Kapitel 6 Reelle und komplexe FunktionenKapitel 6 Reelle und komplexe Funktionen 6.1 Stetigkeit Sei...
57
Kapitel 6 Reelle und komplexe Funktionen 6.1 Stetigkeit Sei f eine Funktion und sei x ein Punkt ihres Definitionsbereiches. Sagen wir, dass diese Funktion stetig an der Stelle x ist, so verstehen wir darunter anschaulich, dass der Funktionswert f (t) sich beliebig wenig von f ( x) unterscheidet, wenn nur t hinreichend nahe bei x ist. Wir sehen, dass man diesem Begriff Sinn geben kann, wenn man verlangt, dass Definitionsbereich und Wertebereich der betrachteten Funktion metrische Räume sind. 6.1.1 Definition. Seien X, d X und Y , d Y metrische Räume, D ⊆ X und f : D → Y eine Funktion. f heißt stetig an einer Stelle x ∈ D, wenn gilt ∀> 0 ∃δ> 0: d Y ( f (t), f ( x)) < für alle t ∈ D mit d X (t, x) <δ, oder äquivalent dazu, wenn ∀> 0 ∃δ> 0: f (U X δ ( x) ∩ D) ⊆ U Y ( f ( x)) . Ist f an jeder Stelle x ihres Definitionsbereiches D stetig, so heißt f stetig auf D. Die Menge aller stetigen Funktionen von X nach Y wird mit C(X, Y ) bezeichnet. 6.1.2 Beispiel. (i) Sei f : X → Y die konstante Funktion f ( x):= y 0 , x ∈ X. Dann ist f stetig, denn ist x ∈ X und > 0, so wähle etwa δ = 1. Für alle t ∈ X mit d X (t, x) <δ gilt sicher d Y ( f (t), f ( x)) = d Y (y 0 , y 0 ) = 0 <. (ii) stetig. Um das einzusehen seien x ∈ X und > 0 gegeben. Mit δ = folgt für alle t ∈ X, d X (t, x) <δ, dass d X ( f (t), f ( x)) = d X (t, x) <δ = .
Transcript of Kapitel 6 Reelle und komplexe FunktionenKapitel 6 Reelle und komplexe Funktionen 6.1 Stetigkeit Sei...

Kapitel 6
Reelle und komplexe Funktionen
6.1 StetigkeitSei f eine Funktion und sei x ein Punkt ihres Definitionsbereiches. Sagen wir, dassdiese Funktion stetig an der Stelle x ist, so verstehen wir darunter anschaulich, dass derFunktionswert f (t) sich beliebig wenig von f (x) unterscheidet, wenn nur t hinreichendnahe bei x ist. Wir sehen, dass man diesem Begriff Sinn geben kann, wenn man verlangt,dass Definitionsbereich und Wertebereich der betrachteten Funktion metrische Räumesind.
6.1.1 Definition. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, D ⊆ X und f : D→ Y eineFunktion. f heißt stetig an einer Stelle x ∈ D, wenn gilt
∀ε > 0∃δ > 0 : dY( f (t), f (x)) < ε für alle t ∈ D mit dX(t, x) < δ ,
oder äquivalent dazu, wenn
∀ε > 0∃δ > 0 : f (UXδ (x) ∩ D) ⊆ UY
ε ( f (x)) .
Ist f an jeder Stelle x ihres Definitionsbereiches D stetig, so heißt f stetig auf D. DieMenge aller stetigen Funktionen von X nach Y wird mit C(X,Y) bezeichnet.
6.1.2 Beispiel.
(i) Sei f : X → Y die konstante Funktion f (x) := y0, x ∈ X. Dann ist f stetig, denn istx ∈ X und ε > 0, so wähle etwa δ = 1. Für alle t ∈ X mit dX(t, x) < δ gilt sicher
dY( f (t), f (x)) = dY(y0, y0) = 0 < ε .
(ii) stetig. Um das einzusehen seien x ∈ X und ε > 0 gegeben. Mit δ = ε folgt für allet ∈ X, dX(t, x) < δ, dass
dX( f (t), f (x)) = dX(t, x) < δ = ε .

166 6 Reelle und komplexe Funktionen
f (x)
x
f (x) + ε
f (x) − ε
x − δ x + δ
Abbildung 6.1: ε-δ-Kriterium für f : I (⊆ R)→ R
(iii) Allgemeiner gilt, dass jede isometrische Abbildung 1 f : X → Y stetig ist, da zux ∈ X und ε > 0 mit δ = ε wieder für alle t ∈ X, dX(t, x) < δ
dY( f (t), f (x)) = dX(t, x) < δ = ε .
(iv) Die Einbettungsabbildungen ιyj : R → Rp für j = 1, . . . , p und für y ∈ Rp definiertdurch
ξ 7→ (0, . . . , ξ − y j︸︷︷︸j−te Stelle
, 0 . . . , 0) + y
sind isometrisch und daher stetig, wenn man R und Rp mit d2 versieht. Insbesonderesind die Abbildungen ι1 : R→ C, x 7→ x + i0 und ι2 : R→ C, y 7→ 0 + iy stetig.
(v) Die Abbildung z 7→ z als Funktion auf C ist isometrisch und daher stetig.
(vi) Sei f : C→ R die Funktion z 7→ |z|. Dann ist f stetig. Denn bei gegebenen z ∈ C undε > 0 wähle δ := ε. Für alle w ∈ Cmit |w−z| < δ gilt wegen der Dreiecksungleichungnach unten
| f (w) − f (z)| =∣∣∣|w| − |z|
∣∣∣ ≤ |w − z| < δ = ε .
(vii) Sei π j : Rp → R, j = 1, . . . , p, die Funktion x = (xi)pi=1 7→ x j. Diese ist überall stetig,
denn bei gegebenen (xi)pi=1 ∈ Rp und ε > 0 wähle δ = ε. Für alle (ti)
pi=1 ∈ Rp mit
d2((xi)pi=1, (ti)
pi=1) < δ gilt
|x j − t j| ≤ d2((xi)pi=1, (ti)
pi=1) < ε .
Genauso zeigt man, dass auch die Abbildungen π j : Cp → C, j = 1, . . . , p, definiertdurch z = (zi)
pi=1 7→ z j stetig sind, wobei Cp und C mit d2 versehen sind; vgl. Beispiel
3.1.5, (iii).
1 Isometrisch bedeutet dY ( f (x), f (y)) = dX(x, y).

6.1 Stetigkeit 167
(viii) Sei f : R→ R die Funktion f (x) := bxc. Dabei bezeichnet b.c wieder die Gaußklam-mer. Diese Funktion ist stetig an jeder Stelle x ∈ R \Z, und nicht stetig an jeder Stellex ∈ Z:
Ist x ∈ R \Z, und ist ε > 0 gegeben, so wähle δ > 0, sodass das Intervall (x− δ, x + δ)keine ganze Zahl enthält. Dann ist f auf (x − δ, x + δ) konstant, und somit gilt
| f (t) − f (x)| = 0 < ε, falls |t − x| < δ .Ist dagegen x ∈ Z, so enthält das Intervall (x− δ, x + δ) für jedes δ > 0 sowohl Zahlent, die größer als x sind, als auch Zahlen t, die kleiner als x sind. Nun ist aber für t− < xsicher f (t−) < f (x) und – da ja beide Werte ganze Zahlen sind – | f (t−) − f (x)| ≥ 1.Wir können also für kein ε mit 0 < ε ≤ 1 ein δ finden, das der geforderten Bedingunggenügt.
6.1.3 Fakta. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, x ∈ D ⊆ X und f : D→ Y eineFunktion.
1. Unmittelbar aus der Definition der Stetigkeit folgt, dass die Stetigkeit bei x einelokale Eigenschaft ist. Also ist f bei x genau dann stetig, wenn es ein ρ > 0 gibt,sodass f |Uρ(x)∩D stetig bei x ist.
2. Ist x ein isolierter Punkt von D, dann ist f immer stetig bei x. Ist nämlich δ > 0,sodass Uδ(x) ∩ D = {x}, dann folgt f (Uδ(x) ∩ D) = { f (x)} ⊆ Uε( f (x)) für beliebigesε > 0.
3. Ist f : D→ Y stetig auf D, so sicherlich auch f |C auf jeder Teilmenge C ⊆ D. Alsosind Einschränkungen stetiger Abbildungen wieder stetig.
Nun wollen wir die Stetigkeit an einer Stelle mit Hilfe verschiedener Grenzwertbegriffecharakterisieren.
6.1.4 Proposition. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, D ⊆ X, und f : D → Yeine Funktion. Ist x ∈ D ein fester Punkt, dann sind folgende Aussagen äquivalent.
(i) f ist stetig an der Stelle x.
(ii) Ist x kein isolierter Punkt, so gilt limt→x f (t) = f (x), wobei wir diesen Limes verstehenals Limes des Netzes ( f (t))t∈D\{x}, wo D \ {x} mit der Relation
t � u :⇔ dX(u, x) ≤ dX(t, x)
zu einer gerichteten Menge wird, vgl. Definition 5.5.2.
(iii) Für jede Folge (tn)n∈N aus D \ {x} mit limn→∞ tn = x gilt limn→∞ f (tn) = f (x).
(iv) Für jede Folge (tn)n∈N aus D mit limn→∞ tn = x gilt limn→∞ f (tn) = f (x).
(v) Für jedes Netz (ti)i∈I aus D mit limi∈I ti = x gilt limi∈I f (ti) = f (x).

168 6 Reelle und komplexe Funktionen
Beweis.
(i)⇔ (ii): Im Falle, dass x ein isolierter Punkt von D ist, wissen wir schon, dass f bei xstetig ist.
Sei also x ∈ D Häufungspunkt von D. Die Stetigkeit von f an der Stelle x bedeutetnach Definition
∀ε > 0∃δ > 0 : dY( f (t), f (x)) < ε für alle t ∈ D mit dX(t, x) < δ .
Die Beziehung limt→x f (t) = f (x) bedeutet gemäß Definition 5.5.2,
∀ε > 0∃δ > 0 : dY( f (t), f (x)) < ε für alle t ∈ D \ {x} mit dX(t, x) < δ .
Wegen dX(t, x) = 0 für t = x sind diese beiden Aussagen äquivalent.
(ii)⇔ (iii): Das haben wir schon Korollar 5.5.4 gesehen.
(v)⇒ (iv)⇒ (iii): (iv) ist Spezialfall von (v) und genauso (iii) von (iv).
(i)⇒ (v): Sei ε > 0, dann gibt es ein δ > 0 mit f (Uδ(x)) ⊆ Uε( f (x)). Sei nun i0 ∈ I mitxi ∈ Uδ(x), i � i0. Für diese i folgt f (xi) ∈ Uε( f (x)), und daraus die behaupteteGrenzwertbeziehung. q
6.1.5 Korollar. Sind f , g : D → Y beide stetig und gilt f (x) = g(x) für alle x in einerTeilmenge E ⊆ D, so gilt auch f (x) = g(x) für alle x ∈ c(E) ∩ D.Insbesondere stimmen zwei stetige f und g auf D überein, wenn sie das nur auf einerdichten Teilmenge E von D tun.
Beweis. Zu x ∈ D ∩ c(E) gibt es eine Folge (xn)n∈N in E ⊆ D, sodass xn → x. Wegenf (xn) = g(xn) und aus der Stetigkeit beider Funktionen folgt
f (x) = limn→∞
f (xn) = limn→∞
g(xn) = g(x) . q
Viele stetige Funktionen lassen sich mit Hilfe des nächsten Lemmas als solche identifizie-ren.
6.1.6 Lemma. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, D ⊆ X, E ⊆ Y und f : D→ Yund g : E → Z mit f (D) ⊆ E. Ist f bei x ∈ D und g bei f (x) stetig, so ist g ◦ f : D → Zbei x stetig.
Beweis. Zu ε > 0 gibt es wegen der Stetigkeit von g ein γ > 0, sodass g(Uγ( f (x)) ∩ E) ⊆Uε
(g( f (x))
), und wegen der Stetigkeit von f ein δ > 0, sodass f (Uδ(x) ∩ D) ⊆ Uγ( f (x)).
Setzt man das zusammen und beachtet, dass auch f (Uδ(x)∩D) ⊆ f (D) ⊆ E, so erhält man
(g ◦ f )(Uδ(x) ∩ D) ⊆ g(Uγ( f (x)) ∩ E
) ⊆ Uε
(g( f (x))
). q

6.1 Stetigkeit 169
6.1.7 Beispiel. Aus den Rechenregeln für Folgen in Satz 3.3.5 folgern wir mit Hilfe derFolgencharakterisierung der Stetigkeit, Proposition 6.1.4, (iv), dass die algebraischenOperationen
+ :{
R2 → R ,(x, y) 7→ x + y , − :
{R → R ,x 7→ −x ,
· :{
R2 → R ,(x, y) 7→ x · y , .−1 :
{R \ {0} → R \ {0} ,
x 7→ 1x ,
stetig sind. Genauso sind die algebraischen Operationen auf C stetig. Hier sind R,R2,C,C2
alle mit der euklidischen Metrik d2 versehen2.
6.1.8 Korollar. Sei 〈X, d〉 ein metrischer Raum, x ∈ D ⊆ X, λ ∈ R, und seien f , g : D→ RFunktionen.
� Die Abbildung t 7→ ( f (t), g(t)) von D nach R2 ist genau dann bei x stetig, wenn fund g es sind.
� Sind f und g stetig bei x, so auch die Abbildungen
t 7→ λ · f (t), t 7→ f (t) + g(t), t 7→ f (t)g(t)
von D nach R.
� Ist f bei x stetig, und gilt f (t) , 0, t ∈ D, so ist auch t 7→ 1f (t) von D nach R bei x
stetig.
Dieselben Aussagen sind wahr, wenn f und g komplexwertig sind.
Beweis. Für eine beliebige Folge (xn)n∈N aus D mit limn→∞ xn = x gilt gemäß Propo-sition 3.6.1, dass limn→∞ f (xn) = f (x) und limn→∞ g(xn) = g(x) genau dann, wennlimn→∞( f (xn), g(xn)) = ( f (x), g(x)). Wegen Proposition 6.1.4, (iv), folgt daher die ers-te Behauptung.Für bei x stetige f und g sind t 7→ f (t)+g(t), t 7→ f (t)·g(t) und t 7→ 1
f (t) Zusammensetzungenvon einer bei x stetigen und einer überall stetigen Funktion. Zum Beispiel ist t 7→ f (t)g(t)die Zusammensetzung von t 7→ ( f (t), g(t)) und (u, v) 7→ uv; siehe Beispiel 6.1.7. Jedeskonstante g(t) = λ, t ∈ D, ist stetig, wodurch sich auch die Stetigkeit von t 7→ λ · f (t)ergibt. q
6.1.9 Bemerkung. Mit fast identer Argumentation sieht man, dass für Abbildungenf1, . . . , fp : D → R mit x ∈ D ⊆ X für einen metrischen Raum X genau dann allediese Abbildungen stetig bei x sind, wenn die Abbildung t 7→ ( f1(t), . . . , fp(t)) von D nachRp stetig bei x ist. Diese Feststellung können wir auch so formulieren, dass eine Abbildungφ : D→ Rp genau dann stetig ist, wenn alle Abbildungen π j ◦ φ : D→ R für j = 1, . . . , pstetig sind; vgl. Beispiel 6.1.2. Entsprechendes gilt für Abbildungen f1, . . . , fp : D→ C.
2 Diese Feststellung gilt für den reellen Fall auch, wenn man d1 oder d∞ hernimmt; vgl. Proposition 3.6.1.

170 6 Reelle und komplexe Funktionen
6.1.10 Beispiel.
(i) Weil x 7→ x als Abbildung von R nach R stetig ist, folgt mit Korollar 6.1.8 nacheinan-der auch die Stetigkeit der Abbildungen x 7→ x · x, x 7→ x · x · x usw. . Also sind dieAbbildungen x 7→ xm von R nach R für jedes m ∈ N stetig genauso wie die konstanteAbbildung x 7→ x0 := 1.
Wieder mit einigen Anwendungen von Korollar 6.1.8 folgt, dass für jedes Polynom pmit reellen Koeffizienten an, . . . , a0 ∈ R die Abbildung
x 7→ p(x) = anxn + · · · + a0
von R nach R stetig ist. Für zwei Polynome p und q mit reellen Koeffizientenbetrachten wir die rationale Funktion f : D → R definiert durch f (x) =
p(x)q(x) mit
D = {x ∈ R : q(x) , 0}. Wegen Fakta 6.1.3, 3, sind p|D und q|D stetig und wegenKorollar 6.1.8 auch f 3.
(ii) Für ein Polynom p mit komplexen Koeffizienten an, . . . , a0 ∈ C können wir dieAbbildung z 7→ anzn + · · · + a0 = p(z) als Abbildung von C nach C betrachten. Manzeigt wie im vorherigen Beispiel, dass auch diese Abbildung stetig ist.
Für zwei Polynome p und q mit komplexen Koeffizienten ist die rationale Funktionf : D→ C definiert durch f (z) =
p(z)q(z) mit D = {z ∈ C : q(z) , 0} ebenfalls stetig.
(iii) Für zwei Polynome p und q mit komplexen Koeffizienten sind auch die Funktionenx 7→ p(x) und x 7→ q(x) als Abbildungen von R nach C sowie x 7→ p(x)
q(x) als Abbildun-gen von {x ∈ R : q(x) , 0} von R nach C stetig, denn sie lassen sich schreiben alsZusammensetzung der stetigen Abbildung ι1 : x 7→ x + i0 und der entsprechendenFunktion aus dem letzten Punkt.
(iv) Da für ein lineares Funktional f : Rp → R der Ausdruck f (x) als Linearkombina-tion der Einträge von x ∈ Rp geschrieben werden kann, folgt leicht mit Hilfe vonProposition 6.1.4, (iv), dass ein jedes solches f stetig ist.
Daraus und mit Hilfe von Bemerkung 6.1.9 sieht man allgemeiner, dass auch allelinearen Abbildungen A : Rp → Rq stetig sind. Entsprechendes gilt für C-lineareAbbildungen A : Cp → Cq.
(v) Aus dem letzten Beispiel oder direkt mit Hilfe von Proposition 6.1.4, (iv), zusammenmit Bemerkung 6.1.9 erkennt man auch, dass (x, y) 7→ x + y als Abbildung vonR2p � Rp × Rp nach Rp sowie (λ, x) 7→ λx als Abbildung von Rp+1 � R × Rp nachRp stetig sind. Entsprechendes gilt im komplexen Fall.
3 Wem diese Tatsache trivial vorkommt, der versuche „zu Fuß“, also durch explizite Angabe einer Zahl δzu vorgegebenen ε und x, zu überprüfen, dass etwa die Funktion f (x) = x3+x+1
x2+1 auf ihrem DefinitionsbereichR stetig ist.

