„JeT Challenge VDI/HsH Cup 2017“ - bbs-burgdorf.de · S. 20 Ausgleichsgetriebe S. 21 Brushless...
40
3 - Rad Bild: Dreiräder Wikipedia.de Stand 27.04.2017 Mo „JeT-Challenge VDI/HsH Cup 2017“
Transcript of „JeT Challenge VDI/HsH Cup 2017“ - bbs-burgdorf.de · S. 20 Ausgleichsgetriebe S. 21 Brushless...

3 - Rad
Bild: Dreiräder Wikipedia.de Stand 27.04.2017 Mo
„JeT-Challenge VDI/HsH Cup 2017“

Von der Idee zum 3-Rad - „Elektromobilität zum Anfassen“
Technische Anregungen zur Konstruktion eines ferngesteuerten 3-Rades
S. 2 Inhalt S. 3 JeT-Challenge VDI/HsH Cup 2017 S. 5 Fertigkeiten, Kompetenzen, Lerninhalte S. 8 Reglement in Kürze S. 9 Teamaufgaben S. 10 Beispiele: 3- Räder S. 11 Erwartungen S. 12 RC-Bauteile und Zubehör S. 13 Rad. – Antriebs. - Lenkkombinationen S. 14 Fahrwerk, Lenkung S. 15 Fahrdynamik – Spur, Sturz S. 16 Federn/Stoßdämpfer S. 17 Kraftübertragung S. 18 Antrieb Zahnräder S. 19 Übersetzungen/Geschwindigkeit S. 20 Ausgleichsgetriebe S. 21 Brushless Motor – In/Outrunner
S. 23 Brushless Regler S. 24 Brushless Regler - Programmierung S. 25 Fernbedienung, Lenkservo S. 26 Umgang mit LiPos S. 27 Beispiele LiPos / Ladegerät S. 28 Zubehör und Werkzeug S. 30 Starterkit „Carbon Fighter“ S. 31 Bedienungsanleitungen links S. 32 UniLog 2 u. LogView V2 Software S. 33 UniLog 2 Anschlussplan S. 34 Erste Schritte UniLog 2 S. 35 UniLog 2 Tool S. 36 Erste Schritte LogView V2 S. 37 LogView Ausdruck / Auswertung S. 38 Datenlogger Verkabelung Limiter S. 39 Optimierungsmaßnahmen S. 40 Kontakt – Technik-Hotline
3 - Rad
Veranstalter: Hochschule Hannover und VDI / JeT
Technische Unterstützung: Berufsbildende Schulen Burgdorf
Ort/Datum: IdeenExpo Hannover Messe H9 / 10.-18.06.2017
Ziel: Junge Menschen für Technik insbesondere für E-Mobilität zu begeistern
Aufgabe: Die Teams bauen im Vorfeld elektrisch angetriebene ferngesteuerte dreirädrige Autos im Maßstab von ca. 1:10 . Die auf Energie-Effizienz und Straßenlage optimierten Modelle beweisen am Wettbewerbstag:
1. Welche Energiemenge sie für eine definierte Fahrstrecke benötigen.
2. Wie schnell sie eine definierte Strecke zurücklegen können.
Neben den technischen Herausforderungen müssen die Lösungsansätze/Umsetzungen dokumentiert, eine Portfolio der Jury vorgelegt und vor Publikum präsentiert werden.
Näheres ist im Reglement „JeT Challenge VDI/HsH Cup“ des VDIs zu entnehmen.
„JeT-Challenge VDI/HsH Cup“
http://www.jet-online.net Fragen zum Reglement: [email protected]
3 - Rad
Technik-Hotline (bis 7.2017) : [email protected]
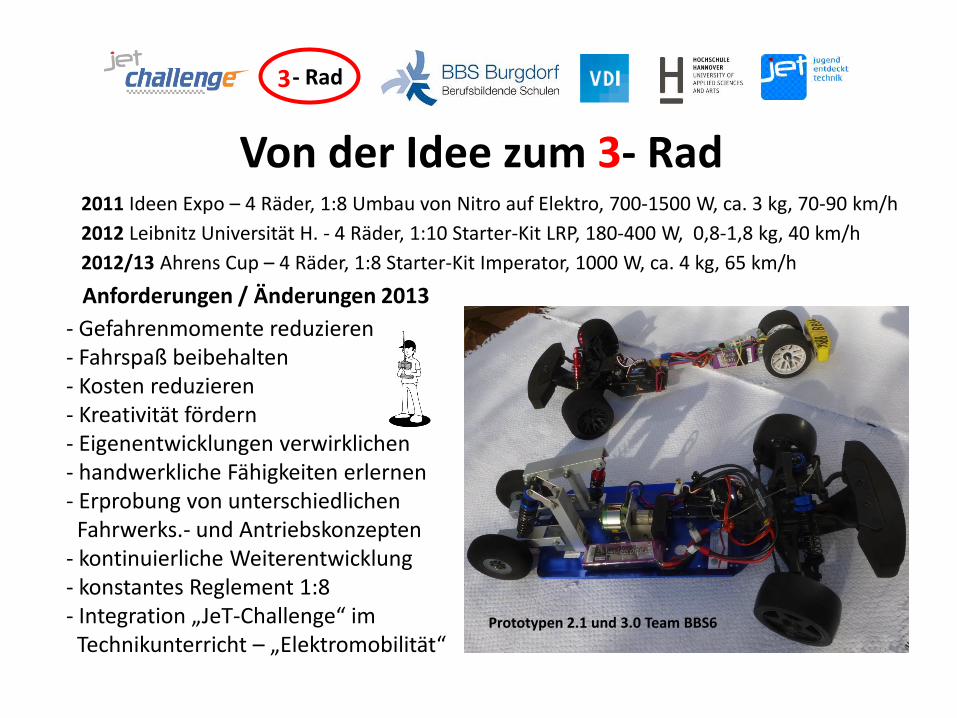
Anforderungen / Änderungen 2013
- Gefahrenmomente reduzieren - Fahrspaß beibehalten - Kosten reduzieren - Kreativität fördern - Eigenentwicklungen verwirklichen - handwerkliche Fähigkeiten erlernen - Erprobung von unterschiedlichen Fahrwerks.- und Antriebskonzepten - kontinuierliche Weiterentwicklung - konstantes Reglement 1:8 - Integration „JeT-Challenge“ im Technikunterricht – „Elektromobilität“
Von der Idee zum 3- Rad
Prototypen 2.1 und 3.0 Team BBS6
2011 Ideen Expo – 4 Räder, 1:8 Umbau von Nitro auf Elektro, 700-1500 W, ca. 3 kg, 70-90 km/h
2012 Leibnitz Universität H. - 4 Räder, 1:10 Starter-Kit LRP, 180-400 W, 0,8-1,8 kg, 40 km/h
2012/13 Ahrens Cup – 4 Räder, 1:8 Starter-Kit Imperator, 1000 W, ca. 4 kg, 65 km/h
3 - Rad
Bau eines RC - Fahrzeuges
Fertigkeiten, Kompetenzen, Lerninhalte
Nur das Zusammenspiel von Kompetenzen
1. im handwerklichen Bereich
2. in der Elektrotechnik
3. in der Mechanik
4. in der Gestaltung (Formen/Farben)
5. im Wirtschaftsbereich (Kosten/Zeitmanagement)
ermöglicht ein energieeffizientes und siegfähiges Fahrzeug.
3 - Rad
1. Handwerkliche Fertigkeiten Anreißen, Bohren, Senken, Feilen, Sägen, Fräsen (Langlöcher)
Blechschneiden (Halter), Biegen, Löten, Gewindeschneiden von Hand Messen, technische Zeichnungen lesen und erstellen
2. Elektrotechnik - Kabelquerschnitte berechnen (max. Strom, Steckverbindungen wählen)
- Akku (Aufbau, Energiedichte, Kapazität, max. Entladestrom, Ladestrom)
- Ladegeräte (Ladekennlinie, Ladezeit, Ladestrom) - Auswahl Elektromotor ( Brushless, Leistung, Drehzahl/Volt, Kennlinien)
- Auswahl Regler (Anforderungen, Programmierbarkeit)
- Einsatz Datenlogger (Strom.- , Drehzahl.- und Temperaturaufnahme)
- Limitereinsatz (Messergebnisse aufzeichnen und interpretieren)
- Schaltplan lesen, zeichnen, nach Schaltplan verkabeln - Auswahl Fernbedienung und Lenkservo (Empfänger/Sender, Sendefrequenz)
Fertigkeiten, Kompetenzen, Lerninhalte
3 - Rad
Fertigkeiten, Kompetenzen, Lerninhalte
3. Mechanik (Kraftübertragung)
- Übersetzung (Drehzahl, Drehmoment, Geschwindigkeit, Energieeffizienz)
- Aufbau und Funktion Achsdifferential (Ausgleichsgetriebe, Einsatz Allrad ?)
- Fahrwerk einstellen (Sturz, Spur, Bodenfreiheit, Spurverbreiterung ?)
- Federung und Dämpfung (Federrate, Ölauswahl/Viskosität)
- Auswahl und Montage von Kardanwellen, Riemen und Zahnrädern
- Lagerung von Wellen (Lagerausführung, Dimensionierung, Reibung)
- Auswahl Räder (Reifengröße, Profil, Gripp, Rollwiderstand)
4. Karosserie - Auswahl Materialien (Gewicht, Festigkeit, Haltbarkeit, Kosten, Bearbeitbarkeit)
- Auswahl Karosserie (Aerodynamik/Luftwiderstand inkl. Spoiler , Anpressdruck)
- Künstlerische Gestaltung (Design)
5. Finanzen (Wirtschaftlichkeit, Sponsorensuche, Kostenaufstellung, Zeitmanagement)
3 - Rad

Das technische Reglement „JeT-Challenge VDI/HSH Cup“ in Kürze
1. Definition: Abmaße 3- Rad:
Achse 1: Breite min. 220 mm, max. 280 mm (Radaußenflanken links und rechts)
Achse 2: Breite ≤ 50% der Breite von Achse 1 (2 Räder erlaubt max.140 mm)
Die Achsanordnung (Achse 1V / Achse 2H oder Achse 2V / Achse 1H ist freigestellt.
