Modellierung und Leakage-Kompensation von 77GHz FMCW ...
151
Modellierung und Leakage-Kompensation von 77 GHz FMCW-Weitbereichsradar- Transceivern in SiGe-Technologie f ¨ ur Kfz-Anwendungen Der Technischen Fakult¨ at der Universit¨ at Erlangen-N¨ urnberg zur Erlangung des Grades Doktor-Ingenieur vorgelegt von Dipl.-Ing. Oliver G¨ unther Erlangen 2008
Transcript of Modellierung und Leakage-Kompensation von 77GHz FMCW ...

Modellierung und Leakage-Kompensation
von 77GHz FMCW-Weitbereichsradar-
Transceivern in SiGe-Technologie fur
Kfz-Anwendungen
Der Technischen Fakultat derUniversitat Erlangen-Nurnberg
zur Erlangung des Grades
Doktor-Ingenieur
vorgelegt von
Dipl.-Ing. Oliver Gunther
Erlangen 2008

Als Dissertation genehmigt vonder Technischen Fakultat der
Universitat Erlangen-Nurnberg
Tag der Einreichung: 07. Marz 2008Tag der Promotion: 28. Juli 2008
Dekan: Prof. Dr.-Ing. Dr.-Ing. habil. J. Huber
Berichterstatter: Prof. Dr.-Ing. Dr.-Ing. habil. R. WeigelProf. Dr.-Ing. habil. S. Lindenmeier

fur Dominiqueund meine Eltern

iv
Danksagung
Die vorliegende Arbeit entstand wahrend meiner wissenschaftlichen Arbeit am Lehr-stuhl fur Technische Elektronik der Universitat Erlangen-Nurnberg im Zeitraum Ja-nuar 2005 bis Februar 2008. Im Folgenden mochte ich all denjenigen meinen Dankaussprechen, die mich wahrend der Bearbeitung der Dissertation begleitet haben.
Mein besonderer Dank gilt dabei Herrn Professor Robert Weigel, der mir die Ar-beit erst ermoglicht und mir sein Vertrauen geschenkt hat. Fur seine Unterstutzungund fur den zugestandenen Freiraum wahrend der Bearbeitung und Ausrichtung derArbeit bin ich weiterhin zu großem Dank verpflichtet. Auch danke ich Herrn Profes-sor Stefan Lindenmeier fur die Ubernahme des zweiten Berichterstatters sowie denHerren Professoren Jorn Thielecke und Reinhard German fur die Mitwirkung beider mundlichen Prufung.
Meine Arbeit ist im Rahmen des BMBF-Projektes KOKON und insbesondere inZusammenarbeit mit der Robert Bosch GmbH entstanden. In diesem Zusammen-hang mochte ich vor allem Herrn Dirk Steinbuch fur die Unterstutzung danken. Dankgilt auch den Herren Oliver Bruggemann, Michael Thiel, Joachim Hauk und JurgenHasch von der Robert Bosch GmbH fur die ausfuhrlichen Diskussionen und die vie-len kleinen und großen Hilfen sowie Herrn Dr. Rudolf Lachner fur die Unterstutzungvon Seiten Infineon Technologies.
Eine besondere Hilfe habe ich durch fachliche Diskussionen, Anregungen undVorschlage von meinen Kollegen am Lehrstuhl fur Technische Elektronik erhalten.Hierfur und fur die hervorragende Arbeitsatmosphare mochte ich allen herzlich dan-ken. Namentlich erwahnen mochte ich an dieser Stelle Marcus Hartmann auf Grundder guten Zusammenarbeit im gemeinsamen KOKON-Projekt und vor allem meinenZimmerkollegen Peter Wenig fur die freundschaftliche Zusammenarbeit und Atmo-sphare.
Die Arbeit habe ich meiner Freundin Dominique und meinen Eltern gewidmet.Sie haben mir den Rucken gestarkt und mich in jeder Hinsicht unterstutzt undmotiviert.
Lauf, im Juli 2008 Oliver Gunther
v

vi
Zusammenfassung
Die Untersuchungen, die in der vorliegenden Arbeit durchgefuhrt wurden, dienender Weiterentwicklung aktueller 77GHz Kfz-Weitbereichsradarsensoren, die auf demFMCW-Prinzip basieren. Fur zukunftige aktive Fahrerassistenz- und Sicherheitssy-steme soll eine Kostensenkung herbeigefuhrt und ahnliche Marktdurchdringungenerreicht werden wie bei den passiven Sicherheitssystemen ABS und ESP. Dafur wer-den fur den Hochfrequenzteil der Sensoren auf Basis der 77GHz SiGe-TechnologieEinchiplosungen angestrebt. Gleichzeitig mit den zu senkenden Sensorkosten, mussfur zukunftige Anwendungen die Sensorperformance erheblich gesteigert werden. Alseines der großen Probleme beim Design von monostatischen FMCW-Radaren gilt dieIsolation von Sende- und Empfangspfad. Bei mangelnder Isolation kommt es zu einerUbersteuerung des Mischereingangs und somit zu einem Anstieg von Intermodulati-onsprodukten sowie zu einem durch Selbstmischung erzeugten Gleichspannungsan-teil am Mischerausgang. Dieser kann wiederum den AD-Konverter ubersteuern. Bis-herige Low-cost Losungen dieses Problems zielen ausschließlich auf eine Dampfungdes Gleichspannungsanteils ab. Zum Einsatz kommen in aktuellen Systemen derzweiten Generation (LRR2) Hochpassfilter, die neben der Dampfung des Gleichspan-nungsanteils auch eine Dampfung der informationstragenden Signalanteile bewirken.Dies fuhrt wiederum zu einer Einschrankung der Sensorperformance.
Um zukunftige Fahrerassistenz- und Sicherheitssysteme realisieren zu konnen,muss fur die Isolationsproblematik eine kostengunstige Losung gefunden werden, diedie Sensorperformance nicht negativ beeinflusst. Fur Kfz-Radarsysteme der drittenGeneration (LRR3) kommen unter anderem Transfermischerarchitekturen zum Ein-satz, die aus einer Zusammenschaltung von Gilbert-Mischer und Ratrace-Koppleraufgebaut sind und bei idealer Betrachtung hohe Isolationen zwischen Sende- undEmpfangspfad aufweisen. Durch Nichtidealitaten der Schaltungskomponenten ent-stehen jedoch Leakagepfade, die die Isolation erheblich reduzieren konnen. In die-ser Arbeit wurde der Einfluss der Nichtidealitaten auf den Gleichspannungsan-teil mit Hilfe von Simulationen untersucht. Dabei konnten Messungen an einemLRR3-Prototypen der Robert Bosch GmbH nachvollzogen sowie eine starke Pha-senabhangigkeit des Gleichspannungsanteils von den Eingangssignalen des Mischersnachgewiesen werden.
Fur eine Kompensationslosung des Leakage bei der Transfermischerarchitekturwird diese Phasenabhangigkeit ausgenutzt. Die in dieser Arbeit vorgestellte Losunggreift eine bereits bekannte, jedoch nicht kostengunstig zu realisierende Losung zurAusloschung des Leakage zwischen Sende- und Empfangspfad durch den Einsatz
vii
viii
eines Vektormodulators in der Ruckkopplung eines Regelkreises auf. Anders als beidiesem dynamischen Ansatz, kommt in dieser Arbeit ein statischer Ansatz zum Ein-satz. Es wurde gezeigt, dass durch die Optimierung von ein bzw. zwei Leitungslangender Transfermischerarchitektur eine Kompensation des Gleichspannungsanteils undder Wirkleistung am Eingang des Mischers erreicht werden kann.
Die Untersuchung und Losung der Isolationsproblematik wird allgemein an derTransfermischerarchitektur nachvollzogen und anhand eines sich aktuell in Entwick-lung befindlichen Radarsensors der dritten Generation der Robert Bosch GmbH kon-kretisiert. Dafur wurden die Systemkomponenten des LRR3-Prototypen modelliert.Zum Einsatz kommen bevorzugt Verhaltensmodelle, um den Simulationsaufwandniedrig zu halten. Eine besondere Herausforderung bei der Verhaltensmodellierungstellte die Modellierung eines Gilbert-Mischers dar, der in der SiGe-Technologie rea-lisiert wurde. Auf Grund der begrenzten Ausgangsleistung der integrierten 77GHzSiGe-Signalquelle wird der Mischer an der Grenze der LO-Sattigung betrieben. Furdiesen Anwendungsfall sind Standard-Verhaltensmodelle nicht einsetzbar. Deshalbwurde eine neue Verhaltensmodellierung vorgestellt, deren prinzipieller Aufbau sichvon den internen Funktionsblocken des zu modellierenden Gilbert-Mischers ableitet.Durch den Einsatz von Datentabellen, die Mess- oder Simulationsdaten aufnehmenkonnen, lasst sich das reale Verhalten des Mischers im Radartransceiver sehr gutmodellieren. Dies wurde durch eine Verifikation mit einem Schaltungsmodell nach-gewiesen. Im Vergleich zum Schaltungsmodell wurde gezeigt, dass der Simulations-aufwand erheblich reduziert werden konnte. Bezogen auf die Simulationszeit wirddurch den Einsatz des Verhaltensmodells bei einem typischen Simulationssetup einZeitgewinn von ca. 120 erreicht.
Der Einsatz von Verhaltensmodellen zur Beschreibung der Transfermischerarchi-tektur des LRR3-Prototypen ermoglichte eine statistische Untersuchung der Kom-pensation. Dafur wurden den Schaltungsparametern Verteilungsfunktionen zugeord-net und die statistische Verteilung der Storsignale durch Monte Carlo-Simulationenermittelt. Es konnte gezeigt werden, dass durch die Optimierung von ein bzw. zweiLeitungslangen der Transfermischerarchitektur, der Mittelwert sowie die Streuungder Storsignale erheblich reduziert werden konnen. Durch die Optimierung vonzwei Leitungslangen kann ein hoherer Optimierungsgewinn fur die Mittelwerte vonGleichspannungsanteil und RF-Wirkleistung erzielt werden, wahrend durch die Op-timierung mit einer Leitungslange hohere Optimierungsgewinne fur die Streuungenerreicht werden. Wird eine Optimierung mit zwei Leitungslangen vorgenommen, sowird fur den Gleichspannungsanteil bei einer Optimierungsgenauigkeit von 5 einstatistischer Optimierungsgewinn fur den Median von 70,1 dB erzielt. Fur den Me-dian der Wirkleistung am Mischereingang wird ein Optimierungsgewinn von 22,4 dBerzielt. Der Optimierungsgewinn fur die Streuungen betragt dabei 25 dB bzw. 8,3 dB.

Abstract
In this thesis detailed analyses are presented contributing to the further develop-ment of current 77GHz automotive long-range-radar sensors based on the FMCW-principle. In order to reduce the costs of the sensors and to achieve similar marketpenetrations as for the passive safety systems ABS and ESP the RF-frontend of fu-ture driver assistance and active safety systems are to be integrated as a single chipusing SiGe-technology. Simultaneously the performance of the sensors must signifi-cantly be enhanced. An important design criterion is to provide sufficient isolationbetween the transmitting and receiving paths of the RF-frontend. If the isolation islow, the sensor performance degrades due to mixer intermodulation and self-mixing.The latter results in a DC-offset, which can degrade the dynamic range of the A/D-converter. A low-cost state of the art solution of this problem is to attenuate theDC-offset using a high-pass filter. The drawback of this solution is that the requiredsignal is also attenuated leading to a reduced sensor performance.
In order to provide future driver assistance and active safety systems a low-costsolution of the isolation problem must be found which avoids degradation of thesensor performance. In third generation radar sensors the transfer-mixer architectureis used which is a combination of a Gilbert-mixer and a ratrace-coupler. If theideal transfer-mixer architecture is examined, it provides a high isolation betweentransmitting and receiving paths. However, non-idealities of the circuit componentsgenerate leakage-paths which can seriously degrade that isolation. In this thesis theinfluence of the circuit non-idealities on the DC-offset is analyzed using simulations.Measurements of a LRR3-prototype of the Robert Bosch GmbH could be understoodwith simulations, and a strong dependency of the DC-offset on the phase of theleakage signals could be demonstrated.
This phase dependency is used for a leakage compensation of the transfer-mixerarchitecture. The solution proposed in this thesis builds upon an existing solution,which can not be realized referred to the low-cost aspect. In the existing solutiona vector modulator is applied in the feedback of a control loop in order to cancelthe leakage signals out. In contrast to this dynamic solution a static approach willbe used in this thesis. It has been demonstrated that it is possible to compensa-te the DC-offset and the RF-power at the mixer-input by optimizing one or twotransmission lines of the transfer-mixer architecture, respectively.
The analysis and solution of the isolation problem will generally be comprehen-ded and in the following concretized with the third generation radar sensor of the
ix

x
Robert Bosch GmbH. For this application the system components of the LRR3-prototype have been behaviorally modelled in order to keep the simulation efforton a low level. The behavioral modeling of the SiGe-Gilbert-mixer represented aspecial challenge. Due to restricted output power of the integrated 77GHz signal-source the mixer will be driven at the LO-compression edge. For this applicationstandard behavioral models can not be applied. Thus a new behavioral model hasbeen proposed whose structure was derived from the internal functional sections ofthe Gilbert-mixer. With the use of look-up tables containing simulation or measu-rement data the real behavior of the mixer could be accurately modelled. This hasbeen verified with a circuit model. With this approach the simulation time could beconsiderably reduced compared to the circuit model technique. Using the behavioralmodel instead of a circuit model in a typical simulation setup a time related gain ofabout 120 can be obtained.
The application of behavioral models in order to model the RF-frontend of thesensor allows for a statistic analysis of the compensation. For this analysis distribu-tion functions were assigned to the circuit parameters and Monte-Carlo simulationswere carried out. It could be demonstrated that the statistical mean and spread of theleakage signals can be considerably reduced by optimizing one or two transmissionlines of the transfer mixer architecture, respectively. By optimizing two transmis-sion lines a higher mean related gain can be obtained whereas by optimizing onetransmission line a higher spread related gain can be achieved. By optimizing twotransmission lines with a phase accuracy of 5 a median related gain for the DC-offset of 70,1 dB and for the RF-power of 22,4 dB can be achieved. Simultaneouslythe spread related gain for the DC-offset is 25 dB and for the RF-power is 8,3 dB.

Inhaltsverzeichnis
1 Einleitung 1
1.1 Motivation und Ziele der Arbeit . . . . . . . . . . . . . . . . . . . . . 4
1.2 Aufbau der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Grundlagen von FMCW-Radaren 7
2.1 Das FMCW-Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Analyse eines idealen FMCW-Sendesignals . . . . . . . . . . . . . . . 9
2.2.1 Rauschfreies Signal . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.2 Rauschbehaftetes Signal . . . . . . . . . . . . . . . . . . . . . 14
2.3 Die Radargleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.1 Herleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.2 Verlustfaktoren . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.3 Radarruckstreuquerschnitt . . . . . . . . . . . . . . . . . . . . 20
2.3.4 Signal-Rausch-Verhaltnis . . . . . . . . . . . . . . . . . . . . . 21
2.4 Herleitung der Zielparameter . . . . . . . . . . . . . . . . . . . . . . . 23
2.5 Basisbandverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.5.1 Analoge Vorverarbeitung . . . . . . . . . . . . . . . . . . . . . 26
2.5.2 Analog-Digital-Wandlung . . . . . . . . . . . . . . . . . . . . 27
2.5.3 Fensterung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5.4 FFT - Fast Fourier Transformation . . . . . . . . . . . . . . . 31
2.5.5 Spektrale Nachverarbeitung . . . . . . . . . . . . . . . . . . . 32
2.6 Transceiverarchitekturen . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.7 Eigenschaften der homodynen Mischung . . . . . . . . . . . . . . . . 37
2.7.1 Selbstmischung . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.7.2 Intermodulation . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.7.3 Flicker-Rauschen . . . . . . . . . . . . . . . . . . . . . . . . . 40
xi

xii INHALTSVERZEICHNIS
3 77 GHz SiGe-Schaltungsentwicklungen 43
3.1 Uberblick verschiedener SiGe-Technologien . . . . . . . . . . . . . . . 44
3.2 SiGe-Schaltungskomponenten fur Kfz-Radare . . . . . . . . . . . . . . 45
3.2.1 Aktive Mischer . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.2 Rauscharme Verstarker . . . . . . . . . . . . . . . . . . . . . . 47
3.2.3 Spannungsgesteuerte Oszillatoren . . . . . . . . . . . . . . . . 48
3.3 Passive, integrierte HF-Baugruppen . . . . . . . . . . . . . . . . . . . 49
3.4 HF-Architektur eines LRR3-Prototypen . . . . . . . . . . . . . . . . . 50
4 Modellierung von 77 GHz SiGe-Komponenten 55
4.1 Klassifizierung der Modelltypen . . . . . . . . . . . . . . . . . . . . . 55
4.2 Modellierung von Gilbert-Mischern . . . . . . . . . . . . . . . . . . . 56
4.2.1 Uberblick und Vorgehensweise . . . . . . . . . . . . . . . . . . 57
4.2.2 Schaltungsmodell . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.2.3 Verhaltensmodell . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3 Verhaltensmodellierung eines koplanaren Bondubergangs . . . . . . . 81
4.4 Verhaltensmodellierung passiver HF-Komponenten . . . . . . . . . . 83
4.5 Verhaltensmodellierung von Patchantennen . . . . . . . . . . . . . . . 86
5 Untersuchungen zum Leakage 91
5.1 Bedeutung fur Fahrerassistenz- und Sicherheitssysteme . . . . . . . . 91
5.2 Ursachen des Leakage . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.2.1 Reflexionen im TX-Pfad . . . . . . . . . . . . . . . . . . . . . 94
5.2.2 Reflexionen im LO-Pfad . . . . . . . . . . . . . . . . . . . . . 94
5.2.3 Direktes Leakage im Ratrace-Koppler und Gilbert-Mischer . . 95
5.3 Simulative Untersuchung des Leakage . . . . . . . . . . . . . . . . . . 96
5.3.1 Kalibrierung des Simulationssetups . . . . . . . . . . . . . . . 96
5.3.2 Simulationsergebnisse . . . . . . . . . . . . . . . . . . . . . . . 97
6 Leakage-Kompensation 105
6.1 Klassische Methoden zur Kompensation . . . . . . . . . . . . . . . . 105
6.2 Theoretische Betrachtung der TL-Optimierung . . . . . . . . . . . . . 106
6.2.1 Herleitung der Kompensationsbedingungen . . . . . . . . . . . 107
6.2.2 Analyse der TL-Optimierung . . . . . . . . . . . . . . . . . . 108
6.3 Simulative Untersuchung der TL-Optimierung . . . . . . . . . . . . . 118
6.3.1 Konzept und Vorgehen . . . . . . . . . . . . . . . . . . . . . . 118
6.3.2 Statistische Untersuchungen der TL-Optimierung . . . . . . . 119

INHALTSVERZEICHNIS xiii
7 Ausblick 125
Abkurzungen und Formelzeichen 127
Literaturverzeichnis 130

Kapitel 1
Einleitung
Uberlebenschancen steigern! - Das ist das Ziel passiver Sicherheitssysteme furdas Kfz, wie Airbag, Antiblockiersystem (ABS) oder Elektronisches Stabi-litatsprogramm (ESP), die wahrend der vergangenen Jahre Einzug in alle Fahr-zeugklassen, von der Premium- bis zur Kompaktklasse, gehalten haben. Dieser Ent-wicklung ist es sicher mit zu verdanken, dass die Anzahl der Straßenunfalle mit To-desfolge rucklaufig ist. So sank die Zahl der in Deutschland getoteten Pkw-Insassenpro gefahrenen Mrd. Kfz-km von 9,5 im Jahre 1996 auf 4,5 im Jahre 2006 (Quel-le: Statistisches Bundesamt). Um eine Stagnation des Ruckgangs der Verkehrstotenzu verhindern, mussen weiter neue Sicherheitssysteme entwickelt, zur Serienreifegefuhrt und in allen Fahrzeugklassen etabliert werden. Das Erreichen dieser Punkteist maßgeblich vom Kostenfaktor des Sicherheitssystems abhangig, so dass Low-costein Hauptmerkmal zukunftiger Sicherheitssysteme darstellen muss.
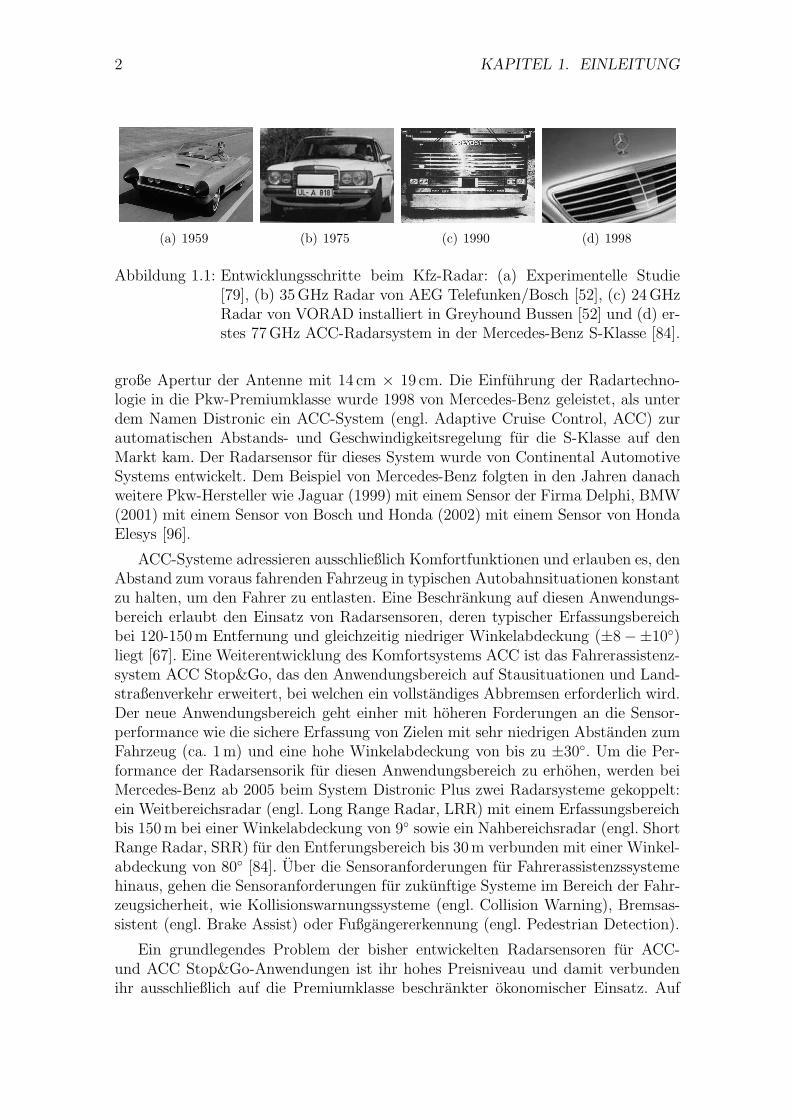
Unfalle vermeiden! - Das ist das Ziel zukunftiger Sicherheitssysteme im Kfz, wasim Vergleich zu bisherigen Ansatzen einen Paradigmenwechsel bedeutet [39]. Einegrundsatzliche Strategie zur Vermeidung von Unfallen ist die Fruherkennung von Ge-fahren und dadurch die Moglichkeit, die Reaktionszeit von Fahrer und Fahrzeug zuverlangern. Erreicht werden kann das durch den Einsatz von Sensoren auf Basis vonUltraschall, Infrarot, Radar, Lidar oder Video zur Uberwachung des Fahrzeugum-feldes. Der Einsatz von Radarsensoren zu diesem Zweck stellt dabei keinen neuenAnsatz dar, wie in Abbildung 1.1 aufgezeigt wird. Bereits in den spaten funfzigerJahren wurde die Radartechnologie auf experimenteller Basis in einem Zivilfahrzeuginstalliert um den Bereich vor dem Fahrzeug zu uberwachen. In Deutschland wurdein den siebziger Jahren von AEG Telefunken/Bosch erstmals ein experimenteller35GHz Radarsensor zur Kollisionsvermeidung vorgestellt. Das erste Radarsystem,das in signifikanter Stuckzahl in Serienfahrzeugen installiert und bei einer Frequenzvon 24GHz betrieben wurde, war das Kollisionswarnsystem VORAD (engl. VehicleOn-board RADar, VORAD), [95]. Ab 1990 wurde die gesamte Greyhound-Busflottedamit bestuckt, was im ersten Betriebsjahr zu einem Ruckgang der Unfalle umca. 25% fuhrte. Dass dieses Radarsystem damals keinen Einzug in den Pkw-Markthalten konnte, ist in technologischer Hinsicht auf zwei Dinge zuruckzufuhren: derhohe Preis des Systems, der sich auf ca. $ 3000 im Jahre 1995 belief und die relativ
1
2 KAPITEL 1. EINLEITUNG
(a) 1959 (b) 1975 (c) 1990 (d) 1998
Abbildung 1.1: Entwicklungsschritte beim Kfz-Radar: (a) Experimentelle Studie[79], (b) 35GHz Radar von AEG Telefunken/Bosch [52], (c) 24GHzRadar von VORAD installiert in Greyhound Bussen [52] und (d) er-stes 77GHz ACC-Radarsystem in der Mercedes-Benz S-Klasse [84].
große Apertur der Antenne mit 14 cm × 19 cm. Die Einfuhrung der Radartechno-logie in die Pkw-Premiumklasse wurde 1998 von Mercedes-Benz geleistet, als unterdem Namen Distronic ein ACC-System (engl. Adaptive Cruise Control, ACC) zurautomatischen Abstands- und Geschwindigkeitsregelung fur die S-Klasse auf denMarkt kam. Der Radarsensor fur dieses System wurde von Continental AutomotiveSystems entwickelt. Dem Beispiel von Mercedes-Benz folgten in den Jahren danachweitere Pkw-Hersteller wie Jaguar (1999) mit einem Sensor der Firma Delphi, BMW(2001) mit einem Sensor von Bosch und Honda (2002) mit einem Sensor von HondaElesys [96].
ACC-Systeme adressieren ausschließlich Komfortfunktionen und erlauben es, denAbstand zum voraus fahrenden Fahrzeug in typischen Autobahnsituationen konstantzu halten, um den Fahrer zu entlasten. Eine Beschrankung auf diesen Anwendungs-bereich erlaubt den Einsatz von Radarsensoren, deren typischer Erfassungsbereichbei 120-150m Entfernung und gleichzeitig niedriger Winkelabdeckung (±8 −±10)liegt [67]. Eine Weiterentwicklung des Komfortsystems ACC ist das Fahrerassistenz-system ACC Stop&Go, das den Anwendungsbereich auf Stausituationen und Land-straßenverkehr erweitert, bei welchen ein vollstandiges Abbremsen erforderlich wird.Der neue Anwendungsbereich geht einher mit hoheren Forderungen an die Sensor-performance wie die sichere Erfassung von Zielen mit sehr niedrigen Abstanden zumFahrzeug (ca. 1m) und eine hohe Winkelabdeckung von bis zu ±30. Um die Per-formance der Radarsensorik fur diesen Anwendungsbereich zu erhohen, werden beiMercedes-Benz ab 2005 beim System Distronic Plus zwei Radarsysteme gekoppelt:ein Weitbereichsradar (engl. Long Range Radar, LRR) mit einem Erfassungsbereichbis 150m bei einer Winkelabdeckung von 9 sowie ein Nahbereichsradar (engl. ShortRange Radar, SRR) fur den Entferungsbereich bis 30m verbunden mit einer Winkel-abdeckung von 80 [84]. Uber die Sensoranforderungen fur Fahrerassistenzssystemehinaus, gehen die Sensoranforderungen fur zukunftige Systeme im Bereich der Fahr-zeugsicherheit, wie Kollisionswarnungssysteme (engl. Collision Warning), Bremsas-sistent (engl. Brake Assist) oder Fußgangererkennung (engl. Pedestrian Detection).
Ein grundlegendes Problem der bisher entwickelten Radarsensoren fur ACC-und ACC Stop&Go-Anwendungen ist ihr hohes Preisniveau und damit verbundenihr ausschließlich auf die Premiumklasse beschrankter okonomischer Einsatz. Auf
3
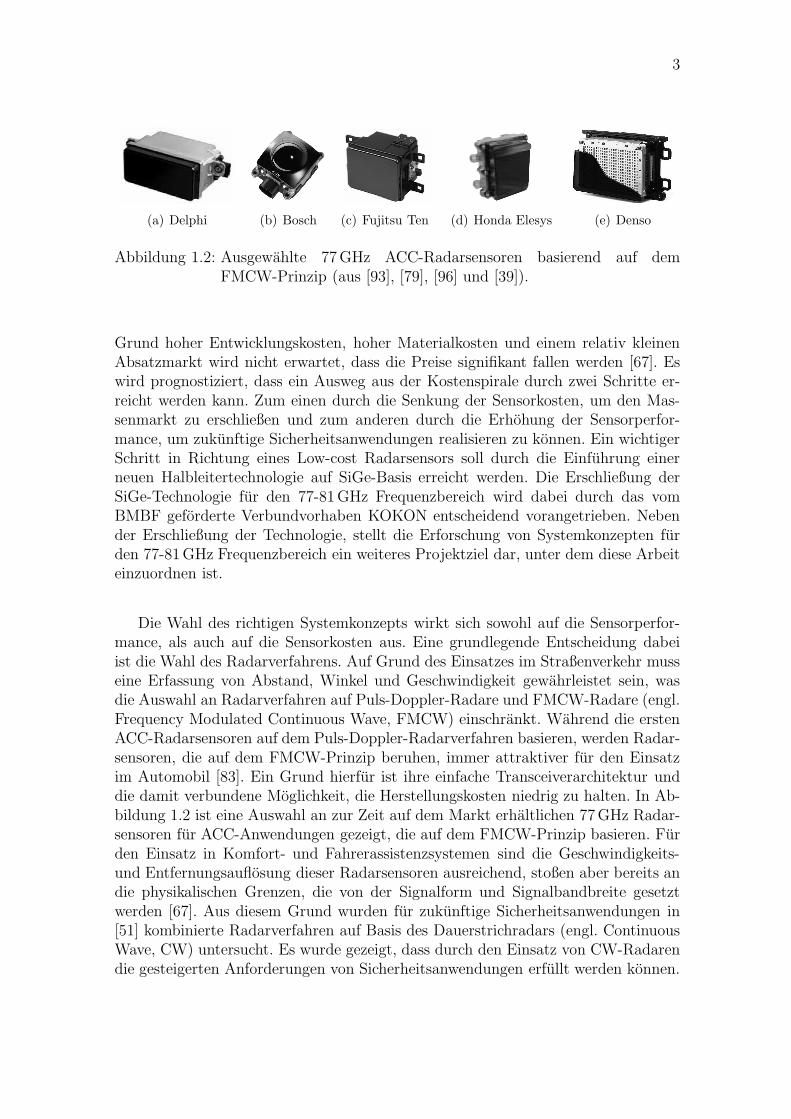
(a) Delphi (b) Bosch (c) Fujitsu Ten (d) Honda Elesys (e) Denso
Abbildung 1.2: Ausgewahlte 77GHz ACC-Radarsensoren basierend auf demFMCW-Prinzip (aus [93], [79], [96] und [39]).
Grund hoher Entwicklungskosten, hoher Materialkosten und einem relativ kleinenAbsatzmarkt wird nicht erwartet, dass die Preise signifikant fallen werden [67]. Eswird prognostiziert, dass ein Ausweg aus der Kostenspirale durch zwei Schritte er-reicht werden kann. Zum einen durch die Senkung der Sensorkosten, um den Mas-senmarkt zu erschließen und zum anderen durch die Erhohung der Sensorperfor-mance, um zukunftige Sicherheitsanwendungen realisieren zu konnen. Ein wichtigerSchritt in Richtung eines Low-cost Radarsensors soll durch die Einfuhrung einerneuen Halbleitertechnologie auf SiGe-Basis erreicht werden. Die Erschließung derSiGe-Technologie fur den 77-81GHz Frequenzbereich wird dabei durch das vomBMBF geforderte Verbundvorhaben KOKON entscheidend vorangetrieben. Nebender Erschließung der Technologie, stellt die Erforschung von Systemkonzepten furden 77-81GHz Frequenzbereich ein weiteres Projektziel dar, unter dem diese Arbeiteinzuordnen ist.
Die Wahl des richtigen Systemkonzepts wirkt sich sowohl auf die Sensorperfor-mance, als auch auf die Sensorkosten aus. Eine grundlegende Entscheidung dabeiist die Wahl des Radarverfahrens. Auf Grund des Einsatzes im Straßenverkehr musseine Erfassung von Abstand, Winkel und Geschwindigkeit gewahrleistet sein, wasdie Auswahl an Radarverfahren auf Puls-Doppler-Radare und FMCW-Radare (engl.Frequency Modulated Continuous Wave, FMCW) einschrankt. Wahrend die erstenACC-Radarsensoren auf dem Puls-Doppler-Radarverfahren basieren, werden Radar-sensoren, die auf dem FMCW-Prinzip beruhen, immer attraktiver fur den Einsatzim Automobil [83]. Ein Grund hierfur ist ihre einfache Transceiverarchitektur unddie damit verbundene Moglichkeit, die Herstellungskosten niedrig zu halten. In Ab-bildung 1.2 ist eine Auswahl an zur Zeit auf dem Markt erhaltlichen 77GHz Radar-sensoren fur ACC-Anwendungen gezeigt, die auf dem FMCW-Prinzip basieren. Furden Einsatz in Komfort- und Fahrerassistenzsystemen sind die Geschwindigkeits-und Entfernungsauflosung dieser Radarsensoren ausreichend, stoßen aber bereits andie physikalischen Grenzen, die von der Signalform und Signalbandbreite gesetztwerden [67]. Aus diesem Grund wurden fur zukunftige Sicherheitsanwendungen in[51] kombinierte Radarverfahren auf Basis des Dauerstrichradars (engl. ContinuousWave, CW) untersucht. Es wurde gezeigt, dass durch den Einsatz von CW-Radarendie gesteigerten Anforderungen von Sicherheitsanwendungen erfullt werden konnen.

4 KAPITEL 1. EINLEITUNG
1.1 Motivation und Ziele der Arbeit
Die Untersuchungen, die im Rahmen der vorliegenden Arbeit durchgefuhrt wur-den, sind innerhalb des KOKON-Projekts in Zusammenarbeit mit der Firma Boschentstanden und widmen sich der Weiterentwicklung des Weitbereichsradarsensorsder zweiten Generation LRR2 [36] mit ACC-Funktionalitat zum Radarsensor derdritten Generation LRR3 mit ACC Stop&Go-Funktionalitat. Wahrend der Hoch-frequenzteil des LRR2-Sensors diskret in einer Eindiodenmischer-Architektur auf-gebaut ist, sollen fur den LRR3-Sensor die wahrend des KOKON-Projekts ent-wickelten SiGe-Schaltungen zum Einsatz kommen. Das Ziel dabei ist eine moglichstvollstandige Integration der Hochfrequenzkomponenten auf einem SiGe-MMIC(engl. Monolithic Microwave Integrated Circuit, MMIC) zu erreichen. Sowohl derSensor LRR2 als auch der Sensor LRR3 verwenden als Radarverfahren das FMCW-Prinzip und gehoren folglich zu der Gruppe der CW-Radare. Auf Grund derpositiven Einschatzung der Einsetzbarkeit von CW-Radaren fur kommende Kfz-Sicherheitsanwendungen [51] sind die in dieser Arbeit durchgefuhrten Uberlegungenund Losungen auch fur zukunftige Systeme relevant.
Diese Arbeit widmet sich einer der großten Herausforderungen beim Design vonCW-Radaren [5], [83], [48], namlich der ausreichenden Isolation von Sende- undEmpfangspfad. Im Gegensatz zu Puls-Doppler-Radaren, bei denen Sende- und Emp-fangsvorgang zeitlich getrennt ablaufen, liegen bei CW-Radaren das Sendesignalrelativ hoher Leistung sowie das Empfangssignal, ublicherweise sehr niedriger Lei-stung, im Transceiver gleichzeitig vor. Bei unzureichender Isolation werden durchein uberkoppelndes starkes Sendesignal im Empfangspfad zwei Effekte hervorru-fen, welche beide die Empfangssensitivitat negativ beeinflussen. Zum Einen wirdder Arbeitspunkt des Mischers verschoben, so dass ein Uberschreiten des Linea-ritatsbereichs moglich ist. Zum anderen wird durch Selbstmischung im Basisbandein Gleichspannungsanteil erzeugt, der den Dynamikbereich des AD-Konverters ver-kleinert. Um die Anforderungen an die Sensorperformance zu erfullen, mussen bei-de Effekte moglichst verhindert werden. Die einfachste Methode, die Isolation vonSende- und Empfangspfad zu erhohen, ist die Wahl einer bistatischen Transceiver-architektur und damit die Trennung von Sende- und Empfangsantenne. Nachteiledieser Losung sind der zusatzliche Schaltungsaufwand und der erhohte Platzbedarfder Schaltung; beides Aspekte, die hinsichtlich des Low-cost Anspruchs des Radar-sensors sehr genau abgewogen werden mussen. Beim LRR3-Radartransceiver kannnicht vollstandig auf die monostatische Transceiverarchitektur verzichtet werden, sodass eine Alternativlosung gefunden werden muss, die fur eine ausreichende Isolationzwischen Sende- und Empfangspfad sorgt und gleichzeitig kostengunstig realisiertwerden kann.
Eine solche Losung wurde in dieser Arbeit mit Hilfe von Systemsimulationenerarbeitet. Hierfur war es zuerst notig, den HF-Teil des Radarsensors LRR3 zumodellieren, um die beschriebenen Effekte nachzuvollziehen und ihren Einfluss zuerfassen. Besonders die Modellierung des eingesetzten Gilbert-Mischers als zentralesaktives Bauelement im monostatischen FMCW-Radartransceiver stellt dabei eine

1.2. AUFBAU DER ARBEIT 5
besondere Herausforderung dar. Auf Grund der begrenzten Ausgangsleistung derintegrierten 77GHz-Signalquelle, deren Kernkomponente ein spannungsgesteuerterSiGe-Oszillator ist, wird der Mischer an der Grenze der Sattigung des LO-Eingangs(Lokal Oszillator, LO) betrieben. In diesem Bereich sind der Konversionsgewinnund die Rauschzahl des Mischers stark von der am LO-Eingang anstehenden Si-gnalleistung abhangig. Fur diesen Einsatz sind Standardmodelle fur Mischer nichtausgelegt, so dass fur eine genaue Beschreibung des Radarsensors ein individuellesMischermodell erstellt werden musste. Um den Simulationsaufwand niedrig zu hal-ten, wurde eine Verhaltensmodellierung bevorzugt. Das erlaubte im Anschluss einesimulative Auswertung der Parametereinflusse auf die Isolation zwischen Sende- undEmpfangspfad, sowie eine statistische Untersuchung der Losungsansatze.
1.2 Aufbau der Arbeit
Diese Arbeit ist wie folgt gegliedert: In Kapitel 2 werden die Radargrundlagenerortert, die fur das Verstandnis von FMCW-Radaren fur Kfz-Anwendungen notigsind. Im Anschluss widmet sich Kapitel 3 den aktuellen SiGe-Schaltungen, die furKfz-Radaranwendungen im 77GHz-Frequenzbereich entwickelt wurden. Dabei wirdeine Gegenuberstellung der Schaltungen hinsichtlich unterschiedlicher Performan-ceparameter, die fur die Modellierungen und Untersuchungen im Weiteren wich-tig sind, vorgenommen. In Kapitel 3 wird zudem die HF-Architektur eines LRR3-Prototypen vorgestellt, der im weiteren Verlauf dieser Arbeit naher untersuchtwird. In Kapitel 4 werden fur die simulative Untersuchung des LRR3-Prototypen,Modellierungen der Schaltungskomponenten hergeleitet. Nach einer Klassifizierungder moglichen Modelltypen wird zuerst die Modellierung des 77GHz SiGe-Gilbert-Mischers vorgestellt. Wichtige Erkenntnisse des Mischerverhaltens werden anhandeines Schaltungsmodells erarbeitet und im Anschluss ein Verhaltensmodell des Mi-schers hergeleitet. Es folgt die Verifikation des Verhaltensmodells und die Ermitt-lung der Modellperformance. Weitere Systemkomponenten, deren Modellierung inKapitel 4 vorgestellt wird, sind ein koplanarer Bondubergang, ein Ratrace-Koppler,ein Wilkinson-Leistungsteiler, sowie eine Patchantenne. Nach der Modellierung folgtin Kapitel 5 eine Untersuchung des Leakage bei Transfermischerarchitekturen. An-hand von simulativen Untersuchungen des LRR3-Prototypen werden die Auswir-kungen der Nichtidealitaten der Systemkomponenten auf den durch Selbstmischunggenerierten Gleichspannungsanteil betrachtet. Die Kompensation des Leakage beiTransfermischerarchitekturen wird schließlich in Kapitel 6 erortert. Nachdem klassi-sche Methoden zur Kompensation diskutiert wurden, wird eine Losung vorgestellt,die dem Low-cost Anspruch genugt und fur die Integration auf MMICs geeignetist. Durch eine analytische und simulative Betrachtung wird gezeigt, dass mit dieserLosung der Gleichspannungsanteil und die Wirkleistung am Mischereingang kom-pensiert werden kann. Durch Monte Carlo Simulationen wird dabei eine Prognosefur die Wirksamkeit der Kompensation gegeben.

6 KAPITEL 1. EINLEITUNG

Kapitel 2
Grundlagen von FMCW-Radaren
In diesem Kapitel werden die Radargrundlagen vorgestellt und spezielle Aspekte desFMCW-Radars theoretisch aufgearbeitet. Da auf Grund der Komplexitat von Ra-darsystemen in diesem Kapitel nicht alle Aspekte angesprochen werden konnen, istdie weiterfuhrende Literatur [4], [50], [66] und [82] fur eine umfassende Darstellungempfohlen.
Die theoretischen Betrachtungen beginnen mit der Einfuhrung in das Prinzip desFMCW-Radars. Anschließend wird das FMCW-Sendesignal analysiert und fur denidealen Fall ohne Rauschen der spektrale Verlauf dargestellt. Aus diesen Betrach-tungen lassen sich wichtige Parameter fur die Simulation von FMCW-Radaren ab-leiten. Weiterhin wird der Einfluss von Rauschen auf das Sendesignal mathematischbeschrieben und der Zusammenhang zum Phasen- und Amplitudenrauschen herge-stellt. Der folgende Abschnitt widmet sich der Leistungsbetrachtung von Radarsy-stemen mit Hilfe der Radargleichung. Durch die Einfuhrung geeigneter Verlustfak-toren kann eine genaue Abschatzung des Signal-Rausch-Verhaltnisses am Ausgangdes Transceivers vorgenommen werden. Danach wird aus Sende- und Empfangssi-gnal das FMCW-Basisbandsignal hergeleitet und die typische Basisbandverarbei-tung beim FMCW-Radar vorgestellt. Die fur diese Arbeit relevanten Transceiverar-chitekturen sowie wichtige Eigenschaften des homodynen Mischprinzips werden inweiteren Abschnitten erlautert.
2.1 Das FMCW-Prinzip
FMCW-Radare (engl. Frequency Modulated Continous Wave, FMCW) gehoren zuder Gruppe der Dauerstrichradare. Im Gegensatz zu reinen Pulsradaren vermogensie die Phasenbeziehung zwischen Sende- und Empfangssignal auszuwerten. Diesgeschieht durch die Aussendung eines zeitkontinuierlichen, frequenzmodulierten Si-gnals der Lange T , welches im Verhaltnis zur Signallaufzeit τ sehr lang ist (T ≫ τ).Die Signallaufzeit τ ist bestimmt durch den Abstand s des Ziels vom Radar undder Ausbreitungsgeschwindigkeit der elektromagnetischen Wellen im Raum c0. AufGrund der Signallange T und der dazu verhaltnismaßig kurzen Signallaufzeit τ liegen
7

8 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
sich Sende- und das Empfangssignal im Radartransceiver zeitgleich vor. Durch einegeeignete Auswertung beider Signale kann der Abstand und die Geschwindigkeit desZiels ermittelt werden.
Fur die Art der Frequenzmodulation sind eine Vielzahl von Funktionen wie dieSinusmodulation, die Rauschmodulation, die codierte Modulation und die linea-re Modulation (engl. Linear FMCW, LFMCW) moglich [82]. Eine Weiterentwick-lung der LFMCW-Radare stellen die so genannten LFMSK-Radare (engl. LinearFrequency Modulated Shift Keying, LFMSK) als eine Kombination des LFMCW-und FSK-Prinzips (engl. Frequency Shift Keying, FSK) dar [51]. In der Praxiswerden sehr haufig LFMCW-Radare eingesetzt, was durch ihre Vielseitigkeit unddie Moglichkeit, die Radarsignalverarbeitung relativ einfach im Frequenzbereichdurchfuhren zu konnen, bedingt ist [83]. Beim Sendesignalentwurf von LFMCW-Radaren stellen die Entfernungs- und Geschwindigkeitsauflosung sowie die Auflosungvon Mehrzielszenarien wichtige Optimierungskriterien dar. Freiheitsgrade fur denEntwurf sind dabei der Frequenzhub fhub der Modulation, die Modulationsdauer Tund die Anzahl der hintereinander gereihten Einzelmodulationen, so genannter Fre-quenzrampen. Auf die Zusammenhange wird in Abschnitt 2.5 naher eingegangen.Der Radarsensor LRR2 der Robert Bosch GmbH [36] verwendet als Sendesignal ei-ne Serie von drei linear modulierten Signalen, so genannten Frequenzrampen, mitunterschiedlichem Modulationshub und unterschiedlicher Rampendauer.
0
Frequenz
Zeitτ
fD
f1
f1
f2
f2
Abbildung 2.1: FMCW-Verfahren mit zwei Frequenzrampen zur Auflosung derEntfernungs- und Geschwindigkeitsmehrdeutigkeit.
Im Folgenden wird mit Hilfe eines Sendesignals, das sich aus zwei Frequenz-rampen zusammensetzt, das grundlegende FMCW-Prinzip erlautert (siehe Abbil-dung 2.1). Das Sendesignal wird zum Zeitpunkt t = 0 ausgesendet. Nach Reflexionan einem bewegten Ziel erreicht es das Radar um die Signallaufzeit τ verzogertund zusatzlich auf Grund des Dopplereffektes um die Frequenz fD verschoben. ImRadarsensor werden nun beide, ab dem Zeitpunkt t = τ gleichzeitig vorliegenden
2.2. ANALYSE EINES IDEALEN FMCW-SENDESIGNALS 9
Signale direkt ins Basisband abgemischt. Durch die Mischung ergeben sich die zeit-lich konstanten Differenzfrequenzen f1 und f2 zwischen Sende- und Empfangssignal.Durch Aufstellung eines Gleichungssystems unter Kenntnis der Rampenparameterund der Differenzfrequenzen lassen sich die Zielinformationen Abstand s und Ge-schwindigkeit v berechnen. In den folgenden Abschnitten wird nun naher auf dasbeschriebene FMCW-Prinzip eingegangen. Dazu wird zuerst die Frequenzrampe, alskleinste Einheit des FMCW-Sendesignals, isoliert betrachtet.
2.2 Analyse eines idealen FMCW-Sendesignals
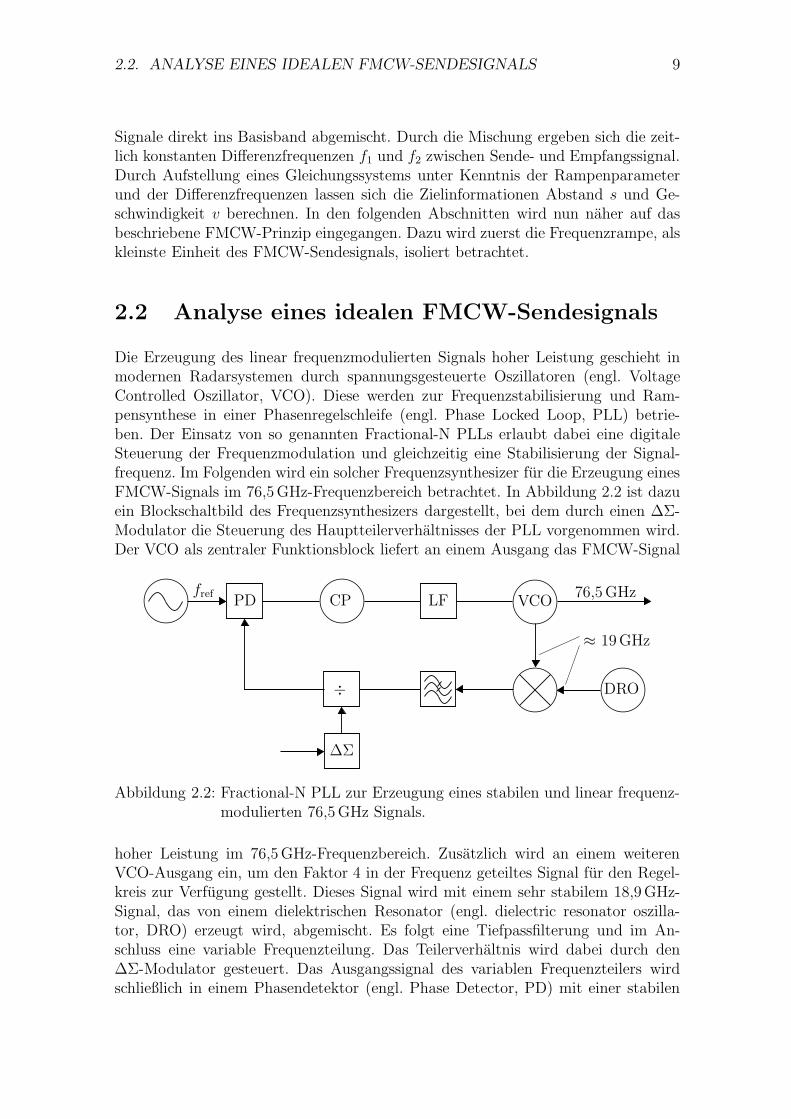
Die Erzeugung des linear frequenzmodulierten Signals hoher Leistung geschieht inmodernen Radarsystemen durch spannungsgesteuerte Oszillatoren (engl. VoltageControlled Oszillator, VCO). Diese werden zur Frequenzstabilisierung und Ram-pensynthese in einer Phasenregelschleife (engl. Phase Locked Loop, PLL) betrie-ben. Der Einsatz von so genannten Fractional-N PLLs erlaubt dabei eine digitaleSteuerung der Frequenzmodulation und gleichzeitig eine Stabilisierung der Signal-frequenz. Im Folgenden wird ein solcher Frequenzsynthesizer fur die Erzeugung einesFMCW-Signals im 76,5GHz-Frequenzbereich betrachtet. In Abbildung 2.2 ist dazuein Blockschaltbild des Frequenzsynthesizers dargestellt, bei dem durch einen ∆Σ-Modulator die Steuerung des Hauptteilerverhaltnisses der PLL vorgenommen wird.Der VCO als zentraler Funktionsblock liefert an einem Ausgang das FMCW-Signal
PD CP LF VCO
DRO÷
∆Σ
fref
≈ 19GHz
76,5GHz
Abbildung 2.2: Fractional-N PLL zur Erzeugung eines stabilen und linear frequenz-modulierten 76,5GHz Signals.
hoher Leistung im 76,5GHz-Frequenzbereich. Zusatzlich wird an einem weiterenVCO-Ausgang ein, um den Faktor 4 in der Frequenz geteiltes Signal fur den Regel-kreis zur Verfugung gestellt. Dieses Signal wird mit einem sehr stabilem 18,9GHz-Signal, das von einem dielektrischen Resonator (engl. dielectric resonator oszilla-tor, DRO) erzeugt wird, abgemischt. Es folgt eine Tiefpassfilterung und im An-schluss eine variable Frequenzteilung. Das Teilerverhaltnis wird dabei durch den∆Σ-Modulator gesteuert. Das Ausgangssignal des variablen Frequenzteilers wirdschließlich in einem Phasendetektor (engl. Phase Detector, PD) mit einer stabilen
10 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
Referenzfrequenz fref verglichen. Das Ausgangssignal des Phasendetektors, welcheswiederum eine Ladungspumpe (engl. Charge Pump, CP) treibt, ist dabei propor-tional zu der an seinen Eingangen anliegenden Differenzfrequenz. Ein Schleifenfilter(engl. loop filter, LF) schließt den Regelkreis und liefert die Steuerspannung fur denVCO.
Wichtige charakterisierende Großen des FMCW-Signals stellen die Modulations-linearitat, die Ausgangsleistung sowie das Phasenrauschen dar. Werden fur die PLLfolgende Annahmen getroffen, so kann eine relativ einfache Analyse des Phasenrau-schens durchgefuhrt werden [3]:
• die PLL ist gelockt,
• alle Rauschquellen in der Regelschleife sind unkorreliert,
• das Verhalten der Regelschleife ist linear, d.h. das Superpositionsprinzip istgultig,
• das DRO-Signal selbst besitzt ein sehr geringes Phasenrauschen weshalb dessenBeitrag vernachlassigt werden kann.
Das zweiseitige Phasenrauschspektrum des geregelten Ausgangssignals berechnetsich dann durch Addition der zweiseitigen Phasenrauschspektren der einzelnen Funk-tionsblocke der PLL:
Wφ (ωk) = Wφvco (ωk) +Wφdsm (ωk) +Wφpd (ωk) +Wφcp (ωk) +Wφfilter (ωk) (2.1)
mit den zweiseitigen Phasenrauschspektren des VCOs Wφvco, des Delta-Sigma-Modulators Wφdsm, des Phasendetektors Wφpd, der Ladungspumpe Wφcp und desSchleifenfilters Wφfilter. Eine ausfuhrliche Betrachtung des PLL-Verhaltens findet sichin [3]. An dieser Stelle wird das Phasenrauschen der einzelnen Funktionsblocke nichtnaher betrachtet, sondern das Gesamtrauschen am Ausgang der PLL untersucht. Zu-erst wird jedoch das ideale FMCW-Sendesignal untersucht und der spektrale Verlaufanalysiert. Hieraus konnen Erkenntnisse fur die Simulation von FMCW-Signalen ge-wonnen werden.
2.2.1 Rauschfreies Signal
Die Momentanfrequenz einer linearen Frequenzrampe kann durch eine Geradenglei-chung ausgedruckt werden:
f (t) =fhub
Tt+ f0 fur |t| ≤ T/2. (2.2)
Dabei stellt fhub den maximalen Frequenzhub und T die Rampendauer dar. DieTrager- bzw. Mittenfrequenz f0 liegt hier o.B.d.A. in der Mitte des Modulationsin-tervalls bei t = 0. Die beschriebene Frequenzrampe ist in Abbildung 2.3(a) veran-schaulicht. Aus Gleichung 2.2 lasst sich durch Integration die Phase des Zeitsignals
2.2. ANALYSE EINES IDEALEN FMCW-SENDESIGNALS 11
f0
t
f0 + fhub
2
T/2
f
(a)
t
RevV0
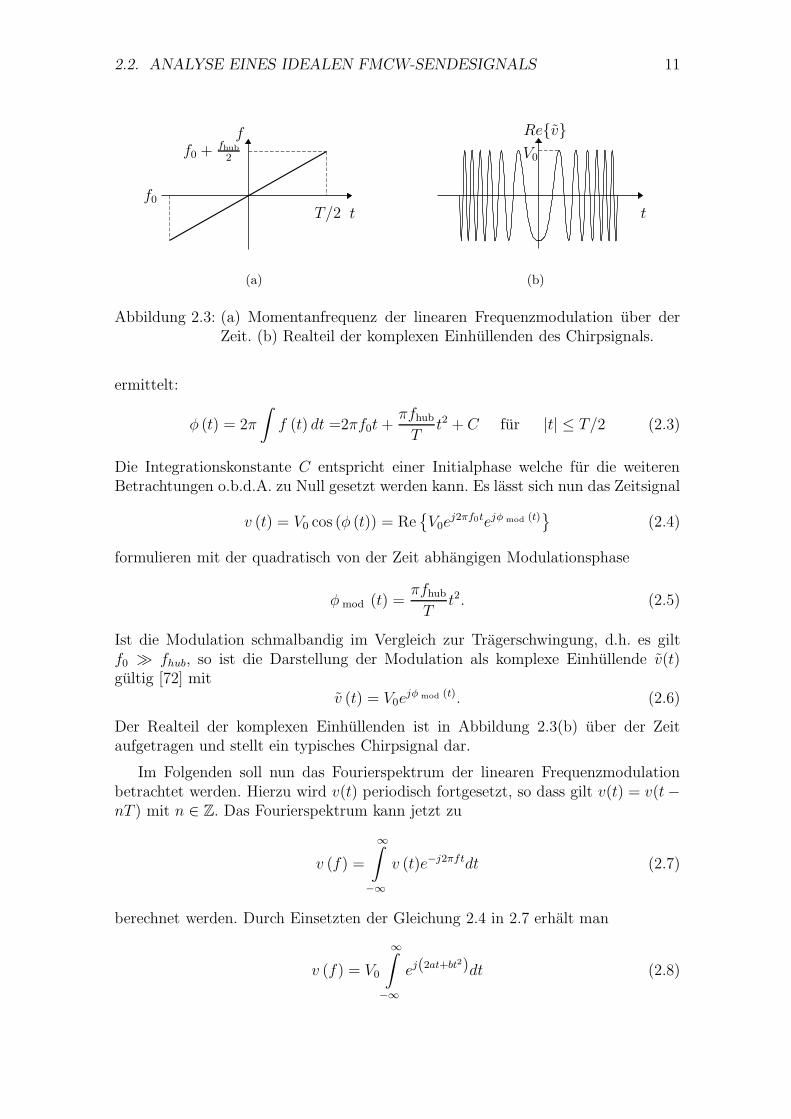
(b)
Abbildung 2.3: (a) Momentanfrequenz der linearen Frequenzmodulation uber derZeit. (b) Realteil der komplexen Einhullenden des Chirpsignals.
ermittelt:
φ (t) = 2π
∫
f (t) dt =2πf0t+πfhub
Tt2 + C fur |t| ≤ T/2 (2.3)
Die Integrationskonstante C entspricht einer Initialphase welche fur die weiterenBetrachtungen o.b.d.A. zu Null gesetzt werden kann. Es lasst sich nun das Zeitsignal
v (t) = V0 cos (φ (t)) = Re
V0ej2πf0tejφ mod (t)
(2.4)
formulieren mit der quadratisch von der Zeit abhangigen Modulationsphase
φ mod (t) =πfhub
Tt2. (2.5)
Ist die Modulation schmalbandig im Vergleich zur Tragerschwingung, d.h. es giltf0 ≫ fhub, so ist die Darstellung der Modulation als komplexe Einhullende v(t)gultig [72] mit
v (t) = V0ejφ mod (t). (2.6)
Der Realteil der komplexen Einhullenden ist in Abbildung 2.3(b) uber der Zeitaufgetragen und stellt ein typisches Chirpsignal dar.
Im Folgenden soll nun das Fourierspektrum der linearen Frequenzmodulationbetrachtet werden. Hierzu wird v(t) periodisch fortgesetzt, so dass gilt v(t) = v(t−nT ) mit n ∈ Z. Das Fourierspektrum kann jetzt zu
v (f) =
∞∫
−∞
v (t)e−j2πftdt (2.7)
berechnet werden. Durch Einsetzten der Gleichung 2.4 in 2.7 erhalt man
v (f) = V0
∞∫
−∞
ej(2at+bt2)dt (2.8)

12 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
x
C(x
),S
(x)
C(x)S(x)
0 1 2 3 4 50
0.2
0.4
0.6
0.8
(a)f/fhub
|v(t
)|2/A
indB
-1 -0.5 0 0.5 1-35
-30
-25
-20
-15
-10
-5
0
5
(b)
Abbildung 2.4: (a) Fresnel-Integrale (b) Normiertes Spektrum fur ein Zeit-Bandbreitenprodukt Tfhub = 100.
mit a = π(f0 − f) und b = πfhub/T . Das Integral in Gleichung 2.8 wird unterZuhilfenahme der integralen Zusammenhange [2]
∫
cos(
2at+ bt2)
dt =
√
π
2b
cos
(
a2
b
)
C (x) + sin
(
a2
b
)
S (x)
(2.9)
∫
sin(
2at+ bt2)
dt =
√
π
2b
cos
(
a2
b
)
S (x) + sin
(
a2
b
)
C (x)
(2.10)
mit x =√
2πb
(a+ bt) und den Fresnel-Integralen
C (x) =
x∫
0
cos
(
πt2
2
)
dt (2.11)
S (x) =
x∫
0
sin
(
πt2
2
)
dt (2.12)
gelost. Die Fresnel-Integrale sind in Abbildung 2.2 grafisch dargestellt. Es berechnetsich das quadrierte Amplitudenspektrum
|v (f)|2 = A
[C (x2) − C (x1)]2 + [S (x2) − S (x1)]
2 (2.13)
mit x1 = x(T/2), x2 = x(−T/2) und dem skalierenden Faktor
A =V 2
0 T
2fhub. (2.14)
In Abbildung 2.4(b) ist das auf den Faktor A normierte Spektrum fur f0 = 0Hzabgebildet. Das Spektrum kann in zwei Bereiche aufgeteilt werden. Der erste Be-reich ist der so genannte Inband-Bereich in dem das Spektrum nahezu konstant ist
2.2. ANALYSE EINES IDEALEN FMCW-SENDESIGNALS 13
f/fhub
Ain
dB
10−1 100-110
-100
-90
-80
-70
-60
-50
-40
-30
102
103
104
(a)
f/fhub
∑
f
|v(f
)|2/A
105
104
103
102
0.4 0.45 0.5 0.550.9
0.92
0.94
0.96
0.98
1
1.02
(b)
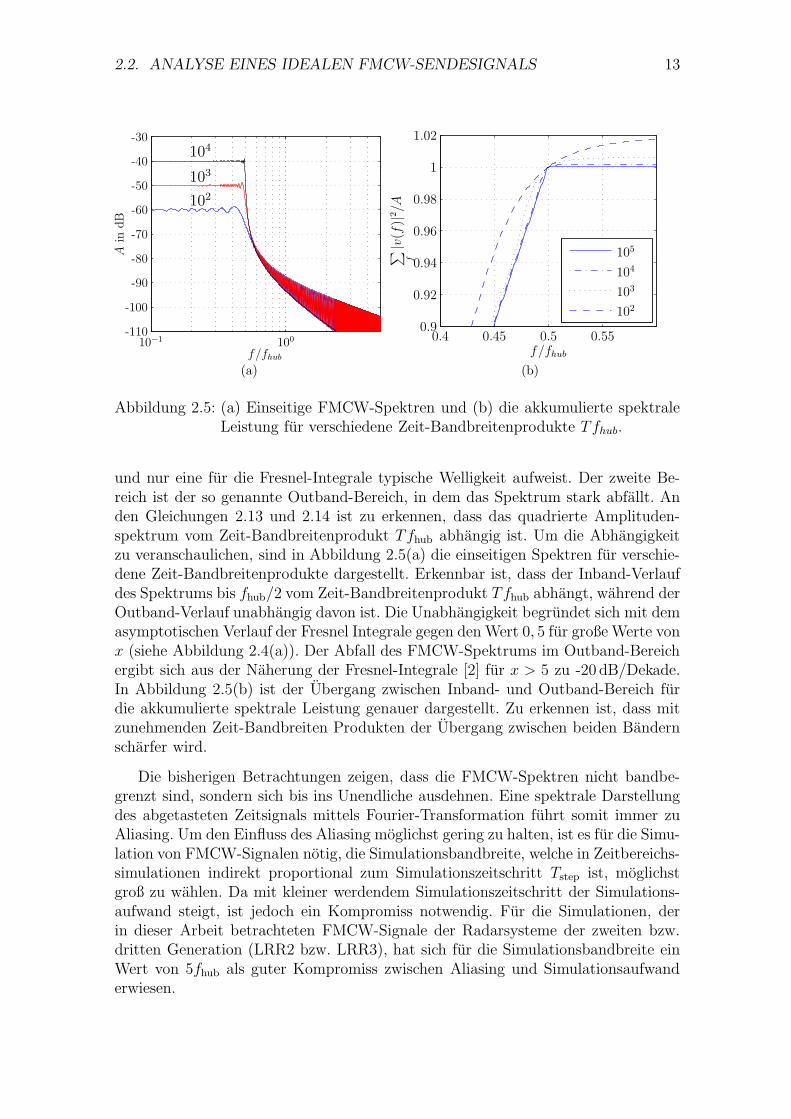
Abbildung 2.5: (a) Einseitige FMCW-Spektren und (b) die akkumulierte spektraleLeistung fur verschiedene Zeit-Bandbreitenprodukte Tfhub.
und nur eine fur die Fresnel-Integrale typische Welligkeit aufweist. Der zweite Be-reich ist der so genannte Outband-Bereich, in dem das Spektrum stark abfallt. Anden Gleichungen 2.13 und 2.14 ist zu erkennen, dass das quadrierte Amplituden-spektrum vom Zeit-Bandbreitenprodukt Tfhub abhangig ist. Um die Abhangigkeitzu veranschaulichen, sind in Abbildung 2.5(a) die einseitigen Spektren fur verschie-dene Zeit-Bandbreitenprodukte dargestellt. Erkennbar ist, dass der Inband-Verlaufdes Spektrums bis fhub/2 vom Zeit-Bandbreitenprodukt Tfhub abhangt, wahrend derOutband-Verlauf unabhangig davon ist. Die Unabhangigkeit begrundet sich mit demasymptotischen Verlauf der Fresnel Integrale gegen den Wert 0, 5 fur große Werte vonx (siehe Abbildung 2.4(a)). Der Abfall des FMCW-Spektrums im Outband-Bereichergibt sich aus der Naherung der Fresnel-Integrale [2] fur x > 5 zu -20 dB/Dekade.In Abbildung 2.5(b) ist der Ubergang zwischen Inband- und Outband-Bereich furdie akkumulierte spektrale Leistung genauer dargestellt. Zu erkennen ist, dass mitzunehmenden Zeit-Bandbreiten Produkten der Ubergang zwischen beiden Bandernscharfer wird.
Die bisherigen Betrachtungen zeigen, dass die FMCW-Spektren nicht bandbe-grenzt sind, sondern sich bis ins Unendliche ausdehnen. Eine spektrale Darstellungdes abgetasteten Zeitsignals mittels Fourier-Transformation fuhrt somit immer zuAliasing. Um den Einfluss des Aliasing moglichst gering zu halten, ist es fur die Simu-lation von FMCW-Signalen notig, die Simulationsbandbreite, welche in Zeitbereichs-simulationen indirekt proportional zum Simulationszeitschritt Tstep ist, moglichstgroß zu wahlen. Da mit kleiner werdendem Simulationszeitschritt der Simulations-aufwand steigt, ist jedoch ein Kompromiss notwendig. Fur die Simulationen, derin dieser Arbeit betrachteten FMCW-Signale der Radarsysteme der zweiten bzw.dritten Generation (LRR2 bzw. LRR3), hat sich fur die Simulationsbandbreite einWert von 5fhub als guter Kompromiss zwischen Aliasing und Simulationsaufwanderwiesen.

