Modulare PV- und Hybridsystemtechnik
342
Abschlussbericht FuE – Vorhaben Nr. 0329833 Modulare PV- und Hybridsystemtechnik Gefördert durch das Bundesministerium für Wirtschaft und Technologie Institut für Solare Energieversorgungstechnik Verein an der Universität Kassel e.V.
Transcript of Modulare PV- und Hybridsystemtechnik

Abschlussbericht FuE – Vorhaben Nr. 0329833
Modulare PV- und Hybridsystemtechnik Gefördert durch das Bundesministerium für Wirtschaft und Technologie Institut für Solare Energieversorgungstechnik Verein an der Universität Kassel e.V.


Abschlussbericht Modulare PV- und Hybridsystemtechnik - PV-Technik mit integrierten Energie- und Informationsmodulen für elektrische Versorgungssysteme - Gefördert durch das Bundesministerium für Wirtschaft und Technologie Förderkennzeichen Nr. 0329833 Laufzeit des Projektes: 01.07.1998 - 30.08.2001 Projektleitung: Dipl.-Ing. Martin Rothert
Dr.-Ing. habil. Peter Zacharias
Beiträge: Dr.-Ing. Bruno Burger, ISET Dr.-Ing. Alfred Engler, ISET Dipl.-Ing. Heiko Faßhauer, ISET Dipl. Ing. Oliver Haas, Universität Kassel Dipl.-Ing. Jörg Jahn, ISET Dipl.-Ing. Arno Jansen, ISET Dipl.-Ing. Franz Kininger, Universität Kassel Dipl.-Ing. Markus Landau, ISET Dipl.-Ing. Lothar Löwer, Universität Kassel Dipl.-Ing. Fotios Raptis !, Universität Kassel Dipl.-Ing. Martin Rothert, ISET Dr.-Ing. Christoph Siedle, ISET Dipl.-Ing. Philipp Strauß, ISET Dr.-Ing. Bernd Willer, ISET Dr.-Ing. Peter Zacharias, ISET Bearbeitende Institution: Institut für Solare Energieversorgungstechnik e. V. Verein an der Universität Kassel Bereich Anlagentechnik und Leistungselektronik Königstor 59 D-34119 Kassel Tel.: +49-(0)561-7294-0, Fax: +49-(0)561-7294-400 Kassel, März 2002

Das diesem Bericht zugrundeliegende Vorhaben wurde mit Mitteln des Bundesministers für Wirtschaft und Technologie unter dem Förderkennzeichen 0329833 gefördert. Die Verant-wortung für den Inhalt dieser Veröffentlichung liegt beim Autor.

Vorwort
Das Projekt Modulare PV- und Hybridsystemtechnik diente der Fortentwicklung der Modu-laren Systemtechnik, welche die systemtechnische Voraussetzung für die effiziente Integra-tion erneuerbarer Energien in Stromversorgungsstrukturen schaffen soll. Erste Ansätze wurden bereits in vorausgehenden Projekten Modulare Photovoltaik-Systemtechnik1 und MEGA-Hybrid2 erarbeitet. Diese Grundlagen wurden hier und auch in parallelen euro-päischen Verbundprojekten weiterentwickelt.
Im Vorgängerprojekt lagen die Schwerpunkte auf Untersuchungen zur Integration von Photovoltaikgeneratoren in das Verbundnetz. In den folgenden Kapiteln werden die Grund-lagenuntersuchungen zum Aufbau modularer, hybrider Inselnetze dargestellt. Diese Untersu-chungen lieferten die Basis für anwendungsorientierte europäische Projekte wie z. B. PV-Mode3 und MORE4 in welchen entsprechende Feldtestanlagen aufgebaut wurden.
Das Anschlussprojekt Vernetzung Modularer Systeme5 wird wichtige Ergebnisse dieses Projektes für die verteilte Stromerzeugung mit Erneuerbaren Energien nutzbar machen. Dieser Aspekt gewinnt durch die Liberalisierung des Strommarktes und das Erneuerbare-Energien-Gesetz zunehmend an Bedeutung. Neue technische Lösungen, die in diesen Projekten erarbei-tet werden, können dann helfen hohe Anteile Erneuerbarer Energien in Verbundnetze zu in-tegrieren.
Die Entwicklung der modularen Systemtechnik für erneuerbare Energien wäre nicht initiiert worden ohne die Visionen von Prof. Kleinkauf, dem Gründer des ISET. Die Förderung des ersten Projektes durch das Bundesministerium für Bildung und Forschung Bundesministerium (BMBF) und die Unterstützung diese Projektes durch das Bundesministerium für Wirtschaft und Technologie (BMWi) waren Voraussetzung für die kontinuierliche Fortentwicklung. Für das Vertrauen und die konstruktive Zusammenarbeit mit dem Projektträger Jülich möchten wir uns an dieser Stelle bedanken.
Auch die gute Zusammenarbeit mit den Forschungsgruppen des Instituts für Elektrische Energietechnik der Universität Kassel und den Mitarbeitern des ISET waren notwendig um die Ergebnisse zu erzielen. Die Förderung durch die Programme der EU und die enge Koope-ration mit der einschlägigen Industrie in den Projekten Modularer Batteriestromrichter6 und Multi-String-Wechselrichter7 waren die Voraussetzung für die erfolgreiche Umsetzung der Ergebnisse in Serienprodukte.
Kassel im März 2002 Philipp Strauß, ISET
1 Entwicklung von PV- Versorgungsanlagen mit modularer Systemtechnik, Nr: 0329549A 2 MEGA-HYBRID: Modular Expandable Generally Adaptable Hybrid Systems, JOU2-CT94-402 3 PV-Mode: Modular Stand-Alone PV-Plants for Decentralised Electrification, JOR3-CT98-0244 4 MORE: Components for Modular Renewable Energy Hybrid Systems, JOR3-CT98-0215 5 Vernetzung Modularer Systeme, Nr: 0329900B 6 Batteriestromrichter für die Modulare Systemtechnik in PV-Anlagen, Nr: 0329746 7 Multi-String-Wechselrichter, Nr: 0329864B


Abschlussbericht Modulare PV- und Hybridsystemtechnik 1
Inhaltsverzeichnis
0 Einleitung ..........................................................................................................................................................7 1 Kostenstrukturen in modularen PV- und Hybridversorgungsanlagen .............................................................11
1.1 Anwendungsfelder und Entwicklungstrends bei Hybridanlagen (P. Zacharias) ..................................11 1.1.1 Strategische Aspekte bei Hybridsystemen.............................................................................11 1.1.2 Energiewandler für Solar-, Wind- und Wasserenergie ..........................................................13 1.1.3 Speicher in Hybridsystemen..................................................................................................17 1.1.4 Backup-Komponenten für Hybridsysteme ............................................................................18 1.1.5 Energiekosten in Hybridsystemen .........................................................................................20 1.1.6 Zusammenfassung .................................................................................................................24 1.1.7 Literatur .................................................................................................................................24
1.2 Ermittlungen der elektrischen Anforderungen (A. Engler) ..................................................................25 1.2.1 Normen und Richtlinien ........................................................................................................25 1.2.2 Bestimmung der elektrischen Qualität...................................................................................25
1.3 Untersuchungen zum Modularitätsgrad in Verbindung mit dem resultierenden Kostengefüge (P. Zacharias) .......................................................................................................................................29 1.3.1 Leistungssegmentierung ........................................................................................................29 1.3.2 Energiewirtschaftliche Rahmenbedingungen ........................................................................30 1.3.3 Literatur .................................................................................................................................35
1.4 Vergleich verschiedener Varianten der PV-Energieaufbereitung im Verbund mit anderen Energiequellen (M. Rothert) ................................................................................................................37 1.4.1 Vergleich der DC- und AC-Kopplung von PV-Hybridsystemen ..........................................39 1.4.2 Zusammenfassung .................................................................................................................43 1.4.3 Literatur .................................................................................................................................44
1.5 Definition von Subsystemen und Subkomponenten (F. Kininger).......................................................47 1.6 Ermittlung der Kostenstrukturen und Abschätzung des Degressionspotentials (F. Kininger) .............49
1.6.1 PV-Modulkosten....................................................................................................................50 1.6.2 Inverterkosten ........................................................................................................................50 1.6.3 Batterie-Speicherkosten.........................................................................................................51 1.6.4 Literatur .................................................................................................................................52
1.7 Ermittlung einer effizienten Stufung der Leistungsklassen der Systemkomponenten (F. Kininger, B. Willer)........................................................................................................................53
1.8 Ermittlung der allgemeinen Investitions- und Betriebskostenstrukturen für modulare PV- und Hybridsysteme (F. Kininger)................................................................................................................55 1.8.1 Ermittlung der Annuität.........................................................................................................55 1.8.2 Die Energiegestehungs- und Energiespeicherkosten .............................................................58
1.8.2.1 PV-Generator.......................................................................................................58 1.8.2.2 Motor-Generator..................................................................................................59 1.8.2.3 Batterie-Speicher .................................................................................................61
1.8.3 Ermittlung reeller Investitions- und Betriebskosten anhand einer Beispielhaften Auslegung..............................................................................................................................66
1.8.4 Literatur .................................................................................................................................68

2 Modulare PV- und Hybridsystemtechnik Abschlussbericht
1.9 Marktanalyse und -prognose für Hybridsysteme (F. Kininger) ...........................................................69 1.9.1 Autarke Energieversorgungssysteme im Überblick ..............................................................69 1.9.2 Photovoltaik integrierende autarke Energieversorgungssysteme ..........................................70 1.9.3 Marktvolumen nach Anwendung ..........................................................................................70
1.9.3.1 Service Anwendungen.........................................................................................71 1.9.3.2 Ländliche Hauselektrifizierung ...........................................................................71 1.9.3.3 Große Inselsysteme .............................................................................................72
1.9.4 Marktvolumen nach Regionen ..............................................................................................72 1.9.4.1 Entwicklungsländer und Länder ohne flächendeckende öffentliche
Stromversorgung .................................................................................................72 1.9.4.2 Europa und Länder mit flächendeckender Stromversorgung ..............................74
1.9.5 Literatur.................................................................................................................................76 1.10 Definition der ökonomischen Leistungsbereiche für verschiedenartige Hybridsysteme unter
Einbindung der Photovoltaik (F. Kininger) .........................................................................................77 2 Entwicklung von Komponenten für modular erweiterbare PV- und Hybridsysteme zur
Energieversorgung aus Photovoltaik und anderen erneuerbaren Energiequellen............................................79 2.1 Stromrichter für den Aufbau erweiterbarer Energieversorgungsnetze.................................................79
2.1.1 Modulare inselnetzfähige und vernetzbare PV-Wechselrichter (A. Jansen) .........................79 2.1.1.1 Anforderung ........................................................................................................79 2.1.1.2 Topologien galvanisch nicht trennender DC/DC-Wandler .................................81 2.1.1.3 Topologien galvanisch trennender DC/DC-Wandler ..........................................81 2.1.1.4 Der Sperrwandler ................................................................................................83 2.1.1.5 Strombegrenzung ................................................................................................84 2.1.1.6 Einfluss verschiedener Wickelaufbauten auf den Transformator........................86 2.1.1.7 Aufbau.................................................................................................................94 2.1.1.8 Zusammenfassung...............................................................................................98
2.1.2 Verbesserung der Power Quality" durch den Einsatz von PV-Wechselrichtern als aktive Oberwellenfilter und Blindleistungskompensatoren (J. Jahn) ...................................99 2.1.2.1 Aktive Filterung ..................................................................................................99 2.1.2.2 Aktive Leistungsfaktorkorrektur .......................................................................104 2.1.2.3 Zusammenfassung.............................................................................................105 2.1.2.4 Literatur.............................................................................................................106
2.2 Modulare Speichereinheiten ..............................................................................................................107 2.2.1 Grundlegende Untersuchungen zum Aufbau modularer Energiespeicher
(M. Rothert, B. Willer)........................................................................................................107 2.2.1.1 Grenzwertüberwachung.....................................................................................109 2.2.1.2 Batterieladung ...................................................................................................109 2.2.1.3 Pumpenansteuerung ..........................................................................................110 2.2.1.4 Batteriezustandserkennung................................................................................110
2.2.2 Aufbau modularer Speichereinheiten / Batteriestromrichter (A. Engler) ............................111 2.2.2.1 Kurzschlussverhalten ........................................................................................111 2.2.2.2 Dreiphasiger Betrieb .........................................................................................113 2.2.2.3 Messwerterfassung ............................................................................................115
2.2.3 Entwicklung von Betriebsführungskomponenten für modulare Energiespeicher (M. Rothert, B. Willer)........................................................................................................117 2.2.3.1 Aufbau der Entladeschlussüberwachung...........................................................118 2.2.3.2 Aufbau der Zwangsbelüftung............................................................................118 2.2.3.3 Aufbau der Laderegelung..................................................................................119

Abschlussbericht Modulare PV- und Hybridsystemtechnik 3
2.2.4 Weiterentwicklung von Betriebsführungs- und Systemenergiemanagementverfahren BAZ (M. Rothert, B. Willer) ...............................................................................................121
2.2.5 Test von Komponenten, modularen Einheiten und Verfahren (M. Rothert) ......................127 2.2.5.1 Ladezustandsbestimmung bei Bleibatterien ......................................................127 2.2.5.2 Das Verfahren zur Ladezustandsbestimmung des ISET....................................137
2.2.6 Literatur ...............................................................................................................................141 2.3 Systembausteine für die Energieversorgung aus PV- und regenerativen Energiequellen ..................143
2.3.1 Untersuchung der Besonderheiten von Versorgungssystemen, die auf regenerativen Energiequellen beruhen und der daraus resultierenden erforderlichen Spezialkomponenten (T. Loh) .............................................................................................143 2.3.1.1 Besonderheiten regenerativer Energieversorgungssysteme...............................143 2.3.1.2 Erforderliche Spezialkomponenten ...................................................................145 2.3.1.3 Anforderungen an die Komponenten.................................................................146 2.3.1.4 Aufgaben für die Zukunft ..................................................................................148 2.3.1.5 Literatur .............................................................................................................149
2.3.2 Netzausfallerkennungsmethoden und bausteine für netzgekoppelte Systeme (H. Faßhauer).......................................................................................................................151 2.3.2.1 Inselnetzbildung bei netzparallelen Wechselrichtern ........................................151 2.3.2.2 Übersicht der bekannten Netzausfallerkennungsmethoden ...............................153 2.3.2.3 Verfahren zur Netzimpedanzmessung, Stand der Technik................................154 2.3.2.4 Untersuchung zur Netzimpedanz.......................................................................155 2.3.2.5 Zusammenfassung .............................................................................................159 2.3.2.6 Literatur .............................................................................................................159
2.3.3 Flexibler Betriebsführungsbaustein (Ch. Siedle).................................................................161 3 Gestaltung und Steuerung modularer regenerativer Energieversorgungssysteme.........................................163
3.1 Grundlagen der Modellbildung in Stromrichternetzen (A. Engler)....................................................163 3.1.1 DC/DC-Wandler (CUK); getaktete Systeme.......................................................................163
3.1.1.1 Der Cuk-Wandler ..............................................................................................163 3.1.1.2 Der gesteuerte Betrieb .......................................................................................164 3.1.1.3 State-space Averaging .......................................................................................167 3.1.1.4 Verwendung von Ersatzstrom- und Spannungsquellen zur Beschreibung ........169 3.1.1.5 Simulation des Cuk-Wandlers mit C .................................................................171 3.1.1.6 Current-mode Regelung ....................................................................................173 3.1.1.7 Zustandsregelung...............................................................................................174 3.1.1.8 Zusammenfassung .............................................................................................178 3.1.1.9 Literatur .............................................................................................................178
3.1.2 Annäherung von Stromrichtern durch Spannungsquellen ...................................................179 3.2 Dezentrale Regelungskonzepte für die Kurzzeitregelung von regenerativ gespeisten
Versorgungsnetzen (A. Engler)..........................................................................................................181 3.2.1 Untersuchungen zur Frequenz- und Spannungshaltung ......................................................181
3.2.1.1 Wirkleistungsregelung.......................................................................................181 3.2.1.2 Blindleistungsregelung ......................................................................................185
3.2.2 Untersuchungen zum Parallelbetrieb von Stromrichtern .....................................................186 3.2.2.1 Kenngrößen in einphasigen Systemen...............................................................186 3.2.2.2 Netzstützende Stromquelle ................................................................................191 3.2.2.3 Parallelbetrieb von Spannungsquellen...............................................................194 3.2.2.4 Literatur .............................................................................................................204

4 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3.2.3 Einbindung weiterer Stromerzeugungsaggregate in modulare PV-Anlagen (B. Burger, A. Engler, P. Funtan, P. Strauß) ..........................................................................................205 3.2.3.1 Generelle Aspekte .............................................................................................205 3.2.3.2 Untersuchung zur Einbindung asynchroner Stromerzeuger ..............................205 3.2.3.3 Identifikation und Modellierung eines einphasigen asynchronen Generators ...211 3.2.3.4 Modellierung .....................................................................................................215 3.2.3.5 Literatur.............................................................................................................220
3.3 Modularisierung von Betriebsführungssoftware für lokal begrenzte Energieversorgungssysteme ...223 3.3.1 Modelle von Betriebsführungssoftware für lokal begrenzte Energieversorgungssysteme
(F. Raptis !)........................................................................................................................223 3.3.1.1 Einleitung - Einteilung der Aufgaben von Betriebsführungssystemen..............223 3.3.1.2 Modell zur Steuerung der Leistungsflüsse ........................................................225 3.3.1.3 Model zur Frequenz-Wirkleistungs-Regelung ..................................................231 3.3.1.4 Literatur.............................................................................................................232
3.3.2 Aufgaben der Betriebsoptimierung und Stand der Technik (M. Rothert) ...........................233 3.3.2.1 Einteilung nach Systemklassen .........................................................................234 3.3.2.2 Stand der Technik für die Betriebsoptimierung ................................................234 3.3.2.3 Literatur.............................................................................................................236
3.3.3 Fortschrittliche Betriebsführung mittels Fuzzy-Logic (M. Ibrahim)...................................237 3.3.3.1 Überblick...........................................................................................................237 3.3.3.2 Untersuchung von Betriebsführungsstrategien..................................................237 3.3.3.3 Fortschrittliche Betriebsführung durch die Modellierung der
Batteriealterung mittels Fuzzy-Logik................................................................240 3.3.3.4 Literatur.............................................................................................................241
3.3.4 Möglichkeiten und Ansätze der Modularisierung von Betriebsführungssoftware (M. Rothert).........................................................................................................................242
3.3.5 Aufgaben der Betriebsoptimierung und Stand der Technik (M. Rothert) ...........................243 3.3.5.1 Einteilung nach Systemklassen .........................................................................244
3.3.6 Definition der Kostenstruktur (F. Kininger)........................................................................245 3.3.7 Aufstellung und Wertung von Methoden zur Systemauslegung (F. Kininger) ...................248 3.3.8 Entwicklung eines vereinfachten Verfahrens zur Systemauslegung (F. Kininger) .............249
3.3.8.1 Die Hauptcharakteristiken eines Expertensystems............................................250 3.3.8.2 Die Struktur eines Expertensystems..................................................................250 3.3.8.3 Die Wissensdatenbank ......................................................................................251 3.3.8.4 Die Inferenz-Technik ........................................................................................252 3.3.8.5 Problemdefinition des Expertensystems............................................................253 3.3.8.6 Definition der Ziele ...........................................................................................254 3.3.8.7 Entwicklung der Zielregeln: Wie Experten das Design von PV-Hybrid-
System abschätzen.............................................................................................254 3.3.9 Beispielhafte Systemauslegung für typische Anwendungsfelder (F. Kininger) ..................257 3.3.10 Literatur 258
4 Schnittstellen zwischen Systemkomponenten und Teilsystemen..................................................................259 4.1 Klassifizierung der Leistungsbereiche und Kopplungsbedingungen für Teilsysteme (A. Engler) ....259
4.1.1 Leistungsbereiche................................................................................................................259 4.1.2 Kopplungsbedingungen.......................................................................................................259

Abschlussbericht Modulare PV- und Hybridsystemtechnik 5
4.2 Definition und Standardisierung des Regelungs- und Klemmenverhaltens der Versorgungskomponenten (A. Engler)...............................................................................................260 4.2.1 Regelungsverhalten .............................................................................................................260 4.2.2 Klemmverhalten ..................................................................................................................260 4.2.3 Standardisierung ..................................................................................................................260
4.3 Informationsbereitstellung und -übertragung für die Steuerung von modular strukturierten, lokal begrenzten Energieversorgungsnetzen (O. Haas)...............................................................................261 4.3.1 Kommunikation in der Energieversorgung..........................................................................261 4.3.2 Kenngrößen für die Informationsübertragung .....................................................................262
4.3.2.1 Funktionsklasse Betriebsführung.......................................................................263 4.3.2.2 Funktionsklasse Regelung .................................................................................263 4.3.2.3 Funktionsklasse Monitoring / Diagnose ............................................................263 4.3.2.4 Funktionsklasse Identifizierung.........................................................................264
4.3.3 Zustandsmodell zur Steuerung und Überwachung der Betriebszustände von Versorgungskomponenten ...................................................................................................264 4.3.3.1 Betriebszustände und Befehle der Komponenten ..............................................265 4.3.3.2 Betriebszustände und Befehle aus Sicht der übergeordneten Betriebsführung
/ Visualisierung..................................................................................................267 4.3.4 Literatur ...............................................................................................................................268
4.4 Standardisierung und Normung der Schnittstellen für Energie- und Informationsübertragung (O. Haas, L. Löwer) ...........................................................................................................................269 4.4.1 Auswahl des Datenbusses....................................................................................................270 4.4.2 Testumgebung .....................................................................................................................270 4.4.3 Erweiterung der Testumgebung...........................................................................................272 4.4.4 PV-Stromrichter ..................................................................................................................272
4.4.4.1 Labor-Maschinensatz.........................................................................................274 4.4.5 Voruntersuchung zur Standardisierung ...............................................................................274
4.4.5.1 Übernahme von Ergebnissen früherer Arbeiten ................................................274 4.4.5.2 Test der vorgeschlagenen EIB-Schnittstellen-Funktionen am Beispiel des
Sunny Boy SWR 700.........................................................................................275 4.4.6 Standardisierungsvorschlag für die PV-Stromrichter-Schnittstelle .....................................277
4.4.6.1 Zweck und Ziel (Aims and Objectives)............................................................277 4.4.6.2 Funktionsbeschreibung (Functional Specification) ...........................................277 4.4.6.3 Beschreibung des Funktionsblocks (Functional Block Description) .................284
4.4.7 Literatur ...............................................................................................................................284 4.5 Sicherheit- und Schutztechnik in erweiterbaren dezentralen Energieversorgungssystemen
(Ch. Siedle) ........................................................................................................................................285 4.5.1 Absicherung.........................................................................................................................285 4.5.2 Schutz vor lokaler Inselnetzbildung in größeren Versorgungssystemen .............................286
4.5.2.1 Passive Methoden..............................................................................................287 4.5.2.2 Aktive Methoden ...............................................................................................287
4.5.3 Resultierende Anforderungen an die Netztopologie............................................................288 4.5.3.1 Einspeisepunkte und Absicherung.....................................................................288 4.5.3.2 Transformatoren ................................................................................................288 4.5.3.3 Spannungsregelung............................................................................................288 4.5.3.4 Maßnahmen gegen lokale Inselnetzbildung ......................................................291

6 Modulare PV- und Hybridsystemtechnik Abschlussbericht
5 Probleme der Vernetzung von Versorgungskomponenten und lokalen Versorgungssystemen (A. Engler) .293 5.1 Stabilisierung der Netzgrößen in modularen Versorgungssystemen..................................................293 5.2 Bedingungen für die Kopplung von Komponenten in modularen Systemen.....................................295
5.2.1 Bereitstellung von Energie und Inselnetzbildung................................................................295 5.2.2 Komponenten modularer Systeme ......................................................................................295
5.2.2.1 Klassifizierung der Komponenten.....................................................................295 5.2.2.2 Systemauslegung...............................................................................................297
5.2.3 Möglichkeiten des Parallelbetriebs von Stromrichtern........................................................298 5.2.3.1 Parallelbetrieb einer Spannungs- mit zusätzlichen Stromquellen
(Master/Slave-Verfahren)..................................................................................298 5.2.3.2 Parallelbetrieb von Spannungsquellen ..............................................................299 5.2.3.3 Synchronisierte Spannungsquellen....................................................................302 5.2.3.4 Vergleich und Einsatz der Verfahren ................................................................302
5.3 Forderungen an vernetzbare Komponenten .......................................................................................305 5.3.1 Lasten und rotierende Arbeitsmaschinen ............................................................................305 5.3.2 Rotierende elektromechanische Generatoren ......................................................................305 5.3.3 Stromrichter und Stromrichter-Cluster in Netzen ...............................................................307
6 Labor- und Feldtests an Pilotanlagen ............................................................................................................309 6.1 Ergebnisse und Untersuchungen an der Pilotanlage Starkenburgerhütte...........................................309
6.1.1 Saisonberichte Starkenburgerhütte (M. Landau, M. Rothert) .............................................309 6.1.1.1 Einleitung ..........................................................................................................310 6.1.1.2 Messergebnisse..................................................................................................310
6.1.2 Batteriespeicher...................................................................................................................315 6.1.3 Störgeschehen .....................................................................................................................316
6.1.3.1 Anlage ...............................................................................................................316 6.1.3.2 Messtechnik.......................................................................................................318
6.1.4 Anlagenmodifikationen.......................................................................................................318 6.1.4.1 BaKos................................................................................................................318
6.2 Aufbau eines Testzentrums für Modulare Versorgungssysteme - DeMoTec (P. Strauß) ..................319 6.2.1 Erweiterung der Demonstrations- und Experimentierumgebung ........................................319
6.2.1.1 Motivation und Aufgaben des Design-Zentrums für Modulare Versorgungs technik -DeMoTec.............................................................................................319
6.2.1.2 Infrastruktur.......................................................................................................319 6.2.1.3 Experimentieren im DeMoTec..........................................................................321 6.2.1.4 Projektbeispiel: Entwicklung- und Test eines Batteriestromrichters.................321 6.2.1.5 Projektbeispiel: PV- und Hybridsysteme für die ländliche Elektrifizierung .....322 6.2.1.6 Literatur.............................................................................................................323
6.2.2 Laboruntersuchungen an der MEGA-Hybrid-Anlage (A. Engler, R. Geipel) .....................324 6.2.2.1 Aufbau der Batteriestromrichtereinheit .............................................................324 6.2.2.2 Inselnetzbildung mit Umrichter.........................................................................326
7 Zusammenfassung (M. Rothert, P. Zacharias) ..............................................................................................329 8 Veröffentlichungen und Patente....................................................................................................................333
8.1 Vorträge und Veröffentlichungen mit Bezug zum Projekt ................................................................333 8.2 Ausstellungsbeiträge ..........................................................................................................................336 8.3 Messestände .......................................................................................................................................336 8.4 Patente................................................................................................................................................336

Abschlussbericht Modulare PV- und Hybridsystemtechnik 7
0 Einleitung
Vor über 10 Jahren entstand die Idee, ein einfaches Baukastensystem zur verstärkten Nutzung der Photovoltaik zu entwickeln8. Dieses sollte sowohl in netzgekoppelten wie in autarken Stromversorgungssystemen einsatzfähig sein. Die Vision, die damals wie heute dahintersteht, ist ein breiter Einsatz dezentraler, photovoltaischer Stromversorgungen sowohl in großen elektrischen Verbundnetzen, als auch zur dezentralen Elektrifizierung. Um dies zu erreichen, muss diese Technik kostengünstig, umweltfreundlich aber auch zukunftssicher sein.
Die Situation hat sich in den letzten 10 Jahren folgendermaßen entwickelt: Der weltweite Umsatz von Solarzellen hat sich etwa verfünffacht. Die Kosten kleiner netzgekoppelter Anla-gen habe sich fast halbiert. Hierzu trugen die Neuentwicklungen in der Systemtechnik stark bei. Die Idee des Baukastensystems für PV-Wechselrichter zum Aufbau netzgekoppelter PV-Anlagen hat sich nach der Markteinführung erster Geräte, sogenannter Stringwechsel-richter, im Jahr 1995 bei kleinen bis mittleren (1-30 kW) Anlagen und den gebäudeintegrier-ten Anlagen durchgesetzt. Sogar bei Großanlagen bis in den Megawattbereich werden Stringwechselrichter eingesetzt. Dabei konnten die Geräte in den letzten 6 Jahren technisch stetig verbessert und trotzdem kostengünstiger angeboten werden.
Bei den autarken Energiesystemen gab es in den letzten 10 Jahren ebenfalls einen großen Aufschwung. Die sogenannten Solar Home Systems (SHS) werden heute in Stückzahlen von weit über 100.000 pro Jahr gebaut und verkauft. Sowohl im Freizeitbereich, zur Elektrifi-zierung abgelegener Häuser und Hütten, aber auch verstärkt in Entwicklungsländern werden diese Systeme eingesetzt und haben sich bewährt. Bei den autarken Energiesystemen im Kilowatt-Bereich und größer hat sich bis heute keine einheitliche Systemtechnik entwickelt.
Die Umsetzung der Modularen Systemtechnik erfordert geeignete Komponenten sowie den Nachweis der technischen Machbarkeit. Um die Machbarkeit zu demonstrieren wurde 1995 eine erste Labor- und Demonstrationsanlage vom ISET aufgebaut. 1997 ging dann die ersten Feldtestanlage auf der Starkenburger Hütte in Betrieb. Bis heute versorgt diese Anlage die Alpenhütte sehr zuverlässig mit Strom und Wärme. Das dort eingesetzte Konzept wurde von der Industrie und Ingenieurbüros übernommen und weiterentwickelt; dies zeigt die Zukunfts-fähigkeit dieses Konzeptes.
Technische Schwierigkeiten und Unzulänglichkeiten bei den ersten beiden Test- und De-monstrationsanlagen sind heute durch die zu diesem Vorhaben parallel laufende Neuentwick-lung des modularen Batteriestromrichters Sunny Island weitgehend gelöst. Erste Feldtest-anlagen sind in diesem Jahr erfolgreich in Betrieb genommen worden. Seit Mitte 2001 ist die-ses Gerät als Seriengerät auf dem Markt verfügbar.
8 Kleinkauf, W.; Photovoltaic Power Conditioning / Inverter Technology; 10th European Photovoltaic Solar Energy Conference; Lissabon 1991

8 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Viele Entwicklungen, die während dieses Vorhabens Modulare PV- und Hybridsystemtech-nik entwickelt wurden, werden bereits oder sollen in Zukunft von der Firma SMA Regel-systeme GmbH in das Seriengerät Sunny Island übernommen werden. Auch mit anderen Firmen besteht ein enger Kontakt und Austausch.
Hier hat für zukünftige Systeme das neu entwickelte Batteriemanagementsystem sowie eine darauf aufbauende erste Betriebsführung für Hybridanlagen eine herausragende Bedeutung. Neben einer deutlich längeren Batterielebensdauer ist auch eine bessere Systemeffizienz zu erwarten. Durch die Integration der hierfür notwendigen Algorithmen in den Batteriestrom-richter konnten die Kosten für ansonsten zusätzlich benötigte Überwachungseinrichtungen und deren Installation gespart werden. Gleichzeitig dürfte die Fehleranfälligkeit aufgrund der einfachen Installation und der aufeinander abgestimmten Komponenten signifikant sinken.
Durch die Entwicklung eines neuen Verfahrens zum kommunikationslosen Parallelbetrieb von netzbildenden Stromrichtern in den letzten Jahren sind heute die Grundlagen für eine elektrische Kopplung nach einem einfachen Plug and Play-Verfahren erarbeitet. Mit diesem Verfahren wurden im Labor bereits 5 netzbildende Stromrichter ohne eine Kommunikations-leitung parallelbetrieben und auf verschiedenste Betriebszustände (Lastsprünge, Kurzschluss, Leerlauf, usw.) erfolgreich getestet. Auch ein Parallelbetrieb zum Verbundnetz oder mit Verbrennungsaggregaten war problemlos möglich. Die Vorteile, die sich in der Systemtech-nik sowohl für netzgekoppelte PV-Anlagen wie auch für autarke Hybridsysteme ergeben, sind sehr vielfältig. Erst durch dieses Verfahren werden die Systeme wirklich beliebig erweiterbar und die Installation deutlich vereinfacht. Die Kosten können durch das Einsparen einer echt-zeitfähigen Kommunikation, die einfachere Installation, eine geringere Fehleranfälligkeit, sowie einer höheren Systemredundanz gesenkt werden. Diese Vorteile werden auch zu einer angepassteren und damit kostengünstigeren Anlagenauslegung führen. Die Übernahme dieses Verfahrens in erste Seriengeräte ist für 2002 geplant. Durch die Netzkompatibilität dieses Verfahrens sind viele Anwendungen im Verbundnetz denkbar. Viele kleine dezentrale Ener-gieerzeuger, die bislang als reine Stromquellen ins Verbundnetz einspeisten, könnten mit die-sem neuen Regelungsverfahren in Zukunft sehr einfach zu sogenannten virtuellen Kraftwer-ken zusammengeschaltet werden und sich dann auch aktiv an der Netzregelung beteiligen.
Auch wenn durch dieses schnelle kommunikationslose Regelungsverfahren eine Echtzeit-kommunikation zwischen den Stromrichtern nicht mehr notwendig ist, so muss für eine Betriebsoptimierung doch der aktuelle Betriebszustand aller im System vorhandenen Kompo-nenten der Betriebsführung bekannt sein. Hierzu bedarf es einfacher, kostengünstiger und herstellerübergreifender Kommunikationssysteme. Bislang hat sich aber kein einheitlicher Standard durchsetzen können. Auch wenn fast alle, in Hybridsystemen eingesetzten, Kom-ponenten über Kommunikationsschnittstellen verfügen, so ist doch aufgrund der sehr unter-schiedlichen Schnittstellen und Protokolle meistens eine aufwendige Anpassung notwendig. Ein Grossteil der Zeit für die Anlagenplanung und Inbetriebnahme ist allein für den Aufbau der Kommunikation notwendig, welches die Kosten dieser Systeme unnötig erhöht. Im Jahr 2001 wurde aus diesem Grunde eine universelle Koppelkomponente für den europäischen Installationsbus (EIB) entwickelt, die es in Zukunft ermöglicht, alle Geräte mit einer seriellen Schnittstelle an den EIB anzuschließen. Auf der EIB-Seite dieser Koppelkomponente wird zur Zeit an standardisierten EIB-konformen Kommunikationsprotokollen gearbeitet.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 9
Auch der Test von Komponenten, die Betreuung und Auswertung der Labor- und Feldtest-anlagen, die Entwicklung von neuen Ansätzen zur Betriebsoptimierung, Untersuchungen zu den Kostenstrukturen in PV-Hybridanlagen und viele weitere Detailarbeiten wurden im Jahr 2001 erfolgreich fortgeführt. Aus den Erfahrungen mit den Labor- und Feldanlagen entstehen dabei immer wieder neue Ideen zur Verbesserung der Systeme.
Zusammenfassend lässt sich sagen, dass sich die Idee der Modularen Systemtechnik langsam auch im Bereich der Hybridsysteme durchsetzt. Seit dem geeignete Geräte auf dem Markt verfügbar sind, erfreuen sie sich auch einer regen Nachfrage. Trotz allem bisher Erreichten gibt es immer noch ein sehr großes Optimierungspotential, welches auch in Zukunft für eine deutliche Kostensenkung bei PV-Hybridsystemen sorgen dürfte. Durch die Idee einer netz-kompatiblen elektrischen Energieversorgung mit kleinen Hybridsystemen, sind prinzipiell fast alle Entwicklungen für netzgekoppelte Anlagen und die Vernetzung von verschiedenen Insel-systemen geeignet. Diese Synergieeffekte gilt es in der Zukunft noch stärker auszunutzen. Durch die in den letzten 10 Jahren sehr schnell vorangetriebene Liberalisierung der Strom-märkte werden viele der hier entwickelten Ideen auch eine zunehmende Bedeutung im Bereich der dezentralen Stromerzeugung, z. B. mittels Brennstoffzellen und im Bereich der virtuelle Kraftwerke, erlangen.

10 Modulare PV- und Hybridsystemtechnik Abschlussbericht

Abschlussbericht Modulare PV- und Hybridsystemtechnik 11
1 Kostenstrukturen in modularen PV- und Hybridversorgungsanlagen
1.1 Anwendungsfelder und Entwicklungstrends bei Hybridanlagen (P. Zacharias)
1.1.1 Strategische Aspekte bei Hybridsystemen
Hybridsysteme - elektrische Energieversorgungssysteme in Inselanwendungen - die aus ver-schiedenen (regenerativen) Energiequellen gespeist werden, haben ihre Hauptanwendung in folgenden Bereichen
• zuverlässige Versorgung einzelner Verbraucher im Kleinleistungsbereich von bis zu wenigen 100 W (z. B. Telekom-Anwendungen, kleine Messstationen usw.),
• Elektrifizierung und Wirtschaftsentwicklung in netzfernen Gebieten, auf niedrigem Niveau beginnend und
• Versorgung netzferner Einzelobjekte (Berghütten, Wetterstationen, Yachten usw.).
Aufgrund der hohen spezifischen Preise der Komponenten von Hybridsystemen fanden sich in der Vergangenheit zunächst vor allem Anwendungen aus dem letzten Bereich. Hier waren hohe Ansprüche an eine sichere Versorgung im mittleren Leistungsbereich bei gleichzeitig zahlungskräftiger Nachfrage vorhanden, die die Entwicklung und den Einsatz von Hybrid-systemen rechtfertigten. Jedoch führte dies wegen der relativ geringen Anzahl gleichartiger Einsatzfälle bei gleichzeitig sehr unterschiedlichen Randbedingungen zu zugeschnittenen Speziallösungen, die wenig Potential für größere Serien und damit Kostensenkung hatten.
In dieser Hinsicht unterscheiden sich die ersten beiden Bereiche stark vom letzten. Hier ent-wickelt sich ein starkes Bedürfnis nach elektrischen Versorgungssystemen, das zunehmend mit zahlungskräftiger Nachfrage einher geht. Wegen der - sachlich begründeten - unterschied-lichen systemtechnischen Ansätze zur Realisierung in diesen Anwendungsbereichen ist in der o. g. Aufzählung eine Trennung vorgenommen worden.
Elektrische Versorgungen im genannten Kleinleistungsbereich (Telekom, Umweltmessstatio-nen usw.) sind zwar ebenfalls sehr spezifisch auf ihren Einsatz und die mögliche Umgebung optimiert. Jedoch ist dies verbunden mit einer relativ großen Zahl gleichartiger Anwendun-gen, so dass das jeweilige Markvolumen hier diese speziellen Entwicklungen stimuliert. Der Markt für solche Systeme entwickelt sich zwangsläufig mit der zunehmenden weltweiten Vernetzung der Kommunikationswege und der zusätzlichen Anwendungen und hat bereits seit längerem die Bezeichnung Nischenmarkt nicht mehr verdient. Wie oben erläutert, ist für viele Anwendungsgruppen eine spezifische Anpassung und Optimierung technisch als auch wirtschaftlich sinnvoll. In dem Maße, wie sich hier Teillösungen übertragen lassen, wer-den sich auch bei kleineren Stückzahlen hier die spezifischen Kosten weiter senken lassen.
Hybridanlagen für eine Elektrifizierung und Wirtschaftsentwicklung netzferner Gebiete kor-respondieren mit weltweit vorhanden Bedürfnissen, die mittlerweile auch zunehmend in einen finanziell gedeckten Bedarf münden. Eine elektrische Versorgung im Kilowattbereich durch ein Hybridsystem erfordert von vornherein bereits eine relative große Investition pro Einheit.

12 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Bei einem niedrigen Pro-Kopf-Verbrauch an Energie bedingt dies eine langfristige Nutzung dieser Anlage. Essentiell ist die Sicherung der Werterhaltung der Anlage durch einen geeig-neten Mechanismus. Dies muss sowohl personell als auch materiell abgesichert werden, da die Betreuung der Anlage und ihre Wartung die Möglichkeiten einzelner (wirtschaftlich schwacher) Personen übersteigt. Eine Nutzung für reine Konsumzwecke wird somit mit zu-nehmender Anlagengröße schwieriger. Auch wenn die Anlage von mehreren Personen genutzt wird, wird es einen Besitzer/Betreiber der Anlage geben müssen, der aus einem ge-eigneten Unternehmen die erforderlichen Rücklagen für die Werterhaltung bilden kann. Als Unternehmenszweck kommen dabei die produktive Verwendung der Energie und/oder ihr Verkauf in Frage.
Im Unterschied zu der zuvor dargestellten Gruppe, die für eine a priori bekannte Lasten-gruppe ausgelegt ist, hat man es im hier betrachteten Anwendungsfall mit Anforderungen seitens der Last zu tun, die sich einerseits qualitativ ständig ändern können, aber auch quan-titativ ständig wachsen. An die Komponenten dieser Systeme werden deswegen vergleichs-weise sehr hohe Ansprüche hinsichtlich ihrer Flexibilität gestellt. Aber auch ihre Erweiter-barkeit bzw. ihr modularer Aufbau sind zwingende Eigenschaften der Systemkomponenten, sollen sie ihren Zweck nachhaltig erreichen.
Obwohl ein sehr hohes zukünftiges Marktpotential dieser Systeme in Entwicklungs- und Schwellenländern gegeben ist, trägt dieses zur Zeit wenig zu einer Kostensenkung bei.
Die Situation stellt sich jedoch anders dar, wenn man begreift, dass die Elektrifizierung auf niedrigem Verbrauchsniveau (s. o.) begleitet wird von einer immer stärkeren Durchdringung der elektrischen Versorgungsnetze mit regenerativen Quellen in Industrieländern. Techno-logisch heißt das ein Aufeinanderzu-Gehen von zwei Seiten: Einerseits Vernetzung schwach entwickelter Gebiete mit vielen Energielieferanten und andererseits Durchdrin-gung des traditionellen Verbundnetzes mit regenerativen Energiequellen. Da ein Aufeinan-dertreffen unvermeidbar ist, drängt sich eine einheitliche elektrische Systemtechnik für beide Anwendungsbereiche sowohl aus technischen als auch aus wirtschaftlichen Gründen geradezu auf. Aus dieser Überlegung heraus dürfte sich in den kommenden Jahren das Kostensen-kungspotential bei derartigen Hybridanlagen vor allem über die Synergie von Hybridanlagen und netzgekoppelten Anlagen erschließen lassen.
Dabei sind Komponenten von Hybridanlagen keineswegs nur Bittsteller bei den derzeit durch Förderprogramme in diversen Industrieländern forcierten Komponenten netzgekoppel-ter Systeme, was ihre technische Entwicklung angeht.
Die zu bewältigenden Probleme in Inselanwendungen, der im Hybridbereich Standard ist, sind dort weitaus komplexer als im netzgekoppelten Bereich. Energiewandler müssen dort weitaus mehr können, als nur stur Wirkleistung zu liefern, während Energiewandler im netzgekoppelten Betrieb mit der schlichten Lieferung von Wirkleistung unterfordert sind. Ihr mögliches, aber nicht ausgeschöpftes Anwendungsspektrum reicht von der Energielieferung über die aktive Filterung bis zu Backup-Aufgaben.
Daher sollte für diesen Anwendungsbereich das Ziel einer einheitlichen elektrischen System-technik für Hybridsysteme und netzgekoppelte Anlagen verfolgt werden.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 13
1.1.2 Energiewandler für Solar-, Wind- und Wasserenergie
Die Basistechnologien zur effektiven Wandlung von primär geliefertem Gleichstrom oder Wechselstrom sind bekannt. Mit zunehmend besseren am Markt verfügbaren leistungselek-tronischen Schaltern wird sich die Zahl der Grundschaltungen zur Energiewandlung immer weiter reduzieren. Bei hohem Wirkungsgrad-Niveau für alle Wandlerschaltungen gewinnt die einfache Steuer-/Regelbarkeit sofort an Bedeutung. Dies führt sicher zu einer höheren Sys-temintegration in den Komponenten und wegen den Tendenz zur Vereinheitlichung zu einer perspektivischen Kostensenkung.
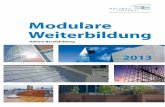
Auf PV-Module als typische Gleichstromlieferanten soll hier nur sehr kurz eingegangen wer-den. Die wichtigsten Kennziffern für eine überschlägige Beurteilung sind in Abbildung 1-1 zusammengestellt. PV-Anlagen sind zwangsläufig modular aufgebaut. Bezogen auf den Generator gibt es somit keine Möglichkeit, durch Übergang zu einer größeren Leistungsklasse (z. B. der Übergang von 100W-Modulen auf 1kW-Module) zu einer Kostensenkung zu kom-men. Kostensenkungspotenziale sind nahezu ausschließlich über große Produktionsmengen und/oder "Technologiesprünge" (z. B. Dünnschicht) gegeben. Dies lässt gerade bei der Markterschließung noch keine besondere Dynamik in der Kostenreduktion erwarten.
A
PealS
IN
Nennleistungsbereich: 20 W...200 W
spezifische Investkosten: (4...6) kEuro/kWp
Einsatzbedingungen: " verschattungsfrei
" Ausrichtung: Süden
" Neigung: ~ Breitengrad
typ. Energieertrag: 800 kWh/kWp (D) 1800 kWh/kWp
(Namibia, Jemen)
Investkosten /Ertrag: (Jahresertrag, günst. Fall)
2,2 bis 7,5 Euro/kWh
Lebensdauer > 20 Jahre
Foto: Siemens Solar
bbildung 1-1 Kennwerte und Einsatzbedingungen von PV-Generatoren zur direkten Umwandlung von Solarstrahlung in Gleichstrom
V-Generatoren sind durch hohe spezifische Investitionskosten gekennzeichnet, denen jedoch ine vergleichsweise sehr hohe nachgewiesene Lebensdauer gegenübersteht, die mittlerweile uch häufig vom Hersteller garantiert wird. Die Erträge sind u. U. sehr stark standort- und ageabhängig. Jahreszeitliche Schwankungen werden immer geringer, je weiter sich der tandort in Äquatornähe befindet.
m küstennahen Bereich oder an ausgewählten Gebirgsstandorten bietet sich oft auch die utzung von Windenergie an (Abbildung 1-2).

14 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3-flügelige Windkraftanlage für max. 12m/s Windkraftanlage für <5m/s
Häufigster Turbinentyp: 3- Flügler Nennleistungsbereich: 150 W...10 kW spezifische Investkosten des WEK+Turm: (2...6) kEuro/kWp Einsatzbedingungen: " Höhe > 10 m
" Windgeschwindigkeit > 3 m/s max. Energieertrag (bei 2000 Vollaststunden): ~ 5,5 kWh/kWp (d)
~ 2000 kWh/kWp (a) Investkosten /Ertrag: 1 bis 3 Euro/kWh Wartungskosten: ~ 5 %/a Verfügbarkeit: extrem standortabhängig
Abbildung 1-2 Verschiedene Windkraft für die Erzeugung elektrischer Energie: Charak-teristische Kennwerte für den unteren Leistungsbereich von Windkraftan-lagen
Auch hier fallen (vor allem im unteren Nennleistungsbereich) hohe spezifische Investitions-kosten an. Gleichzeitig ist man jedoch mit relativ hohen Wartungsaufwendungen und geringe-ren Lebensdauerwerten (4...10 Jahre) konfrontiert. Die Verhältnisse bezüglich Kosten verbes-sern sich wesentlich, geht man zu größeren Leistungseinheiten der Windkraftkonverter über, da die spezifischen Kosten pro Leistung hierbei stark sinken. Zur Erhöhung der Lebensdauer kommt im Kleinleistungsbereich Asynchrongeneratoren oder permanenterregte Synchron-generatoren zur Anwendung. Damit wird meist eine elektronische Energieaufbereitung zur Spannungs- und Frequenzstabilisierung notwendig. Ein Beispiel hierfür zeigt Abbildung 1-3. Für diesen Konverter werden sowohl Ladegeräte für Batterien als auch Inverter zur Netzein-speisung angeboten.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 15
BWC 1500 Bergy Ltd.
Ausführung 3- Flügler mit bürstenlosem DC-Generator Nennleistungsbereich: 1,5 kW bei 12,5 m/s Maße: Länge: Rotordurchmesser: Masse:
> 12 m 3 m 76 kg
max. Energieertrag: (bei 2000 Vollaststunden = 5,5 m/s)
~ 8,2 kWh/d
Preis: (ohne Elektronik)
4500 $ US
Abbildung 1-3 Nutzung der Windkraft für die Erzeugung elektrischer Energie: Beispiel einer neueren Anlage mit robustem permanent erregtem DC-Generator mit nachfolgender elektronischer Energieaufbereitung mittels Inverter [7]
Ist an einem Standort fließendes Wasser mit einem bestimmten Gefälle vorhanden, bietet sich die Nutzung dieser Ressource für die elektrische Energiegewinnung an. Für den kleinen Leis-tungsbereich (ab ca. 40Wp) werden hier Pelton-Turbinen mit entsprechend kleinen Generato-ren von verschiedenen Herstellern angeboten. Je nach Standort und Dimensionierung kann diese Energiequelle weitgehend kontinuierlich unter Vermeidung jahreszeitlicher Schwan-kungen genutzt werden. Dadurch sind bereits mit kleinen Nennleistungen relativ hohe Jahres-erträge erreichbar (Abbildung 1-4). Die Investitionskosten lassen sich allerdings nur schwer allgemein angeben, da sie von den geografischen Standortbedingungen und den einschlägigen Bauvorschriften des Landes abhängen. Auch die Wartungskosten sind nicht unbedeutend. Allgemein rechnet man mit 1...2 Reparaturen an der Turbine pro Jahr, insbesondere bei größe-ren Wasserdurchsätzen. Sehr kompakte Energiekonverter im kleinen Leistungsbereich ermög-lichen hier sehr einfache Installationen (Abbildung 1-5).

16 Modulare PV- und Hybridsystemtechnik Abschlussbericht
unterläufige Turbine mit breiter Anströmung Pelton-Turbienräder im n * 100 W-Bereich
Häufigster Turbinentyp: Pelton Nennleistungsbereich: 50 W...5 kW spezifische Investkosten: (5...10) kEuro/kWp Einsatzbedingungen:
Höhendifferenz: Durchflussmenge:
1,5 ... 60 m 0,5 ... 10 l/s
max. Energieertrag: ~ 22 kWh/kWp (d) ~ 8030 kWh/kWp (a)
Investkosten /Ertrag: (Jahresertrag, günst. Fall) 0,6 ... 1,2 Euro/kWh Wartungskosten: ~ 5 %/a Verfügbarkeit: 95%
Abbildung 1-4 Nutzung von Wasserkraft für die Gewinnung elektrischer Energie: Cha-rakteristische Werte für Kleinanlagen
Hersteller: Intertialessdrive Ltd., Neuseeland Ausführung Turbine und Generator Nennleistungsbereich: 125 W bei 60 N/cm2 Maße: Länge: Durchmesser: Masse:
140 mm 110 mm 3,5 kg
Max. Energieertrag: 3 kWh/d Preis: 495 $ US
Abbildung 1-5 Nutzung von Wasserkraft für die Gewinnung elektrischer Energie: Bei-spiel für eine kompakte Miniaturturbine + Generator [4]

Abschlussbericht Modulare PV- und Hybridsystemtechnik 17
Wandler für die o. g. Quellen werden sich immer ähnlicher. Der energieoptimale Einsatz drehzahlvariabler elektromechanischer Generatoren für Wind- und Wasserkraft, aber auch für Energie aus Biomasse erfordert die Lösung ähnlicher elektrischer Probleme (große Variatio-nen der verfügbaren Eingangsspannung, Entkopplung von Generator- und Verbraucher-frequenz und Blindleistungsfähigkeit zur Übernahme von Netzbildungsfunktionen bzw. zur Sicherung von Notlaufeigenschaften des Inselsystems). Dadurch werden Standardisierung und Integration der Komponenten und ihrer Teile ermöglicht.
Mit der leistungselektronischen Vernetzung über den Energiebus nach 1~230V oder 3~400V bzw. einem adäquatem Standard geht notwendigerweise auch eine Vernetzung zur Koordination der Komponenten mit einheitlichen Schnittstellen einher. Diese Feststellung gilt für alle Komponenten von Hybridsystemen, da eine Koordination der Funktionen durch einen local Master immer erforderlich sein wird, wenn mehrere Komponenten gleicher Nutzungs-eigenschaften (z. B. Netzbildung) im System eingebunden sind.
1.1.3 Speicher in Hybridsystemen
Nach wie vor bleibt die Zwischenspeicherung von Energie in Hybridsystemen ein zentrales Thema der regenerativen Energietechnik. Im kleinen und mittleren Leistungsbereich wird aus Kostengründen aber auch wegen des relativ hohen Maßes an Robustheit und ihrer breiten Verfügbarkeit die Blei-Säure-Batterie ihre dominierende Rolle weiter spielen.
Kostensenkungen für den Betrieb der Versorgungssysteme sind durch geeignete Dimensionie-rung und regelmäßiges Energiemanagement in Verbindung mit einer Ladezustandsanalyse für derartige elektrochemische Speicher in beträchtlichem Umfang möglich, da die Betriebskos-ten eines Systems über die Lebensdauer der Speicher erheblich beeinflusst werden können. Auch Potentiale zur Kostensenkung in der Herstellung der Bleibatterien durch für diese Ein-sätze optimierte Batterien und Herstellverfahren sind durchaus möglich.
Als Alternative zum Blei-Akkumulator steht im wesentlichen nur der NiCd-Akku zur Verfü-gung. Weitere Optionen wie z. B. Zink- oder Lithium-basierte Systeme sind ohne tatsächliche breitere Basis in der Hybridsystemtechnik der nächsten Jahre, jedoch in Diskussion hinsicht-lich ihrer Gesamtkosten und möglicher Einsatzbereiche.
Mit den seit einigen Jahren auch für energietechnische Zwecke verfügbaren Doppelschicht-kondensatoren sind Speicher verfügbar, die bei relativ moderaten Eigenverlusten einen hohen Kurzzeitbedarf an Energie decken können. Dies empfiehlt sie zur Bereitstellung von Kurzzeit-reserven im Bereich bis zu einigen 10 min im Kilowattbereich aus rein technischer Sicht. Die hohen Kosten dieser Speicher stehen einem Einsatz in der Hybridsystemtechnik bislang ent-gegen.
Für die leistungselektronischen Energiewandler für Speicher gilt im wesentlichen das in Kapi-tel 1.1.2 Ausgeführte bezüglich ihrer Eigenschaften. Hinzu kommt jedoch zwingend in modu-laren Systemen ein (steuerbarer) bidirektionaler Energiefluss für diese Wandler zur System-einbindung der Speicher in AC-Systeme.

18 Modulare PV- und Hybridsystemtechnik Abschlussbericht
1.1.4 Backup-Komponenten für Hybridsysteme
In Kapitel 1.1.1 wurde zwischen drei Einsatzbereichen von Hybridsystemen aus Gründen der Anwendung, des Marktes etc. unterschieden. Die Art der sinnvoll einsetzbaren Backup-Generatoren kennzeichnet diese Bereiche jedoch noch zusätzlich. Während im unteren Leis-tungsbereich < x00 W Zusatzgeneratoren mit unbeweglichen Teilen bevorzugt sind, kann dies so nicht für den größeren Leistungsbereich reklamiert werden.
Die eingesetzten Wirkprinzipien für die Energiewandlung unterscheiden sich ebenso, wie die dafür erforderliche Systemtechnik. Das am meisten verbreitete Backup-System ist der Diesel-generator gefolgt von Generatoren mit Ottomotoren. Durch die vermehrte Anwendung von Mikroturbinen in BHKW-Anwendungen der letzten Jahre wird diese Technologie vermutlich in den nächsten Jahren im oberen Kilowattbereich interessant. Tabelle 1-1 zeigt hier eine Ge-genüberstellung für den höheren Kilowattbereich. Der schon oft angekündigte Stirlingmotor könnte in Verbindung mit der energetischen Nutzung von Biomasse seine Vorteile voll zum Tragen bringen.
Kolben-maschine
Mini- Turbine
Micro- Turbine
Brennstoff- zelle
Kommerziali-sierung etabliert etabliert neues Produkt neues Produkt
Nennleistung 50 kW - 5 MW 200 kW - 1 MW 25 kW - 200 kW 1 kW - 200 kW
spezif. Preis (€/kW) 800 - 1500 700 - 900 500 - 1300 .. 3000
O&M-Kosten ohne Brennstoff (€/kw) 0,007 0,015 0,002 0,008 0,004 0,010 0,003 0,015
typische Brennstoffe
Diesel, Propan, Erdgas, Öl,
Biogas
Propan, Erdgas, Öldestillat, Bio-
gas
Propan, Erdgas, Öldestillat, Bio-
gas
Wasserstoff, Methan, Biogas
typische Betriebsarten
Dauerbetrieb, Aussetzbetrieb,
Spitzenlast
Dauerbetrieb, Aussetzbetrieb,
Spitzenlast
Dauerbetrieb, Aussetzbetrieb,
Spitzenlast
Dauerbetrieb
Tabelle 1-1 Backup-Systeme für den oberen kW-Bereich im Vergleich
Um die spezifischen Kosten zu senken und bestimmte Eigenschaften der Generatoren zu er-reichen, werden sogar bei Diesel- und Benzingeneratoren Wechselrichter zur Energieaufberei-tung eingesetzt. Dabei werden mehrere Ziele verfolgt:
• Erhöhung der Lebensdauer durch drehzahlvariablen Betrieb,
• schnelle elektronische Steuerbarkeit und
• Kosteneinsparung durch Einsatz eines geringerwertigen Generators bei gleichzeitiger hochwertiger Sinusform durch den Einsatz eines Pulswechselrichters.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 19
Abbildung 1-6 zeigt ein Beispiel für ein solches Aggregat.
Abbildung 1-6 1kW-Benzingenerator mit integriertem Umrichter zur Energieauf-
bereitung
Zur Effizienzsteigerung und Betriebskostensenkung aber auch wegen möglicher Lebens-dauererhöhung ist ein Trend zu drehzahlvariablen Konzepten erkennbar. Die Spannungs- und Frequenzregelung wird in diesen Anlagen über einen leistungselektronischen Umrichter er-reicht. Dies ist ein weiterer Schritt zur Angleichung der Energieaufbereitung in den Kompo-nenten von Hybridsystemen.
Abbildung 1-7 Entwicklung der Baugröße im Brennstoffzellenbereich [3]

20 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Brennstoffzellen sind aus technischer Sicht eigentlich ideale Backup-Systeme. Durch den hohen spezifischen Preis ist jedoch der Einsatz zur Zeit stark begrenzt.
Abbildung 1-8 Preiserwartungen im Brennstoffzellenbereich [3]
Dies dürfte sich jedoch stark ändern, wenn die Preiserwartungen amerikanischer Automobil-hersteller von 50 $/kW in 20...30 Jahren auch nur annähernd erreicht werden [3] (vergl. Abbildung 1-7; Abbildung 1-8).
1.1.5 Energiekosten in Hybridsystemen
Die anfallenden Kosten sind natürlich neben der erreichbaren Versorgungsqualität Kriterien für den Einsatz einer Technik. Mit Hilfe der in Kapitel 1.1.2 aufgeführten Kennwerte soll da-her hier nachfolgend eine Kalkulation durchgeführt werden, die die zu lösenden Problemen verdeutlicht. Dazu wird zunächst einmal auf den häufig vorhandenen Dieselgenerator als Ver-sorgungsbasis eingegangen (Abbildung 1-9). Aus der Darstellung geht hervor, dass möglichst kurze Diesellaufzeiten im optimalen Betriebsbereich zu einer bedeutenden Verringerung der resultierenden Energiekosten führen. Dies führt in der Konsequenz zunächst zur Anwendung von Diesel-Batterie-Systemen zur Kostensenkung.
Trotz des Batteriewirkungsgrades von nur ca. 80% lassen sich so Kosten und auch Treibstoff bei hoher Versorgungssicherheit sparen (Abbildung 1-10 b).

Abschlussbericht Modulare PV- und Hybridsystemtechnik 21
0 1 2 3 4
l/h kWh/l
Bereich mithohem Wir-kungsgrad
geringer Wir-kungsgrad
Leistung [kW]
1,6
1,2
0,8
0,4
0,0
2,0
2,4
2,8
Verb
rauc
h[l/
h]
1,00
0,67
0,33
0,00
1,33
1,67
2,00
2,33
Effiz
ienz
[kW
h/l]
täglicher Verbrauch: 6 kWhJahresverbrauch: 2190 kWhmax. Leistung: 5 kWInvestitionskosten: 10.000 DMLebensdauer: 5000 hMinderung durch Kaltstart: 0,25 hmax. Wirkungsgrad: 20 %Dieselpreis: 1,50 DM Zins: 5 %
Verfügbarkeit: 24 h 8 h
Energiekosten: 12,00 DM/kWh 4,54 DM/kWh
AbschreibungenBrennstoffkostenWartung
Abbildung 1-9 5kW Dieselgenerator mit Kennlinien und Betriebsbedingungen und er-zielter Energiepreis für verschiedene Betriebsarten
Abbildung 1-10 (a) Hybridsystem (b) Batterie-Diesel-System

22 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Jahresverbrauch: 2190 kWh/a Spitzenleistung: 5 kWVerfügbarkeit: 24 hDieselpreis: 1,50 DM/l
Solare Deckung: 0% 80%
Investitionskosten: 22.400 DM 46.600 DMEnergiekosten: 2,84 DM/kWh 2,96 DM/kWh
Diesel-Batterie-System PV-Diesel-Batterie-System
Abbildung 1-11 Energiekosten und Kostenverteilung bei einem Dieselpreis von 1,50DM
Wenn ein Hybridsystem nur unter Kostengesichtpunkten gegenüber dem Diesel bestehen will, muss es mit einem Batterie-Diesel-System verglichen werden. Abbildung 1-11 und Abbildung 1-12 zeigen die Ergebnisse eines solchen Vergleichs für die Annahme unterschied-licher Treibstoffkosten.
Jahresverbrauch: 2190 kWh/a Spitzenleistung: 5 kWVerfügbarkeit: 24 hDieselpreis: 3 ,00 DM/l
Solare Deckung: 0% 80%
Investitionskosten: 22.400 DM 46.600 DMEnergiekosten: 3,59 DM/kWh 3,11 DM/kWh
Diesel-Batterie-System PV-Diesel-Batterie-System
Abbildung 1-12 Energiekosten und Kostenverteilung bei einem Dieselpreis von 3,00DM
Es wird deutlich, dass noch immer PV-Hybridsysteme erst bei recht hohen Dieselpreisen konkurrenzfähig werden, da der PV-Anteil äußerst kapitalintensiv ist. Für Gebiete mit einer

Abschlussbericht Modulare PV- und Hybridsystemtechnik 23
gut entwickelten Infrastruktur sind daher mit PV-Diesel-Systemen keinesfalls die Kosten des alternativen Batterie-Diesel-Systems zu erreichen, zumal der Dieselpreis für die Energieer-zeugung gewöhnlich deutlich niedriger ist als der für mobile Anwendungen. Daher wird ein wirtschaftlicher Einsatz sich beschränken auf Anwendungen an Standorten, die nicht einfach zu versorgen sind wie Meeresinseln, Sennhütten, Gebirgsdörfer und sonstige dünn besiedelte Gebiete.
Hier stellen sich die Kosten für Brennstoffbeschaffung anders dar. Als Markt stellen sich da-her verstreut gelegene Farmen in aller Welt, staatliche Einrichtungen (Schulen, Hospitäler, Messstationen, Militärposten) und Hotels in abgelegenen Regionen dar, da hier die notwendi-gen finanziellen Voraussetzungen gegeben sind. Trifft man jedoch auf subventionierte Die-selkosten, wie dies in einer Reihe von Entwicklungsländern (z. B. Vietnam, Jemen, Ägypten u. a.) der Fall ist, hat man praktisch keine Chance die Konkurrenz zu bestehen, wenn nur der kurzfristige Cash-Flow zählt.
Dies gilt auch, wenn man andere Energiequellen wie Wind- oder Wasserkraft einsetzt (Abbildung 1-13). Die Wasserkraft schneidet hier erwartungsgemäß etwas günstiger ab. Die Windkraft hat relativ hohe spezifische Investitions- und Betriebskosten, so dass sie hier ver-gleichsweise die Energie teurer als PV liefert. Dies ist auf dem relativ kleinen Nennleistungs-bereich begründet und würde bei größeren Anlagenleistungen zu anderen Ergebnissen führen. Jedoch würden sich PV-Hybridsysteme in den meisten Fällen nur auf den unteren Kilowatt-bereich beschränken.
Jahresverbrauch: 2190 kWh/a Spitzenleistung: 5 kWVerfügbarkeit: 24 hDieselpreis: 1,50 DM/l
Solare Deckung: 80% 80%
Investitionskosten: 44.480 DM 27.930 DMEnergiekosten: 3,32 DM/kWh 2,33 DM/kWh
Wind-Diesel-Batterie Wasser-Diesel-Batterie
Abbildung 1-13 Energiekosten und Kostenverteilung für Systeme mit einer Stützung auf Wind- und Wasserkraft bei einem Dieselpreis von 1,50DM

24 Modulare PV- und Hybridsystemtechnik Abschlussbericht
1.1.6 Zusammenfassung
Hybridsysteme sind elektrische Versorgungssysteme mit einem sehr großen Marktpotential, das noch zu erschließen ist. Anwendungsbereiche ergeben sich vor allem in der Elektrifizie-rung einzelner Objekte. Der stets wachsende Energiebedarf erfordert Systeme, die erweiterbar und ggf. netzkompatibel sind. Vor allem im größeren Leistungsbereich (>1kW) lassen sich die Kostenziele nur durch die Schaffung einer zum Netzstandard kompatiblen Technik errei-chen. Die Energieaufbereitung für die einzelnen Komponenten eines Hybridsystems gleicht sich immer stärker aneinander an.
1.1.7 Literatur
[1] Fünftes Kasseler Symposium Energiesystemtechnik, 9.-10. Nov. 2000, Kassel
[2] Zacharias, P.: Nutzung von Stromrichtern für die dezentrale Energieversorgung, 4. Kasseler Symposium Energiesystemtechnik, 14.-15. Oktober 1999, Kassel
[3] Sperry, M. A.: Fuel Cells for the Residential Electric Market. Distrubuted Power 2000, 25.-27. Sept. 2000, Arlington, VA
[4] http://www.inertialessdrive.co.nz
[5] http://www.zetatalk3.com
[6] http://www.poweriseverything.com
[7] http://www.bergey.com
[8] http://www.aeroweb.aero.csir.co.za
[9] http://www.windsun.com
[10] http://www.bitterrootsolar.com

Abschlussbericht Modulare PV- und Hybridsystemtechnik 25
1.2 Ermittlungen der elektrischen Anforderungen (A. Engler)
1.2.1 Normen und Richtlinien
Um eine problemlose Integration elektrischer Geräte in Inselnetze oder das Verbundnetz zu gewährleisten ist die Einhaltung der bestehenden Normen und Richtlinien unumgänglich. Wesentliche Bestimmung für die Kopplung von Umrichtern oder Generatoren an ein Netz ist die VDEW-Richtlinie Parallelbetrieb mit dem Niederspannungsnetz. Eine Übersicht zu relevanten Normen und Richtlinien gibt die nachfolgende Grafik.
Abbildung 1-14 Normen und Richtlinien für den Betrieb Erzeugern und Verbrauchern am Netz
Für regelungstechnische Aspekte ist die EN 50160 ausschlaggebend. In ihr werden die zuläs-sigen Frequenz- und Spannungstoleranzen festgelegt. Weiterhin enthält sie Angaben zu er-laubten Oberschwingungsanteilen. Zum einen muss eine Regelung die Einhaltung dieser To-leranzen sicherstellen und zum anderen muss insbesondere der frequenzvariable Betrieb (siehe Kapitel 3.2) innerhalb der zulässigen Toleranzen möglich sein. Das am ISET entwi-ckelte Verfahren zum Parallelbetrieb von Stromrichtern erfüllt die Anforderungen der EN 50160.
1.2.2 Bestimmung der elektrischen Qualität
Zur Auswertung und Beobachtung der elektrischen Netzqualität sind zahlreiche kommerzielle Netzanalysatoren verfügbar. Ein Beispiel ist der EUROQUANT der Fa. Haag in Abbildung 1-14. Er verfügt über je vier Spannungs- und Stromeingänge (L1, L2, L3, N). Weiterhin kann

26 Modulare PV- und Hybridsystemtechnik Abschlussbericht
ein Funkzeitsignal (DCF77 oder GPS) ausgewertet werden. Dieses ermöglicht die genaue zeitliche Zuordnung von Störungen oder sogar die Synchronisation mehrer, an verschiedenen Orten befindlicher Geräte zur Analyse von Störausbreitungen.
Abbildung 1-15 Gerät zur Bestimmung der Netzqualität (EUROQUANT der Fa. Haag)
Zum Zweck der Störanalyse werden Zeitreihen aus Mittelwerten aufgezeichnet. Die zeitliche Länge der Mittelwertbildung ist zwar gerätetechnisch frei wählbar, wird in der Regel jedoch durch die angewendete Norm (z. B. EN 50160) festgelegt. Die Aufzeichnung der Mittelwerte erfolgt auf einer geräteinternen Festplatte. Der EUROQUANT berechnet netzcharakteristische Größen online und zeichnet sie ebenfalls auf. Ein Beispiel ist in Abbildung 1-16 dargestellt. Neben Spannung und Frequenz werden z. B. Flicker und THD (Summe der harmonischen Oberschwingungen) aufgezeichnet.
Abbildung 1-16: Zeitliche Verläufe einer Phasenspannung

Abschlussbericht Modulare PV- und Hybridsystemtechnik 27
Der zeitliche Verlauf gibt zwar schon einen ersten Eindruck der Netzqualität. Die letztend-liche Beurteilung des Produktes Elektrische Energie erfolgt anhand einer statistischen Aus-wertung. Hier werden die Häufigkeiten und Höhe der Abweichungen der verschiedenen Netzkenngrößen vom Sollzustand bewertet. Ein Beispiel ist der Plot in Abbildung 1-17. In dem vermessenen Netzzweig ist der Flicker deutlich zu hoch.
Abbildung 1-17 Statistische Auswertung der Verläufe (siehe Abbildung 1-16) nach
EN 50160

28 Modulare PV- und Hybridsystemtechnik Abschlussbericht

Abschlussbericht Modulare PV- und Hybridsystemtechnik 29
1.3 Untersuchungen zum Modularitätsgrad in Verbindung mit dem resultie-renden Kostengefüge (P. Zacharias)
Ein Energieversorgungssystem gliedert sich in die Komponenten: Erzeuger elektrischer Ener-gie, Verbraucher und Energiespeichereinrichtungen. Alle diese Komponenten sollen an einer Spannungsschiene betrieben werden, an der eine Erweiterung problemlos möglich ist. Prak-tisch lässt sich das durch ein Baukastensystem erfüllen. Der Energieaustausch zwischen den Bauteilen findet über einen Energiebus statt, ein Signalbus übermittelt den Informationsaus-tausch von und zur übergeordneten Betriebsführung.
Abbildung 1-18 Baukastensystem zur Energieversorgung
Neben der einfachen Erweiterbarkeit wird ein universeller Einsatzbereich von Versorgungs-leistungen von wenigen Kilowatt bis zu Großanlagen von mehreren hundert kW angestrebt. Daraus ergeben sich große Stückzahlen der einzelnen Komponenten mit damit verbundenen verringerten Stückkosten in der Serienproduktion. An die Komponenten werden allerdings hohe Anforderungen in Bezug auf die Integrations- und Ausbaufähigkeit gestellt.
Um innerhalb dieses Baukastensystems zu sinnvoll gestaffelten Baureihen zu gelangen, wird zunächst eine Abschätzung des Bedarfs an Leistungs- und Energieklassen von PV-Systemen vorgenommen.
1.3.1 Leistungssegmentierung
Bereits im 1. Zwischenbericht zum Projekt "Modulare PV-Systemtechnik" 1995 wurde ver-sucht, die Leistungssegmentierung aus der Häufigkeitsverteilung der Systeme von ihrer Leis-tung eine sinnvolle Abstufung von Leistungsklassen zu ermitteln. Um die Häufigkeitsvertei-lung zu erhalten, können Marktanalysen und -prognosen herangezogen werden. Eine andere

30 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Möglichkeit ist die Abschätzung des zukünftigen PV-Marktes unter Zuhilfenahme verschie-dener Studien zur Entwicklung der weltweiten Energiewirtschaft und der Weltbevölkerung.
1.3.2 Energiewirtschaftliche Rahmenbedingungen
In den letzten 25 Jahren wurden mehr als 1,3 Mrd. Menschen in Entwicklungsländern an die elektrische Energieversorgung angeschlossen. Die meisten dieser Versorgungsanschlüsse wurden in urbanen Gebieten installiert. In vielen Regionen der Welt einschließlich der Sub-Sahara Bereiche Afrikas und im südlichen Asien ist die Bevölkerung jedoch schneller ge-wachsen als der Zubau an elektrischer Versorgung (Abbildung 1-19).
Abbildung 1-19 Ländliche Elektrifizierung, Zunahme der Bevölkerung mit und ohne
elektrische Versorgung im Zeitraum 1970-1990
Bei einem Wachstum der Bevölkerung in Entwicklungsländern um mehr als 3 Mrd. in weni-ger als 4 Jahrzehnten darf man davon ausgehen, dass die Probleme der ländlichen Elektrifizie-rung drückender werden als sie jemals waren.
Alle veröffentlichten Marktanalysen [1] bis [4] von Photovoltaiksystemen haben eine Eintei-lung nach Anwendungsgebieten, Produktions- oder Einsatzorten. Die Zahlen ergeben sich dabei aus den jährlichen Verschiffungszahlen. Die verschiedenen Studien unterscheiden fol-gende Einsatzgebiete von Photovoltaikanlagen mit den dazugehörigen Leistungsspektren so-wie Beispielen (vgl. Abbildung 1-20):

Abschlussbericht Modulare PV- und Hybridsystemtechnik 31
Kleinver-braucher außen
Kleinver-braucher
innenWeltraumGroßanlageFassadeDach
netzgekoppelt
PV-Anwendungen
Inselsysteme Spezialanwendungen
netzferne Industrie
ländliches Wohnen
Dorfver-sorgung
Solar Home
SystemsPumpen
Abbildung 1-20 Einteilung von PV-Systemen nach Anwendungen
Netzgekoppelte Stromversorgung oder autarke PV-Systeme sind nicht notwendigerweise sich gegenseitig ausschließende Möglichkeiten für die elektrische Energieversorgung. Die netzge-koppelte Stromversorgung ist preisgünstig bei einer großen Konzentrationen von Haushalten und/oder einer Vielzahl produktiver Lasten (Pumpen, Wasserdesinfektion usw.) oder Unter-nehmen. Allerdings erfordern Netzlösungen einen minimalen Schwellwert beim Elektrizitäts-bedarf pro Haushalt und eine gewisse minimale Anzahl zu versorgender Lasten, um eine "economy of scale" zu erreichen.
Will man entscheiden, ob das Netz oder autarke PV-Systeme die kostengünstigere Möglich-keit ist, Elektrizität für ländliche Gebiete bereitzustellen, muss folgendes berücksichtigt wer-den:
• der tägliche elektrische Energieverbrauch eines Haushalts,
• die Gesamtzahl der zu versorgenden Haushalte,
• die Anzahl der Haushalte pro Fläche (in km2),
• Zahl und Strombedarf der sogenannten produktiven Lasten und Unternehmen und
• der perspektivische Lastzuwachs pro Jahr.
Abbildung 1-21, Abbildung 1-22 und Abbildung 1-23 identifizieren die Übergangsschwellen von netzgekoppelten zu solar basierten Versorgungssystemen in indonesischen Kommunen mit bis zu 1,000 Haushalten und Haushaltsdichten, die von 50-150 Haushalten pro km2 schwanken. Die Schwelle, an der die netzbasierte Stromversorgung und die PV-Systeme e-benso rentabel in diesen drei Szenarien sind, hängt von der Größe und Dichte der zu versor-genden spezifischen Lasten ab, aber auch von den Entfernungen zur nächsten Niederspan-nungsleitung (LV) und Mittelspannungsleitung (MV). Diese Analyse enthält sowohl Inselnetze als auch Verbundnetze. Während die Verbundnetze die elektrische Leistung von "zentralen" Kraftwerken beziehen, werden die betrachteten Inselnetze aus Diesel-Generatorsätzen von 3 bis 2000 kW in einem eng begrenzten Verteilungssystem versorgt [5].

32 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Abbildung 1-21 Vergleich der Versorgungskosten unter Annahme eines abgelegenen
Dorfes in Indonesien [5]
Das in dieser Analyse verwendete Grundkonzept ist die "vergleichbare Versorgung", die an-nimmt, dass die Haushalte vergleichbare Versorgungsniveaus sowohl für PV als auch bei netzbasierter Versorgung erhalten. Dies entspricht:
• 6 Stunden (Arbeits-) Platzbeleuchtung (10 W Leuchtstoffröhre oder 40 W Glühbirne),
• 8 Stunden von Flächenbeleuchtung (6 W Leuchtstoffröhre oder 25 W Glühbirne) und
• 60 Wh diverse Lasten pro Tag.
In Indonesien entspricht dies ländlichen Haushalten, die durchschnittlich 15 kWh pro Monat vom Netz beziehen. Dabei wurde angenommen, dass keine produktiven Lasten oder Unter-nehmen mit angeschlossen sind. Die Analysen basieren auf Netzversorgungs- und PV-Systemkostendaten in Indonesien.
Abbildung 1-22 Kostenvergleich PV - Netz unter Annahme eines Dorfes, das sich 5 km
von der nächsten Mittelspannungsleitung befindet [5]
PV-Systeme sind kostengünstiger für den Bereich unterhalb der Linie in Abbildung 1-21 und die Netzversorgung ist die günstigere Möglichkeit für den Bereich oberhalb der Linie. Zum Beispiel ist ein isoliertes Netz mit Diesel-Genset die günstigere Möglichkeit für ein Dorf mit 400 Haushaltsanschlüssen und 100 Haushalten pro km2 (siehe Abbildung 1-21). Wenn dieses

Abschlussbericht Modulare PV- und Hybridsystemtechnik 33
Dorf die halbe Anzahl von Haushaltsanschlüssen und einer niedrigeren Anschlussdichte hätte (zum Beispiel, 65/km2), wären PV-Systeme die günstigere Wahl.
Abbildung 1-21 unterstreicht nochmals die wirtschaftliche Nische für PV in kleinen isolierten Gemeinschaften. Hier sind PV-Systeme billiger als Kerosin und Batterien oder Energie aus dem Netz. Typischerweise sind PV-Systeme die günstigere Möglichkeit für Dörfer mit weni-ger als 200 Haushalten.
Abbildung 1-22 verdeutlicht die Verhältnisse beim Vorhandensein einer Mittelspannungslei-tung in der Nähe der Siedlung (5 km oder weniger). Typischerweise sind hier die PV-Systeme die günstigere Möglichkeit für Dörfer bis 5 km vom Netz aber mit weniger als 100 Verbin-dungen. Selbst wenn eine Niederspannungsleitung in der Nähe einer Siedlung liegt, haben PV-Systeme noch Vorteile, wenn es sich um relativ wenige verstreute Verbraucher handelt (Abbildung 1-23). Sie sind günstiger, wenn weniger als 50 Haushalte verbunden werden sol-len. Oft werden diese spärlich besiedelten Gebiete beim ländlichen Elektrifizierungsprozess übergangen und bleiben unelektrifizierte Enklaven in ansonsten elektrifizierten Regionen.
Abbildung 1-23 Kostenvergleich PV - Netz unter Annahme eines Dorfes, das sich 3 km
von der nächsten Niederspannungsleitung befindet [5]
Diese Aussagen lassen sich treffen unter der Voraussetzung des oben beschriebenen außeror-dentlich geringen Verbrauchs pro Haushalt und ohne Berücksichtigung eines wachsenden Energieverbrauchs. Unterstellt man ein Wachstum des elektrischen Energieverbrauchs und eine zumindest teilweise produktive Nutzung der Energie, so kommt man sofort zum Aufbau von Mikro- oder Mini-Netzen, die von einem Diesel-Generator oder einem Hybridsystem versorgt werden und perspektivisch den Anschluss ans Verbundnetz gestatten.
In [6] schlägt Palz für die Elektrifizierung der weltweit ca. 2 Milliarden Menschen ohne Elektrizitätsversorgung eine minimale Dorfstromversorgung vor. Dazu gehören u. a. Wasser-versorgung und -desinfektion, Krankenstationen, elektrisches Licht in Häusern und auf Stra-ßen, Schulfernsehen, Telefon, Radio und TV, Klimatisierung und Bewässerung. Für ein Dorf mit 40 Familien mit je 15 Familienmitgliedern ergibt sich eine PV-Leistung pro Kopf von 10 Wp, d. h. 6 kW pro Dorf. Auf ähnliche Werte kommt Schott in [7], dessen Werte anhand einer Studie der inneren Mongolei erstellt wurden.