2. Achsabstand 300 – 350 mm
3. Bodenfreiheit ≥ 8 mm
4. Raddurchmesser Ø ≥ 60 mm
Radbreite ≥ 10 mm und ≤ 50 mm
5. Nur 2,4 GHz Fernbedienung zugelassen
6. Das Chassis ist mit einer Karosserie zu versehen.
7. Motoren, Regler und Spannungsversorgung sind nicht reglementiert.
8. Datenlogger und Stromsensor (Drehzahlsensor optional) müssen installiert werden können.
9. Eine Federung und Dämpfung der Räder ist nach Reglement nicht unbedingt erforderlich.
Prototyp 1.0 Team BBS6
3 - Rad
Teppich
1. Umbau eines Basisfahrzeuges bzw. Konstruktion eines Dreirades
2. Erstellen einer Portfolio
3. Ein Vortrag bzw. PPT Länge ca. 10 min.
4. Karosserie bzw. Fahrzeug ist zu designen.
5. Die Kosten sind zu dokumentieren.
6. Effizienzfahrt (kein Limitereinsatz)
2 Fahrern/innen müssen ca. 1000 m fahren. Es werden die dazu benötigte
Energiemenge und Zeit mit Hilfe des Datenloggers aufgezeichnet.
Außenmaße der Rennbahn ca. 17 ± 3 X 6 Meter, Bodenbelag – Teppich,
Umrandung der Bahn: Holzbalken mit Schaumstoff gepolstert
7. Ausscheidungsrennen: 2 Gegeneinander - 5 Runden (ca. 250 m)
8. Das Fahrzeug muss einer technischen Kommission vorgestellt werden.
Teamaufgaben
Teppich
3 - Rad

Beispiele: 3- Räder
Bilder 1-3: Robbe Info 2044 E-Ei
1
2
3
Prototyp 2.1 Team BBS6
Prototyp 2.0 Team BBS6 Hannover
Rotary Cup 2014
3
3 - Rad
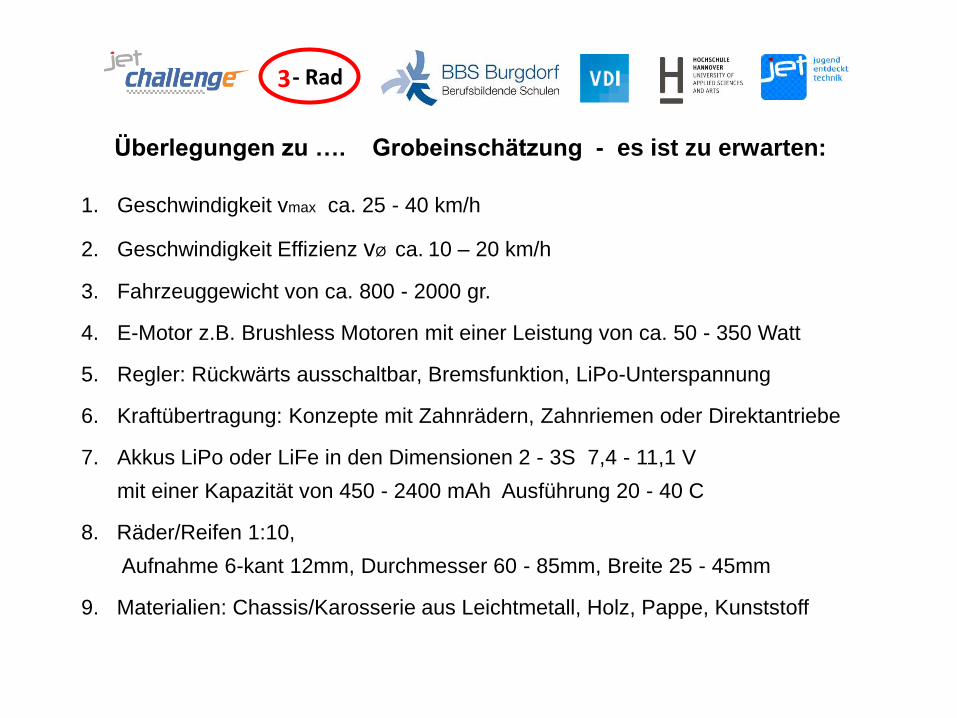
Überlegungen zu …. Grobeinschätzung - es ist zu erwarten:
1. Geschwindigkeit vmax ca. 25 - 40 km/h
2. Geschwindigkeit Effizienz vØ ca. 10 – 20 km/h
3. Fahrzeuggewicht von ca. 800 - 2000 gr.
4. E-Motor z.B. Brushless Motoren mit einer Leistung von ca. 50 - 350 Watt
5. Regler: Rückwärts ausschaltbar, Bremsfunktion, LiPo-Unterspannung
6. Kraftübertragung: Konzepte mit Zahnrädern, Zahnriemen oder Direktantriebe
7. Akkus LiPo oder LiFe in den Dimensionen 2 - 3S 7,4 - 11,1 V
mit einer Kapazität von 450 - 2400 mAh Ausführung 20 - 40 C
8. Räder/Reifen 1:10,
Aufnahme 6-kant 12mm, Durchmesser 60 - 85mm, Breite 25 - 45mm
9. Materialien: Chassis/Karosserie aus Leichtmetall, Holz, Pappe, Kunststoff
3 - Rad

RC-Bauteile und Zubehör
1 2
3
4 Bilder 1-4 www.sm-modellbau.de / UniLog2