6.1 Stetigkeit 171
6.1.11 Beispiel. Ist D ⊆ Rp, Y ein metrischer Raum und f : D → Y stetig, so folgt ausBeispiel 6.1.2, Fakta 6.1.3, 3 und Lemma 6.1.6 für alle j = 1, . . . , p und alle y ∈ Rp dieStetigkeit von f ◦ ιyj : {t ∈ R : ιyj(t) ∈ D} → Y .Umgekehrt kann man aber nicht von der Stetigkeit aller f ◦ ιyj auf die von f schließen, wiedie Funktion f : R2 → R definiert durch
f (ξ, η) :=
ξη
ξ2+η2 , falls (ξ, η) , (0, 0) ,
0 , falls (ξ, η) = (0, 0) ,
zeigt. Diese Funktion ist bei (0, 0) nicht stetig, weil etwa f ( 1n ,
1n ) = 1
2 für alle n ∈ N.
Die folgende mengentheoretisch orientierte Charakterisierung der Stetigkeit einer Funktionspielt eine wichtige Rolle. Man beachte, dass dabei für die Funktion f der Definitionsbe-reich gleich dem ganzen metrischen Raum X ist.
6.1.12 Proposition. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, und f : X → Y eineFunktion. Dann sind folgende Aussagen äquivalent.
(i) f ist stetig.
(ii) Für jede in 〈Y, dY〉 offene Teilmenge B von Y ist ihr Urbild f −1(B) = {x ∈ X : f (x) ∈B} offen in 〈X, dX〉.
(iii) Für jede in 〈Y, dY〉 abgeschlossene Teilmenge F von Y ist ihr Urbild f −1(F) = {x ∈X : f (x) ∈ F} abgeschlossen in 〈X, dX〉.
Beweis.
(i)⇒ (ii): Sei B ⊆ Y offen, und sei x ∈ f −1(B). Da B offen ist und f (x) ∈ B, folgtUε( f (x)) ⊆ B für ein ε > 0. Wegen der Stetigkeit existiert δ > 0 mit f (Uδ(x)) ⊆Uε( f (x)) ⊆ B, was zu Uδ(x) ⊆ f −1(B) äquivalent ist. Also enthält f −1(B) mit jedemPunkt eine ganze δ-Kugel, womit sich f −1(B) als offen erweist.
(ii)⇒ (i): Sei ε > 0 und x ∈ X gegeben. Die Menge Uε( f (x)) ist offen, also ist auchf −1(Uε( f (x))
)offen. Wegen x ∈ f −1(Uε( f (x))
)existiert ein δ > 0, sodass Uδ(x) ⊆
f −1(Uε( f (x))). Das heißt aber gerade f (Uδ(x)) ⊆ Uε( f (x)).
(ii)⇔ (iii): Das folgt sofort aus Proposition 5.1.14 und der Tatsache, dass f −1(Mc) =
f −1(M)c für alle M ⊆ Y . q
6.1.13 Proposition. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, und f : D → Y einestetige Funktion. Ist K ⊆ D kompakt, so ist auch f (K) ⊆ Y kompakt und damit auchbeschränkt.

172 6 Reelle und komplexe Funktionen
Beweis. Sei (yn)n∈N eine Folge in f (K), und sei xn ∈ K, sodass f (xn) = yn. Wegen derKompaktheit von K gibt es eine gegen ein x ∈ K konvergente Teilfolge (xn(k))k∈N von(xn)n∈N. Aus der Stetigkeit folgt
f (x) = limk→∞
f (xn(k)) = limk→∞
yn(k) .
Also hat (yn)n∈N eine konvergente Teilfolge mit Grenzwert aus f (K). Also ist f (K) kompaktund wegen Proposition 5.2.8 beschränkt. q
6.1.14 Korollar. Sei 〈X, dX〉 ein metrischer Raum, D ⊆ X, f : D → R stetig, und seiK ⊆ D kompakt. Dann ist f auf K beschränkt und nimmt ein Maximum und ein Minimuman: Es gibt Punkte xmax, xmin ∈ K mit
f (xmin) ≤ f (x) ≤ f (xmax) für alle x ∈ K .
Insbesondere nimmt jede auf einem reellen Intervall [a, b] definierte und stetige reellwertigeFunktion ein Maximum und ein Minimum an.
Beweis. Nach Proposition 6.1.13 ist f (K) ⊆ R kompakt, und wegen Proposition 5.2.8damit beschränkt und abgeschlossen. Wegen Beispiel 5.1.13 ist sup f (K) = max f (K) =
f (xmax) für ein xmax ∈ K. Entsprechend zeigt man die Aussage für das Minimum. q
6.1.15 Proposition. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume und D ⊆ X kompakt. Istf : D→ Y stetig und injektiv, so ist es auch f −1 : ran( f )→ D ⊆ X.
Beweis. Sei (yn)n∈N eine Folge in ran f mit yn → y, und setze xn = f −1(yn) für jedesn ∈ N. Für die Stetigkeit von f −1 bei y müssen wir xn → f −1(y) nachweisen, wofür esgemäß Lemma 5.2.11 wegen der Kompaktheit von D reicht, f −1(y) als einzig möglichenHäufungspunkt von (xn)n∈N zu identifizieren.Ist x ∈ X Häufungspunkt von (xn)n∈N, also ist x Grenzwert einer Teilfolge (xn(k))k∈N, dannfolgt x ∈ D, da D wegen Proposition 5.2.8 abgeschlossen ist. Aus der Stetigkeit erhaltenwir yn(k) = f (xn(k)) → f (x) für k → ∞. Als Teilfolge einer gegen y konvergenten Folgekonvergiert (yn(k))k∈N auch gegen y, womit f (x) = y bzw. x = f −1(y). q
6.1.16 Beispiel. Sei n ∈ N. Für ein festes c > 0 sei f : [0, c] → R definiert durch dieVorschrift f (t) = tn. Wegen Beispiel 6.1.10 und Fakta 6.1.3, 3, ist f stetig. Zudem giltf ([0, c]) = [0, cn], vgl. Bemerkung 2.9.7.Die Umkehrfunktion f −1 : [0, cn] → [0, c] ⊆ R, t 7→ n√t, ist gemäß Proposition 6.1.15stetig. Wegen cn → +∞ für c → +∞ und da die Stetigkeit wegen Fakta 6.1.3, 1, einelokale Eigenschaft ist, folgt sogar die Stetigkeit von n
√. : [0,+∞)→ R.
Die Stetigkeit der Wurzelfunktion kann man auch mit Hilfe von Satz 3.3.5, (vii), leichtzeigen.

6.2 Der Zwischenwertsatz 173
6.2 Der ZwischenwertsatzSei I ⊆ R ein Intervall. Die Anschauung von Stetigkeit legt nahe, dass mit I auch f (I) einIntervall ist.
6.2.1 Bemerkung. Man überlegt sich leicht, dass I ⊆ R genau dann ein Intervall ist, alsogenau dann eine der Formen (a, b ∈ R, a < b,)
∅, (a, b), [a, b], [a, a], (a, b], [a, b), (a,+∞), (−∞, a), [a,+∞), (−∞, a],R ,
hat, wenn für I gilt∀x, y ∈ I, x < y⇒ [x, y] ⊆ I .
Um zu rechtfertigen, dass f (I) wieder ein Intervall ist, werden wir eine weitere charakte-ristische Eigenschaft von Intervallen herleiten.
6.2.2 Definition. Dazu nennen wir eine Teilmenge E eines metrischen Raumes zusam-menhängend, wenn man E nicht als Vereinigung zweier nichtleerer getrennter Mengenschreiben kann. Dabei heißen A und B getrennt, wenn
c(A) ∩ B = A ∩ c(B) = ∅ .6.2.3 Satz. Eine Teilmenge I von R ist genau dann ein Intervall, wenn I zusammenhängendist.
Beweis.
Im Falle, dass I nur ein oder gar kein Element enthält – also I = {x} oder I = ∅,erkennt man sofort mit Bemerkung 6.2.1 und Definition 6.2.2, dass I ein Intervall undI auch zusammenhängend ist. Wir können also für den Rest des Beweises annehmen,dass I zumindest zwei verschiedene Elemente enthält.
Angenommen es existieren x, y ∈ I, x < y, sodass [x, y] * I. Wähle z ∈ [x, y] \ I undsetze
A := (−∞, z] ∩ I, B := [z,+∞) ∩ I .
Dann sind A und B disjunkt, und jeder Häufungspunkt t von A ist in (−∞, z], dadiese Menge ja abgeschlossen ist. Wegen z < I folgt z < B und damit c(A) ∩ B = ∅.Genauso sieht man A ∩ c(B) = ∅. Also ist I nicht zusammenhängend.
Sei umgekehrt I nicht zusammenhängend. Dann können wir I als A∪ B mit nichtlee-ren A, B schreiben, wobei c(A) ∩ B = A ∩ c(B) = ∅. Wähle x ∈ A und y ∈ B, und seiohne Beschränkung der Allgemeinheit angenommen, dass x < y.
Man betrachte t = sup(A ∩ [x, y]). Insbesondere ist x ≤ t ≤ y. Weiters erhält manaus t ∈ c(A ∩ [x, y]) ⊆ c(A) (siehe Beispiel 3.3.4), dass t < B, und somit x ≤ t < y.
Wir wollen nun [x, y] * I zeigen, was im Fall t < A, sofort aus t ∈ [x, y] \ (A ∪ B) =
[x, y] \ I folgt.

174 6 Reelle und komplexe Funktionen
Im Fall t ∈ A folgt aus t < c(B) die Existenz einer ε-Kugel (t − ε, t + ε), sodass
(t − ε, t + ε) ∩ B = ∅ .
Zusammen mit x ≤ t < y ∈ B folgt daraus
x ≤ t < t +ε
2︸︷︷︸<B
< t + ε ≤ y also t +ε
2∈ (x, y) \ B .
Wegen t = sup(A ∩ [x, y]) kann t + ε2 aber nicht in A liegen. Somit gilt t + ε
2 ∈[x, y] \ (A ∪ B) = [x, y] \ I und daher [x, y] * I. q
6.2.4 Proposition. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, D ⊆ X und f : D→ Y einestetige Funktion. Ist E ⊆ D zusammenhängend, so auch f (E).
Beweis. Angenommen f (E) wäre nicht zusammenhängend. Dann gilt f (E) = A ∪ B mitA, B , ∅ und c(A)∩ B = A∩ c(B) = ∅. Für die nichtleeren Mengen E ∩ f −1(A), E ∩ f −1(B)folgt
E =(E ∩ f −1(A)
) ∪ (E ∩ f −1(B)
),
(E ∩ f −1(A)
) ∩ (E ∩ f −1(B)
)= ∅ .
Zu jedem x ∈ c(E ∩ f −1(A)
) ∩ E ∩ f −1(B) gibt es wegen Lemma 5.1.12 eine gegen xkonvergente Folge (xn)n∈N aus E ∩ f −1(A). Aus der Stetigkeit von f folgt limn→∞ f (xn) =
f (x), und somit f (x) ∈ c(f (E∩ f −1(A))
) ⊆ c(A). Andererseits ist f (x) ∈ f(E∩ f −1(B)
) ⊆ Bim Widerspruch zu c(A) ∩ B = ∅.Also kann nur c
(E∩ f −1(A)
)∩E∩ f −1(B) = ∅. Entsprechend gilt c(E∩ f −1(B)
)∩E∩ f −1(A) =
∅, und E wäre somit nicht zusammenhängend, was unserer Annahme widerspricht. q
6.2.5 Beispiel. Die Einheitskreislinie T = {z ∈ C : |z| = 1} kann als das Bild von [0, 2π)unter der stetigen Abbildung x 7→ exp(ix) geschrieben werden, wie wir später sehenwerden; vgl. Satz 6.9.3 und Satz 6.9.10. Nach Proposition 6.2.4 identifizieren wir damit Tals zusammenhängend.
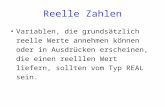
6.2.6 Korollar (Zwischenwertsatz). Sei I ⊆ D ein Intervall und f : I → R stetig. Dann istauch f (I) ein Intervall. Also gibt es zu jedem c ∈ R mit
(−∞ ≤) inf f (I) < c < sup f (I) (≤ +∞)
einen Punkt x ∈ I, sodass f (x) = c.
Beweis. Nach Satz 6.2.3 ist I zusammenhängend. Gemäß Proposition 6.2.4 ist daher auchf (I) ⊆ R zusammenhängend, und wiederum wegen Satz 6.2.3 ein Intervall. Wählt manα, β ∈ f (I) mit infx∈I f (x) < α < c < β < supx∈I f (x), dann enthält f (I) das ganze Intervall[α, β] (siehe Bemerkung 6.2.1). Also gibt es ein x ∈ I mit f (x) = c. q

6.3 Gleichmäßige Stetigkeit 175
I
inf f (I)
f (I)
sup f (I)
f (x) = c
x
Abbildung 6.2: Veranschaulichung des Zwischenwertsatzes
6.2.7 Beispiel. Die Funktion f : [0,+∞)→ R definiert durch f (t) = tn für ein festes n ∈ Nist stetig. In Bemerkung 2.9.7 hatten wir in Folge der Existenz von n-ten Wurzeln – vgl.Satz 2.9.5 – schon festgestellt, dass f ([0,+∞)) = [0,+∞).Ohne Satz 2.9.5 zu verwenden, können wir das auch aus Korollar 6.2.6 herleiten. In derTat folgt aus diesem, dass f ([0,+∞)) ein Intervall ist. Wegen f (t) ≥ 0 für t ∈ [0,+∞) mussf ([0,+∞)) ⊆ [0,+∞). Aus limt→∞ f (t) = +∞ schließen wir, dass das Intervall f ([0,+∞))beliebig große Zahlen enthält, also nicht beschränkt ist. Zusammen mit f (0) = 0 folgtdaraus, dass f ([0,+∞)) nur von der Form [0,+∞) sein kann.Da f streng monoton wachsend und somit f : [0,+∞)→ [0,+∞) bijektiv ist, folgt somitauch ohne Satz 2.9.5, dass tn = x für jedes reelle x ≥ 0 eine eindeutige Lösung in [0,+∞)hat – also dass es eindeutige n-te Wurzeln von Zahl aus [0,+∞) in [0,+∞) gibt.
6.3 Gleichmäßige StetigkeitDie Definition der Stetigkeit einer Funktion f : D→ Y in logischen Formeln angeschriebenlautet
∀x ∈ D∀ε > 0∃δ > 0 : ∀t ∈ D : dX(t, x) < δ⇒ dY( f (t), f (x)) < ε . (6.1)
Die Zahl δ, die es zu jedem ε geben muss, hängt im Allgemeinen nicht nur von ε, sondernauch von der Stelle x ab.
6.3.1 Beispiel. Betrachte die Funktion f (x) = x−1 : R+ → R+. Ist x ∈ R+ und ε > 0gegeben, so berechnet man:
1x− 1
x + δ=
δ
(x + δ)x.
Damit dieser Ausdruck ≤ ε ist, darf δ höchstens εx2
1−εx sein. Man sieht, dass diese größtmög-liche Wahl von δ immer kleiner wird, je kleiner x ist, und tatsächlich für x→ 0 gegen 0

176 6 Reelle und komplexe Funktionen
strebt. Man kann in diesem Beispiel also zu gegebenem ε > 0 kein δ > 0 finden, welchesvon x unabhängig ist.
Sollte eine Funktion nun so beschaffen sein, dass dieses Phänomen nicht auftritt, solltealso zu gegebenem ε > 0 stets ein δ > 0 existieren, welches für alle x funktioniert, so nenntman die Funktion gleichmäßig stetig.
6.3.2 Definition. Seien 〈X, dX〉 und 〈Y, dY〉metrische Räume und f : D→ Y eine Funktion.Dann heißt f gleichmäßig stetig, wenn gilt
∀ε > 0∃δ > 0∀x, t ∈ D : dX(t, x) < δ⇒ dY( f (t), f (x)) < ε .
Vergleicht man diese Definition mit der Formel (6.1), so sieht man, dass man hier denAllquantor ∀x ∈ D und den Existenzquantor ∃δ > 0 vertauscht hat. Dies wird also nichtden gleichen, sondern einen stärkeren Begriff liefern.Ist f gleichmäßig stetig, so ist f auch stetig. Wie wir in Beispiel 6.3.1 gesehen haben, giltdie Umkehrung nicht. Interessant in diesem Zusammenhang ist nun der folgende Satz.
6.3.3 Satz. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume und D ⊆ X kompakt. Dann ist jedestetige Funktion f : D→ Y sogar gleichmäßig stetig.
Beweis. Nehme man das Gegenteil an. Dann gibt es ein ε > 0, sodass es für alle n ∈ NPunkte xn, yn ∈ D gibt, sodass dX(xn, yn) < 1
n und dY( f (xn), f (yn)) ≥ ε.Die Folgen (xn)n∈N (yn)n∈N haben wegen der Kompaktheit von D Häufungspunkte x bzw. y.Somit gilt
x = limk→∞
xn(k), y = limk→∞
yn(k)
für Teilfolgen (xn(k))k∈N und (yn(k))k∈N. Aus dX(xn(k), yn(k)) < 1n(k) folgt mit Lemma 3.2.10,
dassdX(x, y) = lim
k→∞dX(xn(k), yn(k)) = 0 ,
also x = y und somit f (x) = f (y). Andererseits folgt aus der Stetigkeit zusammen mitLemma 3.3.1 der offensichtliche Widerspruch
dY( f (x), f (y)) = dY( limk→∞
f (xn(k)), limk→∞
f (yn(k))) = limk→∞
dY( f (xn(k)), f (yn(k))) ≥ ε . q
6.3.4 Beispiel. Für nicht kompaktes E ⊆ R gilt:
(i) Es gibt eine auf E stetige Funktion, die nicht beschränkt ist.
(ii) Es gibt eine auf E stetige und beschränkte Funktion, die kein Maximum hat.
(iii) Ist E beschränkt, so gibt es eine auf E stetige, aber nicht gleichmäßig stetige Funktion.
Wir betrachten zuerst den Fall, dass E beschränkt ist. Weil E als nicht kompakt vorausge-setzt wird, hat E einen Häufungspunkt x0, der nicht zu E gehört; vgl. Korollar 5.2.9.Eine Funktion mit den in (i) geforderten Eigenschaften ist dann x 7→ 1
x−x0. Ähnlich wie in
Beispiel 6.3.1 zeigt man, dass diese Funktion auch nicht gleichmäßig stetig ist, womit sie

6.3 Gleichmäßige Stetigkeit 177
auch als Beispiel für (iii) herhält. Dagegen ist die Funktion f (x) = 11+(x−x0)2 zwar stetig auf
E, aber wegen 0 < f (x) < 1 beschränkt. Zudem nimmt f auf E wegen limx→x0 f (x0) = 1und infolge supx∈E f (x) = 1 kein Maximum an. Also gilt auch (ii).Im Fall, dass E nicht beschränkt ist, folgt (i) mit f (x) = x, und (ii) mit f (x) = x2
1+x2 .In (iii) kann man die Forderung, dass E beschränkt ist, nicht ganz weglassen. Zum Beispielbetrachte E = Z. Dann ist jede Funktion auf E gleichmäßig stetig.
6.3.5 Satz (*). Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, wobei 〈Y, dY〉 vollständig ist.Weiters sei D ⊆ X und f : D→ Y gleichmäßig stetig.Dann existiert eine eindeutige gleichmäßig stetige Fortsetzung F : c(D)→ Y.
Beweis.
Sei (xn)n∈N eine Cauchy-Folge von Punkten aus D. Zu ε > 0 wähle δ > 0 so, dass
dY(f (y), f (z)
)< ε für alle y, z ∈ D mit dX(y, z) < δ . (6.2)
Weiters wähle N ∈ N, sodass dX(xn, xm) < δ für alle n,m ≥ N. Dann folgt
dY(f (xn), f (xm)
)< ε für alle n,m ≥ N .
Somit ist ( f (xn))n∈N eine Cauchy-Folge in Y , und infolge existiert limn→∞ f (xn).
Sei x ∈ X, und seien (xn)n∈N und (yn)n∈N zwei Folgen von Punkten in D mit xn → xsowie yn → x. Ist ε > 0 gegeben und δ > 0 wie in (6.2), so wähle N ∈ N mit
dX(xn, x) <δ
2, dX(yn, x) <
δ
2für alle n ≥ N .
Aus dX(xn, yn) ≤ dX(xn, x) + dX(yn, x) < δ folgt folgt dann dY( f (xn), f (yn)) < ε füralle n ≥ N, und daher
dY(
limn→∞
f (xn), limn→∞
f (yn)) ≤ ε .
Weil ε > 0 beliebig war, folgt limn→∞ f (xn) = limn→∞ f (yn).
Zu jedem x ∈ c(D) gibt es definitionsgemäß eine Folge (xn)n∈N mit xn → x. Wirdefinieren
F(x) := limn→∞
f (xn) .
Wegen der obigen Punkte ist F eine wohldefinierte Funktion von X nach Y .
Für x ∈ D konvergiert die konstante Folge xn := x, n ∈ N, gegen x, und infolge diekonstante Folge f (xn) = f (x), n ∈ N, gegen f (x), wodurch F(x) = f (x). Also ist Feine Fortsetzung von f .
Es bleibt zu zeigen, dass F gleichmäßig stetig ist. Dazu sei ε > 0 gegeben, undwähle δ > 0, sodass dY( f (x), f (y)) < ε
3 für alle x, y ∈ D mit dX(x, y) < δ.

