Moderne Rollführung - Ein Beitrag zur Vision 2020 - Am ... · Paper Strips Heutiger Stand (c)...
40
Moderne Rollführung - Ein Beitrag zur Vision 2020 - Am Beispiel des Europäischen Projektes EMMA
-
Upload
truongdieu -
Category
Documents
-
view
214 -
download
0
Transcript of Moderne Rollführung - Ein Beitrag zur Vision 2020 - Am ... · Paper Strips Heutiger Stand (c)...
Moderne Rollführung
- Ein Beitrag zur Vision 2020 -Am Beispiel des Europäischen Projektes
EMMA
Moderne Rollführung - EMMA(c) M.Roeder, DLR 2
Agenda
Vision 2020RollführungEuropäische Projekt EMMA
ProjektzieleProjektaufbauProjektergebnisse
Ausblick
Moderne Rollführung - EMMA(c) M.Roeder, DLR 3
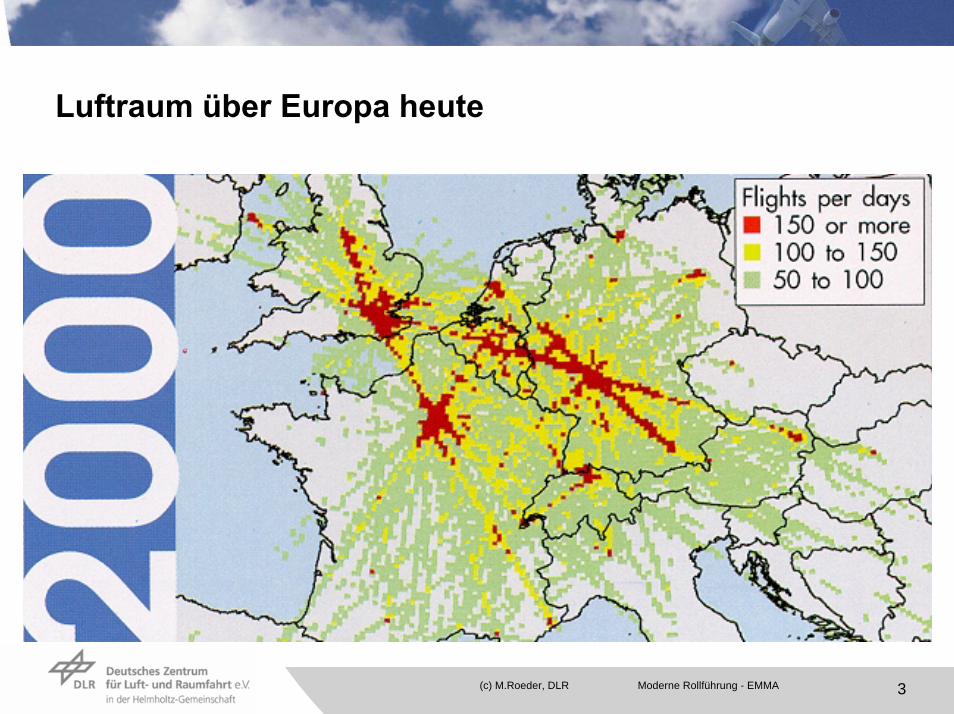
Luftraum über Europa heute
Moderne Rollführung - EMMA(c) M.Roeder, DLR 4
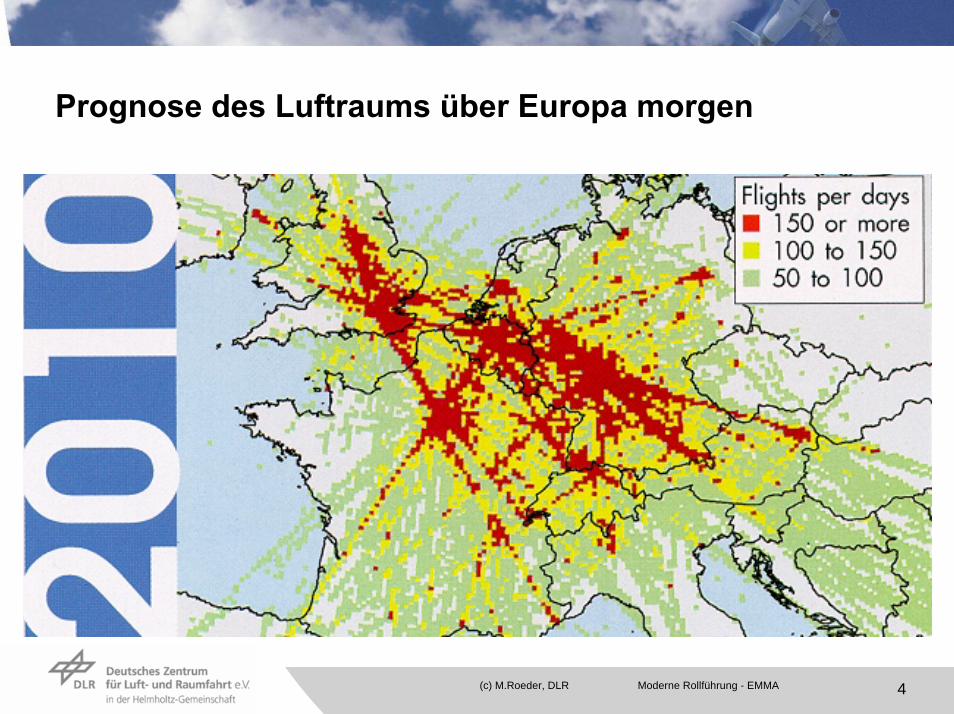
Prognose des Luftraums über Europa morgen
Moderne Rollführung - EMMA(c) M.Roeder, DLR 5
Vision 2020 (Januar 2001)
In der Vision 2020 werden ehrgeizige Ziele angestrebt:
Steigerung des Luftverkehrs (3x)
Pünktlichkeit (99%)
Verweildauer am Flughafen (15 / 30 min)
Sicherheit (1/5)
Leiser und sauberer Flugverkehr
Integration aller Transportmittel
Von diesen Zielen können vier maßgeblich durch ein Rollmanagementsystem beeinflusst werden:
Moderne Rollführung - EMMA(c) M.Roeder, DLR 6
Vision 2020
1. Wetterunabhängigkeit des Luftverkehrs (am Flughafen)
2. Pünktlichkeit (99%)
3. Reduktion der Unfallrate (Faktor 5)
4. Leiser und sauberer Verkehr (am Flughafen)

Moderne Rollführung - EMMA(c) M.Roeder, DLR 7
Vision 2020
1. Wetterunabhängigkeit des Luftverkehrs (am Flughafen)
