom
ent-
rege
lung
)
r006
7C
O:B
eg. A
usg.
stro
m
Imax
CI:
M-Z
SW (0:0
)p1
511.
C
0 1
CI:
M-S
ollw (0:0
)p1
503.
C
(0:0
)
BI:n
<>M
-Reg
p150
1.C
0
CI:
Ob.
M-G
r.
(152
0:0)
p152
2.C
CI:
Unt
.M-G
r
(152
1:0)
p152
3.C
CO
: Ob.
M-G
r.-9
9999
.00
... 9
9999
.00
[Nm
]p1
520.
D (5
.13)
CO
: Unt
.M-G
r-9
9999
.00
... 9
9999
.00
[Nm
]p1
521.
D (-
5.13
)
CO
/BO
:Sta
t2 R
egl.
r140
7r1
407
CO
/BO
:Sta
t2 R
egl.
r140
7r1
407
r007
9C
O: M
om.s
ollw
. ges
[Nm
]
MIN
MA
X
r153
6C
O: M
ax. I
sq
r153
7C
O: M
ax. I
sq (g
en.)
**)
*)*)
nur
in Z
ugrif
fsst
ufe
4
Id
**)
r153
8
r153
9
.8 .9
aan
d FP
7510
bFP
7510
FP79
00
CO
/BO
:Sta
t2 R
egl.
r140
7r1
407
CO
/BO
:Sta
t2 R
egl.
r140
7r1
407.8 .9
FP75
10
FP75
10
Mot
.übe
rl.fa
kt.[%
]10
.0 ..
. 400
.0 [
%]
p064
0.D
(150
.0)
Mot
orne
nnst
rom
0.01
... 1
0000
.00
[A]
p030
5.D
(1.8
6)
Mot
or-T
empe
ratu
rU
mric
hter
-Tem
pera
tur
i2 tU
mric
hter
M [N
m] =
*)
1000
. P[k
W]
2 . π
. f
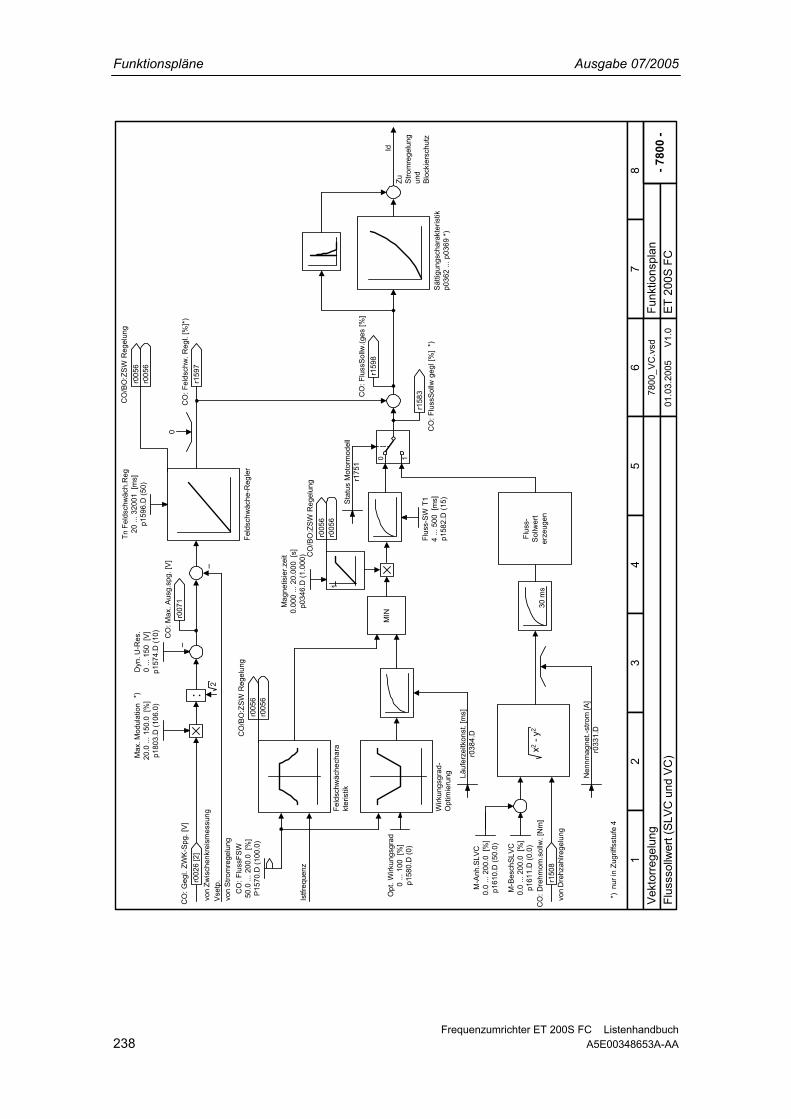
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 238 A5E00348653A-AA
Zu Stro
mre
gelu
ngun
dB
lock
iers
chut
zS
ättig
ungs
char
akte
ristik
p036
2 ...
p03
69 *
)
von
Dre
hzah
lrege
lung
Feld
schw
äche
-Reg
ler
Wirk
ungs
grad
-O
ptim
ieru
ng
Feld
schw
äche
char
akt
eris
tik
Istfr
eque
nz
von
Stro
mre
gelu
ng
von
Zwis
chen
krei
smes
sung
- 780
0 -
Funk
tions
plan
87
65
43
21
7800
_VC
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0Fl
usss
ollw
ert (
SLVC
und
VC
)Max
. Mod
ulat
ion
20.0
... 1
50.0
[%
]p1
803.
D (1
06.0
)
Dyn
. U-R
es.
0 ...
150
[V]
p157
4.D
(10)
*) n
ur in
Zug
riffs
stuf
e 4
*)
r007
1C
O: M
ax. A
usg.
spg.
[V]
Vse
tp.
Tn F
elds
chw
äch.
Reg
20 ..
. 320
01 [
ms]
p159
6.D
(50)
CO
/BO
:ZS
W R
egel
ung
r005
6r0
056
0
r159
7C
O: F
elds
chw
. Reg
l. [%
]*)
CO
: Flu
ssFS
W50
.0 ..
. 200
.0 [
%]
P157
0.D
(100
.0)
M-B
esch
SLVC
0.0
... 2
00.0
[%
]p1
611.
D (0
.0)
CO
/BO
:ZS
W R
egel
ung
r005
6r0
056
MIN
1
Mag
netis
ier.z
eit
0.00
0 ...
20.
000
[s]
p034
6.D
(1.0
00)
Flus
s-SW
T1
4 ...
500
[m
s]p1
582.
D (1
5)
CO
/BO
:ZS
W R
egel
ung
r005
6r0
056
10
r158
3C
O: F
luss
Sol
lw g
egl [
%]
r159
8C
O: F
luss
Sol
lw.(g
es [%
]
M-A
nh.S
LVC
0.0
... 2
00.0
[%
]p1
610.
D (5
0.0)
30 m
s
Flus
s-S
ollw
ert
erze
ugen
Id
*)
−
−
r150
8C
O: D
rehm
om.s
ollw
. [N
m]
r002
6 [2
]C
O: G
egl.
ZWK-
Spg.
[V]
Läuf
erze
itkon
st. [
ms]
r038
4.D
Nen
nmag
net.-
stro
m [A
]r0
331.
D
Opt
. Wirk
ungs
grad
0 ...
100
[%
]p1
580.
D (0
)
Sta
tus
Mot
orm
odel
lr1
751
:
x2 - y
2
2
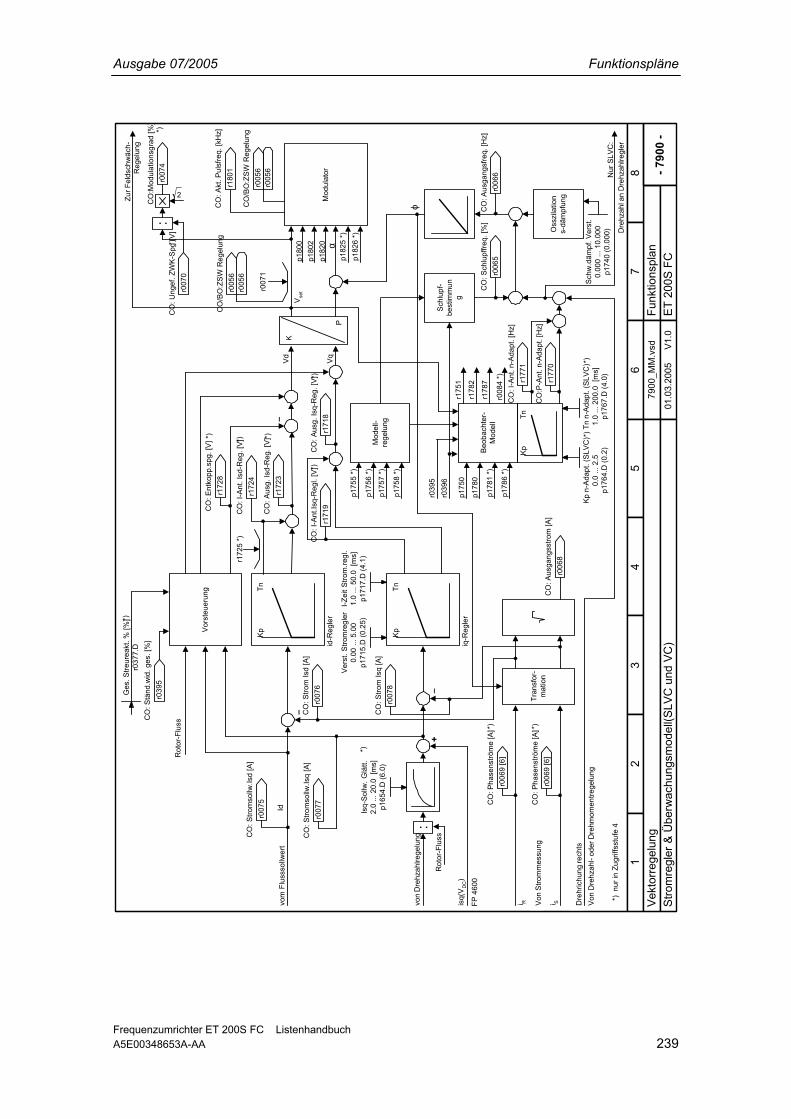
Ausgabe 07/2005 Funktionspläne
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 239
Nur
SLV
C:
Dre
hzah
l an
Dre
hzah
lregl
er
Zur F
elds
chw
äch-
Reg
elun
g
Von
Dre
hzah
l- od
er D
rehm
omen
trege
lung
iq-R
egle
r
id-R
egle
r
vom
Flu
ssso
llwer
t
Rot
or-F
luss
von
Dre
hzah
lrege
lung
- 790
0 -
Funk
tions
plan
87
65
43
21
7900
_MM
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0St
rom
regl
er &
Übe
rwac
hung
smod
ell(S
LVC
und
VC
)
*) n
ur in
Zug
riffs
stuf
e 4:
Isq-
Sol
lw. G
lätt.
