
Modellbildung, Identifikation und Reglerentwurf für eine ... · Modellbildung, Identifikation...
26
Modellbildung, Identifikation und Reglerentwurf für eine pneumatische Lageregelung Versuch im Labor: Regelungstechnisches Praktikum 1 Betreuer : Dipl.-Ing. Michael Homann Stand : 21. März 2016
Transcript of Modellbildung, Identifikation und Reglerentwurf für eine ... · Modellbildung, Identifikation...
Modellbildung, Identifikation
und Reglerentwurf für eine
pneumatische Lageregelung
Versuch im Labor: Regelungstechnisches Praktikum 1
Betreuer : Dipl.-Ing. Michael HomannStand : 21. März 2016

III
Inhaltsverzeichnis
1 Einleitung 1
2 Versuchsaufbau und regelungstechnische Ziele 2
3 Modellbildung 4
3.1 Stationäres Verhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43.2 Dynamisches Verhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.3 Mathematisches Modell des Gebläses . . . . . . . . . . . . . . . . . . . . . . 63.4 Mathematisches Modell der Mechanik . . . . . . . . . . . . . . . . . . . . . . 7
4 Bestimmung der Streckenparameter durch Messungen 10
5 Der Regelkreis 12
5.1 Wahl der Reglerstruktur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125.2 Bestimmung des Reglerparameters . . . . . . . . . . . . . . . . . . . . . . . 13
6 Simulation 16
6.1 Simulationsverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
7 Hausaufgaben 19
8 Versuchsdurchführung 20
8.1 Modellbildung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208.2 Simulation der Strecke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218.3 Simulation des geschlossenen Kreises . . . . . . . . . . . . . . . . . . . . . . 218.4 Stabilität des geschlossenen Kreises . . . . . . . . . . . . . . . . . . . . . . . 228.5 Regelung der Strecke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22

1
1 Einleitung
Anhand des Versuchs �Pneumatische Lageregelung� wird die prinzipielle Vorgehensweise bei
regelungstechnischen Problemstellungen verdeutlicht. Wir werden in diesem Versuch einen
Lösungsweg verfolgen, der in sechs Schritte unterteilt ist:
1. Formulierung der regelungstechnischen Ziele
2. Mathematische Modellbildung der physikalischen Regelstrecke
3. Bestimmung der Parameter des Modells anhand von Messungen an der Regelstrecke
(Identi�kation)
4. Auswahl eines geeigneten Reglers und Parameterbestimmung
5. Simulation des Streckenmodells und des geschlossenen Regelkreises
6. Regelung der Strecke
Natürlich kann jeder dieser hier angeführten Schritte noch weiter unterteilt und verfeinert
werden. Mit diesem Praktikum wird ein systematischer Weg zum Entwurf von Regelungen
aufgezeigt.
2
2 Versuchsaufbau undregelungstechnische Ziele
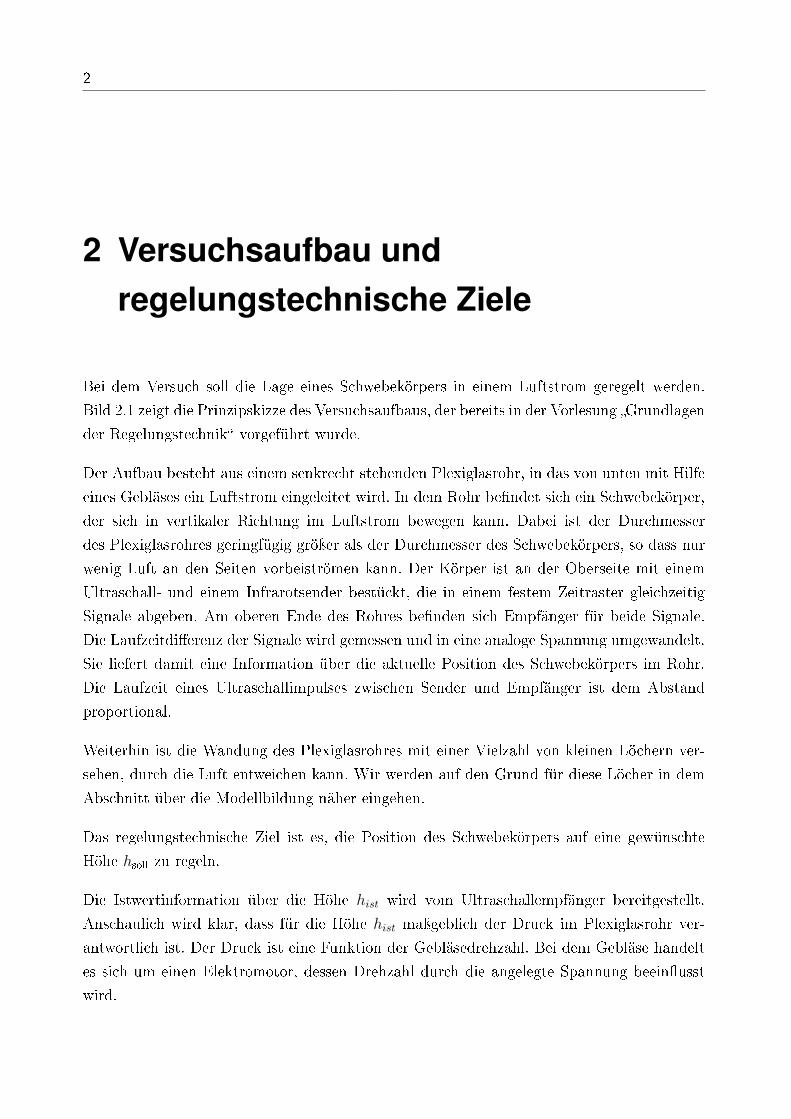
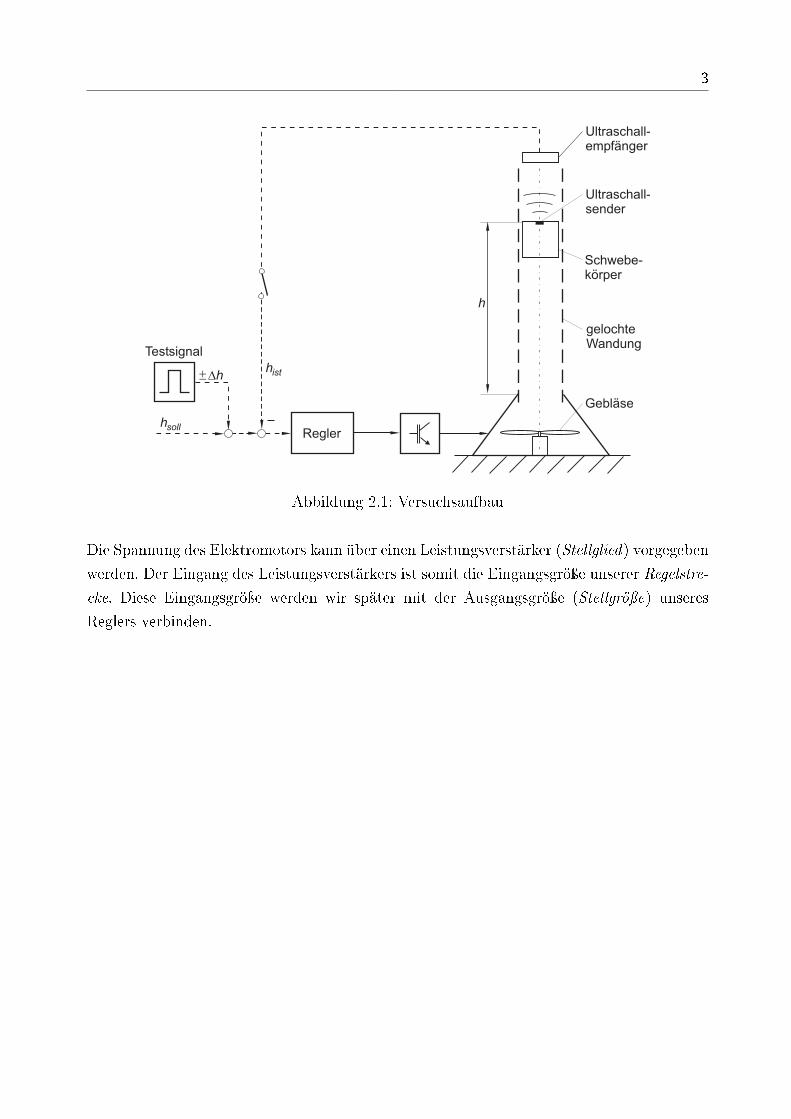
Bei dem Versuch soll die Lage eines Schwebekörpers in einem Luftstrom geregelt werden.
