Funktionsprinzip von Planimetern - mathe.tu-freiberg.dehebisch/cafe/seminarplanimeter.pdf ·...
27
FUNKTIONSPRINZIP VON PLANIMETERN Schilderung anhand eines Polarplanimeters Vortragsskript zur Modulprüfung „Seminar Angewandte Mathematik 1“ Verfasser: Dipl.-Ing.(FH) Martin Gollnick [57204] Prüfer/Mentor: Prof. Dr. rer. nat. Udo Hebisch Termin: 17.11.2015
Transcript of Funktionsprinzip von Planimetern - mathe.tu-freiberg.dehebisch/cafe/seminarplanimeter.pdf ·...
FUNKTIONSPRINZIP VON
PLANIMETERN
Schilderung anhand eines Polarplanimeters
Vortragsskript zur Modulprüfung „Seminar Angewandte Mathematik 1“
Verfasser: Dipl.-Ing.(FH) Martin Gollnick [57204]
Prüfer/Mentor: Prof. Dr. rer. nat. Udo Hebisch
Termin: 17.11.2015
I
Inhaltsverzeichnis
1. Aufbau und Verwendungszweck 1
1.1 Allgemeiner Verwendungszweck 1
1.2 Das Polarplanimeter 1
1.3 Aufbau des Ott-Polarplanimeters 2
2. Funktionsprinzip 4
2.1 Mathematischer Hintergrund 4
2.2 Technisches Funktionsprinzip 4
3. Anwendung 8
3.1 Die Bedeutung der Tabelle 8
3.2 Messweisen 9
3.3 Kompensationsmessung und Kalibrierung 11
3.4 Schematische Durchführung einer Messung 12
3.5 Eine abschließende Durchführung 13
Anhang 15
A Einstelltabelle 15
B.1 Beweis zur Proportionalität des Messradweges zum Flächeninhalt 16
B.2 Beweis zum Messfehler (Grundkreis) bei der Messung mit Pol innen 20
B.3 Beweis zur Elimination des Messfehlers durch den Grundkreis 21
B.4 Beweis zur Filterung der Achsenschiefe des Messrades bei der Kompensationsmessung 22
Literatur – und Quellverzeichnis
24
Abbildungsverzeichnis
Abb. 1 Polarplanimeter mit Fahrstift (links) und mit Lupe mit Fadenkreuz (rechts) 1
Abb. 2 Kernbestandteile 2
Abb. 3 Aufbau des Ott-Planimeters (oben: Kugelpol, unten: Nadelpol) 2
Abb. 4 Zählwerk des Ott-Polarplanimeters 2
Abb. 5 Aufbewahrungsetui nebst Tabelle und Kontroll-Lineal (mittig oberhalb des Polarms) 3
Abb. 6 Umfahren eines Rechtecks mittels Linearplanimeters 5
Abb. 7 Scherabbildungen und Gesamtergebnis 6
II
Abb. 8 Infinitesimales Flächenstück 6
Abb. 9 Beispiel einer beigefügten Tabelle 8
Abb. 10 Messung mit Pol außen bei Lage des Pols innerhalb der Fläche 10
Abb. 11 Kompensationsmessung durch symmetrische Anordnung 11
Abb. 12 Kontroll-Lineal 11
Abb. 13 Vorbereitetes Planimeter 13
Abb. 14 Vermessung des Freiberger Mittelteichs 14
Abb. A Einstelltabelle des Herstellers für das Ott-Planimeter 15
Abb. B.1 Hilfsabbildungen zur Vorbetrachtung 16
Abb. B.2 Weitere Hilfsabbildung 16
Abb. B.3 Der Vektor bzw. das Planimetervektorfeld � 17
Abb. B.4 Veranschaulichung des Fehlers 20
Abb. B.5 Messrollenlage beim Grundkreis 20
Abb. B.6 Messfehlerelimination mittels Ausgrenzen von 0,0 21
Abb. B.7 Effekt ohne und mit Achsenschiefe 22
Abb. B.8 Schematische Kompensationsmessung 23
Funktionsprinzip von Planimetern Aufbau und Verwendungszweck
1
1. Aufbau und Verwendungszweck
1.1 Allgemeiner Verwendungszweck
Im Allgemeinen ist ein Planimeter ein mechanisches Messinstrument zur Bestimmung von Flächen-
inhalten auf Landkarten, Plänen oder Zeichnungen, sowie zur Ermittlung des Flächeninhalts unterhalb
von Graphen. Speziell wurden Planimeter auch zur Bestimmung von Momenten eingesetzt und dien-
ten damit der Auslegung von Motoren und Dampfmaschinen im Schiffsbau.
Je nach Einsatzgebiet gibt es Planimeter in unterschiedlichen Baugrößen und Arten, bspw. Schneiden-
planimeter, Rollenplanimeter oder Polarplanimeter. Mit letzterem befasst sich diese Ausarbeitung.
Daher werden u.a. das Polarplanimeter allgemein vorgestellt und dessen allgemeines und technisches
Funktionsprinzip erklärt. Der Aufbau und die Anwendung wird konkret am Ott-Polarplanimeter1 erläu-
tert.
1.2 Das Polarplanimeter
Das Polarplanimeter (vgl. [ ]) wurde 1854 vom schweizer Mathematiker, Ingenieur und Unternehmer
Jakob Amsler-Laffon (1823 – 1912) erfunden und löste durch seine wesentlich bessere Genauigkeit die
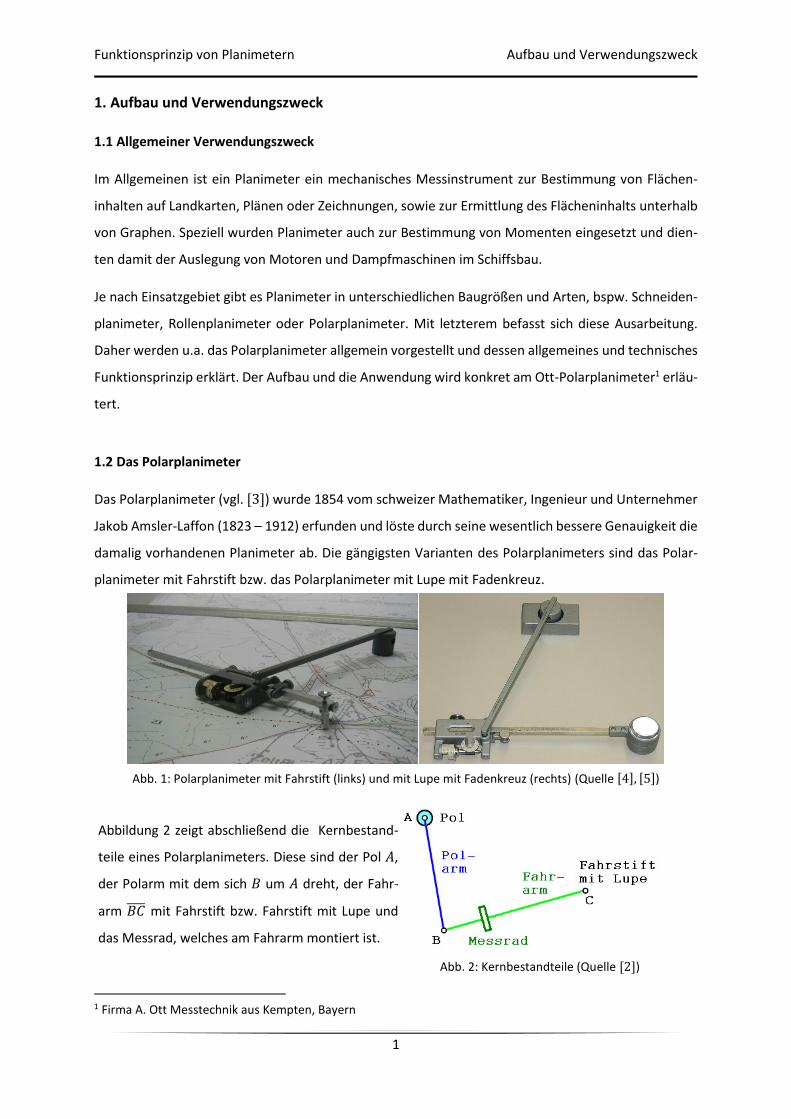
damalig vorhandenen Planimeter ab. Die gängigsten Varianten des Polarplanimeters sind das Polar-
planimeter mit Fahrstift bzw. das Polarplanimeter mit Lupe mit Fadenkreuz.
Abb. 1: Polarplanimeter mit Fahrstift (links) und mit Lupe mit Fadenkreuz (rechts) (Quelle [ ], [ ])
1 Firma A. Ott Messtechnik aus Kempten, Bayern
Abb. 2: Kernbestandteile (Quelle [ ])
Abbildung 2 zeigt abschließend die Kernbestand-
teile eines Polarplanimeters. Diese sind der Pol ,
der Polarm mit dem sich um dreht, der Fahr-
arm mit Fahrstift bzw. Fahrstift mit Lupe und
das Messrad, welches am Fahrarm montiert ist.
Funktionsprinzip von Planimetern Aufbau und Verwendungszweck
2
1.3 Aufbau des Ott-Polarplanimeters
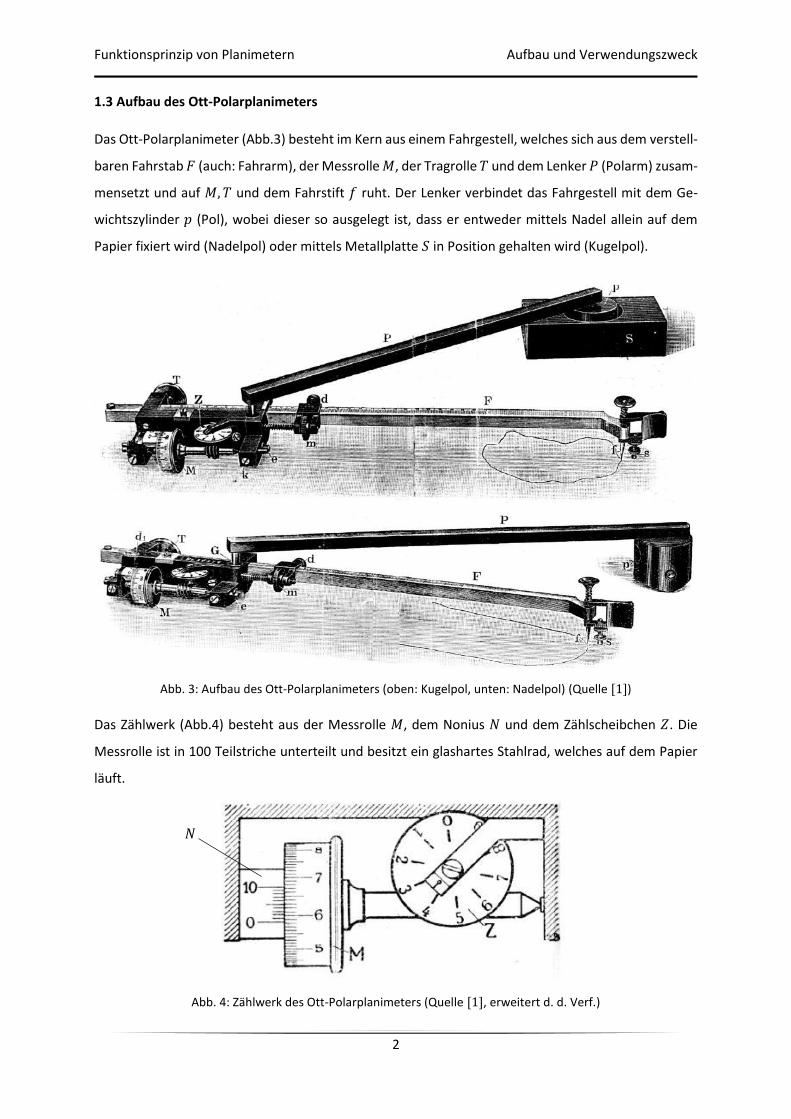
Das Ott-Polarplanimeter (Abb.3) besteht im Kern aus einem Fahrgestell, welches sich aus dem verstell-
baren Fahrstab � (auch: Fahrarm), der Messrolle , der Tragrolle und dem Lenker � (Polarm) zusam-
mensetzt und auf , und dem Fahrstift � ruht. Der Lenker verbindet das Fahrgestell mit dem Ge-
wichtszylinder � (Pol), wobei dieser so ausgelegt ist, dass er entweder mittels Nadel allein auf dem
Papier fixiert wird (Nadelpol) oder mittels Metallplatte in Position gehalten wird (Kugelpol).
