Grundlagen der mathematischen Modellierung · Grundlagen der Mathematischen Modellierung Skript zur...
129
Grundlagen der Mathematischen Modellierung Skript zur Vorlesung f¨ ur Studierende der Masterstudieng¨ ange Marine Umweltwissenschaften und Umweltmodellierung an der Carl von Ossietzky Universit¨ at Oldenburg im Wintersemester 2009/2010 Cora Kohlmeier 25. Januar 2010
Transcript of Grundlagen der mathematischen Modellierung · Grundlagen der Mathematischen Modellierung Skript zur...

Grundlagen
der Mathematischen Modellierung
Skript zur Vorlesung fur Studierende der Masterstudiengange
Marine Umweltwissenschaften und Umweltmodellierung
an der Carl von Ossietzky Universitat Oldenburg
im Wintersemester 2009/2010
Cora Kohlmeier
25. Januar 2010

GMM WS2009/2010
Inhaltsverzeichnis
1 Einfuhrung 1
1.1 Was ist Modellbildung – mathematische Modellierung . . . . . . 1
1.2 Was ist ein Modell ? . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2.1 Merkmale von Modellen . . . . . . . . . . . . . . . . . . 2
1.2.2 Arten von Modellen . . . . . . . . . . . . . . . . . . . . . 2
1.2.3 Modell-Simulation . . . . . . . . . . . . . . . . . . . . . 2
2 Empirische Modelle 3
2.1 Parameteranpassung . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Lineare Regression . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.1 Methode der kleinsten Quadrate . . . . . . . . . . . . . . 7
2.3 Logarithmischer Zusammenhang am Beispiel der Karzinogenese 9
2.4 Verallgemeinerung der linearen Regression ersten Grades . . . . 11
2.4.1 Fourieranalyse . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Diskrete Modelle 13
3.1 Bakterienwachstum . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Fibonacci und die Kaninchen . . . . . . . . . . . . . . . . . . . 20
3.2.1 Schritte beim Aufstellen eines Modells . . . . . . . . . . 21
3.2.2 Formalisierung des Kaninchenmodells . . . . . . . . . . . 21
3.2.3 Losung/Simulation des Systems . . . . . . . . . . . . . . 23
3.3 Bienen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 Zusammenfassung der Wachstumstypen . . . . . . . . . . . . . . 25
3.5 Diskrete 2D-Modelle . . . . . . . . . . . . . . . . . . . . . . . . 26
3.5.1 Fibonacci und der goldene Schnitt . . . . . . . . . . . . . 28
3.5.2 Uberlagerung von Losungen – Anfangswertproblem . . . 28
4 Aufstellen eines Modells 31
4.1 Verbale Beschreibung, Ziele . . . . . . . . . . . . . . . . . . . . 35
4.2 Zustandsvariable, Prozesse . . . . . . . . . . . . . . . . . . . . . 35
4.3 Randbedingungen, Antriebe . . . . . . . . . . . . . . . . . . . . 39
4.4 Prozessbeschreibungen . . . . . . . . . . . . . . . . . . . . . . . 41
4.5 Parameterliste und Parameterwerte . . . . . . . . . . . . . . . . 43
4.6 Programmierung, Simulation . . . . . . . . . . . . . . . . . . . . 47
3
5 Modellierung mit Differentialgleichungen 49
5.1 Die Wachstumsrate . . . . . . . . . . . . . . . . . . . . . . . . . 50
6 Systeme mit einer Variablen 51
6.1 Aufstellen einer DGL am Beispiel auslaufender Gefaße . . . . . 51
6.1.1 Der auslaufende Zylinder . . . . . . . . . . . . . . . . . . 51
6.1.2 Der auslaufende Trichter . . . . . . . . . . . . . . . . . . 52
6.2 Das logistische Wachstum . . . . . . . . . . . . . . . . . . . . . 55
6.3 Stationare Zustande . . . . . . . . . . . . . . . . . . . . . . . . 56
6.3.1 Stabilitat stationarer Zustande . . . . . . . . . . . . . . 56
6.4 Skalierung der logistischen Differentialgleichung . . . . . . . . . 59
6.5 Wachstums und Sterbeprozesse . . . . . . . . . . . . . . . . . . 60
7 Systeme mit 2 Variablen 63
7.1 Rauber-Beute-Modelle . . . . . . . . . . . . . . . . . . . . . . . 63
7.1.1 Stationare Zustande . . . . . . . . . . . . . . . . . . . . 65
7.1.2 Richtungsfeld . . . . . . . . . . . . . . . . . . . . . . . . 65
7.1.3 Stabilitat . . . . . . . . . . . . . . . . . . . . . . . . . . 66
7.1.4 Modellverbesserungen . . . . . . . . . . . . . . . . . . . 67
7.1.5 Das skalierte allgemeine Rauber-Beute-Modell . . . . . . 70
7.2 Verhalten 2-dimensionaler autonomer Systeme . . . . . . . . . . 71
7.2.1 Stationare Zustande . . . . . . . . . . . . . . . . . . . . 71
7.2.2 Geschlossene Bahnen . . . . . . . . . . . . . . . . . . . . 72
7.2.3 Satz von Poincare . . . . . . . . . . . . . . . . . . . . . . 72
7.2.4 Teilgleichgewichte (Isoklinen) . . . . . . . . . . . . . . . 72
7.2.5 Stabilitat stationarer Zustande . . . . . . . . . . . . . . 73
7.2.6 Stabilitat im Beispielsystem . . . . . . . . . . . . . . . . 75
8 Raumliche Systeme 79
8.1 Zellulare Automaten . . . . . . . . . . . . . . . . . . . . . . . . 79
8.1.1 Conway’s Life . . . . . . . . . . . . . . . . . . . . . . . . 79
8.1.2 Charakteristika von zelluaren Automaten . . . . . . . . . 81
8.1.3 Zirkularer Raum . . . . . . . . . . . . . . . . . . . . . . 81
8.1.4 Erweiterungen . . . . . . . . . . . . . . . . . . . . . . . . 82
8.2 Transportprozesse . . . . . . . . . . . . . . . . . . . . . . . . . . 82
8.2.1 Diffusion . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
8.2.2 Advektion (Transportgleichung) . . . . . . . . . . . . . . 85
8.2.3 2D Advektion . . . . . . . . . . . . . . . . . . . . . . . . 86
9 Ausbreitung von Borkenkafern (W. Ebenhoh) 87
9.1 Borkenkafer-Dynamik . . . . . . . . . . . . . . . . . . . . . . . . 87
9.2 Wald-Dynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
9.3 Raumliche Ausdehnung des Modells . . . . . . . . . . . . . . . . 93
9.3.1 Bekampfung . . . . . . . . . . . . . . . . . . . . . . . . . 93
10 Mathematische Epidemiemodelle 95
10.1 Das klassische Epidemiemodell nach Kermack & McKendrick . . 96
10.1.1 Stabilitatsanalyse des SIR-Modells . . . . . . . . . . . . 97
10.2 Masern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
10.2.1 Simulationsergebnis . . . . . . . . . . . . . . . . . . . . . 101
A Funktionen 103
A.1 Polynome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
A.2 Periodische Funktionen – Winkelfunktionen . . . . . . . . . . . 104
B Differential- und Integralrechnung 106
B.1 Kettenregel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
B.2 Substitutionsregel . . . . . . . . . . . . . . . . . . . . . . . . . . 107
B.3 Partielle Integration . . . . . . . . . . . . . . . . . . . . . . . . 108
C Differentialgleichungen 109
C.1 Numerisches Losen von Differentialgleichungen . . . . . . . . . . 113
C.1.1 Verbesserungen . . . . . . . . . . . . . . . . . . . . . . . 115
D Zweidimensionale lineare Abbildungen 115
E Stabilitatsanalyse autonomer Systeme (2D) 119
E.1 System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
E.2 Stationare Zustande . . . . . . . . . . . . . . . . . . . . . . . . 119
E.3 Geschlossene Bahnen . . . . . . . . . . . . . . . . . . . . . . . . 119
E.4 Satz von Poincare . . . . . . . . . . . . . . . . . . . . . . . . . . 119
E.5 Teilgleichgewichte . . . . . . . . . . . . . . . . . . . . . . . . . . 120
E.5.1 Stabilitat stationarer Zustande . . . . . . . . . . . . . . 120
E.6 Veranschaulichung des Systemverhaltens . . . . . . . . . . . . . 122

GMM WS2009/2010 Kapitel 1 – Einfuhrung
1 Einfuhrung
1.1 Was ist Modellbildung – mathematische Modellierung
Die mathematische Modellbildung oder mathematische Modellierung
• bezeichnet eine Methode
• ist nicht an eine spezielle Wissenschaft gebunden und wird in Naturwis-
senschaften und Technik und in der Okonomie angewendet
• versucht Teile der Realitat mathematisch begreifbar zu machen
(Natur)-Wissenschaft ist Modellierung: In der Wissenschaft werden Modelle
aufgestellt, um eine vorgebenen Fragestellung zu beantworten.
Jedes Modelliervorhaben braucht eine Leitfrage oder ein Ziel!
Dies ist wichtig, da die Art und die Komplexitat eines Modells von dieser
Zielvorgabe abhangt. Ein Modell soll einen Teilaspekt der Realitat so darstel-
len, dass es die Information liefern kann, die zur Beantwortung einer Leitfrage
notwendig ist.
Beispiel:
Ein Klimamodell taugt nicht zur Wettervorhersage, ein Regentropfenmodell
auch nicht.
1.2 Was ist ein Modell ?
Hierfur gibt es keine eindeutige Definition. Man konnte es wie folgt beschrei-
ben:
Ein Modell ist ein Objekt oder Konzept, das benutzt wird, um einen realen
Aspekt so darzustellen, dass er in Hinblick auf eine Zielfrage verstanden werden
kann. Beispiele fur Modelle sind:
• ein Landschaftsbild
• Landkarten
• Wettermodelle
1
1.2. Was ist ein Modell ? GMM WS2009/2010
1.2.1 Merkmale von Modellen
• Vereinfachung. Es werden nur die wesentlichen Aspekte durch das Modell
beschrieben. Will man z.B. das Volumen eines Wurfels berechnen, so ist
dessen Farbe unwichtig.
• Skalierung in Raum und Zeit. Ein Atommodell stellt das Atom in einer
Große dar, die wir sehen konnen, ein Globus ist so klein, dass er bequem
auf dem Schreibtisch stehen kann. Modelle zur Wettervorhersage mussen
schneller sein als das Wetter selbst.
• Modelle haben einen begrenzten Gultigkeitsbereich, z.B. gelten die New-
ton’schen Gesetze nicht nahe der Lichtgeschwindigkeit
1.2.2 Arten von Modellen
• einfache Modelle, die Prinzipien erklaren, z.B. Beschreibung des radio-
aktiven Zerfalls durch die Exponentialfunktion
• komplexe Modelle, wie z.B. Klimamodelle, die die Atmosphare und die
Ozeanstromungen berucksichtigen
• empirische Modelle, die einen funktionalen Zusammenhang zu Messdaten
liefern
• prozessorientierte Modelle
• deterministische Modelle
• stochastische Modelle
Diese Einteilung ist nicht eindeutig! Z.B. Konnen einfache Modelle sowohl
deterministisch als auch stochastisch gebildet werden.
1.2.3 Modell-Simulation
Ergebnisse von Modellen erhalt man durch eine Simulation. Die Simulation
liefert eine Realisierung des Modells. Das Modell gibt die Einsicht in die Zu-
sammenhange, die Simulation liefert ein Ergebnis, das z.B. mit Messdaten
verglichen werden kann. Wird dieser Vergleich fur ausreichend gut befunden,
so kann das Modell den beschriebenen Sachverhalt reproduzieren. Zeigt der
2
GMM WS2009/2010 Kapitel 2 – Empirische Modelle
Vergleich von Simulationsergebnis mit den Daten Abweichungen, so muss dass
Modell verbessert werden.
2 Empirische Modelle
Bei der empirischen Modellierung wird ausgehend von einem oder mehreren
Datensatzen versucht, einen funktionalen Zusammenhang zu bestimmen, der
diese Daten ausreichend gut reproduziert.
2.1 Parameteranpassung
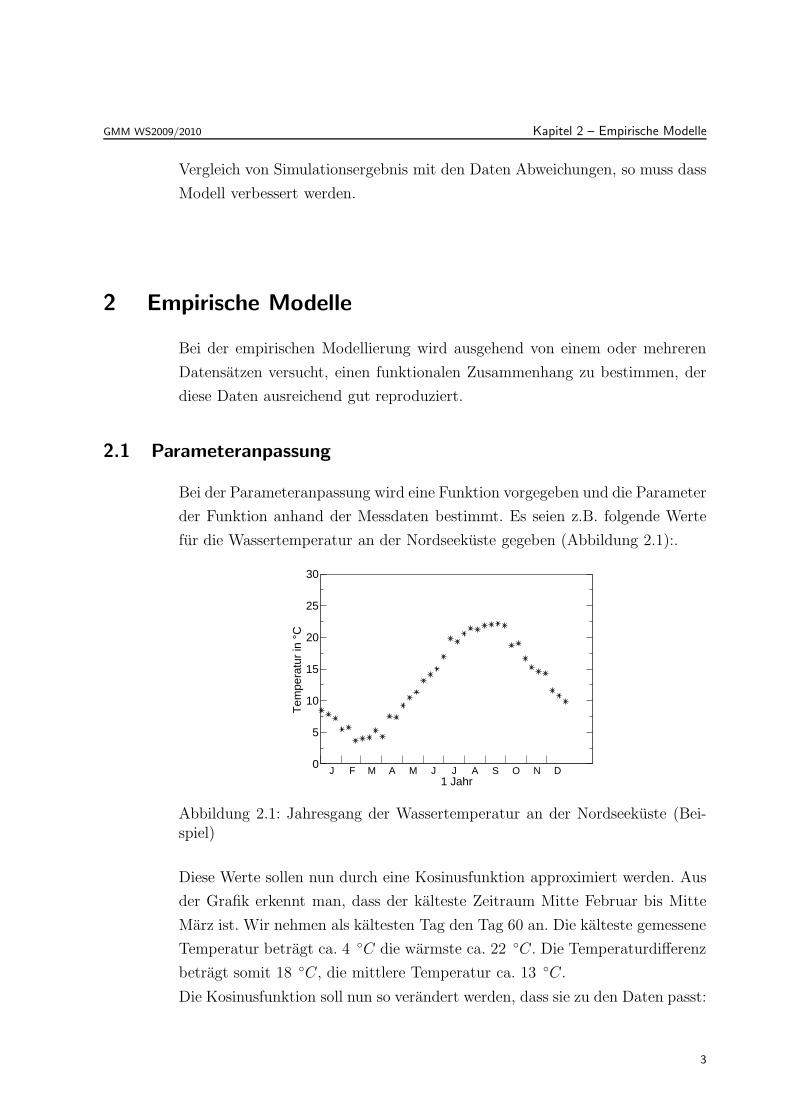
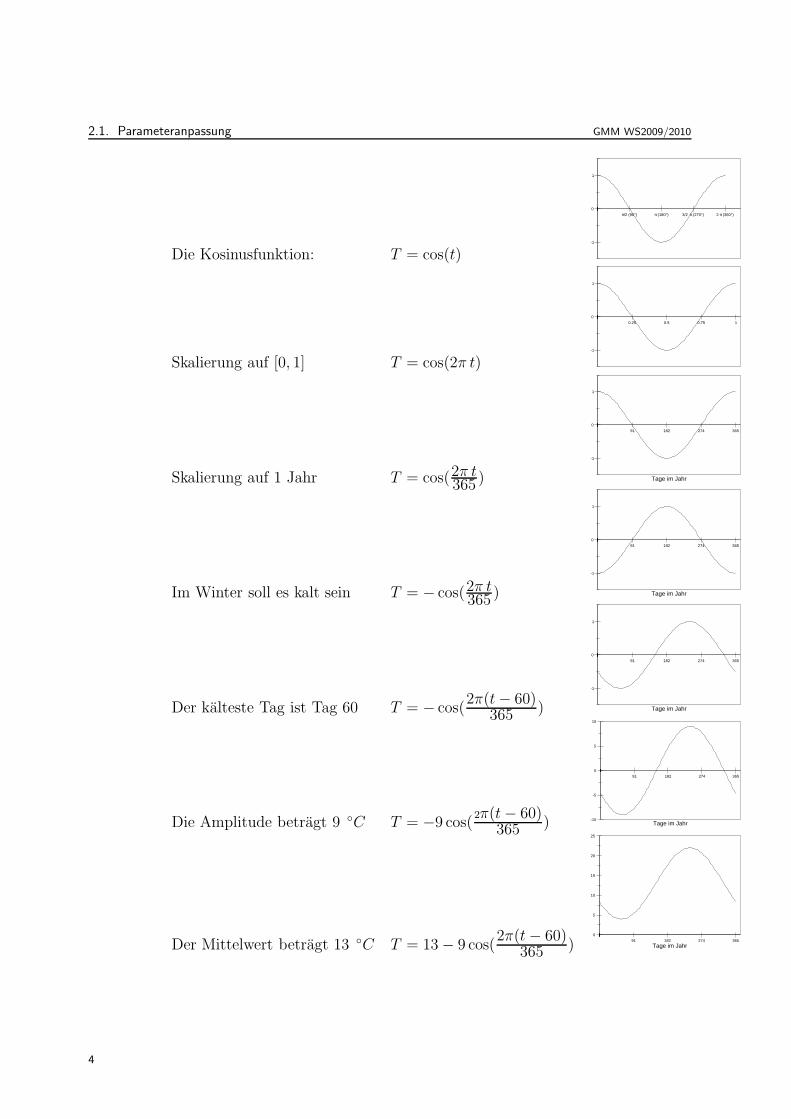
Bei der Parameteranpassung wird eine Funktion vorgegeben und die Parameter
der Funktion anhand der Messdaten bestimmt. Es seien z.B. folgende Werte
fur die Wassertemperatur an der Nordseekuste gegeben (Abbildung 2.1):.
J F M A M J J A S O N D1 Jahr
0
5
10
15
20
25
30
Tem
pera
tur
in °
C
Abbildung 2.1: Jahresgang der Wassertemperatur an der Nordseekuste (Bei-spiel)
Diese Werte sollen nun durch eine Kosinusfunktion approximiert werden. Aus
der Grafik erkennt man, dass der kalteste Zeitraum Mitte Februar bis Mitte
Marz ist. Wir nehmen als kaltesten Tag den Tag 60 an. Die kalteste gemessene
Temperatur betragt ca. 4 ◦C die warmste ca. 22 ◦C. Die Temperaturdifferenz
betragt somit 18 ◦C, die mittlere Temperatur ca. 13 ◦C.
Die Kosinusfunktion soll nun so verandert werden, dass sie zu den Daten passt:
3
2.1. Parameteranpassung GMM WS2009/2010
Die Kosinusfunktion: T = cos(t)
π/2 (90°) π (180°) 3/2 π (270°) 2 π (360°)
-1
0
1
Skalierung auf [0, 1] T = cos(2π t)
0.25 0.5 0.75 1
-1
0
1
Skalierung auf 1 Jahr T = cos(2π t365 )
91 182 274 365
Tage im Jahr
-1
0
1
Im Winter soll es kalt sein T = − cos(2π t365 )
91 182 274 365
Tage im Jahr
-1
0
1
Der kalteste Tag ist Tag 60 T = − cos(2π(t − 60)
365 )
91 182 274 365
Tage im Jahr
-1
0
1
Die Amplitude betragt 9 ◦C T = −9 cos(2π(t − 60)
365 )
91 182 274 365
Tage im Jahr-10
-5
0
5
10
Der Mittelwert betragt 13 ◦C T = 13 − 9 cos(2π(t − 60)
365 ) 91 182 274 365
Tage im Jahr
0
5
10
15
20
25
4
GMM WS2009/2010 Kapitel 2 – Empirische Modelle
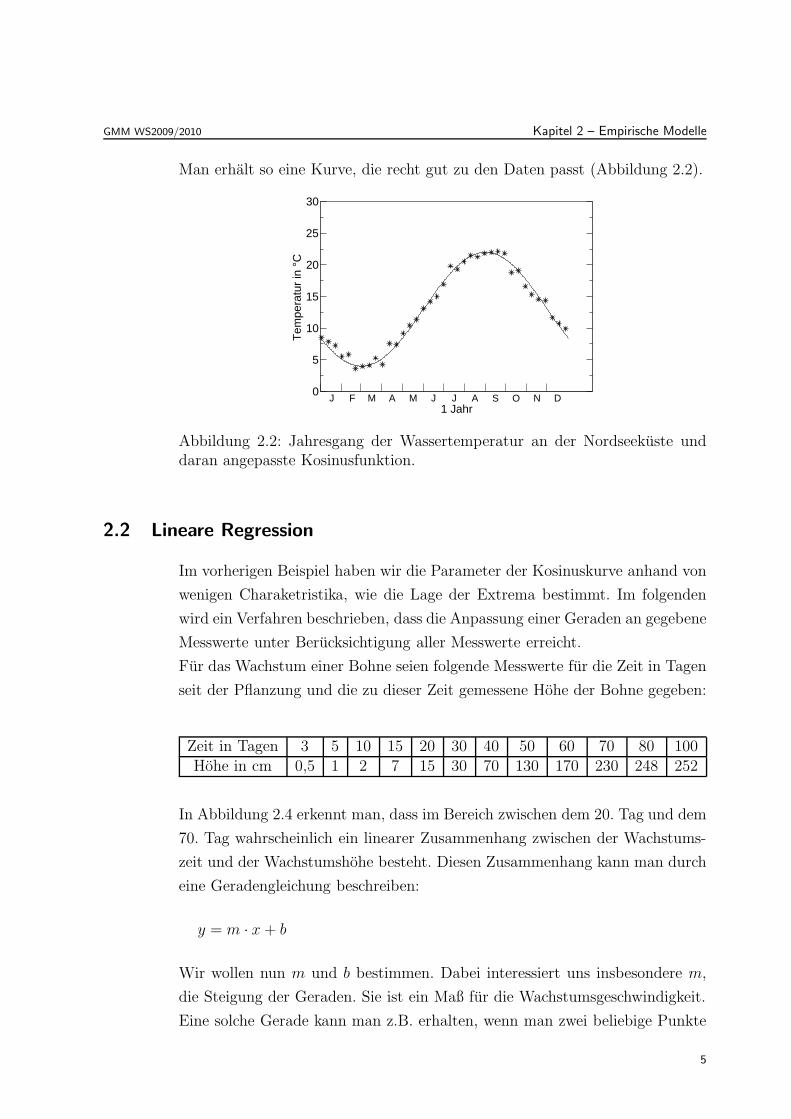
Man erhalt so eine Kurve, die recht gut zu den Daten passt (Abbildung 2.2).
J F M A M J J A S O N D1 Jahr
0
5
10
15
20
25
30
Tem
pera
tur
in °
C
Abbildung 2.2: Jahresgang der Wassertemperatur an der Nordseekuste unddaran angepasste Kosinusfunktion.
2.2 Lineare Regression
Im vorherigen Beispiel haben wir die Parameter der Kosinuskurve anhand von
wenigen Charaketristika, wie die Lage der Extrema bestimmt. Im folgenden
wird ein Verfahren beschrieben, dass die Anpassung einer Geraden an gegebene
Messwerte unter Berucksichtigung aller Messwerte erreicht.
Fur das Wachstum einer Bohne seien folgende Messwerte fur die Zeit in Tagen
seit der Pflanzung und die zu dieser Zeit gemessene Hohe der Bohne gegeben:
Zeit in Tagen 3 5 10 15 20 30 40 50 60 70 80 100Hohe in cm 0,5 1 2 7 15 30 70 130 170 230 248 252
In Abbildung 2.4 erkennt man, dass im Bereich zwischen dem 20. Tag und dem
70. Tag wahrscheinlich ein linearer Zusammenhang zwischen der Wachstums-
zeit und der Wachstumshohe besteht. Diesen Zusammenhang kann man durch
eine Geradengleichung beschreiben:
y = m · x + b
Wir wollen nun m und b bestimmen. Dabei interessiert uns insbesondere m,
die Steigung der Geraden. Sie ist ein Maß fur die Wachstumsgeschwindigkeit.
Eine solche Gerade kann man z.B. erhalten, wenn man zwei beliebige Punkte
5

2.2. Lineare Regression GMM WS2009/2010
0 20 40 60 80 100Zeit in Tagen
0
50
100
150
200
250
300
Höh
e in
cm
Abbildung 2.3: Wachstum einer Stangenbohne.
in diesem Bereich miteinander verbindet. Handelt es sich tatsachlich um einen
linearen Zusammenhang und sind die Messungen nicht fehlerbehaftet, so kann
man so die Steigung und damit die Wachstumsgeschwindigkeit erhalten. Liegen
aber nicht alle Punkte auf dieser Geraden, so wird die Lage der Geraden von
der Wahl der Punkte abhangen.
In der Realitat wird aber weder das Wachstum exakt einem linearen Zusam-
menhang folgen (Bohnen wissen gar nicht, was das ist) noch wird man die Hohe
derart exakt messen. In Abschnitt 2.2.1 wird daher ein Verfahren vorgestellt,
eine Gerade zu bestimmen, die allen Punkten in diesem Bereich Rechnung
tragt.
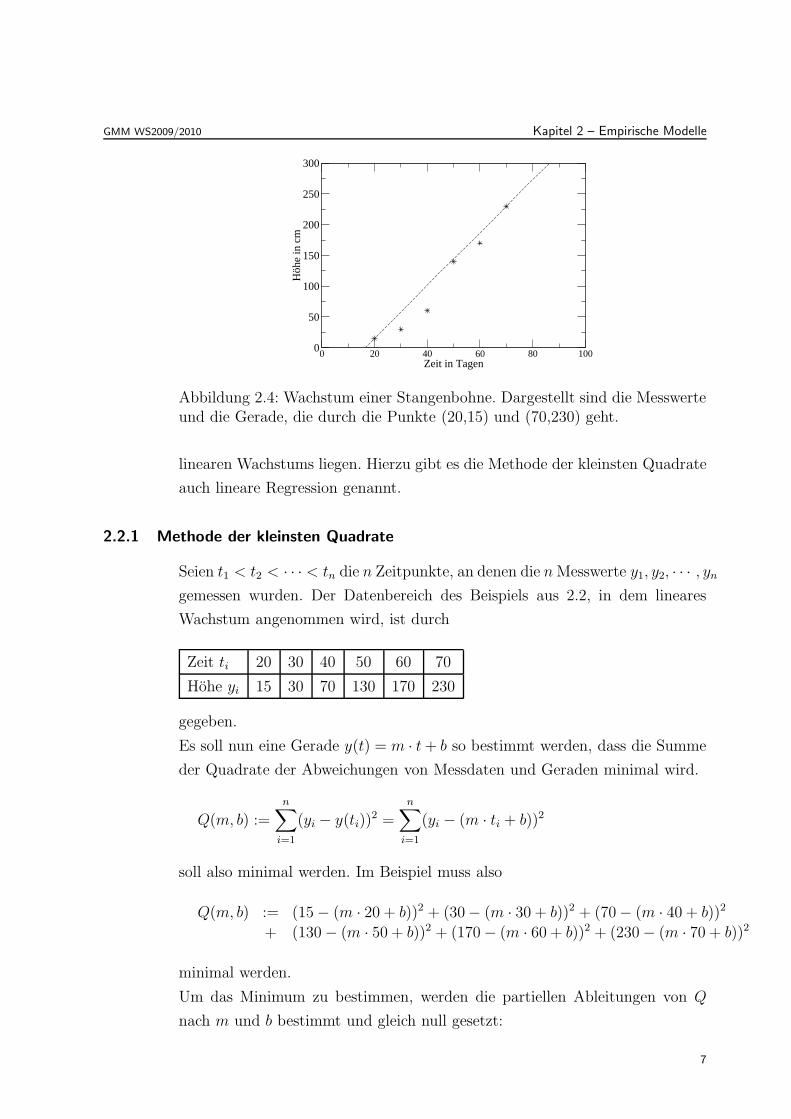
Aber nehmen wir mal beispielsweise die Gerade, die durch die Punkte bei t=20
und t=70 lauft, dann gilt:
15 = m · 20 + b
230 = m · 70 + b
Auflosen ergibt m = 4.3 und b = −71.0 .
Man kann die Steigung m auch erhalten, indem man ein Steigungsdreieck
betrachtet:
m =∆y
∆x=
230 cm − 15 cm
70 Tage− 20 Tage
Im betrachteten Zeitintervall wachst die Bohne also 4.3 cm/Tag.
Die Methode, nur zwei Punkte zu berucksichtigen, ist naturlich falsch, da sich
Messfehler und Abweichungen in diesen Punkten stark auf die Lage der Gera-
den auswirken. Besser ist es alle Punkte zu berucksichtigen, die im Bereich des
6
GMM WS2009/2010 Kapitel 2 – Empirische Modelle
0 20 40 60 80 100Zeit in Tagen
0
50
100
150
200
250
300
Höh
e in
cm
Abbildung 2.4: Wachstum einer Stangenbohne. Dargestellt sind die Messwerteund die Gerade, die durch die Punkte (20,15) und (70,230) geht.
linearen Wachstums liegen. Hierzu gibt es die Methode der kleinsten Quadrate
auch lineare Regression genannt.
2.2.1 Methode der kleinsten Quadrate
Seien t1 < t2 < · · · < tn die n Zeitpunkte, an denen die n Messwerte y1, y2, · · · , yn
gemessen wurden. Der Datenbereich des Beispiels aus 2.2, in dem lineares
Wachstum angenommen wird, ist durch
Zeit ti 20 30 40 50 60 70
Hohe yi 15 30 70 130 170 230
gegeben.
Es soll nun eine Gerade y(t) = m · t + b so bestimmt werden, dass die Summe
der Quadrate der Abweichungen von Messdaten und Geraden minimal wird.
Q(m, b) :=n∑
i=1
(yi − y(ti))2 =
n∑
i=1
(yi − (m · ti + b))2
soll also minimal werden. Im Beispiel muss also
Q(m, b) := (15 − (m · 20 + b))2 + (30 − (m · 30 + b))2 + (70 − (m · 40 + b))2
+ (130 − (m · 50 + b))2 + (170 − (m · 60 + b))2 + (230 − (m · 70 + b))2
minimal werden.
Um das Minimum zu bestimmen, werden die partiellen Ableitungen von Q
nach m und b bestimmt und gleich null gesetzt:
7

2.2. Lineare Regression GMM WS2009/2010
∂Q(m, b)
∂m= 2
n∑
i=1
(yi − (m · ti + b)) · (−ti) =: 0
∂Q(m, b)
∂b= 2
n∑
i=1
(yi − (m · ti + b)) · (−1) =: 0
Man erhalt also zwei Gleichungen mit den zwei Unbekannten m und b. Formal
muss man naturlich zeigen, dass es sich tatsachlich um ein Minimum handelt!
Satz 2.2.1 Methode der keinsten Quadrate (lineare Regression)
Es seien n Messwerte yi, i = 1 · · ·n zu den Zeitpunkten ti, i = 1 · · ·n gegeben.
Die Summe der Abstandsquadrate der Messwerte von der Geraden
y(t) = m · t + b wird durch
m =
n ·n∑
i=1
ti · yi − T · Y
n ·n∑
i=1
t2i − T · Tb =
1
n(Y − mT )
minimiert, wobei
T :=
n∑
i=1
ti = t1 + · · ·+ tn Y :=
n∑
i=1
yi = y1 + · · ·+ yn
gilt.
Mit Hilfe der Großen Mittelwert, Varianz und Kovarianz erhalt man
m =Cov(t, y)
V (t)b = y − mt
mit
t =1
n
n∑
i=1
ti y =1
n
n∑
i=1
yi V (t) =1
n
n∑
i=1
(ti − t)2 Cov(t, y) =1
n
n∑
i=1
(ti − t) · (yi − y)
Im Beispiel erhalt man die Gerade
y = 4.44 · t − 92.43
8
GMM WS2009/2010 Kapitel 2 – Empirische Modelle
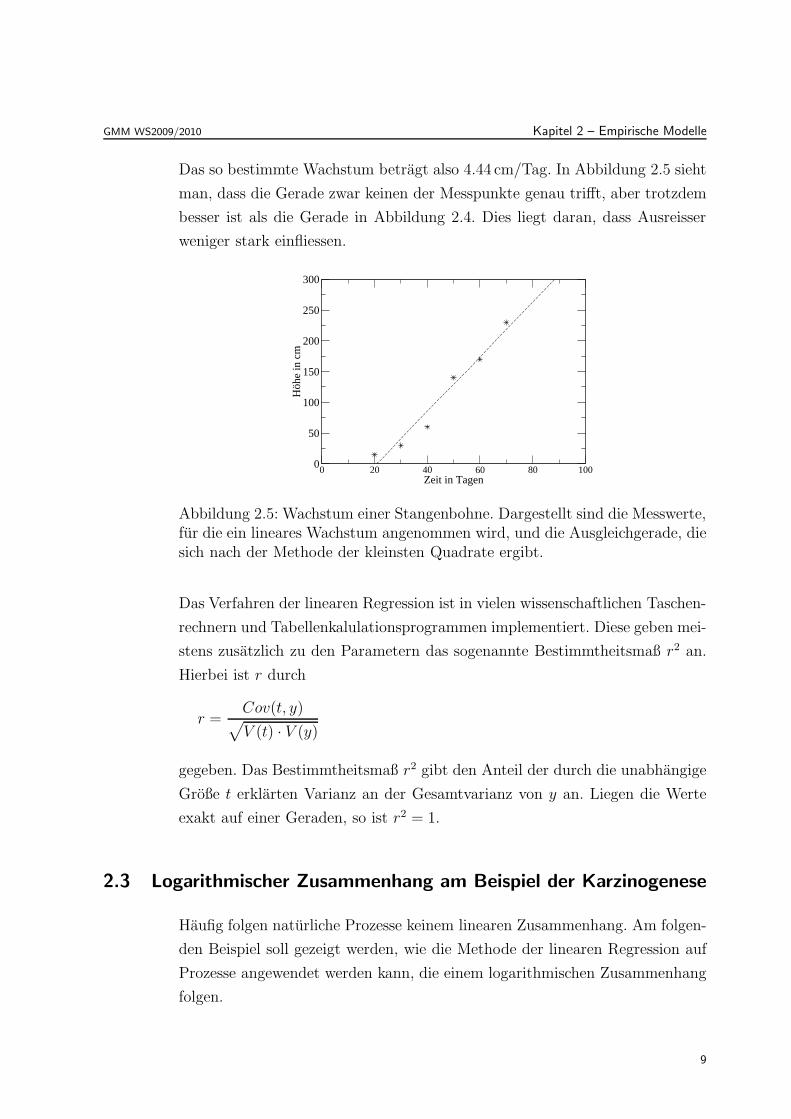
Das so bestimmte Wachstum betragt also 4.44 cm/Tag. In Abbildung 2.5 sieht
man, dass die Gerade zwar keinen der Messpunkte genau trifft, aber trotzdem
besser ist als die Gerade in Abbildung 2.4. Dies liegt daran, dass Ausreisser
weniger stark einfliessen.
0 20 40 60 80 100Zeit in Tagen
0
50
100
150
200
250
300
Höh
e in
cm
Abbildung 2.5: Wachstum einer Stangenbohne. Dargestellt sind die Messwerte,fur die ein lineares Wachstum angenommen wird, und die Ausgleichgerade, diesich nach der Methode der kleinsten Quadrate ergibt.
Das Verfahren der linearen Regression ist in vielen wissenschaftlichen Taschen-
rechnern und Tabellenkalulationsprogrammen implementiert. Diese geben mei-
stens zusatzlich zu den Parametern das sogenannte Bestimmtheitsmaß r2 an.
Hierbei ist r durch
r =Cov(t, y)
√
V (t) · V (y)
gegeben. Das Bestimmtheitsmaß r2 gibt den Anteil der durch die unabhangige
Große t erklarten Varianz an der Gesamtvarianz von y an. Liegen die Werte
exakt auf einer Geraden, so ist r2 = 1.
2.3 Logarithmischer Zusammenhang am Beispiel der Karzinogenese
Haufig folgen naturliche Prozesse keinem linearen Zusammenhang. Am folgen-
den Beispiel soll gezeigt werden, wie die Methode der linearen Regression auf
Prozesse angewendet werden kann, die einem logarithmischen Zusammenhang
folgen.
9
2.3. Logarithmischer Zusammenhang am Beispiel der Karzinogenese GMM WS2009/2010
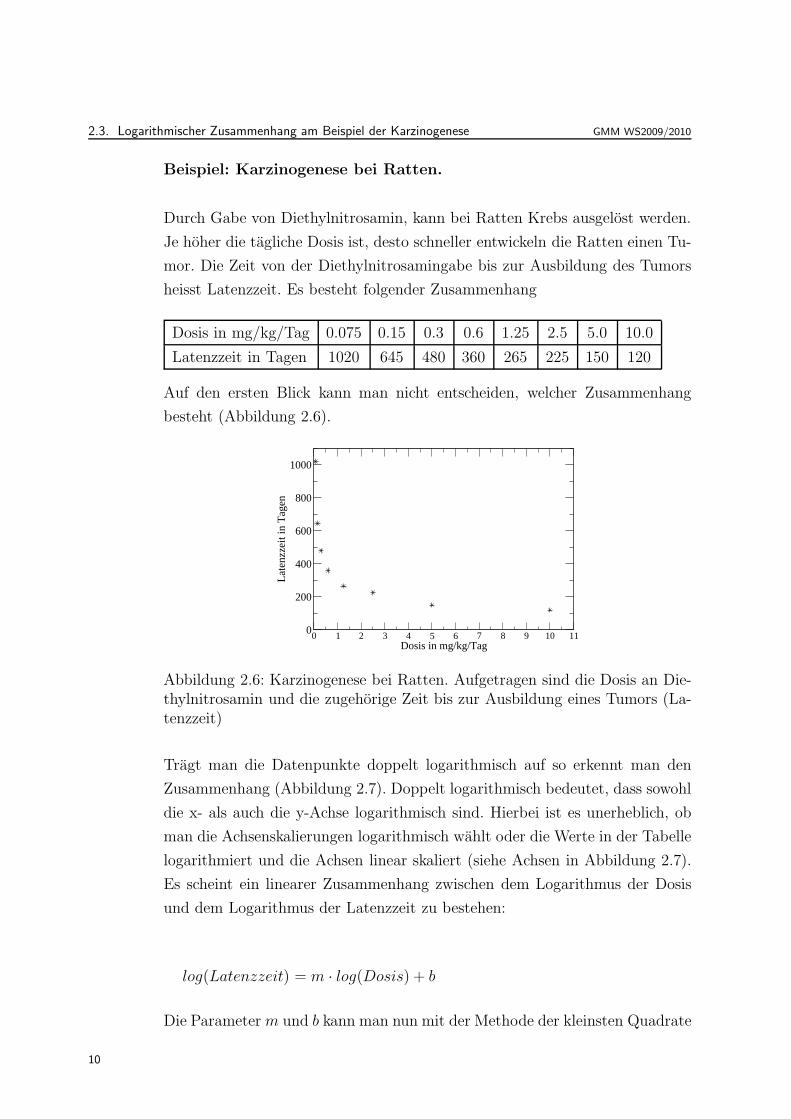
Beispiel: Karzinogenese bei Ratten.
Durch Gabe von Diethylnitrosamin, kann bei Ratten Krebs ausgelost werden.
Je hoher die tagliche Dosis ist, desto schneller entwickeln die Ratten einen Tu-
mor. Die Zeit von der Diethylnitrosamingabe bis zur Ausbildung des Tumors
heisst Latenzzeit. Es besteht folgender Zusammenhang
Dosis in mg/kg/Tag 0.075 0.15 0.3 0.6 1.25 2.5 5.0 10.0
Latenzzeit in Tagen 1020 645 480 360 265 225 150 120
Auf den ersten Blick kann man nicht entscheiden, welcher Zusammenhang
besteht (Abbildung 2.6).
0 1 2 3 4 5 6 7 8 9 10 11Dosis in mg/kg/Tag
0
200
400
600
800
1000
Late
nzze
it in
Tag
en
Abbildung 2.6: Karzinogenese bei Ratten. Aufgetragen sind die Dosis an Die-thylnitrosamin und die zugehorige Zeit bis zur Ausbildung eines Tumors (La-tenzzeit)
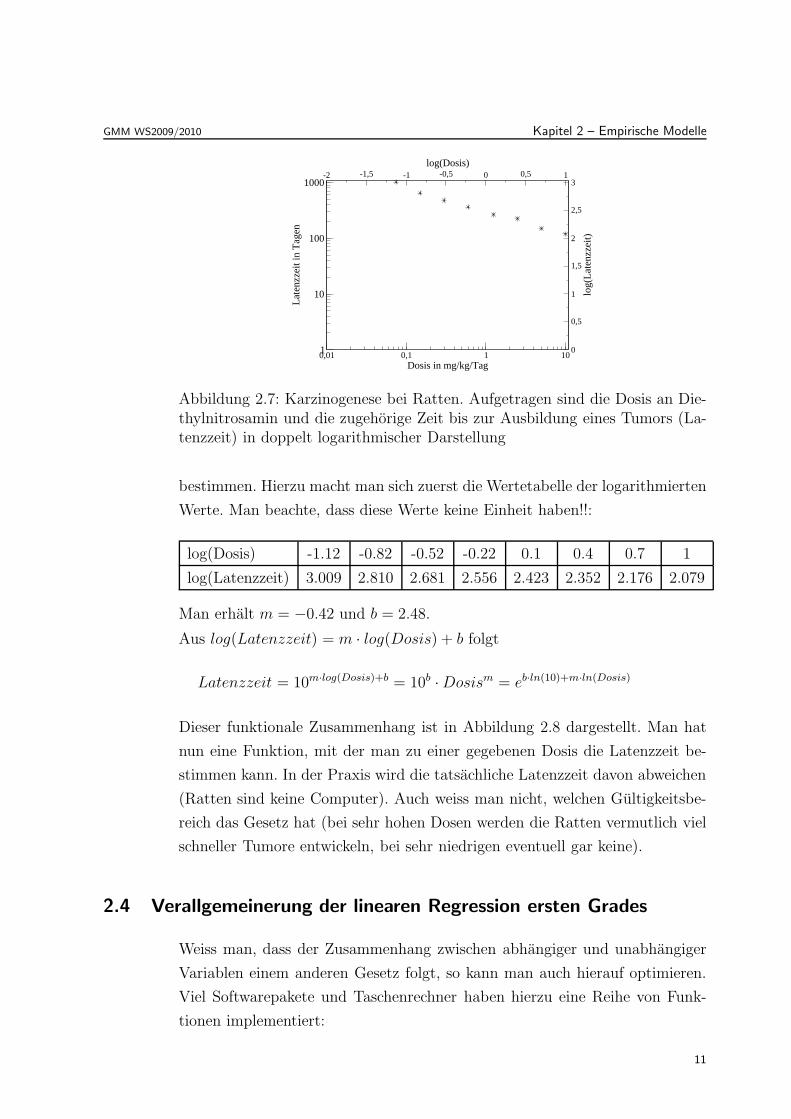
Tragt man die Datenpunkte doppelt logarithmisch auf so erkennt man den
Zusammenhang (Abbildung 2.7). Doppelt logarithmisch bedeutet, dass sowohl
die x- als auch die y-Achse logarithmisch sind. Hierbei ist es unerheblich, ob
man die Achsenskalierungen logarithmisch wahlt oder die Werte in der Tabelle
logarithmiert und die Achsen linear skaliert (siehe Achsen in Abbildung 2.7).
Es scheint ein linearer Zusammenhang zwischen dem Logarithmus der Dosis
und dem Logarithmus der Latenzzeit zu bestehen:
log(Latenzzeit) = m · log(Dosis) + b
Die Parameter m und b kann man nun mit der Methode der kleinsten Quadrate
10
GMM WS2009/2010 Kapitel 2 – Empirische Modelle
0,01 0,1 1 10Dosis in mg/kg/Tag
1
10
100
1000
Late
nzze
it in
Tag
en
-2 -1,5 -1 -0,5 0 0,5 1log(Dosis)
0
0,5
1
1,5
2
2,5
3
log(
Late
nzze
it)
Abbildung 2.7: Karzinogenese bei Ratten. Aufgetragen sind die Dosis an Die-thylnitrosamin und die zugehorige Zeit bis zur Ausbildung eines Tumors (La-tenzzeit) in doppelt logarithmischer Darstellung
bestimmen. Hierzu macht man sich zuerst die Wertetabelle der logarithmierten
Werte. Man beachte, dass diese Werte keine Einheit haben!!:
log(Dosis) -1.12 -0.82 -0.52 -0.22 0.1 0.4 0.7 1
log(Latenzzeit) 3.009 2.810 2.681 2.556 2.423 2.352 2.176 2.079
Man erhalt m = −0.42 und b = 2.48.
Aus log(Latenzzeit) = m · log(Dosis) + b folgt
Latenzzeit = 10m·log(Dosis)+b = 10b · Dosism = eb·ln(10)+m·ln(Dosis)
Dieser funktionale Zusammenhang ist in Abbildung 2.8 dargestellt. Man hat
nun eine Funktion, mit der man zu einer gegebenen Dosis die Latenzzeit be-
stimmen kann. In der Praxis wird die tatsachliche Latenzzeit davon abweichen
(Ratten sind keine Computer). Auch weiss man nicht, welchen Gultigkeitsbe-
reich das Gesetz hat (bei sehr hohen Dosen werden die Ratten vermutlich viel
schneller Tumore entwickeln, bei sehr niedrigen eventuell gar keine).
2.4 Verallgemeinerung der linearen Regression ersten Grades
Weiss man, dass der Zusammenhang zwischen abhangiger und unabhangiger
Variablen einem anderen Gesetz folgt, so kann man auch hierauf optimieren.
Viel Softwarepakete und Taschenrechner haben hierzu eine Reihe von Funk-
tionen implementiert:
11