14 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
2.2.2 Rauschbehaftetes Signal
Nach der vorangegangenen Betrachtung des idealen FMCW-Sendesignals wird indiesem Abschnitt der Einfluss von Rauschen untersucht. Zunachst wird das Rau-schen allgemein betrachtet und dem FMCW-Sendesignal nach Gleichung 2.4 addi-tives Rauschen hinzugefugt. Nach [78] kann geschrieben werden:
v (t) = V0 cos (ω0t+ φ mod (t)) + n (t)
= [V0 + ∆v (t)] cos (ω0t+ φ mod (t) + ∆φ (t)) . (2.15)
Das additive Rauschsignal n(t) kann also in statistische Schwankungen der Ampli-tude ∆v(t) und der Phase ∆φ(t) getrennt werden wobei die Erwartungswerte derGroßen Null sind.
Der Zusammenhang zwischen n(t) und den statistischen Amplituden- und Pha-senschwankungen ∆v(t) und ∆φ(t) wird nun im Folgenden dargestellt. Hierfur istdie Betrachtung von Gleichung 2.15 in komplexer Form vorteilhaft, so dass nachUmformung geschrieben werden kann
v (t) = Re
V0
[
1 +∆v (t)
V0
]
ej[ω0t+φ mod (t)+∆φ(t)]
(2.16)
bzw.
v (t) = V0
[
1 +∆v (t)
V0
]
ej[φ mod (t)+∆φ(t)] (2.17)
als aquivalentes komplexes Basisbandsignal (ECB-Signal). Im Allgemeinen kann vonsehr kleinen Amplituden- und Phasenrauschschwankungen ausgegangen werden, sodass die Bedingungen ∆v(t)/V0 ≪ 1 und ∆φ(t) ≪ 1 erfullt sind. Fur kleine Ex-ponenten kann die Exponentialfunktion durch die Naherung ej∆φ(t) ≈ 1 + j∆φ(t)ersetzt werden [9] und Gleichung 2.17 vereinfacht sich zu
v (t) = V0ejφ mod (t)
(
1 +∆v (t)
V0
+ j∆φ (t)
)
(2.18)
unter Annahme der weiteren Vereinfachung ∆φ(t)∆v(t) ≈ 0. Im nachsten Schrittwird fur die Amplituden- und Phasenschwankungen ein Ansatz gewahlt, der sich auseiner anschaulichen Betrachtung eines Rauschprozesses im diskreten Spektralbereichherleitet. So kann ein Rauschprozess sehr genau durch eine hinreichend große AnzahlkN an Kosinus-Schwingungen nachgebildet werden, so dass
∆v (t) ≈kN∑
k=1
∆Vk cos (ωkt+ φak) (2.19)
∆φ (t) ≈kN∑
k=1
∆Φk cos (ωkt+ φbk) (2.20)
2.2. ANALYSE EINES IDEALEN FMCW-SENDESIGNALS 15
fk in Hz
Pss
bin
dB
c/H
z
Vorgabe
Simulation
Wφ
Wv
103 104 105 106-160
-140
-120
-100
-80
-60
-40
-20
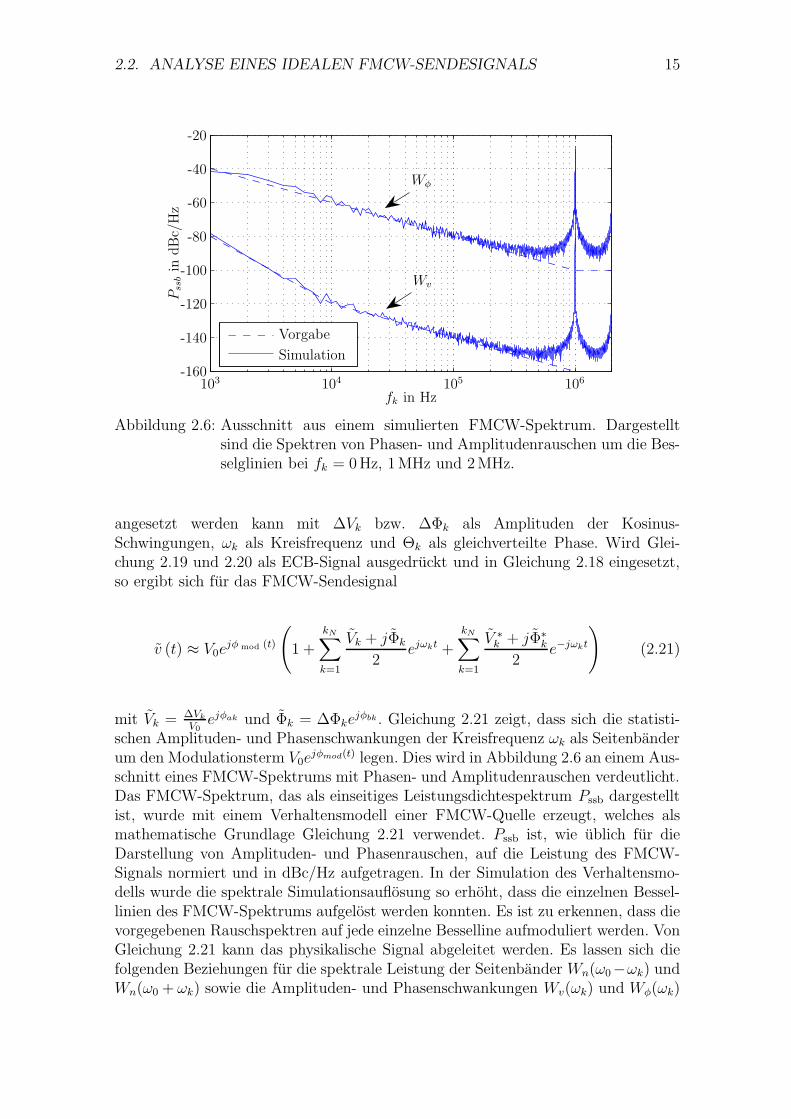
Abbildung 2.6: Ausschnitt aus einem simulierten FMCW-Spektrum. Dargestelltsind die Spektren von Phasen- und Amplitudenrauschen um die Bes-selglinien bei fk = 0Hz, 1MHz und 2MHz.
angesetzt werden kann mit ∆Vk bzw. ∆Φk als Amplituden der Kosinus-Schwingungen, ωk als Kreisfrequenz und Θk als gleichverteilte Phase. Wird Glei-chung 2.19 und 2.20 als ECB-Signal ausgedruckt und in Gleichung 2.18 eingesetzt,so ergibt sich fur das FMCW-Sendesignal
v (t) ≈ V0ejφ mod (t)
(
1 +
kN∑
k=1
Vk + jΦk
2ejωkt +
kN∑
k=1
V ∗k + jΦ∗
k
2e−jωkt
)
(2.21)
mit Vk = ∆Vk
V0ejφak und Φk = ∆Φke
jφbk . Gleichung 2.21 zeigt, dass sich die statisti-schen Amplituden- und Phasenschwankungen der Kreisfrequenz ωk als Seitenbanderum den Modulationsterm V0e
jφmod(t) legen. Dies wird in Abbildung 2.6 an einem Aus-schnitt eines FMCW-Spektrums mit Phasen- und Amplitudenrauschen verdeutlicht.Das FMCW-Spektrum, das als einseitiges Leistungsdichtespektrum Pssb dargestelltist, wurde mit einem Verhaltensmodell einer FMCW-Quelle erzeugt, welches alsmathematische Grundlage Gleichung 2.21 verwendet. Pssb ist, wie ublich fur dieDarstellung von Amplituden- und Phasenrauschen, auf die Leistung des FMCW-Signals normiert und in dBc/Hz aufgetragen. In der Simulation des Verhaltensmo-dells wurde die spektrale Simulationsauflosung so erhoht, dass die einzelnen Bessel-linien des FMCW-Spektrums aufgelost werden konnten. Es ist zu erkennen, dass dievorgegebenen Rauschspektren auf jede einzelne Besselline aufmoduliert werden. VonGleichung 2.21 kann das physikalische Signal abgeleitet werden. Es lassen sich diefolgenden Beziehungen fur die spektrale Leistung der Seitenbander Wn(ω0−ωk) undWn(ω0 + ωk) sowie die Amplituden- und Phasenschwankungen Wv(ωk) und Wφ(ωk)

16 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
formulieren:
Wn (ω0 − ωk) =V 2
0
4[Wv (ωk) +Wφ (ωk) + 2Im Wvφ (ωk)] (2.22)
Wn (ω0 + ωk) =V 2
0
4[Wv (ωk) +Wφ (ωk) − 2Im Wvφ (ωk)] . (2.23)
Der Term Wvφ stellt dabei das Kreuzspektrum zwischen Amplituden- und Phasen-term dar. Eine messtechnische Erfassung des Kreuzspektrums ist nur mit großemAufwand moglich, weshalb es ublicherweise vernachlassigt wird [78]. Hiermit wurdeder Zusammenhang zwischen dem additiven Rauschen n(t) mit seiner spektralenLeistung Wn und den Amplituden- und Phasenschwankungen, aufgezeigt.
2.3 Die Radargleichung
Wahrend in den vorangegangenen Abschnitten die Signalform von FMCW-Radarenuntersucht wurde, widmet sich dieser Abschnitt einer linearen Leistungsbetrachtungder Radarsignale, die allgemein fur alle Signalformen gilt. Das Ziel dieses Abschnittsist die Herleitung einer Beziehung zwischen der Energie bzw. Leistung des gesendetenund empfangenen Signals. Diese Beziehung ist in der einschlagigen Literatur unterdem Begriff Radargleichung bekannt. Fur die folgenden Betrachtungen werden, wiein der Radartechnik ublich, Vereinfachungen angenommen:
• es wird von einer Freiraumausbreitung der Radarwellen in der Erdatmosphareausgegangen [6], d.h. der Raum ist leer außer dem Radar und seinen Zielen,
• Die Wellenausbreitung zwischen Sendeantenne und Empfangsantenne erfolgtbei gleicher Polarisation, d.h. die Reflexion an den Radarzielen verursacht keinePolarisationsanderung.
• die Radarziele stellen Punktziele dar, die die gemaß ihrer Ruckstrahlflacheeingesammelte Leistung isotrop wieder abstrahlen,
• die Radarziele befinden sich im Fernfeld der Antennen,
• die Radarantennen sind optimal auf das Ziel ausgerichtet.
2.3.1 Herleitung
Werden elektromagnetische Wellen von einer isotropischen Punktquelle abgestrahlt,so breiten sie sich gleichformig in alle Raumrichtungen aus und die Wellenfrontenbilden eine Kugeloberflache. Die Leistungsdichte St auf der Kugeloberflache in einerEntfernung s von der Punktquelle kann in Abhangigkeit der gesamten abgestrahltenLeistung Pt ausgedruckt werden:
Siso =Pt
4πs2. (2.24)

2.3. DIE RADARGLEICHUNG 17
Im Gegensatz zur isotropischen Abstrahlung bewirken Radarantennen ublicherweiseeine starke direktionale Abstrahlung der Wellen in eine gewunschte Raumrichtung.Diese Richtwirkung der Antenne wird durch den Antennengewinn G reprasentiert,der im Allgemeinen von den Raumwinkeln θ und φ abhangt und in Hauptstrahl-richtung maximal wird. Die Reprasentation der Richtwirkung durch den Antennen-gewinn ist fur den Fernfeldbereich (Fraunhofer Region) gultig, der ab einem Ziel-abstand von sff = 2D2/λ angenommen werden darf. Der Parameter D stellt dabeidie großte Apertur der Antenne dar. Fur niedrigere Zielabstande als die Rayleigh-Distanz D2/λ ist der Antennengewinn vom Zielabstand abhangig.
Fur Antennensysteme, die in modernen Kfz-Radarsensoren zum Einsatz kommenund aus Patchantennen, dielektrischen Fokusiereinheiten und Linsen bestehen, kannder Fernfeldabstand nur naherungsweise angegeben werden. Besitzt die dielektrischeLinse als großtes Element einen Durchmessers von 50mm, so errechnet sich bei77GHz ein Fernfeldabstand von sff = 1,28m.
Unter Einbezug des Gewinns Gt der Sendeantenne wird Gleichung 2.24 erweitertzu
St =PtGt
4πs2. (2.25)
Befindet sich in der Entfernung s vom Radarsystem ein Radarziel, das durch seinenRadarruckstreuquerschnitt σ reprasentiert wird (engl. Radar Cross Section, RCS),so wird vom Ziel eine Leistung
Pc = Stσ (2.26)
proportional zu σ aufgesammelt und, wie vereinfacht angenommen, isotrop reflek-tiert. Es ergibt sich hieraus am Ort der Empfangsantenne eine Leistungsdichte
Sr =Pc
4πs2. (2.27)
Aus der Leistungsdichte Sr erhalt man die vom Transceiver aufgesammelte Leistungbei angepasster Antenne durch Multiplikation mit der Antennenwirkflache Ar, diefur verlustbehaftete Antennen durch den Gewinn und der Wellenlange λ ausgedrucktwerden kann:
Pr = ArSr =Grλ
2
4πSr. (2.28)
Werden die Gleichungen 2.25-2.28 ineinander eingesetzt, so erhalt man die einfachsteForm der Radargleichung:
Pr = PtGtGrσλ
2
(4π)3 s4. (2.29)
Bei der Verwendung der Radargleichung ist zu beachten, dass nicht alle Parametervoneinander unabhangig sind. Gleichung 2.29 suggeriert beispielsweise eine qua-dratische Abhangigkeit der Empfangsleistung von der Wellenlange. Allerdings sindweitere Parameter (Pt, Gt, Gr, σ) von der Wellenlange abhangig, so dass eine Ana-lyse der Frequenzabhangigkeit mit der einfachen Form der Radargleichung nichtdurchgefuhrt werden kann. Eine Verallgemeinerung der Radargleichung gelingt mitso genannten Verlustfaktoren, welche im nachsten Abschnitt erortert werden.
18 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
2.3.2 Verlustfaktoren
In Abschnitt 2.3 wurden Vereinfachungen zur Herleitung der Radargleichung getrof-fen. Durch Einfuhrung so genannter Verlustfaktoren gelingt es, die Realitat besserabzubilden und die Fehler, die durch die Vereinfachungen gemacht werden, zu kom-pensieren. Alle Verlustfaktoren addieren sich zu einem gesamten Verlustfaktor Lges
welcher als Quotient in der Radargleichung Berucksichtigung findet, so dass 2.29erweitert werden kann:
Pr = PtGtGrσλ
2
(4π)3 s4Lges
. (2.30)
2.3.2.1 Wellenausbreitung
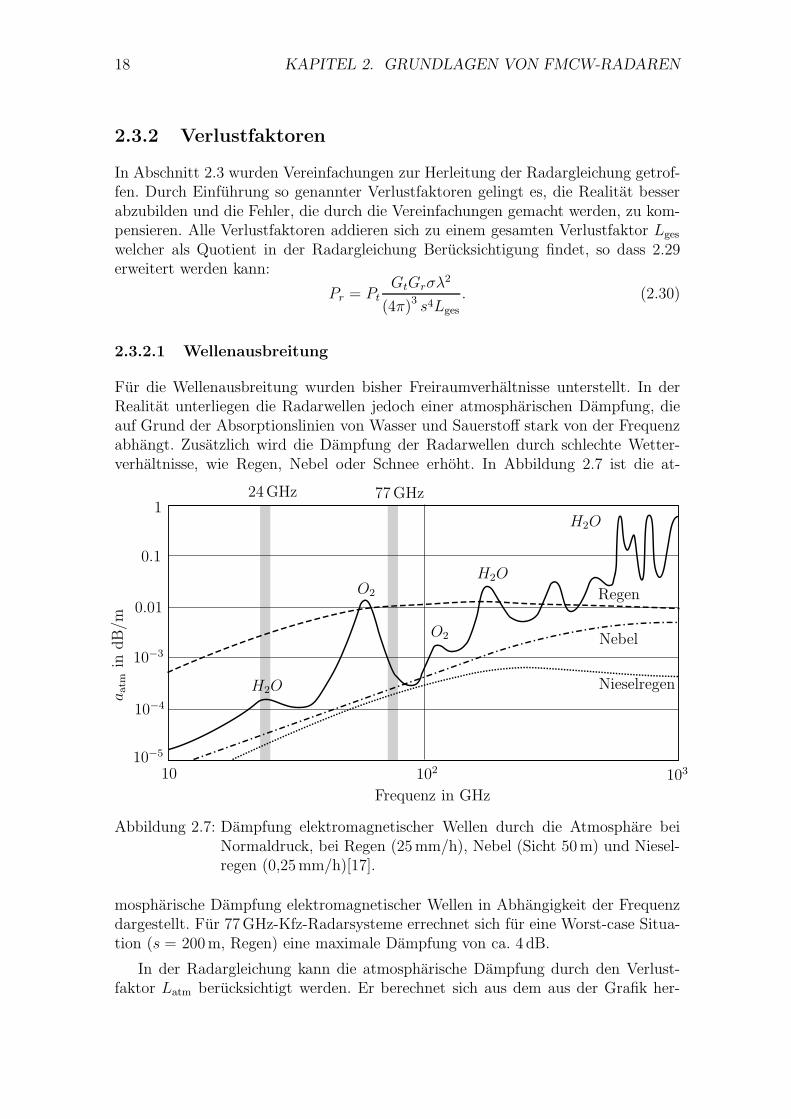
Fur die Wellenausbreitung wurden bisher Freiraumverhaltnisse unterstellt. In derRealitat unterliegen die Radarwellen jedoch einer atmospharischen Dampfung, dieauf Grund der Absorptionslinien von Wasser und Sauerstoff stark von der Frequenzabhangt. Zusatzlich wird die Dampfung der Radarwellen durch schlechte Wetter-verhaltnisse, wie Regen, Nebel oder Schnee erhoht. In Abbildung 2.7 ist die at-
10−5
10−4
10−3
0.01
0.1
1
10 102 103
Frequenz in GHz
aatm
indB
/m
Regen
Nebel
Nieselregen
O2
O2
H2O
H2O
H2O
24GHz 77GHz
Abbildung 2.7: Dampfung elektromagnetischer Wellen durch die Atmosphare beiNormaldruck, bei Regen (25mm/h), Nebel (Sicht 50m) und Niesel-regen (0,25mm/h)[17].
mospharische Dampfung elektromagnetischer Wellen in Abhangigkeit der Frequenzdargestellt. Fur 77GHz-Kfz-Radarsysteme errechnet sich fur eine Worst-case Situa-tion (s = 200m, Regen) eine maximale Dampfung von ca. 4 dB.
In der Radargleichung kann die atmospharische Dampfung durch den Verlust-faktor Latm berucksichtigt werden. Er berechnet sich aus dem aus der Grafik her-
2.3. DIE RADARGLEICHUNG 19
auszulesenden Wert aatm zu
Latm = 102saatm/10. (2.31)
2.3.2.2 Antenne
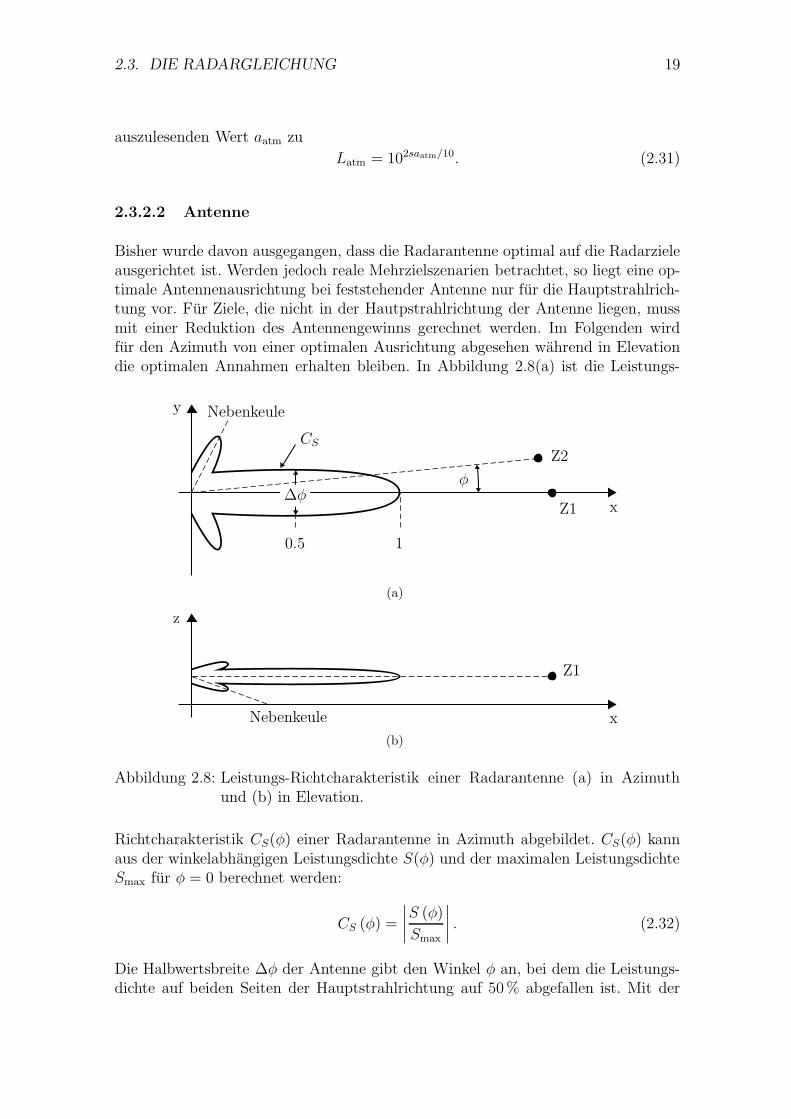
Bisher wurde davon ausgegangen, dass die Radarantenne optimal auf die Radarzieleausgerichtet ist. Werden jedoch reale Mehrzielszenarien betrachtet, so liegt eine op-timale Antennenausrichtung bei feststehender Antenne nur fur die Hauptstrahlrich-tung vor. Fur Ziele, die nicht in der Hautpstrahlrichtung der Antenne liegen, mussmit einer Reduktion des Antennengewinns gerechnet werden. Im Folgenden wirdfur den Azimuth von einer optimalen Ausrichtung abgesehen wahrend in Elevationdie optimalen Annahmen erhalten bleiben. In Abbildung 2.8(a) ist die Leistungs-
y
x
CS
∆φ
1
Z1
Z2
φ
0.5
Nebenkeule
(a)
z
x
Z1
Nebenkeule
(b)
Abbildung 2.8: Leistungs-Richtcharakteristik einer Radarantenne (a) in Azimuthund (b) in Elevation.
Richtcharakteristik CS(φ) einer Radarantenne in Azimuth abgebildet. CS(φ) kannaus der winkelabhangigen Leistungsdichte S(φ) und der maximalen LeistungsdichteSmax fur φ = 0 berechnet werden:
CS (φ) =
∣
∣
∣
∣
S (φ)
Smax
∣
∣
∣
∣
. (2.32)
Die Halbwertsbreite ∆φ der Antenne gibt den Winkel φ an, bei dem die Leistungs-dichte auf beiden Seiten der Hauptstrahlrichtung auf 50% abgefallen ist. Mit der
20 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
Leistungs-Richtcharakteristik und dem maximalen Gewinn Gmax kann der win-kelabhangige Gewinn der Antenne ausgedruckt werden:
Gt/r (φ) = GmaxCS (φ) . (2.33)
In Abbildung 2.8(b) ist die Leistungsrichtcharakteristik der Antenne in Elevation ab-gebildet. Die Antenne befindet sich in einer definierten Hohe uber der Erdoberflache(z = 0). Um die Aufnahme von Straßenclutter uber die Hauptkeule zu verhindern,wird die Halbwertsbreite der Antenne in Elevation ∆θ moglichst klein dimensioniert.Dennoch wird uber Elevations-Nebenkeulen Straßenclutter aufgenommen.
2.3.3 Radarruckstreuquerschnitt
Wie Gleichung 2.29 zeigt, geht der Radarruckstreuquerschnitt σ in gleichem Maße indie Empfangsleistung Pr ein wie etwa der Antennengewinn oder die Sendeleistung.Aus diesem Grund ist es wunschenswert, σ moglichst exakt zu spezifizieren. Fur realeRadarziele ist dieses Vorhaben jedoch mit erheblichen Schwierigkeiten verbunden,da der Radarruckstreuquerschnitt von einer Vielzahl an Parametern abhangt [6]:
• Abmessung des Ziels,
• Zielform,
• elektrische Eigenschaften des Ziels,
• Frequenz der Radarwellen,
• Aspektwinkel und
• Polarisation.
Zur Spezifizierung des Radarruckstreuquerschnitts von Objekten im Straßenver-kehr wird die Abmessung des Ziels im Verhaltnis zur Radarauflosungszelle be-trachtet. Diese dreidimensionale Zelle definiert sich aus den Winkelauflosungen inAzimuth und Elevation sowie der Entfernungsauflosung des Radarsystems. Fur dieWinkelauflosungen werden in der Praxis als Naherungswerte die Halbwertsbreiten∆φ und ∆θ der Antenne angenommen. Die Entfernungsauflosung von FMCW-Radarsystemen wird durch die Frequenzauflosung der Basisbandauswertung be-stimmt. Fur Kfz-Radarsysteme liegen die Großen von Auflosungszellen und die Ab-messungen typischer Radarziele in der gleichen Großenordnung. Somit konnen dieZiele nicht mehr als Punktziele interpretiert werden, sondern bedurfen einer kom-plexeren Beschreibung. Hierauf wird in [22] naher eingegangen.
Um dennoch in der Praxis aussagekraftige, vergleichbare und reproduzierba-re Messungen bzw. Simulationen durchfuhren zu konnen, wird ublicherweise einStandardziel definiert. Als Standardziele werden bestimmte geometrische Formen

2.3. DIE RADARGLEICHUNG 21
Ziele σ in m2
Fußganger 1Pkw 100Lkw 200Winkelreflektor 5000
Tabelle 2.1: Radarruckstreuquerschnitte von Zielen im Straßenverkehr [80]. Als Ver-gleichswert dient der Winkelreflektor mit einer Flache von 78mm2 bei76,5GHz.
hergenommen (Kugel, Zylinder oder ebenen Flachen) fur die exakte mathema-tische Herleitungen des Radarruckstreuquerschnitts existieren [75]. Besonders ge-eignet als Standardziel ist der so genannte Winkelreflektor (engl. corner cube re-flector), der aus drei zueinander senkrecht stehenden Flachen aufgebaut ist. SeinRuckstreuquerschnitt ist in eingeschrankten Winkelbereichen nahezu unabhangigvom Aspektwinkel und von der Polarisation der einfallenden Welle und kann mit
σcc ≈4πA2
λ2(2.34)
angenahert werden [76]. Demnach ist σcc quadratisch von der projizierten Flachedes Winkelreflektors A abhangig. Weiterhin geht auch die Frequenz der Radarsigna-le quadratisch in den Ruckstreuquerschnitt des Winkelreflektors ein. Beispielhaftberechnet sich fur eine Frequenz von 76,5GHz und einer Flache von ca. 78mm2
ein typischer Ruckstreuquerschnitt von σcc = 5000. Wird fur ein FMCW-Radareine Tragerfrequenz von 76,5GHz und ein maximaler Frequenzhub von 200MHzangenommen, so errechnet sich nach Gleichung 2.34 fur den Ruckstreuquerschnittdes Winkelreflektors eine Variation von 0,5% uber dem gesamten Frequenzintervall.Das entspricht einer Anderung im hundertstel dB-Bereich weshalb die Frequenz-abhangigkeit im betrachteten Frequenzbereich in sehr guter Naherung vernachlassigtwerden und der Ruckstreuquerschnitt als konstant angenommen werden kann. In Ta-belle 2.1 sind ubliche Radarruckstreuquerschnitte von Zielen im Straßenverkehr demRuckstreuquerschnitt des Winkelreflektors gegenubergestellt.
2.3.4 Signal-Rausch-Verhaltnis
Mit der bisherigen Form der Radargleichung gelingt es, das Leisungsverhaltnisvon Sende- und Empfangssignal in einem Radarszenario darzustellen. Eine aus-sagekraftigere Charakterisierung der Radarperformance gelingt hingegen mit demSignal-Rausch-Verhaltnis (engl. Signal Noise Ratio, SNR), welches im Folgendennaher betrachtet wird. Hierzu sind in Abbildung 2.9 die Funktionsblocke eines Ra-darempfangers dargestellt. Die Antenne als erstes Element nimmt Rauschen aus derUmgebung gemaß ihrer Richtcharakteristik CS auf und tragt, bedingt durch ihreeigenen Verluste (Widerstandsrauschen), selbst zum Rauschen bei. Das aufgenom-mene Rauschen setzt sich aus mehreren Komponenten zusammen:
22 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
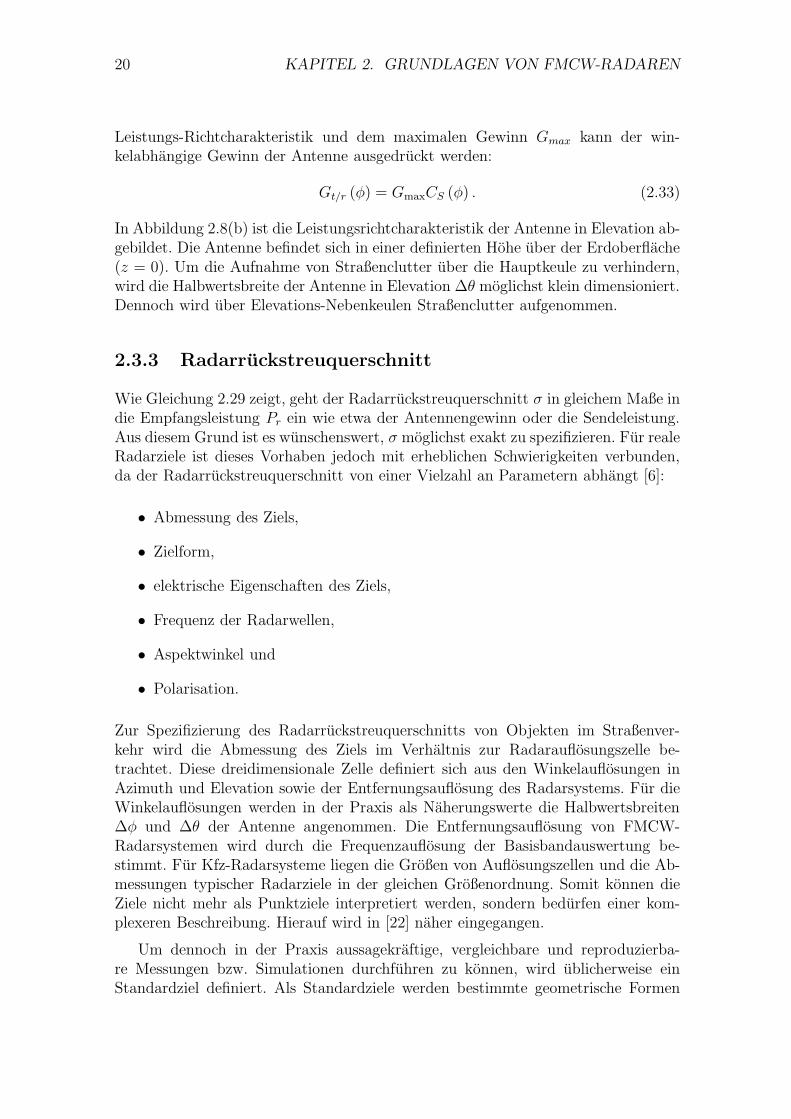
Antenne Zuleitung EmpfangerSNR
Systemrauschtemperatur Tsys
Abbildung 2.9: Blockschaltbild eines Radarempfangers zur Berechnung des SNR amEmpfangerausgang.
• Elektromagnetische Temperaturstrahlung aus der Atmosphare, dem Weltraum(galaktisches Rauschen) und dem Erdboden [4].
• Zielrauschen, gegliedert in: Amplitudenrauschen, Winkelrauschen, Entfer-nungsrauschen sowie Rauschen welches Polarisation und Dopplerfrequenz be-einflusst [81]. Das Zielrauschen wird im Folgenden nicht naher betrachtet.
• Rauschen des Sendesignals, welches am Ziel reflektiert und von der Empfangs-antenne aufgenommen wird.
Das Rauschen, welches in Form elektromagnetischer Temperaturstrahlung auf-genommen wird, ist im 24GHz bis 77GHz Frequenzbereich nach [42] vom at-mospharischen Rauschen dominiert. Es kann durch eine aquivalente Antennen-rauschtemperatur Ta gekennzeichnet werden, welche nach [6] bei 77GHz den Wert300K nicht uberschreitet. Werden zusatzlich die ohmschen Verluste der Anten-ne uber den Antennenwirkungsgrad ηa berucksichtigt, dann kann eine geanderteaquivalente Antennentemperatur T ′
a berechnet werden, die sich aus Ta und der phy-sikalischen Temperatur der Antenne Ttha
wie folgt berechnet:
T ′a = ηaTa + Ttha
(1 − ηa) . (2.35)
Nach der Antenne schließt eine Zuleitung an, welche durch ihren Verlustfaktor Lz
und ihre physikalische Temperatur Tthzcharakterisiert ist. Die Rauschtemperatur
der Zuleitung berechnet sich zu
Tz = Tthz(Lz − 1) . (2.36)
Das Rauschen des Empfangers wird durch seine Rauschzahl NF (engl. Noise Figure,NF) charakterisiert, die sich nach IEEE-Standard in die Rauschtemperatur
Tr = T0 (NF − 1) (2.37)
umrechnen lasst. Die Systemrauschtemperatur Tsys (siehe Abbildung 2.9) berechnetsich dann nach der Kettenrauschformel zu
Tsys = Ta + Tz + LzTr (2.38)
2.4. HERLEITUNG DER ZIELPARAMETER 23
und das SNR kann durch Kombination der Radargleichung 2.30 und Gleichung 2.38unter Annahme einer Rauschbandbreite Bn zu
SNR =Pr
kTsysBn=
PtGtGrσλ2
kTsysBn (4π)3 s4Lges
(2.39)
berechnet werden.
2.4 Herleitung der Zielparameter
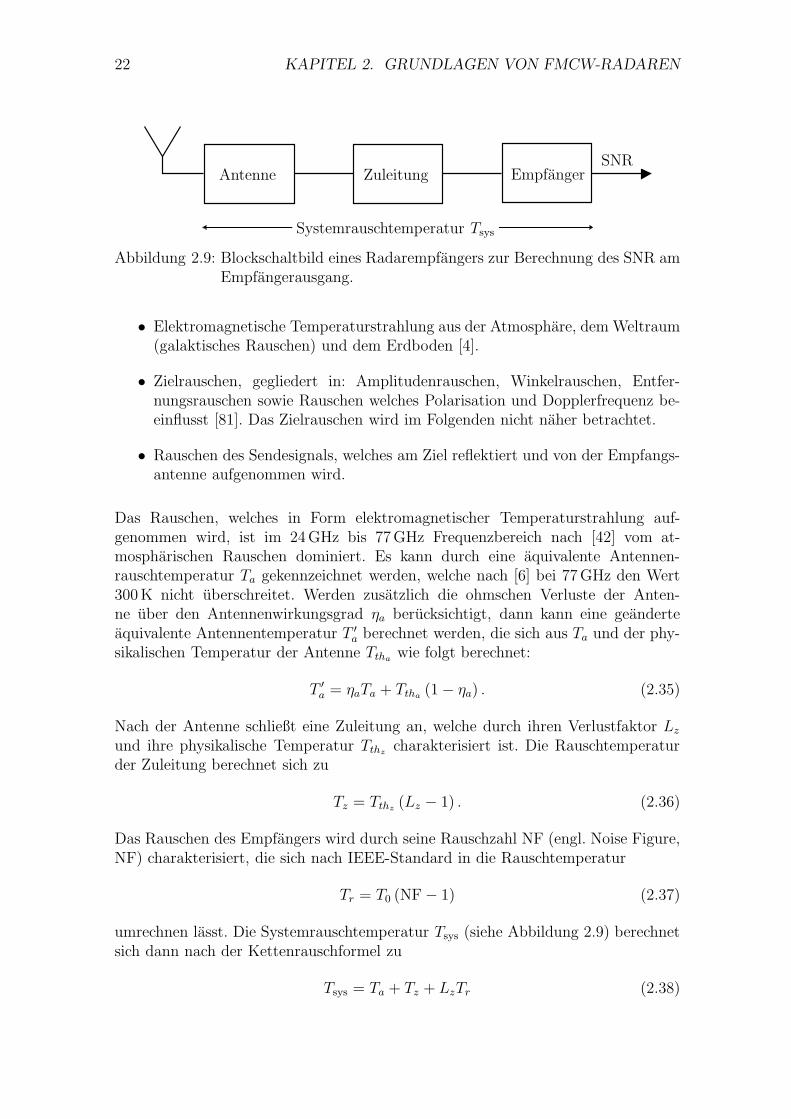
In diesem Abschnitt wird das in Abschnitt 2.1 erlauterte FMCW-Prinzip mathe-matisch betrachtet. Dazu wird das rauschfreie FMCW-Signal aus Gleichung 2.4 alsSendesignal eines Kfz-Radarsystems angenommen und ein Empfangssignal hergelei-tet, das durch Reflexion an einem einzelnen Ziel am Empfangereingang auftritt. ZurVeranschaulichung des zu betrachtenden Radar-Ziel-Szenarios wird Abbildung 2.10hergenommen. Ein Automobil, das mit einem Radarsystem R ausgestattet ist, be-wegt sich mit konstanter Geschwindigkeit vR fort. Ein Radarziel Z, z.B. ein weiteresAutomobil im Abstand s, beschreibt die gleiche Bewegungsrichtung mit der konstan-ten Geschwindigkeit vZ in einem Winkel φ in Azimuth. Da Objekte im Straßenver-kehr nur sehr kleine Beschleunigungen erfahren, wird im Folgenden die Beschleuni-gungskomponente vernachlassigt. Wird das Sendesignal v(t) von R ausgesendet, an
R
Z
vR
vZ
vZr
vRr
s
φ
Abbildung 2.10: Radar-Ziel-Szenario fur ein Kfz-Radarsystem.
Z reflektiert und von R wieder empfangen, so erfahrt es auf der Strecke 2s eine Zeit-verzogerung τ (t), die auf Grund der radialen Relativgeschwindigkeit vrel = vZr−vRr
zwischen R und Z zeitabhangig ist. Fur das Empfangssignal e(t) kann somit geschrie-ben werden:
e(t) =E0
V0v(t− τ(t)), (2.40)
mit E0 als Amplitude des Empfangssignals, V0 als Amplitude des Sendesignals und
τ (t) = τ0 +2vrel
ct (2.41)
als Signallaufzeit. Diese setzt sich aus einem konstanten Anteil τ0 = 2s0/c mit s0 =s(t = 0) und einem zeitvarianten Anteil zusammen. Das Empfangssignal e(t) wird imRadartransceiver mit dem Sendesignal v(t) direkt ins Basisband abgemischt. Unter

24 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
Annahme eines idealen Mischprozesses und einer anschließenden Tiefpassfilterungerhalt man das Basisbandsignal
b (t) =2B0
E0cos (2π ((fs + fD + fc (t)) t+ ψ)) rect
(
t− τmax
T− 1
2
)
(2.42)
mit B0 als Amplitude, τmax als Maximum der Signallaufzeit τ(t) wobei τmax = τ(T )fur vrel > 0 und τmax = τ0 fur vrel < 0. Weiterhin stellt ψ = τ0(f0−k/2τ0) einen kon-stanten Phasenterm dar, der keine Zielinformationen reprasentiert und aus diesemGrund fur die folgenden Betrachtungen vernachlassigt werden kann. Die Rechteck-funktion in Gleichung 2.42 beschreibt eine Maskierung auf das Zeitintervall, in demsowohl Sende- als auch Empfangssignal im Transceiver vorliegen. In Gleichung 2.42existiert ein entfernungsabhangiger Frequenzterm
fs =fhub
Tτ0
(
1 − 2vrel
c
)
(2.43)
und ein geschwindigkeitsabhangiger Frequenzterm
fD =2f0vrel
c. (2.44)
Letzterer kann auf den Dopplereffekt zuruckgefuhrt werden. Fur den dritten,zeitabhangigen Frequenzterm
fc (t) =2kvrel
c
(
1 − vrel
c
)
t (2.45)
sind zwei Interpretationen moglich [83]. Auf Grund der sich andernden Zielentfer-nung wahrend der Rampendauer, kann der Frequenzterm zum einen als Chirp auf derEntfernungskomponente aufgefasst werden. Zum anderen als Chirp auf der Dopp-lerfrequenz durch die sich andernde Sendefrequenz. Zum Ende der Rampendauer Twird der Frequenzterm fc(t) maximal und es lasst sich eine maximale spektrale Auf-weitung angeben, die sich fur die im Kfz-Bereich typischen Relativgeschwindigkeiten|vrel| = 0...80m/s sehr gut durch
Afc= fc(T ) ≈ 2vrelfhub
c(2.46)
annahern lasst. Die maximale spektrale Aufweitung darf nur sehr kleine Werte imVergleich zur Frequenzauflosung der FFT in der Basisbandverarbeitung annehmenum den Fehler bei der Frequenzauswertung gering zu halten. In [22] wird als zulassigeRichtgroße fur Afc
die doppelte Frequenzauflosung der FFT angegeben. Wird die-se Richtgroße nicht uberschritten, so kann der Frequenzterm fc(t) vernachlassigtwerden und das Basisbandsignal lasst sich schreiben als:
b (t) =2B0
E0
cos (2π (fs + fD) t) rect
(
t− τmax
T− 1
2
)
. (2.47)

2.5. BASISBANDVERARBEITUNG 25
Durch Fourier-Transformation erhalt man das komplexe Amplitudenspektrum vonb(t):
b (f) =B0T
E0
[sinc (πT (f + fs + fD)) + sinc (πT (f − fs − fD))] e−j2πf(τmax+T/2)
(2.48)mit der Sincfunktion sinc (x) = sin (x) /x.
Das Basisbandsignal b(t) am Mischerausgang dient als Eingangssignal fur dieBasisbandverarbeitung. Diese wird im nachsten Abschnitt erortert.
2.5 Basisbandverarbeitung
Die Basisbandverarbeitung hat in modernen Kfz-Weitbereichsradarsystemen eineVielzahl an Aufgaben. Sie kann grob in zwei Bereiche gegliedert werden. Im erstenBereich der sich direkt nach dem Mischer anschließt, wird jeder Radarkanal desFrontends parallel verarbeitet. Die wichtigsten Aufgaben dieses Bereichs sind:
• Digitalisierung der Analogsignale,
• Transformation in den Frequenzbereich,
• Ziel-Detektion und Interpolation.
Auf Grund der synchronen Ausfuhrung der Aufgaben ergeben sich hohe Anspruchean die Rechenleistung des digitalen Signalprozessors (DSP), welche einen limitieren-den Faktor beim Entwurf des Sendesignals darstellt. Nach Abarbeitung der Aufga-ben liegt fur jeden Kanal eine so genannte Zielliste vor. Die Ziellisten der einzelnenKanale werden dann im zweiten Bereich geeignet kombiniert (engl. matching) umZielinformationen, wie beispielsweise den Zielwinkel, zu ermitteln. Die wichtigstenAufgaben des zweiten Bereichs sind:
• Ziel-Matching: Mehrdeutigkeitsauflosung sowie Berechnung des Abstands, derRelativgeschwindigkeit und des Winkels fur jedes Radarziel,
• Tracking und Zielverfolgung: Kurspradiktion sowie Abstands- und Geschwin-digkeitsregelung bei ACC-Systemen,
• Datenaustausch uber CAN mit dem Fahrzeug.
Die Basisbandverarbeitung bis zur Auswertung von Entfernungs- und Geschwin-digkeitsinformationen wird im Folgenden naher betrachtet. In Abbildung 2.11 isthierzu eine Signalverarbeitungskette dargestellt, wie sie bei FMCW-Radaren zumEinsatz kommen kann.
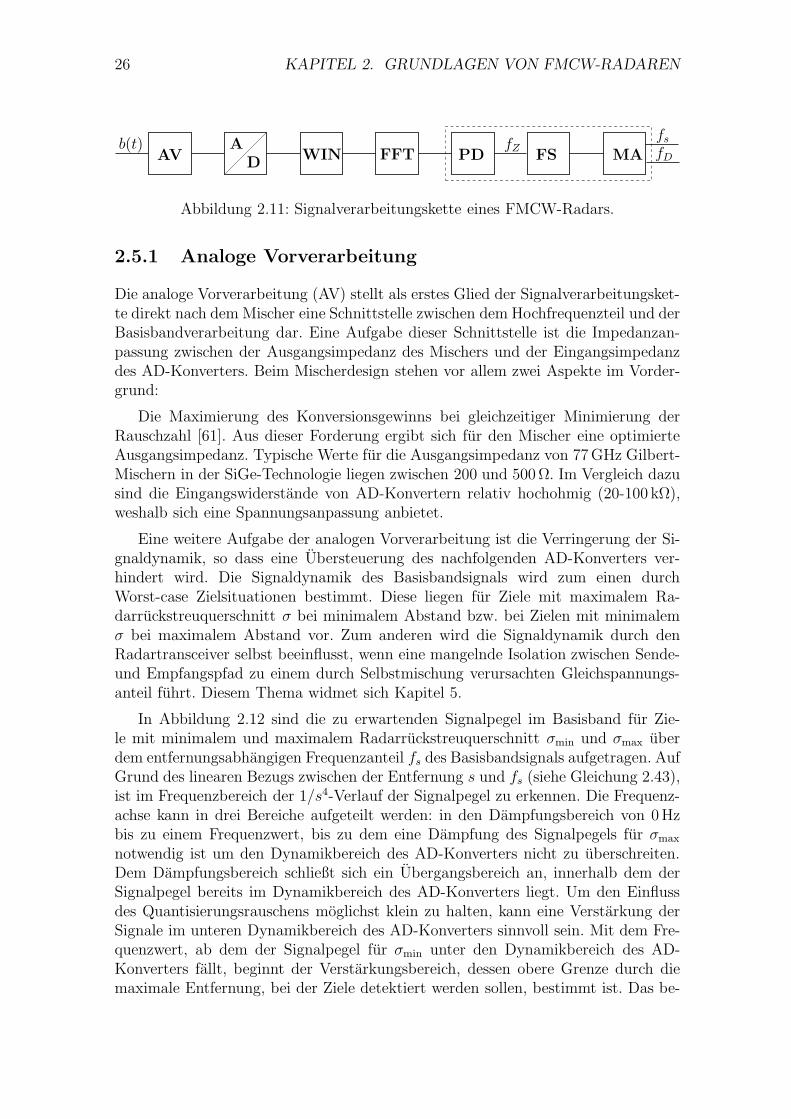
26 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
b(t) A
DWIN FFT PD FS MA
fZfs
fDAV
Abbildung 2.11: Signalverarbeitungskette eines FMCW-Radars.
2.5.1 Analoge Vorverarbeitung
Die analoge Vorverarbeitung (AV) stellt als erstes Glied der Signalverarbeitungsket-te direkt nach dem Mischer eine Schnittstelle zwischen dem Hochfrequenzteil und derBasisbandverarbeitung dar. Eine Aufgabe dieser Schnittstelle ist die Impedanzan-passung zwischen der Ausgangsimpedanz des Mischers und der Eingangsimpedanzdes AD-Konverters. Beim Mischerdesign stehen vor allem zwei Aspekte im Vorder-grund:
Die Maximierung des Konversionsgewinns bei gleichzeitiger Minimierung derRauschzahl [61]. Aus dieser Forderung ergibt sich fur den Mischer eine optimierteAusgangsimpedanz. Typische Werte fur die Ausgangsimpedanz von 77GHz Gilbert-Mischern in der SiGe-Technologie liegen zwischen 200 und 500Ω. Im Vergleich dazusind die Eingangswiderstande von AD-Konvertern relativ hochohmig (20-100 kΩ),weshalb sich eine Spannungsanpassung anbietet.
Eine weitere Aufgabe der analogen Vorverarbeitung ist die Verringerung der Si-gnaldynamik, so dass eine Ubersteuerung des nachfolgenden AD-Konverters ver-hindert wird. Die Signaldynamik des Basisbandsignals wird zum einen durchWorst-case Zielsituationen bestimmt. Diese liegen fur Ziele mit maximalem Ra-darruckstreuquerschnitt σ bei minimalem Abstand bzw. bei Zielen mit minimalemσ bei maximalem Abstand vor. Zum anderen wird die Signaldynamik durch denRadartransceiver selbst beeinflusst, wenn eine mangelnde Isolation zwischen Sende-und Empfangspfad zu einem durch Selbstmischung verursachten Gleichspannungs-anteil fuhrt. Diesem Thema widmet sich Kapitel 5.
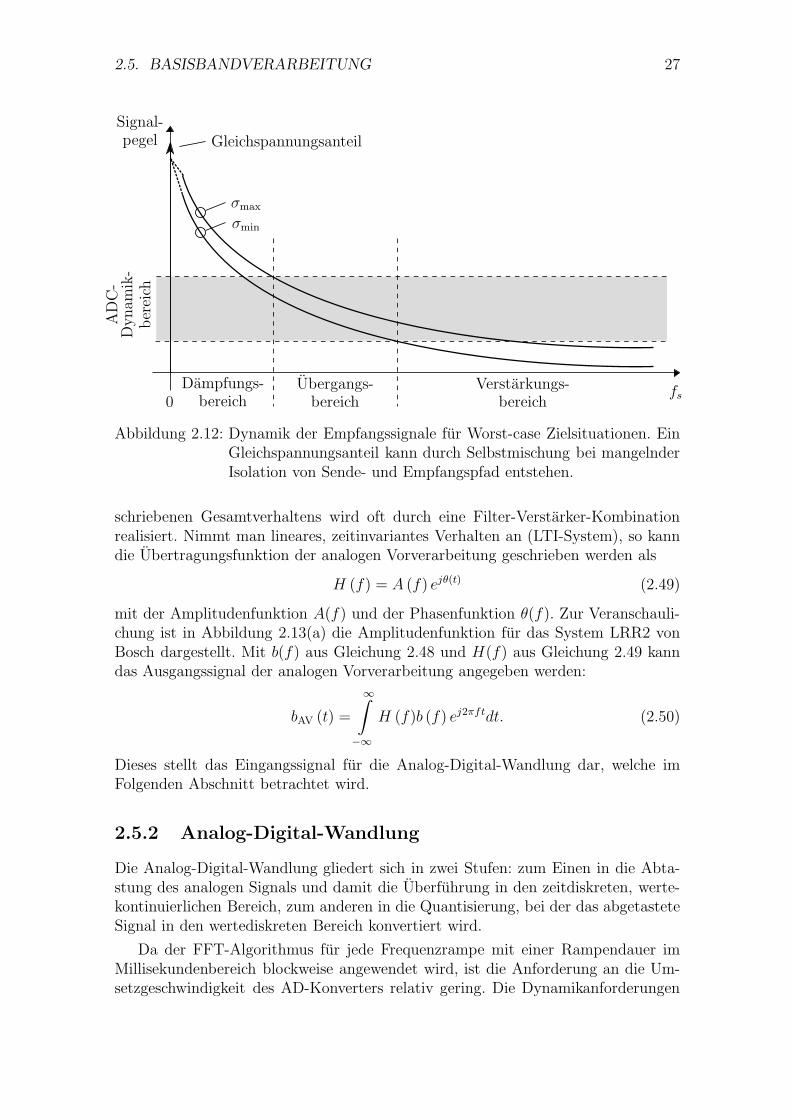
In Abbildung 2.12 sind die zu erwartenden Signalpegel im Basisband fur Zie-le mit minimalem und maximalem Radarruckstreuquerschnitt σmin und σmax uberdem entfernungsabhangigen Frequenzanteil fs des Basisbandsignals aufgetragen. AufGrund des linearen Bezugs zwischen der Entfernung s und fs (siehe Gleichung 2.43),ist im Frequenzbereich der 1/s4-Verlauf der Signalpegel zu erkennen. Die Frequenz-achse kann in drei Bereiche aufgeteilt werden: in den Dampfungsbereich von 0Hzbis zu einem Frequenzwert, bis zu dem eine Dampfung des Signalpegels fur σmax
notwendig ist um den Dynamikbereich des AD-Konverters nicht zu uberschreiten.Dem Dampfungsbereich schließt sich ein Ubergangsbereich an, innerhalb dem derSignalpegel bereits im Dynamikbereich des AD-Konverters liegt. Um den Einflussdes Quantisierungsrauschens moglichst klein zu halten, kann eine Verstarkung derSignale im unteren Dynamikbereich des AD-Konverters sinnvoll sein. Mit dem Fre-quenzwert, ab dem der Signalpegel fur σmin unter den Dynamikbereich des AD-Konverters fallt, beginnt der Verstarkungsbereich, dessen obere Grenze durch diemaximale Entfernung, bei der Ziele detektiert werden sollen, bestimmt ist. Das be-
2.5. BASISBANDVERARBEITUNG 27
0fs
Signal-pegel Gleichspannungsanteil
σmax
σmin
Dampfungs-bereich
Ubergangs-bereich
Verstarkungs-bereich
AD
C-
Dynam
ik-
ber
eich
Abbildung 2.12: Dynamik der Empfangssignale fur Worst-case Zielsituationen. EinGleichspannungsanteil kann durch Selbstmischung bei mangelnderIsolation von Sende- und Empfangspfad entstehen.
schriebenen Gesamtverhaltens wird oft durch eine Filter-Verstarker-Kombinationrealisiert. Nimmt man lineares, zeitinvariantes Verhalten an (LTI-System), so kanndie Ubertragungsfunktion der analogen Vorverarbeitung geschrieben werden als
H (f) = A (f) ejθ(t) (2.49)
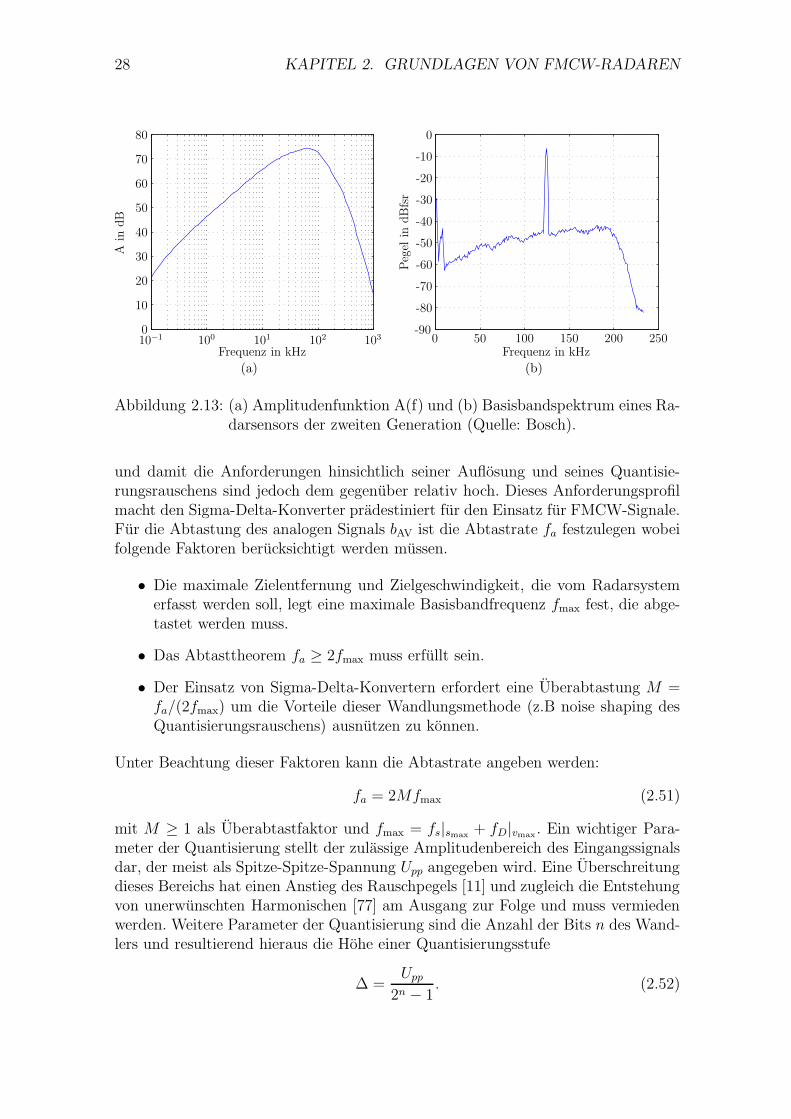
mit der Amplitudenfunktion A(f) und der Phasenfunktion θ(f). Zur Veranschauli-chung ist in Abbildung 2.13(a) die Amplitudenfunktion fur das System LRR2 vonBosch dargestellt. Mit b(f) aus Gleichung 2.48 und H(f) aus Gleichung 2.49 kanndas Ausgangssignal der analogen Vorverarbeitung angegeben werden:
bAV (t) =
∞∫
−∞
H (f)b (f) ej2πftdt. (2.50)
Dieses stellt das Eingangssignal fur die Analog-Digital-Wandlung dar, welche imFolgenden Abschnitt betrachtet wird.
2.5.2 Analog-Digital-Wandlung
Die Analog-Digital-Wandlung gliedert sich in zwei Stufen: zum Einen in die Abta-stung des analogen Signals und damit die Uberfuhrung in den zeitdiskreten, werte-kontinuierlichen Bereich, zum anderen in die Quantisierung, bei der das abgetasteteSignal in den wertediskreten Bereich konvertiert wird.
Da der FFT-Algorithmus fur jede Frequenzrampe mit einer Rampendauer imMillisekundenbereich blockweise angewendet wird, ist die Anforderung an die Um-setzgeschwindigkeit des AD-Konverters relativ gering. Die Dynamikanforderungen
28 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
Ain
dB
Frequenz in kHz10−1 100 101 102 1030
10
20
30
40
50
60
70
80
(a)
Frequenz in kHz
Peg
elin
dB
fsr
0 50 100 150 200 250-90
-80
-70
-60
-50
-40
-30
-20
-10
0
(b)
Abbildung 2.13: (a) Amplitudenfunktion A(f) und (b) Basisbandspektrum eines Ra-darsensors der zweiten Generation (Quelle: Bosch).
und damit die Anforderungen hinsichtlich seiner Auflosung und seines Quantisie-rungsrauschens sind jedoch dem gegenuber relativ hoch. Dieses Anforderungsprofilmacht den Sigma-Delta-Konverter pradestiniert fur den Einsatz fur FMCW-Signale.Fur die Abtastung des analogen Signals bAV ist die Abtastrate fa festzulegen wobeifolgende Faktoren berucksichtigt werden mussen.
• Die maximale Zielentfernung und Zielgeschwindigkeit, die vom Radarsystemerfasst werden soll, legt eine maximale Basisbandfrequenz fmax fest, die abge-tastet werden muss.
• Das Abtasttheorem fa ≥ 2fmax muss erfullt sein.
• Der Einsatz von Sigma-Delta-Konvertern erfordert eine Uberabtastung M =fa/(2fmax) um die Vorteile dieser Wandlungsmethode (z.B noise shaping desQuantisierungsrauschens) ausnutzen zu konnen.
Unter Beachtung dieser Faktoren kann die Abtastrate angeben werden:
fa = 2Mfmax (2.51)
mit M ≥ 1 als Uberabtastfaktor und fmax = fs|smax+ fD|vmax
. Ein wichtiger Para-meter der Quantisierung stellt der zulassige Amplitudenbereich des Eingangssignalsdar, der meist als Spitze-Spitze-Spannung Upp angegeben wird. Eine Uberschreitungdieses Bereichs hat einen Anstieg des Rauschpegels [11] und zugleich die Entstehungvon unerwunschten Harmonischen [77] am Ausgang zur Folge und muss vermiedenwerden. Weitere Parameter der Quantisierung sind die Anzahl der Bits n des Wand-lers und resultierend hieraus die Hohe einer Quantisierungsstufe
∆ =Upp
2n − 1. (2.52)

