GEOINFORMATIONSSEMINAR Positionsabgleich mit der Karte Map Matching Techniken Seminarbeitrag von:...
36
GEOINFORMATIONSSEMINAR Positionsabgleich mit der Karte Map Matching Techniken Seminarbeitrag von: Michael Homoet
-
Upload
hansl-thomas -
Category
Documents
-
view
214 -
download
0
Transcript of GEOINFORMATIONSSEMINAR Positionsabgleich mit der Karte Map Matching Techniken Seminarbeitrag von:...
GEOINFORMATIONSSEMINAR
Positionsabgleich mit der KarteMap Matching Techniken
Seminarbeitrag von: Michael Homoet

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 2
GliederungGliederung
1. Motivation
2. Anforderungen / Fahrzeugnavigation
3. Karteneinpassung mit Profilen1.Einfache Zuordnung mit Kreuzkorrelation2.Rekursive Parameterschätzung (Kalman-Filter)
4. Karteneinpassung auf Koordinatenebene1.Translationseinpassung2.Ebene Ähnlichkeitstransformation3.Affintransformation
5. Beurteilung
_____________

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 3
MotivationMotivation
• Probleme der Positionsbestimmung durch die Anwendung von Algorithmen ausgleichen
• Kontinuierliche sehr genaue Nachführung der Bewegung
Bisher kein zuverlässiges System in Innenstädten (Problem der Abschattung und anderen Störeinflüssen)
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 4
Map MatchingMap Matching
Definition:
Map Matching bezeichnet den logischen Bezug zwischen der eigenen Position und der digitalen Karte, auch als Karteneinpassung oder Kartenzuordnung bezeichnet.
Einflussfaktoren:
- Güte der Karte (Qualität der Digitalisierung)- Genauigkeit der Positionsbestimmung
( Kompensation von Fehlern)- Entfernung zum Graph

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 5
GrundlagenGrundlagen
• Strategien zum Map Matching existieren für die FahrzeugnavigationAnwendung für die Füßgänger-Navigation ist noch
zu prüfen
• Koordinaten werden mittels Sensoren ermittelt (Ortung)
• Digitale Karte (meist in Form von: Geographic Data File GDF) dient als Grundlage
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 6
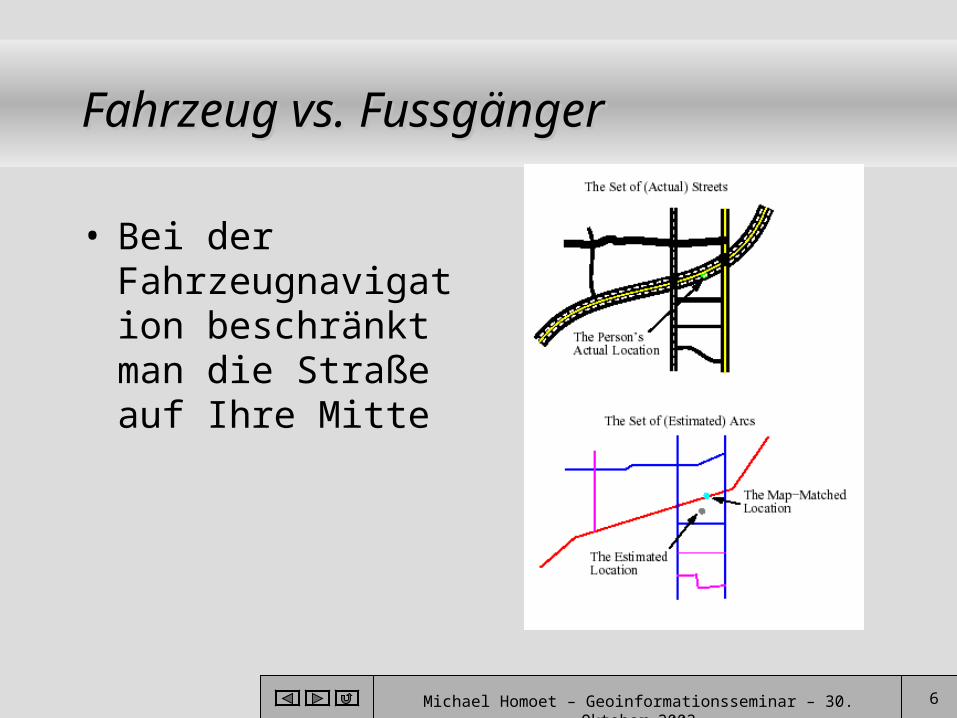
Fahrzeug vs. FussgängerFahrzeug vs. Fussgänger
• Bei der Fahrzeugnavigation beschränkt man die Straße auf Ihre Mitte

