LD Cart Transporter - Omron · 2020. 10. 8. · Transporter bezeichnet. Wagen: Ein Wagen auf vier...
182
LD Cart Transporter Betriebsanleitung I612-DE-01
Transcript of LD Cart Transporter - Omron · 2020. 10. 8. · Transporter bezeichnet. Wagen: Ein Wagen auf vier...
-
LD Cart Transporter
Betriebsanleitung
I612-DE-01
-
Copyright-Hinweis
Alle hier erwähnten Informationen sind Eigentum der Omron Adept Technologies, Inc. und dürfen ohne vorherige schriftliche Genehmigung durch die Omron Adept Technologies Inc. weder ganz noch teilweise vervielfältigt werden. Die hier enthaltenen Informationen können ohne Vorankündigung geändert werden und deshalb Omron Adept Technologies, Inc. nicht als verbindlich ausgelegt werden. Die Dokumentation wird regelmäßig überprüft und überarbeitet.
Omron Adept Technologies, Inc. übernimmt für Fehler oder Auslassungen in dieser Dokumentation keinerlei Haftung. Bemerkungen oder Hinweise zu dieser Dokumentation durch den Benutzer sind erwünscht. Ihre Kommentare helfen uns bei der Vorbereitung zukünftiger Dokumente. Bitte senden Sie Ihre Kommentare an [email protected].
Copyright © 2016–2017 Omron Adept Technologies, Inc. Alle Rechte vorbehalten.
Marken anderer Unternehmen, die in diesem Dokument genannt werden, sind Eigentum der jeweiligen Unternehmen.
Audiocodierung MPEG Layer-3, lizenziert von Fraunhofer IIS und Thomson.
Copyright 2012 CEPSTRAL LLC http://www.cepstral.com. Dieses Produkt kann urheberrechtlich geschütztes Material von CEPSTRAL LLC enthalten. Alle Rechte vorbehalten.
Dieses Handbuch wurde ursprünglich in englischer Sprache verfasst.
Erstellt in den Vereinigten Staaten von Amerika
-
14766-000 Rev. B Seite 3 von 182LD Cart Transporter Betriebsanleitung
Inhaltsverzeichnis
Kapitel 1: Einleitung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9Definitionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1 Produktbeschreibung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9LD Cart Transporter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Gehäuse und Antriebe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Sicherheits-Laserscanner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Wagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Kopplung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Optionale Komponenten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Benutzerseitige Komponenten/Systemanforderungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2 Softwareübersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Mobile Robot Software Suite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15SetNetGo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3 Wo erhalte ich Hilfe? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Zugehörige Handbücher . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Anhängen einer DebugInfo-Datei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Netzwerkeinrichtung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Zugriff auf SetNetGo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Kapitel 2: Sicherheit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.1 Gefahren, Warnungen, Vorsichtshinweise und Vorsichtsmaßnahmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.2 Verhalten bei Notfällen/in Ausnahmesituationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Lösen der Bremsen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Freigeben eines Not-Halts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Pflichten des Benutzers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Allgemeine Gefahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Sturzgefahr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Stromschlaggefahr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Quetschgefahr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Gefahr durch magnetische Felder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Qualifiziertes Personal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Transport und Übergabe der Nutzlast . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Konfigurierbarer Warnsummer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Kollisionsvermeidung bei mehreren Robotern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Verkehrssteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Überholspuren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.4 Umgebung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Allgemeine Umgebungsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Öffentlich zugängliche Bereiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Sicherheitsabstand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Hindernisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
-
Seite 4 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
Inhaltsverzeichnis
2.5 Verwendungszweck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28Missbrauch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Modifikationen am Roboter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.6 Sicherheit im Umgang mit dem Akku . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.7 Zusätzliche Sicherheitshinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Unbeabsichtigte Abkopplung des Wagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Sicherheitshandbuch Mobile Robot LD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Kapitel 3: Einrichtung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.1 Transport und Lagerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32LD Cart Transporter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Akku . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Wagen separat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2 Vor dem Auspacken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.3 Auspacken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Akku . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 LD Cart Transporter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Einpacken für Ortswechsel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4 Einrichten eines LD Cart Transporters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Montieren der Seitenlaser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Montieren der Seitenlaser-Halterohre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Entnehmen des LD Cart Transporters aus dem Kistenunterteil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Einsetzen des Akkus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 Installieren der Dockingstation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.5 Einbau des Bremslösemechanismus am Wagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Einbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Einstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Kapitel 4: Konfiguration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.1 Einstellungen und Konfiguration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Wartungs-Ethernet-Anschluss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Einrichten des Wireless Ethernet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.2 Erstellen einer Karte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Einrichten von Abstellzielen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Markieren von Abstellzielen am Boden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.3 Konfigurieren eines Touchscreens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Einrichten des Ethernet für den Touchscreen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Betriebsarten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Lokalisierungsziele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Bildschirmlogo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Bildschirmschoner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68Anzeigesprache . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68Kontaktdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.4 Grenzwerte für Beschleunigung, Verzögerung und Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.5 Zusätzliche Informationen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Einrichten der Laser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
-
14766-000 Rev. B Seite 5 von 182LD Cart Transporter Betriebsanleitung
Inhaltsverzeichnis
Kapitel 5: Nutzlast. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 715.1 Sicherheit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Fahrwarnleuchte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Warnleuchten für Wendemanöver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.2 Weitere Aspekte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Abmessungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Quetschgefahr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Gewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Schwerpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.3 Kompromisse bei der Nutzlast . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Kapitel 6: Anschlussmöglichkeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796.1 Benötigte Verbindungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796.2 Anschlüsse des LD Cart Transporters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80Wagen-spezifische Platine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.3 Standard-Plattformanschlüsse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86Vorderseite des Robotercores, oben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86Rückseite des Cores, oben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93Interne Anschlüsse des Cores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100Kontaktbelegung Core (intern) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101Kontaktbelegungen Robotercore (intern) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Kapitel 7: Bedienerschnittstelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1057.1 Touchscreen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Touchscreen-Initialisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105Touchscreen-Konfiguration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106Bildschirm-Titelleiste. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106Linkes Fenster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106Rechtes Fenster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108Aufnahme wiedergeben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112Mittleres Fenster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113Neulokalisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113Ablieferort auswählen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113Patrouillenmodus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
7.2 Bedienfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117Not-Halt-Taste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117ON-Taste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117OFF-Taste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117BRAKE-Taste (Bremsen lösen) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117Schlüsselschalter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118LATCH-Taste (Verriegeln) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118UNLATCH-Taste (Entriegeln) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
7.3 Weitere Steuerelemente und Anzeigen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .118Kreisleuchten und Kennleuchte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118Anzeigeleuchten des Cores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123Akku und Dockingstation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
-
Seite 6 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
Inhaltsverzeichnis
Kapitel 8: Betrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1258.1 Betriebsumgebung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Verwendungszweck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125Sicherheitsabstand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125Hindernisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125Umgebung und Boden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126Festfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
8.2 Typischer Betrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1278.3 Stromversorgung und Ladevorgang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .128
Akkuanzeigen und Bedienelemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128Dockingstation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129Manuelles Laden des Akkus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130Ausbalancieren des Akkus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
8.4 Einschalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132Joystick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
8.5 Arbeiten mit den Wagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133Ziele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133Betrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133Lokalisieren des Wagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133Wagenbremsen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Kapitel 9: Optionen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Enterprise Manager 1100 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135MobilePlanner-Software (lizenziert) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Joystick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Ersatzakku . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Ersatzwagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Ruftasten/Türöffner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Acuity Lokalisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136HAPS (Positioniersystem mit hoher Genauigkeit) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Kapitel 10: Wartung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13710.1 Sicherheitsaspekte bei Wartungsarbeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138
Stromschlaggefahr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138Quetschgefahr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139Gefahr durch magnetische Felder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
10.2 Sicheres Anheben der Plattform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139Vordere Hebepunkte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139Hinterer Hebebereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
10.3 Sicherheitsprüfung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141Warneinrichtungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141Warnschilder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141Informationsbeschriftungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
-
14766-000 Rev. B Seite 7 von 182LD Cart Transporter Betriebsanleitung
Inhaltsverzeichnis
10.4 Reinigung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145Wartung im Arbeitsbereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145LD Cart Transporter und Wagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145Reifen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145Laufrollen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145Achsen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145Laser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Kontakte der Dockingstation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
10.5 Freilegen der Nutzlastbucht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Entfernen der Verkleidung des Verriegelungsmechanismus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Entfernen der Oberplatte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Installieren der Oberplatte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147Anbringen der Verkleidung des Verriegelungsmechanismus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
10.6 Abnehmen und Wiederanbringen der Verkleidungen des LD Cart Transporters . . . . . . . . . . . . . . . . . . . . . .148Entfernen der Verkleidungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Anbringen der Verkleidungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
10.7 Ersatz von regelmäßig auszutauschenden Teilen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15310.8 Ersatz von nicht regelmäßig auszutauschenden Teilen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Rolle und Lager der Dockingstation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154Sicherheits-Laserscanner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156Hinderniserkennungslaser und Kopplungslaser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157Verriegelungsmechanismus des Wagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161Kreisleuchten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163Räder und Reifen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164Antriebsbaugruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166Laufrollen der Plattform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168Laufrollen des Wagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169Bremslösemechanismus des Wagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172Robotercore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174Inbetriebnahme von Not-Halt und Sicherheits-Laserscanner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
Kapitel 11: Technische Daten. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17711.1 Bemaßungszeichnungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17711.2 Technische Daten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .178
LD Cart Transporter – Gerät . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178LD Cart Transporter – Leistung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179Akkuausgänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180Wagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181Dockingstation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
-
Seite 8 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
Inhaltsverzeichnis
-
14766-000 Rev. B Seite 9 von 182LD Cart Transporter Betriebsanleitung
Einleitung
Kapitel 1: Einleitung
Dieses Handbuch beschreibt die Einrichtung, den Betrieb und die benutzerseitige Wartung des LD Cart Transporter-Systems.