2.4. Verallgemeinerung der linearen Regression ersten Grades GMM WS2009/2010
0 1 2 3 4 5 6 7 8 9 10 11Dosis in mg/kg/Tag
0
200
400
600
800
1000
Late
nzze
it in
Tag
en
Abbildung 2.8: Karzinogenese bei Ratten. Aufgetragen sind die Dosis an Die-thylnitrosamin und die zugehorige Zeit bis zur Ausbildung eines Tumors (La-tenzzeit) sowie der funktionale Zusammenhang, der sich nach der Methode derkleinsten Quadrate ergibt.
f(x) = a1x + a0 linear
f(x) = a2x2 + a1x + a0 quadratisch
f(x) = a3x3 + a2x
2 + a1x + a0 kubisch
... ...
Bei der Optimierung mit Hilfe der angegebenen Funktionen handelt es sich
auch um lineare Regressionen, da die Parameter ai nicht in hoherer Potenz
vorkommen. Allgemein handelt es sich um eine lineare Uberlagerung von ein-
fachen Funktionen:
f(x) =
J∑
j=1
aj · hj(x) ,
wobei hier hj(x) = xj gilt.
Die Losung eines Optimierungsproblems lauft analog wie im Falle der Geraden.
Man leitet die Funktion der Summe der Abstandquadrate nach den Parametern
ab, setzt diese gleich null und erhalt J Gleichungen mit J Unbekannten.
2.4.1 Fourieranalyse
Nun ist es nicht zwingend, dass die Funktionen hj Potenzen von x sind. Hat
man Messwerte, von denen man weiss, dass sie einer Periodizitat unterliegen,
wie z.B. der Temperaturverlauf eines Jahres, so kann man auch periodische
Funktionen als Basis wahlen. Das bekannteste Beispiel hierfur ist die Fourier-
12

GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
Analyse. Man wahlt als Funktion eine Uberlagerung aus Sinus- und Kosinus-
funktionen
f(t, a0, a1, . . . , aJ , b1, . . . , bJ ) = a0 +J∑
k=1
(
ak · cos(2πkt
T) + bk · sin(2πk
t
T)
)
wobei T die Periodenlange ist. Sind die Stutzwerte ti der Messwerte yi, i =
1, . . . , N aquidistant uber die Periode T verteilt, so ergibt sich fur die optimalen
Parameter
a∗0 =
1
N
N∑
i=1
yi a∗k =
2
N
N∑
i=1
yi · cos(2πktiT
) b∗k =2
N
N∑
i=1
yi · sin(2πktiT
)
3 Diskrete Modelle
Im vorherigen Kapitel haben wir ausgehend von Messwerten einen funktiona-
len Zusammenhang hergestellt. Manchmal hat man aber das Problem, dass es
keine Messungen gibt. In diesem Fall fragt man die Experten z.B. Biologen
oder Physiker wie sich das System, das man durch ein Modell beschreiben
mochte, verhalt1.Modelle, die auf den dem System zu Grunde liegenden Pro-
zesse basieren, nennt man auch prozessorientierte Modelle.
3.1 Bakterienwachstum
Aus der Mikrobiologie sei bekannt, dass sich Bakterien einer bestimmten Art
ca. alle 20 Minuten teilen. Wir nehmen vereinfachend an, dass sich dabei auch
die Bakterienbiomasse alle 20 Minuten verdoppelt. Ein Bakterium hat in etwa
einen Durchmesser von 0.5 µm.
Zielfrage: Wieviele Bakterien entstehen aus einer vorgegebenen Anzahl in ei-
ner vorgegebenen Zeit?
1Das Wissen der Experten basiert dabei im allgemeinen naturlich auch auf Messungen undderen Interpretation. Die Messdaten sind aber vielleicht im Laufe der Zeit verloren gegangen.
13

3.1. Bakterienwachstum GMM WS2009/2010
Anhand der uns zur Verfugung stehenden Information stellen wir folgendes
Wachstumsmodell auf:
Bakterienzahl zur Zeit t0 = 0 min x0
t1 = 20 min x1 = 2 · x0
t2 = 40 min x2 = 2 · x1 = 2 · 2 · x0
......
tn = n · 20 min xn = 2 · xn−1 = 2 · · · ·2 · x0 = 2n · x0
Man erhalt das Wachstumsmodell des exponentiellen Wachstums in expliziter
Darstellung 2
xn = 2n · x0 ,
oder in impliziter (rekursiver) Darstellung
xn = 2 · xn−1 ,
wobei jeweils x0 als Anfangswert vorgegeben wird.
Uberprufung der Plausibilitat des Modells
Wieviele Bakterien gibt es nach einem Tag und welches Volumen nehmen sie
ein ?
Ein Tag hat 24 · 3 · 20 Minuten, enspricht also 72 Zeitschritten. Unter der An-
nahme, dass zu Anfang ein Bakterium existiert, hat man nach 72 Zeitschritten
x72 = 272 = 1072 log 2 ≈ 1021.674 ≈ 4.7 · 1021
Bakterien.
Nun, solch eine Zahl sagt uns anschaulich nicht mehr viel. Schauen wir uns
das Volumen an. Wir nehmen der Einfachheit halber an, dass die Bakterien
2Beweis der expliziten Formel durch vollstandige InduktionInduktionsanfang: n = 0 : x0 = 20 · x0
Induktionsschritt n − 1 → n :Es gelte xn−1 = 2n−1 · x0 , dann ist xn = 2 · xn−1 = 2 · 2n−1 · x0 = 2n · x0 .
14

GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
kugelformig sind und trotzdem dicht an dicht (ohne Lucken) gepackt liegen.
Damit unterschatzen wir das tatsachliche Volumen.
Das Volumen VB eines Bakteriums mit einem Durchmesser von
d = 0.5 µm = 0.5 · 10−6 m betragt
VB =4
3π
(d
2
)3
=4
3π(0.25 · 10−6
)3m3 =
1
48π · 10−18m3 .
Das Gesamtvolumen V betragt also nach einem Tag
V = x72 · VB = 47 · 1020 · 1
48· π · 10−18m3 ≈ 3 · 102 m3 .
Dieses Volumen entspricht einem Quader der Kantenlange 3 m× 10 m× 10 m,
also in etwa einem großen Seminarraum.
Vielleicht ist die von uns angenommene Wachstumsrate zu groß.
Bisher ist die Zahl der Bakterien, die pro Zeitschritt hinzukommt, genauso
groß wie die Zahl bereits existierender Bakterien. Die Anderung der Zellzahl
ist also zu jeder Zeit die Zellzahl selbst:
xn+1 = 2 · xn = xn + xn = xn + 1 · xn
Die Wachstumsrate betragt 1.
Vielleicht mussen wir diese Wachstumsrate verringern. Setzen wir anstelle von
1 nun den Kontrollparameter r ein, so erhalten wir folgendes Modell:
xn+1 = xn + r · xn = (1 + r) · xn r ∈ R+
Wir erhalten nun folgende explizite Darstellung:
xn+1 = (1 + r) · xn = (1 + r) · (1 + r) · xn−1 = . . . = (1 + r)n+1 · x0
oder anders geschrieben
xn = x0 · (1 + r)n = x0 · eln(1+r)n
= x0 · en·ln(1+r)
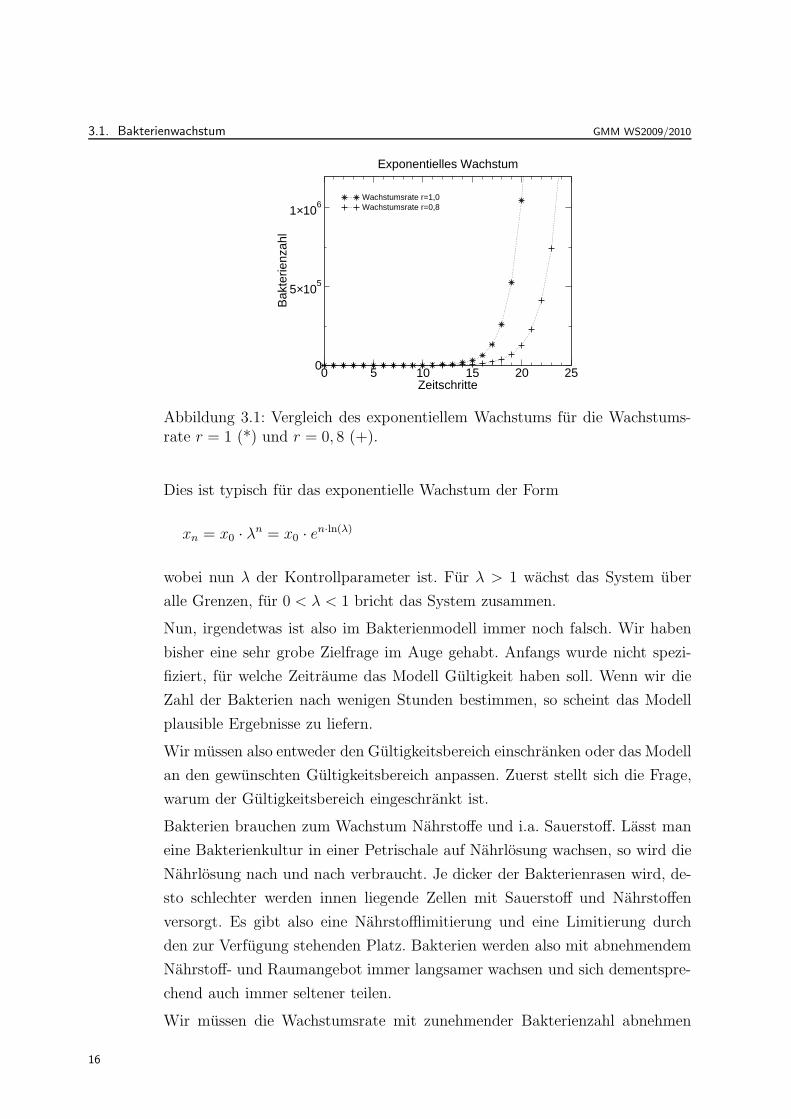
Es handelt sich hierbei um das Modell des exponentiellen Wachstums. Fur jede
positive Wachstumsrate r wachst die Zahl der Bakterien schliesslich uber alle
Grenzen. Also wachst die Bakterienzahl auch dann uber alle Grenzen, wenn
wir die Wachstumsrate verringeren (Abbildung 3.1).
15
3.1. Bakterienwachstum GMM WS2009/2010
0 5 10 15 20 25Zeitschritte
0
5×105
1×106
Bak
terie
nzah
l
Wachstumsrate r=1,0Wachstumsrate r=0,8
Exponentielles Wachstum
Abbildung 3.1: Vergleich des exponentiellem Wachstums fur die Wachstums-rate r = 1 (*) und r = 0, 8 (+).
Dies ist typisch fur das exponentielle Wachstum der Form
xn = x0 · λn = x0 · en·ln(λ)
wobei nun λ der Kontrollparameter ist. Fur λ > 1 wachst das System uber
alle Grenzen, fur 0 < λ < 1 bricht das System zusammen.
Nun, irgendetwas ist also im Bakterienmodell immer noch falsch. Wir haben
bisher eine sehr grobe Zielfrage im Auge gehabt. Anfangs wurde nicht spezi-
fiziert, fur welche Zeitraume das Modell Gultigkeit haben soll. Wenn wir die
Zahl der Bakterien nach wenigen Stunden bestimmen, so scheint das Modell
plausible Ergebnisse zu liefern.
Wir mussen also entweder den Gultigkeitsbereich einschranken oder das Modell
an den gewunschten Gultigkeitsbereich anpassen. Zuerst stellt sich die Frage,
warum der Gultigkeitsbereich eingeschrankt ist.
Bakterien brauchen zum Wachstum Nahrstoffe und i.a. Sauerstoff. Lasst man
eine Bakterienkultur in einer Petrischale auf Nahrlosung wachsen, so wird die
Nahrlosung nach und nach verbraucht. Je dicker der Bakterienrasen wird, de-
sto schlechter werden innen liegende Zellen mit Sauerstoff und Nahrstoffen
versorgt. Es gibt also eine Nahrstofflimitierung und eine Limitierung durch
den zur Verfugung stehenden Platz. Bakterien werden also mit abnehmendem
Nahrstoff- und Raumangebot immer langsamer wachsen und sich dementspre-
chend auch immer seltener teilen.
Wir mussen die Wachstumsrate mit zunehmender Bakterienzahl abnehmen
16

GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
0 5 10 15 20 25Zeitschritte
0
5×105
1×106
Bak
terie
nzah
l
Exponentielles WachstumLogistisches Wachstum
Abbildung 3.2: Vergleich zwischen exponentiellem Wachstum und logistischemWachstum. Startwert x0 = 1.
lassen , also
xn+1 = xn + R(xn) · xn
wobei R nun eine Funktion der Bakterienzahl ist, die monoton fallend sein soll,
also z.B.
R(x) = 1 − x
K
mit z.B. K = 106. Fur sehr kleine Bakterienzahlen betragt R nahezu 1, und
wird immer kleiner, je mehr sich die Zahl der Bakterien einer Million nahert.
Wir erhalten also das verbesserte Modell:
xn+1 = xn +(
1 − xn
K
)
· xn
K heisst Kapazitat der Bakterienpopulation.
xn+1 = xn +(
1 − xn
K
)
· xn
Dieses ist das Modell des logistischen Wachstums. Fur kleine Bakterienzahlen
wachst die Population nahezu ungebremst. Je großer die Population wird, desto
langsamer wachst sie (Abbildung 3.2).
Auch das logistische Wachstum kann man verallgemeinern:
xn+1 = xn + r ·(
1 − xn
K
)
· xn r ∈ R+ (3.1)
17
3.1. Bakterienwachstum GMM WS2009/2010
0 K
Bakterienzahl zur Zeit n
K
Bak
terie
nzah
l zur
Zei
t n+
1
g(x)=xf(x) = x + r*x(1-x/K)
r=1
x0 x1 x2 x3
x1
x2
x3
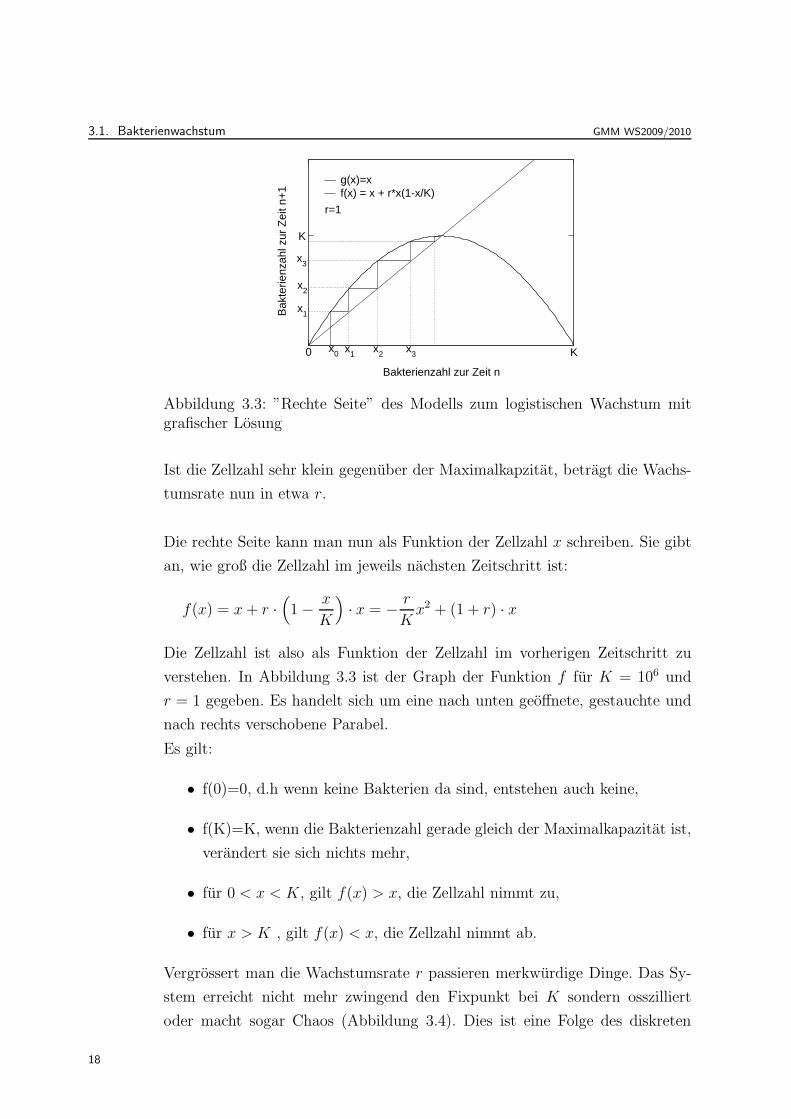
Abbildung 3.3: ”Rechte Seite” des Modells zum logistischen Wachstum mitgrafischer Losung
Ist die Zellzahl sehr klein gegenuber der Maximalkapzitat, betragt die Wachs-
tumsrate nun in etwa r.
Die rechte Seite kann man nun als Funktion der Zellzahl x schreiben. Sie gibt
an, wie groß die Zellzahl im jeweils nachsten Zeitschritt ist:
f(x) = x + r ·(
1 − x
K
)
· x = − r
Kx2 + (1 + r) · x
Die Zellzahl ist also als Funktion der Zellzahl im vorherigen Zeitschritt zu
verstehen. In Abbildung 3.3 ist der Graph der Funktion f fur K = 106 und
r = 1 gegeben. Es handelt sich um eine nach unten geoffnete, gestauchte und
nach rechts verschobene Parabel.
Es gilt:
• f(0)=0, d.h wenn keine Bakterien da sind, entstehen auch keine,
• f(K)=K, wenn die Bakterienzahl gerade gleich der Maximalkapazitat ist,
verandert sie sich nichts mehr,
• fur 0 < x < K, gilt f(x) > x, die Zellzahl nimmt zu,
• fur x > K , gilt f(x) < x, die Zellzahl nimmt ab.
Vergrossert man die Wachstumsrate r passieren merkwurdige Dinge. Das Sy-
stem erreicht nicht mehr zwingend den Fixpunkt bei K sondern osszilliert
oder macht sogar Chaos (Abbildung 3.4). Dies ist eine Folge des diskreten
18
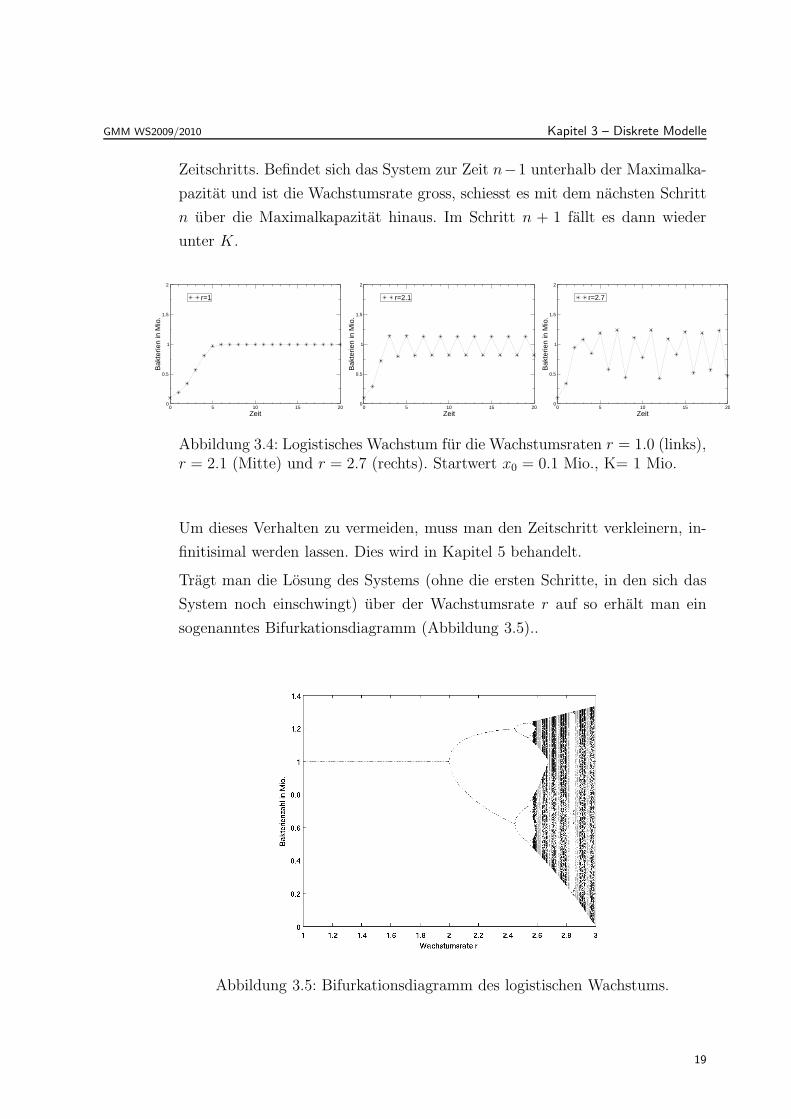
GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
Zeitschritts. Befindet sich das System zur Zeit n−1 unterhalb der Maximalka-
pazitat und ist die Wachstumsrate gross, schiesst es mit dem nachsten Schritt
n uber die Maximalkapazitat hinaus. Im Schritt n + 1 fallt es dann wieder
unter K.
0 5 10 15 20
Zeit
0
0.5
1
1.5
2
Bak
terie
n in
Mio
.
r=1
0 5 10 15 20
Zeit
0
0.5
1
1.5
2
Bak
terie
n in
Mio
.
r=2.1
0 5 10 15 20
Zeit
0
0.5
1
1.5
2
Bak
terie
n in
Mio
.
r=2.7
Abbildung 3.4: Logistisches Wachstum fur die Wachstumsraten r = 1.0 (links),r = 2.1 (Mitte) und r = 2.7 (rechts). Startwert x0 = 0.1 Mio., K= 1 Mio.
Um dieses Verhalten zu vermeiden, muss man den Zeitschritt verkleinern, in-
finitisimal werden lassen. Dies wird in Kapitel 5 behandelt.
Tragt man die Losung des Systems (ohne die ersten Schritte, in den sich das
System noch einschwingt) uber der Wachstumsrate r auf so erhalt man ein
sogenanntes Bifurkationsdiagramm (Abbildung 3.5)..
Abbildung 3.5: Bifurkationsdiagramm des logistischen Wachstums.
19
3.2. Fibonacci und die Kaninchen GMM WS2009/2010
3.2 Fibonacci und die Kaninchen
Leonardo da Pisa, auch Fibonacci (figlio di Bonacci, Sohn des Bonacci, gebo-
ren ca. 1180) genannt, war italienischer Mathematiker und gilt als der bedeu-
tendste Mathematiker des Mittelalters. Er brachte das arabische Zahlensystem
nach Europa. Bekannt sind heute vor allem die nach ihm benannten Fibonacci-
Zahlen.
Die Fibonacci-Zahlen sind eine Zahlenfolge, die sich daraus ergibt, dass eine
Zahl jeweils die Summe ihrer beiden Vorganger ist. Begonnen wird hierbei mit
1 1:
1 1 2 3 5 8 13 21 35 55 ...
Das Bildungsgesetz kann man wie folgt formalisieren:
xn+1 = xn−1 + xn
wobei x0 = 1 und x1 = 1 die sogenannten Anfangswerte sind.
In seinem ”Buch der Rechenkunst” (ca. 1227) beschreibt er die Zahlenfolge
anhand des Beispiels eines Kaninchenzuchters der herausfinden will, wie viele
Kaninchenpaare innerhalb eines Jahres aus einem einzigen Paar entstehen,
wenn jedes Paar ab dem zweiten Lebensmonat ein weiteres Paar pro Monat zur
Welt bringt. Er kann somit als Begrunder der mathematischen Modellierung
angesehen werden.
Fibonacci veranschaulichte diese Folge durch die mathematischen Modellie-
rung des Wachstums einer Kaninchenpopulation :
1. Zu Beginn gibt es ein Paar geschlechtsreifer (reproduktiver) Kaninchen.
2. Jedes neugeborene Paar wird im zweiten Lebensmonat geschlechtsreif.
3. Jedes geschlechtsreife Paar wirft pro Monat ein weiteres Paar.
4. Es kommen keine Tiere von außen in die Population oder verlassen diese
Das erste Paar erzeugt seinen Nachwuchs im ersten Monat. Jeden Folgemonat
kommt dann zu der Anzahl der Paare, die im letzten Monat gelebt haben, eine
Anzahl von neugeborenen Paaren hinzu, die gleich der Anzahl der Paare ist,
die bereits im vorletzten Monat gelebt haben, da genau diese geschlechtsreif
sind und sich nun vermehren.
Dieses Modell wollen wir nun formalisieren:
20
GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
3.2.1 Schritte beim Aufstellen eines Modells
1. Die Zielsetzung des Modells definieren (haufig noch vage). Eine verbale
Beschreibung des Modells erstellen. Dies ist schwierig, da die Zielset-
zung noch nicht konkretisiert Eine prazise Formulierung setzt bereits ein
starkes Systemverstandnis voraus. Die erste Formulierung legt meistens
schon die Struktur des Modells fest und last sich spater schwer andern.
Man hat hier meistens auch schon die eigene Denkstruktur festgelegt.
2. Man muss das Wesentliche (z.B. Vermehrungszyklus) vom Unwesentli-
chen(z.B. Farbe der Kaninchen) trennen.
3. Festlegung der Zustandsvariabeln und der Prozesse. Man nimmt Verein-
fachungen an:
• Kaninchen sterben nicht
• Jedes reproduktive Paar produziert exakt ein neues Paar pro Monat
• Jedes neue Paar wird exakt nach einem Monat reproduktiv
Solche Vereinfachungen sind unumganglich, da nicht alle Fakten des
betrachteten Systems bekannt sind. Haufig werden Modelle durch die
Berucksichtigung vieler Details nicht unbedingt realistischer sondern nur
komplizierter.
Die Kunst des Modellierens besteht darin, genau die fur die Zielfrage
wesentlichen Faktoren zu berucksichtigen.
4. Losung/Simulation des Systems
3.2.2 Formalisierung des Kaninchenmodells
Die Zielfrage und die verbale Beschreibung sind bereits durch Fibonacci gege-
ben worden.
Festlegung der Zustandsvariabeln
Die Kaninchenpaare (im folgenden kurz Kaninchen genannt) unterscheiden
sich durch die Eigenschaft der reproduktivitatsfahigkeit. Es gibt Neugeborene,
die sich noch nicht vermehren konnen und bereits Reproduktive. Da wir Aus-
sagen uber die Anzahl der Kaninchen von Monat zu Monat bestimmen wollen,
liegt es Nahe die Zeit in Monatsschritten zu betrachten. Somit liegt es nahe,
21

3.2. Fibonacci und die Kaninchen GMM WS2009/2010
als Zustandsvariablen die Neugeborenen zur Zeit (Nt) und die Reproduktiven
zur Zeit t (Rt) zu beschreiben.
Wir erhalten also die Zustandsvariablen
Nt, n ∈ N0 die Anzahl der Neugeborenen(paare)
Rt, n ∈ N0 die Anzahl der Reproduktiven(paare)
Die Gesamtzahl der Kaninchenpaare Ft ergibt sich dann zu
Ft = Nt + Rt
Ft ist keine Zustandsvariable, sondern eine abgeleitete Große.
Prozessbeschreibungen
Gesucht ist eine Funktion f (hier eine Folge), die zu jeder Zeit t die Werte Nt
und Rt angibt:
f : N −→ N × N (3.2)
t 7→ (Nt, Rt)
Damit weiss man, wie sich der Zustand des Systems in der Zeit andert. Man
hat die Dynamik des Systems beschrieben.
Die Prozesse, mit denen wir es zu tun haben sind:
Reproduktion: Reproduktive Kaninchen bringen Neugeborene hervor
Altern: Neugeborene Kaninchen werden reproduktiv
also erhalt man folgende Gleichungen
Nt+1 = Nt + Rt − Nt = Rt
Rt+1 = Rt + Nt = Rt + Nt
Diese Gleichungen sind nun die Vorschrift, wie man aus den Kaninchenzahlen
zur Zeit t die Zahl zur Zeit t+1 bestimmt. Zusammen mit der Anfangsbedin-
gung N0 = 1, R0 = 0 hat man das Systen nun vollstandig beschrieben.
Mathematisch handelt es sich hierbei um ein lineares Differenzenmodell:
22
GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
(Nt+1
Rt+1
)
=
(
0 1
1 1
)
·(
Nt
Rt
)
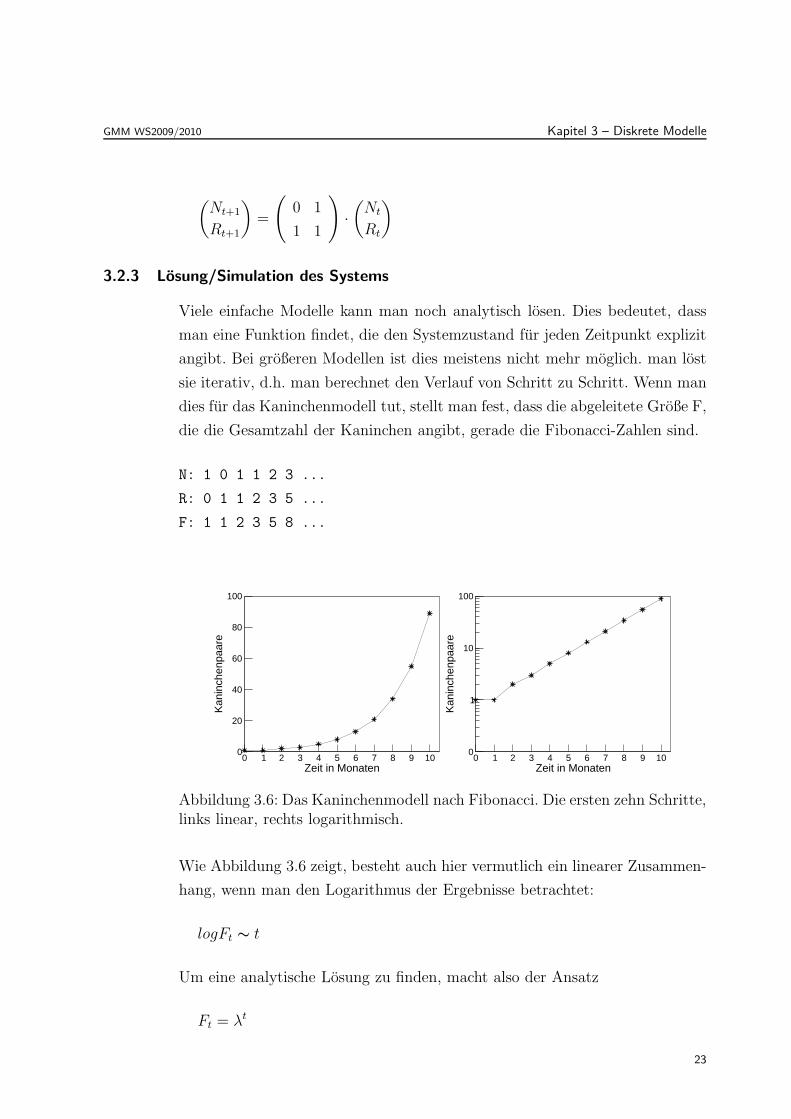
3.2.3 Losung/Simulation des Systems
Viele einfache Modelle kann man noch analytisch losen. Dies bedeutet, dass
man eine Funktion findet, die den Systemzustand fur jeden Zeitpunkt explizit
angibt. Bei großeren Modellen ist dies meistens nicht mehr moglich. man lost
sie iterativ, d.h. man berechnet den Verlauf von Schritt zu Schritt. Wenn man
dies fur das Kaninchenmodell tut, stellt man fest, dass die abgeleitete Große F,
die die Gesamtzahl der Kaninchen angibt, gerade die Fibonacci-Zahlen sind.
N: 1 0 1 1 2 3 ...
R: 0 1 1 2 3 5 ...
F: 1 1 2 3 5 8 ...
0 1 2 3 4 5 6 7 8 9 10Zeit in Monaten
0
20
40
60
80
100
Kan
inch
enpa
are
0 1 2 3 4 5 6 7 8 9 10Zeit in Monaten
0
1
10
100
Kan
inch
enpa
are
Abbildung 3.6: Das Kaninchenmodell nach Fibonacci. Die ersten zehn Schritte,links linear, rechts logarithmisch.
Wie Abbildung 3.6 zeigt, besteht auch hier vermutlich ein linearer Zusammen-
hang, wenn man den Logarithmus der Ergebnisse betrachtet:
logFt ∼ t
Um eine analytische Losung zu finden, macht also der Ansatz
Ft = λt
23

