motion control SERVOMOTOREN -...
188
Katalog DA 65.3 • 2004 motion control Synchron- und Asynchron- Servomotoren für SIMOVERT MASTERDRIVES SERVOMOTOREN SERVOMOTOREN SERVOMOTOREN
Transcript of motion control SERVOMOTOREN -...

Ka
talo
g D
A 6
5.3
• 2
00
4
motion controlSynchron- und Asynchron-Servomotorenfür SIMOVERT MASTERDRIVES
SERVOMOTORENSERVOMOTORENSERVOMOTOREN

Verwandte Kataloge
SIMOVERT MASTERDRIVESVector Control0,55 kW bis 2300 kW
Bestell-Nr.:E86060-K5165-A101-A3
DA 65.10
SIMOVERT MASTERDRIVESMotion Control0,55 kW bis 250 kW
Bestell-Nr.:E86060-K5165-A111-A3
DA 65.11
SIMODRIVE 611 universalund POSMO
Bestell-Nr.:E86060-K5165-A401-A1
DA 65.4
Motion Control SystemSIMOTION
Bestell-Nr.:E86060-K4910-A101-A4
PM 10
Offline-Mall vonAutomation and Drives
Bestell-Nr.:E86060-D4001-A100-C1
CA 01
A&D Mall
Internet:www.siemens.com/automation/mall
Marken
Alle Erzeugnisbezeichnungen können Marken oder Erzeugnisnamen der Siemens AG oder anderer zuliefernder Unternehmen sein, deren Benutzung durch Dritte für deren Zwecke die Rechte der Inhaber verletzen kann.
CD-ROM zu Katalog DA 65.3
In der beiliegenden CD-ROM zum Katalog DA 65.3 · 2004 finden Sie:• Informationen zur Planung/Projek-
tierung auf Basis der Technischen Dokumentation; weitere Technische Dokumentation finden Sie unter:www.siemens.com/automation/doconweb
• Maßzeichnungen von unseren Motoren (PDF-/DXF-Format)Hinweis: Die Maßzeichnungen zu den Getriebemotoren können unter folgender Internet-Adresse herun-tergeladen werden:www.siemens.com/sgmdesignerDie CD-ROM zum SGM-Designer beziehen Sie unter der Bestell-Nr.E86060-D5202-A100-A2über Ihre Siemens-Geschäftsstelle.
• Katalog DA 65.3 in elektronischer Form (PDF-Format)
Hard- und Softwarevoraus-setzungen• Intel Pentium 333 MHz oder höher• Min. 128 Mbyte RAM• Bildschirmauflösung 1024 x 768 Pixel• 4fach CD-ROM-Laufwerk• Windows 9x/NT 4.x/2000/XP• Acrobat Reader• MS Internet Explorer ab 5.5StartLegen Sie die CD-ROM in Ihr CD-ROM-Laufwerk ein. Das Programm startet automatisch. Sollte die AutoRun-Funktion in Ihrem System nicht aktiviert sein, starten Sie bitte in Ihrem Windows Explorer die Datei „start.hta“ von der CD-ROM.HinweisZur Ansicht der Informationen dieser CD-ROM ist keine Installation not-wendig. Ausnahme ist die Nutzung der Maßzeichnungen im DXF-Format.
HotlineFragen und Anregungen senden Sie bitte an:[email protected]
�
���# $� %�&' (���)��� � $*�&+)�)���
,,,����� �-��.�)����%��/��
������������� ��� ���!���"��� ���!���"��� ���!���"
�����������
������ ������ ��� ���!���"��� ���!���"
��� �����������������
��������
���� �
����� ��������� � ��������� � ����� � �! "���
s
Ungültig:Katalog DA 65.3 · 2002
Die in diesem Katalog enthaltenenProdukte sind auch Bestandteil des CD-ROM-Kataloges CA 01Bestell-Nr.:E86060-D4001-A100-C1
Wenden Sie sich bitte an IhreSiemens Geschäftsstelle
© Siemens AG 2004
ServomotorenSynchron- undAsynchron-Servomotoren
Katalog DA 65.3 · 2004
Die in diesem Katalog aufgeführten Produkte und Systeme werden unter Anwendung eines zertifizierten Qualitäts-managementsystems nach DIN EN ISO 9001 (Zertifikat-Registrier-Nr. 001258 QM) und DIN EN ISO 14001 (Zertifikat-Registrier-Nr.081342 UM) hergestellt/vertrieben.Das Zertifikat ist in allen IQNet-Ländern aner-kannt.
Übersicht
1
Synchron-Servomotoren
2
Asynchron-Servomotoren
3
AnbautenGetriebemotorenGetriebe
4
Verbindungstechnik
5
Dokumentation
6
Projektierungshinweise
7
Anhang
A

Siemens DA 65.3 · 20040/2
Projektierungshinweise PFAD PlusMit dem Projektierungsprogramm PFAD Plus lassen sich fre-quenzumrichtergespeiste Antriebe in Drehstromtechnik für die Gerätereihe SIMOVERT MASTERDRIVES Vector Control und Mo-tion Control einfach und zeitsparend projektieren.
Das Programm ist ein leistungsstarkes Engineering Tool, das den Anwender in allen Projektierungsschritten von der Einspei-sung bis zum Motor unterstützt.
Dabei werden durch eine menügeführte Auswahl und Auslegung der Frequenzumrichter die Systemkomponenten sowie der erfor-derliche Motor für eine Antriebsaufgabe ermittelt. Automatisch eingeblendete Hinweise garantieren eine fehlerfreie Planung.
Ein umfassendes Hilfesystem unterstützt zusätzlich den Einstei-ger bei der Bedienung des Programms. PFAD Plus führt den Pro-jektierungsingenieur, ausgehend von den mechanischen Anfor-derungen der Arbeitsmaschine und der Antriebsaufgabe, durch eine logische und einfach zu bedienende Prozedur von Dialogen zu einer sicheren, reproduzierbaren und wirtschaftlichen An-triebsprojektierung. Die technischen Daten der ermittelten Fre-quenzumrichter und Motoren, die gewählten Systemkomponen-ten und das notwendige Zubehör werden ausführlich aufgelistet.
PFAD Plus gestattet die Projektierung von Antrieben ausgehend von einer Lastkennlinie bzw. von einem Lastspiel und ermöglicht die Projektierung von Applikationen wie■ Fahr- und Hubwerk, ■ Drehwerk, ■ Spindelantrieb■ Achswickler und■ Schubkurbel.
PFAD Plus umfaßt eine komfortable grafische Anzeige des Ver-laufs von■ Drehmoment, Drehzahl, Leistung, Strom, Geschwindigkeit
und Beschleunigung über der Zeit und ■ Drehmoment über der Drehzahl.
Netzrückwirkungen werden berechnet und grafisch angezeigt.
Die Projektierungsergebnisse lassen sich auf Datenträger spei-chern, auf Papier ausdrucken oder über die Zwischenablage in andere Anwenderprogramme zur weiteren Bearbeitung kopieren.
PFAD Plus ist in den Benutzeroberflächen deutsch/englisch er-hältlich.
Die Demo-Version von PFAD Plus kann unter folgender Internet-Adresse heruntergeladen werden:http://www.siemens.com/motioncontrol(Produkte&Systeme/Antriebssysteme/Software), oder Sie benut-zen das Fax-Formular im Anhang des Katalogs.
Die Vollversion von PFAD Plus beziehen Sie unter der Bestell-Nr. 6SW1710-0JA00-2FC0über Ihre Siemens-Geschäftsstelle. Die Adresse finden Sie im Anhang des Katalogs.

Siemens DA 65.3 · 2004
11/2 Willkommen bei Automation
and Drives
1/6 Kurzbeschreibung
1/8 Ablaufplan für Auswahlverfahren
1/10 Typenübersicht und Bemessungsdaten
1/12 Technische Erläuterungen
Übersicht
Willkommen beiAutomation and Drives
1/2 Siemens DA 65.3 · 2004
Herzlich willkommen bei Automation and Drives
und unserem umfassenden Spektrum an Produkten,
Systemen, Lösungen und Dienstleistungen für Ferti-
gungs- und Prozessautomatisierung und Gebäude-
technik weltweit.
Mit Totally Integrated Automation und Totally
Integrated Power halten wir auf Standards basierte
Lösungsplattformen mit beträchtlichen Einspar-
potenzialen für Sie bereit.
Entdecken Sie nun die Welt unserer Technik.
Wenn Sie weitergehende Informationen benötigen,
wenden Sie sich bitte an Ihren Siemens-Partner vor
Ort. Dort hilft man Ihnen gerne weiter.

1/3Siemens DA 65.3 · 2004
Siemens DA 65.3 · 20041/4
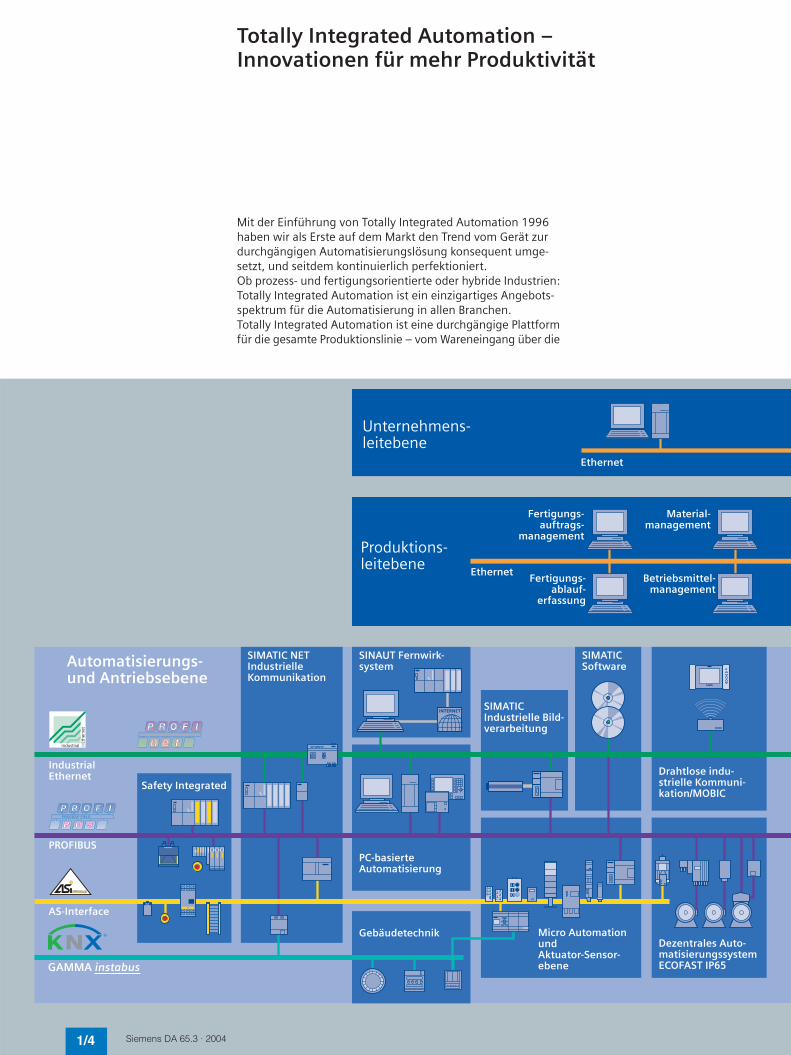
Mit der Einführung von Totally Integrated Automation 1996haben wir als Erste auf dem Markt den Trend vom Gerät zurdurchgängigen Automatisierungslösung konsequent umge-setzt, und seitdem kontinuierlich perfektioniert.Ob prozess- und fertigungsorientierte oder hybride Industrien:Totally Integrated Automation ist ein einzigartiges Angebots-spektrum für die Automatisierung in allen Branchen.Totally Integrated Automation ist eine durchgängige Plattformfür die gesamte Produktionslinie – vom Wareneingang über die
Totally Integrated Automation –Innovationen für mehr Produktivität
Industrial
Ethe
rnet
PROCESS FIELD
GAMMA instabus
Gebäudetechnik
Unternehmens-leitebene
Produktions-leitebene
Ethernet
Ethernet
Material-management
Betriebsmittel-management
Fertigungs-auftrags-
management
Fertigungs-ablauf-
erfassung
SIMATIC NETIndustrielleKommunikation
Drahtlose indu-strielle Kommuni-kation/MOBIC
Dezentrales Auto-matisierungssystemECOFAST IP65
Micro AutomationundAktuator-Sensor-ebene
AS-Interface
PROFIBUS
IndustrialEthernet
Safety Integrated
Automatisierungs-und Antriebsebene
SINAUT Fernwirk-system
SIMATICSoftware
SIMATICIndustrielle Bild-verarbeitung
PC-basierteAutomatisierung
1/5Siemens DA 65.3 · 2004
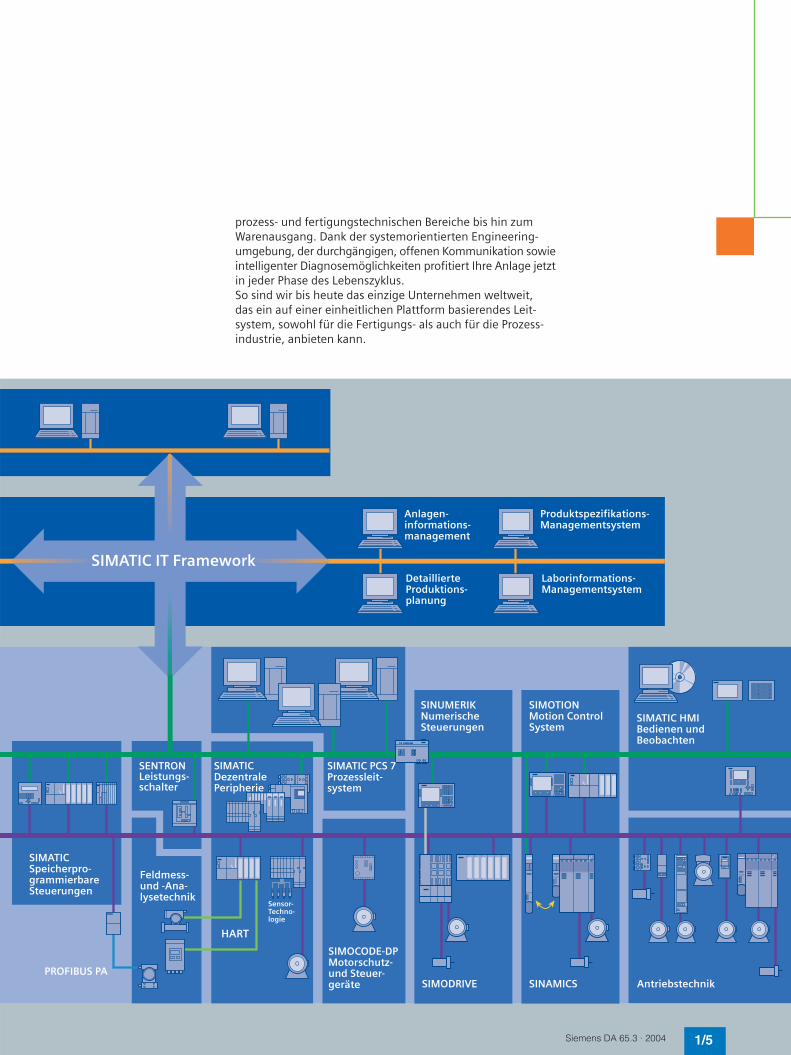
prozess- und fertigungstechnischen Bereiche bis hin zumWarenausgang. Dank der systemorientierten Engineering-umgebung, der durchgängigen, offenen Kommunikation sowieintelligenter Diagnosemöglichkeiten profitiert Ihre Anlage jetztin jeder Phase des Lebenszyklus.So sind wir bis heute das einzige Unternehmen weltweit,das ein auf einer einheitlichen Plattform basierendes Leit-system, sowohl für die Fertigungs- als auch für die Prozess-industrie, anbieten kann.
SIMODRIVE
Anlagen-informations-management
DetaillierteProduktions-planung
SIMATIC IT Framework
Produktspezifikations-Managementsystem
Laborinformations-Managementsystem
Feldmess-und -Ana-lysetechnik
SIMATIC PCS 7Prozessleit-system
SIMATICSpeicherpro-grammierbareSteuerungen
SIMOCODE-DPMotorschutz-und Steuer-geräte
SIMATIC HMIBedienen undBeobachten
AntriebstechnikPROFIBUS PA
SENTRONLeistungs-schalter
HART
Sensor-Techno-logie
SIMATICDezentralePeripherie
SIMOTIONMotion ControlSystem
SINUMERIKNumerischeSteuerungen
SINAMICS

Siemens DA 65.3 · 20041/6
Servomotoren
Kurzbeschreibung
Übersicht1
Die SIEMENS Servomotoren wurden speziell für die hohen An-forderungen, die an drehzahlveränderbare Antriebe gestellt werden, konzipiert.
Ausführungen• Synchron-Servomotoren• Asynchron-Servomotoren
Hauptmerkmale• kompakte Bauform• hohe Leistungsdichte und Überlastfähigkeit• hohe Maximaldrehzahlen• integriertes Gebersystem• hohe Dynamik durch geringes Läuferträgheitsmoment• ausgezeichnete Rundlaufeigenschaften• robuste, weitgehend wartungsfreie Konstruktion.
Synchron-ServomotorenDie Synchron-Servomotoren sind besonders durch• hohe Überlastfähigkeit, • hohe Dynamik und • hohe Stillstandsmomente gekennzeichnet.
Servomotoren 1FK7Die Servomotoren 1FK7 decken den unteren Leistungsbereich (0,4 kW bis 8,2 kW) ab und sind durch ihren optimierten Aufbau für viele Anwendungen die wirtschaftlichste Lösung.
Die Servomotoren 1FK7 zeichnen sich speziell durch • extrem hohe Dynamik (1FK7 HD, High Dynamic), • kompakte Bauform (1FK7 CT, Compact) und • erweitertes Leistungs- und Optionsspektrum aus.
Die neuen Servogetriebemotoren 1FK7 mit direkt angebautem Stirnrad-, Flach-, Kegel- und Schneckengetriebe werden als komplette Einheit geliefert.
Servomotoren 1FT6 – High Performance• Die Servomotoren 1FT6 sind für extreme Anforderungen in
einem Leistungsbereich von 0,2 kW bis 118 kW einsetzbar.
Diese Motoren sind selbstgekühlt in Schutzart von IP64 bis IP68, fremdbelüftet oder wassergekühlt erhältlich. Durch das breite Optionsspektrum sind sie in vielen High-end-Anwendungen die optimale Lösung.
Servomotoren 1FS6 – explosionsgeschütztDie Servomotoren 1FS6 sind für den Einsatz in explosionsge-fährdeten Bereichen der Zone 1 ausgeführt. Diese Motoren ent-sprechen der Zündschutzart EEx de IIC T3.
Torquemotoren 1FW3Die Komplett-Tourquemotoren 1FW3 sind durch ihre hohen Mo-mente bei kleiner Drehzahl als Direktantrieb konzipiert. Durch die integrierte Wasserkühlung haben diese Motoren eine sehr kompakte Bauweise.
Asynchron-Servomotoren 1PH7, 1PL6, 1PH4Die kompakten Asynchronmotoren ergänzen die Synchron-Ser-vomotoren bei Anwendungen im oberen Leistungsbereich (bis 630 kW).
Ausführungen:• fremdbelüftete Motoren 1PH7 in Schutzart IP55• wassergekühlte Motoren 1PH4 in Schutzart IP65• fremd- und durchzugsbelüftete Motoren 1PL6 in Schutzart IP23.
Die Motoren lassen das volle Nennmoment im gesamten Kon-stantflussbereich zu.
Den Anforderungen entsprechend werdendie Motoren mit den passenden Optionenversehen: •Geber (Inkrementalgeber HTL, Resol-
ver, Inkrementalgeber sin/cos 1 Vpp,Absolutwertgeber)•Haltebremse.Planetengetriebe können bei allenServomotoren nach Bedarf ange-baut werden.
Die Motoren und SIMOVERT®
MASTERDRIVES Umrichtersind optimal aufeinander ab-gestimmt und bilden leis-tungsfähige Antriebssyste-me (siehe auch Kataloge DA 65.10 und DA 65.11).
Siemens DA 65.3 · 2004 1/7
ServomotorenÜbersicht
Kurzbeschreibung
1
����������
�
�� �
����
�����������
���������������� ��������
����������� �������
���������������� ���!�"�����#�$%�#
����!���
�������!� !�
&�'&� ������� (��� �������� �)
���*��������������� ������$
&��+��,� &
������!�
���*���������
����!���������!� ��
�$��������� ��������
�������-�
������!&���� �
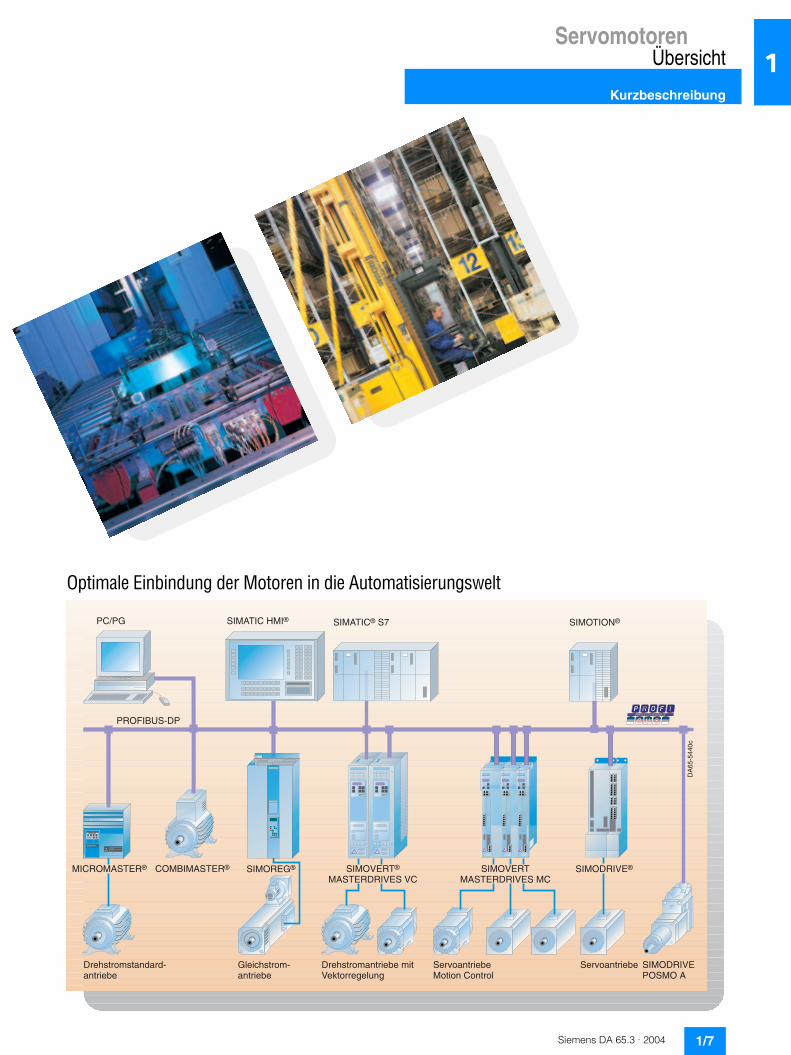
Optimale Einbindung der Motoren in die Automatisierungswelt
Siemens DA 65.3 · 20041/8
Servomotoren
Ablaufplan für Auswahlverfahren
Übersicht1
�����������������
���
�
��
� ����
��
��
����
�
�
��
�� ������������������
��� ������������
���
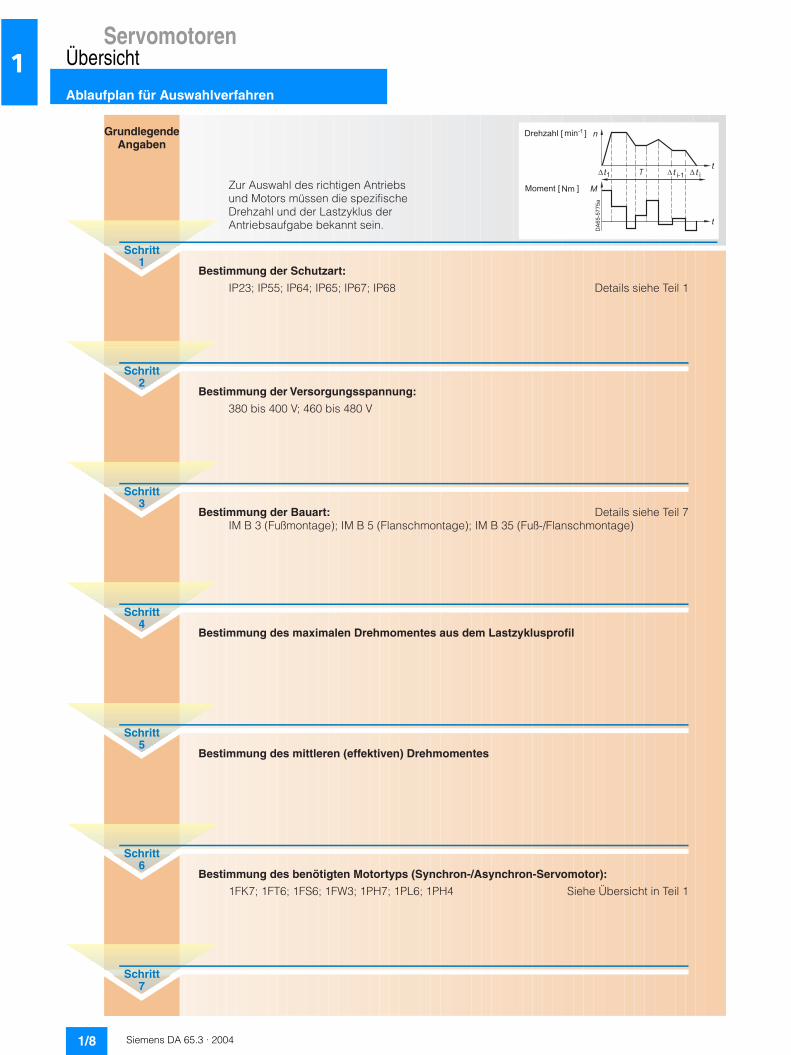
��������������� �� �������� ���������������������� ������ � ���������������������������������� ��������������������� ��
�� ���������������������
� !"#�� $$#�� %&#�� %$#�� %'#�� %( ���� ��� ���)� �*
�� ��������������� ������ �������
"(+�� ��&++�,#�&%+�� ��&(+�,
�� ����������������� ���� ��� ���)� �'���-�"�./�0�������1#����-�$�./�����������1#����-�"$�./�023/�����������1
�� ���������� �����������������������������������
�� ���������� ���� �������!�����"� ���"������#$ "������#������������
*/4'#�*/)%#�*/5%#�*/6"#�* 7'#�* �%#�* 7& 5 ���8���� ��� ��)� �*
�� ���������� ��%����������������� �� �����& ��"��� ������
�������'
�������(
�������)
�������*
�������+
�������,
�������-

Siemens DA 65.3 · 2004 1/9
ServomotorenÜbersicht
Ablaufplan für Auswahlverfahren
1
�������'
�������. ���� �/������!����#�� �����������������������������������0��������
*/4'#�*/)%#�*/5%#�*/6"#�* 7'#�* �%#�* 7& ���� ��� ���)� �!������"
�� �����������!����� -12' ���#�����#����-13( ���#�����#����-1�( ���#�����#����-14+ ���#�����#����-56' ���#�����#����-5&( ���#�����#����-56* ���#�����#0������7�2����%�
�������8 �� ���������� ��������������������� " ��� � ���� ��� ���)� �&
����������������7)�#�9���:��#������������������ �3����*�,��#����������������
�������-9 �� ������������&/��������:��� ������������������������������������������
&�� ���� ��������������� ��������������������� ;���<��2������������
���� ������-������������������� ���)� �$
�� ���������������������������������������������������������������� �������������������� ;���<��2������������
����������������7)�#�9���:��#������������������ �3����*�,��#�������������������� ������-������������������� ���)� �$
� =����� �>�������� $4��� ��������� ��<��������=/������!������������� =��#������ ������������������������#?���� ������������
� ������������;�� ����36����� ������������ ��� �����4���������������������<��� ���������25� ����������������������2-���������������/���*/4'=�*/)%=�*/5%�����*/6"�� ���)� �!#����* 7'=�* �%�����* 7&�� ���)� �"�
� =����� �!���� ����������� ��������������� ������3����,������+�@������������������2������������<����
5������25��:������> ��������25��:������>���? ��*=*�@��A��� ���? ������ ���������� ��������������� ���A���� ���� ���A���
� �������������.�=�� 1�������"+�B�����������4 ��������� �����
�������--
�������-,
����������� ����� ��
�������-+
����������� ����� ��������� ��
4����� �����?���� ������������?���� ��������������������� ���@ �����2��������()A--�B�C!0�DE3�!�3DE�EC�D��!������F������G@��()A-9�B�C!0�DE3�!�3DE�EC�D���������F������G�����5��H��������������B51��5�� GA
*1 *%+�B�����"+��������*"%�B�����%+�� !1��-� �8������� ���������5�������28��������C�����"++�������������
11
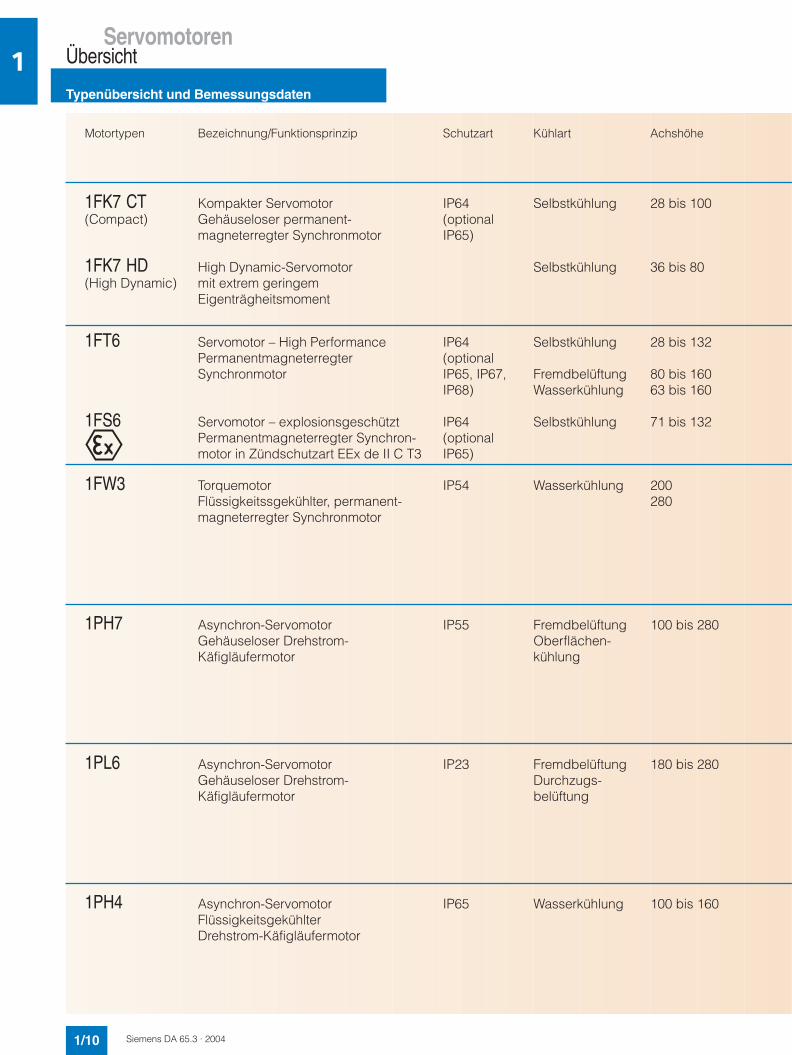
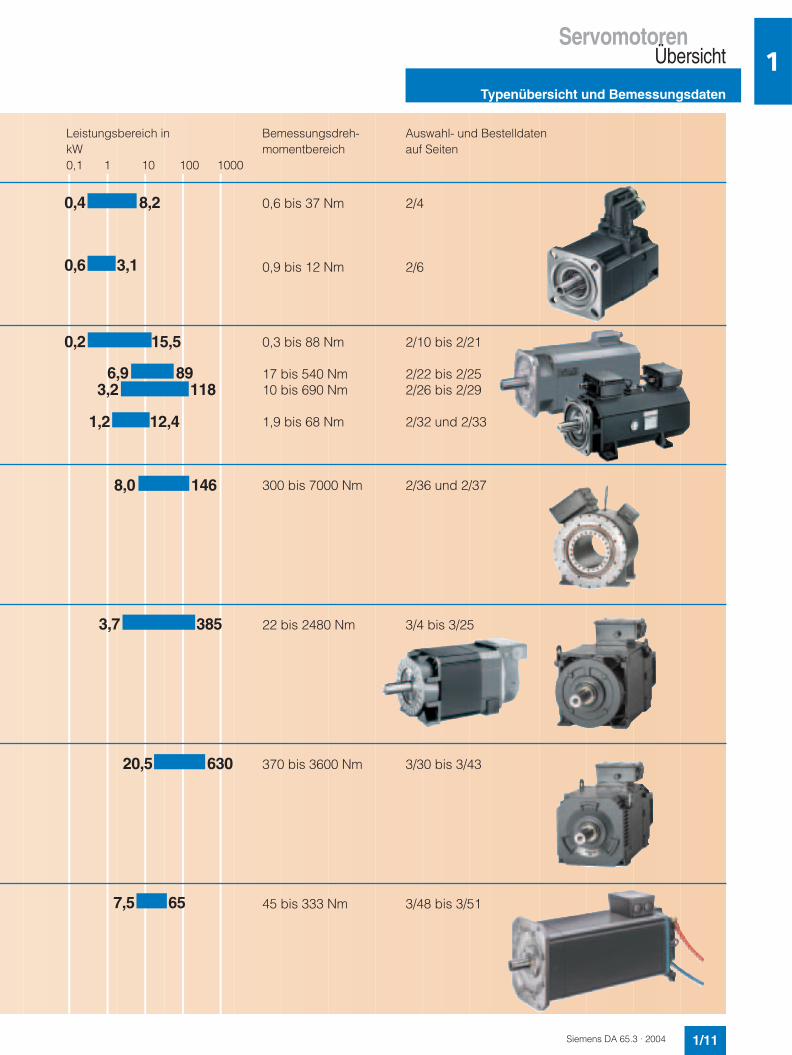
Motortypen Bezeichnung/Funktionsprinzip Schutzart Kühlart Achshöhe Leistungsbereich in Bemessungsdreh- Auswahl- und BestelldatenkW momentbereich auf Seiten0,1 1 10 100 1000
1FK7 CT Kompakter Servomotor IP64 Selbstkühlung 28 bis 100 0,6 bis 37 Nm 2/4(Compact) Gehäuseloser permanent- (optional
magneterregter Synchronmotor IP65)
1FK7 HD High Dynamic-Servomotor Selbstkühlung 36 bis 80 0,9 bis 12 Nm 2/6(High Dynamic) mit extrem geringem
Eigenträgheitsmoment
1FT6 Servomotor – High Performance IP64 Selbstkühlung 28 bis 132 0,3 bis 88 Nm 2/10 bis 2/21Permanentmagneterregter (optionalSynchronmotor IP65, IP67, Fremdbelüftung 80 bis 160 17 bis 540 Nm 2/22 bis 2/25
IP68) Wasserkühlung 63 bis 160 10 bis 690 Nm 2/26 bis 2/29
1FS6 Servomotor – explosionsgeschützt IP64 Selbstkühlung 71 bis 132 1,9 bis 68 Nm 2/32 und 2/33Permanentmagneterregter Synchron- (optionalmotor in Zündschutzart EEx de II C T3 IP65)
1PH7 Asynchron-Servomotor IP55 Fremdbelüftung 100 bis 280 22 bis 2480 Nm 3/4 bis 3/25Gehäuseloser Drehstrom- Oberflächen-Käfigläufermotor kühlung
1FW3 Torquemotor IP54 Wasserkühlung 200 300 bis 7000 Nm 2/36 und 2/37Flüssigkeitssgekühlter, permanent- 280magneterregter Synchronmotor
1PL6 Asynchron-Servomotor IP23 Fremdbelüftung 180 bis 280 370 bis 3600 Nm 3/30 bis 3/43Gehäuseloser Drehstrom- Durchzugs-Käfigläufermotor belüftung
1PH4 Asynchron-Servomotor IP65 Wasserkühlung 100 bis 160 45 bis 333 Nm 3/48 bis 3/51FlüssigkeitsgekühlterDrehstrom-Käfigläufermotor
0,2 15,5
6,9 89
3,7 385
7,5 65
20,5 630
3,2 118
Siemens DA 65.3 · 2004 Siemens DA 65.3 · 20041/10
Typenübersicht und Bemessungsdaten
1/11
ServomotorenÜbersicht
Typenübersicht und Bemessungsdaten
ServomotorenÜbersicht
0,6 3,1
1,2 12,4
8,0 146
0,4 8,2
11
Motortypen Bezeichnung/Funktionsprinzip Schutzart Kühlart Achshöhe Leistungsbereich in Bemessungsdreh- Auswahl- und BestelldatenkW momentbereich auf Seiten0,1 1 10 100 1000
1FK7 CT Kompakter Servomotor IP64 Selbstkühlung 28 bis 100 0,6 bis 37 Nm 2/4(Compact) Gehäuseloser permanent- (optional
magneterregter Synchronmotor IP65)
1FK7 HD High Dynamic-Servomotor Selbstkühlung 36 bis 80 0,9 bis 12 Nm 2/6(High Dynamic) mit extrem geringem
Eigenträgheitsmoment
1FT6 Servomotor – High Performance IP64 Selbstkühlung 28 bis 132 0,3 bis 88 Nm 2/10 bis 2/21Permanentmagneterregter (optionalSynchronmotor IP65, IP67, Fremdbelüftung 80 bis 160 17 bis 540 Nm 2/22 bis 2/25
IP68) Wasserkühlung 63 bis 160 10 bis 690 Nm 2/26 bis 2/29
1FS6 Servomotor – explosionsgeschützt IP64 Selbstkühlung 71 bis 132 1,9 bis 68 Nm 2/32 und 2/33Permanentmagneterregter Synchron- (optionalmotor in Zündschutzart EEx de II C T3 IP65)
1PH7 Asynchron-Servomotor IP55 Fremdbelüftung 100 bis 280 22 bis 2480 Nm 3/4 bis 3/25Gehäuseloser Drehstrom- Oberflächen-Käfigläufermotor kühlung
1FW3 Torquemotor IP54 Wasserkühlung 200 300 bis 7000 Nm 2/36 und 2/37Flüssigkeitssgekühlter, permanent- 280magneterregter Synchronmotor
1PL6 Asynchron-Servomotor IP23 Fremdbelüftung 180 bis 280 370 bis 3600 Nm 3/30 bis 3/43Gehäuseloser Drehstrom- Durchzugs-Käfigläufermotor belüftung
1PH4 Asynchron-Servomotor IP65 Wasserkühlung 100 bis 160 45 bis 333 Nm 3/48 bis 3/51FlüssigkeitsgekühlterDrehstrom-Käfigläufermotor
0,2 15,5
6,9 89
3,7 385
7,5 65
20,5 630
3,2 118
Siemens DA 65.3 · 2004 Siemens DA 65.3 · 20041/10
Typenübersicht und Bemessungsdaten
1/11
ServomotorenÜbersicht
Typenübersicht und Bemessungsdaten
ServomotorenÜbersicht
0,6 3,1
1,2 12,4
8,0 146
0,4 8,2
Siemens DA 65.3 · 20041/12
Servomotoren
Technische Erläuterungen
Übersicht1
■ Vorschriften, Normen, Bestimmungen
Die Motoren entsprechen den einschlägigen Normen und Vor-schriften, siehe nebenstehende Tabelle.
Durch die bereits in vielen Ländern vollzogene Anpassung der nationalen Vorschriften an die internationale Empfehlung IEC 60034-1 bestehen dort bei Kühlmitteltemperaturen, Wärme-klassen und Grenzübertemperaturen keine Unterschiede mehr.
Die nachfolgend aufgeführten Motoren sind durch „Underwriters Laboratories Inc.®“ UL-approbiert, einschließlich der kanadi-schen Vorschriften mit dem Kennzeichen URc: 1FK7, 1FT6 selbstgekühlt, 1PH7 (ohne Bremse), 1PL6, 1PH4.
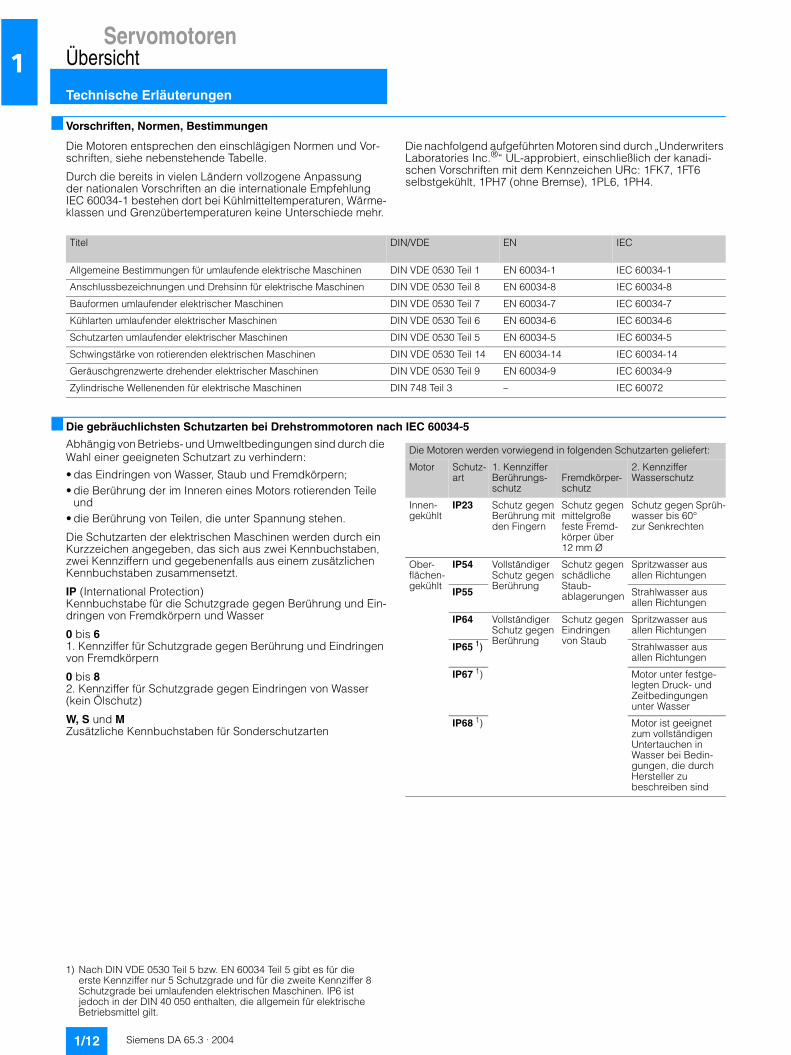
■ Die gebräuchlichsten Schutzarten bei Drehstrommotoren nach IEC 60034-5
Abhängig von Betriebs- und Umweltbedingungen sind durch die Wahl einer geeigneten Schutzart zu verhindern:
• das Eindringen von Wasser, Staub und Fremdkörpern;• die Berührung der im Inneren eines Motors rotierenden Teile
und• die Berührung von Teilen, die unter Spannung stehen.
Die Schutzarten der elektrischen Maschinen werden durch ein Kurzzeichen angegeben, das sich aus zwei Kennbuchstaben, zwei Kennziffern und gegebenenfalls aus einem zusätzlichen Kennbuchstaben zusammensetzt.
IP (International Protection)Kennbuchstabe für die Schutzgrade gegen Berührung und Ein-dringen von Fremdkörpern und Wasser
0 bis 61. Kennziffer für Schutzgrade gegen Berührung und Eindringen von Fremdkörpern
0 bis 82. Kennziffer für Schutzgrade gegen Eindringen von Wasser (kein Ölschutz)
W, S und MZusätzliche Kennbuchstaben für Sonderschutzarten
Titel DIN/VDE EN IEC
Allgemeine Bestimmungen für umlaufende elektrische Maschinen DIN VDE 0530 Teil 1 EN 60034-1 IEC 60034-1
Anschlussbezeichnungen und Drehsinn für elektrische Maschinen DIN VDE 0530 Teil 8 EN 60034-8 IEC 60034-8
Bauformen umlaufender elektrischer Maschinen DIN VDE 0530 Teil 7 EN 60034-7 IEC 60034-7
Kühlarten umlaufender elektrischer Maschinen DIN VDE 0530 Teil 6 EN 60034-6 IEC 60034-6
Schutzarten umlaufender elektrischer Maschinen DIN VDE 0530 Teil 5 EN 60034-5 IEC 60034-5
Schwingstärke von rotierenden elektrischen Maschinen DIN VDE 0530 Teil 14 EN 60034-14 IEC 60034-14
Geräuschgrenzwerte drehender elektrischer Maschinen DIN VDE 0530 Teil 9 EN 60034-9 IEC 60034-9
Zylindrische Wellenenden für elektrische Maschinen DIN 748 Teil 3 – IEC 60072
Die Motoren werden vorwiegend in folgenden Schutzarten geliefert:
Motor Schutz-art
1. KennzifferBerührungs-schutz
Fremdkörper-schutz
2. KennzifferWasserschutz
Innen-gekühlt
IP23 Schutz gegen Berührung mit den Fingern
Schutz gegen mittelgroße feste Fremd-körper über 12 mm Ø
Schutz gegen Sprüh-wasser bis 60°zur Senkrechten
Ober-flächen-gekühlt
IP54 Vollständiger Schutz gegen Berührung
Schutz gegen schädliche Staub-ablagerungen
Spritzwasser aus allen Richtungen
IP55 Strahlwasser aus allen Richtungen
IP64 Vollständiger Schutz gegen Berührung
Schutz gegen Eindringen von Staub
Spritzwasser aus allen Richtungen
IP65 1) Strahlwasser aus allen Richtungen
IP67 1) Motor unter festge-legten Druck- und Zeitbedingungen unter Wasser
IP68 1) Motor ist geeignet zum vollständigen Untertauchen in Wasser bei Bedin-gungen, die durch Hersteller zu beschreiben sind
1) Nach DIN VDE 0530 Teil 5 bzw. EN 60034 Teil 5 gibt es für die erste Kennziffer nur 5 Schutzgrade und für die zweite Kennziffer 8 Schutzgrade bei umlaufenden elektrischen Maschinen. IP6 ist jedoch in der DIN 40 050 enthalten, die allgemein für elektrische Betriebsmittel gilt.
Siemens DA 65.3 · 2004 1/13
ServomotorenÜbersicht
Technische Erläuterungen
1
■ Rundlauftoleranz, Wellen- und Flanschgenauigkeit (Koaxialität und Planlauf) nach IEC 60072
Rundlauftoleranz der Welle zur Gehäuseachse(bezogen auf die zylindrischen Wellenenden)
Koaxialitäts- und Planlauftoleranz der Flanschflächezur Wellenachse (bezogen auf den Zentrierdurchmesser des Befestigungsflansches)
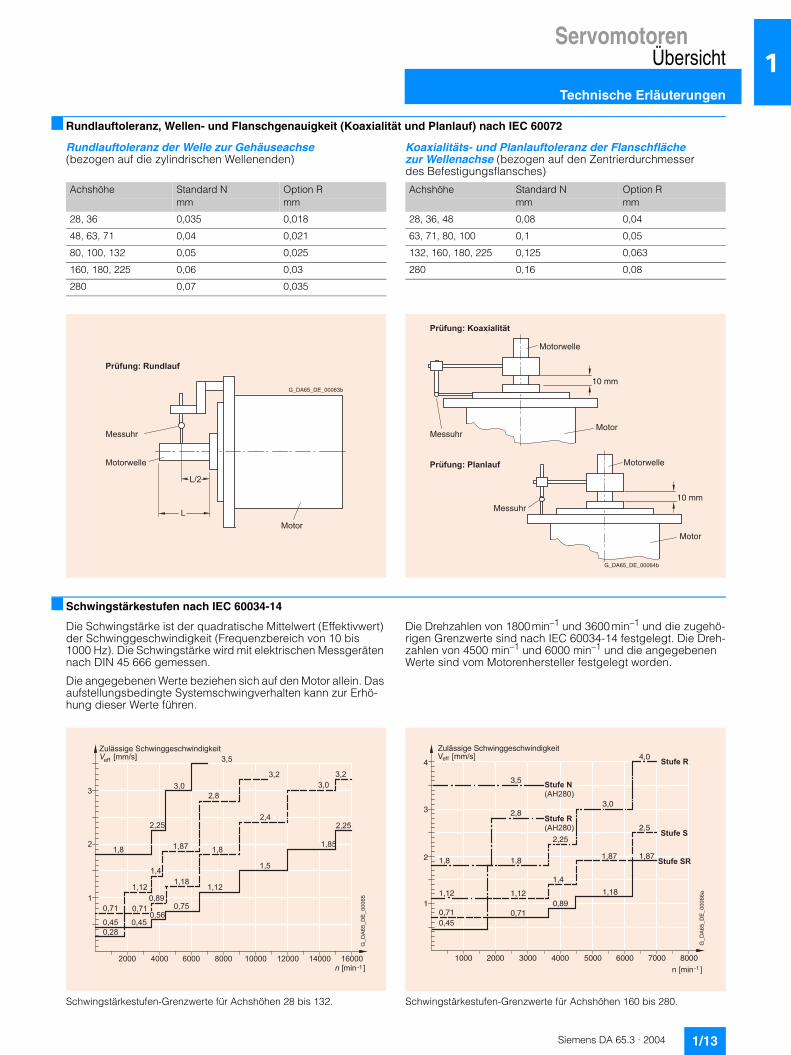
■ Schwingstärkestufen nach IEC 60034-14
Die Schwingstärke ist der quadratische Mittelwert (Effektivwert) der Schwinggeschwindigkeit (Frequenzbereich von 10 bis 1000 Hz). Die Schwingstärke wird mit elektrischen Messgeräten nach DIN 45 666 gemessen.
Die angegebenen Werte beziehen sich auf den Motor allein. Das aufstellungsbedingte Systemschwingverhalten kann zur Erhö-hung dieser Werte führen.
Schwingstärkestufen-Grenzwerte für Achshöhen 28 bis 132.
Die Drehzahlen von 1800 min–1 und 3600 min–1 und die zugehö-rigen Grenzwerte sind nach IEC 60034-14 festgelegt. Die Dreh-zahlen von 4500 min–1 und 6000 min–1 und die angegebenen Werte sind vom Motorenhersteller festgelegt worden.
Schwingstärkestufen-Grenzwerte für Achshöhen 160 bis 280.
Achshöhe Standard N Option Rmm mm
28, 36 0,035 0,018
48, 63, 71 0,04 0,021
80, 100, 132 0,05 0,025
160, 180, 225 0,06 0,03
280 0,07 0,035
�
� � �
� � � � �
� � � � � �
� � � � �
� � � � � � � � � � � � � � � �
� � � � � � � � � � � � � �
Achshöhe Standard N Option Rmm mm
28, 36, 48 0,08 0,04
63, 71, 80, 100 0,1 0,05
132, 160, 180, 225 0,125 0,063
280 0,16 0,08
Motorwelle
Motorwelle
Motor
Messuhr
Messuhr
Motor
G_DA65_DE_00064b
10 mm
10 mm
� � � � � � � � � � � � � �
� � � � � � � � � � � � � � � � �
�
�
�
� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
� � � �
� � � �
� � � �
� � �
� � � �
� � �
� � �
� � �
� � � �
� � � �
� � �
� � � �
� � � �� � � �
� � � �
� � �
� � � �
� � �� � �
� � � �
� � � �
� � � � � � � � !
� � � �
" � # � � $ % � & ' � $ ( % % � ' � $ ( ) $ % * $ �
� � � � �
� � � �� � � �
� � � �
� � � $ ( � � � ! � �+ �
, ,
���
���
�����
����
1
2
3
2000 3000 4000 5000 6000 7000 8000
0,450,71
1,18
3,0
1,4
1,12
0,71
1,12
2,25
1,8
V [mm/s]4
0,89
1,87 1,87
2,5
4,0
1000
1,8
2,8
3,5
� � � � � �
� � � � � �
� � � � �
Zulässige Schwinggeschwindigkeit
n [min ] -1
eff
G_D
A65
_DE
_000
66a
� � � � � �� � � � � � �
� � � � � � � � � � � �
Siemens DA 65.3 · 20041/14
Servomotoren
Technische Erläuterungen
Übersicht1
■ Wuchtung nach DIN ISO 8821
Anforderungen an den Wuchtprozess von Anbauteilen, ins-besondere Riemenscheiben
Das Schwinggüteverhalten von Motoren mit angebauten Rie-menscheiben wird neben der Wuchtgüte des Motors maßgeb-lich vom Wuchtzustand des Anbauteiles bestimmt.
Werden Motor und Anbauteil vor dem Zusammenbau getrennt gewuchtet, ist der Wuchtprozess der Riemenscheibe der Wuchtart des Motors anzupassen. Bei den Motoren 1PH4, 1PH7 sowie 1PL6 sind folgende Wuchtarten zu unterscheiden: • Halbkeilwuchtung • Vollkeilwuchtung • glattes Wellenende.
Für die Motoren 1PH7 und 1PL6 ist die Wuchtart in der Bestell-bezeichnung verschlüsselt. Halb- und vollkeilgewuchtete Moto-ren sind durch die Kennzeichnung „H“ (half key) bzw. „F“ (full key) am Wellenspiegel erkennbar.
Die Motoren 1FK7 und 1FT6 mit Passfeder sind immer halbkeil-gewuchtet.
Grundsätzlich wird für höchste Ansprüche an die System-schwinggüte empfohlen, Motoren mit glatter Welle einzusetzen. Für vollkeilgewuchtete Motoren werden Riemenscheiben mit zwei gegenüberliegenden Passfedernuten empfohlen, jedoch nur eine Passfeder im Wellenende.
■ Rüttelbeanspruchung, immittierte Schwingwerte
Die folgenden maximal zulässigen Grenzwerte der Rüttelbean-spruchung bei voller Funktionsfähigkeit gelten nur für die per-manenterregte Synchronmotoren 1FK7, 1FT6 und 1FS6 bzw. bei geschlossener Bremse. Rüttelbeanspruchung (nach IEC 68-2-6):
• 1 g axial (20 Hz bis 2 kHz)• 5 g radial (20 Hz bis 2 kHz).
Für alle Asynchronmotoren 1PH7, 1PH4 und 1PL6 gelten fol-gende Grenzwerte für von außen in den Motor eingeleitete (immittierte) Schwingwerte:
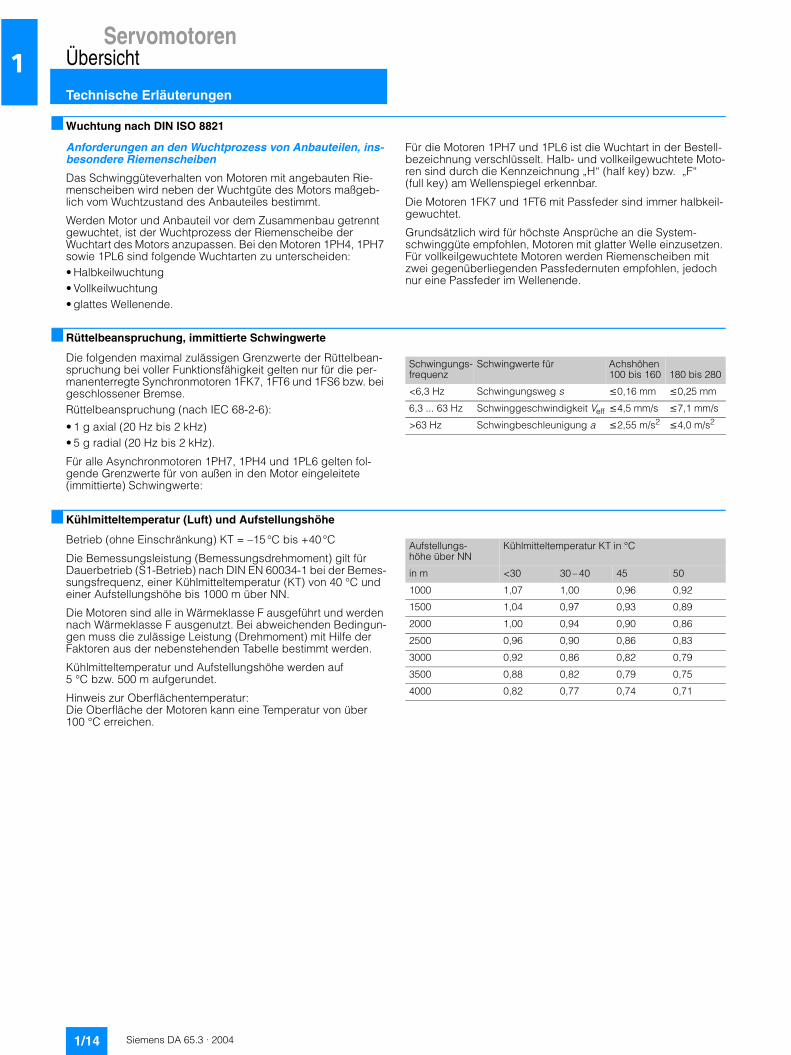
■ Kühlmitteltemperatur (Luft) und Aufstellungshöhe
Betrieb (ohne Einschränkung) KT = –15 °C bis +40 °C
Die Bemessungsleistung (Bemessungsdrehmoment) gilt für Dauerbetrieb (S1-Betrieb) nach DIN EN 60034-1 bei der Bemes-sungsfrequenz, einer Kühlmitteltemperatur (KT) von 40 °C und einer Aufstellungshöhe bis 1000 m über NN.
Die Motoren sind alle in Wärmeklasse F ausgeführt und werden nach Wärmeklasse F ausgenutzt. Bei abweichenden Bedingun-gen muss die zulässige Leistung (Drehmoment) mit Hilfe der Faktoren aus der nebenstehenden Tabelle bestimmt werden.
Kühlmitteltemperatur und Aufstellungshöhe werden auf 5 °C bzw. 500 m aufgerundet.
Hinweis zur Oberflächentemperatur:Die Oberfläche der Motoren kann eine Temperatur von über 100 °C erreichen.
Schwingungs-frequenz
Schwingwerte für Achshöhen100 bis 160 180 bis 280
<6,3 Hz Schwingungsweg s �0,16 mm �0,25 mm
6,3 ... 63 Hz Schwinggeschwindigkeit Veff �4,5 mm/s �7,1 mm/s
>63 Hz Schwingbeschleunigung a �2,55 m/s2 �4,0 m/s2
Aufstellungs-höhe über NN
Kühlmitteltemperatur KT in °C
in m <30 30 – 40 45 50
1000 1,07 1,00 0,96 0,92
1500 1,04 0,97 0,93 0,89
2000 1,00 0,94 0,90 0,86
2500 0,96 0,90 0,86 0,83
3000 0,92 0,86 0,82 0,79
3500 0,88 0,82 0,79 0,75
4000 0,82 0,77 0,74 0,71
Siemens DA 65.3 · 2004 1/15
ServomotorenÜbersicht
Technische Erläuterungen
1
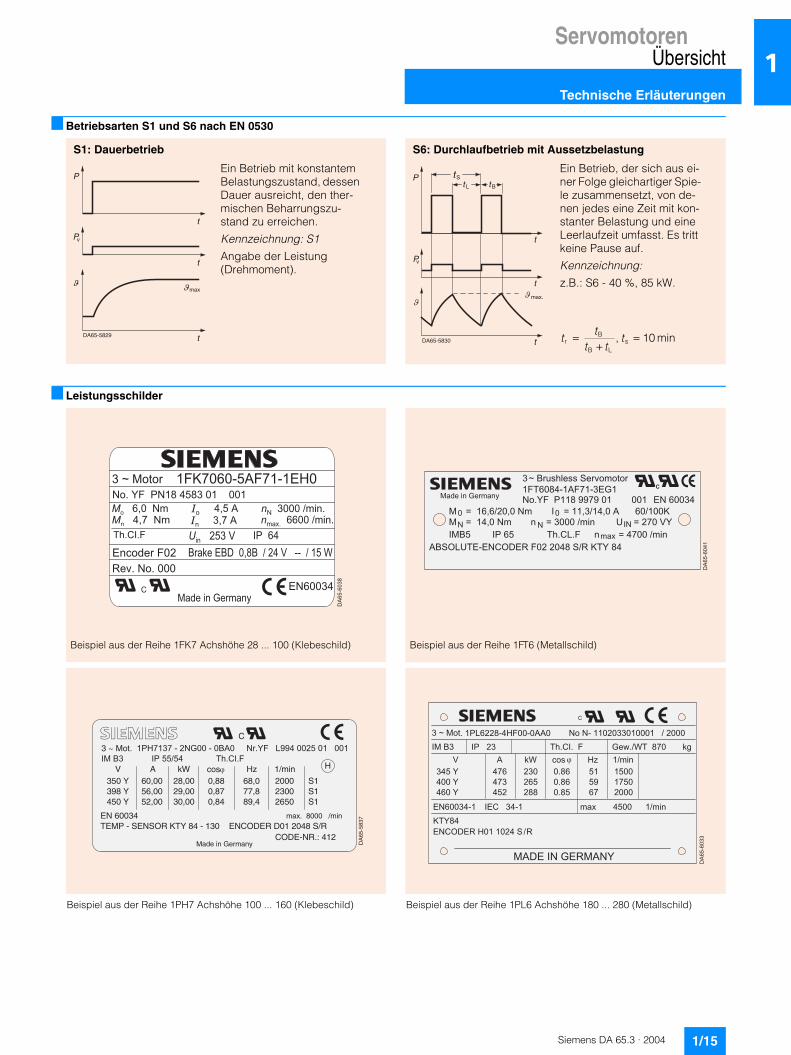
■ Betriebsarten S1 und S6 nach EN 0530
■ Leistungsschilder
P
t
P
t
tDA65-5829
max
v
Ein Betrieb mit konstantem Belastungszustand, dessen Dauer ausreicht, den ther-mischen Beharrungszu-stand zu erreichen.
Kennzeichnung: S1
Angabe der Leistung (Drehmoment).
S1: Dauerbetrieb
P
t
P
t
tDA65-5830
t
v
Bt L
tS
max.
S6: Durchlaufbetrieb mit Aussetzbelastung
Ein Betrieb, der sich aus ei-ner Folge gleichartiger Spie-le zusammensetzt, von de-nen jedes eine Zeit mit kon-stanter Belastung und eine Leerlaufzeit umfasst. Es tritt keine Pause auf.
Kennzeichnung:
z.B.: S6 - 40 %, 85 kW.
tt
t ttr
B
B Ls=
+=, min10
���������������� �����������
����� ������
�� ����
�����������������������������������
��!��"#�$����#%
�#&�!�����
'�()���)����
��)�*��+������������������
�#������������� ����������#����������
�����������"#)���,)�� �����"#)
-.)/0) �"#� � ������ 0+�� �
� /�
�� �� ���
Beispiel aus der Reihe 1FK7 Achshöhe 28 ... 100 (Klebeschild)
DA
65-5
837
3 ~ Mot)���+����������$����������������)*���122���������������0����������������0+��������������������-.)/0)
V A kW cos� 1/min
EN 60034TEMP - SENSOR KTY 84 - 130 ENCODER D01 2048 S/R
350 Y398 Y450 Y
Made in Germany
�
Hz60,0056,0052,00
28,0029,0030,00
0,880,870,84
68,077,889,4
200023002650
S1S1S1
H
max. 8000 /min
CODE-NR.: 412
� C�
Beispiel aus der Reihe 1PH7 Achshöhe 100 ... 160 (Klebeschild)
� ����������34.5�44�6��(������
�- �����������$���)*��+����22�2��� ��� ��� ����
�� 7��� � �������� 0� 7������������ �����
��6819-����/8��'���������6�'�-*���
�� 7��������� #� 7��������"# 90� 7������*
0��� 0+� � -.)/1) #��, 7��������"#
�� �� ���
��!��"#�$����#%
Beispiel aus der Reihe 1FT6 (Metallschild)
� �/ �����������������������������
-.)/0)��
�������)��+1 �������������
0���� 0+����� $�:)� -�������������;
� � � ���"#
����*
����*
� ��*
�<
��
���
���
���
� �
���
�)�
�)�
�)��
��
�2
�
����
����
����
�� ������ 0�/������� ��, ���� ���"#
�����0��$�'���*
��/8��'����������6����'
-*��
�� �� ���
&�4
Beispiel aus der Reihe 1PL6 Achshöhe 180 ... 280 (Metallschild)
Siemens DA 65.3 · 20041/16
Servomotoren
Technische Erläuterungen
Übersicht1
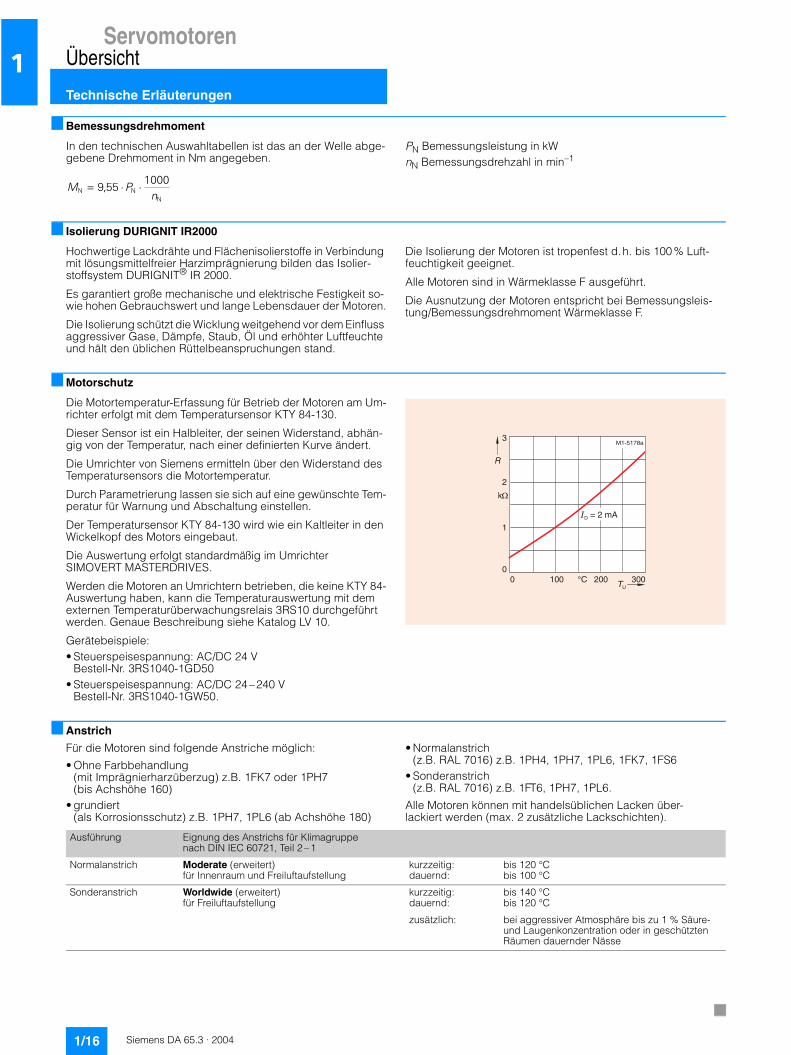
■ Bemessungsdrehmoment
In den technischen Auswahltabellen ist das an der Welle abge-gebene Drehmoment in Nm angegeben.
PN Bemessungsleistung in kWnN Bemessungsdrehzahl in min–1
■ Isolierung DURIGNIT IR2000
Hochwertige Lackdrähte und Flächenisolierstoffe in Verbindung mit lösungsmittelfreier Harzimprägnierung bilden das Isolier-stoffsystem DURIGNIT® IR 2000.
Es garantiert große mechanische und elektrische Festigkeit so-wie hohen Gebrauchswert und lange Lebensdauer der Motoren.
Die Isolierung schützt die Wicklung weitgehend vor dem Einfluss aggressiver Gase, Dämpfe, Staub, Öl und erhöhter Luftfeuchte und hält den üblichen Rüttelbeanspruchungen stand.
Die Isolierung der Motoren ist tropenfest d. h. bis 100 % Luft-feuchtigkeit geeignet.
Alle Motoren sind in Wärmeklasse F ausgeführt.
Die Ausnutzung der Motoren entspricht bei Bemessungsleis-tung/Bemessungsdrehmoment Wärmeklasse F.
■ Motorschutz
Die Motortemperatur-Erfassung für Betrieb der Motoren am Um-richter erfolgt mit dem Temperatursensor KTY 84-130.
Dieser Sensor ist ein Halbleiter, der seinen Widerstand, abhän-gig von der Temperatur, nach einer definierten Kurve ändert.
Die Umrichter von Siemens ermitteln über den Widerstand des Temperatursensors die Motortemperatur.
Durch Parametrierung lassen sie sich auf eine gewünschte Tem-peratur für Warnung und Abschaltung einstellen.
Der Temperatursensor KTY 84-130 wird wie ein Kaltleiter in den Wickelkopf des Motors eingebaut.
Die Auswertung erfolgt standardmäßig im Umrichter SIMOVERT MASTERDRIVES.
Werden die Motoren an Umrichtern betrieben, die keine KTY 84-Auswertung haben, kann die Temperaturauswertung mit dem externen Temperaturüberwachungsrelais 3RS10 durchgeführt werden. Genaue Beschreibung siehe Katalog LV 10.
Gerätebeispiele:• Steuerspeisespannung: AC/DC 24 V
Bestell-Nr. 3RS1040-1GD50• Steuerspeisespannung: AC/DC 24 – 240 V
Bestell-Nr. 3RS1040-1GW50.
■ Anstrich
Für die Motoren sind folgende Anstriche möglich:
• Ohne Farbbehandlung (mit Imprägnierharzüberzug) z.B. 1FK7 oder 1PH7 (bis Achshöhe 160)
• grundiert (als Korrosionsschutz) z.B. 1PH7, 1PL6 (ab Achshöhe 180)
• Normalanstrich (z.B. RAL 7016) z.B. 1PH4, 1PH7, 1PL6, 1FK7, 1FS6
• Sonderanstrich (z.B. RAL 7016) z.B. 1FT6, 1PH7, 1PL6.
Alle Motoren können mit handelsüblichen Lacken über-lackiert werden (max. 2 zusätzliche Lackschichten).
M Pn
N NN
= ⋅ ⋅9 551000
,
30020010000
1
2
3
k�
°C
M1-5178a
�D = 2 mA
R
TU
Ausführung Eignung des Anstrichs für Klimagruppenach DIN IEC 60721, Teil 2 – 1
Normalanstrich Moderate (erweitert)für Innenraum und Freiluftaufstellung
kurzzeitig:dauernd:
bis 120 °Cbis 100 °C
Sonderanstrich Worldwide (erweitert)für Freiluftaufstellung
kurzzeitig:dauernd:
bis 140 °Cbis 120 °C
zusätzlich: bei aggressiver Atmosphäre bis zu 1 % Säure- und Laugenkonzentration oder in geschützten Räumen dauernder Nässe
Siemens DA 65.3 · 2004
22/2 Motoren 1FK7
2/8 Motoren 1FT6
2/30 Motoren 1FS6
2/34 Torquemotoren 1FW3
Synchron-Servomotoren
Siemens DA 65.3 · 20042/2
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FK7Selbstkühlung
Synchron-Servomotoren
2
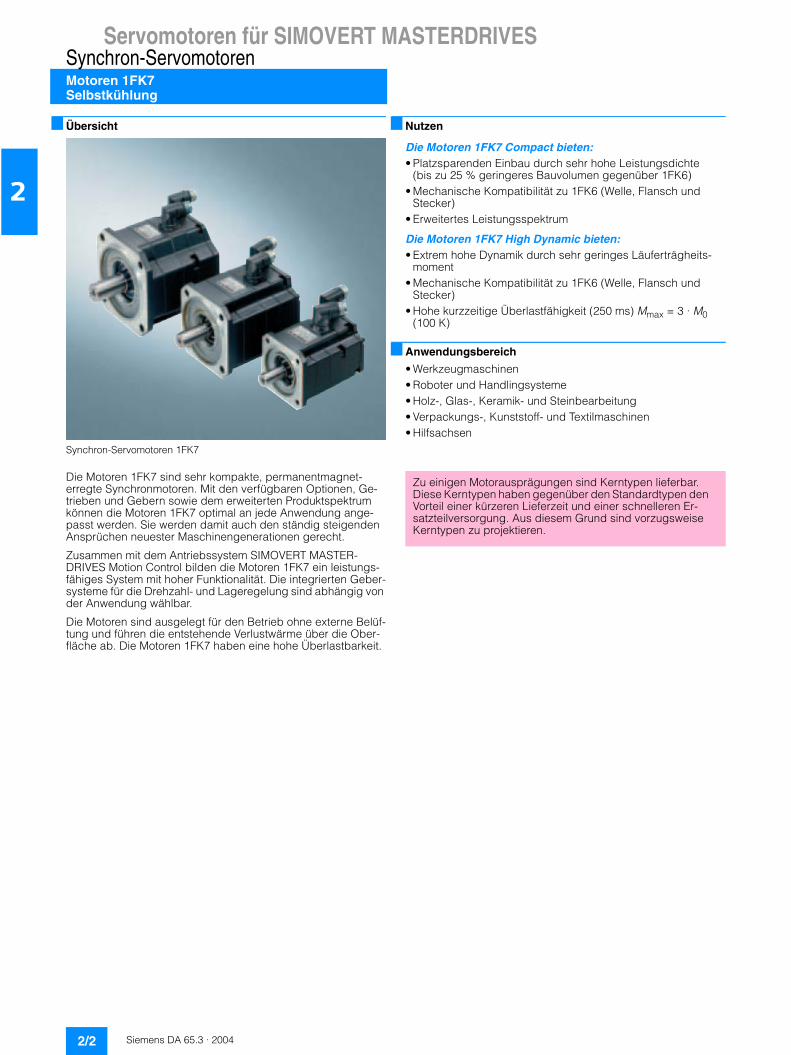
■ Übersicht
Synchron-Servomotoren 1FK7
Die Motoren 1FK7 sind sehr kompakte, permanentmagnet-erregte Synchronmotoren. Mit den verfügbaren Optionen, Ge-trieben und Gebern sowie dem erweiterten Produktspektrum können die Motoren 1FK7 optimal an jede Anwendung ange-passt werden. Sie werden damit auch den ständig steigenden Ansprüchen neuester Maschinengenerationen gerecht.
Zusammen mit dem Antriebssystem SIMOVERT MASTER-DRIVES Motion Control bilden die Motoren 1FK7 ein leistungs-fähiges System mit hoher Funktionalität. Die integrierten Geber-systeme für die Drehzahl- und Lageregelung sind abhängig von der Anwendung wählbar.
Die Motoren sind ausgelegt für den Betrieb ohne externe Belüf-tung und führen die entstehende Verlustwärme über die Ober-fläche ab. Die Motoren 1FK7 haben eine hohe Überlastbarkeit.
■ Nutzen
Die Motoren 1FK7 Compact bieten:• Platzsparenden Einbau durch sehr hohe Leistungsdichte
(bis zu 25 % geringeres Bauvolumen gegenüber 1FK6)• Mechanische Kompatibilität zu 1FK6 (Welle, Flansch und
Stecker)• Erweitertes Leistungsspektrum
Die Motoren 1FK7 High Dynamic bieten:• Extrem hohe Dynamik durch sehr geringes Läuferträgheits-
moment• Mechanische Kompatibilität zu 1FK6 (Welle, Flansch und
Stecker)• Hohe kurzzeitige Überlastfähigkeit (250 ms) Mmax = 3 · M0
(100 K)
■ Anwendungsbereich
• Werkzeugmaschinen• Roboter und Handlingsysteme• Holz-, Glas-, Keramik- und Steinbearbeitung• Verpackungs-, Kunststoff- und Textilmaschinen• Hilfsachsen
Zu einigen Motorausprägungen sind Kerntypen lieferbar. Diese Kerntypen haben gegenüber den Standardtypen den Vorteil einer kürzeren Lieferzeit und einer schnelleren Er-satzteilversorgung. Aus diesem Grund sind vorzugsweise Kerntypen zu projektieren.
Siemens DA 65.3 · 2004 2/3
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FK7Selbstkühlung
2
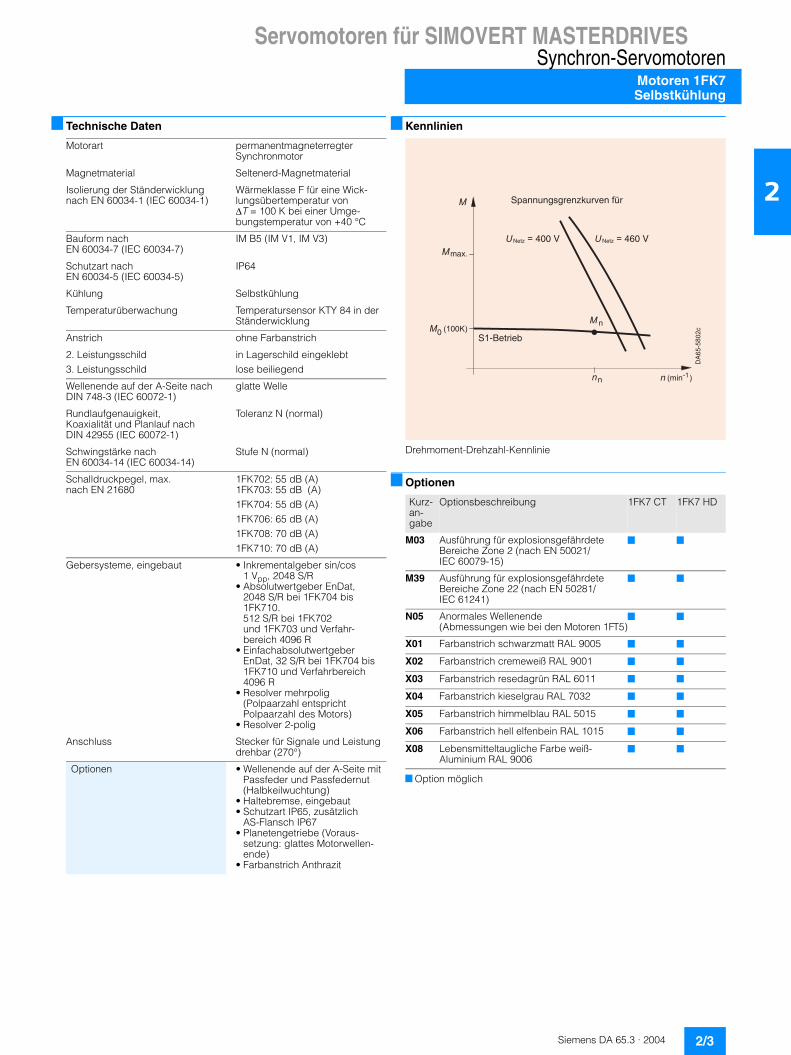
■ Technische Daten ■ Kennlinien
Drehmoment-Drehzahl-Kennlinie
■ Optionen
7Option möglich
Motorart permanentmagneterregter Synchronmotor
Magnetmaterial Seltenerd-Magnetmaterial
Isolierung der Ständerwicklung
nach EN 60034-1 (IEC 60034-1)Wärmeklasse F für eine Wick-lungsübertemperatur von �T = 100 K bei einer Umge-bungstemperatur von +40 °C
Bauform nach EN 60034-7 (IEC 60034-7)
IM B5 (IM V1, IM V3)
Schutzart nach EN 60034-5 (IEC 60034-5)
IP64
Kühlung Selbstkühlung
Temperaturüberwachung Temperatursensor KTY 84 in der Ständerwicklung
Anstrich ohne Farbanstrich
2. Leistungsschild3. Leistungsschild
in Lagerschild eingeklebtlose beiliegend
Wellenende auf der A-Seite nach DIN 748-3 (IEC 60072-1)
glatte Welle
Rundlaufgenauigkeit, Koaxialität und Planlauf nach DIN 42955 (IEC 60072-1)
Toleranz N (normal)
Schwingstärke nach EN 60034-14 (IEC 60034-14)
Stufe N (normal)
Schalldruckpegel, max. nach EN 21680
1FK702: 55 dB (A)1FK703: 55 dB (A)1FK704: 55 dB (A)1FK706: 65 dB (A)1FK708: 70 dB (A)1FK710: 70 dB (A)
Gebersysteme, eingebaut • Inkrementalgeber sin/cos 1 Vpp, 2048 S/R
• Absolutwertgeber EnDat, 2048 S/R bei 1FK704 bis 1FK710. 512 S/R bei 1FK702 und 1FK703 und Verfahr-bereich 4096 R
• Einfachabsolutwertgeber EnDat, 32 S/R bei 1FK704 bis 1FK710 und Verfahrbereich 4096 R
• Resolver mehrpolig (Polpaarzahl entspricht Polpaarzahl des Motors)
• Resolver 2-polig
Anschluss Stecker für Signale und Leistung drehbar (270°)
Optionen • Wellenende auf der A-Seite mit Passfeder und Passfedernut (Halbkeilwuchtung)
• Haltebremse, eingebaut• Schutzart IP65, zusätzlich
AS-Flansch IP67• Planetengetriebe (Voraus-
setzung: glattes Motorwellen-ende)
• Farbanstrich Anthrazit
Kurz- an-gabe
Optionsbeschreibung 1FK7 CT 1FK7 HD
M03 Ausführung für explosionsgefährdete Bereiche Zone 2 (nach EN 50021/IEC 60079-15)
7 7
M39 Ausführung für explosionsgefährdete Bereiche Zone 22 (nach EN 50281/IEC 61241)
7 7
N05 Anormales Wellenende (Abmessungen wie bei den Motoren 1FT5)
7 7
X01 Farbanstrich schwarzmatt RAL 9005 7 7
X02 Farbanstrich cremeweiß RAL 9001 7 7
X03 Farbanstrich resedagrün RAL 6011 7 7
X04 Farbanstrich kieselgrau RAL 7032 7 7
X05 Farbanstrich himmelblau RAL 5015 7 7
X06 Farbanstrich hell elfenbein RAL 1015 7 7
X08 Lebensmitteltaugliche Farbe weiß-Aluminium RAL 9006
7 7
�
��./�
01��23��
�� � 0��� 3 1
-��4
�
�� �
5�6�
��
�7���%�#�#���4"%�*�� 89�
� : ��� !
�1 �������
-��4� : ��� !