Abb. 3: Aufbau des Ott-Polarplanimeters (oben: Kugelpol, unten: Nadelpol) (Quelle [ ]) Das Zählwerk (Abb.4) besteht aus der Messrolle , dem Nonius und dem Zählscheibchen �. Die
Messrolle ist in 100 Teilstriche unterteilt und besitzt ein glashartes Stahlrad, welches auf dem Papier
läuft.
Abb. 4: Zählwerk des Ott-Polarplanimeters (Quelle [ ], erweitert d. d. Verf.)
Funktionsprinzip von Planimetern Aufbau und Verwendungszweck
3
Der Nonius dient zum Ablesen der Zehntel, d.h. der Messbereich zwischen zwei Teilstrichen der
Messrolle wird durch den Nonius in zehn Teile geteilt und es kann somit auf den Zehntel genau ge-
messen werden. Die Zählscheibe erfasst über ein feines Schneckengewinde die Anzahl der Rollen-
umdrehungen.
Die Ablesung ist stets vierstellig. Dabei werden die Tausender vom Zählscheibchen, die Hunderter und
Zehner von der Messrolle und die Einer von dem Nonius abgelesen. Konkret wäre das Ablese-ergebnis
in Abb.4 der (einheitslose) Wert 3584.
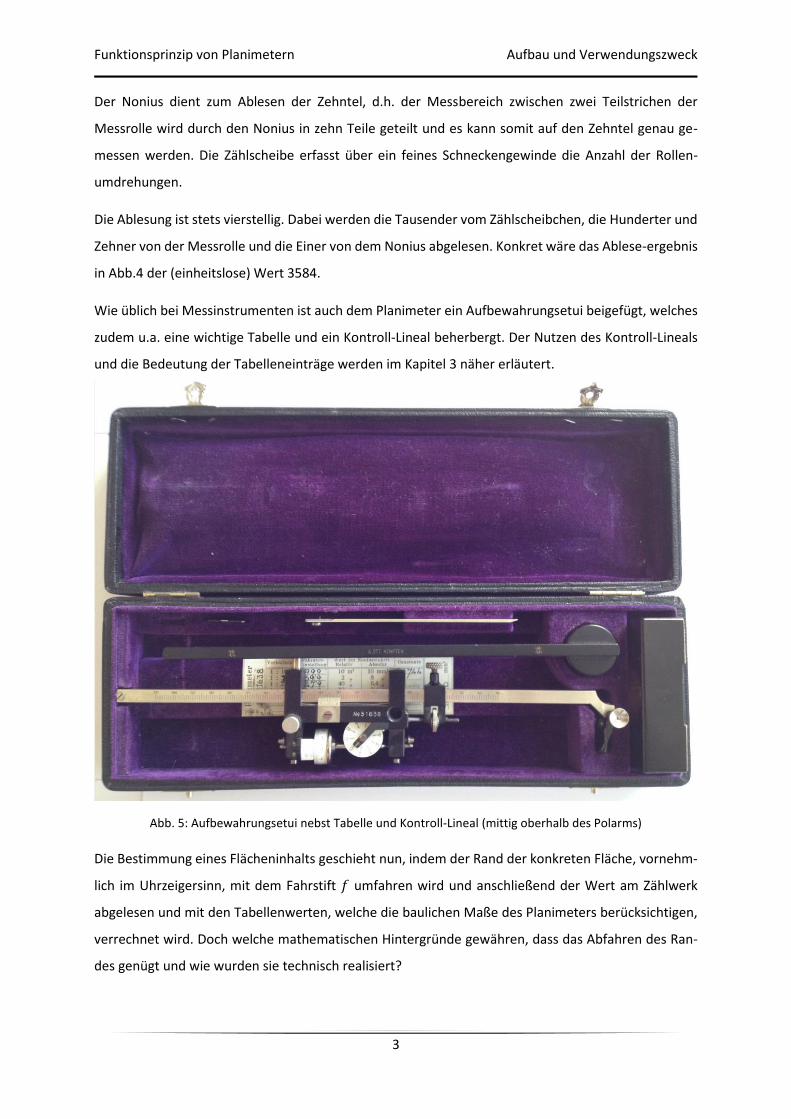
Wie üblich bei Messinstrumenten ist auch dem Planimeter ein Aufbewahrungsetui beigefügt, welches
zudem u.a. eine wichtige Tabelle und ein Kontroll-Lineal beherbergt. Der Nutzen des Kontroll-Lineals
und die Bedeutung der Tabelleneinträge werden im Kapitel 3 näher erläutert.
Abb. 5: Aufbewahrungsetui nebst Tabelle und Kontroll-Lineal (mittig oberhalb des Polarms)
Die Bestimmung eines Flächeninhalts geschieht nun, indem der Rand der konkreten Fläche, vornehm-
lich im Uhrzeigersinn, mit dem Fahrstift � umfahren wird und anschließend der Wert am Zählwerk
abgelesen und mit den Tabellenwerten, welche die baulichen Maße des Planimeters berücksichtigen,
verrechnet wird. Doch welche mathematischen Hintergründe gewähren, dass das Abfahren des Ran-
des genügt und wie wurden sie technisch realisiert?
Funktionsprinzip von Planimetern Funktionsprinzip
4
2. Funktionsprinzip
2.1 Mathematischer Hintergrund
Das Funktionsprinzip von Planimetern beruht wesentlich auf den folgenden beiden mathematischen
Erkenntnissen bzw. Prinzipien:
1. Satz von Green,
2. Berechnung infinitesimaler Flächen nach Leonhard Euler.
Der Satz von Green (Spezialfall des Satzes von Stokes) gewährt die Berechnung eines ebenen Flächen-
integrals über das Kurvenintegral einer stückweise stetig differenzierbaren Kurve (Rand). Daher genügt
es tatsächlich den Rand einer solchen Fläche zu umfahren.
Das Prinzip nach Euler besagt im Kern, dass sich ein infinitesimales Flächenstück aus der Summe eines
infinitesimalen Parallelogramms und einer infinitesimalen Dreiecksfläche zusammensetzt (vgl. Abb. 8).
Ein Planimeter ist die technische Realisierung dieser beiden mathematischen Sachverhalte, d.h. beim
Umfahren einer gewünschten Fläche werden von der Messeinrichtung infinitesimal kleine Flächen-
stücke (gemäß Euler) aufaddiert. Zusätzlich zu bemerken ist, dass das Vorzeichen der Messung von der
Umfahrrichtung abhängt. Konkret gilt hier: Positives Vorzeichen beim Umfahren im Uhrzeigersinn.
Damit scheint die (abstrakte) Funktionsweise klar, aber wie funktioniert dies technisch nun im Detail?
2.2 Technisches Funktionsprinzip
Es wird an dieser Stelle erläutert, warum der zurückgelegte Weg des Messrades der Messeinrichtung
proportional zum Flächeninhalt der umfahrenden Fläche ist1. Hierzu seien einführend die beiden
grundlegenden Verhaltensweisen des Messrades erläutert:
1. Bei einer Längsbewegung (ausgeführt über den Fahrarm), also einer axialen Verschiebung des
Messrades in Richtung dessen Drehachse, rutscht das Messrad lediglich über die Unterlage
und dreht sich dabei nicht,
2. Alle anderen Bewegungen bewirken eine Drehung des Messrades in Proportion des senkrecht
zurückgelegten Weganteils.
Zum Verständnis des grundlegenden Funktionsprinzips wird, der Einfachheit halber, eingangs ein soge-
nanntes Linearplanimeter gewählt. Dies ist eine Vereinfachung des Planimeters in der Hinsicht, dass
man sich den Polararm des Planimeters extrem lang vorstellt, wodurch eine Drehung des Polararms
1 Der mathematische Beweis dessen befindet sich im Anhang B.1.
Funktionsprinzip von Planimetern Funktionsprinzip
5
um den Pol durch eine lineare Bewegung approximiert wird. Das folgende illustrative Beispiel2 dient
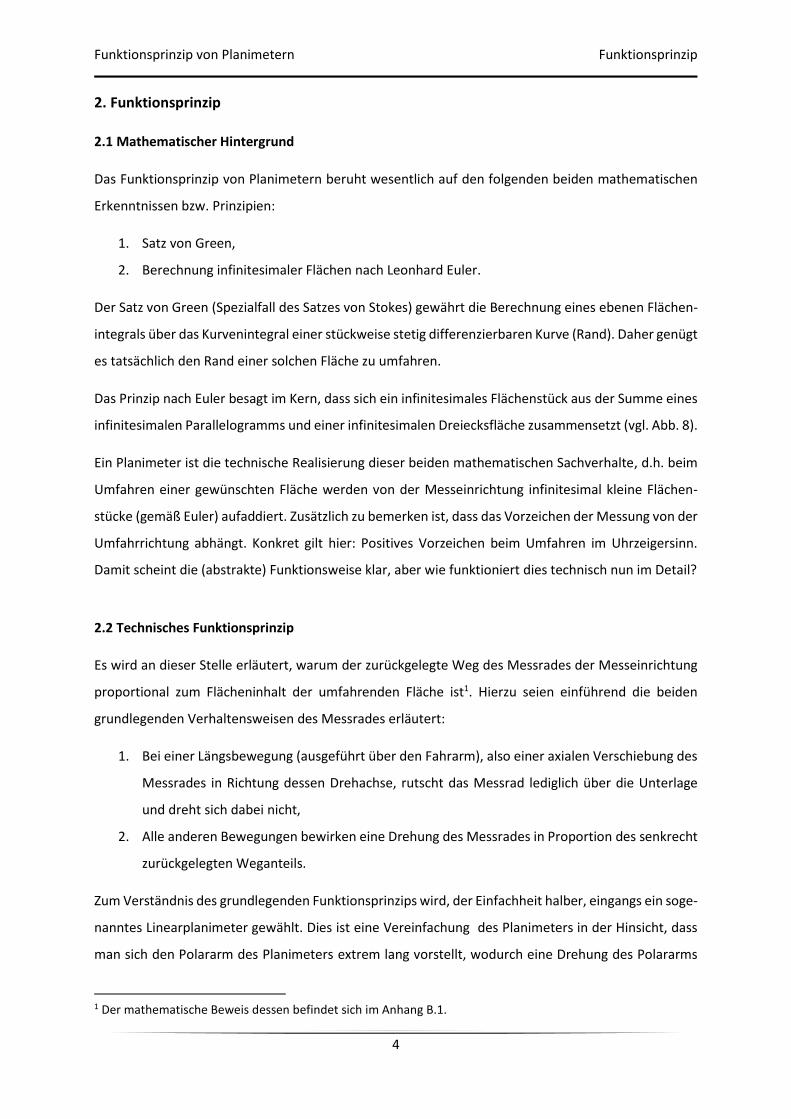
zur Verdeutlichung der Funktionsweise (siehe Abb. 6):
Beginnend im Punkt wird die zu ermittelnde Rechteckfläche mit dem zu umfahrenden Rand � = + + + mit dem Fahrstift im Uhrzeigersinn umfahren. Bei den senkrechten Strecken-
anteilen und wird vom Fahrarm eine Parallelverschiebung vollführt. Hingegen wird bei den
waagerechten Streckenanteilen und eine Drehung (hier konkret: Auf- und Abwärtsbewegung
des Punktes längs einer „imaginären Schiene“) ausgeführt. Fortlaufend seien der Fahrstift als und
die Fahrarmlänge als � = bezeichnet.