3.3. Bienen GMM WS2009/2010
Sinn. Wir haben es also wieder mit dem exponentiellen Wachstum zu tun. Wie
man λ bestimmt, wird in der Ubung gezeigt.
3.3 Bienen
Bei den Bakterien und den Kaninchen wachst die Population schliesslich ex-
ponentiell (wenn man mal die Modellverbesserung bei den Bacs weglasst). Im
folgenden soll das Wachstum einer Bienenkolonie beschrieben werden. Hierzu
wird zwischen Koniginnen und Arbeiterinnen unterschieden.
Es wird angenommen, dass die Zahl der Koniginnen konstant ist, d.h man
muss sie nicht explizit modellieren. Die Zahl der Arbeiterinnen hangt von der
bisherigen Zahl der Arbeiterinnen und der Zahl der gerade Geschlupften ab.
Die Zahl der gerade Geschlupften ist proportional zur Zahl der Koniginnen K
mulipliziert mit der Zahl der Nachkommen pro Konigin r, die ja konstant ist.
Fur die Arbeiterinnen erhalt man also das Modell
At+1 = At + r · K = At + α = A0 + (t + 1) · α
man hat es hier mit linearem (arithmetischem) Wachstum zu tun (Abbil-
dung 3.7)
0 1 2 3 4 5 6 7 8 9 10Zeit
A
Abbildung 3.7: Bienenwachstum.
24
GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
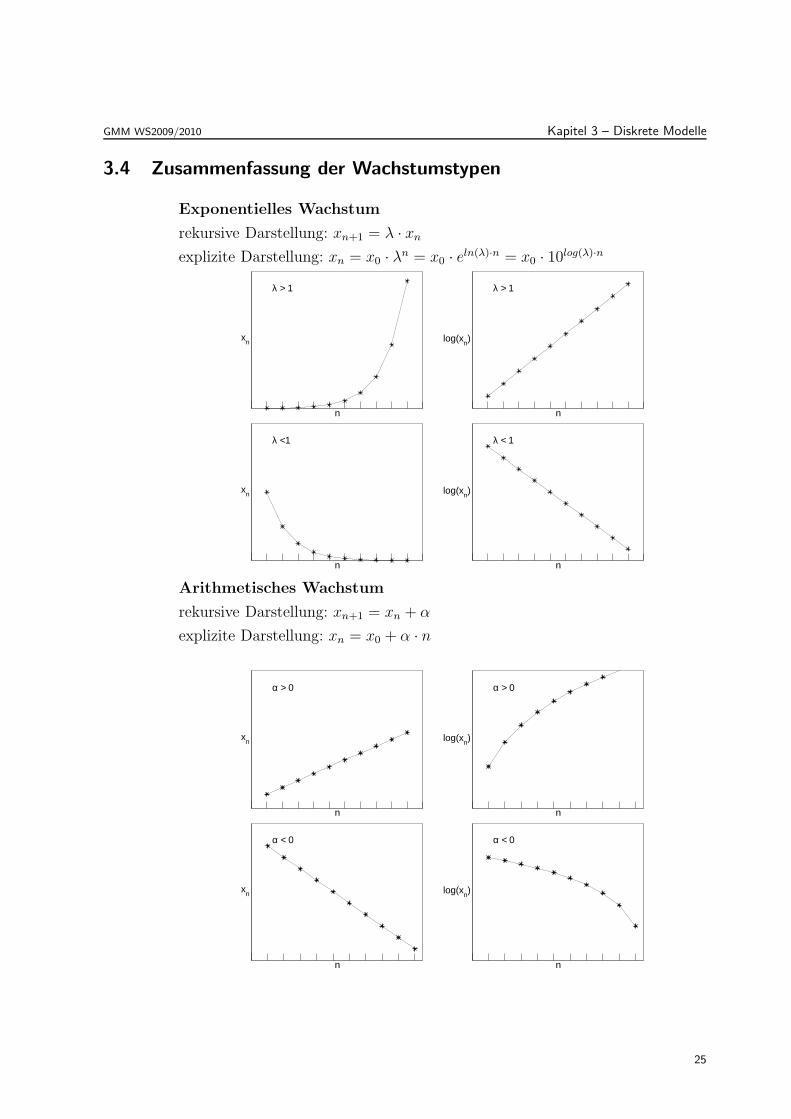
3.4 Zusammenfassung der Wachstumstypen
Exponentielles Wachstum
rekursive Darstellung: xn+1 = λ · xn
explizite Darstellung: xn = x0 · λn = x0 · eln(λ)·n = x0 · 10log(λ)·n
n
xn
λ > 1
n
log(xn)
λ > 1
n
xn
λ <1
n
log(xn)
λ < 1
Arithmetisches Wachstum
rekursive Darstellung: xn+1 = xn + α
explizite Darstellung: xn = x0 + α · n
n
xn
α > 0
n
log(xn)
α > 0
n
xn
α < 0
n
log(xn)
α < 0
25
3.5. Diskrete 2D-Modelle GMM WS2009/2010
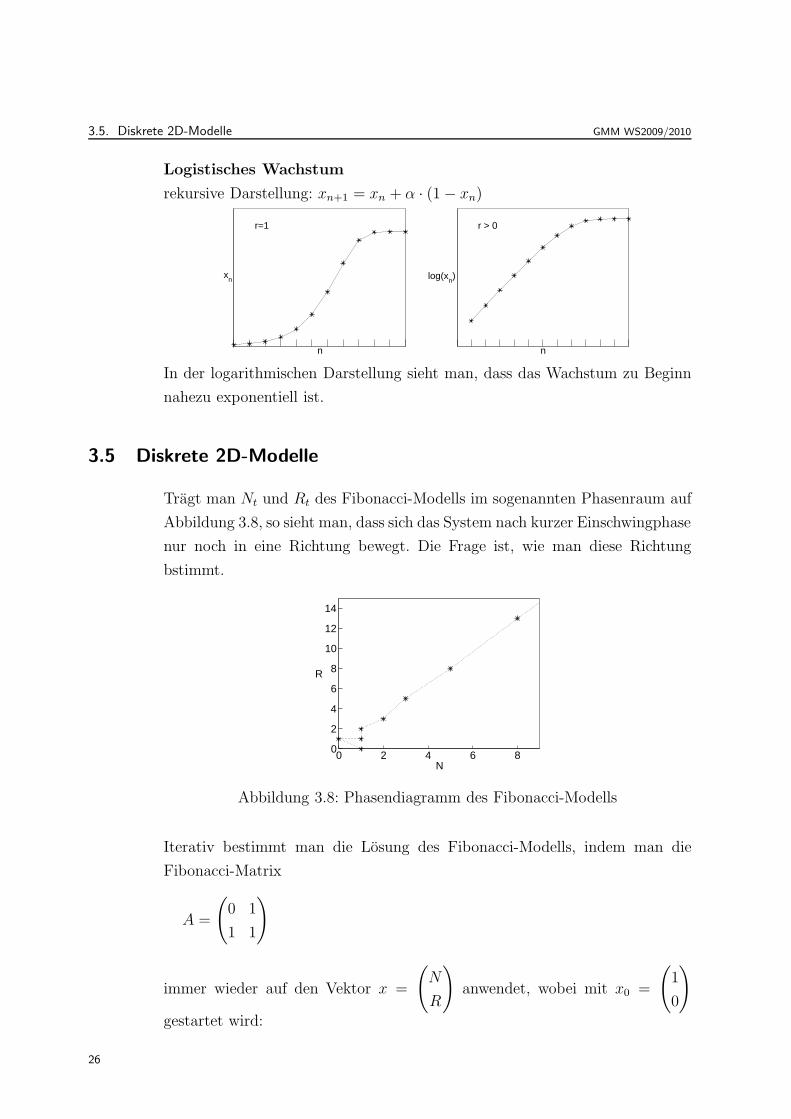
Logistisches Wachstum
rekursive Darstellung: xn+1 = xn + α · (1 − xn)
n
xn
r=1
n
log(xn)
r > 0
In der logarithmischen Darstellung sieht man, dass das Wachstum zu Beginn
nahezu exponentiell ist.
3.5 Diskrete 2D-Modelle
Tragt man Nt und Rt des Fibonacci-Modells im sogenannten Phasenraum auf
Abbildung 3.8, so sieht man, dass sich das System nach kurzer Einschwingphase
nur noch in eine Richtung bewegt. Die Frage ist, wie man diese Richtung
bstimmt.
0 2 4 6 8N
0
2
4
6
8
10
12
14
R
Abbildung 3.8: Phasendiagramm des Fibonacci-Modells
Iterativ bestimmt man die Losung des Fibonacci-Modells, indem man die
Fibonacci-Matrix
A =
(
0 1
1 1
)
immer wieder auf den Vektor x =
(
N
R
)
anwendet, wobei mit x0 =
(
1
0
)
gestartet wird:
26

GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
x1 = A · x0 =
(
0 1
1 1
)
·(
1
0
)
=
(
0
1
)
x2 = A · x1 =
(
0 1
1 1
)
·(
0
1
)
=
(
1
1
)
Man erhalt so die Trajektorie
[(
1
0
)
,
(
0
1
)
,
(
1
1
)
,
(
1
2
)
, · · ·]
Wir haben es hier also mit einem linearen System der Form
xn+1 = A · xn
zu tun.
Eine Losung eines solchen linearen Systems lasst sich leicht finden, indem man
die Eigenwerte und Eigenvektoren der Fibonacci-Matrix bestimmt.
Man sucht eine Zahl λ und einen Vektor v fur die gilt
A · v = λ · v
Dies bedeutet, dass die Matrix A den (Eigen-) Vektor v gerade um den (Eigen-)
Wert λ streckt. Hierzu lost man die charakteristische Gleichung
det(A − λ · I) = det
((
0 − λ 1
1 1 − λ
))
= −λ · (1 − λ) − 1 = 0
Zur Bestimmung der Eigenwerte und Eigenvektoren siehe Anhang D.
Im Falle der Fibonacci-Matrix erhalt man 2 verschiedene reelle Eigenwerte mit
ihren zugehorigen Eigenvektoren:
λ1 =1 +
√5
2= 1.618 · · · =: Φ v1 =
(
1
Φ
)
27

3.5. Diskrete 2D-Modelle GMM WS2009/2010
In die Richtung von v1 findet eine Streckung um den Faktor Φ statt.
λ2 =1 −
√5
2= −0.618 · · · =: φ v2 =
(
1
φ
)
In die Richtung von v2 findet eine alternierende Stauchung um den Faktor φ
statt.
Nach einer gewissen Zeit ”wirkt” nur noch Φ: xn+1 = Φ · xn.
damit wachsen Rn,Nn und Fn in jedem Zeitschritt um den Faktor Φ.
Jetzt wissen wir auch, in welche Richtung das System wachst: Rt
Nt
= Nt+1
Nt
≈ Φ
3.5.1 Fibonacci und der goldene Schnitt
Zwei aufeinanderfolgende Fibonacci-Zahlen stehen also im Verhaltnis Φ zuein-
ander: Fn+1 = Φ ·Fn. Die Zahl Φ = 1+√
52
≈ 1.618 heisst auch goldener Schnitt.
Sie ist eine beruhmte Zahl und beschreibt in Kunst und Architektur ein be-
sonderes Verhaltnis. Ein Rechteck mit den Seitenlangen a und b (a>b) genugt
dem goldenen Schnitt wenn, gilt:
a + b : a = a : b
Dieses Verhaltnis wird als besonders harmonisch empfunden und findet sich
z.B. bei Bilderrahmen.
3.5.2 Uberlagerung von Losungen – Anfangswertproblem
Wir haben in unseren Uberlegungen bisher nicht berucksichtigt, dass unser
Modell naturlich auch den Anfangswerten Nt = 1und Rt = 0, d.h. x0 =
(
1
0
)
genugen soll. Wir wissen aber, dass beide Ansatze xn = λn1 · v1 und auch
xn = λn2 · v2 die Dynamik des Systems beschreiben.
Da es sich bei unserem Modell um ein lineares Modell handelt, ist aber auch
jede Linearkombination von Losungen wiederum eine Losung, also
xn = α1 · λn1 · v1 + α2λ
n2 · v2
fur beliebige α1, α2 ∈ R.
28

GMM WS2009/2010 Kapitel 3 – Diskrete Modelle
Man muss nun also α1 und α2 so bestimmen, dass x0 =
(
1
0
)
gilt:
x0 = α1 · λ01 · v1 + α2λ
02 · v2 = α1 · v1 + α2 · v2
29

3.5. Diskrete 2D-Modelle GMM WS2009/2010
30
GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
4 Aufstellen eines Modells
Der Wasserstand eines Sees (W. Ebenhoh)
Wir erfinden einen (Modell-)See. Der Zufluss unterliege starken jahreszeitli-
chen Schwankungen, insbesondere tritt ein Fruhjahrshochwasser auf, und im
Hochsommer ist der Zufluss sehr gering oder verschwindet. Der jahrliche Zu-
fluss konnte den See etwa zweimal fullen. Der Abfluss hangt vom Wasserstand
ab. Sinkt dieser unter eine Schwelle, versiegt er ganz. Ein Teil des zugeflos-
senen Wassers verdunstet, besonders im warmen Sommer. Die Verdunstung
steigt mit der Temperatur stark an. Im Jahresmittel moge etwa die Halfte des
zugeflossenen Wassers verdunsten. Die Oberflache des Sees betrage bei mittle-
rem Wasserstand 2 km2, er habe flache Ufer. Seine maximale Tiefe betragt 6 m.
Gesucht sind die jahreszeitlichen Wasserstandsschwankungen des Sees!
Da die Angaben qualitativ und unvollstandig sind, mussen sie durch sinnvolle
Annahmen erganzt werden. Auch die Gleichungen fur Zufluss, Abfluss und
Verdunstung mussen erfunden werden! Die Aufgabe lasst damit viel Freiheit.
Es werden aber fur die Modellierung zwei technische Forderung gestellt:
• Die Wasserstandsanderungen werden von Tag zu Tag berechnet (die Zeit
schreitet in Tagesschritten fort, diskretes Modell).
• Der Zufluss zum See soll durch zwolf Monatsmittel beschrieben werden.
Der Modellzufluss”springt“ dann jeweils zum Monatswechsel (12 Monate
zu je 30 Tagen).
Bei diesem Beispiel geht es nicht nur um die mathematische Technik, vielmehr
mussen alle Arbeitsschritte eines Modellierers durchgefuhrt werden. Es werden
acht Modellierungsschritte vorgestellt und kommentiert und fur das einfache
Modell”See“ ausgefuhrt.
Acht Schritte bei der Aufstellung eines Modells
1. Verbale Beschreibung des Systems, Fragen, Ziele des Modells
2. Zustandsvariable auswahlen, Prozesse benennen, Modellgleichungen (top
level)
31

Kapitel 4 – Aufstellen eines Modells GMM WS2009/2010
3. Randbedingungen, Antriebe
4. Prozessbeschreibungen, Modellgleichungen (lower levels)
5. Parameterliste, Parameterwerte beschaffen
6. Programmierung und Simulation
7. Modellverbesserung: Iteration der vorangegangenen Schritte
8. Anwendungen des Modells, Dokumentation der Ergebnisse und Erkennt-
nisse
1. Eine verbale Beschreibung des Modells ist dann unerlasslich, wenn man
nicht allein am Modell arbeitet, oder wenn der Modellierer einen Auftrag-
geber hat. Man arbeitet sonst aneinander vorbei. Aber auch sonst deckt
der Versuch, das aufzuschreiben, was man im Kopf zu haben glaubt,
erst die Lucken der Vorstellungen auf. Man schafft durch die verbale
Beschreibung eine hilfreiche Vorstufe des mathematischen Modells: ein
konzeptionelles Modell. Insbesondere ist es wichtig, die Ziele und die Fra-
gen, die mit dem Modell beantwortet werden sollen, gut zu formulieren.
Man modelliert ja nicht einfach”ein System“, sondern modelliert es fur
einen Zweck, und der bestimmt die Art des Modells.
2. Die Zustandsvariablen (auch Systemvariablen) sind die Komponenten
eines Zustandsvektors. Sie werden durch die Fragestellung bestimmt,
hangen also vom Zweck des Modells ab. Die Auswahl kann sich spater im
Modellierungsprozess noch andern (Schritt”Modellverbesserung“), aber
man muss mit einer Entscheidung fur einen Satz von Zustandsvariablen
beginnen, um die nachsten Schritte ausfuhren zu konnen. Bei einem dy-
namischen System andert sich der Zustand mit der Zeit. Deshalb mussen
als nachstes die Prozesse aufgelistet werden, die die Zustandsvariablen
andern. Beide (Zustandsvariable und Prozesse) werden nun verbunden,
indem die Modellgleichungen in einer wenig spezifizierten Form aufge-
stellt werden. Das Ergebnis nennen wir”top level“-Gleichungen, da sie
die Ubersicht uber das gesamte Modell enthalten und noch alle Einzel-
heiten offen lassen. Zum Beispiel konnte man schreiben:
Anderung der Bevolkerungszahl = Geburten - Todesfalle + Zuwanderung
32
GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
Die Bevolkerungszahl ist die Zustandsvariable, Geburten, Todesfalle und
Wanderungsbewegungen sind die Prozesse, die sie andern.
3. Bei einem”System“ muss man immer klar trennen, was dazu gehort und
was als extern anzusehen ist. Die Umgebung beeinflusst die Entwicklung
des Modellsystems, aber – und das ist eine Folge der (kunstlichen) Mo-
dellabgrenzung – das Modellsystem kann das”Externe“ nicht andern,
auch wenn es”in Wirklichkeit“ eine Ruckwirkung uber die Systemgren-
zen hinaus gibt. Soll diese modelliert werden, sind die Systemgrenzen
weiter zu fassen. Die externen Bedingungen, die fur den Fortgang der
internen Entwicklung wesentlich sind, werden”Antriebskrafte“ genannt
(”driving forces“). Bei Okosystemen sind die wichtigsten Antriebskrafte
Licht, Temperatur und Niederschlag. Sie andern sich mit der Jahreszeit
und der Tageszeit. Aber auch andere”Randbedingungen“ gehoren zu den
Antriebskraften. Das sind z.B. Konzentrationen von Stoffen außerhalb
der raumlichen Systemgrenzen, wenn sie diese durch Transportprozesse
uberschreiten und dadurch im System die Zustandsvariablen andern.
4. Die”top-level“-Gleichungen mussen durch jede Menge Einzelbetrachtun-
gen prazisiert werden, und zwar so weit, dass man sie auf dem Rech-
ner programmieren kann. Es mussen Formeln fur die Prozesse gefunden
oder erfunden werden (”lower level“). Dazu ist notig, dass man sich klar
macht, wovon die Prozessraten abhangen, und wie die Einflussfaktoren
zu gestalten sind. Dabei werden Parameter in den neu entwickelten Glei-
chungen auftauchen, von denen einige noch unbekannte Werte haben.
5. Den Parametern, die in den spezifizierten Gleichungen von Schritt (4)
enthalten sind, mussen Werte zugeordnet werden. Viele Werte kann man
aus der Literatur, aus Lehrbuchern oder durch Expertenbefragung gewin-
nen. Allerdings muss der Modellierer meistens die Werte einiger Parame-
ter schatzen, da sie nicht bekannt sind. Diesen Prozess, das”Erraten“
von Parameterwerten, nennt man”educated guessing“. Es handelt sich
nicht um ein blindes Herumraten, sondern um den Einsatz des gesam-
ten Systemverstandnisses, das sich der Modellierer auf den bisherigen
Schritten und durch Literaturstudium erworben hat. Regelmaßig ist ein
Teil der Parameter in den Modellgleichungen erst durch Aufstellung der
Gleichungen definiert worden, also durch die Einsicht des Modellierers in
das Problem. Fur diese Parameter konnen gar keine Werte vorher durch
33

Kapitel 4 – Aufstellen eines Modells GMM WS2009/2010
Messungen bestimmt worden sein! Durch die Modellierung liegt nun eine
theoretische Vorstellung des Systems vor, die es erlaubt, Experimente zu
ersinnen, mit denen diese neuen Parameter gemessen werden konnten.
Zunachst aber muss man diese Werte schatzen.
6. Die Programmierung des Modells ist eine ganz andere Kunst, andere
Fertigkeiten sind gefordert, die man im Prinzip auch zu anderen Zei-
ten (vorher) lernen kann. Die Durchfuhrung von Simulationslaufen und
der Vergleich mit Beobachtungsergebnissen oder experimentellen Resul-
taten erfordert dann wieder den Modellierer im Wissenschaftler. Man
kann davon ausgehen, dass die Modellresultate der ersten Versuche nicht
das gewunschte Bild zeigen. Nun kommt es darauf an, herauszufinden,
woran das liegt. Ist es ein Programmierfehler, ein Fehler in den Parame-
terabschatzungen oder ein Denkfehler beim Aufstellen der Modellglei-
chungen? Wenn es sich um Programmierfehler handelt, so erfordert es
Geduld, Ubersicht und detektivische Kleinarbeit, sie in einem langeren
Code aufzuspuren. Fehlersuche ist anspruchsvoll und wird durch Erfah-
rung erleichtert.
7. Spatestens an dieser Stelle erweist sich der Modellierungsprozess als Ite-
rationsschleife. Man muss wieder und wieder die Modellgleichungen in
Frage stellen (nicht nur den Code oder die Parameterwerte). Man muss
sogar die Ziele des Modells hinterfragen. Der Vergleich zwischen Simu-
lation und Messdaten erzeugt Einsicht in das Problem, auch und gerade
dann, wenn die Ubereinstimmung schlecht ist.
8. Wenn das Modell vertrauenswurdig”lauft“, kann man es in verschie-
denen Anwendungen nutzen, um weitere Einsichten in das System zu
erhalten. Durch Sensitivitatsanalysen sind die Parameter und Modelltei-
le zu identifizieren, die das Simulationsergebnis empfindlich beeinflussen.
Man kann Szenarien aller Art berechnen, und insbesondere das Modell
unter Bedingungen laufen lassen, die man dem realen System nicht zu-
muten mag. Die Dokumentation des Modells und die Publikation der
Ergebnisse sind unabdingbar.
34
GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
4.1 Verbale Beschreibung, Ziele
Die Wasserstandsanderungen eines Sees sollen modelliert werden. Es handelt
sich nicht um einen realen See, sondern um einen erdachten See. Wir sind seine
”Schopfer“ und wollen ihn nicht zu langweilig gestalten. Die Einleitungsaufga-
be enthalt eine sehr knappe Beschreibung des Sees und einige Zahlenangaben
(Tiefe, Flache, Zufluss, Verdunstungsanteil). Er soll einen mit der Jahreszeit
stark wechselnden Wasserstand haben. Der Zufluss ist in der kalteren regen-
reichen Zeit hoch, insbesondere gibt es ein Hochwasser (z.B. nach der Schnee-
schmelze). Im Sommer kann eine Periode ohne Zufluss existieren, und in der
Sommerhitze werden die großten Wasserverluste durch Verdunstung hervorge-
rufen. Der Seespiegel sinkt dann so stark, dass der Abfluss versiegt. Im Ex-
tremfall konnte der See auch austrocknen. Der uber das Jahr integrierte Zufluss
soll etwa zweimal das mittlere Seevolumen betragen, davon verdunstet etwa die
Halfte. Das Modell dient zu Lehrzwecken, deshalb wird ein sogenanntes”kli-
matologisches Jahr“ zugrunde gelegt, also mittlere Verhaltnisse im Zeitraum
der letzten 30 Jahre (mindestens). Dieses klimatologische Jahr wiederholt sich
im Modell immer wieder, und die Losung wird entsprechend periodische jahres-
zeitliche Schwankungen aufzeigen. Die Freiheit eines”erdachten“ Sees ist nicht
nur angenehm, sie erzwingt auch, uber Große, Querschnitt und alles andere
erfinderisch nachzudenken.
Das Wasserstandsmodell konnten wir als erste Stufe einer See-Modellierung an-
sehen. In einer Modellerweiterung wurde ein Betrieb am Ufer einen Schadstoff
uber Abwasser einleiten. Dann interessiert die Zeitentwicklung der Schadstoff-
konzentration im See. Offenbar sind die Zeiten mit niedrigem Wasserstand und
ohne Abfluss besonders kritisch. Man konnte das erweiterte Modell benutzen,
um herauszufinden, wie die Schadstoffeinleitung zu steuern und zu begrenzen
ware, wenn ein vorgegebener Grenzwert im See nicht uberschritten werden
darf.
In weiteren Fortsetzungen konnten dann die Auswirkung des Schadstoffes (oder
einer Eutrophierung) auf das Okosystem des Sees modelliert werden.
4.2 Zustandsvariable, Prozesse
Dynamische Systeme haben einen zeitabhangigen”Zustand“. Der Zustands-
raum ist die Menge aller moglichen Zustande, die das Modellsystem im Prin-
zip annehmen kann. Der aktuelle Zustand des Systems zu einem ausgewahlten
35
4.2. Zustandsvariable, Prozesse GMM WS2009/2010
Zeitpunkt t ist ein Punkt im Zustandsraum. Mit Ablauf der Zeit t verschiebt
er sich darin. Das Entwicklungsgesetz gibt die Regeln an, nach denen diese
Verschiebung erfolgt.
Wenn die Zustandsvariablen definiert sind, werden die Modellgleichungen auf-
gestellt, die es ermoglichen, ihre Zeitentwicklung zu berechnen. Im Falle des
oben beschriebenen Sees bietet sich auf den ersten Blick als einzige Zustandsva-
riable der Wasserstand an. Spater kann als zweite Zustandsvariable die Schad-
stoffkonzentration hinzukommen. Als”Wasserstand“ H bezeichnen wir einen
Pegel, der sich nur durch eine Nullpunktverschiebung von der aktuellen Tiefe
des Sees unterscheidet.
Zustandsvariable: Wasserstand H
Der Name H fur die Zustandsvariable ist willkurlich (H wie Hohe des Was-
serstandes). T fur Tiefe geht nicht, weil T fur Temperatur benutzt werden
soll, und P fur Pegel kollidiert mit dem in aquatischen Okosystemmodellen
ublichen P fur Phytoplankton. Derartige Entscheidungen haben oft langanhal-
tende Auswirkungen. Modellierer halten sich moglichst an die Bezeichnungen,
die ihre Vordenker eingefuhrt haben. Sie erhohen damit die Akzeptanz ihrer
Arbeit.
Mit dem Wasserstand verknupft sind Seeoberflache F und Wasservolumen V,
die beide fur die Modellierung gebraucht werden:
Oberflache: F (H) Volumen: V (H) =H∫
−L
F (h) dh
Der Pegelstand, bei dem der See leer ist, wird hier mit -L (leer) bezeichnet,
er tritt als untere Integrationsgrenze auf und ist negativ, wenn der Pegel-
Nullpunkt daruber liegt. Wird die Seeoberflache F (H) als Funktion des Was-
serstandes H vorgegeben, so ist alles bekannt, was das Modell uber die Geo-
metrie des Sees wissen muss. Die horizontale Form spielt keine Rolle, aber der
vertikale Querschnitt, das Tiefenprofil. Als einfaches Beispiel kann man sich
einen See mit einem parabelformigen vertikalen Querschnitt vorstellen (4.1),
dann ist die Flache proportional zur Tiefe, und die Tiefe ist H + L.
F (H) = FNH + L
HN + L(4.1)
36

GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
In diesem Kapitel soll der Zusammenhang 4.1 gelten. Dabei ist HN ein Referenz-
Wasserstand (etwa der mittlere Wasserstand) und FN die zugehorige Flache.
Die Prozesse sind die Vorgange, die die Zustandsvariablen andern. Der Was-
serstand H wird durch Zufluss, Abfluss und Verdunstung geandert:
Prozesse: Zufluss zu
Abfluss ab
Verdunstung vd
Alle drei Großen haben die Dimension Volumen pro Zeiteinheit, also z.B. die
Einheit m3d−1 (Kubikmeter pro Tag). Es ist von allergroßter Bedeutung, sich
beim Modellieren immer uber Dimension und Einheiten aller auftretender
Großen im Klaren zu sein und bei jedem Term, bei jeder Gleichung sofort
die Einheiten auf Konsistenz zu uberprufen! Das ist ein wichtiges Hilfsmittel,
um Fehler beim Aufstellen der Gleichungen fruhzeitig aufzuspuren.
Die Modellgleichungen (top-level) verbinden die Zustandsvariablen mit den
Prozessen in Form von”dynamischen“ Gleichungen, das sind Gleichungen,
die die Anderungen der Zustandsvariablen beschreiben. In der Regel sind das
Differentialgleichungen oder Differenzengleichungen. Die Prozesse andern den
Wasserstand, indem sie das Volumen andern:
Volumenanderung = Zufluss - Abfluss - Verdunstung
Hier soll die Zeit in festen Tagesschritten ∆t fortschreiten. Statt mit der Ande-
rungsgeschwindigkeit V = dV/dt rechnen wir mit der Naherung”Volumenande-
rung pro Tag“
∆V = (zu − ab − vd) · ∆t (4.2)
Die Multiplikation mit ∆t auf der rechten Seite ist aus zwei Grunden bemer-
kenswert: Zum einen werden die Prozesse mit Dimension Volumen pro Zeit
durch die Multiplikation mit einer Zeit in Volumen verwandelt, wie es die linke
Seite erfordert. Zum anderen erkennt man eine”Linearitat“: Die Volumenande-
rung ist proportional zur Lange des Zeitschrittes. Genau hierin besteht der
Approximationscharakter der Differenzengleichung, denn offensichtlich ist die-
37
4.2. Zustandsvariable, Prozesse GMM WS2009/2010
se Linearitat nur fur kleine Zeitschritte ∆t akzeptabel, namlich solange sich
zu, ab und vd in ∆t nur unwesentlich andern.
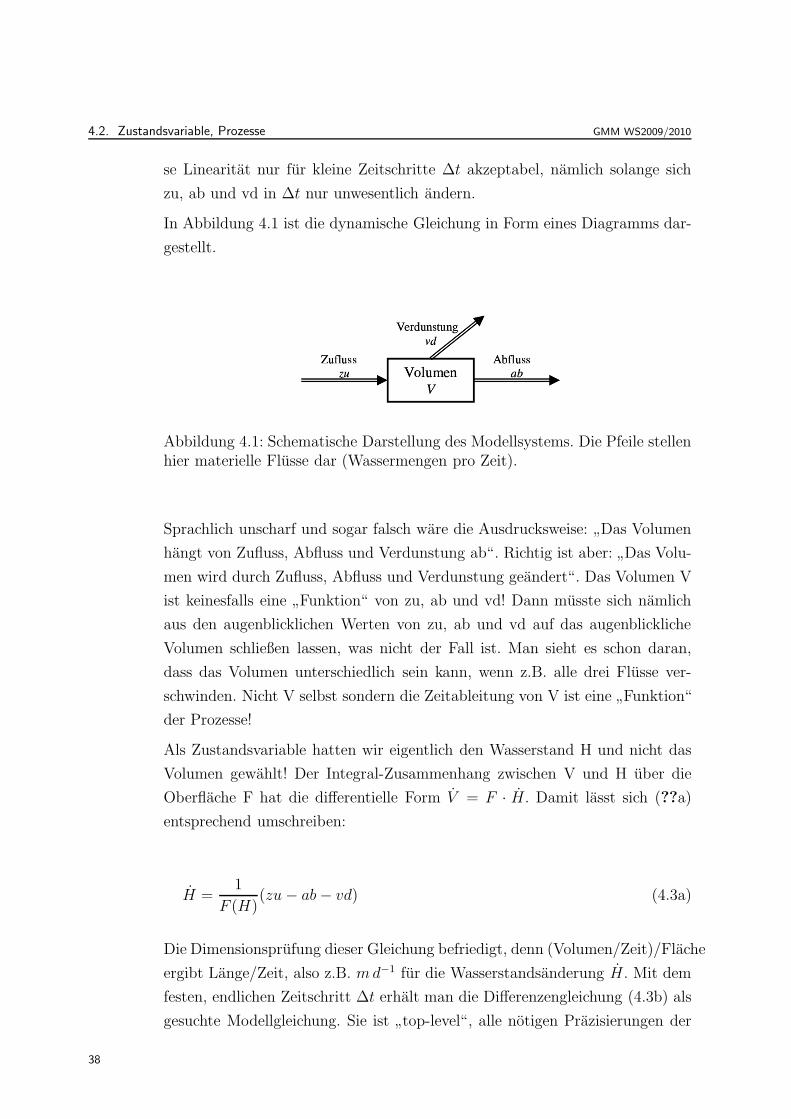
In Abbildung 4.1 ist die dynamische Gleichung in Form eines Diagramms dar-
gestellt.
Abbildung 4.1: Schematische Darstellung des Modellsystems. Die Pfeile stellenhier materielle Flusse dar (Wassermengen pro Zeit).
Sprachlich unscharf und sogar falsch ware die Ausdrucksweise:”Das Volumen
hangt von Zufluss, Abfluss und Verdunstung ab“. Richtig ist aber:”Das Volu-
men wird durch Zufluss, Abfluss und Verdunstung geandert“. Das Volumen V
ist keinesfalls eine”Funktion“ von zu, ab und vd! Dann musste sich namlich
aus den augenblicklichen Werten von zu, ab und vd auf das augenblickliche
Volumen schließen lassen, was nicht der Fall ist. Man sieht es schon daran,
dass das Volumen unterschiedlich sein kann, wenn z.B. alle drei Flusse ver-
schwinden. Nicht V selbst sondern die Zeitableitung von V ist eine”Funktion“
der Prozesse!
Als Zustandsvariable hatten wir eigentlich den Wasserstand H und nicht das
Volumen gewahlt! Der Integral-Zusammenhang zwischen V und H uber die
Oberflache F hat die differentielle Form V = F · H. Damit lasst sich (??a)
entsprechend umschreiben:
H =1
F (H)(zu − ab − vd) (4.3a)
Die Dimensionsprufung dieser Gleichung befriedigt, denn (Volumen/Zeit)/Flache
ergibt Lange/Zeit, also z.B. m d−1 fur die Wasserstandsanderung H. Mit dem
festen, endlichen Zeitschritt ∆t erhalt man die Differenzengleichung (4.3b) als
gesuchte Modellgleichung. Sie ist”top-level“, alle notigen Prazisierungen der
38
GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
Prozessbeschreibungen fehlen noch.
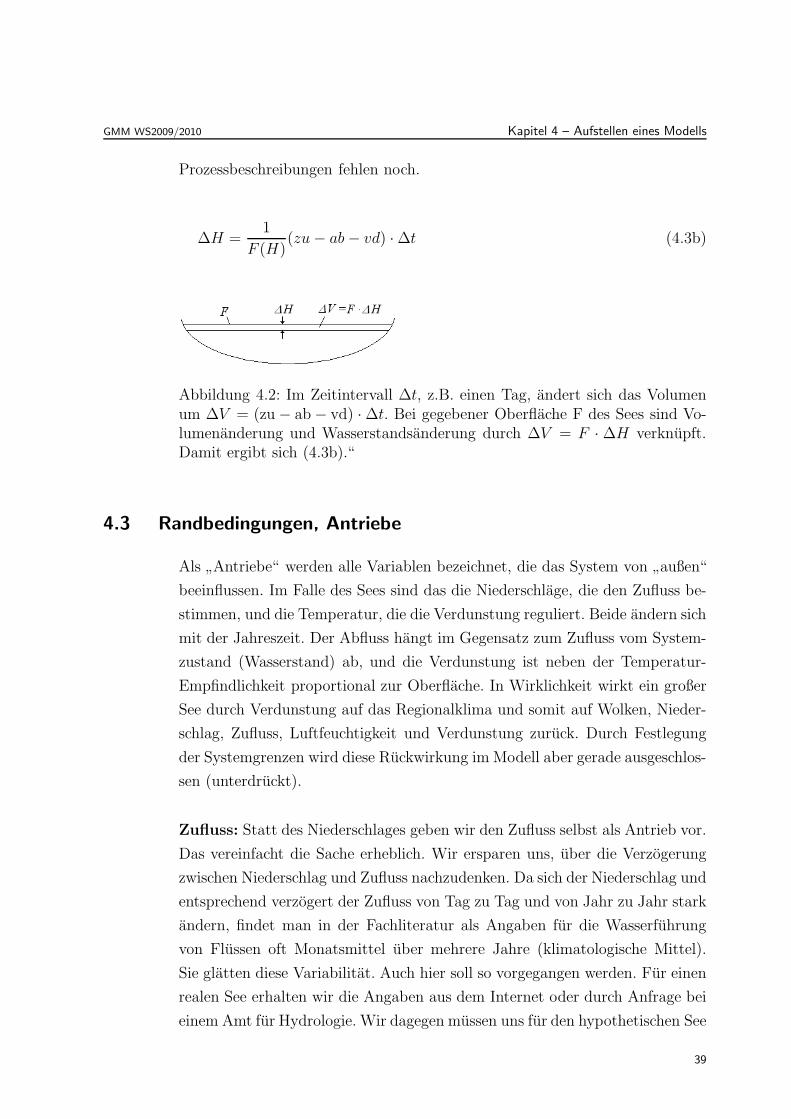
∆H =1
F (H)(zu − ab − vd) · ∆t (4.3b)
Abbildung 4.2: Im Zeitintervall ∆t, z.B. einen Tag, andert sich das Volumenum ∆V = (zu − ab − vd) · ∆t. Bei gegebener Oberflache F des Sees sind Vo-lumenanderung und Wasserstandsanderung durch ∆V = F · ∆H verknupft.Damit ergibt sich (4.3b).“
4.3 Randbedingungen, Antriebe
Als”Antriebe“ werden alle Variablen bezeichnet, die das System von
”außen“
beeinflussen. Im Falle des Sees sind das die Niederschlage, die den Zufluss be-
stimmen, und die Temperatur, die die Verdunstung reguliert. Beide andern sich
mit der Jahreszeit. Der Abfluss hangt im Gegensatz zum Zufluss vom System-
zustand (Wasserstand) ab, und die Verdunstung ist neben der Temperatur-
Empfindlichkeit proportional zur Oberflache. In Wirklichkeit wirkt ein großer
See durch Verdunstung auf das Regionalklima und somit auf Wolken, Nieder-
schlag, Zufluss, Luftfeuchtigkeit und Verdunstung zuruck. Durch Festlegung
der Systemgrenzen wird diese Ruckwirkung im Modell aber gerade ausgeschlos-
sen (unterdruckt).
Zufluss: Statt des Niederschlages geben wir den Zufluss selbst als Antrieb vor.
Das vereinfacht die Sache erheblich. Wir ersparen uns, uber die Verzogerung
zwischen Niederschlag und Zufluss nachzudenken. Da sich der Niederschlag und
entsprechend verzogert der Zufluss von Tag zu Tag und von Jahr zu Jahr stark
andern, findet man in der Fachliteratur als Angaben fur die Wasserfuhrung
von Flussen oft Monatsmittel uber mehrere Jahre (klimatologische Mittel).
Sie glatten diese Variabilitat. Auch hier soll so vorgegangen werden. Fur einen
realen See erhalten wir die Angaben aus dem Internet oder durch Anfrage bei
einem Amt fur Hydrologie. Wir dagegen mussen uns fur den hypothetischen See
39
4.3. Randbedingungen, Antriebe GMM WS2009/2010
die 12 Monatsmittel MM(m), m = 1 . . . 12 ausdenken. Dabei ist es sinnvoll,
den absoluten Wert von den relativen Monatsmitteln relMM(m) zu trennen:
MM(m) = relMM(m) · vzu , wobei
12∑
m=1
relMM(m) = 12 (4.4)
Das Jahresmittel vzu des Zuflusses ist in der Aufgabenstellung gegeben:
vzu =2VN
360 d(4.5)
wobei VN = V (HN) das Volumen beim Referenz-Wasserstand HN ist und mit
12 Monaten zu je 30 Tagen gerechnet wird. In einem halben Jahr konnte der
Zufluss also den See fullen, gabe es keine Verluste. Die 12 relativen Monats-
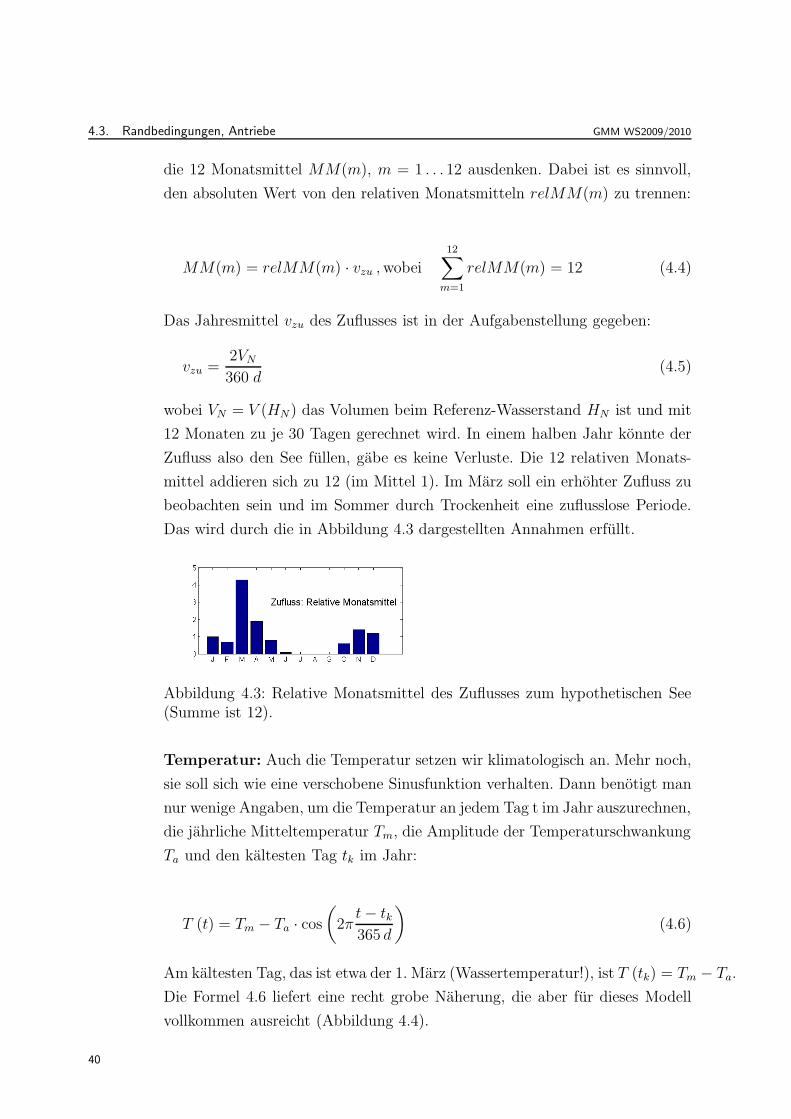
mittel addieren sich zu 12 (im Mittel 1). Im Marz soll ein erhohter Zufluss zu
beobachten sein und im Sommer durch Trockenheit eine zuflusslose Periode.
Das wird durch die in Abbildung 4.3 dargestellten Annahmen erfullt.
Abbildung 4.3: Relative Monatsmittel des Zuflusses zum hypothetischen See(Summe ist 12).
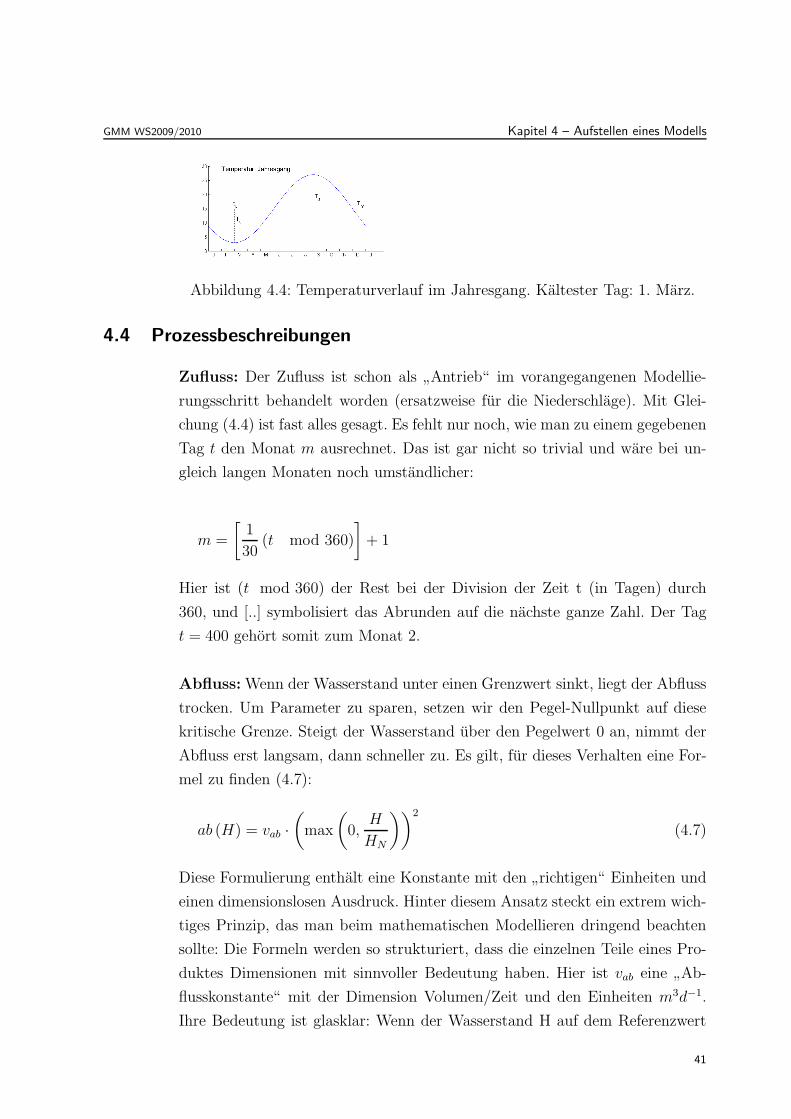
Temperatur: Auch die Temperatur setzen wir klimatologisch an. Mehr noch,
sie soll sich wie eine verschobene Sinusfunktion verhalten. Dann benotigt man
nur wenige Angaben, um die Temperatur an jedem Tag t im Jahr auszurechnen,
die jahrliche Mitteltemperatur Tm, die Amplitude der Temperaturschwankung
Ta und den kaltesten Tag tk im Jahr:
T (t) = Tm − Ta · cos
(
2πt − tk365 d
)
(4.6)
Am kaltesten Tag, das ist etwa der 1. Marz (Wassertemperatur!), ist T (tk) = Tm − Ta.
Die Formel 4.6 liefert eine recht grobe Naherung, die aber fur dieses Modell
vollkommen ausreicht (Abbildung 4.4).
40
GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
Abbildung 4.4: Temperaturverlauf im Jahresgang. Kaltester Tag: 1. Marz.
4.4 Prozessbeschreibungen
Zufluss: Der Zufluss ist schon als”Antrieb“ im vorangegangenen Modellie-
rungsschritt behandelt worden (ersatzweise fur die Niederschlage). Mit Glei-
chung (4.4) ist fast alles gesagt. Es fehlt nur noch, wie man zu einem gegebenen
Tag t den Monat m ausrechnet. Das ist gar nicht so trivial und ware bei un-
gleich langen Monaten noch umstandlicher:
m =
[1
30(t mod 360)
]
+ 1
Hier ist (t mod 360) der Rest bei der Division der Zeit t (in Tagen) durch
360, und [..] symbolisiert das Abrunden auf die nachste ganze Zahl. Der Tag
t = 400 gehort somit zum Monat 2.
Abfluss: Wenn der Wasserstand unter einen Grenzwert sinkt, liegt der Abfluss
trocken. Um Parameter zu sparen, setzen wir den Pegel-Nullpunkt auf diese
kritische Grenze. Steigt der Wasserstand uber den Pegelwert 0 an, nimmt der
Abfluss erst langsam, dann schneller zu. Es gilt, fur dieses Verhalten eine For-
mel zu finden (4.7):
ab (H) = vab ·(
max
(
0,H
HN
))2
(4.7)
Diese Formulierung enthalt eine Konstante mit den”richtigen“ Einheiten und
einen dimensionslosen Ausdruck. Hinter diesem Ansatz steckt ein extrem wich-
tiges Prinzip, das man beim mathematischen Modellieren dringend beachten
sollte: Die Formeln werden so strukturiert, dass die einzelnen Teile eines Pro-
duktes Dimensionen mit sinnvoller Bedeutung haben. Hier ist vab eine”Ab-
flusskonstante“ mit der Dimension Volumen/Zeit und den Einheiten m3d−1.
Ihre Bedeutung ist glasklar: Wenn der Wasserstand H auf dem Referenzwert
41

