Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS...
40
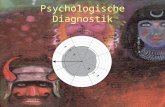
Kapitel 7 Das Riemann–Integral 7.1 Unter– und Obersummen 7.2 Riemann–Integral 7.3 Riemannsche Summen 7.4 Rechenregeln 7.5 Differentiation und Integration 7.6 Die L p –Normen 7.1 Unter– und Obersummen Unter einer Partition oder Zerlegung eines Intervalls [a, b] verstehen wir eine endliche Men- ge P = {x 0 ,x 1 ,...,x n } mit der Eigenschaft a = x 0 <x 1 <...<x n = b, vergleiche die Abbildung 7.1. a b R = x 0 x 1 x 2 x 3 ... x n−1 = x n ... = I 1 = I 2 = I 3 = I n Abbildung 7.1: Beispiel einer Partition des Intervalls [a, b] Als Feinheit einer solchen Zerlegung bezeichnen wir den Ausdruck δ (P ) := max k=1,...,n |x k − x k−1 |, d.h., δ (P ) ist die L¨ ange des gr¨ oßten Teilintervalls I k := [x k−1 ,x k ],k =1,...,n. 201
Transcript of Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS...
![Page 1: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/1.jpg)
Kapitel 7
Das Riemann–Integral
7.1 Unter– und Obersummen7.2 Riemann–Integral7.3 Riemannsche Summen7.4 Rechenregeln7.5 Differentiation und Integration7.6 Die Lp–Normen
7.1 Unter– und Obersummen
Unter einer Partition oder Zerlegung eines Intervalls [a, b] verstehen wir eine endliche Men-ge P = {x0, x1, . . . , xn} mit der Eigenschaft
a = x0 < x1 < . . . < xn = b,
vergleiche die Abbildung 7.1.
a b
R
= x0 x1 x2 x3. . . xn−1 = xn
. . .= I1 = I2 = I3 = In
Abbildung 7.1: Beispiel einer Partition des Intervalls [a, b]
Als Feinheit einer solchen Zerlegung bezeichnen wir den Ausdruck
δ(P ) := maxk=1,...,n
|xk − xk−1|,
d.h., δ(P ) ist die Lange des großten Teilintervalls Ik := [xk−1, xk], k = 1, . . . , n.
201
![Page 2: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/2.jpg)
202 KAPITEL 7. DAS RIEMANN–INTEGRAL
Definition 7.1 Sei f : [a, b] → R eine beschrankte Funktion und P = {x0, x1, . . . , xn}eine Partition von [a, b] in die Teilintervalle Ik := [xk−1, xk] fur k = 1, . . . , n. Setze
mk(f) := infx∈Ik
f(x) und Mk(f) := supx∈Ik
f(x).
Dann heißen
UP (f) :=∑
P
mk(f)(xk − xk−1) :=n∑
k=1
mk(f)(xk − xk−1) und
OP (f) :=∑
P
Mk(f)(xk − xk−1) :=
n∑
k=1
Mk(f)(xk − xk−1)
die Untersumme und die Obersumme von f zur Partition P .
Zu einer beschrankten Funktion f : [a, b] → R und einer gegebenen Partition P ={x0, x1, . . . , xn} von [a, b] bezeichne mk(f) und Mk(f) fur alle k = 1, . . . , n stets die Begriffeaus der Definition 7.1. Ferner setzen wir
m(f) := infx∈[a,b]
f(x) und M(f) := supx∈[a,b]
f(x)
und erlauben uns, von diesen Bezeichnungen im Folgenden ebenfalls freien Gebrauch zumachen, ohne diese explizit zu wiederholen. Die Abbildung 7.2 illustriert die Begriffe derOber– und Untersumme.
f
xa b
= x0 x2x1 x3 = x4
OP (f)
UP (f)
Abbildung 7.2: Veranschaulichung einer Ober– und Untersumme
Lemma 7.2 Seien f : [a, b] → R beschrankt und P eine beliebige Partition von [a, b].Dann gilt
m(f)(b − a) ≤ UP (f) ≤ OP (f) ≤ M(f)(b − a).
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 3: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/3.jpg)
7.1. UNTER– UND OBERSUMMEN 203
Beweis: Per Definition gilt m(f) ≤ mk(f) ≤ Mk(f) ≤ M(f) fur alle k = 1, 2, . . . , n.Multiplikation mit xk − xk−1 > 0 ergibt
m(f)(xk − xk−1) ≤ mk(f)(xk − xk−1) ≤ Mk(f)(xk − xk−1) ≤ M(f)(xk − xk−1).
Summation uber alle k = 1, 2, . . . , n liefert daher die Behauptung wegen∑n
k=1 xk −xk−1 =b − a. 2
Im Folgenden bezeichnen wir eine Partition P ′ = {x′0, x
′1, . . . , x
′n′} von [a, b] als eine Verfei-
nerung von einer Partition P = {x0, x1, . . . , xn}, wenn {x0, x1, . . . , xn} ⊆ {x′0, x
′1, . . . , x
′n′}
gilt. Offenbar ist dann δ(P ′) ≤ δ(P ).
Lemma 7.3 Seien f : [a, b] → R beschrankt und P, P ′ zwei Zerlegungen von [a, b] derart,dass P ′ eine Verfeinerung von P ist. Dann gilt OP ′(f) ≤ OP (f) und UP ′(f) ≥ UP (f).
Beweis: Wir beweisen die Aussage nur fur die Obersummen, da sie sich fur die Unter-summen analog verifizieren lasst. Sei P = {x0, x1, . . . , xn} die gegebene Partition. Dannentsteht P ′ durch Hinzunahme von endlich vielen Punkten zu P . Wir nehmen jetzt an,dass P ′ aus P durch Hinzunahme nur eines Punktes x entstehe, der in dem Teilintervall[xr−1, xr] liegen moge. Der allgemeine Fall kann dann bewiesen werden, indem man dienachstehenden Argumente endlich viele Male wiederholt.
Gemaß Definition ist
OP (f) =
n∑
k=1
Mk(f)(xk − xk−1).
Mit Ausnahme des Summanden k = r stimmt diese Formel auch fur die Obersumme OP ′(f)der Partition P ′, so dass wir nur diesen einen Summanden zu betrachten brauchen. Es istauf dem Teilintervall [xr−1, xr] = [xr−1, x] ∪ [x, xr] aber
supx∈[xr−1,x]
f(x)(x − xr−1) + supx∈[x,xr]
f(x)(xr − x)
≤ supx∈[xr−1,xr]
f(x)(x − xr−1) + supx∈[xr−1,xr]
f(x)(xr − x)
= supx∈[xr−1,xr]
f(x)[(x − xr−1) + (xr − x)
]
= Mr(f)(xr − xr−1)
und daher OP ′(f) ≤ OP (f). 2
Als Konsequenz des Lemmas 7.3 erhalten wir sofort das nachstehende Resultat.
Lemma 7.4 Seien f : [a, b] → R beschrankt und P1, P2 zwei Partitionen von [a, b]. Danngilt UP1(f) ≤ OP2(f).
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 4: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/4.jpg)
204 KAPITEL 7. DAS RIEMANN–INTEGRAL
Beweis: Die Partition P := P1 ∪ P2 ist ganz offensichtlich eine Verfeinerung sowohl vonP1 als auch von P2. Daher erhalten wir aus den Lemmata 7.2 und 7.3 unmittelbar
UP1(f) ≤ UP (f) ≤ OP (f) ≤ OP2(f),
womit auch schon alles bewiesen ist. 2
Wir definieren jetzt die unteren und oberen Riemann–Integrale unter Verwendung derUnter– und Obersummen.
Definition 7.5 Sei f : [a, b] → R eine beschrankte Funktion. Dann heißen
b∫
a
f(x)dx := sup{UP (f)
∣∣P ist eine Partition von [a, b]
}und
b∫
a
f(x)dx := inf{OP (f)
∣∣P ist eine Partition von [a, b]
}
das untere und obere Riemann–Integral von f auf [a, b].
Das untere und obere Riemann–Integral wird in der Literatur manchmal auch als unte-res und oberes Darboux–Integral oder Riemann–Darboux–Integral bezeichnet. Man beachtehierbei, dass beide Integrale im Falle von beschrankten Funktionen endliche Werte liefernund daher wohldefiniert sind. Im Falle des unteren Riemann–Integrals folgt dies beispiels-weise aus der Tatsache, dass eine beliebige Obersumme OP (f) wegen Lemma 7.4 stets eineobere Schranke fur alle moglichen Untersummen darstellt und wir daher das Supremumuber eine offenbar nichtleere und nach oben beschrankte Menge nehmen mussen. Ein sol-ches Supremum existiert in der Menge der reellen Zahlen aber stets (siehe Definition 1.31und Satz 1.32).
Bemerkung 7.6 Seien f, g : [a, b] → R zwei beschrankte Funktionen mit f(x) ≤ g(x) furalle x ∈ [a, b]. Fur jede Partition P des Intervalls [a, b] gelten dann offenbar UP (f) ≤ UP (g)und OP (f) ≤ OP (g). Dies impliziert wiederum die Monotonie–Eigenschaften
b∫
a
f(x)dx ≤b∫
a
g(x)dx und
b∫
a
f(x)dx ≤b∫
a
g(x)dx
des unteren und oberen Riemann–Integrals.
Mittels unserer Vorbetrachtungen gelangen wir sofort zu dem folgenden Resultat.
Lemma 7.7 Sei f : [a, b] → R beschrankt. Dann gilt
b∫
a
f(x)dx ≤b∫
a
f(x)dx.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 5: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/5.jpg)
7.2. RIEMANN–INTEGRAL 205
Beweis: Fur beliebige Partitionen P1, P2 von [a, b] gilt UP1(f) ≤ OP2(f) nach Lemma 7.4.Halten wir P2 vorubergehend fest, so folgt
supP1
UP1(f) ≤ OP2(f).
Da P2 hierbei eine beliebige Partition sein kann, impliziert dies
supP1
UP1(f) ≤ infP2
OP2(f).
Aus der Definition des unteren und oberen Riemann–Integrals folgt somit die Behauptung.2
7.2 Riemann–Integral
Wir fuhren in diesem Abschnitt den Begriff des Riemann–Integrals ein und beweisen einigeder wichtigsten Eigenschaften von Riemann–integrierbaren Funktionen.
Definition 7.8 Ist f : [a, b] → R eine beschrankte Funktion mit
b∫
a
f(x)dx =
b∫
a
f(x)dx,
so heißt f (Riemann–) integrierbar und der gemeinsame Wert
b∫
a
f(x)dx :=
b∫
a
f(x)dx(
=
b∫
a
f(x)dx)
,
das (bestimmte Riemann–) Integral von f auf [a, b].
Ist f : [a, b] → R eine integrierbare Funktion mit f(x) ≥ 0 fur alle x ∈ [a, b], so lasst sichdas Integral
∫ b
a
f(x)dx (7.1)
als Flache zwischen der x-Achse und dem Graphen von f deuten. Dies folgt unmittelbar ausder Definition des Integrals und der Herleitung der Unter– und Obersummen im vorigenAbschnitt, vergleiche hierzu auch die Abbildung 7.3.