2.0
... 2
0.0
[ms]
p165
4.D
(6.0
)
*)
Kp
Tn
Kp
Tn
Vor
steu
erun
g
r039
5C
O: S
tänd
.wid
. ges
. [%
]
Ges
. Stre
urea
kt. %
[%]
r037
7.D
r007
5C
O: S
trom
sollw
.Isd
[A]
Id
r007
7C
O: S
trom
sollw
.Isq
[A]
r007
6C
O: S
trom
Isd
[A]
Tran
sfor
-m
atio
n
Dre
hric
hung
rech
ts
Von
Stro
mm
essu
ng
i R i S
r006
9 [6
]C
O: P
hase
nströ
me
[A]
r006
9 [6
]C
O: P
hase
nströ
me
[A]
r006
8C
O: A
usga
ngss
trom
[A]
I-Zei
t Stro
m.re
gl.
1.0
... 5
0.0
[ms]
p171
7.D
(4.1
)
Vers
t. S
trom
regl
er0.
00 ..
. 5.0
0p1
715.
D (0
.25)
r171
9C
O: I
-Ant
.Isq-
Reg
l. [V
]*)r1
718
CO
: Aus
g. Is
q-R
eg. [
V] *)
Beo
bach
ter-
Mod
ell
Kp
Tn
*)
r172
3C
O: A
usg.
Isd-
Reg
. [V]
*)
r172
4C
O: I
-Ant
. Isd
-Reg
. [V
]r1
725
*)
r177
1C
O: I
-Ant
. n-A
dapt
. [H
z]
r177
0C
O:P
-Ant
. n-A
dapt
. [H
z]
Sch
lupf
-be
stim
mun
g
r006
5C
O: S
chlu
pffre
q. [%
]
p178
6 *)
p178
1 *)
p178
0
p175
0
r039
6r0
395
Kp
n-A
dapt
. (S
LVC
)0.
0 ...
2.5
p176
4.D
(0.2
)
Tn n
-Ada
pt. (
SLV
C)
1.0
... 2
00.0
[m
s]p1
767.
D (4
.0)
r008
4 *)
r178
7
r178
2
r175
1
Schw
.däm
pf. V
erst
.0.
000
... 1
0.00
0p1
740
(0.0
00)O
sszi
latio
ns-
däm
pfun
g
r006
6C
O: A
usga
ngsf
req.
[Hz]
r172
8C
O: E
ntko
pp.s
pg. [
V] *
)
Vq
Vd
K
P
r007
1
Vse
t
CO
/BO
:ZS
W R
egel
ung
r005
6r0
056
r007
0C
O: U
ngef
. ZW
K-S
pg [V
]:
2
r007
4C
O:M
odul
atio
nsgr
ad [%
]
αM
odul
ator
p180
0p1
802
p182
0
r180
1C
O: A
kt. P
ulsf
req.
[kH
z]
CO
/BO
:ZSW
Reg
elun
g
r005
6r0
056
p182
6 *)
p182
5 *)
*)
*) *)
*)*)
*)
*)
−
−
ϕ
Mod
ell-
rege
lung
p175
8 *)
p175
7 *)
p175
6 *)
p175
5 *)
r007
8C
O: S
trom
Isq
[A]
−
Rot
or-F
luss
isq(
VD
C)
FP 4
600
+
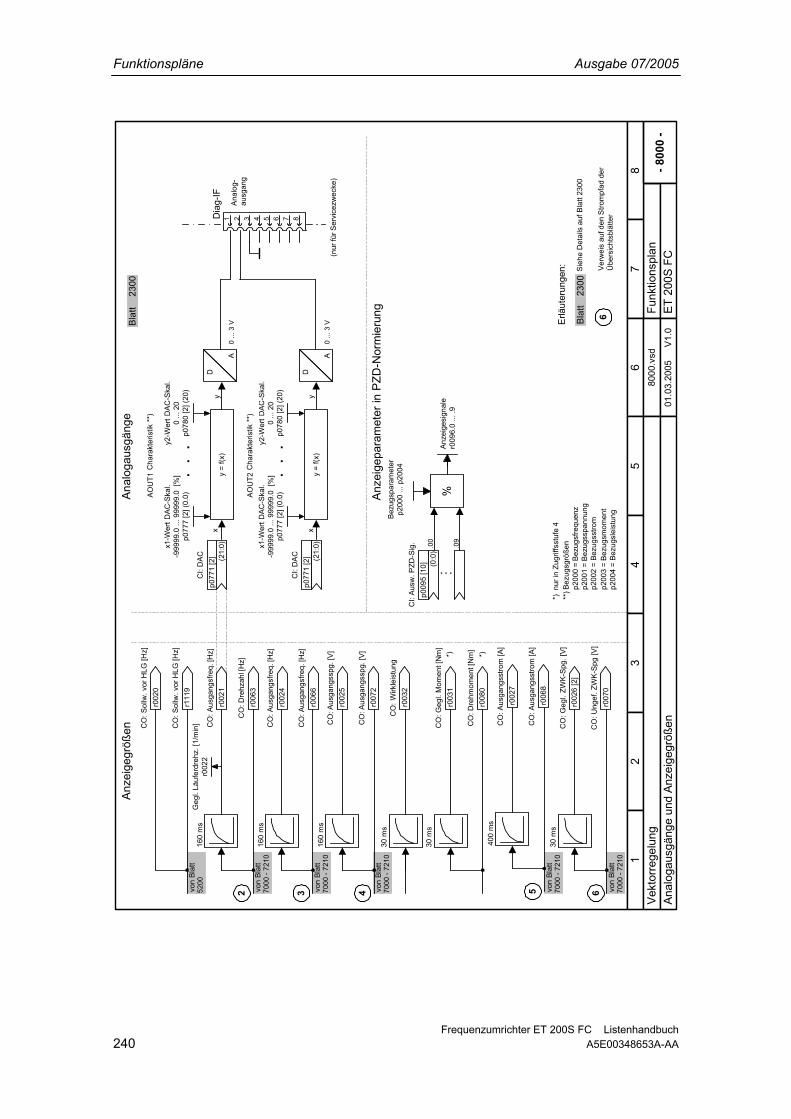
Funktionspläne Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 240 A5E00348653A-AA
von
Blat
t52
00
von
Blat
t70
00 -
7210
von
Blat
t70
00 -
7210
von
Blat
t70
00 -
7210
von
Blat
t70
00 -
7210
von
Blat
t70
00 -
7210
- 800
0 -
Funk
tions
plan
87
65
43
21
8000
.vsd
Vekt
orre
gelu
ngET
200
S FC
01.0
3.20
05
V1.
0An
alog
ausg
änge
und
Anz
eige
größ
en
xy
= f(x
)y
D
A
D
A
0 ...
3 V
0 ...
3 V
%.0
0
.09
6
r002
0C
O: S
ollw
. vor
HLG
[Hz]
r111
9C
O: S
ollw
. vor
HLG
[Hz]
160
ms
2
r002
1C
O: A
usga
ngsf
req.
[Hz]
r006
3C
O: D
rehz
ahl [
Hz]
Geg
l. Lä
ufer
dreh
z. [1
/min
]r0
022
CI:
DA
C (21:
0)p0
771
[2]
CI:
DA
C (21:
0)p0
771
[2]
3
160
ms
4
30 m
s
30 m
s
r006
6C
O: A
usga
ngsf
req.
[Hz]
r002
4C
O: A
usga
ngsf
req.
[Hz]
r007
2C
O: A
usga
ngss
pg. [
V]
r002
5C
O: A
usga
ngss
pg. [
V]
r003
2C
O: W
irkle
istu
ng
r008
0C
O: D
rehm
omen
t [N
m]
r003
1C
O: G
egl.
Mom
ent [
Nm
]
30 m
s
r007
0C
O: U
ngef
. ZW
K-S
pg [V
]
r002
6 [2
]C
O: G
egl.
ZWK-
Spg.
[V]
6
y2-W
ert D
AC
-Ska
l.0
... 2
0p0
780
[2] (
20)
x1-W
ert D
AC
-Ska
l.-9
9999
.0 ..
. 999
99.0
[%
]p0
777
[2] (
0.0)
xy
= f(x
)y
y2-W
ert D
AC
-Ska
l.0
... 2
0p0
780
[2] (
20)
x1-W
ert D
AC
-Ska
l.-9
9999
.0 ..
. 999
99.0
[%
]p0
777
[2] (
0.0)
.
.
.
.
.
.
Cha
rakt
eris
tik *
*)A
OU
T1
Cha
rakt
eris
tik *
*)A
OU
T2
CI:
Aus
w. P
ZD-S
ig.
(0:0
)p0
095
[10] ...
Anze
iges
igna
ler0
096.
0 ...
.9
Bez
ugsp
aram
eter
p200
0 ...
p20
04
Erlä
uter
unge
n: Sieh
e D
etai
ls a
uf B
latt
2300
Ver
wei
s au
f den
Stro
mpf
ad d
erÜ
bers
icht
sblä
tter
Anze
igeg
röße
nAn
alog
ausg
änge
Anze
igep
aram
eter
in P
ZD-N
orm
ieru
ng
Bla
tt23
00
Bla
tt23
00
*) n
ur in
Zug
riffs
stuf
e 4
**) B
ezug
sgrö
ßen
p200
0 =
Bez
ugsf
requ
enz
p200
1 =
Bezu
gssp
annu
ngp2
002
= Be
zugs
stro
m
*) *)40
0 m
s
5r0
068
CO
: Aus
gang
sstro
m [A
]
r002
7C
O: A
usga
ngss
trom
[A]
160
ms
p200
3 =
Bezu
gsm
omen
tp2
004
= Be
zugs
leis
tung
4321 5 6 7 8Dia
g-IF
Ana
log-
ausg
ang
(nur
für S
ervi
cezw
ecke
)
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 241
Fehlermeldungen und Alarme 3
3.1 Fehlermeldungen
Übersicht
Beim Auftreten eines Fehlers schaltet der Umrichter mit einer Fehlermeldung ab. Einschalten ist erst wieder möglich, nachdem der Fehler quittiert wurde.
Intern wird beim Quittieren der Fehlerspeicher zurückgesetzt. Zum Rücksetzen des Fehlerspeichers gibt es unterschiedliche Möglichkeiten:
• Netz AUS/EIN (24 V)
• Steuerwort 1, Bit 07 (Fehler-Quittierung)
FB100, Parameter „CTRL“, Signal „Fehler-Quittierung“. Hierbei ist zu beachten, dass bei mehr als einem Fehler im Umrichter eine doppelte Flanke erforderlich ist, um alle Fehler zu löschen.
HINWEIS Fehlermeldungen werden im Parameter r0947 unter ihrer Codenummer (z. B. F0003 = 3) gespeichert. Der zugehörige Fehlerwert ist in Parameter r0949 zu finden. Besitzt ein Fehler keinen Fehlerwert, so wird der Wert 0 eingetragen. Weiterhin können der Zeitpunkt des Auftretens eines Fehlers (r0948) und die Anzahl der in Parameter r0947 gespeicherten Fehlermeldungen (P0952) ausgelesen werden.