4.4. Prozessbeschreibungen GMM WS2009/2010
HN > 0 steht, gibt sie gerade den Abfluss an, da dann der dimensionslose
Faktor 1 ist. Nach der Aufgabenstellung in der Einleitung ist sogar ungefahr
ihr Wert bekannt. Da namlich etwa die Halfte des Zuflusses verdunsten und
die andere Halfte abfließen soll, wird vab ≈ 1/2vzu gelten. vzu ist in 4.4 definiert
und hat die gleichen Einheiten wie vab.
Verdunstung: Die Verdunstung vd ist proportional zur aktuellen Oberflache
F des Sees. Die auf die Flacheneinheit bezogene Verdunstung ist damit vd/F .
Sie steigt mit der Temperatur stark an und hangt in Wahrheit außerdem
vom Wind und von der Luftfeuchtigkeit ab. Wir ignorieren diese zusatzlichen
Abhangigkeiten und setzen eine exponentielle Zunahme mit der Temperatur
an (4.8).
vd (t, H) = avd · F (H) · exp
(T (t) − 20 ◦C
Tvd
)
(4.8)
Wie schon beim Abfluss haben auch in (4.8) die Faktoren des Produktes klare
Dimensionen. Die eigentliche Temperaturabhangigkeit steckt in einem dimen-
sionslosen Faktor, der bei T = 20 ◦C den Wert 1 annimmt und sich bei einer
Temperatursteigerung um Tvd ver-e-facht. Damit ist die Bedeutung des Pa-
rameters Tvd beschrieben. Die Verdunstungskonstante avd hat die Dimension
Lange/Zeit mit den Einheiten md−1. Sie gibt an, um wie viel der Seespie-
gel bei 20 ◦C taglich allein durch Verdunstung sinken wurde. Das Produkt
vvd = avd · F hat wieder die Dimension Volumen/Zeit und ist mit vzu und vab
vergleichbar. Weil sich F mit H verandert, ist vvd allerdings keine Konstante.
Es kann gar nicht genug betont und wiederholt werden, wie wichtig es beim
Erfinden von Gleichungen ist, den neu auftretenden Parametern”Bedeutun-
gen“ und sinnvolle Dimensionen zu geben, um sie abschatzbar und messbar,
auch erklarbar und verstandlich zu machen! Ein grundsatzlicher”Trick“ dabei
sind dimensionslose Ausdrucke, wie sie in (4.7) und (4.8) auftreten, wo sie die
wesentlichen Abhangigkeiten vom Wasserstand bzw. von der Temperatur ent-
halten.
Entwicklungsgesetz
Nachdem die drei Prozesse durch (lower-level) Gleichungen prazisiert wurden,
lasst sich das Modell als Ganzes durch Zusammenfassung von 4.1 bis (4.8) in
42

GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
Gleichungsform darstellen (4.9). Das System 4.9 ist die mathematische For-
mulierung des Modells, das”Entwicklungsgesetz“, da es den Zustand zur Zeit
t+∆t aus dem Zustand zur Zeit t zu berechnen erlaubt. Aus gegebenen “alten“
Werten werden”neue“ berechnet, und das wird iterativ wiederholt.
Bei einer Iteration muss ein”Iterationsanfang“ vorgegeben werden. Zu Beginn
muss fur einen Anfangszeitpunkt t0 der zugehorige Wasserstand H0 vorgegeben
werden. Dann kann 4.9 immer wiederholt werden: Fur gegebene Werte t und
H(t) werden zuerst die Hilfsgroßen Flache F und Temperatur T und Monat
m berechnet. Diese Hilfsgroßen werden fur die Berechnung der Prozesse zu, ab
und vd benotigt. Zum Schluss wird mit ihnen die Anderung des Wasserstandes
∆H und der neue Wasserstand H (t + ∆t) = H + ∆H bestimmt. Die Zeit
schreitet um ∆t fort (in 4.9 nicht aufgefuhrt). Nach dem Durchlaufen kann
diese Abfolge mit den”neuen“ Werten t und H erneut gestartet und immer
wiederholt werden, bis ein Endzeitpunkt erreicht ist. Der Iterationsanfang bei
t0 mit dem Startwert H0 legt so eine ganze Iterationsfolge fest.
Es seien t und H = H (t) gegeben:
F = FNH + L
HN + L
T = Tm − Ta · cos
(
2πt − tk365 d
)
m =
[1
30(t mod 360)
]
+ 1
zu = vzu · relMM (m) (4.9)
ab = vab ·(
max
(
0,H
HN
))2
vd = avd · F · exp
(T (t) − 20 ◦C
Tvd
)
∆H =1
F(zu − ab − vd) · ∆t
H(t + ∆t) = H(t) + ∆H
4.5 Parameterliste und Parameterwerte
Wie man aus dem System 4.9 entnehmen kann, hat das Modell die Parameter
HN , FN , L, vab, avd, Tvd, vzu, relMM, Tm, Ta, tk
HN , FN beschreiben die Seegroße, L die Tiefe bei Pegel 0, vzu, relMM, Tm,Ta,
tk sind Angaben uber die externen Antriebe. Dabei hangt vzu durch die Vor-
43
4.5. Parameterliste und Parameterwerte GMM WS2009/2010
gaben von der Seegroße ab. Nur die drei Parameter vab,avd, Tvd beeinflussen
unmittelbar die Prozesse, ohne von externen Daten abhangig zu sein. Wir
nennen sie die dynamischen Parameter (genauer: Dynamik-Parameter). Sie
mussen nicht geandert werden, wenn beispielsweise das klimatologische Jahr
durch eine Abfolge unterschiedlicher”realer“ Jahre ersetzt wird. Wenn ein rea-
ler See modelliert werden sollte, mussten die Parameterwerte durch Befragung
von Experten, durch Literaturstudium und zum Teil durch eigene Schatzungen
bestimmt werden. Das ist eine schwierige und verantwortungsvolle Aufgabe.
Hier aber denken wir uns einen See aus. Auch dies erfordert tiefes Nachdenken
uber die Parameterwerte, wenn sie einigermaßen konsistent und realistisch sein
sollen.
Seegroße: Unser See soll bei Normalfullung 2 km2 Oberflache haben und 6 m
Wassertiefe, das Tiefenprofil wird als parabelformig angesetzt. Den Pegel-
Nullpunkt (wo der Abfluss gerade versiegt) wollen wir so festlegen, dass der
Normalpegel HN bei 1m liegt.
FN = 2 km HN + L = 6 m HN = 1 m L = 5 m VN = 6 · 106 m3 (4.10)
Antriebe: Der Zufluss soll so hoch sein, dass das Wasser im Mittel in einem
Jahr etwa zweimal erneuert wird. Dadurch wird der Parameter vzu festgelegt.
vzu =2VN
360 d≈ 30 · 103 m3 d−1 (4.11)
Fur die relativen jahreszeitlichen Schwankungen relMM wurden bereits in Bild
2 Annahmen gemacht. Fur die Parameter der Temperaturschwankung nach
Gleichung (4.6) wurden in Bild 3 auch schon Werte festgelegt, die fur einen
eher warmen Ort mit ausgepragtem Landklima gelten konnten:
Tm = 10 ◦C Ta = 12 ◦C tk = 60 d (4.12)
Abfluss: Vom Parameter vab hangt ab, um wieviel der Wasserstand uber den
kritischen Pegel 0 steigen kann. Die Formel (4.7) fur den Abfluss wurde so
konstruiert, dass bei einem Pegel von HN = 1 m (1 m in der Abflussrinne)
der Abfluss vab betragt. Da sich bei mittlerem Zufluss vzu bei diesem Pegel ein
44
GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
Gleichgewicht einstellen soll, muss man (4.13) ansetzen, denn entsprechend der
verbalen Beschreibung verdunstet die Halfte des zufließenden Wassers.
vab ≈1
2vzu (4.13)
Wenn vab um einen Faktor 2 vergroßert oder verkleinert wird, so hat das wegen
der quadratischen Abhangigkeit in (4.7) die Auswirkung, dass sich bei gleichem
vzu ein Gleichgewichtspegel von 1.4 m bzw. 0.70 m einstellen wurde. Das sind
relativ geringe Verschiebungen, vab ist also kaum als kritischer Parameter zu
bezeichnen.
Verdunstung: Wir beginnen mit einer groben Schatzung unter Benutzung
des gesunden Menschenverstandes. Es ist plausibel, dass bei 20 ◦C (Wasser-
temperatur!) der Wasserspiegel durch Verdunstung taglich um etwa 2 cm sinkt
– ohne Zufluss naturlich.
avd = 0.02 m d−1 (4.14)
Der wahre Wert hangt sicher von Wind und Luftfeuchtigkeit ab und ist mogli-
cherweise um einen Faktor 2 falsch, aber wohl nicht viel mehr. Auch die
Abhangigkeit der Verdunstung von der Temperatur muss erraten werden, wenn
wir nicht tief in Physiklehrbuchern graben wollen. Die funktionelle Form die-
ser Abhangigkeit wurde bereits in (4.8) als Exponentialfunktion angesetzt. Bei
welcher Temperaturerhohung wird sich wohl die Verdunstung verdoppeln? Es
scheint nicht unvernunftig zu sein, dafur 5 ◦C anzunehmen. Das bedeutet
2 ≈ exp
(5 ◦C
Tvd
)
⇒ Tvd ≈ 5 ◦C
ln 2≈ 7.2 ◦C (4.15)
Prufung auf Konsistenz: Da die Schatzungen fur Zufluss und Verdunstung ganz
unabhangig voneinander gemacht wurden, ist keineswegs klar, ob die Vorga-
be aus der verbalen Beschreibung auch nur annahernd erfullt ist, nach der die
Verdunstung etwa die Halfte des Zuflusses ausmacht. Wir schatzen deshalb die
jahrliche Verdunstung ab. Sie konzentriert sich auf die vier Sommermonate, in
denen die Temperatur bis zu 27oC erreicht, also mit bis zu 2 · avd ≈ 4 cm d−1
erfolgt. In vier Monaten (∼ 124 d) macht das etwa 5 m aus. Der See konnte sich
also weitgehend leeren. Der Zufluss vzu wurde in (4.11) festgelegt. Er fullt den
See im Jahr zweimal. Damit ist das Verhaltnis von Zufluss und Verdunstung
45
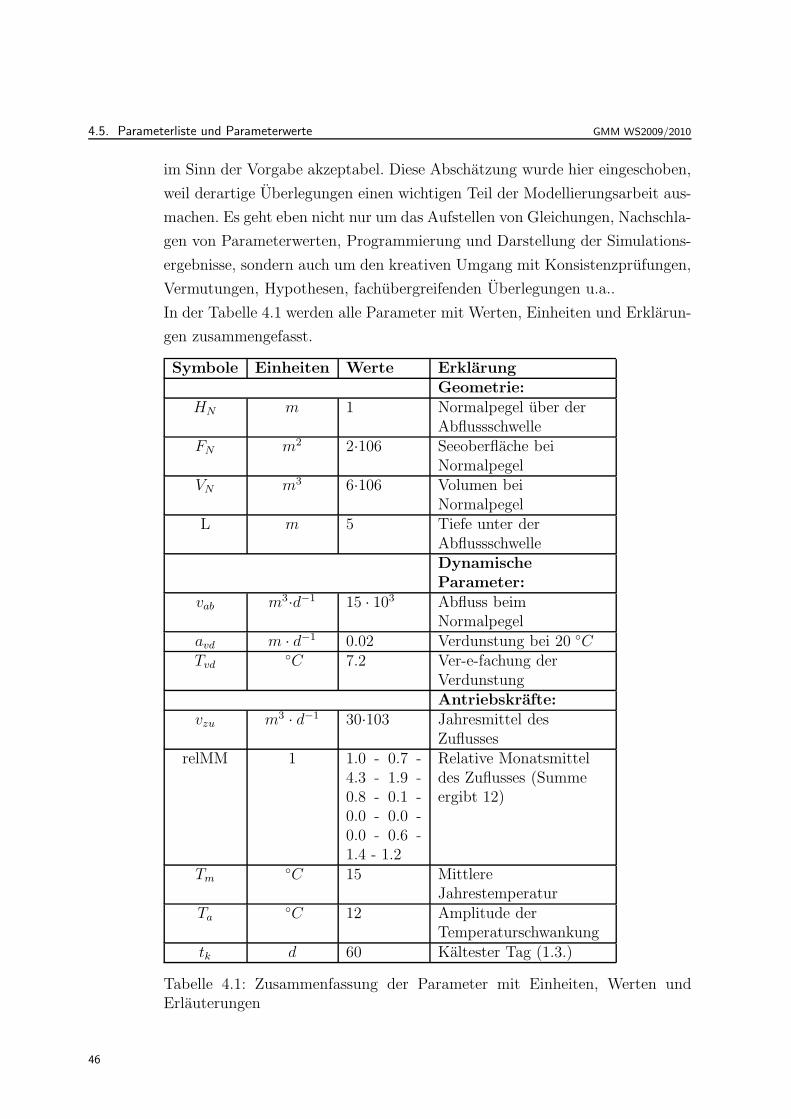
4.5. Parameterliste und Parameterwerte GMM WS2009/2010
im Sinn der Vorgabe akzeptabel. Diese Abschatzung wurde hier eingeschoben,
weil derartige Uberlegungen einen wichtigen Teil der Modellierungsarbeit aus-
machen. Es geht eben nicht nur um das Aufstellen von Gleichungen, Nachschla-
gen von Parameterwerten, Programmierung und Darstellung der Simulations-
ergebnisse, sondern auch um den kreativen Umgang mit Konsistenzprufungen,
Vermutungen, Hypothesen, fachubergreifenden Uberlegungen u.a..
In der Tabelle 4.1 werden alle Parameter mit Werten, Einheiten und Erklarun-
gen zusammengefasst.
Symbole Einheiten Werte ErklarungGeometrie:
HN m 1 Normalpegel uber derAbflussschwelle
FN m2 2·106 Seeoberflache beiNormalpegel
VN m3 6·106 Volumen beiNormalpegel
L m 5 Tiefe unter derAbflussschwelleDynamischeParameter:
vab m3·d−1 15 · 103 Abfluss beimNormalpegel
avd m · d−1 0.02 Verdunstung bei 20 ◦CTvd
◦C 7.2 Ver-e-fachung derVerdunstungAntriebskrafte:
vzu m3 · d−1 30·103 Jahresmittel desZuflusses
relMM 1 1.0 - 0.7 -4.3 - 1.9 -0.8 - 0.1 -0.0 - 0.0 -0.0 - 0.6 -1.4 - 1.2
Relative Monatsmitteldes Zuflusses (Summeergibt 12)
Tm◦C 15 Mittlere
JahrestemperaturTa
◦C 12 Amplitude derTemperaturschwankung
tk d 60 Kaltester Tag (1.3.)
Tabelle 4.1: Zusammenfassung der Parameter mit Einheiten, Werten undErlauterungen
46
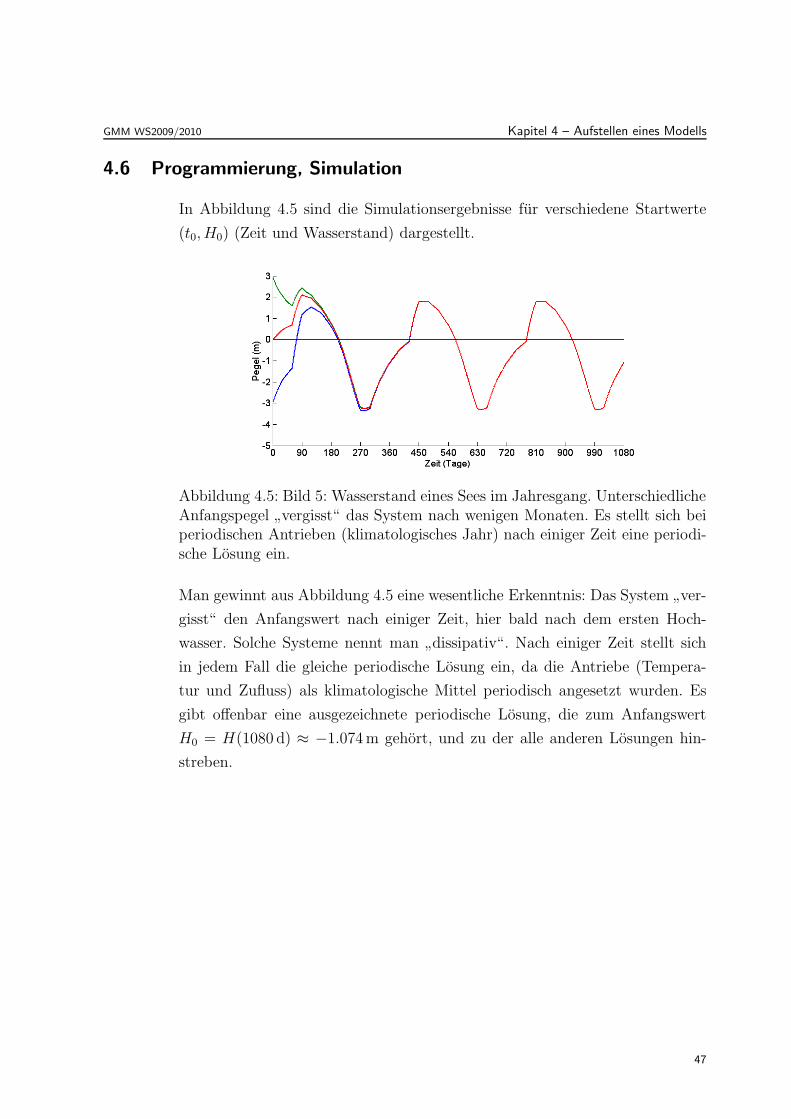
GMM WS2009/2010 Kapitel 4 – Aufstellen eines Modells
4.6 Programmierung, Simulation
In Abbildung 4.5 sind die Simulationsergebnisse fur verschiedene Startwerte
(t0, H0) (Zeit und Wasserstand) dargestellt.
Abbildung 4.5: Bild 5: Wasserstand eines Sees im Jahresgang. UnterschiedlicheAnfangspegel
”vergisst“ das System nach wenigen Monaten. Es stellt sich bei
periodischen Antrieben (klimatologisches Jahr) nach einiger Zeit eine periodi-sche Losung ein.
Man gewinnt aus Abbildung 4.5 eine wesentliche Erkenntnis: Das System”ver-
gisst“ den Anfangswert nach einiger Zeit, hier bald nach dem ersten Hoch-
wasser. Solche Systeme nennt man”dissipativ“. Nach einiger Zeit stellt sich
in jedem Fall die gleiche periodische Losung ein, da die Antriebe (Tempera-
tur und Zufluss) als klimatologische Mittel periodisch angesetzt wurden. Es
gibt offenbar eine ausgezeichnete periodische Losung, die zum Anfangswert
H0 = H(1080 d) ≈ −1.074 m gehort, und zu der alle anderen Losungen hin-
streben.
47

4.6. Programmierung, Simulation GMM WS2009/2010
48
GMM WS2009/2010 Kapitel 5 – Modellierung mit Differentialgleichungen
5 Modellierung mit Differentialgleichungen
Gehen wir noch einmal zuruck zu dem Bakterienmodell des exponentiellen
Wachstums:
xn+1 = xn + r · xn ,
wobei x0 als Anfangswert vorgegeben wird. Dieses Modell berechnet die Bak-
terienzahl von Zeitschritt zu Zeitschritt (n → n + 1).
Betrachtet man nun die Bakterienzahl zu einer Zeit und wahlt den Zeitschritt
∆t, so bleibt mit
x(t + ∆t) = x(t) + r · x(t) · ∆t ,
fur ∆t = 1 alles beim alten. Nun stellen wir die Gleichung um und lassen ∆t
immer kleiner werden. Der Differenzenquotient geht uber in den Differential-
quotienten
x(t+∆t)−x(t)∆t
= r · x(t)
↓dx(t)
dt= r · x(t)
Man erhalt die Differentialgleichung (DGL) des exponentiellen Wachstums:
dx(t)
dt= r · x(t) kurz x′ = r · x oder x = r · x , (5.1)
sie hat die Losung
x(t) = C · er·t .
C ist eine freie Konstante, die durch den Anfangswert bestimmt wird. Der
Parameter r heisst Wachstumsrate.
Fur alle, die noch keine Vorlesung zu Differentialgleichungen gehort haben, sei
an dieser Stelle der Anhang C empfohlen.
49

5.1. Die Wachstumsrate GMM WS2009/2010
5.1 Die Wachstumsrate
Betrachten wir noch einmal den diskreten Fall
xn+1 = (1 + r) · xn = x0 · (1 + r)n+1 = x0 · e(n+1)·ln(1+r)
Fur n=0 ergibt sich x1 = x0 · eln(1+r). Im stetigen Fall gilt x(1) = x0 · eα.
Um also mit dem diskreten und dem stetigen Modell dasselbe Wachstum zu
erreichen, muss α = ln(1 + r) gesetzt werden.
x(t) = x0 · e(ln(1+r))·t = x0 · eln(1+r)t
= x0 · (1 + r)t ,
Will man ganz speziell nach einem Zeitschritt eine Verdopplung (r=1) errei-
chen, so gilt α = ln 2:
x(t) = x0 · e(ln 2)·t = x0 · eln 2t
= x0 · 2t ,
50

GMM WS2009/2010 Kapitel 6 – Systeme mit einer Variablen
6 Systeme mit einer Variablen
6.1 Aufstellen einer DGL am Beispiel auslaufender Gefaße
6.1.1 Der auslaufende Zylinder
Ein Gefaß mit festem Querschnitt F (Zylinder) habe ein kleines Loch am Bo-
den. Anfangs sei es bis zur Hohe H0 gefullt. Die zeitlich veranderliche Fullhohe
H(t) ist die Systemvariable, d.h. es ist die Funktion H(t) gesucht, die das Sy-
stem beschreibt. Diese erhalt man, indem man die Anderung der Hohe mit der
Zeit beschreibt. Wenn Reibung und Zahigkeit dominieren (das Loch ist klein),
ist die Auslaufgeschwindigkeit (Anderung des Fullvolumens pro Zeiteinheit)
proportional zum Druck am Loch, und dieser ist proportional zur Hohe H.
Die Proportionalitatskonstante hangt von Zahigkeit, Lochform und Lochgroße
ab. Das sind Großen, die sich wahrend des Auslaufprozesses nicht andern. Die
Auslaufgeschwindigkeit hat die Dimension Volumen/Zeit, man muss deshalb
zur Herleitung der Differentialgleichung fur H den Umweg uber die Anderung
des Fullvolumen ∆V im Zeitintervall ∆t gehen:
Es gilt, da die Zylinderflache F konstant ist ∆V = F · ∆H , also
∆V = F · ∆H = −k · H · ∆t also ∆H = − k
F· H · ∆t . (6.1)
wobei k die Proportionalitatskonstante ist. Der Grenzubergang liefert
H = − k
F· H , (6.2)
Gleichung 6.2 hat dieselbe Form wie Gleichung 5.1. Sie hat fur die Anfangsbe-
dingung H(0) = H0 die Losung
H(t) = H0 · exp
(
−k · tF
)
. (6.3)
Die Fullhohe des Zylinders nimmt also mit der Zeit exponentiell ab.
Um den Wert von k zu bestimmen und um die Bedeutung von k besser zu
erkennen, kann man in Gedanken experimentieren:
Uberlegen wir zuerst, welche Einheit k hat: V hat die Einheit Volumen pro
51

6.1. Aufstellen einer DGL am Beispiel auslaufender Gefaße GMM WS2009/2010
Zeit, z.B. Kubikmeter pro Sekunde , H hat die Einheit Lange z.B. Meter, dann
muss nach Gleichung 6.2 der Parameter k die Einheit Flache pro Zeit also z.B.
Quadratmeter pro Sekunde haben.
Angenommen, ein Zylinder mit einem Radius von 5 cm sei anfangs bis
H0 = 30 cm mit Wasser gefullt, und wir beobachten, dass der Wasserstand
in der Zeit ∆t = 1 min um ∆H = −1 cm gesunken ist. Dann kann man k
abschatzen. Das in ∆t ausgelaufene Volumen ∆V ist naherungsweise gleich
dem Produkt aus Anfangs-Auslaufgeschwindigkeit kH0 und Zeitintervall :
∆V = F · ∆H ≈ −kH0 · ∆t
Damit gilt
k ≈ −∆H · FH0 · ∆t
=−(−1 cm) · (π · (5 cm)2)
30 cm · 1 min≈ 78, 54 cm2
30 min≈ 2, 62 cm2/min
6.1.2 Der auslaufende Trichter
Im Falle des Zylinders anderte sich die Flache der Wasseroberflache nicht.
Anders beim Trichter. Hier verandert sich die Flache F in Abhangigkeit von
der Fullhohe H . Fur das Wasservolumen im Trichter bei der Fullhohe H gilt
V (H) =
∫ H
0
F (h) dh
Nimmt man wieder an, dass die Auslaufoffnung sehr klein ist, so ist die Aus-
laufgeschwindigkeit proportional zum Druck, als proportional zur Fullhohe H .
Es gilt also wieder
∆V = −k · H · ∆t
also
V = −k · H
Nach der Kettenregel gilt
V ≡ dV (H(t))
dt=
dV (H)
dH· dH
dt= F (H) · H
52

GMM WS2009/2010 Kapitel 6 – Systeme mit einer Variablen
Damit gilt
H = −kH
F (H)(6.4)
Der Radius des Trichters sei bei der anfanglichen Fullhohe H0 durch den
Wert R0 gegeben. Der Trichter besitzt gerade Seiten, damit ist der Radius
in Abhangigkeit von der Fullhohe durch eine Geradengleichung gegeben:
R(H) = m · H + b
Da nun R(H0) = H0 gilt und R(0) = 0, folgt b = 0 und a = R0
H0(Steigung),
also
R(H) =R0
H0· H
Fur die Flache in Anhangigkeit von der Hohe gilt also:
F (H) = π
(R0
H0· H)2
= F0 ·(
H
H0
)2
Man erhalt die Differentialgleichung fur die Fullhohe:
H = −k · H20
F0
· 1
H(6.5)
Aus Gleichung 6.5 folgt H · H = −A, mit A =kH2
0
F0. Integration auf beiden
Seiten fuhrt zu
∫ t
0
H(s) · H(s) ds = −A · t
Partielle Integration der linken Seite fuhrt zu
H(s) · H(s)|t0 −∫ t
0
H(s) · H(s) ds
︸ ︷︷ ︸
−A·t
= −A · t
H(t)2 − H20 = −2A · t
H(t) =√
H20 − 2A · t = H0 ·
√
1 − 2k
F0· t mit F0 = F (H0)
53

6.1. Aufstellen einer DGL am Beispiel auslaufender Gefaße GMM WS2009/2010
Man erhalt als Losung
H(t) = H0 ·√
max
(
0, 1 − 2k
F0· t)
(6.6)
54

GMM WS2009/2010 Kapitel 6 – Systeme mit einer Variablen
6.2 Das logistische Wachstum
In Abschnitt haben wird das das logistische Wachstum kennen gelernt. Im
diskreten Fall hatte das logistische Wachstum folgende Form
Yn+1 = Yn + r ·(
1 − Yn
K
)
· Yn .
Diese Gleichung geht nun in
dY (t)
dt= r ·
(
1 − Y
K
)
· Y
uber.
Die Losungen der logistischen DGL weisen im Unterschied zur Differenzenglei-
chung unabhangig von der Parametrisierung nun kein Chaos mehr auf.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2Richtungsfeld der logistischen DGL
Abbildung 6.1: Richtungsfeld des logistischen Wachstums mit einer moglichenTrajektorie.
Am Richtungsfeld (Abbildung 6.1) kann man drei verschiedene Losungstypen
erkennen:
1. Losungen, die zwischen 0 und K bleiben und monoton wachsen
2. Losungen, die sich monoton fallend K annaheren
3. Losungen, die sich von 0 nach unten entfernend gegen −∞ streben
55