2.5. BASISBANDVERARBEITUNG 29
Durch die Quantisierung des analogen Signals in Stufen der Hohe ∆ entstehen Quan-tisierungsfehler, die, fur sich ausreichend schnell andernde Signale, durch weißesRauschen mit der Einseitenband-Rauschleistung
erms2 =
∆2
12(2.53)
modelliert werden konnen [11]. Durch Rauschformung (engl. noise shaping) reduziertsich das Quantisierungsrauschen beim Delta-Sigma-Wandler mit L Stufen innerhalbder betrachteten Signalbandbreite fmax auf
n20 = e2rms
π2L
2L+ 1
(
1
M
)2L+1
. (2.54)
Das Quantisierungsrauschen addiert sich zum Effektivwert des Systemrauschens Un
am Eingang des AD-Konverters. Druckt man das Systemrauschen als Vielfache meiner Quantisierungsstufe ∆ aus und betrachtet die Leistungsverhaltnisse, so kannein SNR-Verlust (Quantisierungsverlust) fur den AD-Konverter angegeben werden:
Lquant = 10 log
(
U2n + n2
0
U2n
)
dB =m2 + π2L
24L+12
(
1M
)2L+1
m2. (2.55)
Um abschatzen zu konnen, welchen Einfluss das Quantisierungsrauschen im Ver-gleich zum Systemrauschen hat, ist in Abbildung 2.14 der Quantisierungsverlustuber der Rauschleistungsdichte des Systemrauschens am Eingang von typischenAD-Konverter Realisierungen aufgetragen. Folgende Randparameter wurden fur diedargestellten Kurven angenommen: fmax = 500 kHz, fs = 20MHz, Rn = 200 Ωund Upp = 3V). Betrachtet man den Dynamikbereich eines AD-Konverters, so istdie obere Grenze durch die maximal zulassige Signalspannung Upp festgelegt. Dieuntere Grenze wird durch das Quantisierungsrauschen, Nichtlinearitaten des AD-Konverters, Jitter und das Rauschen der Stromversorgung bestimmt. Die gesamtenEinflusse der nicht idealen Effekte werden durch die Angabe der effektiven Bits neff
beschrieben. Hieraus lasst sich an Hand einer Faustformel der Dynamikbereich einesDelta-Sigma-Konverters naherungsweise angeben [77]:
D ≈ neff · 6,02 dB. (2.56)
Fur einen Wandler mit effektiven 13,5 bit Auflosung berechnet sich ein Dynamikbe-reich von ca. 80 dB.
Wie Gleichung 2.51 beschreibt, wird das Eingangssignal um den Faktor Muberabgetastet. Um die nachfolgende Transformation in den Frequenzbereich mit-tels FFT recheneffizient durchfuhren zu konnen, muss die Anzahl der Abtastwertereduziert und auf die nachstliegende Zweierpotenz erweitert werden, dass sich amAusgang des AD-Konverters eine digitale Zahlenfolge der Lange N = 2i mit i ∈ N
+
ergibt. Fur unterschiedliche Rampendauern wird dies mit Hilfe einer veranderlichenDezimazionsrate d ∈ N
+ realisiert. Es gilt der folgende Zusammenhang:
N =Tfa
d− v, (2.57)

30 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
Rauschleistungsdichte in dBm/Hz
Lquant
indB
1 Stufe,12Bit
1 Stufe,13Bit
1 Stufe,14Bit
2 Stufen,12Bit
2 Stufen,13Bit
-180 -175 -170 -165 -160 -155 -1500
0.5
1
1.5
2
Abbildung 2.14: Quantisierungsverlust uber der Rauschleistungsdichte am Eingangdes AD-Konverters fur verschiedene Realisierungen.
mit v als Anzahl der verworfenen Werte. Fur eine Rampendauer von T = 1msec,einer Abtastrate von fs = 20MHz und einer gewunschten LangeN = 1024 berechnetsich eine Dezimazionsrate d = 19 und ein Wert v = 28. Wird der AD-Konverter alsBlackbox betrachtet, so kann die eigentliche Abtastrate fs aus der Rampendauer Tund der Lange der Zahlenfolge N berechnet werden:
fs =N
T. (2.58)
Als digitales Ausgangssignal des AD-Konverters erhalt man also eine Folge
b [n] mit n = 0, 1, ..., N − 1. (2.59)
Nach der Analog-Digital-Wandlung schließt sich ein weiterer, rein digitaler Verar-beitungsblock an: die Fensterung.
2.5.3 Fensterung
Vor der Transformation in den Frequenzbereich ist eine Fensterung der Basisband-signale notig. Dadurch werden Leckeffekte unterdruckt, die durch die zeitliche Be-grenzung der Signale entstehen. Anschaulich lasst sich das am Basisbandsignal nachGleichung 2.47 und seiner dazugehorigen Fouriertransfomierten aus Gleichung 2.48zeigen. Die zeitliche Maskierung des Signals b(t) durch die Rechteckfunktion stelltim Frequenzbereich eine Faltung mit der Sinc-Funktion dar, deren Nebenzipfel dieFrequenzauswertung negativ beeinflussen konnen (Leckeffekt). Wird die Fenster-funktion im diskreten durch w[n] beschrieben, so kann die gefensterte Folge durch
bw [n] = w [n] b [n] (2.60)
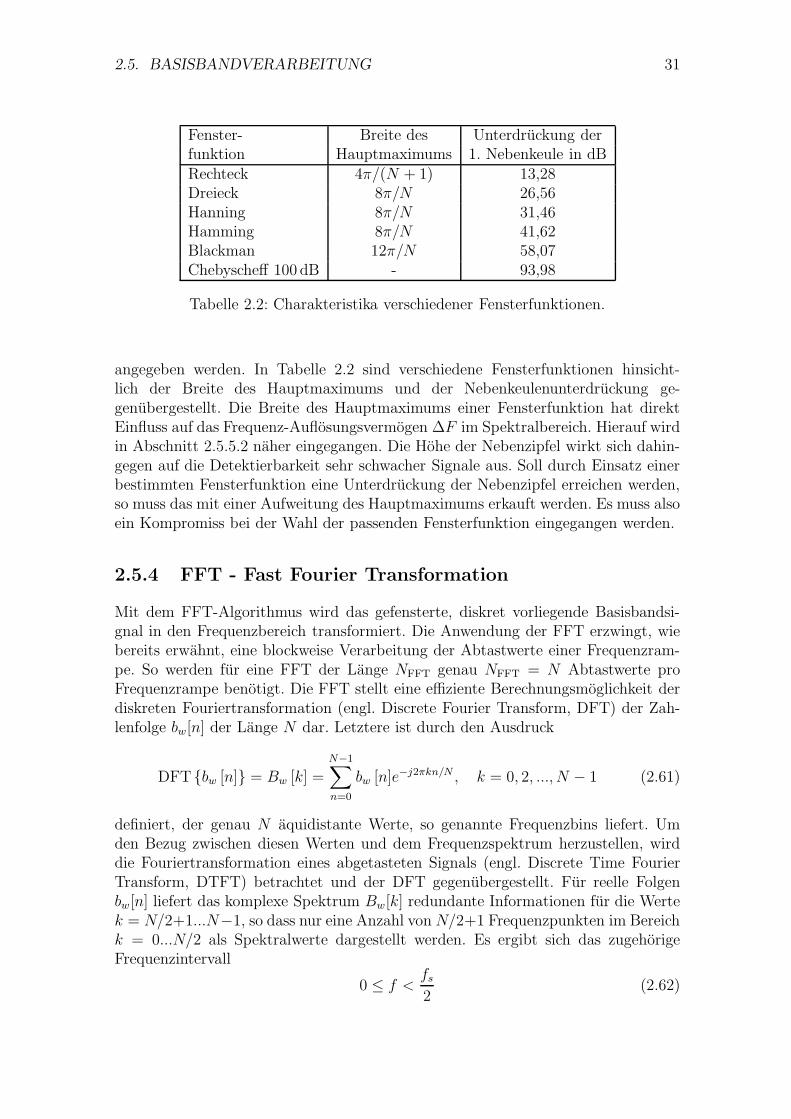
2.5. BASISBANDVERARBEITUNG 31
Fenster- Breite des Unterdruckung derfunktion Hauptmaximums 1. Nebenkeule in dBRechteck 4π/(N + 1) 13,28Dreieck 8π/N 26,56Hanning 8π/N 31,46Hamming 8π/N 41,62Blackman 12π/N 58,07Chebyscheff 100 dB - 93,98
Tabelle 2.2: Charakteristika verschiedener Fensterfunktionen.
angegeben werden. In Tabelle 2.2 sind verschiedene Fensterfunktionen hinsicht-lich der Breite des Hauptmaximums und der Nebenkeulenunterdruckung ge-genubergestellt. Die Breite des Hauptmaximums einer Fensterfunktion hat direktEinfluss auf das Frequenz-Auflosungsvermogen ∆F im Spektralbereich. Hierauf wirdin Abschnitt 2.5.5.2 naher eingegangen. Die Hohe der Nebenzipfel wirkt sich dahin-gegen auf die Detektierbarkeit sehr schwacher Signale aus. Soll durch Einsatz einerbestimmten Fensterfunktion eine Unterdruckung der Nebenzipfel erreichen werden,so muss das mit einer Aufweitung des Hauptmaximums erkauft werden. Es muss alsoein Kompromiss bei der Wahl der passenden Fensterfunktion eingegangen werden.
2.5.4 FFT - Fast Fourier Transformation
Mit dem FFT-Algorithmus wird das gefensterte, diskret vorliegende Basisbandsi-gnal in den Frequenzbereich transformiert. Die Anwendung der FFT erzwingt, wiebereits erwahnt, eine blockweise Verarbeitung der Abtastwerte einer Frequenzram-pe. So werden fur eine FFT der Lange NFFT genau NFFT = N Abtastwerte proFrequenzrampe benotigt. Die FFT stellt eine effiziente Berechnungsmoglichkeit derdiskreten Fouriertransformation (engl. Discrete Fourier Transform, DFT) der Zah-lenfolge bw[n] der Lange N dar. Letztere ist durch den Ausdruck
DFT bw [n] = Bw [k] =
N−1∑
n=0
bw [n]e−j2πkn/N , k = 0, 2, ..., N − 1 (2.61)
definiert, der genau N aquidistante Werte, so genannte Frequenzbins liefert. Umden Bezug zwischen diesen Werten und dem Frequenzspektrum herzustellen, wirddie Fouriertransformation eines abgetasteten Signals (engl. Discrete Time FourierTransform, DTFT) betrachtet und der DFT gegenubergestellt. Fur reelle Folgenbw[n] liefert das komplexe Spektrum Bw[k] redundante Informationen fur die Wertek = N/2+1...N−1, so dass nur eine Anzahl von N/2+1 Frequenzpunkten im Bereichk = 0...N/2 als Spektralwerte dargestellt werden. Es ergibt sich das zugehorigeFrequenzintervall
0 ≤ f <fs
2(2.62)

32 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
mit der Frequenzauflosung
∆f =fs
N=
1
T. (2.63)
In Abbildung 2.13(b) ist das Basisbandspektrum eines Einzielszenarios dargestellt.Das Spektrum wurde nach einer Fensterung mit einem 70 dB Tschebyscheff-Fensterdurch Anwendung einer FFT der Lange N = 512 gewonnen. Auf der Abszisse istder Signalpegel bezogen auf die Vollaussteuerung des AD-Konverters in dBfsr auf-getragen.
Durch Kombination der Gleichungen 2.63, 2.43 und 2.44 lassen sich die Entfer-nungsauflosung ∆s und die Geschwindigkeitsauflosung ∆vrel des FMCW-Radars wiefolgt angeben:
∆s =c
2fhub(2.64)
∆vrel =c
2f0T(2.65)
Fur die Herleitung der Entfernungsauflosung wurde eine Relativgeschwindigkeit vonvrel = 0 angenommen. Die Gleichungen 2.64 und 2.65 zeigen, dass die Entfernungs-auflosung und die Geschwindigkeitsauflosung fur großere Werte von fhub bzw. t hoherwird.
Die Frequenzauflosung ∆f des Spektrums gibt keinen endgultigen Aufschlussdaruber, mit welcher Genauigkeit die Zielinformationen bestimmt werden konnen.Durch Anwendung von Frequenzschatzmethoden kann die Auflosung des Systemserheblich gesteigert werden, so dass eine sehr genaue Bestimmung der Parametermoglich ist. Die Frequenzschatzung ist Bestandteil der spektralen Nachverarbeitung,die im nachsten Abschnitt naher betrachtet wird.
2.5.5 Spektrale Nachverarbeitung
Die spektrale Nachverarbeitung umfasst die Zieldetektion (PD), die Fre-quenzschatzung (FS) und die Mehrdeutigkeitsauflosung (MA), wie in Abbildung 2.11zu erkennen. Auf die einzelnen Aufgaben wird im Folgenden naher eingegangen.
2.5.5.1 Detektion
Das Basisbandsignal enthalt neben den Signalen, denen Ziele zugeordnet wer-den konnen (Zielsignale) auch durch Clutter, Echos oder Rauschen hervorgerufe-ne Storsignale. Die Aufgabe des Detektors ist es, Ziel- und Storsignale zu trennen.Wahrend die Detektion starker Zielsignale nahezu problemlos erfolgt, stellen schwa-che Ziele, die in der Großenordnung der Storsignale liegen, die eigentliche Heraus-forderung bei der Detektion dar [50]. Betrachtet man bei den Storsignalen nur dasRauschen und sieht von Clutter und Interferenzen ab, so ist das Signal-Rausch-Verhaltnis SNR ein Maß dafur, wie stark sich ein Signalpegel vom Storpegel abhebt.
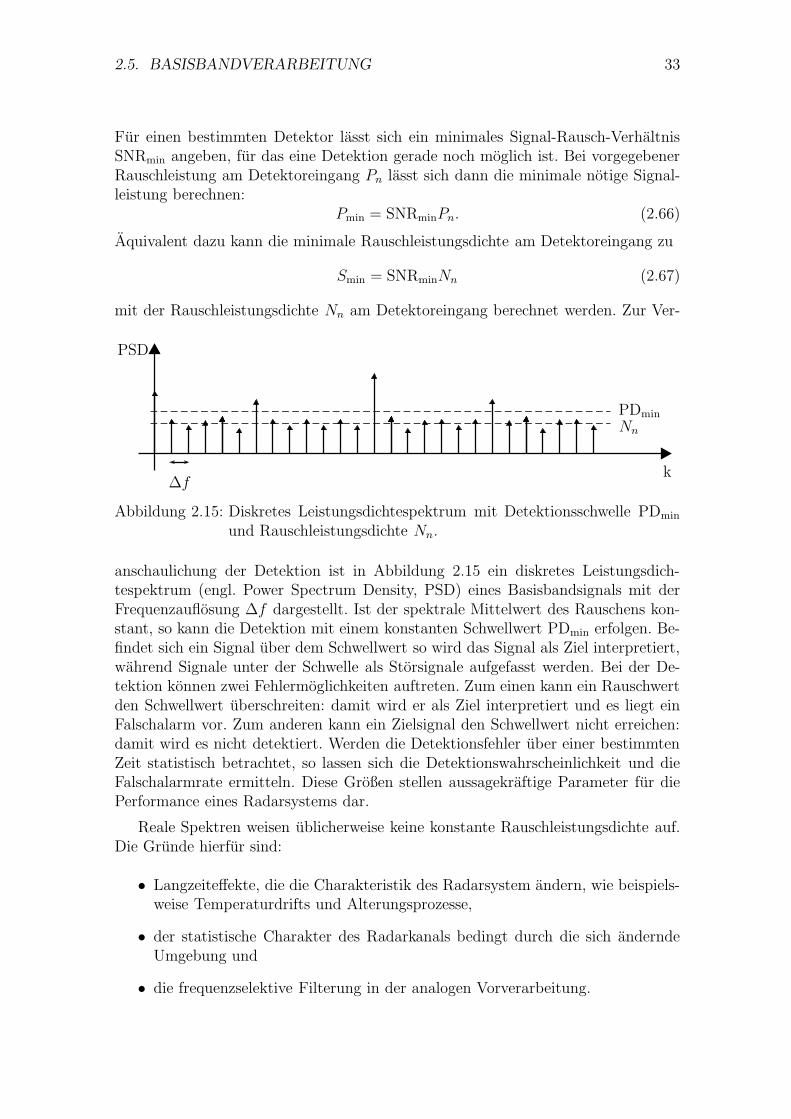
2.5. BASISBANDVERARBEITUNG 33
Fur einen bestimmten Detektor lasst sich ein minimales Signal-Rausch-VerhaltnisSNRmin angeben, fur das eine Detektion gerade noch moglich ist. Bei vorgegebenerRauschleistung am Detektoreingang Pn lasst sich dann die minimale notige Signal-leistung berechnen:
Pmin = SNRminPn. (2.66)
Aquivalent dazu kann die minimale Rauschleistungsdichte am Detektoreingang zu
Smin = SNRminNn (2.67)
mit der Rauschleistungsdichte Nn am Detektoreingang berechnet werden. Zur Ver-
PSD
k
Nn
PDmin
∆f
Abbildung 2.15: Diskretes Leistungsdichtespektrum mit Detektionsschwelle PDmin
und Rauschleistungsdichte Nn.
anschaulichung der Detektion ist in Abbildung 2.15 ein diskretes Leistungsdich-tespektrum (engl. Power Spectrum Density, PSD) eines Basisbandsignals mit derFrequenzauflosung ∆f dargestellt. Ist der spektrale Mittelwert des Rauschens kon-stant, so kann die Detektion mit einem konstanten Schwellwert PDmin erfolgen. Be-findet sich ein Signal uber dem Schwellwert so wird das Signal als Ziel interpretiert,wahrend Signale unter der Schwelle als Storsignale aufgefasst werden. Bei der De-tektion konnen zwei Fehlermoglichkeiten auftreten. Zum einen kann ein Rauschwertden Schwellwert uberschreiten: damit wird er als Ziel interpretiert und es liegt einFalschalarm vor. Zum anderen kann ein Zielsignal den Schwellwert nicht erreichen:damit wird es nicht detektiert. Werden die Detektionsfehler uber einer bestimmtenZeit statistisch betrachtet, so lassen sich die Detektionswahrscheinlichkeit und dieFalschalarmrate ermitteln. Diese Großen stellen aussagekraftige Parameter fur diePerformance eines Radarsystems dar.
Reale Spektren weisen ublicherweise keine konstante Rauschleistungsdichte auf.Die Grunde hierfur sind:
• Langzeiteffekte, die die Charakteristik des Radarsystem andern, wie beispiels-weise Temperaturdrifts und Alterungsprozesse,
• der statistische Charakter des Radarkanals bedingt durch die sich anderndeUmgebung und
• die frequenzselektive Filterung in der analogen Vorverarbeitung.
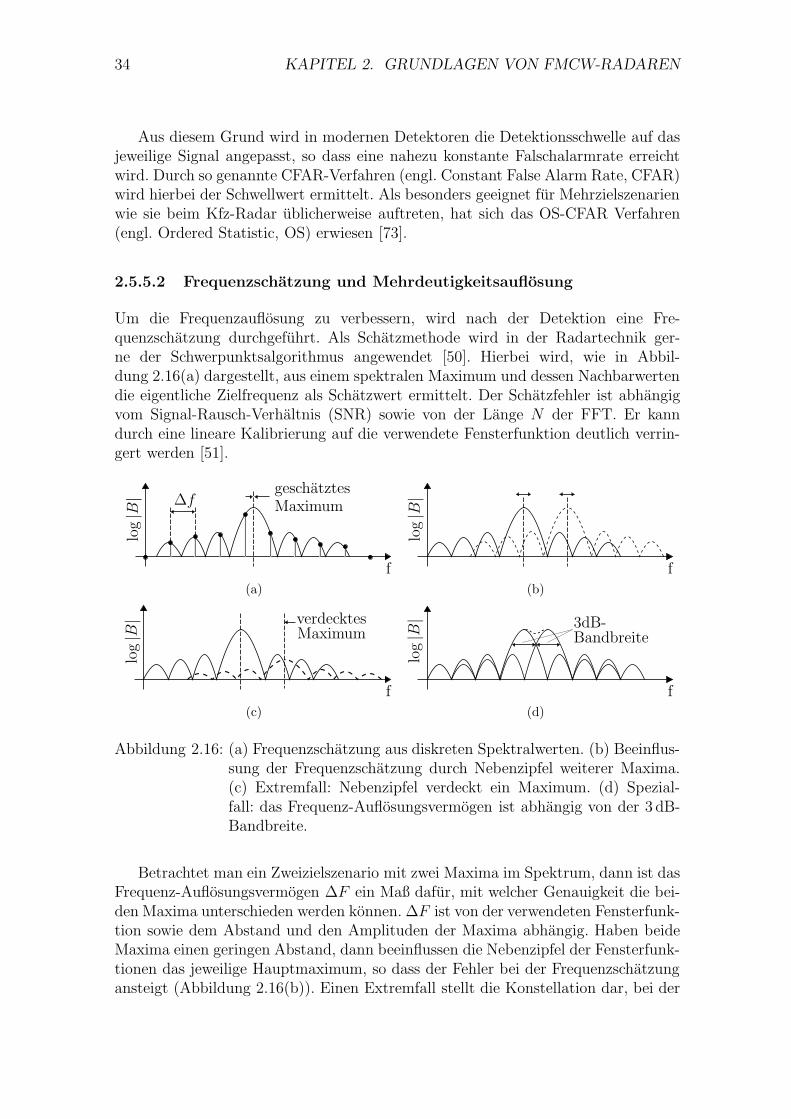
34 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
Aus diesem Grund wird in modernen Detektoren die Detektionsschwelle auf dasjeweilige Signal angepasst, so dass eine nahezu konstante Falschalarmrate erreichtwird. Durch so genannte CFAR-Verfahren (engl. Constant False Alarm Rate, CFAR)wird hierbei der Schwellwert ermittelt. Als besonders geeignet fur Mehrzielszenarienwie sie beim Kfz-Radar ublicherweise auftreten, hat sich das OS-CFAR Verfahren(engl. Ordered Statistic, OS) erwiesen [73].
2.5.5.2 Frequenzschatzung und Mehrdeutigkeitsauflosung
Um die Frequenzauflosung zu verbessern, wird nach der Detektion eine Fre-quenzschatzung durchgefuhrt. Als Schatzmethode wird in der Radartechnik ger-ne der Schwerpunktsalgorithmus angewendet [50]. Hierbei wird, wie in Abbil-dung 2.16(a) dargestellt, aus einem spektralen Maximum und dessen Nachbarwertendie eigentliche Zielfrequenz als Schatzwert ermittelt. Der Schatzfehler ist abhangigvom Signal-Rausch-Verhaltnis (SNR) sowie von der Lange N der FFT. Er kanndurch eine lineare Kalibrierung auf die verwendete Fensterfunktion deutlich verrin-gert werden [51].
f
log|B
| geschatztesMaximum∆f
(a)
f
log|B
|
(b)
f
log|B
| verdecktesMaximum
(c)
f
log|B
| 3dB-Bandbreite
(d)
Abbildung 2.16: (a) Frequenzschatzung aus diskreten Spektralwerten. (b) Beeinflus-sung der Frequenzschatzung durch Nebenzipfel weiterer Maxima.(c) Extremfall: Nebenzipfel verdeckt ein Maximum. (d) Spezial-fall: das Frequenz-Auflosungsvermogen ist abhangig von der 3 dB-Bandbreite.
Betrachtet man ein Zweizielszenario mit zwei Maxima im Spektrum, dann ist dasFrequenz-Auflosungsvermogen ∆F ein Maß dafur, mit welcher Genauigkeit die bei-den Maxima unterschieden werden konnen. ∆F ist von der verwendeten Fensterfunk-tion sowie dem Abstand und den Amplituden der Maxima abhangig. Haben beideMaxima einen geringen Abstand, dann beeinflussen die Nebenzipfel der Fensterfunk-tionen das jeweilige Hauptmaximum, so dass der Fehler bei der Frequenzschatzungansteigt (Abbildung 2.16(b)). Einen Extremfall stellt die Konstellation dar, bei der
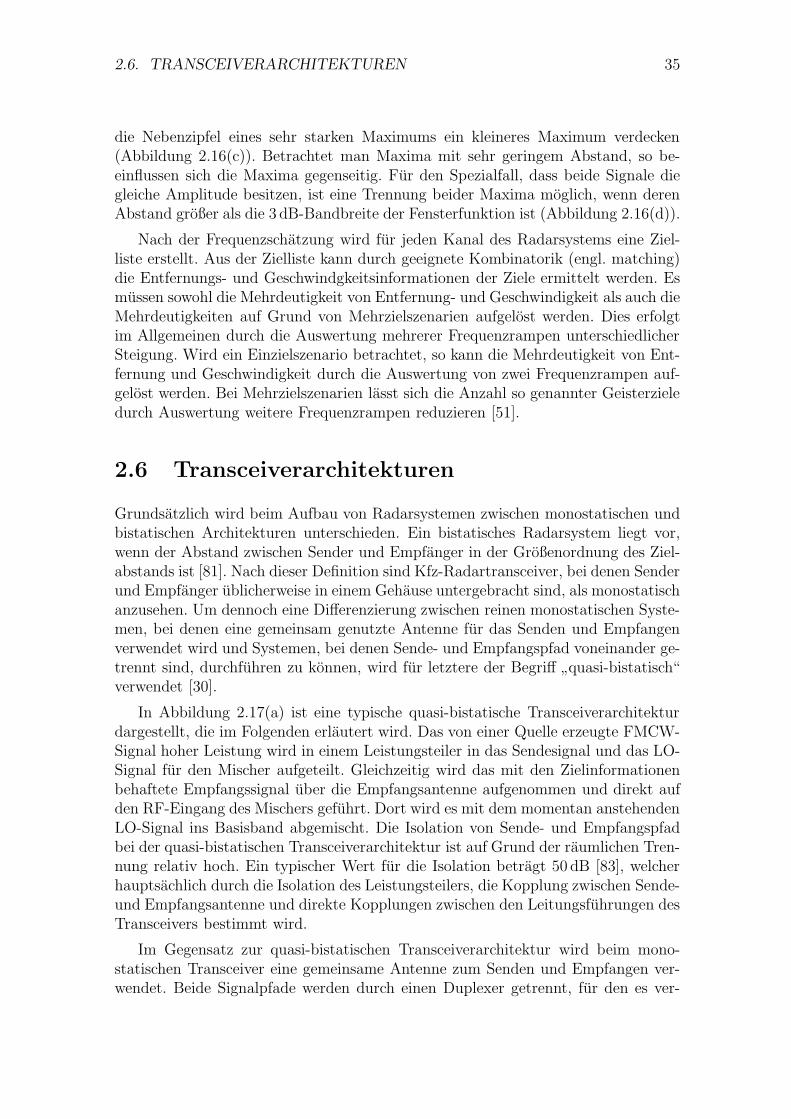
2.6. TRANSCEIVERARCHITEKTUREN 35
die Nebenzipfel eines sehr starken Maximums ein kleineres Maximum verdecken(Abbildung 2.16(c)). Betrachtet man Maxima mit sehr geringem Abstand, so be-einflussen sich die Maxima gegenseitig. Fur den Spezialfall, dass beide Signale diegleiche Amplitude besitzen, ist eine Trennung beider Maxima moglich, wenn derenAbstand großer als die 3 dB-Bandbreite der Fensterfunktion ist (Abbildung 2.16(d)).
Nach der Frequenzschatzung wird fur jeden Kanal des Radarsystems eine Ziel-liste erstellt. Aus der Zielliste kann durch geeignete Kombinatorik (engl. matching)die Entfernungs- und Geschwindgkeitsinformationen der Ziele ermittelt werden. Esmussen sowohl die Mehrdeutigkeit von Entfernung- und Geschwindigkeit als auch dieMehrdeutigkeiten auf Grund von Mehrzielszenarien aufgelost werden. Dies erfolgtim Allgemeinen durch die Auswertung mehrerer Frequenzrampen unterschiedlicherSteigung. Wird ein Einzielszenario betrachtet, so kann die Mehrdeutigkeit von Ent-fernung und Geschwindigkeit durch die Auswertung von zwei Frequenzrampen auf-gelost werden. Bei Mehrzielszenarien lasst sich die Anzahl so genannter Geisterzieledurch Auswertung weitere Frequenzrampen reduzieren [51].
2.6 Transceiverarchitekturen
Grundsatzlich wird beim Aufbau von Radarsystemen zwischen monostatischen undbistatischen Architekturen unterschieden. Ein bistatisches Radarsystem liegt vor,wenn der Abstand zwischen Sender und Empfanger in der Großenordnung des Ziel-abstands ist [81]. Nach dieser Definition sind Kfz-Radartransceiver, bei denen Senderund Empfanger ublicherweise in einem Gehause untergebracht sind, als monostatischanzusehen. Um dennoch eine Differenzierung zwischen reinen monostatischen Syste-men, bei denen eine gemeinsam genutzte Antenne fur das Senden und Empfangenverwendet wird und Systemen, bei denen Sende- und Empfangspfad voneinander ge-trennt sind, durchfuhren zu konnen, wird fur letztere der Begriff
”quasi-bistatisch“
verwendet [30].
In Abbildung 2.17(a) ist eine typische quasi-bistatische Transceiverarchitekturdargestellt, die im Folgenden erlautert wird. Das von einer Quelle erzeugte FMCW-Signal hoher Leistung wird in einem Leistungsteiler in das Sendesignal und das LO-Signal fur den Mischer aufgeteilt. Gleichzeitig wird das mit den Zielinformationenbehaftete Empfangssignal uber die Empfangsantenne aufgenommen und direkt aufden RF-Eingang des Mischers gefuhrt. Dort wird es mit dem momentan anstehendenLO-Signal ins Basisband abgemischt. Die Isolation von Sende- und Empfangspfadbei der quasi-bistatischen Transceiverarchitektur ist auf Grund der raumlichen Tren-nung relativ hoch. Ein typischer Wert fur die Isolation betragt 50 dB [83], welcherhauptsachlich durch die Isolation des Leistungsteilers, die Kopplung zwischen Sende-und Empfangsantenne und direkte Kopplungen zwischen den Leitungsfuhrungen desTransceivers bestimmt wird.
Im Gegensatz zur quasi-bistatischen Transceiverarchitektur wird beim mono-statischen Transceiver eine gemeinsame Antenne zum Senden und Empfangen ver-wendet. Beide Signalpfade werden durch einen Duplexer getrennt, fur den es ver-
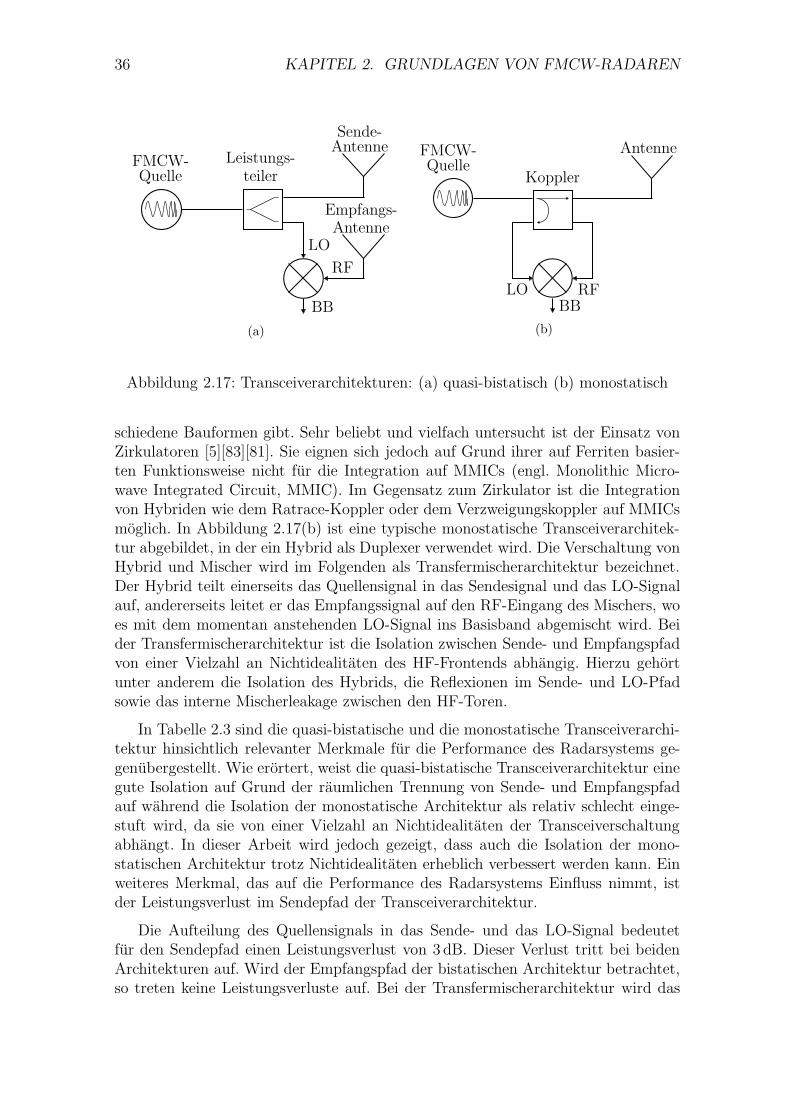
36 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
FMCW-Quelle
Leistungs-teiler
Empfangs-Antenne
Sende-Antenne
LO
RF
BB
(a)
FMCW-Quelle
Koppler
Antenne
LO RFBB
(b)
Abbildung 2.17: Transceiverarchitekturen: (a) quasi-bistatisch (b) monostatisch
schiedene Bauformen gibt. Sehr beliebt und vielfach untersucht ist der Einsatz vonZirkulatoren [5][83][81]. Sie eignen sich jedoch auf Grund ihrer auf Ferriten basier-ten Funktionsweise nicht fur die Integration auf MMICs (engl. Monolithic Micro-wave Integrated Circuit, MMIC). Im Gegensatz zum Zirkulator ist die Integrationvon Hybriden wie dem Ratrace-Koppler oder dem Verzweigungskoppler auf MMICsmoglich. In Abbildung 2.17(b) ist eine typische monostatische Transceiverarchitek-tur abgebildet, in der ein Hybrid als Duplexer verwendet wird. Die Verschaltung vonHybrid und Mischer wird im Folgenden als Transfermischerarchitektur bezeichnet.Der Hybrid teilt einerseits das Quellensignal in das Sendesignal und das LO-Signalauf, andererseits leitet er das Empfangssignal auf den RF-Eingang des Mischers, woes mit dem momentan anstehenden LO-Signal ins Basisband abgemischt wird. Beider Transfermischerarchitektur ist die Isolation zwischen Sende- und Empfangspfadvon einer Vielzahl an Nichtidealitaten des HF-Frontends abhangig. Hierzu gehortunter anderem die Isolation des Hybrids, die Reflexionen im Sende- und LO-Pfadsowie das interne Mischerleakage zwischen den HF-Toren.
In Tabelle 2.3 sind die quasi-bistatische und die monostatische Transceiverarchi-tektur hinsichtlich relevanter Merkmale fur die Performance des Radarsystems ge-genubergestellt. Wie erortert, weist die quasi-bistatische Transceiverarchitektur einegute Isolation auf Grund der raumlichen Trennung von Sende- und Empfangspfadauf wahrend die Isolation der monostatische Architektur als relativ schlecht einge-stuft wird, da sie von einer Vielzahl an Nichtidealitaten der Transceiverschaltungabhangt. In dieser Arbeit wird jedoch gezeigt, dass auch die Isolation der mono-statischen Architektur trotz Nichtidealitaten erheblich verbessert werden kann. Einweiteres Merkmal, das auf die Performance des Radarsystems Einfluss nimmt, istder Leistungsverlust im Sendepfad der Transceiverarchitektur.
Die Aufteilung des Quellensignals in das Sende- und das LO-Signal bedeutetfur den Sendepfad einen Leistungsverlust von 3 dB. Dieser Verlust tritt bei beidenArchitekturen auf. Wird der Empfangspfad der bistatischen Architektur betrachtet,so treten keine Leistungsverluste auf. Bei der Transfermischerarchitektur wird das

2.7. EIGENSCHAFTEN DER HOMODYNEN MISCHUNG 37
Empfangssignal durch den Hybrid in das RF-Signal und ein weiteres Signal geteilt,welches ungenutzt bleibt und im Eingangswiderstand der Signalquelle abgesumpftwird. Das kann als Leistungsverlust in der Hohe von 3 dB im Empfangspfad gewertetwerden.
Merkmal quasi-bistat. monostat.
Isolation + -
Verluste im Sendepfad 3 dB 3dB
Verluste im Empfangspfad keine 3 dB
Platzbedarf hoch niedrig
Herstellungskosten hoch niedrig
Tabelle 2.3: Gegenuberstellung von Merkmalen der quasi-bistatischen und monosta-tischen Transceiverarchitektur.
Im Folgenden werden die Transceiverarchitekturen hinsichtlich ihres Platzbe-darfs und ihrer Herstellungskosten beurteilt. Beide Merkmale sind miteinander ver-knupft. Steigt der Platzbedarf fur die Transceiverschaltung, so resultiert das in einemAnstieg der Kosten. Die Vorteile hinsichtlich des Platzbedarfs sind bei der mono-statische Architektur zu finden, da hier eine gemeinsam genutzte Antenne fur dasSenden und Empfangen verwendet wird und die Architektur deshalb relativ kom-pakt realisiert werden kann. Wird ein Transceiver betrachtet, dessen Architektur,mit Ausnahme der Antenne, sich auf einem MMIC befindet, so ist fur den monosta-tischen Fall eine Bondverbindung vom MMIC zur Antenne notig wahrend fur denquasi-bistatischen Fall zwei Bondverbindungen benotigt werden. Auch dieser Aspektgeht in die Herstellungskosten ein.
2.7 Eigenschaften der homodynen Mischung
Die Frequenzumsetzung eines Mischprozesses wird allgemein durch die Konversions-gleichung
fIF = mfLO + nfRF , m,n ∈ Z
charakterisiert, die mathematisch zum Ausdruck bringt, dass das Ausgangssignaldes Mischers mit der Frequenz fIF (engl. Intermediate Frequency, IF) sich aus Viel-fachen der Eingangssignale mit den Frequenzen fRF (engl. Radio Frequency, RF)und fLO (engl. Local Oszillator, LO) zusammensetzt. Durch Abwartsmischung derGrundschwingung von Sende- und Empfangssignal konnen, wie in Abschnitt 2.1erlautert, die Zielinformationen direkt ermittelt werden. Ein solcher Mischprozesswird als homodyn bezeichnet. Weitere Bezeichnungen fur diesen Michprozess sind
38 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
die englischen Ausdrucke zero-IF bzw. direct-conversion. Fur den homodynen Misch-prozess lasst sich die Konversionsgleichung vereinfacht darstellen:
fIF = |fLO − fRF |. (2.68)
Im Vergleich zum heterodynen Mischprozess besitzt der homodyne MischprozessVorteile hinsichtlich der monolithischen Schaltungsintegration. Diese Vorteile sindunter anderem auf einen geringeren Platzbedarf, einen einfacheren Schaltungsaufbauund niedrigere IF-Filteranforderungen zuruckzufuhren [68]. Der homodyne Misch-prozess besitzt jedoch auch Nachteile, welche darauf zuruckzufuhren sind, dass zu-sammen mit den Nutzsignalen, charakteristische Storsignale im Basisband auftreten,die die Nutzsignale uberlagern konnen. Dadurch kann die Detektion und Auswer-tung der Nutzsignale erschwert werden. Die Storsignale (engl. Leakage) werden un-ter anderem durch eine mangelnde Isolation zwischen Sende- und Empfangspfaddes Transceivers hervorgerufen. Aus diesem Grund gilt die Sicherstellung einer aus-reichenden Isolation als eine der großten Herausforderungen beim Design solcherArchitekturen [5],[83],[48]. Ein Verlust an Isolation kann durch verschiedene Effektehervorgerufen werden. Im Folgenden werden die Effekte in zwei Gruppen eingeteilt:in die elektrischen und in die architektonischen Effekte. Zu den elektrischen Effektengehoren direkte induktive, kapazitive oder resistive Kopplungen zwischen Signalpfa-den, wie beispielsweise Bonddrahtkopplungen, Substratkopplungen oder parasitareKopplungen. Unter den architektonischen Effekte werden im Folgenden Signalkopp-lungen verstanden, die auf Grund von Nichtidealitaten der Schaltungskomponentenauf den regularen Signalpfaden zustande kommen. Diese Signalpfade werden im Fol-genden als Leakagepfade bezeichnet. Bei der Transfermischerarchitektur haben diearchitektonischen Effekte, bedingt durch die Transmissionspfade des Hybrids einensehr großen Einfluss auf die Isolation zwischen Sende- und Empfangspfad. Hieraufwird in den Kapiteln 5 und 6 naher eingegangen. Als Beispiel fur einen architekto-nischen Effekt sei an dieser Stelle die Signalkopplung betrachtet, die durch die nichtideale Anpassung der Antenne hervorgerufen wird. Das an der Antenne reflektierteSendesignal wird uber den Transmissionspfad des Hybrids auf den Mischereinganggekoppelt und stellt hier ein Storsignal dar.
2.7.1 Selbstmischung
Auf Grund von Leakagepfaden werden die Eingangssignale des Mischers auf den je-weiligen anderen Eingang gekoppelt. Dieser Vorgang ist in Abbildung 2.18 graphischverdeutlicht. Zum einen kann das relativ leistungsstarke LO-Signal uber einen LO-Leakagepfad auf den RF-Eingang gekoppelt werden und zum anderen kann ana-log dazu das RF-Signal uber einen RF-Leakagepfad auf den LO-Eingang gekoppeltwerden. Am jeweiligen anderen Eingang des Mischers werden die Signale mit sichselbst gemischt, was als Selbstmischung (engl. self-mixing) bezeichnet wird. Wirdvon harmonischen Eingangssignalen einer Frequenz ausgegangen, so wird durch dieSelbstmischung ein Gleichspannungsanteil erzeugt. Liegen an den Eingangen des Mi-schers jedoch FMCW-Signale vor, so wird in Analogie zum FMCW-Prinzip durch die

2.7. EIGENSCHAFTEN DER HOMODYNEN MISCHUNG 39
Selbstmischung ein niederfrequentes Signal im Basisband erzeugt, dessen Frequenznach Gleichung 2.43 proportional zur Lange des Leakagepfades ist.
RF
LO
IF
LO-Leakage
(a)
RF
LO
IF
RF-Leakage
(b)
Abbildung 2.18: Selbstmischung auf Grund unterschiedlicher Leakagepfade.
2.7.2 Intermodulation
Die Storsignale am RF-Eingang fuhren zu einer zusatzlichen Belastung und damitzu einem Anstieg der Intermodulationsprodukte. Da in dieser Arbeit ein Gilbert-Mischer zum Einsatz kommt, werden die folgenden Uberlegungen an dieser Mischer-architektur durchgefuhrt. Auf Grund der differentiellen Architektur des Gilbert-Mischers werden durch die Nichtlinearitat des Mischers ausschließlich Intermodula-tionsprodukte (Intermodulation, IM) ungerader Ordnung hervorgerufen. Allerdingswird durch Toleranzen und Asymmetrien die ideale differentielle Struktur gestortund somit auch Intermodulationsprodukte gerader Ordnung erzeugt, welche unteranderem im Basisband des IF-Signals auftreten.
RF
LO
IF
fRF1fRF2
f2fLO 0 f1 f3 f4 f5 f6
Abbildung 2.19: Intermodulation am Beispiel eines Zweitontests.
In Abbildung 2.19 werden am Beispiel eines Zweitontests die Intermodulations-produkte im Basisband betrachtet. Dabei werden zwei Signale mit den FrequenzenfRF1
und fRF2an den RF-Eingang des Mischers angelegt und mit dem LO-Signal
der Frequenz fLO abgemischt. Im Basisband treten neben den abgemischten Signal-frequenzen weitere Spektralanteile auf, welche Intermodulationsprodukte darstellen.Durch eine mathematische Betrachtung lassen sich die einzelnen Spektralanteile denOrdnungen der Intermodulationsprodukte zuordnen. Hierauf wird an dieser Stellejedoch verzichtet und auf die Literaturstellen [64] und [19] verwiesen. In Tabel-le 2.4 sind fur den Zweitontest die einzelnen Spektralanteile den Ordnungen der

40 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
Intermodulationsprodukte zugeordnet. Die Intermodulationsprodukte zweiter unddritter Ordnung werden ublicherweise durch die Interceptpunkte zweiter und dritterOrdnung (IP2 bzw. IP3) charakterisiert.
IM-Produkt Zusammensetzung Ordnung
f1 |fRF1− fRF2
| 2
f2 |fLO − 2fRF1+ fRF2
| 3
f3 |fLO − 2fRF2+ fRF1
| 3
f4 |2fLO − 2fRF1| 2
f5 |2fLO − fRF1− fRF2
| 2
f6 |2fLO − 2fRF2| 2
Tabelle 2.4: Intermodulationsprodukte im Basisband.
2.7.3 Flicker-Rauschen
Eine weitere Storkomponente im Basisband stellt das Flicker-Rauschen der Schal-tung mit seinem 1/f-formigen Spektrum um 0Hz dar. Charakterisiert wird dasFlicker-Rauschen durch seine Eckfrequenz (engl. Corner Frequency), die als die-jenige Frequenz definiert ist, bei der der Rauschpegel des Flicker-Rauschens denRauschpegel des breitbandigen Rauschens schneidet. Ist die Eckfrequenz des Flicker-Rauschens hoher als die Frequenz der Nutzsignale, so kann durch das Flicker-Rauschen der Signal-Rausch-Abstand (SNR) reduziert werden. In Abbildung 2.20 istein solcher Fall schematisch dargestellt. Ist die Eckfrequenz kleiner als die Frequenzder Nutzsignale, so hat das Flicker-Rauschen nur einen sehr geringen Einfluss auf dasSNR. Welchen Einfluss das Flicker-Rauschen der in dieser Arbeit zu betrachtendenSiGe-Schaltungen auf das SNR hat, wird im Folgenden erortert.
RF
LO
IF
fRF fLO
|fLO − fRF |0
1/f-Rauschen
Abbildung 2.20: Verringerung des SNR durch Flicker-Rauschen.
2.7. EIGENSCHAFTEN DER HOMODYNEN MISCHUNG 41
Quellen fur Flicker-Rauschen stellen ohmsche Widerstande sowie Halblei-terubergange dar, in denen sehr hohen Stromdichten vorliegen [97]. Die ohmschenWiderstande in den Schaltungen, die im Rahmen dieser Arbeit untersucht werden,sind integriert als Polysilizium Widerstande ausgefuhrt, in denen nur geringe Strom-dichten erreicht werden. Aus diesem Grund ist es zulassig, das Flicker-Rauschen derohmschen Widerstande zu vernachlassigen. Fur die Halbleiterubergange im Transi-stor kann allgemein eine Abhangigkeit des Flicker-Rauschens vom Raum, den die ak-tiven Bereiche der Ubergange einnehmen, hergestellt werden. Je großer der Raum deraktiven Bereiche, desto kleiner ist bei konstantem Strom die auftretende Stromdich-te. Da bei Feldeffekttransistoren die aktiven Bereiche nahe der Oberflache des Halb-leitermaterials konzentriert sind, treten relativ hohe Stromdichten auf. Im Gegen-satz dazu liegen bei bipolaren Transistoren die aktiven Bereiche auch im Inneren desHalbleitermaterials vor und sind nicht auf die Oberflache beschrankt. Somit konnenniedrigere Stromdichten und analog dazu auch ein niedrigeres Flicker-Rauschen alsbei Feldeffekttransistoren erreicht werden. Fur eine Abschatzung der Eckfrequenzdes in dieser Arbeit betrachteten SiGe-Prozesses B7HF200 von Infineon Technologieswird ein ahnlicher Prozess von IBM betrachtet. In [18] werden Rauschmessungen furden 0,18µm IBM-Prozess SiGe-7HP-BiCMOS vorgestellt. Fur einen npn-Transistorwird dabei eine Eckfrequenz von 1 kHz angegeben. Damit liegt die Eckfrequenz desFlicker-Rauschens in der Großenordnung wie die Frequenzauflosung ∆f des FFT-Spektrums der in dieser Arbeit betrachteten FMCW-Radare. Das Flicker-Rauschenwird deshalb auf den ersten Frequenzbin des Spektrums abgebildet. In diesen Fre-quenzbin fallt unter anderem auch der angesprochene DC-Offset, dessen Einflussim Vergleich zum Flicker-Rauschen relativ groß ist und somit das Flicker-Rauschenuberlagert. Somit hat das Flicker-Rauschen nur einen sehr geringen Einfluss auf dasBasisbandsignal.

42 KAPITEL 2. GRUNDLAGEN VON FMCW-RADAREN
Kapitel 3
77 GHz
SiGe-Schaltungsentwicklungen
Nachdem die fur diese Arbeit relevanten Radargrundlagen theoretisch aufgearbeitetwurden, widmet sich dieses Kapitel aktuellen SiGe-Schaltungen (Silizium Germani-um, SiGe) fur die Radartechnik im 77GHz Frequenzbereich. Die Entwicklung derSiGe-Schaltungen wird von drei Aspekten beeinflusst die fur die Weiterentwick-lung der 77GHz Kfz-Weitbereichsradarsysteme (LRR) von entscheidender Bedeu-tung sind:
1. Die Radarsysteme sollen kostengunstiger werden, um sie fur das Kfz-Mittelklassesegment zu erschließen. Dabei soll ahnlich wie im Mobilfunkmarkt,auch beim 77GHz-Radar die SiGe-Technologie einen Beitrag zur Kostenreduk-tion leisten. In Abschnitt 3.1 werden die aussichtsreichsten SiGe-Technologienfur den 77GHz Frequenzbereich vorgestellt. Aktuelle Schaltungen von span-nungsgesteuerten Oszillatoren (engl. Voltage Controlled Oszillator, VCO), Mi-schern, rauscharmen Verstarkern (engl. Low Noise Amplifier, LNA) und on-chip Hybriden, die in den vorgestellten Technologien realisiert wurden, werdenin Abschnitt 3.2 betrachtet.
2. Die Radarsensoren sollen kleiner werden. Dadurch konnen weitere Kosten ein-gespart und die Radarsensoren unauffallig in die Fahrzeuge integriert werden.Auch dieser Aspekt kann durch den Einsatz der SiGe-Technologie vorange-trieben werden. Moderne SiGe-Technologien weisen Metallisierungsschichtenauf, die eine Implementierung von On-chip Mikrostreifenleitungen sowie Ka-pazitaten und Widerstanden erlauben. So konnen passive Schaltungskompo-nenten wie Hybride, Teiler und Baluns auf dem Chip realisiert werden, wasden ersten Schritt zur Implementierung kompletter Radartransceiver (engl.System on Chip, SoC) darstellt. Auf den aktuellen Stand der Entwicklung vonpassiven Schaltungskomponenten wird in Abschnitt 3.3 naher eingegangen.
3. Das Einsatzgebiet der Radarsensoren soll von bisher reinen Komfortanwendun-gen erweitert werden auf Fahrerassistenz- und Sicherheitsanwendungen. Dafur
43
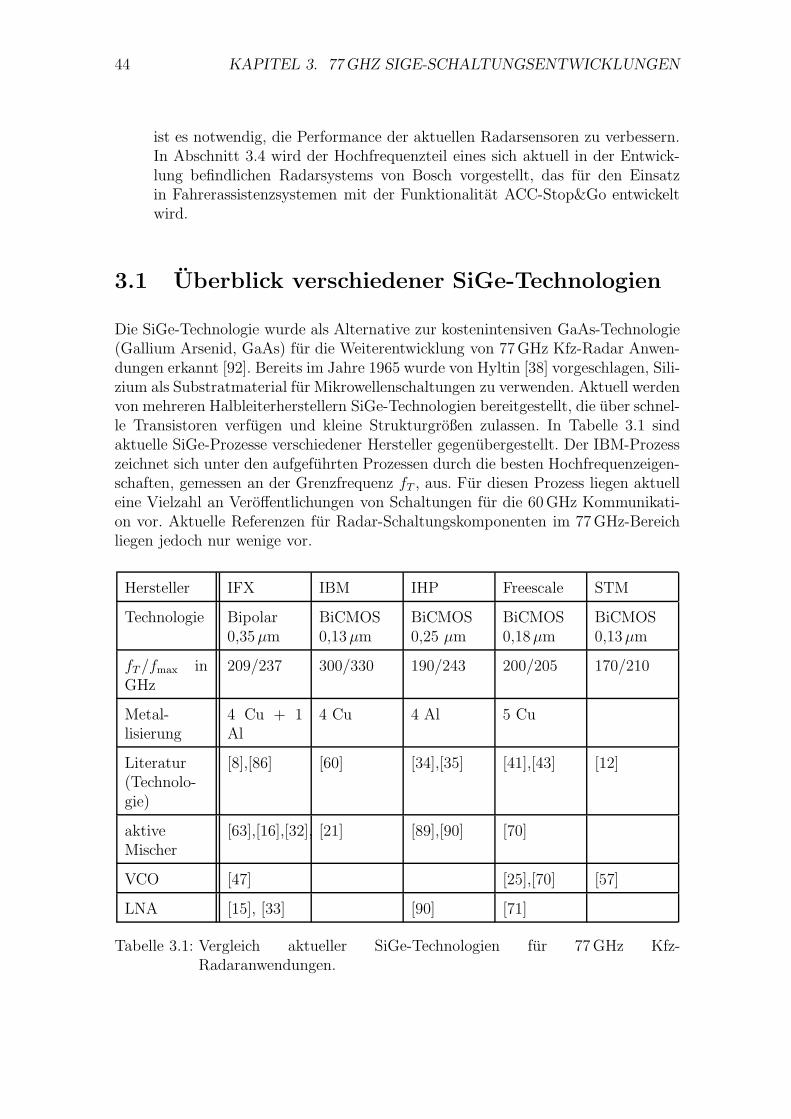
44 KAPITEL 3. 77GHZ SIGE-SCHALTUNGSENTWICKLUNGEN
ist es notwendig, die Performance der aktuellen Radarsensoren zu verbessern.In Abschnitt 3.4 wird der Hochfrequenzteil eines sich aktuell in der Entwick-lung befindlichen Radarsystems von Bosch vorgestellt, das fur den Einsatzin Fahrerassistenzsystemen mit der Funktionalitat ACC-Stop&Go entwickeltwird.
3.1 Uberblick verschiedener SiGe-Technologien
Die SiGe-Technologie wurde als Alternative zur kostenintensiven GaAs-Technologie(Gallium Arsenid, GaAs) fur die Weiterentwicklung von 77GHz Kfz-Radar Anwen-dungen erkannt [92]. Bereits im Jahre 1965 wurde von Hyltin [38] vorgeschlagen, Sili-zium als Substratmaterial fur Mikrowellenschaltungen zu verwenden. Aktuell werdenvon mehreren Halbleiterherstellern SiGe-Technologien bereitgestellt, die uber schnel-le Transistoren verfugen und kleine Strukturgroßen zulassen. In Tabelle 3.1 sindaktuelle SiGe-Prozesse verschiedener Hersteller gegenubergestellt. Der IBM-Prozesszeichnet sich unter den aufgefuhrten Prozessen durch die besten Hochfrequenzeigen-schaften, gemessen an der Grenzfrequenz fT , aus. Fur diesen Prozess liegen aktuelleine Vielzahl an Veroffentlichungen von Schaltungen fur die 60GHz Kommunikati-on vor. Aktuelle Referenzen fur Radar-Schaltungskomponenten im 77GHz-Bereichliegen jedoch nur wenige vor.
Hersteller IFX IBM IHP Freescale STM
Technologie Bipolar0,35µm
BiCMOS0,13µm
BiCMOS0,25 µm
BiCMOS0,18µm
BiCMOS0,13µm
fT /fmax inGHz
209/237 300/330 190/243 200/205 170/210
Metal-lisierung
4 Cu + 1Al
4 Cu 4 Al 5 Cu
Literatur(Technolo-gie)
[8],[86] [60] [34],[35] [41],[43] [12]
aktiveMischer
[63],[16],[32], [21] [89],[90] [70]
VCO [47] [25],[70] [57]
LNA [15], [33] [90] [71]
Tabelle 3.1: Vergleich aktueller SiGe-Technologien fur 77GHz Kfz-Radaranwendungen.