Siemens DA 65.3 · 20042/4
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FK7 CompactSelbstkühlung
Synchron-Servomotoren
2
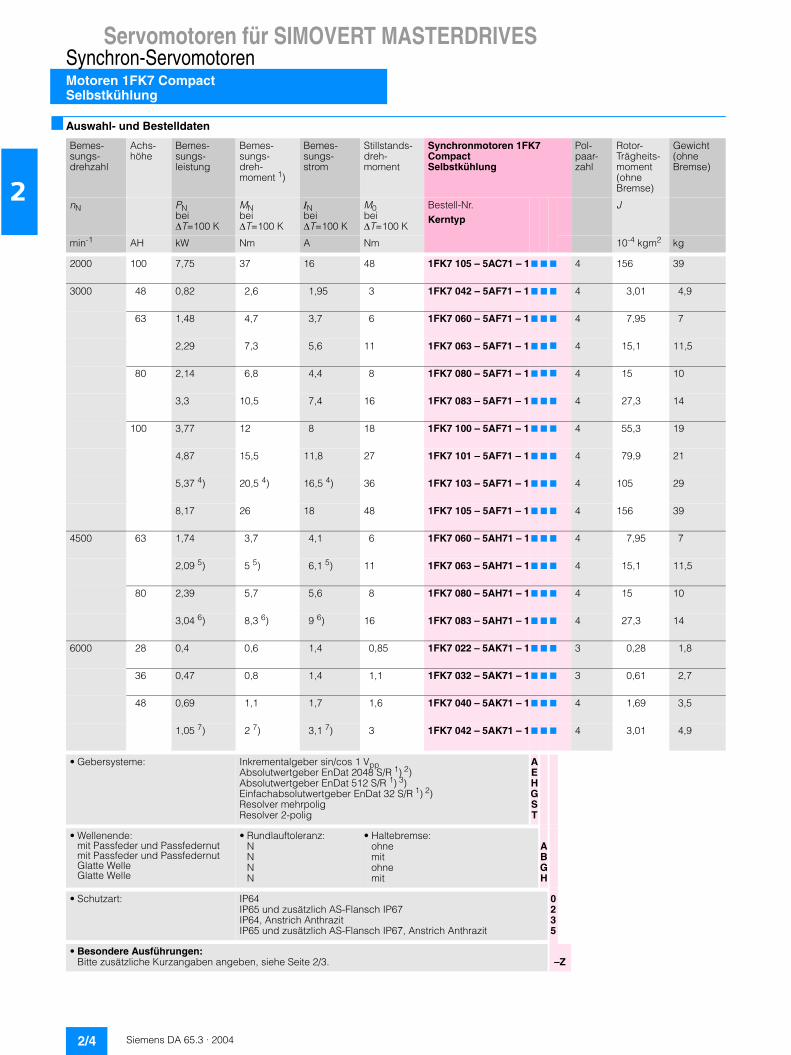
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Synchronmotoren 1FK7 CompactSelbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Kerntyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
2000 100 7,75 37 16 48 1FK7 105 – 5AC71 – 17 7 7 4 156 39
3000 48 0,82 2,6 1,95 3 1FK7 042 – 5AF71 – 1 7 7 7 4 3,01 4,9
63 1,48 4,7 3,7 6 1FK7 060 – 5AF71 – 1 7 7 7 4 7,95 7
2,29 7,3 5,6 11 1FK7 063 – 5AF71 – 1 7 7 7 4 15,1 11,5
80 2,14 6,8 4,4 8 1FK7 080 – 5AF71 – 1 7 7 7 4 15 10
3,3 10,5 7,4 16 1FK7 083 – 5AF71 – 1 7 7 7 4 27,3 14
100 3,77 12 8 18 1FK7 100 – 5AF71 – 1 7 7 7 4 55,3 19
4,87 15,5 11,8 27 1FK7 101 – 5AF71 – 1 7 7 7 4 79,9 21
5,37 4) 20,5 4) 16,5 4) 36 1FK7 103 – 5AF71 – 1 7 7 7 4 105 29
8,17 26 18 48 1FK7 105 – 5AF71 – 1 7 7 7 4 156 39
4500 63 1,74 3,7 4,1 6 1FK7 060 – 5AH71 – 17 7 7 4 7,95 7
2,09 5) 5 5) 6,1 5) 11 1FK7 063 – 5AH71 – 17 7 7 4 15,1 11,5
80 2,39 5,7 5,6 8 1FK7 080 – 5AH71 – 17 7 7 4 15 10
3,04 6) 8,3 6) 9 6) 16 1FK7 083 – 5AH71 – 17 7 7 4 27,3 14
6000 28 0,4 0,6 1,4 0,85 1FK7 022 – 5AK71 – 17 7 7 3 0,28 1,8
36 0,47 0,8 1,4 1,1 1FK7 032 – 5AK71 – 17 7 7 3 0,61 2,7
48 0,69 1,1 1,7 1,6 1FK7 040 – 5AK71 – 17 7 7 4 1,69 3,5
1,05 7) 2 7) 3,1 7) 3 1FK7 042 – 5AK71 – 17 7 7 4 3,01 4,9
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1) 2)Absolutwertgeber EnDat 512 S/R 1) 3)Einfachabsolutwertgeber EnDat 32 S/R 1) 2)Resolver mehrpoligResolver 2-polig
AEHGST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte Welle
• Rundlauftoleranz: NNNN
• Haltebremse:ohnemitohnemit
ABGH
• Schutzart: IP64IP65 und zusätzlich AS-Flansch IP67IP64, Anstrich AnthrazitIP65 und zusätzlich AS-Flansch IP67, Anstrich Anthrazit
0235
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/3. –Z
Siemens DA 65.3 · 2004 2/5
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FK7 CompactSelbstkühlung
2
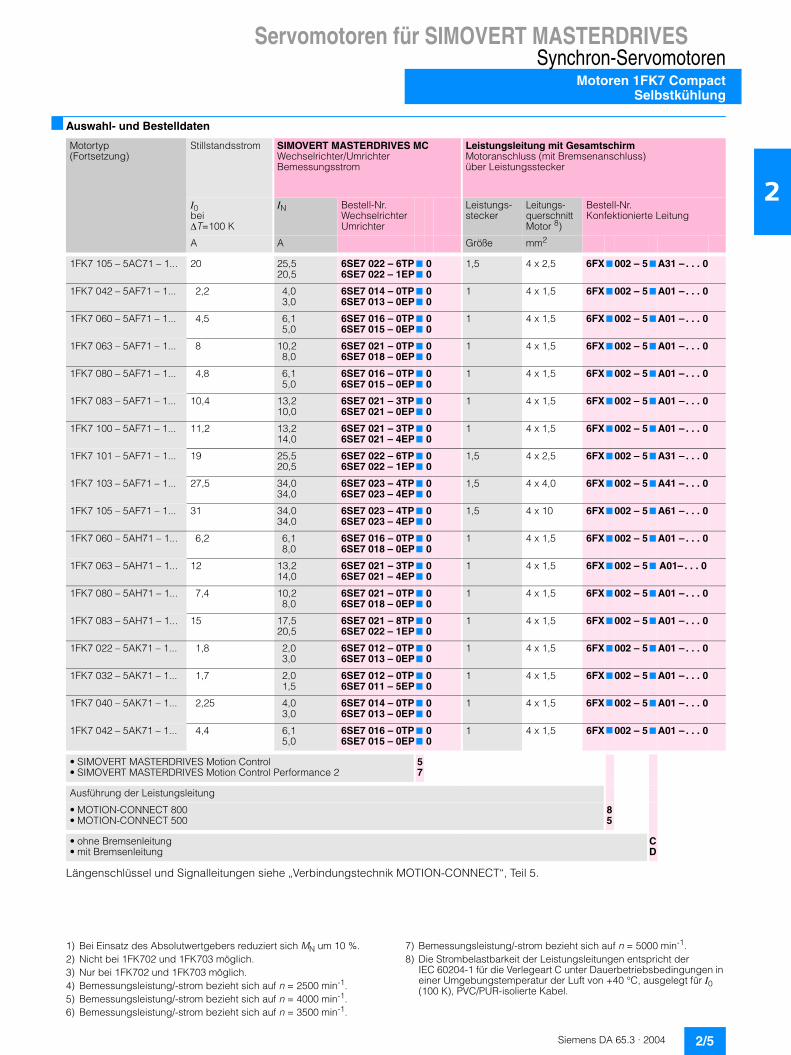
■ Auswahl- und Bestelldaten
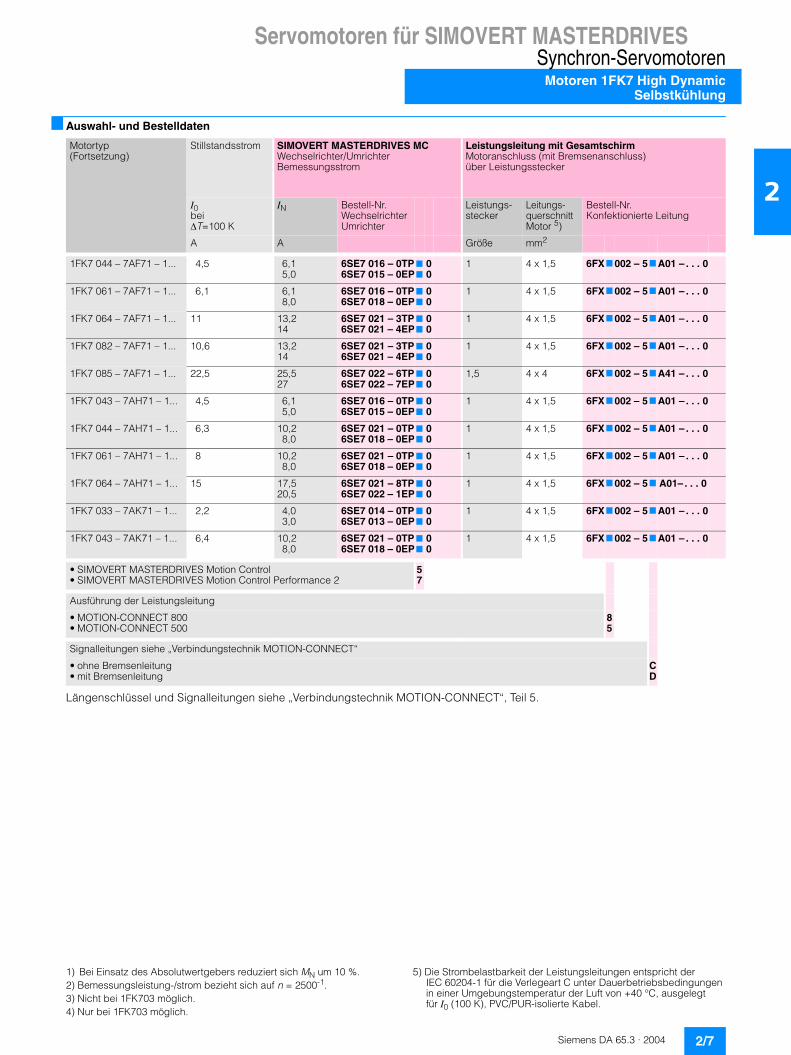
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstandsstrom SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss (mit Bremsenanschluss) über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 8)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FK7 105 – 5AC71 – 1... 20 25,520,5
6SE7 022 – 6TP6SE7 022 – 1EP
77
00
1,5 4 x 2,5 6FX7 002 – 5 7A31 – . . . 0
1FK7 042 – 5AF71 – 1... 2,2 4,03,0
6SE7 014 – 0TP6SE7 013 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 060 – 5AF71 – 1... 4,5 6,15,0
6SE7 016 – 0TP6SE7 015 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 063 – 5AF71 – 1... 8 10,28,0
6SE7 021 – 0TP6SE7 018 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 080 – 5AF71 – 1... 4,8 6,15,0
6SE7 016 – 0TP6SE7 015 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 083 – 5AF71 – 1... 10,4 13,210,0
6SE7 021 – 3TP6SE7 021 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 100 – 5AF71 – 1... 11,2 13,214,0
6SE7 021 – 3TP6SE7 021 – 4EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 101 – 5AF71 – 1... 19 25,520,5
6SE7 022 – 6TP6SE7 022 – 1EP
77
00
1,5 4 x 2,5 6FX7 002 – 5 7A31 – . . . 0
1FK7 103 – 5AF71 – 1... 27,5 34,034,0
6SE7 023 – 4TP6SE7 023 – 4EP
77
00
1,5 4 x 4,0 6FX7 002 – 5 7A41 – . . . 0
1FK7 105 – 5AF71 – 1... 31 34,034,0
6SE7 023 – 4TP6SE7 023 – 4EP
77
00
1,5 4 x 10 6FX7 002 – 5 7A61 – . . . 0
1FK7 060 – 5AH71 – 1... 6,2 6,18,0
6SE7 016 – 0TP6SE7 018 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 063 – 5AH71 – 1... 12 13,214,0
6SE7 021 – 3TP6SE7 021 – 4EP
77
00
1 4 x 1,5 6FX7 002 – 5 7 A01– . . . 0
1FK7 080 – 5AH71 – 1... 7,4 10,28,0
6SE7 021 – 0TP6SE7 018 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 083 – 5AH71 – 1... 15 17,520,5
6SE7 021 – 8TP6SE7 022 – 1EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 022 – 5AK71 – 1... 1,8 2,03,0
6SE7 012 – 0TP6SE7 013 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 032 – 5AK71 – 1... 1,7 2,01,5
6SE7 012 – 0TP6SE7 011 – 5EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 040 – 5AK71 – 1... 2,25 4,03,0
6SE7 014 – 0TP6SE7 013 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 042 – 5AK71 – 1... 4,4 6,15,0
6SE7 016 – 0TP6SE7 015 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.2) Nicht bei 1FK702 und 1FK703 möglich.3) Nur bei 1FK702 und 1FK703 möglich.4) Bemessungsleistung/-strom bezieht sich auf n = 2500 min-1.5) Bemessungsleistung/-strom bezieht sich auf n = 4000 min-1.6) Bemessungsleistung/-strom bezieht sich auf n = 3500 min-1.
7) Bemessungsleistung/-strom bezieht sich auf n = 5000 min-1.8) Die Strombelastbarkeit der Leistungsleitungen entspricht der
IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
Siemens DA 65.3 · 20042/6
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FK7 High DynamicSelbstkühlung
Synchron-Servomotoren
2
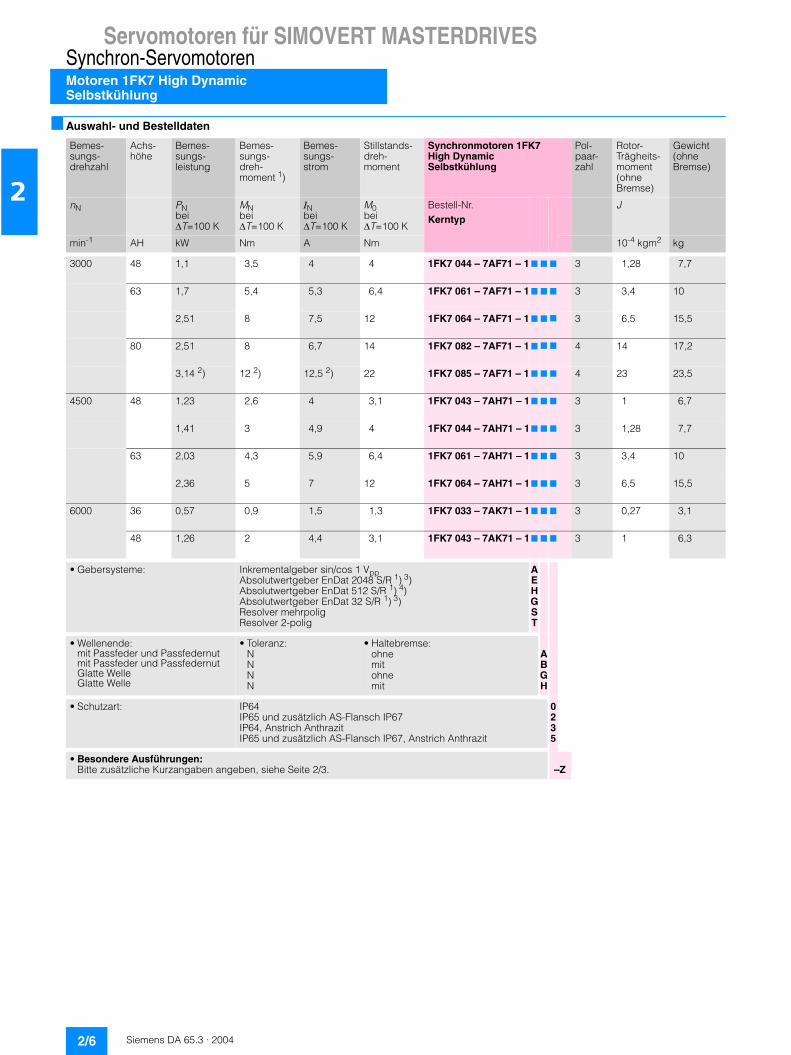
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Synchronmotoren 1FK7 High DynamicSelbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Kerntyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
3000 48 1,1 3,5 4 4 1FK7 044 – 7AF71 – 1 7 7 7 3 1,28 7,7
63 1,7 5,4 5,3 6,4 1FK7 061 – 7AF71 – 1 7 7 7 3 3,4 10
2,51 8 7,5 12 1FK7 064 – 7AF71 – 1 7 7 7 3 6,5 15,5
80 2,51 8 6,7 14 1FK7 082 – 7AF71 – 1 7 7 7 4 14 17,2
3,14 2) 12 2) 12,5 2) 22 1FK7 085 – 7AF71 – 1 7 7 7 4 23 23,5
4500 48 1,23 2,6 4 3,1 1FK7 043 – 7AH71 – 17 7 7 3 1 6,7
1,41 3 4,9 4 1FK7 044 – 7AH71 – 17 7 7 3 1,28 7,7
63 2,03 4,3 5,9 6,4 1FK7 061 – 7AH71 – 17 7 7 3 3,4 10
2,36 5 7 12 1FK7 064 – 7AH71 – 17 7 7 3 6,5 15,5
6000 36 0,57 0,9 1,5 1,3 1FK7 033 – 7AK71 – 17 7 7 3 0,27 3,1
48 1,26 2 4,4 3,1 1FK7 043 – 7AK71 – 17 7 7 3 1 6,3
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1) 3)Absolutwertgeber EnDat 512 S/R 1) 4)Absolutwertgeber EnDat 32 S/R 1) 3)Resolver mehrpoligResolver 2-polig
AEHGST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte Welle
• Toleranz: NNNN
• Haltebremse:ohnemitohnemit
ABGH
• Schutzart: IP64IP65 und zusätzlich AS-Flansch IP67IP64, Anstrich AnthrazitIP65 und zusätzlich AS-Flansch IP67, Anstrich Anthrazit
0235
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/3. –Z
Siemens DA 65.3 · 2004 2/7
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FK7 High DynamicSelbstkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstandsstrom SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss (mit Bremsenanschluss) über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 5)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FK7 044 – 7AF71 – 1... 4,5 6,15,0
6SE7 016 – 0TP6SE7 015 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 061 – 7AF71 – 1... 6,1 6,1 8,0
6SE7 016 – 0TP6SE7 018 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 064 – 7AF71 – 1... 11 13,214
6SE7 021 – 3TP6SE7 021 – 4EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 082 – 7AF71 – 1... 10,6 13,214
6SE7 021 – 3TP6SE7 021 – 4EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 085 – 7AF71 – 1... 22,5 25,527
6SE7 022 – 6TP6SE7 022 – 7EP
77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FK7 043 – 7AH71 – 1... 4,5 6,15,0
6SE7 016 – 0TP6SE7 015 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 044 – 7AH71 – 1... 6,3 10,28,0
6SE7 021 – 0TP6SE7 018 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 061 – 7AH71 – 1... 8 10,28,0
6SE7 021 – 0TP6SE7 018 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 064 – 7AH71 – 1... 15 17,520,5
6SE7 021 – 8TP6SE7 022 – 1EP
77
00
1 4 x 1,5 6FX7 002 – 5 7 A01– . . . 0
1FK7 033 – 7AK71 – 1... 2,2 4,03,0
6SE7 014 – 0TP6SE7 013 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FK7 043 – 7AK71 – 1... 6,4 10,28,0
6SE7 021 – 0TP6SE7 018 – 0EP
77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.2) Bemessungsleistung-/strom bezieht sich auf n = 2500-1.3) Nicht bei 1FK703 möglich.4) Nur bei 1FK703 möglich.
5) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
Siemens DA 65.3 · 20042/8
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6
Synchron-Servomotoren
2
■ Übersicht
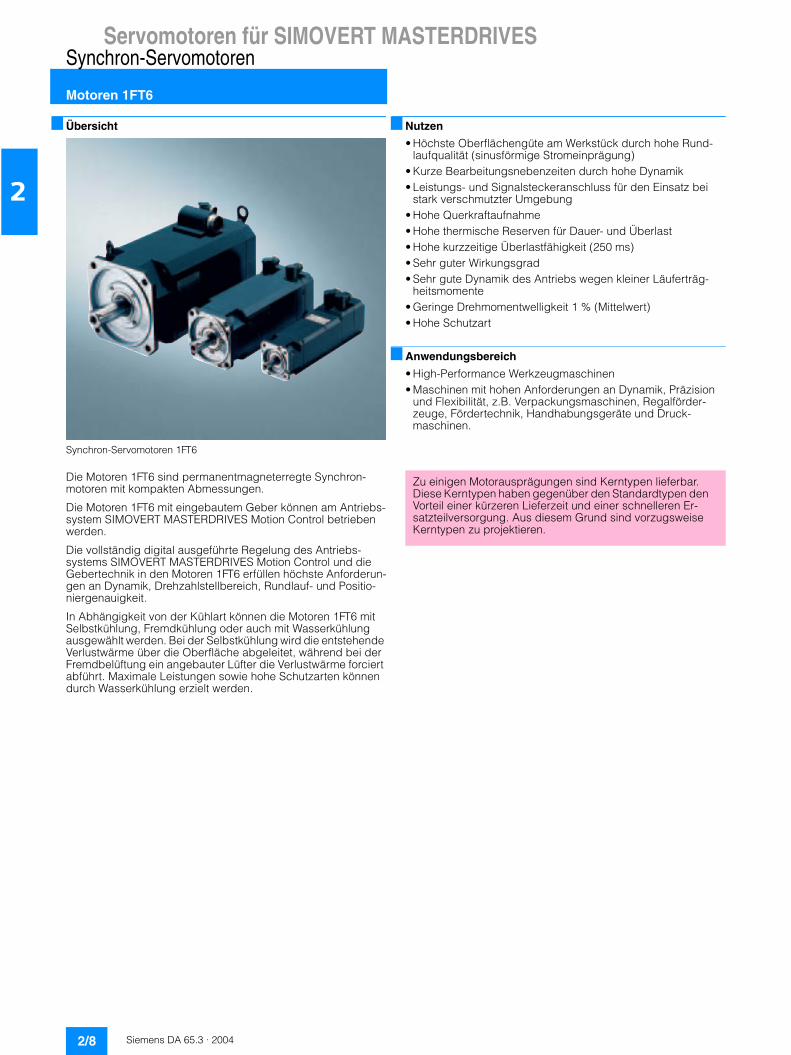
Synchron-Servomotoren 1FT6
Die Motoren 1FT6 sind permanentmagneterregte Synchron-motoren mit kompakten Abmessungen.
Die Motoren 1FT6 mit eingebautem Geber können am Antriebs-system SIMOVERT MASTERDRIVES Motion Control betrieben werden.
Die vollständig digital ausgeführte Regelung des Antriebs-systems SIMOVERT MASTERDRIVES Motion Control und die Gebertechnik in den Motoren 1FT6 erfüllen höchste Anforderun-gen an Dynamik, Drehzahlstellbereich, Rundlauf- und Positio-niergenauigkeit.
In Abhängigkeit von der Kühlart können die Motoren 1FT6 mit Selbstkühlung, Fremdkühlung oder auch mit Wasserkühlung ausgewählt werden. Bei der Selbstkühlung wird die entstehende Verlustwärme über die Oberfläche abgeleitet, während bei der Fremdbelüftung ein angebauter Lüfter die Verlustwärme forciert abführt. Maximale Leistungen sowie hohe Schutzarten können durch Wasserkühlung erzielt werden.
■ Nutzen
• Höchste Oberflächengüte am Werkstück durch hohe Rund-laufqualität (sinusförmige Stromeinprägung)
• Kurze Bearbeitungsnebenzeiten durch hohe Dynamik• Leistungs- und Signalsteckeranschluss für den Einsatz bei
stark verschmutzter Umgebung• Hohe Querkraftaufnahme• Hohe thermische Reserven für Dauer- und Überlast• Hohe kurzzeitige Überlastfähigkeit (250 ms)• Sehr guter Wirkungsgrad• Sehr gute Dynamik des Antriebs wegen kleiner Läuferträg-
heitsmomente• Geringe Drehmomentwelligkeit 1 % (Mittelwert)• Hohe Schutzart
■ Anwendungsbereich
• High-Performance Werkzeugmaschinen• Maschinen mit hohen Anforderungen an Dynamik, Präzision
und Flexibilität, z.B. Verpackungsmaschinen, Regalförder-zeuge, Fördertechnik, Handhabungsgeräte und Druck-maschinen.
Zu einigen Motorausprägungen sind Kerntypen lieferbar. Diese Kerntypen haben gegenüber den Standardtypen den Vorteil einer kürzeren Lieferzeit und einer schnelleren Er-satzteilversorgung. Aus diesem Grund sind vorzugsweise Kerntypen zu projektieren.
Siemens DA 65.3 · 2004 2/9
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6
2
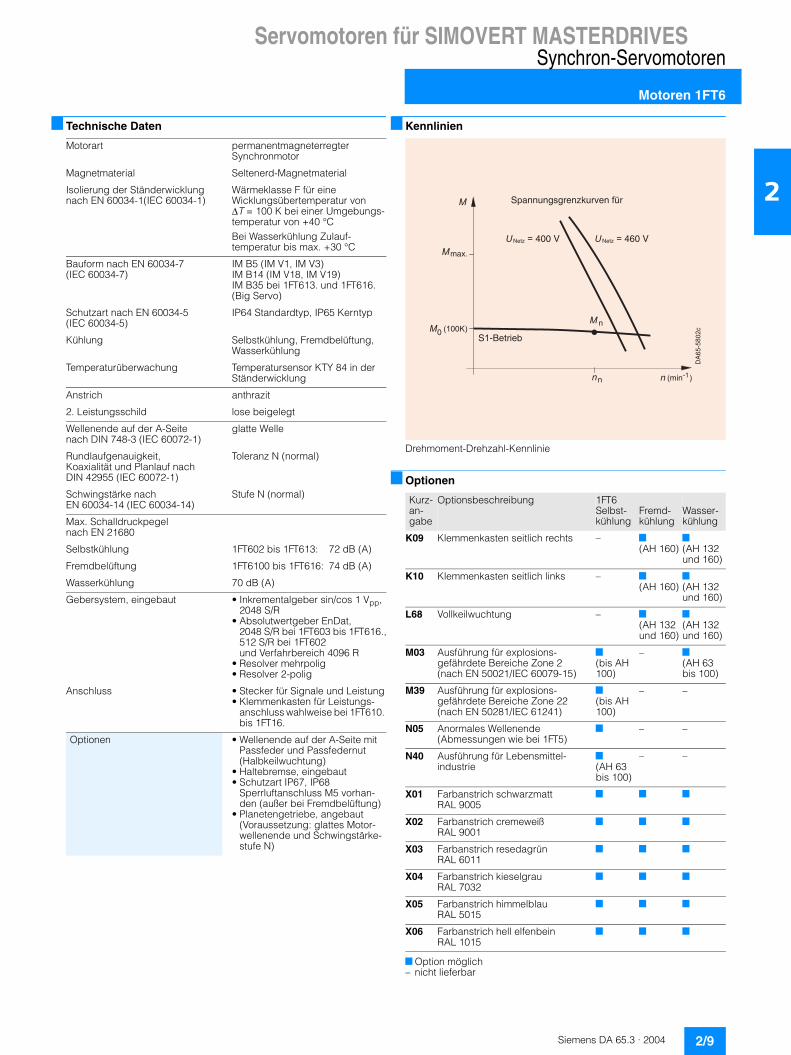
■ Technische Daten ■ Kennlinien
Drehmoment-Drehzahl-Kennlinie
■ Optionen
7Option möglich– nicht lieferbar
Motorart permanentmagneterregter Synchronmotor
Magnetmaterial Seltenerd-Magnetmaterial
Isolierung der Ständerwicklung nach EN 60034-1(IEC 60034-1)
Wärmeklasse F für eine Wicklungsübertemperatur von �T = 100 K bei einer Umgebungs-temperatur von +40 °CBei Wasserkühlung Zulauf-temperatur bis max. +30 °C
Bauform nach EN 60034-7 (IEC 60034-7)
IM B5 (IM V1, IM V3)IM B14 (IM V18, IM V19)IM B35 bei 1FT613. und 1FT616. (Big Servo)
Schutzart nach EN 60034-5 (IEC 60034-5)
IP64 Standardtyp, IP65 Kerntyp
Kühlung Selbstkühlung, Fremdbelüftung, Wasserkühlung
Temperaturüberwachung Temperatursensor KTY 84 in der Ständerwicklung
Anstrich anthrazit
2. Leistungsschild lose beigelegt
Wellenende auf der A-Seite nach DIN 748-3 (IEC 60072-1)
glatte Welle
Rundlaufgenauigkeit, Koaxialität und Planlauf nach DIN 42955 (IEC 60072-1)
Toleranz N (normal)
Schwingstärke nach EN 60034-14 (IEC 60034-14)
Stufe N (normal)
Max. Schalldruckpegel nach EN 21680
Selbstkühlung 1FT602 bis 1FT613: 72 dB (A)
Fremdbelüftung 1FT6100 bis 1FT616: 74 dB (A)
Wasserkühlung 70 dB (A)
Gebersystem, eingebaut • Inkrementalgeber sin/cos 1 Vpp, 2048 S/R
• Absolutwertgeber EnDat,2048 S/R bei 1FT603 bis 1FT616.,512 S/R bei 1FT602 und Verfahrbereich 4096 R
• Resolver mehrpolig • Resolver 2-polig
Anschluss • Stecker für Signale und Leistung• Klemmenkasten für Leistungs-
anschluss wahlweise bei 1FT610. bis 1FT16.
Optionen • Wellenende auf der A-Seite mit Passfeder und Passfedernut (Halbkeilwuchtung)
• Haltebremse, eingebaut• Schutzart IP67, IP68
Sperrluftanschluss M5 vorhan-den (außer bei Fremdbelüftung)
• Planetengetriebe, angebaut(Voraussetzung: glattes Motor-wellenende und Schwingstärke-stufe N)
Kurz- an-gabe
Optionsbeschreibung 1FT6Selbst-kühlung
Fremd-kühlung
Wasser-kühlung
K09 Klemmenkasten seitlich rechts – 7(AH 160)
7(AH 132 und 160)
K10 Klemmenkasten seitlich links – 7(AH 160)
7(AH 132 und 160)
L68 Vollkeilwuchtung – 7(AH 132 und 160)
7(AH 132 und 160)
M03 Ausführung für explosions-gefährdete Bereiche Zone 2 (nach EN 50021/IEC 60079-15)
7(bis AH 100)
– 7(AH 63 bis 100)
M39 Ausführung für explosions-gefährdete Bereiche Zone 22 (nach EN 50281/IEC 61241)
7(bis AH 100)
– –
N05 Anormales Wellenende (Abmessungen wie bei 1FT5)
7 – –
N40 Ausführung für Lebensmittel-industrie
7(AH 63 bis 100)
– –
X01 Farbanstrich schwarzmatt RAL 9005
7 7 7
X02 Farbanstrich cremeweiß RAL 9001
7 7 7
X03 Farbanstrich resedagrün RAL 6011
7 7 7
X04 Farbanstrich kieselgrau RAL 7032
7 7 7
X05 Farbanstrich himmelblau RAL 5015
7 7 7
X06 Farbanstrich hell elfenbein RAL 1015
7 7 7
�
��./�
01��23��
�� � 0��� 3 1
-��4
�
�� �
5�6�
��
�7���%�#�#���4"%�*�� 89�
� : ��� !
�1 �������
-��4� : ��� !
Siemens DA 65.3 · 20042/10
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6 KerntypSelbstkühlung
Synchron-Servomotoren
2
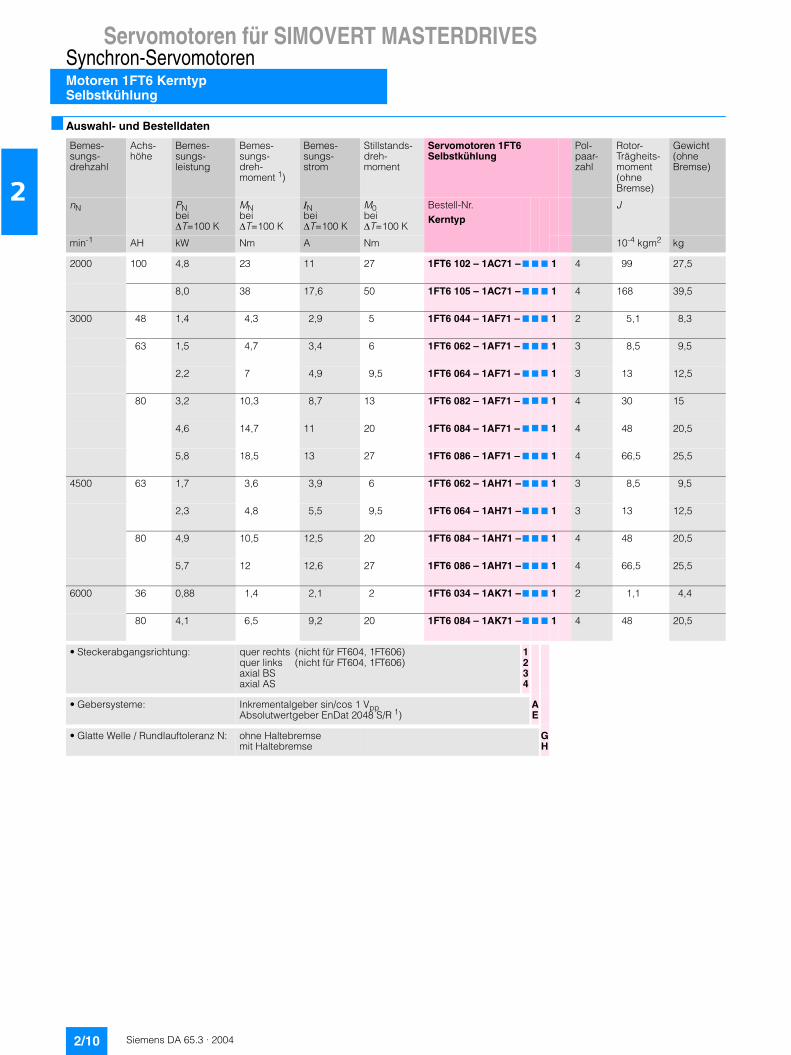
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Servomotoren 1FT6 Selbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Kerntyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
2000 100 4,8 23 11 27 1FT6 102 – 1AC71 – 7 7 7 1 4 99 27,5
8,0 38 17,6 50 1FT6 105 – 1AC71 – 7 7 7 1 4 168 39,5
3000 48 1,4 4,3 2,9 5 1FT6 044 – 1AF71 – 7 7 7 1 2 5,1 8,3
63 1,5 4,7 3,4 6 1FT6 062 – 1AF71 – 7 7 7 1 3 8,5 9,5
2,2 7 4,9 9,5 1FT6 064 – 1AF71 – 7 7 7 1 3 13 12,5
80 3,2 10,3 8,7 13 1FT6 082 – 1AF71 – 7 7 7 1 4 30 15
4,6 14,7 11 20 1FT6 084 – 1AF71 – 7 7 7 1 4 48 20,5
5,8 18,5 13 27 1FT6 086 – 1AF71 – 7 7 7 1 4 66,5 25,5
4500 63 1,7 3,6 3,9 6 1FT6 062 – 1AH71 –7 7 7 1 3 8,5 9,5
2,3 4,8 5,5 9,5 1FT6 064 – 1AH71 –7 7 7 1 3 13 12,5
80 4,9 10,5 12,5 20 1FT6 084 – 1AH71 –7 7 7 1 4 48 20,5
5,7 12 12,6 27 1FT6 086 – 1AH71 –7 7 7 1 4 66,5 25,5
6000 36 0,88 1,4 2,1 2 1FT6 034 – 1AK71 –7 7 7 1 2 1,1 4,4
80 4,1 6,5 9,2 20 1FT6 084 – 1AK71 –7 7 7 1 4 48 20,5
• Steckerabgangsrichtung: quer rechts (nicht für FT604, 1FT606)quer links (nicht für FT604, 1FT606)axial BSaxial AS
1234
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1)
AE
• Glatte Welle / Rundlauftoleranz N: ohne Haltebremsemit Haltebremse
GH
Siemens DA 65.3 · 2004 2/11
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6 KerntypSelbstkühlung
2
■ Auswahl- und Bestelldaten
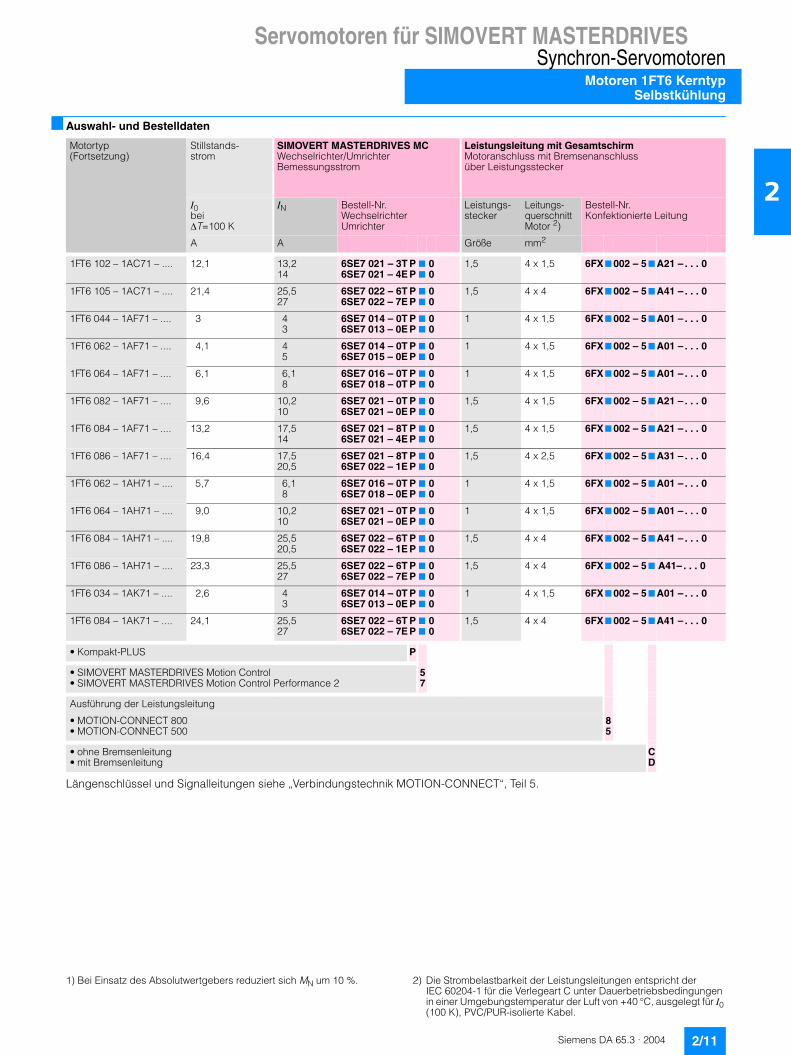
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss mit Bremsenanschluss über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 2)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FT6 102 – 1AC71 – .... 12,1 13,214
6SE7 021 – 3T6SE7 021 – 4E
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 105 – 1AC71 – .... 21,4 25,527
6SE7 022 – 6T6SE7 022 – 7E
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 044 – 1AF71 – .... 3 43
6SE7 014 – 0T6SE7 013 – 0E
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 062 – 1AF71 – .... 4,1 45
6SE7 014 – 0T6SE7 015 – 0E
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 1AF71 – .... 6,1 6,18
6SE7 016 – 0T6SE7 018 – 0T
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 082 – 1AF71 – .... 9,6 10,210
6SE7 021 – 0T6SE7 021 – 0E
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 084 – 1AF71 – .... 13,2 17,514
6SE7 021 – 8T6SE7 021 – 4E
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 086 – 1AF71 – .... 16,4 17,520,5
6SE7 021 – 8T6SE7 022 – 1E
PP77
00
1,5 4 x 2,5 6FX7 002 – 5 7A31 – . . . 0
1FT6 062 – 1AH71 – .... 5,7 6,18
6SE7 016 – 0T6SE7 018 – 0E
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 1AH71 – .... 9,0 10,210
6SE7 021 – 0T6SE7 021 – 0E
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 084 – 1AH71 – .... 19,8 25,520,5
6SE7 022 – 6T6SE7 022 – 1E
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 086 – 1AH71 – .... 23,3 25,527
6SE7 022 – 6T6SE7 022 – 7E
PP77
00
1,5 4 x 4 6FX7 002 – 5 7 A41– . . . 0
1FT6 034 – 1AK71 – .... 2,6 43
6SE7 014 – 0T6SE7 013 – 0E
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 084 – 1AK71 – .... 24,1 25,527
6SE7 022 – 6T6SE7 022 – 7E
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
• Kompakt-PLUS P
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %. 2) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
Siemens DA 65.3 · 20042/12
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6Selbstkühlung
Synchron-Servomotoren
2
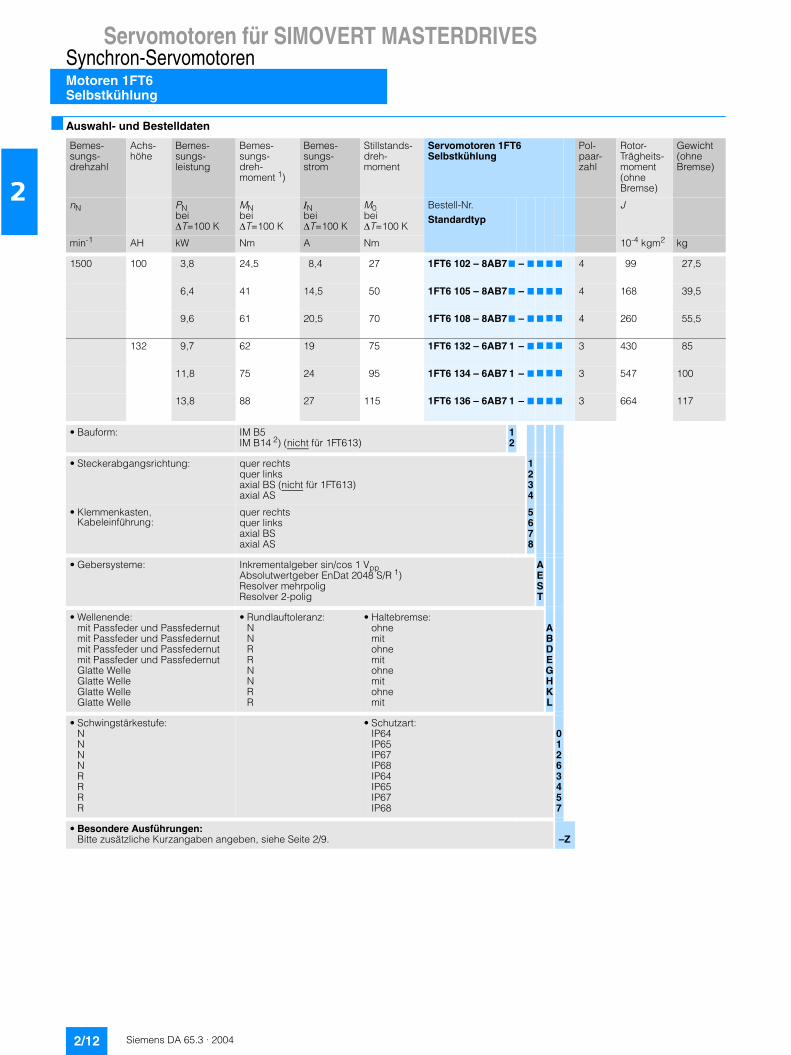
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Servomotoren 1FT6 Selbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Standardtyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
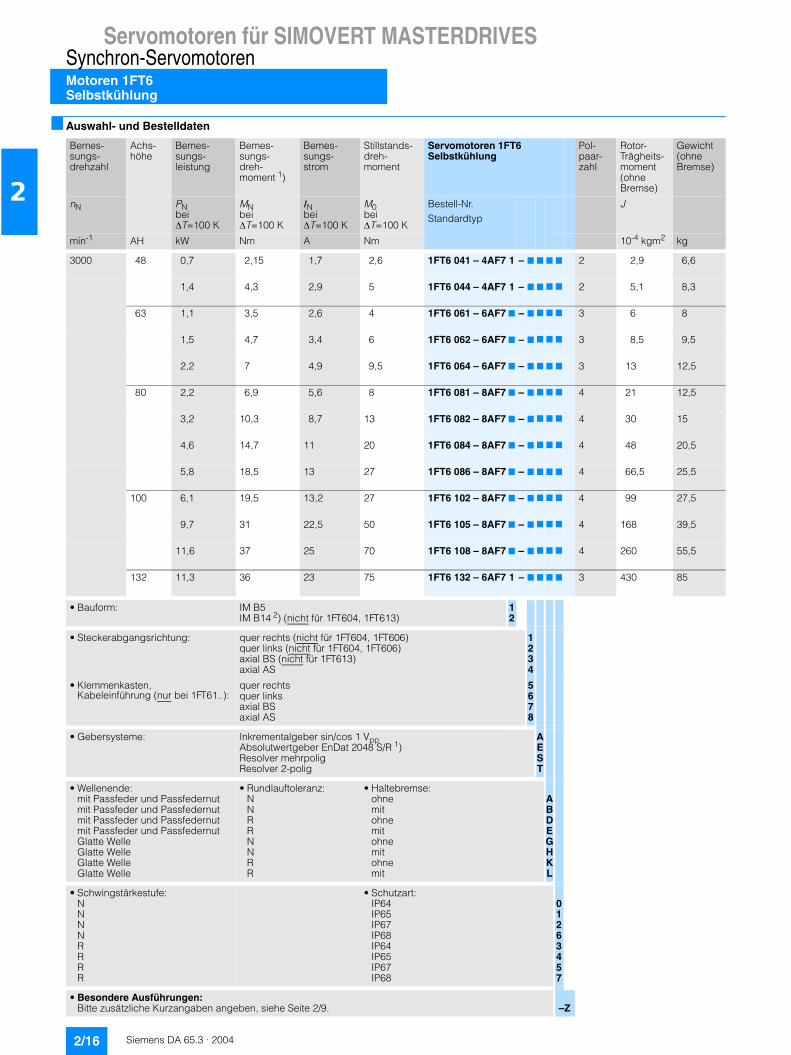
1500 100 3,8 24,5 8,4 27 1FT6 102 – 8AB77 – 7 7 7 7 4 99 27,5
6,4 41 14,5 50 1FT6 105 – 8AB77 – 7 7 7 7 4 168 39,5
9,6 61 20,5 70 1FT6 108 – 8AB77 – 7 7 7 7 4 260 55,5
132 9,7 62 19 75 1FT6 132 – 6AB7 1 – 7 7 7 7 3 430 85
11,8 75 24 95 1FT6 134 – 6AB7 1 – 7 7 7 7 3 547 100
13,8 88 27 115 1FT6 136 – 6AB7 1 – 7 7 7 7 3 664 117
• Bauform: IM B5IM B14 2) (nicht für 1FT613)
12
• Steckerabgangsrichtung: quer rechtsquer linksaxial BS (nicht für 1FT613)axial AS
1234
• Klemmenkasten, Kabeleinführung:
quer rechtsquer linksaxial BSaxial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1)Resolver mehrpoligResolver 2-polig
AEST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte WelleGlatte WelleGlatte Welle
• Rundlauftoleranz:NNRRNNRR
• Haltebremse:ohnemitohnemitohnemitohnemit
ABDEGHKL
v• Schwingstärkestufe:NNNNRRRR
• Schutzart:IP64IP65IP67IP68IP64IP65IP67IP68
01263457
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
Siemens DA 65.3 · 2004 2/13
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6Selbstkühlung
2
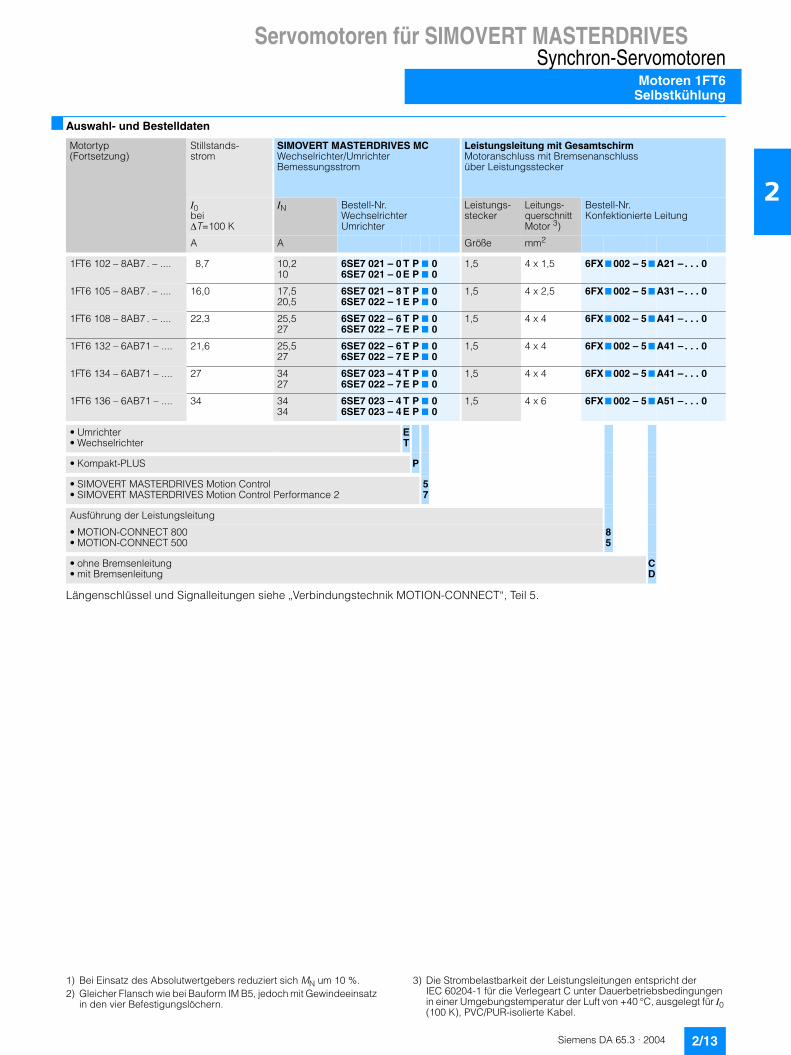
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss mit Bremsenanschluss über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 3)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FT6 102 – 8AB7 . – .... 8,7 10,210
6SE7 021 – 06SE7 021 – 0
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 105 – 8AB7 . – .... 16,0 17,520,5
6SE7 021 – 86SE7 022 – 1
TE
PP77
00
1,5 4 x 2,5 6FX7 002 – 5 7A31 – . . . 0
1FT6 108 – 8AB7 . – .... 22,3 25,527
6SE7 022 – 66SE7 022 – 7
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 132 – 6AB71 – .... 21,6 25,527
6SE7 022 – 66SE7 022 – 7
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 134 – 6AB71 – .... 27 3427
6SE7 023 – 46SE7 022 – 7
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 136 – 6AB71 – .... 34 3434
6SE7 023 – 46SE7 023 – 4
TE
PP77
00
1,5 4 x 6 6FX7 002 – 5 7A51 – . . . 0
• Umrichter• Wechselrichter
ET
• Kompakt-PLUS P
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.2) Gleicher Flansch wie bei Bauform IM B5, jedoch mit Gewindeeinsatz
in den vier Befestigungslöchern.
3) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
Siemens DA 65.3 · 20042/14
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6Selbstkühlung
Synchron-Servomotoren
2
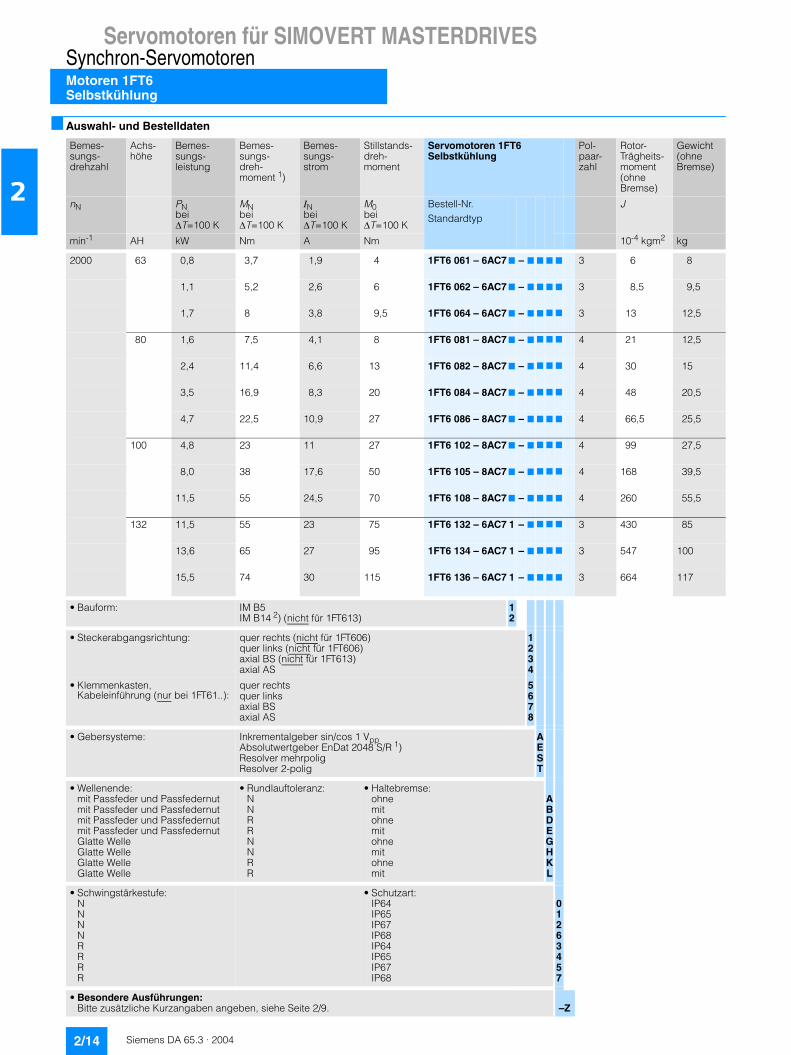
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Servomotoren 1FT6 Selbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Standardtyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
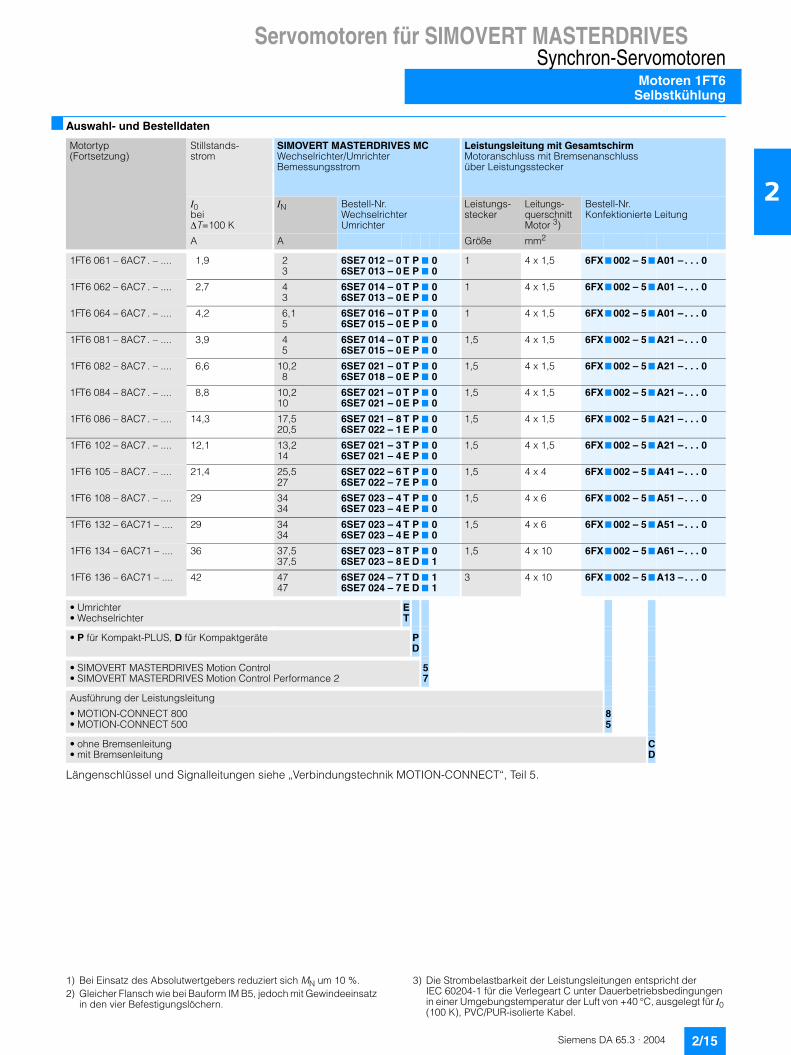
2000 63 0,8 3,7 1,9 4 1FT6 061 – 6AC7 7 – 7 7 7 7 3 6 8
1,1 5,2 2,6 6 1FT6 062 – 6AC7 7 – 7 7 7 7 3 8,5 9,5
1,7 8 3,8 9,5 1FT6 064 – 6AC7 7 – 7 7 7 7 3 13 12,5
80 1,6 7,5 4,1 8 1FT6 081 – 8AC7 7 – 7 7 7 7 4 21 12,5
2,4 11,4 6,6 13 1FT6 082 – 8AC7 7 – 7 7 7 7 4 30 15
3,5 16,9 8,3 20 1FT6 084 – 8AC7 7 – 7 7 7 7 4 48 20,5
4,7 22,5 10,9 27 1FT6 086 – 8AC7 7 – 7 7 7 7 4 66,5 25,5
100 4,8 23 11 27 1FT6 102 – 8AC7 7 – 7 7 7 7 4 99 27,5
8,0 38 17,6 50 1FT6 105 – 8AC7 7 – 7 7 7 7 4 168 39,5
11,5 55 24,5 70 1FT6 108 – 8AC7 7 – 7 7 7 7 4 260 55,5
132 11,5 55 23 75 1FT6 132 – 6AC7 1 – 7 7 7 7 3 430 85
13,6 65 27 95 1FT6 134 – 6AC7 1 – 7 7 7 7 3 547 100
15,5 74 30 115 1FT6 136 – 6AC7 1 – 7 7 7 7 3 664 117
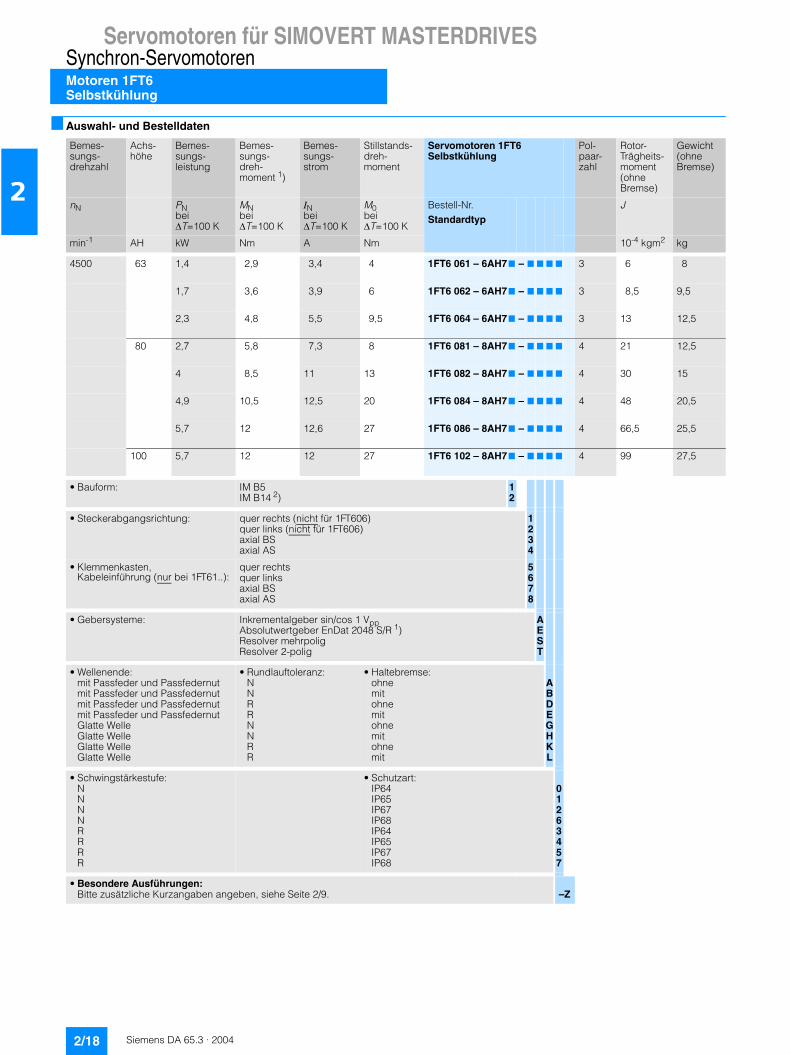
• Bauform: IM B5IM B14 2) (nicht für 1FT613)
12
• Steckerabgangsrichtung: quer rechts (nicht für 1FT606)quer links (nicht für 1FT606)axial BS (nicht für 1FT613)axial AS
1234
• Klemmenkasten, Kabeleinführung (nur bei 1FT61..):
quer rechtsquer linksaxial BSaxial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1)Resolver mehrpoligResolver 2-polig
AEST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte WelleGlatte WelleGlatte Welle
• Rundlauftoleranz:NNRRNNRR
• Haltebremse:ohnemitohnemitohnemitohnemit
ABDEGHKL
• Schwingstärkestufe:NNNNRRRR
• Schutzart:IP64IP65IP67IP68IP64IP65IP67IP68
01263457
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
Siemens DA 65.3 · 2004 2/15
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6Selbstkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss mit Bremsenanschluss über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 3)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FT6 061 – 6AC7 . – .... 1,9 23
6SE7 012 – 06SE7 013 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 062 – 6AC7 . – .... 2,7 43
6SE7 014 – 06SE7 013 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 6AC7 . – .... 4,2 6,15
6SE7 016 – 06SE7 015 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 081 – 8AC7 . – .... 3,9 45
6SE7 014 – 06SE7 015 – 0
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 082 – 8AC7 . – .... 6,6 10,28
6SE7 021 – 06SE7 018 – 0
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 084 – 8AC7 . – .... 8,8 10,210
6SE7 021 – 06SE7 021 – 0
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 086 – 8AC7 . – .... 14,3 17,520,5
6SE7 021 – 86SE7 022 – 1
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 102 – 8AC7 . – .... 12,1 13,214
6SE7 021 – 36SE7 021 – 4
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 105 – 8AC7 . – .... 21,4 25,527
6SE7 022 – 66SE7 022 – 7
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 108 – 8AC7 . – .... 29 3434
6SE7 023 – 46SE7 023 – 4
TE
PP77
00
1,5 4 x 6 6FX7 002 – 5 7A51 – . . . 0
1FT6 132 – 6AC71 – .... 29 3434
6SE7 023 – 46SE7 023 – 4
TE
PP77
00
1,5 4 x 6 6FX7 002 – 5 7A51 – . . . 0
1FT6 134 – 6AC71 – .... 36 37,537,5
6SE7 023 – 86SE7 023 – 8
TE
PD77
01
1,5 4 x 10 6FX7 002 – 5 7A61 – . . . 0
1FT6 136 – 6AC71 – .... 42 4747
6SE7 024 – 76SE7 024 – 7
TE
DD77
11
3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
• Umrichter• Wechselrichter
ET
• P für Kompakt-PLUS, D für Kompaktgeräte PD
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.2) Gleicher Flansch wie bei Bauform IM B5, jedoch mit Gewindeeinsatz
in den vier Befestigungslöchern.
3) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
Siemens DA 65.3 · 20042/16
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6Selbstkühlung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Servomotoren 1FT6 Selbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Standardtyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
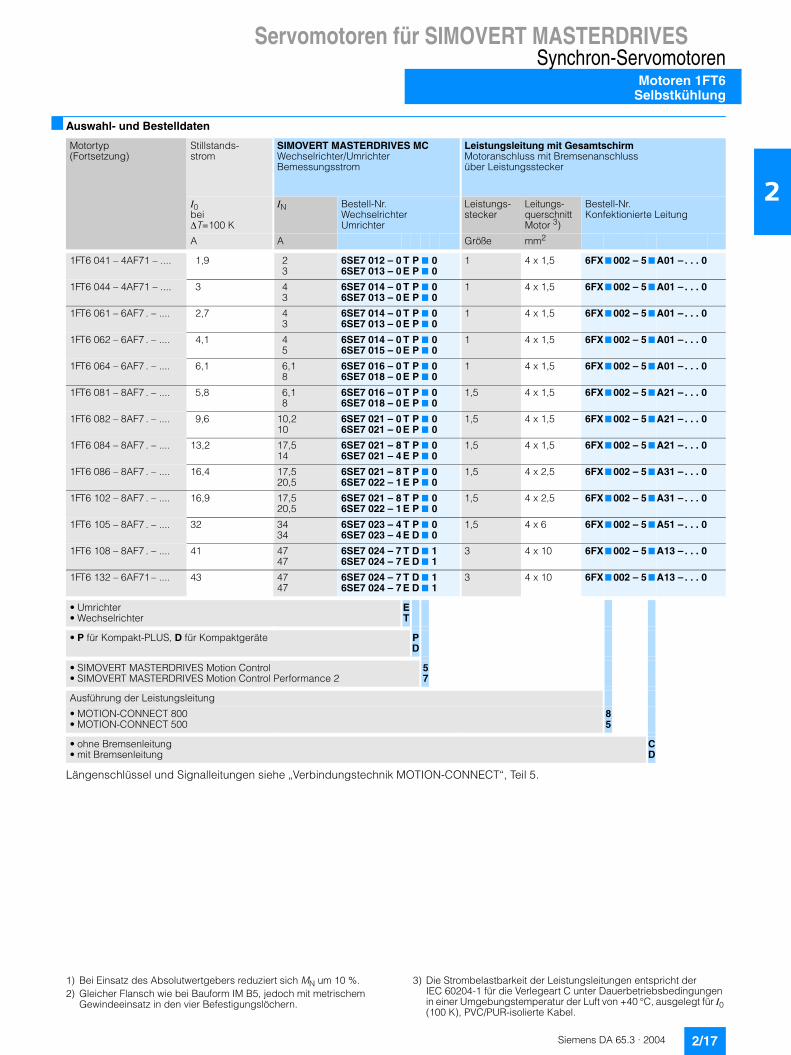
3000 48 0,7 2,15 1,7 2,6 1FT6 041 – 4AF7 1 – 7 7 7 7 2 2,9 6,6
1,4 4,3 2,9 5 1FT6 044 – 4AF7 1 – 7 7 7 7 2 5,1 8,3
63 1,1 3,5 2,6 4 1FT6 061 – 6AF7 7 – 7 7 7 7 3 6 8
1,5 4,7 3,4 6 1FT6 062 – 6AF7 7 – 7 7 7 7 3 8,5 9,5
2,2 7 4,9 9,5 1FT6 064 – 6AF7 7 – 7 7 7 7 3 13 12,5
80 2,2 6,9 5,6 8 1FT6 081 – 8AF7 7 – 7 7 7 7 4 21 12,5
3,2 10,3 8,7 13 1FT6 082 – 8AF7 7 – 7 7 7 7 4 30 15
4,6 14,7 11 20 1FT6 084 – 8AF7 7 – 7 7 7 7 4 48 20,5
5,8 18,5 13 27 1FT6 086 – 8AF7 7 – 7 7 7 7 4 66,5 25,5
100 6,1 19,5 13,2 27 1FT6 102 – 8AF7 7 – 7 7 7 7 4 99 27,5
9,7 31 22,5 50 1FT6 105 – 8AF7 7 – 7 7 7 7 4 168 39,5
11,6 37 25 70 1FT6 108 – 8AF7 7 – 7 7 7 7 4 260 55,5
132 11,3 36 23 75 1FT6 132 – 6AF7 1 – 7 7 7 7 3 430 85
• Bauform: IM B5IM B14 2) (nicht für 1FT604, 1FT613)
12
• Steckerabgangsrichtung: quer rechts (nicht für 1FT604, 1FT606)quer links (nicht für 1FT604, 1FT606)axial BS (nicht für 1FT613)axial AS
1234
• Klemmenkasten, Kabeleinführung (nur bei 1FT61..):
quer rechtsquer linksaxial BSaxial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1)Resolver mehrpoligResolver 2-polig
AEST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte WelleGlatte WelleGlatte Welle
• Rundlauftoleranz:NNRRNNRR
• Haltebremse:ohnemitohnemitohnemitohnemit
ABDEGHKL
• Schwingstärkestufe:NNNNRRRR
• Schutzart:IP64IP65IP67IP68IP64IP65IP67IP68
01263457
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
Siemens DA 65.3 · 2004 2/17
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6Selbstkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss mit Bremsenanschluss über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 3)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FT6 041 – 4AF71 – .... 1,9 23
6SE7 012 – 06SE7 013 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 044 – 4AF71 – .... 3 43
6SE7 014 – 06SE7 013 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 061 – 6AF7 . – .... 2,7 43
6SE7 014 – 06SE7 013 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 062 – 6AF7 . – .... 4,1 45
6SE7 014 – 06SE7 015 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 6AF7 . – .... 6,1 6,18
6SE7 016 – 06SE7 018 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 081 – 8AF7 . – .... 5,8 6,18
6SE7 016 – 06SE7 018 – 0
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 082 – 8AF7 . – .... 9,6 10,210
6SE7 021 – 06SE7 021 – 0
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 084 – 8AF7 . – .... 13,2 17,514
6SE7 021 – 86SE7 021 – 4
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 086 – 8AF7 . – .... 16,4 17,520,5
6SE7 021 – 86SE7 022 – 1
TE
PP77
00
1,5 4 x 2,5 6FX7 002 – 5 7A31 – . . . 0
1FT6 102 – 8AF7 . – .... 16,9 17,520,5
6SE7 021 – 86SE7 022 – 1
TE
PP77
00
1,5 4 x 2,5 6FX7 002 – 5 7A31 – . . . 0
1FT6 105 – 8AF7 . – .... 32 3434
6SE7 023 – 46SE7 023 – 4
TE
PD77
00
1,5 4 x 6 6FX7 002 – 5 7A51 – . . . 0
1FT6 108 – 8AF7 . – .... 41 4747
6SE7 024 – 76SE7 024 – 7
TE
DD77
11
3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
1FT6 132 – 6AF71 – .... 43 4747
6SE7 024 – 76SE7 024 – 7
TE
DD77
11
3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
• Umrichter• Wechselrichter
ET
• P für Kompakt-PLUS, D für Kompaktgeräte PD
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.2) Gleicher Flansch wie bei Bauform IM B5, jedoch mit metrischem
Gewindeeinsatz in den vier Befestigungslöchern.
3) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
Siemens DA 65.3 · 20042/18
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6Selbstkühlung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Servomotoren 1FT6 Selbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Standardtyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
4500 63 1,4 2,9 3,4 4 1FT6 061 – 6AH77 – 7 7 7 7 3 6 8
1,7 3,6 3,9 6 1FT6 062 – 6AH77 – 7 7 7 7 3 8,5 9,5
2,3 4,8 5,5 9,5 1FT6 064 – 6AH77 – 7 7 7 7 3 13 12,5
80 2,7 5,8 7,3 8 1FT6 081 – 8AH77 – 7 7 7 7 4 21 12,5
4 8,5 11 13 1FT6 082 – 8AH77 – 7 7 7 7 4 30 15
4,9 10,5 12,5 20 1FT6 084 – 8AH77 – 7 7 7 7 4 48 20,5
5,7 12 12,6 27 1FT6 086 – 8AH77 – 7 7 7 7 4 66,5 25,5
100 5,7 12 12 27 1FT6 102 – 8AH77 – 7 7 7 7 4 99 27,5
• Bauform: IM B5IM B14 2)
12
• Steckerabgangsrichtung: quer rechts (nicht für 1FT606)quer links (nicht für 1FT606)axial BSaxial AS
1234
• Klemmenkasten, Kabeleinführung (nur bei 1FT61..):
quer rechtsquer linksaxial BSaxial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1)Resolver mehrpoligResolver 2-polig
AEST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte WelleGlatte WelleGlatte Welle
• Rundlauftoleranz:NNRRNNRR
• Haltebremse:ohnemitohnemitohnemitohnemit
ABDEGHKL
• Schwingstärkestufe:NNNNRRRR
• Schutzart:IP64IP65IP67IP68IP64IP65IP67IP68
01263457
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
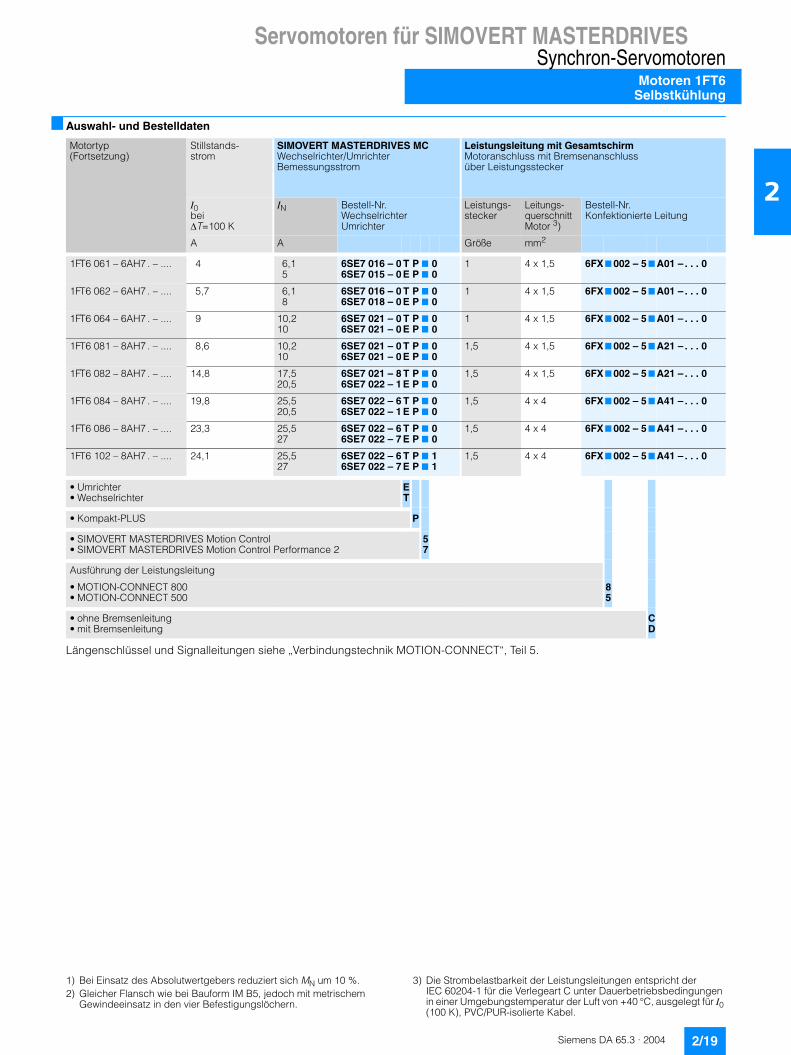
Siemens DA 65.3 · 2004 2/19
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6Selbstkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss mit Bremsenanschluss über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 3)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FT6 061 – 6AH7 . – .... 4 6,15
6SE7 016 – 06SE7 015 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 062 – 6AH7 . – .... 5,7 6,18
6SE7 016 – 06SE7 018 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 6AH7 . – .... 9 10,210
6SE7 021 – 06SE7 021 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 081 – 8AH7 . – .... 8,6 10,210
6SE7 021 – 06SE7 021 – 0
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 082 – 8AH7 . – .... 14,8 17,520,5
6SE7 021 – 86SE7 022 – 1
TE
PP77
00
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 084 – 8AH7 . – .... 19,8 25,520,5
6SE7 022 – 66SE7 022 – 1
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 086 – 8AH7 . – .... 23,3 25,527
6SE7 022 – 66SE7 022 – 7
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 102 – 8AH7 . – .... 24,1 25,527
6SE7 022 – 66SE7 022 – 7
TE
PP77
11
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
• Umrichter• Wechselrichter
ET
• Kompakt-PLUS P
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.2) Gleicher Flansch wie bei Bauform IM B5, jedoch mit metrischem
Gewindeeinsatz in den vier Befestigungslöchern.
3) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
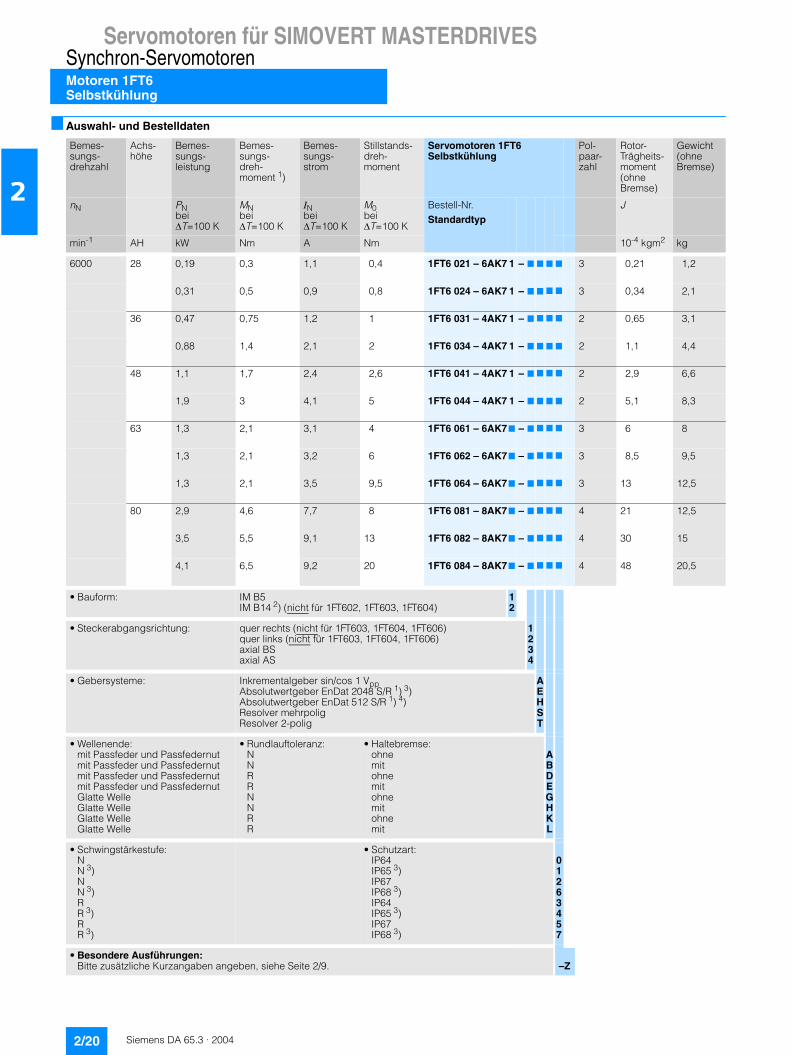
Siemens DA 65.3 · 20042/20
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6Selbstkühlung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Servomotoren 1FT6 Selbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Standardtyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
6000 28 0,19 0,3 1,1 0,4 1FT6 021 – 6AK7 1 – 7 7 7 7 3 0,21 1,2
0,31 0,5 0,9 0,8 1FT6 024 – 6AK7 1 – 7 7 7 7 3 0,34 2,1
36 0,47 0,75 1,2 1 1FT6 031 – 4AK7 1 – 7 7 7 7 2 0,65 3,1
0,88 1,4 2,1 2 1FT6 034 – 4AK7 1 – 7 7 7 7 2 1,1 4,4
48 1,1 1,7 2,4 2,6 1FT6 041 – 4AK7 1 – 7 7 7 7 2 2,9 6,6
1,9 3 4,1 5 1FT6 044 – 4AK7 1 – 7 7 7 7 2 5,1 8,3
63 1,3 2,1 3,1 4 1FT6 061 – 6AK77 – 7 7 7 7 3 6 8
1,3 2,1 3,2 6 1FT6 062 – 6AK77 – 7 7 7 7 3 8,5 9,5
1,3 2,1 3,5 9,5 1FT6 064 – 6AK77 – 7 7 7 7 3 13 12,5
80 2,9 4,6 7,7 8 1FT6 081 – 8AK77 – 7 7 7 7 4 21 12,5
3,5 5,5 9,1 13 1FT6 082 – 8AK77 – 7 7 7 7 4 30 15
4,1 6,5 9,2 20 1FT6 084 – 8AK77 – 7 7 7 7 4 48 20,5
• Bauform: IM B5IM B14 2) (nicht für 1FT602, 1FT603, 1FT604)
12
• Steckerabgangsrichtung: quer rechts (nicht für 1FT603, 1FT604, 1FT606)quer links (nicht für 1FT603, 1FT604, 1FT606)axial BSaxial AS
1234
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1) 3)Absolutwertgeber EnDat 512 S/R 1) 4)Resolver mehrpoligResolver 2-polig
AEHST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte WelleGlatte WelleGlatte Welle
• Rundlauftoleranz:NNRRNNRR
• Haltebremse:ohnemitohnemitohnemitohnemit
ABDEGHKL
• Schwingstärkestufe:NN 3)NN 3)RR 3)RR 3)
• Schutzart:IP64IP65 3)IP67IP68 3)IP64IP65 3)IP67IP68 3)
01263457
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
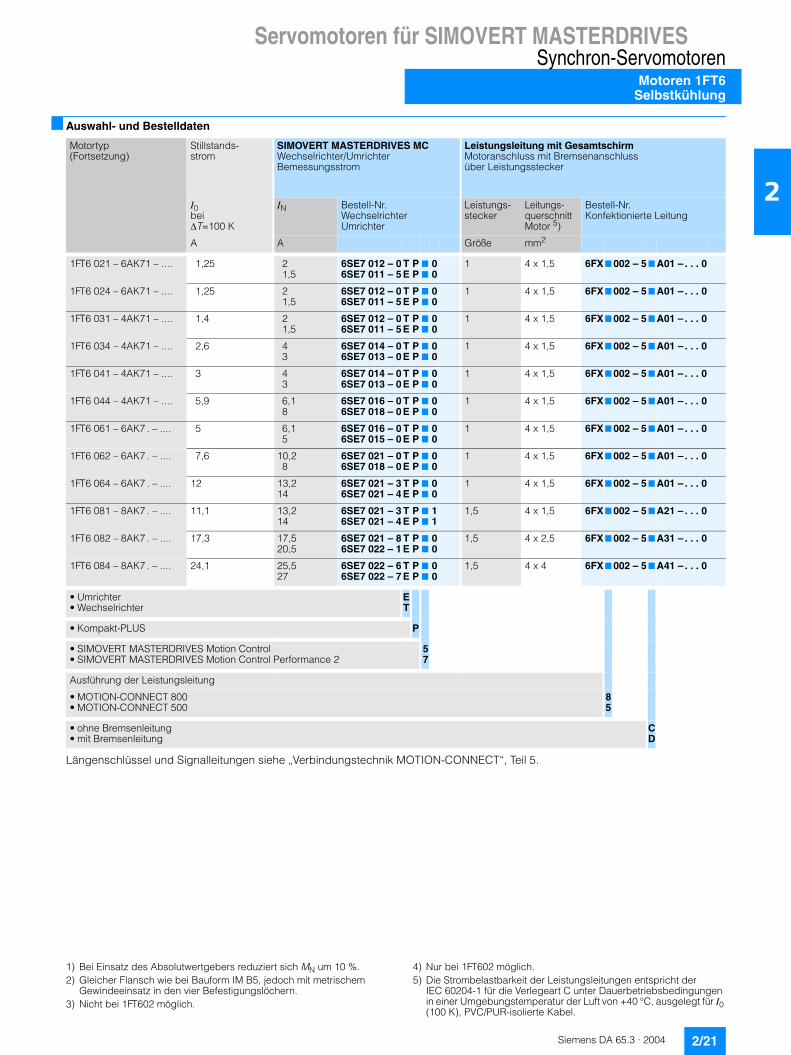
Siemens DA 65.3 · 2004 2/21
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6Selbstkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss mit Bremsenanschluss über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 5)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FT6 021 – 6AK71 – .... 1,25 21,5
6SE7 012 – 06SE7 011 – 5
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 024 – 6AK71 – .... 1,25 21,5
6SE7 012 – 06SE7 011 – 5
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 031 – 4AK71 – .... 1,4 21,5
6SE7 012 – 06SE7 011 – 5
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 034 – 4AK71 – .... 2,6 43
6SE7 014 – 06SE7 013 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 041 – 4AK71 – .... 3 43
6SE7 014 – 06SE7 013 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 044 – 4AK71 – .... 5,9 6,18
6SE7 016 – 06SE7 018 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 061 – 6AK7 . – .... 5 6,15
6SE7 016 – 06SE7 015 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 062 – 6AK7 . – .... 7,6 10,28
6SE7 021 – 06SE7 018 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 6AK7 . – .... 12 13,214
6SE7 021 – 36SE7 021 – 4
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 081 – 8AK7 . – .... 11,1 13,214
6SE7 021 – 36SE7 021 – 4
TE
PP77
11
1,5 4 x 1,5 6FX7 002 – 5 7A21 – . . . 0
1FT6 082 – 8AK7 . – .... 17,3 17,520,5
6SE7 021 – 86SE7 022 – 1
TE
PP77
00
1,5 4 x 2,5 6FX7 002 – 5 7A31 – . . . 0
1FT6 084 – 8AK7 . – .... 24,1 25,527
6SE7 022 – 66SE7 022 – 7
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
• Umrichter• Wechselrichter
ET
• Kompakt-PLUS P
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.2) Gleicher Flansch wie bei Bauform IM B5, jedoch mit metrischem
Gewindeeinsatz in den vier Befestigungslöchern.3) Nicht bei 1FT602 möglich.