Abb. 6: Umfahren eines Rechtecks mittels Linearplanimeters
Die einzelnen Streckenanteile:
1. [ ]: Bei der Bewegung von längs wird das gelb unterlegte Parallelogramm über-
strichen. Das Messrad (bzw. das Zählwerk) nahe bei misst lediglich den Weg 1 = ,
welcher senkrecht zu � verläuft. Bezüglich des Parallelogramms entsprechen dessen
Höhe, � dessen Seite und ferner = ∙ � dessen Flächeninhalt.
2. [ ]: Bei der Bewegung von längs vollführt der Fahrarm eine Drehung. Das Messrad
erfasst die Größe .
3. [ ]: Bei der Bewegung von längs wird das blau unterlegte Parallelogramm überstrichen.
Dieses ist aufgrund des steileren Fahrarmes ungleich dem gelben. Es wird der Weg − 3 =− erfasst. Das negati e Vorzei hen ist der Be egung „ on unten na h o en“ ges huldet,
d.h. rein praktisch dreht sich das Messrad zurück. Analog zu 1. ergibt sich = − ∙ �.
4. [ ]: Bei der Bewegung von längs vollführt der Fahrarm eine Drehung, die der vorherigen
bei in engegengesetzter Richtung entspricht. Das Messrad erfasst dabei die Größe =− , d.h. der Einfluss der Drehung wurde eliminiert und ist somit für das Ergebnis der
Messung unbedeutend.
2 Dieses Beispiel nebst Abbildungen wurde aus [6] übernommen und wurde, aus Gründen der Anpassung, durch
den Verfasser an gewählten Textstellen abweichend umbenannt.
Funktionsprinzip von Planimetern Funktionsprinzip
6
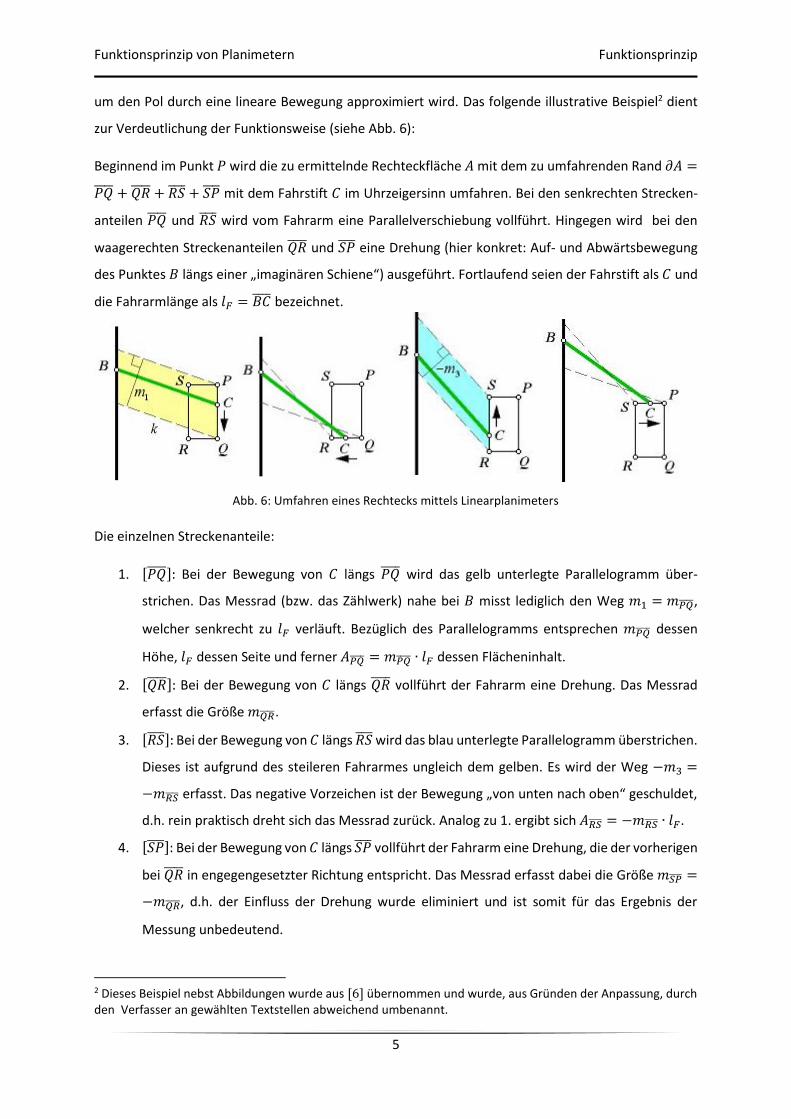
Zusammenfassend ergibt sich die Gesamterfassung am Messrad zu ��� = − und daraus
für den Flächeninhalt von resultierend = � ∙ ( ���) = � ∙ ( − ) = − , was
bedeutet, dass das blaue Parallelogramm vom gelben subtrahiert wird. Dass dies tatsächlich dem
gesuchten Flächeninhalt von entspricht wird durch die Zuhilfenahme der Scherabbildung, die jedes
Parallelogramm in ein flächengleiches Rechteck transformieren vermag, deutlich.
Abb. 7: Scherabbildungen und Gesamtergebnis
An dieser Stelle wird die eingangs gewählte Vereinfachung fallen gelassen und zum Polarplanimeter
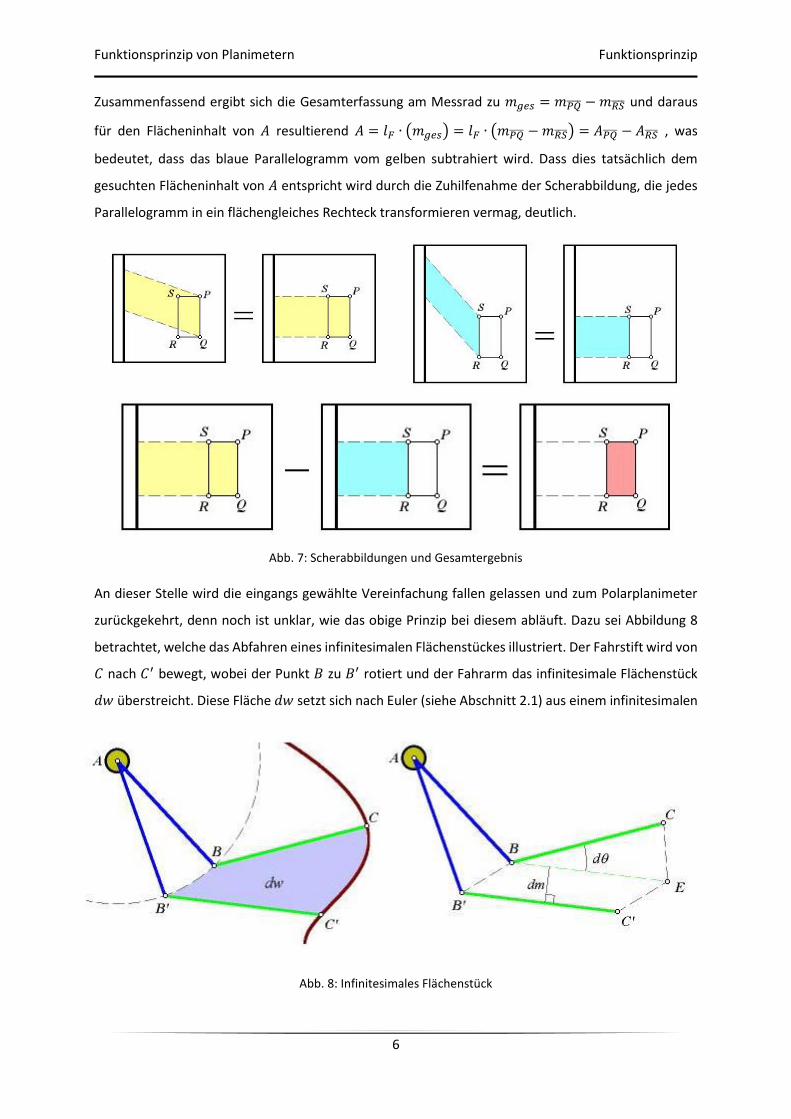
zurückgekehrt, denn noch ist unklar, wie das obige Prinzip bei diesem abläuft. Dazu sei Abbildung 8
betrachtet, welche das Abfahren eines infinitesimalen Flächenstückes illustriert. Der Fahrstift wird von
nach ′ bewegt, wobei der Punkt zu ′ rotiert und der Fahrarm das infinitesimale Flächenstück �� überstreicht. Diese Fläche �� setzt sich nach Euler (siehe Abschnitt 2.1) aus einem infinitesimalen
Abb. 8: Infinitesimales Flächenstück
Funktionsprinzip von Planimetern Funktionsprinzip
7
Parallelogramm und einem infinitesimalen Dreieck mit infinitesimalem Winkel �� zusammen. Für das
Messrad bedeutet dies einen translatorischen und rotatorischen Anteil.
Das Parallelogramm wird in der obig beschriebenen Art bemessen, jedoch ist noch offen, ob der
Drehanteil auf das Gesamtergebnis Einfluss nimmt oder ob sich dieser in analoger Weise (s.o.) elimi-
niert. Tatsächlich ist es so, dass sich das Planimeter beim vollständigen Umfahren der Fläche wieder in
der ursprünglichen Ausgangslage vor dem Beginn der Messung befindet, d.h. dass sich die einzelnen
Drehanteile aufheben und somit die Messung nicht verfälschen.
Da nun klar ist, wie das Funktionsprinzip allgemein und aus technischer Sicht aussieht, stellt sich die
Frage, wie denn nun konkret ein Flächeninhalt gemessen bzw. berechnet wird?