Statt der Schreibweise (7.1) werden wir haufig auch∫ b
a
f(t)dt oder
∫ b
a
f(ξ)dξ
schreiben. Wir sind also nicht an den Buchstaben x fur die Integrationsvariable in (7.1)gebunden.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 6: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/6.jpg)
206 KAPITEL 7. DAS RIEMANN–INTEGRAL
f
x
ba
∫ b
af(x)dx
Abbildung 7.3: Interpretation des Riemann–Integrals als Flache
Beispiel 7.9 (a) Wir betrachten die konstante Funktion f : [a, b] → R, f(x) := 1 furalle x ∈ [a, b]. Offenbar gilt
OP (f) = b − a und UP (f) = b − a
fur jede Partition P von [a, b]. Hieraus ergibt sich
b∫
a
f(x)dx = b − a und
b∫
a
f(x)dx = b − a.
Folglich ist f integrierbar mit
∫ b
a
f(x)dx = b − a.
(b) Wir betrachten die durch
f(x) :=
{1, falls x ∈ Q,0, falls x 6∈ Q
definierte Funktion f : [a, b] → R. Fur jede Partition P von [a, b] gilt dann
OP (f) = b − a und UP (f) = 0
wegen Satz 1.34. Also ist
b∫
a
f(x)dx = 0 < b − a =
∫ b
a
f(x)dx
und f somit nicht integrierbar auf [a, b]. 3
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 7: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/7.jpg)
7.2. RIEMANN–INTEGRAL 207
Wir betrachten im Folgenden einige Kriterien fur die Integrierbarkeit von Funktionen.Dabei stellt das nachstehende Resultat vielleicht das Kriterium schlechthin fur die Inte-grierbarkeit einer beschrankten Funktion dar. Es ist fur die praktische Berechnung desIntegrals zwar nicht besonders geeignet, wird im Laufe unserer theoretischen Untersuchun-gen allerdings noch haufig die Integrierbarkeit gewisser Funktionen liefern und stellt somitein wichtiges beweistheoretisches Hilfsmittel dar.
Satz 7.10 ( Integrabilitatskriterium von Riemann )Sei f : [a, b] → R eine beschrankte Funktion. Dann ist f genau dann auf [a, b] integrierbar,wenn es zu jedem ε > 0 eine Partition P von [a, b] gibt mit
OP (f) − UP (f) < ε. (7.2)
Beweis: Sei zunachst die Bedingung (7.2) fur ein beliebiges ε > 0 erfullt. Per Definitiondes unteren und oberen Riemann–Integrals gilt stets
0 ≤b∫
a
f(x)dx −b∫
a
f(x)dx ≤ OP (f) − UP (f)
fur jede Partition P von [a, b]. Nach Voraussetzung (7.2) existiert aber eine spezielle Par-tition P mit
OP (f) − UP (f) < ε.
Hierfur gilt somit
0 ≤b∫
a
f(x)dx −b∫
a
f(x)dx < ε.
Da ε > 0 beliebig war, folgt die Integrierbarkeit von f auf [a, b].Sei f umgekehrt als integrierbar vorausgesetzt und ε > 0. Dann ist
b∫
a
f(x)dx = sup{UP (f)
∣∣P ist eine Partition von [a, b]
}und
b∫
a
f(x)dx = inf{OP (f)
∣∣P ist eine Partition von [a, b]
}.
Also existieren Partitionen P1 und P2 mit
OP1(f) <
∫ b
a
f(x)dx +ε
2und UP2(f) >
∫ b
a
f(x)dx − ε
2.
Fur die verfeinerte Partition P := P1 ∪ P2 von [a, b] ergibt sich somit
OP (f) − UP (f) ≤ OP1(f) − UP2(f) < ε
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 8: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/8.jpg)
208 KAPITEL 7. DAS RIEMANN–INTEGRAL
wegen Lemma 7.3. 2
Mit Hilfe des Satzes 7.10 sind wir nun in der Lage, fur zwei wichtige Klassen von Funktionendie Integrierbarkeit zu beweisen.
Satz 7.11 ( Integrierbarkeit monotoner Funktionen )Sei f : [a, b] → R eine beschrankte und monotone Funktion. Dann ist f integrierbar auf[a, b].
Beweis: Sei f monoton wachsend (fur monoton fallende Funktionen verlauft der Beweisanalog). Fur jede Partition P von [a, b] gilt dann
OP (f) − UP (f) =∑
P
(Mk(f) − mk(f)
)(xk − xk−1)
=∑
P
(f(xk) − f(xk−1)
)(xk − xk−1)
≤ δ(P ) ·∑
P
(f(xk) − f(xk−1)
)
= δ(P )(f(b) − f(a)
),
(7.3)
wobei die Monotonie von f in die zweite Gleichung (und die Ungleichung) eingeht und dieletzte Identitat aus der Tatsache folgt, dass
∑
P
(f(xk) − f(xk−1)
)
eine Teleskopsumme ist, bei der sich mit Ausnahme des ersten und letzten Summandenalle anderen Terme gegeneinander aufheben. Gilt nun f(a) = f(b), so ist f eine konstanteFunktion und daher naturlich integrierbar, vergleiche das Beispiel 7.9 (a). Sei daher f(a) <f(b) und ε > 0 beliebig gegeben. Wir wahlen dann eine Partition P von [a, b] mit derFeinheit
δ(P ) <ε
f(b) − f(a).
Aus (7.3) folgt dann OP (f) − UP (f) < ε. Folglich ist f integrierbar aufgrund des Satzes7.10. 2
Die vielleicht wichtigste Klasse von integrierbaren Funktionen sind die stetigen Abbildun-gen. Dieses Resultat ist in dem folgenden Satz enthalten.
Satz 7.12 ( Integrierbarkeit stetiger Funktionen )Sei f : [a, b] → R eine stetige Funktion. Dann ist f integrierbar auf [a, b].
Beweis: Als stetige Funktion auf dem kompakten Intervall [a, b] ist f wegen Satz 4.47zunachst beschrankt. Außerdem ist f gleichmaßig stetig auf [a, b] wegen Satz 4.50. Zujedem ε > 0 existiert daher ein δ > 0 mit
∣∣f(ξ1) − f(ξ2)
∣∣ <
ε
b − afur alle ξ1, ξ2 ∈ [a, b] mit |ξ1 − ξ2| < δ.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 9: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/9.jpg)
7.2. RIEMANN–INTEGRAL 209
Wir wahlen jetzt eine Partition P = {x0, x1, . . . , xn} von [a, b] mit der Feinheit δ(P ) < δ.Nach Satz 4.47 existieren zu jedem k ∈ {1, . . . , n} Zwischenpunkte ξk ∈ [xk−1, xk] undξ
k∈ [xk−1, xk] mit Mk(f) = f(ξk) und mk(f) = f(ξ
k). Dann folgt
OP (f) − UP (f) =∑
P
(Mk(f) − mk(f)
)(xk − xk−1)
=
n∑
k=1
(f(ξk) − f(ξ
k))(xk − xk−1)
<ε
b − a
n∑
k−1
(xk − xk−1)
= ε.
Die Integrierbarkeit von f auf [a, b] folgt daher erneut aus dem Satz 7.10. 2
Als Verallgemeinerung des Satzes 7.12 erwahnen wir an dieser Stelle noch ein weiteres undmanchmal sehr nutzliches hinreichendes (nicht notwendiges) Kriterium fur die Riemann–Integrierbarkeit einer gegebenen Funktion, das sich spater als Spezialfall des Integrabilitats-kriteriums von Lebesgue herausstellen wird und das wir erst im nachsten Kapitel beweisenwerden.
Satz 7.13 ( Hinreichendes Kriterium fur Integrierbarkeit )Sei f : [a, b] → R eine beschrankte Funktion. Ist f mit Ausnahme von hochstens abzahlbarvielen Stellen in [a, b] stetig, so ist f Riemann–integrierbar auf [a, b].
Wir zeigen in dem folgenden Resultat, dass unter gewissen Voraussetzungen auch das Kom-positum zweier Funktionen wieder Riemann–integrierbar ist. Die Situation ist allerdingsetwas komplizierter, als man zunachst vielleicht vermuten wurde, denn wir werden anschlie-ßend noch sehen, dass die Zusammensetzung zweier Riemann–integrierbarer Funktionen imAllgemeinen nicht Riemann–integrierbar ist, so dass man etwas starkere Voraussetzungenbenotigt. Naturlich ist das Kompositum zweier stetiger Abbildungen Riemann–integrierbar(da stetig). Tatsachlich gilt das folgende Resultat.
Satz 7.14 ( Integrierbarkeit des Kompositums )Seien f : [a, b] → R und g : [c, d] → R zwei gegebene Funktionen mit f([a, b]) ⊆ [c, d]. Istf Riemann–integrierbar auf [a, b] und g stetig auf [c, d], so ist das Kompositum h := g ◦ fRiemann–integrierbar auf [a, b].
Beweis: Wegen Satz 4.50 ist die auf dem kompakten Intervall [c, d] stetige Funktion gdort sogar gleichmaßig stetig. Also existiert zu beliebigem ε > 0 ein δ > 0 mit
∣∣g(s) − g(t)
∣∣ < ε fur alle s, t ∈ [c, d] mit |s − t| < δ. (7.4)
Nach Voraussetzung ist f auf [a, b] Riemann–integrierbar. Aufgrund des Satzes 7.10 gibtes deshalb eine Partition P = {x0, x1, . . . , xm} von [a, b] in Teilintervalle Ik := [xk−1, xk]
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 10: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/10.jpg)
210 KAPITEL 7. DAS RIEMANN–INTEGRAL
mitOP (f) − UP (f) < δ2. (7.5)
Ohne Einschrankung der Allgemeinheit konnen wir dabei voraussetzen, dass
δ < ε (7.6)
gilt. Seien nunmk := inf
x∈Ik
f(x), Mk := supx∈Ik
f(x)
sowiem∗
k := infx∈Ik
h(x), M∗k := sup
x∈Ik
h(x).
Wir definieren dann die beiden Indexmengen
A :={k ∈ {1, . . . , m}
∣∣Mk − mk < δ
}und
B :={k ∈ {1, . . . , m}
∣∣Mk − mk ≥ δ
}= {1, . . . , m}\A.
Wegen (7.4) gilt dannM∗
k − m∗k ≤ ε fur alle k ∈ A.
Hingegen haben wir
M∗k − m∗
k ≤ 2c fur alle k ∈ B mit der Konstanten c := supt∈[a,b]
∣∣h(t)
∣∣.