Es wird die grundlegende Konfiguration behandelt, die mit der im Lieferumfang des Systems enthaltenen Software durchgeführt wird. Ausführliche Informationen zu dieser Konfiguration finden Sie in der Betriebsanleitung zur Mobile Robot Software Suite.
DefinitionenPlattform: Basisteil des Roboters; umfasst Gehäuse, Antriebsbaugruppen, Aufhängung, Räder, Akku, Sicherheits-Laserscanner, Kollisionsvermeidungs-Laser, Sonareinheit, eingebauten Core des Roboters mit integriertem Gyroskop, Navigationssoftware, Anschlüsse als Schnittstelle und Stromversorgung für das Bedienfeld sowie Wagenkopplungssystem, Bedienfeld und Plattformverkleidungen.
LD Cart Transporter: Eine Plattform mit HMI-Säule (einschließlich seitlich angebrachter Arme) und montierter Koppelplatte, die für den Transport eines Wagens eingerichtet ist; auch einfach als Transporter bezeichnet.
Wagen: Ein Wagen auf vier Rollen, der von einem LD Cart Transporter aufgenommen werden kann, um die Nutzlastaufnahme des Transporters zu erhöhen. Zwei Rollen des Wagens sind mit Bremsen ausgestattet, die entweder durch Kopplung an den Transporter oder durch Verwendung eines manuellen Bremslösehebels am Wagen gelöst werden können.
AIV (Autonomous Intelligent Vehicle): Der Transporter mit angekoppeltem Wagen; dies ist der vollständige mobile Roboter, der die auf dem Wagen platzierte Nutzlast transportiert.
In Hinblick auf die Ersteinrichtung, Konfiguration und Anschlüsse wird der Begriff „Plattform“ verwendet.
In Hinblick auf die Steuerung oder Überwachung des vollständigen mobilen Roboters mit angekoppeltem Wagen wird der Begriff „AIV“ oder „Roboter“ verwendet.
1.1 ProduktbeschreibungDer LD Cart Transporter ist ein mobiler Universalroboter, der für den Transport eines abkoppelbaren Wagens in Innenräumen und in Anwesenheit von Personen vorgesehen ist. Er ist selbststeuernd und mithilfe einer automatisierten Dockingstation selbstladend.
Der Transporter, der den Wagen bewegt, verfügt ab Werk über die Fähigkeit zur Orientierung innerhalb eines Arbeitsbereichs und zur sicheren und autonomen Navigation an jedes zugängliche Ziel innerhalb dieses Arbeitsbereichs, kontinuierlich und ohne menschliches Eingreifen.
Der Wagen erweitert das Spektrum von Nutzlasten hinsichtlich Größe und Gewicht, die durch den Transporter bewegt werden können.
Der LD Cart Transporter ist in zwei Modellen erhältlich, die für den Transport von Wagen mit einem Gesamtgewicht von bis zu 105 kg (Modell LD-105CT) bzw. 130 kg (Modell LD-130CT) ausgelegt sind. Wo erforderlich, werden die Unterschiede zwischen den Modellen genannt. Alle anderen Angaben in diesem Handbuch gelten für beide Modelle des LD Cart Transporters.
-
Produktbeschreibung
Seite 10 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
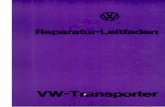
Ab. 1-1. Wagen und LD Cart Transporter getrennt
Ab. 1-2. Wagen und LD Cart Transporter gekoppelt
-
14766-000 Rev. B Seite 11 von 182LD Cart Transporter Betriebsanleitung
Einleitung
Abbildung 1-3. Kennzeichnung des jeweiligen LD Cart Transporter-Modells
LD Cart TransporterDer Transporter ist eine mobile Roboterplattform, die für den Transport von Wagen in Anwesenheit von Personen vorgesehen ist. Er ist selbststeuernd und mithilfe einer automatisierten Dockingstation selbstladend. Der Transporter verbindet Hardware und Mobilroboter-Software und bildet damit eine intelligente, mobile Plattform für den Transport von Nutzlasten auf einem Wagen. Die Navigation erfolgt im Wesentlichen über einen Sicherheits-Laserscanner, der die Ergebnisse der Lasermessung mit einer auf der Plattform gespeicherten digitalen Karte abgleicht. Unterstützt wird der Laser durch ein im Core montiertes Gyroskop sowie durch Drehgeber und Hallgeber an jedem Antriebsrad.
Zusätzlich zum vorderen Sicherheits-Laserscanner verfügt jedes Transporter-Modell über zwei Seitenlaser zur Erkennung möglicher Hindernisse auf seinem Pfad: einen auf geringer Höhe im Stoßschutz angebrachten Boden-Frontlaser zur Erkennung von Hindernissen unterhalb der Höhe des Sicherheits-Laserscanners und einen nach hinten gerichteten Hinderniserkennungslaser, mit dem sichergestellt wird, dass der Transporter ohne Gefahr rückwärts fahren oder auf der Stelle wenden kann.
In Situationen, die so dynamisch sind, dass die Laserlokalisierung schwierig wird, bieten wir die Acuity-Lokalisierung an, die die Plattform mit einer nach oben gerichteten Kamera zur Erkennung von Oberlichtmustern lokalisiert. Dies empfiehlt sich für Bereiche, in denen Objekte wie Paletten oder Wagen so häufig bewegt werden, dass sie sich nicht kartieren lassen, oder in denen solche Objekte die Sicht des Lasers auf kartierte Merkmale verdecken. Dies wird in der Betriebsanleitung zu den Peripheriegeräten der LD-Plattform behandelt.
Gehäuse und AntriebeDer Transporter ist relativ klein, leicht und äußerst wendig. Sein robustes Aluminiumgehäuse und seine solide Konstruktion machen ihn sehr langlebig.
Jede Plattform verfügt über einen Zweirad-Differenzialantrieb mit federbelasteten Passivrollen vorn und hinten sowie über Antriebsräder mit gefederter Einzelradaufhängung zur Balance. Die schaumgefüllten Räder befinden sich an der Mittellinie der Plattform, sodass die Plattform auf der Stelle wenden kann.
-
Produktbeschreibung
Seite 12 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
Sicherheits-LaserscannerDer integrierte Sicherheits-Laserscanner ist ein sehr präziser Scansensor. Der Laser liefert 500 Messwerte in einem 250°-Sichtfeld mit einer typischen maximalen Reichweite von 15 m. Er arbeitet in einer einzigen Ebene an einer Position 203 mm über dem Boden. In den meisten Umgebungen liefert der Sensor hochgenaue Daten.
Glas, Spiegel und andere stark reflektierende Objekte werden vom Laser nicht zuverlässig erkannt. Gehen Sie deshalb beim Betrieb des Roboters in Bereichen mit solchen Objekten vorsichtig vor. Wenn sich der Roboter in großer Nähe zu solchen Objekten bewegen muss, wird empfohlen, die Objekte mehrfach zu markieren (z. B. mit Klebeband oder farbigen Streifen) und zusätzlich Sperrbereiche in der Karte anzulegen, sodass der Roboter diese Objekte bei der Pfadplanung sicher vermeidet.