178 6 Reelle und komplexe Funktionen
Sind nun x, y ∈ c(D) mit dX(x, y) < δ3 , so gibt es gegen x bzw. y konvergente Folgen
(xn)n∈N und (yn)n∈N aus D. Wählt man N ∈ N mit
dX(xn, x) <δ
3, dX(yn, y) <
δ
3, dY(F(x), f (xn)) <
ε
3, dY(F(y), f (yn)) <
ε
3
für alle n ≥ N, so folgt für diese n aus der Dreiecksungleichung dX(xn, yn) <δ. Gemäß unserer Wahl von δ > 0 gilt dann dY( f (xn), f (yn)) < ε
3 , und infolgedY(F(x), F(y)) < ε.
Die Eindeutigkeit erhalten wir aus Korollar 6.1.5. q
6.4 UnstetigkeitsstellenSei 〈Y, dY〉 ein metrischer Raum, I ⊆ R ein Intervall und f : I → Y eine Funktion. f istgemäß Proposition 6.1.4 genau dann bei einem x ∈ I stetig, wenn f (x) = limt→x f (t). In(5.25) haben wir gesehen, dass für ein x ∈ I, welcher kein Randpunkt ist, f (x) = limt→x f (t)genau dann gilt, wenn die Grenzwerte
f (x−) := limt→x−
f (t) und f (x+) := limt→x+
f (t)
existieren und beide mit f (x) übereinstimmen. Ist x rechter bzw. linker Randpunkt von I,so ist die Stetigkeit bei x zu f (x) = f (x−) bzw. f (x) = f (x+) äquivalent.
6.4.1 Bemerkung. Ist x ∈ I nicht linker (nicht rechter) Randpunkt von I, und gilt zumin-dest f (x) = f (x−) ( f (x) = f (x+)), so spricht man von Linksstetigkeit bzw. linksseitigerStetigkeit (Rechtsstetigkeit bzw. rechtsseitiger Stetigkeit) der Funktion f bei x.
Ist f nicht stetig, so unterscheidet man folgende Fälle.
6.4.2 Definition. Sei f : I → Y unstetig bei x.
� Ist x kein Randpunkt von I, existieren sowohl f (x−) also auch f (x+) und stimmenzumindest zwei der drei Zahlen f (x−), f (x), f (x+) nicht überein, so hat f bei xeine Unstetigkeit 1. Art. Ist x rechter (linker) Randpunkt von I, so hat f bei x eineUnstetigkeit 1. Art, wenn f (x−) und f (x) ( f (x+) und f (x)) nicht übereinstimmen.
Ist x ist kein Randpunkt und gilt f (x−) , f (x+), so spricht man von einer Sprung-stelle. Anderenfalls spricht man von einer4hebbaren Unstetigkeit.
� Liegt keine Unstetigkeit 1. Art vor, so spricht man von einer Unstetigkeit 2. Art.
Wir wollen zeige, dass im Allgemeinen alle möglichen Varianten von Unstetigkeitenauftreten können.
4 Den Begriff „hebbar“ hat man deswegen gewählt, weil man f an der Stelle x so abändern kann, dass dieneue Funktion bei x stetig ist.

6.4 Unstetigkeitsstellen 179
6.4.3 Beispiel.
(i) Die Funktion f : R→ R, welche bei allen rationalen Zahlen den Wert 1 und bei allenirrationalen Zahlen den Wert 0 annimmt, hat an jeder Stelle eine Unstetigkeit 2.Art.
(ii) Sei
g(x) =
x , falls x rational ,0 , falls x irrational .
g ist stetig bei 0, hat aber an jeder Stelle x , 0 eine Unstetigkeit 2.Art. Es gibt nämlicheine Folge (rn)n∈N aus Q ∩ (x,+∞) und eine Folge (xn)n∈N aus R \ Q ∩ (x,+∞), diebeide gegen x konvergieren; vgl. Beispiel 3.3.4. Nun gilt aber f (xn) = 0 → 0 undf (rn) = rn → x für n → ∞. Nach (5.25) kann daher limt→x+ f (t) nicht existieren.Ähnlich zeigt man, dass auch limt→x− f (t) nicht existiert.
(iii) Sei
0 1−1−2−3
2
1
−2
−1
h
h(x) =
x + 2 , falls x ∈ (−3,−2) ,−x − 2 , falls x ∈ [−2, 0) ,x + 2 , falls x ∈ [0, 1) .
Dann ist h stetig auf (−3, 1) \ {0} und hat bei 0 eine Sprungstelle.
(iv) Den Begriff der Sinusfunktion aus der Schule voraussetzend sei
0 1π
f
f (x) =
sin 1
x , falls x > 0 ,0 , falls x ≤ 0 .
Dann ist f stetig auf R \ {0} und hat eine Unstetigkeit 2.Art bei 0.
Thematisch dazu passend wollen wir uns der Fortsetzbarkeit von stetigen Funktionen aufum einen Punkt größere Mengen zuwenden.

180 6 Reelle und komplexe Funktionen
6.4.4 Bemerkung. Seien 〈X, dX〉 und 〈Y, dY〉 metrische Räume, D ⊆ X und f : D → Yeine stetige Funktion. Sei weiters x ∈ X \ D. Wir fragen uns, ob wir eine Fortsetzungf : D ∪ {x} → Y von f finden können, die die Eigenschaft stetig zu sein beibehält.Wenn x kein Häufungspunkt von D ist, so sieht man leicht, dass x ein isolierter Punkt vonD ∪ {x} ist, und daher jede Fortsetzung f stetig ist.Sei also x ein Häufungspunkt von D. Gibt es eine stetige Fortsetzung f , so muss nachProposition 6.1.4 f (x) = limt→x f (t). Existiert umgekehrt limt→x f (t), und setzt man
f (s) =
limt→x f (t) , falls s = x ,f (s) , falls s ∈ D ,
so ist f eine Fortsetzung von f . Wegen Proposition 6.1.4, (ii), ist f bei x stetig. Andererseitsist wegen Fakta 6.1.3 mit f auch f bei allen t ∈ D stetig. Also ist f eine auf D∪ {x} stetigeFortsetzung.
6.4.5 Beispiel.
(i) Seien a, b, c ∈ R, c ≤ 0, D = (−∞, 0) ∪ (0,+∞) und f : D → R definiert durchf (x) = a für x < 0 und f (x) = b
x−c für x > 0. Dann gilt limt→0− f (t) = a und
limt→0+
f (t) =
−bc , falls b , 0, c < 0 ,
sgn(b) · ∞ , falls b , 0, c = 0 ,0 , falls b = 0 .
Gemäß Bemerkung 6.4.4 lässt sich f genau dann zu einer Funktion f : R → Rfortsetzen, wenn limt→0 f (t) existiert. Nach (5.25) existiert dieser Grenzwert genaudann, wenn a = b = 0 oder b , 0, c , 0, a = −b
c . Dabei muss f (0) = 0 bzw.f (0) = a = −b
c .
(ii) Die komplexwertige Funktion f : D→ C
f (z) =iz + 1z3 + z
ist zunächst definiert auf D = {z ∈ C : z3 + z , 0} = C \ {0, i,−i}. Wir haben inBeispiel 6.1.10 gesehen, dass f auf D stetig ist. Zudem gilt wegen Fakta 5.3.8
limz→i
f (z) = limz→i
i(z − i)z(z + i)(z − i)
= limz→i
iz(z + i)
=i
limz→i z(z + i)=
i2i2 = − i
2.
Somit lässt sich f stetig auf D = D ∪ {i} durch f (i) = − i2 fortsetzen.
Eine Fortsetzung auf eine noch größere Menge – etwa auf D∪{−i} – ist nicht möglich,da dann auch limz→−i f (z) und wegen (5.9) auch limz→−i | f (z)| existieren müsste. Nungilt aber (vgl. Bemerkung 5.3.9)
limz→−i| f (z)| = lim
z→−i
1|z| · |z + i| = +∞ ,
da für den Nenner rechts limz→−i |z| · |z + i| = (limz→−i |z|) · (limz→−i |z + i|) = 0 gilt.

6.5 Monotone Funktionen 181
6.5 Monotone Funktionen6.5.1 Definition. Man sagt, dass für ein Intervall I ⊆ R eine Funktion f : I → R monotonwachsend ist, falls
x < y⇒ f (x) ≤ f (y) .
Gilt sogar x < y⇒ f (x) < f (y), so nennt man f streng monoton wachsend.Analog heißt f monoton fallend, falls x < y⇒ f (x) ≥ f (y). Sollte x < y sogar f (x) > f (y)implizieren, so spricht von einer streng monoton fallenden Funktion.
Klarerweise ist eine streng monotone Funktion stets injektiv. Nun kommen wir zur Diskus-sion der Unstetigkeitsstellen monotoner Funktionen.
6.5.2 Proposition. Sei f monoton wachsend auf einem reellen Intervall I, wobei a, b ∈R ∪ {−∞,+∞}, a < b, die Intervallränder bezeichnet.Dann existieren für jeden Punkt x ∈ (a, b) sowohl f (x−) := lims→x− f (s) als auch f (x+) :=limt→x+ f (t), wobei5
supa<s<x
f (s) = f (x−) ≤ f (x) ≤ f (x+) = infx<t<b
f (t) . (6.3)
Ist x = a ∈ I (x = b ∈ I), so gilt die rechte (linke) Seite von (6.3). Schließlich folgt ausx < y immer f (x+) ≤ f (y−).Entsprechende Aussagen gelten für monoton fallende Funktionen.
Beweis. Wir beschränken uns auf x ∈ (a, b). Den Fall der Intervallränder betrachtet manin analoger Weise.Der Beweis folgt unmittelbar aus (5.10), da die Grenzwerte in (6.3) ja Grenzwerte mono-toner und beschränkter Netze sind.Ungleichung (6.3) folgt aus der Tatsache, dass jeder Punkt aus { f (s) : s ∈ (a, x)} kleineroder gleich f (x) und f (x) kleiner oder gleich jedem Punkt aus { f (t) : t ∈ (x, b)} ist.Schließlich gilt
f (x+) = limt→x+
f (t) = infx<t<y
f (t) ≤ supx<s<y
f (s) = lims→y−
f (s) = f (y−) . q
6.5.3 Korollar. Sei I ⊆ R ein Intervall, f : I → R eine monoton wachsende Funktion undJ = f (I).
(i) Das Bild J ist genau dann ein Intervall, wenn f stetig ist.
(ii) Ist f streng monoton wachsend, so ist f −1 : J → I auch streng monoton wachsend.Dabei enthält I genau dann seinen linken (rechten) Intervallrand, wenn J sein Infimum(Supremum) enthält – also J ein Minimum (Maximum) hat.
5 Insbesondere können in (a, b) nur Unstetigkeitsstellen 1.Art auftreten.

182 6 Reelle und komplexe Funktionen
x1
f (x1) = f (x1−)
f (x1+)
x2
= f (x2−)f (x2)= f (x2+)
f (x3−)
f
x3
f (x3+)
f (x3)
Abbildung 6.3: Veranschaulichung monotoner Funktionen
(iii) Ist f streng monoton wachsend und stetig, so ist auch f −1 : J → I streng monotonwachsend und stetig.
Entsprechende Aussagen gelten für (streng) monoton fallende Funktionen.
Beweis.
(i) Ist f stetig, so ist wegen Korollar 6.2.6 auch f (I) ein Intervall.
Angenommen f ist nicht stetig an einem x ∈ I, das zunächst nicht ein Intervallrandvon I sei. Wegen (6.3) muss lims→x− f (s) < limt→x+ f (t). Es folgt
f (τ) ≤ lims→x−
f (s) = f (x−), τ < x und f (τ) ≥ limt→x+
f (t) = f (x+), τ > x .
f (x)
f (x−)
f (x+)Also kann f keine Werte im Intervall(
f (x−), f (x+))
bis auf unter Umständeneinen, nämlich f (x), annehmen.
Ist x der linke Intervallrand von I, so muss nach (6.3) f (x) < limt→x+ f (t). Somitfolgt ( f (x), limt→x+ f (t))∩ J = ∅. Entsprechend argumentiert man im Fall des rechtenRandes. Jedenfalls ist J kein Intervall.
(ii) Wegen der strengen Monotonie ist f injektiv. Ist x, y ∈ J, x < y, und gilt f −1(x) ≥f −1(y), so folgt wegen der vorausgesetzten Monotonie von f der Widerspruch x =

6.6 Gleichmäßige Konvergenz 183
f ( f −1(x)) ≥ f ( f −1(y)) = y; also gilt f (x) < f (y), womit f −1 : J → I streng monotonwachsend ist.
Enthält I seinen linken Rand6 a, so folgt aus der Monotonie, dass f (a) ≤ f (t), t ∈ I,und somit dass f (a) Minimum von J ist.
Hat J = f (I) das Minimum y, so folgt aus der Monotonie von f −1, dass f −1(y) ≤f −1(x), x ∈ J, und somit dass f −1(y) Minimum von I ist; also a = f −1(y) ∈ I.
(iii) Für stetiges f ist J ein Intervall, und die streng monoton wachsende Funktion f −1 :J → I hat als Bild genau das Intervall I. Nach dem ersten Punkt muss daher auch f −1
stetig sein. q
Wir werden später dieses Korollar verwenden, um z.B. zu zeigen, dass der Logarithmuseine stetige Funktion ist.
6.5.4 Beispiel. Die Funktion f : [0,+∞) → R definiert durch f (t) = tn für ein festesn ∈ N ist stetig und streng monoton wachsend. Korollar 6.5.3 bietet uns nun eine weitereMöglichkeit, einzusehen, dass f −1 =
√. von f ([0,+∞)) = [0,+∞) nach [0,+∞) (⊆ R)
stetig ist; vgl. Beispiel 6.1.16 und Beispiel 6.2.7.
Thematisch zu obigem Ergebnis passt das nächste Lemma, das aus dem Zwischenwertsatzfolgt.
6.5.5 Lemma. Seien I, J ⊆ R zwei Intervalle und f : I → J stetig und bijektiv. Dann ist fstreng monoton wachsend oder fallend.
Beweis. Wäre f weder streng monoton wachsend noch streng monoton fallend, so gibt esx1 < x2 aus I mit f (x1) ≥ f (x2) und x3 < x4 aus I mit f (x3) ≤ f (x4). Weil f injektiv ist,muss sogar f (x1) > f (x2) und f (x3) < f (x4). Daraus folgt, dass {x1, x2, x3, x4} zumindestdrei Elemente hat.Durch Fallunterscheidungen je nachdem, wie diese Punkte angeordnet sind, findet manimmer a < b < c aus {x1, x2, x3, x4}, sodass entweder f (a) < f (b), f (b) > f (c) oderf (a) > f (b), f (b) < f (c). Man beachte, dass dabei wegen der Injektivität alle drei Wertef (a), f (b), f (c) untereinander verschieden sein müssen.Im ersten Fall ist entweder f (a) ∈ ( f (c), f (b)) oder f (c) ∈ ( f (a), f (b)). Aus Korollar 6.2.6folgt daher f (a) = f (t) für ein t ∈ (b, c) bzw. f (c) = f (t) für ein t ∈ (a, b), was jedenfallsder Injektivität widerspricht.Im zweiten Fall argumentiert man entsprechend. q
6.6 Gleichmäßige KonvergenzFür eine Folge ( fn)n∈N von Funktionen, die zum Beispiel alle eine Menge E nachR abbilden,würden wir gerne erklären, was es bedeutet, dass diese Folge gegen eine Funktion f : E →
6 I ist daher von der Form [a, a], [a, b], [a, b), [a,+∞) mit b ∈ R, b > a.

184 6 Reelle und komplexe Funktionen
R konvergiert. Der offensichtlichste Zugang ist, für jedes x ∈ E die Konvergenz der reellenFolge ( fn(x))n∈N gegen f (x) zu verlangen. Wir werden sehen, dass diese Herangehensweisezwar Sinn macht, sich aber viele Eigenschaften der Folge, wie etwa die Stetigkeit der fn,bei dieser Art von Grenzübergang nicht auf f übertragen. Ein anderer, fruchtbringendererZugang ist, eine geeignete Metrik auf einer Menge von Funktionen f : E → R zudefinieren, und dann die Konvergenz bezüglich dieser Metrik zu studieren.
6.6.1 Definition. Sei ∅ , E eine Menge und 〈Y, dY〉 ein metrischer Raum. Eine Folge( fn)n∈N von Funktionen fn : E → Y heißt punktweise konvergent gegen die Funktionf : E → Y , wenn
limn→∞
fn(x) = f (x) für alle x ∈ E .
Entsprechend definiert man die punktweise Konvergenz von Netzen von Funktionen.
Die folgenden Beispiele illustrieren, dass sich die fundamentale Eigenschaft der Stetigkeitder Funktionen fn nicht auf die Grenzfunktion f übertragen muss.
6.6.2 Beispiel.
(i) Betrachte die Funktionen gn : [0, 1] → R, definiert durch gn(x) := xn, n ∈ N.Bekannterweise gilt
limn→∞
gn(x) =
0 , falls x ∈ [0, 1) ,1 , falls x = 1 .
Jede der Funktionen gn ist eine stetige Funktionen auf [0, 1], nicht jedoch die Grenz-funktion.
(ii) Betrachte die Funktionen sn : R→ R definiert durch
sn(x) :=n∑
k=0
x2
(1 + x2)k .
Für jedes x , 0 ist∑∞
k=0x2
(1+x2)k eine konvergente geometrische Reihe, deren Summe1 + x2 ist. Im Falle x = 0 verschwinden alle Summanden und damit auch die Summeder Reihe. Also erhalten wir
limn→∞
sn(x) =
1 + x2 , falls x , 0 ,0 , falls x = 0 .
Alle Funktionen sn sind stetige Funktionen auf R, nicht jedoch die Grenzfunktion.
Wir wollen nun einen stärkeren Konvergenzbegriff für Folgen von Funktionen einführen,welcher unter anderem die Stetigkeit erhält.