4) Nur bei 1FT602 möglich.5) Die Strombelastbarkeit der Leistungsleitungen entspricht der
IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
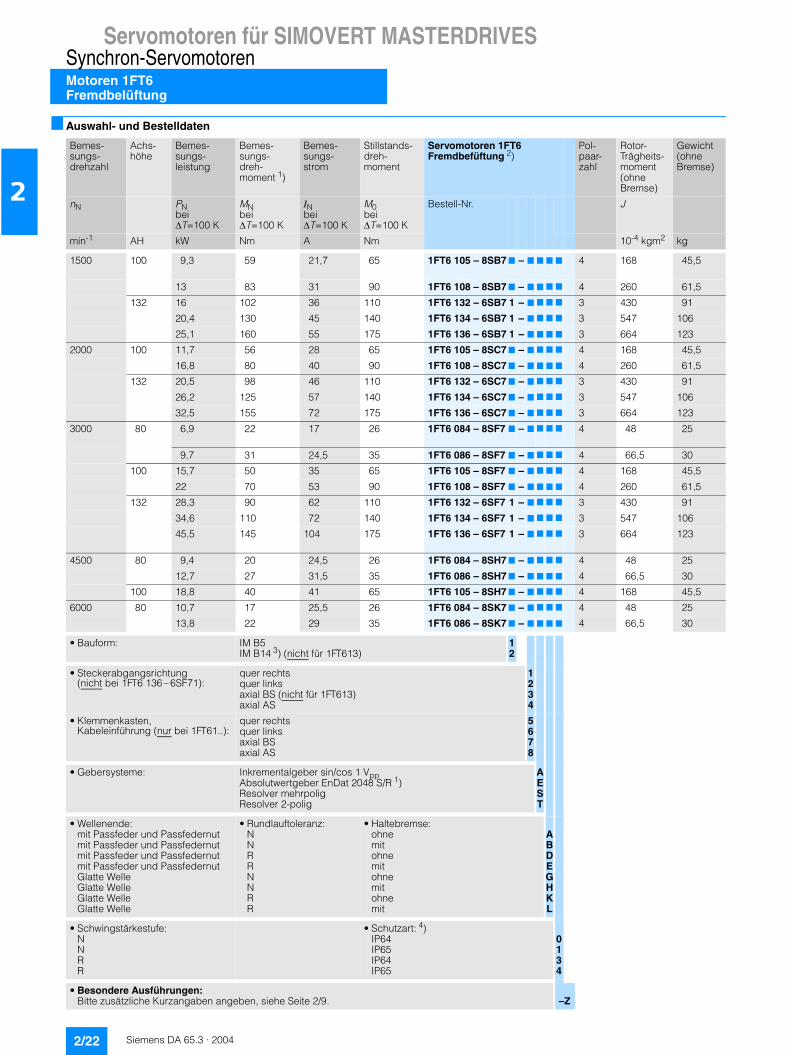
Siemens DA 65.3 · 20042/22
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6Fremdbelüftung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Servomotoren 1FT6 Fremdbefüftung 2)
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr. J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
1500 100 9,3 59 21,7 65 1FT6 105 – 8SB7 7 – 7 7 7 7 4 168 45,5
13 83 31 90 1FT6 108 – 8SB7 7 – 7 7 7 7 4 260 61,5
132 16 102 36 110 1FT6 132 – 6SB7 1 – 7 7 7 7 3 430 91
20,4 130 45 140 1FT6 134 – 6SB7 1 – 7 7 7 7 3 547 106
25,1 160 55 175 1FT6 136 – 6SB7 1 – 7 7 7 7 3 664 123
2000 100 11,7 56 28 65 1FT6 105 – 8SC7 7 – 7 7 7 7 4 168 45,5
16,8 80 40 90 1FT6 108 – 8SC7 7 – 7 7 7 7 4 260 61,5
132 20,5 98 46 110 1FT6 132 – 6SC7 7 – 7 7 7 7 3 430 91
26,2 125 57 140 1FT6 134 – 6SC7 7 – 7 7 7 7 3 547 106
32,5 155 72 175 1FT6 136 – 6SC7 7 – 7 7 7 7 3 664 123
3000 80 6,9 22 17 26 1FT6 084 – 8SF7 7 – 7 7 7 7 4 48 25
9,7 31 24,5 35 1FT6 086 – 8SF7 7 – 7 7 7 7 4 66,5 30
100 15,7 50 35 65 1FT6 105 – 8SF7 7 – 7 7 7 7 4 168 45,5
22 70 53 90 1FT6 108 – 8SF7 7 – 7 7 7 7 4 260 61,5
132 28,3 90 62 110 1FT6 132 – 6SF7 1 – 7 7 7 7 3 430 91
34,6 110 72 140 1FT6 134 – 6SF7 1 – 7 7 7 7 3 547 106
45,5 145 104 175 1FT6 136 – 6SF7 1 – 7 7 7 7 3 664 123
4500 80 9,4 20 24,5 26 1FT6 084 – 8SH7 7 – 7 7 7 7 4 48 25
12,7 27 31,5 35 1FT6 086 – 8SH7 7 – 7 7 7 7 4 66,5 30
100 18,8 40 41 65 1FT6 105 – 8SH7 7 – 7 7 7 7 4 168 45,5
6000 80 10,7 17 25,5 26 1FT6 084 – 8SK7 7 – 7 7 7 7 4 48 25
13,8 22 29 35 1FT6 086 – 8SK7 7 – 7 7 7 7 4 66,5 30
• Bauform: IM B5IM B14 3) (nicht für 1FT613)
12
• Steckerabgangsrichtung(nicht bei 1FT6 136 – 6SF71):
quer rechtsquer linksaxial BS (nicht für 1FT613)axial AS
1234
• Klemmenkasten, Kabeleinführung (nur bei 1FT61..):
quer rechtsquer linksaxial BSaxial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1)Resolver mehrpoligResolver 2-polig
AEST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte WelleGlatte WelleGlatte Welle
• Rundlauftoleranz:NNRRNNRR
• Haltebremse:ohnemitohnemitohnemitohnemit
ABDEGHKL
• Schwingstärkestufe:NNRR
• Schutzart: 4)IP64IP65IP64IP65
0134
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
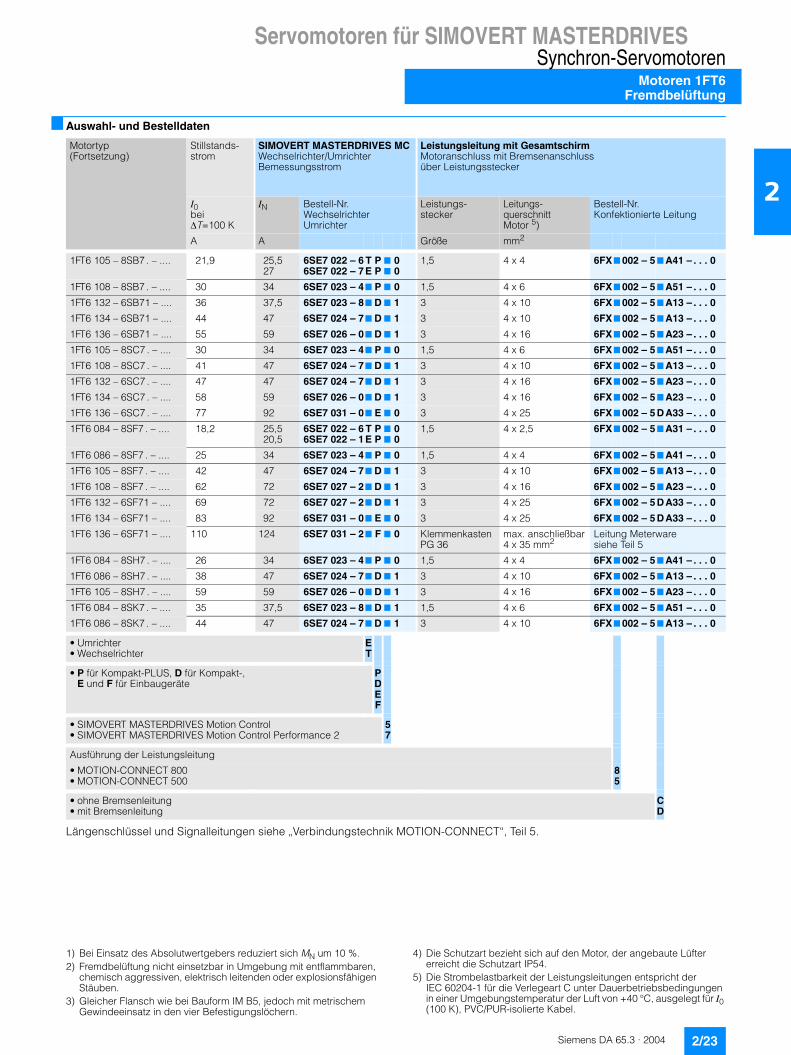
Siemens DA 65.3 · 2004 2/23
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6Fremdbelüftung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss mit Bremsenanschluss über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 5)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FT6 105 – 8SB7 . – .... 21,9 25,527
6SE7 022 – 66SE7 022 – 7
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 108 – 8SB7 . – .... 30 34 6SE7 023 – 47 P 7 0 1,5 4 x 6 6FX7 002 – 5 7A51 – . . . 0
1FT6 132 – 6SB71 – .... 36 37,5 6SE7 023 – 87 D 7 1 3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
1FT6 134 – 6SB71 – .... 44 47 6SE7 024 – 77 D 7 1 3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
1FT6 136 – 6SB71 – .... 55 59 6SE7 026 – 07 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 0
1FT6 105 – 8SC7 . – .... 30 34 6SE7 023 – 47 P 7 0 1,5 4 x 6 6FX7 002 – 5 7A51 – . . . 0
1FT6 108 – 8SC7 . – .... 41 47 6SE7 024 – 77 D 7 1 3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
1FT6 132 – 6SC7 . – .... 47 47 6SE7 024 – 77 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 0
1FT6 134 – 6SC7 . – .... 58 59 6SE7 026 – 07 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 0
1FT6 136 – 6SC7 . – .... 77 92 6SE7 031 – 07 E 7 0 3 4 x 25 6FX7 002 – 5 D A33 – . . . 0
1FT6 084 – 8SF7 . – .... 18,2 25,520,5
6SE7 022 – 66SE7 022 – 1
TE
PP77
00
1,5 4 x 2,5 6FX7 002 – 5 7A31 – . . . 0
1FT6 086 – 8SF7 . – .... 25 34 6SE7 023 – 47 P 7 0 1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 105 – 8SF7 . – .... 42 47 6SE7 024 – 77 D 7 1 3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
1FT6 108 – 8SF7 . – .... 62 72 6SE7 027 – 27 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 0
1FT6 132 – 6SF71 – .... 69 72 6SE7 027 – 27 D 7 1 3 4 x 25 6FX7 002 – 5 D A33 – . . . 0
1FT6 134 – 6SF71 – .... 83 92 6SE7 031 – 07 E 7 0 3 4 x 25 6FX7 002 – 5 D A33 – . . . 0
1FT6 136 – 6SF71 – .... 110 124 6SE7 031 – 27 F 7 0 KlemmenkastenPG 36
max. anschließbar4 x 35 mm2
Leitung Meterware siehe Teil 5
1FT6 084 – 8SH7 . – .... 26 34 6SE7 023 – 47 P 7 0 1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 086 – 8SH7 . – .... 38 47 6SE7 024 – 77 D 7 1 3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
1FT6 105 – 8SH7 . – .... 59 59 6SE7 026 – 07 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 0
1FT6 084 – 8SK7 . – .... 35 37,5 6SE7 023 – 87 D 7 1 1,5 4 x 6 6FX7 002 – 5 7A51 – . . . 0
1FT6 086 – 8SK7 . – .... 44 47 6SE7 024 – 77 D 7 1 3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
• Umrichter• Wechselrichter
ET
• P für Kompakt-PLUS, D für Kompakt-, E und F für Einbaugeräte
PDEF
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.2) Fremdbelüftung nicht einsetzbar in Umgebung mit entflammbaren,
chemisch aggressiven, elektrisch leitenden oder explosionsfähigen Stäuben.
3) Gleicher Flansch wie bei Bauform IM B5, jedoch mit metrischem Gewindeeinsatz in den vier Befestigungslöchern.
4) Die Schutzart bezieht sich auf den Motor, der angebaute Lüfter erreicht die Schutzart IP54.
5) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
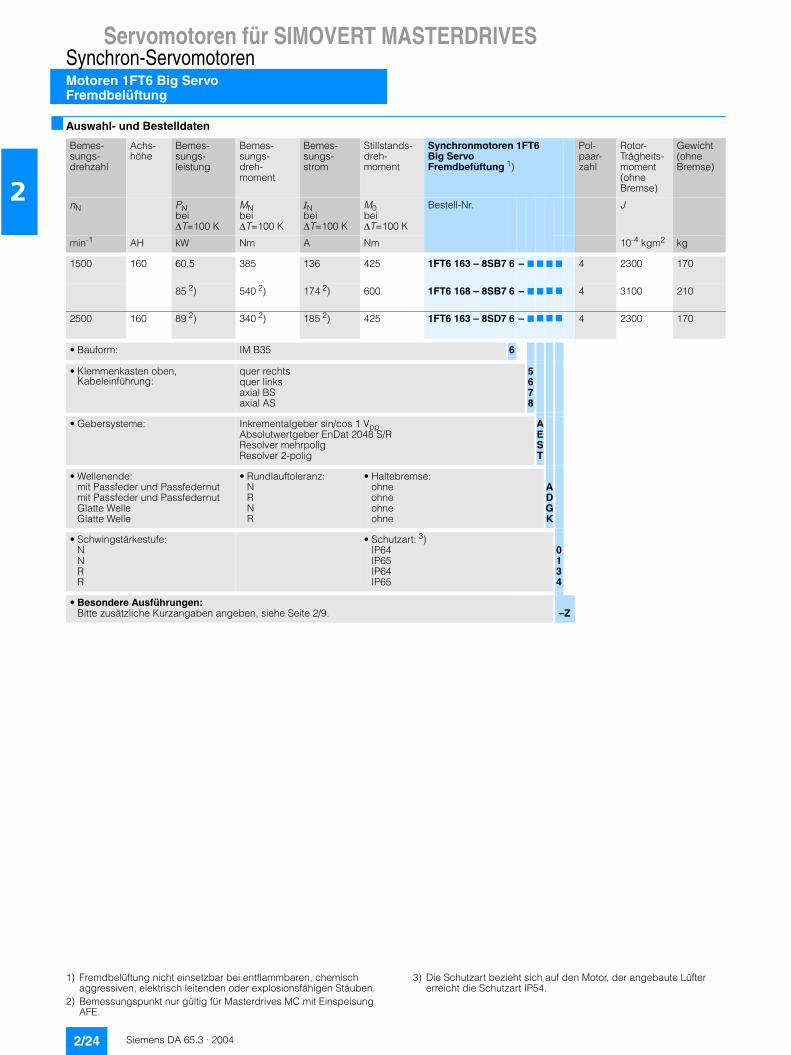
Siemens DA 65.3 · 20042/24
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6 Big ServoFremdbelüftung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment
Bemes-sungs-strom
Stillstands-dreh-moment
Synchronmotoren 1FT6 Big ServoFremdbefüftung 1)
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr. J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
1500 160 60,5 385 136 425 1FT6 163 – 8SB7 6 – 7 7 7 7 4 2300 170
85 2) 540 2) 174 2) 600 1FT6 168 – 8SB7 6 – 7 7 7 7 4 3100 210
2500 160 89 2) 340 2) 185 2) 425 1FT6 163 – 8SD7 6 – 7 7 7 7 4 2300 170
• Bauform: IM B35 6
• Klemmenkasten oben, Kabeleinführung:
quer rechtsquer linksaxial BSaxial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/RResolver mehrpoligResolver 2-polig
AEST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte Welle
• Rundlauftoleranz:NRNR
• Haltebremse:ohneohneohneohne
ADGK
• Schwingstärkestufe:NNRR
• Schutzart: 3)IP64IP65IP64IP65
0134
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
1) Fremdbelüftung nicht einsetzbar bei entflammbaren, chemisch aggressiven, elektrisch leitenden oder explosionsfähigen Stäuben.
2) Bemessungspunkt nur gültig für Masterdrives MC mit Einspeisung AFE.
3) Die Schutzart bezieht sich auf den Motor, der angebaute Lüfter erreicht die Schutzart IP54.
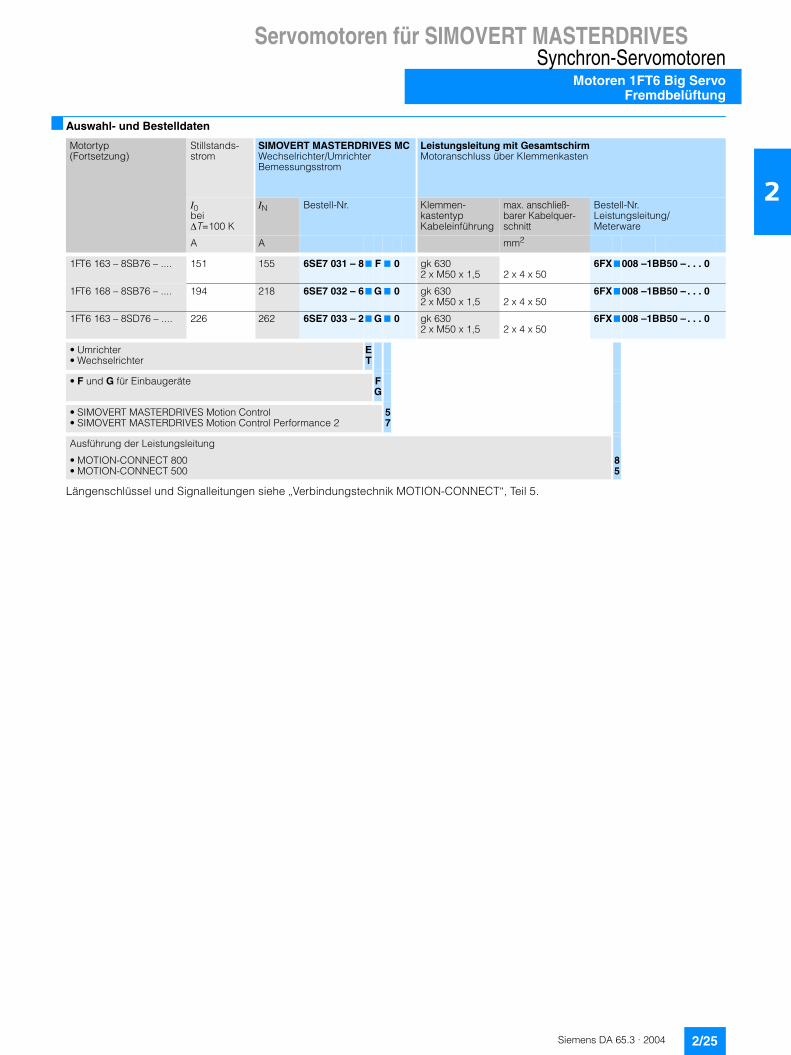
Siemens DA 65.3 · 2004 2/25
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6 Big ServoFremdbelüftung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss über Klemmenkasten
I0bei �T=100 K
IN Bestell-Nr. Klemmen- kastentyp Kabeleinführung
max. anschließ- barer Kabelquer-schnitt
Bestell-Nr.Leistungsleitung/Meterware
A A mm2
1FT6 163 – 8SB76 – .... 151 155 6SE7 031 – 87 F 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50
6FX7 008 –1BB50 – . . . 0
1FT6 168 – 8SB76 – .... 194 218 6SE7 032 – 67 G 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50
6FX7 008 –1BB50 – . . . 0
1FT6 163 – 8SD76 – .... 226 262 6SE7 033 – 27 G 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50
6FX7 008 –1BB50 – . . . 0
• Umrichter• Wechselrichter
ET
• F und G für Einbaugeräte FG
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
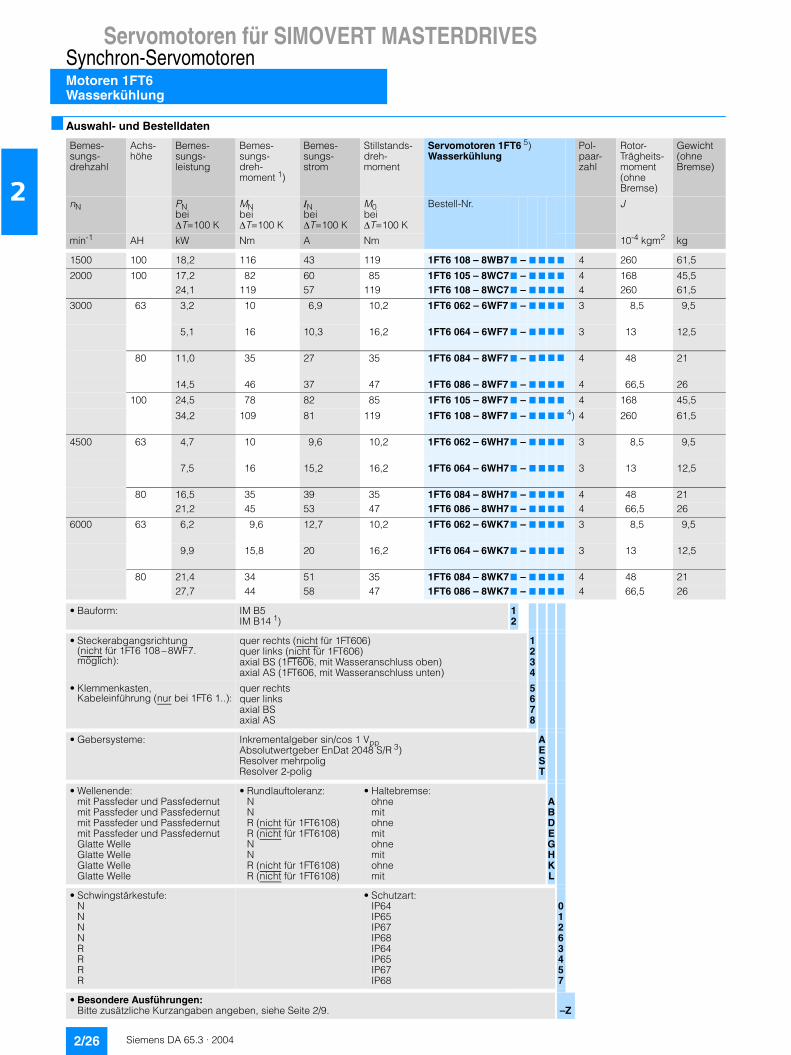
Siemens DA 65.3 · 20042/26
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6Wasserkühlung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Servomotoren 1FT6 5)Wasserkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr. J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
1500 100 18,2 116 43 119 1FT6 108 – 8WB77 – 7 7 7 7 4 260 61,5
2000 100 17,2 82 60 85 1FT6 105 – 8WC77 – 7 7 7 7 4 168 45,524,1 119 57 119 1FT6 108 – 8WC77 – 7 7 7 7 4 260 61,5
3000 63 3,2 10 6,9 10,2 1FT6 062 – 6WF7 7 – 7 7 7 7 3 8,5 9,5
5,1 16 10,3 16,2 1FT6 064 – 6WF7 7 – 7 7 7 7 3 13 12,5
80 11,0 35 27 35 1FT6 084 – 8WF7 7 – 7 7 7 7 4 48 21
14,5 46 37 47 1FT6 086 – 8WF7 7 – 7 7 7 7 4 66,5 26
100 24,5 78 82 85 1FT6 105 – 8WF7 7 – 7 7 7 7 4 168 45,5
34,2 109 81 119 1FT6 108 – 8WF7 7 – 7 7 7 7 4) 4 260 61,5
4500 63 4,7 10 9,6 10,2 1FT6 062 – 6WH77 – 7 7 7 7 3 8,5 9,5
7,5 16 15,2 16,2 1FT6 064 – 6WH77 – 7 7 7 7 3 13 12,5
80 16,5 35 39 35 1FT6 084 – 8WH77 – 7 7 7 7 4 48 2121,2 45 53 47 1FT6 086 – 8WH77 – 7 7 7 7 4 66,5 26
6000 63 6,2 9,6 12,7 10,2 1FT6 062 – 6WK77 – 7 7 7 7 3 8,5 9,5
9,9 15,8 20 16,2 1FT6 064 – 6WK77 – 7 7 7 7 3 13 12,5
80 21,4 34 51 35 1FT6 084 – 8WK77 – 7 7 7 7 4 48 2127,7 44 58 47 1FT6 086 – 8WK77 – 7 7 7 7 4 66,5 26
• Bauform: IM B5IM B14 1)
12
• Steckerabgangsrichtung(nicht für 1FT6 108 – 8WF7. möglich):
quer rechts (nicht für 1FT606)quer links (nicht für 1FT606)axial BS (1FT606, mit Wasseranschluss oben)axial AS (1FT606, mit Wasseranschluss unten)
1234
• Klemmenkasten, Kabeleinführung (nur bei 1FT6 1..):
quer rechtsquer linksaxial BSaxial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 3)Resolver mehrpoligResolver 2-polig
AEST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte WelleGlatte WelleGlatte Welle
• Rundlauftoleranz:NNR (nicht für 1FT6108)R (nicht für 1FT6108)NNR (nicht für 1FT6108)R (nicht für 1FT6108)
• Haltebremse:ohnemitohnemitohnemitohnemit
ABDEGHKL
• Schwingstärkestufe:NNNNRRRR
• Schutzart:IP64IP65IP67IP68IP64IP65IP67IP68
01263457
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
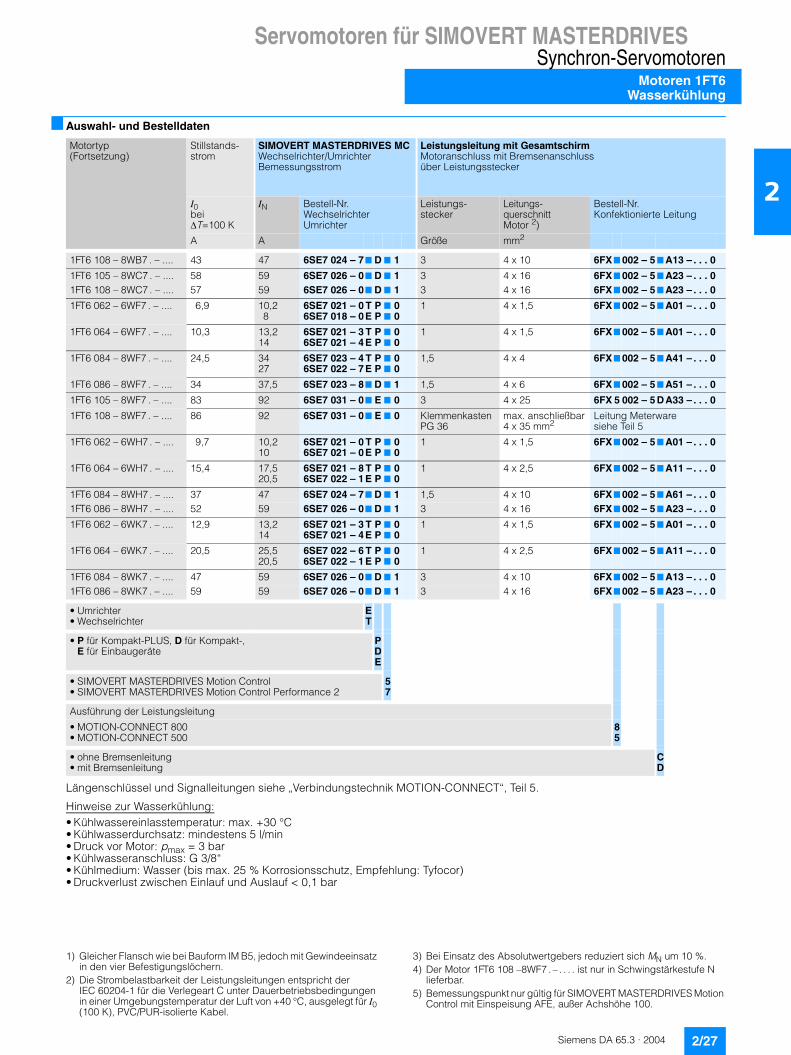
Siemens DA 65.3 · 2004 2/27
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6Wasserkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Hinweise zur Wasserkühlung:• Kühlwassereinlasstemperatur: max. +30 °C• Kühlwasserdurchsatz: mindestens 5 l/min• Druck vor Motor: pmax = 3 bar• Kühlwasseranschluss: G 3/8“• Kühlmedium: Wasser (bis max. 25 % Korrosionsschutz, Empfehlung: Tyfocor)• Druckverlust zwischen Einlauf und Auslauf < 0,1 bar
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss mit Bremsenanschluss über Leistungsstecker
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leistungs-stecker
Leitungs-querschnitt Motor 2)
Bestell-Nr.Konfektionierte Leitung
A A Größe mm2
1FT6 108 – 8WB7 . – .... 43 47 6SE7 024 – 77 D 7 1 3 4 x 10 6FX7 002 – 5 7A13 – . . . 0
1FT6 105 – 8WC7 . – .... 58 59 6SE7 026 – 07 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 01FT6 108 – 8WC7 . – .... 57 59 6SE7 026 – 07 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 0
1FT6 062 – 6WF7 . – .... 6,9 10,28
6SE7 021 – 06SE7 018 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 6WF7 . – .... 10,3 13,214
6SE7 021 – 36SE7 021 – 4
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 084 – 8WF7 . – .... 24,5 3427
6SE7 023 – 46SE7 022 – 7
TE
PP77
00
1,5 4 x 4 6FX7 002 – 5 7A41 – . . . 0
1FT6 086 – 8WF7 . – .... 34 37,5 6SE7 023 – 87 D 7 1 1,5 4 x 6 6FX7 002 – 5 7A51 – . . . 0
1FT6 105 – 8WF7 . – .... 83 92 6SE7 031 – 07 E 7 0 3 4 x 25 6FX 5 002 – 5 D A33 – . . . 0
1FT6 108 – 8WF7 . – .... 86 92 6SE7 031 – 07 E 7 0 KlemmenkastenPG 36
max. anschließbar4 x 35 mm2
Leitung Meterware siehe Teil 5
1FT6 062 – 6WH7 . – .... 9,7 10,210
6SE7 021 – 06SE7 021 – 0
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 6WH7 . – .... 15,4 17,520,5
6SE7 021 – 86SE7 022 – 1
TE
PP77
00
1 4 x 2,5 6FX7 002 – 5 7A11 – . . . 0
1FT6 084 – 8WH7 . – .... 37 47 6SE7 024 – 77 D 7 1 1,5 4 x 10 6FX7 002 – 5 7A61 – . . . 01FT6 086 – 8WH7 . – .... 52 59 6SE7 026 – 07 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 0
1FT6 062 – 6WK7 . – .... 12,9 13,214
6SE7 021 – 36SE7 021 – 4
TE
PP77
00
1 4 x 1,5 6FX7 002 – 5 7A01 – . . . 0
1FT6 064 – 6WK7 . – .... 20,5 25,520,5
6SE7 022 – 66SE7 022 – 1
TE
PP77
00
1 4 x 2,5 6FX7 002 – 5 7A11 – . . . 0
1FT6 084 – 8WK7 . – .... 47 59 6SE7 026 – 07 D 7 1 3 4 x 10 6FX7 002 – 5 7A13 – . . . 01FT6 086 – 8WK7 . – .... 59 59 6SE7 026 – 07 D 7 1 3 4 x 16 6FX7 002 – 5 7A23 – . . . 0
• Umrichter• Wechselrichter
ET
• P für Kompakt-PLUS, D für Kompakt-, E für Einbaugeräte
PDE
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
• ohne Bremsenleitung• mit Bremsenleitung
CD
1) Gleicher Flansch wie bei Bauform IM B5, jedoch mit Gewindeeinsatz in den vier Befestigungslöchern.
2) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
3) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.4) Der Motor 1FT6 108 –8WF7 . – . . . . ist nur in Schwingstärkestufe N
lieferbar.5) Bemessungspunkt nur gültig für SIMOVERT MASTERDRIVES Motion
Control mit Einspeisung AFE, außer Achshöhe 100.
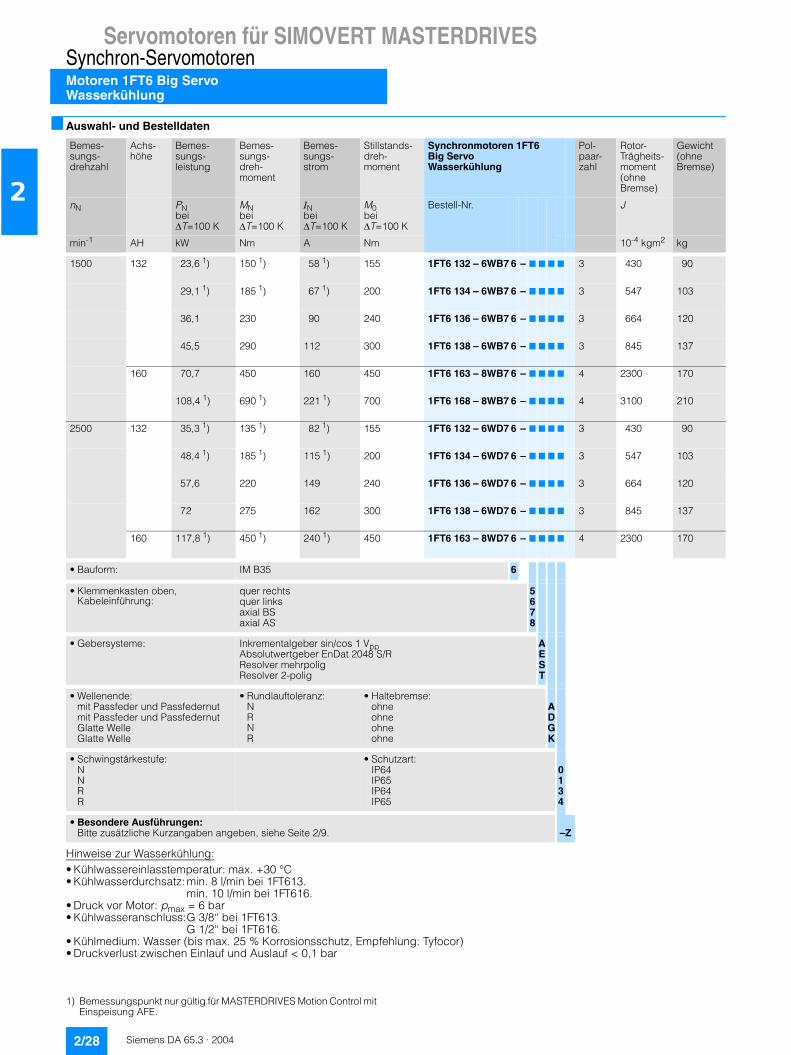
Siemens DA 65.3 · 20042/28
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FT6 Big ServoWasserkühlung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Hinweise zur Wasserkühlung:• Kühlwassereinlasstemperatur: max. +30 °C• Kühlwasserdurchsatz: min. 8 l/min bei 1FT613.
min. 10 l/min bei 1FT616.• Druck vor Motor: pmax = 6 bar• Kühlwasseranschluss:G 3/8“ bei 1FT613.
G 1/2“ bei 1FT616.• Kühlmedium: Wasser (bis max. 25 % Korrosionsschutz, Empfehlung: Tyfocor)• Druckverlust zwischen Einlauf und Auslauf < 0,1 bar
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh- moment
Bemes-sungs-strom
Stillstands-dreh-moment
Synchronmotoren 1FT6 Big ServoWasserkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr. J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
1500 132 23,6 1) 150 1) 58 1) 155 1FT6 132 – 6WB7 6 – 7 7 7 7 3 430 90
29,1 1) 185 1) 67 1) 200 1FT6 134 – 6WB7 6 – 7 7 7 7 3 547 103
36,1 230 90 240 1FT6 136 – 6WB7 6 – 7 7 7 7 3 664 120
45,5 290 112 300 1FT6 138 – 6WB7 6 – 7 7 7 7 3 845 137
160 70,7 450 160 450 1FT6 163 – 8WB7 6 – 7 7 7 7 4 2300 170
108,4 1) 690 1) 221 1) 700 1FT6 168 – 8WB7 6 – 7 7 7 7 4 3100 210
2500 132 35,3 1) 135 1) 82 1) 155 1FT6 132 – 6WD7 6 – 7 7 7 7 3 430 90
48,4 1) 185 1) 115 1) 200 1FT6 134 – 6WD7 6 – 7 7 7 7 3 547 103
57,6 220 149 240 1FT6 136 – 6WD7 6 – 7 7 7 7 3 664 120
72 275 162 300 1FT6 138 – 6WD7 6 – 7 7 7 7 3 845 137
160 117,8 1) 450 1) 240 1) 450 1FT6 163 – 8WD7 6 – 7 7 7 7 4 2300 170
• Bauform: IM B35 6
• Klemmenkasten oben, Kabeleinführung:
quer rechtsquer linksaxial BSaxial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/RResolver mehrpoligResolver 2-polig
AEST
• Wellenende:mit Passfeder und Passfedernutmit Passfeder und PassfedernutGlatte WelleGlatte Welle
• Rundlauftoleranz:NRNR
• Haltebremse:ohneohneohneohne
ADGK
• Schwingstärkestufe:NNRR
• Schutzart:IP64IP65IP64IP65
0134
• Besondere Ausführungen:Bitte zusätzliche Kurzangaben angeben, siehe Seite 2/9. –Z
1) Bemessungspunkt nur gültig für MASTERDRIVES Motion Control mit Einspeisung AFE.
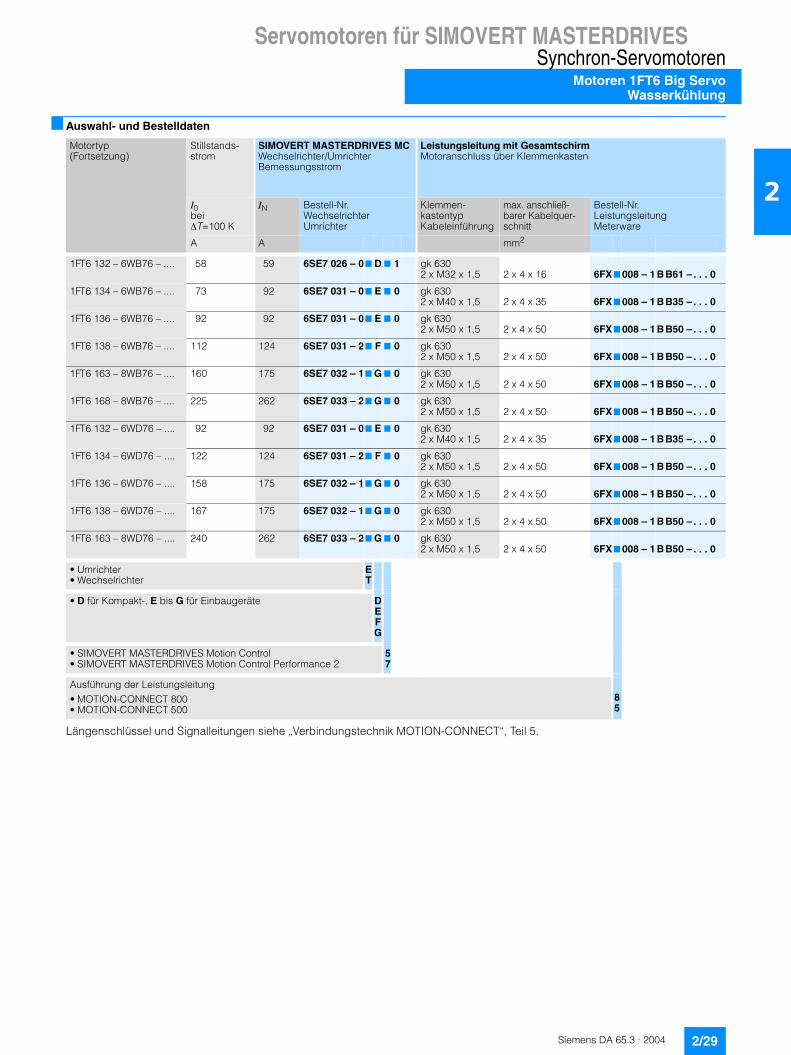
Siemens DA 65.3 · 2004 2/29
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FT6 Big ServoWasserkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Signalleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss über Klemmenkasten
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Klemmen- kastentyp Kabeleinführung
max. anschließ- barer Kabelquer-schnitt
Bestell-Nr.LeistungsleitungMeterware
A A mm2
1FT6 132 – 6WB76 – .... 58 59 6SE7 026 – 07 D 7 1 gk 6302 x M32 x 1,5 2 x 4 x 16 6FX7 008 – 1 B B61 – . . . 0
1FT6 134 – 6WB76 – .... 73 92 6SE7 031 – 07 E 7 0 gk 6302 x M40 x 1,5 2 x 4 x 35 6FX7 008 – 1 B B35 – . . . 0
1FT6 136 – 6WB76 – .... 92 92 6SE7 031 – 07 E 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50 6FX7 008 – 1 B B50 – . . . 0
1FT6 138 – 6WB76 – .... 112 124 6SE7 031 – 27 F 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50 6FX7 008 – 1 B B50 – . . . 0
1FT6 163 – 8WB76 – .... 160 175 6SE7 032 – 17 G 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50 6FX7 008 – 1 B B50 – . . . 0
1FT6 168 – 8WB76 – .... 225 262 6SE7 033 – 27 G 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50 6FX7 008 – 1 B B50 – . . . 0
1FT6 132 – 6WD76 – .... 92 92 6SE7 031 – 07 E 7 0 gk 6302 x M40 x 1,5 2 x 4 x 35 6FX7 008 – 1 B B35 – . . . 0
1FT6 134 – 6WD76 – .... 122 124 6SE7 031 – 27 F 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50 6FX7 008 – 1 B B50 – . . . 0
1FT6 136 – 6WD76 – .... 158 175 6SE7 032 – 17 G 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50 6FX7 008 – 1 B B50 – . . . 0
1FT6 138 – 6WD76 – .... 167 175 6SE7 032 – 17 G 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50 6FX7 008 – 1 B B50 – . . . 0
1FT6 163 – 8WD76 – .... 240 262 6SE7 033 – 27 G 7 0 gk 6302 x M50 x 1,5 2 x 4 x 50 6FX7 008 – 1 B B50 – . . . 0
• Umrichter• Wechselrichter
ET
• D für Kompakt-, E bis G für Einbaugeräte DEFG
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Ausführung der Leistungsleitung• MOTION-CONNECT 800• MOTION-CONNECT 500
85
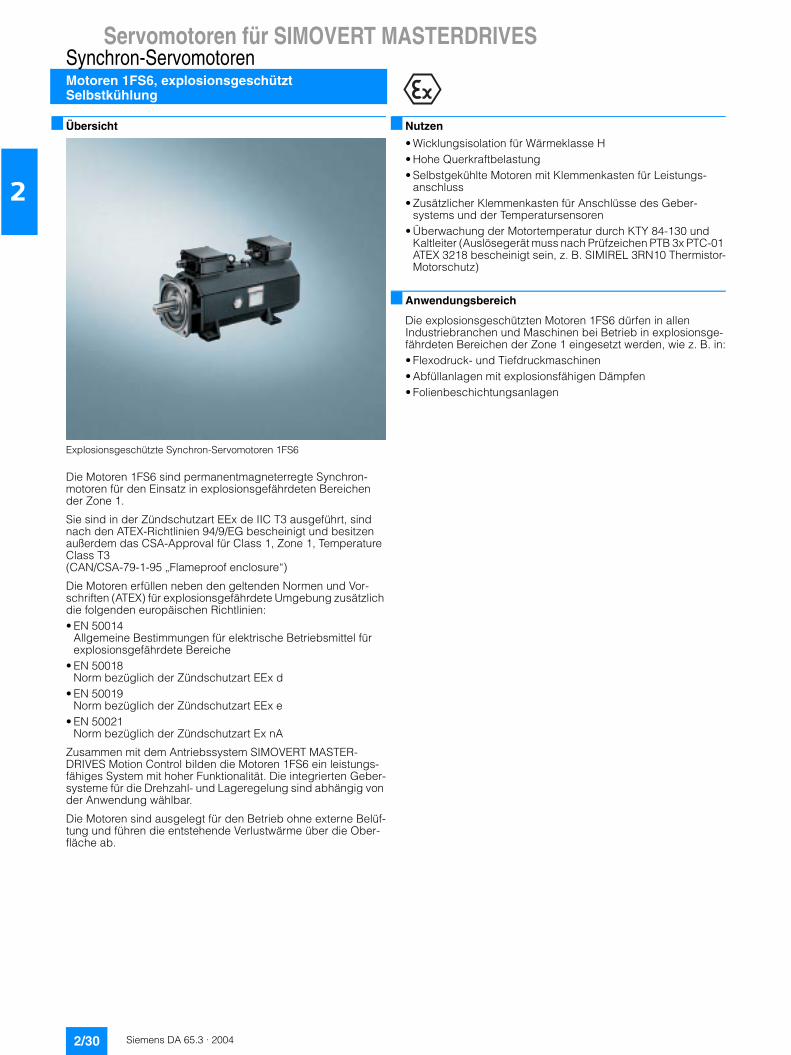
Siemens DA 65.3 · 20042/30
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FS6, explosionsgeschütztSelbstkühlung
Synchron-Servomotoren
2
■ Übersicht
Explosionsgeschützte Synchron-Servomotoren 1FS6
Die Motoren 1FS6 sind permanentmagneterregte Synchron-motoren für den Einsatz in explosionsgefährdeten Bereichen der Zone 1.
Sie sind in der Zündschutzart EEx de IIC T3 ausgeführt, sind nach den ATEX-Richtlinien 94/9/EG bescheinigt und besitzen außerdem das CSA-Approval für Class 1, Zone 1, Temperature Class T3(CAN/CSA-79-1-95 „Flameproof enclosure“)
Die Motoren erfüllen neben den geltenden Normen und Vor-schriften (ATEX) für explosionsgefährdete Umgebung zusätzlich die folgenden europäischen Richtlinien:• EN 50014
Allgemeine Bestimmungen für elektrische Betriebsmittel für explosionsgefährdete Bereiche
• EN 50018Norm bezüglich der Zündschutzart EEx d
• EN 50019Norm bezüglich der Zündschutzart EEx e
• EN 50021Norm bezüglich der Zündschutzart Ex nA
Zusammen mit dem Antriebssystem SIMOVERT MASTER-DRIVES Motion Control bilden die Motoren 1FS6 ein leistungs-fähiges System mit hoher Funktionalität. Die integrierten Geber-systeme für die Drehzahl- und Lageregelung sind abhängig von der Anwendung wählbar.
Die Motoren sind ausgelegt für den Betrieb ohne externe Belüf-tung und führen die entstehende Verlustwärme über die Ober-fläche ab.
■ Nutzen
• Wicklungsisolation für Wärmeklasse H• Hohe Querkraftbelastung• Selbstgekühlte Motoren mit Klemmenkasten für Leistungs-
anschluss• Zusätzlicher Klemmenkasten für Anschlüsse des Geber-
systems und der Temperatursensoren• Überwachung der Motortemperatur durch KTY 84-130 und
Kaltleiter (Auslösegerät muss nach Prüfzeichen PTB 3x PTC-01 ATEX 3218 bescheinigt sein, z. B. SIMIREL 3RN10 Thermistor-Motorschutz)
■ Anwendungsbereich
Die explosionsgeschützten Motoren 1FS6 dürfen in allen Industriebranchen und Maschinen bei Betrieb in explosionsge-fährdeten Bereichen der Zone 1 eingesetzt werden, wie z. B. in:• Flexodruck- und Tiefdruckmaschinen• Abfüllanlagen mit explosionsfähigen Dämpfen• Folienbeschichtungsanlagen
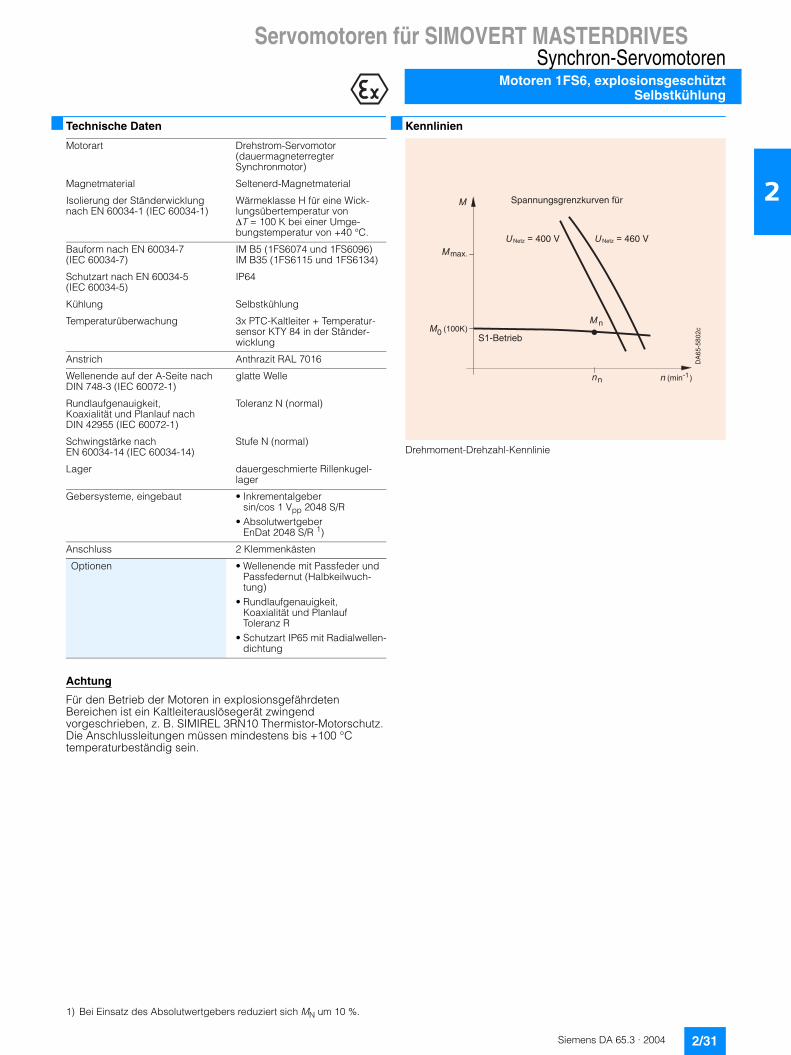
Siemens DA 65.3 · 2004 2/31
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FS6, explosionsgeschütztSelbstkühlung
2
■ Technische Daten
Achtung
Für den Betrieb der Motoren in explosionsgefährdeten Bereichen ist ein Kaltleiterauslösegerät zwingend vorgeschrieben, z. B. SIMIREL 3RN10 Thermistor-Motorschutz.Die Anschlussleitungen müssen mindestens bis +100 °C temperaturbeständig sein.
■ Kennlinien
Drehmoment-Drehzahl-Kennlinie
Motorart Drehstrom-Servomotor(dauermagneterregter Synchronmotor)
Magnetmaterial Seltenerd-Magnetmaterial
Isolierung der Ständerwicklung
nach EN 60034-1 (IEC 60034-1)Wärmeklasse H für eine Wick-lungsübertemperatur von �T = 100 K bei einer Umge-bungstemperatur von +40 °C.
Bauform nach EN 60034-7 (IEC 60034-7)
IM B5 (1FS6074 und 1FS6096)IM B35 (1FS6115 und 1FS6134)
Schutzart nach EN 60034-5 (IEC 60034-5)
IP64
Kühlung Selbstkühlung
Temperaturüberwachung 3x PTC-Kaltleiter + Temperatur-sensor KTY 84 in der Ständer-wicklung
Anstrich Anthrazit RAL 7016
Wellenende auf der A-Seite nach DIN 748-3 (IEC 60072-1)
glatte Welle
Rundlaufgenauigkeit, Koaxialität und Planlauf nach DIN 42955 (IEC 60072-1)
Toleranz N (normal)
Schwingstärke nach EN 60034-14 (IEC 60034-14)
Stufe N (normal)
Lager dauergeschmierte Rillenkugel-lager
Gebersysteme, eingebaut • Inkrementalgeber sin/cos 1 Vpp 2048 S/R
• Absolutwertgeber EnDat 2048 S/R 1)
Anschluss 2 Klemmenkästen
Optionen • Wellenende mit Passfeder und Passfedernut (Halbkeilwuch-tung)
• Rundlaufgenauigkeit, Koaxialität und Planlauf Toleranz R
• Schutzart IP65 mit Radialwellen-dichtung
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %.
�
��./�
01��23��
�� � 0��� 3 1
-��4
�
�� �
5�6�
��
�7���%�#�#���4"%�*�� 89�
� : ��� !
�1 �������
-��4� : ��� !
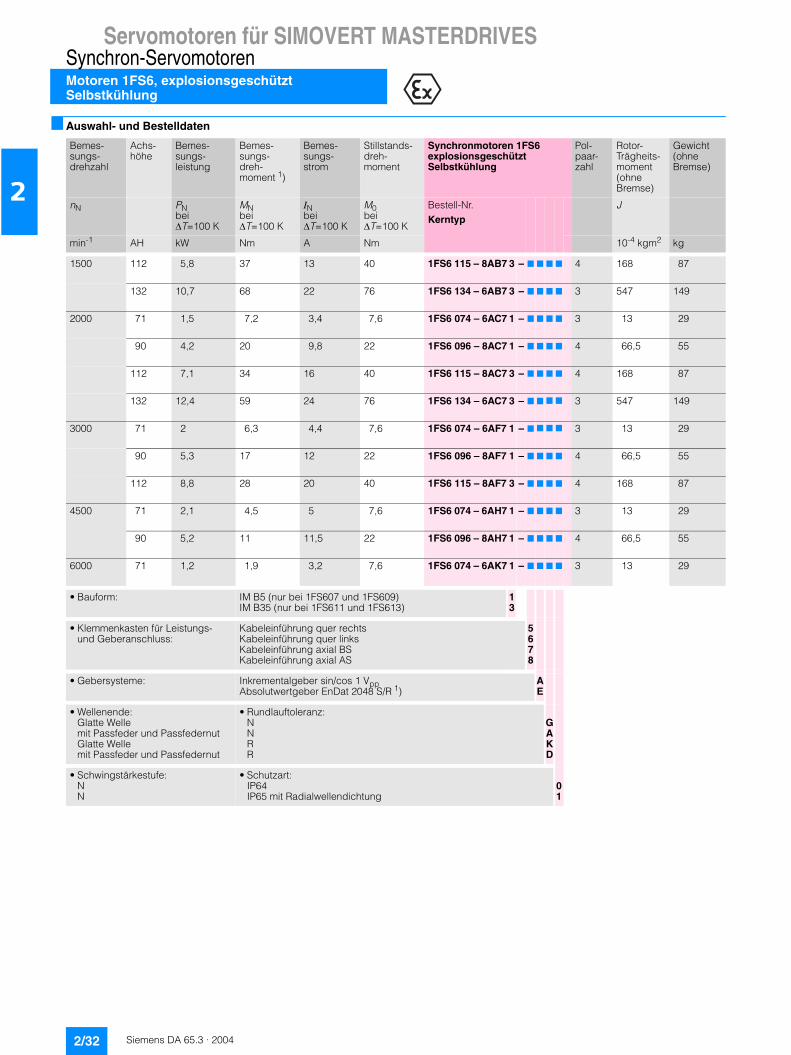
Siemens DA 65.3 · 20042/32
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1FS6, explosionsgeschütztSelbstkühlung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment 1)
Bemes-sungs-strom
Stillstands-dreh-moment
Synchronmotoren 1FS6 explosionsgeschütztSelbstkühlung
Pol-paar-zahl
Rotor-Trägheits-moment (ohne Bremse)
Gewicht(ohne Bremse)
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr.Kerntyp
J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
1500 112 5,8 37 13 40 1FS6 115 – 8AB7 3 – 7 7 7 7 4 168 87
132 10,7 68 22 76 1FS6 134 – 6AB7 3 – 7 7 7 7 3 547 149
2000 71 1,5 7,2 3,4 7,6 1FS6 074 – 6AC7 1 – 7 7 7 7 3 13 29
90 4,2 20 9,8 22 1FS6 096 – 8AC7 1 – 7 7 7 7 4 66,5 55
112 7,1 34 16 40 1FS6 115 – 8AC7 3 – 7 7 7 7 4 168 87
132 12,4 59 24 76 1FS6 134 – 6AC7 3 – 7 7 7 7 3 547 149
3000 71 2 6,3 4,4 7,6 1FS6 074 – 6AF7 1 – 7 7 7 7 3 13 29
90 5,3 17 12 22 1FS6 096 – 8AF7 1 – 7 7 7 7 4 66,5 55
112 8,8 28 20 40 1FS6 115 – 8AF7 3 – 7 7 7 7 4 168 87
4500 71 2,1 4,5 5 7,6 1FS6 074 – 6AH7 1 – 7 7 7 7 3 13 29
90 5,2 11 11,5 22 1FS6 096 – 8AH7 1 – 7 7 7 7 4 66,5 55
6000 71 1,2 1,9 3,2 7,6 1FS6 074 – 6AK7 1 – 7 7 7 7 3 13 29
• Bauform: IM B5 (nur bei 1FS607 und 1FS609)IM B35 (nur bei 1FS611 und 1FS613)
13
• Klemmenkasten für Leistungs- und Geberanschluss:
Kabeleinführung quer rechtsKabeleinführung quer linksKabeleinführung axial BSKabeleinführung axial AS
5678
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1)
AE
• Wellenende:Glatte Wellemit Passfeder und PassfedernutGlatte Wellemit Passfeder und Passfedernut
• Rundlauftoleranz: NNRR
GAKD
• Schwingstärkestufe:NN
• Schutzart:IP64IP65 mit Radialwellendichtung
01
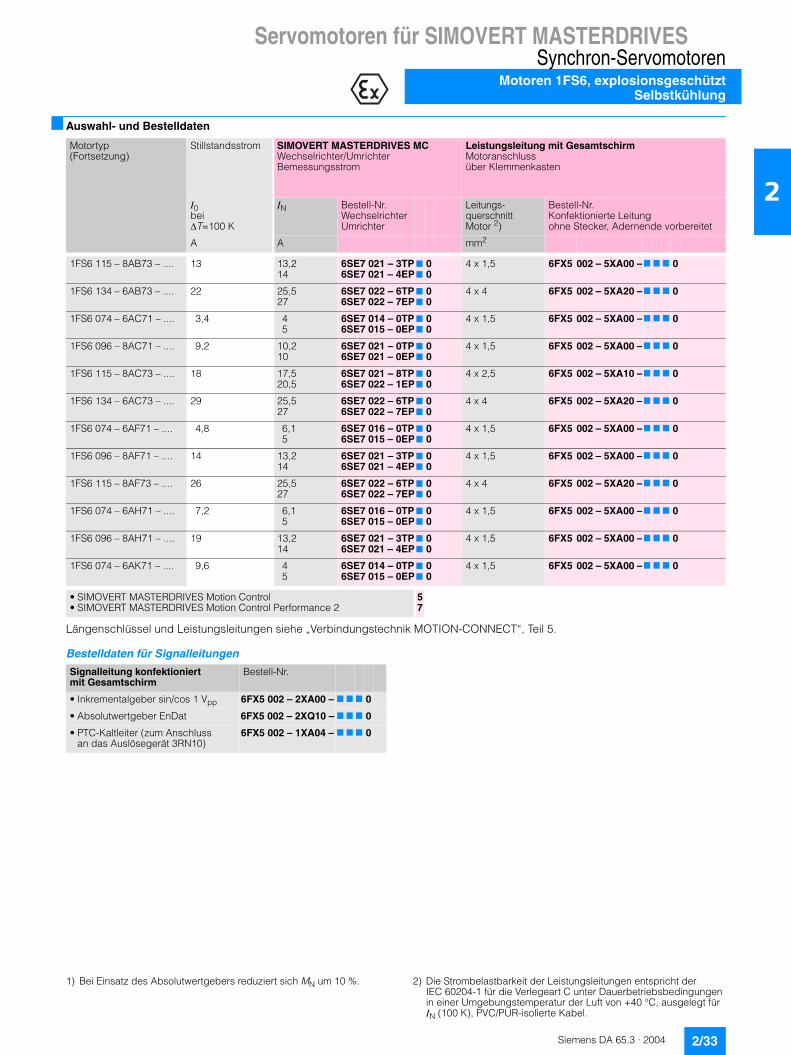
Siemens DA 65.3 · 2004 2/33
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Motoren 1FS6, explosionsgeschütztSelbstkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel und Leistungsleitungen siehe „Verbindungstechnik MOTION-CONNECT“, Teil 5.
Bestelldaten für Signalleitungen
Motortyp(Fortsetzung)
Stillstandsstrom SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschlussüber Klemmenkasten
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Leitungs-querschnitt Motor 2)
Bestell-Nr.Konfektionierte Leitung ohne Stecker, Adernende vorbereitet
A A mm2
1FS6 115 – 8AB73 – .... 13 13,2 14
6SE7 021 – 3TP6SE7 021 – 4EP
77
00
4 x 1,5 6FX5 002 – 5XA00 –7 7 7 0
1FS6 134 – 6AB73 – .... 22 25,5 27
6SE7 022 – 6TP6SE7 022 – 7EP
77
00
4 x 4 6FX5 002 – 5XA20 –7 7 7 0
1FS6 074 – 6AC71 – .... 3,4 45
6SE7 014 – 0TP6SE7 015 – 0EP
77
00
4 x 1,5 6FX5 002 – 5XA00 –7 7 7 0
1FS6 096 – 8AC71 – .... 9,2 10,210
6SE7 021 – 0TP6SE7 021 – 0EP
77
00
4 x 1,5 6FX5 002 – 5XA00 –7 7 7 0
1FS6 115 – 8AC73 – .... 18 17,520,5
6SE7 021 – 8TP6SE7 022 – 1EP
77
00
4 x 2,5 6FX5 002 – 5XA10 –7 7 7 0
1FS6 134 – 6AC73 – .... 29 25,527
6SE7 022 – 6TP6SE7 022 – 7EP
77
00
4 x 4 6FX5 002 – 5XA20 –7 7 7 0
1FS6 074 – 6AF71 – .... 4,8 6,15
6SE7 016 – 0TP6SE7 015 – 0EP
77
00
4 x 1,5 6FX5 002 – 5XA00 –7 7 7 0
1FS6 096 – 8AF71 – .... 14 13,214
6SE7 021 – 3TP6SE7 021 – 4EP
77
00
4 x 1,5 6FX5 002 – 5XA00 –7 7 7 0
1FS6 115 – 8AF73 – .... 26 25,527
6SE7 022 – 6TP6SE7 022 – 7EP
77
00
4 x 4 6FX5 002 – 5XA20 –7 7 7 0
1FS6 074 – 6AH71 – .... 7,2 6,15
6SE7 016 – 0TP6SE7 015 – 0EP
77
00
4 x 1,5 6FX5 002 – 5XA00 –7 7 7 0
1FS6 096 – 8AH71 – .... 19 13,214
6SE7 021 – 3TP6SE7 021 – 4EP
77
00
4 x 1,5 6FX5 002 – 5XA00 –7 7 7 0
1FS6 074 – 6AK71 – .... 9,6 45
6SE7 014 – 0TP6SE7 015 – 0EP
77
00
4 x 1,5 6FX5 002 – 5XA00 –7 7 7 0
• SIMOVERT MASTERDRIVES Motion Control• SIMOVERT MASTERDRIVES Motion Control Performance 2
57
Signalleitung konfektioniertmit Gesamtschirm
Bestell-Nr.
• Inkrementalgeber sin/cos 1 Vpp 6FX5 002 – 2XA00 – 7 7 7 0
• Absolutwertgeber EnDat 6FX5 002 – 2XQ10 – 7 7 7 0
• PTC-Kaltleiter (zum Anschluss an das Auslösegerät 3RN10)
6FX5 002 – 1XA04 – 7 7 7 0
1) Bei Einsatz des Absolutwertgebers reduziert sich MN um 10 %. 2) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für IN (100 K), PVC/PUR-isolierte Kabel.
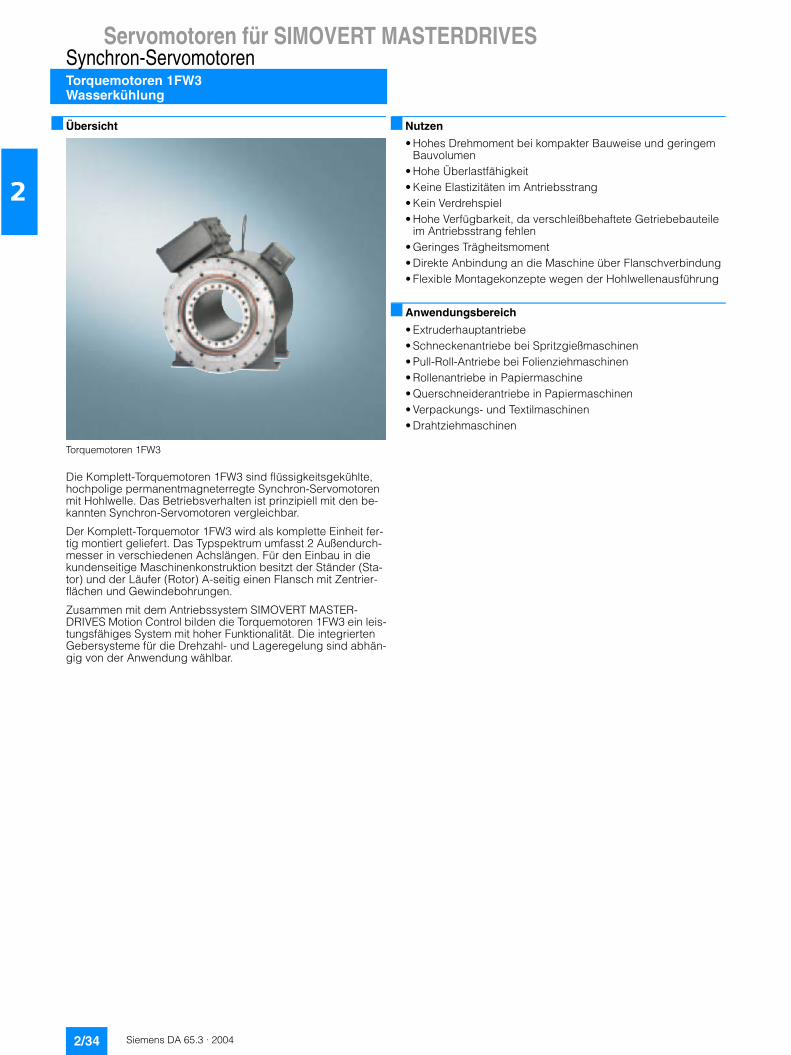
Siemens DA 65.3 · 20042/34
Servomotoren für SIMOVERT MASTERDRIVES
Torquemotoren 1FW3Wasserkühlung
Synchron-Servomotoren
2
■ Übersicht
Torquemotoren 1FW3
Die Komplett-Torquemotoren 1FW3 sind flüssigkeitsgekühlte, hochpolige permanentmagneterregte Synchron-Servomotoren mit Hohlwelle. Das Betriebsverhalten ist prinzipiell mit den be-kannten Synchron-Servomotoren vergleichbar.
Der Komplett-Torquemotor 1FW3 wird als komplette Einheit fer-tig montiert geliefert. Das Typspektrum umfasst 2 Außendurch-messer in verschiedenen Achslängen. Für den Einbau in die kundenseitige Maschinenkonstruktion besitzt der Ständer (Sta-tor) und der Läufer (Rotor) A-seitig einen Flansch mit Zentrier-flächen und Gewindebohrungen.
Zusammen mit dem Antriebssystem SIMOVERT MASTER-DRIVES Motion Control bilden die Torquemotoren 1FW3 ein leis-tungsfähiges System mit hoher Funktionalität. Die integrierten Gebersysteme für die Drehzahl- und Lageregelung sind abhän-gig von der Anwendung wählbar.
■ Nutzen
• Hohes Drehmoment bei kompakter Bauweise und geringem Bauvolumen
• Hohe Überlastfähigkeit• Keine Elastizitäten im Antriebsstrang• Kein Verdrehspiel • Hohe Verfügbarkeit, da verschleißbehaftete Getriebebauteile
im Antriebsstrang fehlen• Geringes Trägheitsmoment• Direkte Anbindung an die Maschine über Flanschverbindung• Flexible Montagekonzepte wegen der Hohlwellenausführung
■ Anwendungsbereich
• Extruderhauptantriebe• Schneckenantriebe bei Spritzgießmaschinen• Pull-Roll-Antriebe bei Folienziehmaschinen• Rollenantriebe in Papiermaschine• Querschneiderantriebe in Papiermaschinen• Verpackungs- und Textilmaschinen• Drahtziehmaschinen
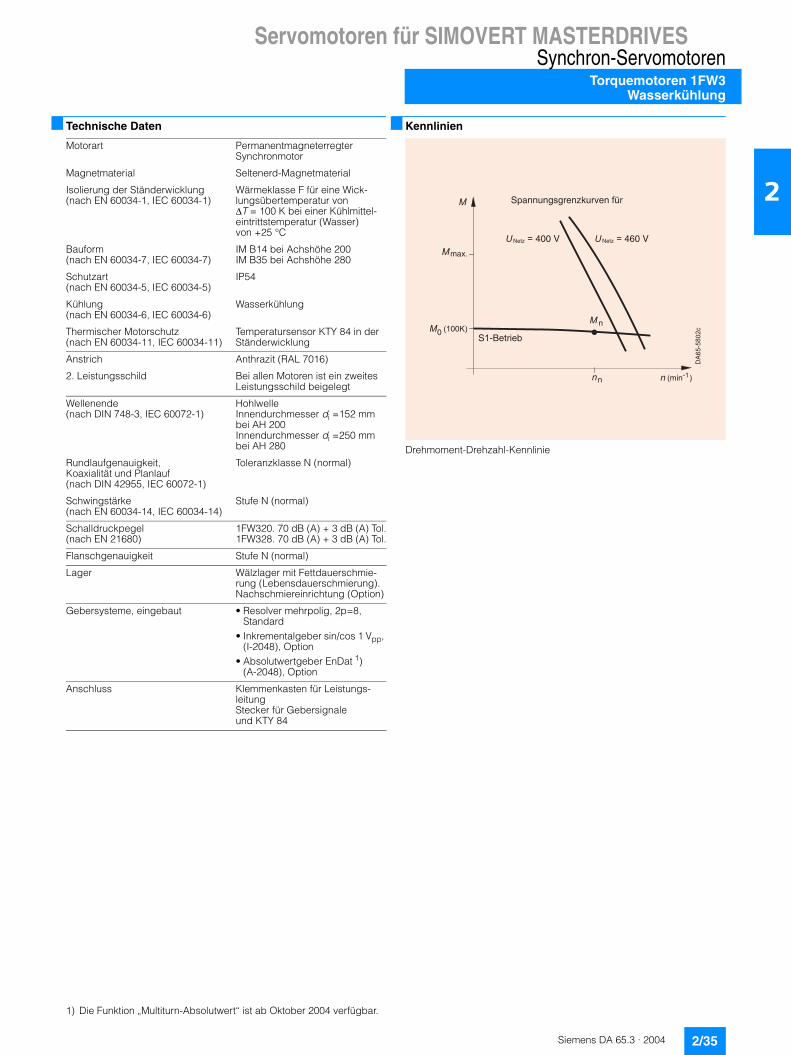
Siemens DA 65.3 · 2004 2/35
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Torquemotoren 1FW3Wasserkühlung
2
■ Technische Daten ■ Kennlinien
Drehmoment-Drehzahl-Kennlinie
Motorart Permanentmagneterregter Synchronmotor
Magnetmaterial Seltenerd-Magnetmaterial
Isolierung der Ständerwicklung (nach EN 60034-1, IEC 60034-1)
Wärmeklasse F für eine Wick-lungsübertemperatur von �T = 100 K bei einer Kühlmittel-eintrittstemperatur (Wasser) von +25 °C
Bauform (nach EN 60034-7, IEC 60034-7)
IM B14 bei Achshöhe 200IM B35 bei Achshöhe 280
Schutzart (nach EN 60034-5, IEC 60034-5)
IP54
Kühlung(nach EN 60034-6, IEC 60034-6)
Wasserkühlung
Thermischer Motorschutz(nach EN 60034-11, IEC 60034-11)
Temperatursensor KTY 84 in der Ständerwicklung
Anstrich Anthrazit (RAL 7016)
2. Leistungsschild Bei allen Motoren ist ein zweites Leistungsschild beigelegt
Wellenende (nach DIN 748-3, IEC 60072-1)
Hohlwelle Innendurchmesser di =152 mm bei AH 200Innendurchmesser di =250 mm bei AH 280
Rundlaufgenauigkeit, Koaxialität und Planlauf(nach DIN 42955, IEC 60072-1)
Toleranzklasse N (normal)
Schwingstärke (nach EN 60034-14, IEC 60034-14)
Stufe N (normal)
Schalldruckpegel (nach EN 21680)
1FW320. 70 dB (A) + 3 dB (A) Tol.1FW328. 70 dB (A) + 3 dB (A) Tol.
Flanschgenauigkeit Stufe N (normal)
Lager Wälzlager mit Fettdauerschmie-rung (Lebensdauerschmierung). Nachschmiereinrichtung (Option)
Gebersysteme, eingebaut • Resolver mehrpolig, 2p=8, Standard
• Inkrementalgeber sin/cos 1 Vpp, (I-2048), Option
• Absolutwertgeber EnDat 1)(A-2048), Option
Anschluss Klemmenkasten für Leistungs-leitungStecker für Gebersignale und KTY 84
�
��./�
01��23��
�� � 0��� 3 1
-��4
�
�� �
5�6�
��
�7���%�#�#���4"%�*�� 89�
� : ��� !
�1 �������
-��4� : ��� !
1) Die Funktion „Multiturn-Absolutwert“ ist ab Oktober 2004 verfügbar.
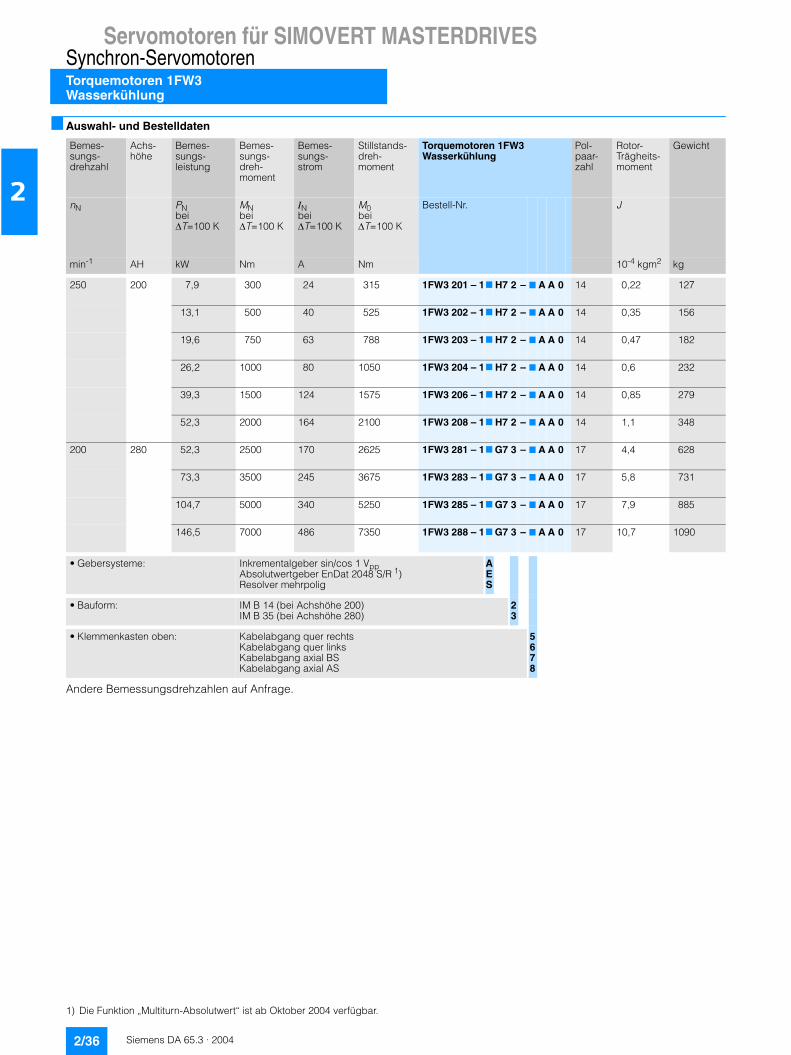
Siemens DA 65.3 · 20042/36
Servomotoren für SIMOVERT MASTERDRIVES
Torquemotoren 1FW3Wasserkühlung
Synchron-Servomotoren
2
■ Auswahl- und Bestelldaten
Andere Bemessungsdrehzahlen auf Anfrage.
Bemes-sungs-drehzahl
Achs-höhe
Bemes-sungs-leistung
Bemes-sungs-dreh-moment
Bemes-sungs-strom
Stillstands-dreh-moment
Torquemotoren 1FW3Wasserkühlung
Pol-paar-zahl
Rotor-Trägheits-moment
Gewicht
nN PN bei �T=100 K
MN bei �T=100 K
IN bei �T=100 K
M0 bei �T=100 K
Bestell-Nr. J
min-1 AH kW Nm A Nm 10-4 kgm2 kg
250 200 7,9 300 24 315 1FW3 201 – 17 H7 2 – 7 A A 0 14 0,22 127
13,1 500 40 525 1FW3 202 – 17 H7 2 – 7 A A 0 14 0,35 156
19,6 750 63 788 1FW3 203 – 17 H7 2 – 7 A A 0 14 0,47 182
26,2 1000 80 1050 1FW3 204 – 17 H7 2 – 7 A A 0 14 0,6 232
39,3 1500 124 1575 1FW3 206 – 17 H7 2 – 7 A A 0 14 0,85 279
52,3 2000 164 2100 1FW3 208 – 17 H7 2 – 7 A A 0 14 1,1 348
200 280 52,3 2500 170 2625 1FW3 281 – 17 G7 3 – 7 A A 0 17 4,4 628
73,3 3500 245 3675 1FW3 283 – 17 G7 3 – 7 A A 0 17 5,8 731
104,7 5000 340 5250 1FW3 285 – 17 G7 3 – 7 A A 0 17 7,9 885
146,5 7000 486 7350 1FW3 288 – 17 G7 3 – 7 A A 0 17 10,7 1090
• Gebersysteme: Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R 1)Resolver mehrpolig
AES
• Bauform: IM B 14 (bei Achshöhe 200)IM B 35 (bei Achshöhe 280)
23
• Klemmenkasten oben: Kabelabgang quer rechtsKabelabgang quer linksKabelabgang axial BSKabelabgang axial AS
5678
1) Die Funktion „Multiturn-Absolutwert“ ist ab Oktober 2004 verfügbar.
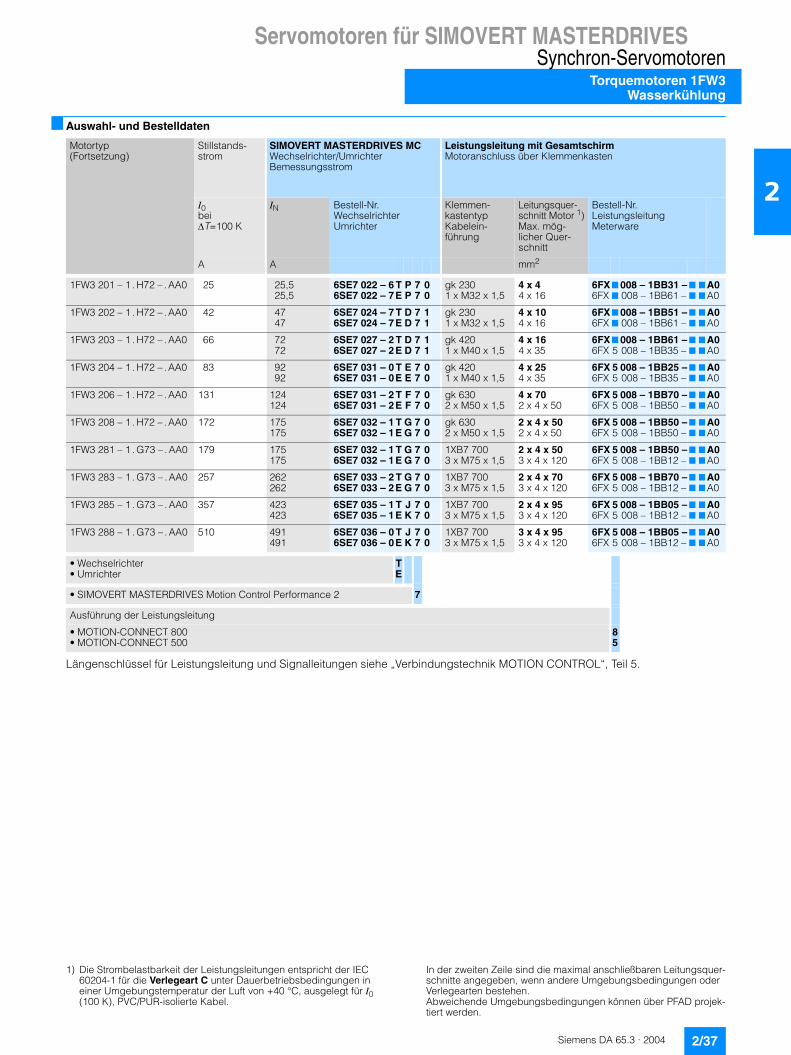
Siemens DA 65.3 · 2004 2/37
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Torquemotoren 1FW3Wasserkühlung
2
■ Auswahl- und Bestelldaten
Längenschlüssel für Leistungsleitung und Signalleitungen siehe „Verbindungstechnik MOTION CONTROL“, Teil 5.
Motortyp(Fortsetzung)
Stillstands-strom
SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
Leistungsleitung mit GesamtschirmMotoranschluss über Klemmenkasten
I0bei �T=100 K
IN Bestell-Nr.WechselrichterUmrichter
Klemmen-kastentypKabelein-führung
Leitungsquer-schnitt Motor 1)Max. mög-licher Quer-schnitt
Bestell-Nr.LeistungsleitungMeterware
A A mm2
1FW3 201 – 1 . H72 – . AA0 25 25,525,5
6SE7 022 – 66SE7 022 – 7
TE
PP
77
00
gk 2301 x M32 x 1,5
4 x 44 x 16
6FX6FX
77
008 – 1BB31 –008 – 1BB61 –
7777
A0A0
1FW3 202 – 1 . H72 – . AA0 42 4747
6SE7 024 – 76SE7 024 – 7
TE
DD
77
11
gk 2301 x M32 x 1,5
4 x 104 x 16
6FX6FX
77
008 – 1BB51 –008 – 1BB61 –
7777
A0A0
1FW3 203 – 1 . H72 – . AA0 66 7272
6SE7 027 – 26SE7 027 – 2
TE
DD
77
11
gk 4201 x M40 x 1,5
4 x 164 x 35
6FX6FX
75
008 – 1BB61 –008 – 1BB35 –
7777
A0A0
1FW3 204 – 1 . H72 – . AA0 83 9292
6SE7 031 – 06SE7 031 – 0
TE
EE
77
00
gk 4201 x M40 x 1,5
4 x 254 x 35
6FX6FX
55
008 – 1BB25 –008 – 1BB35 –
7777
A0A0
1FW3 206 – 1 . H72 – . AA0 131 124124
6SE7 031 – 26SE7 031 – 2
TE
FF
77
00
gk 6302 x M50 x 1,5
4 x 702 x 4 x 50
6FX6FX
55
008 – 1BB70 –008 – 1BB50 –
7777
A0A0
1FW3 208 – 1 . H72 – . AA0 172 175175
6SE7 032 – 16SE7 032 – 1
TE
GG
77
00
gk 6302 x M50 x 1,5
2 x 4 x 502 x 4 x 50
6FX6FX
55
008 – 1BB50 –008 – 1BB50 –
7777
A0A0
1FW3 281 – 1 . G73 – . AA0 179 175175
6SE7 032 – 16SE7 032 – 1
TE
GG
77
00
1XB7 7003 x M75 x 1,5
2 x 4 x 503 x 4 x 120
6FX6FX
55
008 – 1BB50 –008 – 1BB12 –
7777
A0A0
1FW3 283 – 1 . G73 – . AA0 257 262262
6SE7 033 – 26SE7 033 – 2
TE
GG
77
00
1XB7 7003 x M75 x 1,5
2 x 4 x 703 x 4 x 120
6FX6FX
55
008 – 1BB70 –008 – 1BB12 –
7777
A0A0
1FW3 285 – 1 . G73 – . AA0 357 423423
6SE7 035 – 16SE7 035 – 1
TE
JK
77
00
1XB7 7003 x M75 x 1,5
2 x 4 x 953 x 4 x 120
6FX6FX
55
008 – 1BB05 –008 – 1BB12 –
7777
A0A0
1FW3 288 – 1 . G73 – . AA0 510 491491
6SE7 036 – 06SE7 036 – 0
TE
JK
77
00
1XB7 7003 x M75 x 1,5
3 x 4 x 953 x 4 x 120
6FX6FX
55
008 – 1BB05 –008 – 1BB12 –
7777
A0A0
• Wechselrichter• Umrichter
TE
• SIMOVERT MASTERDRIVES Motion Control Performance 2 7
Ausführung der Leistungsleitung
• MOTION-CONNECT 800• MOTION-CONNECT 500
85
1) Die Strombelastbarkeit der Leistungsleitungen entspricht der IEC 60204-1 für die Verlegeart C unter Dauerbetriebsbedingungen in einer Umgebungstemperatur der Luft von +40 °C, ausgelegt für I0 (100 K), PVC/PUR-isolierte Kabel.
In der zweiten Zeile sind die maximal anschließbaren Leitungsquer-schnitte angegeben, wenn andere Umgebungsbedingungen oder Verlegearten bestehen.Abweichende Umgebungsbedingungen können über PFAD projek-tiert werden.
Siemens DA 65.3 · 20042/38
Servomotoren für SIMOVERT MASTERDRIVES
Notizen
Synchron-Servomotoren
2
Siemens DA 65.3 · 2004
33/2 Motoren 1PH7
3/28 Motoren 1PL6
3/46 Motoren 1PH4
Asynchron-Servomotoren
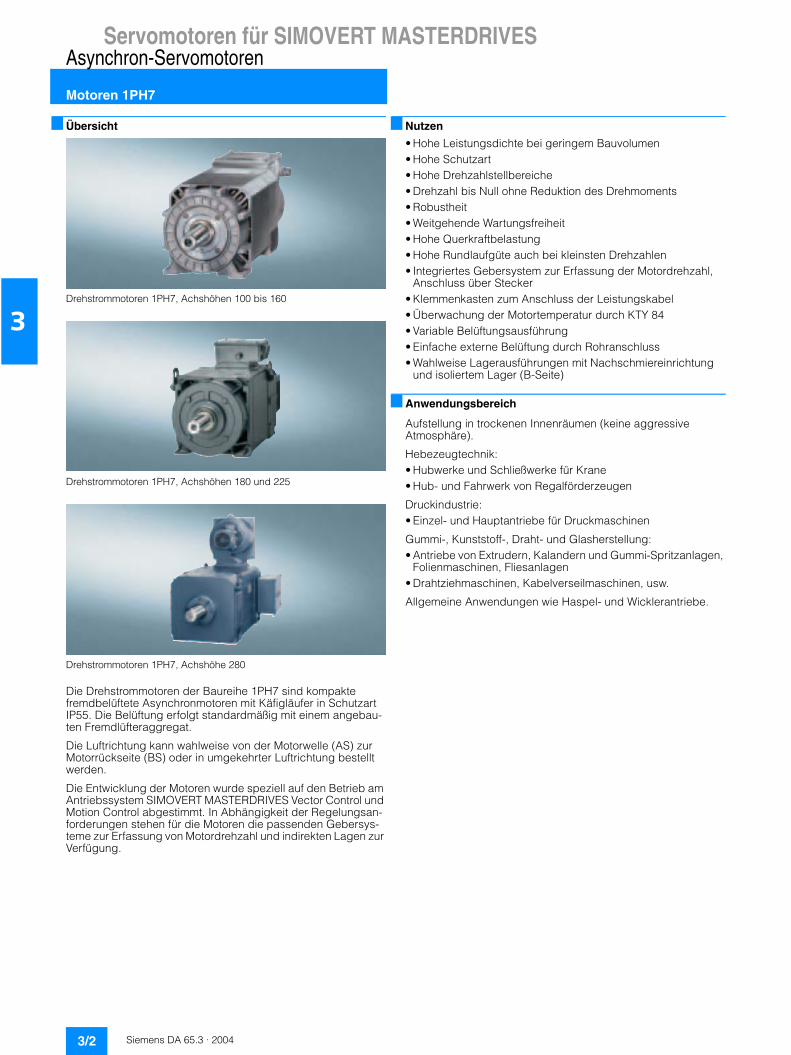
Siemens DA 65.3 · 20043/2
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Übersicht
Drehstrommotoren 1PH7, Achshöhen 100 bis 160
Drehstrommotoren 1PH7, Achshöhen 180 und 225
Drehstrommotoren 1PH7, Achshöhe 280
Die Drehstrommotoren der Baureihe 1PH7 sind kompakte fremdbelüftete Asynchronmotoren mit Käfigläufer in Schutzart IP55. Die Belüftung erfolgt standardmäßig mit einem angebau-ten Fremdlüfteraggregat.