2. Pünktlichkeit (99%)
3. Reduktion der Unfallrate (Faktor 5)
4. Leiser und sauberer Verkehr (am Flughafen)

Moderne Rollführung - EMMA(c) M.Roeder, DLR 8
Vision 2020
1. Wetterunabhängigkeit des Luftverkehrs (am Flughafen)
2. Pünktlichkeit (99%)
3. Reduktion der Unfallrate (Faktor 5)
4. Leiser und sauberer Verkehr (am Flughafen)

Moderne Rollführung - EMMA(c) M.Roeder, DLR 9
Vision 2020
1. Wetterunabhängigkeit des Luftverkehrs (am Flughafen)
2. Pünktlichkeit (99%)
3. Reduktion der Unfallrate (Faktor 5)
4. Leiser und sauberer Verkehr (am Flughafen)
Moderne Rollführung - EMMA(c) M.Roeder, DLR 10
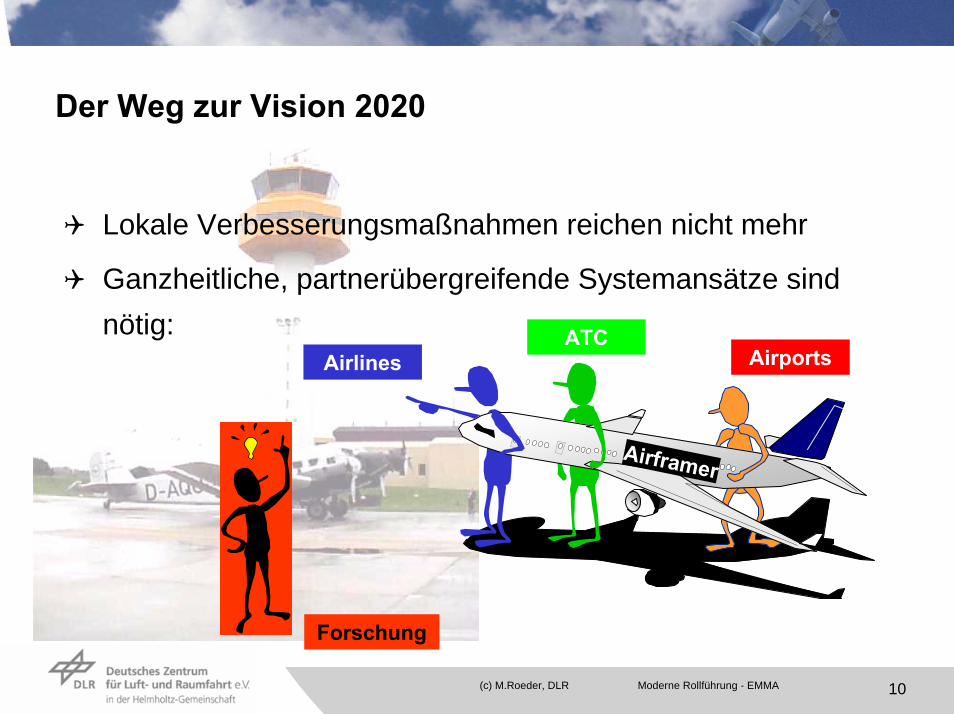
Der Weg zur Vision 2020
Lokale Verbesserungsmaßnahmen reichen nicht mehr
Ganzheitliche, partnerübergreifende Systemansätze sind nötig:
Airlines AirportsATC
Airframer
Forschung
Moderne Rollführung - EMMA(c) M.Roeder, DLR 11
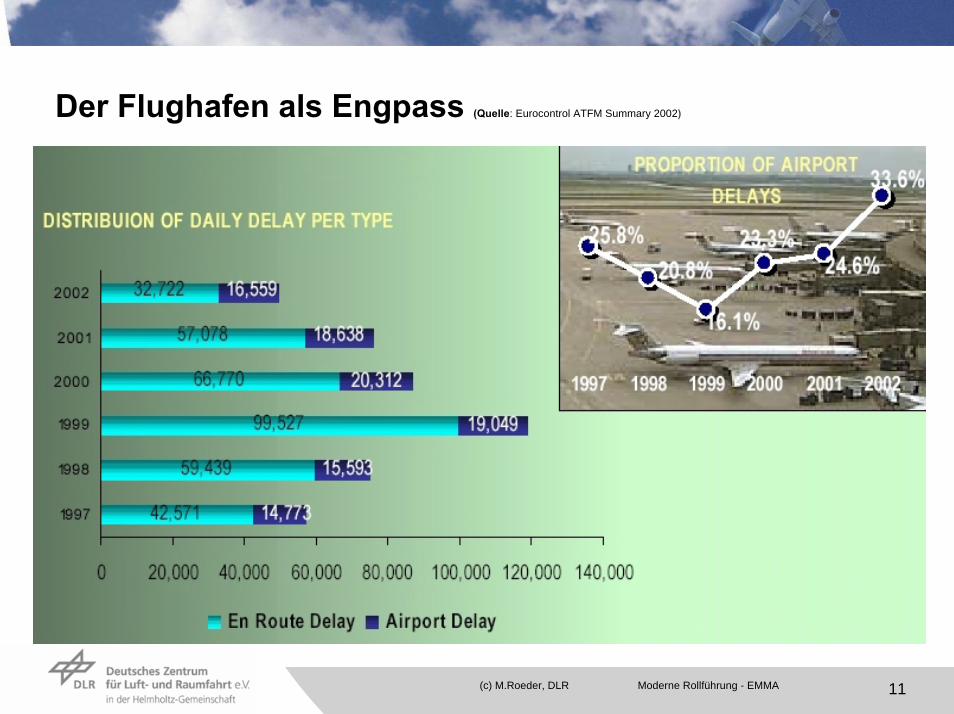
Der Flughafen als Engpass (Quelle: Eurocontrol ATFM Summary 2002)
Moderne Rollführung - EMMA(c) M.Roeder, DLR 12
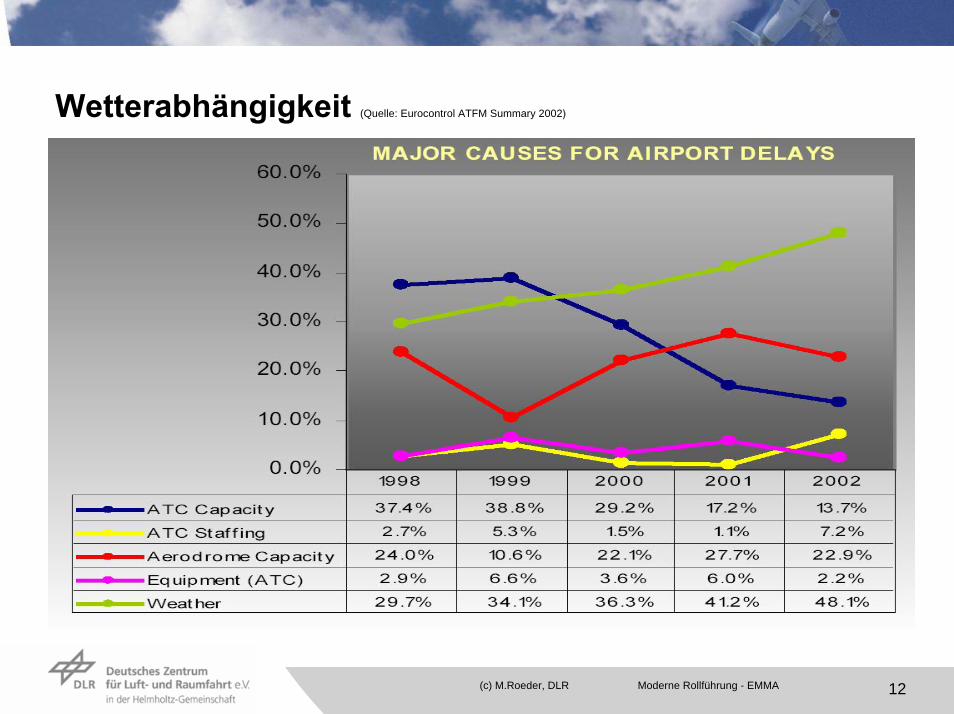
Wetterabhängigkeit (Quelle: Eurocontrol ATFM Summary 2002)
Moderne Rollführung - EMMA(c) M.Roeder, DLR 13
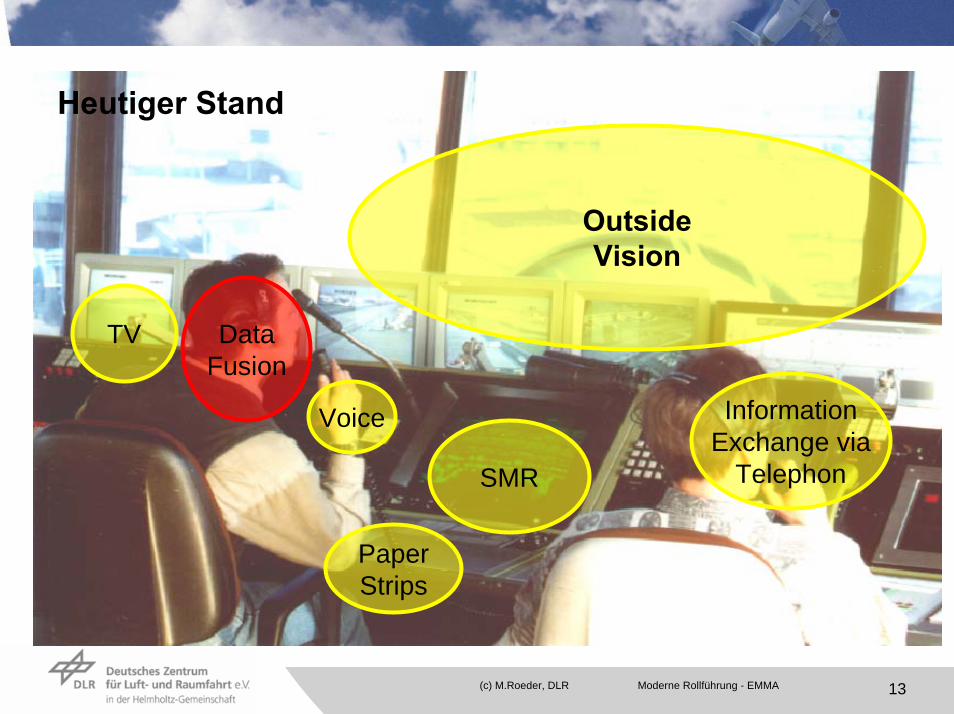
OutsideVision
SMR
Voice
DataFusion
TV
InformationExchange via
Telephon
PaperStrips
Heutiger Stand
Moderne Rollführung - EMMA(c) M.Roeder, DLR 14
Rollführung
Was ist Rollführung:Rollführung ist ein System, das den Lotsen und den Piloten bei den Arbeitsprozessen am Flughafen unterstützt.Fachbegriff A-SMGCS (Advanced Surface MovementGuidance and Control System)Ein A-SMGCS besteht aus vier Hauptfunktionen:
ErfassungÜberwachungPlanungFührung
Level I / II System (ICAO 9830)
Erweiterte Services
Moderne Rollführung - EMMA(c) M.Roeder, DLR 15
Erfassung
Perfekte Erfassung des Rollverkehrs notwendig:für das Situationsbewusstseins des Nutzersals Basis aller weiteren A-SMGCS Funktionen
Ein adäquates Sensor-Set, abhängig von der Flughafen-TopographieRedundante Informations-Quellen (primär- / sekundär-Quellen)Eine intelligente Sensor-Daten-FusionValidiertes Lotsen-Displays zur Systeminteraktion (HMIs)
Moderne Rollführung - EMMA(c) M.Roeder, DLR 16
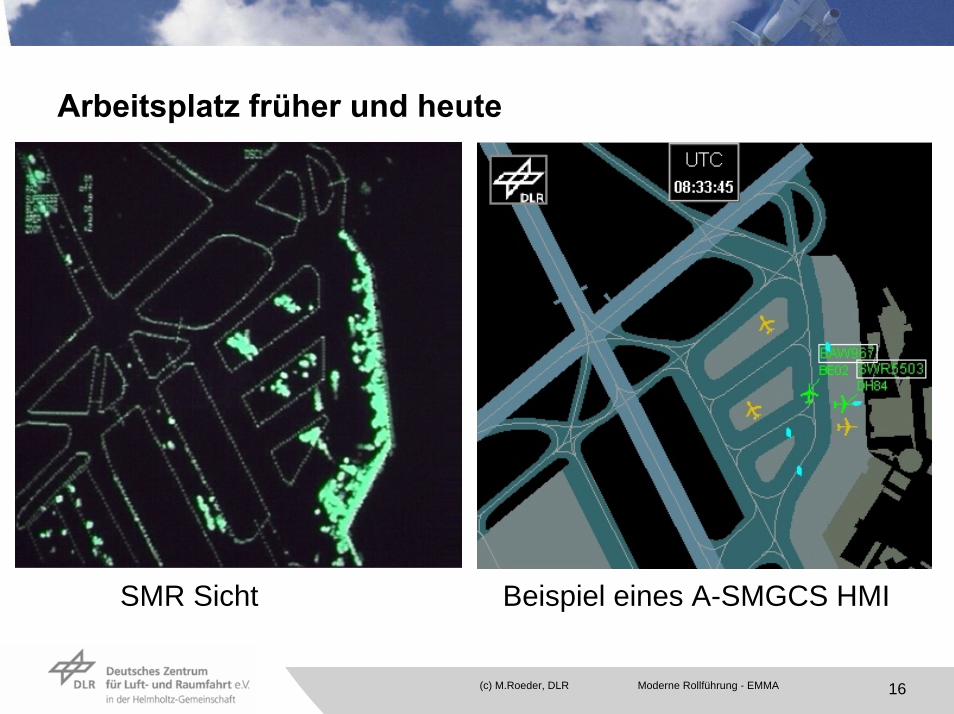
Arbeitsplatz früher und heute
SMR Sicht Beispiel eines A-SMGCS HMI
Moderne Rollführung - EMMA(c) M.Roeder, DLR 17
Überwachung
Überwachung bedeutet eine Vergleich des Ist-Zustandes mit dem Soll-Zustand bezüglich:
Rollen auf / über eine RWY / Stoppbars ohne FreigabeRollen auf gesperrten RollwegenKollisionswarnung mit anderen Fahrzeugen
Wenn ein Planungssystem vorhanden ist, erweitern sich die Möglichkeiten:
RollwegüberwachungZeitliche Überwachung von Freigaben
Moderne Rollführung - EMMA(c) M.Roeder, DLR 18
Planung
Planung ist die Krönung eines A-SMGCS und bedeutet:RollwegplanungPlanung der zeitlichen Abfolge von Freigaben (z.B. Start Up, Push Back, Line Up, Take Off Clearance)
Planung basiert auf mehreren Teilaspekten:Runway BelegungAnflugplanungAbflugplanungStreckenflugplanung‚Slot‘-Vergabe
Moderne Rollführung - EMMA(c) M.Roeder, DLR 19
Führung
Es gibt zwei mögliche Arten der Rollführung:Bodengebunden (z.B. gesteuerte Mittellinienbefeuerung)Bordgebunden (z.B. ‚Moving Map Display‘)