6.6 Gleichmäßige Konvergenz 185
6.6.3 Definition. Sei ∅ , E eine Menge und 〈Y, dY〉 ein metrischer Raum. Wir bezeichnenmit B(E,Y) die Menge aller beschränkten Funktionen f : E → Y , also
B(E,Y) :={
f : E → Y : ∃R > 0, y ∈ Y : ∀x ∈ E ⇒ dY( f (x), y) ≤ R}.
Weiters definieren wir die Funktion
d∞ :{ B(E,Y) × B(E,Y) → R ,
( f , g) 7→ sup{dY( f (x), g(x)) : x ∈ E} ,
und sprechen von der Supremumsmetrik7.
d∞( f , g) ist in der Tat eine reelle Zahl, da es wegen f , g ∈ B(E,Y) reelle R1,R2 > 0 undy1, y2 ∈ Y gibt, sodass dY( f (x), y1) ≤ R1, dY(g(x), y2) ≤ R2 und infolge
dY( f (x), g(x)) ≤ dY( f (x), y1) + dY(y1, y2) + dY(y2, g(x)) ≤ R1 + dY(y1, y2) + R2
für alle x ∈ E gilt. Also ist die nichtleere Teilmenge {dY( f (x), g(x)) : x ∈ E} von R nachoben beschränkt.
d∞( f , g)
E
fg
| f − g|
Für reellwertige Funktionenf , g : E → R = Y istdY(x, y) = |x − y| und daherd∞( f , g) = supx∈E | f (x) − g(x)|.
6.6.4 Lemma. Die Supremumsmetrik d∞ ist eine Metrik auf der Menge B(E,Y).
Beweis. Für f , g ∈ B(E,Y) ist {dY( f (x), g(x)) : x ∈ E} eine nichtleere Teilmenge von[0,+∞), wodurch d∞( f , g) ≥ 0. Dabei gilt offenbar d∞( f , g) = sup{dY( f (x), g(x)) : x ∈E} = 0 genau dann, wenn {dY( f (x), g(x)) : x ∈ E} = {0} – also genau dann, wenndY( f (x), g(x)) = 0 für jedes x ∈ E. Letzteres ist aber zu f (x) = g(x), x ∈ E – also f = gäquivalent.Aus dY( f (x), g(x)) = dY(g(x), f (x)) folgt d∞( f , g) = d∞(g, f ). Ist h eine weitere Funktion,so gilt für festes x ∈ E
dY( f (x), g(x)) ≤ dY( f (x), h(x)) + dY(h(x), g(x)) ,7 Identifiziert man Rp mit der Menge aller Funktionen von {1, . . . , p} nach R, so stimmt auf Rp die
Supremumsmetrik hier mit der aus Beispiel 3.1.5, (ii), überein.

186 6 Reelle und komplexe Funktionen
und daher auch
dY( f (x), g(x)) ≤ supt∈E
dY( f (t), h(t)) + supt∈E
dY(h(t), g(t)) = d∞( f , h) + d∞(h, g) .
Da diese Beziehung für jedes x ∈ E gilt, erhalten wir d∞( f , g) = supx∈E dY( f (x), g(x)) ≤d∞( f , h) + d∞(h, g). q
6.6.5 Definition. Eine Folge ( fn)n∈N von Funktionen aus B(E,Y) heißt gleichmäßig kon-vergent gegen f , wenn limn→∞ fn = f bezüglich d∞, daher wenn
∀ε > 0 ∃N ∈ N : d∞( fn, f ) ≤ ε für alle n ≥ N . (6.4)
Entsprechend definiert man die gleichmäßige Konvergenz von Netzen von Funktionen.
E
fn, n ≥ N
f
f + ε
f − ε
Abbildung 6.4: Veranschaulichung der gleichmäßigen Konvergenz
6.6.6 Bemerkung. Ist f ∈ B(E,Y) und g irgendeine Funktion von E nach Y mit derEigenschaft, dass supt∈E dY( f (t), g(t)) < ∞, so folgt aus der Dreiecksungleichung, dassauch g eine beschränkte Funktion ist.Ist daher ( fn)n∈N eine Folge aus B(E,Y), und gilt supt∈E dY( fn(t), g(t)) → 0, so folgtg ∈ B(E,Y) und fn → g gleichmäßig.
Im Unterschied zur punktweisen Konvergenz muss man bei der gleichmäßiger Konvergenzzu jedem ε > 0 ein N ∈ N finden, welches, salopp gesagt, für alle x ∈ E funktioniert. Inder Tat gilt
d∞( fn, f ) ≤ ε ⇔ dY( fn(x), f (x)) ≤ ε für alle x ∈ E ,
wodurch (6.4) zu
∀ε > 0∃N ∈ N∀x ∈ E : dY( fn(x), f (x)) ≤ ε für alle n ≥ N

6.6 Gleichmäßige Konvergenz 187
äquivalent ist. Die punktweise Konvergenz dagegen bedeutet
∀x ∈ E ∀ε > 0∃N ∈ N : dY( fn(x), f (x)) ≤ ε für alle n ≥ N .
Insbesondere sehen wir, dass jede gleichmäßig konvergente Folge auch punktweise kon-vergiert, und zwar gegen die gleiche Grenzfunktion.
6.6.7 Beispiel. Betrachte nochmals die reellwertigen Funktionen gn(x) := xn, n ∈ N, nundefiniert für x ∈ [0, 1), vgl. Beispiel 6.6.2. Wir wissen schon, dass gn punktweise gegendie Nullfunktion auf [0, 1) konvergiert. Dabei gilt wegen xn < 1 für x ∈ [0, 1), n ∈ N, undwegen limx→1− xn = 1, dass
d∞(gn, 0) = supx∈[0,1)
d2(gn(x), 0) = supx∈[0,1)
|xn| = 1 .
Also d∞(gn, 0) 6→ 0 für n → ∞, womit (gn)n∈N auf [0, 1) nicht gleichmäßig gegen dieNullfunktion konvergiert.
x
gn(x)
0 12
η 1
12
1 n = 1n = 3n = 7n = 13
Abbildung 6.5: Graph der Funktionen gn für ausgewählte n ∈ N
6.6.8 Beispiel. Sei η ∈ (0, 1) fest, und betrachte die Funktionenfolge gn(x) = xn, n ∈ N, aufdem Intervall [0, η]. Klarerweise konvergiert auch diese eingeschränkte Funktionenfolgepunktweise gegen die Nullfunktion auf [0, η]. Nun folgt aber wegen
d∞(gn, 0) = supx∈[0,η]
d2(gn(x), 0) = supx∈[0,η]
|xn| = ηn ,
dass d∞(gn, 0)→ 0 für n→ ∞. Also konvergiert (gn)n∈N auf [0, η] gleichmäßig gegen dieNullfunktion.
6.6.9 Beispiel. Wir untersuchen die Funktionenfolge fn(x) := nxe−12 nx2
, x ∈ [0,∞), n ∈ N,auf gleichmäßige Konvergenz. Dabei greifen wir der Definition der Funktion x 7→ ex fürx ∈ R weiter hinten vor. Wir verwenden auch die Tatsache, dass ye−y → 0 für y → +∞.Weiters verwenden wir die Differentialrechnung zur Bestimmung von Extrema. Da dieses

188 6 Reelle und komplexe Funktionen
x
fn(x)
0 1 2 312
32
52
72
1
2
3
4
5
6
7 n = 1n = 5n = 20n = 120
Abbildung 6.6: Graph der Funktionen fn für ausgewählte n ∈ N
Beispiel nur zum besseren Verständnis des Begriffes der gleichmäßigen Konvergenz dientund später nicht verwendet wird, sind diese Vorgriffe gerechtfertigt.Zunächst sei bemerkt, dass für alle n ∈ N die Funktion fn(x) stetig ist und fn(x) ≥ 0 fürx ∈ [0,∞). Eine getrennte Untersuchung der Fälle x , 0 und x = 0 liefert punktweiseKonvergenz fn(x)→ f (x) ≡ 0 für n→ ∞. Um ( fn)n∈N auf gleichmäßige Konvergenz gegendie Funktion f (x) ≡ 0 zu untersuchen, berechnen wir
d∞( fn, 0) = supx∈[0,∞)
d2( fn(x), 0) = supx∈[0,∞)
| fn(x)| .
Da für jedes n ∈ N die Funktion fn(x) nicht negativ ist, fn(0) = 0 und limx→∞ fn(x) = 0 gilt,folgt, dass fn(x) sogar ein Maximum in [0,∞) annimmt. Um das Maximum zu berechnen,ist Lemma 7.2.2 hilfreich. Für jedes n ∈ N ist fn(x) beliebig oft differenzierbar, und setztman die erste Ableitung gleich Null, so erhält man
f ′n(x) = ne−12 nx2 − n2x2e−
12 nx2
= e−12 nx2
(n − n2x2) = 0 ⇔ x = ± 1√n.
Also ist x = 1√n die einzige Nullstelle der ersten Ableitung, die in [0,∞) enthalten ist.
Somit hat fn(x) ein einziges Maximum und zwar an der Stelle x = 1√n . Wir erhalten
d∞( fn, 0) = supx∈[0,∞)
| fn(x)| = maxx∈[0,∞)
| fn(x)| = fn
( 1√n
)=√
ne−12 ,
und sehen, dass d∞( fn, 0) 6→ 0 für n → ∞, womit ( fn)n∈N punktweise aber nicht gleich-mäßig gegen die Nullfunktion konvergiert.
6.6.10 Beispiel. Sei η > 0 und betrachte die Funktionenfolge fn(x) := nxe−12 nx2
, n ∈ N, aufdem Intervall [η,∞). Aus f ′n(x) = e−
12 nx2
(n − n2x2) erkennt man mit Korollar 7.2.9, dass

6.6 Gleichmäßige Konvergenz 189
Funktion fn(x) auf [ 1√n ,+∞) monoton fallend ist. Wegen 1√
n → 0 für n → ∞ gibt es einN ∈ N, sodass 1√
n < [η,∞) für alle n ≥ N. Daher ergibt sich für n ≥ N
d∞( fn, 0) = supx∈[η,∞)
| fn(x)| = maxx∈[η,∞)
| fn(x)| = fn(η) = nηe−12 nη2
.
Also folgt d∞( fn, 0) → 0 für n → ∞, und ( fn)n∈N konvergiert gleichmäßig gegen dieNullfunktion auf [η,∞).
6.6.11 Satz. Ist ∅ , E eine Menge und 〈Y, dY〉 ein vollständig metrischer Raum, so ist〈B(E,Y), d∞〉 ebenfalls ein vollständig metrischer Raum.Somit konvergiert eine Folge ( fn)n∈N von Funktionen aus B(E,Y) genau dann gleichmäßig,wenn es zu jedem ε > 0 ein N ∈ N gibt, sodass für alle n,m ≥ N und beliebiges x ∈ E gilt
dY(fn(x), fm(x)
) ≤ ε . (6.5)
Beweis. Klarerweise ist eine konvergente Folge ( fn)n∈N von Funktionen aus B(E,Y) eineCauchy-Folge. Diese Tatsache gilt ja in allen metrischen Räumen.Sei nun umgekehrt die Cauchy-Bedingung erfüllt. Man beachte, dass (6.5) für alle x ∈ Ezu d∞( fn, fm) ≤ ε äquivalent ist.Es folgt, dass insbesondere für jedes einzelne x die Folge ( fn(x))n∈N eine Cauchy-Folge inY und daher konvergent ist. Also existiert der Grenzwert limn→∞ fn(x) punktweise auf E.Wir setzen
f (x) := limn→∞
fn(x) .
Wir müssen noch zeigen, dass f beschränkt ist und dass die Konvergenz sogar gleichmäßigstattfindet. Dazu sei ε > 0 gegeben und wähle N ∈ N, sodass dY( fn(x), fm(x)) ≤ ε für allen,m ≥ N und alle x ∈ E. Hält man x fest und bildet den Grenzwert für m → ∞, so folgtfür n ≥ N
dY( fn(x), f (x)) ≤ ε .Da x beliebig war, erhalten wir supx∈E dY( fn(x), f (x)) ≤ ε für alle n ≥ N. Also konvergiert( fn)n∈N gleichmäßig gegen f , wobei f gemäß Bemerkung 6.6.6 beschränkt ist. q
Die gleichmäßige Konvergenz sichert nun, dass sich Grenzübergänge gutmütig punktoStetigkeit verhalten.
6.6.12 Lemma. Sei 〈Y, dY〉 ein vollständig metrischer Raum, ∅ , E und f , fn ∈ B(E,Y),n ∈ N. Weiters sei (xk)k∈N eine Folge in E.Ist die Folge ( fn)n∈N auf E gleichmäßig konvergent gegen f , und existiert für jedes n ∈ Nder Grenzwert
limk→∞
fn(xk) = An ,
dann konvergieren die Folgen (An)n∈N und ( f (xk))k∈N in Y und zwar gegen denselbenGrenzwert. Also gilt
limk→∞
limn→∞
fn(xk) = limn→∞
limk→∞
fn(xk) .

190 6 Reelle und komplexe Funktionen
Beweis. Sei ε > 0 gegeben. Da ( fn)n∈N gegen f bezüglich d∞ konvergiert, ist ( fn)n∈N inB(E,Y) eine Cauchy-Folge. Es existiert also ein N ∈ N, sodass für n,m ≥ N und alle t ∈ Egilt
dY( fn(t), fm(t)) ≤ ε .Hält man n und m fest, und lässt man t die Folge (xk)k∈N durchlaufen, so folgt mit Lemma3.2.10 und Lemma 3.3.1 die Beziehung dY(An, Am) ≤ ε. Damit ist (An)n∈N eine Cauchy-Folge in Y und infolge konvergent. Setzen wir A := limn→∞ An, so gilt
dY( f (xk), A) ≤ dY( f (xk), fn(xk)) + dY( fn(xk), An) + dY(An, A) . (6.6)
Wähle n so groß, dass für alle t ∈ E und insbesondere für alle t = xk
dY( f (t), fn(t)) < ε und dY(An, A) < ε .
Wegen fn(xk)k→∞−→ An existiert zu diesem n ein k0 ∈ N, sodass aus k ≥ k0 die Ungleichung
dY( fn(xk), An) < ε folgt. Aus (6.6) erhalten wir
dY( f (xk), A) < 3ε für alle k ≥ k0 . q
6.6.13 Bemerkung. Wir werden später eine Verallgemeinerung dieses Lemmas für Netzezeigen. Der Beweis davon wird im Wesentlichen derselbe sein.
6.6.14 Korollar. Sei 〈X, dX〉 ein metrischer Raum und 〈Y, dY〉 ein vollständig metrischerRaum, ∅ , E ⊆ X und f , fn ∈ B(E,Y), n ∈ N, sodass ( fn)n∈N auf E gleichmäßig gegen fkonvergiert.Sind die Funktionen fn alle stetig bei einem x ∈ E, so ist es auch f . Sind alle fn auf ganz Estetig, so ist es auch f .
Beweis. Sei x ∈ E und sei (xk)k∈N eine Folge mit xkk→∞−→ x. Aus Lemma 6.6.12 folgt
limk→∞
f (xk) = limk→∞
limn→∞
fn(xk) = limn→∞
limk→∞
fn(xk) = limn→∞
fn(x) = f (x) .
Gemäß Proposition 6.1.4 ist f bei x stetig. q
6.6.15 Bemerkung. Nach Lemma 5.1.12 erhält man, dass die Menge Cb(E,Y) aller be-schränkten und stetigen Funktionen von E → Y eine abgeschlossene Teilmenge vonB(E,Y) versehen mit der Metrik d∞ ist. Dabei ist E Teilmenge eines metrischen Raumes.
6.7 Vervollständigung*6.7.1 Definition. Sei 〈X, d〉 ein metrischer Raum. Ein Paar (〈Y, dY〉, ι) heißt Vervollständi-gung von 〈X, d〉, wenn 〈Y, dY〉 ein vollständig metrischer Raum ist, und wenn ι : X → Yeine isometrische Abbildung mit dichtem Bild, also c(ι(X)) = Y , ist.

6.7 Vervollständigung* 191
Wegen dY(ι(x1), ι(x2)) = d(x1, x2) ist die isometrische Abbildung ι auch injektiv, wodurchbei einer Vervollständigung (〈Y, dY〉, ι) der Raum Y als Obermenge von X betrachtet werdenkann.
6.7.2 Satz. Jeder metrische Raum 〈X, d〉 hat eine Vervollständigung.
Beweis. Der Raum B(X,R) aller beschränkten reellwertigen Funktionen versehen mit d∞ist nach Satz 6.6.11 ein vollständig metrischer Raum.Sei a ∈ X festgehalten. Die Abbildung ι auf X, die einem x ∈ X die Funktion y 7→d(y, x) − d(y, a) zuweist, ist wegen (Dreiecksungleichung)
| d(y, x) − d(y, a) | ≤ d(x, a), y ∈ X ,
eine Abbildung nach B(X,R) hinein, also ι : X → B(X,R). Wegen
d(x1, x2) = |d(x1, x1) − d(x1, a) − d(x1, x2) + d(x1, a)| = |ι(x1)(x1) − ι(x2)(x1)|≤ d∞
(ι(x1), ι(x2)
)= sup
y∈X| d(y, x1) − d(y, a) − d(y, x2) + d(y, a) | ≤ d(x1, x2)
ist ι isometrisch. Bezeichnet nun Y den Abschluss von ι(X) in B(X,R) bezüglich der Metrikd∞ und dY die Einschränkung von d∞ auf Y , so ist (〈X, d〉, ι) offenbar eine Vervollständigungvon 〈X, d〉. q
6.7.3 Proposition. Sei 〈X, d〉 ein metrischer Raum. Sind (〈Y, dY〉, ι) und (〈Z, dZ〉, ζ) zweiVervollständigungen, so sind diese isomorph in dem Sinne, dass es eine isometrischeBijektion ϕ : Y → Z gibt mit ζ = ϕ ◦ ι.Beweis. Die beiden Abbildungen ζ ◦ ι−1 : ι(X) (⊆ Y)→ ζ(X) (⊆ Z) und ι ◦ ζ−1 : ζ(X) (⊆Z) → ι(X) (⊆ Y) sind isometrisch und daher insbesondere gleichmäßig stetig; vgl. Defi-nition 6.3.2. Nach Satz 6.3.5 existiert eine eindeutige, gleichmäßig stetige Fortsetzungϕ : Y → Z von ζ ◦ ι−1 und eine eindeutige, gleichmäßig stetige Fortsetzung ψ : Z → Y vonι ◦ ζ−1.Weil ϕ◦ψ auf der dichten Teilmenge ι(X) mit der Identität übereinstimmt, folgt aus Korollar6.1.5, dass ϕ ◦ ψ = idZ . Genauso erkennt man, dass ψ ◦ ϕ = idY . Wegen Satz 1.2.19 sind ϕund ψ bijektiv mit ψ = ϕ−1. Nach unserer Konstruktion gilt für jedes x ∈ X
ϕ ◦ ι(x) = ζ ◦ ι−1(ι(x)) = ζ(x) ,
wodurch ζ = ϕ ◦ ι. Schließlich ist ϕ isometrisch, da für u, v ∈ Y und Folgen (un)n∈N, (vn)n∈Naus ι(X) mit Grenzwerten u bzw. v (vgl. Lemma 5.1.12)
dZ(ϕ(u), ϕ(v)) = limn→∞
dZ(ϕ(un), ϕ(vn)) = limn→∞
dZ(ζ ◦ ι−1(un), ζ ◦ ι−1(vn))
= limn→∞
d(ι−1(un), ι−1(vn)) = limn→∞
dY(un, vn) = dY(u, v) . q
6.7.4 Bemerkung. Die Voraussetzung in Korollar 6.6.14, dass der Zielraum Y der Funk-tionen fn, f : E → Y vollständig ist, ist nicht notwendig. Nimmt man nämlich eineVervollständigung (〈V, dV〉, ι) von 〈Y, dY〉, identifiziert Y mit ι(Y) ⊆ V , und wendet Korollar6.6.14 auf fn, f : E → V an, so bedingt die Stetigkeit der fn auch die von f .