Die Luftrichtung kann wahlweise von der Motorwelle (AS) zur Motorrückseite (BS) oder in umgekehrter Luftrichtung bestellt werden.
Die Entwicklung der Motoren wurde speziell auf den Betrieb am Antriebssystem SIMOVERT MASTERDRIVES Vector Control und Motion Control abgestimmt. In Abhängigkeit der Regelungsan-forderungen stehen für die Motoren die passenden Gebersys-teme zur Erfassung von Motordrehzahl und indirekten Lagen zur Verfügung.
■ Nutzen
• Hohe Leistungsdichte bei geringem Bauvolumen• Hohe Schutzart • Hohe Drehzahlstellbereiche • Drehzahl bis Null ohne Reduktion des Drehmoments• Robustheit• Weitgehende Wartungsfreiheit• Hohe Querkraftbelastung• Hohe Rundlaufgüte auch bei kleinsten Drehzahlen• Integriertes Gebersystem zur Erfassung der Motordrehzahl,
Anschluss über Stecker• Klemmenkasten zum Anschluss der Leistungskabel• Überwachung der Motortemperatur durch KTY 84• Variable Belüftungsausführung• Einfache externe Belüftung durch Rohranschluss• Wahlweise Lagerausführungen mit Nachschmiereinrichtung
und isoliertem Lager (B-Seite)
■ Anwendungsbereich
Aufstellung in trockenen Innenräumen (keine aggressive Atmosphäre).
Hebezeugtechnik:• Hubwerke und Schließwerke für Krane• Hub- und Fahrwerk von Regalförderzeugen
Druckindustrie:• Einzel- und Hauptantriebe für Druckmaschinen
Gummi-, Kunststoff-, Draht- und Glasherstellung:• Antriebe von Extrudern, Kalandern und Gummi-Spritzanlagen,
Folienmaschinen, Fliesanlagen• Drahtziehmaschinen, Kabelverseilmaschinen, usw.
Allgemeine Anwendungen wie Haspel- und Wicklerantriebe.
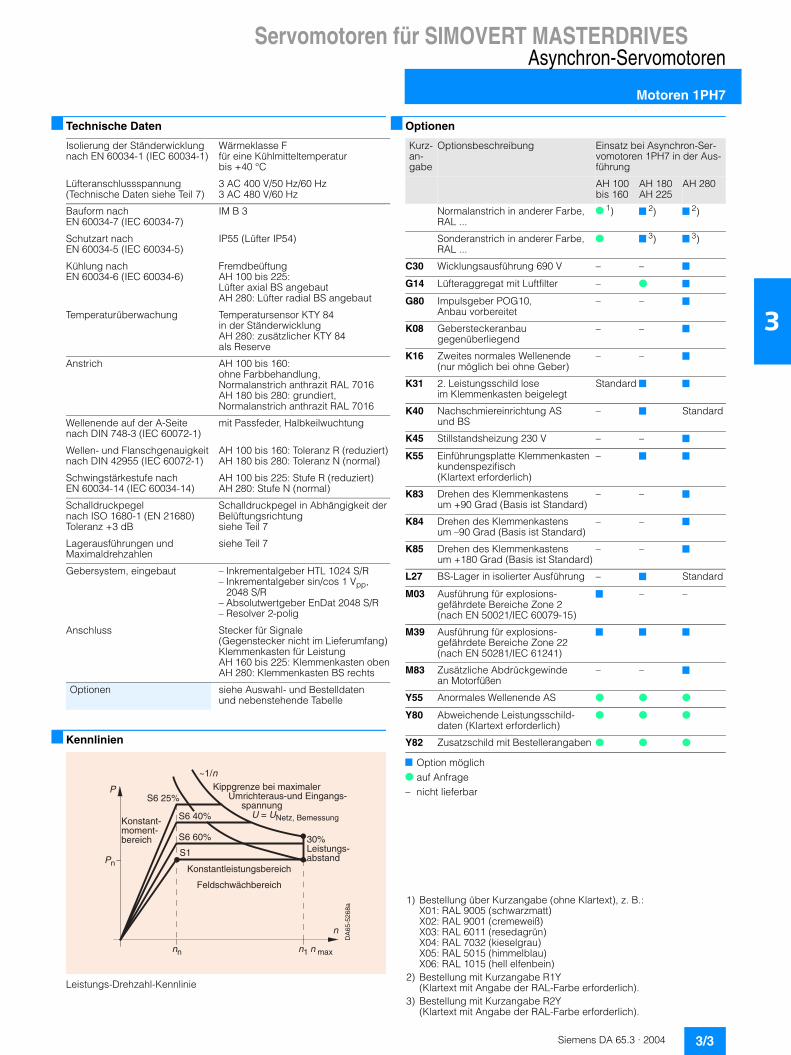
Siemens DA 65.3 · 2004 3/3
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Technische Daten
■ Kennlinien
Leistungs-Drehzahl-Kennlinie
■ Optionen
7 Option möglich4 auf Anfrage– nicht lieferbar
Isolierung der Ständerwicklung nach EN 60034-1 (IEC 60034-1)
Wärmeklasse F für eine Kühlmitteltemperatur bis +40 °C
Lüfteranschlussspannung(Technische Daten siehe Teil 7)
3 AC 400 V/50 Hz/60 Hz3 AC 480 V/60 Hz
Bauform nach EN 60034-7 (IEC 60034-7)
IM B 3
Schutzart nach EN 60034-5 (IEC 60034-5)
IP55 (Lüfter IP54)
Kühlung nach EN 60034-6 (IEC 60034-6)
FremdbeüftungAH 100 bis 225: Lüfter axial BS angebautAH 280: Lüfter radial BS angebaut
Temperaturüberwachung Temperatursensor KTY 84 in der StänderwicklungAH 280: zusätzlicher KTY 84 als Reserve
Anstrich AH 100 bis 160: ohne Farbbehandlung,Normalanstrich anthrazit RAL 7016AH 180 bis 280: grundiert,Normalanstrich anthrazit RAL 7016
Wellenende auf der A-Seite nach DIN 748-3 (IEC 60072-1)
mit Passfeder, Halbkeilwuchtung
Wellen- und Flanschgenauigkeitnach DIN 42955 (IEC 60072-1)
AH 100 bis 160: Toleranz R (reduziert)AH 180 bis 280: Toleranz N (normal)
Schwingstärkestufe nach EN 60034-14 (IEC 60034-14)
AH 100 bis 225: Stufe R (reduziert)AH 280: Stufe N (normal)
Schalldruckpegelnach ISO 1680-1 (EN 21680)Toleranz +3 dB
Schalldruckpegel in Abhängigkeit der Belüftungsrichtungsiehe Teil 7
Lagerausführungen und Maximaldrehzahlen
siehe Teil 7
Gebersystem, eingebaut – Inkrementalgeber HTL 1024 S/R– Inkrementalgeber sin/cos 1 Vpp,
2048 S/R – Absolutwertgeber EnDat 2048 S/R– Resolver 2-polig
Anschluss Stecker für Signale (Gegenstecker nicht im Lieferumfang)Klemmenkasten für LeistungAH 160 bis 225: Klemmenkasten obenAH 280: Klemmenkasten BS rechts
Optionen siehe Auswahl- und Bestelldatenund nebenstehende Tabelle
P
Pn
Konstant-moment-bereich
~1/nKippgrenze bei maximaler Umrichteraus-und Eingangs- spannung U = UNetz, Bemessung
nn n1 n max
n
Konstantleistungsbereich
Feldschwächbereich
S1
S6 60%
S6 25%
30%Leistungs-abstand
DA
65-5
268a
S6 40%
Kurz- an-gabe
Optionsbeschreibung Einsatz bei Asynchron-Ser-vomotoren 1PH7 in der Aus-führung
AH 100 bis 160
AH 180 AH 225
AH 280
Normalanstrich in anderer Farbe, RAL ...
4 1) 7 2) 7 2)
Sonderanstrich in anderer Farbe, RAL ...
4 7 3) 7 3)
C30 Wicklungsausführung 690 V – – 7
G14 Lüfteraggregat mit Luftfilter – 4 7
G80 Impulsgeber POG10, Anbau vorbereitet
– – 7
K08 Gebersteckeranbau gegenüberliegend
– – 7
K16 Zweites normales Wellenende (nur möglich bei ohne Geber)
– – 7
K31 2. Leistungsschild lose im Klemmenkasten beigelegt
Standard 7 7
K40 Nachschmiereinrichtung AS und BS
– 7 Standard
K45 Stillstandsheizung 230 V – – 7
K55 Einführungsplatte Klemmenkasten kundenspezifisch (Klartext erforderlich)
– 7 7
K83 Drehen des Klemmenkastens um +90 Grad (Basis ist Standard)
– – 7
K84 Drehen des Klemmenkastens um –90 Grad (Basis ist Standard)
– – 7
K85 Drehen des Klemmenkastens um +180 Grad (Basis ist Standard)
– – 7
L27 BS-Lager in isolierter Ausführung – 7 Standard
M03 Ausführung für explosions-gefährdete Bereiche Zone 2 (nach EN 50021/IEC 60079-15)
7 – –
M39 Ausführung für explosions-gefährdete Bereiche Zone 22 (nach EN 50281/IEC 61241)
7 7 7
M83 Zusätzliche Abdrückgewinde an Motorfüßen
– – 7
Y55 Anormales Wellenende AS 4 4 4
Y80 Abweichende Leistungsschild-daten (Klartext erforderlich)
4 4 4
Y82 Zusatzschild mit Bestellerangaben 4 4 4
1) Bestellung über Kurzangabe (ohne Klartext), z. B.:X01: RAL 9005 (schwarzmatt)X02: RAL 9001 (cremeweiß)X03: RAL 6011 (resedagrün)X04: RAL 7032 (kieselgrau)X05: RAL 5015 (himmelblau)X06: RAL 1015 (hell elfenbein)
2) Bestellung mit Kurzangabe R1Y (Klartext mit Angabe der RAL-Farbe erforderlich).
3) Bestellung mit Kurzangabe R2Y (Klartext mit Angabe der RAL-Farbe erforderlich).
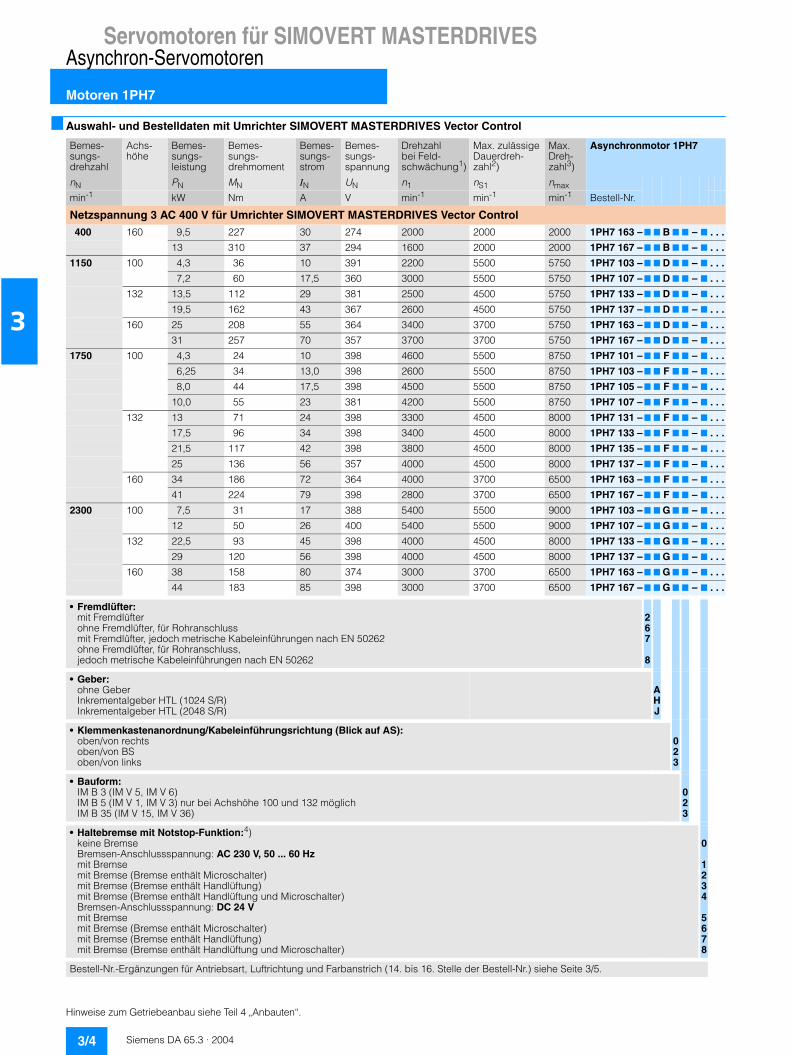
Siemens DA 65.3 · 20043/4
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control400 160 9,5 227 30 274 2000 2000 2000 1PH7 163 –7 7 B 7 7 – 7 . . .
13 310 37 294 1600 2000 2000 1PH7 167 –7 7 B 7 7 – 7 . . .
1150 100 4,3 36 10 391 2200 5500 5750 1PH7 103 –7 7 D 7 7 – 7 . . .
7,2 60 17,5 360 3000 5500 5750 1PH7 107 –7 7 D 7 7 – 7 . . .
132 13,5 112 29 381 2500 4500 5750 1PH7 133 –7 7 D 7 7 – 7 . . .
19,5 162 43 367 2600 4500 5750 1PH7 137 –7 7 D 7 7 – 7 . . .
160 25 208 55 364 3400 3700 5750 1PH7 163 –7 7 D 7 7 – 7 . . .
31 257 70 357 3700 3700 5750 1PH7 167 –7 7 D 7 7 – 7 . . .
1750 100 4,3 24 10 398 4600 5500 8750 1PH7 101 –7 7 F 7 7 – 7 . . .
6,25 34 13,0 398 2600 5500 8750 1PH7 103 –7 7 F 7 7 – 7 . . .
8,0 44 17,5 398 4500 5500 8750 1PH7 105 –7 7 F 7 7 – 7 . . .
10,0 55 23 381 4200 5500 8750 1PH7 107 –7 7 F 7 7 – 7 . . .
132 13 71 24 398 3300 4500 8000 1PH7 131 –7 7 F 7 7 – 7 . . .
17,5 96 34 398 3400 4500 8000 1PH7 133 –7 7 F 7 7 – 7 . . .
21,5 117 42 398 3800 4500 8000 1PH7 135 –7 7 F 7 7 – 7 . . .
25 136 56 357 4000 4500 8000 1PH7 137 –7 7 F 7 7 – 7 . . .
160 34 186 72 364 4000 3700 6500 1PH7 163 –7 7 F 7 7 – 7 . . .
41 224 79 398 2800 3700 6500 1PH7 167 –7 7 F 7 7 – 7 . . .
2300 100 7,5 31 17 388 5400 5500 9000 1PH7 103 –7 7 G 7 7 – 7 . . .
12 50 26 400 5400 5500 9000 1PH7 107 –7 7 G 7 7 – 7 . . .
132 22,5 93 45 398 4000 4500 8000 1PH7 133 –7 7 G 7 7 – 7 . . .
29 120 56 398 4000 4500 8000 1PH7 137 –7 7 G 7 7 – 7 . . .
160 38 158 80 374 3000 3700 6500 1PH7 163 –7 7 G 7 7 – 7 . . .
44 183 85 398 3000 3700 6500 1PH7 167 –7 7 G 7 7 – 7 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
267
8
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von BSoben/von links
023
• Bauform:IM B 3 (IM V 5, IM V 6)IM B 5 (IM V 1, IM V 3) nur bei Achshöhe 100 und 132 möglichIM B 35 (IM V 15, IM V 36)
023
• Haltebremse mit Notstop-Funktion:4)keine BremseBremsen-Anschlussspannung: AC 230 V, 50 ... 60 Hzmit Bremsemit Bremse (Bremse enthält Microschalter)mit Bremse (Bremse enthält Handlüftung)mit Bremse (Bremse enthält Handlüftung und Microschalter)Bremsen-Anschlussspannung: DC 24 Vmit Bremsemit Bremse (Bremse enthält Microschalter)mit Bremse (Bremse enthält Handlüftung)mit Bremse (Bremse enthält Handlüftung und Microschalter)
0
1234
5678
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/5.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
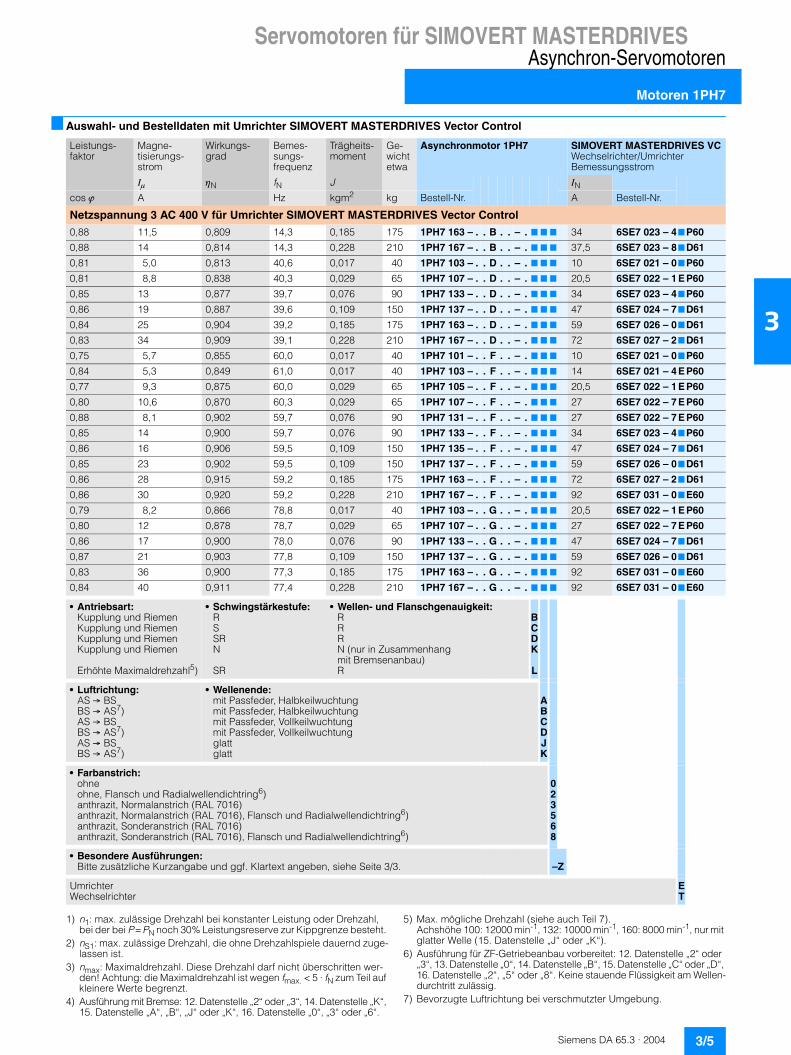
Siemens DA 65.3 · 2004 3/5
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,88 11,5 0,809 14,3 0,185 175 1PH7 163 – . . B . . – . 7 7 7 34 6SE7 023 – 47P60
0,88 14 0,814 14,3 0,228 210 1PH7 167 – . . B . . – . 7 7 7 37,5 6SE7 023 – 87D61
0,81 5,0 0,813 40,6 0,017 40 1PH7 103 – . . D . . – . 7 7 7 10 6SE7 021 – 07P60
0,81 8,8 0,838 40,3 0,029 65 1PH7 107 – . . D . . – . 7 7 7 20,5 6SE7 022 – 1 EP60
0,85 13 0,877 39,7 0,076 90 1PH7 133 – . . D . . – . 7 7 7 34 6SE7 023 – 47P60
0,86 19 0,887 39,6 0,109 150 1PH7 137 – . . D . . – . 7 7 7 47 6SE7 024 – 77D61
0,84 25 0,904 39,2 0,185 175 1PH7 163 – . . D . . – . 7 7 7 59 6SE7 026 – 07D61
0,83 34 0,909 39,1 0,228 210 1PH7 167 – . . D . . – . 7 7 7 72 6SE7 027 – 27D61
0,75 5,7 0,855 60,0 0,017 40 1PH7 101 – . . F . . – . 7 7 7 10 6SE7 021 – 07P60
0,84 5,3 0,849 61,0 0,017 40 1PH7 103 – . . F . . – . 7 7 7 14 6SE7 021 – 4 EP60
0,77 9,3 0,875 60,0 0,029 65 1PH7 105 – . . F . . – . 7 7 7 20,5 6SE7 022 – 1 EP60
0,80 10,6 0,870 60,3 0,029 65 1PH7 107 – . . F . . – . 7 7 7 27 6SE7 022 – 7 EP60
0,88 8,1 0,902 59,7 0,076 90 1PH7 131 – . . F . . – . 7 7 7 27 6SE7 022 – 7 EP60
0,85 14 0,900 59,7 0,076 90 1PH7 133 – . . F . . – . 7 7 7 34 6SE7 023 – 47P60
0,86 16 0,906 59,5 0,109 150 1PH7 135 – . . F . . – . 7 7 7 47 6SE7 024 – 77D61
0,85 23 0,902 59,5 0,109 150 1PH7 137 – . . F . . – . 7 7 7 59 6SE7 026 – 07D61
0,86 28 0,915 59,2 0,185 175 1PH7 163 – . . F . . – . 7 7 7 72 6SE7 027 – 27D61
0,86 30 0,920 59,2 0,228 210 1PH7 167 – . . F . . – . 7 7 7 92 6SE7 031 – 07E60
0,79 8,2 0,866 78,8 0,017 40 1PH7 103 – . . G . . – . 7 7 7 20,5 6SE7 022 – 1 EP60
0,80 12 0,878 78,7 0,029 65 1PH7 107 – . . G . . – . 7 7 7 27 6SE7 022 – 7 EP60
0,86 17 0,900 78,0 0,076 90 1PH7 133 – . . G . . – . 7 7 7 47 6SE7 024 – 77D61
0,87 21 0,903 77,8 0,109 150 1PH7 137 – . . G . . – . 7 7 7 59 6SE7 026 – 07D61
0,83 36 0,900 77,3 0,185 175 1PH7 163 – . . G . . – . 7 7 7 92 6SE7 031 – 07E60
0,84 40 0,911 77,4 0,228 210 1PH7 167 – . . G . . – . 7 7 7 92 6SE7 031 – 07E60
• Antriebsart:Kupplung und RiemenKupplung und RiemenKupplung und RiemenKupplung und Riemen
Erhöhte Maximaldrehzahl5)
• Schwingstärkestufe:RSSRN
SR
• Wellen- und Flanschgenauigkeit:RRRN (nur in Zusammenhang mit Bremsenanbau)R
BCDK
L
• Luftrichtung:AS � BSBS � AS7)AS � BSBS � AS7)AS � BSBS � AS7)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:ohneohne, Flansch und Radialwellendichtring6)anthrazit, Normalanstrich (RAL 7016)anthrazit, Normalanstrich (RAL 7016), Flansch und Radialwellendichtring6)anthrazit, Sonderanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016), Flansch und Radialwellendichtring6)
023568
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Ausführung mit Bremse: 12. Datenstelle „2“ oder „3“, 14. Datenstelle „K“, 15. Datenstelle „A“, „B“, „J“ oder „K“, 16. Datenstelle „0“, „3“ oder „6“.
5) Max. mögliche Drehzahl (siehe auch Teil 7). Achshöhe 100: 12000 min-1, 132: 10000 min-1, 160: 8000 min-1, nur mit glatter Welle (15. Datenstelle „J“ oder „K“).
6) Ausführung für ZF-Getriebeanbau vorbereitet: 12. Datenstelle „2“ oder „3“, 13. Datenstelle „0“, 14. Datenstelle „B“, 15. Datenstelle „C“ oder „D“, 16. Datenstelle „2“, „5“ oder „8“. Keine stauende Flüssigkeit am Wellen-durchtritt zulässig.
7) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
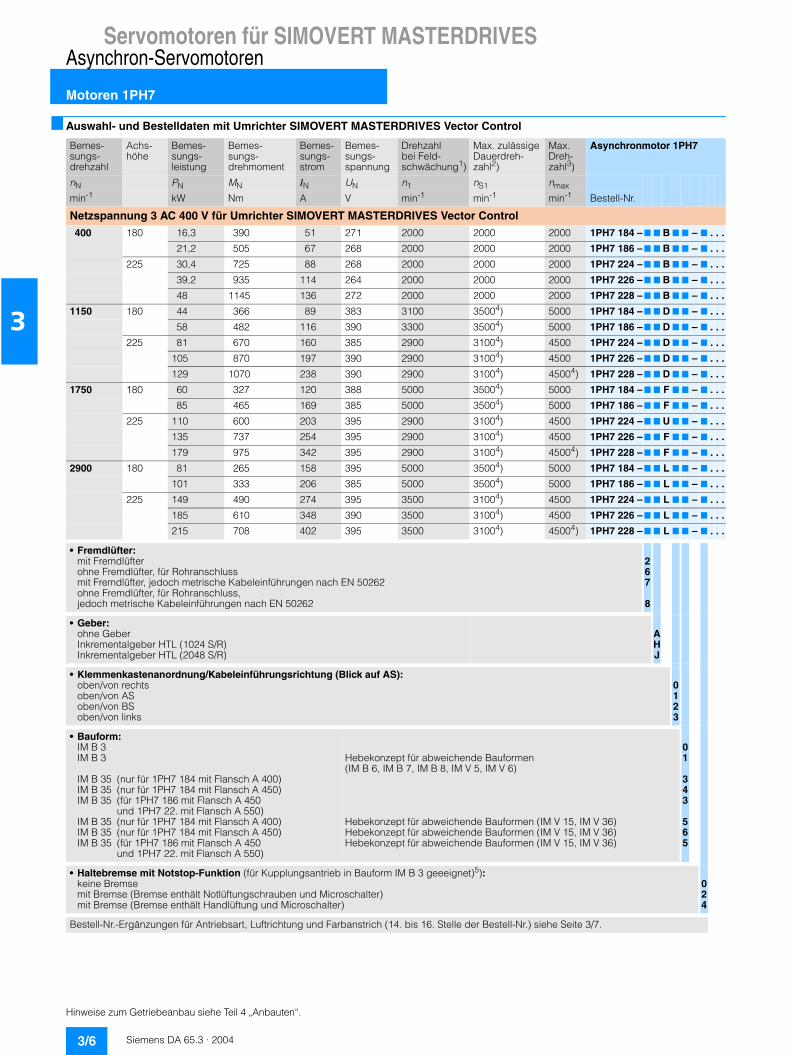
Siemens DA 65.3 · 20043/6
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control400 180 16,3 390 51 271 2000 2000 2000 1PH7 184 –7 7 B 7 7 – 7 . . .
21,2 505 67 268 2000 2000 2000 1PH7 186 –7 7 B 7 7 – 7 . . .
225 30,4 725 88 268 2000 2000 2000 1PH7 224 –7 7 B 7 7 – 7 . . .
39,2 935 114 264 2000 2000 2000 1PH7 226 –7 7 B 7 7 – 7 . . .
48 1145 136 272 2000 2000 2000 1PH7 228 –7 7 B 7 7 – 7 . . .
1150 180 44 366 89 383 3100 35004) 5000 1PH7 184 –7 7 D 7 7 – 7 . . .
58 482 116 390 3300 35004) 5000 1PH7 186 –7 7 D 7 7 – 7 . . .
225 81 670 160 385 2900 31004) 4500 1PH7 224 –7 7 D 7 7 – 7 . . .
105 870 197 390 2900 31004) 4500 1PH7 226 –7 7 D 7 7 – 7 . . .
129 1070 238 390 2900 31004) 45004) 1PH7 228 –7 7 D 7 7 – 7 . . .
1750 180 60 327 120 388 5000 35004) 5000 1PH7 184 –7 7 F 7 7 – 7 . . .
85 465 169 385 5000 35004) 5000 1PH7 186 –7 7 F 7 7 – 7 . . .
225 110 600 203 395 2900 31004) 4500 1PH7 224 –7 7 U 7 7 – 7 . . .
135 737 254 395 2900 31004) 4500 1PH7 226 –7 7 F 7 7 – 7 . . .
179 975 342 395 2900 31004) 45004) 1PH7 228 –7 7 F 7 7 – 7 . . .
2900 180 81 265 158 395 5000 35004) 5000 1PH7 184 –7 7 L 7 7 – 7 . . .
101 333 206 385 5000 35004) 5000 1PH7 186 –7 7 L 7 7 – 7 . . .
225 149 490 274 395 3500 31004) 4500 1PH7 224 –7 7 L 7 7 – 7 . . .
185 610 348 390 3500 31004) 4500 1PH7 226 –7 7 L 7 7 – 7 . . .
215 708 402 395 3500 31004) 45004) 1PH7 228 –7 7 L 7 7 – 7 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
267
8
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von ASoben/von BSoben/von links
0123
• Bauform:IM B 3IM B 3
IM B 35 (nur für 1PH7 184 mit Flansch A 400)IM B 35 (nur für 1PH7 184 mit Flansch A 450)IM B 35 (für 1PH7 186 mit Flansch A 450
und 1PH7 22. mit Flansch A 550)IM B 35 (nur für 1PH7 184 mit Flansch A 400)IM B 35 (nur für 1PH7 184 mit Flansch A 450)IM B 35 (für 1PH7 186 mit Flansch A 450
und 1PH7 22. mit Flansch A 550)
Hebekonzept für abweichende Bauformen (IM B 6, IM B 7, IM B 8, IM V 5, IM V 6)
Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)
01
343
565
• Haltebremse mit Notstop-Funktion (für Kupplungsantrieb in Bauform IM B 3 geeeignet)5):keine Bremsemit Bremse (Bremse enthält Notlüftungschrauben und Microschalter)mit Bremse (Bremse enthält Handlüftung und Microschalter)
024
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/7.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
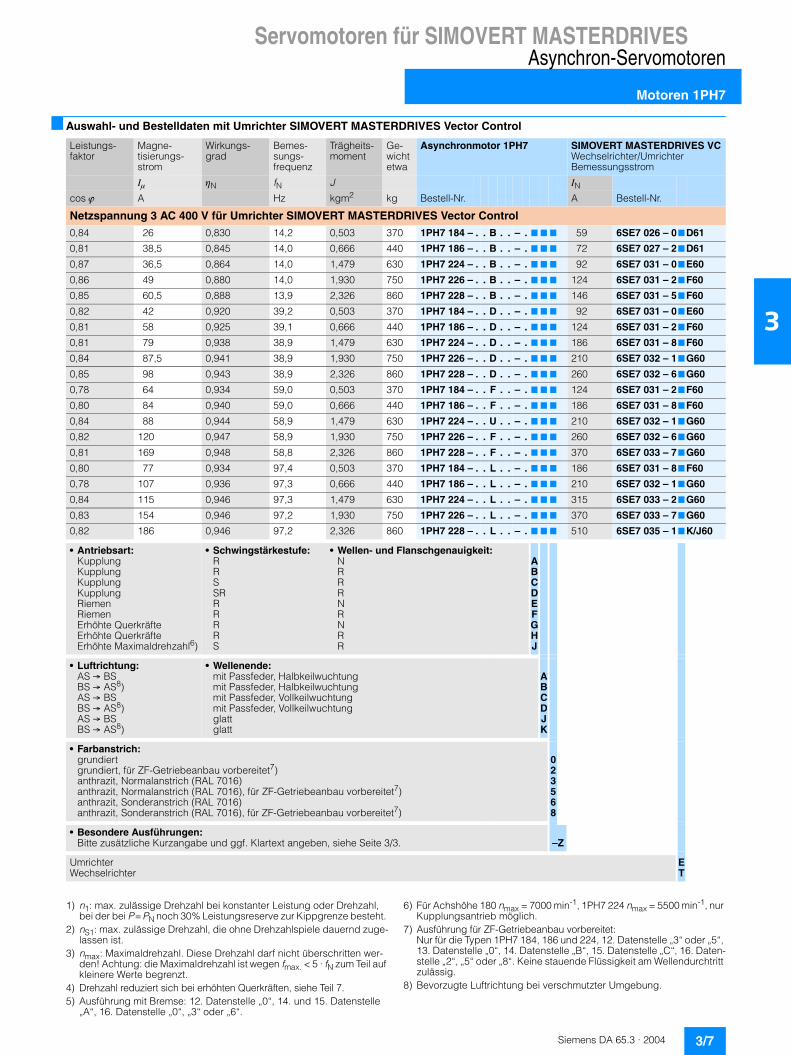
Siemens DA 65.3 · 2004 3/7
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,84 26 0,830 14,2 0,503 370 1PH7 184 – . . B . . – . 7 7 7 59 6SE7 026 – 07D61
0,81 38,5 0,845 14,0 0,666 440 1PH7 186 – . . B . . – . 7 7 7 72 6SE7 027 – 27D61
0,87 36,5 0,864 14,0 1,479 630 1PH7 224 – . . B . . – . 7 7 7 92 6SE7 031 – 07E60
0,86 49 0,880 14,0 1,930 750 1PH7 226 – . . B . . – . 7 7 7 124 6SE7 031 – 27F60
0,85 60,5 0,888 13,9 2,326 860 1PH7 228 – . . B . . – . 7 7 7 146 6SE7 031 – 57F60
0,82 42 0,920 39,2 0,503 370 1PH7 184 – . . D . . – . 7 7 7 92 6SE7 031 – 07E60
0,81 58 0,925 39,1 0,666 440 1PH7 186 – . . D . . – . 7 7 7 124 6SE7 031 – 27F60
0,81 79 0,938 38,9 1,479 630 1PH7 224 – . . D . . – . 7 7 7 186 6SE7 031 – 87F60
0,84 87,5 0,941 38,9 1,930 750 1PH7 226 – . . D . . – . 7 7 7 210 6SE7 032 – 17G60
0,85 98 0,943 38,9 2,326 860 1PH7 228 – . . D . . – . 7 7 7 260 6SE7 032 – 67G60
0,78 64 0,934 59,0 0,503 370 1PH7 184 – . . F . . – . 7 7 7 124 6SE7 031 – 27F60
0,80 84 0,940 59,0 0,666 440 1PH7 186 – . . F . . – . 7 7 7 186 6SE7 031 – 87F60
0,84 88 0,944 58,9 1,479 630 1PH7 224 – . . U . . – . 7 7 7 210 6SE7 032 – 17G60
0,82 120 0,947 58,9 1,930 750 1PH7 226 – . . F . . – . 7 7 7 260 6SE7 032 – 67G60
0,81 169 0,948 58,8 2,326 860 1PH7 228 – . . F . . – . 7 7 7 370 6SE7 033 – 77G60
0,80 77 0,934 97,4 0,503 370 1PH7 184 – . . L . . – . 7 7 7 186 6SE7 031 – 87F60
0,78 107 0,936 97,3 0,666 440 1PH7 186 – . . L . . – . 7 7 7 210 6SE7 032 – 17G60
0,84 115 0,946 97,3 1,479 630 1PH7 224 – . . L . . – . 7 7 7 315 6SE7 033 – 27G60
0,83 154 0,946 97,2 1,930 750 1PH7 226 – . . L . . – . 7 7 7 370 6SE7 033 – 77G60
0,82 186 0,946 97,2 2,326 860 1PH7 228 – . . L . . – . 7 7 7 510 6SE7 035 – 17K/J60
• Antriebsart:KupplungKupplungKupplungKupplungRiemenRiemenErhöhte QuerkräfteErhöhte QuerkräfteErhöhte Maximaldrehzahl6)
• Schwingstärkestufe:RRSSRRRRRS
• Wellen- und Flanschgenauigkeit:NRRRNRNRR
ABCDEFGHJ
• Luftrichtung:AS � BSBS � AS8)AS � BSBS � AS8)AS � BSBS � AS8)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:grundiertgrundiert, für ZF-Getriebeanbau vorbereitet7)anthrazit, Normalanstrich (RAL 7016)anthrazit, Normalanstrich (RAL 7016), für ZF-Getriebeanbau vorbereitet7)anthrazit, Sonderanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016), für ZF-Getriebeanbau vorbereitet7)
023568
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Drehzahl reduziert sich bei erhöhten Querkräften, siehe Teil 7.5) Ausführung mit Bremse: 12. Datenstelle „0“, 14. und 15. Datenstelle
„A“, 16. Datenstelle „0“, „3“ oder „6“.
6) Für Achshöhe 180 nmax = 7000 min-1, 1PH7 224 nmax = 5500 min-1, nur Kupplungsantrieb möglich.
7) Ausführung für ZF-Getriebeanbau vorbereitet: Nur für die Typen 1PH7 184, 186 und 224, 12. Datenstelle „3“ oder „5“, 13. Datenstelle „0“, 14. Datenstelle „B“, 15. Datenstelle „C“, 16. Daten-stelle „2“, „5“ oder „8“. Keine stauende Flüssigkeit am Wellendurchtritt zulässig.
8) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
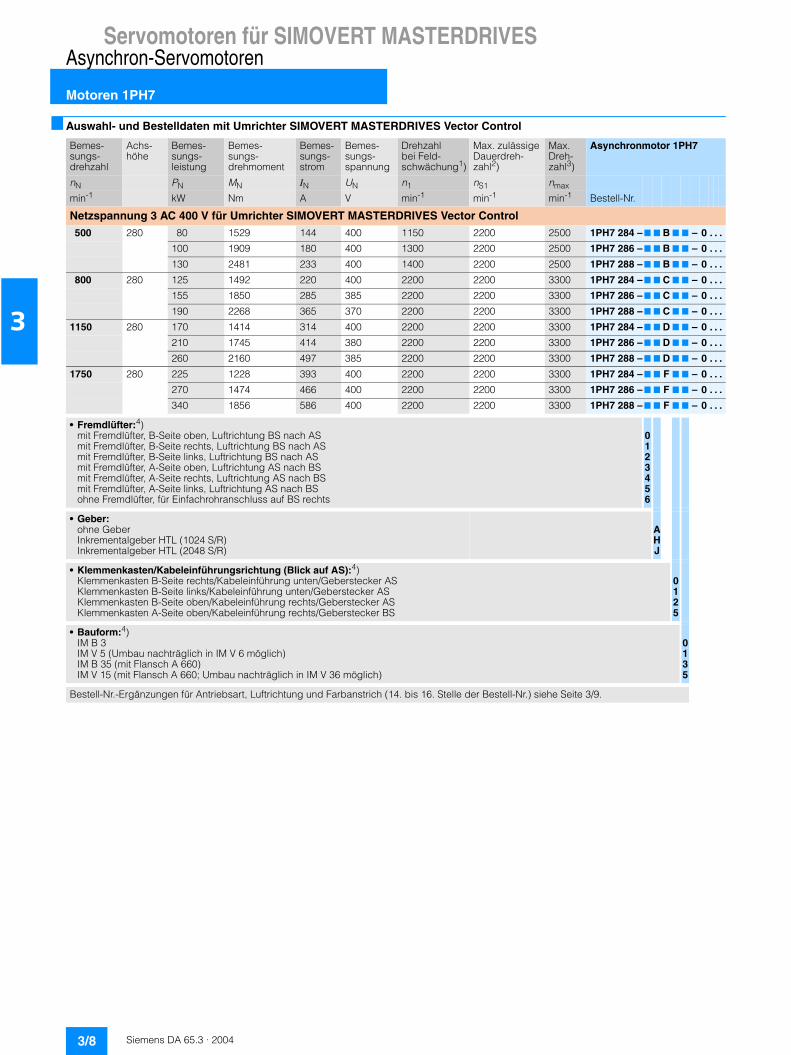
Siemens DA 65.3 · 20043/8
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control500 280 80 1529 144 400 1150 2200 2500 1PH7 284 –7 7 B 7 7 – 0 . . .
100 1909 180 400 1300 2200 2500 1PH7 286 –7 7 B 7 7 – 0 . . .
130 2481 233 400 1400 2200 2500 1PH7 288 –7 7 B 7 7 – 0 . . .
800 280 125 1492 220 400 2200 2200 3300 1PH7 284 –7 7 C 7 7 – 0 . . .
155 1850 285 385 2200 2200 3300 1PH7 286 –7 7 C 7 7 – 0 . . .
190 2268 365 370 2200 2200 3300 1PH7 288 –7 7 C 7 7 – 0 . . .
1150 280 170 1414 314 400 2200 2200 3300 1PH7 284 –7 7 D 7 7 – 0 . . .
210 1745 414 380 2200 2200 3300 1PH7 286 –7 7 D 7 7 – 0 . . .
260 2160 497 385 2200 2200 3300 1PH7 288 –7 7 D 7 7 – 0 . . .
1750 280 225 1228 393 400 2200 2200 3300 1PH7 284 –7 7 F 7 7 – 0 . . .
270 1474 466 400 2200 2200 3300 1PH7 286 –7 7 F 7 7 – 0 . . .
340 1856 586 400 2200 2200 3300 1PH7 288 –7 7 F 7 7 – 0 . . .
• Fremdlüfter:4)mit Fremdlüfter, B-Seite oben, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite rechts, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite links, Luftrichtung BS nach ASmit Fremdlüfter, A-Seite oben, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite rechts, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite links, Luftrichtung AS nach BSohne Fremdlüfter, für Einfachrohranschluss auf BS rechts
0123456
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkasten/Kabeleinführungsrichtung (Blick auf AS):4)Klemmenkasten B-Seite rechts/Kabeleinführung unten/Geberstecker ASKlemmenkasten B-Seite links/Kabeleinführung unten/Geberstecker ASKlemmenkasten B-Seite oben/Kabeleinführung rechts/Geberstecker ASKlemmenkasten A-Seite oben/Kabeleinführung rechts/Geberstecker BS
0125
• Bauform:4)IM B 3IM V 5 (Umbau nachträglich in IM V 6 möglich)IM B 35 (mit Flansch A 660)IM V 15 (mit Flansch A 660; Umbau nachträglich in IM V 36 möglich)
0135
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/9.
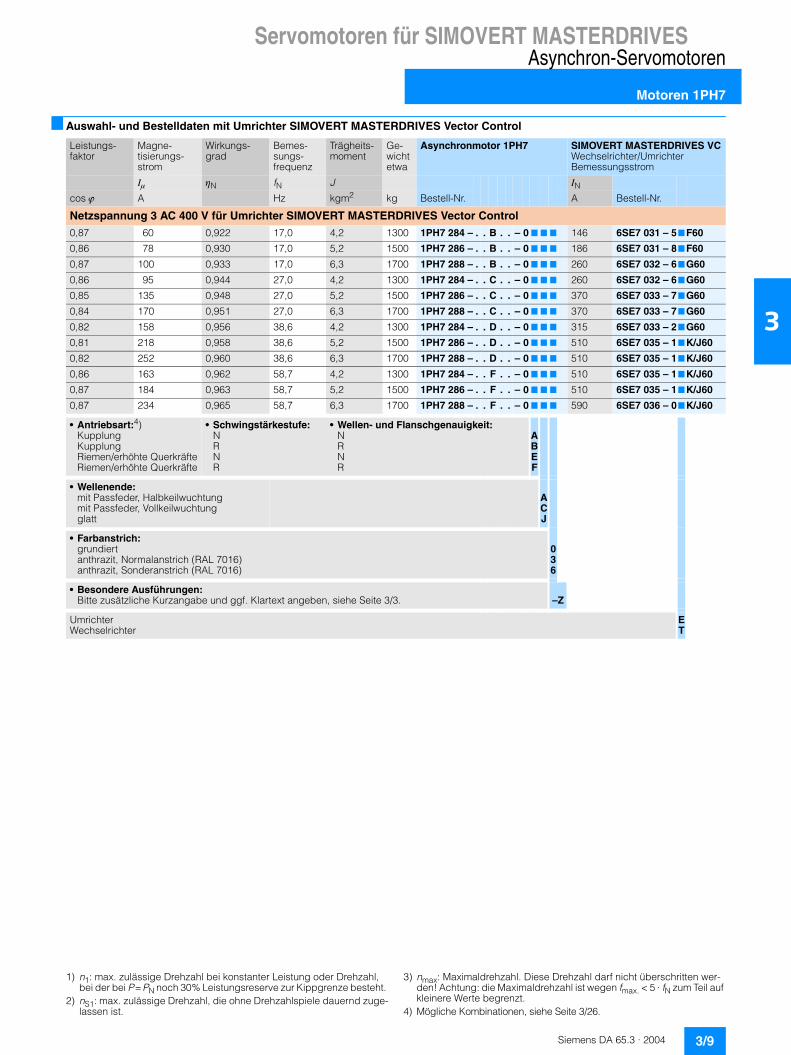
Siemens DA 65.3 · 2004 3/9
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,87 60 0,922 17,0 4,2 1300 1PH7 284 – . . B . . – 0 7 7 7 146 6SE7 031 – 57F60
0,86 78 0,930 17,0 5,2 1500 1PH7 286 – . . B . . – 0 7 7 7 186 6SE7 031 – 87F60
0,87 100 0,933 17,0 6,3 1700 1PH7 288 – . . B . . – 0 7 7 7 260 6SE7 032 – 67G60
0,86 95 0,944 27,0 4,2 1300 1PH7 284 – . . C . . – 0 7 7 7 260 6SE7 032 – 67G60
0,85 135 0,948 27,0 5,2 1500 1PH7 286 – . . C . . – 0 7 7 7 370 6SE7 033 – 77G60
0,84 170 0,951 27,0 6,3 1700 1PH7 288 – . . C . . – 0 7 7 7 370 6SE7 033 – 77G60
0,82 158 0,956 38,6 4,2 1300 1PH7 284 – . . D . . – 0 7 7 7 315 6SE7 033 – 27G60
0,81 218 0,958 38,6 5,2 1500 1PH7 286 – . . D . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,82 252 0,960 38,6 6,3 1700 1PH7 288 – . . D . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,86 163 0,962 58,7 4,2 1300 1PH7 284 – . . F . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,87 184 0,963 58,7 5,2 1500 1PH7 286 – . . F . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,87 234 0,965 58,7 6,3 1700 1PH7 288 – . . F . . – 0 7 7 7 590 6SE7 036 – 07K/J60
• Antriebsart:4)KupplungKupplungRiemen/erhöhte QuerkräfteRiemen/erhöhte Querkräfte
• Schwingstärkestufe:NRNR
• Wellen- und Flanschgenauigkeit:NRNR
ABEF
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungglatt
ACJ
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Mögliche Kombinationen, siehe Seite 3/26.
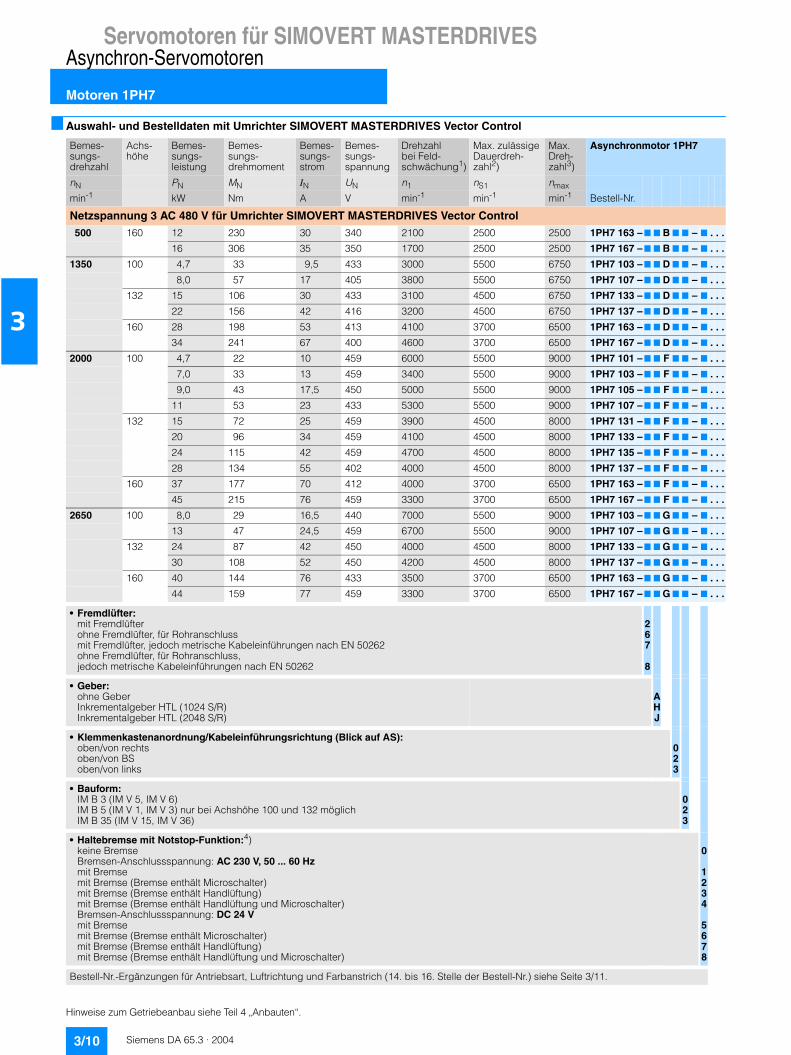
Siemens DA 65.3 · 20043/10
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control500 160 12 230 30 340 2100 2500 2500 1PH7 163 –7 7 B 7 7 – 7 . . .
16 306 35 350 1700 2500 2500 1PH7 167 –7 7 B 7 7 – 7 . . .
1350 100 4,7 33 9,5 433 3000 5500 6750 1PH7 103 –7 7 D 7 7 – 7 . . .
8,0 57 17 405 3800 5500 6750 1PH7 107 –7 7 D 7 7 – 7 . . .
132 15 106 30 433 3100 4500 6750 1PH7 133 –7 7 D 7 7 – 7 . . .
22 156 42 416 3200 4500 6750 1PH7 137 –7 7 D 7 7 – 7 . . .
160 28 198 53 413 4100 3700 6500 1PH7 163 –7 7 D 7 7 – 7 . . .
34 241 67 400 4600 3700 6500 1PH7 167 –7 7 D 7 7 – 7 . . .
2000 100 4,7 22 10 459 6000 5500 9000 1PH7 101 –7 7 F 7 7 – 7 . . .
7,0 33 13 459 3400 5500 9000 1PH7 103 –7 7 F 7 7 – 7 . . .
9,0 43 17,5 450 5000 5500 9000 1PH7 105 –7 7 F 7 7 – 7 . . .
11 53 23 433 5300 5500 9000 1PH7 107 –7 7 F 7 7 – 7 . . .
132 15 72 25 459 3900 4500 8000 1PH7 131 –7 7 F 7 7 – 7 . . .
20 96 34 459 4100 4500 8000 1PH7 133 –7 7 F 7 7 – 7 . . .
24 115 42 459 4700 4500 8000 1PH7 135 –7 7 F 7 7 – 7 . . .
28 134 55 402 4000 4500 8000 1PH7 137 –7 7 F 7 7 – 7 . . .
160 37 177 70 412 4000 3700 6500 1PH7 163 –7 7 F 7 7 – 7 . . .
45 215 76 459 3300 3700 6500 1PH7 167 –7 7 F 7 7 – 7 . . .
2650 100 8,0 29 16,5 440 7000 5500 9000 1PH7 103 –7 7 G 7 7 – 7 . . .
13 47 24,5 459 6700 5500 9000 1PH7 107 –7 7 G 7 7 – 7 . . .
132 24 87 42 450 4000 4500 8000 1PH7 133 –7 7 G 7 7 – 7 . . .
30 108 52 450 4200 4500 8000 1PH7 137 –7 7 G 7 7 – 7 . . .
160 40 144 76 433 3500 3700 6500 1PH7 163 –7 7 G 7 7 – 7 . . .
44 159 77 459 3300 3700 6500 1PH7 167 –7 7 G 7 7 – 7 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
267
8
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von BSoben/von links
023
• Bauform:IM B 3 (IM V 5, IM V 6)IM B 5 (IM V 1, IM V 3) nur bei Achshöhe 100 und 132 möglichIM B 35 (IM V 15, IM V 36)
023
• Haltebremse mit Notstop-Funktion:4)keine BremseBremsen-Anschlussspannung: AC 230 V, 50 ... 60 Hzmit Bremsemit Bremse (Bremse enthält Microschalter)mit Bremse (Bremse enthält Handlüftung)mit Bremse (Bremse enthält Handlüftung und Microschalter)Bremsen-Anschlussspannung: DC 24 Vmit Bremsemit Bremse (Bremse enthält Microschalter)mit Bremse (Bremse enthält Handlüftung)mit Bremse (Bremse enthält Handlüftung und Microschalter)
0
1234
5678
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/11.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
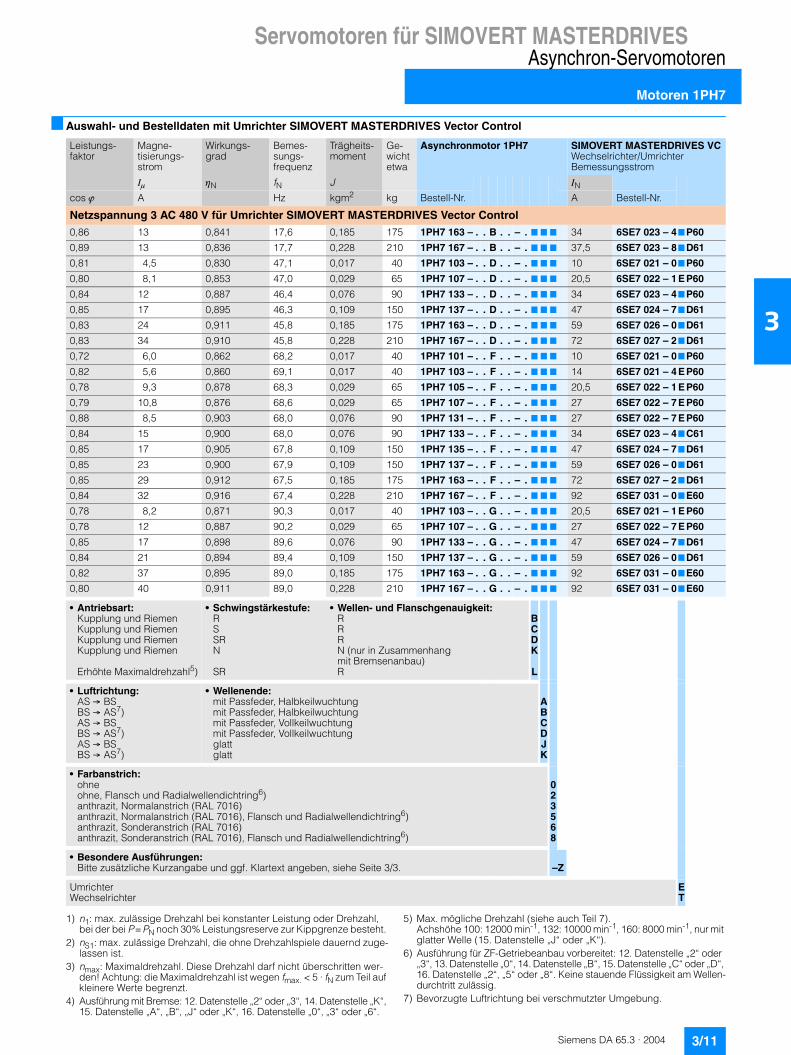
Siemens DA 65.3 · 2004 3/11
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,86 13 0,841 17,6 0,185 175 1PH7 163 – . . B . . – . 7 7 7 34 6SE7 023 – 47P60
0,89 13 0,836 17,7 0,228 210 1PH7 167 – . . B . . – . 7 7 7 37,5 6SE7 023 – 87D61
0,81 4,5 0,830 47,1 0,017 40 1PH7 103 – . . D . . – . 7 7 7 10 6SE7 021 – 07P60
0,80 8,1 0,853 47,0 0,029 65 1PH7 107 – . . D . . – . 7 7 7 20,5 6SE7 022 – 1 EP60
0,84 12 0,887 46,4 0,076 90 1PH7 133 – . . D . . – . 7 7 7 34 6SE7 023 – 47P60
0,85 17 0,895 46,3 0,109 150 1PH7 137 – . . D . . – . 7 7 7 47 6SE7 024 – 77D61
0,83 24 0,911 45,8 0,185 175 1PH7 163 – . . D . . – . 7 7 7 59 6SE7 026 – 07D61
0,83 34 0,910 45,8 0,228 210 1PH7 167 – . . D . . – . 7 7 7 72 6SE7 027 – 27D61
0,72 6,0 0,862 68,2 0,017 40 1PH7 101 – . . F . . – . 7 7 7 10 6SE7 021 – 07P60
0,82 5,6 0,860 69,1 0,017 40 1PH7 103 – . . F . . – . 7 7 7 14 6SE7 021 – 4 EP60
0,78 9,3 0,878 68,3 0,029 65 1PH7 105 – . . F . . – . 7 7 7 20,5 6SE7 022 – 1 EP60
0,79 10,8 0,876 68,6 0,029 65 1PH7 107 – . . F . . – . 7 7 7 27 6SE7 022 – 7 EP60
0,88 8,5 0,903 68,0 0,076 90 1PH7 131 – . . F . . – . 7 7 7 27 6SE7 022 – 7 EP60
0,84 15 0,900 68,0 0,076 90 1PH7 133 – . . F . . – . 7 7 7 34 6SE7 023 – 47C61
0,85 17 0,905 67,8 0,109 150 1PH7 135 – . . F . . – . 7 7 7 47 6SE7 024 – 77D61
0,85 23 0,900 67,9 0,109 150 1PH7 137 – . . F . . – . 7 7 7 59 6SE7 026 – 07D61
0,85 29 0,912 67,5 0,185 175 1PH7 163 – . . F . . – . 7 7 7 72 6SE7 027 – 27D61
0,84 32 0,916 67,4 0,228 210 1PH7 167 – . . F . . – . 7 7 7 92 6SE7 031 – 07E60
0,78 8,2 0,871 90,3 0,017 40 1PH7 103 – . . G . . – . 7 7 7 20,5 6SE7 021 – 1 EP60
0,78 12 0,887 90,2 0,029 65 1PH7 107 – . . G . . – . 7 7 7 27 6SE7 022 – 7 EP60
0,85 17 0,898 89,6 0,076 90 1PH7 133 – . . G . . – . 7 7 7 47 6SE7 024 – 77D61
0,84 21 0,894 89,4 0,109 150 1PH7 137 – . . G . . – . 7 7 7 59 6SE7 026 – 07D61
0,82 37 0,895 89,0 0,185 175 1PH7 163 – . . G . . – . 7 7 7 92 6SE7 031 – 07E60
0,80 40 0,911 89,0 0,228 210 1PH7 167 – . . G . . – . 7 7 7 92 6SE7 031 – 07E60
• Antriebsart:Kupplung und RiemenKupplung und RiemenKupplung und RiemenKupplung und Riemen
Erhöhte Maximaldrehzahl5)
• Schwingstärkestufe:RSSRN
SR
• Wellen- und Flanschgenauigkeit:RRRN (nur in Zusammenhang mit Bremsenanbau)R
BCDK
L
• Luftrichtung:AS � BSBS � AS7)AS � BSBS � AS7)AS � BSBS � AS7)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:ohneohne, Flansch und Radialwellendichtring6)anthrazit, Normalanstrich (RAL 7016)anthrazit, Normalanstrich (RAL 7016), Flansch und Radialwellendichtring6)anthrazit, Sonderanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016), Flansch und Radialwellendichtring6)
023568
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Ausführung mit Bremse: 12. Datenstelle „2“ oder „3“, 14. Datenstelle „K“, 15. Datenstelle „A“, „B“, „J“ oder „K“, 16. Datenstelle „0“, „3“ oder „6“.
5) Max. mögliche Drehzahl (siehe auch Teil 7). Achshöhe 100: 12000 min-1, 132: 10000 min-1, 160: 8000 min-1, nur mit glatter Welle (15. Datenstelle „J“ oder „K“).
6) Ausführung für ZF-Getriebeanbau vorbereitet: 12. Datenstelle „2“ oder „3“, 13. Datenstelle „0“, 14. Datenstelle „B“, 15. Datenstelle „C“ oder „D“, 16. Datenstelle „2“, „5“ oder „8“. Keine stauende Flüssigkeit am Wellen-durchtritt zulässig.
7) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
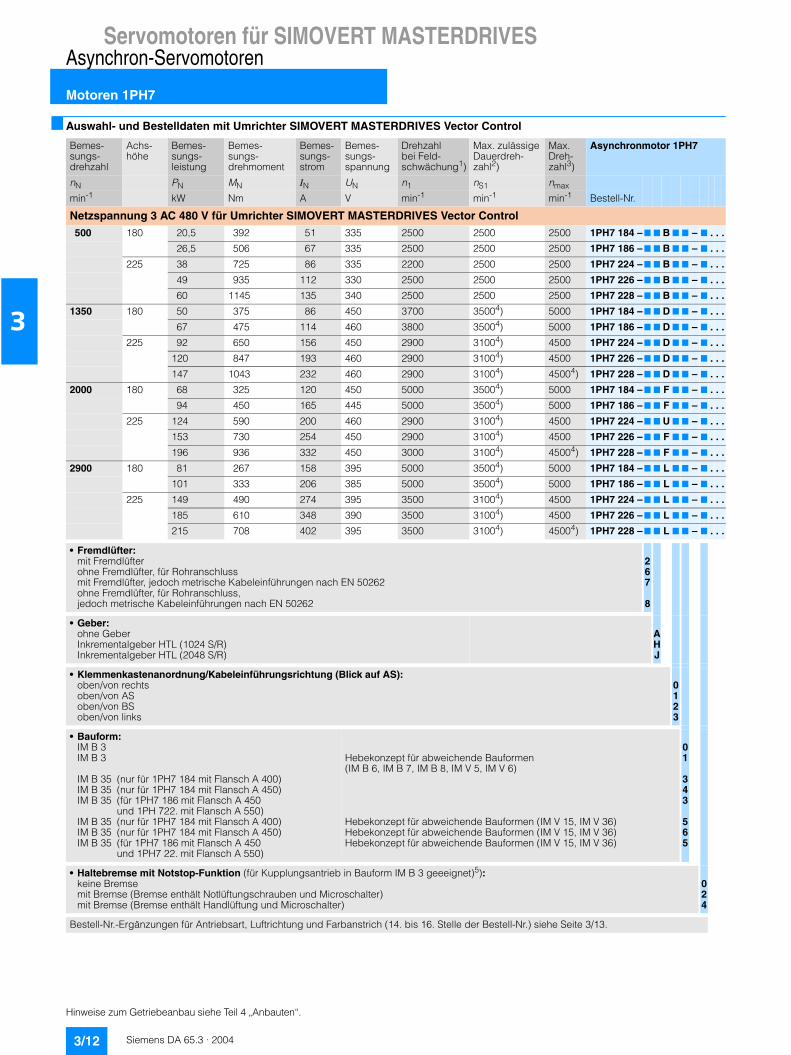
Siemens DA 65.3 · 20043/12
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control500 180 20,5 392 51 335 2500 2500 2500 1PH7 184 –7 7 B 7 7 – 7 . . .
26,5 506 67 335 2500 2500 2500 1PH7 186 –7 7 B 7 7 – 7 . . .
225 38 725 86 335 2200 2500 2500 1PH7 224 –7 7 B 7 7 – 7 . . .
49 935 112 330 2500 2500 2500 1PH7 226 –7 7 B 7 7 – 7 . . .
60 1145 135 340 2500 2500 2500 1PH7 228 –7 7 B 7 7 – 7 . . .
1350 180 50 375 86 450 3700 35004) 5000 1PH7 184 –7 7 D 7 7 – 7 . . .
67 475 114 460 3800 35004) 5000 1PH7 186 –7 7 D 7 7 – 7 . . .
225 92 650 156 450 2900 31004) 4500 1PH7 224 –7 7 D 7 7 – 7 . . .
120 847 193 460 2900 31004) 4500 1PH7 226 –7 7 D 7 7 – 7 . . .
147 1043 232 460 2900 31004) 45004) 1PH7 228 –7 7 D 7 7 – 7 . . .
2000 180 68 325 120 450 5000 35004) 5000 1PH7 184 –7 7 F 7 7 – 7 . . .
94 450 165 445 5000 35004) 5000 1PH7 186 –7 7 F 7 7 – 7 . . .
225 124 590 200 460 2900 31004) 4500 1PH7 224 –7 7 U 7 7 – 7 . . .
153 730 254 450 2900 31004) 4500 1PH7 226 –7 7 F 7 7 – 7 . . .
196 936 332 450 3000 31004) 45004) 1PH7 228 –7 7 F 7 7 – 7 . . .
2900 180 81 267 158 395 5000 35004) 5000 1PH7 184 –7 7 L 7 7 – 7 . . .
101 333 206 385 5000 35004) 5000 1PH7 186 –7 7 L 7 7 – 7 . . .
225 149 490 274 395 3500 31004) 4500 1PH7 224 –7 7 L 7 7 – 7 . . .
185 610 348 390 3500 31004) 4500 1PH7 226 –7 7 L 7 7 – 7 . . .
215 708 402 395 3500 31004) 45004) 1PH7 228 –7 7 L 7 7 – 7 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
267
8
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von ASoben/von BSoben/von links
0123
• Bauform:IM B 3IM B 3
IM B 35 (nur für 1PH7 184 mit Flansch A 400)IM B 35 (nur für 1PH7 184 mit Flansch A 450)IM B 35 (für 1PH7 186 mit Flansch A 450
und 1PH 722. mit Flansch A 550)IM B 35 (nur für 1PH7 184 mit Flansch A 400)IM B 35 (nur für 1PH7 184 mit Flansch A 450)IM B 35 (für 1PH7 186 mit Flansch A 450
und 1PH7 22. mit Flansch A 550)
Hebekonzept für abweichende Bauformen (IM B 6, IM B 7, IM B 8, IM V 5, IM V 6)
Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)
01
343
565
• Haltebremse mit Notstop-Funktion (für Kupplungsantrieb in Bauform IM B 3 geeeignet)5):keine Bremsemit Bremse (Bremse enthält Notlüftungschrauben und Microschalter)mit Bremse (Bremse enthält Handlüftung und Microschalter)
024
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/13.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
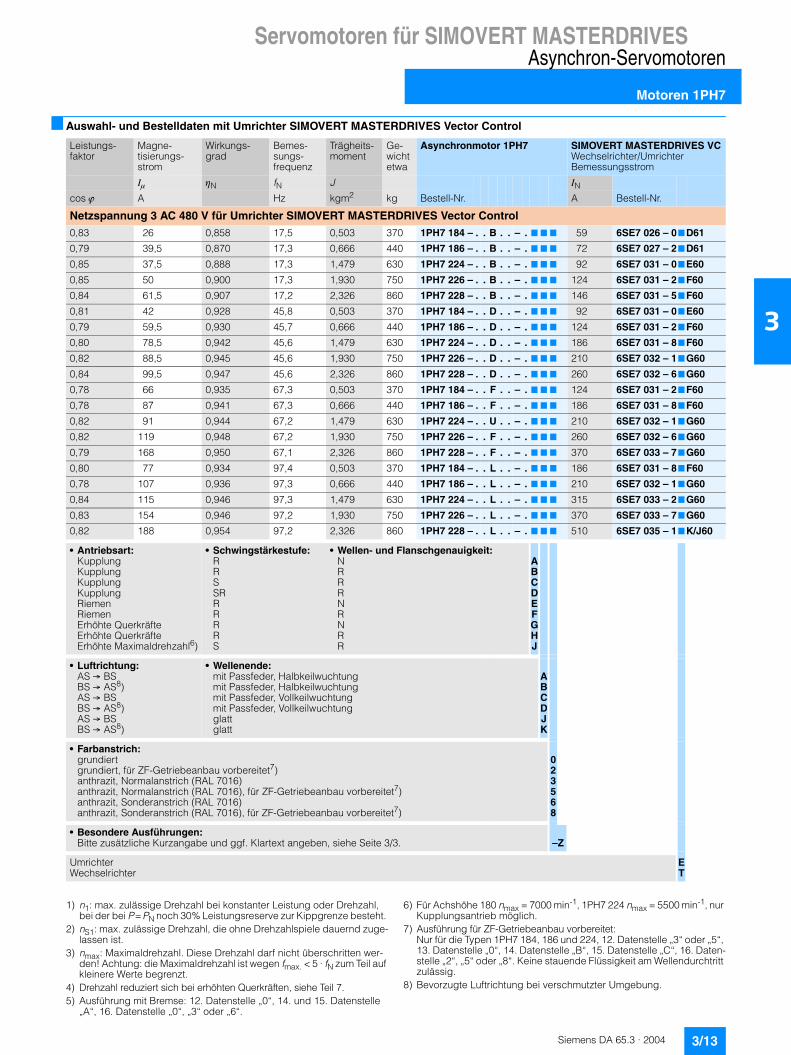
Siemens DA 65.3 · 2004 3/13
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,83 26 0,858 17,5 0,503 370 1PH7 184 – . . B . . – . 7 7 7 59 6SE7 026 – 07D61
0,79 39,5 0,870 17,3 0,666 440 1PH7 186 – . . B . . – . 7 7 7 72 6SE7 027 – 27D61
0,85 37,5 0,888 17,3 1,479 630 1PH7 224 – . . B . . – . 7 7 7 92 6SE7 031 – 07E60
0,85 50 0,900 17,3 1,930 750 1PH7 226 – . . B . . – . 7 7 7 124 6SE7 031 – 27F60
0,84 61,5 0,907 17,2 2,326 860 1PH7 228 – . . B . . – . 7 7 7 146 6SE7 031 – 57F60
0,81 42 0,928 45,8 0,503 370 1PH7 184 – . . D . . – . 7 7 7 92 6SE7 031 – 07E60
0,79 59,5 0,930 45,7 0,666 440 1PH7 186 – . . D . . – . 7 7 7 124 6SE7 031 – 27F60
0,80 78,5 0,942 45,6 1,479 630 1PH7 224 – . . D . . – . 7 7 7 186 6SE7 031 – 87F60
0,82 88,5 0,945 45,6 1,930 750 1PH7 226 – . . D . . – . 7 7 7 210 6SE7 032 – 17G60
0,84 99,5 0,947 45,6 2,326 860 1PH7 228 – . . D . . – . 7 7 7 260 6SE7 032 – 67G60
0,78 66 0,935 67,3 0,503 370 1PH7 184 – . . F . . – . 7 7 7 124 6SE7 031 – 27F60
0,78 87 0,941 67,3 0,666 440 1PH7 186 – . . F . . – . 7 7 7 186 6SE7 031 – 87F60
0,82 91 0,944 67,2 1,479 630 1PH7 224 – . . U . . – . 7 7 7 210 6SE7 032 – 17G60
0,82 119 0,948 67,2 1,930 750 1PH7 226 – . . F . . – . 7 7 7 260 6SE7 032 – 67G60
0,79 168 0,950 67,1 2,326 860 1PH7 228 – . . F . . – . 7 7 7 370 6SE7 033 – 77G60
0,80 77 0,934 97,4 0,503 370 1PH7 184 – . . L . . – . 7 7 7 186 6SE7 031 – 87F60
0,78 107 0,936 97,3 0,666 440 1PH7 186 – . . L . . – . 7 7 7 210 6SE7 032 – 17G60
0,84 115 0,946 97,3 1,479 630 1PH7 224 – . . L . . – . 7 7 7 315 6SE7 033 – 27G60
0,83 154 0,946 97,2 1,930 750 1PH7 226 – . . L . . – . 7 7 7 370 6SE7 033 – 77G60
0,82 188 0,954 97,2 2,326 860 1PH7 228 – . . L . . – . 7 7 7 510 6SE7 035 – 17K/J60
• Antriebsart:KupplungKupplungKupplungKupplungRiemenRiemenErhöhte QuerkräfteErhöhte QuerkräfteErhöhte Maximaldrehzahl6)
• Schwingstärkestufe:RRSSRRRRRS
• Wellen- und Flanschgenauigkeit:NRRRNRNRR
ABCDEFGHJ
• Luftrichtung:AS � BSBS � AS8)AS � BSBS � AS8)AS � BSBS � AS8)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:grundiertgrundiert, für ZF-Getriebeanbau vorbereitet7)anthrazit, Normalanstrich (RAL 7016)anthrazit, Normalanstrich (RAL 7016), für ZF-Getriebeanbau vorbereitet7)anthrazit, Sonderanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016), für ZF-Getriebeanbau vorbereitet7)
023568
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Drehzahl reduziert sich bei erhöhten Querkräften, siehe Teil 7.5) Ausführung mit Bremse: 12. Datenstelle „0“, 14. und 15. Datenstelle
„A“, 16. Datenstelle „0“, „3“ oder „6“.
6) Für Achshöhe 180 nmax = 7000 min-1, 1PH7 224 nmax = 5500 min-1, nur Kupplungsantrieb möglich.
7) Ausführung für ZF-Getriebeanbau vorbereitet: Nur für die Typen 1PH7 184, 186 und 224, 12. Datenstelle „3“ oder „5“, 13. Datenstelle „0“, 14. Datenstelle „B“, 15. Datenstelle „C“, 16. Daten-stelle „2“, „5“ oder „8“. Keine stauende Flüssigkeit am Wellendurchtritt zulässig.
8) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
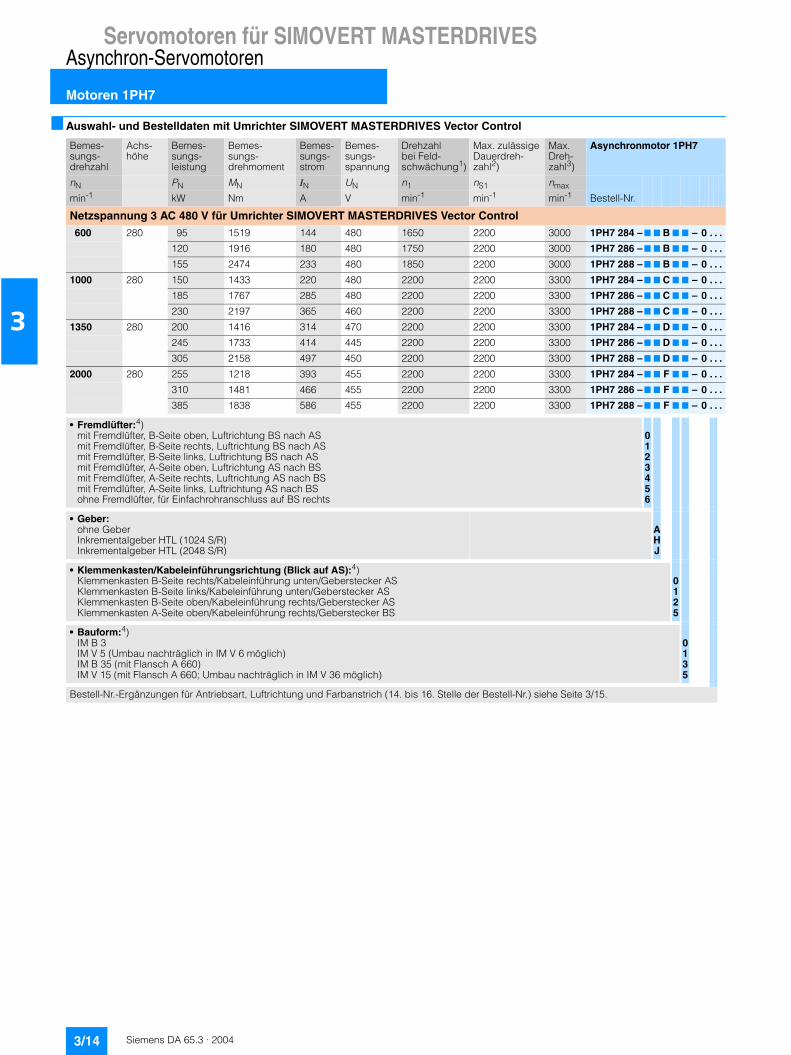
Siemens DA 65.3 · 20043/14
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control600 280 95 1519 144 480 1650 2200 3000 1PH7 284 –7 7 B 7 7 – 0 . . .
120 1916 180 480 1750 2200 3000 1PH7 286 –7 7 B 7 7 – 0 . . .
155 2474 233 480 1850 2200 3000 1PH7 288 –7 7 B 7 7 – 0 . . .
1000 280 150 1433 220 480 2200 2200 3300 1PH7 284 –7 7 C 7 7 – 0 . . .
185 1767 285 480 2200 2200 3300 1PH7 286 –7 7 C 7 7 – 0 . . .
230 2197 365 460 2200 2200 3300 1PH7 288 –7 7 C 7 7 – 0 . . .
1350 280 200 1416 314 470 2200 2200 3300 1PH7 284 –7 7 D 7 7 – 0 . . .
245 1733 414 445 2200 2200 3300 1PH7 286 –7 7 D 7 7 – 0 . . .
305 2158 497 450 2200 2200 3300 1PH7 288 –7 7 D 7 7 – 0 . . .
2000 280 255 1218 393 455 2200 2200 3300 1PH7 284 –7 7 F 7 7 – 0 . . .
310 1481 466 455 2200 2200 3300 1PH7 286 –7 7 F 7 7 – 0 . . .
385 1838 586 455 2200 2200 3300 1PH7 288 –7 7 F 7 7 – 0 . . .
• Fremdlüfter:4)mit Fremdlüfter, B-Seite oben, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite rechts, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite links, Luftrichtung BS nach ASmit Fremdlüfter, A-Seite oben, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite rechts, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite links, Luftrichtung AS nach BSohne Fremdlüfter, für Einfachrohranschluss auf BS rechts
0123456
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkasten/Kabeleinführungsrichtung (Blick auf AS):4)Klemmenkasten B-Seite rechts/Kabeleinführung unten/Geberstecker ASKlemmenkasten B-Seite links/Kabeleinführung unten/Geberstecker ASKlemmenkasten B-Seite oben/Kabeleinführung rechts/Geberstecker ASKlemmenkasten A-Seite oben/Kabeleinführung rechts/Geberstecker BS
0125
• Bauform:4)IM B 3IM V 5 (Umbau nachträglich in IM V 6 möglich)IM B 35 (mit Flansch A 660)IM V 15 (mit Flansch A 660; Umbau nachträglich in IM V 36 möglich)
0135
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/15.
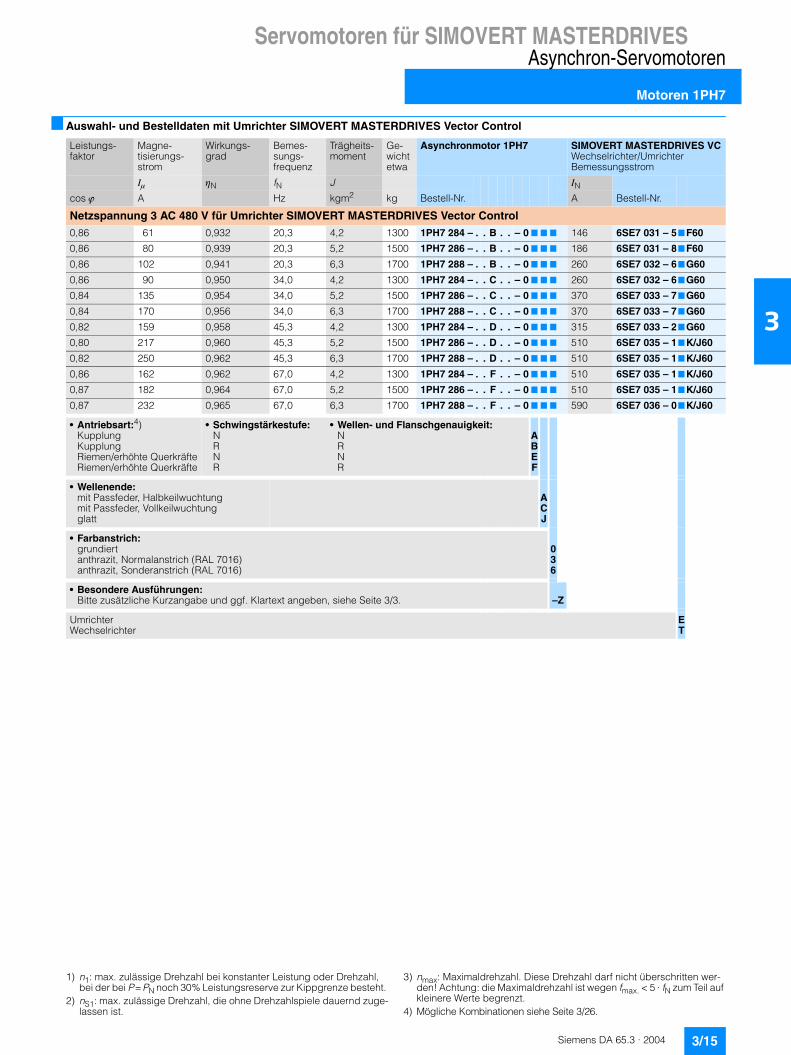
Siemens DA 65.3 · 2004 3/15
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,86 61 0,932 20,3 4,2 1300 1PH7 284 – . . B . . – 0 7 7 7 146 6SE7 031 – 57F60
0,86 80 0,939 20,3 5,2 1500 1PH7 286 – . . B . . – 0 7 7 7 186 6SE7 031 – 87F60
0,86 102 0,941 20,3 6,3 1700 1PH7 288 – . . B . . – 0 7 7 7 260 6SE7 032 – 67G60
0,86 90 0,950 34,0 4,2 1300 1PH7 284 – . . C . . – 0 7 7 7 260 6SE7 032 – 67G60
0,84 135 0,954 34,0 5,2 1500 1PH7 286 – . . C . . – 0 7 7 7 370 6SE7 033 – 77G60
0,84 170 0,956 34,0 6,3 1700 1PH7 288 – . . C . . – 0 7 7 7 370 6SE7 033 – 77G60
0,82 159 0,958 45,3 4,2 1300 1PH7 284 – . . D . . – 0 7 7 7 315 6SE7 033 – 27G60
0,80 217 0,960 45,3 5,2 1500 1PH7 286 – . . D . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,82 250 0,962 45,3 6,3 1700 1PH7 288 – . . D . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,86 162 0,962 67,0 4,2 1300 1PH7 284 – . . F . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,87 182 0,964 67,0 5,2 1500 1PH7 286 – . . F . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,87 232 0,965 67,0 6,3 1700 1PH7 288 – . . F . . – 0 7 7 7 590 6SE7 036 – 07K/J60
• Antriebsart:4)KupplungKupplungRiemen/erhöhte QuerkräfteRiemen/erhöhte Querkräfte
• Schwingstärkestufe:NRNR
• Wellen- und Flanschgenauigkeit:NRNR
ABEF
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungglatt
ACJ
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Mögliche Kombinationen siehe Seite 3/26.
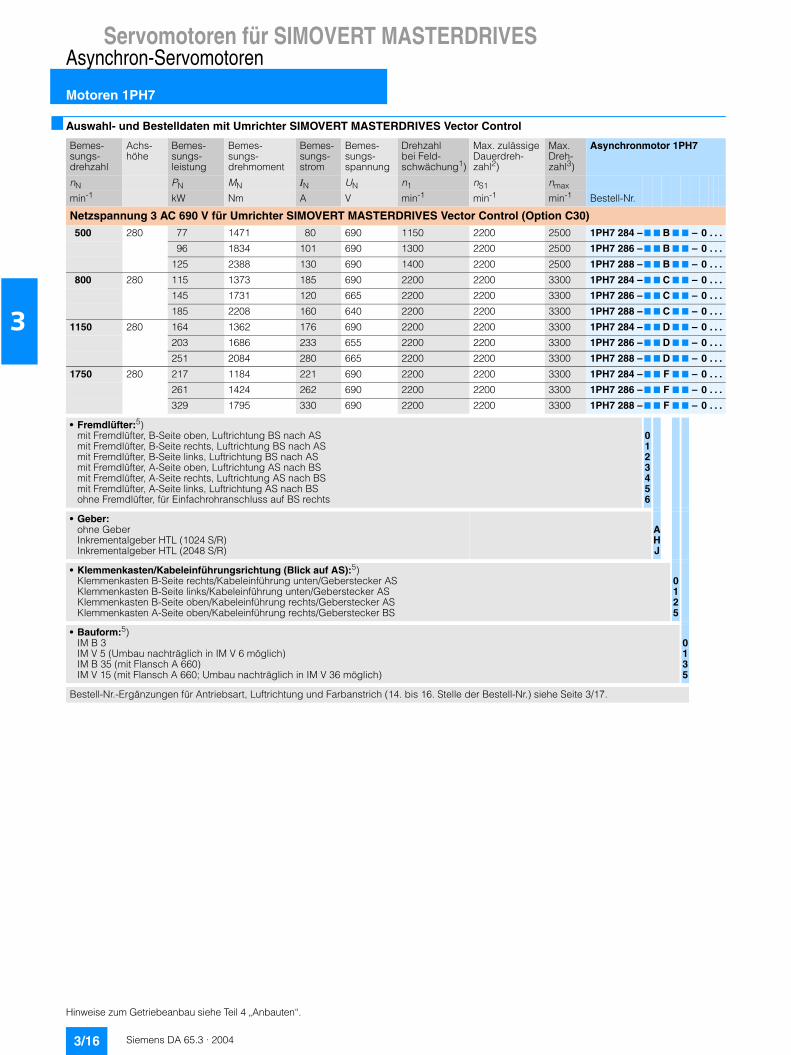
Siemens DA 65.3 · 20043/16
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 690 V für Umrichter SIMOVERT MASTERDRIVES Vector Control (Option C30)500 280 77 1471 80 690 1150 2200 2500 1PH7 284 –7 7 B 7 7 – 0 . . .