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 7
Fahrzeug vs. FussgängerFahrzeug vs. Fussgänger
Im Unterschied zur Fahrzeugnavigation lässt sich die Position nicht auf die Straßenmittellinie begrenzen:
1. Personen können in Gebäude gehen
2. Der Überquerungs-vorgang ist sehr komplex und nicht zu verallgemeinern
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 8
AllgemeinesAllgemeines
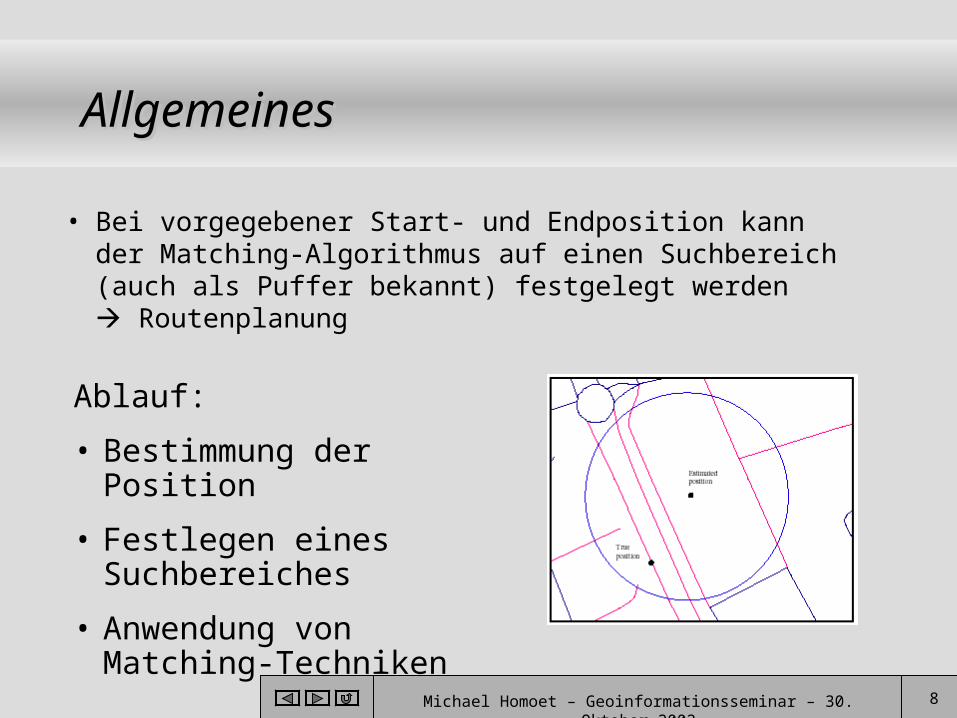
• Bei vorgegebener Start- und Endposition kann der Matching-Algorithmus auf einen Suchbereich (auch als Puffer bekannt) festgelegt werden Routenplanung
Ablauf:
• Bestimmung der Position
• Festlegen eines Suchbereiches
• Anwendung von Matching-Techniken