Die bodengebunden Rollführung kann dem Fahrzeugführer lediglich seinen Weg aufzeigen.Bei der bordgebundenen Rollführung - über ein grafisches Kartendisplay - erhöht sich sein Situationsbewusstsein:
Darstellung anderer Verkehrsteilnehmer über einen möglichen DatenlinkMöglichkeit eines bordgebundenes Warnsystem (Routenabweichung, Kollision, RWY-Incursion, Stoppbar)
Moderne Rollführung - EMMA(c) M.Roeder, DLR 20
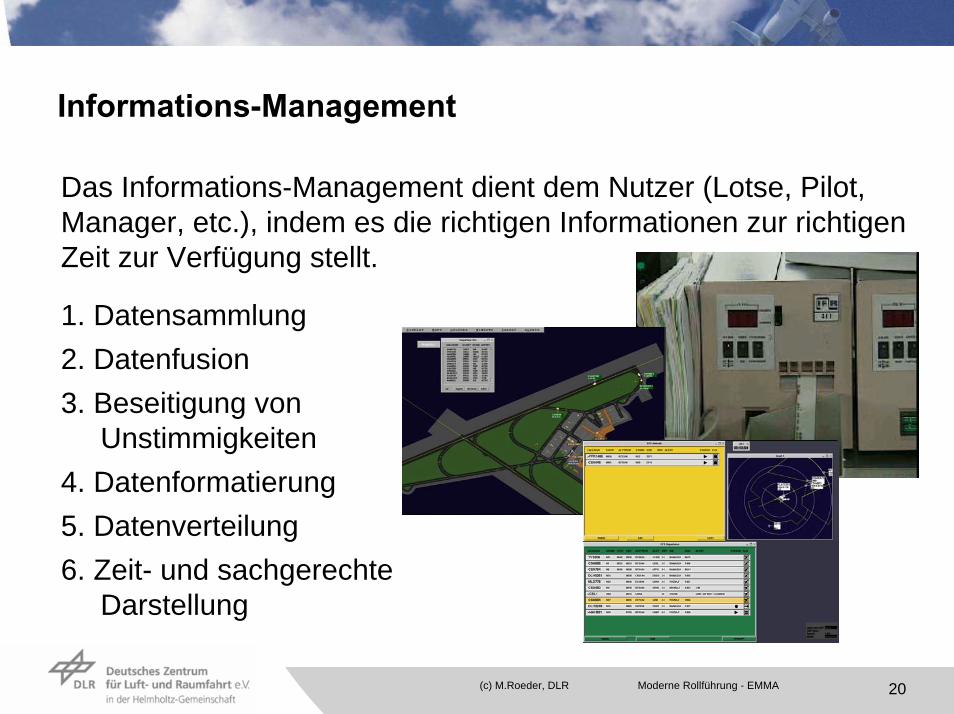
Informations-Management
1. Datensammlung2. Datenfusion3. Beseitigung von
Unstimmigkeiten4. Datenformatierung5. Datenverteilung6. Zeit- und sachgerechte
Darstellung
Das Informations-Management dient dem Nutzer (Lotse, Pilot, Manager, etc.), indem es die richtigen Informationen zur richtigen Zeit zur Verfügung stellt.
Moderne Rollführung - EMMA(c) M.Roeder, DLR 21
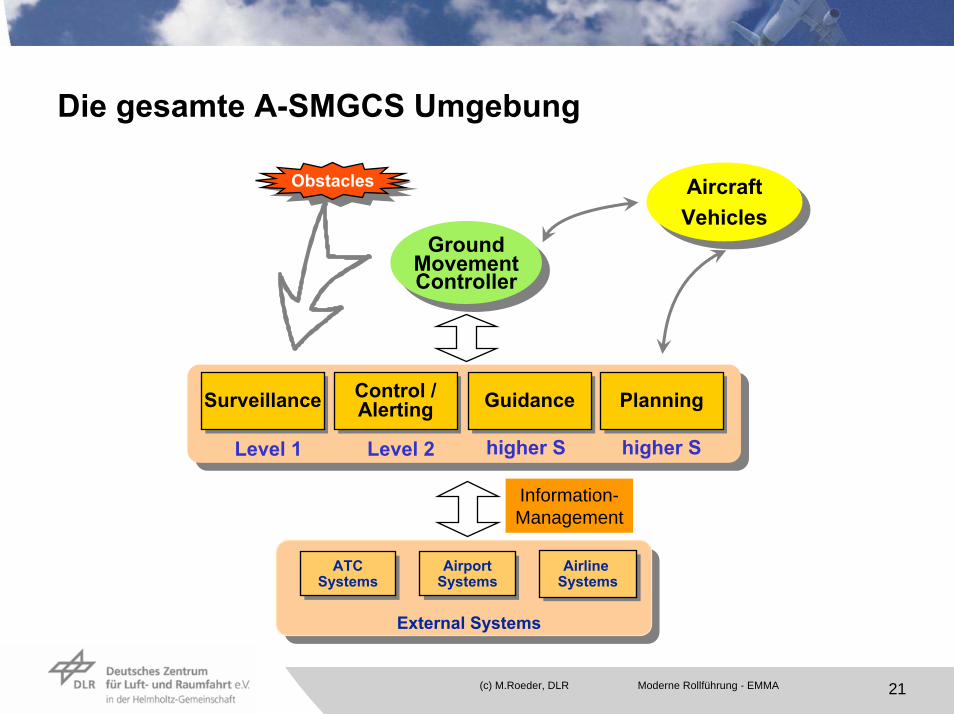
Die gesamte A-SMGCS Umgebung
AircraftVehicles
AircraftVehicles
ObstaclesObstacles
GroundMovementController
GroundMovementController
Level 1
SurveillanceSurveillance Control /Alerting
Control /Alerting GuidanceGuidance PlanningPlanning
Level 2 higher S higher S
Information-Management
External Systems
AirportSystemsAirport
SystemsAirline
SystemsAirline
SystemsATC
SystemsATC
Systems
Moderne Rollführung - EMMA(c) M.Roeder, DLR 22
Vorteile von A-SMGCS
A-SMGCS ist modular und in verschiedenen Ausbaustufen implementierbar
A-SMGCS basiert in den beiden ersten Ausbaustufen auf vorhandener Technik
A-SMGCS benötigt Datenpools und fügt sich somit in Datenstrukturen ein, wie sie auch von anderen Konzepten (z.B. ‚Gate to Gate‘, CDM) benötigt werden.