Bilder: www.conrad.de / modellbau
3 - Rad
Hochstromstecker XT60
Hochstrombuchse XT60
Regler
Datenlogger
Temperatursensor
Drehzahlsensor brushless
LiPo, Ladekabel
Stromsensor 80A
E-Motor brushless Inrunner
Fernbedienung 2,4 GHz
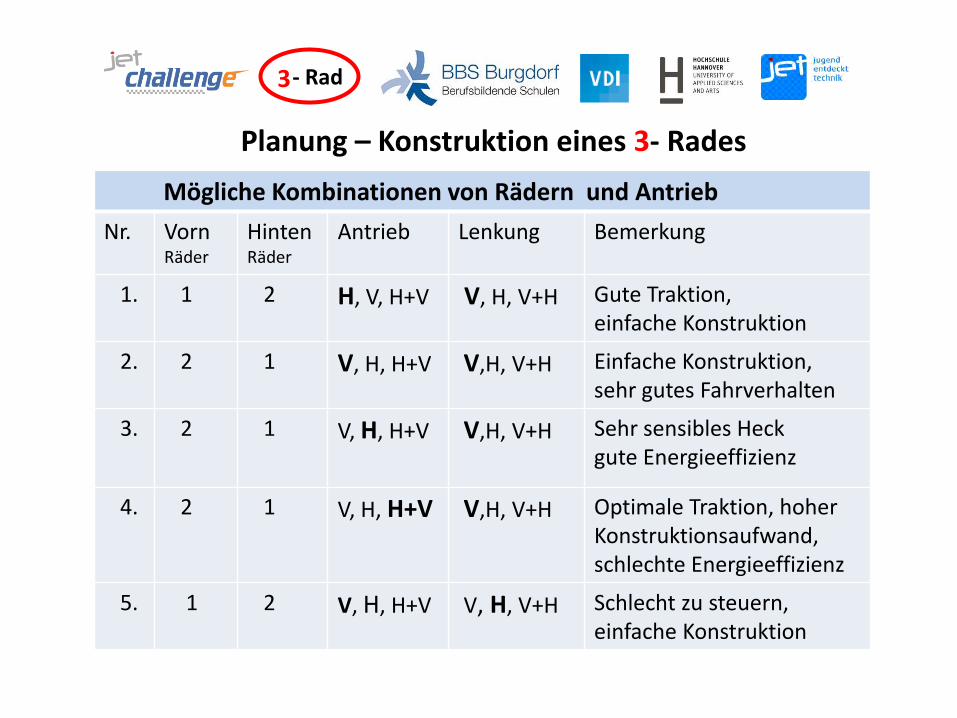
Planung – Konstruktion eines 3- Rades
Mögliche Kombinationen von Rädern und Antrieb
Nr. Vorn Räder
Hinten Räder
Antrieb Lenkung Bemerkung
1. 1 2 H, V, H+V V, H, V+H Gute Traktion, einfache Konstruktion
2. 2 1 V, H, H+V V,H, V+H Einfache Konstruktion, sehr gutes Fahrverhalten
3. 2 1 V, H, H+V V,H, V+H Sehr sensibles Heck gute Energieeffizienz
4. 2 1 V, H, H+V V,H, V+H Optimale Traktion, hoher Konstruktionsaufwand, schlechte Energieeffizienz
5. 1 2 V, H, H+V V, H, V+H Schlecht zu steuern, einfache Konstruktion
3 - Rad
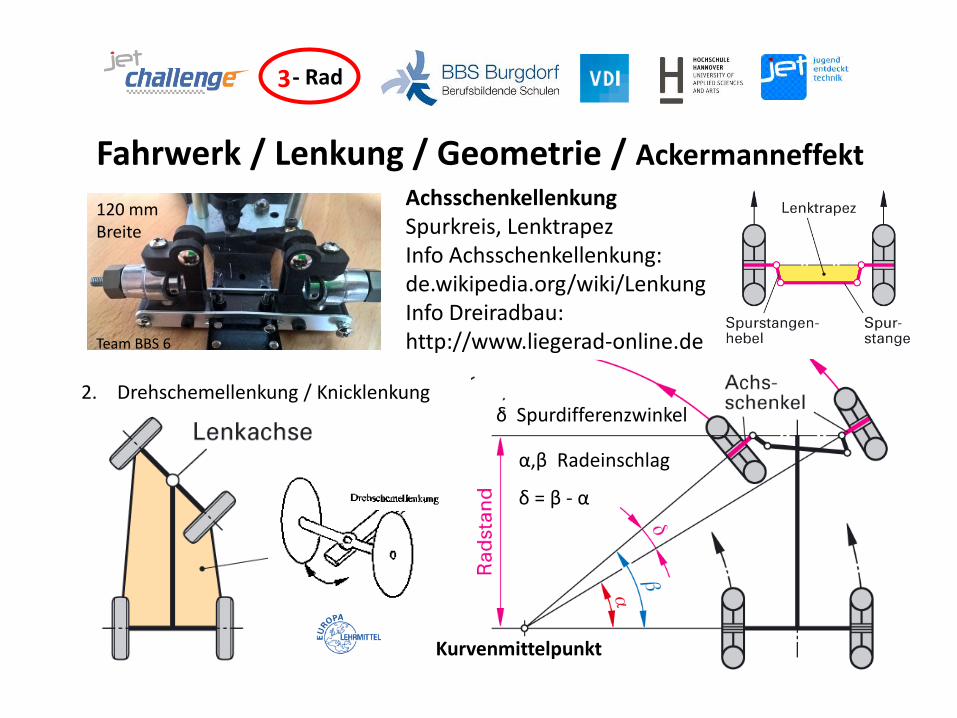
Fahrwerk / Lenkung / Geometrie / Ackermanneffekt
Kurvenmittelpunkt
δ Spurdifferenzwinkel 2. Drehschemellenkung / Knicklenkung
α,β Radeinschlag
δ = β - α
3 - Rad
Achsschenkellenkung Spurkreis, Lenktrapez Info Achsschenkellenkung: de.wikipedia.org/wiki/Lenkung Info Dreiradbau: http://www.liegerad-online.de
120 mm Breite
Team BBS 6
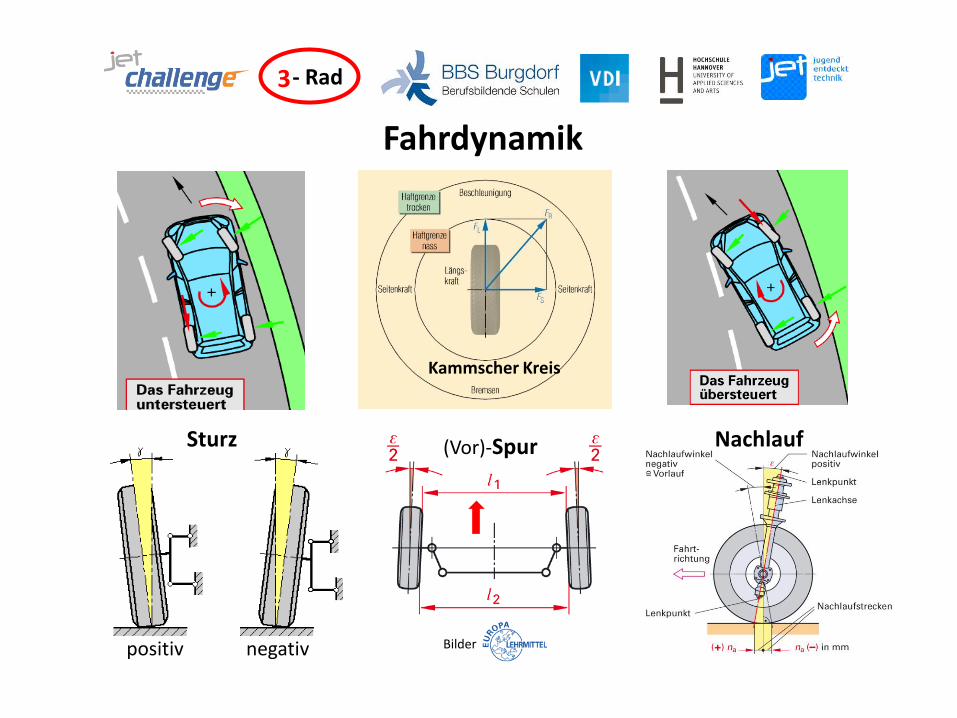
Sturz
Fahrdynamik
(Vor)-Spur
positiv negativ
Kammscher Kreis
3 - Rad
Nachlauf
Bilder
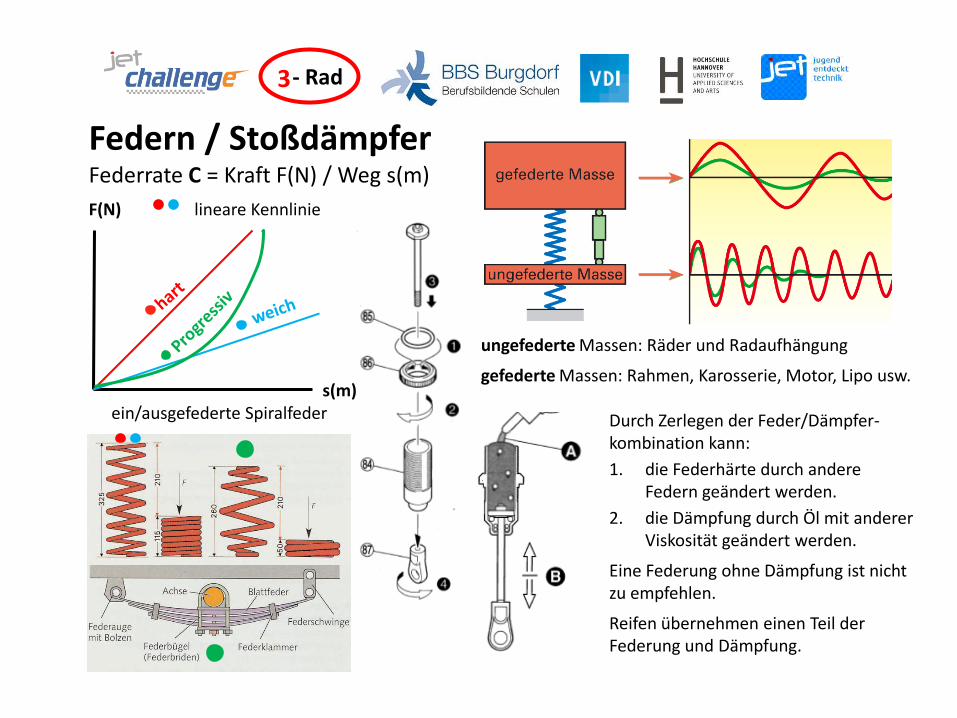
Federn / Stoßdämpfer
Durch Zerlegen der Feder/Dämpfer-kombination kann:
1. die Federhärte durch andere Federn geändert werden.
2. die Dämpfung durch Öl mit anderer Viskosität geändert werden.
Eine Federung ohne Dämpfung ist nicht zu empfehlen.
Reifen übernehmen einen Teil der Federung und Dämpfung.
3 - Rad
Federrate C = Kraft F(N) / Weg s(m)
s(m)
F(N) lineare Kennlinie
ein/ausgefederte Spiralfeder
ungefederte Massen: Räder und Radaufhängung
gefederte Massen: Rahmen, Karosserie, Motor, Lipo usw.
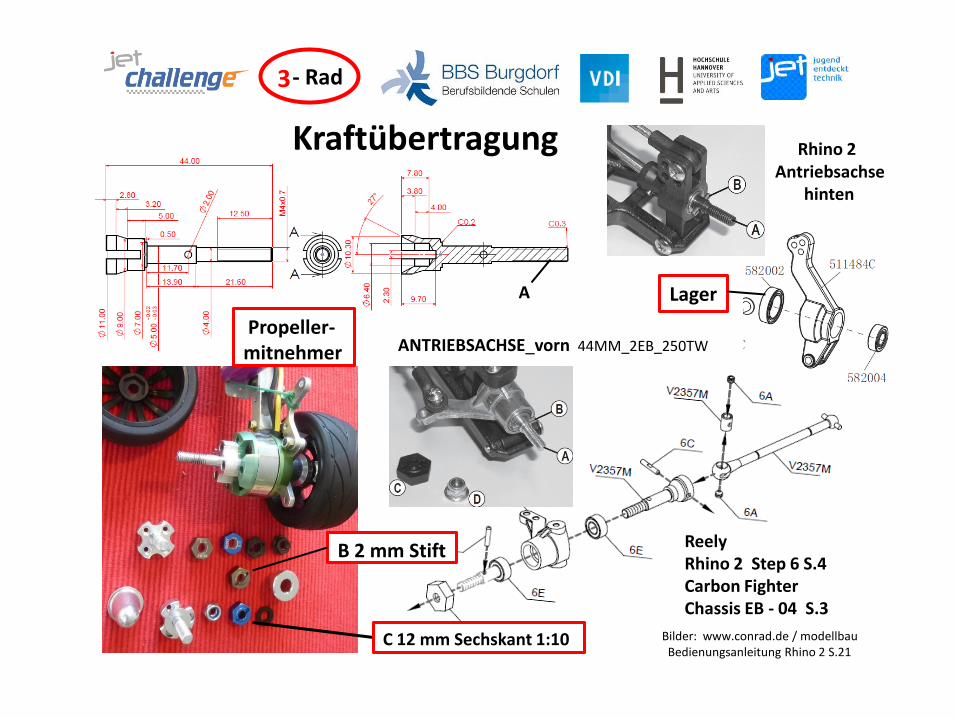
Bilder: www.conrad.de / modellbau Bedienungsanleitung Rhino 2 S.21
Reely Rhino 2 Step 6 S.4 Carbon Fighter Chassis EB - 04 S.3
ANTRIEBSACHSE_vorn 44MM_2EB_250TW
Kraftübertragung
Propeller- mitnehmer
Lager
B 2 mm Stift
A
Antriebsachse hinten
Rhino 2
3 - Rad
C 12 mm Sechskant 1:10

