Grundlagen der Rechnerarchitektur - userpages.uni-koblenz.deunikorn/lehre/gdra/ss19/04...
116
Grundlagen der Rechnerarchitektur Prozessor
Transcript of Grundlagen der Rechnerarchitektur - userpages.uni-koblenz.deunikorn/lehre/gdra/ss19/04...

Grundlagen der Rechnerarchitektur
Prozessor

Übersicht• Datenpfad• Control• Pipelining• Data‐Hazards• Control‐Hazards• Multiple‐Issue
2Grundlagen der Rechnerarchitektur ‐ Prozessor

Datenpfad einer einfachen MIPS‐CPU
Grundlagen der Rechnerarchitektur ‐ Prozessor 3

Ziel
Grundlagen der Rechnerarchitektur ‐ Prozessor 4
Konstruktion des Datenpfads einer einfachen MIPS‐CPU als Blockschaltbild. Die CPU hat 32 Register und soll folgende MIPS‐Instruktionen realisieren:
Instruktionen für Speicherzugriff: lw, swlw $s1, 4($s2) # $s1 = Memory[$s2+4]sw $s1, 4($s2) # Memory[$s2+4] = $s1
Arithmetisch‐logische Instruktionen: add, sub, and, or, sltadd $s0, $s1, $s2 # $s0 = $s1 + $s2slt $s0, $s1, $s2 # $s0 = ($s1<$s2)? 1 : 0
Branch‐ Instruktion: beqbeq $s1, $s2, 4096 # $pc = $pc + 4 + 4096<<2, wenn $s1=$s2

Datenpfad einer einfachen MIPS‐CPUErster Abschnitt des Datenpfades
Grundlagen der Rechnerarchitektur ‐ Prozessor 5

Benötigte Bausteine
Grundlagen der Rechnerarchitektur ‐ Logik und Arithmetik 6Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Speicherbaustein in dem die abzuarbeitenden Instruktionen stehen. „Instruction Address“ ist 32‐Bit groß. Wenn an den Leitungen „Instruction Address“ eine Adresse anliegt, liegt im nächsten Taktzyklus eine 32‐Bit lange Instruktion auf den „Instruction“ Leitungen.
Register in dem der Programm‐Counter steht. Hier steht die Adresse der nächsten abzuarbeitenden Instruktion.
Eine ALU, die fest auf die Funktion Addieren verdrahtet ist. Mit dieser ALU wird der Program‐Counter in 4er Schritten erhöht, um auf die nächste folgende Instruktion zu zeigen.

Erster Schritt der Instruktionsausführung
Grundlagen der Rechnerarchitektur ‐ Prozessor 7
Mit dem neuen Clock‐Signal passiert folgendes:
Instruction‐Fetch:Lag der Program‐Counter‐Wert seit dem letzten Clock‐Signal am Instruction‐Memory an, erscheint mit dem nächsten Clock‐Signal die nächste auszuführende Instruktion an der Instruction‐Leitung.
Program‐Counter erhöhen:Damit der Speicher schon mit dem Bereitstellen der nächsten Instruktion beginnen kann, wird der Program‐Counter direkt zu Beginn der Instruktionsabarbeitung auf die nächste abzuarbeitende Instruktion gesetzt.

Das Blockschaltbild dazu
Grundlagen der Rechnerarchitektur ‐ Prozessor 8

Datenpfad einer einfachen MIPS‐CPUArithmetische‐Logische Operationen
Grundlagen der Rechnerarchitektur ‐ Prozessor 9

Erinnerung, Instruktionen vom R‐Typ‐Format:
Solche Instruktionen machen immer folgendes:• Lese zwei Register (src1 und src2)• Führe eine ALU‐Operation darauf aus• Schreibe Ergebnis zurück in ein Register (dest)
Alle hier zu realisierenden arithmetisch‐logischen Instruktionen (d.h. add, sub, and, or, slt) sind R‐Typ‐Instruktionen.
Zum Speichern der Registerinhalte und zur Durchführung der Rechenoperationen benötigen wir zwei weitere Bausteine.
Betrachten zunächst R‐Typ‐Instruktionen
Grundlagen der Rechnerarchitektur ‐ Prozessor 10
opcode src1 src2 dest shamt funct6 Bit 5 Bit 5 Bit 5 Bit 5 Bit 6 Bit
R‐Typ(Register‐Typ)
31 26 25 21 20 16 15 11 10 6 5 0

Register‐File und ALU
Grundlagen der Rechnerarchitektur ‐ Prozessor 11
Auf den Read‐Data‐Leitungen liegen die 32‐Bit‐Inhalte der Register, die den 5‐Bit‐Read‐Register‐Inputs entsprechen. Ein Register‐File ist wesentlich schneller als der Speicher. Daten liegen in einem Instruktionszyklus unmittelbar auf den Read‐Data‐Leitungen vor. In einem Taktzyklus überschriebener Registerinhalt ist erst im darauf folgenden auf den Read‐Data‐Leitungen sichtbar.Zum Schreiben in ein Register müssen die Daten auf den Write‐Data‐Leitungen vorliegen und die RegWrite‐Leitung muss aktiv sein.
Die ALU rechnet auf 32‐Bit‐Werten. Die ALU‐Operation wird über die 4‐Bit ALU‐Operation‐Leitungen gewählt; hierzu später mehr. Die Zero‐Leitung ist 0, wenn das ALU‐Ergebnis 0 ergab.
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Erweiterung des Blockschaltbilds
Grundlagen der Rechnerarchitektur ‐ Prozessor 12

Datenpfad einer einfachen MIPS‐CPUDie Branch‐Instruktion beq
Grundlagen der Rechnerarchitektur ‐ Prozessor 13