Moderne Rollführung - EMMA(c) M.Roeder, DLR 23
Warum EMMA
Die EU hat schrittweise die Einführung des A-SMGCS durch Projekte in den verschiedenen Rahmenprogrammen gefördert:
FP4: DEFAMM (Demonstration Facilities for Airport MovementManagement) mit dem Hauptziel der technischen Machbarkeit.FP5: BETA (operational Benefit Evaluation by Testing an A-SMGCS) zur ersten Einführung eines A-SMGCS unter operationellen Bedingungen.FP6: EMMA (European Airport Movement Management by A-SMGCS), dass eine Harmonisierung der zweistufigen Implementierung von A-SMGCS (I/II) und (III/IV) unter angepassten operationellen Verfahren fördert.
Moderne Rollführung - EMMA(c) M.Roeder, DLR 24
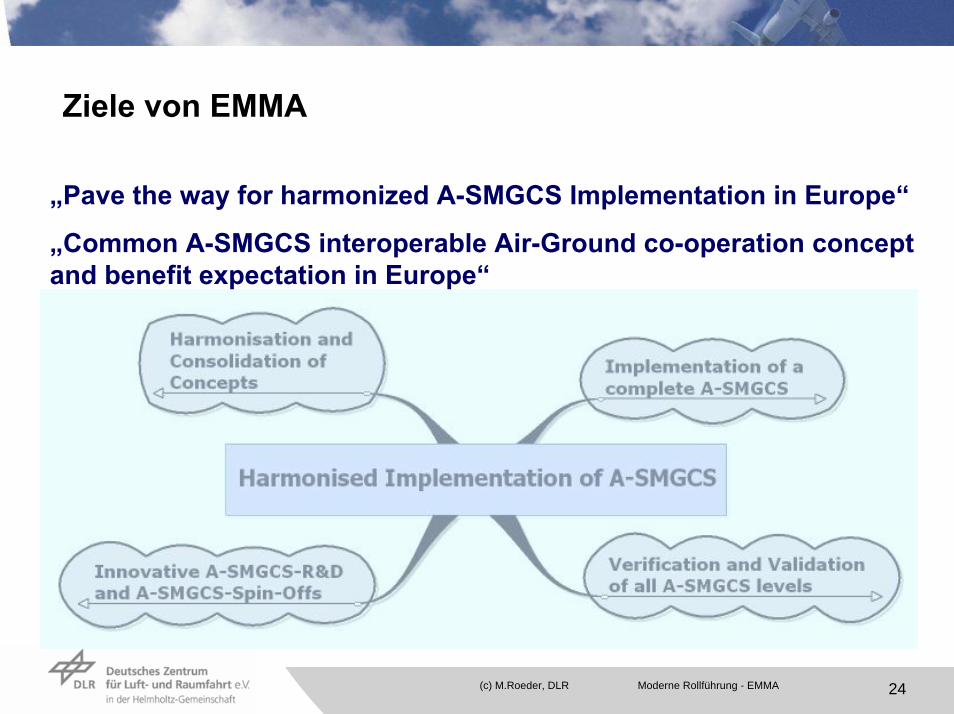
Ziele von EMMA
„Pave the way for harmonized A-SMGCS Implementation in Europe“
„Common A-SMGCS interoperable Air-Ground co-operation concept and benefit expectation in Europe“
Moderne Rollführung - EMMA(c) M.Roeder, DLR 25
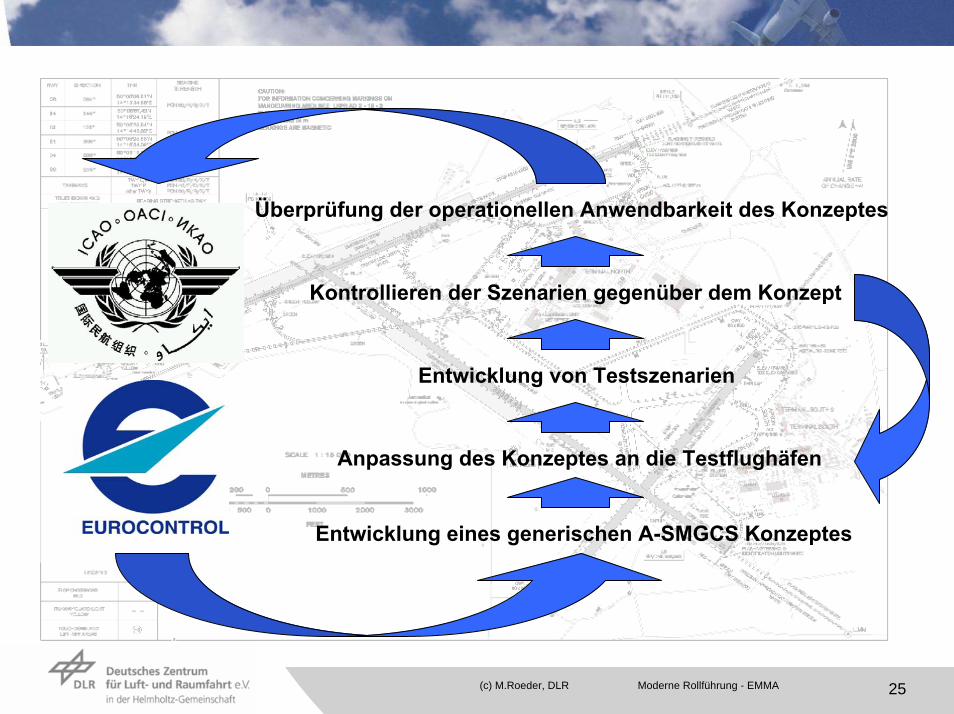
Anpassung des Konzeptes an die Testflughäfen
Entwicklung von Testszenarien
Kontrollieren der Szenarien gegenüber dem Konzept
Überprüfung der operationellen Anwendbarkeit des Konzeptes
Entwicklung eines generischen A-SMGCS Konzeptes
Moderne Rollführung - EMMA(c) M.Roeder, DLR 26
EMMA Konsortium26 Partner, 9 Ländern