96 1834 101 690 1300 2200 2500 1PH7 286 –7 7 B 7 7 – 0 . . .
125 2388 130 690 1400 2200 2500 1PH7 288 –7 7 B 7 7 – 0 . . .
800 280 115 1373 185 690 2200 2200 3300 1PH7 284 –7 7 C 7 7 – 0 . . .
145 1731 120 665 2200 2200 3300 1PH7 286 –7 7 C 7 7 – 0 . . .
185 2208 160 640 2200 2200 3300 1PH7 288 –7 7 C 7 7 – 0 . . .
1150 280 164 1362 176 690 2200 2200 3300 1PH7 284 –7 7 D 7 7 – 0 . . .
203 1686 233 655 2200 2200 3300 1PH7 286 –7 7 D 7 7 – 0 . . .
251 2084 280 665 2200 2200 3300 1PH7 288 –7 7 D 7 7 – 0 . . .
1750 280 217 1184 221 690 2200 2200 3300 1PH7 284 –7 7 F 7 7 – 0 . . .
261 1424 262 690 2200 2200 3300 1PH7 286 –7 7 F 7 7 – 0 . . .
329 1795 330 690 2200 2200 3300 1PH7 288 –7 7 F 7 7 – 0 . . .
• Fremdlüfter:5)mit Fremdlüfter, B-Seite oben, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite rechts, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite links, Luftrichtung BS nach ASmit Fremdlüfter, A-Seite oben, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite rechts, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite links, Luftrichtung AS nach BSohne Fremdlüfter, für Einfachrohranschluss auf BS rechts
0123456
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkasten/Kabeleinführungsrichtung (Blick auf AS):5)Klemmenkasten B-Seite rechts/Kabeleinführung unten/Geberstecker ASKlemmenkasten B-Seite links/Kabeleinführung unten/Geberstecker ASKlemmenkasten B-Seite oben/Kabeleinführung rechts/Geberstecker ASKlemmenkasten A-Seite oben/Kabeleinführung rechts/Geberstecker BS
0125
• Bauform:5)IM B 3IM V 5 (Umbau nachträglich in IM V 6 möglich)IM B 35 (mit Flansch A 660)IM V 15 (mit Flansch A 660; Umbau nachträglich in IM V 36 möglich)
0135
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/17.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
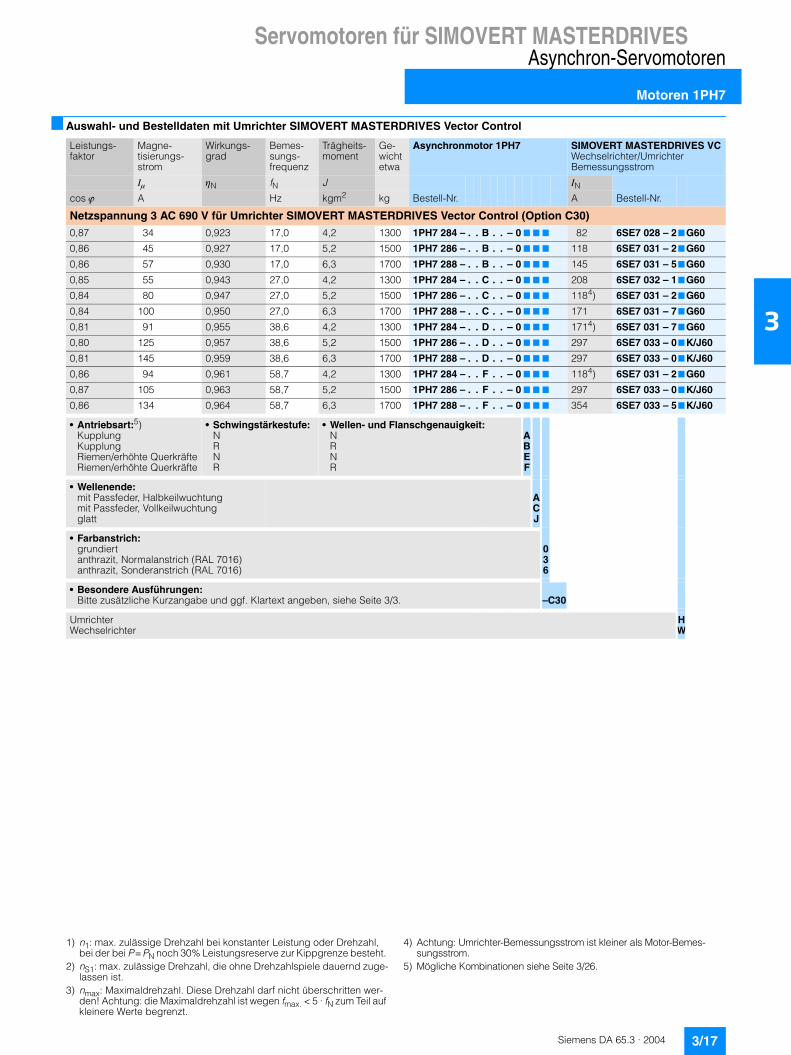
Siemens DA 65.3 · 2004 3/17
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 690 V für Umrichter SIMOVERT MASTERDRIVES Vector Control (Option C30)0,87 34 0,923 17,0 4,2 1300 1PH7 284 – . . B . . – 0 7 7 7 82 6SE7 028 – 27G60
0,86 45 0,927 17,0 5,2 1500 1PH7 286 – . . B . . – 0 7 7 7 118 6SE7 031 – 27G60
0,86 57 0,930 17,0 6,3 1700 1PH7 288 – . . B . . – 0 7 7 7 145 6SE7 031 – 57G60
0,85 55 0,943 27,0 4,2 1300 1PH7 284 – . . C . . – 0 7 7 7 208 6SE7 032 – 17G60
0,84 80 0,947 27,0 5,2 1500 1PH7 286 – . . C . . – 0 7 7 7 1184) 6SE7 031 – 27G60
0,84 100 0,950 27,0 6,3 1700 1PH7 288 – . . C . . – 0 7 7 7 171 6SE7 031 – 77G60
0,81 91 0,955 38,6 4,2 1300 1PH7 284 – . . D . . – 0 7 7 7 1714) 6SE7 031 – 77G60
0,80 125 0,957 38,6 5,2 1500 1PH7 286 – . . D . . – 0 7 7 7 297 6SE7 033 – 07K/J60
0,81 145 0,959 38,6 6,3 1700 1PH7 288 – . . D . . – 0 7 7 7 297 6SE7 033 – 07K/J60
0,86 94 0,961 58,7 4,2 1300 1PH7 284 – . . F . . – 0 7 7 7 1184) 6SE7 031 – 27G60
0,87 105 0,963 58,7 5,2 1500 1PH7 286 – . . F . . – 0 7 7 7 297 6SE7 033 – 07K/J60
0,86 134 0,964 58,7 6,3 1700 1PH7 288 – . . F . . – 0 7 7 7 354 6SE7 033 – 57K/J60
• Antriebsart:5)KupplungKupplungRiemen/erhöhte QuerkräfteRiemen/erhöhte Querkräfte
• Schwingstärkestufe:NRNR
• Wellen- und Flanschgenauigkeit:NRNR
ABEF
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungglatt
ACJ
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –C30
UmrichterWechselrichter
HW
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Achtung: Umrichter-Bemessungsstrom ist kleiner als Motor-Bemes-sungsstrom.
5) Mögliche Kombinationen siehe Seite 3/26.
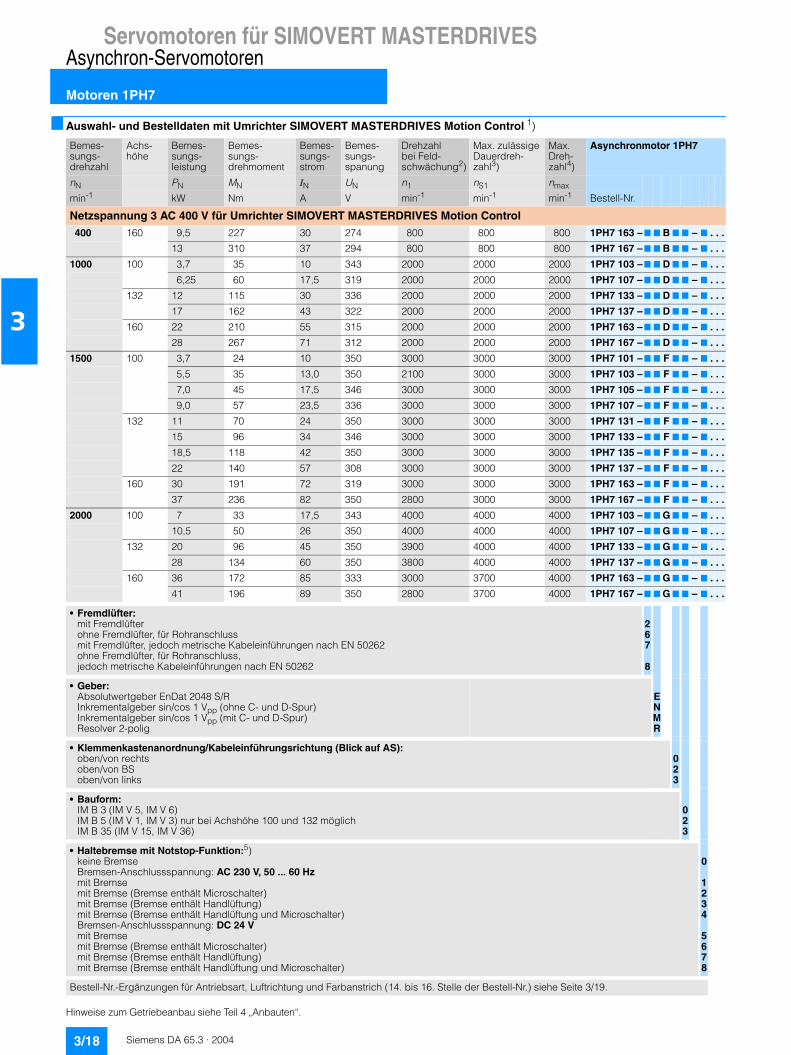
Siemens DA 65.3 · 20043/18
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control 1)
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spanung
Drehzahl bei Feld- schwächung2)
Max. zulässige Dauerdreh-zahl3)
Max. Dreh- zahl4)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Motion Control400 160 9,5 227 30 274 800 800 800 1PH7 163 –7 7 B 7 7 – 7 . . .
13 310 37 294 800 800 800 1PH7 167 –7 7 B 7 7 – 7 . . .
1000 100 3,7 35 10 343 2000 2000 2000 1PH7 103 –7 7 D 7 7 – 7 . . .
6,25 60 17,5 319 2000 2000 2000 1PH7 107 –7 7 D 7 7 – 7 . . .
132 12 115 30 336 2000 2000 2000 1PH7 133 –7 7 D 7 7 – 7 . . .
17 162 43 322 2000 2000 2000 1PH7 137 –7 7 D 7 7 – 7 . . .
160 22 210 55 315 2000 2000 2000 1PH7 163 –7 7 D 7 7 – 7 . . .
28 267 71 312 2000 2000 2000 1PH7 167 –7 7 D 7 7 – 7 . . .
1500 100 3,7 24 10 350 3000 3000 3000 1PH7 101 –7 7 F 7 7 – 7 . . .
5,5 35 13,0 350 2100 3000 3000 1PH7 103 –7 7 F 7 7 – 7 . . .
7,0 45 17,5 346 3000 3000 3000 1PH7 105 –7 7 F 7 7 – 7 . . .
9,0 57 23,5 336 3000 3000 3000 1PH7 107 –7 7 F 7 7 – 7 . . .
132 11 70 24 350 3000 3000 3000 1PH7 131 –7 7 F 7 7 – 7 . . .
15 96 34 346 3000 3000 3000 1PH7 133 –7 7 F 7 7 – 7 . . .
18,5 118 42 350 3000 3000 3000 1PH7 135 –7 7 F 7 7 – 7 . . .
22 140 57 308 3000 3000 3000 1PH7 137 –7 7 F 7 7 – 7 . . .
160 30 191 72 319 3000 3000 3000 1PH7 163 –7 7 F 7 7 – 7 . . .
37 236 82 350 2800 3000 3000 1PH7 167 –7 7 F 7 7 – 7 . . .
2000 100 7 33 17,5 343 4000 4000 4000 1PH7 103 –7 7 G 7 7 – 7 . . .
10,5 50 26 350 4000 4000 4000 1PH7 107 –7 7 G 7 7 – 7 . . .
132 20 96 45 350 3900 4000 4000 1PH7 133 –7 7 G 7 7 – 7 . . .
28 134 60 350 3800 4000 4000 1PH7 137 –7 7 G 7 7 – 7 . . .
160 36 172 85 333 3000 3700 4000 1PH7 163 –7 7 G 7 7 – 7 . . .
41 196 89 350 2800 3700 4000 1PH7 167 –7 7 G 7 7 – 7 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
267
8
• Geber:Absolutwertgeber EnDat 2048 S/R
Inkrementalgeber sin/cos 1 Vpp (ohne C- und D-Spur)Inkrementalgeber sin/cos 1 Vpp (mit C- und D-Spur)Resolver 2-polig
ENMR
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von BSoben/von links
023
• Bauform:IM B 3 (IM V 5, IM V 6)IM B 5 (IM V 1, IM V 3) nur bei Achshöhe 100 und 132 möglichIM B 35 (IM V 15, IM V 36)
023
• Haltebremse mit Notstop-Funktion:5)keine BremseBremsen-Anschlussspannung: AC 230 V, 50 ... 60 Hzmit Bremsemit Bremse (Bremse enthält Microschalter)mit Bremse (Bremse enthält Handlüftung)mit Bremse (Bremse enthält Handlüftung und Microschalter)Bremsen-Anschlussspannung: DC 24 Vmit Bremsemit Bremse (Bremse enthält Microschalter)mit Bremse (Bremse enthält Handlüftung)mit Bremse (Bremse enthält Handlüftung und Microschalter)
0
1234
5678
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/19.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
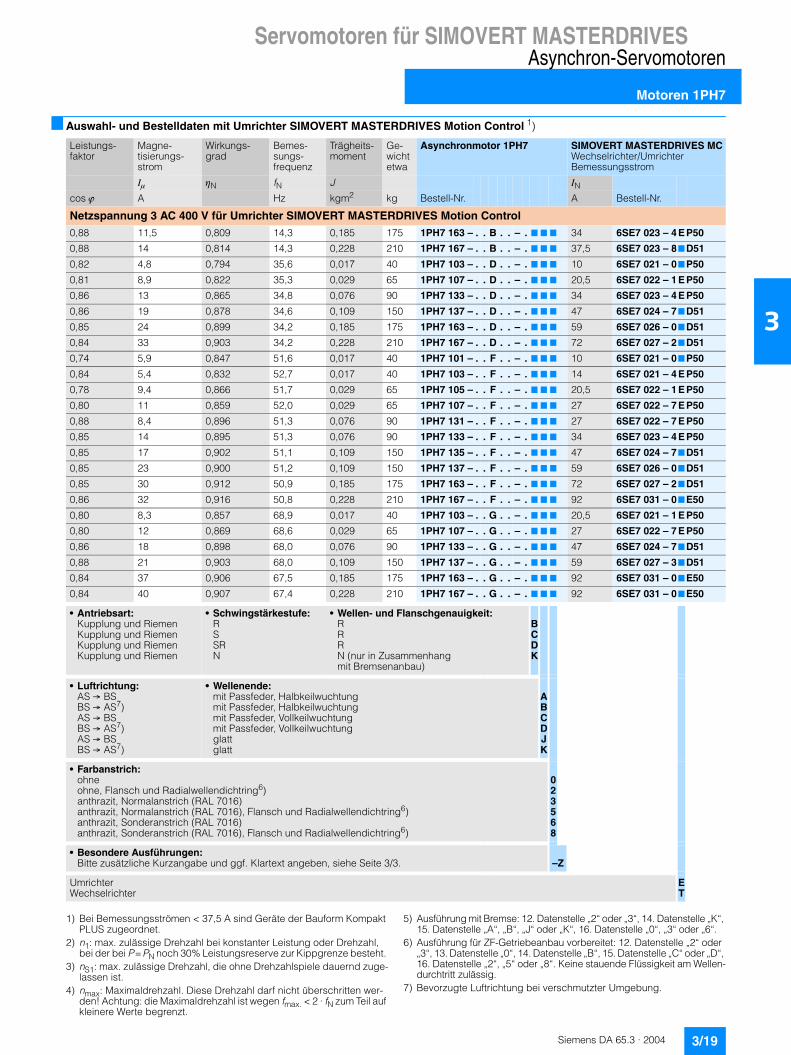
Siemens DA 65.3 · 2004 3/19
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control 1)
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Motion Control0,88 11,5 0,809 14,3 0,185 175 1PH7 163 – . . B . . – . 7 7 7 34 6SE7 023 – 4 EP50
0,88 14 0,814 14,3 0,228 210 1PH7 167 – . . B . . – . 7 7 7 37,5 6SE7 023 – 87D51
0,82 4,8 0,794 35,6 0,017 40 1PH7 103 – . . D . . – . 7 7 7 10 6SE7 021 – 07P50
0,81 8,9 0,822 35,3 0,029 65 1PH7 107 – . . D . . – . 7 7 7 20,5 6SE7 022 – 1 EP50
0,86 13 0,865 34,8 0,076 90 1PH7 133 – . . D . . – . 7 7 7 34 6SE7 023 – 4 EP50
0,86 19 0,878 34,6 0,109 150 1PH7 137 – . . D . . – . 7 7 7 47 6SE7 024 – 77D51
0,85 24 0,899 34,2 0,185 175 1PH7 163 – . . D . . – . 7 7 7 59 6SE7 026 – 07D51
0,84 33 0,903 34,2 0,228 210 1PH7 167 – . . D . . – . 7 7 7 72 6SE7 027 – 27D51
0,74 5,9 0,847 51,6 0,017 40 1PH7 101 – . . F . . – . 7 7 7 10 6SE7 021 – 07P50
0,84 5,4 0,832 52,7 0,017 40 1PH7 103 – . . F . . – . 7 7 7 14 6SE7 021 – 4 EP50
0,78 9,4 0,866 51,7 0,029 65 1PH7 105 – . . F . . – . 7 7 7 20,5 6SE7 022 – 1 EP50
0,80 11 0,859 52,0 0,029 65 1PH7 107 – . . F . . – . 7 7 7 27 6SE7 022 – 7 EP50
0,88 8,4 0,896 51,3 0,076 90 1PH7 131 – . . F . . – . 7 7 7 27 6SE7 022 – 7 EP50
0,85 14 0,895 51,3 0,076 90 1PH7 133 – . . F . . – . 7 7 7 34 6SE7 023 – 4 EP50
0,85 17 0,902 51,1 0,109 150 1PH7 135 – . . F . . – . 7 7 7 47 6SE7 024 – 77D51
0,85 23 0,900 51,2 0,109 150 1PH7 137 – . . F . . – . 7 7 7 59 6SE7 026 – 07D51
0,85 30 0,912 50,9 0,185 175 1PH7 163 – . . F . . – . 7 7 7 72 6SE7 027 – 27D51
0,86 32 0,916 50,8 0,228 210 1PH7 167 – . . F . . – . 7 7 7 92 6SE7 031 – 07E50
0,80 8,3 0,857 68,9 0,017 40 1PH7 103 – . . G . . – . 7 7 7 20,5 6SE7 021 – 1 EP50
0,80 12 0,869 68,6 0,029 65 1PH7 107 – . . G . . – . 7 7 7 27 6SE7 022 – 7 EP50
0,86 18 0,898 68,0 0,076 90 1PH7 133 – . . G . . – . 7 7 7 47 6SE7 024 – 77D51
0,88 21 0,903 68,0 0,109 150 1PH7 137 – . . G . . – . 7 7 7 59 6SE7 027 – 37D51
0,84 37 0,906 67,5 0,185 175 1PH7 163 – . . G . . – . 7 7 7 92 6SE7 031 – 07E50
0,84 40 0,907 67,4 0,228 210 1PH7 167 – . . G . . – . 7 7 7 92 6SE7 031 – 07E50
• Antriebsart:Kupplung und RiemenKupplung und RiemenKupplung und RiemenKupplung und Riemen
• Schwingstärkestufe:RSSRN
• Wellen- und Flanschgenauigkeit:RRRN (nur in Zusammenhang mit Bremsenanbau)
BCDK
• Luftrichtung:AS � BSBS � AS7)AS � BSBS � AS7)AS � BSBS � AS7)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:ohneohne, Flansch und Radialwellendichtring6)anthrazit, Normalanstrich (RAL 7016)anthrazit, Normalanstrich (RAL 7016), Flansch und Radialwellendichtring6)anthrazit, Sonderanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016), Flansch und Radialwellendichtring6)
023568
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) Bei Bemessungsströmen < 37,5 A sind Geräte der Bauform Kompakt PLUS zugeordnet.
2) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
3) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
4) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 2 · fN zum Teil auf kleinere Werte begrenzt.
5) Ausführung mit Bremse: 12. Datenstelle „2“ oder „3“, 14. Datenstelle „K“, 15. Datenstelle „A“, „B“, „J“ oder „K“, 16. Datenstelle „0“, „3“ oder „6“.
6) Ausführung für ZF-Getriebeanbau vorbereitet: 12. Datenstelle „2“ oder „3“, 13. Datenstelle „0“, 14. Datenstelle „B“, 15. Datenstelle „C“ oder „D“, 16. Datenstelle „2“, „5“ oder „8“. Keine stauende Flüssigkeit am Wellen-durchtritt zulässig.
7) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
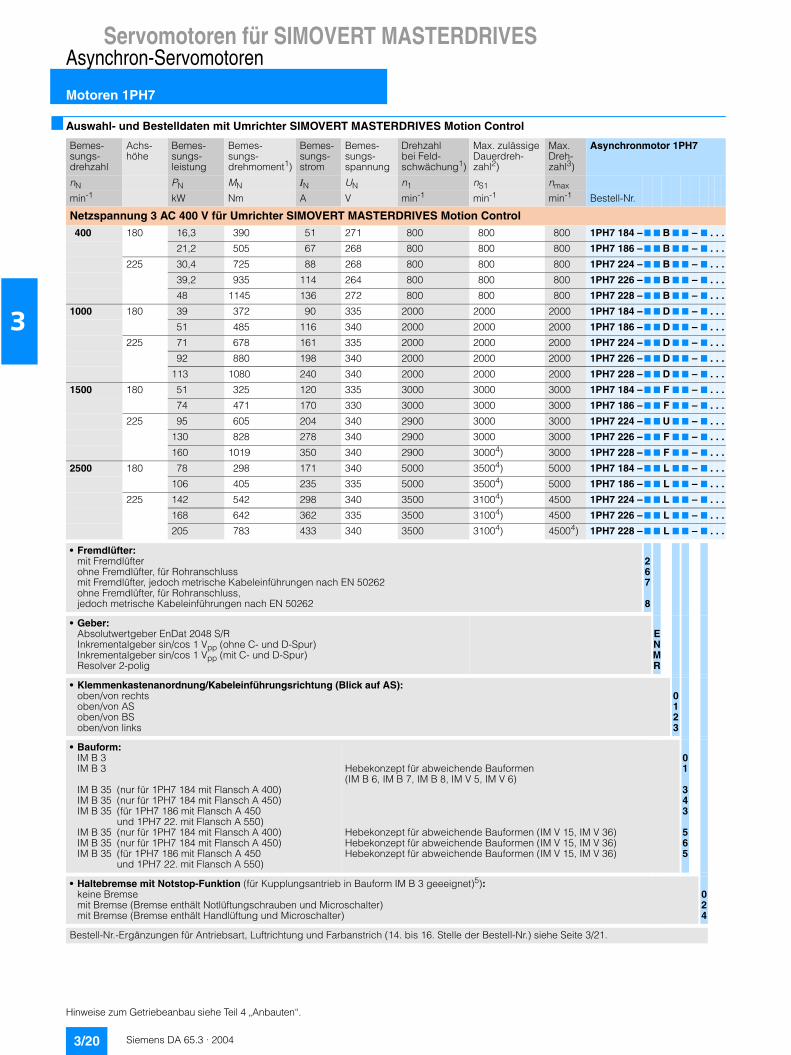
Siemens DA 65.3 · 20043/20
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment1)
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Motion Control400 180 16,3 390 51 271 800 800 800 1PH7 184 –7 7 B 7 7 – 7 . . .
21,2 505 67 268 800 800 800 1PH7 186 –7 7 B 7 7 – 7 . . .
225 30,4 725 88 268 800 800 800 1PH7 224 –7 7 B 7 7 – 7 . . .
39,2 935 114 264 800 800 800 1PH7 226 –7 7 B 7 7 – 7 . . .
48 1145 136 272 800 800 800 1PH7 228 –7 7 B 7 7 – 7 . . .
1000 180 39 372 90 335 2000 2000 2000 1PH7 184 –7 7 D 7 7 – 7 . . .
51 485 116 340 2000 2000 2000 1PH7 186 –7 7 D 7 7 – 7 . . .
225 71 678 161 335 2000 2000 2000 1PH7 224 –7 7 D 7 7 – 7 . . .
92 880 198 340 2000 2000 2000 1PH7 226 –7 7 D 7 7 – 7 . . .
113 1080 240 340 2000 2000 2000 1PH7 228 –7 7 D 7 7 – 7 . . .
1500 180 51 325 120 335 3000 3000 3000 1PH7 184 –7 7 F 7 7 – 7 . . .
74 471 170 330 3000 3000 3000 1PH7 186 –7 7 F 7 7 – 7 . . .
225 95 605 204 340 2900 3000 3000 1PH7 224 –7 7 U 7 7 – 7 . . .
130 828 278 340 2900 3000 3000 1PH7 226 –7 7 F 7 7 – 7 . . .
160 1019 350 340 2900 30004) 3000 1PH7 228 –7 7 F 7 7 – 7 . . .
2500 180 78 298 171 340 5000 35004) 5000 1PH7 184 –7 7 L 7 7 – 7 . . .
106 405 235 335 5000 35004) 5000 1PH7 186 –7 7 L 7 7 – 7 . . .
225 142 542 298 340 3500 31004) 4500 1PH7 224 –7 7 L 7 7 – 7 . . .
168 642 362 335 3500 31004) 4500 1PH7 226 –7 7 L 7 7 – 7 . . .
205 783 433 340 3500 31004) 45004) 1PH7 228 –7 7 L 7 7 – 7 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
267
8
• Geber:Absolutwertgeber EnDat 2048 S/R
Inkrementalgeber sin/cos 1 Vpp (ohne C- und D-Spur)Inkrementalgeber sin/cos 1 Vpp (mit C- und D-Spur)Resolver 2-polig
ENMR
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von ASoben/von BSoben/von links
0123
• Bauform:IM B 3IM B 3
IM B 35 (nur für 1PH7 184 mit Flansch A 400)IM B 35 (nur für 1PH7 184 mit Flansch A 450)IM B 35 (für 1PH7 186 mit Flansch A 450
und 1PH7 22. mit Flansch A 550)IM B 35 (nur für 1PH7 184 mit Flansch A 400)IM B 35 (nur für 1PH7 184 mit Flansch A 450)IM B 35 (für 1PH7 186 mit Flansch A 450
und 1PH7 22. mit Flansch A 550)
Hebekonzept für abweichende Bauformen (IM B 6, IM B 7, IM B 8, IM V 5, IM V 6)
Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)
01
343
565
• Haltebremse mit Notstop-Funktion (für Kupplungsantrieb in Bauform IM B 3 geeeignet)5):keine Bremsemit Bremse (Bremse enthält Notlüftungschrauben und Microschalter)mit Bremse (Bremse enthält Handlüftung und Microschalter)
024
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/21.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
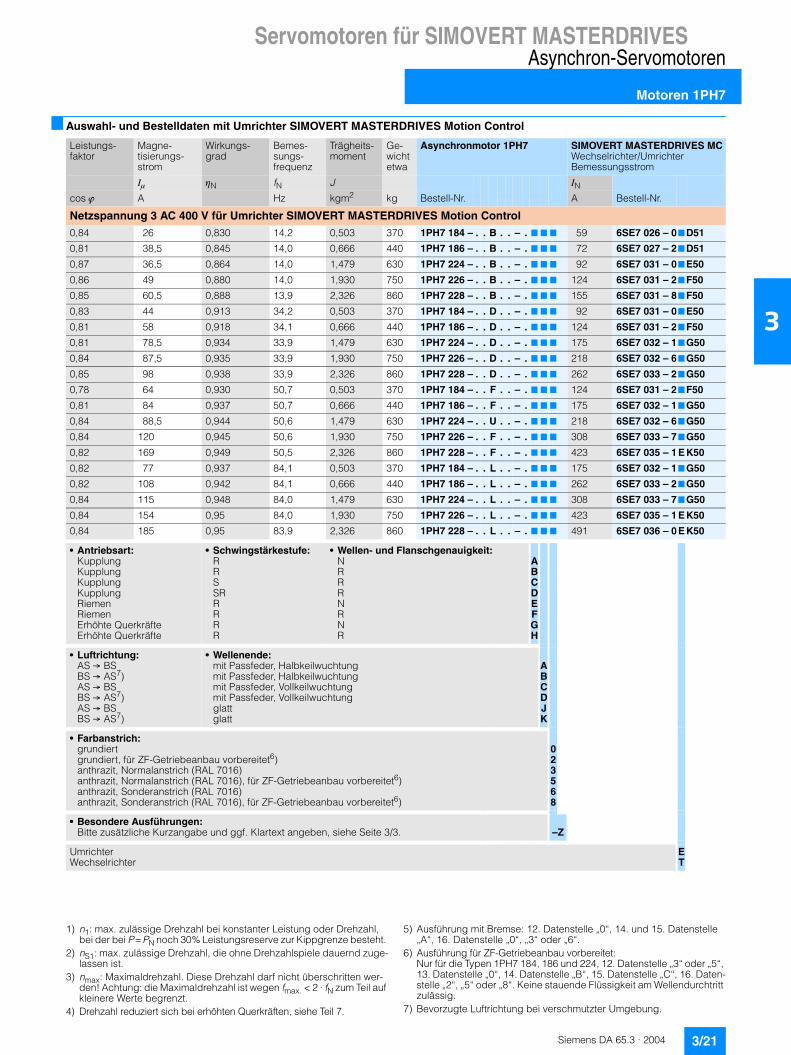
Siemens DA 65.3 · 2004 3/21
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Motion Control0,84 26 0,830 14,2 0,503 370 1PH7 184 – . . B . . – . 7 7 7 59 6SE7 026 – 07D51
0,81 38,5 0,845 14,0 0,666 440 1PH7 186 – . . B . . – . 7 7 7 72 6SE7 027 – 27D51
0,87 36,5 0,864 14,0 1,479 630 1PH7 224 – . . B . . – . 7 7 7 92 6SE7 031 – 07E50
0,86 49 0,880 14,0 1,930 750 1PH7 226 – . . B . . – . 7 7 7 124 6SE7 031 – 27F50
0,85 60,5 0,888 13,9 2,326 860 1PH7 228 – . . B . . – . 7 7 7 155 6SE7 031 – 87F50
0,83 44 0,913 34,2 0,503 370 1PH7 184 – . . D . . – . 7 7 7 92 6SE7 031 – 07E50
0,81 58 0,918 34,1 0,666 440 1PH7 186 – . . D . . – . 7 7 7 124 6SE7 031 – 27F50
0,81 78,5 0,934 33,9 1,479 630 1PH7 224 – . . D . . – . 7 7 7 175 6SE7 032 – 17G50
0,84 87,5 0,935 33,9 1,930 750 1PH7 226 – . . D . . – . 7 7 7 218 6SE7 032 – 67G50
0,85 98 0,938 33,9 2,326 860 1PH7 228 – . . D . . – . 7 7 7 262 6SE7 033 – 27G50
0,78 64 0,930 50,7 0,503 370 1PH7 184 – . . F . . – . 7 7 7 124 6SE7 031 – 27F50
0,81 84 0,937 50,7 0,666 440 1PH7 186 – . . F . . – . 7 7 7 175 6SE7 032 – 17G50
0,84 88,5 0,944 50,6 1,479 630 1PH7 224 – . . U . . – . 7 7 7 218 6SE7 032 – 67G50
0,84 120 0,945 50,6 1,930 750 1PH7 226 – . . F . . – . 7 7 7 308 6SE7 033 – 77G50
0,82 169 0,949 50,5 2,326 860 1PH7 228 – . . F . . – . 7 7 7 423 6SE7 035 – 1 EK50
0,82 77 0,937 84,1 0,503 370 1PH7 184 – . . L . . – . 7 7 7 175 6SE7 032 – 17G50
0,82 108 0,942 84,1 0,666 440 1PH7 186 – . . L . . – . 7 7 7 262 6SE7 033 – 27G50
0,84 115 0,948 84,0 1,479 630 1PH7 224 – . . L . . – . 7 7 7 308 6SE7 033 – 77G50
0,84 154 0,95 84,0 1,930 750 1PH7 226 – . . L . . – . 7 7 7 423 6SE7 035 – 1 EK50
0,84 185 0,95 83,9 2,326 860 1PH7 228 – . . L . . – . 7 7 7 491 6SE7 036 – 0 EK50
• Antriebsart:KupplungKupplungKupplungKupplungRiemenRiemenErhöhte QuerkräfteErhöhte Querkräfte
• Schwingstärkestufe:RRSSRRRRR
• Wellen- und Flanschgenauigkeit:NRRRNRNR
ABCDEFGH
• Luftrichtung:AS � BSBS � AS7)AS � BSBS � AS7)AS � BSBS � AS7)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:grundiertgrundiert, für ZF-Getriebeanbau vorbereitet6)anthrazit, Normalanstrich (RAL 7016)anthrazit, Normalanstrich (RAL 7016), für ZF-Getriebeanbau vorbereitet6)anthrazit, Sonderanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016), für ZF-Getriebeanbau vorbereitet6)
023568
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 2 · fN zum Teil auf kleinere Werte begrenzt.
4) Drehzahl reduziert sich bei erhöhten Querkräften, siehe Teil 7.
5) Ausführung mit Bremse: 12. Datenstelle „0“, 14. und 15. Datenstelle „A“, 16. Datenstelle „0“, „3“ oder „6“.
6) Ausführung für ZF-Getriebeanbau vorbereitet: Nur für die Typen 1PH7 184, 186 und 224, 12. Datenstelle „3“ oder „5“, 13. Datenstelle „0“, 14. Datenstelle „B“, 15. Datenstelle „C“, 16. Daten-stelle „2“, „5“ oder „8“. Keine stauende Flüssigkeit am Wellendurchtritt zulässig.
7) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
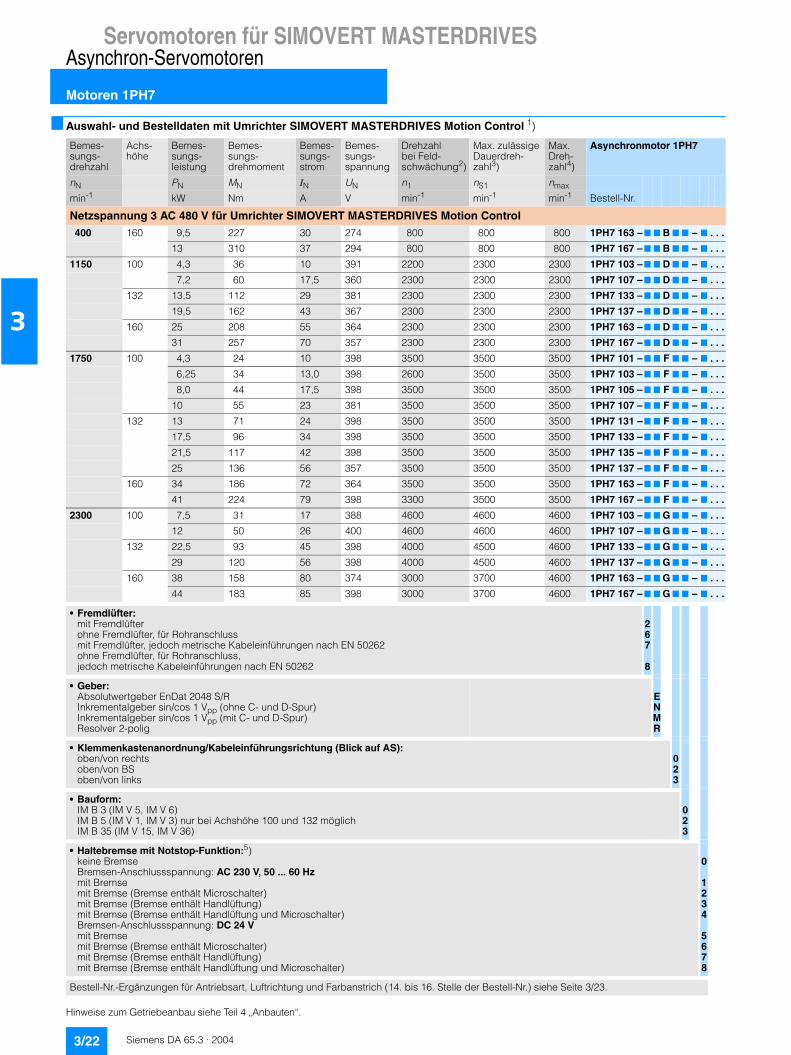
Siemens DA 65.3 · 20043/22
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control 1)
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung2)
Max. zulässige Dauerdreh-zahl3)
Max. Dreh- zahl4)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Motion Control400 160 9,5 227 30 274 800 800 800 1PH7 163 –7 7 B 7 7 – 7 . . .
13 310 37 294 800 800 800 1PH7 167 –7 7 B 7 7 – 7 . . .
1150 100 4,3 36 10 391 2200 2300 2300 1PH7 103 –7 7 D 7 7 – 7 . . .
7,2 60 17,5 360 2300 2300 2300 1PH7 107 –7 7 D 7 7 – 7 . . .
132 13,5 112 29 381 2300 2300 2300 1PH7 133 –7 7 D 7 7 – 7 . . .
19,5 162 43 367 2300 2300 2300 1PH7 137 –7 7 D 7 7 – 7 . . .
160 25 208 55 364 2300 2300 2300 1PH7 163 –7 7 D 7 7 – 7 . . .
31 257 70 357 2300 2300 2300 1PH7 167 –7 7 D 7 7 – 7 . . .
1750 100 4,3 24 10 398 3500 3500 3500 1PH7 101 –7 7 F 7 7 – 7 . . .
6,25 34 13,0 398 2600 3500 3500 1PH7 103 –7 7 F 7 7 – 7 . . .
8,0 44 17,5 398 3500 3500 3500 1PH7 105 –7 7 F 7 7 – 7 . . .
10 55 23 381 3500 3500 3500 1PH7 107 –7 7 F 7 7 – 7 . . .
132 13 71 24 398 3500 3500 3500 1PH7 131 –7 7 F 7 7 – 7 . . .
17,5 96 34 398 3500 3500 3500 1PH7 133 –7 7 F 7 7 – 7 . . .
21,5 117 42 398 3500 3500 3500 1PH7 135 –7 7 F 7 7 – 7 . . .
25 136 56 357 3500 3500 3500 1PH7 137 –7 7 F 7 7 – 7 . . .
160 34 186 72 364 3500 3500 3500 1PH7 163 –7 7 F 7 7 – 7 . . .
41 224 79 398 3300 3500 3500 1PH7 167 –7 7 F 7 7 – 7 . . .
2300 100 7,5 31 17 388 4600 4600 4600 1PH7 103 –7 7 G 7 7 – 7 . . .
12 50 26 400 4600 4600 4600 1PH7 107 –7 7 G 7 7 – 7 . . .
132 22,5 93 45 398 4000 4500 4600 1PH7 133 –7 7 G 7 7 – 7 . . .
29 120 56 398 4000 4500 4600 1PH7 137 –7 7 G 7 7 – 7 . . .
160 38 158 80 374 3000 3700 4600 1PH7 163 –7 7 G 7 7 – 7 . . .
44 183 85 398 3000 3700 4600 1PH7 167 –7 7 G 7 7 – 7 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
267
8
• Geber:Absolutwertgeber EnDat 2048 S/R
Inkrementalgeber sin/cos 1 Vpp (ohne C- und D-Spur)Inkrementalgeber sin/cos 1 Vpp (mit C- und D-Spur)Resolver 2-polig
ENMR
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von BSoben/von links
023
• Bauform:IM B 3 (IM V 5, IM V 6)IM B 5 (IM V 1, IM V 3) nur bei Achshöhe 100 und 132 möglichIM B 35 (IM V 15, IM V 36)
023
• Haltebremse mit Notstop-Funktion:5)keine BremseBremsen-Anschlussspannung: AC 230 V, 50 ... 60 Hzmit Bremsemit Bremse (Bremse enthält Microschalter)mit Bremse (Bremse enthält Handlüftung)mit Bremse (Bremse enthält Handlüftung und Microschalter)Bremsen-Anschlussspannung: DC 24 Vmit Bremsemit Bremse (Bremse enthält Microschalter)mit Bremse (Bremse enthält Handlüftung)mit Bremse (Bremse enthält Handlüftung und Microschalter)
0
1234
5678
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/23.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
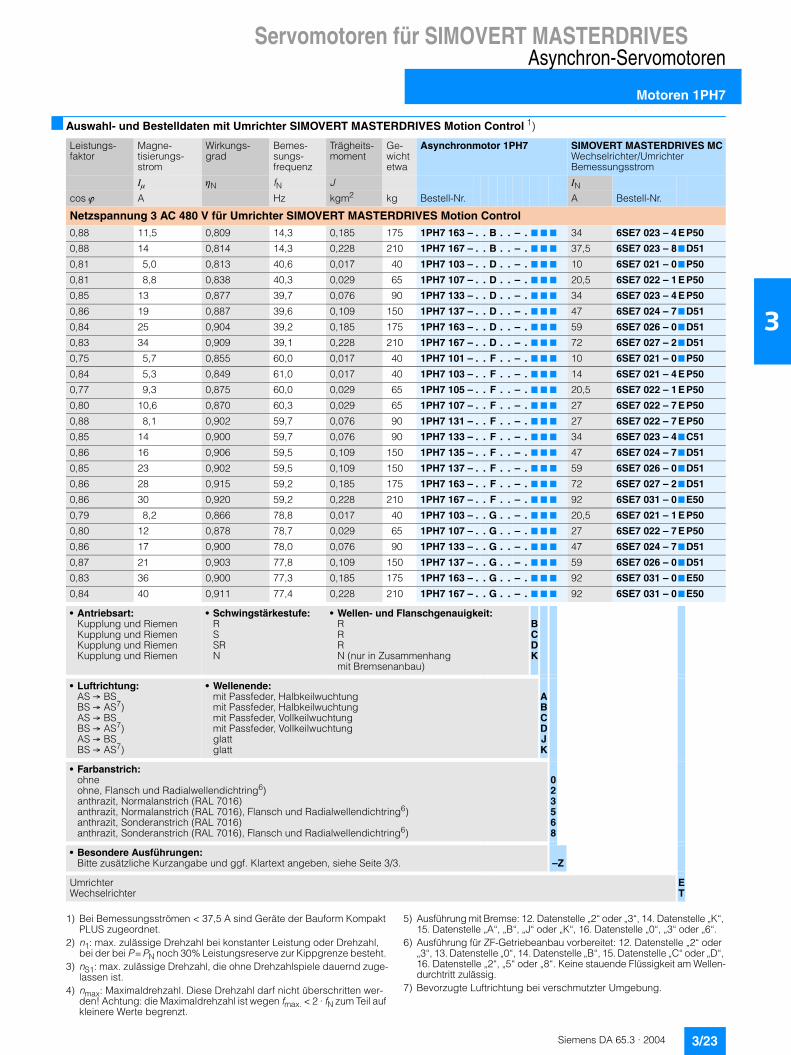
Siemens DA 65.3 · 2004 3/23
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control 1)
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Motion Control0,88 11,5 0,809 14,3 0,185 175 1PH7 163 – . . B . . – . 7 7 7 34 6SE7 023 – 4 EP50
0,88 14 0,814 14,3 0,228 210 1PH7 167 – . . B . . – . 7 7 7 37,5 6SE7 023 – 87D51
0,81 5,0 0,813 40,6 0,017 40 1PH7 103 – . . D . . – . 7 7 7 10 6SE7 021 – 07P50
0,81 8,8 0,838 40,3 0,029 65 1PH7 107 – . . D . . – . 7 7 7 20,5 6SE7 022 – 1 EP50
0,85 13 0,877 39,7 0,076 90 1PH7 133 – . . D . . – . 7 7 7 34 6SE7 023 – 4 EP50
0,86 19 0,887 39,6 0,109 150 1PH7 137 – . . D . . – . 7 7 7 47 6SE7 024 – 77D51
0,84 25 0,904 39,2 0,185 175 1PH7 163 – . . D . . – . 7 7 7 59 6SE7 026 – 07D51
0,83 34 0,909 39,1 0,228 210 1PH7 167 – . . D . . – . 7 7 7 72 6SE7 027 – 27D51
0,75 5,7 0,855 60,0 0,017 40 1PH7 101 – . . F . . – . 7 7 7 10 6SE7 021 – 07P50
0,84 5,3 0,849 61,0 0,017 40 1PH7 103 – . . F . . – . 7 7 7 14 6SE7 021 – 4 EP50
0,77 9,3 0,875 60,0 0,029 65 1PH7 105 – . . F . . – . 7 7 7 20,5 6SE7 022 – 1 EP50
0,80 10,6 0,870 60,3 0,029 65 1PH7 107 – . . F . . – . 7 7 7 27 6SE7 022 – 7 EP50
0,88 8,1 0,902 59,7 0,076 90 1PH7 131 – . . F . . – . 7 7 7 27 6SE7 022 – 7 EP50
0,85 14 0,900 59,7 0,076 90 1PH7 133 – . . F . . – . 7 7 7 34 6SE7 023 – 47C51
0,86 16 0,906 59,5 0,109 150 1PH7 135 – . . F . . – . 7 7 7 47 6SE7 024 – 77D51
0,85 23 0,902 59,5 0,109 150 1PH7 137 – . . F . . – . 7 7 7 59 6SE7 026 – 07D51
0,86 28 0,915 59,2 0,185 175 1PH7 163 – . . F . . – . 7 7 7 72 6SE7 027 – 27D51
0,86 30 0,920 59,2 0,228 210 1PH7 167 – . . F . . – . 7 7 7 92 6SE7 031 – 07E50
0,79 8,2 0,866 78,8 0,017 40 1PH7 103 – . . G . . – . 7 7 7 20,5 6SE7 021 – 1 EP50
0,80 12 0,878 78,7 0,029 65 1PH7 107 – . . G . . – . 7 7 7 27 6SE7 022 – 7 EP50
0,86 17 0,900 78,0 0,076 90 1PH7 133 – . . G . . – . 7 7 7 47 6SE7 024 – 77D51
0,87 21 0,903 77,8 0,109 150 1PH7 137 – . . G . . – . 7 7 7 59 6SE7 026 – 07D51
0,83 36 0,900 77,3 0,185 175 1PH7 163 – . . G . . – . 7 7 7 92 6SE7 031 – 07E50
0,84 40 0,911 77,4 0,228 210 1PH7 167 – . . G . . – . 7 7 7 92 6SE7 031 – 07E50
• Antriebsart:Kupplung und RiemenKupplung und RiemenKupplung und RiemenKupplung und Riemen
• Schwingstärkestufe:RSSRN
• Wellen- und Flanschgenauigkeit:RRRN (nur in Zusammenhang mit Bremsenanbau)
BCDK
• Luftrichtung:AS � BSBS � AS7)AS � BSBS � AS7)AS � BSBS � AS7)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:ohneohne, Flansch und Radialwellendichtring6)anthrazit, Normalanstrich (RAL 7016)anthrazit, Normalanstrich (RAL 7016), Flansch und Radialwellendichtring6)anthrazit, Sonderanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016), Flansch und Radialwellendichtring6)
023568
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) Bei Bemessungsströmen < 37,5 A sind Geräte der Bauform Kompakt PLUS zugeordnet.
2) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
3) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
4) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 2 · fN zum Teil auf kleinere Werte begrenzt.
5) Ausführung mit Bremse: 12. Datenstelle „2“ oder „3“, 14. Datenstelle „K“, 15. Datenstelle „A“, „B“, „J“ oder „K“, 16. Datenstelle „0“, „3“ oder „6“.
6) Ausführung für ZF-Getriebeanbau vorbereitet: 12. Datenstelle „2“ oder „3“, 13. Datenstelle „0“, 14. Datenstelle „B“, 15. Datenstelle „C“ oder „D“, 16. Datenstelle „2“, „5“ oder „8“. Keine stauende Flüssigkeit am Wellen-durchtritt zulässig.
7) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
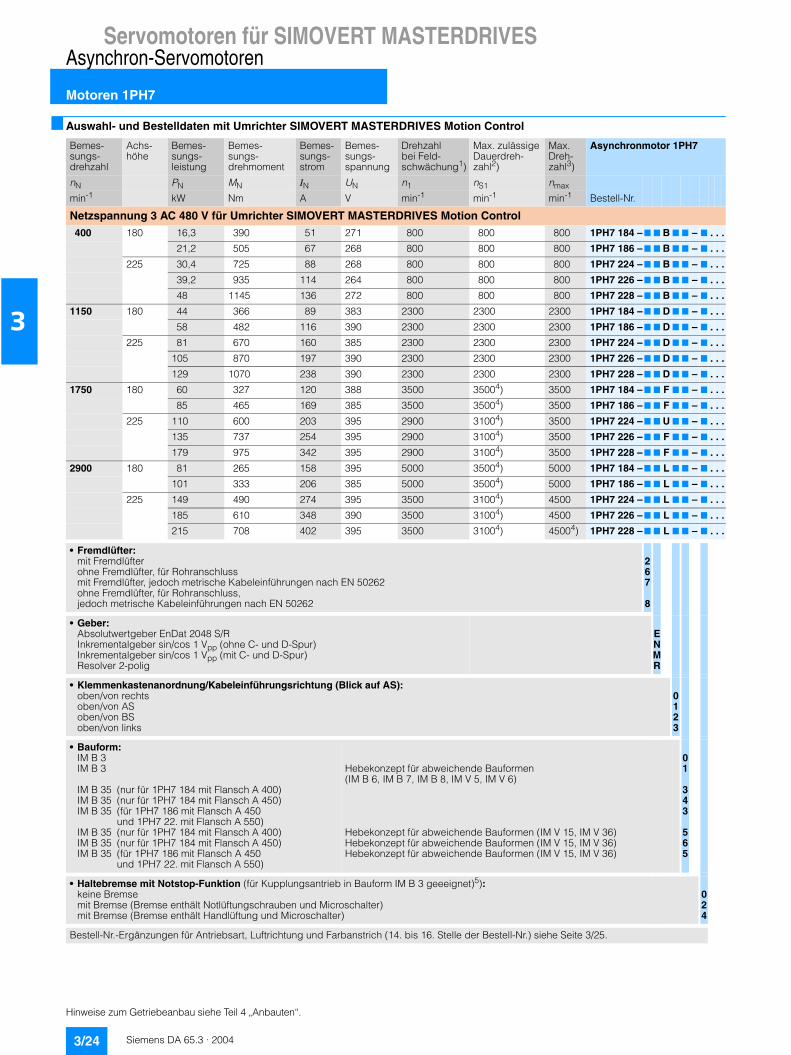
Siemens DA 65.3 · 20043/24
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PH7
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Motion Control400 180 16,3 390 51 271 800 800 800 1PH7 184 –7 7 B 7 7 – 7 . . .
21,2 505 67 268 800 800 800 1PH7 186 –7 7 B 7 7 – 7 . . .
225 30,4 725 88 268 800 800 800 1PH7 224 –7 7 B 7 7 – 7 . . .
39,2 935 114 264 800 800 800 1PH7 226 –7 7 B 7 7 – 7 . . .
48 1145 136 272 800 800 800 1PH7 228 –7 7 B 7 7 – 7 . . .
1150 180 44 366 89 383 2300 2300 2300 1PH7 184 –7 7 D 7 7 – 7 . . .
58 482 116 390 2300 2300 2300 1PH7 186 –7 7 D 7 7 – 7 . . .
225 81 670 160 385 2300 2300 2300 1PH7 224 –7 7 D 7 7 – 7 . . .
105 870 197 390 2300 2300 2300 1PH7 226 –7 7 D 7 7 – 7 . . .
129 1070 238 390 2300 2300 2300 1PH7 228 –7 7 D 7 7 – 7 . . .
1750 180 60 327 120 388 3500 35004) 3500 1PH7 184 –7 7 F 7 7 – 7 . . .
85 465 169 385 3500 35004) 3500 1PH7 186 –7 7 F 7 7 – 7 . . .
225 110 600 203 395 2900 31004) 3500 1PH7 224 –7 7 U 7 7 – 7 . . .
135 737 254 395 2900 31004) 3500 1PH7 226 –7 7 F 7 7 – 7 . . .
179 975 342 395 2900 31004) 3500 1PH7 228 –7 7 F 7 7 – 7 . . .
2900 180 81 265 158 395 5000 35004) 5000 1PH7 184 –7 7 L 7 7 – 7 . . .
101 333 206 385 5000 35004) 5000 1PH7 186 –7 7 L 7 7 – 7 . . .
225 149 490 274 395 3500 31004) 4500 1PH7 224 –7 7 L 7 7 – 7 . . .
185 610 348 390 3500 31004) 4500 1PH7 226 –7 7 L 7 7 – 7 . . .
215 708 402 395 3500 31004) 45004) 1PH7 228 –7 7 L 7 7 – 7 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
267
8
• Geber:Absolutwertgeber EnDat 2048 S/R
Inkrementalgeber sin/cos 1 Vpp (ohne C- und D-Spur)Inkrementalgeber sin/cos 1 Vpp (mit C- und D-Spur)Resolver 2-polig
ENMR
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von ASoben/von BSoben/von links
0123
• Bauform:IM B 3IM B 3
IM B 35 (nur für 1PH7 184 mit Flansch A 400)IM B 35 (nur für 1PH7 184 mit Flansch A 450)IM B 35 (für 1PH7 186 mit Flansch A 450
und 1PH7 22. mit Flansch A 550)IM B 35 (nur für 1PH7 184 mit Flansch A 400)IM B 35 (nur für 1PH7 184 mit Flansch A 450)IM B 35 (für 1PH7 186 mit Flansch A 450
und 1PH7 22. mit Flansch A 550)
Hebekonzept für abweichende Bauformen (IM B 6, IM B 7, IM B 8, IM V 5, IM V 6)
Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)
01
343
565
• Haltebremse mit Notstop-Funktion (für Kupplungsantrieb in Bauform IM B 3 geeeignet)5):keine Bremsemit Bremse (Bremse enthält Notlüftungschrauben und Microschalter)mit Bremse (Bremse enthält Handlüftung und Microschalter)
024
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/25.
Hinweise zum Getriebeanbau siehe Teil 4 „Anbauten“.
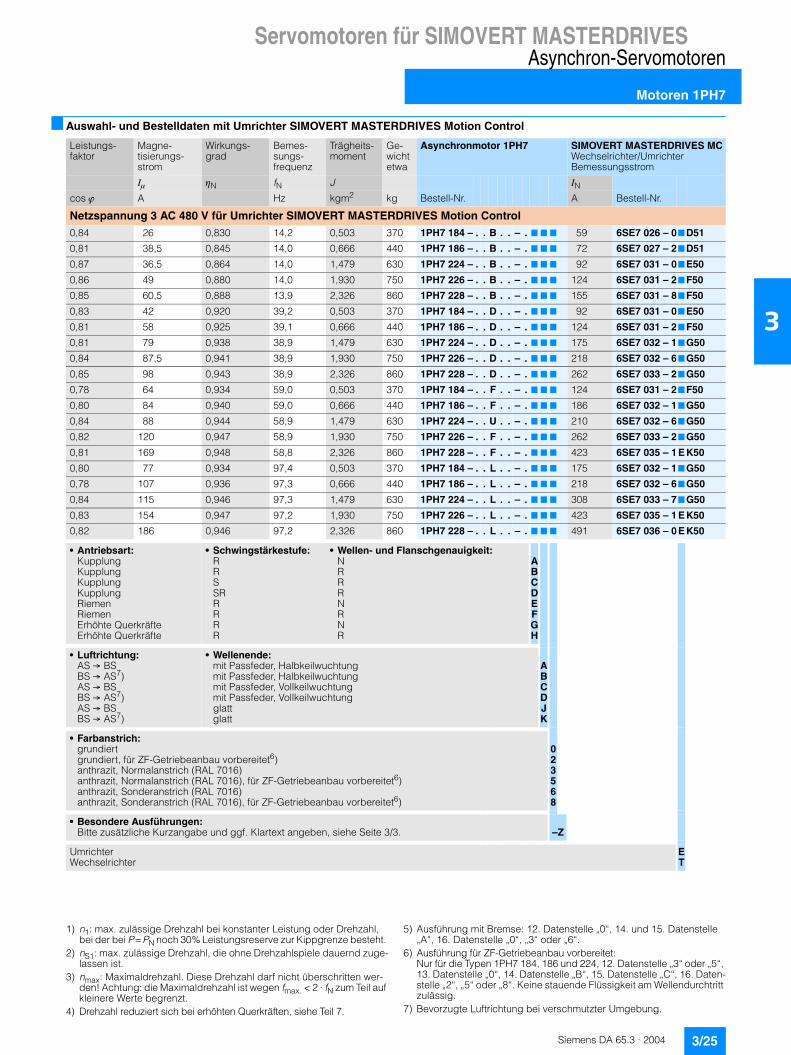
Siemens DA 65.3 · 2004 3/25
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH7 SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Motion Control0,84 26 0,830 14,2 0,503 370 1PH7 184 – . . B . . – . 7 7 7 59 6SE7 026 – 07D51
0,81 38,5 0,845 14,0 0,666 440 1PH7 186 – . . B . . – . 7 7 7 72 6SE7 027 – 27D51
0,87 36,5 0,864 14,0 1,479 630 1PH7 224 – . . B . . – . 7 7 7 92 6SE7 031 – 07E50
0,86 49 0,880 14,0 1,930 750 1PH7 226 – . . B . . – . 7 7 7 124 6SE7 031 – 27F50
0,85 60,5 0,888 13,9 2,326 860 1PH7 228 – . . B . . – . 7 7 7 155 6SE7 031 – 87F50
0,83 42 0,920 39,2 0,503 370 1PH7 184 – . . D . . – . 7 7 7 92 6SE7 031 – 07E50
0,81 58 0,925 39,1 0,666 440 1PH7 186 – . . D . . – . 7 7 7 124 6SE7 031 – 27F50
0,81 79 0,938 38,9 1,479 630 1PH7 224 – . . D . . – . 7 7 7 175 6SE7 032 – 17G50
0,84 87,5 0,941 38,9 1,930 750 1PH7 226 – . . D . . – . 7 7 7 218 6SE7 032 – 67G50
0,85 98 0,943 38,9 2,326 860 1PH7 228 – . . D . . – . 7 7 7 262 6SE7 033 – 27G50
0,78 64 0,934 59,0 0,503 370 1PH7 184 – . . F . . – . 7 7 7 124 6SE7 031 – 27F50
0,80 84 0,940 59,0 0,666 440 1PH7 186 – . . F . . – . 7 7 7 186 6SE7 032 – 17G50
0,84 88 0,944 58,9 1,479 630 1PH7 224 – . . U . . – . 7 7 7 210 6SE7 032 – 67G50
0,82 120 0,947 58,9 1,930 750 1PH7 226 – . . F . . – . 7 7 7 262 6SE7 033 – 27G50
0,81 169 0,948 58,8 2,326 860 1PH7 228 – . . F . . – . 7 7 7 423 6SE7 035 – 1 EK50
0,80 77 0,934 97,4 0,503 370 1PH7 184 – . . L . . – . 7 7 7 175 6SE7 032 – 17G50
0,78 107 0,936 97,3 0,666 440 1PH7 186 – . . L . . – . 7 7 7 218 6SE7 032 – 67G50
0,84 115 0,946 97,3 1,479 630 1PH7 224 – . . L . . – . 7 7 7 308 6SE7 033 – 77G50
0,83 154 0,947 97,2 1,930 750 1PH7 226 – . . L . . – . 7 7 7 423 6SE7 035 – 1 EK50
0,82 186 0,946 97,2 2,326 860 1PH7 228 – . . L . . – . 7 7 7 491 6SE7 036 – 0 EK50
• Antriebsart:KupplungKupplungKupplungKupplungRiemenRiemenErhöhte QuerkräfteErhöhte Querkräfte
• Schwingstärkestufe:RRSSRRRRR
• Wellen- und Flanschgenauigkeit:NRRRNRNR
ABCDEFGH
• Luftrichtung:AS � BSBS � AS7)AS � BSBS � AS7)AS � BSBS � AS7)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:grundiertgrundiert, für ZF-Getriebeanbau vorbereitet6)anthrazit, Normalanstrich (RAL 7016)anthrazit, Normalanstrich (RAL 7016), für ZF-Getriebeanbau vorbereitet6)anthrazit, Sonderanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016), für ZF-Getriebeanbau vorbereitet6)
023568
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/3. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 2 · fN zum Teil auf kleinere Werte begrenzt.
4) Drehzahl reduziert sich bei erhöhten Querkräften, siehe Teil 7.
5) Ausführung mit Bremse: 12. Datenstelle „0“, 14. und 15. Datenstelle „A“, 16. Datenstelle „0“, „3“ oder „6“.
6) Ausführung für ZF-Getriebeanbau vorbereitet: Nur für die Typen 1PH7 184, 186 und 224, 12. Datenstelle „3“ oder „5“, 13. Datenstelle „0“, 14. Datenstelle „B“, 15. Datenstelle „C“, 16. Daten-stelle „2“, „5“ oder „8“. Keine stauende Flüssigkeit am Wellendurchtritt zulässig.
7) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
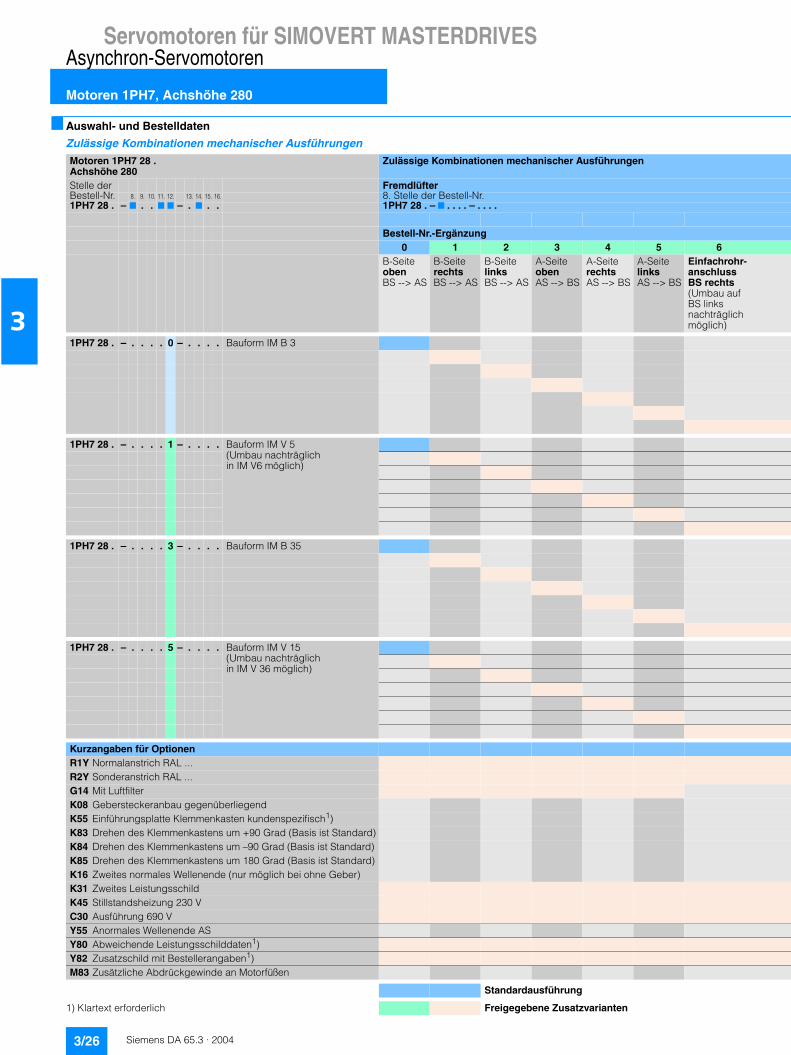
Siemens DA 65.3 · 20043/26
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH7, Achshöhe 280
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten
Zulässige Kombinationen mechanischer Ausführungen
Motoren 1PH7 28 .Achshöhe 280
Zulässige Kombinationen mechanischer Ausführungen
Stelle der FremdlüfterBestell-Nr. 8. 9. 10. 11. 12. 13. 14. 15. 16. 8. Stelle der Bestell-Nr.1PH7 28 . – 7 . . 7 7 – . 7 . . 1PH7 28 . – 7 . . . . – . . . .
Bestell-Nr.-Ergänzung0 1 2 3 4 5 6
B-SeiteobenBS --> AS
B-SeiterechtsBS --> AS
B-SeitelinksBS --> AS
A-SeiteobenAS --> BS
A-SeiterechtsAS --> BS
A-SeitelinksAS --> BS
Einfachrohr-anschlussBS rechts(Umbau auf BS links nachträglich möglich)
1PH7 28 . – . . . . 0 – . . . . Bauform IM B 3
1PH7 28 . – . . . . 1 – . . . . Bauform IM V 5(Umbau nachträglichin IM V6 möglich)
1PH7 28 . – . . . . 3 – . . . . Bauform IM B 35
1PH7 28 . – . . . . 5 – . . . . Bauform IM V 15(Umbau nachträglich in IM V 36 möglich)
Kurzangaben für OptionenR1Y Normalanstrich RAL ...R2Y Sonderanstrich RAL ...G14 Mit LuftfilterK08 Gebersteckeranbau gegenüberliegend K55 Einführungsplatte Klemmenkasten kundenspezifisch1)K83 Drehen des Klemmenkastens um +90 Grad (Basis ist Standard)K84 Drehen des Klemmenkastens um –90 Grad (Basis ist Standard)K85 Drehen des Klemmenkastens um 180 Grad (Basis ist Standard)K16 Zweites normales Wellenende (nur möglich bei ohne Geber)K31 Zweites LeistungsschildK45 Stillstandsheizung 230 VC30 Ausführung 690 VY55 Anormales Wellenende ASY80 Abweichende Leistungsschilddaten1)Y82 Zusatzschild mit Bestellerangaben1)M83 Zusätzliche Abdrückgewinde an Motorfüßen
Standardausführung
1) Klartext erforderlich Freigegebene Zusatzvarianten
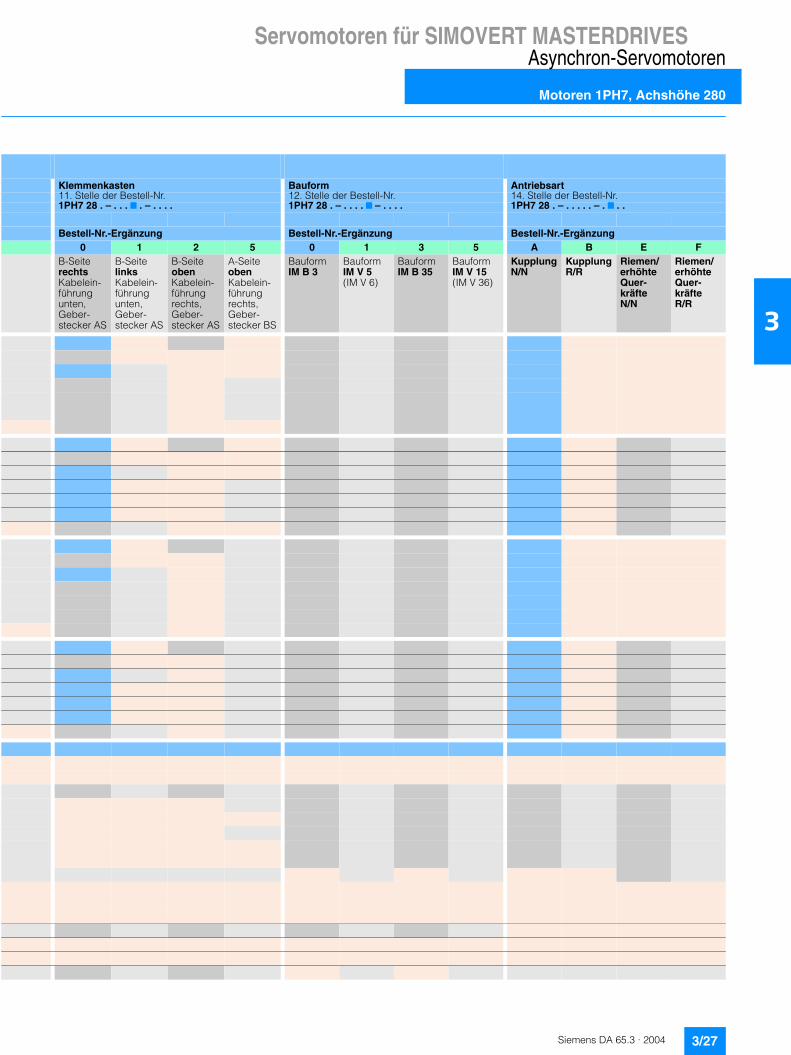
Siemens DA 65.3 · 2004 3/27
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH7, Achshöhe 280
3
Klemmenkasten Bauform Antriebsart11. Stelle der Bestell-Nr. 12. Stelle der Bestell-Nr. 14. Stelle der Bestell-Nr.1PH7 28 . – . . . 7 . – . . . . 1PH7 28 . – . . . . 7 – . . . . 1PH7 28 . – . . . . . – . 7 . .
Bestell-Nr.-Ergänzung Bestell-Nr.-Ergänzung Bestell-Nr.-Ergänzung0 1 2 5 0 1 3 5 A B E F
B-SeiterechtsKabelein-führung unten, Geber-stecker AS
B-SeitelinksKabelein-führung unten, Geber-stecker AS
B-SeiteobenKabelein-führung rechts, Geber-stecker AS
A-SeiteobenKabelein-führung rechts, Geber-stecker BS
BauformIM B 3
BauformIM V 5(IM V 6)
BauformIM B 35
BauformIM V 15(IM V 36)
KupplungN/N
KupplungR/R
Riemen/erhöhte Quer-kräfteN/N
Riemen/erhöhte Quer-kräfteR/R
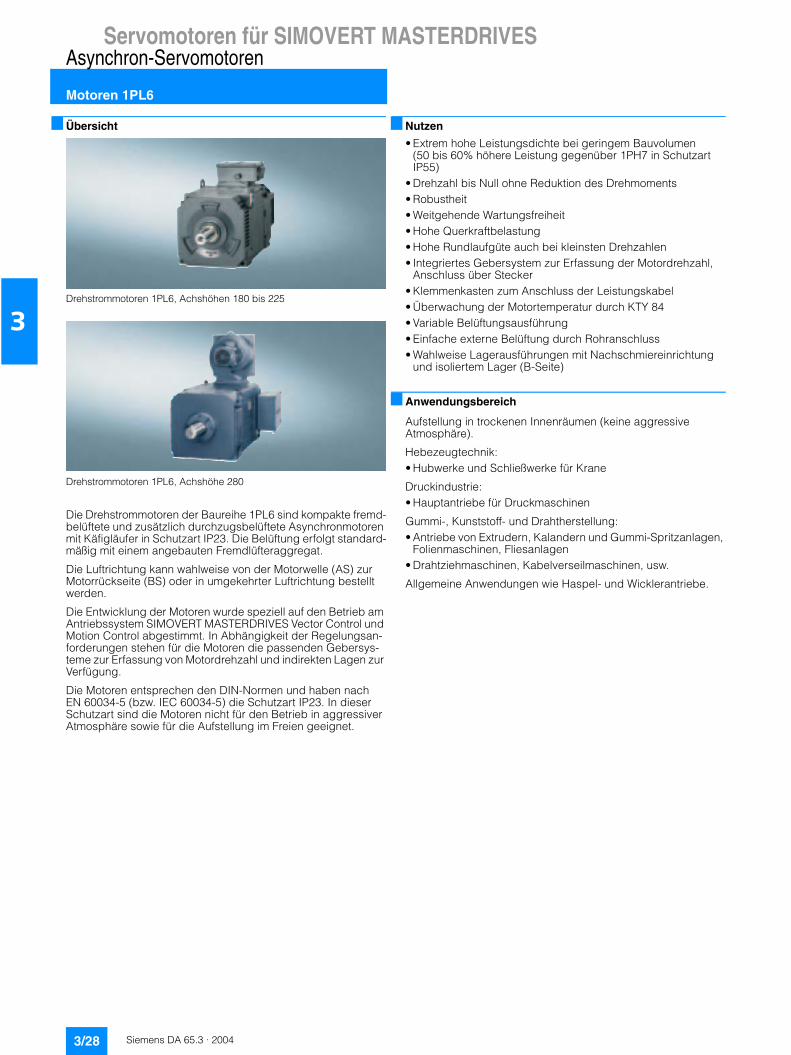
Siemens DA 65.3 · 20043/28
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6
Asynchron-Servomotoren
3
■ Übersicht
Drehstrommotoren 1PL6, Achshöhen 180 bis 225
Drehstrommotoren 1PL6, Achshöhe 280
Die Drehstrommotoren der Baureihe 1PL6 sind kompakte fremd-belüftete und zusätzlich durchzugsbelüftete Asynchronmotoren mit Käfigläufer in Schutzart IP23. Die Belüftung erfolgt standard-mäßig mit einem angebauten Fremdlüfteraggregat.
Die Luftrichtung kann wahlweise von der Motorwelle (AS) zur Motorrückseite (BS) oder in umgekehrter Luftrichtung bestellt werden.
Die Entwicklung der Motoren wurde speziell auf den Betrieb am Antriebssystem SIMOVERT MASTERDRIVES Vector Control und Motion Control abgestimmt. In Abhängigkeit der Regelungsan-forderungen stehen für die Motoren die passenden Gebersys-teme zur Erfassung von Motordrehzahl und indirekten Lagen zur Verfügung.
Die Motoren entsprechen den DIN-Normen und haben nach EN 60034-5 (bzw. IEC 60034-5) die Schutzart IP23. In dieser Schutzart sind die Motoren nicht für den Betrieb in aggressiver Atmosphäre sowie für die Aufstellung im Freien geeignet.
■ Nutzen
• Extrem hohe Leistungsdichte bei geringem Bauvolumen (50 bis 60% höhere Leistung gegenüber 1PH7 in Schutzart IP55)
• Drehzahl bis Null ohne Reduktion des Drehmoments• Robustheit• Weitgehende Wartungsfreiheit• Hohe Querkraftbelastung• Hohe Rundlaufgüte auch bei kleinsten Drehzahlen• Integriertes Gebersystem zur Erfassung der Motordrehzahl,
Anschluss über Stecker• Klemmenkasten zum Anschluss der Leistungskabel• Überwachung der Motortemperatur durch KTY 84• Variable Belüftungsausführung• Einfache externe Belüftung durch Rohranschluss• Wahlweise Lagerausführungen mit Nachschmiereinrichtung
und isoliertem Lager (B-Seite)
■ Anwendungsbereich
Aufstellung in trockenen Innenräumen (keine aggressive Atmosphäre).
Hebezeugtechnik:• Hubwerke und Schließwerke für Krane
Druckindustrie:• Hauptantriebe für Druckmaschinen
Gummi-, Kunststoff- und Drahtherstellung:• Antriebe von Extrudern, Kalandern und Gummi-Spritzanlagen,
Folienmaschinen, Fliesanlagen• Drahtziehmaschinen, Kabelverseilmaschinen, usw.
Allgemeine Anwendungen wie Haspel- und Wicklerantriebe.
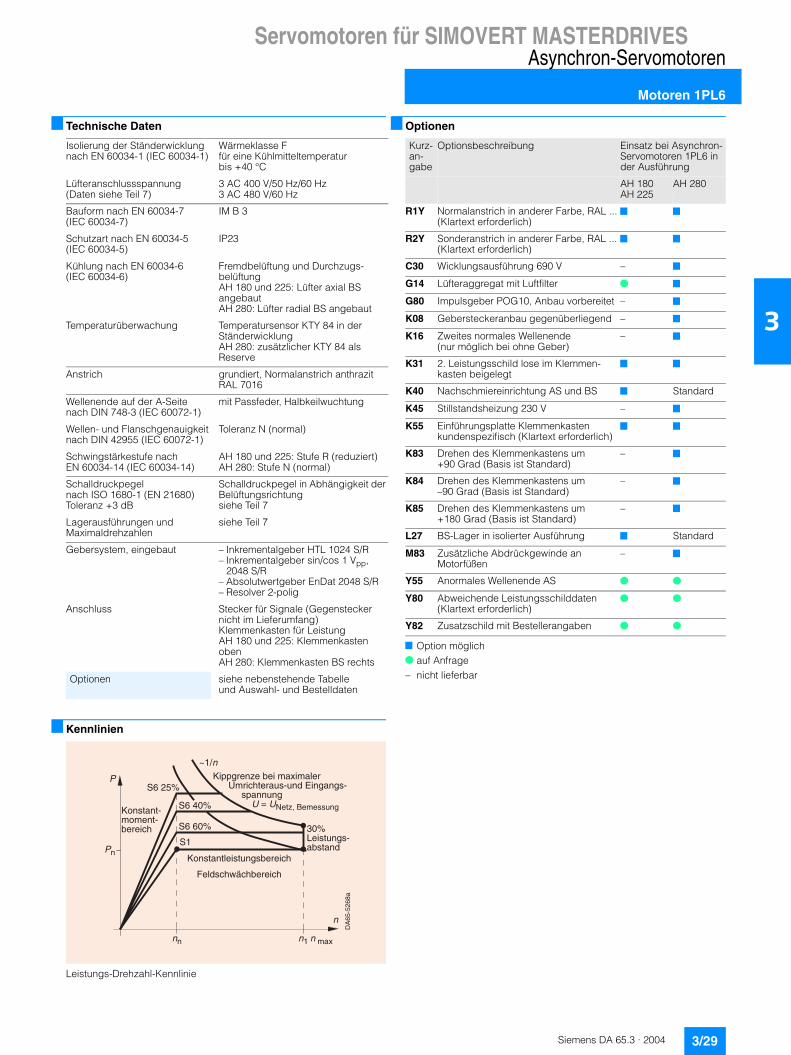
Siemens DA 65.3 · 2004 3/29
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6
3
■ Technische Daten
■ Kennlinien
Leistungs-Drehzahl-Kennlinie
■ Optionen
7 Option möglich4 auf Anfrage– nicht lieferbar
Isolierung der Ständerwicklung nach EN 60034-1 (IEC 60034-1)
Wärmeklasse F für eine Kühlmitteltemperatur bis +40 °C
Lüfteranschlussspannung(Daten siehe Teil 7)
3 AC 400 V/50 Hz/60 Hz3 AC 480 V/60 Hz
Bauform nach EN 60034-7 (IEC 60034-7)
IM B 3
Schutzart nach EN 60034-5 (IEC 60034-5)
IP23
Kühlung nach EN 60034-6 (IEC 60034-6)
Fremdbelüftung und Durchzugs-belüftungAH 180 und 225: Lüfter axial BS angebautAH 280: Lüfter radial BS angebaut
Temperaturüberwachung Temperatursensor KTY 84 in der StänderwicklungAH 280: zusätzlicher KTY 84 als Reserve
Anstrich grundiert, Normalanstrich anthrazit RAL 7016
Wellenende auf der A-Seite nach DIN 748-3 (IEC 60072-1)
mit Passfeder, Halbkeilwuchtung
Wellen- und Flanschgenauigkeitnach DIN 42955 (IEC 60072-1)
Toleranz N (normal)
Schwingstärkestufe nach EN 60034-14 (IEC 60034-14)
AH 180 und 225: Stufe R (reduziert)AH 280: Stufe N (normal)
Schalldruckpegelnach ISO 1680-1 (EN 21680)Toleranz +3 dB
Schalldruckpegel in Abhängigkeit der Belüftungsrichtungsiehe Teil 7
Lagerausführungen und Maximaldrehzahlen
siehe Teil 7
Gebersystem, eingebaut – Inkrementalgeber HTL 1024 S/R– Inkrementalgeber sin/cos 1 Vpp,
2048 S/R – Absolutwertgeber EnDat 2048 S/R– Resolver 2-polig
Anschluss Stecker für Signale (Gegenstecker nicht im Lieferumfang)Klemmenkasten für LeistungAH 180 und 225: Klemmenkasten obenAH 280: Klemmenkasten BS rechts
Optionen siehe nebenstehende Tabelleund Auswahl- und Bestelldaten
P
Pn
Konstant-moment-bereich
~1/nKippgrenze bei maximaler Umrichteraus-und Eingangs- spannung U = UNetz, Bemessung
nn n1 n max
n
Konstantleistungsbereich
Feldschwächbereich
S1
S6 60%
S6 25%
30%Leistungs-abstand
DA
65-5
268a
S6 40%
Kurz- an-gabe
Optionsbeschreibung Einsatz bei Asynchron-Servomotoren 1PL6 in der Ausführung
AH 180AH 225
AH 280
R1Y Normalanstrich in anderer Farbe, RAL ... (Klartext erforderlich)
7 7
R2Y Sonderanstrich in anderer Farbe, RAL ...(Klartext erforderlich)
7 7
C30 Wicklungsausführung 690 V – 7
G14 Lüfteraggregat mit Luftfilter 4 7
G80 Impulsgeber POG10, Anbau vorbereitet – 7
K08 Gebersteckeranbau gegenüberliegend – 7
K16 Zweites normales Wellenende (nur möglich bei ohne Geber)
– 7
K31 2. Leistungsschild lose im Klemmen-kasten beigelegt
7 7
K40 Nachschmiereinrichtung AS und BS 7 Standard
K45 Stillstandsheizung 230 V – 7
K55 Einführungsplatte Klemmenkasten kundenspezifisch (Klartext erforderlich)
7 7
K83 Drehen des Klemmenkastens um +90 Grad (Basis ist Standard)
– 7
K84 Drehen des Klemmenkastens um –90 Grad (Basis ist Standard)
– 7
K85 Drehen des Klemmenkastens um +180 Grad (Basis ist Standard)
– 7
L27 BS-Lager in isolierter Ausführung 7 Standard
M83 Zusätzliche Abdrückgewinde an Motorfüßen
– 7
Y55 Anormales Wellenende AS 4 4
Y80 Abweichende Leistungsschilddaten (Klartext erforderlich)
4 4
Y82 Zusatzschild mit Bestellerangaben 4 4
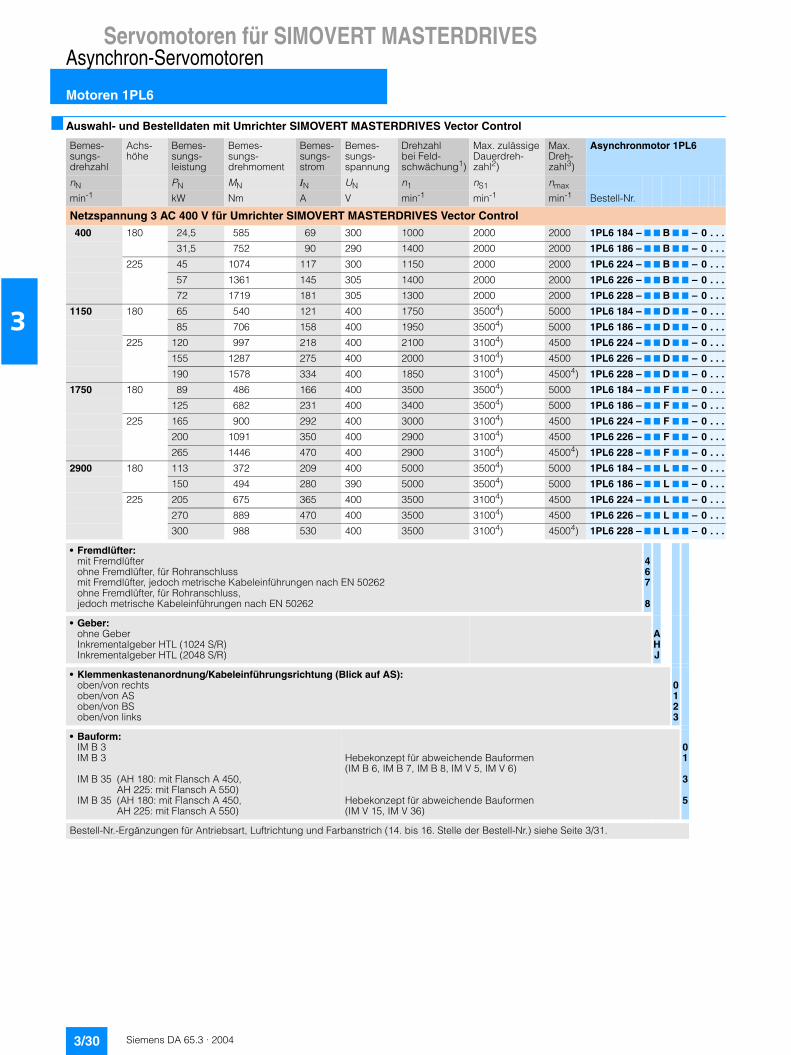
Siemens DA 65.3 · 20043/30
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PL6
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control400 180 24,5 585 69 300 1000 2000 2000 1PL6 184 – 7 7 B 7 7 – 0 . . .
31,5 752 90 290 1400 2000 2000 1PL6 186 – 7 7 B 7 7 – 0 . . .
225 45 1074 117 300 1150 2000 2000 1PL6 224 – 7 7 B 7 7 – 0 . . .
