
Inhalt der Vorlesung Experimentalphysik I · 22 Experimentalphysik I 2. Kinematik vom Massenpunkten...
16
21 Experimentalphysik I Inhalt der Vorlesung Experimentalphysik I Teil 1: Mechanik 1. Physikalische Größen und Einheiten 2. Kinematik von Massepunkten 2.1 Massenpunkte 2.2 Geschwindigkeit 2.3 Beschleunigung 2.4 Mehrdimensionale Bewegung 2.5 Kreisbewegung 3. Dynamik von Massepunkten 4. Gravitation 5. ...
Transcript of Inhalt der Vorlesung Experimentalphysik I · 22 Experimentalphysik I 2. Kinematik vom Massenpunkten...
21
Experimentalphysik I
Inhalt der Vorlesung Experimentalphysik I
Teil 1: Mechanik
1. Physikalische Größen und Einheiten2. Kinematik von Massepunkten
2.1 Massenpunkte2.2 Geschwindigkeit2.3 Beschleunigung2.4 Mehrdimensionale Bewegung2.5 Kreisbewegung
3. Dynamik von Massepunkten4. Gravitation5. ...
22
Experimentalphysik I
2. Kinematik vom Massenpunkten
Kinematik meint die Beschreibung einer Bewegung in Form einer Gleichung, ohne die Ursache der Bewegung zu
Ein Massenpunkt ist ein idealisierter Körper, dessen gesamte Masse in einem Punkt vereint ist. Die Lage des Massen-punktes wird durch einen Ortsvektor beschrieben:
���
�
�
���
�
�
=)()()(
)(tz
ty
tx
tr�
Mit dem Superpositionsprinzip kann die Bewegung durch Angabe der (voneinander unabhängigen) Koordinaten x, y, und z beschrieben werden.
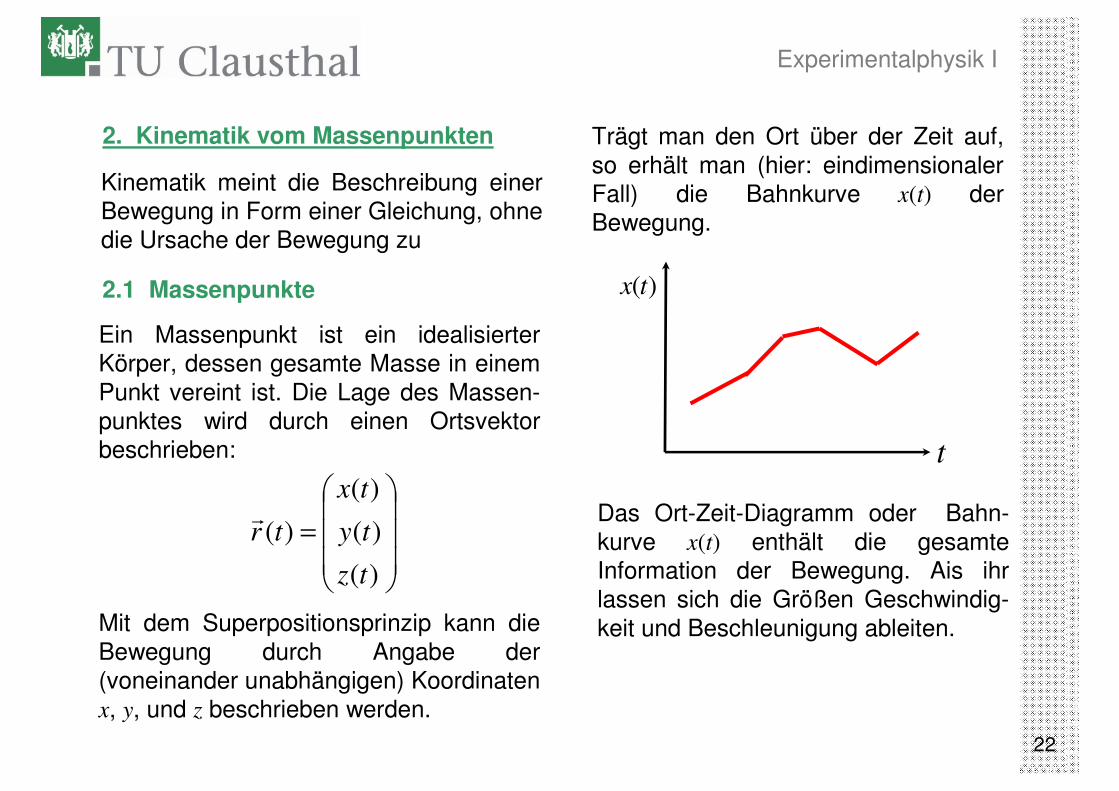
Trägt man den Ort über der Zeit auf, so erhält man (hier: eindimensionaler Fall) die Bahnkurve x(t) der Bewegung.
t
)(tx
Das Ort-Zeit-Diagramm oder Bahn-kurve x(t) enthält die gesamte Information der Bewegung. Ais ihr lassen sich die Größen Geschwindig-keit und Beschleunigung ableiten.