Für bestimmte Safety-Fehler gelten eigene Quittiervorschriften. Diese sind bei den betreffenden Fehlermeldungen beschrieben.
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 242 A5E00348653A-AA
F0001 Überstrom STOP_II
Ursache - Motorleistung (P0307) entspricht nicht der Umrichterleistung (r0206) - Kurzschluss in der Motorleitung - Erdschluss
Diagnose und Beseitigung Bitte überprüfen Sie: - Entspricht die Motorleistung (P0307) der Leistung des Umrichters (r0206)? - Sind die Grenzwerte für die Kabellängen eingehalten? - Liegt ein Kurz- bzw. Erdschluss bei Motorkabel oder Motor vor? - Entsprechen die Motorparameter denen des eingesetzten Motors? - Ständerwiderstandswert (P0350) korrekt? - Ist der Motor überlastet oder die Rotation behindert? - Hochlaufzeit (P1120) erhöhen. - Spannungsanhebung beim Anlauf (P1312) reduzieren.
F0002 Überspannung STOP_II
Ursache - Netzspannung zu hoch - Motor arbeitet generatorisch Hinweis Generatorbetrieb kann durch schnelles Herunterfahren hervorgerufen werden, oder durch eine aktive Last, die den Motor antreibt.
Diagnose und Beseitigung Bitte überprüfen Sie: - Liegt die Netzspannung im zulässigen Bereich? - Ist die Rücklaufzeit (P1121) den Lastverhältnissen angepasst? - Liegt die erforderliche Bremsleistung innerhalb der zulässigen Grenzen? Eine höhere Trägheit erfordert längere Rücklaufzeiten; gegebenenfalls Bremswiderstand anwenden. Hinweis Eine höhere Trägheit erfordert längere Rücklaufzeiten.
F0003 Unterspannung STOP_II
Ursache - Netzspannung ausgefallen - Laststöße außerhalb der zulässigen Grenzen.
Diagnose und Beseitigung Netzspannung prüfen.
F0004 Umrichter-Übertemperatur STOP_II
Ursache - Umrichter überlastet - Belüftung unzureichend - Pulsfrequenz zu hoch - Umgebungstemperatur zu hoch - Lüfter dreht nicht
Diagnose und Beseitigung Bitte überprüfen Sie: - Last oder Lastspiel zu hoch? - Motorleistung (P0307) ist größer als die Umrichterleistung (r0206). - Pulsfrequenz auf Werkseinstellung zurücksetzen. - Umgebungstemperatur zu hoch? - Lüfter muss sich drehen, wenn der Umrichter in Betrieb ist
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 243
F0005 Umrichter I2T STOP_II
Ursache - Umrichter überlastet. - Lastspiel zu hoch. - Motorleistung (P0307) ist größer als die Umrichterleistung (r0206).
Diagnose und Beseitigung Bitte überprüfen Sie: - Liegt das Lastspiel innerhalb der zulässigen Grenzen? - Entspricht die Motorleistung (P0307) der Leistung des Umrichters (r0206)?
F0011 Motor-Übertemperatur STOP_II
Ursache Motor überlastet
Diagnose und Beseitigung Bitte überprüfen Sie: - Last oder Lastspiel zu hoch? - Nenn-Motor-Übertemperaturen (P0626-P0628) korrekt? - Stimmt Warnschwelle für Motortemperatur (P0604)?
F0015 Kein Motor-Temperatursignal STOP_II
Ursache Kurzschluss oder offener Stromkreis des Motortemperaturfühlers. Wird Signalverlust festgestellt, wird der Motor mit Fehler F0015 abgeschaltet und die Temperaturüberwachung schaltet auf um, auf Überwachung mit thermischem Motormodell.
Diagnose und Beseitigung Bitte überprüfen Sie: - den Anschluss des Thermofühlers an der Regelungsbaugruppe. - die Parametereinstellung von P0601
F0020 Netzphase fehlt STOP_II
Ursache Fehler tritt auf, wenn eine der drei Eingangsphasen fehlt, die Pulse freigegeben sind und Last ansteht.
Diagnose und Beseitigung Sind die Leistungsanschlüsse ok?
F0022 HW-Überwachung aktiv STOP_II
Ursache Dieser Fehler tritt auf bei: - Überstrom im Zwischenkreis = Kurzschluss im IGBT
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen! Umrichter-Leistungsteil tauschen
F0023 Ausgangsfehler STOP_II
Ursache Eine Ausgangsphase ist nicht angeschlossen.
Diagnose und Beseitigung Überprüfen Sie den Motoranschluss.
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 244 A5E00348653A-AA
F0025 Zwischenkreis-Spannungsschwankungen STOP_II
Ursache Starke Spannungsschwankungen im Zwischenkreis.
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen!
F0026 Ansteuerung nicht freigegeben STOP_II
Ursache Fehler bei Synchronisation der Safety-Funktionen.
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen!
F0027 Überstrom an Phase W STOP_II
Ursache Dieser Fehler tritt auf bei: - Überstromabschaltung an Phase W - Erdschluss
Diagnose und Beseitigung Überprüfen Sie den Motoranschluss.
F0028 Leistungsgrenze beim Rückspeisen überschritten STOP_II
Ursache Der Motor wird von einer zu großen aktiven Last angetrieben dadurch wird die Rückspeiseenergie zu groß. Geschieht bei Lasten mit großer Trägheit, insbesondere beim Herunterfahren auf Drehzahl 0.
Diagnose und Beseitigung - Generatorische Last reduzieren - Rücklaufzeit vergrößern - Imax-Begrenzung in P1253 vergrößern
F0035 Wiederanlauf nach n STOP_II
Ursache Wiederanlauf nach n erfolglosen Versuchen (siehe P1211).
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 245
F0041 Ausfall Motordaten-Identifizierung STOP_II
Ursache Motordaten-Identifizierung fehlgeschlagen. - r0949 = 0: Last fehlt. - r0949 = 1: Stromgrenzwert während der Identifizierung erreicht. - r0949 = 2: Identifizierter Ständerwiderstand kleiner als 0.1% oder größer als 100%. - r0949 = 3: Identifizierter Läuferwiderstand kleiner als 0.1% oder größer als 100%. - r0949 = 4: Identifizierte Ständerreaktanz kleiner als 50% oder größer als 500% - r0949 = 5: Identifizierte Hauptreaktanz kleiner als 50% oder größer als 500% - r0949 = 6: Identifizierte Läufer-Zeitkonstante kleiner als 10ms oder größer als 5s - r0949 = 7: Identifizierte Gesamt-Streureaktanz kleiner als 5% oder größer als 50% - r0949 = 8: Identifizierte Ständer-Streureaktanz kleiner als 25% oder größer als 250% - r0949 = 9: Identifizierte Läufer-Streureaktanz kleiner als 25% oder größer als 250% - r0949 = 20: Identifizierte IGBT Ansprechspannung kleiner als 0.5 oder größer als 10V - r0949 = 30: Stromregler bei Spannungsgrenzwert - r0949 = 40: Identifizierter Datensatz inkonsistent; mindestens eine Identifizierung
fehlgeschlagen Prozentwerte basieren auf der Impedanz Zb = Vmot,nenn / sqrt(3) / Imot,nenn
Diagnose und Beseitigung Bitte überprüfen Sie: - r0949 = 0: Ist der Motor am Umrichter angeschlossen? - r0949 = 1-40: sind die Motordaten in P0304-P0311 korrekt? - Wie muss der Motor angeschlossen werden (Stern, Dreieck)?
F0042 Fehler bei Optimierung des Drehzahlreglers STOP_II
Ursache Motordaten-Identifizierung fehlgeschlagen. - r0949 = 0: Zeitscheibenüberlauf bei Warten auf stabile Drehzahl - r0949 = 1: keine passenden Werte beim Lesen
Diagnose und Beseitigung Sind die Motordaten richtig eingegeben? Wurde die Motordatenidentifikation durchgeführt?
F0051 Parameter EEPROM-Fehler STOP_II
Ursache Lese- oder Schreifehler beim Zugriff auf das EEPROM.
Diagnose und Beseitigung - Rücksetzen auf Werkseinstellung und danach neu parametrieren - Gegebenenfalls Umrichter-Regelungsbaugruppe wechseln - Mit Kundendienst Kontakt aufnehmen!
F0052 Power Stack-Fehler STOP_II
Ursache Lesefehler bei den Leistungsdaten oder ungültige Leistungsteildaten. Hinweis Dieser Fehler kann bei einem Hot Swap auftreten, wenn keine Verbindung zum Leistungsteil ansteht.
Diagnose und Beseitigung - Verbindung zwischen Leistungsteil und Regelungsbaugruppe überprüfen. - Regelungsbaugruppe AUS / EIN - Gegebenenfalls Umrichter-Leistungsteil auswechseln. - Gegebenenfalls Umrichter-Regelungsbaugruppe auswechseln
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 246 A5E00348653A-AA
F0060 ASIC-Zeitscheibenüberlauf STOP_II
Ursache Interner Kommunikationsausfall /-störung zwischen Prozessor und Steuersatz-ASIC Hinweis Dieser Fehler kann bei einem Hot Swap auftreten.
Diagnose und Beseitigung Verbindung zwischen Leistungsteil und Regelungsbaugruppe überprüfen. Fehler tritt sporadisch auf: - Kommunikationsstörung ist auf EMV zurückzuführen - EMV-Maßnahmen überprüfen und ggfs. ausführen - Einsatz eines Filters Fehler tritt sofort nach Anlegen der Netzspannung und EIN-Befehl auf: - Wenn Fehler weiterhin auftritt, Umrichter-Leistungsteil auswechseln. - Mit Kundendienst Kontakt aufnehmen!
F0061 Parameter-Klonen: MMC-PS nicht gesteckt STOP_II
Ursache MMC-PS: Fehler beim Klonen. - r0949 = 0: MMC-PS nicht gesteckt oder falscher MMC-PS - r0949 = 1: Fehler beim Kopieren, möglicherweise korrupte Daten. - r0949 = 2: Datei nicht vorhanden oder in falschem Pfad.
Diagnose und Beseitigung - r0949 = 0: MMC-PS stecken bzw. MMC-PS mit FAT12- oder FAT16-Format verwenden,
korrekten Kartentyp verwenden. - r0949 = 1: Daten erneut kopieren. - r0949 = 2: Datei mit richtiger Bezeichnung in das richtige Verzeichnis stellen
/USER/SINAMICS/DATA.
F0062 Parameter-Klonen: MMC-PS-Daten ungültig STOP_II
Ursache Datei vorhanden, aber der Inhalt ist nicht gültig.
Diagnose und Beseitigung Erneut kopieren. Sicherstellen, dass der Vorgang nicht unterbrochen wird.
F0063 Parameter-Klonen:. MMC-PS-Daten inkompatibel STOP_II
Ursache Datei vorhanden, aber falscher Umrichtertyp.
Diagnose und Beseitigung Stellen Sie sicher, dass die Daten von einem passenden Umrichter geklont werden.
F0070 PLC-Sollwertfehler STOP_II
Ursache Interner Kommunikationsfehler der Regelungsbaugruppe.