Betrachten nun Branch‐Instruktion beq
Grundlagen der Rechnerarchitektur ‐ Prozessor 14
Erinnerung, Branch‐Instruktionen beq ist vom I‐Typ‐Format:
beq‐Instruktion macht immer folgendes:• Ziehe zwei Register voneinander ab (reg1 und reg2)• Wenn das Ergebnis ungleich 0: nächste Instruktion ist bei PC+4• Wenn das Ergebnis gleich 0 :
• Sign‐Extension von 16‐Bit‐Offset auf 32‐Bit Zahl x• x = 4*x (lässt sich durch ein Links‐Shift von 2 erreichen)• nächste Instruktion ist bei PC+4+x
Berechnung reg1 ‐ reg2 ist durch den Datenpfad schon realisiert.Für den Rest brauchen wir noch zwei neue Bausteine:
31 26 25 21 20 16 15 0opcode reg1 reg2 Offset6 Bit 5 Bit 5 Bit 16 Bit
I‐Typ(Immediate‐Typ)

Sign‐Extend und Shift‐Left 2
Grundlagen der Rechnerarchitektur ‐ Logik und Arithmetik 15
Sign‐Extend
Vorzeichenbehaftetes Ausweiten von k auf n
Leitungen (z.B. 16 auf 32).
Shift‐Left 2
Links oder Rechts‐Shift von Leitungen (z.B. Shift‐Left 2)
k n

Wir müssen außerdem eine Auswahl treffen• Wenn die aktuelle Instruktion ein beq ist, dann berechne den PC nach vorhin beschriebener Vorschrift.
• Wenn die Instruktion kein beq ist, dann bestimme den PC wie bisher gehabt; also PC=PC+4.
• Zum Treffen von Auswahlen brauchen wir eine weiteren Bausteintyp:
Grundlagen der Rechnerarchitektur ‐ Prozessor 16

Multiplexer
Grundlagen der Rechnerarchitektur ‐ Logik und Arithmetik 17
0 Mux 1Select
A B
C
Für ein Bit Für n Bit(z.B. 32 Bit)
0 Mux 1Select
A B
C
3232
32
C = A, wenn Select = 0C = B, wenn Select = 1
Für n‐Bit‐Select(z.B. 2 Bit)
MuxSelect
A1 A4
C
A2 A3
C = A0, wenn Select = 00C = A1, wenn Select = 01C = A2, wenn Select = 10C = A3, wenn Select = 11

Erweiterung des Blockschaltbilds
Grundlagen der Rechnerarchitektur ‐ Prozessor 18

Datenpfad einer einfachen MIPS‐CPUZugriff auf den Datenspeicher
Grundlagen der Rechnerarchitektur ‐ Prozessor 19

Betrachten nun Load‐ und Store‐Word
Grundlagen der Rechnerarchitektur ‐ Prozessor 20
Erinnerung, Instruktionen lw und sw sind vom I‐Typ‐Format:
Die Adresse des Speicherzugriffs berechnet sich wie folgt:• Sign‐Extension von 16‐Bit‐Offset auf 32‐Bit Zahl x• Adresse ist Inhalt von reg1 + xHierzu werden wir vorhandene ALU und Sign‐Extend mitbenutzen
Der Speicherinhalt wird dann• bei lw in Register reg2 geschrieben• bei sw mit Registerinhalt von reg2 überschrieben
Zur Vereinfachung trennen wir im Folgenden den Speicher der Instruktionen vom Speicher der Daten. Letzterer ist wie folgt:
31 26 25 21 20 16 15 0opcode reg1 reg2 Offset6 Bit 5 Bit 5 Bit 16 Bit
I‐Typ(Immediate‐Typ)

Datenspeicher
Grundlagen der Rechnerarchitektur ‐ Prozessor 21
Speicherbaustein in dem die Daten liegen. „Address“, „Write‐Data“ und „Read‐Data“ sind 32‐Bit groß. In keinem Taktzyklus wird gleichzeitig gelesen und geschrieben. Schreiben oder lesen wird über Signale an MemWrite und MemRead durchgeführt. Der Grund für ein MemRead ist, dass sicher gestellt sein muss, dass die anliegende Adresse gültig ist (mehr dazu im Kapitel Speicher).
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Erweiterung des Blockschaltbilds
Grundlagen der Rechnerarchitektur ‐ Prozessor 22

Eine Übung zum Abschluss
Grundlagen der Rechnerarchitektur ‐ Prozessor 23
Wie lässt sich das Blockschaltbild des Datenpfads erweitern, sodass auch die MIPS‐Instruktion j unterstützt wird?
Zur Erinnerung:
j 4096 # $pc = 4096<<2 + oberste vier# Bit von $pc

Control einer einfachen MIPS‐CPU
Grundlagen der Rechnerarchitektur ‐ Prozessor 24

Ziel
Grundlagen der Rechnerarchitektur ‐ Prozessor 25
Bisher haben wir lediglich den Datenpfad einer einfachen MIPS‐CPU entworfen.
Die Steuerleitungen der einzelnen Bausteine zeigen noch ins Leere.
Jetzt wollen wir festlegen, wann zur Abarbeitung unserer Instruktionen (d.h. lw, sw,add, sub, and, or, slt,beq ) welche Steuerleitungen an oder aus sein sollen. Den Baustein der das macht, nennt man „Control“.
Wir trennen die Control in zwei Teile:ALU‐Control: Legt für jeden Befehl die ALU‐Operation fest.Main‐Unit‐Control: Legt für jeden Befehl die übrigen Steuerleitungen fest.
Wir verwenden auf den nächsten Folien die folgende Terminologie:Steuerleitung an: assertedSteuerleitung aus: deasserted

Control einer einfachen MIPS‐CPUALU‐Control
Grundlagen der Rechnerarchitektur ‐ Prozessor 26

Vorüberlegung: Die passenden ALU‐Funktionen
Grundlagen der Rechnerarchitektur ‐ Prozessor 27Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Control‐Eingänge der betrachteten ALU
• Für Load‐ und Store‐Instruktionen lw, sw brauchen wir die ALU‐Funktion add.
• Für die arithmetisch‐logischen Instruktionen add, sub, and, or,slt brauchen wir die entsprechende passende ALU‐Funktion.
• Für die Branch‐Instruktion beq brauchen wir die ALU‐Funktion sub.