Seitenlaser
Diese beiden Laser dienen zur Erkennung von Hindernissen, die in den Pfad des Roboters hineinragen, aber vom Sicherheits-Laserscanner möglicherweise nicht erkannt werden.
Dies ist erforderlich, wenn Hindernisse oberhalb des Sicherheits-Laserscanners (jedoch niedrig genug, um den Roboter zu behindern) in den Roboterpfad ragen.
Boden-Frontlaser
Dieser Laser ist am vorderen Stoßschutz angebracht und erkennt niedrige Hindernisse vor dem Transporter, wie z. B. eine Leerpalette, die zu niedrig ist, als dass der Sicherheits-Laserscanner sie erfassen kann.
Rücklaser
Dieser Laser ergänzt die Sonareinheit bei der Erfassung der Umgebung hinter dem Wagen. Er ist beim Wenden und Rückwärtsfahren erforderlich, wenn Transport und Wagen gekoppelt sind.
Kopplungslaser
Ein auf der Koppelplatte des Transporters angebrachter Laser zur Lokalisierung eines Dreiecks an der Unterseite der Koppelplatte am Wagen. Mit seiner Unterstützung kann sich der Transporter beim Koppelvorgang genau am Wagen ausrichten.
Sonareinheit
Die beiden nach hinten gerichteten Sonarpaare des Transporters dienen der Hinderniserkennung beim Rückwärtsfahren. Ihre Reichweite beträgt bis zu 5 m, die typische Reichweite mit erforderlicher Genauigkeit jedoch nur bis zu 2 m. Jedes Paar besteht aus einem Sender und einem Empfänger, die physisch identisch sind, aber vom Transporter unterschiedlich eingesetzt werden.
Drehgeber und Gyroskop
Jedes Rad hat einen Drehgeber, der dem Navigationssystem meldet, wie weit das Rad in welche Richtung gedreht hat. Jedes Rad verfügt außerdem über einen Hall-Sensor.
Am Core des Roboters ist ein Gyroskop angebracht, das die Drehung der Plattform verfolgt.
Die Kombination aus Drehungs- und Streckendaten unterstützt den Sicherheits-Laserscanner bei der Lokalisierung. Diese Werte begrenzen den Bereich der Karte, den die Plattform bei der Lokalisierung durchsuchen muss.
-
14766-000 Rev. B Seite 13 von 182LD Cart Transporter Betriebsanleitung
Einleitung
Lieferumfang des LD Cart Transporters
Eine vollständig montierte PlattformDie Plattform umfasst einen Sicherheits-Laserscanner, einen Boden-Frontlaser, zwei Seitenlaser, einen Rücklaser und zwei nach hinten gerichtete Sonarpaare, bestehend aus jeweils einem Sender und einem Empfänger.
Ein AkkuDieser wird separat von der Plattform geliefert, um die Vorschriften für den Luftversand einzuhalten. Wenn der Akku als Luftfracht versandt wurde, ist er gemäß IATA-Bestimmungen zu weniger als 30 % geladen.
Oberplatte und KoppelplatteDie Oberplatte der Plattform bedeckt deren Nutzlastbucht und stützt die untere Koppelplatte der Plattform, die die Koppelplatte des Wagens aufnimmt, sowie den Kopplungslaser.
Der Core des Roboters im Inneren der Plattform umfasst einen integrierten Computer mit Advanced Robotics Automation Management (ARAM) und einen Microcontroller mit MARC-Firmware. Er führt auch das SetNetGo-Betriebssystem aus.Das ARAM-System, die MARC-Firmware und das SetNetGo-Betriebssystem sind auf dem Core des Roboters vorinstalliert.
Eine HMI-SäuleAn ihr sind die beiden Seitenlaser und der Rücklaser angebracht, die der Vermeidung von Hindernissen dienen, sowie auch das Bedienfeld.
BedienfeldDieses umfasst einen Touchscreen, eine Not-Halt-Taste, EIN- und AUS-Tasten, eine Bremslöse-Taste und einen Schlüsselschalter, der in beiden Stellungen verriegelbar ist, sodass der Schlüssel abgezogen werden kann. Am Rahmen des Bedienfelds sind zwei WLAN-Antennen und eine Kennleuchte angebracht.Unterhalb der Not-Halt-Taste befinden sich die Tasten LATCH (VERRIEGELN) und UNLATCH (ENTRIEGELN).Die optionale Acuity-Lokalisierungskamera ist oben am Bedienfeld-Rahmen auf gleicher Höhe wie die Antennen und die Kennleuchte angebracht.
Automatisierte DockingstationDiese ermöglicht das Laden der LD Plattform ohne Eingreifen des Bedieners. Sie enthält eine Wandhalterung und eine Bodenplatte für verschiedene Installationsmethoden. Siehe Siehe Installieren der Dockingstation auf Seite 48. Ein Ladekabel für manuelles Laden ist im Lieferumfang enthalten, sodass Sie einen Ersatzakku außerhalb der Plattform aufladen können.
Ein Joystick (Option)Dieser wird zur manuellen Steuerung des Roboters verwendet, insbesondere wenn ein Scan zur Erstellung einer Karte erfasst wird.Für jede Roboter-Flotte wird mindestens ein Joystick benötigt. Nachdem eine Karte erstellt wurde, kann diese von mehreren Robotern im selben Bereich gemeinsam genutzt werden.
WagenDer Wagen ist auf vier Laufrollen montiert und kann an einen LD Cart Transporter gekoppelt werden. Im gekoppelten Zustand bewegt sich der Wagen mit dem Transporter. Wenn der Transporter das gewünschte Ziel erreicht, entkoppelt er den Wagen und lässt ihn am Ziel zurück. Die Bremsen an den Laufrollen des Wagens werden automatisch aktiviert und verhindern ein Wegrollen für den Fall, dass der Boden nicht vollkommen eben ist.
Der Wagen verfügt über einen manuellen Bremslösehebel, kann also manuell bewegt werden.
-
Produktbeschreibung
Seite 14 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
KopplungDer Transporter kann am Abholort an einen Wagen koppeln, den Wagen zu einem Zielort bewegen und ohne menschliches Eingreifen dort zurücklassen.
Wenn Wagen und Transporter gekoppelt sind, betätigt der Transporter automatisch einen Hebel, der die Bremsen des Wagens löst, sodass er sich frei mit dem Transporter bewegen kann.
Das Kopplungssystem umfasst
einen motorgetriebenen Verriegelungsmechanismus einen Kopplungslaser
Dieser ist in der Koppelplatte angebracht und dient während der Kopplung zur Ausrichtung des Transporters am Wagen.
die Tasten LATCH (VERRIEGELN) und UNLATCH (ENTRIEGELN) am Bedienfeld
Koppelplatten
Jeder Wagen und jede Plattform besitzen jeweils eine Koppelplatte. Die Platten sind so angebracht, dass sie sich beim Manövrieren der Plattform unter den Wagen miteinander verbinden und die Plattform den Wagen anschließend bewegen kann. Die Software erkennt, ob ein Wagen angekoppelt ist.
Die Koppelplatte des Wagens weist einen Schlitz auf, mit dem sich die Koppelplatte der Plattform verriegelt. Die Koppelplatte des Wagens verhält sich passiv.
Die Koppelplatte der Plattform umfasst einen Laser zur Ausrichtung der Plattform vor dem Koppelvorgang sowie einen motorgetriebenen Verriegelungsmechanismus zum Verriegeln mit der Koppelplatte des Wagens.
Optionale KomponentenWeitere Informationen siehe Siehe Optionen auf Seite 135.
Acuity-NavigationFür Umgebungen, die so dynamisch sind, dass eine Karte nicht aktuell gehalten werden kann, oder in Bereichen, die für die Erfassung durch den Navigationslaser zu groß sind, kann der Roboter mithilfe des Acuity-Systems anhand von Oberlichtmustern navigieren, die mit einer nach oben gerichteten Kamera erkannt werden.
Enterprise Manager 1100Dieses System verwaltet eine Flotte von Robotern zur Pfadkoordination mehrerer Roboter und für das Auftragsmanagement. Es enthält das Enterprise Manager-System, auf dem die Mobile Software Suite ausgeführt wird.
ErsatzakkuZur Minimierung von Ausfallzeiten kann ein Ersatzakku verwendet werden. Indem Sie den Akku gegen einen voll geladenen Akku austauschen, muss der Roboter nicht länger als wenige Minuten außer Betrieb genommen werden.