Funktionsprinzip von Planimetern Anwendung
8
3. Anwendung
3.1 Die Bedeutung der Tabelle
Im vorherigen Kapitel wurde die Größe � aus Gründen der Illustration des Prinzips gewählt und mag
suggerieren, dass stets die Gesamtlänge des Fahrarmes einzusetzen ist. Dies ist leider nicht so, denn
das Messrad sitzt nie ganz am Ende des Fahrarmes, sondern ortsfest in einem gewissen Längen-
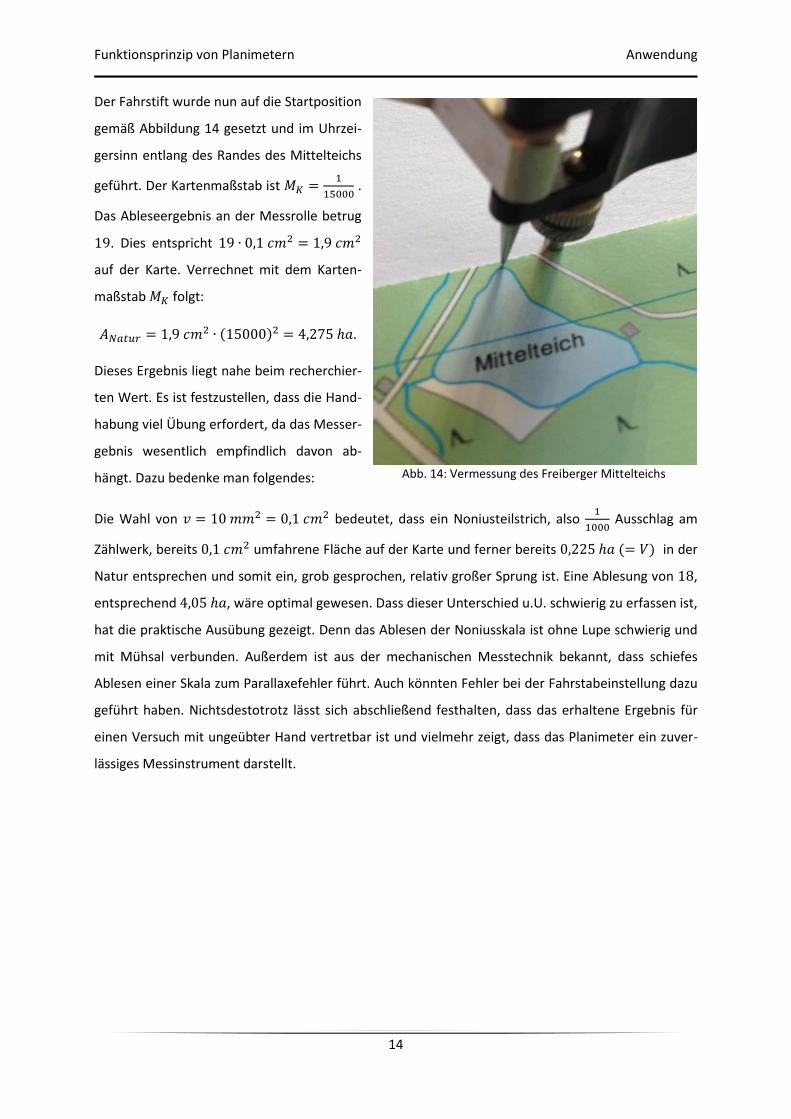
verhältnis zum verstellbaren Fahrarm. Den wirklich einzusetzenden Wert für �, welcher Noniuswert
genannt wird und abhängig von der Fahrstabeinstellung ist, entnimmt man der beigefügten Tabelle im
Aufbewahrungsetui (siehe Abb.9) oder der Tabelle des Herstellers in der Gebrauchsanweisung1. Übli-
cherweise ist die Herangehensweise jene, dass man für die Noniuswert einen angenehmen Wert,
bspw. wählt und entsprechend gemäß jeweiliger Tabelle den Fahrarm einstellt.
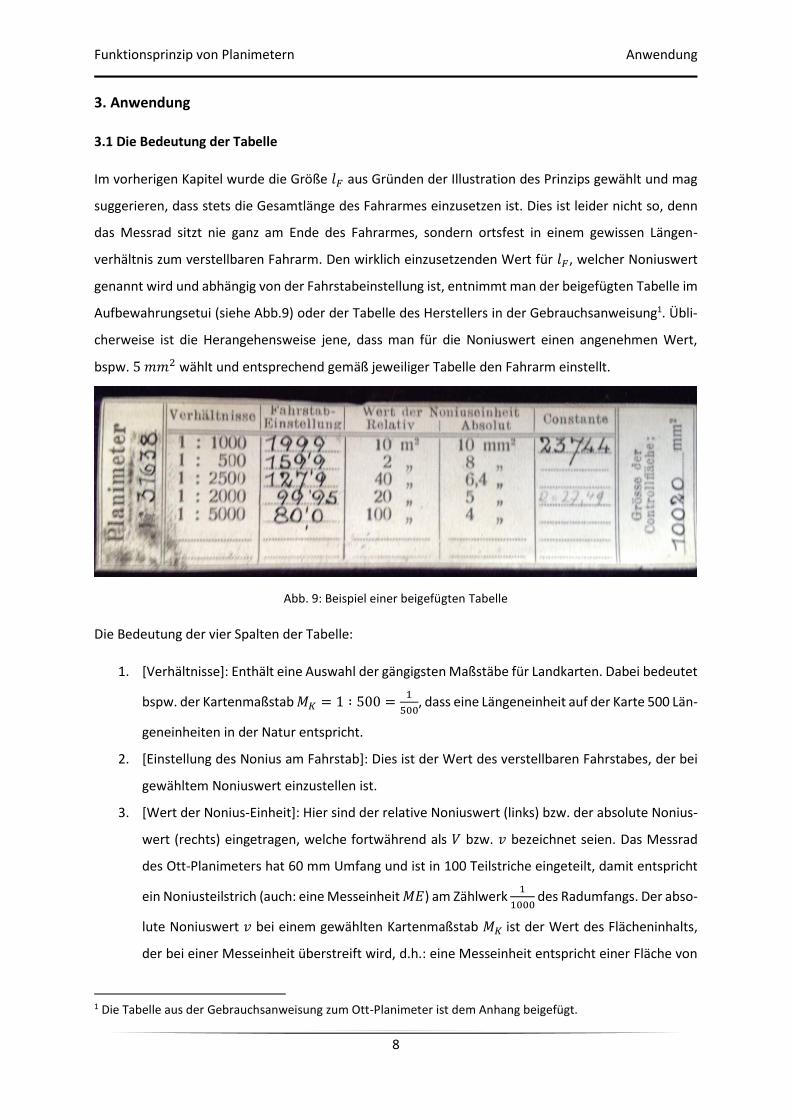
Abb. 9: Beispiel einer beigefügten Tabelle
Die Bedeutung der vier Spalten der Tabelle:
1. [Verhältnisse]: Enthält eine Auswahl der gängigsten Maßstäbe für Landkarten. Dabei bedeutet
bspw. der Kartenmaßstab � = ∶ = 5 , dass eine Längeneinheit auf der Karte 500 Län-
geneinheiten in der Natur entspricht.
2. [Einstellung des Nonius am Fahrstab]: Dies ist der Wert des verstellbaren Fahrstabes, der bei
gewähltem Noniuswert einzustellen ist.
3. [Wert der Nonius-Einheit]: Hier sind der relative Noniuswert (links) bzw. der absolute Nonius-
wert (rechts) eingetragen, welche fortwährend als � bzw. � bezeichnet seien. Das Messrad
des Ott-Planimeters hat 60 mm Umfang und ist in 100 Teilstriche eingeteilt, damit entspricht
ein Noniusteilstrich (auch: eine Messeinheit �) am Zählwerk des Radumfangs. Der abso-
lute Noniuswert � bei einem gewählten Kartenmaßstab � ist der Wert des Flächeninhalts,
der bei einer Messeinheit überstreift wird, d.h.: eine Messeinheit entspricht einer Fläche von
1 Die Tabelle aus der Gebrauchsanweisung zum Ott-Planimeter ist dem Anhang beigefügt.
Funktionsprinzip von Planimetern Anwendung
9
� in auf der Karte bei passend eingestelltem Fahrstab. Der relative Noniuswert ist ein
entsprechender Verhältniswert aus absolutem Noniuswert, Kartenmaßstab und einer Skalie-
rungseinheit, d. h.: eine Messeinheit entspricht einer Fläche von � in in der Natur bei pas-
send eingestelltem Fahrstab. Beim Ott-Planimeter gelten die Zusammenhänge � = ∙ = ∙ � ∙ �, wobei die Ablesung an der Teilung des Fahrstabes, also die eingestellte Fahrstablänge, ist
und der Faktor zur Umrechnung von der Karte in der Natur dient. Für die
Berechnung des Flächeninhaltes ( �� = Ablesung am Zählwerk) ergeben sich somit ��� � = �� ∙ ���� = �� ∙ � . 4. [Konstante]: Diese Zahl entspricht dem Wert des Grundkreises und wird benötigt, sofern eine
Messung mit Pol innen durchgeführt wird (siehe dazu Kapitel 3.2).
3.2 Messweisen
Bei der Messung eines Flächeninhalts mittels Polarplanimeter werden zwei Aufstellungen bzw. Mess-
weisen unterschieden:
1. Messung mit Aufstellung des Pols außerhalb der zu messenden Fläche (Messung mit Pol au-
ßen, siehe dazu Abb. 3 im Kapitel 1.3, bzw. Abb. 11 im Kapitel 3.3),
2. Messung mit Aufstellung des Pols innerhalb der zu messenden Fläche (Messung mit Pol innen).
Die Messung mit Pol außen ist die übliche Messweise, denn Messungen mit Pol innen sind i.d.R. weni-
ger genau. Sollte man jene jedoch anwenden, so empfiehlt es sich eine Kompensationsmessung durch-
zuführen, d.h. eine Doppelmessung mit symmetrischer Armstellung (siehe dazu 3.3). Sollte man sich
trotzdem für eine Messung mit Pol innen entscheiden, so muss man beachten, dass das Planimeter
automatisch nur die Differenzfläche zwischen der zu umfahrenden Kurve und dem Grundkreis misst,
d.h. dem ermittelten Flächeninhalt muss der Flächeninhalt des Grundkreises hinzuaddiert werden um
den korrekten Flächeninhalt zu erhalten2. Um diesen Sachverhalt zu verstehen, muss man sich verdeut-
lichen, was bei dem Fahren eines Kreises mit Pol innen, also des Fahrens eines Kreises um das Plani-
meter herum mit Radius � = passiert: Die Messrolle dreht sich bei der Umfahrung nicht, sie rutscht
lediglich, d.h. die Messung ergibt einen Flächeninhalt von Null. Würde man denselben Kreis per
Messung mit Pol außen abfahren, so ergäbe sich als Messergebnis gerade der Grundkreis. Den Wert
2 Der mathematische Beweis dessen befindet sich im Anhang B.2.
Funktionsprinzip von Planimetern Anwendung
10
des jeweiligen Grundkreises, den man aufaddieren muss, findet man in der Spalte „Konstante“ der
beigefügten Tabelle, bzw. der Tabelle des Herstellers in der Gebrauchsanweisung.