34 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Eine indische Studie [8] betrachtet ein Dorf mit 100 Familien und durchschnittlich 5 Fami-lienmitgliedern, das außer der in [6] beschriebenen Grundversorgung u. a. zusätzlich eine in-tensive Bewässerung, eine kleine Industrieanlage, 2 bewegliche Krankenstationen und einen großen Kühlraum vorsieht, was zu einer elektrischen Last von ca. 100 kW führt.
Bei einem modularen Hybridsystem zur elektrischen Versorgung muss also in jedem Fall von einer lokalen Vernetzung und einer installierten (Gesamt-) Leistung im mehrfachen Kilowatt-bereich ausgegangen werden. Um zu einer geeigneten Modulgröße für die einzelnen Kompo-nenten eines Hybridsystems zu kommen, kann man einerseits über den zu erwartenden Ver-brauch der "Nutzereinheiten" gehen und andererseits typische Installationen im privaten Nutzungsbereich zugrunde legen. In jedem Fall ist man sicher gut beraten, Familien als typi-sche Nutzergruppen im unteren kW-Bereich anzunehmen, da die nachhaltige Nutzung solcher Systeme (Wartung, Reparatur, Ersatz) durch größere Gruppen nur schwer zu sichern ist, es sei denn über unternehmerische Tätigkeit einzelner Personen.
Legt man den spezifischen Energieverbrauch deutscher Haushalte für eine Abschätzung einer komfortablen Elektroenergieausstattung zugrunde (Abbildung 1-24), so erhält man einen mitt-leren jährlichen elektrischen Energiebedarf von ca. 600 kWh bis 1600 kWh pro Person. Die-sem Bedarf muss das Gesamtsystem gerecht werden. Die Bereitstellung der "Rohenergie", d. h. ohne Zwischenspeicherung und erneute Aufbereitung von Wechselstrom, würde im Mit-tel pro Person 2 kWp Photovoltaik (bei 800 Sonnenstunden) oder einen 800 W Windgenerator (2000 Volllaststunden) oder 800 l Dieselkraftstoff (bei 20 % Wirkungsgrad) usw. erfordern, was zu einem geeigneten Mix entsprechend der örtlichen Gegebenheiten zusammengestellt werden könnte. Zusätzlich bedarf es eines Energiespeichers, um Versorgungslücken abzude-cken. In erster Linie bestimmen die benötigte Energiemenge im Zusammenhang mit der ge-wünschten Versorgungssicherheit und den natürlichen Schwankungen des Energieangebotes die Größe der einzusetzenden Speicher. Bei einem 2-Tagesspeicher kommt man so auf eine Durchschnittsgröße von 14 kWh, wenn eine Tiefentladegrenze von 40% nicht unterschritten werden soll.
Abbildung 1-24 Privater Energieverbrauch in Deutschland

Abschlussbericht Modulare PV- und Hybridsystemtechnik 35
Bei der Bemessung der Nennleistungen der Komponenten ist sicher eine Orientierung an üblichen elektrischen Installationen im Wohnbereich sinnvoll. Dies betrifft insbesondere die Schalt- und Schutztechnik sowie Steckverbindungen. Als Sicherungen in 1~230V bzw. 3~400V-Niederspannungsnetzen sind die gebräuchlichsten Werte 6A, 10A, 16A, 20A und 35A. Dabei sind die 35A eher in Absicherungen von Mehrfamilienhäusern oder auf Bauern-höfen mit Kraftmaschinen anzutreffen. Daraus ergeben sich typische Nennleistungswerte für Energielieferanten zu
• ≥ 1,3kVA, ≥ 2,3kVA, ≥ 3,6kVA oder ≥ 4,6kVA (einphasige Anwendungen),
• ≥ 6,9kVA, ≥ 11kVA, ≥ 13,8kVA oder ≥ 24kVA (dreiphasige Anwendungen),
die entsprechend wie allgemein üblich abgesichert werden können.
1.3.3 Literatur
[1] http://www.europa.eu.int/en/comm/dg17/thermie/volt/90-111.htm
[2] http://www.solardome.com
[3] http://www.public.usit.net/pinecrst/text/hplans.htm
[4] Jean-Francois Rischard: Rural Energy and Development for Two Billion People. http://www.worldbank.org/html/fpd/energy/e4_files/rural.pdf
[5] Anil Cabraal, Mac Cosgrove-Davies and Loretta Schaeffer: Accelerating PV-Market Development. Asia Alternative Energy Pro-gram (ASTAE), The World Bank, Washington, D.C.
[6] W. Palz: Power for the World, A Global Photovoltaic Action Plan 12th European Photovoltaic Solar Energy Conference, Amsterdam, 1994
[7] T. Schott: Einsatzpotential und ausgewählte Beispiele für PV-System-technik in Entwicklungsländern. Neuntes Symposium Photovoltaische Solarener-gie, Staffelstein 1994
[8] N.K. Bansal: Energy Requirements of a Small Village in India and Role of Non-Conventional Energy Sources
[9] Asia Alternative Energy Program (ASTAE): Best Practices for Household Electrification Programs: Lessons from Experiences in Selected Countries, World Bank Technical Paper No. 324, Asia Technical Department Series, Wa-shington, DC, 1996

36 Modulare PV- und Hybridsystemtechnik Abschlussbericht
[10] Foley, G.: PV Applications in the Rural Areas of the Developing World, World Bank Technical Paper No. 304, Energy Series, Washington, DC, No-vember 1995
[11] Wiesner, T.: Technische Aspekte einer großflächigen Integration dezentraler Ener-gieversorgungsanlagen in elektrische Verteilungsnetze, VDI Fortschritt-Bericht, 2001

Abschlussbericht Modulare PV- und Hybridsystemtechnik 37
1.4 Vergleich verschiedener Varianten der PV-Energieaufbereitung im Ver-bund mit anderen Energiequellen (M. Rothert)
Die Versorgung elektrischer Lasten, aber auch die Einspeisung elektrischer Energie erzeugt mittels photovoltaischer Wandler, ist fast immer mit einer Energieaufbereitung verbunden. Nur bei sehr kleinen Einheiten (z. B. Taschenrechner, PV-Spielzeug, Thermometer) kann auf eine Energieaufbereitung verzichtet werden. Die Art der Aufbereitung hängt stark von der Last oder den Lasten selber, den Ansprüchen an die Verfügbarkeit der Versorgung aber auch von Faktoren wie Kosten, Erweiterbarkeit, Einfachheit, Wartungsarmut, Wirkungsgraden, Marktverfügbarkeit der Komponenten und vielen weiteren Einflüssen ab. Es lassen sich dabei prinzipiell drei verschiedene Systemkonfigurationen unterscheiden:
• Direktversorgung von DC-Lasten,
• DC- Kopplung der PV mit einem Energiespeicher und
• AC-Kopplung mit einem PV-Wechselrichter und Einspeisung oder Bildung eines Netzes.
Bei der direkten Versorgung von Lasten mittels photovoltaischer Wandler ist es notwendig, die Spannung des PV-Moduls an die Spannung der Last anzupassen. Dies wird ohne einen weiteren Wandler durch eine Reihenschaltung mehrerer PV-Zellen erreicht.
Die DC-Kopplung der PV mit einem Energiespeicher und die Versorgung der Lasten aus der vom Speicher stabilisierten DC-Spannung ist für autonome Energieversorgungssysteme, die zu einem großen Anteil mittels Photovoltaik gespeist werden, die bis heute am weitesten verbreitete Technologie. Vom Einsatz in Solaruhren bis hin zu Hybridsystemen mit einigen Kilowatt Leistung wird diese Technologie bis heute fast immer eingesetzt. Durchgesetzt hat sich diese Art der PV-Energieaufbereitung bei den sogenannten Solar Home Systems (SHS). Die Vorteile dieser Energieaufbereitung für SHS sind die sehr einfache und dadurch kosten-günstige Systemtechnik, die nur aus einem Laderegler besteht. Dieser hat die Aufgabe, den Energiespeicher vor Überladung und vor Tiefentladung zu schützen. Dabei sind in den letzten Jahren große Fortschritte bei der Entwicklung und Optimierung von Ladereglern gemacht worden, die mehr und mehr auch die Aufgaben eines Systemmanagements übernehmen [1].
Die in diesen Systemen eingesetzten Laderegler lassen sich dabei in zwei Gruppen aufteilen. Bei der ersten Gruppe findet im Laderegler keine Spannungsanpassung zwischen PV und Bat-terie statt. Die zweite Gruppe der Laderegler nimmt eine Spannungsanpassung mittels eines DC/DC-Stellers vor. Bislang überwiegt bei weitem der Anteil der Laderegler ohne Span-nungsanpassung. Vorteile dieses Konzepts sind die einfachere Leistungselektronik sowie der höhere Wirkungsgrad des Ladereglers. Die Kosten und die Ausfallrate dieser Geräte sind sehr gering. Nachteilig ist der geringere Nutzungsgrad der PV aufgrund von Fehlanpassungen und die durch die Batteriespannung fest vorgegebene Modulspannung des PV-Moduls. Diese Nachteile können durch einen Laderegler mit integriertem DC/DC-Wandler ausgeglichen werden, der die Spannungsanpassung über eine Maximum Power Point (MPP) Regelung durchführt und dadurch Fehlanpassungen vermeidet. Die höheren Kosten aufgrund des DC/DC-Wandlers und der geringere Wirkungsgrad sind aber nachteilig. Durch die immer kostengünstigeren und besseren Bauelemente der Leistungselektronik werden sich aber in

38 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Zukunft vermutlich immer stärker Laderegler mit DC/DC-Steller und einer MPP-Regelung durchsetzen.
In Serie gefertigte Laderegler gibt es heute bis zu einer Größe von 5 kW [2]. Eine Parallel-schaltung mehrerer Laderegler ist prinzipiell möglich, allerdings gibt es dabei Schwierigkeit mit den im Laderegler integrierten Systemmanagementfunktionen.
Nachteilig an der DC-Kopplung sind die sehr unterschiedlichen DC-Spannungsebenen (12 V, 24 V, 48 V, usw.) und die durch die relativ niedrigen Spannungen bei größeren Leistungen verursachten hohen Ströme. Dies spiegelt sich in den hohen Kosten für die DC-Verkabelung und die teurere Sicherheitstechnik wider. Noch immer sind die für diese Systeme notwendi-gen DC-Verbraucher teurer oder am Markt nicht verfügbar. Bei den kleinen Systemen (klei-ner 200 Wp) z. B. SHS überwiegen bislang eindeutig die Kostenvorteile gegenüber den Nachteilen. Die dort eingesetzten Verbraucher (Lampen, Fernseher, Radio und Kühlschränke) gibt es kostengünstig auch mit einer 12 V DC-Versorgung. Der Anschluss von AC-Lasten ist allerdings nur über einen an die DC-Spannungsschiene angeschlossenen netzbildenden Strom-richter möglich.
Die AC-Kopplung der PV-Anlage mittels eines Wechselrichters ist die einzige Möglichkeit der PV-Energieaufbereitung für die sogenannten netzgekoppelten Anlagen. Hier wird unter-schieden zwischen:
• den modulintegrierten (50 bis 300 W),
• dem modulorientierten (0,5 bis 6 kW) und
• den zentralen Wechselrichtern (größer 10 kW).
In den letzten Jahren haben sich bei kleinen und mittleren Anlagen (1 - 20 kW) die modulori-entierten sogenannten String-Wechselrichter durchgesetzt. Selbst bei größeren Anlagen ist ein Trend von zentralen hin zu modulorientierten Wechselrichtern zu beobachten. Dies lässt sich dadurch begründen, dass vermehrt auch große PV-Anlagen als gebäudeintegrierte Anlagen aufgebaut werden, in denen die modulorientierten Wechselrichter sowohl energetisch günsti-ger als auch wirtschaftlicher eingesetzt werden können als zentrale Wechselrichter. Auf der anderen Seite gibt es auch weiterhin Entwicklungstrends hin zu modulintegrierten Wechsel-richtern, die bei einem stark wachsendem PV-Markt und größer werdenden Modulen (bis 360 W) [3] sowie günstigeren Leistungshalbleitern in Zukunft vielleicht doch noch eine stär-kere Bedeutung erlangen könnten.
Die bei netzgekoppelten Anlagen verwendeten PV-Stromrichter können prinzipiell auch in PV-Hybridsystemen eingesetzt werden, wenn vom Hybridsystem ein AC-Netz mit ausrei-chender Qualität (Frequenz- und Spannungsstabilität) für eine Netzeinspeisung des PV-Stromrichters zur Verfügung steht. Die meisten heute auf dem Markt befindlichen PV-Wechselrichter lassen sich so parametrieren, dass sie auch in einem Inselnetz mit erhöhten Frequenz- und Spannungsschwankungen arbeiten, und sind somit zunächst einmal auch für Hybridsysteme geeignet. Bei einem sehr hohen PV-Anteil in diesen Netzen ergibt sich aller-dings das Problem, dass bei einem Überangebot an Solarenergie eine Leistungsabregelung der PV-Wechselrichter notwendig wird, da bei einem bereits gefüllten Energiespeicher dieser die photovoltaisch erzeugte Energie nicht mehr aufnehmen kann. In Hybridsystemen kann über die Betriebsführung versucht werden, diesen Betriebszustand zu vermeiden und es bedarf

Abschlussbericht Modulare PV- und Hybridsystemtechnik 39
lediglich einer Sicherheitseinrichtung, um die PV-Anlage abschalten zu können. In reinen PV-Batteriesystemen kann aber nur über die PV-Anlage die Batterie definiert geladen werden, was unter Lebensdauergesichtspunkten der Batterie sehr wichtig ist. Hier ist geregelte Leistungsreduzierung der PV-Anlage notwendig, die die heute verfügbaren PV-Wechselrichter bislang nicht implementiert haben.
Ein Vergleich der unterschiedlichen Möglichkeiten zur PV-Energieaufbereitung bei PV-Hybridsystemen und die Kopplung dieser Systeme wird im Folgenden untersucht.
1.4.1 Vergleich der DC- und AC-Kopplung von PV-Hybridsystemen
Eine der Grundideen der Modularen Systemtechnik ist die einheitliche Kopplung unter-schiedlichster Komponenten, die sowohl für netzgekoppelte PV-Anlagen wie für Inselnetze geeignet sind. Durch die höheren Stückzahlen ergeben sich dann zukünftig günstigere Produktionskosten. Um die Inselanlagen später untereinander vernetzen oder auch an ein Ver-bundnetz anschließen zu können, muss der für Niederspannungsnetze übliche 230 V/50 Hz Wechselstrom als Kopplungsebene Verwendung finden. Blockschaltbilder für eine nach der Modularen Systemtechnik aufgebaute Anlage mit einer konsequenten AC-Kopplung sowie für eine Hybridanlage mit der bis heute weitgehend üblichen DC-Kopplung sind in der fol-genden Abbildung 1-25 zu erkennen.
Bei der DC-Kopplung werden alle Komponenten des Systems an einem DC-Verteiler ange-schlossen. Dieses sind der PV-Laderegler, die Batterie, der Stromrichter (meistens 3-phasig) zur Bereitstellung des üblichen 230 V/50 Hz Wechselstromnetzes, sowie der Generator mit-tels eines speziellen Ladereglers. Die Netzreglung des Wechselstromnetzes wird dann entwe-der vom Dieselgenerator oder dem Stromrichter durchgeführt. Ein paralleler Betrieb vom Dieselgenerator und Stromrichter ist nicht möglich und wird mittels einer Verriegelungsschal-tung verhindert. Eine gesondert notwendige Betriebsführung überwacht die Batterie, startet den Dieselgenerator und schaltet zwischen Dieselgenerator und Stromrichter um.
=~~~
PV-generator
Laderegler
Batterien
3 phasigerStromrichter
Verb
rauc
her
3~ /
400
V
Diesel-generator
GS
=~~~
Laderegler
Verriegelung
DC
-Ver
teilu
ng
DC-Verbraucher
Diesel-generator
Verb
rauc
her
modularerBatteriestromrichter(Sunny Island)
Batterien
GS
=~
=~
=~
=~
=~
=~
=~
String-wechselrichter(z.B. Sunny Boy)
PV-generator
Windkraft-generator
G
3~ / 400 V
Abbildung 1-25 links Blockschaltbild einer DC-gekoppelten PV-Hybridanlage rechts Blockschaltbild einer AC-gekoppelten PV-Hybridanlage

40 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Bei der vollständig AC-gekoppelten PV-Hybridanlage arbeiten alle Komponenten parallel auf der 230 V/50 Hz Wechselstromschiene und speisen dort entweder einen Strom ein (PV-Stromrichter, Dieselgeneratoren und gegebenenfalls Batteriestromrichter) oder entnehmen einen Strom (Lasten und Batteriestromrichter im Ladebetrieb). Voraussetzung hierfür ist ein Batteriestromrichter, der im Lade- und Entladebetrieb das Netz bilden kann. Er hat damit die Aufgabe, zu jedem Zeitpunkt für ein ausgeglichenes Verhältnis zwischen Erzeugung und Verbrauch zu sorgen, um das Wechselstromnetz stabil zu halten. Beim gleichzeitigen Betrieb eines Motorgenerators am selben Wechselspannungsnetz gibt es verschiedene Möglichkeiten der Netzregelung.
1. Der Batteriestromrichter schaltet von der Spannungs-Frequenzregelung um in eine Strom-regelung und stellt damit fürs Netz nur noch eine Stromquelle dar. Das Netz wird in die-sem Fall vom Motorgenerator gebildet.
2. Der zugeschaltete Generator arbeitet im Netzparallelbetrieb als regelbare Stromquelle, die vom netzbildenden Batteriestromrichter Leistungssollwerte vorgegeben bekommt.
3. Sowohl der Batteriestromrichter als auch der Motorgenerator arbeiten als netzbildende Aggregate mit einer Wirkleistungs-Frequenzstatik und eine Blindleistungs-Spannungs-statik und teilen sich Wirk- und Blindleistung über die voreingestellten Statiken auf.
Diese drei Möglichkeiten der Kopplung von verschiedenen Komponenten auf der Wechsel-spannungsseite gelten prinzipiell auch für mehrere parallele Batteriestromrichter oder weitere Synchron- und Asynchrongeneratoren, die in dieses Netz einspeisen.
Da nur der Batteriestromrichter die Batterie laden und entladen kann, ist es recht einfach, die Batterieüberwachung durchzuführen und ein übergeordnetes Anlagenmanagement in den Stromrichter zu integrieren. Die Einkopplung der PV wird über PV-Wechselrichter bewerk-stelligt. Eine aufwendige DC-Verkabelung wird vermieden. Allerdings muss sichergestellt sein, dass bei einem Überangebot an PV-Energie und gleichzeitig einer vollen Batterien die PV-Einspeisung entweder abgeregelt, oder zumindest die PV-Anlage abgeschaltet werden kann.
Die Vor- und Nachteile der unterschiedlichen Kopplungsmöglichkeiten sind in Tabelle 1-2 dargestellt. Die Hauptvorteile der AC-Kopplung liegen dabei vor allem in der einfachen An-lagenauslegung, der einfachen Installation und der sehr guten Erweiterbarkeit einschließlich einer späteren Vernetzung mit weiteren Hybridanlagen oder auch einem Anschluss ans öffent-liche Netz. Hauptprobleme waren bislang die sehr komplexe Netzregelung und die nur be-dingt geeigneten Komponenten, die einiges an Zusatzbeschaltungen notwendig machten. Hier konnten aber in den letzten Jahren durch dieses und einige weitere Vorhaben viele techni-schen Lücken geschlossen werden.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 41
DC-Kopplung AC-Kopplung
Vorteile • geringe Anzahl an Komponenten • einfache Netzregelung • relativ robustes System • Redundanz durch zwei unabhängige
Systeme (Motorgenerator; Wechsel-richter)
• einfache Auslegung • einfache Installation • gute Erweiterbarkeit • Vermeidung des DC-Verteilers • einfache Kopplung weiterer Stromerzeu-
gungsaggregate (Wind) • größere Redundanz • bessere Möglichkeiten einer Betriebsop-
timierung
Nachteile • nur schwierig erweiterbar • DC-Spannungsebene nicht genormt • Stromrichter sowie Motorgenerator müs-
sen auf die Höchstlast ausgelegt werden ! höhere Investitionskosten bei größeren Systemen
• aufwendige DC-Verkabelung ! PV-Anlage und Batterie sollten örtlich nah bei einander liegen
• eine MPP-Regelung erfordert einen zu-sätzlichen DC/DC-Steller
• höhere Anzahl an Einzelkomponenten
• komplexe Netzregelung
• höhere Anlagenkosten bei sehr kleinen Systemen ohne Motor-Generator
Energetische Bewertung
• beim Laden der Batterien über die Photovoltaik hat die DC-Kopplung energetische Vorteile, da keine Energiewandlung notwendig ist
• bei der direkten Versorgung der Lasten mit Solarenergie ist die AC-Kopplung energetisch günstiger, aufgrund der MPP-Regelung, einer geringeren Fehlanpassung, sowie der meist höheren Wirkungsgrade der Stringwechselrichter gegenüber dem netzbildenden Stromrichter
Tabelle 1-2 Vor- und Nachteile der unterschiedlichen Kopplungsmöglichkeiten
Die Vorteile der DC-Kopplung liegen hingegen in der sehr einfachen Netzregelung, der gro-ßen Robustheit des Systems und der entsprechenden Verfügbarkeit der Komponenten. Bei dieser Kopplung werden allerdings deutlich andere Komponenten eingesetzt als bei den netz-gekoppelten Anlagen. Nachteilig ist der deutlich erhöhte Installationsaufwand aufgrund der umfangreichen und komplexeren DC-Verkabelung, sowie die schwierigere Erweiterbarkeit.
Zwischen der reinen DC-Kopplung und der reinen AC-Kopplung wie in Abbildung 1-25 dar-gestellt, gibt es auch die Möglichkeiten, die AC- und DC-Kopplung zu kombinieren. Die Vor-teile, den Motorgenerator sowie den Batteriestromrichter auf der AC-Seite parallel betreiben zu können, sind direkt einsichtig. Die einzelnen Komponenten müssen nicht mehr auf die Maximalleistung ausgelegt werden, sondern nur die Summe der Einzelleistungen muss der Maximalleistung entsprechen. Dies führt neben erheblichen Kostenersparnissen bei den In-vestitionen auch zu Betriebskostenersparnissen durch den Betrieb der Komponenten mit einer besseren Auslastung und dadurch einem besseren Wirkungsgrad.
Anders ist dies bei der PV-Energieaufbereitung. Die PV-Module liefern eine DC-Spannung, die für eine Einspeisung ins Netz zunächst mittels eines PV-Wechselrichters aufbereitet wer-den muss. Soll diese Energie nun in einer Batterie gespeichert werden, muss die Wechsel-spannung wieder gleichgerichtet und in ihrer Höhe angepasst werden. Zum Laden des Batte-riespeichers mittels der PV-Anlage müssen somit immer zwei Wandlungsprozesse mit nur

42 Modulare PV- und Hybridsystemtechnik Abschlussbericht
begrenztem Wirkungsgrad durchlaufen werden. Hier scheint es doch wesentlich sinnvoller, die PV-Module nur über einen Laderegler direkt auf die Batterie aufzuschalten. Anders sieht es aus, wenn die PV-Energie nicht zur Ladung der Batterie verwendet, sondern direkt von den unterschiedlichen Lasten verbraucht wird. In diesem Fall wird bei beiden Anlagenkonstellati-onen ein Wechselrichter als Energiewandler durchlaufen. Hier hat die direkte Einspeisung mit einem PV-Wechselrichter Vorteile gegenüber der DC-Kopplung und der Einspeisung über den netzbildenden Wechselrichter. Die Vorteile ergeben sich durch die im PV-Wechselrichter integrierte MPP-Regelung, dem Wegfall der Laderegler im Aufbereitungszweig und den in der Regel höheren Wirkungsgraden guter PV-Wechselrichter gegenüber dem netzbildenden Stromrichter.
Welche Kopplung energetisch günstiger ist, hängt somit sehr stark von der Anlagenbetriebs-führung und der Anlagenauslegung (solare Deckungsrate) ab. Wird ein großer Teil der PV-Energie direkt von Verbrauchern abgenommen, ist eine reine AC-Kopplung energetisch güns-tiger. Ist es dagegen notwendig, einen großen Anteil der PV-Energie in der Batterie zu spei-chern, hat eine DC-Kopplung der PV-Anlage energetische Vorteile.
Mittels Simulationsrechnungen am Fraunhofer ISE [4] wurden die AC- und DC-Kopplung energetisch genauer untersucht. Hierbei kam heraus, dass zwischen beiden Systemen nur geringe Unterschiede bestehen. Die AC-Kopplung lag aber bei allen Systemkonfigurationen immer schlechter als die DC-Kopplung. Bei etwas anderen Annahmen bezüglich der Wirkungsgrade von Ladereglern und Wechselrichtern kann sich dieses Verhältnis aber auch schnell verschieben. So wurde für den PV-Stromrichter nur ein Wirkungsgrad von im Mittel 89% angesetzt. Heute auf dem Markt befindliche trafolose PV-Wechselrichter erreichen aber bereits europäische Wirkungsgrade von 93% bis zu 96% und Wechselrichter mit Trafo im-merhin noch Wirkungsgrade von 90% bis 92,5%. Für den netzbildenden Stromrichter lag der mittlere Wirkungsgrad bei 92% in dieser Berechnung. Ein so hoher mittlerer Wirkungsgrad konnte am ISET aber noch bei keinem netzbildenden Stromrichter gemessen werden. Ein mittlerer Wirkungsgrad von 85% bis 90% dürfte realistischer sein. Als Beispiel hierfür seinen die Online-USV-Stromrichter der Firma Masterguard angeführt, die mit maximalen Wirkungsgraden von 90% bis 92% angegeben werden [5]. Ein bei PV-Wechselrichtern höhe-rer Wirkungsgrad als bei den netzbildenden Stromrichtern würde zu einer günstigeren energe-tischen Bewertung der AC-Kopplung führen. Ebenfalls nicht berücksichtigt in der Simulation wurde die bessere Auslastung des netzbildenden Stromrichters und Motorgenerators, die in AC-gekoppelten Systemen kleiner ausgelegt werden können. Dadurch sind erhebliche energe-tische Vorteile durch den Betrieb der Komponenten mit im Mittel besseren Wirkungsgraden möglich.
Einen Vergleich der Kosten für die unterschiedlichen Systemkonzepte hat Herr Brünner vom Ingenieurbüro EST [6] in Staffelstein vorgestellt. Er hat die Investitionskosten für ein AC- und DC-gekoppeltes System gegenübergestellt. Die Anlagen müssen dabei einen täglichen Stromverbrauch von ca. 50 kWh bei einer Maximallast von 13 kW abdecken. Bei einer De-ckung des thermischen Energiebedarfs werden durch das BHKW ca. 30 kWh elektrische Energie erzeugt. Die Kosten setzen sich wie in Tabelle 1-3 dargestellt zusammen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 43
AC-Kopplung DC-Kopplung
PV-Generator 4,5kWp (1070 DM/kWp) 48.000,- DM 48.000,- DM
Batteriesatz OPzS 48V / 1000Ah (330 DM/kWh) 16.000,- DM 16.000,- DM
4 PV-WR / 4 Modulanschlusskasten + ÜSS 6.800,- DM 1.900,- DM
4 DC-Hauptleitung + Laderegler 35A 100,- DM 3.900,- DM
3 WR bidirektional / Insel-WR 30.000,- DM 16.000,- DM
5 kW netzparallel BHKW / 13 kW Insel BHKW 27.000,- DM 49.000,- DM
3~ Ladegleichrichter 5 kW /48V 6.000.- DM
DC-Schrank, DC-Überwachungseinrichtung 3.000,- DM 6.000,- DM
AC-Schrank, Lastabwurf, Verriegelung MG 10.000,- DM 10.000,- DM
Visualisierung, Fernüberwachung 9.500,- DM 13.000,- DM
Gesamt (DM netto) 150.400,- DM 170.400,- DM
Tabelle 1-3 Kostenvergleich AC- und DC Kopplung [6]
Der Kostenvergleich zeigt, dass das AC-System bei den Investitionskosten um ca. 12% güns-tiger ist als das vergleichbare DC-System. Die im AC-System höheren Kosten für die 4 PV-Wechselrichter und die 3 bidirektionalen Batteriestromrichter werden durch die Einspa-rungen bei der DC-Verkabelung, dem günstigeren BHKW, welches im AC-System kleiner ausgelegt werden kann, und den geringeren sonstigen Systemkosten mehr als kompensiert. Weitere Einsparungen in AC-gekoppelten Systemen sind durch die Integration von ansonsten zusätzlich benötigten Komponenten (Batteriemanagement, Lastabwurf, Fernüberwachung) in den Batteriestromrichter zu erreichen. Der vom ISET und SMA Regelsysteme GmbH gemeinsam entwickelte Batteriestromrichter Sunny Island zielt in diese Richtung. Durch die bessere elektrische Auslastung des BHKWs können zusätzlich die Betriebskosten im AC-gekoppelten System verringert werden. Die bei hoher Solarstrahlung größere Maximal-leistung des Systems durch die Parallelschaltung auf der AC-Seite ist ein weiterer Vorteil, der gerade bei gastronomischen Betrieben mit einer sehr guten Korrelation zwischen Solarein-strahlung und Stromverbrauch zum Tragen kommt.
1.4.2 Zusammenfassung
Die direkte Kopplung der PV-Module mit Lasten ohne zusätzlichem Energiespeicher oder einem elektrischen Netz, in das die Energie eingespeist wird, hat bislang nur bei PV-Pumpensystemen eine gewisse Bedeutung. Eine Energieaufbereitung findet hier in der Regel nicht statt. Die notwendige Spannungsanpassung erfolgt durch eine Reihenschaltung der Zel-len oder Module.
Bei den netzgekoppelten PV-Anlagen hat sich eindeutig die energetische Aufbereitung der PV-Energie mit den sogenannten Stringwechselrichtern durchgesetzt, die es heute in einer

44 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Vielzahl von verschiedenen Herstellern auf dem Markt gibt [7]. Auch bei größeren, gebäude-integrierten Anlagen werden die Stringwechselrichter häufig den zentralen Wechselrichtern vorgezogen. Bei großen, nicht gebäudeintegrierten PV-Anlagen werden weiterhin zentrale Wechselrichter (größer 10 kW) eingesetzt. Diese weisen einen spezifisch deutlich günstigeren Preis bei einem gleichzeitig etwas höheren Wirkungsgrad auf. Auch in diesem Bereich gibt es mittlerweile einige Anbieter und eine Vielzahl unterschiedlicher Geräte. Modulintegrierte Wechselrichter haben sich im deutschen Markt bislang nicht durchgesetzt, doch gibt es immer noch einige Entwicklungstätigkeiten. Der Trend zu größeren Modulen und immer günstigeren und besseren leistungselektronischen Bauelementen könnten aber in Zukunft auch die modul-integrierten Wechselrichter wieder interessanter machen.
In den autonomen oder häufig sogenannten Inselanlagen hat sich bei den kleinen Systemen (kleiner 500 Wp) die DC-Kopplung der PV-Module an die Batterie über einen Laderegler eindeutig durchgesetzt. Die Laderegler haben dabei einen sehr guten technischen Stand er-reicht, werden in großen Stückzahlen produziert und übernehmen mittlerweile sogar die Auf-gaben des Systemmanagements. Eine MPP-Regelung ist allerdings nur in wenigen Ladereg-lern zu finden. Dies liegt an dem erhöhten Aufwand und damit höheren Kosten für einen MPP geregelten Laderegler. Auch die mittlerweile in großen Stückzahlen gebauten, solar betriebe-nen Kompaktgeräte (Parkscheinautomat, Zigarettenautomat, Verkehrsüberwachung, usw.) arbeiten mit der Energieaufbereitung über einen einfachen Laderegler.
Bei größeren Inselanlagen (größer 1 kWp), die fast immer neben der PV-Anlage einen weite-ren Energieerzeuger enthalten und dann als Hybridsysteme bezeichnet werden, gibt es erste Anzeichen, dass sich die AC-gekoppelten Systeme in Zukunft durchsetzten könnten. Wie im vorherigen dargestellt, sind sie energetisch zumindest gleichwertig mit den DC-gekoppelten Systemen, weisen aber viele systemspezifische Vorteile auf. Unter Kostengesichtspunkten sind sie heute schon bei vielen Anwendungen die kostengünstigere Alternative. Die einfache-re Installation, die bessere Erweiterbarkeit, und die Verwendung der selben PV-Wechselrichter zur Energieaufbereitung wie bei den netzgekoppelten PV-Anlagen macht diese Systeme sehr zukunftsträchtig. Dabei sind viele hierfür notwendigen Entwicklungen durch das hier beschriebene Vorhaben durchgeführt oder ausgelöst worden.
1.4.3 Literatur
[1] Adelmanm, P., Gutzeit, D., Commerell, W., Eckel, H.: Systemmanagement; Workshop Elektrochemische Speichersysteme für regenerative Energieversorgungsanlagen; Forschungsverbund Sonnenergie; Ulm, 1999;
[2] Uhlmann Solarelectronic GmbH http://www.uhlmann-solar.de/;2001
[3] Kreutzmann, A.: Markübersicht Solarmodule, Photon - das Solarstrom-Magazin; Solar Verlag GmbH, Ausgabe 2-2001; Aachen, 2001

Abschlussbericht Modulare PV- und Hybridsystemtechnik 45
[4] Gabler, H., Wiemken, E.: Modelling of Stand-Alone PV-Hybrid Systems and Comparison of Sys-tem Concepts; 2 nd World Conference and Exhibition on Photovoltaic Solar Energy Conversion; Wien, 1998
[5] http://www.masterguard.de/page/ger/1010/index.cfm
[6] Brünner, M., Landau, M.: Batteriegestützte Hybridsysteme mit HKA und PV; 16. Symposium Photovoltaische Solarenergie; OTTI Energie-Kolleg, Staffelstein; März 2001
[7] Kreutzmann, A.: Markübersicht Wechselrichter; Photon - das Solarstrom-Magazin; Solar Verlag GmbH, Ausgabe 3-2001; Aachen, 2001

46 Modulare PV- und Hybridsystemtechnik Abschlussbericht

Abschlussbericht Modulare PV- und Hybridsystemtechnik 47
1.5 Definition von Subsystemen und Subkomponenten (F. Kininger)
In diesem Kapitel werden die Subsysteme und deren Komponenten für modulare PV- und Hybrid-Versorgungsanlagen definiert. Unter Berücksichtigung der allgemeinen Zusammen-hänge in Energieerzeugungs- und -verbrauchssystemen (ES) wird im folgenden auf die Unter-teilung von Erzeuger-, Speicher- und Verbraucher- sowie Energie-Management-Systeme (Be-triebsführung) und deren Subkomponenten eingegangen. Der Energiebus (Netz) als eigen-ständiges Subsystem wird im weiteren nicht behandelt da er von den individuellen Rahmen-bedingungen des jeweiligen Projektes abhängt. Zur eindeutigen Trennung der Subsysteme dient die jeweilige Schnittstelle zum Energie-Bus. Die Erzeuger-, Speicher- und Verbraucher-systeme können in modularen Versorgungsanlagen aber auch in ökonomischer Hinsicht, unabhängig voneinander betrachtet werden. Da sich die unterschiedlichen Subsysteme gegen-seitig beeinflussen, müssen an deren Schnittstellen nicht nur technische sondern auch ökono-mische Standards gesetzt werden. Für das Energie-Management-System (EMS) lässt sich eine solche klare Trennung von den anderen Subsystemen nicht realisieren, weder in technischer noch in ökonomischer Hinsicht. Das EMS hat nicht nur zentrale Betriebsführungsaufgaben, es ist auch in die jeweiligen Subsysteme integriert und verursacht dort subsystembezogene Kos-ten die positiv aber auch negativ sein können. Da diese negativen Kosten zur Zeit noch nicht mit ausreichender Genauigkeit ermittelt und zugeordnet werden können, werden die Betriebs-kosten des EMS als eigenständige Kostenstelle geführt.
Um die Kostenrechnung in Kapitel 1.6 transparenter zu gestalten, werden die Subsysteme in ihre Subkomponenten unterteilt:
I. Erzeuger
1. Photovoltaik-Generatoren A. Photovoltaik-Module B. Photovoltaik-Inverter D. Montagegestell E. Elektrotechnik F. sonstige
2. Motor-Generatoren A. Diesel-Generator B. Frequenzumrichter, Synchronisationseinrichtung D. Kraftstoffsystem E. Abgassystem F. sonstige

48 Modulare PV- und Hybridsystemtechnik Abschlussbericht
II. Energie-Speicher-Systeme
1. Batterie-Speicher A. Batterie B. Batterie-Inverter D. Montagegestell E. Säureumwälzung, Belüftung, Sicherungen etc. F. sonstige
III. Energie-Management-System
1. Zentrale oder dezentrale Komponenten A. Prozessor B. Schnittstellen D. Gehäuse, Modem, etc.
2. PV-Generator-Schnittstellen A. PV-Generator 1 B. PV-Generator 2
3. Batterie-Inverter-Schnittstellen A. Batterie-Inverter 1 B. Batterie-Inverter 2
4. Informationsbus-System
5. Verbraucher-Schnittstellen A. Pumpe 1
IV. Energiebus
V. Verbraucher
1. Beleuchtung A. Leuchtmittel B. elektronisches Vorschaltgerät D. Gehäuse, Schalter, Kabel, etc.
2. Pumpen A. Pumpe B. Frequenzumrichter, Steuerung, etc. D. Gehäuse, Schalter, Kabel, etc.
3. sonstige

Abschlussbericht Modulare PV- und Hybridsystemtechnik 49
1.6 Ermittlung der Kostenstrukturen und Abschätzung des Degressionspo-tentials (F. Kininger)
Bei der Betrachtung des Degressionspotentials muss unter der statischen Kostendegression, also der Kostenreduzierung unter den aktuellen Markt- und Produktionsbedingungen, sowie der dynamischen Kostendegression unter Berücksichtigung der zukünftigen Marktentwick-lung unterschieden werden. In diesem Kapitel wird die Degression unter den aktuellen Markt-bedingungen abgeschätzt. Für das Gesamtsystem und für das jeweilige Subsystem kann eine Kostendegression durch folgende Einflussfaktoren erreicht werden:
• Steigerung der Stück- bzw. der Systemzahlen In den meisten Industriezweigen machen die Produktions- und Personaleinzelkosten nur einen geringen Anteil, die Entwicklungs-, Vertriebs- und Gemeinkosten dagegen einem erheblichen Anteil des Endkundenpreises aus [1, 2].
• Steigerung der Komponenten- bzw. der Systemleistung Durch die Steigerung der Nennleistung der einzelnen Komponenten können die nicht leistungsspezifischen Kosten (z. B. Regelungs- und Betriebsführungskomponenten) sowie die oben genannten Entwicklungs-, Vertriebs- und Allgemeinkosten reduziert werden. Dabei ist zu beachten, dass die Erhöhung der Komponentenleistung einen Rückgang der Stückzahlen und somit eine Kostensteigerung zur Folge haben kann. Ebenso kann die Modularität unter einer Erhöhung der Komponentenleistung leiden wodurch erhöhte Planungskosten entstehen können.
• Steigerung der Komponenten- bzw. der Systemlebensdauer Bei einer Steigerung der Lebensdauer können die Investitionskosten nicht gesenkt werden. Durch längere Abschreibungszeiten wird jedoch die jährliche Annuität redu-ziert. Dies wirkt sich positiv auf die Stromgestehungskosten aus.
Um die Kostendegression in der Investitionskostenrechnung mathematisch berücksichtigen zu können, werden die größten Investitionskostenfaktoren nach Kapitel 3.3.6 in
1. Variable (spezifische) Kosten und
2. Fixkosten aufgeteilt.
Somit kann das Degressionspotential einer Subkomponente nach folgender Funktion be-schrieben werden:
zkkk VF *+= (1)
mit k Kosten []
kF Fixkosten [DM]
(unabhängig von der Anzahl oder der Leistung der Subkomponenten)
kV Variable (spezifische) Kosten [/EH]
z Anzahl oder Leistung der Subkomponente [EH]

50 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Im weiteren werden die Kostendegressionspotentiale bei der Planung von Hybrid-Systemen durch die kostenintensivsten Komponenten exemplarisch dargestellt. Als Degressionspotenti-ale stehen bei dem aktuellen Stand der Technik die Steigerung der Stückzahlen sowie die Steigerung der Komponenten- und Systemleistung im Vordergrund.
1.6.1 PV-Modulkosten
Bei dem größten Investitionskostenfaktor, den PV-Modulen, liegt das Degressionspotential hauptsächlich in der Steigerung der Stückzahl. Die Degression liegt dabei meist in einem Be-reich zwischen 0,5-5%. Bei der Steigerung der Komponentenleistung kommt es dagegen nur zu geringen Kostenreduktionen. Bei einigen Herstellern ergeben sich sogar Kostensteigerun-gen im Bereich von 1-2% Kosten.
3000
3500
4000
4500
5000
5500
6000
0 25 50 75 100 125 150
Modulanzahl [Stück]
spez
ifisc
he K
oste
n [€
/kW
]
Degressionsfunktion
spez. Kosten bei 85 Wpeak
spez. Kosten bei 170 Wpeak
Abbildung 1-26 Kostendegression namhafter PV-Module im Großhandel - Oktober 2001
1.6.2 Inverterkosten
Bei den Inverterkosten muss zwischen den PV-Invertern und den Batterie-Invertern unter-schieden werden:
Bei PV-Invertern liegt das Degressionspotential hauptsächlich in der Steigerung der Kompo-nentenleistung. Bei der Verdoppelung der Komponentenleistung werden Kostendegressionen von 10-20% erreicht. Durch größere Stückzahlen kann man nur eine geringe Kostensenkung erreichen, sie liegt im Bereich von 2-5%.
Bei Batterie-Invertern wurde kein nennenswertes statisches Degressionspotential entdeckt. Da jedoch der Markt für diese Produkte erst erschlossen wird, ist in den nächsten Jahren ein dynamisches Degressionspotential bezüglich der Stückzahlen, zu erwarten.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 51
0
200
400
600
800
1000
1200
0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0
Ausgangsleistung [kW]
spez
ifisc
he K
oste
n [€
/kW
]
Degressionsfunktion spez. Kosten bei 1-2 Invertern
spez. Kosten bei 3-5 Invertern spez. Kosten bei 6-9 Invertern
Abbildung 1-27 Kostendegression namhaften PV-Inverterfamilie im Großhandel - Okto-
ber 2001
1.6.3 Batterie-Speicherkosten
Mit einer Kostenreduktion zwischen 7-25% haben die Batterie-Speicher das größte Degressi-onspotential, welches hauptsächlich durch die Steigerung der Kapazität der Einzelzellen erreicht wird.
0
50
100
150
200
250
300
0,0 1,0 2,0 3,0 4,0 5,0 6,0 7,0 8,0Nennkapazität [kWh]
spez
ifisc
he P
reis
e [€
/kW
h]
Degressionsfunktion
spez. Kosten bei 30 Zellen
Abbildung 1-28 Kostendegression einer namhaften Zellenfamilie im Großhandel -
August 2001

52 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Das große Degressionspotential des Batteriespeichers ist auch in Abbildung 1-29 erkennbar. Bis auf das 26,4 kW Hybrid-System verfügen alle anderen Systeme über einen Batterie-String, bei dem genannten 26,4 kW System wurden zwei Strings mit jeweils geringerer Spei-cherkapazität eingesetzt.
Standard PV-Diesel-Hybrid-Systeme
0
1.000
2.000
3.000
4.000
5.000
6.000
7.000
8.000
9.000
10.000
Summenleistung aus den Batterie-Inverter und dem Diesel-Generators [kW]
spez
ifisc
he In
vest
ition
skos
ten
[€
/kW
]
EM - Planung - Inst allat io n
Energ ie- M anag ement
B at t er ie
B at t er ie- Invert er
D iesel- Generat o r
PV - M o dule
6,6 13,2 19,8 26,4 33,0
B at t er ie- Planung - Inst al lat io n
B I- Planung - Inst al lat io n
D G- Planung - Inst al lat io n
PV - Planung - Inst allat io n
PV - Invert er
Abbildung 1-29 Das System-Degressionspotential eines modularen PV-Diesel-Hybrid-Systems.
1.6.4 Literatur
[1] K.-D. Däumler, J. Grabe: Kostenrechnung 1 Grundlagen Uwb-Verlag, Herne, Berlin 2000
[2] M. Meinhardt: Kostenreduktion durch neue PV-Systemtechnik Kasseler Symposium Energie-Systemtechnik, Kassel 2000

Abschlussbericht Modulare PV- und Hybridsystemtechnik 53
1.7 Ermittlung einer effizienten Stufung der Leistungsklassen der System-komponenten (F. Kininger, B. Willer)
Grundlage einer sinnvollen Stufung modularer PV-Hybrid-Systeme und deren Systemkom-ponenten bilden die Energiegestehungskosten, die den konkurrierenden Varianten von PV- und Diesel-Generator-Systemen entsprechen müssen. Da die Rahmenbedingungen einen sehr starken Einfluss auf die verfügbaren Komponenten haben, kann eine generelle Einstufung nur mit Einschränkungen erfolgen. Tabelle 1-4 zeigt eine sinnvolle Einstufung der wichtigsten Komponenten.
Subsystem Beschreibung Wert Einheit
20 PV-Module + 1 Sunny Boy 1700 2,000 kWp
24 PV-Module + 1 Sunny Boy 2000 2,500 kWp
33 PV-Module + 1 Sunny Boy 2500 3,300 kWp
40 PV-Module + 1 Sunny Boy 3000 4,000 kWp
45 PV-Module + 1 Sunny Boy 1700 + 1 Sunny Boy 2000 4,500 kWp
48 PV-Module + 2 Sunny Boy 2000 5,000 kWp
57 PV-Module + 1 Sunny Boy 2000 + 1 Sunny Boy 2500 5,800 kWp
66 PV-Module + 2 Sunny Boy 2500 6,600 kWp
73 PV-Module + 1 Sunny Boy 2500 + 1 Sunny Boy 3000 7,300 kWp
80 PV-Module + 2 Sunny Boy 3000 8,000 kWp
88 PV-Module + 2 Sunny Boy 2000 + 1 Sunny Boy 3000 9,000 kWp
99 PV-Module + 3 Sunny Boy 2500 9,900 kWp
106 PV-Module + 2 Sunny Boy 2500 + 1 Sunny Boy 3000 10,600 kWp
113 PV-Module + 2 Sunny Boy 3000 + 1 Sunny Boy 2500 11,300 kWp
120 PV-Module + 3 Sunny Boy 3000 12,000 kWp
132 PV-Module + 4 Sunny Boy 2500 13,200 kWp
140 PV-Module + 3 Sunny Boy 2500 + 1 Sunny Boy 3000 14,000 kWp
146 PV-Module + 2 Sunny Boy 2500 + 2 Sunny Boy 3000 14,600 kWp
153 PV-Module + 3 Sunny Boy 3000 + 1 Sunny Boy 2500 15,300 kWp
160 PV-Module + 4 Sunny Boy 3000 16,000 kWp
165 PV-Module + 5 Sunny Boy 2500 16,500 kWp
172 PV-Module + 4 Sunny Boy 2500 + 1 Sunny Boy 3000 17,200 kWp
179 PV-Module + 3 Sunny Boy 2500 + 2 Sunny Boy 3000 17,900 kWp
186 PV-Module + 3 Sunny Boy 3000 + 2 Sunny Boy 2500 18,600 kWp
193 PV-Module + 4 Sunny Boy 3000 + 1 Sunny Boy 2500 19,300 kWp
PV-G
ener
ator
200 PV-Module + 5 Sunny Boy 3000 20,000 kWp

54 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Subsystem Beschreibung Wert Einheit
1 Diesel-Generator 3,300 kW
1 Diesel-Generator 6,600 kW
1 Diesel-Generator 9,900 kW
1 Diesel-Generator 13,200 kW
1 Diesel-Generator 16,500 kWMot
or-G
ener
ator
1 Diesel-Generator 19,800 kW
30 OPzV 300 18 kWh
30 OPzV 420 25 kWh
30 OPzV 600 36 kWh
30 OPzV 800 48 kWh
30 OPzV 1000 60 kWh
30 OPzV 1200 72 kWh
30 OPzV 1500 90 kWh
30 OPzV 2000 120 kWh
30 OPzV 2500 150 kWh
30 OPzV 3000 180 kWh
Batte
rie-S
peic
her
30 OPzV 1500 + 30 OPzV 800 198 kWh
1 Sunny Island 3,3 kWh
2 Sunny Island 6,6 kWh
3 Sunny Island 9,9 kWh
4 Sunny Island 13,2 kWh
5 Sunny Island 16,5 kWhBatte
rie-In
verte
r
6 Sunny Island 19,8 kWh
Tabelle 1-4 Unterschiedliche Leistungsklassen der Systemkomponenten

Abschlussbericht Modulare PV- und Hybridsystemtechnik 55
1.8 Ermittlung der allgemeinen Investitions- und Betriebskostenstrukturen für modulare PV- und Hybridsysteme (F. Kininger)
Bei der Betrachtung der Wirtschaftlichkeit von Energieanlagen werden meist die spezifischen Energiegestehungskosten in /kWh berechnet, welche die Anlage über einen bestimmten Betrachtungszeitraum verursacht. Die Berechnung berücksichtigt die Investitionskosten für die Planung, die Systemkomponenten und deren Installation sowie allgemeinen Investitions-kosten. Aus diesen Kosten werden jährliche Annuitäten berechnet; zusammen mit den Be-triebs- und Brennstoffkosten sowie den Kosten für die Wartung und anderen allgemeinen Kosten ergeben sich dann die Energiegestehungskosten.
Um die allgemeinen Investitions- und Betriebskostenstrukturen transparent darzustellen, müs-sen jedoch die einzelnen Kostenfaktoren erfasst und definiert werden (siehe Kapitel 3.3.6). Hierfür stellt man fest, welche Kosten variabel und welche fix sind. Für variable Kosten muss berücksichtigt werden, in wie fern sie von der Betriebsart beeinflusst werden.
Auf den Investitions- und Betriebskosten aufbauend, werden dann die spezifischen Energie-gestehungs- oder -speicherkosten für die einzelnen Subsysteme ermittelt. Hierzu wird die Annuitätsmethode benutzt die in Kapitel 1.8.1 erläutert wird. Die energiespezifischen Kosten dienen im weiteren sowohl als Auslegungs- wie auch als Regelparameter.
1.8.1 Ermittlung der Annuität
Die Annuitätsmethode bietet eine einfache Berechnungsgrundlage für langfristige Investiti-onsgüter. Investitions- und Betriebskosten sind nicht immer genau abgegrenzt, weil betriebs-spezifische Kostenzuordnungen von Transaktionskosten und betrieblichen Infrastrukturkosten möglich sind. Wichtig ist daher die Transparenz einer jeden Berechnung.
Prinzipiell unterscheidet man statische und dynamische Methoden.9 Statische Methoden ge-hen von Kosten-, Gewinn- und Rentabilitätsvergleichen aus. Der Zeitfaktor wird dabei nicht oder nur unvollkommen berücksichtigt, so dass Ertrags-, Aufwands- und Kostengrößen, die sich im Lauf der Zeit ändern, vernachlässigt werden. Bei einer Lebensdauer von mehr als fünf Jahren sollte man jedoch möglichst dynamisch rechnen. Dynamische Methoden umfassen Einzahlungs- und Auszahlungsströme bis zum Ende der wirtschaftlichen Nutzungsdauer der Investition oder bis zu einem bestimmten Planungshorizont. Zu ihnen zählen die Kapital-wertmethode, die Methode des internen Zinsfußes sowie die Annuitätsmethode. In der Praxis ist die Annuitätsmethode wegen ihrer Übersichtlichkeit bei hinreichender Genauigkeit der Schätzung am weitesten verbreitet.
Die Idee dieser Methode ist die Bildung von äquivalenten, uniformen Zahlungsreihen, den Annuitäten, die den durchschnittlichen jährlichen Einzahlungsüberschüssen entsprechen.
9 Ausführliche Erläuterungen dazu finden sich in (VDI-Gesellschaft Energietechnik 1991).

56 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die Annuität berechnet sich nach folgender Gleichung: ( )
( )a K i i
i
n
n= ⋅⋅ ++ −1
1 1 (1)
mit K Kapitalwert [DM]
i Kalkulationszinsfuß
n Abschreibungszeit [Jahre]
a Annuität [DM]
Der Annuitätsfaktor, mit dem der Kapitalwert in obiger Gleichung multipliziert wird, lässt sich auch in Tabelle 1-5 ablesen. Um den Kapitalwert zu bestimmen, betrachtet man zunächst die Zahlungsreihe des gesamten Planungshorizonts. Einzahlungen und Auszahlungen können nach Größe, zeitlichem Anfall und Dauer unterschiedlich sein. Dabei sollten vorhersehbare Kosten, z. B. Instandhaltung, ebenso berücksichtigt werden wie unvorhersehbare Ertrags-schwankungen, z. B. die Jahresstromerzeugung von Windkraftanlagen. Diese Daten sind nur dann vergleichbar, wenn der Zeitmoment in der Rechnung mit berücksichtigt wird. Eine Ein-zahlung ist um so weniger Wert, je weiter sie in der Zukunft liegt, und eine Auszahlung um so belastender, je näher der Zahlungszeitpunkt ist.
Als einfaches Beispiel soll folgende Überlegung dienen: wenn in zehn Jahren 1000 DM gezahlt werden müssen, so könnte man heute bei einem Kalkulationszins von i = 0,08 nur K=1000 DM/(1,08)10 = 463 DM bei einer Bank anlegen, um damit in zehn Jahren 1000 DM zu bezahlen.
Alle Ein- und Auszahlungen werden auf den Zeitpunkt unmittelbar vor der Investition abge-zinst, so dass man deren Barwert erhält. Die Abzinsung erfolgt mit dem Kalkulationszinsfuß, der als Mindestverzinsung den Kapitalkosten des Investors und dessen Risiko entsprechen soll. Erfahrungsgemäß liegt der Kalkulationszinsfuß bei einer Inflationserwartung von durch-schnittlich 2% bei etwa 7% bis 9%. Den Rechnungen liegt die Annahme zugrunde, dass Ein-zahlungen wieder zum Kalkulationszinsfuß verzinst werden (Wiederanlageprämisse).

Abschlussbericht Modulare PV- und Hybridsystemtechnik 57
Der Kapitalwert entspricht der Summe aller Barwerte der Einzahlungsüberschüsse.
( ) ( )K E A it tt
t
n
= − ⋅ + −
=∑ 1
0 (2)
mit K Kapitalwert [DM]
Et Einzahlungen am Ende der Periode t [DM]
At Auszahlungen am Ende der Periode t [DM]
i Kalkulationszinsfuss
t Periode (t = 0, 1, 2 ..., n)
Sind die jährlichen Einzahlungen und Auszahlungen gleichbleibend, so entspricht der jährli-che Einzahlungsüberschuss gerade deren Annuität und kann direkt in die Investitionsrechnung übernommen werden. Liegt z. B. nur eine Investition am Anfang des Betrachtungszeitraums vor, während sonst ausschließlich uniforme Zahlungsströme (z. B. jährliche Brennstoffkosten) vorkommen, addiert man die Annuitäten der Investition, also die in durchschnittliche jährliche Kosten transformierte Investition, direkt zu den übrigen jährlichen Kosten, um die gesamten durchschnittlichen jährlichen Kosten zu erhalten.
In diesem Fall wird nur die Annuität der Investition berechnet, während die uniformen Zah-lungsströme direkt als Annuitäten behandelt werden können. Der Kapitalwert dieser Investiti-on ist identisch mit ihrem Gegenwartswert, da die Investition zum Zeitpunkt 0 getätigt wird.
Realzinssatz Planungshorizont [Jahre]
[%] 5 10 15 20 25 30 35 40
3 21,8 11,7 8,4 6,7 5,7 5,1 4,7 4,3
4 22,5 12,3 9,0 7,4 6,4 5,7 5,4 5,0
5 23,1 13,0 9,6 8,0 7,1 6,5 6,1 5,8
6 23,7 13,6 10,3 8,7 7,8 7,3 6,9 6,7
7 24,4 14,2 11,0 9,4 8,6 8,1 7,7 7,5
8 25,0 14,9 11,7 10,2 9,4 8,9 8,9 8,4
Tabelle 1-5 Annuitätenfaktoren [%] für verschiedene Planungshorizonte und Realzinssätze

58 Modulare PV- und Hybridsystemtechnik Abschlussbericht
1.8.2 Die Energiegestehungs- und Energiespeicherkosten
Die auf die Subsysteme bezogenen Energiegestehungs- und Energiespeicherkosten ergeben sich aus der Division der entsprechenden jährlichen Gesamtkosten durch die jährliche Ener-gieabgabe.
Subsystem
SubsystemBetriebSubsystem
eka
c ,+=
mit c Energiegestehungskosten [DM/kWh]
aSubsystem Annuität [DM]
kBetrieb,Subsystem Betriebskosten [DM]
eSubsystem Energieabgabe [kWh]
1.8.2.1 PV-Generator
Die Energiegestehungskosten des PV-Generators werden hauptsächlich von den Kapitalkos-ten (aGen,PV) beeinflusst. Aufgrund der langen Lebensdauer werden diese im wesentlichen von dem Kalkulationszinsfuß aber auch von den hohen Investitionskosten (kGen,F,PV) bestimmt.
Investitionskosten
Sie liegen für netzgekoppelte Anlagen im Bereich zwischen 5.500 8.500 /kWp.
Lebensdauer
Für zertifizierte PV-Module liegt die Lebensdauer bei über zwanzig Jahren, einige Hersteller bieten sogar eine Garantie von 25 Jahren.
Betriebsrückwirkungskosten
Betriebsrückwirkungskosten wie sie bei der Batterie oder dem Diesel-Generator berücksich-tigt werden müssen, sind aufgrund der langen Garantiezeit nicht zu erwarten.
Wartungskosten
Die jährlichen Betriebskosten haben im Vergleich zu den Kapitalkosten nur eine untergeord-nete Position. Sie setzten sich aus Grund- sowie Reparaturwartungskosten zusammen und werden auf 2% der Investitionskosten festgesetzt. Die Reparaturwartungskosten beziehen sich hauptsächlich auf die Systemanbindung (Laderegler oder PV-Inverter).
Diverse Kosten
Unter diesen Kostenfaktor fallen die Kosten die durch Diebstahl und Vandalismus oder durch den Abschluss entsprechender Versicherungen entstehen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 59
Energieabgabe
Bei der Bestimmung der Energieabgabe des PV-Generators stellt sich das Problem, dass sie nur schwer kalkulierbar ist. Sie hängt nicht nur von der Gesamtsystemkonfiguration und den Einstrahlungsbedingungen sondern auch von der Betriebsweise und somit von dem verwende-ten Energiemanagementsystem ab. Im weiteren wird die Energieabgabe über ein Simulations-programm unter Berücksichtigung der Systemkonfiguration abgeschätzt. Das Energiemana-gement spielt in dieser Abschätzung noch keine Rolle.
1.8.2.2 Motor-Generator
Die Energiegestehungskosten des Motor-Generators sind sehr stark von dem verwendeten Generator-Typ, der Lebensdauer und der Betriebsart abhängig. Wird er bei einer hohen Aus-lastung (P/PNenn ≥ 0,75) im Spitzenlast- oder Intervallbetrieb mit einer Deckungsrate von klei-ner 10 % betrieben überwiegen die Kapitalkosten kGen,F,MG. Wird er dagegen im Dauerbetrieb mit größeren Deckungsraten betrieben, überwiegen je nach Kraftstoffkosten die Energieer-zeugungskosten (kGen,V,MG).
Investitionskosten
Die Investitionskosten hängen sehr stark von dem verwendeten Generator-Typ und der Gene-rator-Lebensdauer ab. Im allgemeinen kann davon ausgegangen werden, dass wassergekühlte Generatoren mit geringen Motor-Drehzahlen höhere spezifische Investitionskosten, aber auch eine wesentlich längere Lebensdauer haben. Im allgemeinen liegen die Investitionskosten im Bereich von 300 2.500 /kW.
Lebensdauer
Bei der Betrachtung der Lebensdauer muss zwischen Benzin-, Gas- und Diesel-Motoren unterschieden werden. Diesel-Generatoren haben prinzipiell eine deutlich höhere Lebensdauer als Benzin-Generatoren und sind weniger Wartungsintensiv. Außerdem ist die Lebensdauer sehr stark von der Betriebsweise abhängig. Häufige Starts, lange Stillstandszeiten, Leistungs-schwankungen und extreme Klimabedienungen reduzieren die Lebensdauer deutlich.
Da Motor-Generatoren sehr wartungsintensive Geräte sind, wird ihre wirtschaftliche Lebens-dauer im wesentlichen von den Wartungskosten und hier im speziellen von den Lohnkosten begrenzt. Da die Lohnkosten in Entwicklungsländern wesentlich geringer sind als in Deutsch-land führt dies in diesen Ländern zu einer Verlängerung der wirtschaftlichen Lebensdauer von bis zu 500 %.
Die Spannbreite der Lebensdauer ist somit deutlich größer als die anderer Geräte und liegt für Generatoren kleiner 30 kW im Bereich von 1.000 80.000 Laufstunden.
Betriebsrückwirkungskosten
Betriebsrückwirkungskosten entstehen bei Motor-Generatoren vor allem durch unsachgemäße Behandlung, unterlassene Wartungsarbeiten und die Überlastung des Motors bei hohen Um-gebungstemperaturen.

60 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Wartungskosten
Bei den Wartungskosten muss wiederum zwischen Benzin-, Gas- und Diesel-Motoren unter-schieden werden. Dabei haben Benzin-Generatoren deutlich höhere Wartungskosten als Die-selgeneratoren. Die Wartungskosten können jedoch bei allen Typen in
• Grund-Wartungskosten, • Betriebs-Wartungskosten und • Reparatur-Wartungskosten
unterteilt werden.
Grund-Wartungskosten
Grund-Wartungskosten entstehen im allgemeinen nur dann, wenn der Motorgenerator selten betrieben wird. Das Schmieröl und der Schmierölfilter sollten unabhängig von den Betriebs-stunden einmal pro Jahr gewechselt werden. Hinzu kommt, dass der Motor mindestens drei bis vier mal pro Jahr für ein bis zwei Stunden betrieben werden sollte, um Korrosion auf den Laufflächen zu vermeiden. Wenn der Generator über einen Elektrostart verfügt, muss man zusätzlich die Batterie prüfen.
Betriebs-Wartungskosten
Die Betriebs-Wartungskosten sind direkt von den Betriebsstunden abhängig. Die Hersteller empfehlen regelmäßige Wartungsintervalle. Qualitativ hochwertige Generatoren, die speziell für den Dauerbetrieb ausgelegt sind, haben dabei deutlich größere Wartungsintervalle als sie in Tabelle 1-6 angegeben sind.
Wartungsintervalle [h]
4/y 50 150 250 500 1.000 3.000 6.000
Ölstand prüfen X
Kühlflüssigkeit prüfen X
Batterie prüfen X
Zündkerzen reinigen X
Schmieröl wechseln X
Schmierölfilter wechseln X
Luftfilter wechseln X
Kraftstofffilter wechseln X
Keilriemen wechseln X
Ventilspiel einstellen X
Einspritzdüse wechseln X
Kraftstoffpumpe X
Tabelle 1-6 Wartungsintervalle für Motor-Generatoren

Abschlussbericht Modulare PV- und Hybridsystemtechnik 61
Reparatur-Wartungskosten
Zu den Reparatur-Wartungskosten zählen alle Wartungskosten, die nicht dem direkten Betrieb zuzuordnen sind.
Energieerzeugungskosten
Zu den Energieerzeugungskosten zählen der Kraftstoffverbrauch und der Schmierölverbrauch. Je nach Betriebsart und Kraftstoffpreisen bestimmen die Energieerzeugungskosten die Ener-giegestehungskosten des Motor-Generators. Um die Kosten möglichst gering zu halten, sollte der Generator nahe der Nennleistung betrieben werden. In einem Bereich von 75 und 100 % ihrer Nennleistung arbeiten die meisten Generatoren mit einem nahezu konstanten Wirkungs-grad.
0
100
200
300
400
500
600
700
800
900
1.000
0 10 20 30 40 50 60 70 80 90 100
Lastverhältnis [P/PNennleistung]
spez
ifisc
her K
rafts
toffv
erbr
auch
[ml/k
Wh]
Abbildung 1-30 Spezifischer Kraftstoffverbrauch eines Luft gekühlten Diesel-Generators
1.8.2.3 Batterie-Speicher
Die Energie-Speicherkosten werden hauptsächlich durch die Lebensdauer der Batterie und die durch sie transferierte Energie- bzw. Ladungsmenge festgelegt. Über die Lebensdauer erge-ben sich aus den Kapitalkosten und den Betriebskosten die jährlichen spezifischen Gesamt-kosten. Die jährlichen Kosten durch die im Jahr agglomeriert abgegebene Energiemenge divi-diert ergeben die spezifischen Energie-Speicherkosten.
Investitionskosten
Die Investitionskosten hängen sehr stark von dem verwendeten Batterietyp ab und werden für ortsfeste Batterien mit 400 DM/kWh und für Starterbatterien mit 150 DM/kWh angegeben (siehe Anlage, Investitionskosten). Dabei ist zu berücksichtigen, dass die Lebensdauer eben-falls sehr stark von dem verwendeten Batterietyp abhängt, so dass die Kapitalkosten nur durch eine genaue Bestimmung der Lebensdauer ermittelt werden können.

62 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Lebensdauer
Das Hauptproblem bei der Ermittlung der Lebensdauer sind die Einflüsse der zyklischen Be-lastung, der Umgebungstemperaturen und der Entladetiefe der Batterie. Alle Größen hängen stark von der Betriebsführung des Hybridsystems ab.
Das Problem wird wie folgt gelöst:
Es wird zuerst einmal von einer, an die Batteriebedürfnisse und an die Einsatzgegebenheiten gut angepassten Batteriebetriebsführung ausgegangen. Die zu erwartende Lebensdauer und Zyklenfestigkeit wird somit als relativ hoch aber durchaus realistisch eingeschätzt. Als weite-res werden typische Einsatzgegebenheiten definiert, wie sie aus realen Anwendungen bekannt sind. Für diesen Standardfall wird eine zu erwartende Lebensdauer und Zyklenbelastung fest-geschrieben. Hieraus ergeben sich die vorläufigen spezifischen Energiekosten.
Sind nun Einsatzbedingungen zu erwarten, die sich stark von den angesetzten Standard-Randbedingungen unterscheiden oder wird diese Abweichung während des Betriebes beobachtet, so erfolgt eine Korrektur der Kapitalkosten durch sogenannte Betriebsrückwir-kungskosten (kRep,V,Bat). Auch eine stark von der angesetzten Betriebsführung abweichende Betriebsführung kann Korrekturkosten erzeugen.
Sind zu Beginn andere Einsatzbedingungen bekannt - z. B. eine stark von der angesetzten Temperatur abweichende Umgebungstemperatur - so können diese von vornherein bei der Ermittlung der zu erwartenden Lebensdauer und damit der zu erwartenden spezifischen Spei-cherkosten berücksichtigt werden. Im anderen Fall sollte ihre Berücksichtigung während des Betriebes erfolgen.
Wie solche Abweichungen festgestellt werden, wann und auf welche Art sie in die Kostener-mittlung eingehen wird später erörtert.
In einem Dauerversuch ergaben Panzerplatten Batterien eine Lebensdauer von 7 Jahren bei 600 Zyklen. Gitterplattenbatterien und Gel-Panzerplatten-Batterien hatten nach 7 Jahren und 600 Zyklen eine unveränderte Kapazität [1].
Festlegung: Die Lebensdauer und Zyklenfestigkeit wird wie folgt angesetzt:
• Ortsfest ( Gitterplatte, Panzerplatte, Gelbatterie )
- 10 Jahre
- 100 Zyklen pro Jahr bei 80% QN
• Starterbatterie 4 Jahre
- 25 Zyklen pro Jahr bei 50% QN

Abschlussbericht Modulare PV- und Hybridsystemtechnik 63
Batterie-Speicherkosten (aGen,F,PV), Energietransfer und der Mindestverlustenergie
Aus der erfolgten Lebensdauerabschätzung ergibt sich folgende Abschätzung des jährlichen Energietransfers:
Festlegung: Ortsfest: 80 QN, Starter 12,5 QN
Eine Auswertung von Dauerversuchen im Labor ergab folgende Wirkungsgrade von Bleibat-terien [1]:
Neu: 91%
Alt ( 60 Monate ) 85% Daraus ergibt sich die Mindestverlustenergie:
Festlegung: 0,01 QE
Wartungskosten
Die jährlichen Grund- und Reparaturwartungskosten werden auf 1% der Investitionskosten festgesetzt.
Betriebsrückwirkungskosten und entsprechende Korrekturgrößen
Im folgenden werden mögliche Korrekturgrößen quantifiziert. Diese beinhalten die Abhän-gigkeiten der Lebensdauer von der zyklischen Belastung pro Jahr, der Zyklentiefe, der Teil-zyklentiefe und der Umgebungstemperatur sowie die energetischen Batterieverluste in Ab-hängigkeit der Zyklenzahl und des Alters.
Abhängigkeit der Lebensdauer von der zyklischen Belastung pro Jahr
Bei einer angesetzten Lebensdauer von 10 Jahren und einer jährlichen Zyklenzahl von 100 mit einer jeweiliger Entladung um 80% QN ergibt sich ein Ladungstransfer im Laufe der Le-benszeit von 800 QN.
Als maximale Grenzwerte ergeben sich daraus:
Lebensdauer 10 Jahre
Energietransfer 800 QN
Eine Reduzierung des jährlichen Energietransfers (ZJ) unter 80 QN verändert nicht die maxi-male Lebensdauer von 10 Jahren. Es gilt dann:
Lebensdauer 10 Jahre
Energietransfer 10 * ZJ
Die geringere Zyklenbelastung führt zu höheren spezifischen Energiekosten.

64 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Eine Erhöhung des jährlichen Energietransfers über 80 QN reduziert die Lebensdauer. Es gilt dann:
Lebensdauer 10 (ZN/ZJ) Jahre
Energietransfer 800 QN
Abhängigkeit der Lebensdauer von der Zyklentiefe
In Labortests wurden folgende Abhängigkeiten des maximalen Energietransfers von der Ent-ladetiefe festgestellt [1].
Entladetiefe in % QN Zyklenzahl Ladungstransfer in QN
80 1000 800
45 2000 900
20 4000 1000
Tabelle 1-7 Energietransfer in Abhängigkeit der Entladetiefe
Geringere Entladetiefen ermöglichen somit einen erhöhten Energietransfer. Dieser ist bei Ent-ladetiefen um 25% oder kleiner auf maximal 1000 begrenzt.
Festlegung: ZN = QN ( 80 + (80 - qeminj)/3
Abhängigkeit der Lebensdauer von der Teilzyklentiefe
Wird eine Batterie mit Teilzyklen einer relativ geringen Energiemenge belastet, so erhöht sich der maximal mögliche Energietransfer (siehe Anlage, Bewag).
Die Teilzyklenfestigkeit wird wie folgt festgelegt:
Bei Teilzyklen d.h. bei Entladungen der Batterie mit weniger oder gleich 5 QN beträgt die Teilzyklenfestigkeit 600 QN pro Jahr
Bei Teilzyklen mit 80% liegt sie wie bereits festgelegt bei 80 QN pro Jahr
Festlegung: ZN = QN ( 80 + ( 80 - zj ) 7
Abhängigkeit der Lebensdauer von der Umgebungstemperatur
Liegt die mittlere Temperatur der Batterie oberhalb von Tu = 25 °C so ergibt sich ein Redu-zierung der Lebensdauer der Batterie auf die Hälfte bei einer Temperaturerhöhung um jeweils 10 K [2].

Abschlussbericht Modulare PV- und Hybridsystemtechnik 65
Abhängigkeit der energetischen Batterieverluste von der Zyklenzahl und vom Alter
Eine Auswertung europäischer PV-Hybridanlagen [3] ergab folgende Abhängigkeiten:
Klasse Zyklen/Jahr NQ nU n Zyklen/10Jahre (theoretischer Wert)
1 10 84 94 79 100
4 250 96,5 91,5 88 2500
Tabelle 1-8 PV-Hybridanlagen in Europa
Batteriewirkungsgrade(Batterielebensdauer 10 Jahre)
0,75
0,8
0,85
0,9
0,95
1
0 500 1000 1500 2000 2500Zyklenzahl
Wir
kung
sgra
de
eta Q
eta U
eta Bat
Abbildung 1-31 Zyklenbelastung und Wirkungsgrade von Bleibatterieverbänden in realen
PV- und Hybridanlagen in Europa [4]
Festlegung: n = 0,9 - (t/to) (0,9 - nalt)
nalt = 0,8 + (z/25000)
Diverse Kosten (Strategische Kosten)
Als weiteres werden die spezifischen Kosten durch sogenannte strategische Kosten (kBatt,V,Str) verändert. Die strategischen Kosten können sich gegenüber den sonstigen spezifische Kosten relativ schnell verändern. Sie dienen dazu die Versorgungssicherheit für besonders wichtige Verbraucher zu erhöhen und eine schnelle Alterung des Speichers zu vermeiden. Die strategi-schen Kosten sind abhängig vom
Ladezustand der Batterie und
Gesundheitszustand der Batterie.

66 Modulare PV- und Hybridsystemtechnik Abschlussbericht
1.8.3 Ermittlung reeller Investitions- und Betriebskosten anhand einer Beispielhaften Auslegung
Anhand aktueller Marktdaten wurden die Investitions- und Betriebskosten eines modularen Hybridsystems ermittelt. Die Grundlage hierfür bildet die beispielhafte Auslegung für eine Kleingaststätte als typisches Anwendungsfeld (vgl. Kapitel 3.3.9). Die Kosten für den Ener-giebus (Netz) wurden in dieser Beispielrechnung nicht berücksichtigt.
Investitionskosten eines standardisierten PV-Diesel-Hybrid-Systems
Subsystem Kostenart Wert Einheit Sp. Kosten [€/EH]
Kosten[€]
PV-Generator PV-Module 9.9 kWp 4.300 42.500
Montage-System 380 3.800
PV-Inverter 300 3.000
Komponenten 35 350
Planung, Transport, Montage 725 7.250
Zwischensumme PV-Generator 56.900
Diesel-Generator Diesel-Generator 6.6 kW 1.060 7.000
Komponenten 260 1.700
Planung, Transport, Montage 181 1.200
Zwischensumme Diesel-Generator 123.700
Batterie-Speicher Batterie-Speicher 96.0 kWh 144 13.800
Batterie-Inverter 6.6 kWh 1.060 7.000
Komponenten 121 800
Planung, Transport, Montage 333 2.200
Zwischensumme Batterie-Speicher 23.800
Energie-Management
Komponenten 3.300
Planung, Transport, Montage 2.500
Zwischensumme System-Komponenten 53.400
Gesamtsumme zzgl. MwStr 210.000
Tabelle 1-9 Kostenstruktur eines standardisierten PV-Hybrid-Systems
Die Kosten für die PV- und Diesel-Generatoren sowie für den Batteriespeicher wurden durch aktuelle Angebote (Stand Jan 2001) ermittelt. Dabei ist zu berücksichtigen, dass die Pla-nungs-, Transport- und Montagekosten für den Raum Kassel vorgegeben wurden, für abgele-genere Regionen erhöhen sich die Kosten entsprechend. Die Kostenverhältnisse des in Tabelle 1-9 dargestellten Hybrid-Systems stellen sich wie folgt dar:

Abschlussbericht Modulare PV- und Hybridsystemtechnik 67
3%7%
9%
3%
7%
1%
15%
1%3%3%
48%
PV-Module
Diesel-Generator
Batterie-Inverter
Batterie
Energie-Management
PV-Inverter
PV-Planung-Installation
DG-Planung-Installation
BI-Planung-Installation
Batterie-Planung-Installation
EM-Planung-Installation
Abbildung 1-32 Investitionskosten in einem standardisierten PV-Diesel-Hybrid-System
Betriebskosten eines standardisierten PV-Diesel-Hybrid-Systems
Da die Betriebskosten eines PV-Hybrid-Systems nicht nur von dem Energieverbrauch abhän-gen sondern sehr stark von der solaren Einstrahlung, dem Zinssatz und den Kraftstoffkosten beeinflusst werden, müssen die Randbedingungen im voraus definiert werden. Die Betriebs-kosten wurden für einen Standort im Süden Spaniens ermittelt. Aufgrund der sehr guten Ein-strahlungsverhältnisse können Energiegestehungskosten von 0,76 /kWh erreicht werden.
Energieverbrauch: 50 kWh/d Einstrahlungssumme: Sevillia - Spanien 4,8 kWh/m²d Kraftstoffkosten: 1,00 /l Zinssatz: 5,0 % Lohnkosten 37,5 /h

68 Modulare PV- und Hybridsystemtechnik Abschlussbericht
2%
9%
22%
7%
1%
16%
1%5%
33%
4% PV-Generator Kapitalkosten
Diesel-Generator Kapitalkosten
Batterie-Inverter Kapitalkosten
Batterie Kapitalkosten
Energie-ManagementKapitalkosten
PV-Generator Betriebskosten
Diesel-Generator Betriebskosten
Batterie-Inverter Betriebskosten
Batterie Betriebskosten
Energie-ManagementBetriebskosten
Abbildung 1-33 Energiegestehungskosten in einem standardisierten PV-Diesel-Hybrid-System
1.8.4 Literatur
[1] U. Wagner, B. Geiger, K. Reiner: Untersuchungen zur Prozesskette einer Wasserstoff-Energiewirtschaft IFE Schriftenreihe, Heft 34, München 1996
[2] IBN: Batterie-Energiespeicher in der Elektrizitätsversorgung IBN Aachen, 1996
[3] Elektrochemische Speicher in regenerativen Energiesystemen, Ulm 1993
[4] D. U. Sauer, M. Bächler, G. Bopp, W. Höhe J. Mittermeier, P. Sprau, B. Willer, M. Wollny: Analysis of the performance parameters of lead acid batteries in photo-voltaic Systems Journal of Power Sources 64 (1997) 197-201

Abschlussbericht Modulare PV- und Hybridsystemtechnik 69
1.9 Marktanalyse und -prognose für Hybridsysteme (F. Kininger)
1.9.1 Autarke Energieversorgungssysteme im Überblick
Für die autarke Energieversorgung stehen die unterschiedlichsten Techniken zur Verfügung. Über den jeweiligen Einsatz entscheidet immer die Wirtschaftlichkeit und geforderte Zuver-lässigkeit des Systems. Jede Technologie hat dabei ihren Einsatzbereich, in dem sie die wirt-schaftlichste Lösung darstellt. Dabei ist das wichtigste Entscheidungskriterium die zu versor-gende Leistung. Tabelle 1-10 zeigt verschiedene Versorgungssysteme und deren typische Einsatzbereiche.
Systemleistung 1 W 10 W 100 W 1 kW 10 kW 100 kW Primärbatterien PV-Batterie Wind-Batterie Klein-Wasserkraft PV-Diesel-Batterie Diesel-Batterie Diesel Netzanschluss
Tabelle 1-10 Typische Einsatzbereiche von Energieversorgungssystemen
Die Leistungsbereiche sind selbstverständlich nur ein Kriterium. Voraussetzung bei Photovol-taik, Windenergie und Wasserkraft ist deren Verfügbarkeit. Der wirtschaftliche Einsatz von Dieselsystemen hängt ebenfalls stark mit der Verfügbarkeit und den Transportmöglichkeiten des Kraftstoffs zusammen. In manchen Gebieten ist ein Netzanschluss völlig ausgeschlossen. In diesem Fall treffen folgende Aussagen zu:
• Aufgrund der extremen Verbreitung von Primärbatterien (Wegwerfbatterien) wird auf lange Zeit ein Markt für den untersten Leistungsbereich bestehen bleiben, z. B. für Uhren, Taschenlampen und Radios. Wiederaufladbare Batterien in Zusammenhang mit einem PV-System werden sich jedoch in wenigen Jahren für viele Anwendungen als wirtschaftlichere Lösung herausstellen.
• Zur Deckung des häuslichen Energiebedarfs in Entwicklungsländern, z. B. für Licht, TV, Radio und Ventilator, ist die Energiebereitstellung mittels sogenannter Solar-Home-Sytemen (SHS) auch in der Kombination mit Windsystemen die wirtschaft-lichste Art der Versorgung.
• Für größere Haushalte in ländlichen Regionen oder kleine Dorfstromversorgungen in Entwicklungsländern liegt die wirtschaftliche Wahl zwischen einer größeren Anzahl individueller PV-Batteriesystemen und einem zentralen Hybridsystem. Es ist aber auch ein modulares (dezentrales) Hybridsystem denkbar.
• Für Systeme zum Pumpen von Wasser liegt die Wahl zwischen PV-, Wind- und Diesel Pumpensystemen.

70 Modulare PV- und Hybridsystemtechnik Abschlussbericht
• Zur Elektrifizierung größerer Dörfer mit mehreren Hundert kW installierter Leistung, liegt die Entscheidung prinzipiell zwischen Wasserkraft, Wind, Diesel und einer Ex-pansion des öffentlichen Netzes.
1.9.2 Photovoltaik integrierende autarke Energieversorgungssysteme
Die meisten heute existierenden Photovoltaiksysteme sind autarke Energieversorgungs-systeme, sowohl was deren Anzahl als auch die installierte Leistung betrifft. Es wird erwartet, dass dies auch in den nächsten zehn Jahren so bleiben wird [1]. Der Verkauf autarker Photo-voltaik-Systeme betrug in den Jahren 1982 bis 1994 insgesamt 391,3 MWp und teilte sich auf die folgenden Anwendungen auf:
Industrielle Anwendung Leistung in MWp
Kommunikationstechnik 100,0
Rohrleitungsschutz 12,9
Militärische Nutzung 11,7
Ländliche Anwendung
Wasserpumpensysteme 49,6
Dorfstromversorgung 17,9
Solar Home Systems 60,1
Häuser in ländlichen Gebieten 25,7
Andere 12,2
Konsum / Freizeit
Camping, Boote 58,5
Verbraucher im Haus 42,7
Gesamt 391,3
Tabelle 1-11 Autarke Systeme zwischen 1982 und 1994 [2]
In einem von der European PV Industry Association (EPIA) erstellten Szenario [2] wird von einem Potenzial von 3000 MWp für autarke PV-Systeme ausgegangen. Dies entspricht den Aussagen einer Studie, die allein für Europa bis im Jahr 2010 ein Marktvolumen von 700 MWp vorhersagt [3]. Experten der Utility Photovoltaic Group (UPVG) sagen für die USA ein Potenzial autarker Systeme von 350 MWp vorher [4].
1.9.3 Marktvolumen nach Anwendung
Im folgenden werden die Anwendungen nach zwei Kategorien unterschieden:
• ländliche Hauselektrifizierung und
• große Inselsysteme.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 71
1.9.3.1 Service Anwendungen
Service Anwendungen liefern Energiedienstleistungen und zwar meist für Anwendungen mit geringem Energiebedarf. Typische Anwendungen sind Telekommunikation, Bojen, Warnlich-ter, Wasserpumpen und Wasserbehandlungssysteme. Aufstrebende Märkte sind öffentliche Beleuchtung, Kühl- und Lüftungssysteme sowie Monitoring-, Regelungs- und Informations-systeme. Dabei handelt es sich aus wirtschaftlichen Gründen hauptsächlich um reine PV-Batterieversorgungssysteme im kleinen Leistungsbereich unter 1 kWp
Schätzungen aus niederländischen und amerikanischen Studien [5] weisen den Service An-wendungen ein wirtschaftlich erschließbares Marktvolumen von ca. 1 GWp weltweit in den nächsten 10 Jahren aus.
Die meisten dieser Energiedienstleistungen sind auch in Gebieten mit gut ausgebautem Netz wirtschaftlich einsetzbar. In den meisten Fällen ist ein PV-System mit 10-300 Wp ausrei-chend. Ausnahmen bilden Regionen mit sehr niedriger solarer Einstrahlung wie die Polarregi-onen. Manchmal benötigen Relaisstationen für Telekommunikation, Kathodischer Schutz, Wasserpumpen und Solarboote Systeme mit einer Leistung oberhalb von 1 kWp.
Vor allem der niedrige Energiebedarf macht diese autarke Energieversorgung auch in Regio-nen wirtschaftlich, in denen das öffentliche Netz bereits vorhanden ist. Das erwähnte Markt-volumen kann beachtlich erhöht werden, wenn der Entwicklungsschwerpunkt mehr auf Ener-gieeffizienz gelegt wird. Die meisten Energiedienstleistungen sind in dieser Hinsicht noch stark entwicklungsfähig. Hier sind Verbesserungen um einen Faktor 3 bis 10 möglich [1]. Effizientere Systeme ermöglichen eine niedrigere installierte PV-Leistung und erhöht dadurch die Wettbewerbsfähigkeit mit dem öffentlichen Netz.
1.9.3.2 Ländliche Hauselektrifizierung
Versorgungssysteme für die ländliche Hauselektrifizierung reichen vom kleinen Solar-Home-System (SHS), die hier nicht näher betrachtet werden sollen, bis zu größeren Hybridsystemen, die neben der Photovoltaik einen Dieselgenerator einsetzen. Die installierte Leistung reicht in der Regel von 2 kWp bis 30 kWp und in Ausnahmefällen bis zu 300 kWp. Das weltweite Marktvolumen übersteigt 10 GWp [6]. Bei einer angenommenen Implementierungszeit von 40 Jahren bedeutet dies ein Potenzial von 1 GWp bis zum Jahr 2010.
In industrialisierten Ländern sind die Hauptinitiatoren der Endverbraucher und die Energie-versorgungsunternehmen, während in Entwicklungsländern auch staatliche Organisationen aktiv sind. Autarke PV-Hybrid-Systeme werden in zunehmendem Maße als kostengünstige Alternative zur Netzerweiterung für die ländliche Elektrifizierung gesehen. Für eine breite Marktöffnung werden noch immer adäquate Vertriebsmöglichkeiten, Qualitätssicherungs-, Wartungsmaßnahmen und Finanzierungsmodelle entwickelt [5, 7].
In Ländern wie Italien, den Niederlanden und den USA haben Energieversorger Möglichkei-ten eines remote pricing entwickelt, in dem die Kunden für den Service anstatt für die An-zahl der Kilowattstunden bezahlen [2]. In Catalonia (Spanien) wurden erfolgreich Organisati-ons- und Wartungsmechanismen eingeführt, die den Endverbraucher einbeziehen [9]

72 Modulare PV- und Hybridsystemtechnik Abschlussbericht
1.9.3.3 Große Inselsysteme
Diese Systeme versorgen Inseln und größere Dörfer und kombinieren PV-Generatoren zwi-schen 10 und 300 kWp mit Diesel und/oder Windgeneratoren. Die größten Systeme reichen bis zu 1 MWp PV und 1 MW Diesel [10]. Für die nächsten 20 Jahre wird für solche Systeme ein Potenzial von bis zu 1 GWp gesehen. Diese Systeme sollen in diesem Bericht jedoch nicht näher betrachtet werden.
1.9.4 Marktvolumen nach Regionen
1.9.4.1 Entwicklungsländer und Länder ohne flächendeckende öffentliche Stromver-sorgung
Der Hauptbedarf an autarken Stromversorgungssystemen liegt in den Nicht-OECD Staaten, da hier der Großteil der nicht elektrifizierten Weltbevölkerung liegt. Tabelle 1-12 zeigt, in welchen Teilen der Welt diese Menschen 1990 lebten und welche Mängel vorhanden sind. Tabelle 1-13 verdeutlicht dies mit Angaben der Bevölkerungszahl und dem Anteil der in länd-lichen Gebieten lebenden Bevölkerung. In 2010 werden ca. 3 Milliarden Menschen in ländli-chen Regionen leben. Der Bedarf an autarken PV-Systemen ist in Tabelle 1-14 zusammenge-fasst.
Der geschätzte Bedarf an autonomen PV- oder PV-Hybrid-Systemen für die Trinkwasserbe-reitstellung wird zusammenfassend auf 2.647,1 MWp geschätzt (Vergleich hierzu ca. 70MWp Weltjahresproduktion an PV in 1994).
Insgesamt 953.600 Schulen und zukünftig zusätzliche 2,5 Millionen Schulen haben keinen elektrischen Anschluss. Der Bedarf liegt hier in folgenden Bereichen:
• Beleuchtung (energiesparend)
• Kleine Wasserpumpen und -entkeimungsanlagen
• Kommunikation (Telefon)
• Kühlschränke
• TV und Videosysteme
Insgesamt werden hier für die Bereitstellung von Elektrizität in der Tabelle 1-14 ein weiteres Marktvolumen von 2.647,1 MWp gesehen.
Im Gesundheitswesen fehlen derzeit 157.500 Gesundheitszentren, die folgenden Bedarf dar-stellen:
• Kühlschrank für Arznei
• Beleuchtung
• kleine Wasserpumpen
• Kommunikation (Telefon)
Die hier zu installierende PV Leistung wird zusammenfassend auf 111,7 MWp geschätzt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 73
Geografisches Gebiet ohne Zugang zu sauberen Trinkwasser
ohne Zugang zu einem Gesundheits-wesen
ohne Ausbildung
ohne Elektrizität
Zentral Amerika, Karibik 40 23 34 45
Latein Amerika 46 67 22 60
Sahelzone 35 42 38 60
Südliche Sahelzone 70 72 56 55
Süd Afrika 64 77 58 64
Mittlerer Osten 35 47 39 53
Süd Asien 32 95 54 40
Zentralasien 32 19 41 27
Ostasien 47 55 35 65
Ozeanien 80 47 53 39
Gesamt 40 57 45 43
Tabelle 1-12 Angaben der Landbevölkerung in [%], die nicht über sauberes Trink wasser, Zugang zum Gesundheitswesen, Ausbildung und Elektrizität verfügen [2]
Ein weiteres Marktvolumen liegt in der Bereitstellung von minimalen Kommunikationsmög-lichkeiten wie Radio und die dazugehörenden Sendestationen. Das hierzu geschätzte Marktvolumen liegt bei 314 MWp.
Geografisches Gebiet Bevölkerung in Millionen
1990
Bevölkerung in Millionen
2010
Land-bevölkerung
1990
Land-bevölkerung
2010
Zentral Amerika, Karibik 136 185 36% 24%
Latein Amerika 297 386 25% 11%
Sahelzone 115 157 51% 44%
Südliche Sahelzone 49 89 76% 65%
Süd Afrika 369 607 73% 63%
Mittlerer Osten 105 170 64% 55%
Süd Asien 1.092 1.549 75% 69%
Zentralasien 1.184 1,394 72% 64%
Ostasien 435 579 69% 58%
Ozeanien 4 7 83% 82%
Gesamt 3.980 5.440 66% 55%
Tabelle 1-13 Bevölkerungszahlen und Anteil der Landbevölkerung [2]

74 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Über 2,6 Milliarden Menschen leben in Haushalten ohne Stromversorgung. Mit ca. 50 Wp pro Haushalt können ein paar DC-Lampen und kleinere Stromverbraucher betrieben werden. Der Bedarf für autonome PV Systeme liegt bei 11.151 MWp.
Zusammenfassend wird das Marktvolumen für autonome PV Systeme auf 16.900 MWp ge-schätzt. Davon entfallen 66% auf SHS, 16% auf Trinkwasserbereitung, 16% auf Ausbildung, 2% auf Kommunikation und 1% auf Gesundheit.
Geografisches Gebiet MWp für die Bereitstel-lung von Trinkwasser
MWp für die Ausbildung
MWp für das Gesund-heitswesen
MWp für SHS MWp für Kommuni-kation
Gesamt
Zentral Amerika,Karibik 46,9 236,1 2,7 217 13 516
Latein Amerika 71,6 295,6 28,3 443 22 861
Nordafrika 111,3 73,9 1,7 356 8 550
Sahelzone 83,0 35,9 1,5 290 7 418
Südliche Sahelzone 326,7 194,1 6,7 1.468 28 2.023
Süd Afrika 105,8 50,2 2,0 427 8 593
Mittlerer Osten 130,7 191,4 8,8 450 15 796
Süd Asien 530,4 749,2 43,5 3.272 107 4.702
Zentralasien 941,6 519,3 9,4 2.267 73 3.810
Ostasien 293,5 305,4 6,9 1.947 34 2.586
Ozeanien 1,8 5,9 0,1 13 1 22
Gesamt 2.647,1 2.657,0 111,7 11.151 314 16.877
Tabelle 1-14 Bedarf autonomer PV-Systeme [2]
1.9.4.2 Europa und Länder mit flächendeckender Stromversorgung
Auch in entwickelten Ländern gibt es mehr oder weniger viele Häuser, die nicht an ein öffent-liches Netz angeschlossen sind. Diese liegen dann meist auf Inseln oder in schwer zugängli-chen Lagen wie den Bergen.
Im Weißbuch der Europäischen Union legen die 15 Mitgliedsstaaten ihre Entwicklungsziele bis zum Jahr 2010 fest. Die erneuerbaren Energien sollen bis dahin einen Anteil von 23,5 % einnehmen. Die Photovoltaik mit einer derzeitigen Jahresstromproduktion von nur 0,03 TWh soll auf immerhin 3 TWh steigen [11].
1987 wurde der Anteil der in Europa lebenden Menschen, die nicht elektrifiziert sind mit 1,2 Millionen geschätzt. Diese befinden sich vor allem im mediterranen Raum. Es wird ge-schätzt, dass ca. 70.000 Häuser mit Photovoltaik billiger elektrifiziert werden können als durch eine Netzerweiterung [2]. Dies entspricht einem Potenzial von 50 MWp.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 75
Tabelle 1-15 zeigt die Anzahl der nicht ans öffentliche Netz angeschlossenen Häuser süd-europäischer Länder:
Land Griechen-land Italien Portugal Spanien Total
Zahl der nicht ans Netz angeschlossenen Häuser
114,500 48,800 31,000 117,500 311,800
PV Potenzial [MWp] 32 97-147 13 33-50 175-242
Tabelle 1-15 Zahl nicht elektrifizierter Häuser [12]
Griechenland Eine Expansion des Netzes ist sehr schwierig. PPC (Public Power Corporation) versorgt abge-legene Gebiete mit Elektrizität zu sehr hohen Kosten. Die Zahl der nicht elektrifizierten Häu-ser ist etwa 114.500. Davon wurden 47 Häuser in 23 Siedlungen unterschiedlicher Regionen untersucht. Die Häuser werden von ihren Eigentümern bewohnt; die meisten davon sind in der Landwirtschaft und Viehzucht tätig. Sie können sich derzeit nicht die kompletten Kosten eines Solarsystems leisten.
Italien ENEL gibt die Zahl der nicht elektrifizierten Häuser mit 48.800 an, basierend aus Erhebungen von 1971 und 1986. Es wurden 43 Häuser in 26 Siedlungen untersucht. Der typische Bedarf eines PV-Systems läge bei etwa 2 kWp, unter der Annahme, dass der Bedarf für Beleuchtung, Kühlung und TV gedeckt werden soll. 72 % der Gebäude haben eine Entfernung von über 2 km zum Netz. Der Einsatz von PV-Systemen ist immer noch die Ausnahme, da sich die wenigsten die Investitionskosten leisten können.
Portugal Untersucht wurde das Festland, die beiden Inseln von Madeira und neun Inseln der Azoren. Es wurden 31.000 Häuser mit 59.300 Bewohnern ermittelt, die nicht elektrifiziert sind (Stand 1995). Von 53 untersuchten Häusern sind 43 bereit in PV zu investieren und 25 davon wären in der Lage nach einer Schulung Wartungsarbeiten an den Systemen selbst zu vollziehen.
Spanien Der Grad der Nicht-Elektrifizierung steigt von Norden nach Süden. Eine Erhebung ergab 110.000 bis 125.000 nicht elektrifizierte Häuser. Bei einer angenommenen durchschnittlich installierten PV-Leistung von 300-400 Wp beträgt das Potenzial 33-50 MWp.
Bergregionen Ein weiteres Potenzial in Europa sind bewohnte Gebiete in den Bergen. 7,5 % der Europäer leben in diesen Regionen. Zum einen ist der Zugang des Netzes in diesen Regionen schwierig und somit teuer. Zum anderen ist für diese Regionen die Nutzung der Wasserkraft und Wind-energie oft nicht möglich und aufgrund des empfindlichen Ökosystems wird auch der Einsatz von Dieselsystemen immer schwieriger.

76 Modulare PV- und Hybridsystemtechnik Abschlussbericht
1.9.5 Literatur
[1] International Energy Agency: Stand-Alone Photovoltaic Applications Lessons Learned James & James, London, 1999
[2] EPIA: Photovoltaics in 2010 European Commission, DG Energy, Luxembourg, 1996
[3] B. Chabot, M. van Brummelen, D. de Jager: Large Scale Market Deployment of Photovoltaic Technology in Euro-pe, Ademe, Ecofys, ETSU, ENEL, IEH, Sofia Antipolis, France, 1997
[4] UPVG: On the verge of Comercialisation, Washington DC, June 1997
[5] G. Loois, Bennalou: Feasibility Study for Solar Energy Systems for Rural Households in the Rif in Morocco ECOFYS, Niederlande, 1994
[6] W. Palz: Power for the World: A global plan in Yearbook of Renewable Energy 1994, James & James, 1994
[7] A. Cabraal: Best Practices for Photovoltaic Household Electrification Programs, ASTEA, World Bank, Washington, 1995
[8] ENEL: A solar wireless electric service, electric energy supply by means of photovoltaic power systems to remote off-grid users ENEL, Italien, 1995
[9] X. Vallvé, J. Serrasolses: Operation experience of the 51 kWp stand-alone PV electrification pro-grame in La Garrotxa (Catalonia, Spain) 13th EPVSEC, Nice, 1995
[10] International Energy Agency: Examples of Stand-Alone Systems, IEA PVPS Programme, Task III, 1995
[11] European Commission: Energy for the future: Renewable Sources of Energy, White Paper for a Community Strategy and Action Plan Plan COM(97)599 final, Brüssel, 1997
[12] A. Hänel, L. Kallivroussis, M. Sala, S. Magni, A. Gómez Gotor, G. Pie-navieja Izquierdo, L. Guimaraes, C. Helmke, H. Ossenbrink: ElectricHome The Assessment of Non-Electrified Houses in Southern Europe. A Reliable Planning Basis for Stand-Alone PV Systems 14th European Photovoltaic Solar Energy Conference, Barcelona, Spain, 1997

Abschlussbericht Modulare PV- und Hybridsystemtechnik 77
1.10 Definition der ökonomischen Leistungsbereiche für verschiedenartige Hybridsysteme unter Einbindung der Photovoltaik (F. Kininger)
Nach der in Kapitel 1.9 erstellten Marktanalyse und den in Kapitel 1.8 ermittelten Investiti-ons- und Betriebskostenstrukturen wurden in Kapitel 3.3 zahlreiche beispielhafte Hybridsys-teme für unterschiedliche Einstrahlungsverhältnisse und Lastprofile ausgelegt und simuliert. Entsprechend den Hybridsystemen wurden gleichwertige Diesel- und PV-Batterie-Systeme simuliert. Für jedes System wurde anschließend eine Wirtschaftlichkeitsrechnung für einen definierten Lastbereich bei gegebenen Rahmenbedingungen (Einstrahlungsverhältnisse, Last-profile, Lohnkosten, Kraftstoffkosten usw.) durchgeführt. In Abbildung 1-34 ist beispielhaft der Lastbereich von 10-30 kWh dargestellt.
Als Berechnungsgrundlage dienten:
I. Diesel-System mit einem Diesel-Generator (DG) 3,3 kW
II. PV-Diesel-Hybrid-System mit einem PV-Generator (PV) 5,0 kWp Diesel-Generator (DG) 3,3 kW Batterie-Inverter (BI) 3,3 kW Batterie 50,0 kWh Energiemanagement (EM)
III. PV-Batterie-System mit unterschiedlichen Leistungen PV-Generator (PV) 5,0/6,6/9,0/11,4/13,8 kWp Batterie-Inverter (BI) 3,3 kW Batterie 50/60/90/120 kWh
In Abbildung 1-34 ist der optimale Leistungsbereich des beispielhaften Hybrid-Systems deut-lich zu erkennen.
Als Resultat können die ökonomischen Leistungsbereiche für PV-Diesel-Hybrid-Systeme in Abhängigkeit der mittleren täglichen Globalstrahlungssumme sowie den Treibstoffkosten wie in Tabelle 1-16 definiert werden:

78 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Diesel-, Hybrid- und PV-Systeme im Vergleichbei einer Variation des Energieverbrauchs von 10-30 kWh/d
Sevillia - Spanien und 0.75 €/l Kraftstoffkosten
0,00
0,25
0,50
0,75
1,00
1,25
1,50
1,75
2,00
Energieverbrauch [kWh/d]
spz.
Ene
rgie
gest
ehun
gsko
sten
[€
/kW
h]
EM Betriebskosten
EM Kapitalkosten
Batterie Kapitalkosten
BI Kapitalkosten
DG Kapitalkosten
PV-Generator Kapitalkosten
4.61 3.13 2.39
15.0 20.0 25.0 30.010.0
Hyb
rid
Die
sel
PV Hyb
rid
Die
sel
PV Hyb
rid
Die
sel
PV Hyb
rid
Die
sel
PV Hyb
rid
Die
sel
PV
Abbildung 1-34 Diesel-, PV-Diesel-Hybrid und PV-System im Vergleich
Batterie Betriebskosten
BI Betriebskosten
DG Betriebskosten
PV-Generator Betriebskosten
Systemleistung 500 W 1 kW 2 kW 5 kW 10 kW 20 kW 50 kW 100 kWGo [kWh/m2d] / KKraftstoff
[/l] Energieverbrauch
3-4 / 0,75 6-60 kWh/d
4-5 / 0,75 10-100 kWh/d
3-4 / 1,00 8-80 kWh/d
4-5 / 1,00 12-120 kWh/d
3-4 / 1,25 10-100 kWh/d
4-5 / 1,25 15-150 kWh/d
Tabelle 1-16 Typische Einsatzbereiche von Energieversorgungssystemen
Die angegebenen Leistungsbereiche sind selbstverständlich von zahlreichen zusätzlichen Rahmendbedingungen abhängig, die aufgrund ihrer Komplexität oder regionalen Begrenztheit nicht berücksichtigt wurden. Beispielsweise hängt der wirtschaftliche Einsatz von Diesel-PV-Hybrid-Systemen stark von den Transportmöglichkeiten der einzelnen Komponenten ab. Außerdem blieben die Zusatz- und Diversen-Kosten wie Einfuhrzölle, Steuern, staatliche Zuschüsse und Subventionen unberücksichtigt. In manchen Gebieten ist ein Netzanschluss oder eine Dieselversorgung aus geographischen- oder Umweltschutzgründen völlig aus-geschlossen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 79
2 Entwicklung von Komponenten für modular erweiterbare PV- und Hybridsysteme zur Energieversorgung aus Photovoltaik und ande-ren erneuerbaren Energiequellen
2.1 Stromrichter für den Aufbau erweiterbarer Energieversorgungsnetze
2.1.1 Modulare inselnetzfähige und vernetzbare PV-Wechselrichter (A. Jansen)
2.1.1.1 Anforderung
Ein modularer PV-Wechselrichter verfügt über einen DC-Anschluss für eine Reihenschaltung von PV-Modulen (String) und einen AC-Anschluss für das Wechselspannungsnetz (typisch 230 Volt, 50 Hertz). Daraus folgt die einfache Skalierbarkeit eines aus modularen PV-Wechselrichtern bestehenden Systems durch die Möglichkeit des Parallelschaltens auf der Wechselspannungsseite (Vernetzbarkeit).
Jeder PV-Wechselrichter ist an einem eigenen PV-Modulstring angeschlossen und maximiert die Stringleistung durch eine Maximum Power Point Regelung. Diese Stringwechselrichter sind bis zu einer Leistung von ca. 2,5 Kilowatt erhältlich. Bei installierten Stringleistungen größer zwei Kilowatt kann die Modulspannung die in Europa zugelassenen 1000 Volt über-steigen. Für hohe PV-Leistungen werden zur Vermeidung von solch hohen Spannungen ent-sprechend viele String-Wechselrichter benötigt. Alternativ können mehrere Strings parallel geschaltet an einem entsprechend leistungsstarken String-Wechselrichter betrieben werden. Dies führt jedoch bei unterschiedlicher Ausrichtung oder Abschattung der Module aufgrund von Fehlanpassungen durch die MPP-Regelung zu einem Leistungsverlust.
Eine Lösung des Problems ist möglich, indem der bisher einfach vorhandene DC/DC-Wandler in einem String-Wechselrichter um weitere DC/DC-Wandler erweitert wird, die ge-meinsam einen Gleichspannungszwischenkreis speisen. Der AC-Steller ist für die gesamte Leistung ausgelegt.
AC-Leitungen von Leistungen größer 3,6 kW können nicht mit standarisierten 16 Ampère-Leitungsschutzschaltern abgesichert werden. Hier bietet sich eine dreiphasige Lösung an.
Ein Inselnetz stellt andere Anforderungen an PV-Stromrichter als ein Verbundnetz und unter-scheidet sich von diesem vor allem durch folgende Eigenschaften:
• höhere Frequenzschwankungen
• höhere Spannungsschwankungen
• Leistungsaufnahme ist nicht gewährleistet
• Spannungsunterbrechungen im Millisekundenbereich möglich
Inselnetzfähige PV-Wechselrichter müssen in einem größeren Frequenzbereich arbeiten und für größere Spannungsschwankungen ausgelegt sein, da die Frequenz und Spannung eines Dieselgenerators stark mit der Belastung schwanken kann.