Aus (7.5) und der Definition der Indexmenge B folgt außerdem
δ∑
k∈B
|Ik| ≤∑
k∈B
(Mk − mk)|Ik| ≤m∑
k=1
(Mk − mk)|Ik| = OP (f) − UP (f) < δ2,
so dass wir wegen (7.6)∑
k∈B
|Ik| < δ ≤ ε
erhalten. Insgesamt folgt damit
OP (h) − UP (h) =
m∑
k=1
[supx∈Ik
h(x) − infx∈Ik
h(x)]|Ik|
=m∑
k=1
[supx∈Ik
g(f(x)
)− inf
x∈Ik
g(f(x)
)]|Ik|
=∑
k∈A
[supx∈Ik
g(f(x)
)− inf
x∈Ik
g(f(x)
)]|Ik|
+∑
k∈B
[supx∈Ik
g(f(x)
)− inf
x∈Ik
g(f(x)
)]|Ik|
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 11: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/11.jpg)
7.3. RIEMANNSCHE SUMMEN 211
≤∑
k∈A
ε|Ik| +∑
k∈B
2c|Ik|
≤ ε(b − a) + 2c∑
k∈B
|Ik|
≤ (b − a + 2c)ε.
Da ε > 0 beliebig war, folgt die Integrierbarkeit von h auf [a, b] aus dem RiemannschenIntegrabilitatskriterium. 2
Korollar 7.15 Seien f : [a, b] → R beschrankt und integrierbar mit |f(x)| ≥ γ fur allex ∈ [a, b] mit einer Konstanten γ > 0. Dann ist auch 1
fintegrierbar.
Beweis: Setze c := infx∈[a,b] f(x), d := supx∈[a,b] f(x) sowie g(t) := 1/t fur t ∈ [c, d]. Dannist g wohldefiniert und stetig auf [c, d] sowie h := g ◦ f gerade gleich der Abbildung 1/f .Da diese nach Voraussetzung beschrankt ist, folgt die Behauptung unmittelbar aus demSatz 7.14. 2
Das folgende Beispiel zeigt, dass das Kompositum zweier Riemann–integrierbarer Funktio-nen im Allgemeinen nicht integrierbar ist.
Beispiel 7.16 Betrachte die beiden Funktionen f, g : [0, 1] → R mit
f(x) :=
{0, falls x irrational,1q, falls x = p
qmit p, q ∈ N teilerfremd
und
g(t) :=
{0, falls t = 0,1, falls t ∈ (0, 1].
Man sieht sofort ein, dass keine der beiden Abbildungen stetig ist. Allerdings sind sowohlf als auch g Riemann–integrierbar auf [0, 1]. Im Falle der Funktion g ist dies sehr leichteinzusehen, bei f ist dies eine Konsequenz aus dem Satz 7.13 sowie der Tatsache, dass fmit Ausnahme von abzahlbar vielen Punkten (namlich den rationalen Zahlen in [0, 1]) mitder Nullfunktion ubereinstimmt. Fur das Kompositum erhalten wir nun
h(x) := g(f(x)
)=
{0, falls f(x) = 0, also falls x irrational,1, falls x rational.
Diese Funktion ist wegen Beispiel 7.9 (b) jedoch nicht integrierbar. 3
7.3 Riemannsche Summen
Zur Berechnung des Integrals einer beschrankten Funktion mussen wir bislang explizitalle Ober– oder Untersummen ausrechnen. Dies ist nicht besonders praktikabel. In einigenFallen kann dies mit Hilfe so genannter Riemannscher Summen vereinfacht werden.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 12: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/12.jpg)
212 KAPITEL 7. DAS RIEMANN–INTEGRAL
Definition 7.17 Seien f : [a, b] → R beschrankt, P = {x0, x1, . . . , xn} eine Partitionvon [a, b] und ξ = {ξ1, . . . , ξn} eine Menge von Zwischenpunkten in dem Sinne, dass ξk ∈[xk−1, xk] fur alle k = 1, . . . , n gilt. Dann heißt
SP (f, ξ) :=∑
P
f(ξk)(xk − xk−1) :=n∑
k=1
f(ξk)(xk − xk−1)
eine Riemannsche Summe von f zur Partition P .
f
a bξ1
= x0 x4 = x5x3x2x1
xξ2 ξ3 ξ4 ξ5
Abbildung 7.4: Veranschaulichung einer Riemannschen Summe
Die Abbildung 7.4 veranschaulicht den Begriff einer Riemannschen Summe. Man beachte,dass es unendlich viele Riemannsche Summen zu einer Partition P des Intervalls [a, b] gibt,da man Freiheiten in der Wahl der Zwischenpunkte ξk ∈ [xk−1, xk] hat. Ferner sei an dieserStelle noch bemerkt, dass eine Ober– oder Untersumme im Allgemeinen keine RiemannscheSumme darstellt, da das Supremum in Mk(f) bzw. das Infimum in mk(f) auf dem Intervall[xk−1, xk] nicht angenommen werden muss.
Lemma 7.18 Seien f : [a, b] → R beschrankt, P = {x0, x1, . . . , xn} eine Partition von[a, b] und ξk ∈ [xk−1, xk] beliebige Zwischenpunkte. Dann gilt
UP (f) ≤ SP (f, ξ) ≤ OP (f).
Beweis: Per Definition gilt mk(f) ≤ f(ξk) ≤ Mk(f) fur alle k = 1, . . . , n. Multipliziertman diese Ungleichung mit xk − xk−1 und addiert sie anschließend fur k = 1, . . . , n auf, sofolgt die Behauptung. 2
Sei f : [a, b] → R beschrankt. Existiert dann eine Zahl I ∈ R und gibt es zu jedem ε > 0ein δ > 0, so dass fur alle Partitionen P von [a, b] (in gewisse Teilintervalle Ik) mit der
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 13: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/13.jpg)
7.3. RIEMANNSCHE SUMMEN 213
Feinheit δ(P ) < δ sowie bei beliebiger Wahl ξk ∈ Ik der Zwischenpunkte die Ungleichung
∣∣SP (f, ξ) − I
∣∣ < ε
gilt, so schreiben wirI = lim
δ(P )→0SP (f, ξ)
und sagen, dass die Riemannschen Summen gegen I konvergieren.Der nachstehende Satz besagt nun, dass man hiermit eine vollstandige Charakterisie-
rung der Riemann–Integrierbarkeit erhalt.
Satz 7.19 ( Charakterisierung der Riemann–Integrierbarkeit )Sei f : [a, b] → R eine beschrankte Funktion. Dann gelten:
(a) Ist f integrierbar auf [a, b], so existiert limδ(P )→0 SP (f, ξ), und es gilt
limδ(P )→0
SP (f, ξ) =
∫ b
a
f(x)dx.
(b) Existiert limδ(P )→0 SP (f, ξ), so ist f integrierbar auf [a, b], und es gilt
∫ b
a
f(x)dx = limδ(P )→0
SP (f, ξ).
Beweis: Die Aussage (a) folgt unmittelbar aus dem Lemma 7.18. Zum Nachweis von (b)sei ε > 0 beliebig gegeben und I := limδ(P )→0 SP (f, ξ) der nach Voraussetzung existierendeLimes. Dann gibt es ein δ > 0, so dass
I − ε
2< SP (f, ξ) < I +
ε
2
fur alle Partitionen P mit δ(P ) < δ und alle zugehorigen Zwischenpunkte ξ gilt. Wirbetrachten nun eine feste Partition P = {x0, x1, . . . , xn} von [a, b] mit δ(P ) < δ. In jedemTeilintervall [xk−1, xk] wahlen wir dann einen Zwischenpunkt ξk derart aus, dass
f(ξk) > Mk(f) − ε
2(b − a)
gilt (was nach Definition von Mk(f) offenbar moglich ist). Fur diese Wahl der Zwischen-punkte ergibt sich dann
I +ε
2> SP (f, ξ)
=∑
P
f(ξk)(xk − xk−1)
>∑
P
Mk(f)(xk − xk−1) −ε
2(b − a)
∑
P
(xk − xk−1)
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 14: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/14.jpg)
214 KAPITEL 7. DAS RIEMANN–INTEGRAL
= OP (f) − ε
2
≥b∫
a
f(x)dx − ε
2.
Also gilt
I >
b∫
a
f(x)dx − ε.
Ebenso beweist man die Gultigkeit der Ungleichung
I <
b∫
a
f(x)dx + ε,
indem man die Zwischenpunkte ζk so wahlt, dass
f(ζk) < mk(f) +ε
2(b − a)
gilt. Zusammen folgt dann
b∫
a
f(x)dx − ε < I <
b∫
a
f(x)dx + ε.
Da ε > 0 beliebig gewahlt war, impliziert dies
b∫
a
f(x) ≤ I ≤b∫
a
f(x).
Wegen Lemma 7.7 gilt aberb∫
a
f(x) ≤b∫
b
f(x)dx.
Also folgt
I =
b∫
a
f(x)dx =
b∫
a
f(x)dx =
b∫
a
f(x)dx
und damit die Behauptung (b). 2
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 15: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/15.jpg)
7.3. RIEMANNSCHE SUMMEN 215
Bislang ist der Nachweis der Konvergenz von Riemannschen Summen noch sehr aufwendig,da man bei vorgegebenem ε > 0 alle Partitionen und fur jede feste Partition auch noch jedeWahl der Zwischenpunkte in Betracht ziehen muss. Der nachste Satz besagt jedoch, dasses im Falle einer integrierbaren Funktion genugt, eine einfache Folge von RiemannschenSummen zu betrachten.
Satz 7.20 Seien f : [a, b] → R eine beschrankte und integrierbare Funktion, {P (n)} eineFolge von Partitionen des Intervalls [a, b] mit δ(P (n)) → 0 fur n → ∞ und {ξ(n)} eine festeWahl von Zwischenpunkten zur Partition P (n). Dann ist
∫ b
a
f(x)dx = limn→∞
SP (n)(f, ξ(n)).
Beweis: Wegen Satz 7.19 existiert zu jedem ε > 0 ein δ > 0 derart, dass fur alle Partitionenδ(P ) < δ die Ungleichung
∣∣∣∣SP (f, ξ) −
∫ b
a
f(x)dx
∣∣∣∣< ε
gilt, und zwar bei beliebiger Wahl der Zwischenpunkte ξ. Wegen δ(P (n)) → 0 existiert einN ∈ N mit δ(P (n)) < δ fur alle n ∈ N mit n ≥ N . Fur jedes n ≥ N ist daher
∣∣∣∣SP (n)(f, ξ) −
∫ b
a
f(x)dx
∣∣∣∣< ε,
woraus sich die Behauptung unmittelbar ergibt. 2
Zum Abschluss betrachten wir noch ein Beispiel zur Berechnung des Integrals einer gege-benen Funktion mittels Riemannscher Summen.
Beispiel 7.21 Wir wollen das Integral
∫ 1
0
(x2 − x)dx
berechnen. Da die Funktion f(x) := x2 − x auf [0, 1] stetig ist, handelt es sich wegen Satz7.12 insbesondere um eine integrierbare Funktion. Daher konnen wir den Satz 7.20 anwen-den. Wir betrachten dazu die Folge {P (n)} von aquidistanten Partitionen des Intervalls[0, 1] mit
x(n)k :=
k
n∀k = 0, 1, . . . , n (n ∈ N).
Dann ist offensichtlich δ(P (n)) = 1n→ 0 fur n → ∞. Ferner wahlen wir die Zwischenpunkte
ξ(n)k :=
k
n∀k = 1, . . . , n (n ∈ N).