Bild 2.1 zeigt die Prinzipskizze des Versuchsaufbaus, der bereits in der Vorlesung �Grundlagen
der Regelungstechnik� vorgeführt wurde.
Der Aufbau besteht aus einem senkrecht stehenden Plexiglasrohr, in das von unten mit Hilfe
eines Gebläses ein Luftstrom eingeleitet wird. In dem Rohr be�ndet sich ein Schwebekörper,
der sich in vertikaler Richtung im Luftstrom bewegen kann. Dabei ist der Durchmesser
des Plexiglasrohres geringfügig gröÿer als der Durchmesser des Schwebekörpers, so dass nur
wenig Luft an den Seiten vorbeiströmen kann. Der Körper ist an der Oberseite mit einem
Ultraschall- und einem Infrarotsender bestückt, die in einem festem Zeitraster gleichzeitig
Signale abgeben. Am oberen Ende des Rohres be�nden sich Empfänger für beide Signale.
Die Laufzeitdi�erenz der Signale wird gemessen und in eine analoge Spannung umgewandelt.
Sie liefert damit eine Information über die aktuelle Position des Schwebekörpers im Rohr.
Die Laufzeit eines Ultraschallimpulses zwischen Sender und Empfänger ist dem Abstand
proportional.
Weiterhin ist die Wandung des Plexiglasrohres mit einer Vielzahl von kleinen Löchern ver-
sehen, durch die Luft entweichen kann. Wir werden auf den Grund für diese Löcher in dem
Abschnitt über die Modellbildung näher eingehen.
Das regelungstechnische Ziel ist es, die Position des Schwebekörpers auf eine gewünschte
Höhe hsoll zu regeln.
Die Istwertinformation über die Höhe hist wird vom Ultraschallempfänger bereitgestellt.
Anschaulich wird klar, dass für die Höhe hist maÿgeblich der Druck im Plexiglasrohr ver-
antwortlich ist. Der Druck ist eine Funktion der Gebläsedrehzahl. Bei dem Gebläse handelt
es sich um einen Elektromotor, dessen Drehzahl durch die angelegte Spannung beein�usst
wird.
3
Strecke( )G sReglerhsoll
hist
h
gelochteWandung
Schwebe-körper
Ultraschall-empfänger
Ultraschall-sender
Testsignal
�h��
Gebläse
Abbildung 2.1: Versuchsaufbau
Die Spannung des Elektromotors kann über einen Leistungsverstärker (Stellglied) vorgegeben
werden. Der Eingang des Leistungsverstärkers ist somit die Eingangsgröÿe unserer Regelstre-
cke. Diese Eingangsgröÿe werden wir später mit der Ausgangsgröÿe (Stellgröÿe) unseres
Reglers verbinden.
4
3 Modellbildung
Die Modellbildung ist die Grundlage für die Berechnung eines geeigneten Reglers. Dabei ist
es oft nicht erforderlich, die Stecke in allen Details ganz genau wiederzugeben, sondern das
Modell sollte das wesentliche Streckenverhalten wiedergeben.
In diesem einführenden Versuch werden der theoretischen Modellbildung zwei Messungen an
der Regelstrecke vorangestellt. Die Ergebnisse dieses Experiments liefern Hinweise über das
mathematische Modell.
Wir unterscheiden im Folgenden Messungen bezüglich des stationären (d. h. für t→∞) und
des dynamischen Verhaltens.
3.1 Stationäres Verhalten
Zunächst wird das stationäre Verhalten untersucht, um Aussagen über die Linearität des
Prozesses zu machen. Hierzu werden nacheinander konstante Spannungen (s. Bild 3.1) an
den Eingang der Strecke gelegt.
Gu0 y
Strecke
Abbildung 3.1: Anregung der Stecke mit konstanter Eingangsspannung
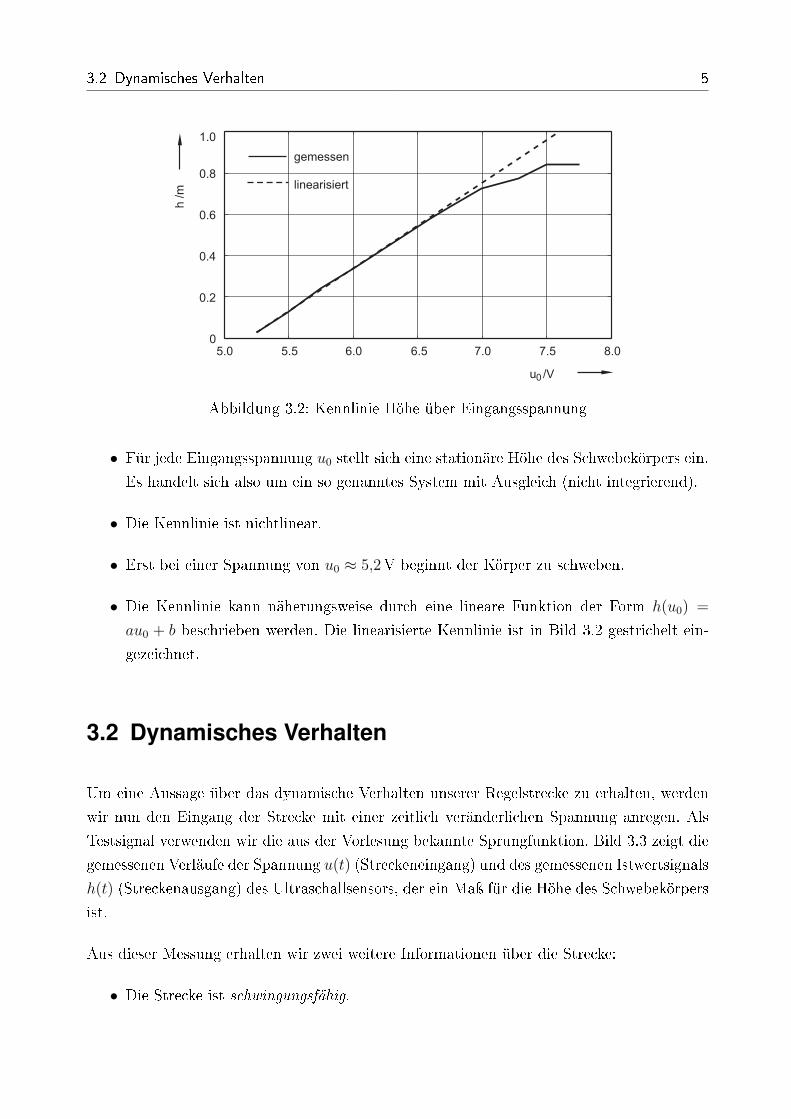
Vor der Messung der Höhe über den Ultraschallsensor muss abgewartet werden, bis die
Position des Schwebekörpers eingeschwungen ist, d. h. konstant bleibt (ca. 10 Sekunden). In
Bild 3.2 ist die so gemessene Kennlinie der Höhe des Schwebekörpers in Abhängigkeit von
der Eingangsspannung gezeigt (durchgezogene Linie).
Aus dieser Kennlinie lassen sich drei wesentliche Eigenschaften der Strecke ablesen:
3.2 Dynamisches Verhalten 5
1.0
0.8
0.6
0.4
0.2
05.0 5.5 6.0 6.5 7.57.0 8.0
gemessen
linearisiert
0u /V
h/m
Abbildung 3.2: Kennlinie Höhe über Eingangsspannung
• Für jede Eingangsspannung u0 stellt sich eine stationäre Höhe des Schwebekörpers ein.
Es handelt sich also um ein so genanntes System mit Ausgleich (nicht integrierend).
• Die Kennlinie ist nichtlinear.
• Erst bei einer Spannung von u0 ≈ 5,2V beginnt der Körper zu schweben.
• Die Kennlinie kann näherungsweise durch eine lineare Funktion der Form h(u0) =
au0 + b beschrieben werden. Die linearisierte Kennlinie ist in Bild 3.2 gestrichelt ein-
gezeichnet.