80 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die PV-Energie wird in einem Inselnetz entweder in der Batterie gespeichert oder in den Lasten umgesetzt. Bei einem PV-Energieüberangebot muss der PV-Wechselrichter die in das Inselnetz eingespeiste Leistung reduzieren. Dies wird durch Kommunikation mit der spannungsbildenden Einheit erfolgen. Möglich sind eine zusätzliche Kommunikationsleitung oder das Nutzen von Netzspannung und -frequenz als Informationsträger.
Ein Inselnetz besitzt kleinere kurzzeitige Leistungsreserven als ein Verbundnetz. Darum kann die Spannung bei kurzzeitiger Überlast (z. B. Anlauf eines Motors) für einige Millisekunden zusammenbrechen. Dies sollte von einem PV-Wechselrichter nicht als Fehler erkannt werden.
=
=
Regelung,µRechner
=
=
Regelung,µRechner
=
=
Regelung,µRechner
+/- 400 V
Regelung
Betriebsführung
MultiString-Wechselrichter
230 V50 Hz
Fernüberwachung, Visualisierung
3
=
~~
Abbildung 2-1 Blockschaltbild eines PV-Multi-String-Wechselrichters
Das ISET entwickelt in Zusammenarbeit mit der Firma SMA Regelsysteme GmbH in einem durch das BMWi geförderten Vorhaben (Förderkennzeichen 0329864B) einen inselnetzfähi-gen Multistringwechselrichter (siehe Abbildung 2-1). In diesem Vorhaben werden, über die in diesem Bericht vorgestellten Arbeiten hinaus, umfangreiche weitere Untersuchungen und Entwicklungen durchgeführt. Im dem hier berichteten Projekt werden viele Grundlagen für das andere Forschungsvorhaben erarbeitet, so dass eine enger Austausch zwischen beiden Vorhaben durchgeführt wird.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 81
Ein möglichst großer Eingangsspannungsbereich kommt als zusätzliche Anforderungen auf der Modulseite hinzu, um mit vielen unterschiedlichen Modulkonfigurationen arbeiten zu können.
2.1.1.2 Topologien galvanisch nicht trennender DC/DC-Wandler
Eine Untersuchung der zur Zeit auf dem Markt gängigen Module führt zu der Anforderung an den DC/DC-Wandler, die auf der Eingangsseite Spannungen von 150 Volt bis 550 Volt ver-arbeiten können (siehe Abbildung 2-2).
Für Zwischenkreisspannungen unter 550 Volt, benötigt der Wandler hoch- und tiefsetzende Eigenschaften, für Zwischenkreisspannungen größer 550 Volt hochsetzende Eigenschaften.
Hoch-Tiefsetzsteller
150V-550V UZW = 400V UAC=230 V
=
~~
Hochsetzsteller150V-550V UZW = 800VUAC=3 *230 V
=
~~
Hochsetzsteller150V-550V UZW = 800V UAC=230 V
=
~~
Abbildung 2-2 unterschiedliche Topologien für einen PV-Multi-String-Wechselrichter mit Gleichspannungszwischenkreis ohne galvanische Trennung
2.1.1.3 Topologien galvanisch trennender DC/DC-Wandler
Die galvanische Trennung wird durch das Einfügen eines Transformators realisiert. Die ver-schiedenen Grundschaltungen verlangen unterschiedliche Strom- und Spannungsbelastbarkei-ten der Leistungshalbleiter (siehe Abbildung 2-3). Die zu übertragene Leistung von mindes-tens einem Kilowatt erfordert eine große Ausnutzung des Transformators, um mit wenig Kernmaterial auszukommen und eine geringe Baugröße zu realisieren.

82 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Gegentakt-DurchflusswandlerHalbbrückenwandler
Vollbrückenwandler
Eintakt-DurchflusswandlerSperrwandler
Abbildung 2-3 DC/DC-Grundschaltungen von PV-Wechselrichter mit Gleichspan-nungszwischenkreis mit galvanischer Trennung
Die Hauptnachteile der Topologien sind im einzelnen:
• Eintaktdurchflusswandler: Transformatorausnutzung gering, hohe Spannungsbelastung des Schalttransistors
• Gegentakwandler: Transformatorausnutzung gering
• Halbbrückenwandler: im Vergleich zum Vollbrückenwandler nur halbe Leistung übertragbar
• Vollbrückenwandler: viele Leistungshalbleiter
• Sperrwandler: Luftspalt notwendig, hohe Spannungsbelastung des Schalttransistors, Transformatorausnutzung gering
Durch das Verwenden eines Transformators ist ein festes Übersetzungsverhältnis in der Schaltung vorhanden. Dieses bestimmt sich bei der niedrigsten Eingangsspannung. Liegt die höchste zulässige Eingangsspannung an, wird sie mit diesem hohen Übersetzungsverhältnis

Abschlussbericht Modulare PV- und Hybridsystemtechnik 83
transformiert, was zu einer sehr hohen Spannungsbelastung der Halbleiter auf der Sekundär-seite führt.
Soll auf die Reihenschaltung von Leistungshalbleitern verzichtet werden, beschränkt bei den meisten Topologien die Auswahl von 1200 Volt-Halbleitern den Eingangsspannungsbereich (niedrigste Spannung : höchste Spannung) auf 1:2.
Für den Sperrwandler gilt diese Einschränkung nicht, doch ist man bei Anwendung dieser Topologie auf das Verwenden von magnetischen Kernen mit Luftspalt angewiesen, die es nur in bestimmten Bauformen gibt.
2.1.1.4 Der Sperrwandler
In der Literatur wird der Einsatz eines Sperrwandlers für einen Leistungsbereich bis zweihun-dert Watt vorgeschlagen. Moderne Leistungshalbleiter, welche sehr schnell schalten und we-sentlich geringere Schaltverluste aufweisen als noch vor einigen Jahren, ermöglichen den Ein-satz im höheren Leistungsbereich. Durch die geringe Anzahl an Leistungshalbleitern und nur einem induktivern Bauelement, dem Transformator, ist der Sperrwandler sehr kostengünstig herzustellen und kann einen sehr hohen Wirkungsgrad aufweisen. Allerdings ist viel Entwick-lungsaufwand für die Minimierung der Streuinduktivität des Transformators notwendig, da diese den Wirkungsgrad, die elektromechanische Verträglichkeit und die Funktion der Schal-tung wesentlich beeinflusst.
Im Folgenden wird dieses sehr einfache und effizientes Schaltungskonzept vorgestellt und eine technische Realisierung für einen Multistring-Wechselrichter gezeigt. Abbildung 2-4 zeigt die Schaltung und die Spannungs- und Stromverläufe eines Sperrwandlers. Die Schal-tung besteht aus einem Transistor, einem Transformator, einer Diode und zwei Kondensa-toren.
.
C1
C2 Last
IGBT
ip
Ue
U
Up Us Ua
ip
is
t
t
t
up
tE
tA tT
A2
A1
A)
B)
is
Abbildung 2-4 A) Schaltplan und B) Spannungs- und Stromverläufe eines Sperrwand-lers im diskontinuierlichen Betrieb

84 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die lösungsorientierte Vorgehensweise ist, zuerst den Sperrwandler mathematisch zu be-schreiben, mit einem Mathematikprogramm eine Dimensionierungsanleitung zu erstellen und die Ergebnisse anschließend in der Simulation zu evaluieren.
Die Dimensionierung mit einem Mathematikprogramm ermöglicht es, in kurzer Zeit mit ver-schiedenen Parametern Dimensionierungen zu erstellen und zu vergleichen. So kann ein Optimum der Schaltfrequenz, der Luftspaltgröße und der Wickelraumbefüllung gefunden werden.
Die Struktur gibt Abbildung 2-5 wieder.
Leistung, Eingangsspannungsbereich,Tastverhältnis, Schaltfrequenz
Induktivitäten
Kern- undWickelkörperdaten,
Sollstromdichte
Luftspalt
max. Kernverluste
Induktion
Windungszahlen
Drähte, HF-Litze
Ist-Stromdichte
Stromdichtezu groß ?
Nein
Transformatormuster
Abbildung 2-5 Flussdiagramm des MathCad-Programms zur Dimensionierung des
Transformators
2.1.1.5 Strombegrenzung
Da der Transformator des Sperrwandlers die gesamte zu übertragene Energie in seinem Mag-netfeld speichern muss, wird er für den maximalen Strom (entsprechend der minimalen Ein-gangsspannung) dimensioniert. Aus den Eigenschaften der PV-Module ist jedoch ersichtlich,

Abschlussbericht Modulare PV- und Hybridsystemtechnik 85
dass die maximale Modulleistung nicht bei maximalem Strom, d. h. minimaler Spannung er-reicht wird. Folglich muss der Wandler bei minimaler Eingangsspannung nicht den maxima-len Strom übertragen können. Wird dies bei der Transformatorberechnung berücksichtigt, kann aus der sich daraus ergebenen Stromdichtereduktion der Transformator weiter optimiert werden. Dies geschieht durch Einfügen einer Strombegrenzung für die Dimensionierung.
200 250 300 350 400 450 500 550400
500
600
700
800
900
1000
Pa_Iemax Ue( )
Pa_DEmax Ue( )
Ue
Abbildung 2-6 maximal übertragbare Ausgangsleistung bei maximalem Eingangsstrom bzw. maximalem Tastverhältnis
Dies bedeutet eine Reduktion der übertragbaren Leistung bei kleinen Spannungen. In Abbildung 2-6 ist erkennbar, dass die maximale Leistung von 1 kW erst bei einer Spannung von 300 Volt übertragen werden kann. Die Strombegrenzung erfordert ein Messen des Stro-mes für die Regelrückführung. In der Regelstrecke kann sich außer der Strombegrenzung auch eine Tastverhältnisbegrenzung befinden. Diese beschränkt die übertragbare Leistung stärker als die Strombegrenzung (Abbildung 2-6, gepunktete blaue Kurve) , sodass bei Exis-tenz einer Tastverhältnisbegrenzung auf die Strommessung verzichtet werden kann.
200 250 300 350 400 450 500 5500.2
0.25
0.3
0.35
0.4
0.45
0.246
te Ue( )
T
550200 Ue Abbildung 2-7 Tastverhältnis bei Dimensionierung des Transformators mit Strom-
begrenzung

86 Modulare PV- und Hybridsystemtechnik Abschlussbericht
2.1.1.6 Einfluss verschiedener Wickelaufbauten auf den Transformator
Bei der Bewicklung eines E- bzw. ETD-Wickelkörpers kann prinzipiell unterschieden werden zwischen
• Verwendung von Hochfrequenzlitze (HF-Litze) und • Verwendung von Einzellackdrähten.
Die Wicklungen können auf den Wickelkörper geschachtelt oder ungeschachtelt gewickelt werden.
Um den Einfluss des Drahtdurchmessers auf die Transformatoreigenschaften bewerten zu können, wurden mit dem Finite-Elemente-Programm Flux2D Untersuchungen angestellt.
2.1.1.6.1 Verluste durch den Skineffekt
Der Skineffekt, der theoretisch bereits von Maxwell (1873) behandelt und 1885 von Hughes beobachtet wurde, beschreibt die Stromverdrängung in einem Leiter infolge des durch ihn fließenden Stromes. Während ein von Gleichstrom durchflossener Leiter eine konstante Stromdichte über den gesamten Leiterquerschnitt aufweist und somit keine Stromverdrängung existiert, reduzieren bei Wechselstrom (zeitliche Änderung der Stromdichte) die magnetische Induktion und die damit verbundene Entstehung von elektromagnetischen Wirbelfeldern die Stromdichte im Leiterinneren. Es findet eine Verdrängung des Stromes zur Oberfläche des Leiters hin statt, wodurch effektiv weniger Leitungsquerschnitt zur Verfügung steht und der Wechselstromwiderstand des Leiters steigt. In einschlägiger Literatur findet man Gleichungen oder Näherungen zur Berechnung von Eindringtiefe und Wechselstromwiderstand nur für eine sinusförmige Anregung. Da ein Sperrwandler mit nichtsinusförmigen Wechselspannun-gen und -strömen (Rechteck, Trapez) betrieben wird, ist es hier von großem Interesse heraus-zufinden, inwieweit sich die Verluste aufgrund der Oberwellen im Vergleich zu einer reinen Sinusanregung vergrößern.
Geometrie und elektrischer Stromkreis in FLUX2D
In Abbildung 2-8 ist der Runddraht mitsamt der Umgebung (Luft) und die Zerlegung der Ge-ometrie in Finite Elemente zu sehen, wobei die rechte Abbildung eine Vergrößerung des Drahtbereiches darstellt.
Abbildung 2-8 FE-Gitter der Beobachtungsfläche (links) und des Runddrahtes (rechts,
Vergrößerung)

Abschlussbericht Modulare PV- und Hybridsystemtechnik 87
Den elektrischen Stromkreis aus FLUX2D zeigt Abbildung 2-9.
Abbildung 2-9 Circuit-File von FLUX2D zur Spannungseinprägung
Für Spannungseinprägung besteht der elektrische Kreis wie nebenstehend abgebildet aus der Spannungsquelle U0, einem Solid conductor, der den Runddraht repräsentiert, und einem Abschlusswiderstand RA.
Simulation mit einer Frequenz von 16 kHz
Die erste Simulation wird für eine typische Anregung mit der Frequenz von 16 kHz, welche einer Periodendauer von 62,5 µs entspricht, durchgeführt.
Den Verlauf der Augenblicksleistung am Runddraht kann betrachtet werden; die am Draht verbrauchte Wirkleistung P D lässt sich aus der Graphik in Abbildung 2-10 ablesen.
Abbildung 2-10 Verlauf der Augenblicksleistung PD am Runddraht
Der Effektivwert des Stroms Ieff beträgt laut FLUX2D:
Ieff = 704,57 mA
Damit ergibt sich der Wechselstromwiderstand des Runddrahtes RW:
( )mΩ35,98
mA704,57mW17,861
IP
R 22eff
DW ===

88 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die Qualität dieses Ergebnisses muss der Vergleich mit den Näherungslösungen aus der Literatur liefern. Bei 16 kHz ist die Stromverdrängung relativ schwach (r0/2δ = 0,38 < 1).
Die entsprechende Gleichung liefert einen Wechselstromwiderstand von 35,65 mΩ, der nur geringfügig höher ist als der Gleichstromwiderstand des Drahtes (RG = 35,41 mΩ). Die Simu-lation führt also zu einem ähnlichen Ergebnis wie die Näherung. Die Differenz zwischen bei-den beträgt lediglich 0,93 % (bezogen auf den Näherungswert).
Simulation für die Frequenzen 80 kHz, 128 kHz und 160 kHz
Analog zu dem vorangegangenen Abschnitt werden weitere Simulationen für die Frequenzen 48 kHz, 80 kHz, 128 kHz und 160 kHz durchgeführt. Wie erwartet steigt der Wechselstrom-widerstand mit steigender Frequenz an und liegt jeweils etwa 2 % über den Näherungslösun-gen. Zu beachten ist, dass ab 128 kHz die Näherung für starke Stromverdrängung zu verwen-den ist.
Zusammenfassung der Simulationen für Sinusanregung
Für sinusförmige Spannungseinprägung lassen sich die Verluste durch den Skineffekt im Runddraht gut mit FLUX2D simulieren. Die Ergebnisse für den Wechselstromwiderstand liegen für den gesamten simulierten Frequenzbereich innerhalb von maximal 2,2 % Abwei-chung zu den Näherungslösungen. Abbildung 2-11zeigt den Verlauf des Wechselstromwider-standes sowohl für die beiden Näherungslösungen als auch für den von FLUX2D ermittelten Wert in Abhängigkeit von r0/2δ.
Abbildung 2-11 Wechselstromwiderstand des Runddrahtes bei Sinusanregung
Der Skineffekt lässt sich also mit FLUX2D sehr gut beschreiben, da die berechneten Werte nur mit geringer Abweichung zu den Näherungen verlaufen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 89
Ergebnis der Simulationen zum Skineffekt
Zusammenfassend lässt sich sagen, dass mit wachsenden Drahtradius r oder mit steigender Frequenz f der Wechselstromwiderstand eines Drahtes ansteigt. Es besteht ein geringer Ein-fluss des Skineffektes, solange der Quotient aus Drahtradius r und doppelter Eindringtiefe 2δ kleiner als eins ist. Dies ist gleichbedeutend mit der Ungleichung:
0
0
r < 2δ 0
0
1. falls die Frequenz f gegeben ist,
2. falls der Drahtradius r gegeben ist.
Man erhält für die folgenden Abhängigkeiten der maßgebenden Parameter r und f eine gerin-ge Stromverdrängung durch den Skineffekt:
f1
µκπ2r0 ⋅
⋅⋅<
20r1
µκπ4f ⋅
⋅⋅< 0
Ist, wie in den Simulationen aus den vorangegangenen Abschnitten einen Drahtradius von 0,4 mm gegeben, so liegt man für das Material Kupfer bis zu einer Frequenz von 112,7 kHz im Bereich schwacher Stromverdrängung durch den Skineffekt.
Der Oberwellengehalt des Stromes einer trapezförmigen Anregung mit der Grundfrequenz von 16 kHz bewirkt nur eine geringe Erhöhung des Wechselstromwiderstandes. Als gute Nä-herung zur Abschätzung der Verluste durch den Skineffekt kann mit der Sinusschwingung der Grundfrequenz gerechnet werden.
2.1.1.6.2 Verluste durch den Proximityeffekt
Im Gegensatz zum Skineffekt wird in der Literatur häufig auf die Beschreibung und vor allem auf die mathematische Berechnungen des Proximityeffektes verzichtet oder auf eine Integra-tion des Poynting´schen Vektors über die Leiteroberfläche verwiesen. In dieser Arbeit soll hingegen der Einfluss des Proximityeffektes, bei dem die elektromagnetischen Wechselfelder benachbarter Leiter eine zusätzliche Stromverdrängung in den Leitern hervorrufen, durch ver-schiedene Simulationsreihen erfasst und bewertet werden. Hierbei fließt der Strom durch alle Leiter in die gleiche Richtung, wodurch die Stromverdrängung zum entgegengesetzten Leiter-rand bewirkt wird. Fließen die Ströme in zwei benachbarten Leitern in entgegengesetzte Rich-tung, hat dies eine anziehende Wirkung auf die Stromdichte in beiden Leitern.
Einfluss von Drahtradius und Drahtabstand auf die Stromverdrängung
Eine einfache Geometrie zur Untersuchung der Verluste in einem Draht, die zusätzlich den Proximityeffekt berücksichtigt, ist die Anordnung zweier identischer, paralleler Runddrähte. Die Näherungsgleichungen beschreiben die Eindringtiefe δ als Funktion von Frequenz und Materialeigenschaften des Leiters, während der Leiterdurchmesser keinen Einfluss auf die Eindringtiefe hat. Allerdings hängt der Wechselstromwiderstand des Drahtes von der Draht-geometrie ab; mit wachsendem Drahtdurchmesser steigt bei konstanter Eindringtiefe dieser Widerstand an. Abbildung 2-11 macht dies bereits deutlich. Ebenso ist der Abstand zwischen

90 Modulare PV- und Hybridsystemtechnik Abschlussbericht
den einzelnen Drähten eine relevante Größe. Je dichter die Drähte angeordnet sind, desto grö-ßer ist der Einfluss des Magnetfelds des Nachbarleiters. Wird hingegen dieser Abstand sehr groß, wird der Proximityeffekt vernachlässigbar und man erhält nur noch die Verluste durch den Skineffekt für jeden dieser beiden Drähte. In den folgenden Simulationsreihen soll nun die Abhängigkeit des Wechselstromwiderstandes vom Abstand d zweier Leiter für die Para-meter Drahtradius und Frequenz ermittelt und interpretiert werden. Abbildung 2-12 zeigt den schematischen Aufbau.
Abbildung 2-12 Geometrische Anordnung der Runddrähte bei variabler Distanz
Da sich mit steigendem Abstand d die Ausdehnung der Gesamtgeometrie vergrößert und bei allen Simulationen gleiche Bedingungen gegeben sein sollen, wird für jede Simulation die maximale Ausdehnung der Geometrie bestimmt und der Radius der Umgebungsgrenze als zehnfacher Wert dieser maximalen Ausdehnung gewählt, um mögliche Fehler durch eine zu enge Wahl der Umgebungsgrenze zu verhindern.
Abbildung 2-13 Elektrische Schaltung der Runddrähte (aus FLUX2D)
Elektrisch sind beide Runddrähte parallel geschaltet und über den Vorwiderstand RA mit der Spannungsquelle U0 verbunden (siehe Abbildung 2-13).
Simulation
Zu Beginn soll die Abhängigkeit des Wechselstromwiderstandes vom Drahtabstand d unter-sucht werden.
Simuliert man anstatt beider Runddrähte nur einen einzelnen Draht mit den oben angegebenen Parametern, so erhält man einen Wechselstromwiderstand, der nur durch den Skineffekt be-einflusst wird.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 91
Dieser soll im Folgenden als Skinwiderstand Rskin bezeichnet werden. Er beträgt:
Rskin = 35,975 mΩ.
Der Gesamtwiderstand RWges beider parallel geschalteter Drähte wird wie folgt berechnet:
1
W2W1Wges R
1R
1R−
+= .
Den mittleren Widerstand RW eines jeden Drahtes ist dann:
WgesW R2R ⋅= .
Abbildung 2-14 stellt den auf den Skinwiderstand normierten durchschnittlichen Wechsel-stromwiderstand in Abhängigkeit des auf den Drahtdurchmesser normierten Drahtabstand dar.
1,012
1,014
1,016
1,018
1,02
1,022
1,024
1,026
1,028
0 0,5 1 1,5 2 2,5 3
d/2r0
RW
/Rsk
in
Abbildung 2-14 Wechselstromwiderstand in Abhängigkeit vom Drahtabstand
Mit wachsendem Abstand d nähert sich die Kurve der Asymptote RW/Rskin = 1, d. h. man er-hält dann nur noch den Skinwiderstand für zwei sich nicht beeinflussende Runddrähte. Ist dagegen der Abstand beider Drähte geringer als der Drahtdurchmesser, ist also d/2r0 < 1, so wird der Einfluss des Proximityeffektes stärker, der Wechselstromwiderstand des Drahtes steigt dann steil an.

92 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Der Verlauf der Stromdichten in beiden Drähten für die Abstände d = 0.1 mm bzw. 2 mm ist in Abbildung 2-15 bzw. in Abbildung 2-16 dargestellt.
Abbildung 2-15 Stromdichteverteilung für einen Abstand von 0,1 mm
Abbildung 2-16 Stromdichteverteilung für einen Abstand von 2 mm
In einer zweiten Simulationsreihe wird der Drahtradius r0 beider Runddrähte jeweils vervier-facht. Der zweite Parameter (Frequenz) bleibt unverändert bei 16 kHz.
In einer dritten Simulationsreihe beträgt der Radius 0,4 mm, dagegen wird die Frequenz f auf den fünffachen Wert erhöht.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 93
Vergleich der Simulationsreihen mit variablem Drahtabstand
Stellt man für die drei vorangegangenen Simulationsreihen den auf den jeweiligen Skinwider-stand Rskin normierten Wechselstromwiderstand RW als Funktion des auf den Drahtdurchmes-ser 2r0 normierten Abstand beider Runddrähte d dar, so ergibt sich Abbildung 2-17.
1
1,05
1,1
1,15
1,2
1,25
1,3
1,35
0 0,5 1 1,5 2 2,5 3d/2r0
Rw
/Rsk
in
für r=1,6 mm und f=16 kHz
für r=0,4 mm und f=80 kHz
für r=0,4 mm und f=16 kHz
Abbildung 2-17 RW/Rskin als Funktion von d/2r0 der drei Simulationsreihen
Allen drei Verläufen ist die reziproke Abhängigkeit vom Quotienten d/2r0 gemeinsam. Zieht man in den Graphen eine Grenze, ab der man den Einfluss des Proximityeffektes vernachläs-sigen kann, so liegt diese Grenze bei d/2r0 = 1. Ist also der Abstand zwischen beiden Drähten größer als der Drahtdurchmesser, so kann man mit geringen Proximityverlusten rechnen. In der Praxis liegt man allerdings im Bereich d/2r0 < 1, denn normalerweise werden die Drähte möglichst dicht angeordnet. Da jeder Draht von einer Lackschicht umgeben ist, beträgt der Drahtabstand dann etwa die Summe beider Lackschichtstärken (typischer Wert für d ist dann 0,1 mm). In diesem Bereich macht sich eine Abweichung von einem Zehntel Millimeter im Abstand stärker bemerkbar als bei größeren Abständen.
Aber nicht nur der Abstand zwischen beiden Drähte, sondern besonders die beiden Parameter Drahtradius r0 und Frequenz f sind für die Proximityverluste verantwortlich. Denn wie der Verlauf von RW/Rskin für r0 = 0,4 mm und f = 16 kHz (rote Kurve) zeigt, liegt die Wider-standserhöhung durch den Proximityeffekt auch bei sehr geringem Drahtabstand nur etwa 2,5 % über dem Skinwiderstand. Die Abhängigkeit vom Drahtabstand kommt für diese Parame-terwerte kaum zur Geltung. Ganz anders sind die Verhältnisse für die beiden anderen Simula-tionsreihen. Vervierfacht man bei gleichbleibender Frequenz den Parameter r0, so liegt der Wechselstromwiderstand des Drahtes bis zu 33 % über dem Skinwiderstand (blaue Kurve). Ebenso führt eine Verfünffachung der Frequenz zu deutlich größerem Proximityverlust (grüne Kurve). Der Wechselstromwiderstand liegt nun bis zu 20% über dem Skinwiderstand. In bei-den Fällen ist die Abhängigkeit des Wechselstromwiderstandes vom Drahtabstand deutlich.

94 Modulare PV- und Hybridsystemtechnik Abschlussbericht
2.1.1.7 Aufbau
2.1.1.7.1 Parallelschaltung von Leistungstransistoren
Die Parallelschaltung von IGBTs wird benutzt, um höhere Leistungen zu übertragen. Vorteile dieser Methode gegenüber IGBT-Module sind:
• Das Layout ist einfacher zu gestalten.
• Die Wärme durch die Verluste der IGBTs kann besser abgeführt werden. Folglich können höhere Leistungen übertragen werden.
• Die Kosten können reduziert werden.
Ein sehr großer Nachteil ist die Tatsache, dass bei der Parallelschaltung von IGBTs die ein-zelnen Transistoren unterschiedliche Ströme führen. Die Stromunterschiede können so groß sein, dass bei kleineren Strömen einer der Transistoren den gesamten Strom leitet, während durch die anderen überhaupt kein Strom fließt. Diese Unterschiede können 100% betragen. Es ist zu erwarten, dass die Stromverteilung der Transistoren größere Unterschiede aufweist, je größer der Effektivwert des Gesamtstromes wird. Das ist aber nicht der Fall. Wie später erklärt wird, wird der Unterschied zwischen den Strömen bei größerem Gesamtstrom kleiner (siehe Abbildung 2-18).
IGBT1 IGBT2
L1
L2 L3
L4
R1 R2
P
Uein
Treiber
L5
L6
Ig
I1 I2
Abbildung 2-18 Parallelschaltung von IGBTs unter Berücksichtigung parasitärer Indukti-
vitäten

Abschlussbericht Modulare PV- und Hybridsystemtechnik 95
Die Induktivitäten L1 und L6 stellen die parasitären Induktivitäten der Spannungsquelle, die Induktivitäten L2 bis L5, die Induktivitäten von Leitungen und den eigenen Bauelementen dar. Es ist sehr wichtig, vor Beginn des Aufbaus die IGBTs gut zu platzieren, damit keine langen Leitungen, und letztendlich keine große Induktivitäten auftreten.
Der Strom verteilt sich unterschiedlich in den Transistoren. Diese unterschiedliche Verteilung verursacht eine unterschiedliche Erwärmung der Transistoren. Bei IGBTs kann man nicht sagen, wie der Fall bei MOSFETs oder BJTs ist, dass diese einen positiven bzw. einen negati-ven Temperaturkoeffizient aufweisen. Denn bei IGBTs handelt es sich um eine Kombination aus MOSFET und BJT. Der Temperaturkoeffizient der IGBTs hängt nämlich von der ange-wendeten Technologie ab.
Die drei wichtigste Kriterien für die Parallelschaltung von IGBTs sind:
• Die Sättigungsspannung (USAT)
• Der Strom (Ic)
• Die Temperatur des Kristalls (junction temperatur Tj).
Ein Unterschied von 10% zwischen den parasitären Induktivitäten der Kollektoren und des Faktors ergibt einen Spitzenspannungsunterschied beim Ausschalten der Transistoren von 20%. Das bedeutet, dass die Sperrspannung des einen Transistors um 20% größer ist als die Spannung des anderen. Das ist kein entscheidender Faktor für die Parallelschaltung von IGBTs solange die Durchbruchsspannung nicht überschritten wird.
Einige wichtige Faktoren für die Parallelschaltung von IGBTs sind:
• Es soll ein Gatewiderstand verwendet werden, um mögliche Schwingungen zu ver-meiden.
• Die parasitären Induktivitäten müssen so weit wie möglich ausgeglichen werden, um die Verlustleistung der Transistoren klein zu halten.
• Die Streuinduktivität (z. B. eines Transformators) soll so klein wie möglich gehalten werden, damit nicht so große Spannungsschwingungen entstehen.
• In der Gatesteuerung eingesetzte Zenerdioden verursachen Schwingungen. Wenn das Gate vor Überspannungen geschützt werden soll, darf keine Zenerdiode direkt zwi-schen Gate und Emitter angeschlossen werden (auch nicht direkt zwischen Gate und Kollektor). Es ist ratsam, die Zenerdiode direkt an den Treiber anzuschließen. Dann soll ein Widerstand zwischen der Diode und dem Gate angeschlossen werden. Damit vermeidet man die Entstehung von Schwingungen.
• Wie bei der Zenerdiode, verursachen ans Gate angeschlossene Kapazitäten Schwin-gungen. Wenn eine Kapazität zwischen Gate und Emitter oder Kollektor angeschlos-sen werden soll, gelten die gleichen Voraussetzungen wie bei der Zenerdiode. Kapazi-täten verursachen, im Extremfall, eine unterschiedliche Stromverteilung in den Tran-sistoren.
Parallel geschaltete Bauelemente haben unter bestimmten Voraussetzungen die gleiche Span-nung. Das gilt auch für die Parallelschaltung von IGBTs. Da aber physikalisch gesehen keine Halbleiter ganz genau die gleichen Eigenschaften besitzen, haben IGBTs der gleichen Typen verschiedene Sättigungsspannungen. Die Unterschiede zwischen den Sättigungsspannungen

96 Modulare PV- und Hybridsystemtechnik Abschlussbericht
der Transistoren wird bei der Parallelschaltung ausgeglichen. Das geschieht auf Kosten der Stromverteilung. Das bedeutet, dass der Transistor mit der niedrigsten Sättigungsspannung einen größeren Strom leiten wird als die anderen Transistoren. Folglich wird in diesem Tran-sistor eine größere Verlustleitung umgesetzt, was zu einer schnelleren und höheren Erwär-mung führt.
Eine ganz besondere Eigenschaft von Halbleitern ist, dass diese empfindlicher auf Tempera-turänderungen reagieren als auf Stromänderungen. Also muss man auf die Temperatur der Transistoren Acht geben.
Die Stromverteilung bedingt durch die unterschiedlichen Sättigungsspannungen, kann nicht vom Anwender direkt beeinflusst werden. Eine ganz elegante und einfache Lösung ist die thermische Kopplung der Transistoren. Das heißt nichts anderes als dass die Transistoren auf einen gemeinsamen Kühlkörper montiert werden. Das vermeidet nämlich, dass die einzelnen Temperaturen sehr stark von einander abweichen.
Wenn die Transistoren auf verschiedene Kühlkörper montiert werden, sind die Kollektorströ-me und die Temperaturen der Transistoren sehr unterschiedlich. Werden dagegen die Transis-toren auf einem gemeinsamen Kühlkörper angebracht, so sind die Strom- und Temperaturun-terschiede nicht so groß oder relevant.
Unterschiedliche Streuinduktivitäten der einzelnen Transistoren verursachen auch eine Erhö-hung der Stromunterschiede. Um dieses Problem zu bewältigen, sollen die einzelnen Streuin-duktivitäten individuell studiert und dementsprechend verkleinert und ausgeglichen werden, denn diese unterschiedlichen Induktivitäten haben beim Ausschalten zur Folge, dass die Tran-sistoren ungleich schnell ausschalten. Das bewirkt, dass der letzte Transistor, der ausschaltet, eine Zeit lang den ganzen Laststrom führt. Dies macht sich in der Temperatur dieses Transis-tors bemerkbar.
Von Interesse ist die Tatsache, dass die Stromverteilung bei der Parallelschaltung von IGBTs auch von der Frequenz abhängt. Je größer die Frequenz ist, desto kleiner ist der Stromunter-schied.
Bei einer gegebenen Leistung kann man auch die Stromdifferenzen verkleinern, wenn man die Pulsbreite der Schaltfrequenz verringert. Das hat nämlich eine größere Stromspitze zur Folge, um die gleiche Leistung als bei einer größeren Pulsbreite zu übertragen. Diese Strom-spitze macht die Stromdifferenzen kleiner.
2.1.1.7.2 Wirkungsgrad
Um die erforderlichen 1000 Watt übertragen zu können, sind drei IGB-Transistoren in Paral-lelschaltung notwendig.
Abbildung 2-19 gibt die Spannungs- und Stromverläufe zweier IGBTs wieder. Durch eine extrem niederinduktive Leiterbahnführung und eine geringe Streuinduktivität des Transforma-tors konnten die Überspannungsspitzen sehr gering gehalten werden.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 97
Der Strom teilt sich gleichmäßig auf alle drei Transistoren auf.
Abbildung 2-19 Spannungs- und Stromverläufe an zwei der drei IGBTs
Es wurden drei Transformatoren für einen ETD-59-Kern gewickelt:
Trafo 1 50 kHz Lackdraht
Trafo 2 50 kHz HF-Litze
Trafo 3 35 kHz HF-Litze
Nachdem die Verluste durch Austausch von Transformator 1 durch Muster 2 reduziert werden konnten, wurde mit dem Dimensionierungsalgorithmus die niedrigste Taktfrequenz zu 35 kHz ermittelt. Für das Muster 3 ergaben sich somit auch andere Windungszahlen und Drahtquer-schnitte.
Die Wickelraumaufteilung auf Primär- und Sekundärwicklung ist bei diesem Muster jedoch deutlich ungünstiger als bei Transformator 2, so dass Muster 3 eine höhere Streuinduktivität besitzt. Die Gesamtverluste sind mit Transformator 2 am geringsten.

98 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Der maximale Wirkungsgrad beträgt 92%. Abbildung 2-20 zeigt den Wirkungsgrad über der Ausgangsleistung.
0
10
20
30
40
50
60
70
80
90
100
0 100 200 300 400 500 600 700 800 900 1000 1100 1200
Paus(W)
η
Abbildung 2-20 Wirkungsgradkennlinie des Sperrwandlers
2.1.1.8 Zusammenfassung
Im vorliegenden Beitrag wurden zuerst die Anforderungen an modulare inselnetzfähige und vernetzbare PV-Wechselrichter ausgearbeitet. Konzeptionell erfüllen String- und Multistring- Wechselrichter die Modularitätsbedingung. Verschiedene Topologien für Multistring-Wechselrichter wurden daraufhin vorgestellt. Von diesen wurde eine sehr erfolgversprechen-de Topologie, der Sperrwandler, herausgegriffen und die systematische Vorgehensweise für seine Dimensionierung erläutert. Der Schwerpunkt liegt in der Demonstration der Ergebnisse des Finite-Elemente-Programms FLUX2D, mit welchem möglich wird, schwer oder nicht analytisch beschreibbare Eigenschaften von insbesondere induktiven Bauelementen zu simu-lieren und somit einen Weg zu deren Optimierung zu finden. Diese sind für die PV-Wechselrichter von großer Bedeutung, da sie gerade die Geräte in Kosten und Wirkungsgrad wesentlich beeinflussen. Insbesondere verifizieren die Simulationsergebnisse des Proximity-effekts die empirisch gewonnen Erkenntnisse und veranschaulichen die physikalischen Vor-gänge. Schließlich wurde unter Verwendung der Werkzeuge ein DC/DC-Wandler für einen Multistring-Wechselrichter aufgebaut und gezeigt, dass diese Topologie auch in deutlich über der in der Literatur genannten Leistungsgrenze sinnvoll einsetzbar ist.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 99
2.1.2 Verbesserung der „Power Quality" durch den Einsatz von PV-Wechselrichtern als aktive Oberwellenfilter und Blindleistungskompensatoren (J. Jahn)
Der Begriff Power Quality gewinnt in modernen Energieversorgungsnetzen zunehmend an Stellenwert. Gemeint ist die Verbesserung der Netzqualität also die Qualität der bereit ge-stellten elektrischen Energie, was implizit den Ausgleich von Netzrückwirkungen der Ver-braucher bedeutet.
Netzrückwirkungen lassen sich in die Bereiche
• Spannungsverzerrung und
• Blindleistungsbelastung
unterteilen.
Nichtlineare Lasten lassen einen nichtlinearen Strom im Netz fließen, der an den Impedanzen einen nichtsinusförmigen Spannungsabfall verursacht. Dies führt zur Verzerrung der Netz-klemmenspannung. Zur Gruppe der nichtlinearen Lasten gehören Eisendrosselspulen und Lichtbögen sowie Leuchtstofflampen und Stromrichterventile. Somit verursachen alle Ein-richtungen, die Ventile beinhalten, wie z. B. Batterie-Ladegeräte, elektronische Lichtregler, Fernsehapparate oder Schaltnetzteile, eine Verzerrung der Netzspannung. [1] Durch die große Verbreitung der leistungselektronischen Einrichtungen gehören diese zu den wichtigsten Verbrauchern, die störend auf das Netz zurückwirken.
Ein Großteil elektrischer Verbraucher verursacht außerdem eine Phasenverschiebung zwi-schen Spannung und Strom, was eine Blindleistungsbelastung für das Netz bedeutet. Blind-leistungsübertragung vermindert die maximal übertragbare Wirkleistung der Übertragungslei-tungen und verursacht zusätzliche Stromwärmeverluste in ihnen.
Ziel der Verbesserung der Power Quality ist es also einerseits den Oberschwingungsgehalt der Netzspannung zu senken. Andererseits sollen, durch gezielte dezentrale Bereitstellung von Blindleistung, die Übertragungsleitungen entlastet werden.
Die Möglichkeiten für diese Aufgaben Solarwechselrichter - als dezentrale Kleinkraftwerke - heranzuziehen, soll untersucht werden.
2.1.2.1 Aktive Filterung
Bei passiver Filterung werden Kompensationseinrichtungen in das Netz eingebracht, die je-weils auf eine bestimmte Frequenz abgestimmt sind. Diese Filter bedeuten für jede ausgeführ-te Frequenz einen Bauteilaufwand. Als schwingungsfähige Gebilde können zwischen solchen Elementen auch Wechselwirkungen auftreten.
Ein aktives Filter misst den Netzspannungsverlauf, stellt Abweichungen vom Idealwert (Sollwert) fest und antwortet in einer festgelegten Weise darauf. Es ist somit in der Lage, fle-xibel auf sich ändernde Netzzustände z. B. durch Abweichungen im Verbraucherverhalten zu reagieren.

100 Modulare PV- und Hybridsystemtechnik Abschlussbericht
2.1.2.1.1 Sollwertgenerierung
Um dem Ziel der flexiblen Einflussnahme näher zukommen, sind aktive Filterungen meist als Regelkreise ausgeführt. Ein zentrales Element eines Regelkreises ist der Sollwert. Die Rege-lung soll bestrebt sein, diesen Sollwert einzuhalten.
Jede periodische Funktion der Frequenz f lässt sich in eine unendliche Reihe von Sinus-schwingungen der ganzzahligen Frequenzen 0f, f, 2f, 3f ... zerlegen. [1]
Somit kann man die Funktion darstellen als:
)sin(...)3sin()2sin()sin()( 3322110 nn tnAtAtAtAAtF ϕωϕωϕωϕω +++++++++=
Während die Schwingung der Frequenz f ( fπω 2= ) die Grundschwingung und somit den Idealwert der Spannung repräsentiert, spricht man bei den Vielfachen der Grundschwingung von den harmonischen Oberschwingungen. Die Koeffizienten An und ϕn bezeichnen die Amp-litude bzw. den Phasenwinkel der einzelnen Oberwelle.
Um auf eine Spannungsverzerrung aktiv reagieren zu können, benötigt man zumindest den Grundschwingungsgehalt, der den Sollwert der Spannung darstellt. Ein gängiges Verfahren um die Koeffizienten An und fn zu bestimmen, ist die Fourier-Analyse. Die klassische Fourier-Zerlegung ist jedoch nicht für Online-Rechenverfahren geeignet, da der Rechenaufwand zu hoch ist. Aus diesem Grund wurden Fast-Fourier-Algorithmen entwickelt. Ein entscheidender Nachteil dieser Rechenmethode ist, dass sie eine bestimmte Zahl von Stützstellen benötigen, die genau eine Periode umfassen, um präzise Ergebnisse zu liefern.
Eine weitere Möglichkeit, den Grundschwingungsgehalt einer periodischen Funktion zu bestimmen, ist die Verwendung von Verallgemeinerten Integratoren (VI). Grundlegende Be-trachtungen und Eigenschaften der Verallgemeinerten Integratoren finden sich im Kapitel 3.2.2.
Um einen VI als Filterelement einsetzen zu können, muss er wie in Abbildung 2-21 zu se-hen gegengekoppelt werden.
ωN
ωN
u
-
-
ub
ua
KUωN
Abbildung 2-21 Verallgemeinerter Integrator als Filter
Abbildung 2-22 zeigt die Spannungsverläufe am Filter, bei rechteckförmigem Eingangssignal. Im eingeschwungenen Zustand besitzt das Signal eine Amplitude von 4/π, was dem Fourier-Koeffizienten der Grundschwingung eines Rechecksignals entspricht. Am zweiten Ausgang ub(t) liegt eine zu ua(t) orthogonale Spannung an.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 101
-1,5
-1,0
-0,5
0,0
0,5
1,0
1,5
0 10 20 30 40 50 60 70 80 90 100
Zeit / ms
u(t)u a (t)
u b (t)
Abbildung 2-22 Spannungsverläufe eines gefilterten Rechtecksignals
2.1.2.1.2 Regelungsstrategien
Die Ableitung des Sollwertsignals ist die Grundvoraussetzung für den Aufbau eines aktiven Filters. Mit der gewonnenen Information kann man Spannungsverzerrungen auf verschiedene Weise begegnen.
„Totale“ Kompensation
Vergleicht man das Sollwert-Signal mit dem Ist-Wert der Spannung, erhält man die Regelab-weichung. Eine Addition dieser Differenz zum Eingangssignal, kompensiert alle Verzer-rungsanteile.
Mit dieser Methode ist es möglich (im technisch umsetzbaren Rahmen), alle Oberschwin-gungsanteile zu erkennen und ihnen zu begegnen. Auch kurzzeitige Spannungseinbrüche und spitzen können erkannt und ausgeregelt werden. Nachteilig an dieser Methode ist, dass man unter Umständen sehr viel Energie zur Verfügung stellen muss.
„Selektive“ Kompensation
In vielen Fällen bestehen Spannungsverzerrungen aus charakteristischen Anteilen, die durch die Bauart der rückwirkenden Verbraucher bestimmt ist. Somit kann man einen Großteil der Spannungsverzerrungen mit der Kompensation einiger, definierter Oberschwingungen elimi-nieren.
Aus einer Übersicht der zu erwartenden Oberschwingungswerte in der Netzspannung in Deutschland ist zu ersehen, dass es sich bei den am deutlichsten ausgeprägten Oberschwin-gungen um ungeradzahlige Harmonische handelt. Von besonderer Bedeutung sind hier die 3., die 5., die 7. sowie die 11. Oberschwingung, deren zu erwartende Höchstwerte bei ca. 5% der Netznennspannung liegen. [1]
Der Vorteil der selektiven Kompensation liegt darin, dass zusätzliche Informationen wie z. B. Rundsteuersignale das Filter nahezu unbeeinflusst passieren können. Weiterhin lassen sich mit dieser Methode Filter entwickeln, die erst bei bestimmtem Oberschwingungsgehalt

102 Modulare PV- und Hybridsystemtechnik Abschlussbericht
aktiv werden und die Oberwellen in vorher festgelegten Werten halten. Der Energieeinsatz wird so minimiert.
Nachteilig an diesem Verfahren ist, dass unerwünschte Oberwellen nicht erwarteter Ordnung keinerlei Bedämpfung erfahren.
2.1.2.1.3 Regelungsstruktur
Die entwickelte Regelungsstruktur ist Abbildung 2-23 zu entnehmen.
V133950
V57.5250
V32.5150
U_Grund U_3te
gain
U5
0.1
V1V2
QM6
SUBV
U6 942.48
U7 942.48
gain
U4
1
V1
V2
Q
M7
AD
DV
V1
V2
Q
M4SUBV
gain
U1
0.135
V1V2
QM2
SUBV
U2 314.16
U3 314.16
V1V2
QM1
SUBVU_GrundExtrakt
V1
V2
Q
M8
AD
DV
gain
U8
0.3
V1V2
QM10
SUBV
U9 1570.79
U101570.79
U_VPIin V1
V2
Q
M11
AD
DV
gain
U14
2
V1V2
QM15
SUBV
U154712.39
U164712.39
V1
V2
Q
M12
AD
DV
V153750
U_3detekt
U_5detekt
U_15detekt
gain
U11
0.35
V1V2
QM14
SUBV
U122199.11
U132199.11
U_7detekt
V1V2
QADDVV75350
U_ges U_TestU_5teM13
U_7te
Abbildung 2-23 Erarbeitete Regelungsstruktur zur aktiven Filterung mit VPI-Regler
Die Grundschwingung wird über einen Verallgemeinerten Integrator extrahiert. Mit dem so gewonnenen Sollwertsignal wird die Regelabweichung errechnet. Ein Verallgemeinerter Pro-portional-/Integralregler (VPI) ermittelt den Gehalt an relevanten Oberschwingungen.
Die Simulationsergebnisse in Abbildung 2-24 belegen die Wirksamkeit der entworfenen Re-gelungsstruktur.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 103
Abbildung 2-24 Simulationsergebnisse VPI-Oberschwingungsbedämpfung
Abbildung 2-25 Simulationsergebnisse bei bewusst überhöhten Oberschwingungsvorga-
ben
Es ist zu sehen, dass die von den VIen detektierten Schwingungsbestandteile sehr gut mit den von den Spannungsquellen gelieferten Werten übereinstimmen. Die Phasendrehung um 180° resultiert aus der Invertierung durch den Soll-/Istwert Vergleich.
Um die Aussagekraft der Grafik zu erhöhen, zeigt Abbildung 2-25 die Simulationsergebnisse bei bewusst unrealistisch vorgegebenen Oberschwingungswerten.

104 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die Linien der Ausgangsspannung (u_test) und der detektierten Grundwellenspannung (u_grundextrakt) sind bei dieser Auflösung nicht von der Originalschwingung (u_grund) zu unterscheiden. Die maximale Abweichung ist kleiner als 750 mV.
2.1.2.2 Aktive Leistungsfaktorkorrektur
Viele elektrische Verbraucher benötigen zum einwandfreien Betrieb Blindleistung. Im allge-meinen Fall wird die Blindleistung Q1 durch motorische Verbraucher und Kommutie-rungsdrosseln induktiv [3]. Bei Q1 handelt es sich um die Grundschwingungsblindleistung, die durch Phasenverschiebung zwischen Grundschwingungsspannung und -strom entsteht. Höhere Ordnungen von Spannung und Strom sind ebenfalls nicht an der Wirkleistungsüber-tragung beteiligt [1]; die Oberschwingungsleistung wird mit dem Begriff Verzerrungsleistung zusammen gefasst.
Aktive Filterung und aktive Leistungsfaktorkorrektur sind eng miteinander verknüpft, denn durch aktive Filterung wird der Verzerrungsleistungsanteil direkt beeinflusst. Die aktive Leis-tungsfaktorkorrektur zielt somit primär auf die Kompensation der Grundschwingungsblind-leistung.
Bei der passiven Blindleistungskompensation werden zentrale, netzparallele Kondensatoren eingesetzt. Somit kann die Blindleistung nur in Stufen gestellt werden und es besteht die ebenfalls unerwünschte Möglichkeit der Überkompensation.
Ein zentrales Problem in der einphasigen Wechselstromtechnik ist die schnelle Leistungsbe-stimmung, da hier im Gegensatz zum Dreiphasensystem keine Raumzeiger unmittelbar vorhanden sind. Zur Ermittlung der Leistungswerte kann man wiederum die Verallgemeiner-ten Integratoren (VIen), zur Erzeugung von Zeigern, einsetzen. Ausführliche Erläuterungen des Prinzips der Leistungsbestimmung finden sich in Kapitel 3.2.2.1.
Mit Hilfe der Verallgemeinerten Integratoren lässt sich nun der Netzstrom in Wirk- und Blin-danteil zerlegen. Der Blindanteil des Stromes lässt sich mit der Formel
22)(BA
Bq uu
uQti+⋅
=
berechnen. [4]
Dabei ist Q die berechnete Blindleistung, uB die um 90° zur Eingangsspannung verschobene Komponente. Die Summe uA²+uB² spiegelt den Scheitelwert der Eingangsspannung wider.
Eine Lösung zur Blindstrombestimmung zeigt Abbildung 2-26.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 105
U133
INT 314.16
V1V2
QU130
SUBV gain
U131
1.41
V1V2
QU132
SUBV
U134
INT 314.16
V1
itude 325uency 50e Delay 0
U163
INT 314.16
V1V2
QU160
SUBV gain
U161
1.41
V1V2
QU162
SUBV
U164
INT 314.16
V1V2
QU155
MULTV
V1V2
QU156
MULTV
gain
U159
0.5
Q1V1V2
QU157
SUBV
u1_a
u1_b
i1_a
i1_b
V2
litude 14.14uency 50e Delay 315
V1V2
QM11
MULTV
V1V2
QM10
MULTV
V1V2
QM12
ADDVV1V2
QM13
DIVV
V1V2
QM14
MULTV
U_in
I_in
I_q
Abbildung 2-26 Simulationsaufbau zur Blindstrombestimmung
Die Simulationsergebnisse zeigen, dass der Blindstrom nach Betrag und Phase richtig erkannt wird. Eine um 180° zu iq gedrehte (invertierte) Schwingung repräsentiert den Stromsollwert, der in Verbindung mit der Netzspannung für die Bereitstellung der Blindleistung verant-wortlich ist, die benötigt wird. Dies ermöglich einem Stellglied, wie einem Solar-Wechselrichter, die Bereitstellung von Blindleistung.
Abbildung 2-27 Simulationsergebnisse zur Blindstrombestimmung
2.1.2.3 Zusammenfassung
Es wurden Möglichkeiten aufgezeigt, um mit PV-Wechselrichtern Netzrückwirkungen be-gegnen zu können. Die Verallgemeinerten Integratoren präsentieren sich - auf der theoreti-schen Ebene - als zuverlässige und genaue Einrichtungen zur Bestimmung von Harmonischen und von Raumzeigern. Somit lassen sich Regelungen entwerfen, die Netzrückwirkungen kompensieren können.

106 Modulare PV- und Hybridsystemtechnik Abschlussbericht
2.1.2.4 Literatur
[1] Kloss, A.: Oberschwingungen Netzrückwirkungen der Leistungselektronik 2. Auflage VDE Verlag, Berlin 1996
[2] Büchner, P.: Stromrichter-Netzrückwirkungen und ihre Beherrschung 2. überarbeitete Auflage, VEB Verlag, Leipzig 1982
[3] Anke, D., Dittrich, I., Probst, R.: Netzrückwirkungen Seminarunterlagen, Regensburg 15./16. April 1999
[4] Burger, B., Engler, A.: Bestimmung eines Raumzeigers in einphasigen Systemen Antrag auf Erteilung eines Patents, Aktenzeichen 199 49 997.7, Deutsches Patentamt, Dezember 1999

Abschlussbericht Modulare PV- und Hybridsystemtechnik 107
2.2 Modulare Speichereinheiten
2.2.1 Grundlegende Untersuchungen zum Aufbau modularer Energiespeicher (M. Rothert, B. Willer)
Für die Versorgung kleiner, dezentraler Wechselstromnetze im Leistungsbereich von 2 bis 30 kW eignen sich insbesondere modular aufgebaute, erweiterbare photovoltaische Energie-versorgungssysteme, deren Einzelkomponenten über ein 230-V-Netz miteinander verknüpft werden. Zentrale Komponenten einer solchen modularen und baukastenartigen Versorgungs-technik sind Batteriespeicher mit ihren zugehörigen Batteriestromrichtern. Sie dienen dem Energieausgleich zwischen Angebot und Nachfrage und garantieren die Versorgungssicher-heit für die angeschlossenen Verbraucher. Der Batteriestromrichter muss auf der Wechsel-spannungsseite für stabile Netzgrößen sorgen und auf der Gleichstromseite eine optimale Bat-teriebetriebsführung realisieren. Eine optimale Batteriebetriebsführung muss sowohl Anforde-rungen der Batterien bzgl. eines batterieschonenden Betriebes erfüllen als auch eine hohe Versorgungssicherheit garantieren.
Aufbauend auf Voruntersuchungen und Vorentwicklungen im ersten Vorhaben zur modularen Systemtechnik ist es ein Teilziel dieses Vorhabens, das modulare Speicherkonzept weiterzu-entwickeln und zu optimieren. Nach der Festlegung der Aufgaben einer Batteriebetriebsfüh-rung für modulare Bleibatterieeinheiten wurde mit ihrer Realisierung begonnen. Modulare Softwarepakete wurden erstellt und hierbei die Ladezustandserfassung für Bleibatterien durch die Entwicklung und Implementierung automatischer Rekalibrierungen verbessert. Testver-fahren zum Test und zur Weiterentwicklung von Betriebsführungsalgorithmen wurden entwi-ckelt.
Die an die Batteriebetriebsführung gestellten Anforderungen und die eingeschlagenen Wege zur Erfüllung der Anforderungen enthält Tabelle 2-1.

108 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Aufgaben Realisierung
Schutz der Batterie vor Extremwerten (U, I, T), Sicherheitsmanagement
Grenzwertüberwachung mit Notabschaltung, Zwangsbelüftung
Elektrisches Management:
• Überladeschutz, maximale Nutzung
• regenerativer Energien, regelmäßige
• Volladungen, Ladungsausgleich
Vorgabe veränderbarer Sollwerte für die Laderegelung (U, I)
Thermisches Management Steuerung einer Temperaturvergleich-mäßigung und Kühlung
Angabe der Batterieverfügbarkeit und -nutzbarkeit
Definition des Batteriezustandes in Abhängigkeit von
• Ladezustand
• Alterungszustand
• Gesundheitszustand
• Gasungszustand
Vorgabe von Empfehlungen für das Energie-management (Generator-, Back-up-, Last-steuerung)
Vorgabe diskreter Batteriezustände
Tabelle 2-1 Aufgaben der Batteriebetriebsführung und Möglichkeiten ihrer Umset-zung
Zur Bearbeitung der wichtigsten Aufgaben der Betriebsführung werden vom ISET verschie-dene Betriebsführungsalgorithmen entwickelt und in modular aufgebaute Softwaremodule umgesetzt. Die Betriebsführung enthält zur Zeit, wie in Abbildung 2-29 prinzipiell dargestellt, Module für folgende Aufgaben:
• Grenzwertüberwachung von Spannung, Strom und Temperatur,
• Geregelte Batterieladung durch Vorgabe von Spannungs- und Zeitsollwerten,
• Lüfter- und Pumpenansteuerung und
• Batteriezustandserkennung.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 109
Abbildung 2-28 Prinzip der Batteriebetriebsführung
2.2.1.1 Grenzwertüberwachung
Spannung, Strom und Temperatur der Batterie werden erfasst und mit vorgegebenen Grenz-werten verglichen. Bei Überschreitung eines Grenzwertes erfolgt eine Meldung, die z. B. zum Abschalten der Batterieeinheit verwendet werden kann. Zur Ansteuerung eines Lüfters zur Belüftung eines Batterieraumes wurden entsprechend den geltenden Sicherheitsvorschriften Softwaremodule geschrieben.
2.2.1.2 Batterieladung
Zur geregelten Ladung der Batterie werden 4 unterschiedliche Ladeverfahren mit verschiede-nen Spannungswerten und Ladezeiten eingesetzt. Die verschiedenen Ladespannungen der unterschiedlichen Verfahren werden temperaturkompensiert und an den Batterietyp angepasst. Ein Wechsel zwischen den verschiedenen Ladeverfahren erfolgt im Wesentlichen in Abhän-gigkeit von der Zeit und von Ladungsdurchsätzen. Folgende Ladeverfahren kommen zum Einsatz (siehe Abbildung 2-29):
• Normalladung,
• Vollladung,
• Ausgleichsladung und
• Erhaltungsladung.

110 Modulare PV- und Hybridsystemtechnik Abschlussbericht
NormalladungU = 2,55 V
ErhaltungsladungU = 2,23 V
AusgleichsladungU = 2,45 V
VolladungU = 2,5 V
7 Tagen oder 4 Ladungsdurchsätze
60 Tagen oder16 Ladungsdurchsätze
60 Tagen oder 16 Ladungsdurchsätze
U > 2,45V für 7 hU > 2,4V für 15 h
U > 2,5 V für 1 h
SOC
<90%
Abbildung 2-29 Verschiedene Ladeverfahren zum verbesserten Betrieb von Bleibatterien
Eine geregelte Ladung der Batterie wird in Abhängigkeit des Erreichens bestimmter Batterie-zustände initiiert bzw. angefordert. Eine Normalladung führt zu einer Ladung der Batterie auf einen hohen Ladezustand, ohne die Batterie vollständig aufzuladen. Priorität haben hierbei eine große Ladungsaufnahme und kurze Laufzeiten eines Zusatzaggregates. Eine Vollladung führt zur vollständigen Aufladung der Batterie und damit zur Minderung irreversibler Alte-rungsvorgänge. Eine Ausgleichsladung soll ein Auseinanderlaufen und damit eine Streuung der Ladezustände der einzelnen Zellen im Batterieverband verhindern. Eine Erhaltungsladung dient zum Schutz der Batterie vor Überladung und zum Erhalt des Vollladezustandes.
2.2.1.3 Pumpenansteuerung
Zur Ansteuerung von Pumpen für ein thermisches Management wurden entsprechende Soft-waremodule geschrieben und umgesetzt.
2.2.1.4 Batteriezustandserkennung
Der Zustand der Batterie wird in Abhängigkeit von
• Ladezustand,
• Alterungszustand,
• Gesundheitszustand und
• Gasungszustand
bestimmt, aufbereitet und für die Betriebsführung zur Verfügung gestellt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 111
2.2.2 Aufbau modularer Speichereinheiten / Batteriestromrichter (A. Engler)
Ziel dieses Arbeitspaketes ist es, den im Projekt "Batteriestromrichter für Modulare System-technik in PV-Anlagen" (Nr. 0329746) entwickelten Batteriestromrichter weiter an die Be-dürfnisse in modularen PV-Anlagen anzupassen und weiter zu optimieren.
2.2.2.1 Kurzschlussverhalten
Verwendet man in einem modular aufgebauten Energieversorgungssystem handelsübliche Installationstechnik - und das ist ein Ziel der Modularen Systemtechnik - so muss der Batte-riestromrichter in der Lage sein, die im Kurzschlussfall zum magnetischen Auslösen von Si-cherungsautomaten erforderlichen hohen Ströme bereitzustellen. Andererseits sollte die Rege-lung diese Ströme begrenzen können, um die Leistungsteile zu schützen.
Abbildung 2-30 Spannungs- (Ch1) und Stromverlauf (Ch2, 20 A/div) bei auftretendem
Kurzschluss im Leerlaufbetrieb. Nach eineinhalb Netzperioden löst die Sicherung aus. Ch3 zeigt die Umschaltung zwischen den Stromreglern (L-Pegel: Kondensatorstromregler, H-Pegel: Drosselstromregler)
Die als Spannungsregler mit unterlagertem Stromregler realisierte Regelung wurde hierzu um einen zweiten Stromregler für den Kurzschluss- bzw. Überlastfall und einen Mechanismus zur automatischen Umschaltung zwischen beiden Stromreglern erweitert. Während der Stromreg-ler des Normalbetriebs den Strom im Ausgangskondensator regelt, muss der Stromregler für den Kurzschluss- bzw. Überlastfall den Strom in der Wechselrichterbrücke regeln; er verwen-det daher den Strom in der Speicherdrossel als Istwert. Als Kriterien für das Umschalten zwi-schen beiden Reglern werden der Strom in der Speicherdrossel und die Ausgangsspannung herangezogen.

112 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Mit einer Strombegrenzung auf 70 A gelingt es, den 16-A-Automaten mit A-Charakteristik zuverlässig magnetisch auszulösen. Abbildung 2-30 zeigt die Vorgänge bei einem auftreten-den Kurzschluss im Leerlaufbetrieb. Die Ausgangsspannung wird durch den Kurzschluss un-gefähr Null, während der Strom nach dem Umschalten auf den Drosselstromregler begrenzt wird. Das magnetische Auslösen des Sicherungsautomaten nach eineinhalb Netzperioden stellt wieder den Leerlauffall mit sinusförmiger Ausgangsspannung her. Der Strom folgt wäh-rend der Kurzschlussphase einer Sinuskurve mit abgeschnittenen Spitzen. Liegt kein Kurz-schluss, sondern ein Überlastfall vor mit einer Stromamplitude unterhalb der Begrenzung, so bleibt der Strom sinusförmig.
Abbildung 2-31 Kurzschlussfall im Betrieb mit einer ohmschen 1,2-kW-Last. Nach dem Auslösen der Sicherung wird die Last weiterversorgt. (Kanalzuordnung wie in Abbildung 2-30)
In Abbildung 2-31 tritt ein Kurzschluss während der Versorgung einer ohmschen 1,2-kW-Last auf. Nach dem Wegfall des Kurzschlusses durch Auslösen des Sicherungsautomaten im Kurzschlusszweig wird die Last wie zuvor weiterversorgt. Die Einschwingvorgänge in Span-nung und Strom beim Auftreten des Kurzschlusses werden durch das Ausgangsfilter hervor-gerufen. Sie hängen vom Phasenwinkel der Spannung ab und sind beim Kurzschlussbeginn im Nulldurchgang fast nicht zu beobachten (Abbildung 2-32).

Abschlussbericht Modulare PV- und Hybridsystemtechnik 113
Abbildung 2-32 Kurzschlussfall wie in Abbildung 2-31. Da der Kurzschluss im Null-durchgang der Spannung auftritt, treten die durch das Ausgangsfilter her-vorgerufenen Einschwingvorgänge nicht auf
2.2.2.2 Dreiphasiger Betrieb
Der Batteriestromrichter verfügt über Synchronisationsmechanismen, die es erlauben, mit drei einphasigen Geräten ein dreiphasiges Netz aufzubauen. Dabei arbeitet ein Gerät als Master, der einen Synchronisationsimpuls an die beiden Slaves sendet. Die steigende Flanke des Syn-chronisationsimpulses wird vom Master zum Zeitpunkt des Nulldurchgangs zwischen negati-ver und positiver Halbwelle (Phasenwinkel Null) generiert, wobei die zeitliche Auflösung der Taktperiode des eingesetzten Signalprozessors entspricht. Bei der Messung in Abbildung 2-33 beträgt die Taktfrequenz 20 MHz, die zeitliche Auflösung ist also 50 ns. Die Slaves stellen, sobald sie diese steigende Flanke detektieren, ihre Phasenwinkel auf 120° bzw. 240°.
Zur Veranschaulichung des Vorgangs wurden in Abbildung 2-34 die Frequenzvorgaben der beiden Slaves gegenüber dem Master verstimmt. Der Slave auf Ch1 läuft zu langsam und geht nach. Sein Phasenwinkel wird bei Masterphasenwinkel Null stets auf 240° vorgestellt. Analog dazu wird der vorgehende Slave auf Ch3 jedes Mal auf 120° zurückgestellt.

114 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Abbildung 2-33 Mit drei synchronisierten Stromrichtern aufgebautes dreiphasiges Netz.
Ch1 und Ch2 zeigen die Ausgangsspannungen der Slave-Geräte, Ch3 die Ausgangsspannung des Masters. Ch4 zeigt den vom Master bei Phasen-winkel Null erzeugten Synchronisationsimpuls
Abbildung 2-34 Dreiphasiges Netz wie in Abbildung 2-33. Zur Verdeutlichung des Syn-
chronisationsvorgangs wird der Slave auf Ch2 mit 51 Hz Frequenzvorga-be betrieben und der Slave auf Ch1 mit 49 Hz, wobei der Master (Ch3) mit 50 Hz läuft

Abschlussbericht Modulare PV- und Hybridsystemtechnik 115
Die Reaktion der Ausgangsspannungen auf den Synchronisationsimpuls sind aufgrund der Zeitkonstanten im Regelkreis etwas verzögert.
2.2.2.3 Messwerterfassung
Die vom Digitalen Signalprozessor der Regelung gemessenen und betriebsartabhängig über-wachten Größen werden einerseits als Istwerte von der Regelung benötigt, andererseits zur Betriebsführung und zur Visualisierung in teilweise aufbereiteter Form (z. B. Effektivwerte) an den Betriebsführungsrechner weitergegeben.
Die in der Anlage vorhandenen Batteriestromrichter kommunizieren untereinander und mit dem (optionalen) PC zur Anlagensteuerung und Visualisierung über einen RS485-Bus. Dabei werden Vorgaben, Betriebsdaten und Messergebnisse ausgetauscht.
Abbildung 2-35, Abbildung 2-36 und Abbildung 2-37 vermitteln einen Eindruck der Visuali-sierung am PC.
Abbildung 2-35 Beispiel einer Messwertdarstellung mit Bedienelementen für den Wselrichter
ech-

116 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Abbildung 2-36 Beispiel einer Messwertdarstellung mit Bedienelementen für den Cuk-Wandler
Abbildung 2-37 Bedien- und Messoberfläche für das Batteriemanagement

Abschlussbericht Modulare PV- und Hybridsystemtechnik 117
2.2.3 Entwicklung von Betriebsführungskomponenten für modulare Energiespeicher (M. Rothert, B. Willer)
Während des öffentlich geförderten Projekts Entwicklung von PV-Versorgungsanlagen mit modularer Systemtechnik [1] wurden verschiedene Betriebführungsalgorithmen entwickelt und getestet. Auf diesen Erfahrungen aufbauend wurden dann in dem hier beschriebenen Vorhaben diese Algorithmen in modular aufgebaute Softwaremodule umgesetzt. Teile hier-von wurden im März 1999 als Patent angemeldet [2].
Ziel eines Batteriemanagements ist es einen batterieschonenden Betrieb zu ermöglichen und wichtige Informationen über den Zustand der Batterien zu liefern. Die Betriebsführung für den Batteriestromrichter enthält Module für folgende Aufgaben:
• Grenzwertüberwachung von Spannung, Strom und Temperatur,
• Geregelte Batterieladung durch Vorgabe von Spannungs- und Zeitsollwerten,
• Entladeschlusserkennung,
• Ladezustandsbestimmung,
• Kapazitätsabschätzung,
• Zwangsbelüftung und
• Batteriezustandserkennung.
Digitaler Signalprozessor
Betriebsführungsrechner
Grenzwert-überwachung
Meßwert-aufbereitung
manuelle Eingabe:Nennspannung, Nennkapazität, Batterietyp, (optional Nennsäuredichte)
Batteriemanagement übergeordneteBetriebsführung
nichtflüchtiger Speicher
Spannungs-kalibrierte Ladungsbilanz
Ah-Bilanz mit Verlustbe.,Meßfehlerkomp.,Volladeerk.
Ruhespannungs-kennlinie &Kapazitätsab-schätzung
Entladeschluß-überwachung
Zwangs-belüftung
Laderegelung
Ladezustands-bestimmung
Batterie-zustands-erkennung
Spannung
Temperatur
Strom
Abbildung 2-38 Prinzipieller Aufbau der Batteriebetriebsführung

118 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Der Zustand der Batterie wird in Abhängigkeit des Ladezustandes der Entladeschlusserken-nung sowie der Laderegelung bestimmt, aufbereitet und für eine übergeordnete Betriebsfüh-rung zur Verfügung gestellt. Die wesentlichen Funktionsblöcke der Batteriebetriebsführung sind in Abbildung 2-38 dargestellt.
2.2.3.1 Aufbau der Entladeschlussüberwachung
Die Überwachung der Entladeschlussspannung, korrigiert durch eine Stromabhängigkeit der Grenzspannung, vermeidet die Tiefentladung der Batterie, die in vielen Systemen zu einer Zerstörung der Batterie führt. Im Falle der Bleibatterie führt eine Tiefentladung unter anderem zu einer Verringerung der Säuredichte, was mit einer erhöhten Löslichkeit des Elektrodenma-terials einhergeht. Zur Vermeidung einer Tiefentladung sollte beim Erreichen eines Grenz-wertes die Last, die zur Entladung führt, rechtzeitig abgeschaltet werden, um zu große Schä-digungen der Batterie zu vermeiden.
Deshalb ist in das Batteriemanagement neben der Ladezustandsbestimmung eine zweistufige Entladeschlussüberwachung integriert worden. Diese dient als zusätzliche Sicherheitsfunktion vor Tiefentladungen, wenn z. B. die Ladezustandserfassung große Ungenauigkeiten aufweist. Der Aufbau der zweistufig ausgeführten Entladeschlussüberwachung ist in Abbildung 2-39 dargestellt. Dabei gilt es zu berücksichtigen, dass die beiden Grenzspannungen stromkompen-siert werden.
Normalbetrieb
Warnung vor Tiefentladung
Entladeschluß
Spannung niedrigerals Grenzspannung 1 Spannung höher
als Grenzspannung 1
Spannung höher als Grenzspannung 2
Spannung niedrigerals Grenzspannung 2
Abbildung 2-39 Zustandsdiagramm für die Entladeschlussüberwachung
2.2.3.2 Aufbau der Zwangsbelüftung
Ein erweitertes Batteriemanagement (BMS) sollte über eine Steuerungs- und Regelungsfunk-tion zur Zwangsbelüftung eines geschlossenen Batterieraums verfügen. Dabei regelt die DIN 0510 die Notwendigkeit und Menge der Zwangsbelüftung für die Batterietechnik. Die Umset-zung in Form einer Zustandsmaschine ist in Abbildung 2-40 dargestellt. Es wird zwischen einem Zustand 1 Ruhe- & Entladephase, einem Zustand 2 Ladephase und einem Zustand

Abschlussbericht Modulare PV- und Hybridsystemtechnik 119
3 Phase nach einer Ladung unterschieden. Wenn sich das BMS in Zustand 2 oder 3 befin-det, ist der Lüfter eingeschaltet. Dabei ist der Zustand 3 für die Verzögerung der Ausschal-tung des Lüfters von einer Stunde nach einer Ladung verantwortlich. Sollte die Batterie entla-den werden oder sich im Ruhezustand befinden, ist eine Lüftung nicht notwendig. Das BMS befindet sich dann im Zustand 1 Ruhe- & Entladephase.
Ladestromgrößer 0,1A
Ladestrom kleiner 0,1A
Ladestrom größer 0,1A
1 Stunde Ruhe- & EntladephaseLüfter: aus
LadephaseLüfter: ein
Phasenach LadungLüfter: ein
Abbildung 2-40 Zustandsdiagramm für die Zwangsbelüftung
2.2.3.3 Aufbau der Laderegelung
Zur geregelten Ladung der Batterie werden 4 unterschiedliche Ladeverfahren mit verschiede-nen Spannungswerten und Ladezeiten eingesetzt. Die verschiedenen Ladespannungen der unterschiedlichen Verfahren werden temperaturkompensiert und an den Batterietyp angepasst. Ein Wechsel zwischen den verschiedenen Ladeverfahren erfolgt im Wesentlichen in Abhän-gigkeit von der Zeit und von Ladungsdurchsätzen. Folgende Ladeverfahren kommen zum Einsatz:
• Normalladung,
• Volladung,
• Ausgleichsladung und
• Erhaltungsladung.
7 Tagen oder 4 Ladungsdurchsätze
60 Tagen oder16 Ladungsdurchsätze
60 Tagen oder 16 Ladungsdurchsätze
U > 2,45V für 7 hU > 2,4V für 15 h
U > 2,5 V für 1 h
SOC
<90%
ErhaltungsladungU = 2,23 V
NormalladungU = 2,55 V
VolladungU = 2,5 V
AusgleichsladungU = 2,45 V
Abbildung 2-41 Zustandsdiagramm für die unterschiedlichen Ladeverfahren

120 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Einen Überblick über die verschiedenen Ladeverfahren und die Bedingungen für den Wechsel zwischen den Verfahren für eine Batterie mit flüssigem Elektrolyt sind Abbildung 2-41 wiedergegeben.
Eine Ladung wird in Abhängigkeit des Erreichens bestimmter Batteriezustände initiiert bzw. angefordert. Eine Normalladung führt zu einer Ladung der Batterie auf einen hohen Ladezu-stand, ohne die Batterie vollständig aufzuladen. Priorität haben hierbei eine große Ladungs-aufnahme und kurze Laufzeiten eines Zusatzaggregates. Eine Volladung führt zur vollständi-gen Aufladung der Batterie und damit zur Minderung irreversibler Alterungsvorgänge. Eine Ausgleichsladung soll ein Auseinanderlaufen und damit eine Streuung der Ladezustände der einzelnen Zellen im Batterieverband verhindern. Eine Erhaltungsladung dient zum Schutz der Batterie vor Überladung und zum Erhalt des Vollladezustandes.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 121
2.2.4 Weiterentwicklung von Betriebsführungs- und Systemenergiemanagementver-fahren BAZ (M. Rothert, B. Willer)
Als eine neue und vereinfachte Schnittstelle zwischen dem Anlagenbetreiber beziehungsweise einer übergeordneten Betriebsführung auf der einen Seite und der Batterie auf der anderen Seite, ist eine automatische Batteriezustandserkennung entwickelt worden, die in diesem Pro-jekt erstmals auch Anwendung findet. Dabei geht in die Batteriezustandserkennung neben dem Ladezustand auch die Entladespannungskontrolle und die Laderegelung mit ein.
Der Zustand der Batterie wird durch das BMS eindeutig einem von 10 möglichen Batteriezu-ständen (BAZ) zugeordnet und der Gesamtbetriebsführung mitgeteilt. Durch die eindeutige Festlegung auf jeweils einen BAZ sind klare Maßnahmen seitens der Gesamtbetriebsführung möglich. Sie behält dabei eine gewisse Flexibilität, auf unterschiedliche Wünsche, z. B. be-züglich einer hohen Versorgungssicherheit oder einer lange Lebensdauer zu reagieren.
Die Batteriezustände (BAZ) lassen sich in drei Zustandsbereiche einteilen:
Bereich 1 (V1, V2, V3,V4) normaler Arbeitsbereich mit unterschiedlicher Verfügbarkeit der Batterie
Bereich 2 (A1, A2, A3,A4) Arbeitsbereich mit reduzierter Verfügbarkeit der Batterie und zunehmender Batteriealterung
Bereich 3 (Ü1,Ü2;Ü3) Überladebereich
Das Zustandsdiagramm in Abbildung 2-42 zeigt die Verknüpfung der 8 beschriebenen Batte-riezustände.
Der Bereich 1 mit den Batteriezuständen V1, V2, V3 und V4 bildet den normalen Betriebsbe-reich des Batteriespeichers. Von V1 über V2 zu V3 bis V4 betrachtet, unterscheiden sie sich durch eine abnehmende Verfügbarkeit der Batterie, die vorrangig durch ihren Ladezustand festgelegt ist. Die Verfügbarkeit wird zusätzlich reduziert mit zunehmender Zeit seit der letz-ten Ladung und mit zunehmendem Ladedurchsatz seit der letzten Ladung. Die letzten zwei Kriterien berücksichtigen eine zunehmende Notwendigkeit für die Ladung der Batterie beim Betrieb. Sollte das Spannungskriterium für den Entladeschluss erkannt werden, wird mit einer Zeitverzögerung von einigen Sekunden eine Zustandswechsel in den nächst niedrigeren Zustand durchgeführt. Dies kann bei stark gealterten Batterien oder einer fehlerhaften Lade-zustandsberechnung auftreten und dient dem zusätzlichem Schutz der Batterie.
Zustand V1 V2 V3 V4
LZ-Kritrium 100 % - 60 % 60 % - 50 % 50 % - 40 % 40 % - 30 %
Zeit-Kriterium t > Grenzwert 1 t > Grenzwert 2 t > Grenzwert 3
Ladungs-Kriterium Qe > Grenzwert 1 Qe > Grenzwert 2 Qe > Grenzwert 3
Spannungs-Kriterium U < Entladeschluss 1 U < Entladeschluss 1 U < Entladeschluss 1 U < Entladeschluss 1
Tabelle 2-2 Zustandsübergänge im normalen Arbeitsbereich

122 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Ein Wechsel der Batteriezustände von V1 zu V2 zu V3 bis V4 ist in beide Richtungen mög-lich (siehe dazu auch Abbildung 2-42).
V1sehr hohe Versorgungssicherheit
V2hohe Versorgungssicherheit
V3mittlere Versorgungssicherheit
A1zunehmende Alterung
A2starke Alterung
A3sehr starke Alterung
Ü2 verstärkte
Gasung
Ü3sehr starke
Gasung
V4 niedrige Versorgungssicherheit
Ü1 Gasung
A3sehr starke Alterung
Abbildung 2-42 Zustandsdiagramm für die möglichen Batteriezustände
Der Bereich 2 mit den Batteriezuständen A1, A2 und A3 und A4 zeigt eine reduzierte Ver-fügbarkeit der Batterie an und die stark erhöhte Gefahr von irreversiblen Alterungsprozessen. Die Batteriezustände A1, A2, A3 und A4 sind durch geringe Ladezustände der Batterie oder durch lange Zeiten oder große Ladungsdurchsätze seit der letzten Ladung oder durch das Unterschreiten vorgegebener Spannungsgrenzen (siehe Entladeschlussüberwachung) charak-terisiert.
Zustand A1 A2 A3 A4
LZ-Kritrium 30 % - 20 % 20 % - 10 % 10 % 0 % < 0%
Zeit-Kriterium t > Grenzwert3
Ladungs-Kriterium Qe > Grenzwert 3
Spannungs-Kriterium U < Entlade-schluss 1
U < Entlade-schluss 2
Tabelle 2-3 Zustandsübergänge im Arbeitsbereich mit starker Alterung
Ein Übergang innerhalb dieser Zustände ist in beide Richtungen möglich, ein Übergang in den normalen Arbeitsbereich allerdings erst nach einer durchgeführten Normal-, Voll- oder Ausgleichsladung. Die Art der notwendigen Ladung wird durch das Modul Ladeverfahren festgelegt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 123
Wird vom Anwender eine lange Lebensdauer der Batterie gewünscht, sollte spätestens nach Erreichen des Zustandes A1 eine Ladung initiiert werden. Dringend empfohlen wird dieses beim Erreichen des Zustandes A2. Beim Zustand A3 sollten spätestens alle noch von der Bat-terie versorgten Verbraucher abgeschaltet werden. Wird trotz aller Maßnahmen der Zustand A4 erreicht, muss jede Entladung der Batterie unbedingt verhindert werden - dies gilt auch für eine Belastung der Batterie durch die Energieversorgung für das BMS. Eine baldige Ladung muss umgehend sichergestellt werden.
Die Batteriezustände Ü1, Ü2 und Ü3 im Bereich 3 (Überladung) dienen dem Schutz der Bat-terie vor Überladung und ermöglichen eine Ladung der Batterie, wenn die Einhaltung der von der BMS vorgegebenen Spannungssollwerte bei einer Ladung nicht möglich ist. Ist die Ein-haltung der vorgegebenen Spannungs-Ladegrenzen gesichert, werden diese Zustände nie er-reicht. Die BAZ Ü1, Ü2 und Ü3 werden lediglich durch ein Überschreiten vorgegebener Spannungsgrenzen erreicht. In diesem Fall haben sie Priorität vor allen anderen Batteriezu-ständen.
Zustand Ü1 Ü2 Ü3
U-Kriterium U > Usoll + ∆U1,
U < Usoll + ∆U2
U > Usoll + ∆U2
U < Usoll + ∆U3
U > Usoll + ∆U3
Tabelle 2-4 Zustandsübergänge im Überladebereich
Nach der Unterschreitung der Spannungsgrenzen und einer Zeithysterese wird der zuvor bestandene Batteriezustand wieder angenommen.
Eine Übersicht über die einzelnen Batteriezustände deren Bedeutung, Empfehlungen und mögliche Schalthandlungen findet man in Tabelle 2-5.

124 Modulare PV- und Hybridsystemtechnik Abschlussbericht
BAZ Bedeutung Empfehlungen mögliche Schalthandlungen
Ü3 sehr starke Überladung
Ladung sofort beenden Abschaltung aller Einspeiser über die Frequenz
Ü2 starke Überladung
Ladeleistung stark verringern leichte Frequenzanhebung um erste PV-Wechselrichter abzu-schalten
Ü1 Überladung Ladeleistung verringern Zuschalten einer Dumpload
V1 sehr hohe Versor-gungssicherheit
Keine Abschalten eines Zusatzstromag-gregats
V2 hohe Versorgungs-sicherheit
Meldung des Ladezustands; Mög-licherweise erste Reduzierung der Verbraucher
Abschaltung erster nicht kontinu-ierlich benötigter Lastgruppen oder Reduzierung der Leistung
V3 mittlere Versor-gungssicherheit
Entweder Verbrauch reduzieren oder für baldige Ladung sorgen
Baldige Zuschaltung eines Zusatz-stromaggregats oder Abschaltung bestimmter Lastgruppen
V4 geringe Versor-gungssicherheit
Entweder Verbrauch drastisch reduzieren oder für baldige Ladung sorgen
Sofortige Zuschaltung eines Zu-satzstromaggregats oder Abschal-ten aller nicht unbedingt notwen-digen Lastgruppen
A1 Zunehmende Alterung
Verbrauch bis auf eine Notversor-gung reduzieren; Ladung initiieren, Alarmmeldung
Sofortige Zuschaltung eines Zu-satzstromaggregats oder Abschal-ten aller Lastgruppen mit Ausnah-me einer Notversorgung
A2 starke Alterung Alle Verbraucher Abschalten, La-dung initiieren
Sofortige Zuschaltung eines Zu-satzstromaggregats oder Abschal-ten aller äußeren Lastgruppen
A3 sehr starke Alterung
Eigenverbrauch sofort reduzieren, Ladung initiieren, Alarmmeldung über die Abschaltung
Stromrichter in den Standbybetrieb
A4 Zerstörung der Batterie droht
Eigenverbrauch sofort reduzieren, Ladung initiieren, Alarmmeldung über die Abschaltung
Stromrichter abschalten
Tabelle 2-5 Handlungsempfehlungen und Schalthandlungen in Abhängigkeit des Batteriezustandes
Einen Überblick über die 11 Batteriezustände gibt folgende Abbildung 2-43. Dort ist auch zu erkennen, dass neben dem Ladezustand die Alterung der Batterie mit in den Batteriezustand einfließt. Bei der Alterung wird einerseits eine verstärkte Alterung durch Überladung (z. B. Korrosion) berücksichtigt, wie eine Alterung aufgrund von Tiefentladungen (z. B. Sulfatation) sowie eine verstärkte Alterung einzelner Zellen durch ein auseinanderlaufen der Zellen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 125
Ü 2Ü 3 Ü 1 V 1 V 2 V 3 V 4 A 1 A 2 A 3
ÜberladungGasung
normaler Arbeitsbereich
stark zunehmendeAlterung
star
k
star
k
oder
Kapazitätsverlust
A 4
10
0 %
10
0 %
Ladezustand
Batteriezustand
entspricht
0 %
Abbildung 2-43 Überblick über die Batteriezustände und deren Bestimmung
Die 11 fest definierten Batteriezustände (BAZ) erlauben es dem Nutzer Schalthandlungen nicht nur anhand des Ladezustands durchzuführen, sondern sie berücksichtigen bereits einige der wichtigsten Alterungsvorgänge in der Batterie. Dadurch ist ein guter Schutz der Batterie gewährleistet. Eine auf die Batterie abgestimmte Ladung durch die an das Nutzerverhalten angepassten Ladeverfahren sind auch in Anlagen ohne regelbare Stromquellen (z. B. PV-Stromrichter) möglich. Ein sicherer Tiefentladeschutz auch für Einzelzellen wird nicht nur durch die Ladezustandserfassung gewährleistet, sondern zusätzlich über stromabhängige Spannungsgrenzen, sowie Zeiten- und Ladungsdurchsatzgrenzen bei langen Phasen ohne vollständige Ladung. Dadurch ist eine sichere Betriebsführung unter besonderer Berücksich-tigung der Batterieeigenschaften mittels der Batteriezustände sehr einfach zu realisieren.