Der Messbereich bzw. Wirkungsbereich eines Planimeters ist begrenzt durch die Fahrarmlänge und die
Länge des Lenkers und entspricht einer Kreisringfläche. Dahingehend gibt es vom jeweiligen Hersteller
Angaben über maximal vermessbare Rechtecke innerhalb dieses Kreisringe. Klar ist, dass ein längen-
verstellbarer Fahrarm und noch ein zusätzlich längenverstellbarer Lenker einen größeren Messbereich
abdecken können als ein Planimeter mit nicht verstellbarem Fahrarm. Sollten die zu messenden Flä-
chen trotzdem zu groß sein, so empfiehlt es sich einen größeren Planimetertyp zu besorgen oder die
zu vermessenden Fläche in kleinere, messbare Teile zu zerlegen und diese einzeln zu vermessen.
Zusätzlich gibt es noch die Möglichkeit eine Messung mit Pol innen durchzuführen. Da diese i.d.R.
weniger genau ist, kann man sie durch einen Trick in eine Messung mit Pol außen verwandeln und
damit umgehen, wie es die folgende Abb. 10 zeigt.
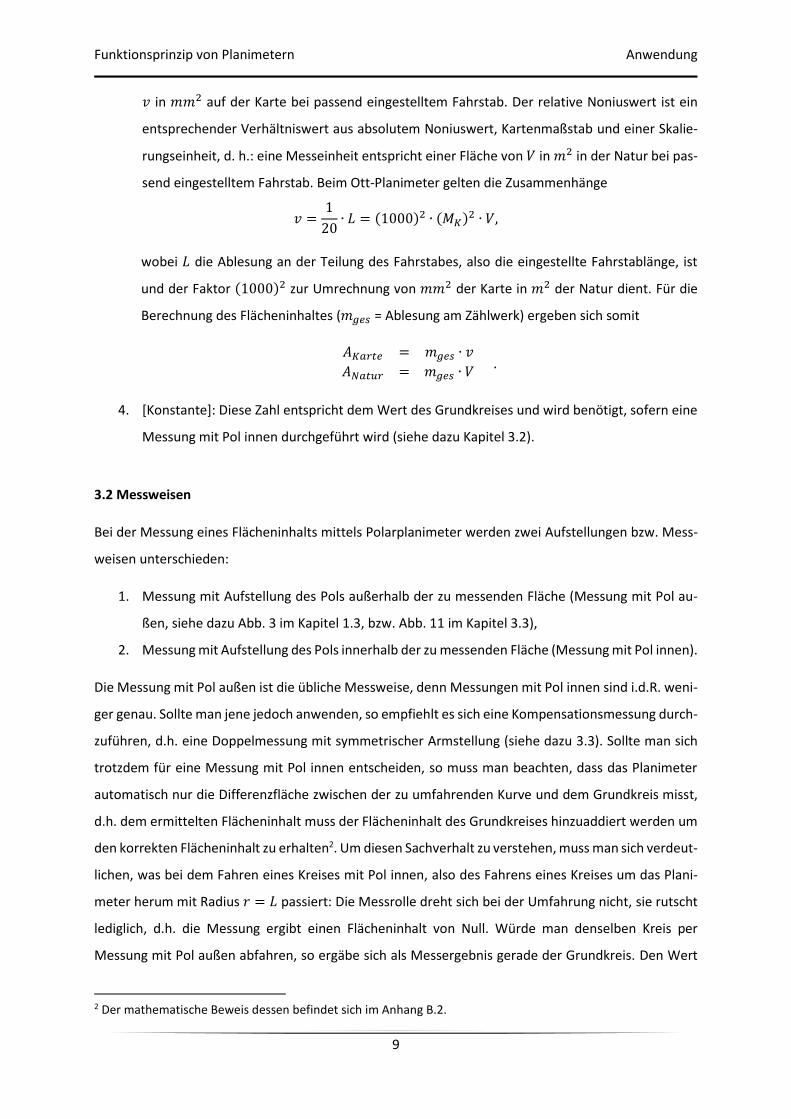
Abb. 10 Messung mit Pol außen bei Lage des Pols innerhalb der Fläche
Hierbei wird das Planimeter bzw. der Pol in die Fläche gestellt und eine leicht zu messende Innenfläche
gewählt, sodass man entlang der eingezeichneten Pfeile mit dem Planimeter den äußeren unbekann-
ten Reststreifen abfährt und an dem Umfang der Innenfläche zurückfährt. Dem Messergebnis des
äußeren unbekannten Reststreifens ist somit die leicht zu messende (mitunter schon bekannte) Innen-
fläche aufzuaddieren. Mit diesem Vorgehen hat man künstlich eine Messung mit Pol außen erzeugt,
obwohl sich das Planimeter bzw. der Pol örtlich innerhalb der Fläche befindet3.
3 Der mathematische Beweis dessen befindet sich im Anhang B.3.
Funktionsprinzip von Planimetern Anwendung
11
3.3 Kompensationsmessung und Kalibrierung
Eine Kompensationsmessung per symmetrischer Anordnung des Planimeters wird bei der Kalibrierung
oder bei Messungen mit hohen Genauigkeitsansprüchen angewendet. Die Anordnung dieser Messung
ist in Abbildung 11 illustriert.
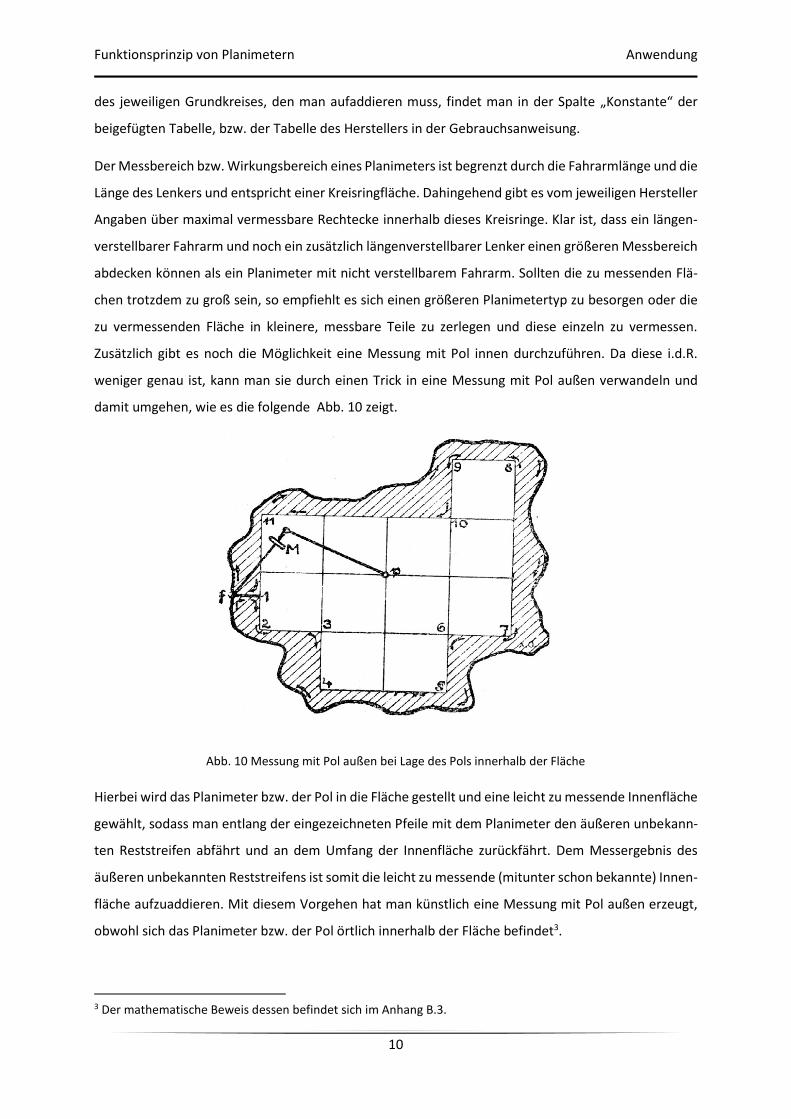
Abb. 11: Kompensationsmessung durch symmetrische Anordnung
Hierbei wird das Planimeter bei der ersten Messung entsprechend der linken und bei der zweiten Mes-
sung entsprechend der rechten Teilabbildung aufgestellt und die Fläche umfahren. Als Endergebnis
wird das arithmetische Mittel gewählt. Die gestrichelten Darstellungen symbolisieren den negativen
Effekt einer Achsenschiefe eines Planimeters, welche bspw. durch einen verbogenen Fahrstift aus-
gelöst wird. Infolgedessen werden in den Einzelmessungen die Flächen � und � anstatt � umfahren.
Die Kompensationsmessung mit anschließender Mittelwertbildung bleibt von diesem Effekt unbe-
rührt4, die Standard-Einzelmessung ist jedoch fehlerbehaftet.
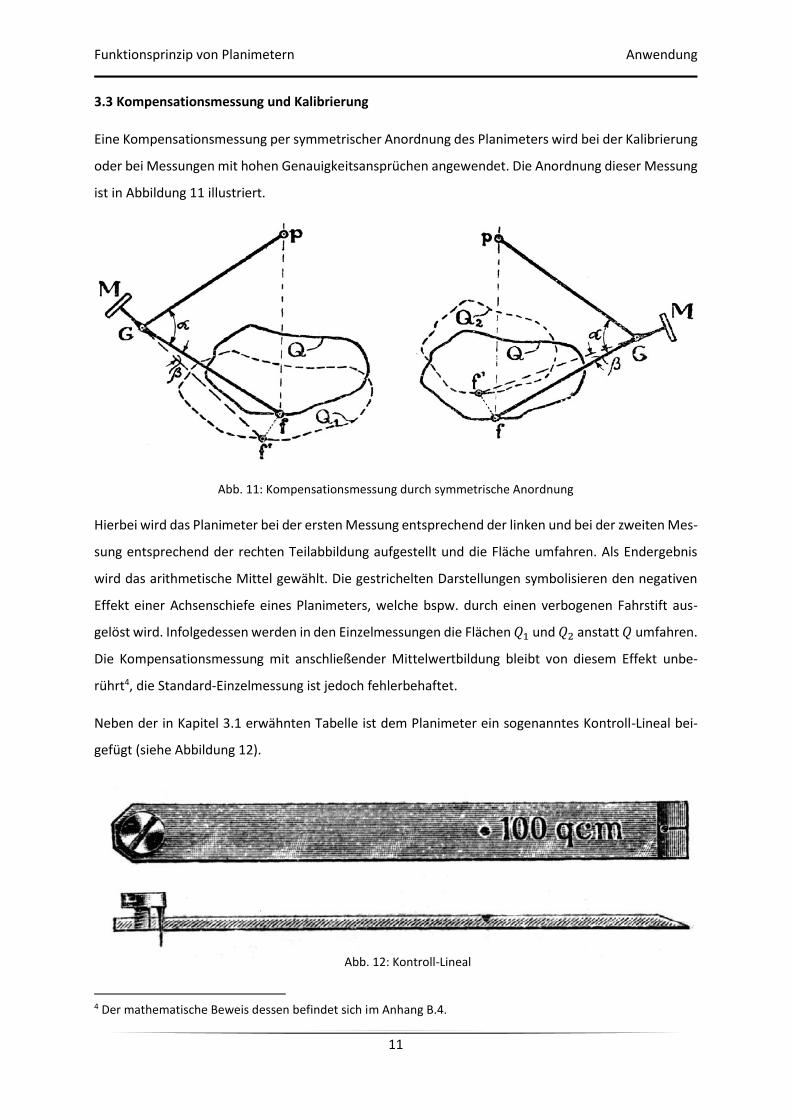
Neben der in Kapitel 3.1 erwähnten Tabelle ist dem Planimeter ein sogenanntes Kontroll-Lineal bei-
gefügt (siehe Abbildung 12).