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 16: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/16.jpg)
216 KAPITEL 7. DAS RIEMANN–INTEGRAL
Die ξ(n)k sind also gerade die rechten Endpunkte der einzelnen Teilintervalle
[k−1n
, kn
]. Hier-
mit folgt
SP (n)(f, ξ(n)) =∑
P (n)
f(ξ(n)k )(x
(n)k − x
(n)k−1)
=
n∑
k=1
(k2
n2− k
n
)(k
n− k − 1
n
)
=1
n
n∑
k=1
(k2
n2− k
n
)
=1
n3
n∑
k=1
k2 − 1
n2
n∑
k=1
k
=1
n3
n(n + 1)(2n + 1)
6− 1
n2
n(n + 1)
2
→ 2
6− 1
2= −1
6,
wobei wir beim Grenzubergang den Satz 1.5 und die ebenfalls leicht durch Induktionbeweisbare Formel
n∑
k=1
k2 =n(n + 1)(2n + 1)
6
benutzt haben. Wegen Satz 7.20 gilt daher∫ 1
0(x2 − x)dx = −1
6. 3
7.4 Rechenregeln
Wir stellen in diesem Abschnitt eine Reihe von Rechenregeln fur das Riemann–Integral zurVerfugung. Dabei haben wir den Ausdruck
∫ b
a
f(x)dx
bislang nur fur beschrankte Funktionen auf einem Intervall [a, b] mit a < b definiert. Umin unseren weiteren Untersuchungen auf Fallunterscheidungen verzichten zu konnen, gebenwir diesem Ausdruck auch im Fall a ≥ b einen Sinn.
Definition 7.22 Fur a = b setzen wir∫ b
a
f(x)dx := 0,
sofern f(a) ∈ R existiert. Fur a > b definieren wir∫ b
a
f(x)dx := −∫ a
b
f(x)dx,
sofern f eine auf dem Intervall [b, a] (beschrankte und) integrierbare Funktion ist.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 17: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/17.jpg)
7.4. RECHENREGELN 217
Wir werden in den nachstehenden Beweisen haufiger verwenden, dass fur eine beschrankteFunktion h auf einem Intervall I offenbar die folgenden Gleichheiten gelten:
supx∈I h(x) − infx∈I h(x) = sup{h(x) − h(y)
∣∣x, y ∈ I
}
= sup{∣∣h(x) − h(y)
∣∣∣∣ x, y ∈ I
}.
(7.7)
Beispielsweise erhalten wir hieraus die Linearitat des Integrals.
Satz 7.23 ( Linearitat des Integrals )Seien f, g : [a, b] → R beschrankte und integrierbare Funktionen sowie α, β ∈ R beliebiggegeben. Dann ist auch αf + βg integrierbar mit
∫ b
a
(αf + βg
)(x)dx = α
∫ b
a
f(x)dx + β
∫ b
a
g(x)dx. (7.8)
Beweis: Setze h := αf +βg und sei ε > 0 beliebig gegeben. Da f und g beide integrierbarsind, existieren wegen Satz 7.10 Partitionen P1 und P2 des Intervalls [a, b] mit
OP1(f) − UP1(f) <ε
2(1 + |α| + |β|) und OP2(g) − UP2(g) <ε
2(1 + |α| + |β|) .
Aus der Definition von h folgt zunachst
∣∣h(x) − h(y)
∣∣ ≤ |α|
∣∣f(x) − f(y)
∣∣+ |β|
∣∣g(x) − g(y)
∣∣ fur alle x, y ∈ [a, b].
Mit der verfeinerten Partition P := P1 ∪ P2 von [a, b] in gewisse Teilintervalle Ik =[xk−1, xk], k = 1, . . . , n, ergibt sich unter Verwendung von (7.7) dann
OP (h) − UP (h)
=
n∑
k=1
(Mk(h) − mk(h)
)(xk − xk−1)
=
n∑
k=1
supx,y∈Ik
∣∣h(x) − h(y)
∣∣(xk − xk−1)
≤ |α|n∑
k=1
supx,y∈Ik
∣∣f(x) − f(y)
∣∣+ |β|
n∑
k=1
supx,y∈Ik
∣∣g(x) − g(y)
∣∣
= |α|n∑
k=1
(Mk(f) − mk(f)
)(xk − xk−1) + |β|
n∑
k=1
(Mk(g) − mk(g)
)(xk − xk−1)
= |α|[OP (f) − UP (f)
]+ |β|
[OP (g) − UP (g)
]
<ε
2+
ε
2= ε.
Also ist h nach Satz 7.10 integrierbar.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 18: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/18.jpg)
218 KAPITEL 7. DAS RIEMANN–INTEGRAL
Die Darstellung (7.8) schließlich ergibt sich unmittelbar aus dem Satz 7.20, denn furdie Zwischensumme gilt offenbar SP (αf + βg, ξ) = αSP (f, ξ) + βSP (g, ξ). 2
Aufgrund des vorhergehenden Resultates ist die Abbildung
f 7→∫ b
a
f(x)dx
linear. Wir beweisen als Nachstes eine Monotonie–Eigenschaft des Integrals.
Lemma 7.24 ( Monotonie des Integrals )Seien f, g : [a, b] → R integrierbar mit f(x) ≤ g(x) fur alle x ∈ [a, b]. Dann gilt
∫ b
a
f(x)dx ≤∫ b
a
g(x)dx.
Beweis: Die Funktion h := g − f ist wegen des Satzes 7.23 integrierbar auf [a, b]. Sei nunP = {x0, x1, . . . , xn} eine beliebige Partition von [a, b]. Aus h(x) ≥ 0 fur alle x ∈ [a, b] folgtdann mk(h) ≥ 0 fur alle k = 0, 1, . . . , n und daher
UP (h) =∑
P
mk(h)(xk − xk−1) ≥ 0,
was wiederumb∫
a
h(x)dx = supP
UP (h) ≥ 0
impliziert. Da h aber integrierbar ist, folgt hieraus
0 ≤b∫
a
h(x)dx =
b∫
a
h(x)dx =
b∫
a
g(x)dx −b∫
a
f(x)dx.
Dies liefert die Behauptung. 2
Anschaulich ist die Aussage des Lemmas 7.24 in der Abbildung 7.5 wiedergegeben: Dortfinden sich zwei Abbildungen (mit ausschließlich positiven Funktionswerten), von denendie eine oberhalb der anderen liegt, so dass die zugehorige Flache unterhalb des Graphenauch entsprechend großer ist. Genau dies wird letztlich auch nur durch das Lemma 7.24ausgedruckt.
Aus dem Lemma 7.24 erhalten wir insbesondere die Gultigkeit von
∫ b
a
f(x)dx ≥ 0
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 19: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/19.jpg)
7.4. RECHENREGELN 219
f
x
g
a b
Abbildung 7.5: Veranschaulichung der Monotonie des Integrals
fur jede integrierbare Funktion f : [a, b] → R mit der Eigenschaft f(x) ≥ 0 fur alle x ∈ [a, b](man vergleiche f hierzu mit der Nullfunktion).
Fur eine gegebene Funktion f : [a, b] → R benutzen wir im Folgenden die Bezeichnungenf+, f− : [a, b] → R fur die Abbildungen
f+(x) :=
{f(x), falls f(x) ≥ 0,0, falls f(x) < 0
und
f−(x) :=
{−f(x), falls f(x) < 0,0, falls f(x) ≥ 0,
vergleiche hierzu die Abbildung 7.6.
x xf+
f ff−
Abbildung 7.6: Beispiel einer Funktion f und der zugehorigen Abbildungen f+ und f−
Aus diesen Definitionen folgt unmittelbar
f(x) = f+(x) − f−(x) und |f(x)| = f+(x) + f−(x) fur alle x ∈ [a, b].
Wir beweisen zunachst das folgende Hilfsresultat.
Lemma 7.25 Sei f : [a, b] → R eine beschrankte Funktion. Dann ist f genau dann inte-grierbar auf [a, b], wenn f+ und f− auf [a, b] integrierbar sind.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 20: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/20.jpg)
220 KAPITEL 7. DAS RIEMANN–INTEGRAL
Beweis: Die Integrierbarkeit von f+ und f− impliziert wegen Satz 7.23 und der obenerwahnten Beziehung f = f+ − f− unmittelbar die Integrierbarkeit von f (man beachtehierzu, dass mit f naturlich auch f+ und f− integrierbar sind). Daher ist nur die andereRichtung zu beweisen.
Wir verifizieren die Aussage nur fur f+, da der Beweis fur f− analog verlauft. Sei dazuP eine beliebige Partition von [a, b]. Wir setzen
M+k := sup
x∈Ik
f+(x) und m+k := inf
x∈Ik
f+(x).
Dann konnen die folgenden Moglichkeiten eintreten:
(a) Mk ≥ 0, mk ≥ 0: Dann ist M+k = Mk und m+
k = mk.
(b) Mk ≥ 0, mk < 0: Dann ist M+k = Mk und m+
k = 0.
(c) Mk < 0, mk < 0: Dann ist M+k = 0 und m+
k = 0.
In allen drei Fallen ergibt sich
M+k − m+
k ≤ Mk − mk.
Nach Multiplikation mit (xk−xk−1) und anschließendem Aufsummieren erhalten wir daher
OP (f+) − UP (f+) ≤ OP (f) − UP (f).
Da f als integrierbar vorausgesetzt war, folgt hieraus wegen Satz 7.10 unmittelbar die In-tegrierbarkeit von f+. 2
Als Konsequenz des Lemmas 7.25 erhalten wir das nachstehende Resultat.
Satz 7.26 ( Dreiecksungleichung fur Integrale )Sei f : [a, b] → R integrierbar. Dann ist |f | ebenfalls auf [a, b] integrierbar, und es gilt
∣∣∣∣
∫ b
a
f(x)dx
∣∣∣∣≤∫ b
a
|f(x)|dx.
Beweis: Wegen |f | = f+ + f− folgt die Integrierbarkeit der Funktion |f | auf [a, b] ausdem Satz 7.23 und dem Lemma 7.25. Ferner gilt
∫ b
a
∣∣f(x)
∣∣dx =
∫ b
a
f+(x)dx +
∫ b
a
f−(x)dx.
Dies impliziert einerseits
∫ b
a
∣∣f(x)
∣∣dx ≥
∫ b
a
f+(x)dx −∫ b
a
f−(x)dx =
∫ b
a
f(x)dx
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 21: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/21.jpg)
7.4. RECHENREGELN 221
und andererseits
∫ b
a
∣∣f(x)
∣∣dx ≥ −
∫ b
a
f+(x)dx +
∫ b
a
f−(x)dx = −∫ b
a
f(x)dx
wegen Lemma 7.24. Zusammen ergibt sich gerade die Behauptung. 2
Wir zeigen jetzt, dass mit zwei integrierbaren Funktionen auch deren Produkt integrierbarist.
Satz 7.27 Seien f, g : [a, b] → R integrierbare Funktionen. Dann ist auch f ·g integrierbarauf [a, b].