2.1 Massenpunkte
23
Experimentalphysik I
Hat ein Körper eine konstante Geschwin-digkeit, dann wird ihr Wert angegeben durch den Quotienten
Da neben dem Betrag auch die Richtung wichtig ist, ist die Geschwindigkeit (im dreidimensionalen Fall) ein Vektor:
tr
v�
� =
Hierbei ist t die Zeit, die zur Verschiebung um die Strecke r benötigt
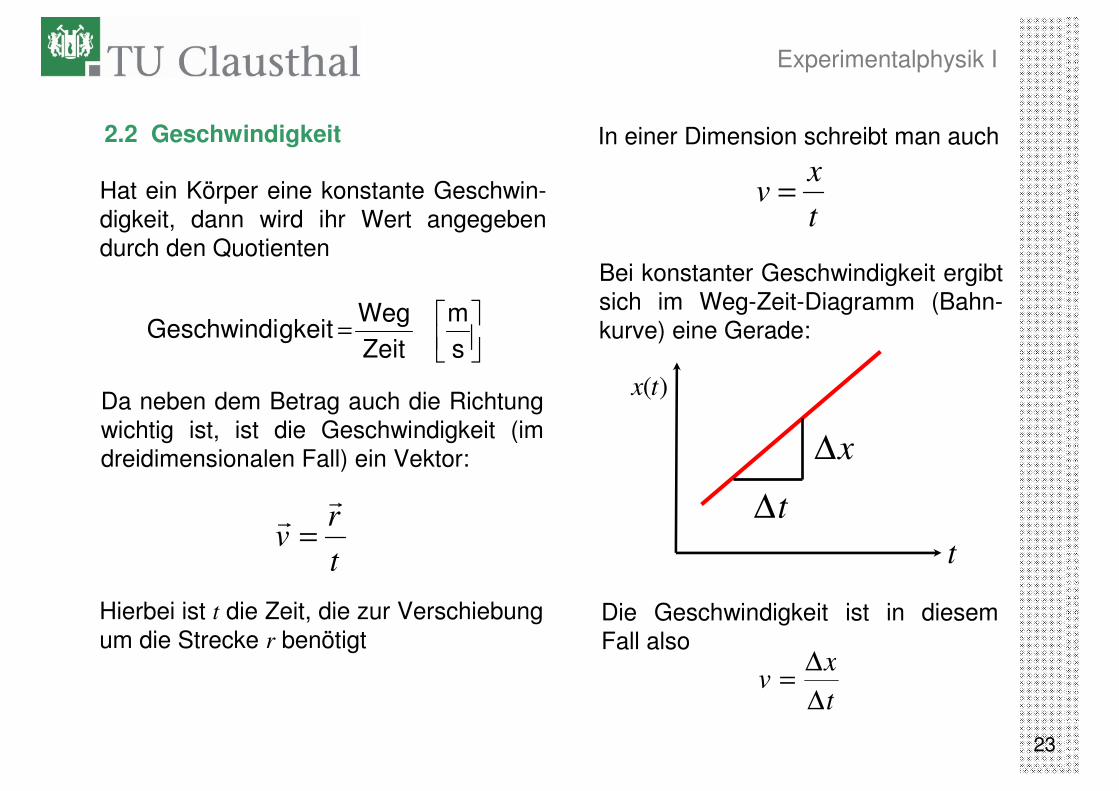
Bei konstanter Geschwindigkeit ergibt sich im Weg-Zeit-Diagramm (Bahn-kurve) eine Gerade:
t
)(tx
t∆
x∆
Die Geschwindigkeit ist in diesem Fall also
tx
v∆∆=
��
�
�=sm
ZeitWeg
gkeitGeschwindi
2.2 Geschwindigkeit
tx
v =
In einer Dimension schreibt man auch
24
Experimentalphysik I
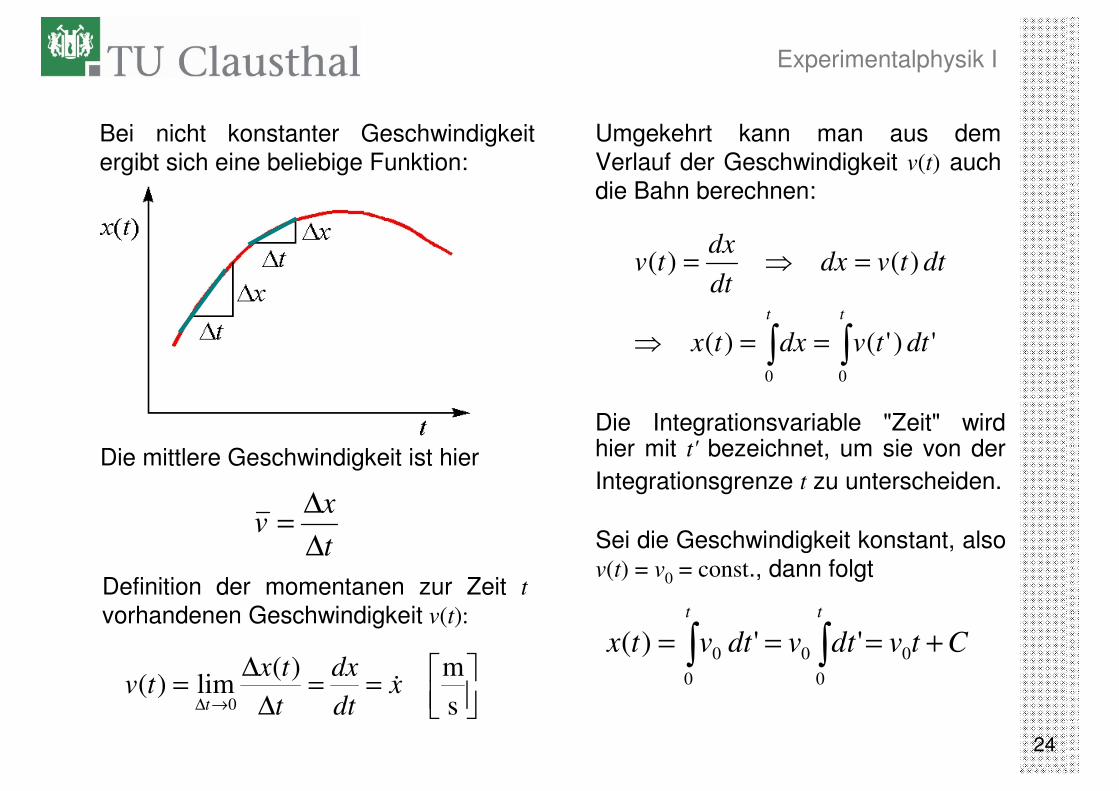
Definition der momentanen zur Zeit tvorhandenen Geschwindigkeit v(t):
��
�
�==∆
∆=→∆ s
m)(lim)(
0x
dtdx
ttx
tvt
�
Bei nicht konstanter Geschwindigkeit ergibt sich eine beliebige Funktion:
tx
v∆∆=
Die mittlere Geschwindigkeit ist hier
Umgekehrt kann man aus dem Verlauf der Geschwindigkeit v(t) auch die Bahn berechnen:
==�
=�=
tt
dttvdxtx
dttvdxdtdx
tv
00
')'()(
)()(
Sei die Geschwindigkeit konstant, alsov(t) = v0 = const., dann folgt
Ctvtdvdtvtxtt
+=== 00
00
0 '')(
Die Integrationsvariable "Zeit" wird hier mit t' bezeichnet, um sie von der Integrationsgrenze t zu unterscheiden.