4 Der mathematische Beweis dessen befindet sich im Anhang B.4.
Abb. 12: Kontroll-Lineal
Funktionsprinzip von Planimetern Anwendung
12
Mit diesem können die korrekte Arbeitsweise und korrekte Längeneinstellung des Fahrarmes schnell
und fehlerfrei überprüft werden, indem eine vom Kontroll-Lineal erzwungene Kreislinie mit bekann-
tem Flächeninhalt als Probefigur umfahren wird. Dabei wird das Kontroll-Lineal mittels dessen Nadel
auf der Unterlage fixiert und der Fahrstift des Polarplanimeters in die Aufnahmevertiefung eingesetzt.
Bei einer vollständigen Drehung des Kontroll-Lineals umfährt das Planimeter einen erzwungenen Kreis
mit Flächeninhalt von � .
Das Messergebnis des Planimeters anhand �� �� = �� ∙ � wird mit dem exakten Flächeninhalt ver-
glichen. Beim Auftreten einer Differenz ist folgende Maßnahme zu ergreifen:
Sollte sich deren Fläche um p Prozent zu klein ergeben, so ist die Fahrstabeinstellung um p Pro-
zent zu vergrößern.
Sollte sich deren Fläche um p Prozent zu gorß ergeben, so ist die Fahrstabeinstellung um p Pro-
zent zu verkleinern.
Aus Gründen der Messsicherheit umfährt man die Probefläche in zwei symmetrischen Aufstellungen
und wählt das arithmetische Mittel. Sollten die Messergebnisse der beiden Aufstellungen eine wesent-
liche Differenz aufweisen, so liegt ein Verdacht auf Achsenschiefe des Planimeters vor, die durch eine
Justierung der Messrolle durch eine Fachkraft behoben werden sollte.
3.4 Schematische Durchführung einer Messung
In der Gebrauchsanweisung des Ott-Polarplanimeters werden zur Durchführung einer Messung vom
Hersteller Ratschläge und Handhabungskniffe gegeben. Eine schematische Abfolge ist zwar nicht direkt
gegeben, jedoch kristallisiert sich folgendes Vorgehen heraus:
Vor dem Beginn der Messung:
1. Wahl eines angenehmen Noniuswerts � und entsprechendes Einstellen der Fahrarmlänge ge-
mäß Tabellenwerten.
2. Aufstellen/Aufbauen des Planimeters.
3. Zurückstellen des Zählwerks: Entweder stelle man das Zählwerk zurück auf Null oder man
merke sich den aktuellen Wert als Anfangsablesung und ziehe sie von dem Schlussergebnis ab.
Zum Einleiten dieses Vorgangs, kippe man den Rollrahmen (Rahmen um das Zählwerk), sodass
sich die Messrolle von der Unterlage hebt und stelle das Zählwerk durch entsprechende Dre-
hung der Messrolle zurück (beachte: niemals den Stahlrand der Rolle mit dem Finger berüh-
ren).
4. (optional): Durchführen einer Prüfung des Planimeters mittels Kontroll-Lineal.
Funktionsprinzip von Planimetern Anwendung
13
5. Platzierung: Zweckmäßigerweise platziert man den Pol bzw. das Planimeter so, dass Lenker
und Fahrstab rechtwinklig zueinander stehen, sofern der Fahrstift im Schwerpunkt der Fläche
steht.
Zur Messung:
1. Den Fahrstift auf den gewählten Anfangspunkt der Figur (Fläche) legen, das Griffchen mit
Daumen und Mittelfinger halten und den Zeigefinger auf dem Kopf des Fahrstiftes ruhen las-
sen. Den Fahrstift, geführt vom Griffchen, im Uhrzeigersinn entlang des Randes der Figur
bewegen und nach Beendigung des Umfahrens, den Messwert am Zählwerk ablesen.
2. (optional): Sollten die Genauigkeitsansprüche hoch sein, so empfiehlt es sich obendrein, eine
zweite Umfahrung in symmetrischer Aufstellung durchzuführen und das Mittel zu nehmen.
3. Für die Berechnung des Flächeninhaltes ( �� = Ablesung am Zählwerk) nutze man ab-
schließend ��� � = �� ∙ ���� = �� ∙ � .
4. (optional): Messvorgang bei Bedarf wiederholen bzw. weitere Messvorgänge einleiten.
Nach der Messung:
Den Arbeitsplatz beräumen und das Planimeter in das Etui in vorgesehener Weise einpacken. Anleitun-
gen zur Pflege des Instrumentes entnehme man der Gebrauchsanweisung des Herstellers.
3.5 Eine abschließende Durchführung
Zur Erlangung eines ersten Eindrucks der Handhabung des Ott-Planimeters wurde die Vermessung vom
Freiberger Mittelteich intendiert, welcher, nach Angaben des Internets, einen Flächeninhalt von 4 ha
hat. Hierzu wurde ein Noniuswert von gewählt, der Fahrarm entsprechend auf , einge-
stellt, das Planimeter aufgebaut und die Messrolle zurückgesetzt.
Abb. 13:Vorbereitetes Planimeter
Funktionsprinzip von Planimetern Anwendung
14
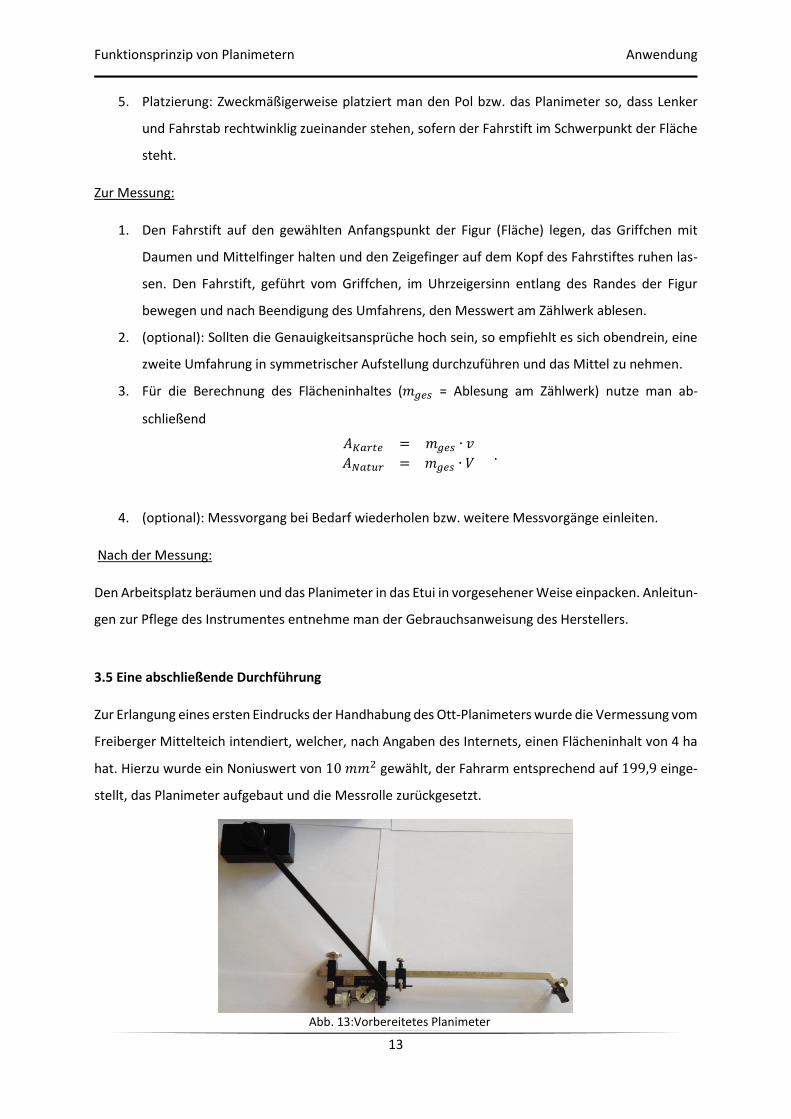
Der Fahrstift wurde nun auf die Startposition
gemäß Abbildung 14 gesetzt und im Uhrzei-
gersinn entlang des Randes des Mittelteichs
geführt. Der Kartenmaßstab ist � = 5 .
Das Ableseergebnis an der Messrolle betrug
. Dies entspricht ∙ , � = , �
auf der Karte. Verrechnet mit dem Karten-
maßstab � folgt: ��� = , � ∙ = , ℎ�. Dieses Ergebnis liegt nahe beim recherchier-
ten Wert. Es ist festzustellen, dass die Hand-
habung viel Übung erfordert, da das Messer-
gebnis wesentlich empfindlich davon ab-
hängt. Dazu bedenke man folgendes:
Die Wahl von � = = , � bedeutet, dass ein Noniusteilstrich, also Ausschlag am
Zählwerk, bereits , � umfahrene Fläche auf der Karte und ferner bereits , ℎ� = � in der
Natur entsprechen und somit ein, grob gesprochen, relativ großer Sprung ist. Eine Ablesung von ,
entsprechend , ℎ�, wäre optimal gewesen. Dass dieser Unterschied u.U. schwierig zu erfassen ist,
hat die praktische Ausübung gezeigt. Denn das Ablesen der Noniusskala ist ohne Lupe schwierig und
mit Mühsal verbunden. Außerdem ist aus der mechanischen Messtechnik bekannt, dass schiefes
Ablesen einer Skala zum Parallaxefehler führt. Auch könnten Fehler bei der Fahrstabeinstellung dazu
geführt haben. Nichtsdestotrotz lässt sich abschließend festhalten, dass das erhaltene Ergebnis für
einen Versuch mit ungeübter Hand vertretbar ist und vielmehr zeigt, dass das Planimeter ein zuver-
lässiges Messinstrument darstellt.
Abb. 14: Vermessung des Freiberger Mittelteichs
Funktionsprinzip von Planimetern Anhang
15
Anhang
A Einstelltabelle
Abb. A: Einstelltabelle des Herstellers für das Ott-Planimeter
Funktionsprinzip von Planimetern Anhang
16
B.1 Beweis zur Proportionalität des Messradweges zum Flächeninhalt
Zu zeigen ist: Der zurückgelegte Weg des Messrades ist proportional zum Flächeninhalt der zu umfah-
renden Fläche.