3.2 Dynamisches Verhalten
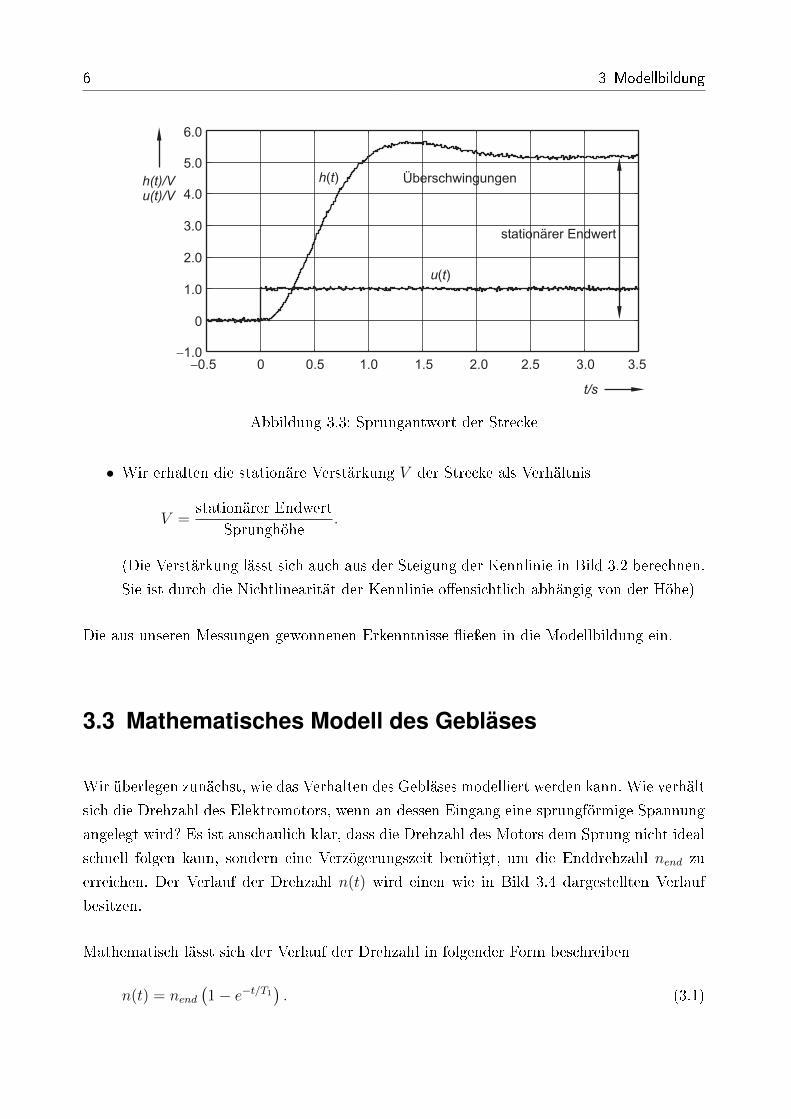
Um eine Aussage über das dynamische Verhalten unserer Regelstrecke zu erhalten, werden
wir nun den Eingang der Strecke mit einer zeitlich veränderlichen Spannung anregen. Als
Testsignal verwenden wir die aus der Vorlesung bekannte Sprungfunktion. Bild 3.3 zeigt die
gemessenen Verläufe der Spannung u(t) (Streckeneingang) und des gemessenen Istwertsignals
h(t) (Streckenausgang) des Ultraschallsensors, der ein Maÿ für die Höhe des Schwebekörpers
ist.
Aus dieser Messung erhalten wir zwei weitere Informationen über die Strecke:
• Die Strecke ist schwingungsfähig.
6 3 Modellbildung
6.0
5.0
4.0
3.0
0
0 1.0 1.5 2.52.0 3.0
2.0
1.0
�1.0�0.5 0.5 3.5
u t( )
h t( ) Überschwingungen
stationärer Endwert
t/s
h(t)/Vu(t)/V
Abbildung 3.3: Sprungantwort der Strecke
• Wir erhalten die stationäre Verstärkung V der Strecke als Verhältnis
V =stationärer Endwert
Sprunghöhe.
(Die Verstärkung lässt sich auch aus der Steigung der Kennlinie in Bild 3.2 berechnen.
Sie ist durch die Nichtlinearität der Kennlinie o�ensichtlich abhängig von der Höhe)
Die aus unseren Messungen gewonnenen Erkenntnisse �ieÿen in die Modellbildung ein.
3.3 Mathematisches Modell des Gebläses
Wir überlegen zunächst, wie das Verhalten des Gebläses modelliert werden kann. Wie verhält
sich die Drehzahl des Elektromotors, wenn an dessen Eingang eine sprungförmige Spannung
angelegt wird? Es ist anschaulich klar, dass die Drehzahl des Motors dem Sprung nicht ideal
schnell folgen kann, sondern eine Verzögerungszeit benötigt, um die Enddrehzahl nend zu
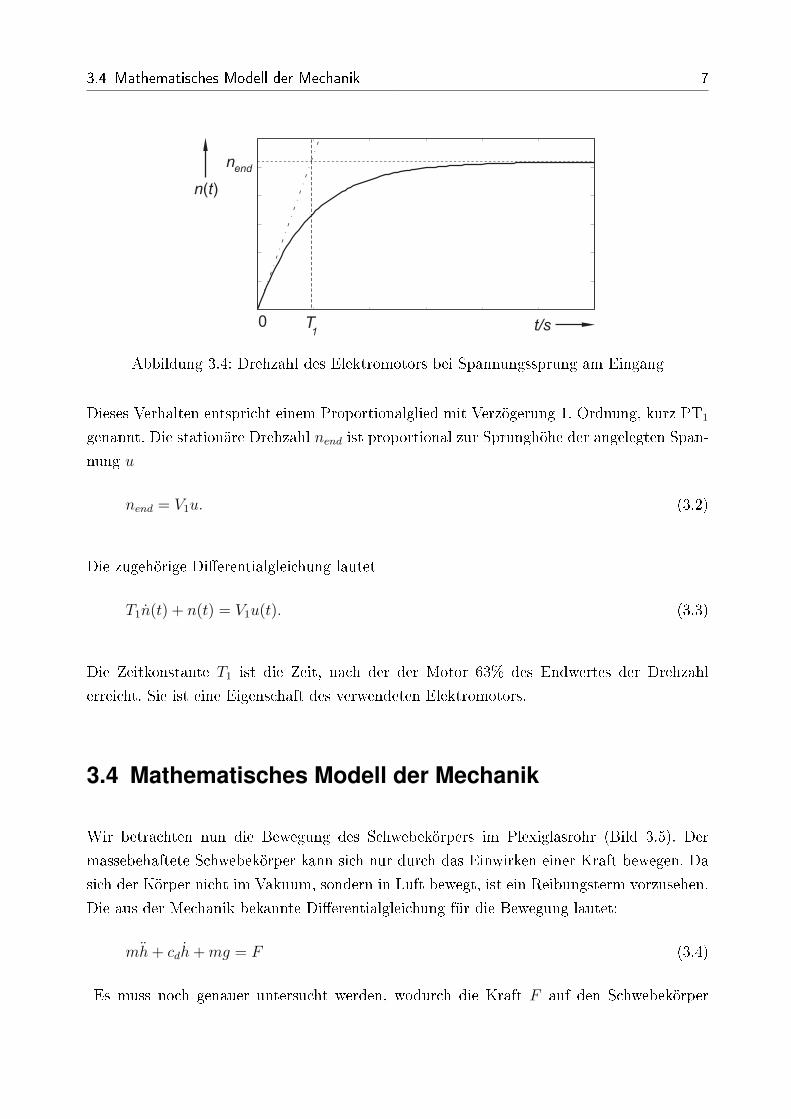
erreichen. Der Verlauf der Drehzahl n(t) wird einen wie in Bild 3.4 dargestellten Verlauf
besitzen.
Mathematisch lässt sich der Verlauf der Drehzahl in folgender Form beschreiben
n(t) = nend
(1− e−t/T1
). (3.1)
3.4 Mathematisches Modell der Mechanik 7
t/s0 T1
( )n t
nend
Abbildung 3.4: Drehzahl des Elektromotors bei Spannungssprung am Eingang
Dieses Verhalten entspricht einem Proportionalglied mit Verzögerung 1. Ordnung, kurz PT1
genannt. Die stationäre Drehzahl nend ist proportional zur Sprunghöhe der angelegten Span-
nung u
nend = V1u. (3.2)
Die zugehörige Di�erentialgleichung lautet
T1n(t) + n(t) = V1u(t). (3.3)
Die Zeitkonstante T1 ist die Zeit, nach der der Motor 63% des Endwertes der Drehzahl
erreicht. Sie ist eine Eigenschaft des verwendeten Elektromotors.