6.3. Stationare Zustande GMM WS2009/2010
Das logistische Wachstum weist fur kleine Anfangswerte Y0 zunachst ein ex-
ponentielles Wachstum, denn in diesem Fall gilt
dY (t)
dt= r ·
(
1 − Y
K
)
· Y = r · Y − r
K· Y 2 ≈ r · Y .
Fur Startwerte in der Nahe von K/2 ist das Wachstum zunachst linear.
Die sigmoiden Losungen (0 < Y0 < K/2) der logistischen Differentialgleichung
sind punktsymmetrisch am Wendepunkt. Daher nahern sich Losungen in der
Nahe von K exponentiell dem Wert K.
Die logistische Differentialgleichung kann man noch analytisch losen, die be-
schrankten Losungen lauten
Y (t) = K · er(t−m)
1 + er(t−m)−∞ < m < ∞
Dies ist eine Funktionenschar, der Scharparameter m kann alle reellen Werte
annehmen und hangt fur das Anfangswertproblem Y (0) = Y0 von Y0 ab.
6.3 Stationare Zustande
Autonome Systeme der Form Y = f(Y ) haben gewohnlich spezielle Losungen
der Form
Y (t) = Y ∗ = konstant ,
d.h. dass die Anderung von Y gleich Null ist, also Y = 0 Die Konstante Y ∗
erfullt also die Gleichung
f(Y ∗) = 0 .
Diese zeitlich unveranderlichen Losungen heißen stationare Zustande, sta-
tionare Losungen, Gleichgewichtszustande oder kurz Fixpunkte.
Im Fall des logistischen Wachstums gibt es zwei stationare Zustande:
Y ∗ = 0 und Y ∗ = K.
6.3.1 Stabilitat stationarer Zustande
Es gibt zwei Arten von stationaren Zustanden:
56
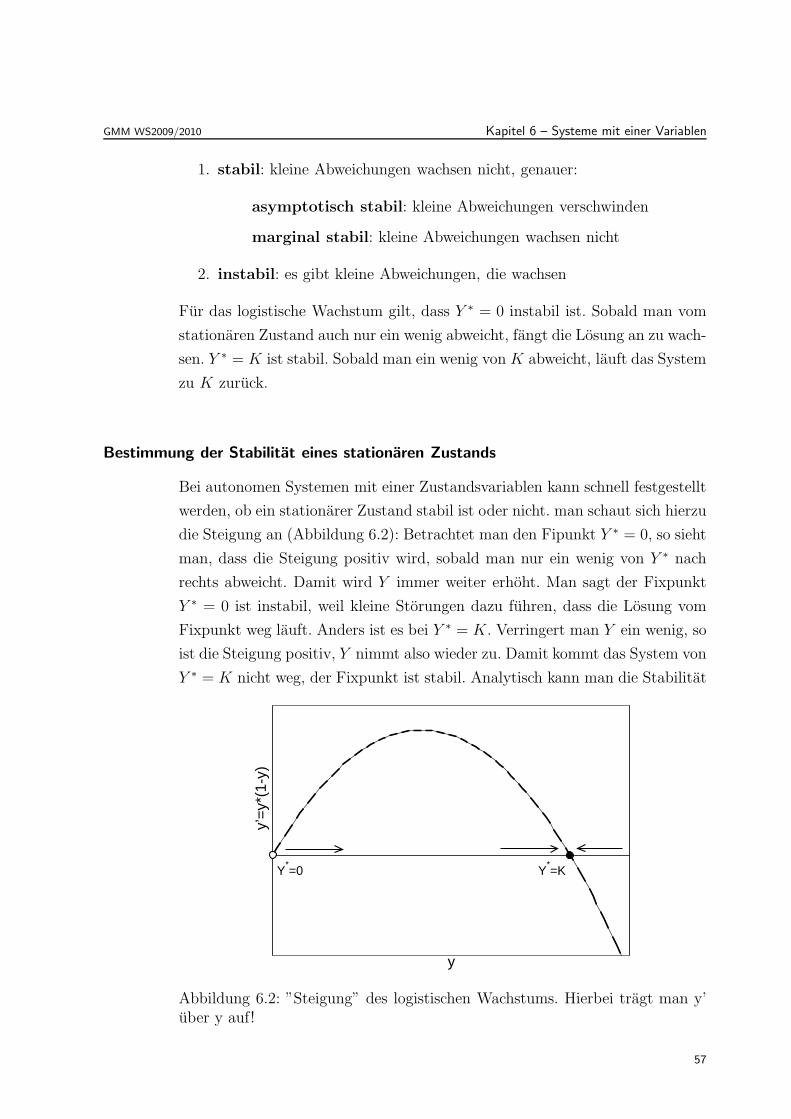
GMM WS2009/2010 Kapitel 6 – Systeme mit einer Variablen
1. stabil: kleine Abweichungen wachsen nicht, genauer:
asymptotisch stabil: kleine Abweichungen verschwinden
marginal stabil: kleine Abweichungen wachsen nicht
2. instabil: es gibt kleine Abweichungen, die wachsen
Fur das logistische Wachstum gilt, dass Y ∗ = 0 instabil ist. Sobald man vom
stationaren Zustand auch nur ein wenig abweicht, fangt die Losung an zu wach-
sen. Y ∗ = K ist stabil. Sobald man ein wenig von K abweicht, lauft das System
zu K zuruck.
Bestimmung der Stabilitat eines stationaren Zustands
Bei autonomen Systemen mit einer Zustandsvariablen kann schnell festgestellt
werden, ob ein stationarer Zustand stabil ist oder nicht. man schaut sich hierzu
die Steigung an (Abbildung 6.2): Betrachtet man den Fipunkt Y ∗ = 0, so sieht
man, dass die Steigung positiv wird, sobald man nur ein wenig von Y ∗ nach
rechts abweicht. Damit wird Y immer weiter erhoht. Man sagt der Fixpunkt
Y ∗ = 0 ist instabil, weil kleine Storungen dazu fuhren, dass die Losung vom
Fixpunkt weg lauft. Anders ist es bei Y ∗ = K. Verringert man Y ein wenig, so
ist die Steigung positiv, Y nimmt also wieder zu. Damit kommt das System von
Y ∗ = K nicht weg, der Fixpunkt ist stabil. Analytisch kann man die Stabilitat
y
y’
=y*
(1-y
)
Y*=0 Y
*=K
Abbildung 6.2: ”Steigung” des logistischen Wachstums. Hierbei tragt man y’uber y auf!
57

6.3. Stationare Zustande GMM WS2009/2010
also wie folgt untersuchen: Man bildet die Ableitung der rechten Seite der
Differentialgleichung nach der Zustandsvariablen im stationaren Zustand:
γ =df(Y ∗)
dY
Es gilt :
γ > 0: Y ∗ ist instabil
γ < 0: Y ∗ ist stabil
γ = 0: weitere Analysen sind erforderlich
Fur das logistische Wachstum
Y = f(Y ) = r ·(
1 − Y
K
)
· Y r > 0
gilt
df(Y )
dY= r − 2r
K· Y
Fur Y ∗ = 0 gilt: γ = r > 0, der Zustand ist instabil
Fur Y ∗ = K gilt: γ = r − 2r < 0, der Zustand ist stabil
Was im Detail passiert
Man betrachte Y als Abweichung vom Fixpunkt Y ∗ mit der Storung h: Y =
Y ∗ + h. Fur Y gilt
Y =dY
dt=
d(Y ∗ + h)
dt=
d(Y ∗)
dt+
d(h)
dt=
d(h)
dt= h
Andererseits gilt die Taylorentwicklung
Y = f(Y ) = f(Y ∗ + h) = f(Y ∗) +df(Y ∗)
dY· h + · · ·
Betrachtet man nun die Taylorentwickung nur bis zum ersten Glied1, so erhalt
1
f(x0 + h) ≈ f(x0) + f ′(x0) · h
58

GMM WS2009/2010 Kapitel 6 – Systeme mit einer Variablen
man eine neue, lineare DGL fur die Storung h = Y ∗ − Y .
h = f(Y ∗) +df(Y ∗)
dY· h =
df(Y ∗)
dY· h = γ · h (6.7)
mit der Losung
h(t) = h0 · eγ·t
Damit wachst die”Storung“ fur γ > 0 exponentiell (instabil) und zerfallt ex-
ponentiell fur γ < 0 (stabil). Dieses Verfahren nennt man auch”Linearisierung
am stationaren Zustand“. Man sagt, man habe die ursprungliche DGL lineari-
siert. Nun ist auch klar, warum man fur γ = 0 keine Aussage uber die Stabilitat
des Fixpunkts der ursprunglichen Gleichung treffen kann. Da die Storung un-
verandert bleibt, hangt die Stabilitat nun womoglich von den hoheren Termen
der Taylorentwicklung ab, die beim linearisierten System vernachlassigt wur-
den.
6.4 Skalierung der logistischen Differentialgleichung
Wie schon im diskreten Fall kann man auch bei der logistischen Differential-
gleichung zwei Parameter loswerden:
Setze y = YK
, dann gilt
y =1
KY = r · Y
K· (1 − Y
K) = r · y · (1 − y)
Damit liegt der stabile stationare Zustand nun bei y∗ = 1. Man kann dies
so interpretieren, dass die dimensionslose Zustandsgroße y den Anteil an der
Maximalkapazitat K angibt. Jetzt spielt es keine Rolle mehr, wie groß K ist.
Um auch noch r loszuwerden, muss man die Zeit skalieren. Fur die”neue“ Zeit
s = r · t gilt nach der Kettenregel
dy
dt=
dy(s(t))
dt=
dy(s)
ds· ds(t)
dt
Mit ds(t)dt
= r folgt
dy(s)
ds=
1
r· dy
dt= y · (1 − y)
59

6.5. Wachstums und Sterbeprozesse GMM WS2009/2010
Betragt die maximale Wachstumsrate z.B. 5 pro Minute, und lauft die Zeit t
in Minuten, so lauft die neue Zeit nun in 5 Minuten Abschnitten, so dass die
neue maximale Wachstumsrate gerade eins wird.
6.5 Wachstums und Sterbeprozesse
Betrachtet man die Veranderung einer Population, so kann man fur die Popu-
lationsgroße ganz allgemein die Differentialgleichung
N = Wachstum − Sterben (6.8)
aufstellen. Im allgemeinen ist das Wachstum von der aktuellen Populations-
große abhangig, also
Wachstum = r · N (6.9)
Es findet kein Wachstum aus dem nichts statt.
Auch der Anteil der stirbt hangt von der aktuellen Populationsgroße ab
Sterben = µ · N (6.10)
Sind r und µ Konstanten, kann man sie zu einer Nettowachstumsrate d zu-
sammenfassen
N =d·N (6.11)
Anders ausgedruckt, bedeutet es, dass
N
N= konstant (6.12)
gilt.
Im Fall des logistischen Wachstums gilt:
N = R(N) · N R(N) = r · (1 − N
K) (6.13)
also
N
N= R(N) (6.14)
60

GMM WS2009/2010 Kapitel 6 – Systeme mit einer Variablen
Dieses ist das Wachstumsmodell nach Verhulst (1838). Es handelt sich um
ein dichtereguliertes Wachstum. Fur R(N) > 0 nimmt die Population zu, fur
R(N) < 0 nimmt sie ab. Unter idealen Bedingungen betragt die Wachstums-
rate r.
61

6.5. Wachstums und Sterbeprozesse GMM WS2009/2010
62
GMM WS2009/2010 Kapitel 7 – Systeme mit 2 Variablen
7 Systeme mit 2 Variablen
7.1 Rauber-Beute-Modelle
Beim Beispiel des Bakterienwachstums sind wir davon ausgegangen, dass die
Abnahme der Wachstumsrate von der Bakterienbiomasse selbst abhangt. Je
mehr Bakterien da sind, umso schlechter kann die Population wachsen. Dies
nennt man auch intraspezifische Konkurrenz. Im folgenden wollen wir uber-
legen was passiert, wenn eine andere Art die Population dezimiert und de-
ren Biomasse also von der ersten Art abhangt. Solche Modelle werden auch
Rauber-Beute-Modelle genannt. Traditionell spricht man von Hasen als Beu-
te und Fuchsen als Rauber. In Wirklichkeit fressen Fuchse wohl keine Hasen
und es ware sinniger, Luchse als Rauber zu nehmen, aber das interessiert den
Mathematiker nicht wirklich In diesem Abschnitt soll also das Zusammenspiel
zwischen einer Beutepopulation, den Hasen und einer Rauberpopulation, den
Fuchsen simuliert werden (Abbildung 7.1). Hierzu machen wir folgende An-
nahmen.
Hasen(Beute)
Füchse(Räuber)
wachsen fressen sterben
Abbildung 7.1: Diagramm des Rauber-Beute-Systems. Die Pfeile geben denBiomassenfluss an.
1. Die Hasen wachsen in Abhangigkeit der Anzahl der aktuell vorhandenen
Hasen.
2. Die Fuchse fressen einen Teil der Hasen, umso mehr, je mehr Hasen da
sind.
3. Ein Teil der Fuchse stirbt
Sei B(t) (Beute) die Anzahl der Hasen und R(t) (Rauber) die Anzahl der
Fuchse zur Zeit t.
Zur Zeit t0 = 0 sei die Zahl der Hasen B0 = 200, die Zahl der Fuchse R0 = 20.
Wir nehmen in Kauf, dass auch nicht-ganzzahlige Werte vorkommen konnen.
Wen das stort, der kann als Einheit auch kg Hasen und kg Fuchse wahlen.
63

7.1. Rauber-Beute-Modelle GMM WS2009/2010
Das Wachstum der Hasen wird wie in Abschnitt 6.2 durch
B = r · B
beschrieben. Hierbei ist r die Wachstumsrate der Hasen. Wir nehmen an, dass
die Wachstumsrate der Hasen r = 0.01 pro Tag betragt. Das bedeutet, dass die
Hasenpopulation jeden Tag um ca. 1 %1 wachst, wenn keine Hasen gefressen
werden. Die Abnahme der Rauber ist durch
R = −s · R
beschrieben.Hierbei ist s die Sterberate der Rauber. Wir nehmen an, dass
die Sterberate der Fuchse s = 0.05 pro Tag betragt . Das bedeutet, dass die
Fuchspopulation jeden Tag um 5 % abnimmt, wenn nichts gefressen wird.
Nun mussen wir noch berucksichtigen, wie viel ein Fuchs frisst. Klar ist, dass
er nichts zu fressen findet, wenn es keine Hasen gibt, und dass er umso mehr
frisst, je mehr Hasen da sind (er muss dann nicht so lange suchen). Die Wachs-
tumsrate der Fuchse w wird also von der Hasenzahl abhangen, z.B.
w(B) = b · B
Setzen wir fur den Parameter b = 0.0004, dann gilt bei 100 Hasen gerade
w = 0.04. Stehen den Fuchsen 100 Hasen als Nahrung zur Verfugung, kann
ihre Population am Tag 4% wachsen (dies ist unrealistisch, aber es ist ein sehr
einfaches Modell). Die Differentialgleichungen lauten nun:
B = r · B − b · B · R (7.1)
R = b · B · R − s · R
Simuliert man nun die Hasen- und Fuchszahl (Abbildung 7.2), so fallt folgendes
auf: Beide Populationen oszillieren. Zuerst steigt die Zahl der Hasen. Dadurch
steht den Fuchsen mehr Nahrung zur Verfugung und ihre Zahl steigt kurz
darauf ebenfalls. Dies reduziert die Zahl der Hasen wieder und den Fuchsen
steht wieder weniger Nahrung zur Verfugung usw..
1genauer: R(1) = R0 · (1 + 0.01 + ...)Verdopplungszeit T: R(T ) = 2R0 = R0 · er·T , also T = ln2
r= ln2 · 100.
64
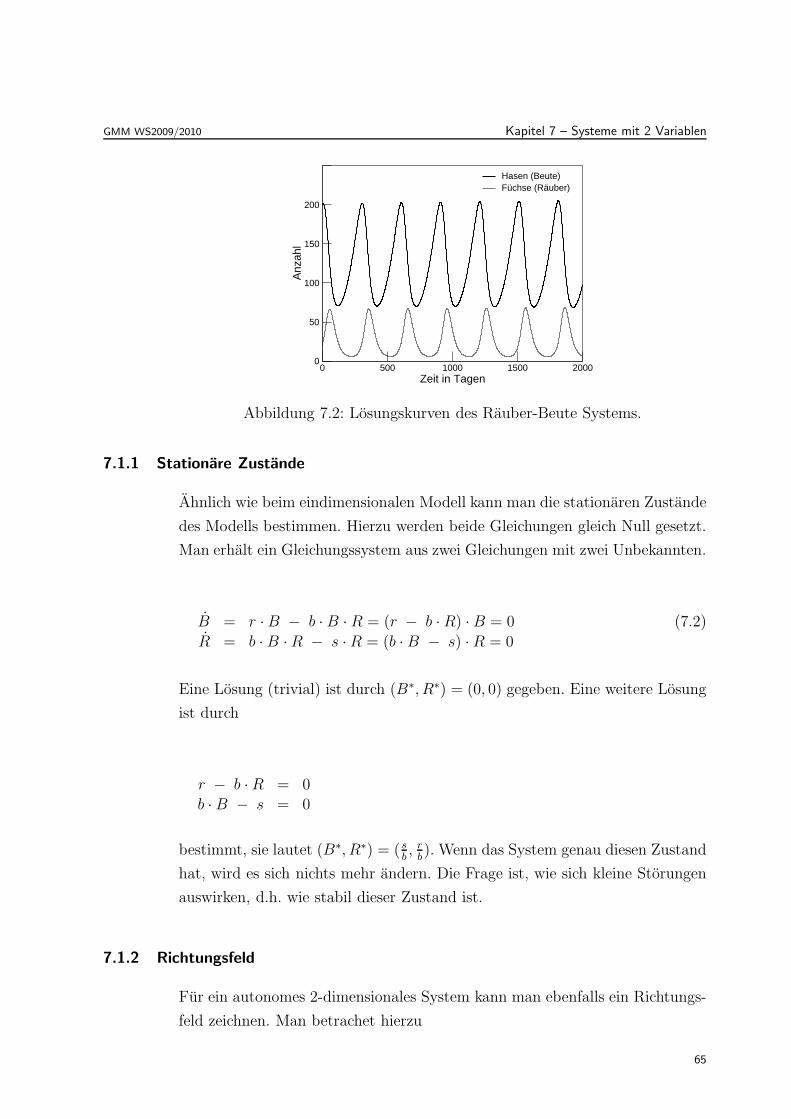
GMM WS2009/2010 Kapitel 7 – Systeme mit 2 Variablen
0 500 1000 1500 2000Zeit in Tagen
0
50
100
150
200
Anz
ahl
Hasen (Beute)Füchse (Räuber)
Abbildung 7.2: Losungskurven des Rauber-Beute Systems.
7.1.1 Stationare Zustande
Ahnlich wie beim eindimensionalen Modell kann man die stationaren Zustande
des Modells bestimmen. Hierzu werden beide Gleichungen gleich Null gesetzt.
Man erhalt ein Gleichungssystem aus zwei Gleichungen mit zwei Unbekannten.
B = r · B − b · B · R = (r − b · R) · B = 0 (7.2)
R = b · B · R − s · R = (b · B − s) · R = 0
Eine Losung (trivial) ist durch (B∗, R∗) = (0, 0) gegeben. Eine weitere Losung
ist durch
r − b · R = 0
b · B − s = 0
bestimmt, sie lautet (B∗, R∗) = ( sb, r
b). Wenn das System genau diesen Zustand
hat, wird es sich nichts mehr andern. Die Frage ist, wie sich kleine Storungen
auswirken, d.h. wie stabil dieser Zustand ist.
7.1.2 Richtungsfeld
Fur ein autonomes 2-dimensionales System kann man ebenfalls ein Richtungs-
feld zeichnen. Man betrachet hierzu
65
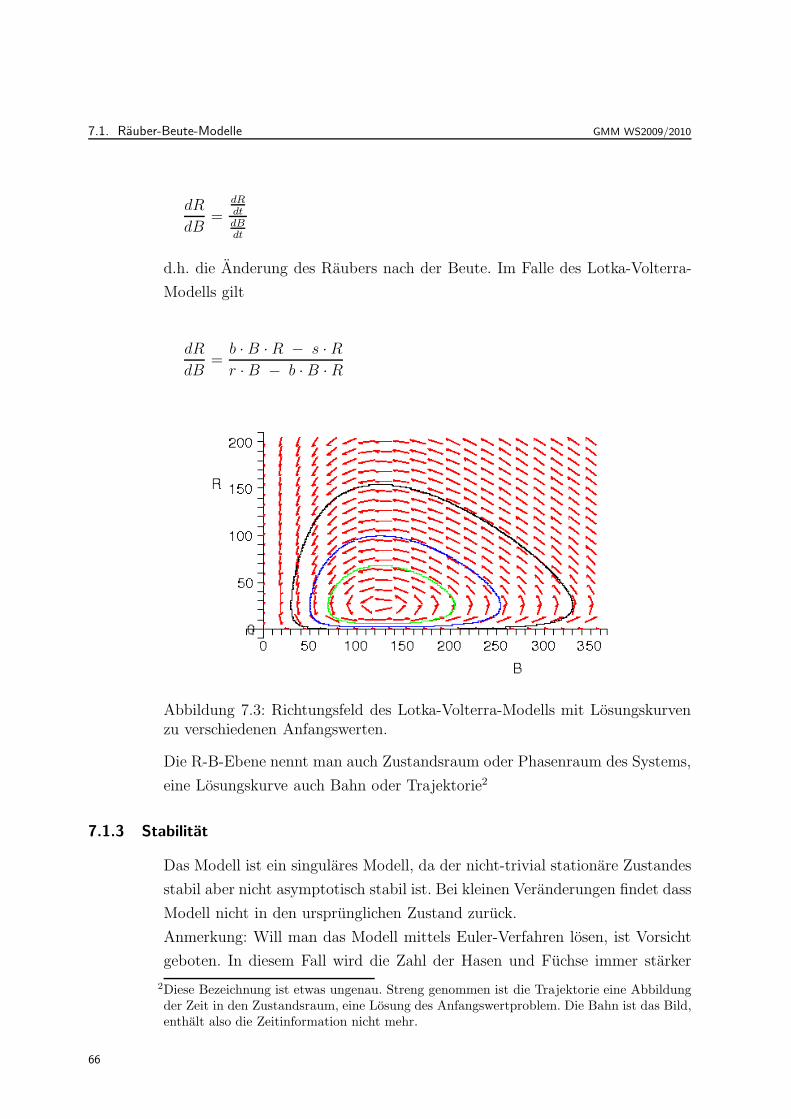
7.1. Rauber-Beute-Modelle GMM WS2009/2010
dR
dB=
dRdtdBdt
d.h. die Anderung des Raubers nach der Beute. Im Falle des Lotka-Volterra-
Modells gilt
dR
dB=
b · B · R − s · Rr · B − b · B · R
Abbildung 7.3: Richtungsfeld des Lotka-Volterra-Modells mit Losungskurvenzu verschiedenen Anfangswerten.
Die R-B-Ebene nennt man auch Zustandsraum oder Phasenraum des Systems,
eine Losungskurve auch Bahn oder Trajektorie2
7.1.3 Stabilitat
Das Modell ist ein singulares Modell, da der nicht-trivial stationare Zustandes
stabil aber nicht asymptotisch stabil ist. Bei kleinen Veranderungen findet dass
Modell nicht in den ursprunglichen Zustand zuruck.
Anmerkung: Will man das Modell mittels Euler-Verfahren losen, ist Vorsicht
geboten. In diesem Fall wird die Zahl der Hasen und Fuchse immer starker
2Diese Bezeichnung ist etwas ungenau. Streng genommen ist die Trajektorie eine Abbildungder Zeit in den Zustandsraum, eine Losung des Anfangswertproblem. Die Bahn ist das Bild,enthalt also die Zeitinformation nicht mehr.
66

GMM WS2009/2010 Kapitel 7 – Systeme mit 2 Variablen
oszillieren. Dies ist ein numerischer Artefakt.
Wie man die Stabilitat nachweisen kann wird spater gezeigt.
7.1.4 Modellverbesserungen
Dieses Modell kann naturlich verbessert werden. Folgende Verbesserungen fal-
len einem sofort ein:
• Die Hasen durfen nicht unbegrenzt wachsen, wenn keine Fuchse da sind.
Es muss eine Maximalkapazitat wie in Abschnitt 6.2 geben.
• Die Fuchse mussen satt werden. Die Zunahme der Wachstumsrate der
Fuchse darf nicht linear von der Zahl der Hasen abhangen.
• Nur ein Teil der Hasen kann als Nahrung verwertet werden (Fell und Kno-
chen werden ausgeschieden).
Maximalkapazitat
Verbessern wir das Modell nun dahingehend, dass wir eine Maximalkapazitat
fur Hasen berucksichtigen. In diesem Fall wird das Wachstum der Hasen durch
Gleichung 3.1 beschrieben, und das vollstandige Modell lautet:
B = r · B ·(
1 − B
K
)
− b · B · R (7.3)
R = b · B · R − s · R
Die Modellergebnisse sind in Abbildung 7.3 fur K = 250 und K = 500 dar-
gestellt (andere Parameter wie bisher). Die Oszillationen sind nun mehr oder
weniger stark gedampft. Die Zahl der Hasen und Fuchse strebt letztlich auf
konstante Werte zu.
Sattigung
Will man nun zusatzlich berucksichtigen, dass die Fuchse satt werden, so muss
man anstelle der monoton steigenden Fressrate b ·B eine Fressrate annehmen,
die durch einen maximalen Wert begrenzt ist. Diese maximale Fressrate gibt an
wie viel ein Fuchs pro Zeiteinheit maximal fressen kann. Dies ist u.a. von der so
genannten”handling time“ abhangig, der Zeitspanne, die ein Fuchs benotigt,
die Nahrung aufzunehmen (den Hasen zu zerlegen). Ein weiterer Faktor ist
die Stoffwechselgeschwindigkeit, d.h. wie schnell Biomasse aus der Nahrung
67
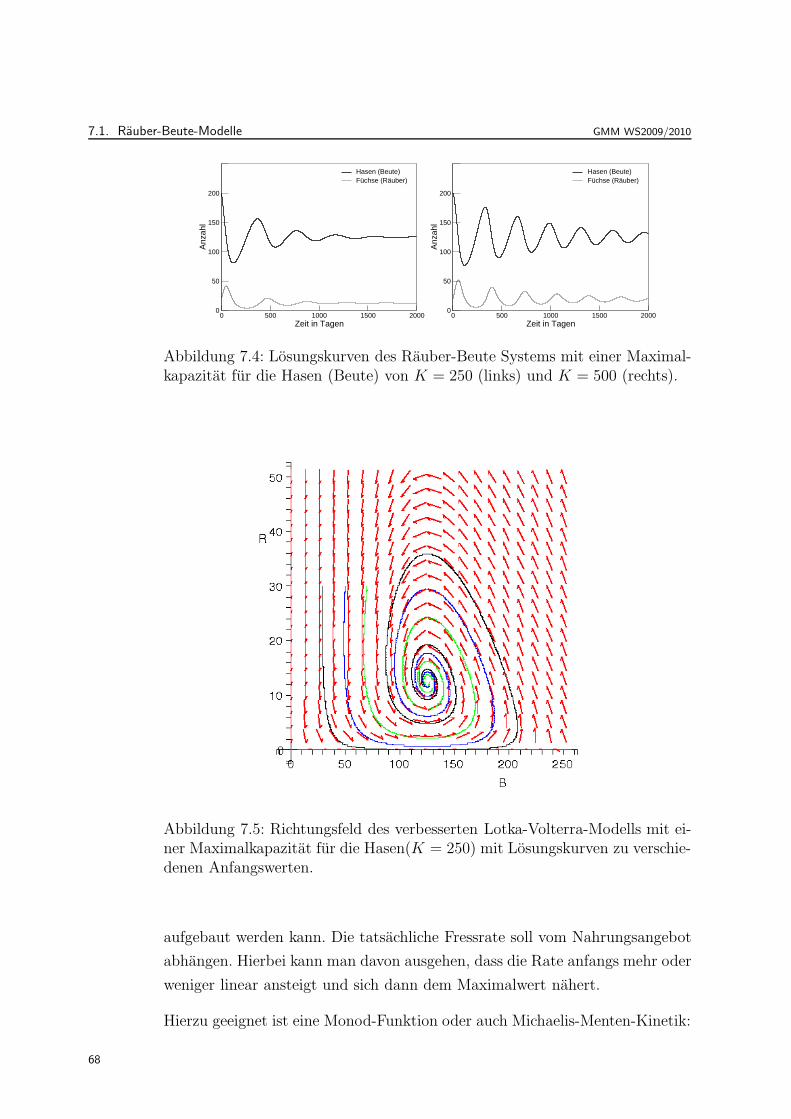
7.1. Rauber-Beute-Modelle GMM WS2009/2010
0 500 1000 1500 2000Zeit in Tagen
0
50
100
150
200A
nzah
l
Hasen (Beute)Füchse (Räuber)
0 500 1000 1500 2000Zeit in Tagen
0
50
100
150
200
Anz
ahl
Hasen (Beute)Füchse (Räuber)
Abbildung 7.4: Losungskurven des Rauber-Beute Systems mit einer Maximal-kapazitat fur die Hasen (Beute) von K = 250 (links) und K = 500 (rechts).
Abbildung 7.5: Richtungsfeld des verbesserten Lotka-Volterra-Modells mit ei-ner Maximalkapazitat fur die Hasen(K = 250) mit Losungskurven zu verschie-denen Anfangswerten.
aufgebaut werden kann. Die tatsachliche Fressrate soll vom Nahrungsangebot
abhangen. Hierbei kann man davon ausgehen, dass die Rate anfangs mehr oder
weniger linear ansteigt und sich dann dem Maximalwert nahert.
Hierzu geeignet ist eine Monod-Funktion oder auch Michaelis-Menten-Kinetik:
68

GMM WS2009/2010 Kapitel 7 – Systeme mit 2 Variablen
w(B) = bMB
B + M
oder allgemeiner
w(B) = µB
B + M
Die erste Gleichung geht fur M → ∞ in die alte Form uber. In der zweiten
Form ist der Bruch dimensionslos und µ ist die maximale Wachstumsrate in
1/Zeiteinheit. Der Bruch geht fur B → ∞ gegen 1.
Die Michaelis-Menten-Kinetik wird in vielen Modellen verwendet, z.B.
• Algenwachstum als Funktion der Nahrstoffkonzentration (Monod-Modell)
• Alkoholabbau als Funktion der Blutalkoholkonzentration
• Aktenbearbeitung als Funktion der Aktenmenge
Eigenschaften
• nimmt bei M die Halfte des Maximalwerts an. M heißt deshalb auch
Halbsattigungskonstante
• die Tangente im Ursprung schneidet den Grenzwert µ bei M
• die Annaherung an den Grenzwert ist sehr langsam
0 M 2M 3M 4M 5M
µ/2
µ
Abbildung 7.6: Graph der Monod-Funktion (Michaelis-Menten-Funktion) mitder Halbsattigungskonstanten M und dem Grenzwert µ.
Man erhalt hiermit folgendes allgemeinere Rauber-Beute-Modell nach Rosen-
zweig und MacArthur:
69
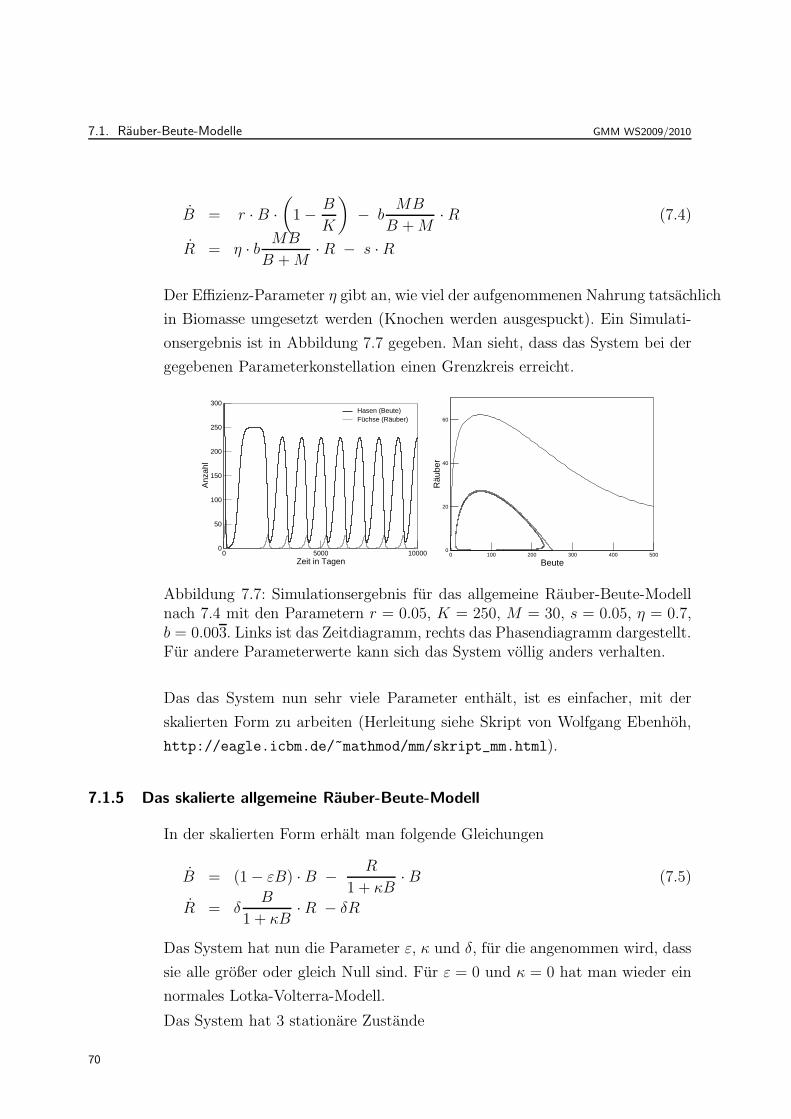
7.1. Rauber-Beute-Modelle GMM WS2009/2010
B = r · B ·(
1 − B
K
)
− bMB
B + M· R (7.4)
R = η · b MB
B + M· R − s · R
Der Effizienz-Parameter η gibt an, wie viel der aufgenommenen Nahrung tatsachlich
in Biomasse umgesetzt werden (Knochen werden ausgespuckt). Ein Simulati-
onsergebnis ist in Abbildung 7.7 gegeben. Man sieht, dass das System bei der
gegebenen Parameterkonstellation einen Grenzkreis erreicht.
0 5000 10000Zeit in Tagen
0
50
100
150
200
250
300
Anz
ahl
Hasen (Beute)Füchse (Räuber)
0 100 200 300 400 500
Beute
0
20
40
60
Räu
ber
Abbildung 7.7: Simulationsergebnis fur das allgemeine Rauber-Beute-Modellnach 7.4 mit den Parametern r = 0.05, K = 250, M = 30, s = 0.05, η = 0.7,b = 0.003. Links ist das Zeitdiagramm, rechts das Phasendiagramm dargestellt.Fur andere Parameterwerte kann sich das System vollig anders verhalten.
Das das System nun sehr viele Parameter enthalt, ist es einfacher, mit der
skalierten Form zu arbeiten (Herleitung siehe Skript von Wolfgang Ebenhoh,
http://eagle.icbm.de/~mathmod/mm/skript_mm.html).
7.1.5 Das skalierte allgemeine Rauber-Beute-Modell
In der skalierten Form erhalt man folgende Gleichungen
B = (1 − εB) · B − R
1 + κB· B (7.5)
R = δB
1 + κB· R − δR
Das System hat nun die Parameter ε, κ und δ, fur die angenommen wird, dass
sie alle großer oder gleich Null sind. Fur ε = 0 und κ = 0 hat man wieder ein
normales Lotka-Volterra-Modell.
Das System hat 3 stationare Zustande
70
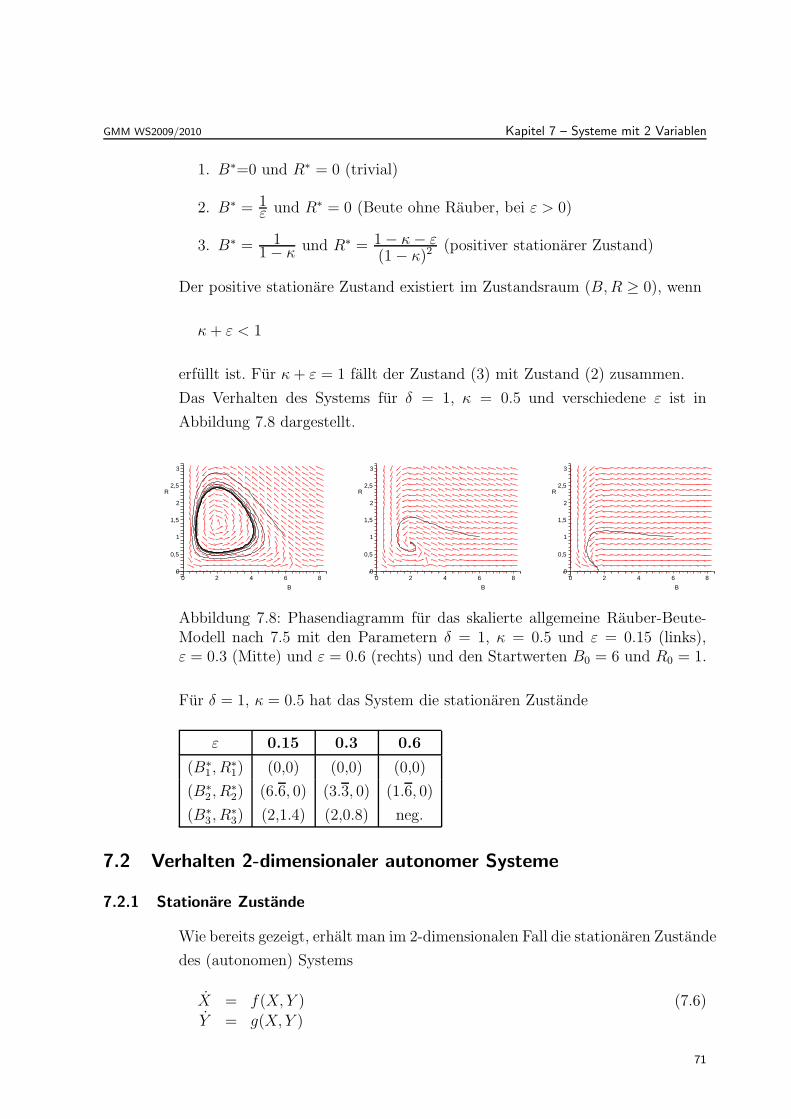
GMM WS2009/2010 Kapitel 7 – Systeme mit 2 Variablen
1. B∗=0 und R∗ = 0 (trivial)
2. B∗ = 1ε und R∗ = 0 (Beute ohne Rauber, bei ε > 0)
3. B∗ = 11 − κ und R∗ = 1 − κ − ε
(1 − κ)2 (positiver stationarer Zustand)
Der positive stationare Zustand existiert im Zustandsraum (B, R ≥ 0), wenn
κ + ε < 1
erfullt ist. Fur κ + ε = 1 fallt der Zustand (3) mit Zustand (2) zusammen.
Das Verhalten des Systems fur δ = 1, κ = 0.5 und verschiedene ε ist in
Abbildung 7.8 dargestellt.
B
86420
R
3
2,5
2
1,5
1
0,5
0
B
86420
R
3
2,5
2
1,5
1
0,5
0
B
86420
R
3
2,5
2
1,5
1
0,5
0
Abbildung 7.8: Phasendiagramm fur das skalierte allgemeine Rauber-Beute-Modell nach 7.5 mit den Parametern δ = 1, κ = 0.5 und ε = 0.15 (links),ε = 0.3 (Mitte) und ε = 0.6 (rechts) und den Startwerten B0 = 6 und R0 = 1.
Fur δ = 1, κ = 0.5 hat das System die stationaren Zustande
ε 0.15 0.3 0.6
(B∗1 , R
∗1) (0,0) (0,0) (0,0)
(B∗2 , R
∗2) (6.6, 0) (3.3, 0) (1.6, 0)
(B∗3 , R
∗3) (2,1.4) (2,0.8) neg.
7.2 Verhalten 2-dimensionaler autonomer Systeme
7.2.1 Stationare Zustande
Wie bereits gezeigt, erhalt man im 2-dimensionalen Fall die stationaren Zustande
des (autonomen) Systems
X = f(X, Y ) (7.6)
Y = g(X, Y )
71
7.2. Verhalten 2-dimensionaler autonomer Systeme GMM WS2009/2010
in dem
f(x, y) = 0 (7.7)
g(x, y) = 0
gesetzt wird, und die Losungen (X∗, Y ∗) dieses Gleichungssystems bestimmt
werden.
7.2.2 Geschlossene Bahnen
Im Gegensatz zu eindimensionalen Systemen konnen im zweidimensionalen
Fall geschlossene Losungsbahnen auftreten. Im Normalfall ist die geschlossene
Bahn das Bild einer periodischen Losung. Man nennt eine solche periodische
Bahn stabil, wenn alle Bahnen, die in ihrer Nahe starten, zu dieser hin laufen.
Man nennt solche stabilen Bahnen auch Grenzkreise. Periodische Bahnen
konnen auch instabil sein.
7.2.3 Satz von Poincare
Bei autonomen Systemen mit zwei Zustandsvariablen lauft jede Losung ent-
weder
• auf einen stationaren Zustand zu, oder
• nahert sich einer geschlossenen Kurve (Grenzkreis) an, oder
• lauft nach unendlich
7.2.4 Teilgleichgewichte (Isoklinen)
Wir betrachten das System aus Gleichung 7.6. Zuerst wollen wir einen Uber-
blick uber das Losungsverhalten gewinnen. Hierzu betrachten wird die Menge
aller Punkte fur die X = 0 bzw. Y = 0 gilt:
Teilgleichgewicht von X = {X = 0} = {(X, Y )|f(X, Y ) = 0}
Das Teilgleichgewicht von X trennt die Bereiche des Zustandsraums, in denen
die Bewegung nach rechts bzw. links erfolgt. Analog gilt
Teilgleichgewicht von Y = {Y = 0} = {(X, Y )| g(X, Y ) = 0}
Das Teilgleichgewicht von X trennt die Bereiche des Zustandsraums, in denen
die Bewegung nach oben bzw. unten erfolgt.
72
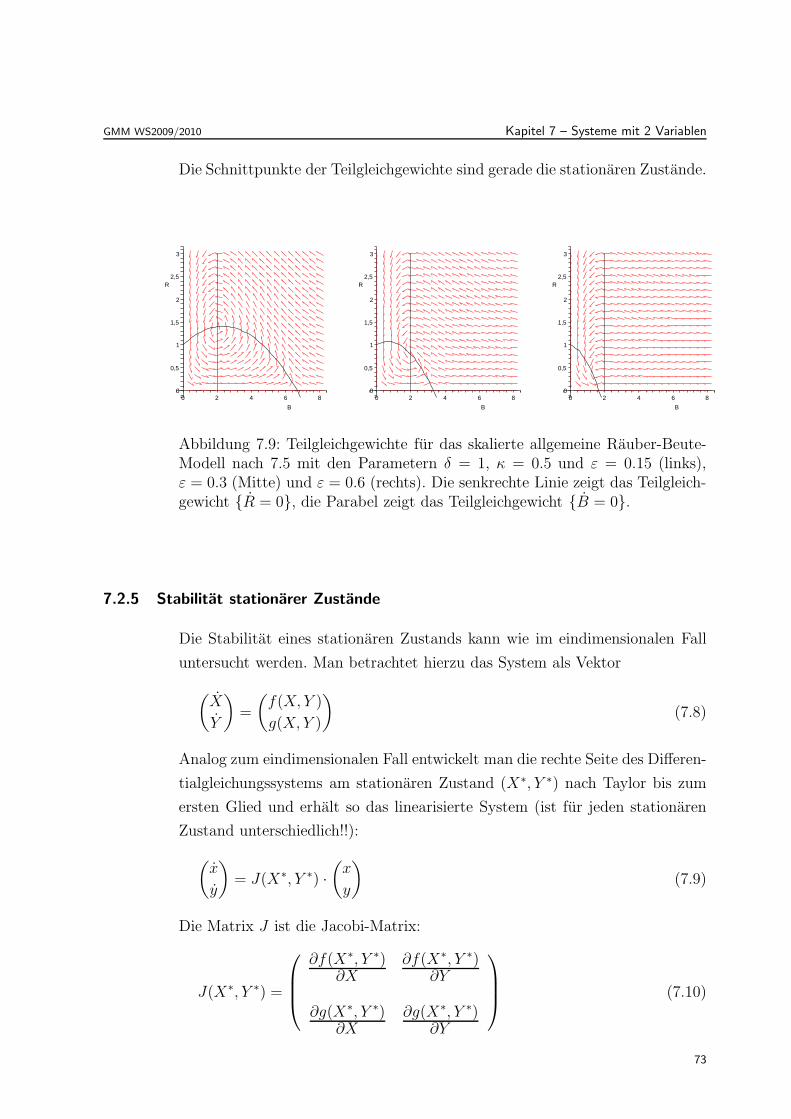
GMM WS2009/2010 Kapitel 7 – Systeme mit 2 Variablen
Die Schnittpunkte der Teilgleichgewichte sind gerade die stationaren Zustande.
B
86420
R
3
2,5
2
1,5
1
0,5
0
B
86420
R
3
2,5
2
1,5
1
0,5
0
B
86420
R
3
2,5
2
1,5
1
0,5
0
Abbildung 7.9: Teilgleichgewichte fur das skalierte allgemeine Rauber-Beute-Modell nach 7.5 mit den Parametern δ = 1, κ = 0.5 und ε = 0.15 (links),ε = 0.3 (Mitte) und ε = 0.6 (rechts). Die senkrechte Linie zeigt das Teilgleich-gewicht {R = 0}, die Parabel zeigt das Teilgleichgewicht {B = 0}.
7.2.5 Stabilitat stationarer Zustande
Die Stabilitat eines stationaren Zustands kann wie im eindimensionalen Fall
untersucht werden. Man betrachtet hierzu das System als Vektor
(X
Y
)
=
(f(X, Y )
g(X, Y )
)
(7.8)
Analog zum eindimensionalen Fall entwickelt man die rechte Seite des Differen-
tialgleichungssystems am stationaren Zustand (X∗, Y ∗) nach Taylor bis zum
ersten Glied und erhalt so das linearisierte System (ist fur jeden stationaren
Zustand unterschiedlich!!):
(x
y
)
= J(X∗, Y ∗) ·(
x
y
)
(7.9)
Die Matrix J ist die Jacobi-Matrix:
J(X∗, Y ∗) =
∂f(X∗, Y ∗)∂X
∂f(X∗, Y ∗)∂Y
∂g(X∗, Y ∗)∂X
∂g(X∗, Y ∗)∂Y
(7.10)
73