3.2. SIGE-SCHALTUNGSKOMPONENTEN FUR KFZ-RADARE 45
Die Technologie von Infineon Technologies (IFX) ist fur diese Arbeit beson-ders interessant, da Infineon als Halbleiterhersteller im KOKON Konsortium ver-treten ist. Der aktuelle Prozess von Infineon mit der Bezeichnung B7HF200 ist einebipolare SiGe:C Technologie und stellt unter anderem zwei npn-Transistoren be-reit. Einen Transistor fur schnelle Anwendungen (engl. high speed npn) mit einerGrenzfrequenz von fT = 209GHz und einen Transistor mit erhohter Durchbruchs-festigkeit (engl. high voltage npn) mit fT = 52GHz [86]. Neben den Transisto-ren ermoglicht der Prozess eine Implementierung von Polysilizium-Widerstanden(engl. polysilicon resistors) mit Schichtwiderstanden von 150 und 1000Ω/ sowieTaN Dunnfilmwiderstanden mit 20Ω/. Weiterhin stehen beim B7HF200-ProzessVaraktoren fur Oszillatoranwendungen zur Verfugung. Der Prozess stellt außer-dem 4 Metallisierungsschichten aus Kupfer (Cu) und eine Aluminium (Al) Ober-schicht fur die Kontaktierung (Realisierung der Bondpads) bereit. In die Metalli-sierungsschichten konnen MIM-Kapazitaten mit einem Al2O3 Dielektrikum und ei-ner spezifischen Kapazitat von 1,4 fF/µm2 integriert werden. Fur MIM-Kapazitatenin der SiGe-Technologie von IBM wird in [18] eine Toleranz der spezifischen Ka-pazitat von 15% angegeben. Dieser Wert soll auch als Richtwert fur die MIM-Kapazitaten in der Infineon-Technologie dienen. Als Richtwert fur die Prozesstole-ranzen und parasitaren Kapazitaten der Widerstande sollen auch die fur den IBM-Prozess veroffentlichten Werte dienen [18]. Demnach muss mit einer Prozesstoleranzvon 10-25% sowie parasitaren Kapazitaten von 0,09-0,11 fF/µm bei Polysilizium-Widerstanden gerechnet werden.
Mit der Infineon-Technologie B7HF200 wurden im Laufe des KOKON-ProjektsMischer, VCOs, LNAs und Hybride fur 77GHz Kfz-Radar-Anwendungen entwickelt.Hierzu sind ausgewahlte Literaturstellen neben denen ahnlicher Schaltungen in denTechnologien von IBM, IHP, Freescale und STMicroelectronics in Tabelle 3.1 auf-gefuhrt. In den folgenden Abschnitten wird auf einzelne Schaltungen naher einge-gangen.
3.2 SiGe-Schaltungskomponenten fur Kfz-Radare
3.2.1 Aktive Mischer
Der Mischer stellt eine zentrale Schaltungskomponente von FMCW-Radartransceivern dar. Die relativ hohen Grenzfrequenzen der in Abschnitt 3.1 vor-gestellten SiGe-Prozesse erlauben es, aktive Mischer fur den 77GHz Frequenzbereichzu entwerfen. Fur die monolithische Integration ist die Gilbert-Mischer-Architektur[26] und zunehmend die Micromixer-Architektur [27] popular, was die Anzahl derVeroffentlichungen in Tabelle 3.2 zeigt. In Abbildung 3.1 sind beide Architekturenschematisch dargestellt. Der Micromixer besitzt im Vergleich zum Gilbert-Mischereinen großeren Dynamikbereich und eine definierte RF-Eingangsimpedanz [27].Welche Architektur jedoch letztendlich zum Einsatz kommt, ist auch von der Artder Eingangssignale abhangig. Da die Baluns einen großen Teil der Chipflache in
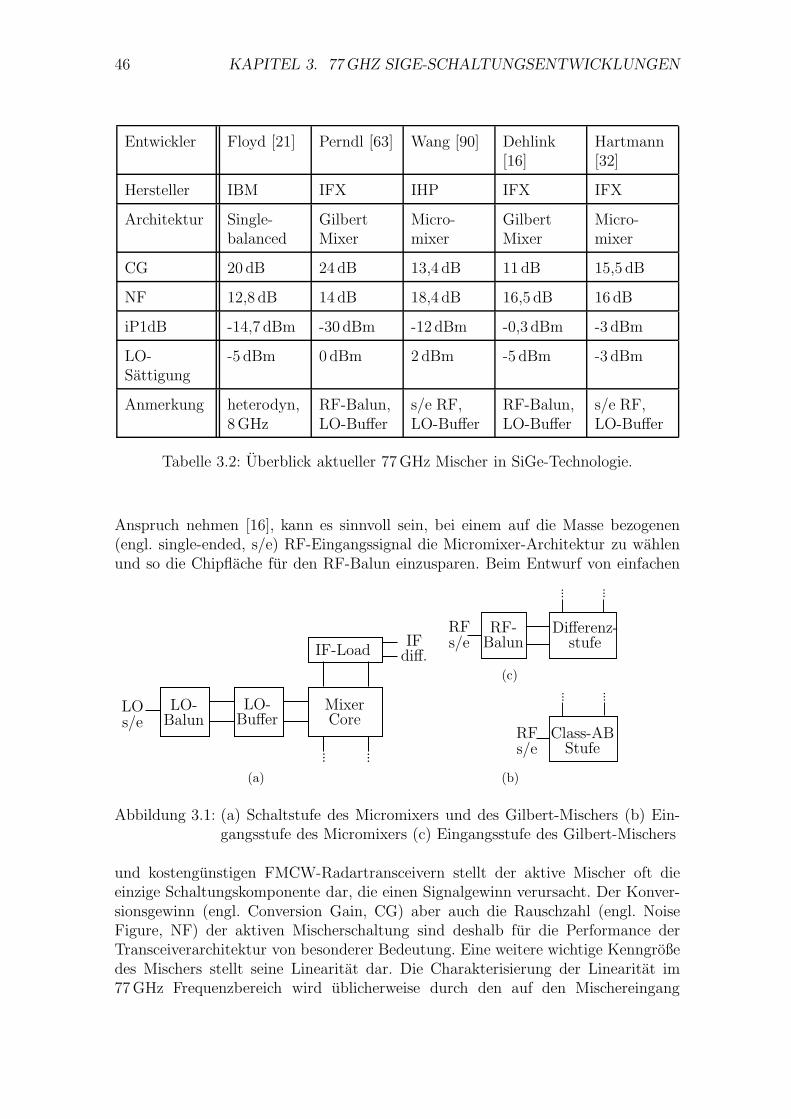
46 KAPITEL 3. 77GHZ SIGE-SCHALTUNGSENTWICKLUNGEN
Entwickler Floyd [21] Perndl [63] Wang [90] Dehlink[16]
Hartmann[32]
Hersteller IBM IFX IHP IFX IFX
Architektur Single-balanced
GilbertMixer
Micro-mixer
GilbertMixer
Micro-mixer
CG 20 dB 24 dB 13,4 dB 11 dB 15,5 dB
NF 12,8 dB 14 dB 18,4 dB 16,5 dB 16 dB
iP1dB -14,7 dBm -30 dBm -12 dBm -0,3 dBm -3 dBm
LO-Sattigung
-5 dBm 0dBm 2dBm -5 dBm -3 dBm
Anmerkung heterodyn,8GHz
RF-Balun,LO-Buffer
s/e RF,LO-Buffer
RF-Balun,LO-Buffer
s/e RF,LO-Buffer
Tabelle 3.2: Uberblick aktueller 77GHz Mischer in SiGe-Technologie.
Anspruch nehmen [16], kann es sinnvoll sein, bei einem auf die Masse bezogenen(engl. single-ended, s/e) RF-Eingangssignal die Micromixer-Architektur zu wahlenund so die Chipflache fur den RF-Balun einzusparen. Beim Entwurf von einfachen
MixerCore
IF-Load
LO-Buffer
LO-Balun
LOs/e
IFdiff.
(a)
(c)
Differenz-stufe
RF-Balun
RFs/e
RFs/e
Class-ABStufe
(b)
Abbildung 3.1: (a) Schaltstufe des Micromixers und des Gilbert-Mischers (b) Ein-gangsstufe des Micromixers (c) Eingangsstufe des Gilbert-Mischers
und kostengunstigen FMCW-Radartransceivern stellt der aktive Mischer oft dieeinzige Schaltungskomponente dar, die einen Signalgewinn verursacht. Der Konver-sionsgewinn (engl. Conversion Gain, CG) aber auch die Rauschzahl (engl. NoiseFigure, NF) der aktiven Mischerschaltung sind deshalb fur die Performance derTransceiverarchitektur von besonderer Bedeutung. Eine weitere wichtige Kenngroßedes Mischers stellt seine Linearitat dar. Die Charakterisierung der Linearitat im77GHz Frequenzbereich wird ublicherweise durch den auf den Mischereingang
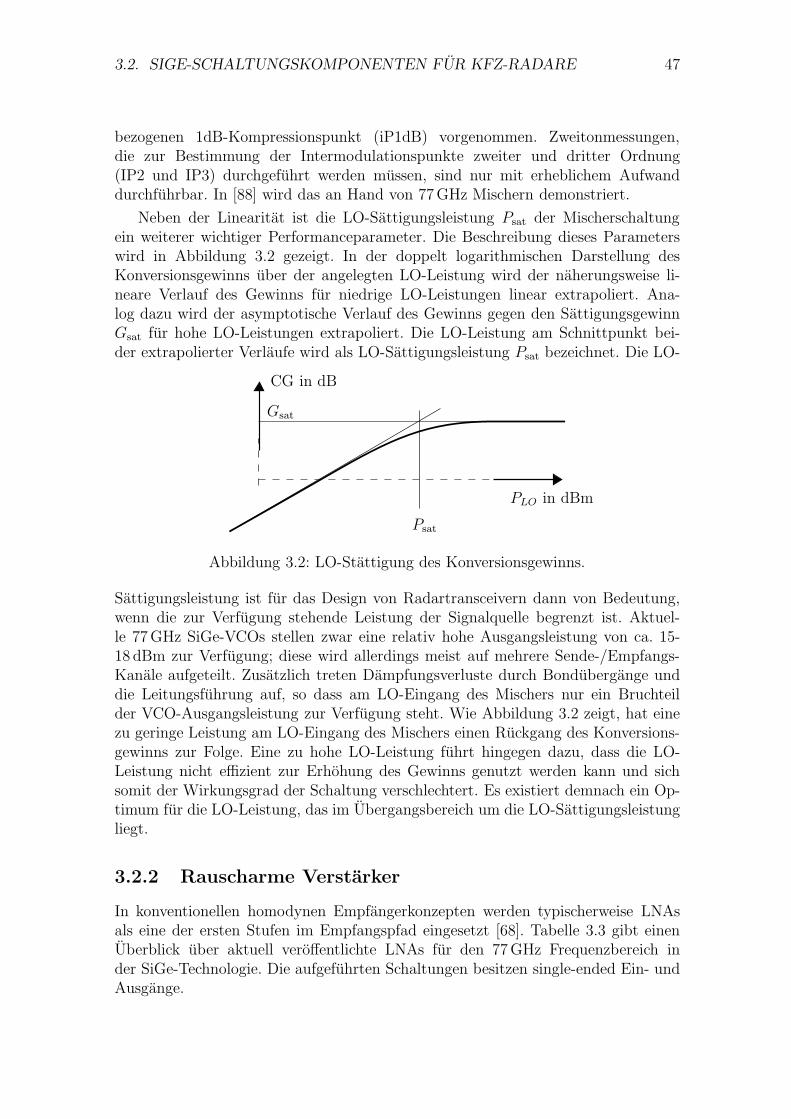
3.2. SIGE-SCHALTUNGSKOMPONENTEN FUR KFZ-RADARE 47
bezogenen 1dB-Kompressionspunkt (iP1dB) vorgenommen. Zweitonmessungen,die zur Bestimmung der Intermodulationspunkte zweiter und dritter Ordnung(IP2 und IP3) durchgefuhrt werden mussen, sind nur mit erheblichem Aufwanddurchfuhrbar. In [88] wird das an Hand von 77GHz Mischern demonstriert.
Neben der Linearitat ist die LO-Sattigungsleistung Psat der Mischerschaltungein weiterer wichtiger Performanceparameter. Die Beschreibung dieses Parameterswird in Abbildung 3.2 gezeigt. In der doppelt logarithmischen Darstellung desKonversionsgewinns uber der angelegten LO-Leistung wird der naherungsweise li-neare Verlauf des Gewinns fur niedrige LO-Leistungen linear extrapoliert. Ana-log dazu wird der asymptotische Verlauf des Gewinns gegen den SattigungsgewinnGsat fur hohe LO-Leistungen extrapoliert. Die LO-Leistung am Schnittpunkt bei-der extrapolierter Verlaufe wird als LO-Sattigungsleistung Psat bezeichnet. Die LO-
CG in dB
PLO in dBm
Gsat
Psat
Abbildung 3.2: LO-Stattigung des Konversionsgewinns.
Sattigungsleistung ist fur das Design von Radartransceivern dann von Bedeutung,wenn die zur Verfugung stehende Leistung der Signalquelle begrenzt ist. Aktuel-le 77GHz SiGe-VCOs stellen zwar eine relativ hohe Ausgangsleistung von ca. 15-18 dBm zur Verfugung; diese wird allerdings meist auf mehrere Sende-/Empfangs-Kanale aufgeteilt. Zusatzlich treten Dampfungsverluste durch Bondubergange unddie Leitungsfuhrung auf, so dass am LO-Eingang des Mischers nur ein Bruchteilder VCO-Ausgangsleistung zur Verfugung steht. Wie Abbildung 3.2 zeigt, hat einezu geringe Leistung am LO-Eingang des Mischers einen Ruckgang des Konversions-gewinns zur Folge. Eine zu hohe LO-Leistung fuhrt hingegen dazu, dass die LO-Leistung nicht effizient zur Erhohung des Gewinns genutzt werden kann und sichsomit der Wirkungsgrad der Schaltung verschlechtert. Es existiert demnach ein Op-timum fur die LO-Leistung, das im Ubergangsbereich um die LO-Sattigungsleistungliegt.
3.2.2 Rauscharme Verstarker
In konventionellen homodynen Empfangerkonzepten werden typischerweise LNAsals eine der ersten Stufen im Empfangspfad eingesetzt [68]. Tabelle 3.3 gibt einenUberblick uber aktuell veroffentlichte LNAs fur den 77GHz Frequenzbereich inder SiGe-Technologie. Die aufgefuhrten Schaltungen besitzen single-ended Ein- undAusgange.
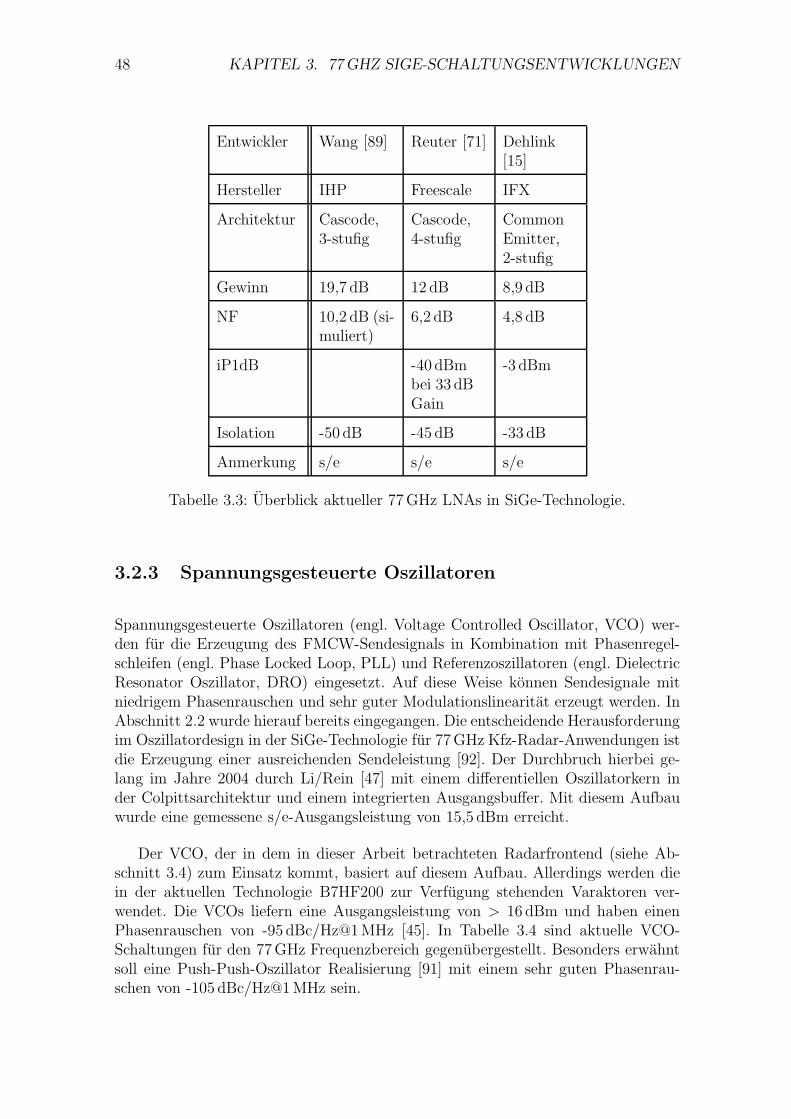
48 KAPITEL 3. 77GHZ SIGE-SCHALTUNGSENTWICKLUNGEN
Entwickler Wang [89] Reuter [71] Dehlink[15]
Hersteller IHP Freescale IFX
Architektur Cascode,3-stufig
Cascode,4-stufig
CommonEmitter,2-stufig
Gewinn 19,7 dB 12 dB 8,9 dB
NF 10,2 dB (si-muliert)
6,2 dB 4,8 dB
iP1dB -40 dBmbei 33 dBGain
-3 dBm
Isolation -50 dB -45 dB -33 dB
Anmerkung s/e s/e s/e
Tabelle 3.3: Uberblick aktueller 77GHz LNAs in SiGe-Technologie.
3.2.3 Spannungsgesteuerte Oszillatoren
Spannungsgesteuerte Oszillatoren (engl. Voltage Controlled Oscillator, VCO) wer-den fur die Erzeugung des FMCW-Sendesignals in Kombination mit Phasenregel-schleifen (engl. Phase Locked Loop, PLL) und Referenzoszillatoren (engl. DielectricResonator Oszillator, DRO) eingesetzt. Auf diese Weise konnen Sendesignale mitniedrigem Phasenrauschen und sehr guter Modulationslinearitat erzeugt werden. InAbschnitt 2.2 wurde hierauf bereits eingegangen. Die entscheidende Herausforderungim Oszillatordesign in der SiGe-Technologie fur 77GHz Kfz-Radar-Anwendungen istdie Erzeugung einer ausreichenden Sendeleistung [92]. Der Durchbruch hierbei ge-lang im Jahre 2004 durch Li/Rein [47] mit einem differentiellen Oszillatorkern inder Colpittsarchitektur und einem integrierten Ausgangsbuffer. Mit diesem Aufbauwurde eine gemessene s/e-Ausgangsleistung von 15,5 dBm erreicht.
Der VCO, der in dem in dieser Arbeit betrachteten Radarfrontend (siehe Ab-schnitt 3.4) zum Einsatz kommt, basiert auf diesem Aufbau. Allerdings werden diein der aktuellen Technologie B7HF200 zur Verfugung stehenden Varaktoren ver-wendet. Die VCOs liefern eine Ausgangsleistung von > 16 dBm und haben einenPhasenrauschen von -95 dBc/Hz@1MHz [45]. In Tabelle 3.4 sind aktuelle VCO-Schaltungen fur den 77GHz Frequenzbereich gegenubergestellt. Besonders erwahntsoll eine Push-Push-Oszillator Realisierung [91] mit einem sehr guten Phasenrau-schen von -105 dBc/Hz@1MHz sein.
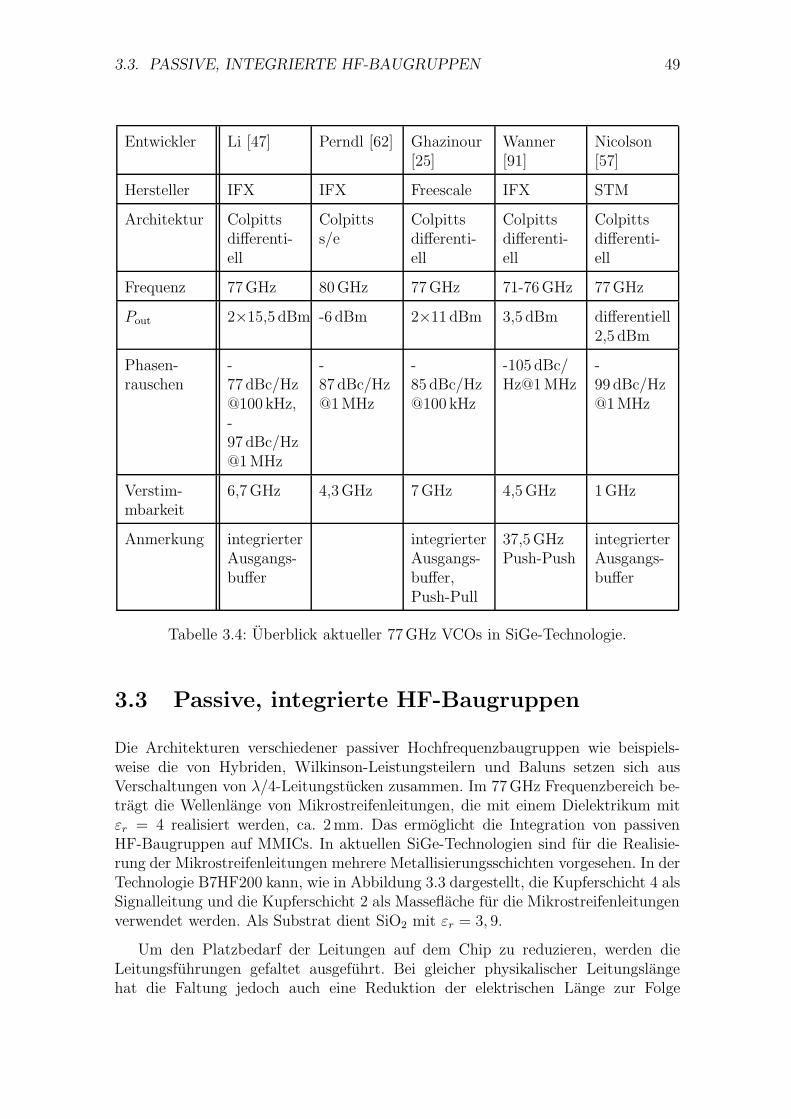
3.3. PASSIVE, INTEGRIERTE HF-BAUGRUPPEN 49
Entwickler Li [47] Perndl [62] Ghazinour[25]
Wanner[91]
Nicolson[57]
Hersteller IFX IFX Freescale IFX STM
Architektur Colpittsdifferenti-ell
Colpittss/e
Colpittsdifferenti-ell
Colpittsdifferenti-ell
Colpittsdifferenti-ell
Frequenz 77GHz 80GHz 77GHz 71-76GHz 77GHz
Pout 2×15,5 dBm -6 dBm 2×11 dBm 3,5 dBm differentiell2,5 dBm
Phasen-rauschen
-77 dBc/Hz@100 kHz,-97 dBc/Hz@1MHz
-87 dBc/Hz@1MHz
-85 dBc/Hz@100 kHz
-105 dBc/Hz@1MHz
-99 dBc/Hz@1MHz
Verstim-mbarkeit
6,7GHz 4,3GHz 7GHz 4,5GHz 1GHz
Anmerkung integrierterAusgangs-buffer
integrierterAusgangs-buffer,Push-Pull
37,5GHzPush-Push
integrierterAusgangs-buffer
Tabelle 3.4: Uberblick aktueller 77GHz VCOs in SiGe-Technologie.
3.3 Passive, integrierte HF-Baugruppen
Die Architekturen verschiedener passiver Hochfrequenzbaugruppen wie beispiels-weise die von Hybriden, Wilkinson-Leistungsteilern und Baluns setzen sich ausVerschaltungen von λ/4-Leitungstucken zusammen. Im 77GHz Frequenzbereich be-tragt die Wellenlange von Mikrostreifenleitungen, die mit einem Dielektrikum mitεr = 4 realisiert werden, ca. 2mm. Das ermoglicht die Integration von passivenHF-Baugruppen auf MMICs. In aktuellen SiGe-Technologien sind fur die Realisie-rung der Mikrostreifenleitungen mehrere Metallisierungsschichten vorgesehen. In derTechnologie B7HF200 kann, wie in Abbildung 3.3 dargestellt, die Kupferschicht 4 alsSignalleitung und die Kupferschicht 2 als Masseflache fur die Mikrostreifenleitungenverwendet werden. Als Substrat dient SiO2 mit εr = 3, 9.
Um den Platzbedarf der Leitungen auf dem Chip zu reduzieren, werden dieLeitungsfuhrungen gefaltet ausgefuhrt. Bei gleicher physikalischer Leitungslangehat die Faltung jedoch auch eine Reduktion der elektrischen Lange zur Folge
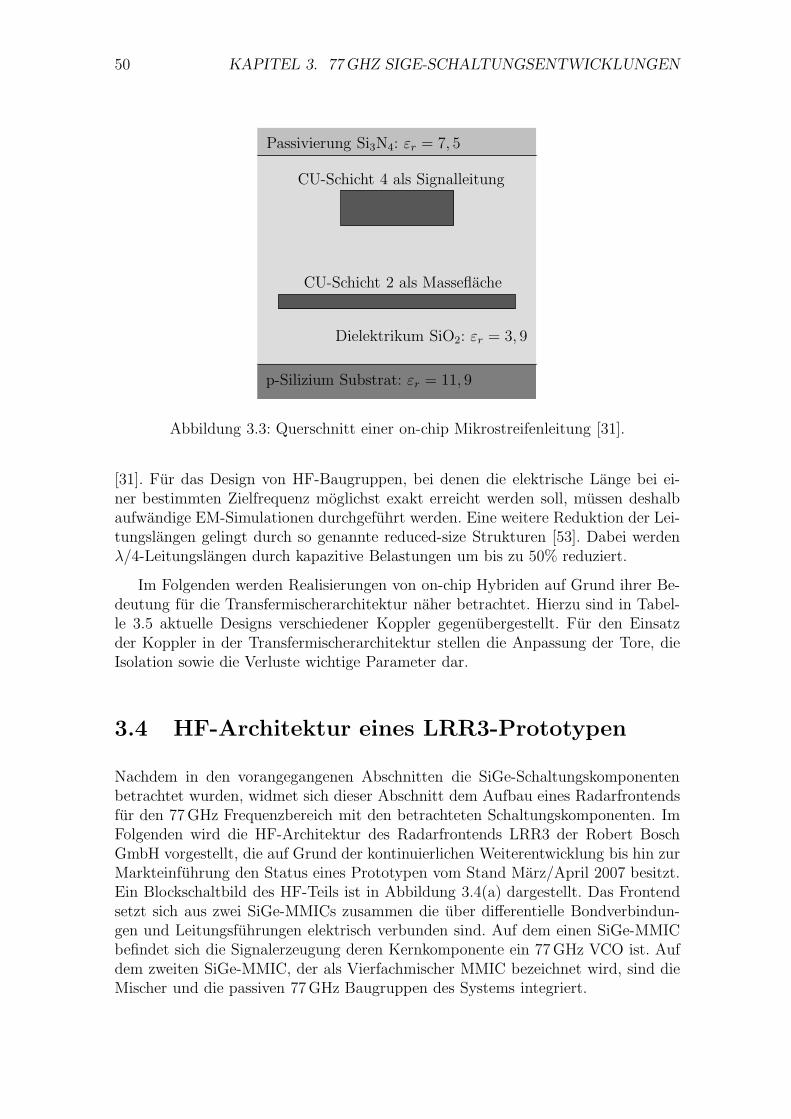
50 KAPITEL 3. 77GHZ SIGE-SCHALTUNGSENTWICKLUNGEN
p-Silizium Substrat: εr = 11, 9
Dielektrikum SiO2: εr = 3, 9
CU-Schicht 2 als Masseflache
CU-Schicht 4 als Signalleitung
Passivierung Si3N4: εr = 7, 5
Abbildung 3.3: Querschnitt einer on-chip Mikrostreifenleitung [31].
[31]. Fur das Design von HF-Baugruppen, bei denen die elektrische Lange bei ei-ner bestimmten Zielfrequenz moglichst exakt erreicht werden soll, mussen deshalbaufwandige EM-Simulationen durchgefuhrt werden. Eine weitere Reduktion der Lei-tungslangen gelingt durch so genannte reduced-size Strukturen [53]. Dabei werdenλ/4-Leitungslangen durch kapazitive Belastungen um bis zu 50% reduziert.
Im Folgenden werden Realisierungen von on-chip Hybriden auf Grund ihrer Be-deutung fur die Transfermischerarchitektur naher betrachtet. Hierzu sind in Tabel-le 3.5 aktuelle Designs verschiedener Koppler gegenubergestellt. Fur den Einsatzder Koppler in der Transfermischerarchitektur stellen die Anpassung der Tore, dieIsolation sowie die Verluste wichtige Parameter dar.
3.4 HF-Architektur eines LRR3-Prototypen
Nachdem in den vorangegangenen Abschnitten die SiGe-Schaltungskomponentenbetrachtet wurden, widmet sich dieser Abschnitt dem Aufbau eines Radarfrontendsfur den 77GHz Frequenzbereich mit den betrachteten Schaltungskomponenten. ImFolgenden wird die HF-Architektur des Radarfrontends LRR3 der Robert BoschGmbH vorgestellt, die auf Grund der kontinuierlichen Weiterentwicklung bis hin zurMarkteinfuhrung den Status eines Prototypen vom Stand Marz/April 2007 besitzt.Ein Blockschaltbild des HF-Teils ist in Abbildung 3.4(a) dargestellt. Das Frontendsetzt sich aus zwei SiGe-MMICs zusammen die uber differentielle Bondverbindun-gen und Leitungsfuhrungen elektrisch verbunden sind. Auf dem einen SiGe-MMICbefindet sich die Signalerzeugung deren Kernkomponente ein 77GHz VCO ist. Aufdem zweiten SiGe-MMIC, der als Vierfachmischer MMIC bezeichnet wird, sind dieMischer und die passiven 77GHz Baugruppen des Systems integriert.
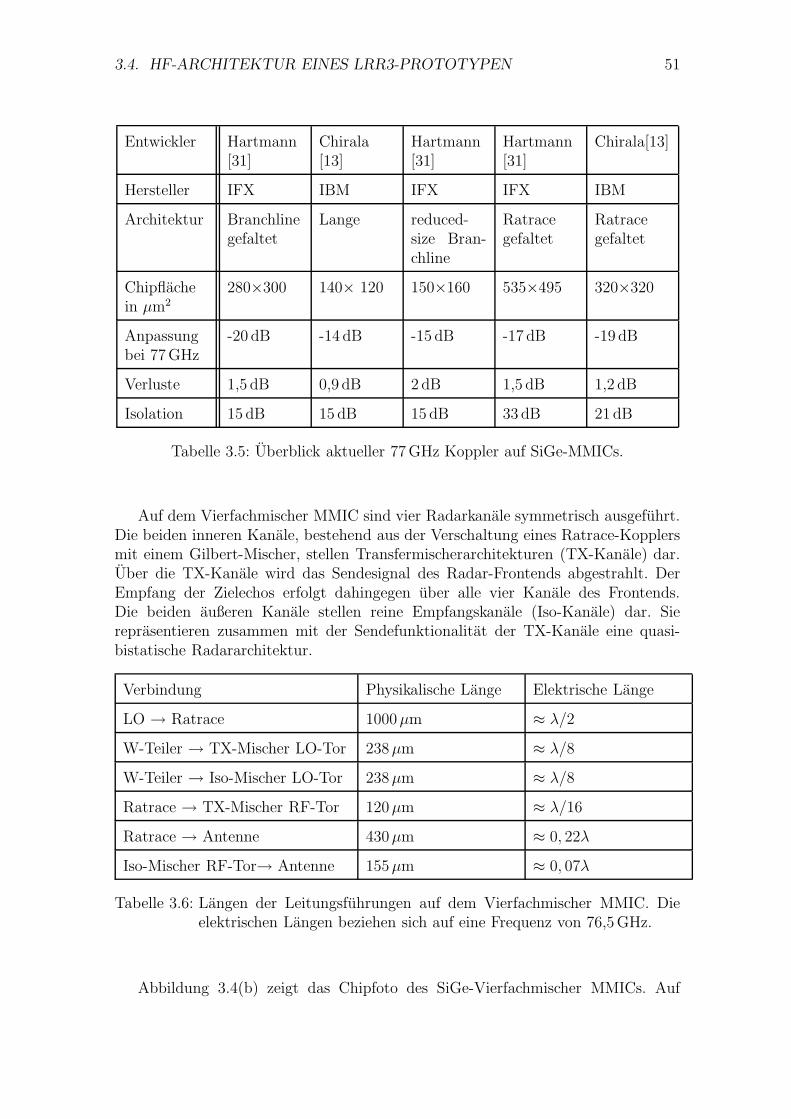
3.4. HF-ARCHITEKTUR EINES LRR3-PROTOTYPEN 51
Entwickler Hartmann[31]
Chirala[13]
Hartmann[31]
Hartmann[31]
Chirala[13]
Hersteller IFX IBM IFX IFX IBM
Architektur Branchlinegefaltet
Lange reduced-size Bran-chline
Ratracegefaltet
Ratracegefaltet
Chipflachein µm2
280×300 140× 120 150×160 535×495 320×320
Anpassungbei 77GHz
-20 dB -14 dB -15 dB -17 dB -19 dB
Verluste 1,5 dB 0,9 dB 2dB 1,5 dB 1,2 dB
Isolation 15 dB 15 dB 15 dB 33 dB 21 dB
Tabelle 3.5: Uberblick aktueller 77GHz Koppler auf SiGe-MMICs.
Auf dem Vierfachmischer MMIC sind vier Radarkanale symmetrisch ausgefuhrt.Die beiden inneren Kanale, bestehend aus der Verschaltung eines Ratrace-Kopplersmit einem Gilbert-Mischer, stellen Transfermischerarchitekturen (TX-Kanale) dar.Uber die TX-Kanale wird das Sendesignal des Radar-Frontends abgestrahlt. DerEmpfang der Zielechos erfolgt dahingegen uber alle vier Kanale des Frontends.Die beiden außeren Kanale stellen reine Empfangskanale (Iso-Kanale) dar. Siereprasentieren zusammen mit der Sendefunktionalitat der TX-Kanale eine quasi-bistatische Radararchitektur.
Verbindung Physikalische Lange Elektrische Lange
LO → Ratrace 1000µm ≈ λ/2
W-Teiler → TX-Mischer LO-Tor 238µm ≈ λ/8
W-Teiler → Iso-Mischer LO-Tor 238µm ≈ λ/8
Ratrace → TX-Mischer RF-Tor 120µm ≈ λ/16
Ratrace → Antenne 430µm ≈ 0, 22λ
Iso-Mischer RF-Tor→ Antenne 155µm ≈ 0, 07λ
Tabelle 3.6: Langen der Leitungsfuhrungen auf dem Vierfachmischer MMIC. Dieelektrischen Langen beziehen sich auf eine Frequenz von 76,5GHz.
Abbildung 3.4(b) zeigt das Chipfoto des SiGe-Vierfachmischer MMICs. Auf
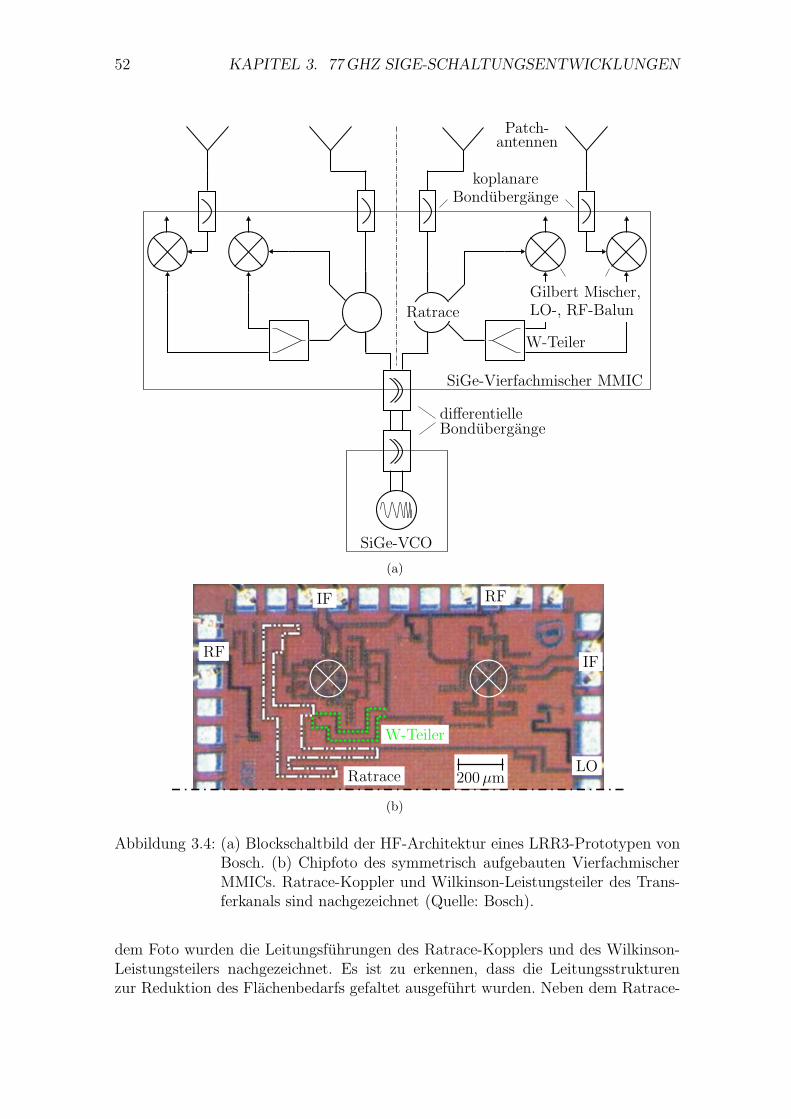
52 KAPITEL 3. 77GHZ SIGE-SCHALTUNGSENTWICKLUNGEN
SiGe-VCO
SiGe-Vierfachmischer MMIC
differentielleBondubergange
Gilbert Mischer,LO-, RF-BalunRatrace
W-Teiler
koplanareBondubergange
Patch-antennen
(a)
Ratrace
W-Teiler
LO
IF
IFRF
RF
200µm
(b)
Abbildung 3.4: (a) Blockschaltbild der HF-Architektur eines LRR3-Prototypen vonBosch. (b) Chipfoto des symmetrisch aufgebauten VierfachmischerMMICs. Ratrace-Koppler und Wilkinson-Leistungsteiler des Trans-ferkanals sind nachgezeichnet (Quelle: Bosch).
dem Foto wurden die Leitungsfuhrungen des Ratrace-Kopplers und des Wilkinson-Leistungsteilers nachgezeichnet. Es ist zu erkennen, dass die Leitungsstrukturenzur Reduktion des Flachenbedarfs gefaltet ausgefuhrt wurden. Neben dem Ratrace-

3.4. HF-ARCHITEKTUR EINES LRR3-PROTOTYPEN 53
Koppler und dem Wilkinson-Leistungsteiler sind die Gilbert-Mischer des TX- undIso-Kanals sowie die on-chip Leitungsfuhrungen zwischen den Baugruppen zu erken-nen. In Tabelle 3.6 sind die Leitungslangen der on-chip Leitungsfuhrung aufgefuhrt.Sie wurden unter Kenntnis der Große eines Bondpads (81x81µm2) aus dem Chipfotoherausgemessen. Die Bondpads mit der Bezeichnung RF (siehe Abbildung 3.4(b))werden uber koplanare Bondverbindungen mit der Leitungsfuhrung auf der HF-Platine kontaktiert. Die Verbindung vom Vierfachmischer MMIC zu den vier Pat-chantennen ist als Mikrostreifenleitung ausgefuhrt. Die Langen der Verbindungenbetragen fur den TX-Kanal 3,12mm und fur den Iso-Kanal 3,74mm. space spacespace space space space space space space space space space space space space spacespace space space space space space space space space space space space space spacespace space space space space space space space space space space space space spacespace space space space space space space space space space space space space spacespace space space space space space space space space space space space space spacespace space space space space space space space space space space space space spacespace space space space

54 KAPITEL 3. 77GHZ SIGE-SCHALTUNGSENTWICKLUNGEN
Kapitel 4
Modellierung von 77 GHz
SiGe-Komponenten
Fur die simulativen Untersuchungen in den folgenden Kapiteln dieser Arbeit ist esnotig, die Systemkomponenten eines auf SiGe-MMICs integrierten 77GHz FMCW-Radarsystems zu modellieren. Um die Praxisrelevanz der Untersuchungen hervor-zuheben, wird speziell der LRR3-Prototyp der Robert Bosch GmbH betrachtet. DieArchitektur des HF-Teils des Prototypen wurde bereits in Abschnitt 3.4 vorgestellt.In diesem Kapitel werden die einzelnen Systemkomponenten dieses Prototypen mo-delliert.
Zuerst werden verschiedene Modelltypen hinsichtlich ihrer Einsetzbarkeit fur dieModellierungen in dieser Arbeit klassifiziert. Im Anschluss wird die zentrale Schal-tungskomponente des Prototypen, ein 77GHz Gilbert-Mischer, modelliert. Anhandeines Schaltungsmodells wird das Verhalten des Mischers untersucht und aus den Er-kenntnissen ein Verhaltensmodell abgeleitet. Nachdem die Theorie und der Aufbaudes Verhaltensmodells vorgestellt wurden, wird die Modellierung verifiziert und diePerformance des Modells analysiert. Nach der Mischermodellierung werden die Mo-dellierungen der weiteren Systemkomponenten des Prototypen betrachtet. Im einzel-nen werden Verhaltensmodelle fur einen koplanaren Bondubergang, einen Ratrace-Koppler, einen Wilkinson-Leistungsteiler und eine Patchantenne vorgestellt.
4.1 Klassifizierung der Modelltypen
Fur die Modellierung der Systemkomponenten des LRR3-Prototypen werden ver-schiedene Modelltypen verwendet. Es wird zwischen Schaltungsmodellen, Datenmo-dellen und Verhaltensmodellen unterschieden. Unter dem Begriff Schaltungsmodellwerden die Modelle zusammengefasst, die aus diskreten Bauteilmodellen wie Tran-sistormodelle, Widerstandsmodelle, Kapazitatsmodelle, Induktivitatsmodelle undLeitungsmodelle aufgebaut sind und die Schaltungsarchitektur der Systemkompo-nenten berucksichtigen. Der Vorteil der Schaltungsmodellierung resultiert aus derBerucksichtigung der Schaltungsarchitektur. Dadurch konnen schaltungsspezifische
55

56 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
Effekte wie beispielsweise Unsymmetrien und parasitare Effekte sehr genau model-liert werden. Die Genauigkeit des Modells ist durch die Modellierungsgenauigkeitder Bauteilmodelle begrenzt. Ein Nachteil der Schaltungsmodellierung ist ihre hoheKomplexitat und damit verbunden, relativ hohe Simulationszeiten.
Im Gegensatz dazu werden Datenmodelle durch Simulations- oder Messdaten be-schrieben. Sie eignen sich besonders fur die Beschreibung von passiven Komponen-ten. Hierbei kann eine sehr hohe Modellierungsgenauigkeit erreicht werden. WerdenDatenmodelle, die in Zeitbereichssimulationen eingesetzt werden sollen, mit Fre-quenzbereichsdaten beschrieben, so ist eine Konversion der Daten notwendig. DieseKonversion bedeutet zusatzlichen Rechenaufwand und fuhrt zu einer Erhohung derSimulationszeit.
Bei den Verhaltensmodellen werden die zu modellierenden Systemkomponentendurch mathematische Zusammenhange beschrieben. Eine solche Beschreibung ist al-lerdings fur die nichtidealen Vorgange in den Schaltungen ausgesprochen komplexund es gelingt oft nur eine grobe Charakterisierung des Verhaltens. In Tabelle 4.1sind die drei Modelltypen gegenubergestellt und hinsichtlich ihrer Modellierungs-genauigkeit, ihrer Simulationsgeschwindigkeit und ihrer Flexibilitat in Bezug aufAnderungen von Modellparametern bewertet.
Bewertungs-kriterium
Schaltungsmodell Datenmodell Verhaltensmodell
Modellierungs-genauigkeit
+ ++ -
Simulations-geschwindigkeit
- - ++
Flexibilitat + - - ++
Tabelle 4.1: Modellperformance von Schaltungs-, Daten- und Verhaltensmodellen(++ sehr gut, + gut, - schlecht, - - sehr schlecht).
4.2 Modellierung von Gilbert-Mischern
In diesem Abschnitt wird ein Gilbert-Mischer modelliert, der im vorgestellten LRR3-Prototypen als zentrale Systemkomponente zum Einsatz kommen kann. Der Model-lierung des Mischers kommt erhohte Bedeutung zu, was folgende Argumente zeigen.
• Der Mischer ist die erste verstarkende Komponente in der Empfangskette desRadarsystems. Das SNR wird deshalb entscheidend vom Mischer bestimmtund macht eine exakte Modellierung des Konversionsgewinns und der Rausch-zahl notwendig.

4.2. MODELLIERUNG VON GILBERT-MISCHERN 57
• Die Signale am RF-Eingang des Mischers besitzen eine sehr hohe Dynamik aufGrund des großen zu erfassenden Entfernungsbereichs (2 · 200m) eines Weit-bereichsradars. Zusatzlich wird die Signaldynamik am Mischereingang durchLeckstrome auf der Transceiverschaltung, die durch eine mangelnde Isolati-on zwischen Sende- und Empfangssignal entstehen, erhoht. Die Folge ist einemogliche Ubersteuerung des Mischereingangs und resultierend das Auftretenvon Intermodulation. Das nichtlinearen Verhalten des Mischers muss deshalbmodelliert werden.
• Steht am LO-Eingang des Mischers nicht ausreichend Leistung zur Verfugung,so fuhrt das zu einem Ruckgang des Konversionsgewinns und zu einem Anstiegder Rauschzahl. Wird zu viel Leistung am LO-Eingang zur Verfugung gestellt,so fuhrt das hingegen zu einer Abnahme des Wirkungsgrads der Schaltung.Typischerweise befindet sich der Arbeitspunkt des Mischers im Bereich derLO-Sattigung, welche folglich fur eine Modellierung der beschriebenen Effekteexakt modelliert werden muss.
4.2.1 Uberblick und Vorgehensweise
Fur die Modellierung des Mischers werden zwei unterschiedliche Modelltypen einge-setzt: das Schaltungsmodell und das Verhaltensmodell. Eine Schaltungsmodellierungdes Mischers wird dazu verwendet, das Verhalten des Gilbert-Mischers sehr genauzu charakterisieren. Aus den gewonnenen Erkenntnissen wird daraufhin ein Verhal-tensmodell erstellt, das im Vergleich zum Schaltungsmodell den Simulationsaufwandreduzieren soll. Als Simulationsplattform fur das Schaltungs- und das Verhaltensmo-dell soll das EDA-Softwarepaket ADS (Agilent’s Advanced Design System
TM
) zumEinsatz kommen. In ADS werden bereits vorhandene Verhaltensmodelle fur Mischermit der Bezeichnung Mixer2 und MixerIMT) angeboten. Diese Modelle konnen je-doch nur eingeschrankt fur die Beschreibung eines 77GHz Gilbert-Mischers in derSiGe-Technologie eingesetzt werden, wie im Folgenden erortert wird.
Das ADS-Mischermodell Mixer2 basiert auf einem Modellierungsansatz fur ak-tive Schaltmischer, der eine ausreichende Leistung am LO-Eingang voraussetzt. Da-durch kann der Konversionsgewinn und die Rauschzahl des Mischer von dem amLO-Eingang anstehenden Signal entkoppelt angesehen werden. Der Mischer lasstsich dann als Zweitor modellieren mit einer schwach nichtlinearen, jedoch periodischzeitvarianten Ubertragungsfunktion [46]. Die Anpassung und das interne Leakagezwischen den Toren des Mischers wird durch seine Konversions-Matrix beschrieben[94].
Ein weiterer Modellierungsansatz fur Mischer wird mit dem ADS-MischermodellMixerIMT2 umgesetzt. Durch Verwendung so genannter Beschreibungsfunktionenkann das Mischerverhalten im Frequenzbereich beschrieben werden [85]. Dabeiwird fur jede spektrale Komponente des Ausgangssignals eine komplexe Beschrei-bungsfunktion formuliert, die von den spektralen Komponenten der Eingangssigna-le abhangt. Eine vereinfachte Variante dieses Ansatzes ist die Beschreibung des

58 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
Mischerverhaltens mittels Intermodulationstabellen (IMT) [20], mit der auch dieModellierung der LO-Sattigung aller spektralen Komponenten des Ausgangssignalsmoglich ist [49]. Die Abhangigkeit der Rauschzahl von der LO-Leistung kann mitdiesem Modell jedoch nicht wiedergegeben werden.
Modellname Mixer2 MixerIMT2
Modelltyp Schaltungs-modell
Verhaltens-modell
Verhaltens-modell
Nichtlinearitat imRF-Signalpfad
ja ja ja
LO-Abhangigkeit des CG ja eingeschrankt ja
LO-Abhangigkeit der NF ja nein nein
frequenzabhangigeAnpassung/Leakage
ja nein nein
Simulationszeit hoch niedrig mittel
Tabelle 4.2: Gegenuberstellung verschiedener Modellierungsansatze fur Mischer.
In Tabelle 4.2 werden die ADS-Mischermodelle Mixer2 und MixerIMT2 und ei-ne Schaltungsmodellierung miteinander verglichen. Es werden dabei Modellierungs-aspekte, die fur den Einsatz der Modelle in einer Systemsimulation fur FMCW-Radartransceiver in SiGe-Technologie von Bedeutung sind, betrachtet. Die Tabellezeigt, dass fur schnelle Simulationen mit gleichzeitiger genauer Modellierung derLO-Abhangigkeit des Konversionsgewinns und der Rauschzahl eine Erweiterung derexistierenden Verhaltensmodelle notig ist.
Im Folgenden wird beschrieben, wie ein erweitertes Verhaltensmodell auf Basisvon Datentabellen (engl. Look-up Tables) erstellt werden kann. Das beschriebeneVorgehen ist dadurch begrundet, dass eine Charakterisierung des zu modellierenden77GHz-SiGe Mischers durch Messdaten nur eingeschrankt vorhanden ist. TypischeMischerkenndaten, die durch Messungen ermittelt werden, sind der 1 dB Kompressi-onspunkt (iP1dB), die Charakterisierung des Konversionsgewinns und der Rausch-zahl uber der angelegten LO-Leistung sowie die Anpassung und das Leakage derHF-Tore [16], [32], [63], [90]. Die Charakterisierung der Anpassung und des Lea-kage wird meist mit Hilfe eines Netzwerkanalysators bei einer definierten Leistungdurchgefuhrt. Da die Ausgangsleistung des Messgerates beschrankt ist, kann die zurCharakterisierung verwendete Leistung jedoch von der Signalsituation Arbeitspunktdes Mischers abweichen.
Die Moglichkeit einer uber Standardmessungen hinaus gehenden Charakteri-sierung fur ein erweitertes Verhaltensmodell ist durch Zuhilfenahme eines Schal-tungsmodells moglich. Zuerst wird mit den Standardmessdaten eine Verifikation
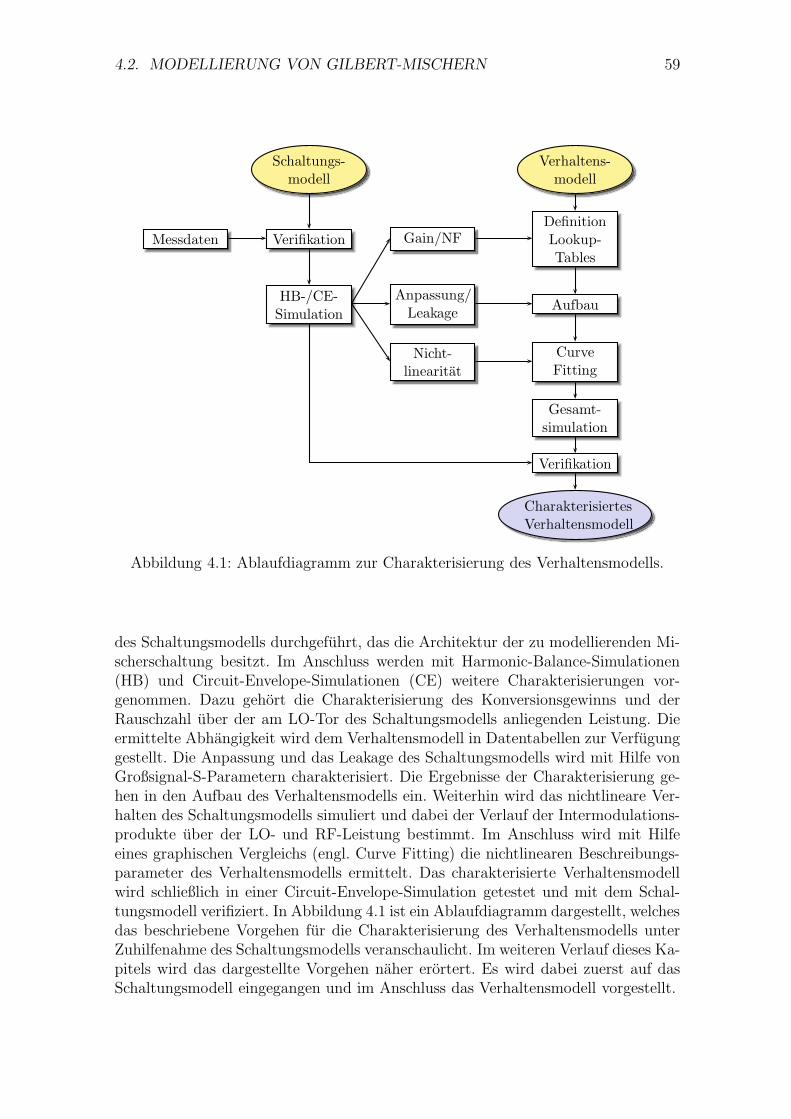
4.2. MODELLIERUNG VON GILBERT-MISCHERN 59
Schaltungs-modell
Verhaltens-modell
Messdaten Verifikation Gain/NFDefinitionLookup-Tables
HB-/CE-Simulation
Anpassung/Leakage
Aufbau
Nicht-linearitat
CurveFitting
Gesamt-simulation
Verifikation
CharakterisiertesVerhaltensmodell
Abbildung 4.1: Ablaufdiagramm zur Charakterisierung des Verhaltensmodells.
des Schaltungsmodells durchgefuhrt, das die Architektur der zu modellierenden Mi-scherschaltung besitzt. Im Anschluss werden mit Harmonic-Balance-Simulationen(HB) und Circuit-Envelope-Simulationen (CE) weitere Charakterisierungen vor-genommen. Dazu gehort die Charakterisierung des Konversionsgewinns und derRauschzahl uber der am LO-Tor des Schaltungsmodells anliegenden Leistung. Dieermittelte Abhangigkeit wird dem Verhaltensmodell in Datentabellen zur Verfugunggestellt. Die Anpassung und das Leakage des Schaltungsmodells wird mit Hilfe vonGroßsignal-S-Parametern charakterisiert. Die Ergebnisse der Charakterisierung ge-hen in den Aufbau des Verhaltensmodells ein. Weiterhin wird das nichtlineare Ver-halten des Schaltungsmodells simuliert und dabei der Verlauf der Intermodulations-produkte uber der LO- und RF-Leistung bestimmt. Im Anschluss wird mit Hilfeeines graphischen Vergleichs (engl. Curve Fitting) die nichtlinearen Beschreibungs-parameter des Verhaltensmodells ermittelt. Das charakterisierte Verhaltensmodellwird schließlich in einer Circuit-Envelope-Simulation getestet und mit dem Schal-tungsmodell verifiziert. In Abbildung 4.1 ist ein Ablaufdiagramm dargestellt, welchesdas beschriebene Vorgehen fur die Charakterisierung des Verhaltensmodells unterZuhilfenahme des Schaltungsmodells veranschaulicht. Im weiteren Verlauf dieses Ka-pitels wird das dargestellte Vorgehen naher erortert. Es wird dabei zuerst auf dasSchaltungsmodell eingegangen und im Anschluss das Verhaltensmodell vorgestellt.