3.4 Mathematisches Modell der Mechanik
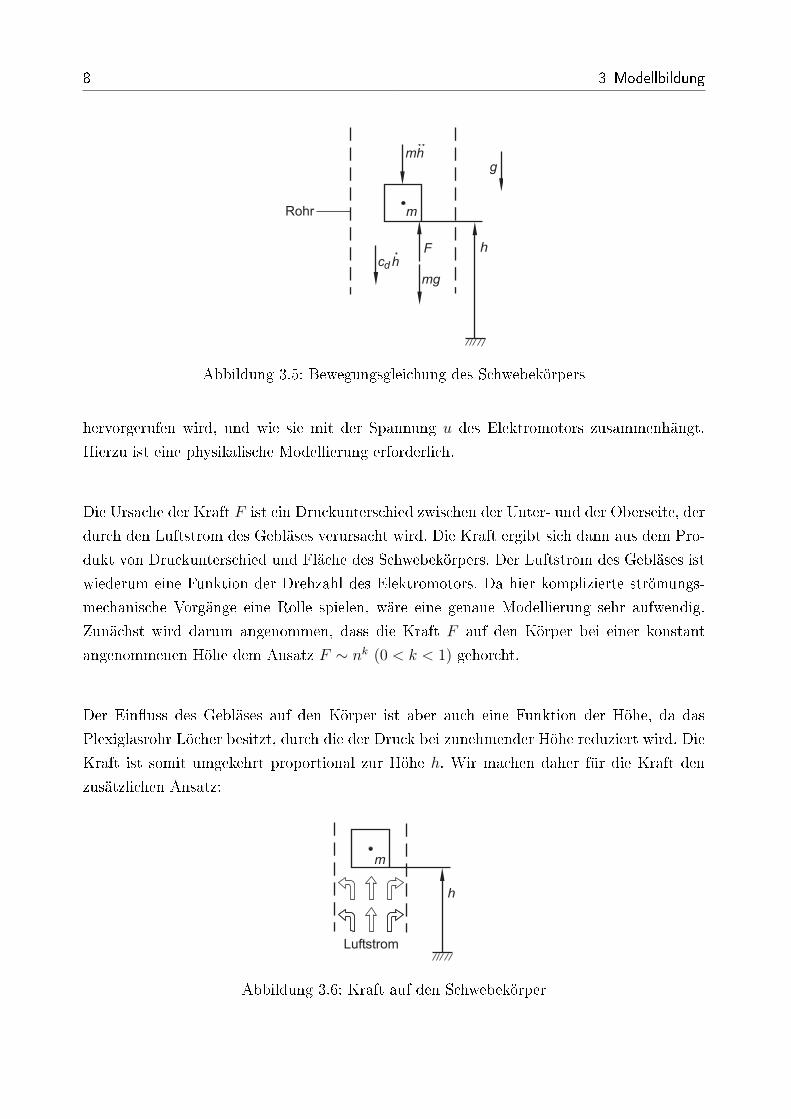
Wir betrachten nun die Bewegung des Schwebekörpers im Plexiglasrohr (Bild 3.5). Der
massebehaftete Schwebekörper kann sich nur durch das Einwirken einer Kraft bewegen. Da
sich der Körper nicht im Vakuum, sondern in Luft bewegt, ist ein Reibungsterm vorzusehen.
Die aus der Mechanik bekannte Di�erentialgleichung für die Bewegung lautet:
mh+ cdh+mg = F (3.4)
Es muss noch genauer untersucht werden, wodurch die Kraft F auf den Schwebekörper
8 3 Modellbildung
m
mh
F
mg
c hd
g
h
Rohr
Abbildung 3.5: Bewegungsgleichung des Schwebekörpers
hervorgerufen wird, und wie sie mit der Spannung u des Elektromotors zusammenhängt.
Hierzu ist eine physikalische Modellierung erforderlich.
Die Ursache der Kraft F ist ein Druckunterschied zwischen der Unter- und der Oberseite, der
durch den Luftstrom des Gebläses verursacht wird. Die Kraft ergibt sich dann aus dem Pro-
dukt von Druckunterschied und Fläche des Schwebekörpers. Der Luftstrom des Gebläses ist
wiederum eine Funktion der Drehzahl des Elektromotors. Da hier komplizierte strömungs-
mechanische Vorgänge eine Rolle spielen, wäre eine genaue Modellierung sehr aufwendig.
Zunächst wird darum angenommen, dass die Kraft F auf den Körper bei einer konstant
angenommenen Höhe dem Ansatz F ∼ nk (0 < k < 1) gehorcht.
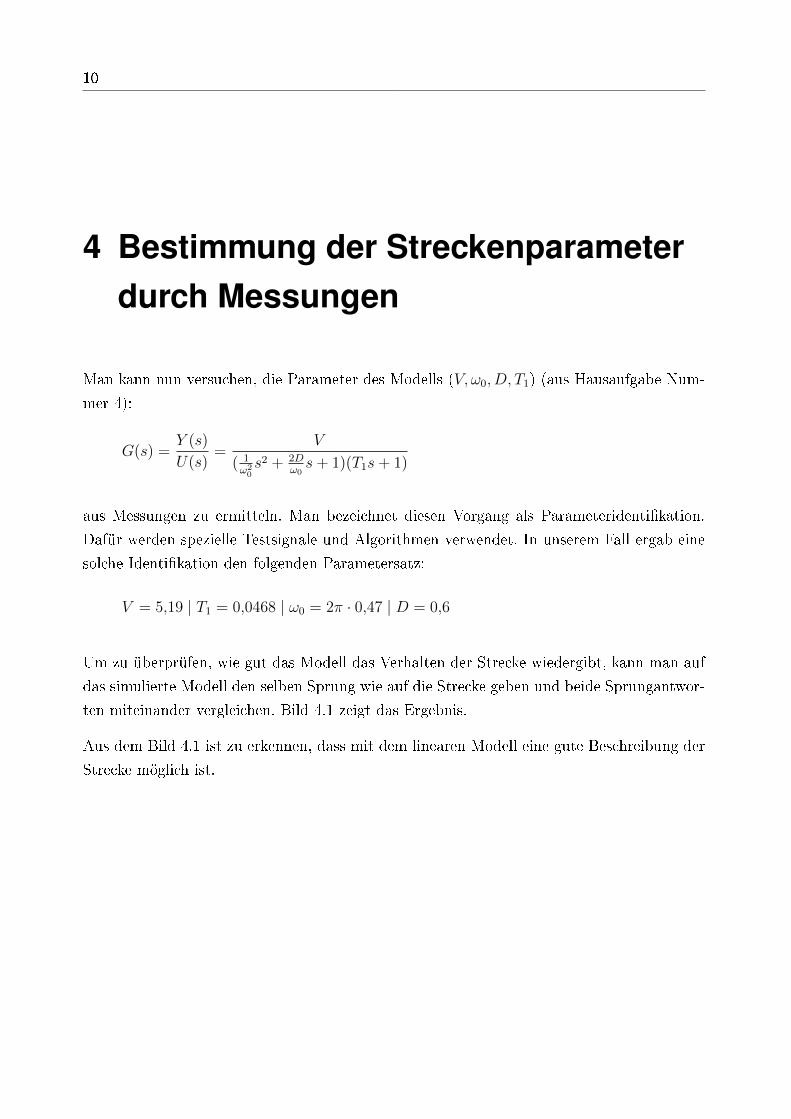
Der Ein�uss des Gebläses auf den Körper ist aber auch eine Funktion der Höhe, da das
Plexiglasrohr Löcher besitzt, durch die der Druck bei zunehmender Höhe reduziert wird. Die
Kraft ist somit umgekehrt proportional zur Höhe h. Wir machen daher für die Kraft den
zusätzlichen Ansatz:
m
h
Luftstrom
Abbildung 3.6: Kraft auf den Schwebekörper

3.4 Mathematisches Modell der Mechanik 9
F ∼ 1
h+ β(3.5)
Fassen wir beide Ein�üsse auf die Kraft zu einer Gleichung zusammen, so erhalten wir
F =αnk
h+ β. (3.6)
Diese Gleichung stellt bereits eine Näherung dar, die wir aufgrund von Plausibilitätsbetrach-
tungen gewonnen haben. Die Bestimmung der Parameter α, β und k würde eine genauere
Untersuchung der strömungsmechanischen Gegebenheiten erfordern, die wir hier nicht an-
stellen werden.
Der stationäre Fall (h = h = 0) der Bewegungsgleichung (3.4) lautet dann mit (3.6)
mg =αnk
h+ β, (3.7)
woraus sich der stationäre, nichtlineare Zusammenhang zwischen der Höhe des Schwebekör-
pers und der Drehzahl des Gebläses
h =αnk
mg− β (3.8)
ergibt. Aus der Gleichung (3.8) erkennen wir, dass der Ein�uss der Drehzahl auf die Höhe
des Schwebekörpers nichtlinear ist, sobald k 6= 1. Der Exponent 0 < k < 1 bewirkt auch das
�Abknicken� (Degression) der gemessenen Kennlinie in Bild 3.2.