Ruftaste/TüröffnerMit der Ruftaste kann ein Roboter von einem entfernten Ort angefordert werden. Mit dem Türöffner kann das Robotersystem eine automatische Tür öffnen, um sich Durchgang zu verschaffen.
Benutzerseitige Komponenten/SystemanforderungenPC mit Microsoft Windows®
Ethernet (WLAN bevorzugt)Für eine Flotte (mehr als ein Roboter) ist eine WLAN-Verbindung erforderlich.
100 MB verfügbarer Festplattenspeicher
-
14766-000 Rev. B Seite 15 von 182LD Cart Transporter Betriebsanleitung
Einleitung
1.2 Softwareübersicht
Mobile Robot Software SuiteDie Mobile Robot Software Suite enthält die gesamte für Plattformen und die Enterprise Manager-Anwendung verwendete Software, mit Ausnahme des SetNetGo-Betriebssystems.
ARAMDie ARAM-Software (Advanced Robotics Automation Management) wird auf dem Core des Roboters ausgeführt. Sie arbeitet mit Abstandssensoren (z. B. Sicherheits-Laserscanner und Sonareinheit) und führt alle übergeordneten autonomen Robotikfunktionen, darunter Hindernisvermeidung, Pfadplanung, Lokalisierung, Navigation usw. durch, bis hin zu Bewegungsbefehlen an die MARC-Firmware. ARAM steuert auch die Akku- und Kreisleuchten und verwaltet die Digital- und Analog-E/A, die zusammen mit der plattformeigenen Stromversorgung die Integration der anwendungsspezifischen Sensoren und vom Benutzer ergänzten Effektoren ermöglichen.
ARAM verwaltet die drahtgebundene und Wireless-Ethernet-Kommunikation mit externer Software für Fernüberwachung, Entwicklung und Systemkoordination und koordiniert dabei auch eine Flotte von Robotern über den optionalen Enterprise Manager 1100. Mit der Anwendung MobilePlanner verwaltet ARAM die Integration mit anderen Systemen sowie die externe Überwachung, Einrichtung und Steuerung.
ARAMCentralARAMCentral ist die Software, die auf dem Enterprise Manager-System ausgeführt wird. Diese Software und das System werden als Enterprise Manager 1100 bezeichnet.
Bei Flotten verwaltet die ARAMCentral-Software:
die Karte, die alle Roboter verwenden die Konfiguration, die alle Roboter verwenden die Verkehrssteuerung der Roboter
Dazu gehören Hindernisvermeidung, Zielsteuerung, Standby-Steuerung und Docksteuerung mehrerer Roboter.
Warteschlangen-Einreihung der Aufträge für die Roboter Externe E/A (sofern Sie damit arbeiten)
MobilePlanner (lizenziert)Damit der Roboter mobile Aktivitäten autonom ausführen kann, müssen Sie eine Karte des Arbeitsbereichs erstellen und die Betriebsparameter konfigurieren. Die entsprechenden Tools werden von der MobilePlanner Software bereitgestellt.
Weitere Informationen zum Kartieren des Arbeitsbereichs und zur Vorbereitung der virtuellen Elemente, Ziele, Routen und Aufgaben für Ihre Anwendung finden Sie in der separaten Betriebsanleitung zur Mobile Robot Software Suite. Siehe dazu insbesondere:
Arbeiten mit Kartendateien > Bearbeiten einer Kartendatei > Verwenden der Zeichenwerkzeuge > Hinzufügen von Zielen und Dockingstationen
Zum Ausführen der MobilePlanner-Software ist eine Lizenz erforderlich. Für jede Roboterflotte benötigen Sie mindestens eine MobilePlanner-Lizenz. Nachdem Sie eine Karte für einen Bereich erstellt haben, kann sie von mehreren Robotern in einer Flotte gemeinsam genutzt werden.
-
Softwareübersicht
Seite 16 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
MobilePlanner, BedienermodusMit dem Bedienermodus in MobilePlanner können Sie die Aktivitäten eines oder mehrerer Roboter überwachen und sie Aufgaben im kartierten Raum ausführen lassen. Wenn Sie MobilePlanner ohne Lizenz-Dongle starten, startet das Programm automatisch in diesem Modus. Weitere Informationen finden Sie in der separaten Betriebsanleitung zur Mobile Robot Software Suite.
Mobile Adept Robot Controller (MARC)Auf der untersten Ebene verarbeitet ein Microcontroller mit MARC-Firmware die Details der Roboterbewegungen, also auch die Geschwindigkeit und Fahrtrichtung des Roboters. Er erfasst aber auch Sensorwerte (z. B. von Drehgebern und Gyroskop) und verwaltet die Not-Halt-Systeme der Plattform, den Stoßschutz und den Joystick. Die MARC-Firmware berechnet die Odometrie der Plattform (X, Y und Orientierung) sowie eine Vielzahl anderer einfacher Betriebsbedingungen und meldet sie an ARAM.
Touchscreen-SupportDie Mobile Software Suite enthält die Supportsoftware für den optionalen Touchscreen.
Unterstützung für Ruftasten/TüröffnerRuftasten/Türöffner arbeiten mit einer Softwarekomponente im Gerät sowie im Enterprise Manager 1100 oder am einzelnen Roboter, wenn kein Enterprise Manager 1100 vorhanden ist.
ARCL-ProtokollARCL ist als Befehlssprache von ARAM und ARAMCentral ein Bestandteil dieser Suite.
ARCL (Advanced Robotics Command Language) ist ein einfacher, textbasierter Befehls- und Antwortserver für die Integration eines Roboters (oder einer Roboterflotte) mit einem externen Automatisierungssystem.
ARCL ermöglicht die Bedienung und Überwachung des Roboters sowie des Zubehörs und der Nutzlastvorrichtungen über das Netzwerk (mit oder ohne MobilePlanner.)
SetNetGoDas SetNetGo-Betriebssystem wird auf dem Core des Roboters und auf dem Enterprise Manager-System ausgeführt. Es dient als Host-Betriebssystem, in dem ARAM und ARAMCentral ausgeführt werden.
Die SetNetGo-Schnittstelle in der MobilePlanner-Software dient zum Konfigurieren der Ethernet-Einstellungen der Plattform, der Aktualisierung von Software und der Durchführung von Systemdiagnosen (z. B. Abrufen von Protokolldateien). Sie ist über die Ethernet-Anschlüsse für Wartung und Management oder über das drahtlose Ethernet (sofern aktiviert) verbunden.
HINWEIS: Eine direkte Verbindung zum SetNetGo-Betriebssystem auf einer Plattform über einen Webbrowser ist möglich. Der Hauptzweck besteht darin, dass Ihr IT-Support das Netzwerk für Sie einrichten kann, ohne MobilePlanner zu verwenden, wofür eine Lizenz erforderlich ist.
-
14766-000 Rev. B Seite 17 von 182LD Cart Transporter Betriebsanleitung
Einleitung
1.3 Wo erhalte ich Hilfe?Auf den Websites des Unternehmens:
http://www.ia.omron.com
und
http://www.adept.com
Zugehörige HandbücherDieses Handbuch behandelt Installation, Einrichtung, Betrieb und Wartung einer Mobile Robot LD-Plattform. Es gibt zusätzliche Handbücher, die diese Aktionen für die Plattform abdecken. Siehe folgende Tabelle.
Tabelle 1-1. Zugehörige Handbücher
Titel des Handbuchs Beschreibung
Sicherheitshandbuch Mobile Robot LD
Enthält allgemeine Sicherheitsinformationen zu allen unseren mobilen Robotern.
Betriebsanleitung zur Mobile Robot Software Suite
Behandelt die MobilePlanner-Software, das SetNetGo-Betriebssystem und den Großteil der Konfiguration einer LD-Plattform.
Betriebsanleitung zum Enterprise Manager 1100
Behandelt das Enterprise Manager 1100-System, eine Kombination aus Hardware und Software zur Verwaltung einer Roboterflotte.
Betriebsanleitung zu den Peripheriegeräten der LD-Plattform
Behandelt Peripheriegeräte wie Touchscreen, Ruftaste/Türöffner und Acuity-Lokalisierung.
SupportWenn Sie nach dem Lesen dieses Handbuchs noch Probleme mit Ihrem Cart Transporter oder Wagen haben, wenden Sie sich an Omron Adept Technologies, Inc.
Geben Sie im Text Ihrer E-Mail-Nachricht die Seriennummer Ihrer Plattform an, und beschreiben Sie das Problem so detailliert wie möglich.