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 9
Information über die HistorieInformation über die Historie
• Ist der Startpunkt oder der letzte Punkt bekannt, kann der Suchbereich eingegrenzt werden
• Eine Fehlzuordnung kann damit ein-gegrenzt werden
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 10
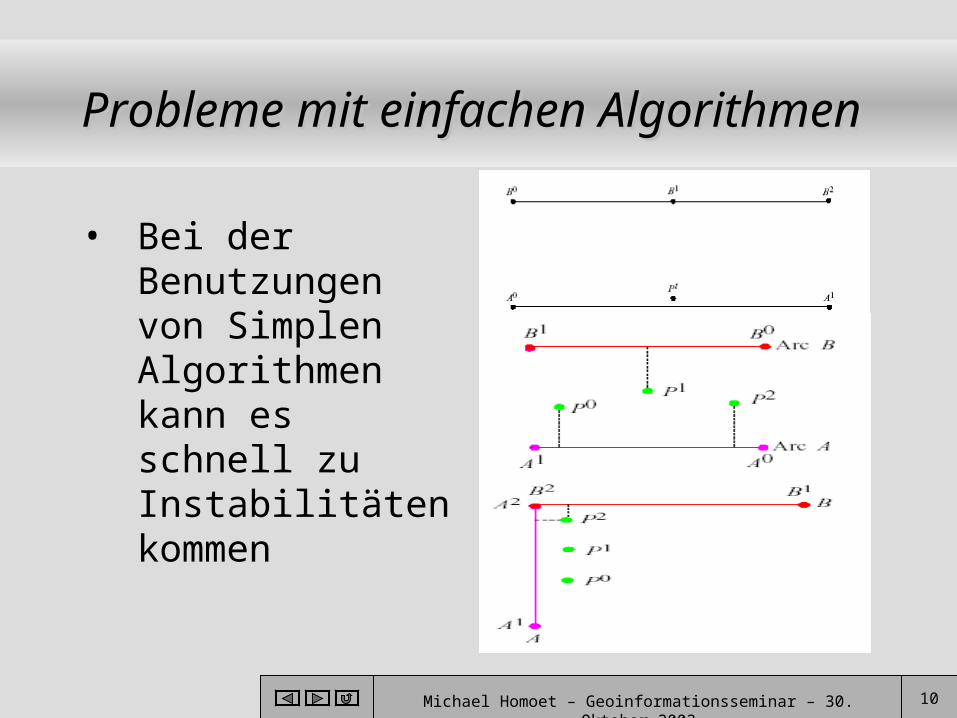
Probleme mit einfachen AlgorithmenProbleme mit einfachen Algorithmen
• Bei der Benutzungen von Simplen Algorithmen kann es schnell zu Instabilitäten kommen
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 11
Matching TechnikenMatching Techniken
Beschränkung auf zwei wesentliche Techniken:
• Karteneinpassung mit Profilen
• Karteneinpassung auf Koordinatenebene

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 12
Karteneinpassung mit ProfilenKarteneinpassung mit Profilen
• Einfache Zuordnung mit Kreuzkorrelation• Zuordnung mit kleinsten Verbesserungsquadraten• Rekursive Parameterschätzung (Kalman Filter)

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 13
Einfache Zuordnung mit KreuzkorrelationEinfache Zuordnung mit Kreuzkorrelation
• Wird auch eingesetzt um Näherungswerte abzuleiten
• Zwei Signale werden multipliziert bis man ein Maximum erkennt
• Normierung und Abzug des Mittelwertes führen zu einer besseren Detektion

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 14
Einfache Zuordnung mit KreuzkorrelationEinfache Zuordnung mit Kreuzkorrelation
Normierung:
oo
ooj
ibiajibjaic )()()()()( Zu den Formeln:a(i) und b(i) entsprechen den Soll- und Ist-Krümmungen oder Richtungswinkeln
oo
ooib
oo
ooia
ba
ibE
iaE
ibiaEE
ic
)²(
)²(
)()(1)(
Liegen zwei identische Profile vor, so ist die Kreuzkorrelation identisch null und springt bei i=m auf ihren Maximalwert
Soll Ist
Verschiebung

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 15
Rekursive ParameterschätzungRekursive Parameterschätzung
• Praktische Anwendung des Kalman-Filters
• Erste Gruppe von Beobachtungen wird auf herkömmliche Weise ausgeglichen
• Von zusätzliche Beobachtungen (weiteren Epochen) werden die Parameter genauso geschätzt als wären alle Beobachtungen in einem Guss ausgeglichen worden weniger Rechenaufwand
• Ergebnis entspricht dem Ausgleich in einem Rutsch
Beim Eintreffen einer neuen Messung lassen sich die Unbekannten neu berechnen ohne die zurückliegende Messung zu benutzen.