25
Experimentalphysik I
Wenn der Körper zum Zeitpunkt t = 0 am Ort x(0) = x0 war, dann folgt sofortC = x0
00)( xtvtx +=
Die Definition der Momentanbeschleu-nigung in einer Dimension lautet:
��
�
�=== 2sm
xdt
xddtdv
ta ��2
2
)(
Ändert sich die Geschwindigkeit v(t) mit der Zeit t, spricht man von Beschleu-nigung.
Anschaulich ist die Beschleunigung die Krümmung der Bahnkurve bzw. die Steigung in der v(t)-Kurve.
Aus der Beschleunigung kann auch wieder rückwärts die Geschwindigkeit und der Ort berechnet werden:
=t
dttatv0
')'()(
���
����
�==
t tt
dtdttadttvtx0
''
00
''')'(')'()(
2.3 Beschleunigung
Dies ist vom Typ eine Geradengleichung.
tv
a∆∆=
Die mittlere Beschleunigung ist dann
��
�
�= 2sm
ZeitgkeitGeschwindi
gungBeschleuni
26
Experimentalphysik I
Die Integrationsvariablen "Zeit" werden wieder mit t' bzw. t'' bezeichnet, um sie von den Integrationsgrenzen zu unter-scheiden.
Wenn der Körper zum Zeitpunkt t = 0 am Ort x(0) = x0 war und die Geschwindigkeit v(0) = v0 hatte, und weiter die Beschleunigung a = a0 = const. ist, dann folgt
2000 2
1)( tatvxtx ++=
Dies ist vom Typ eine Parabelgleichung.
Vorzeichen der Beschleunigung:
a > 0 : "Beschleunigung"a < 0 : "Verzögerung"a = 0 : "gleichförmige Bewegung"
Beispiel: Vollbremsung eines PKW's
Ein PKW bremst von der Geschwin-digkeit 100km/h bis zum Stillstand ab; der Bremsweg beträgt 38m. Gesucht: Bremszeit ∆t, Verzögerung
ttv
a∆
−=∆∆= km/h1000
= const. � v nimmt linear mit t zu:mittlere Geschwindigkeit km/h50=v
2sm
skm/h
skm/h
m
3.107.2
100
7.250
38
−==
==∆=∆⇔∆∆=
-a
vx
ttx
v
a
a
27
Experimentalphysik I