60 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
4.2.2 Schaltungsmodell
In diesem Abschnitt wird das Schaltungsmodell eines Gilbert-Mischers untersucht,dessen Architektur in ahnlicher Bauform in dem in Abschnitt 3.4 vorgestellten Weit-bereichsradarsystem LRR3 von Bosch zum Einsatz kommt.
4.2.2.1 Beschreibung der Architektur
Die Mischerarchitektur des Schaltungsmodells ist in Abbildung 4.2 dargestellt undwurde in [16] publiziert sowie messtechnisch charakterisiert. Sie gliedert sich grob inden Mischerkern, einen LO-Buffer und zwei HF-Baluns. Der Mischerkern wird vonder Schaltstufe und der Eingangsstufe in Kollektor-Basis-Konfiguration gebildet. DieSchaltstufe wird uber den LO-Buffer, der aus zwei Emitterfolger-Stufen aufgebautist, gespeist. Die Konversion der Eingangssignale in differentielle Signale wird vonzwei Baluns ubernommen.
Im Folgenden werden wichtige elektrische Parameter der in [16] publizierten Ar-chitektur festgehalten. Die Eingangsimpedanz der HF-Tore des Mischers betragt50Ω wahrend die Impedanz des Ausgangs ca. 200Ω hat. Wie aus Tabelle 3.2 ent-nommen werden kann, besitzt der Mischer eine sehr gute elektrische Performance imVergleich zu ahnlichen, in dieser Arbeit aufgefuhrten Mischerrealisierungen. Fur denKonversionsgewinn wurde messtechnisch ein Wert von 11 dB und fur die Rauschzahlwurde ein Wert von 16,5 dB ermittelt. Die Nichtlinearitat des Mischers wurde durchden 1 dB-Kompressionspunkt charakterisiert, welcher messtechnisch zu -0,3 dBm er-mittelt wurde. Fur die Sattigungsleistung Psat des LO-Eingangs wurde eine Wertvon -5 dBm ermittelt.
Wahrend fur die Widerstande, Kapazitaten und HF-Leitungen des MischersStandardbauteilmodelle verwendet werden, wird fur die Modellierung der Transi-storen ein modifiziertes BJT-Modell (engl. Bipolar Junction Transistor, BJT) nachGummel-Poon eingesetzt. Durch die Modifizierung wird das Gummel-Poon-Modellum zusatzliche Bahnwiderstande, sowie parasitare Kapazitaten erweitert. In derMischerarchitektur kommen zwei unterschiedliche Transistormodelle zum Einsatz.Ein Modell fur Transistoren mit großer effektiven Emitterlange, was in niedrigerenBahnwiderstanden und hoheren parasitaren Kapazitaten resultiert und ein weiteresModell fur Transistoren mit kleiner effektiven Emitterlange, was in hoheren Bahn-widerstanden und niedrigeren parasitaren Kapazitaten resultiert. Fur eine genaueBeschreibung der Transistormodelle wird auf [61] verwiesen.
4.2.2.2 Modellierung der Intermodulation zweiter Ordnung
Wird das Schaltungsmodell nach der in Abbildung 4.2 dargestellten Architekturmit idealen Bauteilmodellen aufgebaut, so wird ein perfekter doppelt balancierter(engl. Double-Balanced) Mischer modelliert. Diese Mischerarchitektur sorgt dafur,dass bei idealer differentieller Signalaussteuerung keine Intermodulationsproduktegerader Ordnung am Mischerausgang auftreten. Dieses ideale Verhalten wird in der

4.2. MODELLIERUNG VON GILBERT-MISCHERN 61
Abbildung 4.2: Gilbert-Mischer Architektur des Schaltungsmodells [16].
Realitat durch einen unsymmetrischen Aufbau, sowie durch eine unsymmetrische Si-gnalzufuhrung auf Grund von Bauteil- und Prozesstoleranzen gestort, was wiederumzu einem Auftreten von Intermodulationsprodukten gerader Ordnung fuhrt [1]. Umeine korrekte Schaltungsmodellierung des nichtlinearen Verhaltens zu erreichen istes deshalb notwendig, den idealen Aufbau des Schaltungsmodells gezielt zu storen.Hierfur gibt es eine Vielzahl an Moglichkeiten die in [14] naher erortert werden. EineMoglichkeit, die auf die Architektur des Mischers abzielt, ist die ungleiche Dimen-sionierung der Lastwiderstande RL [44]. Dabei werden beide Lastwiderstande umden Wert ∆R geandert. O.b.d.A wird der linke Lastwiderstand um ∆R vergroßert,wahrend gleichzeitig der rechte Lastwiderstand um ∆R verkleinert wird.
Rlinks = RL + ∆R/2, Rrechts = RL − ∆R/2.
Fur diese Storung der Symmetrie lasst sich der auf den Eingang bezogene Intercept-punkt zweiter Ordnung (IIP2) formelmaßig ausdrucken:
IIP2 ≈ 4G√
2
πηnoma2∆R. (4.1)
Mit ηnom wird hierbei der nominale Duty-Cycle der Schalttransistoren beschrieben,der fur den Wert 0,5 ideal ist. a2 bezeichnet den Vorfaktor des Terms zweiter Ord-nung einer Potenzreihe, welche die gesamte Nichtlinearitat des Mischer beschreibtund G ist der Konversionsgewinn des Mischers.
Eine weitere Moglichkeit die Intermodulation zweiter Ordnung und damit denIIP2 der Mischerschaltung zu beeinflussen, ist eine Storung der idealen Signal-zufuhrung. In der realen Schaltungsarchitektur kann eine solche Storung durch einen

62 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
∆R in %
IIP
2/
IIP
3in
dB
mIIP2 (δ = 0, κ = 0 dB)
IIP2 Theorie
IIP2 (δ = 10, κ = 5dB)
IIP3
0 5 10 15 20 250
10
20
30
40
50
60
Abbildung 4.3: Interceptpunkte zweiter (IIP2) und dritter (IIP3) Ordung uber derAbweichung des Lastwiderstandes ∆R.
nichtidealen Aufbau der HF-Baluns auftreten. Wird ein HF-Balun als 3-Tor durchseine S-Parameter Matrix
SBALUN =j√2
0 1 + k2
(
k2− 1)
ejδ
1 + k2
0 0(
k2− 1)
ejδ 0 0
(4.2)
beschrieben, so kann mit dem Parameter k das Amplitudenverhaltnis und mit δ dasPhasenverhaltnis der Ausgangssignale gezielt verandert und damit unbalancierteSignalanteile hervorgerufen werden. Mit dem Parameter κ wird im Folgenden einleistungsbezogener dB-Wert fur k angegeben, wobei κ = 10 log10 k gilt.
In Abbildung 4.3 sind der Interceptpunkt zweiter Ordnung und dritter OrdnungIIP2 bzw. IIP3 des Schaltungsmodells uber der Abweichung des Lastwiderstandes∆R dargestellt. Fur eine ideale differentielle Aussteuerung (δ = 0 , κ = 0dB)folgt der simulierte IIP2-Verlauf dem theoretisch durch Gleichung 4.1 beschriebe-nen Verlauf. Der Verlauf des IIP3 bleibt von der Anderung des Lastwiderstandes imbetrachteten Intervall nahezu unbeeinflusst und nimmt einen Wert von ca. 9 dBmein. Wird zusatzlich zur Storung der Symmetrie die differentielle Signalzufuhrungdes RF- und LO-Eingangs gestort, so sinkt der Wert des IIP2 auf ca. 28 dBm undliegt damit etwa 20 dB uber dem Wert des IIP3. Fur die Balunparameter wurdendabei die Werte δ = 10 und κ = 5dB angenommen. In Abbildung 4.4 wird derEinfluss einer nicht idealen Signalaussteuerung auf den IIP2 fur ∆R = 0 betrachtet.Der IIP2 wird dabei uber dem Verhaltnis der common-mode Signalleistung zur diffe-rentiellen Signalleistung PRFc/PRFd am RF-Eingang des Mischers aufgetragen. DieGrafik zeigt, dass fur konstante δ der IIP2 mit zunehmendem Leistungsverhaltnissinkt. Demgegenuber kann fur den Verlauf des IIP2 uber der Anderung des Phasen-verhaltnisses keine Monotonie festgestellt werden.
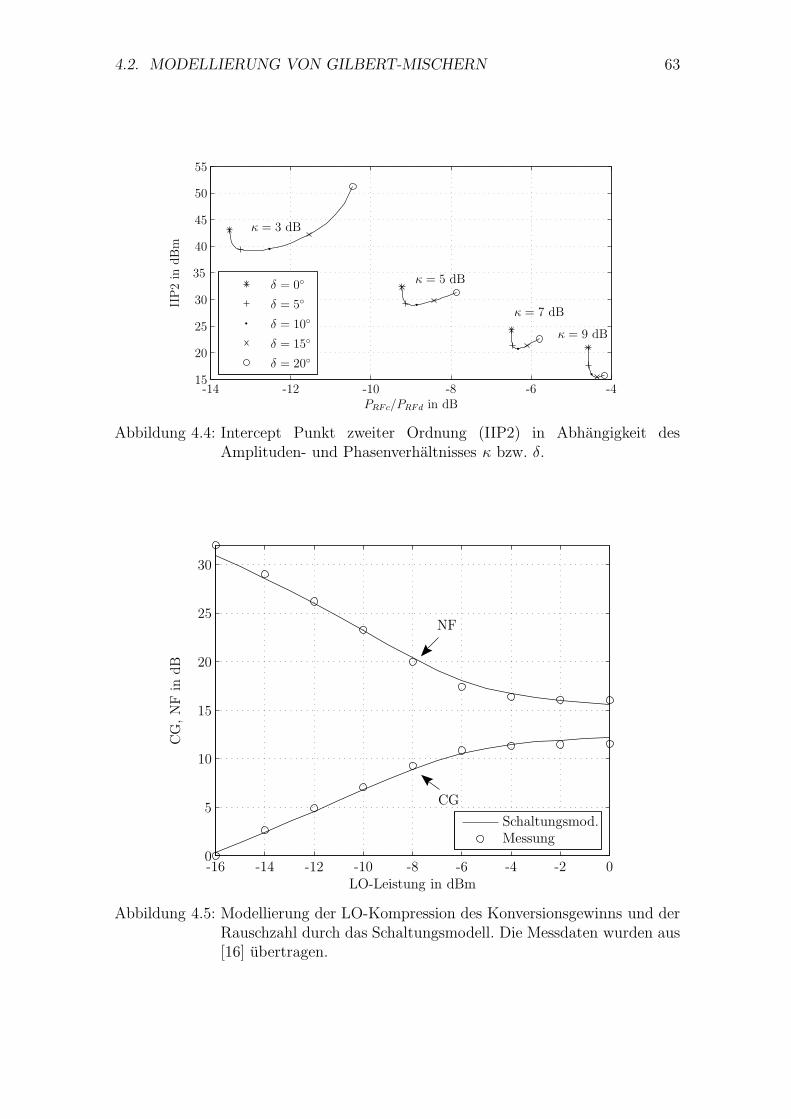
4.2. MODELLIERUNG VON GILBERT-MISCHERN 63
PRFc/PRFd in dB
IIP
2in
dB
m
κ = 3 dB
κ = 5 dB
κ = 7 dB
κ = 9 dB
δ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -415
20
25
30
35
40
45
50
55
Abbildung 4.4: Intercept Punkt zweiter Ordnung (IIP2) in Abhangigkeit desAmplituden- und Phasenverhaltnisses κ bzw. δ.
LO-Leistung in dBm
CG
,N
Fin
dB
Schaltungsmod.Messung
NF
CG
-16 -14 -12 -10 -8 -6 -4 -2 00
5
10
15
20
25
30
Abbildung 4.5: Modellierung der LO-Kompression des Konversionsgewinns und derRauschzahl durch das Schaltungsmodell. Die Messdaten wurden aus[16] ubertragen.

64 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
4.2.2.3 Modellverifikation
Das Schaltungsmodell wird mit Harmonic Balance (HB) Simulationen charakteri-siert und an Hand von Messergebnisse aus [16] verifiziert. Zunachst wird die LO-Abhangigkeit des Konversionsgewinns und der Rauschzahl uberpruft. Dafur wirdeine RF-Eingangsleistung von -20 dBm gewahlt und der Mischer hochohmig abge-schlossen. In Abbildung 4.5 sind die Simulationsergebnisse des Schaltungsmodellszusammen mit den Messergebnissen aus [16] dargestellt. Die Verlaufe zeigen in demdurch Messungen erfassten Leistungsbereich zwischen -16 und 0 dBm eine sehr guteUbereinstimmung.
Frequenz in GHz
|Γ|,|T|i
ndB
|ΓLO|
|ΓRF|
|TLORF|
|TRFLO|
74 75 76 77 78 79-40
-36
-32
-28
-24
-20
(a)
Frequenz in GHz
∠Γ,∠T
in
∠ΓLO
∠ΓRF
∠TLORF
∠TRFLO
74 75 76 77 78 79-180
-150
-120
-90
-60
-30
0
30
(b)
Abbildung 4.6: Betrag (a) und Phase (b) der Großsignal-S-Parameter der HF-Toredes Mischers bei einer Eingangsleistung von -5 dBm.
4.2. MODELLIERUNG VON GILBERT-MISCHERN 65
Das nichtlineare Verhalten des Mischers wurde in [16] messtechnisch mit dem1dB-Kompressionspunkt charakterisiert. Dabei wurde ein Wert von -0,3 dBm er-mittelt, wahrend fur das Schaltungsmodell sich simulativ ein Wert von -2,5 dBm fureine perfekt balancierte Architektur (∆R = 0, δ = 0 , κ = 0dB) ermitteln lasst.Der 1 dB-Kompressionspunkt des Schaltungsmodells liegt somit ca. 2dB unter demgemessenen Wert. Da in dieser Arbeit keine Absolutwerte der Intermodulationspro-dukte betrachtet werden, ist diese Abweichung in der Modellierung nicht relevant.
Fur eine Verifikation der Anpassung der HF-Tore des Mischers werden Simula-tionen durchgefuhrt, die die in [16] beschriebene Messung zur Charakterisierung derS-Parameter mit einem 110GHz Netzwerkanalysator nachbilden. Die Charakteri-sierung wurde dabei nicht bei LO-Sattigung durchgefuhrt, da die Ausgangsleistungdes Netzwerkanalysator hierfur nicht ausreicht. Es wurde deshalb ein LO- und RF-Signal der Leistung -5 dBm eingespeist und die S-Parameter ΓLO und ΓRF ermittelt.Analog zur Messung wurden auch die Simulationen zur Ermittlung der S-Parameterdes Schaltungsmodells durchgefuhrt. In Abbildung 4.6 sind die Simulationsergeb-nisse fur die Großsignal-S-Parameter des Mischers in Betrag und Phase bei einerEingangsleistung von -5 dBm dargestellt.
Neben der Anpassung wird in [16] das Leakage zwischen den HF-Torenmit einem 110GHz Netzwerkanalysator charakterisiert. Das Leakage ist bei denMessungen stark frequenzabhangig mit Werten um ca. -20 dB bei 76,5GHz.Die Ursachen des Leakage sind nach [68] auf kapazitive Kopplungen, Substrat-kopplungen und Bondubergangskopplungen zuruckzufuhren. Im Schaltungsmodellwerden kapazitive Kopplungen ausschließlich in den Transistormodellen durchJunction-Kapazitaten nachgebildet. Architekturbedingte Kopplungen wie beispiels-weise Leitungskopplungen werden nicht modelliert. Auch Substratkopplungen undBondubergangskopplungen werden im Schaltungsmodell nicht berucksichtigt. AnHand von Simulationen lasst sich zeigen, dass der Einfluss der Kopplungen in denTransistoren sehr gering ist, so dass das Schaltungsmodell Leakagewerte zwischen60 und 80 dB aufweist. Zusatzlich wird das Leakage im Mischer jedoch auch durchcommon-mode Signalanteile in den Eingangssignalen auf Grund von nichtidealeEffekte in den Baluns beeinflusst. Werden die nichtidealen Effekte in den Balunsberucksichtigt, so steigt das Leakage des Mischers und erreicht mit den Balunpara-metern δ = 10 und κ = 5dB die in Abbildung 4.6 dargestellten Werte zwischen denToren LO und RF TLORF und zwischen den Toren RF und LO TRFLO. Die Leakage-werte des Schaltungsmodells liegen ca. 10 dB unterhalb der gemessenen Werte. Daslasst darauf schließen, dass weitere nichtideale Effekte, welche durch das Schaltungs-modell nicht berucksichtigt werden in der Realitat zusatzliches Leakage verursachen.
4.2.2.4 Untersuchung der Anpassung und des internen Leakage
Nach der Verifikation mit den Messdaten aus [16] wird das Schaltungsmodell dazuverwendet, weitere Untersuchungen durchzufuhren. Fur die Untersuchung des DC-Offsets in Kapitel 5 ist der Verlauf der S-Parameter uber dem Arbeitspunkt desMischers von besonderem Interesse. In Abbildung 4.7(a) sind die Reflexionen am
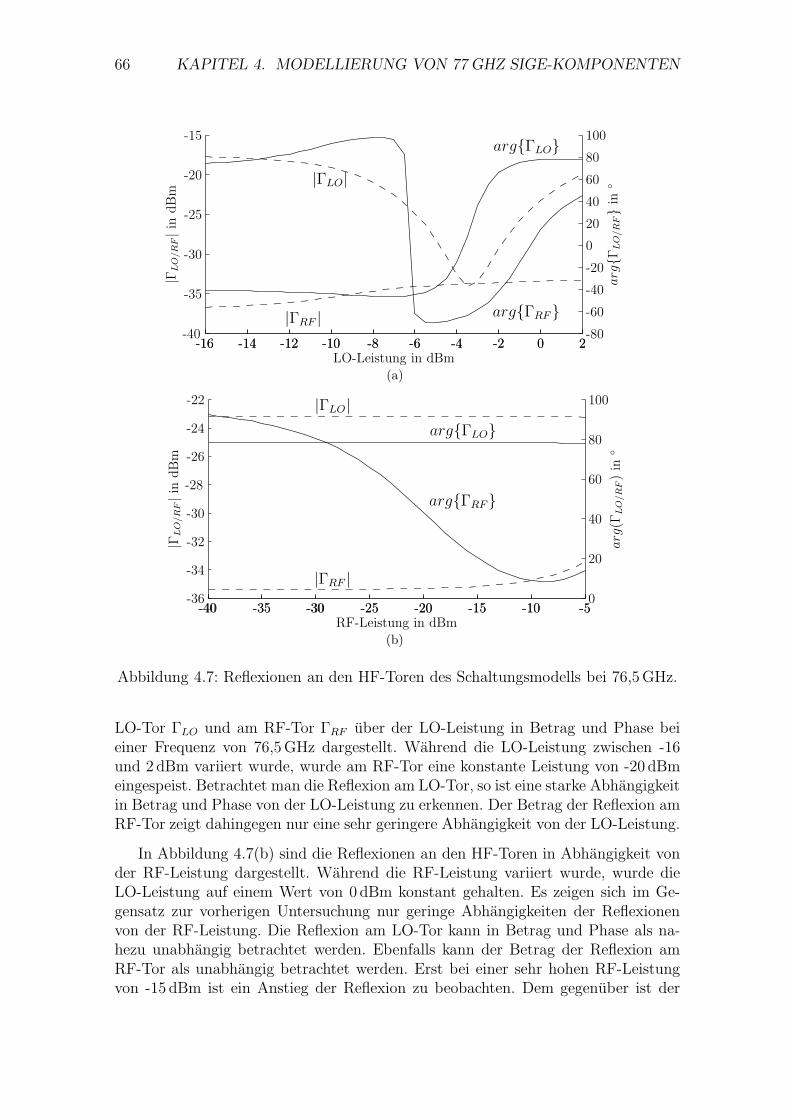
66 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
|ΓL
O/R
F|i
ndB
m
LO-Leistung in dBm
argΓ
LO
/R
F
in
-16 -14 -12 -10 -8 -6 -4 -2 0 2-16 -14 -12 -10 -8 -6 -4 -2 0 2-80
-60
-40
-20
0
20
40
60
80
100
-40
-35
-30
-25
-20
-15
|ΓLO|
|ΓRF |
argΓLO
argΓRF
(a)
|ΓL
O/R
F|i
ndB
m
RF-Leistung in dBmarg
(ΓL
O/R
F)
in
-40 -35 -30 -25 -20 -15 -10 -5-40 -35 -30 -25 -20 -15 -10 -50
20
40
60
80
100
-36
-34
-32
-30
-28
-26
-24
-22 |ΓLO|
|ΓRF |
argΓLO
argΓRF
(b)
Abbildung 4.7: Reflexionen an den HF-Toren des Schaltungsmodells bei 76,5GHz.
LO-Tor ΓLO und am RF-Tor ΓRF uber der LO-Leistung in Betrag und Phase beieiner Frequenz von 76,5GHz dargestellt. Wahrend die LO-Leistung zwischen -16und 2 dBm variiert wurde, wurde am RF-Tor eine konstante Leistung von -20 dBmeingespeist. Betrachtet man die Reflexion am LO-Tor, so ist eine starke Abhangigkeitin Betrag und Phase von der LO-Leistung zu erkennen. Der Betrag der Reflexion amRF-Tor zeigt dahingegen nur eine sehr geringere Abhangigkeit von der LO-Leistung.
In Abbildung 4.7(b) sind die Reflexionen an den HF-Toren in Abhangigkeit vonder RF-Leistung dargestellt. Wahrend die RF-Leistung variiert wurde, wurde dieLO-Leistung auf einem Wert von 0 dBm konstant gehalten. Es zeigen sich im Ge-gensatz zur vorherigen Untersuchung nur geringe Abhangigkeiten der Reflexionenvon der RF-Leistung. Die Reflexion am LO-Tor kann in Betrag und Phase als na-hezu unabhangig betrachtet werden. Ebenfalls kann der Betrag der Reflexion amRF-Tor als unabhangig betrachtet werden. Erst bei einer sehr hohen RF-Leistungvon -15 dBm ist ein Anstieg der Reflexion zu beobachten. Dem gegenuber ist der
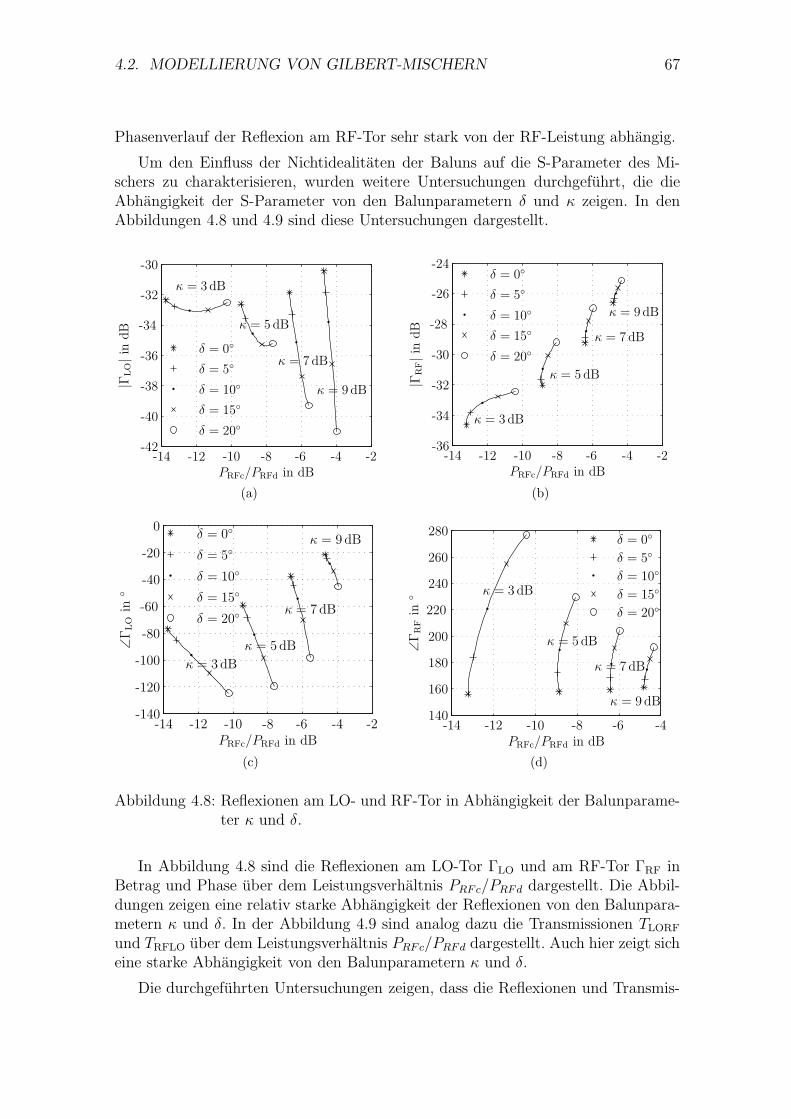
4.2. MODELLIERUNG VON GILBERT-MISCHERN 67
Phasenverlauf der Reflexion am RF-Tor sehr stark von der RF-Leistung abhangig.
Um den Einfluss der Nichtidealitaten der Baluns auf die S-Parameter des Mi-schers zu charakterisieren, wurden weitere Untersuchungen durchgefuhrt, die dieAbhangigkeit der S-Parameter von den Balunparametern δ und κ zeigen. In denAbbildungen 4.8 und 4.9 sind diese Untersuchungen dargestellt.
PRFc/PRFd in dB
|ΓLO|i
ndB
κ = 3dB
κ = 5dB
κ = 7dB
κ = 9dB
δ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -4 -2-42
-40
-38
-36
-34
-32
-30
(a)
PRFc/PRFd in dB
|ΓR
F|i
ndB
κ = 3dB
κ = 5dB
κ = 7dB
κ = 9dB
δ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -4 -2-36
-34
-32
-30
-28
-26
-24
(b)
PRFc/PRFd in dB
∠Γ
LO
in
κ = 3dB
κ = 5dB
κ = 7dB
κ = 9dBδ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -4 -2-140
-120
-100
-80
-60
-40
-20
0
(c)
PRFc/PRFd in dB
∠Γ
RF
in
κ = 3dB
κ = 5dB
κ = 7dB
κ = 9dB
δ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -4140
160
180
200
220
240
260
280
(d)
Abbildung 4.8: Reflexionen am LO- und RF-Tor in Abhangigkeit der Balunparame-ter κ und δ.
In Abbildung 4.8 sind die Reflexionen am LO-Tor ΓLO und am RF-Tor ΓRF inBetrag und Phase uber dem Leistungsverhaltnis PRFc/PRFd dargestellt. Die Abbil-dungen zeigen eine relativ starke Abhangigkeit der Reflexionen von den Balunpara-metern κ und δ. In der Abbildung 4.9 sind analog dazu die Transmissionen TLORF
und TRFLO uber dem Leistungsverhaltnis PRFc/PRFd dargestellt. Auch hier zeigt sicheine starke Abhangigkeit von den Balunparametern κ und δ.
Die durchgefuhrten Untersuchungen zeigen, dass die Reflexionen und Transmis-
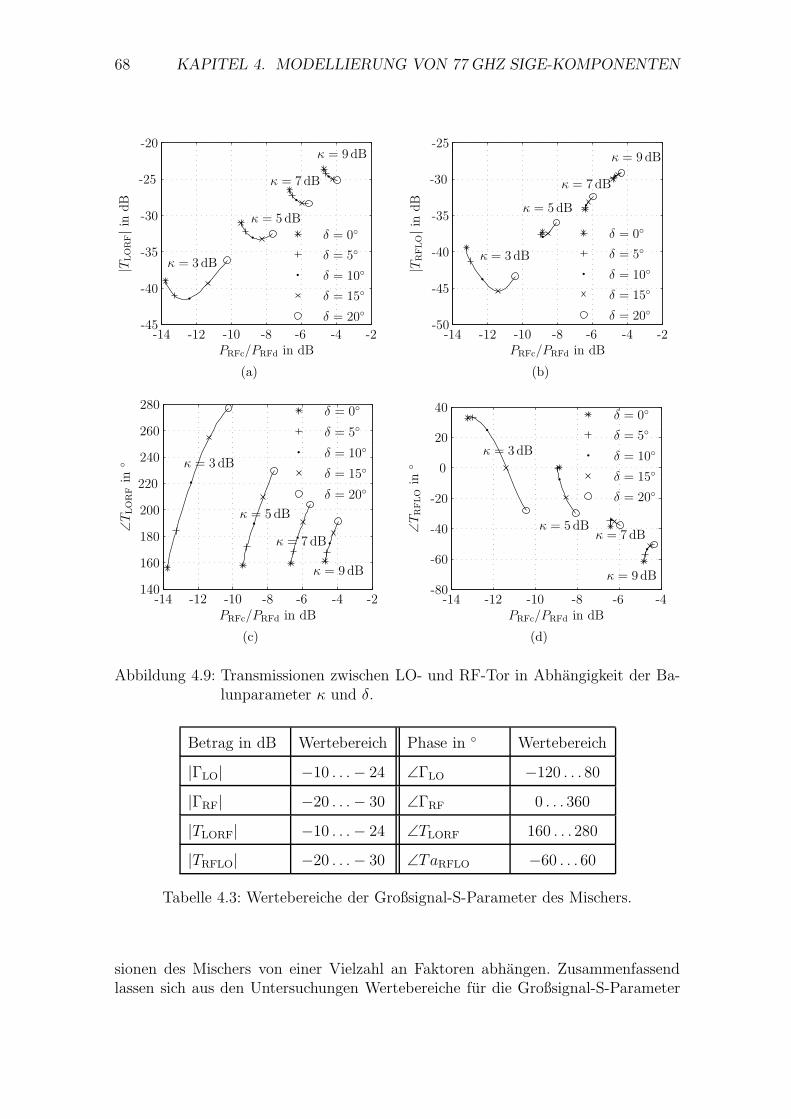
68 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
PRFc/PRFd in dB
|TLO
RF|i
ndB
κ = 3dB
κ = 5dB
κ = 7dB
κ = 9dB
δ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -4 -2-45
-40
-35
-30
-25
-20
(a)
PRFc/PRFd in dB
|TR
FLO|i
ndB
κ = 3dB
κ = 5dB
κ = 7dB
κ = 9dB
δ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -4 -2-50
-45
-40
-35
-30
-25
(b)
PRFc/PRFd in dB
∠T
LO
RF
in κ = 3dB
κ = 5dB
κ = 7dB
κ = 9dB
δ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -4 -2140
160
180
200
220
240
260
280
(c)
PRFc/PRFd in dB
∠T
RFLO
in
κ = 3dB
κ = 5dBκ = 7dB
κ = 9dB
δ = 0
δ = 5
δ = 10
δ = 15
δ = 20
-14 -12 -10 -8 -6 -4-80
-60
-40
-20
0
20
40
(d)
Abbildung 4.9: Transmissionen zwischen LO- und RF-Tor in Abhangigkeit der Ba-lunparameter κ und δ.
Betrag in dB Wertebereich Phase in Wertebereich
|ΓLO| −10 . . .− 24 ∠ΓLO −120 . . . 80
|ΓRF| −20 . . .− 30 ∠ΓRF 0 . . . 360
|TLORF| −10 . . .− 24 ∠TLORF 160 . . . 280
|TRFLO| −20 . . .− 30 ∠TaRFLO −60 . . . 60
Tabelle 4.3: Wertebereiche der Großsignal-S-Parameter des Mischers.
sionen des Mischers von einer Vielzahl an Faktoren abhangen. Zusammenfassendlassen sich aus den Untersuchungen Wertebereiche fur die Großsignal-S-Parameter

4.2. MODELLIERUNG VON GILBERT-MISCHERN 69
des Mischers angeben. In Tabelle 4.3 sind diese Wertebereiche zusammengefasst.
4.2.3 Verhaltensmodell
Zur Herleitung eines erweiterten Verhaltensmodells [28] wird die in Abbildung 4.10dargestellte zentrale Architektur eines Gilbert-Mischers betrachtet. Die Eingangsstu-fe des Mischers ist als Differenzverstarker in Emitter-Basis-Konfiguration ausgefuhrtund besteht aus dem Transistorenpaar T1/T2, den Emitterwiderstanden RE und ei-ner vereinfacht dargestellten Konstantstromquelle. Die folgenden auf das Verhaltenabzielenden Uberlegungen gelten ohne Einschrankung auch fur die Kollektor-Basis-Konfiguration, die in dem bereits beschriebenen Schaltungsmodell zur Anwendungkommt. Wahrend die Eingangsstufe im Verstarkerbetrieb arbeitet und einen kon-stanten Arbeitspunkt besitzt, arbeitet die aus zwei Differenzverstarkern (T3/T4bzw. T5/T6) zusammengesetzte Schaltstufe im Schaltbetrieb mit zeitvarianten Ar-beitspunkten. Zuerst wird auf die Modellierung der Schaltstufe und der Eingangs-stufe naher eingegangen. Danach folgt ein Abschnitt uber die Rauschmodellierungund ein weiterer, in dem der Modellaufbau erlautert wird. Schließlich wird das Ver-haltensmodell verifiziert und die Modellperformance ermittelt.
RLRL
Schaltstufe
IFn IFp
T3 T4 T5 T6
T1 T2
RERE
2I0
LOnLOn
RFp RFnEingangsstufe
LOp
Abbildung 4.10: Zentrale Gilbert-Mischer Architektur.
4.2.3.1 Modellierung der Schaltstufe
Als Grundlage fur die Modellierung der Schaltstufe wird allgemein das Verhalteneines Differenzverstarkers betrachtet. Die Uberlegungen werden an einem Differenz-
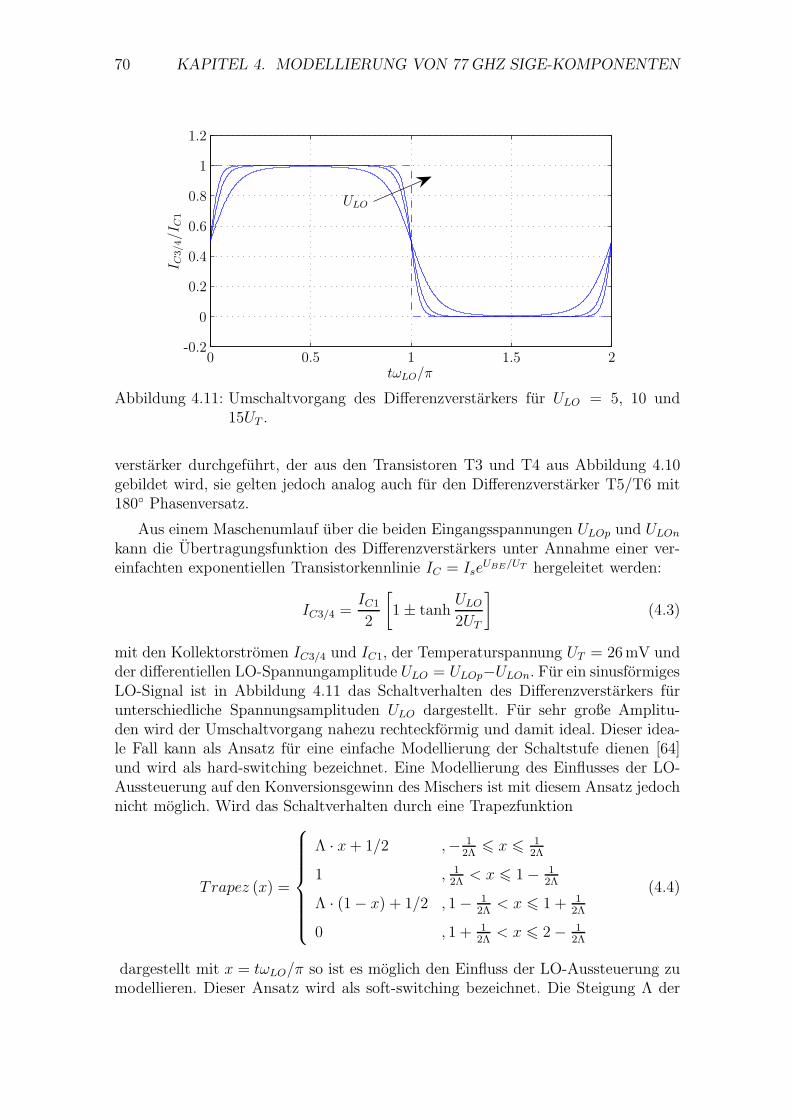
70 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
tωLO/π
I C3/4/I
C1
ULO
0 0.5 1 1.5 2-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Abbildung 4.11: Umschaltvorgang des Differenzverstarkers fur ULO = 5, 10 und15UT .
verstarker durchgefuhrt, der aus den Transistoren T3 und T4 aus Abbildung 4.10gebildet wird, sie gelten jedoch analog auch fur den Differenzverstarker T5/T6 mit180 Phasenversatz.
Aus einem Maschenumlauf uber die beiden Eingangsspannungen ULOp und ULOn
kann die Ubertragungsfunktion des Differenzverstarkers unter Annahme einer ver-einfachten exponentiellen Transistorkennlinie IC = Ise
UBE/UT hergeleitet werden:
IC3/4 =IC1
2
[
1 ± tanhULO
2UT
]
(4.3)
mit den Kollektorstromen IC3/4 und IC1, der Temperaturspannung UT = 26mV undder differentiellen LO-Spannungamplitude ULO = ULOp−ULOn. Fur ein sinusformigesLO-Signal ist in Abbildung 4.11 das Schaltverhalten des Differenzverstarkers furunterschiedliche Spannungsamplituden ULO dargestellt. Fur sehr große Amplitu-den wird der Umschaltvorgang nahezu rechteckformig und damit ideal. Dieser idea-le Fall kann als Ansatz fur eine einfache Modellierung der Schaltstufe dienen [64]und wird als hard-switching bezeichnet. Eine Modellierung des Einflusses der LO-Aussteuerung auf den Konversionsgewinn des Mischers ist mit diesem Ansatz jedochnicht moglich. Wird das Schaltverhalten durch eine Trapezfunktion
Trapez (x) =
Λ · x+ 1/2 ,− 12Λ
6 x 6 12Λ
1 , 12Λ< x 6 1 − 1
2Λ
Λ · (1 − x) + 1/2 , 1 − 12Λ< x 6 1 + 1
2Λ
0 , 1 + 12Λ< x 6 2 − 1
2Λ
(4.4)
dargestellt mit x = tωLO/π so ist es moglich den Einfluss der LO-Aussteuerung zumodellieren. Dieser Ansatz wird als soft-switching bezeichnet. Die Steigung Λ der
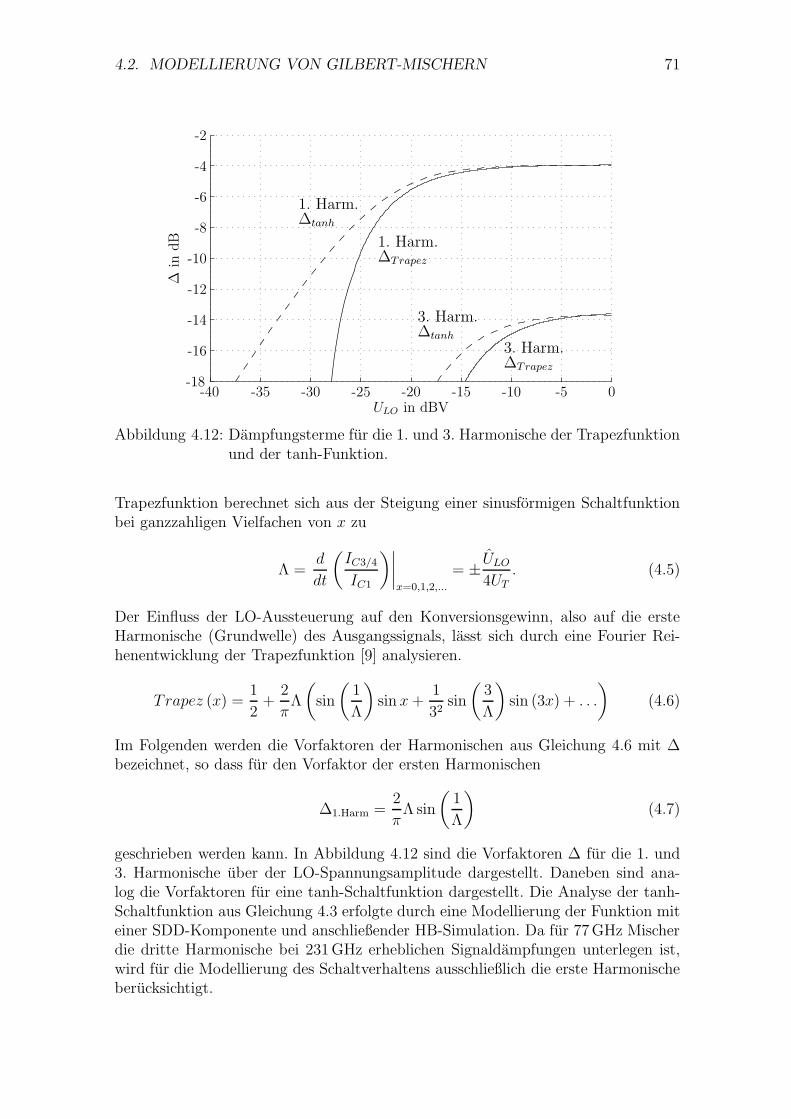
4.2. MODELLIERUNG VON GILBERT-MISCHERN 71
ULO in dBV
∆in
dB
-40 -35 -30 -25 -20 -15 -10 -5 0-18
-16
-14
-12
-10
-8
-6
-4
-2
1. Harm.∆tanh
1. Harm.∆Trapez
3. Harm.∆tanh
3. Harm.∆Trapez
Abbildung 4.12: Dampfungsterme fur die 1. und 3. Harmonische der Trapezfunktionund der tanh-Funktion.
Trapezfunktion berechnet sich aus der Steigung einer sinusformigen Schaltfunktionbei ganzzahligen Vielfachen von x zu
Λ =d
dt
(
IC3/4
IC1
)∣
∣
∣
∣
x=0,1,2,...
= ±ULO
4UT. (4.5)
Der Einfluss der LO-Aussteuerung auf den Konversionsgewinn, also auf die ersteHarmonische (Grundwelle) des Ausgangssignals, lasst sich durch eine Fourier Rei-henentwicklung der Trapezfunktion [9] analysieren.
Trapez (x) =1
2+
2
πΛ
(
sin
(
1
Λ
)
sin x+1
32sin
(
3
Λ
)
sin (3x) + . . .
)
(4.6)
Im Folgenden werden die Vorfaktoren der Harmonischen aus Gleichung 4.6 mit ∆bezeichnet, so dass fur den Vorfaktor der ersten Harmonischen
∆1.Harm =2
πΛ sin
(
1
Λ
)
(4.7)
geschrieben werden kann. In Abbildung 4.12 sind die Vorfaktoren ∆ fur die 1. und3. Harmonische uber der LO-Spannungsamplitude dargestellt. Daneben sind ana-log die Vorfaktoren fur eine tanh-Schaltfunktion dargestellt. Die Analyse der tanh-Schaltfunktion aus Gleichung 4.3 erfolgte durch eine Modellierung der Funktion miteiner SDD-Komponente und anschließender HB-Simulation. Da fur 77GHz Mischerdie dritte Harmonische bei 231GHz erheblichen Signaldampfungen unterlegen ist,wird fur die Modellierung des Schaltverhaltens ausschließlich die erste Harmonischeberucksichtigt.
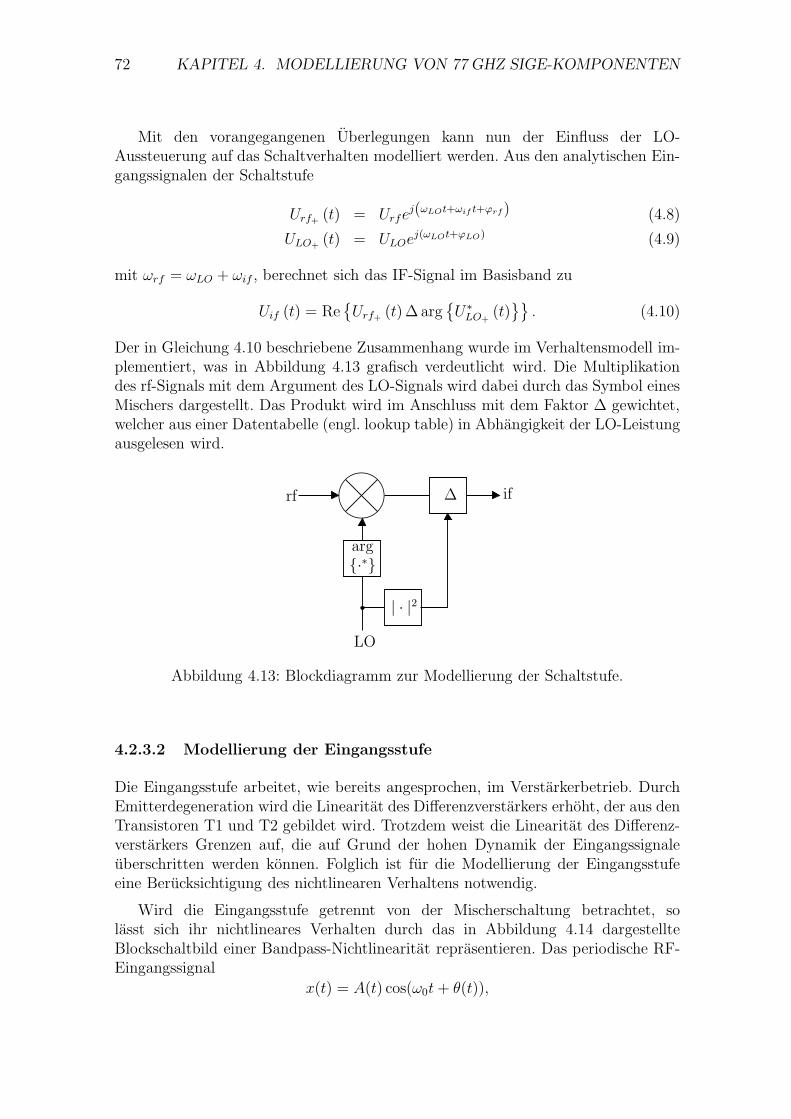
72 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
Mit den vorangegangenen Uberlegungen kann nun der Einfluss der LO-Aussteuerung auf das Schaltverhalten modelliert werden. Aus den analytischen Ein-gangssignalen der Schaltstufe
Urf+(t) = Urfe
j(ωLOt+ωif t+ϕrf) (4.8)
ULO+(t) = ULOe
j(ωLOt+ϕLO) (4.9)
mit ωrf = ωLO + ωif , berechnet sich das IF-Signal im Basisband zu
Uif (t) = Re
Urf+(t) ∆ arg
U∗LO+
(t)
. (4.10)
Der in Gleichung 4.10 beschriebene Zusammenhang wurde im Verhaltensmodell im-plementiert, was in Abbildung 4.13 grafisch verdeutlicht wird. Die Multiplikationdes rf-Signals mit dem Argument des LO-Signals wird dabei durch das Symbol einesMischers dargestellt. Das Produkt wird im Anschluss mit dem Faktor ∆ gewichtet,welcher aus einer Datentabelle (engl. lookup table) in Abhangigkeit der LO-Leistungausgelesen wird.
rf
LO
if
arg·∗
∆
| · |2
Abbildung 4.13: Blockdiagramm zur Modellierung der Schaltstufe.
4.2.3.2 Modellierung der Eingangsstufe
Die Eingangsstufe arbeitet, wie bereits angesprochen, im Verstarkerbetrieb. DurchEmitterdegeneration wird die Linearitat des Differenzverstarkers erhoht, der aus denTransistoren T1 und T2 gebildet wird. Trotzdem weist die Linearitat des Differenz-verstarkers Grenzen auf, die auf Grund der hohen Dynamik der Eingangssignaleuberschritten werden konnen. Folglich ist fur die Modellierung der Eingangsstufeeine Berucksichtigung des nichtlinearen Verhaltens notwendig.
Wird die Eingangsstufe getrennt von der Mischerschaltung betrachtet, solasst sich ihr nichtlineares Verhalten durch das in Abbildung 4.14 dargestellteBlockschaltbild einer Bandpass-Nichtlinearitat reprasentieren. Das periodische RF-Eingangssignal
x(t) = A(t) cos(ω0t+ θ(t)),

4.2. MODELLIERUNG VON GILBERT-MISCHERN 73
x(t)F(·) z(t) Zonen-
filter 0
Zonen-filter 1
y0(t)
y1(t)
Abbildung 4.14: Blockschaltbild einer Bandpass-Nichtlinearitat.
dessen Spektrum um die Tragerschwingung ω0 konzentriert ist und sich als komplexeEinhullende x(t) beschreiben lasst, wird einer nichtlinearen Funktion F(·) zugefuhrt.Hierdurch wird ein Signal z(t) erzeugt, dessen spektralen Anteile nicht mehr aus-schließlich um die Tragerschwingung des Eingangssignals konzentriert sind, sondernauch um Vielfache m derselben.
Die nichtlineare Funktion eines perfekt balancierten Verstarkers lasst sichnaherungsweise durch eine Potenzreihe ausdrucken, bei der der a0-Term und dieTerme gerader Ordnung entfallen. Wie in Abschnitt 2.7.2 erlautert, treten bei rea-len Verstarkern, bedingt durch Asymmetrien im Aufbau und in den zugefuhrtendifferentiellen Signalen jedoch auch Terme gerader Ordnung auf, so dass fur eineModellierung des realen Verhaltens auch der Gleichspannungsterm und die geradenTerme der Potenzreihe berucksichtigt werden mussen. Fur das Ausgangssignal dernichtlinearen Funktion kann deshalb
z (t) = F [x (t)] ≈N∑
n=0
anxn (t) ≈ a0 + a1x (t) + a2x
2 (t) + a3x3 (t) . (4.11)
angesetzt werden. Die Potenzreihe in Gleichung 4.11 wurde fur n > 3 abgebrochen,da der Einfluss der Terme hoherer Ordnung sehr gering ist und zudem die Modell-komplexitat reduziert werden kann.
Da fur z(t) die Darstellung als komplexe Einhullende nicht moglich ist, wirddurch so genannte Zonenfilter (engl. zonal filters) der Frequenzbereich um jede Har-monische der Tragerschwingung selektiert [40]. Die Ausgangssignale der einzelnenFilter ym(t) lassen sich dann wieder als komplexe Einhullende darstellen. Um denEinfluss der Glieder der Potenzreihe auf die jeweiligen Zonen darzustellen, werdendurch Binomialentwicklung die Terme xn(t) auf die Form
xn (t) =1
2n
n∑
k=0
(
nk
)
[x (t)]k [x∗ (t)]n−k ej2πf0(2k−n)t (4.12)
gebracht. Fur die Zonen m = 0, 1 und 2 lassen sich die in Tabelle 4.4 zusammenge-fassten Modellierungsparameter ermitteln. Weitere Zonen wurden wieder zur Ein-schrankung der Modellkomplexitat vernachlassigt. Der Parameter b(k;n) reprasentiert

74 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
den, von der jeweiligen Zone und dem Potenzterm abhangigen Vorfaktor und derParameter X(k;n)(t) beschreibt die mathematische Vorgehensweise fur das Eingangs-signal x(t).
Zone 0 1 2
(k;n) (0; 0) (1; 2) (0; 1) (1; 1) (1; 3) (2; 3) (0; 2) (2; 2)
b(k;n) 1 1/2 1/2 1/2 3/8 3/8 1/4 1/4
X(k;n)(t) 1 xx∗ x∗ x x[x∗]2 [x]2x∗ [x∗]2 [x]2
Tabelle 4.4: Modellierungsparameter nach Gleichung 4.12 fur die Zonen 0, 1 und 2.
Die Ausgangssignale ym(t) der Zonenfilter lassen sich wie folgt ausdrucken:
ym (t) = Re
ym (t) ej2πf0mt
(4.13)
mit
y0 (t) = a0 +1
2a2x (t) x∗ (t) (4.14)
y1 (t) =1
2a1x
∗ (t) +1
2a1x (t) +
3
8a3x (t) [x∗ (t)]2 +
3
8a3 [x (t)]2 x∗ (t) (4.15)
y2 (t) =1
4a2 [x∗ (t)]2 +
1
4a2 [x (t)]2 . (4.16)
Die Vorfaktoren a1, a2 und a3 des linearen, quadratischen und kubischen Terms derPotenzreihe sind nach den bekannten, beispielsweise in [69] und [19] ausfuhrlich dar-gestellten Zusammenhangen mit den auf den Eingang bezogenen Interceptpunktenzweiter (IIP2) und dritter (IIP3) Ordnung verknupft:
IIP2 =1
2R
(
a1
a2
)2
(4.17)
IIP3 =2
3R
∣
∣
∣
∣
a1
a3
∣
∣
∣
∣
. (4.18)
Der Vorfaktor a0 stellt anschaulich den Gleichspannungsanteil dar und der Vorfaktora1 beschreibt die lineare Verstarkung Gsat des Eingangsverstarkers.
4.2.3.3 Rauschmodellierung
Das Rauschen am IF-Ausgangstor des Mischers hat zum einen seine Ursache in demRauschen das in den Mischer eingespeist und an den Ausgang transferiert wird undzum anderen in dem Rauschen das durch die internen Rauschquellen des Mischerserzeugt wird. Es wird im Folgenden gezeigt, dass eine Modellierung des intern er-zeugten Rauschens durch additives weißes Gaußsches Rauschen am IF-Ausgangstorunter den in dieser Arbeit gegebenen Voraussetzungen gultig ist.
4.2. MODELLIERUNG VON GILBERT-MISCHERN 75
Um die internen Rauschquellen des Mischers zu identifizieren, wird die Schaltungdes Gilbert-Mischers in Abbildung 4.10 betrachtet. Es wird zwischen niederfrequen-tem Flicker-Rauschen der Widerstande und Halbleiterubergange, hochfrequentemSchrotrauschen der Halbleiterubergange und thermischem Rauschen der Last- undTransistorbahnwiderstande unterschieden. In Abschnitt 2.7.3 wurde bereits erortert,dass fur die bipolare SiGe-Technologie das Flicker-Rauschen der Widerstande undHalbleiterubergange fur das betrachtete Radarsystem nicht relevant ist und aus die-sem Grund vernachlassigt werden kann. Der spektrale Verlauf des Schrotrauschensist bei Halbleiterubergangen von der zeitlichen Lange τ des von einer Ladung hervor-gerufenen Impulses abhangig. Fur Frequenzen f ≪ τ−1 gilt die bekannte Schottky-Beziehung
Ws = 2qI, (4.19)
welche aussagt, dass das einseitige Leistungsspektrum Ws linear vom Strom Iabhangt, der den Halbleiterubergang passiert. Wird fur τ naherungsweise der Gate-Delay von SiGe-Transistoren in der Technologie B7HF200 angesetzt, der in [8] mit3,5 ps angegeben ist, so ist Gleichung 4.19 noch fur Frequenzen um 77GHz gultig.Die Schottky-Beziehung zeigt die Frequenzunabhangigkeit des Schrotrauschens, wel-ches folglich ein weißes Spektrum aufweist. Zudem weist bei Frequenzen um 77GHzdas thermische Rauschen noch keine Frequenzabhangigkeit auf, so dass die Nyquist-Beziehung
Pv = kT∆f (4.20)
Gultigkeit hat, mit der die verfugbare Rauschleistung Pv aus der Boltzmann-Konstante k = 1, 38 · 10−23 Ws/K, der Temperatur in Kelvin sowie der betrachtetenBandbreite ∆f berechnet werden kann.
In hetero-bipolar-Transistoren (HBT) sind die dominierenden Rauschquellen dasvom Basis- und Kollektorstrom abhangige Schrotrauschen sowie das thermische Rau-schen des Basisbahnwiderstandes [58]. Da sich sowohl der Basis- als auch der Kol-lektorstrom der Schalttransistoren mit dem LO-Signal uber der Zeit andern, mussnach Gleichung 4.19 das erzeugte Schrotrauschen als zeitvariant angenommen wer-den. Auf Grund der Periodizitat der Schaltstrome liegt ein so genanntes zyklosta-tionares Rauschen vor [74]. Wird das zyklostationare Rauschen gefiltert, so wird esstationar, wenn die Filterbandbreite kleiner ist als die LO-Frequenz [37]. In der Mi-scherarchitektur aus Abbildung 4.2 wird mit den Schaltungselementen RL und CL
ein Tiefpassfilter gebildet, der diese Bedingung erfullt. Folglich kann das im Mischererzeugte Rauschen am IF-Ausgang als stationar und weiß angenommen werden.
Im vorliegenden Fall lasst sich Schrotrauschen [40] und thermisches Rauschenals gaußsches Rauschen beschreiben. Im Gilbert-Mischer uberlagern sich eine Viel-zahl an gaußscher Rauschprozesse zu einem Gesamtrauschen, welches sich nach demzentralen Grenzwertsatz der Statistik wiederum als gaußscher Rauschprozess be-schreiben lasst. Eine Modellierung des internen Mischerrauschens kann demnachdurch additives weißes gaußsches Rauschen am Mischerausgang erfolgen.

76 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
4.2.3.4 Modellaufbau
Der Aufbau des Verhaltensmodells ist in Abbildung 4.15 dargestellt und wird im Fol-genden erlautert. Der Aufbau setzt sich aus dem nichtlinearen Modell des Eingangs-verstarkers gm mit den nachfolgenden Zonenfiltern Z0 und Z1 sowie dem Modell derSchaltstufe zusammen. Die Abhangigkeit des Konversionsgewinns und der Rausch-zahl von der am LO-Tor anliegenden Leistung wird in Tabellen dem Modell zurVerfugung gestellt, was durch die Funktionsblocke ∆ und WGN symbolisiert wird.Der Modellaufbau weist funf Koppelpfade auf, die durch ihre Koppelfaktoren be-schrieben werden. Es wurden ausschließlich die Koppelpfade modelliert, welche einenEinfluss auf das IF-Basisband ausuben. Der Koppelfaktor LRF beschreibt den Ein-fluss des Koppelpfads zwischen dem RF- und dem LO-Tor des Modells, wahrend LLO
den Koppelpfad zwischen dem LO- und dem RF-Tor beschreibt. Das Ausgangssignaldes Zonenfilters Z0 weist ausschließlich Signalanteile im Basisband auf, welche durcheinen Koppelpfad mit dem Koppelfaktor Lrf0 in das IF-Basisband gekoppelt werden.Das Ausgangssignal des Zonenfilters Z1 wird demgegenuber durch den Mischprozessins Basisband abgemischt. Zwischen dem Knoten rf und dem LO-Tor des Modellswerden durch die Koppelfaktoren Lrf und Llo weitere Koppelpfade beschrieben.
Die Parameter Gsat, IIP2, IIP3 sowie die angesprochenen Koppelfaktoren werdenfur die Modellierung des nichtlinearen Verhaltens verwendet. Die Parameterwertewerden dabei folgendermaßen ermittelt. Mit einem Zweitontest werden die Verlaufeder Intermodulationsprodukte im Basisband uber der LO- und RF-Leistung fur dasSchaltungs- und Verhaltensmodell aufgetragen. Durch Variation der Parameter wirddaraufhin versucht, die Verlaufe des Verhaltensmodells und des Schaltungsmodellsin Ubereinstimmung zu bringen. Im folgenden Abschnitt wird hierauf naher einge-gangen und das Verhaltensmodell verifiziert.
RF
LO
IFrf
gm
| · |2
Gsat,IIP2,IIP3
∆
WGN
LRF LLO Lrf1 Llo
Lrf0Z0
arg
Z1
Abbildung 4.15: Aufbau des Verhaltensmodells.

4.2. MODELLIERUNG VON GILBERT-MISCHERN 77
4.2.3.5 Modellverifikation
In diesem Abschnitt wird das Verhaltensmodell des Mischers verifiziert. Dazu wirddas Verhaltensmodell und das Schaltungsmodell anhand von Simulationen unter-sucht und die Ergebnisse miteinander verglichen. Fur beide Modelle wird ein iden-tisches Simulationssetup verwendet, welches eine typische Signalsituation an denEingangen des Mischers in einem monostatischen Radartransceiver nachbildet. DieSignalsituation ist in Abbildung 4.16(a) dargestellt. Am RF-Eingang des Mischersliegen drei Signale RF1, RF2 und RF3 mit unterschiedlichen Frequenzen an. DieSignale RF1 und RF2 stellen zwei Echos von Zielen in unterschiedlicher Entfernungdar. RF3 stellt ein Leakagesignal dar, welches durch einen Leakagepfad vom Sen-depfad auf den Empfangspfad und damit an den RF-Eingang des Mischers gelangt.Da der Leakagepfad im Vergleich zu der Entfernung der Ziele vom Radarsystemeine sehr geringe Lange besitzt, wird im vorliegenden Szenario fur die Frequenz vonRF3 die Sende- bzw. LO-Frequenz angenommen. Aus der Signalsituation am Mi-
HF-S
ignal
e
RF2 RF1
LO
RF3
f
(a)
Bas
isban
d
f0 f1 f2 f3 f4 f5 f6 f7 f8 f9 f(b)
Abbildung 4.16: Typische Signalsituation am Mischer eines FMCW-Radartransceivers: (a) Frequenzen der Eingangssignale und(b) resultierenden Frequenzen im Basisband.
schereingang resultiert das in Abbildung 4.16(b) vereinfacht dargestellte Spektrumdes Basisbands. Die Vereinfachung besteht darin, dass nur die Spektralanteile be-trachtet werden, die einen relevanten Signalpegel aufweisen. Die Spektralanteile mitden Frequenzen f4 und f5 stellen die mit der LO-Frequenz abgemischten ZielechosRF1 bzw. RF2 dar. Der Gleichspannungsanteil f0 entsteht durch Selbstmischung derSignalfrequenzen LO und RF3. Weiterhin stellen die Spektralanteile f3 und f6 dieIntermodulationsprodukte dritter Ordnung dar. Die ubrigen Spektralanteile f1, f2,f7, f8 und f9 konnen der Intermodulation zweiter Ordnung zugeordnet werden.
Die Signalpegel werden nun fur das Verhaltens- und das Schaltungsmodell uberder RF-Leistung und der LO-Leistung betrachtet. In der Simulation wurde dazu die
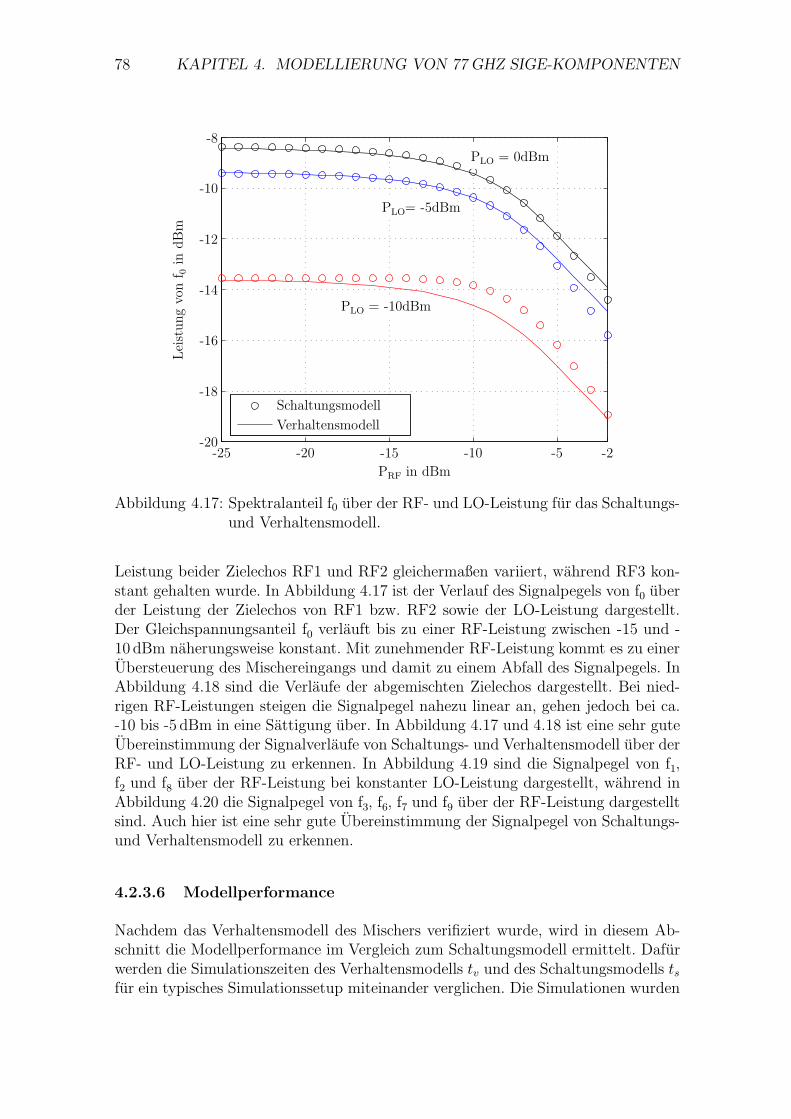
78 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
PRF in dBm
Lei
stung
von
f 0in
dB
m
PLO = -10dBm
PLO= -5dBm
PLO = 0dBm
Schaltungsmodell
Verhaltensmodell
-25 -20 -15 -10 -5 -2-20
-18
-16
-14
-12
-10
-8
Abbildung 4.17: Spektralanteil f0 uber der RF- und LO-Leistung fur das Schaltungs-und Verhaltensmodell.
Leistung beider Zielechos RF1 und RF2 gleichermaßen variiert, wahrend RF3 kon-stant gehalten wurde. In Abbildung 4.17 ist der Verlauf des Signalpegels von f0 uberder Leistung der Zielechos von RF1 bzw. RF2 sowie der LO-Leistung dargestellt.Der Gleichspannungsanteil f0 verlauft bis zu einer RF-Leistung zwischen -15 und -10 dBm naherungsweise konstant. Mit zunehmender RF-Leistung kommt es zu einerUbersteuerung des Mischereingangs und damit zu einem Abfall des Signalpegels. InAbbildung 4.18 sind die Verlaufe der abgemischten Zielechos dargestellt. Bei nied-rigen RF-Leistungen steigen die Signalpegel nahezu linear an, gehen jedoch bei ca.-10 bis -5 dBm in eine Sattigung uber. In Abbildung 4.17 und 4.18 ist eine sehr guteUbereinstimmung der Signalverlaufe von Schaltungs- und Verhaltensmodell uber derRF- und LO-Leistung zu erkennen. In Abbildung 4.19 sind die Signalpegel von f1,f2 und f8 uber der RF-Leistung bei konstanter LO-Leistung dargestellt, wahrend inAbbildung 4.20 die Signalpegel von f3, f6, f7 und f9 uber der RF-Leistung dargestelltsind. Auch hier ist eine sehr gute Ubereinstimmung der Signalpegel von Schaltungs-und Verhaltensmodell zu erkennen.
4.2.3.6 Modellperformance
Nachdem das Verhaltensmodell des Mischers verifiziert wurde, wird in diesem Ab-schnitt die Modellperformance im Vergleich zum Schaltungsmodell ermittelt. Dafurwerden die Simulationszeiten des Verhaltensmodells tv und des Schaltungsmodells tsfur ein typisches Simulationssetup miteinander verglichen. Die Simulationen wurden

4.2. MODELLIERUNG VON GILBERT-MISCHERN 79
PRF in dBm
Lei
stung
von
f 4und
f 5in
dB
m
PLO = -10dBm
PLO = -5dBm
PLO = 0dBm
Schaltungsmodell
Verhaltensmodell
-25 -20 -15 -10 -5 -2-20
-15
-10
-5
0
5
10
Abbildung 4.18: Spektralanteile f4 und f5 uber der RF- und LO-Leistung fur dasSchaltungs- und Verhaltensmodell.
PRF in dBm
Lei
stung
indB
m
f1
f2
f8
Schaltungsmodell
Verhaltensmodell
-25 -20 -15 -10 -5 -2-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
Abbildung 4.19: Spektralanteile f1, f2 und f8 uber der RF-Leistung fur dasSchaltungs- und Verhaltensmodell.