Beweis: Als integrierbare Funktionen sind f und g beschrankt. Also existieren die Kon-stanten
α := supξ∈[a,b]
∣∣f(ξ)
∣∣ und β := sup
ξ∈[a,b]
∣∣g(ξ)
∣∣.
Ferner gibt es wegen Satz 7.10 Partitionen P1 und P2 von [a, b] mit
OP1(f) − UP1(f) <ε
2(1 + α + β)und OP2(g) − UP2(g) <
ε
2(1 + α + β).
Setzen wir h := f · g, so gilt
∣∣h(x) − h(y)
∣∣ ≤
∣∣f(x)
∣∣∣∣g(x) − g(y)
∣∣+∣∣g(y)
∣∣∣∣f(x) − f(y)
∣∣
≤ α∣∣g(x) − g(y)
∣∣+ β
∣∣f(x) − f(y)
∣∣
fur alle x, y ∈ [a, b]. Mit der verfeinerten Partition P := P1 ∪ P2 von [a, b] in gewisseTeilintervalle Ik = [xk−1, xk], k = 1, . . . , n, ergibt sich unter Verwendung von (7.7) dann
OP (h) − UP (h)
=
n∑
k=1
(Mk(h) − mk(h)
)(xk − xk−1)
=n∑
k=1
supx,y∈Ik
∣∣h(x) − h(y)
∣∣(xk − xk−1)
≤ αn∑
k=1
supx,y∈Ik
∣∣g(x) − g(y)
∣∣(xk − xk−1) + β
n∑
k=1
supx,y∈Ik
∣∣f(x) − f(y)
∣∣(xk − xk−1)
= α
n∑
k=1
(Mk(g) − mk(g)
)(xk − xk−1) + β
n∑
k=1
(Mk(f) − mk(f)
)(xk − xk−1)
= α(OP (g) − UP (g)
)+ β
(OP (f) − UP (f)
)
<ε
2+
ε
2
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 22: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/22.jpg)
222 KAPITEL 7. DAS RIEMANN–INTEGRAL
= ε.
Die Behauptung folgt somit aus dem Satz 7.10. 2
Korollar 7.28 Seien f, g : [a, b] → R integrierbar und |g(x)| ≥ c fur alle x ∈ [a, b] miteiner Konstanten c > 0. Dann ist auch f/g integrierbar auf [a, b].
Beweis: Wegen Korollar 7.15 ist 1/g integrierbar, also ist auch f/g = f · 1/g integrierbarnach Satz 7.27. 2
Wir zeigen jetzt, dass eine auf einem Intervall [a, b] integrierbare Funktion automatischauch auf jeden Teilintervall [c, d] ⊆ [a, b] integrierbar ist.
Satz 7.29 Sei f : [a, b] → R integrierbar. Dann ist f auch auf jedem Teilintervall [c, d] ⊆[a, b] integrierbar.
Beweis: Da f auf [a, b] integrierbar ist, existiert zu jedem ε > 0 wegen Satz 7.10 einePartition P ′ von [a, b] mit
OP ′(f) − UP ′(f) < ε.
Wir betrachten dann die Verfeinerung P ′′ := P ∪ {c, d}, fur die wegen Lemma 7.3 dannerst recht
OP ′′(f) − UP ′′(f) < ε
gilt. Sei nun P := P ′′ ∩ [c, d] die Restriktion der Partition P ′′ auf das Teilintervall [c, d].Dann gilt mit g := f |[c,d] die Abschatzung
OP (g) − UP (g) =∑
P
(Mk(g) − mk(g)
)(xk − xk−1)
=∑
P
(Mk(f) − mk(f)
)(xk − xk−1)
≤∑
P ′′
(Mk(f) − mk(f)
)(xk − xk−1)
= OP ′′(f) − UP ′′(f)
< ε,
wobei die erste Ungleichung einfach aus der Tatsache folgt, dass eventuell weitere nichtne-gative Summanden hinzukommen. Die Behauptung folgt daher aus dem Satz 7.10. 2
Wir beweisen jetzt noch eine wichtige Additionseigenschaft des Riemann–Integrals bezuglichder Integrationsintervalle.
Satz 7.30 Sei P = {x0, x1, . . . , xn} eine beliebige Partition des Intervalls [a, b]. Danngelten:
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 23: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/23.jpg)
7.4. RECHENREGELN 223
(a) Ist f : [a, b] → R integrierbar, so ist f auf jedem der Teilintervalle [xk−1, xk] inte-grierbar, und es gilt
∫ b
a
f(x)dx =
n∑
k=1
∫ xk
xk−1
f(x)dx.
(b) Ist f auf jedem der Teilintervalle [xk−1, xk] integrierbar, so auch auf [a, b], und es gilt
∫ b
a
f(x)dx =n∑
k=1
∫ xk
xk−1
f(x)dx.
Beweis: Der Beweis ist weitgehend analog zu dem des Satzes 7.29 und sei daher demLeser als Ubungsaufgabe uberlassen. 2
Eine interessante Folgerung aus dem obigen Resultat ist der nachste Satz.
Satz 7.31 Seien f : [a, b] → R integrierbar und [an, bn] ⊆ [a, b] gegeben mit an → a undbn → b. Dann ist
∫ b
a
f(x)dx = limn→∞
∫ bn
an
f(x)dx.
Beweis: Als integrierbare Funktion ist f insbesondere beschrankt auf [a, b], etwa
∣∣f(x)
∣∣ ≤ M fur alle x ∈ [a, b]
mit einer Konstanten M > 0. Wegen Satz 7.30 ist
∫ b
a
f(x)dx =
∫ an
a
f(x)dx +
∫ bn
an
f(x)dx +
∫ b
bn
f(x)dx,
wobei wir ohne Einschrankung an < bn fur alle n ∈ N vorausgesetzt haben. Mit
∣∣∣∣
∫ an
a
f(x)dx
∣∣∣∣
≤∫ an
a
∣∣f(x)
∣∣dx
≤∫ an
a
Mdx
= M
∫ an
a
1dx
= M(an − a)
→ 0 fur n → ∞
und, analog,∣∣∣∣
∫ b
bn
f(x)dx
∣∣∣∣≤ M(b − bn) → 0 fur n → ∞
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 24: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/24.jpg)
224 KAPITEL 7. DAS RIEMANN–INTEGRAL
folgt dann die Behauptung. 2
Aus dem Satz 7.31 folgt beispielsweise sofort, dass die Werte f(a) und f(b) weder auf dieIntegrierbarkeit von f noch auf den Wert des Integrals
∫ b
a
f(x)dx
einen Einfluss haben (solange f integrierbar und insbesondere beschrankt ist). Aufgrunddes Satzes 7.30 folgt hieraus wiederum, dass man f an endlich vielen Stellen abandern darf,ohne damit die Integrierbarkeit von f oder den Wert des Integrals zu beeinflussen.
7.5 Differentiation und Integration
Wir beweisen in diesem Abschnitt einige der fundamentalen Resultate uber das Riemann–Integral, mit deren Hilfe sich diverse Integrale auch leicht berechnen lassen. Insbesondereergibt sich hierbei ein interessanter Zusammenhang zwischen der Differentiation und Inte-gration. Zu diesem Zweck beginnen wir mit dem folgenden Resultat.
Satz 7.32 ( Verallgemeinerter Mittelwertsatz der Integralrechnung )Seien f, g : [a, b] → R stetige Funktionen und g ≥ 0. Dann existiert ein ξ ∈ [a, b] mit
∫ b
a
f(x)g(x)dx = f(ξ)
∫ b
a
g(x)dx.
Beweis: Wir setzen
m := min{f(x)
∣∣ x ∈ [a, b]
}und M := max
{f(x)
∣∣ x ∈ [a, b]
}
(Minimum und Maximum werden hierbei wegen Satz 4.47 angenommen). Dann ist mg ≤f · g ≤ Mg wegen g ≥ 0 und daher
m
∫ b
a
g(x)dx =
∫ b
a
(mg)(x)dx ≤∫ b
a
(fg)(x)dx ≤∫ b
a
(Mg)(x)dx = M
∫ b
a
g(x)dx
wegen Lemma 7.24. Also ist
∫ b
a
f(x)g(x)dx = µ
∫ b
a
g(x)dx fur ein µ ∈ [m, M ].
Nach dem Zwischenwertsatz 4.29 gibt es ein ξ ∈ [a, b] mit f(ξ) = µ. Daraus folgt dieBehauptung. 2
Der Satz 7.32 gilt naturlich auch dann, wenn g(x) ≤ 0 fur alle x ∈ [a, b] ist. Dies folgt sofortaus dem obigen Resultat, indem man dort g durch −g ersetzt. Wesentlich fur die Aussage
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 25: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/25.jpg)
7.5. DIFFERENTIATION UND INTEGRATION 225
des Satzes 7.32 ist also nur, dass g auf dem Intervall [a, b] ein einheitliches Vorzeichenbesitzt.
Speziell fur die Funktion g ≡ 1 erhalten wir hieraus das nachstehende Korollar, furdessen geometrische Deutung wir auf die Abbildung 7.7 verweisen.
ξa b
f(ξ) · (b − a)
f(x)
f(ξ)
Abbildung 7.7: Geometrische Deutung des Mittelwertsatzes der Integralrechung
Korollar 7.33 ( Mittelwertsatz der Integralrechnung )Sei f : [a, b] → R eine stetige Funktion. Dann existiert ein ξ ∈ [a, b] mit
∫ b
a
f(x)dx = f(ξ)(b− a).
Bislang haben wir Funktionen immer uber ein festes (abgeschlossenes) Intervall integriert.Jetzt betrachten wir eine Integrationsgrenze als Variable und erhalten auf diese Weise eineneue Funktion.
Satz 7.34 Seien I ⊆ R ein Intervall, f : I → R eine stetige Funktion und a ∈ I. Furx ∈ I setze
F (x) :=
∫ x
a
f(t)dt.
Dann ist die Funktion F : I → R differenzierbar, und es gilt F ′ = f .
Beweis: Fur jedes h 6= 0 ist
F (x + h) − F (x)
h=
1
h
(∫ x+h
a
f(t)dt −∫ x
a
f(t)dt
)
=1
h
∫ x+h
x
f(t)dt
wegen Satz 7.30. Nach dem Mittelwertsatz der Integralrechnung existiert zu jedem solchenh 6= 0 ein Zwischenpunkt ξh ∈ [x, x + h] (bzw. ξh ∈ [x + h, x], falls h < 0) mit
∫ x+h
x
f(t)dt = hf(ξh).
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 26: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/26.jpg)
226 KAPITEL 7. DAS RIEMANN–INTEGRAL
Nun ist ξh → x fur h → 0 und daher f(ξh) → f(x) fur h → 0 aufgrund der Stetigkeit vonf . Damit erhalten wir
F ′(x) = limh→0
F (x + h) − F (x)
h= lim
h→0
1
h
∫ x+h
x
f(t)dt = limh→0
1
h
(hf(ξh)
)= f(x).
Damit ist alles bewiesen. 2
Die im Satz 7.34 definierte Abbildung F ist eine so genannte Stammfunktion von f imSinne der nachstehenden Definition.