126 Modulare PV- und Hybridsystemtechnik Abschlussbericht

Abschlussbericht Modulare PV- und Hybridsystemtechnik 127
2.2.5 Test von Komponenten, modularen Einheiten und Verfahren (M. Rothert)
Fast alle PV-Inselsysteme und PV-Hybridanlagen benötigen Energiespeicher, um die stark fluktuierende Energieeinspeisung der Photovoltaik auszugleichen. In fast allen dieser Anlagen werden aus wirtschaftlichen Gründen Bleibatterien als Energiespeicher eingesetzt, woran sich auch in näherer Zukunft nicht viel ändern wird. In diesen Anlagen betragen die Kosten für die Bleibatterien häufig weit mehr als 30 % der gesamten Anlagenkosten, wenn alle Kosten, die über die Lebensdauer der Anlage entstehen, berücksichtigt werden [3]. Dies ist auf die kurze Lebensdauer (häufig kleiner als 4 Jahre) der Bleibatterien zurückzuführen.
Durch angepasste Betriebsführungsstrategien lässt sich die Lebensdauer der Batterien signifi-kant verlängern und damit die Kosten dieser Anlagen senken. Hier sind, ausgehend von den 4 Jahren, Verbesserung von mehr als 100 % möglich. Auch eine Lebensdauer von 12 bis 15 Jahren dürfte erreichbar sein, da sie in konventionell betriebenen Batterieanlagen bereits Stand der Technik ist. Um diese Verbesserungen zu erreichen, sind aber neue, angepasste Betriebsführungsstrategien notwendig.
Am ISET sind hierzu in den vergangen Jahren eine Vielzahl an Untersuchungen durchgeführt worden. Die neuesten und sehr erfolgversprechenden Entwicklungen in diesem Bereich, die weitgehend innerhalb dieses Vorhabens durchgeführt wurden, sollen hier kurz dargestellt werden. Dabei ist besonders ein neues Berechnungsverfahren zur Bestimmung des Ladezu-stands von Batterien in PV- und Hybridanlagen zu beachten, durch das es gelungen ist, die Genauigkeit vor allem im Langzeitbereich deutlich zu verbessern. Dieses Verfahren liefert neben Informationen zum Ladezustand auch Informationen zur aktuellen Kapazität der Batte-rien. Während dieser Entwicklung sind auch umfangreiche Recherchen zu den prinzipiellen Möglichkeiten der Ladezustandserfassung und über aktuell sich in der Entwicklung befindli-che Verfahren durchgeführt worden.
Für die Betriebsführung der Batterie ist neben dem Ladezustand auch der Gesundheitszustand ein sicher ebenso wichtiger Parameter. Auch hier sind erste Ansätze entwickelt und in Soft-ware umgesetzt worden. Um den Ladezustand und den Gesundheitszustand in einer für den Nutzer verständlichen Größe zusammenzufassen, wurde die Größe Batteriezustand einge-führt. Die Hintergründe und die Umsetzung dieser Ideen wird ebenfalls in den folgenden Ka-piteln dargestellt.
Diese beiden neuen Verfahren wurden durch zwei Patentanmeldungen [2, 4] abgesichert. Das bislang sehr große Interesse der Industrie (z. B. SMA, STECA und andere) an diesen Verfah-ren bestätigt die Notwendigkeit für diese Entwicklungen.
2.2.5.1 Ladezustandsbestimmung bei Bleibatterien
Der Ladezustand von Batterien ist die zentrale Zustandsgröße sowohl für das Energiemana-gement von autonomen Hybridsystemen mit einem Batteriespeicher als auch für die Batterie-betriebsführung selber. Nur bei einer ausreichend genauen Kenntnis des Ladezustandes der Batterien kann eine hohe Anlagenverfügbarkeit gewährleistet werden. Für die lange Lebens-dauer der Batterie, die eine der wichtigsten Parameter für die Wirtschaftlichkeit solcher Sys-

128 Modulare PV- und Hybridsystemtechnik Abschlussbericht
teme ist, ist eine auf den Ladezustand aufbauende Batteriebetriebsführung notwendig [5]. Nur dadurch ist es möglich, Tiefentladungen und Überladungen zu vermeiden.
Die Problematik der Ladezustandsbestimmung von Bleibatterien bei PV-Anwendungen wird seit vielen Jahren intensiv diskutiert und bearbeitet. Sie liegt vor allem darin begründet, dass die Energiespeicherung auf einer elektrochemischen Gleichgewichtsreaktion beruht und eine direkte Erfassung des Zustands über eine Messgröße nicht beziehungsweise nur sehr einge-schränkt möglich ist. Neben der Hauptreaktion haben noch verschiedene Nebenreaktionen einen nicht zu vernachlässigenden Einfluss. Der Ladezustand lässt sich deshalb nur aus abge-leiteten Größen mit mehr oder minder hoher Genauigkeit schätzen. Außerdem haben die Vor-geschichte, die Alterung, die Temperatur, und die Höhe des Entladestroms einen Einfluss auf die insgesamt entnehmbare Energie. Dies erschwert die genaue Zustandsbestimmung von Batterien erheblich [6].
Während der beiden öffentlich geförderter Projekte Entwicklung von Einheiten zur Ladezu-standserfassung von Batterien in PV-Anlagen [7] und Entwicklung von PV-Versorgungs-anlagen mit modularer Systemtechnik [1] wurden verschiedene Verfahren zur Ladezustands-bestimmung von Bleibatterien entwickelt und getestet. Aufbauend auf diesen Erfahrungen war es dann in dem hier beschriebenen Vorhaben sehr schnell möglich ein neues Verfahren zur Ladezustandsbestimmung zu entwickelt und in eine modulare und weitestgehend univer-selle Software umzusetzen. Diese Verfahren wurde im April 1999 als Patent angemeldet [21].
Auch die Ergebnisse einer Recherche zu verschiedenen Möglichkeiten der Ladezustandsbe-stimmung, sowie aktuell sich in der Entwicklung befindliche Verfahren sollen hier zu Beginn kurz dargestellt werden [4].
2.2.5.1.1 Ansätze der Ladezustandsbestimmung
Die unterschiedlichen Ansätze der Ladezustandsbestimmung von Bleibatterien haben sich vor allem an den Anforderungen, die an die Bestimmung gestellt werden, zu orientieren. Diese Anforderungen können sich je nach Anwendung der Verfahren zum Teil stark unterscheiden. Vor allem ist eine Differenzierung in Online- und Offline-Verfahren notwendig. Die Online-Verfahren haben die Aufgabe, kontinuierlich während des Betriebs einer Batterieanlage den Ladezustand zu berechnen und diesen als Steuergröße für die Batteriebetriebsführung und das Energiemanagement zur Verfügung zu stellen. Die Offline-Verfahren sollen hingegen nach-träglich aus den Messwerten Strom, Spannung und Temperatur den Ladezustand und wenn möglich auch weitere innere Zustandsgrößen der Batterie bestimmen. Genauere Aussagen über die Anlagenbetriebsführung, aber vor allem die Alterung der Batterien, sind dadurch möglich. Zukünftig kann dadurch die Betriebsführung hinsichtlich einer noch längeren Batte-rielebensdauer und besseren Anlagenverfügbarkeit optimiert werden. Die hierfür notwendigen Datensätze wurden bereits während des Projektes Auswertung und Bewertung des Betriebs-verhaltens von Batteriesystemen in bestehenden PV-Anlagen aufgezeichnet und stehen in einer Datenbank zur Verfügung [8, 9].
Tabelle 2-6 gibt einen Überblick über die Anforderungen an die Verfahren für diese unter-schiedlichen Anwendungen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 129
Online-Verfahren Offline-Verfahren
• Hohe Fehlertoleranz bezüglich der Messgenauigkeit
• Langzeitstabilität
• einfach parametrierbar
• selbstadaptierend
• kostengünstig in der Realisierung
• hohe Genauigkeit (max. 10 % - 20 % Fehler)
• Fehlertoleranz bezüglich der Messgenauigkeit
• Langzeitstabilität
• sehr hohe Genauigkeit des Verfah-rens (max. 5 % - 10 % Fehler)
• Parameteroptimierung mit Messda-ten ist möglich
• Bestimmung weiterer interner Zu-standsgrößen
Tabelle 2-6 Überblick über die Anforderungen bei unterschiedlichen Anwendungen
Im weiteren soll vor allem auf die Problematik der Online-Erfassung des Ladegrads einge-gangen werden. Der Ladegrad unterscheidet sich vom Ladezustand dahingehend, dass er defi-niert wurde als Verhältnis aus der Differenz zwischen Nennkapazität und Ladungsbilanz ei-nerseits und der Nennkapazität andererseits und somit im Gegensatz zum Ladezustand die aktuelle Kapazität nicht bekannt sein muss [10]. Der Ladegrad ist somit die einfacher zu be-stimmende Kenngröße.
100%
50%
15%5%
20%
42%
67%
13% 15% 16% 12%0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
max
imal
er F
ehle
r der
Lad
egra
dbes
timm
ung
Kle
mm
ensp
annu
ng(I
> I1
0)
Kle
mm
ensp
annu
ng(I
< I1
00)
Säur
edic
hte
(I <
I10)
Selb
sten
tladu
ng
Gas
ung
Meß
fehl
er(2
.5%
von
I10)
Ges
amte
r Feh
ler
mit
Meß
fehl
erko
r. un
d V
erlu
stbe
trach
tung
im V
olla
dezu
stan
d(1
Mon
at)
im fa
st V
olla
dezu
stan
d (1
Woc
he)
über
die
Ruh
espa
nnun
g(1
Tag
)
WocheMonat
direkte Meßgrößen Fehler der Ladungsbilanzierung
Bilanzierung mit Rekalibrierung
Abbildung 2-44 Hier sind die Fehler beziehungsweise Fehleranteile unterschiedlicher
Verfahren zur Ladezustandsbestimmung graphisch dargestellt. Nur die genaue Säuredichtemessung sowie bilanzierende Verfahren mit häufiger Rekalibrierung können eine langzeitstabile Ladezustandsbestimmung mit maximalen Fehlern von unter 20% gewährleisten. Aussagen über mo-dellgestützte Verfahren sind hier allerdings noch nicht berücksichtigt

130 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Eine Aufteilung der unterschiedlichen Ansätze kann nach folgendem Schema durchgeführt werden:
• Verfahren über eine Messgröße (z. B. Säuredichte, Spannung)
• bilanzierende Verfahren (Ah-Bilanzierung)
• modellgestützte Verfahren - Kennlinienmodelle - mathematische Modelle - physikalische Modelle
Abschätzungen zur Genauigkeit der unterschiedlichen Verfahren sind bereits in [6] gemacht worden. Dabei wurde deutlich, dass der Ladezustand nur mit einer mehr oder minder hohen Genauigkeit geschätzt werden kann. Maximale Fehler von 10 % - 20 % sind auch bei auf-wendigeren Verfahren noch möglich. Eine Abschätzung der Genauigkeit von modellgestütz-ten Verfahren ist zur Zeit schwierig, da es hier sehr unterschiedliche Ansätze gibt. Aufgrund der großen prinzipiellen Unterschiede müssen diese Verfahren einzeln betrachtet werden und bedürfen zunächst noch genauerer Tests und Vergleiche mit anderen gängigen Verfahren. In Kapitel 2.2.5.1.4 wird auf diese Verfahren mit ihren Vor- und Nachteilen noch weiter einge-gangen.
direkteMessung
Bilanzierung KennlinienModell
mathematischesModell
physikalischesModell
DENSOFLEXSäuredichtesensorgaskatel / ISETBAKOEnnos / Fraunhofer-ISE
SolarixSteca
BRAINSOCFraunhofer-ISE
mathematisches ModellFh-Ulm
lineares Modell& Kalmanfilter ZSW
ISET-LABISET
ISET-AlgorithmusISET
Abbildung 2-45 Überblick über die ausgewählten Verfahren
2.2.5.1.2 Direkte Messgrößen
Da der Elektrolyt sowohl bei der Hauptreaktion wie bei den Nebenreaktionen einer Bleibatte-rie als Reaktionspartner eingeht, kann der Ladezustand durch die Messung einer Elektrolytei-genschaft (z. B. Dichte, Konzentration, Brechungsindex) bestimmt werden. Einen Überblick über die möglichen Messverfahren und die dafür benötigten Sensoren gibt Jossen in [11] und

Abschlussbericht Modulare PV- und Hybridsystemtechnik 131
Kindscher in [12]. Bislang hat sich allerdings keiner der dort beschriebenen Sensoren für die Ladezustandsbestimmung durchgesetzt. Am weitesten entwickelt und am besten für die Zu-standsüberwachung geeignet scheint zur Zeit der Säuredichtesensor DENSOFLEX, der am ISET entwickelt [7] wurde und von der Firma gaskatel zur Zeit optimiert und noch in diesem Jahr auf den Markt gebracht werden soll. Mit einem maximalen Messfehler von weniger als 5% für den in Batterien typischen Säuredichtebereich (1,05-1,3 kg/l), einer integrierten Tem-peraturkompensation und durch das Messen der mittleren Säuredichte über die Bauhöhe der Batterie, ist dieser Sensor besonders auch für PV-Anlagen geeignet. Der Preis für diesen Sen-sor wird ausschlaggebend sein, ob er zukünftig in PV-Anlagen eingesetzt wird. Für die Be-stimmung des Ladezustandes aus der Säuredichte bleibt allerdings zu berücksichtigen, dass neben dem Messfehler des Sensors auch der Wasseraustrag aus der Batterie und unterschied-liche Säuredichten im inneren (Porensystem) und im freien Elektrolytraum zu berücksichtigen sind. Ob der Sensor auch für die Säuredichtemessung in Gelbatterien geeignet ist, muss erst noch genauer untersucht werden.
-40%
-20%
0%
20%
40%
60%
80%
100%
120%
0 10 20 30 40 50 60 70Zeit [h]
Lade
grad
/ B
atte
riest
rom
Ladegrad aus der Säuredichte [%]
Ladegrad aud der Ah-Bilanzierung [%]
Batteriestrom [20% = I20]
Abbildung 2-46 Vergleich der Ladegradbestimmung anhand der gemessenen Säuredichte
(DENSOFLEX) und einer Ah-Bilanzierung ohne Verlustbetrachtung
Die Klemmenspannung der Batterie ist bis heute immer noch die häufigste Größe, die zur Zustandsüberwachung (z. B. Entladeschlussspannung) eingesetzt wird. Allerdings gehen in diese Messgröße neben dem ohmschen Spannungsabfall bei Stromfluss auch verschiedene weitere Überspannungen ein. Diese hängen wiederum von sehr unterschiedlichen Parametern (z. B. Strom, Temperatur, Alter, Vorgeschichte, Säureschichtung) ab. Nur die Ruhespannung der Batterie nach Ruhezeiten von mehreren Stunden ist proportional zum Ladezustand. Für Batterien in PV-Anlagen, die mit sehr unterschiedlichen Strömen ge- und entladen werden, ist die Klemmenspannung ungeeignet für eine Zustandsüberwachung.
2.2.5.1.3 Bilanzierende Verfahren
Diese Verfahren haben bis heute die größte Bedeutung bei mittleren und größeren Batterie-verbänden mit Zustandsüberwachung. Hierbei wird die Batterie als Black-Box betrachtet, und

132 Modulare PV- und Hybridsystemtechnik Abschlussbericht
der in diese Box hineinfließende und herausfließende Strom wird bilanziert. Vorausgesetzt die Batterie war zu Beginn der Bilanz voll und der gesamte Inhalt der Batterie ist bekannt, kann anhand der Bilanz der Ladegrad bestimmt werden. Problematisch ist die Messgenauigkeit der Stromerfassung (siehe Abbildung 2-44), da die Messfehler ebenfalls über die Zeit bilanziert werden und somit die Genauigkeit mit zunehmender Zeit seit der letzten Volladung schlechter wird. Fehler von bis zu 100 % innerhalb eines Monats ohne Volladung sind möglich.
Coulombsche Verluste durch die in der Bilanz nicht berücksichtigten Nebenreaktionen führen zu weiteren erheblichen Fehlern in der Ladungsbilanz. Je nach Betriebsart und Alter der Bat-terie können die Fehler in der Ladungsbilanz bei über 50 % bis hin zu 100 % innerhalb eines Monats liegen. Dies führt dazu, dass eine reine Ladungsbilanz bereits nach einigen Tagen ohne Volladung zu nicht mehr verwertbaren Ergebnissen führt. Deshalb sind Geräte, die eine reine Ladungsbilanz durchführen, für PV-Anlagen nicht geeignet, da hier häufig auch über längere Zeiträume keine Volladungen auftreten. Für Batterien in Gabelstaplern oder Elektro-fahrzeugen kann ein solches Verfahren aber je nach Einsatz völlig ausreichend sein.
Einen Schritt weiter gehen Verfahren, die versuchen die Verluste innerhalb der Batterie mit-tels fest einstellbarer Ladefaktoren abzuschätzen. Dies ist zum Beispiel das Gerät DCC 4000 der Firma magnetronic GmbH. Dieses Gerät ist zwar besser als eine reine Ladungsbilanz, für PV-Anlagen aber nur bedingt geeignet [13].
Spezielle für PV-Anlagen entwickelte Verfahren zur Ladegradbestimmung gehen deshalb dazu über, neben einer möglichst genauen Stromerfassung die Verluste der wichtigsten Nebenreaktion Gasung mittels eines recht einfachen aber die Realität gut abbildenden Modells in der Ladungsbilanz zu berücksichtigen. Der wichtigste sich mit dem Alter der Bat-terie ändernde Parameter dieses Modellansatzes wird adaptiv nachgeführt. Außerdem wurde meistens die Volladeerkennung an die speziellen Gegebenheiten bei PV-Anlagen angepasst. Ein Gerät, das mit diesem Ansatz arbeitet, ist die BAKO der Firma Ennos GmbH. Verfahren, die auf diesem Ansatz aufbauen, sind bei ausreichend genauer Stromerfassung in der Lage, den Ladegrad von Batterien auch bei Zeiträumen von 1- 4 Wochen ohne Volladung ausrei-chend genau zu bestimmen. Allerdings ist bei einem Zeitraum von 4 Wochen ohne Volladung schon eine sehr genaue Strommessung notwendig. Nachteil auch dieses Verfahrens ist, dass bei noch längeren Zeiträumen ohne Volladung (Winterhalbjahr in PV-Anlagen) oder einer ungenauen Stromerfassung nicht mehr tolerierbare Fehler auch von weit über 20 % auftreten können. Außerdem führt die durch das Verfahren bedingte sehr genaue Stromerfassung zu relativ hohen Preisen für dieses Gerät.
Bei diesen Verfahren ist eine weitere Abschätzung von Batteriegrößen neben der Ladungsbi-lanz und dem Gasungsverhalten nur bedingt möglich. Die aktuelle Kapazität der Batterie kann zum Beispiel nur dann festgestellt werden, wenn die Batterie auch bis zum Entladeschluss entladen wird und die Bilanz noch eine ausreichende Genauigkeit aufweist.
Trotz der vorher beschriebenen Problematik bietet der bilanzierende Ansatz mit einer Ver-lustbetrachtung und genauen Stromerfassung für viele PV-Anlagen eine ausreichende Genau-igkeit bei der Ladegradbestimmung. Weiterentwicklungen für diesen Ansatz versuchen Reka-librierungspunkte bereits unterhalb des Vollladezustandes zu finden. Hierzu wurde von Jossen [14] ein Verfahren entwickelt, mit dem es möglich ist, bereits ab einem Ladezustand von ca. 90 % eine Rekalibrierung der Ladungsbilanz durchzuführen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 133
2.2.5.1.4 Modellgestützte Verfahren
Bereits das letzte Verfahren im vorhergehenden Kapitel kann als ein modellgestütztes Verfah-ren betrachtet werden. Neben der Ladungsbilanz wurde ein Modell eingesetzt, um die Ga-sungsverluste der Batterie anhand der Messwerte Batteriespannung und -temperatur abzu-schätzen. Trotzdem entsprechen die wichtigsten Merkmale dieses Verfahrens einer Ladungs-bilanzierung.
Aufgrund immer höherer Rechenkapazitäten und Rechengeschwindigkeiten ist es mit moder-nen Mikroprozessoren möglich, die Batterien zumindest in bestimmten Bereichen zu model-lieren. Mittels der Messgrößen Strom, Spannung und Temperatur, die als Eingangsgrößen für diese Modelle dienen, können die inneren Batteriegrößen Ladegrad oder auch Ladezustand geschätzt werden.
Vor allem die folgenden Ansätze sind in letzter Zeit intensiv diskutiert, entwickelt oder unter-sucht worden:
• Stromspannungskennlinie (Solarix / Firma Steca)
• nichtparametrisches lineares mathematisches Modell (FH-Ulm)
• lineares physikalisches Modell mit Kalmanfilter (ZSW)
• Bilanzierung mit Abgleich und Korrektur über ein neuronales Netz (BRAINSOC / ISE)
• physikalisches Modell (ISET-LAB)
• bilanzierendes Verfahren in Kombination mit einem Stromspannungsmodell (ISET-Algorithmus)
Stromspannungskennlinie
Die Firma Steca GmbH hat ein sehr einfaches aber trotzdem effizientes Stromspannungskenn-linienmodell entwickelt und in die Solarladeregler der Familie Solarix in Form des Atonic Chips integriert. Diese Solarladeregler wurden weltweit bereits über 100.000 mal verkauft und eingesetzt. Das ISET hat die Genauigkeit dieses Verfahrens in Zusammenarbeit mit der Firma Steca getestet und Vorschläge für eine weiter Optimierung erarbeitet.
Die mit diesem Verfahren zur Zeit erreichte Genauigkeit der Ladegradbestimmung liegt im Mittel bei 6 - 16 % und beträgt maximal bis zu 40 %. Beim Einsatz von ortsfesten (OPzS) Batterien oder Gelbatterien sind noch höhere Abweichungen gemessen worden. Allerdings erlaubt dieses Verfahren einen guten Tiefentladeschutz, da im unteren Ladezustandsbereich bei der im Laderegler integrierten Lastabschaltung die maximalen Fehler 10% für Solar- und Gitterplattenbatterien und 30% für Gelbatterien betrugen. Durch die vom ISET erarbeiteten Verbesserungsvorschläge scheint es auch möglich, für andere Batterietypen und im oberen Ladezustandsbereich einen maximalen Fehler von 30 % nicht zu überschreiten.

134 Modulare PV- und Hybridsystemtechnik Abschlussbericht
0%
20%
40%
60%
80%
100%
120%
140%
0.0 24.0 48.0 72.0 96.0 120.0 144.0Zeit [h]
Lade
grad
[%]
1
3
5
7
9
11
13
15
Batte
riesp
annu
ng [V
]
Batteriespannung
Steca / SolarixSäuredicht
Amperestundenbilanzierung mit Verlustbetrachtung
Abbildung 2-47 Vergleich der Ladegradbestimmung mittels einer Säuredichtemessung, des Steca Solarix Ladereglers, und einer genauen Ah-Bilanzierung mit Verlustbetrachtung
Die Vorteile dieses Ansatzes sind, dass dieses Verfahren vollständig selbstadaptierend arbeitet und nicht einmal die Nennkapazität eingeben werden muss. Außerdem ist es langzeitstabil, da es auf eine Strombilanzierung völlig verzichtet. Die Anforderungen an die Strommessgenau-igkeit sind minimal. Zusätzlich bietet es die Möglichkeit einer Kapazitätsabschätzung. Die Anforderungen an Rechenkapazität und Rechengeschwindigkeit sind sehr gering, so dass der Einsatz in Solarladereglern möglich wurde. Gegenüber herkömmlichen Ladereglern mit ei-nem Tiefentladeschutz über die Spannung ist dieses Verfahren ein großer Fortschritt.
Nichtparametrisches lineares mathematisches Modell
Zur Zeit wird an der Fh-Ulm zusammen mit dem ZSW und der Firma Steca ein völlig neuer Ansatz zur Ladezustandsbestimmung beschritten. Dabei ist ein einfacher physikalischer Mo-dellansatz von Burkner [15] soweit vereinfacht worden, dass sich die Ladungsbilanz aus zwei einfachen linearen Gleichungen mit 4 Parametern bestimmen lässt. Da sich diese 4 Parameter nicht mehr physikalisch ableiten lassen, soll dieser Ansatz im weiteren als mathematisches Modell bezeichnet werden. Die 4 Parameter müssen mittels Trainingsdaten und einem Opti-mierungsverfahren nach der Methode der kleinsten Fehlerquadrate gelernt werden. Dafür sind Referenzdaten notwendig.
Die bisherigen Ergebnisse dieses Ansatzes sind vielversprechend. Der mittlere Fehler wird mit 4 % [16] angegeben. Dabei wurde die Parameteroptimierung mit Daten der selben Batte-rie durchgeführt, mit der auch das Verfahren getestet wurde. Für eine andere Batterie (Gelbat-terie) bei dem gleichen Belastungszyklus betrug der mittlere Fehler bereits 20 %. Aussagen über die maximalen Fehler wurden bislang nicht gemacht. Wie das Verhalten des Modells bei

Abschlussbericht Modulare PV- und Hybridsystemtechnik 135
anderen Belastungszyklen, bei anderen Batterietypen sowie unterschiedlichen Alterungszu-ständen aussehen wird, ist noch offen.
Die Vorteile dieses Ansatzes liegen in dem sehr einfachen Gleichungssystems mit nur 4 Pa-rametern, die nach einmaliger Optimierung nicht mehr adaptiert werden müssen. Dadurch ist das Verfahren auch für einfachste Mikroprozessoren geeignet. Die Problematik der Langzeit-stabilität bei seltenen Volladungen ist nicht vorhanden. Außerdem weist das Verfahren eine hohe Fehlertoleranz bezüglich falscher Messwerte auf. Die Genauigkeit auch bei sehr unter-schiedlichen Batterien, unterschiedlichen Belastungszyklen und verschiedenen Alterungszu-ständen der Batterie muss zunächst noch nachgewiesen werden. Auch Aussagen über die ma-ximalen Fehler sind bislang nicht gemacht worden.
Lineares physikalisches Modell mit Kalmanfilter (ZSW)
Bereits 1988 wurde von Schöner [17] aufbauend auf einem einfachen Modell für die Entla-dung von Bleibatterien ein Kalmanfilter verwendet, um die inneren Zustandsgrößen Ruhe-spannung und Innenwiderstand zu schätzen. Zur Zeit wird ein ähnliches Verfahren am ZSW entwickelt und getestet [18]. Der Kalmanfilter dient dabei zur Schätzung des Zustandsvektors eines linearen Modells und ist besonders dort geeignet, wo weder exakte Anfangswerte, noch eine exakte Übereinstimmung von Modell und Wirklichkeit und nur verrauschte oder fehler-behaftete Messwerte existieren. Deshalb scheint der Kalmanfilter geeignet, den Zustandsvek-tor eines linearen Batteriemodells zu schätzen. Wird das Batteriemodell so gewählt, dass eine Größe die Ruhespannung der Batterie widerspiegelt, kann durch einen Kalmanfilter aus den Batteriemesswerten Strom, Spannung und Temperatur die Ruhespannung geschätzt und der Ladezustand berechnet werden. Die Genauigkeit des geschätzten Zustandsvektors ist von der Genauigkeit des linearen Modells abhängig. Da es sich bei einer Bleibatterie um ein in weiten Bereichen nichtlineares System handelt, müssen Modellfehler in Kauf genommen werden. Am ZSW wird versucht, diese Fehler durch Ausblenden stark nichtlinearer Bereiche - wie zum Beispiel dem Gasungsverhalten - zu minimieren. Außerdem können Vereinfachungen durch statistische Vorgaben für den Filter berücksichtigt werden. Als Batteriemodell wird am ZSW ein vereinfachtes bereits von Burkner verwendetes Modell eingesetzt [15].
Die auf dieser Basis bislang erzielten Ergebnisse sind sehr gut. Der mittels Kalmanfilter ge-schätzte Ladezustand wies nur einen maximalen Fehler von 6 % bezogen auf eine in diesem Bereich sehr genaue Ladungsbilanzierung mit Verlustbetrachtung auf. Da mittels des Kalman-filter die Ah-Bilanz im Batteriemodell mit jedem Zeitschritt korrigiert wird, ist dieses Verfah-ren sehr langzeitstabil. Die hohe Fehlertoleranz bezüglich Messungenauigkeiten ist ein weite-rer Vorteil. Da neben der Ruhespannung prinzipiell auch weitere innere Zustandsgrößen der Batterie geschätzt werden können, ist zukünftig möglicherweise auch eine bessere Abschät-zung des Alterungszustandes von Batterien möglich. Allerdings ist zur Zeit die Bestimmung der Batteriemodellgrößen und der Kalman-Parameter mit Aufwand verbunden. An einer Ver-einfachung wird am ZSW gearbeitet.

136 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Bilanzierung mit Abgleich und Korrektur über ein neuronales Netz
Bei diesem Verfahren wird versucht, zunächst alle Möglichkeiten der Ladegradbestimmung mittels Bilanzierung zu nutzen (BAKO-Algorithmus ergänzt um das Reststromverfahren von Jossen [14]). Zusätzlich werden mittels eines selbstadaptiven Verfahrens Informationen aus der Spannungslage bei kleinen Entladeströmen oder in Ruhephasen genutzt, um auf den Ladegrad zu schließen. Durch die intelligente Verknüpfung der Bilanzierung mit den ver-schiedenen Verfahren zur Rekalibrierung wird eine sehr hohe Langzeitstabilität bereits durch den konventionellen Teil erreicht. Dieser kann auch unabhängig vom neuronalen Netz einge-setzt werden. Der konventionell berechnete Ladezustand dient zusammen mit den Messwerten für Strom, Spannung und Temperatur zum Belernen des neuronalen Netzes in einer Neuro-ToolBox. Diese liefert wiederum einen Schätzwert für den Ladegrad, der mit dem konventio-nellen Wert verglichen wird, um Langzeitdrifts und Messfehler zu kompensieren [19]. Durch das Verschieben von sogenannten Neuronen wird ein Kennfeld SOC(U,I,T) des Bleiakkumu-lators gelernt. Die NeuroToolBox ist somit in der Lage, ohne physikalische Kenntnisse ein Kennlinienmodell für die Batterie zu approximieren. Die Vorteile, die sich dadurch ergeben, sind, dass sich das Kennfeld automatisch und ohne vorherige Kenntnis auf die verwendete Batterie einstellt, und so beliebige Typen von Batterien in unterschiedlichen Alterungszustän-den mit guter Genauigkeit abgebildet werden können. Auch kann sich das neuronale Netz kontinuierlich im Betrieb dem Alterungszustand anpassen. Erst der Vergleich mit einem Refe-renzverfahren macht Absolutaussagen zur Genauigkeit des Gesamtverfahrens möglich. Eine Realisierung dieses Ansatzes auf einem Mikrocontroller scheint möglich.
Physikalisches Modell (ISET-LAB)
In den letzten Jahren wurde am ISET ein Modell für Bleibatterien entwickelt, das die physika-lische und elektrochemische Struktur dieser Speicher nachbildet und zur Parametrierung kei-nerlei Messung erfordert. Das Modell entwickelt zur Verwendung in automatischen Zustand-süberwachungs- und Fehlerdiagnosesystemen. Eingesetzt wird es überwiegend zur System-auslegung und dem Zelldesign. Das entsprechende Software-Paket (ISET-LAB) wird heute bereits in mehreren großen Industrieunternehmen eingesetzt [20].
Prinzipiell ist mit diesem Modell eine sehr genaue Beschreibung des Ladegrads möglich. Die-ser wird vom Modell für die positive und negative Elektrode getrennt bestimmt. Auch die in der Batterie zu einem bestimmten Zeitpunkt und unter definierten Entladebedingungen noch entnehmbare Energie könnte mittels dieses Modells mit einer hohen Genauigkeit bestimmt werden. Die notwendige Rechenkapazität und die benötigte Rechenzeit für diese Aufgaben ermöglichen allerdings bislang keinen Online-Einsatz mit gängigen und kostengünstigen Mik-rocontrollern. Auch erfordert dieses Verfahren eine Parametrierung, für die Detailkenntnisse über die Batterie notwendig sind. Die Batteriehersteller können zwar meistens die notwendi-gen Daten zur Verfügung stellen, allerdings ist dieses Vorgehen einem Anwender in der Re-gel nicht zumutbar.
Vorteile dieses Modells ergeben sich, wenn es für vorhandene Datensätze zur nachträglichen Zustandsbeobachtung innerer Batteriegrößen verwendetet wird. Dadurch könnte es möglich sein, genauere Aussagen über die Alterungserscheinungen und Ausfallursachen für Batterien in PV-Anlagen zu bekommen. Auch die Optimierung von Betriebsführungsstrategien bezüg-

Abschlussbericht Modulare PV- und Hybridsystemtechnik 137
lich Batterielebensdauer könnten mit Hilfe des Modells zukünftig auch ohne umfangreiche Batterietests gelingen.
2.2.5.2 Das Verfahren zur Ladezustandsbestimmung des ISET
Allgemein handelt es sich bei diesem Verfahren um einen neu entwickelten Ansatz zur Lade-zustandserfassung, der aufbauend auf einer Bilanzierung mit Verlustbetrachtung und mehrstu-figer Vollladeerkennung auch ein selbstadaptierendes Strom-Spannungsmodell nutzt, um die Ladungsbilanz auch außerhalb des Vollladezustandes zu rekalibrieren. Für das Stromspan-nunsmodell wird der lineare Zusammenhang zwischen der Ruhespannung und dem Ladegrad genutzt. Dieser wird in Phasen nach einer Volladung mittels der dann genauen Ladungsbilanz gelernt. Dies ist wichtig, da der Zusammenhang zwischen Ruhespannung und Ladegrad für unterschiedliche Batterietypen sehr unterschiedlich sein kann. Durch die Festlegung einer unteren Ruhespannung für den Entladeschluss kann die Kapazität einer Batterie abgeschätzt werden. Es wird ein Wert von 1,96 V/Zelle verwendet, was einer Säuredichte im entladenen Zustand von 1,1 kg/l entspricht. Um auch bei kleinen Entladeströmen die Ruhespannung zu schätzen, wird ein nichtlineares Kennlinienmodell verwendet. Während der Ladephasen und Entladungen mit hohen Strömen wird der Ladegrad mittels des bilanzierenden Verfahrens bestimmt. Zusätzlich wurden konsequent statistische Methoden angewendet, um Aussagen darüber zu gewinnen, ob die Ah-Bilanz oder das Stromspannungsmodell zur Zeit die genaue-ren Informationen über die Ladebilanz bereitstellen kann. Der Aufbau ist der Abbildung 2-48 zu entnehmen. Dabei wurde aus Gründen der Übersichtlichkeit das dynamische Modell, das bei Entladeströmen größer dem 10-stündigen Entladestrom die geringere entnehmbare La-dung der Batterie berücksichtigt, nicht mit dargestellt.
VolladeerkennungBilanzierung
Strom- Spannungsmodell
Spannungs-rekalibrierung
Parameterschätzer Ladezustands-berechnung
UI
T
SOC
QB
SB
Ca
IG0 IK Reset
IS
UR
QU
SB
QB QU
SU
SU
QU
Ca
QB
SB
SU
UR
QB
Umin Umax
Ca
0
Berechnung Gasungsstrom
Zustands-überwachung
Zustands-überwachung
∫t
H dtI0
∫t
S dtI0
+
-
+
-
U I T
UR
Q U
Berechnung: - Gasungsstrom - Kompensationsstrom - Strommeßfehler
Zustands-überwachung
Kennlinien-modell
UR
Abbildung 2-48 Aufbau des ISET Algorithmus zur Ladezustandserfassung

138 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Der ISET Algorithmus besteht aus einem Modul zur Ah-Bilanzierung mit Verlustbetrachtung und Messfehlerkompensation, einem Modul zur Vollladeerkennung mit der Parameteradapti-on für die Bilanzierung, einem Stromspannungsmodell mit einer Parameteradaption über ei-nen Parameterschätzer, einem Modul zur Rekalibrierung über die Spannung und einem Modul zur Ladezustandsbestimmung. Neben der Ladungsbilanz (Q) wird auch immer die Standard-abweichung der unterschiedlichen Verfahren berechnet, die eine Aussage über die Genauig-keit beinhaltet.
Bei der Umsetzung des Algorithmus in eine Programmiersprache C++ wurde auf eine über-sichtliche und modulare Struktur wert gelegt. So ist es einfach möglich zusätzliche Module zu implementieren, oder auch die Ladezustandserfassung in ein übergeordnetes Batteriemana-gement zu integrieren.
Die Vorteile dieses Ansatzes sind: • keine umfangreichen Voreinstellungen, da der Algorithmus sich vollständig
selbstadaptiert, • sehr einfaches Batteriemodell, dadurch benötigt der Algorithmus nur eine geringe
Rechenkapazität, • äußerst fehlertolerant durch die Kombination zweier unabhängiger Verfahren und
das Nutzen statistischer Informationen über die jeweiligen Ungenauigkeiten, • langzeitstabil durch das Stromspannungsmodell, • eine Abschätzung der aktuellen Kapazität ist möglich auch ohne Kapazitätstest oder
Tiefentladung, • die Batteriealterung wird berücksichtigt, durch die ständige Adaption der wichtigs-
ten Batterieparameter und die Kapazitätsabschätzung.
-100%
-80%
-60%
-40%
-20%
0%
20%
40%
60%
80%
100%
120%
0 5 10 15Zeit [Tagen]
Lade
grad
-20
0
20
40
60
80St
rom
[A/1
00A
h]
ISET-Algorithmus
Ah-Bilanz mit Verlustb.
Batteriestrom
Abbildung 2-49 Vergleich einer Ah-Bilanzierung mit Verlustbetrachtung und dem ISET-
Algorithmus anhand des Testdatensatzes mit einem aufmodellierten Strommessfehler (+2% von I10 bezogen auf den Betrag des Batterie-stroms); zur Erstellung des Testdatensatzes wurde eine Batterie mit dem ISET-Testzyklus belastet und vermessen

Abschlussbericht Modulare PV- und Hybridsystemtechnik 139
Bislang wurde das Verfahren mit Datensätzen einer Solarstraßenleuchte in Freiburg, der PV-Hybridanlage in Brunnenbach, Daten der PV-Hybridanlage Starkenburger Hütte und einem im Labor aufgezeichneten Datensatz für den ISET-Testzyklus intensiv getestet. Die Ergebnis-se geben die folgenden Abbildungen wieder.
-20%
0%
20%
40%
60%
80%
100%
120%
140%
01.08.98 08.08.98 15.08.98 22.08.98 29.08.98 05.09.98
Zeit
Lade
grad
-60
-30
0
30
60
90
120
150
180
210
240
270
300
330
360
390
420
Stro
m [A
]
ISET-Algorithmus
Ah-Bilanz mit Verlustbetrachtung
Batteriestrom
Abbildung 2-50 Vergleich zwischen dem ISET-Algorithmus und einer Ah-Bilanzierung
mit Verlustbetrachtung anhand des Testdatensatzes der PV-Hybrid-anlagen in Brunnenbach (Batterie mit 600Ah); die Ah-Bilanzierung weist vor der Erkennung des Vollladezustandes einen Fehler von ca. 30 %, der ISET-Algorithmus nach fast 5 Wochen ohne Vollladezustand nur einen Fehler von 5 % auf.
1.96
1.98
2
2.02
2.04
2.06
2.08
2.1
0 20 40 60 80 100
Ladungsbilanz [Ah/100Ah]
Ruh
espa
nnun
g [V
/Zel
le]
120
Ausgleichsgrade
Abbildung 2-51 Die aus den Testdaten Brunnenbach berechnete Ruhespannungskennlinie mit der entsprechenden Ausgleichsgrade.
Tabelle 2-7 gibt einen Überblick über die bisher erzielten Testergebnisse mit den zwei für die Offline-Tests verwendeten Testdatensätze. Ein maximaler Fehler von mehr als 10 % wurde

140 Modulare PV- und Hybridsystemtechnik Abschlussbericht
im Vollladezustand nie überschritten. Nur einmal konnte eine maximale Abweichung der Wertepaare (Ladungsbilanz und Ruhespannung) von mehr als 10% beobachtet werden.
Verfahren Fehler der Ladegradbestimmung
PV-Hybridsystem Brunnenbach
Solarstraßenleuchte Freiburg
Standardabweichung von der Ausgleichsgraden der Ruhe-spannungskennlinie
2,5 % bis 5,5 % 2,4 % bis 6,8 %
maximale Abweichung von der Ausgleichsgraden
10 % 12 %
ISET-Algorithmus
Fehler beim Erreichen des Voll-ladezustandes
kleiner 10 % kleiner 10 %
Mittlerer Fehler beim Erreichen des Vollladezustandes
12 % 10 % ISE-Referenz- verfahren
Maximaler Fehler beim Er-reichen des Vollladezustandes
32 % 32 %
Tabelle 2-7 Überblick über die bisher erzielten Testergebnisse mit dem ISET-Algorithmus und dem ISE-Referenzverfahren für die Testdatensätze des PV-Hybridsystems in Brunnenbach und der Solarstraßenleuchte in Frei-burg. Alle Ergebnisse wurden auf die Nennkapazität der Batterie bezo-gen; bei der Berechnung der mittleren Fehler beim Erreichen des Volla-dezustandes sind nur die Fehler berücksichtigt worden, bei denen die letzte Volladungen länger als eine Woche zurücklag
Im Mittel lagen die Abweichungen bei 2-7 %. Ebenfalls wurden die Fehler des Referenzver-fahrens, welches in [21] in diesem Tagungsband genauer erläutert wird, ausgewertet. Dieses Verfahren - Bilanzierung mit Verlustbetrachtung und Vollladeerkennung - gibt den Fehler beim Erreichen des Vollladezustandes an. Dieser Fehler würde bei diesem Verfahren aller-dings nur beim Einsatz als Online-Verfahren zum Tragen kommen, da im Offline-Betrieb dieser Fehler genutzt wird, um den Gasungsparameter anzupassen und der Ladezustand an-schließend mit dem optimierten Parameter neu berechnet wird. Die Ergebnisse des Referenz-verfahrens im Offline-Betrieb sollten somit deutlich besser sein, als die Ergebnisse in der Ta-belle, die für den Online-Betrieb gelten. Die maximalen Fehler lagen hier bei über 30 % und waren damit rund 3 mal größer als beim ISET-Algorithmus.
Der am ISET neu entwickelte Algorithmus zur Ladezustandsbestimmung wird demnächst online in dem von SMA und ISET entwickelten Batteriestromrichter eingesetzt und getestet. Auch wird an einer Implementierung des Algorithmus in neue Laderegler der Firma Uhlmann Solarelectronic GmbH in einem gemeinsamem Kooperationsvorhaben gearbeitet. Zur Zeit werden weitere Test mit anderen Testdatensätzen sowie eine Optimierung des Algorithmus durchgeführt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 141
2.2.6 Literatur
[1] P. Zacharias, J. Sachau, A. Engler, et. al. Entwicklung von PV-Versorgungsanlagen mit modularer Systemtechnik, Abschlußbericht BMBF FuE-Vorhaben Nr. 0329549A, ISET, Kassel (1998)
[2] B. Willer, C. Schmitz Verfahren und Vorrichtung zur Beurteilung und Bestimmung der Nutzbarkeit einer Batterie und/oder zum Betreiben ei-ner Batterie, Antrag auf Erteilung eines Patents Aktenzeichen 199 10 287.2; Deutsches Patentamt (März 1999)
[3] R. Kaiser, G. Bopp, J. Schmid, Betriebsführungsstrategien für Photovoltaik-Systeme, Forschungsverbund Sonnenergie Themen 96/97; Köln, Februar 1997
[4] M. Rothert, B. Willer, R. Knorr, C. Schmitz Verfahren und Vorrich-tung zur Bestimmung des Ladezustands und/oder der Kapazität einer Batterie, Antrag auf Erteilung eines Patents Aktenzeichen 199 18 529.8; Deutsches Patentamt (April 1999)
[5] J. Garche, H. Döring Einfluss von Tiefentladungen auf die Batteriele-bensdauer Workshop: Elektrochemische Speicher in regenerativen Energiesystemen des Forschungsverbundes Sonnenenergie, Ulm (1993)
[6] M. Rothert, B. Willer Möglichkeiten und Grenzen der Ladezustands-bestimmung von Bleibatterien in PV-Anlagen 13. Symposium Photo-voltaische Solarenergie, Staffelstein (1998)
[7] M. Rothert, R. Knorr, B. Willer Entwicklung von Einheiten zur Lade-zustandserfassung von Batterien in PV-Anlagen Abschlußbericht BMBF FuE-Vorhaben Nr. 0329629, ISET, Kassel (1997)
[8] G. Bopp, H. Gabler, D.U. Sauer, A. Jossen, W. Höhe, J. Mittermeier, M. Bächler, P. Sprau, B. Willer, M. Wollny, A systematic effort to de-fine evaluation and performence parameters and criteria for lead-acid batteries in PV-systems 13th European Photovoltaic Solar Energy Conference, Nice (1995)
[9] B. Willer, M. Wollny, A. Jossen, W. Höhe, G. Bopp, D. U. Sauer, M. Bächler, H. P. Sprau Betriebsverhalten elektrochemischer Energie-speicher in PV-Anlagen 12. Symposium Photovoltaische Solarenergie, Staffelstein (1997)

142 Modulare PV- und Hybridsystemtechnik Abschlussbericht
[10] M. Rothert, M. Wollny, B. Willer, A. Jossen, W. Höhe, G. Bopp, D. U. Sauer, M. Bächler, H. P. Sprau Ladezustandsbestimmung von Bleibatterien Begriffsbestimmung, Referenzverfahren, Testdatensätze 14. Symposium Photovoltaische Solarenergie, Staffelstein (1999) S. 496
[11] A. Jossen, H.-P. Hönes, H. Karl, G. Lehner Langzeittests mit Batterien unterschiedlicher Bauweise Methoden zur Bestimmung des Batterie-zustandes Workshop: Elektrochemische Speicher in regenerativen Energiesystemen des Forschungsverbundes Sonnenenergie, Ulm (1993)
[12] M. Kindscher Die Elektrolytleitfähigkeit als driftfreier Ladezustands-indikator in geschlossenen Bleiakkumulatoren Dissertation TU-Berlin (1996)
[13] G. Bopp, T. Hauser, W. Heydenreich, P. Kremer State-of-Charge Dis-play for Lead-Acid Batteries Intention, Methods, Reality Third Eu-ropean Power Quality Conference, Bremen (1995)
[14] A. Jossen Betriebsführung photovoltaischer Anlagen mit Energiespei-chern Dissertation, Universität Stuttgart (1994)
[15] W. Burkner Verfahren zur Ladezustandsbestimmung von Bleibatte-rien in Photovoltaikanlagen Dissertation, Technische Universität Mün-chen (1994)
[16] Ch. Ehret, M. Ivanov, W. Schroer, P. Adelmann Nichtparametrische Modelle zur Bestimmung des Ladezustands von Bleiakkumulatoren 14. Symposium Photovoltaische Solarenergie, Staffelstein (1999) S. 171
[17] H.-P. Schöner Über die Auswertung des Elektrischen Verhaltens von Bleibatterien Beim Entladen und Laden Dissertation RWTH Aachen (1988)
[18] S. Piller, V. Späth, A. Jossen Kalman-Filter zur Ladezustandsbestim-mung von Bleibatterien in PV-Anlagen 14. Symposium Photovoltai-sche Solarenergie, Staffelstein (1999) S. 454
[19] D. Kray, D. U. Sauer Neuronale Netze für Betriebsführungsaufgaben 14. Symposium Photovoltaische Solarenergie, Staffelstein (1999) S. 465
[20] ISET, Zehnjahresbericht, Kassel (1998) S. 70
[21] M. Wollny, M. Rothert, et al.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 143
2.3 Systembausteine für die Energieversorgung aus PV- und regenerativen Energiequellen
2.3.1 Untersuchung der Besonderheiten von Versorgungssystemen, die auf regenera-tiven Energiequellen beruhen und der daraus resultierenden erforderlichen Spezialkomponenten (T. Loh)
Die Verfügbarkeit von Energie steht in einem engen Zusammenhang mit dem wirtschaftlichen Wachstum [1]. Es gibt jedoch immer noch viele Gebiete ohne Versorgung mit elektrischer Energie. Dies sind meist dünn besiedelte Gebiete, in denen sich der Aufbau eines elektrischen Verbundsystems nicht lohnt oder technisch zu aufwändig wäre. Bisher wurden für die Ver-sorgung dieser Gebiete häufig Diesel-Generatoren eingesetzt. In entlegenen Gebieten kann der Transport des Treibstoffs jedoch zu einem Problem werden, wenn die zu versorgenden Orte nicht ständig erreichbar sind. Da liegt die Chance der regenerativen Energieversorgungs-systeme.
Es gibt keinen Ort auf der Erde, an dem regenerative Energiequellen nicht nutzbar sind. Durch die Vielzahl der nutzbaren Energiequellen, wie z. B. Wind, Wasser, Sonne und Bio-masse, stehen meistens mehrere Energiequellen für eine Versorgungsaufgabe zur Verfügung.
Dennoch werden regenerative Energiequellen bei der Lösung elektrischer Versorgungsaufga-ben häufig nicht in Betracht gezogen. Der Grund liegt in den vielfältigen Besonderheiten die-ser Systeme im Vergleich mit einem Netzanschluss oder einem Diesel-Aggregat.
2.3.1.1 Besonderheiten regenerativer Energieversorgungssysteme
2.3.1.1.1 Wetterabhängigkeit
Die Abhängigkeit der Energieerzeugung von zufälligen Größen charakterisiert die meisten regenerativen Energieversorgungssysteme.
Wind und Sonne lassen sich in ihrer Verfügbarkeit und Leistung nicht beeinflussen, wie z. B. ein Dieselgenerator. Soll elektrische Energie mit einer hohen Verfügbarkeit bereitgestellt werden, muss die Energie zwischengespeichert werden bzw. mit einem zusätzlichen Genera-tor erzeugt werden. Typische regenerative Versorgungssysteme bestehen somit häufig aus mehreren Generatoren und einer Batterie. Damit diese Komponenten reibungslos zusammen-arbeiten, benötigt man noch eine Steuerung.
Es wird deutlich, dass die fehlende Beeinflussbarkeit der Energiequellen das System komple-xer macht, wodurch es auch schwieriger zu dimensionieren ist.
2.3.1.1.2 Einsatzdauer
Für viele Anwendungen ist es wichtig, dass ständig elektrische Energie verfügbar ist. Das bedeutet, dass auch ständig die Netzspannung verfügbar sein muss und somit die netzbildende Komponente ebenfalls ständig eingeschaltet ist. Daraus ergeben sich mehrere Forderungen: Der Eigenverbrauch der netzbildenden Komponente muss möglichst gering sein und die Le-

144 Modulare PV- und Hybridsystemtechnik Abschlussbericht
bensdauer muss möglichst groß sein. Auch wenn in der Unterhaltungselektronik Lebensdau-ern von mehr als 10 Jahren nicht ungewöhnlich sind, lassen sich diese Zahlen kaum auf die Komponenten regenerativer Versorgungssysteme übertragen, da die Geräte der Unterhal-tungselektronik nur wenige Stunden am Tag betrieben werden.
Durch die hohe Einsatzdauer kann die Lebensdauer einiger Bauteile schon nach wenigen Jah-ren erreicht werden. Die Komponenten können ausfallen und müssen ersetzt werden. Da re-generative Versorgungssysteme in der Regel für langfristige Energieerzeugung eingesetzt werden, bestimmt die Lebensdauer der Systemkomponenten die Betriebskosten.
Bei der Entwicklung von Komponenten für regenerative Versorgungssysteme muss auf eine hohe Zuverlässigkeit und eine lange Lebensdauer besonderen Wert gelegt werden.
2.3.1.1.3 Leistungs- und Energiebegrenzung
Im Verbundnetz gibt es für den normalen Nutzer keine Energie- und auch keine merklichen Leistungsbegrenzungen. In einem regenerativen Energieversorgungssystem sind sowohl E-nergie als auch Leistung begrenzt. Da die Bereitstellung von Leistung und Energie hohe Kos-ten verursacht, werden Leistungs- und Energiereserven in einem regenerativen Versorgungssystem nur in einem geringem Umfang vorgehalten.
Für die Betriebsführung stellt sich die Herausforderung, diese begrenzten Ressourcen optimal zu nutzen, so dass ständig elektrische Energie verfügbar ist. Dies ist jedoch unmöglich, wenn der Nutzer unbedacht mit der Energie umgeht. Der durchschnittliche Nutzer macht sich keine Gedanken über das Versorgungssystem, solange es funktioniert [2]. Die Nutzer eines regene-rativen Energieversorgungssystems müssen sich jedoch der begrenzten Ressourcen bewusst sein und sparsam mit der Energie umgehen. Ohne die Mitarbeit der Nutzer ist ein zuverlässi-ger Betrieb nur schwer sicher zustellen.
2.3.1.1.4 Qualifikation der Systembetreiber
Im Verbundnetz wird der Betrieb durch qualifiziertem Fachpersonal sichergestellt. Bei rege-nerativen Versorgungssystemen ist der Nutzer häufig auch der Betreiber des Systems. Da-durch entsteht das Problem, dass die meisten regenerativen Energieversorgungssysteme durch elektrotechnische Laien betrieben werden. Außerdem werden diese Systeme auch in Regionen betrieben, die über kein entsprechendes Service-Netzwerk verfügen. Der Betreiber des Sys-tems muss somit das System selbstständig bedienen und Störungen beheben können.
Für die Entwicklung entsprechender Anlagen bedeutet dies, dass die Bedienung möglichst einfach und eindeutig erfolgen muss, so dass Fehlbedienungen vermieden werden. Die Do-kumentation der Anlage muss den Betreiber in die Lage versetzen, bei Störungen die Ursache festzustellen und bei Ausfall einzelner Komponenten eine Notversorgung für besonders wich-tige Verbraucher sicherzustellen. Außerdem sollte die Dokumentation der Anlage einen örtli-chen Elektrobetrieb in die Lage versetzen, die Installation und gegebenenfalls Reparaturen durchführen zu können.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 145
2.3.1.2 Erforderliche Spezialkomponenten
2.3.1.2.1 Batteriestromrichter
Durch die wechselnde Verfügbarkeit regenerativer Energiequellen fällt der Zeitpunkt der Er-zeugung häufig nicht mit dem Zeitpunkt des Bedarfs zusammen. Das macht den Einsatz eines Energiespeichers unumgänglich. In heutigen Systemen werden dafür meist Blei-Akkumulatoren eingesetzt.
Da der Batteriestromrichter meist die einzige Komponente des Versorgungssystems ist, die Energie sowohl aufnehmen wie auch abgeben kann, hat er neben der Laderegelung und Ü-berwachung der Batterie auch die Aufgabe, auf der Wechselspannungsseite für konstante Netzgrößen, wie Spannung und Frequenz zu sorgen. Damit ist der Batteriestromrichter eine zentrale Komponente zur Ermittlung und Beeinflussung des Systemzustands.
2.3.1.2.2 Betriebsführung und Energiemanagement
Die Kosten des Energiespeichers bilden einen großen Anteil an den Investitions- und Unter-haltungskosten (vgl. [3],[4]). Die Lebensdauer der Batterie wird stark von ungünstigen Be-triebsbedingungen wie z. B. tiefe Entladung oder anhaltende Überladung beeinflusst. Werden diese Betriebszustände vermieden, kann die Lebensdauer der Batterie erhöht und die Be-triebskosten der Anlage verringert werden. Das Batteriemanagement hat als Teil der Betriebs-führung die Aufgabe den (Lade-)Zustand der Batterie möglichst zuverlässig zu ermitteln, da-mit ungünstige Betriebszustände vermieden werden können.
Eine weitere Aufgabe der Betriebsführung ist die optimale Steuerung eines Zusatzgenerators, wie z. B. eines Diesel-Aggregates, welcher zugeschaltet wird, wenn der Energieertrag aus den regenerativen Energiequellen zu gering und der Speicher leer ist. Für den optimalen Wir-kungsgrad ist es sinnvoll, den Generator mit Volllast zu betreiben und auch eine gewisse Mindestlaufzeit nicht zu unterschreiten. So kann die Betriebsführung einen Einfluss auf den Treibstoffverbrauch des Zusatzgenerators, wie auch auf dessen Lebensdauer und die War-tungsintervalle nehmen.
2.3.1.2.3 Kommunikationseinrichtungen
Damit die Betriebsführung den Systemzustand ermitteln und beeinflussen kann, muss sie mit allen wesentlichen Komponenten des Systems kommunizieren können. Das sind neben den Generatoren vor allem die Batteriestromrichter und auch größere oder besonders wichtige Lasten. Diese Kommunikationseinrichtungen müssen robust, erweiterbar und auch fehlertole-rant sein.
Damit der Nutzer auf die verschiedenen Systemzustände reagieren kann, muss es auch Anzei-gen geben, die den Nutzer z. B. über den Ladezustand der Batterie informieren. Nur wenn der Nutzer den Systemzustand kennt, kann er seinen Energieverbrauch entsprechend anpassen.
2.3.1.2.4 Dump-Loads
In einigen Systemen können Dump-Loads notwendig werden, wenn einige Generatoren nicht über Einrichtungen zur Abregelung der Leistung verfügen. Es kann dann der Fall eintreten,

146 Modulare PV- und Hybridsystemtechnik Abschlussbericht
dass diese Generatoren mehr Energie in das System einspeisen als benötigt wird bzw. gespei-chert werden kann. In diesem Fall gibt es zwei Möglichkeiten das System zu schützen. Ent-weder man trennt den entsprechenden Generator vom Netz oder man nutzt die Energie in zu-sätzlichen Verbrauchern.
Wenn man den Generator vom Netz trennt, kann es sein, dass angeschlossene Verbraucher dann aus der Batterie versorgt werden müssen. In diesem Fall ist es sinnvoller, den überschüs-sigen Teil der Energie mit Dump-Loads zu verbrauchen. Mit Hilfe dieser Dump-Loads kann die Energie auch in Form von Wärme zwischengespeichert werden.
2.3.1.2.5 Dimensionierungshilfen
Die Dimensionierung von regenerativen Versorgungssystemen ist häufig ein langwieriger und aufwändiger Prozess. So muss zuerst das Potenzial der zu Verfügung stehenden Energiequel-len ermittelt werden, bevor die Entscheidung getroffen werden kann, welche Energiequellen in welcher Größenordnung genutzt werden sollen.
Neben den Energiequellen müssen auch die Verbraucher quantifiziert werden. Es reicht je-doch nicht, die reine Nennleistung der Verbraucher festzustellen, vielmehr muss ein Lastgang ermittelt werden, um neben der maximalen Leistung auch die benötigte Energie zu ermitteln. Erst wenn diese Werte über einen längeren Zeitraum ermittelt worden sind, kann man die Komponenten des Versorgungssystems dimensionieren. Jedes System muss somit genau für den entsprechenden Ort und Zweck ausgelegt werden.
Zum Aufbau der Systeme hat man die Auswahl zwischen einer Vielzahl verschiedener Kom-ponenten mit zum Teil völlig verschiedenen Eigenschaften. Die Qualität des Systems hängt somit wesentlich vom Expertenwissen der Systemdesigner ab. Dies schlägt sich auch in ho-hen Kosten für die Dimensionierung der Systeme nieder.
Expertensysteme könnten die Auswertung der meteorologische Daten wie auch der Lastgänge vereinfachen und die Dimensionierung der Anlagen optimieren. Dadurch ließen sich auch die Systemkosten senken. Weitere Vereinfachungen der Systemauslegung ließen sich erreichen, wenn Standards entwickelt werden, welche die Zusammenarbeit und die Kommunikation der Komponenten festlegen.
2.3.1.3 Anforderungen an die Komponenten
2.3.1.3.1 Geringer Eigenverbrauch
Eine wesentliche Forderung an alle Komponenten in einem regenerativen Versorgungssystem ist ein geringer Eigenbedarf an Energie. Durch den meist ununterbrochenen Betrieb des Sys-tems kann der Eigenverbrauch der Komponenten einen signifikanten Teil des Energiedurch-satzes ausmachen. Dies wird immer dann offensichtlich, wenn längere Perioden ohne einen Energieeintrag überbrückt werden sollen. Während Verbraucher unter Umständen vom Netz getrennt werden können, können die Komponenten zur Netzbildung nicht abgeschaltet wer-den, ohne das auch das Netz abgeschaltet wird.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 147
2.3.1.3.2 Konformität zu weltweiten Normen
Das Einsatzgebiet von regenerativen Energieversorgungsanlagen ist weltweit. Da der Markt in einem einzelnen Land meist begrenzt ist, müssen die Komponenten des Systems so ausgelegt sein, dass sie in möglichst vielen Ländern eingesetzt werden können. Neben der Herausforde-rung der unterschiedlichen klimatischen Bedingungen muss sich der Entwickler jedoch auch der Herausforderung der unterschiedlichen nationalen und internationalen Normen stellen. Um Zugang zu einem entsprechenden Markt zu erlagen muss man häufig die Einhaltung die-ser Normen nachweisen. Für die Entwicklung der Komponenten bedeutet dies einen großen Aufwand bei der Recherche der relevanten Normen und bei dem Nachweis deren Einhaltung.
Werden die Normen nicht von Anfang an in der Entwicklung berücksichtigt, führen die mög-licherweise notwendigen Änderungen und zusätzlichen Prüfungen zu einer Steigerung der Entwicklungskosten und zu einem verzögerten Zugang zu dem entsprechenden Markt.
2.3.1.3.3 Zuverlässigkeit in verschiedenen Klimazonen
Der weltweite Einsatz regenerativer Energieversorgungssysteme bedeutet auch den Einsatz in verschiedensten Klimazonen. Das entsprechende Klima kann sich stark auf die Zuverlässig-keit und Lebensdauer der Geräte auswirken. So gilt für einige Bauteile die Faustregel, dass sich die Lebensdauer halbiert, wenn die Temperatur um 10°C steigt. Man muss jedoch auch die maximal zulässige Betriebstemperatur berücksichtigen. In heißen Regionen kann ein Ge-rät unter ungünstigen Bedingungen Temperaturen von über 60°C ausgesetzt sein. Im Gerät ist die Temperatur aufgrund der Eigenerwärmung noch höher. Eine Erwärmung eines Bauteils von nur 20°C kann somit schon dessen zulässige Betriebstemperatur von typisch 85°C (indus-trial temperature range) überschreiten. Neben der möglichst geringen Verlustleistung der Bau-teile muss auch besonders auf eine gute Wärmeabfuhr geachtet werden, um die Bauteiltempe-ratur so gering wie möglich zu halten. Bei der Bauteilauswahl muss auch auf eine entspre-chend hohe zulässige Betriebstemperatur geachtet werden.
Neben der absoluten Temperatur beeinflussen besonders die Temperaturwechsel die Zuver-lässigkeit des Gerätes. Starke Temperaturwechsel können durch kontinentales Klima verur-sacht werden, aber auch durch die Eigenerwärmung bei Laständerungen. Durch schnelle Temperaturwechsel entstehen mechanische Spannungen sowohl zwischen dem Bauteil und der Leiterplatte, wie auch im Bauteil selbst. Diese Spannungen bewirken mit der Zeit eine Materialermüdung, die dazu führen kann, dass Lötverbindungen aufbrechen oder Bauteile ausfallen.
Regenerative Versorgungssysteme werden jedoch nicht nur in warmen Regionen aufgebaut. Eine besondere Herausforderung ist auch die Entwicklung für Regionen mit extrem tiefen Temperaturen, wie z. B. Sibirien. Dort können Temperaturen von unter -50°C erreicht wer-den. Während im Betrieb die Temperatur im Gerät höher ist und man für sensible Komponen-ten fordern kann, dass sie in geheizten Räumen aufgestellt werden, besteht jedoch weiterhin das Problem bei saisonal betriebenen Anlagen oder bei Ausfall der Anlage. Es gibt nur weni-ge Bauteile, die für Temperaturen von unter -45°C spezifiziert sind. Das gilt nicht nur für die Betriebstemperatur, sondern auch für die Lagertemperatur. Bei der Komponentenentwicklung für solche Gebiete muss man somit darauf achten, dass keine Bauteile eingesetzt werden, die durch tiefe Temperaturen zerstört werden können, wie z. B. einige Elektrolytkondensatoren oder Batterien.

148 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Einen Einfluss auf die Zuverlässigkeit hat auch die Luftfeuchtigkeit, insbesondere wenn auch aggressive Stoffe, wie z. B. durch Salzluft, ins Gerät gelangen können. Die Feuchtigkeit kann ungeschützte Metallflächen, wie z. B. Lötverbindungen, Steckverbindungen oder IC-Sockel korrodieren, wodurch die Funktion beeinträchtigt werden kann. Des weiteren kann sich mit Staub eine leitfähige Schicht auf der Leiterplatte ausbilden, welche die Isolationsfestigkeit stark herabsetzt. Beim Gerätedesign sollten Steckverbinder und Sockel so weit wie möglich vermieden werden und Isolationsabstände entsprechend groß gewählt werden. Des weiteren sollte der Luftaustausch des Gerätes möglichst klein sein.
Auch große Höhe hat Einfluss auf die Zuverlässigkeit der Komponenten. Durch die Höhen-strahlung können elektronische Bauteile geschädigt werden. Speziell sehr hochintegrierte Bauteile sind empfindlich gegen radioaktive Strahlung. Bei großer Höhe nimmt jedoch auch die Luftdichte ab. Damit wird der Wärmetransport mittels Konvektion verringert, wodurch die Eigenerwärmung zunimmt.
2.3.1.3.4 Hohe Verfügbarkeit des aufgebauten Netzes
Für viele Versorgungsaufgaben ist eine hohe Verfügbarkeit und Zuverlässigkeit des Netzes unerlässlich. So darf für den Betrieb eines Kühlschranks das Netz nie länger als wenige Stun-den ausfallen, ohne dass das Kühlgut Schaden nimmt. Da regenerative Versorgungssysteme meist wartungsarm sind, werden sie teilweise schon heute konventionellen Energieerzeugern bei der Elektrifizierung, z. B. von Krankenstationen in Entwicklungsländern, vorgezogen [5].
Für eine hohe Verfügbarkeit des Netzes ist neben der Zuverlässigkeit der Komponenten auch die Redundanz der Komponenten wichtig. Fällt eine Komponenten aus, muss mit den anderen Komponenten wenigstens ein Notbetrieb sichergestellt werden können.
Ein Notbetrieb ist jedoch nur ein Schritt zur Überbrückung eines Ausfalls. Für einen stabilen Betrieb des Netzes ist es auch wichtig, dass defekte Komponenten schnell instandgesetzt bzw. ausgetauscht werden können. Der Aufwand sowohl für die Instandsetzung, wie auch für den Austausch kann beim Design der Komponente stark beeinflusst werden.
Häufig fällt das Netz jedoch auch wegen verschiedener Störfälle aus, die manuell zurück ge-setzt werden müssen. Diese Störfälle sind sehr lästig, da für einen zuverlässigen Betrieb über eine längere Zeit das System immer in regelmäßigen Abständen überwacht werden muss. Bei der Auslegung der Systemkomponenten sollten Störfälle, die manuell zurückgesetzt werden müssen, so weit wie möglich vermieden werden.
2.3.1.4 Aufgaben für die Zukunft
In den letzten Jahren wurden viele Grundlagen geschaffen, um Versorgungssysteme mit rege-nerativen Energiequellen aufzubauen. Nachdem in vielen Bereichen die Machbarkeit nach-gewiesen worden ist, stehen wir nun vor der nächsten Herausforderung: Einer Weiterentwick-lung der System-Komponenten mit einem besonderen Blick auf die Zuverlässigkeit und Langlebigkeit der Komponenten, sowie einer Kostenreduktion sowohl der Investitionskosten als auch der Betriebskosten dieser Systeme.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 149
2.3.1.5 Literatur
[1] F. Cluver, C. Cooper, D. Kotzé:
The Role of Energy in Economic Growth
17th World Energy Congress, Sep. 1998
[2] Renewable Energy in South Asia
World Energy Council, Report, 2000
Online: http:// www.worldenergy.org/wec-geis
[3] P. Zacharias: Energiekosten in Hybridsystemen
Modulare PV- und Hybridsystemtechnik 3. Zwischenbericht,
S. 1722, 2000
[4] F. Kininger, B. Willer:
Ermittlung der allgemeinen Investitions- und Betriebskostenstrukturen für modulare PV- und Hybridsysteme
Modulare PV- und Hybridsystemtechnik 3. Zwischenbericht, S. 44-56, 2000
[5] A. C. Jimenez, K. Olson:
Renewable Energy for Rural Health Clinics
National Renewable Energy Laboratory, Report, Sep. 1998
Online: http:// www.nrel.gov/wind/library.html, File: 25233.pdf

150 Modulare PV- und Hybridsystemtechnik Abschlussbericht

Abschlussbericht Modulare PV- und Hybridsystemtechnik 151
2.3.2 Netzausfallerkennungsmethoden und –bausteine für netzgekoppelte Systeme (H. Faßhauer)
Die weitere Verbreitung von dezentralen Eigenerzeugungsanlagen für den netzparallelen Be-trieb erfordert neue Sicherheitsmaßnahmen um einen gefahrlosen Netzbetrieb zu gewährleis-ten. Bei einer bewusst herbeigeführten oder technisch bedingten Teilnetzabschaltung muss sichergestellt sein, dass der freigeschaltete Netzabschnitt auch tatsächlich spannungslos ist und sich kein unkontrolliertes Inselnetz ausbildet. Um dies zu gewährleisten, müssen in den Eigenerzeugungsanlagen entsprechende Sicherheitseinrichtungen vorhanden sein, die im Be-darfsfall eine Trennung der Anlage vom Netz vornehmen.
2.3.2.1 Inselnetzbildung bei netzparallelen Wechselrichtern
Beim Einsatz von netzgekoppelten Photovoltaikanlagen muss sichergestellt sein, dass im Fal-le einer Netztrennung (z. B. bei Wartungsarbeiten) der freigeschaltete Netzabschnitt span-nungslos ist. Hierfür ist es notwendig, dass Wechselrichter, die in das öffentliche Netz ein-speisen, die Freischaltung erkennen, um eine unkontrollierte Inselnetzbildung zu vermeiden. Zur Sicherstellung der Spannungsfreiheit verlangen die EVUs bei Eigenerzeugungsanlagen eine jederzeit zugängliche Trennstelle. Diese Art der Freischaltung ist technisch zwar sehr einfach, erfordert aber einen hohen zeitlichen Aufwand, wenn eine Vielzahl von Eigenerzeu-gungsanlagen vorhanden sind. Zudem ist die Freischaltstelle die an der Grundstücksgrenze angebracht sein soll, mit einem hohen zusätzlichen Installationsaufwand verbunden. Für Pho-tovoltaikanlagen gibt es eine Sonderregelung, bei der auf die manuelle Trennstelle verzichtet werden kann, wenn eine selbsttätige Freischalteinrichtung vorhanden ist. In den VDEW-Richtlinien [VDEW] zum Parallelbetrieb mit dem Niederspannungsnetz ist eine 3-phasige Unterspannungsüberwachung bei einphasig einspeisenden, nicht inselbetriebsfähigen Wech-selrichtern als Ersatz für die manuelle Freischalteinrichtung gefordert. Nach dem Normen-entwurf DIN VDE0126 [VDE0126] ist auch ein einphasiger Netzanschluss möglich, wenn neben der Spannung und der Frequenz auch die Netzimpedanz überwacht wird. Ein einphasi-ger Netzanschluss reduziert zudem den Installationsaufwand für die Wechselrichter.
Üblicherweise werden bei netzeinspeisenden Wechselrichtern die Netzspannung und Fre-quenz überwacht. Systembedingt verfügen netzparallele Wechselrichter (WR) über eine Stromregelung. Als Führungsgröße dient die Netzspannung. Im Falle einer Freischaltung ei-nes Teilnetzes kommt es daher in aller Regel zu einer Veränderung der Netzspannung und/oder Frequenz, da prinzipiell keine Regelung auf die Netzspannung und Frequenz vor-handen ist. Bei Überschreiten der geforderten Grenzwerte erfolgt dann eine Trennung des WR vom Netz.
In Ausnahmefällen ist es möglich, dass es zur Inselnetzbildung kommt. In Abbildung 2-52 ist ein vereinfachtes Ersatzschaltbild vom Versorgungsnetz UNetz mit angeschlossenem Verbrau-cher Zv und netzparallelen Wechselrichter als Stromquelle IWR dargestellt. Wird der Netzab-schnitt vom Versorgungsnetz getrennt, kann sich ein unkontrolliertes Inselsystem ausbilden. Dieses kann in Bezug auf Spannung und Frequenz nur stabil sein, wenn ein Wirk- und Blind-leistungsgleichgewicht vorhanden ist, so dass gilt:
VWR
VWR
QQPP
==

152 Modulare PV- und Hybridsystemtechnik Abschlussbericht
In diesem Fall werden die Grenzwerte für Spannung und Frequenz nicht überschritten und der freigeschaltete Netzabschnitt ist weiter in Betrieb. Unter Laborbedingungen konnte eine sol-che Inselnetzbildung beobachtet werden [1].
PWR, QWRPV, QV
PNetz, QNetz
ZV
ZL2ZL1
UNetz IWR
Abbildung 2-52 Inselnetzbildung
Die 3-phasige Überwachung ermöglicht auch unter den speziellen Bedingungen des Leis-tungsgleichgewichts zwischen Verbrauchern und Einspeisung die Erkennung eines Inselsys-tems. Da nur auf einer Phase eingespeist wird, liefert die Netzspannungsmessung auf allen drei Phasen die notwendige Information zum Abschalten des Wechselrichters. Falls in einem Teilnetz mehrere Wechselrichter auf allen Phasen einspeisen und ein Wirk- und Blindleis-tungsgleichgewicht auf allen Phasen herrscht ist eine sichere Freischaltung nicht gewährleis-tet. Dieser Zustand ist allerdings sehr unwahrscheinlich. Ein anderer Nachteil der 3-phasigen Überwachung ist der erhöhte Installationsaufwand und die Bereitstellung eines 3-phasigen Netzanschlusses. Als Ersatz für die 3-phasige Spannungsüberwachung ist eine Netzimpe-danzmessung möglich. In dem Normentwurf DIN VDE 0126 sind die Forderungen für einen einphasigen Anschluss eines WR mit einer Leistung ≤ 4,6 kVA festgelegt.
Beim Abschalten eines Teilnetzes erhöht sich der Innenwiderstand dieses Netzabschnittes. Die Überwachung der Netzimpedanz ZN kann daher als Kriterium für die Erkennung der In-selnetzbildung herangezogen werden.
Im 1. Fall sei angenommen, dass der Widerstand ZV wesentlich größer als die Leitungswider-stände ZL1 und ZL2 ist. Bei geschlossenem Schalter beträgt die Netzimpedanz näherungsweise
211 LLN ZZZ += . ( 2.1 )
Durch Öffnen des Schalters ändert sich die Netzimpedanz aus Sicht des Wechselrichters zu
VLN ZZZ += 22 . ( 2.2 )
Da ZV wesentlich größer als ZL1 ist, ist ein Vergrößerung der Netzimpedanz aufgetreten.
Für den Fall, dass ZV und ZL1 die gleiche Größenordnung besitzen, gilt bei geschlossenem Schalter
21
13 L
VL
VLN Z
ZZZZZ +
+⋅
= ( 2.3 )

Abschlussbericht Modulare PV- und Hybridsystemtechnik 153
und bei geöffnetem Schalter
VLN ZZZ += 24 . ( 2.4 )
Die Impedanzänderung ∆ZN beträgt in diesem Fall
VL
VLVNNN ZZ
ZZZZZZ+⋅
−=−=∆1
134 , ( 2.5 )
welches ebenfalls eine Impedanzvergrößerung bedeutet.
In der Norm ist ein Impedanzsprung von ∆ZN ≥ + 0,5 Ω als Auslösekriterium zur Trennung vom Netz gefordert. Das bedeutet, dass eine Abschaltung eines Teilnetzes von ca. 100 kW Leistung noch als unkontrollierte Inselnetzbildung erkannt werden muss, da gilt:
( ) kWVZ
UPN
8,1055,0
230 22
=Ω
=∆
= ( 2.6 )
2.3.2.2 Übersicht der bekannten Netzausfallerkennungsmethoden
Es gibt eine Reihe von unterschiedlichen Methoden zur Erkennung von Inselnetzbildung. Es kann zwischen passiven und aktiven Verfahren unterschieden werden. Passive Verfahren sind rückwirkungsfreie Methoden die anhand von direkt messbaren Netzparametern eine Insel-netzbildung erkennen können. Die aktiven Verfahren beeinflussen das Netz mehr oder weni-ger stark und werten die Reaktion des Netzes aus.
Passive Verfahren
• Auswertung von Spannungs- und/oder Frequenzänderungen
• Anstieg des typischen Oberwellengehaltes bei Teilabschaltungen
• Erkennen von Phasensprüngen [2]
• Auswertung der Phasen-Frequenz-Charakteristik [2]
• Auswertung des Frequenz-Lastverhältnisses [3]
Aktive Verfahren
• Impedanzmessung und Impedanzsprungerkennung
• Erzwungene Frequenzverschiebung und Frequenzüberwachung
• Erzwungene Spannungsverschiebung und Spannungsüberwachung [4]
• Zuschalten einer Reaktanz [2]
Nach dem Normentwurf DIN VDE0126 ist zur Erkennung der Inselnetzbildung die Impe-danzmessung zwingend vorgeschrieben. Sollte die Norm in der vorliegend Form in Deutsch-land gültig werden ist nur dieses Verfahren zulässig. Im Weiteren werden daher die bekannten Verfahren zur Netzimpedanzmessung näher betrachtet.

154 Modulare PV- und Hybridsystemtechnik Abschlussbericht
2.3.2.3 Verfahren zur Netzimpedanzmessung, Stand der Technik
Um die Netzimpedanz zu messen, gibt es derzeit verschiedene Möglichkeiten. Ein übliches Verfahren wertet die Netzspannungsänderung während des Zuschaltens einer Last (z. B. ein Widerstand) aus. Nachteilig bei diesem Verfahren ist, dass hiermit auch ein für Photovoltaik-anlagen nicht zu vernachlässigender Energieverbrauch verbunden ist. Eine modifizierte Mög-lichkeit besteht darin, mit dem Wechselrichter selbst eine Leistungsvariation durchzuführen und damit die Netzspannungsänderung zu verursachen. Die Netzspannung selbst ist aber kei-ne konstante Größe und bereits zwischen zwei Netzhalbwellen können nennenswerte Span-nungsdifferenzen auftreten.
An einer Netzimpedanz von 0,5 Ω verursacht ein Leistungsvariation von 230 W eine Ände-rung der Netzspannung von ∆UN = 0,5 V oder entsprechend 0,22% bezogen auf die Netznenn-spannung.
VVW
UPZUN
NN 5,02302305,0 =⋅Ω=
∆⋅=∆ ( 2.7 )
Ein von Siemens patentiertes Verfahren [5] erzeugt zunächst eine Spannungsüberhöhung Uerh durch Vergrößerung des momentan eingespeisten Stromes Ierh. In der folgenden Netzperiode wird der Stromfluss unterbrochen und es wird die Netzspannung U0 gemessen. Aufgrund der Spannungsdifferenz
0UUU erhN −=∆ ( 2.8 )
wird die Netzimpedanz
erh
NN I
UZ ∆= ( 2.9 )
berechnet. Die verursachten Lastsprünge können bei diesem Verfahren zu Flickerstörungen führen. Die Veränderung der abgegebenen Leistung bedeutet bei einer PV-Anlage, dass der Solargenerator zeitweise nicht im MPP-Punkt betrieben wird. Abhängig von der Häufigkeit, der Messdauer und der Zeitdauer zum wiedereinstellen des MPP-Punktes führt dies zu einem Minderertrag der PV-Anlage.
In [6] ist ein Verfahren zur Netzimpedanzmessung beschrieben, welches nur die Leistungsän-derungen durch das MPP-Tracking des Wechselrichters benutzt, um die Veränderung der Netzspannung zu messen. An die Messtechnik werden dabei sehr hohe Anforderungen ge-stellt, da eine Änderung der momentan eingespeisten Leistung von 5 W an einer Netzimpe-danz von 0,5 Ω nach Gleichung ( 2.7 ) nur eine Änderung von ca. 10 mV verursacht. Um dennoch eine Änderung der Netzspannung zu messen, kann die Suchbewegung vergrößerte werden. Ziel des MPP-Tracking ist es aber gerade, die Suchbewegung so klein wie möglich zu halten um die Anpassungsverluste zu minimieren.
Ein weiteres Verfahren zur Impedanzmessung [7] wertet die Phasenverschiebung eines kapa-zitiv belasteten zum unbelasteten Stromnetz aus. Wird eine Kapazität parallel zum Wechsel-stromnetz geschaltet, so fließt während der Nulldurchgänge des Netzes ein Blindstrom. Aus dem daraus resultierenden Spannungsabfall an der Netzimpedanz findet der Nulldurchgang in Relation zum unbelasteten Netz zeitverschoben statt. Aus dem Zeitunterschied zwischen dem

Abschlussbericht Modulare PV- und Hybridsystemtechnik 155
Auftreten des Nulldurchganges im belasteten und unbelasteten Fall wird die Netzimpedanz bestimmt. Unter der Näherung, dass der Strom I um den Nulldurchgang konstant ist und der Spannungsverlauf im Nulldurchgang linear verläuft, ist der Netzinnenwiderstand proportional zur Zeitdifferenz ∆T und umgekehrt proportional zum Strom. So dass gilt:
ITZ N
∆≈ ( 2.10 )
Eine Änderung der Netzimpedanz von 0,5 Ω bewirkt bei einem kapazitiven Strom von ca. 10 A eine Zeitdifferenz von ca. 50 µs10. Diese kleine Zeitdifferenz muss von der Messtechnik erkannt werden. Schaltvorgänge und Rundsteuersignale im Netz können zu Fehlmessungen führen. Das Zu- und Abschalten der Kapazität erfolgt jeweils bei möglichst gleicher Netz-spannung, um hohe Schaltströme zu verhindern. Ein etwas abgewandeltes Verfahren erzeugt einen Stromimpuls der die Nullpunktverschiebung verursacht. Diese impulsartigen Messver-fahren sollten aber wie in der Norm angemerkt möglichst vermieden werden. Im Hinblick auf eine zukünftige Datenkommunikation über das Versorgungsnetz können solche Impulse Stö-rungen verursachen.
2.3.2.4 Untersuchung zur Netzimpedanz
Mit einem Digitalen Spannungsanalysator (DSA) und Impedanzmesszusatz wurde der Netz-impedanzverlauf an unterschiedlichen Netzanschlusspunkten gemessen. Das DSA-Gerät er-zeugt pseudozufällige Lastströme die eine Netzspannungsänderung hervorrufen. Zur Erhö-hung der Messgenauigkeit wird über mehrere Messungen gemittelt. Die Netzimpedanz wird bis 2,5 kHz, mit einer Frequenzauflösung von 3,125 Hz gemessen.
0
0,5
1
1,5
2
2,5
3
3,5
4
0 500 1000 1500 2000 2500
Frequenz [Hz]
Impe
danz
[ Ω]
ISET PV-Anlage Wohnhaus Abbildung 2-53 Frequenzabhängige Netzimpedanz
10 Dieser Wert wurden mit einer PSpice Simulation ermittelt

156 Modulare PV- und Hybridsystemtechnik Abschlussbericht
0
0,2
0,4
0,6
0,8
1
0 10 20 30 40 50 60 70 80 90 100
Frequenz [Hz]
Impe
danz
[W]
-10
0
10
20
30
40
Phas
e [G
rad]
ISET PV-Anlage Wohnhaus P(ISET) P(PV-Anlage) P(Wohnhaus)
Abbildung 2-54 Frequenzabhängige Netzimpedanz mit Betrag und Phase
Je nach Netzanschlusspunkt, ergeben sich unterschiedliche Verläufe der Netzimpedanz. Die Messungen Wohnhaus11 und PV-Anlage12 sind weitgehend linear. Die Messung ISET13 zeigt dagegen ausgeprägte Resonanzstellen. An den Resonanzstellen, welche durch Kompensati-onsanlagen hervorgerufen werden, weicht die Netzimpedanz stark vom ohmsch-induktiven Verhalten ab. Für solche Verläufe der Impedanz kann das vereinfachte Ersatzschaltbild (ESB) aus Abbildung 2-55 nicht für den gesamten Frequenzbereich verwendet werden. In [8] wurde gezeigt wie ein solcher Verlauf durch eine entsprechende Ersatzschaltung angenähert werden kann. Dieses ESB ist dann nur für diesen einen Netzanschlusspunkt gültig und kann nicht allgemein angewendet werden. Die Bestimmung der Netzimpedanz ist jedoch nur für die 50 Hz notwendig. Die folgende Abbildung 2-54 zeigt nochmals den Betrag und die Phase der Netzimpedanz in der Umgebung der Netzfrequenz.
Die Messungen zeigen, dass im Frequenzbereich um 50 Hz ein ausgeprägtes ohmsch-induktives Verhalten der Netzimpedanz gegeben ist. Unter diesen Voraussetzungen kann nä-herungsweise im Bereich der Netzfrequenz ein weitgehend lineares Verhalten angenommen werden.
LNetz
ZN
RNetz
Abbildung 2-55 Vereinfachtes Ersatzschaltbild der Netzimpedanz
11 Einfamilien Haus in einer Wohnsiedlung 12 Netzanschlusspunkt einer PV-Anlage in einem Wohnhaus 13 Labortisch im ISET, Raum 2.35

Abschlussbericht Modulare PV- und Hybridsystemtechnik 157
2.3.2.4.1 Prüfaufbau zur Impedanzsprungerkennung
Zur Erkennung der Inselnetzbildung ist in der Norm eine Prüfschaltung spezifiziert, die den Impedanzsprung simuliert. Die dort festgelegten Grenzwerte geben einen Aufschluss über die Anforderungen, die ein Messsystem erfüllen muss.
Auszug aus der DIN VDE 0126, Typprüfung 5.2.1:
Die Prüfschaltung simuliert einen abgeglichenen Paralleleinspeise-/Lastzustand sowie Span-nungs- und Frequenzstabilitätsbedingungen eines Netzbereiches, der durch eine Unterbre-chung eine Netzinsel bilden kann. Auch unter diesen Inselnetzbedingungen muss die ENS die Unterbrechung des Netzes, welche stets mit einem Impedanzsprung verbunden ist, sicher er-kennen und die Einspeisung aus der Eigenerzeugungsanlage über die Schalter vom Netz in den betroffenen Außen- und Neutralleiter innerhalb von 5 s nach Unterbrechung trennen (siehe Abbildung 2-56).
Abbildung 2-56 Prüfschaltung der selbsttätigen Freischaltstelle
Die Prüfschaltung weist folgende Eigenschaften auf:
• Die Gleichspannungsseite des Wechselrichters wird über eine geeignete regelbare Energiequelle versorgt.
• Auf der Wechselspannungsseite des Wechselrichters/ENS werden parallel zum Ausgang Widerstände, Induktivitäten und Kapazitäten geschaltet, die auf die er-zeugte Wirk- und Blindleistung so feinstufig angepasst werden können, dass die Höhe der Leistung über die geschlossene Schalteinrichtung zur Impedanzerhöhung des Netzanschlusses ≤ 5 % der Wechselrichternennausgangsleistung ist, was als Prüfabstimmung definiert ist.
• Der Schalteinrichtung ist ein Widerstand so parallel geschaltet, dass bei Betätigung die Netzimpedanz um 0,5 Ω erhöht wird.
• Ausgehend von der Impedanz ZN ≤ 0,5 Ω des Netzes, an welchem die Prüfungen durchgeführt werden, wird die Impedanz in frei wählbaren Stufen mit zulässigen Abweichungen (einschließlich der betrieblich gegebenen Netzimpedanzschwan-kungen) von ± 0,25 Ω auf Werte bis 2,5 Ω ohmscher Widerstand sowie bis 1,66 Ω ohmscher Widerstand kombiniert mit 1,1 Ω Reaktanz erhöht und hierbei überprüft, ob eine Netztrennung innerhalb von 5 s infolge eines Impedanzsprunges von 0,5 Ω erfolgt.
Die Prüfung der selbsttätigen Freischaltstelle erfolgt bei Wechselrichternennleistung, sowie bei wählbaren Leistungen im mittleren und unteren Drittel der Nenneingangsleistung des Wechselrichters. Zwischen den angegebenen Grenzwerten wird die Impedanz in frei wähl-

158 Modulare PV- und Hybridsystemtechnik Abschlussbericht
baren Stufen eingestellt und die Typprüfung durchgeführt. Die am Netzanschlusspunkt vor-handene Netzimpedanz ZN muss ≤ 0,5 Ω sein.
2.3.2.4.2 Untersuchung eines neuen Impedanzmessverfahrens
Auf der Grundlage der bisher bekannten Messverfahren und den Prüfbedingungen, ist die Idee entstanden ein neues Messverfahren zu untersuchen und zu entwickeln. Die Idee besteht dar-in, die Netzimpedanz bei zwischenharmonischen Frequenz nahe der Netzfrequenz zu messen.
Wie bereits in [9], [10] und [11] gezeigt ist es möglich, die Netzimpedanz für 50 Hz durch eine Anregung des Netzes mit von dieser Frequenz abweichenden Signalen zu bestimmen. In [9] und [10] wurden Untersuchungen durchgeführt, bei denen zur Messung netzharmonische Oberwellen als Anregungssignal benutzt wurden. Problematisch hierbei sind Impedanzverläu-fe mit nicht linearen Verhalten (siehe Abbildung 2-53), wenn z. B. Resonanzstellen vorhan-den sind. Je nach Lage der Resonanzstelle und ausgewerteten Frequenzen führt das bei einem linearen Ansatz zu fehlerhaften Ergebnissen. Bei den Messungen wurden mehrfrequente Sig-nale von geradzahligen Oberschwingungen verwendet, da diese im Netz kaum vorhanden sind. Folgende Abbildung zeigt beispielhaft die Amplituden der harmonischen Netzober-schwingungen am Netzanschlusspunkt ISET14.
0
1
2
3
4
5
6
7
8
9
10
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900 950 1000
f [Hz]
Ampl
itude
[V]
Abbildung 2-57 Netzharmonische Oberschwingungen
Zur Unterdrückung der Grundwelle wurde ein 50 Hz Sperrfilter verwendet. Je nach Netzan-schlusspunkt variieren hauptsächlich nur die Amplituden der ungeradzahligen Netzober-schwingungen. Es hat sich als günstig herausgestellt, zur Messung Frequenzen nahe der Netz-grundfrequenz zu benutzen. Wie bereits zuvor beschrieben kann dann die Berechnung mit ausreichender Genauigkeit mit einem linearen Ansatz erfolgen. Die Anregung mit zwischen-harmonischen Frequenzen hat den Vorteil, dass diese Frequenzanteile im Netz nur mit ver-schwindend kleinen Amplituden vorhanden sind. Änderungen der Netzspannung und deren Oberschwingungen haben daher im idealen Fall keinen Einfluss auf die Messung. Bei Verfah-ren die die Netzspannungsänderung bei 50 Hz auswerten, führt das zu Fehlmessungen. Zur
14 Labortisch im ISET, Raum 2.35

Abschlussbericht Modulare PV- und Hybridsystemtechnik 159
Erzeugung der zwischenharmonischen Frequenzen ist eine aktive Last notwendig. Hierfür kann die Leistungselektronik des Wechselrichter selbst verwendet werden. Durch einen ge-eigneten Eingriff in die WR-Steuerung muss ein Anregungssignal überlagert werden. Wichtig ist es, ein geeignetes Anregungssignal zu generieren, welches unter den Randbedingungen des Energienetzes, der WR-Steuerung und der Auswertung zu optimalen Ergebnissen führt. Das Messverfahren erfordert die Messung und Digitalisierung der Netzspannung und des einge-speisten Stroms. Die Weiterverarbeitung erfolgt in einem Mikrocontroller. Mit Hilfe der Fou-rieranalyse kann dann die frequenzabhängige Netzimpedanz berechnet werden.
Bei einem mehrfrequenten Anregungssignal erhält man für jede vorhandene Frequenz einen Impedanzwert. Über die Approximation der einzelnen Impedanzen ist eine Bestimmung des 50 Hz Impedanzwertes möglich.
2.3.2.5 Zusammenfassung
Die Verbreitung und Akzeptanz von dezentralen Erzeugungsanlagen im Verbundnetz erfor-dern neue Methoden zur Netzausfallerkennung, damit eine ungewollte Inselnetzbildung, mit den daraus entstehenden Gefahren vermieden werden kann. Zur Gewährleistung der Sicher-heit im Versorgungsnetz müssen geeignete Maßnahmen zum Schutz von Personen und tech-nischen Einrichtungen vorgesehen werden.
Die bisher bekannten aktiven oder passiven Verfahren haben alle ihre spezifischen Vor- und Nachteile. Besonders bei den passiven Verfahren besteht eine Unsicherheit bei der Erkennung eines Netzausfalles. Die aktiven Verfahren erzeugen teilweise große Störungen auf dem Ver-sorgungsnetz, die besonders bei einer weiten Verbreitung von Eigenerzeugungsanlagen ein Problem darstellen.
Darüber hinaus bestehen weltweit sehr unterschiedliche Anschlussbedingungen und Richtli-nien, welche Verfahren zulässig sind. In Deutschland und Österreich wird die ENS favorisiert, die als Bestandteil eine Impedanzmessung vorsieht. Diese Methodik ist in dem Normenent-wurf DIN VDE0126 spezifiziert.
An diesen Entwurf angelehnt wurde ein neues Verfahren zur Netzimpedanzmessung unter-sucht. Ziel ist es ein Verfahren zu entwickeln welches möglichst rückwirkungsarm die Netz-impedanz messen kann. Das Messverfahren zur Impedanzmessung mit zwischenharmoni-schen Frequenz soll sich zur Integration in einen selbstgeführten Wechselrichter eigenen. Als weitere Entwicklungsschritte steht die Umsetzung der Idee, der Aufbau der Schaltung, sowie umfangreiche Messungen bevor. Dieses wird in einem eigenständigen Projekt weiter bearbei-tet.
2.3.2.6 Literatur
[1] Die kapazitive Impedanzmessung bietet mehr Sicherheit K.-W. Köln, Sonnenenergie & Wärmetechnik 4/95, Seiten 22-26
[2] Prevention of Islanding in grid-connected photovoltaic-systems, Progress in Photovoltaic: Ressearch and Applications 7/1999 M. E. Ropp, M. Begovic, A.Rohatgi

160 Modulare PV- und Hybridsystemtechnik Abschlussbericht
[3] A new approach to islanding detection of dispersed generators with self- commutated static power converters. IEEE Transactions on po-wer delivery,vol. 15 no 2, 2000 S. J. Huang
[4] Development and Testing of an approach to anti-islanding in Utility- Interconnected Photovoltaic systems J. Stevens, Sandia National Laboratories 2000
[5] DE 195 22 496 C1 Verfahren zur Messung der Netz-Impedanz bei netzgekoppelten Wechselrichtern Siemens AG, 80333 München
[6] A. Blache: Netzimpedanzüberwachung als integraler Bestandteil der Betriebsfüh-rung eines Netzeinspeisegerätes
[7] DE 195 04 271 C1 Verfahren und Vorrichtung zur Impedanzmessung in Wechselstromnetzen sowie Verfahren und Vorrichtung zur Verhinderung von Inselnetzen K.-W. Köln, 37077 Göttingen
[8] Projektdokumentation: Analyse der Netz - Impedanzmessungen und Synthese einer Ersatzschaltung, A. Netzband, ISET 1998
[9] Projektdokumentation: Voruntersuchungen zur ENS, H. Faßhauer, ISET 1997
[10] Diplomarbeit I: Untersuchungen zur Schätzung der Quellenimpedanz des öffentlichen Stromversorgungsnetzes, V. Kremer, ISET 1998
[11] Diplomarbeit II: Entwicklung eines Systems zur Impedanzmessung des Stromversorgungsnetzes, V. Kremer, ISET 1999
Normen:
[VDE0126] DIN VDE 0126 Entwurf, April 1999, Selbsttätige Freischaltstelle für Photovoltaikanlagen einer Nennleistung ≤ 4,6 kVA und einphasiger Paralleleinspeisung über Wechselrichter in das Netz der öffentlichen Versorgung
[VDEW] Richtline für den Parallelbetrieb von Eigenerzeugungsanlagen mit dem Niederspannungsnetz der Elektrizitätsversorgungsunternehmen, 1991

Abschlussbericht Modulare PV- und Hybridsystemtechnik 161
2.3.3 Flexibler Betriebsführungsbaustein (Ch. Siedle)
Modular aufgebaute Energieversorgungssysteme stellen hinsichtlich Komplexität und Flexibi-lität hohe Anforderungen an die Betriebsführung und Regelungstechnik der Stromrichter. Di-gitale Konzepte auf Mikrocontrollerbasis sind für die Realisierung sehr gut geeignet. Zusätz-lich werden zu Zwecken von Energiemanagement, Synchronisation, Fernsteuerbarkeit und Fehlerdiagnose in der Regel Kommunikationsmöglichkeiten benötigt.
Im Rahmen des Projekts wird zur Bewältigung der angeführten Aufgaben eine universell ein-setzbare Rechnerkarte entwickelt, die im Wesentlichen aus einem Digitalen Signalprozessor (DSP) zur Regelung der Leistungselektronik und einem Microcontroller für Betriebsführung und Kommunikation besteht.
Abbildung 2-58 Rechnerkarte (links) und zugehörige Aufsteckkarte (rechts)
Im Berichtszeitraum wurde die Rechnerkarte überarbeitet und zur Erleichterung der Soft-wareentwicklung eine Aufsteckkarte mit Speicherbausteinen, Digital-Analog-Wandler und Leuchtdioden entwickelt (Abbildung 2-58).
Die Kommunikation zwischen Signalprozessor und Microcontroller wird derzeit über die PC-104-Schnittstelle der Rechnerkarte abgewickelt, da sich der Microcontroller noch auf einer separaten Karte befindet (Abbildung 2-59). Die Kommunikationssoftware wird auf dieser Hardware-Kombination entwickelt.
Der Microcontroller ist in der Lage, über die USB- oder die CAN-Schnittstelle Messwerte und Regelgrößen aus dem Signalprozessor in Echtzeit auf einen PC zu übertragen, wo diese dann ähnlich einem Oszilloskop visualisiert werden können. Im Berichtszeitraum wurde hier-zu die Windows-Software für den PC entwickelt (Abbildung 2-60). Es können bis zu acht Größen gleichzeitig dargestellt werden. Darüber hinaus bietet die Software die Möglichkeit, auf einzelne Speicherzellen der Rechnerkarte gezielt zuzugreifen sowohl lesend als auch schreibend.

162 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Abbildung 2-59 Kopplung der Rechnerkarte (vorn) über die PC-104-Schnittstelle mit
einem Microcontrollerboard (hinten)
Abbildung 2-60 Bildschirmkopie der Oszilloskopfunktion

Abschlussbericht Modulare PV- und Hybridsystemtechnik 163
3 Gestaltung und Steuerung modularer regenerativer Energieversorgungssysteme
3.1 Grundlagen der Modellbildung in Stromrichternetzen (A. Engler)
3.1.1 DC/DC-Wandler (CUK); getaktete Systeme
Dem Entwickler stehen heute zahlreiche Werkzeuge für das Design elektronischer Schaltun-gen oder elektrischer Systeme zur Verfügung. In diesem Beitrag wird am Beispiel eines bidi-rektionalen Cuk-Wandlers gezeigt, wie eine Regelung mit Rechnerunterstützung entworfen und verifiziert werden kann. Dazu werden folgende Programme verwendet:
• C (Programmiersprache)
• SIMPLORER (Simec)
• PSPICE (MicroSim)
• MATLAB (Mathworks Inc.)
Natürlich sind nicht alle oben aufgeführten Programme für den Reglerentwurf notwendig, vielmehr soll gezeigt werden wie man mit Hilfe von Simulation einen Entwurf unterstützen kann.
Das Problem bei der Simulation getakteter Stromversorgungen ist das Vorhandensein sehr unterschiedlicher Zeitkonstanten, nämlich Millisekunden (Speicher und Filter) und Mikrose-kunden (Taktung und Schaltflanken). Das führt zu sehr langen, eventuell nicht tragbaren Si-mulationszeiten oder sogar zu numerischen Fehlern [4]. Deshalb empfiehlt es sich, geeignete Modelle (z. B. State Space Averaging) der Schaltung herzuleiten und mit ihnen den Regler-entwurf durchzuführen. Am Ende jedoch sollte der Entwurf mit einer Simulation verifiziert werden, bei der die spätere Implementation (insbesondere die Taktung) nachvollzogen wird.
3.1.1.1 Der Cuk-Wandler
3.1.1.1.1 Allgemeines
Während seiner Arbeiten an der Universität in Pasadena/USA beschäftigte sich S. Cuk mit der Analyse und Modellierung von getakteten Stromversorgungen [1]. Bei der Betrachtung der Reihenschaltung von hoch- und tiefsetzenden Konvertern entdeckte er den Cuk-Wandler15. Dabei handelt es sich um einen hoch- und tiefsetzenden bidirektionalen DC/DC-Wandler, dessen Grundschaltung in Abbildung 3-1 dargestellt ist. Er besteht aus je zwei Drosseln und Kondensatoren (System vierter Ordnung). Weiterhin werden noch zwei Schalttransistoren16 benötigt. Diese werden komplementär geschaltet. In der Literatur wird der Cuk-Wandler auf-grund der wenigen benötigten Bauteile als "optimales System" bezeichnet. Durch geeignete
15 Der Cuk-Wandler wurde 1980 patentiert (Patent ist aufgelaufen). 16 Ersetzt man einen Schalter durch eine Diode, so ist nur ein unidirektionaler Energiefluss möglich.