80 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
PRF in dBm
Lei
stung
indB
m f3, f6
f7, f9
Schaltungsmodell
Verhaltensmodell
-25 -20 -15 -10 -5 -2-80
-70
-60
-50
-40
-30
-20
-10
0
Abbildung 4.20: Spektralanteile f3, f6, f7 und f9 uber der RF-Leistung fur dasSchaltungs- und Verhaltensmodell.
auf einem PC mit einem 3GHz Intel Pentium 4 Chipsatz durchgefuhrt. In Tabelle 4.5sind die Simulationszeiten beider Modelle fur eine unterschiedliche Anzahl an Simu-lationszeitschritten n einer Zeitbereichssimulation gegenubergestellt. Der Quotientder Simulationszeiten beider Modelle ts/tv kann als Zeitgewinn des Verhaltensmo-dells im Vergleich zum Schaltungsmodell interpretiert werden. Die Tabelle zeigt,dass mit zunehmender Anzahl an Simulationszeitschritten ein großerer Zeitgewinnmoglich ist.
n 104 105 106
ts 146 s 1442 s 13834 s
tv 3 s 10 s 74 s
ts/tv 49 144 187
Tabelle 4.5: Vergleich der Simulationszeiten von Schaltungs- und Verhaltensmodellfur ein typisches Simulationssetup.
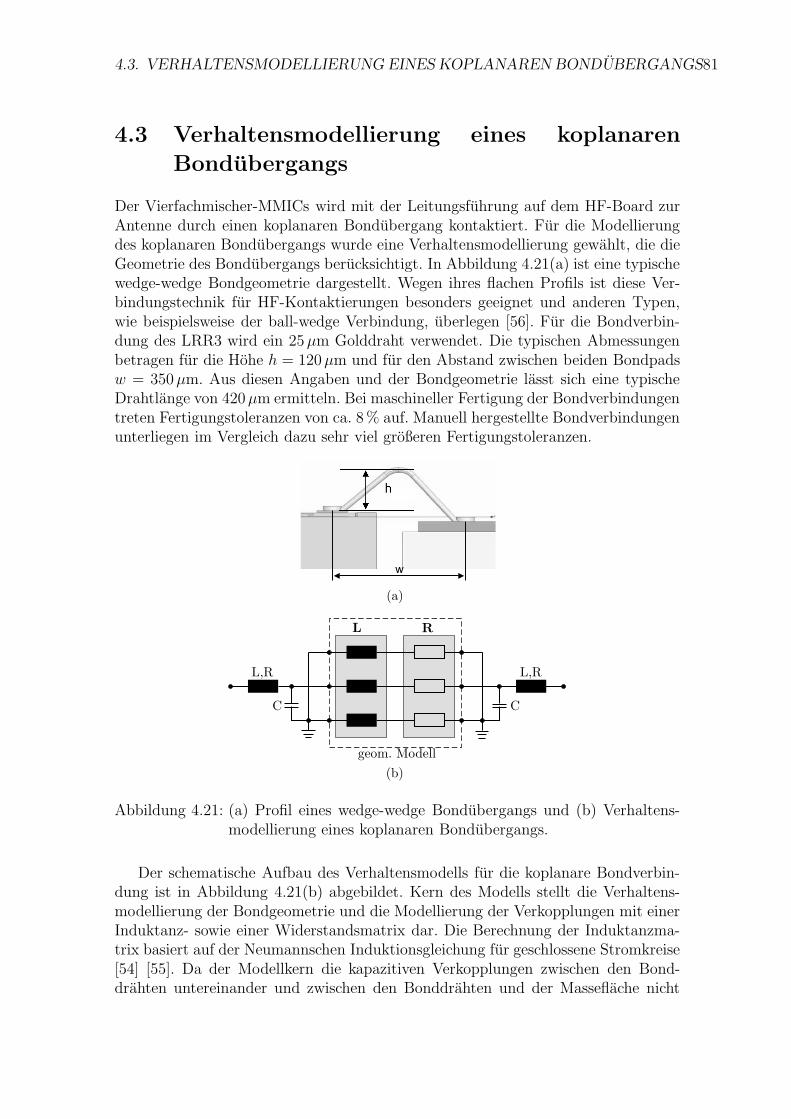
4.3. VERHALTENSMODELLIERUNG EINES KOPLANAREN BONDUBERGANGS81
4.3 Verhaltensmodellierung eines koplanaren
Bondubergangs
Der Vierfachmischer-MMICs wird mit der Leitungsfuhrung auf dem HF-Board zurAntenne durch einen koplanaren Bondubergang kontaktiert. Fur die Modellierungdes koplanaren Bondubergangs wurde eine Verhaltensmodellierung gewahlt, die dieGeometrie des Bondubergangs berucksichtigt. In Abbildung 4.21(a) ist eine typischewedge-wedge Bondgeometrie dargestellt. Wegen ihres flachen Profils ist diese Ver-bindungstechnik fur HF-Kontaktierungen besonders geeignet und anderen Typen,wie beispielsweise der ball-wedge Verbindung, uberlegen [56]. Fur die Bondverbin-dung des LRR3 wird ein 25µm Golddraht verwendet. Die typischen Abmessungenbetragen fur die Hohe h = 120µm und fur den Abstand zwischen beiden Bondpadsw = 350µm. Aus diesen Angaben und der Bondgeometrie lasst sich eine typischeDrahtlange von 420µm ermitteln. Bei maschineller Fertigung der Bondverbindungentreten Fertigungstoleranzen von ca. 8% auf. Manuell hergestellte Bondverbindungenunterliegen im Vergleich dazu sehr viel großeren Fertigungstoleranzen.
w
(a)
geom. Modell
L R
L,RL,R
CC
(b)
Abbildung 4.21: (a) Profil eines wedge-wedge Bondubergangs und (b) Verhaltens-modellierung eines koplanaren Bondubergangs.
Der schematische Aufbau des Verhaltensmodells fur die koplanare Bondverbin-dung ist in Abbildung 4.21(b) abgebildet. Kern des Modells stellt die Verhaltens-modellierung der Bondgeometrie und die Modellierung der Verkopplungen mit einerInduktanz- sowie einer Widerstandsmatrix dar. Die Berechnung der Induktanzma-trix basiert auf der Neumannschen Induktionsgleichung fur geschlossene Stromkreise[54] [55]. Da der Modellkern die kapazitiven Verkopplungen zwischen den Bond-drahten untereinander und zwischen den Bonddrahten und der Masseflache nicht
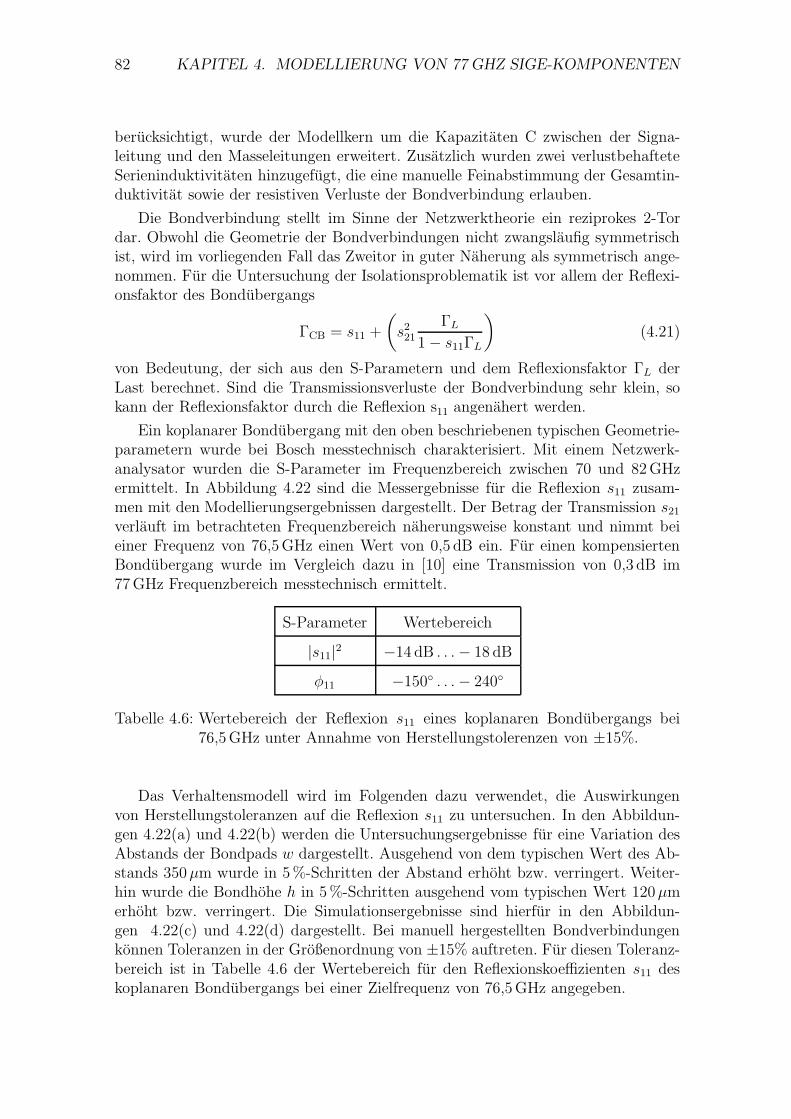
82 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
berucksichtigt, wurde der Modellkern um die Kapazitaten C zwischen der Signa-leitung und den Masseleitungen erweitert. Zusatzlich wurden zwei verlustbehafteteSerieninduktivitaten hinzugefugt, die eine manuelle Feinabstimmung der Gesamtin-duktivitat sowie der resistiven Verluste der Bondverbindung erlauben.
Die Bondverbindung stellt im Sinne der Netzwerktheorie ein reziprokes 2-Tordar. Obwohl die Geometrie der Bondverbindungen nicht zwangslaufig symmetrischist, wird im vorliegenden Fall das Zweitor in guter Naherung als symmetrisch ange-nommen. Fur die Untersuchung der Isolationsproblematik ist vor allem der Reflexi-onsfaktor des Bondubergangs
ΓCB = s11 +
(
s221
ΓL
1 − s11ΓL
)
(4.21)
von Bedeutung, der sich aus den S-Parametern und dem Reflexionsfaktor ΓL derLast berechnet. Sind die Transmissionsverluste der Bondverbindung sehr klein, sokann der Reflexionsfaktor durch die Reflexion s11 angenahert werden.
Ein koplanarer Bondubergang mit den oben beschriebenen typischen Geometrie-parametern wurde bei Bosch messtechnisch charakterisiert. Mit einem Netzwerk-analysator wurden die S-Parameter im Frequenzbereich zwischen 70 und 82GHzermittelt. In Abbildung 4.22 sind die Messergebnisse fur die Reflexion s11 zusam-men mit den Modellierungsergebnissen dargestellt. Der Betrag der Transmission s21
verlauft im betrachteten Frequenzbereich naherungsweise konstant und nimmt beieiner Frequenz von 76,5GHz einen Wert von 0,5 dB ein. Fur einen kompensiertenBondubergang wurde im Vergleich dazu in [10] eine Transmission von 0,3 dB im77GHz Frequenzbereich messtechnisch ermittelt.
S-Parameter Wertebereich
|s11|2 −14 dB . . .− 18 dB
φ11 −150 . . .− 240
Tabelle 4.6: Wertebereich der Reflexion s11 eines koplanaren Bondubergangs bei76,5GHz unter Annahme von Herstellungstolerenzen von ±15%.
Das Verhaltensmodell wird im Folgenden dazu verwendet, die Auswirkungenvon Herstellungstoleranzen auf die Reflexion s11 zu untersuchen. In den Abbildun-gen 4.22(a) und 4.22(b) werden die Untersuchungsergebnisse fur eine Variation desAbstands der Bondpads w dargestellt. Ausgehend von dem typischen Wert des Ab-stands 350µm wurde in 5%-Schritten der Abstand erhoht bzw. verringert. Weiter-hin wurde die Bondhohe h in 5%-Schritten ausgehend vom typischen Wert 120µmerhoht bzw. verringert. Die Simulationsergebnisse sind hierfur in den Abbildun-gen 4.22(c) und 4.22(d) dargestellt. Bei manuell hergestellten Bondverbindungenkonnen Toleranzen in der Großenordnung von ±15% auftreten. Fur diesen Toleranz-bereich ist in Tabelle 4.6 der Wertebereich fur den Reflexionskoeffizienten s11 deskoplanaren Bondubergangs bei einer Zielfrequenz von 76,5GHz angegeben.
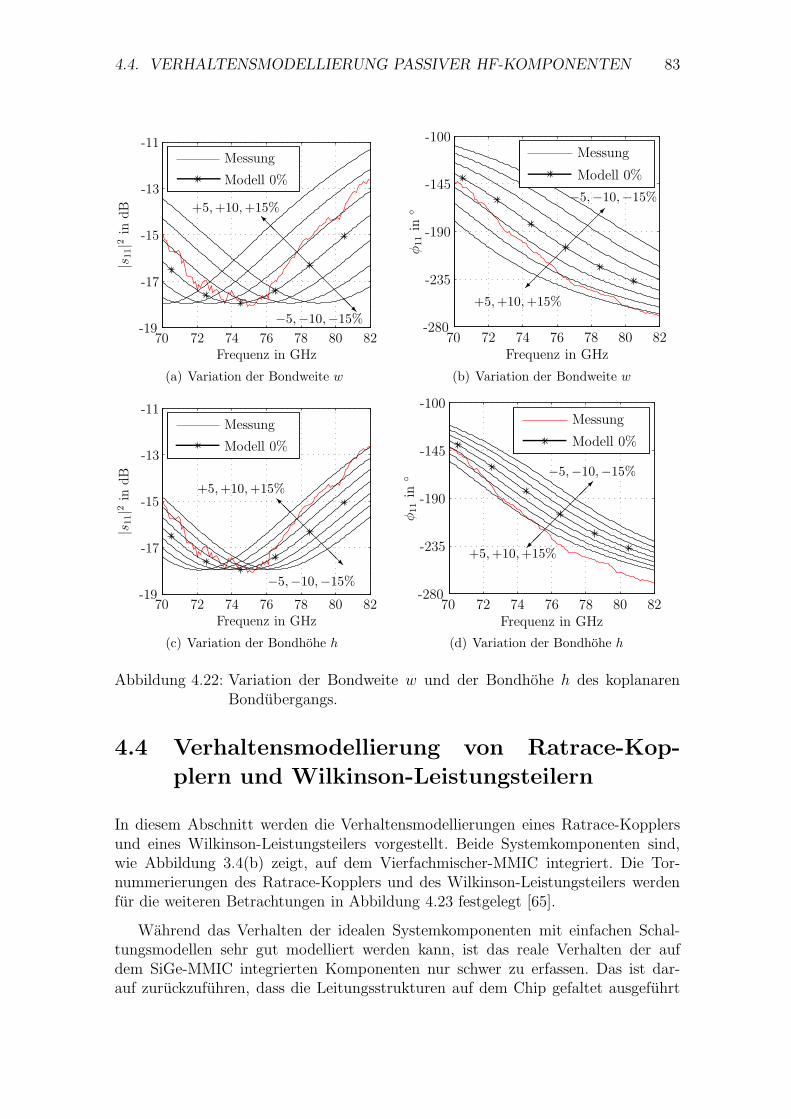
4.4. VERHALTENSMODELLIERUNG PASSIVER HF-KOMPONENTEN 83
Frequenz in GHz
|s 11|2
indB
Modell
Messung
Modell 0%
70 72 74 76 78 80 82-19
-17
-15
-13
-11
@@
@@I
@@
@@R
+5, +10, +15%
−5,−10,−15%
(a) Variation der Bondweite w
Frequenz in GHz
φ11
in
Messung
Modell 0%
70 72 74 76 78 80 82-280
-235
-190
-145
-100
+5, +10, +15%
−5,−10,−15%
(b) Variation der Bondweite w
Frequenz in GHz
|s 11|2
indB
Messung
Modell 0%
70 72 74 76 78 80 82-19
-17
-15
-13
-11
@@@I
@@@R
+5, +10, +15%
−5,−10,−15%
(c) Variation der Bondhohe h
Frequenz in GHz
φ11
in
Messung
Modell 0%
70 72 74 76 78 80 82-280
-235
-190
-145
-100
+5, +10, +15%
−5,−10,−15%
(d) Variation der Bondhohe h
Abbildung 4.22: Variation der Bondweite w und der Bondhohe h des koplanarenBondubergangs.
4.4 Verhaltensmodellierung von Ratrace-Kop-
plern und Wilkinson-Leistungsteilern
In diesem Abschnitt werden die Verhaltensmodellierungen eines Ratrace-Kopplersund eines Wilkinson-Leistungsteilers vorgestellt. Beide Systemkomponenten sind,wie Abbildung 3.4(b) zeigt, auf dem Vierfachmischer-MMIC integriert. Die Tor-nummerierungen des Ratrace-Kopplers und des Wilkinson-Leistungsteilers werdenfur die weiteren Betrachtungen in Abbildung 4.23 festgelegt [65].
Wahrend das Verhalten der idealen Systemkomponenten mit einfachen Schal-tungsmodellen sehr gut modelliert werden kann, ist das reale Verhalten der aufdem SiGe-MMIC integrierten Komponenten nur schwer zu erfassen. Das ist dar-auf zuruckzufuhren, dass die Leitungsstrukturen auf dem Chip gefaltet ausgefuhrt
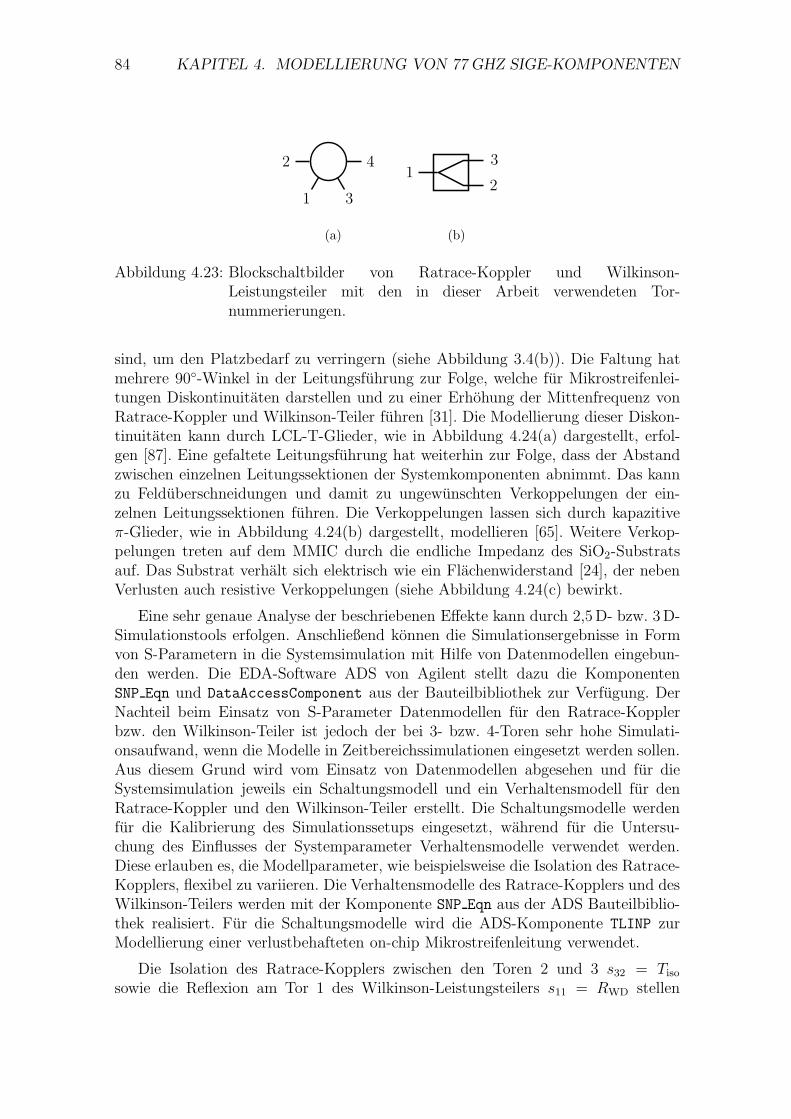
84 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
1
2
3
4
(a)
12
3
(b)
Abbildung 4.23: Blockschaltbilder von Ratrace-Koppler und Wilkinson-Leistungsteiler mit den in dieser Arbeit verwendeten Tor-nummerierungen.
sind, um den Platzbedarf zu verringern (siehe Abbildung 3.4(b)). Die Faltung hatmehrere 90-Winkel in der Leitungsfuhrung zur Folge, welche fur Mikrostreifenlei-tungen Diskontinuitaten darstellen und zu einer Erhohung der Mittenfrequenz vonRatrace-Koppler und Wilkinson-Teiler fuhren [31]. Die Modellierung dieser Diskon-tinuitaten kann durch LCL-T-Glieder, wie in Abbildung 4.24(a) dargestellt, erfol-gen [87]. Eine gefaltete Leitungsfuhrung hat weiterhin zur Folge, dass der Abstandzwischen einzelnen Leitungssektionen der Systemkomponenten abnimmt. Das kannzu Felduberschneidungen und damit zu ungewunschten Verkoppelungen der ein-zelnen Leitungssektionen fuhren. Die Verkoppelungen lassen sich durch kapazitiveπ-Glieder, wie in Abbildung 4.24(b) dargestellt, modellieren [65]. Weitere Verkop-pelungen treten auf dem MMIC durch die endliche Impedanz des SiO2-Substratsauf. Das Substrat verhalt sich elektrisch wie ein Flachenwiderstand [24], der nebenVerlusten auch resistive Verkoppelungen (siehe Abbildung 4.24(c) bewirkt.
Eine sehr genaue Analyse der beschriebenen Effekte kann durch 2,5D- bzw. 3D-Simulationstools erfolgen. Anschließend konnen die Simulationsergebnisse in Formvon S-Parametern in die Systemsimulation mit Hilfe von Datenmodellen eingebun-den werden. Die EDA-Software ADS von Agilent stellt dazu die KomponentenSNP Eqn und DataAccessComponent aus der Bauteilbibliothek zur Verfugung. DerNachteil beim Einsatz von S-Parameter Datenmodellen fur den Ratrace-Kopplerbzw. den Wilkinson-Teiler ist jedoch der bei 3- bzw. 4-Toren sehr hohe Simulati-onsaufwand, wenn die Modelle in Zeitbereichssimulationen eingesetzt werden sollen.Aus diesem Grund wird vom Einsatz von Datenmodellen abgesehen und fur dieSystemsimulation jeweils ein Schaltungsmodell und ein Verhaltensmodell fur denRatrace-Koppler und den Wilkinson-Teiler erstellt. Die Schaltungsmodelle werdenfur die Kalibrierung des Simulationssetups eingesetzt, wahrend fur die Untersu-chung des Einflusses der Systemparameter Verhaltensmodelle verwendet werden.Diese erlauben es, die Modellparameter, wie beispielsweise die Isolation des Ratrace-Kopplers, flexibel zu variieren. Die Verhaltensmodelle des Ratrace-Kopplers und desWilkinson-Teilers werden mit der Komponente SNP Eqn aus der ADS Bauteilbiblio-thek realisiert. Fur die Schaltungsmodelle wird die ADS-Komponente TLINP zurModellierung einer verlustbehafteten on-chip Mikrostreifenleitung verwendet.
Die Isolation des Ratrace-Kopplers zwischen den Toren 2 und 3 s32 = Tiso
sowie die Reflexion am Tor 1 des Wilkinson-Leistungsteilers s11 = RWD stellen

4.4. VERHALTENSMODELLIERUNG PASSIVER HF-KOMPONENTEN 85
A
A
B
B
LL
C
w
(a)
w ws
hC
CC
(b)
aa b
b
cc
(c)
Abbildung 4.24: (a) 90-Winkel als Diskontinuitat der Mikrostreifenleitung. (b) Ka-pazitive Kopplungen zwischen nahen Leitungen. (c) Resistive Sub-stratkopplungen.
fur die Systembetrachtungen in den folgenden Kapiteln wichtige Parameter dar.Die Modellierungsergebnisse dieser Parameter sind in Abbildung 4.25 uber derFrequenz dargestellt. Die Verhaltensmodellierung (VM) wird dabei im Falle desRatrace-Kopplers mit Simulationsergebnissen einer 2,5D-Simulation und im Falledes Wilkinson-Leistungsteilers mit Simulationsergebnissen eines Schaltungsmodells(SM) verglichen. Bei einer Frequenz von 76,5GHz kann fur den Betrag des Isolati-onskoeffizienten ein Wert von -34 dB heraus gelesen werden. Der Betrag des Refle-xionskoeffizienten des Wilkinson-Leistungsteilers weist einen Wert von -35 dB auf.Diese Werte stellen fur den betrachteten Frequenzbereich um 77GHz ausgesprochengute Kennzahlen dar. Wie Tabelle 3.5 zeigt, konnen die durch Messungen ermittel-ten Werte erheblich davon abweichen. Fur eine Einschatzung der realen Werte desRatrace-Kopplers, der im Vierfachmischer-MMIC zum Einsatz kommt, wird Tabel-le 3.5 verwendet. Sowohl der Grad der Faltung als auch der gegenseitige Abstandder Tore des Ratrace-Kopplers im Vierfachmischer-MMIC kann grob mit dem in[31] vorgestellten Design eines gefalteten Verzweigungskopplers verglichen werden.Bei diesem wurden fur den Isolationskoeffizienten ein Wert von 15 dB und fur dieTransmissionspfade ein Verlust von 1,5 dB messtechnisch ermittelt.
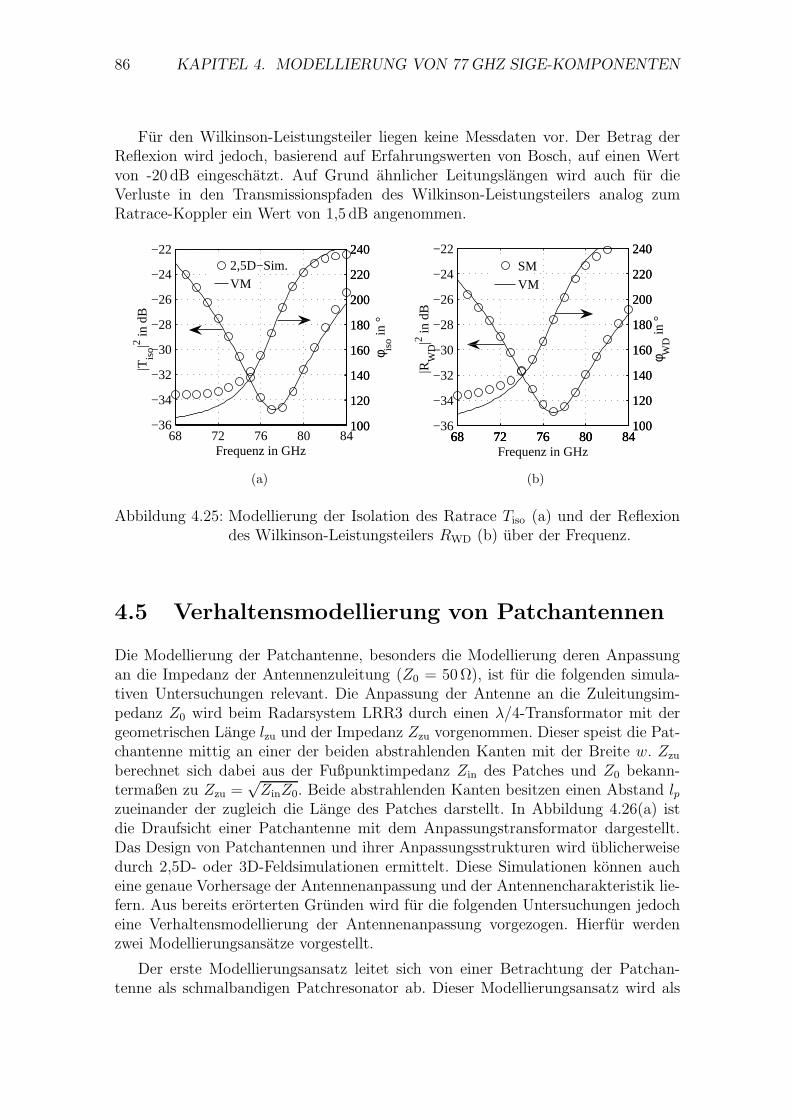
86 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
Fur den Wilkinson-Leistungsteiler liegen keine Messdaten vor. Der Betrag derReflexion wird jedoch, basierend auf Erfahrungswerten von Bosch, auf einen Wertvon -20 dB eingeschatzt. Auf Grund ahnlicher Leitungslangen wird auch fur dieVerluste in den Transmissionspfaden des Wilkinson-Leistungsteilers analog zumRatrace-Koppler ein Wert von 1,5 dB angenommen.
68 72 76 80 84−36
−34
−32
−30
−28
−26
−24
−22
|Tis
o|2 in d
B
Frequenz in GHz
100
120
140
160
180
200
220
240
φ iso in
°
100
120
140
160
180
200
220
2402,5D−Sim.
VM
(a)
68 72 76 80 84−36
−34
−32
−30
−28
−26
−24
−22
|RW
D|2 in
dB
Frequenz in GHz
68 72 76 80 84100
120
140
160
180
200
220
240
φ WD
in °
68 72 76 80 84100
120
140
160
180
200
220
240SM
VM
(b)
Abbildung 4.25: Modellierung der Isolation des Ratrace Tiso (a) und der Reflexiondes Wilkinson-Leistungsteilers RWD (b) uber der Frequenz.
4.5 Verhaltensmodellierung von Patchantennen
Die Modellierung der Patchantenne, besonders die Modellierung deren Anpassungan die Impedanz der Antennenzuleitung (Z0 = 50Ω), ist fur die folgenden simula-tiven Untersuchungen relevant. Die Anpassung der Antenne an die Zuleitungsim-pedanz Z0 wird beim Radarsystem LRR3 durch einen λ/4-Transformator mit dergeometrischen Lange lzu und der Impedanz Zzu vorgenommen. Dieser speist die Pat-chantenne mittig an einer der beiden abstrahlenden Kanten mit der Breite w. Zzu
berechnet sich dabei aus der Fußpunktimpedanz Zin des Patches und Z0 bekann-termaßen zu Zzu =
√ZinZ0. Beide abstrahlenden Kanten besitzen einen Abstand lp
zueinander der zugleich die Lange des Patches darstellt. In Abbildung 4.26(a) istdie Draufsicht einer Patchantenne mit dem Anpassungstransformator dargestellt.Das Design von Patchantennen und ihrer Anpassungsstrukturen wird ublicherweisedurch 2,5D- oder 3D-Feldsimulationen ermittelt. Diese Simulationen konnen aucheine genaue Vorhersage der Antennenanpassung und der Antennencharakteristik lie-fern. Aus bereits erorterten Grunden wird fur die folgenden Untersuchungen jedocheine Verhaltensmodellierung der Antennenanpassung vorgezogen. Hierfur werdenzwei Modellierungsansatze vorgestellt.
Der erste Modellierungsansatz leitet sich von einer Betrachtung der Patchan-tenne als schmalbandigen Patchresonator ab. Dieser Modellierungsansatz wird als
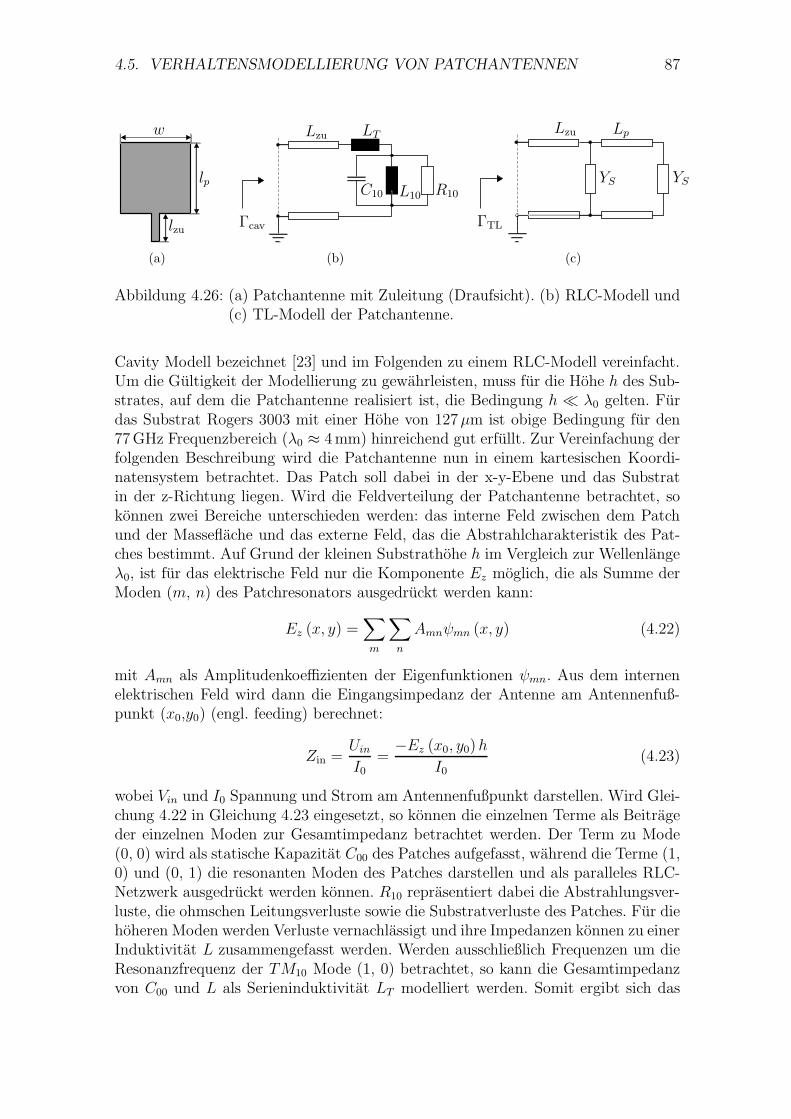
4.5. VERHALTENSMODELLIERUNG VON PATCHANTENNEN 87
w
lp
lzu
(a)
Γcav
R10L10C10
LTLzu
(b)
ΓTL
YS YS
LpLzu
(c)
Abbildung 4.26: (a) Patchantenne mit Zuleitung (Draufsicht). (b) RLC-Modell und(c) TL-Modell der Patchantenne.
Cavity Modell bezeichnet [23] und im Folgenden zu einem RLC-Modell vereinfacht.Um die Gultigkeit der Modellierung zu gewahrleisten, muss fur die Hohe h des Sub-strates, auf dem die Patchantenne realisiert ist, die Bedingung h ≪ λ0 gelten. Furdas Substrat Rogers 3003 mit einer Hohe von 127µm ist obige Bedingung fur den77GHz Frequenzbereich (λ0 ≈ 4mm) hinreichend gut erfullt. Zur Vereinfachung derfolgenden Beschreibung wird die Patchantenne nun in einem kartesischen Koordi-natensystem betrachtet. Das Patch soll dabei in der x-y-Ebene und das Substratin der z-Richtung liegen. Wird die Feldverteilung der Patchantenne betrachtet, sokonnen zwei Bereiche unterschieden werden: das interne Feld zwischen dem Patchund der Masseflache und das externe Feld, das die Abstrahlcharakteristik des Pat-ches bestimmt. Auf Grund der kleinen Substrathohe h im Vergleich zur Wellenlangeλ0, ist fur das elektrische Feld nur die Komponente Ez moglich, die als Summe derModen (m, n) des Patchresonators ausgedruckt werden kann:
Ez (x, y) =∑
m
∑
n
Amnψmn (x, y) (4.22)
mit Amn als Amplitudenkoeffizienten der Eigenfunktionen ψmn. Aus dem internenelektrischen Feld wird dann die Eingangsimpedanz der Antenne am Antennenfuß-punkt (x0,y0) (engl. feeding) berechnet:
Zin =Uin
I0=
−Ez (x0, y0)h
I0(4.23)
wobei Vin und I0 Spannung und Strom am Antennenfußpunkt darstellen. Wird Glei-chung 4.22 in Gleichung 4.23 eingesetzt, so konnen die einzelnen Terme als Beitrageder einzelnen Moden zur Gesamtimpedanz betrachtet werden. Der Term zu Mode(0, 0) wird als statische Kapazitat C00 des Patches aufgefasst, wahrend die Terme (1,0) und (0, 1) die resonanten Moden des Patches darstellen und als paralleles RLC-Netzwerk ausgedruckt werden konnen. R10 reprasentiert dabei die Abstrahlungsver-luste, die ohmschen Leitungsverluste sowie die Substratverluste des Patches. Fur diehoheren Moden werden Verluste vernachlassigt und ihre Impedanzen konnen zu einerInduktivitat L zusammengefasst werden. Werden ausschließlich Frequenzen um dieResonanzfrequenz der TM10 Mode (1, 0) betrachtet, so kann die Gesamtimpedanzvon C00 und L als Serieninduktivitat LT modelliert werden. Somit ergibt sich das

88 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
in Abbildung 4.26(b) dargestellte Ersatzschaltbild der Patchantenne fur die TM10
Mode. Wird die Zuleitungslange lzu der Mikrostreifenleitung Lzu mit der ImpedanzZzu berucksichtigt, so lasst sich der Reflexionsfaktor Γcav durch Transformation vonZin uber die Lange lzu ermitteln.
Frequenz in GHz
|Γa|i
ndB
3D-Feldsim.
TL-Modell
Cavity-Modell
70 75 80 85-35
-30
-25
-20
-15
-10
-5
0
(a)
Frequenz in GHz
∠Γ
ain
-
3D-Feldsim.
TL-ModellCavity-Modell
70 75 80 85-700
-600
-500
-400
-300
-200
-100
0
100
(b)
Abbildung 4.27: Betrag und Phase des Reflexionsfaktors verschiedener Modellierun-gen einer Patchantenne.
Durch Betrachtung der Leitungsstruktur der Patchantenne kann ein weitererModellierungsansatz, TL-Modell genannt (engl. transmission line, TL), intuitiv her-geleitet werden [23]. Wie die Zuleitung des Patches, stellt auch das Patch selbsteinen Abschnitt einer Mikrostreifenleitung dar, deren Impedanz Zp und deren Pha-senmaß β von den Abmessungen des Patches w und lp sowie den Substratparameternbestimmt ist. Das Dampfungsmaß α der Mikrostreifenleitungen wird im Folgendenvernachlassigt. Die Abstrahlung erfolgt hauptsachlich an den Kanten der Lange wund kann durch eine Lastadmittanz YS = GS + jBS modelliert werden. Dabei stelltdie Konduktanz GS den Abstrahlungsverlust und die Suszeptanz BS die im Feldgespeicherte Energie dar. Die Randeffekte an den Kanten der Lange lp werden uberdas Phasenmaß β berucksichtigt. Fur die Eingangsadmittanz des Modells lasst sich
Yin = Y0
(
Y0
YS+Y0 + jYS tan (βlp)
YS + jY0 tan (βlp)
)
(4.24)
ansetzten. In Abbildung 4.26(c) ist der Aufbau des Modells dargestellt. Wird die Zu-leitungslange lzu der Mikrostreifenleitung Lzu mit der Impedanz Zzu berucksichtigt,so kann der Reflexionsfaktor ΓTL durch Transformation von Zin = 1/Yin um dieLange lzu ermittelt werden.
In Abbildung 4.27 sind die Reflexionsfaktoren der zwei erlauterten Verhaltens-modelle in Betrag und Phase dargestellt. Zusatzlich sind die Ergebnisse aus einer3D-Feldsimulation eingetragen. Die Verlaufe der Reflexionsfaktoren zeigen sehr gute

4.5. VERHALTENSMODELLIERUNG VON PATCHANTENNEN 89
Ubereinstimmung bis zur Resonanzfrequenz bei ca. 77GHz. Ab der Resonanzfre-quenz weist die durch 3D-Feldsimulation ermittelte Phase einen starkeren Abfallauf als die der Verhaltensmodelle. Die Ursache hierfur ist auf die Berucksichtunghoherer Ausbreitungsmoden durch die 3D-Feldsimulation zuruckzufuhren.

90 KAPITEL 4. MODELLIERUNG VON 77 GHZ SIGE-KOMPONENTEN
Kapitel 5
Untersuchungen zum Leakage bei
Transfermischerarchitekturen
In diesem Kapitel werden die Ursachen und Auswirkungen von Leakage bei Trans-fermischerarchitekturen untersucht. Dabei wird auf die in Abschnitt 2.6 erlautertenGrundlagen uber die Transceiverarchitekturen aufgebaut. Zunachst wird die Be-deutung des Leakage fur Fahrerassistenz- und Sicherheitssysteme erlautert. Im An-schluss werden die Ursachen von Leakage bei Transfermischerarchitekturen naher be-trachtet. Es folgt eine simulative Untersuchung des Leakage fur den in Abschnitt 3.4vorgestellten LRR3-Prototypen. Dafur wird zuerst eine Kalibrierung des Simulati-onssetups durch einen Vergleich mit Messergebnissen des Prototypen vorgenommenund daraufhin Untersuchungen durchgefuhrt, die den Zusammenhang zwischen Ur-sachen und Auswirkungen des Leakage darstellen.
5.1 Bedeutung fur Fahrerassistenz- und Sicher-
heitssysteme
Der HF-Teil des bereits auf dem Markt erhaltlichen 77GHz FMCW-Radarsystemsfur Kfz-Komfortanwendungen LRR2 von Bosch [36] ist uberwiegend diskret aufge-baut. Die Mischung von Sende- und Empfangssignalen wird dabei an der nichtli-nearen Kennlinie einer Diode durchgefuhrt (Eindiodenmischer). Diese Mischerarchi-tektur weist konzeptionell bedingt nur eine ungenugende Isolation zwischen Sende-und Empfangspfad von etwa 3 dB auf. Die Folge ist Selbstmischung des Sendesi-gnals an der Diode und daraus resultierend ein im Vergleich zu den Nutzsignalensehr hoher niederfrequenter Signalanteil, der den AD-Konverter ubersteuern kann.Das macht beim LRR2 den Einsatz eines Hochpassfilters notwendig, der die nieder-frequenten Signalanteile dampft. Allerdings werden durch das Hochpassfilter auchniederfrequente Nutzsignalanteile von Zielen in kleiner Entfernung zum Radarsy-stem gedampft. Um den Einfluss des Filters auf Performance des Radartransceiversniedrig zu halten, mussen bei der Dimensionierung zwei Forderungen erfullt wer-den. Zum einen muss die Grenzfrequenz des Filters niedrig sein und zum anderen
91

92 KAPITEL 5. UNTERSUCHUNGEN ZUM LEAKAGE
muss die Einschwingzeit des Filters bis zum Erreichen eines nahezu stationarenZustandes im Verhaltnis zur Dauer des FMCW-Sendesignals niedrig sein. Anhandeines Hochpasses 1. Ordnung mit den bekannten Formeln fur die Grenzfrequenzfco = 1
2πRCund der Einschwingzeit τ90% = RC ln(10) (Zeitdauer bis 90% des sta-
tionaren Endwertes erreicht ist) lasst sich anschaulich nachvollziehen, dass beideForderungen hinsichtlich der Dimensionierung von R und C gegenlaufig sind undsomit ein Kompromiss zwischen Grenzfrequenz und Einschwingzeit des Tiefpassesgefunden werden muss. Ein solcher Kompromiss ist fur reine Komfortanwendungenwie beim LRR2 moglich, da fur die automatische Abstandsregelung auf Autobahnentypischerweise große Ziele wie PKWs und LKWs bei mittleren bis großen Entfer-nungen (ca. 100-150m) detektiert werden mussen. Die Grenzfrequenz des Filterskann als relativ hoch dimensioniert werden, ohne dass die Detektion negativ beein-flusst wird. Zukunftige Radarsysteme werden jedoch neben Komfortanwendungenzusatzlich Stop&Go-Funktionalitat sowie den Sicherheitsaspekt abdecken mussen.Bereits fur die Stop&Go-Funktionalitat ist es dabei notig auch sehr nahe große Zie-le zuverlassig zu detektieren. Fur Sicherheitsanwendungen wird diese Problematiknoch verstarkt, da im Nahbereich nicht nur große Ziele zuverlassig detektiert wer-den mussen, sondern auch relativ kleine Ziele wie Fußganger, Radfahrer oder Mo-torradfahrer. Die Grenzfrequenz des Filters muss also sehr niedrig gewahlt werden,was oben genannten Kompromiss erheblich erschwert. Folglich kann gesagt wer-den, dass fur zukunftige FMCW-Weitbereichsradarsyteme eine Hochpassfilterungzur Dampfung des Gleichspannungsanteils ungeeignet ist.
Kommen in zukunftigen integrierten Transceiverschaltungen aktive Mischer zumEinsatz, die eine relativ niedrige Eingangslinearitat aufweisen, so muss ein weitererAspekt neben der Selbstmischung beachtet werden. Auf Grund des Leakage zwi-schen Sende- und Empfangspfad wird die Eingangsleistung am RF-Tor des Mischerserhoht, was zu einer Ubersteuerung des Eingangs und so zu einem Anstieg der In-termodulationsprodukte am Mischerausgang fuhren kann. Die Grundlagen hierzuwurden in Abschnitt 2.7.2 erortert.
5.2 Ursachen des Leakage
In diesem Abschnitt wird eine Transfermischerarchitektur betrachtet, bei der alsHybrid ein Ratrace-Koppler zum Einsatz kommt. Die Architektur besteht somitaus der Zusammenschaltung eines Gilbert-Mischers und eines Ratrace-Kopplers wiein Abbildung 5.1(a) dargestellt. Der ideale Ratrace-Koppler wird durch seine S-Parameter Matrix
S =−j√
2
0 1 0 00 0 0 01 0 0 10 −1 0 0
(5.1)
beschrieben. Fur eine Erlauterung des Sende- und Empfangsprinzips der Trans-fermischerarchitektur wird auf Abschnitt 2.6 verwiesen. Neben den gewunschten
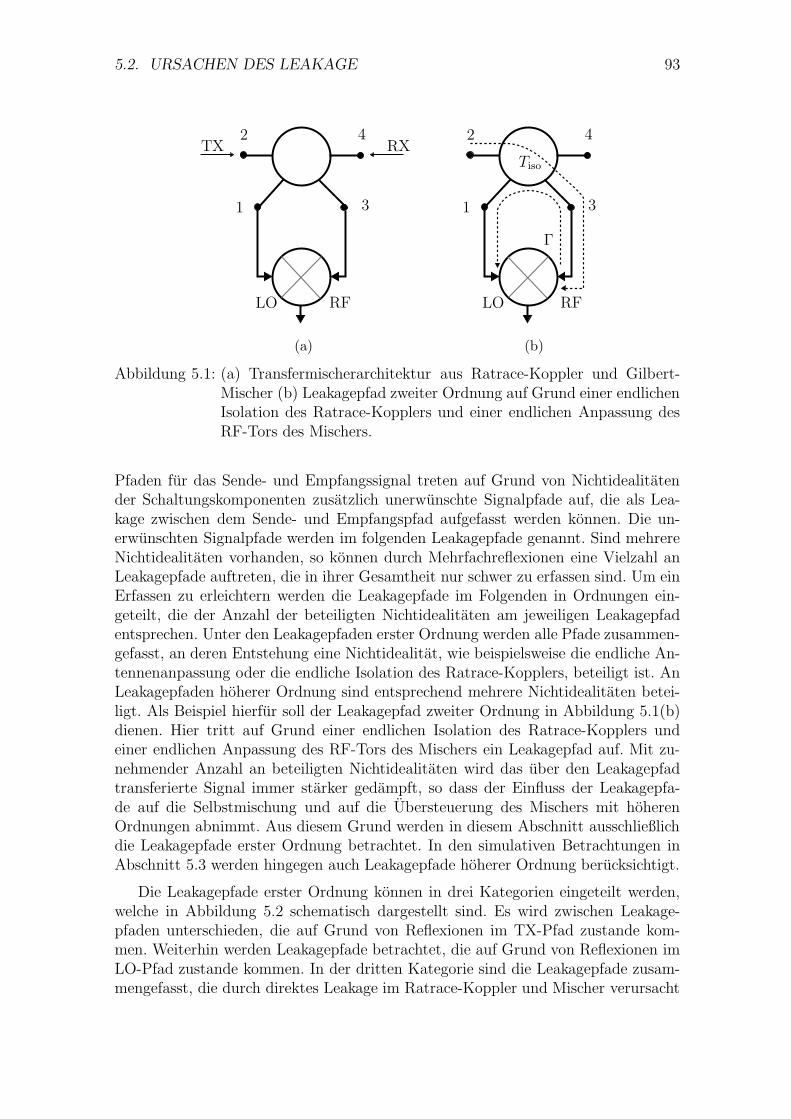
5.2. URSACHEN DES LEAKAGE 93
LO LORF RF
2 24 4
1 13 3
Γ
Tiso
TX RX
(a) (b)
Abbildung 5.1: (a) Transfermischerarchitektur aus Ratrace-Koppler und Gilbert-Mischer (b) Leakagepfad zweiter Ordnung auf Grund einer endlichenIsolation des Ratrace-Kopplers und einer endlichen Anpassung desRF-Tors des Mischers.
Pfaden fur das Sende- und Empfangssignal treten auf Grund von Nichtidealitatender Schaltungskomponenten zusatzlich unerwunschte Signalpfade auf, die als Lea-kage zwischen dem Sende- und Empfangspfad aufgefasst werden konnen. Die un-erwunschten Signalpfade werden im folgenden Leakagepfade genannt. Sind mehrereNichtidealitaten vorhanden, so konnen durch Mehrfachreflexionen eine Vielzahl anLeakagepfade auftreten, die in ihrer Gesamtheit nur schwer zu erfassen sind. Um einErfassen zu erleichtern werden die Leakagepfade im Folgenden in Ordnungen ein-geteilt, die der Anzahl der beteiligten Nichtidealitaten am jeweiligen Leakagepfadentsprechen. Unter den Leakagepfaden erster Ordnung werden alle Pfade zusammen-gefasst, an deren Entstehung eine Nichtidealitat, wie beispielsweise die endliche An-tennenanpassung oder die endliche Isolation des Ratrace-Kopplers, beteiligt ist. AnLeakagepfaden hoherer Ordnung sind entsprechend mehrere Nichtidealitaten betei-ligt. Als Beispiel hierfur soll der Leakagepfad zweiter Ordnung in Abbildung 5.1(b)dienen. Hier tritt auf Grund einer endlichen Isolation des Ratrace-Kopplers undeiner endlichen Anpassung des RF-Tors des Mischers ein Leakagepfad auf. Mit zu-nehmender Anzahl an beteiligten Nichtidealitaten wird das uber den Leakagepfadtransferierte Signal immer starker gedampft, so dass der Einfluss der Leakagepfa-de auf die Selbstmischung und auf die Ubersteuerung des Mischers mit hoherenOrdnungen abnimmt. Aus diesem Grund werden in diesem Abschnitt ausschließlichdie Leakagepfade erster Ordnung betrachtet. In den simulativen Betrachtungen inAbschnitt 5.3 werden hingegen auch Leakagepfade hoherer Ordnung berucksichtigt.
Die Leakagepfade erster Ordnung konnen in drei Kategorien eingeteilt werden,welche in Abbildung 5.2 schematisch dargestellt sind. Es wird zwischen Leakage-pfaden unterschieden, die auf Grund von Reflexionen im TX-Pfad zustande kom-men. Weiterhin werden Leakagepfade betrachtet, die auf Grund von Reflexionen imLO-Pfad zustande kommen. In der dritten Kategorie sind die Leakagepfade zusam-mengefasst, die durch direktes Leakage im Ratrace-Koppler und Mischer verursacht
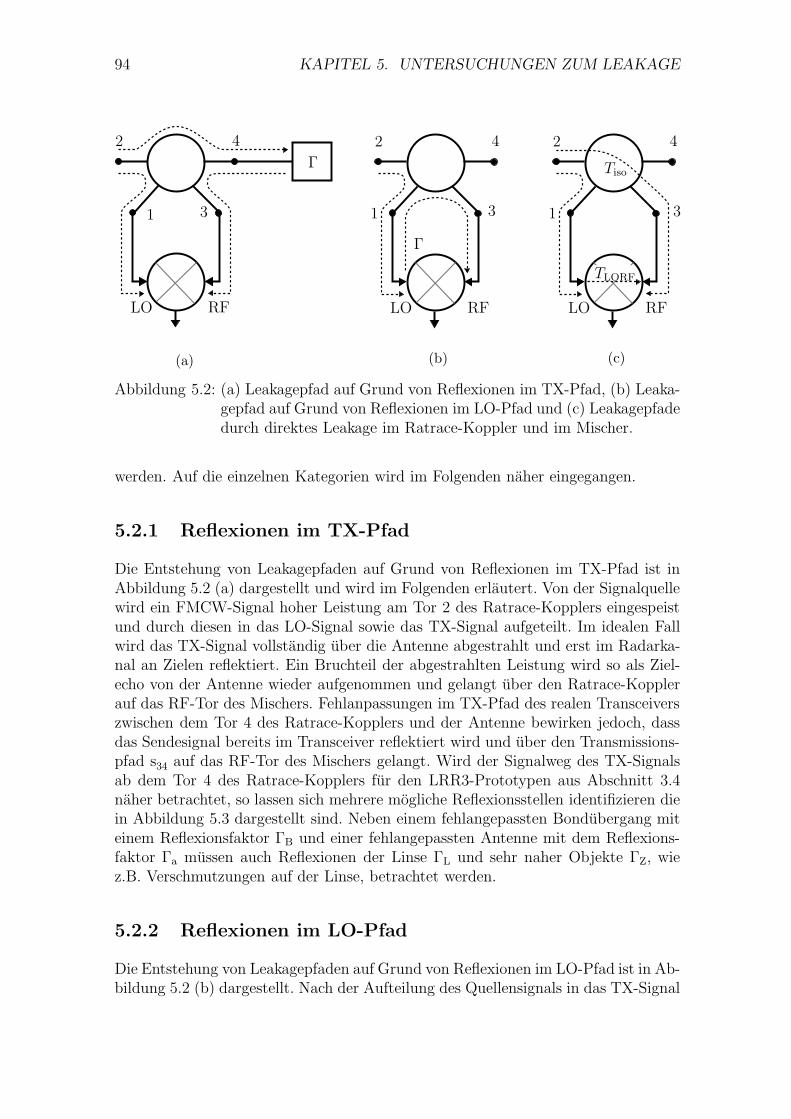
94 KAPITEL 5. UNTERSUCHUNGEN ZUM LEAKAGE
LO LOLO
Γ
RF RFRF
2 22 4 44
1 11 3 33
Γ
Tiso
TLORF
(a) (b) (c)
Abbildung 5.2: (a) Leakagepfad auf Grund von Reflexionen im TX-Pfad, (b) Leaka-gepfad auf Grund von Reflexionen im LO-Pfad und (c) Leakagepfadedurch direktes Leakage im Ratrace-Koppler und im Mischer.
werden. Auf die einzelnen Kategorien wird im Folgenden naher eingegangen.
5.2.1 Reflexionen im TX-Pfad
Die Entstehung von Leakagepfaden auf Grund von Reflexionen im TX-Pfad ist inAbbildung 5.2 (a) dargestellt und wird im Folgenden erlautert. Von der Signalquellewird ein FMCW-Signal hoher Leistung am Tor 2 des Ratrace-Kopplers eingespeistund durch diesen in das LO-Signal sowie das TX-Signal aufgeteilt. Im idealen Fallwird das TX-Signal vollstandig uber die Antenne abgestrahlt und erst im Radarka-nal an Zielen reflektiert. Ein Bruchteil der abgestrahlten Leistung wird so als Ziel-echo von der Antenne wieder aufgenommen und gelangt uber den Ratrace-Kopplerauf das RF-Tor des Mischers. Fehlanpassungen im TX-Pfad des realen Transceiverszwischen dem Tor 4 des Ratrace-Kopplers und der Antenne bewirken jedoch, dassdas Sendesignal bereits im Transceiver reflektiert wird und uber den Transmissions-pfad s34 auf das RF-Tor des Mischers gelangt. Wird der Signalweg des TX-Signalsab dem Tor 4 des Ratrace-Kopplers fur den LRR3-Prototypen aus Abschnitt 3.4naher betrachtet, so lassen sich mehrere mogliche Reflexionsstellen identifizieren diein Abbildung 5.3 dargestellt sind. Neben einem fehlangepassten Bondubergang miteinem Reflexionsfaktor ΓB und einer fehlangepassten Antenne mit dem Reflexions-faktor Γa mussen auch Reflexionen der Linse ΓL und sehr naher Objekte ΓZ, wiez.B. Verschmutzungen auf der Linse, betrachtet werden.
5.2.2 Reflexionen im LO-Pfad
Die Entstehung von Leakagepfaden auf Grund von Reflexionen im LO-Pfad ist in Ab-bildung 5.2 (b) dargestellt. Nach der Aufteilung des Quellensignals in das TX-Signal
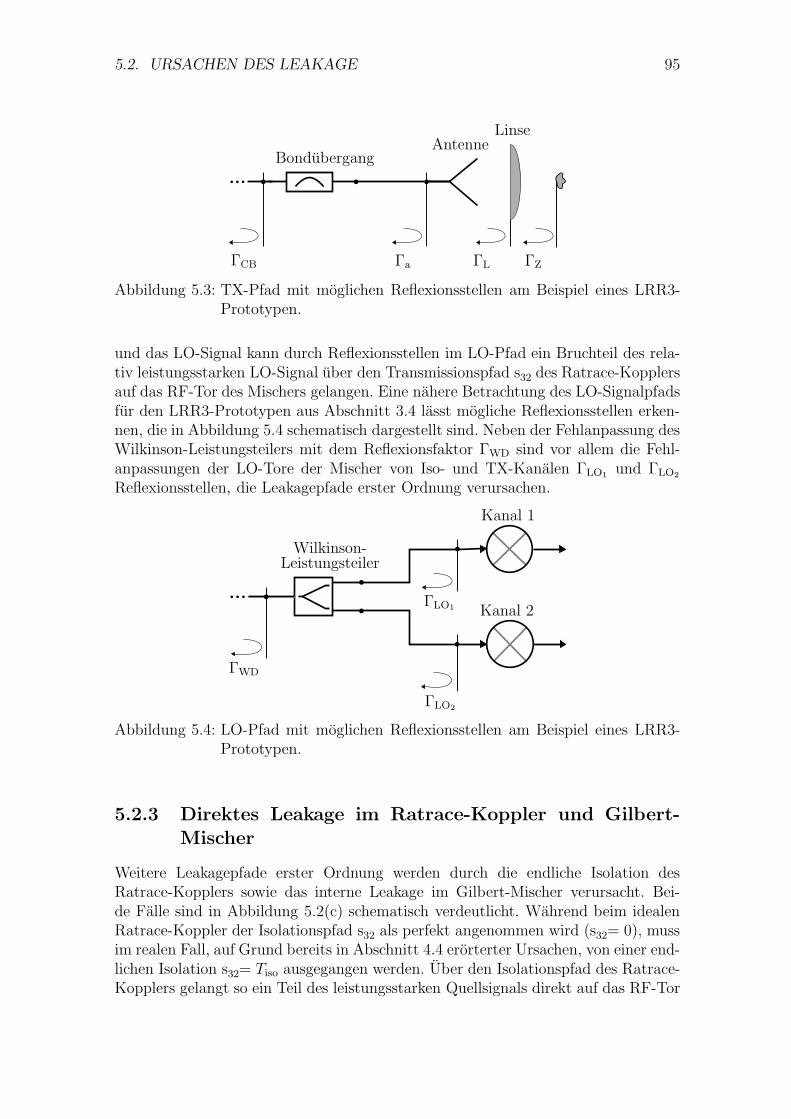
5.2. URSACHEN DES LEAKAGE 95
BondubergangAntenne
Linse
ΓCB Γa ΓL ΓZ
Abbildung 5.3: TX-Pfad mit moglichen Reflexionsstellen am Beispiel eines LRR3-Prototypen.
und das LO-Signal kann durch Reflexionsstellen im LO-Pfad ein Bruchteil des rela-tiv leistungsstarken LO-Signal uber den Transmissionspfad s32 des Ratrace-Kopplersauf das RF-Tor des Mischers gelangen. Eine nahere Betrachtung des LO-Signalpfadsfur den LRR3-Prototypen aus Abschnitt 3.4 lasst mogliche Reflexionsstellen erken-nen, die in Abbildung 5.4 schematisch dargestellt sind. Neben der Fehlanpassung desWilkinson-Leistungsteilers mit dem Reflexionsfaktor ΓWD sind vor allem die Fehl-anpassungen der LO-Tore der Mischer von Iso- und TX-Kanalen ΓLO1
und ΓLO2
Reflexionsstellen, die Leakagepfade erster Ordnung verursachen.
Wilkinson-Leistungsteiler
Kanal 2
Kanal 1
ΓLO1
ΓLO2
ΓWD
Abbildung 5.4: LO-Pfad mit moglichen Reflexionsstellen am Beispiel eines LRR3-Prototypen.
5.2.3 Direktes Leakage im Ratrace-Koppler und Gilbert-
Mischer
Weitere Leakagepfade erster Ordnung werden durch die endliche Isolation desRatrace-Kopplers sowie das interne Leakage im Gilbert-Mischer verursacht. Bei-de Falle sind in Abbildung 5.2(c) schematisch verdeutlicht. Wahrend beim idealenRatrace-Koppler der Isolationspfad s32 als perfekt angenommen wird (s32= 0), mussim realen Fall, auf Grund bereits in Abschnitt 4.4 erorterter Ursachen, von einer end-lichen Isolation s32= Tiso ausgegangen werden. Uber den Isolationspfad des Ratrace-Kopplers gelangt so ein Teil des leistungsstarken Quellsignals direkt auf das RF-Tor
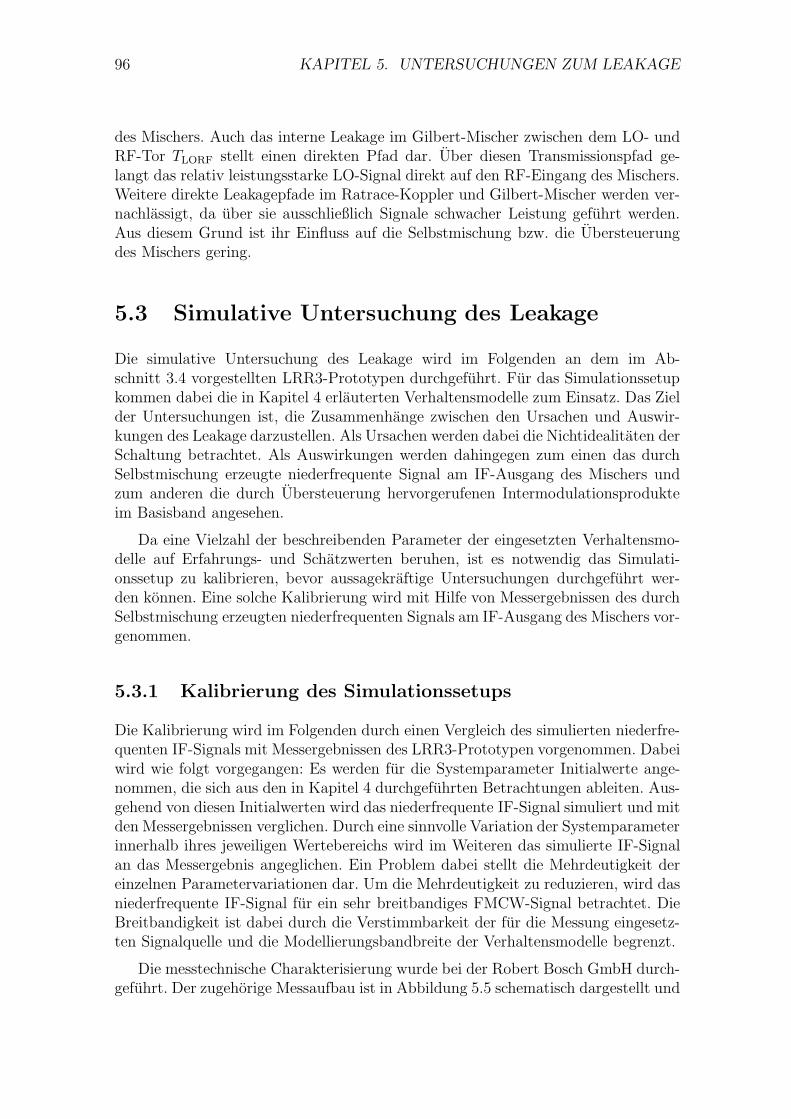
96 KAPITEL 5. UNTERSUCHUNGEN ZUM LEAKAGE
des Mischers. Auch das interne Leakage im Gilbert-Mischer zwischen dem LO- undRF-Tor TLORF stellt einen direkten Pfad dar. Uber diesen Transmissionspfad ge-langt das relativ leistungsstarke LO-Signal direkt auf den RF-Eingang des Mischers.Weitere direkte Leakagepfade im Ratrace-Koppler und Gilbert-Mischer werden ver-nachlassigt, da uber sie ausschließlich Signale schwacher Leistung gefuhrt werden.Aus diesem Grund ist ihr Einfluss auf die Selbstmischung bzw. die Ubersteuerungdes Mischers gering.
5.3 Simulative Untersuchung des Leakage
Die simulative Untersuchung des Leakage wird im Folgenden an dem im Ab-schnitt 3.4 vorgestellten LRR3-Prototypen durchgefuhrt. Fur das Simulationssetupkommen dabei die in Kapitel 4 erlauterten Verhaltensmodelle zum Einsatz. Das Zielder Untersuchungen ist, die Zusammenhange zwischen den Ursachen und Auswir-kungen des Leakage darzustellen. Als Ursachen werden dabei die Nichtidealitaten derSchaltung betrachtet. Als Auswirkungen werden dahingegen zum einen das durchSelbstmischung erzeugte niederfrequente Signal am IF-Ausgang des Mischers undzum anderen die durch Ubersteuerung hervorgerufenen Intermodulationsprodukteim Basisband angesehen.
Da eine Vielzahl der beschreibenden Parameter der eingesetzten Verhaltensmo-delle auf Erfahrungs- und Schatzwerten beruhen, ist es notwendig das Simulati-onssetup zu kalibrieren, bevor aussagekraftige Untersuchungen durchgefuhrt wer-den konnen. Eine solche Kalibrierung wird mit Hilfe von Messergebnissen des durchSelbstmischung erzeugten niederfrequenten Signals am IF-Ausgang des Mischers vor-genommen.
5.3.1 Kalibrierung des Simulationssetups
Die Kalibrierung wird im Folgenden durch einen Vergleich des simulierten niederfre-quenten IF-Signals mit Messergebnissen des LRR3-Prototypen vorgenommen. Dabeiwird wie folgt vorgegangen: Es werden fur die Systemparameter Initialwerte ange-nommen, die sich aus den in Kapitel 4 durchgefuhrten Betrachtungen ableiten. Aus-gehend von diesen Initialwerten wird das niederfrequente IF-Signal simuliert und mitden Messergebnissen verglichen. Durch eine sinnvolle Variation der Systemparameterinnerhalb ihres jeweiligen Wertebereichs wird im Weiteren das simulierte IF-Signalan das Messergebnis angeglichen. Ein Problem dabei stellt die Mehrdeutigkeit dereinzelnen Parametervariationen dar. Um die Mehrdeutigkeit zu reduzieren, wird dasniederfrequente IF-Signal fur ein sehr breitbandiges FMCW-Signal betrachtet. DieBreitbandigkeit ist dabei durch die Verstimmbarkeit der fur die Messung eingesetz-ten Signalquelle und die Modellierungsbandbreite der Verhaltensmodelle begrenzt.
Die messtechnische Charakterisierung wurde bei der Robert Bosch GmbH durch-gefuhrt. Der zugehorige Messaufbau ist in Abbildung 5.5 schematisch dargestellt und
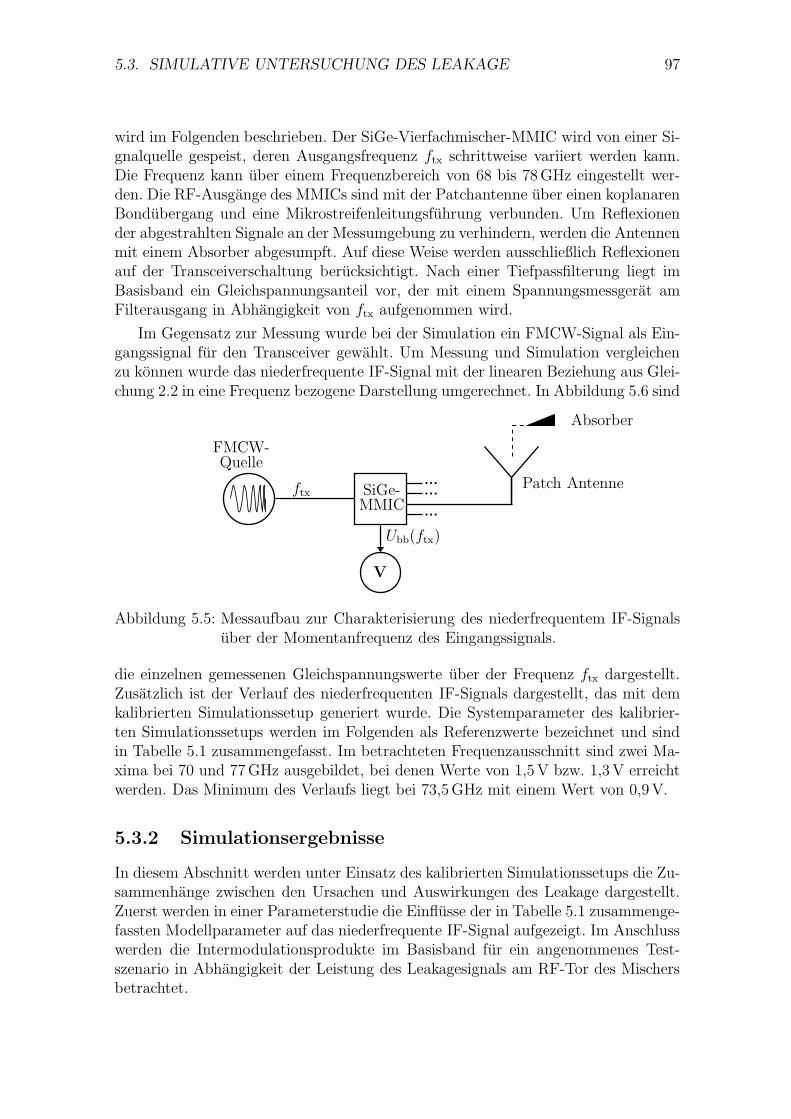
5.3. SIMULATIVE UNTERSUCHUNG DES LEAKAGE 97
wird im Folgenden beschrieben. Der SiGe-Vierfachmischer-MMIC wird von einer Si-gnalquelle gespeist, deren Ausgangsfrequenz ftx schrittweise variiert werden kann.Die Frequenz kann uber einem Frequenzbereich von 68 bis 78GHz eingestellt wer-den. Die RF-Ausgange des MMICs sind mit der Patchantenne uber einen koplanarenBondubergang und eine Mikrostreifenleitungsfuhrung verbunden. Um Reflexionender abgestrahlten Signale an der Messumgebung zu verhindern, werden die Antennenmit einem Absorber abgesumpft. Auf diese Weise werden ausschließlich Reflexionenauf der Transceiverschaltung berucksichtigt. Nach einer Tiefpassfilterung liegt imBasisband ein Gleichspannungsanteil vor, der mit einem Spannungsmessgerat amFilterausgang in Abhangigkeit von ftx aufgenommen wird.
Im Gegensatz zur Messung wurde bei der Simulation ein FMCW-Signal als Ein-gangssignal fur den Transceiver gewahlt. Um Messung und Simulation vergleichenzu konnen wurde das niederfrequente IF-Signal mit der linearen Beziehung aus Glei-chung 2.2 in eine Frequenz bezogene Darstellung umgerechnet. In Abbildung 5.6 sind
SiGe-MMIC
V
Patch Antenne
Ubb(ftx)
ftx
Absorber
FMCW-Quelle
Abbildung 5.5: Messaufbau zur Charakterisierung des niederfrequentem IF-Signalsuber der Momentanfrequenz des Eingangssignals.
die einzelnen gemessenen Gleichspannungswerte uber der Frequenz ftx dargestellt.Zusatzlich ist der Verlauf des niederfrequenten IF-Signals dargestellt, das mit demkalibrierten Simulationssetup generiert wurde. Die Systemparameter des kalibrier-ten Simulationssetups werden im Folgenden als Referenzwerte bezeichnet und sindin Tabelle 5.1 zusammengefasst. Im betrachteten Frequenzausschnitt sind zwei Ma-xima bei 70 und 77GHz ausgebildet, bei denen Werte von 1,5V bzw. 1,3V erreichtwerden. Das Minimum des Verlaufs liegt bei 73,5GHz mit einem Wert von 0,9V.
5.3.2 Simulationsergebnisse
In diesem Abschnitt werden unter Einsatz des kalibrierten Simulationssetups die Zu-sammenhange zwischen den Ursachen und Auswirkungen des Leakage dargestellt.Zuerst werden in einer Parameterstudie die Einflusse der in Tabelle 5.1 zusammenge-fassten Modellparameter auf das niederfrequente IF-Signal aufgezeigt. Im Anschlusswerden die Intermodulationsprodukte im Basisband fur ein angenommenes Test-szenario in Abhangigkeit der Leistung des Leakagesignals am RF-Tor des Mischersbetrachtet.