7.2. Verhalten 2-dimensionaler autonomer Systeme GMM WS2009/2010
Das linearisierte System ist am stationaren Zustand (X∗, Y ∗) entwickelt und
gibt die Abweichung (Storung) von diesem an. Zu linearen Abbildungen, Ei-
genwerten etc. siehe Anhang D.
Hat die Matrix J zwei verschiedene Eigenwerte λ1 und λ2, so kann man eine
allgemeine Losung des linearen Systems E.4 angeben:
~z(t) = C1 · eλ1t · ~v1 + C2 · eλ2t · ~v2
Hierbei ist ~v1 Eigenvektor zum Eigenwert λ1 und ~v2 Eigenvektor zum Eigenwert
λ2, C1 und C2 sind freie Konstanten.
Sind beide Eigenwerte reell so handelt es sich bei den Summanden entweder
um exponentielles Wachstum oder exponentiellen Zerfall. Ist also einer der
Eigenwerte großer Null, wachst die Storung, der Zustand ist instabil. Sind beide
Eigenwerte negativ, so verschwindet eine anfangliche Storung, der Zustand ist
stabil.
Fur einen komplexen Eigenwert λ = a + ib gilt
eλt = e(a+ib)t = eat · eibt = eat · (cos bt + i sin bt)
Das System vollzieht also Schwingungen. Ist der Realteil a kleiner Null, so ver-
schwindet die Storung, ist der Realteil a großer Null, so explodieren Storungen.
Bei a = 0 bleiben Storungen erhalten. Uber die Stabilitat des Ursprungssy-
stems kann dann nicht entschieden werden.
Bezuglich der Stabilitat des Systems 7.6 gilt der folgende Satz:
Satz 7.2.1 Stabilitat von stationaren Zustanden autonomer Systeme
1. Der stationare Zustand (X∗, Y ∗) von 7.6 ist asymptotisch stabil, falls
alle Eigenwerte von 7.10 negative Realteile besitzen.
2. Der stationare Zustand (X∗, Y ∗) ist instabil, falls mindestens ein Ei-
genwert von 7.10 einen positiven Realteil besitzt.
3. Sind alle Realteile aller Eigenwerte von 7.10 kleiner oder gleich Null und
mindestens ein Realteil gleich Null, so kann nicht uber die Stabilitat
des stationaren Zustands (X∗, Y ∗) entschieden werden.
74

GMM WS2009/2010 Kapitel 7 – Systeme mit 2 Variablen
Die Eigenwerte der Jacobimatrix J := J(X∗, Y ∗) sind durch
λ1,2 =spur J
2±√
(spur J)2
4− det J
gegeben. Fur die Stabilitat des Zustands (X∗, Y ∗) gilt:
spur J det J Stabilitat
spur J < 0 det J > 0 stabil
spur J > 0 beliebig instabil
beliebig det J < 0 instabil
spur J = 0 det J ≥ 0 keine Entscheidung moglich
spur < 0 det J = 0 keine Entscheidung moglich
7.2.6 Stabilitat im Beispielsystem
Das skalierte allgemeine Rauber-Beute-System (7.5)
B = (1 − εB) · B − R
1 + κB· B
R = δB
1 + κB· R − δR
hat die drei stationaren Zustande
1. (B∗, R∗) = (0, 0) (trivial)
2. (B∗, R∗) = (1ε , 0) (Beute ohne Rauber, bei ε > 0)
3. (B∗, R∗) = ( 11 − κ,
1 − (κ + ε)(1 − κ)2 ) (positiver stationarer Zustand)
Der positive stationare Zustand existiert im Zustandsraum (B, R ≥ 0), wenn
κ + ε < 1
erfullt ist. Fur κ + ε = 1 fallt der Zustand (3) mit Zustand (2) zusammen.
Die Jacobi-Matrix des System ist durch
J(B, R) =
1 − 2 ε B − R
(1 + κ B)2 − B
1 + κ B
δR
(1 + κ B)2 δ
(B
1 + κ B− 1
)
(7.11)
75

7.2. Verhalten 2-dimensionaler autonomer Systeme GMM WS2009/2010
Stabilitat von (B∗1 , R
∗1) = (0, 0)
Fur (B∗1 , R
∗1) = (0, 0) erhalt man
J(B∗1 , R
∗1) =
1 0
0 −δ
(7.12)
Damit gilt det J < 0, der Zustand ist instabil.
Stabilitat von (B∗2 , R
∗2) = (1
ε, 0) (Beute ohne Rauber)
Fur (B∗2 , R
∗2) = (1
ε, 0) erhalt man
J(B∗2 , R
∗2) =
−1 − 1
κ + ε
0 δ
(1
κ + ε− 1
)
(7.13)
Es gilt
det J = δ
(
1 − 1
κ + ε
)
1.Fall κ + ε < 1 (der dritte Zustand existiert):
det J < 0, der Zustand 2 ist instabil.
2. Fall κ + ε > 1 (der dritte Zustand existiert nicht ):
det J > 0 und spur J = −1 + δ
(1
κ + ε− 1
)
< 0, der Zustand 2 ist stabil.
3. Fall κ + ε = 1 (der zweite und dritte Zustand fallen zusammen): det J = 0
keine Entscheidung uber die Stabilitat des Zustands 2 moglich.
Stabilitat von (B∗3 , R
∗3) =
(
11 − κ,
1 − (κ + ε)(1 − κ)2
)
Der Zustand 3 existiert fur κ + ε < 1. Fur die Jacobimatrix erhalt man
J(B∗3 , R
∗3) =
−ε1 + κ
1 − κ+ κ −1
δ (1 − (κ + ε)) 0
(7.14)
76
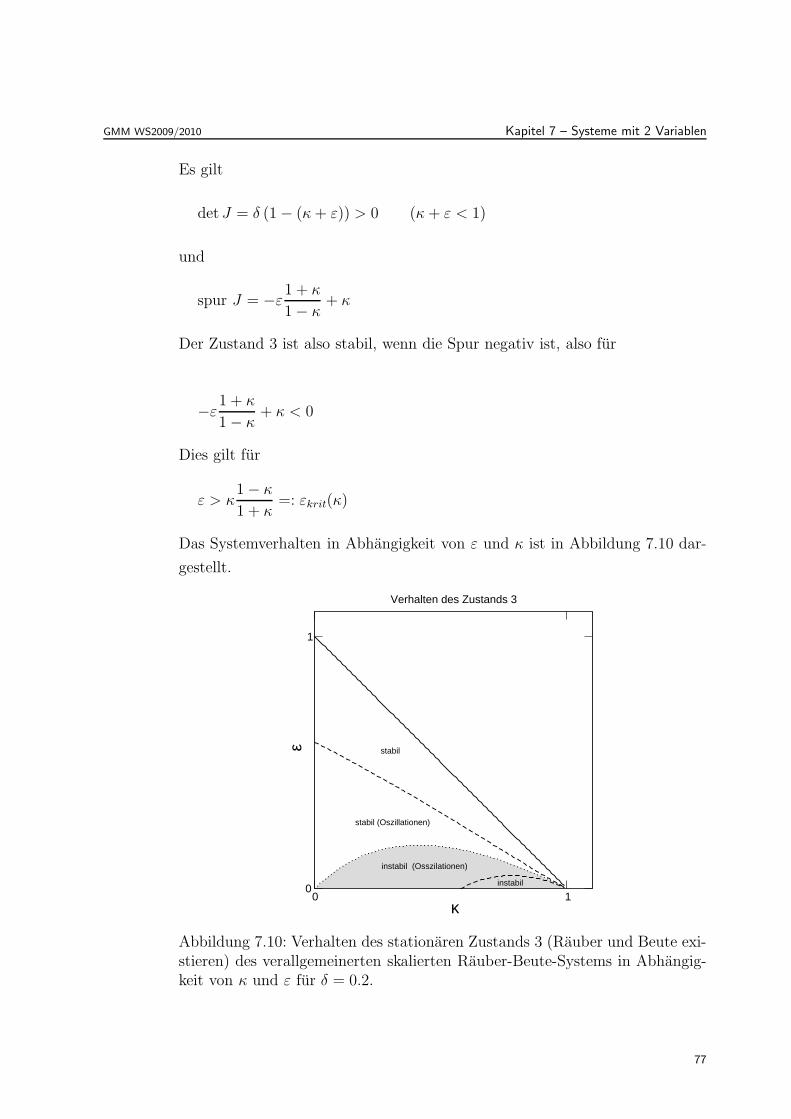
GMM WS2009/2010 Kapitel 7 – Systeme mit 2 Variablen
Es gilt
det J = δ (1 − (κ + ε)) > 0 (κ + ε < 1)
und
spur J = −ε1 + κ
1 − κ+ κ
Der Zustand 3 ist also stabil, wenn die Spur negativ ist, also fur
−ε1 + κ
1 − κ+ κ < 0
Dies gilt fur
ε > κ1 − κ
1 + κ=: εkrit(κ)
Das Systemverhalten in Abhangigkeit von ε und κ ist in Abbildung 7.10 dar-
gestellt.
0 1 κ
0
1
ε
Verhalten des Zustands 3
stabil
stabil (Oszillationen)
instabil (Osszilationen)
instabil
Abbildung 7.10: Verhalten des stationaren Zustands 3 (Rauber und Beute exi-stieren) des verallgemeinerten skalierten Rauber-Beute-Systems in Abhangig-keit von κ und ε fur δ = 0.2.
77

7.2. Verhalten 2-dimensionaler autonomer Systeme GMM WS2009/2010
78
GMM WS2009/2010 Kapitel 8 – Raumliche Systeme
8 Raumliche Systeme
8.1 Zellulare Automaten
Bei der Beschreibung von Prozessen in der Natur spielt nicht nur die Verande-
rung der Zustandsgroßen im Laufe der Zeit eine Rolle. Haufig mochte man
zusatzlich auch Informationen uber die raumliche Verteilung haben. Stellt man
sich eine Rasenflache vor, und mochte man die Grasmenge auf dieser Flache
modellieren, so kann man naturlich ein Modell entwickeln, dass die Grasmenge
auf dieser Flache im Laufe der Jahreszeiten beschreibt. Dann hat man aber
keinerlei Informationen daruber, ob auf dieser Rasenflache an einigen Stellen
braune Stellen oder dicke Grasbuschel existieren. Hierzu benotigt man ein Mo-
dell, das die Grasflache raumlich beschreibt. Hierzu kann man die Rasenflache
zum Beispiel in Quadrate einteilen. Man kann nun Wachstumsregeln aufstellen,
die das Graswachstum beschreiben. Ist z.B. ein Quadrat von braunen Stellen
umgeben, d.h., dass auf den Nachbarquadraten sehr wenig Gras ist, so wird
das Gras auch in der Mitte schlecht wachsen, da der Schutz vor Wind fehlt.
Sind um ein Quadrat dicke Grasbuschel, so werden die Nahrstoffe knapp und
auch dann kann das Gras schlecht wachsen.
8.1.1 Conway’s Life
Ein erstes solches Modell, genannt LIFE, wurde von Conway im Jahre 1970
zur Beschreibung einer fiktiven Bevolkerung beschrieben. Jedes Quadrat, auch
Zelle genannt, kann hierbei zwei Zustande annehmen, tot (0) oder lebendig
(1). Conway hat nun folgende Regeln aufgestellt:
1. Eine Zelle wird geboren, wenn sie drei lebende Nachbarn hat.
2. Eine Zelle bleibt am Leben, wenn sie zwei oder drei lebende Nachbarn
hat.
3. Eine Zelle stirbt sie an Vereinsamung oder Uberbevolkerung, wenn sie
weniger als zwei oder mehr als drei lebende Nachbarn hat.
4. Nachbarn sind die 8 Zellen um eine Zelle herum.
Mit diesen Regeln ergeben sich interessante Ergebnisse. Es gibt Konstellatio-
nen, die sich uber die Zeit nicht andern, andere die Zyklen durchlaufen, welche
79
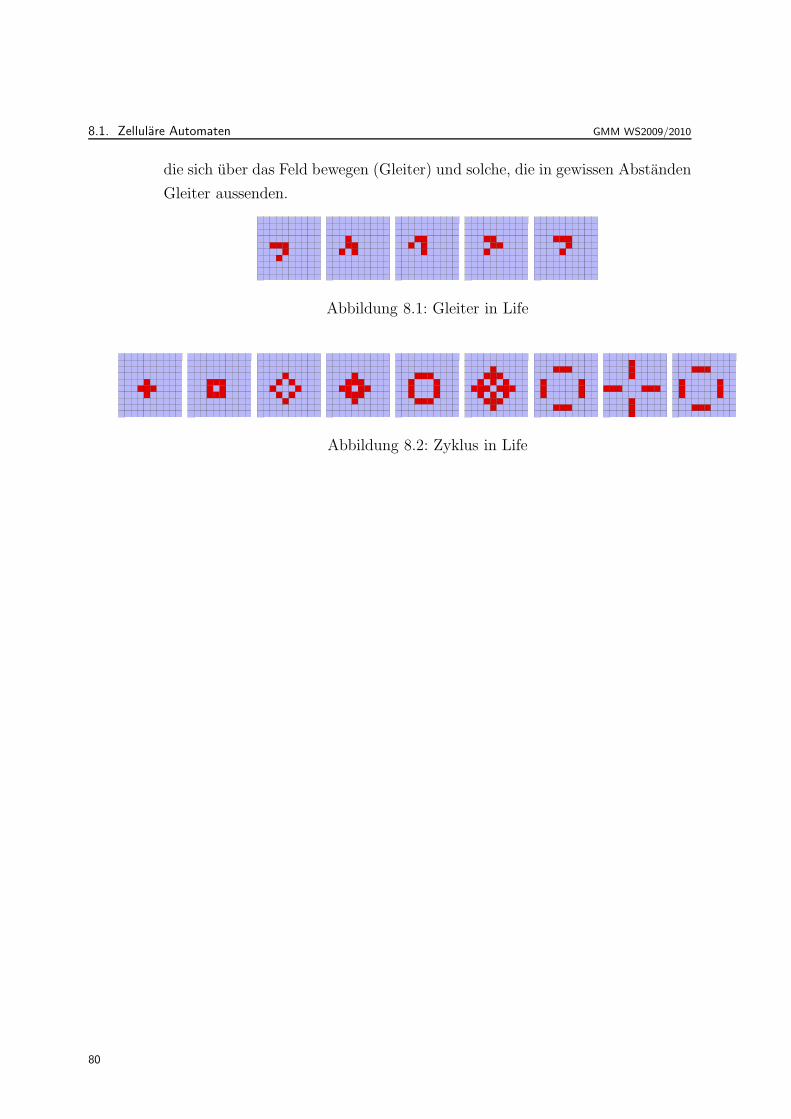
8.1. Zellulare Automaten GMM WS2009/2010
die sich uber das Feld bewegen (Gleiter) und solche, die in gewissen Abstanden
Gleiter aussenden.
Abbildung 8.1: Gleiter in Life
Abbildung 8.2: Zyklus in Life
80
GMM WS2009/2010 Kapitel 8 – Raumliche Systeme
8.1.2 Charakteristika von zelluaren Automaten
Allgemein kann man die Charakteristika von zelluaren Automaten wie folgt
beschreiben:
• Entwicklung in Raum und Zeit
• diskrete Anzahl an Zellen
• endliche Anzahl an Zustanden fur jede Zelle (kann man aufweichen)
• Anderung der Zustande in diskreten Zeitschritten
• Zustand hangt von den Nachbarzellen ( und evtl. der Zelle selbst) ab
• alle Zellen Verhalten sich nach den gleichen Regeln
Nachbarschaftsbeziehungen
Der Zustand einer Zelle hangt von den Zustanden seiner Nachbarn ab. Man
kann verschiedene Nachbarschaftsbeziehungen betracheten.
• 4 Nachbarn (oben,unten, rechts und links)
• 8 Nachbarn (alle direkt angrenzenden Zellen)
• die Zelle selbst kann zu den Nachbarn gezaht werden
• entferntere Zellen werden hinzugenommen
Randbedingungen
Man kann die Rander offen lassen, so dass die Randzellen einfach weniger
Nachbarn haben. In diesem Fall wird der Zustand der Randzellen je nach
Automat anders ausfallen als der der Zellen in der Mitte. Will man dies ver-
meiden schliesst man das Feld zu einem Torus. Dann haben alle Zellen gleich
viele Nachbarn.
8.1.3 Zirkularer Raum
Der zirkulare Raum ist ein beruhmtes Beispiel fur Selbstorganisation. Nach
einer geringen Anzahl von Schritten bilden sich Strukturen heraus.
• Es gibt N mogliche Zustande
• Der Zustand der Zelle wird um Eins erhoht, wenn mindestens ein Nachbar
den Zustand der Zelle plus Eins hat.
• Jede Zelle hat 4 Nachbarn (links, rechts, oben und unten)
• Der Zustand 0 wird mit dem Zustand N gleichgesetzt
81
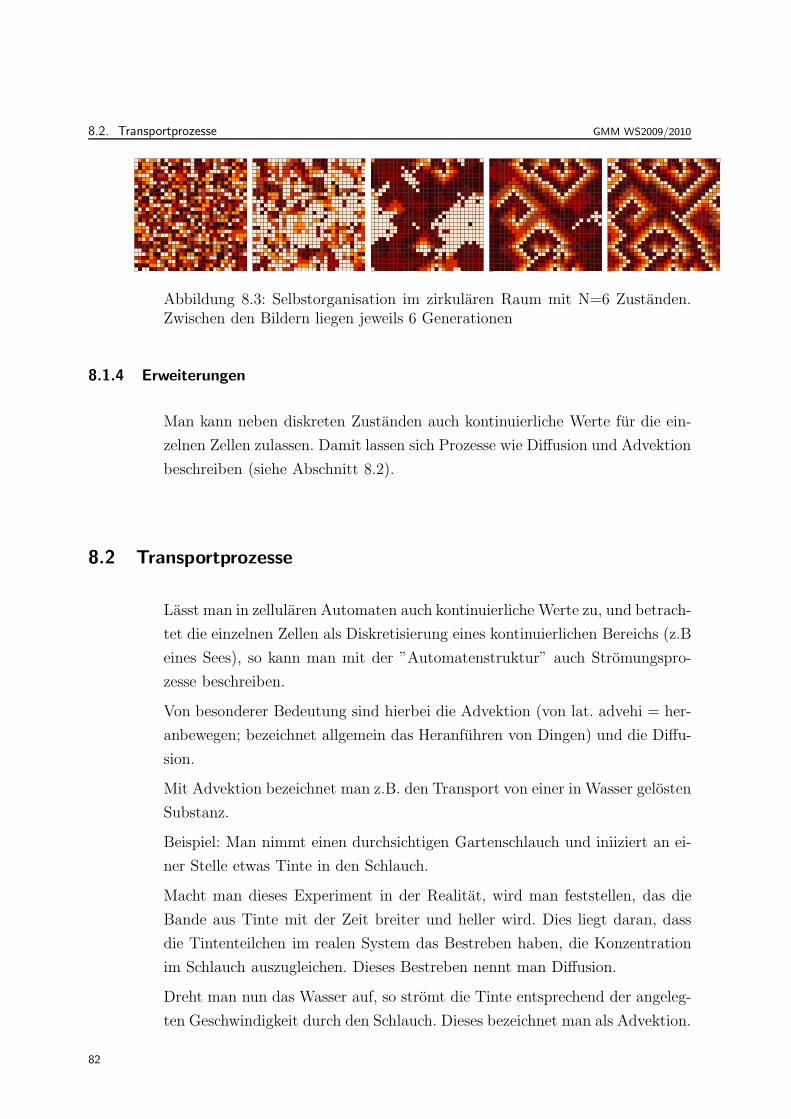
8.2. Transportprozesse GMM WS2009/2010
Abbildung 8.3: Selbstorganisation im zirkularen Raum mit N=6 Zustanden.Zwischen den Bildern liegen jeweils 6 Generationen
8.1.4 Erweiterungen
Man kann neben diskreten Zustanden auch kontinuierliche Werte fur die ein-
zelnen Zellen zulassen. Damit lassen sich Prozesse wie Diffusion und Advektion
beschreiben (siehe Abschnitt 8.2).
8.2 Transportprozesse
Lasst man in zellularen Automaten auch kontinuierliche Werte zu, und betrach-
tet die einzelnen Zellen als Diskretisierung eines kontinuierlichen Bereichs (z.B
eines Sees), so kann man mit der ”Automatenstruktur” auch Stromungspro-
zesse beschreiben.
Von besonderer Bedeutung sind hierbei die Advektion (von lat. advehi = her-
anbewegen; bezeichnet allgemein das Heranfuhren von Dingen) und die Diffu-
sion.
Mit Advektion bezeichnet man z.B. den Transport von einer in Wasser gelosten
Substanz.
Beispiel: Man nimmt einen durchsichtigen Gartenschlauch und iniiziert an ei-
ner Stelle etwas Tinte in den Schlauch.
Macht man dieses Experiment in der Realitat, wird man feststellen, das die
Bande aus Tinte mit der Zeit breiter und heller wird. Dies liegt daran, dass
die Tintenteilchen im realen System das Bestreben haben, die Konzentration
im Schlauch auszugleichen. Dieses Bestreben nennt man Diffusion.
Dreht man nun das Wasser auf, so stromt die Tinte entsprechend der angeleg-
ten Geschwindigkeit durch den Schlauch. Dieses bezeichnet man als Advektion.
82

GMM WS2009/2010 Kapitel 8 – Raumliche Systeme
8.2.1 Diffusion
Die Diffusion kann man wie folgt formalisieren: Angenommen wir betrachten
den Schlauch als eindimensional (x-Richtung) und geben die Tinte als Kon-
zentration c an. Dann ist c(t, x) die Konzentration zur Zeit t am Ort x.
Nach dem 1. Fickschen Gesetz ist die Teilchenstromdichte (der Fluss) J pro-
portional zum Konzentrationsgradienten entgegen der Diffusionsrichtung:
J = −D∂ c
∂x
Hierbei ist D die Proportionalitatskonstante, die Diffusionskonstante. Das Mi-
nuszeichen bewirkt, dass der Fluss entgegen dem Konzentrationsgradienten
wirkt, also von hoherer zu niedrigerer Konzentration. Die ”runden” ∂’s be-
zeichnen die partielle Ableitung.
Einheiten: Ist die Konzentration c z.B. in mol/m3 angegeben und die Zeit in s,
so ist die Einheit des Flusses J mol/m2s. Die Einheit der Diffusionskonstanten
ist m2/s.
Die zeitliche Anderung der Konzentration ergibt sich aus der Kontinuitatsglei-
chung, die besagt, dass keine Masse verloren geht oder entsteht:
∂c
∂t+
∂J
∂x= 0
∂c
∂t= −∂J
∂x= − ∂
∂x
[
−D · ∂ c
∂x
]
Fur eine Diffusionskonstante unabhangig von x ergibt sich
∂c
∂t= D · ∂2c
∂x2
Um die Diffusionsgleichung fur ein System zu losen, muss man eine Anfangs-
bedingung vorgeben. In unserem Fall die Konzentration an jeder Stelle x zur
Zeit t=0 c(0,x).
Bisher haben wir noch keine Angabe uber die Lange des Schlauches gemacht.
Wir sind von einem unendlich langen Schlauch ausgegangen. Will man die
Verteilung in einem endlichen Schlauchstuck beschreiben, so muss man auch
Randbedingungen definieren.
Hier gibt es zwei Moglichkeiten: Entweder man setzt die Konzentration am
Anfang (x=0) und am Ende des Schlauchstucks (x=L) fest, also
83

8.2. Transportprozesse GMM WS2009/2010
c(t, 0) und c(t, L) f.a t >= 0 Dirichlet-Problem
oder man gibt die Ableitungen am Rand vor
∂c
∂tc(t, 0) und
∂c
∂tc(t, L) f.a t >= 0 Neumann-Problem
Der Unterschied ist wie folgt:
Sind die Konzentrationen am Rand vorgegeben, so bestimmen diese letztlich
nach einer gewissen Zeit die Konzentration im Schlauchstuck. Vom Rand her
diffundiert Substanz (Tinte) in den Schlauch hinein.
Halt man den Gradienten am Rand fest, z.B setzt in gleich null, dann bedeutet
dies, dass keine Substanz aus dem Schlauch oder in den Schlauch diffundieren
kann. Die Menge im Schlauch bleibt konstant und verteilt sich mit der Zeit
gleichmassig.
Im allgemeinen ist es sehr schwierig, Anfangs- und Randwertprobleme analy-
tisch zu losen. Daher ist es meistens sinnvoll solche Probleme numerisch zu
behandeln. Hierzu gibt es hervorragende Verfahren. Das Grundprinzip soll im
folgenden mit einem sehr elementaren Verfahren erlautert werden:
Numerische Losung
Der Schlauch wird durch ein eindimensionales Gitter simuliert. Hierzu wird
die die x-Achse in Abschnitte der Lange ∆x unterteilt. Jeder Abschnitt be-
schreibt ein kurzes Stuckchen des Schlauches (Gitterzelle), n dem die Substanz
als homogen verteilt angenommen wird. Es wird nun die zeitliche Anderung
der Konzentration in der i-ten Gitterzelle bestimmt. Hierzu werden zuerst die
Gradienten zu den benachbarten Gitterzellen diskretisiert, indem man die je-
weiligen Differenzenquotienten betrachtet:
84
GMM WS2009/2010 Kapitel 8 – Raumliche Systeme
∂c(t, x)
∂t≈ D ·
∂c(t,x+∆x)∂x
− ∂c(t,x)∂x
∆x
≈ D ·c(t,x+∆x)−c(t,x)
∆x− c(t,x)−c(x−∆x)
∆x
∆x
= D · c(t, x + ∆x) − 2 · c(t, x) + c(x − ∆x)
∆x2
Die zeitliche Diskretisierung (Euler) fuhrt zu:
c(t + ∆t, x) = c(t, x) + D · c(t, x + ∆x) − 2 · c(t, x) + c(x − ∆x)
∆x2· ∆t
Betrachtet man nun Gitterzellen mit Abstand ∆x so erhalt man folgende For-
mel:
c(t + ∆t, i) = c(t, i) + D · c(t, i + 1) − 2 · c(t, i) + c(i − 1)
∆x2· ∆t
Diese Art der Diskretisierung nennt man forward in time und centered in space.
Man muss nun ∆x und ∆t so wahlen, dass tatsachlich ein Konzentrationsaus-
gleich geschaffen wird, und dass das diskretisierte System nicht osszilliert. Dies
ist fur
D <1
2· ∆x2
∆t
der Fall.
8.2.2 Advektion (Transportgleichung)
Die Beschreibung der Advektion, also einer Stromung, die durch eine konstante
Stromungsgeschwindigkeit v > 0 bestimmt ist, lasst sich im eindimensionalen
fall wie folgt beschreiben
∂c(t, x)
∂t+ v · ∂c(t, x)
∂x= 0
gegeben.
85
8.2. Transportprozesse GMM WS2009/2010
Eine sehr einfache Diskretisierung ist durch
c(t + ∆t, i) = c(t, i) + v · c(t, i − 1) − c(t, i)
∆x· ∆t
gegeben. Hierbei ist die raumliche Ableitung nicht symmetrisch sondern strom-
aufwarts verschoben. Man nennt dies daher auch Upstream-Schema. Es ist
stabil, wenn
v · ∆t
∆x<= 1
gilt.
Das Problem bei der Diskretisierung der Advektion ist, dass ∆x und ∆t genau
zueinander ”passen” mussen. Dies kann man aber nur bei konstanter Geschwin-
digkeit v erreichen. Ansonsten ”verschmiert” das Signal, d.h. die Bande aus
Tinte wird immer breiter. Dieses sieht ahnlich wie eine Diffusion aus. Daher
wird dieses Phanomen, dass sich aufgrund der Diskretisierung ergibt, auch
numerische Diffusion genannt.
8.2.3 2D Advektion
Eine sehr einfache Moglichkeit, diese Transportprozesse im zweidimensionalen
Fall zu beschreiben, funktioniert ahnlich wie bei denAutomaten.
Man betrachtet jetzt nicht nur die Nachbarzellen rechts und links, sondern
auch oben und unten. Man definiert also fur jede Zelle vier Austauschflusse.
Diese Transportprozesse konnen mit Differentialgleichungen gekoppelt werden.
86
GMM WS2009/2010 Kapitel 9 – Ausbreitung von Borkenkafern (W. Ebenhoh)
9 Ausbreitung von Borkenkafern (W. Ebenhoh)
Naturlicherweise stirbt ein Teil eines Waldes gelegentlich, das ist Teil seiner re-
gularen Erneuerung. Er stirbt an Waldbranden, an Sturmschaden, an Trocken-
heit, an Schadlingsbefall, und stets folgt dem Sterben eine Erneuerung. Jeder
Teil des naturlichen Waldes erneuert sich etwa alle 30 bis 200 Jahre. Alter Wald
verhindert das Aufkommen von Samlingen. Viel zu effektiv sammeln die Kro-
nen das Licht und die Wurzeln Nahrstoffe und Wasser. Samlinge haben nur in
Lichtungen und an den Randern eine Chance – und eben nach einem kollekti-
ven Absterben eines großeren Bestandes von altem Wald. Alternder Wald wird
gegen die oben genannten Gefahren immer anfalliger, irgendwann setzt dann
das von außen induzierte Sterben ein, fur jeden Standort je nach Anfalligkeit
zu einem anderen Zeitpunkt, aber infolge der oft weiten raumlichen Ausdeh-
nung der Ursachen (z.B. ein besonders trockener Sommer in Mitteleuropa) an
vielen Orten gleichzeitig.
In diesem Kapitel wird ein sehr einfaches Modell einer Walderneuerung kon-
struiert. Im ersten Abschnitt wird die Entwicklung der Borkenkaferpopulation
isoliert betrachtet. Das heißt, zunachst wird die Ruckwirkung der Borkenkafer
auf den Wald vergessen. Naturlich ist das der wichtigste Prozess im Gesamt-
system”Wald“, jedenfalls im Modell. Aber um das
”Subsystem“ Borkenkafer
zu verstehen, wird zunachst die Borkenkaferpopulation in einen Wald mit fest-
gehaltener Altersstruktur gesetzt. Wir lernen dann, in welcher Art Wald sie
sich schnell oder langsam vermehrt. Im zweiten Abschnitt beschreiben wir die
Wirkung einer hohen Borkenkaferdichte auf den Wald als”Verjungung“. Die
Annahme dabei ist, dass die alten Baume sterben und Platz fur Samlinge ma-
chen. Das Modell ist naturlich ubertrieben einfach, da es nur zwei Variable hat,
namlich Borkenkaferdichte und Alter des Waldes. Zuletzt wird das Modell als
raumliches Modell auf einer Automatenstruktur betrachtet.
9.1 Borkenkafer-Dynamik
Borkenkafer vermehren sich und werden von Vogeln gefressen oder sterben an
eigenen Krankheiten.
Als erste (und in diesem Abschnitt einzige) Systemvariable fuhren wir die
Borkenkaferdichte B ein. Als leicht vorstellbare Maßeinheit fur B konnte man
etwa”Zahl der Kafer pro Ar“ verwenden. Unser Modell wird aber nicht an die
Wirklichkeit heranreichen, in der diese Zahl wohl um viele Großenordnungen
87
9.1. Borkenkafer-Dynamik GMM WS2009/2010
schwankt. Die Prozesse, die die Anderung der Borkenkaferdichte B beschrei-
ben, sind Wachstum und Mortalitat. Beide Prozesse sind dichteabhangig, und
außerdem noch abhangig vom Alter A des Waldes. Das Modell besteht in dieser
Entwicklungsstufe aus Gleichung (9.1).
B = Wachstum(B, A) − Mortalitat(B, A) (9.1)
Fur das Wachstum bietet sich als fast einfachste Moglichkeit eine Art logisti-
scher Ansatz an, wobei die Wachstumsrate bei niedrigen Dichten vom Alter A
des Waldes abhangt. Alte Baume sind anfalliger, deshalb wird r(A) in Ansatz
(9.2) mit dem Alter A steigen.
Wachstum = r(A) · B ·(
1 − B
K
)
(9.2)
Hier ist K die Kapzitat der Kafer, eine Wachstumsgrenze die nie erreicht wird,
da ja eine Mortalitat in (9.1) vorgesehen ist. Nur dieser Teil der Gesamtmorta-
litat wird explizit durch eine Formel beschrieben (9.3). Die Wachstumsgrenze
ist dagegen Ausdruck einer”impliziten“ Mortalitat, die nicht weiter spezifiziert
ist und zusatzlich zur explizit angegebenen Mortalitat (9.3) wirkt.
Mortalitat = µB2
B2 + M2(9.3)
Der Ansatz (9.3) ist eine sigmoide Kurve. Ohne die Quadrate ware (9.3) ein
Monod-Ansatz, also ein Predationsterm mit Sattigung. Der Sattigungswert µ
gibt an, wie viel Borkenkafer maximal von seinen Fressfeinden, den Vogeln, ge-
fressen werden konnen (pro Tag und Ar). Naturlich ist die Sache komplizierter.
Einerseits zieht ein reichhaltiges Nahrungsangebot mehr Vogel an, andererseits
fuhrt Uberfluss und Einseitigkeit der Nahrung auch zur Abwanderung von
Vogeln. Im jungen Wald sind wahrscheinlich mehr Vogel als im alten. Deshalb
konnte man vermuten, dass die (maximale) Sterberate µ mit A abnimmt. Wir
ignorieren jedoch der Einfachheit halber eine mogliche Abhangigkeit µ(A). Die
Michaeliskonstante M gibt an, bei welcher Borkenkaferdichte diese mit halb-
maximaler Intensitat gefressen werden.
Die quadratische Abweichung bewirkt, dass bei sehr niedrigen Dichten die Mor-
talitat der Borkenkafer sehr klein ist. Die Schadlinge konnen so von den Vogeln
nicht ausgerottet werden. Man kann vermuten, dass die Kafer umso besser ver-
steckt sind, je weniger von ihnen da sind. Außerdem konzentrieren Rauber ihre
88