164 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Kopplung der magnetischen Bauteile kann der Schaltrippel des Stroms unterdrückt werden. Auch ohne magnetische Kopplung ist der Rippel im Ein- und Ausgang gering, da bedingt durch die Topologie jeweils eine Serieninduktivität vorhanden ist.
3.1.1.2 Der gesteuerte Betrieb
Wird der Cuk-Wandler mit einem Pulsweitenmodulator gesteuert, ergibt sich eine Gleich-spannungsverstärkung in Abhängigkeit des Tastverhältnisses wie folgt:
U U DDaus ein= −
−1 mit D: Tein/(Taus+Tein).
Abbildung 3-1 Prinzip des Cuk-Wandlers (SIMPLORER Eingabe)
Die Spannungsabfälle innerhalb der Schaltung sind vernachlässigbar, d.h. die Ausgangsspan-nung bleibt unter Belastung weitgehend konstant. Inwieweit der gesteuerte Betrieb jedoch geeignet ist, soll im Folgenden untersucht werden. Dazu wurde zunächst ein Pulsweitenmodu-lator und ein Abtastautomat für eine geglättete Bereitstellung von Strom- und Spannungswer-ten entworfen. Hierzu bot sich die Verwendung von Zustandsautomaten (Petri-Netze) an (sie-he Abbildung 3-2). Ziel ist eine quasi digitale Modellierung, die Rückschlüsse auf eine späte-re Implementation des Algorithmus auf einem Mikro-Controller zulässt. Der "Takt" der Steu-erung wird durch die Frequenz des Dreiecksignals bestimmt. Die Abtastzeitpunkte für Strom und Spannung sind so gewählt, dass man einen geglätteten17 Mittelwert erhält, der unverzö-gert ist. Außerdem ist die Abtastung (Abbildung 3-2; Z11_7) - sie erfolgt nur einmal während einer Periode des Dreiecksignals - zur PWM und Steuerung (Regelung) synchronisiert. Die "abgetasteten" Werte bleiben so bis zur nächsten Abtastung konstant, sind also quasi zeitdis-kret18. Die PWM wird in bekannter Weise mit einem Dreieckvergleich durchgeführt - hier mit dem Wert 0, so dass sich ein Tastverhältnis von D = 0.5 einstellt. Mit den in Abbildung 3-2 erzeugten Ansteuersignalen (Rechteck1,2) wird der Cuk-Wandler (siehe Abbildung 3-1) an-gesteuert. Zusätzlich wird er mit einem rechteckförmigen Laststrom beaufschlagt, um Rück-schlüsse auf sein Verhalten ziehen zu können.
17 Der Schaltrippel wird eliminiert! 18 Die Verwendung von "discrete-Blöcken" erlaubt eine zusätzliche Amplitudendiskretisierung.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 165
Abbildung 3-2 Pulsweitenmodulator (SIMPLORER)
Wird der Cuk-Wandler gesteuert betrieben, so neigen die Ströme (IL1samp, IL2samp) zu schwach gedämpften Schwingungen (siehe Abbildung 3-3). Dies ist auf die Dominanz von reaktiven Bauelementen in der Schaltung zurückzuführen. Ohmsche Anteile sind kaum ent-halten, was für einen hohen Wirkungsgrad des Konverters eine Voraussetzung ist. Die geringe Dämpfung der Schaltung macht einen Entwurf einer Regelung notwendig.
Abbildung 3-3 Sprungantwort des Cuk-Wandlers
In den zwei folgenden Plots (Abbildung 3-4, Abbildung 3-5) wird die mit SIMPLORER simulierte Schaltung und eine Messung gegenübergestellt. Dabei wird bei der entladenen Schaltung die PWM sprungartig von 0 auf 25 % gesteuert. Es soll gezeigt werden, wie aussagekräftig Simulation ist. Um die Messung am Versuchsaufbau und die Simulation vergleichbar zu machen, wurden die ohmschen Widerstände der Simulation an den Wirkungsgrad der Versuchsschaltung angepasst. Die Verläufe zeigen eine hohe Übereinstimmung. Das größere Schwingen der Spannung an der Koppelkapazität (UC1) ist

166 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Schwingen der Spannung an der Koppelkapazität (UC1) ist darin begründet, dass die Verluste in der Simulation konzentriert (in L1, L2) angenommen wurden.
Abbildung 3-4 Simulierter Einschaltsprung (Simplorer)
Abbildung 3-5 Gemessener Einschaltsprung (PWM 0 -> 25 %)
Grundsätzlich ist an dieser Stelle anzumerken, dass bei der Simulation insbesondere auf die Einstellung der Integrationsparameter (Verfahren, Integrationsschrittweite) geachtet werden muss, da Fehleinstellungen zu falschen Ergebnissen führt. Deshalb müssen die Ergebnisse auch immer einer kritischen Prüfung unterzogen werden.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 167
3.1.1.3 State-space Averaging
Die Grundidee dieses Verfahrens ist - wie der Name sagt -, die zu beschreibende Schaltung in die zwei durch die Schaltzustände bestimmten Teilsysteme zu zerlegen und entsprechend dem eingestellten Tastverhältnis zu gewichten.
Anwendung auf den Cuk-Wandler
Abbildung 3-6 zeigt die beim Cuk-Wandler abhängig von der Schalterstellung entstehenden Teilsysteme.
Abbildung 3-6 State-space Averaging; Anwendung auf den Cuk-Wandler im Leerlauf
Ziel des State Space Averaging ist die Beschreibung der Schaltung in der Zustandsdarstel-lung:
&x Ax Buy Cx
= +=
mit x: Zustandsvektor, y: Ausgangsvektor, u: Steuervektor,
A: Systemmatrix, B: Steuermatrix, C: Ausgangsmatrix.
Die Beschreibung erfolgt für den Leerlauf, da hier aufgrund der geringen Dämpfung die größ-ten Schwierigkeiten für die Auslegung einer Regelung zu erwarten sind. Zunächst müssen die Gleichungen der beiden Teilsysteme 1 und 2 entsprechend der Abbildung 3-6 aufgestellt wer-den:
−−−
−
=
002/10001/10
2/12/12/200001/1
1
CC
LLLRLR
A
−−
−−
=
002/100001/1
2/102/2001/101/1
2
CC
LLRLLR
A

168 Modulare PV- und Hybridsystemtechnik Abschlussbericht
=
000
1/1 L
B C [ ]1000=
=
2121
UCUCILIL
x [ ]Ubattu = .
Das oben aufgestellte Gleichungssystem beschreibt den Cuk-Wandler bei Anregung durch die Eingangsspannung (E1). Als Ausgangsgröße wurde lediglich die Spannung der Ausgangska-pazität (UC2) gewählt. Die Steuermatrix B und die Ausgangsmatrix C unterscheiden sich für die Teilsysteme nicht und wurden deshalb nicht getrennt aufgeschlüsselt. Um zur endgültigen Form der Zustandsdarstellung zu gelangen, werden die Teilmatrizen - hier A1 und A2 - ent-sprechend dem Tastverhältnis19 D gewichtet (State-space averaging):
A A1 A2= + −* *(D D1 ) .
Das so hergeleitete Modell ist für konstantes Tastverhältnis und Eingangsspannung linear. Die Taktung der Schaltung ist eliminiert. Aus der Zustandsbeschreibung kann direkt ein rege-lungstechnisches ESB abgeleitet werden (Abbildung 3-7).
Abbildung 3-7 Regelungstechnische Darstellung des Cuk-Wandlers (SIMPLORER)
Die Herleitung der Steuermatrix B für die Variation des Tastverhältnisses D (Kleinsignal-verhalten) ist nicht so offensichtlich. An dieser Stelle soll deshalb lediglich auf [1] verwiesen werden.
Übertragungsfunktion des Cuk-Wandlers
Das in Matrizenform vorliegende Modell ohne Taktung vereinfacht die Analyse erheblich, da sie direkt mit einer relativ großen Schrittweite erfolgen kann. Die untenstehende Übertra-gungsfunktion PWM/Ausgangsspannung (Abbildung 3-8) wurde mit Hilfe von Matlab (Mathworks Inc.) errechnet (Schaltung aus Abbildung 3-2 mit D=0.6). Die Phasenverschie-
19 Achtung: D beschreibt hier das Tastverhältnis und nicht - wie in der Zustandsdarstellung üblich - die Durch-gangsmatrix!

Abschlussbericht Modulare PV- und Hybridsystemtechnik 169
bung von 180° bei niedrigen Frequenzen ist auf die Umkehr von Ein- und Ausgangsspannung zurückzuführen. Die Übertragungsfunktion enthält zwei konjugiert komplexe Polstellen und eine konjugiert komplexe Nullstelle. Grundsätzlich hätte die Analyse des Frequenzganges auch mit dem SIMPLORER-Tool Experimenteller Frequenzgang bei der getakteten Schaltung oder mit der regelungstechnischen Beschreibung durchgeführt werden können.
Abbildung 3-8 Übertragungsfunktion Cuk-Wandler (PWM-Uaus; MATLAB)
3.1.1.4 Verwendung von Ersatzstrom- und Spannungsquellen zur Beschreibung
Im vorangehenden Kapitel wurde der Cuk-Wandler mit seinen Differentialgleichungen be-schrieben und daraus ein regelungstechnisches ESB mit eliminierter Taktung abgeleitet (Sta-te-space averaging).
In [1], [4], [5] wird auch die Möglichkeit ausgeführt, ein elektrisches ESB mit gesteuerten Strom- und Spannungsquellen herzuleiten. So kann z. B. die Sekundärseite des Cuk-Wandlers prinzipiell wie in Abbildung 3-9 dargestellt werden.
Abbildung 3-9 Cuk-Wandler mit ersetzten Schaltern; Prinzip Sekundärseite

170 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Dabei gilt für die Spannungsquelle:
DUU CKoppel *−=
und für die Stromquelle
DuelleSpannungsqII *)(=
mit D: Tastverhältnis.
I(Spannungsquelle) entspricht der Summe von IL1 und IL2 (Abbildung 3-1). In dem Beitrag von M. Giesselmann [5] für das EPE-Tutorial97 wurde das oben skizzierte Verfahren mit Hilfe des Simulationstools PSPICE umgesetzt (Abbildung 3-10). Dabei wurde der Cuk-Wandler als diskrete Schaltung und mit Strom- und Spannungsquellen eingegeben. Abbildung 3-11 (ein Subsheet) zeigt das averaged Switch Model, mit dessen Hilfe die Taktung elimi-niert wird. So ist ein direkter Vergleich der Modelle mit einer Simulation möglich. Ein Simu-lationsergebnis ist in Abbildung 3-12 dargestellt. Die Verläufe des Eingangsstroms, der Span-nung der Koppelkapazität und die Ausgangsspannung verlaufen für beide Modelle identisch. Natürlich sind den Verläufen der getakteten Schaltung die typischen Dreieckanteile überla-gert.
Abbildung 3-10 Vergleich geschaltetes Modell, Linearisierung (PSPICE, aus [7])

Abschlussbericht Modulare PV- und Hybridsystemtechnik 171
Abbildung 3-11 Linearisierung des Cuk-Wandlers mit PSPICE (aus [7])
Abbildung 3-12 Einschwingvorgang Cuk-Wandler (MsimProbe-Ausgabe; aus [7])
3.1.1.5 Simulation des Cuk-Wandlers mit C
Die Motivation trotz leistungsfähiger Tools eine Simulation zu programmieren kann vor al-lem drei Gründe haben:
• Geschwindigkeitsvorteil
• Flexibilität (hardwarenahe Simulation)
• Exportierbarer Softwarecode.
Diese Vorgehensweise kann nur dann empfohlen werden, wenn ein überschaubares System mit einer begrenzten Anzahl von Zustandsgrößen vorliegt. Die Motivation einer C-Implementation im vorliegenden Fall war die Berücksichtigung eines prozessorspezifischen

172 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Timings. Da einzelne Schaltvorgänge betrachtet werden sollen, wurde das State-space Avera-ging nicht angewendet.
Kern einer Simulation ist das Integrieren der systembeschreibenden Differentialgleichungen. Diese sind im Folgenden dargestellt (Ausschnitt aus Quellcode):
void calc_derivatives( double x[], double k[] ) if (Switch1 == 1) /* switch 1 closed */ k[0] = (Ubatt - Non_St_s.Ur1) / L_1; /* d il1 / dt */ k[1] = (- Non_St_s.Ur2 - x[2] - x[3]) / L_2; /* d il2 / dt */ k[2] = x[1] / C_1; /* d uc1 / dt */ k[3] = (x[1] - Iload) / C_2; /* d uc2 / dt */ ; if (Switch2 == 1) /* switch 2 closed */ k[0] = (Ubatt - x[2] - Non_St_s.Ur1) / L_1; /* d il1 / dt */ k[1] = (-Non_St_s.Ur2 - x[3]) / L_2; /* d il2 / dt */ k[2] = x[0] / C_1; /* d uc1 / dt */ k[3] = (x[1] - Iload) / C_2; /* d uc2 / dt */ ; if ((Switch1 != 1) && (Switch2 != 1)) /* no switch closed */ k[0] = (Ubatt -x[2] - x[3] - Non_St_s.Ur1 - Non_St_s.Ur2) / (L_1 + L_2); /* d il1 / dt */ k[1] = k[0]; /* d il2 / dt */ k[2] = x[0] / C_1; /* d uc1 / dt */ k[3] = (x[0] - Iload) / C_2; /* d uc2 / dt */ ; /* calc_derivatives */
Abbildung 3-13 Listing der Differentialgleichungen (C-Code)
Wie man dem oben stehenden Listing entnehmen kann, werden der Funktion die Zustands-größen x[ ] übergeben und damit deren zeitliche Ableitungen berechnet. Die Werte k[ ] wer-den anschließend einer Integrationsfunktion übergeben, die die neuen Zustände errechnet. Dies könnte im einfachsten Fall eine Euler-Integration sein:
)(*)()1( nkhnxnx +=+
mit h: Integrationsschrittweite und t = n * h.
Aufgrund der Taktung des Cuk-Wandlers liegen drei verschiedene Topologien vor, für die eine Fallunterscheidung getroffen wird:
• Schalter 1 geschlossen oder Freilauf (Schalter 2)
• Schalter 2 geschlossen oder Freilauf (Schalter 1)
• kein Schalter angesteuert / kein Freilauf

Abschlussbericht Modulare PV- und Hybridsystemtechnik 173
Abbildung 3-14 Ausgabe der C-Simulation; nicht komplementäre Taktung
Die Ergebnisse aus Abbildung 3-14 zeigen den Cuk-Wandler mit Dreipunktregelung. Hierbei wurden die Differentialgleichungen mit dem Runge-Kutta Verfahren 4. Ordnung gelöst. Die Doppelimpulse entsprechen der prozessorspezifischen Implementation der Versuchsschal-tung.
3.1.1.6 Current-mode Regelung
Abbildung 3-15 Current-mode Regelung (aus [3])
Eine sehr verbreitete und pragmatische Methode getaktete Stromversorgungen zu regeln, ist die sogenannte Current-mode-Regelung (siehe Abbildung 3-15). Dabei wird der Strom in den Drosseln mit Hilfe einer (synchronisierten) Zweipunktregelung schnell eingeregelt. Hierfür

174 Modulare PV- und Hybridsystemtechnik Abschlussbericht
werden meistens spezielle Schaltkreise (z. B. CS3842) eingesetzt. Die Verzögerungen durch die Induktivitäten werden so eliminiert und überlagerte Spannungsregelungen vereinfacht. Eine Current-mode-Regelung ist aber nicht immer unproblematisch. Bei Tastverhältnissen > 0.5 treten vom Referenzwert abweichende und streuende Ausgangsströme (siehe Abbildung 3-16) auf. Zwar hat dies keinen Einfluss auf eine eventuell implementierte überla-gerte Spannungsregelung (geschlossener Regelungskreis), wohl aber auf die Stromform, die sich dann verschlechtert. Zur Entschärfung dieses Problems wird häufig eine Slope-Kompensation, bei der dem Referenzwert (Abbildung 3-15: iref) ein Sägezahn überlagert wird [2], verwendet. Die Current-mode-Regelung soll hier nicht weiter untersucht werden, sollte aber im Rahmen eines Beitrages zur Regelung eines Cuk-Wandlers nicht unerwähnt bleiben.
Abbildung 3-16 Mehrdeutige und streuende Ausgangsströme bei der Current-mode Rege-
lung (aus [3])
3.1.1.7 Zustandsregelung
Sowohl Stabilität als auch die Geschwindigkeit von Einschwingvorgängen werden aus-schließlich von der Lage der Pole einer Übertragungsfunktion bestimmt. Es liegt nun nahe, einen Regler so zu entwerfen, dass die Pole des geschlossenen Kreises bestimmte Werte in der linken Halbebene annehmen. Man spricht in diesem Fall von Polvorgabe oder von Pol-verschiebung. Eine einfache und elegante Vorgabe von Polen kann mit einem Zustandsregler erfolgen [5]. Dabei werden keine neuen Pole hinzugefügt. Die Zustandsgrößen - sie kenn-zeichnen oftmals einen Energieinhalt - eines Systems beschreiben den jeweiligen "Zustand" vollständig, in dem sich die Strecke befindet.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 175
Abbildung 3-17 Zustandsregelung
Ein Cuk-Wandler enthält vier Energiespeicher (je zwei Drosseln und Kondensatoren). Da diese bekannt und weitgehend konstant sind, bietet es sich an, eine Zustandsregelung zu ent-werfen. Die Regelung beruht auf dem Prinzip der Rückführung der Zustandsgrößen (siehe Abbildung 3-17) und wird eigentlich bei linearen Systemen angewendet. Beim Cuk-Wandler muss also die Gültigkeit eines linearen Ansatzes geprüft werden.
Die Zustandsgrößen werden entsprechend der Schaltung wie folgt gewählt:
• die Ströme der zwei Drosseln (Abbildung 3-1: L1 u. L2)
• die Spannung des Koppelkondensators (Abbildung 3-1: C1)
• des Ausgangskondensators (Abbildung 3-1: C2)
Da die vier Zustandsgrößen beim Cuk-Wandler mit vertretbarem Aufwand (Sensoren) erfasst werden können, wird eine vollständige Zustandsrückführung untersucht (siehe Abbildung 3-18). Ziel einer Reglerauslegung ist also die Bestimmung der geeigneten Rückführungskoef-fizienten (in diesem Beitrag für den kontinuierlichen Betrieb).
In [6] wird für die Bestimmung der Rückführungskoeffizientenmatrix R z. B. das Verfahren von J. Ackermann vorgeschlagen. Da dieses auch in Matlab implementiert ist, werden die Koeffizienten mit diesem Programm ermittelt. Die Wirkungsweise der Rückführung ergibt sich aus dem folgenden Zusammenhang:
Ag A B * R= −
Hierbei beschreibt die Systemmatrix Ag das zustandsgeregelte System. Aus vorstehend ge-nannter Beziehung ist nur R unbekannt. Bei dem Verfahren von J. Ackermann wird nicht Ag vorgegeben, sondern die Pole (P) der geregelten Strecke, so dass der entsprechende Matlab-Befehl "R=acker(A,B,P)" lautet20. Nachdem die Vorgehensweise zur Bestimmung der Pole
20 Die hier verwendete Steuermatrix B beschreibt das Kleinsignalverhalten bei Variation des Tastverhältnisses!

176 Modulare PV- und Hybridsystemtechnik Abschlussbericht
bekannt ist, bleibt noch die Frage offen, wohin die Pole verschoben werden sollten. Auch hier gibt es Optimierungsverfahren (z. B. Ricatti), wofür geeignete Kriterien formuliert werden müssten. Geht man davon aus, dass die im System enthaltenen Zeitkonstanten für den jewei-ligen Anwendungsfall ausreichend sind, so besteht die einfache Möglichkeit, durch Linksver-schiebung der dominanten Pole das System "aktiv zu dämpfen".
Abbildung 3-18 Realisierung einer vollständigen Zustandsrückführung mit Simplorer
Dies wurde für das Beispielsystem aus Abbildung 3-2 wie folgt realisiert:
Pole ohne Zu-standsrückführung (D=0.5)
Pole mit Zustands-rückführung (D=0.5)
-50+7084i -50+7084i
-50-7084i -50-7084i
-50+359i -450+359i
-50-359i -450-359i
Tabelle 3-1 Polverschiebung beim Beispielsystem
Daraus resultieren die Rückführungskonstanten aus Abbildung 3-18, in der die vollständige Zustandsrückführung abgebildet ist. Die zusätzliche Konstante stellt den Arbeitspunkt ein. Berücksichtigt man nur das langsame konjugiert komplexe Polpaar, so müsste der Cuk-Wandler laut der Berechnung nach Abbildung 3-19 seinen eingeschwungenen Zustand nach 14 ms erreicht haben. Um dies zu überprüfen, wird die Simulation mit rechteckförmiger Strombelastung wiederholt (siehe auch Abbildung 3-3). Es wird jedoch ein kleinerer Last-strom gewählt, um in der Nähe des Arbeitspunktes der Linearisierung zu bleiben.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 177
Das durch die Polvorgabe zu erzielende Ergebnis wird mit der Simulation der getakteten Schaltung (Abbildung 3-20) gut getroffen. Auch hier wird nach ca. 14 ms der stationäre Zustand erreicht. Dass hier eine stärkere Dämpfung als bei der analytischen Berechnung (Abbildung 3-19) vorhanden ist, liegt an der nachgebenden Spannung; der Arbeitspunkt wird verlassen. Eine Veränderung des Systemverhaltens ist auch bei größeren Lastströmen zu er-kennen, wohingegen eine geringere Dämpfung auftritt.
Die Überprüfung (SIMPLORER; "Experimente") des für unsere Anwendung relevanten Ein-gangsspannungsbereiches ergab, dass eine Adaption der Rückführungskoeffizienten für die Stabilität der Regelung nicht notwendig ist. Um die Ausgangsspannung jedoch bei Last-schwankungen in einem vernünftigen Band zu halten, muss die Regelung um einen Integrator erweitert werden, z. B. parallel zum Zustandsregler.
Abbildung 3-19 Analytische Berechnung der zu erwartenden Sprungantwort
Abbildung 3-20 Simulation der getakteten Schaltung (Abbildung 3-1) mit Z
führung nach Abbildung 3-18 ustandsrück-

178 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3.1.1.8 Zusammenfassung
Im vorliegenden Beitrag wurde der Cuk-Wandler vorgestellt und untersucht.. Er ist ein bidi-rektionaler, hoch- und tiefsetzender DC/DC-Wandler. Er besticht durch seinen einfachen Aufbau, ist aber dennoch nicht einfach zu regeln. Mit verschiedenen Werkzeugen und einer mathematischen Beschreibung des Wandlers (State-space averaging) wurde eine Zustandsre-gelung entwickelt. Gezeigt wurde, dass verschiedene Werkzeuge (SIMPLORER, PSPICE, Matlab, C) und Methoden (diskrete Simulation, State-space averaging) den Reglerentwurf unterstützen. Dabei wurden die Ergebnisse mit Vergleichsrechnungen (Simulationen) verifi-ziert. Dieses ist wichtig, da die Ergebnisse einer Simulation immer auf Plausibilität geprüft werden sollten, um Einstellungsfehler des Programms oder eine fehlerhafte Modellierung zu vermeiden. Obwohl die einzelnen Simulationstools über spezifische Vorteile verfügen, über-decken sie sich aufgrund ihrer rasanten Entwicklung in der Funktionalität immer stärker. Welches Simulationstool daher für ein bestimmtes Problem eingesetzt wird, hängt stark von subjektiven Kriterien des Benutzers ab, z. B. ob er das Programm kennt oder eine einfache, möglichst intuitive Bedienung möglich ist. Durch Simulationen und experimentelle Überprü-fungen konnte gezeigt werden, dass der Cuk-Wandler trotz der aus der Literatur bekannten Probleme der Stabilität der Regler mit einer Zustandsregelung beherrscht werden kann. Der Cuk-Wandler stellt somit eine, in modular strukturierten DC- und AC-Versorgungs systemen sehr vielseitig einsetzbare, Komponente für die Energieaufbereitung dar. Aufgrund seiner minimalen Zahl an Bauelementen kann er als eine optimale Variante für einen bidirek-tionalen DC/DC-Steller angesehen werden.
3.1.1.9 Literatur
[1] Cuk S.: Modelling, Analysis and Design of Switching Converters, Thesis at California Institute of Technology, Pasadena California 1977.
[2] Billings K.: Switchmode Power Supply Handbook, McGraw-Hill, Inc., 1989.
[3] C. K. Tse, W. C. Y. Chan: Chaos from a Current-Programmed Cuk Converter, International Jour-nal of Circuit Theory and Applications, 1995.
[4] Edel. H: Allgemeiner Ansatz zur Linearisierung von Schaltnetzteilen. ELEKT-RONIK 1992, Heft 12, S. 76 .. 81.
[5] Giesselmann, M. et. al: Simulation of Power Electronics, EPE Tutorial, Trondheim 9/97

Abschlussbericht Modulare PV- und Hybridsystemtechnik 179
3.1.2 Annäherung von Stromrichtern durch Spannungsquellen
Wendet man das State-Space-Averaging, das im vorigen Kapitel erfolgreich für die Model-lierung von getakteten DC/DC-Wandlern angewendet wurde, auf Wechselrichter an, so erzielt man ebenfalls starke Vereinfachungen. Ein getakteter Wechselrichter, also z. B. eine H-Brücke, lässt sich nach entsprechender Mittelwertbildung durch eine kontinuierliche Span-nungsquelle und der entsprechenden Filterverzögerung annähern. Auch hier kommen die Vor-teile
• einer verkürzten Rechenzeit und
• weniger numerische Probleme
zum Tragen.
VI_VOLL_7SYNC
Stromsummation
i_mess
u_mess
u_inv
u_ef f
Px
i_ef f
Qx
f _kor
u_kor
f req
vi_inv1
i_mess
u_mess
u_inv
u_ef f
Px
i_ef f
Qx
f _kor
u_kor
f req
vi_inv
u_korrektur1u_korrektur
Usoll
I_Last
U_SI_Inv ert
u-control1
Usoll
I_Last
U_SI_Inv ert
u-control
du/dt kap. Lasts
1induk. Last
fdifff_korrektur1f_korrektur
Udiff
U_invert1
U_invert
U_Netz
Q1Q
P1P
s
1
Integrator1s
1
Integrator
I_Drossel1
0.0
Gain4
-K-
Gain3
0.0
Gain2
-K-
Gain1
-K-Gain0.0
Constant
0.0C
-K-1/R
0.01/L
Abbildung 3-21 Spannungsquellenmodell zur Simulation von Stromrichternetzen in MatLab
Ein Beispiel für eine solche Simulation ist der Parallelbetrieb zweier Stromrichter aus Abbildung 3-21. Die Summationstellen mit der Kennzeichnung Stromsummation stellt ei-nen Netzknoten dar. Dieser kann ohmsch, kapazitiv oder induktiv belastet werden. Die mit diesem Sheet erzielten Simulationsergebnisse stimmen mit den Versuchen aus Kapitel 3.2.2.3 überein.

180 Modulare PV- und Hybridsystemtechnik Abschlussbericht

Abschlussbericht Modulare PV- und Hybridsystemtechnik 181
3.2 Dezentrale Regelungskonzepte für die Kurzzeitregelung von regenerativ gespeisten Versorgungsnetzen (A. Engler)
3.2.1 Untersuchungen zur Frequenz- und Spannungshaltung
Um die Frequenz- und Spannungshaltung - entspricht einer Wirk- und Blindleistungsregelung in konventionellen Netzen - zu untersuchen, werden die Modelle für die Wirk- und Blindleis-tungsregelung in Stromrichternetzen hergeleitet und ihre Stabilität geprüft. Es wird davon ausgegangen, dass die Stromrichter auf ein starres Netz arbeiten. Dies entspricht der Parallel-schaltung vieler Stromrichter. Weiterhin wird das Verhalten der unterlagerten Spannungsrege-lung in den Stromrichtern vernachlässigt. Vorausgesetzt wird auch ein vernachlässigbarer ohmscher Anteil der Netzkoppelinduktivität, so dass eine weitgehende Entkopplung von Wirk- und Blindleistungsregelung vorliegt.
Wesentliches Element der unten beschriebenen Regelung für den Stromrichterparallelbetrieb und somit für die Modellierung zu berücksichtigende Übertragungsfunktion ist die Wirk- und Blindleistungserfassung. Sie wird durch ein Verzögerungsglied zweiter Ordnung angenähert.
3.2.1.1 Wirkleistungsregelung
Das Modell zur Bestimmung der Stabilität der Wirkleistungsregelung ist in Abbildung 3-22 dargestellt. Es enthält als wesentliche Elemente das oben erwähnte PT2-Glied als Ersatz für die P/Q-Erfassung, die Verzögerung Tmech, den Statikfaktor st1, einen Integrator, der die Fre-quenzdifferenz zur Phasendifferenz integriert und die Streckenverstärkung vf. Sie ist eine Funktion der Spannung U0,eff und der Filterinduktivität Lf:
vf = U 0,eff 2/ω*Lf
mit vf: Streckenverstärkung P(δ), U0,eff : Effektivwert der Nennspannung, ω: Kreisfrequenz des Netzes, Lf: Filterinduktivität.
Diese Gleichung läßt sich aus Gleichung ableiten, indem man die Näherung
sin(δ) = δ
für kleine Winkeldifferenzen δ zwischen den Spannungsquellen anwendet und die Spannun-gen mit dem Nennwert U0,eff annimmt. vf repräsentiert die Kurzschlussleistung der Ersatz-spannungsquellen für die Wechselrichter mit der Impedanz Lf.

182 Modulare PV- und Hybridsystemtechnik Abschlussbericht
st1
st1
Modell für Verzögerung derMeßwerterfassung
Netz
mech
f
T
Netzo ff =
P
P
∆f
δ∆f
v
--
Strecke
f
Abbildung 3-22 Modell zur Beurteilung des Stabilität der Wirkleistungsregelung
In Abbildung 3-22 sind im wesentlichen alle Größen festgelegt. Die Streckenverstärkung vf ergibt sich wie oben beschrieben. Tmech muss eine ausreichende Entkopplung der Wirk- und Blindleistungsregelung gewährleisten und der Statikfaktor st1 wird durch systemtechnische Randbedingungen bestimmt. In der folgenden Simulation und den Laborversuchen wurde st1 = 1 Hz/ Pnenn gewählt. Kritischer und freier Parameter ist der Faktor st1'.
Die Phasenvorsteuerung st1' bewirkt eine Gegenkopplung, deren Einfluss übersichtlich mit einer Wurzelortskurve dargestellt werden kann. Zu diesem Zweck muss Abbildung 3-22 so umgestellt werden, dass alle Übertragungsglieder mit Ausnahme von st1' zusammengefasst werden. Die Auswertung mit der Funktion rlocus, die das Programm MATLAB zur Verfü-gung stellt, ergibt dann die Abbildung 3-23.
-500 -400 -300 -200 -100 0 100-500
0
500
real
jω
Abbildung 3-23 Wurzelortskurve zur Ermittlung einer zulässigen Phasenvorsteuerung st1' mit st1=1Hz/Pnenn (x: Polstelle, o: Nullstelle, +: optimaler Arbeitspunkt)

Abschlussbericht Modulare PV- und Hybridsystemtechnik 183
Eine Wurzelortskurve wird wie folgt beschrieben:
Die Wurzelortskurve liegt symmetrisch zur reellen Achse. Sie beginnt für k=0 in den Polen des offenen Kreises und endet für k=+ ∞ in seinen Nullstellen, wobei s= ∞ als (n-m)-fache Nullstelle mitzuzählen ist.
mit k: Verstärkung der Gegenkopplung; n,m: Zähler- und Nennergrad.
Entsprechend kann man der Abbildung 3-23 entnehmen, dass eine Stabilisierung der Wirk-leistungsregelung ohne Phasenvorsteuerung, d., h. st1' = 0, mit st1 =1Hz/Pnenn nicht möglich ist. In diesem Fall befinden sich zwei niederfrequente Pole in der rechten Halbebene. Die Ver-größerung von st1' ermöglicht einen aperiodisch gedämpften Betrieb. Praktisch ist dieser Be-trieb jedoch nicht zu empfehlen, da hier die Ausgleichsvorgänge zwischen den Stromrichtern zu lange dauern, was zu hohen Strömen führt. Eine weitere Vergrößerung von st1' verursacht wieder zwei konjugiert komplexe Pole. Man kann sie so legen, das ein schneller Ausgleichs-vorgang zwischen Stromrichtern möglich ist. Jedoch bei zu großer Phasenvorsteuerung wan-dern die konjugiert komplexen Pole in die rechte Halbebene, was wiederum zu Instabilitäten führt.
Die Forderung nach einem möglichst geringen Energiebedarf zur Synchronisation bei einem Frequenzsprung des Netzes kann zur Festlegung des Parameters st1' verwendet werden. Dieser Energiebedarf wurde in Abbildung 3-24 mit Simulationen bestimmt. Der Verlauf zeigt ein ausgeprägtes Minimum bei st1' = 0,00043. Dieser Arbeitspunkt ist in Abbildung 3-23 mit +-Zeichen markiert. Der dazugehörige Bodeplot wird in Abbildung 3-25 und der Zeitverlauf der Sprungantwort in Abbildung 3-26 gezeigt. Der Synchronisationsvorgang ist nach ca. 60 ms abgeschlossen. Da die Wirkleistungsregelung in diesem Arbeitspunkt nur schwach gedämpft ist, kann es notwendig werden, eine kleinere Phasenvorsteuerung zu verwenden. So können mögliche Resonanzen bei der Netzbildung vermieden werden. Jedoch wird die benötigte Energie für einen Synchronisationsvorgang erhöht. Bei sehr flachen Statiken zeigt die Untersuchung mit der Wurzelortskurve, dass ein Verzicht auf die Phasenvorsteuerung möglich wird. Da in diesem Fall eine sehr hohe Frequenzauflösung notwendig wird, entstehen Implementierungsprobleme.
0 0.2 0.4 0.6 0.8 1x 10-3
0
500
1000
1500
2000
2500
st1'
W/W
s
Abbildung 3-24 Energiebedarf für die Synchronisation eines Stromrichters auf ein starres
Netz bei einem Frequenzsprung von 1Hz in Abhängigkeit der Phasenvor-steuerung st1'

184 Modulare PV- und Hybridsystemtechnik Abschlussbericht
10-1 100 101 10265
70
75
80
85
Ver
st./d
B
10-1 100 101 102-100
-50
0
50
Frequenz/Hz
Pha
se/G
rad
Abbildung 3-25 Bodediagramm zur Übertragungsfunktion P(f) nach Abbildung 3-22 im
optimalen Arbeitspunkt
0 0.02 0.04 0.06 0.08 0.10
1000
2000
3000
4000
5000
6000
7000
Zeit/s
P/W
Abbildung 3-26 Einschwingverhalten der Wirkleistung bei Synchronisation mit einem
Frequenzunterschied von 1 Hz im optimalen Arbeitspunkt

Abschlussbericht Modulare PV- und Hybridsystemtechnik 185
3.2.1.2 Blindleistungsregelung
Das Modell zur Bestimmung der Stabilität der Blindleistungsregelung ist in Abbildung 3-27 dargestellt. Es enthält als wesentliche Elemente ebenfalls das PT2-Glied als Ersatz für die P/Q-Erfassung, die Verzögerung Terreg, den Statikfaktor st2 und die Streckenverstärkung vu:
vu= ∆ UWR,eff / ω*Lf
mit vu: Streckenverstärkung Q(∆UWR,eff), UWR,eff: Effektivwert der Wechselrichterspannung, ω : Kreisfrequenz des Netzes, Lf: Filterinduktivität.
Diese Gleichung lässt sich ableiten, indem man die Näherung
cos(δ) = 1
für kleine Winkeldifferenzen δ zwischen den Spannungsquellen anwendet. vu repräsentiert den Kurzschlussstrom der Ersatzspannungsquellen für die Wechselrichter mit der Nennspan-nung U0,eff und der Impedanz Lf.
st2Modell für Verzögerung derMeßwerterfassung
Netz
WR
erreg
StreckeU
U
T
Netzo UU =
Q
Q
∆U
-
vu
Abbildung 3-27 Modell zur Beurteilung des Stabilität der Blindleistungsregelung
Geht man bei der Blindleistungsregelung auch von einer festgelegten Verzögerung Terreg aus, so verbleiben keine Freiheitsgrade mehr. Es besteht also nur die Möglichkeit, die Stabilität der Anordnung bei der gewünschten Steigung der Spannungs-/Blindleistungsstatik zu überprüfen. Die Auswertung der Wurzelortskurve in Abbildung 3-28 ergibt, dass die Anordnung bis zu einer Steigung von ∆U0,eff = 24 % bei Qnenn = 3600 var aperiodisch gedämpft ist.

186 Modulare PV- und Hybridsystemtechnik Abschlussbericht
-600 -500 -400 -300 -200 -100 0 100-500
0
500
real
j ω
24 % Steigungder Spannungs-statik
Abbildung 3-28 Wurzelortskurve bei Variation des Statikfaktors st2
3.2.2 Untersuchungen zum Parallelbetrieb von Stromrichtern
Der maßgebende Aspekt der Erweiterbarkeit von Inselsystemen ist die Parallelschaltbarkeit von Stromrichtern und die Entwicklung dafür geeigneter Regelungsalgorithmen. Hierbei sind verschiedene Vorgehensweisen möglich; jedoch bietet nur die Parallelschaltung von als Spannungsquellen geregelten Stromrichtern ohne Kommunikation sehr hohe Redundanz und die Möglichkeit, verteilte Systeme aufzubauen. Zu betonen ist hier, dass hohe Redundanz auch von großer Relevanz für die USV-Technik ist.
Insbesondere die hier betrachteten Systeme kleiner Leistung sind meistens einphasig. Aber aufgrund der typischen Schieflastsituation sollten auch dreiphasige Systeme durch Sternschal-tung drei einphasiger Wechselrichter aufgebaut werden. Deshalb werden im Folgenden Rege-lungen für einphasige Stromrichter entwickelt, die dann ebenfalls in dreiphasigen Anlagen Anwendung finden können.
3.2.2.1 Kenngrößen in einphasigen Systemen
Bekannte Verfahren für den geforderten kommunikationslosen Parallelbetrieb basieren auf Blind- und Wirkleistungsstatiken oder Spannungs- und Frequenzstatiken21. Es werden also die Netzgrößen Spannung und Frequenz als Medium für die Koordination der Stromrichter genutzt.
Die Verwendung von Statiken erfordert allerdings, dass die Wirk- und Blindleistung oder der Betrag der Spannung und die Frequenz der jeweils gesteuerten Komponente bekannt sind. Für
21Mit Hilfe von Statiken werden bei einem Generator (Stromrichter) in Abhängigkeit der Netzfrequenz und spannung Wirk- und Blindleistungsaufnahme bestimmt . Dabei bestimmt die Frequenz die Wirkleistung und die Spannung die Blindleistung. Die mit Statiken geregelten Komponenten verhalten sich wie ein primärgeregeltes Netz. Die Steilheit der Statiken bestimmt auch die Leistungsaufteilung zwischen den an der Netzbildung beteiligten Komponenten. Die Statiken sollen an dieser Stelle nicht weiter vertieft werden, sondern es soll auf die zahlreiche Literatur hingewiesen werden: [1, 2]

Abschlussbericht Modulare PV- und Hybridsystemtechnik 187
symmetrisch belastete, dreiphasige Komponenten ist die Bestimmung der momentanen Leis-tungen und des Betrages für die Spannung bekannt [3, 4]. Da aber in den hier betrachten In-selsystemen einphasige Batteriestromrichter zum Einsatz kommen, musste speziell für ein-phasige Systeme eine schnelle Leistungs- und Betragsbestimmung entwickelt werden. Die im folgenden hergeleiteten und auch patentierten Verfahren [5] lehnen sich an die übliche Zei-gerdarstellung dreiphasiger Systeme an und bilden die Basis für die unten vorgestellten An-sätze zur Regelung parallelschaltbarer Wechselrichter.
3.2.2.1.1 Zerlegung von einphasigen Größen in Komponenten
Zeiger sind für einphasige Systeme nicht direkt bestimmbar, da hier nur zeitliche, hauptsäch-lich sinusförmige Verläufe vorliegen. Die Zeigerdarstellung erfordert aber orthogonale Kom-ponenten. Die Grundidee der neuen Verfahren zur Bestimmung der Kenngrößen in einphasi-gen Systemen besteht darin, die Komponenten iα, iβ bzw. uα, uβ der benötigen Zeiger mit gegengekoppelten verallgemeinerten Integratoren entsprechend Abbildung 3-29 zu generie-ren.
ui
uααi-
-
uβ
βi
ωN
ωN
Abbildung 3-29 Erzeugung orthogonaler Komponenten aus zeitlichen Verläufen
Neben der Eigenschaft, orthogonale Komponenten zu generieren, hat diese Anordnung zwei weitere wichtige Eigenschaften für den Einsatz in gestörten Umgebungen wie der Strom-richtertechnik:
• Filterwirkung: Die Ausgangsgrößen beschreiben die Grundschwingung.
• Da das System gegengekoppelt ist, driften die Integratoren nicht.
Die Integrationsverstärkungen der Anordnung müssen auf die Netzfrequenz abgestimmt wer-den. Das Proportionalglied dieser Anordnung ermöglicht die Einstellung der Güte der Filter-eigenschaften [6]. Im eingeschwungenen Zustand überdeckt sich die α-Komponente mit der Grundschwingung der Eingangsgröße. Die Funktionsweise wird in Abbildung 3-30 verdeut-licht. Dabei wurde das Eingangssignal verrauscht, um auch die Filterwirkung demonstrieren zu können.

188 Modulare PV- und Hybridsystemtechnik Abschlussbericht
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08-1.5
-1
-0.5
0
0.5
1
1.5
Zeit/s
Eingangsgröße
α β
Abbildung 3-30 Komponentenzerlegung einphasiger Größen mit dem VI und inhärente
Filterung
3.2.2.1.2 Offset
Hat das Eingangssignal einen Gleichanteil, so wird er auf dem Integrator für die β-Komponente abgebildet. Somit ist die α-Komponente immer offsetfrei. Bei einer Span-nungsregelung kann ein solcher Offset durch die ohnehin benötigte Offsetregelung vermieden werden. Bei der Stromerfassung ist der Offset im Fall bestimmter Gleichrichtlasten (Halbwel-lenlast) unvermeidlich. Der Raumzeiger für das Signal beschreibt dann keinen Kreis mehr.
In [7] wurde ein anderer Ansatz zur Komponentenbestimmung gewählt. Hier wurde ein Tief-pass und eine negative Vorsteuerung (P-Glied) zur Erzeugung der senkrechten β-Komponente verwendet. Nachteil dieser Anordnung ist die fehlende Filterwirkung.
3.2.2.1.3 Bestimmung des Betrags (Effektivwerts) von einphasigen Größen
Wenn hier von Betragsbestimmung einer sinusförmigen Größe gesprochen wird, ist die Län-ge, also der Betrag, des beschreibenden Vektors gemeint. Diese Größe repräsentiert ebenfalls den Spitzenwert der Spannung û oder des Stroms î.
Zur Betragsbestimmung werden die oben beschrieben Komponenten verwendet. Für z. B. die Spannung gilt dann:
|u| = û = 22βα uu + und
Ueff = û \ 2 .
Analog können Amplitude î und Effektivwert Ieff der Grundschwingung des Stromes ermittelt werden. Die dazugehörige Messanordnung ist in Abbildung 3-31 dargestellt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 189
u uα
-
βu
-
U effU√
12√
Abbildung 3-31 Anordnung zur Bestimmung des Betrags einphasiger Größen
0 0.02 0.04 0.06 0.08 0.1
-2
-1
0
1
2
Zeit/s
Eingangsgröße
Betrag
Abbildung 3-32 Betragsbildung mit dem VI (Simulation)
Um die Wirkungsweise dieser Anordnung zu demonstrieren, wird in Abbildung 3-32 ein Si-nus mit einer Anfangsamplitude von eins, die sich nach 55 ms verdoppelt, ausgewertet. Nach ca. 10 ms (entspricht einer halben Periode) ist die Betragsmessung fast eingeschwungen!
3.2.2.1.4 Wirk- und Blindleistungsbestimmung in einphasigen Systemen
Bei der Bestimmung der Wirk- und Blindleistung wird von der gemittelten komplexen Scheinleistung, die sich wie folgt berechnet, ausgegangen:
S = P + jQ = 0,5 u i*
u und i sind die komplexen Zeiger für Spannung und Strom. i* ist der konjugiert komplexe Zeiger für den Strom, der sich aus i ergibt:
i* = î e-j(ω t + ϕ i)=iα-j iβ.
Durch Einsetzen der Komponenten uα, uβ, iα und iβ, die mit der Anordnung nach Abbildung 3-29 bestimmt werden, in die folgende Gleichung, können Wirk- und Blindleistung berechnet werden:
P + jQ = 0,5 u i* = 0,5 ( uα + j uβ ) ( iα j iβ ).

190 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Nach der Komponentenzerlegung bestimmt sich die Wirkleistung zu:
P = 0,5 ( uα iα + uβ iβ )
und die Blindleistung zu:
Q = 0,5 ( uβ iα - uα iβ ).
Die dazugehörige Messanordnung ist in Abbildung 3-33 dargestellt.
u uα
α
β
βu
-
-
-
i i
i
-
-
Q
0,5
P
0,5
Abbildung 3-33 Anordnung zur Bestimmung der momentanen Wirk- u. Blindleistung in
einphasigen Systemen
Sie zeichnet sich vor allem durch
• Verzicht auf Nulldurchgangserkennung,
• Berechnung der Leistung in weniger als einer Periodendauer mit Ausgabe von Gleichgrößen und
• den geringen Aufwand
aus.
Um die Funktion der neuartigen Messanordnung aus Abbildung 3-33 zu demonstrieren, wur-de sie mit einem Testsignal, das zwischen Spannung u. Strom eine Phasenverschiebung hat, beaufschlagt. Nach 45 ms erfolgt ein Lastsprung. Der Spitzenwert (Betrag) des Stroms ver-größert sich dabei von 1 auf ca. 1.7 A. Die Spannung bleibt konstant.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 191
0 0.02 0.04 0.06 0.08 0.1-2
-1
0
1
2
i/A,
u/V
0 0.02 0.04 0.06 0.08 0.1-0.5
0
0.5
1
1.5
Zeit [s]
P/W
, Q/v
ar
u
i
P
Q
Abbildung 3-34 Leistungsmessung mit dem VI (Verbraucherzählpfeilsystem)
In Abbildung 3-34 sind die Ausgangsgrößen der zeitkontinuierlichen P,Q-Bestimmung (P(t), Q(t)) abgebildet. Die Gesamtanordnung ist in ca. 25 ms eingeschwungen. Sprünge in der Leistung werden in weniger als 10 ms bestimmt und stehen als Gleichgrößen zur Verfügung. Anzumerken ist an dieser Stelle der Definitionskonflikt, der dadurch entsteht, dass Wirk- und Blindleistung eigentlich nicht innerhalb einer Periode definiert sind.
Gleichanteile in den Eingangsgrößen verursachen ein Pulsieren der Ausgangsgrößen, so dass eine zusätzliche Mittelwertbildung erforderlich wird. Trotz des bei Gleichanteilen leicht ver-zögerten aber richtigen Ergebnisses profitiert man durch dieses Verfahren auch hier vom Ver-zicht einer Nulldurchgangserkennung. Grundsätzlich ist es auch möglich, andere Signalfor-men als einen Sinus mit der Anordnung zu vermessen. Aufgrund ihrer Filterwirkung wird bei periodischen Signalen nur die Grundschwingung bewertet. Die Messanordnung bestimmt also bei solchen Signalen im wesentlichen die Grundschwingungswirk- und Grundschwingungs-blindleistung.
3.2.2.2 Netzstützende Stromquelle
Eine mit Statiken gesteuerte Stromquelle wird besonders vorteilhaft in verteilten Systemen eingesetzt, da sie ohne zusätzlichen Verkabelungsaufwand für Kommunikation auskommt. Ebenfalls ist der Aufwand für die Regelung überschaubar. Deshalb wurde für eine solche Komponente ein Regelungskonzept entwickelt.
Die gewählte Bezeichnung Netzstützende Stromquelle soll die Kompatibilität des Verfahrens zur konventionellen Energieversorgungstechnik betonen. Entsprechend können so geregelte Komponenten in Standardnetzen eingesetzt werden. Möglich ist aber auch der Betrieb in Net-zen, die von einem Stromrichter aufgebaut werden (Master/Slave-Prinzip). Eine denkbare Anwendung wären PV-Wechselrichter für die Netzkopplung. Mit Hilfe der zusätzlichen Blindleistung kann die Spannung in verteilten Systemen stabilisiert oder in ihre Lastflussver-

192 Modulare PV- und Hybridsystemtechnik Abschlussbericht
teilung eingegriffen werden. Ob es wirtschaftlich sinnvoll ist, Photovoltaikanlagen an der Frequenzregelung zu beteiligen, ist zu überprüfen. Hierbei muss die Leistung der PV mitunter abgeregelt werden.
3.2.2.2.1 Implementierung
Die Regelung in Abbildung 3-35 basiert hauptsächlich auf der oben entwickelten schnellen Bestimmung von Betrag und Komponenten der Spannung. Da die orthogonalen Spannungs-komponenten bekannt sind, wird eine einfache Vektorregelung für einphasige Systeme mög-lich. Dafür charakteristisch ist die entkoppelte Beeinflussung von Wirk- und Blindstrom durch Vorgabe von Gleichgrößen. Das geschieht durch Multiplikation der Stromsollwerte iwirk, soll und iblind, soll mit den normierten Werten der entsprechenden Komponenten uα bzw. uβ. Der so berechnete Stromsollwert kann dann wie in Abbildung 3-35 mit einem P-Regler einge-stellt werden.
fOO
O
O
_
_
_
_
f
st
ωT
ωT
Ui
iωref
α
β
PWM
bref
1
SR
SR
2
Stromregelung
Statiken Betrags- und Komponentenbildung
Vektorregelung für einphasiges System
st
u
u
uNetziNetz
Netz
α
uNetz
uVI
Netzu
βu
U
U
u
u
Abbildung 3-35 Regelungskonzept für eine netzstützende Stromquelle
Es ist eine Entkopplung der Wirk- und Blindleistungsregelung aufgrund der verzögerten Stromregelung notwendig. Im Fall des P-Reglers berechnet sich die für die Entkopplungskon-stanten benötigte Verzögerung TSR zu:
TSR = L / RL (1+v')
mit L: Induktivität der Filterdrossel, RL: ohmscher Anteil der Filterdrossel, v': Steckenverstärkung einschließlich des P-Reglers.
Dabei wurde die Totzeit des Umrichters nicht berücksichtigt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 193
3.2.2.2.2 Vorgabe der Leistungssollwerte
Die Sollwerte für Wirk- und Blindleistung werden durch Statiken, d. h. durch die gewichtete Abweichung der Netzfrequenz und -spannung von ihren jeweiligen Nennwerten, bestimmt. Die Gewichtungs- oder Statikfaktoren st1 und st2 sind an die Leistung des Stromrichters anzu-passen. Eine Frequenzänderung bewirkt die Vorgabe von Wirkleistung:
Psoll = st1 ( fNetz, Nenn - fNetz )
und eine Spannungsabweichung die Vorgabe von Blindleistung:
Qsoll = st2 ( UNetz, Nenn - UNetz)
Die Eigenschaften einer so gesteuerten Stromquelle sind denen eines rotierenden Generators ähnlich. Bei einem PV-Stringwechselrichter kann ein MPP-Regler an die Stelle der frequenz-abhängigen Wirkleistungssteuerung treten. Aufgrund der bei konstanten Netzverhältnissen sinusförmigen Sollwertvorgabe am Stromregler wird nur Grundschwingungsleistung einge-speist.
3.2.2.2.3 Simulation zur Spannungsstützung
Der zeitliche Verlauf von Spannung und Strom bei einem Spannungseinbruch mit der oben beschriebenen Regelung ist in Abbildung 3-36 dargestellt. Zum Zeitpunkt t = 50 ms bricht die Spannung uNetz um 3 % ein. Dieser Einbruch wird durch die Betragsbestimmung festgestellt und daraus der Sollwert iblind,soll berechnet. Sofort wird der entsprechende Strom iNetz mit dem P-Regler eingestellt. Der Verlauf für den Wert der Blindleistung Qmess in Abbildung 3-36 ist aufgrund der zeitlichen Verzögerung der Blindleistungsbestimmung um ca. 7 ms verzögert.
Die Richtung der Spannungsstatik (Faktor st2 in Abbildung 3-35) wurde so gewählt, dass das Netz gestützt wird. Also verhält sich der Stromrichter bei einem Spannungseinbruch wie ein Kondensator, d. h. es wird ein voreilender Strom eingeprägt. Dies bewirkt in konventionellen Netzen eine Spannungserhöhung.
In [2] wird auch die Möglichkeit erläutert, durch Umkehr der Spannungsstatik Generatoren weicher (schwächer) zu gestalten. So wird eine zusätzliche virtuelle Koppelinduktivität erzeugt, was dem Gegenteil der Netzstützung entspricht.

194 Modulare PV- und Hybridsystemtechnik Abschlussbericht
0 0.02 0.04 0.06 0.08 0.1-6000
-4000
-2000
0
2000
i blin
d,w*1
00/A
, Q/v
ar
0 0.02 0.04 0.06 0.08 0.1-400
-200
0
200
400
Zeit/s
i Net
z*10
/A, u
Net
z/V
Qmess
iblind, w
uNetz
iNetz
Spannungs-einbruch
Spannungseinbruch
Abbildung 3-36 Spannungsstützung mit einphasigem, als Stromquelle betriebenem
Stromrichter (Simulation)
3.2.2.3 Parallelbetrieb von Spannungsquellen
Will man als Spannungsquellen geregelte Stromrichter parallel schalten, muss man folgende Bedingungen einhalten:
• Alle beteiligten Stromrichter benötigen eine identische Frequenz.
• Es sind nur kleine Spannungsdifferenzen zwischen den Stromrichtern zugelassen.
• Die Phasenunterschiede zwischen den Stromrichtern müssen sehr klein sein.
Lf2Lf1
WR2UWR1U netzU
Abbildung 3-37 Prinzip der Wechselrichterkopplung
Bei diesen Bedingungen wird von der Kopplung der Stromrichter über ihre typischerweise kleine Netzkoppelinduktivität, die zum Schutz des Filterkondensators vor Störungen aus dem Netz dient, ausgegangen (siehe Abbildung 3-37).
Will man bei dem Parallelbetrieb der Stromrichter auf Synchronisationsleitungen oder zusätz-liche Kommunikationseinrichtungen verzichten, benötigt jeder Stromrichter eine eigene Spannungs- und Frequenzreferenz. Die Referenzen weisen jedoch in der Regel für diesen Anwendungsfall nicht vernachlässigbare Toleranzen und Alterungseffekte auf. Weitere Fehler

Abschlussbericht Modulare PV- und Hybridsystemtechnik 195
entstehen bei der Strom- und Spannungserfassung und durch Temperaturabhängigkeiten der Bauteile.
Entsprechend muss jeder Stromrichter seine Frequenz, Phase und Spannung richtig einregeln. Dazu steht ihm der zeitliche Verlauf der Netzspannung und der seines Stroms als Information zur Verfügung.
3.2.2.3.1 Struktur der Regelung
Die hier entwickelte Regelungsstruktur (siehe Abbildung 3-38) verwendet netzkompatible Wirk- und Blindleistungsstatiken. Im Vergleich zu dem Verfahren aus [8] wurde ein Phasen-regelkreis eingeführt. So entfallen die dort geforderten Genauigkeiten für die Frequenzrefe-renz und es wird die freie Festlegung der Steigung der Wirkleistungsstatik ermöglicht. Wei-terhin ermöglicht die schnelle Erfassung von Wirk- und Blindleistung aus Abbildung 3-33 die Anwendung der Statiken auch in einphasigen Systemen. Die P/Q-Erfassung stellt somit die Grundlage der in dieser Arbeit entwickelten Regelung für den Parallelbetrieb von Spannungs-quellen dar.
i f
ϕ
P
Qu
urefTmech
Terreg
uo
st1
st1
StatikenEntkopplung Erzeugungder Spannungs-referenz
Leistungs-bestimmung mit VI
2st
OSZVI
fo
u
‘
Abbildung 3-38 Regelungsstruktur für die Erzeugung der Spannungsreferenz für den Pa-
rallelbetrieb von Spannungsquellen
Auffallend in Abbildung 3-38 sind die beiden PT1-Glieder Tmech und Terreg. Die PT1-Glieder wurden eingeführt, um Wirk- und Blindleistungsregelung bei Stromänderungen, die schneller als die Einschwingzeit der Messwerterfassung sind, zu entkoppeln. Auch sind sie notwendig, um die Frequenz und Spannung bei nichtlinearen Lasten (z. B. Gleichrichter) konstant zu hal-ten, da die P/Q-Bestimmung in diesem Fall pulsierende Ergebnisse liefert. Die gewählten Be-zeichnungen der Verzögerungen sollen die Analogie zu einer Maschine verdeutlichen. Hier haben das Trägheitsmoment (Tmech) und die Erregungszeitkonstante (Terreg) eine ähnliche Glättungswirkung. Die Größe der zu wählenden Verzögerung ist ein Kompromiss zwischen Überlastbarkeit der Stromrichter, die eine unverzögerte Regelung zur Vermeidung hoher Ausgleichsströme erfordert, und gewünschter Glättung bei nichtlinearen Lasten. Die Verzöge-rung wurde in der Simulation und in den Versuchen mit etwa 200 ms gewählt.

196 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die verzögerten Werte für P und Q werden zunächst den Statiken zugeführt um dann entspre-chend ihrer Wirkung das Spannungsreferenzsignal uref zu erzeugen. P bestimmt dabei die Fre-quenz und Q die Spannung. Der Funktionsblock OSZ in Abbildung 3-38 enthält somit die Funktion:
uref = |u| sin(2 π f t + ϕ ).
uref wird dann mit einer phasen- und amplitudengenauen Regelung eingestellt.
Die Implementierung der Kennlinie f(P) in den Algorithmus ist besonders vorteilhaft. So wird eine kritische Frequenzmessung für eine Wirkleistungsvorgabe P(f) vermieden, was das Ver-fahren vereinfacht und robuster macht.
3.2.2.3.2 Simulation von parallelgeschalteten Umrichtern
Für die folgend beschriebenen Ergebnisse wurde die Parallelschaltung von zwei Umrichtern mit dem oben entwickelten Verfahren simuliert. Die Simulation enthält auch die Spannungs-regelung der Umrichter. Weiterhin wurden die Messgrößen Spannung und Strom amplituden-diskretisiert. Ebenfalls wurde die Frequenzerzeugung diskretisiert um die Implementierung auf einem digitalen Signalprozessor besser zu beschreiben.
0 0.05 0.1 0.15 0.2
-500
0
500
Q1, Q
2 / va
r
Zeit / s
0 0.05 0.1 0.15 0.2
0
500
1000
1500
P 1 , P 2 /W
Zeit / s
0 0.05 0.1 0.15 0.2-10
-5
0
5
i 1, i2 /
A
Zeit / s
0 0.05 0.1 0.15 0.2-0.6
-0.4
-0.2
0
0.2
|u| di
ff/ V
Zeit / s
0 0.05 0.1 0.15 0.2
0
0.5
1
f diff /
rad/
s
Zeit / s
0 0.05 0.1 0.15 0.2
-200
0
200
u Grid
/ V
Zeit / s
Abbildung 3-39 Synchronisationsvorgang nach Aufschaltung zweier Umrichter auf eine
ohmsche Last

Abschlussbericht Modulare PV- und Hybridsystemtechnik 197
In Abbildung 3-39 ist der Synchronisationsvorgang von zwei gegeneinander verstimmten Umrichtern nach Aufschaltung auf eine ohmsche Last zum Zeitpunkt t=0 dargestellt. Die Verstimmung der Spannung beträgt etwa 2 Veff und die Frequenzabweichung 1 rad/s.
Die Spannungsdifferenz beträgt etwa 1 % der Nennspannung und stellt somit einen praxisre-levanten Wert dar. Zu Demonstrationszwecken wurde die Frequenzdifferenz 10 mal höher gewählt, als sie mit einem Standardquarz (max. Abweichung etwa 100 ppm im gesamten Temperaturbereich) auftreten würde.
Mit der entwickelten Regelung wird eine saubere Spannungsform auch während der Synchro-nisationsphase erreicht. Innerhalb von zwei Perioden klingen die erhöhten Ströme ab.
Die Phase und Frequenz der Umrichter wird mit den Wirkleistungen P1 und P2 angeglichen. Die Stufen im Frequenzunterschied fdiff, der eigentlich Null sein müsste, sind auf die simulier-te Frequenzquantisierung der digitalen Signalerzeugung zurückzuführen. Da die Frequenzsta-tiken der beiden Umrichter aufgrund der angenommenen Quarzungenauigkeiten nicht gleich sind, ist auch die stationär abgegebene Wirkleistung unterschiedlich. Dieser Wirkleistungsun-terschied ist der Grund dafür, dass sich i1 und i2 in Abbildung 3-39 nicht vollständig überde-cken.
Die Spannungsdifferenz zwischen den Stromrichtern wird mit Hilfe von Blindleistung verrin-gert. Da in der Simulation keine Blindlast vorgegeben wurde, arbeitet ein Umrichter induktiv und der andere kapazitiv. Dieser Vorgang kann mit dem Einfügen virtueller Induktivitäten verglichen werden.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-3
-2
-1
0
1
∆ f
/ rad
/s
Zeit / s
Frequenzänderung Umrichter 1
Abbildung 3-40 Frequenzveränderung der Umrichter bei Belastung mit ohmscher Last
Insbesondere durch die Einführung der Verzögerungen Tmech und Terreg (siehe Abbildung 3-38) verhält sich die Ausgangsspannung der Stromrichter wie ein primär geregeltes Netz. Dies wird in Abbildung 3-40 verdeutlich. Hierbei handelt es sich um den selben Synchronisationsvorgang wie in Abbildung 3-39. Durch vergrößerte Leistungsaufnahme bzw. -abgabe gleichen sich die Frequenzen der beiden beteiligten Umrichter schnell an und ihr Spannungsunterschied udiff wird 0. Aufgrund der ohmschen Last senken beide Stromrichter im weiteren Verlauf entsprechend der Zeitkonstanten Tmech gemeinsam ihre Frequenz. Ähnliches Verhalten hat die Spannung bei Belastung der Stromrichter mit Blindlasten.

198 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3.2.2.3.3 Synchronisation
Simulationsversuche haben gezeigt, dass das vorgestellte Verfahren aus Abbildung 3-38 auch dann noch stabil arbeitet, wenn zwei Stromrichter mit einem Phasenunterschied von 180° zusammengeschaltet werden. Die dabei auftretenden hohen Leistungen überschreiten aller-dings bei weitem die Stromrichterleistung. Entsprechend muss die Betriebsführung des Um-richters über eine Synchronisationsvorrichtung verfügen, die eine Zuschaltung auf ein Netz nur bei einer kleinen Phasendifferenz zulässt.
3.2.2.3.4 Experimentelle Ergebnisse
Um den oben ausgeführten Algorithmus für die Regelung des Parallelbetriebs von Span-nungsquellen zu verifizieren, wurde er in die Regelung des Batteriestromrichters Sunny Islands integriert. Die Wechselrichterregelung erfolgt mit ca. 8,3 kHz und wird mit einem Digitalen Signal Prozessor TMX320F240 der Firma Texas Instruments gerechnet. Der Batte-riestromrichter ist mit einer Nennleistung von 3,6 kW und einer Überlastbarkeit bis 6,6 kW für 20s angegeben. Für die folgend vorgestellten Messungen wurden zwei Sunny Islands kommunikationslos parallel betrieben.
Leerlauf. Die Untersuchung des Verhaltens im Leerlauf soll die erreichte Qualität des Ab-gleichs der Stromrichter durch das vorgeschlagene Verfahren demonstrieren. Hier sind insbe-sondere die Ströme zwischen den Stromrichtern zu beurteilen, was im Leerlauf am einfachs-ten ist. Weiterhin soll das Verhalten bei einer vorgegebenen Spannungs- und Frequenzdiffe-renz in Hinsicht auf die erzielte Entkopplung beider Regelungen verifiziert werden.
Abbildung 3-41 Zwei parallelgeschaltete Wechselrichter im Leerlauf
Abbildung 3-41 zeigt die Ströme zwischen den Stromrichtern im Leerlauf. Hierbei wurde beiden Stromrichtern eine Sollfrequenz f0 von 50 Hz und eine Spannung u0 von 230Veff

Abschlussbericht Modulare PV- und Hybridsystemtechnik 199
(WR1) bzw. 229 Veff (WR2) vorgeben. Es stellt sich ein pulsierender Gleichstrom mit einem Mittelwert von ca. 200 mA (WR1) bzw. +200 mA (WR2) ein. Dieser Gleichstrom ist auf geringe Fehler der Offset-Regelung des Wechselrichters, die einem Spannungsmittelwert von 0 V sicherstellt, zurückzuführen. Ein weiterer Effekt sind die rampenförmigen Ströme, die auf den Oberwellengehalt der Spannung zurückzuführen sind.
Parallelschaltung mit Frequenzdifferenz. Entsprechend der Funktion einer Frequenzstatik wird die Differenz zwischen den verschiedenen Werten von f0 der Stromrichter durch Auf-nahme bzw. Abgabe von Wirkleistung ausgeglichen. So wird eine gemeinsame mittlere Fre-quenz eingestellt; in Abbildung 3-42 sind dies 50,15 Hz. Da eine Frequenzstatik proportional regelndes Verhalten hat, könnte man eine Regelabweichung zu der durch die Frequenzstatik vorgegebenen Leistung annehmen. Dies ist jedoch nicht der Fall, da die Leistung nicht durch die Frequenz- sondern durch die Phasendifferenz bestimmt wird. Die Phase wiederum ent-steht aus der Integration der Frequenzdifferenz über die Zeit:
∫ ∆= dtfδ .
Dieses inhärente integrale Verhalten bewirkt eine genaue Einhaltung der von der Statik vor-gegebenen Wirkleistungsvorgabe.
Abbildung 3-42 Zwei parallelgeschaltete Wechselrichter im Leerlauf mit einer
Leerlauffrequenz 50,0 Hz (WR1) und 50,3 Hz (WR2)
In Abbildung 3-42 ist eine kleine Phasenverschiebung zwischen den Strömen und der Span-nung zu erkennen. Diese ist durch eine leichte Spannungsänderung der beiden Stromrichter aufgrund der Belastung zu erklären. Dadurch wird zusätzlich Blindleistung zwischen den Stromrichtern ausgetauscht.
Parallelschaltung mit Spannungsdifferenz. Theoretisch ist bekannt, dass eine Spannungs-differenz zwischen zwei über eine Induktivität gekoppelte Spannungsquellen zu Blindströmen

200 Modulare PV- und Hybridsystemtechnik Abschlussbericht
führt. Dieses konnte auch im Versuch bestätigt werden (Abbildung 3-43), indem die Nenn-spannung von Wechselrichter 2 um 4 Veff verstimmt wurde.
Abbildung 3-43 Zwei parallelgeschaltete WR im Leerlauf mit einer Spannungsdifferenz
von 4 Veff
In den Wechselrichtern wurde eine Blindleistungsstatik mit der Neigung st2= -2 % / 3,6 kVAr implementiert. Bei der eingestellten Verstimmung von 4 Veff zwischen den Stromrichtern ent-fallen 2 Veff auf jeden Stromrichter. Damit sollte sich die aufgenommene bzw. abgegebene Blindleistung zu:
Q= 2Veff / st2 =1565 VAr
mit st2: Faktor für die Spannungsstatik
ergeben.
Die Auswertung von Abbildung 3-43 ergibt aber eine Blindleistung von ca. 850 VAr. Die Blindleistung ist also geringer als die Berechnung mit dem Statikfaktor st2 ergibt. Dies ist typisch für Strecken mit proportionalem Verhalten und geringer Verstärkung. Der Wert aus obigen Gleichung muss um den Faktor
korr = vu st2 / ( vu st2 + 1 ) = 0.54
mit st2: Faktor für die Spannungsstatik, vu: Streckenverstärkung für Blindleistung
korrigiert werden (Fehler der Form v / (v+1) ). Physikalisch ist dies durch eine notwendige Restspannung zum Erzeugen der Blindleistung zu erklären. Die untersuchte Verstimmung entspricht ungefähr 1 % der Nennspannung eines Stromrichters. Bei starrer Kopplung der Stromrichter, d. h. st2 = 0, hätte sie zur einer Blindleistung von 1,8 kVAr geführt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 201
Lastaufteilung. Da die Parallelschaltung der Stromrichter mit Hilfe von Statiken geschieht, die ihrerseits mit Grundschwingungsleistungen gesteuert werden, wird prinzipiell auch nur die Grundschwingungsleistung auf die Stromrichter aufgeteilt. Somit wird die Aufteilung von Oberschwingungen durch die Impedanz und die Eigenschaften der Regelung der einzelnen Stromrichter bestimmt. In verteilten Netzen haben zusätzlich die Leitungen einen Einfluss. Um die dynamische Leistungsaufteilung sicherzustellen, sollten daher in einem System Stromrichter mit gleichem dynamischen Verhalten eingesetzt werden.
Abbildung 3-44 Versorgung einer ohmschen Last (2,8 kW) mit zwei parallelgeschalteten
Wechselrichtern
Abbildung 3-44 zeigt die Versorgung einer ohmschen Last von 2,8 kW mit zwei Stromrich-tern. Die Ströme sind nahezu identisch. Der Vergleich der Wirkleistungsabgabe der beiden Stromrichter ergab, dass die Wirkleistungsaufteilung besser als 1 % ist. Dies war zu erwarten, da die typischen Quarzfehler im Vergleich zur relativ steilen Neigung der Wirkleistungsstatik von 1 Hz / Pnenn klein sind.
Eine dynamische Lastaufteilung wird am Beispiel des Einschaltens von Halogenlampen in Abbildung 3-45 gezeigt. Auch hier werden gute Ergebnisse erzielt. Die Verwendung gleicher Stromrichter ermöglicht somit auch eine dynamische Lastaufteilung.
Nichtlineare Lasten. Bei Parallelschaltung von zwei gleichen Stromrichtern und aufgrund der Tatsache, dass die oben beschriebene Leistungsmessung ohne Nulldurchgangserkennung arbeitet, ist es möglich verschiedenste nichtlineare Lasten zur versorgen. Dies wird am Bei-spiel einer Phasenanschnittsteuerung (siehe Abbildung 3-46) und eines Föns im Halbwellen-betrieb (siehe Abbildung 3-47) belegt.

202 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Abbildung 3-45 Einschaltvorgang von Halogenlampen (1,5 kW) an zwei parallel-
geschalteten Wechselrichtern
Abbildung 3-46 Zwei Sunny Islands betreiben eine ohmsche Last und Glühlampen mit
Phasenanschnittsteuerung

Abschlussbericht Modulare PV- und Hybridsystemtechnik 203
Abbildung 3-47 Zwei Sunny Islands betreiben einen Heißluftfön im Halbwellenbetrieb
3.2.2.3.5 Optimierung durch übergeordnete Betriebsführung
Das vorgestellte Verfahren für den Parallelbetrieb von Stromrichtern ist grundsätzlich ohne übergeordnete Betriebsführung, d. h. ohne zusätzliche Kommunikation, funktionsfähig. Je-doch können je nach Grad der Verstimmung von Spannung und Frequenz der einzelnen Stromrichter aufgrund der oben erläuterten Toleranzen und Temperaturdifferenzen Ströme zwischen ihnen auftreten. Diese Ströme tragen nicht zur Versorgung von Lasten bei, sondern verursachen Verluste und reduzieren die Gesamtleistung des Systems [9]. Es besteht hier also ein Entwicklungsbedarf für ein Verfahren - es ist vielleicht aus der Netzleittechnik ableitbar -, das die Arbeitspunkte f0 und u0 (siehe Abbildung 3-38) abstimmt. Dies kann eventuell durch eine übergeordnete Betriebsführung, die die Leistungen der einzelnen Stromrichter auswertet, geschehen. Hierzu ist dann jedoch ein langsames Kommunikationssystem, z. B. der EIB, not-wendig.
3.2.2.3.6 Sekundärregelung mit Ladezustand
Untersucht werden sollte ebenfalls die Möglichkeit, f0 in Abhängigkeit des Ladezustands der Batteriebank des jeweiligen Stromrichters zu steuern. Der zu erwartende Effekt wäre eine Vergleichmäßigung des relativen Ladezustands aller im verteilten System enthaltenen Batte-riebänke ohne den Eingriff durch eine übergeordnete Betriebsführung. Voraussetzung ist al-lerdings eine qualitative Ladezustandserkennung [10]. Da dies ein übergeordneter Eingriff basierend auf dem integralen Verhalten einer Batterie wäre, kann er mit der Sekundärregelung im Verbundnetz verglichen werden.

204 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3.2.2.4 Literatur
[1] ISET, CRES, ITER, WIP: Development and Test of Modularly Expandable Generally Adaptable Hybrid Systems, Final Report EC-Project: Jou2-Ct94-0402, 1997.
[2] W. Leonhard: Regelung in der Elektrischen Energieversorgung, Teubner Studienbü-cher, Stuttgart, 1980.
[3] Markus Heller: Die doppelt gespeiste Drehstrommaschine für drehzahlvariable Pump-speicherkraftwerke, Dissertation, TU Braunschweig, 1998.
[4] V. Soares und P. Verdelho: Active power filter with neutral current compensation based on the in-stantaneous active and reactive current component id-iq method, EPE, Lausanne, 1999.
[5] A. Engler und B. Burger: Verfahren und Vorrichtung zur Bestimmung charakteristischer Größen aus einem zeitlich periodischem Signal, Deutsche Patentanmeldung Nr. 199 49 997.7, 1999.
[6] Bruno Burger: Transformatorloses Schaltungskonzept für ein dreiphasiges Inselnetz mit Photovoltaik und Batteriespeicher, Dissertation, Karlsruhe, 1997.
[7] G. Clos: Blindleistungskompensation mit dem Direktumrichter, Arbeiten aus dem Elektrotechnischen Institut der Universität, Karlsruhe, Karlsruhe, 1984.
[8] T. Kawabata et. al: Large capacity parallel redundant transistor UPS, IPEC, Tokyo, 1983
[9] J. Holtz und K. H. Werner: Multi-inverter UPS system with redundant load sharing control,IEEE Transactions on Industrial Electronics, 1990.
[10] M. Rothert und B. Willer: Ladezustandserfassung und Batteriemanagement für Batterie-stromrichter, 7. Entwickler-Forum Batterien, Ladekonzepte und Strom-versorgungsdesign, München, 2000.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 205
3.2.3 Einbindung weiterer Stromerzeugungsaggregate in modulare PV-Anlagen (B. Burger, A. Engler, P. Funtan, P. Strauß)
3.2.3.1 Generelle Aspekte
Um modulare elektrische Versorgungssysteme wirtschaftlich und zuverlässig einsetzen zu können, ist die Integration von Aggregaten mit hohem Speichervermögen, d. h. Dieselaggre-gate, Systeme auf Basis von Biomasse usw., unabdinglich. Bei der Integration solcher Strom-erzeuger in Versorgungssysteme treten zum Teil widersprüchliche Anforderungen auf:
• Zur Erzeugung ausreichender Redundanz müssen die Aggregate ihre netzbildende Fähig-keit behalten.
• Es muss ein einfaches Aufschalten auf ein eventuell vorhandenes Netz möglich sein; kost-spielige Synchronisationseinrichtungen sollten vermieden werden.
• Eine ausreichende Spannungsqualität muss erreicht werden.
Diesen Anforderungen stehen vorhandene kommerzielle Geräte, z. B. Standarddieselaggrega-te, und technische Randbedingungen, z. B. die Probleme beim Zusammenschalten von Span-nungsquellen, gegenüber. Abhängig von Generatortyp (ASG, SG) des Aggregats und der Art der Regelung, die elektronisch oder mechanisch sein kann, sind verschiedene Integrations-konzepte denkbar:
• Standardaggregat mit Asynchrongenerator (Sättigung) ohne Zusatzeinrichtung auf das Netz schalten.
• Standardaggregat mit Asynchronmotor (keine Sättigung) auf das Netz schalten.
• Standardaggregat mit Asynchrongenerator und umschaltbarer Kompensation zur Span-nungsanpassung auf das Netz schalten.
• Standardaggregat mit Asynchrongenerator über NTCs auf das Netz schalten.
• Aggregat mit Synchrongenerator, steuerbarer Fremderregung und elektronischer Dreh-zahlregelung auf das Netz synchronisieren.
• Standardaggregate allgemein mit verfügbaren Synchronisationseinrichtungen aufschalten.
Alle Konzepte verfolgen das Ziel, Überströme beim Aufschalten und Blindströme durch Fehlanpassung der Erregung der Generatoren zu vermeiden. Weiterhin muss durch die Eigen-schaften der Frequenzregelung eine gezielte Wirkleistungsabgabe gewährleistet sein.
3.2.3.2 Untersuchung zur Einbindung asynchroner Stromerzeuger
Um das Verhalten von Dieselaggregaten beim Aufschalten auf ein bestehendes Netz zu unter-suchen wurden zunächst Kopplungsversuche mit dem öffentlichen Netz durchgeführt. Das ausgewählte Aggregat besitzt folgende Kenndaten:

206 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Es handelt sich um ein Stromer-zeugungsaggregat mit Hubkolben-Verbrennungsmotor. Als Antriebs-motor wird ein luftgekühlter Vier-takt-Dieselmotor eingesetzt. Der 2-Zylindermotor ist ein Direktein-spritzer mit Druckumlaufschmie-rung. Der eingesetzte Asynchron-generator ist als selbsterregte, 2-polige Innenpolmaschine mit Aluminium-Käfigläufer ausge-führt. Konstruktion und Auslegung von Dieselaggregate erfolgten nach DIN ISO 8528 [3] bzw. DIN 6280 [4]. Ebenfalls wird eine Un-terscheidung nach Ausführungs-klassen getroffen, welche im we-sentlichen auf die Einhaltung von vorgegebenen Spannungs- und Frequenzbereichen definiert sind. Folgende Definitionen zu den Aus-führungsklassen werden getroffen:
T
A
A(B
A
Aövtu
A
AF
Typ SDK(D+E) 9 DRE
Nennleistung 9 kVA
Nennleistungsfaktor 0,8 cos ϕN
Nennfrequenz. B. 3000 1/min 50 Hz
Nenndrehzahl 3000 1/min
Toleranz d. Frequenz ± 7%
Nennspannung 3∼ 400 V
Nennstrom 3∼ 13 A
Nennspannung1∼ 230 V
Nennstrom1∼ 21,7 A
Toleranz der Spannung ±7 %
Motorhersteller Ruggerini
Motortyp MD 190
Motorleistung(A) 10,5 kW
Schutzart Gen./Schaltk.IP 55/43
Verbrauch(0,75 PN) 2,6 1/h
Tankinhalt 20 l
abelle 3-2 Kenndaten des Dieselaggregates
usführungsklasse 1
usführung mit geringen Anforderungen an das Spannungs- und Frequenzverhalten eleuchtungsanlagen oder einfache Elektroantriebe)
usführungsklasse 2
usführung für Verbraucher, bei denen die Anforderungen an das Spannungsverhalten dem ffentlichen Netz weitgehend entsprechen. Bei Lastwechseln können bezüglich der Spannung orübergehend Abweichungen, die größer sind als im öffentlichen Netz, auftreten. (Beleuch-ngsanlagen, elektromotorisch angetriebene Pumpen, Lüfter und Aufzüge).
usführungsklasse 3
usführung für erhöhte Verbraucheranforderungen an das Frequenz- und Spannungsverhalten ernmeldeeinrichtungen, frequenz- und spannungsempfindliche Einrichtungen).

Abschlussbericht Modulare PV- und Hybridsystemtechnik 207
Experimente zur Einbindung von Dieselaggregaten
Die durchzuführenden Untersuchungen beschränken sich auf Aggregate im kleinen Leis-tungsbereich, die im wesentlichen der Ausführungsklasse 1 zuzuordnen sind. Es handelt sich um Aggregate, an denen Verbraucher mit nur geringen Ansprüchen an die Netzqualität be-trieben werden können, was für den vorgesehenen Einsatzbereich ausreichend ist. Sehr oft verfügen die Maschinen über keine regelungstechnischen Eingriffsmöglichkeiten. So war es erforderlich entsprechende Modifikationen am Aggregat vorzunehmen. Unter anderem wurde durch Neujustierung der Drosselklappe die Motordrehzahl bei einer Leistung von 6 kW auf ca. 50 Hz eingestellt (Abbildung 3-48).
47
48
49
50
51
52
53
0 20 40 60 80 100 120 140
Pn [%]
f [H
z]
lineare f / P Kennlinie des Generators Versuch a)lineare f / P Kennlinie des Generators Versuch b)
Abbildung 3-48 Angepasste Frequenz/Leistungskennlinie vor (a) und nach (b)
der Drehzahleinstellung am Motor
200
210
220
230
240
250
260
0 20 40 60 80 100 120 140
Pn [%]
U [V
]
lineare U / P Kennlinie des Generators Versuch a)lineare U / P Kennlinie des Generators Versuch b)
Abbildung 3-49 Spannungsanhebung durch zusätzliche Kondensatoren
(Versuch a 100 µF; Versuch b 149 µF)

208 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Des weiteren wurde die Ausgangsspannung durch eine Ergänzung der Erregerkapazitäten von 100 auf 149 µF so angepasst, dass sie entsprechend 230 V beträgt (Abbildung 3-49).
Um ein möglichst synchrones Zuschalten des Diesels zu gewährleisten ist sicherzustellen, dass die Spannungen des Drehstromsystems nach Amplitude, Frequenz und Phasenlage mit dem Netz übereinstimmt. Für diesen Zweck entwickelte Synchronisiereinrichtungen sind mit sehr hohem Kostenaufwand verbunden und stehen in keinem Verhältnis zu dem relativ klei-nen Leistungsspektrum, indem sie zum Einsatz kommen würde. Kostengünstige Möglichkei-ten zur Synchronisierung, für einfach strukturierte Hybridsysteme wären deshalb von großem Vorteil.
Um den Synchronisierungszeitpunkt bestimmen zu können, wurde zur optischen Kontrolle die Dunkelschaltung in den Versuchsaufbau integriert. An zwei in Reihe geschalteten Glüh-lampen liegt die Differenz der Strangspannungen von Netz und Generator, so dss sie nicht aufleuchten, wenn beide stets übereinstimmen. Bei gleicher Amplitude und Phasenfolge, je-doch geringem Frequenzunterschied, entsteht eine Schwebung in der Lichtstärke, die um so langsamer pulsiert, je näher die Frequenzen beieinander liegen. Die Zuschaltung kann erfol-gen, wenn beide Lampen erloschen sind.
Die erste Versuchsreihe beinhaltete Zuschaltversuche im Leerlauf des Dieselaggregates. Wie zu erwarten war, hatte jeder Zuschaltversuch das Auslösen des Motorschutzschalters des Die-sels zur Folge. Die Frequenzabweichung zwischen Generator und Netz betrug 1,9 Hz (Diffe-renz zwischen Leerlauffrequenz Diesel und Netzfrequenz), was eine Zuschaltung mit Hilfe der Dunkelschaltung unmöglich machte. Ebenfalls betrug sie amplitudenbezogene Span-nungsdifferenz mehr als 10V.
In der folgenden Versuchsreihe wurde die Drehzahl und damit die Frequenz des Generators, durch Belastung an die Netzfrequenz angenähert. Mittels der Dunkelschaltung konnte nun der gewünschte Zuschaltzeitpunkt gewählt werden. Durch zuschaltbare Lasten konnte die Fre-quenzabweichung zwischen Diesel und Netz in der Art angeglichen werden, dass ein definier-tes Zuschalten des Dieselaggregates möglich ist. Abbildung 3-50 zeigt das Strom- und Span-nungsverhalten des Diesels bei einer Phasenverschiebung von ca. 180o (Lampen hell) zwi-schen Diesel- und Netzspannung. Dargestellt sind Dieselspannung L1 und der entsprechende Strom in dieser Phase.
Deutlich zu erkennen ist, dass die Spannung des Diesels auf das momentane Spannungsni-veau der Netzspannung springt, was einen plötzlichen Stromanstieg zur Folge hat. Der Spit-zenwert des Stromes liegt bei ca. 400 A. Nach ca. 15 ms löst der Motorschutzschalter des Diesels aus. Eine Kopplung von Diesel und Netz kommt nicht zustande.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 209
Abbildung 3-50 Zuschaltversuch Diesel/Netz bei einer Phasenverschiebung von 180o zwi-
schen den Leiterspannungen
Bei der Versuchsdurchführung, wie in Abbildung 3-51 dargestellt erfolgte die Zuschaltung bei einer Phasenverschiebung der beiden Spannungen von ca. 36o. Die Zuschaltung ist mit einem kurzen Spannungseinbruch der Netzspannung (im Bild nicht dargestellt) verbunden. Die Spannung des Diesels wird anschließend sofort auf Netzniveau angehoben.
>> Zuschaltung
Phasenverschiebung2ms = 36°(10ms = 180° bei 50 Hz)
Abbildung 3-51 Zuschaltung Diesel/Netz bei einer Phasenverschiebung von ca. 36o zwi-
schen den Leiterspannungen
Der Ausgleichsstrom erreicht einen momentanen Spitzenwert von ca. 200 A und klingt inner-halb von wenigen Perioden ab. Die Aufschaltung des Diesels auf das öffentliche Netz war erfolgreich.