57 1361 145 305 1400 2000 2000 1PL6 226 – 7 7 B 7 7 – 0 . . .
72 1719 181 305 1300 2000 2000 1PL6 228 – 7 7 B 7 7 – 0 . . .
1150 180 65 540 121 400 1750 35004) 5000 1PL6 184 – 7 7 D 7 7 – 0 . . .
85 706 158 400 1950 35004) 5000 1PL6 186 – 7 7 D 7 7 – 0 . . .
225 120 997 218 400 2100 31004) 4500 1PL6 224 – 7 7 D 7 7 – 0 . . .
155 1287 275 400 2000 31004) 4500 1PL6 226 – 7 7 D 7 7 – 0 . . .
190 1578 334 400 1850 31004) 45004) 1PL6 228 – 7 7 D 7 7 – 0 . . .
1750 180 89 486 166 400 3500 35004) 5000 1PL6 184 – 7 7 F 7 7 – 0 . . .
125 682 231 400 3400 35004) 5000 1PL6 186 – 7 7 F 7 7 – 0 . . .
225 165 900 292 400 3000 31004) 4500 1PL6 224 – 7 7 F 7 7 – 0 . . .
200 1091 350 400 2900 31004) 4500 1PL6 226 – 7 7 F 7 7 – 0 . . .
265 1446 470 400 2900 31004) 45004) 1PL6 228 – 7 7 F 7 7 – 0 . . .
2900 180 113 372 209 400 5000 35004) 5000 1PL6 184 – 7 7 L 7 7 – 0 . . .
150 494 280 390 5000 35004) 5000 1PL6 186 – 7 7 L 7 7 – 0 . . .
225 205 675 365 400 3500 31004) 4500 1PL6 224 – 7 7 L 7 7 – 0 . . .
270 889 470 400 3500 31004) 4500 1PL6 226 – 7 7 L 7 7 – 0 . . .
300 988 530 400 3500 31004) 45004) 1PL6 228 – 7 7 L 7 7 – 0 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
467
8
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von ASoben/von BSoben/von links
0123
• Bauform:IM B 3IM B 3
IM B 35 (AH 180: mit Flansch A 450,AH 225: mit Flansch A 550)
IM B 35 (AH 180: mit Flansch A 450,AH 225: mit Flansch A 550)
Hebekonzept für abweichende Bauformen (IM B 6, IM B 7, IM B 8, IM V 5, IM V 6)
Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)
01
3
5
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/31.
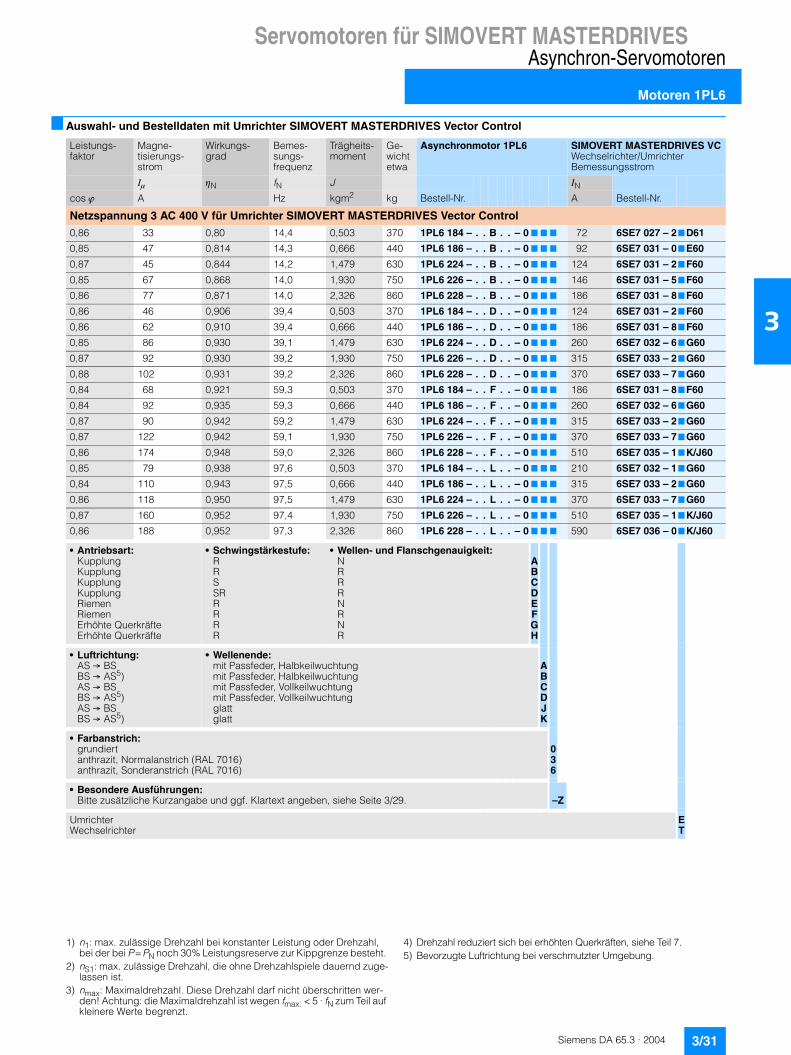
Siemens DA 65.3 · 2004 3/31
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PL6 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,86 33 0,80 14,4 0,503 370 1PL6 184 – . . B . . – 0 7 7 7 72 6SE7 027 – 27D61
0,85 47 0,814 14,3 0,666 440 1PL6 186 – . . B . . – 0 7 7 7 92 6SE7 031 – 07E60
0,87 45 0,844 14,2 1,479 630 1PL6 224 – . . B . . – 0 7 7 7 124 6SE7 031 – 27F60
0,85 67 0,868 14,0 1,930 750 1PL6 226 – . . B . . – 0 7 7 7 146 6SE7 031 – 57F60
0,86 77 0,871 14,0 2,326 860 1PL6 228 – . . B . . – 0 7 7 7 186 6SE7 031 – 87F60
0,86 46 0,906 39,4 0,503 370 1PL6 184 – . . D . . – 0 7 7 7 124 6SE7 031 – 27F60
0,86 62 0,910 39,4 0,666 440 1PL6 186 – . . D . . – 0 7 7 7 186 6SE7 031 – 87F60
0,85 86 0,930 39,1 1,479 630 1PL6 224 – . . D . . – 0 7 7 7 260 6SE7 032 – 67G60
0,87 92 0,930 39,2 1,930 750 1PL6 226 – . . D . . – 0 7 7 7 315 6SE7 033 – 27G60
0,88 102 0,931 39,2 2,326 860 1PL6 228 – . . D . . – 0 7 7 7 370 6SE7 033 – 77G60
0,84 68 0,921 59,3 0,503 370 1PL6 184 – . . F . . – 0 7 7 7 186 6SE7 031 – 87F60
0,84 92 0,935 59,3 0,666 440 1PL6 186 – . . F . . – 0 7 7 7 260 6SE7 032 – 67G60
0,87 90 0,942 59,2 1,479 630 1PL6 224 – . . F . . – 0 7 7 7 315 6SE7 033 – 27G60
0,87 122 0,942 59,1 1,930 750 1PL6 226 – . . F . . – 0 7 7 7 370 6SE7 033 – 77G60
0,86 174 0,948 59,0 2,326 860 1PL6 228 – . . F . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,85 79 0,938 97,6 0,503 370 1PL6 184 – . . L . . – 0 7 7 7 210 6SE7 032 – 17G60
0,84 110 0,943 97,5 0,666 440 1PL6 186 – . . L . . – 0 7 7 7 315 6SE7 033 – 27G60
0,86 118 0,950 97,5 1,479 630 1PL6 224 – . . L . . – 0 7 7 7 370 6SE7 033 – 77G60
0,87 160 0,952 97,4 1,930 750 1PL6 226 – . . L . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,86 188 0,952 97,3 2,326 860 1PL6 228 – . . L . . – 0 7 7 7 590 6SE7 036 – 07K/J60
• Antriebsart:KupplungKupplungKupplungKupplungRiemenRiemenErhöhte QuerkräfteErhöhte Querkräfte
• Schwingstärkestufe:RRSSRRRRR
• Wellen- und Flanschgenauigkeit:NRRRNRNR
ABCDEFGH
• Luftrichtung:AS � BSBS � AS5)AS � BSBS � AS5)AS � BSBS � AS5)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/29. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Drehzahl reduziert sich bei erhöhten Querkräften, siehe Teil 7.5) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
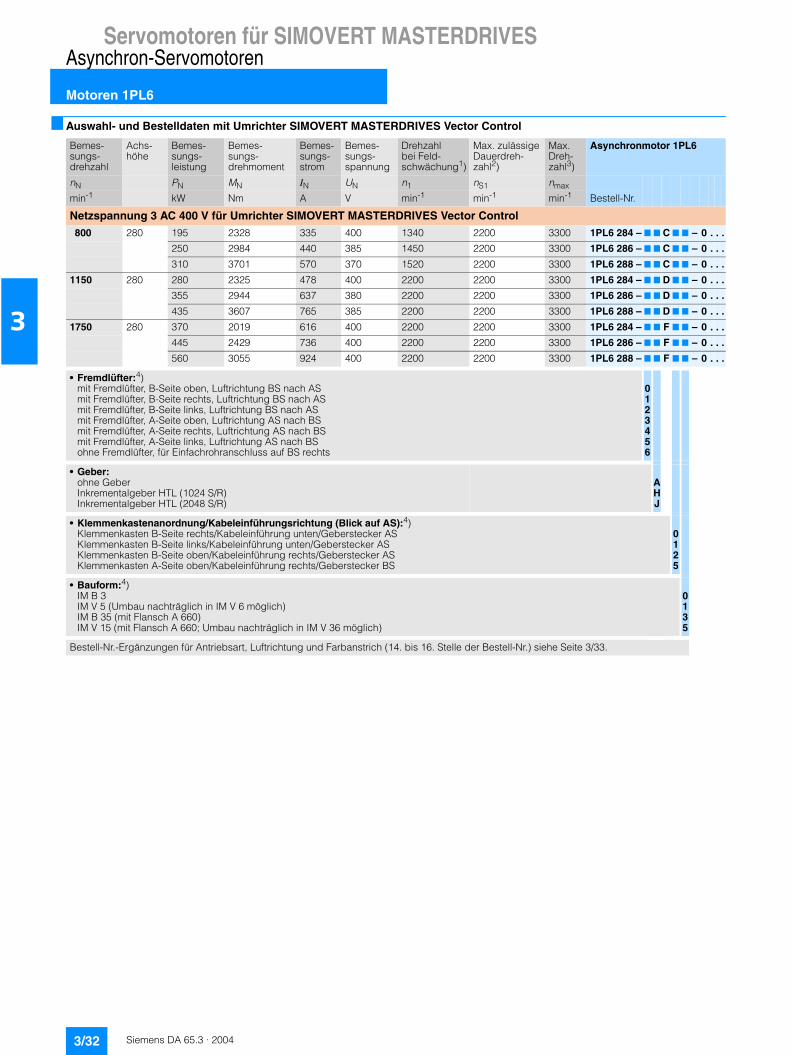
Siemens DA 65.3 · 20043/32
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PL6
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control800 280 195 2328 335 400 1340 2200 3300 1PL6 284 – 7 7 C 7 7 – 0 . . .
250 2984 440 385 1450 2200 3300 1PL6 286 – 7 7 C 7 7 – 0 . . .
310 3701 570 370 1520 2200 3300 1PL6 288 – 7 7 C 7 7 – 0 . . .
1150 280 280 2325 478 400 2200 2200 3300 1PL6 284 – 7 7 D 7 7 – 0 . . .
355 2944 637 380 2200 2200 3300 1PL6 286 – 7 7 D 7 7 – 0 . . .
435 3607 765 385 2200 2200 3300 1PL6 288 – 7 7 D 7 7 – 0 . . .
1750 280 370 2019 616 400 2200 2200 3300 1PL6 284 – 7 7 F 7 7 – 0 . . .
445 2429 736 400 2200 2200 3300 1PL6 286 – 7 7 F 7 7 – 0 . . .
560 3055 924 400 2200 2200 3300 1PL6 288 – 7 7 F 7 7 – 0 . . .
• Fremdlüfter:4)mit Fremdlüfter, B-Seite oben, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite rechts, Luftrichtung BS nach AS mit Fremdlüfter, B-Seite links, Luftrichtung BS nach ASmit Fremdlüfter, A-Seite oben, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite rechts, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite links, Luftrichtung AS nach BSohne Fremdlüfter, für Einfachrohranschluss auf BS rechts
0123456
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):4)Klemmenkasten B-Seite rechts/Kabeleinführung unten/Geberstecker AS Klemmenkasten B-Seite links/Kabeleinführung unten/Geberstecker AS Klemmenkasten B-Seite oben/Kabeleinführung rechts/Geberstecker AS Klemmenkasten A-Seite oben/Kabeleinführung rechts/Geberstecker BS
0125
• Bauform:4)IM B 3IM V 5 (Umbau nachträglich in IM V 6 möglich)IM B 35 (mit Flansch A 660)IM V 15 (mit Flansch A 660; Umbau nachträglich in IM V 36 möglich)
0135
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/33.
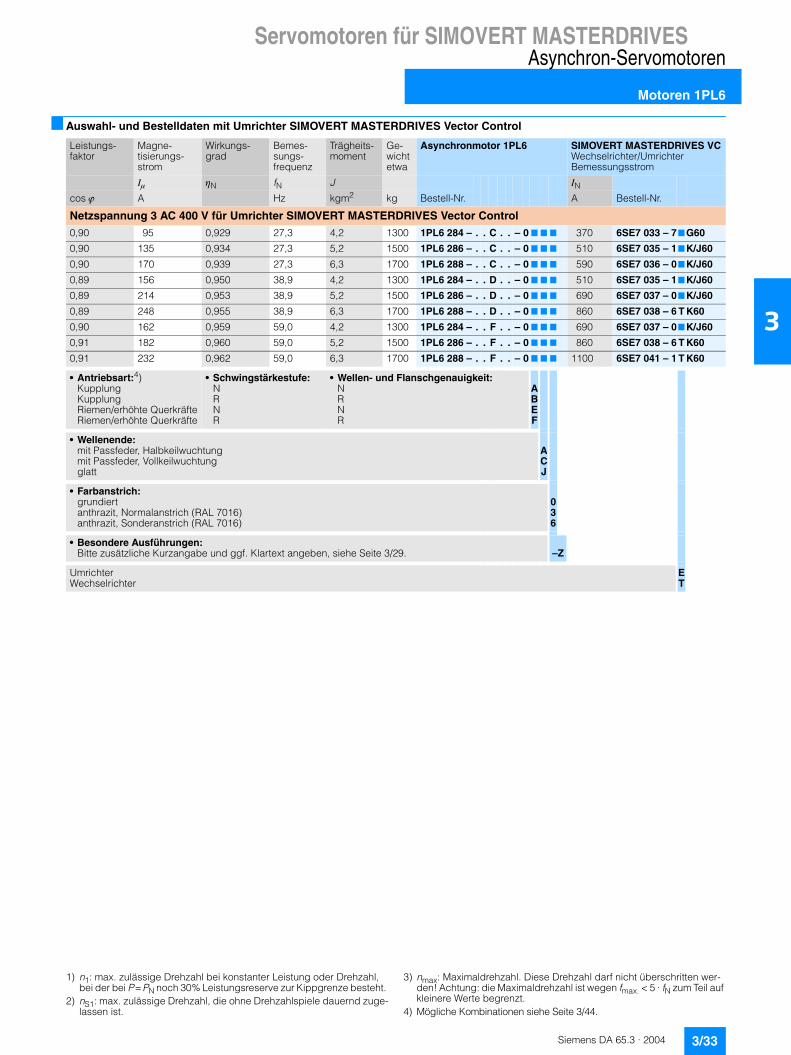
Siemens DA 65.3 · 2004 3/33
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PL6 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,90 95 0,929 27,3 4,2 1300 1PL6 284 – . . C . . – 0 7 7 7 370 6SE7 033 – 77G60
0,90 135 0,934 27,3 5,2 1500 1PL6 286 – . . C . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,90 170 0,939 27,3 6,3 1700 1PL6 288 – . . C . . – 0 7 7 7 590 6SE7 036 – 07K/J60
0,89 156 0,950 38,9 4,2 1300 1PL6 284 – . . D . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,89 214 0,953 38,9 5,2 1500 1PL6 286 – . . D . . – 0 7 7 7 690 6SE7 037 – 07K/J60
0,89 248 0,955 38,9 6,3 1700 1PL6 288 – . . D . . – 0 7 7 7 860 6SE7 038 – 6 T K60
0,90 162 0,959 59,0 4,2 1300 1PL6 284 – . . F . . – 0 7 7 7 690 6SE7 037 – 07K/J60
0,91 182 0,960 59,0 5,2 1500 1PL6 286 – . . F . . – 0 7 7 7 860 6SE7 038 – 6 T K60
0,91 232 0,962 59,0 6,3 1700 1PL6 288 – . . F . . – 0 7 7 7 1100 6SE7 041 – 1 T K60
• Antriebsart:4)KupplungKupplungRiemen/erhöhte QuerkräfteRiemen/erhöhte Querkräfte
• Schwingstärkestufe:NRNR
• Wellen- und Flanschgenauigkeit:NRNR
ABEF
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungglatt
ACJ
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/29. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Mögliche Kombinationen siehe Seite 3/44.
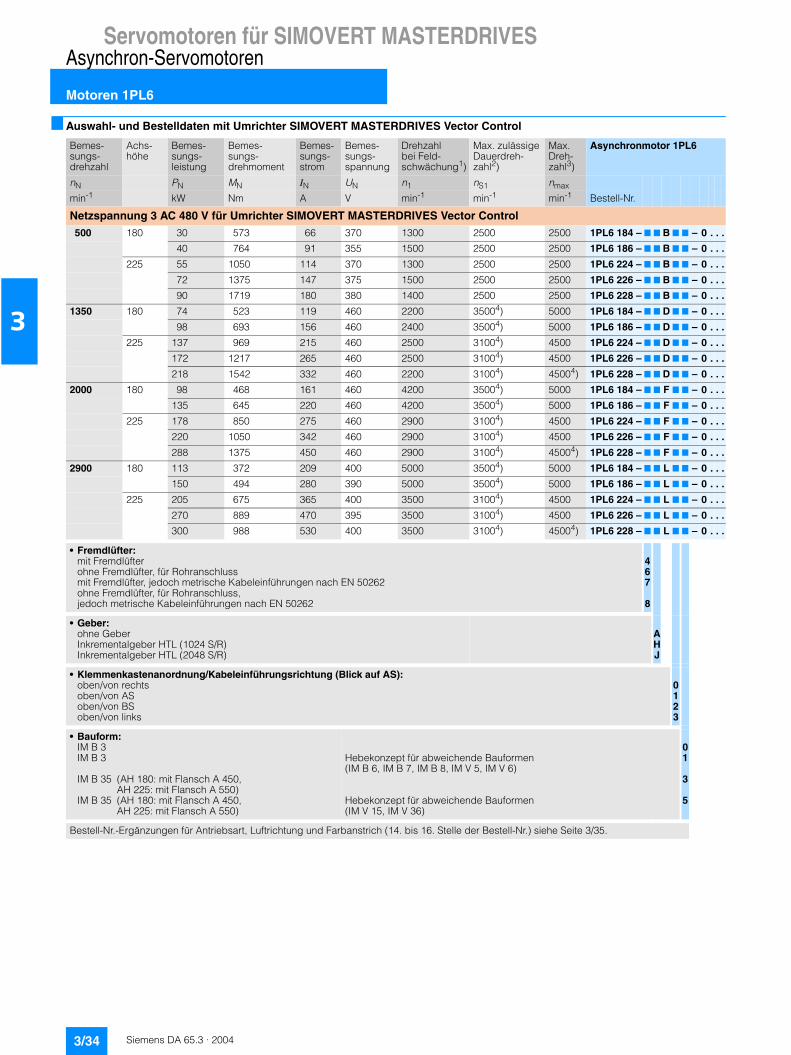
Siemens DA 65.3 · 20043/34
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PL6
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control500 180 30 573 66 370 1300 2500 2500 1PL6 184 – 7 7 B 7 7 – 0 . . .
40 764 91 355 1500 2500 2500 1PL6 186 – 7 7 B 7 7 – 0 . . .
225 55 1050 114 370 1300 2500 2500 1PL6 224 – 7 7 B 7 7 – 0 . . .
72 1375 147 375 1500 2500 2500 1PL6 226 – 7 7 B 7 7 – 0 . . .
90 1719 180 380 1400 2500 2500 1PL6 228 – 7 7 B 7 7 – 0 . . .
1350 180 74 523 119 460 2200 35004) 5000 1PL6 184 – 7 7 D 7 7 – 0 . . .
98 693 156 460 2400 35004) 5000 1PL6 186 – 7 7 D 7 7 – 0 . . .
225 137 969 215 460 2500 31004) 4500 1PL6 224 – 7 7 D 7 7 – 0 . . .
172 1217 265 460 2500 31004) 4500 1PL6 226 – 7 7 D 7 7 – 0 . . .
218 1542 332 460 2200 31004) 45004) 1PL6 228 – 7 7 D 7 7 – 0 . . .
2000 180 98 468 161 460 4200 35004) 5000 1PL6 184 – 7 7 F 7 7 – 0 . . .
135 645 220 460 4200 35004) 5000 1PL6 186 – 7 7 F 7 7 – 0 . . .
225 178 850 275 460 2900 31004) 4500 1PL6 224 – 7 7 F 7 7 – 0 . . .
220 1050 342 460 2900 31004) 4500 1PL6 226 – 7 7 F 7 7 – 0 . . .
288 1375 450 460 2900 31004) 45004) 1PL6 228 – 7 7 F 7 7 – 0 . . .
2900 180 113 372 209 400 5000 35004) 5000 1PL6 184 – 7 7 L 7 7 – 0 . . .
150 494 280 390 5000 35004) 5000 1PL6 186 – 7 7 L 7 7 – 0 . . .
225 205 675 365 400 3500 31004) 4500 1PL6 224 – 7 7 L 7 7 – 0 . . .
270 889 470 395 3500 31004) 4500 1PL6 226 – 7 7 L 7 7 – 0 . . .
300 988 530 400 3500 31004) 45004) 1PL6 228 – 7 7 L 7 7 – 0 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
467
8
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von ASoben/von BSoben/von links
0123
• Bauform:IM B 3IM B 3
IM B 35 (AH 180: mit Flansch A 450,AH 225: mit Flansch A 550)
IM B 35 (AH 180: mit Flansch A 450,AH 225: mit Flansch A 550)
Hebekonzept für abweichende Bauformen (IM B 6, IM B 7, IM B 8, IM V 5, IM V 6)
Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)
01
3
5
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/35.
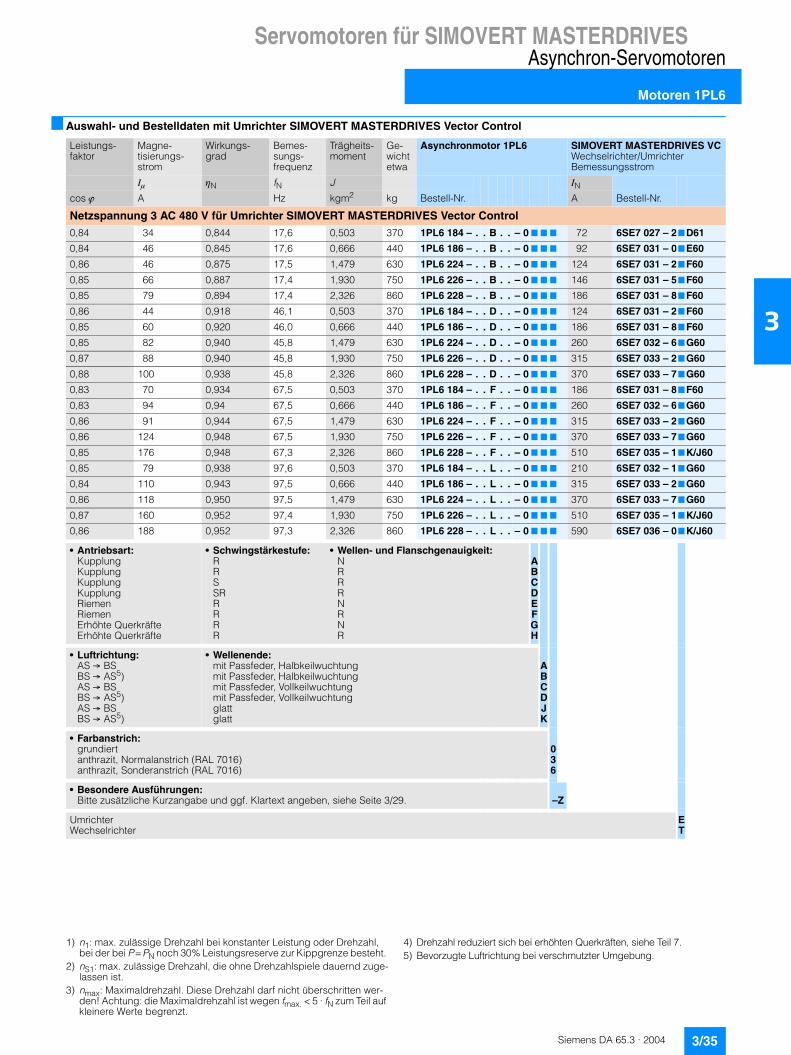
Siemens DA 65.3 · 2004 3/35
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PL6 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,84 34 0,844 17,6 0,503 370 1PL6 184 – . . B . . – 0 7 7 7 72 6SE7 027 – 27D61
0,84 46 0,845 17,6 0,666 440 1PL6 186 – . . B . . – 0 7 7 7 92 6SE7 031 – 07E60
0,86 46 0,875 17,5 1,479 630 1PL6 224 – . . B . . – 0 7 7 7 124 6SE7 031 – 27F60
0,85 66 0,887 17,4 1,930 750 1PL6 226 – . . B . . – 0 7 7 7 146 6SE7 031 – 57F60
0,85 79 0,894 17,4 2,326 860 1PL6 228 – . . B . . – 0 7 7 7 186 6SE7 031 – 87F60
0,86 44 0,918 46,1 0,503 370 1PL6 184 – . . D . . – 0 7 7 7 124 6SE7 031 – 27F60
0,85 60 0,920 46,0 0,666 440 1PL6 186 – . . D . . – 0 7 7 7 186 6SE7 031 – 87F60
0,85 82 0,940 45,8 1,479 630 1PL6 224 – . . D . . – 0 7 7 7 260 6SE7 032 – 67G60
0,87 88 0,940 45,8 1,930 750 1PL6 226 – . . D . . – 0 7 7 7 315 6SE7 033 – 27G60
0,88 100 0,938 45,8 2,326 860 1PL6 228 – . . D . . – 0 7 7 7 370 6SE7 033 – 77G60
0,83 70 0,934 67,5 0,503 370 1PL6 184 – . . F . . – 0 7 7 7 186 6SE7 031 – 87F60
0,83 94 0,94 67,5 0,666 440 1PL6 186 – . . F . . – 0 7 7 7 260 6SE7 032 – 67G60
0,86 91 0,944 67,5 1,479 630 1PL6 224 – . . F . . – 0 7 7 7 315 6SE7 033 – 27G60
0,86 124 0,948 67,5 1,930 750 1PL6 226 – . . F . . – 0 7 7 7 370 6SE7 033 – 77G60
0,85 176 0,948 67,3 2,326 860 1PL6 228 – . . F . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,85 79 0,938 97,6 0,503 370 1PL6 184 – . . L . . – 0 7 7 7 210 6SE7 032 – 17G60
0,84 110 0,943 97,5 0,666 440 1PL6 186 – . . L . . – 0 7 7 7 315 6SE7 033 – 27G60
0,86 118 0,950 97,5 1,479 630 1PL6 224 – . . L . . – 0 7 7 7 370 6SE7 033 – 77G60
0,87 160 0,952 97,4 1,930 750 1PL6 226 – . . L . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,86 188 0,952 97,3 2,326 860 1PL6 228 – . . L . . – 0 7 7 7 590 6SE7 036 – 07K/J60
• Antriebsart:KupplungKupplungKupplungKupplungRiemenRiemenErhöhte QuerkräfteErhöhte Querkräfte
• Schwingstärkestufe:RRSSRRRRR
• Wellen- und Flanschgenauigkeit:NRRRNRNR
ABCDEFGH
• Luftrichtung:AS � BSBS � AS5)AS � BSBS � AS5)AS � BSBS � AS5)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/29. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Drehzahl reduziert sich bei erhöhten Querkräften, siehe Teil 7.5) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
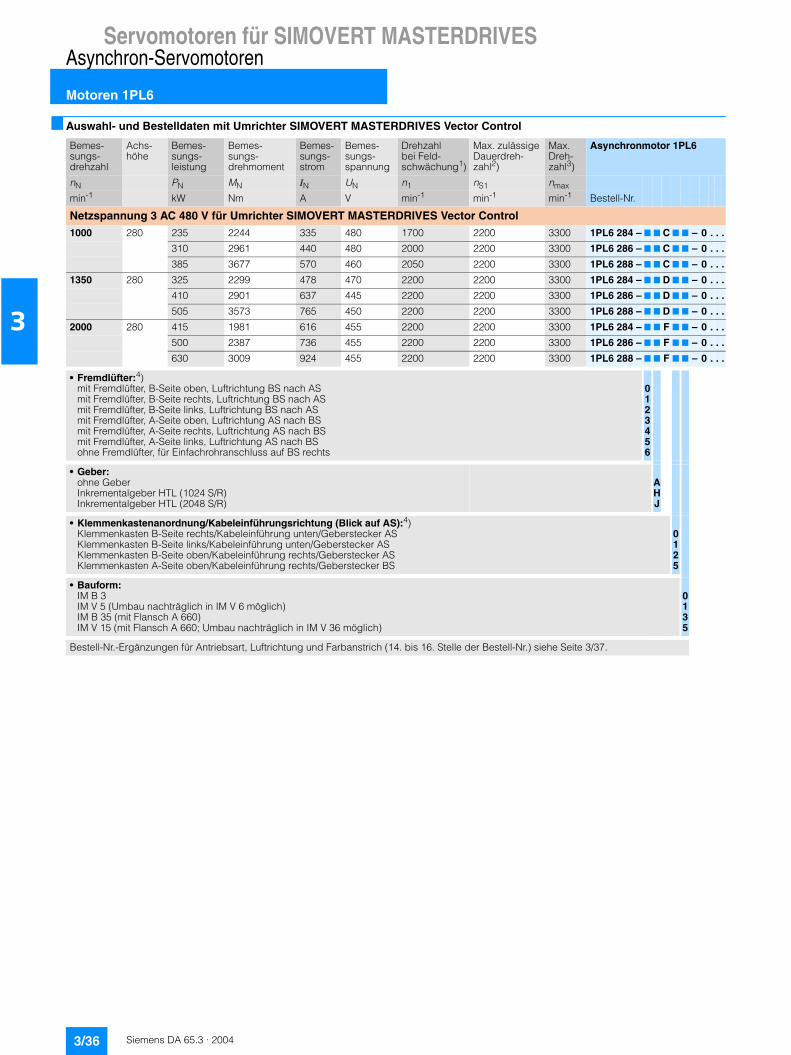
Siemens DA 65.3 · 20043/36
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PL6
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control1000 280 235 2244 335 480 1700 2200 3300 1PL6 284 – 7 7 C 7 7 – 0 . . .
310 2961 440 480 2000 2200 3300 1PL6 286 – 7 7 C 7 7 – 0 . . .
385 3677 570 460 2050 2200 3300 1PL6 288 – 7 7 C 7 7 – 0 . . .
1350 280 325 2299 478 470 2200 2200 3300 1PL6 284 – 7 7 D 7 7 – 0 . . .
410 2901 637 445 2200 2200 3300 1PL6 286 – 7 7 D 7 7 – 0 . . .
505 3573 765 450 2200 2200 3300 1PL6 288 – 7 7 D 7 7 – 0 . . .
2000 280 415 1981 616 455 2200 2200 3300 1PL6 284 – 7 7 F 7 7 – 0 . . .
500 2387 736 455 2200 2200 3300 1PL6 286 – 7 7 F 7 7 – 0 . . .
630 3009 924 455 2200 2200 3300 1PL6 288 – 7 7 F 7 7 – 0 . . .
• Fremdlüfter:4)mit Fremdlüfter, B-Seite oben, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite rechts, Luftrichtung BS nach AS mit Fremdlüfter, B-Seite links, Luftrichtung BS nach ASmit Fremdlüfter, A-Seite oben, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite rechts, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite links, Luftrichtung AS nach BSohne Fremdlüfter, für Einfachrohranschluss auf BS rechts
0123456
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):4)Klemmenkasten B-Seite rechts/Kabeleinführung unten/Geberstecker AS Klemmenkasten B-Seite links/Kabeleinführung unten/Geberstecker AS Klemmenkasten B-Seite oben/Kabeleinführung rechts/Geberstecker AS Klemmenkasten A-Seite oben/Kabeleinführung rechts/Geberstecker BS
0125
• Bauform:IM B 3IM V 5 (Umbau nachträglich in IM V 6 möglich)IM B 35 (mit Flansch A 660)IM V 15 (mit Flansch A 660; Umbau nachträglich in IM V 36 möglich)
0135
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/37.
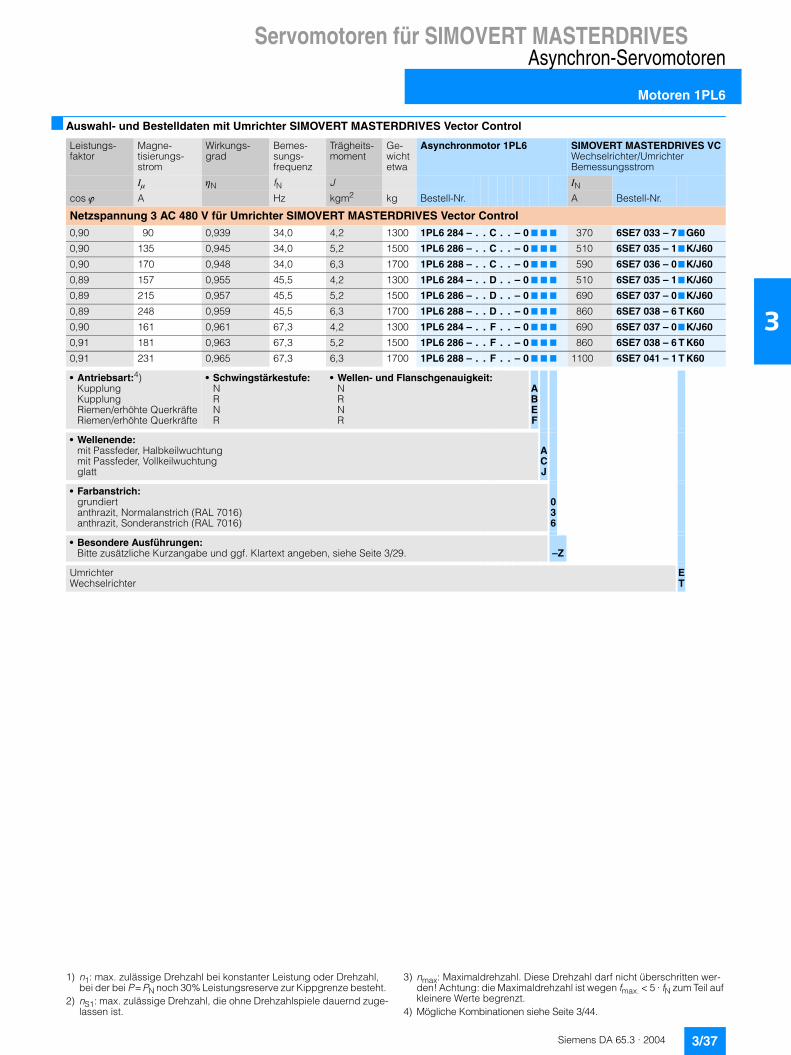
Siemens DA 65.3 · 2004 3/37
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PL6 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,90 90 0,939 34,0 4,2 1300 1PL6 284 – . . C . . – 0 7 7 7 370 6SE7 033 – 77G60
0,90 135 0,945 34,0 5,2 1500 1PL6 286 – . . C . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,90 170 0,948 34,0 6,3 1700 1PL6 288 – . . C . . – 0 7 7 7 590 6SE7 036 – 07K/J60
0,89 157 0,955 45,5 4,2 1300 1PL6 284 – . . D . . – 0 7 7 7 510 6SE7 035 – 17K/J60
0,89 215 0,957 45,5 5,2 1500 1PL6 286 – . . D . . – 0 7 7 7 690 6SE7 037 – 07K/J60
0,89 248 0,959 45,5 6,3 1700 1PL6 288 – . . D . . – 0 7 7 7 860 6SE7 038 – 6 T K60
0,90 161 0,961 67,3 4,2 1300 1PL6 284 – . . F . . – 0 7 7 7 690 6SE7 037 – 07K/J60
0,91 181 0,963 67,3 5,2 1500 1PL6 286 – . . F . . – 0 7 7 7 860 6SE7 038 – 6 T K60
0,91 231 0,965 67,3 6,3 1700 1PL6 288 – . . F . . – 0 7 7 7 1100 6SE7 041 – 1 T K60
• Antriebsart:4)KupplungKupplungRiemen/erhöhte QuerkräfteRiemen/erhöhte Querkräfte
• Schwingstärkestufe:NRNR
• Wellen- und Flanschgenauigkeit:NRNR
ABEF
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungglatt
ACJ
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/29. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Mögliche Kombinationen siehe Seite 3/44.
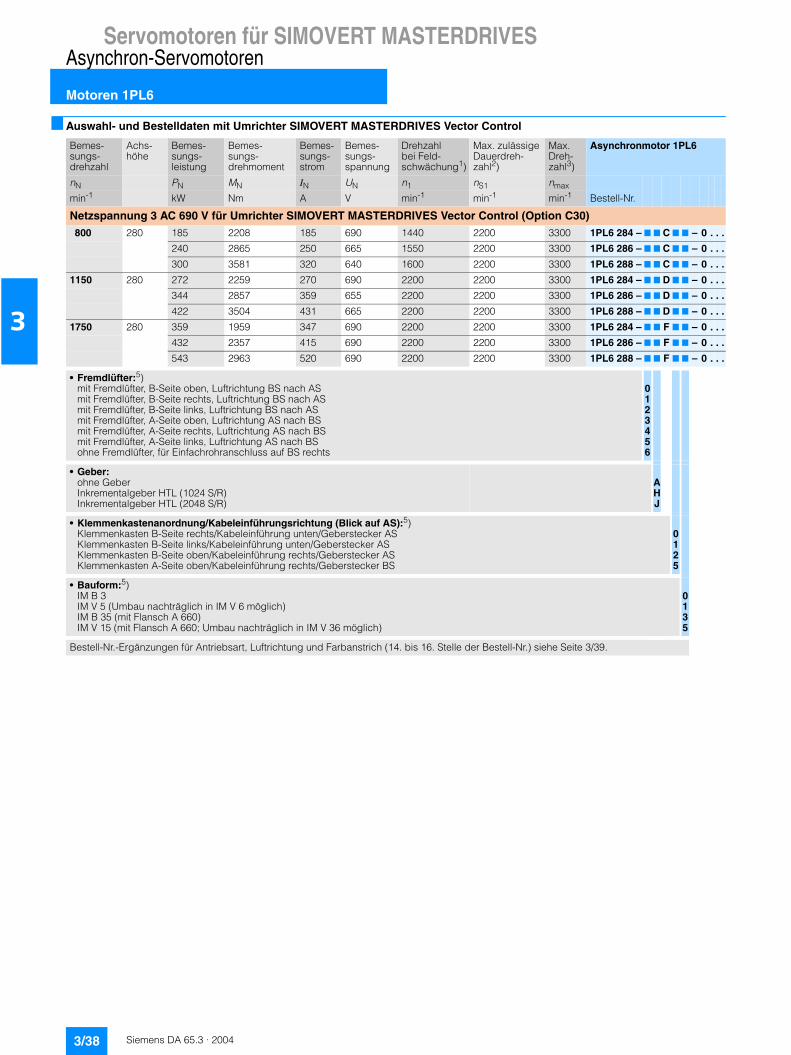
Siemens DA 65.3 · 20043/38
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PL6
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 690 V für Umrichter SIMOVERT MASTERDRIVES Vector Control (Option C30)800 280 185 2208 185 690 1440 2200 3300 1PL6 284 – 7 7 C 7 7 – 0 . . .
240 2865 250 665 1550 2200 3300 1PL6 286 – 7 7 C 7 7 – 0 . . .
300 3581 320 640 1600 2200 3300 1PL6 288 – 7 7 C 7 7 – 0 . . .
1150 280 272 2259 270 690 2200 2200 3300 1PL6 284 – 7 7 D 7 7 – 0 . . .
344 2857 359 655 2200 2200 3300 1PL6 286 – 7 7 D 7 7 – 0 . . .
422 3504 431 665 2200 2200 3300 1PL6 288 – 7 7 D 7 7 – 0 . . .
1750 280 359 1959 347 690 2200 2200 3300 1PL6 284 – 7 7 F 7 7 – 0 . . .
432 2357 415 690 2200 2200 3300 1PL6 286 – 7 7 F 7 7 – 0 . . .
543 2963 520 690 2200 2200 3300 1PL6 288 – 7 7 F 7 7 – 0 . . .
• Fremdlüfter:5)mit Fremdlüfter, B-Seite oben, Luftrichtung BS nach ASmit Fremdlüfter, B-Seite rechts, Luftrichtung BS nach AS mit Fremdlüfter, B-Seite links, Luftrichtung BS nach ASmit Fremdlüfter, A-Seite oben, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite rechts, Luftrichtung AS nach BSmit Fremdlüfter, A-Seite links, Luftrichtung AS nach BSohne Fremdlüfter, für Einfachrohranschluss auf BS rechts
0123456
• Geber:ohne GeberInkrementalgeber HTL (1024 S/R)Inkrementalgeber HTL (2048 S/R)
AHJ
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):5)Klemmenkasten B-Seite rechts/Kabeleinführung unten/Geberstecker AS Klemmenkasten B-Seite links/Kabeleinführung unten/Geberstecker AS Klemmenkasten B-Seite oben/Kabeleinführung rechts/Geberstecker AS Klemmenkasten A-Seite oben/Kabeleinführung rechts/Geberstecker BS
0125
• Bauform:5)IM B 3IM V 5 (Umbau nachträglich in IM V 6 möglich)IM B 35 (mit Flansch A 660)IM V 15 (mit Flansch A 660; Umbau nachträglich in IM V 36 möglich)
0135
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/39.
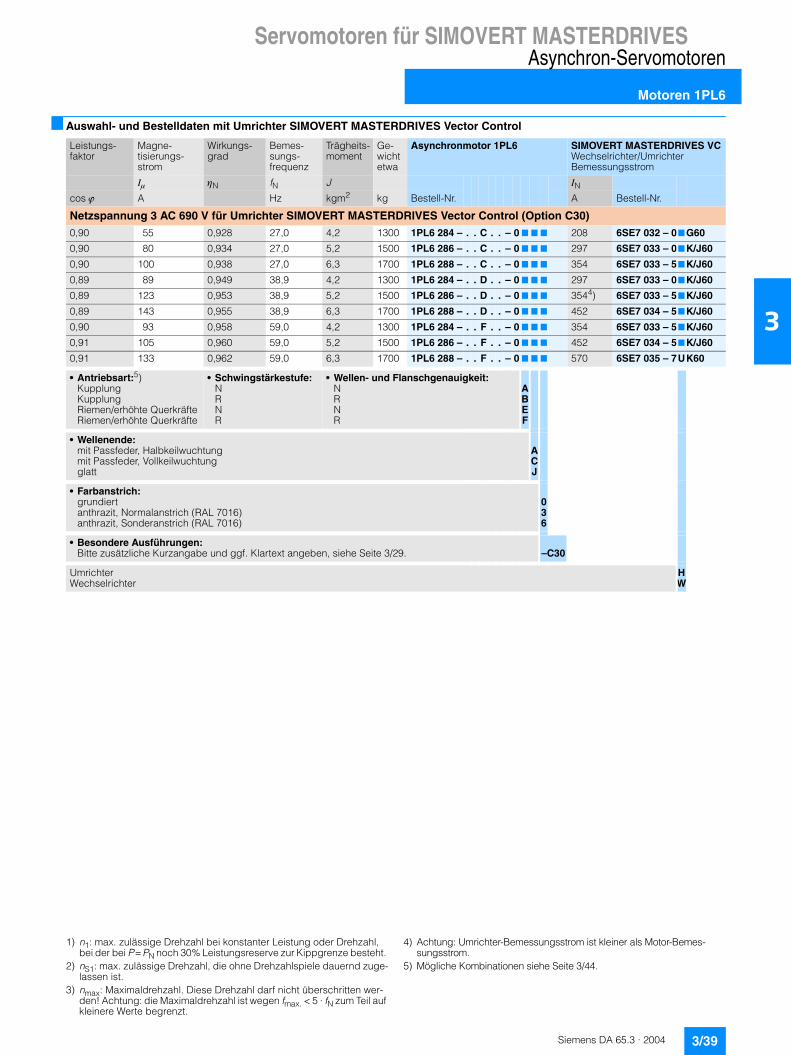
Siemens DA 65.3 · 2004 3/39
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PL6 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 690 V für Umrichter SIMOVERT MASTERDRIVES Vector Control (Option C30)0,90 55 0,928 27,0 4,2 1300 1PL6 284 – . . C . . – 0 7 7 7 208 6SE7 032 – 07G60
0,90 80 0,934 27,0 5,2 1500 1PL6 286 – . . C . . – 0 7 7 7 297 6SE7 033 – 07K/J60
0,90 100 0,938 27,0 6,3 1700 1PL6 288 – . . C . . – 0 7 7 7 354 6SE7 033 – 57K/J60
0,89 89 0,949 38,9 4,2 1300 1PL6 284 – . . D . . – 0 7 7 7 297 6SE7 033 – 07K/J60
0,89 123 0,953 38,9 5,2 1500 1PL6 286 – . . D . . – 0 7 7 7 3544) 6SE7 033 – 57K/J60
0,89 143 0,955 38,9 6,3 1700 1PL6 288 – . . D . . – 0 7 7 7 452 6SE7 034 – 57K/J60
0,90 93 0,958 59,0 4,2 1300 1PL6 284 – . . F . . – 0 7 7 7 354 6SE7 033 – 57K/J60
0,91 105 0,960 59,0 5,2 1500 1PL6 286 – . . F . . – 0 7 7 7 452 6SE7 034 – 57K/J60
0,91 133 0,962 59,0 6,3 1700 1PL6 288 – . . F . . – 0 7 7 7 570 6SE7 035 – 7UK60
• Antriebsart:5)KupplungKupplungRiemen/erhöhte QuerkräfteRiemen/erhöhte Querkräfte
• Schwingstärkestufe:NRNR
• Wellen- und Flanschgenauigkeit:NRNR
ABEF
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungglatt
ACJ
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/29. –C30
UmrichterWechselrichter
HW
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
4) Achtung: Umrichter-Bemessungsstrom ist kleiner als Motor-Bemes-sungsstrom.
5) Mögliche Kombinationen siehe Seite 3/44.
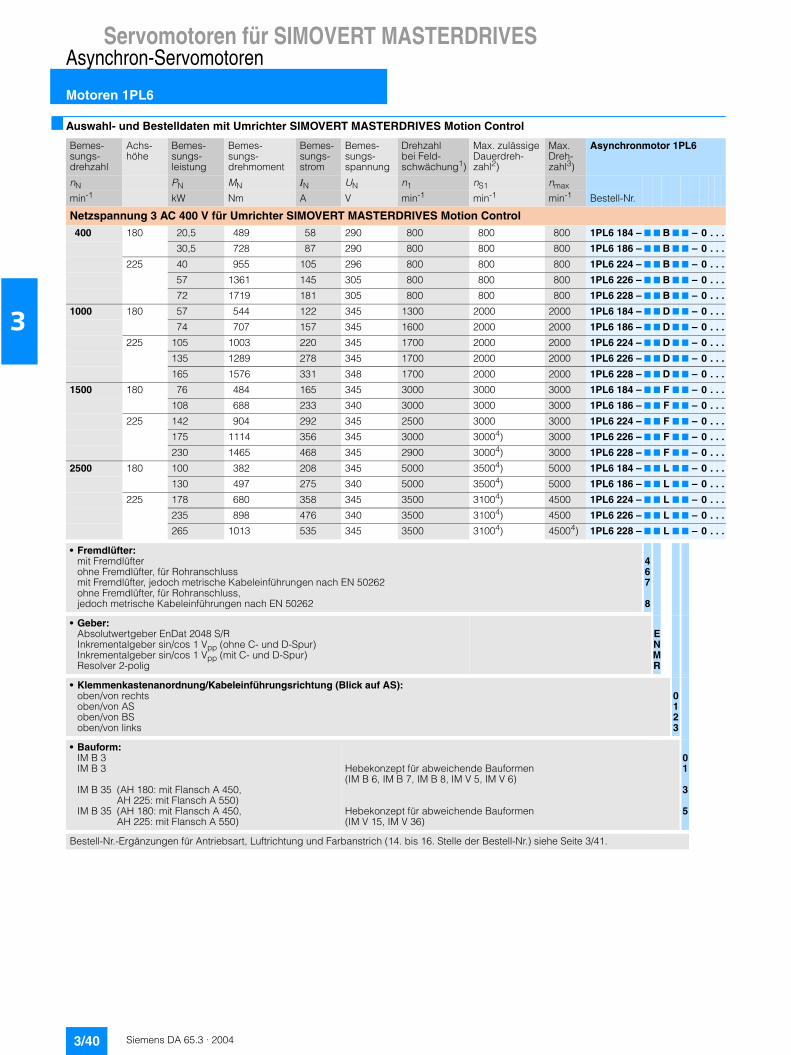
Siemens DA 65.3 · 20043/40
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PL6
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Motion Control400 180 20,5 489 58 290 800 800 800 1PL6 184 – 7 7 B 7 7 – 0 . . .
30,5 728 87 290 800 800 800 1PL6 186 – 7 7 B 7 7 – 0 . . .
225 40 955 105 296 800 800 800 1PL6 224 – 7 7 B 7 7 – 0 . . .
57 1361 145 305 800 800 800 1PL6 226 – 7 7 B 7 7 – 0 . . .
72 1719 181 305 800 800 800 1PL6 228 – 7 7 B 7 7 – 0 . . .
1000 180 57 544 122 345 1300 2000 2000 1PL6 184 – 7 7 D 7 7 – 0 . . .
74 707 157 345 1600 2000 2000 1PL6 186 – 7 7 D 7 7 – 0 . . .
225 105 1003 220 345 1700 2000 2000 1PL6 224 – 7 7 D 7 7 – 0 . . .
135 1289 278 345 1700 2000 2000 1PL6 226 – 7 7 D 7 7 – 0 . . .
165 1576 331 348 1700 2000 2000 1PL6 228 – 7 7 D 7 7 – 0 . . .
1500 180 76 484 165 345 3000 3000 3000 1PL6 184 – 7 7 F 7 7 – 0 . . .
108 688 233 340 3000 3000 3000 1PL6 186 – 7 7 F 7 7 – 0 . . .
225 142 904 292 345 2500 3000 3000 1PL6 224 – 7 7 F 7 7 – 0 . . .
175 1114 356 345 3000 30004) 3000 1PL6 226 – 7 7 F 7 7 – 0 . . .
230 1465 468 345 2900 30004) 3000 1PL6 228 – 7 7 F 7 7 – 0 . . .
2500 180 100 382 208 345 5000 35004) 5000 1PL6 184 – 7 7 L 7 7 – 0 . . .
130 497 275 340 5000 35004) 5000 1PL6 186 – 7 7 L 7 7 – 0 . . .
225 178 680 358 345 3500 31004) 4500 1PL6 224 – 7 7 L 7 7 – 0 . . .
235 898 476 340 3500 31004) 4500 1PL6 226 – 7 7 L 7 7 – 0 . . .
265 1013 535 345 3500 31004) 45004) 1PL6 228 – 7 7 L 7 7 – 0 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
467
8
• Geber:Absolutwertgeber EnDat 2048 S/RInkrementalgeber sin/cos 1 Vpp (ohne C- und D-Spur)Inkrementalgeber sin/cos 1 Vpp (mit C- und D-Spur)Resolver 2-polig
ENMR
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von ASoben/von BSoben/von links
0123
• Bauform:IM B 3IM B 3
IM B 35 (AH 180: mit Flansch A 450,AH 225: mit Flansch A 550)
IM B 35 (AH 180: mit Flansch A 450,AH 225: mit Flansch A 550)
Hebekonzept für abweichende Bauformen (IM B 6, IM B 7, IM B 8, IM V 5, IM V 6)
Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)
01
3
5
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/41.
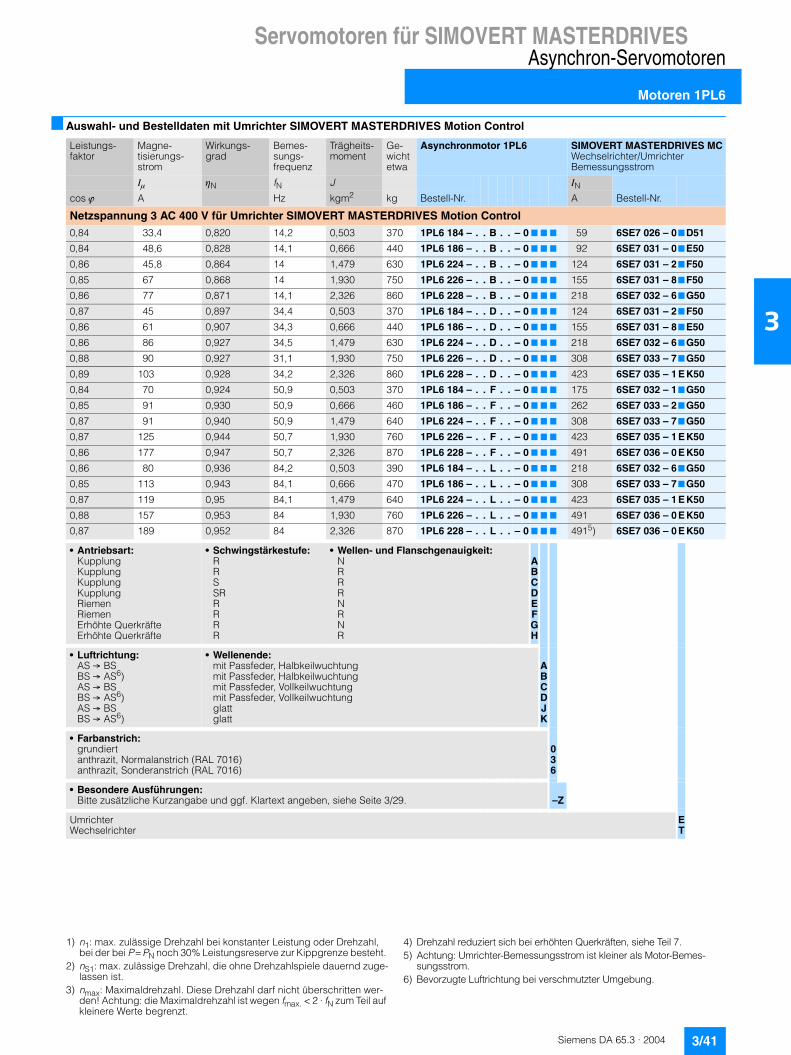
Siemens DA 65.3 · 2004 3/41
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PL6 SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Motion Control0,84 33,4 0,820 14,2 0,503 370 1PL6 184 – . . B . . – 0 7 7 7 59 6SE7 026 – 07D51
0,84 48,6 0,828 14,1 0,666 440 1PL6 186 – . . B . . – 0 7 7 7 92 6SE7 031 – 07E50
0,86 45,8 0,864 14 1,479 630 1PL6 224 – . . B . . – 0 7 7 7 124 6SE7 031 – 27F50
0,85 67 0,868 14 1,930 750 1PL6 226 – . . B . . – 0 7 7 7 155 6SE7 031 – 87F50
0,86 77 0,871 14,1 2,326 860 1PL6 228 – . . B . . – 0 7 7 7 218 6SE7 032 – 67G50
0,87 45 0,897 34,4 0,503 370 1PL6 184 – . . D . . – 0 7 7 7 124 6SE7 031 – 27F50
0,86 61 0,907 34,3 0,666 440 1PL6 186 – . . D . . – 0 7 7 7 155 6SE7 031 – 87E50
0,86 86 0,927 34,5 1,479 630 1PL6 224 – . . D . . – 0 7 7 7 218 6SE7 032 – 67G50
0,88 90 0,927 31,1 1,930 750 1PL6 226 – . . D . . – 0 7 7 7 308 6SE7 033 – 77G50
0,89 103 0,928 34,2 2,326 860 1PL6 228 – . . D . . – 0 7 7 7 423 6SE7 035 – 1 EK50
0,84 70 0,924 50,9 0,503 370 1PL6 184 – . . F . . – 0 7 7 7 175 6SE7 032 – 17G50
0,85 91 0,930 50,9 0,666 460 1PL6 186 – . . F . . – 0 7 7 7 262 6SE7 033 – 27G50
0,87 91 0,940 50,9 1,479 640 1PL6 224 – . . F . . – 0 7 7 7 308 6SE7 033 – 77G50
0,87 125 0,944 50,7 1,930 760 1PL6 226 – . . F . . – 0 7 7 7 423 6SE7 035 – 1 EK50
0,86 177 0,947 50,7 2,326 870 1PL6 228 – . . F . . – 0 7 7 7 491 6SE7 036 – 0 EK50
0,86 80 0,936 84,2 0,503 390 1PL6 184 – . . L . . – 0 7 7 7 218 6SE7 032 – 67G50
0,85 113 0,943 84,1 0,666 470 1PL6 186 – . . L . . – 0 7 7 7 308 6SE7 033 – 77G50
0,87 119 0,95 84,1 1,479 640 1PL6 224 – . . L . . – 0 7 7 7 423 6SE7 035 – 1 EK50
0,88 157 0,953 84 1,930 760 1PL6 226 – . . L . . – 0 7 7 7 491 6SE7 036 – 0 EK50
0,87 189 0,952 84 2,326 870 1PL6 228 – . . L . . – 0 7 7 7 4915) 6SE7 036 – 0 EK50
• Antriebsart:KupplungKupplungKupplungKupplungRiemenRiemenErhöhte QuerkräfteErhöhte Querkräfte
• Schwingstärkestufe:RRSSRRRRR
• Wellen- und Flanschgenauigkeit:NRRRNRNR
ABCDEFGH
• Luftrichtung:AS � BSBS � AS6)AS � BSBS � AS6)AS � BSBS � AS6)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/29. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 2 · fN zum Teil auf kleinere Werte begrenzt.
4) Drehzahl reduziert sich bei erhöhten Querkräften, siehe Teil 7.5) Achtung: Umrichter-Bemessungsstrom ist kleiner als Motor-Bemes-
sungsstrom.6) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
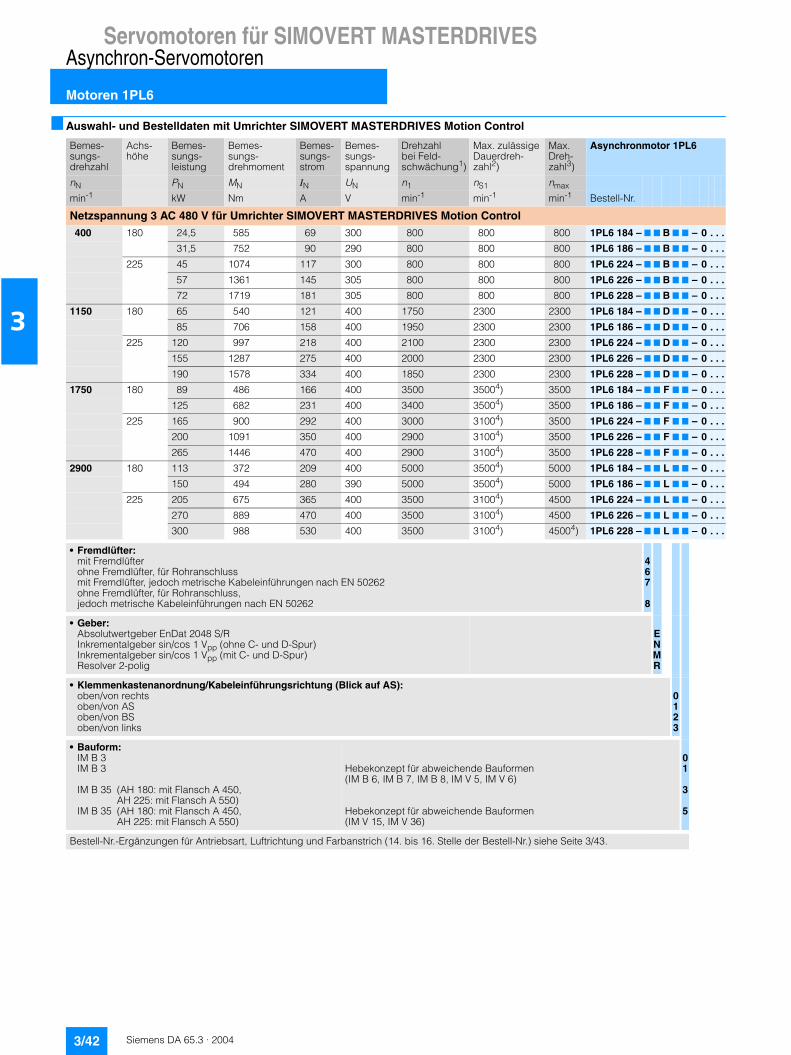
Siemens DA 65.3 · 20043/42
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung1)
Max. zulässige Dauerdreh-zahl2)
Max. Dreh- zahl3)
Asynchronmotor 1PL6
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Motion Control400 180 24,5 585 69 300 800 800 800 1PL6 184 – 7 7 B 7 7 – 0 . . .
31,5 752 90 290 800 800 800 1PL6 186 – 7 7 B 7 7 – 0 . . .
225 45 1074 117 300 800 800 800 1PL6 224 – 7 7 B 7 7 – 0 . . .
57 1361 145 305 800 800 800 1PL6 226 – 7 7 B 7 7 – 0 . . .
72 1719 181 305 800 800 800 1PL6 228 – 7 7 B 7 7 – 0 . . .
1150 180 65 540 121 400 1750 2300 2300 1PL6 184 – 7 7 D 7 7 – 0 . . .
85 706 158 400 1950 2300 2300 1PL6 186 – 7 7 D 7 7 – 0 . . .
225 120 997 218 400 2100 2300 2300 1PL6 224 – 7 7 D 7 7 – 0 . . .
155 1287 275 400 2000 2300 2300 1PL6 226 – 7 7 D 7 7 – 0 . . .
190 1578 334 400 1850 2300 2300 1PL6 228 – 7 7 D 7 7 – 0 . . .
1750 180 89 486 166 400 3500 35004) 3500 1PL6 184 – 7 7 F 7 7 – 0 . . .
125 682 231 400 3400 35004) 3500 1PL6 186 – 7 7 F 7 7 – 0 . . .
225 165 900 292 400 3000 31004) 3500 1PL6 224 – 7 7 F 7 7 – 0 . . .
200 1091 350 400 2900 31004) 3500 1PL6 226 – 7 7 F 7 7 – 0 . . .
265 1446 470 400 2900 31004) 3500 1PL6 228 – 7 7 F 7 7 – 0 . . .
2900 180 113 372 209 400 5000 35004) 5000 1PL6 184 – 7 7 L 7 7 – 0 . . .
150 494 280 390 5000 35004) 5000 1PL6 186 – 7 7 L 7 7 – 0 . . .
225 205 675 365 400 3500 31004) 4500 1PL6 224 – 7 7 L 7 7 – 0 . . .
270 889 470 400 3500 31004) 4500 1PL6 226 – 7 7 L 7 7 – 0 . . .
300 988 530 400 3500 31004) 45004) 1PL6 228 – 7 7 L 7 7 – 0 . . .
• Fremdlüfter:mit Fremdlüfterohne Fremdlüfter, für Rohranschlussmit Fremdlüfter, jedoch metrische Kabeleinführungen nach EN 50262ohne Fremdlüfter, für Rohranschluss,jedoch metrische Kabeleinführungen nach EN 50262
467
8
• Geber:Absolutwertgeber EnDat 2048 S/RInkrementalgeber sin/cos 1 Vpp (ohne C- und D-Spur)Inkrementalgeber sin/cos 1 Vpp (mit C- und D-Spur)Resolver 2-polig
ENMR
• Klemmenkastenanordnung/Kabeleinführungsrichtung (Blick auf AS):oben/von rechtsoben/von ASoben/von BSoben/von links
0123
• Bauform:IM B 3IM B 3
IM B 35 (AH 180: mit Flansch A 450,AH 225: mit Flansch A 550)
IM B 35 (AH 180: mit Flansch A 450,AH 225: mit Flansch A 550)
Hebekonzept für abweichende Bauformen (IM B 6, IM B 7, IM B 8, IM V 5, IM V 6)
Hebekonzept für abweichende Bauformen (IM V 15, IM V 36)
01
3
5
Bestell-Nr.-Ergänzungen für Antriebsart, Luftrichtung und Farbanstrich (14. bis 16. Stelle der Bestell-Nr.) siehe Seite 3/43.
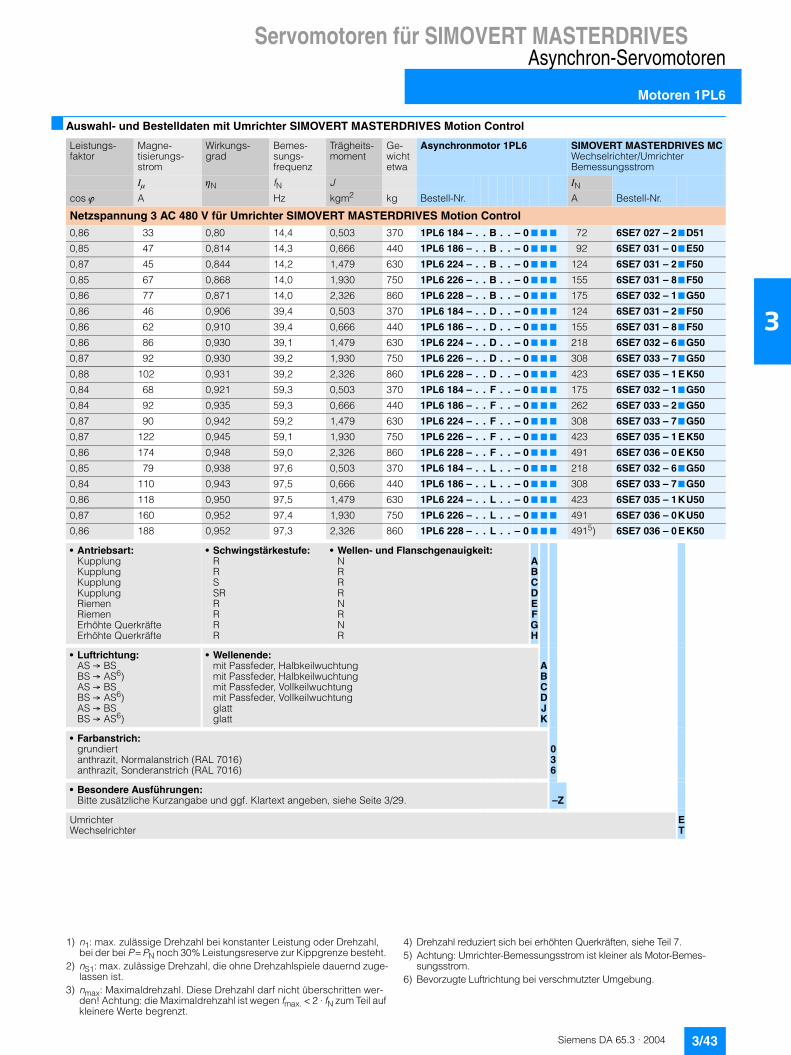
Siemens DA 65.3 · 2004 3/43
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PL6 SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Motion Control0,86 33 0,80 14,4 0,503 370 1PL6 184 – . . B . . – 0 7 7 7 72 6SE7 027 – 27D51
0,85 47 0,814 14,3 0,666 440 1PL6 186 – . . B . . – 0 7 7 7 92 6SE7 031 – 07E50
0,87 45 0,844 14,2 1,479 630 1PL6 224 – . . B . . – 0 7 7 7 124 6SE7 031 – 27F50
0,85 67 0,868 14,0 1,930 750 1PL6 226 – . . B . . – 0 7 7 7 155 6SE7 031 – 87F50
0,86 77 0,871 14,0 2,326 860 1PL6 228 – . . B . . – 0 7 7 7 175 6SE7 032 – 17G50
0,86 46 0,906 39,4 0,503 370 1PL6 184 – . . D . . – 0 7 7 7 124 6SE7 031 – 27F50
0,86 62 0,910 39,4 0,666 440 1PL6 186 – . . D . . – 0 7 7 7 155 6SE7 031 – 87F50
0,86 86 0,930 39,1 1,479 630 1PL6 224 – . . D . . – 0 7 7 7 218 6SE7 032 – 67G50
0,87 92 0,930 39,2 1,930 750 1PL6 226 – . . D . . – 0 7 7 7 308 6SE7 033 – 77G50
0,88 102 0,931 39,2 2,326 860 1PL6 228 – . . D . . – 0 7 7 7 423 6SE7 035 – 1 EK50
0,84 68 0,921 59,3 0,503 370 1PL6 184 – . . F . . – 0 7 7 7 175 6SE7 032 – 17G50
0,84 92 0,935 59,3 0,666 440 1PL6 186 – . . F . . – 0 7 7 7 262 6SE7 033 – 27G50
0,87 90 0,942 59,2 1,479 630 1PL6 224 – . . F . . – 0 7 7 7 308 6SE7 033 – 77G50
0,87 122 0,945 59,1 1,930 750 1PL6 226 – . . F . . – 0 7 7 7 423 6SE7 035 – 1 EK50
0,86 174 0,948 59,0 2,326 860 1PL6 228 – . . F . . – 0 7 7 7 491 6SE7 036 – 0 EK50
0,85 79 0,938 97,6 0,503 370 1PL6 184 – . . L . . – 0 7 7 7 218 6SE7 032 – 67G50
0,84 110 0,943 97,5 0,666 440 1PL6 186 – . . L . . – 0 7 7 7 308 6SE7 033 – 77G50
0,86 118 0,950 97,5 1,479 630 1PL6 224 – . . L . . – 0 7 7 7 423 6SE7 035 – 1KU50
0,87 160 0,952 97,4 1,930 750 1PL6 226 – . . L . . – 0 7 7 7 491 6SE7 036 – 0KU50
0,86 188 0,952 97,3 2,326 860 1PL6 228 – . . L . . – 0 7 7 7 4915) 6SE7 036 – 0 EK50
• Antriebsart:KupplungKupplungKupplungKupplungRiemenRiemenErhöhte QuerkräfteErhöhte Querkräfte
• Schwingstärkestufe:RRSSRRRRR
• Wellen- und Flanschgenauigkeit:NRRRNRNR
ABCDEFGH
• Luftrichtung:AS � BSBS � AS6)AS � BSBS � AS6)AS � BSBS � AS6)
• Wellenende:mit Passfeder, Halbkeilwuchtungmit Passfeder, Halbkeilwuchtungmit Passfeder, Vollkeilwuchtungmit Passfeder, Vollkeilwuchtungglattglatt
ABCDJK
• Farbanstrich:grundiertanthrazit, Normalanstrich (RAL 7016)anthrazit, Sonderanstrich (RAL 7016)
036
• Besondere Ausführungen:Bitte zusätzliche Kurzangabe und ggf. Klartext angeben, siehe Seite 3/29. –Z
UmrichterWechselrichter
ET
1) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
2) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
3) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 2 · fN zum Teil auf kleinere Werte begrenzt.
4) Drehzahl reduziert sich bei erhöhten Querkräften, siehe Teil 7.5) Achtung: Umrichter-Bemessungsstrom ist kleiner als Motor-Bemes-
sungsstrom.6) Bevorzugte Luftrichtung bei verschmutzter Umgebung.
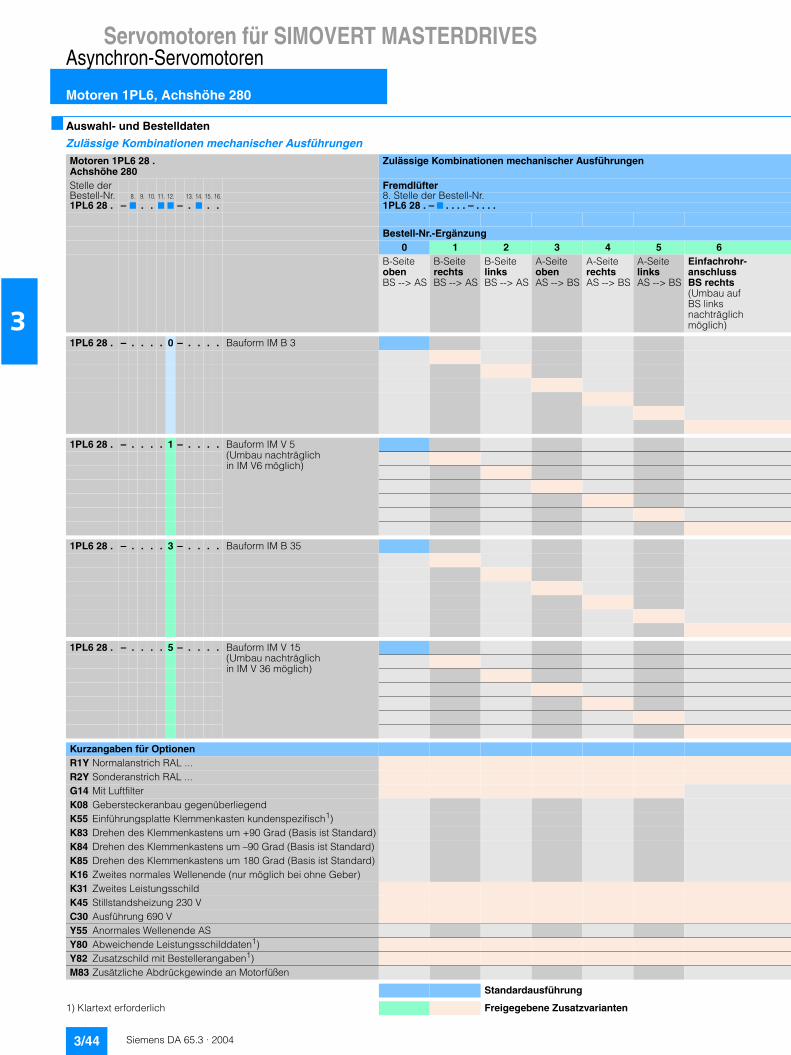
Siemens DA 65.3 · 20043/44
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PL6, Achshöhe 280
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten
Zulässige Kombinationen mechanischer Ausführungen
Motoren 1PL6 28 .Achshöhe 280
Zulässige Kombinationen mechanischer Ausführungen
Stelle der FremdlüfterBestell-Nr. 8. 9. 10. 11. 12. 13. 14. 15. 16. 8. Stelle der Bestell-Nr.1PL6 28 . – 7 . . 7 7 – . 7 . . 1PL6 28 . – 7 . . . . – . . . .
Bestell-Nr.-Ergänzung0 1 2 3 4 5 6
B-SeiteobenBS --> AS
B-SeiterechtsBS --> AS
B-SeitelinksBS --> AS
A-SeiteobenAS --> BS
A-SeiterechtsAS --> BS
A-SeitelinksAS --> BS
Einfachrohr-anschlussBS rechts(Umbau auf BS links nachträglich möglich)
1PL6 28 . – . . . . 0 – . . . . Bauform IM B 3
1PL6 28 . – . . . . 1 – . . . . Bauform IM V 5(Umbau nachträglichin IM V6 möglich)
1PL6 28 . – . . . . 3 – . . . . Bauform IM B 35
1PL6 28 . – . . . . 5 – . . . . Bauform IM V 15(Umbau nachträglich in IM V 36 möglich)
Kurzangaben für OptionenR1Y Normalanstrich RAL ...R2Y Sonderanstrich RAL ...G14 Mit LuftfilterK08 Gebersteckeranbau gegenüberliegend K55 Einführungsplatte Klemmenkasten kundenspezifisch1)K83 Drehen des Klemmenkastens um +90 Grad (Basis ist Standard)K84 Drehen des Klemmenkastens um –90 Grad (Basis ist Standard)K85 Drehen des Klemmenkastens um 180 Grad (Basis ist Standard)K16 Zweites normales Wellenende (nur möglich bei ohne Geber)K31 Zweites LeistungsschildK45 Stillstandsheizung 230 VC30 Ausführung 690 VY55 Anormales Wellenende ASY80 Abweichende Leistungsschilddaten1)Y82 Zusatzschild mit Bestellerangaben1)M83 Zusätzliche Abdrückgewinde an Motorfüßen
Standardausführung
1) Klartext erforderlich Freigegebene Zusatzvarianten
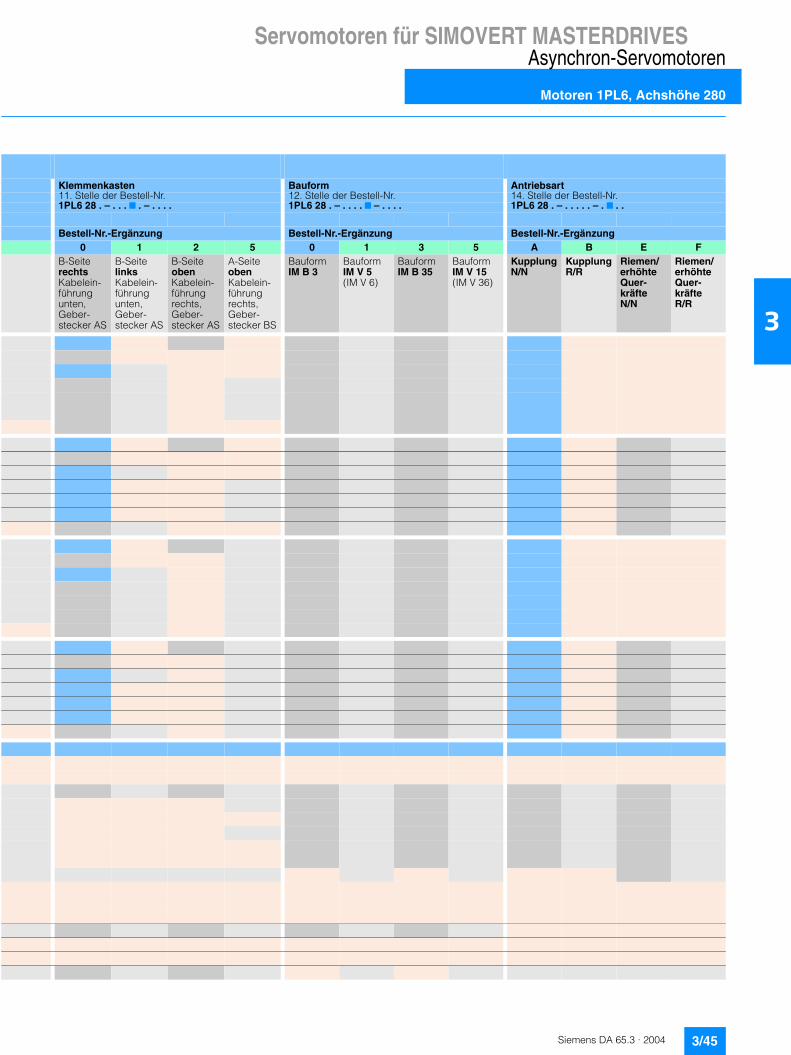
Siemens DA 65.3 · 2004 3/45
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PL6, Achshöhe 280
3
Klemmenkasten Bauform Antriebsart11. Stelle der Bestell-Nr. 12. Stelle der Bestell-Nr. 14. Stelle der Bestell-Nr.1PL6 28 . – . . . 7 . – . . . . 1PL6 28 . – . . . . 7 – . . . . 1PL6 28 . – . . . . . – . 7 . .
Bestell-Nr.-Ergänzung Bestell-Nr.-Ergänzung Bestell-Nr.-Ergänzung0 1 2 5 0 1 3 5 A B E F
B-SeiterechtsKabelein-führung unten, Geber-stecker AS
B-SeitelinksKabelein-führung unten, Geber-stecker AS
B-SeiteobenKabelein-führung rechts, Geber-stecker AS
A-SeiteobenKabelein-führung rechts, Geber-stecker BS
BauformIM B 3
BauformIM V 5(IM V 6)
BauformIM B 35
BauformIM V 15(IM V 36)
KupplungN/N
KupplungR/R
Riemen/erhöhte Quer-kräfteN/N
Riemen/erhöhte Quer-kräfteR/R

Siemens DA 65.3 · 20043/46
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH4Wasserkühlung
Asynchron-Servomotoren
3
■ Übersicht
Drehstrommotoren 1PH4, Achshöhen 100 bis 160
Die Drehstrommotoren der Baureihe 1PH4 sind kompakte was-sergekühlte Asynchronmotoren mit Käfigläufer in hoher Schutz-art.
Die Entwicklung der Motoren wurde speziell auf den Betrieb am Antriebssystem SIMOVERT MASTERDRIVES Vector Control und Motion Control abgestimmt. Dadurch konnten Verlustleistung und Geräuschbildung auf ein Minimum reduziert werden. In Ab-hängigkeit der Regelungsanforderungen stehen für die Motoren die passenden Gebersysteme zur Erfassung von Motordrehzahl und indirekten Lagen zur Verfügung.
■ Nutzen
• Hohe Leistungsdichte bei geringem Bauvolumen• Hohe Schutzart (IP65, Wellenaustritt IP55)• Drehzahl bis Null ohne Reduktion des Drehmomentes• Niedriger Geräuschpegel• Hohe Querkraftbelastung• Robustheit• Weitgehende Wartungsfreiheit • Hohe Rundlaufgüte• Integriertes Gebersystem zur Erfassung der Motordrehzahl,
Anschluss über Stecker• Klemmenkasten zum Anschluss der Leistungskabel• Überwachung der Motortemperatur durch KTY 84• Max. zulässiger Wasserdruck 6 bar
■ Anwendungsbereich
• Überall dort, wo extreme Umgebungsbedingungen wie Staub, Schmutz oder aggressive Atmosphäre eine Luftkühlung nicht zulassen.
• In den Prozessen, in denen die Umgebung thermisch nicht be-lastet werden darf.
• An Sondermaschinen, wenn prozessbedingt Kühlwasser vor-handen ist.
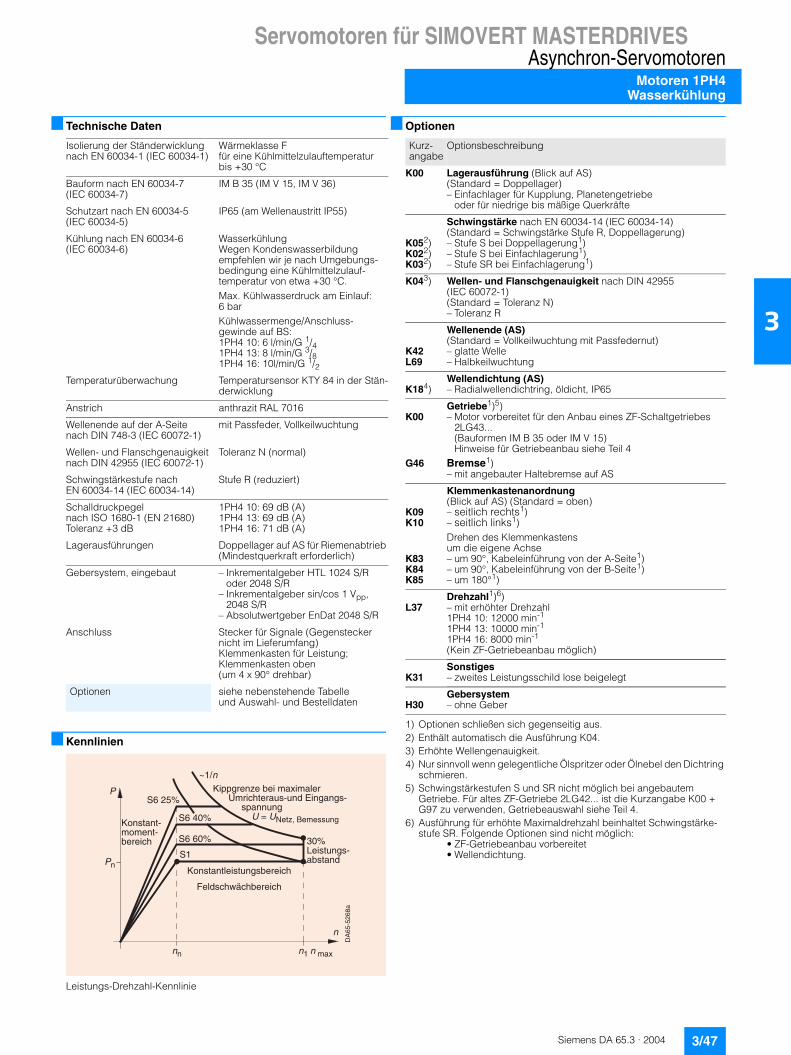
Siemens DA 65.3 · 2004 3/47
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH4Wasserkühlung
3
■ Technische Daten
■ Kennlinien
Leistungs-Drehzahl-Kennlinie
■ Optionen
1) Optionen schließen sich gegenseitig aus.2) Enthält automatisch die Ausführung K04.3) Erhöhte Wellengenauigkeit.4) Nur sinnvoll wenn gelegentliche Ölspritzer oder Ölnebel den Dichtring
schmieren.5) Schwingstärkestufen S und SR nicht möglich bei angebautem
Getriebe. Für altes ZF-Getriebe 2LG42... ist die Kurzangabe K00 + G97 zu verwenden, Getriebeauswahl siehe Teil 4.