Vorüberlegung: die Instruktionsformate
Grundlagen der Rechnerarchitektur ‐ Prozessor 28Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Wenn der Wert von Bit 31 bis 26 in der gefetchten Instruktion gleich• 0: arithmetisch‐logische Instruktion (d.h. add,sub,and,or,slt).Die Funktion ist mit dem Wert von Bit 5 bis 0 festgelegt.
• 35 oder 43: Load‐ bzw. Store‐Instruktion (d.h. lw, sw).
• 4: Branch‐Instruktion (d.h. beq).
(I-type)
(I-type)

ALU‐Control
Grundlagen der Rechnerarchitektur ‐ Prozessor 29
ALU‐Control
Belegung der ALU‐Steuerleitungen, so dass die ALU die richtigen ALU‐Operation ausführt.
Ausgabe Eingabe
5‐Bit‐Funct‐Field der Instruktion
ALUOp in Abhängigkeit des Instruktionstyps
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

In einer Wahrheitstabelle zusammengefasst
Grundlagen der Rechnerarchitektur ‐ Prozessor 30
Eingabe Ausgabe
Daraus lässt sich mechanisch eine kombinatorische Schaltung generieren, die wir im Folgenden mit dem ALU‐Control‐Symbol abstrakt darstellen.
ALU‐Control
ALUOp
Instruction[5:0]
(also das Funct‐Field der Instruktion)
ALU‐Operation
0
0
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Erweiterung des Blockschaltbilds
Grundlagen der Rechnerarchitektur ‐ Prozessor 31

Control einer einfachen MIPS‐CPUMain‐Unit‐Control
Grundlagen der Rechnerarchitektur ‐ Prozessor 32

Opcode bestimmt Steuerleitungsbelegungen
Grundlagen der Rechnerarchitektur ‐ Prozessor 33
Instruction RegDst ALUSrcMemto‐Reg
Reg‐Write
Mem‐Read
Mem‐Write Branch
ALU‐Op1
ALU‐Op0
R‐format (0)
lw (35)
sw (43)
beq (4)Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Eingabe:Instruction [31‐26] Ausgabe

Auch hier wieder
Grundlagen der Rechnerarchitektur ‐ Prozessor 34
Aus voriger Wahrheitstabelle lässt sich mechanisch eine kombinatorische Schaltung generieren, die wir im Folgenden mit dem Control‐Symbol abstrakt darstellen.
ControlInstruction[31—26](also: das Opcode‐Field der Instruktion)
RegDstBranchMemReadMemtoRegALUOpMemWriteALUSrcRegWrite

Erweiterung des Blockschaltbilds
Grundlagen der Rechnerarchitektur ‐ Prozessor 35

Beispiel für eine R‐Typ‐Instruktion
• Instruktion wird gefetched und PC um 4 erhöht.• Die Register $t2 (Instruction [25‐21]) und $t3 (Instruction [20‐16]) werden aus dem Register‐File geladen.
• Die ALU führt die in dem Function‐Field (Instruction[5‐0]) codierte Operation auf den gelesenen Register‐Daten aus.
• Das Ergebnis der ALU wird in Register $t1 (Instruction[15‐11]) zurück geschrieben.
Grundlagen der Rechnerarchitektur ‐ Prozessor 36
add $t1, $t2, $t3

Beispiel für eine Load/Save‐Instruktion
• Instruktion wird gefetched und PC um 4 erhöht.• Das Register $t2 (Instruction [25‐21]) wird aus dem Register‐File geladen.
• Die ALU addiert das Register‐Datum und den 32‐Bit Sign‐exteded 16‐Bit‐Immediate‐Wert 8 (Instruction [15‐0]).
• Die Summe aus der ALU wird als Adresse für den Datenspeicher verwendet.
• Das Datum aus dem Datenspeicher wird in das Register‐File geschrieben. Das Register in das geschrieben wird ist $t1 (Instruction [20‐16]).
Grundlagen der Rechnerarchitektur ‐ Prozessor 37
lw $t1, 8($t2)

Beispiel für eine Branch‐Instruktion
• Instruktion wird gefetched und PC um 4 erhöht.• Die Register $t1 (Instruction [25‐21]) und $t2 (Instruction[20‐16]) werden aus dem Register‐File geladen.
• Die Haupt‐ALU subtrahiert die ausgelesenen Register‐Daten voneinander.Die zusätzliche ALU addiert PC+4 auf den 32‐Bit Sign‐exteded und um 2 nach links geshifteten 16‐Bit‐Immediate‐Wert 42 (Instruction [15‐0]).
• Das Zero‐Ergebins der Haupt‐ALU entscheidet ob der PC auf PC+4 oder auf das Ergebnis der zusätzlichen ALU gesetzt wird.
Grundlagen der Rechnerarchitektur ‐ Prozessor 38
beq $t1, $t2, 42

Eine Übung zum Abschluss
Grundlagen der Rechnerarchitektur ‐ Prozessor 39
In der vorigen „Übung zum Abschluss“ wurde das Blockschaltbild des Datenpfads so erweitert, sodass auch die MIPS‐Instruktion junterstützt wird.
Wie müssen Control und Alu‐Control modifiziert werden (wenn überhaupt), damit die MIPS‐Instruktion j auch von Seiten des Control unterstützt wird?
Erinnerung:j addr # Springe pseudo-direkt nach addr
000010 addressOpcodeBits 31‐26
AdresseBits 25‐0
J‐Typ