Diagnose und Beseitigung - Überprüfen und vergrößern Sie ggf. den Wert von P2040 - Fehler quittieren bzw. Spannung AUS / EIN - Mit Kundendienst Kontakt aufnehmen! - Wenn Fehler weiterhin auftritt, Umrichter-Regelungsbaugruppe auswechseln.
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 247
F0071 USS on RS232 Sollwertfehler STOP_II
Ursache Keine Sollwerte von USS on RS232 während Telegramm-Aus-Zeit
Diagnose und Beseitigung Überprüfen bzw. erhöhen Sie die Überwachungszeit in der STARTER-Software beim Holen der Steuerhoheit. USS-Master prüfen
F0075 Keine Kommunikation mit der Steuerung STOP_II
Ursache - Keine Kommunikation mit der Steuerung. Hinweis Dieser Fehler kann beim Einschalten der Regelung auftreten. In diesem Fall den Fehler quittieren.
Diagnose und Beseitigung - Prüfen Sie, ob die Bus-Leitung richtig angeschlossen ist. - Schalten Sie die Steuerung zu.
- CPU der Steuerung in Stop-Zustand? - Werten Sie bei Busausfall die Diagnose-Informationen der Busteilnehmer aus. - Kontrollieren Sie die HW-Konfig, Profibus-Konfiguration bzw. die ET200S-Konfiguration - Ist Zyklus für FB100-Aufruf kürzer als p8451? - Ist der FB100 mit den richtigen Schnittstellen-Daten geladen?
F0085 Externer Fehler STOP_II
Ursache Externer Fehler durch Befehlseingabe, siehe p2106.
Diagnose und Beseitigung Kontrollieren Sie die Einstellung von P2106.
F0090 Signalverlust Geber STOP_II
Ursache Signal vom Geber verloren (überprüfen Sie den Fehlerwert in r0949): - r0949 = 0: Keine Gebersignale. - r0949 = 1: Verlust der Gebersignale bei plötzlichem Drehzahlwechsel (z.B. Drehzahldifferenz >
Wert in P0492) - r0949 = 2: Verlust der Gebersignale bei niedrigen Drehzahlen (Drehmomentgrenze wurde
erreicht und der Geber misst Drehzahl 0 für eine Zeit > P0494 während der Frequenzsollwert > 0 ist).
- r0949 = 5: Geber in P0400 nicht eingestellt, aber erforderlich für Geberregelung (P1300 = 21 oder 23).
- r0949 = 6: Geber nicht vorhanden, aber eingestellt in p0400.
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 248 A5E00348653A-AA
Diagnose und Beseitigung Stoppen Sie den Umrichter. Wenn ein Geber eingebaut ist und - r0949 = 5: stellen Sie über P0400 den Gebertyp ein. - r0949 = 6: überprüfen Sie den Anschluss zwischen Geber und Umrichter. - r0949 = 0: überprüfen Sie, ob der Geber fehlerhaft ist (wählen Sie P1300 = 0, Betrieb mit
Festdrehzahl, kontrollieren Sie das Gebersignal in r0061). - r0949 = 1: überprüfen Sie, ob der Geber fehlerhaft ist (wählen Sie P1300 = 0, Betrieb mit
Festdrehzahl, kontrollieren Sie das Gebersignal in r0061). Erhöhen Sie die zulässige Drehzahldifferenz in p0492.
- r0949 = 2: überprüfen Sie, ob der Geber fehlerhaft ist (wählen Sie P1300 = 0, Betrieb mit Festdrehzahl, kontrollieren Sie das Gebersignal in r0061). Erhöhen Sie den Wert für die Drehzahlverlustreaktion in p0494.
- Überprüfen Sie die Anschlüsse zwischen Motor und Umrichter. Wenn kein Geber eingebaut ist und - r0949 = 5: wählen Sie Betriebsart "Geberlose Vektorregelung" (P1300 = 20 oder 22). - r0949 = 6: setzen Sie p0400 = 0.
F0100 Watchdog Reset STOP_II
Ursache Software-Fehler
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen! Umrichter-Regelungsbaugruppe tauschen.
F0101 Stack Überlauf STOP_II
Ursache Softwarefehler bzw. Prozessorausfall.
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen! Umrichter-Regelungsbaugruppe tauschen.
F0396 Safety-Freigabe von Steuerung stimmt nicht mit Freigabe vom Parametersatz überein STOP_II
Ursache P8456 Bit 2 stimmt nicht mit P9801 / P9601 überein. P8456 ist der gespeicherte Wert der von der Steuerung gesendet wird.
Diagnose und Beseitigung Zur Freigabe von Safety müssen p9801 und p9601 gesetzt werden. Auf der Steuerungsseite muss (im Eigenschaftsfenster der ICU24F) Safety freigegeben werden. Zum Sperren von Safety müssen p9801 und p9601 zurückgesetzt werden. Auf der Steuerungsseite muss (im Eigenschaftsfenster der ICU24F) Safety gesperrt werden. Hinweis Dieser Fehler kann nur durch AUS/EIN (24 V) quittiert werden, wenn die Einstellungen in ICU24(F) und SIMATIC-Manager übereinstimmen.
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 249
F0397 Steckplatz-ID nicht eindeutig STOP_II
Ursache Die Steckplatz-ID von der Steuerung stimmt nicht mit der im Parameter (P8455) abgespeicherten überein.
Diagnose und Beseitigung - Steckplatzkennung in Steuerung oder im Umrichter (siehe P8455) ändern und ggf. auf MMC-PS
speichern. - Slot ID in Parameter p8455 auf den Defaultwert (-1) setzen. Nur möglich, wenn p8457 = 1. Hinweis Dieser Fehler kann nur durch AUS/EIN (24 V) quittiert werden. Wenn die Steckplatzkennung nicht angepasst wird, steht dieser Fehler nach AUS/EIN (24 V) weiterhin an.
F0398 PMMC-PS nicht eindeutig STOP_II
Ursache PMMC-PS von der Steuerung stimmt nicht mit der PMMC-PS im Parameter (P8456) überein.
Diagnose und Beseitigung Parameter wird automatisch geändert, nachdem er von der Steuerung empfangen wurde. Hinweis Dieser Fehler kann nur durch AUS/EIN (24 V) quittiert werden, wenn die Einstellung in ICU24(F) und SIMATIC-Manager übereinstimmen.
F0399 Hot Swap-Fehler STOP_II
Ursache Mit der Regelungsbaugruppe oder dem Leistungsteil hat ein nicht zulässiger Hot Swap stattgefunden. In der Werkseinstellung (p7840=1) ist im Betrieb nur der PM-Hot Swap (Leistungsteil) zulässig, Details siehe Betriebsanleitung, "Inbetriebnahme und Betrieb".
Diagnose und Beseitigung - Ändern Sie das Steuerwort p7840 auf 33, um die Hot Swap-Steuerung zu überschreiben. Setzen
Sie nach dem Hot Swap diesen Wert wieder auf 1, um Schäden aufgrund unzulässiger Hot Swaps zu verhindern.
Hinweis Dieser Fehler kann nur durch AUS/EIN (24 V) quittiert werden.
F0452 Lastmoment-Fehler erkannt STOP_II
Ursache Lastbedingungen am Motor deuten auf Lastmoment-Fehler oder mechanischen Fehler hin
Diagnose und Beseitigung Bitte überprüfen Sie: 1. Keine Bremsung, Ausfall oder Zerstörung des Antriebsstranges. 2. Wenn Sie einen externen Geber einsetzen, überprüfen Sie bitte folgende Parametereinstellungen:
- P2192 (Verzögerungszeit Lastmomentüberwachung) 3. Wenn Sie mit einem Drehzahlbereich arbeiten, überprüfen Sie bitte:
- P2182 (Lastmomentüberw. F1) - P2183 (Lastmomentüberw. F2) - P2184 (Lastmomentüberw. F3) - P2185 (Obere Lastmomentschwelle M_o1) - P2186 (untere Lastmomentschwelle M_u1) - P2187 (obere Lastmomentschwelle M_o2) - P2188 (untere Lastmomentschwelle M_u2) - P2189 (obere Lastmomentschwelle M_o3) - P2190 (untere Lastmomentschwelle M_u3) - P2192 (Verzögerungszeit Lastmomentüberwachung)
4. Gegebenenfalls Antriebsstrang schmieren.
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 250 A5E00348653A-AA
F0453 Motor gekippt STOP_II
Ursache 1. SLVC oder VC (P1300 >= 20) und Rampenzeiten zu kurz 2. SLVC oder VC (P1300 >= 20) und AUS2 mit folgendem EIN bei noch drehendem Motor wobei
Fangen nicht aktiviert ist. 3. SLVC oder VC (P1300 >= 20), kein Motor angeschlossen oder der angeschlossene Motor ist für
den Umrichter zu klein. 4. SLVC (P1300 = 20 oder 21) und Last zu hoch bei sehr niedrigen Drehzahlen
Diagnose und Beseitigung 1. Hochlaufzeit in P1120 vergrößern 2. Fangen freigeben (P1200 = 1) 3. Motor anschließen oder größeren Motor verwenden (passend zum Umrichter) oder P1300 < 20
einstellen (U/f-Betrieb). 4. Drehmomentanhebung in P1611 vergrößern
F1600 Sicherer Halt mit Impulslöschung STOP_II
Ursache Ein Sicherer Halt (SH) wurde durch einen Umrichterfehler ausgelöst: - r0949 = 33: SH quittieren nach einem Umrichterfehler erfordert zuerst einen AUS-Befehl und
danach ein Quittieren um den Safety-Fehler zu beheben. Wird der Fehler quittiert bevor der AUS-Befehl gegeben wurde, bleibt der Sichere Halt aktiv.
- r0949 = 100: Die Pegel der Signalschienen für SH stimmen an P1 nicht überein. - Dieser Fehler kann zusammen mit F1601.0 oder F1601.1 auftreten, wenn ein
Prozessor nach einem Reset falsche Sicherheitseinstellungen hat. - Sehr schnelles Schalten der Safety-Schienen kann dazu führen, dass
inkonsistente Safety-Signale erkannt werden und der Umrichter mit Safety-Fehler abgeschaltet wird. Trotz einer kurzen Hardware-Filter-Zeit und einer zusätzlichen Entprell-Zeit könnten beide Prozessoren unterschiedliche Signal-Pegel erkennen und damit einen Safety-Fehler auslösen.
- r0949 = 101: Maximaldrehzahl beim Aktivieren des Sicheren Halts (SH) überschritten. Die abgeschätzte Geschwindigkeit weicht von der in der Sicheren Bremsrampe eingestellten Rampe ab. Wenn der Umrichter mit Vektorregelung (mit p1300 > 19) arbeitet: - Vergrößern Sie p9691 und p9891 um die Toleranz zu erhöhen oder führen Sie
die Motor-Identifikation (siehe p1910) noch einmal durch, um eine bessere Abstimmung von Motormodell und Regelung zu erzielen.
- Erhöhen Sie die Rampenzeiten (p1120, p1121) um die Abweichung zwischen Istfrequenz und Bezugsfrequenz zu verringern.