192 6 Reelle und komplexe Funktionen
6.8 Reell- und komplexwertige Folgen und Reihen vonFunktionen
6.8.1 Definition. Ist Y = R oder Y = C und ∅ , E eine Menge, dann setzt man fürf : E → Y
‖ f ‖∞ := supx∈E| f (x)| (∈ [0,+∞])
und spricht von der Supremumsnorm.
Unmittelbar überprüft man, dass für f : E → Y
� ‖ f ‖∞ < +∞ genau dann, wenn f ∈ B(E,R) bzw. f ∈ B(E,C)
� ‖ f ‖∞ ≥ 0 und ‖ f ‖∞ = 0 genau dann, wenn f = 0.
Für f , g ∈ B(E,R) bzw. f , g ∈ B(E,C) gilt zudem
� d∞( f , g) = ‖ f − g‖∞ und ‖ f ‖∞ = d∞( f , 0), wobei 0 hier die Nullfunktion ist.
� ‖λ · f ‖∞ = |λ| · ‖ f ‖∞ für λ ∈ R bzw. λ ∈ C,
� ‖ f + g‖∞ ≤ ‖ f ‖∞ + ‖g‖∞,
� ‖ f · g‖∞ ≤ ‖ f ‖∞ · ‖g‖∞.
6.8.2 Korollar. Sind ( fn)n∈N, (gn)n∈N Folgen von Funktionen aus B(E,R) bzw. B(E,C), diegleichmäßig gegen f bzw. g konvergieren, und λ ∈ R bzw. λ ∈ C, so gilt auch
limn→∞
fn + gn = f + g, limn→∞
λ · fn = λ · f , limn→∞
fn · gn = f · g ,
und zwar gleichmäßig.
Beweis. Wir beweisen exemplarisch die dritte Grenzwertaussage. Zunächst ist (gn)n∈N alskonvergente Folge beschränkt: Es gibt ein C ≥ 0, sodass ‖gn‖∞ = d∞(gn, 0) ≤ C für allen ∈ N. Daraus folgt
d∞( fngn, f g) = ‖ fngn − f g‖∞ ≤ ‖gn‖∞ · ‖ fn − f ‖∞ + ‖ f ‖∞ · ‖gn − g‖∞ n→∞−→ 0 . q
6.8.3 Definition. Für k ∈ N sei fk : E → R (C) eine Funktion.
� Man sagt, die Reihe∑∞
k=1 fk konvergiert punktweise, wenn für jedes x ∈ E die Reihe∑∞k=1 fk(x) in R (C) konvergiert.
� Ist fk ∈ B(E,R) (∈ B(E,C)) für alle k ∈ N, so heißt∑∞
k=1 fn gleichmäßig konvergent,wenn die Folge
(∑nk=1 fk(.)
)n∈N von Partialsummen gleichmäßig konvergiert.
� Die Reihe∑∞
k=1 fk konvergiert absolut als Funktionenreihe, wenn∑∞
k=1 ‖ fk‖∞ < +∞.

6.8 Reell- und komplexwertige Folgen und Reihen von Funktionen 193
Klarerweise impliziert die absolute Konvergenz von∑∞
k=1 fk als Funktionenreihe die abso-lute Konvergenz von
∑∞k=1 fk(x) für jedes x ∈ E. Wir haben aber auch folgendes Ergebnis:
6.8.4 Korollar (Weierstraß-Kriterium). Sei ( fk)k∈N eine Folge von beschränkten reell- bzw.komplexwertigen Funktionen auf einer Menge E , ∅. Ist
∑∞k=1 fk absolut konvergent als
Funktionenreihe, so ist diese Funktionenreihe auch gleichmäßig konvergent.∑∞k=1 fk ist sicher dann absolut konvergent, und somit auch gleichmäßig konvergent, wenn
es Mk ∈ [0,+∞), k ∈ N gibt, für die∑∞
k=1 Mk konvergiert, sodass
‖ fk‖∞ ≤ Mk für alle k ∈ N .
Beweis. Nach dem Majorantenkriterium in Lemma 3.9.8 folgt aus der Konvergenz von∑∞k=1 Mk die von
∑∞k=1 ‖ fk‖∞.
Wenn∑∞
k=1 ‖ fk‖∞ < +∞, dann ist die Folge(∑n
k=1 ‖ fk‖∞)n∈N von Partialsummen eineCauchy-Folge in R. Es gibt somit zu ε > 0 ein N ∈ N, sodass für n ≥ m ≥ N gilt, dass∑n
k=m+1 ‖ fk‖∞ ≤ ε. Für solche n ≥ m ≥ N folgt auch∥∥∥∥∥∥∥
n∑
k=m+1
fk
∥∥∥∥∥∥∥∞≤
n∑
k=m+1
‖ fk‖∞ ≤ ε .
Also ist(∑n
k=1 fk)
n∈N eine Cauchy-Folge in B(E,R) (B(E,C)), und gemäß Satz 6.6.11bezüglich d∞ konvergent. q
Ein bedeutendes Beispiel für Reihen von Funktionen sind die sogenannten Potenzreihen.
6.8.5 Definition. Sind ak ∈ C oder auch nur ak ∈ R für k ∈ N∪ {0}, und ist z ∈ C, so nenntman die komplexwertige Reihe – ob konvergent oder nicht –
∞∑
k=0
akzk
eine Potenzreihe8. Als Konvergenzradius wollen wir die Zahl R ∈ [0,+∞] mit
R = sup
|z| : z ∈ C,∞∑
k=0
akzk ist konvergent
(6.7)
bezeichnen9.
6.8.6 Beispiel. Wir sind solchen Reihen schon begegnet, z.B. sind die geometrische Reihe∑∞k=0 zk und die Exponentialreihe
∑∞k=0
zk
k! Potenzreihen.Erstere konvergiert genau für |z| < 1 und hat somit Konvergenzradius 1. Die Exponential-reihe konvergiert für alle z ∈ C und hat somit Konvergenzradius +∞.
8 Praktischerweise ist hier bei den Potenzreihen in Analogie zu den Polynomen z0 als 1 definiert auchwenn z Null sein sollte.
9 Da für z = 0 die Reihe immer absolut konvergiert, ist diese Menge nicht leer.

194 6 Reelle und komplexe Funktionen
6.8.7 Satz. Sei∑∞
k=0 akzk eine Potenzreihe und R ihr Konvergenzradius.
(i) Für jedes z ∈ C mit |z| > R ist∑∞
k=0 akzk divergent.
(ii) Für jedes z ∈ C mit |z| < R ist∑∞
k=0 akzk sogar absolut konvergent. Insbesondere gilt
R = sup
|z| : z ∈ C,∞∑
k=0
akzk ist absolut konvergent
. (6.8)
(iii) Für jedes r ∈ [0,R) ist∑∞
k=0 akzk auf dem abgeschlossenen Kreis Kr(0) = {z ∈ C :|z| ≤ r} absolut konvergent als Funktionenreihe. Die Funktion
z 7→∞∑
k=0
akzk, z ∈ Kr(0) ,
ist dabei stetig und beschränkt auf Kr(0).
Re
Im
C
r
R−R
Abbildung 6.7: Konvergenzradius
(iv) Auf UR(0) = {z ∈ C : |z| < R} ist z 7→ ∑∞k=0 akzk eine stetige Funktion10.
(v) Der Konvergenzradius lässt sich mittels der Koeffizienten ak bestimmen durch11
R =1
lim supk→∞k√|ak|
.
Falls ak , 0 für alle hinreichend großen k, so gilt auch
1lim supk→∞ |ak+1
ak| ≤ R ≤ 1
lim infk→∞ | ak+1ak| . (6.9)
10 Im Allgemeinen ist sie aber nicht mehr beschränkt11 Ist die Folge ( k√|ak |)k∈N nicht nach oben beschränkt, so sei 1
lim supk→∞k√|ak | = 0.

6.8 Reell- und komplexwertige Folgen und Reihen von Funktionen 195
Beweis.
(i) Folgt sofort aus (6.7).
(ii) Folgt aus dem nächsten Punkt.
(iii) Nach (6.7) gibt es ein w ∈ C mit r < |w| ≤ R, sodass∑∞
k=0 akwk konvergiert. Somit istdie Summandenfolge eine Nullfolge; insbesondere gilt |akzk
0| ≤ C für alle k ∈ N undein C > 0. Ist z ∈ C mit |z| ≤ r < |w|, so erhalten wir die Abschätzung
|akzk| = |akzk0| ·
∣∣∣∣∣zw
∣∣∣∣∣k
≤ C ·∣∣∣∣∣rw
∣∣∣∣∣k
=: Mk .
Wegen∣∣∣ rw
∣∣∣ < 1 konvergiert∑∞
k=0 Mk.
Die Partialsummen∑n
k=0 akzk, n ∈ N, sind Polynome und damit stetig. Da Kr(0)kompakt ist (vgl. Beispiel 5.2.7), sind diese Partialsummen auf Kr(0) beschränkt.
Aus dem Weierstraß Kriterium, Korollar 6.8.4, angewandt auf E = Kr(0) folgt dieabsolute Konvergenz als Funktionenreihe und somit die gleichmäßige Konvergenzder entsprechenden Funktionenfolge von Partialsummen auf Kr(0) gegen eine be-schränkte Funktion. Nach Korollar 6.6.14 ist die Grenzfunktion sogar stetig aufE = Kr(0).
(iv) Betrachtet man z 7→ ∑∞k=0 akzk auf UR(0), so ist auch dies eine stetige Funktion.
In der Tat ist die Stetigkeit gemäß Fakta 6.1.3 eine lokale Eigenschaft, und mankann zu jedem komplexen z mit |z| < R ein δ > 0 und ein r ∈ [0,R) finden, sodassUδ(z) ⊆ Kr(0).
(v) Für jedes z ∈ C mit |z| < 1lim supk→∞
k√|ak |gilt
lim supk→∞
k√|akzk| = |z| · lim sup
k→∞k√|ak| < 1 .
Nach dem Wurzelkriterium, Satz 3.10.1, konvergiert∑∞
k=0 akzk, woraus mit (6.7)
1lim supk→∞
k√|ak|≤ R
folgt. Wäre 1lim supk→∞
k√|ak |< R, so wähle z ∈ C mit 1
lim supk→∞k√|ak |
< |z| < R.
Wegen (ii) konvergiert die Potenzreihe. Andererseits gilt lim supk→∞k√|akzk| =
|z| · lim supk→∞k√|ak| > 1, und mit dem Wurzelkriterium, Satz 3.10.1, folgt die
Divergenz der Potenzreihe. Also muss auch
1lim supk→∞
k√|ak|≥ R .
Analog beweist man (6.9) mit Hilfe des Quotientenkriteriums. q

196 6 Reelle und komplexe Funktionen
6.8.8 Beispiel. Das Konvergenzverhalten einer Potenzreihe ist durch den obigen Satzrelativ gut abgeklärt. Einzig über die Punkte mit |z| = R, wo R der Konvergenzradius ist,hat man keine Aussage. Es können hier tatsächlich auch alle Fälle eintreten. Betrachtedazu die Potenzreihen ∞∑
k=0
zk,
∞∑
k=0
zk
kund
∞∑
k=0
zk
k2 .
Alle haben Konvergenzradius 1. Jedoch ist∑∞
k=0 zk für |z| = 1 divergent,∑∞
k=0zk
k2 absolutkonvergent und
∑∞k=0
zk
k bedingt konvergent, außer bei z = 1, wo sie divergiert.
6.8.9 Korollar. Sei f (z) :=∑∞
k=0 akzk eine Potenzreihe mit Konvergenzradius R > 0.
� Verschwinden nicht alle ak, so gibt es ein δ ∈ (0,R), sodass f (z) , 0 für allez ∈ Uδ(0) \ {0}.
� Sei∑∞
k=0 bkzk eine weitere Potenzreihe mit Konvergenzradius R > 0. Gibt es eineMenge E ⊆ Umin(R,R)(0), die Null als Häufungspunkt hat und sodass
∑∞k=0 akzk =∑∞
k=0 bkzk für alle z ∈ E, so folgt ak = bk, k ∈ N ∪ {0} und damit R = R.
Beweis. Sei k0 ∈ N ∪ {0} der erste Index, sodass ak0 , 0. Wegen den Rechenregeln fürReihen konvergiert
∑∞k=0 akzk genau dann, wenn g(z) =
∑∞k=0 ak+k0z
k es tut, wobei im Fallder Konvergenz zk0g(z) = f (z). g(z) ist also auch eine Potenzreihe mit Konvergenzradius R.Wegen g(0) = ak0 , 0 und wegen der Stetigkeit von g auf UR(0) gibt es ein δ ∈ (0,R),sodass |g(z) − g(0)| < |ak0 | und somit g(z) , 0 für z ∈ Uδ(0). Also ist auch f (z) , 0 fürz ∈ Uδ(0) \ {0}.Bezüglich der zweiten Aussage betrachte die Potenzreihe h(z) =
∑∞k=0(ak − bk)zk, welche
zumindest für |z| < min(R, R) konvergiert und damit einen Konvergenzradius größeroder gleich min(R, R) hat. Nach Voraussetzung und den Rechenregeln für Reihen folgth(z) = 0, z ∈ E. Da 0 ein Häufungspunkt von E ist, widerspricht das aber der erstenAussage, außer es gilt ak − bk = 0 für alle k ∈ N. q
6.8.10 Bemerkung. Ist |z| < R, so erhalten wir aus Korollar 3.9.3
∞∑
k=0
ak(z)k =
∞∑
k=0
akzk . (6.10)
Insbesondere folgt zieht ak ∈ R für alle k ∈ N, die Tatsache nach sich, dass∑∞
k=0 akxk ∈ Rfür alle x ∈ R mit |x| < R.Ist umgekehrt
∑∞k=0 akxk ∈ R für alle x ∈ R, |x| < R, so folgt aus (6.10), dass die Potenzrei-
hen (beide mit Konvergenzradius R)
∞∑
k=0
akzk,
∞∑
k=0
akzk
für z ∈ R ∩ UCR (0) = (−R,R) übereinstimmen. Aus Korollar 6.8.9 bekommen wir dann
ak = ak, also ak ∈ R, für alle k ∈ N.

6.9 Die Exponentialfunktion 197
6.8.11 Bemerkung. Üblicherweise werden auch Reihen der Form
∞∑
k=0
ak(z − w)k (6.11)
für ein festes w als Potenzreihen bezeichnet. Die hergeleiteten Aussagen für Potenzreihenstimmen sinngemäß offensichtlich auch für solche Reihen. Dabei ist z.B. der Bereich derKonvergenz UR(w) mit entsprechend definiertem Konvergenzradius.Funktionen f : D → C mit offenem D ⊆ C heißen analytisch in einem Punkt w ∈ D,falls es eine offene Kugel Ur(w) ⊆ D mit r > 0 und eine Potenzreihe der Form (6.11)gibt, sodass r kleiner oder gleich dem Konvergenzradius der Reihe ist und sodass f (z) füralle z ∈ Ur(w) mit dem Grenzwert der Reihe (6.11) übereinstimmt, f also lokal um w alsGrenzwert einer Potenzreihe dargestellt werden kann.Ist f um jedes w ∈ D analytisch, so heißt f analytisch.
6.9 Die ExponentialfunktionAusgangspunkt für viele, sogenannte elementare Funktionen ist die Exponentialfunktion
exp(z) =
∞∑
n=0
zn
n!, z ∈ C . (6.12)
Wir haben schon gesehen, dass diese Reihe für alle z ∈ C konvergiert. Sie ist also einePotenzreihe mit Konvergenzradius +∞. Insbesondere ist exp : C→ C stetig.Weitere wichtige elementare Funktionen sind Sinus und Cosinus.
6.9.1 Definition. Für z ∈ C seien
sin z =exp(iz) − exp(−iz)
2i, cos z =
exp(iz) + exp(−iz)2
,
die sogenannten trigonometrischen Funktionen Sinus und Cosinus.
Als Zusammensetzung von stetigen Funktionen sind sin : C→ C und cos : C→ C auf Cstetig (siehe Lemma 6.1.6 und Korollar 6.1.8).
6.9.2 Lemma. Für alle z ∈ C gilt
cos z =
∞∑
k=0
(−1)k z2k
(2k)!, sin z =
∞∑
k=0
(−1)k z2k+1
(2k + 1)!.
Also sind cos und sin Grenzfunktionen von Potenzreihen12 mit Konvergenzradius +∞.12 Ganz genau genommen ist eine Reihe der Bauart
∑∞k=0 ckz2k keine Potenzreihe, da sie nicht von der
Form∑∞
n=0 anzn ist. Setzt man aber a2k = ck für k ∈ N∪ {0} und an = 0 für ungerade n, so überzeugt man sichleicht davon, dass
∑∞k=0 ckz2k genau dann konvergiert, wenn
∑∞n=0 anzn es tut, wobei die Grenzwerte dieser
Reihen dann übereinstimmen. Entsprechendes gilt für Reihen der Bauart∑∞
k=0 ckz2k+1

198 6 Reelle und komplexe Funktionen
Beweis. Für gerade n = 2k gilt in + (−i)n = 2i2k = 2(−1)k, und für ungerade n = 2k + 1 giltin + (−i)n = 0. Aus den Rechenregeln für Reihen folgt somit
exp(iz) + exp(−iz)2
=
∞∑
n=0
in + (−i)n
2zn
n!=
∞∑
k=0
(−1)k z2k
(2k)!.
Analog leitet man die Potenzreihenentwicklung für sin z her. q
6.9.3 Satz. Sei z,w ∈ C und x, y ∈ R. Dann gilt
(i) exp(z) , 0, exp(z + w) = exp(z) exp(w) und exp(−z) = 1exp(z) . Schließlich ist (exp z)n =
exp(zn), n ∈ Z.
(ii) Die Formel von de Moivre:
(cos z + i sin z)n = cos(nz) + i sin(nz) für alle n ∈ Z .
(iii) exp(z) = exp(z), cos(z) = cos(z), sin(z) = sin(z).Insbesondere sind exp |R, cos |R, sin |R Funktionen, die R nach R abbilden.
(iv) cos y = Re exp(iy), sin y = Im exp(iy) und exp(x + iy) = exp(x)(cos y + i sin y), wobeiexp(x) ∈ R.
Re
Im
−1 1
−i
i
i sin y
cos y
exp(iy) =
cos y + i sin y
0
exp(x)exp(x + iy) =
exp(x)(cos y + i sin y)
exp(x) cos y
i exp(x) sin y
Abbildung 6.8: Darstellung der Lage von exp(x + iy)
(v) Die Funktion exp eingeschränkt auf die reelle Achse ist eine streng monoton wach-sende, bijektive Funktion von R auf R+ mit exp(0) = 1. Insbesondere gilt
limx→+∞
exp(x) = +∞ und limx→−∞
exp(x) = 0 . (6.13)
(vi) | exp(z)| = exp(Re z). Insbesondere gilt (cos y)2 + (sin y)2 = 1 und | exp(z)| = 1 genaudann, wenn Re z = 0.