Pipelining
Grundlagen der Rechnerarchitektur ‐ Prozessor 40

PipeliningInstruktionszyklen
Grundlagen der Rechnerarchitektur ‐ Prozessor 41

MIPS‐Instruktionszyklus
Grundlagen der Rechnerarchitektur ‐ Prozessor 42
Ein MIPS‐Instruktionszklus besteht aus:
1. Instruktion aus dem Speicher holen(IF: Instruction‐Fetch)
2. Instruktion decodieren und Operanden aus Register lesen(ID: Instruction‐Decode/Register‐File‐Read)
3. Ausführen der Instruktion oder Adresse berechnen(EX: Execute/Address‐Calculation)
4. Datenspeicherzugriff(MEM: Memory‐Access)
5. Resultat in Register abspeichern(WB: Write‐Back)

Instruktionszyklen in unserem Blockschaltbild
Grundlagen der Rechnerarchitektur ‐ Prozessor 43

Instruktionszyklen generell• Instruktionszyklen anderer moderner CPUs haben diese oder eine sehr ähnliche Form von Instruktionszyklen.
• Unterschiede sind z.B.:– Instruktion decodieren und Operanden lesen sind zwei getrennte Schritte. Dies ist z.B. notwendig,
• wenn Instruktionen sehr komplex codiert sind (z.B. x86 Instruktionen der Länge 1 bis 17 Byte)
• wenn Instruktionen Operanden im Speicher anstatt Register haben (z.B. einige Instruktionen bei x86)
Grundlagen der Rechnerarchitektur ‐ Prozessor 44

PipeliningDie Pipelining‐Idee
Grundlagen der Rechnerarchitektur ‐ Prozessor 45

Annahme die einzelnen Abschnitte des MIPS‐Instruktionszyklus benötigen folgende Ausführungszeiten:Instruction‐Fetch 200ps, Register‐Read 100ps, ALU‐Operation 200ps, Data‐Access 200ps, Register‐Write 100ps.
Wie hoch dürfen wir unseren Prozessor (ungefähr) Takten?
Die längste Instruktion benötigt 800ps. Also gilt für den Clock‐Cycle c:
Single‐Cycle‐Performance
Grundlagen der Rechnerarchitektur ‐ Prozessor 46Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Die Pipelining‐Idee am Beispiel Wäsche waschen
Grundlagen der Rechnerarchitektur ‐ Prozessor 47Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Waschen
Trocknen
Falten
Einräumen
Bearbeitungszeit pro Wäscheladung bleibt dieselbe (Delay).Gesamtzeit für alle Wäscheladungen sinkt (Throughput).

Was ist die Performance‐Ratio?
Grundlagen der Rechnerarchitektur ‐ Prozessor 48
Annahme jeder Arbeitsgang beansprucht dieselbe Zeit. Was ist die Performance‐Ratio für n Wäscheladungen?
Generell für k „Pipeline‐Stufen“, d.h. k Arbeitsgänge und gleiche Anzahl Zeiteinheiten t pro Arbeitsgang?

Im Folgenden betrachten wir zunächst ein ganz einfaches Programm:lw $1, 100($0)lw $2, 200($0)lw $3, 300($0)lw $4, 400($0)lw $5, 500($0)
Bemerkung: Da die MIPS‐Registernamen im Folgenden nicht von Bedeutung sind, geben wir in den Programmbeispielen häufig nur noch die Registernummern (z.B. wie oben $0 und $1) an. Außerdem betrachten wir das spezielle Zero‐Register momentan nicht.
Wie kann man die Pipelining‐Idee im Falle unseres MIPS‐Prozessors anwenden?
Pipelining für unseren MIPS‐Prozessor
Grundlagen der Rechnerarchitektur ‐ Prozessor 49

Die Pipeline nach den ersten drei Instruktionen
Grundlagen der Rechnerarchitektur ‐ Prozessor 50Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Annahme:IF = 200psID = 100psEX = 200psMEM = 200psWB = 100ps

Was ist die Performance‐Ratio?
Grundlagen der Rechnerarchitektur ‐ Prozessor 51
Wie eben gezeigt wäre für k Pipeline‐Stufen und eine große Zahl an ausgeführten Instruktionen die Performance‐Ratio gleich k, wenn jede Pipeline‐Stufe dieselbe Zeit beanspruchen würde.
Allerdings brauchen die einzelnen Stufen s1,...,sk unterschiedliche Zeiteinheiten: t1,..., tk. Somit ist die Performance‐Ratio für n Instruktionen:
Mit den Zeiten aus dem vorigen Beispiel für n also:
Die Performance‐Ratio wird durch die langsamste Stufe bestimmt.

Taktung
Grundlagen der Rechnerarchitektur ‐ Prozessor 52
Annahme die einzelnen Abschnitte des MIPS‐Instruktionszyklus benötigen die bisher betrachteten Ausführungszeiten:Instruction‐Fetch 200ps, Register‐Read 100ps, ALU‐Operation 200ps, Data‐Access 200ps, Register‐Write 100ps.
Wie hoch dürfen wir unseren Prozessor (ungefähr) Takten? Die längste Stufe benötigt 200ps. Also gilt für den Clock‐Cycle c:
Achtung: Maximal mögliche Taktung hängt aber auch von anderen Faktoren ab. (Erinnerung: Power‐Wall).

Quiz
Grundlagen der Rechnerarchitektur ‐ Prozessor 53
Welchen CPI‐Wert suggeriert das MIPS‐Pipelining‐Beispiel?
Achtung: der CPI‐Wert ist in der Regel höher, wie wir noch sehen.