Um einen linearen Regler auslegen zu können, ist der Ausdruck für die Kraft in Gl. (3.6) um
einen Arbeitspunkt (n0, h0) zu linearisieren. Der Ansatz lautet gemäÿ Vorlesung
F = F |n0,h0 +∂F
∂n
∣∣∣∣n0,h0
∆n+∂F
∂h
∣∣∣∣n0,h0
∆h (3.9)
mit h = h0 + ∆h, n = n0 + ∆n
Der Rest dieses Kapitels ist Teil der Hausaufgaben (siehe Aufgabe 4). Das weitere Skript
lässt sich auch ohne diese Lösung verstehen.
10
4 Bestimmung der Streckenparameterdurch Messungen
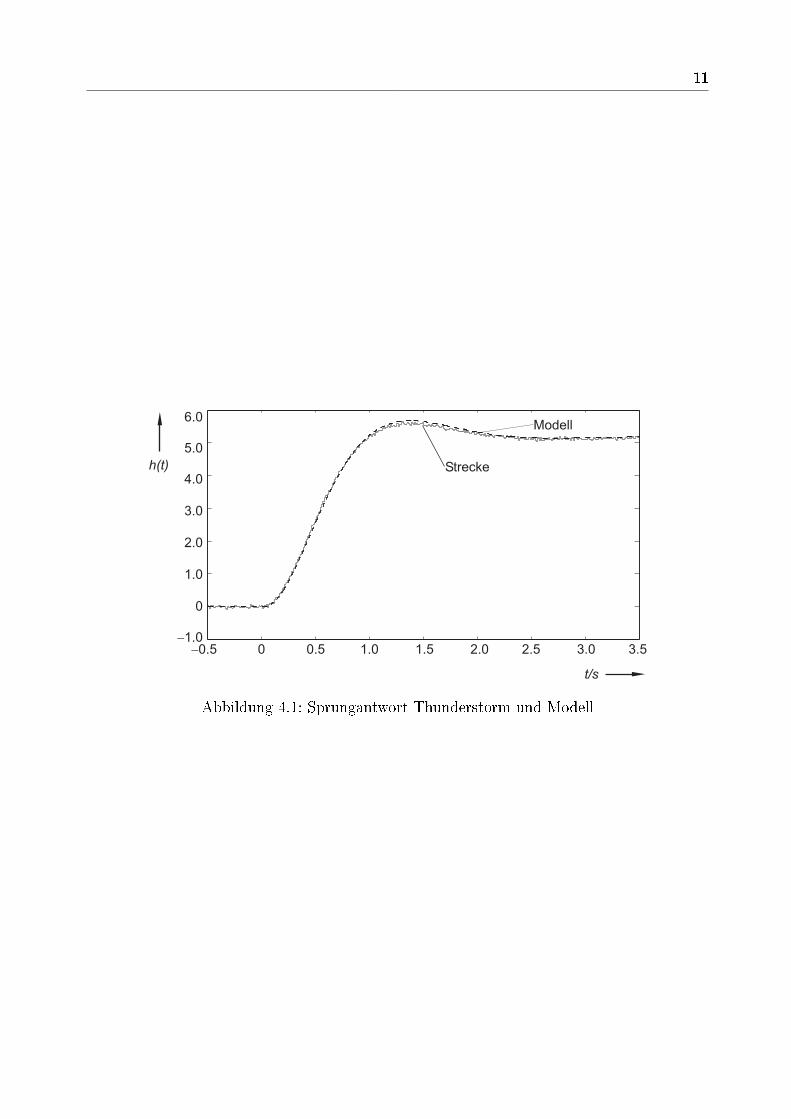
Man kann nun versuchen, die Parameter des Modells (V, ω0, D, T1) (aus Hausaufgabe Num-
mer 4):
G(s) =Y (s)
U(s)=
V
( 1ω20s2 + 2D
ω0s+ 1)(T1s+ 1)
aus Messungen zu ermitteln. Man bezeichnet diesen Vorgang als Parameteridenti�kation.
Dafür werden spezielle Testsignale und Algorithmen verwendet. In unserem Fall ergab eine
solche Identi�kation den folgenden Parametersatz:
V = 5,19 | T1 = 0,0468 | ω0 = 2π · 0,47 | D = 0,6
Um zu überprüfen, wie gut das Modell das Verhalten der Strecke wiedergibt, kann man auf
das simulierte Modell den selben Sprung wie auf die Strecke geben und beide Sprungantwor-
ten miteinander vergleichen. Bild 4.1 zeigt das Ergebnis.
Aus dem Bild 4.1 ist zu erkennen, dass mit dem linearen Modell eine gute Beschreibung der
Strecke möglich ist.
11
6.0
5.0
4.0
3.0
0
0 1.0 1.5 2.52.0 3.0
2.0
1.0
�1.0�0.5 0.5 3.5
t/s
h(t)
Modell
Strecke
Abbildung 4.1: Sprungantwort Thunderstorm und Modell
12
5 Der Regelkreis
5.1 Wahl der Reglerstruktur
Ein Regler hat die Aufgabe, einen Prozess in einem konstanten Zustand zu halten oder varia-
blen Sollwerten nachzuführen. Dabei sollen die Auswirkungen von auf den Prozess wirkenden
Störungen möglichst schnell und vollständig ausgeregelt werden (gutes Störverhalten). Oft
kommt noch die Forderung hinzu, dass Änderungen der Sollwerte schnell und gut gedämpft
in Zustandsänderungen umgesetzt werden sollen (gutes Führungsverhalten).
Der einfachste Regler, der bei proportional wirkenden Strecken stationäre Genauigkeit her-
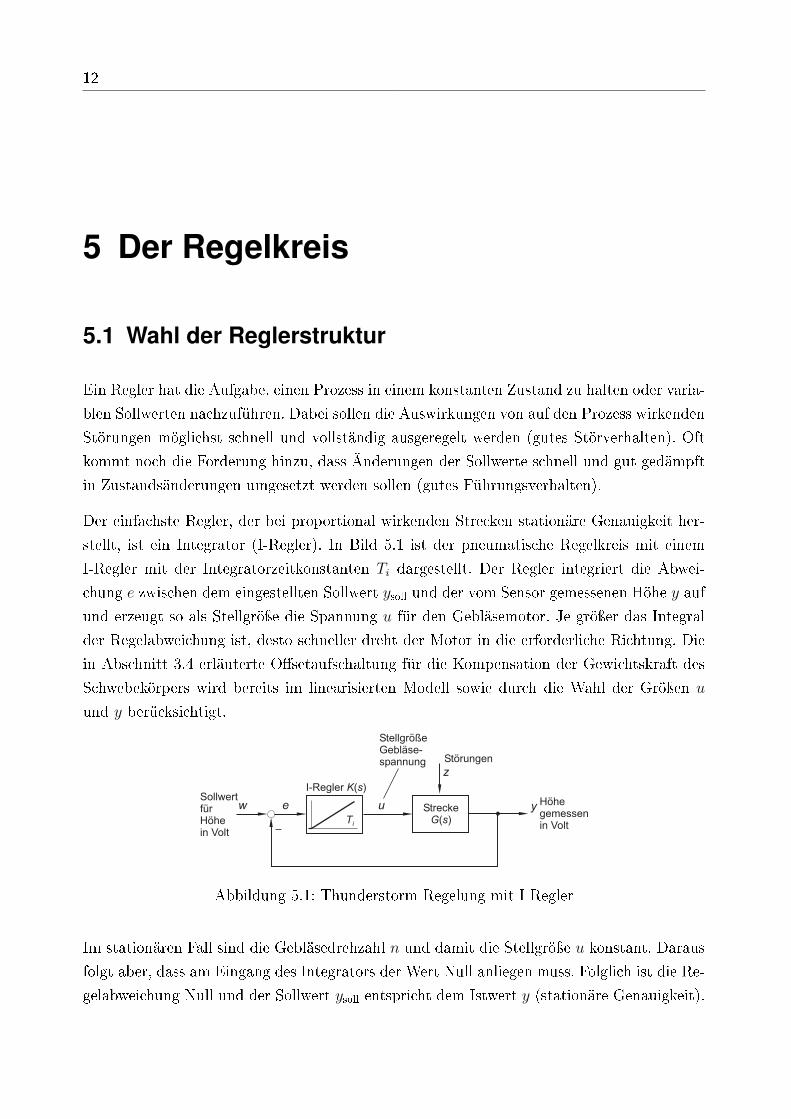
stellt, ist ein Integrator (I-Regler). In Bild 5.1 ist der pneumatische Regelkreis mit einem
I-Regler mit der Integratorzeitkonstanten Ti dargestellt. Der Regler integriert die Abwei-
chung e zwischen dem eingestellten Sollwert ysoll und der vom Sensor gemessenen Höhe y auf
und erzeugt so als Stellgröÿe die Spannung u für den Gebläsemotor. Je gröÿer das Integral
der Regelabweichung ist, desto schneller dreht der Motor in die erforderliche Richtung. Die
in Abschnitt 3.4 erläuterte O�setaufschaltung für die Kompensation der Gewichtskraft des
Schwebekörpers wird bereits im linearisierten Modell sowie durch die Wahl der Gröÿen u
und y berücksichtigt.
e u
I-Regler ( )K s
Strecke( )G s
w
z
Ti
y
StellgrößeGebläse-spannung Störungen
SollwertfürHöhein Volt
Höhegemessenin Volt
Abbildung 5.1: Thunderstorm-Regelung mit I-Regler
Im stationären Fall sind die Gebläsedrehzahl n und damit die Stellgröÿe u konstant. Daraus
folgt aber, dass am Eingang des Integrators der Wert Null anliegen muss. Folglich ist die Re-
gelabweichung Null und der Sollwert ysoll entspricht dem Istwert y (stationäre Genauigkeit).