Antrieb - Zahnräder - Zahnriemen
1. Zahnräder: Zähnezahl, Modul, Durchmesser für Welle, Material
2. Zahnräder nur mit gleichen Modulen verwenden
3. Auf Spiel A (Papier) zwischen Zahnrädern achten
4. Schraubensicherung bei Madenschraube für Ritzel verwenden !!!
5. Motor mit Motorhalterung und Chassis fest verschrauben s.S.21 !!!
6. Zahnriemenspannung beachten (Spannvorrichtung einplanen)
Bilder: www.conrad.de / modellbau
A
3 - Rad
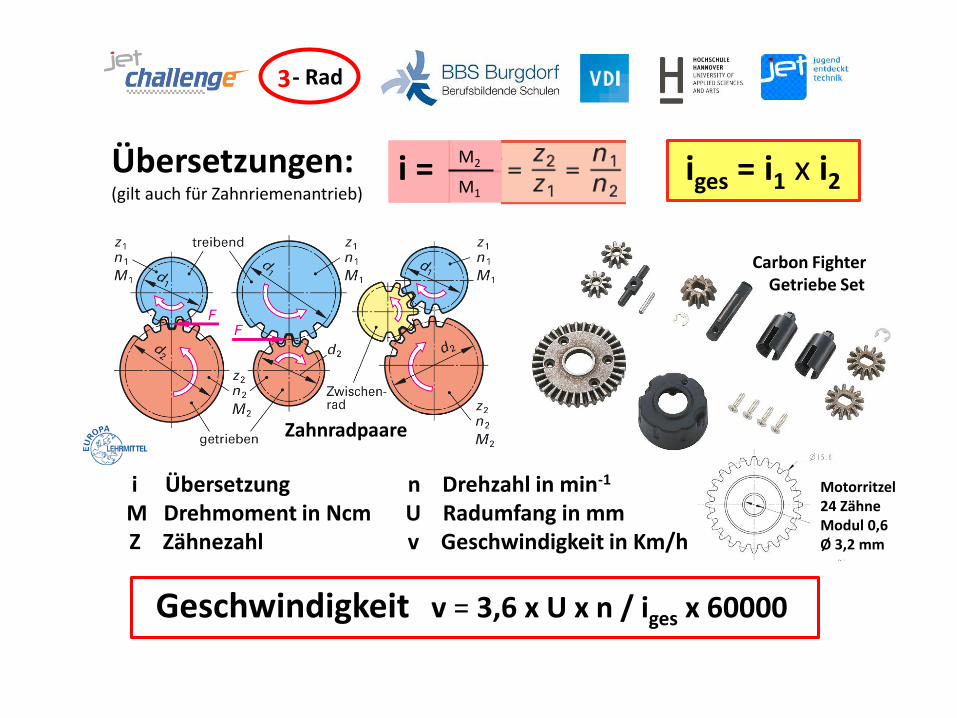
Übersetzungen: (gilt auch für Zahnriemenantrieb)
Geschwindigkeit v = 3,6 x U x n / iges x 60000
iges = i1 x i2
Zahnradpaare
i = M2
M1
i Übersetzung M Drehmoment in Ncm Z Zähnezahl
n Drehzahl in min-1
U Radumfang in mm v Geschwindigkeit in Km/h
Carbon Fighter Getriebe Set
Motorritzel 24 Zähne Modul 0,6 Ø 3,2 mm
3 - Rad
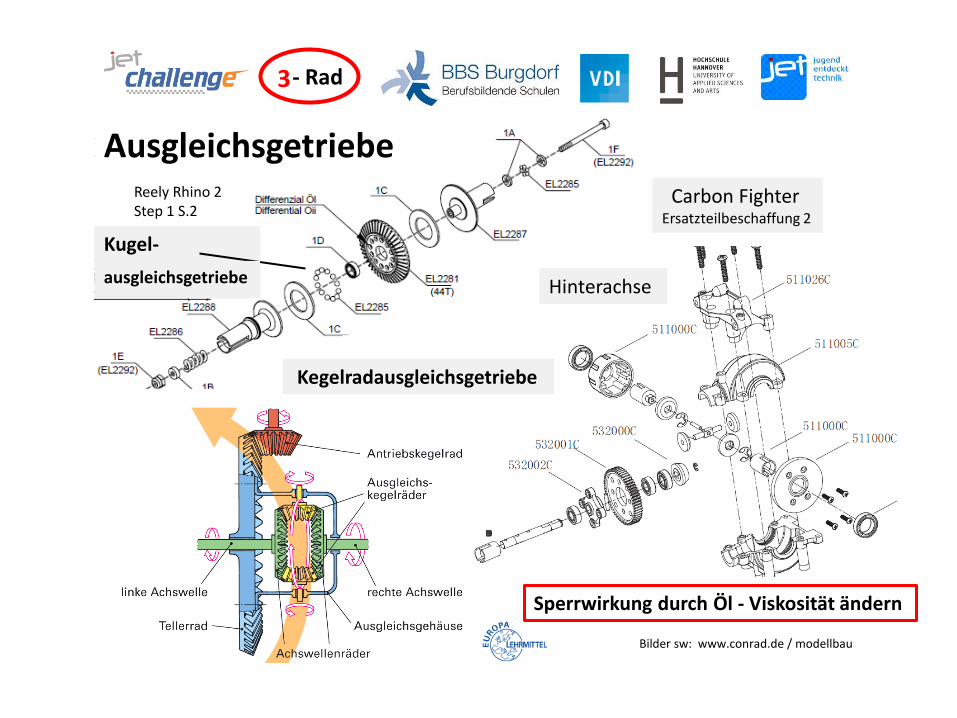
Kugel-
ausgleichsgetriebe
Ausgleichsgetriebe Reely Rhino 2 Step 1 S.2
Bilder sw: www.conrad.de / modellbau
Carbon Fighter Ersatzteilbeschaffung 2
Hinterachse
Kegelradausgleichsgetriebe
Sperrwirkung durch Öl - Viskosität ändern
3 - Rad
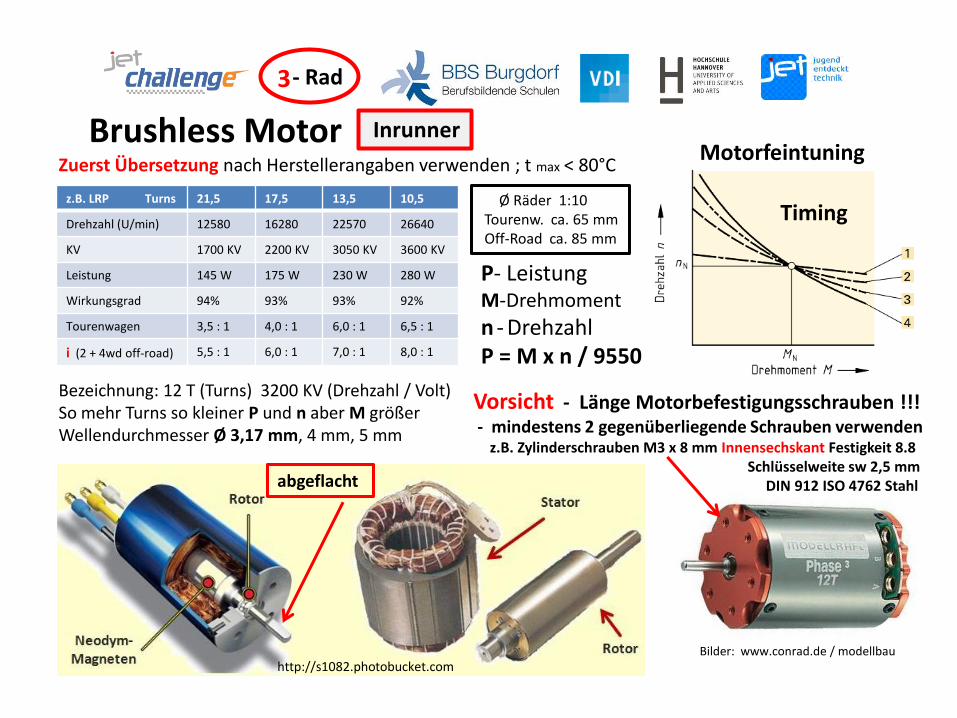
Brushless Motor
P = M x n / 9550
Bilder: www.conrad.de / modellbau
Timing
Bezeichnung: 12 T (Turns) 3200 KV (Drehzahl / Volt) So mehr Turns so kleiner P und n aber M größer Wellendurchmesser Ø 3,17 mm, 4 mm, 5 mm
Motorfeintuning
Vorsicht - Länge Motorbefestigungsschrauben !!! - mindestens 2 gegenüberliegende Schrauben verwenden z.B. Zylinderschrauben M3 x 8 mm Innensechskant Festigkeit 8.8 Schlüsselweite sw 2,5 mm DIN 912 ISO 4762 Stahl
Zuerst Übersetzung nach Herstellerangaben verwenden ; t max < 80°C
http://s1082.photobucket.com
Ø Räder 1:10 Tourenw. ca. 65 mm Off-Road ca. 85 mm
Inrunner
abgeflacht
3 - Rad
z.B. LRP Turns 21,5 17,5 13,5 10,5
Drehzahl (U/min) 12580 16280 22570 26640
KV 1700 KV 2200 KV 3050 KV 3600 KV
Leistung 145 W 175 W 230 W 280 W
Wirkungsgrad 94% 93% 93% 92%
Tourenwagen 3,5 : 1 4,0 : 1 6,0 : 1 6,5 : 1
i (2 + 4wd off-road) 5,5 : 1 6,0 : 1 7,0 : 1 8,0 : 1
P- Leistung M-Drehmoment
n - Drehzahl
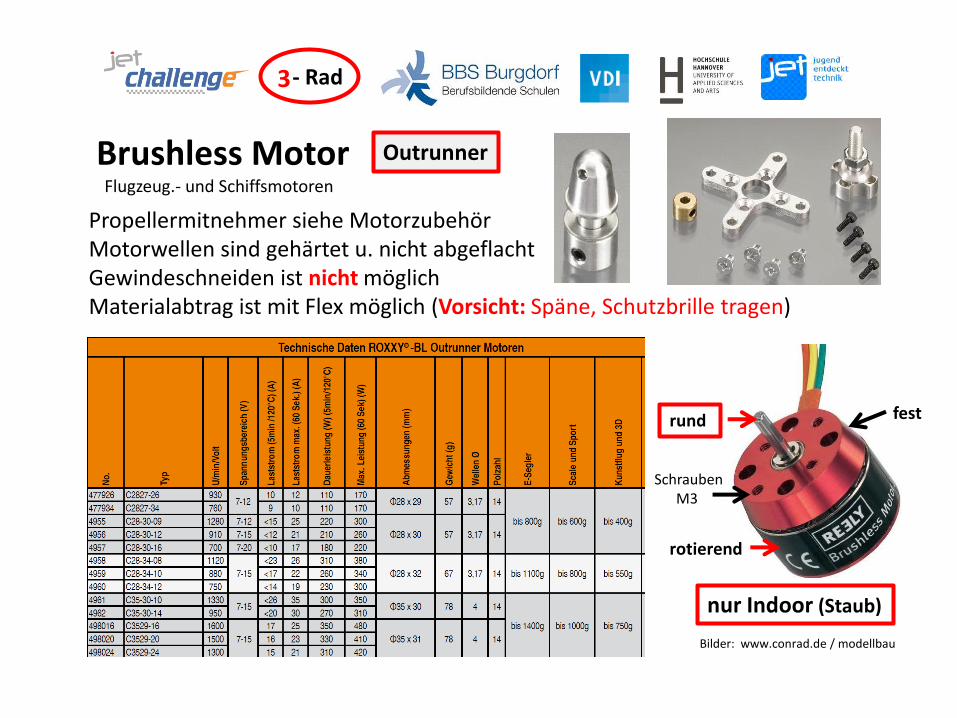
Brushless Motor Flugzeug.- und Schiffsmotoren
Bilder: www.conrad.de / modellbau
Outrunner
Propellermitnehmer siehe Motorzubehör Motorwellen sind gehärtet u. nicht abgeflacht Gewindeschneiden ist nicht möglich Materialabtrag ist mit Flex möglich (Vorsicht: Späne, Schutzbrille tragen)
rund
nur Indoor (Staub)
3 - Rad
rotierend
Schrauben M3
fest
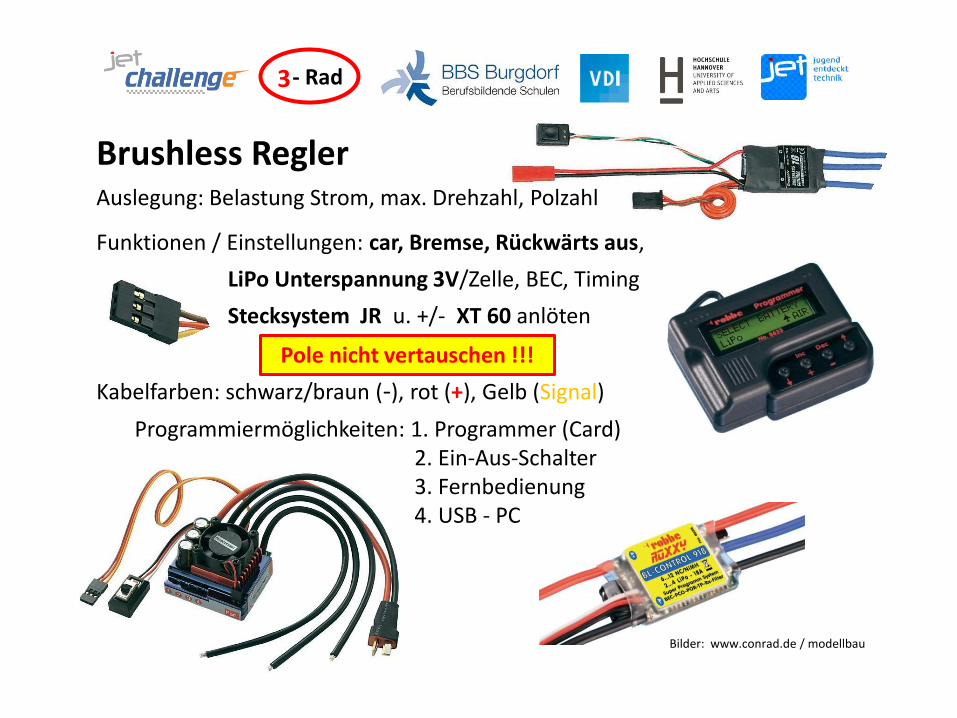
Brushless Regler Auslegung: Belastung Strom, max. Drehzahl, Polzahl
Funktionen / Einstellungen: car, Bremse, Rückwärts aus,
LiPo Unterspannung 3V/Zelle, BEC, Timing
Stecksystem JR u. +/- XT 60 anlöten
Kabelfarben: schwarz/braun (-), rot (+), Gelb (Signal)
Programmiermöglichkeiten: 1. Programmer (Card) 2. Ein-Aus-Schalter 3. Fernbedienung 4. USB - PC
Bilder: www.conrad.de / modellbau
Pole nicht vertauschen !!!