Der Ansatz ist noch zu naiv
Grundlagen der Rechnerarchitektur ‐ Prozessor 54
lw $1, 100($0)lw $2, 200($0)lw $3, 300($0)lw $4, 400($0)lw $5, 500($0)Beispiel:
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
IF ID EX MEM WB

PipeliningPipeline‐Register
Grundlagen der Rechnerarchitektur ‐ Prozessor 55

Pipeline‐Stufen brauchen Pipeline‐Register
Grundlagen der Rechnerarchitektur ‐ Prozessor 56Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Pipeline‐Stufen brauchen Pipeline‐Register
Grundlagen der Rechnerarchitektur ‐ Prozessor 57Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Control
…Änderungim Tafelbild
Write‐Register darf erst in der WB‐Stufe gesetzt werden.
RegDst steht mit der Entscheidung von Control erst in der EX‐Stufe fest.
Wird durchgereicht

Was speichern die Pipeline‐Register?
Grundlagen der Rechnerarchitektur ‐ Prozessor 58
Wir schauen uns den Weg einer einzigen Instruktion durch die Pipeline an; und zwar den der Load‐Word‐Instruktion lw.
Auf dem Weg durch die Pipeline überlegen wir, was alles in den Pipeline‐Registern IF/ID, ID/EX, EX/MEM und MEM/WB stehen muss.
In der Darstellung verwenden wir folgende Konvention.
Bedeutet: Register/Speicher wird gelesen Bedeutet: Register/Speicher wird beschrieben

Was speichern die Pipeline‐Register?
Grundlagen der Rechnerarchitektur ‐ Prozessor 59
IF/ID:• Instruktion• PC+4 (z.B. für beq)
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Grundlagen der Rechnerarchitektur ‐ Prozessor 60
Was speichern die Pipeline‐Register?
ID/EX:• PC+4 (z.B. für beq)• Inhalt Register 1• Inhalt Register 2• Sign‐ext. Immediate (z.B. für beq)• Das Write‐Register(wird im Letzten Zyklus von lw gebraucht)
Generell: Alles was in einem späteren Clock‐Cycle noch verwendet werden könnte, muss durchgereicht werden.
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Grundlagen der Rechnerarchitektur ‐ Prozessor 61
Was speichern die Pipeline‐Register?
EX/MEM:• Ergebnis von PC+4+Offset (z.B. für beq)
• Zero der ALU(z.B. für beq)
• Result der ALU
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
• Register 2 Daten (z.B. für sw)• Das Write‐Register (wird im letzten Zyklus von lw gebraucht)

Was speichern die Pipeline‐Register?
Grundlagen der Rechnerarchitektur ‐ Prozessor 62
MEM/WB:• Das geleseneDatum aus demSpeicher (wird dann vonlw im nächsten Zyklus ins Write‐Register geschrieben)
• Das Ergebnis der ALU‐Operation (für diearithmetisch‐logischen Instruktionen)
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Grundlagen der Rechnerarchitektur ‐ Prozessor 63
Was speichern die Pipeline‐Register?
Für die letzte Pipeline‐Stufe braucht man kein Pipeline‐Register.
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Zusätzlich wird noch Control‐Info gespeichert
Grundlagen der Rechnerarchitektur ‐ Prozessor 64Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Control
…

Zusätzlich wird noch Control‐Info gespeichert
Grundlagen der Rechnerarchitektur ‐ Prozessor 65Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Control hängt von der Instruktion ab. Damit muss Control‐Info erst ab ID/EX‐Register gespeichert werden.
Das ID/EX‐Register muss bereitstellen:• RegDst• ALUOp (2)• ALUSrc
Das EX/MEM‐Register muss bereit stellen:• Branch•MemRead•MemWrite
Werden durch‐gereicht.
Das MEM/WB‐Register muss bereit stellen:• MemtoReg• RegWrite

PipeliningPipelining‐Visualisierung
Grundlagen der Rechnerarchitektur ‐ Prozessor 66

Pipelining‐Visualisierung
Grundlagen der Rechnerarchitektur ‐ Prozessor 67
Zusammenfassung der vorhin implizit eingeführten Visualisierungen und Einführung einer neuen Visualisierung.
Wir betrachten folgenden Beispiel‐Code:
lw $10, 20($1)sub $11, $2, $3add $12, $3, $4lw $13, 24($1)add $14, $5, $6
Wir unterscheiden generell zwischen zwei Visualisierungsarten:Single‐Clock‐Cylce‐Pipeline‐Diagramm undMultiple‐Clock‐Cycle‐Pipeline‐Diagramm

Single‐Clock‐Cycle‐Pipeline‐Diagramm
Grundlagen der Rechnerarchitektur ‐ Prozessor 68Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Einfaches Multiple‐Clock‐Cycle‐Pipeline‐Diagramm
Grundlagen der Rechnerarchitektur ‐ Prozessor 69Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Detaillierteres Multiple‐Clock‐Cycle‐Pipeline‐Diagramm
Grundlagen der Rechnerarchitektur ‐ Prozessor 70Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
IF ID EX MEM WB

PipeliningKomplexere Pipelines
Grundlagen der Rechnerarchitektur ‐ Prozessor 71

Komplexere Piplelines• Pipeline‐Stufen sind nicht auf 5 festgelegt!• z.B. weitere Unterteilung von IF, ID, EX, MEM, WB
– Erlaubt höhere Taktung– Kann aufgrund der Instruktions‐Komplexität erforderlich sein– Kann aufgrund von Instruktionen mit zeitlich unbalancierten Stufen erforderlich sein
• Wie „pipelined“ man x86 ISA mit Instruktionslängen zwischen 1 und 17 Bytes?– Komplexe Instruktionen der x86 ISA werden in Folge von Mikroinstruktionen
übersetzt– Mikroinstruktionssatz ist vom Typ RISC– Pipelining findet auf den Mikroinstruktionen statt
• Beispiel AMD Opteron X4:
Grundlagen der Rechnerarchitektur ‐ Prozessor 72
Was das ist sehen wir noch im Kapitel Multiple‐Issue
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