Vorbetrachtungen:
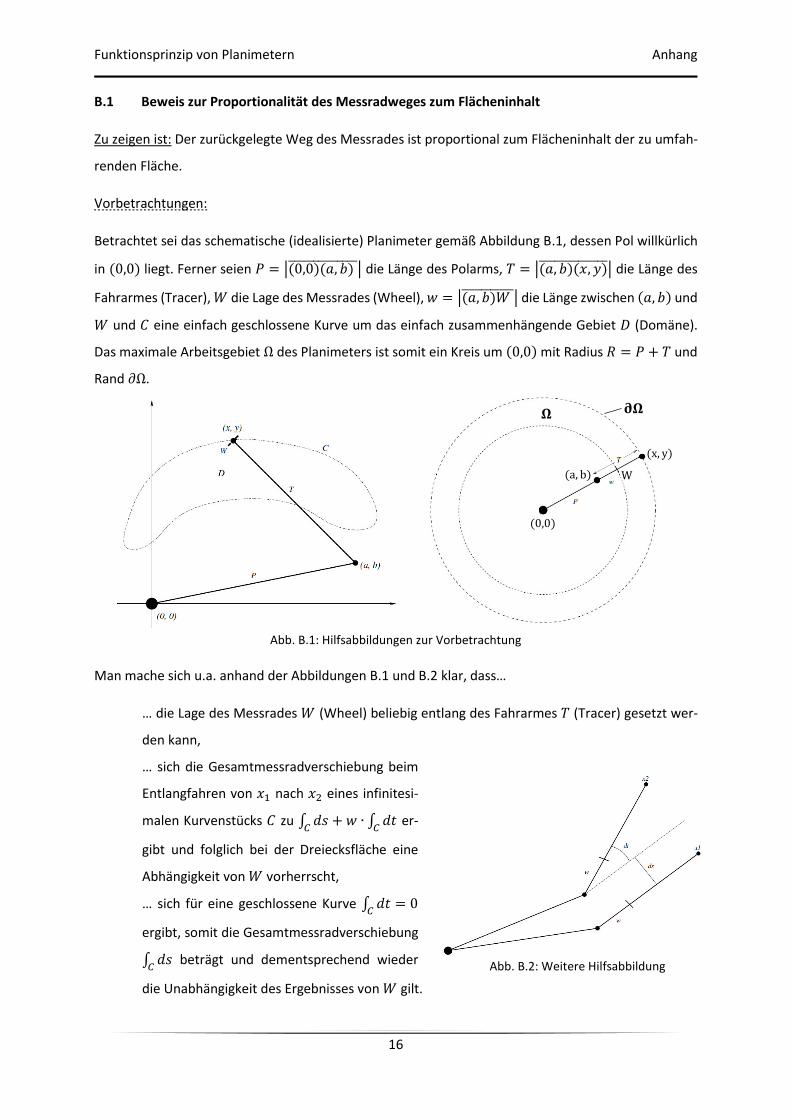
Betrachtet sei das schematische (idealisierte) Planimeter gemäß Abbildung B.1, dessen Pol willkürlich
in , liegt. Ferner seien = | , , | die Länge des Polarms, � = | , , | die Länge des
Fahrarmes (Tracer), � die Lage des Messrades (Wheel), = | , � | die Länge zwischen , und � und eine einfach geschlossene Kurve um das einfach zusammenhängende Gebiet (Domäne).
Das maximale Arbeitsgebiet Ω des Planimeters ist somit ein Kreis um , mit Radius = + � und
Rand Ω.
Abb. B.1: Hilfsabbildungen zur Vorbetrachtung
Man mache sich u.a. anhand der Abbildungen B.1 und B.2 klar, dass…
… die Lage des Messrades � (Wheel) beliebig entlang des Fahrarmes � (Tracer) gesetzt wer-
den kann,
… sich die Gesamtmessradverschiebung beim
Entlangfahren von nach eines infinitesi-
malen Kurvenstücks zu + ∙ er-
gibt und folglich bei der Dreiecksfläche eine
Abhängigkeit von � vorherrscht,
… sich für eine geschlossene Kurve =
ergibt, somit die Gesamtmessradverschiebung
beträgt und dementsprechend wieder
die Unabhängigkeit des Ergebnisses von � gilt.
� ��
,
a, b
x, y W
Abb. B.2: Weitere Hilfsabbildung

Funktionsprinzip von Planimetern Anhang
17
Zum Beweis:
Mittels obiger Notationen sei nun ein von umrandetes Gebiet in Ω betrachtet, welches vom Plani-
meter vollständig erfassbar ist, d.h. Ω = = . Motiviert sei der Satz von Green:
Sei ein einfach zusammenhängendes Gebiet umrandet von einer einfach geschlossenen
Kurve = . Seien ferner , , , � in einer Umgebung von . Dann gilt:
∫ + = ∫ ∫ ( − ) .
Benötigte Funktionen , , , � :
Seien �� = � ∙ − − , � = � ∙ − − normierte, mathematisch positiv orientierte
Vektoren, wobei � ⊥ � und � ⊥ ∥ �. Mit � = ergibt sich die Messradverschiebung � zu � = � ∙ = �, . Es handelt sich also um ein Kurvenintegral 2. Art auf dem Planimetervek-
torfeld � längs , d.h. in jedem Kurvenpunkt wird das Skalarprodukt zwischen dem Feldvektor �
und dem Geschwindigkeitsvektor = gebildet, was Abbildung B.3 illustrieren möge.
Demnach folgt:
� = ∫� ∙ = ∫ ⟨� ∙ −− , ( )⟩ = � ∙ ∫ − + − , wobei festzuhalten ist, dass die Koordinaten , funktionell von den Koordinaten , abhängig
sind. Dies bedeutet, dass und in obiger Formel nicht als Konstanten, sondern als Funktionen ,
x a
y
b
−
−
� ∙ �
�
�
�
� x+, +
−, − dx dy dr
dr �
x, y
Abb. B.3: Der Vektor bzw. das Planimetervektorfeld �

Funktionsprinzip von Planimetern Anhang
18
bzw. , zu verstehen sind, wobei diese Schreibweise zwecks besserer Lesbarkeit nachfolgend fast
ausschließlich unterdrückt wird. Dies im Kontext mit dem Satz von Green folgt:
� = � ∙ ∫ −⏟ + −⏟ = � ∙ ∫ ∫ − − − =����� � ∙ ∫ ∫ ( − − ( − )) = � ∙ ∫ ∫ ( − ( + )) ⏟ �
. Somit gelten , = , − und , = − , . Ferner ist ersichtlich, dass die Propor-
tionalität des Messradweges zur Fläche sofort folgt, falls �� + �� = gilt, denn dann ist � = und � ∙ � = � = .
Nachweis:
Die Koordinaten , erfüllen stets
� + = ,�� − + − = � .
Leitet man nacheinander die Gleichungen nach bzw. nach ab1, so erhält man folgendes Gleichungs-
system mit den vier Gleichungen
� + = ,�� + = − , (� + = ,
(�� + = − ,
für die vier Unbekannten �� , �� , �� und
�� . Umstellen von � nach �� , (� nach
�� , �� nach ��
und (�� nach �� mit Einsetzen von �� in � und (� in (�� ergibt
+ = − −− + −− = −− = , sofern , ≠ � , für � beliebig. Die Gleichheit tritt nur ein, wenn , Ω, d.h. und � bilden
eine Linie (� = �), oder , = , , d.h. und � liegen deckungsgleich übereinander � = . In
1 Bspw.:
�( 2+ 2� =��� � 2� + � 2� = ∙ �� + �� = � 2� = mittels Kettenregel � und = .

Funktionsprinzip von Planimetern Anhang
19
diesen Fällen, sprich = � und = � tritt die Division durch Null auf und die Ableitung existiert in
dem Punkt nicht. Dies heißt schlussendlich:
Ist ein vollständig erfassbares Gebiet ( Ω) und gilt , , so ist das Planimetervektorfeld �� = � − − � stetig differenzierbar auf und es folgt nach dem Satz von Green
� ∙ � = ∫ ∫ = �
und damit die Proportionalität der zurückgelegten Weges des Messrades zum Flächeninhalt der zu um-
fahrenden Fläche2.
#
2 Beachte: , Ω muss nicht gefordert werden, da Ω gilt und Ω offene Menge ist. D.h. dieser Fall tritt
durch die smarte Wahl der Definitionen garnicht erst ein.
Funktionsprinzip von Planimetern Anhang
20
B.2 Beweis zum Messfehler (Grundkreis) bei der Messung mit Pol innen
Zu zeigen ist: Bei der Messung mit Pol innen tritt ein Fehler in Höhe des Grundkreises auf.
Vorbetrachtung:
Wird das Planimeter in die zu ermittelnde Fläche gelegt (o.B.d.A. sei der Pol in , ), so folgt mit den
Erkenntnissen aus dem vorherigen Beweis, dass der Satz von Green nicht mehr direkt angewandt wer-
den kann.
Zum Beweis:
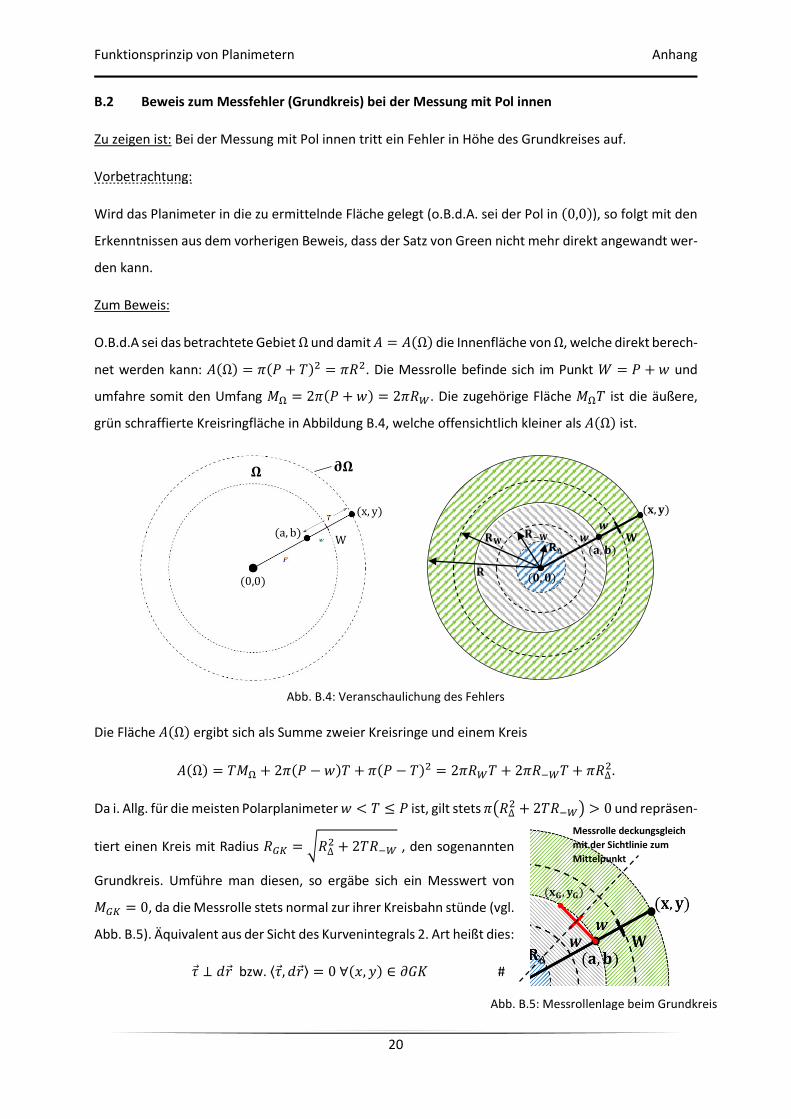
O.B.d.A sei das betrachtete Gebiet Ω und damit � = � Ω die Innenfläche von Ω, welche direkt berech-
net werden kann: � Ω = + � = . Die Messrolle befinde sich im Punkt � = + und
umfahre somit den Umfang �Ω = + = �. Die zugehörige Fläche �Ω� ist die äußere,
grün schraffierte Kreisringfläche in Abbildung B.4, welche offensichtlich kleiner als � Ω ist.