Moderne Rollführung - EMMA(c) M.Roeder, DLR 27
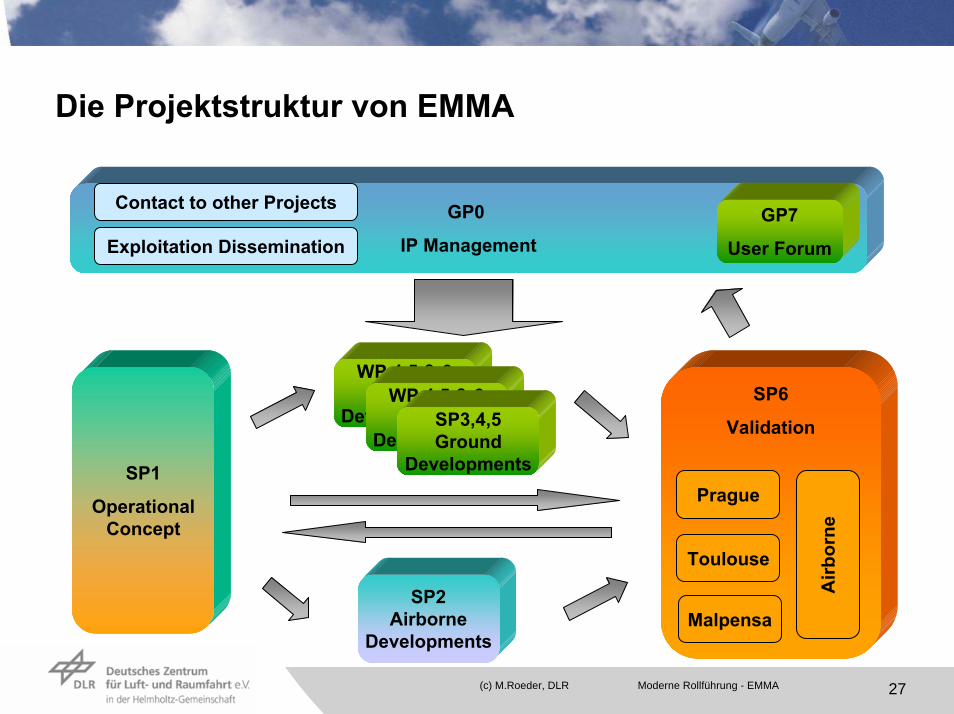
Die Projektstruktur von EMMA
GP0
IP ManagementExploitation Dissemination
Contact to other Projects GP7
User Forum
WP 4,5 & 6Ground
Developments
SP1
OperationalConcept
SP6
ValidationWP 4,5 & 6
GroundDevelopments
SP3,4,5Ground
DevelopmentsPrague
Toulouse
Malpensa
Airb
orne
SP2Airborne
Developments
Moderne Rollführung - EMMA(c) M.Roeder, DLR 28
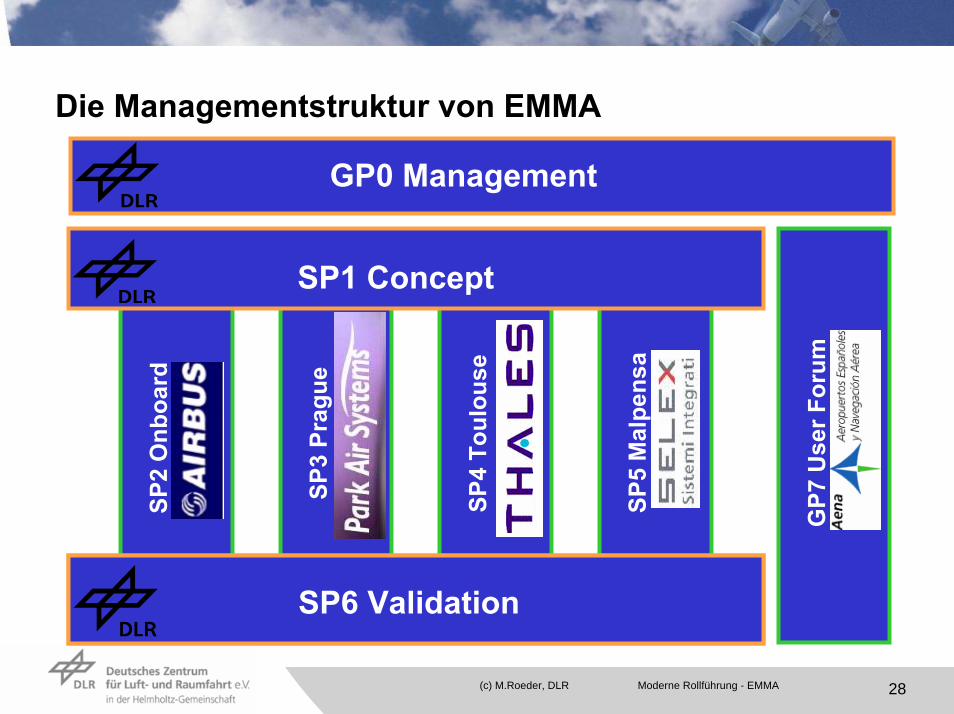
Die Managementstruktur von EMMA
GP0 Management
GP7
Use
r For
um
SP2
Onb
oard
SP3
Prag
ue
SP4
Toul
ouse
SP5
Mal
pens
a
SP1 Concept
SP6 Validation
Moderne Rollführung - EMMA(c) M.Roeder, DLR 29
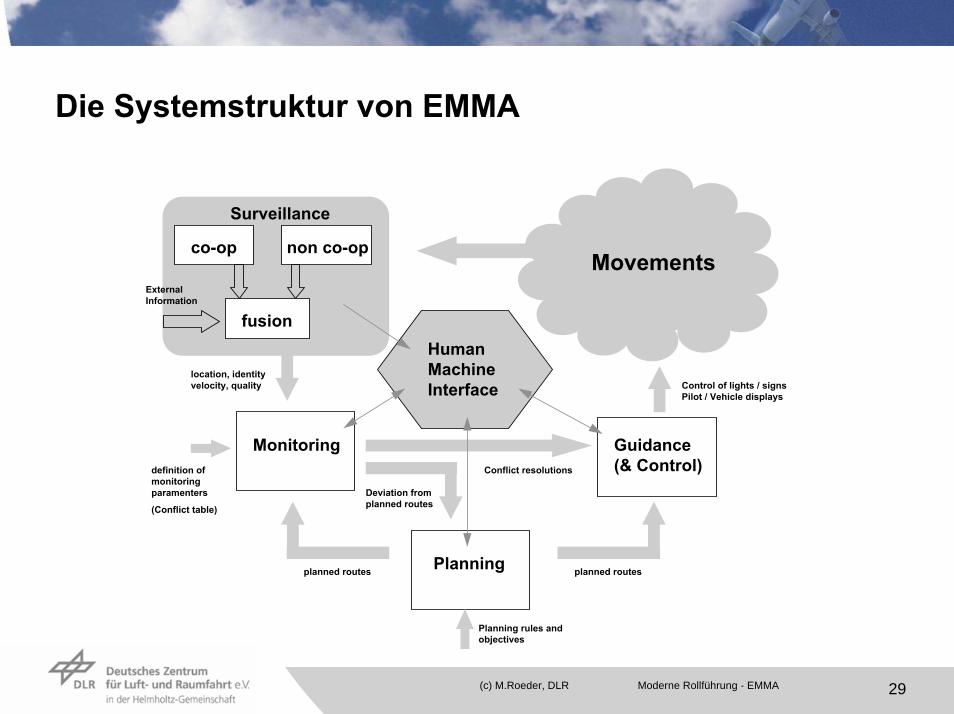
Die Systemstruktur von EMMA
Movements
Guidance(& Control)
Monitoring
Planning
co-op non co-op
fusion
Surveillance
location, identityvelocity, quality
planned routes
Deviation fromplanned routes
Conflict resolutions
planned routes
Control of lights / signsPilot / Vehicle displays
definition ofmonitoring paramenters
Planning rules andobjectives
(Conflict table)
ExternalInformation
HumanMachineInterface
Moderne Rollführung - EMMA(c) M.Roeder, DLR 30
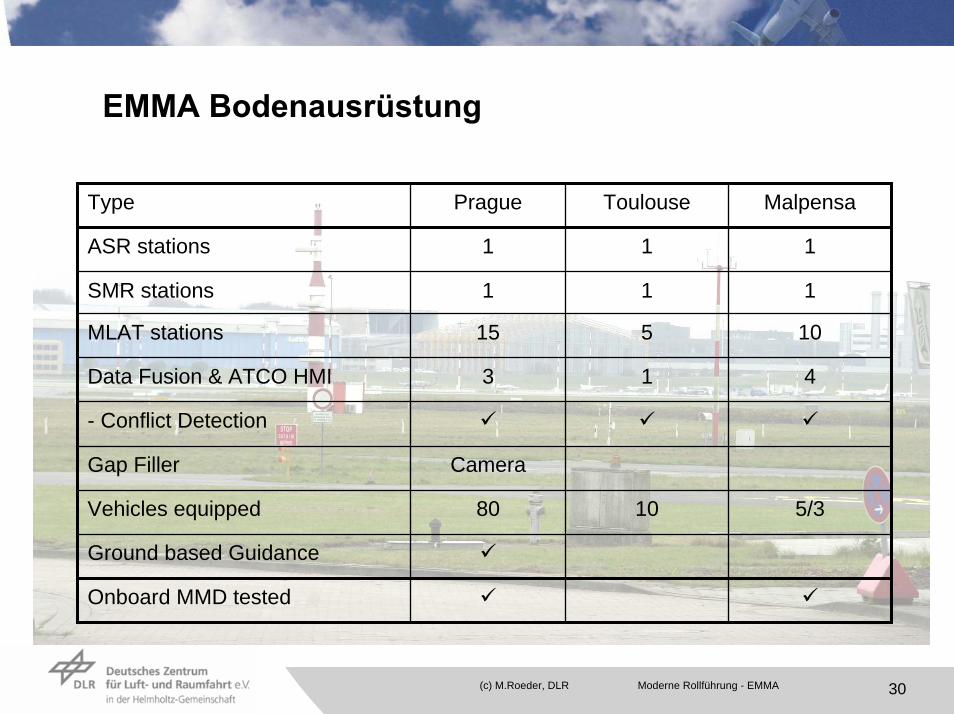
EMMA Bodenausrüstung
Type Prague Toulouse Malpensa
ASR stations 1 1 1
SMR stations 1 1 1
MLAT stations 15 5 10
Data Fusion & ATCO HMI 3 1 4