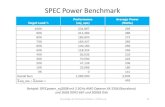
Pipeline‐Stufen einiger ausgewählter ProzessorenMikroprozesor Jahr Taktrate Pipeline‐Stufen LeistungIntel 486 1989 25 MHz 5 5 WIntel Pentium 1993 66 MHz 5 10 WIntel Pentium Pro 1997 200 MHz 10 29 WIntel Pentium 4 Willamette 2001 2000 MHz 22 75 WIntel Pentium 4 Prescott 2004 3600 MHz 31 103 WIntel Core 2006 2930 MHz 14 75 WUltraSPARC IV+ 2005 2100 MHz 14 90 WSun UltraSPARC T1 (Niagara) 2005 1200 MHz 6 70 W
Grundlagen der Rechnerarchitektur ‐ Prozessor 73
Pipeline‐Stufen sinken wieder?• Aggressives Pipelining ist sehr Leistungshungrig• Aktueller Trend eher zu Multi‐Cores mit geringerer
Leistungsaufnahme pro Core.

Data‐Hazards
Grundlagen der Rechnerarchitektur ‐ Prozessor 74

Motivation
Grundlagen der Rechnerarchitektur ‐ Prozessor 75
Ist die Pipelined‐Ausführung immer ohne Probleme möglich?
Beispiel:sub $2, $1, $3and $12, $2, $5or $13, $6, $2add $14, $2, $2sw $15, 100($2)
Also, alle vier nachfolgenden Instruktionen hängen von der sub‐Instruktion ab.
Annahme:$2 speichert 10 vor der sub‐Instruktion.$2 speichert ‐20 nach der sub‐Instruktion.
Betrachten wir die Pipeline:
sub $2, $1, $3and $12, $2, $5or $13, $6, $2add $14, $2, $2sw $15, 100($2)

Problem Rückwärtsabhängigkeiten
Grundlagen der Rechnerarchitektur ‐ Prozessor 76
Instr.‐Zeile
Sollte aus $2 lesen
Liest aus $2
and
or
add
sw
Data‐Hazard
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Behandeln von Data‐Hazards mittels Forwarding
Grundlagen der Rechnerarchitektur ‐ Prozessor 77Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Allgemeine Lösung mittels Forwarding‐Unit
Grundlagen der Rechnerarchitektur ‐ Prozessor 78Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
012
012
WB WB
EX/MEM.Rd
MEM/WB.Rd

Implementation der Forwarding‐Unit
Grundlagen der Rechnerarchitektur ‐ Prozessor 79

Bemerkungen
Grundlagen der Rechnerarchitektur ‐ Prozessor 80
Die Bestimmung von ForwardB erfolgt analog. (Übung)
Das Ganze muss noch als Wahrheitstabelle aufgeschrieben und dann als kombinatorische Schaltung realisiert werden.
Wie sieht die Wahrheitstabelle von ForwardA nach voriger hergeleiteter Vorschrift aus? (Übung) [Tipp: um Platz zu sparen sollte man möglichst viele „don‘t cares“ verwenden.]

Nicht auflösbare Data‐Hazards
Grundlagen der Rechnerarchitektur ‐ Prozessor 81
Nicht jeder Data‐Hazard lässt sich durch Forwardingauflösen. Beispiel: Zugriff auf vorher gelesenes Register.
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Pipeline‐Stall als Lösung
Grundlagen der Rechnerarchitektur ‐ Prozessor 82Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Allgemeine Lösung mittels Hazard‐Detection‐Unit
Grundlagen der Rechnerarchitektur ‐ Prozessor 83Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Implementation der Hazard‐Detection‐Unit
Grundlagen der Rechnerarchitektur ‐ Prozessor 84

Quiz: Vermeiden von Pipeline‐Stalls
Grundlagen der Rechnerarchitektur ‐ Prozessor 85
lw $t1, 0($t0)
lw $t2, 4($t0)
add $t3, $t1, $t2
sw $t3, 12($t0)
lw $t4, 8($t0)
add $t5, $t1, $t4
sw $t5, 16($t0)
Wo findet ein Pipe‐line‐Stall statt? Bitte ankreuzen.
Bitte Befehle umorganisie‐ren, sodass alle Stalls vermieden werden.
Anzahl Taktzyklen mit Stalls?Anzahl Taktzyklen ohne Stalls?

Control‐Hazards
Grundlagen der Rechnerarchitektur ‐ Prozessor 86

Control‐Hazards
Grundlagen der Rechnerarchitektur ‐ Prozessor 87Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Branch‐Not‐Taken‐Strategie und Pipeline‐Flush
Grundlagen der Rechnerarchitektur ‐ Prozessor 88
Flush = Verwerfe Instruktionen in der Pipeline. Hier: Setze IF/ID‐, ID/EX‐ und EX/MEM‐Register auf 0.
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Reduktion des Branch‐Delays• Adressberechnung kann schon in der
ID‐Stufe stattfinden• beq und bne erfordert lediglich ein
32‐Bit‐XOR und ein 32‐Bit‐OR– Dazu braucht man keine ALU– Also auch in der ID‐Stufe realisierbar
• Damit ist der Sprung schon in der ID‐Stufe entschieden
Grundlagen der Rechnerarchitektur ‐ Prozessor 89Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Beispiel: für $1 und $3:

Reduktion des Branch‐Delays
• Konsequenz– Branch‐Delay ist damit ein Instruktions‐Zyklus– Wir brauchen lediglich ein Flush‐IF/ID‐Register
Grundlagen der Rechnerarchitektur ‐ Prozessor 90