3 - Rad
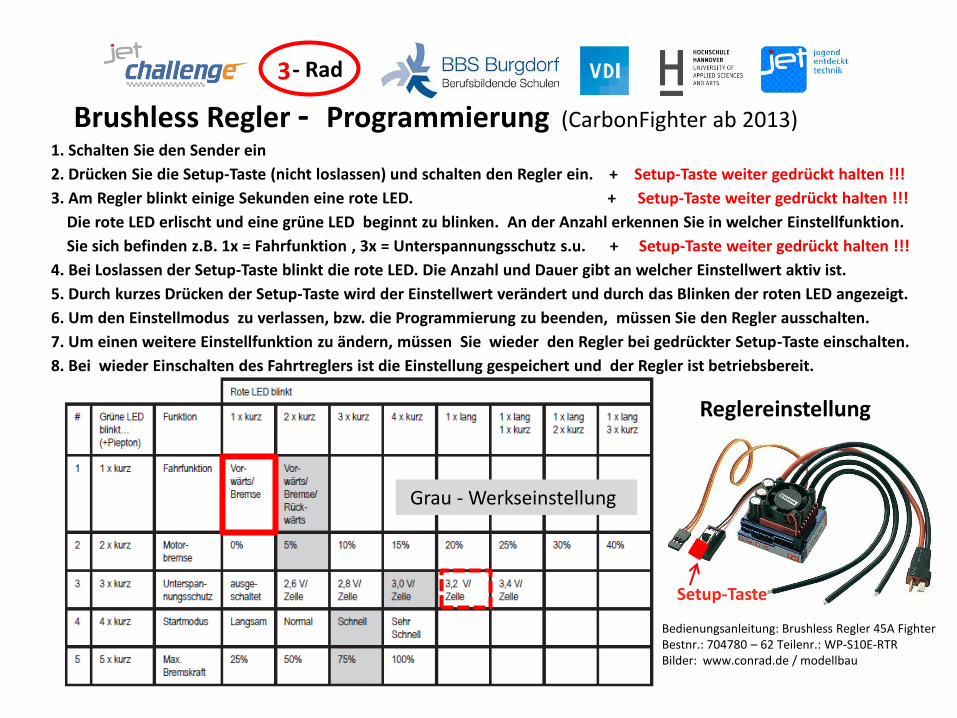
Brushless Regler - Programmierung (CarbonFighter ab 2013)
Bedienungsanleitung: Brushless Regler 45A Fighter Bestnr.: 704780 – 62 Teilenr.: WP-S10E-RTR Bilder: www.conrad.de / modellbau
1. Schalten Sie den Sender ein
2. Drücken Sie die Setup-Taste (nicht loslassen) und schalten den Regler ein. + Setup-Taste weiter gedrückt halten !!!
3. Am Regler blinkt einige Sekunden eine rote LED. + Setup-Taste weiter gedrückt halten !!!
Die rote LED erlischt und eine grüne LED beginnt zu blinken. An der Anzahl erkennen Sie in welcher Einstellfunktion.
Sie sich befinden z.B. 1x = Fahrfunktion , 3x = Unterspannungsschutz s.u. + Setup-Taste weiter gedrückt halten !!!
4. Bei Loslassen der Setup-Taste blinkt die rote LED. Die Anzahl und Dauer gibt an welcher Einstellwert aktiv ist.
5. Durch kurzes Drücken der Setup-Taste wird der Einstellwert verändert und durch das Blinken der roten LED angezeigt.
6. Um den Einstellmodus zu verlassen, bzw. die Programmierung zu beenden, müssen Sie den Regler ausschalten.
7. Um einen weitere Einstellfunktion zu ändern, müssen Sie wieder den Regler bei gedrückter Setup-Taste einschalten.
8. Bei wieder Einschalten des Fahrtreglers ist die Einstellung gespeichert und der Regler ist betriebsbereit.
Setup-Taste
Grau - Werkseinstellung
3 - Rad
Reglereinstellung

Lenkservo
z.B. Modelcraft MC 4519 ca.10 € Stell-Moment 4,8/6V 35/45 Ncm JR Stecksystem
Fernbedienung 2,4 GHz - Pistolengriff Set ab 35 € Empfänger / Programmier-Stecker
Bedienungsanleitung Modelcraft GT2 S.11
CH 3 Binding-Steckplatz
CH 2 Fahrtregler
CH 1 Lenk-Servo
Steckplätze Empfänger
Stecksystem JR / Futaba
2/3 Kanal ; 4 oder 8 Batterien
Binding - anlernen Sender / Empfänger siehe z.B. http://www.produktinfo.conrad.com/datenblaetter/200000-224999/207600-an-01-ml-PISTOLENGRIFF_ANL_GT2_2_4GHZ_de_en_fr_nl.pdf
Bilder: www.conrad.de / modellbau
Stecker JR / Futaba Nase manchmal entfernen
3 - Rad
Bilder: www.conrad.de / modellbau
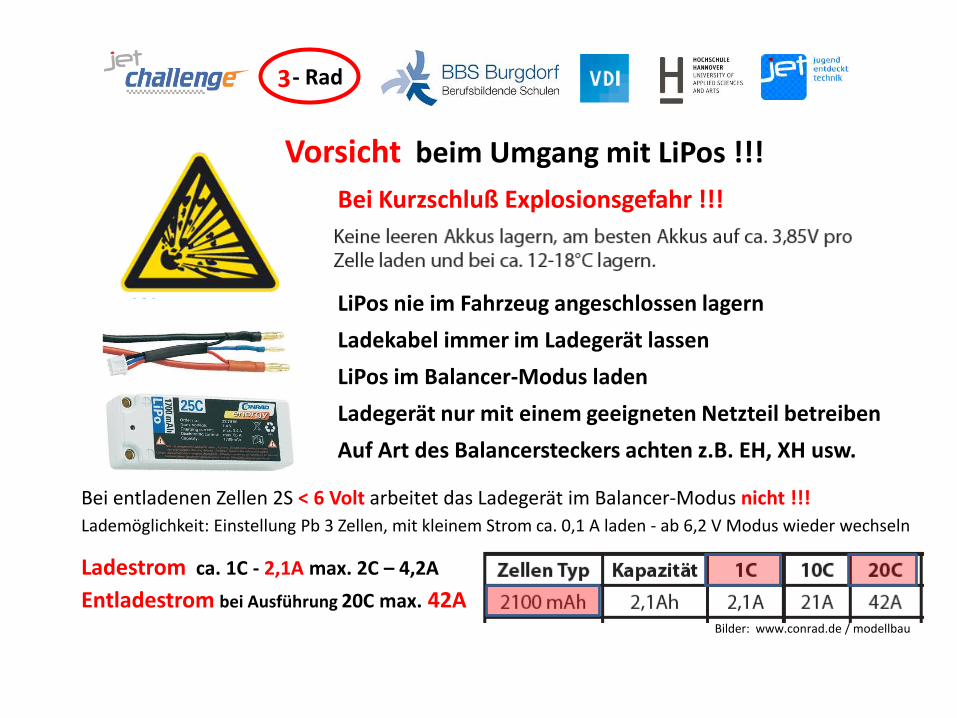
Vorsicht beim Umgang mit LiPos !!!
Bei Kurzschluß Explosionsgefahr !!!
LiPos nie im Fahrzeug angeschlossen lagern
Ladekabel immer im Ladegerät lassen
LiPos im Balancer-Modus laden
Ladegerät nur mit einem geeigneten Netzteil betreiben
Auf Art des Balancersteckers achten z.B. EH, XH usw.
Bei entladenen Zellen 2S < 6 Volt arbeitet das Ladegerät im Balancer-Modus nicht !!!