- r0949 = 102: Maximale Geschwindigkeit auf P1 beim Aktivieren der "Sicher reduzierten Geschwindigkeit" (SG) überschritten. Die abgeschätzte Geschwindigkeit weicht von der in der Sicheren Bremsrampe eingestellten Rampe ab. - Erhöhen Sie die Rampenzeiten (p1120, p1121) um die Abweichung zwischen
Istfrequenz und Bezugsfrequenz zu verringern. - Wenn der Umrichter mit Vektorregelung (mit p1300 > 19) arbeitet, vergrößern
Sie p9691 und p9891 um die Toleranz zu erhöhen oder führen Sie die Motor-Identifikation (siehe p1910) noch einmal durch, um eine bessere Abstimmung von Motormodell und Regelung zu erzielen.
- r0949 = 103: Kommunikations-Zeitscheibenüberlauf von Prozessor P1 während der Zwangsdynamisierung .Quittieren über Hardware ist fehlgeschlagen.
- r0949 = 104: Kommunikations-Zeitscheibenüberlauf von Prozessor P2 während der Zwangsdynamisierung. Quittieren über Hardware ist fehlgeschlagen.
- r0949 = 105: Quittier-Fehler auf P1 beim Versuch, den sicheren Halt (SH), ausgelöst durch einen Umrichterfehler, zu verlassen.
- r0949 = 106: Fehler in der mechanischen Bremse oder im Rückmeldepfad von P1. - r0949 = 107: Fehler im Gate driver oder Rückmeldepfad. GCA-Rückmeldepfad überprüfen.
Dieser Fehler kann auftreten, wenn das Leistungsteil fehlerhaft ist oder die beiden Prozessoren der Regelungsbaugruppe nicht synchronisiert sind.
- r0949 = 108: Fehler nach dem Entprellblock in der Safety Zustandsabbildung. - r0949 = 109: Hardware-Fehler. Beide Prozessoren haben unterschiedliche Hardware bei der
zyklischen Überprüfung entdeckt. - r0949 = 200: Die Pegel der Signalschienen für SH stimmen an P2 nicht überein. (siehe
Beschreibung zu Fehlerwert 100).
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 251
- r0949 = 201: Maximaldrehzahl beim Aktivieren des Sicheren Halts (SH) überschritten (siehe Beschreibung zu Fehlerwert 101).
- r0949 = 202: Maximale Geschwindigkeit beim Aktivieren der "Sicher reduzierten Geschwindigkeit" (SG) überschritten (siehe Beschreibung zu Fehlerwert 102).
- r0949 = 203: Kommunikations-Zeitscheibenüberlauf von Prozessor P1 während der Zwangsdynamisierung (siehe Beschreibung zu Fehlerwert 103).
- r0949 = 204: Kommunikations-Zeitscheibenüberlauf von Prozessor P2 während der Zwangsdynamisierung (siehe Beschreibung zu Fehlerwert 104).
- r0949 = 205: Quittier-Fehler beim Versuch, den sicheren Halt (SH), ausgelöst durch einen Umrichterfehler, zu verlassen.
- r0949 = 206: Fehlende Impulssperre von P1, während sich P2 im Zustand SH befindet. Möglicherweise Folge einer Abweichung bei der Synchronisation von P1 und P2 bei einer kurzen SBR.
- r0949 = 207: Fehler im Gate driver oder Rückmeldepfad (siehe Beschreibung zu Fehlerwert 107). - r0949 = 208: Fehler nach dem Entprellblock in der Safety Zustandsabbildung (siehe
Beschreibung zu Fehlerwert 108). - r0949 = 209: Hardware-Fehler (siehe Beschreibung zu Fehlerwert 109).
Diagnose und Beseitigung Erneuern Sie den 24-V-Anschluss für die Safety-Schienen (PM DF-X1) oder wählen Sie die Safety-Schienen ab (PM DF PROFIsafe) und geben danach einen AUS-Befehl (AUS1, AUS2 oder AUS3) und quittieren den Safety-Fehler. - r0949 = 100, 101, 200 oder 201:
Erhöhen Sie die Rampenzeiten (p1120, p1121) oder die Safety-Toleranz p9691/p9891, überprüfen Sie die Motor-Parameter (p0394 - p0311) oder führen Sie die Motordatenidentifikation (siehe p1910) erneut durch, falls der Umrichter im Vektorbetrieb (p1300 > 19) arbeitet.
- r0949 = 100, 108, 200 oder 208: Verringern Sie die Schaltgeschwindigkeit der Schienen für Sicheren Halt und Sicher reduzierte Geschwindigkeit oder erhöhen Sie die Abtastzeiten der Steuerung.
- r0949 = 206: |Vergrößern Sie die Rampenzeiten für die Sichere Bremsrampe in p9681/p9881.
F1601 Hochlauffehler STOP_II
Ursache Fehler beim Hochlauf nach EIN-Befehl (24 V )oder Hot-Swap. Dieser Fehler kann nicht quittiert werden. Ein Neustart des Umrichters (Hot-Swap oder AUS/EIN (24 V)) ist zwingend erforderlich. - r0949 = 0: Quittierfehler in P1. Entweder unerwarteter Neustart in P1 oder
Synchronisationsfehler beim Hochlauf. - r0949 = 1: Quittierfehler in P2. Entweder fehlerhafter Neustart in P2 oder
Synchronisationsfehler beim Hochlauf. - r0949 = 100: P1 hat Versionsfehler entdeckt. Die Failsafe-Versionsnummern auf P1 und P2 sind
nicht identisch. - r0949 = 101: Falsche Kennung beim Hochlauf von P1. Kann durch Abschalten bevor der
Hochlauf beendet wurde verursacht werden oder durch einen Fehler im EEPROM. - r0949 = 102: Falsche Kennung beim Hochlauf von P1. Der Umrichter lädt die
Parameterwerkseinstellung statt der Kundeneinstellungen. - r0949 = 103: Fehler mit der Initialisierung und erstmaligen Hardware-Erkennung auf P1. Die
Regelungsbaugruppe (ICU24 oder ICU24F) konnte nicht identifiziert werden. Entweder ist die Regelungsbaugruppe fehlerhaft oder die Erkennung wird durch elektromagnetische Strahlung (EMV) gestört.
- r0949 = 104: Zeitscheibenfehler auf P1 beim Warten auf Kommunikation mit P2. - Möglicherweise arbeitet der Rückwandbus nicht und verhindert dadurch die
Kommunikation mit P1. Überprüfen Sie, ob die ICU24(F) richtig gesteckt ist. Überprüfen Sie, ob der Rückwandbus-Abschlussstecker richtig gesteckt ist. Wenn nicht, ist die Kommunikation mit der Steuerung nicht möglich und verhindert damit auch die Kommunikation von P2 mit P1.
- Ein Fehler kann ebenso auftreten, wenn P2 nicht läuft. Mögliche Ursachen: defekte Hardware, falsche Software oder keine Software.
- r0949 = 105: Fehler auf P1 bei Hardware-Tausch. Prozessoren haben nicht die gleiche Hardware-Plattform erkannt.
- r0949 = 106: Zeitscheibenfehler auf P1 während der Hardware-Erkennungsphase. Quittieren mit P2 fehlgeschlagen.
- r0949 = 107: Prüfsummenfehler auf P1. Die Safety-Parameter im EEPROM sind nicht konsistent.
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 252 A5E00348653A-AA
- r0949 = 108: Fehler auf P1 bei der Parameterübertragung nach P2. Die richtigen Safety-Parameter sind wegen eines Kommunikations-Fehlers auf P2 nicht verfügbar.
- r0949 = 109: Zeitscheibenfehler auf P1 beim Parametertransfer nach P2, aufgrund unterschiedlicher Prüfsummen in P1 und P2. Der Parametertransfer nach P2 ist fehlgeschlagen.
- r0949 = 110: Zeitscheibenfehler auf P1 bei Zwangsdynamisierung und Prozessorselbsttest. - r0949 = 111: Zeitscheibenfehler auf P1 beim Verlassen der Safety-Inbetriebnahme während des
Hochlaufs. - r0949 = 112: Prüfsummenfehler auf P1 beim Initialisieren des Prozessors. - r0949 = 200: Von P2 wurde ein Versionsfehler entdeckt. Die Safety-Versionsnummer (siehe
r9770) auf P1 und P2 ist nicht identisch. - r0949 = 201: Falsche Kennung beim Hochlauf von P2. Kann durch Abschalten bevor der
Hochlauf beendet wurde verursacht werden oder durch einen Fehler im EEPROM. - r0949 = 202: Falsche Kennung beim Hochlauf von P2. Der Umrichter lädt die
Parameterwerkseinstellung statt der Kundeneinstellungen. - r0949 = 203: Fehler mit der Initialisierung und erstmaligen Hardware-Erkennung auf P2. Die
Regelungsbaugruppe (ICU24 oder ICU24F) konnte nicht identifiziert werden. Entweder ist die Regelungsbaugruppe fehlerhaft oder die Erkennung wird durch elektromagnetische Strahlung (EMV) gestört.
- r0949 = 204: Zeitscheibenfehler auf P2 beim Warten auf Kommunikation mit P2. - r0949 = 205: Fehler auf P2 bei Hardware-Tausch. Prozessoren haben nicht die gleiche
Hardware-Plattform erkannt. - r0949 = 206: Zeitscheibenfehler auf P2 während der Hardware-Erkennungsphase. Quittieren mit
P1 fehlgeschlagen. - r0949 = 207: Prüfsummenfehler auf P2. Die Safety-Parameter auf P2 sind nicht konsistent. - r0949 = 208: Fehler auf P2 bei der Parameterübertragung nach P1. Die richtigen Safety-
Parameter sind wegen eines Kommunikations-Fehlers auf P2 nicht gültig. - r0949 = 209: Zeitscheibenfehler auf P2 beim Parametertransfer nach P1, aufgrund
unterschiedlicher Prüfsummen in P1 und P2. - r0949 = 210: Zeitscheibenfehler auf P2 bei Dynamisierung beim Hochlauf. Keine Kommunikation. - r0949 = 211: Zeitscheibenfehler auf P2 beim Verlassen der ersten Safety-Inbetriebnahme. - r0949 = 212: Prüfsummenfehler auf P2 beim Initialisieren des Prozessors.
Diagnose und Beseitigung - ICU24(F) AUS/EIN (24 V), da F1601 nicht quittiert werden kann. - Stellen Sie sicher, dass die ICU24(F) richtig mit dem Leistungsteil (IPM25) und dem Terminalmodul
verbunden ist. - Überprüfen Sie den Rückwandbusabschluss am Terminalmodul ganz rechts in der ET 200S-
Station. - Verringern Sie elektromagnetische Störungen (EMV).
F1610 Hochlauffehler - EEPROM-Daten inkonsistent STOP_II
Ursache Fehler aufgrund inkonsistenter EEPROM-Daten: - r0949 = 100: Safety-Parameter wurden nicht sauber ins EEPROM auf P1 geschrieben.