6.9 Die Exponentialfunktion 199
(vii) cos(−z) = cos z und sin(−z) = − sin z.
(viii) Es gelten die Summensätze für Sinus und Cosinus
cos(z + w) = cos z cos w − sin z sin w, sin(z + w) = sin z cos w + cos z sin w .
Beweis.
(i) exp(z + w) = exp(z) exp(w) haben wir in Beispiel 5.4.12 gesehen. exp(z) , 0 undexp(−z) = 1
exp(z) folgen aus exp(−z) · exp(z) = exp(0) = 1. Schließlich zeigt man(exp z)n = exp(zn) für n ∈ N durch vollständige Induktion, und für n ∈ Z mit Hilfevon exp(−zn) = 1
exp(zn) .
(ii) exp(iz) = cos z + i sin z folgt leicht durch Nachrechnen, und daraus
(cos z + i sin z)n = (exp iz)n = exp(inz) = cos(nz) + i sin(nz) .
(iii) Da die Koeffizienten in den Potenzreihenentwicklungen reell sind, folgt die Aussagesofort aus Bemerkung 6.8.10.
(iv) Diesen Punkt erhalten wir aus (i) und (ii), da nach dem letzten Punktexp(x), cos y, sin y ∈ R.
(v) Für x > 0 folgt aus der Tatsache, dass alle Koeffizienten in der Potenzreihe (6.12)von exp strikt positiv sind, immer exp(x) > 1 + x > 1. Klarerweise ist exp(0) = 1.Für x < 0 erhalten wir aus 1
exp(x) = exp(−x) > 1 − x > 1, dass exp(x) ∈ (0, 1) sowieexp(x) < 1
1−x .
Aus diesen Abschätzungen schließen wir sofort auf (6.13). Für x < y ergibt sichwegen
exp(y) = exp(x + (y − x)) = exp(x) · exp(y − x) > exp(x)
die Tatsache, dass exp(x) streng monoton wachsend ist.
Schließlich folgt aus der Stetigkeit von exp(x) : R → R+ zusammen mit Korollar6.5.3, dass exp(R) ein offenes Intervall ist. Wegen (6.13) muss selbiges mit (0,+∞) =
R+ übereinstimmen.
(vi) Aus
| exp(z)|2 = exp(z) exp(z) = exp(z) exp(z) = exp(z + z) = exp(2 Re z) = exp(Re z)2
und aus der Tatsache, dass | exp(z)| und exp(Re z) positive reelle Zahlen sind, folgt| exp(z)| = exp(Re z). Wegen dem vorherigen Punkt ist dieser Ausdruck 1 genau dann,wenn Re z = 0. Weiters gilt
(cos y)2 + (sin y)2 = | cos y + i sin y |2 = | exp(iy) |2 = exp(0) = 1 .

200 6 Reelle und komplexe Funktionen
x
y
−3 −2 −1 1 2 30
1
4
3
2
−1
y = exp(x)
Abbildung 6.9: Funktionsgraph der reellen Exponentialfunktion
(vii) Folgt aus der jeweiligen Potenzreihenentwicklung, da nur gerade bzw. nur ungeradePotenzen vorkommen.
(viii) Man setze die Definition von sin z und cos z ein und rechne die Gleichheit nach. q
Wie wir unter anderem gerade gesehen haben, ist exp : R→ R+ eine Bijektion.
6.9.4 Definition. Mit ln : R+ → R wollen wir die Inverse von exp : R→ R+ bezeichnenund sprechen vom natürlichen Logarithmus bzw. vom Logarithmus naturalis.
x
y
−1 1 2 3 4 5 60
3
2
1
−1
−2
−3
y = ln(x)
Abbildung 6.10: Logarithmus naturalis
Aus Satz 6.9.3, Korollar 6.5.3 und durch elementares Nachrechnen folgt sofort

6.9 Die Exponentialfunktion 201
6.9.5 Korollar. Die Funktion ln : R+ → R ist eine stetige und streng monoton wachsendeBijektion. Es gilt
limx→0+
ln x = −∞ und limx→+∞
ln x = +∞sowie
ln(xy) = ln x + ln y und ln(xn) = n ln x für alle x, y > 0, n ∈ Z .
Beachte, dass wir den Logarithmus nur für reelle Werte definiert haben. Dies ist kein Zufall,da exp : C → C \ {0} zwar surjektiv aber nicht injektiv ist. Weiters ist es nicht klar, aufwelche Teilmenge von C man exp einschränken soll, um Injektivität zu gewährleisten; vgl.Satz 6.9.10.Mit Hilfe der Exponentialfunktion können wir den bisher nur für rationale b definiertenAusdrücke ab auch für beliebige b ∈ R einen Sinn geben.
6.9.6 Korollar. Ist a ∈ R+ und b ∈ Q, so gilt ab = exp(b ln a).Setzen wir ab durch exp(b ln a) auf ganz (a, b) ∈ R+ × R fort, dann gilt für a, a1, a2 ∈R+, b, b1, b2 ∈ R
ab1+b2 = ab1 · ab2 , (a1a2)b = ab1 · ab
2 .
Beweis. Schreiben wir b =pq ∈ Q mit p ∈ Z, q ∈ N, so ist exp(b ln a) nach Satz 6.9.3 eine
positive reelle Zahl mit der Eigenschaft
(exp(b ln a))q = exp(bq ln a) = exp(p ln a) = exp(ln ap) = ap .
Also gilt exp(b ln a) =q√ap.
Die Funktionalgleichungen folgen aus denen von exp und ln durch Nachrechnen. q
6.9.7 Bemerkung.
Als Zusammensetzung der stetigen Funktionen exp, ln und · ist (a, b) 7→ ab auf(a, b) ∈ R+ × R stetig; vgl. Beispiel 6.1.7.
Die Funktion exp selbst kann mit dieser Notation als allgemeine Potenz angeschrie-ben werden. Dazu definieren wir die Eulersche Zahl e := exp(1). Nach der Definitionder allgemeinen Potenz gilt dann für x ∈ R
ex = exp(x ln e) = exp(x ln exp(1)︸ ︷︷ ︸
=1
)= exp(x) .
Neben ihrer Definition als e := exp(1) =∑∞
n=01n! kann man die Eulersche Zahl auch
in vielfacher Weise anders charakterisieren. Zum Beispiel ist e Grenzwert der Folge((1 + 1
n )n)n∈N; vgl. Beispiel 3.4.3. Allgemeiner kann man zeigen, dass
exp(z) = limn→∞
(1 +
zn)n für alle z ∈ C .

202 6 Reelle und komplexe Funktionen
Ausgehend von der Definition e = limn→∞(1 + 1
n
)n kann man für reelles x dieFunktion exp(x) durch ex erklären. Dafür muss man allerdings die allgemeine Potenzzuerst – ohne Verwendung von exp – definieren. Dies kann so geschehen, dass manvon der Funktion q√ap : R+ ×Q→ R+ ausgeht und diese mittels stetiger Fortsetzungzu einer Funktion auf R+ × R mit Werten in R+ macht.
Wie aus der Schule bekannt, ist eine der wichtigsten Naturkonstanten die Zahl π. Mit Hilfeder Funktion cos kann man die Existenz dieser Zahl mit all ihren wichtigen Eigenschaftenherleiten. Dazu benötigen wir zuerst folgende Hilfsaussage.
6.9.8 Lemma.
Für t ∈ [0, 2] und n ∈ N gilt tnn! ≥ tn+2
(n+2)! .
Die Funktion cos : R→ R hat eine kleinste positive Nullstelle x0, die im Intervall(0, 2) liegt.
Für x0 gilt sin x0 = 1.
Beweis.
Durch Umformen ist die zu beweisende Ungleichung äquivalent zu(n + 2)(n + 1) ≥ t2 und somit richtig.
Wir betrachten die Potenzreihenentwicklung von cos z in Lemma 6.9.2 und stellensofort cos 0 = 1 fest. Da man in Reihen Klammern setzen darf, folgt aus dem letztenPunkt
cos 2 = 1 − 22
2+
24
4!−∞∑
l=1
(24l+2
(4l + 2)!− 24l+4
(4l + 4)!
)≤ 1 − 22
2+
24
4!= −1
3.
Nach dem Zwischenwertsatz Korollar 6.2.6 hat t 7→ cos t im Intervall (0, 2) sichereine Nullstelle x.
Nach Proposition 6.1.12 ist die Menge N = {t ∈ R : cos t = 0} = (cos |R)−1({0}) unddaher auch N ∩ [0,+∞) abgeschlossen. In Beispiel 5.1.13 haben wir gesehen, dassN ∩ [0,+∞) ein Minimum hat, welches wegen cos 0 = 1 sicher nicht 0 ist. Also gibtes eine kleinste positive Nullstelle x0 von t 7→ cos t.
(sin x0)2 = 1 folgt aus (cos x0)2 + (sin x0)2 = 1; vgl. Satz 6.9.3. Nun ist aber wegendes ersten Punktes
sin x0 =
∞∑
l=0
(x4l+1
0
(4l + 1)!− x4l+3
0
(4l + 3)!
)≥ 0 ,
also sin x0 = 1. q
6.9.9 Definition. Die Zahl π sei jene positive reelle Zahl, sodass π2 die kleinste positive
Nullstelle von cos : R→ R ist.

6.9 Die Exponentialfunktion 203
x
y
−π2 π2−3π
23π2
−π π−2π 2π0−1
1
y = sin(x)y = cos(x)
Abbildung 6.11: Funktionsgraphen des reellen Sinus und Cosinus
6.9.10 Satz. Für z, ζ ∈ C und m ∈ Z gelten folgende Aussagen.
(i) exp(±iπ2 ) = ±i, exp(±iπ) = −1, exp(±2iπ) = 1.
(ii) cos(±π2 ) = 0, cos(±π) = −1, cos(±2π) = 1,sin(±π2 ) = ±1, sin(±π) = 0, sin(±2π) = 0.
(iii) exp(z + 2mπi) = exp(z), sin(z + 2mπ) = sin(z), cos(z + 2mπ) = cos(z).
(iv) exp(z) = 1⇔ ∃ k ∈ Z : z = 2kπi (⇔ z ∈ 2πiZ).
(v) cos z = 0⇔ ∃ k ∈ Z : z = π2 + πk, sin z = 0⇔ ∃ k ∈ Z : z = πk.
(vi) exp(C) = C \ {0} und exp(z) = exp(ζ)⇔ z − ζ ∈ 2πiZ.
Beweis.
(i) Wegen Satz 6.9.3 und Lemma 6.9.8 gilt exp(iπ2 ) = cos π2 + i sin π
2 = i. Der Rest folgtaus Satz 6.9.3, (i).
(ii) Folgt aus (i), indem man Real- und Imaginärteil betrachtet.
(iii) exp(z + 2mπi) = exp(z) · exp(2πi)m = exp(z). Daraus folgen durch Einsetzen vonDefinition 6.9.1 die restlichen Aussagen.
(iv) Aus exp(z) = 1 folgt zunächst mit Satz 6.9.3, dass Re z = 0. Also gilt z = 0 + iy fürein y ∈ R. Klarerweise ist y = η + 2lπ für ein eindeutiges l ∈ Z und η ∈ [0, 2π)13. Aus(iii) folgt exp(iη) = exp(iy) = 1. Wäre nun η , 0, so erhielte man für
exp(iη
4) = cos
η
4+ i sin
η
4=: u + iv mit u, v ∈ R ,
13 Für l nehme man das Maximum von {k ∈ Z : 2kπ ≤ y}.

204 6 Reelle und komplexe Funktionen
wegen 0 < η
4 <π2 , und der Definition von π
2 , sicherlich u , 0. Im Fall v = 0 wäreexp(i η4 ) = u = ±1 und somit
exp(i(π
2− η
4))
=exp(iπ2 )
exp(i η4 )=
i±1
= ±i .
Also ist α = π2 − η
4 eine reelle Nullstelle von cos mit α ∈ (0, π2 ) im Widerspruch zurDefinition von π
2 . Also muss auch v , 0. Nun gilt
1 = exp(iη) = (u + iv)4 =(u4 − 6u2v2 + v4) + i
(4uv(u2 − v2)
).
Wegen u , 0, v , 0 ist die rechte Zahl genau dann reell, wenn u2 − v2 = 0. Ausu2 +v2 = 1 folgt dann u2 = v2 = 1
2 , was aber den Widerspruch u4−6u2v2 +v4 = −1 , 1ergibt.
(v) Es gilt cos z = 0 genau dann, wenn exp(iz) = − exp(−iz) = exp(iπ − iz), also wennexp(2iz − iπ) = 1. Dieses tritt genau dann ein, wenn 2iz−iπ
2πi ∈ Z, bzw. z ∈ π2 + πZ.
Analog bestimmt man die Nullstellen des Sinus.
(vi) Sei w ∈ C, w , 0, gegeben. Da exp(x) eine Bijektion von R auf R+ ist, gibt es einx ∈ R mit exp(x) = |w|. Schreibe w
exp x = u + iv mit u, v ∈ R.
Klarerweise ist u2 + v2 = 1. Insbesondere gilt u ∈ [−1, 1]. Wegen cos 0 = 1 undcos π = −1 gibt es nach dem Zwischenwertsatz, Korollar 6.2.6, ein t ∈ [0, π] mitu = cos t.
Aus u2 + v2 = 1 = (cos t)2 + (sin t)2 folgt v2 = (sin t)2. Ist v = sin t, so setze y = t.Sonst muss v = − sin t, und dann setze man y = −t. In jedem Falle ist cos y = u undsin y = v und somit
w = exp(x)(cos y + i sin y) = exp(x + iy) .
Ist exp(z) = exp(ζ), so folgt 1 = exp(z − ζ), also z − ζ ∈ 2πiZ. q
Jede komplexe Zahl w , 0 lässt sich gemäß Satz 6.9.10 als exp(z) schreiben. Wählt manz so, dass 0 ≤ Im z < 2π, so ist nach Satz 6.9.10, (v), z eindeutig bestimmt. Also istexp : R × [0, 2π)→ C \ {0} bijektiv.Ist zu einem gegebenen w ∈ C \ {0} das komplexe z ∈ R × [0, 2π) ⊆ (C) die eindeutigeLösung von exp(z) = w, und setzt man r = exp(Re z) und t = Im z, so erhält man
w = exp(Re z) exp(i Im z) = r(cos t + i sin t) . (6.14)
Somit ist (r, t) 7→ r(cos t + i sin t) eine Bijektion T : R+ × [0, 2π)→ C \ {0}.6.9.11 Definition. Das Paar (r, t) in (6.14) nennt man die Polarkoordinaten von w, und dieBijektion T : R+ × [0, 2π)→ C \ {0} Polarkoordinatenfunktion.

6.9 Die Exponentialfunktion 205
−1 1
Im z
0
12πi−1 +1
2πi 1 +12πi
πi−1 +πi 1 +πi
32πi−1 +3
2πi 1 +32πi
2πi−1 +2πi 1 +2πi
Re z
14πi
exp(z) = w
Re w
Im w
1 = exp(0) = exp(2πi)
exp(πi) = −1
exp( 12πi) = i
exp(32πi) = −i
1√2(1 + i) = exp(1
4πi)
e = exp(1)exp(1 + πi) = −e
exp(1 + 12πi) = ie
exp(1 + 32πi) = −ie
0
Abbildung 6.12: Exponentialfunktion als Abbildung von C auf C \ {0}
6.9.12 Bemerkung.
Betrachtet man (r, t) 7→ r(cos t + i sin t) als Abbildung von [0,+∞) × [0, 2π), soerreicht man alle komplexen w – auch w = 0 – zu dem Preis, dass diese Abbildungdann nicht mehr injektiv ist.
Wegen Satz 6.9.10, (iii), kann dabei auch das Intervall [0, 2π) durch irgendeinhalboffenes Intervall der Länge 2π, z.B. (−π, π], ersetzen.
Offensichtlich ist T : R+ × [0, 2π) → C \ {0} als Zusammensetzung von stetigenFunktionen selbst stetig. Die Umkehrung ist nicht stetig: Es gilt limn→∞ exp(−i1
n ) = 1,aber
limn→∞
T−1(exp(−i1n
)) = limn→∞
(1, 2π − 1n
) = (1, 2π) , (1, 0) = T−1(1) .
Nimmt man statt [0, 2π) z.B. das Intervall [a, a + 2π), so treten entsprechendeProbleme beim Winkel a auf.
Nimmt man den kritischen Winkel aus, so sind die Polarkoordinaten in beide Richtungenstetig.
6.9.13 Proposition (*). Die Abbildung
T : R+ × (a, a + 2π)→ C \ {r exp(ia) : r ∈ [0,+∞)}, (r, t) 7→ r(cos t + i sin t) ,
ist bijektiv, und T sowie T−1 sind stetig.
Beweis. Es bleibt die Stetigkeit von T−1 : D := C \ {r exp(ia) : r ∈ [0,+∞)} → R+× (a, a +
2π) zu zeigen. Dazu sei limn→∞ zn = z ∈ D für eine Folge aus D. Wir schreiben
z = T (r, α) = r exp(iα) und zn = T (rn, αn) = rn exp(iαn), n ∈ N ,

206 6 Reelle und komplexe Funktionen
mit eindeutigen rn, r ∈ (0,+∞) und αn, α ∈ (a, a + 2π). Wegen rn = |zn|, r = |z| folgtrn → r.Ist (αn(k))k∈N eine Teilfolge, so hat diese wegen der Kompaktheit von [a, a + 2π] eine gegenein β ∈ [a, a + 2π] konvergente Teilfolge (αn(k(l)))l∈N. Somit gilt wegen der Stetigkeit von T
exp(iβ) = liml→∞
exp(iαn(k(l))) = liml→∞
zn(k(l))
rn(k(l))=
zr
= exp(iα) .
Nach Satz 6.9.10 erhalten wir β − α ∈ 2πZ und infolge α = β. Gemäß Lemma 5.2.11können wir daher auf αn → α schließen. q
6.9.14 Bemerkung. Mit Hilfe der Exponentialfunktion und ihrer Eigenschaften könnenwir auch hergeleiteten, dass es für n ∈ N immer n viele n-te Wurzeln einer jeden Zahlw ∈ C \ {0} in C gibt. Dazu schreiben wir w in Polarkoordinaten w = r(cos t + i sin t) mit(r, t) ∈ R+ × [0, 2π). Dann gilt für ein ζ ∈ C
exp(ζ)n = w⇔ exp(nζ) = r(cos t + i sin t) = exp(ln(r) + it) .
Wegen Satz 6.9.10 ist das genau dann der Fall, wenn nζ = ln(r) + i(t + 2 jπ) für ein j ∈ Z.Somit sind
η j = exp(ln(r) + i(t + 2 jπ)
n
)=
n√r ·(cos
t + 2 jπn
+ i sint + 2 jπ
n
)∈ C, j ∈ Z ,
genau die Lösungen der Gleichung zn = w. Wieder wegen Satz 6.9.10 sind aber nurη0, . . . , ηn−1 paarweise verschieden, und für j < {0, . . . , n − 1} stimmt η j mit einem derη0, . . . , ηn−1 überein.
6.10 Fundamentalsatz der Algebra
Als Anwendung der bisher entwickelten Stetigkeitstheorie wollen wir den Fundamentalsatzder Algebra beweisen. Zunächst benötigen wir ein Lemma.
6.10.1 Lemma. Ist p(z) ∈ C[z] vom Grad n, also p(z) = anzn + . . . + a0, an , 0, einkomplexes Polynom, so hat z 7→ |p(z)| ein Minimum: Es gibt eine Zahl c ∈ C mit |p(c)| ≤|p(z)| für alle z ∈ C.
Beweis. Wie aus Beispiel 5.5.14 bekannt, gilt limz→∞ |anzn + . . . + a0| = +∞. Insbesonderegibt es eine Zahl R > 0, sodass |p(z)| ≥ |a0| = |p(0)| für alle z ∈ C mit |z| > R.Die Kreisscheibe KR(0) := {z ∈ C : |z| ≤ R} ist kompakt, und |p(z)| ist, als Zusammenset-zung der stetigen Funktionen p und |.|, stetig auf KR(0). Gemäß Korollar 6.1.14 wird danndarauf ein Minimum angenommen; also existiert ein c ∈ KR(0) mit |p(c)| ≤ |p(z)| für allez ∈ KR(0). Unsere Wahl von R sichert schließlich, dass |p(c)| ≤ |p(z)| für alle z ∈ C. q