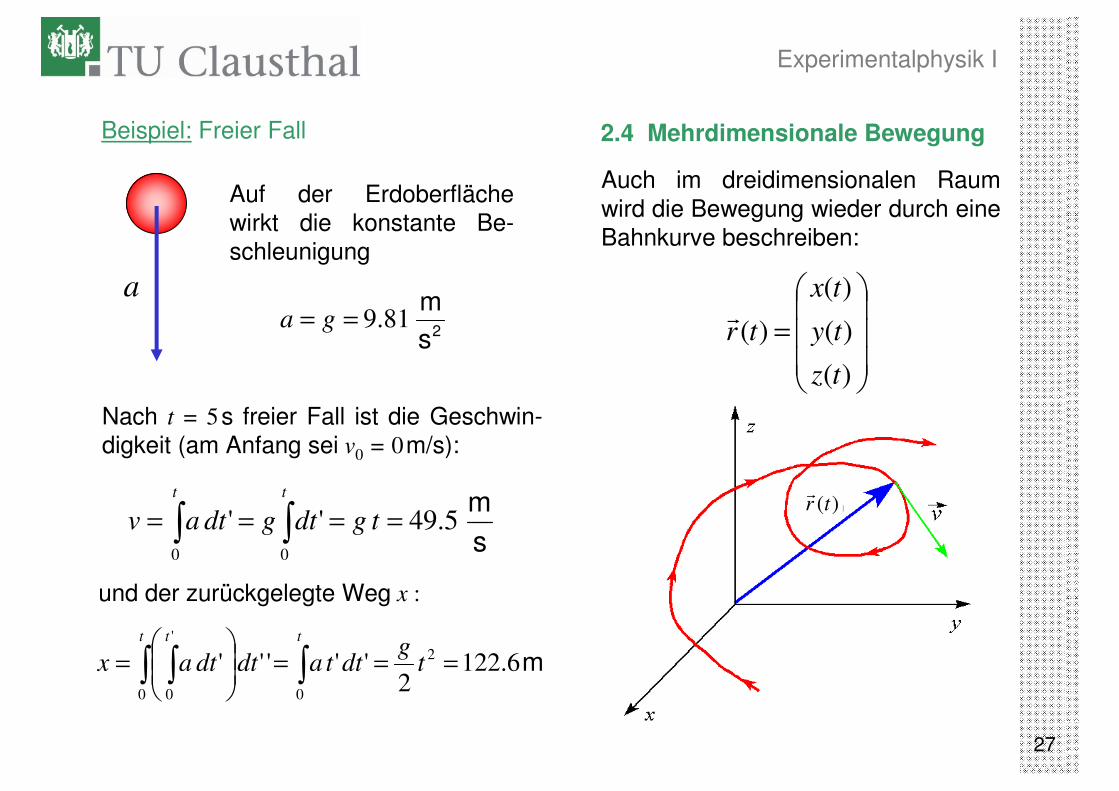
Beispiel: Freier Fall
Auf der Erdoberfläche wirkt die konstante Be-schleunigung
2sm
81.9== gaa
Nach t = 5s freier Fall ist die Geschwin-digkeit (am Anfang sei v0 = 0m/s):
sm
5.49''00
==== tgdtgdtavtt
und der zurückgelegte Weg x :
m6.1222
''''' 2
0 0
'
0
===���
����
�= t
gdttadtdtax
t tt
2.4 Mehrdimensionale Bewegung
Auch im dreidimensionalen Raum wird die Bewegung wieder durch eine Bahnkurve beschreiben:
)(tr�
���
�
�
���
�
�
=)()()(
)(tz
ty
tx
tr�
28
Experimentalphysik I
Die Ableitung eines Vektors erfolgt durch Ableitung der Komponenten. Der Geschwindigkeitsvektor liegt tangen-tial zur Bahnkurve .
)(tv�
)(tr�
���
�
�
���
�
�
=���
�
�
���
�
�
===
z
y
x
v
v
v
tz
ty
tx
trdt
trdv
)()()(
)()(
�
�
�
���
�
Die Bewegung lässt sich zusammen-setzen ("superpositionieren") aus den (Teil-) Bewegungen entlang der drei Koordinatenachsen.
In kartesischen Koordinaten ist
zyx etzetyetxtr����
)()()()( ++=
mit den Einheitsvektoren ., zyx eee���
und
Für die (momentane) Geschwindigkeit giltDie (momentane) Beschleunigung ist wieder die Änderung der Geschwin-digkeit pro Zeit, jetzt aber als Vektor:
��
�
�
��
�
�=
���
�
�
���
�
�===
zyx
vvv
dtvd
va
z
y
x
��
��
��
�
�
��
���
dtds
zyxv =++= 222���
�
Der Betrag der Geschwindigkeit ist dann gegeben durch
222 )()()( dzdydxds ++=
Das Wegelement ist dann
29
Experimentalphysik I
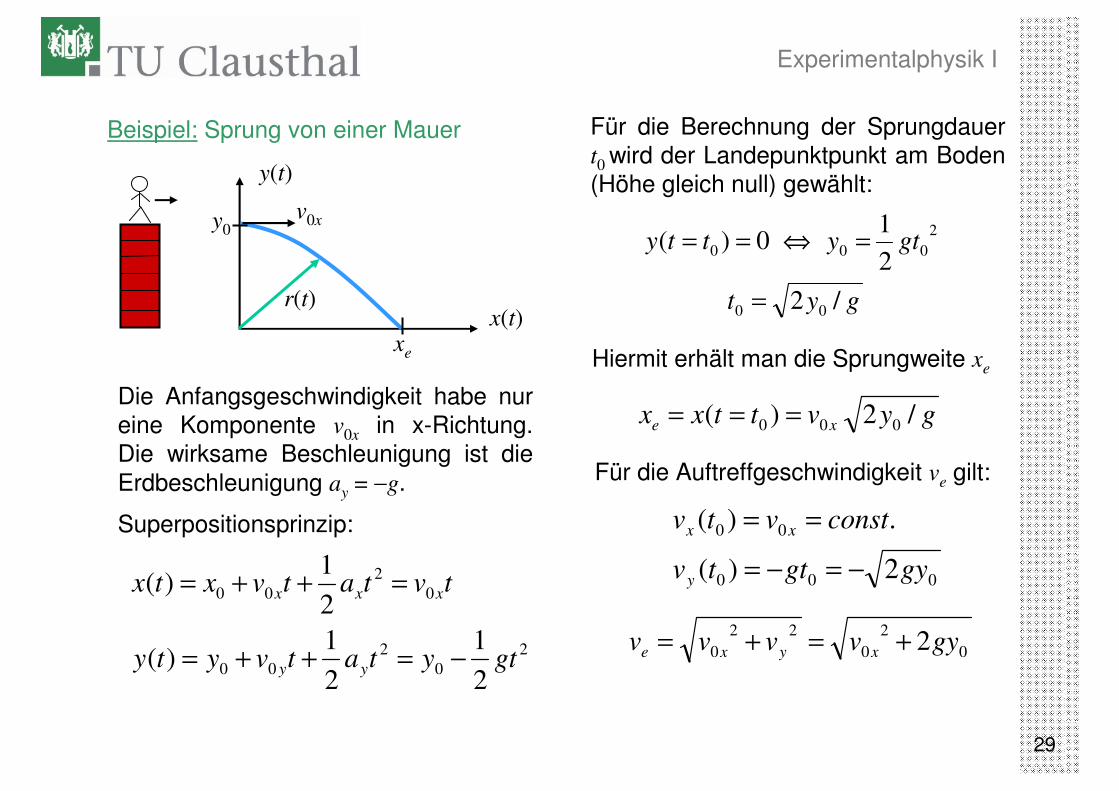
Beispiel: Sprung von einer Mauer
x(t)
y(t)
v0x
r(t)
xe
y0
Die Anfangsgeschwindigkeit habe nur eine Komponente v0x in x-Richtung. Die wirksame Beschleunigung ist die Erdbeschleunigung ay = −g.