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 16
Rekursive ParameterschätzungRekursive Parameterschätzung
Mathematisches Modell:• Zwischen den Bogenlängen: bibi uxmy
)()()( 21 xnbyax ii • Zwischen den Krümmungen:)()()( 21 xnbuxmax bibi
VerschiebungMaßstab
VerschiebungMaßstabKrümmung
nichtlineare Beobachtungsgleichung:^^
1 )()()( byfaxvx iii

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 17
Rekursive ParameterschätzungRekursive Parameterschätzung
Daraus erhält man folgende Vektoren fürs GMM:
dudmdbda
x ii xyaxyayA )(',)(',1),( 02002002
00201 )()( byaxl i
Diese können entsprechend angewendet werden:
PlAPAAx TT 1)(
Entsteht aus Linearisierung

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 18
Rekursive ParameterschätzungRekursive Parameterschätzung
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 19
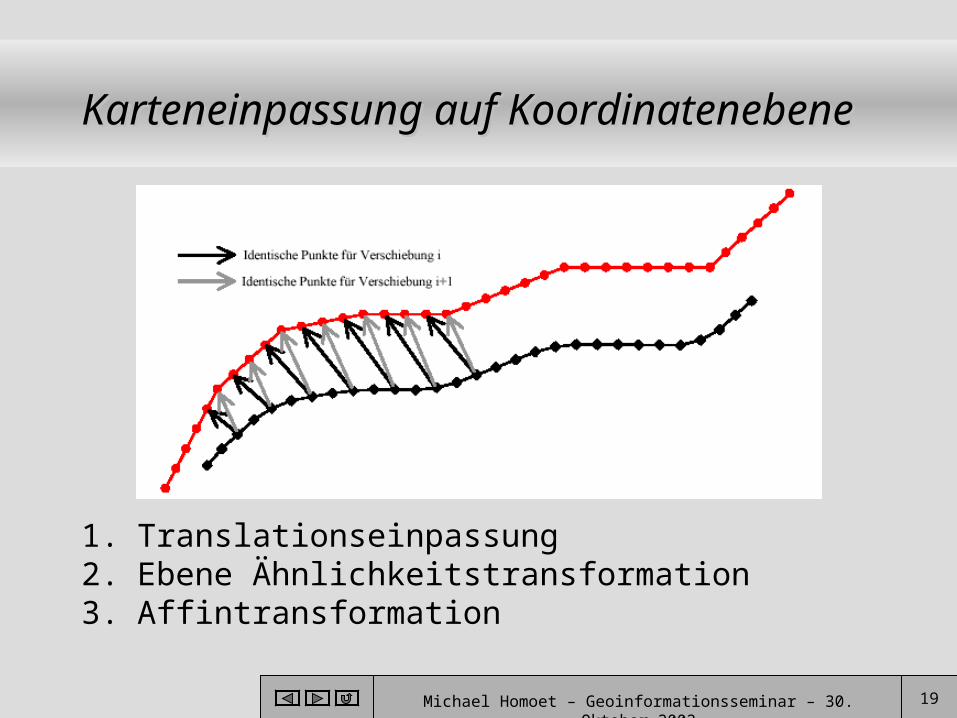
Karteneinpassung auf KoordinatenebeneKarteneinpassung auf Koordinatenebene
1. Translationseinpassung2. Ebene Ähnlichkeitstransformation3. Affintransformation
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 20
Karteneinpassung auf KoordinatenebeneKarteneinpassung auf KoordinatenebeneAllgemeinesAllgemeines
• Soll- und Ist- Messstrecke werden in konstante Linienelemente geteilt (z.B. alle 5 m)
• m Meßpunkten werden m Punkte der Vergleichstrasse zugeordnet und so lange verschoben bis alle Punkte übereinstimmen
• Bei Alternativtrassen ist dies für jede Trasse zu rechnen und jeweils auf Plausibilität zu prüfen
• Es wird die Trasse mit der besten Genauigkeit aus der Ausgleichung gewählt

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 21
TranslationeinpassungTranslationeinpassung
• nur zwei Parameter in Form eines Vektors
• nur für genaue Messungen geeignet
es werden keine systematischen Fehler zugelassen bzw. berücksichtigt

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 22
Ebene ÄhnlichkeitstransformationEbene Ähnlichkeitstransformation
• neben der Translation werden Rotation und Maßstab mitberücksichtigt
• entspricht der Netzeinpassung nach Helmert
• es werden beide Systeme auf den Schwerpunkt umgerechnet um numerisch günstige Gleichungen zu erhalten