Lademöglichkeit: Einstellung Pb 3 Zellen, mit kleinem Strom ca. 0,1 A laden - ab 6,2 V Modus wieder wechseln
Ladestrom ca. 1C - 2,1A max. 2C – 4,2A
Entladestrom bei Ausführung 20C max. 42A
3 - Rad
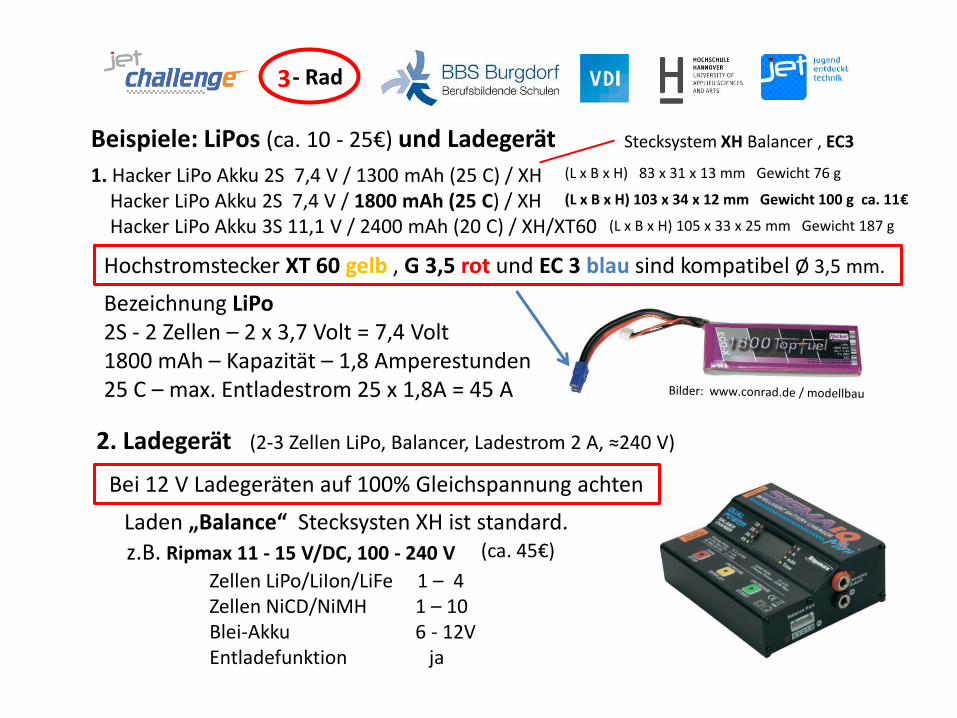
Beispiele: LiPos (ca. 10 - 25€) und Ladegerät
1. Hacker LiPo Akku 2S 7,4 V / 1300 mAh (25 C) / XH Hacker LiPo Akku 2S 7,4 V / 1800 mAh (25 C) / XH Hacker LiPo Akku 3S 11,1 V / 2400 mAh (20 C) / XH/XT60
z.B. Ripmax 11 - 15 V/DC, 100 - 240 V
(L x B x H) 103 x 34 x 12 mm Gewicht 100 g ca. 11€
Zellen LiPo/LiIon/LiFe 1 – 4 Zellen NiCD/NiMH 1 – 10 Blei-Akku 6 - 12V Entladefunktion ja
(L x B x H) 105 x 33 x 25 mm Gewicht 187 g
(L x B x H) 83 x 31 x 13 mm Gewicht 76 g
Bezeichnung LiPo 2S - 2 Zellen – 2 x 3,7 Volt = 7,4 Volt 1800 mAh – Kapazität – 1,8 Amperestunden 25 C – max. Entladestrom 25 x 1,8A = 45 A
Hochstromstecker XT 60 gelb , G 3,5 rot und EC 3 blau sind kompatibel Ø 3,5 mm.
(ca. 45€)
Bei 12 V Ladegeräten auf 100% Gleichspannung achten
2. Ladegerät (2-3 Zellen LiPo, Balancer, Ladestrom 2 A, ≈240 V)
Stecksystem XH Balancer , EC3
Laden „Balance“ Stecksysten XH ist standard.
3 - Rad
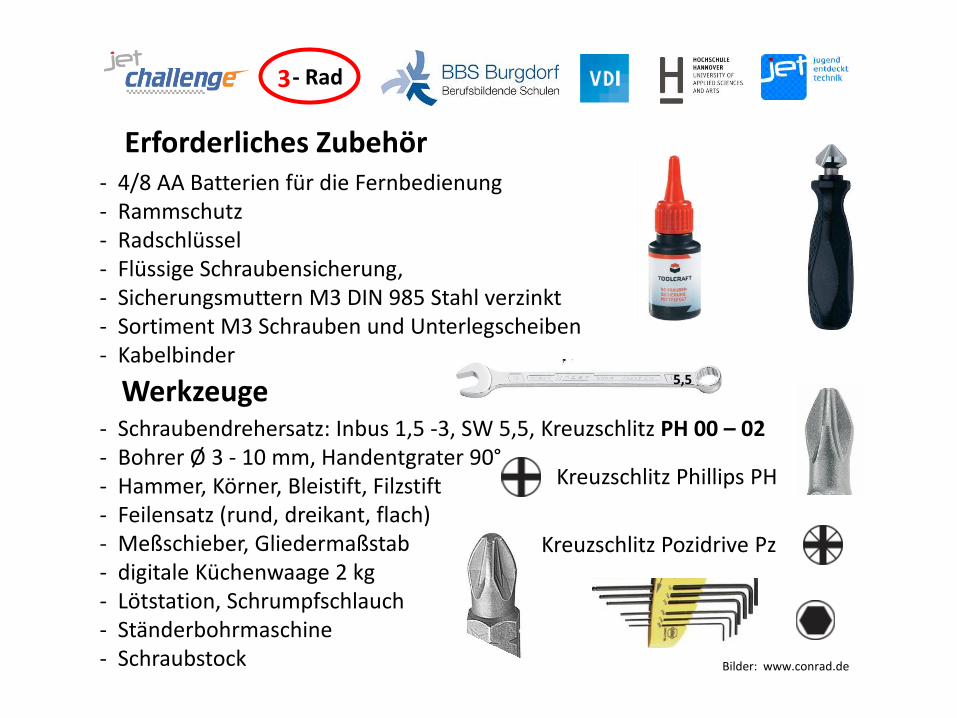
Erforderliches Zubehör - 4/8 AA Batterien für die Fernbedienung - Rammschutz - Radschlüssel - Flüssige Schraubensicherung, - Sicherungsmuttern M3 DIN 985 Stahl verzinkt - Sortiment M3 Schrauben und Unterlegscheiben - Kabelbinder
Werkzeuge - Schraubendrehersatz: Inbus 1,5 -3, SW 5,5, Kreuzschlitz PH 00 – 02 - Bohrer Ø 3 - 10 mm, Handentgrater 90° - Hammer, Körner, Bleistift, Filzstift - Feilensatz (rund, dreikant, flach) - Meßschieber, Gliedermaßstab - digitale Küchenwaage 2 kg - Lötstation, Schrumpfschlauch - Ständerbohrmaschine - Schraubstock
Kreuzschlitz Phillips PH
Kreuzschlitz Pozidrive Pz
5,5
Bilder: www.conrad.de
3 - Rad

Starter-Kits bzw. Basisfahrzeug
Carbon Fighter (III) Evo als Basisfahrzeug inkl. Karosserie
2,4Ghz Fernbedienung GT2 Evo, Regler Idauer = (45A) 50A
3215 kV Brushless-Motor für 2/3S (7,4/11,1V)
Radstand 300 mm, vmax 7,4V 45 Km/h, vmax 11,1V 60 Km/h
(L x B x H) 405 x 243 x 160 mm
Bilder: www.conrad.de / modellbau
3 - Rad
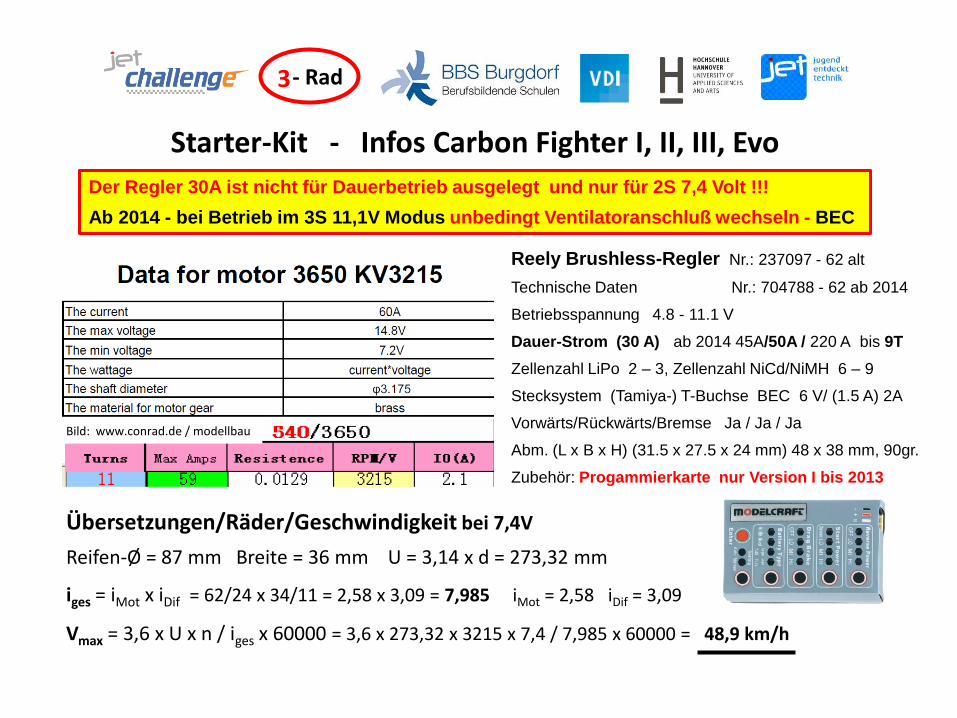
Starter-Kit - Infos Carbon Fighter I, II, III, Evo
Übersetzungen/Räder/Geschwindigkeit bei 7,4V
Reifen-Ø = 87 mm Breite = 36 mm U = 3,14 x d = 273,32 mm
iges = iMot x iDif = 62/24 x 34/11 = 2,58 x 3,09 = 7,985 iMot = 2,58 iDif = 3,09
Vmax = 3,6 x U x n / iges x 60000 = 3,6 x 273,32 x 3215 x 7,4 / 7,985 x 60000 = 48,9 km/h
Reely Brushless-Regler Nr.: 237097 - 62 alt
Technische Daten Nr.: 704788 - 62 ab 2014
Betriebsspannung 4.8 - 11.1 V
Dauer-Strom (30 A) ab 2014 45A/50A / 220 A bis 9T
Zellenzahl LiPo 2 – 3, Zellenzahl NiCd/NiMH 6 – 9
Stecksystem (Tamiya-) T-Buchse BEC 6 V/ (1.5 A) 2A
Vorwärts/Rückwärts/Bremse Ja / Ja / Ja
Abm. (L x B x H) (31.5 x 27.5 x 24 mm) 48 x 38 mm, 90gr.
Zubehör: Progammierkarte nur Version I bis 2013
Der Regler 30A ist nicht für Dauerbetrieb ausgelegt und nur für 2S 7,4 Volt !!!