GMM WS2009/2010 Kapitel 9 – Ausbreitung von Borkenkafern (W. Ebenhoh)
Wahrnehmung auf den haufigsten Beutetyp und neigen dazu”seltene“ Beute
zu ignorieren.
Das Alter des Waldes A wird spater die zweite Systemvariable. Hier ist A
eine”Konstante“. Wir normieren das Alter auf den Bereich 0 bis 1. Damit ist
A eine dimensionslose Große. Man kann sich etwa vorstellen, dass mit A =
1 ein Wald aus hundertjahrigen oder alteren Baumen beschrieben wird. Da
unser Modell so einfach wie moglich sein soll, wird die Wachstumsrate der
Borkenkafer proportional zu A angesetzt, (9.4).
r(A) = r · A (9.4)
Die Doppelfunktion des Buchstaben r als Wachstumsfunktion r(A) und als
Ratenkonstante r wird keine Schwierigkeiten machen, da im folgenden nur noch
letztere auftritt. Wird (9.2) bis (9.4) in die Systemgleichung (9.1) eingesetzt,
ergibt sich Gleichung (9.5).
B = r · A · B ·(
1 − B
K
)
− µB2
B2 + M2(9.5)
Die Fixpunkte des Systems erhalt man als Schnittpunkte des Wachstumsterms
und des Mortalitatsterms (Abbildung 9.1). Je nach Alter des Waldes gibt es
zwei, drei oder vier Schnittpunkte. Die erste ist die triviale Losung B∗1 =
0, die anderen sind die Losung einer kubische Gleichung. Da wir analytisch
den Zusammenhang B∗(A) nur schwer berechnen konnen (wer lost schon gern
kubische Gleichungen), betrachten wir die Umkehrfunktion A (B∗) und plotten
die Kurve mit vertauschten Achsen:
A(B∗) =µ · B∗
r ·(1 − B∗
K
)· (B∗2 + M2)
B∗ > 0 (9.6)
In Abbildung 9.2 ist die Losung fur K = 5000 Kafer pro Ar, M = 500 Kafer
pro Ar, r = 0.15 pro Tag und µ = 100 pro Ar und Tag dargestellt. Es gibt
ein breites Intervall auf der A-Achse, in dem zu jedem Alter drei positive
stationare Zustande B∗(A) koexistieren. (Fur großere M verkleinert sich das
Intervall, fur kleinere M dehnt es sich bis uber A = 1 aus). Das Modell kann
zu einer sogenannten Hysterese fuhren. Um die Hysterese zu verstehen, drehen
wir im Gedanken am Parameter A. Bei A = 0.4 existiert (neben B∗ = 0)
zunachst nur einen Gleichgewichtswert mit sehr kleiner Borkenkaferdichte B∗.
Bei Erhohung von A steigt B∗ nur langsam an und erreicht bei A ≈ 0.75 etwa
89
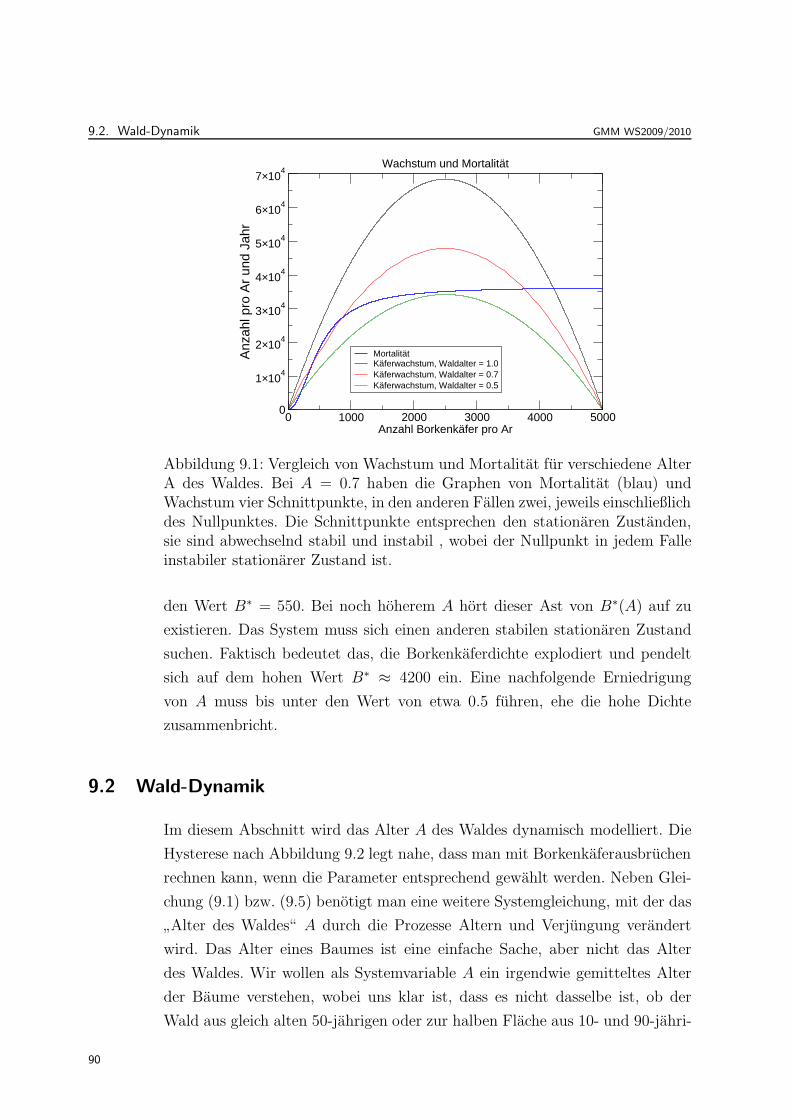
9.2. Wald-Dynamik GMM WS2009/2010
0 1000 2000 3000 4000 5000Anzahl Borkenkäfer pro Ar
0
1×104
2×104
3×104
4×104
5×104
6×104
7×104
Anz
ahl p
ro A
r un
d Ja
hr
MortalitätKäferwachstum, Waldalter = 1.0Käferwachstum, Waldalter = 0.7Käferwachstum, Waldalter = 0.5
Wachstum und Mortalität
Abbildung 9.1: Vergleich von Wachstum und Mortalitat fur verschiedene AlterA des Waldes. Bei A = 0.7 haben die Graphen von Mortalitat (blau) undWachstum vier Schnittpunkte, in den anderen Fallen zwei, jeweils einschließlichdes Nullpunktes. Die Schnittpunkte entsprechen den stationaren Zustanden,sie sind abwechselnd stabil und instabil , wobei der Nullpunkt in jedem Falleinstabiler stationarer Zustand ist.
den Wert B∗ = 550. Bei noch hoherem A hort dieser Ast von B∗(A) auf zu
existieren. Das System muss sich einen anderen stabilen stationaren Zustand
suchen. Faktisch bedeutet das, die Borkenkaferdichte explodiert und pendelt
sich auf dem hohen Wert B∗ ≈ 4200 ein. Eine nachfolgende Erniedrigung
von A muss bis unter den Wert von etwa 0.5 fuhren, ehe die hohe Dichte
zusammenbricht.
9.2 Wald-Dynamik
Im diesem Abschnitt wird das Alter A des Waldes dynamisch modelliert. Die
Hysterese nach Abbildung 9.2 legt nahe, dass man mit Borkenkaferausbruchen
rechnen kann, wenn die Parameter entsprechend gewahlt werden. Neben Glei-
chung (9.1) bzw. (9.5) benotigt man eine weitere Systemgleichung, mit der das
”Alter des Waldes“ A durch die Prozesse Altern und Verjungung verandert
wird. Das Alter eines Baumes ist eine einfache Sache, aber nicht das Alter
des Waldes. Wir wollen als Systemvariable A ein irgendwie gemitteltes Alter
der Baume verstehen, wobei uns klar ist, dass es nicht dasselbe ist, ob der
Wald aus gleich alten 50-jahrigen oder zur halben Flache aus 10- und 90-jahri-
90
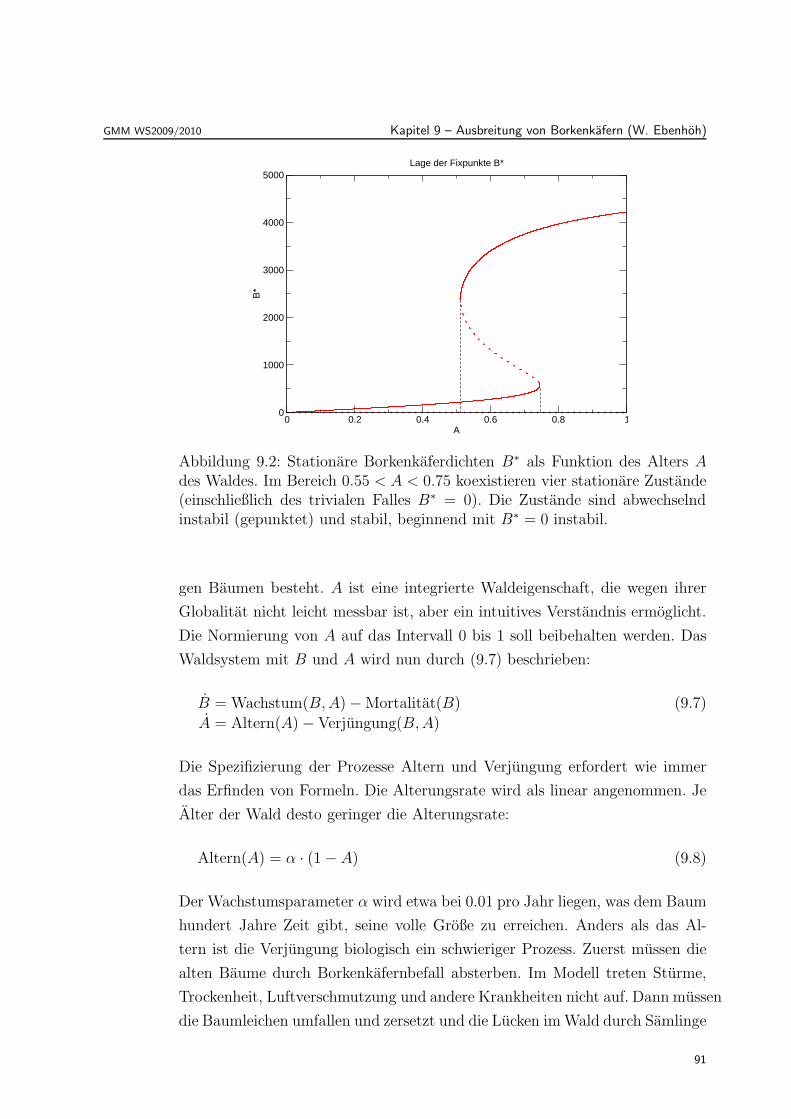
GMM WS2009/2010 Kapitel 9 – Ausbreitung von Borkenkafern (W. Ebenhoh)
0 0.2 0.4 0.6 0.8 1A
0
1000
2000
3000
4000
5000
B*
Lage der Fixpunkte B*
Abbildung 9.2: Stationare Borkenkaferdichten B∗ als Funktion des Alters Ades Waldes. Im Bereich 0.55 < A < 0.75 koexistieren vier stationare Zustande(einschließlich des trivialen Falles B∗ = 0). Die Zustande sind abwechselndinstabil (gepunktet) und stabil, beginnend mit B∗ = 0 instabil.
gen Baumen besteht. A ist eine integrierte Waldeigenschaft, die wegen ihrer
Globalitat nicht leicht messbar ist, aber ein intuitives Verstandnis ermoglicht.
Die Normierung von A auf das Intervall 0 bis 1 soll beibehalten werden. Das
Waldsystem mit B und A wird nun durch (9.7) beschrieben:
B = Wachstum(B, A) − Mortalitat(B) (9.7)
A = Altern(A) − Verjungung(B, A)
Die Spezifizierung der Prozesse Altern und Verjungung erfordert wie immer
das Erfinden von Formeln. Die Alterungsrate wird als linear angenommen. Je
Alter der Wald desto geringer die Alterungsrate:
Altern(A) = α · (1 − A) (9.8)
Der Wachstumsparameter α wird etwa bei 0.01 pro Jahr liegen, was dem Baum
hundert Jahre Zeit gibt, seine volle Große zu erreichen. Anders als das Al-
tern ist die Verjungung biologisch ein schwieriger Prozess. Zuerst mussen die
alten Baume durch Borkenkafernbefall absterben. Im Modell treten Sturme,
Trockenheit, Luftverschmutzung und andere Krankheiten nicht auf. Dann mussen
die Baumleichen umfallen und zersetzt und die Lucken im Wald durch Samlinge
91
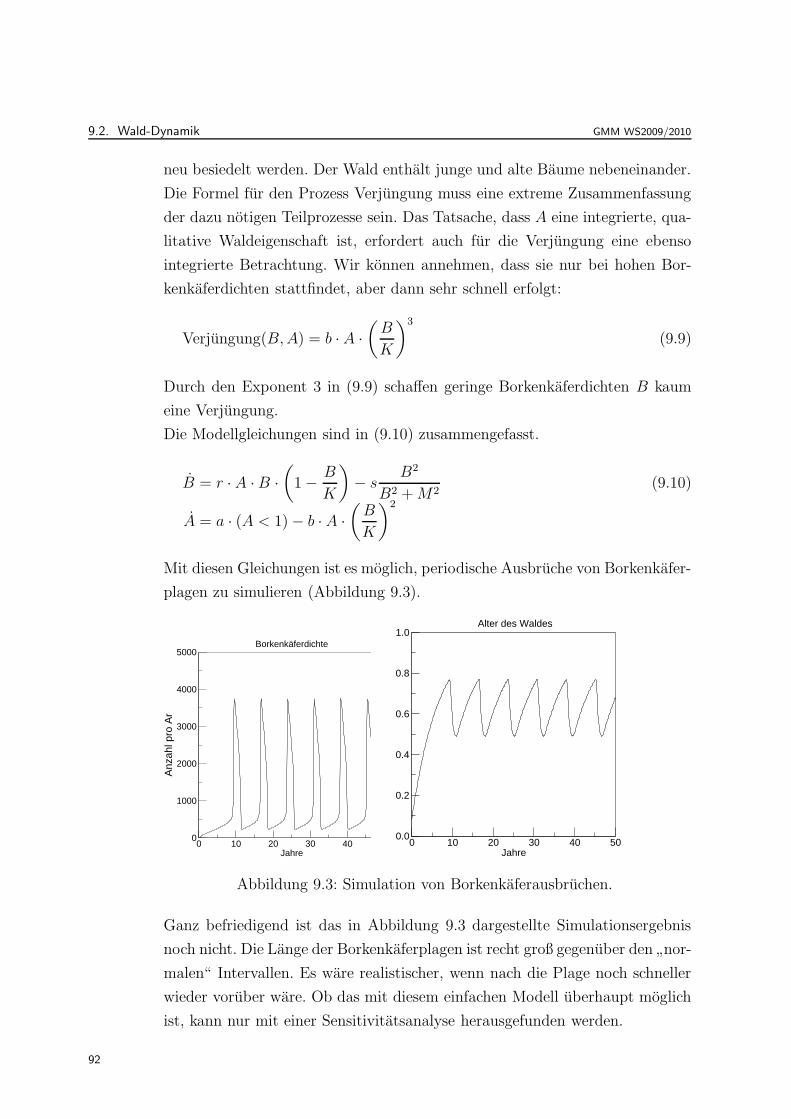
9.2. Wald-Dynamik GMM WS2009/2010
neu besiedelt werden. Der Wald enthalt junge und alte Baume nebeneinander.
Die Formel fur den Prozess Verjungung muss eine extreme Zusammenfassung
der dazu notigen Teilprozesse sein. Das Tatsache, dass A eine integrierte, qua-
litative Waldeigenschaft ist, erfordert auch fur die Verjungung eine ebenso
integrierte Betrachtung. Wir konnen annehmen, dass sie nur bei hohen Bor-
kenkaferdichten stattfindet, aber dann sehr schnell erfolgt:
Verjungung(B, A) = b · A ·(
B
K
)3
(9.9)
Durch den Exponent 3 in (9.9) schaffen geringe Borkenkaferdichten B kaum
eine Verjungung.
Die Modellgleichungen sind in (9.10) zusammengefasst.
B = r · A · B ·(
1 − B
K
)
− sB2
B2 + M2(9.10)
A = a · (A < 1) − b · A ·(
B
K
)2
Mit diesen Gleichungen ist es moglich, periodische Ausbruche von Borkenkafer-
plagen zu simulieren (Abbildung 9.3).
0 10 20 30 40 50Jahre
0
1000
2000
3000
4000
5000
Anz
ahl p
ro A
r
Borkenkäferdichte
0 10 20 30 40 50Jahre
0.0
0.2
0.4
0.6
0.8
1.0 Alter des Waldes
Abbildung 9.3: Simulation von Borkenkaferausbruchen.
Ganz befriedigend ist das in Abbildung 9.3 dargestellte Simulationsergebnis
noch nicht. Die Lange der Borkenkaferplagen ist recht groß gegenuber den”nor-
malen“ Intervallen. Es ware realistischer, wenn nach die Plage noch schneller
wieder voruber ware. Ob das mit diesem einfachen Modell uberhaupt moglich
ist, kann nur mit einer Sensitivitatsanalyse herausgefunden werden.
92
GMM WS2009/2010 Kapitel 9 – Ausbreitung von Borkenkafern (W. Ebenhoh)
9.3 Raumliche Ausdehnung des Modells
Mit Hilfe der Struktur der zellularen Automaten kann das Modell erweitert
werden. Hierzu teilen den Wald in Quadrate der Große 10 m x 10 m (1Ar2) ein.
Wir nehmen an, dass jeweils ein Teil der Kafer in die benachbarten Zellen (4
Nachbarn) abwandert. Zusatzlich kann man annehmen, dass diese Wanderung
durch eine vorgegebene Windrichtung nicht symmetrisch ist.
9.3.1 Bekampfung
Die Bekampfung der Kafer erfolgt durch das Schlagen von Schneisen. Im Mo-
dell kann man das simulieren, indem man die Kaferzahl in einigen benachbar-
ten Spalten stark dezimiert oder auf Null setzt und das Waldalter herabsetzt
(Schlagen alter Baume).
Man darf bei Betrachtung dieser Modellergebnisse naturlich keinen Moment
vergessen, dass sie mit einem sehr einfachen Modell erzielt wurden, das nur
einige prinzipielle Mechanismen erklaren und nicht die Realitat quantitativ
widerspiegeln soll. Seine Parameter sind nicht an die Realitat angepasst und
vielleicht nicht einmal anpassbar, da wesentliche Komponenten des naturlichen
Systems im Modell nicht erfasst wurden.
93

9.3. Raumliche Ausdehnung des Modells GMM WS2009/2010
94
GMM WS2009/2010 Kapitel 10 – Mathematische Epidemiemodelle
10 Mathematische Epidemiemodelle
Unter einer Epidemie (aus dem Griechischen fur”im Volk verbreitend
”) ver-
steht man ein stark gehauftes ortlich und zeitlich begrenztes Vorkommen einer
Erkrankung, insbesondere von Infektionskrankheiten. Bei einer Ausbreitung
uber meherer Lander und Kontinente spricht man von einer Pandemie.
Mathematische Epidemiemodelle beschreiben die Dynamik und Ausbreitung
von Epidemien. Sie liefern ein Verstandnis der Auswirkungen krankheitssep-
zifischer Eigenschaften auf den Epidemieverlauf, wie z.B. die Auswirkung der
Lange der Inkubationsszeit. Die Inkubationszeit, ist die Zeitspanne zwischen
der Infektion (Eindringen des Erregers in den Korper) bis zum Auftreten der
ersten Symptome (bei Masern 8-14 Tage). Die Inkubationszeit ist zu unter-
scheiden von der Latenzzeit, Zeitspanne zwischem den Eindringen des Erregers
und dem Beginn der Infektiositat.
Historischer Uberblick (sehr unvollstandig)
• Hippokrates 459 - ca. 370 v. Chr.: Begrunder der wissenschaftlichen Medi-
zin, erste Aufzeichnungen von Krankheitsverlaufen
• Louis Pasteur 1822-1895: Begrunder der Mikrobiologie, Entwicklung der
Schutzimpfungen gegen Huhnercholera, Milzbrand und Tollwut
• Robert Koch 1843 - 1910: Entdecker des Tuberkullose-Bazillus
• 19. Jahrhundert: Aufzeichnung von Krankheitsverlaufen und Erklarungsver-
suche von Epidemien (Cholera, Typhus, Pocken)
• Ende des 19 Jahrhundert: erste Modelle
• Kermack & McKendrick (1927): Klassisches Epidemiemodell (SIR), Schwel-
lenwertsatz der Epidemiologie
Wichtige Faktoren bei der Modellierung von Epidemien
• Ubertragungswege Zwischenwirte, Blutkontakt, Tropfcheninfektion
• Immunitat durch Erkrankung, durch Impfung
• Latenzzeit und Inkubationszeit
• Krankheitsverlauf Dauer, Letalitat, bei Kindern/Erwachsenen
• Populationsstruktur Dichte, Verteilung
• Reaktion auf Fallzahlen Schulschließungen, Impfungen, Quaratane, Verhal-
tensanderungen
95
10.1. Das klassische Epidemiemodell nach Kermack & McKendrick GMM WS2009/2010
Statistische Kenngroßen von Epidemien
• Pravalenz
relative Pravalenz: Anteil der Infizierten/Erkrankten an der Gesamtbevolke-
rung
absolute Pravalenz: Anzahl der Infizierten/Erkrankten
• Inzidenz
relative Inzidenz: Anteil der Neuinfizierten/Neuerkrankten an der Gesamt-
bevolkerung in einem bestimmten Zeitraum
absolute Inzidenz: Anzahl der Neuinfizierten/Neuerkrankten an der Ge-
samtbevolkerung in einem bestimmten Zeitraum
kumulative Inzidenz: Gesamtzahl der Neuinfizierten/Neuerkrankten bis zu
einem bestimmten Zeitpunkt
10.1 Das klassische Epidemiemodell nach Kermack & McKendrick
Es wird eine Bevolkerung mit einer konstanten Große N zugrunde gelegt.
In dieser Bevolkerung seien alle Personen fur die modellierte Krankeit gleich
anfallig. Die Ubertragung der Krankheit findet durch den Kontakt einer infi-
zierten Person I (engl. infectious) mit einer anfalligen Person S ( engl. suszep-
tible) statt. Eine Person, die infiziert wurde, gesundet nach einer gewissen Zeit
und wird eine immune Personen R (engl. removal). Es wird hierbei nicht zwi-
schen infizierten und erkrankten Personen unterschieden. Aus den englischen
Bezeichnungen leitet sich der Name SIR-Modell ab:
S(t) Anzahl der anfalligen Personen zur Zeit t,
I(t) Anzahl der infizierten Personen zur Zeit t und
R(t) Anzahl der gesundeten Personen zur Zeit t
Man nimmt an, dass zu Beginn einer Epidemie eine sehr kleine Anzahl von
Personen infiziert ist: I(0) << N und die restlichen Personen anfallig sind
S(0) = N − I(0), R(0) = 0.
Wird eine Infektion durch den Kontakt eines Anfalligen mit einem Infizierten
hervorgerufen, so ist das Infektionsrisiko eines Anfalligen umso großer, je mehr
Infizierte in der Bevolkerung sind. Die Ansteckungsrate B wird mit der Zahl
der Infizierten steigen:
B = β I
96

GMM WS2009/2010 Kapitel 10 – Mathematische Epidemiemodelle
Hierbei ist β ein Parameter, der die Infektiositat angibt. Geht man von einer
Population mit konstanter Populationsgroße N aus, so betragt der Anteil der
Infizierten IN
. Betrachtet man eine anfallige Person, so hat diese innerhalb eines
Zeitintervalls k Kontakte zu anderen Personen. Die Anzahl der Kontakte zu
infizierten betragt somit k · IN
. Von diesen potentiell gefahrlichen Kontakten
fuhrt nur ein Teil p zur Infektion (Ansteckungswahrscheinlichkeit oder An-
steckungsrisiko). Die Zahl der fatalen Kontakte (also derer, die zur Infektion
fuhren) betragt somit fur eine anfallige Person im betrachteten Zeitintervall
p · k · IN
. Dies ist die Infektionsrate B
B = p · k · I
N= β I mit β =
p · kN
(10.1)
Die Konvertierung von infiziert zu immun hangt von der Gesundungsrate γ
und der Anzahl der aktuell Infizierten ab. Man erhalt somit folgendes Modell:
S = −β I S
I = β I S − γ I (10.2)
R = γ I
Fuhrt man zusatzlich den Parameter ρ = γβ
ein, so erhalt man das Modell
S = −β S I (10.3)
I = β (S − ρ) I
R = β ρ I
Fur eine konstante Bevolkerungsgroße gilt zu jeder Zeit S + I + R = N . Das
System lasst sich also auf zwei Gleichungen reduzieren.
Diesem System sieht man den Epidemieverlauf bereits an. Fur S > ρ gilt I > 0,
fur S < ρ gilt I < 0. Dass bedeutet das die Epidemie ausbrechen kann, wenn
die Anzahl der Anfalligen oberhalb des Schwellenwerts ρ liegt. Anderenfalls
ebbt sie ab. Das Systemverhalten ist in Abbildung 10.1 dargestellt.
10.1.1 Stabilitatsanalyse des SIR-Modells
Es reicht, das zweidimensionale Modell zu untersuchen:
S = −β S I (10.4)
I = β (S − ρ) I
97
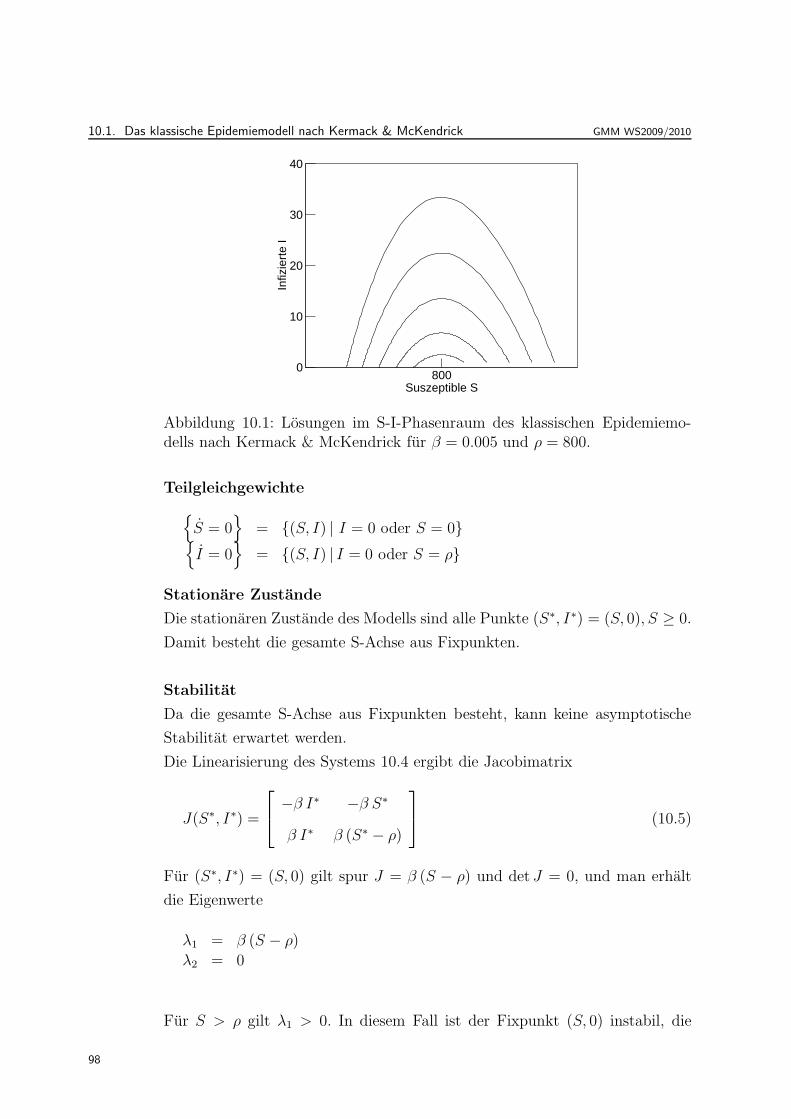
10.1. Das klassische Epidemiemodell nach Kermack & McKendrick GMM WS2009/2010
800Suszeptible S
0
10
20
30
40
Infiz
iert
e I
Abbildung 10.1: Losungen im S-I-Phasenraum des klassischen Epidemiemo-dells nach Kermack & McKendrick fur β = 0.005 und ρ = 800.
Teilgleichgewichte
{
S = 0}
= {(S, I) | I = 0 oder S = 0}{
I = 0}
= {(S, I) | I = 0 oder S = ρ}
Stationare Zustande
Die stationaren Zustande des Modells sind alle Punkte (S∗, I∗) = (S, 0), S ≥ 0.
Damit besteht die gesamte S-Achse aus Fixpunkten.
Stabilitat
Da die gesamte S-Achse aus Fixpunkten besteht, kann keine asymptotische
Stabilitat erwartet werden.
Die Linearisierung des Systems 10.4 ergibt die Jacobimatrix
J(S∗, I∗) =
−β I∗ −β S∗
β I∗ β (S∗ − ρ)
(10.5)
Fur (S∗, I∗) = (S, 0) gilt spur J = β (S − ρ) und det J = 0, und man erhalt
die Eigenwerte
λ1 = β (S − ρ)
λ2 = 0
Fur S > ρ gilt λ1 > 0. In diesem Fall ist der Fixpunkt (S, 0) instabil, die
98
GMM WS2009/2010 Kapitel 10 – Mathematische Epidemiemodelle
Epidemie bricht aus.
Schwellenwertsatz der Epidemiologie (ohne Beweis)
Fur das Epidemiemodell 10.3 gilt: Sei die Anzahl der Anfalligen zu Beginn der
Epidemie S(0) = ρ + ε fur ein ε > 0 und die Anzahl der Infizierten sehr viel
kleiner als die Anzahl der Anfalligen I(0) << S(0), so werden schliesslich ca.
2 ε Personen erkranken.
Hierbei handelt es sich um eine Approximation. Diese unterschatzt den tatsachli-
chen Epidemieverlauf etwas.
10.2 Masern
Masern sind hochansteckende fieberhafte, exanthematische Viruserkrankun-
gen, die nur beim Menschen vorkommen. Schwere Krankheitsverlaufe mit Kom-
plikationen in Form von Pneumonien, Mittelohrentzundungen, Bronchitiden
sowie der lebensbedrohenden akuten postinfektiosen Enzephalitis (0,1 % al-
ler Erkrankungsfalle) sind moglich. Daruber hinaus kommt es bei etwa 1 pro
100.000 Erkrankungen zum Auftreten der sog. subakuten sklerosierenden Pa-
nenzephalitis (SSPE), die immer zum Tod fuhrt. Masernerkrankungen konnen
durch eine Impfung effektiv verhindert werden. Die Eliminierung der Masern
bis zum Jahr 2010 ist ein erklartes Gesundheitsziel der WHO. Um dies zu er-
reichen, sollten 95 % der Bevolkerung durch Impfung bereits im Kindesalter
geschutzt sein (s. a. RKI, Epid. Bull. 10/2004). Masern sind weltweit verbrei-
tet. Aufgrund der hohen Infektiositat treten Masern meist als Kinderkrankheit
auf und hinterlassen eine lebenslange Immunitat. Masern werden durch Tropf-
cheninfektion ubertragen, also z.B. durch Husten, Niesen oder Sprechen. Die
Inkubationszeit betragt zwischen ca. 9 und 14 Tagen. Weltweit sind die Ma-
sern mit jahrlich 31 Millionen Erkrankungen und 614.000 Todesfallen (2002)
weiterhin eine Hauptursache fur Todesfalle im Kindesalter, die durch Impfung
vermeidbar waren (Quelle: RKI).
Epidemiologisch gesehen ist die Bevolkerungsdichte ein wesentlicher Parame-
ter fur den Verlauf der Epidemie (siehe Spektrum der Wissenschaft, 1984.
Insulare Epidemien). Die Ansteckungsrate variiert im Laufe des Jahres, sie ist
z.B wahrend der Schulferien geringer.
Um die Auswirkung der Bevolkerungsdichte zu berucksichtigen, muss im klas-
99

10.2. Masern GMM WS2009/2010
sischen Epidemiemodell die Ansteckungsrate B modifiziert werden. Desweitern
wird eine Zu- und Abwanderung von Teilen der Bevolkerung berucksichtigt.
Masern-Modell
Es wird angenommen, dass die Bevolkerungsgroße N konstant ist. Es findet
eine Migration statt, wobei pro Tag µ · N gesunde Personen pro Quadratkilo-
meter einwandern und dieselbe Personenzahl das Gebiet verlasst. Die auswan-
derenden Personen setzen sich anteilig aus Gesunden, infizierten und immunen
zusammen. Es wird im Modell nicht zwischen infizierten und erkrankten Per-
sonen unterschieden. Erkrankte Personen werden mit einer Gesundungsrate ρ
immun.
S = µ · N − B · S − µ · SI = B · S − ρ · I − µ · IR = ρ · I − µ · R
Zustandsvariablen:
S: Dichte der Suszeptiblen in Einwohner/km2
I: Dichte der Infizierten in Einwohner/km2
R: Dichte der Immunen in Einwohner/km2
Parameter:
N: Bevolkerungsdichte in Einwohner/km2
µ: Zuwanderungsrate in in 1/Tag
B: Infektionsrate in 1/Tag
ρ: Gesundungssrate von infiziert nach immun in 1/Tag
Geht man im klassischen Epidemiemodell von einer konstanten Populations-
große N aus, so kann man die Infektionsrate B entsprechend Gleichung 10.2
interpretieren:
B = p · k · I
N
Hierbei ist p das Ansteckungsrisiko bei einem fatalen Kontakt und k die Anzahl
der Kontakte einer anfalligen Person in einem Zeitintervall.
Bei hoher Bevolkerungsdichte (z.B. in Großstadten) ist die Zahl der Kontak-
te pro Zeiteinheit großer als bei niedriger Bevolkerungsdichte (z.B. auf dem
100
GMM WS2009/2010 Kapitel 10 – Mathematische Epidemiemodelle
Land). Da Masern uber Tropfcheninfektion ubetragen werden, kann man sich
vor einer Infektion nicht wirklich schutzen, so dass die Infektionsrate bei hoher
Dichte zunehmen wird.
Die Kontaktzahl k soll also abhangig von der Bevolkerungsdichte N sein. Ist
κ die Anzahl der Kontakte bei einer Bevolkerungsdichte Nκ, so ist folgende
Annahme sinnvoll:
k(N) =κN · N
Nκ
Dann erhalt man die Infektionsrate B:
B = p · κN · NNκ
· I
N= p · κN
Nκ· I
Man kann nun uber Nκ oder κ die Kontaktzahl steuern. Angenommen die
Kontaktzahl k betragt bei einer Bevolkerungsdichte von Nκ = 200 Personen
pro Quadratkilometer κ = 5 Kontakte pro Tag, dann wird sie fur N=1000
Personen pro Quadratkilometer das Funffache betragen.
Die Anzahl der Kontakte κ bei der Bevolkerungsdichte Nκ hangt von der
Jahreszeit ab. Wahrend der Sommermonate, wenn Schulferien sind, ist die
Zahl der Kontakte geringer. Hierzu modifiziert man κ so, dass es im Sommer
niedriger als im Winter ist. Dies kann durch eine Rechteckkurve oder auch
durch eine Cosinuskurve geschehen:
κ(t) = κ ·(
1 + c
2+
1 − c
2· cos
2π t
365
)
Der Parameter c ∈ [0, 1] gibt an, auf wieviel Prozent des ursprunglichen Wert
κ gesenkt wird.
10.2.1 Simulationsergebnis
Die Simulationsverlaufe in Abbildung 10.2 wurden mit folgender Parametri-
sierung berechnet:
101
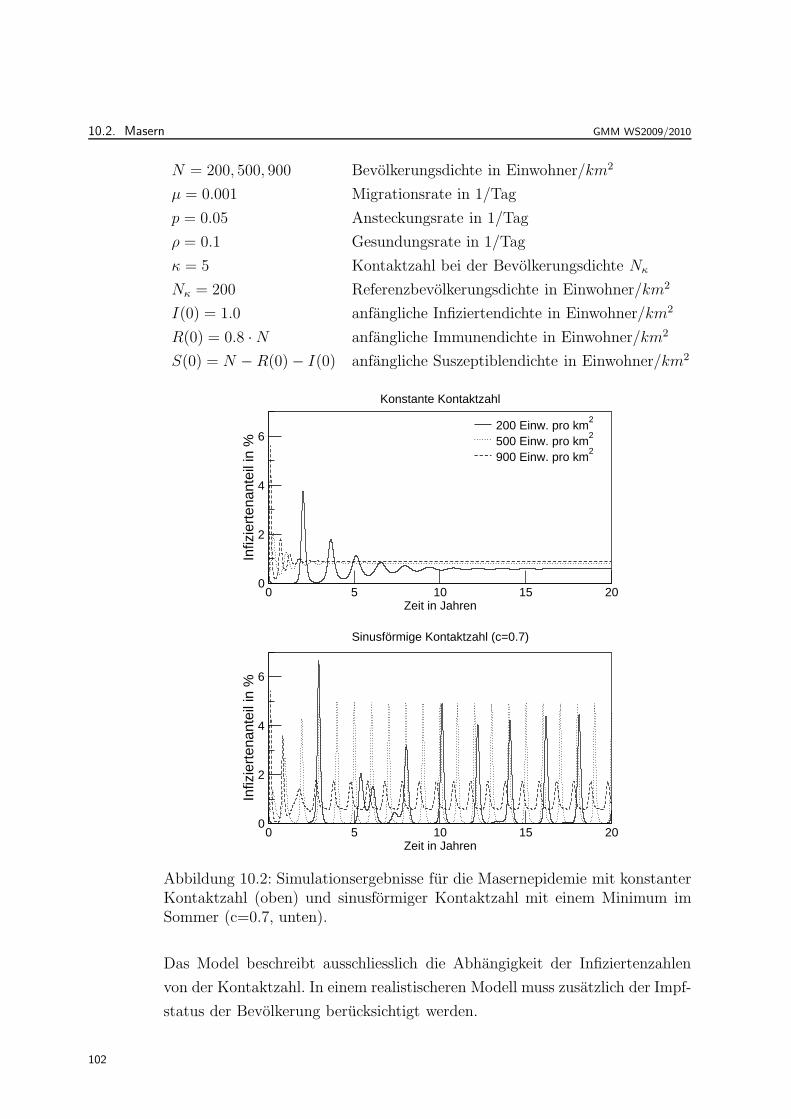
10.2. Masern GMM WS2009/2010
N = 200, 500, 900 Bevolkerungsdichte in Einwohner/km2
µ = 0.001 Migrationsrate in 1/Tag
p = 0.05 Ansteckungsrate in 1/Tag
ρ = 0.1 Gesundungsrate in 1/Tag
κ = 5 Kontaktzahl bei der Bevolkerungsdichte Nκ
Nκ = 200 Referenzbevolkerungsdichte in Einwohner/km2
I(0) = 1.0 anfangliche Infiziertendichte in Einwohner/km2
R(0) = 0.8 · N anfangliche Immunendichte in Einwohner/km2
S(0) = N − R(0) − I(0) anfangliche Suszeptiblendichte in Einwohner/km2
0 5 10 15 20Zeit in Jahren
0
2
4
6
Infiz
iert
enan
teil
in %
200 Einw. pro km2
500 Einw. pro km2
900 Einw. pro km2
Konstante Kontaktzahl
0 5 10 15 20Zeit in Jahren
0
2
4
6
Infiz
iert
enan
teil
in %
Sinusförmige Kontaktzahl (c=0.7)
Abbildung 10.2: Simulationsergebnisse fur die Masernepidemie mit konstanterKontaktzahl (oben) und sinusformiger Kontaktzahl mit einem Minimum imSommer (c=0.7, unten).
Das Model beschreibt ausschliesslich die Abhangigkeit der Infiziertenzahlen
von der Kontaktzahl. In einem realistischeren Modell muss zusatzlich der Impf-
status der Bevolkerung berucksichtigt werden.
102