Superpositionsprinzip:
20
200
02
00
21
21
)(
21
)(
gtytatvyty
tvtatvxtx
yy
xxx
−=++=
=++=
Für die Berechnung der Sprungdauer t0 wird der Landepunktpunkt am Boden (Höhe gleich null) gewählt:
gyt
gtytty
/221
0)(
00
2000
=
=⇔==
Hiermit erhält man die Sprungweite xe
gyvttxx xe /2)( 000 ===
Für die Auftreffgeschwindigkeit ve gilt:
000
00
2)(
.)(
gygttv
constvtv
y
xx
−=−=
==
02
022
0 2gyvvvv xyxe +=+=
30
Experimentalphysik I
a�
0v�
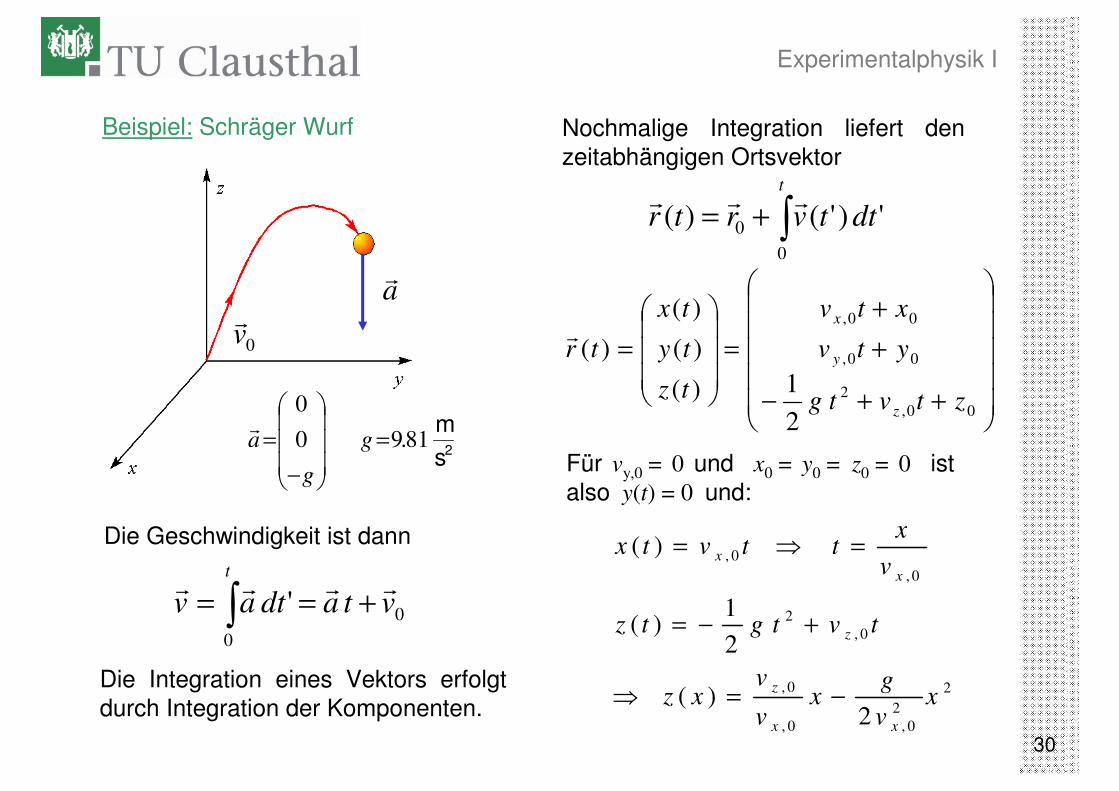
Beispiel: Schräger Wurf
2sm
81.900
=���
�
�
���
�
�
−= g
g
a�
Die Geschwindigkeit ist dann
00
' vtadtavt
���� +==
Die Integration eines Vektors erfolgt durch Integration der Komponenten.