Definition 7.35 Sei I ⊆ R ein beliebiges Intervall. Eine differenzierbare Funktion F :I → R heißt Stammfunktion von einer Abbildung f : I → R, wenn Funktion F ′ = f gilt.
Der Begriff der Stammfunktion wird in der Abbildung 7.8 interpretiert: Sie beschreibt dieFlache unterhalb des Graphen von f zwischen dem Anfangspunkt a und dem aktuellenPunkt x.
f
xa x b
F (x)
Abbildung 7.8: Interpretation der Stammfunktion als Flache von a nach x mit variablemx
Wegen Satz 7.34 hat jede stetige Funktion mindestens eine Stammfunktion. Mit Aus-nahme einer additiven Konstante, die beim Differenzieren ja wegfallt, ist die Stammfunk-tion auch eindeutig bestimmt. Dies ist der Inhalt des folgenden Satzes.
Satz 7.36 Seien I ⊆ R ein beliebiges Intervall und F : I → R eine Stammfunktion vonf : I → R. Dann gelten:
(a) Die Funktion F + c ist fur jede Konstante c ∈ R ebenfalls eine Stammfunktion vonf .
(b) Ist G : I → R eine weitere Stammfunktion von f , so gibt es eine Konstante c ∈ R
mit G = F + c.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 27: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/27.jpg)
7.5. DIFFERENTIATION UND INTEGRATION 227
Beweis: (a) Offenbar ist mit F auch F + c differenzierbar, und es gilt
(F + c)′ = F ′ = f,
womit Teil (a) bereits bewiesen ist.
(b) Da F und G Stammfunktionen von f sind, gilt F ′ = f = G′. Also ist (F − G)′ = 0und F − G somit eine konstante Funktion wegen Korollar 6.19. 2
Die Menge aller Stammfunktionen von f : I → R wird als das unbestimmte Integral von fbezeichnet. Man schreibt hierfur ∫
f(x)dx.
Ist F eine beliebige Stammfunktion, so gilt wegen Satz 7.36 also∫
f(x)dx ={F + c
∣∣ c ∈ R
}.
Mittels einer Stammfunktion lasst sich das Integral einer gegebenen Abbildung sehr leichtberechnen.
Satz 7.37 ( Hauptsatz der Differential– und Integralrechnung )Seien I ⊆ R ein Intervall, f : I → R eine stetige Funktion und F eine beliebige Stamm-funktion von f . Dann gilt
∫ b
a
f(x)dx = F (b) − F (a) =: F (x)∣∣∣
b
a
fur alle a, b ∈ I.
Beweis: Fur x ∈ I definieren wir
F0(x) :=
∫ x
a
f(t)dt.
Dann ist F0 : I → R wegen Satz 7.34 eine (spezielle) Stammfunktion von f mit
F0(a) = 0 und F0(b) =
∫ b
a
f(t)dt.
Fur die beliebige Stammfunktion F gilt somit F − F0 = c fur eine Konstante c ∈ R,vergleiche Satz 7.36. Deshalb ist
F (b) − F (a) = F0(b) − F0(a) = F0(b) =
∫ b
a
f(t)dt,
womit alles bewiesen ist. 2
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 28: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/28.jpg)
228 KAPITEL 7. DAS RIEMANN–INTEGRAL
Der Satz 7.37 ist das zentrale Ergebnis zur Berechnung konkreter Integrale. Man benotigtdanach nur eine Stammfunktion und hat von dieser lediglich die Differenz der Funktions-werte zwischen den beiden Endpunkten des Intervalls [a, b] zu bilden. Insbesondere spieltes uberhaupt keine Rolle, welche Werte die Stammfunktion im Inneren des Intervalls [a, b]annimmt. Wir illustrieren die Nutzlichkeit dieses Resultates an einigen Beispielen.
Beispiel 7.38 (a) Fur jedes s ∈ R mit s 6= −1 ist
∫ b
a
xsdx =xs+1
s + 1
∣∣∣
b
a,
denn xs+1
s+1ist offenbar eine Stammfunktion der allgemeinen Potenz xs. Der hier nicht
betrachtete Fall s = −1 wird im Teil (b) diskutiert.
(b) Fur jedes a, b > 0 ist∫ b
a
1
xdx = ln(x)
∣∣∣
b
a
wegen ddx
ln(x) = 1x. Fur a, b < 0 gilt hingegen
∫ b
a
1
xdx = ln(−x)
∣∣∣
b
a,
denn ddx
ln(−x) = 1x
fur x < 0. Man kann die beiden Falle auch so zusammenfassen,dass man ∫ b
a
1
xdx = ln |x|
∣∣∣
b
a
schreibt, sofern x = 0 nicht in dem Integrationsintervall [a, b] liegt.
(c) Es ist∫ b
a
exp(x)dx = exp(x)∣∣∣
b
a.
3
Wegen Satz 7.34 ist die Integration letztlich die Umkehrung der Differentiation. Das derKettenregel entsprechende Resultat in der Integration ist die nachfolgende Substitutions-regel.
Satz 7.39 ( Substitutionsregel )Seien I ⊆ R ein Intervall, f : I → R stetig und g : [a, b] → R stetig differenzierbar mitg([a, b]) ⊆ I. Dann ist
∫ b
a
f(g(t)
)g′(t)dt =
∫ g(b)
g(a)
f(x)dx.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 29: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/29.jpg)
7.5. DIFFERENTIATION UND INTEGRATION 229
Beweis: Sei F : I → R eine wegen Satz 7.34 existierende Stammfunktion von f . Fur diezusammengesetzte Funktion F ◦ g : [a, b] → R gilt nach der Kettenregel dann
(F ◦ g)′(t) = F ′(g(t)
)g′(t) = f
(g(t)
)g′(t).
Also ist F ◦ g eine Stammfunktion der Abbildung t 7−→ f(g(t)
)g′(t). Aus dem Hauptsatz
7.37 folgt daher
∫ b
a
f(g(t)
)g′(t)dt = (F ◦ g)(t)
∣∣∣
b
a= F
(g(b)
)− F
(g(a)
)=
∫ g(b)
g(a)
f(x)dx,
was zu zeigen war. 2
Unter Verwendung der symbolischen Schreibweise
dg(t) := g′(t)dt
lautet die Substitutionsregel
∫ b
a
f(g(t)
)dg(t) =
∫ g(b)
g(a)
f(x)dx.
In dieser Form ist sie besonders einfach zu merken, denn man hat einfach x durch g(t) zuersetzen. Lauft t von a nach b, so lauft x = g(t) von g(a) nach g(b).
Ansonsten gibt es fur die Substitutionsregel im Prinzip zwei Lesarten, man kann sieentweder von links nach rechts oder von rechts nach links anwenden. Liegt ein Integralexplizit in der Form
∫ b
a
f(g(t))g′(t)dt
vor, so konnen wir die Substitutionsregel von links nach rechts anwenden. Dies ist bei-spielsweise bei dem Integral
∫ 1
0
(1 + t2)22tdt
der Fall. Setzt man namlich f(x) := x2 und g(t) := 1+t2, so folgt aus der Substitutionsregelunmittelbar
∫ 1
0
(1 + t2)22tdt =
∫ 1
0
f(g(t))g′(t)dt =
∫ g(1)
g(0)
f(x)dx =
∫ 2
1
x2dx =1
3x3∣∣2
1=
7
3.
Die andere Lesart von rechts nach links wird meist auf der Schule beigebracht. Dabei liegtein Integral der Gestalt
∫ β
α
f(x)dx
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 30: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/30.jpg)
230 KAPITEL 7. DAS RIEMANN–INTEGRAL
mit gewissen Grenzen α, β ∈ R vor, das schwer zu berechnen scheint. Man versucht dannmittels geeigneter Substitution x = g(t), dieses Integral umzuformulieren, so dass dieSubstitutionsregel anwendbar ist, wobei g(a) = α und g(b) = β gelten muss. Betrachtenwir beispielsweise das Integral ∫ r
0
√r2 − x2dx
fur ein gegebenes r > 0. Hier ist also f(x) =√
r2 − x2. Mit der Substitution x = g(t) :=r sin t fur t ∈ [0, π/2] ist dann g(0) = 0, g(π/2) = r und daher aufgrund der Substitutions-regel
∫ r
0
√r2 − x2dx =
∫ g(π/2)
g(0)
f(x)dx
=
∫ π/2
0
f(g(t))g′(t)dt
=
∫ π/2
0
√
r2 − r2 sin2(t)r cos(t)dt
=
∫ π/2
0
r2 cos2(t)dt
=πr2
4,
wobei man die letzte Gleichheit aus der im Anschluss folgenden Regel der partiellen Inte-gration herleiten kann, vergleiche Beispiel 7.42 (c).
Wir geben jetzt eine Reihe weiterer Beispiele zur Substitutionsregel.
Beispiel 7.40 (a) Mittels der Substitution g(t) = t + c folgt
∫ b
a
f(t + c)dt =
∫ b
a
f(g(t)
)g′(t)dt =
∫ g(b)
g(a)
f(x)dx =
∫ b+c
a+c
f(x)dx.
(b) Fur c 6= 0 erhalt man mit der Substitution g(t) = ct
∫ b
a
f(ct)dt =1
c
∫ b
a
f(g(t)
)g′(t)dt =
1
c
∫ g(b)
g(a)
f(x)dx =1
c
∫ bc
ac
f(x)dx.
(c) Sei g : [a, b] → R eine stetig differenzierbare Funktion mit g(t) 6= 0 fur alle t ∈ [a, b].Mit Beispiel 7.38 (b) folgt dann (man setze f(x) := 1
xin der Substitutionsregel)
∫ b
a
g′(t)
g(t)dt =
∫ b
a
f(g(t)
)g′(t)dt
=
∫ g(b)
g(a)
f(x)dx
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 31: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/31.jpg)
7.5. DIFFERENTIATION UND INTEGRATION 231
=
∫ g(b)
g(a)
1
xdx
= ln |x|∣∣∣
g(b)
g(a)
= ln∣∣g(t)
∣∣
∣∣∣
b
a.
(d) Aus Beispiel (c) folgt mit g(t) = cos(t) fur jedes Intervall [a, b] ⊆ (−π2, +π
2)
∫ b
a
tan tdt =
∫ b
a
sin t
cos tdt = −
∫ b
a
− sin t
cos tdt = − ln
∣∣ cos(t)
∣∣
∣∣∣
b
a.
(e) Die Integration von rationalen Funktionen gelingt im Allgemeinen mittels der so ge-nannten Partialbruchzerlegung , bei der man die rationale Funktion wie im Abschnitt2.4 in Hauptteil und Polynomanteil zerlegt und anschließend die entstehenden Sum-manden (oft unter Verwendung der Substitutionsregel) einzeln integriert. Zur Illu-stration betrachten wir das Beispiel
∫ b
a
1
1 − x2dx, wobei − 1, 1 /∈ [a, b].
Partialbruchzerlegung von f(x) := 11−x2 = 1
(1−x)(1+x)liefert
1
1 − x2=
1
2
1
1 − x+
1
2
1
1 + x.