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 23
Ebene ÄhnlichkeitstransformationEbene Ähnlichkeitstransformation
Notwendige Formeln:

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 24
Ebene ÄhnlichkeitstransformationEbene Ähnlichkeitstransformation
zur Beurteilung wird Helmert‘sche Punktfehler berechnet:

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 25
AffintransformationAffintransformation
• es können Translation, Rotation, Scherungen, Spiegelungen und projektive Abbildungen erfasst werden
• langgestreckte Trassen können leicht durch die vielen Freiheitsgrade zu einer falschen Zuordnung führen

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 26
AffintransformationAffintransformation

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 27
Beurteilung / EinschätzungBeurteilung / Einschätzung
• Zu den Algorithmen der Fahrzeug-navigation müssen noch viele Sonderfälle modelliert werden
• Aus Erfahrungsberichten scheint die Zuordnung mit Profilen erfolgreicher
Fazit: Es liegt noch viel Arbeit vor uns!

Vielen Dank für Eure Vielen Dank für Eure AufmerksamkeitAufmerksamkeit
Noch Fragen???
Michael Homoet

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 29
LiteraturLiteratur
1. Czommer, R. (2000): Leistungsfähigkeit fahrzeugautonomer Ortungsverfahren auf der Basis von Map-Matching-Techniken, Universität Stuttgart
2. Bernstein, D. and Kornhauser, A. (1996): An introduction to Map matching for personal navigation assistants, The Transportation Research Board – 77th Annual Meeting, Washington, D.C.
3. Rouller, J., Perrottet, D., Ladetto, Q. and Merminod, B.: Faciliter le déplacement des aveugles avec une carte numérique et une interface vocale, Ecole Polytechnique Fédérale Lausanne (EPFL)
4. Taylor, G., Uff, J., and Al-Hamadani, A.: GPS positioning using map-matching algrorithms drive restiction information and road network connectivity, NavSat 2001, Nice, France
5. Taylor, G., and Blewitt, G.: Virtual Differential GPS & Road Reduction Filtering by Map Matching, in Proceeding of ION’99, Twelfth Internation Technical Meeting of Satellite Division of the Institue of navigation, Nashville, Tennessee
6. Mitschrift Vorlesung Statistik III bei Prof. Schuh (2002), Universität Bonn
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 30
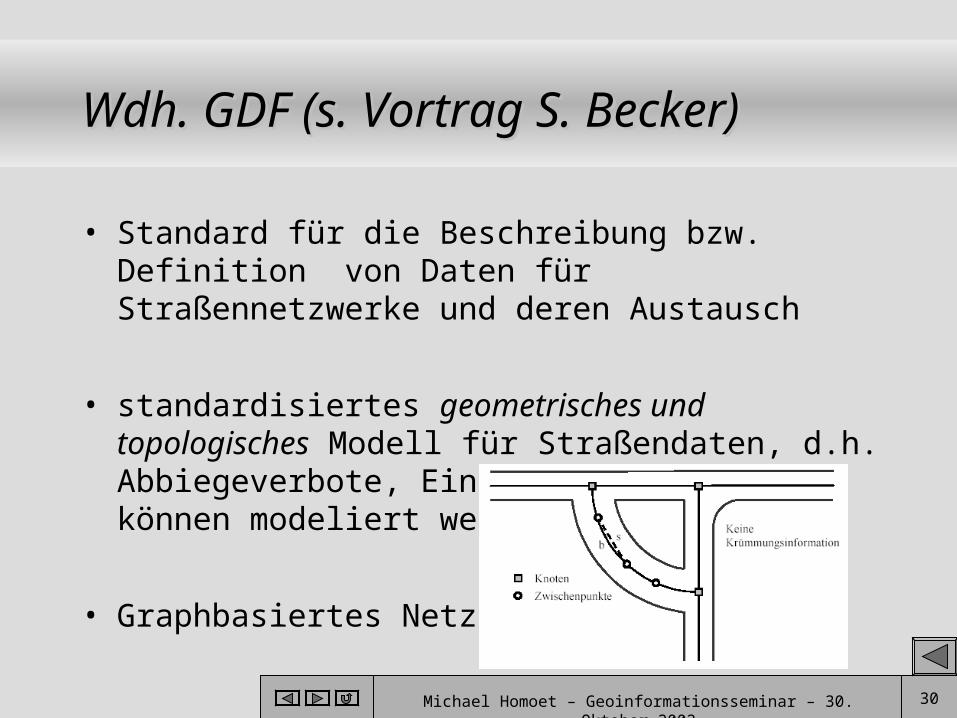
Wdh. GDF (s. Vortrag S. Becker)Wdh. GDF (s. Vortrag S. Becker)
• Standard für die Beschreibung bzw. Definition von Daten für Straßennetzwerke und deren Austausch
• standardisiertes geometrisches und topologisches Modell für Straßendaten, d.h. Abbiegeverbote, Einbahnstrassen etc. können modeliert werden
• Graphbasiertes Netz