Ab 2014 - bei Betrieb im 3S 11,1V Modus unbedingt Ventilatoranschluß wechseln - BEC
Bild: www.conrad.de / modellbau
3 - Rad
Produktinfos - Carbon Fighter I, II, (III), Evo Bedienungsanleitung - Carbon Fighter Evo Best.-Nr.: 1365900 - 62 http://www.produktinfo.conrad.com/datenblaetter/1300000-1399999/001365900-an-01-ml-1_10_ELEKTRO_BUGGY_CARBON_FI_de_en_fr_nl.pdf
Bedienungsanleitung – Modelcraft Fernsteueranlage GT2 Evo 2-Kanal 2,4 GHz http://www.produktinfo.conrad.com/datenblaetter/1300000-1399999/001302221-an-01-de-FERNSTEUERUNG_GT2_EVO_2_4_GHZ.pdf
EXPLOSIONSZEICHNUNG Carbon Fighter Evo http://www.produktinfo.conrad.com/datenblaetter/1300000-1399999/001365900-in-01-de-EXPLOSIONSZEICHNUNG_1_10_ELEKTRO_BUGGY_C.pdf
Bedienungsanleitung – Carbon Fighter Best.-Nr.: 238111 – 62 [Teilenr: FS53618] http://www.produktinfo.conrad.com/datenblaetter/225000-249999/238111-an-01-ml-ELEK_CARBON_FIGHTER_BL4WDRTR_de_en_fr_nl.pdf
Ersatzteile, Teile.-/Bestellnummern, Baupläne - Carbon Fighter http://www.produktinfo.conrad.com/datenblaetter/225000-249999/238111-el-01-de-ELEKTRO_CARBON_FIGHTER_BL_4WD_RTR.pdf
Bedienungsanleitung - Reely Brushless-Regler Bestnr.: 704780 – 62 Teilenr.: WP-S10E-RTR http://www.conrad.de/ce/de/product/704788/Reely-Brushless-Regler-Figter-45A-Belastbarkeit-220--45-A-Motorlimit-9-Turns?ref=list
Bedienungsanleitung - Reely Brushless-Regler Bestnr.: 237097 – 62 Teilenr.: 511439 alt http://www.produktinfo.conrad.com/datenblaetter/225000-249999/237097-an-01-ml-Brushless_Fahrtregler_de_en_fr_nl.pdf
Bedienungsanleitung – Modelcraft Fernsteueranlage GT2 2-Kanal 2,4 GHz http://www.produktinfo.conrad.com/datenblaetter/200000-224999/207600-an-01-ml-PISTOLENGRIFF_ANL_GT2_2_4GHZ_de_en_fr_nl.pdf
Reely Brushless-Motor 7.2 - 14.8 V/DC Rpm. 23148 (bei 7.2 V) U/min Turns 11 http://www.produktinfo.conrad.com/datenblaetter/225000-249999/237096-da-01-en-ET_BRUSHLESS_MOTOR_TC_04_EB_04.pdf
3 - Rad
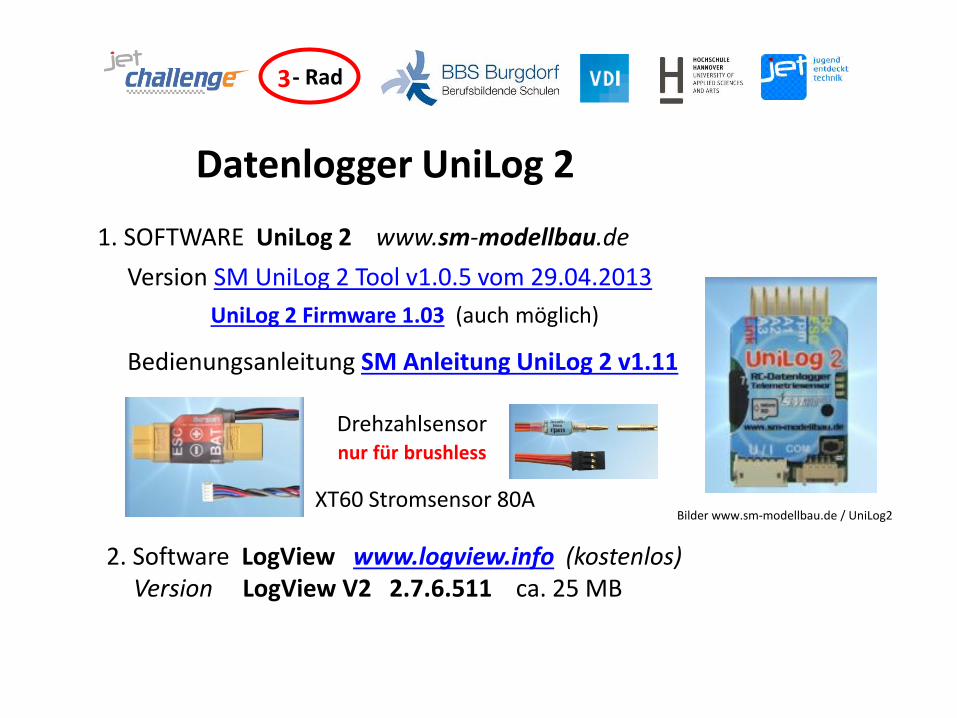
1. SOFTWARE UniLog 2 www.sm-modellbau.de
Version SM UniLog 2 Tool v1.0.5 vom 29.04.2013
UniLog 2 Firmware 1.03 (auch möglich)
Bedienungsanleitung SM Anleitung UniLog 2 v1.11
Drehzahlsensor
2. Software LogView www.logview.info (kostenlos) Version LogView V2 2.7.6.511 ca. 25 MB
Bilder www.sm-modellbau.de / UniLog2 XT60 Stromsensor 80A
Datenlogger UniLog 2
nur für brushless
3 - Rad
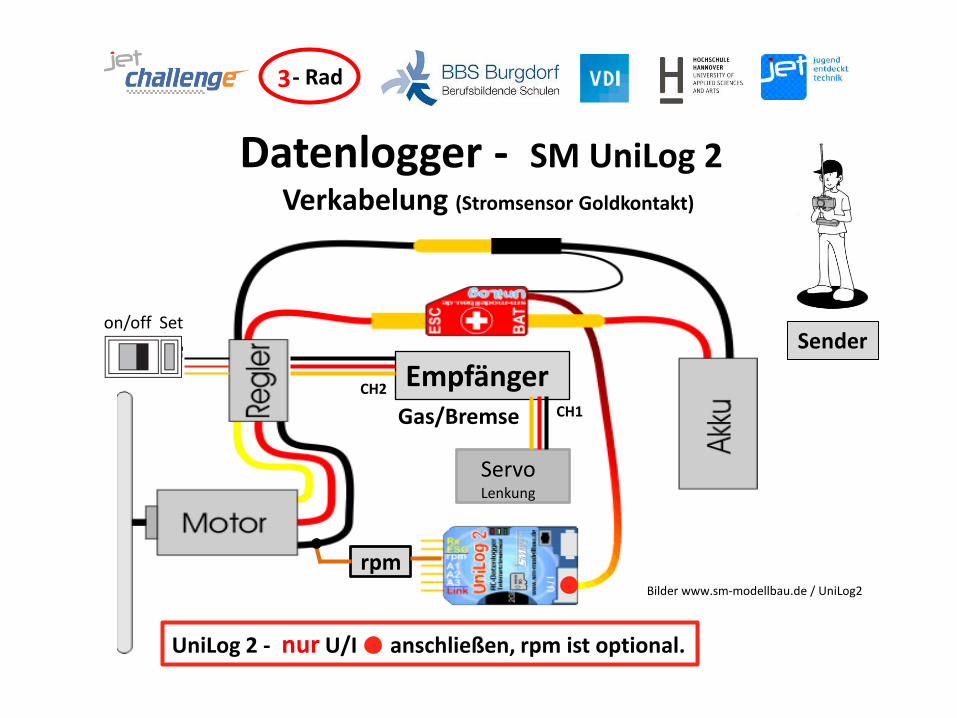
Datenlogger - SM UniLog 2 Verkabelung (Stromsensor Goldkontakt)
Empfänger
Bilder www.sm-modellbau.de / UniLog2
Gas/Bremse
Sender
rpm
Servo Lenkung
UniLog 2 - nur U/I anschließen, rpm ist optional.
CH1
CH2
3 - Rad
on/off Set
Erste Schritte - SM UniLog 2 1. UniLog 2 auf PC installieren
2. MicoSD-card mit PC konfigurieren (s. UniLog 2 Tool)
Seriennummer und Firmware werden automatisch geladen
Datenrate 10 Hz oder 20 Hz wählen
Polanzahl vom Motor müssen für Drehzahlbestimmung eingegeben werden
Limiter aus, Stromstart 1A empfohlen
3. MicoSD-card in UniLog 2 stecken und Spannungsversorgung Auto herstellen
Rote LED muß ausgehen, grüne LED leuchten
4. Start über Knopf UniLog 2 oder über Strom > 1 A
5. Fahren, Anhalten und über Knopf Datenaufnahme unterbrechen,
bei Stromunterbrechung werden die Maximalwerte nicht seperat abgerufen.