Damit folgt∫ b
a
1
1 − x2dx =
1
2
∫ b
a
1
1 − xdx +
1
2
∫ b
a
1
1 + xdx
=1
2
∫ b
a
1
x + 1dx − 1
2
∫ b
a
1
x − 1dx
=1
2
(ln |x + 1| − ln |x − 1|
)∣∣∣
b
a
=1
2ln
∣∣∣∣
x + 1
x − 1
∣∣∣∣
∣∣∣
b
a
wobei wir das Additionstheorem des naturlichen Logarithmus verwendet haben. 3
Die nachstehend formulierte Regel der partiellen Integration ist das Gegenstuck zur Pro-duktregel aus der Differentialrechnung.
Satz 7.41 ( Partielle Integration )Seien f, g : [a, b] → R zwei stetig differenzierbare Funktionen. Dann gilt
∫ b
a
f(x)g′(x)dx = f(x)g(x)∣∣∣
b
a−∫ b
a
f ′(x)g(x)dx.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 32: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/32.jpg)
232 KAPITEL 7. DAS RIEMANN–INTEGRAL
Beweis: Die Abbildung F := f · g ist nach Voraussetzung stetig differenzierbar. Aus derProduktregel folgt
F ′(x) = f ′(x)g(x) + f(x)g′(x).
Der Hauptsatz 7.37 liefert daher
∫ b
a
f ′(x)g(x)dx +
∫ b
a
f(x)g′(x)dx = F (x)∣∣∣
b
a= f(x)g(x)
∣∣∣
b
a,
woraus die Behauptung unmittelbar folgt. 2
Wir illustrieren die Regel der partiellen Integration an einigen Beispielen.
Beispiel 7.42 (a) Seien a, b > 0. Zur Berechnung von∫ b
aln(x)dx setzen wir f(x) :=
ln(x), g(x) := x. Dann folgt
∫ b
a
ln(x)dx =
∫ b
a
f(x)g′(x)dx
= f(x)g(x)∣∣∣
b
a−∫ b
a
f ′(x)g(x)dx
= x ln(x)∣∣∣
b
a−∫ b
a
1dx
= x(ln(x) − 1
)∣∣∣
b
a.
(b) Zur Bestimmung von∫ b
aarctan(x)dx setzen wir f(x) := arctan(x), g(x) := x. Damit
erhalten wir wegen ddx
arctan(x) = 11+x2 (vergleiche Beispiel 6.10 (c))
∫ b
a
arctan(x)dx =
∫ b
a
f(x)g′(x)dx
= f(x)g(x)∣∣∣
b
a−∫ b
a
f ′(x)g(x)dx
= x · arctan(x)∣∣∣
b
a−∫ b
a
x
1 + x2dx
= x · arctan(x)∣∣∣
b
a− 1
2
∫ b2
a2
1
1 + tdt
= x · arctan(x)∣∣∣
b
a− 1
2ln(1 + t)
∣∣∣
b2
a2
= x · arctan(x)∣∣∣
b
a− 1
2ln(1 + x2)
∣∣∣
b
a,
wobei wir neben der Regel der partiellen Integration auch die Substitution t = x2
verwendet haben.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 33: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/33.jpg)
7.5. DIFFERENTIATION UND INTEGRATION 233
(c) Als Erganzung zu den Ausfuhrungen vor dem Beispiel 7.40 wollen wir hier das un-bestimmte Integral ∫
cos2(x)dx
berechnen. Durch partielle Integration sowie unter Ausnutzung der bekannten Iden-titat sin2(x) + cos2(x) = 1 ergibt sich
∫
cos2(x)dy =
∫
cos(x)︸ ︷︷ ︸
=:f(x)
cos(x)︸ ︷︷ ︸
=:g′(x)
dx
= cos(x) sin(x) +
∫
sin2(x)dx
= cos(x) sin(x) +
∫(1 − cos2(x)
)dx
= cos(x) sin(x) −∫
cos2(x)dx +
∫
1dx.
Dies liefert die Formel∫
cos2(x)dx =1
2cos(x) sin(x) +
1
2
∫
1dx.
Speziell fur das Beispiel vor 7.40 erhalten wir damit
∫ π2
0
r2 cos2(t)dt = r2
∫ π2
0
cos2(t)
=r2
2cos(t) sin(t)
∣∣∣
π2
0+
r2
2
∫ π2
0
1dx
=r2π
4
also das gewunschte Ergebnis.
(d) In Verallgemeinerung des vorigen Beispiels wollen wir hier eine Rekursionsformel furdas unbestimmte Integral
Im :=
∫
sinm(x)dx
herleiten, wir suchen also eine Stammfunktion fur sinm(x). Offenbar ist
I0 =
∫
sin0(x)dx = x und I1 =
∫
sin xdx = − cos x.
Fur m ≥ 2 folgt durch partielle Integration
Im = −∫
sinm−1(x) cos(x)′dx
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 34: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/34.jpg)
234 KAPITEL 7. DAS RIEMANN–INTEGRAL
= − cos(x) sinm−1(x) + (m − 1)
∫
cos2(x) sinm−2(x)dx
= − cos(x) sinm−1(x) + (m − 1)
∫(1 − sin2(x)
)sinm−2(x)dx
= − cos(x) sinm−1(x) + (m − 1)
∫
sinm−2(x)dx − (m − 1)
∫
sinm(x)dx
= − cos(x) sinm−1(x) + (m − 1)Im−2 − (m − 1)Im.
Diese Gleichung kann man nach Im auflosen und erhalt
Im = − 1
mcos(x) sinm−1(x) +
m − 1
mIm−2
fur jedes m ≥ 2. 3
7.6 Die Lp–Normen
Im Abschnitt 6.6 haben wir gesehen, dass man den Raum Kn mittels der lp–Normen
‖z‖p :=
{
(∑n
i=1 |zi|p)1/p, falls p ∈ [1, +∞)
maxi=1,...,n |zi|, falls p = +∞
zu einem normierten Raum machen kann, wobei K wieder fur R oder C steht. Wir wollenin diesem Abschnitt analog vorgehen und den Raum
C([a, b]) :={f : [a, b] → R
∣∣ f ist stetig
}
der auf dem kompakten Intervall [a, b] stetigen Funktionen normieren. Dazu ersetzen wirin der Definition von ‖z‖p im Wesentlichen nur die Summe durch ein Integral und erhaltensomit die so genannten Lp-Normen
‖f‖Lp :=
{ (∫ b
a|f(x)|pdx
)1/p
, falls p ∈ [1, +∞),
maxx∈[a,b] |f(x)|, falls p = +∞(7.9)
als Kandidaten fur geeignete Normen auf C([a, b]). Der Rest dieses Abschnitts besteht vorallem darin, die Norm–Eigenschaften fur diese Vorschriften zu verifizieren. Fur p = 1 undp = +∞ ist dies relativ einfach, fur p ∈ (1, +∞) ist der Aufwand hingegen etwas großerund bedarf daher einiger Vorbereitungen. Wir beginnen unsere Ausfuhrungen mit demfolgenden Resultat.
Lemma 7.43 Sei p ∈ [1, +∞] beliebig gegeben. Dann gilt
‖f‖Lp = 0 ⇐⇒ f ≡ 0 (7.10)
fur jedes f ∈ C([a, b]).
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 35: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/35.jpg)
7.6. DIE LP –NORMEN 235
Beweis: Aus f ≡ 0 folgt offensichtlich ‖f‖Lp = 0 fur jedes p ∈ [1, +∞]. Sei also umgekehrtf eine stetige Funktion mit ‖f‖Lp = 0. Fur p = +∞ ergibt sich dann sofort f ≡ 0, sodass wir im Folgenden p ∈ [1, +∞) voraussetzen durfen. Angenommen, f ist nicht dieNullfunktion. Dann existiert ein ξ ∈ (a, b) mit f(ξ) 6= 0 (zunachst existiert nur ein ξ ∈ [a, b]mit f(ξ) 6= 0, gilt dabei ξ = a oder ξ = b, so konnen wir den Punkt ξ etwas nach rechtsbzw. links verschieben und erhalten dann aus Stetigkeitsgrunden ein ξ aus dem offenenIntervall (a, b) mit der Eigenschaft f(ξ) 6= 0).
Setze nun ε := |f(ξ)|/2 > 0. Da f stetig ist, existiert ein zugehoriges δ > 0 mit
∣∣f(x) − f(ξ)
∣∣ < ε fur alle x ∈ [a, b] mit |x − ξ| < δ.
Wegen ξ ∈ (a, b) konnen wir dabei voraussetzen, dass δ > 0 bereits so klein gewahlt ist,dass jedes x ∈ R mit |x − ξ| < δ automatisch in dem Intervall [a, b] liegt. Dann folgtzunachst
∣∣f(x)
∣∣ ≥
∣∣f(ξ)
∣∣−∣∣f(x) − f(ξ)
∣∣ >
∣∣f(ξ)
∣∣− ε =
1
2
∣∣f(ξ)
∣∣
fur alle x ∈ R mit |x − ξ| < δ und daher
‖f‖Lp =
(∫ b
a
∣∣f(x)
∣∣pdx
)1/p
≥(∫ ξ+δ
ξ−δ
∣∣f(x)
∣∣pdx
)1/p
≥(∫ ξ+δ
ξ−δ
(∣∣f(ξ)
∣∣
2
)p
dx
)1/p
=1
2
∣∣f(ξ)
∣∣ · (2δ)1/p
> 0
aufgrund der Monotonie des Integrals. Dies widerspricht jedoch unserer Voraussetzung‖f‖Lp = 0. 2
Der obige Beweis benutzt ganz entscheidend die Stetigkeit der Funktion f . In der Tatdurfte jetzt auch klar sein, warum wir (zumindest zu diesem Zeitpunkt) die Lp-Normenauf dem Raum der stetigen statt beispielsweise der Riemann–integrierbaren Funktioneneinfuhren (was vielleicht naheliegender ware): Fur Riemann–integrierbare Funktionen giltdie Aquivalenz (7.10) namlich nicht. Beispielsweise konnten wir die Nullfunktion an endlichvielen Stellen des Intervalls [a, b] abandern und wurden immer noch ‖f‖Lp = 0 erhalten.Somit kann die Vorschrift ‖f‖Lp keine Norm auf dem Raum der Riemann–integrierbarenFunktionen liefern!
Wir kehren damit wieder zuruck zum Raum der stetigen Funktionen. Die nachstehendenAusfuhrungen entsprechen fast wortlich denen des Abschnitts 6.6.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 36: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/36.jpg)
236 KAPITEL 7. DAS RIEMANN–INTEGRAL
Satz 7.44 ( Holdersche Ungleichung fur Integrale )
Seien p, q ∈ (1, +∞) zwei Zahlen mit 1p
+ 1q
= 1. Dann gilt
∣∣∣∣
∫ b
a
f(x)g(x)dx
∣∣∣∣≤∫ b
a
∣∣f(x)g(x)
∣∣dx ≤ ‖f‖Lp · ‖g‖Lq
fur alle f, g ∈ C([a, b]).