Nochmalige Integration liefert den zeitabhängigen Ortsvektor
+=t
dttvrtr0
0 ')'()(���
�����
�
�
�����
�
�
++−
++
=���
�
�
���
�
�
=
00,2
00,
00,
21)(
)()(
)(
ztvtg
ytv
xtv
tz
ty
tx
tr
z
y
x�
Für vy,0 = 0 und x0 = y0 = z0 = 0 ist also y(t) = 0 und:
22
0,0,
0,
0,2
0,0,
2)(
21
)(
)(
xvg
xv
vxz
tvtgtz
vx
ttvtx
xx
z
z
xx
−=�
+−=
=�=
31
Experimentalphysik I
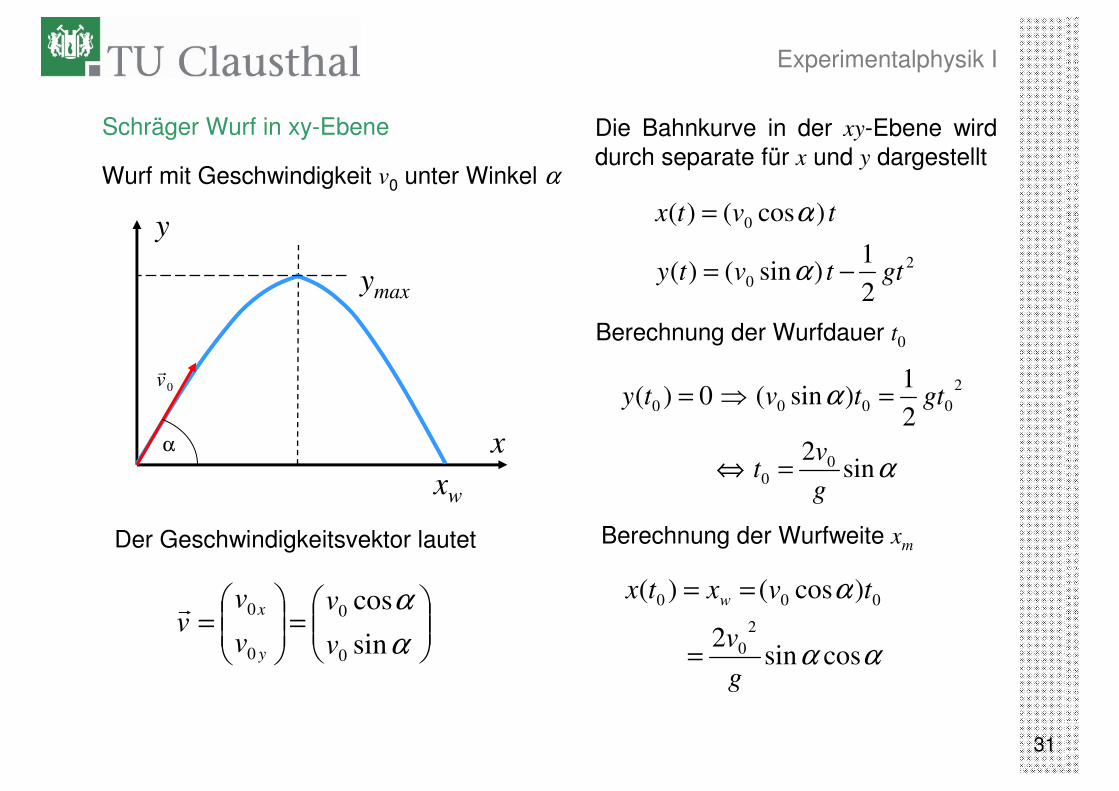
Schräger Wurf in xy-Ebene
0v�
α
xw
x
y
ymax
Wurf mit Geschwindigkeit v0 unter Winkel α
Der Geschwindigkeitsvektor lautet
���
����
�=��
�
����
�=
αα
sin
cos
0
0
0
0
v
vv
vv
y
x�
Die Bahnkurve in der xy-Ebene wird durch separate für x und y dargestellt
20
0
21
)sin()(
)cos()(
gttvty
tvtx
−=
=
α
α
Berechnung der Wurfdauer t0
α
α
sin2
21
)sin(0)(
00
20000
gv
t
gttvty
=⇔
=�=
Berechnung der Wurfweite xm
αα
α
cossin2
)cos()(2
0
000
gv
tvxtx w
=
==
32
Experimentalphysik I
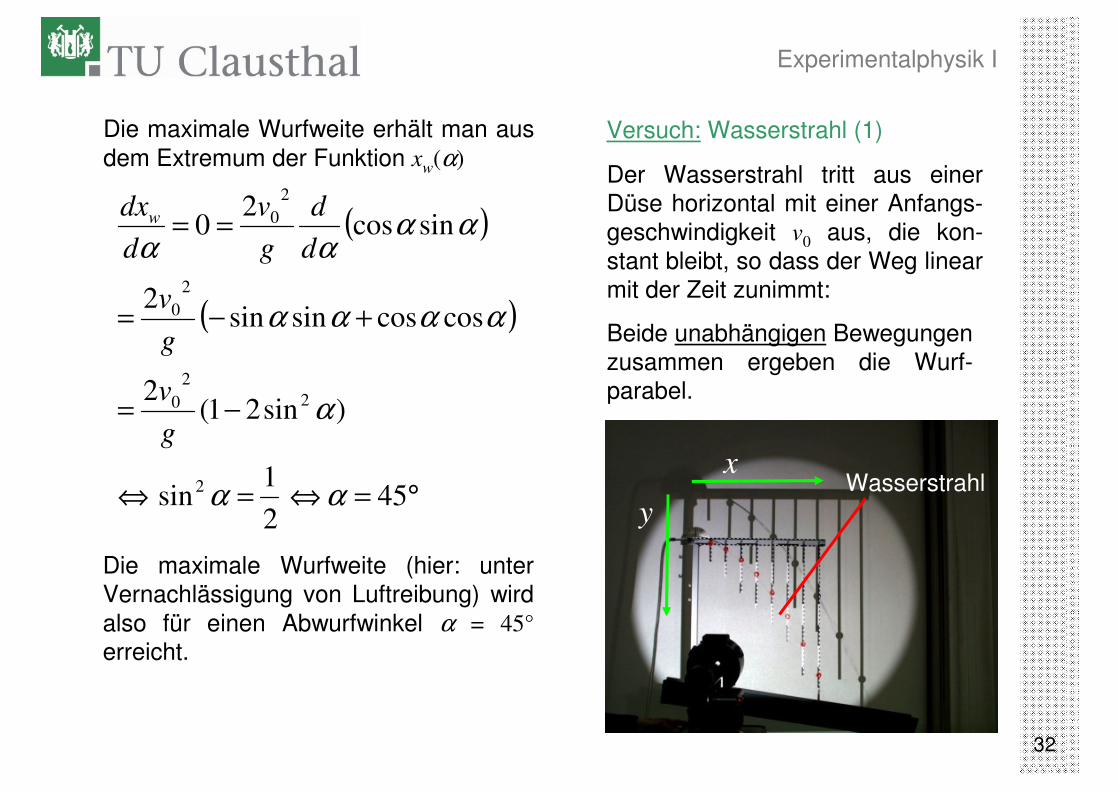
Versuch: Wasserstrahl (1)
Wasserstrahlx
y
Der Wasserstrahl tritt aus einer Düse horizontal mit einer Anfangs-geschwindigkeit v0 aus, die kon-stant bleibt, so dass der Weg linear mit der Zeit zunimmt:
Beide unabhängigen Bewegungen zusammen ergeben die Wurf-parabel.