Versuchen Sie die Parameter noch einmal zu laden. - r0949 = 200: Fehler aufgrund inkonsistenter Daten im EEPROM auf P2. - r0949 = 2011: Safety-Parameter wurden nicht sauber ins EEPROM geschrieben.
Diagnose und Beseitigung Safety-Parameter noch einmal laden.
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 253
F1611 Fehler beim Quervergleich der Daten STOP_II
Ursache Fehler beim Datenaustausch zwischen den Prozessoren: - r0949 = 100: P2 ist aufgrund eines Antriebsfehlers in den Sicheren Halt gegangen, aber auf P1
wurde kein Fehler erkannt. - r0949 = 102: Die dynamischen Prüfsummen auf P1 sind unterschiedlich. Fehler beim
Quervergleich oder Probleme mit der Kommunikation. - r0949 = 103: Berechnete Frequenz für beide Prozessoren unterschiedlich. Fehler beim
Quervergleich oder Probleme mit der Kommunikation. - r0949 = 104: Fehler bei der Frequenzberechnung in P1 (siehe auch F1614). - r0949 = 201: Frequenzprüfung führte zu Fehler in P2. - r0949 = 202: Die dynamischen Prüfsummen auf P2 sind unterschiedlich. Fehler beim
Quervergleich oder Probleme mit der Kommunikation.
Diagnose und Beseitigung - Quittieren Sie den Safety-Fehler: Erneuern Sie den 24-V-Anschluss für die Safety-Schienen (PM
DF-X1) oder wählen Sie die Safety-Schienen ab (PM DF PROFIsafe) und geben danach einen AUS-Befehl (AUS1, AUS2 oder AUS3) und quittieren den Safety-Fehler.
- Verringern Sie elektromagnetische Störungen (EMV). - Führen Sie eine Zwangsdynamisierung durch. - Tauschen Sie die Regelungsbaugruppe (ICU24(F)), wenn der Fehler weiterhin auftritt.
F1612 Fehler bei Safety-Hardware-Erkennung STOP_II
Ursache Die Regelungsbaugruppe (ICU24 oder ICU24F) konnte nicht identifiziert werden. - r0949 = 100: Identifizierungsfehler beim Hochlauf auf P1. - r0949 = 101: Fehler bei der Laufzeiterkennung auf P1. - r0949 = 102: Fehler bei Hardware- oder Software-Konfiguration in P1. - r0949 = 200: Hochlauffehler auf P2. - r0949 = 201: Fehler bei der Laufzeiterkennung auf P2. - r0949 = 202: Fehler bei Hardware- oder Software-Konfiguration in P2.
Diagnose und Beseitigung - AUS/EIN-Befehl (24 V) für ICU24F geben.
F1613 Maximalfrequenz überschritten STOP_II
Ursache Die Maximalfrequenz wurde überschritten. - r0949 = 100: Maximalfrequenz auf P1 überschritten. - r0949 = 200: Maximalfrequenz auf P2 überschritten.
Diagnose und Beseitigung - Überprüfen Sie die Anwendung oder erhöhen Sie die Safety-Schwelle p9691/p9891. - Siehe auch "Diagnose und Beseitigung" für F1614.
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 254 A5E00348653A-AA
F1614 Frequenzfehler STOP_II
Ursache Fehler bei der Frequenzerkennung : - r0949 = 100: Unterschiede beim Frequenzvergleich auf P1. - r0949 = 101: Berechnete Frequenz auf P1 zu hoch. - r0949 = 102: Berechnete Frequenz auf P1 zu niedrig. - r0949 = 103: Berechnete Frequenz in P1 nicht vorhanden. - r0949 = 104: Fehler in Zeitscheibe auf P1. - r0949 = 200: Frequenzabweichung auf P2. - r0949 = 201: Berechnete Frequenz auf P2 zu hoch. - r0949 = 202: Berechnete Frequenz auf P2 zu niedrig. - r0949 = 203: Berechnete Frequenz in P2 nicht vorhanden. - r0949 = 204: Fehler in Zeitscheibe auf P2. Der Fehler kann durch kurze Rampenzeiten verursacht werden. Wenn der Umrichter im VC- oder im SLVC-Betrieb arbeitet (siehe p1300), kann die Fehlerursache die gleiche sein, wie für Fehler F0453.
Diagnose und Beseitigung - Erhöhen Sie die Rampenzeiten p1120 und p1121. - Stellen Sie sicher, dass der Umrichter beim Einschalten nicht an der Stromgrenze betrieben wird. - Siehe auch "Diagnose und Beseitigung" für F0453 - Mit Kundendienst Kontakt aufnehmen!
F1615 Spannungsversorgung für Regelungsbaugruppe fehlerhaft STOP_II
Ursache - r0949 = 100: Fehler in der Spannungsversorgung (3,3 V oder 24 V auf der
Regelungsbaugruppe).
Diagnose und Beseitigung - Überprüfen Sie die Versorgungsspannung. - Reduzieren Sie die elektromagnetischen Störungen (EMV).
F1616 Fehler beim Prozessor-Selbsttest STOP_II
Ursache Beim Prozessor-Selbsttest wurde ein Fehler entdeckt: - r0949 = 100: Allgemeiner Fehler auf P1. - r0949 = 101: Fehler beim RAM-Test auf P1. - r0949 = 102: Fehler beim ROM-Test auf P1. - r0949 = 103: Fehler beim Funktionstest für den Prozessor auf P1. - r0949 = 200: Fehler beim Funktionstest für den Prozessor auf P2. Der Selbsttest ist Teil der Zwangsdynamisierung und wird immer zusammen mit dieser durchgeführt. Er kann nicht unabhängig von ihr durchgeführt werden.
Diagnose und Beseitigung - Selbsttest noch einmal durchführen (p9601.1 und p9801.1 setzen) und durch Anwählen der
entsprechenden Abschaltgruppen in den Sicheren Halt gehen. - AUS/EIN (24 V) - Umrichter-Regelungsbaugruppe wechseln
F1625 Folgezähler fehlerhaft STOP_II
Ursache Der Folgezähler überwacht die Kommunikation zwischen P1 und P2. - r0949 = 100: Folgezählerüberwachung hat einen Fehler auf P1 entdeckt. - r0949 = 101: Prozessoren arbeiten nicht synchron. - r0949 = 102: Kommunikation der beiden Prozessoren fehlerhaft. - r0949 = 103: Kommunikation der Prozessoren fehlerhaft oder nicht synchron. - r0949 = 200: Folgezähler auf P2 zeigt einen Fehler.
Diagnose und Beseitigung - Safety AUS/EIN (24 V), überprüfen Sie bei Fehlerhäufungen die EMV.
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 255
F1630 Treiber für mechanische Bremse fehlerhaft STOP_II
Ursache Das Signal der mechanischen Bremse ist fehlerhaft - r0949 = 0: Fehler in der mechanischen Bremse
Diagnose und Beseitigung - Tauschen Sie das Bremsmodul.
F1649 Interner Softwarefehler STOP_II
Ursache - r0949 = 1: Pufferüberlauf bei der Prüfsummenberechnung für Parameterzugriffsfunktionen auf
P1 - r0949 = 2: Pufferüberlauf bei der Prüfsummenberechnung für Parameterzugriffsfunktionen auf
P2 - r0949 = 3: Endlosschleife auf P1. - r0949 = 4: Endlosschleife auf P2. - r0949 > 100: Zeigt einen internen oder unerwarteten Softwarefehler an. Nur zur internen Diagnose.
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen!
F1650 Fehler bei den Safety-Parametern STOP_II
Ursache Fehler in den Safety-Parametern, entweder beim Hochlauf, bei der Inbetriebnahme oder beim Reset: - r0949 = 1: Prüfsummenfehler bei der Safety-Inbetriebnahme oder beim Rücksetzen der
Safety-Parameter. - r0949 = 2: Fehler bei der internen Parameterübertragung - r0949 = 3: Fehler beim Beenden der Pufferübertragung - r0949 = 4: Fehler beim Speichern der Parameter im EEPROM. - r0949 = 5: Übertragungsfehler beim Rücksetzen der Safety-Parameter - r0949 = 11: Kommunikationsfehler zwischen beiden Prozessoren - r0949 = 2000: Die Safety-Inbetriebnahme kann nur über Einstellen von p3900 beendet werden.
Diagnose und Beseitigung - Versuchen Sie die Safety-Inbetriebnahme über p3900 = 11 zu verlassen. - Starten Sie die Safety-Inbetriebnahme erneut - Versuchen Sie einen Reset der Sicherheitsparameter
F1655 Fehler beim Rücksetzen des Prozessors STOP_II
Ursache - r0949 = 100: Zeitscheibenüberlauf beim Rücksetzen der Safety-Parameter auf P1. - r0949 = 200: Zeitscheibenüberlauf beim Rücksetzen der Safety-Parameter auf P2.
Diagnose und Beseitigung - Rücksetzen der Safety-Parameter erneut starten.
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 256 A5E00348653A-AA
F1659 Parameteränderung abgelehnt STOP_II
Ursache Eine Schreibanfrage für einen oder mehrere Safety-Parameter wurde abgewiesen: - r0949 = 0: Fehler beim Beenden des Schreibvorgangs der Safety-Parameter. Umrichter
arbeitet mit alten Daten. - r0949 = 1: Safety-Passwort falsch eingegeben. - r0949 = 2: Safety Parameter können nicht zurückgesetzt werden, da ein Safety-Zustand aktiv
(SH, SG, SBR) ist. - r0949 = 3: Toleranz zu klein (p9691 < p9690). Toleranz in p9691 erhöhen! - r0949 = 10: Versuch SH zu aktivieren, aber Safety-Funktion nicht vorhanden. - r0949 = 11: Versuch SG zu aktivieren, aber Safety-Funktion nicht vorhanden.. - r0949 = 203: Toleranz zu klein (p9891 < p9890). Toleranz erhöhen!
Diagnose und Beseitigung - Fehler quittieren und Safety-Inbetriebnahme erneut durchführen. Falls das nicht möglich ist,
verlassen Sie die Safety-Inbetriebnahme mit p3900 = 11 und betreiben den Umrichter mit den alten Safety-Einstellungen.
F1660 Prüfsummenfehler bei Safety-IBN STOP_II
Ursache - r0949 = 0: Versuch, die Safety-Inbetriebnahme zu verlassen mit r9798 != p9799. - r0949 = 1: Versuch, die Safety-Inbetriebnahme zu verlassen mit r9898 != p9899. - r0949 = 2: Versuch, die Safety-Inbetriebnahme zu verlassen mit r9798 != r9898.
Diagnose und Beseitigung - Stellen Sie sicher, dass die Prüfsummen in p9798 und p9898 identisch sind. Sind diese nicht
identisch, setzen Sie folgende Parameterpaare auf die gleichen Werte: p96xx = p98xx - Übertragen Sie die Prüfsummen korrekt in p9799 und p9899 - Verlassen Sie die Safety-Inbetriebnahme mit p3900 = 11 (Safety-Inbetriebnahme abbrechen), wenn
die Einstellung der Prüfsummen nicht erfolgreich ist.