6) Ausführung für erhöhte Maximaldrehzahl beinhaltet Schwingstärke-stufe SR. Folgende Optionen sind nicht möglich:
• ZF-Getriebeanbau vorbereitet• Wellendichtung.
Isolierung der Ständerwicklung nach EN 60034-1 (IEC 60034-1)
Wärmeklasse F für eine Kühlmittelzulauftemperatur bis +30 °C
Bauform nach EN 60034-7 (IEC 60034-7)
IM B 35 (IM V 15, IM V 36)
Schutzart nach EN 60034-5 (IEC 60034-5)
IP65 (am Wellenaustritt IP55)
Kühlung nach EN 60034-6 (IEC 60034-6)
WasserkühlungWegen Kondenswasserbildung empfehlen wir je nach Umgebungs-bedingung eine Kühlmittelzulauf-temperatur von etwa +30 °C.Max. Kühlwasserdruck am Einlauf: 6 barKühlwassermenge/Anschluss-gewinde auf BS:1PH4 10: 6 l/min/G 1/41PH4 13: 8 l/min/G 3/81PH4 16: 10l/min/G 1/2
Temperaturüberwachung Temperatursensor KTY 84 in der Stän-derwicklung
Anstrich anthrazit RAL 7016
Wellenende auf der A-Seite nach DIN 748-3 (IEC 60072-1)
mit Passfeder, Vollkeilwuchtung
Wellen- und Flanschgenauigkeitnach DIN 42955 (IEC 60072-1)
Toleranz N (normal)
Schwingstärkestufe nach EN 60034-14 (IEC 60034-14)
Stufe R (reduziert)
Schalldruckpegelnach ISO 1680-1 (EN 21680)Toleranz +3 dB
1PH4 10: 69 dB (A)1PH4 13: 69 dB (A)1PH4 16: 71 dB (A)
Lagerausführungen Doppellager auf AS für Riemenabtrieb (Mindestquerkraft erforderlich)
Gebersystem, eingebaut – Inkrementalgeber HTL 1024 S/R oder 2048 S/R
– Inkrementalgeber sin/cos 1 Vpp, 2048 S/R
– Absolutwertgeber EnDat 2048 S/R
Anschluss Stecker für Signale (Gegenstecker nicht im Lieferumfang)Klemmenkasten für Leistung; Klemmenkasten oben (um 4 x 90° drehbar)
Optionen siehe nebenstehende Tabelleund Auswahl- und Bestelldaten
P
Pn
Konstant-moment-bereich
~1/nKippgrenze bei maximaler Umrichteraus-und Eingangs- spannung U = UNetz, Bemessung
nn n1 n max
n
Konstantleistungsbereich
Feldschwächbereich
S1
S6 60%
S6 25%
30%Leistungs-abstand
DA
65-5
268a
S6 40%
Kurz- angabe
Optionsbeschreibung
K00 Lagerausführung (Blick auf AS) (Standard = Doppellager)– Einfachlager für Kupplung, Planetengetriebe
oder für niedrige bis mäßige Querkräfte
K052)K022)K032)
Schwingstärke nach EN 60034-14 (IEC 60034-14)(Standard = Schwingstärke Stufe R, Doppellagerung)– Stufe S bei Doppellagerung1)– Stufe S bei Einfachlagerung1)– Stufe SR bei Einfachlagerung1)
K043) Wellen- und Flanschgenauigkeit nach DIN 42955(IEC 60072-1) (Standard = Toleranz N)– Toleranz R
K42L69
Wellenende (AS)(Standard = Vollkeilwuchtung mit Passfedernut) – glatte Welle – Halbkeilwuchtung
K184)Wellendichtung (AS)– Radialwellendichtring, öldicht, IP65
K00
G46
Getriebe1)5)– Motor vorbereitet für den Anbau eines ZF-Schaltgetriebes
2LG43...(Bauformen IM B 35 oder IM V 15)Hinweise für Getriebeanbau siehe Teil 4
Bremse1)– mit angebauter Haltebremse auf AS
K09K10
K83K84K85
Klemmenkastenanordnung(Blick auf AS) (Standard = oben)– seitlich rechts1)– seitlich links1)Drehen des Klemmenkastensum die eigene Achse– um 90°, Kabeleinführung von der A-Seite1)– um 90°, Kabeleinführung von der B-Seite1)– um 180°1)
L37Drehzahl1)6)– mit erhöhter Drehzahl1PH4 10: 12000 min-1
1PH4 13: 10000 min-1
1PH4 16: 8000 min-1
(Kein ZF-Getriebeanbau möglich)
K31Sonstiges– zweites Leistungsschild lose beigelegt
H30Gebersystem– ohne Geber
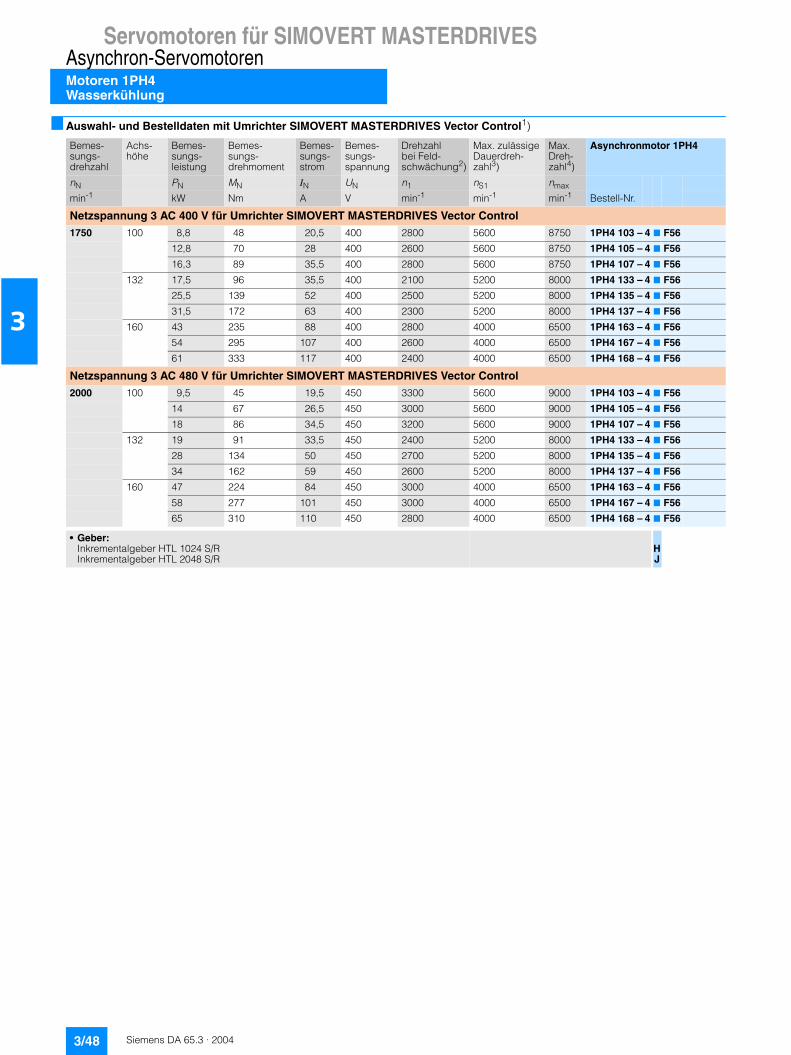
Siemens DA 65.3 · 20043/48
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH4Wasserkühlung
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control1)
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung2)
Max. zulässige Dauerdreh-zahl3)
Max. Dreh- zahl4)
Asynchronmotor 1PH4
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control1750 100 8,8 48 20,5 400 2800 5600 8750 1PH4 103 – 4 7 F56
12,8 70 28 400 2600 5600 8750 1PH4 105 – 4 7 F56
16,3 89 35,5 400 2800 5600 8750 1PH4 107 – 4 7 F56
132 17,5 96 35,5 400 2100 5200 8000 1PH4 133 – 4 7 F56
25,5 139 52 400 2500 5200 8000 1PH4 135 – 4 7 F56
31,5 172 63 400 2300 5200 8000 1PH4 137 – 4 7 F56
160 43 235 88 400 2800 4000 6500 1PH4 163 – 4 7 F56
54 295 107 400 2600 4000 6500 1PH4 167 – 4 7 F56
61 333 117 400 2400 4000 6500 1PH4 168 – 4 7 F56
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control2000 100 9,5 45 19,5 450 3300 5600 9000 1PH4 103 – 4 7 F56
14 67 26,5 450 3000 5600 9000 1PH4 105 – 4 7 F56
18 86 34,5 450 3200 5600 9000 1PH4 107 – 4 7 F56
132 19 91 33,5 450 2400 5200 8000 1PH4 133 – 4 7 F56
28 134 50 450 2700 5200 8000 1PH4 135 – 4 7 F56
34 162 59 450 2600 5200 8000 1PH4 137 – 4 7 F56
160 47 224 84 450 3000 4000 6500 1PH4 163 – 4 7 F56
58 277 101 450 3000 4000 6500 1PH4 167 – 4 7 F56
65 310 110 450 2800 4000 6500 1PH4 168 – 4 7 F56
• Geber:Inkrementalgeber HTL 1024 S/RInkrementalgeber HTL 2048 S/R
HJ
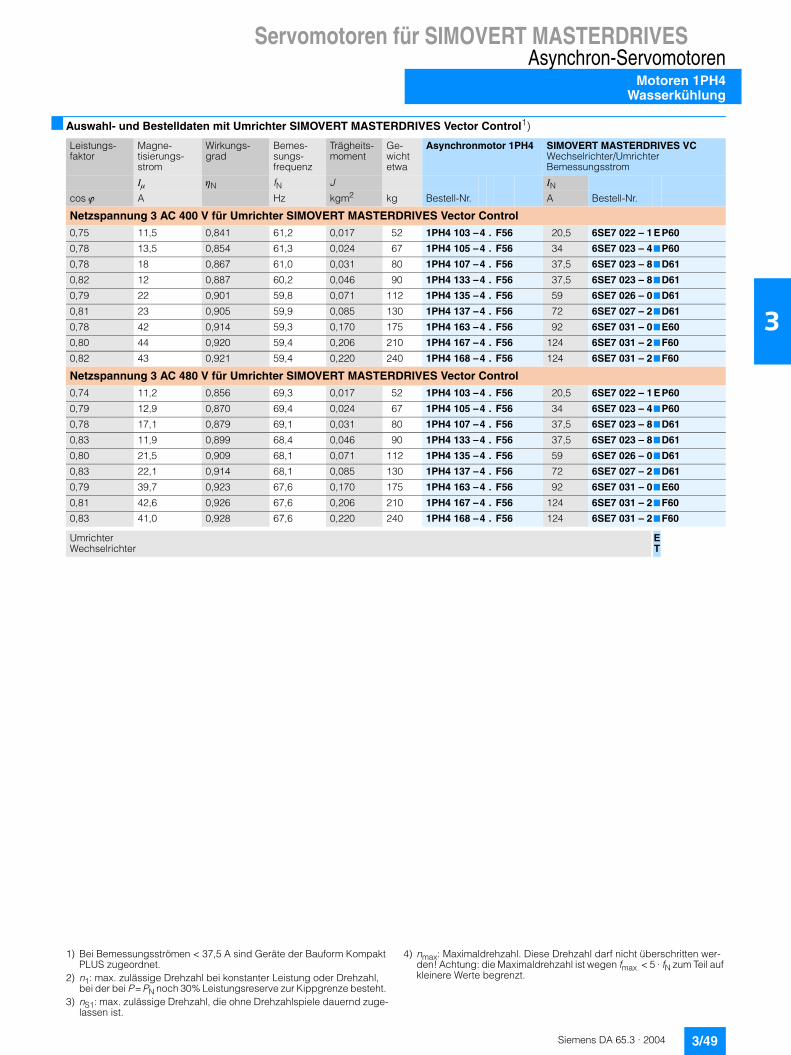
Siemens DA 65.3 · 2004 3/49
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH4Wasserkühlung
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Vector Control1)
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH4 SIMOVERT MASTERDRIVES VCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,75 11,5 0,841 61,2 0,017 52 1PH4 103 –4 . F56 20,5 6SE7 022 – 1 EP60
0,78 13,5 0,854 61,3 0,024 67 1PH4 105 –4 . F56 34 6SE7 023 – 47P60
0,78 18 0,867 61,0 0,031 80 1PH4 107 –4 . F56 37,5 6SE7 023 – 87D61
0,82 12 0,887 60,2 0,046 90 1PH4 133 –4 . F56 37,5 6SE7 023 – 87D61
0,79 22 0,901 59,8 0,071 112 1PH4 135 –4 . F56 59 6SE7 026 – 07D61
0,81 23 0,905 59,9 0,085 130 1PH4 137 –4 . F56 72 6SE7 027 – 27D61
0,78 42 0,914 59,3 0,170 175 1PH4 163 –4 . F56 92 6SE7 031 – 07E60
0,80 44 0,920 59,4 0,206 210 1PH4 167 –4 . F56 124 6SE7 031 – 27F60
0,82 43 0,921 59,4 0,220 240 1PH4 168 –4 . F56 124 6SE7 031 – 27F60
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Vector Control0,74 11,2 0,856 69,3 0,017 52 1PH4 103 –4 . F56 20,5 6SE7 022 – 1 EP60
0,79 12,9 0,870 69,4 0,024 67 1PH4 105 –4 . F56 34 6SE7 023 – 47P60
0,78 17,1 0,879 69,1 0,031 80 1PH4 107 –4 . F56 37,5 6SE7 023 – 87D61
0,83 11,9 0,899 68,4 0,046 90 1PH4 133 –4 . F56 37,5 6SE7 023 – 87D61
0,80 21,5 0,909 68,1 0,071 112 1PH4 135 –4 . F56 59 6SE7 026 – 07D61
0,83 22,1 0,914 68,1 0,085 130 1PH4 137 –4 . F56 72 6SE7 027 – 27D61
0,79 39,7 0,923 67,6 0,170 175 1PH4 163 –4 . F56 92 6SE7 031 – 07E60
0,81 42,6 0,926 67,6 0,206 210 1PH4 167 –4 . F56 124 6SE7 031 – 27F60
0,83 41,0 0,928 67,6 0,220 240 1PH4 168 –4 . F56 124 6SE7 031 – 27F60
UmrichterWechselrichter
ET
1) Bei Bemessungsströmen < 37,5 A sind Geräte der Bauform Kompakt PLUS zugeordnet.
2) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
3) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
4) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 5 · fN zum Teil auf kleinere Werte begrenzt.
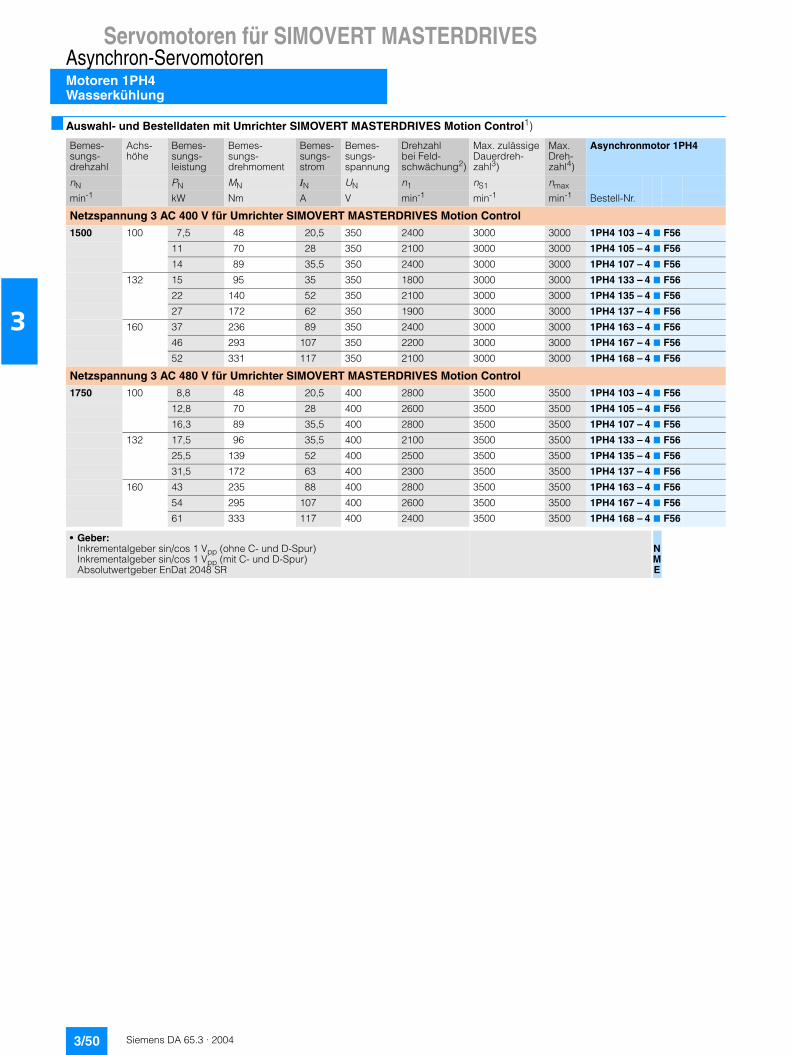
Siemens DA 65.3 · 20043/50
Servomotoren für SIMOVERT MASTERDRIVES
Motoren 1PH4Wasserkühlung
Asynchron-Servomotoren
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control1)
Bemes-sungs-drehzahl
Achs- höhe
Bemes-sungs- leistung
Bemes- sungs- drehmoment
Bemes-sungs- strom
Bemes-sungs- spannung
Drehzahl bei Feld- schwächung2)
Max. zulässige Dauerdreh-zahl3)
Max. Dreh- zahl4)
Asynchronmotor 1PH4
nN PN MN IN UN n1 nS1 nmax
min-1 kW Nm A V min-1 min-1 min-1 Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Motion Control1500 100 7,5 48 20,5 350 2400 3000 3000 1PH4 103 – 4 7 F56
11 70 28 350 2100 3000 3000 1PH4 105 – 4 7 F56
14 89 35,5 350 2400 3000 3000 1PH4 107 – 4 7 F56
132 15 95 35 350 1800 3000 3000 1PH4 133 – 4 7 F56
22 140 52 350 2100 3000 3000 1PH4 135 – 4 7 F56
27 172 62 350 1900 3000 3000 1PH4 137 – 4 7 F56
160 37 236 89 350 2400 3000 3000 1PH4 163 – 4 7 F56
46 293 107 350 2200 3000 3000 1PH4 167 – 4 7 F56
52 331 117 350 2100 3000 3000 1PH4 168 – 4 7 F56
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Motion Control1750 100 8,8 48 20,5 400 2800 3500 3500 1PH4 103 – 4 7 F56
12,8 70 28 400 2600 3500 3500 1PH4 105 – 4 7 F56
16,3 89 35,5 400 2800 3500 3500 1PH4 107 – 4 7 F56
132 17,5 96 35,5 400 2100 3500 3500 1PH4 133 – 4 7 F56
25,5 139 52 400 2500 3500 3500 1PH4 135 – 4 7 F56
31,5 172 63 400 2300 3500 3500 1PH4 137 – 4 7 F56
160 43 235 88 400 2800 3500 3500 1PH4 163 – 4 7 F56
54 295 107 400 2600 3500 3500 1PH4 167 – 4 7 F56
61 333 117 400 2400 3500 3500 1PH4 168 – 4 7 F56
• Geber:Inkrementalgeber sin/cos 1 Vpp (ohne C- und D-Spur)Inkrementalgeber sin/cos 1 Vpp (mit C- und D-Spur)Absolutwertgeber EnDat 2048 SR
NME
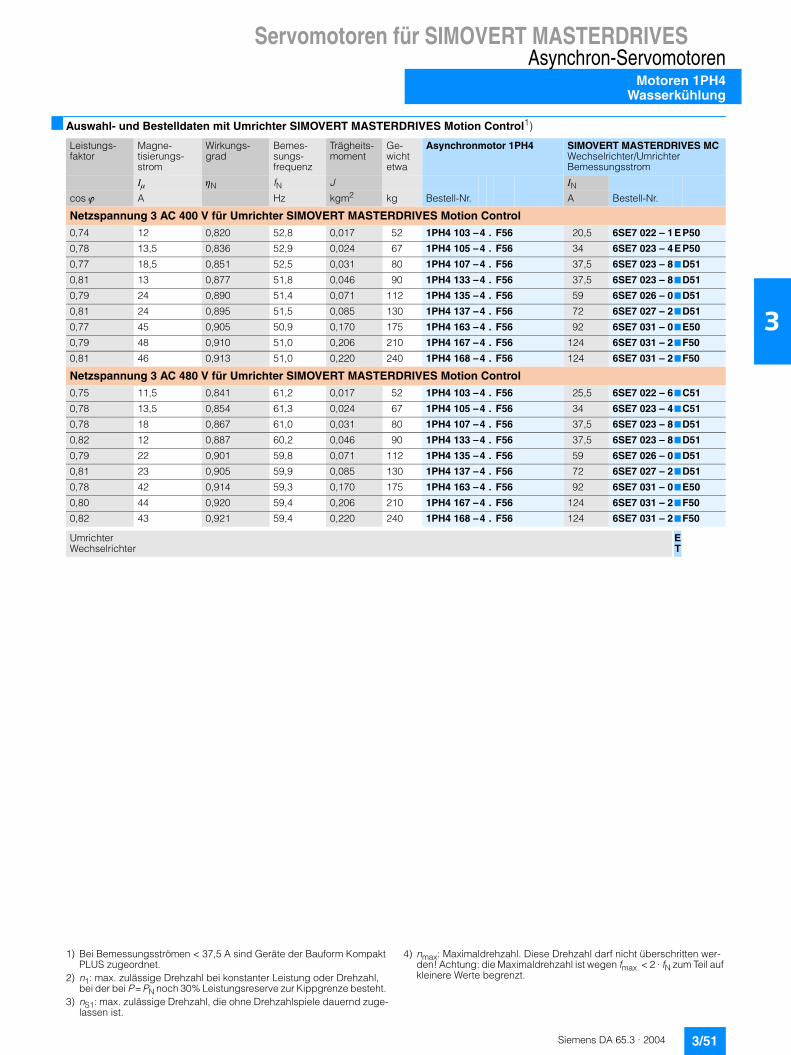
Siemens DA 65.3 · 2004 3/51
Servomotoren für SIMOVERT MASTERDRIVESAsynchron-Servomotoren
Motoren 1PH4Wasserkühlung
3
■ Auswahl- und Bestelldaten mit Umrichter SIMOVERT MASTERDRIVES Motion Control1)
Leistungs-faktor
Magne-tisierungs-strom
Wirkungs-grad
Bemes- sungs- frequenz
Trägheits-moment
Ge-wichtetwa
Asynchronmotor 1PH4 SIMOVERT MASTERDRIVES MCWechselrichter/UmrichterBemessungsstrom
I� �N fN J INcos � A Hz kgm2 kg Bestell-Nr. A Bestell-Nr.
Netzspannung 3 AC 400 V für Umrichter SIMOVERT MASTERDRIVES Motion Control0,74 12 0,820 52,8 0,017 52 1PH4 103 –4 . F56 20,5 6SE7 022 – 1E P50
0,78 13,5 0,836 52,9 0,024 67 1PH4 105 –4 . F56 34 6SE7 023 – 4E P50
0,77 18,5 0,851 52,5 0,031 80 1PH4 107 –4 . F56 37,5 6SE7 023 – 87D51
0,81 13 0,877 51,8 0,046 90 1PH4 133 –4 . F56 37,5 6SE7 023 – 87D51
0,79 24 0,890 51,4 0,071 112 1PH4 135 –4 . F56 59 6SE7 026 – 07D51
0,81 24 0,895 51,5 0,085 130 1PH4 137 –4 . F56 72 6SE7 027 – 27D51
0,77 45 0,905 50,9 0,170 175 1PH4 163 –4 . F56 92 6SE7 031 – 07E50
0,79 48 0,910 51,0 0,206 210 1PH4 167 –4 . F56 124 6SE7 031 – 27F50
0,81 46 0,913 51,0 0,220 240 1PH4 168 –4 . F56 124 6SE7 031 – 27F50
Netzspannung 3 AC 480 V für Umrichter SIMOVERT MASTERDRIVES Motion Control0,75 11,5 0,841 61,2 0,017 52 1PH4 103 –4 . F56 25,5 6SE7 022 – 67C51
0,78 13,5 0,854 61,3 0,024 67 1PH4 105 –4 . F56 34 6SE7 023 – 47C51
0,78 18 0,867 61,0 0,031 80 1PH4 107 –4 . F56 37,5 6SE7 023 – 87D51
0,82 12 0,887 60,2 0,046 90 1PH4 133 –4 . F56 37,5 6SE7 023 – 87D51
0,79 22 0,901 59,8 0,071 112 1PH4 135 –4 . F56 59 6SE7 026 – 07D51
0,81 23 0,905 59,9 0,085 130 1PH4 137 –4 . F56 72 6SE7 027 – 27D51
0,78 42 0,914 59,3 0,170 175 1PH4 163 –4 . F56 92 6SE7 031 – 07E50
0,80 44 0,920 59,4 0,206 210 1PH4 167 –4 . F56 124 6SE7 031 – 27F50
0,82 43 0,921 59,4 0,220 240 1PH4 168 –4 . F56 124 6SE7 031 – 27F50
UmrichterWechselrichter
ET
1) Bei Bemessungsströmen < 37,5 A sind Geräte der Bauform Kompakt PLUS zugeordnet.
2) n1: max. zulässige Drehzahl bei konstanter Leistung oder Drehzahl, bei der bei P = PN noch 30% Leistungsreserve zur Kippgrenze besteht.
3) nS1: max. zulässige Drehzahl, die ohne Drehzahlspiele dauernd zuge-lassen ist.
4) nmax: Maximaldrehzahl. Diese Drehzahl darf nicht überschritten wer-den! Achtung: die Maximaldrehzahl ist wegen fmax. < 2 · fN zum Teil auf kleinere Werte begrenzt.
Siemens DA 65.3 · 20043/52
Servomotoren für SIMOVERT MASTERDRIVES
Notizen
Asynchron-Servomotoren
3
Siemens DA 65.3 · 2004
44/2 Gebersysteme
4/4 Haltebremsen
4/7 Servogetriebemotoren 1FK7
4/34 Getriebe für Motoren 1FK7
4/36 Getriebe für Motoren 1FT6
4/39 Getriebe für Motoren 1PH7
AnbautenGetriebemotorenGetriebe
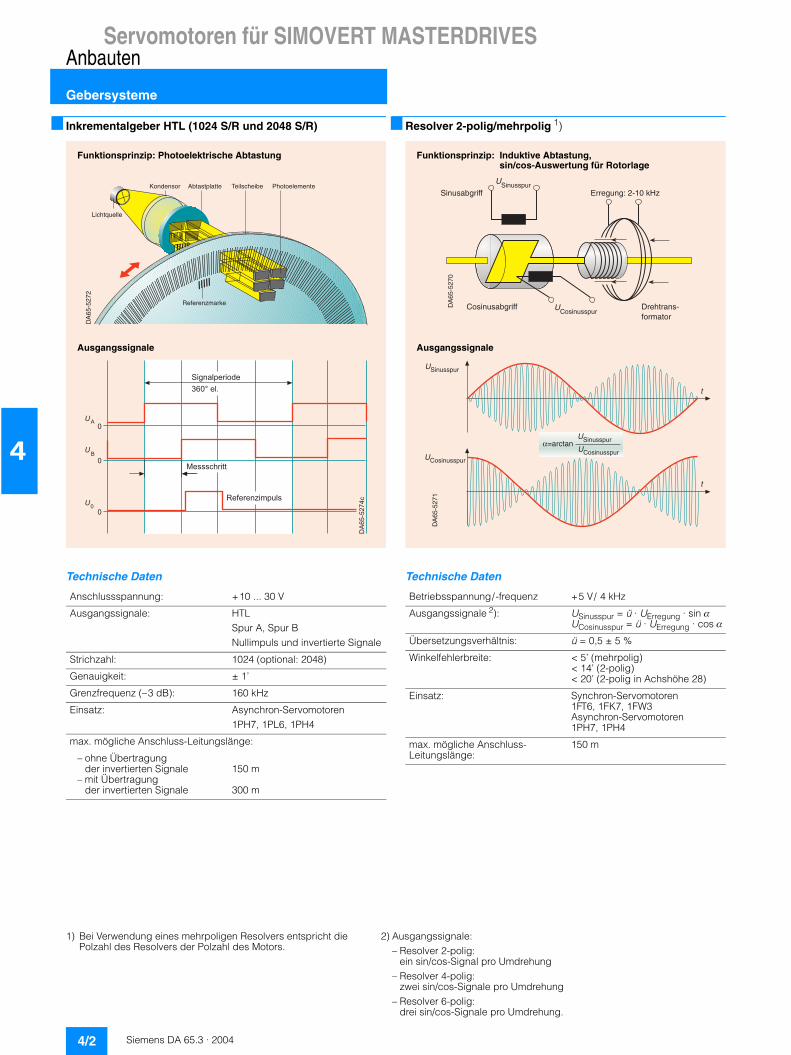
Siemens DA 65.3 · 20044/2
Servomotoren für SIMOVERT MASTERDRIVES
Gebersysteme
Anbauten
4
■ Inkrementalgeber HTL (1024 S/R und 2048 S/R)
Technische Daten
■ Resolver 2-polig/mehrpolig 1)
Technische Daten
Kondensor
Lichtquelle
Abtastplatte Teilscheibe Photoelemente
Referenzmarke
DA
65-5
272
�
�
�
�
�
�
�
�
�
��
����
��
� ������� �����������
�������� ��
�� ����! "�#��
Funktionsprinzip: Photoelektrische Abtastung
Ausgangssignale
Anschlussspannung: +10 ... 30 V
Ausgangssignale: HTLSpur A, Spur BNullimpuls und invertierte Signale
Strichzahl: 1024 (optional: 2048)
Genauigkeit: ± 1’
Grenzfrequenz (–3 dB): 160 kHz
Einsatz: Asynchron-Servomotoren1PH7, 1PL6, 1PH4
max. mögliche Anschluss-Leitungslänge:
– ohne Übertragungder invertierten Signale
– mit Übertragungder invertierten Signale
150 m
300 m
Sinusabgriff
USinusspurErregung: 2-10 kHz
Drehtrans-formator
Cosinusabgriff UCosinusspur
DA
65-5
270
α=arctanUSinusspur
UCosinusspur
USinusspur
UCosinusspur
t
t
DA
65-5
271
Funktionsprinzip: Induktive Abtastung, sin/cos-Auswertung für Rotorlage
Ausgangssignale
Betriebsspannung/-frequenz +5 V/ 4 kHz
Ausgangssignale 2): USinusspur = ü · UErregung · sin � UCosinusspur = ü · UErregung · cos �
Übersetzungsverhältnis: ü = 0,5 ± 5 %
Winkelfehlerbreite: < 5’ (mehrpolig)< 14’ (2-polig)< 20’ (2-polig in Achshöhe 28)
Einsatz: Synchron-Servomotoren1FT6, 1FK7, 1FW3Asynchron-Servomotoren1PH7, 1PH4
max. mögliche Anschluss-Leitungslänge:
150 m
1) Bei Verwendung eines mehrpoligen Resolvers entspricht die Polzahl des Resolvers der Polzahl des Motors.
2) Ausgangssignale:– Resolver 2-polig:
ein sin/cos-Signal pro Umdrehung– Resolver 4-polig:
zwei sin/cos-Signale pro Umdrehung– Resolver 6-polig:
drei sin/cos-Signale pro Umdrehung.
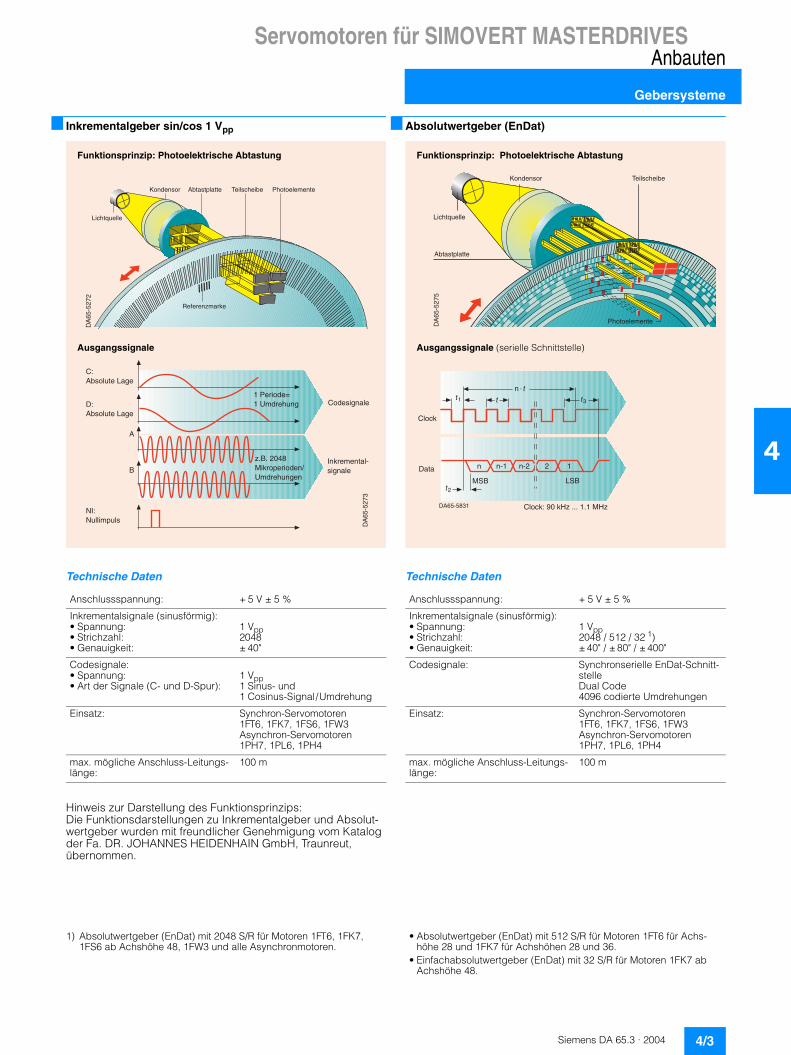
Siemens DA 65.3 · 2004 4/3
Servomotoren für SIMOVERT MASTERDRIVESAnbauten
Gebersysteme
4
■ Inkrementalgeber sin/cos 1 Vpp
Technische Daten
Hinweis zur Darstellung des Funktionsprinzips:Die Funktionsdarstellungen zu Inkrementalgeber und Absolut-wertgeber wurden mit freundlicher Genehmigung vom Katalog der Fa. DR. JOHANNES HEIDENHAIN GmbH, Traunreut,übernommen.
■ Absolutwertgeber (EnDat)
Technische Daten
Kondensor
Lichtquelle
Abtastplatte Teilscheibe Photoelemente
Referenzmarke
DA
65-5
272
C:Absolute Lage
D:Absolute Lage
A
B
NI:Nullimpuls
Codesignale
Inkremental-signale
1 Periode=1 Umdrehung
z.B. 2048Mikroperioden/Umdrehungen
DA
65-5
273
Funktionsprinzip: Photoelektrische Abtastung
Ausgangssignale
Anschlussspannung: + 5 V ± 5 %
Inkrementalsignale (sinusförmig):• Spannung:• Strichzahl:• Genauigkeit:
1 Vpp 2048± 40"
Codesignale:• Spannung:• Art der Signale (C- und D-Spur):
1 Vpp 1 Sinus- und 1 Cosinus-Signal/Umdrehung
Einsatz: Synchron-Servomotoren1FT6, 1FK7, 1FS6, 1FW3Asynchron-Servomotoren1PH7, 1PL6, 1PH4
max. mögliche Anschluss-Leitungs-länge:
100 m
1) Absolutwertgeber (EnDat) mit 2048 S/R für Motoren 1FT6, 1FK7, 1FS6 ab Achshöhe 48, 1FW3 und alle Asynchronmotoren.
• Absolutwertgeber (EnDat) mit 512 S/R für Motoren 1FT6 für Achs-höhe 28 und 1FK7 für Achshöhen 28 und 36.
• Einfachabsolutwertgeber (EnDat) mit 32 S/R für Motoren 1FK7 ab Achshöhe 48.
Kondensor
Lichtquelle
Abtastplatte
Teilscheibe
PhotoelementePhotoelementeDA
65-5
275
�1 3
n �.� �
Data
Clock: 90 kHz ... 1.1 MHzDA65-5831
n n-1 n-2 2 1
2
MSB LSB�
Clock
Funktionsprinzip: Photoelektrische Abtastung
Ausgangssignale (serielle Schnittstelle)
Anschlussspannung: + 5 V ± 5 %
Inkrementalsignale (sinusförmig):• Spannung:• Strichzahl:• Genauigkeit:
1 Vpp 2048 / 512 / 32 1)± 40" / ± 80" / ± 400"
Codesignale: Synchronserielle EnDat-Schnitt-stelleDual Code4096 codierte Umdrehungen
Einsatz: Synchron-Servomotoren1FT6, 1FK7, 1FS6, 1FW3Asynchron-Servomotoren1PH7, 1PL6, 1PH4
max. mögliche Anschluss-Leitungs-länge:
100 m
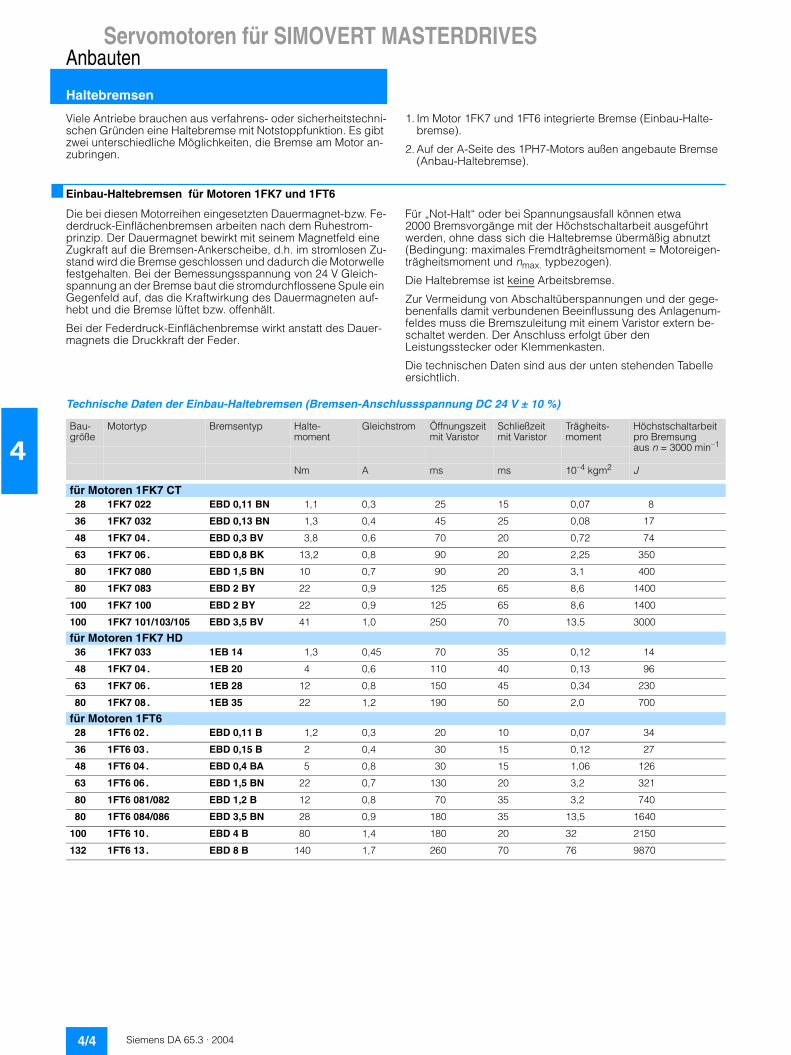
Siemens DA 65.3 · 20044/4
Servomotoren für SIMOVERT MASTERDRIVES
Haltebremsen
Anbauten
4
Viele Antriebe brauchen aus verfahrens- oder sicherheitstechni-schen Gründen eine Haltebremse mit Notstoppfunktion. Es gibt zwei unterschiedliche Möglichkeiten, die Bremse am Motor an-zubringen.
1. Im Motor 1FK7 und 1FT6 integrierte Bremse (Einbau-Halte-bremse).
2. Auf der A-Seite des 1PH7-Motors außen angebaute Bremse (Anbau-Haltebremse).
■ Einbau-Haltebremsen für Motoren 1FK7 und 1FT6
Die bei diesen Motorreihen eingesetzten Dauermagnet-bzw. Fe-derdruck-Einflächenbremsen arbeiten nach dem Ruhestrom-prinzip. Der Dauermagnet bewirkt mit seinem Magnetfeld eine Zugkraft auf die Bremsen-Ankerscheibe, d.h. im stromlosen Zu-stand wird die Bremse geschlossen und dadurch die Motorwelle festgehalten. Bei der Bemessungsspannung von 24 V Gleich-spannung an der Bremse baut die stromdurchflossene Spule ein Gegenfeld auf, das die Kraftwirkung des Dauermagneten auf-hebt und die Bremse lüftet bzw. offenhält.
Bei der Federdruck-Einflächenbremse wirkt anstatt des Dauer-magnets die Druckkraft der Feder.
Für „Not-Halt“ oder bei Spannungsausfall können etwa 2000 Bremsvorgänge mit der Höchstschaltarbeit ausgeführt werden, ohne dass sich die Haltebremse übermäßig abnutzt (Bedingung: maximales Fremdträgheitsmoment = Motoreigen-trägheitsmoment und nmax. typbezogen).
Die Haltebremse ist keine Arbeitsbremse.
Zur Vermeidung von Abschaltüberspannungen und der gege-benenfalls damit verbundenen Beeinflussung des Anlagenum-feldes muss die Bremszuleitung mit einem Varistor extern be-schaltet werden. Der Anschluss erfolgt über den Leistungsstecker oder Klemmenkasten.
Die technischen Daten sind aus der unten stehenden Tabelle ersichtlich.
Technische Daten der Einbau-Haltebremsen (Bremsen-Anschlussspannung DC 24 V ± 10 %)
Bau-größe
Motortyp Bremsentyp Halte-moment
Gleichstrom Öffnungszeit mit Varistor
Schließzeit mit Varistor
Trägheits-moment
Höchstschaltarbeit pro Bremsungaus n = 3000 min–1
Nm A ms ms 10–4 kgm2 J
für Motoren 1FK7 CT28 1FK7 022 EBD 0,11 BN 1,1 0,3 25 15 0,07 8
36 1FK7 032 EBD 0,13 BN 1,3 0,4 45 25 0,08 17
48 1FK7 04 . EBD 0,3 BV 3,8 0,6 70 20 0,72 74
63 1FK7 06 . EBD 0,8 BK 13,2 0,8 90 20 2,25 350
80 1FK7 080 EBD 1,5 BN 10 0,7 90 20 3,1 400
80 1FK7 083 EBD 2 BY 22 0,9 125 65 8,6 1400
100 1FK7 100 EBD 2 BY 22 0,9 125 65 8,6 1400
100 1FK7 101/103/105 EBD 3,5 BV 41 1,0 250 70 13,5 3000
für Motoren 1FK7 HD36 1FK7 033 1EB 14 1,3 0,45 70 35 0,12 14
48 1FK7 04 . 1EB 20 4 0,6 110 40 0,13 96
63 1FK7 06 . 1EB 28 12 0,8 150 45 0,34 230
80 1FK7 08 . 1EB 35 22 1,2 190 50 2,0 700
für Motoren 1FT628 1FT6 02 . EBD 0,11 B 1,2 0,3 20 10 0,07 34
36 1FT6 03 . EBD 0,15 B 2 0,4 30 15 0,12 27
48 1FT6 04 . EBD 0,4 BA 5 0,8 30 15 1,06 126
63 1FT6 06 . EBD 1,5 BN 22 0,7 130 20 3,2 321
80 1FT6 081/082 EBD 1,2 B 12 0,8 70 35 3,2 740
80 1FT6 084/086 EBD 3,5 BN 28 0,9 180 35 13,5 1640
100 1FT6 10 . EBD 4 B 80 1,4 180 20 32 2150
132 1FT6 13 . EBD 8 B 140 1,7 260 70 76 9870

Siemens DA 65.3 · 2004 4/5
Servomotoren für SIMOVERT MASTERDRIVESAnbauten
Haltebremsen
4
■ Anbau-Haltebremsen für Motoren 1PH7
An die Motoren 1PH7 mit den Achshöhen 100, 132, 160, 180 und 225 kann auf der A-Seite des Motors eine Bremse angebaut werden.
Diese Bremsen sind elektromagnetische Geräte für Trockenlauf, bei denen die Kraftwirkung eines elektromagnetischen Feldes zum Aufheben der durch Federkraft erzeugten Bremswirkung benutzt wird. Sie arbeiten nach dem Ruhestromprinzip, d.h. die Federdruckbremse bremst im stromlosen Zustand und hält den Antrieb fest. Bei Stromfluss wird die Bremse gelüftet und der An-trieb kann sich drehen.
Bei Spannungsausfall oder „Not-Halt“ wird der Antrieb aus seiner aktuellen Drehzahl bis zum Stillstand abgebremst. Die Haltemomente und die Anzahl der Notstopps sind aus der Tabelle auf Seite 4/6 ersichtlich.
Die Bremsen sind für Anschluss an Wechselspannung AC 230 V, 50 ... 60 Hz oder an Gleichspannung DC 24 V vorge-sehen (nur bis Baugröße 160), welche anlagenseitig zur Ver-fügung gestellt werden muss.
Der Gleichrichter ist im Klemmenkasten der Bremse eingebaut. Die Schutzart ist IP55.
In der Grundausführung enthält die Bremse drei Notlüftschrau-ben (nur bei Achshöhen 180 und 225), die axial von vorne zu-gänglich sind. Der ein- bzw. angebaute Mikroschalter kann als Öffner oder Schließer in eine übergeordnete Steuerung einge-bunden werden. Der Schnellschalt-Gleichrichter dient der Über-erregung der Spule zum Lüften der Bremse und zum Erreichen kurzer Lüftzeiten (Lüftstrom = 2 x Haltestrom).
Alle technischen Daten wie z.B. Haltemoment, zul. Drehzahlen, Anzahl der Notbremsungen und Bremsenströme sind in der Tabelle auf Seite 4/6 enthalten.
Die Betriebsanleitung zur Anbau-Haltebremse wird zusammen mit der Einheit Motor-Bremse ausgeliefert.
Bestellbeispiel: 1PH7 186–2HF00–2AA3Bauform IM B 3, Haltebremse enthält Mikroschalter und Notlüft-schraube (weitere Bestellmöglichkeiten siehe auch Bestellnum-mernschlüssel auf Seite 4/6).
Anbau-Haltebremse für Motoren der Achshöhen 100 ... 160
Die Haltebremse für Motoren mit den Achshöhen 100, 132 und 160 sind Bremsmodule (Hersteller Fa. Binder) mit eigener Lage-rung, Flansch und Wellenende. Die Abmessungen von Flansch und Wellenende des Bremsmoduls sind identisch mit denen des Motors. Wenn ein Motor eine Bremse erhalten soll, wird der Mo-tor in Flanschbauform und mit glatter Welle (ohne Passfeder) ausgeführt. Auf die Motorwelle wird dann die Welle des Brems-moduls warm aufgeschrumpft. Mittels Ölpressverband kann sie wieder demontiert werden. Danach wird das Bremsmodul am Motorflansch angeschraubt. Das Wellenende am Bremsmodul enthält eine Passfeder (mit Halbkeilwuchtung).
Der Abtrieb kann über Kupplung oder Riemenscheibe erfolgen. Die zulässigen Querkräfte können den entsprechenden Quer-kraftdiagrammen entnommen werden.
Die Motoren 1PH7 (Achshöhen 100, 132) sind in Bauform IM B 5 ausführbar, außerdem sind die Motoren mit den Achshöhen 100, 132 und 160 auch in Bauform IM B 35 lieferbar (Aufstellung in Fußbauform IM B 3 ist damit ebenso möglich).
Optional kann an das Bremsmodul eine Handlüftung ange-bracht werden, so dass bei Spannungsausfall oder Motorstill-stand die Bremse von Hand gelüftet werden kann. Wird der Handlüfthebel losgelassen, springt er selbstständig wieder in den Bremszustand zurück. Als weitere Option ist ein angebauter Mikroschalter möglich, der als Öffner oder Schließer in eine übergeordnete Steuerung eingebunden werden kann. Der An-schluss des Mikroschalters erfolgt über eine separat herausge-führte Leitung.
Das Bremsmodul hält die Schutzart IP55 ein. Motoren mit ange-bautem Bremsmodul sind nur in Schwingstärkestufe N und mit Wellen- und Flanschgenauigkeit N lieferbar.
Alle technischen Daten wie z.B. Haltemoment, max. Bremsar-beit, zul. Drehzahlen, Querkräfte und Bremsenströme sind in der Tabelle auf Seite 4/6 enthalten.
Bestellbeispiel: 1PH7 137–2HF02–3KB3Bauform IM B 5, Haltebremse mit Handlüftung (weitere Bestell-möglichkeiten siehe auch Bestellnummernschlüssel auf Seite 4/6).
Anbau-Haltebremse für Motoren 1PH7 Achshöhen 180 und 225
Bei diesen Motoren wird die Bremse (Hersteller Fa. Stromag) am A-seitigen Lagerschild befestigt. Hierzu wird die Motorwelle mit-tels einer aufgeschrumpften Steckwelle verlängert. Die Dreh-momentübertragung erfolgt über eine Passfeder nach DIN 6885/1. Die Steckwelle kann durch eine Druckscheibe und eine Zentralschraube (M20) zusätzlich axial gesichert werden. Die Haltebremse besitzt keine eigene Lagerung. Die Abtriebs-kräfte werden deshalb in den Motorlagern aufgenommen. Rie-menscheiben können aus Platzgründen und wegen der hohen Querkräfte nicht angebaut werden. Bei der Auswahl der Kupp-lung zum Anschluss an die Motor-Brems-Kombination ist darauf zu achten, dass der Durchmesser des Wellenendes jetzt größer ist als der Durchmesser des Motorwellenendes. Vorzugsweise können REVOLEX-Bolzenkupplungen 2LF6337 für Achshöhe 180 und 2LF6338 für Achshöhe 225 verwendet werden.
Bestelldaten und Maße siehe Katalog M 11.
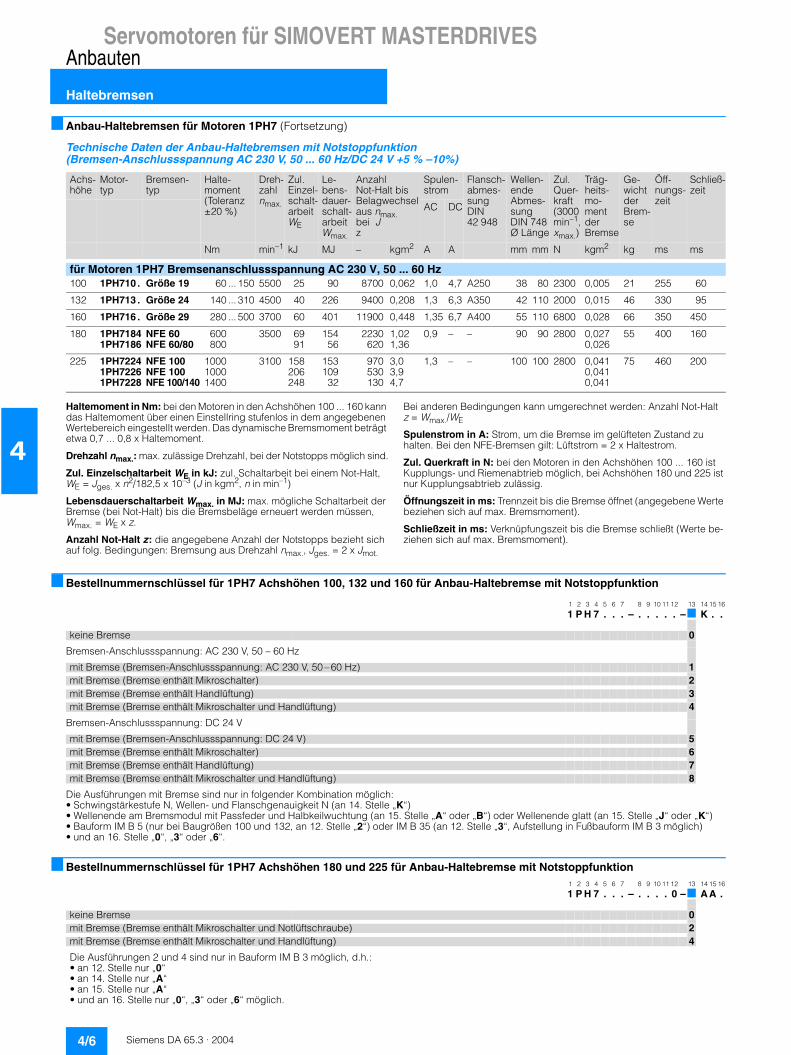
Siemens DA 65.3 · 20044/6
Servomotoren für SIMOVERT MASTERDRIVES
Haltebremsen
Anbauten
4
■ Anbau-Haltebremsen für Motoren 1PH7 (Fortsetzung)
Technische Daten der Anbau-Haltebremsen mit Notstoppfunktion (Bremsen-Anschlussspannung AC 230 V, 50 ... 60 Hz/DC 24 V +5 % –10%)
■ Bestellnummernschlüssel für 1PH7 Achshöhen 100, 132 und 160 für Anbau-Haltebremse mit Notstoppfunktion
■ Bestellnummernschlüssel für 1PH7 Achshöhen 180 und 225 für Anbau-Haltebremse mit Notstoppfunktion
Achs-höhe
Motor-typ
Bremsen-typ
Halte-moment(Toleranz±20 %)
Dreh-zahlnmax.
Zul.Einzel-schalt-arbeitWE
Le-bens-dauer-schalt-arbeitWmax.
Anzahl Not-Halt bisBelagwechselaus nmax. bei Jz
Spulen-strom
Flansch-abmes-sungDIN42 948
Wellen-endeAbmes-sungDIN 748Ø Länge
Zul.Quer-kraft(3000 min–1, xmax.)
Träg-heits-mo-ment derBremse
Ge-wicht der Brem-se
Öff-nungs-zeit
Schließ-zeit
AC DC
Nm min–1 kJ MJ – kgm2 A A mm mm N kgm2 kg ms ms
für Motoren 1PH7 Bremsenanschlussspannung AC 230 V, 50 ... 60 Hz100 1PH710 . Größe 19 60 ... 150 5500 25 90 8700 0,062 1,0 4,7 A250 38 80 2300 0,005 21 255 60
132 1PH713 . Größe 24 140 ... 310 4500 40 226 9400 0,208 1,3 6,3 A350 42 110 2000 0,015 46 330 95
160 1PH716 . Größe 29 280 ... 500 3700 60 401 11900 0,448 1,35 6,7 A400 55 110 6800 0,028 66 350 450
180 1PH71841PH7186
NFE 60NFE 60/80
600800
3500 6991
15456
2230620
1,021,36
0,9 – – 90 90 2800 0,0270,026
55 400 160
225 1PH72241PH72261PH7228
NFE 100NFE 100NFE 100/140
100010001400
3100 158206248
153109
32
970530130
3,03,94,7
1,3 – – 100 100 2800 0,0410,0410,041
75 460 200
Haltemoment in Nm: bei den Motoren in den Achshöhen 100 ... 160 kann das Haltemoment über einen Einstellring stufenlos in dem angegebenen Wertebereich eingestellt werden. Das dynamische Bremsmoment beträgt etwa 0,7 ... 0,8 x Haltemoment.
Drehzahl nmax.: max. zulässige Drehzahl, bei der Notstopps möglich sind.
Zul. Einzelschaltarbeit WE in kJ: zul. Schaltarbeit bei einem Not-Halt, WE = Jges. x n2/182,5 x 10–3 (J in kgm2, n in min–1)
Lebensdauerschaltarbeit Wmax. in MJ: max. mögliche Schaltarbeit der Bremse (bei Not-Halt) bis die Bremsbeläge erneuert werden müssen, Wmax. = WE x z.
Anzahl Not-Halt z: die angegebene Anzahl der Notstopps bezieht sich auf folg. Bedingungen: Bremsung aus Drehzahl nmax., Jges. = 2 x Jmot.
Bei anderen Bedingungen kann umgerechnet werden: Anzahl Not-Halt z = Wmax./WE
Spulenstrom in A: Strom, um die Bremse im gelüfteten Zustand zu halten. Bei den NFE-Bremsen gilt: Lüftstrom = 2 x Haltestrom.
Zul. Querkraft in N: bei den Motoren in den Achshöhen 100 ... 160 ist Kupplungs- und Riemenabtrieb möglich, bei Achshöhen 180 und 225 ist nur Kupplungsabtrieb zulässig.
Öffnungszeit in ms: Trennzeit bis die Bremse öffnet (angegebene Werte beziehen sich auf max. Bremsmoment).
Schließzeit in ms: Verknüpfungszeit bis die Bremse schließt (Werte be-ziehen sich auf max. Bremsmoment).
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
1 P H 7 . . . – . . . . . –7 K . .
keine Bremse 0
Bremsen-Anschlussspannung: AC 230 V, 50 – 60 Hz
mit Bremse (Bremsen-Anschlussspannung: AC 230 V, 50 – 60 Hz) 1mit Bremse (Bremse enthält Mikroschalter) 2mit Bremse (Bremse enthält Handlüftung) 3mit Bremse (Bremse enthält Mikroschalter und Handlüftung) 4
Bremsen-Anschlussspannung: DC 24 V
mit Bremse (Bremsen-Anschlussspannung: DC 24 V) 5mit Bremse (Bremse enthält Mikroschalter) 6mit Bremse (Bremse enthält Handlüftung) 7mit Bremse (Bremse enthält Mikroschalter und Handlüftung) 8
Die Ausführungen mit Bremse sind nur in folgender Kombination möglich:• Schwingstärkestufe N, Wellen- und Flanschgenauigkeit N (an 14. Stelle „K“)• Wellenende am Bremsmodul mit Passfeder und Halbkeilwuchtung (an 15. Stelle „A“ oder „B“) oder Wellenende glatt (an 15. Stelle „J“ oder „K“)• Bauform IM B 5 (nur bei Baugrößen 100 und 132, an 12. Stelle „2“) oder IM B 35 (an 12. Stelle „3“, Aufstellung in Fußbauform IM B 3 möglich)• und an 16. Stelle „0“, „3“ oder „6“.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
1 P H 7 . . . – . . . . 0 –7 A A .
keine Bremse 0mit Bremse (Bremse enthält Mikroschalter und Notlüftschraube) 2mit Bremse (Bremse enthält Mikroschalter und Handlüftung) 4
Die Ausführungen 2 und 4 sind nur in Bauform IM B 3 möglich, d.h.:• an 12. Stelle nur „0“• an 14. Stelle nur „A“• an 15. Stelle nur „A“• und an 16. Stelle nur „0“, „3“ oder „6“ möglich.

Siemens DA 65.3 · 2004 4/7
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7
4
■ Übersicht
Servogetriebemotoren 1FK7
Die Servogetriebemotoren 1FK7 setzen sich aus den im Teil 2 beschriebenen Servomotoren 1FK7 und den direkt angebauten Stirnrad- und Winkelgetrieben zusammen.
Die Servogetriebemotoren 1FK7 werden als komplette Einheit fertig montiert und mit ölbefülltem Getriebe geliefert. Das Typ-spektrum umfasst Stirnradgetriebemotoren mit 9 Getriebegrö-ßen, Flachgetriebemotoren mit 5 Getriebegrößen, Kegelrad-getriebemotoren mit 8 Getriebegrößen und Schneckengetriebe-motoren mit 5 Getriebegrößen. Mit den zahlreichen Optionen können die verschiedensten mechanischen Anbaumöglich-keiten realisiert werden.
Die Servogetriebemotoren 1FK7 sind ausgelegt für den Betrieb ohne externe Belüftung und führen die entstehende Verlust-wärme über die Oberfläche ab.
Zusammen mit dem Antriebssystem SIMOVERT MASTER-DRIVES Motion Control bilden die Servogetriebemotoren 1FK7 ein leistungsfähiges System mit hoher Funktionalität. Die inte-grierten Gebersysteme für die Drehzahl- und Lageregelung sind abhängig von der Anwendung genauso wählbar wie bei den Servomotoren 1FK7.
■ Nutzen
Die Servogetriebemotoren 1FK7 bieten:• Sehr kompakter Aufbau durch den Direktanbau
(keine Kupplungsglocke zwischen Motor und Getriebe)• Wartungsfrei und lebensdauergeschmiert
(Ausnahme Schneckengetriebe)• Hoher Wirkungsgrad • Geringes Verdrehspiel• Geringe Laufgeräusche durch Schrägverzahnung• Dauerfeste Verzahnung (Ausnahme Schneckengetriebe)• Geeignet für Taktbetrieb mit Wechsellast und Dauerbetrieb• Preisgünstige Lösung gegenüber Planetengetriebemotoren
■ Anwendungsbereich
Die Servogetriebemotoren 1FK7 sind bestens geeignet für den Einsatz im allgemeinen Maschinenbau für einfache Positionier-aufgaben und durchlaufende Hilfsantriebe in Servo-Qualität, wie z.B. in :• Verpackungsmaschinen• Regalbediengeräten• Holz-, Glas- und Keramikbearbeitungsmaschinen• Getränkeabfüllanlagen• Transportbänder
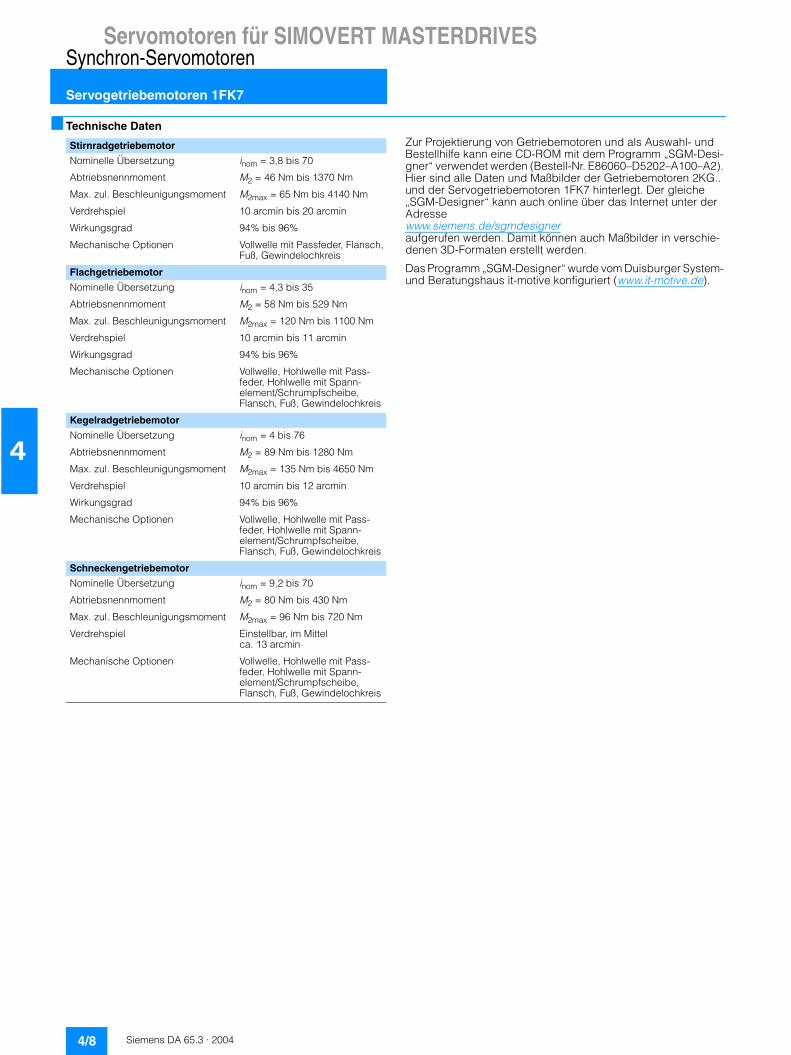
Siemens DA 65.3 · 20044/8
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7
Synchron-Servomotoren
4
■ Technische DatenZur Projektierung von Getriebemotoren und als Auswahl- und Bestellhilfe kann eine CD-ROM mit dem Programm „SGM-Desi-gner“ verwendet werden (Bestell-Nr. E86060–D5202–A100–A2). Hier sind alle Daten und Maßbilder der Getriebemotoren 2KG.. und der Servogetriebemotoren 1FK7 hinterlegt. Der gleiche „SGM-Designer“ kann auch online über das Internet unter der Adressewww.siemens.de/sgmdesigneraufgerufen werden. Damit können auch Maßbilder in verschie-denen 3D-Formaten erstellt werden.
Das Programm „SGM-Designer“ wurde vom Duisburger System- und Beratungshaus it-motive konfiguriert (www.it-motive.de).