210 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Nach Auswertung zahlreicher Koppelversuche kann festgestellt werden, dass die direkte Zu-schaltung prinzipiell möglich ist, wenn die Frequenzabweichung innerhalb eines Fensters von ± 20 Grad erfolgt. Dennoch können relativ hohe Ströme auftreten, die ein Abschalten des Mo-torschutzschalters zur Folge haben können. Die Wahl eines Motorschutzschalters mit geeigne-ter Auslösecharakteristik kann nicht als akzeptabel angesehen werden, zumal die Modifikati-on seitens des Dieselherstellers vorgenommen werden müsste.
Zur Begrenzung der Ausgleichsströme wurden deshalb ergänzende Messungen durchgeführt. Dazu wurden NTC-Widerstände seriell in den Stromkreis zwischen Netz und Diesel einge-fügt. Einsatzgebiet derartiger Einschaltstrombegrenzer ist dort, wo durch extrem niedrige Im-pedanzen hohe Einschaltströme auftreten können. Bei normaler Umgebungstemperatur be-grenzt der Widerstand den Einschaltstrom. Durch die Erwärmung wird das Bauteil sehr nie-derohmig. Um eine wirksame Strombegrenzung zu erreichen wurden je Phase drei Wider-stände zu je 26 Ω in Reihe geschaltet. Trotz einer Phasenverschiebung zwischen den Span-nungen von Diesel und Netz von ca. 55o tritt keine gravierende Stromüberhöhung wie in den vorhergehenden Versuchen auf.
Die Wirkung dieser Maßnahme wird sehr deutlich. Die zuvor auftretende Stromüberhöhung konnte auf ein akzeptables Maß reduziert werden. Das Maximum des Spitzenstromes beträgt ca. 30 A.
Abbildung 3-52 Einschaltvorgang mit seriell geschalteten NTC-Widerständen
Als problematisch hat sich jedoch herausgestellt, dass die Bauelemente nach einmaliger Be-lastung eine längere Erholungsphase benötigen, die bei starker thermischer Beanspruchung bis zu vier Minuten betragen kann. Trotz Einhaltung dieser Abkühlzeiten wurden im darauf folgenden Zuschaltversuch Bauelemente zerstört. Nach dem bisherigen Wissensstand kann der Einsatz von NTC´s derzeitig nicht empfohlen werden.
Es ist als sinnvoll anzusehen, ausgehend von dem Prinzip der Dunkelschaltung, eine einfache und kostengünstige Aufschalteinheit zu entwickeln, die den Erfordernissen für derartige An-

Abschlussbericht Modulare PV- und Hybridsystemtechnik 211
wendungen gerecht wird. Andererseits besteht aber auch die Möglichkeit ein, mittels Strom-richter gebildetes Netz, an den Diesel anzupassen. Diesbezügliche Untersuchungen werden zur Zeit am ISET durchgeführt.
3.2.3.3 Identifikation und Modellierung eines einphasigen asynchronen Generators
Versuche mit der einfachen Aufschaltung von Asynchrongeneratoren auf ein starres Netz (s. o.) haben gezeigt, dass sehr hohe Überströme auftreten. D. h. es müssen Maßnahmen zur Überstrombegrenzung getroffen werden. Um mögliche Konzepte zu verifizieren, müssen Simulationen durchgeführt werden. Deshalb wurde zunächst einmal ein geeignetes Simulati-onsmodell eines Stromerzeugers entwickelt.
3.2.3.3.1 Identifikation
In der Literatur sind vor allem Identifikationsverfahren bekannt, die in Antriebsregelungen zum Zweck der automatischen Reglerparametrierung eingesetzt werden. In [5] wird eine Pa-rameterschätzung mit Hilfe der linearen Regression vorgeschlagen. Dabei werden alle Eigen-werte der ASM mit einem pseudostatistischen Spannungssignal (PRBS) angeregt. Größtes Problem hierbei ist die Wahl des Frequenzspektrums, das für den Maschinenbetrieb tatsäch-lich relevant ist. In [6] werden für die Bestimmung der einzelnen Parameter speziell geeignete Anregungen verwendet. Hierbei ist allerdings zusätzlicher Hardwareaufwand für Messungen notwendig. Gute Ergebnisse werden mit der in [7, 8] ausgeführten Methode erzielt, bei der lediglich zwei Frequenzen verwendet werden. Voraussetzung ist hier eine phasengenaue Be-stimmung der Spannungen, welche nicht durch die Filterung der pulsweitenmodulierten Sig-nale verfälscht werden darf.
0 0.5 1 1.5 20.5
2.5
0
0.5
1
1.5
Zeit / s
I / A
a) b) Abbildung 3-53 a) 2 kW Aggregat der Firma Kirsch
b) Oszillogramm der 1 V Sprungantwort des stillstehenden ASG
Im folgenden wird eine Methode zur Offline-Identifikation der Maschinenparameter ent-wickelt. Diese ist besonders gut geeignet, um Simulationsmodelle zu parametrieren, da keine spezielle Hardware benötigt wird. Die Methode verwendet den durch einen Spannungssprung verursachten und durch ein Oszilloskop aufgezeichneten Stromverlauf in einem Strang (s. Abbildung 3-53 b). Der Kondensator für die Erregung des Generators muss dabei abgetrennt sein. Da aufgrund der bei Maschinenstillstand fehlenden Gegenspannung eine geringe Span-

212 Modulare PV- und Hybridsystemtechnik Abschlussbericht
nung zur Identifikation ausreicht, kann zur Erzeugung des Spannungssprungs ein übliches Labornetzteil verwendet werden. Die Auswertung erfolgt mit Hilfe eines Mathcad-Sheets.
Das vorgestellte Verfahren eignet sich sowohl für drei- als auch für zweisträngige Maschinen oder Generatoren. Entwickelt und verifiziert wurde das Verfahren am Beispiel eines einpha-sigen 2 kW-Aggregats der Firma Kirsch. Bei diesem Aggregat (siehe Abbildung 3-53 a) treibt ein Honda-Diesel-Motor einen mit Kondensatoren erregten zweisträngigen Asynchron-generator an.
In Abbildung 3-54 a ist der prinzipielle Aufbau einer zweisträngigen Asynchronmaschine dar-gestellt. In den Hilfsstrang, der üblicherweise eine höhere Windungszahl als der Hauptstrang hat, muss ein zum Hauptstrang phasenverschobener Strom eingeprägt werden, so dass ein Drehfeld in der Maschine entsteht. Dies kann mit einem Kondensator entsprechend Abbildung 3-54 b geschehen. Ein symmetrisches Feld entsteht bei gegebenen ü und C jedoch nur in einem Arbeitspunkt:
) (1) 1( 2üCUI NNN +⋅⋅⋅= ω
mit C: Kapazität für Hilfswicklung, IN: Netzstrom, UN: Netzspannung, ü: Übersetzungsver-hältnis Hilfs- zu Hauptstrang.
Bei allen anderen Lastzuständen treten elliptische Drehfelder auf, die Pendelmomente doppel-ter Netzfrequenz zur Folge haben [9].
a) b)
Rs σsL
Lh Rr/s
σrL
Us
c) Abbildung 3-54 a) Aufbau einer zweisträngigen Asynchronmaschine [13]
b) Verschaltung der Stränge mit dem Kondensator c) einphasiges ESB einer ASM
Für die Identifikation wird das einphasige ESB der Asynchronmaschine (siehe Abbildung 3-54 c) zugrunde gelegt. In [10] wird für die Impedanz angegeben:
R
R
R
R
SS
RLjsl
RLjsl
LjRZ ω
ωσ
ωω ⋅+
⋅+
⋅+=1
1)(ASM (2)
mit RS: Statorwiderstand, LS: Statorinduktivität, LR: Rotorinduktivität, RR: Rotorwiderstand, σ: totale Streuung, sl: Schlupf.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 213
Will man, wie oben ausgeführt, eine Sprungantwort zur Identifikation verwenden, so muss man im Frequenzbereich lediglich die Übertragungsfunktion der Strecke mit der Laplace-transformierten der Sprungfunktion 1/s multiplizieren [11]. Die Rücktransformierte dieses Produkts beschreibt die Funktion des gesuchten Verlaufs im Zeitbereich. Dieser Verlauf muss dann mit Hilfe von Parametersuchverfahren an die Messung angepasst werden. Im Fall der Asynchronmaschine kann die Übertragungsfunktion aus dem Kehrwert der komplexen Ma-schinenimpedanz entsprechend Gleichung 2 bei blockiertem Rotor (sl = 1) ermittelt werden. Dann ergibt sich für den Stromverlauf im Zeitbereich folgende Funktion:
sZ
ti⋅
←−
(s)1)(
ASM
1L (3)
mit s: Laplaceoperator, LS=LR=L, sl=1.
Um eine entkoppelte Identifikation der Streuinduktivität σ⋅L und L zu ermöglichen, sollte für die Maschinenimpedanz eine Darstellung gewählt werden, die von einer Konstanten σL aus-geht. Das Programm Mathcad ist in der Lage, den Ausdruck aus Gleichung 3 symbolisch zu lösen, so dass für den Suchalgorithmus die wenn auch längliche und deshalb hier nicht vor-gestellte analytische Funktion zur Verfügung steht. So wird eine einfache Implementierung eines Parametersuchverfahren möglich. Eine analytisch berechnete Sprungantwort und ihre numerisch bestimmten Ableitungen nach den Maschinenparametern werden in Abbildung 3-55 dargestellt. Deutlich zu erkennen ist die prinzipielle Übereinstimmung des Verlaufs der Funktion x(t) mit dem gemessenen Verlauf in Abbildung 3-53 b).
0 0.2 0.4 0.6 0.8 1 1.20.8
0.6
0.4
0.2
0
0.2
0.4
0.6
x L σL, Rs, Rr, t,( )
Lx L σL, Rs, Rr, t,( )d
d
σLx L σL, Rs, Rr, t,( ) 0.1d
d
Rsx L σL, Rs, Rr, t,( )d
d
Rrx L σL, Rs, Rr, t,( )d
d
t Abbildung 3-55 Berechnete Sprungantwort einer ASM mit dazugehörigen Ableitungen
nach den Maschinenparametern
Die Ableitungen in Abbildung 3-55 geben Auskunft über den Einfluss der Maschinenparame-ter auf den Verlauf der Sprungantwort. Der steile Anstieg zu Beginn wird durch die Streuin-

214 Modulare PV- und Hybridsystemtechnik Abschlussbericht
duktivität σL und der daran anschließende Verlauf wird schwach durch den Rotorwiderstand RR bestimmt. Die Induktivität L hat über einen sehr weiten Bereich Einfluss. Wenn für
ein stationärer Strom fließt, existiert nur noch der Einfluss des Statorwiderstands R∞→t S. Abbildung 3-55 zeigt weiterhin, dass Mathcad die Ableitungen nach den Maschinenparame-tern bilden kann, was für viele Suchalgorithmen eine Voraussetzung ist.
Ein einfacher Ansatz für die Parametersuche ist das Gradientenverfahren [12]. Hierbei werden die Parameter ausgehend von dem steilsten Abstieg (negativer Gradient) des quadratischen Fehlers verstellt. Die Verstellrichtung ergibt sich demnach wie folgt:
i
i
i dd
ddQ
γγ
γ
2x)-)(x(−=− (4)
mit Q: quadratischer Fehler; x: gemessener Verlauf; x(γi): berechneter Verlauf in Abhängig-keit der Maschinenparameter.
Aufgelöst unter Verwendung der Kettenregel ergibt sich folgender Term:
i
i
i dxx
ddQ
γγγ
γ)(x)-)((2 ⋅⋅−=− . (5)
Die Gleichung 5 sagt aus, dass sich die Verstellrichtung für die Parameter aus dem negativen Produkt der Differenz zwischen Rechnung und Messung (Fehler) und der partiellen Ableitung der berechneten Funktion nach dem jeweiligen Parameter ergibt. Um die Parameter zu ermit-teln, werden die Korrektursignale (Gleichung 5) über den zeitlichen Bereich des gemes-senen Stromverlaufs integriert, auf den sie Einfluss haben (siehe Abbildung 3-55). Dabei wird von einem sinnvollen Startwert ausgegangen. Schwingungen sind je nach den Integrations-verstärkungen und in Abhängigkeit von der Strecke möglich! Es werden für alle Parameter mehrere Iterationen durchlaufen.
0 500 1000 1500 2000 25000.05
0
0.05
0.1
en
n
0 5 10 15 20 250.5
1
1.5
2
2.5
parami 0,
parami 1,
parami 2, 100
parami 3, 10
i
Ls
σL
RsRr
I/A
a) b) Abbildung 3-56 a) Verlauf der Schätzung
b) Verbleibender Fehler zwischen Messung und analytischer Funktion mit geschätzten Parametern
Es konnten Verstärkungen für die Integrationen gefunden werden, die eine gut gedämpfte und schnelle Konvergenz ermöglichen. Die Iterationsschritte mit den Ergebnissen für die ein-

Abschlussbericht Modulare PV- und Hybridsystemtechnik 215
zelnen Parameter sind in Abbildung 3-56 a) dargestellt. Das Verfahren wurde erfolgreich mit verschiedenen Startwerten für die Parameter, die sich von den richtigen Werten um den Fak-tor 2-3 unterschieden haben, getestet.
Die Funktion wird so gut angenähert, dass im verbleibenden Fehler, d. h. in der Abweichung zwischen geschätztem und gemessenem Stromverlauf, die Amplitudendiskretisierung des Oszilloskops sichtbar wird (siehe Abbildung 3-56 b). Lediglich am Anfang, also im Bereich des Einflusses der Streuinduktivität, ist ein größerer Fehler (<10%) sichtbar. Dieser kann auf Mess- oder Triggerfehler zurückzuführen sein; beim Identifizieren einer simulierten Sprung-antwort sind keine Fehler verblieben.
Identifiziert wurde die Arbeitswicklung und die Hilfswicklung. So konnte eine einfache Plau-sibilitätsprüfung der Ergebnisse durchgeführt werden, nämlich der Vergleich der so ermittel-ten Rotorzeitkonstanten (LR/RR), die sich nicht unterscheiden dürfen. Die Rotorzeitkonstante der Arbeitswicklung wurde mit 346 ms und die der Hilfswicklung mit 354 ms geschätzt; also besteht lediglich ein Unterschied von ca. 2%. An dieser Stelle ist anzumerken, dass man bei der Wahl der Spannung für die Anregung den Wert wählen sollte, bei dem noch keine Sät-tigung auftritt. Dieser ist abhängig von der Windungszahl des jeweiligen Strangs und dessen Widerstand (RS). Bei der hier vorgestellten Identifikation wurden für beide Wicklungen 2,5 V gewählt. Dann stellen sich so hohe Ströme ein, dass mögliche Messfehler nicht so stark ins Gewicht fallen und noch keine Fehler durch Sättigung (s. u.) auftreten.
3.2.3.4 Modellierung
Das unten vorgestellte Modell für einen einphasigen, zweisträngigen Asynchrongenerator un-terscheidet sich von dem einer dreiphasigen Asynchronmaschine vor allem durch
• das Vorhandensein von nur zwei statt drei Strängen,
• der unsymmetrischen Windungszahl und
• der Notwendigkeit einer nichtlinearen Magnetisierungskennlinie (Sättigung) für die Fest-legung der Leerlaufspannung im Inselnetzbetrieb.
Da nur zwei Stränge vorhanden sind, ist eine direkte Beschreibung in A,B-Komponenten möglich, was eine Vereinfachung darstellt. Die sonst notwendigen 3/2-Transformationen ent-fallen hier. Weiterhin kann die unsymmetrische Windungszahl durch einen idealen Transfor-mator berücksichtigt werden.
Mit dieser Vorgehensweise kann ein Standardmaschinenmodell für die Modellierung des ASG verwendet werden, wie es z. B. in [8] beschrieben ist. Das Modell, das auf dem Invers-gamma-ESB basiert, beinhaltet eine nichtlineare Magnetisierungskennlinie und beschreibt die Momenten- und Flussbildung in der bequemen feldorientierten Darstellung. Auf der Stator-seite bleiben die Wechselgrößen erhalten. Die Abbildung 3-57 verdeutlicht das Modellie-rungsprinzip.

216 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Parktransformation
US
IS
RS σLR /(s(1+ ))R Rσ 2(1- )Lσ
A,B-Komponenten D,Q-Komponenten
UH
ID
IQ
Abbildung 3-57 Modellierungsprinzip der ASM (einphasiges ESB)
Die mathematische Beschreibung des Modells wird hier nicht ausgeführt, sondern es wird auf die zahlreiche Literatur [z. B. 5,8,10] zu diesem Thema verwiesen.
Formula :
IQID
UHA
UHBEXT
EXT
I
RHO
I
SPEED_W
P
IQ
ID
WMR
Torque
P
UHDUHQ
I
PSIMR
X Y
mag_ch
NL
IMRmag_ch6.mdk mag_ch
P
CO
NST 330
NEG
RSA
RSB
LSIGA
LSIGB
&E&3UHA
&
E&4UHB
Klemmen Stator
C1 V
VM1
R1
. .
TFR1P2W1
S1
R2
23.33
Hauptfeld-spannung
Parktransformation u. Berechnung der Hauptfeld-spannung
a / b
SLIP
Flußmodell
Momenten-bildung
Last
Verbrennungsmotormit mechanischemFrequenzregler 0.887
mload
+
Abbildung 3-58 Implementierung des Stromerzeuger-Modells in SIMPLORER

Abschlussbericht Modulare PV- und Hybridsystemtechnik 217
Abbildung 3-58 zeigt die vollständige Implementation des Stromerzeugers in SIMPLORER. Sie umfasst den Kondensator für die Hilfswicklung, das Modell des ASG und ein stark ver-einfachtes Modell für einen Verbrennungsmotor mit mechanischem Regler, bei dem die Fre-quenz-Leistungskennlinie nachgebildet wurde. Zu Testzwecken ist zusätzlich eine schaltbare Last vorhanden.
Dieses, in der Lehrversion von SIMPLORER lauffähige Modell, wurde mit elektrischen Ele-menten, Regelungsblöcken und Formeln implementiert. Die Verwendung elektrischer Ele-mente auf der Statorseite der Maschine sichert die problemlose Einbindung des Modells in elektrische Netze. Zusätzlich arbeitet das Modell aufgrund dieser von SIMPLORER gut un-terstützten Möglichkeiten sowohl motorisch als auch generatorisch. Bei anderen Programmen hingegen entstehen bei der Unterstützung beider Betriebsarten oft Probleme. Die Parktrans-formation, die die statorseitigen Wechselgrößen in Gleichgrößen (I , I ) für die Berechnung von Moment und Fluss umrechnet und umgekehrt, ist mit Hilfe von Formeln realisiert. Eben-falls erfolgt die Berechnung der Hauptfeldspannung (U , U ) im Formelblock. Die Rege-lungsblöcke bieten eine gute Möglichkeit für die Bestimmung des Moments und seiner Inte-gration zur Geschwindigkeit. Auch das sogenannte Flussmodell für die Berechnung des Magnetisierungsvektors lässt sich gut mit den Regelungsblöcken implementieren.
D Q
HA HB
3.2.3.4.1 Magnetisierungskennlinie
Bei einem inselfähigen, mit Kondensatoren erregten Generator muss in jedem Fall eine nicht-lineare Magnetisierungskennlinie für die Sättigung berücksichtigt werden. Diese bestimmt u. a. die Leerlaufspannung. In dem hier beschriebenen Modell wird eine symmetrische Sättigung angenommen. In Wirklichkeit aber entsteht eine stärkere Sättigung in der Hilfswicklung. Ob-wohl die Annahme einer symmetrischen Sättigung eine starke Vereinfachung darstellt, zeigen die unten vorgestellten Ergebnisse, dass diese zumindest für die Effektivwerte der Spannun-gen und Ströme zulässig ist.
1 0 1
20
0
20
Imrj
yi
Psimrj xi,
amp 0< > Psimr amp 1< > Imr
ampmag_ch6.mda
0 500 1000 1500 2000 25000.2
0
0.2
en
n
a) b)
Abbildung 3-59 a) Erzeugung der nichtlinearen Magnetisierungskennlinie in Mathcad b) Typischer Verlauf des Fehlers bei der Identifikation einer gesättigten Wicklung
Ausgehend von der Induktivität des ungesättigten Generators wird die nichtlineare Kennlinie mit Hilfe von Mathcad erzeugt (Abbildung 3-59 a) und dem Simulationsmodell über den Kennlinienblock mag_ch in Abbildung 3-58 zur Verfügung gestellt. Die Kennlinie wird an die Leerlaufspannung des Generators angepasst, indem man den Punkt des Abknickens auf der identifizierten Gerade verschiebt. Die folgende Steigung ist relativ unkritisch. Mathcad er-

218 Modulare PV- und Hybridsystemtechnik Abschlussbericht
möglicht ein problemloses Schreiben der Daten in ein File durch Hinzufügen eines entsprech-enden Symbols auf dem Sheet.
Abbildung 3-59 b zeigt den typischen Verlauf des Fehlers bei der Identifikation einer gesättig-ten Wicklung, der einen positiven und negativen Ausschlag aufweist. Die Parameter werden bei Sättigung so identifiziert, dass der gemittelte Fehler minimal wird. Diese Eigenschaft könnte die Identifizierung der Magnetisierungskennlinie zulassen. Man müsste im ungesättig-ten Zustand alle Parameter bestimmen und diese festhalten. In weiteren Versuchen mit höhe-ren Strömen müsste man dann jeweils eine neue Induktivität L ermitteln. Das Ergebnis wäre eine jeweils zum Grad der Sättigung korrespondierende mittlere Induktivität. Dieses Verfah-ren wurde noch nicht verifiziert. Jedoch war der identifizierte Wert der Induktivität L im Fall der Sättigung deutlich geringer, so dass für das vorgeschlagene Verfahren Erfolgschancen bestehen.
3.2.3.4.2 Verifikation des Simulationsmodells
In Abbildung 3-60 ist der simulierte Verlauf der Klemmenspannung für die Selbsterregung, den Leerlauf und eine Belastung von 2 kW (ohmsche Last) dargestellt. Dabei wurde der Inte-grator, der die Geschwindigkeit der Maschine berechnet, beim Simulationsstart mit dem Wert der Leerlaufdrehzahl initialisiert. Die Ströme in den Wicklungen und die Spannung an der Hilfswicklung sehen ähnlich wie in Abbildung 3-60 aus und werden deshalb nicht abgebildet.
Leerlauf: 256 Veff
@ 2 kW: 211 Veff
Selbsterregungsphase
C: 40 uF
Abbildung 3-60 Spannungsverlauf an der Arbeitswicklung (Simulation)
Im folgenden werden einige Simulationsergebnisse mit den entsprechenden Messergebnissen des realen Stromerzeugers verglichen. Da im Generatormodell eine symmetrische Magnetisie-rung angenommen wurde, ist nur der Vergleich von Effektivwerten sinnvoll. Die in der Simu-lation berechneten Verläufe für Spannungen und Ströme sind nämlich annähernd sinusförmig.
In Tabelle 3-3 sind die Effektivwerte der verschiedenen Größen für den Leerlauf und für den Betrieb einer ohmschen 2 kW Last gegenübergestellt. Trotz der im Modell enthaltenen Ver-

Abschlussbericht Modulare PV- und Hybridsystemtechnik 219
einfachung einer symmetrischen Sättigung, stimmen die Simulationsergebnisse erstaunlich gut mit der Messung überein. Bei genauerer Abstimmung der Magnetisierungskennlinie sind noch kleinere Fehler zu erwarten.
Simulation Messung Fehler
U_aw @ Leerlauf 256 V 249 V eff 2,8 % eff
U_aw @ 2 kW 211 V 216 V -2,3 % eff eff
U_hw @ Leerlauf 381 Veff 361 V eff 5,5 %
U_hw @ 2 kW eff 330 V eff
I_aw @ Leerlauf 6,66 A 6,49 A eff 2,6 %
334 V 1,2 %
eff
I_aw @ 2 kW 5,49 A eff 5,55 A -1,1% eff
I_hw @ Leerlauf 6,66 A eff 6,49 Aeff 2,6 %
I_hw @ 2 kW 5,06 A 5,13 A -1,4 % eff eff
Tabelle 3-3 Fehler der Effektivwerte von Spannung und Strom beim Vergleich von Messung und Simulation (_aw: Arbeitswicklung, _hw: Hilfswicklung)
Abbildung 3-61 Messung am realen Stromerzeuger @ 2 kW (_aw: Arbeitswicklung, _hw:
Hilfswicklung)
Dass der durch die unsymmetrische Sättigung entstehende Oberschwingungsgehalt der Strö-me in den Strängen (siehe Abbildung 3-61) nicht von dem Simulationsmodell berücksichtigt wird, ist für das Klemmverhalten unwesentlich. Aus Abbildung 3-61 geht nämlich hervor, dass die Klemmspannung U_aw annähert sinusförmig ist und somit der Simulation entspricht.

220 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Hier werden die Pendel-momente sichtbar!
Abbildung 3-62 Verlauf der mechanische Leistung (Simulation)
Weiterhin wurde das für zweisträngige Maschinen typische Verhalten überprüft, dass im Fall einer Verpolung der Hilfswicklung erhöhte Ströme in der Arbeitswicklung auftreten. Dieses Verhalten wurde von der Simulation ebenfalls richtig wiedergegeben.
3.2.3.4.3 Zusammenfassung
Die in diesem Beitrag entwickelte Methode zur Identifikation und die Modellierung des ein-phasigen, zweisträngigen Asynchrongenerators sind dazu geeignet, ein aussagekräftiges Si-mulationsmodell mit begrenztem Aufwand zu implementieren. Mögliche Weiterentwick-lungen wären die Identifikation der Magnetisierungskennlinie und die Berücksichtigung der unsymmetrischen Sättigung z. B. durch Verwendung eines nichtlinearen Transformatormo-dells für die Hilfswicklung.
3.2.3.5 Literatur
[1] Abschlußbericht des EU-Projekts: Components for Modular Renewable Energy Systems (MORE); JOR-3-CT98-0215)
[2] Abschlußbericht des EU-Projekts: Hybrid System Sifnos (Contract SEO 135-96/GR-I-D)
Neben den Spannungen und den Strömen muss auch die Leistungsbilanz des Simulations-modells überprüft werden. Abbildung 3-62 zeigt den Verlauf der mechanischen Leistung des Verbrennungsmotors während der Selbsterregungsphase, im Leerlauf und bei Belastung mit einer ohmschen Last von 23,3 Ohm (2 kW). Aufgrund der Rotor- und Statorverluste ist die mechanische Leistung während der Belastung erwartungsgemäß etwas größer als 2 kW. Auch der Einfluss der elliptischen Drehfelder mit den daraus resultierenden Pendelmomenten ist in Abbildung 3-62 sichtbar.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 221
[3] DIN ISO 8528 Wechselstrom-Erzeugungsaggregate mit Antrieb durch Hubkolben-Verbrennungsmotoren Oktober 1997
[4] DIN 6280 Stromerzeugungsaggregate mit Hubkolben-Verbrennungsmotoren Februar 1983
[5] G. Heinemann, Selbsteinstellende, feldorientierte Regelung für einen asynchronen Drehstromantrieb, Dissertation, TU Braunschweig, 1992
[6] H. Schierling, Selbsteinstellendes und selbstanpassendes Antriebsregel-system für die Asynchronmaschine mit Pulswechselrichter, Dissertati-on, TU Darmstadt, 1986
[7] N. Klaes, Identifikationsverfahren für die betriebspunktabhängigen Pa-rameter einer wechselrichtergespeisten Induktionsmaschine, Dissertati-on, Ruhr-Universität Bochum, 1992
[8] H. Klaassen, Selbsteinstellende, feldorientierte Regelung einer Asyn-chronmaschine und geberlose Drehzahlregelung, Dissertation, TU Braunschweig, 1999
[9] H. Moczala, Elektrische Kleinstmotoren und ihr Einsatz, VDE-Verlag
[10] W. Leonhard, Control of Electrical Drives, Springer-Verlag Berlin, Heidelberg, 2. edition, 1996
[11] W. Leonhard, Einführung in die Regelungstechnik, Vieweg-Verlag, Braunschweig, 1990
[12] W. Leonhard, Statistische Analyse linearer Regelsysteme, Teubner Ver-lag, Stuttgart, 1974
[13] G. Henneberger, Elektrische Maschinen I, Vorlesung RWTH Aachen, 1994

222 Modulare PV- und Hybridsystemtechnik Abschlussbericht

Abschlussbericht Modulare PV- und Hybridsystemtechnik 223
3.3 Modularisierung von Betriebsführungssoftware für lokal begrenzte Ener-gieversorgungssysteme
Die Betriebsführung von Inselnetzen und Hybridsystemen hat die Aufgabe, das gesamte Sys-tem stabil zu halten, die Betriebskosten zu minimieren und eine hohe Versorgungssicherheit zu gewährleisten. Um dieses Ziele zu erreichen, werden bis heute meistens spezielle, auf eine Anlage abgestimmte Lösungen eingesetzt. Von den vielen verschiedenen Anlagenkonzepten konnte sich keines eindeutig gegen ein anderes durchsetzen. Gleiches gilt für die häufig sehr unterschiedlichen Betriebsführungsansätze.
Zukünftig wird sich aber nur ein Konzept durchsetzen, welches sich an die Standards der gro-ßen Verbundnetze anlehnt sowie leicht erweiterbar ist, um auch einen in Zukunft wachsenden Bedarf abdecken zu können.
Bei der Entwicklung von Komponenten, die diese zukünftigen Anforderungen erfüllen, sind in den letzten Jahren am ISET große Fortschritte erzielt worden. Dies ist sowohl den vielen grundlegenden Arbeiten in den Projekten der Modularen Systemtechnik wie einigen Kompo-nentenentwicklungen in enger Zusammenarbeit mit der Industrie zu verdanken. Diese vom ISET entwickelten Anlagenkonzepte sowie neu entwickelte Komponenten könnten schon in naher Zukunft zu einer deutlichen Vereinheitlichung führen.
Auf der Ebene der Betriebsführung sind ähnliche Konzepte notwendig. Sie müssen zur elekt-rischen Energieversorgung im Verbundnetz kompatibel, für unterschiedliche Versorgungs-aufgaben und Anlagengrößen geeignet und auf Anlagenerweiterungen vorbereitet sein.
3.3.1 Modelle von Betriebsführungssoftware für lokal begrenzte Energieversorgungs-systeme (F. Raptis !)
3.3.1.1 Einleitung - Einteilung der Aufgaben von Betriebsführungssystemen Die Aufgaben von Betriebsführungssystemen lassen sich grundsätzlich in drei Bereiche auf-teilen (vgl. Abbildung 3-63):
• Netzregelung • Sicherung des Netzbetriebes und • Betriebsoptimierung
Unter Netzregelung (siehe Abbildung 3-63) versteht man alle regelungstechnischen Aufga-ben, die zur Einhaltung der Frequenz und Spannung innerhalb vorgegebenen Toleranzgrenzen und deren Ausregelung in den vorgegebenen Sollwerten dienen. Dazu gehören die regelungs-technischen Verfahren zur Frequenz- und Spannungsstabilisierung (Frequenz-, Wirkleistungs-regelung und Spannungs-Blindleistungsregelung), die regelungstechnische Maßnahmen zum Parallelbetrieb mehrerer Versorgungseinheiten, z. B. Verfahren zur momentanen Aufteilung der Wirk- und Blindleistung, regelungstechnische Koordination in den verschiedenen Be-triebsmodi des Netzes und sämtliche Maßnahmen zur Aufrechterhaltung des Betriebes unter Verwendung der Primär-, Sekundär- und Tertiärregelung.

224 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die Betriebsoptimierung umfasst alle Aufgaben, die den optimalen Netzbetrieb gewährleis-ten können. Eine wesentliche Aufgabe ist die Prognostizierung der elektrischen Nachfrage (Lastprognose) sowie des Leistungs- und Energieangebotes von Konvertern fluktuierender Energieträger. Die Prognosen unterscheiden sich anhand des Betrachtungshorizontes und der Genauigkeit in kurz-, mittel und langzeitige Prognosen. Anhand von Prognosen, Kostenanga-ben und Zielfunktionen schätzt die Betriebsoptimierung diejenigen Betriebszustände und Fahrweisen ab, die zur Minimierung der Betriebskosten oder Gesamtkosten führen. Dies um-fasst verschiedene suboptimale Aufgaben wie
• die Einsatzplanung von Versorgungseinheiten,
• die Aufteilung der Wirk- und Blindleistung auf die Erzeuger- und die Energieüber-tragungsseite sowie
• das Lastmanagement.
Auf die Einsatzplanung entfallen sowohl die Ermittlung der Betriebszeiten der Versorgungs-einheiten als auch die Ermittlung der jeweils in der Primär-, Sekundär- und Tertiärregelung teilzunehmenden Einheiten.
Abbildung 3-63 Aufgaben von Betriebsführungssystemen
Schließlich gehören zum Bereich der Betriebsoptimierung strategische Planungen hinsichtlich der Nutzung der Primärenergie.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 225
Um die Sicherung des Netzbetriebes zu erreichen, enthalten moderne Betriebsführungssys-teme von Energieversorgungsanlagen mehrere Aufgaben wie Kurzschluss-, Stabilitäts-, und Kontingenzanalysen.
Ebenso sollen anhand der erfassten Daten die möglichen Netzkonfigurationen ermittelt wer-den. Hierbei ist es Aufgabe der Versorgungssicherheit, zukünftige Eventualitäten hinsichtlich des möglichen Ausfalles von Komponenten abzuschätzen und entsprechende Warnungen oder vorbeugende Maßnahmen einzuleiten.
Darüber hinaus soll sichergestellt werden, dass alle Netzvariablen innerhalb der Betriebsgren-zen und daher das Netz sich im Normalzustand befinden.
Schließlich gehören hierzu alle Überwachungs- und Schutzfunktionen, die den Aufbau des Netzes und den Betrieb in den verschiedenen Zustände (Anfahr-, Normal-, Abfahr- und Stör-zustand) ermöglichen.
Um die Aufgaben der Netzregelung, Betriebsoptimierung und der Sicherung des Betriebes durchzuführen, benötigen Betriebsführungssysteme eine Anzahl von binären und analogen Echtzeit-Informationen wie Zustände der Versorgungskomponenten, Spannungen, Wirk- sowie Blindleistungen und Ströme. Die Gesamtinformation soll nach Möglichkeit dezentral von den Betriebsführungseinheiten der Versorgungseinheiten und nur in besonderen Fällen direkt vom Übertragungssystem erfasst und der übergeordneten, zentralen Koordinationsstelle des Netzes zur Verfügung gestellt werden.
Darüber hinaus ist die Gestaltung der Schnittstellen zwischen Koordinationsstelle und dem Betreiberpersonal von besonderen Bedeutung. Dezentrale Monitoringstellen, die an die Be-triebsführungen der Komponenten angeschlossen sind, sollen sämtliche komponentenspezifi-sche Information bieten. Diese Information kann beim Abruf zentral in die Koordinations- und Visualisierungsstelle übertragen werden. Ebenso soll eine zentrale Parametrierung der Komponenten möglich sein.
Schließlich benötigen Betriebsführungssysteme umfassende Informationen über das Energie-versorgungssystem und zwar die Netztopologien, die Betriebsarten und die Betriebsrandbe-dingungen sowie Kostenangaben.
3.3.1.2 Modell zur Steuerung der Leistungsflüsse
Für die Stabilisierung des Netzbetriebs ergeben sich Randbedingungen des momentanen Leis-tungsflusses, die zugeschnittene Überwachungs- und Steuerungsmaßnahmen erfordern. Dies trifft insbesondere auf den Betrieb von kleinen Inselnetzen mit variierenden Betriebseigen-schaften oder auf eine erweiterte Integration von Versorgungseinheiten fluktuierender erneu-erbarer Energien (VEE-F) zu. Verschiedenartige Faktoren bestimmen die Aufnahmefähigkeit von Leistungsschwankungen in einem Inselnetz, wie:
• die Betriebseigenschaften der netzbildenden und -stützenden Versorgungseinheiten (Mindest- und Tiefstleistungen, Überlastverhalten und Leistungsänderungsge-schwindigkeiten),

226 Modulare PV- und Hybridsystemtechnik Abschlussbericht
• die Merkmale der angewendeten Netzregelung (Geschwindigkeit, verfügbare Rota-tions- und Regelreserven) sowie
• die verfügbare Kurzschlussleistung an verschiedenen Netzanschlusspunkten.
Das Blockschaltbild in Abbildung 3-64 [1] kann u. a. als Grundlage zur Überwachung und Steuerung der Leistungsflüsse von hybriden Inselnetzen mit Konvertern fluktuierender erneu-erbarer Energien verwendet werden. Für das Konzept gelten folgende Konventionen: Die Verbraucherleistung P hat ein positives Vorzeichen. Die einzelnen Abgabeleistungen der Energieerzeuger sind mit negativem Vorzeichen versehen, da sie einen Teil der Verbraucher-leistung abdecken.
V
Nach diesem Schema kann der elektrische Verbrauch P durch Einstellen der Randbedin-gungen (in Abbildung 3-64 eingezeichnete Leistungsbegrenzungen) entsprechend der jeweili-gen Netzanforderungen auf die einzelnen Versorgungseinheiten aufgeteilt werden. Das Mo-dell der Abbildung 3-64 wurde zur Beschreibung des momentanen Leistungsflusses in Hyb-rid-Inselnetzen konzipiert.
Ver
Abbildung 3-64 Modell zur Aufteilung der Leistungsflüsse [1] Beispiel für die rege-
lungstechnische Struktur einer vorgegebenen Netzkonfiguration
Anhand der jeweiligen regelungstechnischen Netzkonfiguration (Kombination der im Betrieb befindlichen Versorgungseinheiten) ergeben sich die Möglichkeiten zur Überwachung und darüber hinaus zur optimalen Steuerung des Leistungsflusses.
Das betrachtete Inselnetz besteht aus unterschiedlichen VEE-F wie photovoltaischen Einhei-ten und Windenergiekonvertern, aus Speichereinheiten wie elektrochemischen Speichern oder Wasserspeichern sowie aus Verbrennungskraftmaschinen gespeist von Öl, Gas bzw. Biogas oder thermischen Kraftwerken.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 227
Je nach Betriebszustand, d.h. Lastsituation und Speicherinhalt, ergeben sich unterschiedliche wirtschaftlich effektive regelungstechnische Netzkonfigurationen. Üblicherweise kommen u.a. Verbrennungskraftmaschinen, Speicherwasserkraftwerke mit Synchronmaschinen oder stromrichter-gekoppelte Batterie- und Brennstoffzellen-Aggregate als netzbildende Einheiten (Einheiten, die durch I oder PI-Regler in der Sekundärregelung der Netzfrequenz teilnehmen) in Frage. VEE-F können hier lediglich als steuerbare oder schaltbare Wirkleistungseinspeiser mit oder ohne Möglichkeiten zur Teilnahme an der Primärregelung der Netzfrequenz betrach-tet werden.
Die Leistungsflüsse derjenigen Gruppen von Versorgungseinheiten, die vom gleichen Typ und Primärenergieträger sind und darüber hinaus regelungstechnisch im Netz ähnlich betrie-ben werden (z. B. mehrere PV-Generatoren vom gleichen Typ), lassen sich zunächst nach Abbildung 3-64 summarisch betrachten. Die summarisch berechnete Leistungssollwertvorga-be für derartige Anlagengruppen lässt sich dann auf die einzelnen Versorgungseinheiten unter Berücksichtigung der Nenngrößen und der weiteren anlagenspezifischen Eigenschaften verteilen.
Netzbildende Einheiten (Einheiten, die durch I- bzw. PI-Regler in der Sekundärregelung der Netzfrequenz teilnehmen)
Die netzbildenden Einheiten (beispielsweise in Abbildung 3-64 die Verbrennungskraftma-schinen) decken die Leistungsdifferenzen P' zwischen der Leistungsnachfrage P und dem Angebot der Leistungseinspeiser ab. Um den Netzbetrieb zu gewährleisten, soll das Se-kundärregelband der netzbildenden Einheiten ausreichend groß ausgelegt werden, so dass der Wert P' momentan bereitgestellt werden kann.
4Ver Ver
4Ver
3.3.1.2.1 Betrieb von Leistungseinspeiseneden VEE-F ohne Speicherstützung
Steuerungsprioritäten werden nach Abbildung 3-64 für die Ermittlung der Sollwertvorgabe der Versorgungseinheiten benötigt. Viele Gründe sprechen für die höchste Einspeisepriorität der verbrauchernah angeordneten VEE-F (kleine Betriebskosten und ggf. Umweltkriterien oder Minimierung der Übertragungsleistung), wenn diese nicht sowieso durch fehlende Rege-lungsmöglichkeiten von VEE-F vorgegeben ist. So wurde auch in Abbildung 3-64 den photo-voltaischen Generatoren und den Windenergiekonvertern die höchste Priorität eingeräumt, um die erzielbaren Leistungsbeiträge möglichst vollständig ins Netz einspeisen zu können.
Die unteren Begrenzungen P' und P'' , die sich aus den jeweiligen Randbedingungen zur Stabilisierung des Netzbetriebs ergeben können, bestimmen die maximalen Leistungsan-teile von VEE-F, die dem Verbraucher direkt zugeführt werden können. Die benötigten Netz-regelreserven, die Mindest- bzw. Tiefstleistungen von Versorgungseinheiten oder kleine Kurzschlussleistungen bestimmen derartige Randbedingungen, die als maximal erlaubte Leis-tungsbeträge von VEE-F definiert werden können. Hiermit lassen sich zusammenhängende maximale Leistungsstörungen im Netz beeinflussen, die u. a. von den Leistungsänderungsge-schwindigkeiten der Versorgungseinheiten vorgegeben werden.
V,min V,min
Diese Abregelung von VEE-F läßt sich durch Leistungssollwertvorgabe von übergeordneten Netzkoordinationsstellen realisieren. Die maximale momentane Leistung von VEE-F, die ins

228 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Netz eingespeist werden kann, könnte für jede Netzkonfiguration anhand der Netzparameter durch Simulation berechnet werden.
max
und
(3.1)
Statt der direkten Überwachung der maximalen momentanen Leistung von VEE-F lassen sich vereinfachte Leistungsabregelungskonzepte mit Leistungs-Frequenz-Kennlinien realisieren. Arbeiten die netzbildenden Einheiten mit Leistungs-Frequenz-Statiken, dann steigt die Netz-frequenz bei kleinen Belastungen P' . Sie kann entweder durch geringe elektrische Nach-frage oder durch hohe Leistungsangebote von VEE-F hervorgerufen werden. Durch Einfüh-rung von geeigneten f / P-Abregelkennlinien an den Betriebsführungen von VEE-F, die über einen gut definierten Grenzfrequenzbereich wirken, lassen sich Leistungsüberschüsse abre-geln.
4Ver
Die wirtschaftlichen Kriterien zur Steuerung der Leistungsflüsse wie auch die Randbedingun-gen zur Stabilisierung des Netzbetriebes ändern sich maßgeblich beim Einsatz von Speichern. In Abbildung 3-64 ist zunächst zwischen Speicherleistungen unterschieden worden, die sich aus unterschiedlichen Kriterien ergeben.
Der auftretende Leistungsüberschuss von VEE-F definiert durch diejenige Leistungsanteile, die nicht direkt zur Abdeckung der Last dienen können wird mit höchster Priorität in den Speichern umgelenkt. Nach Abbildung 3-64 gilt:
wobei
wenn und
) wenn (3.2)
Die oberen Begrenzungen der Ladeleistungen P und P nach Abbildung 3-64 hängen vom Speicherzustand ab. Beispielsweise werden die Sollwerte im Falle eines Batte-rieaggregates beim Erreichen der U-Ladegrenzspannung durch U-Ladeverfahren bestimmt bzw. beim Erreichen der Ladeschlussspannung auf null gesetzt. VEE-F sollen nur dann abge-regelt werden (s. obere Begrenzungen P , P ), wenn Leistungsüberschüsse nicht voll-ständig in den Speicher umgelenkt werden können. Die Begrenzung der Abgabeleistung von VEE-F lässt sich durch entsprechende Sollwertvorgaben realisieren. Es wird an dieser Stelle besonders deutlich, dass nicht beeinflussbare Leistungen von VEE-F (d.h. nicht schaltbare Leistungen) in einem Inselnetz nur bis zur Höhe der Dauergrundlast und ggf. der permanent verfügbaren Speicherreserve im Netz betrieben werden können.
W,Sp, max
S,max W,max
Abregelungskonzepte lassen sich dann durch direkte Leistungssollwertvorgabe P für VEE-F realisieren, wobei gilt (vgl. auch Abbildung 3-64; Betrieb ohne Speicher):
min,''
min,''
vsvervver PPPPP ≥−⇒≥
min,'
max, vvers PPP −=
3.3.1.2.2 Betrieb von netzstützenden Speichereinheiten
)(' ', SVerVerSpS PPPP −−=
0, =SpSP min'' )( VSVer PPP ≥−
( 'min
', SVerVSpS PPPP −−= min
'' )( VSVer PPP <−
S,Sp,max

Abschlussbericht Modulare PV- und Hybridsystemtechnik 229
Statt einer direkten Leistungsüberwachung können Frequenz-Leistungskennlinien angewen-det, um den Leistungsüberschuss von VEE-F, in dem Speicher umzulenken.
Eine weitere prognostizierende Aufgabe einer übergeordneten Betriebsführung wäre die Be-reitstellung einer ausreichenden Speicherkapazität (rechtzeitige Teilentladung der Batterie) zur Aufnahme eines in der Zukunft erwartenden Energieüberschusses von regenerativen Energiequellen, so dass die unteren Begrenzungen P , P möglichst selten aktiviert sind.
W,max S,max
Die Abdeckung des Verbrauchs P'' übernehmen die netzbildenden und netzstützenden Ein-heiten gemeinsam. Die Aufteilung dieser Leistung soll aus wirtschaftlichen Gesichtspunkten erfolgen. Zur Berechnung der Entlade- bzw. Ladeleistungen P und P können Wirt-schaftlichkeitsaspekte herangezogen werden. Die eingezeichneten Begrenzungen P , P sind vom Ladezustand des Speichers (Erreichen der Entlade- bzw. Ladegrenzen) abhängig. Schließlich bildet die Aufteilung der Grundleistung in mehreren netzstützenden Speicheraggregaten oder netzbildenden Einheiten einen Gegenstand einer weiteren Optimie-rungsaufgabe.
Ver
Sp,Ent VM,Sp
Sp,Ent,max
VM,Sp,max
Das Problem der wirtschaftlich optimalen Lastaufteilung ist so vielschichtig, dass es wohl kaum gelingen wird, eine generell anwendbare Leistungsflusssteuerung zu erstellen, die auf alle diesbezüglichen Optimierungsprobleme anwendbar ist. Maßgebend für die optimale Steuerung der Leistungsflüsse sind anfallende Kosten im Umfeld der Energieversorgung.
3.3.1.2.3 Beispiele zum Leistungsflussmodell
Das oben beschriebene generelle Leistungsflussmodell wird im folgenden anhand von Bei-spielen erläutert.
Abbildung 3-65 zeigt eine Möglichkeit zur Einstellung der Leistungs- und Energiegrenzen für Netzbildung mit Verbrennungskraftmaschinen. Die Leistungsbegrenzungen sind hier einstell-bare, leistungsabhängige Funktionen. Das Inselnetz kann die resultierende Leistungsdifferenz P P bis zur Leistungsgrenze P versorgen, die durch die Summe der Nennleistungen der Verbrennungskraftmaschine und des elektrochemischen Speichers unter Berücksichtigung der nötigen Leistungsreserven bestimmt wird. Dies gilt selbstverständlich nur falls entspre-chende Energiereserven (vgl. Energiegrenzen; Ermittlung von P ) vorhanden sind. Die Leis-tungsdifferenz ∆P gibt die Lastanteile die nicht abgedeckt werden können und daher min-destens abgeschaltet werden . Im realen Betrieb kann der Lastabwurf auch bei Unterschrei-tung von Netzfrequenzgrenzen realisiert werden. Haben die netzbildenden Einheiten übliche Frequenz-Leistungscharakteristiken, dann sinkt die Frequenz mit zunehmender Belastung ab. Solche Lastabschaltverfahren werden in der Regel schrittweise realisiert.
Ver VEE-F max
max
ver22
22 Diese Leistung hat auch eine Bedeutung für die Simulation des optimalen Betriebes und der Auslegung des Versorgungssystems.

230 Modulare PV- und Hybridsystemtechnik Abschlussbericht
elektr.-chem.SpeicherVerbraucher Verbrennungs-
maschineVEE - F
Wirtschaftliche Leistungsaufteilung
Energiegrenzen
Leistungsgrenzen
Enlade-grenzen
Lade-grenzen
n n
f/P-Regelung
∆ PVer ∆ PVEE - F
∆ PVer
PMax Pmin
∆ PVEE - F
PVEE - F, Sp
PSp, Ent, max PSP,L, max
U/I/P-Ladeverf.
PVM, Nenn PVM, min
P - PL, Sp Ent, Sp
PVM, Sp
P'VEE - F
P'Ver P''Ver P'''Ver PVM
PSp,L max PSp,Ent max
P -P
Sp,Lmax
VEE-F, Sp
Pmax Pmin
P
I I
V
P = P + PMax Sp, Nenn VM, Nenn P = - P + Pmin Sp, Nenn VM, min
PSp,Ent
PVEE - F Pver
Abbildung 3-65 Kontrollierter Leistungsfluss für hybride Energieversorgungssysteme - Leistungs- und Energiegrenzen
Einstellbare minimale Leistungen P sind für der Betrieb der netzbildenden Verbrennungs-maschinen und für die Einschränkung der maximal erlaubten fluktuierenden Leistung von VEE-F vorgesehen. Die Grenzen der Lade- und Entladespeicherleistungen sind der Abbildung 3-65 zu entnehmen. Höchste Priorität zur Ladung der elektrochemischen Speichers hat der Leistungsüberschuss von VEE-F. Die Grenze P entspricht der maximalen Ladeleistung (vgl. auch Energiegrenzen).
min
Sp,L max
Die Leistungsdifferenz ∆P ist die Leistung von VEE-F, die abgeregelt werden muss. Im realen Betrieb kann diese Überwachung mit direkter Leistungsüberwachung realisiert werden. Eine alternative Möglichkeit zur Abregelung der Leistung von VEE-F ist die Integration von geeigneten Frequenz-Leistungs-Abregelcharakteristiken in den Betriebsführungen von VEE-F, die erst bei Überschreitung von bestimmten Netzfrequenzgrenzen wirken. Haben die netzbildenden Einheiten übliche Frequenz-Leistungscharakteristiken, dann erhöht sich die Frequenz mit sinkender Belastung. Die Überschreitung der Netzfrequenzgrenzen aktiviert die Abregelung der Leistung von VEE-F anhand ihrer Frequenz-Leistungs-Abregelkennlinie.
Die Ladeleistung P und die Entladeleistung P , die durch die wirtschaftliche Leis-tungsaufteilung (Energiemanagement) bestimmt werden, bewegen sich innerhalb der zustandsabhängigen Grenzen P P und P .
VM,Sp Sp, Ent
Sp,Lmax VEE-F,Sp Sp, Entmax
VEE-F

Abschlussbericht Modulare PV- und Hybridsystemtechnik 231
Abbildung 3-66 Modellierung des Leistungsflusses beim Parallelbetrieb von Vnungskraftmaschinen und VEE-F
erbren-
Derartige Modellierungen von Leistungsflüssen sind flexible und können bei unterschiedli-chen Betriebskombinationen und regelungstechnischen Betriebsarten verwendet werden. Bei-spielsweise beschreibt Abbildung 3-66 den Leistungsfluss beim Parallelbetrieb von VEE-F und Verbrennungskraftmaschinen. Neben dem Lastabwurf und der Abregelung von VEE-F werden beim Bedarf Leistungsvergleichmäßigungskonzepte benötigt. Schonende Betriebs-weisen können hierdurch erreicht werden wie z. B. Betrieb mit geringer Dynamik und kleinen Regelgeschwindigkeiten der netzbildenden Einheiten sowie geringer Alterung von Versor-gungskomponenten.
3.3.1.3 Model zur Frequenz-Wirkleistungs-Regelung
Abbildung 3-67 stellt einen ersten Entwurf zur Darstellung der Zusammenwirkung der ver-schiedenen Frequenz-Wirkleistungs-Regelungsebenen in einem Inselnetz dar. Einige Gedan-ken basieren auf das Konzept in [2]. Hierbei lässt sich die Mobilisierung von Leistungen im Rahmen der in unterschiedlichen Zeitbereichen wirkenden Regelungsebenen sowie des Selbstregelvermögens des Netzes durch rotierende Generatoren und frequenzabhängige Las-ten abschätzen. Das Modell bietet ein recht einfaches Simulationswerkzeug zur groben rege-lungstechnischen Auslegung des Gesamtnetzes und liefert wertvolle Hinweise hinsichtlich
• der regelungstechnischen Anforderungen und der wichtigen Regelungsparametern der unterschiedlichen Regelungsebenen des Netzes,
• des Zusammenspieles zwischen den Regelungsebenen,
In der einfachsten Simulationsbetrachtung kann von dem Verhalten des Gesamtverbrauchs ausgegangen werden. Dieser setzt sich aus dem Verbrauch bei Nennleistung abzüglich der frequenz-abhängigen netzstützenden Anteile der Lasten zusammen. Übertragungsverluste
• des Verhaltens des Inselnetzes bei Leistungsstörungen, sowohl auf Verbraucherseite als auch auf Erzeugerseite z. B. durch dominierende Einzellasten oder Erzeuger fluktuierender erneuerbarer Energien, die nicht in der Regelung des Netzes teilneh-men und als negative Verbraucher betrachtet werden können.

232 Modulare PV- und Hybridsystemtechnik Abschlussbericht
lassen sich dem Verbraucher zuordnen. Sowohl die Wirkung der einzelnen Einheiten, die an der Primär-, Sekundär- und Tertiärregelung des Netzes partizipieren, als auch die summari-sche Wirkung der Primär-, Sekundär- und Tertiärregelung im Netz lassen sich ermitteln.
Damit können auch erforderliche Primär-, Sekundär- und Tertiärregelreserven sowie Fre-quenzverläufe bei unterschiedlichen Leistungsstörungen ebenso vereinfacht abgeschätzt. Mit diesen Informationen über das Gesamtverhalten des Netzes lassen sich die geeignete Versor-gungseinheiten definieren, die den Betrieb gewährleisten können.
Abbildung 3-67 Model zur Frequenz-Wirkleistungsregelung
3.3.1.4 Literatur
[1] G. Hackenberg, W. Kleinkauf, F. Raptis, J. Chatzivassiliadis Power Management for the compound operation of Diesel generator sets with Wind Energy and photovoltaic Plants; EWEC 86, Rome.
[2] E. Welfonder Regelverhalten von Verbund- und Inselnetzen unter besonderer Be-rücksichtigung der wirk- und blindleistungsseitigen Stellmöglichkeiten; VDI-Berichte 582, Düsseldorf 1986

Abschlussbericht Modulare PV- und Hybridsystemtechnik 233
3.3.2 Aufgaben der Betriebsoptimierung und Stand der Technik (M. Rothert)
Die Vielfältigkeit der Aufgaben einer Betriebsoptimierung sind im folgenden Bild dargestellt.
Abbildung 3-68 Eingangs- und Ausgangsgrößen der Betriebsoptimierung
Die Betriebsoptimierung sollte den Zustand jedes Erzeugers, der wichtigsten Verbraucher-gruppen sowie aller vorhandenen Speicher kennen. Ist dies nicht möglich, muss mindestens die Summenleistung aller Verbraucher und nicht erfassbarer Erzeuger sowie der Zustand aller regelbaren Erzeuger und Speicher bekannt sein. Die Betriebsoptimierung hat dann die Auf-gabe, Leistungssollwerte für die regelbaren Erzeuger und Speicher vorzugeben, Wind oder PV-Anlagen abzuregeln und Lastgruppen zu- oder abzuschalten. Um die Stromgestehungs-kosten zu minimieren, müssen zusätzlich die Betriebs- und Investitionskosten der regel- und steuerbaren Komponenten bekannt sein. Zur Vermeidung von Fehlentscheidungen durch die stark fluktuierende Erzeugung und große Laständerungen auf der Verbrauchsseite sollten Lastprognosen und Erzeugungsprognosen für die Einsatzplanung im Stunden- bis Tagesbe-reich genutzt werden. Eine vorausschauende Lastaufteilung wird so möglich, die aber ständig an die aktuellen Gegebenheiten angepasst werden muss.
Durch diese Maßnahmen ist es möglich, die Betriebskosten von Inselnetzen signifikant zu verringern. Vorteile der Betriebsoptimierung ergeben sich vor allem durch:
• einen geringeren Brennstoffverbrauch,
• geringere Emissionen,
• Minimierung der Wartungskosten und
Neben der Betriebsoptimierung hat die Anlagenauslegung einen großen Einfluss auf die Wirt-schaftlichkeit. Fehler in der Planungsphase können durch eine Betriebsoptimierung nicht aus-geglichen werden. Optimierungstools für die Anlagenauslegung und die Betriebsführung soll-ten deshalb aufeinander abgestimmt sein.
Betriebsoptimierung
Aktueller Zustand
Erzeuger
Verbraucher
Speicher
Sollwertvorgabe
Wartungs-anforderung
Last-abschaltung
Lastaufteilung
Windprognose
Einstrahlungs-prognose
Lastprognose
Betriebs-kosten
Investitions-kosten Leistungs-
kennlinien
Manuelle Eingabe
• lange Lebensdauern der Komponenten.

234 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3.3.2.1 Einteilung nach Systemklassen
Für die Betriebsoptimierung ist es wichtig, die Systeme in unterschiedliche Systemklassen aufzuteilen.
• PV- und/oder Wind-Speichersysteme,
• PV- und/oder Wind-Speichersysteme mit zusätzlichem Motor-Generatorsatz und
• Systeme mit mehreren parallelen Komponenten (mehrere Speicher, Motor-Generatorsätze, PV-Stromrichter).
Beim reinen PV-Speichersystem hat eine Betriebsoptimierung kaum Möglichkeiten, auf den Systemzustand zu reagieren. Der Speicher hat dort die Aufgabe, die Differenz zwischen An-gebot und Nachfrage auszugleichen. Bei einem Überangebot an regenerativer Energie und einem vollen Speicher kann die Betriebsführung gegebenenfalls zusätzliche Verbraucher (z. B. Pumpen) zuschalten oder die Energiewandler abregeln. Ist das regenerative Energiean-gebot zu gering und der Speicher leer, kann die Betriebsführung Verbraucher abschalten. Reagiert der verwendete Speicher (z. B. Batterien) empfindlich auf gewisse Zustände, kann über die Zeitsteuerung der Zu- und Abschaltung von Verbrauchergruppen versucht werden, die Lebensdauer des Speichers zu optimieren.
Ist in der Anlage aber zusätzlich ein Motor-Generator vorhanden, erhöhen sich neben der Komplexität des Systems auch die Freiheitsgrade der Betriebsoptimierung. Eine Lastauf-teilung zwischen Speicher und Motor-Generator ist möglich und sogar notwendig für einen sicheren Betrieb. In diesem System hat die Betriebsoptimierung bereits einen großen Einfluss auf die Betriebskosten der Anlage.
In größeren Anlagen mit mehreren parallelen Motor-Generatorsätzen und gegebenenfalls mehreren parallelen Speichern erhöht sich zwar die Komplexität des Systems weiter, aber auch die Eingriffsmöglichkeiten der Betriebsoptimierung steigen. So kann in diesen Systemen z. B. nachts der meist sehr geringe elektrische Grundbedarf durch mehrere Motor-Generatorsätze parallel, durch nur einen Motor-Generator oder durch den Speicher gedeckt werden. Wird als Speicher eine Bleibatterie verwendet, kann in diesen Systemen die ab und zu notwendige Ausgleichsladung nicht nur durch den Motorgenerator erfolgen sondern auch durch einen zweiten parallelen Speicher. In diesen Systemen ist eine gute Betriebsoptimie-rung Grundvoraussetzung für einen reibungslosen und kostengünstigen Betrieb der Anlage.
3.3.2.2 Stand der Technik für die Betriebsoptimierung
Bislang gibt es hauptsächlich Systeme der ersten und zweiten Klasse. Sind diese aber modular aufgebaut, werden sie durch eine Erweiterung zu Systemen der dritten Klasse. Bislang ist dies die Ausnahme. Aufgrund vieler Vorteile werden sich solche Systeme in Zukunft aber stärker durchsetzen. Die Betriebsoptimierung spielt bislang in den meisten Anlagen nur eine sehr untergeordnete Rolle. Es wird dort versucht, den Betrieb durch sinnvoll festgelegte Grenzwer-te zu steuern. Systeme mit einer ständigen Optimierung der Lastaufteilung sind kaum zu fin-den. Die jeweiligen Strategien sind sehr eng an die eingesetzten Komponenten gebunden und orientieren sich vornehmlich an dem Zustand der in fast allen Systemen eingesetzten Blei-batterien.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 235
Die Batterie hat die Aufgabe, die Differenz zwischen Erzeugung und Verbrauch aufzunehmen oder abzudecken. Ziel der Betriebsführung ist der Schutz der Batterie, um eine lange Lebens-dauer zu erreichen. Dies ist deshalb wichtig, weil einerseits die Batterie sehr empfindlich auf bestimmte Betriebszustände reagiert, andererseits die Kosten der Batterie über die Lebens-dauer einer Hybridanlage die Gesamtkosten dominieren [1, 2].
Die Betriebsführung arbeitet dabei folgendermaßen: In Abhängigkeit vom Zustand der Batte-rie wird der Motor-Generator (MG) zu- oder abgeschaltet. Dabei werden ausschließlich feste Grenzwerte verwendet. Strategien, bei denen die Grenzwerte von der Betriebsoptimierung laufend an den Systemzustand angepasst werden, finden bis heute kaum Verwendung. Einen Überblick über die unterschiedlichen Strategien liefert die folgende Tabelle.
Strategie Schaltkriterium Bemerkung
1.
Feste Batteriespan-nungsgrenzwerte
MG start U < U MG stopp U > U
batt min
batt max
typische Werte: U = 1.96 V/Zelle U = 2.35 V/Zelle
min
max
2.
Temperaturkompensier-te Ladespannung
MG start U < U MG stopp U > U (T )
batt min
batt max bat
Temperaturkompensation 3 bis 5 mV / °C / Zelle
3.
Stromkompensierte Entladespannung
MG start U < U (I )MG stopp U > U
batt min bat
batt max
Häufig wird Methode 2 und 3 kombiniert.
4.
Ladezustand (SOC) MG start SOC < SOC MG stopp SOC > SOC
min
max
Häufig werden aus Sicherheitsgründen Methode 4 mit der 1.,2. oder 3. kombiniert.
5.
Netzlast MG start P > P MG stopp P < P
Netz Netz,max
Netz Netz,min
Diese Methode muss mit einer der vorhergehenden Methoden kombiniert werden, um Über- und Tief-entladungen zu vermeiden.
6.
Batteriezustand (BAZ) MG start BAZ < BAZ MG stopp BAZ > BAZ
min
max
neue Methode, die erstmals im Sunny Island Ver-wendung findet.
Tabelle 3-4 Stand der Technik für Strategien zur Betriebsoptimierung
Zusätzlich zu dem Zuschalten des Motor-Generators nach einem festen Grenzwert wird in vielen Anlagen über eine Zeitsteuerung (ca. alle 4 Wochen) eine Volladung der Batterie durchgeführt. Dadurch wird eine Vergleichmäßigung der vielen in Reihe geschalteten Batte-riezellen erreicht.
Eine neu in diesem Vorhaben entwickelte Methode ist es, den Motor-Generator anhand des Batteriezustands (BAZ) zu- oder abzuschalten. In die Bestimmung des Batteriezustandes geht dabei neben der Batteriespannung auch der Ladezustand ein sowie die Zeiten und der Ener-giedurchsatz seit der letzten Voll- oder Ausgleichsladung. Unter bestimmten Umständen ist ein Zustandswechsel, der zu einer Abschaltung des Generators führt, nur nach Abschluss des sich an die Gegebenheiten anpassenden Ladeverfahrens möglich. Dadurch können Voll- oder Ausgleichsladungen ohne gesonderte Anforderungen regelmäßig durchgeführt werden. Diese neue Methode der Betriebsführung über den Batteriezustand ist erstmals im Batteriestromrichter Sunny Island integriert und wird somit die Betriebsführung aller Anlagen, die in nächster Zeit mit diesem Batteriestromrichter aufgebaut werden, bestimmen. Längere Praxiserfahrungen hiermit liegen zur Zeit aber noch nicht vor. Auch einige neuere Laderegler verfügen bereits über eine Ladezustandserfassung und verschiedene adaptierende Ladeverfahren.

236 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die reine Betriebsführung über die Spannung ist bei neu aufgebauten Anlagen nur noch selten anzutreffen.
Eine Betriebsoptimierung, die neben dem Zustand der Batterie auch den Zustand des Motor-Generators (z. B. momentane Betriebskosten) berücksichtigt und zusätzlich über Last- und Einstrahlungsprognosen eine optimierte Einsatzplanung durchführt, ist bislang nicht im Ein-satz. Einige Ansätze hierzu gibt es aber in den verschiedenen Forschungsinstituten und Uni-versitäten.
3.3.2.3 Literatur
[1] R. Kaiser, G. Bopp, J. Schmid: Betriebsführungsstrategien für Photovoltaik-Systeme, Forschungsver-bund Sonnenenergie Themen 96/97,S. 61-68, Köln, Februar 1997
[2] G. Bopp, R. Kaiser: Einfluss der Betriebsführung auf die Batterielebensdauer und das Sys-temverhalten, Forschungsverbund Sonnenenergie, Workshop Elektro-chemische Speichersysteme für regenerative Energieversorgungsanla-gen in Ulm 1999, Berlin, Dezember 1999

Abschlussbericht Modulare PV- und Hybridsystemtechnik 237
3.3.3 Fortschrittliche Betriebsführung mittels Fuzzy-Logic (M. Ibrahim)
3.3.3.1 Überblick
Hybride PV-Systeme haben sich in Form einer modularen Komponentenstruktur bewährt und ihre Einsatzreife bewiesen [1]. Die Modularisierung der Komponenten von PV-Systemen ist als eins der bedeutendsten Kostenreduktionspotentiale für die Systemtechnik mittlerweile allgemein anerkannt. Stets ist hierbei jedoch zu beachten, dass PV-Versorgungssysteme wet-terabhängige Energielieferanten sind. Für die Gewährleistung einer hohen Verfügbarkeit der Energie ist daher die Stabilisierung durch Speichereinheiten und die Einbeziehung anderer Energiequellen und Wandlungstechniken unabdingbar. Daraus folgt, dass die Optimierung des Energieoutputs jeder Komponente im System ein wichtiger Schritt zur optimalen Nutzung des Gesamtsystems ist . Wichtige Parameter für die Systemauslegung und die Wirtschaftlich-keit sind z. B. die Orientierung der PV-Module (Neigungs- und Azimuthwinkel), der Typ der Windturbine (stall- oder pitch-Regelung) und die Parametern der Energieaufbereitungseinheit (Wechselrichter).
Die Energiemanagementstrategie ist verschiedenen Überlegungen unterworfen, wenn sie sich von der Ebene der Komponenten auf die Ebene der Betriebsführungsoptimierung des Gesamt-systems begibt. Die wichtigste Aufgabe des Betriebsführungskonzeptes ist es, den Lastbedarf zu decken und hierfür die verfügbare Energie jeder Komponente effizient zu nutzen. Die Rahmenbedingungen für eine Energiemanagementstrategie sind die wirtschaftliche Betriebs-weise, die Auswirkungen auf die Umwelt (das betrifft hauptsächlich den Dieselgenerator), die Zuverlässigkeit der Energieversorgung und die Qualität der gelieferten Energie [2]. Dies führt zu bestimmten Grenzen, die mittels verschiedener Verfahren eingehalten werden können.
Unabhängig von der Systemkonfiguration stimmen alle eingesetzten Strategien darin überein, dass zuerst der Output der erneuerbaren Energiewandler (z. B. PV, Wind usw. ) genutzt wer-den muss, um den Bedarf zu decken. Verschiedene Vorgehensweisen werden vorgeschlagen, falls die regenerative Energie nicht ausreicht. Eine besagt, dass die Nettolast zuerst vom Speicher gedeckt werden soll. Die Restlast soll dann der Dieselgenerator ausgleichen. Ein anderes Konzept bevorzugt die Deckung der Nettolast primär durch den Dieselgenerator, und der Speicher soll anschließend den übrigen Teil der benötigten Energie liefern. Jede dieser Vorgehensweisen hat ihre spezifischen Auswirkungen auf die Systemkosten über die Lebens-dauer des Systems.
23
3.3.3.2 Untersuchung von Betriebsführungsstrategien
Der Betrieb eines dezentralen PV-Systems hängt nicht nur von der Qualität der einzelnen Sys-temkomponenten ab, sondern auch von ihrem Zusammenwirken im Gesamtsystem. Auf diese Weise steigen die Anforderungen an die Betriebsführung, welche das Zusammenspiel der Komponenten koordiniert, mit der Komplexität des Systems. Die Betriebsführung beeinflusst vor allem die Zuverlässigkeit der Energieversorgung und die Lebensdauer der Systemkompo-nenten.
23 Nettolast ist der Last-Bedarf minus der erzeugten regenerativen Energie

238 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die Kosten einer Komponente in einem PV-Inselsystem setzen sich aus zwei Teilen zusam-men:
• den Investitionskosten, die eine Funktion der Komponentengröße und ihres Typs darstellen und
• den Wartungs- und Reparaturkosten, die vom Komponentenverschleiß abhängen.
Abbildung 3-69 Darstellung der Hauptkostenfaktoren und deren Einfluss auf die Life-
Cycle Costs in PV-Inselsystem
Letzterer ist wiederum abhängig vom Betriebsführungskonzept. Abbildung 3-69 gibt eine schematische Darstellung der Hauptkostenfaktoren und deren Auswirkung auf die Gesamtkosten über die Nutzungsdauer
Bei hybriden Systemen, die neben regenerativen Energiewandlern (PV und Wind) auch Die-selgeneratoren und / oder mehrere Speicher integriert haben, lassen sich verschiedene Betriebsführungsstrategien unterscheiden und anhand der Zuverlässigkeit und der über die Nutzung entstandenen Gesamtkosten miteinander vergleichen. Die geläufigsten Konzepte werden hier vorgestellt und ihre Auswirkungen erläutert.
3.3.3.2.1 Systeme ohne Speicher
Neben den erneuerbaren Energiewandlern nutzen diese Systeme ein Verbrennungsaggregat, das den zusätzlichen Energiebedarf abdeckt. Diese Systeme haben den Vorteil, relativ einfach aufgebaut zu sein, wie in [3] beschrieben wird. In diesen Systemen gibt es keine Freiheits-grade für eine Betriebsführung, da das Verbrennungsaggregat die Nettolast ausgleichen muss, wenn sie nicht von den erneuerbaren Energien gedeckt wird. Es gibt allerdings drei Betriebs-modi für den Dieselgenerator in dieser Systemkonfiguration, nämlich:
• Kontinuierlicher Dieselbetrieb • Start/Stop - Dieselbetrieb • Unterbrechungsfreie Stromversorgung

Abschlussbericht Modulare PV- und Hybridsystemtechnik 239
Der Unterschied zwischen diesen Modi basiert auf dem Anteil der erneuerbaren Energie an der Gesamtlast. Ein geringer Anteil der erneuerbaren Energie an der Last lässt den Diesel im ersten Modus arbeiten. Wenn dagegen ein höherer Anteil an erneuerbaren Energien bereit-steht, wird gewöhnlich der Start/StopModus angewandt. Falls schließlich die meiste Zeit über genügend erneuerbare Energie bereitsteht, um den Bedarf zu decken, werden die konventionellen Generatoren wie Notstromaggregate für eine unterbrechungsfreie Stromversorgung eingesetzt.
Oft haben Dieselgeneratoren unter dem 1. und 2. Betriebsmodus eine hohe Start/Stop-Häufig-keit und/oder arbeiten mit geringer Effizienz (Teillast oder Leerlauf). Das erhöht die Betriebs- und Wartungskosten der Einheiten und verkürzt die Lebensdauer. All dies resultiert in höhe-ren Stromgestehungskosten und hat zusätzlich negative Auswirkungen auf die Umwelt.
In großen Systemen mit mehreren Verbrennungsaggregaten unterschiedlicher Nennleistung steigt die Systemkomplexität deutlich an. Einige Methoden diese Probleme zu lösen, sind als Unit-commitment-Strategien bekannt, die allerdings an Komplexität nochmals deutlich zu-nehmen beim Einsatz fluktuierender regenerativer Energiequellen [4].
3.3.3.2.2 Systeme mit Batteriespeicher
Die große Mehrheit der installierten dezentralen Hybridsysteme ist mit einem Batteriespeicher zur Energiepufferung ausgestattet. Die Existenz eines Speichermediums erhöht die Nutzbar-keit der regenerativen Energien und verbessert die Energieverfügbarkeit des Systems. Außer-dem können auf diese Weise Fluktuationen in den erneuerbaren Energiequellen ausgeglichen werden und die Start/Stop-Häufigkeit sowie der Kraftstoffverbrauch des Dieselgenerators gesenkt werden. Der Batteriespeicher im System fügt aber auch einen weiteren Komplexitäts-grad und einen Freiheitsgrad für die Betriebsführung hinzu. Von besonderem Interesse sind die Möglichkeiten, den Diesel zu nutzen, um den Batteriespeicher zu laden, und der Einsatz der Batterie zur Deckung des Nettolast. Verschiedene grundlegende Konzepte und Vorschläge zur Optimierung der Betriebsführung werden in den folgenden Kapiteln dargelegt.
3.3.3.2.3 Lastfolgebetrieb mittels Speicher
Bei dieser Strategie deckt im Regelfall die Batterie die Nettolast, und das Verbrennungsag-gregat dient zum Laden der Batterie. Es sollten jedoch verschiedene Variationen des Lastfol-gebetriebs mittels Speicher in Betracht gezogen werden.
Nennleistunsstrategie: Wenn das Verbrennungsaggregat gestartet wird, dann wird es mit Nennleistung (maximale Kraftstoffeffizienz) betrieben, um die Nettolast zu decken, und der Rest wird in der Batterie gespeichert, solange die Batterie die Energie aufnehmen kann. Dies hängt hauptsächlich von der Systemauslegung bezüglich der Leistung und Energie von der Batterie und der Leistung des Verbrennungsaggregats ab. Beschleunigte Alterung ist eine mögliche Folge aufgrund der Belastung der Batterie durch ungünstige Betriebszustände.
Periodische Volladestrategie: Dieses Konzept wurde für verschiedene Anlagen vorgeschla-gen und eingesetzt [5]. Diese Strategie empfiehlt, dass die Batterie gelegentlich zu 100% geladen werden sollte und das immer in bestimmten Zeitabständen, normalerweise alle zwei bis vier Wochen. Diese definierten Volladungen nur anhand eines vordefinierten Zeitplans

240 Modulare PV- und Hybridsystemtechnik Abschlussbericht
durchzuführen, kann jedoch eine Schädigung der Batterie verursachen (die Ladung erfolgt zu spät oder der Prozeß ist noch gar nicht notwendig, wenn die Batterie z. B. im vorangegange-nen Zeitraum nicht stark in Anspruch genommen wurde). Diese Maßnahmen können zu einem vorzeitigen Ausfall der Batterie führen. Zusätzlich läuft das Verbrennungsaggregat während der relativ langen Volladungen meistens mit einem hohem spezifischen Kraftstoff-verbrauch und steigert so die Wartungskosten.
3.3.3.2.4 Lastfolgebetrieb mittels Verbrennungsaggregat
Dies ist eine einfache Strategie, die aber wirklich in der Praxis angewandt wird [6]. Diese Strategie nutzt das Verbrennungsaggregat gar nicht, um die Batterie zu laden, sondern nur, um die momentane Nettolast zu decken (Lastfolgebetrieb). Diese Strategie erlaubt keine Fest-legung einer minimal Leistung des Verbrennungsaggregats. Da die Nettolast zu Spitzenlast-zeiten höher liegen kann als die Nennleistung des Verbrennungsaggregats, arbeitet die Batte-rie dann parallel hierzu, um diesen Zeitraum zu überbrücken. Wenn dann immer noch ein Teil der Nettolast nicht gedeckt wird, gilt dies als Leistungsdefizit. Eine Ladung der Batterie geschieht nur durch die PV- und/oder Windgeneratoren in den Zeiträumen, in denen die höchste Verfügbarkeit an erneuerbaren Energien besteht. Dieses Konzept soll das Starten ei-nes zusätzlichen Dieselgenerators (falls vorhanden) möglichst verhindern und dennoch eine hohe Systemverfügbarkeit garantieren. Vor allem die Anlagenauslegung (Größe der regenera-tiven Generatoren zur Batteriekapazität) hat großen Einfluss auf die Batteriealterung und ihre Lebensdauer, da viel Zeit verstreichen kann, während sich die Batterie im niedrigen Ladezu-stand befindet. Außerdem wird das Verbrennungsaggregat bei dieser Strategie meistens unter Teillast-Bedingungen betrieben.
3.3.3.2.5 Diesel zum Nachladen der Batterie
Dies ist ein einfaches Konzept zur Verbesserung des Kraftstoffverbrauchs des Verbren-nungsmotors. Im Gegensatz zum Lastfolgebetrieb mittels Verbrennungsaggregat wird die Nettolast hierbei nur durch die Batterie gedeckt. Die Aufgabe des Dieselgenerators in dieser Betriebsführungsstrategie ist einzig das Laden der Batterie. Daher wird der Verbrennungsmo-tor lange Zeit nahe der Nennleistung betrieben. Dadurch ist eine effiziente Nutzung des Die-selkraftstoffs und eine Minimierung der Wartungsaufwendungen möglich. Das Problem die-ser Strategie ist allerdings eine schnelle Alterung der Batterie aufgrund der recht hohen Ener-giedurchsätze. Außerdem kann sie nur sinnvoll in Systemen angewandt werden, in denen der Nettolast-Bedarf relativ gering ist.
3.3.3.3 Fortschrittliche Betriebsführung durch die Modellierung der Batteriealterung mittels Fuzzy-Logik
Aus der vorangegangenen Analyse lässt sich schließen, dass die Batterie die schwächste Komponente im System ist. Ein Missbrauch ihrer gespeicherten Energie hat fatale Auswir-kungen auf ihre Lebensdauer und somit auf die Kosten des Gesamtsystems. Häufig beträgt die Lebensdauer der Bleibatterien in PV-Systemen nur 2 bis 4 Jahre, was im Vergleich zu den anderen Systemkomponenten sehr kurz ist. Diese schnelle Alterung der Bleibatterie ist eine Folge der ungünstigen Betriebsbedingungen. Daher liegt der Anteil der Batterie an den jährli-

Abschlussbericht Modulare PV- und Hybridsystemtechnik 241
chen Kosten bei ungefähr 40%, was die Kosten des gesamten Systems erhöht und sich in ei-nem hohen Strompreis widerspiegelt.
Offensichtlich besteht die Notwendigkeit, eine fortschrittliche Betriebsführungsstrategie zu entwickeln, welche sowohl die Verfügbarkeit als auch die Betriebsbeschränkungen der Sys-temkomponenten, besonders des Batteriespeichers und des Verbrennungsaggregats, berück-sichtigt. Außerdem benötigt die Batterie, als ein grundlegendes Element im Hybridsystem, ein angemessenes Alterungsmodell, welches ihren realen Gesundheitszustand anhand von einigen charakteristischen Parametern reflektiert. Diese Parameter sollten wiederum die Betriebsfüh-rungsstrategie bei ihrer Steuerung des Energieflusses unterstützen. Anhand dieses Alterungs-modells können die notwendigen Schritte zur Minimierung der Gesamtkosten über die Nut-zungsdauer unternommen werden. Diese Arbeit wird sich auf zwei zentrale Punkte konzent-rieren:
• Konstruktion eines Alterungsmodells für den Batteriespeicher auf der Basis von Fuz-zy-Logik
• Entwicklung eines fortschrittlichen Konzepts einer Betriebsführung für hybride PV-Inselsysteme.
3.3.3.4 Literatur
[1] W. Kleinkauf, F. Raptis; "Elektrifizierung mit erneuerbaren Energien-Hybridanlagentechnik zur dezentralen, netzkompatiblen Stromversor-gung" Forschungsverbund Sonnenenergie, 96/97.
[2] E. Handschin and A. Petroianu; Energy Management Systems Springer-Verlag, Berlin, 1991.
[3] J.G. McGowan and J.F. Manwell; Wind/ Diesel Energy Systems: Re-view of Design Options and Recent Developments, Solar Energy, Vol. 41, No. 6, 1988.
[4] Shyh-Jier Huang und Ching-Lien Huang; "Application of Genetic-Based Neural Networks to Thermal Unit Commitment" IEEE Transac-tion on Power Systems, Vol. 12, No. 2, 1997.
[5] G. Bopp and M. Stoll; Ursachen von Batterieveränderungen und Kon-sequenczen für die Betriebsführung in regenerativen autonomen Ener-gieversorgungssystemen Forschungsverbund Sonnenenergie, Elektro-chemische Speicher in regenerativen Energiesystemen, 1993, Ulm, Germany.
[6] V. Dijk; " Hybrid Photovoltaic Solar Energy Systems, Design Operati-on, Modelling, and Optimization of the Utrecht PBB System" Disserta-tion Thesis, University of Utrecht. Nederlands, 1996.

242 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3.3.4 Möglichkeiten und Ansätze der Modularisierung von Betriebsführungssoftware (M. Rothert)
Die Betriebsführung von Inselnetzen und Hybridsystemen hat die Aufgabe, das gesamte Sys-tem stabil zu halten, die Betriebskosten zu minimieren und eine hohe Versorgungssicherheit zu gewährleisten. Um dieses Ziele zu erreichen, werden bis heute meistens spezielle, auf eine Anlage abgestimmte Lösungen eingesetzt. Von den vielen verschiedenen Anlagenkonzepten konnte sich keines eindeutig gegen ein anderes durchsetzen. Gleiches gilt für die häufig sehr unterschiedlichen Betriebsführungsansätze.
Zukünftig wird sich aber nur ein Konzept durchsetzen, welches sich an die Standards der gro-ßen Verbundnetze anlehnt sowie leicht erweiterbar ist, um auch einen in Zukunft wachsenden Bedarf abdecken zu können.
Bei der Entwicklung von Komponenten, die diese zukünftigen Anforderungen erfüllen, sind in den letzten Jahren am ISET große Fortschritte erzielt worden. Dies ist sowohl den vielen grundlegenden Arbeiten in den Projekten der Modularen Systemtechnik wie einigen Kompo-nentenentwicklungen in enger Zusammenarbeit mit der Industrie zu verdanken. Diese vom ISET entwickelten Anlagenkonzepte sowie neu entwickelte Komponenten könnten schon in naher Zukunft zu einer deutlichen Vereinheitlichung führen.
Auf der Ebene der Betriebsführung sind ähnliche Konzepte notwendig. Sie müssen zur elekt-rischen Energieversorgung im Verbundnetz kompatibel, für unterschiedliche Versorgungs-aufgaben und Anlagengrößen geeignet und auf Anlagenerweiterungen vorbereitet sein.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 243
3.3.5 Aufgaben der Betriebsoptimierung und Stand der Technik (M. Rothert)
Die Vielfältigkeit der Aufgaben einer Betriebsoptimierung sind in Abbildung 3-70 dargestellt.
Die Betriebsoptimierung sollte den Zustand jedes Erzeugers, der wichtigsten Verbraucher-gruppen sowie aller vorhandenen Speicher kennen. Ist dies nicht möglich, muss mindestens die Summenleistung aller Verbraucher und nicht erfassbarer Erzeuger sowie der Zustand aller regelbaren Erzeuger und Speicher bekannt sein. Die Betriebsoptimierung hat dann die Aufga-be, Leistungssollwerte für die regelbaren Erzeuger und Speicher vorzugeben, Wind oder PV-Anlagen abzuregeln und Lastgruppen zu- oder abzuschalten. Um die Stromgestehungskosten zu minimieren, müssen zusätzlich die Betriebs- und Investitionskosten der regel- und steuer-baren Komponenten bekannt sein. Zur Vermeidung von Fehlentscheidungen durch die stark fluktuierende Erzeugung und große Laständerungen auf der Verbrauchsseite sollten Lastprog-nosen und Erzeugungsprognosen für die Einsatzplanung im Stunden- bis Tagesbereich ge-nutzt werden. Eine vorausschauende Lastaufteilung wird so möglich, die aber ständig an die aktuellen Gegebenheiten angepasst werden muss.
Durch diese Maßnahmen ist es möglich, die Betriebskosten von Inselnetzen signifikant zu verringern. Vorteile der Betriebsoptimierung ergeben sich vor allem durch:
• geringere Emissionen,
• Minimierung der Wartungskosten und
Neben der Betriebsoptimierung hat die Anlagenauslegung einen großen Einfluss auf die Wirt-schaftlichkeit. Fehler in der Planungsphase können durch eine Betriebsoptimierung nicht aus-geglichen werden. Optimierungstools für die Anlagenauslegung und die Betriebsführung soll-ten deshalb aufeinander abgestimmt sein.
Betriebsoptimierung
Aktueller Zustand
Erzeuger
Verbraucher
Speicher
Sollwertvorgabe
Wartungs-anforderung
Last-abschaltung
Lastaufteilung
Windprognose
Einstrahlungs-prognose
Lastprognose
Betriebs-kosten
Investitions-kosten Leistungs-
kennlinien
Manuelle Eingabe
Abbildung 3-70 Eingangs- und Ausgangsgrößen der Betriebsoptimierung
• einen geringeren Brennstoffverbrauch,
• lange Lebensdauern der Komponenten.

244 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3.3.5.1 Einteilung nach Systemklassen
Für die Betriebsoptimierung ist es wichtig, die Systeme in unterschiedliche Systemklassen aufzuteilen.
• PV- und/oder Wind-Speichersysteme,
• PV- und/oder Wind-Speichersysteme mit zusätzlichem Motor-Generatorsatz und
• Systeme mit mehreren parallelen Komponenten (mehrere Speicher , Motor-Generatorsätze, PV-Stromrichter).
Beim reinen PV- Speichersystem hat eine Betriebsoptimierung kaum Möglichkeiten, auf den Systemzustand zu reagieren. Der Speicher hat dort die Aufgabe, die Differenz zwischen An-gebot und Nachfrage auszugleichen. Bei einem Überangebot an regenerativer Energie und einem vollen Speicher kann die Betriebsführung gegebenenfalls zusätzliche Verbraucher (z. B. Pumpen) zuschalten oder die Energiewandler abregeln. Ist das regenerative Energiean-gebot zu gering und der Speicher leer, kann die Betriebsführung Verbraucher abschalten. Reagiert der verwendete Speicher (z. B. Batterien) empfindlich auf gewisse Zustände, kann über die Zeitsteuerung der Zu- und Abschaltung von Verbrauchergruppen versucht werden, die Lebensdauer des Speichers zu optimieren.
Ist in der Anlage aber zusätzlich ein Motor-Generator vorhanden, erhöhen sich neben der Komplexität des Systems auch die Freiheitsgrade der Betriebsoptimierung. Eine Lastauf-teilung zwischen Speicher und Motor-Generator ist möglich und sogar notwendig für einen sicheren Betrieb. In diesem System hat die Betriebsoptimierung bereits einen großen Einfluss auf die Betriebskosten der Anlage.
In größeren Anlagen mit mehreren parallelen Motor-Generatorsätzen und gegebenenfalls mehreren parallelen Speichern erhöht sich zwar die Komplexität des Systems weiter, aber auch die Eingriffsmöglichkeiten der Betriebsoptimierung steigen. So kann in diesen Systemen z. B. nachts der meist sehr geringe elektrische Grundbedarf durch mehrere Motor-Generatorsätze parallel, durch nur einen Motor-Generator oder durch den Speicher gedeckt werden. Wird als Speicher eine Bleibatterie verwendet, kann in diesen Systemen die ab und zu notwendige Ausgleichsladung nicht nur durch den Motorgenerator erfolgen sondern auch durch einen zweiten parallelen Speicher. In diesen Systemen ist eine gute Betriebsoptimie-rung Grundvoraussetzung für einen reibungslosen und kostengünstigen Betrieb der Anlage.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 245
3.3.6 Definition der Kostenstruktur (F. Kininger)
Grundsätzlich lassen sich die Kosten in einem Energieversorgungssystem in zwei (grundle-gende) Kostenarten aufteilen:
1. Variable Kosten
2. Fixkosten
Die variablen Kosten sind dabei Solche, die sich durch die Betriebsführung des Energiema-nagement-Systems (EMS) verändern lassen. Kosten, die in der Planungsphase nicht vorherzu-sehen sind, können über die variablen Kosten in den Systempreis mit einfließen.
Fixkosten sind die Kosten, die feststehen und sich im Laufe des Betriebs einer Anlage nur eingeschränkt verändern oder ansteigen. Die Fixkosten setzen sich hauptsächlich aus den In-vestitionskosten der Anlage zusammen.
Die einzelnen Kosten lassen sich zusätzlich noch in unterschiedliche Kostengruppen untertei-len, die allerdings die grundsätzliche Unterteilung in variable und Fixkosten berücksichtigt. Bei der Bestimmung der Kostengruppen wurde die Definition der Subsysteme aus Kapitel 1.5 zugrundegelegt. Die Bezeichnung der Subkomponenten wird im Index des jeweiligen Kos-tenparameter angegeben.
Investitionskosten:
Investitionskosten sind solche Kosten, die in die Anlage investiert werden müssen, bevor sie in Betrieb genommen werden. Die Zusammensetzung der Investitionskosten ist in Tabelle 3-5 aufgeführt.
Die meisten in Tabelle 3-5 aufgeführten Investitionskostenarten setzen sich ebenfalls aus ei-ner Summe von weiteren Unterkosten zusammen, die vom jeweiligen Anwendungsfall ab-hängen (z.B k für die Investitionskosten des PV-Generators). Speziell die Infrastruktur-kosten hängen stark vom Einzelfall ab. So stellt sich z. B. auch die Frage nach dem Land, in welchem das System eingesetzt werden soll. Außerdem ergeben sich Investitionskostenunter-schiede in Abhängigkeit der Nutzerzahl. Bei Mehrnutzersystemen wächst somit der Anteil der Infrastrukturkosten.
Gen,F,PV
Die Betriebsrückwirkungskosten beziehen sich auf die eventuell erforderliche Neubewertung der Investitionskosten, die durch die nicht exakt bestimmbare Lebensdauer spezieller Anla-genkomponenten notwendig wird. Bei schlechter Betriebsführung kann die Lebensdauer eines Batterie-Speichers zum Beispiel stark herabgesetzt werden, und es entstehen dadurch nicht kalkulierte Neuinvestitionskosten. Diese Kosten können aber auch bei guter Betriebsführung kostensenkend wirken. Die Betriebsrückwirkungskosten bilden den Übergang zu den Be-triebskosten.

246 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Benennung Zeichen und Art der Kos-24
ten Beschreibung
Kosten für allgemeine Regelungs- und Steuerungs-komponenten (z. B. Energie-Management), sowie deren Installations- und Systemkopplungskomponen-ten, aber auch Kosten für Gehäuse oder Gebäude.
Systemkomponenten-Kosten
FSysk ,
FGenk ,
FStok ,
VInf
FInf
k
k
,
,
FTrak ,
FPlak ,
FInsk ,
FAddk ,
FDivk ,
FSubk ,
VepRk ,
Generatorkomponenten-Kosten
Kosten für Generatorkomponenten (z. B. Diesel- und PV-Generator) sowie deren Installations- und Sys-temkopplungskomponenten, aber auch Kosten für Gehäuse oder Gebäude.
Speicherkomponenten-Kosten
Kosten für Speicherkomponenten (z. B. Batterien) sowie deren Installations- und Systemkopplungskom-ponenten, aber auch Kosten für Gehäuse oder Ge-bäude. Es können auch zusätzliche Kosten zur Ent-sorgung berücksichtigt werden.
Kosten, die für eine Infrastruktur auf der Verbraucher-seite anfallen (z. B. Zähler und Elektroinstallation).
Infrastrukturkosten (Verbraucherorientiert)
Je nach Anwendungsfall können diese Kosten sehr unterschiedlich ausfallen.
Kosten, die für den Transport zum Standort aufge-wendet werden müssen. Die Transportkosten können auch den jeweiligen Komponenten zugeordnet wer-den.
Transportkosten
Planungs- und Installati-onskosten
Kosten, die für Planung und Installation aufgewendet werden müssen. Die Planungs- und Installationskos-ten können auch den jeweiligen Komponenten zuge-ordnet werden.
Zusatzkosten Eventuelle Kosten durch Einfuhrzölle und Steuern, die im Land des Standortes einer Anlage anfallen. Auch Versicherungskosten gehören hierzu.
Diverse Kosten Diverse andere Kosten, die nicht eine der anderen Kostenarten zugerechnet werden können.
Subventionen Zu den Investitionskosten negative Kosten, wie staatliche Zuschüsse.
Betriebsrückwirkungs-Kosten
Rückwirkungen der Art der Betriebsführung auf die Lebensdauer von Komponenten und den damit ver-bundenen veränderten Investitionskosten.
Tabelle 3-5 Auflistung der Investitionskosten
24Die Art der Kosten gibt der zweite Index nach dem Komma im Zeichen an. Dabei gilt: V = variable Kosten; F = Fixkosten

Abschlussbericht Modulare PV- und Hybridsystemtechnik 247
Betriebskosten:
Zeichen und Art der Kosten 5 Beschreibung
Grundwartungs- Kosten
Planmäßige Wartungen; Kosten für Lohn, Anreise von Personal und Aus-tauschmaterialien (z. B. Batteriewasser, Öl, Ölfil-ter ), die nicht dem direkten Betrieb zuzuordnen sind.
25
Betriebsbedingte Wartungs-Kosten
26
Reparaturwartungs- Kosten
Unplanmäßige Wartungen; Kosten für Lohn, Anreise von Personal und Aus-tauschmaterialien (z. B. defekte Sicherungen und Kabel, Ölfilter), die nicht dem direkten Betrieb zuzu-ordnen sind.
Energie-Erzeugungskosten (Treibstoffkosten)
Beinhalten Treibstoffkosten zuzüglich den entspre-chenden Transportkosten, aber auch Ölkosten, die dem direkten Betrieb zuzuordnen sind.
Energie- Speicherkosten
Kosten die durch den Energieumsatz entstehen (z. B. durch Ausgleichsladungen) sowie Kosten durch wirkungsgradbedingte Verluste.
Externe Kosten (alternative Zusatzkos-ten)
Kosten durch Lärm, Verschmutzung und anderen Auswirkungen auf das Umfeld eines ES. Sind Ab-hängig vom Nutzungsgrad der einzelnen Betriebs-komponenten.
Subventionen Negative Kosten durch Vergünstigungen bei ver-mehrter Nutzung von erneuerbaren Energien.
Diverse Diverse andere Kosten, die nicht eine der anderen Kostenarten zugerechnet werden können.
Tabelle 3-6 Auflistung der Betriebskosten
Als Betriebskosten werden die Kosten bezeichnet, die durch den Betrieb der einzelnen Gene-rator- und Speicherkomponenten entstehen. Sie beinhalten sowohl Fixkosten als auch variable Kosten und sind hauptsächlich vom Betrieb der Anlage abhängig. Sie entstehen aber auch, wenn die Anlage nicht betrieben wird, dann allerdings in einem geringeren Maße.
Benennung
FMaink ,
VOpek ,
VMaink ,
VGenk ,
VBattk ,
VExtk ,
VSubk ,
VDivk ,
Planmäßige Wartungen; Kosten für Lohn, Anreise von Personal und Aus-tauschmaterialien (z. B. PV-Module Ersatzteile; Öl, Ölfilter ), die dem direkten Betrieb zuzuordnen sind.
25 Bei zu bestimmten zeitlichen Wartungsintervallen fälligen Ölwechseln. 26 Bei betriebstundenabhängigen Ölwechseln.