5.2 Bestimmung des Reglerparameters 13
Der I-Regler erfüllt diese Forderung für Führungs- und Störverhalten. Die Geschwindigkeit
des Führungsverhaltens wird später beurteilt.
5.2 Bestimmung des Reglerparameters
Damit der Regler die an den Regelkreis gestellten Anforderungen erfüllen kann, ist eine sorg-
fältige Bestimmung des Reglerparameters erforderlich. Eine falsche Reglereinstellung kann
sogar eine Instabilität des Regelkreises zur Folge haben, auch wenn die ungeregelte Stre-
cke stabil ist. Instabilität bedeutet, dass sich eine kleine Störung im Regelkreis aufschau-
kelt und zu einer aufklingenden Schwingung führt (Grund: der Regler reagiert zu �heftig�).
Die Reglerauslegung erfolgt üblicherweise im Frequenzbereich mittels Ortskurve bzw. Bode-
Diagramm oder mit Hilfe empirischer Einstellregeln im Zeitbereich.
Beim I-Regler mit der Übertragungsfunktion
K(s) =U(s)
E(s)=
1
Tis(5.1)
gibt es ein vereinfachtes Verfahren, mit dem wir die Integratorzeitkonstante Ti algebraisch
bestimmen können. Dazu wird zunächst die Regelstrecke durch ein Verzögerungsglied erster
Ordnung (PT1) angenähert, das die gleicheVerstärkung und die gleiche Regel�äche aufweist.
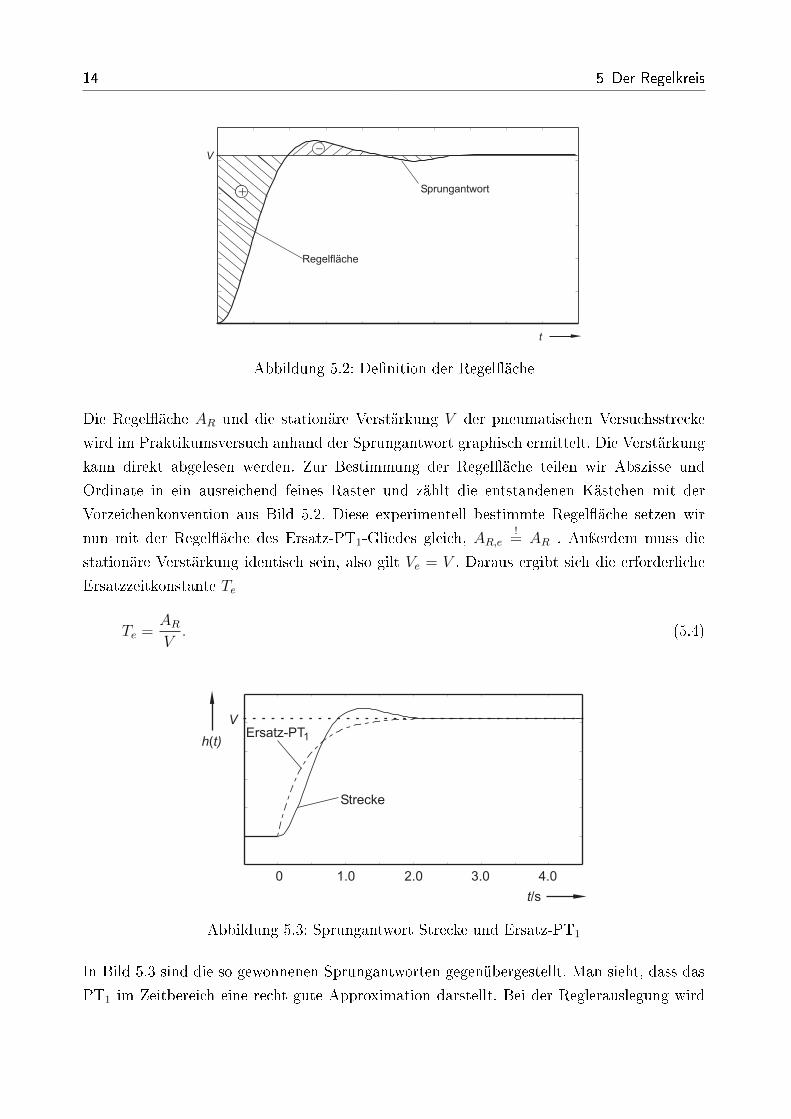
Die Regel�äche ist die Fläche zwischen dem stationären Endwert der Sprungantwort und
ihrem tatsächlichen Verlauf. Dabei sind die Einzel�ächen vorzeichenbehaftet, wie in Bild 5.2
gezeigt. Es lässt sich zeigen, dass sich Strecken mit gleicher Regel�äche im Frequenzbereich
bei niedrigen Frequenzen sehr ähnlich verhalten. Man kann also jede Strecke höherer Ordnung
durch ein PT1-Glied annähern, wenn diese Näherung nur für tiefe Frequenzen gelten soll.
Für die Regelung mit einem langsamen I-Regler ist das oft ausreichend.
Die Sprungantwort eines PT1-Gliedes mit der Zeitkonstanten Te und Verstärkung Ve lautet
h(t) = Ve
(1− e−
tTe
). (5.2)
Die zugehörige Regel�äche lässt sich über das folgende Integral berechnen:
AR,e =
∫ ∞0
(Ve − Ve
(1− e−
tTe
))dt = Ve
∫ ∞0
e−tTe dt = VeTe (5.3)
14 5 Der Regelkreis
t
V
++
�
Regelfläche
Sprungantwort
Abbildung 5.2: De�nition der Regel�äche
Die Regel�äche AR und die stationäre Verstärkung V der pneumatischen Versuchsstrecke
wird im Praktikumsversuch anhand der Sprungantwort graphisch ermittelt. Die Verstärkung
kann direkt abgelesen werden. Zur Bestimmung der Regel�äche teilen wir Abszisse und
Ordinate in ein ausreichend feines Raster und zählt die entstandenen Kästchen mit der
Vorzeichenkonvention aus Bild 5.2. Diese experimentell bestimmte Regel�äche setzen wir
nun mit der Regel�äche des Ersatz-PT1-Gliedes gleich, AR,e!