Hängen Sie der E-Mail die Datei mit Debug-Informationen an. Im nächsten Abschnitt finden Sie weitere Informationen zum Abrufen der Datei „debuginfo“. Im folgenden Abschnitt finden Sie Informationen zum Erzeugen der Datei „debuginfo“.
Teilen Sie uns mit, wann und wie wir Sie am besten erreichen können. Wir gehen davon aus, dass E-Mail das beste Format ist, sofern nicht anders angegeben. Wir werden versuchen, das Problem auf dem Kommunikationsweg zu lösen. Wenn der Cart Transporter zur Reparatur an das Werk zurückgeschickt werden muss, fordern Sie zuerst einen Reparatur-Autorisierungscode sowie Versanddetails von uns an.
Anhängen einer DebugInfo-DateiWenn die Plattform für ein drahtloses Netzwerk eingerichtet wurde, gehen Sie direkt zum Kapitel Zugriff auf SetNetGo auf Seite 19.
-
Wo erhalte ich Hilfe?
Seite 18 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
NetzwerkeinrichtungWenn der Roboter nicht für ein Drahtlosnetzwerk eingerichtet wurde, müssen Sie ein lokales Netzwerk auf einem separaten PC einrichten und so konfigurieren, dass es über einen TCP/IP-Port mit dem Roboter kommuniziert. Stellen Sie die IP-Adresse auf 1.2.3.5 ein. Die Subnetzmaske muss 255.255.255.0 lauten.
(Windows 7) Start > Systemsteuerung > Netzwerk- und Freigabecenter > Adaptereinstellungen ändern
Klicken Sie mit der rechten Maustaste auf die LAN-Verbindung, und klicken Sie dann auf „Eigenschaften“.
Blättern Sie im Dialogfeld „Eigenschaften“ zur Option „Internetprotokoll (TCP/IP oder TCP/IPv4)“, und doppelklicken Sie darauf. Aktivieren Sie im Dialogfenster für die Eigenschaften zum Internetprotokoll beide entsprechenden Optionsschaltflächen „Folgende IP-Adresse verwenden:“. Geben Sie dann die IP-Adresse und die Subnetzmaske ein.
Verbinden Sie den Netzwerkanschluss Ihres Computers mit dem Wartungsanschluss der Plattform. Siehe dazu die Abbildung „Anordnung der Teile in der Nutzlastbucht“ auf Seite 138.
-
14766-000 Rev. B Seite 19 von 182LD Cart Transporter Betriebsanleitung
Einleitung
Zugriff auf SetNetGoWenn die MobilePlanner-Software verfügbar ist, verwenden Sie die SetNetGo-Schnittstelle innerhalb dieser Software, um auf SetNetGo zuzugreifen. Andernfalls öffnen Sie einen Webbrowser, und geben Sie diese URL ein: https://1.2.3.4:
Sie werden aufgefordert, Sicherheitszertifikate zu bestätigen.
Unabhängig davon, wie Sie auf SetNetGo zugegriffen haben, sollten Sie jetzt das folgende Fenster (oder ähnlich) sehen:
1. Wählen Sie im Menü „SetNetGo“ die Option:Status > Debug Info
Daraufhin wird die Schaltfläche „Debug-Informationen herunterladen“ angezeigt.2. Klicken Sie auf „Debug-Informationen herunterladen“.3. Speichern Sie die heruntergeladene Datei, und hängen Sie sie an Ihre Supportanfrage an.
-
Wo erhalte ich Hilfe?
Seite 20 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
-
14766-000 Rev. B Seite 21 von 182LD Cart Transporter Betriebsanleitung
Sicherheit
Kapitel 2: Sicherheit
2.1 Gefahren, Warnungen, Vorsichtshinweise und Vorsichtsmaßnahmen
In diesem Handbuch gibt es sechs Stufen von besonderen Warnhinweisen. In absteigender Reihenfolge ihrer Wichtigkeit sind dies:
GEFAHR: Dies weist auf eine unmittelbare Gefahr durch elektrischen Strom hin, die bei Nichtvermeidung zum Tod oder zu schweren Verletzungen führen kann.
GEFAHR: Dies weist auf eine unmittelbare Gefahr hin, die bei Nichtvermeidung zum Tod oder zu schweren Verletzungen führen kann.
WARNUNG: Dies weist auf eine potenzielle Gefahr durch elektrischen Strom hin, die bei Nichtvermeidung zu schweren Verletzungen oder größeren Schäden am Gerät führen kann.
WARNUNG: Dies weist auf eine potenzielle Gefahr hin, die bei Nichtvermeidung zu schweren Verletzungen oder größeren Schäden am Gerät führen kann.
ACHTUNG: Dies weist auf eine Situation hin, die bei Nichtvermeidung zu leichten Verletzungen oder Schäden am Gerät führen kann.
Vorsichtsmaßnahmen für die sichere Verwendung: Dies weist auf Vorsichtsmaß-nahmen zur Vorgehensweise und auf Maßnahmen zur Gewährleistung der sicheren Verwendung des Produkts hin.
2.2 Verhalten bei Notfällen/in AusnahmesituationenDrücken Sie die Not-Halt-Taste (rote Drucktaste auf gelbem Hintergrund), und befolgen Sie dann die internen Verfahren Ihres Unternehmens oder Ihrer Organisation für Notfall- oder Ausnahmesituationen. Bei einem Brand verwenden Sie einen Feuerlöscher des Typs D (Schaum, Trockenchemikalien oder CO2).
Lösen der BremsenBei Notfällen und in Ausnahmesituationen kann der Transporter manuell bewegt werden. Nur qualifiziertes Personal, das diese Betriebsanleitung und das Sicherheitshandbuch Mobile Robot LD gelesen und verstanden hat, darf die Plattform manuell bewegen. Die Bremsen an den Antriebsrädern können mit der Bremslöse-Taste gelöst werden. Dazu muss der Akku geladen sein, und am Roboter muss eine Not-Halt-Taste gedrückt werden.
-
Pflichten des Benutzers
Seite 22 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
Freigeben eines Not-Halts
WARNUNG: Wenn der Not-Halt des Roboters ausgelöst wird, stellen Sie sicher, dass die Ursache des Not-Halts behoben ist und alle umliegenden Bereiche frei sind, bevor Sie den Not-Halt freigeben.
2.3 Pflichten des BenutzersEs liegt in der Verantwortung des Endbenutzers, dass die mobilen Roboter gefahrlos eingesetzt werden:
Lesen Sie die Installations- und Bedienungsanleitung sowie das Sicherheitshandbuch Mobile Robot LD, bevor Sie die Einheit verwenden.
Sorgen Sie dafür, dass die Umgebung für den gefahrlosen Betrieb des Roboters geeignet ist.Wenn eine Flotte mobiler Roboter (zwei oder mehr) installiert ist, muss Enterprise Manager 1100 verwendet werden, es sei denn, es ist sichergestellt, dass nie zwei Roboter im selben Bereich betrieben werden.
Sorgen Sie dafür, dass alle Personen, die mit oder an einem mobilen Roboter arbeiten, ausreichend dafür geschult sind und die Vorgaben in dieser Betriebsanleitung sowie im Sicherheitshandbuch Mobile Robot LD befolgen, damit der gefahrlose Roboterbetrieb gewährleistet ist.
Sorgen Sie dafür, dass die Roboter so gewartet werden, dass alle Steuer- und Sicherheitsfunktionen ordnungsgemäß funktionieren.
Allgemeine Gefahren
WARNUNG: Die folgenden Situationen können zu leichten Verletzungen oder Schäden am Gerät führen.
Fahren Sie nicht auf dem Transporter oder dem Wagen mit. Überschreiten Sie nicht die maximale Gewichtsgrenze. Überschreiten Sie nicht die maximal empfohlene Geschwindigkeit, Beschleunigung, Verzögerung
oder Rotation. Siehe Schwerpunkt auf Seite 72 und Siehe Grenzwerte für Beschleunigung, Verzögerung und Rotation auf Seite 69.Die Rotationsgeschwindigkeit wird bedeutsamer, je mehr sich der Schwerpunkt der Nutzlast vom Schwerpunkt der Plattform entfernt (vertikal und/oder horizontal).
Lassen Sie den Roboter nicht fallen oder abstürzen, und betreiben Sie ihn stets verantwortungsvoll. Lassen Sie den Roboter nur durch automatische Türen/Tore fahren, wenn Tür/Tor und Roboter
korrekt mit der Türöffner-Option konfiguriert sind.Weitere Informationen zur Türöffner-Option finden Sie in der Betriebsanleitung zu den Peripheriegeräten der LD-Plattform.