248 Modulare PV- und Hybridsystemtechnik Abschlussbericht
3.3.7 Aufstellung und Wertung von Methoden zur Systemauslegung (F. Kininger)
Um PV-Hybrid-Systeme auszulegen gibt es zahlreiche Möglichkeiten die jedoch in Ihrer Qua-lität sehr unterschiedlich sind. Dabei lassen sich die meisten Methoden in die vier folgenden Kategorien einteilen.
1. Methoden die eine Auslegung des Systems durch einfache mathematische Formeln, sogenannten Faustformeln oder Kalkulationstabellen ermöglichen. Da für diese Methoden meist empirisch bestimmte Parameter benötigt werden, sind grundlegende Fachkenntnisse erforderlich. Eine weit verbreitete Auslegungsmethode beruht auf der Definition des Qualitätsfaktors [1]. In Verbindung mit einer Formeln zur Bestimmung der Batteriekapazität lassen sich somit zufriedenstellende Auslegungsergebnisse erzie-len. Mit den Kalkulationstabellen der Sandia National Laboratories [2] ist es zudem möglich die einzelnen Subkomponenten exakt zu bestimmen. Mit ihnen kann ein Hyb-rid-System auch professionell ausgelegt werden. Die Methode ist jedoch sehr aufwen-dig und erfordert von dem Nutzer fundierte Fachkenntnisse.
2. Die zweite Kategorie setzt sich aus den sehr einfachen, kostenlos im Internet down-loadbaren Softwaretools zusammen. Sie bieten für all jene eine Möglichkeit der Systemauslegung, die nur über begrenzte physikalische, mathematische und technische Kenntnisse verfügen. Die meisten dieser Programme sind mit grafischen Erläuterungen oder multimedialen Einspielungen ergänzt, so dass der Laie eine Möglichkeit hat, ohne selbst rechnen zu müssen, die Größenordnung eines Hybridsystems zu bestimmen. Hier soll vor allem die kostenlose Version des SolarSizer von CREST [3] genannt werden. Ein weiteres sehr einfaches und leicht verständliches Tool steht auf der Internetseite von CREST [3] zu Verfügung.
3. Zur dritten Kategorie gehören die professionellen Auslegungs- und Simulationspro-gramme. Diese Programme sind für den fachkundigen Nutzer gedacht und ermögli-chen es ihm, die wichtigen Komponenten eines Hybridsystems zu bestimmen. Um diese Programme bedienen zu können, benötigt der Nutzer jedoch fundierte Fach-kenntnisse, da sehr viele fachspezifische Parameter eingegeben werden müssen. Alle Programme enthalten umfangreiche Solarstrahlungs- und Produktdatenbanken, mit de-ren Hilfe es sehr schnell möglich ist, ein Hybrid-System in der richtigen Größenord-nung auszulegen, die Anzahl der Komponenten zu bestimmen und somit eine Mach-barkeitsstudie zu erstellen. Zusätzlich bieten alle Programme ein Simulationsmodul an. Die wichtigsten Systemparameter können somit graphisch dargestellt werden. Hiermit ergibt sich eine sehr effektive Möglichkeit das Auslegungsergebnis zu verifi-zieren und gegebenenfalls korrigierend einzugreifen. Teilweise verfügen diese Pro-gramme über ein Modul zur Wirtschaftlichkeitsanalyse, womit sie für Planer und In-stallateure besonders interessant sind. Die gängigsten Softwareprodukte sind Hybrid Designer, INSEL, PVSYST [4], PVS [5], PV*Sol [6] und SolarSizer [3].
4. Die vierte Kategorie stellt die Gruppe der wissenschaftlich orientierten Simulations-programme dar. Sie bieten im Vergleich zu den professionellen Softwareprodukten wesentlich mehr Eingriffsmöglichkeiten. Funktion dieser Programme ist die Modellie-rung der Systemzustände und der physikalischen Eigenschaften von Systemkompo-

Abschlussbericht Modulare PV- und Hybridsystemtechnik 249
nenten. Diese dienen dazu Optimierungspotentiale zu erkennen und technische Neue-rungen testen zu können. Der Einarbeitungsaufwand und die Preise für solche Simula-tionsprogramme sind sehr hoch, sodass sie für fachkundige Projektplaner und Installa-teure nicht in Frage kommen.
Die Komplexität der meisten professionellen Auslegungsmethoden, die hier beschrieben wor-den sind (Auslegungsprogramme), bergen jedoch ein hohes Fehlerrisiko. Viele Planungsinge-nieure oder Techniker tendieren aus Zeitmangel dazu, die zahlreichen Einstellungen und Pa-rameter falsch zu interpretieren. Die Vorgaben und Resultate der Auslegungsprogramme wer-den dann ohne Verifizierung auf Plausibilität übernommen und führen somit schnell zu einer Fehlauslegung.
Vor allem aus diesem Grund wurden neue Ansätze zur Systemauslegung gesucht, wie sie bei-spielsweise in der Industrie und Installationstechnik immer häufiger Anwendung finden. Da-bei werden definierte Baugruppen zu einem Baukasten zusammengestellt, die für bestimmte Anwendungsfelder optimal geeignet sind. Zur Bestimmung des individuellen Anwendungs-falls kann der Planungsingenieur oder Techniker dann anhand unterschiedlicher, charakteristi-scher Kennwerte auf ein wissensbasierendes Expertensystem mit beispielhaften Anwendungs-fällen zurückgreifen. Diese Vorgehensweise wird beispielsweise seit Jahren erfolgreich in der Pumpenindustrie eingesetzt.
In Kapitel 3.3.8 wird dieses vereinfachte Verfahren detaillierter erläutert.
3.3.8 Entwicklung eines vereinfachten Verfahrens zur Systemauslegung (F. Kininger)
Aufgrund der in Kapitel 3.3.7 genannten Problematik wurde das Konzept eines vereinfachten Verfahrens zur Systemauslegung nach dem Prinzip eines wissensbasierenden Expertensys-tems entwickelt [7]. Die Zielgruppe des Auslegungssystems besteht hauptsächlich aus Ent-scheidungsträgern mit einem technischen Hintergrund und deren Planungsingenieure. In den meisten Fällen hat diese Zielgruppe nicht die Möglichkeit, die entsprechenden Auslegungs-programme sinnvoll für eine Machbarkeitsstudie einzusetzen, da die nötigen Grundlagen-kenntnisse nicht vorhanden sind. Daraus resultiert, dass die Alternative PV-Diesel-Hybrid-System aus Mangel an Kenntnissen nicht in Betracht gezogen wird.
Die fehlende Kenntnis bildet dabei, neben den finanziellen Unzulänglichkeiten, die größte Barriere bei der Elektrifizierung mit erneuerbaren Energien und im Speziellen mit PV-Hybrid-Systemen.
Das Internet bietet nun seit mehreren Jahren gute Voraussetzungen, um die Kenntnislücke mit der Zeit zu schließen. Auf unzähligen Internetseiten werden sowohl allgemeine als auch tech-nische Informationen zu einzelnen Komponenten und zu kompletten PV-Hybrid-Systemen angeboten. Doch trotz, vielleicht aber auch wegen dieser Vielfalt an Information, sind die meisten Entscheidungsträger nicht in der Lage, die notwendigen Informationen zusammenzu-tragen.
Die Absicht des Expertensystems ist es, den potentiellen Hybrid-System-Planern und Nutzern ein Mittel für Projektskizzen und Machbarkeitsstudien bereitzustellen. Typische Anwen-

250 Modulare PV- und Hybridsystemtechnik Abschlussbericht
dungsfelder könnten beispielsweise Ökotourismus in Spanien, Kleingewerbe in Thailand und Fischerdörfer in Indonesien sein.
Das Expertensystem PVDiS [7] wurde mit dem Hintergrund entwickelt, das Wissen der Ener-gieexperten der Allgemeinheit bereitzustellen. Bei der Konzepterstellung des Expertensys-tems wurde dabei auf eine modulare Struktur geachtet um eventuelle Neuerungen oder Erwei-terungen problemlos realisieren zu können.
Das nächste Kapitel erläutert die Charakteristiken eines Expertensystems, bevor auf die detailliert Realisierung des PVDiS Konzeptes eingegangen wird.
3.3.8.1 Die Hauptcharakteristiken eines Expertensystems
Bei [8] wird ein Expertensystem wie folgt definiert: ,,Ein Expertensystem ist ein Computer-programm, das den Problemlösungsmechanismus eines Experten moduliert". Der Wert menschlicher Kenntnis kann weiter verbreitet werden, wenn die Leistungsfähigkeit des Com-puters mit der Reichhaltigkeit menschlichen Wissens verknüpft wird. Der große Vorteil von Simulations- und Auslegungsprogrammen sowie von Expertensystemen ist, dass sie leicht zu vervielfältigen sind. Der Vorteil eines Expertensystems ist darüber hinaus, dass es leicht zu verstehen, umzusetzen und somit auch in Regionen verbreitet werden kann, in denen das Ex-pertenwissen gefragt ist.
Expertensysteme werden hauptsächlich im Bereich der Selektion, der optischen und akusti-schen Erfassung sowie der Überwachung eingesetzt. Sie werden aber immer häufiger auch im Bereich der Auslegung verwendet. Dabei berechnen sie die Objekte nicht selbst, sondern ver-knüpfen unterschiedliche Objektkonfigurationen mit bestimmten definierten Objekteigen-schaften.
Ein Expertensystem identifiziert das beste Objekt aus einer Menge von möglichen Objekten basierend auf einer Spezifikation von Eigenschaften, die der Nutzer dem System eingibt. Die Auswahl des richtigen Objektes basiert entweder auf einer Verknüpfung logischer Zustände oder aber auf einer Auswertfunktion.
3.3.8.2 Die Struktur eines Expertensystems
Ein Experte wird in der Regel als eine Person definiert, die in einem bestimmten Bereich über ein spezielles Wissen verfügt. Deshalb muss auch ein Expertensystem über ein solch speziel-les Wissen verfügen, das in einer Wissensdatenbank gespeichert ist. Diese Wissensdatenbank kann mit dem Langzeitgedächtnis eines Experten, beispielsweise eines Arztes, verglichen werden. Wenn zum Beispiel ein Patient um Rat sucht, erkundigt sich der Arzt nach den Sym-ptomen und speichert diese in seinem Kurzzeitgedächtnis. Ähnlich macht es auch das Exper-tensystem, das die Informationen des Nutzers, die es gezielt erfragt hat, im Arbeitsspeicher ablegt.
Wenn der Arzt die einzelnen Symptome aus dem Kurzzeitgedächtnis mit den Informationen aus der Wissensdatenbank in seinem Langzeitgedächtnis vergleicht, schließt er auf mögliche Krankheitsbilder. Er stellt dem Patienten zielgerichtet neue Fragen, um aus den möglichen

Abschlussbericht Modulare PV- und Hybridsystemtechnik 251
Krankheitsbildern, das richtige herauszufinden. Dieser Vorgang wird in einem Expertensys-tem von der sogenannten Inferenz-Maschine durchgeführt.
Abbildung 3-71 Problemlösung eines Experten [8]
In Abbildung 3-71 und Abbildung 3-72 sind die Strukturen bei der Lösungsfindung eines Problems abgebildet wie ein menschlicher Experte und ein Expertensystem ein Problem löst und eine Auswahl trifft [8]
Abbildung 3-72 Problemlösung eines Expertensystems [8]
3.3.8.3 Die Wissensdatenbank
Die Wissensdatenbank verfügt über Expertenwissen, welches zuvor von einem Experten in die Datenbank eingegeben wurde. Dabei können unterschiedliche Formen zur Wissensdarstel-lung verwendet werden:
• Objekt, Attribut und Wert • Regeln
• Rahmen • Logik
Für die PVDiS wurde die Form der Regeln verwendet. Dabei ist eine Regel eine Wissens-struktur, die eine oder mehrere bekannte Informationen (Prämissen) mit einer oder mehreren Resultaten verknüpft [8]. Die Regelstruktur beinhaltet einen IF- und einen THEN-Term. Da-bei sind die sogenannten Prämissen im IF-Term und die Resultate im THEN-Term enthalten.
In einem regelbasierenden Expertensystem enthält die Wissensdatenbank eine Reihe von Re-geln. Bei der Eingabe von zu lösenden Problemen werden die entsprechenden Regeln in den Arbeitsspeicher geladen. Wenn die Prämissen im IF-Term einer Regel mit den Informationen die der Nutzer eingegeben hat übereinstimmen, wird die Regel aktiviert und das Expertensys-tem gibt das entsprechende Resultat des THEN-Terms in den Arbeitsspeicher.
Experten-System
Arbeitsspeicher
Wissens-Datenbank
Experten Wissen
InterferenzMaschine
Empfehlungen
Informationen
Der menschliche Experte
Langzeit-Gedächtnis
Experten-Wissen
Kurzzeit-Gedächtnis
Case/Inferred FactsConclusions
VerknüpfungEmpfehlung
InformationenSchlußfolgerungen
• Semantische Netzwerke

252 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Dieses Resultat kann entweder an den Nutzer ausgegeben werden oder aber als neue Informa-tion wiederum eine oder mehrere Regeln aktivieren. Wenn alle Regeln berücksichtigt wurden und keine neuen Resultate ermittelt wurden, wird das System gestoppt.
3.3.8.4 Die Inferenz-Technik
In [8] wird eine Inferenz als Prozess definiert, der benutzt wird, um aus existierenden Infor-mationen neue Informationen abzuleiten.
Die sogenannte Inferenz-Maschine eines Expertensystems nimmt die Informationen eines Problems aus dem Arbeitsspeicher auf und verknüpft sie mit dem Wissen aus der Wissensda-tenbank, um dann ein Resultat als Information auszugeben. Diese Informationen können mit Hilfe zweier unterschiedlicher Inferenz-Techniken ermittelt werden, dem sogenannten For-ward-Chaining oder dem Backward-Chaining.
Das Forward-Chaining beginnt mit einer Reihe von definierten Informationstypen. Es ver-gleicht deren Innhalte mit den Prämissen die in den Regeln enthalten sind, um bei einer Über-einstimmung das entsprechende Resultat als Information auszugeben. Der Prozess läuft solange bis entweder ein bestimmtes Resultat erreicht oder alle Regeln bearbeitet wurden.
Dieses Vorgehen garantiert, dass keine Frage zweimal gestellt wird. Alle möglichen Resultate werden im voraus den möglichen Informationen zugeordnet. Das System kann dabei eine wichtige Information von einer unwichtigen nicht unterscheiden und fragt den Nutzer alle definierten Fragen. Forward-Chaining wird hauptsächlich dann benutzt, wenn ein Problem mit einer, im voraus feststehenden, definierten Datenreihe gelöst werden kann oder muss. Entsprechende Anwendungen sind: Überwachungs-, Steuer- und Interpretationsaufgaben.
Im Gegensatz dazu beginnt das Backward-Chaining mit einer Hypothese und versucht diese zu beweisen, indem es nach relevanten Informationen sowohl im Arbeitsspeicher als auch in der Datenbank sucht. Die Suche ist dabei zielorientiert. Das System sucht nach Regeln, die das Resultat als Ziel enthält. Eine solche Regel wird dann auch Zielregel genannt. Wenn die Prämissen dieser Zielregel nicht im Arbeitsspeicher enthalten sind, sucht das System nach Regeln, die die Prämissen der Zielregel in ihrem THEN-Term enthalten. Dieser rekursive Prozess wird fortgesetzt, bis das System eine Prämisse gefunden hat, welche in keiner anderen Regel enthalten ist. Diese Prämisse wird auch als PRIMITIVE-Prämisse bezeichnet. Das Sys-tem fragt dann den Nutzer nach einer Information zu dieser PRIMITIVEN. Die Backward-Chaining-Technik wird eingesetzt, wenn eine bestimmte Hypothese überprüft werden soll. Der Vorteil besteht darin, dass das System zielorientiert ist und keine unnötigen Fragen an den Nutzer stellt. Außerdem bearbeitet es nur den Teil der Datenbank, der für das aktuelle Problem relevant ist. Dieser Anspruch ist vor allem für Diagnoseanwendungen und Fehlerbe-seitigung geeignet.
Für das PVDiS wurde das Backward-Chaining mit dem Ziel verwendet, ein PV-Hybrid-System mit einer angemessenen Auslegung als Energieversorgungssystem für eine nutzerde-finierte Anwendung vorzuschlagen [7]. In diesem Fall sind die exakt definierten Hypothesen drei ausgewählte Standard-Hybrid-Systeme.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 253
Phase 1Assessment
Phase 2Knowledge Acquisition
Phase 3Design
Phase 4Test
Requirements
Knowlage
Structure
Explotations
Refinements
Evaluation
Abbildung 3-73 Die Entwicklung eines regelbasierenden Expertensystems [8]
Abbildung 3-73 zeigt den hochiterativen Prozess eines regelbasierenden Expertensystems mit der Backward-Chaining-Technik. Zuerst wird ein Teil des Wissens in das System eingegeben und dann getestet. Basierend auf den Ergebnissen wird weiteres Wissen in zyklischen Prozes-sen eingegeben, so dass das Expertensystem Schritt für Schritt wächst.
In den folgenden Abschnitten wird die Entwicklung des PVDiSystems mit der Backward-Chaining-Technik anhand von fünf Schritten dargestellt [8]:
1. Definition des Problems
3. Definition der Zielregeln
4. Erweiterung der Zielregeln
5. Optimierung des Systems
3.3.8.5 Problemdefinition des Expertensystems
Wie es in Kapitel 3.3.7 schon beschrieben wurde ist der erste Schritt, ein regelbasierendes Backward-Chaining-Experten-System zu entwickeln, der, das Problem zu definieren.
Bei der Auswahl eines geeigneten Energieversorgungssystems entscheidet sich der Experte nur für ein PV-Hybrid-System, wenn dieses unter den gegebenen Rahmenbedingungen ge-genüber den konkurrierenden Versorgungssystemen über entsprechende Vorteile verfügt [7].
2. Definition der Ziele
Das Problem wird dabei in zwei Teilprobleme untergliedert:

254 Modulare PV- und Hybridsystemtechnik Abschlussbericht
In einem zweiten Schritt bestimmt er, basierend auf der getroffenen Entscheidung das Sys-temdesign, beispielsweise die Generatorgröße.
3.3.8.6 Definition der Ziele
Die Definition der Systemziele ist der erste Schritt zur Implementierung eines Backward-Chaining-Systems. Mit Rücksicht auf die zwei Teilprobleme, die im vorigen Abschnitt be-schrieben wurden, verfolgt die PVDiS zwei Hauptziele [7]:
1. den Systemtyp zu ermitteln und
2. das Systemdesign zu definieren.
Um die Funktionsweise des PVDiSystems zu erläutern wurden jeweils drei charakteristische Systeme ausgewählt, die in Kapitel 3.3.8 detaillierter beschrieben sind.
Die folgenden Zielregeln wurden eingeführt, um das Vorgehen bei der Auswahl des entspre-chenden Systems erläutern zu können.
01. Systemtyp: PV-Diesel-Hybrid-System 01.A.050.0050.033.033 PV 5,0kW Batterie 50,0 kWh - Inverter 3,3 kW - Diesel 3,3kW p
01.B.100.0100.066.066 PV 10kW Batterie 100 kWh - Inverter 6,6 kW - Diesel 6,6kW p
01.C.150.0150.099.099 PV 15kW Batterie 150 kWh - Inverter 9,9 kW - Diesel 9,9kW p
02. Systemtyp: Diesel-System 01.A.050.0050.033.033 Systemdesign A Diesel 3,3kW
01.B.100.0100.066.066 Systemdesign B Diesel 6,6kW
01.C.000.0000.000.099 Systemdesign C Diesel 9,9kW
Um ein Maximum an Flexibilität für spätere Veränderungen oder Erweiterungen zu gewähr-leisten, werden die Ziele mit einer Nummerierung versehen, die zum einen technische Infor-mationen beinhaltet und zum anderen eine schnelle Bearbeitung ermöglicht.
3.3.8.7 Entwicklung der Zielregeln: Wie Experten das Design von PV-Hybrid-System abschätzen
3.3.8.7.1 Das Ableiten der Zielregeln
Für jedes der genannten Ziele muss es mindestens eine Regel geben, von der aus, auf das Ziel geschlossen werden kann. Die allgemeine Formulierung der Regeln wird wie folgt dargestellt:
IF Prämisse 01: Inhalt
AND Prämisse 02: Inhalt
AND Prämisse 99: Inhalt
THEN Ziel 04: Inhalt

Abschlussbericht Modulare PV- und Hybridsystemtechnik 255
Um nun Zielregeln formulieren zu können, müssen die Entscheidungskriterien, die für ein PV-Hybrid-System sprechen, bekannt sein. Basierend auf diesen Kriterien wird eine entspre-chende Entscheidungstabelle eingeführt und die Zielregeln bestimmt. Parallel zeigt ein Infe-renz-Netzwerk die logischen Verknüpfungen zwischen den Informationsteilen, die die Regeln repräsentieren.
Im Anschluss daran werden die Zielregeln getestet und die Suchreihenfolge festgelegt.
Das wichtigste Entscheidungskriterium für die Auswahl eines Energieversorgungssystems ist deren Wirtschaftlichkeit bei individuell gegebenen Randbedingungen.
• Da die Wirtschaftlichkeit der unterschiedlichen Systemtypen sehr stark von dem Leis-tungsbereich abhängt, ist die geforderte Leistung, in Verbindung mit dem zu erwarten-den Energieverbrauch ein zentrales Entscheidungskriterium.
• Ein weiterer, sehr wichtiger Aspekt ist die Entfernung zu konkurrierenden Energiever-sorgungssystemen, beispielsweise dem öffentlichen Stromversorgungsnetz.
• Ein dritter Punkt ist die Verfügbarkeit der Solarstrahlung für die PV-Generatoren, ver-gleichbar mit dem Kraftstoff für Verbrennungs-Generatoren.
Bei der Auswahl der Entscheidungskriterien gilt es aber, auch mögliche K.O. Kriterien früh-zeitig einzubeziehen.
3.3.8.7.2 Entscheidungstabelle und Zielregeln zur Definierung des Systemtyps
Die Entscheidungstabelle dient zur Klärung der Vorbedingungen, um schließlich zu einer richtigen Entscheidung zu gelangen. [8] definiert die Entscheidungstabelle wie folgt:
Verbrauchs-informationen
Allgemeine Informationen
Solarstrahlungs-daten Ziel
Energie-verbrauch
[kWh/d] …
Kraftstoff- Preis [km]
… Solarstrahlung [kWh/m²d]
45 ≤ E < 55 Verbrauch 0,75 ≤ k < 0,85 Kraftstoff 4,75 ≤ E < 5,25 Glob Hybrid-System
45 ≤ E < 55 Verbrauch 0,95 ≤ k < 1,05 Kraftstoff 4,75 ≤ E < 5,25 Glob Hybrid-System
…
85 ≤ E < 95 Verbrauch 0,95 ≤ k < 1,05 Kraftstoff 4,75 ≤ E < 5,25 Glob Diesel-System
…
0,5 ≤ E < 1,5 Verbrauch 0,95 ≤ k < 1,05 Kraftstoff 4,75 ≤ E < 5,25 Glob PV-System
…
35 ≤ E < 45 Verbrauch 0,25 ≤ k < 0,35 Kraftstoff 2,75 ≤ E < 3,25 Glob Diesel-System
…
Tabelle 3-7 Auszüge aus der Entscheidungstabelle zur Bestimmung der Zielregeln für das PVDiSystem

256 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die Tabelle 3-7 enthält eine gewisse Anzahl von Entscheidungsfaktoren (Informationen) in jeweils einer Spalte. Dem gegenüber sind in je einer Reihe die unterschiedlichen Ziele angeordnet, sodass die Erfüllung einer bestimmten Prämissenkonstellation zu dem gewünschte
IF Land des Standortes Thailand
AND mittlerer täglicher Energiebedarf 45 ≤ E < 55 kWh AND Lastspitze (15 Minutenmittel) E < 4,5 kW
Verbrauch
Verbrauch
AND Lastprofil (Gleichzeitigkeitsfaktor) 0,4 ≤ S < 0,6 GF
Global
AND Breitengrad - 23,3° ≤ B < 23,3° AND
Breitengrad
AND Treibstoffkosten 0,95 ≤ k < 1,05 €/l Kraftstoff
AND
THEN Ziel Hybrid-System A
n Ziel führt.
Die folgenden Zielregeln wurden abgeleitet:
AND mittlere tägliche Einstrahlung 4,75 ≤ E < 5,25 kWh
Allgemeine Informationen Verbrauchsinformationen Einstrahlungsdaten
Prämissen
Resultat Hybrid-System
Diesel-Generator Keine
Empfehlung
Kraftstoff-Preis
[]1,0
EnergyConsumption
[kWh/d]90
Irradiation[kWh/m²d]
4,8
Irradiation[kWh/m²d]
4,8
EnergyConsumption
[kWh/d]50
Kraftstoff-
Preis[]
0,75
AND AND AND AND AND AND AND AND AND AND AND AND AND AND AND
Allgemeine Informationen Verbrauchsinformationen Einstrahlungsdaten
Prämissen
Resultat Hybrid-System
Diesel-Generator Keine
Empfehlung
Kraftstoff-Preis
[]1,0
EnergyConsumption
[kWh/d]90
Irradiation[kWh/m²d]
4,8
Irradiation[kWh/m²d]
4,8
EnergyConsumption
[kWh/d]50
Kraftstoff-
Preis[]
0,75
AND AND AND AND AND AND AND AND AND AND AND AND AND AND AND
Abbildung 3-74 Das Interferenz-Netzwerk für den Prozess der Entscheidungsfindung
3.3.8.7.3 Zielregeln zur Definition des Systemdesigns
Nachdem das anfängliche Expertensystem erfolgreich getestet wurde, erfolgte der nächste Schritt, um die Unterziele für das Systemdesign zu definieren.
Um das Systemdesign möglichst passend definieren zu können, müssen entweder die Metho-den zur Auslegung eines Systems bekannt sein oder es existiert eine Informationsdatenbank, in der reale Systeme gespeichert sind. Wichtig ist dabei, dass die Randbedingungen (Parame-

Abschlussbericht Modulare PV- und Hybridsystemtechnik 257
ter), die zu einer bestimmten Auslegung geführt haben, bekannt sind und dass bei Simulati-ons- oder Messergebnissen charakteristische Kennwerte ermittelt werden. Mit Hilfe dieser Parameter und Kennwerte können die Prämissen bestimmt werden, die dann zu den richtigen Zielen führen.
Die Zielregeln sind so aufgebaut, dass sie eine möglichst maximale Flexibilität des Experten-systems ermöglichen. Um die Ziele noch zu verfeinern, sind jedoch weitere Zielregeln not-wendig, wobei die Zuordnung der Prämissen zu den Zielen stets durch Experten überprüft werden muss.
3.3.9 Beispielhafte Systemauslegung für typische Anwendungsfelder (F. Kininger)
Typische Anwendungsfelder wären beispielsweise Ökotourismus, Kleingewerbe- und Dorf-stromversorgungssysteme in ländlichen Gebieten. Ein dafür geeignetes PV-Diesel-Hybrid-System zeigt Abbildung 3-75.
Diesel GeneratorOnan
3,3 kW
1 InverterSunny Island
3,3 kVACounter
Counter M
AC-Bus
Informations-Bus
Modem
BatterieExide 48 kWh
EMS
33 PV-ModuleBP 5150
2 Sunny BoyInverter2000 W
EnergieManagement
System10 W
StandardVerbraucher
GDiesel Generator
Onan3,3 kW
1 InverterSunny Island
3,3 kVACounter
CounterCounter MM
AC-Bus
Informations-Bus
Modem
BatterieExide 48 kWh
EMS
33 PV-ModuleBP 5150
2 Sunny BoyInverter2000 W
EnergieManagement
System10 W
StandardVerbraucher
G
Abbildung 3-75 Standard PV-Diesel-Hybrid-System
Um den möglichen Einsatzbereich dieses Systembeispieles darstellen zu können wurden drei charakteristische Lastprofile definiert. Auf diesen Charakteristischen Profilen basierend wur-den fünf PV-Diesel-Hybrid-System mit jeweils fünf Laststufen für fünf Standorte simuliert. Die jeweiligen Energiegestehungskosten wurden dann in einem Diagramm aufgetragen. Die Ergebnisse dieser Simulationsreihe dienen nun als Wissensdatenbank für das Auslegungspro-gramm PVDiS.

258 Modulare PV- und Hybridsystemtechnik Abschlussbericht
0
2
4
6
8
10
12
14
16
18
20
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Time [hours]
Ener
gy D
eman
d [%
]
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
Sola
r Irr
adia
tion
[kW
h/m
²]
High Solar Irradiation Medium Solar Irradiation
Day Load Profile Night Load Profile Mixed Profile
Abbildung 3-76 Charakteristische Lastprofile
[1] J. Schmid: Photovoltaic Systems Technologie Skript zur Vorlesung, Kassel, 2001
[2] Sandia National Laboratories: Hybrid Power Systems http://www.sandia.gov/pv/sysd/HybridDescript.html , New Mexico, 2001
[3] CREST: PV Systems Activity http://aurora.crest.org/pv/systems/activity/activity.htm ,
[4] A. Mermoud: Photovoltaic System Study (PVSYST) Geneva, 1999
[5] econzept Energieplanung GmbH: PVS2.000 http://www.econzept.com , Freiburg, 2001
[6] Dr.-Ing. Gerhard Valentin + Partner GbR: PV*Sol http://www.valentin.de , Berlin, 2001
[8] J. Durkin: Expert systems: Design and Development Macmillan Publishing Company, New York, 1994
3.3.10 Literatur
[7] B. Buchholz: Smart Web Index and Data Exchange Options Dissertation.de Verlag, Berlin, 2001

Abschlussbericht Modulare PV- und Hybridsystemtechnik 259
4 Schnittstellen zwischen Systemkomponenten und Teilsystemen
4.1 Klassifizierung der Leistungsbereiche und Kopplungsbedingungen für Teilsysteme (A. Engler)
4.1.1 Leistungsbereiche
Bei der Klassifizierung von den Leistungsbereichen ist insbesondere zwischen ein- und drei-phasigen Systemen zu unterscheiden. Weiterhin sollte für die Geräte die gängige Installationstechnik berücksichtigt werden. So finden in Haushalten oftmals 16A-Sicherungen Anwendung, die eine Phasenleistung auf ca. 3,3 kW begrenzen. Auf diese Art und Weise ergibt sich automatisch eine Klassifizierung für die Leistungsbereiche. Geräte, die gängige Vorschriften erfüllen, werden ebenso automatisch in die so vorgegebenen Klassen fallen.
4.1.2 Kopplungsbedingungen
Die bisherigen Erfahrungen zeigen, dass die elektrische Ankopplung von dezentralen Ener-gieerzeugungsanlagen an bestehende Netze die unbedingte Einhaltung von technischen und organisatorischen Reglements notwendig macht und in zunehmendem Maße weitere techni-sche Entwicklungen und Richtlinien erfordert. Auf Basis von Erkenntnissen aus verschiede-nen Forschungsprojekten hat ISET hier bereits einige Aktivitäten eingeleitet und erste Norm-vorschläge z. B. für PV-Wechselrichter über die Deutsche Normkommission DKE 373.3 und TC82 an das internationale Normkomitee IEC eingereicht.
Die aktuelle Situation erfordert eine wissenschaftlich-technische Weiterentwicklung und Ver-besserung der dezentralen netzgekoppelten Energieeinspeisung sowie einen ordnenden Ein-griff, aufgrund von offenbarten Defiziten auf den Gebieten der Personen- und Anlagensicher-heit, Zuverlässigkeit sowie begleitenden Standardisierung/Normung bzw. Harmonisierung mit bestehenden Normen.

260 Modulare PV- und Hybridsystemtechnik Abschlussbericht
4.2 Definition und Standardisierung des Regelungs- und Klemmenverhaltens der Versorgungskomponenten (A. Engler)
4.2.1 Regelungsverhalten
In der modularen Systemtechnik werden insbesondere netzkompatible Geräte favorisiert. Die-se weisen also eine variable Frequenz (verursacht durch die Frequenzstatik) und eine durch die Blindleistung bestimmte Spannung (verursacht durch die Spannungsstatik) auf. Ihre Cha-rakteristik ist ähnlich der einer elektrischen Maschine. Für das regelungstechnische Verhalten sollte gefordert werden:
• gut gedämpfte Einschwingvorgänge und
• eine Entkoppelte Blind- und Wirkleistungsregelung.
Beide Forderungen können gut von Stromrichtern erfüllt werden.
Im Gegensatz zu elektrischen Maschinen liegt bei ihnen keine prinzipielle Verkopplung von Frequenz und Spannung vor. Bei elektrischen Maschinen ist sie aufgrund des Magnetfelds prinzipbedingt.
Eine weitere Eigenschaft von Maschinen, die allgemein als günstig erachtet wird, ist ihre Trägheit und die damit Verbunden kinetische Speichereigenschaft. Regelungstechnisch stellt hat sie das Verhalten eines Integrators und verkompliziert das Streckenverhalten. Bei Syn-chronmaschinennetze äußerst sich dieser Umstand z. B. in Pendelungen. Im Gegensatz zu Maschinen haben Umrichter keine träge Masse. Auch hier ergibt sich eine Vereinfachung, die die Bedingung gut gedämpfter Einschwingvorgänge unterstützt.
4.2.2 Klemmverhalten
Bezüglich dem Klemmverhalten von Komponenten sollten vor allem auf die in Kapitel 1.2 hingewiesenen Richtlinien und Normen eingehalten werden.
4.2.3 Standardisierung
Während das Regelungs- und das Klemmverhalten für Einzelgeräte gute beschrieben werden kann müssen aber für die Standardisierung viele unterschiedliche Geräte in Interaktion (z. B. in Mikronetzen) getestet werden. Eine Standardisierung für das starre Verbundnetz würde nicht in das Szenario Distributed Generation passen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 261
4.3 Informationsbereitstellung und -übertragung für die Steuerung von mo-dular strukturierten, lokal begrenzten Energieversorgungsnetzen (O. Haas)
Für die Bearbeitung der Themenstellung Informationsbereitstellung und -übertragung für die Steuerung von modular strukturierten, lokal begrenzten Energieversorgungsnetzen ist es wichtig, die einzelnen Steuer- und Regelungsaufgaben zu analysieren und daraus Steuer- und Regelgrößen abzuleiten sowie die zugehörigen Kommunikationsanforderungen zu definieren. Diese Vorgehensweise wird in den folgenden Abschnitten näher erläutert.
4.3.1 Kommunikation in der Energieversorgung
Neben der energieseitigen Kopplung von Anlagen über den Wechselstrom-Energiebus bedarf es zur Komponenten- und Anlagensteuerung noch einer internen Kommunikationsstruktur zwischen den einzelnen Bausteinen. Auf dieser unteren Ebene der Kommunikation in Abbildung 4-1, im Bereich der Anlagentechnik, steht die Übermittlung von Schaltbefehlen und die Erfassung der Betriebsdaten von Versorgungskomponenten im Vordergrund. Dazu gehören Meldungen, Betriebszustände sowie Netzgrößen (Spannung, Frequenz, Wirk- und Blindleistungen) und für den Anlagenbetrieb relevante Kenngrößen (z. B. Speicherinhalt, Solarstrahlung, Windstärke etc.). Wenn die Entfernungen nicht zu groß sind (<1 km), können hier Feldbusse zum Einsatz kommen. Insbesondere eignen sich die standardisierten und am Markt eingeführten Installationsbusse [2], z. B. für die Integration in vorhandene Gebäudeau-tomationssysteme.
In dezentralen und autonomen Systemen kommunizieren die Versorgungskomponenten un-tereinander und mit einer lokalen Betriebsführung, die bei einem regionalen Netzverbund auch die Verbindung zur mittleren, der regionalen Ebene ermöglicht.
Obere Ebene
Mittlere Ebene
Untere Ebene
- zentrale Leit-technik -
- regionale Netz-leittechnik -
- lokale Anlagen-technik -
⇒ Zentrales Management−−−−
Zentrale EinsatzplanungFernüberwachungFern-Diagnose, -ReparaturControlling und Abrechnungswesen
⇒ Führung des Verteilnetzes−−−
Übergeordnete BetriebsführungLokale EinsatzplanungNetzbetrieb (Netzleittechnik)
⇒ Komponenten und Anlagensteuerung−−
Koordination zwischen den KomponentenAnlagenbetriebsführung
Abbildung 4-1 Kommunikation in der Energieversorgung Strukturen und Aufgaben
In der mittleren Ebene, der regionalen Netzleittechnik, geht es im wesentlichen um die Über-mittlung von Netzdaten an eine zentrale Netzleitstelle, das Senden von Steuerbefehlen an Trafostationen und Netzschaltstellen sowie von Sollwertvorgaben an die untergeordneten

262 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Betriebsführungen in der Komponentenebene. Hier sind für die Signalübertragung aufgrund großer Entfernungen Weitverkehrstechniken erforderlich. Typischer Weise werden Signalka-bel, Funk- aber auch Powerline-Übertragungstechniken (Datenübertragung auf der Abschir-mung von Energiekabeln, Rundsteuerungssignale) eingesetzt.
In der oberen Ebene, der zentralen Netzleitstelle, stehen hauptsächlich planende und überwa-chende Aufgaben im Vordergrund. Dazu sind ungefähr im Stundentakt Betriebsdaten der Versorgungskomponenten notwendig. Schalthandlungen werden in der oberen Ebene norma-lerweise nicht ausgeführt, statt dessen wird, durch entsprechende Parametervorgaben des Netzbetriebs, die zugehörige regionale Verteilungsebene zu den Schalthandlungen veranlasst. Aufgrund der häufig sehr großen Entfernungen kommen hier Datenfernübertragungen über Signalkabel oder Satellitenverbindungen zur Anwendung.
Die wiedergegebene Kommunikationsstruktur entspricht im wesentlichen auch den jetzigen Gegebenheiten in der Energiewirtschaft. Bei der Nutzung erneuerbarer Energiequellen sind jedoch verstärkt die Dezentralität und die verhältnismäßig geringen Leistungseinheiten der Stromerzeuger zu berücksichtigen. Um hier zu einer wirtschaftlichen Basis zu kommen und die Anlagen kostengünstig überwachen und Fehler erkennen sowie Komponenten warten und reparieren zu können, wird der Einsatz modernster Fernwirk- und -überwachungssysteme, z. B. von einer zentralen Leitstelle aus unerlässlich sein. Dies hat natürlich auch Auswirkun-gen auf die Auslegung der Anlagen und Komponenten. Sie müssen in besonderem Maße dia-logfähig sein.
4.3.2 Kenngrößen für die Informationsübertragung
Im Hinblick auf das Ziel der Standardisierung ist es hilfreich, die einzelnen, zu übertragenden Informationen zu analysieren und sie in Funktionsklassen einzuteilen. Aufgrund der bisher durchgeführten Untersuchungen sind folgende Funktionsklassen denkbar:
• Betriebsführung, • Regelung, • Monitoring / Diagnose und • Identifizierung.
Jeder Funktionsklasse können wiederum Kenngrößen zugeordnet werden, die jeweils eine bestimmte Funktion übernehmen. Unter dem Begriff Kenngröße soll hier eine Funktionsein-heit verstanden werden, deren Name als Oberbegriff für einen bestimmten Datenwert und dessen zugehörige Bit-Kodierung verwendet wird.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 263
4.3.2.1 Funktionsklasse Betriebsführung
Die Funktionsklasse Betriebsführung beinhaltet alle Funktionen zur Steuerung und Überwa-chung von Anlagenkomponenten sowie deren Parametrierung. Hierzu werden folgende Kenngrößen vorgeschlagen:
• Betriebsart • Regelungstyp, • Befehl, • Betriebszustand und • Betriebsparameter.
Mit der Kenngröße Betriebsart wird einer übergeordneten Betriebsführung mitgeteilt, ob die Versorgungskomponente für den automatischen Betrieb zur Verfügung steht oder im manuel-len Betrieb arbeitet. Die Kenngröße Regelungstyp legt fest, ob eine Versorgungskomponente als netzbildende oder netzstützende Einheit bzw. als Netzeinspeiser arbeitet. Der Kenngröße Befehl werden alle Schaltbefehle einer Komponente zugeordnet, die für Steuerungseingriffe von außen erforderlich sind. In gleicher Weise werden der Kenngröße Betriebszustand alle für eine übergeordnete Betriebsführung erforderlichen stationären Betriebszustände zugeordnet. Die Kenngröße Betriebsparameter erlaubt die Einstellung von Betriebsgrenzwerten (z. B. Einstellen von oberem und unterem Grenzwert zur Festlegung des normalen Betriebsberei-ches einer Speicherkomponente oder die Änderung der maximalen Leistungsabgabe eines PV-Generators).
4.3.2.2 Funktionsklasse Regelung
Dieser Funktionsklasse werden alle Funktionen zugeordnet, die für eine Netzregelung erfor-derlich sind. Hierzu zählen nicht die dezentral in der Versorgungskomponente angeordneten Regelungen wie Laderegelung, MPP-Tracking usw. Für die Datenübertragung zur Netzrege-lung sind folgende Kenngrößen denkbar:
• Sollwert, • Istwert und • Regelungsparameter.
Regelungsgrößen können je nach Regelungstyp Spannung und Frequenz (Netzbildung) bzw. Wirk- und Blindleistung (Netzstützung) sein. Die Kenngröße Regelungsparameter ermöglicht z. B. die Einstellung neuer Statiken oder die Vorgabe neuer Reglerparameter.
4.3.2.3 Funktionsklasse Monitoring / Diagnose
Diese Funktionsklasse beinhaltet alle Funktionen, die notwendig sind, um Monitoring und Ferndiagnosen durchzuführen. Folgende Kenngrößen sind vorgesehen:
• Meldung, • Quittierung und • Komponentenspezifischer Messwert.

264 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die Kenngröße Meldung wird verwendet, um Ereignisse an die Betriebsführung zu melden. Gedacht ist hier an das Senden von Störungsmeldungen und Warnungen. Entsprechend dient die Kenngröße Quittierung zum Rücksetzen der Meldungen. Über die Kenngröße Komponen-tenspezifischer Messwert werden alle für das Monitoring und die Ferndiagnose wichtigen Da-ten übertragen.
4.3.2.4 Funktionsklasse Identifizierung
Über die Funktionsklasse Identifizierung meldet sich eine neu hinzugekommene Komponente bei einer übergeordneten Betriebsführung an. Hierfür sind als Kenngrößen vorgesehen:
• Kennung,
• Komponententyp und
• Nenndaten.
Die Kenngröße Kennung besteht z. B. aus einer eindeutigen, fortlaufenden Nummerierung, mit deren Hilfe gleichartige Komponenten auseinander gehalten werden können. Sie dient nicht als Absender- oder Empfängeradresse, diese Aufgabe erledigt die Bussteuerung selbst. Mit der Kenngröße Komponententyp wird einer übergeordneten Betriebsführung mitgeteilt, ob es sich bei der neu hinzugekommenen Komponente um eine Quelle, einen Speicher oder eine Last handelt. Wichtige Betriebsdaten einer Komponente wie Nennleistung oder Nennka-pazität werden mit Hilfe der Kenngröße Nenndaten übermittelt.
4.3.3 Zustandsmodell zur Steuerung und Überwachung der Betriebszustände von Versorgungskomponenten
Das Zustandsmodell wurde in seinen Grundzügen bereits in dem Vorläufer dieses Projektes, dem BMBF-Projekt Entwicklung von PV-Versorgungsanlagen mit modularer Systemtech-nik [1] erarbeitet. Zum besseren Verständnis der darauf aufbauenden Arbeiten wird es hier jedoch nochmals dargestellt.
Bei der Beschreibung von Schaltbefehlen und Betriebszuständen sind zwei Fälle zu unter-scheiden: Einmal sind dies alle internen Betriebszustände der Komponenten einschließlich ihrer Übergangsphasen. Im zweiten Fall wird der Schwerpunkt auf die eindeutige Beschrei-bung der Komponente aus Sicht einer übergeordneten, koordinierend wirkenden Betriebsfüh-rung gelegt. Hier interessieren weniger die einzelnen Übergangsphasen und komponentenspe-zifischen Zustände als vielmehr wenige, eindeutige, leicht überschaubare, für alle Komponen-ten anwendbare Zustandsbeschreibungen. Jedem Zustand kann dann ein ebenfalls eindeutiger Schaltbefehl zugeordnet werden, mit dem die Komponente in den zugeordneten Betriebszu-stand geführt wird.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 265
4.3.3.1 Betriebszustände und Befehle der Komponenten
Für die bisher eingesetzten Komponenten wurden folgende wichtige Betriebszustände defi-niert:
• Abgeschaltet, • Stand-By, • Bereit, • Anfahren am Netz, • Normalbetrieb, • Abfahren am Netz, • Abfahren der Komponente, • Notabschaltphase, • Störung.
Die Betriebszustände lassen sich wie folgt unterscheiden:
Stationäre Betriebszustände: Hierunter sind Dauerzustände zu verstehen, die die Komponenten nach entsprechenden Befehlen annehmen.
Transiente Betriebszustände: Diese sind Übergangszustände zwischen zwei stationären Betriebszuständen, in denen die Komponenten mit speziellen Regelungsverfahren betrieben werden. Dazu gehören An- und Abfahren der Komponenten vor und nach Netzzuschaltung sowie die Notabschaltungsphase.
Die stationären Zustände sind in Abbildung 4-2 dargestellt. Für sie gelten folgende Definitio-nen:
Abgeschaltet: Sämtliche Leistungs- und Steuerungsteile der Komponente sind abgeschal-tet. Übergeordnete Fernsteuerung, -diagnose ist nicht möglich.
Stand-By: Entspricht dem normalen Aus-Zustand der Versorgungskomponente. Die Leistungsteile sind abgeschaltet. Das Empfangsteil der Komponentenbetriebsführung zur Kommunikation mit dem Bus ist eingeschaltet. In diesem Zustand soll der Leistungsbedarf der eingeschalteten Elektronik möglichst gering sein.
Bereit: Erhält die Versorgungskomponente den Befehl Anfahren (Start-up), erfolgt zunächst der Selbsttest und die Initialisierungsphase. Die Steuerungs- und Leistungsteile wer-den eingeschaltet. Komponentenspezifische Vorbereitungsphasen (Hochlauf beendet, Be-triebswerte in den Toleranzen) werden abgeschlossen. Die Komponente ist am Netz sofort synchronisierbar und zuschaltbar. Nach Abschluss der Hochlaufphase wird der Zustand Bereit an die übergeordnete Betriebsführung gemeldet.
Normalbetrieb: Im Zustand Bereit wird beim Befehl Ein (On) die Komponente nach der ggf. notwendigen Synchronisation an das Netz geschaltet und der Zustand Normalbetrieb an die übergeordnete Betriebsführung gemeldet. Durch den Befehl Aus (Off) wird die Kompo-nente vom Zustand Normalbetrieb in den Zustand Bereit überführt. Dazu wird sie zunächst am Netz abgefahren und anschließend vom Netz getrennt.

266 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Bem. 1: Da der explizite Zustand Bereit nicht bei allen Komponenten erforderlich z. B. bei Stromrichtern oder überhaupt nicht vorhanden ist, wird hier der Befehl Ein zum direkten Überführen der Komponente aus dem Zustand Stand-By in den Zustand Normalbetrieb ver-wendet. Entsprechend führt der Befehl Aus die Komponente vom Zustand Normalbetrieb in den Zustand Stand-By über. Bem. 2: Anfahr- und Abfahrphase am Netz sind hier als transiente, komponenteninterne Betriebszustände ausgeführt, in denen die Komponenten mit speziellen Regelungsverfahren betrieben werden. Hier wird bei Bedarf die Leistung durch spezielle Funktionen, z. B. über eine Rampe, bis zum geforderten Sollwert verändert. Diese Phasen werden der übergeordne-ten Betriebsführung nicht gemeldet.
Störung: Dieser Zustand kann von jedem anderen Zustand aus erreicht werden. Zu-vor ist ein Fehler aufgetreten, der zum Abfahren und ggf. zur Notabschaltung der Versor-gungskomponente geführt hat. Schwerwiegende Fehler müssen vom Bedienungspersonal quittiert werden. Erst nach Beseitigung und Quittierung des Fehlers darf ein erneutes Ein-schalten der Komponente möglich sein. Nach der Fehlerbehebung und dessen Quittierung verläßt die Komponente den Zustand Störung und geht in den Zustand Stand-By über.
Abbildung 4-2 Zustände und Befehle der Komponenten aus Sicht der übergeordneten Betriebsführung
Abgeschaltet
Stand-By
Bereit
Normalbetrieb
Abfahren
Reset
Aus
Anfahren
Ein
Manuell Ein/Aus
Not-AusManuell aus
Störung

Abschlussbericht Modulare PV- und Hybridsystemtechnik 267
4.3.3.2 Betriebszustände und Befehle aus Sicht der übergeordneten Betriebsführung / Visualisierung
Mit Hilfe der für den EIB entwickelten Test- und Simulationsumgebung konnte gezeigt wer-den, dass für die Kommunikation mit der übergeordneten Betriebsführung nur die in Abbildung 4-2 dargestellten stationären Betriebszustände
• Abgeschaltet,
• Bereit, • Normalbetrieb
sowie der Sonderzustand
• Störung
relevant sind. Für die Implementierung der Zustandsmaschine ist es wichtig, eine Zuordnung aller Betriebszustände zu den oben genannten fünf stationären Betriebszuständen zu definie-ren. Diese Zuordnung zeigt Abbildung 4-3.
Abbildung 4-3 Zuordnung der transienten und gerätespezifischen Betriebszustände zu den fünf stationären Betriebszuständen der übergeordneten Betriebsfüh-rung
• Stand-By,
Abgeschaltet
Standby
Anfahren der Komponente
Bereit Bereit
Anfahren am Netz
Normalbetrieb
Abfahren am Netz
Abfahren der Komponente
Notabschaltphase
Störung
Abgeschaltet
Standby
Normalbetrieb
Störung
Transiente und stationäre Zuständeder Komponenten-Betriebsführung
Stationäre Zustände für dieübergeordnete Betriebsführung

268 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Da der Zustand Abgeschaltet per Definition nicht übertragen werden kann, dient er auf der Ebene der übergeordneten Betriebsführung eher als Indikator für eine unterbrochene oder fehlerhafte Kommunikation. Die vier wichtigen Betriebszustände werden, wie bereits in Kapi-tel 4.3.3.1 erläutert, durch die Befehle
• Anfahren, • Abfahren, • Ein, • Aus sowie • Not-Aus
erreicht.
4.3.4 Literatur
[1] ISET: Abschlußbericht zum BMBF-Projekt Entwicklung von PV-Versorgungsanlagen mit modularer Systemtechnik. Kassel, Januar 1999
[2] P. Strauß, R.-P. Wurtz, O. Haas, M. Ibrahim et al.: Stand-alone AC PV Systems and Micro Grids with New Standard Po-wer Components First Results of two European Joule Projects PV-MODE and MORE. In: Proceedings of the 16 European Solar Energy Conference and Ex-hibition, May 2000, Glasgow, UK
th
[3] W. Kleinkauf u. O. Haas: Dezentrale Elektrifizierung mit erneuerbaren Energien Energie und Kommunikation. In: O. Langniß, M. Pehnt (Hrsg.): Energie im Wandel. Springer Verlag Berlin, Heidelberg, 2001

Abschlussbericht Modulare PV- und Hybridsystemtechnik 269
4.4 Standardisierung und Normung der Schnittstellen für Energie- und Informationsübertragung (O. Haas, L. Löwer)
Wie bereits im BMBF-Projekt Entwicklung von PV-Versorgungsanlagen mit modularer Sys-temtechnik [1] erwähnt, wird das Ziel einer standardisierten Energieschnittstelle durch die Kopplung aller Komponenten über einen Wechselstrom-Energiebus mit den in Europa übli-chen Standards von 230 V/50 Hz für einphasige Anlagen bzw. 400 V/50 Hz für dreiphasige Anlagen erreicht. Dadurch entfällt hier die Notwendigkeit zur Schaffung eines neuen Stan-dards, so dass die verbleibende Aufgabe auf die Standardisierung der Kommunikations-schnittstelle beschränkt werden kann.
Abbildung 4-4 Modulare Systemtechnik mit Energie- und Kommunikationsbus
Ziel der Standardisierung ist ein standardisiertes Protokoll auf der Ebene des Application Lay-ers (Anwendungsschicht im ISO/OSI 7-Schichtenmodell [2]), möglichst unabhängig von der gewählten Übertragungstechnik (Einschränkung: Randbedingungen durch das ausgewählte Bussystem wie Taktrate, Protokoll, Zugriffssteuerung etc.).
Die Forderung nach Unabhängigkeit wird durch die in Kapitel 4.3 definierten Funktionsgrup-pen und Kenngrößen erreicht. Hierzu müssen nur die dazu gehörigen Variablen und Datenty-pen sowie ihre Verwendung standardisiert werden aber nicht ihre Übertragung. Dann läßt sich jede Komponente, die über eine Kommunikationsmöglichkeit verfügt (z. B. RS-232-Schnittstelle), mit einem Software-Treiber und einem vorgeschalteten Hardwareadapter an das verwendete Bussystem und dessen Protokollstruktur anpassen.
Viele Busankoppler sind bereits heute intelligent genug, um zusätzliche Software-Algorithmen auszuführen, die eine Protokoll-Anpassung an die vorhandene Geräte-Schnittstelle erlauben. Dies hat den Vorteil, dass kein zusätzlicher Eingriff in der Geräte-Firmware notwendig wird, wenn die vorgeschlagenen Funktionsgruppen und die dazugehöri-gen Datenformate bereits unterstützt werden. Auf diese Weise sind Kommunikationsmodule für verschiedene Bussysteme denkbar, die durch einfaches Austauschen die Anpassung an
K O M M U N I K A T I O N S - B U S
W E C H S E L - / D R E H S T R O M - E N E R G I E B U S
Ver-braucher
imInselnetz
Verbund-netz-
anschluß(optional)
PV mitInverter
a
x
=~
=~
Verbrenn.-Aggregat
SM
Transient-Speicher
SM
Wind-konverter
Gen.~
Koordi-nation
Fernüber-wachung
Batterie-speicher
=~

270 Modulare PV- und Hybridsystemtechnik Abschlussbericht
zukünftige Bussysteme ermöglichen und so ein zukunftsfähiger Kommunikations-Standard gewährleistet ist.
4.4.1 Auswahl des Datenbusses
Gemäß den im vorigen Abschnitt gemachten Voraussetzungen wurde zum Test der Kommu-nikationsschnittstelle ein im Vergleich mit auf dem Markt etablierten Feldbussen (Profibus, Interbus etc.) weniger leistungsfähigerer, aber preisgünstigerer Haus-Installationsbus aus-gewählt: der Europäische Installations-Bus EIB.
Der EIB wurde für das Einsatzgebiet Hausinstallation optimiert. Auf dem Markt gibt es be-reits zahlreiche EIB-Komponenten zur Steuerung von Licht, Heizung, Lüftung und Klima. Die European Installation Bus Association (EIBA) stellt durch die Interworking Standards und die Zertifizierung jedes EIB-Produktes sicher, dass alle EIB-Komponenten zueinander kompatibel sind und deren Interoperabilität gewährleistet ist. Ein weiterer Vorteil der EIB-Nutzung liegt darin, dass es bereits viele EIB-fähige Komponenten (Energie-Zähler, Last-Steuerungen etc.) auf dem Markt gibt, mit denen ein Energiemanagement möglich ist. Damit ist der EIB ein gut geeignetes Bindeglied für die Kommunikation zwischen Energieversor-gungssystem und Verbrauchern.
Zusätzliche Motivation: Wenn die Kommunikation über den EIB funktioniert, dann funktio-niert sie auch mit den oben erwähnten Feldbus-Systemen und erst recht mit zukünftigen Über-tragungsstandards wie JINI (Java Intelligent Network Infrastructure, z. B. über TCP/IP) von SUN-Microsystems oder das Pendant von Microsoft UPnP (Universal Plug and Play).
4.4.2 Testumgebung
Zum Testen und Implementieren der standardisierten Kommunikations-Schnittstelle auf Basis des EIB wurde die in Abbildung 4-4 und Abbildung 4-5 dargestellte Testumgebung realisiert. Im wesentlichen besteht sie aus einer Simulationsumgebung zur
• Nachbildung von Versorgungskomponenten (z. B. von PV-Generator, Batteriespeichereinheit),
• Durchführung übergeordneter Betriebsführungsaufgaben und Visualisierung sowie zum
• Test der Schnittstellen-Protokoll-Struktur.
Um die Kompatibilität zu handelsüblichen Komponenten eines Haus-Installations-Systems sicherzustellen, sind diese ebenfalls ein wichtiger Bestandteil der Testumgebung. Eingesetzt wurden hier
• EIB-gesteuerte Schalter (Schalten ohmscher Lasten, Hauptschalter der Spannungs-versorgung) und
• 4-Kanal Analog-Input-Modul (Erfassen der Netzgrößen Spannung und Frequenz sowie des gesamten Laststroms).

Abschlussbericht Modulare PV- und Hybridsystemtechnik 271
In Abbildung 4-5 ist zunächst das Schema mit allen wichtigen Busverbindungen dargestellt. Alle Tests beziehen sich zur Zeit auf die Nachbildung einphasiger Stromversorgungskompo-nenten, deren Ergebnisse können aber mit wenigen Ausnahmen (geänderte Messwerterfas-sung und Darstellung) ohne weiteres auf dreiphasige Systeme übertragen werden. Hauptbe-standteil der Simulationsumgebung sind zur Zeit drei PCs, auf denen die Simulationspro-gramme und das Programm für die übergeordnete Betriebsführung / Visualisierung laufen. Alle PCs sind nur über den EIB miteinander verbunden. Als Adapter zwischen EIB und serieller Schnittstelle des PCs kommt hier das auf dem Markt verfügbare EIB/RS-232-Interface zur Anwendung, das normaler Weise zur Programmierung der EIB-Komponenten und zur Überwachung / Diagnose des Bus-Datenverkehrs eingesetzt wird.
RS 232 RS 232 RS 232
BA BA BA
BA
BA
Modell desPV-Generators
Modell desBatteriespeichers
Zentrale Koordinationund Visualisierung
Netzdaten-Erfassung
Haupt-schalter
Netz
EIB Europäischer Installations-Bus
BA
BA
BA
A
D
Last 1 Last 2 Last 3
Simulationsumgebung
“Real World”
Abbildung 4-5 Schematische Darstellung der EIB-Testumgebung
Eine Übersicht der gesamten Anlage bietet das Foto von Abbildung 4-6, auf dem die einzel-nen Bestandteile der realisierten Testumgebung gut zu erkennen sind.

272 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Abbildung 4-6 Realisierte EIB-Testumgebung
4.4.3 Erweiterung der Testumgebung
Es ist geplant, mit wachsender Verfügbarkeit von Versorgungskomponenten, die das Konzept der modularen Systemtechnik erfüllen, die Testumgebung kontinuierlich zu erweitern. Als erste Erweiterung wurde ein PV-Stromrichter der Firma SMA Regelsysteme vom Typ Sunny Boy SWR 700 integriert. Weiterhin ist geplant, auf der Basis eines einfachen Maschinensat-zes für Laborzwecke, eine EIB-Steuereinheit zu erarbeiten, die eine Anbindung nicht-intelligenter Systemkomponenten ermöglicht und somit z. B. das Steuern und Überwachen eines handelsüblichen Dieselaggregats erlaubt.
4.4.4 PV-Stromrichter
In der Basis-Version der EIB-Testumgebung wurde der PV-Stromrichter durch ein Simula-tionsmodell via PC nachgebildet. Um dem Ziel, der standardisierten Kommunikationsschnitt-stelle näher zukommen, wurde ein bereits auf dem Markt verfügbarer kommunikationsfähiger PV-Stromrichter der Firma SMA Regelsysteme integriert (siehe Abbildung 4-7).
Abbildung 4-7 Sunny Boy SWR 700

Abschlussbericht Modulare PV- und Hybridsystemtechnik 273
Er ist mit einer seriellen Schnittstelle ausgestattet und ermöglicht auf der Basis eines herstel-lerspezifischen Kommunikationsprotokolls (Sunny Net) die Abfrage von Betriebsdaten sowie die Einstellung von Geräteparametern für Steuer- und Überwachungsaufgaben.
PC
c) Aktueller Stand: PC als Gateway
b) Anschließender Arbeitsschritt: Ergänzung der Task Sunny-Boy-Kommunikation
d) Ziel/Ausblick: EIB-kompatibler Sunny Boy
a) Anfängliche Implementierung: Simulation des PV-Stromrichters
simulierte Daten über zyklische Berechnungen:solare Einstrahlung, Wirkleistung, Betriebsstatus,
über EIB empfangene Daten:Netzfrequenz, Netzspannung, Schaltbefehle,
Umsetzung der über EIBempfangenen Schaltbefehle(Ändern der Sunny-Boy-Parameter)
die Simulation startet jedesmal ausdem gleichen, festgelegten Zustand
EIB
EIB
EIB
Siehe
Oben
PC
Sunny BoyKommunikation
PV Simulation,EIB-Kommunikation
Erfassung desSunny Boys
Erfassung des Sunny Boys
Kanalabfrage
Kanalabfrage
PC
Auslesen der Para-meter und der Meß-daten über zyklischeDatenabfragen
Auslesen der Parameter und der Meß-daten über zyklische Datenabfragen(Wirkleistung, Betriebsstatus, Netzfrequenz, Netzspannung, ...)
(Wirkleistung, Betriebsstatus, ...)EI
B
BCU RS 232 RS 232RS 232
implementierte
Firmware
Funktionen
Sunny Boy
RS 232
RS 232
BCU
implementierte
Firmware
Funktionen
Sunny Boy
RS 232
SMA
SMA SMA- rotokollKommunikationsp
EIB EIB-Kommunikationsprotokoll
RS 232
implementierte
Firmware
Funktionen
Sunny Boy
SMA
EIB EIB
EIB
RS-232-Adapter
BCU RS 232EIB EIB
RS-232-Adapter
BCU RS 232 RS 232EIB EIB
RS-232-Adapter
Abbildung 4-8 Entwicklungsphasen der EIB-Schnittstelle für den PV-Stromrichter Sunny Boy
In einem ersten Schritt wurde der PC, auf dem das Simulationsmodell des PV-Stromrichters implementiert ist, als Gateway zwischen EIB- und SMA-Protokoll eingesetzt. Zu diesem Zweck wurden zunächst innerhalb des Gateway-Programms zwei unabhängige Tasks geschaf-fen, die in Abbildung 4-8, Teil b dargestellt sind.

274 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Nach erfolgreicher Implementierung wurden die beiden Tasks untereinander verbunden, so dass die Simulationsdaten des Wechselrichters durch Messdaten ersetzt werden konnten. Abbildung 4-8 zeigt die wichtigen Projekt-Phasen und gibt einen Ausblick auf das angestrebte Ziel, den EIB-kompatiblen PV-Stromrichter.
4.4.4.1 Labor-Maschinensatz
Zur Zeit läuft eine Diplomarbeit, deren Zielsetzung der Aufbau einer Hardware-Schnittstelle zur Ankopplung der Steuerung eines handelsüblichen Dieselaggregats an den EIB ist. Über Relaisausgänge sollen die Steuerschütze für das Ein- und Ausschalten des Dieselmotors sowie des Netz-Schützes angesteuert werden können. Gleichzeitig sind Digitaleingänge vorgesehen, mit denen der Betriebszustand des Aggregats erfasst werden kann.
Hierfür wird ein kleiner Labor-Maschinensatz integriert, der aus Gleichstrommaschine (als Ersatz für den Dieselmotor) und Drehstrom-Asynchrongenerator besteht. Die Hardware-Schnittstelle besitzt einen Controller-Baustein, der die notwendige Intelligenz für Betriebsfüh-rungsaufgaben bereitstellt und den Betriebszustand des Dieselaggregats mit einer Zustands-maschine darstellt, der das Zustandsmodell aus Abbildung 4-2 zugrunde liegt.
4.4.5 Voruntersuchung zur Standardisierung
Am Beginn dieses Kapitels soll zunächst mit ein paar einleitenden Worten auf die Übernahme von Ergebnissen früherer Arbeiten eingegangen werden, die im Rahmen des BMBF-Projekts Entwicklung von PV-Versorgungsanlagen mit modularer Systemtechnik erarbeitet wurden.
4.4.5.1 Übernahme von Ergebnissen früherer Arbeiten
Im Gegensatz zu den unter [1] gemachten Vorschlägen für ein Kommunikationsmodell wurde auf ein Master-Slave-Modell mit obligatorischer Quittierung verzichtet. Bei dem Versuch, dieses Modell umzusetzen, traten zwei Schwierigkeiten auf. Zum einen ist der EIB ein soge-nanntes multi-master-fähiges Bussystem. Der EIB kennt keinen Master, alle an den Bus ange-schlossenen Geräte sind gleichberechtigt. Darüber hinaus hat der Anwender aus Gründen der Kompatibilität mit anderen EIB-Komponenten keinen Einfluß auf das Busprotokoll, das vor-geschlagene Modell konnte daher nicht implementiert werden. Die zweite Schwierigkeit trat bei der Umsetzung des zyklischen Sendens nur nach Aufforderung auf. Dieses Prinzip würde bereits bei einer Taktrate von 1 s in einem kleinen Versorgungssystem mit drei Komponenten (Übergeordnete Betriebsführung, PV-Generator, Batteriespeicher) zu einer starken Busauslas-tung führen. Aufgrund seiner technischen Daten (Maximale Übertragungsgeschwindigkeit 9600 Bd, Telegrammgröße 32 Byte) können im Idealfall maximal 37 Telegramme pro Sekun-de übertragen werden, in der Praxis ist dieser Wert jedoch deutlich geringer.
Zur Beseitigung der oben genannten Schwierigkeiten wurden die in den folgenden Absätzen erläuterten Änderungen durchgeführt:
Der Vorschlag, dass die Komponenten nur dann senden, wenn Sie von der übergeordneten Betriebsführung dazu aufgefordert werden, wurde dahingehend modifiziert, dass bei bestimm-

Abschlussbericht Modulare PV- und Hybridsystemtechnik 275
ten Sonderfällen (z. B. Störungen, Notabschaltung usw.) die Komponenten auch ohne explizi-te Aufforderung senden dürfen.
In dem jetzt entwickelten Modell zur Beschreibung des Betriebszustandes der Komponenten spielt der Zustand der Datenübertragung keine Rolle mehr. Es wird davon ausgegangen, dass die im Rahmen der modularen Systemtechnik entwickelten Systemkomponenten mit soviel technischer Intelligenz ausgestattet werden, dass sie unabhängig von einer übergeordneten Kontrolleinheit in jedem Betriebszustand sicher arbeiten können. Damit entfällt die Notwen-digkeit zu einer ständigen Überwachung der Kommunikationsfähigkeit aller Systemkompo-nenten und somit die Notwendigkeit des zyklischen Sendens der dazu erforderlichen Kontroll-informationen.
Im Interesse einer reduzierten Buslast wurde das ursprünglich vorgeschlagene Prinzip der zyklischen Datenübertragung, wo immer es möglich war, durch das Prinzip einer ereignisge-steuerten Datenübertragung ersetzt.
Dies entspricht auch eher der bisherigen Nutzung des EIB bei Gebäudeinstallationen, wo ü-berwiegend auf das zyklische Senden von Daten verzichtet wird. Gesendet wird nur dann, wenn z. B. ein Lichtschalter betätigt oder eine Schaltschwelle überschritten wird. Ausnahmen bilden hier z. B. die mess- und regeltechnischen Aufgaben für Heizung, Lüftung, Klima, die jedoch aufgrund ihrer relativ langsamen Wertänderungen keine großen Ansprüche an die Übertragungskapazität stellen.
4.4.5.2 Test der vorgeschlagenen EIB-Schnittstellen-Funktionen am Beispiel des Sunny Boy SWR 700
Die erste Stufe bei der Inbetriebnahme der EIB-Schnittstelle war die Zuordnung der gerätein-ternen Betriebszustände zu dem Zustandsmodell in Abbildung 4-2. Ein Vergleich mit dem Zuordnungsvorschlag aus Abbildung 4-3 mit der Zuordnung aus Abbildung 4-9 zeigt, dass dieser im wesentlichen übernommen werden konnte. Wie bereits bei der Definition des Zu-standsmodells in Kapitel 4.3.3 erwähnt, wird der Zustand Bereit nicht unterstützt. Dagegen kann der Zustand Abgeschaltet entgegen der bei der Festlegung getroffenen Beschreibung trotz abgeschaltetem Gerät von dem intelligenten Gateway detektiert werden, da der EIB-Busankoppler eine unabhängige Spannungsversorgung besitzt. Durch Auswertung der zuletzt übermittelten DC-Spannungswerte kann zusätzlich noch unterschieden werden, ob das Gerät aufgrund der fehlenden Solareinstrahlung abgeschaltet wurde oder ein interner Kommunikati-onsfehler vorliegt.
Bei der weiteren Inbetriebnahme stellte sich heraus, dass das Gateway nach einer bestimmten Zeit keine EIB-Telegramme mehr sendete. Eine daraufhin durchgeführte Analyse ergab, dass Wartezeiten während des Übergangs zwischen zwei Betriebszuständen ein ständiges Wieder-holen des zugeordneten Schaltbefehls durch die übergeordnete Betriebsführung verursachten. Beispielsweise führt der Sunny Boy beim Einschalten eine Vielzahl von Tests durch, die zu einer Einschaltverzögerung von ca. 1 min führen. Diese Eigenschaft des PV-Wechselrichters hatte die Konsequenz, dass der Empfangspuffer des Gateways mit Einschaltbefehlen gefüllt war und nach erfolgter Zustandsänderung ein Senden des neuen Zustands aufgrund der dadurch entstandenen Bus-Überlastung nicht mehr möglich war.

276 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Abbildung 4-9 Zuordnung der Sunny-Boy-Betriebszustände zu den fünf stationären Be-triebszuständen der übergeordneten Betriebsführung
Dieser Fehler zeigte, dass entweder in der Betriebsführungsroutine gerätespezifische Warte-zeiten berücksichtigt werden müssen, oder eine zusätzliche Bestätigung des empfangen Befehls erforderlich wird. Im Interesse einer schnellen Problemlösung wurden zunächst War-tezeiten eingefügt, es ist jedoch geplant, das vom Bus eigenständig generierte Acknowledge-Signal auszuwerten und als Empfangsbestätigung zu nutzen.
Trotz der oben beschriebenen Probleme, ließ sich der PV-Stromrichter ohne weitere Ein-schränkungen in die Testumgebung integrieren und über den EIB mit den vorgestellten Funk-tionsklassen steuern und überwachen. Auf dieser Basis entstand der im folgenden Abschnitt aufgeführte Standardisierungsvorschlag.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 277
4.4.6 Standardisierungsvorschlag für die PV-Stromrichter-Schnittstelle
In den folgenden Abschnitten wird der Standardisierungsvorschlag für eine PV-Wechselrichter-Schnittstelle auf der Basis des EIB erläutert, der zur Einreichung bei den Zer-tifizierungsgremien der EIBA vorgesehen ist. Hierzu wird ein sogenannter Funktionsblock Photovoltaik Inverter definiert.
4.4.6.1 Zweck und Ziel (Aims and Objectives)
a) Einleitung (Introduction)
Zur Steuerung und Überwachung von Photovoltaik-Stromrichtern über den EIB soll ein Interface geschaffen werden, das den standardisierten Zugriff auf Betriebsdaten unabhän-gig vom Hersteller gewährleistet, sowie die Fernsteuerung und Fernparametrierung von einer übergeordneten Anlagenkoordination aus erlaubt.
b) Anwendungsbereich (Scope)
Dieser Funktionsblock ist nur für den Einsatz in der Application Domain Decentralized Power Supply System gedacht und sollte außerdem nur in Verbindung mit dem Applica-tion Model Photovoltaic eingesetzt werden.
c) Umgebung (Environment)
Der Funktionsblock Photovoltaic Inverter bildet den Auftakt zu einer ganzen Reihe neuer Funktionsblocks, die die Zusammenarbeit von Stromversorgungskomponenten in einer dezentralen Energieversorgung gewährleisten sollen.
d) Überblick der Funktionen (Introduction to the functional specification)
Der Funktionsblock Photovoltaic Inverter besitzt ein Eingangssignal, mit dem der Stromrichter gesteuert wird und ein Ausgangssignal, das den Betriebszustand in einer normierten Form ausgibt. Daneben besteht die Möglichkeit, die momentan ins Netz ein-gespeiste Wirkleistung, die gesamte, ins Netz eingespeiste Energie, die gemessene Netz-frequenz und Netzspannung sowie die zugeführte Modulleistung und die DC-Eingangsspannung abzufragen. Für die Konfiguration des Stromrichters sind Parameter vorgesehen, mit denen Regelungs- und Steuerungsmodi sowie Arbeitsbereiche vorgege-ben werden können. Ergänzend sind herstellerspezifische Parameter und Ausgabedaten vorgesehen, die in einer speziellen Kommunikationsart erweiterte Konfigurations- und Wartungsmöglichkeiten erlauben.
4.4.6.2 Funktionsbeschreibung (Functional Specification)
Die Funktionalität des Blocks besteht aus fünf Teilfunktionen. Sie gliedern sich in: Zu-standsmaschine, Parametereinstellung, Datenausgabe, Initialisierung und hersteller-spezifische Daten.

278 Modulare PV- und Hybridsystemtechnik Abschlussbericht
4.4.6.2.1 Zustandsmaschine
Die erste Teilfunktion ist die Zustandsmaschine, die wie in Abbildung 4-10 dargestellt, die Betriebszustände des PV-Stromrichters herstellerunabhängig für übergeordnete Betriebsfüh-rungszwecke zur Verfügung stellt. Der Zugriff auf diese Zustandsmaschine erfolgt über den Eingang Command und den Ausgang State of Operation.
Standby Ready Operation
Failure
On
OffShut-down
Start-up
Power DownMan. Off
Man. On
State of Operation EIB Command Manual Abbildung 4-10 Zustandsmaschine des PV-Stromrichters
Gültige Werte für Command sind:
Start-up: Mit diesem Befehl wechselt die Komponente vom Status Standby in den Status Ready. Komponenten, die keinen expliziten Zustand Ready haben, müssen die-sen Befehl ignorieren.
On: Dieser Befehl führt aus dem Zustand Ready in den Zustand Operation. Bei Komponenten, die keinen expliziten Status Ready haben, bewirkt der Befehl On den Wechsel von Standby nach Operation.
Off: Mit diesem Befehl wird der Zustand Operation verlassen und in den Zustand Ready gewechselt. Bei Komponenten, die keinen expliziten Status Ready haben, bewirkt der Befehl Off den Wechsel in den Zustand Standby.
Shut-down: Dieser Befehl führt zum Wechseln des Betriebszustands von Ready nach Stand-by. Komponenten, die keinen expliziten Zustand Ready haben, müssen diesen Befehl ignorieren.
Die Befehle Manual Off und Manual On werden nicht über den EIB geschickt. Dieser Befehl entspricht dem Schalten von Hand bzw. bei PV-Wechselrichtern einem automatischen Ab-schalten, z. B. bei Unterschreitung der Mindest-Modulspannung. Zusätzlich zur Statusmel-dung ist ein weiterer Ausgang Message vorgesehen, der die kodierte Ausgabe von Störungs- und Warnungsmeldungen erlaubt. Wird diese Funktion unterstützt, muss die Meldung über den Eingang Message Confirm. bestätigt werden.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 279
4.4.6.2.2 Parametereinstellung
Die zweite Teilfunktion realisiert die Parameterübergabe mit der die Betriebsart, Regelungs- und Steuerungsparameter, die für den sicheren Betrieb notwendigen Wertebereiche von Netz-spannung und -frequenz sowie der Eingangsbereich der DC-Spannung eingestellt werden können.
Der Parameter Operation Mode kann folgende Werte annehmen:
0 MPP Operation: Dies ist die Standard-Betriebsart der meisten PV-Stromrichter. Der Stromrichter arbeitet so, dass er immer die maximal mögliche Solarleistung ins Netz einspeisen kann.
1 Controllable Power: In dieser Betriebsart kann die Wirkleistung nach oben begrenzt werden. Zusätzlich kann ein Wert für den Leistungsfaktor vorgegeben werden.
2 Grid Support: Diese Betriebsart legt den netzstützenden Betrieb fest. Abgegebene Wirk- und Blind-ströme werden jeweils über Statiken definiert.
3 Grid Formation: In dieser Betriebsart arbeitet der Stromrichter als netzbildende Einheit, d.h. er über-nimmt die Regelung von Spannung und Frequenz.
Für heutige PV-Wechselrichter erscheint die Betriebsart Grid Formation ungewöhnlich, aber in naher Zukunft könnten PV-Wechselrichter auf den Markt kommen, die z. B. einen gepuf-ferten Zwischenkreis besitzen und so Solarschwankungen ausgleichen und im Inselbetrieb gefahren werden können.
Je nach dem Wert des Parameters Operation Mode ändern sich auch Aufbau und Bedeutung des Parametersatzes Control Parameters, siehe hierzu Tabelle 4-1.

280 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Op.Mode Anzahl der Parameter
Bedeutung der Parameter
0 0 ---
1 2 1. Param.: Wirkleistungssollwert 2. Param.: Leistungsfaktor-Sollwert
Parameter der Regelgleichungen
N
N0
N1
N2Blind
N
N0
N1
N2Wirk
UPr
UUr
ffrI
UPa
UUa
ffaI
⋅
+⋅+⋅=
⋅
+⋅+⋅=
2 6
1. Param.: Faktor a2, 4. Param.: Faktor r2
2. Param.: Faktor a1 5. Param.: Faktor r1
3. Param.: Konstante a0 6. Param.: Konstante r0
Parameter der Regelgleichungen
N0N
1N
2
N0N
1N
2
ffPQf
PPff
UvPQv
PPvU
⋅
+⋅+⋅=
⋅
+⋅+⋅=
3 6
1. Param.: Faktor v2, 4. Param.: Faktor f2
2. Param.: Faktor v1 5. Param.: Faktor f1
3. Param.: Konstante v0 6. Param.: Konstante f0
Tabelle 4-1 Aufbau des Parametersatzes Control Parameters abhängig vom Wert des Parameters Operation Mode
Die Parameter Setpoints AC Voltage Range, Setpoints Frequency Range und Setpoints DC Voltage Range bestehen jeweils aus zwei Werten, die den unteren und oberen Grenzwert des Bereichs festlegen.
4.4.6.2.3 Datenausgabe
Die dritte Teilfunktion ermöglicht die Ausgabe von Messwerten und Betriebsdaten. Hierfür sind folgende Ausgänge vorgesehen:
Grid Voltage: Messwert der Spannung am Netzanschluss des Wechselrichters
Grid Frequency: Messwert der Netzfrequenz
AC Active Power: Messwert der abgegebenen Wirkleistung
Power Factor: Messwert des Leistungsfaktors
DC Power: Messwert der Eingangsleistung der Solarmodule
Total Energy: Gesamte ins Netz eingespeiste Energie
Temperature: Messwert der Wechselrichter-Temperatur
Message: Kodierte Ausgabe von Störungs- und Warnungsmeldungen zur Ergän-zung der Statusinformation

Abschlussbericht Modulare PV- und Hybridsystemtechnik 281
4.4.6.2.4 Initialisierung
Mit der vierten Teilfunktion werden Initialisierungsaufgaben durchgeführt, die zur Konfigura-tion des Versorgungssystems erforderlich sind. Hierzu gehören die Identifizierung der Kom-ponente, die auf Anforderung über den Ausgang Identification bereitgestellt wird sowie die Ausgabe der verfügbaren Mess- und Betriebsdaten über den Ausgang Available Outputs und die für den Betrieb notwendigen Grenzwerte, die über den Ausgang Device Limits abgefragt werden.
Der Ausgang Identification gibt Informationen über die Art des Gerätes und seine regelungs-technischen Merkmale. In diesem Zusammenhang ist es sinnvoll, alle denkbaren Komponen-ten eines Hybridsystems mit einzubeziehen.
Für die Beschreibung des Gerätetyps sind die drei Grundtypen
Quelle,
Speicher und
Last
vorgesehen. Bei Quellen wird angegeben, ob die Energie
regenerativ oder
konventionell
erzeugt wird. Für Quellen und Speicher wird die Zeitkategorie ihrer Verfügbarkeit angegeben. Hierfür werden die Unterscheidungsmerkmale
kurzfristig, Quelle: stark fluktuierende Energiebereitstellung Speicher: Kurzzeitspeicher (Transient-/Stundenspeicher)
mittelfristig Quelle: saisonal fluktuierende Energiebereitstellung Speicher: Balancespeicher (Tages-/Wochenspeicher) und
langfristig Quelle: konstante Energiebereitstellung Speicher: Langzeitspeicher (Saison-/Jahresspeicher)
definiert. Zusätzlich wird die Art der Energiezufuhr angegeben. Hier soll angegeben werden, ob die Komponente einen Brennstoff benötigt oder die Energie durch die örtlichen Gegeben-heiten (Sonne, Wind, Wasser etc.) zur Verfügung steht.
Weiterhin werden die im normalen Betrieb möglichen Regelungsarten
Netzbildung
Netzstützung und
Netzeinspeisung
übermittelt.

282 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Über den Ausgang Available Outputs sollen die von dem jeweiligen Gerät unterstützten opti-onalen Ausgabekanäle
Grid Voltage,
Grid Freqency,
Power Factor,
DC Power,
DC Voltage,
Total Energy und
Inverter Temperature
während der Identifikationsphase abgefragt werden. Diese Information wird benötigt, um eine übergeordnete Betriebsführung entsprechend konfigurieren zu können.
Den gleichen Zweck hat der Ausgang Device Limits. Auch hier werden während der Identifi-kationsphase für den sicheren Betrieb notwendige gerätetechnische Grenzwerte an die über-geordnete Betriebsführung übermittelt:
Nennleistung,
Nennspannung,
Nennfrequenz,
Min. Leistungsfaktor,
Zulässiger Netzspannungsbereich (unterer und oberer Grenzwert, jeweils als Differenz zum Nennwert),
Zulässiger Frequenzbereich (unterer und oberer Grenzwert, jeweils als Differenz zum Nennwert),
Zulässiger DC-Arbeitsbereich (unterer und oberer Grenzwert).

Abschlussbericht Modulare PV- und Hybridsystemtechnik 283
Abbildung 4-11 Zugriff auf gerätespezifische Daten während der Identifikationsphase
4.4.6.2.5 Hersteller-spezifische Daten
Die letzte Teilfunktion soll einen herstellerspezifischen Datenzugriff auf den Arbeitsspeicher des Stromrichter-Controllers für Wartungs- und Diagnosezwecke ermöglichen. Hierzu wird der Parameter Manufacturer Specific Parameter und der Ausgang Manufacturer Specific Da-ta vorgesehen. Siehe hierzu das Schema in Abbildung 4-12.
Memory Areawith
Manufacturer Specific Data
Memory Areawith
Manufacturer Specific Data
Set Manufacturer Specific Parameter
Get Manufacturer Specific Data (Get_msd)
Controller’sMemory Area
Controller’sMemory Area
BusCoupling
Unit
BusCoupling
Unit
Data Write Req
Data Read Req.
Data Read Con.Man.Spec.Data
Data Write Con.MSP Con.
Man.Spec.Param.
Get_msd
Abbildung 4-12 Zugriff auf herstellerspezifische Daten

284 Modulare PV- und Hybridsystemtechnik Abschlussbericht
4.4.6.3 Beschreibung des Funktionsblocks (Functional Block Description)
PhotovoltaicInverterCommand
Message Confirm.
Control Parameters
Setpoints AC Voltage Range
Setpoints Frequency Range
Setpoints DC Voltage Range
State of Operation
Grid Voltage
Grid Frequency
AC Active Power
DC Power
DC Voltage
Total Energy
Identfication
Message
I1
I2
O1
O2
O3
O4
O5
O6
O7
O8
P1
P2
P3
P4
Input(s)
Parameter(s)
Output(s)
Inverter Temperature
O9
Operation Mode
P5
Manufacturer Specific Parameter P6
Available Outputs
O10
Power Factor
O11
Device Limits
Manufacturer Specific Data
O12
O13
DPT I1
DPT I2
DPT O1
DPT O2
DPT O3
DPT O4
DPT O5
DPT O6
DPT O7
DPT O8
DPT O9
DPT O10
DPT O11
DPT O12
DPT O13
DPT O14
DPT P1
DPT P2
DPT P3
DPT P4
DPT P5
DPT P6
O14
Abbildung 4-13 Funktionsblock Photovoltaic Inverter
4.4.7 Literatur
[1] ISET: Abschlußbericht zum BMBF-Projekt Entwicklung von PV-Versorgungsanlagen mit modularer Systemtechnik. Kassel, Januar 1999
[2] Deutsches Institut für Normung: DIN EN ISO-IEC 7498-1: Kommunikation offener Systeme, Beuth Verlag, Berlin 1995
[3] O. Haas: Technical Annexes of GhK: Specification of Control Tasks for Com-ponents and Systems. In: Modular Stand-alone PV Plants for Decentra-lised Electrification PV-Mode, 1st Annual Progress Report of the Eu-ropean Commissions Project JOR3-CT987-0244. Kassel, July 1999
[4] EIBA: EIB Handbook for Developers, Version 2.1. Brussels 1997

Abschlussbericht Modulare PV- und Hybridsystemtechnik 285
4.5 Sicherheit- und Schutztechnik in erweiterbaren dezentralen Energiever-sorgungssystemen (Ch. Siedle)
4.5.1 Absicherung
Die konventionelle Elektroenergietechnik mit zentraler Erzeugung verteilt die Energie baum-förmig (Abbildung 4-14 27) Dabei zeigt die Stromrichtung immer vom Erzeuger weg. Der Strom in einem Zweig kann also höchstens gleich, aber nie größer werden als der Strom im übergeordneten Ast. Die Sicherungen sind entsprechend den Querschnitten der nachfolgenden Leitungen dimensioniert. Durch entsprechende Auslegung wird erreicht, dass im Kurzschluss-fall nur die Sicherung des betroffenen Zweigs auslöst, während die anderen Zweige weiterhin mit Energie versorgt werden.
Ver
teiln
etz V
erbraucherLeitung
Z
R
R
R
R
R
R
R
Abbildung 4-14 Energieverteilung mit zentraler Erzeugung
Eine neue Situation ergibt sich, wenn ein oder mehrere zusätzliche Erzeuger parallel zum Verbraucher in einen beliebigen Zweig der Struktur einspeisen. Da jetzt die Ströme in einem Zweig größer werden können als im übergeordneten Ast, entstehen Probleme hinsichtlich der Sicherungsauslegung in Bezug auf den Leitungsquerschnitt und den Kurzschlussfall.
In Abbildung 4-15 unten kann der Strom durch den Verbraucher aufgrund des zusätzlich ein-gespeisten Stroms größer als der Sicherungsnennstrom werden, ohne dass die Sicherung aus-löst. Tatsächlich ist der Leitungsquerschnitt aber nur für den Nennstrom der Sicherung ausge-legt. Hier droht ohne sinnvolle Begrenzung der Einspeiseleistung eine Leitungsüberlastung. Im Kurzschlussfall kann der zusätzliche Einspeiser das Auslösen der Sicherung verzögern oder sogar verhindern, weil der zusätzlich eingespeiste Strom den Strom durch die Sicherung reduziert.
27 Das Netz ist vereinfachend als Einphasennetz dargestellt. Die Verbraucher können als ohmsche Lasten aufge-fasst werden, da größere Blindanteile in der Regel kompensiert werden müssen.

286 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Ver
teiln
etz V
erbraucherLeitung
Z
R
R
R
R
R
R
R
~Einspeiser parallelzum Verbraucher
~Einspeiser miteigener Absicherung
Abbildung 4-15 Energieverteilung mit zusätzlichen Einspeisern
In der Realität ist die Leitung gegenüber der Sicherung jedoch überdimensioniert, da Siche-rungen meist erst bei signifikant höheren Strömen als dem angegebenen Nennstrom auslösen bzw. das Auslösen bei Nennstrom erst nach sehr langer Zeit erfolgt. Dieser Sicherheitsabstand kann unter Umständen zum Einspeisen mit begrenzter Leistung genutzt werden.28 Eine höhere Einspeiseleistung erfordert eine eigene für den Einspeisepunkt ausgelegte Absicherung
4.5.2 Schutz vor lokaler Inselnetzbildung in größeren Versorgungssystemen
Zur lokalen Inselnetzbildung kommt es, wenn die Wirk- und Blindleistungsbilanzen in einem Verbund von netzparallelen Einspeisern und Verbrauchern derart ausgeglichen sind, dass das Netz beim Wegschalten der netzbildenden Einheit weiter arbeitet. Ein zentrales Abschalten des Netzes ist somit nicht mehr gewährleistet. Da von diesem ungewollten Betrieb Gefahren für Personen und elektrischen Anlagen ausgehen, ist er möglichst zu vermeiden.
Die Wahrscheinlichkeit zur lokalen Inselnetzbildung beim Ausfall der netzbildenden Einheit steigt mit dem Anteil der dezentralen Energieversorger im Netz, weil die Wahrscheinlichkeit für eine ausgeglichene Leistungsbilanz steigt. Darüber hinaus begünstigt eine hohe Durch-dringung des Netzes mit dezentralen Einspeisern die Trennung vom Netz aufgrund von Trans-formatorüberlastung sogar. Die Transformatoren zwischen Verteil- und Ortsnetz sind oft nicht für die Nennleistung der angeschlossenen Verbraucher ausgelegt, weil das statistische Verhal-ten der Verbraucher für eine gewisse Vergleichmäßigung der Belastung sorgt. Anders z. B. bei einspeisenden Photovoltaikanlagen: Diese liefern aufgrund gleicher Einstrahlungsverhält-
28 Report IEA PVPS T5-01:1998, S. 4-24f

Abschlussbericht Modulare PV- und Hybridsystemtechnik 287
nisse alle gleichzeitig Energie, der Transformator zum Mittelspannungsnetz muss also dann wirklich für den maximalen Strom dimensioniert werden.
Es sind verschiedene Verfahren zur Erkennung der lokalen Inselnetzbildung bekannt.29 Sie lassen sich in passive und aktive Methoden unterteilen.
4.5.2.1 Passive Methoden
Passive Methoden beobachten verschiedene elektrische Netzparameter und schalten ab, so-bald eine Parameteränderung auf einen Übergang vom Netzparallel- zum Inselbetrieb hin-weist. Als Überwachungsparameter eignen sich die Frequenz und die Spannung. Spannung und Frequenz werden in einem Wechselrichter ohnehin erfasst, so dass die Überwachung in den Wechselrichter integriert werden kann. Die Effektivität der Spannungsüberwachung bei einphasigen Wechselrichtern kann noch verbessert werden, indem alle drei Phasen überwacht werden.
Weitere Indizien für eine lokale Inselnetzbildung können Phasensprünge sein, die auftreten, wenn beim Abschalten des Netzes die Leistungen nicht genau ausbalanciert sind, oder der Oberwellengehalt, der sich meist bei Netzabschaltung ändert.
4.5.2.2 Aktive Methoden
Aktive Methoden bringen absichtlich Störungen in das Netz ein und ziehen Rückschlüsse aus der Reaktion darauf.
Ein Verfahren besteht darin, die Frequenz langsam zu verändern. In einem starren Netz gelingt dies dem Wechselrichter nicht, wohl aber im Inselbetrieb. Die Anwendung dieses Ver-fahrens wird jedoch um so schwieriger, je mehr Wechselrichter im Verbund arbeiten, denn sie müssen alle die Frequenz zur selben Zeit in die selbe Richtung verschieben.
Das Beobachten der Netzimpedanz, die sich bei Netzausfall erhöht, zählt ebenfalls zu den aktiven Methoden, da zur Messung die Einprägung eines zusätzlichen Stroms erforderlich ist. In schwachen Netzen kann diese Methode zu Fehlabschaltungen führen. Es ist notwendig, die Schwellwerte individuell einzustellen.
Schließlich können auch Wirk- oder Blindleistung variiert werden, um eine Inselnetzsituati-on zu erkennen. Mit zunehmender Zahl parallel arbeitender Wechselrichter wird jedoch die Reaktion auf die Leistungsvariationen geringer. Hier wäre es gegebenenfalls erforderlich, die Wechselrichter zu koordinieren.
29 Report IEA PVPS T5-01:1998, S. 9-81ff

288 Modulare PV- und Hybridsystemtechnik Abschlussbericht
4.5.3 Resultierende Anforderungen an die Netztopologie
4.5.3.1 Einspeisepunkte und Absicherung
Zur Vermeidung einer Leitungsüberlastung dürfen nur kleine Leistungen hinter einer Ver-brauchersicherung eingespeist werden. Einspeiseströme in der Größenordnung der für die betreffende Installation zulässigen Ströme erfordern eigene Absicherungen und ggf. Unterver-teilungen für die Erzeuger.
4.5.3.2 Transformatoren
Die Transformatoren zwischen Verteil- und Ortsnetzen müssen so dimensioniert werden, dass die gesamte dezentrale Erzeugerleistung vom Orts- in das Verteilnetz eingespeist werden kann. 30 Wo dies nicht möglich ist, ist im einfachsten Fall eine Begrenzung der erzeugten Leistung erforderlich. Ein Energiemanagementsystem könnte dennoch für eine hohe Ausnut-zung der dezentral eingespeisten Energie sorgen. Im Einzelfall kann der Einsatz von Spei-chern sinnvoll sein. Die Spannungsregelung an den Transformatoren braucht Regelreserve für den Fall, dass die dezentrale Erzeugerleistung größer als die Verbraucherleistung ist (s. u.).
4.5.3.3 Spannungsregelung
Bei großen Leitungslängen können erhebliche Spannungsschwankungen auftreten, wenn die eingespeiste Leistung groß ist. Besonders Photovoltaikanlagen sind hier problematisch, da deren Leistung mit der Einstrahlung schwankt. Die Spannungsregelung am Transformator muss hier u. U. oft eingreifen, was sich auf deren Lebensdauer negativ auswirkt. Da das kon-ventionelle Netz bisher keine dezentrale Einspeisung in großem Maßstab vorsah, fehlt mögli-cherweise auch die Regelreserve für die umgekehrte Energieflussrichtung. Aus diesen Grün-den kann die Spannungsregelung vor Ort in der Nähe des Einspeisepunktes zwingend werden. Neben dem Einsatz von Stelltransformatoren kommen hier Stromrichter in Frage. Dabei sind zwei Ansätze denkbar: Spannungsanpassung zwischen Einspeisepunkt und Verbraucher oder Spannungsregelung mittels Blindleistungseinspeisung31.
Ver
teiln
etz
VerbraucherLeitung
R L ~~Spannungs-
regelung
Einspeiser
Abbildung 4-16 Spannungsanpassung zwischen Einspeisepunkt und Verbraucher
30 Report IEA PVPS T5-01:1998, S. 5-28 31 Report IEA PVPS T5-01:1998, S. 5-30f

Abschlussbericht Modulare PV- und Hybridsystemtechnik 289
Die Spannungsanpassung zwischen Einspeisepunkt und Verbraucher besteht aus einem Stell-transformator oder einem blindleistungsfähigen Stromrichter (Abbildung 4-16). Die Span-nung am Einspeisepunkt darf sich frei einstellen, es wird lediglich die Spannung für die Verbraucher geregelt. Transformator oder Stromrichter müssen für die Leistung der ange-schlossenen Verbraucher ausgelegt sein. Die Energie zum Verbraucher fließt stets - auch ohne Einspeisung - über die Spannungsanpassung.
Die Spannungsregelung mittels Blindleistung in Abbildung 4-17 vermeidet die Einschleifung zwischen Leitung und Verbraucher. Die Stromrichterleistung ist damit unabhängig von den Verbrauchern. Der Winkel zwischen Strom und Spannung wird so eingestellt, dass der Span-nungsabfall an der Leitungsinduktivität der Spannungserhöhung am Einspeisepunkt entge-genwirkt. Die genauen Verhältnisse sind aus Abbildung 4-18 ersichtlich.
Ver
teiln
etz
VerbraucherLeitung
R = l · R' L = l · L'
~~ Stromrichter
Einspeiser
U0 U1
UZ
I
Abbildung 4-17 Spannungsregelung mit blindleistungsfähigem Stromrichter
U0
U1 UR
UL
I
1
0
|U|=const
Thales
Abbildung 4-18 Zeigerdiagramm zur Spannungsregelung

290 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Die Spannung UL an der Leitungsinduktivität eilt dem Strom I und damit der Spannung am Leitungswiderstand UR um 90° voraus. Nach Tabelle 4-2 beträgt der ohmsche Widerstand von Niederspannungskabeln ein Mehrfaches des Blindwiderstand, d. h., dass UR betragsmäßig deutlich größer als UL ist. Damit steht der ohmsche Spannungsabfall im Thaleskreis nahezu senkrecht. Der parallel liegende Strom I steht also ebenfalls fast senkrecht auf der Spannung U0. Das bedeutet, dass am Übergabepunkt ins Verteilnetz eine im Verhältnis zur Wirkleistung um ein Mehrfaches höhere Blindleistung eingespeist wird. Der notwendigerweise betragsmä-ßig hohe Strom verursacht große Verluste. Auch der Stromrichter, der ja für die Scheinleis-tung ausgelegt werden muss, wird die Wirkleistung des Einspeisers um ein Mehrfaches über-steigen.
Kabeltyp R' Ω/km
X' Ω/km
Id A
NAYY 4x50 SE 0,772 0,083 142
NAYY 4x120 SE 0,305 0,080 242
NAYY 4x150 SE 0,249 0,080 270
R': Wechselstromwiderstandsbelag bei 70°C; X': induktiver Widerstandsbelag bei 50 Hz; Id: zulässiger Dauerstrom
Tabelle 4-2 Widerstandsbeläge von Niederspannungskabeln32
Man kann zeigen, dass für den bei Niederspannungskabeln vorliegenden Fall kleiner Indukti-vitätsbeläge gilt:. (Leitungslänge l, Wirkleistung P, Scheinleistung S)
20
220
00 cos
URSRlUX
SP
⋅′⋅′⋅−⋅′
≈≈ ϕ 20
220
11 cos
URSRlUX
SP
⋅′⋅′⋅+⋅′
≈≈ ϕ
Abbildung 4-19 veranschaulicht die Verhältnisse. Man erkennt, dass die eingespeiste Wirk-leistung in keinem Fall die Hälfte der Scheinleistung erreicht. Hier erzielt erwartungsgemäß das Kabel mit dem größten Querschnitt das beste Verhältnis.
Weiter sieht man, dass die Differenz zwischen eingespeister und im Netz angekommener Wirkleistung sehr groß ist und beim Kabel mit dem geringen Querschnitt schnell die Hälfte der eingespeisten Wirkleistung annimmt.
Die Kurven der auf Netzseite angekommenen Wirkleistung weisen ein Maximum auf. Weite-re Leistungserhöhung auf Einspeiserseite führt nur zu größeren Leistungsverlusten und ver-mindert sogar die übertragene Wirkleistung wieder. Beim Kabel mit dem niedrigsten Quer-schnitt liegt das Maximum bei nur 790 W (für 0,5 km Länge). Bei einer Scheinleistung von 29 kVA ist die am Netz ankommende Wirkleistung bereits Null. Darüber decken sowohl Ein-speiser als auch Netz gemeinsam die Leitungsverluste, d. h. es wird trotz Einspeisung dem Netz sogar Wirkleistung entnommen!
32 Klaus Heuck, Klaus-Dieter Dettmann: Elektrische Energieversorgung, 3. Auflage; Vieweg Verlag Braun-schweig/Wiesbaden 1995; ISBN 3-528-28547-8; S. 536

Abschlussbericht Modulare PV- und Hybridsystemtechnik 291
Zusammenfassend kann festgestellt werden, dass diese Methode zur Spannungsregelung nur bei sehr kurzen Leitungen überhaupt in Frage kommt, da die Verluste wegen des schlechten Leistungsfaktors sonst unverhältnismäßig hoch sind. Bei sehr kurzen Leitungen ist die Rege-lung der Spannung jedoch ein untergeordnetes Problem. Die Stromrichterleistung muss ein Mehrfaches der Einspeiserleistung sein. Erschwerend kommt hinzu, dass der Energieversor-ger oder Netzbetreiber solch hohe Blindleistungsanteile in der Regel gar nicht zulässt.
Spannungsregelung mittels Blindleistung
0
5
10
15
20
25
30
0 10 20 30 40 50 60
S / kVA
P / k
W
70
NAYY 4*120 SENAYY 4*50 SE
dünn l = 0,25 kmfett l = 0,5 km
o vom Netz aufgenommene Leistungx vom Einspeiser abgegebene Leistung
NAYY 4*150 SE
Abbildung 4-19 Wirkleistungen auf Einspeiser- und Netzseite in Abhängigkeit der Scheinleistung bei unterschiedlichen Kabeln und Leitungslängen
4.5.3.4 Maßnahmen gegen lokale Inselnetzbildung
Je höher der Anteil an verteilter Energieerzeugung im Netz wird, desto unzuverlässiger wer-den die in Absatz 4.5.2 diskutierten Sicherheitsmaßnahmen zur Vermeidung lokaler Insel-netzbildung. Dennoch soll ein hoher Sicherheitsstandard gelten, so dass folgende Anforde-rungen an die Netztopologie zu stellen sind:
Eine Kommunikation zwischen den Erzeugern hilft, die Situation einer lokalen Inselnetzbil-dung zu vermeiden. Beispielsweise könnte die netzbildende Einheit via Rundsteuersignal ein regelmäßiges Lebenszeichen senden. Die Einspeiser würden auf ein Ausbleiben mit Abschal-tung reagieren. Eine Kommunikation zwischen den Einspeisern zur abgestimmten Durchfüh-rung aktiver Erkennungsmaßnahmen ist wahrscheinlich aufwändig.
Automatische Erdungsmaßnahmen bei Netzausfall - wie eine mechanische Verkopplung von Sicherungselementen mit Erdschaltern - könnten den Personenschutz verbessern.