3 - Rad
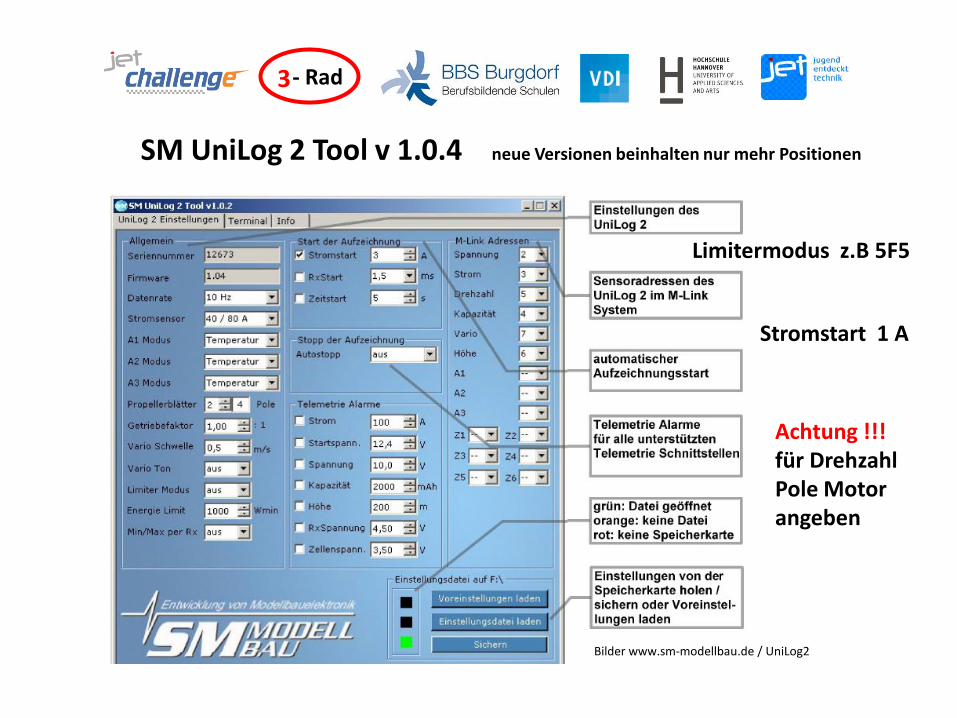
SM UniLog 2 Tool v 1.0.4 neue Versionen beinhalten nur mehr Positionen
Limitermodus z.B 5F5
Stromstart 1 A
Achtung !!! für Drehzahl Pole Motor angeben
Bilder www.sm-modellbau.de / UniLog2
3 - Rad
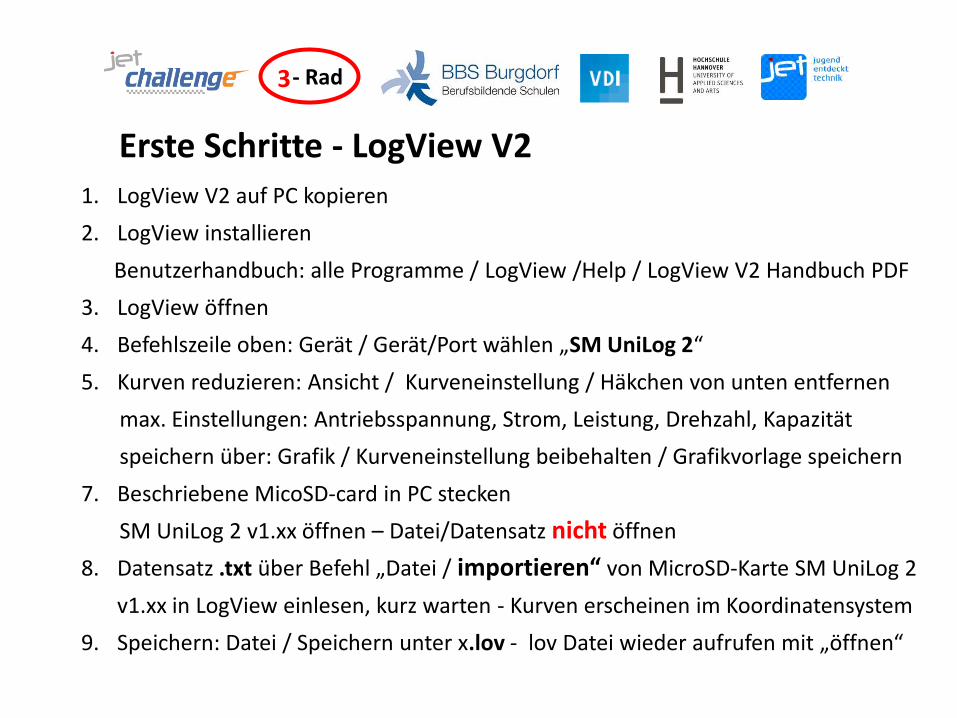
Erste Schritte - LogView V2 1. LogView V2 auf PC kopieren
2. LogView installieren
Benutzerhandbuch: alle Programme / LogView /Help / LogView V2 Handbuch PDF
3. LogView öffnen
4. Befehlszeile oben: Gerät / Gerät/Port wählen „SM UniLog 2“
5. Kurven reduzieren: Ansicht / Kurveneinstellung / Häkchen von unten entfernen
max. Einstellungen: Antriebsspannung, Strom, Leistung, Drehzahl, Kapazität
speichern über: Grafik / Kurveneinstellung beibehalten / Grafikvorlage speichern
7. Beschriebene MicoSD-card in PC stecken
SM UniLog 2 v1.xx öffnen – Datei/Datensatz nicht öffnen
8. Datensatz .txt über Befehl „Datei / importieren“ von MicroSD-Karte SM UniLog 2
v1.xx in LogView einlesen, kurz warten - Kurven erscheinen im Koordinatensystem
9. Speichern: Datei / Speichern unter x.lov - lov Datei wieder aufrufen mit „öffnen“
3 - Rad
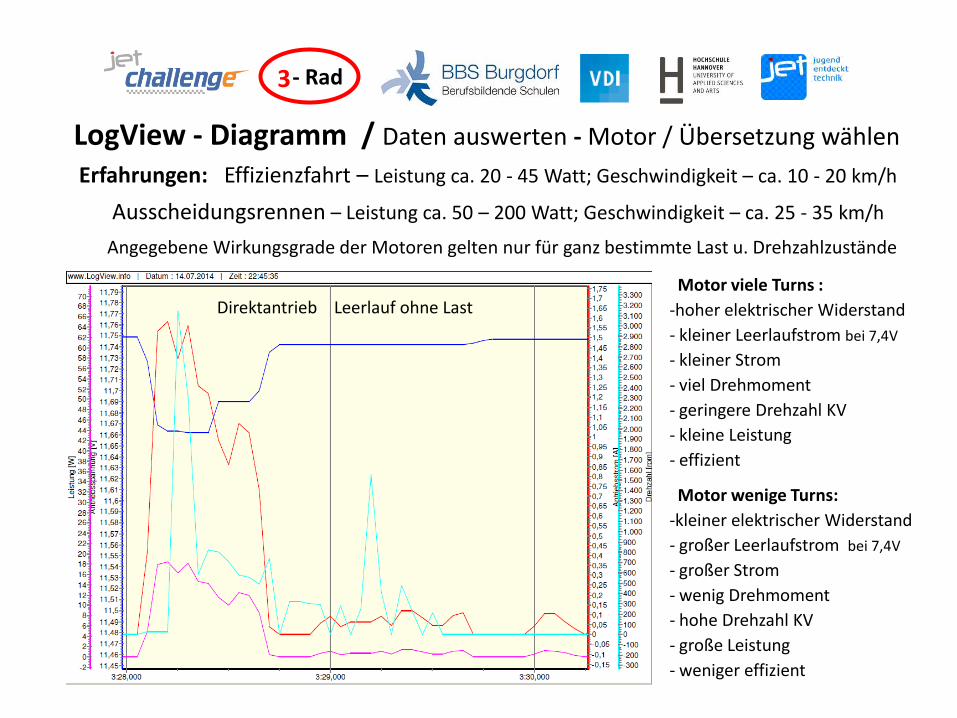
LogView - Diagramm / Daten auswerten - Motor / Übersetzung wählen
Direktantrieb Leerlauf ohne Last
3 - Rad
Erfahrungen: Effizienzfahrt – Leistung ca. 20 - 45 Watt; Geschwindigkeit – ca. 10 - 20 km/h
Ausscheidungsrennen – Leistung ca. 50 – 200 Watt; Geschwindigkeit – ca. 25 - 35 km/h
Angegebene Wirkungsgrade der Motoren gelten nur für ganz bestimmte Last u. Drehzahlzustände
Motor viele Turns :
-hoher elektrischer Widerstand
- kleiner Leerlaufstrom bei 7,4V
- kleiner Strom
- viel Drehmoment
- geringere Drehzahl KV
- kleine Leistung
- effizient
Motor wenige Turns:
-kleiner elektrischer Widerstand
- großer Leerlaufstrom bei 7,4V
- großer Strom
- wenig Drehmoment
- hohe Drehzahl KV
- große Leistung
- weniger effizient
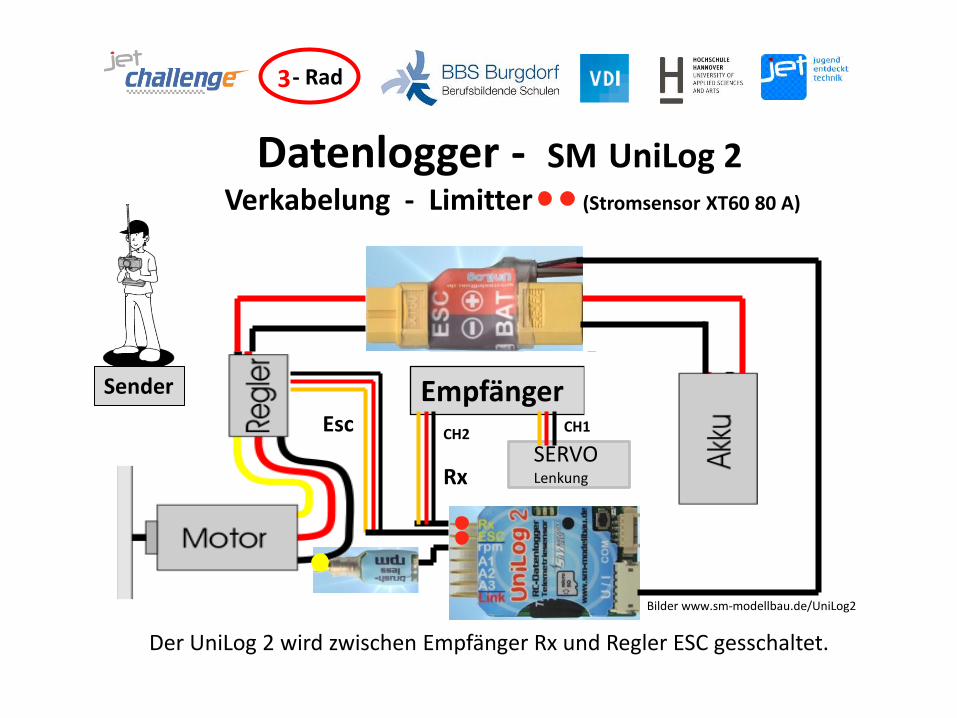
Datenlogger - SM UniLog 2 Verkabelung - Limitter (Stromsensor XT60 80 A)
Empfänger
Rx
Esc
Bilder www.sm-modellbau.de/UniLog2
Sender
SERVO Lenkung
CH1 CH2
3 - Rad
Der UniLog 2 wird zwischen Empfänger Rx und Regler ESC gesschaltet.
Optimierungsmaßnahmen
1. Gewichtsreduzierung – Standfestigkeit ?
z.B. Chassis, Räder, Akkugröße
2. Gewichtsverteilung (Schwerpunkt)
3. Fahrwerkseinstellung: Sturz, Spur, Federung, Dämpfung
4. Daten vom UniLog 2 auswerten und Übersetzung / Geschwindigkeit
anpassen - Zahnräder und Raddurchmesser variieren
5. Motor/Regler-Kombination bei Bedarf ändern
6. Motor-Timing einstellen (Inrunner 0-15°; Outrunner 0-30°)
7. Fernbedienung: Einstellungen an Fahrstil anpassen
8. Optik / Design
3 - Rad

Konzept „3 - Rad“ OStR Jürgen Molsbach Technische Unterstützung Berufsbildende Schulen Burgdorf
Gib Gas – hab Spaß
Bild: Dreiräder Wikipedia.de
Technik-Hotline (bis 7.2017) : [email protected]
3 - Rad