98 KAPITEL 5. UNTERSUCHUNGEN ZUM LEAKAGE
ftx in GHz
Ubb
Messung
Simulation
68 70 72 74 76 780.6
0.8
1
1.2
1.4
1.6
fmin
f0
fmax
Abbildung 5.6: Auf die Messung kalibriertes Signal Ubb uber der Momentanfrequenzftx des Eingangssignals. Die Messwerte wurden bei der Robert BoschGmbH ermittelt.
Parameter Referenzwert Beschreibung
f0a 76.5GHz Resonanzfrequenz der Patchantenne
|Γ0a|2 -12 dB Reflexionskoeffizient bei f0a
∆fa 8GHz 3 dB Bandbreite von |Γ0a|2
w 350µm Padabstand der Bondverbindung
h 120µm Hohe der Bondverbindung
f0wd 76.5GHz Mittenfrequenz des Wilkinson-Teilers
|R0wd|2 -24 dB Reflexionskoeffizient bei f0wd
f0rr 76.5GHz Mittenfrequenz des Ratrace
|T0iso|2 -32 dB Isolation des Ratrace bei f0rr
|SLO|2 -14 dB Reflexionskoeffizient des Mischer LO-Tors
φLO 55 Phase zu SLO
|SLORF|2 -13 dB Transmission zwischen LO- und RF Tor
φLORF 60 dB Phase zu SLORF
Tabelle 5.1: Referenzwerte der Modellparameter des kalibrierten Simulationssetups.
In der Parameterstudie wird jeweils ein Modellparameter variiert, wahrend dierestlichen Parameter konstant gehalten werden. Das niederfrequente IF-Signal wirdnicht wie in Abbildung 5.6 uber dem gesamten Frequenzausschnitt von 68 bis78GHz dargestellt, sondern es werden ausschließlich die Frequenzen f0 =76,5GHz,
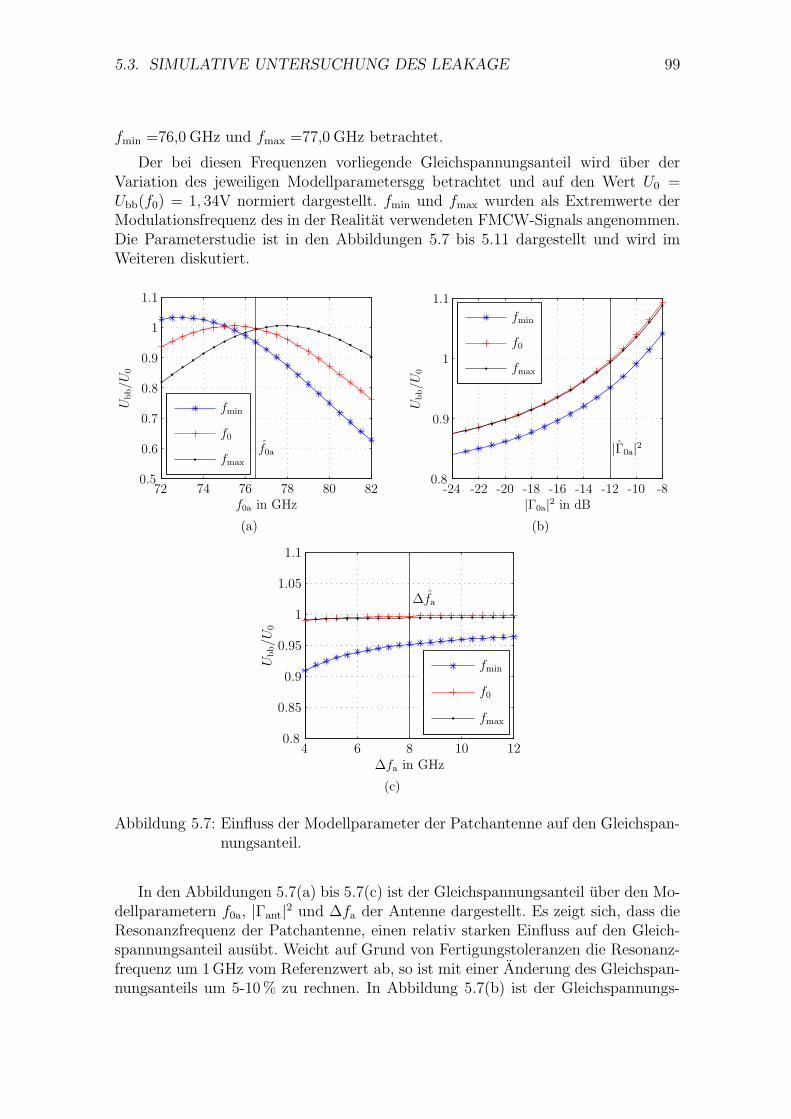
5.3. SIMULATIVE UNTERSUCHUNG DES LEAKAGE 99
fmin =76,0 GHz und fmax =77,0 GHz betrachtet.
Der bei diesen Frequenzen vorliegende Gleichspannungsanteil wird uber derVariation des jeweiligen Modellparametersgg betrachtet und auf den Wert U0 =Ubb(f0) = 1, 34V normiert dargestellt. fmin und fmax wurden als Extremwerte derModulationsfrequenz des in der Realitat verwendeten FMCW-Signals angenommen.Die Parameterstudie ist in den Abbildungen 5.7 bis 5.11 dargestellt und wird imWeiteren diskutiert.
f0a in GHz
Ubb/U
0
f0a
fmin
f0
fmax
72 74 76 78 80 820.5
0.6
0.7
0.8
0.9
1
1.1
(a)
|Γ0a|2 in dB
Ubb/U
0
|Γ0a|2
fmin
f0
fmax
-24 -22 -20 -18 -16 -14 -12 -10 -80.8
0.9
1
1.1
(b)
∆fa in GHz
Ubb/U
0
∆fa
fmin
f0
fmax
4 6 8 10 120.8
0.85
0.9
0.95
1
1.05
1.1
(c)
Abbildung 5.7: Einfluss der Modellparameter der Patchantenne auf den Gleichspan-nungsanteil.
In den Abbildungen 5.7(a) bis 5.7(c) ist der Gleichspannungsanteil uber den Mo-dellparametern f0a, |Γant|2 und ∆fa der Antenne dargestellt. Es zeigt sich, dass dieResonanzfrequenz der Patchantenne, einen relativ starken Einfluss auf den Gleich-spannungsanteil ausubt. Weicht auf Grund von Fertigungstoleranzen die Resonanz-frequenz um 1GHz vom Referenzwert ab, so ist mit einer Anderung des Gleichspan-nungsanteils um 5-10% zu rechnen. In Abbildung 5.7(b) ist der Gleichspannungs-
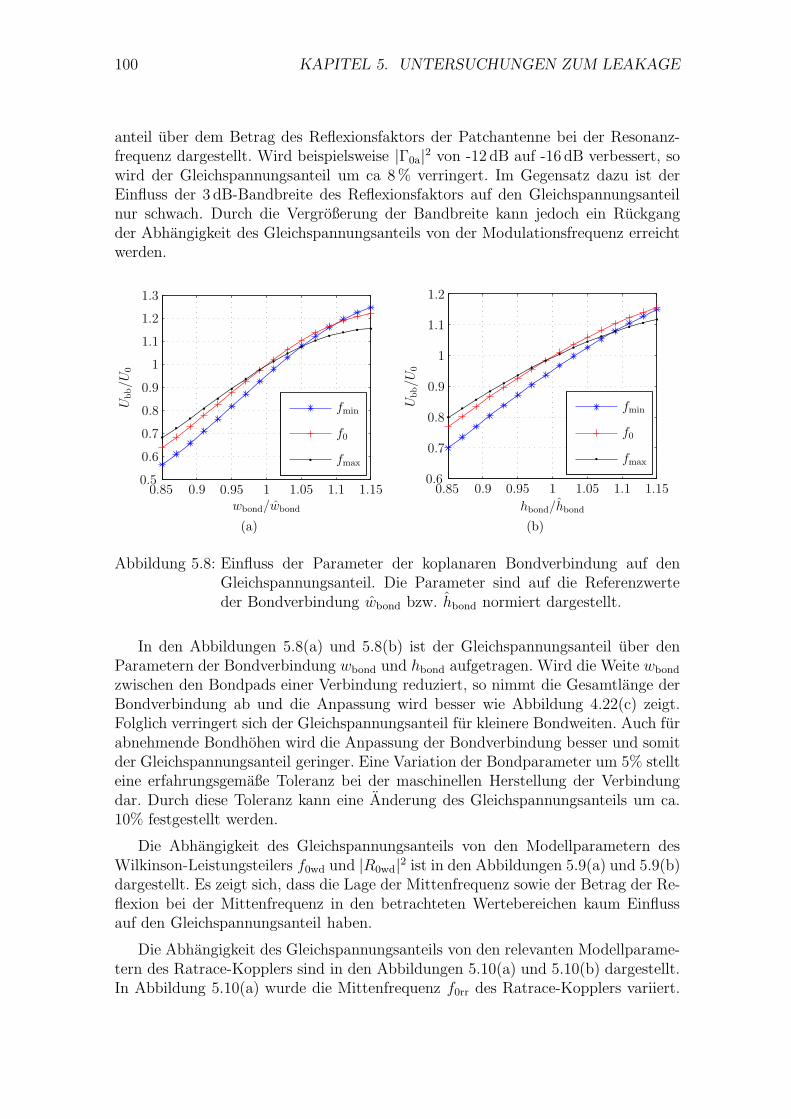
100 KAPITEL 5. UNTERSUCHUNGEN ZUM LEAKAGE
anteil uber dem Betrag des Reflexionsfaktors der Patchantenne bei der Resonanz-frequenz dargestellt. Wird beispielsweise |Γ0a|2 von -12 dB auf -16 dB verbessert, sowird der Gleichspannungsanteil um ca 8% verringert. Im Gegensatz dazu ist derEinfluss der 3 dB-Bandbreite des Reflexionsfaktors auf den Gleichspannungsanteilnur schwach. Durch die Vergroßerung der Bandbreite kann jedoch ein Ruckgangder Abhangigkeit des Gleichspannungsanteils von der Modulationsfrequenz erreichtwerden.
wbond/wbond
Ubb/U
0
fmin
f0
fmax
0.85 0.9 0.95 1 1.05 1.1 1.150.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
(a)
hbond/hbond
Ubb/U
0fmin
f0
fmax
0.85 0.9 0.95 1 1.05 1.1 1.150.6
0.7
0.8
0.9
1
1.1
1.2
(b)
Abbildung 5.8: Einfluss der Parameter der koplanaren Bondverbindung auf denGleichspannungsanteil. Die Parameter sind auf die Referenzwerteder Bondverbindung wbond bzw. hbond normiert dargestellt.
In den Abbildungen 5.8(a) und 5.8(b) ist der Gleichspannungsanteil uber denParametern der Bondverbindung wbond und hbond aufgetragen. Wird die Weite wbond
zwischen den Bondpads einer Verbindung reduziert, so nimmt die Gesamtlange derBondverbindung ab und die Anpassung wird besser wie Abbildung 4.22(c) zeigt.Folglich verringert sich der Gleichspannungsanteil fur kleinere Bondweiten. Auch furabnehmende Bondhohen wird die Anpassung der Bondverbindung besser und somitder Gleichspannungsanteil geringer. Eine Variation der Bondparameter um 5% stellteine erfahrungsgemaße Toleranz bei der maschinellen Herstellung der Verbindungdar. Durch diese Toleranz kann eine Anderung des Gleichspannungsanteils um ca.10% festgestellt werden.
Die Abhangigkeit des Gleichspannungsanteils von den Modellparametern desWilkinson-Leistungsteilers f0wd und |R0wd|2 ist in den Abbildungen 5.9(a) und 5.9(b)dargestellt. Es zeigt sich, dass die Lage der Mittenfrequenz sowie der Betrag der Re-flexion bei der Mittenfrequenz in den betrachteten Wertebereichen kaum Einflussauf den Gleichspannungsanteil haben.
Die Abhangigkeit des Gleichspannungsanteils von den relevanten Modellparame-tern des Ratrace-Kopplers sind in den Abbildungen 5.10(a) und 5.10(b) dargestellt.In Abbildung 5.10(a) wurde die Mittenfrequenz f0rr des Ratrace-Kopplers variiert.
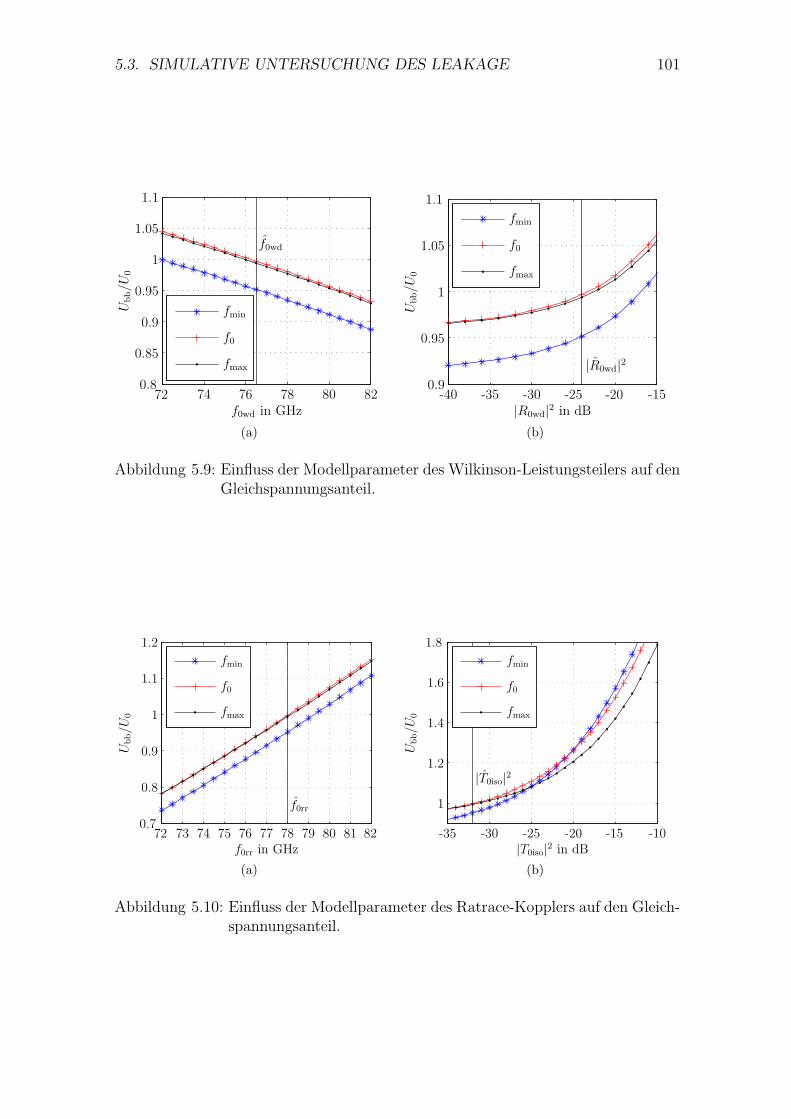
5.3. SIMULATIVE UNTERSUCHUNG DES LEAKAGE 101
f0wd in GHz
Ubb/U
0
f0wd
f
fmin
f0
fmax
72 74 76 78 80 820.8
0.85
0.9
0.95
1
1.05
1.1
(a)
|R0wd|2 in dBU
bb/U
0
|R0wd|2
fmin
f0
fmax
-40 -35 -30 -25 -20 -150.9
0.95
1
1.05
1.1
(b)
Abbildung 5.9: Einfluss der Modellparameter des Wilkinson-Leistungsteilers auf denGleichspannungsanteil.
f0rr in GHz
Ubb/U
0
f0rr
fmin
f0
fmax
72 73 74 75 76 77 78 79 80 81 820.7
0.8
0.9
1
1.1
1.2
(a)
|T0iso|2 in dB
Ubb/U
0
|T0iso|2
fmin
f0
fmax
-35 -30 -25 -20 -15 -10
1
1.2
1.4
1.6
1.8
(b)
Abbildung 5.10: Einfluss der Modellparameter des Ratrace-Kopplers auf den Gleich-spannungsanteil.

102 KAPITEL 5. UNTERSUCHUNGEN ZUM LEAKAGE
Es ist festzustellen, dass eine Verringerung der Mittenfrequenz zu einer Redukti-on des Gleichspannungsanteils fuhrt. Wird die Mittenfrequenz beispielsweise um1GHz reduziert, so wird der Gleichspannungsanteil um ca. 5% verringert. In Ab-bildung 5.10(b) ist die Abhangigkeit des Gleichspannungsanteils vom Betrag derIsolation |T0iso|2 bei der Mittenfrequenz dargestellt. Eine Verbesserung der Isolationfuhrt demnach zu einer Reduktion des Gleichspannungsanteils.
|SLO|2 in dB
Ubb/U
0
|SLO|2
fmin
f0
fmax
-24 -22 -20 -18 -16 -14 -12 -100.8
0.9
1
1.1
(a)
φLO in
Ubb/U
0
φLO
fmin
f0
fmax
-180 -135 -90 -45 0 45 90 135 1800.4
0.6
0.8
1
1.2
(b)
|TLORF|2 in dB
Ubb/U
0
|TLORF|2
fmin
f0
fmax
-24 -22 -20 -18 -16 -14 -12 -100.5
0.7
0.9
1.1
1.3
(c)
φLORF in
Ubb/U
0
φLORF
fmin
f0
fmax
-180 -135 -90 -45 0 45 90 135 180-0.2
0
0.2
0.4
0.6
0.8
1
(d)
Abbildung 5.11: Einfluss der Modellparameter des Mischers auf den Gleichspan-nungsanteil.
Zum Abschluss der Parameterstudie wird in den Abbildungen 5.11(a) bis 5.11(d)die Abhangigkeit des Gleichspannungsanteils von den Modellparametern des Mi-schers dargestellt. Fur die in Abbildung 5.11(a) dargestellte Untersuchung wurde derBetrag des Reflexionsparameters des LO-Tors variiert. Wie erwartet sinkt der Gleich-spannungsanteil mit kleiner werdendem Reflexionsparameter. Die Abhangigkeitdes Gleichspannungsanteils von der Phase des Reflexionsparameters ist in Abbil-dung 5.11(b) dargestellt. Wird ausgehend vom Referenzwert φLO die Phase erhoht,
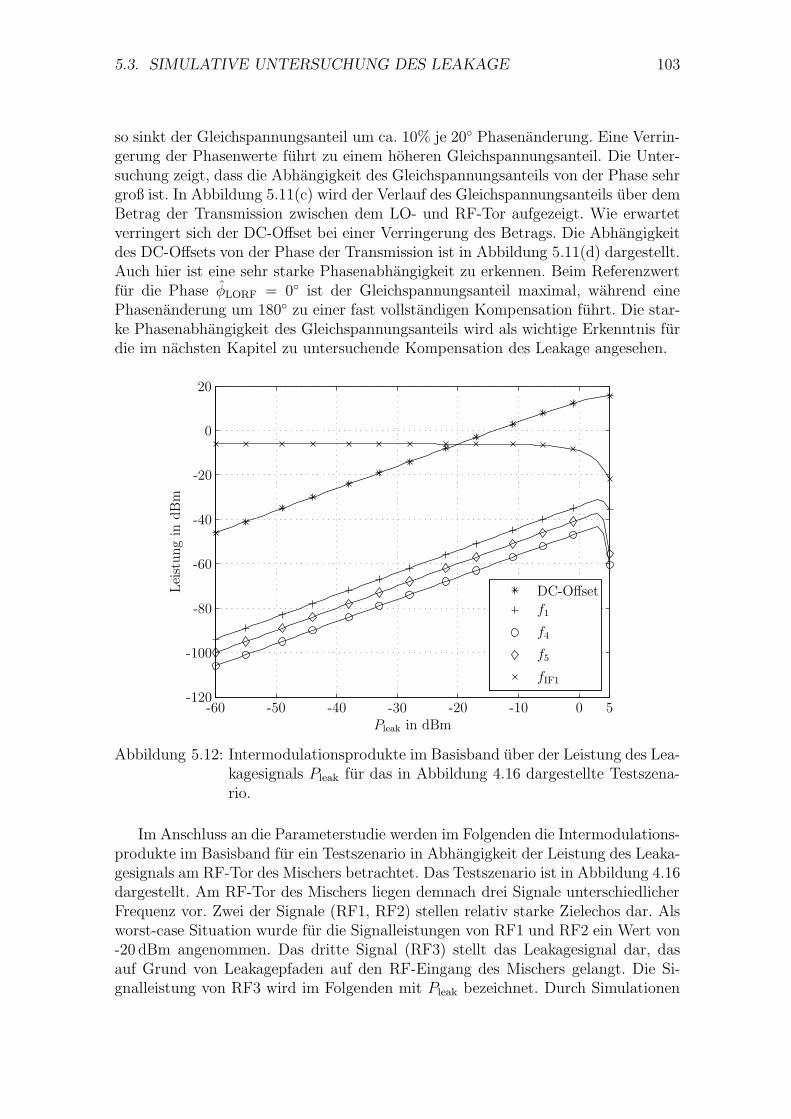
5.3. SIMULATIVE UNTERSUCHUNG DES LEAKAGE 103
so sinkt der Gleichspannungsanteil um ca. 10% je 20 Phasenanderung. Eine Verrin-gerung der Phasenwerte fuhrt zu einem hoheren Gleichspannungsanteil. Die Unter-suchung zeigt, dass die Abhangigkeit des Gleichspannungsanteils von der Phase sehrgroß ist. In Abbildung 5.11(c) wird der Verlauf des Gleichspannungsanteils uber demBetrag der Transmission zwischen dem LO- und RF-Tor aufgezeigt. Wie erwartetverringert sich der DC-Offset bei einer Verringerung des Betrags. Die Abhangigkeitdes DC-Offsets von der Phase der Transmission ist in Abbildung 5.11(d) dargestellt.Auch hier ist eine sehr starke Phasenabhangigkeit zu erkennen. Beim Referenzwertfur die Phase φLORF = 0 ist der Gleichspannungsanteil maximal, wahrend einePhasenanderung um 180 zu einer fast vollstandigen Kompensation fuhrt. Die star-ke Phasenabhangigkeit des Gleichspannungsanteils wird als wichtige Erkenntnis furdie im nachsten Kapitel zu untersuchende Kompensation des Leakage angesehen.
Pleak in dBm
Lei
stung
indB
m
DC-Offset
f1
f4
f5
fIF1
-60 -50 -40 -30 -20 -10 0 5-120
-100
-80
-60
-40
-20
0
20
Abbildung 5.12: Intermodulationsprodukte im Basisband uber der Leistung des Lea-kagesignals Pleak fur das in Abbildung 4.16 dargestellte Testszena-rio.
Im Anschluss an die Parameterstudie werden im Folgenden die Intermodulations-produkte im Basisband fur ein Testszenario in Abhangigkeit der Leistung des Leaka-gesignals am RF-Tor des Mischers betrachtet. Das Testszenario ist in Abbildung 4.16dargestellt. Am RF-Tor des Mischers liegen demnach drei Signale unterschiedlicherFrequenz vor. Zwei der Signale (RF1, RF2) stellen relativ starke Zielechos dar. Alsworst-case Situation wurde fur die Signalleistungen von RF1 und RF2 ein Wert von-20 dBm angenommen. Das dritte Signal (RF3) stellt das Leakagesignal dar, dasauf Grund von Leakagepfaden auf den RF-Eingang des Mischers gelangt. Die Si-gnalleistung von RF3 wird im Folgenden mit Pleak bezeichnet. Durch Simulationen

104 KAPITEL 5. UNTERSUCHUNGEN ZUM LEAKAGE
wurde untersucht, welchen Einfluss Pleak auf die Intermodulationsprodukte im Ba-sisband hat. Die Simulationsergebnisse dazu sind in Abbildung 5.12 dargestellt. Furdie Simulation wurde eine Ausgangsimpedanz des Mischer von 50Ω angenommen.Zu erkennen ist, dass die Intermodulationsprodukte f1, f4 und f5 mit steigenderLeakageleistung ansteigen wahrend das Nutzsignal relativ konstant bleibt. Erst absehr hohen Leakageleistungen zwischen 0 und 5 dBm kommt es zur Kompression desMischers und zu einem Abfall der betrachteten Intermodulationsprodukte.
Kapitel 6
Leakage-Kompensation bei
Transfermischerarchitekturen
In diesem Kapitel werden Losungsmoglichkeiten fur die Kompensation des Leakagebei Transfermischerarchitekturen diskutiert, die dem Low-cost Anspruch genugen.Einfuhrend werden klassische Methoden fur die Kompensation aufgezeigt undVor- und Nachteile sowie Alternativen erortert. Im Folgenden wird ein statischerLosungsansatz, der auf der Optimierung von Leitungslangen der Transfermischer-architektur basiert, theoretisch betrachtet. Zuerst werden die Kompensationbedin-gungen fur die Leakageleistung am RF-Eingang und den Gleichspannungsanteil amIF-Ausgang des Mischers hergeleitet. Im Anschluss werden die Kompensationsbe-dingungen konzeptionell an einer vereinfachten Transfermischerarchitektur analy-tisch untersucht. In einem weiteren Abschnitt werden fur den LRR3-Prototypen derGleichspannungsanteil und die Leakageleistung simulativ untersucht.
6.1 Klassische Methoden zur Kompensation
Wie in Abschnitt 5.1 bereits angesprochen, wird in Kfz-Radartransceiver fur ACC-Komfortanwendungen durch Hochpassfilterung der Basisbandsignale eine Kompen-sation des Gleichspannungsanteils erreicht. Fur zukunftige Radaranwendungen istdieses Konzept jedoch nicht langer geeignet, da neben dem Gleichspannungsanteilauch zu detektierende Signalanteile gedampft werden. Es muss also eine Alterna-tivlosung gefunden werden, die ausschließlich die Storsignale kompensiert und diezu detektierenden Signalanteile unbeeinflusst lasst. Eine solche Losung wurde furCW-Radarsysteme bereits in den fruhen sechziger Jahren vorgestellt [59]. Grundan-satz ist die Ausloschung des Leakage vor dem Mischprozess und damit eine Vermei-dung der Selbstmischung sowie der Ubersteuerung des Mischereingangs. Im Jahre1990 wurde von Beasley et al. [5] eine dynamische Kompensation durch den Einsatzeiner analogen Regelschleife vorgestellt. Dabei wird das IF-Signal als Regelgroße be-trachtet und auf einen Vektormodulator ruckgekoppelt. Dem Vektormodulator wirdals Eingangsgroße das Quellensignal zugefuhrt, das er in Amplitude und Phase so
105

106 KAPITEL 6. LEAKAGE-KOMPENSATION
moduliert, dass nach Kombination mit dem Empfangssignal des Transceivers eineAusloschung des Leakage erreicht wird. Durch den Einsatz der analogen Regelschlei-fe reagiert das System auch auf Frequenz- und Temperaturanderungen. In Abbil-dung 6.1 ist das Prinzip der analogen Regelung zur Ausloschung von Leckstromendargestellt. Sollen neben dem Leakage auf dem Transceiver auch Cluttereffekte aus-geloscht werden, so kann das in [48] vorgestellte Konzept einer digitalen Regel-schleife zum Einsatz kommen. Dabei geht eine Regelgroße aus einem heterodynenMischvorgang hervor, so dass die niederfrequenten Signalanteile in der Regelgroßeeinfach durch Bandpassfilterung eliminiert werden konnen und eine Regelung aufhoherfrequente Cluttereffekte moglich ist.
Zirkulator
Antenne
AR Quadratur-mischer
VM
Abbildung 6.1: Adaptive Ausloschung des Leakage durch einen analogen Regler(AR) in Verbindung mit einem Vektormodulator (VM).
Ein entscheidender Nachteil der analogen und digitalen Regelung zur Kompensa-tion des Leakage ist deren hoher Schaltungsaufwand. Neben zusatzlichen Hybridenzum Ein- und Auskoppeln der Regel- und Stellgroßen, wird fur den Vektormodulatorein zusatzlicher IQ-Mischer benotigt. Diese HF-Komponenten erfordern zusatzlichenPlatzbedarf auf dem SiGe-MMIC und fuhren zu einem Anstieg der Herstellungsko-sten. Aus diesem Grund werden diese Ansatze nicht naher als Mittel zur Kompen-sation des Leakage betrachtet. Im Folgenden wird vielmehr ein statisches Konzeptzur Ausloschung des Leakage untersucht, das fur eine MMIC-Integration geeignetist und zusatzlich dem Low-cost Anspruch genugt.
6.2 Theoretische Betrachtung der TL-Opti-
mierung
Der statische Kompensationsansatz, der im Folgenden naher untersucht wird, leitetsich aus den Erkenntnissen der Parameterstudie aus Abschnitt 5.3.2 ab. Demnach

6.2. THEORETISCHE BETRACHTUNG DER TL-OPTIMIERUNG 107
ist der Gleichspannungsanteil sehr stark von den Phasenwerten der Modellparame-ter des Mischers abhangig. So kann beispielsweise durch Variation der Phase derTransmission zwischen dem LO- und RF-Tor des Mischers eine Kompensation desGleichspannungsanteils erreicht werden. Wird die Phase um ca. 180 geandert, soist sogar eine vollstandige Kompensation des Gleichspannungsanteils moglich (sieheAbbildung 5.11(d)). Im Folgenden werden die Parameter der Systemkomponentenjedoch als unveranderlich und gegeben angenommen. Eine Phasenvariation ist des-halb ausschließlich durch eine Langenvariation der Mikrostreifenleitungsverbindun-gen (engl. Transmission Line, TL) zwischen den Systemkomponenten auf dem MMICmoglich. Ein Vergleich der Chipgroße des Vierfachmischer-MMICs (1×1mm2) mitder Wellenlange der on-chip Mikrostreifenleitungen bei einer Frequenz von 77GHz(λ ≈ 2, 4mm) zeigt, dass eine Realisierung von Leitungslangen zwischen 0 und 360
durch gefaltete Strukturen auf den Chip moglich ist. Es wird nun in den folgendenAbschnitten untersucht, ob durch eine Optimierung der Leitungslangen eine Kom-pensation des Gleichspannungsanteils erreicht werden kann. Zusatzlich wird unter-sucht, ob daneben auch eine Kompensation der Leakageleistung Pleak am RF-Tordes Mischers moglich ist. Dieser Ansatz wird als TL-Optimierung bezeichnet. Dafurwerden zuerst die Kompensationsbedingungen fur den Gleichspannungsanteil unddie Leakageleistung hergeleitet, bevor eine Analyse der TL-Optimierung an einervereinfachten Transfermischerarchitektur durchgefuhrt wird.
6.2.1 Herleitung der Kompensationsbedingungen
Fur die Herleitung der Kompensationsbedingungen werden das RF- und LO-Signalam Mischer betrachtet. Beide Signale entstammen dem FMCW-Quellensignal nachGleichung 2.4. Auf Grund der Vielzahl der Leakagepfade der Transfermischerar-chitektur setzten sich das RF- und LO-Signal aus zeit- und phasenverschobenenUberlagerungen des Quellensignals zusammen. Die Herleitung von exakten Kom-pensationsbedingungen fur den Gleichspannungsanteil bzw. die Leakageleistung amRF-Eingang des Mischers ist deshalb nicht moglich. Aus diesem Grund wird imFolgenden das RF- und LO-Signal vereinfacht betrachtet. Die Parameterstudie ausAbschnitt 5.3.2 zeigt, dass die Abhangigkeit des Gleichspannungsanteils von derModulationsfrequenz in einem Frequenzbereich von ±500MHz um 76,5GHz sehrgering ist. Wird diese geringe Abhangigkeit vernachlassigt, so kann fur das Quellen-signal ein harmonisches Signal ohne Modulationsterm angesetzt werden. Das RF-und LO-Signal lasst sich nun als Kosinus-Schwingung mit den Zeigergroßen
ULO (t) =1
2
[
ULOejωt + U ∗
LOe−jωt
]
(6.1)
URF (t) =1
2
[
URFejωt + U ∗
RFe−jωt
]
(6.2)
ansetzen, wobei ω die Kreisfrequenz der Tragerschwingung des Quellensignals dar-stellt. In den ECB-Großen (engl. Equivalent Complex Baseband, ECB)
ULO = ULOejϕLO (6.3)
URF = URFejϕRF (6.4)

108 KAPITEL 6. LEAKAGE-KOMPENSATION
werden mit ϕLO bzw. ϕRF die Phasen des LO- bzw. RF-Signals am Mischereingangbezeichnet. Fur die Leakageleistung
Pleak =U2
RF
2ZRF
am RF-Eingang des Mischers lasst sich nun die triviale KompensationsbedingungURF = 0 ableiten mit ZRF als RF-Eingangsimpedanz des Mischers. Um die Kom-pensationsbedingung fur den Gleichspannungsanteil zu erhalten, werden das RF-und LO-Signal an einem idealen Gilbert-Mischer ins Basisband abgemischt. DasBasisbandsignal am IF-Ausgang berechnet sich aus den Zeigergroßen zu
Ubb (t) =G
2[arg ULOU∗
RF + arg U ∗LOURF]
=G
2
[
URFej(ϕRF−ϕLO) + URFe
−j(ϕRF−ϕLO)]
(6.5)
und kann als harmonische Kosinus-Schwingung
Ubb (t) = GURF cos (ϕRF − ϕLO) (6.6)
geschrieben werden. Demnach ist das Basisbandsignal vom Gewinn G des Gilbert-Mischers, vom Betrag des RF-Signals URF und von der Phasendifferenz ϕRF − ϕLO
abhangig. Es wird nun untersucht unter welchen Bedingungen das Basisbandsignalverschwindet (Ubb = 0). Daraus ergeben sich die Kompensationsbedingungen furden Gleichspannungsanteil zu
URF = 0 ∨ ϕRF − ϕLO =π
2(2n+ 1) . (6.7)
Sollen gleichzeitig die Leakageleistung am RF-Eingang und der Gleichspannungsan-teil am IF-Ausgang des Mischers kompensiert werden, so ergibt sich die gemeinsameKompensationsbedingung
URF = 0. (6.8)
6.2.2 Analyse der TL-Optimierung
Um konzeptionell nachzuweisen, dass eine statische Ausloschung des Leakagedurch eine Optimierung von Leitungslangen zwischen den Systemkomponentender Transfermischerarchitektur moglich ist, werden in diesem Abschnitt analyti-sche Untersuchungen durchgefuhrt. Um die Anschaulichkeit der Untersuchungen zugewahrleisten, werden folgende Vereinfachungen an der Transceiverarchitektur vor-genommen:
1. Es werden ausschließlich die Leakagepfade erster Ordnung betrachtet, da diesedie Hauptursachen des Leakage darstellen.
2. Im LO-Pfad wird ausschließlich die Reflexion am LO-Tor des Mischersberucksichtigt. Weitere Reflexionsstellen werden vernachlassigt.
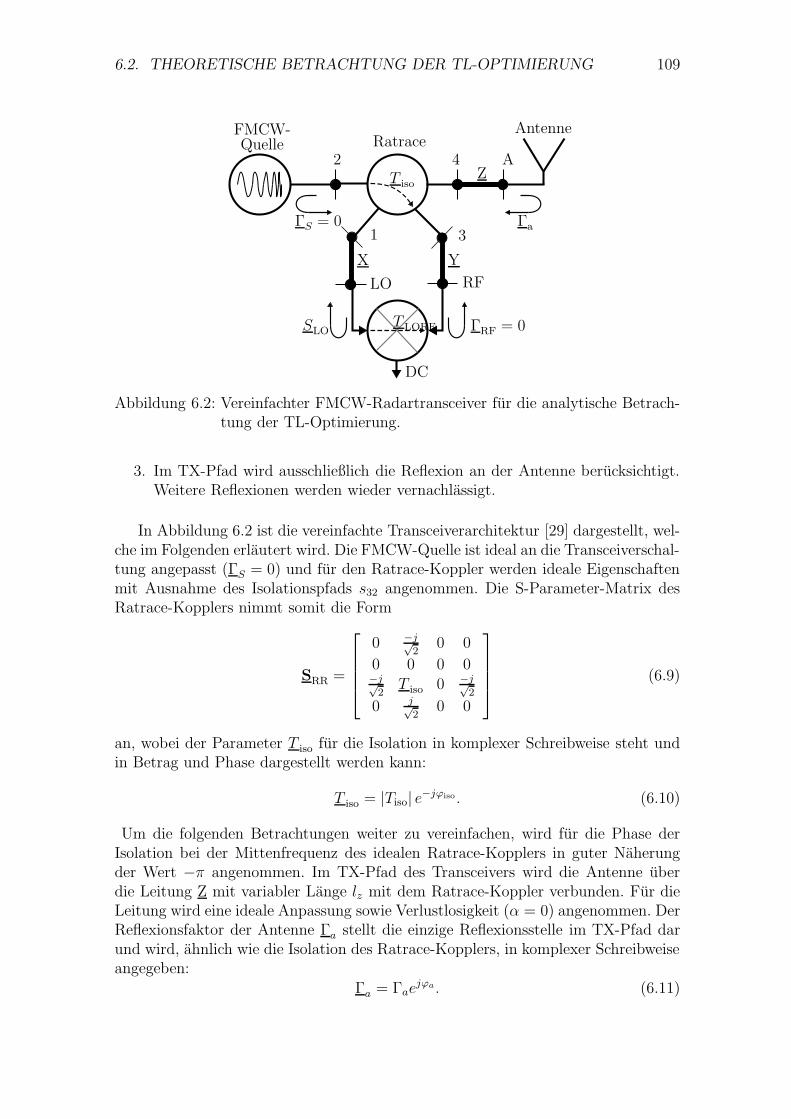
6.2. THEORETISCHE BETRACHTUNG DER TL-OPTIMIERUNG 109
1
2
3
4
LO RF
A
ΓaΓS = 0
Ratrace
X
Z
Y
T iso
DC
T LORFSLO ΓRF = 0
AntenneFMCW-Quelle
Abbildung 6.2: Vereinfachter FMCW-Radartransceiver fur die analytische Betrach-tung der TL-Optimierung.
3. Im TX-Pfad wird ausschließlich die Reflexion an der Antenne berucksichtigt.Weitere Reflexionen werden wieder vernachlassigt.
In Abbildung 6.2 ist die vereinfachte Transceiverarchitektur [29] dargestellt, wel-che im Folgenden erlautert wird. Die FMCW-Quelle ist ideal an die Transceiverschal-tung angepasst (ΓS = 0) und fur den Ratrace-Koppler werden ideale Eigenschaftenmit Ausnahme des Isolationspfads s32 angenommen. Die S-Parameter-Matrix desRatrace-Kopplers nimmt somit die Form
SRR =
0 −j√2
0 0
0 0 0 0−j√
2T iso 0 −j√
2
0 j√2
0 0
(6.9)
an, wobei der Parameter T iso fur die Isolation in komplexer Schreibweise steht undin Betrag und Phase dargestellt werden kann:
T iso = |Tiso| e−jϕiso. (6.10)
Um die folgenden Betrachtungen weiter zu vereinfachen, wird fur die Phase derIsolation bei der Mittenfrequenz des idealen Ratrace-Kopplers in guter Naherungder Wert −π angenommen. Im TX-Pfad des Transceivers wird die Antenne uberdie Leitung Z mit variabler Lange lz mit dem Ratrace-Koppler verbunden. Fur dieLeitung wird eine ideale Anpassung sowie Verlustlosigkeit (α = 0) angenommen. DerReflexionsfaktor der Antenne Γa stellt die einzige Reflexionsstelle im TX-Pfad darund wird, ahnlich wie die Isolation des Ratrace-Kopplers, in komplexer Schreibweiseangegeben:
Γa = Γaejϕa. (6.11)

110 KAPITEL 6. LEAKAGE-KOMPENSATION
Us
Γs = 0
a2
b2s12
T iso
s42
s34
s31
b1 a1 b3 a3
1
1
1111
1
ax bx ay by
aLO
bLO
aRF
bRFSLO
1 − SLO
SRF
T LORF
b4
a4
az
bz
aa
ba
Γa
XX YY
Z
Z
ULO URF
LO RF
Abbildung 6.3: Signalflussgraph fur die Transceiverschaltung aus Abbildung 6.2.
Der Ratrace-Koppler ist mit dem Mischer uber zwei Leitungen X und Y mit denvariablen Langen lx und ly verbunden. Auch fur diese Leitungen wird eine idealeAnpassung sowie Verlustlosigkeit angenommen. In komplexer Schreibweise werdendie Leitungen wie folgt beschrieben:
X = ejϕx (6.12)
Y = ejϕy (6.13)
Z = ejϕz . (6.14)
Die Phase ϕ der Leitungen lasst sich aus der Wellenlange λ und der jeweiligenLeitungslange l berechnen:
ϕx =2πl
λ. (6.15)
Im LO-Pfad des Transceivers stellt die Reflexion am LO-Tor des Mischers
SLO = SLOejϕLO (6.16)
die einzige Reflexionsstelle dar. Das RF-Tor des Mischers wird als ideal angepasstangenommen (ΓRF = 0) um Leakagepfade hoherer Ordnung auszuschließen. Letzt-lich wird das interne Leakage zwischen dem LO- und RF-Tor des Mischers durchden komplexen Ausdruck
TLORF = TLORFejϕLORF (6.17)

6.2. THEORETISCHE BETRACHTUNG DER TL-OPTIMIERUNG 111
a2 b1/ax
aLO
bLO a1/bx b3/ay
T LORF
T iso
aRF/RF
b4/az aa ba a4/bz
s12 X
s42
SLO X s31 Y
Z Γant Z s34
Us URF
ULO
1 − SLO
LO
Abbildung 6.4: Vereinfachter Signalflussgraph fur die Transceiverschaltung aus Ab-bildung 6.2.
berucksichtigt. Um die Kompensation des Leakage konzeptionell nachzuweisen, wer-den die Signale ULO und URF an den Eingangen des Mischers berechnet. Dafurwird im Folgenden ein Signalflussgraph [65] eingesetzt. Fur die in Abbildung 6.2dargestellte Transceiverarchitektur kann der in Abbildung 6.3 dargestellte Signal-flussgraph abgeleitet werden. Im Signalflussgraphen sind Knoten, in die Signale hin-einfließen, mit ai bezeichnet, wahrend mit bi die Tore beschriftet sind, aus denenSignale herausfließen. Der Signalflussgraph aus Abbildung 6.3 lasst sich in die inAbbildung 6.4 dargestellte Form bringen. In Abhangigkeit des Quellensignals U s
lassen sich nun die Signale am LO- und RF-Tor des Mischers berechnen:
ΨLO =ULO
U s
= s12X (1 − SLO) (6.18)
und
ΨRF =URF
U s
(6.19)
= s12s31X2SLOY + T isoY + s42s34Z
2ΓaY + s12X (1 − SLO)T LORF
und mit Hilfe von Gleichung 6.6 der Gleichspannungsanteil
Ubb = GURF cos (φRF − φLO) (6.20)
angeben.
Es wird nun untersucht, ob durch Variation der Leitungslangen lx, ly und lz eineKompensation der Leakageleistung sowie des Gleichspannungsanteils moglich ist.Dazu werden die Langen von jeweils zwei Leitungen variiert, wahrend die Lange der
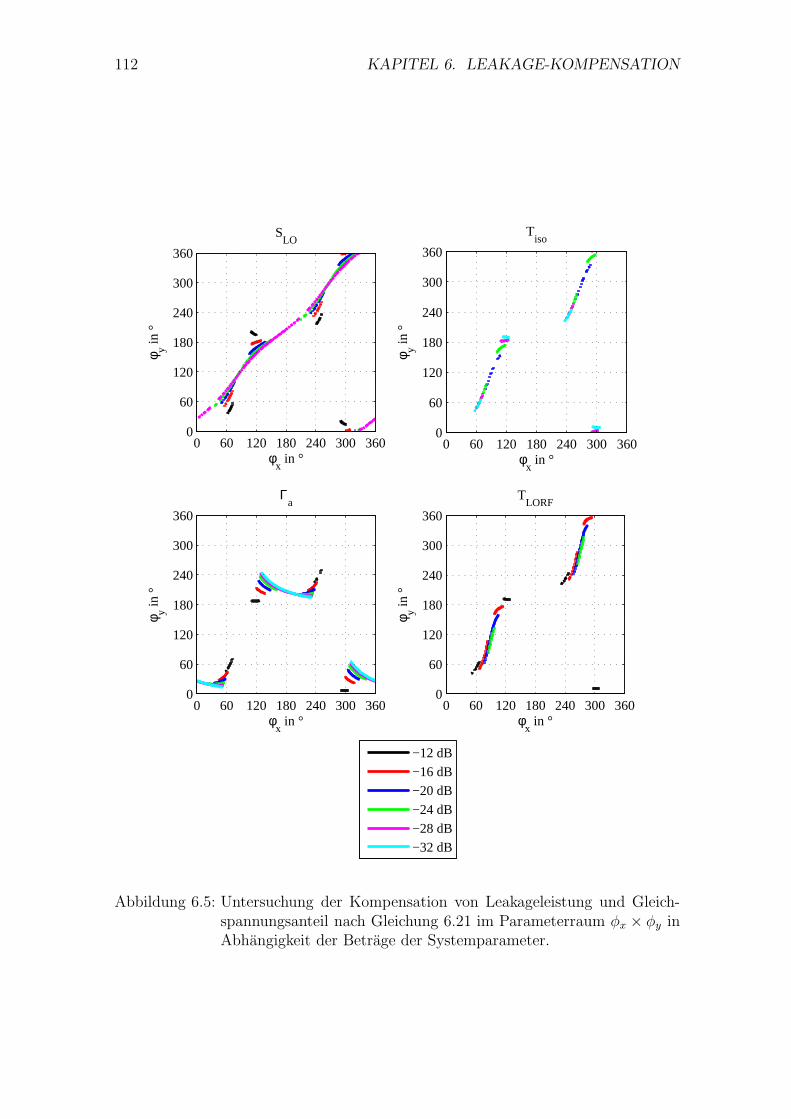
112 KAPITEL 6. LEAKAGE-KOMPENSATION
SLO
φx in °
φ y in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
Tiso
φx in °
φ y in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
Γa
φx in °
φ y in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
TLORF
φx in °
φ y in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
−12 dB
−16 dB
−20 dB
−24 dB
−28 dB
−32 dB
Abbildung 6.5: Untersuchung der Kompensation von Leakageleistung und Gleich-spannungsanteil nach Gleichung 6.21 im Parameterraum φx × φy inAbhangigkeit der Betrage der Systemparameter.
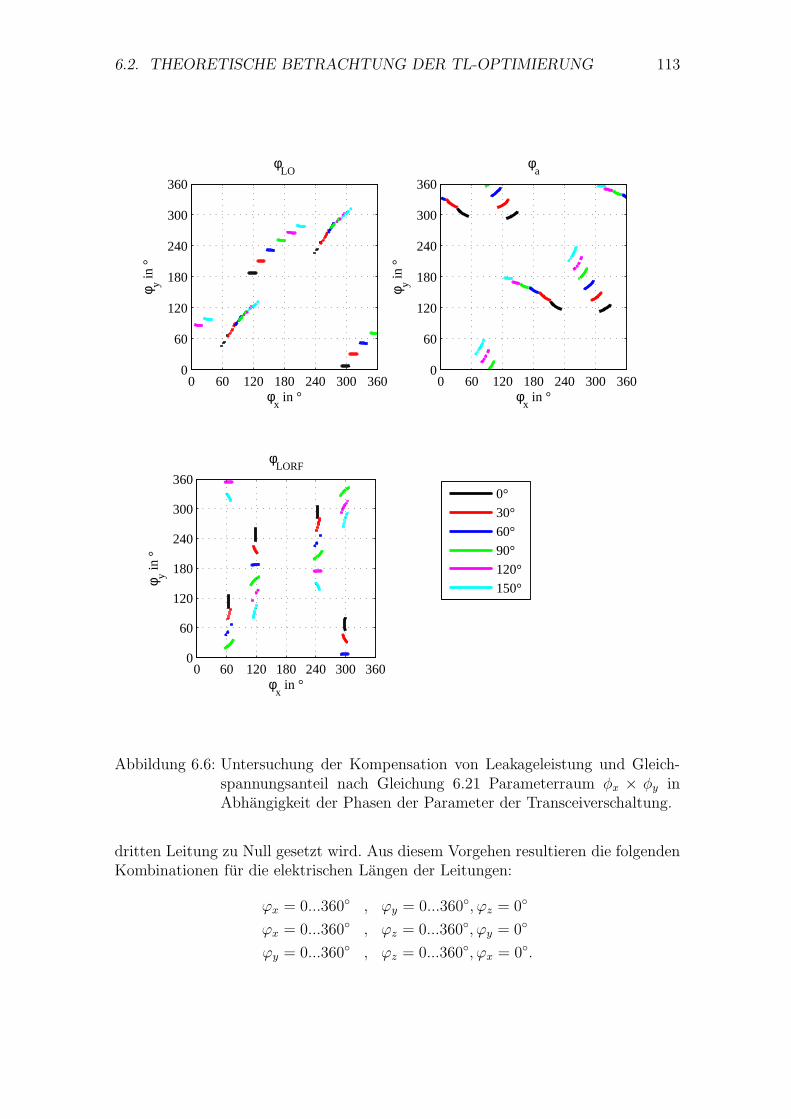
6.2. THEORETISCHE BETRACHTUNG DER TL-OPTIMIERUNG 113
φLO
φx in °
φ y in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
φa
φx in °
φ y in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
φLORF
φx in °
φ y in °
0 60 120 180 240 300 3600
60
120
180
240
300
3600°
30°
60°
90°
120°
150°
Abbildung 6.6: Untersuchung der Kompensation von Leakageleistung und Gleich-spannungsanteil nach Gleichung 6.21 Parameterraum φx × φy inAbhangigkeit der Phasen der Parameter der Transceiverschaltung.
dritten Leitung zu Null gesetzt wird. Aus diesem Vorgehen resultieren die folgendenKombinationen fur die elektrischen Langen der Leitungen:
ϕx = 0...360 , ϕy = 0...360, ϕz = 0
ϕx = 0...360 , ϕz = 0...360, ϕy = 0
ϕy = 0...360 , ϕz = 0...360, ϕx = 0.