6.10 Fundamentalsatz der Algebra 207
6.10.2 Satz (Fundamentalsatz der Algebra). Sei p(z) = a0 + · · · + anzn ein komplexesPolynom vom Grad n. Dann existieren n nicht notwendigerweise verschiedene Zahlenz1, . . . , zn ∈ C, sodass
p(z) = an
n∏
k=1
(z − zk) . (6.15)
Beweis.
Sei h(z) ein Polynom der Form h(z) = 1 + bzk + zkg(z) mit k ∈ N, b ∈ C \ {0}und einem Polynom g, wobei g(0) = 0. Wir zeigen die Existenz eines u ∈ C mit|h(u)| < 1.
Dazu wählen wir gemäß Bemerkung 6.9.14 eine k-te Wurzel von −1b , also eine Zahl
d ∈ C mit bdk = −1. Für t ∈ (0, 1] gilt
|h(td)| ≤ |1 − tk| + |tkdkg(td)| = 1 − tk + tk|dkg(td)| = 1 − tk(1 − |dkg(td)|) .Wegen |dkg(td)| = 0 für t = 0 folgt aus der Stetigkeit dieses Ausdruckes bei 0, dass|dkg(td)| ≤ 1
2 für t ∈ (0, δ) mit einem δ > 0. Für jedes solche t gilt |h(td)| ≤ 1−tk 12 < 1.
Nun zeigen wir, dass jedes nichtkonstante Polynom f (z) eine Nullstelle in C hat.
Nach Lemma 6.10.1 gibt es ein c ∈ C, sodass | f (c)| = minz∈C | f (z)|. Wäre f (c) , 0,so betrachte
h(z) :=f (z + c)
f (c)= 1 + bkzk + bk+1zk+1 + . . . + bnzn, bk , 0 .
Nach dem ersten Beweisschritt existiert ein u ∈ C mit |h(u)| < 1 und daher
| f (u + c)| = |h(u)| · | f (c)| < | f (c)|im Widerspruch zu | f (c)| = minz∈C | f (z)|.
Wir zeigen schließlich (6.15) durch Induktion nach dem Grad von p(z). Ist der Gradeins, also p(z) = a1z + a0 mit a1 , 0, so gilt p(z) = a1(z − (−a0
a1)).
Stimme (6.15) für alle Polynome vom Grad kleiner als n, und sei p(z) vom Grad n.Nach dem vorigen Beweisschritt hat p eine Nullstelle z1. Mittels Polynomdivisionund Einsetzen von z = z1 erhält man p(z) = s(z)(z − z1). Das Polynom s hat dengleichen Führungskoeffizienten wie p und lässt sich nach Induktionsvoraussetzungin der angegebenen Weise faktorisieren. q
6.10.3 Bemerkung. Funktionen f : R→ C der Bauart
f (t) =
N∑
n=−N
cn exp(itn) ,
für ein N ∈ N und cn ∈ C, n = −N, . . . ,N nennt man trigonometrische Polynome.

208 6 Reelle und komplexe Funktionen
Man sieht sofort, dass f (t) = exp(−iNt)·p(exp(it)) mit einem komplexen Polynom p ∈ C[z]
p(z) =
2N∑
n=0
cn−Nzn .
f ist stetig und 2π-periodisch. Weiters stimmen zwei trigonometrische Polynome genaudann überein, wenn das ihre Koeffizienten tun. Ist nämlich
N∑
n=−N
cn exp(itn) =
M∑
n=−M
dn exp(itn) ,
wobei ohne Beschränkung der Allgemeinheit N ≥ M, so folgt∑N
n=−N(cn − dn) exp(itn) = 0.Hier setzen wir d j = 0 für M < j ≤ N. Es folgt q(exp(it)) = 0 für alle t ∈ R, wobeiq(z) =
∑2Nn=0(cn−N − dn−N)zn. Somit hat das Polynom q(z) unendlich viele Nullstellen und
ist infolge das Nullpolynom. Also gilt cn = dn für n = −N, . . . ,N.Schließlich lässt sich jedes trigonometrische Polynom wegen
N∑
n=−N
cn exp(itn) =
N∑
n=−N
cn(cos nt + i sin nt) = c0 +
N∑
n=1
(cn + c−n) cos nt +
N∑
n=1
(cn− ic−n) sin nt ,
in der Form
a0 +
N∑
n=1
an cos nt +
N∑
n=1
bn sin nt , (6.16)
schreiben. Umgekehrt lässt sich jede Funktion der Bauart (6.16) schreiben als
a0 +
N∑
n=1
anexp(int) + exp(−int)
2+
N∑
n=1
bnexp(int) − exp(−int)
2i
=
−1∑
n=−N
a−n + ib−n
2exp(itn) + a0 +
N∑
n=1
an − ibn
2exp(itn) .
Somit ist (6.16) eine zweite Art trigonometrische Polynome darzustellen, wobei die Koef-fizienten in (6.16) ebenfalls eindeutig sind.
6.11 Weitere wichtige elementare FunktionenDie Funktion
tan : R \ {π2
+ πn : n ∈ Z} → R, tan(x) =sin xcos x
,
wird als Tangens und
cot : R \ {πn : n ∈ Z} → R, cot(x) =cos xsin x
,
als Cotangens bezeichnet.

6.11 Weitere wichtige elementare Funktionen 209
x
y
−π2−3π2
−π−2π
π2
3π2
π 2π0
y = tan(x)y = cot(x)
Abbildung 6.13: Tangens und Cotangens
Betrachtet man tan eingeschränkt auf (−π2 , π2 ), so zeigt man elementar, dass tan diesesIntervall bijektiv auf R abbildet. Entsprechend bildet cot das Intervall (0, π) bijektiv auf Rab. Die jeweiligen Umkehrfunktionen heißen arctan (Arcustangens) bzw. arccot (Arcus-cotangens).
x
y
−π π−2π 2π0
π2
−π2
y = arctan(x)y = arccot(x)π
Abbildung 6.14: Arcustangens und Arcuscotangens
Man kann auch sin auf das Intervall [−π2 , π2 ] einschränken, und erhält eine Bijektion von[−π2 , π2 ] auf [−1, 1]. Die Umkehrfunktion davon heißt arcsin (Arcussinus). Entsprechendbildet cos das Intervall [0, π] bijektiv auf [−1, 1] ab. Die Umkehrfunktion davon heißtarccos (Arcuscosinus).Ähnlich wie sin und cos sind Sinus Hyperbolicus sinh und Cosinus Hyperbolicus cosh

210 6 Reelle und komplexe Funktionen
x
y
−2 −1 1 20
π
π2
−π2
y = arcsin(x)y = arccos(x)
Abbildung 6.15: Arcussinus und Arcuscosinus
definiert:
cosh z :=exp(z) + exp(−z)
2, sinh z :=
exp(z) − exp(−z)2
, z ∈ C .Die Werte von cosh z und sinh z liegen im allgemeinen in C. Für reelle z = x liegen cosh xund sinh x offensichtlich in R.
x
y
−3 −2 −1 1 2 30
1
4
3
2
−1
−2
−3
−4
y = sinh(x)y = cosh(x)
Abbildung 6.16: Sinus Hyperbolicus und Cosinus Hyperbolicus
Da sinh : R→ R bijektiv ist, hat er eine Inverse, die mit areasinh (Areasinus Hyperbolicus)bezeichnet wird. Die Funktion cosh eingeschränkt auf [0,+∞) bildet dieses Intervall

6.11 Weitere wichtige elementare Funktionen 211
bijektiv auf [1,+∞) ab. Die entsprechende Umkehrfunktion von [1,+∞) auf [0,+∞) heißtareacosh (Areacosinus Hyperbolicus).
x
y
−6 −5 −4 −3 −2 −1 1 2 3 4 5 60
3
2
1
−1
−2
−3
y = areasinh(x)y = areacosh(x)
Abbildung 6.17: Areasinus Hyperbolicus und Areacosinus Hyperbolicus
x
y
−2 −1 1 20
1
−1
y = tanh(x)y = coth(x)
Abbildung 6.18: Tangens Hyperbolicus und Cotangens Hyperbolicus
Schließlich ist tanh : R→ R definiert durch tanh x = sinh xcosh x , und coth : R \ {0} → R durch
coth x = cosh xsinh x .
Dabei bildet tanh die reellen Zahlen bijektiv auf (−1, 1) und coth die Menge R \ {0} bijektivauf R \ [−1, 1] ab. Die entsprechenden Umkehrfunktion heißen areatanh (AreatangensHyperbolicus) und areacoth (Areacotangens Hyperbolicus).

212 6 Reelle und komplexe Funktionen
x
y
2 4 6
−6 −4 −2
0
2
1
−1
−2
y = areatanh(x)y = areacoth(x)
Abbildung 6.19: Areatangens Hyperbolicus und Areacotangens Hyperbolicus
6.12 Abelscher Grenzwertsatz*Thematisch passt zu diesem Kapitel – insbesondere zum Begriff der Potenzreihe – dersogenannte Abelsche Grenzwertsatz.
6.12.1 Satz. Sei P(z) =∑∞
j=0 a jz j eine Potenzreihe und R ihr Konvergenzradius mit R ∈(0,+∞). Weiters sei w ∈ C mit |w| = R. Ist die Zahlenreihe s :=
∑∞j=0 a jw j konvergent, so
giltlimt→1−
P(tw) = s . (6.17)
Beweis. Zunächst bezeichne sn :=∑n
j=0 a jw j für jedes n ∈ N die n-te Partialsumme. LautVoraussetzung gilt s = limn→∞ sn. Aus Lemma 3.10.5 folgt für |z| < R
n∑
j=0
a jz j =
n∑
j=0
(a jw j)( zw
) j=
( zw
)nsn −
n−1∑
j=0
s j(( zw
) j+1−
( zw
) j)
=
( zw
)nsn +
(1 − z
w
) n−1∑
j=0
s j
( zw
) j.
Weil (s j) also konvergente Folge beschränkt ist, konvergiert∑n−1
j=0 s j
(zw
) jfür n→ ∞ nach
dem Majorantenkriterium aus Lemma 3.9.8. Wir erhalten
P(z) =
∞∑
j=0
a jz j =
(1 − z
w
) ∞∑
j=0
s j
( zw
) j.
Andererseits folgt aus∑∞
j=0 ζj = 1
1−ζ für |ζ | < 1, dass
s =
(1 − z
w
) ∞∑
j=0
s( zw
) j.

6.12 Abelscher Grenzwertsatz* 213
Also erhalten wir für |z| < R und N ∈ N
|P(z) − s| ≤∣∣∣∣∣1 −
zw
∣∣∣∣∣N∑
j=0
|s − s j|( zw
) j+
∣∣∣∣∣1 −zw
∣∣∣∣∣∞∑
j=N+1
|s − s j|( zw
) j.
Zu ε > 0 sei nun N so groß, dass |s − s j| < ε für alle j ≥ N. Dann ist |P(z) − s| kleiner odergleich ∣∣∣∣∣1 −
zw
∣∣∣∣∣N∑
j=0
|s − s j|( zw
) j+ ε
∣∣∣1 − zw
∣∣∣1 −
∣∣∣ zw
∣∣∣. (6.18)
Für z = tw, t ∈ (0, 1), sieht man, dass es ein t0 ∈ (0, 1) gibt, sodass für t > t0 dieserAusdruck kleiner oder gleich 2ε ist. Da ε > 0 beliebig war, gilt (6.17). q
6.12.2 Bemerkung. Mit einer etwas feineren Argumentationsweise lässt sich (6.17) fol-gendermaßen verallgemeinern:Nähert sich z nichttangentiell dem Punkt w an, so konvergiert P(z) gegen s. Das bedeutet,dass
limτ∈Nα, τ→0
P((1 − τ)w
)= s , (6.19)
wobei Nα, 0 < α < π, den Winkelraum
Nα = {reiβ ∈ C : r > 0, β ∈ [−α, α]}bezeichnet.
C
Re
Im
α
α
Abbildung 6.20: Winkelraum Nα
Um das einzusehen, bemerke man zunächst, dass für τ = reiβ ∈ Nα mit r = |τ| ≤ cosα
|τ|1 − |1 − τ| =
|τ|(1 + |1 − τ|)1 − |(1 − τ)|2 ≤
22 cos β − r
≤ 22 cosα − r
≤ 2cosα
.
Nun folgt man dem Beweis von Satz 6.12.1 bis (6.18). Mit z = (1−τ)w, |τ| ≤ cosα, τ ∈ Nα,erhalten wir
|P(z) − s| ≤∣∣∣∣∣1 −
zw
∣∣∣∣∣N∑
j=0
|s − s j|( zw
) j+ ε
2cosα
.
Für |τ| → 0 konvergiert der erste Summand gegen Null. Also gibt es ein t0 ∈ (0, cosα),sodass |P(z) − s| ≤ ε 3
cosα , wenn nur |τ| ≤ t0, τ ∈ Nα. Da ε beliebig war, folgt (6.19).

214 6 Reelle und komplexe Funktionen
6.13 Übungsaufgaben
6.1 Seien Rn, Rn × Rn � R2n und Rm versehen mit der euklidischen Metrik.
Zeigen Sie: Ist A eine m × n-Matrix, so ist die lineare Abbildung Rn → Rm, x 7→ Ax (hierbetrachte man x als ’stehenden’ und nicht als ’liegenden’ Vektor) stetig. Man zeige auch, dass(Rn ×Rn)→ Rn, (x, y) 7→ x + y und (R×Rn)→ Rn, (λ, x) 7→ λx (skalare Multiplikation) stetigsind.
6.2 Sei f : R→ R definiert als
f (x) :=
0 , falls x irrational ,1n , falls x rational, x = m
n mit ggT{m, n} = 1 .
Zeige, dass f in jedem irrationalen Punkt stetig ist.
Hinweis: Zeigen Sie, dass es zu jeder irrationalen Zahl x und vorgegebenen ε > 0 ein Intervall(x − δ, x + δ) gibt, sodass wenn p
q ∈ (x − δ, x + δ) ∩ Q sicher 1|q| < ε.
6.3 Betrachte die Funktion f : R2 → R, die definiert ist als f (x, y) := max{x, y}. Hierbei ist R2
versehen mit der euklidischen Metrik. Man zeige: f ist stetig.
Hinweis: Ein Möglichkeit ist, zunächst zu zeigen, dass max(x, y) =x+y+|x−y|
2 .
6.4 Sei 〈X, d〉 ein metrischer Raum und ∅ , A ⊆ X. Zeigen Sie, dass x 7→ d(x, A) eine stetigeAbbildung von X nach R ist; vgl. 5.20. Weiters zeige man, dass in jeder kompakten TeilmengeK ⊆ X wenigstens ein x liegt, sodass d(K, A) = d(x, A).
6.5 An welchen Punkten ist die folgende Funktion stetig und welche Art von Unstetigkeit liegt anden Unstetigkeitsstellen vor?
f (x) =
x2 , falls x ∈ [−1, 1] ,x + 1 , falls x < −1 ,x − 1 , falls x > 1 .
Weiters bestimme man, für welche Wahl von a, b ∈ R die folgende Funktion f : R→ R stetigist.
f (x) =
(x − a)2 , falls x < −1 ,1 − x2 , falls x ∈ [−1, 2] ,bx3 + x , falls x > 2 .
6.6 An welchen Punkten ist die folgende Funktion stetig und welche Art von Unstetigkeit liegt anden Unstetigkeitsstellen vor?
f (x) =
x2 + 2x + 1 , falls − 1 ≤ x ≤ 0 ,1 − x , sonst .

6.13 Übungsaufgaben 215
Weiters bestimme man, für welche Wahl von a, b ∈ R die folgende Funktion f : R→ R stetigist.
f (x) =
1 + x2 , falls x ≤ 1 ,ax − x3 , falls 1 < x ≤ 2 ,bx2 , falls x > 2 .
6.7 Man betrachte folgende Funktion als Funktion von C \ N nach C (beide mit der euklidischenMetrik versehen), wobei N die Menge der Nullstellen des Nenners ist.
f (z) =z3 − 13z − 12z3 + z2 + z + 1
.
Man zeige, dass f stetig ist, und man gebe die maximale Teilmenge von C an, auf die sich fstetig fortsetzen lässt.
6.8 Man betrachte folgende Funktion als Funktion von C \ N nach C (beide mit der euklidischenMetrik versehen), wobei N die Menge der Nullstellen des Nenners ist.
f (z) =z3 + 2z2 − 13z + 10z4 + 5z3 − z2 − 5z
.
Man zeige, dass f stetig ist, und man gebe die maximale Teilmenge von C an, auf die sich fstetig fortsetzen lässt.
6.9 Weisen Sie nach, dass eine Teilmenge I von R genau dann
∀x, y ∈ I, x < y⇒ [x, y] ⊆ I .
erfüllt, wenn I eine der folgenden Formen hat
∅, (a, b), [a, b], (a, b], [a, b), (a,+∞), (−∞, a), [a,+∞), (−∞, a],R .
Hinweis: Für die⇒ Richtung unterscheiden Sie, ob I nach oben (unten) beschränkt ist, und obin diesem Fall die Menge ihr Supremum (Infimum) enthält oder nicht.
6.10 Gegeben sei ein Polynom p(x) = a0 + a1x + . . . + anxn mit reellen Koeffizienten und an , 0.Zeigen Sie:
Ist n ungerade, so hat p mindestens eine reelle Nullstelle.
Ist n gerade und a0an < 0, so hat p mindestens zwei verschiedene reelle Nullstellen.
6.11 Sei 〈X, d〉 ein metrischer Raum und x in X. Zeigen Sie mit Hilfe der Folgen-Charakterisierungder Stetigkeit, dass eine Abbildung f = ( f1, . . . , fp) : X → Rp genau dann in x stetig ist, wennalle Komponentenfunktionen f j : X → R, j = 1, . . . , p, im Punkt x stetig sind.
6.12 Betrachten Sie die Funktion f : R2 → R definiert durch f (0, 0) = 0 und
f (x, y) =xy2
x2 + y4 für (x, y) , (0, 0) .
Zeigen Sie, dass für jeden eindimensionalen Unterraum D := {λ(x0, y0) : λ ∈ R} die Funktionf |D stetig ist.
Hinweis: Es könnte hilfreich sein, zuerst zu zeigen, dass eine Folge (λn(x0, y0))n∈N in D genaudann bzgl. d2 konvergiert, wenn (λn) in R konvergiert!