= AR . Auÿerdem muss die
stationäre Verstärkung identisch sein, also gilt Ve = V . Daraus ergibt sich die erforderliche
Ersatzzeitkonstante Te
Te =AR
V. (5.4)
0 1.0 2.0 3.0 4.0
/st
h t)(
V
Strecke
Ersatz-PT1
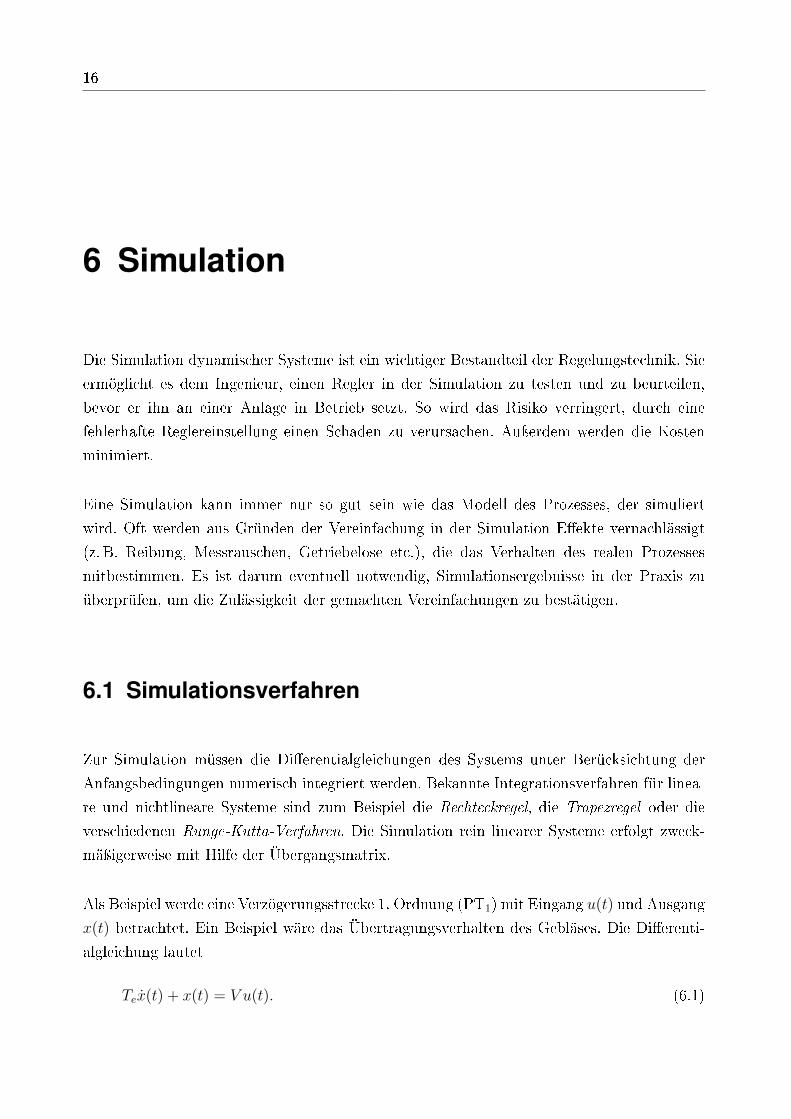
Abbildung 5.3: Sprungantwort Strecke und Ersatz-PT1
In Bild 5.3 sind die so gewonnenen Sprungantworten gegenübergestellt. Man sieht, dass das
PT1 im Zeitbereich eine recht gute Approximation darstellt. Bei der Reglerauslegung wird

5.2 Bestimmung des Reglerparameters 15
nur noch mit der vereinfachten Strecke gerechnet. Die Übertragungsfunktion des geschlos-
senen Kreises nach Bild 5.1 lässt sich wie folgt berechnen: Für die laplacetransformierte
Regelabweichung E(s) gilt der Zusammenhang E(s) = W (s) − G(s)K(s)E(s). Aufgelöst
nach E(s) ergibt sich E = W/(1 +GK) . Für die Ausgangsgröÿe Y (s) folgt
Y = GKE =GK
1 +GKW = GgW. (5.5)
Gg(s) ist die Übertragungsfunktion des geschlossenen Kreises. Setzen wir nun
K =1
Tisund G =
VeTes+ 1
ein, so lässt sich mit der Berechnung des geschlossenen Kreises die Reglerzeitkonstante Tibestimmen. (Hausaufgabe Nummer 8)
16
6 Simulation
Die Simulation dynamischer Systeme ist ein wichtiger Bestandteil der Regelungstechnik. Sie
ermöglicht es dem Ingenieur, einen Regler in der Simulation zu testen und zu beurteilen,
bevor er ihn an einer Anlage in Betrieb setzt. So wird das Risiko verringert, durch eine
fehlerhafte Reglereinstellung einen Schaden zu verursachen. Auÿerdem werden die Kosten
minimiert.
Eine Simulation kann immer nur so gut sein wie das Modell des Prozesses, der simuliert
wird. Oft werden aus Gründen der Vereinfachung in der Simulation E�ekte vernachlässigt
(z. B. Reibung, Messrauschen, Getriebelose etc.), die das Verhalten des realen Prozesses
mitbestimmen. Es ist darum eventuell notwendig, Simulationsergebnisse in der Praxis zu
überprüfen, um die Zulässigkeit der gemachten Vereinfachungen zu bestätigen.
6.1 Simulationsverfahren
Zur Simulation müssen die Di�erentialgleichungen des Systems unter Berücksichtung der
Anfangsbedingungen numerisch integriert werden. Bekannte Integrationsverfahren für linea-
re und nichtlineare Systeme sind zum Beispiel die Rechteckregel, die Trapezregel oder die
verschiedenen Runge-Kutta-Verfahren. Die Simulation rein linearer Systeme erfolgt zweck-
mäÿigerweise mit Hilfe der Übergangsmatrix.
Als Beispiel werde eine Verzögerungsstrecke 1. Ordnung (PT1) mit Eingang u(t) und Ausgang
x(t) betrachtet. Ein Beispiel wäre das Übertragungsverhalten des Gebläses. Die Di�erenti-
algleichung lautet
Tex(t) + x(t) = V u(t). (6.1)
6.1 Simulationsverfahren 17
Die Lösung der Gleichung lässt sich im Zeitbereich bei bekanntem Anfangswert x(0) ge-
schlossen angeben:
x(t) = x(0)e− tT1 +
V
T1
∫ t
0
e− t−τ
T1 u(τ)dτ. (6.2)
Die Funktion e−tT1 wird bei der Simulation von Systemen höherer Ordnung zu einer Matrix
und wird Übergangsmatrix Φ(t) genannt, da sie den Übergang des Zustands x von einem
Zeitpunkt zum nächsten beschreibt. Sie wird von Lösungen der zur Di�erentialgleichung
(6.1) gehörenden charakteristischen Gleichung (also von den Polen der zu (6.1) gehörenden
Übertragungsfunktion) bestimmt.
Der erste Term beschreibt das Abklingverhalten des Anfangswertes (homogene Lösung),
während der zweite Term den Ein�uss der Anregung u(t) berücksichtigt (partikuläre Lö-
sung). Man bezeichnet die Form des zweiten Ausdrucks als Faltungsintegral. Bei der nume-
rischen Integration wird der Zeitverlauf von x(t) nur zu diskreten Zeitpunkten berechnet.
Im einfachsten Fall sind diese Zeitpunkte bei konstanter Schrittweite T äquidistant gewählt,
t = kT . Die Schrittweite T muss dabei abhängig vom Integrationsverfahren gewählt werden,
auf jeden Fall sollte T � T1 erfüllt sein.
Zum Zeitpunkt t = kT wird die Ausgangsgröÿe
x(kT ) = x(0)e−k T
T1 +V
T1
∫ kT
0
e− kT−τ
T1 u(τ)dτ. (6.3)
Beim nächsten Rechenschritt zum Zeitpunkt t = (k + 1)T ist
x((k + 1)T ) = x(0)e−(k+1) T
T1 +V
T1
∫ (k+1)T
0
e− (k+1)T−τ
T1 u(τ)dτ. (6.4)

18 6 Simulation
Der konstante Term e− TT1 lässt sich ausklammern, so dass sich die Rechenvorschrift
x((k + 1)T ) = e− TT1
[x(0)e
−k TT1 +
V
T1
∫ (k+1)T
0
e− kT−τ
T1 u(τ)dτ
]
= e− TT1
[x(0)e
−k TT1 +
V
T1
∫ kT
0
e− kT−τ
T1 u(τ)dτ + . . .
. . .V
T1
∫ (k+1)T
kT
e− kT−τ
T1 u(τ)dτ
]
= e− TT1 x(kT ) +
V
T1
∫ (k+1)T
kt
e− (k+1)T−τ
T1 u(τ)dτ (6.5)
ergibt. Wird nun das Rechenintervall T so klein gewählt, dass die Eingangsgröÿe u(t) für die
Berechnung des Integrales in (6.5) über ein Simulationsintervall als konstant angenommen
werden kann (Annäherung durch eine Treppenfunktion), so lässt sich diese vor das Inte-
gral ziehen. Man erhält nach Lösung des Integrales eine lineare Di�erenzengleichung mit
konstanten Koe�zienten
x((k + 1)T ) = e− TT1 x(kT ) + V
(1− e−
TT1
)u(kT )
= c0x(kT ) + r0u(kT ) (6.6)
Aus der Kenntnis des Anfangswerts x(0) und des zeitlichen Verlaufs u(t) lässt sich der
Verlauf von x(t) zu den diskreten Zeitpunkten t = kT unter den gemachten Annahmen sehr
genau und vor allem sehr schnell simulieren, ohne dass dafür ein Integral gelöst werden muss.
Entspricht die Anregung einer treppenförmigen Funktion (etwa der Sprungfunktion), ist die
Lösung sogar exakt.
19
7 Hausaufgaben
1. Nennen Sie die sechs Schritte zur prinzipiellen Vorgehensweise bei der Reglerauslegung.
2. Beschreiben Sie kurz den physikalischen Aufbau der pneumatischen Lageregelung.
3. Welche beiden grundsätzlichen Methoden sind für die messtechnische Modellbildung
von Bedeutung? Nennen Sie beide und beschreiben Sie diese kurz.