- Conflict Detection
Gap Filler Camera
Vehicles equipped 80 10 5/3
Ground based Guidance
Onboard MMD tested

Moderne Rollführung - EMMA(c) M.Roeder, DLR 31
EMMA Cockpitausrüstung
Moderne Rollführung - EMMA(c) M.Roeder, DLR 32
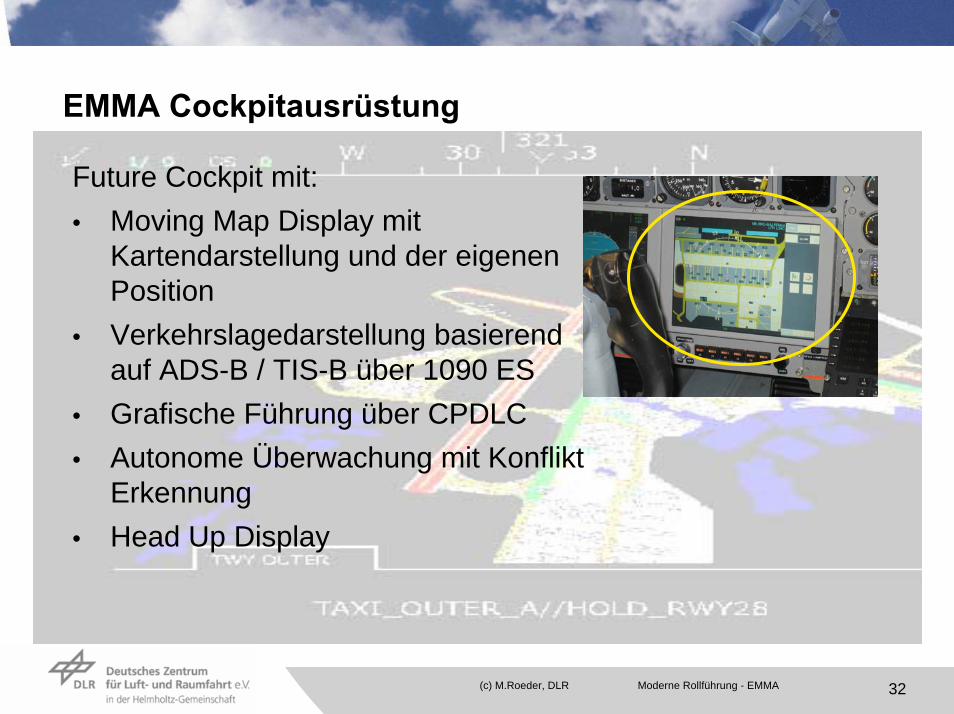
EMMA Cockpitausrüstung
Future Cockpit mit:• Moving Map Display mit
Kartendarstellung und der eigenen Position
• Verkehrslagedarstellung basierend auf ADS-B / TIS-B über 1090 ES
• Grafische Führung über CPDLC• Autonome Überwachung mit Konflikt
Erkennung• Head Up Display
Moderne Rollführung - EMMA(c) M.Roeder, DLR 33
Eine harmonisierte Definition des A-SMGCS Level I & II in Übereinstimmung mit EUROCONTROL an drei Flughäfen
Definition eines Operationellen-Konzeptes, dass außerdem folgendes berücksichtigt:
Funktionale Gefahren-Bewertung (FHA)System Sicherheits-Bewertung (SSA)
Implementierung eines Level I & II Systems an drei Flughäfen inklusive der Cockpitausstattung eines TestflugzeugesEntwicklung einer Verifikations- und Validierungs-Methode
Was hat EMMA bisher erreicht
Moderne Rollführung - EMMA(c) M.Roeder, DLR 34
Ergebnisse basieren auf zwei Methoden:1. Verifikation: Technisches Testen
(“Haben wir das System richtig gebaut?”)Hierbei werden Systemleistungen gegen die definierten technischen Erfordernisse gemessen