216 6 Reelle und komplexe Funktionen
6.13 Mit der Notation aus dem vorherigen Beispiel zeige man, dass f : R2 → R nicht stetig ist.
Hinweis: Suchen Sie spezielle, gegen (0, 0) konvergente Folge aus R2 \ {(0, 0)}, für welche dieBildfolge nicht gegen f (0, 0) konvergiert!
6.14 An welchen Punkten des Definitionsbereiches sind f : R2 → R3 und g : R2 → R stetig, undwarum bzw. warum nicht?
f (u, v) =(e−u, ev, sin(uv)
),
g(x, y) =x2y
x2 + y4 für (x, y) , (0, 0), g(0, 0) = 0 .
6.15 Für n ∈ N seien die Funktionen fn(x) auf (0, 1) definiert durch
fn(x) =
−n3x + 2n2 , falls 0 < x < 1
2n ,n
n+1 , falls 12n ≤ x < 1 .
Skizzieren Sie diese Funktionenfolge! Konvergiert diese Folge von Funktionen punktweiseoder sogar gleichmäßig? Wenn ja, wogegen? Berechnen Sie weiters die Fläche an zwischender Funktion fn und der x-Achse! Wohin konvergiert die Folge dieser Flächen?
6.16 Bestimmen Sie für die unten stehenden Funktionenfolgen ( fn) die jeweilige Grenzfunktionf (x) = lim
n→∞ fn(x). Konvergieren die Funktionenfolgen gleichmäßig auf D?
a) fn(x) =n
n2 + x2 , D = R b) fn(x) =xn
1 + xn , D = [0,∞) .
6.17 Man zeige mit Hilfe der Potenzreihendarstellung von cos und sin, dass limt→0sin t−t
t2 = 0und limt→0
cos t−1t2 = − 1
2 . Weiters berechne man limt→0+ t(cos 1t + 1). Hier ist t immer so zu
verstehen, dass es in R läuft.
Hinweis: Hat eine Potenzreihe f (z) bei Null eine Nullstelle, so ist auch f (z)z eine Potenzreihe
und daher stetig.
6.18 Zeigen Sie für E , ∅ und für beschränkte Abbildungen f , g : E → C, dass ‖ f + g‖∞ ≤‖ f ‖∞ + ‖g‖∞ sowie ‖ f · g‖∞ ≤ ‖ f ‖∞ · ‖g‖∞.
6.19 Ist die Funktionenreihe∑∞
n=1 fn auf E mit Werten in Y ∈ {R,C} nur punktweise, gleichmäßigoder absolut als Funktionenreihe konvergent? Dabei ist
(i) E = R,Y = R, fn = cos nx+sin nxn2 .
(ii) E = [−1, 1],Y = R, fn = (−1)n xn .
(iii) E = [0, 1),Y = R, fn = xn.
6.20 Ist die Funktionenreihe∑∞
n=1 fn auf E = {z ∈ C : |z − 2| > 2} mit fn(z) = z(z−1)n und mit Werten
in Y = C punktweise, gleichmäßig oder absolut als Funktionenreihe konvergent?
Hinweis: Um ‖ fn‖∞ nach unten abzuschätzen, setze man z = − 1n ein.
6.21 Geben Sie die Konvergenzradien von∑
n=0(2 + (−1)n)nzn, von∑
n=0 n!zn sowie von∑n=1
1n2 (√
n2 + n −√
n2 + 1)nzn an.

6.13 Übungsaufgaben 217
6.22 Man beweise mit Hilfe der aus der Vorlesung bekannten Tatsachen folgende Gleichungen(z,w ∈ C):
cos(z + kπ) = (−1)k cos z, k ∈ Z,sin(z + kπ) = (−1)k sin z, k ∈ Z,cos(π2 − z) = sin z, sin(π2 − z) = cos z,
sin(−z) = − sin z, cos(−z) = cos z,
cos 2z = (cos z)2 − (sin z)2, sin 2z = 2 sin z cos z
6.23 Für z ∈ C seien cosh z := exp(z)+exp(−z)2 und sinh z := exp(z)−exp(−z)
2 . Man gebe die Potenzreihen-darstellung dieser Funktionen und ihren Konvergenzradius an.
Für x ∈ R berechne man limx→+∞ sinh x, limx→−∞ sinh x, limx→+∞ cosh x, limx→−∞ cosh x,und skizziere die Funktionsgraphen von cosh |R : R→ R, sinh |R : R→ R.
Man stelle auch cosh z mit Hilfe der cos Funktion und sinh z mit Hilfe der sin Funktion dar(z ∈ C). Weiters bestimme man die z ∈ C, sodass cosh z = 0 und die z mit sinh z = 0.
6.24 Man zeige, dass sinh |R : R→ R streng monoton wachsend ist, dass sinh |R(R) = R, und dassdie Inverse areasinh : R→ R mit ln
(x +√
x2 + 1)
übereinstimmt und stetig ist.
Hinweis: Um areasinh(x) = ln(x +√
x2 + 1)
zu zeigen, setzen Sie unbestimmt sinh t = x undlösen sie diese Gleichung.
Anmerkung: cosh |R : R → R hat nicht diese Eigenschaft. Schränkt man diese Funktionauf [0,+∞) ein, dann gilt aber schon, dass cosh |[0,+∞) : [0,+∞) → [1,+∞) streng monotonwachsend und bijektiv ist. Ihre Inverse ist gegeben durch areacosh(x) := ln
(x +√
x2 − 1).
6.25 Man rechne nach, dass sin s − sin t = 2 cos( s+t2 ) sin( s−t
2 ). Weiters verwende man diese Tatsacheum zu zeigen, dass sin : [−π2 , π2 ] → [−1, 1] streng monoton wachsend und bijektiv ist. Manzeichne eine Skizze der Umkehrfunktion arcsin : [−1, 1]→ [−π2 , π2 ] (Arcussinus).
6.26 Man bestimme alle sechsten Wurzeln von 1 in C auf zwei Arten: In Polarkoordinaten und inder Real- und Imaginärteil Schreibweise.
Man berechne daraus cos(π3 ), sin(π3 ).
6.27 Sei f : [0, 2π)→ C gegeben durch f (t) = exp(it). Ist f stetig?
Zeigen Sie mit den Resultaten aus der Vorlesung: Betrachtet als Abbildung von [0, 2π) nach Tist f bijektiv. Zeigen Sie auch, dass für jedes β ∈ (0, 2π) die Abbildung f |−1
[0,β] : f ([0, β]) →[0, β] ⊆ R stetig ist! Ist auch f −1 : T→ [0, 2π) ⊆ R stetig? Begründung!
6.28 Sei E = N ∪ {0} und z ∈ C fest! Betrachte fn : E → C für n ∈ N ∪ {0} definiert durch
fn(k) =1kn
(kn
)zn .
Zeigen Sie, dass∑∞
n=0 fn als Funktionenreihe absolut konvergiert! Berechnen Sie die Grenz-funktion
∑∞n=0 fn.
Wenn Sie Lemma 6.6.12 (Vertauschung von Grenzwerten) auf die Funktionenfolge (mitFolgenindex N ∈ N) der Partialsummen sN =
∑Nn=0 fn und die Folge xk = k anwenden, welche
Gleichheit erhalten Sie dann?

218 6 Reelle und komplexe Funktionen
6.29 Man betrachte für x ∈ R \ Z,
f (x) =
∞∑
k=1
1(x − k)2 +
∞∑
k=1
1(x + k)2 +
1x2 ,
und zeige, dass diese Funktion auf R \ Z wohldefiniert und stetig ist.
Hinweis: Für die Stetigkeit betrachte man zunächst x ∈ [−K,K] für ein K ∈ N und schreibef (x) =
∑∞k=K+1
1(x−k)2 +
∑∞k=K+1
1(x+k)2 +
∑Kk=−K
1(x−k)2 . Man zeige, dass man auf die beiden
Reihen das Weierstraß Kriterium anwenden kann.
6.30 Sei f (x), x ∈ R \ Z, die Funktion aus dem vorherigen Beispiel. Man betrachte für x ∈ R \ Z,
g(x) =π2
sin2(πx)− f (x) ,
und zeige, dass diese Funktion auf R \ Z wohldefiniert und stetig ist. Weiters zeige man, dass geine stetige Fortsetzung auf R hat, welche 1-periodisch ist. Man bezeichne auch die Fortsetzungmit g.
Weiters zeige man, dass g folgende Gleichung erfüllt:
g( x2
)+ g
(x + 1
2
)= 4g(x) ,
und leite daraus ab, dass g(x) = 0 für alle x ∈ R bzw. f (x) = π2
sin2(πx)für alle x ∈ R \ Z.
Hinweis zu g = 0: Wende diese Funktionalgleichung auf xmax an, wobei xmax Maximum von|g| ist.
6.31 Man zeige mit Hilfe der Potenzreihendarstellung von exp, dass limx→+∞exp(x)
xn = +∞ fürbeliebiges n ∈ N ∪ {0}. Man berechne daraus limx→−∞ xn exp(x), sowie limy→0+ y(ln y)n.
6.32 Man zeige: limn→∞(∑n
j=0z j
j! − (1 + zn )n) = 0 gleichmäßig auf jeder beschränkten Teilmenge
der Form {z : |z| ≤ R} von C. Man leite daraus exp(z) = limn→∞(1 + zn )n (gleichmäßig auf
{z : |z| ≤ R}) ab.
Hinweis: Zuerst zeige man, dass die Differenz gleich∑n
j=2z j
j! a j,n mit a j,n = (1 −∏ j−1l=0 (1 − l
n ))
ist, und beachte, dass |a j,n| ≤ 1 und somit∑n
j=mz j
j! a j,n < ε für N(ε) ≤ m < n, |z| ≤ R für N(ε)hinreichend groß. Beachte auch, dass a j,n → 0 für n→ ∞ und festes j.
6.33 Man betrachte P := { f ∈ C(R,C) : g(x + 2πk) = g(x), ∀x ∈ R, k ∈ Z}, also alle 2π-periodischen, stetigen und komplexwertigen Funktionen. Weiters sei C(T,C) die Menge allerstetigen und komplexwertigen Funktionen auf T = {z ∈ C : |z| = 1}. Seien + und dieSkalarmultiplikation punktweise auf diesen Räumen definiert.
Dann zeige man, dass P und C(T,C) Vektorräume sind. Weiters zeige man, dass genau danng ∈ P, wenn g(x) = f (exp(ix)) für eine Funktion f ∈ C(T,C). Schließlich weise man nach,dass Φ : C(T,C)→ P mit Φ( f ) = g, wobei g(t) = f (exp(it)), ein Vektorraumisomorphismus,also eine lineare Bijektion, ist.

6.13 Übungsaufgaben 219
6.34 Für n ∈ Z sei gn : R→ C definiert durch gn(x) = exp(nix). Man zeige, dass gn ∈ P (Notationwie im vorherigen Beispiel). Weiters bestimme man fn ∈ C(T,C), sodass gn(x) = fn(exp(ix)).Schließlich zeige man, dass die Funktionen fn, n ∈ Z in C(T,C) und die Funktionen gn, n ∈ Zin P linear unabhängig sind.
6.35 Seien f (z) =∑∞
n=0 anzn, g(z) =∑∞
n=0 bnzn zwei Potenzreihen mit Konvergenzradius Ra ∈(0,+∞] bzw. Rb ∈ (0,+∞] mit ohne Beschränkung der Allgemeinheit Ra ≤ Rb und λ ∈ C, N ∈N ∪ {0}. Man betrachte die Funktionen
f (z) + g(z), f (z) − g(z), λ f (z), f (z) · g(z), z f (z),f (z) − a0
z
auf {z ∈ C : |z| < Ra}. Man zeige, dass es zu jeder dieser Funktionen eine Potenzreihegibt, die die jeweilige Funktion als Grenzfunktion hat. Wie schauen die Koeffizienten dieserPotenzreihen aus, und was kann man über die jeweiligen Konvergenzradien sagen?
6.36 Sei f (z) =∑∞
n=0 anzn eine Potenzreihe mit Konvergenzradius R ∈ (0,+∞]. Weiters sei w ∈ Cmit |w| < R. Zeigen Sie, dass es eine Potenzreihe
∑∞n=0 bnζ
n mit Konvergenzradius ≥ R − |w|gibt, sodass
f (z) =
∞∑
n=0
bn(z − w)n
für alle z ∈ UR−|w|(w).
Hinweis: Für z ∈ UR−|w|(w) fest betrachten Sie∑
(n,k)∈(N∪{0})2
an
(nk
)(z − w)kwn−k .
Zeigen Sie, dass∑
n∑
(n,k)∈{n}×N |an(nk
)(z − w)kwn−k| unbedingt konvergiert und wenden Sie
Lemma 5.4.9 und dann Proposition 5.4.8 an!
Anmerkung: Dieses Beispiel zeigt, dass Grenzfunktionen von Potenzreihen analytisch sind;vgl. Bemerkung 6.8.11.
6.37 Die stereographische Projektion σ ist folgendermaßen definiert:
Man betrachte die abgeschlossene Einheitskugel Kd21 (0) im R3 um (0, 0, 0) mit Radius 1 bzgl.
der Metrik d2. Hat man einen Punkt P auf der Kugeloberfläche S gegeben, der verschiedenvom Nordpol N = (0, 0, 1) ist, so bilde man diesen auf einen Punkt der Ebene ab, indem mandie Gerade, welche P und N verbindet, mit der xy-Ebene schneidet.
Zeige, dass die Abbildungsformeln von σ gegeben sind durch
σ(ξ, η, ζ) = (x, y), x =ξ
1 − ζ , y =η
1 − ζ ,
Zeige auch, dass die so erhaltene Abbildung σ die Menge S \ {N} bijektiv auf R2 abbildet, unddass ihre Inverse σ−1 mit τ übereinstimmt, wobei
τ(x, y) = (ξ, η, ζ), ξ =2x
1 + x2 + y2 , η =2y
1 + x2 + y2 , ζ =x2 + y2 − 11 + x2 + y2 .
Hinweis: Für τ = σ−1 zeigen Sie, dass tatsächlich τ(R2) ⊆ S \{N}, und dass τ◦σ = idS \{N} sowieσ◦τ = idR2 (verwenden Sie gegebenenfalls, dass für (ξ, η, ζ) ∈ S \{N} immer ξ2 +η2 +ζ2 = 1)!

220 6 Reelle und komplexe Funktionen
6.38 Mit der Notation aus dem letzten Beispiel zeige man, dass σ : S \ {N} → R2 und τ : R2 →S \ {N} ⊆ R3 stetig sind, wobei R2 und R3 mit d2 versehen sind. Zeigen Sie auch, dass(|(x, y)| := |x + iy| =
√x2 + y2)
lim(ξ,η,ζ)→N
|σ(ξ, η, ζ)| = +∞ ,
sowielim
|(x,y)|→+∞τ(x, y) = N .
Hier ist lim(x,y)∈R2 τ(x, y) gemeint, wobei R2 durch (x, y) � (u, v)⇔ |(x, y)| ≤ |(u, v)| gerichtetist.
6.39 Sei C = C ∪ {∞} (∞ ist ein Element, das nicht in C enthalten ist), wobei wir C als EbeneR2 auffassen. Weiters sei σ die auf ganz S durch σ(N) = ∞ fortgesetzte Abbildung aus demvorletzten Beispiel. Offenbar ist σ : S → C bijektiv.
Wir definieren eine Abbildung χ : C × C→ R durch
χ(z,w) := d2(σ−1(z), σ−1(w)
), z,w ∈ C ,
wobei d2 für die euklidische Metrik auf S ⊆ R3 steht.
Man zeige, dass χ eine Metrik auf C ist, sodass zn → z in C bezüglich χ genau dann wennσ−1(zn)→ σ−1(z) in R3 bzgl. d2. χ wird als chordale Metrik bezeichnet.
Zeigen Sie schließlich, dass C versehen mit χ kompakt ist.
6.40 Mit der Notation aus dem vorherigen Beispiel zeige man:
Ist (zn)n∈N eine Folge komplexer Zahlen, so zeige man, dass zn → ∞, also |zn| → +∞, genaudann, wenn zn → ∞ in C bezüglich χ.
Ist z ∈ C, so zeige man weiters, dass zn → z bzgl. d2 genau dann, wenn zn → z bzgl. χ.
Schließlich zeige man, dass
χ(a, b) =2|a − b|√
1 + |a|2 ·√
1 + |b|2, a, b ∈ C .
6.41 Eine reellwertige Funktion f , die auf einem Intervall I definiert ist, heißt konvex, wenn sie fürbeliebige Punkte x1, x2 ∈ I und beliebige λ ∈ [0, 1] immer folgende Ungleichung erfüllt:
f (λx1 + (1 − λ)x2) ≤ λ f (x1) + (1 − λ) f (x2) .
Beweisen Sie, dass diese Bedingung zur folgenden äquivalent ist:
Für alle Punkte x1, x2, x ∈ I mit x1 < x < x2 gilt:
f (x) ≤ x2 − xx2 − x1
f (x1) +x − x1
x2 − x1f (x2) .
Weiters zeigen Sie, dass diese Gleichung wiederum äquivalent zu
f (x) − f (x1)x − x1
≤ f (x2) − f (x)x2 − x
.

6.13 Übungsaufgaben 221
für alle x, x1, x2 ∈ I mit x1 < x2.
Was bedeutet die Bedingung konvex zu sein geometrisch? Warum?
Bemerkung: Eine Funktion f heißt konkav, wenn − f konvex ist.
6.42 Zeigen Sie, dass konvexe Funktionen auf offenen Intervallen I stetig sind! Hinweis: Für dieStetigkeit in einem Punkt x ∈ I fixiere man a, b ∈ I mit x ∈ (a, b) ⊆ [a, b] ⊆ I, und verwendeletzte Charakterisierung im Übungsbeispiel 6.41.
6.43 Sind z1, . . . , zN ∈ C, so zeige man
N∏
j=1
(1 + |z j|) ≤ exp(N∑
j=1
|z j|) ,
und
|N∏
j=1
(1 + z j) − 1| ≤N∏
j=1
(1 + |z j|) − 1 .
Hinweis für die zweite Ungleichung: Vollständige Induktion
6.44 Sei M eine Menge und fn : M → C, sodass∑∞
n=1 fn absolut auf M konvergiert. Man zeige,dass dann auch
f (m) :=∞∏
n=1
(1 + fn(m))
gleichmäßig auf M konvergiert. Weiters zeige man, dass f (m) = 0⇔ ∃n ∈ N : 1 + fn(m) = 0.
Hinweis: Cauchykriterium.
6.45 Man zeige, dass f (z) = z∏∞
k=1(1 − z2
k2 ) gleichmäßig auf jeder beliebigen Kugel KR(0) ⊆ Ckonvergiert. Man bestimme die Nullstellen von f und zeige, dass f (z + 1) = − f (z).
Anmerkung: Man kann zeigen, dass f (z) = sin πz.