Beweis: Die erste Ungleichung ist gerade die schon aus dem Lemma 7.24 bekannt Mo-notonie des Integrals. Wir haben daher nur die zweite Ungleichung zu verifizieren. Diesgelingt im Prinzip vollig analog zum Beweis des entsprechenden Satzes 6.31.
Wir konnen ‖f‖Lp 6= 0 und ‖g‖Lq 6= 0 voraussetzen, da die Behauptung anderenfallstrivialerweise erfullt ist, vergleiche das Lemma 7.43. Dann konnen wir die Ungleichungzwischen dem arithmetischen und geometrischen Mittel aus dem Satz 6.30 anwenden mit
r := 2, λ1 :=1
p, λ2 :=
1
q, x1 :=
|f(x)|p‖f‖p
Lp
und x2 :=|g(x)|q‖g‖q
Lq
fur ein festes (aber beliebiges) x ∈ [a, b]. Dies liefert
|f(x)|‖f‖Lp
· |g(x)|‖g‖Lq
= xλ11 · xλ2
2 ≤ λ1x1 + λ2x2 =1
p
|f(x)|p‖f‖p
Lp
+1
q
|g(x)|q‖g‖q
Lq
.
Durch Integration von a nach b erhalten wir hieraus
1
‖f‖Lp · ‖g‖Lq
∫ b
a
∣∣f(x)
∣∣ ·∣∣g(x)
∣∣dx
≤ 1
p· 1
‖f‖pLp
∫ b
a
|f(x)|pdx
︸ ︷︷ ︸
=‖f‖p
Lp
+1
q· 1
‖g‖qLq
∫ b
a
|g(x)|qdx
︸ ︷︷ ︸
=‖g‖q
Lq
=1
p+
1
q= 1,
wobei wir die Linearitat des Integrals, die Dreiecksungleichung und die Monotonie des Inte-grals verwendet haben. Multiplikation der obigen Ungleichungskette mit ‖f‖Lp · ‖g‖Lq > 0liefert nun die Behauptung. 2
Als wichtigen Spezialfall der Holderschen Ungleichung erhalten wir im Fall p = q = 2 dasnachstehende Korollar.
Korollar 7.45 ( Cauchy–Schwarzsche Ungleichung fur Integrale )Fur alle f, g ∈ C([a, b]) gilt die Ungleichung
∣∣∣∣
∫ b
a
f(x)g(x)dx
∣∣∣∣≤∫ b
a
∣∣f(x)g(x)
∣∣dx ≤ ‖f‖L2·‖g‖L2 =
(∫ b
a
∣∣f(x)
∣∣2dx
)1/2(∫ b
a
∣∣g(x)
∣∣2dx
)1/2
.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 37: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/37.jpg)
7.6. DIE LP –NORMEN 237
Aus der Holderschen Ungleichung erhalten wir außerdem das folgende Resultat.
Satz 7.46 ( Minkowskische Ungleichung fur Integrale )Sei p ∈ (1, +∞) gegeben. Dann gilt
‖f + g‖Lp ≤ ‖f‖Lp + ‖g‖Lp
fur alle f, g ∈ C([a, b]).
Beweis: Die Behauptung verifiziert man analog zum Beweis der Minkowskischen Unglei-chung fur ℓp–Normen, siehe Satz 6.33. Der Vollstandigkeit halber soll der Beweis dennochdurchgefuhrt werden.
Wir wahlen q := pp−1
, so dass 1p
+ 1q
= 1 bzw. 1q
= 1 − 1p
= p−1p
gilt. Dann folgt
‖|f |p−1‖Lq =( ∫ b
a
∣∣f(x)
∣∣(p−1)q
dx)1/q
=(∫ b
a
|f(x)|pdx)1/q
= ‖f‖p/qLp = ‖f‖p−1
Lp . (7.11)
Hieraus erhalt man durch zweimalige Anwendung der Holderschen Ungleichung
‖f + g‖pLp =
∫ b
a
∣∣f(x) + g(x)
∣∣pdx
=
∫ b
a
∣∣f(x) + g(x)
∣∣p−1 ·
∣∣f(x) + g(x)
∣∣dx
≤∫ b
a
∣∣f(x) + g(x)
∣∣p−1(∣∣f(x)
∣∣ +∣∣g(x)
∣∣)dx
=
∫ b
a
∣∣f(x) + g(x)
∣∣p−1 ·
∣∣f(x)
∣∣dx +
∫ b
a
∣∣f(x) + g(x)
∣∣p−1 ·
∣∣g(x)
∣∣dx
≤ ‖|f + g|p−1‖Lq
(‖f‖Lp + ‖g‖Lp
)(nach Holder)
= ‖f + g‖p−1Lp
(‖f‖Lp + ‖g‖Lp
)
fur alle f, g ∈ C([a, b]), wobei die letzte Gleichheit aus (7.11) folgt. Division durch ‖f+g‖p−1Lp
liefert die Behauptung. 2
Nach diesen Vorbereitungen konnen wir nun das Hauptresultat dieses Abschnitts beweisen.
Satz 7.47 Die Lp-Normen aus (7.9) sind fur alle 1 ≤ p ≤ +∞ Normen auf dem C([a, b]).
Beweis: Die Eigenschaft ‖f‖Lp ≥ 0 fur alle 1 ≤ p ≤ +∞ und alle f ∈ C([a, b]) folgtsofort aus der Monotonie des Integrals und der Definition der Lp-Normen in (7.9). WegenLemma 7.43 gilt auch die Aquivalenz (7.10). Die Gultigkeit von ‖αf‖Lp = |α| · ‖f‖Lp furalle f ∈ C([a, b]) und jedes α ∈ R ist ebenfalls eine unmittelbare Konsequenz der Definition(7.9). Damit bleibt nur noch die Dreiecksungleichung zu verifizieren. Fur p ∈ (1, +∞) istdas aber gerade die Minkowskische Ungleichung aus dem Satz 7.46. Fur p ∈ {1, +∞}
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 38: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/38.jpg)
238 KAPITEL 7. DAS RIEMANN–INTEGRAL
hingegen kann man die Gultigkeit der Dreiecksungleichung direkt verifizieren. So folgt siefur p = 1 aus
‖f + g‖L1 =
∫ b
a
∣∣f(x) + g(x)
∣∣dx
≤∫ b
a
(∣∣f(x)
∣∣ +∣∣g(x)
∣∣)dx
=
∫ b
a
∣∣f(x)
∣∣dx +
∫ b
a
∣∣g(x)
∣∣dx
= ‖f‖L1 + ‖g‖L1,
wahrend man fur p = +∞
‖f + g‖L∞ = maxx∈[a,b]
∣∣f(x) + g(x)
∣∣
≤ maxx∈[a,b]
(∣∣f(x)
∣∣+∣∣g(x)
∣∣)
≤ maxx∈[a,b]
∣∣f(x)
∣∣ + max
x∈[a,b]
∣∣g(x)
∣∣
= ‖f‖L∞ + ‖g‖L∞
erhalt. 2
Haufig werden wir fur die Lp–Norm einer stetigen Funktion f statt ‖f‖Lp auch nur ‖f‖p
schreiben. Im Gegensatz zu dem mit den lp–Normen versehenen Raum Kn ist der RaumC([a, b]) mit keiner der Lp–Normen (p < ∞) vollstandig, also kein Banach–Raum. DieserNachteil wird spater die Einfuhrung des Lebesgue–Integrals motivieren.
Bemerkung 7.48 (a) Sei
R([a, b]) :={f : [a, b] → R | f ist Riemann–integrierbar
}
die Menge aller auf dem Intervall [a, b] Riemann–integrierbaren Funktionen. Dann lassensich die Ausdrucke ‖f‖Lp fur jedes p ∈ [1,∞) analog zu den obigen Ausfuhrungen definie-ren. Es gelten auch fast alle Resultate aus diesem Abschnitt, lediglich die Richtung
‖f‖Lp = 0 =⇒ f ≡ 0
aus dem Lemma 7.43 ist im Allgemeinen falsch (man denke an eine Funktion f , die lediglichmit Ausnahme eines einzelnen Punktes gleich Null ist). Anders formuliert: Die Vorschrift‖f‖Lp definiert auf dem Vektorraum R([a, b]) keine Norm, sondern nur eine Halbnorm!
(b) SeiB([a, b]) :=
{f : [a, b] → R | f ist beschrankt
}
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 39: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/39.jpg)
7.6. DIE LP –NORMEN 239
die Menge der auf [a, b] beschrankten Funktionen. Mit f, g ∈ B([a, b]) und α ∈ R sindoffenbar auch αf und f + g beschrankte Funktionen, also ist B([a, b]) ein Vektorraum, deroffenbar sowohl die Menge C([a, b]) aller auf [a, b] stetigen Funktionen als auch die MengeR([a, b]) der auf [a, b] Riemann–integrierbaren Funktionen umfasst. In Verallgemeinerungder bisherigen Definition konnen wir den Ausdruck
‖f‖L∞ := ‖f‖∞ := supx∈[a,b]
{|f(x)|
}
nun auch fur ein beliebiges (nicht notwendig stetiges oder Riemann–integrierbares) f ∈B([a, b]) definieren. Man sieht relativ leicht ein, dass hierdurch ebenfalls eine Norm auf demRaum B([a, b]) definiert wird, die so genannte Supremumsnorm, mit welcher die Menge derauf [a, b] beschrankten Funktionen also einen normierten Raum bildet. — Die Lp–Normenfur p < ∞ hingegen lassen sich nicht auf die Klasse B([a, b]) verallgemeinern, denn hierzuwird explizit die Integrierbarkeit gewisser Abbildungen benotigt, die Beschranktheit alleinereicht sicherlich nicht aus.
(c) Die Bemerkung (b) lasst sich noch weiter verallgemeinern: Sei X eine beliebige nichtleereMenge und
B(X) :={f : X → R | f ist beschrankt
}
die Menge der auf X beschrankten Funktionen. Die Menge B(X) ist ganz offensichtlichwieder ein Vektorraum, der mittels der ebenfalls als Supremumsnorm bezeichneten Vor-schrift
‖f‖∞ := supx∈X
{|f(x)|
}
zu einem normierten Raum wird. Diese Aussage lasst sich analog zu den vorigen Ausfuhrun-gen beweisen, im Prinzip besteht dabei kein Unterschied, da die wesentlichen Abschatzun-gen nur den Betrag |f(x)| verwenden und damit wie zuvor in der Menge der reellen ZahlenR verlaufen.
Christian Kanzow, Universitat Wurzburg, WS 2010/11
![Page 40: Kapitel 7 Das Riemann– Integralkanzow/analysis1/Kapitel7.pdf · 202 KAPITEL 7. DAS RIEMANN–INTEGRAL Definition 7.1 Sei f : [a,b] → R eine beschr¨ankte Funktion und P = {x0,x1,...,x](https://reader030.fdokument.com/reader030/viewer/2022020316/5b374c997f8b9a310e8c1477/html5/thumbnails/40.jpg)
240 KAPITEL 7. DAS RIEMANN–INTEGRAL
Christian Kanzow, Universitat Wurzburg, WS 2010/11