Abb. B.4: Veranschaulichung des Fehlers
Die Fläche � Ω ergibt sich als Summe zweier Kreisringe und einem Kreis � Ω = ��Ω + − � + − � = �� + −�� + ∆ . Da i. Allg. für die meisten Polarplanimeter < � ≤ ist, gilt stets ( ∆ + � −� > und repräsen-
tiert einen Kreis mit Radius = √ ∆ + � −� , den sogenannten
Grundkreis. Umführe man diesen, so ergäbe sich ein Messwert von � = , da die Messrolle stets normal zur ihrer Kreisbahn stünde (vgl.
Abb. B.5). Äquivalent aus der Sicht des Kurvenintegrals 2. Art heißt dies:
� ⊥ bzw. �, = ∀ , �� #
� ��
,
a, b
x, y W � � � ,
,
�, � �
�� �−� �∆
�, �
Abb. B.5: Messrollenlage beim Grundkreis
Messrolle deckungsgleich
mit der Sichtlinie zum
Mittelpunkt
Funktionsprinzip von Planimetern Anhang
21
B.3 Beweis zur Elimination des Messfehlers durch den Grundkreis
Zu zeigen ist: Eine Messung mit Pol innen ist in eine Messung mit Pol außen überführbar, obwohl sich
das Planimeter bzw. der Pol örtlich innerhalb der Fläche befindet. (In anderen Worten: Der Messfehler
des Grundkreises wird eliminiert.)
Vorbetrachtung:
Aus den vorhergehenden Beweisen resultiert die Gültigkeit des Satzes von Green, sofern der Punkt , nicht in dem zu messenden Gebiet liegt und die Existenz des Messfehlers in Form eines Grund-
kreises mit speziellem Radius, falls dem doch so ist.
Zum Beweis:
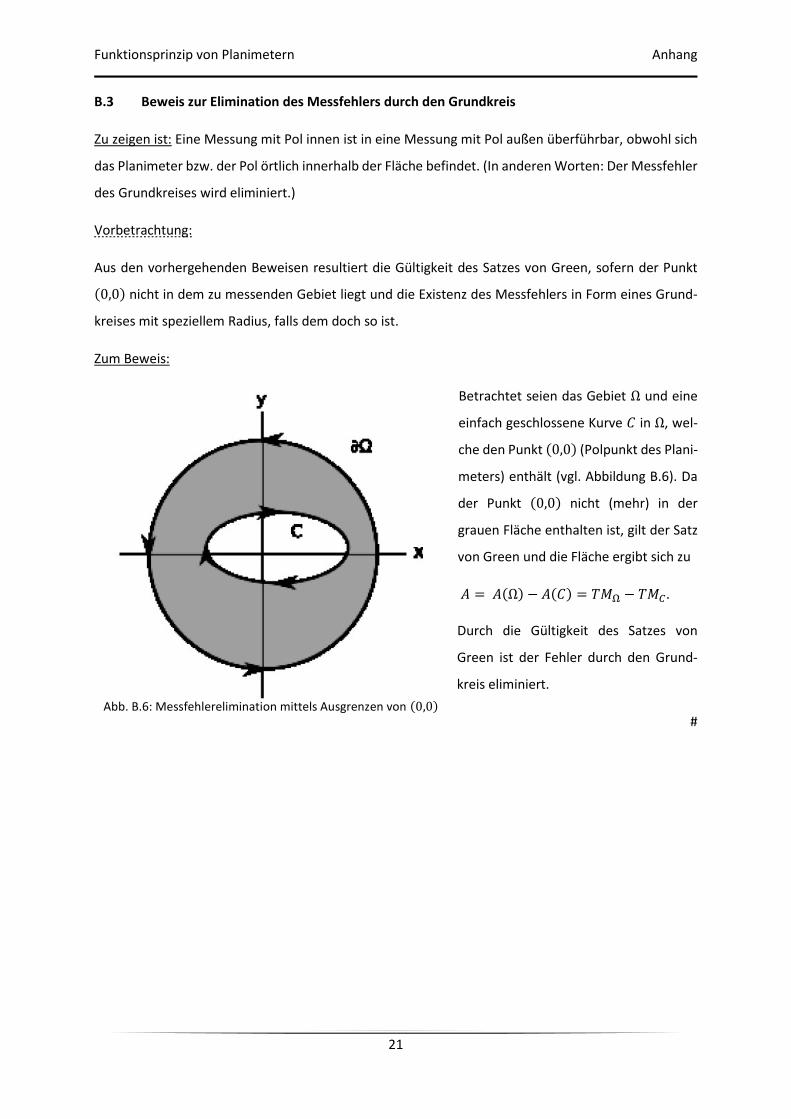
Betrachtet seien das Gebiet Ω und eine
einfach geschlossene Kurve in Ω, wel-
che den Punkt , (Polpunkt des Plani-
meters) enthält (vgl. Abbildung B.6). Da
der Punkt , nicht (mehr) in der
grauen Fläche enthalten ist, gilt der Satz
von Green und die Fläche ergibt sich zu
� = � Ω − � = ��Ω − �� . Durch die Gültigkeit des Satzes von
Green ist der Fehler durch den Grund-
kreis eliminiert.
#
Abb. B.6: Messfehlerelimination mittels Ausgrenzen von ,
Funktionsprinzip von Planimetern Anhang
22
B.4 Beweis zur Filterung der Achsenschiefe des Messrades bei der Kompensationsmessung
Zu zeigen ist: Das Messergebnis einer Kompensationsmessung bleibt von der Achsenschiefe unberührt.
Vorbetrachtung:
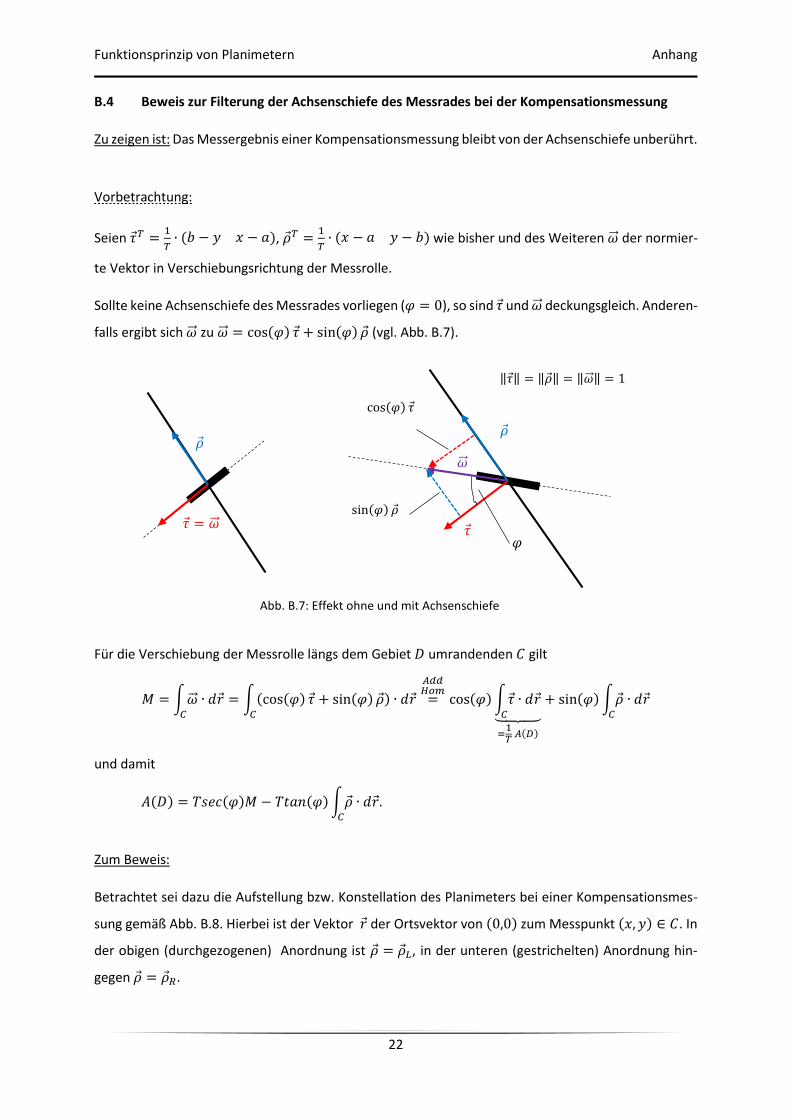
Seien �� = � ∙ − − , � = � ∙ − − wie bisher und des Weiteren der normier-
te Vektor in Verschiebungsrichtung der Messrolle.
Sollte keine Achsenschiefe des Messrades vorliegen (� = ), so sind � und deckungsgleich. Anderen-
falls ergibt sich zu = cos � � + sin � (vgl. Abb. B.7).
Für die Verschiebung der Messrolle längs dem Gebiet umrandenden gilt
� = ∫ ∙ = ∫ cos � � + sin � ∙ =����� cos � ∫� ∙ ⏟ =� �+ sin � ∫ ∙
und damit � = � � � − � � ∫ ∙ .
Zum Beweis:
Betrachtet sei dazu die Aufstellung bzw. Konstellation des Planimeters bei einer Kompensationsmes-
sung gemäß Abb. B.8. Hierbei ist der Vektor der Ortsvektor von , zum Messpunkt , . In
der obigen (durchgezogenen) Anordnung ist = , in der unteren (gestrichelten) Anordnung hin-
gegen = .
� =
�
�
cos � �
sin �
� = = =
Abb. B.7: Effekt ohne und mit Achsenschiefe

Funktionsprinzip von Planimetern Anhang
23
Das Ergebnis � der (arithm. gemittelten) Kompensationsmessung lautet
� = [� + � ] = [� � � − � � ∫ ∙ + � � � − � � ∫ ∙ ]
= [ � � � + � − � � ∫ ∙ + ∫ ∙ ⏟ ∗ ]
.
Zeige ∗ = :
Der Vektor ist aus der Summe der Vektoren und gebildet und verläuft parallel zum Vektor .
Obendrein ist = + nur abhängig von = = √ + , also = + = .
Da das Kreuzprodukt (beachte: ist konstanter Wert)
rot = × = × =(
) × = − ) =
ist, folgt die Wirbelfreiheit des Vektorfeldes und demnach direkt ∗ = ∙ = für jede
einfach geschlossene Kurve . Die übrige Abweichung � wird durch einen anschließenden Kali-
bierungsprozess mittels Kontrolllineal eliminiert. #
Abb. B.8: Schematische Kompensationsmessung
= =
Funktionsprinzip von Planimetern Literatur- und Quellverzeichnis
24
Literatur- und Quellverzeichnis
Literatur: [ ] Ott, A.: Gebrauchsanweisung für das Ott-Polarplanimeter.
(Auch unter: anklick-bar.de/matheprojekt/planimeter-ott.pdf)
Internetquellen: [ ] https://de.wikipedia.org/wiki/Planimeter [ ] https://de.wikipedia.org/wiki/Jakob_Amsler-Laffon [ ] https://commons.wikimedia.org/wiki/File:Polarplanimeter-30-08-2009-055.png?uselang=de [ ] https://commons.wikimedia.org/wiki/File:Polarplanimeter_01.JPG?uselang=de [ ] http://bluemich.net/rechner/rmplanimeter.htm [ ] http://www.math.ucsd.edu/~jeggers/Resources/planimeter_slides.pdf