Lassen Sie den Roboter nicht nass werden. Setzen Sie den Roboter nicht Regen oder Feuchtigkeit aus.
Halten Sie den Roboter an, wenn sich Haare, Garn, Schnüre oder andere Gegenstände um die Achsen, Laufrollen oder Räder der Plattform gewickelt haben.
Verwenden Sie nur von Omron Adept Technologies, Inc. zugelassene Komponenten. Schalten Sie den Roboter nicht ohne montierte Antennen ein. Obwohl die Laser der Klasse 1 (augensicher) entsprechen, wird davon abgeraten, direkt
hineinzusehen.
-
14766-000 Rev. B Seite 23 von 182LD Cart Transporter Betriebsanleitung
Sicherheit
Sturzgefahr
WARNUNG: Ein mobiler Roboter kann schwere Sach-, Personen- und/oder Eigenschäden verursachen, wenn er abstürzt (z. B. an einer Laderampe oder Stufe).
Physische Barrieren
Laderampen, abwärts führende Stufen und andere Steilgefälle innerhalb des vorgesehenen Betriebsbereichs des Roboters sollten physisch so gekennzeichnet sein, dass der Navigationslaser des Roboters die Barriere erkennt und rechtzeitig anhält. Der Navigationslaser des Roboters tastet die Umgebung auf 203 mm Höhe über dem Boden ab, sodass die Barriere mindestens bis zu dieser Höhe reichen muss.
Dies muss am Einsatzort durchlaufend sein, sodass der Roboter die Barriere nicht umfahren oder durchqueren kann.
Logische Barrieren
Sie sollten auch verbotene Bereiche, Sektoren oder Linien mit einer Sicherheitszone von mindestens einem halben Meter (Puffer)
vor der eigentlichen Kante einsetzen, um sicherzustellen, dass der Roboter nicht versucht, dorthin zu fahren.
Diese müssen am Einsatzort durchlaufend sein, sodass der Roboter keine Bahn um sie herum oder zwischen ihnen hindurch plant.
Stromschlaggefahr
WARNUNG: Die Dockingstation arbeitet mit Netzstrom. Die Verkleidungen sind nicht verriegelt.
Verwenden Sie bei der Dockingstation nur geeignete Verlängerungskabel. Öffnen Sie die Plattform niemals bei angeschlossener Dockingstation. Trennen Sie den Akku sofort nach dem Öffnen der Akkufachklappe.
Vermeiden Sie einen Kurzschluss an den Akkuklemmen. Verwenden Sie nur Ladegeräte von Omron Adept Technologies, Inc. Wenn Flüssigkeit auf dem Roboter verschüttet wird, schalten Sie den Roboter aus, entfernen Sie die
gesamte Flüssigkeit, und lassen Sie den Roboter vor dem erneuten Einschalten gründlich trocknen.
-
Pflichten des Benutzers
Seite 24 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
Quetschgefahr
Riegel des Verriegelungssystems
ACHTUNG: Quetschgefahr. Der Verriegelungsmechanismus des LD Cart Transporters kann Quetschungen verursachen, wenn Sie nicht vorsichtig vorgehen. Halten Sie Ihre Hände vom Transporter fern, solange er in Betrieb ist.
Riemen/Riemenscheibe des Verriegelungssystems
ACHTUNG: Quetschgefahr. Bei Wartungsarbeiten am Verriegelungsmechanismus können Riemen und Riemenscheibe Quetschungen verursachen, wenn Sie nicht vorsichtig vorgehen. Halten Sie Ihre Hände von Riemen und Riemenscheibe fern, während sie in Betrieb sind.
Spalt zwischen HMI-Säule und Wagen
ACHTUNG: Quetschgefahr. Der Koppelvorgang zwischen LD Cart Transporter und Wagen kann Quetschungen verursachen, wenn die Nutzlast des Wagens falsch ausgelegt ist und Sie nicht vorsichtig vorgehen. Halten Sie während der Kopplung von Transporter und Wagen Ihre Hände von dem Spalt zwischen HMI-Säule und Wagen fern.
Roboterverkleidungen
ACHTUNG: Quetschgefahr. Die Schutzverkleidungen werden von starken Magneten gehalten, bei denen Quetschgefahr besteht. Befolgen Sie bei der Handhabung der Schutzverkleidungen die Anweisungen im Kapitel „Wartung“.
HINWEIS: Die Gefahr durch die Magneten der Plattformverkleidung ist so gering, dass auf den Verkleidungen und ihren Magneten keine Warnschilder aufgebracht sind.
Gefahr durch magnetische Felder
Roboterverkleidungen
WARNUNG: Magnetfelder können für Träger von Schrittmachern gefährlich sein. Träger von Schrittmachern müssen 30 cm Abstand zu den Verkleidungen halten, da diese von starken Magneten in Position gehalten werden.
Andocktrichter
WARNUNG: Magnetfelder können für Träger von Schrittmachern gefährlich sein. Träger von Schrittmachern müssen 30 cm Abstand zur Unterseite des Cart Transporters halten, die bei bestimmten Wartungsverfahren durch das Kippen des Transporters freigelegt wird.
-
14766-000 Rev. B Seite 25 von 182LD Cart Transporter Betriebsanleitung
Sicherheit
Wagenmagnet
Die Unterseite des Wagens hat einen starken Magneten, der dem Transporter signalisiert, dass er korrekt angekoppelt ist. Dies kann eine Gefahr für Träger von Schrittmachern darstellen, wenn sie ihm zu nahe kommen.
WARNUNG: Magnetfelder können für Träger von Schrittmachern gefährlich sein. Träger von Schrittmachern müssen 30 cm Abstand zu der Unterseite des Wagens halten.
Qualifiziertes PersonalEs liegt in der Verantwortung des Endbenutzers, dass alle Mitarbeiter, die mit oder an mobilen Robotern arbeiten, an einem entsprechenden Schulungskurs von Omron teilgenommen haben und mit dem Einsatz des Systems vertraut sind. Der Benutzer muss für alle Mitarbeiter, die mit dem System arbeiten, alle erforderlichen Zusatzschulungen anbieten.
Wie in dieser Betriebsanleitung und im Sicherheitshandbuch Mobile Robot LD beschrieben dürfen bestimmte Verfahren nur von qualifizierten oder unterwiesenen Personen durchgeführt werden. Zur Beschreibung der Qualifikationsstufe verwenden wir die Standardbegriffe:
Qualifizierte Personen verfügen über technisches Wissen oder ausreichend Erfahrung, um elektrische und/oder mechanische Gefahren zu vermeiden.
Unterwiesene Personen sind entsprechend eingewiesen oder werden durch qualifizierte Personen beaufsichtigt, damit elektrische und/oder mechanische Gefahren vermieden werden.
Bei der Installation, Bedienung und Prüfung aller elektrisch betriebenen Anlagen müssen alle Mitarbeiter die vorgeschriebenen Sicherheitsvorkehrungen beachten.
WARNUNG: Vor der Arbeit mit dem Roboter muss jeder Beauftragte bestätigen, dass er:
über die erforderlichen Qualifikationen verfügt die Handbücher erhalten hat (diese Betriebsanleitung und das Sicherheitshandbuch Mobile
Robot LD) die Anleitungen gelesen hat die Anleitungen versteht sich an die Anleitungen halten wird
Transport und Übergabe der NutzlastDie Überwachung und Bestätigung des Status der Roboter-Nutzlastbewegung sowie der Übergabe von oder zu Anlagengeräten liegt in der Verantwortung des Endbenutzers.
Probleme bei der Nutzlastübergabe müssen einen Roboter-Not-Halt auslösen, der verhindert, dass sich der Roboter bewegt, bis ein Bediener das Problem gelöst und bestätigt hat, dass das System wieder sicher verwendet werden kann. Die Handhabung von Problemen bei der Nutzlastübergabe liegt in der Verantwortung des Endbenutzers.
Der Benutzer ist dafür verantwortlich, ein Interlock zwischen dem Roboter und den Anlagen der Einrichtung vorzunehmen.
-
Pflichten des Benutzers
Seite 26 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
Konfigurierbarer WarnsummerDie LD Cart Transporter verfügen über einen konfigurierbaren Warnsummer. Es liegt in der Verant-wortung des Benutzers, diesen Summer entsprechend der Vorgaben der Einrichtung zu konfigurieren, in der der Roboter betrieben wird. Der Summer ertönt, wenn sich der Roboter rückwärts bewegt oder wendet. Weitere Situationen sind konfigurierbar.