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 257
3.2 Alarmmeldungen
Die Alarmmeldungen werden im Parameter r2110 unter ihrer Codenummer (z. B. A0503 = 503) gespeichert und können von dort ausgelesen werden.
A0501 Stromgrenzwert
Ursache - Motorleistung entspricht nicht der Leistung des Umrichters - Motorkabel sind zu lang - Erdschluss
Diagnose und Beseitigung Bitte überprüfen Sie: - Entspricht die Motorleistung (P0307) der Leistung des Umrichters (r0206)? - Sind die Grenzwerte für die Kabellängen eingehalten? - Liegt ein Kurz- bzw. Erdschluss bei Motorkabel oder Motor vor? - Entsprechen die Motorparameter denen des eingesetzten Motors? - Ständerwiderstandswert (P0350) korrekt? - Ist der Motor überlastet oder die Rotation behindert? - Hochlaufzeit (P1120) erhöhen. - Spannungsanhebung beim Anlauf (P1312) reduzieren.
A0502 Überspannungsgrenzwert
Ursache Der Überspannungsgrenzwert ist erreicht. Dieser Warnhinweis kann während eines Abbremsvorgangs erscheinen, wenn der Vdc-Regler deaktiviert ist (P1240 = 0).
Diagnose und Beseitigung Wird diese Warnung ständig angezeigt, überprüfen Sie die Eingangsspannung des Umrichters.
A0503 Unterspannungsgrenzwert
Ursache - Netzspannung ist ausgefallen. - Netzspannung und folglich auch die Zwischenkreisspannung (r0026) unterhalb des definierten
Grenzwertes.
Diagnose und Beseitigung Netzspannung überprüfen.
A0504 Umrichter-Übertemperatur
Ursache Warnschwelle der Umrichter-Kühlkörper-Temperatur (P0614) wurde überschritten; dies führt zur Reduzierung der Pulsfrequenz und/oder der Ausgangsfrequenz (abhängig von Parametrierung in P0610).
Diagnose und Beseitigung Bitte überprüfen Sie: - Liegt die Umgebungstemperatur innerhalb der zulässigen Grenzen? - Liegt die Last und das Lastspiel innerhalb der zulässigen Grenzen? - Dreht sich der Lüfter, wenn der Umrichter in Betrieb ist?
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 258 A5E00348653A-AA
A0505 Umrichter I2T
Ursache Warngrenze überschritten. Stromzufuhr wird reduziert falls parametriert (P0610 = 1).
Diagnose und Beseitigung Überprüfen Sie, ob das Lastspiel innerhalb der zulässigen Grenzen liegt.
A0506 Umrichter-Lastspiel
Ursache Unterschied zwischen Temperatur an Kühlkörper und IGBT überschreitet die Warngrenzwerte.
Diagnose und Beseitigung Stellen Sie sicher, dass Lastspiel und Laststoß innerhalb der zulässigen Grenzen liegen.
A0507 Verlust Temperatursignal Umrichter
Ursache Umrichter-Temperatursignal verloren.
Diagnose und Beseitigung Bitte überprüfen Sie: - den Anschluss des Thermofühlers an der Regelungsbaugruppe. - die Parametereinstellung von P0601
A0511 Motor-Übertemperatur I2T
Ursache - Motor überlastet. - Lastspiel zu hoch.
Diagnose und Beseitigung Überprüfen Sie unabhängig von der Art der Temperaturüberwachung: - P0604 Warnschwelle Motorübertemperatur - P0625 Motor-Umgebungstemperatur Wenn P0601 = 0 oder 1, überprüfen Sie bitte: - Sind die Motordaten korrekt (Typenschild)? Wenn nicht Schnellinbetriebnahme durchführen. Exakte
Temperaturwerte durch Motor-Identifikation (P1910=1). - Stimmt das Motorgewicht (P0344)? - Über P0626, P0627, P0628 kann die zulässige Übertemperatur geändert werden, falls der Motor
kein Siemens Standard-Motor ist. Wenn P0601 = 2, überprüfen Sie bitte: - Ist die in r0035 angezeigte Temperatur plausibel? - Ist ein KTY84 Temperaturfühler eingesetzt? Andere Typen werden nicht unterstützt.
A0523 Ausgangsfehler
Ursache Eine Ausgangsleitung ist nicht angeschlossen.
Diagnose und Beseitigung Überprüfen Sie den Motoranschluss.
A0525 Zwischenkreis-Spannungsschwankungen
Ursache Starke Spannungsschwankungen im Zwischenkreis.
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 259
A0541 Motordaten-Identifizierung aktiv
Ursache Motordaten-Identifizierung (P1910) ausgewählt bzw. läuft
A0542 Optimierung Drehzahlregler läuft
Ursache Optimierung Drehzahlregler (P1960) ist angewählt oder gerade aktiv.
A0564 MMC-PS während des Betriebs gesteckt
Ursache Der MMC-PS wurde während des Betriebs gesteckt, aber in der HW-Konfig ist "Hochlauf ohne MMC-PS" eingestellt. Das führt möglicherweise dazu, dass der aktuelle Datensatz beim nächsten Hochlauf durch die MMC-PS-Daten überschrieben wird.
Diagnose und Beseitigung Entfernen Sie den MMC-PS aus der Regelungsbaugruppe bzw. aktivieren Sie in der HW-Konfig "Hochlauf mit MMC-PS" und laden Sie die aktuelle Parametrierung auf den MMC-PS.
A0565 MMC-PS stimmt nicht mehr mit EEPROM überein
Ursache Der Inhalt auf dem MMC-PS stimmt nicht mehr mit EEPROM überein. Der Umrichter wurde beim Hochlauf automatisch mit den Daten auf der MMC-PS "Clone00.bin" gestartet. Da im EEPROM Daten geändert wurden stimmt der Inhalt nicht mehr mit den Daten auf "Clone00.bin" auf dem MMC-PS überein.
Diagnose und Beseitigung - Upread des Parametersatzes über p0010=30, p0802=2 mit p0804=00. - oder AUS / EIN (24 V) Hinweis Dieser Alarm kann auch bedeuten, dass ein weiterer Schreibbefehl für das EEPROM nach dem Klonen beim Hochlauf stattgefunden hat. Der Alarm wird zum Beispiel auch erzeugt, wenn Sie die Datei Clone00.bin manuell klonen. In diesem Fall sind die Daten zwar immer noch gleich, aber es hat ein Schreibbefehl stattgefunden.
A0590 Warnung Verlust Gebersignale
Ursache Keine Drehzahlgebersignale; Umrichter hat auf geberlose Vektorregelung umgeschaltet. Überprüfen Sie auch den Wert in r0949: - r0949 = 0: Keine Gebersignale - r0949 = 5: Geber in P0400 nicht eingestellt, aber erforderlich für Geberregelung (P1300 = 21
oder 23) erforderlich.
Diagnose und Beseitigung Stoppen Sie den Umrichter. Wenn ein Geber eingebaut ist und: - r0949 = 5: stellen Sie über P0400 den richtigen Gebertyp ein. - r0949 = 0: überprüfen Sie, ob der Geber fehlerhaft ist (wählen Sie P1300 = 0, Betrieb mit
Festdrehzahl, kontrollieren Sie das Gebersignal in r0061). Wenn kein Geber eingebaut ist: - r0949 = 5: wählen Sie Betriebsart Geberlose Vektorregelung (P1300 = 20 oder 22).
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 260 A5E00348653A-AA
A0600 RTOS-Datenverlustwarnung
Ursache Interner Zeitscheibenüberlauf
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen!
A0700 PLC-Warnung 1
Ursache Die Parametrierung bzw. Konfigurierung durch die Steuerung ist ungültig.
Diagnose und Beseitigung Projektierung der Steuerung überprüfen.
A0702 PLC-Warnung 3
Ursache Keine Verbindung zur Steuerung.
Diagnose und Beseitigung Verbindung zur Steuerung überprüfen.
A0703 PLC-Warnung 4
Ursache Keine bzw. ungültige Sollwerte von der Steuerung.
Diagnose und Beseitigung Sollwerte von der Steuerung überprüfen. SIMATIC CPU in "RUN" schalten.
A0705 PLC-Warnung 6
Ursache Umrichter sendet keine Istwerte.
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen!
A0706 PLC-Warnung 7
Ursache Softwarefehler
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen!
A0710 Kommunikationsfehler
Ursache Verlust der Kommunikation mit der Steuerung.
Diagnose und Beseitigung Mit Kundendienst Kontakt aufnehmen!

Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 261
A0711 Konfigurationsfehler
Ursache Steuerung meldet einen Konfigurationsfehler.
Diagnose und Beseitigung Überprüfen Sie die Parameter der Steuerung
A0910 Vdc-max-Regler abgeschaltet
Ursache Tritt auf, - wenn die Netzspannung permanent zu hoch ist. - wenn der Motor von einer Wirklast angetrieben wird, die dazu führt, dass der Motor in den
Rückspeisebetrieb übergeht. - während des Herunterfahrens bei sehr hohen Lastmomenten
Diagnose und Beseitigung Bitte überprüfen Sie: - Liegt die Netzspannung innerhalb des zulässigen Bereichs? - Liegen Lastspiel und Lastgrenzen innerhalb der zulässigen Grenzen?
A0921 DAC-Parameter nicht richtig gesetzt
Ursache DAC-Parameter (P0777 and P0779) sollten nicht auf identische Werte eingestellt werden, da dies zu unlogischen Resultaten führen würde.
Diagnose und Beseitigung Bitte überprüfen Sie: - Parametereinstellungen für Ausgang identisch. - Parametereinstellungen für Eingang identisch. - Parametereinstellungen für Ausgang entsprechen nicht DAC-Typ. Unterschiedliche Werte für P0777 und P0779 einstellen.
A0922 Keine Last am Umrichter
Ursache Am Umrichter liegt keine Last an. Einige Funktionen könnten daher anders ablaufen als unter normalen Lastbedingungen. Hinweis Wenn die Motorhaltebremse bei einem Brake Control Modul geöffnet ist und die Motorspannung unterbrochen wird, bleibt die Motorhaltebremse geöffnet und es wird nur die Alarmmeldung A0922 ausgegeben.
Diagnose und Beseitigung Überprüfen Sie, ob der Motor korrekt am Umrichter angeschlossen ist.
A0923 Sowohl JOG links als auch JOG rechts sind angefordert
Ursache Sowohl JOG rechts und JOG links (P1055/P1056) sind angefordert worden. Damit wird die HLG-Ausgangsfrequenz auf dem aktuellen Wert eingefroren.
Diagnose und Beseitigung JOG rechts und JOG links nicht gleichzeitig betätigen.
Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 262 A5E00348653A-AA
A0952 Lastfehler erkannt
Ursache Lastbedingungen am Motor deuten auf Lastfehler oder mechanischen Fehler hin.