Reduktion des Branch‐Delays• Achtung!
– Forwarding aus späteren Stufen macht die Sache kompliziert.
– Kann Pipeline‐Stall aufgrund von Data‐Hazards erforderlich machen.
• z.B. ein Zyklus, wenn ALU‐Ergebnis in den Vergleich einfließt
• z.B. zwei Zyklen, wenn Vergleichsoperator einen Schritt vorher aus dem Speicher geladen wurde
– Betrachten wir aber hier nicht genauer.
Grundlagen der Rechnerarchitektur ‐ Prozessor 91Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Dynamic‐Branch‐Prediction‐Strategie
Grundlagen der Rechnerarchitektur ‐ Prozessor 92
Unterer Teil der Adresse
Branch hat stattgefunden
0x00 10x04 00x08 1...0xf8 00xfc 0
Branch‐Prediction‐Buffer
0x400000 : lw $1, 0($4)0x400004 : beq $1, $0, 400x400008 : add $1, $1, $10x40000c : ......
...0x40c004 : bne $3, $4, 120...

Vorhersagegenauigkeit
Grundlagen der Rechnerarchitektur ‐ Prozessor 93
Annahme unendlich langer Loop, der immer 9 mal und dann einmal nicht durchlaufen wird. Was ist die Vorhersagegenauigkeit der vorher beschriebenen Branch‐Prediction?
Lässt sich das verbessern?
loop: ......bne $1,$2,loop...j loop

N‐Bit‐Vorhersage am Beispiel 2‐Bit
Grundlagen der Rechnerarchitektur ‐ Prozessor 94Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Vorhersagegenauigkeit
Grundlagen der Rechnerarchitektur ‐ Prozessor 95
Annahme unendlich langer Loop, der immer 9 mal und dann einmal nicht durchlaufen wird. Was ist die Vorhersagegenauigkeit der vorher beschriebenen 2‐Bit‐Branch‐Prediction?
loop: ......bne $1,$2,loop...j loop
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Branch‐Delay‐Slot‐Idee
Grundlagen der Rechnerarchitektur ‐ Prozessor 96
loop: ......bne $1,$2,loop<instruktion><instruktion>
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
• Wird immer ausgeführt.• Instruktion muss aber unabhängig vonder Branch‐Entscheidung sein.
• Das muss der Compiler entscheiden.• Im Zweifelsfall: nop passt immer.

Beispiele von Branch‐Delay‐Slot‐Schedules
Grundlagen der Rechnerarchitektur ‐ Prozessor 97Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Weniger Branches mit Conditional‐Instruktionen
Grundlagen der Rechnerarchitektur ‐ Prozessor 98
Beispiel MIPS‐Instruktionen movn und movz:movn $8, $11, $4 # $8 = $11, wenn $4 != 0movz $8, $11, $4 # $8 = $11, wenn $4 == 0
Beispiel ARM‐ISA:ADDEQ r0,r1,r2 ; If zero flag set then…
; ... r0 = r1 + r2

Quiz
Grundlagen der Rechnerarchitektur ‐ Prozessor 99
Betrachte die folgenden Branch‐Strategien:1. Vorhersage Branch findet statt2. Vorhersage Branch findet nicht statt3. Dynamische Branch‐Vorhersage (mit 90% Genauigkeit)
Was ist die beste Strategie, wenn:
• Branch findet mit 5% Häufigkeit statt?
• Branch findet mit 95% Häufigkeit statt?
• Branch findet mit 70% Häufigkeit statt?

Multiple‐Issue
Grundlagen der Rechnerarchitektur ‐ Prozessor 100

Motivation• Bisher: Instruction‐Level‐Parallelism (ILP) durch Pipelining
– ILP kann durch Pipeline‐Stufe erhöht werden– Pipelines mit mehr Stufen sind anfälliger gegenüber Data‐ und Control‐
Hazards– Also: Pipeline‐Stufen nur bis zu gewisser Tiefe sinnvoll– Außerdem: Grenzen aufgrund der Leistungsaufnahme– CPI bleibt gleich oder steigt sogar (wegen Hazards), Clock‐Rate steigt
• Hier eine weitere Methode um ILP zu steigern: Multiple‐Issue– Replikation von internen CPU‐Strukturen, sodass mehrere Instruktionen pro
Pipeline‐Stufe möglich sind– CPI sinkt und Clock‐Rate bleibt gleich (oder sinkt sogar wegen erhöhter
Komplexität)– Beispiel: CPI eines 4‐Wege‐Multiple‐Issue‐Mikroprozessor hat eine ideale CPI
von? 0.25!– CPI liegt aber in der Regel höher, wie wir gleich sehen werden
• Wir unterscheiden zwischen:– Static‐Multiple‐Issue: Entscheidungen werden zur Compile‐Zeit gefällt– Dynamic‐Multiple‐Issue: Entscheidungen werden zur Laufzeit gefällt
(auch Superskalare CPU bezeichnet)
Grundlagen der Rechnerarchitektur ‐ Prozessor 101

Multiple‐IssueStatic‐Multiple‐Issue
Grundlagen der Rechnerarchitektur ‐ Prozessor 102

Generelle Idee• Eine große Instruktion pro Clock‐Cycle• Große Instruktion besteht aus mehreren gleichzeitig stattfindenden Operationen
• Aber nicht jede Kombination von Operationen möglich
• Beispiel:– ALU‐Operation und Speicheroperation gleichzeitig möglich
– Aber zwei ALU‐Operation auf einmal nicht möglich
• Terminologie: VLIW (Very Long Instruction Word)
Grundlagen der Rechnerarchitektur ‐ Prozessor 103

Beispiel am MIPS‐Datenpfad
Grundlagen der Rechnerarchitektur ‐ Prozessor 104Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Extra ALU für gleichzeitige Adresskalkulation
ALU für arithmetische Operationen

Statische Two‐Issue Pipeline im Betrieb
Grundlagen der Rechnerarchitektur ‐ Prozessor 105Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Was ist der CPI‐Wert?