292 Modulare PV- und Hybridsystemtechnik Abschlussbericht

Abschlussbericht Modulare PV- und Hybridsystemtechnik 293
5 Probleme der Vernetzung von Versorgungskomponenten und lokalen Versorgungssystemen (A. Engler)
5.1 Stabilisierung der Netzgrößen in modularen Versorgungssystemen
Bei dem in Kapitel 3.2 vorgestellten gleichberechtigten Parallelbetrieb von netzbildenden Stromrichtern wird von einer Kopplung der Spannungsquellen über Induktivitäten ausge-gangen. Bei den im Labor verwendeten SUNNY ISLAND ist dies die Netzkoppeldrossel, die Teil des Netzfilters ist. Da beliebig viele Stromrichter parallel betrieben werden können, ist dieses Verfahren insbesondere für verteilte Systeme interessant. In diesem Fall müssen auch die Eigenschaften der Übertragungsleitungen in Betracht gezogen werden. In der folgenden Tabelle werden für die verschiedenen Spannungsebenen folgende Werte angegeben:
Kabeltyp R‘ (Ω/km) X‘ (Ω/km) Id
Niederspannungskabel 0,642 0,083 142
Mittelspannungskabel 0,161 0,190 396
Hochspannungskabel 0,06 0,191 580
mit R': ohmscher Belag, X': induktiver Belag, Id: Dauerstrom.
Bei den Werten in der obigen Tabelle handelt es sich um Beispiele, die die Tendenz der Ka-beleigenschaften gut darstellen. Allgemein gilt, dass bei niedrigen zugelassenen Dauer-strömen der ohmsche Belag ansteigt. Es wird deutlich, dass insbesondere im Hochspannungs-übertragungsnetz die Annahme einer induktiven Kopplung gerechtfertigt ist. Im Nieder-spannungsnetz überwiegt deutlich der ohmsche Anteil. Bei ohmsch gekoppelten Spannungs-quellen verdreht sich aber die Wirkung von Spannungs- und Phasendifferenz:
)sin(δω
⋅⋅⋅
=fL
EVQ und
)cos(2
δωω
⋅⋅⋅
−⋅
=ff L
EVL
VP .
In Niederspannungsnetzen erfolgt die Kopplung von Netzbildnern also nicht netzkompatibel. Hier müssten Q(f)- und P(U)-Statiken verwendet werden. Um aber eine Kopplung der Syste-me mit dem Mittel- und Hochspannungsnetz zu ermöglichen, sollten die konventionellen P(f)- und Q(U)-Statiken auch im Niederspannungsnetz beibehalten werden. Simulationen mit dem entwickelten Verfahren und die Annahme einer ohmschen Kopplung zwischen den Stromrichtern haben gezeigt, dass das Verfahren in verteilten Systemen bis zu einer Ausdeh-nung von mehreren Kilometern problemlos anwendbar ist. Die Belastung eines solchen Sys-tems mit Blindleistung bewirkt lediglich eine zusätzliche Phasenverschiebung zwischen den Netzbildnern in Abhängigkeit des Entnahmeortes. Die Wirkleistungsaufteilung erfolgt weiter-

294 Modulare PV- und Hybridsystemtechnik Abschlussbericht
hin mit der hohen Genauigkeit. Jedoch führt eine Wirkleistungsentnahme in Abhängigkeit ihres Ortes zum Blindleistungsaustausch zwischen den Netzbildnern.
Zusammenfassend kann also gesagt werden, dass eine Stabilisierung der Netzgrößen mit den konventionellen P(f) und Q(U)-Statiken auch im Niederspannungsnetz angewendet werden sollte und zu brauchbaren Ergebnissen führt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 295
5.2 Bedingungen für die Kopplung von Komponenten in modularen Systemen
5.2.1 Bereitstellung von Energie und Inselnetzbildung
Die Bereitstellung elektrischer Energie kann nach den technischen Anforderungen in die Auf-gaben
• Einspeisung in leistungsstarke Netze,
• Versorgung einzelner Lasten und
• Bildung von Inselnetzen
unterteilt werden. Während ein leistungsstarkes Netz die Netzgrößen vorgibt und zur Einspei-sung die Netzanschlussbedingungen - im wesentlichen für Oberschwingungsgehalt und Leis-tungsfaktor - eingehalten werden müssen, orientiert sich die Versorgung einzelner Lasten allein an deren Anforderungen. Um Inselnetze bilden zu können, muss die elektrische Energie dagegen in definierten Toleranzen von Frequenz und Spannung bereitgestellt werden [8].
Die Aufgabe der Netzregelung ist die Beibehaltung von Netzfrequenz und -spannung. Da in einem Inselsystem mit erneuerbaren Energien die erzeugte Leistung aus PV, Wind, Wasser usw. entsprechend dem Dargebot schwankt und nicht der Verbraucherleistung nachgeführt werden kann, ist ein Energiespeicher für den Ausgleich der Leistungsbilanz erforderlich. Die-ser Ausgleich muss momentan erfolgen; d. h. Netzregelung erfordert schnelle Regler.
Der modulare Aufbau von Inselnetzen mit verschiedenen Komponenten, also der Aufbau hyb-rider Systeme, lässt verschiedene Betriebsarten der Netzbildung mit den Vorteilen erhöhter Versorgungssicherheit und Redundanz zu. Im folgenden wird ein kurzer Überblick über die Randbedingungen einer Parallelschaltung und mögliche Ansätze für die Regelung von Kom-ponenten modularer Systeme gegeben.
5.2.2 Komponenten modularer Systeme
Die Forderung nach standardisierten Schnittstellen für Energiekopplung und Betriebsführung von erneuerbaren Energieversorgungssystemen ist vor allem mit der Notwendigkeit einer ein-fachen Erweiterbarkeit der Systeme mit modularen Komponenten begründet. Hier stellt sich sofort die Frage, wie solche Systeme erweitert werden können. Dieses erfordert die Klassifi-zierung der Komponenten und geeignete Komponentenmodelle.
5.2.2.1 Klassifizierung der Komponenten
In Abbildung 5-1 wird ein schematisiertes modulares Inselnetz (AC-seitige Energiekopplung und Betriebsführung) dargestellt. Zur systematischen Behandlung wird es in
• netzparallele Einheiten,
• netzstützende Einheiten und
• netzbildende Einheiten

296 Modulare PV- und Hybridsystemtechnik Abschlussbericht
eingeteilt. Dieses ist eine Definition von Systemkomponenten nach ihren regelungstech-nisch/elektrischen Eigenschaften; für Betriebsführungszwecke kann eine andere Definition sinnvoll sein.
UNetz
netz- bildend
netz-stützend
netz- parallel
......
Betriebsführung
netz- parallel
netz-stützend
Abbildung 5-1 Regelungstechnisch/elektrisches Schema eines einfachen modularen Sys-tems
Netzbildende Einheiten: Diese Komponenten werden auf die Ausgangsspannung geregelt, haben also eine Spannungsquellencharakteristik. Sie bestimmen Spannung und Frequenz im Netz und balancieren Energieangebot und Verbrauch aus. Dazu benötigen sie einen Speicher. Aufgrund ihrer Flexibilität sind Batteriestromrichter ideale netzbildende Einheiten. Auch kommen Dieselaggregate und Wasserturbinen in Frage. Da sowohl bei Dieselaggregaten als auch Wasserturbinen keine Rückspeisung möglich ist, muss durch die Betriebsführung und eventuell Dumploads sichergestellt werden, dass im Inselnetz kein Energieüberangebot auf-tritt. Windenergiekonverter und Photovoltaik sind nur bedingt für die Netzbildung geeignet, da sie über wenig Speicherkapazität verfügen.
Netzstützende Einheiten: Diese Einheiten werden so gesteuert, dass sie einen zum Verbrauch proportionalen Leistungsbeitrag zur Verfügung stellen. Dies ist gleichbedeutend mit einer Leistungsaufteilung zwischen den Komponenten. Die Steuerung der Komponenten kann auf verschiedene Art und Weise geschehen. Ähnlich der konventionellen Energieversorgungs-technik können die Komponenten Wirk- und Blindleistungsstatiken enthalten; ihre Sollwerte werden dann aus den Netzgrößen Frequenz und Spannung abgeleitet. Eine andere Möglich-keit wären Komponenten, die über ein schnelles Bussystem oder über eine eigene Messein-richtung Sollwerte erhalten, die eine Leistungsaufteilung zwischen den Komponenten be-werkstelligen.
Kommerziell sind die netzstützenden Komponenten nicht verfügbar; denkbar wären hier mo-difizierte PV-String-Wechselrichter, Windenergiekonverter oder Wasserturbinen. Netzstüt-zung würde mitunter ein Abregeln von erneuerbaren Ressourcen bedeuten!

Abschlussbericht Modulare PV- und Hybridsystemtechnik 297
Netzparallele Einheiten: Hierunter fallen Lasten und nicht steuerbare Generatoren; die Lasten entnehmen dem System soviel Leistung wie sie benötigen und die Generatoren speisen so viel wie möglich ein (Maximum Power Point). Am einfachsten werden diese Generatoren als Stromquellen ausgeführt.
Einen Sonderfall stellen Dumploads dar. Da sie gesteuert eingeschaltet werden können, unter-stützen sie zwar das Netzmanagement, tragen aber nicht in Echtzeit zur Netzbildung bei, d. h. sie leisten keinen zum Verbrauch proportionalen Leistungsbeitrag (Primärregelungsbeitrag).
5.2.2.2 Systemauslegung
Bei der üblichsten Form erweiterbarer Systeme kann man verallgemeinern, dass sie eine netz-bildende Einheit mit Spannungsquellencharakteristik enthalten; alle weiteren Erzeuger haben Stromquellencharakteristik, d. h. es wird ein Master/Slave-Verfahren mit netzparallelen Komponenten verwendet. Die Größe einer netzbildenden Einheit ist bei diesem Verfahren durch die maximale Gesamtlast oder das maximale Gesamtleistungsangebot (Blind- und Wirkleistung) des Versorgungssystems bestimmt:
∑=
≥n
iiLoadSS
1)(
im Fall dominierender Lasten oder
∑=
≥m
jjGeneratorSS
1)(
im Fall dominierender Generatoren mit S für die Scheinleistung.
Diese einfachen Systeme können allerdings nur dann mit zusätzlichen Komponenten erweitert werden, wenn die netzbildende Einheit überdimensioniert wurde. Eine Erweiterung ohne Aus-tausch der netzbildenden Einheit ist mit netzstützenden Komponenten möglich. Die Entwick-lung von netzstützenden Komponenten würde also deutlich zur Flexibilität modularer Syste-me beitragen.

298 Modulare PV- und Hybridsystemtechnik Abschlussbericht
5.2.3 Möglichkeiten des Parallelbetriebs von Stromrichtern
5.2.3.1 Parallelbetrieb einer Spannungs- mit zusätzlichen Stromquellen (Master/Slave-Verfahren)
Abbildung 5-2 Master/Slave-Verfahren
Wie oben angedeutet, zeichnet sich das Master/Slave-Verfahren dadurch aus, dass die Netz-bildung von einer Spannungsquelle, nämlich dem Master, übernommen wird; alle weiteren Stromrichter arbeiten als Stromquellen (Slaves). Der Referenzwert des Stromes für die Slaves kann auf verschiedene Art und Weise bestimmt bzw. festgelegt werden:
1. Es wird ein sinusförmiger, aus dem Netzspannungsverlauf abgeleiteter Strom ins Netz eingespeist. Von diesem Konzept wird bei den Stringwechselrichtern für die Netzeinspei-sung von Photovoltaik Gebrauch gemacht. Bei der Einspeisung von Photovoltaik in Netze wird versucht, die maximale Leistung zu erzielen (MPP). Da kein Primärregelungsbeitrag geleistet wird, handelt es sich nach obiger Definition dann um netzparallele Komponen-ten.
2. In [3] wurde eine Anordnung mit Lastrechner (Betriebsführung) vorgestellt. Dieser bestimmt in Echtzeit die Stromsollwerte der einzelnen Stromrichter. Diese können ent-sprechend der Stromrichterleistung gewichtet sein. Hierbei ist eine schnelle Kommunika-tion erforderlich. Da der Strom nicht notwendigerweise sinusförmig ist, kann auch ein Verzerrungsleistungsbeitrag von den Slaves erbracht werden. Erfolgt die Festlegung der Stromsollwerte proportional zur Belastung des Masters, dann leisten die Stromquellen ei-nen Primärregelungsbeitrag, d. h. das Netz wird gestützt.
3. Eine weitere Möglichkeit den Stromsollwert der Slaves zu generieren, ist das Messen des Stroms des Masters, und diesen oder einen entsprechend gewichteten Wert als eigenen Sollwert zu nutzen. So erfolgt automatisch eine dynamische Leistungsaufteilung, d. h. die Slaves leisten auch einen Verzerrungsbeitrag. Da die Leistung der Stromquellen proporti-onal zur Leistung des Masters ist, leisten sie einen Primärregelungsbeitrag. Nachteil ist die Verkabelung der Strommesssensoren.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 299
4. Ein kommunikationsloser Betrieb ist durch die Verwendung von mit Statiken gesteuerten Stromquellen. Es liegt eine erhöhte Redundanz vor, da weder Verkabelung für Sensoren oder Kommunikation mit Bussystemen zwischen den Stromrichtern notwendig ist. Nachteilig ist, dass diese Stromquellen zur Netzstützung ausschließlich Grundschwin-gungsleistung zur Verfügung stellen.
Der größte Vorteil des Master/Slave-Konzeptes sind die einfachen Regelungskonzepte (Strom- u. Spannungsregelung) in den Komponenten.
5.2.3.2 Parallelbetrieb von Spannungsquellen
Ein weiterer Ansatz für die Parallelschaltung von Stromrichtern verwendet gleichberechtigte Spannungsquellen, die mit Frequenz- und Spannungsstatiken versehen sind. Dieses Konzept lehnt sich an das in der traditionellen Energieversorgungstechnik übliche Verfahren an. Auf-grund der Gleichberechtigung der Komponenten kann nicht mehr zwischen Netzbildung und -stützung unterschieden werden. Mit Hilfe der Frequenzstatiken wird der Wirkleistungsfluss und mit Hilfe der Spannungsstatiken wird der Blindleistungsfluss gesteuert. In [6] werden die in Abbildung 5-3 dargestellten Statiken verwendet. Auffällig ist ihr sehr flacher Verlauf, der sehr genaue Referenzen in den einzelnen Geräten erfordert. Die Energieübertragungsmecha-nismen zwischen den Stromrichtern oder zwischen den Stromrichtern und Lasten können mit induktiv gekoppelten Spannungsquellen erklärt werden.
Abbildung 5-3 Statiken für die Steuerung von Spannungsquellen [6]

300 Modulare PV- und Hybridsystemtechnik Abschlussbericht
V L f
Abbildung 5-4 a) Über eine ideale Induktivität gekoppelte Spannungsquellen
b) Zeigerdiagramm zu Spannungsverhältnissen
5.2.3.2.1 Induktive Kopplung von Spannungsquellen
Die induktive Kopplung von Komponenten, insbesondere von Spannungsquellen, beschreibt viele Mechanismen der elektrischen Energieübertragung. Die Ersatzschaltung in Abbildung 5-4 a) kann die Kopplung von Spannungsquellen über eine Leitung, die Kopplung einer Syn-chronmaschine an ein starres Netz und wie in dem hier erörterten Fall, die Parallelschaltung von Stromrichtern über ihre Filterinduktivitäten beschreiben. Im letzten Fall ersetzen die Spannungsquellen in Abbildung 5-4 a) in guter Näherung die Brücken mit den Leistungshalb-leitern in den Stromrichtern.
Die Spannungsquellen in Abbildung 5-4 a) können unterschiedliche Amplituden und eine Winkeldifferenz δ in ihren Phasenlagen aufweisen. Dies wird im Zeigerdiagramm in Abbildung 5-4 b) verdeutlicht. Die in Abhängigkeit des Winkel δ, der Amplitudendifferenz und der Koppelinduktivität auftretende Wirk- und Blindleistung lässt sich wie folgt bestim-men
)sin( δω
⋅⋅⋅
=fL
EVP und
)cos( δωω
⋅⋅⋅
−⋅
=ff L
EVL
VQ
2
.
Für kleine Winkel δ gilt, dass die Größe der Wirkleistung durch den Winkel δ und die der Blindleistung hauptsächlich durch die Amplitudendifferenz bestimmt wird. Dies wird durch die Ebenen in Abbildung 5-5 und in Abbildung 5-6 verdeutlicht. Bei dieser Betrachtung wur-de eine ideale Induktivität mit 1,6 mH angenommen. Somit entspricht die Skalierung den Verhältnissen bei der Kopplung zweier Batteriestromrichter Sunny Island der Fa. SMA (3,3 kVA Nennleistung, 8,33 kHz Regelungstakt und 0,8 mH Ausgangsinduktivität). Da es sich bei den Graphen näherungsweise um Flächen handelt, liegt eine weitgehende Entkopp-lung der Wirk- und Blindleistungsübertragung vor. Diese Entkopplung ermöglicht eine sepa-rate Beeinflussung von Wirk- und Blindleistung. Die induktive Kopplung von Spannungs-quellen soll an einem Beispiel mit dem Batteriestromrichter Sunny Island verdeutlicht wer-den.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 301
Ist die Erzeugung der Sinusfunktion zwischen zwei Stromrichtern um einen Regeltakt ver-schoben, so stellt sich folgende Winkeldifferenz ein:
ooo 16236020120360 ,** ===
mss
TTsamp µδ .
Aufgrund dieser Winkeldifferenz fließt ein Wirkstrom, der einer Leistung von 3967 W ent-spricht. Bei dem oben genannten Stromrichter erfolgt die Erfassung der Spannung von -500 - 500 V mit Hilfe eines 10bit AD-Wandlers. Damit ergibt sich die effektive Differenzspannung bezogen auf ein LSB wie folgt:
eff691021024
1000 VV .*
=
-2-1
01
2
-10
-5
05
10-4000
-2000
0
2000
4000
Winkeldifferenz [°]S pannungs differenz [V]
Wirkleistung [k
W]
Abbildung 5-5 Wirkleistung als Funktion der Winkel- und Spannungsdifferenz von ge-
koppelten Spannungsquellen (Lf=1,6mH, Unenn = 230V)
-2-1
01
2
-10
-5
05
10-4000
-2000
0
2000
4000
Winkeldifferenz [°]S pannungs differenz [V]
Blindleistung [kVA]
Abbildung 5-6 Blindleistung als Funktion der Winkel- und Spannungsdifferenz von ge-
koppelten Spannungsquellen (Lf=1,6mH, Unenn = 230 V)

302 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Aufgrund der Spannungsdifferenz von einem LSB fließt bei der Parallelschaltung von zwei Sunny Islands ein Blindstrom, der einer Leistung von 316 VA entspricht.
Wie das Beispiel zeigt, verursachen schon die geringsten Differenzen in Spannung und Phase nicht vernachlässigbare Ströme zwischen den Stromrichtern. Es werden demnach hohe An-forderungen an die Mikrorechner (DSPs), Halbleiterschalter und Algorithmen gestellt, um eine schnelle und genaue Regelung zu ermöglichen.
5.2.3.3 Synchronisierte Spannungsquellen
Beim Parallelbetrieb von Spannungsquellen bereitet die phasengenaue Steuerung der Span-nungsquellen große Probleme. Man kann dieses Problem entschärfen, indem man die Strom-richter mit einem Signal synchronisiert. Es verbleibt die Aufgabe einer genauen Spannungs-regelung um Ströme (Blindleistung) zu vermeiden. Dies kann mit begrenzter Kommunikation zwischen den Stromrichtern erfolgen. Auch sind hiervon leicht modifizierte Verfahren [9] möglich. Bei diesen Verfahren bleibt der Regelungsaufwand begrenzt. Die Systeme weisen eine hohe Redundanz auf, da es keinen Master gibt.
5.2.3.4 Vergleich und Einsatz der Verfahren
Kriterien für den Parallelbetrieb von Stromrichtern sind
• der Kommunikationsaufwand,
• der Verkabelungsaufwand (Strommessungen, Synchronisationsleitungen, lokale Distanz der Komponenten),
• der Regelungsaufwand (Hardwareaufwand u. regelungstechnische Beherrschbarkeit),
• der Grad der erzielbaren Redundanz und
• die Art des Leistungsbeitrages (Grundschwingungsleistung, Verzerrungsleistung).
An dieser Stelle ist anzumerken, dass der Begriff Redundanz weiter gefasst werden sollte. Da sich die Stromrichter, die als Spannungs- oder Stromquelle betrieben werden, nur in der Rege-lung unterscheiden, technisch sonst aber gleich ausgeführt sind, kann z. B. nach Ausfall des Masters im Master/Slave-Betrieb das System neu konfiguriert werden. Ein anderer Stromrich-ter kann dann die Netzbildung übernehmen. Mit Hilfe von geeigneten Betriebsführungsstrag-tegien wäre nur ein kurzer Netzausfall die Folge, was in den meisten erneuerbaren Inselver-sorgungssystemen tolerierbar ist.
Tabelle 5-1 und Tabelle 5-2 geben eine Übersicht über die Vor- und Nachteile der Konzepte.
Für viele Anwendungen - insbesondere in der USV-Technik - wird man dem Master/Slave-Verfahren wegen der guten technischen Beherrschbarkeit Vorrang geben; ist größere Redun-danz gefragt, so wird man räumlich nah angeordnete und synchronisierte Spannungsquellen bevorzugen.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 303
Die Randbedingungen von dezentralen erneuerbaren Versorgungssystemen machen den Ein-satz von als Spannungsquellen ausgeführten Stromrichtern mit Statiken aus folgenden Grün-den wünschenswert
• geringer Kommunikationsaufwand,
• absolut dezentrales Konzept u.
• vollständige Redundanz.
Hier ist die erreichbare Qualität der Netzregelung und der dazugehörige technische Aufwand, insbesondere der Hardwareaufwand, zu bewerten.
Konzept Vorteile Nachteile
Master/Slave
(Spannungsquelle plus Stromquellen
" einfache Regelungskonzepte in den Komponenten
" hoher Kommunikationsaufwand
" wegen Verkabelungsaufwand dezen-tral schwer einsetzbar
" keine vollständige Redundanz
" selbst kleine Systeme benötigen eine Betriebsführung
Statiken
(ausschließlich Spannungsquellen)
" wenig Kommunikation (langsam)
" vollständige Redundanz
" einfache Erweiterbarkeit
" lange Einschwingzeiten (PLL)
" eventuell Ströme zwischen Strom-richtern
" komplizierte Regelungsalgorithmen
" hohe Anforderungen an Frequenz- und Spannungsreferenzen
Tabelle 5-1 Möglichkeiten für Parallelbetrieb von Stromrichtern (klassisch)
Konzept Vorteile Nachteile
Synchronisierte Spannungsquellen
" hohe Redundanz
" bessere Beherrschbarkeit im Ver-gleich zu P(f)-Statik
" einfache Erweiterbarkeit
" leistet auch einen Verzerrungs-leistungsbeitrag
" Kommunikationsaufwand (schnell)
" wegen Verkabelungsaufwand dezen-tral schwer einsetzbar
" eventuell Ströme zwischen Strom-richtern
mit Statiken gesteu-erte Stromquellen
" wenig Kommunikation (langsam)
" erhöhte Redundanz
" einfache Erweiterbarkeit
" hohe Anforderungen an Frequenz- und Spannungsreferenzen
" stellt nur Grundschwingungsleistung zur Verfügung
Tabelle 5-2 Möglichkeiten für Parallelbetrieb von Stromrichtern (Mischformen)

304 Modulare PV- und Hybridsystemtechnik Abschlussbericht
In verteilten Systemen, wo es nicht ausschließlich auf Redundanz ankommt, können auch Stromquellen mit Statiken eingesetzt werden. In diesem Fall entfällt der Aufwand für Kom-munikation oder Verkabelung von Sensoren.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 305
5.3 Forderungen an vernetzbare Komponenten
5.3.1 Lasten und rotierende Arbeitsmaschinen
An Lasten und rotierende Arbeitsmaschinen sollten bei einem Entwurf eines Versorgungs-systems zunächst einmal keine Anforderungen gestellt werden, sofern sie gängige Normen einhalten. Ein mögliches Lastenmanagement sollte berücksichtigt werden.
5.3.2 Rotierende elektromechanische Generatoren
Versuche mit der Aufschaltung von Asynchrongeneratoren über Widerstände oder Heißleiter (NTCs) auf Netze haben nur bedingt zum Erfolg geführt, was den Einsatz eines Syn-chronisiergeräts notwendig macht. Für die Synchronisation müssen bekanntlich folgende Be-dingungen annähernd erfüllt sein:
• gleiche Phasenlage,
• gleiche Betriebsspannung und
•
gleiche Frequenz.
Bei Aggregaten bis 60 kW wird typischerweise eine Frequenzdifferenz von 0,7 Hz - 1,5 Hz zugelassen, wenn man kleine Schwungmassen voraussetzt. Der kritische Parameter ist die Phasendifferenz, für die +/- 7° als maximale Abweichung angegeben wird33.
Im folgenden soll mit Hilfe der Simulation die unterschiedliche Wirkung der Aufschaltung des oben beschriebenen einphasigen ASG mit Frequenz- oder Phasenfehler auf ein starres Netz untersucht werden. Der Fliehkraftregler des Stromerzeugers wird als P-Regler ange-nommen und das maximale Moment lässt sich direkt aus der Leistung des Verbren-nungsmotors berechnen. Die Beanspruchung des Aggregats wird am bestens durch den Stromverlauf und das elektrische Moment beschrieben.
Abbildung 5-7 und Abbildung 5-8 bestätigen die oben getroffenen Aussagen. Bei einer Fre-quenzdifferenz, die bei der Aufschaltung dem Schlupf entspricht, stellt sich sofort das ent-sprechende elektrische Moment ein. Es treten keine nennenswerten Überströme auf. Verzö-gert stellt der Fliehkraftregler dann das Antriebsmoment ein. Auch ist der Abbildung 5-7 der Verlauf des für einphasige Generatoren typischen Pendelmoments zu erkennen. Im einge-schwungenen Zustand gibt der Generator Nennleistung ab. Hier treten nur kleine Pendelmo-mente auf. Die Aufschaltung mit Phasenfehler in Abbildung 5-8 führt zu deutlichen Über-strömen und extremen elektrischen Momenten.
33 Diese Angaben wurden dem Datenblatt eines kommerziellen Synchronisiergeräts entnommen.

306 Modulare PV- und Hybridsystemtechnik Abschlussbericht
0.2 0.25 0.3 0.35 0.4 0.45 0.5-20
-10
0
10
20
m/N
m
0.2 0.25 0.3 0.35 0.4 0.45 0.5-20
-10
0
10
20
Zeit/s
i Net
z/A
Antriebsmoment
elektr. Moment
Abbildung 5-7 Aufschaltung des einphasigen ASGs auf ein Netz mit 1 Hz Frequenzdif-ferenz (Simulation)
0.2 0.25 0.3 0.35 0.4 0.45 0.5-40
-20
0
20
40
60
m/N
m
0.2 0.25 0.3 0.35 0.4 0.45 0.5-100
-50
0
50
Zeit/s
i Net
z/A
Antriebsmoment
elektr. Moment
Abbildung 5-8 Aufschaltung des einphasigen ASGs auf ein Netz mit 1 Hz Frequenz- und 50° Phasendifferenz (Simulation)

Abschlussbericht Modulare PV- und Hybridsystemtechnik 307
Eine günstige Synchronisiereinrichtung für ein kleines modulares System muss demnach le-diglich für die Phasenübereinstimmung sorgen. Es reicht daher die Spannungsdifferenz zwi-schen Netz und Generator zu vergleichen und im Minimum zuzuschalten. Allerdings muss der Generator bei der Netzfrequenz eine zulässige Leistung abgeben.
5.3.3 Stromrichter und Stromrichter-Cluster in Netzen
Die Forderung, Frequenz- und Spannungsstatiken zu verwenden, lässt eine einfache Erweite-rung von Versorgungssystemen zu. Die Gesamtleistung des Systems kann erhöht werden und sogar lokal verteilte Versorgungssysteme können aufgebaut werden (siehe Abbildung 5-9). Diese verteilten und elektronisch gebildeten Niederspannungsnetze ohne rotierende Generato-ren sind eine vollkommen neuartige Technologie. Diese ist netzkompatibel und erlaubt des-halb auch die Anwendung der gleichen Sicherheitskonzepte.
Abbildung 5-9 Verteiltes, elektronisches Versorgungssystem im DeMoTec mit vier Bat-teriestromrichtern Sunny Island
In solchen Systemen ist es notwendig, Sicherungen einzusetzen. Zu Testzwecken wurde ein Kurzschluss - wie in Abbildung 5-9 dargestellt - verursacht. Eine Sicherung (32 A mit B-Charakteristik) konnte mit einem Spitzenstrom von ca. 250 A entsprechend Abbildung 5-10 geschlagen werden. Nach Auslösen der Sicherungen stand die Spannung sofort wieder zur Verfügung.

308 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Abbildung 5-10 Ströme und Spannung während des Kurzschlusses im elektronischen
Niederspannungsnetz

Abschlussbericht Modulare PV- und Hybridsystemtechnik 309
6 Labor- und Feldtests an Pilotanlagen
6.1 Ergebnisse und Untersuchungen an der Pilotanlage Starkenburgerhütte
6.1.1 Saisonberichte Starkenburgerhütte (M. Landau, M. Rothert)
Thema: Betriebsergebnisse der Pilotanlage Starkenburger Hütte
Bearbeiter: Markus Landau Martin Rothert
Berichtszeitraum: Oktober 1999 bis Oktober 2000
Zusammenfassung:
Solareinstrahlung
STROMVERBRAUCH
SOLARE BETRIEBSKENN-WERTE
STÖRUNGEN
Die Pilotanlage hat auch im vierten Betriebsjahr seit ihrer In-betriebnahme im Jahr 1997 die Starkenburger Hütte zuverlässig mit Elektrizität und Wärme versorgt. Der Sommerbetrieb wurde am 29. Mai 2000 aufgenommen und am 6. Oktober 2000 been-det.
Während des Sommerbetriebes wurden auf die Fläche des So-largenerators 19407 kWh eingestrahlt. Mit 6,317 kWh je Be-triebsstunde liegt dieser Wert um 12,2 % höher als der Ver-gleichswert des Vorjahres (5,629 kWh je Betriebsstunde).
Der Gesamtverbrauch an elektrischem Strom hat sich gegenüber dem Vorjahr von 6018 kWh um 187 kWh auf 5831 kWh verrin-gert. Diese Senkung um 3,1 % geht mit einer um 6,9 % vermin-derten Stromerzeugung durch das BHKW einher. Dieses produ-zierte im Berichtszeitraum 4516 kWh.
Die solare Deckungsrate erhöht sich gegenüber dem Vor-jahreswert von 31,9 % auf 39,5 % und spiegelt die erhöhte spe-zifische Einstrahlung und den reduzierten Stromverbrauch wi-der. Der Performance-Ratio-Wert erreichte 52,7 % und liegt damit um 3,4 % niedriger als im Vorjahr. Diese Minderung kann auf einen Gerätedefekt zurück geführt werden.
Das Störgeschehen wurde im Sommerbetrieb 2000 durch die Batteriekontrolleinheit (BaKo) der BacTERIE® 3 und ein leis-tungsstarkes Küchengerät bestimmt. Die BaKo zeigte keine sinnvollen Daten an, weshalb zunächst die Software-EPROMS gegen einen neuen Satz der Version 5.5 getauscht wurden. Diese Maßnahme war nicht erfolgreich, weshalb in einem weiterge-henden Schritt die vollständige Platine getauscht wurde. Weiter-hin versagte ein gasbetriebenes Warmwasserbad seinen Dienst. Das bereitgestellte Ersatzgerät war jedoch mit einem elektri-schen Drehstromanschluss ausgestattet und erforderte für den Betrieb einen aktiven Motorgenerator. Beide Störungen führten zu vermehrten Starts und längeren Laufzeiten des Motorgenera-tors.

310 Modulare PV- und Hybridsystemtechnik Abschlussbericht
6.1.1.1 Einleitung
Die Pilotanlage, eine autark arbeitende Hybridanlage bestehend aus 6 Photovoltaik-Genera-toren in Kombination mit einem gasbetriebenen Blockheizkraftwerk (BHKW), wurde im Juni 1997 in Betrieb genommen und versorgt seitdem die Starkenburger Hütte mit Elektrizität und Wärme.
Der photovoltaische Teil dieser Anlage wurde u.a. von der Europäischen Kommission ge-fördert. Die damit verbundene Berichtspflicht im Rahmen des Global Monitoring endete mit Ablauf der Sommersaison 1999.
Die messtechnische Begleitung der Anlage durch das ISET ist 1997 begonnen worden und soll auch im kommenden Jahr fortgesetzt werden. Die daraus gewonnenen Ergebnisse finden derzeit Verwendung im Forschungsprogramm Modulare Systemtechnik II, welches das ISET im Auftrag des BMWi bearbeitet.
6.1.1.2 Messergebnisse
Die hier dokumentierten Betriebsergebnisse betreffen den Zeitraum des Winterbetriebes vom 6. Oktober 1999 bis zum 29. Mai 2000 sowie den daran anschließenden Sommerbetrieb bis zum 6. Oktober 2000.
Der Winterbetrieb wurde messtechnisch vollständig erfasst. Hingegen liegen für insgesamt 130 h des Sommerbetriebes keine Messdaten vor.
Der Winterbetrieb 99/00 verlief insgesamt störungsfrei. Die solar versorgten Batterielade-geräte haben jeweils den zugeordneten Batterieverband zuverlässig geladen. Die von den Bat-terie-Kontrolleinheiten (BaKo) ermittelten Ladezustände lagen jederzeit im sicheren Bereich von 90 %.
Abbildung 6-1 zeigt den Jahresgang der Raumtemperatur sowie exemplarisch den der Batte-rietemperatur der BacTERIE 1. Die tiefsten Temperaturen wurden im Januar registriert. Die Ganglinie bleibt dabei deutlich oberhalb der Frostgrenze.
Am 26. März setzte ein starker Schneefall ein, der in Verbindung mit der folgenden Wetterla-ge dazu führte, dass die Solarmodule bis zum Mitte April mit Schnee bedeckt blieben und zwischenzeitlich die Batterien nicht geladen wurden (vgl. Abbildung 6-2). Im Rahmen des geplanten Ganzjahresbetriebes eines Mobilfunksenders muss diese aktuelle Erfahrung hin-sichtlich der zu erwartenden Verfügbarkeit berücksichtigt werden.
Die auf der Modulebene gemessene Strahlung HI belief sich im Zeitraum vom 1.10.1999 bis zum 30.9.2000 insgesamt auf 1157 kWh/m². Für die ebenfalls gemessene Globalstrahlung ergeben sich summarisch 1316 kWh. Beide Ganglinien zeigt Abbildung 6-2.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 311
Jahresgänge der Raumtemperatur und der Batterietemperatur BacTERIE 1Zeitraum: 1.10.1999 bis 30.09.2000
0
5
10
15
20
25
30
35
Datum
TR1 /°CTBAC1 /°C
Abbildung 6-1 Jahresgänge der Raumtemperatur und der Batterietemperatur der
BacTERIE 1
Jahresgänge der solaren Global- und Totalstrahlung (Modulebene) am Standort Starkenburger HütteZeitraum: 1.10.1999 bis 30.09.2000
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
1400
Datum
Summe GI/(kWh/m²)Summe HI/(kWh/m²)
Abbildung 6-2 Jahresgänge der eingestrahlte Solarenergie am Standort Starkenburger
Hütte
Während des Sommerbetriebes wurden auf die Fläche des Solargenerators 19407 kWh ein-gestrahlt. Mit 6,317 kWh je Betriebsstunde liegt dieser Wert um 12,2 % höher als der Ver-gleichswert des Vorjahres (5,629 kWh je Betriebsstunde).

312 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Der Gesamtverbrauch an elektrischem Strom hat sich gegenüber dem Vorjahr von 6018 kWh um 187 kWh auf 5831 kWh verringert. Diese Senkung um 3,1% geht mit einer um 6,9% ver-minderten Stromerzeugung durch das BHKW einher. Dieses hat im Berichtszeitraum 4516 kWh produziert.
Die solare Deckungsrate erhöht sich gegenüber dem Vorjahreswert von 31,9% auf 39,5% und spiegelt die erhöhte spezifische Einstrahlung und den reduzierten Stromverbrauch wider. Der Performance-Ratio-Wert erreichte 52,7% und liegt damit um 3,4% niedriger als im Vorjahr. Diese Minderung kann auf einen Gerätedefekt zurück geführt werden, wie Abbildung 6-1 und Abbildung 6-2 verdeutlichen.
Im Folgenden sind die Betriebsdaten für die letzten beiden Sommerperioden detailliert in den Tabellen Tabelle 6-1 und Tabelle 6-2 aufgeführt.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 313
Anlage: Starkenburger Hütte
Einheit Zeitraum
Verfügbarkeit Mai 00 Jun 00 Juli00 Aug 00 Sep 00 Okt 00
Summe
Anzahl der gemessenen Betriebsstunden: h 55 720 744 744 720 144 3072 Fehlende Daten: % 0,0 0,0 0,0 0,0 5,6 62,5
Meteorologische Daten
Eingestrahlte Energie horizontal: kWh/m² 7,8 118,5 149,0 157,3 120,9 20,4 566,1 Eingestrahlte Energie Modulebene: kWh/m² 6,3 100,3 126,0 134,1 113,8 15,9 490,2 Eingestrahlte Leistung Modulebene (Maximum): W/m² 766,0 1045,0 1127,0 1101,0 1029,0 764,0
Mittlere Umgebungstemperatur: °C 2,5 9,1 7,3 11,4 8,0 8,8
Energiewerte
Summe eingestrahlte Energie (Array-Fläche) kWh 248,0 3921,9 4925,1 5241,0 4447,2 623,3 19406,5 Energieabgabe Solargenerator 1 kWh 3,3 27,3 137,4 111,8 114,3 13,1 407,1 Energieabgabe Solargenerator 2 kWh 5,0 78,7 130,5 111,9 105,5 7,0 438,6 Energieabgabe Solargenerator 3 kWh 5,7 80,9 122,4 120,3 128,2 11,2 468,7 Summe Energieabgabe SG 1 - SG 3 kWh 13,9 186,9 390,3 344,1 348,0 31,3 1314,4 Theoretisch mögliche Energieabgabe SG1 -SG3 kWh 24,3 384,5 482,9 513,8 436,0 61,1 1902,6 PV-Energie in BacTERIE 1 kWh 2,9 21,8 78,1 42,3 63,8 7,6 216,5 Energie aus BacTERIE 1 kWh 3,2 162,3 348,3 334,1 279,4 33,8 1161,1 PV-Energie in BacTERIE 2 kWh 2,9 45,6 50,1 32,0 50,5 3,3 184,5 Energie aus BacTERIE 2 kWh 6,9 152,9 317,5 344,2 258,9 31,6 1111,9 PV-Energie in BacTERIE 3 kWh 2,9 47,5 56,7 30,5 37,1 3,1 177,8 Energie aus BacTERIE 3 kWh 6,1 167,2 256,1 343,6 335,7 51,5 1160,3 Energie vom BHKW (Phase 1) kWh 27,8 188,7 406,3 551,9 354,9 47,0 1576,6 Energie vom BHKW (Phase 2) kWh 27,4 160,5 362,7 527,9 301,5 42,2 1422,2 Energie vom BHKW (Phase 3) kWh 34,7 174,8 270,9 557,8 409,2 70,0 1517,4 Gesamtstromerzeugung BHKW kWh 89,9 524,0 1039,9 1637,6 1065,6 159,2 4516,2 Gesamtverbrauch kWh 103,8 710,9 1430,2 1981,6 1413,6 190,5 5830,5 PV-USE von Verbrauchern genutzte PV-Energie kWh 13,9 186,9 390,3 344,1 348,0 31,3 1314,4
Solare Betriebskennwerte Betriebswirkungsgrad SG1 % 4,0 2,1 8,4 6,4 7,7 6,3 6,2 Betriebswirkungsgrad SG1 % 6,0 6,0 8,0 6,4 7,1 3,4 6,8 Betriebswirkungsgrad SG1 % 6,8 6,2 7,5 6,9 8,6 5,4 7,3 Mittelwert Betriebswirkungsgrad SG (1,2,3) % 5,6 4,8 7,9 6,6 7,8 5,0 6,8 Mittelwert Ladezustand der BacTERIE 1 % 78,1 94,3 85,9 84,5 82,5 88,5 88,3 Mittelwert Ladezustand der BacTERIE 2 % 76,9 72,2 77,2 61,9 63,6 83,5 70,8 Mittelwert Ladezustand der BacTERIE 3 % 75,8 *90,0 *62,0 67,9 68,8 81,8 *73,9 Gesamtertragsfaktor (Final Yield) kWh/(kWp*d) 1,2 1,3 2,5 2,2 2,3 1,1 2,1 Solare Deckungsrate % 85,7 38,7 42,3 33,7 39,8 26,8 39,6Performance Ratio % 43,4 36,9 61,4 50,9 60,7 38,9 52,7
* Werte durch Gerätedefekt verfälscht
Tabelle 6-1 Betriebsdaten Sommerbetrieb 2000

314 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Anlage: Starkenburger Hütte
Einheit Zeitraum
Verfügbarkeit Mai 99 Jun 99 Jul 99 Aug 99 Sep 99 Okt 99 Summe
Anzahl der gemessenen Betriebsstunden: h 556,0 744,0 744,0 720,0 106,0 2870 Fehlende Daten: % 0,0 0,0 0,0 0,0 0,0
Meteorologische Daten
Eingestrahlte Energie horizontal: kWh/m² 81,2 147,1 107,9 118,4 13,8 468,4 Eingestrahlte Energie Modulebene: kWh/m² 70,1 127,3 93,6 110,7 11,6 413,4 Eingestrahlte Leistung Modulebene (Maximum): W/m² 1061,0 1072,0 1029,0 966,0 899,0
Mittlere Umgebungstemperatur: °C 5,7 9,8 9,6 9,0 3,9
Energiewerte
Summe eingestrahlte Energie (Array-Fläche) kWh 2741,4 4975,0 3660,1 4327,9 451,5 16155,9 Energieabgabe Solargenerator 1 kWh 28,4 124,4 101,8 92,0 13,1 359,6 Energieabgabe Solargenerator 2 kWh 52,0 121,4 105,8 107,6 13,2 399,9 Energieabgabe Solargenerator 3 kWh 54,0 129,0 109,7 103,6 13,9 410,2 Summe Energieabgabe SG 1 - SG 3 kWh 134,4 374,8 317,2 303,2 40,1 1169,7 Theoretisch mögliche Energieabgabe SG1 -SG3 kWh 268,8 487,8 358,8 424,3 44,3 1583,9 PV-Energie in BacTERIE 1 kWh 20,3 74,4 44,1 45,6
238,9
9,6 194,0 Energie aus BacTERIE 1 kWh 104,3 350,3 370,1 316,2 33,3 1174,2 PV-Energie in BacTERIE 2 kWh 23,8 39,0 17,2 24,2 7,1 111,3 Energie aus BacTERIE 2 kWh 126,5 353,8 423,5 324,3 24,7 1252,7 PV-Energie in BacTERIE 3 kWh 23,1 49,0 29,9 34,1 5,7 141,8 Energie aus BacTERIE 3 kWh 135,1 351,1 435,1 389,5 41,5 1352,3 Energie vom BHKW (Phase 1) kWh 136,8 420,9 497,4 384,4 67,5 1506,9 Energie vom BHKW (Phase 2) kWh 160,4 418,9 575,1 454,6 49,6 1658,6 Energie vom BHKW (Phase 3) kWh 181,4 414,1 538,0 467,7 81,7 1682,9 Gesamtstromerzeugung BHKW kWh 478,5 1253,9 1610,5 1306,7 198,8 4848,4 Gesamtverbrauch kWh 612,9 1628,7 1927,7 1609,9 6018,1 PV-USE von Verbrauchern genutzte PV-Energie kWh 134,4 374,8 317,2 303,2 40,1 1169,7
Solare Betriebskennwerte
Betriebswirkungsgrad SG1 % 3,1 7,5 8,3 6,4 8,7 6,6 Betriebswirkungsgrad SG1 % 5,7 7,3 8,7 7,5 8,8 7,4 Betriebswirkungsgrad SG1 % 5,9 7,8 9,0 7,2 9,2 7,6 Mittelwert Betriebswirkungsgrad SG (1,2,3) % 4,9 7,5 8,7 7,0 8,9 7,2 Mittelwert Ladezustand der BacTERIE 1 % 85,1 75,7 74,6 87,6 75,3 80,2 Mittelwert Ladezustand der BacTERIE 2 % 46,7 33,3 52,7 49,3 56,3 45,8 Mittelwert Ladezustand der BacTERIE 3 % 58,3 66,2 74,0 82,3 63,9 70,7 Gesamtertragsfaktor (Final Yield) kWh/(kWp*d) 1,2 2,4 2,1 2,0 1,8 2,0 Solare Deckungsrate % 36,7 35,5 25,8 29,4 40,3 31,9 Performance Ratio % 38,0 58,4 67,2 54,3 68,9 56,1
Tabelle 6-2 Betriebsdaten Sommerbetrieb 1999

Abschlussbericht Modulare PV- und Hybridsystemtechnik 315
6.1.2 Batteriespeicher
Für die Beurteilung der Zustände der einzelnen Batterieverbände wurden jeweils vor der Um-stellung der Anlage auf den anderen Betriebsmodus Kapazitätsproben durchgeführt. Nach der Trennung vom Netz und dem Abschalten des Inverterteil des Batteriestromrichters erfolgte gleichstromseitig die Entladung der Batterien mit 25-A-Entladestrom. Dies entspricht bei den Verbänden 1 und 2 dem 10-stündigen Entladestrom, bei Verband 3 entspricht dies jedoch dem 12-stündigen Entladestrom. Bei der Entladung wurden auch die Ganglinien der einzelnen Zel-lenspannungen aufgezeichnet.
Um die Ergebnisse der Messungen miteinander vergleichen zu können, ist der Einfluss der Temperatur zu kompensieren. Die folgenden temperaturkompensierten Werte wurden mit der Beziehung
CMess,+20°C = [1 – 0,006 (TMittel – 20 °C)/ °C] CMess
mit Bezug auf die Nennkapazität CN bestimmt.
BacTERIE 1:
Batterietemperaturen Kapazitätswerte BacTERIE 1 Datum der Probe Beginn Ende Mittel CMess_1 CMess_1,+20°C
09.06.1999 +7,2 °C +15,5 °C +11,35 °C 1,079 CN 1,14 CN
04.10.1999 +22,7 °C +26,5 °C +24,25 °C 1,176 CN 1,14 CN
29.05.2000 +13,3 °C +29,5 °C +16,55 °C 1,077 CN 1,10 CN
05.10.2000 +24,6 °C +23,5 °C +24,07°C 1,166 CN 1,14 CN
Tabelle 6-3 Kapazitätstests BacTERIE 1
Die temperaturkompensierten Werte zeigen, dass die nutzbare Kapazität der Batterie durch den Sommerbetrieb nicht reduziert wurden. Der Batterieverband befindet sich insgesamt in einem sehr guten Zustand. Es besteht kein Handlungsbedarf.
BacTERIE 2:
Batterietemperaturen Kapazitätswerte BacTERIE 2 Datum der Probe Beginn Ende Mittel CMess_2 CMess_2,+20°C
09.06.1999 +14,9 °C +20,2 °C +17,55 °C 1,132 CN 1,15 CN
04.10.1999 +22,0 °C +26,6 °C +24,30 °C 0,975 CN 0,95 CN
29.05.2000 +8,4 °C +16,5 °C +12,45 °C 1,105 CN 1,16 CN
05.10.2000 +21,8 °C +26,2 °C +24,00 °C 1,040 CN 1,02 CN
Tabelle 6-4 Kapazitätstests BacTERIE 2
Der Zustand des Batterieverbandes hat sich nach der Winterpause mit einem Wert von 116 % der bei +20 °C nutzbaren Nennkapazität deutlich verbessert. In Analogie zur Sommersaison 1999 nimmt die nutzbare Kapazität zum Saisonende deutlich ab. Die weitergehende Analyse

316 Modulare PV- und Hybridsystemtechnik Abschlussbericht
der einzelnen Spannungsgänge über die Entladungszeit zeigt, dass die 2 Zellen, die im Jahr 1998 im Verband ausgewechselt wurden, in der Spannung vergleichsweise höher liegen. Dies hat zur Folge, dass die restlichen Module nicht die erforderliche Ladespannung erhalten und damit deren Volladung im Normalbetrieb unmöglich ist.
Bei dem geplanten Winterbetrieb des GSM-Funkumsetzers besteht die Gefahr, das die gleichmäßige Vollladung der Zellen während der Wintersaison nicht mehr mög-lich ist. Hier ist besondere Vorsicht geboten um den Batterieverband nicht bleibend zu schädigen.
Vorsicht
BacTERIE 3:
Batterietemperaturen Kapazitätswerte BacTERIE 3 Datum der Probe Beginn Ende Mittel CMess_3 CMess_3,+20°C
09.06.1999 +7,3 °C +15,6 °C +11,45 °C 0,921 CN 0,97 CN
04.10.1999 +21,7 °C +26,3 °C +24,00 °C 0,990 CN 0,96 CN
29.05.2000 +7,4 °C +16,7 °C +12,05 °C 0,894 CN 0,94 CN
05.10.2000 +22,0 °C +25,7 °C +23,87 °C 0,932 CN 0,91 CN
Tabelle 6-5 Kapazitätstests BacTERIE 2
Der Zustand des Batterieverbandes hat sich durch den Sommerbetrieb geringfügig verschlech-tert. Die bei +20 °C nutzbare Kapazität nahm um 3 % auf 273 Ah ab. Die weitergehende Ana-lyse der Modulspannungsgänge über die Entladungszeit zeigt, dass eine Zelle vom restlichen Verbandsverhalten weiterhin abweicht.
6.1.3 Störgeschehen
6.1.3.1 Anlage
Der Sommerbetrieb 2000 verlief im Wesentlichen störungsfrei. Ende des Monats Juni berei-tete die Batteriekontrolleinheit der BacTERIE 3 Probleme. Diese BaKo wurde vermutlich durch elektromagnetische Einflüsse derart geschädigt, dass die Funktionstüchtigkeit erst durch den Austausch der Schaltungsplatine wieder hergestellt werden konnte. Während der Ausfallzeit waren die Nutzer der Anlage über den Ladezustand der Batterien verunsichert. Um einem möglichen Schaden vorzubeugen, wurde der Motorgenerator häufiger und länger als notwendig betrieben.
Im August versagte ein gasbetriebenes Küchengerät (Warmwasserbad) seinen Dienst. Das elektrische Ersatzgerät verfügte ausschließlich über einen Drehstromanschluss. Während der vierwöchigen Reparaturzeit wurde der Motorgenerator während der Mittagszeit für ca. 2 Stunden betrieben, um den erforderlichen Drehstrom erzeugen zu können. Auch dieser Gerä-tedefekt führte zu erhöhten Laufzeiten des Motorgenerators. Abbildung 6-3 verdeutlicht die untypischen Laufzeiten des Motorgenerators ab dem 68 Betriebstag. Die damit verbundene Batterievollladung zieht eine deutliche Verschlechterung des solaren Tagesnutzungsgrades nach sich (vgl. Abbildung 6-4).

Abschlussbericht Modulare PV- und Hybridsystemtechnik 317
0
2
4
6
8
10
12
14
0 10 20 30 40 50 60 70 80
Betriebstage ab Juni 2000
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14Erhöhte Leistungsanforderung wegen Gerätedefektes
Abbildung 6-3 BHKW-Laufzeiten und solare Nutzungsgrade der Hybridanlage für die
Tageszeit von 10:30 Uhr bis 12:30 Uhr. Ab dem 68 Tag verschlechtert sich der solare Nutzungsgrad deutlich durch den Betrieb eines dreiphasi-gen Küchengerät
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0,09
0,1
0 10 20 30 40 50 60 70 80
Betriebstage ab Juni 2000
Nutzungsgrad, 10:30 - 2 h Nutzungsgrad, 10:30 - 4 h Nutzungsgrad, 10:30 - 6 h
Erhöhte Leistungsanforderung
Abbildung 6-4 Der zweistündig Betrieb des Motorgenerators vermindert die solaren
Nutzungsgrade der Hybridanlage (vgl. Bild 4.1) signifikant, wie bei-spielsweise die Tagesintervalle von 10:30 Uhr bis 12:30 Uhr oder 14:30 Uhr oder 16:30 Uhr zeigen

318 Modulare PV- und Hybridsystemtechnik Abschlussbericht
6.1.3.2 Messtechnik
Aufgrund einer Defektes der im September ausgetauschten Speicherkarte sind einige Messda-ten nicht mehr verfügbar. Dies betrifft den Sommerbetrieb, wie der folgenden Tabelle 6-6 entnommen werden kann.
Zeitraum des Datenverlustes Ausfall Anteil Monat Anteil Jahr Von Bis
29.09.2000, 8 Uhr 30.09.2000, 24 Uhr 40 h 5,6 % 0,46 %
01.10.2000, 0 Uhr 04.10.2000, 18 Uhr 90 h 12,1 % 1,02 %
Jahreswert: 130 h 1,48 %
Tabelle 6-6 Überblick über nicht verfügbare Messdaten
Die während des Sommerbetriebes aufgezeichneten Energiewerte der PV-Wechselrichter zei-gen während der Nachtstunden eine PV-Einspeisung in das Hüttennetz ein. Die Ursache hier-für ist derzeit noch ungeklärt. Der Versuch, das Phänomen mit vergleichbaren Komponenten im Labor nachzubilden, ist bisher noch nicht erfolgreich gewesen.
Vergleichende Messungen der Batterielade- und Entladeströme I(SIO) haben gezeigt, dass die aufgezeichneten Messwerte mit einem lastabhängigen Fehler behaftet sind. Die Bestimmung des Ladezustandes der Batterien mit diesen Werten ist ohne Korrektur nicht möglich. Dies betrifft damit auch die gleichstromseitig errechneten Lade- und Entladeleistungen.
Der Gasmengenzähler, der den Verbrauch für die Küchengeräte erfassen soll, wurde der Sommersaison ausgetauscht.
6.1.4 Anlagenmodifikationen
Im Berichtszeitraum wurden ausschließlich die 3 Batteriekontrolleinheiten (BaKos) modifi-ziert.
6.1.4.1 BaKos
Die eingesetzten Einheiten zur Bestimmung des Ladezustandes der Batterien erhielten die Softwareversion 5.5. Aufgrund von Schwierigkeiten wurde dieser Austausch bei der BaKo 3 im Juli 2000 durchgeführt. Die beiden verbleibenden Einheiten wurden im Oktober 2000 auf den Softwarestand V 5.5.gebracht.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 319
6.2 Aufbau eines Testzentrums für Modulare Versorgungssysteme - DeMoTec (P. Strauß)
6.2.1 Erweiterung der Demonstrations- und Experimentierumgebung
6.2.1.1 Motivation und Aufgaben des Design-Zentrums für Modulare Versorgungs technik -DeMoTec
Eine zentrale Aufgabe des Projektes ist der experimentelle Nachweis der Kombinierbarkeit verschiedener Stromversorgungsmodule zu Hybridsystemen. Dabei sind neben der Kompati-bilität auf der Leistungsebene auch die elektromagnetischen Verträglichkeit und der Kommu-nikationstechnik zu untersuchen. Durch die vielfältigen Kombinationsmöglichkeiten der Energiemodule müssen sowohl Fragen der übergeordneten Betriebsführung, wie z. B. des Energiemanagements als auch Fragen der Regelungstechnik zum Aufbau stabiler Netze be-antwortet werden. Das Konzept der modularen Systemtechnik erfordert darüber hinaus die Fortsetzung der Zusammenarbeit verschiedener Hersteller auch im Bezug auf die Entwick-lung gemeinsamer Standards und zukünftig eventuell die Vorbereitung von Normen und Zer-tifizierungslaboren. Auch hierfür ist die Existenz einer gemeinsam nutzbaren Experimentier-plattform sehr hilfreich. In der Vergangenheit hat sich gezeigt, dass die Vorführung funktio-nierender Demonstrationsanlagen für die Markteinführung neuer, innovativer Produkte einen wichtigen Beitrag leisten kann. Das Design-Zentrum Modulare Versorgungstechnik soll damit auch eine Schaufensterfunktion erfüllen und hiermit insbesondere auch kleine und mittlere Unternehmen auch beim Export solcher Systeme und Komponenten unterstützen.
Nachdem in Projekten zur modularen Strukturierung von PV-Anlagen34 wesentliche Beiträge zur Erweiterung des Einsatzes von PV-Anlagen geleistet wurden, steht jetzt die Aufgabe an, eine hohe Flexibilität des Aufbaus auch auf breiter Ebene umzusetzen. Dazu wird es notwen-dig sein, dass die Integration in bestehende Versorgungssysteme erleichtert und die Anwen-dung für unterschiedliche Versorgungsaufgaben demonstriert wird. Diese Aufgaben umfassen beispielsweise Maßnahmen zur Komponentenentwicklung, zur Effektivität von Standardisie-rungen, zur Qualitätssicherung und zur Überprüfung von notwendigen Eigenschaften. Geziel-te Experimente und Tests unter praxisnahen Einsatzbedingungen sind daher unerlässlich.
6.2.1.2 Infrastruktur
Zur Umsetzung der obengenannten Ziele ist ein Experimentier- und Demonstrationszentrum mit Schulungsumgebung aufgebaut und im Rahmen dieses Projektes erweitert worden, das es Forschungseinrichtungen und der Industrie erlaubt, die vielfältigen modularen Stromversor-gungskomponenten und Lasten in verschiedenen Konfigurationen zu betreiben. Das DeMo-Tec wurde im Juni 1998 eingeweiht und wird seitdem schrittweise erweitert und für verschie-dene Forschungs- und Entwicklungsprojekte sowie für Schulungen und Informationsveran-staltungen genutzt.
34 z. B. im Projekt des ISET: Entwicklung von PV-Versorgungsanlagen mit modularer Systemtechnik, geför-dert durch das Bundesministerium für Bildung, Wissenschaft, Forschung und Technologie

320 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Der thematische Schwerpunkt liegt auf Stromversorgungsanlagen zur Elektrifizierung mit erneuerbaren Energien. Insbesondere wird der schrittweise Ausbau solcher Versorgungssys-teme in Schwellen- bzw. Entwicklungsländern vom kleinen Inselsystem bis zur Stromversor-gung mit Netzanbindung entwickelt [1, 2]. Die Versorgungseinheiten sind über eine flexibel schaltbare Vernetzung sowohl auf der Leistungs- als auch auf der Kommunikationsebene ver-knüpft und können zu einer Vielfalt kleiner und mittlerer Inselsysteme mit einer Summenleis-tung bis zu etwa 200 kW kombiniert werden.
Das DeMoTec spiegelt somit modellhaft die Elektrifizierungsstufen mit marktüblichen Kom-ponenten wider und leistet damit einen wesentlichen Schritt zur Entwicklung und Darstellung der Technik. Wie in Abbildung 6-5 dargestellt, können neben den Systemen in der Experi-mentierhalle weitere Labore der Universität Kassel eingebunden werden. Die Stromversor-gungsanlagen werden laufend ergänzt bzw. ersetzt und entsprechen dem aktuellen Stand der Technik.
Abbildung 6-5 Blockschaltbild ausgewählter Anlagen in der Experimentierhalle des DeMoTec und in Laboren der Universität Kassel

Abschlussbericht Modulare PV- und Hybridsystemtechnik 321
6.2.1.3 Experimentieren im DeMoTec
Das DeMoTec ist mit hochwertiger Mess-, Steuer- und Regelungstechnik ausgestattet und erlaubt die Integration von Systemen in Netze unterschiedlicher Leistungsklassen und Quali-täten. Es bietet auch für externe Nutzer beste Möglichkeiten bezüglich
• Komponenten- und Systementwicklung
• Komponententests, Prüfungen (zukünftig einschließlich EMV)
• Kompatibilitätstests (Hybridisierung im Verbund mit Batterie und anderen Stromer-zeugern)
• Gestaltung und Überprüfung von Betriebsführungs-Konzepten usw.
Die Komponenten- und Systementwicklung sollte schon im frühen Stadium Standards be-rücksichtigen, welche die Kompatibilität der Komponenten verschiedener Hersteller ermögli-chen. Diese Standards sind teilweise schon in Normen festgelegt, teilweise besteht jedoch insbesondere für Inselanlagen noch Abstimmungsbedarf auf verschiedenen Ebenen, wie z. B. bei Leistungs- und Kommunikationsschnittstellen (Software und Hardware) oder bei der Zuordnung von Regelungs- und Betriebsführungsaufgaben.
Die beiden folgenden Projektbeschreibungen sollen exemplarisch die Nutzungsmöglichkeiten des DeMoTec zeigen.
6.2.1.4 Projektbeispiel: Entwicklung- und Test eines Batteriestromrichters
Abbildung 6-6 PV-Batterie-Diesel Hybridsystem Experimentier- und Demonstrations-anlage der Firma SMA Regelsysteme im DeMoTec
In Zusammenarbeit mit der Firma SMA Regelungssysteme GmbH und ISET wird mit Förde-rung des BMBF ein neuartiger Batteriestromrichter entwickelt. Diese Komponente wird u.a. für den Einsatz in kleinen Hybridsystemen vorbereitet [3].

322 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Um die unterschiedlichen Betriebsmodi Inselbetrieb, Batterieladebetrieb und Netzparallelbe-trieb unter verschiedenen Randbedingungen zu testen, wurde im DeMoTec das in Abbildung -7 dargestellte PV-Batterie-Diesel-Hybridsystem aufgebaut. 6
Abbildung 6-7 Test-Werkstatt im DeMoTec
Erste Tests wurden unter Verwendung eines Werkstatt-Laststandes (siehe Abbildung 6-7) sowohl mit typischen Verbrauchern als auch für besondere elektrische Anforderungen durch-geführt. Großer Wert wird hier auf die Praxisnähe, wie beispielsweise auf das Verhalten ver-schiedener Sicherungsautomaten gelegt. Darüber hinaus werden Langzeittests und Prüfungen zur elektromagnetischen Verträglichkeit durchgeführt.
6.2.1.5
Projektbeispiel: PV- und Hybridsysteme für die ländliche Elektrifizierung
Für laufende europäische Verbundprojekte PV-Mode35 und MORE36 werden im DeMoTec PV- und Hybrid-Inselsysteme entwickelt und für den Einsatz in Griechenland vorbereitet. Um zuverlässige Komponenten für den weltweiten Markt vorzubereiten, werden die Anlagen zu-nächst im DeMoTec und später auf der griechischen Insel Kythnos erprobt und optimiert (siehe Abbildung 6-8). Für diese Untersuchungen werden zunächst drei Anlagentypen aufge-baut: ein PV-Batterie-System, einphasig 230 V; ein PV-Batterie-System, dreiphasig 400V und ein PV-Batterie-Diesel-System, dreiphasig 400 V.
35 PV-MODE Modular Stand-Alone PV Plants for Decentralised Electrification, gefördert von der EU 36 MORE Components for Renewable Energy Systems, gefördert von der EU

Abschlussbericht Modulare PV- und Hybridsystemtechnik 323
PV Batterie PV Batterie
WindPV Diesel
Lokale Versorgungca. 3 kWp
Lasten Lasten Lasten Lasten
Bestehende Regionalversorgungca. 2 MW
Lokale Versorgungca. 6 kWp
Abbildung 6-8 Elektrifizierung netzferner Verbraucher auf der griechischen Insel Kyth-nos im Rahmen des europäischen Verbundprojektes PV-MODE2
Erweiterungspläne beinhalten den Aufbau eines Prüflabors für modulare Stromversorgungs-anlagen und -komponenten, das als Modell für später einzurichtende akkreditierte Prüflabore dienen soll. Das bereits akkreditierte EMV-Prüflabor des ISET wird erweitert und gemeinsam mit der Universität Kassel in neuen Prüfräumen des DeMoTec installiert. Weiterhin wird eine Experimentierumgebung für Biomasseaggregate zur Strom- und Wärmeproduktion aufgebaut.
6.2.1.6 Literatur
[1] W. Kleinkauf, F. Raptis, Ph. Strauß: Schaufenster Energieversorgungstechnik der Zukunft Strom aus Er-neuerbaren Energien Internationales Demonstrations- und Experimen-tierzentrum, 13. Symposium Photovoltaische Solarenergie, Staffel-stein, 3/98.
[2] W. Kleinkauf, F. Raptis, O. Haas: Elektrifizierung mit Erneuerbaren Energien , Hybridanlagentechnik zur dezentralen, netzkompatiblen Stromversorgung, FORSCHUNGS-VERBUND SONNENENERGIE, Themen 96/97, ISSN 0939-7582, Köln, 2/97.
[3] B. Burger et al.: Batterie Inverter for Modularly-Structured PV Power Supply Sys-tems, 2nd World Conference and Exhibition on PV Solar Energy Con-version, Vienna, 7/98.

324 Modulare PV- und Hybridsystemtechnik Abschlussbericht
6.2.2 Laboruntersuchungen an der MEGA-Hybrid-Anlage (A. Engler, R. Geipel)
Im folgenden wird die Implementation der Batteriestromrichtereinheit und die Betriebsergeb-nisse der MEGA-Hybrid-Anlage mit einer im Vergleich zur ursprünglichen Anlage verbesser-ten Spannungserfassung dargestellt.
Da die schnellere Spannungserfassung insbesondere die Dynamik der Inselnetzregelung mit statischem Umrichter erhöht hat, werden die entsprechenden Ergebnisse erläutert.
6.2.2.1 Aufbau der Batteriestromrichtereinheit
Die zentrale Komponente der Anlage, die Batteriestromrichtereinheit (siehe Abbildung 6-9), basiert auf einem adaptierten Antriebsstromrichter. Modifikationen am Antriebsstromrichter waren im Rahmen des Projektes nicht möglich und auch nicht gewollt; ein Aspekt der Unter-suchungen war es, die Verwendbarkeit kommerzieller Geräte für Inselnetzbildungszwecke zu überprüfen. Entsprechend mussten die vorhandenen Schnittstellen des Antriebsstromrichters genutzt werden.
Die Batteriestromrichtereinheit besteht aus folgenden Funktionseinheiten:
• einem VME-Rechner-System,
• einer Spannungserfassung,
• einer Synchronisationseinheit und
• dem Antriebsstromrichter (DigiVec60).
VME-Rechner
Bedienpanel
Antriebsstrom-richter (DigiVec60)
Batterierack(96V; 10kWh)
Abbildung 6-9 Batteriestromrichtereinheit basierend auf einem Antriebsstromrichter
6.2.2.1.1 VME-Rechner-System
Das Rechner-System basiert auf einer Motorola 68030 CPU und verwendet MEN-Module für die Ein- und Ausgabe von digitalen und analogen Signalen. Es wird eine Zustandsmaschine gerechnet, die das Batteriemanagement, die Kommunikation mit der übergeordneten Betriebs-führung und die Steuerung des Bedienpanels übernimmt. Weiterhin wird der Stromrichter und

Abschlussbericht Modulare PV- und Hybridsystemtechnik 325
die Synchronisationseinheit von dem VME-System konfiguriert und ein Spannungsregler im 1kHz-Takt gerechnet.
6.2.2.1.2 Spannungserfassung
Die galvanisch getrennte, analoge Spannungserfassung stellt den Betrag der Spannung des Netzes zur Verfügung. Zu diesem Zweck wird eine 3/2-Transformation gerechnet und an-schließend der Betrag bestimmt:
22ba uuU += .
Abbildung 6-10 Verbesserte analoge Spannungserfassungskarte
6.2.2.1.3 Synchronisationseinheit
Die Synchronisationseinheit wird je nach Betriebsart umgeschaltet und stellt dem Antriebs-stromrichter das aktuelle Winkelsignal über die Resolverschnittstelle zur Verfügung. Das Winkelsignal wird bei der Netzbildung mit Schwungrad direkt von dem an der Maschine an-geflanschten Resolver entnommen, bei der Netzbildung mit dem Umrichter wird es synthe-tisch von einem Signalgenerator erzeugt und beim Netzparallelbetrieb wird das Resolver-signal aus der Netzspannung abgeleitet.
6.2.2.1.4 Antriebsstromrichter
Bei dem Stromrichter handelt es sich um einen standardmäßig ausgeführten Antriebsstrom-richter37 mit einer feldorientierten Regelung. Er hat eine Leistung von 36 kW und einen ma-ximalen Ausgangsstrom von 60 A. Als Schnittstellen stehen zwei Analogeingänge für Strom-sollwerte und Digitaleingänge für Steuerungszwecke zur Verfügung. Der für die Vektorrege-lung notwendige Transformationswinkel wird über den Resolvereingang eingestellt. Auf-
37 Der DigiVec60 ist ein Produkt der Fa. Contraves.

326 Modulare PV- und Hybridsystemtechnik Abschlussbericht
grund der im Vergleich zur üblichen Zwischenkreisspannung von 560V niedrigen Batterie-spannung von 100 V resultiert eine für die Anlage nutzbare Leistung von etwa 5 kVA. Diese wird durch den maximalen Ausgangsstrom bestimmt.
6.2.2.2 Inselnetzbildung mit Umrichter
Im Umrichterbetrieb wird das Inselnetz durch Vorgabe der Frequenz über den Resolverein-gang und Regelung der Spannung durch Vorgabe des Stromsollwerts mit Hilfe des VME-Rechnersystems gebildet (siehe Abbildung 6-1 ). Auf die Stromregler im Umrichter konnte nur wenig Einfluss genommen werden. Die in dieser Anlagenkonfiguration erzielte Netzquali-tät wird in den beiden folgenden Plots gezeigt.
1
Abbildung 6-11 Prinzip der Anlagenkonfiguration für die Inselnetzbildung mit Umrichter
Abbildung 6-12 zeigt das Spektrum des Netzes. Der Klirrfaktor ist besser als 4 %. Abbildung -1 zeigt das Verhalten des Netzes bei einem Lastsprung, welcher innerhalb von 50 ms aus-
geregelt wird. Als Spannung wird in dieser und den folgenden Abbildungen jeweils der Be-trag der dreiphasigen Netzspannung dargestellt, also im Idealfall 400 V.
6 3

Abschlussbericht Modulare PV- und Hybridsystemtechnik 327
Abbildung 6-12 Spektrum der Spannung des Inselnetzes bei Umrichterbetrieb (Klirrfaktor
besser 4 %)
Zwei weitere Plots zeigen das Verhalten der Anlage bei für dezentralen Versorgungssystemen typischen, aber schwierigen Erzeugern bzw. Lasten. In Abbildung 6-14 wird der Betrieb einer dreiphasigen ohmschen 1,5 kW Last mit Einspeisung zusätzlicher Energie aus einem asyn-chronen Generator (ASG)38, der mit einem Simulator für einen Windengeriekonverter (DC-Maschine) gekoppelt ist, gezeigt. Der Batteriestrom spiegelt die Fluktuationen des Windes wieder. Die Spannungsregelung arbeitet so schnell, dass bei zugeschalteten Leuchten kein Flicker erkennbar ist! Da die Aufschaltung eines ASG möglich ist, können ebenfalls Diesel-aggregate mit ASG mit geeigneten Magnetisierungskennlinien einfach integriert werden.
0 0.02 0.04 0.06 0.084
2
0
2
4
6
werte 1< >i 0.1.
werte 2< >i 0.01.
4.4
3.6
werte 0< >i
Spannung / 100 V
Batteriestrom / 10 A
Zeit / s
Abbildung 6-13 Schalten einer dreiphasigen ohmschen Last von 1,5 kW (Ausregelung in ca. 50 ms)
38 Der ASG wurde für den Leerlauf mit einem Kondensator kompensiert.

328 Modulare PV- und Hybridsystemtechnik Abschlussbericht
0 2 4 6 82
10
1
0
1
2
3
4
5
werte 1< >i 0.1.
werte 2< >i 0.01.
4.4
3.6
werte 0< >i
Spannung / 100 V
Batteriestrom / 10 A
Zeit / s Abbildung 6-14 Betrieb mit Simulator für WEC
Häufiges Einsatzgebiet dezentraler Versorgungssysteme ist die Wasserversorgung bzw. -aufbereitung. Dazu gehört ebenfalls das Betreiben von Pumpen, was auch mit der MEGA-Hybridanlage möglich ist. In Abbildung 6-15 wird der Start einer 1,3 kW Pumpe mit einer einphasigen Asynchronmaschine dargestellt. Die Anlage wird hierbei schieflastig betrieben. Das ist zum einen an der Welligkeit des Betrages der Netzspannung |UNetz| zu erkennen. Die Welligkeit ist ein Indikator dafür, dass nicht alle Effektivwerte der Phasenspannungen gleich sind. Zum anderen ist der Batteriestrom bei Schieflast keine Gleichgröße mehr, sondern pul-siert mit 100 Hz.
0.1 0 0.1 0.2 0.3 0.4 0.58
6
4
2
0
2
4
6
werte 1< >i 0.1.
werte 2< >i 0.01.
4.4
3.6
werte 0< >i
Spannung / 100 V
Batteriestrom / 10 A
Zeit / s Abbildung 6-15 Betrieb mit einphasiger 1,3kW Pumpe (Schieflast)

Abschlussbericht Modulare PV- und Hybridsystemtechnik 329
7 Zusammenfassung (M. Rothert, P. Zacharias)
Das Vorhaben Modulare Systemtechnik I (Entwicklung von PV-Versorgungsanlagen mit modularer Systemtechnik Nr. 0329549A) und das hier beschriebene Nachfolgevorhaben Modulare Systemtechnik II spielen für die Entwicklung der modularen Systemtechnik eine tragende Rolle. Flankiert wurden diese Arbeiten durch Projekte im Bereich Komponenten-entwicklung, in denen zusammen mit namhaften Industriepartnern die erarbeiteten Erkennt-nisse in konkrete Produkte umgesetzt wurden und auch immer noch werden. Als ein Beispiel soll hier noch einmal das im Markt äußerst erfolgreiche Produkt Sunny Boy der Firma SMA angesprochen werden. Auf einen ähnlichen Erfolg hofft SMA auch bei dem Batterie-stromrichter Sunny Island, der sich zurzeit in der Markteinführungsphase befindet. Das In-teresse an diesem Produkt ist bereits sehr groß.
Durch verschiedene EU-Projekte ist es gelungen, die Ideen der modularen Systemtechnik auch auf europäischer Ebene zu verbreiten. Zurzeit werden innerhalb der beiden EU-Projekte MORE and PV-MODE insgesamt 3 Feldtestanlagen mit dem Batteriestromrichter Sunny Island und dem PV-Wechselrichter Sunny Boy aufgebaut, die neben ersten Betriebserfah-rungen auch die Flexibilität dieser Systemtechnik demonstrieren sollen.
Inhaltlich stand und steht die Reduzierung der Anlagenkosten mittels einer einfach zu struktu-rierenden, erweiterbaren und zu vorhandenen Netzen kompatiblen Systemtechnik im Mittel-punkt. Durch die Kompatibilität zwischen autonomen und netzgekoppelten PV-Anlagen ist es möglich, durch höhere Stückzahlen die Kosten zu senken. Die einfache Anlagenstruktur er-möglicht eine kostengünstigere Anlagenauslegung und Installation. Spezielle für diese An-wendungen entwickelte Komponenten erhöhen die Anlagenwirkungsgrade und die Verfüg-barkeit der Systeme und durch die einfache Erweiterbarkeit sorgen sie für eine höhere Zu-kunftssicherheit der Anlagen. In der Summe können diese Vorteile in Zukunft eine deutliche Kostenreduktion im Bereich der Systemtechnik bewirken.
Die folgende kurze Übersicht (Abbildung 7-1) stellt die thematische und zeitliche Einordnung dieses Vorhabens dar.

330 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Komponenten-entwicklung
KommunikationBetriebsführungSoftware
Feldtest undDemonstration
Meilen-steine
Grundlagen-untersuchungen
Entwicklungder Idee und Projektvor-bereitung
ModulareSystemtechnik I Modulare
Systemtechnik I Demonstration einer ersten
Versuchsanlage13 European
PV-Conference
th
Inbetriebnahme der Pilotanlage Starkenburger-
hütte
Markteinführungvom
Sunny Island&
Inbetriebnahme der Feldanlagen
auf Kythnos
19
90
199
41
996
2002
MEGA Hybrid
Entwicklung eines modulorientierten PV-Wechselrichters
Entwicklung eines modulintegrierten PV-Wechselrichters
1992
erstes modular erweiterbares
Hybridsystem im Labor m
Weltweit erster modulintegrierter
Wechselrichter
Serienprodukt Sunny Boy
BacTERIEWechselstrombatterie
ModulareSystemtechnik II
Entwicklung eines Batteriestromrichters für modulare Hybridsysteme
19
98
200
0
MORE & PV-MODE Vorbereitung und Feldtest für modulare Hybridsysteme
HYBIX Plug&Play Technik für modulare Hybridsysteme
Vernetzung Modularer Systeme(in Planung)
Entwicklung eines Multistring- Wechselrichters
Hochintegrierte PV-Wechselrichter
Abbildung 7-1 Übersicht über die in den letzten 10 Jahren am ISET im Bereich der Systemtechnik durchgeführten Projekte
-
Grundlegende Untersuchungen und Simulationen zum Parallelbetrieb zweier als Spannungs-quellen betriebener Stromrichter ohne Kommunikation zur Synchronisierung sowie die Ent-wicklung eines Regelungskonzeptes für diese Betriebsart bildeten einen Schwerpunkt. Durch diese Arbeiten war es im Jahr 2000 erstmals möglich, den kommunikationslosen Parallelbe-trieb von zwei Batteriestromrichtern im Betrieb zu demonstrieren. Dieses neue Verfahren stellt für den Aufbau von stromrichterdominierten Inselnetzen einen technischen Durchbruch dar. Erst dieses Verfahren macht den echten Parallelbetrieb auf der AC-Seite möglich.
Mit der Entwicklung eines neuen Betriebsführungsrechners für die schnelle Regelung von Stromrichtern aber auch für den Einsatz einer Betriebsoptimierung in Hybridsystemen wurde begonnen. Ein thermisches Modell für die genauere Berechnung der thermischen Belastung von Halbleiterbauelementen in Stromrichtern wurde entwickelt. Dieses wird es in Zukunft

Abschlussbericht Modulare PV- und Hybridsystemtechnik 331
erlauben, die Bauelemente stärker an ihrer Belastungsgrenze zu betreiben, dadurch besser auszulasten und trotzdem einen sicheren Schutz der Bauelemente zu erreichen. Die spezifi-schen Kosten für Stromrichter können hierdurch weiter gesenkt werden.
Die Erarbeitung eines Kommunikationsstandards auf Basis des EIB für einen PV-Stromrichter steht kurz vor dem Abschluss. Anschließend sollen Standards für weitere Kom-ponenten erarbeitet und bei der EIBA zur Zertifizierung eingereicht werden. Dabei können die hierfür erarbeiteten Grundlagen auch für eine Zertifizierung bei anderen Bussystemen genutzt werden.
Die Kostenstrukturen in modularen PV- und Hybridversorgungsanlagen wurden untersucht. Aufbauend auf diesen Ergebnissen werden zurzeit neue Ansätze zur Betriebsführung erarbei-tet.
Die Untersuchungen zur Einbindung weiterer Stromerzeuger wie Asynchron- oder Synchron-generatoren und Windenergieanlagen in von Stromrichtern dominierte Inselnetze wurde in-tensiv weitergeführt. Hierfür wurde die bereits 1999 aufgebaute wahlweise 1- oder 3-phasige Test- und Demoanlage für ein modulares Hybridsystem eingesetzt.
Abbildung 7-2 Test- und Demoanlage in 1- phasiger Technik
Eine weitere Test- und Demoanlage in 1-phasiger Ausführung wurde aufgebaut und auf dem 15. Symposium Photovoltaische Solarenergie in Staffelstein und auf der Europäischen PV-Tagung in Glasgow einer breiten Öffentlichkeit im Betrieb demonstriert. Die Anlagen wurden im Jahr 2000 neben der Demonstration auch intensiv für Tests und Weiterentwicklungen der Anlagenkomponenten genutzt.

332 Modulare PV- und Hybridsystemtechnik Abschlussbericht
Durch diese Präsentation auf der wichtigsten nationalen und internationalen PV-Konferenz konnte eine enge Rückkoppelung mit der Industrie stattfinden. Diese wurde noch durch sehr intensive direkte Kontakte zu Industrieunternehmen (z. B. BP-Solar, Kirsch GmbH, Senertec GmbH, Siemens AG Installationstechnik, Siemens AG Automatisierungs- und Antriebstech-nik, SMA Regelsysteme GmbH) vertieft.

Abschlussbericht Modulare PV- und Hybridsystemtechnik 333
8 Veröffentlichungen und Patente
8.1 Vorträge und Veröffentlichungen mit Bezug zum Projekt
B. Burger, G. Cramer: Reif für das Inselnetz Elektronik Praxis 2 (2000)
B. Burger, P. Zacharias, G. Cramer, W. Kleinkauf, P. Strauß: Hybrid Systems Easy in Configuration and Application; 16th European PV Solar Energy Conference and Exhibition in Glasgow, 1.5. Mai 2000
B. Burger, P. Zacharias: Battery Inverter for Modulary-Strctured PV-Power Supply Systems; PV-Hybrid Power Systems 2000 in Aix-en-Provence, 7./8. September 2000
B. Burger, P. Zacharias, G. Cramer, W. Kleinkauf: Small Hybrid Systems with AC-Coupled Wind Turbines; Wind Power for the 21st Century; Kassel 25.27. September 2000
A. Engler: Identifikation und Modellierung eines einphasigen Generators; Simporer Workshop, 11./12. Mai 2000;
A. Engler: Control of Parallel Operating Battery Inverters; PV-Hybrid Power Systems 2000 in Aix-en-Provence, 7./8. September 2000;
M. Ibrahim, M. Rothert, P. Strauß, P. Zacharias: Advanced Operation Control Concept for Stand-Alone PV-Hybrid Systems Considering Bat-tery Ageing, 16th European PV Solar Energy Conference and Exhibition in Glasgow, 01.05. Mai 2000
W. Kleinkauf, P. Strauß, B. Burger, G. Cramer, O. Haas: Stromversorgung mit erneuerbaren Energien Dezentrale Strukturen und Modulare System-technik; FVS Themen 2000 auf der DGS-Tagung; Freiburg Juli 2000
U. Krengel, J. Schmid, P. Zacharias: PV-Hybrid Plants: State of the Art and Future Trends; PV-Hybrid Power Systems 2000 in Aix-en-Provence, 7./8. September 2000
M. Rothert, B. Willer: Neue Verfahren der Ladezustandserfassung und des Batteriemanagements für Batteriestrom-richter; 7. Entwickler-Forum Batterie, Ladekonzepte & Stromversorgungsdesign, 28 März 2000, München

334 Modulare PV- und Hybridsystemtechnik Abschlussbericht
M. Rothert, M. Ibrahim: Neue Betriebsführungsstrategien für Inselnetze 5. Kasseler Symposium Energie Systemtechnik; Kassel, 9./10. November, 2000
P. Strauß, B. Burger, P. Funtan, W. Kleinkauf, O. Haas: PV-Hybrid Systems and Micro-Grids with New Standard Power Electronics PV-Hybrid Power Systems 2000 September 2000, Aix-en-Provence
P. Zacharias: Stand der PV-Systemtechnik und Entwicklungstendenzen bei netzgekoppelten Anlagen; Workshop Photovoltaik, VDI-Gesellschaft Energietechnik, Düsseldorf 4.April 2000
A. Engler, B. Burger: Fast Signal Conditioning in Single Phase Systems 9th European Conference on Power Electronics and Applications August 2001, Graz, Österreich
A. Engler, C. Hardt, P. Strauß, M. Vandenbergh: Parallel Operation of Generators for Stand-Alone Single-Phase Hybrid Systems First im-plementation of a new control technology 17th European Photovoltaic Solar Energy Conference and Exhibition Oktober 200, München
C. Hardt, P. Strauß: Aufbau von Niederspannungsnetzen mit modularen PV-Hybridsystemen in: 16. Symposium Photovoltaische Solarenergie Hrsg.: Ostbayerisches Technologie Transfer Institut e.V., OTTI Regensburg 2001
A. Engler, M. Rothert: Stromrichter für modular erweiterbare dezentrale elektrische Versorgungen USV mit höchs-ten Anforderungen y VDI Gesellschaft Energietechnik Fachtagung November 2001, Braunschweig
M. Ibrahim, M. Rothert: Operation of Stand-Alone PV Hybrid Systems - Battery Performance and Durability 17th European Photovoltaic Solar Energy Conference and Exhibition Oktober 2001, München
M. Rothert, P. Zacharias: 10 Jahre Modulare Systemtechnik von einer Idee zu einer Technik für das neue Jahrtausend in: 16. Symposium Photovoltaische Solarenergie Hrsg.: Ostbayerisches Technologie Transfer Institut e.V., OTTI Regensburg 2001

Abschlussbericht Modulare PV- und Hybridsystemtechnik 335
J. Schmid: Durchbruch für die Erneuerbaren Energien in: Erneuerbare Energien SunMedia Verlags GmbH April 2001
J. Schmid: Erneuerbare Energien Stand und Perspektiven Kolloquium der TH Berlin Juni 2001 in Berlin
J. Schmid: Integrated Projects European Conference for integration of renewable energy sources and distributed generation in energy supply systems September 2001, Brüssel
J. Schmid: Review of Advances in PV Systems Technology 17th European Photovoltaic Solar Energy Conference and Exhibition Oktober 2001, München
P. Strauß, J. Reekers, G. Betzios: Kythnos Island 19 Years Experience of Renewable Energy Integration in: Tagungsband, Konferenz Renewable Energies for Islands Juni 2001 Chania/Kreta, Griechenland
C. Trousseau, P. Funtan, P. Strauß: Relationship between operation strategics and sizing in a stand-alone PV-system feeding a waterpump 17th European Photovoltaic Solar Energy Conference and Exhibition Oktober 2001, München
M. Vandenbergh, P. Strauß, S. Beverungen, B. Buchholz, H. Colin, N. Ketjoy, F. Kininger, D. Mayer, J. Merten, J. Reekers, T. Suwannakum, X. Vallvé: Expandable Hybrid Systems for Multi-User Mini-Grids 17th European Photovoltaic Solar Energy Conference and Exhibition Oktober 2001, München
P. Zacharias: Neue Entwicklungen bei Hybridanlagen: PV und Wind/Diesel in: 16. Symposium Photovoltaische Solarenergie Hrsg: Ostbayerisches Technologie Transfer Institut e.V., OTII Regensburg 2001

336 Modulare PV- und Hybridsystemtechnik Abschlussbericht
8.2 Ausstellungsbeiträge
Präsentation Aufbau von Niederspannungsnetzen mit modularen PV-Hybrid Systemen C. Hardt 16. Symposium Photovoltaische Solarenergie Ostbayerisches Technologie Transfer Institut e.V., OTTI März 2001, Staffelstein
Präsentation 7 Jahre Modulare Systemtechnik Von einer Idee zu einer Technik für das neue Jahrtausend M. Rothert 16. Symposium Photovoltaische Solarenergie Ostbayerisches Technologie Transfer Institut e.V., OTTI März 2001, Staffelstein
Präsentation Fast Signal Conditioning in Single Phase Systems A. Engler 9th European Conference on Power Electronics and Applications August 2001, Graz, Österreich
Präsentation Interconnection of Modular Hybrid Systems A. Engler, C. Hardt, M. Vandenbergh, P. Strauß 17th European Photovoltaic Solar Energy Conference and Exhibition Oktober 2001, München
8.3 Messestände
15. Symposium Photovoltaische Solarenergie; 15. bis 17. März 2000; Klostern Banz; Staffelstein
16th European PV Solar Energy Conference and Exhibition; 01. bis 05. Mai 2000, Glasgow
16. Symposium Photovoltaische Solarenergie; März 2001; Klostern Banz; Staffelstein
17th European PV Solar Energy Conference and Exhibition; Oktober 2001, München
8.4 Patente
Patent 199 49 997 A1 B. Burger, A. Engler Bestimmung eines Raumzeigers in einphasigen Systemen Anmeldung: 15.10.1999 Offenlegung: 7.6.2001