Diagnose und Beseitigung Bitte überprüfen Sie: 1. Keine Bremsung, Ausfall oder Zerstörung des Antriebsstranges. 2. Wenn Sie einen externen Geber einsetzen, überprüfen Sie bitte folgende Parametereinstellungen:
- P2192 (Verzögerungszeit Lastmomentüberwachung) 3. Wenn Sie mit einem Drehzahlbereich arbeiten, überprüfen Sie bitte:
- P2182 (Lastmomentüberw. F1) - P2183 (Lastmomentüberw. F2) - P2184 (Lastmomentüberw. F3) - P2185 (Obere Lastmomentschwelle M_o1) - P2186 (untere Lastmomentschwelle M_u1) - P2187 (obere Lastmomentschwelle M_o2) - P2188 (untere Lastmomentschwelle M_u2) - P2189 (obere Lastmomentschwelle M_o3) - P2190 (untere Lastmomentschwelle M_u3) - P2192 (Verzögerungszeit Lastmomentüberwachung)
4. Gegebenenfalls Antriebsstrang schmieren.
A1690 Safety-Parameter geändert
Ursache Dieser Alarm zeigt an, dass mindestens ein Parameter bei der Safety-Inbetriebnahme oder beim Rücksetzen der Sicherheitsparameter geändert wurde. Der Alarm wird automatisch zurückgesetzt, wenn die Safety-Inbetriebnahme oder Rücksetzen der Sicherheitsparameter beendet ist.
Diagnose und Beseitigung Beenden Sie die Sicherheitsinbetriebnahme durch p3900 = 10 oder 11 oder warten Sie bis das Rücksetzen der Sicherheitsparameter beendet ist.
A1691 Signale auf SG6 inkonsistent
Ursache Signale auf der Abschaltgruppe SG6 sind nicht konsistent. Der Antrieb reduziert die Frequenz anhand der Einstellungen der Sicheren Bremsrampe (SBR). Sobald die Frequenz 0 Hz erreicht ist, geht der Umrichter in den Sicheren Halt (SH) und ein Antriebsfehler wird gemeldet.
Diagnose und Beseitigung Überprüfen Sie die Abschaltgruppen und quittieren Sie den folgenden durch Antriebsfehler ausgelösten SH.
A1692 Drehzahlalarm, SGx überschritten
Ursache 1. Beim Aktivieren der Sicher reduzierten Geschwindigkeit war die Istfrequenz höher als der Wert in
p9690 und p9692 hat die Einstellung, Sicheren Halt mit Antriebsfehler auslösen. 2. Istfrequenz überschreitet die Toleranz für die Sicher reduzierte Geschwindigkeit p9691. In beiden Fällen wird die Frequenz entsprechend der SBR herunter gefahren. SH wird aktiv und ein Antriebsfehler erzeugt, sobald die Frequenz auf 0 Hz heruntergefahren ist.
Diagnose und Beseitigung Zu 1: Reduzieren Sie die Frequenz bevor sie die Sicher reduzierte Geschwindigkeit aktivieren oder
ändern Sie die Einstellung in p9692. Zu 2: erhöhen Sie die Toleranz in p9691/p9891 im Vergleich zu p9690/p9890.
Quittieren Sie den Sicheren Halt und den Antriebsfehler.
Ausgabe 07/2005 Fehlermeldungen und Alarme
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 263
A1696 Einschalten gesperrt
Ursache Das Einschalten des Umrichters ist nicht möglich und der Umrichter bleibt im Zustand Einschaltbereit (siehe r0002).
Diagnose und Beseitigung Überprüfen Sie, ob ein aktiver Safety-Zustand (SH, SGx, SBR) das Einschalten verhindert. Überprüfen Sie ob Bit r0052.6 "Einschaltsperre aktiv" gesetzt ist. Ist die Zwangsdynamisierung aktiv, (siehe r9601), kann das Einschalten für etwa 2,5 s nach dem Verlassen des Sicheren Halts gesperrt sein.
A1697 Falsche Safety-Daten, Umrichter läuft mit Werkseinstellung
Ursache Hochlaufproblem. Die letzte Variante der Safety-Parameter kann nicht geladen werden. Stattdessen werden die Defaultwerte übernommen.
Diagnose und Beseitigung Starten Sie den Umrichter erneut (AUS/EIN (24 V)) um die Safety-Parameter richtig zu laden. Hinweis Um Fehler beim Schreiben und Speichern sicherheitsrelevanter Daten zu entdecken, muss die Steuerung nach dem Einschalten der Regelungsbaugruppe und vor der Impulsfreigabe sowie zyklisch (z.B. im Raster von 8 Stunden) alle sicherheitsbezogenen Parameter auslesen und mit den erwarteten Werten vergleichen. Im Falle einer Abweichung ist über die Abschaltgruppe der "sichere Halt" herbeizuführen und eine Meldung abzusetzen. Dieser Vorgang ist zu protokollieren.
A1698 Safety-Inbetriebnahme oder Reset aktiv
Ursache Rücksetzen der Safety-Parameter oder Inbetriebnahme der Safety-Parameter aktiv (angewählt über p0010 = 95).
Diagnose und Beseitigung Beenden Sie die Inbetriebnahme mit p3900 = 10 (Änderungen übernehmen) oder p3900 = 11 (Änderungen nicht übernehmen) oder warten Sie bis das Rücksetzen der Safety-Parameter beendet ist.
A1699 Überprüfen der Abschaltpfade erforderlich
Ursache Die Zeit bis zum nächsten Selbsttest (siehe r9660) ist abgelaufen. Ein erneuter Selbsttest ist erforderlich.
Diagnose und Beseitigung - Wählen Sie Sicheren Halt erst an und dann wieder ab, wobei p9601 Bit01 und p9801 Bit01 gesetzt
sind. - AUS / EIN (24 V)

Fehlermeldungen und Alarme Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 264 A5E00348653A-AA
Ausgabe 07/2005 Abkürzungen
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 265
Abkürzungen
AC Wechselstrom
AD Analog-digital Umsetzer
ADC Analog-digital Umsetzer
ADR Adresse
AFM Frequenzmodifikaiton
AG Automatisierungsgerät
AIN Analogeingang
AOUT Analogausgang
ASIC kundenspezifischer integrierter Schaltkreis
ASP Analogsollwert
ASVM Asymmetrische Raumzeigermodulation
BCC Blockprüfzeichen
BCD Binär codierter Dezimalcode
BI Binektoreingang
BICO Binektor / Konnektor
BIST Testprogramm
BO Binektorausgang
BOP Bedieneinheit mit numerischer Anzeige
C Inbetriebnahme
CB Kommunikationsbaugruppe
CCW Links, gegen Uhrzeigersinn
CDS Befehlsdatensatz
CI Konnektoreingang
CM Konfigurationsmanagement
CMD Kommando
CO Konnektorausgang
CO/BO Konnektorausgang / Binektorausgang
COM Wurzel
CT Inbetriebnahme, Betriebsbereit
CT Konstantes Drehmoment
CUT Inbetriebnahme, Betrieb, Betriebsbereit
CW Rechts, im Uhrzeigersinn
DA Digital-analog Umsetzer
DAC Digital-analog Umsetzer
DC Gleichstrom
DDS Antriebsdatensatz
DIN Digitaleingang
DIP DIP-Schalter
DOUT Digitalausgang
DP Dezentrale Peripherie
DS Antriebszustand
EEC Europaeische Wirtschaftsgemeinschaft (EWG)
EEPROM Elektrisch löschbarer Nur-Lese-Speicher (nichtflüchtiger Speicher)
ELCB Fehlerstromschutzschalter
EMC Elektromagnetische Verträglichkeit (EMV)
EMF Elektromagnetische Kraft (EMK)
EMI Elektomagnetische Störung
ESB Ersatzschaltbild
FAQ Häufig gestellte Fragen
FB Funktionsbaustein
FCC Flux current control (Flussstromregelung)
FCL Schnelle Strombegrenzung
FF Festfrequenz
FFB Freier Funktionsblock
FOC Feldorientierte Regelung
FSA Baugröße A
GSG Erste Schritte
GUI ID Globale Kennung
HIW Hauptistwert
HSW Hauptsollwert
HTL Logik mit hoher Störschwelle
I/O Ein- / Ausgang
IBN Inbetriebnahme
IGBT Insulated Gate Bipolar Transistor
IND Subindex
JOG Tippen
KIB Kinetische Pufferung
LCD Flüssigkristallanzeige
LED Leuchtdiode
LGE Länge
MHB Motorhaltebremse
MMC-PS Micro Memory-Card-Parameterspeicher
NC Öffner
NO Schließer
NPN Negativ positiv negativ
OPI Bedienungsanleitung
PDS Antriebssystem
PID PID-Regler (Proportional-, Integral, Differenzialanteil)
PKE Parameterkennung
PKW Parameterkennung Wert
PLC Speicherprogrammierbare Steuerung
PLI Parameterliste
PNP Positiv negativ positiv
POT Potentiometer
Abkürzungen Ausgabe 07/2005
Frequenzumrichter ET 200S FC Listenhandbuch 266 A5E00348653A-AA
PPO Parameter Prozessdaten Objekt
PS Leistungsteil des Frequenzumrichters (Power Stack)
PTC Kaltleiter (positivem Temperaturkoeffizient)
PWE Parameterwert
PWM Pulsweitenmodulation
PX Leistungserweiterung
PZD Prozessdaten
QC Schnellinbetriebnahme
RAM Speicher mit wahlfreiem Zugriff
RCCB Fehlerstromschutzschalter
RCD FI-Schutzschalter
RFG Hochlaufgeber (HLG)
RFI Hochfrequenzstörung
RPM Umdrehungen pro Minute (Upm)
RTOS Echtzeitbetriebssystem
SCL Skalierung
SDP Statusanzeigeeinheit
SBR Sicher reduzierte Bremsrampe
SG Sicher reduzierte Geschwindigkeit
SH Sicherer Halt
SLVC Geberlose Vektorregelung
STW Steuerwort
STX Start Text
SVM Raumzeigermodulation
TTL Transistor-Transistor Logik
USS Universelle serielle Schnittstelle
VC Vektorregelung
Vdc Zwischenkreisspannung
VT Variables Drehmoment
ZSW Zustandswort
ZUSW Zusatzsollwert
Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 267
Absender (bitte ausfüllen)
An
Siemens AG Automation & Drives SD SM Postfach 3269
D-91050 Erlangen
Email: [email protected]
Name Firma / Dienststelle
Anschrift
Telefon
Fax
Listenhandbuch für Frequenzumrichter ET 200S FC
Sind Sie beim Lesen dieses Listenhandbuchs auf Fehler gestoßen?
Bitte teilen Sie uns die Fehler auf diesem Vordruck mit.
Für Anregungen und Verbesserungsvorschläge sind wir Ihnen dankbar.
.............................................................................................................................
.............................................................................................................................
.............................................................................................................................
.............................................................................................................................
.............................................................................................................................
.............................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................
.........................................................................................................................................................

Frequenzumrichter ET 200S FC Listenhandbuch 268 A5E00348653A-AA

Frequenzumrichter ET 200S FC Listenhandbuch A5E00348653A-AA 269

Siemens AG Automation & Drives Standard Drives Postfach 3269, D – 91050 Erlangen Germany www.siemens.com
© Siemens AG 2004Subject to change without prior notice
Printed in Germany


