Was ist nun die Aufgabe des Compilers?
Grundlagen der Rechnerarchitektur ‐ Prozessor 106Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Loop: lw $t0, 0($s1) # $t0=Array-Elementaddu $t0, $t0, $s2 # addiere Wertsw $t0, 0($s1) # Speichere Elementaddi $s1, $s1, -4 # nächstes Elementbne $s1, $zero, Loop # solange $s1 != 0
Compiler erzeugt Assembler‐Code:
und ordnet Instruktionen so an, dass keine Pipeline‐Stalls entstehen
Was ist der CPI‐Wert?

Verbesserung: Loop‐Unrolling
Grundlagen der Rechnerarchitektur ‐ Prozessor 107
Loop: lw $t0, 0($s1) # $t0=Array-Elementaddu $t0, $t0, $s2 # addiere Wertsw $t0, 0($s1) # Speichere Elementaddi $s1, $s1, -4 # nächstes Elementbne $s1, $zero, Loop # solange $s1 != 0
Code wie vorher (der Einfachheit sei Loop‐Index Vielfaches von 4):
Loop‐Body vier mal kopiert und Register‐Renaming
Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012
Was ist der CPI‐Wert?

Multiple‐IssueDynamic‐Multiple‐Issue
Grundlagen der Rechnerarchitektur ‐ Prozessor 108

Generelle‐Idee• CPU entscheidet, ob und wie viele aufeinander folgende Instruktionen parallel gestartet werden können
• Compiler erzeugt nur eine Folge von Instruktionen; kein VLIW
• Instruktions‐Scheduling des Compilers nicht mehr erforderlich aber trotzdem aus Performance‐Gründen sinnvoll
• Verbesserung der Superskalarität durch dynamisches Pipeline‐Scheduling: Instruktionsreihenfolge darf geändert werden, um Stalls zu vermeiden
Grundlagen der Rechnerarchitektur ‐ Prozessor 109

Dynamic‐Pipeline‐Scheduling Motivation
Grundlagen der Rechnerarchitektur ‐ Prozessor 110
lw $t0, 20($s2) # zunächst $t0 ladenaddu $t1, $t0, $t2 # addu durch lw verzögertsub $s4, $s4, $t3 # sub könnte schon startenslti $t5, $s4, 20 # und genau so auch slti
Warum nicht sub (und ggf. slti) vor addu vorziehen?

Dynamic‐Pipeline‐Scheduling generell
Grundlagen der Rechnerarchitektur ‐ Prozessor 111Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Wiedervorlage: Daten einiger ausgewählter Prozessoren
Grundlagen der Rechnerarchitektur ‐ Prozessor 112Bildquelle: David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 2012

Zusammenfassung und Literatur
Grundlagen der Rechnerarchitektur ‐ Prozessor 113

Zusammenfassung• Schlechte Performance von Single‐Cylce‐Ansatz• Instruktionsabarbeitung besteht aus mehreren Zyklen• Moderne Prozessoren nutzen dies für
– Pipelining– Multiple‐Issue
• Allgemein als Instruction‐Level‐Parallelism bezeichnet• Für High‐Level‐Programmierer ist die Parallelität nicht sichtbar
– Sichtbar auf Assembler‐Ebene– Sichtbar auf Compiler‐Ebene
• Hauptprobleme die die Parallelität einschränken– Daten‐Abhängigkeiten– Control‐Abhängigkeiten
• Methoden um Data‐ und Control‐Hazards zu reduzieren– Scheduling– Spekulation
• Sichtbare Grenze der Power‐Wall ist erreicht• Trend zu Multicores mit einfacheren Pipelines• Konsequenz: Parallelität nicht mehr von der Hardware gekapselt
Grundlagen der Rechnerarchitektur ‐ Prozessor 114

Quiz
Bildquelle: www.geemag.de/wp‐content/artikel_endgegner_bild.jpg
Welchen Einfluss hat Pipelining auf den CPI‐Wert?[ ] Der CPI‐Wert bleibt immer unverändert. [ ] Der CPI‐Wert kann unter 1 fallen. [ ] Der CPI‐Wert steigt in der Regel an.
Grundlagen der Rechnerarchitektur ‐ Logik und Arithmetik 115
Mittels Pipelining kann man die Taktrate eines Rechners erhöhen.[ ] Stimmt! [ ] Nein, das ist völliger Quatsch.
Eine Pipeline mit k Stufen erreicht asymptotisch immer eine Performance‐Ratio von k.[ ] Jawohl. [ ] Nein, die Ratio kann darunter liegen.[ ] Nein, die Ratio kann sogar noch höher liegen.
Welchen Einfluss hat Superskalarität auf den CPI‐Wert?[ ] Der CPI‐Wert bleibt immer unverändert, [ ] Der CPI‐Wert steigt an.[ ] Der CPI‐Wert kann unter 1 fallen.
Pipelining erhöht den Durchsatz aber reduziert nicht die Instruktions‐Latenz.[ ] Nein, Durchsatz und Latenz sinken [ ] Nein, Durchsatz und Latenz steigen [ ] Ja, das ist richtig
Super! Geschafft. Auf zum nächsten Level.

Literatur[PattersonHennessy2012] David A. Patterson und John L. Hennessy, „Computer Organization and Design“, Fourth Edition, 20124.1 Introduction4.2 Logic Design Conventions4.3 Building a Datapath4.4 A Simple Implementation Scheme4.5 An Overview of Pipelining4.6 Pipelined Datapath and Control4.7 Data Hazards: Forwarding versus Stalling4.8 Control Hazards4.10 Parallelism and Advanced Instruction‐Level Parallelism4.11 Real Stuff: the AMD Opteron X4 (Barcelona) Pipeline
Grundlagen der Rechnerarchitektur ‐ Prozessor 116