Der Summer wird mit MobilePlanner mit den folgenden Parametern konfiguriert:
HINWEIS: Diese Parameter sind nur mit der Mobile Robot Software Suite 5.0 und höher verfügbar.
DriveWarningEnable
HINWEIS: Wenn dieser Parameter auf „False“ gesetzt ist, werden die übrigen Parameter nicht angezeigt.
WARNUNG: Das Deaktivieren des Parameters „DriveWarningEnable“ verstößt gegen die Norm JIS D 6802. Es wird dringend empfohlen, diesen Wert auf „True“ eingestellt zu lassen.
DoNoWarnungDrivingForwardsStandard: False
DoNotWarnTurningInPlaceStandard: False
DriveWarningLoudMillisecondsStandard: 500; wenn DriveWarningQuietMilliseconds = 0, ist dieser Parameter irrelevant.
DriveWarningQuietMillisecondsStandard: 500; hierbei handelt es sich um die Zeitspanne zwischen den Warnhinweisen, in der kein Summer ertönt. Wenn Sie diesen Wert auf 0 setzen, wird ein durchgängiges Signal ausgegeben.
Kollisionsvermeidung bei mehreren RoboternWenn mehrere Roboter im selben Arbeitsbereich betrieben werden, müssen sie über WLAN mit einem Enterprise Manager 1100 (EM) verbunden sein. Mit dem EM können Kollisionen vermieden werden, indem die dynamischen Daten zu X, Y, Theta, Größe und Pfadplanung der Roboter gemeinsam verwendet werden. Die Roboter melden diese Daten an die Kollisionsvermeidung. Dies ist keine Interlock-Methode zur Kollisionsvermeidung. Letztendlich ist der Endbenutzer/Integrator dafür verantwortlich, eine Interlock-Methode zur Kollisionsvermeidung bereitzustellen.
HINWEIS: Wenn sich zwei Roboter einander nähern, können sie sich nicht erkennen, da beide die eingehenden Laserstrahlen als Reflexion erfassen. Daher muss jede Einrichtung mit mehreren Robotern im selben Arbeitsbereich mit demselben Enterprise Manager 1100 verwaltet werden.
VerkehrssteuerungVerwenden Sie auf der Karte eine umschaltbare Sperrzone, um zu verhindern, dass der Roboter aufgrund des Status einer einzelnen Eingabe sich in einen Bereich bewegt. Wenn diese Eingabe von einem anderen Fahrzeug, z. B. einem Gabelstapler, stammt, während sich dieses in diesem Bereich befindet, darf der Roboter sich nicht in diesem Bereich bewegen.
ÜberholspurenDa die LD Cart Transporter-Technologie keine festen Bahnen zur Führung der Roboter verwendet, sind Überholspuren und Personensicherheitsbereiche nicht relevant.
-
14766-000 Rev. B Seite 27 von 182LD Cart Transporter Betriebsanleitung
Sicherheit
2.4 Umgebung
Allgemeine UmgebungsbedingungenEs liegt in der Verantwortung des Endbenutzers sicherzustellen, dass die Betriebsumgebung der Plattform für die Plattform sicher bleibt. Wenn es Bereiche gibt, in denen sich die Plattform nicht sicher bewegen kann, sollten diese Bereiche physisch gesperrt werden, damit der Scan-Laser der Plattform die Barrieren erkennt und die Plattform nicht versucht, dorthin zu fahren. Diese Bereiche können in der MobilePlanner-Software auch durch verbotene Zonen gesperrt werden. Dies sollte jedoch zusätzlich zu physischen Barrieren erfolgen.
Öffentlich zugängliche BereicheDer LD Cart Transporter ist für den Betrieb in industriellen oder professionellen Umgebungen in geschlossenen Räumen vorgesehen. Bei seinem Einsatz sind alle potenziellen Risiken für Mitarbeiter und Anlagen zu berücksichtigen. Das Produkt ist ohne Risikoanalyse nicht für den Einsatz in unkontrollierten Bereichen (z. B. öffentlich zugängliche Bereiche) vorgesehen. Die Verwendung in solchen Bereichen erfordert möglicherweise zusätzliche Sicherheitsmaßnahmen.
SicherheitsabstandDer LD Cart Transporter ist für den Betrieb in einer größtenteils ebenen Umgebung ohne Türen oder andere Engstellen, die für den Roboter zu schmal sind, vorgesehen. Es liegt in der Verantwortung des Benutzers sicherzustellen, dass auf allen Seiten des Roboters ausreichend Sicherheitsabstand eingehalten wird, damit zwischen dem Roboter und einer Wand oder einem anderen ortsfesten Gegenstand keine Personen eingeklemmt werden. Beachten Sie die geltenden Normen für Ihren Einsatzbereich. Ausnahmen beim Sicherheitsabstand gelten bei Aufnahme- und Abstellorten, an denen sich der Roboter Fördereinrichtungen oder anderen ortsfesten Objekten nähern muss.
Die primäre Fahrtrichtung des LD Cart Transporters ist vorwärts. Wenn sich der Transporter ohne Vorwärtsbewegung auf der Stelle dreht, wird bei Erkennung eines Hindernisses kein Not-Halt ausgelöst.
WARNUNG: Mitarbeiter, die mit oder am Roboter arbeiten, dürfen sich nicht in der Nähe des Roboters befinden, wenn dieser ohne Vorwärtsbewegung auf der Stelle wendet.
HindernisseWenn der LD Cart Transporter in Bereiche mit hohem Verkehrsaufkommen vordringt, muss der Benutzer entsprechende Vorkehrungen treffen, um die Personen in diesen Bereichen zu warnen. Wenn am Verkehr auch andere Maschinen beteiligt sind, muss der Benutzer die Parameter des Roboters und/oder der anderen Maschinen entsprechend anpassen, um das Kollisionsrisiko zu verringern.
-
Verwendungszweck
Seite 28 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
2.5 VerwendungszweckDer LD Cart Transporter ist nicht für den Einsatz in folgenden Situationen vorgesehen:
explosionsgefährdete Bereiche unkontrollierte Bereiche, z. B. Bereiche, die für die allgemeine Öffentlichkeit zugänglich sind.
Für die Anwendung in solchen Bereichen sind möglicherweise zusätzliche Sicherheitsmaßnahmen und eine Risikoanalyse erforderlich.LD Cart Transporter wurden für den Einsatz in industriellen oder professionellen Umgebungen entwickelt. Sie müssen so eingesetzt werden, dass potenzielle Risiken für Personal und Ausrüstung berücksichtigt werden.
Bereiche mit ionisierender oder nichtionisierender Strahlung Bereiche mit lebenserhaltenden Systemen Wohngebiete Bereiche mit großer Wärmeentwicklung oder Luftfeuchtigkeit mobile, tragbare, Schiffsbau- oder Luftfahrtsysteme
HINWEIS: Das Gyroskop für die Navigation der LD Cart Transporter braucht für optimale Genauigkeit eine stationäre Umgebung. Deshalb sollte die Einheit nicht auf Schiffen, in Zügen, Flugzeugen oder anderen beweglichen Umgebungen verwendet werden.
WARNUNG: Die Anweisungen zu Betrieb, Installation und Wartung in dieser Anleitung und in der Roboter-Betriebsanleitung müssen unbedingt beachtet werden.
MissbrauchBei Missbrauch der LD Roboter bestehen folgende Risiken:
Verletzung des Personals Beschädigung des Roboters oder anderer Geräte Reduzierte Systemzuverlässigkeit und -leistung
Das Gehäuse des Roboters darf nicht mit Flüssigkeiten in Berührung kommen. Die Antriebsräder kommen mit feuchten Böden zurecht, das Gehäuse des Roboters muss jedoch trocken bleiben.
Wenn Sie Zweifel hinsichtlich der Anwendung haben, wenden Sie sich an Omron Adept Technologies, Inc. Dort erfahren Sie, ob Ihre Anwendung dem zulässigen Verwendungszweck entspricht.
Modifikationen am RoboterWenn der Benutzer oder Integrator bauliche Veränderungen an der LD-Plattform oder dem Wagen vornimmt, ist er dafür verantwortlich, dass keine scharfen Kanten, Ecken oder Überstände vorhanden sind.
Jegliche Änderungen an der Plattform oder am Wagen können zu Einschränkungen der Betriebssicherheit oder Funktionalität führen. Es liegt in der Verantwortung des Benutzers oder Integrators sicherzustellen, dass alle Sicherheitsfunktionen nach derartigen Änderungen weiterhin betriebsbereit sind.