Die maximale Wurfweite erhält man aus dem Extremum der Funktion xw(α)
( )
( )
°=⇔=⇔
−=
+−=
==
4521
sin
)sin21(2
coscossinsin2
sincos2
0
2
22
0
20
20
αα
α
αααα
αααα
gv
gv
dd
gv
ddxw
Die maximale Wurfweite (hier: unter Vernachlässigung von Luftreibung) wird also für einen Abwurfwinkel α = 45°erreicht.
33
Experimentalphysik I
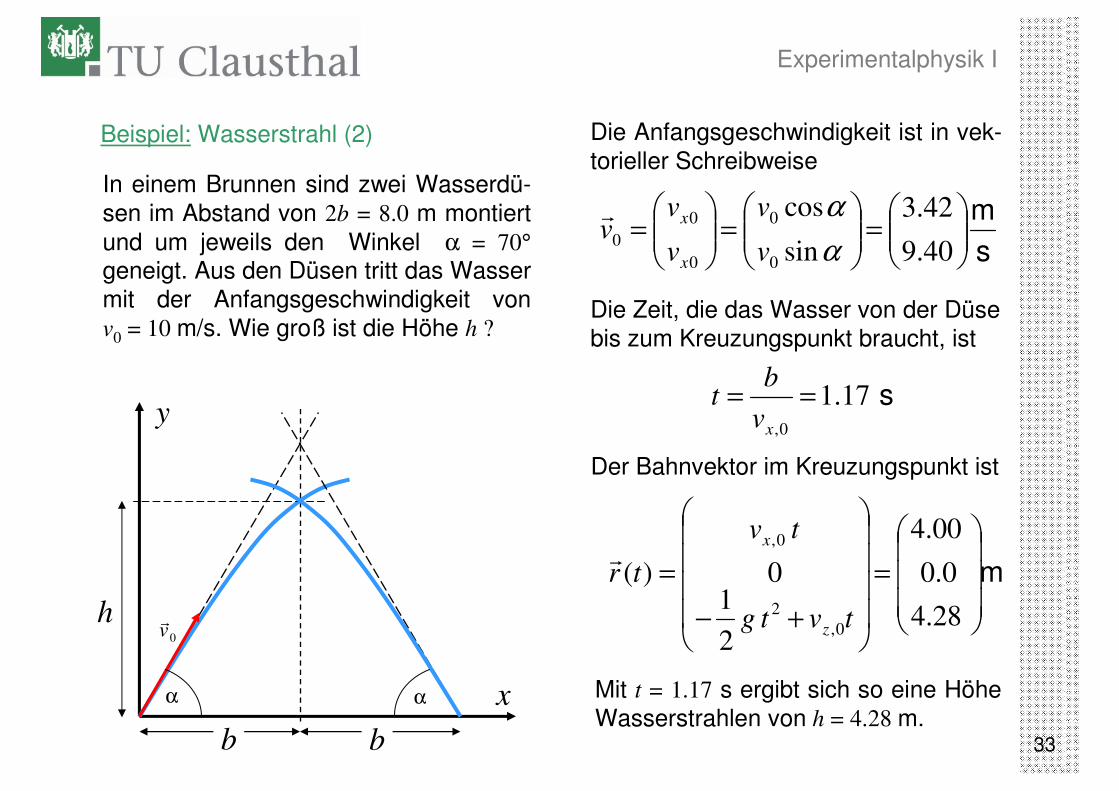
Beispiel: Wasserstrahl (2)
In einem Brunnen sind zwei Wasserdü-sen im Abstand von 2b = 8.0 m montiert und um jeweils den Winkel α = 70°geneigt. Aus den Düsen tritt das Wasser mit der Anfangsgeschwindigkeit vonv0 = 10 m/s. Wie groß ist die Höhe h ?
0v�
α
b bx
y
α
h
Die Anfangsgeschwindigkeit ist in vek-torieller Schreibweise
sm���
����
�=��
�
����
�=��
�
����
�=
40.942.3
sin
cos
0
0
0
00 α
αv
v
v
vv
x
x�
Die Zeit, die das Wasser von der Düse bis zum Kreuzungspunkt braucht, ist
s17.10,
==xvb
t
Der Bahnvektor im Kreuzungspunkt ist
m���
�
�
���
�
�
=����
�
�
����
�
�
+−=
28.40.0
00.4
21
0)(
0,2
0,
tvtg
tv
tr
z
x�
Mit t = 1.17 s ergibt sich so eine Höhe Wasserstrahlen von h = 4.28 m.