2. Validierung: Operationelles Testen mit „Man in the Loop“(“Haben wir das richtige System aufgebaut?”)
Echtzeit-Simulationen‚Shadow Mode‘ VersucheOperationelle Tests im Feld
Ergebnisse
Statistische Daten aus Befragungen
Moderne Rollführung - EMMA(c) M.Roeder, DLR 35
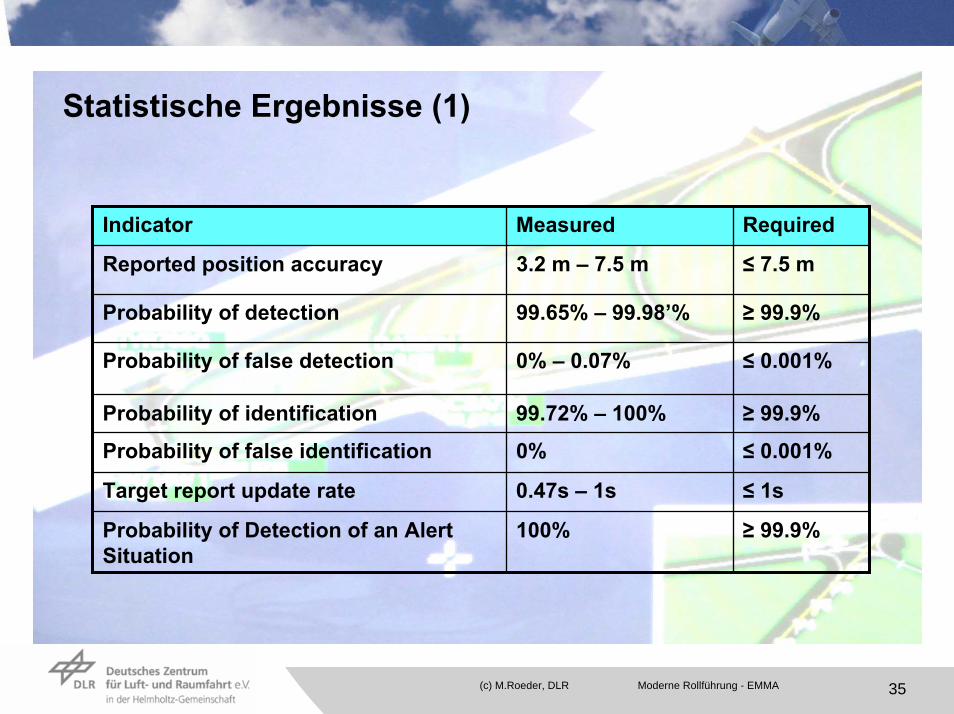
Indicator Measured Required
Reported position accuracy 3.2 m – 7.5 m ≤ 7.5 m
Probability of detection 99.65% – 99.98’% ≥ 99.9%
Probability of false detection 0% – 0.07% ≤ 0.001%
Probability of identification 99.72% – 100% ≥ 99.9%
Probability of false identification 0% ≤ 0.001%
Target report update rate 0.47s – 1s ≤ 1s
Probability of Detection of an Alert Situation
100% ≥ 99.9%
Statistische Ergebnisse (1)
Moderne Rollführung - EMMA(c) M.Roeder, DLR 36
AbdeckungEine komplette Abdeckung des Flughafens ist immer eine große Herausforderung.Ungenügende Abdeckung wird immer dann gegeben sein, wenn Flugzeuge oder Fahrzeuge nicht mit kooperativen Systemen ausgestattet sind. Identifikationswahrscheinlichkeit sollte laut ICAO 99,9% sein, es wurden aber nur 99,65% gemessen. Die Akzeptanz der Lotsen dieser geringeren Leistung hat aber klar gezeigt, dass er dennoch ausreicht.
A-SMGCS reduziert die Kommunikation um mehr als 10%Die Reaktionszeit eines Lotsen im Falle eines Konflikts verringert sich von 6,0 auf 5,3 Sekunden.
Statistische Ergebnisse (2)
Moderne Rollführung - EMMA(c) M.Roeder, DLR 37
Mit A-SMGCS Level I&II haben sich zwei wesentliche Verfahren geändert:
Die Flugzeug-Identifikations-Prozedur durch den LotsenDie Transponder-Prozedur durch den Piloten
Die statistisch signifikanten Antworten der Lotsen zeigen, dass sie auf das A-SMGCS verlassen und die neuen Verfahren vollkommen anwenden.
Die neuen Identifikations-Verfahren sind sicherer, effizienter,speziell unter schlechten Sichtbedingungen.Die Transponder-Prozedur ist korrekt definiert und trifft dieoperationellen Notwendigkeiten
Operationelle Ergebnisse
Moderne Rollführung - EMMA(c) M.Roeder, DLR 38
EMMA2 wird die ‚höheren‘ A-SMGCS Dienste definieren:Technische und operationelle AnforderungenAngepasste VerfahrenCockpit- und Boden-Ausstattungen
CPDLC
EMMA2 wird wieder in enger Zusammenarbeit mit EUROCONTROL stattfinden, bei gleichzeitiger Einbeziehung aller Nutzer.
Ausblick: EMMA2
Moderne Rollführung - EMMA(c) M.Roeder, DLR 39
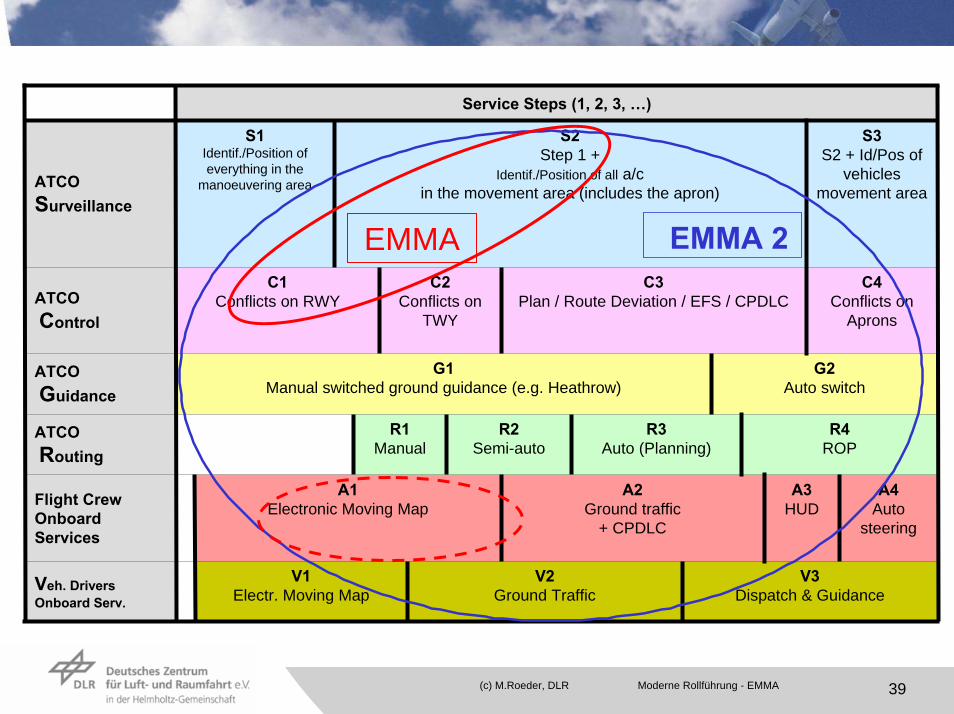
V3Dispatch & Guidance
V2Ground Traffic
V1Electr. Moving MapVeh. Drivers
Onboard Serv.
A4Auto
steering
A3HUD
A2Ground traffic
+ CPDLC
A1Electronic Moving MapFlight Crew
OnboardServices
R4ROP
R3Auto (Planning)
R2Semi-auto
R1Manual
ATCO Routing
G2Auto switch
G1Manual switched ground guidance (e.g. Heathrow)
ATCO Guidance
C4Conflicts on
Aprons
C3Plan / Route Deviation / EFS / CPDLC
C2Conflicts on
TWY
C1Conflicts on RWYATCO
Control
S3S2 + Id/Pos of
vehicles movement area
S2Step 1 +
Identif./Position of all a/c in the movement area (includes the apron)
S1Identif./Position of everything in the
manoeuvering areaATCO Surveillance
Service Steps (1, 2, 3, …)
EMMA 2EMMA

Moderne Rollführung - EMMA(c) M.Roeder, DLR 40
Fragen?
Weiter Informationen: www.dlr.de/emma
Mail to: [email protected]