4. Leiten Sie das mathematische Modell der Mechanik in Form einer Übertragungsfunk-
tion im Laplace Bereich her. Führen Sie dazu folgende einzelne Schritte aus:
a) Stellen Sie die gesamte linearisierte Bewegungsgleichung unter Berücksichtigung
von Gleichung (3.9) auf.
b) Berechnen Sie das stationäre Verhalten im Arbeitspunkt.
c) Mit welcher Maÿnahme lässt sich nun die linearisierte Bewegungsgleichung ver-
einfachen, so dass nur noch Terme auftreten die von ∆n und ∆h beziehungsweise
deren Ableitungen abhängen.
d) Interpretieren Sie die linearisierte Bewegungsgleichung als mechanisches Modell.
e) Transformieren Sie die linearisierte Bewegungsgleichung in den Laplace Bereich
mit dem Übertragungsverhalten ∆n nach ∆h.
5. Stellen Sie die Gesamtübertragungsfunktion von Gebläse und Mechanik auf und zeich-
nen Sie dazu ein Pol/Nullstellen Diagramm.
6. Welcher ist der einfachste Regler der stationäre Genauigkeit bei dieser Art der ÜF
gewährleistet?
7. Welche Näherung ist für die Reglerauslegung zu tre�en?
8. Legen Sie den gewählten Regler für eine vorgegebene Dämpfung von D = 1/√
2 aus.
20
8 Versuchsdurchführung
8.1 Modellbildung
• Nehmen Sie die stationäre Kennlinie der Höhe des Schwebekörpers über der Gebläse-
spannung auf (vgl. Bild 3.2). Verwenden Sie zur Höhenmessung die Sensorausgangs-
spannung (1 V!
= 0,1 m). Beurteilen Sie die Linearität der Regelstrecke.
0u /V
5.0 5.5 6.0 6.5 7.57.0 8.0
1.0
0.8
0.6
0.4
0.2
0
h/m
• Messen Sie mit dem Oszilloskop die Sprungantwort der o�enen Strecke bei einer Sprung-
höhe von 1V. Stellen Sie dazu den Signalgenerator auf eine Rechteckschwingung mit
O�set 0,5V und Amplitude 0,5V bei sehr niedriger Frequenz. Auf dem folgenden Bild
ist die Sprungantwort dargestellt. Ermitteln Sie aus dem Diagramm die stationäre
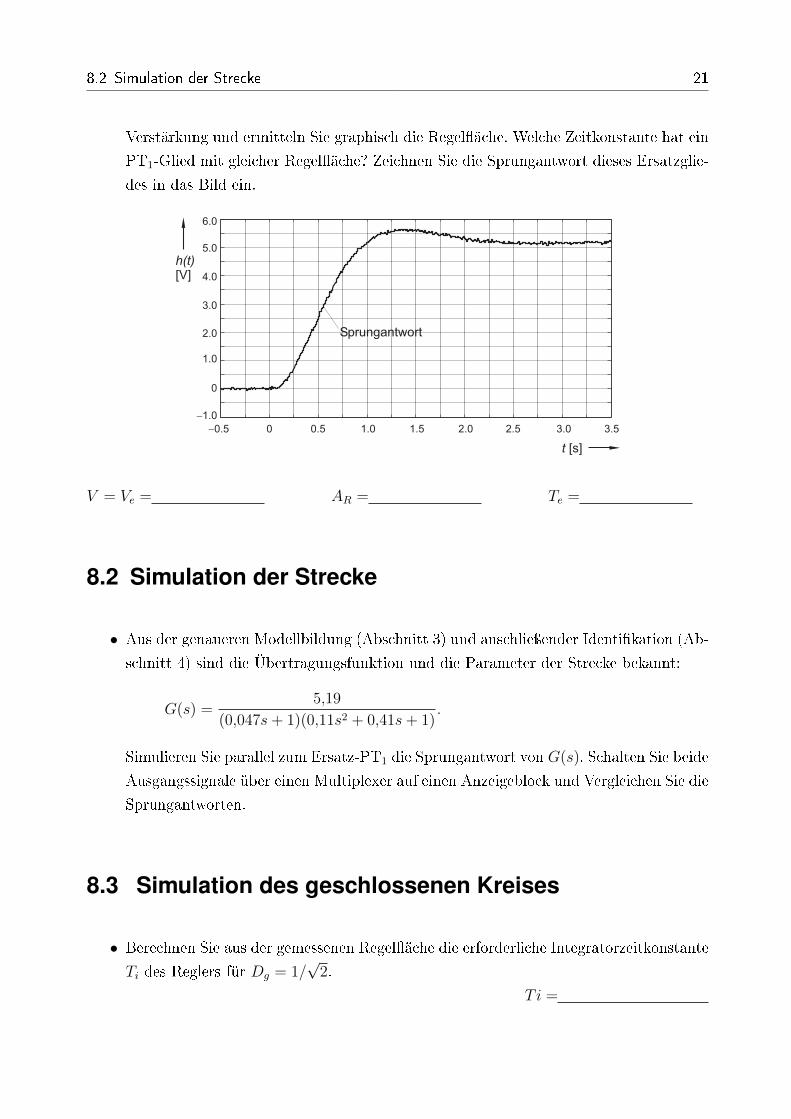
8.2 Simulation der Strecke 21
Verstärkung und ermitteln Sie graphisch die Regel�äche. Welche Zeitkonstante hat ein
PT1-Glied mit gleicher Regel�äche? Zeichnen Sie die Sprungantwort dieses Ersatzglie-
des in das Bild ein.
0 1.0 1.5 2.52.0 3.0�0.5 0.5 3.5
[s]t
6.0
5.0
4.0
3.0
0
2.0
1.0
�1.0
h(t)[V]
Sprungantwort
V = Ve = AR = Te =
8.2 Simulation der Strecke
• Aus der genaueren Modellbildung (Abschnitt 3) und anschlieÿender Identi�kation (Ab-
schnitt 4) sind die Übertragungsfunktion und die Parameter der Strecke bekannt:
G(s) =5,19
(0,047s+ 1)(0,11s2 + 0,41s+ 1).
Simulieren Sie parallel zum Ersatz-PT1 die Sprungantwort von G(s). Schalten Sie beide
Ausgangssignale über einen Multiplexer auf einen Anzeigeblock und Vergleichen Sie die
Sprungantworten.
8.3 Simulation des geschlossenen Kreises
• Berechnen Sie aus der gemessenen Regel�äche die erforderliche Integratorzeitkonstante
Ti des Reglers für Dg = 1/√
2.
Ti =
22 8 Versuchsdurchführung
• Ö�nen Sie ein neues Fenster. Stellen Sie einen geschlossenen Regelkreis aus vereinfach-
ter Strecke (PT1) und Integralregler auf. Passt das Einschwingverhalten zur ausgeleg-
ten Dämpfung (Dg = 1/√
2)? Berücksichtigen Sie, dass Sie einen Integrator mit der
Übertragungsfunktion K(s) = 1/(Tis) auch in der Form K(s) = ki/s mit ki = 1/Ti
(Integratorbeiwert) darstellen können.
• Simulieren Sie die Sprungantwort des geschlossenen Kreises mit dem gleichen Integral-
regler und der PT3 Strecke aus der genauen Modellbildung.
• Beurteilen Sie die Dämpfung des zweiten geschlossenen Kreises. Stimmt Sie mit der
bei der Reglerauslegung gewählten Dämpfung überein? Wie sind Abweichungen zu
erklären? Korrigieren Sie unter Umständen die Integratorzeitkonstante, bis die Sprun-
gantwort Ihren Erwartungen entspricht. Notieren Sie die endgültige Einstellung.
Ti =
8.4 Stabilität des geschlossenen Kreises
• Bestimmen Sie mit Hilfe der Wurzelortskurve (WOK) die kritische Verstärkung des
geschlossenen Regelkreises (MATLAB: rlocus). Überprüfen Sie den gefundenen Wert
mit Hilfe der Simulation. Notieren Sie:
Ti =
8.5 Regelung der Strecke
• Veri�zieren Sie jetzt die Reglereinstellungen aus der Simulation an der Strecke. Stellen
Sie Ti am PID-Regler ein und schalten Sie den P- und D- Anteil aus. Vergleichen Sie
die Sprungantwort mit der Simulation.
• Überzeugen Sie sich, dass der Regler Störungen stationär genau ausregelt.
• Beurteilen Sie die Geschwindigkeit der Regelung im Vergleich mit der ungeregelten
Strecke. Ist der I-Regler also ein �schneller� oder ein �langsamer� Regler?
• Verkleinern Sie Ti, bis der geschlossene Kreis instabil wird. Vergleichen Sie den Wert
von Ti mit dem in der Simulation.
Ti =


