34
Experimentalphysik I
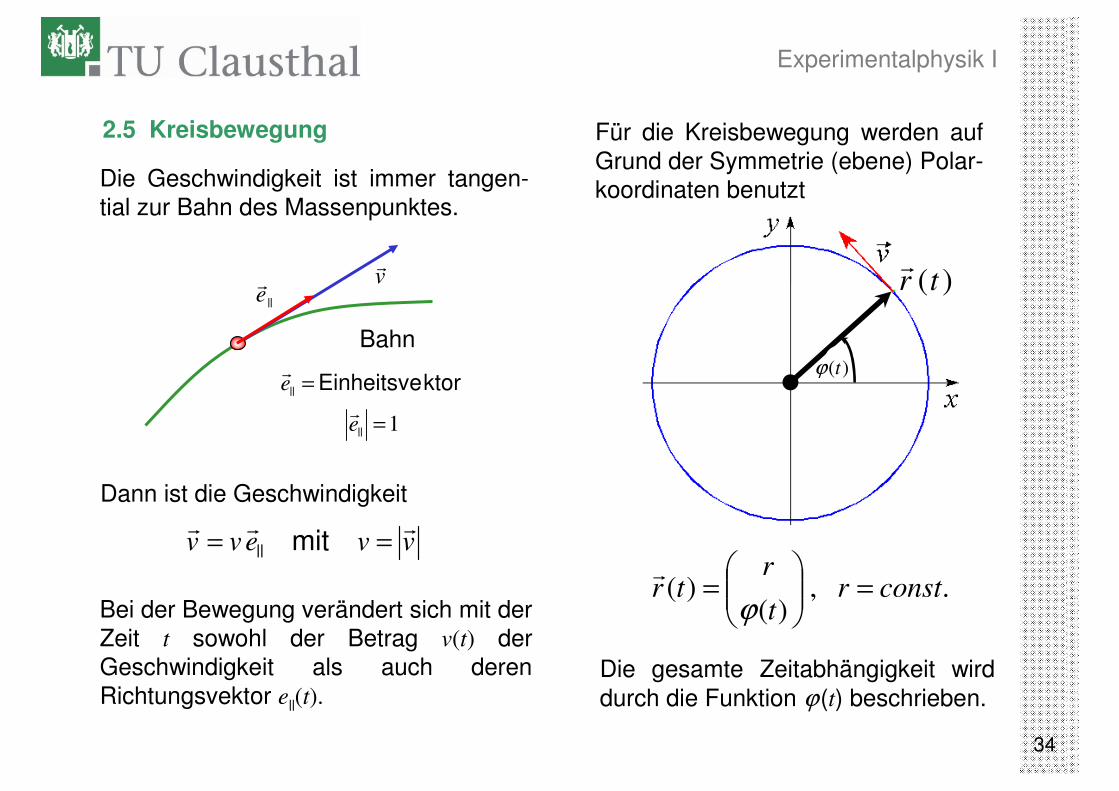
Die Geschwindigkeit ist immer tangen-tial zur Bahn des Massenpunktes.
Bahn
v�
||e�
1||
||
=
=
e
e�
�ktorEinheitsve
Dann ist die Geschwindigkeit
vvevv��� == mit||
Bei der Bewegung verändert sich mit der Zeit t sowohl der Betrag v(t) der Geschwindigkeit als auch deren Richtungsvektor e||(t).
2.5 Kreisbewegung
)(tr�
)(tϕ
Für die Kreisbewegung werden auf Grund der Symmetrie (ebene) Polar-koordinaten benutzt
.,)(
)( constrt
rtr =��
�
����
�=
ϕ�
Die gesamte Zeitabhängigkeit wird durch die Funktion ϕ (t) beschrieben.

35
Experimentalphysik I
Die Winkelgeschwindigkeit ω ist die Winkeländerung pro Zeit:
dttd
t)(
)(ϕω =
mit dem Kreisbogenabschnitt σ wird im Bogenmaß mit der Einheit rad (Radian) angegeben. Ein Winkel von 2π rad ent-spricht 360°im Gradmaß.
Die Bahngeschwindigkeit v ist der zu-rückgelegte Weg s pro Zeit, also
Meist wird die Größe ω als Kreis-frequenz (Einheit s-1) bezeichnet.
rdtd
rts
v ωϕ ===
Der Winkel
rs=ϕ
Der Vektor legt mit seiner Richtung die Drehachse der Rotation fest und mit seinem Betrag die (Kreis-) Frequenz.
ω�
Die Bahngeschwindigkeit ist dann:
rv��� ×= ω
ω�
v�
0
r�
ϕ
dtdϕω =
�
36
Experimentalphysik I
Im Falle einer gleichförmigen Kreisbe-wegung mit ω = const. wirkt nur die so genannte Zentripetalbeschleunigung az
)( rvaa z
������� ××=×== ωωω
Beispiel: Kurvenflug eines Düsenjets
Düsenjet fliege mit v0 = 2.000 km/h (Mach 2) eine Kurve mit Radius r = 5 km
gms 2- 3.67.61||2
2 ≈===rv
raz ω
Es wirkt mehr als die sechsfache Erdbe-schleunigung (g = 9.81 ms-2) auf den Piloten; bereits bei Beschleunigungen von mehr als 4g kommt es aufgrund von Blutmangel im Gehirn zur Ohnmacht.
Die Zentripetalbeschleunigung az zeigt zum Mittelpunkt der Kreisbahn, also entgegengesetzt zum Ortsvektor r.
2
2 )()()(
dttd
dttd
tϕωα ==
Zeigt der rechte (!) Daumen in Rich-tung von ω (Drehachse), so geben die Finger die Drehrichtung an.
Die Winkelbeschleunigung α ist defi-niert durch:
In vektorieller Schreibweise lautete die vorherige Beziehung also
rvrv������
,, ωω ⊥×= d.h.
Dagegen gilt für die Bahnbeschleuni-gung a:
vrdtrd
rdt
ddt
rddtvd
a
����
���
�
����
×+×=
×+×=
×==
ωα
ωω
ω )(


