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 31

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 32

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 33
Wdh. Kalman Filter (vgl. Vorlesung Statistik III)Wdh. Kalman Filter (vgl. Vorlesung Statistik III)
}{)(}{
:_var
)(
:_
)}{(}{
:___
}{}{}{
:Pr
1|
~
|
~
1|
~
1|
~
|
~
11|
~
1|1
1|11|
~
1|1
~
1|
~
KKKKKK
KKKKKKKKK
TKKKKK
TKKKK
KT
KKKKKK
KKKKK
AG
updateinazKo
AlG
updateParameter
AAAG
MatrixGainderBestimmung
w
chrittädiktionss
xxx
xx
K=K+1

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 34
Krümmung und BogenlängeKrümmung und Bogenlänge

Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 35
Einfluss der IntervalllängeEinfluss der Intervalllänge
Michael Homoet – Geoinformationsseminar – 30. Oktober 2002 36
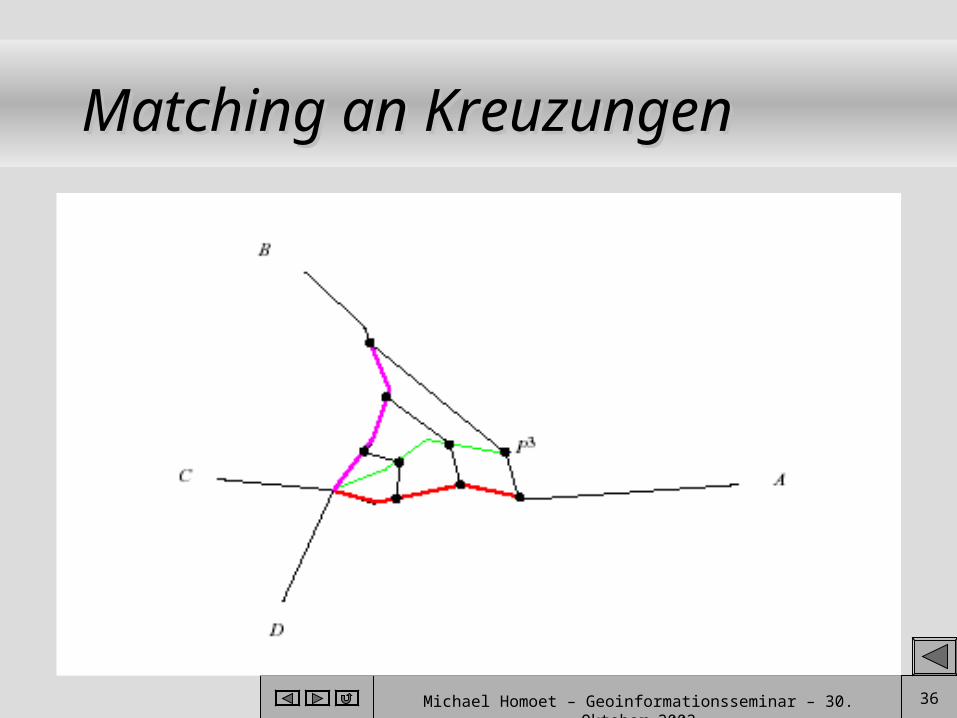
Matching an KreuzungenMatching an Kreuzungen