-
14766-000 Rev. B Seite 29 von 182LD Cart Transporter Betriebsanleitung
Sicherheit
2.6 Sicherheit im Umgang mit dem Akku Die Akkus müssen aufrecht bei 5 bis 60 °C gelagert werden. Setzen Sie die Akkus keinem Wasser aus. Wenn Sie feststellen, dass der Akku undicht ist, halten Sie ihn von Wasser fern.
Tauchen Sie ihn, wenn möglich, in Mineralöl ein, und wenden Sie sich an Omron Adept Technologies, Inc.
Verwenden Sie im Brandfall einen Feuerlöscher des Typs D: Schaum, Trockenchemikalien oder CO2.
2.7 Zusätzliche Sicherheitshinweise
Unbeabsichtigte Abkopplung des WagensIn dem unwahrscheinlichen Fall, dass sich der Wagen während der Fahrt von der LD-Plattform löst, sind die Bremsen so ausgelegt, dass sie den Wagen nach einer Distanz von ca. 1,80 m anhalten.
Sicherheitshandbuch Mobile Robot LDOmron Adept Technologies, Inc. stellt weitere Quellen für weitere Sicherheitsinformationen bereit:
Das Sicherheitshandbuch Mobile Robot LD enthält genaue Informationen zum sicheren Einsatz der LD-Plattformen. Es nennt außerdem Quellen für Informationen zu den relevanten Normen. Dieses Handbuch ist im Lieferumfang jedes mobilen Roboters enthalten.
-
Zusätzliche Sicherheitshinweise
Seite 30 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
-
14766-000 Rev. B Seite 31 von 182LD Cart Transporter Betriebsanleitung
Einrichtung
Kapitel 3: Einrichtung
ACHTUNG: Möglicher Akkuschaden. Laden Sie den Akku unmittelbar nach Erhalt vollständig auf, um das Risiko einer Tiefentladung zu vermeiden. Andernfalls muss der Akku ausgetauscht werden.
HINWEIS: Seit dem 1. April 2016 dürfen gemäß den IATA-Vorschriften Lithium-Ionen-Akkus (UN 3480, PI 965) bei Luftversand nur einen Ladezustand von maximal 30 % haben. Deshalb sollten Sie den Akku vollständig aufladen, sobald Sie ihn erhalten.
ÜbersichtIm Allgemeinen ist die physische Vorbereitung der Plattform und des Wagens und die physische Markierung der Ziel-Abstellpositionen am Boden Ihrer Einrichtung erforderlich. Die Markierung der Abstellziele am Boden dient ihrer Erkennung durch Personen. Für den LD Cart Transporter sind diese Markierungen nicht erforderlich. Dennoch wird empfohlen, diese Ziele in jedem Fall zu markieren, um zu verhindern, dass jemand dort etwas platziert, das ein Abstellen des Wagens verhindern würde.
Die physische Vorbereitung der Plattform umfasst die Montage der von der HMI-Säule ausgehenden horizontalen Rohre, an denen die Seitenlaser angebracht sind.
Das Einrichten umfasst auch das Erzeugen einer Karte des Arbeitsbereichs und das Konfigurieren des Roboters mit der MobilePlanner-Software für die Durchführung seiner Aufgaben.
AufgabenDiese Übersicht behandelt das Starterkit für den LD Cart Transporter, das den Transporter mit allen Komponenten umfasst, die zur Verwendung mit einem Wagen, einer Dockingstation und der Navigationssoftware erforderlich sind.
Setzen Sie den Akku in die Plattform. Siehe Einsetzen des Akkus auf Seite 44. Laden Sie den Akku außer- oder innerhalb der Plattform vollständig auf. Richten Sie das Wireless Ethernet für die Plattform ein. Siehe Konfiguration auf Seite 59. Montieren Sie die Seitenlaser-Halterohre an der HMI-Säule. Installieren Sie die Dockingstation. Siehe Installieren der Dockingstation auf Seite 48. Bauen Sie den Bremslösezug und -hebel zum manuellen Lösen der Bremse ein. Konfigurieren Sie den Roboter für Ihre Umgebung, sodass er seine Aufgaben ausführen kann.
Dazu gehört auch das Erzeugen der Karte, die der LD Cart Transporter zur Navigation verwendet. Dieser Vorgang sowie die Parameterkonfiguration werden in der Betriebsanleitung zur Mobile Robot Software Suite behandelt.
Markieren Sie die Position und Ausrichtung der Ziele, an denen der Wagen abgestellt werden kann. So kann eine Person einen Wagen dort platzieren, wo der Transporter ihn finden kann.So werden Personen auch daran gehindert, andere Dinge als einen Wagen in diesem Bereich abzustellen, was das Abstellen eines Wagens verhindern würde.
Konfigurieren Sie die MobilePlanner-Software so, dass ein Transporter Wagen abholen und abstellen kann.Dazu gehört auch das Ändern der Karte, die der Transporter zur Navigation verwendet. Die entsprechende Konfiguration wird in der Betriebsanleitung zur Mobile Robot Software Suite behandelt.
-
Transport und Lagerung
Seite 32 von 182 14766-000 Rev. BLD Cart Transporter Betriebsanleitung
3.1 Transport und LagerungTransportieren Sie die Versandkisten mit einem Gabelstapler, einem Palettenhubwagen oder einem ähnlichen Gerät.
Die Versandkisten müssen stets in aufrechter Position an einem sauberen, trockenen und kondensationsfreien Ort transportiert und gelagert werden. Legen Sie sie nicht auf die Seite oder in eine andere nicht aufrechte Position.
LD Cart TransporterDas LD Cart Transporter-System, das auch einen Wagen umfasst, wird zusammen mit der Dockingstation, dem Joystick und allen Komponenten außer dem Akku in einer Kiste geliefert.
Transportieren und lagern Sie das System in einer temperaturgeregelten Umgebung mit 5 bis 60 °C. Die empfohlene Luftfeuchtigkeit liegt bei 5 bis 95 % (nicht kondensierend). Das System muss in der mitgelieferten Versandkiste transportiert und gelagert werden, um Schäden durch Stöße und Vibrationen zu vermeiden. Schützen Sie die Kiste vor übermäßigen Stößen und Vibrationen.
Der Transporter allein wiegt 79 kg.
Die Kiste für den Transporter hat die Abmessungen 1156 x 794 x 1765 mm und wiegt 98 kg. Das Gewicht im Lieferzustand beträgt 199 kg.
Akku
HINWEIS: Dieser Abschnitt gilt auch für erworbene Ersatzakkus.
Der Akku wird in einem separaten Karton und nicht mit der Plattform oder in der Kiste mit der Plattform geliefert.
Wenn der Akku gelagert werden muss, empfiehlt der Hersteller Lagertemperaturen von 5 bis 60 °C. Der Akku sollte zu Anfang der Lagerung vollständig geladen sein. Wenn der Akku über einen längeren Zeitraum gelagert wird, sollte er regelmäßig aufgeladen werden, um eine Tiefentladung zu vermeiden, die den Akku beschädigen kann. Das vollständige Aufladen eines Akkus alle sechs Monate reicht aus, um ihn so weit aufzuladen, dass Schäden vermieden werden.
Der Akku muss aufrecht und an einem trockenen Ort aufbewahrt werden.
Wagen separatWenn Sie mehr Wagen als Transporter benötigen, können zusätzliche Wagen optional erworben werden.
Die Kiste hat die Abmessungen 1092 x 635 x 711 mm. Der Wagen in der Kiste allein wiegt 28 kg. Das Gewicht von Wagen und Kiste auf einer Palette beträgt 44,5 kg.
Der Wagen selbst wiegt 22,7 kg.
Jeder Wagen wird mit Laufrollenbremsen geliefert, was den Einbau eines Bremslösehebels erfordert. Siehe Einbau des Bremslösemechanismus am Wagen auf Seite 53.
3.2 Vor dem AuspackenPrüfen Sie alle Versandkisten sorgfältig auf Anzeichen von Transportschäden. Wenn Beschädigungen vermutet werden, bitten Sie den Mitarbeiter des Frachtunternehmens, beim Auspacken anwesend zu sein.
-
14766-000 Rev. B Seite 33 von 182LD Cart Transporter Betriebsanleitung
Einrichtung
3.3 AuspackenGleichen Sie vor dem Unterzeichnen der Empfangsbestätigung des Frachtunternehmens die enthaltenen Artikel (nicht nur auf dem Lieferschein) mit Ihrer Bestellung ab. Vergewissern Sie sich, dass alle Artikel vorhanden s