GMM WS2009/2010 Anhang A – Funktionen
A Funktionen
Eine Funktion f ist eine Vorschrift, die jedem Element einer Menge D genau
ein Element der Menge W zuordnet. Die Menge D heisst Definitionsbereich,
die Menge W Wertebereich:
f : D −→ W (A.1)
x 7→ f(x)
x heisst unabhangige Variable oder Argument. Eine Funktion wird auch Ab-
bildung genannt.
Die Menge aller Punkte G := {(x, f(x))|x ∈ D} der Funktion (A.1) heisst
Graph der Funktion.
Beispiel A.0.1
f : [0, 5] −→ R (A.2)
x → x2
Das Argument x ist anschaulich gesehen ein Platzhalter und ist beliebig durch
einen anderen Buchstaben austauschbar. Durch
f : [0, 5] −→ R
t → t2
ist dieselbe Funktion wie in (A.2) definiert.
In der Schule schreibt man statt f(x) haufig einfach y. Wenn klar ist, welches
in der Vorschrift die unabhangige Variable ist, so ist das ok:
y = 5 · x2 (A.3)
Aber was ist,wenn die Vorschrift y = a · b2 geben ist. Man kann so nicht
erkennen, ob a, b oder sogar beide als Argumente dienen sollen. Moglicherweise
ist a ein Parameter, der einen festen Wert hat, und b das Argument oder
umgekehrt. Daher wird das Argument in der Vorschrift mit angegeben:
y(b) = a · b2
103

A.1. Polynome GMM WS2009/2010
Ist nun a = 5, so haben wie dieselbe Vorschrift wie in (A.3).
Nun gibt es einige Konventionen, die aber nicht strikt eingehalten werden:
So weiss man im Allgemeinen, dass bei y = mx + b eine Geradengleichung
gemeint ist, mit dem Argument x, der Steigung m und dem Abzissenwert b.
Meistens ist, wenn nicht anders angegeben x die unabhangige Variable.
In der Physik gibt es haufig Funktionen, in denen t als Argument auftritt. In
den meisten Fallen ist damit die Zeit gemeint.
Bildet man die Ableitung einer Funktion, so ist mit der Schreibweise y′ die
Ableitung nach dem (einzigen) Argument gemeint, dies ist meistens x. Ins-
besondere beschreibt f ′(x) die Ableitung der Funktion f nach x. Will man
dies besonders hervorheben so schreibt man ddx
f(x). In der Physik wird haufig
die Ableitung nach der Zeit, die sogenannte Zeitableitung, mit einem Punkt
dargestellt:
f(t) :=d
dtf(t) .
Ist der Definitionsbereich einer Abbildung N, so nennt man die Abbildung eine
Folge und schreibt
a : N −→ W
n 7→ an .
oder kurz (an)n∈N.
A.1 Polynome
Abbildungen der Form p(x) = am · xm + · · · + a1 · x + a0 , m ∈ N heissen
Polynome. Beruhmtestes Beispiel ist die Normalparabel p(x) = x2 mit m = 2,
a2 = 1 und a1 = a0 = 0.
A.2 Periodische Funktionen – Winkelfunktionen
Eine Funktion heisst periodisch mit der Periodenlange p , wenn fur alle x ∈ D
f(x + p) = f(x) gilt. Beispiele fur periodische Funktionen sind die Winkel-
funktionen (trigonometrische Funktionen) Sinus und Kosinus.
104
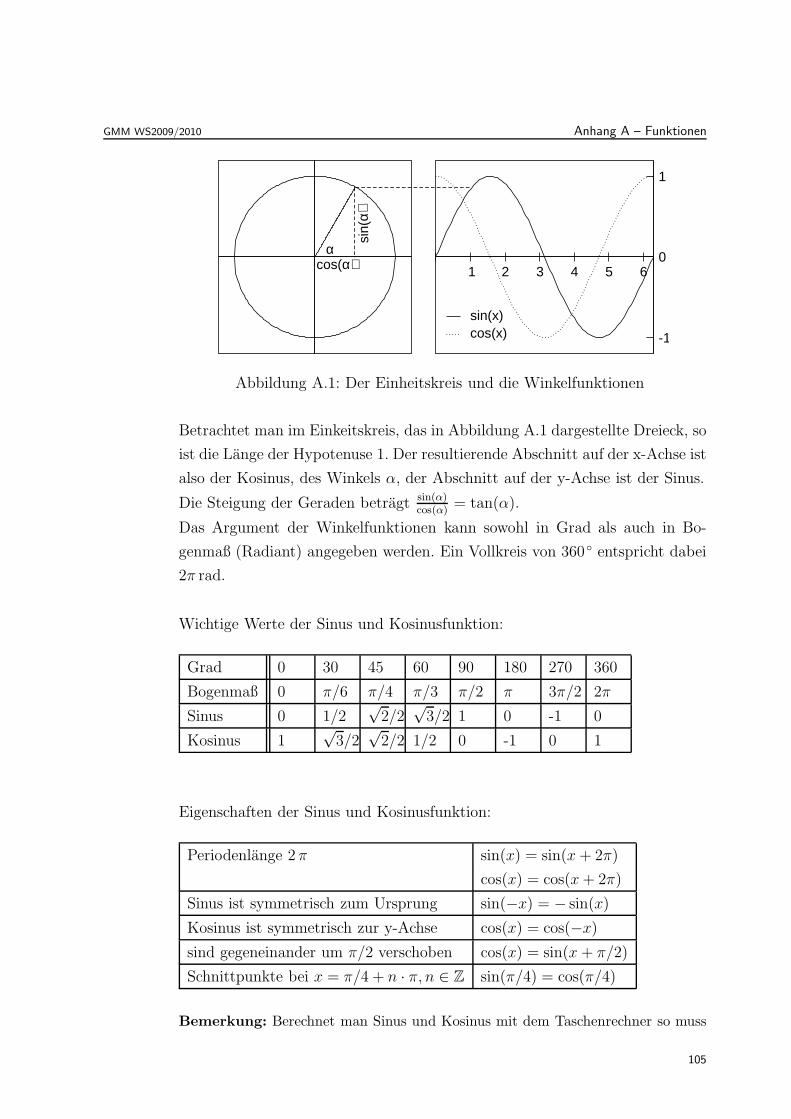
GMM WS2009/2010 Anhang A – Funktionen
1 2 3 4 5 6
-1
0
1
sin(x)cos(x)
α
sin(
α)
cos(α)
Abbildung A.1: Der Einheitskreis und die Winkelfunktionen
Betrachtet man im Einkeitskreis, das in Abbildung A.1 dargestellte Dreieck, so
ist die Lange der Hypotenuse 1. Der resultierende Abschnitt auf der x-Achse ist
also der Kosinus, des Winkels α, der Abschnitt auf der y-Achse ist der Sinus.
Die Steigung der Geraden betragt sin(α)cos(α)
= tan(α).
Das Argument der Winkelfunktionen kann sowohl in Grad als auch in Bo-
genmaß (Radiant) angegeben werden. Ein Vollkreis von 360 ◦ entspricht dabei
2π rad.
Wichtige Werte der Sinus und Kosinusfunktion:
Grad 0 30 45 60 90 180 270 360
Bogenmaß 0 π/6 π/4 π/3 π/2 π 3π/2 2π
Sinus 0 1/2√
2/2√
3/2 1 0 -1 0
Kosinus 1√
3/2√
2/2 1/2 0 -1 0 1
Eigenschaften der Sinus und Kosinusfunktion:
Periodenlange 2 π sin(x) = sin(x + 2π)
cos(x) = cos(x + 2π)
Sinus ist symmetrisch zum Ursprung sin(−x) = − sin(x)
Kosinus ist symmetrisch zur y-Achse cos(x) = cos(−x)
sind gegeneinander um π/2 verschoben cos(x) = sin(x + π/2)
Schnittpunkte bei x = π/4 + n · π, n ∈ Z sin(π/4) = cos(π/4)
Bemerkung: Berechnet man Sinus und Kosinus mit dem Taschenrechner so muss
105
Anhang B – Differential- und Integralrechnung GMM WS2009/2010
man aufpassen, dass die Einstellung stimmt. Ist der Taschenrechner auf Gradmaß
(DEG) eingestellt, muss man den Winkel in Grad eingeben, steht er auf Bogenmaß
(RAD) so muss er in Bogenmaß angegeben werden.
B Nicht ganz Neues aus der
Differential- und Integralrechnung
WARNUNG: Dieser Anhang ersetzt nicht die Mathematikvorlesungen. Aus
Grunden der Ubersichtlichkeit wird auf Vollstandigkeit, insbesondere auf die
Uberprufung und Angabe von Voraussetzungen verzichtet!
B.1 Kettenregel
Aus der Schule ist bekannt
f(g(x))′ = f ′(g(x)) · g′(x)
Was bedeutet dies nun? f und g sind Funktionen, wobei f(g(x)) die Hinter-
einanderausfuhrung der Funktionen f und g bedeutet. Die Funktion f wird
hierbei auch aussere Funktion ung g innere Funktion genannt.
f ◦ g(x) = f(g(x))
Das heisst, dass die unabhangige Variable x zuerst mittels der Funktion g
abgebildet wird und das Ergbnis dann mittels f abgebildet wird.
Die Kettenregel gibt nun an, wie die Ableitung der verketteten Funktion f ◦ g
zu bilden ist:
df(g(x))
dx=
df(g(x))
dg(x)· dg(x)
dx
Der erste Term auf der rechten Seite heisst außere Ableitung, der zweite Term
auf der rechten Seite innere Ableitung.
106
GMM WS2009/2010 Anhang B – Differential- und Integralrechnung
Setzt man nun y=g(x), so sieht das Ganze schon einfacher aus:
df(g(x))
dx=
df(y)
dy· dg(x)
dxoder kurz
df
dx=
df
dy· dy
dx
In der Modellierung ist wird die unabhangige Variable haufig mit t fur die Zeit
und die innere Funktion mit x bezeichnet:
f ◦ x(t) = f(x(t))
Fur die Ableitung gilt dann
df
dt=
df
dx· dx
dt
B.2 Substitutionsregel
Aus der Schule ist bekannt
∫ b
a
f(ϕ(x)) · ϕ′(x) dx =
∫ ϕ(b)
ϕ(a)
f(y) dy
Was bedeutet dies nun? Die Substitutionsregel ist ein Hilfsmittel um kompli-
zierte Funktionen in einfachere zu uberfuhren, die sich dann leichter integrieren
lassen. Diese Uberfuhrung heisst auch Substitution. Im obigen Beispiel wird
ϕ(x) durch y substituiert, also y = ϕ(x).
Letzlich ist die Substitutionsregel nichts anderes als die Kettenregel:
Ist F eine Stammfunktion von f , so gilt
F (ϕ(b)) − F (ϕ(a)) =
∫ ϕ(b)
ϕ(a)
f(y) dy
Es gilt aber auch
F (ϕ(b)) − F (ϕ(a)) =
∫ b
a
[F (ϕ(x))]′ dx
Die Ableitung von F (ϕ(x))′ ist nach der Kettenregel mit y = ϕ(x) aber
dF (ϕ(x))
dx= f(ϕ(x)) · ϕ′(x)
Schreibt man nun ϕ′(x) = dϕ(x)dx
so gilt also
107
B.3. Partielle Integration GMM WS2009/2010
∫ b
a
f(ϕ(x)) · dϕ(x)
dxdx =
∫ ϕ(b)
ϕ(a)
f(y) dy
Und nun sieht man auch, was die Physiker meinen, wenn sie das dx einfach
kurzen.
Haufig findet man auch andere Notationen, z.B.
∫ t
0
f(N) N dt =
∫ N(t)
N(0)
f(N) dN
Streng genommen darf das so nicht, da Integrationsgrenze und unabhangige
Variable verschiedene Bezeichner brauchen (hier heissen beide t), aber in der
Praxis kommt es ofter mal vor.
B.3 Partielle Integration
Die partielle Integration ergibt sich direkt aus der Produktregel fur Ableitun-
gen.
Aus der Schule ist bekannt
[f(x) · g(x)]′ = f ′(x) · g(x) + f(x) · g′(x)
Integration auf beiden Seiten ergibt
∫
[f(x) · g(x)]′ dx =
∫
f ′(x) · g(x) dx +
∫
f(x) · g′(x) dx
damit gilt
[f(x) · g(x)] =
∫
f ′(x) · g(x) dx +
∫
f(x) · g′(x) dx
durch Umstellen ergibt sich die Regel zur partiellen Integration
∫
f(x) · g′(x) dx = [f(x) · g(x)] −∫
f ′(x) · g(x) dx
108
GMM WS2009/2010 Anhang C – Differentialgleichungen
C Differentialgleichungen
Ersetzt nicht die Vorlesung zu Differentialgleichungen !!!
In einer Differentialgleichung (DGL) wird eine (unbekannte) Funktion mit ih-
ren Ableitungen verknupft, z.B.
dy(x)
dx= y(x) (C.1)
Gewohnliche Differentialgleichungen 1. Ordnung
Eine Gleichung der Form
dy(x)
dx= f(x, y(x)) (C.2)
heisst gewohnliche Differentialgleichung 1. Ordnung.
1.Ordnung: es tauchen keine hoheren Ableitungen nach x auf
gewohnlich: es gibt nur die Ableitung nach der unabhangigen Variablen x
Modellierungstechnisch gesprochen:
Die DGL ist eine Vorschrift, die die Anderung einer Zustandsvariablen y bezuglich
x angibt.
Eine Funktion, die die DGL erfullt, heisst Losung der DGL.
Eine DGL zu losen bedeutet, Funktionen y zu finden, die der Vorschriftdy(x)
dx= f(x, y(x)) genugen.
Ist die unabhangige Variable die Zeit, schreibt man anstelle von x gerne t:
dy(t)
dt= f(t, y(t)) oder kurzer
dy
dt= f(t, y) oder auch y = f(t, y)
(C.3)
Eine DGL heisst autonom, wenn f nicht explizit von der unabhangigen Variable
x (bzw. t) abhangt:
dy
dx= f(y) (C.4)
109

Anhang C – Differentialgleichungen GMM WS2009/2010
z.B.
dy
dx= α · y (C.5)
sonst heisst sie nicht-autonom, z.B.
dy
dx= −x · y (C.6)
Was kann man einer DGL ansehen?
Beispiel: y = α · y Die Steigung (Ableitung) der Funktion y an der Stelle t ist
proportional zum Funktionswert an der Stelle t.
Um dies zu visualisieren betrachtet man ein t, y-Koordinatensystem. Zu belie-
big vielen Paaren (t, y)-Paaren zeichnet man nun die Steigung an diesem Punkt
ein, indem man an (t, y) ein Linienelement mit der Steigung y′ = f(t, y) ein-
zeichnet (siehe Abbildung C.1). Ohne die Losungen der DGL zu kennen, weiss
man, dass eine Losung, die durch einen Punkt (t, y) geht, das Linienlement
als Tagente haben muss. Zeichnet man viele Linielemente, so kann man am
Richtungsfeld den Verlauf der Losungen”sehen“.
0
0.5
1
1.5
2
2.5
3
y(t)
0.5 1 1.5 2 2.5 3
t
Abbildung C.1: Richtungsfeld von y = y . Das Richtungsfeld ist t-translationsinvariant, da die DGL autonom ist.
Frage: Wie sieht eine Funktion aus, die in dieses Richtungsfeld passt?
Beobachtung: Es gibt viele Funktionen, die”passen“.
Die Losungen stimmen entweder uberein oder beruhren sich nicht.
Zu jedem Anfangswert y(t0) = y0 gibt es genau eine Losung.
Frage: Ist das bei allen DGLn so ?
Nein, aber unter gewissen Voraussetzungen, ja! Weiter hilft hier der Satz von
110

GMM WS2009/2010 Anhang C – Differentialgleichungen
Picard-Lindelof (siehe Heuser: Differentialgleichungen ): f muss Lipschitzbe-
dingung fur y erfullen
Anfangswertproblem (AWP):
Gesucht ist eine Funktion y, die dy(t)dt
= f(t, y(t)), y(t0) = y0 genugt.
Das AWP zu losen bedeutet, eine Losung der DGL zu finden, die von (t0, y0)
ausgehend in ihrem gesamten Verlauf auf das Richtungsfeld”passt“.
Analytische Losung des AWP y = α · y , y(t0) = y0
Separation der Variablen:
y
y= α
Integration beider Seiten:
∫ t
t0
˙y(s)
yds =
∫ t
t0
α ds
Substitution auf der linken Seite x = y(s):
∫ y(t)
y(t0)
1
xds = α(t − t0)
[ln |x|]y(t)y(t0) = α(t − t0)
ln |y(t)| − ln |y(t0)| = α(t − t0)
ln | y(t)
y(t0)| = α(t − t0)
| y(t)
y(t0)| = eα(t−t0) > 0 ,
also gilt | y(t)y(t0)
e−α(t−t0)| = 1.
Da der Betrag eine stetige Abbildung ist und der Ausdruck in den Betragsstri-
chen nur -1 oder 1 sein kann, muss fur y(t0) > 0 auch y(t) > 0 f.a t gelten.
Damit ist
y(t) = y(t0)eα(t−t0)
die Losung des Anfansgwertproblems.
111

Anhang C – Differentialgleichungen GMM WS2009/2010
Die allgemeine Losung der DGL lautet
y(t) = C eα(t−t0) ,
wobei C eine freie Konstante ist. C ergibt sich fur eine spezielle Losung aus
dem Anfansgwert. Man kann zeigen, dass alle Losungen der DGL diese Form
besitzen.
Eine Losung einer DGL mit einer freien Konstanten heisst allgemeine Losung,
wenn sich jede Losung der DGL in dieser Form schreiben lasst.
Beispiel fur eine DGL, deren Anfangswertproblem keine eindeutige Losung hat
y = 3 3√
y 2 = 3 y2/3 , y(0) = 0
y1(t) = 0 ist Losung
y2(t) = t3 ist Losung, denn y2(t) = 3t2 und 3 ·(
3√
t3)2
= 3t2
Lineare Differentialgleichungen
y + a(t)y = 0 heisst homogene, lineare DGL (in y)
y + a(t)y = b(t) heisst inhomogene, lineare DGL (in y)
Bemerkung: Die inhomogene Gleichung ist streng genommen affin.
Den Term b(t) nennt man auch Storung.
Beispiele:
y = αy ist linear
y = αy2 ist nicht linear
Grundprinzipien bei linearen Differentialgleichungen
1. Uberlagerungsprinzip (Superpositionsprinzip) bei homogenen linearen DGL:
Sind y1, y2 Losungen der homogenen DGL, so ist auch
y3 = αy1 + βy2, α, β ∈ R Losung.
Die Losungsmenge ist ein Vektorraum !!
112

GMM WS2009/2010 Anhang C – Differentialgleichungen
2. Ist y Losung der inhomogenen DGL und z eine beliebige Losung der zu-
gehorigen homogenen DGL, dann ist y+z Losung der inhomogenen DGL.
3. Sind y und w Losungen der inhomogenen DGL, dann ist y-w Losung der
zugehorigen homogenen DGL.
C.1 Numerisches Losen von Differentialgleichungen
Die wenigsten Differentialgleichung, die man in der Modellierung aufstellt, las-
sen sich analytisch losen. Man lost die Gleichungen daher numerisch. Dies
bedeutet, das man die Losung Stuck fur Stuck bestimmt. Gegeben sei das
Anfangswertproblem:
y′ = f(t, y(t)), y(t0) = y0
Euler Verfahren
Zuerst wird an der Stelle (t0, y0) die Steigung bestimmt. Es wird nun ange-
nommen, dass sich die Steigung in einem kleinen Schritt h (Schrittweite) nicht
andert. Die Losung wird also in dem Intervall [t, t + h] durch eine Gerade ap-
proximiert. Man erhalt den approximativen Wert y1 zur Zeit t1. Nun wird die
Steigung an dieser Stelle bestimmt und so weiter:
y(t0 + h) = y(t) + f(t0, y(t0)) · h
allgemein wird also zu einer beliebigen Zeit t der neue Wert zur Zeit t + h
durch
y(t + h) = y(t) + f(t, y(t)) · h
bestimmt. Ausgedruckt in Zeitschritten bedeutet dies:
yk+1 = yk + f(tk, yk) · h k = 0, 1, ..
113
C.1. Numerisches Losen von Differentialgleichungen GMM WS2009/2010
Dieses Verfahren ist recht ungenau.
Beispiel C.1.1 Gegeben ist das Anfangswertproblem y′ = y y(0) = 1, dessen
explizite Losung y(t) = et bekannt ist. Bestimmt man die Losung zur Zeit
T=10 mit dem Euler-Verfahren und einer Schrittweite von h = 1, so erhalt
man als approximative Losung 1024. Der exakte Wert betragt (auf 2 Nach-
kommastellen gerundet) 22026,47.
Fehlerabschatzung
Wie groß ist der Fehler, den man beim numerischen Losen macht? Hierzu
betrachtet man das Taylorpolynom von y:
y(t + h) =n∑
k=0
1
k!y(k)(t) · hk +
1
(n + 1)!· y(n+1)(ξ) · hn+1 ξ ∈ [t, t + h]
= pn(t) + Rn(t)
Wird anstelle der exakten Losung y(t) das Taylorpolynom n-ten Grades be-
trachtet, so ist der Abbruchfehler in jedem Schritt proportional zu hn+1.
Im Falle des Eulerverfahrens wird das Taylorpolynom 1. Grades betrachtet:
y(t + h) = y(t) + y′(t) · h
Der Abbruchfehler ist also in jedem Schritt proportional zu h2.
Runge-Kutta-Verfahren 2. Ordnung (Verbessertes Euler-Verfahren ,
Heun-Verfahren)
Statt der Steigung an der Stelle t als Geradensteigung zu verwenden, werden
die Steigungen in (t, y) und (t+h, y +f(t, y) ·h) gemittelt. Dies bedeutet, dass
man mit dem Funktionswert an der Stelle t+h, der sich nach einem Euler-
Schritt ergibt, die Steigung an t+h noch einmal neu berechnet. Das Mittel
der beiden Steigungen wird dann als endgultige Steigung fur den Zeitschritt
angenommen:
y(t + h) = y(t) +f(t, y(t)) + f(t + h,
Funktionswert nach
einem Euler-Schritt︷ ︸︸ ︷
y(t) + f(t, y(t)) · h)
2· h
114

GMM WS2009/2010 Anhang D – Zweidimensionale lineare Abbildungen
Ausgedruckt in Zeitschritten
yk+1 = yk +f(tk, yk) + f(tk+1, yk + f(tk, yk) · h)
2· h k = 0, 1, ...
Runge-Kutta-Verfahren 4. Ordnung
Das bekannteste Verfahren approximiert die Losung bis zur 4. Ordnung. Hier-
bei wird an einer weiteren Stutzstelle bei t + h2
die Steigung berechnet. auch
dies geschieht wieder mit dem verbesserten Verfahren. Die endgultige Steigung
fur den Zeitschritt wird aus 4 Einzelsteigungen gewichtet gemittelt, wobei die
Steigungen in der Mitte bei t+ h2
ein hoheres Gewicht bekommen. Es wird wie
folgt berechnet:
y(t + h) = y(t) +s1 + 2s2 + 2s3 + s4
6· h
s1 = f(t, y(t))
s2 = f(t + h2, y(t) + s1 · h
2)
s3 = f(t + h2, y(t) + s2 · h
2)
s4 = f(t + h, y(t) + s3 · h)
Ausgedruckt in Zeitschritten
yk+1 = yk +s1 + 2s2 + 2s3 + s4
6· h k = 0, 1, ...
s1 = f(tk, yk)
s2 = f(tk + h2, yk + s1 · h
2)
s3 = f(tk + h2, yk + s2 · h
2)
s4 = f(tk + h, yk + s3 · h)
Dieses Verfahren ist in vielen Programmen implementiert.
C.1.1 Verbesserungen
Bessere Verfahren sind implizite Verfahren, Verfahren mit einer automatischen
Zeitschrittanpassung resp. Prediktor-Korrektor-Verfahren.
115
Anhang D – Zweidimensionale lineare Abbildungen GMM WS2009/2010
D Zweidimensionale lineare Abbildungen
Betrachten wir zunachst die Abbildung
(u
v
)
=
(
a b
c d
)
·(
x
y
)
= A ·(
x
y
)
Die quadratische Matrix A bildet den R2 in sich selbst ab.
Eine solche Abbildung setzt sich aus Drehungen, Scherungen, Streckungen,
Projektionen und Spiegelungen zusammen:
Drehung
(u
v
)
=
cos ϕ − sin ϕ
sin ϕ cos ϕ
·(
x
y
)
Scherung
(u
v
)
=
1 b
0 1
·(
x
y
)
Streckung
(u
v
)
=
a 0
0 d
·(
x
y
)
Projektion
(u
v
)
=
1 0
0 0
·(
x
y
)
Spiegelung
(u
v
)
=
−1 0
0 1
·(
x
y
)
Die Determinate det A = ad − bc der Matrix A gibt an, um welchen Faktor die
Flache des Einheitsquadrats bei Abbildung vergroßert bzw. verkleinert wird.
Enthalt die Abbildung eine Spiegelung, wechselt das Vorzeichen. Enthalt die
Matrix eine Projektion, verschwindet die Determinante.
Betrachtet man die Bilder verschiedener Vektoren unter einer Matrix, so stellt
man fest, dass sie i.a. um verschiedene Winkel gedreht und um verschiedene
Faktoren gestreckt werden. Die Frage ist, inwieweit es Vektoren gibt, die nur
gestreckt, aber nicht gedreht werden. Wird ein Vektor nicht gedreht, so wird
jeder Vektor, der in dieselbe Richtung (oder in die entgegengesetzte Richtung)
zeigt, ebenfalls nicht gedreht. Diese Vektoren laufen entlang der sogenannten
Eigenrichtung der Matrix. Jeder Vektor, der dies erfullt (ausser der Nullvek-
tor) heisst Eigenvektor.
116

GMM WS2009/2010 Anhang D – Zweidimensionale lineare Abbildungen
Fur jeden Vektor −→v in Eigenrichtung kann die Matrix A also durch einen
Faktor λ ersetzt werden, der den jeweiligen Streckungsfaktor angibt. Dieser
Faktor heisst Eigenwert zu dieser Eigenrichtung.
Fur einen Eigenvektor −→v zum Eigenwert λ gilt
A · −→v = λ · −→v
oder anders mit der Einheitsmatrix I geschrieben:
(A − λI) · −→v =−→0
Diese Gleichung ist auch der Schlussel, um die Eigenwerte zu finden, sie heisst
Eigenwertgleichung.
Aus der Algebra ist bekannt: Ein lineares, homogenes Gleichungssystem mit
einer quadratischen Matrix B hat genau dann eine nicht-triviale Losung, wenn
det B=0 gilt, also hat die Eigenwertgleichung nur dann nicht-triviale Losungen,
wenn
p(λ) := det(A − λI) = 0
gilt. p(λ) heisst auch charakteristisches Polynom der Matrix A. Man findet
die Eigenwerte, indem man die Nullstellen des charakteristischen Polynoms
bestimmt. Im zweidimensionalen Fall gibt es hochstens zwei verschiedene Ei-
genwerte und man kann sie einfach bestimmen:
p(λ) = det
(
a − λ b
c d − λ
)
= (a−λ)(d−λ)−bc = λ2−(a+d)λ+ad−bc = 0
Mit det A = ad − bc und spur A = a + d erhalt man die Losungen
λ1,2 =spur A
2±√
(spur A)2
4− det A
Die Eigenvektoren erhalt man, indem man fur ein fest vorgegebenen Eigenwert
die Eigenwertgleichung lost:
(a − λ b
c d − λ
)
·(
v1
v2
)
= 0
Da die Eigenvektoren bis auf einen Faktor bestimmt werden konnen, kann
117

Anhang D – Zweidimensionale lineare Abbildungen GMM WS2009/2010
man eine Komponente festlegen, und die andere bestimmen. Fur b 6= 0 kann
man v1 = b setzen und erhalt den Eigenvektor(
bλ−a
). Fur c 6= 0 kann man
v2 = c setzen und erhalt den Eigenvektor(
λ−dc
). Fur b = c = 0 ist A eine
Streckmatrix mit den Eigenwerten a und d. Die zugehorigen Eigenvektoren
sind die Einheitsvektoren in x- bzw. y-Richtung. Gilt a = d, so ist A Vielfaches
der Einheitsmatrix und jeder Vektor (ausser dem Nullvektor) ist Eigenvektor.
118
GMM WS2009/2010 Anhang E – Stabilitatsanalyse autonomer Systeme (2D)
E Stabilitatsanalyse autonomer Systeme (2D)
E.1 System
X = f(X, Y ) (E.1)
Y = g(X, Y )
E.2 Stationare Zustande
Man erhalt die stationaren Zustande des ) Systems E.1, indem
f(x, y) = 0 (E.2)
g(x, y) = 0
gesetzt wird, und die Losungen (X∗, Y ∗) dieses Gleichungssystems bestimmt
werden.
E.3 Geschlossene Bahnen
Im Gegensatz zu eindimensionalen Systemen konnen im zweidimensionalen
Fall geschlossene Losungsbahnen auftreten. Im Normalfall ist die geschlossene
Bahn das Bild einer periodischen Losung. Man nennt eine solche periodische
Bahn stabil, wenn alle Bahnen, die in ihrer Nahe starten, zu dieser hin laufen.
Man nennt solche stabilen Bahnen auch Grenzkreise. Periodische Bahnen
konnen auch instabil sein.
E.4 Satz von Poincare
Bei autonomen Systemen mit zwei Zustandsvariablen lauft jede Losung ent-
weder
• auf einen stationaren Zustand zu, oder
• nahert sich einer geschlossenen Kurve (Grenzkreis) an, oder
• lauft nach unendlich
119

E.5. Teilgleichgewichte GMM WS2009/2010
E.5 Teilgleichgewichte
Betrachten wird die Menge aller Punkte fur die X = 0 bzw. Y = 0 gilt:
Teilgleichgewicht von X = {X = 0} = {(X, Y )|f(X, Y ) = 0}
Das Teilgleichgewicht von X trennt die Bereiche des Zustandsraums, in denen
die Bewegung nach rechts bzw. links erfolgt. Analog gilt
Teilgleichgewicht von Y = {Y = 0} = {(X, Y )| g(X, Y ) = 0}
Das Teilgleichgewicht von X trennt die Bereiche des Zustandsraums, in denen
die Bewegung nach oben bzw. unten erfolgt.
Die Schnittpunkte der Teilgleichgewichte sind gerade die stationaren Zustande.
E.5.1 Stabilitat stationarer Zustande
Die Stabilitat eines stationaren Zustands kann wie im eindimensionalen Fall
untersucht werden. Man betrachtet hierzu das System als Vektor
(X
Y
)
=
(f(X, Y )
g(X, Y )
)
(E.3)
Analog zum eindimensionalen Fall entwickelt man die rechte Seite des Differen-
tialgleichungssystems am stationaren Zustand (X∗, Y ∗) nach Taylor bis zum
ersten Glied und erhalt so das linearisierte System (ist fur jeden stationaren
Zustand unterschiedlich!!):
(x
y
)
= J(X∗, Y ∗) ·(
x
y
)
(E.4)
Die Matrix J ist die Jacobi-Matrix:
J(X∗, Y ∗) =
∂f(X∗, Y ∗)∂X
∂f(X∗, Y ∗)∂Y
∂g(X∗, Y ∗)∂X
∂g(X∗, Y ∗)∂Y
(E.5)
Das linearisierte System ist am stationaren Zustand (X∗, Y ∗) entwickelt und
gibt die Abweichung (Storung) von diesem an. Zu linearen Abbildungen, Ei-
genwerten etc. siehe Anhang D.
120
GMM WS2009/2010 Anhang E – Stabilitatsanalyse autonomer Systeme (2D)
Hat die Matrix J zwei verschiedene Eigenwerte λ1 und λ2, so kann man eine
allgemeine Losung des linearen Systems E.4 angeben:
~z(t) = C1 · eλ1t · ~v1 + C2 · eλ2t · ~v2
Hierbei ist ~v1 Eigenvektor zum Eigenwert λ1 und ~v2 Eigenvektor zum Eigenwert
λ2, C1 und C2 sind freie Konstanten.
Sind beide Eigenwerte reell so handelt es sich bei den Summanden entweder
um exponentielles Wachstum oder exponentiellen Zerfall. Ist also einer der
Eigenwerte großer Null, wachst die Storung, der Zustand ist instabil. Sind beide
Eigenwerte negativ, so verschwindet eine anfangliche Storung, der Zustand ist
stabil.
Fur einen komplexen Eigenwert λ = a + ib gilt
eλt = e(a+ib)t = eat · eibt = eat · (cos bt + i sin bt)
Das System vollzieht also Schwingungen. Ist der Realteil a kleiner Null, so ver-
schwindet die Storung, ist der Realteil a großer Null, so explodieren Storungen.
Bei a = 0 bleiben Storungen erhalten. Uber die Stabilitat des Ursprungssy-
stems kann dann nicht entschieden werden.
Bezuglich der Stabilitat des Systems E.1 gilt der folgende Satz:
Satz E.5.1 Stabilitat von stationaren Zustanden autonomer Systeme
1. Der stationare Zustand (X∗, Y ∗) von E.1 ist asymptotisch stabil, falls
alle Eigenwerte von negative Realteile besitzen.
2. Der stationare Zustand (X∗, Y ∗) ist instabil, falls mindestens ein Ei-
genwert einen positiven Realteil besitzt.
3. Sind alle Realteile aller Eigenwerte kleiner oder gleich Null und min-
destens ein Realteil gleich Null, so kann nicht uber die Stabilitat des
stationaren Zustands (X∗, Y ∗) entschieden werden.
Der Satz gilt auch fur hoherdimensionale autonome Systeme!
121

E.6. Veranschaulichung des Systemverhaltens GMM WS2009/2010
E.6 Veranschaulichung des Systemverhaltens
Sind beide Eigenwerte reell und verschieden, so gibt es zwei Eigenrichtungen.
Diese Richtungen sind selbst Losungen und konnen von anderen Losungen
nicht uberquert werden. Entlang der Eigenrichtungen bewegen sich die Losun-
gen in gerader Linie auf den stationaren Zustand hin (λ < 0) oder weg (λ > 0).
Die absolute Große des Eigenwerts bestimmt dabei die Geschwindigkeit. Fur
Losungen, die nicht auf einer Eigenrichtung starten gibt es Einflugschneisen.
Fur z.B. λ1 = −0.1 und λ2 = −1 bewegt sich das System zuerst schnell in
Richtung von v2, und dann langsam in Richtung von v1.
Ist ein Eigenwert 0 so findet auf der zugehorigen Eigenrichtung keine Bewegung
statt.
Sind die Eigenwerte komplex (genauer: nicht reell) gibt es keine reellen Eigen-
richtungen. Das System bewegt sich an keiner Stelle radial auf den stationaren
Zustand zu.
Fur die Eigenwerte des Systems gilt
λ1,2 =spur A
2±√
(spur A)2
4− det A =:
µ
2±√
µ2
4− D
Eigenwerte µ D Name Stabilitat Beispiel
λ2 < λ1 < 0 µ < 0 0 < D < µ2
4Knoten stabil
(
−1 1
0.5 −1
)
λ2 < 0 < λ1 D < 0 Sattel instabil
(
0.5 −1
−1 0.5
)
0 < λ2 < λ1 µ > 0 0 < D < µ2
4Knoten instabil
(
0.5 0.5
−1 2
)
λ1,2 ∈ C, Re(λ) < 0 µ < 0 D > µ2
4Focus stabil
(
−1 −1
1 −1
)
λ1,2 ∈ C, Re(λ) = 0 µ = 0 D > µ2
4Zentrum marginal stabil
(
0 −1
1 0
)
λ1,2 ∈ C, Re(λ) > 0 µ > 0 D > µ2
4Focus instabil
(
1 −1
1 1
)
Bei zusammenfallenden Eigenwerten und bei Eigenwerten, die Null werden,
gibt es weitere Formen des Systemverhaltens, auf die hier nicht naher einge-
gangen wird.
122
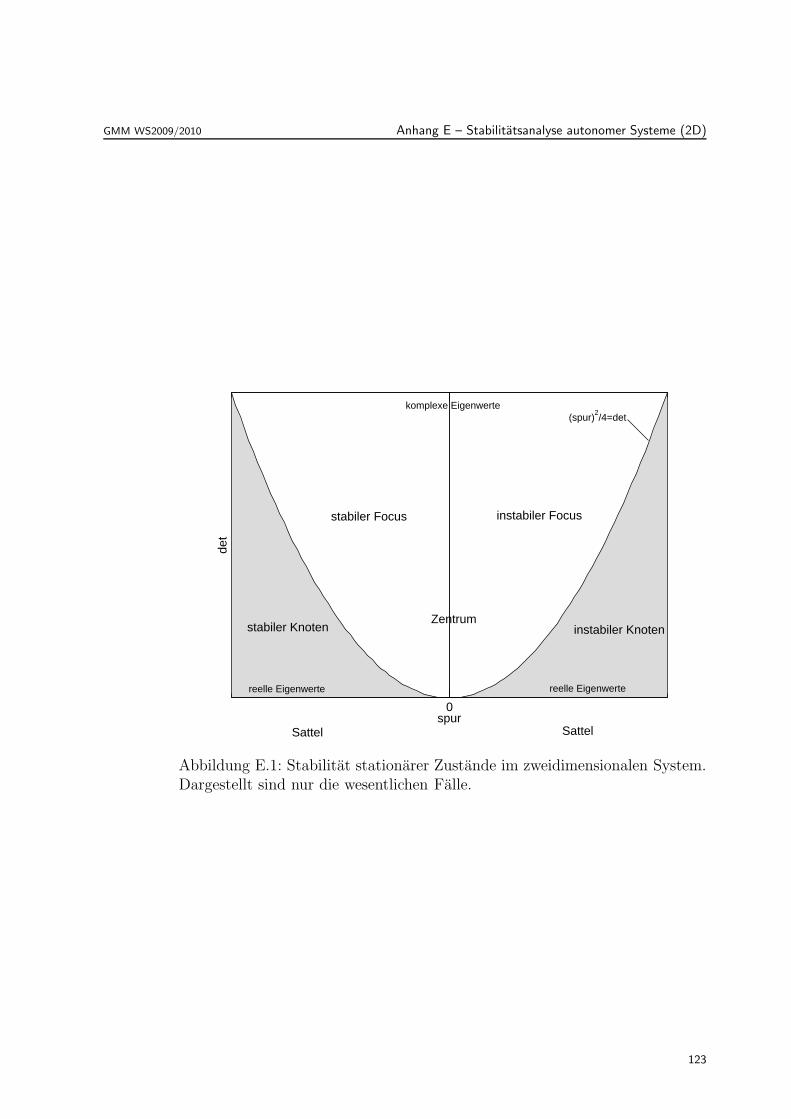
GMM WS2009/2010 Anhang E – Stabilitatsanalyse autonomer Systeme (2D)
0spur
det
reelle Eigenwerte reelle Eigenwerte
(spur)2/4=det
komplexe Eigenwerte
stabiler Focus instabiler Focus
Sattel
Zentrumstabiler Knoten instabiler Knoten
Sattel
Abbildung E.1: Stabilitat stationarer Zustande im zweidimensionalen System.Dargestellt sind nur die wesentlichen Falle.
123