114 KAPITEL 6. LEAKAGE-KOMPENSATION
SLO
φx in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
Tiso
φx in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
Γa
φx in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
TLORF
φx in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
−12 dB
−16 dB
−20 dB
−24 dB
−28 dB
−32 dB
Abbildung 6.7: Untersuchung der Kompensation von Leakageleistung und Gleich-spannungsanteil nach Gleichung 6.21 im Parameterraum φx × φz inAbhangigkeit der Betrage der Parameter der Transceiverschaltung.
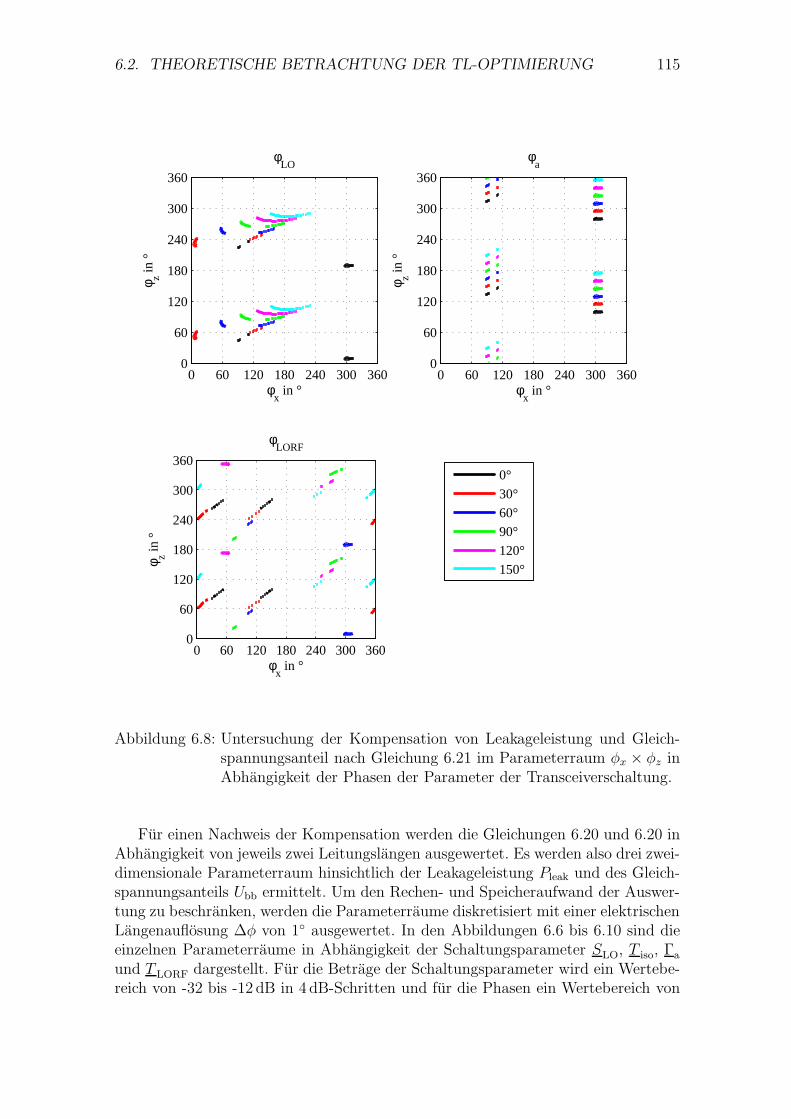
6.2. THEORETISCHE BETRACHTUNG DER TL-OPTIMIERUNG 115
φLO
φx in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
φa
φx in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
φLORF
φx in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
3600°
30°
60°
90°
120°
150°
Abbildung 6.8: Untersuchung der Kompensation von Leakageleistung und Gleich-spannungsanteil nach Gleichung 6.21 im Parameterraum φx × φz inAbhangigkeit der Phasen der Parameter der Transceiverschaltung.
Fur einen Nachweis der Kompensation werden die Gleichungen 6.20 und 6.20 inAbhangigkeit von jeweils zwei Leitungslangen ausgewertet. Es werden also drei zwei-dimensionale Parameterraum hinsichtlich der Leakageleistung Pleak und des Gleich-spannungsanteils Ubb ermittelt. Um den Rechen- und Speicheraufwand der Auswer-tung zu beschranken, werden die Parameterraume diskretisiert mit einer elektrischenLangenauflosung ∆φ von 1 ausgewertet. In den Abbildungen 6.6 bis 6.10 sind dieeinzelnen Parameterraume in Abhangigkeit der Schaltungsparameter SLO, T iso, Γa
und T LORF dargestellt. Fur die Betrage der Schaltungsparameter wird ein Wertebe-reich von -32 bis -12 dB in 4 dB-Schritten und fur die Phasen ein Wertebereich von

116 KAPITEL 6. LEAKAGE-KOMPENSATION
SLO
φy in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
Tiso
φy in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
Γa
φy in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
TLORF
φy in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
−12 dB
−16 dB
−20 dB
−24 dB
−28 dB
−32 dB
Abbildung 6.9: Untersuchung der Kompensation von Leakageleistung und Gleich-spannungsanteil nach Gleichung 6.21 im Parameterraum φy × φz inAbhangigkeit der Betrage der Parameter der Transceiverschaltung.

6.2. THEORETISCHE BETRACHTUNG DER TL-OPTIMIERUNG 117
φLO
φy in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
φa
φy in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
φLORF
φy in °
φ z in °
0 60 120 180 240 300 3600
60
120
180
240
300
3600°
30°
60°
90°
120°
150°
Abbildung 6.10: Untersuchung der Kompensation von Leakageleistung und Gleich-spannungsanteil nach Gleichung 6.21 im Parameterraum φy ×φz inAbhangigkeit der Phasen der Parameter der Transceiverschaltung.
0 bis 150 in 30-Schritten untersucht. In den Abbildungen sind die Bereiche dereinzelnen Parameterraume markiert, fur die die Intermodulationsprodukte im Ba-sisband unter einem Schwellwert von -60 dBm und der Gleichspannungsanteil untereiner Schwelle von -60 dBV bleiben. Der Zusammenhang zwischen den Intermodu-lationsprodukten und der Leakageleistung wurde dabei fur das in Abbildung 4.16dargestellte Testszenario ermittelt. Demnach muss fur obige Bedingung die Leaka-geleistung unter einem Schwellwert von -30 dBm bleiben, wie aus Abbildung 5.12ersichtlich ist. Es lasst sich also folgende Kompensationsbedingung fur die in den

118 KAPITEL 6. LEAKAGE-KOMPENSATION
folgenden Abbildungen markierten Bereiche formulieren:
Pleak < −30 dBm ∧ Ubb < −60 dBV. (6.21)
In Abbildung 6.5 und 6.6 wird der Parameterraum φx × φy untersucht. Es falltauf, dass fur die Betragswerte -12 und -16 dB der Isolation des Ratrace-KopplersTiso die Kompensationsbedingung nicht erfullt ist. Dasselbe gilt fur die Werte -28und -32 dB der Transmission TLORF. Analog wird in den Abbildungen 6.7 und 6.8der Parameterraum φx × φz und in den Abbildungen 6.9 und 6.10 der Parameter-raum φy × φz auf die Kompensationsbedingung uberpruft. Auch in letzterem Para-meterraum fallt bei der Variation von Tiso auf, dass die Kompensationsbedingungfur -12 dB nicht erfullt wird. Wird von den angesprochenen Ausnahmen abgesehen,so kann aus der analytischen Untersuchung geschlussfolgert werden, dass innerhalbgroßer Wertebereiche der Parameter SLO, T iso, Γa und T LORF eine Kompensationvon Leakageleistung und Gleichspannungsanteil mit jeweils zwei Leitungslangen derTransceiverarchitektur moglich ist.
6.3 Simulative Untersuchung der TL-Opti-
mierung
Nachdem in den vorangegangen Abschnitten die Kompensation des Gleichspan-nungsanteils am IF-Ausgang und der Leakageleistung am RF-Eingang des Mischersanalytisch an einer vereinfachten Transceiverarchitektur untersucht wurde, wird indiesem Abschnitt der LRR3-Prototyp von Bosch mit Hilfe von Simulationen unter-sucht. Dabei kommen die in Kapitel 4 vorgestellten Verhaltensmodelle sowie daskalibrierte Simulationssetup aus Abschnitt 5.3.1 zum Einsatz. Zuerst werden derGleichspannungsanteil und die Leakageleistung in Abhangigkeit der Leitungslangenφx und φy ermittelt und das Konzept und Vorgehen zur Optimierung erortert. Beidieser Untersuchung besitzen die Systemparameter des LRR3-Prototypen die in Ta-belle 5.1 zusammengefassten Referenzwerte. Die Referenzwerte konnen jedoch aufGrund von Toleranzen bei der Herstellung der Transceiverarchitektur nicht exakteingehalten werden. Aus diesem Grund wird in einer weiteren Untersuchung der Ein-fluss von Herstellungstoleranzen auf die TL-Optimierung untersucht. Es werden sta-tistische Simulationen durchgefuhrt und der Optimierungsgewinn in Abhangigkeitder Optimierungsgenauigkeit dargestellt.
6.3.1 Konzept und Vorgehen
Um eine Kompensation des Gleichspannungsanteils und der Leakageleistung zu er-reichen, werden zwei Leitungsverbindungen zwischen Systemkomponenten auf demVierfachmischer-MMIC in der Lange variiert. Dafur wird als erste Leitungslange dieVerbindung zwischen dem Wilkinson-Leistungsteiler und dem LO-Tor des Mischersgewahlt und im Folgenden mit φx bezeichnet. Als zweite Leitungslange dient die

6.3. SIMULATIVE UNTERSUCHUNG DER TL-OPTIMIERUNG 119
Verbindung zwischen dem Ratrace-Koppler und dem RF-Tor des Mischers, welcheim Folgenden mit φy bezeichnet wird.
In Abbildung 6.11(a) ist der Gleichspannungsanteil uber dem Parameterraumφx × φy dargestellt. Die Konturlinien fur den Gleichspannungsanteil zeigen, dassfur den LRR3-Prototypen eine vollstandige Kompensation (Ubb = 0V) fur eineVielzahl an Parameterkombinationen (φx, φy) moglich ist. Zu erkennen ist auch,dass eine vollstandige Kompensation des Gleichspannungsanteils durch die Opti-mierung einer Leitungslange erreicht werden kann. So ist beispielsweise durch dieWahl von φx = 95 und φy = 0 eine vollstandige Kompensation moglich. DieLeakageleistung am RF-Tor des Mischers Pleak ist in Abbildung 6.11(b) uber demParameterraum φx × φy farbcodiert in dBm dargestellt. Je dunkler die Bereiche desParameterraums, desto kleiner ist die Leakageleistung Pleak. Ein Vergleich mit Abbil-dung 6.11(a) zeigt, dass Leistungsminima, also sehr dunkle Bereiche, dort auftreten,wo auch der Gleichspannungsanteil Ubb niedrige Werte annimmt. Somit ist fur denLRR3-Prototypen eine gleichzeitige Kompensation von Gleichspannungsanteil undLeakageleistung moglich. Die Parameterkombination φx = 80 und φy = 300 seihierfur als Beispiel genannt. Es existieren jedoch auch Parameterkombinationen, beidenen Ubb vollstandig kompensiert ist, Pleak jedoch relativ hohe Werte annimmt.Beispielhaft sei hierfur die Parameterkombination φx = 185 und φy = 0 genannt,bei der der Gleichspannungsanteil vollstandig kompensiert ist, die Leakageleistungjedoch einen Wert von ca. -5 dBm annimmt.
Der Gleichspannungsanteil und die Leakageleistung des kalibrierten Ausgangs-designs (φx = φy = 0) weisen relativ hohe Werte auf, welche nahe an den Maximal-werten bei φx = 0 und φy = 50 liegen. Das kann fur den Gleichspannungsanteilauch anhand der Abbildungen 5.11(b), 5.11(d) und 6.11(a) nachvollzogen werden.Da bei der Dimensionierung des LRR3-Prototypen die Kompensation von Gleich-spannungsanteil und Leakageleistung nicht im Fokus standen, mussen diese hohenWerte als zufallig gewertet werden.
6.3.2 Statistische Untersuchungen der TL-Optimierung
Um den Einfluss von Herstellungstoleranzen auf die TL-Optimierung darzustellen,werden in diesem Abschnitt statistische Untersuchungen durchgefuhrt. Dafur werdenden Systemparametern statistische Verteilungsfunktionen zugeordnet. Es wird zwi-schen Systemparametern unterschieden, deren Werte im Designvorgang optimiertwurden und Systemparametern, auf welche kein Einfluss wahrend des Designpro-zesses genommen wurde. Ersteren werden Normalverteilungen zugeordnet, derenMittelwerte den jeweiligen Referenzwerten aus Tabelle 5.1 entsprechen. Die Stan-dardabweichungen der Verteilungen sind in Tabelle 6.1 zusammengefasst. Die Sy-stemparameter, auf die kein Einfluss beim Designvorgang genommen wurde, werdenals gleichverteilt angenommen. Hierzu gehoren die Phasenwerte der Konversions-Matrix des Mischers.
Nachdem den Systemparametern Verteilungsfunktionen zugeordnet wurden,wird der Radartransceiver mit Hilfe von Monte Carlo Simulationen statistisch un-
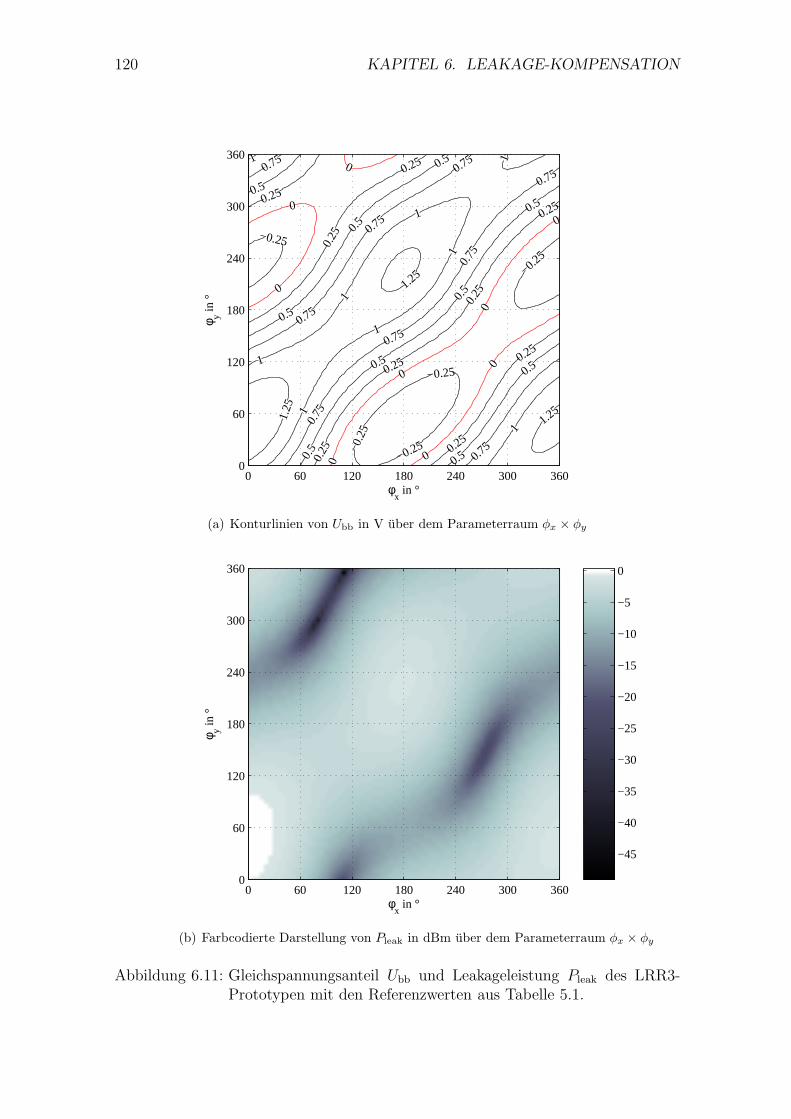
120 KAPITEL 6. LEAKAGE-KOMPENSATION
0
0
0
0
0
0
0
0
0
−0.2
5−0.25
−0.25
−0.25
−0.25
0.25
0.25
0.25
0.250.25
0.25
0.25
0.25
0.25
0.5
0.5
0.5
0.50.5
0.5
0.5
0.5
0.5
0.5
0.75
0.75
0.75
0.75
0.75
0.75
0.75
0.75
0.75
1
1
1
1
1
1
1
11
1.25
1.25
1.25
φx in °
φ y in °
0 60 120 180 240 300 3600
60
120
180
240
300
360
(a) Konturlinien von Ubb in V uber dem Parameterraum φx × φy
φx in °
φ y in °
0 60 120 180 240 300 360
360
300
240
180
120
60
0
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
(b) Farbcodierte Darstellung von Pleak in dBm uber dem Parameterraum φx × φy
Abbildung 6.11: Gleichspannungsanteil Ubb und Leakageleistung Pleak des LRR3-Prototypen mit den Referenzwerten aus Tabelle 5.1.
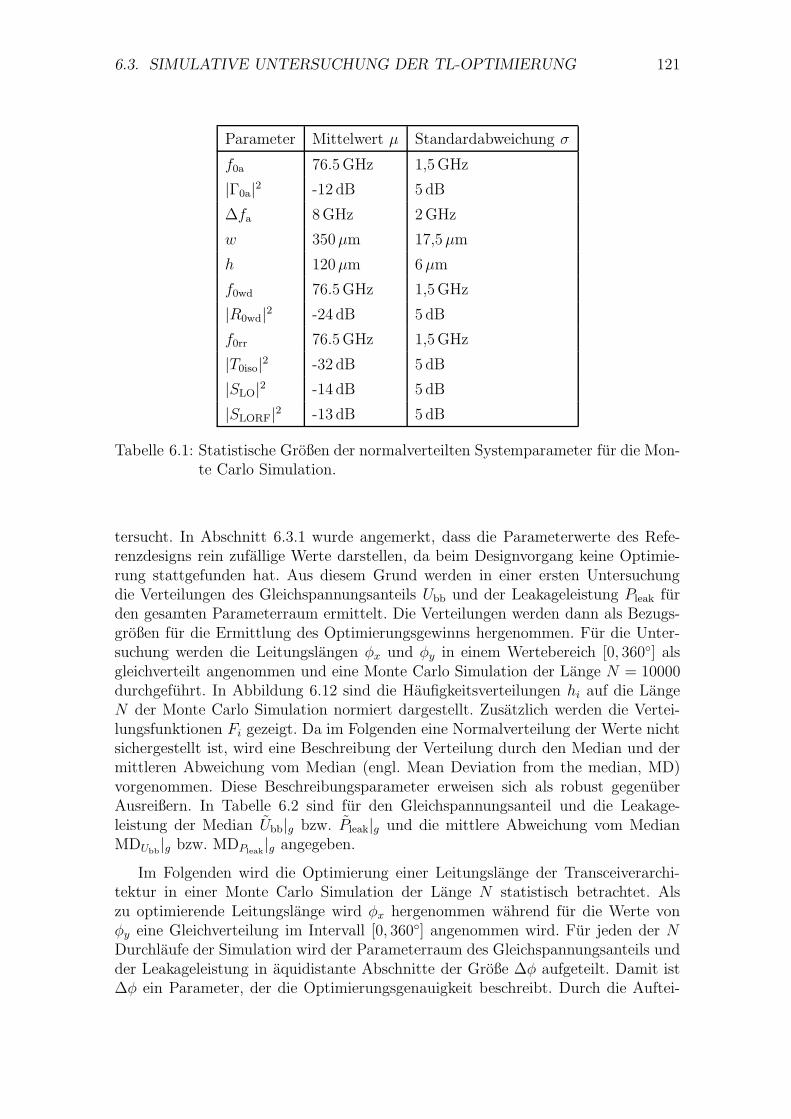
6.3. SIMULATIVE UNTERSUCHUNG DER TL-OPTIMIERUNG 121
Parameter Mittelwert µ Standardabweichung σ
f0a 76.5GHz 1,5GHz
|Γ0a|2 -12 dB 5dB
∆fa 8GHz 2GHz
w 350µm 17,5µm
h 120µm 6µm
f0wd 76.5GHz 1,5GHz
|R0wd|2 -24 dB 5dB
f0rr 76.5GHz 1,5GHz
|T0iso|2 -32 dB 5dB
|SLO|2 -14 dB 5dB
|SLORF|2 -13 dB 5dB
Tabelle 6.1: Statistische Großen der normalverteilten Systemparameter fur die Mon-te Carlo Simulation.
tersucht. In Abschnitt 6.3.1 wurde angemerkt, dass die Parameterwerte des Refe-renzdesigns rein zufallige Werte darstellen, da beim Designvorgang keine Optimie-rung stattgefunden hat. Aus diesem Grund werden in einer ersten Untersuchungdie Verteilungen des Gleichspannungsanteils Ubb und der Leakageleistung Pleak furden gesamten Parameterraum ermittelt. Die Verteilungen werden dann als Bezugs-großen fur die Ermittlung des Optimierungsgewinns hergenommen. Fur die Unter-suchung werden die Leitungslangen φx und φy in einem Wertebereich [0, 360] alsgleichverteilt angenommen und eine Monte Carlo Simulation der Lange N = 10000durchgefuhrt. In Abbildung 6.12 sind die Haufigkeitsverteilungen hi auf die LangeN der Monte Carlo Simulation normiert dargestellt. Zusatzlich werden die Vertei-lungsfunktionen Fi gezeigt. Da im Folgenden eine Normalverteilung der Werte nichtsichergestellt ist, wird eine Beschreibung der Verteilung durch den Median und dermittleren Abweichung vom Median (engl. Mean Deviation from the median, MD)vorgenommen. Diese Beschreibungsparameter erweisen sich als robust gegenuberAusreißern. In Tabelle 6.2 sind fur den Gleichspannungsanteil und die Leakage-leistung der Median Ubb|g bzw. Pleak|g und die mittlere Abweichung vom MedianMDUbb
|g bzw. MDPleak|g angegeben.
Im Folgenden wird die Optimierung einer Leitungslange der Transceiverarchi-tektur in einer Monte Carlo Simulation der Lange N statistisch betrachtet. Alszu optimierende Leitungslange wird φx hergenommen wahrend fur die Werte vonφy eine Gleichverteilung im Intervall [0, 360] angenommen wird. Fur jeden der NDurchlaufe der Simulation wird der Parameterraum des Gleichspannungsanteils undder Leakageleistung in aquidistante Abschnitte der Große ∆φ aufgeteilt. Damit ist∆φ ein Parameter, der die Optimierungsgenauigkeit beschreibt. Durch die Auftei-

122 KAPITEL 6. LEAKAGE-KOMPENSATION
Ubb|g MDUbb|g Pleak|g MDPleak
|g-6.3 dBV -9.6 dB -5.2 dBm -3.7 dB
Tabelle 6.2: Median und mittlere Abweichung vom Median (MD) der Verteilungenvon Gleichspannungsanteil und Leakageleistung fur gleichverteilte Lei-tungslangen φx und φy.
−60 −40 −20 0 100
5
10
15
20
25
h i/N in
%
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
|Ubb
| in dBV
F i
−40 −20 0 200
5
10
15
20
25
h i/N in
%
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
PRF
in dBm
F i
Abbildung 6.12: Verteilungen von Gleichspannungsanteil und Leakageleistung furgleichverteilte Leitungslangen φx und φy im Intervall [0, 360].
lung werden die Parameterraume auf m = 360/∆φ Designs beschrankt, von denendas Design ausgewahlt wird, fur das der Gleichspannungsanteil und die Leakagelei-stung minimal wird. Im Anschluss werden die Haufigkeitsverteilung und Verteilungs-funktion ermittelt und der Median Ubb|x bzw. Pleak|x sowie die mittlere Abweichungvom Median MDUbb
|x bzw. MDPleak|x berechnet. Das beschriebene Vorgehen wird
im Folgenden zusammengefasst:
1. Zuweisen von Verteilungsfunktionen fur die Systemparameter und Lei-tungslangen.
2. MC-Simulation der Lange N .

6.3. SIMULATIVE UNTERSUCHUNG DER TL-OPTIMIERUNG 123
3. Einteilung der Parameterraume in m = 360/∆φ Bereiche.
4. Ermittlung des Designs, fur das der Gleichspannungsanteil und die Leakage-leistung minimal werden.
5. Ermittlung der Haufigkeitsverteilungen und Verteilungsfunktionen fur Ubb undPleak sowie der statistischen Parameter Median und MD.
Es lassen sich nun die Optimierungsgewinne Θ fur den Median und fur die mitt-lere Abweichung des Medians berechnen, welche wie folgt definiert sind.
Θ(Ubb|x) =Ubb|xUbb|g
(6.22)
Θ(Pleak|x) =Pleak|xPleak|g
(6.23)
Θ(MDUbb|x) =
MDUbb|x
MDUbb|g
(6.24)
Θ(MDPleak|x) =
MDPleak|x
MDPleak|g. (6.25)
Analog zum beschriebenen Vorgehen fur die Optimierung einer Leitungslange,wird bei der Optimierung von zwei Leitungslangen verfahren. Neben φx wird nunzusatzlich die Leitungslange φy optimiert. Die Parameterraume, die aus den MonteCarlo Simulationen der Lange N hervorgehen, werden in aquidistante Abschnitteder Große ∆φ aufgeteilt. Daraus gehen m = (360/∆φ)2 Designs hervor, aus de-nen diejenigen ausgewahlt werden, fur welche der Gleichspannungsanteil und dieLeakageleistung minimal werden. Aus den Verteilungen werden im Anschluss derMedian Ubb|xy bzw. Pleak|xy sowie die mittlere Abweichung vom Median MDUbb
|xy
bzw. MDPleak|xy berechnet. Die Optimierungsgewinne fur die Optimierung von zwei
Leitungslangen sind analog zu den Gleichungen 6.22 bis 6.25 definiert.
In Abbildung 6.13 sind die Optimierungsgewinne uber der Optimierungsgenau-igkeit ∆φ dargestellt. Die Verlaufe zeigen mit zunehmender Genauigkeit ein Anstei-gen der Gewinne. Weiterhin ist festzustellen, dass durch die Optimierung von zweiLeitungslangen hohere Optimierungsgewinne beim Median erzielt werden konnen,wahrend durch die Optimierung einer Leitung hohere Optimierungsgewinne bei dermittleren Abweichung vom Median erzielt werden. Wird eine Optimierung mit zweiLeitungslangen bei einer Optimierungsgenauigkeit von 5 vorgenommen, so wird furden Gleichspannungsanteil ein Optimierungsgewinn des Medians von 70,1 dB erzielt.Fur die Leakageleistung wird ein Optimierungsgewinn des Medians von 22,4 dB er-zielt. Gleichzeitig liegt fur die mittlere Abweichung vom Median fur den Gleichspan-nungsanteil ein Optimierungsgewinn von 24,9 dB vor. Fur die mittlere Abweichungvom Median fur die Leakageleistung wird ein Optimierungsgewinn von 8,3 dB erzielt.
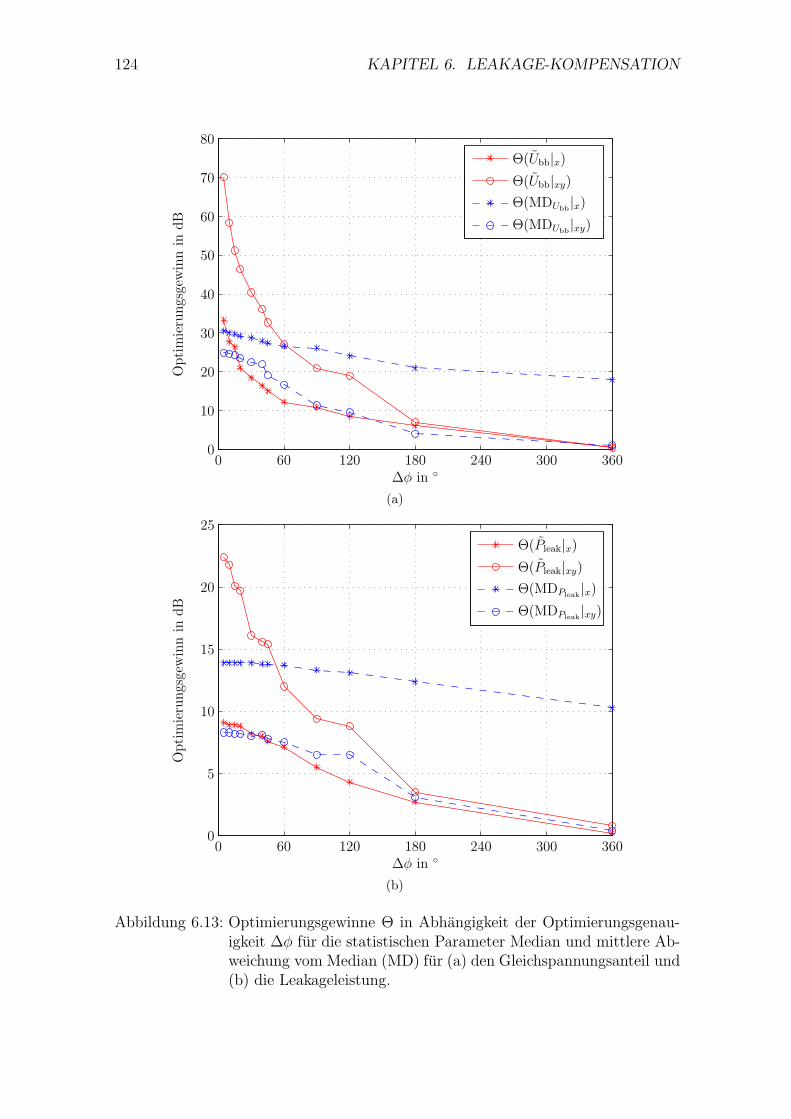
124 KAPITEL 6. LEAKAGE-KOMPENSATION
∆φ in
Opti
mie
rungs
gew
inn
indB
Θ(MD
Θ(Ubb|x)Θ(Ubb|xy)
Θ(MDUbb|x)
Θ(MDUbb|xy)
0 60 120 180 240 300 3600
10
20
30
40
50
60
70
80
(a)
∆φ in
Opti
mie
rungs
gew
inn
indB
Θ(Pleak|x)Θ(Pleak|xy)
Θ(MDPleak|x)
Θ(MDPleak|xy)
0 60 120 180 240 300 3600
5
10
15
20
25
(b)
Abbildung 6.13: Optimierungsgewinne Θ in Abhangigkeit der Optimierungsgenau-igkeit ∆φ fur die statistischen Parameter Median und mittlere Ab-weichung vom Median (MD) fur (a) den Gleichspannungsanteil und(b) die Leakageleistung.
Kapitel 7
Ausblick
Um aktive Fahrerassistenz- und Sicherheitssysteme auf Basis der Radartechnik ko-stengunstig zu realisieren, werden fur den Hochfrequenzteil der Radarsensoren, Ein-chiplosungen auf Basis der 77GHz SiGe-Technologie angestrebt. Im Rahmen desKOKON-Projekts, innerhalb dem auch diese Arbeit entstanden ist, wurden ersteErfolge in dieser Richtung erzielt [7]. Neben der Beachtung des Kostenaspekts, istfur die Realisierung von zukunftigen Sicherheitssystemen eine weitere Verbesserungder Performance existierender Systeme notig.
Bei der Integration von FMCW-Radaren fur Weitbereichsanwendungen kommenauf Grund ihres relativ einfachen Aufbaus auch Transfermischerarchitekturen zumEinsatz. Entscheidend fur die Performance von Radarsystemen ist unter anderemeine ausreichende Isolation zwischen Sende- und Empfangssignal, die bei Transfer-mischerarchitekturen auf Grund von Leakage stark von den Nichtidealitaten derSchaltung abhangt. In dieser Arbeit wurde gezeigt, dass durch Optimierung derTransfermischerarchitektur eine Kompensation des Leakage moglich ist und somitder Einfluss statischer Nichtidealitaten verringert werden kann. Das macht die Trans-fermischerarchitektur fur den Einsatz in zukunftigen Radarsystemen fur Sicherheits-anwendungen interessant.
Fur endgultige Aussagen uber die Einsetzbarkeit von Transfermischerarchitek-turen in zukunftigen Radarsensoren sind jedoch weiterfuhrende Arbeiten notig. Soist fur die Kompensation entscheidend, wie genau und umfassend die 77GHz Sy-stemkomponenten vor einem moglichen Designvorgang messtechnisch charakteri-siert werden konnen. Eine Herausforderung stellt dabei sicher die Charakterisierungder Anpassung der Mischertore in Abhangigkeit des Arbeitspunktes dar. Auch dasinterne Mischerleakage bedarf einer genauen Charakterisierung im Arbeitspunkt.Die Bewertung der Kompensation wurde in dieser Arbeit ausschließlich anhanddes Gleichspannungsanteils und der RF-Wirkleistung vorgenommen. Um eine Be-wertung anhand der Parameter Entdeckungswahrscheinlichkeit und Falschalarmratevornehmen zu konnen, welche die Gesamtperformance des Radarsystems beschrei-ben, ist es notwendig, weitere Systemmodelle zu erstellen. Neben der Modellierungder Basisbandverarbeitung stellt dabei die Implementierung und Simulation des Ra-darkanals eine neue Herausforderung dar.
125

126 KAPITEL 7. AUSBLICK

Verzeichnis der wichtigsten
Formelzeichen und Abkurzungen
Naturkonstanten
Symbol Wert Einheit Bedeutung
c 2,99792458·108 m/s Vakuumlichtgeschwindigkeite 2,718281828 - Eulersche Zahlk 1,380658·10−23 J/K Boltzmann-Konstanteq 1,602·10−19 As Elementarladung
Formelzeichen
Symbol Einheit Beschreibung
CG - Konversionsgewinnfhub Hz Frequenzhubf0 Hz Trager- bzw. Mittenfrequenz der Modulationfs Hz AbtastrateGt - Gewinn der SendeantenneGr - Gewinn der EmpfangsantenneGsat - Sattigungsgewinn des MischersI A StromIIP2 W auf den Eingang bezogener Interceptpunkt zweiter OrdnungIIP3 W auf den Eingang bezogener Interceptpunkt dritter Ordnungk V AmplitudendifferenzN - Lange der FFTP W SignalleistungPsat W LO-Sattigungsleistungs m ZielentfernungS W/m2 LeistungsdichteSNR - Signal-Rausch-VerhaltnisS - Streumatrix
127

128 KAPITEL 7. AUSBLICK
Symbol Einheit Beschreibung
T s Dauer einer FrequenzrampeT - TransmissionsfaktorTa
oder rad aquivalente AntennenrauschtemperaturT ′
a oder rad aquivalente Antennentemperatur
Ttha
oder rad physikalische Antennentemperaturvrel m/s relative GeschwindigkeitΓ - Reflexionsfaktorδ oder rad Phasendifferenz∆f Hz Frequenzauflosung∆v(t) V statistische Amplitudenschwankungen∆v m/s Geschwindigkeitsauflosung∆φ(t) oder rad statistische Phasenschwankungen∆s m Entfernungsauflosungηa - Antennenwirkungsgradλ m Wellenlangeσ m2 Radarruckstreuquerschnittτ s Signallaufzeitφmod
oder rad Modulationsphase

129
Verwendete Abkurzungen
Abkurzung Bedeutung
ABS AntiblockiersystemACC Adaptive Cruise ControlADC Analog Digital ConverterBJT Bipolar Junction TransistorCW Continous WaveDFT Discrete Fourier TransformDRO Dielectric Resonator OscillatorDSP Digital Signal ProcessorDTFT Discrete Time Fourier TransformECB Equivalent Complex BasebandESP Elektronisches StabilitatsprogrammFFT Fast Fourier TransformFMCW Frequency Modulated Continous WaveIF Intermediate FrequencyIMT Intermodulation TableIP Intercept PointLNA Low Noise AmplifierLO Local OscillatorLRR Long Range RadarLTI Linear Time InvariantMD Mean Deviation from the medianMMIC Monolithic Microwave Integrated CircuitNF Noise FigureOS-CFAR Ordered Statistic Constant False Alarm RatePLL Phase Locked LoopRCS Radar Cross SectionRF Radio FrequencySNR Signal Noise RatioSoC System on ChipSRR Short Range RadarTL Transmission LineVCO Voltage Controlled OscillatorVORAD Vehicle On-board Radar

130 KAPITEL 7. AUSBLICK
Literaturverzeichnis
[1] Abidi, A. A.: General Relations Between IP2, IP3, and Offsets in DifferentialCircuits and the Effects of Feedback. IEEE Transactions on Microwave Theoryand Techniques, 51(5):1610–1612, Mai 2003.
[2] Abramowitz, M. und I.A. Stegun (Herausgeber): Handbook of Mathema-tical Functions. Dover Publications, Inc, New York, 1968.
[3] Arora, H., N. Klemmer, J.C. Morizio und P.D. Wolf: Enhanced PhaseNoise Modeling of Fractional-N Frequency Synthesizers. IEEE Transactions onCircuits ans Systems-I, 52(2):379–395, Februar 2005.
[4] Barton, D. K.: Radar System Analysis and Modeling. Artech House, Boston,London, 2005.
[5] Beasley, P.D.L., A.G. Stove, B.J. Reits und B. As: Solving the problemsof a single antenna frequency modulated CW radar. In: Record of the IEEEInternational Radar Conference, Seiten 391–395, 1990.
[6] Blake, L.V.: Radar Range-Performance Analysis. Artech House, Norwood,MA, 1986.
[7] Blocher, H.-L. (Herausgeber): Automotive High Frequency Electronics (KO-KON), Band WSW5 der Reihe European Microwave Week Workshop Notes,Oktober 2007.
[8] Bock, J., H. Schafer, K. Aufinger, R. Stengl, S. Boguth, R. Schrei-
ter, M. Rest, H. Knapp, M. Wurzer, W. Perndl, T. Bottner undT.F. Meister: SiGe bipolar technology for automotive radar applications. In:Proceedings of the Bipolar/BiCMOS Circuits and Technology, Seiten 84–87,2004.
[9] Bronstein, I.N., K.A. Semendjajew, G. Musiol und H. Muhlig: Ta-schenbuch der Mathematik. Verlag Harri Deutsch, 1999.
[10] Budka, T. P.: Wide-Bandwidth Millimeter-Wave Bond-Wire Interconnects.IEEE Transactions on Microwave Theory and Techniques, 49(4), April 2001.
[11] Candy, J.C. und G.C. Temes (Herausgeber): Oversampling Delta-Sigma Da-ta Converters. IEEE Press, New York, 1992.
131

132 LITERATURVERZEICHNIS
[12] Chevalier, P., C. Fellous, L. Rubaldo, D. Dutartre, M. Laurens,T. Jagueneau, F. Leverd, S. Bord, C. Richard, D. Lenoble, J. Bon-
nouvrier, M. Marty, A. Perrotin, D. Gloria, F. Saguin, B. Barba-
lat, R. Beerkens, N. Zerounian, F. Aniel und A. Chantre: 230 GHzself-aligned SiGeC HBT for 90 nm BiCMOS technology. In: Proceedings of theBipolar/BiCMOS Circuits and Technology, Seiten 225–228, 2004.
[13] Chirala, M.K. und B.A. Floyd: Millimeter-Wave Lange and Ring-HybridCouplers in a Silicon Technology for E-Band Applications. In: Microwave Sym-posium Digest, 2006. IEEE MTT-S International, Seiten 1547–1550, 2006.
[14] Coffing, D. und E. Main: Effects of Offsets on Bipolar Integrated CircuitMixer Even-Order Distortion Terms. IEEE Transactions on Microwave Theoryand Techniques, 49(1):23–30, Januar 2001.
[15] Dehlink, B., H.-D. Wohlmuth, K. Aufinger, T.F. Meister, J. Bock
und A.L. Scholtz: A low-noise amplifier at 77 GHz in SiGe:C bipolar tech-nology. In: Compound Semiconductor Integrated Circuit Symposium, Seiten287–290, 2005.
[16] Dehlink, B., H.-D. Wohlmuth, H.-R. Forstner, H. Knapp, S. Trotta,K. Aufinger, T.F. Meister, J. Bock und A.L. Scholtz: A highly linearSiGe double-balanced mixer for 77 GHz automotive radar applications. In: RadioFrequency Integrated Circuits (RFIC) Symposium, 2006.
[17] Detlefsen, J.: Radartechnik: Grundlagen, Bauelemente, Verfahren, Anwen-dungen. Springer, Berlin, 1989.
[18] Dunn, J.S, D.C. Ahlgren, D.D Coolbaugh, N.B. Feilchen-
feld, G. Freeman, D.R. Greenberg, R.A. Groves, F.J. Guarin,Y. Hammad, A.J. Joseph, L.D. Lanzerotti, S.A St.Onge, J.-S. Rieh,K.J. Stein, S.H. Voldman, P.-C. Wang, M.J. Zierak, S. Subbanna,D.L. Harame, D.A. Herman und B.S. Meyerson: Foundation of rf CMOSand SiGe BiCMOS technologies. IBM Journal of Research and Development inComputers & Technology, 47:101–138, 2003.
[19] Egan, W.F.: Practical RF System Design. John Wiley & Sons Inc., New York,2003.
[20] Faria, D., L. Dunleavy und T. Svensen: The Use of Intermodulation Tablesfor Mixer Simulations. Microwave Journal, Seiten 60–76, April 2002.
[21] Floyd, B., U. Pfeiffer, S. Reynolds, A. Valdes-Garcia, C. Haymes,Y. Katayama, D. Nakano, T. Beukema, B. Gaucher und M. Soyuer:Silicon Millimeter-Wave Radio Circuits at 60-100GHz. 2007.
[22] Folster, F.: Erfassung ausgedehnter Objekte durch ein Automobil-Radar.Doktorarbeit, Technische Universitat Hamburg-Harburg, 2006.
LITERATURVERZEICHNIS 133
[23] Garg, R., P. Bhartia, I. Bahl und A. Ittipiboon: Microstrip AntennaDesign Handbook. Artech House, Boston, London, 2001.
[24] Gharpurey, R. und E. Charbon: Substrate Coupling: Modeling, Simulationand Design Perspectives. 5th International Symposium on Quality ElectronicDesign, Seiten 283–290, 2004.
[25] Ghazinour, A., P. Wennekers, R. Reuter, Y. Yi, H. Li, T. Bohm undD. Jahn: An Integrated SiGe-BiCMOS Low Noise Transmitter Chip with aFrequency Divider Chain for 77 GHz Applications. In: European MicrowaveIntegrated Circuits Conference, Seiten 194–197, 2006.
[26] Gilbert, B.: A Precise Four-Quadrant Multiplier with Subnanosecond Respon-se. IEEE Journal of Solid State Circuits, 3(4):365–373, Dezember 1968.
[27] Gilbert, B.: The MICROMIXER: a Highly Linear Variant of the Gilbert Mi-xer using a Bisymmetric Class-AB Input Stage. IEEE Journal of Solid-StateCircuits, 32(9):1412–1423, September 1997.
[28] Gunther, O., M. Hartmann, P. Wenig und R. Weigel: Behavioral MixerModel for Rapid System Simulation of a 77GHz FMCW-Radar Transceiver. In:Asia-Pacific Microwave Conference, 2007.
[29] Gunther, O., D. Steinbuch, O. Bruggemann, H. Jager und R. Wei-
gel: DC-Offset Compensation of a 77GHz Monostatic FMCW-Radar Tran-sceiver for Automotive Application. In: IEEE Radio and Wireless Symposium(RWS), 2008.
[30] Hanle, E. und H.R. Gunputh: Survey of Bistatic and Multistatic Radar.IEE Proceedings F, 133(7):587–595, Dezember 1986.
[31] Hartmann, M., K. Seemann, H. Jaeger, E. Kolmhofer und R. Wei-
gel: Monolithic Integration of Microstrip Line Couplers for Automotive RadarApplications at 77GHz using a Si-HBT Technology. In: Asia-Pacific MicrowaveConference, 2006.
[32] Hartmann, M., C. Wagner, K. Seemann, J. Platz, H. Jaeger undR. Weigel: A Low-Power Micromixer with High Linearity for AutomotiveRadar at 77 GHz in Silicon-Germanium Bipolar Technology. In: Topical Meetingon Silicon Monolithic Integrated Circuits in RF Systems, Seiten 237–240, 2007.
[33] Hartmann, M., C. Wagner, K. Seemann, J. Platz, H. Jager undR. Weigel: A Low-Power Low-Noise Single-Chip Receiver Front-End for Au-tomotive Radar at 77 GHz in Silicon-Germanium Bipolar Technology. In: RadioFrequency Integrated Circuits (RFIC) Symposium, 2007 IEEE, Seiten 149–152,2007.

134 LITERATURVERZEICHNIS
[34] Heinemann, B., R. Barth, D. Bolze, J. Drews, P. Formanek, O. Fur-
senko, M. Glante, K. Glowatzki, A. Gregor, U. Haak, W. Hopp-
ner, D. Knoll, R. Kurps, S. Marschmeyer, S. Orlowski, H. Rucker,P. Schley, D. Schmidt, R. Scholz, W. Winkler und Y. Yamamoto: Acomplementary BiCMOS technology with high speed npn and pnp SiGe:C HBTs.In: IEEE International Electron Devices Meeting, 2003.
[35] Heinemann, B., R. Barth, D. Knoll, H. Rucker, B. Tillack undW. Winkler: High-Performance BiCMOS Technologies without Epitaxially-Buried Subcollectors and Deep Trenches. In: Third International SiGe Techno-logy and Device Meeting, Seiten 1–2, 2006.
[36] Hilsebecher, J., G. Kuhnle und H. Olbrich: Long-Range-Radar-Sensorfur Fahrerassistenz-Systeme. Elektronik automotive, Juni 2004.
[37] Hull, C. D. und R. G. Meyer: A Systematic Approach to the Analysis ofNoise in Mixers. IEEE Transactions on Circuits and Systems-I: FundamentalTheory and Applications, 40(12):909–919, Dezember 1993.
[38] Hyltin, T.M.: Microstrip transmission on semiconductor dielectors. IEEETrans. Microwave Theory Tech., 13:777–781, November 1965.
[39] Jenkins, A.: Remote Sensing Technology for Automotive Safety. MicrowaveJournal, 50(12):27–42, Dezember 2007.
[40] Jeruchim, M.C., P. Balaban und K.S. Shanmugan: Simulation of com-munication systems : modeling, methodology, and techniques. Kluwer Acade-mic/Plenum Publishers, 2000.
[41] John, J.P., J. Kirchgessner, M. Menner, H. Rueda, F. Chai, D. Mor-
gan, J. Hildreth, M. Dawdy, R. Reuter und Hao Li: Development of aCost-Effective, Selective-Epi, SiGe:C HBT Module for 77GHz Automotive Ra-dar. In: Bipolar/BiCMOS Circuits and Technology Meeting, Seiten 1–4, 2006.
[42] Jotzo, J.: Aktive Landmarken zur Positionsbestimmung von autonomen Fahr-zeugen. Doktorarbeit, Technische Universitat Chemnitz, Dezember 2001.
[43] Kirchgessner, J., S. Bigelow, F.K. Chai, R. Cross, P. Dahl, A. Du-
vallet, B. Gardner, M. Griswold, D. Hammock, J. Heddleson,S. Hildreth, A. Irudayam, C. Lesher, T. Meixner, P. Meng, M. Men-
ner, J. McGinley, D. Monk, D. Morgan, H. Rueda, C. Small, S. Ste-
wart, M. Ting, I. To, P. Welch, T. Zirkle und W.M. Huang: A 0.18 &SiGe:C RFBiCMOS technology for wireless and gigabit optical communicationapplications. In: Proceedings of the Bipolar/BiCMOS Circuits and TechnologyMeeting, Seiten 151–154, 2001.
[44] Kivekas, K., A. Parssinen und K.A.I. Halonen: Characterization of IIP2and DC-Offset in Transconductance Mixers. IEEE Transactions on Circuits andSystems II, 48(11):1028–1038, November 2001.
LITERATURVERZEICHNIS 135
[45] Knapp, H., B. Dehlink, H.-P. Forstner, E. Kolmhofer, K. Aufinger,J. Bock und T.F. Meister: SiGe Circuits for Automotive Radar. In: TopicalMeeting on Silicon Monolithic Integrated Circuits in RF Systems, Seiten 231–236, 2007.
[46] Kundert, K.S.: Introduction to RF simulation and its application. Solid-StateCircuits, IEEE Journal of, 34(9):1298–1319, 1999.
[47] Li, H., H.-M. Rein, T. Suttorp und J. Bock: Fully integrated SiGe VCOswith powerful output buffer for 77-GHz automotive Radar systems and applicati-ons around 100 GHz. Solid-State Circuits, IEEE Journal of, 39(10):1650–1658,2004.
[48] Lin, K., Y. E. Wang, C.-K. Pao und Y.-C. Shih: A Ka-Band FMCWRadar Front-End With Adaptive Leakage Cancellation. Microwave Theory andTechniques, IEEE Transactions on, 54(12):4041–4048, 2006.
[49] Liu, J., L.P. Dunleavy und T.B. Svensen: A Table-Based AsymmetricSystem Mixer Model. In: European Microwave Conference, 2003.
[50] Ludloff, A.: Praxiswissen Radar und Radarsignalverarbeitung. Vieweg,Braunschweig, 3. Auflage, 2002.
[51] Meinecke, M.-M.: Zum optimierten Sendesignalentwurf fur Automobilradare.Doktorarbeit, Technische Universitat Hamburg-Harburg, 2001.
[52] Meinel, H.H.: Automotive Millimeterwave Radar. European Microwave Con-ference Amsterdam, 1998.
[53] Mongia, R., I.J. Bahl und P. Bhartia: RF and Microwave Coupled-LineCircuits. Artech House, Boston, London, 1999.
[54] Mouthaan, K., R. Tinti, H.C. de Graaff, J.L. Tauritz und J. Slot-
boom: Microwave modelling and measurement of prematch circuitry for RFpower transistors. European Solid-State Device Research Conference, 1997.
[55] Mouthaan, K., R. Tinti, M. de Kok, H.C. de Graaff, J.L. Tauritz
und J. Slotboom: Microwave modelling and measurement of the self- and mu-tual inductance of coupled bondwires. Bipolar Circuits and Technology Meeting,1997.
[56] Nicholson, D. und H. Lee: Characterization and modeling of bond wiresfor high-frequency applications. Microwave Engineering Europe, Seiten 40–46,August/September 2006.
[57] Nicolson, S.T., H.K. Kenneth, P. Chevalier, A. Chantre, B. Sau-
treuil, K.W. Tang und S.P. Voinigescu: Design and Scaling of W-BandSiGe BiCMOS VCOs. IEEE Journal of Solid-State Circuits, 42(9):1821–1833,September 2007.
136 LITERATURVERZEICHNIS
[58] Niu, G., Z. Jin, J. D. Cressler, R. Rapeta, A. J. Joseph und D. Hara-
me: Transistor Noise in SiGe HBT RF Technology. IEEE Journal of Solid-StateCircuits, 36(9):1424–1427, September 2001.
[59] O’Hara, F.J. und G.M. Moore: A High Performance CW Receiver UsingFeedthru Nulling. Microwave Journal, 6(9):63–71, 1963.
[60] Orner, B.A., M. Dahlstrom, A. Pothiawala, R.M. Rassel, Q. Liu,H. Ding, M. Khater, D. Ahlgren, A. Joseph und J. Dunn: A BiCMOSTechnology Featuring a 300/330 GHz (fT/fmax) SiGe HBT for Millimeter Wa-ve Applications. In: Bipolar/BiCMOS Circuits and Technology Meeting, Seiten1–4, 2006.
[61] Perndl, W.: Monolithic Microwave Integrated Circuits in SiGe:C BipolarTechnology. Doktorarbeit, Technische Universitat Wien, 2004.
[62] Perndl, W., H. Knapp, K. Aufinger, T.F. Meister, W. Simburger
und A.L. Scholz: Voltage-Controlled Oscillators up to 98 GHz in SiGe BipolarTechnology. IEEE Journal of Solid-State Circuits, 39(10):1773–1777, 2004.
[63] Perndl, W., H. Knapp, M. Wurzer, K. Aufinger, T.F. Meister, T.F.
Bock, W. Simburger und A.L. Scholtz: A low-noise, and high-gain double-balanced mixer for 77 GHz automotive radar front-ends in SiGe bipolar techno-logy. In: Radio Frequency Integrated Circuits Symposium, Seiten 47–50, 2004.
[64] Pozar, D.M.: Microwave and RF Wireless Systems. John Wiley & Sons, Inc.,New York, Chichester, Weinheim, Brisbane, Toronto, Singapore, 2001.
[65] Pozar, D.M.: Microwave Engineering. John Wiley & Son, Inc., 2005.
[66] Raemer, H. R.: Radar System Principles. CRC Press, Boca Raton, New York,London, Tokyo, 1997.
[67] Rasshofer, R. H. und K. Naab: 77GHz Long Range Radar Systems Status,Ongoing Developements and Future Challenges. 2nd European Radar Confe-rence, Seiten 161–164, 2005.
[68] Razavi, B.: Design Considerations for Direct-Conversion Receivers. IEEETransactions on Circuits and Systems II, 44(6):428–435, Juni 1997.
[69] Razavi, B.: RF microelectronics. Prentice Hall, Upper Saddle River, NJ, 1998.
[70] Reuter, R., H. Li, I. To, Y. Yin, A. Ghazinour, D. Jahn, D. Morgan,J. Feige, P. Welch, S. Braithwaite, B. Knappenberger, D. Scheit-
lin, J. John, M. Huang, P. Wennekers, M. Tutt, C. Trigas undJ. Kirchgessner: Fully Integrated SiGe-BiCMOS Receiver(RX) and Trans-mitter(TX) Chips for 76.5 GHz FMCW Automotive Radar Systems IncludingDemonstrator Board Design. In: International Microwave Symposium, Seiten1307–1310, 2007.
LITERATURVERZEICHNIS 137
[71] Reuter, R. und Y. Yin: A 77 GHz (W-band) SiGe LNA with a 6.2 dBNoise Figure and Gain Adjustable to 33 dB. In: Bipolar/BiCMOS Circuits andTechnology Meeting, Seiten 1–4, 2006.
[72] Rice, S.O.: Envelopes of Narrow-Band Signals. Proceedings of the IEEE,70(7):692–699, Juli 1982.
[73] Rohling, H. und R. Mende: OS CFAR performance in a 77 GHz radarsensor for car application. CIE International Conference of Radar, Seiten 109–114, Oktober 1996.
[74] Roychowdhury, J., D. Long und P. Feldmann: Cyclostationary NoiseAnalysis of Large RF Circuits with Multitone Excitations. IEEE Journal ofSolid-State Circuits, 33(3):324–336, Marz 1998.
[75] Ruck, G.T., D.E. Barrick, W.D. Stuart und C.K. Krichbaum: RadarCross Section Handbook, Band 1. Plenum Press, 1970.
[76] Ruck, G.T., D.E. Barrick, W.D. Stuart und C.K. Krichbaum: RadarCross Section Handbook, Band 2. Plenum Press, 1970.
[77] Scheer, J.A. und J.L. Kurtz (Herausgeber): Coherent Radar PerformanceEstimation. Artech House, Boston, London, 1993.
[78] Schiek, B. und H.-J. Siweris: Rauschen in Hochfrequenzschaltungen. HuthigBuch Verlag, Heidelberg, 1990.
[79] Schneider, Martin: Hochintegrierte 77GHz Weitbereichsradarsensorik furzukunftige Fahrerassistenzsysteme. Technischer Bericht, Robert Bosch GmbH,Berlin, 2005. offentliches KOKON-Statusseminar.
[80] Skolnik, M.: Introduction to radar systems. McGraw-Hill, Inc., 1980.
[81] Skolnik, M. I.: An Analysis of Bistatic Radar. Transactions on Communica-tions Technology, Seiten 19–27, 1961.
[82] Skolnik, M.I.: Radar Handbook. Mc Graw-Hill Book Company, 1970.
[83] Stove, A.G.: Linear FMCW radar techniques. In: Radar and Signal Proces-sing, IEE Proceedings F, Band 139, Seiten 343–350, 1992.
[84] Strohm, K.M., R. Schneider und J. Wenger: KOKON: A Joint Projectfor the Development of 79GHz Automotive Radar Sensors. International RadarSymposium (IRS), 2005.
[85] Verspecht, J., D. Schreurs, A. Barel und B. Nauwelaers: Black boxmodelling of hard nonlinear behavior in the frequency domain. In: InternationalMicrowave Symposium Digest, Band 3, 1996.
138 LITERATURVERZEICHNIS
[86] Vytla, R.K., T.F. Meister, K. Aufinger, D. Lukashevich, S. Bo-
guth, H. Knapp, J. Bock, H. Schafer und R. Lachner: SimultaneousIntegration of SiGe High Speed Transistors and High Voltage Transistors. In:Bipolar/BiCMOS Circuits and Technology Meeting, Seiten 1–4, 2006.
[87] Wadell, B.C.: Transmission Line Design Handbook. Artech House, 1991.
[88] Wagner, C., M. Treml, M. Hartmann, A. Stelzer und H. Jager: AFully-Automated Measurement System for 77GHz Mixers. IEEE Instrumenta-tion and Measurement Conference, 2007.
[89] Wang, L., J. Borngraeber und W. Winkler: 77 GHz Automotive RadarReceiver Front-end in SiGe:C BiCMOS Technology. In: Proceedings of the Solid-State Circuits Conference, Seiten 388–391, 2006.
[90] Wang, L., R. Kraemer und J. Borngraeber: An Improved Highly-LinearLow-Power Down-Conversion Micromixer for 77 GHz Automotive Radar inSiGe Technology. In: International Microwave Symposium Digest, Seiten 1834–1837, 2006.
[91] Wanner, R., R. Lachner und G.R. Olbrich: SiGe integrated mm-wavepush-push VCOs with reduced power consumption. In: Radio Frequency Inte-grated Circuits Symposium, 2006.
[92] Wenger, J.: Automotive radar - status and perspectives. In: Compound Se-miconductor Integrated Circuit Symposium, 2005. CSIC ’05. IEEE, 2005.
[93] Wenger, J.: Introduction to Automotive Radar Sensors - Challenges, Soluti-ons and Benefits. In: Low-Cost, Integrated, Automotive and Industrial RadarSensors, 2007. IMS 2007 Workshop.
[94] Williams, D.F., F. Ndagijimana, K.A. Remley, J.A. Dunsmore undS. Hubert: Scattering-Parameter Models and Representations for MicrowaveMixers. IEEE Transactions on Microwave Theory and Techniques, 53(1):314–321, 2005.
[95] Woll, J.D.: VORAD Collision Warning Radar. IEEE International RadarConference, Seiten 369– 372, 1995.
[96] Yamano, S., H. Higashida, M. Shono, S. Matsui, T. Tamaki, H. Yagi
und H. Asanuma: 76GHz Milimeter Wave Automobile Radar using SingleChip MMIC. Fujitsu Ten Technical Journal, (23), 2004.
[97] Ziel, A. Van der: Noise in solid state devices and circuits. Wiley-Intersciencepublication, 1986.