Stirnradgetriebemotor
Nominelle Übersetzung inom = 3,8 bis 70
Abtriebsnennmoment M2 = 46 Nm bis 1370 Nm
Max. zul. Beschleunigungsmoment M2max = 65 Nm bis 4140 Nm
Verdrehspiel 10 arcmin bis 20 arcmin
Wirkungsgrad 94% bis 96%
Mechanische Optionen Vollwelle mit Passfeder, Flansch, Fuß, Gewindelochkreis
Flachgetriebemotor
Nominelle Übersetzung inom = 4,3 bis 35
Abtriebsnennmoment M2 = 58 Nm bis 529 Nm
Max. zul. Beschleunigungsmoment M2max = 120 Nm bis 1100 Nm
Verdrehspiel 10 arcmin bis 11 arcmin
Wirkungsgrad 94% bis 96%
Mechanische Optionen Vollwelle, Hohlwelle mit Pass-feder, Hohlwelle mit Spann-element/Schrumpfscheibe, Flansch, Fuß, Gewindelochkreis
Kegelradgetriebemotor
Nominelle Übersetzung inom = 4 bis 76
Abtriebsnennmoment M2 = 89 Nm bis 1280 Nm
Max. zul. Beschleunigungsmoment M2max = 135 Nm bis 4650 Nm
Verdrehspiel 10 arcmin bis 12 arcmin
Wirkungsgrad 94% bis 96%
Mechanische Optionen Vollwelle, Hohlwelle mit Pass-feder, Hohlwelle mit Spann-element/Schrumpfscheibe, Flansch, Fuß, Gewindelochkreis
Schneckengetriebemotor
Nominelle Übersetzung inom = 9,2 bis 70
Abtriebsnennmoment M2 = 80 Nm bis 430 Nm
Max. zul. Beschleunigungsmoment M2max = 96 Nm bis 720 Nm
Verdrehspiel Einstellbar, im Mittel ca. 13 arcmin
Mechanische Optionen Vollwelle, Hohlwelle mit Pass-feder, Hohlwelle mit Spann-element/Schrumpfscheibe, Flansch, Fuß, Gewindelochkreis
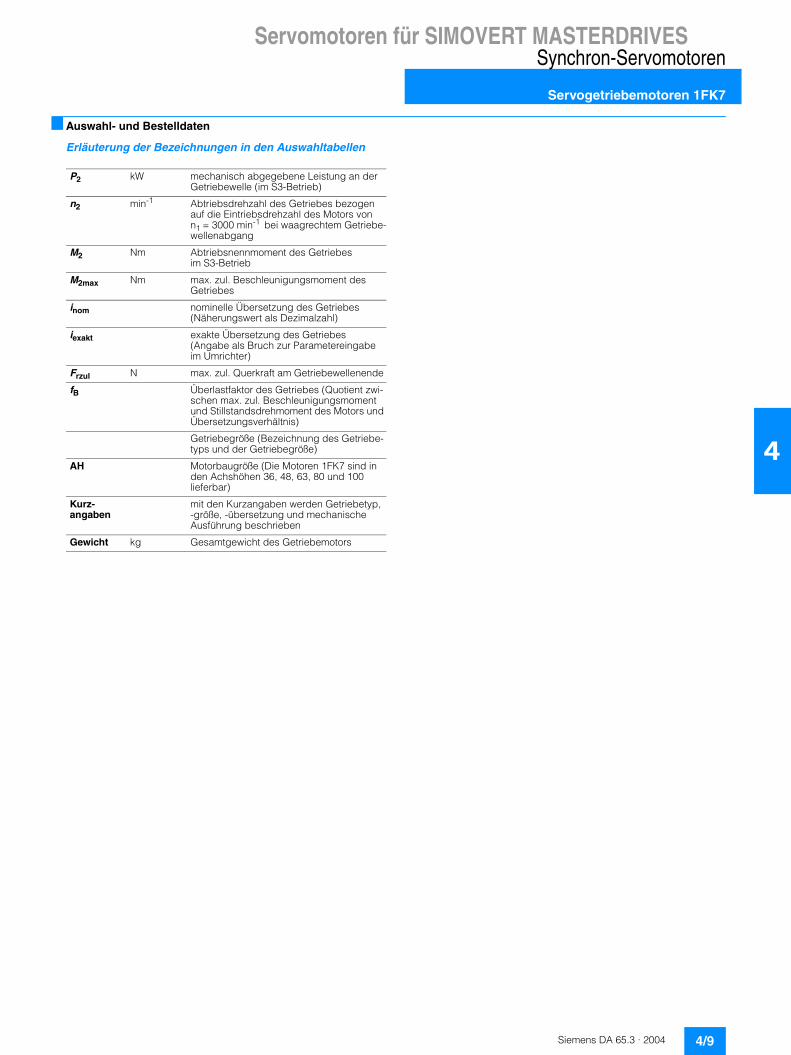
Siemens DA 65.3 · 2004 4/9
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7
4
■ Auswahl- und Bestelldaten
Erläuterung der Bezeichnungen in den Auswahltabellen
P2 kW mechanisch abgegebene Leistung an der Getriebewelle (im S3-Betrieb)
n2 min-1 Abtriebsdrehzahl des Getriebes bezogen auf die Eintriebsdrehzahl des Motors von n1 = 3000 min-1 bei waagrechtem Getriebe-wellenabgang
M2 Nm Abtriebsnennmoment des Getriebes im S3-Betrieb
M2max Nm max. zul. Beschleunigungsmoment des Getriebes
inom nominelle Übersetzung des Getriebes (Näherungswert als Dezimalzahl)
iexakt exakte Übersetzung des Getriebes (Angabe als Bruch zur Parametereingabe im Umrichter)
Frzul N max. zul. Querkraft am Getriebewellenende
fB Überlastfaktor des Getriebes (Quotient zwi-schen max. zul. Beschleunigungsmoment und Stillstandsdrehmoment des Motors und Übersetzungsverhältnis)
Getriebegröße (Bezeichnung des Getriebe-typs und der Getriebegröße)
AH Motorbaugröße (Die Motoren 1FK7 sind in den Achshöhen 36, 48, 63, 80 und 100 lieferbar)
Kurz-angaben
mit den Kurzangaben werden Getriebetyp, -größe, -übersetzung und mechanische Ausführung beschrieben
Gewicht kg Gesamtgewicht des Getriebemotors
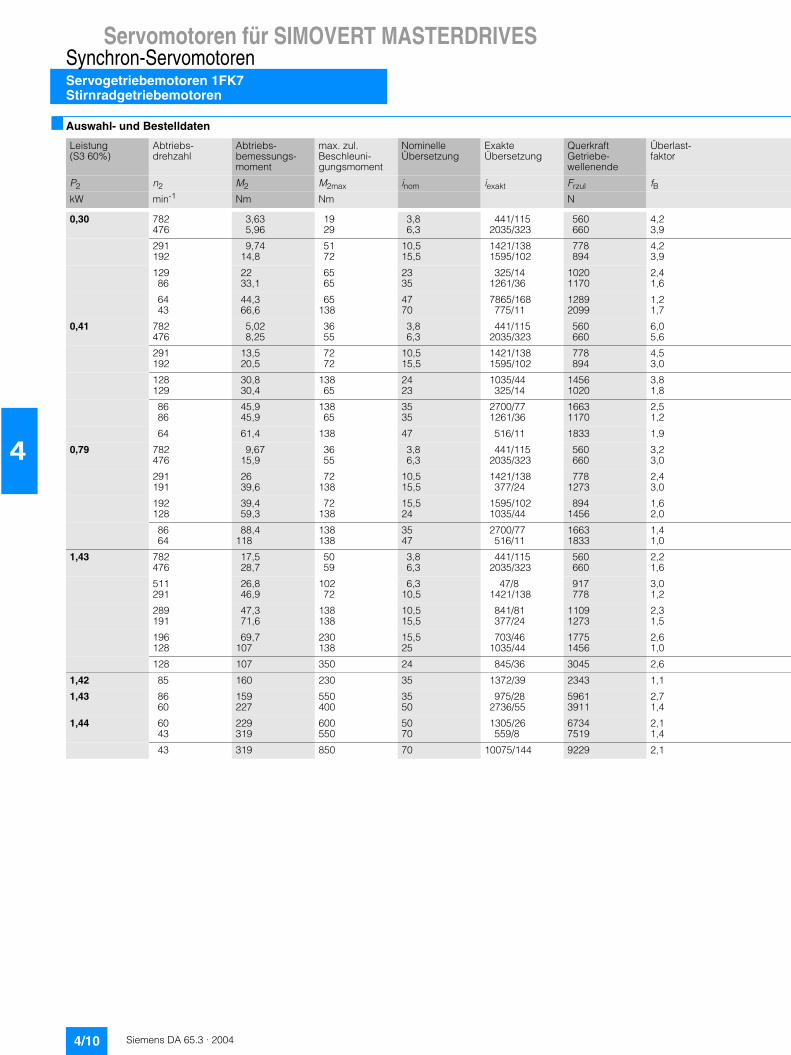
Siemens DA 65.3 · 20044/10
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Stirnradgetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
0,30 782476
3,635,96
1929
3,86,3
441/1152035/323
560660
4,23,9
291192
9,7414,8
5172
10,515,5
1421/1381595/102
778894
4,23,9
12986
2233,1
6565
2335
325/141261/36
10201170
2,41,6
6443
44,366,6
65138
4770
7865/168775/11
12892099
1,21,7
0,41 782476
5,028,25
3655
3,86,3
441/1152035/323
560660
6,05,6
291192
13,520,5
7272
10,515,5
1421/1381595/102
778894
4,53,0
128129
30,830,4
13865
2423
1035/44325/14
14561020
3,81,8
8686
45,945,9
13865
3535
2700/771261/36
16631170
2,51,2
64 61,4 138 47 516/11 1833 1,9
0,79 782476
9,6715,9
3655
3,86,3
441/1152035/323
560660
3,23,0
291191
2639,6
72138
10,515,5
1421/138377/24
7781273
2,43,0
192128
39,459,3
72138
15,524
1595/1021035/44
8941456
1,62,0
8664
88,4118
138138
3547
2700/77516/11
16631833
1,41,0
1,43 782476
17,528,7
5059
3,86,3
441/1152035/323
560660
2,21,6
511291
26,846,9
10272
6,310,5
47/81421/138
917778
3,01,2
289191
47,371,6
138138
10,515,5
841/81377/24
11091273
2,31,5
196128
69,7107
230138
15,525
703/461035/44
17751456
2,61,0
128 107 350 24 845/36 3045 2,6
1,42 85 160 230 35 1372/39 2343 1,1
1,43 8660
159227
550400
3550
975/282736/55
59613911
2,71,4
1,44 6043
229319
600550
5070
1305/26559/8
67347519
2,11,4
43 319 850 70 10075/144 9229 2,1
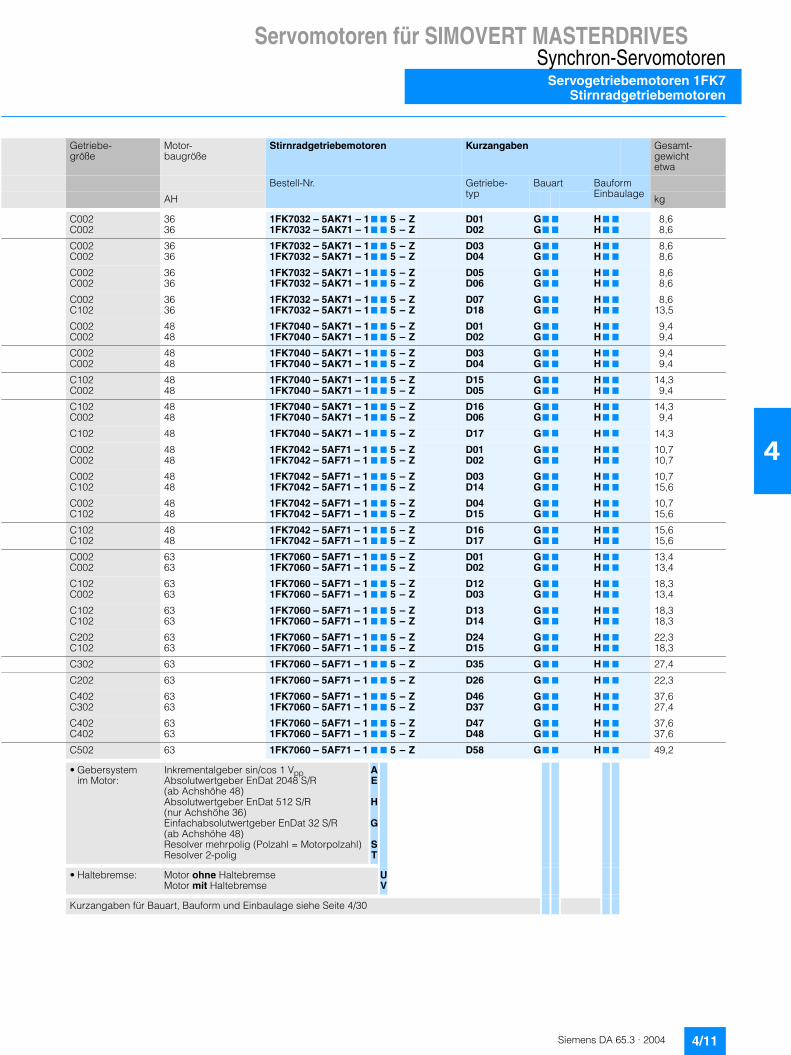
Siemens DA 65.3 · 2004 4/11
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Stirnradgetriebemotoren
4
Getriebe-größe
Motor-baugröße
Stirnradgetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
C002C002
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
D01D02
GG7777
HH7777
8,68,6
C002C002
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
D03D04
GG7777
HH7777
8,68,6
C002C002
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
D05D06
GG7777
HH7777
8,68,6
C002C102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
D07D18
GG7777
HH7777
8,613,5
C002C002
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
D01D02
GG7777
HH7777
9,49,4
C002C002
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
D03D04
GG7777
HH7777
9,49,4
C102C002
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
D15D05
GG7777
HH7777
14,39,4
C102C002
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
D16D06
GG7777
HH7777
14,39,4
C102 48 1FK7040 – 5AK71 – 17 7 5 – Z D17 G7 7 H 7 7 14,3
C002C002
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
D01D02
GG7777
HH7777
10,710,7
C002C102
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
D03D14
GG7777
HH7777
10,715,6
C002C102
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
D04D15
GG7777
HH7777
10,715,6
C102C102
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
D16D17
GG7777
HH7777
15,615,6
C002C002
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
D01D02
GG7777
HH7777
13,413,4
C102C002
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
D12D03
GG7777
HH7777
18,313,4
C102C102
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
D13D14
GG7777
HH7777
18,318,3
C202C102
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
D24D15
GG7777
HH7777
22,318,3
C302 63 1FK7060 – 5AF71 – 1 7 7 5 – Z D35 G7 7 H 7 7 27,4
C202 63 1FK7060 – 5AF71 – 1 7 7 5 – Z D26 G7 7 H 7 7 22,3
C402C302
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
D46D37
GG7777
HH7777
37,627,4
C402C402
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
D47D48
GG7777
HH7777
37,637,6
C502 63 1FK7060 – 5AF71 – 1 7 7 5 – Z D58 G7 7 H 7 7 49,2
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Absolutwertgeber EnDat 512 S/R(nur Achshöhe 36)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
H
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
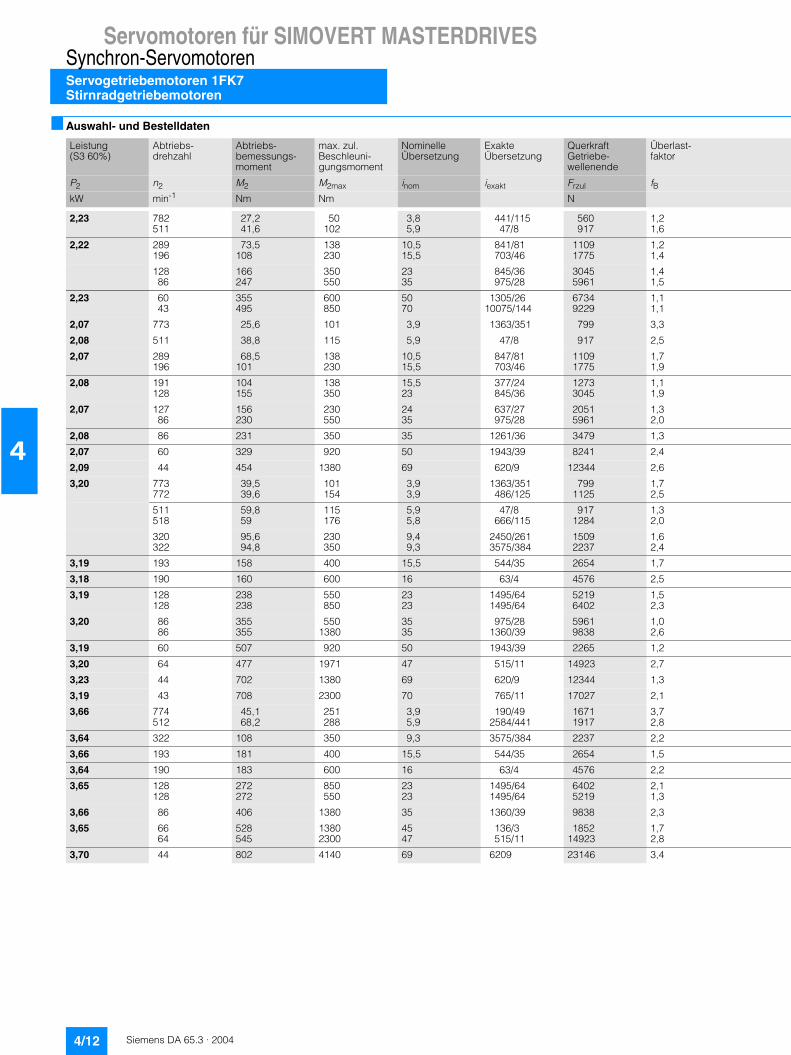
Siemens DA 65.3 · 20044/12
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Stirnradgetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
2,23 782511
27,241,6
50102
3,85,9
441/11547/8
560917
1,21,6
2,22 289196
73,5108
138230
10,515,5
841/81703/46
11091775
1,21,4
12886
166247
350550
2335
845/36975/28
30455961
1,41,5
2,23 6043
355495
600850
5070
1305/2610075/144
67349229
1,11,1
2,07 773 25,6 101 3,9 1363/351 799 3,3
2,08 511 38,8 115 5,9 47/8 917 2,5
2,07 289196
68,5101
138230
10,515,5
847/81703/46
11091775
1,71,9
2,08 191128
104155
138350
15,523
377/24845/36
12733045
1,11,9
2,07 12786
156230
230550
2435
637/27975/28
20515961
1,32,0
2,08 86 231 350 35 1261/36 3479 1,3
2,07 60 329 920 50 1943/39 8241 2,4
2,09 44 454 1380 69 620/9 12344 2,6
3,20 773772
39,539,6
101154
3,93,9
1363/351486/125
7991125
1,72,5
511518
59,859
115176
5,95,8
47/8666/115
9171284
1,32,0
320322
95,694,8
230350
9,49,3
2450/2613575/384
15092237
1,62,4
3,19 193 158 400 15,5 544/35 2654 1,7
3,18 190 160 600 16 63/4 4576 2,5
3,19 128128
238238
550850
2323
1495/641495/64
52196402
1,52,3
3,20 8686
355355
5501380
3535
975/281360/39
59619838
1,02,6
3,19 60 507 920 50 1943/39 2265 1,2
3,20 64 477 1971 47 515/11 14923 2,7
3,23 44 702 1380 69 620/9 12344 1,3
3,19 43 708 2300 70 765/11 17027 2,1
3,66 774512
45,168,2
251288
3,95,9
190/492584/441
16711917
3,72,8
3,64 322 108 350 9,3 3575/384 2237 2,2
3,66 193 181 400 15,5 544/35 2654 1,5
3,64 190 183 600 16 63/4 4576 2,2
3,65 128128
272272
850550
2323
1495/641495/64
64025219
2,11,3
3,66 86 406 1380 35 1360/39 9838 2,3
3,65 6664
528545
13802300
4547
136/3515/11
185214923
1,72,8
3,70 44 802 4140 69 6209 23146 3,4
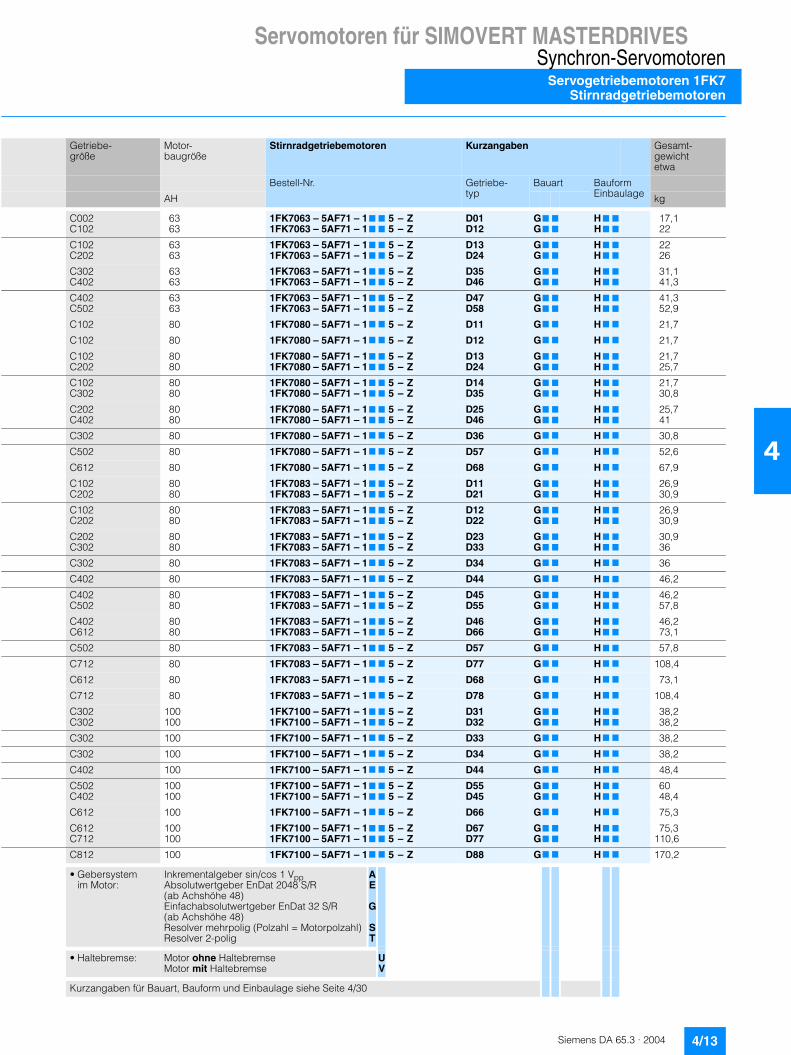
Siemens DA 65.3 · 2004 4/13
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Stirnradgetriebemotoren
4
Getriebe-größe
Motor-baugröße
Stirnradgetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
C002C102
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
D01D12
GG7777
HH7777
17,122
C102C202
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
D13D24
GG7777
HH7777
2226
C302C402
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
D35D46
GG7777
HH7777
31,141,3
C402C502
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
D47D58
GG7777
HH7777
41,352,9
C102 80 1FK7080 – 5AF71 – 17 7 5 – Z D11 G7 7 H 7 7 21,7
C102 80 1FK7080 – 5AF71 – 17 7 5 – Z D12 G7 7 H 7 7 21,7
C102C202
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
D13D24
GG7777
HH7777
21,725,7
C102C302
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
D14D35
GG7777
HH7777
21,730,8
C202C402
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
D25D46
GG7777
HH7777
25,741
C302 80 1FK7080 – 5AF71 – 17 7 5 – Z D36 G7 7 H 7 7 30,8
C502 80 1FK7080 – 5AF71 – 17 7 5 – Z D57 G7 7 H 7 7 52,6
C612 80 1FK7080 – 5AF71 – 17 7 5 – Z D68 G7 7 H 7 7 67,9
C102C202
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
D11D21
GG7777
HH7777
26,930,9
C102C202
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
D12D22
GG7777
HH7777
26,930,9
C202C302
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
D23D33
GG7777
HH7777
30,936
C302 80 1FK7083 – 5AF71 – 17 7 5 – Z D34 G7 7 H 7 7 36
C402 80 1FK7083 – 5AF71 – 17 7 5 – Z D44 G7 7 H 7 7 46,2
C402C502
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
D45D55
GG7777
HH7777
46,257,8
C402C612
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
D46D66
GG7777
HH7777
46,273,1
C502 80 1FK7083 – 5AF71 – 17 7 5 – Z D57 G7 7 H 7 7 57,8
C712 80 1FK7083 – 5AF71 – 17 7 5 – Z D77 G7 7 H 7 7 108,4
C612 80 1FK7083 – 5AF71 – 17 7 5 – Z D68 G7 7 H 7 7 73,1
C712 80 1FK7083 – 5AF71 – 17 7 5 – Z D78 G7 7 H 7 7 108,4
C302C302
100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
7777
55
––
ZZ
D31D32
GG7777
HH7777
38,238,2
C302 100 1FK7100 – 5AF71 – 17 7 5 – Z D33 G7 7 H 7 7 38,2
C302 100 1FK7100 – 5AF71 – 17 7 5 – Z D34 G7 7 H 7 7 38,2
C402 100 1FK7100 – 5AF71 – 17 7 5 – Z D44 G7 7 H 7 7 48,4
C502C402
100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
7777
55
––
ZZ
D55D45
GG7777
HH7777
6048,4
C612 100 1FK7100 – 5AF71 – 17 7 5 – Z D66 G7 7 H 7 7 75,3
C612C712
100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
7777
55
––
ZZ
D67D77
GG7777
HH7777
75,3110,6
C812 100 1FK7100 – 5AF71 – 17 7 5 – Z D88 G7 7 H 7 7 170,2
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
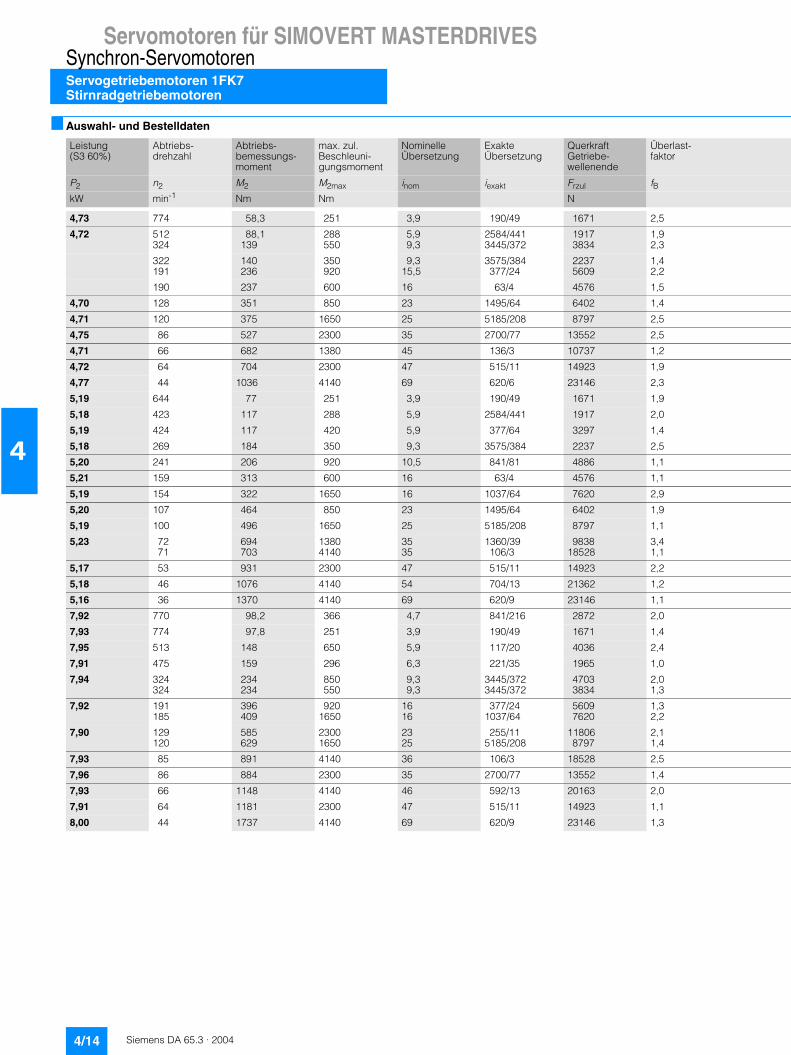
Siemens DA 65.3 · 20044/14
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Stirnradgetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
4,73 774 58,3 251 3,9 190/49 1671 2,5
4,72 512324
88,1139
288550
5,99,3
2584/4413445/372
19173834
1,92,3
322191
140236
350920
9,315,5
3575/384377/24
22375609
1,42,2
190 237 600 16 63/4 4576 1,5
4,70 128 351 850 23 1495/64 6402 1,4
4,71 120 375 1650 25 5185/208 8797 2,5
4,75 86 527 2300 35 2700/77 13552 2,5
4,71 66 682 1380 45 136/3 10737 1,2
4,72 64 704 2300 47 515/11 14923 1,9
4,77 44 1036 4140 69 620/6 23146 2,3
5,19 644 77 251 3,9 190/49 1671 1,9
5,18 423 117 288 5,9 2584/441 1917 2,0
5,19 424 117 420 5,9 377/64 3297 1,4
5,18 269 184 350 9,3 3575/384 2237 2,5
5,20 241 206 920 10,5 841/81 4886 1,1
5,21 159 313 600 16 63/4 4576 1,1
5,19 154 322 1650 16 1037/64 7620 2,9
5,20 107 464 850 23 1495/64 6402 1,9
5,19 100 496 1650 25 5185/208 8797 1,1
5,23 7271
694703
13804140
3535
1360/39106/3
983818528
3,41,1
5,17 53 931 2300 47 515/11 14923 2,2
5,18 46 1076 4140 54 704/13 21362 1,2
5,16 36 1370 4140 69 620/9 23146 1,1
7,92 770 98,2 366 4,7 841/216 2872 2,0
7,93 774 97,8 251 3,9 190/49 1671 1,4
7,95 513 148 650 5,9 117/20 4036 2,4
7,91 475 159 296 6,3 221/35 1965 1,0
7,94 324324
234234
850550
9,39,3
3445/3723445/372
47033834
2,01,3
7,92 191185
396409
9201650
1616
377/241037/64
56097620
1,32,2
7,90 129120
585629
23001650
2325
255/115185/208
118068797
2,11,4
7,93 85 891 4140 36 106/3 18528 2,5
7,96 86 884 2300 35 2700/77 13552 1,4
7,93 66 1148 4140 46 592/13 20163 2,0
7,91 64 1181 2300 47 515/11 14923 1,1
8,00 44 1737 4140 69 620/9 23146 1,3
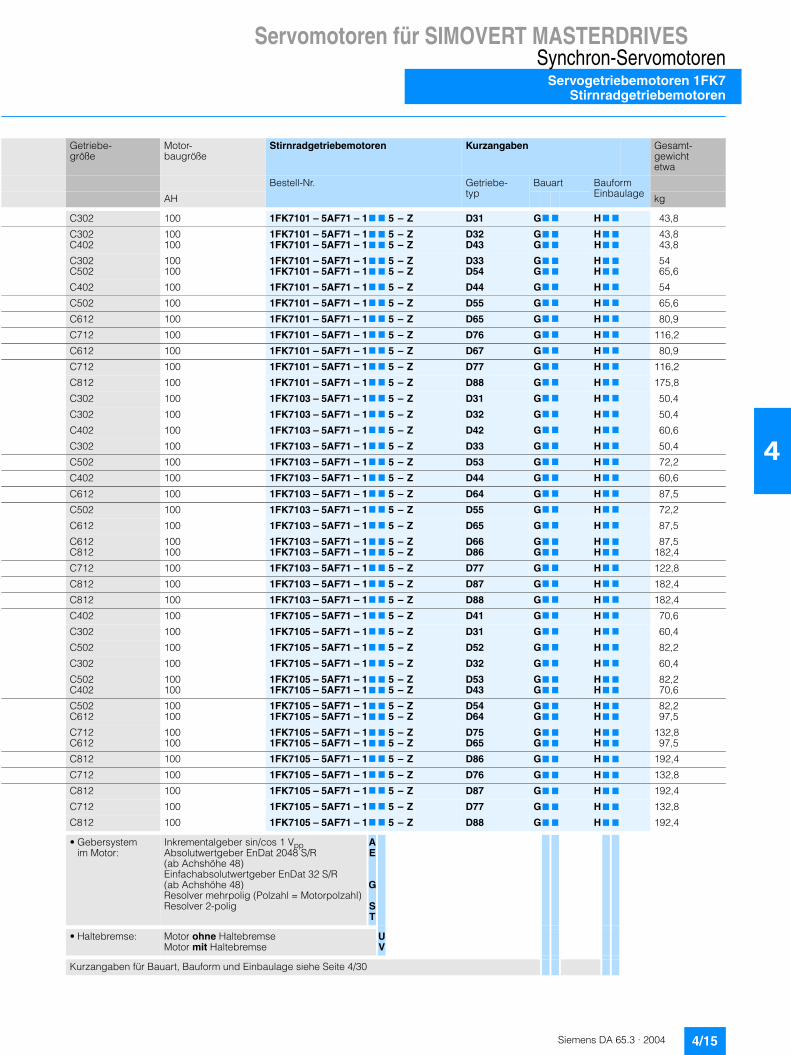
Siemens DA 65.3 · 2004 4/15
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Stirnradgetriebemotoren
4
Getriebe-größe
Motor-baugröße
Stirnradgetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
C302 100 1FK7101 – 5AF71 – 17 7 5 – Z D31 G7 7 H 7 7 43,8
C302C402
100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
7777
55
––
ZZ
D32D43
GG7777
HH7777
43,843,8
C302C502
100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
7777
55
––
ZZ
D33D54
GG7777
HH7777
5465,6
C402 100 1FK7101 – 5AF71 – 17 7 5 – Z D44 G7 7 H 7 7 54
C502 100 1FK7101 – 5AF71 – 17 7 5 – Z D55 G7 7 H 7 7 65,6
C612 100 1FK7101 – 5AF71 – 17 7 5 – Z D65 G7 7 H 7 7 80,9
C712 100 1FK7101 – 5AF71 – 17 7 5 – Z D76 G7 7 H 7 7 116,2
C612 100 1FK7101 – 5AF71 – 17 7 5 – Z D67 G7 7 H 7 7 80,9
C712 100 1FK7101 – 5AF71 – 17 7 5 – Z D77 G7 7 H 7 7 116,2
C812 100 1FK7101 – 5AF71 – 17 7 5 – Z D88 G7 7 H 7 7 175,8
C302 100 1FK7103 – 5AF71 – 17 7 5 – Z D31 G7 7 H 7 7 50,4
C302 100 1FK7103 – 5AF71 – 17 7 5 – Z D32 G7 7 H 7 7 50,4
C402 100 1FK7103 – 5AF71 – 17 7 5 – Z D42 G7 7 H 7 7 60,6
C302 100 1FK7103 – 5AF71 – 17 7 5 – Z D33 G7 7 H 7 7 50,4
C502 100 1FK7103 – 5AF71 – 17 7 5 – Z D53 G7 7 H 7 7 72,2
C402 100 1FK7103 – 5AF71 – 17 7 5 – Z D44 G7 7 H 7 7 60,6
C612 100 1FK7103 – 5AF71 – 17 7 5 – Z D64 G7 7 H 7 7 87,5
C502 100 1FK7103 – 5AF71 – 17 7 5 – Z D55 G7 7 H 7 7 72,2
C612 100 1FK7103 – 5AF71 – 17 7 5 – Z D65 G7 7 H 7 7 87,5
C612C812
100100
1FK7103 – 5AF71 – 11FK7103 – 5AF71 – 1
7777
55
––
ZZ
D66D86
GG7777
HH7777
87,5182,4
C712 100 1FK7103 – 5AF71 – 17 7 5 – Z D77 G7 7 H 7 7 122,8
C812 100 1FK7103 – 5AF71 – 17 7 5 – Z D87 G7 7 H 7 7 182,4
C812 100 1FK7103 – 5AF71 – 17 7 5 – Z D88 G7 7 H 7 7 182,4
C402 100 1FK7105 – 5AF71 – 17 7 5 – Z D41 G7 7 H 7 7 70,6
C302 100 1FK7105 – 5AF71 – 17 7 5 – Z D31 G7 7 H 7 7 60,4
C502 100 1FK7105 – 5AF71 – 17 7 5 – Z D52 G7 7 H 7 7 82,2
C302 100 1FK7105 – 5AF71 – 17 7 5 – Z D32 G7 7 H 7 7 60,4
C502C402
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
D53D43
GG7777
HH7777
82,270,6
C502C612
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
D54D64
GG7777
HH7777
82,297,5
C712C612
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
D75D65
GG7777
HH7777
132,897,5
C812 100 1FK7105 – 5AF71 – 17 7 5 – Z D86 G7 7 H 7 7 192,4
C712 100 1FK7105 – 5AF71 – 17 7 5 – Z D76 G7 7 H 7 7 132,8
C812 100 1FK7105 – 5AF71 – 17 7 5 – Z D87 G7 7 H 7 7 192,4
C712 100 1FK7105 – 5AF71 – 17 7 5 – Z D77 G7 7 H 7 7 132,8
C812 100 1FK7105 – 5AF71 – 17 7 5 – Z D88 G7 7 H 7 7 192,4
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
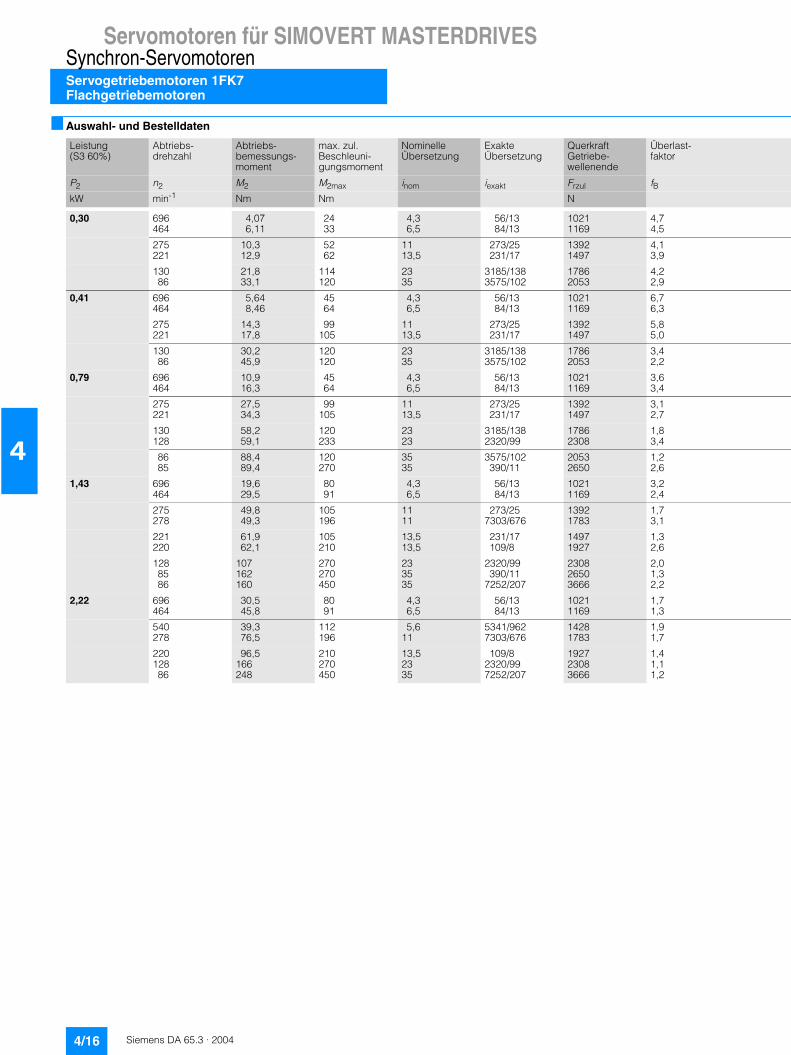
Siemens DA 65.3 · 20044/16
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Flachgetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
0,30 696464
4,076,11
2433
4,36,5
56/1384/13
10211169
4,74,5
275221
10,312,9
5262
1113,5
273/25231/17
13921497
4,13,9
13086
21,833,1
114120
2335
3185/1383575/102
17862053
4,22,9
0,41 696464
5,648,46
4564
4,36,5
56/1384/13
10211169
6,76,3
275221
14,317,8
99105
1113,5
273/25231/17
13921497
5,85,0
13086
30,245,9
120120
2335
3185/1383575/102
17862053
3,42,2
0,79 696464
10,916,3
4564
4,36,5
56/1384/13
10211169
3,63,4
275221
27,534,3
99105
1113,5
273/25231/17
13921497
3,12,7
130128
58,259,1
120233
2323
3185/1382320/99
17862308
1,83,4
8685
88,489,4
120270
3535
3575/102390/11
20532650
1,22,6
1,43 696464
19,629,5
8091
4,36,5
56/1384/13
10211169
3,22,4
275278
49,849,3
105196
1111
273/257303/676
13921783
1,73,1
221220
61,962,1
105210
13,513,5
231/17109/8
14971927
1,32,6
1288586
107162160
270270450
233535
2320/99390/11
7252/207
230826503666
2,01,32,2
2,22 696464
30,545,8
8091
4,36,5
56/1384/13
10211169
1,71,3
540278
39,376,5
112196
5,611
5341/9627303/676
14281783
1,91,7
22012886
96,5166248
210270450
13,52335
109/82320/997252/207
192723083666
1,41,11,2
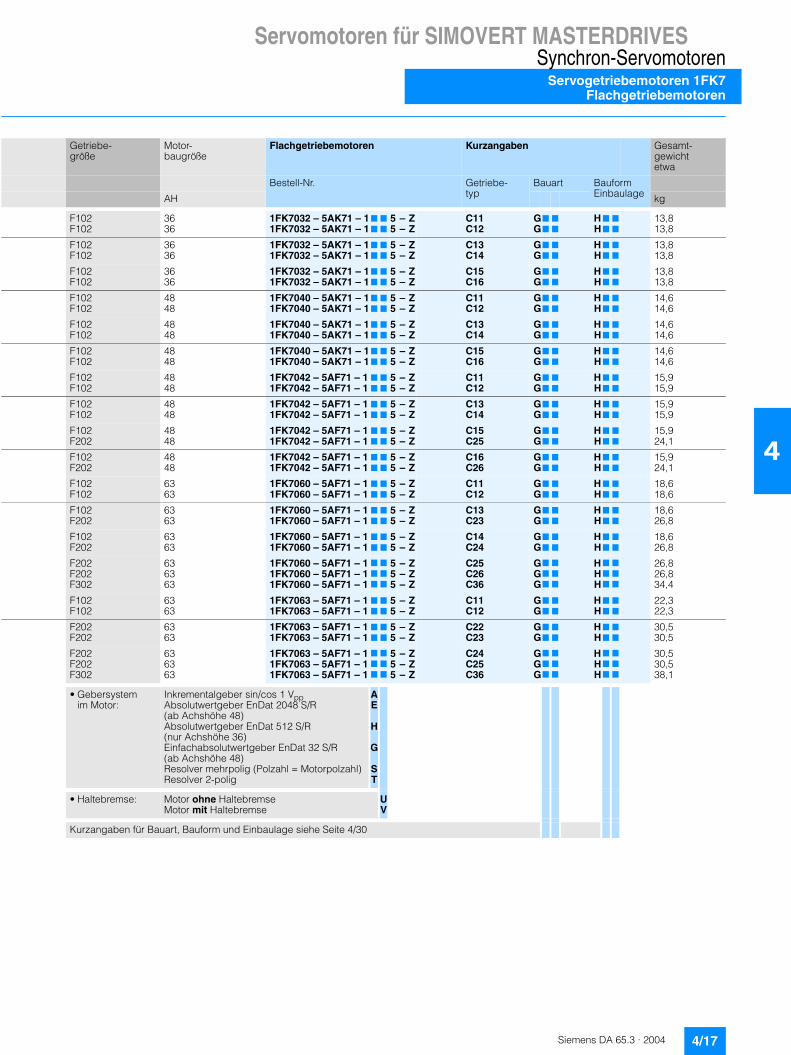
Siemens DA 65.3 · 2004 4/17
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Flachgetriebemotoren
4
Getriebe-größe
Motor-baugröße
Flachgetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
F102F102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
C11C12
GG7777
HH7777
13,813,8
F102F102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
C13C14
GG7777
HH7777
13,813,8
F102F102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
C15C16
GG7777
HH7777
13,813,8
F102F102
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
C11C12
GG7777
HH7777
14,614,6
F102F102
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
C13C14
GG7777
HH7777
14,614,6
F102F102
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
C15C16
GG7777
HH7777
14,614,6
F102F102
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
C11C12
GG7777
HH7777
15,915,9
F102F102
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
C13C14
GG7777
HH7777
15,915,9
F102F202
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
C15C25
GG7777
HH7777
15,924,1
F102F202
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
C16C26
GG7777
HH7777
15,924,1
F102F102
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
C11C12
GG7777
HH7777
18,618,6
F102F202
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
C13C23
GG7777
HH7777
18,626,8
F102F202
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
C14C24
GG7777
HH7777
18,626,8
F202F202F302
636363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
777
777
555
–––
ZZZ
C25C26C36
GGG
777
777
HHH
777
777
26,826,834,4
F102F102
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
C11C12
GG7777
HH7777
22,322,3
F202F202
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
C22C23
GG7777
HH7777
30,530,5
F202F202F302
636363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
777
777
555
–––
ZZZ
C24C25C36
GGG
777
777
HHH
777
777
30,530,538,1
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Absolutwertgeber EnDat 512 S/R(nur Achshöhe 36)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
H
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
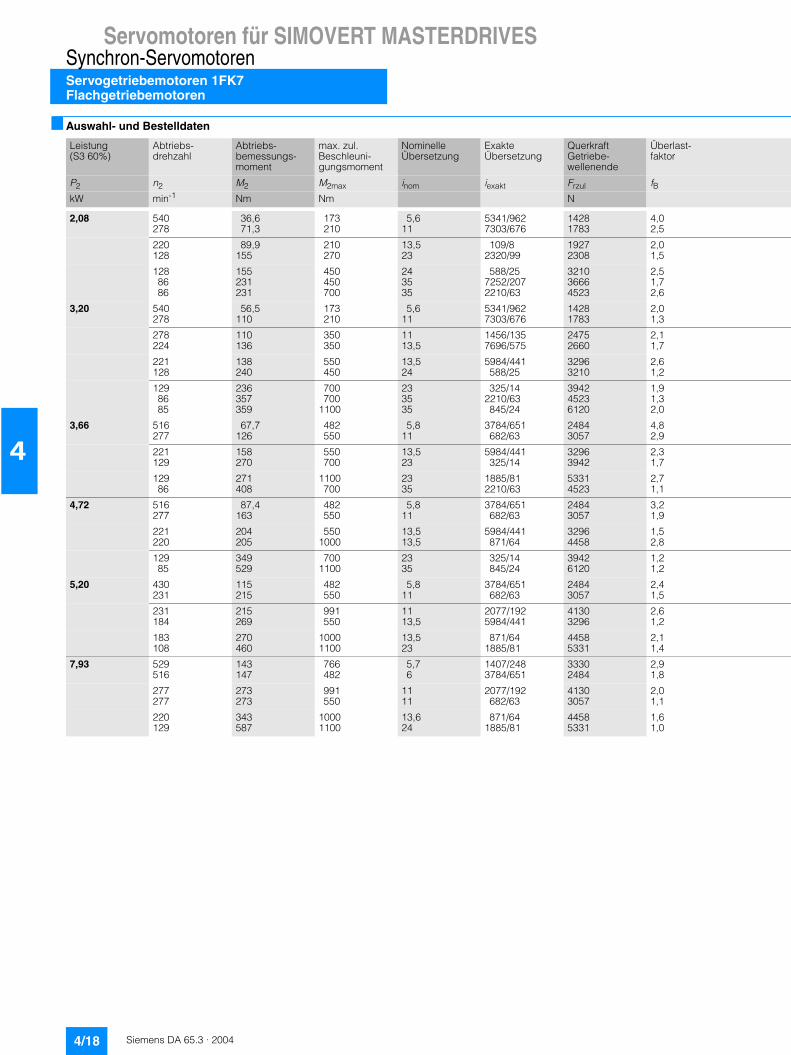
Siemens DA 65.3 · 20044/18
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Flachgetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
2,08 540278
36,671,3
173210
5,611
5341/9627303/676
14281783
4,02,5
220128
89,9155
210270
13,523
109/82320/99
19272308
2,01,5
1288686
155231231
450450700
243535
588/257252/2072210/63
321036664523
2,51,72,6
3,20 540278
56,5110
173210
5,611
5341/9627303/676
14281783
2,01,3
278224
110136
350350
1113,5
1456/1357696/575
24752660
2,11,7
221128
138240
550450
13,524
5984/441588/25
32963210
2,61,2
1298685
236357359
700700
1100
233535
325/142210/63845/24
394245236120
1,91,32,0
3,66 516277
67,7126
482550
5,811
3784/651682/63
24843057
4,82,9
221129
158270
550700
13,523
5984/441325/14
32963942
2,31,7
12986
271408
1100700
2335
1885/812210/63
53314523
2,71,1
4,72 516277
87,4163
482550
5,811
3784/651682/63
24843057
3,21,9
221220
204205
5501000
13,513,5
5984/441871/64
32964458
1,52,8
12985
349529
7001100
2335
325/14845/24
39426120
1,21,2
5,20 430231
115215
482550
5,811
3784/651682/63
24843057
2,41,5
231184
215269
991550
1113,5
2077/1925984/441
41303296
2,61,2
183108
270460
10001100
13,523
871/641885/81
44585331
2,11,4
7,93 529516
143147
766482
5,76
1407/2483784/651
33302484
2,91,8
277277
273273
991550
1111
2077/192682/63
41303057
2,01,1
220129
343587
10001100
13,624
871/641885/81
44585331
1,61,0
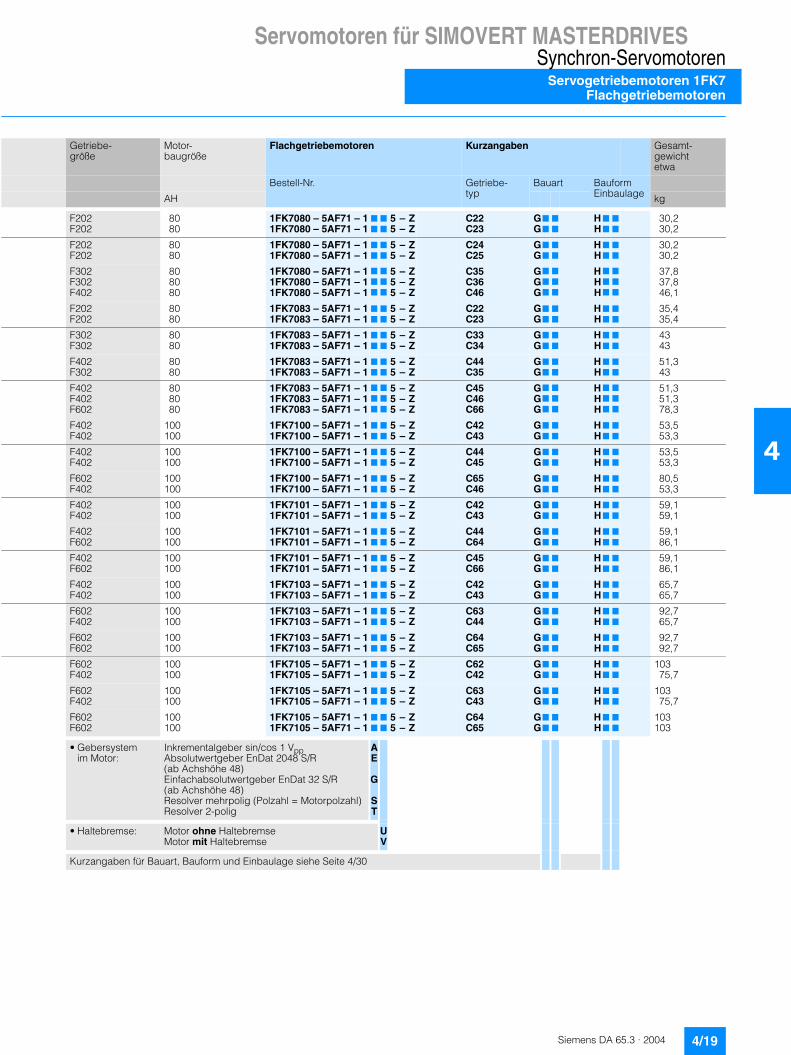
Siemens DA 65.3 · 2004 4/19
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Flachgetriebemotoren
4
Getriebe-größe
Motor-baugröße
Flachgetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
F202F202
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
C22C23
GG7777
HH7777
30,230,2
F202F202
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
C24C25
GG7777
HH7777
30,230,2
F302F302F402
808080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
777
777
555
–––
ZZZ
C35C36C46
GGG
777
777
HHH
777
777
37,837,846,1
F202F202
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
C22C23
GG7777
HH7777
35,435,4
F302F302
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
C33C34
GG7777
HH7777
4343
F402F302
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
C44C35
GG7777
HH7777
51,343
F402F402F602
808080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
777
777
555
–––
ZZZ
C45C46C66
GGG
777
777
HHH
777
777
51,351,378,3
F402F402
100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
7777
55
––
ZZ
C42C43
GG7777
HH7777
53,553,3
F402F402
100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
7777
55
––
ZZ
C44C45
GG7777
HH7777
53,553,3
F602F402
100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
7777
55
––
ZZ
C65C46
GG7777
HH7777
80,553,3
F402F402
100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
7777
55
––
ZZ
C42C43
GG7777
HH7777
59,159,1
F402F602
100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
7777
55
––
ZZ
C44C64
GG7777
HH7777
59,186,1
F402F602
100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
7777
55
––
ZZ
C45C66
GG7777
HH7777
59,186,1
F402F402
100100
1FK7103 – 5AF71 – 11FK7103 – 5AF71 – 1
7777
55
––
ZZ
C42C43
GG7777
HH7777
65,765,7
F602F402
100100
1FK7103 – 5AF71 – 11FK7103 – 5AF71 – 1
7777
55
––
ZZ
C63C44
GG7777
HH7777
92,765,7
F602F602
100100
1FK7103 – 5AF71 – 11FK7103 – 5AF71 – 1
7777
55
––
ZZ
C64C65
GG7777
HH7777
92,792,7
F602F402
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
C62C42
GG7777
HH7777
10375,7
F602F402
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
C63C43
GG7777
HH7777
10375,7
F602F602
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
C64C65
GG7777
HH7777
103103
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
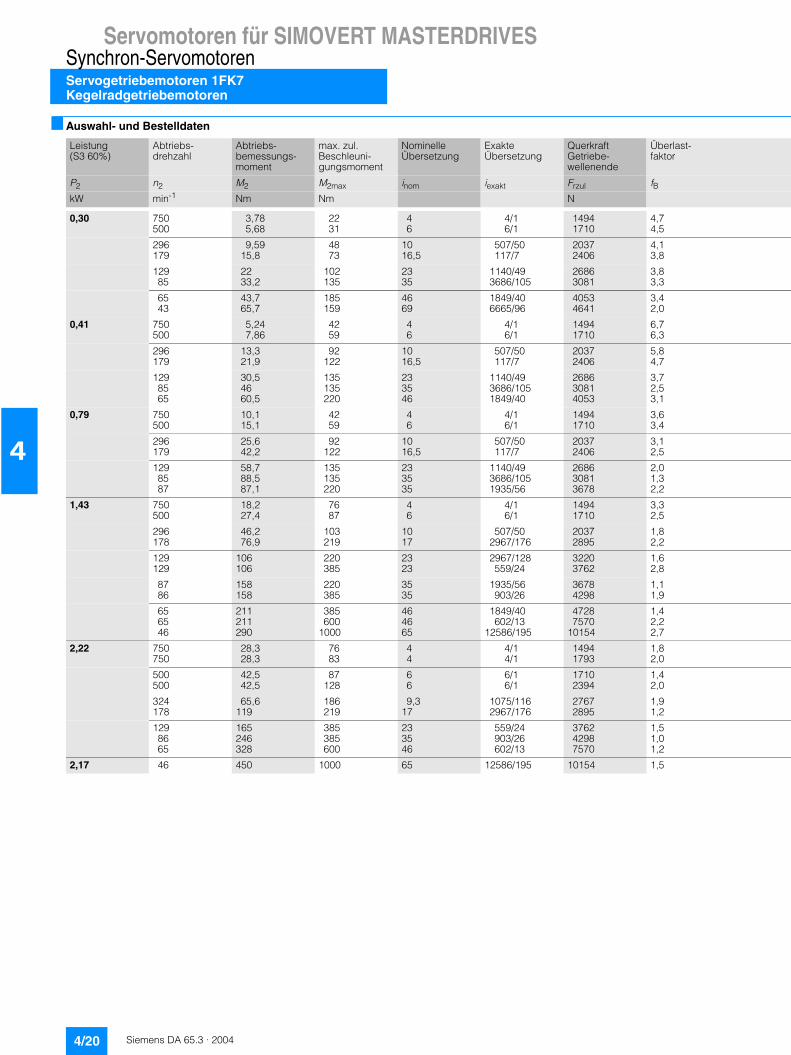
Siemens DA 65.3 · 20044/20
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Kegelradgetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
0,30 750500
3,785,68
2231
46
4/16/1
14941710
4,74,5
296179
9,5915,8
4873
1016,5
507/50117/7
20372406
4,13,8
12985
2233,2
102135
2335
1140/493686/105
26863081
3,83,3
6543
43,765,7
185159
4669
1849/406665/96
40534641
3,42,0
0,41 750500
5,247,86
4259
46
4/16/1
14941710
6,76,3
296179
13,321,9
92122
1016,5
507/50117/7
20372406
5,84,7
1298565
30,54660,5
135135220
233546
1140/493686/1051849/40
268630814053
3,72,53,1
0,79 750500
10,115,1
4259
46
4/16/1
14941710
3,63,4
296179
25,642,2
92122
1016,5
507/50117/7
20372406
3,12,5
1298587
58,788,587,1
135135220
233535
1140/493686/1051935/56
268630813678
2,01,32,2
1,43 750500
18,227,4
7687
46
4/16/1
14941710
3,32,5
296178
46,276,9
103219
1017
507/502967/176
20372895
1,82,2
129129
106106
220385
2323
2967/128559/24
32203762
1,62,8
8786
158158
220385
3535
1935/56903/26
36784298
1,11,9
656546
211211290
385600
1000
464665
1849/40602/13
12586/195
47287570
10154
1,42,22,7
2,22 750750
28,328,3
7683
44
4/14/1
14941793
1,82,0
500500
42,542,5
87128
66
6/16/1
17102394
1,42,0
324178
65,6119
186219
9,317
1075/1162967/176
27672895
1,91,2
1298665
165246328
385385600
233546
559/24903/26602/13
376242987570
1,51,01,2
2,17 46 450 1000 65 12586/195 10154 1,5
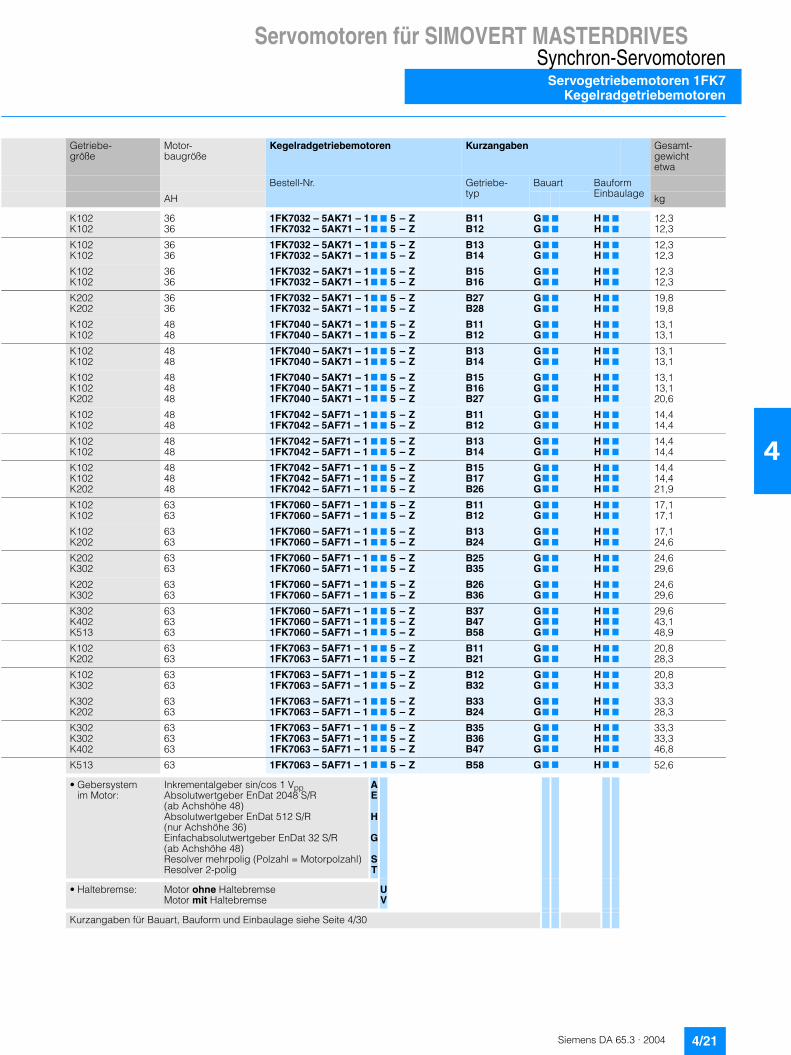
Siemens DA 65.3 · 2004 4/21
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Kegelradgetriebemotoren
4
Getriebe-größe
Motor-baugröße
Kegelradgetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
K102K102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
B11B12
GG7777
HH7777
12,312,3
K102K102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
B13B14
GG7777
HH7777
12,312,3
K102K102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
B15B16
GG7777
HH7777
12,312,3
K202K202
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
B27B28
GG7777
HH7777
19,819,8
K102K102
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
B11B12
GG7777
HH7777
13,113,1
K102K102
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
B13B14
GG7777
HH7777
13,113,1
K102K102K202
484848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
777
777
555
–––
ZZZ
B15B16B27
GGG
777
777
HHH
777
777
13,113,120,6
K102K102
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
B11B12
GG7777
HH7777
14,414,4
K102K102
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
B13B14
GG7777
HH7777
14,414,4
K102K102K202
484848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
777
777
555
–––
ZZZ
B15B17B26
GGG
777
777
HHH
777
777
14,414,421,9
K102K102
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
B11B12
GG7777
HH7777
17,117,1
K102K202
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
B13B24
GG7777
HH7777
17,124,6
K202K302
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
B25B35
GG7777
HH7777
24,629,6
K202K302
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
B26B36
GG7777
HH7777
24,629,6
K302K402K513
636363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
777
777
555
–––
ZZZ
B37B47B58
GGG
777
777
HHH
777
777
29,643,148,9
K102K202
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
B11B21
GG7777
HH7777
20,828,3
K102K302
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
B12B32
GG7777
HH7777
20,833,3
K302K202
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
B33B24
GG7777
HH7777
33,328,3
K302K302K402
636363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
777
777
555
–––
ZZZ
B35B36B47
GGG
777
777
HHH
777
777
33,333,346,8
K513 63 1FK7063 – 5AF71 – 1 7 7 5 – Z B58 G7 7 H 7 7 52,6
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Absolutwertgeber EnDat 512 S/R(nur Achshöhe 36)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
H
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
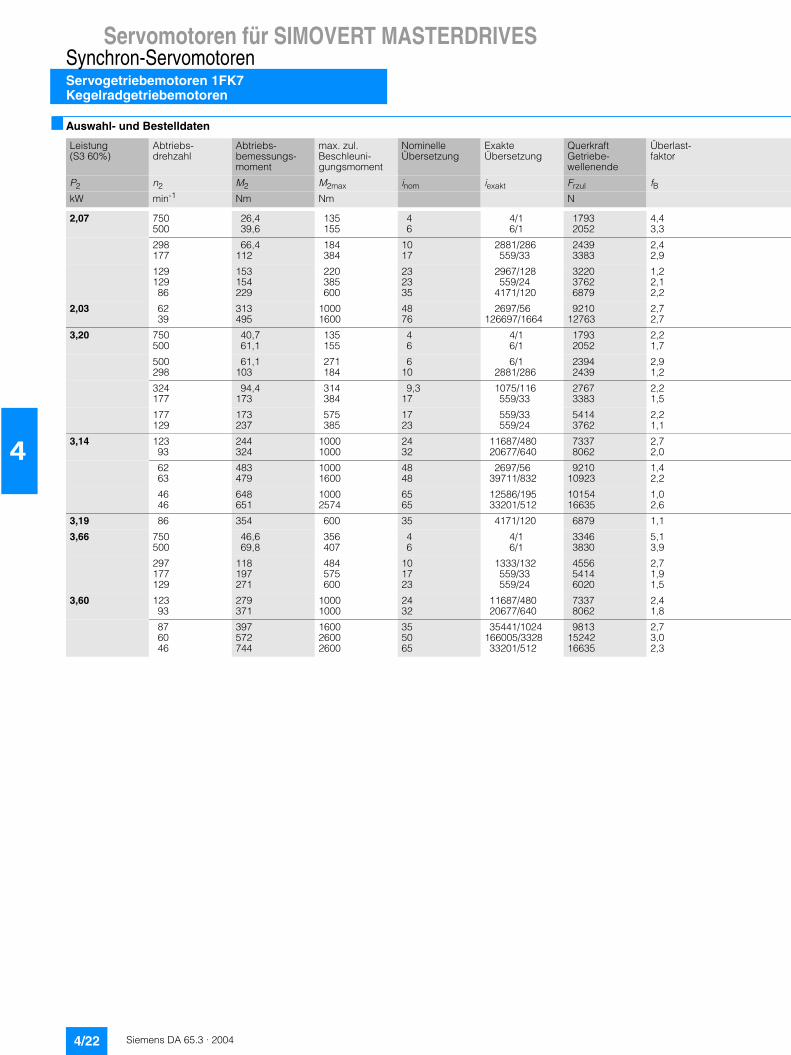
Siemens DA 65.3 · 20044/22
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Kegelradgetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
2,07 750500
26,439,6
135155
46
4/16/1
17932052
4,43,3
298177
66,4112
184384
1017
2881/286559/33
24393383
2,42,9
12912986
153154229
220385600
232335
2967/128559/24
4171/120
322037626879
1,22,12,2
2,03 6239
313495
10001600
4876
2697/56126697/1664
921012763
2,72,7
3,20 750500
40,761,1
135155
46
4/16/1
17932052
2,21,7
500298
61,1103
271184
610
6/12881/286
23942439
2,91,2
324177
94,4173
314384
9,317
1075/116559/33
27673383
2,21,5
177129
173237
575385
1723
559/33559/24
54143762
2,21,1
3,14 12393
244324
10001000
2432
11687/48020677/640
73378062
2,72,0
6263
483479
10001600
4848
2697/5639711/832
921010923
1,42,2
4646
648651
10002574
6565
12586/19533201/512
1015416635
1,02,6
3,19 86 354 600 35 4171/120 6879 1,1
3,66 750500
46,669,8
356407
46
4/16/1
33463830
5,13,9
297177129
118197271
484575600
101723
1333/132559/33559/24
455654146020
2,71,91,5
3,60 12393
279371
10001000
2432
11687/48020677/640
73378062
2,41,8
876046
397572744
160026002600
355065
35441/1024166005/332833201/512
98131524216635
2,73,02,3
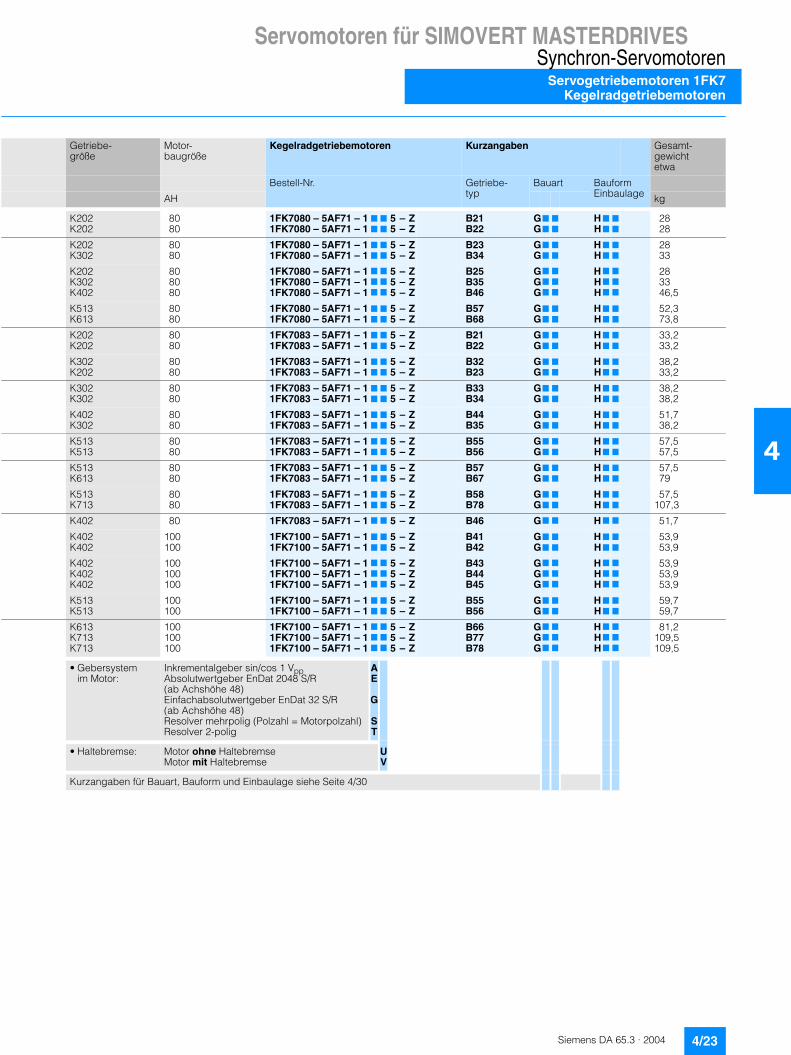
Siemens DA 65.3 · 2004 4/23
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Kegelradgetriebemotoren
4
Getriebe-größe
Motor-baugröße
Kegelradgetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
K202K202
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
B21B22
GG7777
HH7777
2828
K202K302
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
B23B34
GG7777
HH7777
2833
K202K302K402
808080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
777
777
555
–––
ZZZ
B25B35B46
GGG
777
777
HHH
777
777
283346,5
K513K613
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
B57B68
GG7777
HH7777
52,373,8
K202K202
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
B21B22
GG7777
HH7777
33,233,2
K302K202
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
B32B23
GG7777
HH7777
38,233,2
K302K302
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
B33B34
GG7777
HH7777
38,238,2
K402K302
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
B44B35
GG7777
HH7777
51,738,2
K513K513
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
B55B56
GG7777
HH7777
57,557,5
K513K613
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
B57B67
GG7777
HH7777
57,579
K513K713
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
B58B78
GG7777
HH7777
57,5107,3
K402 80 1FK7083 – 5AF71 – 1 7 7 5 – Z B46 G7 7 H 7 7 51,7
K402K402
100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
7777
55
––
ZZ
B41B42
GG7777
HH7777
53,953,9
K402K402K402
100100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
777
777
555
–––
ZZZ
B43B44B45
GGG
777
777
HHH
777
777
53,953,953,9
K513K513
100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
7777
55
––
ZZ
B55B56
GG7777
HH7777
59,759,7
K613K713K713
100100100
1FK7100 – 5AF71 – 11FK7100 – 5AF71 – 11FK7100 – 5AF71 – 1
777
777
555
–––
ZZZ
B66B77B78
GGG
777
777
HHH
777
777
81,2109,5109,5
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
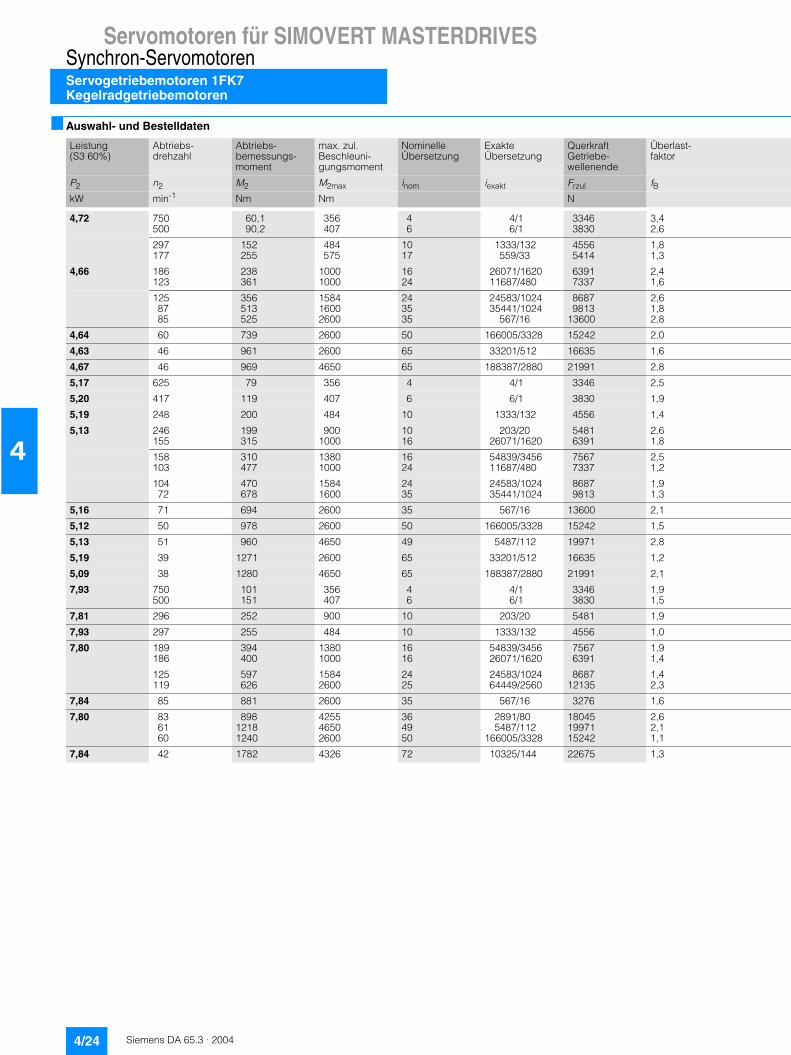
Siemens DA 65.3 · 20044/24
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Kegelradgetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
4,72 750500
60,190,2
356407
46
4/16/1
33463830
3,42,6
297177
152255
484575
1017
1333/132559/33
45565414
1,81,3
4,66 186123
238361
10001000
1624
26071/162011687/480
63917337
2,41,6
1258785
356513525
158416002600
243535
24583/102435441/1024
567/16
86879813
13600
2,61,82,8
4,64 60 739 2600 50 166005/3328 15242 2,0
4,63 46 961 2600 65 33201/512 16635 1,6
4,67 46 969 4650 65 188387/2880 21991 2,8
5,17 625 79 356 4 4/1 3346 2,5
5,20 417 119 407 6 6/1 3830 1,9
5,19 248 200 484 10 1333/132 4556 1,4
5,13 246155
199315
9001000
1016
203/2026071/1620
54816391
2,61,8
158103
310477
13801000
1624
54839/345611687/480
75677337
2,51,2
10472
470678
15841600
2435
24583/102435441/1024
86879813
1,91,3
5,16 71 694 2600 35 567/16 13600 2,1
5,12 50 978 2600 50 166005/3328 15242 1,5
5,13 51 960 4650 49 5487/112 19971 2,8
5,19 39 1271 2600 65 33201/512 16635 1,2
5,09 38 1280 4650 65 188387/2880 21991 2,1
7,93 750500
101151
356407
46
4/16/1
33463830
1,91,5
7,81 296 252 900 10 203/20 5481 1,9
7,93 297 255 484 10 1333/132 4556 1,0
7,80 189186
394400
13801000
1616
54839/345626071/1620
75676391
1,91,4
125119
597626
15842600
2425
24583/102464449/2560
868712135
1,42,3
7,84 85 881 2600 35 567/16 3276 1,6
7,80 836160
89812181240
425546502600
364950
2891/805487/112
166005/3328
180451997115242
2,62,11,1
7,84 42 1782 4326 72 10325/144 22675 1,3
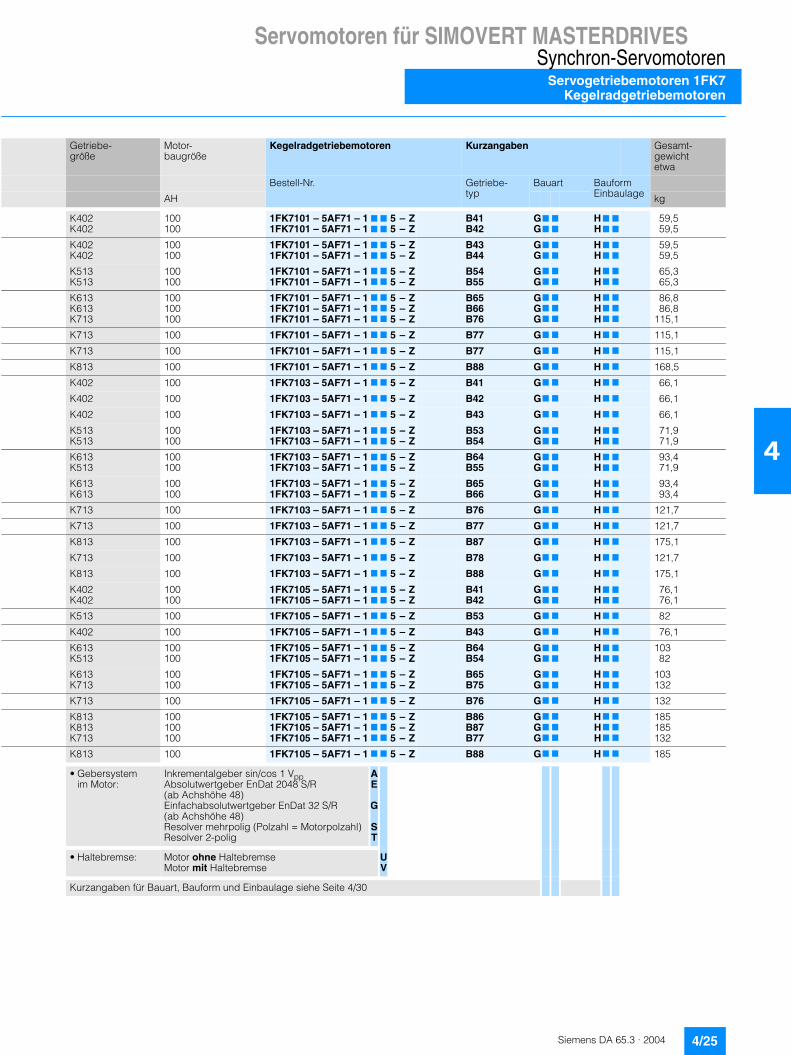
Siemens DA 65.3 · 2004 4/25
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Kegelradgetriebemotoren
4
Getriebe-größe
Motor-baugröße
Kegelradgetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
K402K402
100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
7777
55
––
ZZ
B41B42
GG7777
HH7777
59,559,5
K402K402
100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
7777
55
––
ZZ
B43B44
GG7777
HH7777
59,559,5
K513K513
100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
7777
55
––
ZZ
B54B55
GG7777
HH7777
65,365,3
K613K613K713
100100100
1FK7101 – 5AF71 – 11FK7101 – 5AF71 – 11FK7101 – 5AF71 – 1
777
777
555
–––
ZZZ
B65B66B76
GGG
777
777
HHH
777
777
86,886,8
115,1
K713 100 1FK7101 – 5AF71 – 1 7 7 5 – Z B77 G7 7 H 7 7 115,1
K713 100 1FK7101 – 5AF71 – 1 7 7 5 – Z B77 G7 7 H 7 7 115,1
K813 100 1FK7101 – 5AF71 – 1 7 7 5 – Z B88 G7 7 H 7 7 168,5
K402 100 1FK7103 – 5AF71 – 1 7 7 5 – Z B41 G7 7 H 7 7 66,1
K402 100 1FK7103 – 5AF71 – 1 7 7 5 – Z B42 G7 7 H 7 7 66,1
K402 100 1FK7103 – 5AF71 – 1 7 7 5 – Z B43 G7 7 H 7 7 66,1
K513K513
100100
1FK7103 – 5AF71 – 11FK7103 – 5AF71 – 1
7777
55
––
ZZ
B53B54
GG7777
HH7777
71,971,9
K613K513
100100
1FK7103 – 5AF71 – 11FK7103 – 5AF71 – 1
7777
55
––
ZZ
B64B55
GG7777
HH7777
93,471,9
K613K613
100100
1FK7103 – 5AF71 – 11FK7103 – 5AF71 – 1
7777
55
––
ZZ
B65B66
GG7777
HH7777
93,493,4
K713 100 1FK7103 – 5AF71 – 1 7 7 5 – Z B76 G7 7 H 7 7 121,7
K713 100 1FK7103 – 5AF71 – 1 7 7 5 – Z B77 G7 7 H 7 7 121,7
K813 100 1FK7103 – 5AF71 – 1 7 7 5 – Z B87 G7 7 H 7 7 175,1
K713 100 1FK7103 – 5AF71 – 1 7 7 5 – Z B78 G7 7 H 7 7 121,7
K813 100 1FK7103 – 5AF71 – 1 7 7 5 – Z B88 G7 7 H 7 7 175,1
K402K402
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
B41B42
GG7777
HH7777
76,176,1
K513 100 1FK7105 – 5AF71 – 1 7 7 5 – Z B53 G7 7 H 7 7 82
K402 100 1FK7105 – 5AF71 – 1 7 7 5 – Z B43 G7 7 H 7 7 76,1
K613K513
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
B64B54
GG7777
HH7777
10382
K613K713
100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
7777
55
––
ZZ
B65B75
GG7777
HH7777
103132
K713 100 1FK7105 – 5AF71 – 1 7 7 5 – Z B76 G7 7 H 7 7 132
K813K813K713
100100100
1FK7105 – 5AF71 – 11FK7105 – 5AF71 – 11FK7105 – 5AF71 – 1
777
777
555
–––
ZZZ
B86B87B77
GGG
777
777
HHH
777
777
185185132
K813 100 1FK7105 – 5AF71 – 1 7 7 5 – Z B88 G7 7 H 7 7 185
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
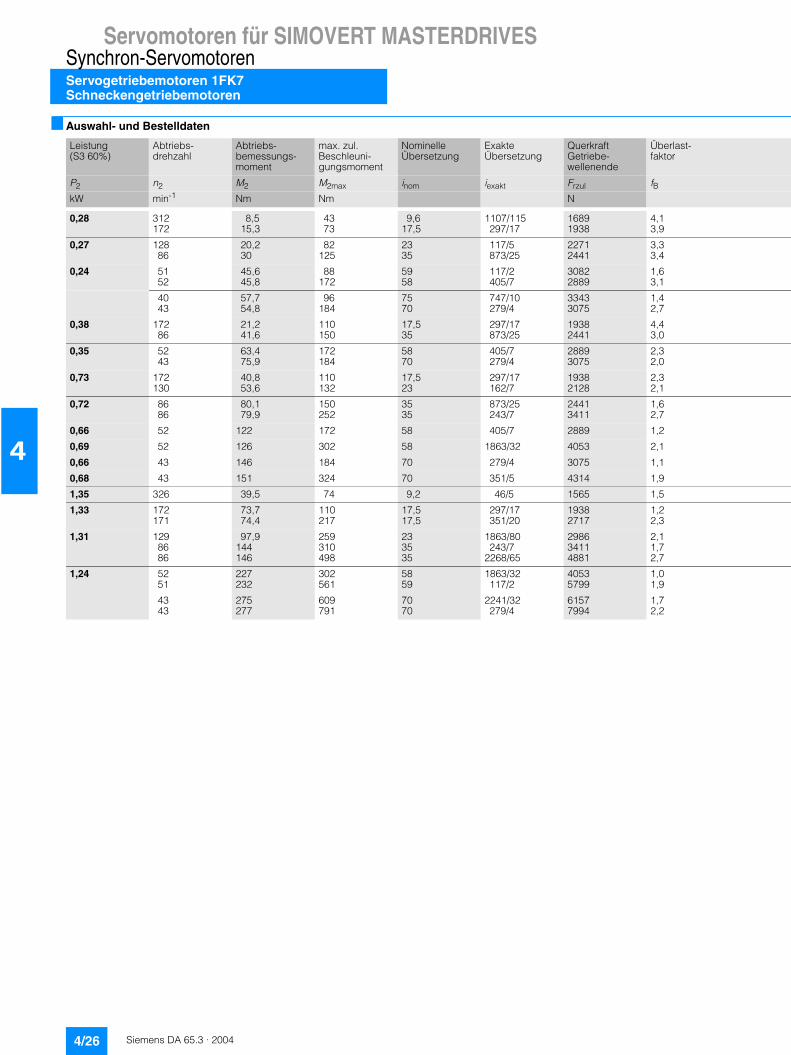
Siemens DA 65.3 · 20044/26
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Schneckengetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
0,28 312172
8,515,3
4373
9,617,5
1107/115297/17
16891938
4,13,9
0,27 12886
20,230
82125
2335
117/5873/25
22712441
3,33,4
0,24 5152
45,645,8
88172
5958
117/2405/7
30822889
1,63,1
4043
57,754,8
96184
7570
747/10279/4
33433075
1,42,7
0,38 17286
21,241,6
110150
17,535
297/17873/25
19382441
4,43,0
0,35 5243
63,475,9
172184
5870
405/7279/4
28893075
2,32,0
0,73 172130
40,853,6
110132
17,523
297/17162/7
19382128
2,32,1
0,72 8686
80,179,9
150252
3535
873/25243/7
24413411
1,62,7
0,66 52 122 172 58 405/7 2889 1,2
0,69 52 126 302 58 1863/32 4053 2,1
0,66 43 146 184 70 279/4 3075 1,1
0,68 43 151 324 70 351/5 4314 1,9
1,35 326 39,5 74 9,2 46/5 1565 1,5
1,33 172171
73,774,4
110217
17,517,5
297/17351/20
19382717
1,22,3
1,31 1298686
97,9144146
259310498
233535
1863/80243/7
2268/65
298634114881
2,11,72,7
1,24 5251
227232
302561
5859
1863/32117/2
40535799
1,01,9
4343
275277
609791
7070
2241/32279/4
61577994
1,72,2
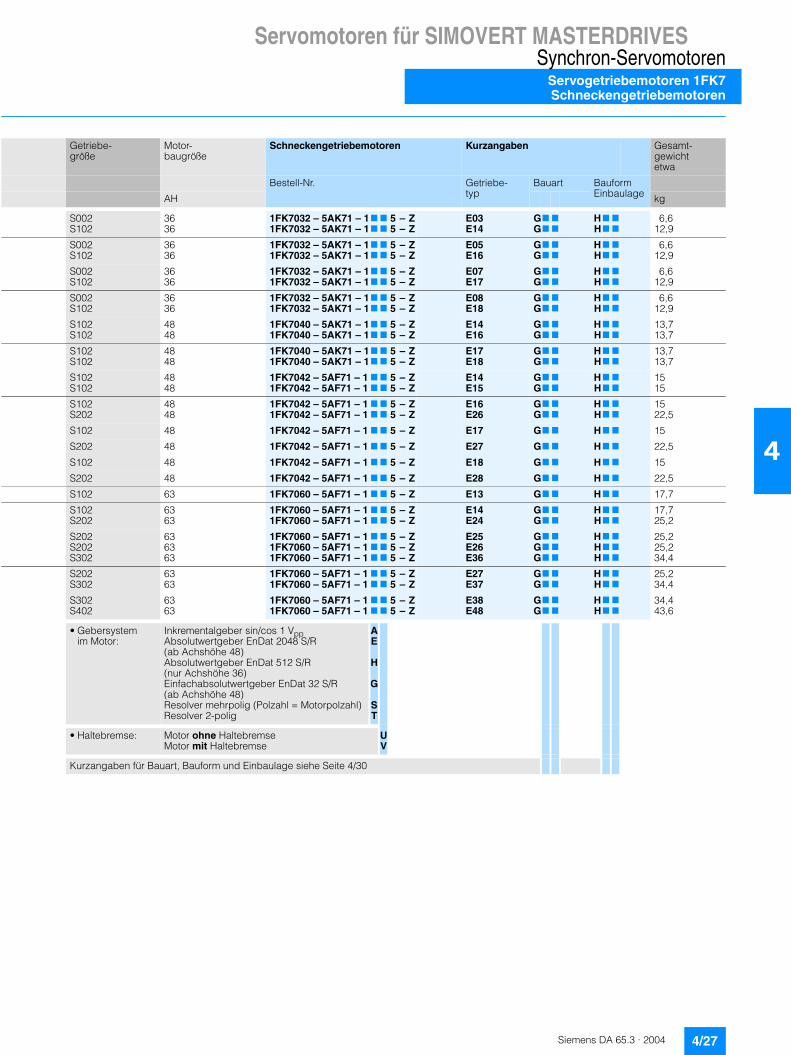
Siemens DA 65.3 · 2004 4/27
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Schneckengetriebemotoren
4
Getriebe-größe
Motor-baugröße
Schneckengetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
S002S102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
E03E14
GG7777
HH7777
6,612,9
S002S102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
E05E16
GG7777
HH7777
6,612,9
S002S102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
E07E17
GG7777
HH7777
6,612,9
S002S102
3636
1FK7032 – 5AK71 – 11FK7032 – 5AK71 – 1
7777
55
––
ZZ
E08E18
GG7777
HH7777
6,612,9
S102S102
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
E14E16
GG7777
HH7777
13,713,7
S102S102
4848
1FK7040 – 5AK71 – 11FK7040 – 5AK71 – 1
7777
55
––
ZZ
E17E18
GG7777
HH7777
13,713,7
S102S102
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
E14E15
GG7777
HH7777
1515
S102S202
4848
1FK7042 – 5AF71 – 11FK7042 – 5AF71 – 1
7777
55
––
ZZ
E16E26
GG7777
HH7777
1522,5
S102 48 1FK7042 – 5AF71 – 1 7 7 5 – Z E17 G7 7 H 7 7 15
S202 48 1FK7042 – 5AF71 – 1 7 7 5 – Z E27 G7 7 H 7 7 22,5
S102 48 1FK7042 – 5AF71 – 1 7 7 5 – Z E18 G7 7 H 7 7 15
S202 48 1FK7042 – 5AF71 – 1 7 7 5 – Z E28 G7 7 H 7 7 22,5
S102 63 1FK7060 – 5AF71 – 1 7 7 5 – Z E13 G7 7 H 7 7 17,7
S102S202
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
E14E24
GG7777
HH7777
17,725,2
S202S202S302
636363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
777
777
555
–––
ZZZ
E25E26E36
GGG
777
777
HHH
777
777
25,225,234,4
S202S302
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
E27E37
GG7777
HH7777
25,234,4
S302S402
6363
1FK7060 – 5AF71 – 11FK7060 – 5AF71 – 1
7777
55
––
ZZ
E38E48
GG7777
HH7777
34,443,6
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Absolutwertgeber EnDat 512 S/R(nur Achshöhe 36)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
H
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
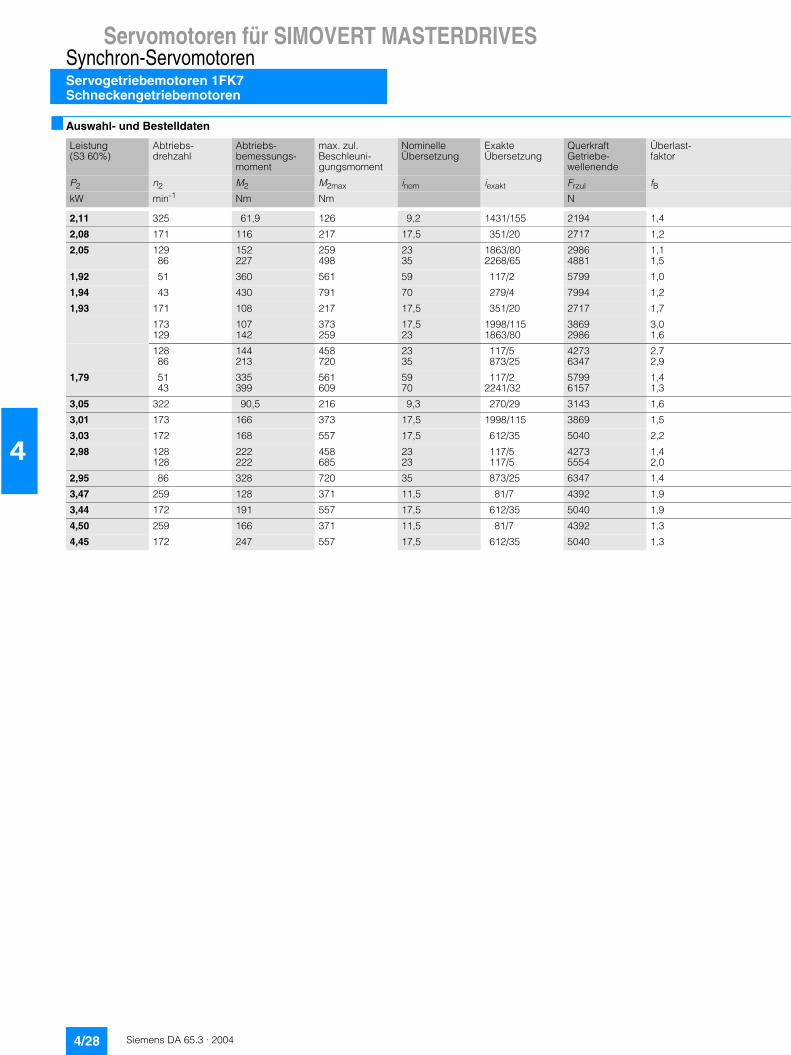
Siemens DA 65.3 · 20044/28
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7Schneckengetriebemotoren
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Leistung (S3 60%)
Abtriebs- drehzahl
Abtriebs- bemessungs- moment
max. zul. Beschleuni-gungsmoment
Nominelle Übersetzung
Exakte Übersetzung
Querkraft Getriebe- wellenende
Überlast- faktor
P2 n2 M2 M2max inom iexakt Frzul fBkW min-1 Nm Nm N
2,11 325 61,9 126 9,2 1431/155 2194 1,4
2,08 171 116 217 17,5 351/20 2717 1,2
2,05 12986
152227
259498
2335
1863/802268/65
29864881
1,11,5
1,92 51 360 561 59 117/2 5799 1,0
1,94 43 430 791 70 279/4 7994 1,2
1,93 171 108 217 17,5 351/20 2717 1,7
173129
107142
373259
17,523
1998/1151863/80
38692986
3,01,6
12886
144213
458720
2335
117/5873/25
42736347
2,72,9
1,79 5143
335399
561609
5970
117/22241/32
57996157
1,41,3
3,05 322 90,5 216 9,3 270/29 3143 1,6
3,01 173 166 373 17,5 1998/115 3869 1,5
3,03 172 168 557 17,5 612/35 5040 2,2
2,98 128128
222222
458685
2323
117/5117/5
42735554
1,42,0
2,95 86 328 720 35 873/25 6347 1,4
3,47 259 128 371 11,5 81/7 4392 1,9
3,44 172 191 557 17,5 612/35 5040 1,9
4,50 259 166 371 11,5 81/7 4392 1,3
4,45 172 247 557 17,5 612/35 5040 1,3
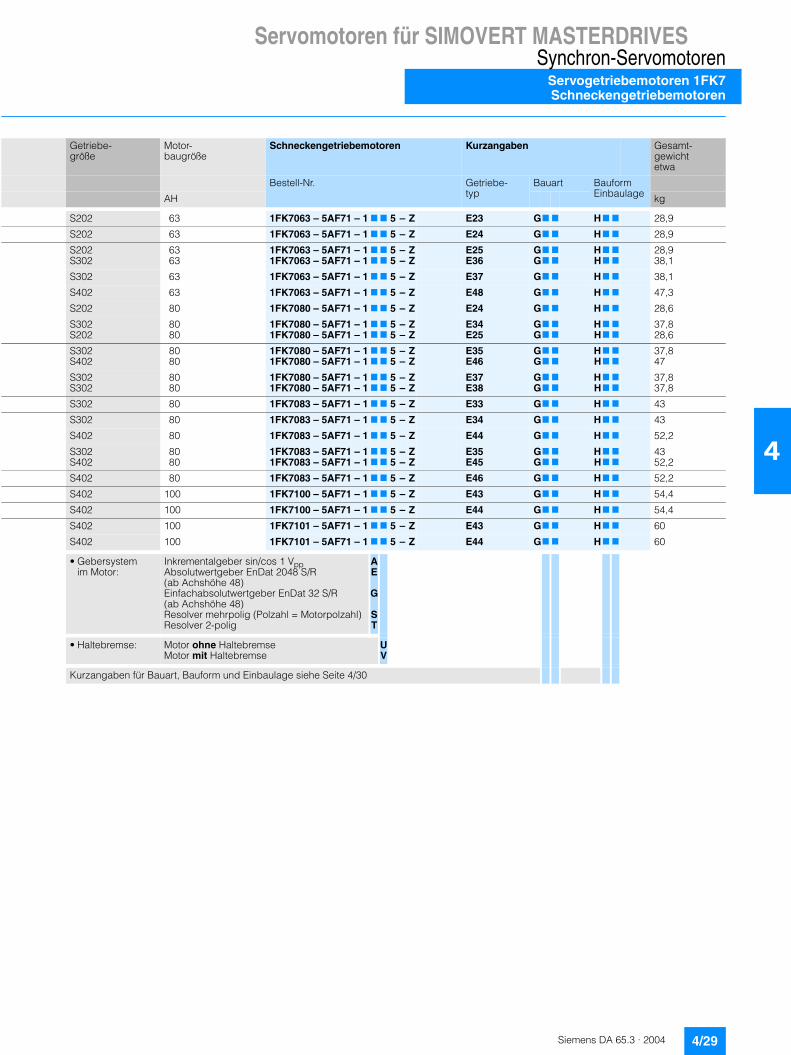
Siemens DA 65.3 · 2004 4/29
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7Schneckengetriebemotoren
4
Getriebe-größe
Motor-baugröße
Schneckengetriebemotoren Kurzangaben Gesamt-gewicht etwa
Bestell-Nr. Getriebe-typ
Bauart Bauform EinbaulageAH kg
S202 63 1FK7063 – 5AF71 – 1 7 7 5 – Z E23 G7 7 H 7 7 28,9
S202 63 1FK7063 – 5AF71 – 1 7 7 5 – Z E24 G7 7 H 7 7 28,9
S202S302
6363
1FK7063 – 5AF71 – 11FK7063 – 5AF71 – 1
7777
55
––
ZZ
E25E36
GG7777
HH7777
28,938,1
S302 63 1FK7063 – 5AF71 – 1 7 7 5 – Z E37 G7 7 H 7 7 38,1
S402 63 1FK7063 – 5AF71 – 1 7 7 5 – Z E48 G7 7 H 7 7 47,3
S202 80 1FK7080 – 5AF71 – 1 7 7 5 – Z E24 G7 7 H 7 7 28,6
S302S202
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
E34E25
GG7777
HH7777
37,828,6
S302S402
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
E35E46
GG7777
HH7777
37,847
S302S302
8080
1FK7080 – 5AF71 – 11FK7080 – 5AF71 – 1
7777
55
––
ZZ
E37E38
GG7777
HH7777
37,837,8
S302 80 1FK7083 – 5AF71 – 1 7 7 5 – Z E33 G7 7 H 7 7 43
S302 80 1FK7083 – 5AF71 – 1 7 7 5 – Z E34 G7 7 H 7 7 43
S402 80 1FK7083 – 5AF71 – 1 7 7 5 – Z E44 G7 7 H 7 7 52,2
S302S402
8080
1FK7083 – 5AF71 – 11FK7083 – 5AF71 – 1
7777
55
––
ZZ
E35E45
GG7777
HH7777
4352,2
S402 80 1FK7083 – 5AF71 – 1 7 7 5 – Z E46 G7 7 H 7 7 52,2
S402 100 1FK7100 – 5AF71 – 1 7 7 5 – Z E43 G7 7 H 7 7 54,4
S402 100 1FK7100 – 5AF71 – 1 7 7 5 – Z E44 G7 7 H 7 7 54,4
S402 100 1FK7101 – 5AF71 – 1 7 7 5 – Z E43 G7 7 H 7 7 60
S402 100 1FK7101 – 5AF71 – 1 7 7 5 – Z E44 G7 7 H 7 7 60
• Gebersystemim Motor:
Inkrementalgeber sin/cos 1 VppAbsolutwertgeber EnDat 2048 S/R(ab Achshöhe 48)Einfachabsolutwertgeber EnDat 32 S/R(ab Achshöhe 48)Resolver mehrpolig (Polzahl = Motorpolzahl)Resolver 2-polig
AE
G
ST
• Haltebremse: Motor ohne HaltebremseMotor mit Haltebremse
UV
Kurzangaben für Bauart, Bauform und Einbaulage siehe Seite 4/30
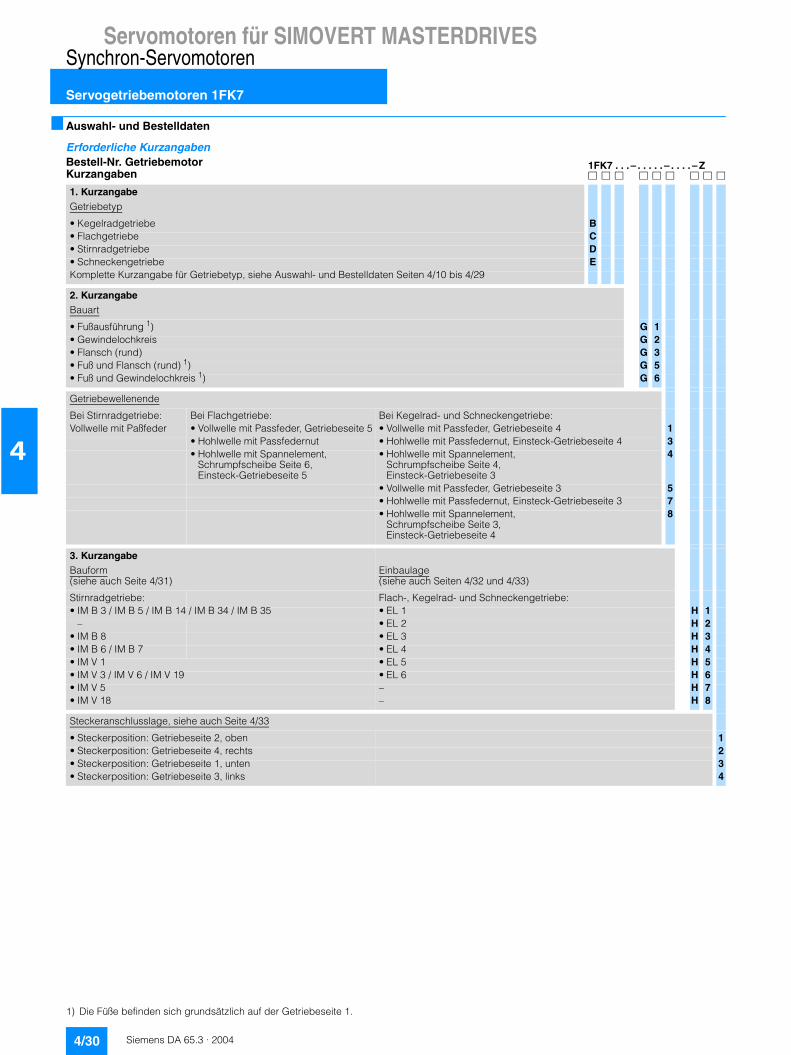
Siemens DA 65.3 · 20044/30
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
Erforderliche KurzangabenBestell-Nr. GetriebemotorKurzangaben
1FK7 . . . – . . . . . – . . . . – Z@ @ @ @ @ @ @ @ @
1. KurzangabeGetriebetyp
• Kegelradgetriebe B• Flachgetriebe C• Stirnradgetriebe D• Schneckengetriebe EKomplette Kurzangabe für Getriebetyp, siehe Auswahl- und Bestelldaten Seiten 4/10 bis 4/29
2. KurzangabeBauart
• Fußausführung 1) G 1• Gewindelochkreis G 2• Flansch (rund) G 3• Fuß und Flansch (rund) 1) G 5• Fuß und Gewindelochkreis 1) G 6
Getriebewellenende
Bei Stirnradgetriebe: Bei Flachgetriebe: Bei Kegelrad- und Schneckengetriebe:Vollwelle mit Paßfeder • Vollwelle mit Passfeder, Getriebeseite 5 • Vollwelle mit Passfeder, Getriebeseite 4 1
• Hohlwelle mit Passfedernut • Hohlwelle mit Passfedernut, Einsteck-Getriebeseite 4 3• Hohlwelle mit Spannelement,
Schrumpfscheibe Seite 6,Einsteck-Getriebeseite 5
• Hohlwelle mit Spannelement, Schrumpfscheibe Seite 4,Einsteck-Getriebeseite 3
4
• Vollwelle mit Passfeder, Getriebeseite 3 5• Hohlwelle mit Passfedernut, Einsteck-Getriebeseite 3 7• Hohlwelle mit Spannelement,
Schrumpfscheibe Seite 3,Einsteck-Getriebeseite 4
8
3. KurzangabeBauform (siehe auch Seite 4/31)
Einbaulage(siehe auch Seiten 4/32 und 4/33)
Stirnradgetriebe: Flach-, Kegelrad- und Schneckengetriebe:• IM B 3 / IM B 5 / IM B 14 / IM B 34 / IM B 35 • EL 1 H 1
– • EL 2 H 2• IM B 8 • EL 3 H 3• IM B 6 / IM B 7 • EL 4 H 4• IM V 1 • EL 5 H 5• IM V 3 / IM V 6 / IM V 19 • EL 6 H 6• IM V 5 – H 7• IM V 18 – H 8
Steckeranschlusslage, siehe auch Seite 4/33
• Steckerposition: Getriebeseite 2, oben 1• Steckerposition: Getriebeseite 4, rechts 2• Steckerposition: Getriebeseite 1, unten 3• Steckerposition: Getriebeseite 3, links 4
1) Die Füße befinden sich grundsätzlich auf der Getriebeseite 1.
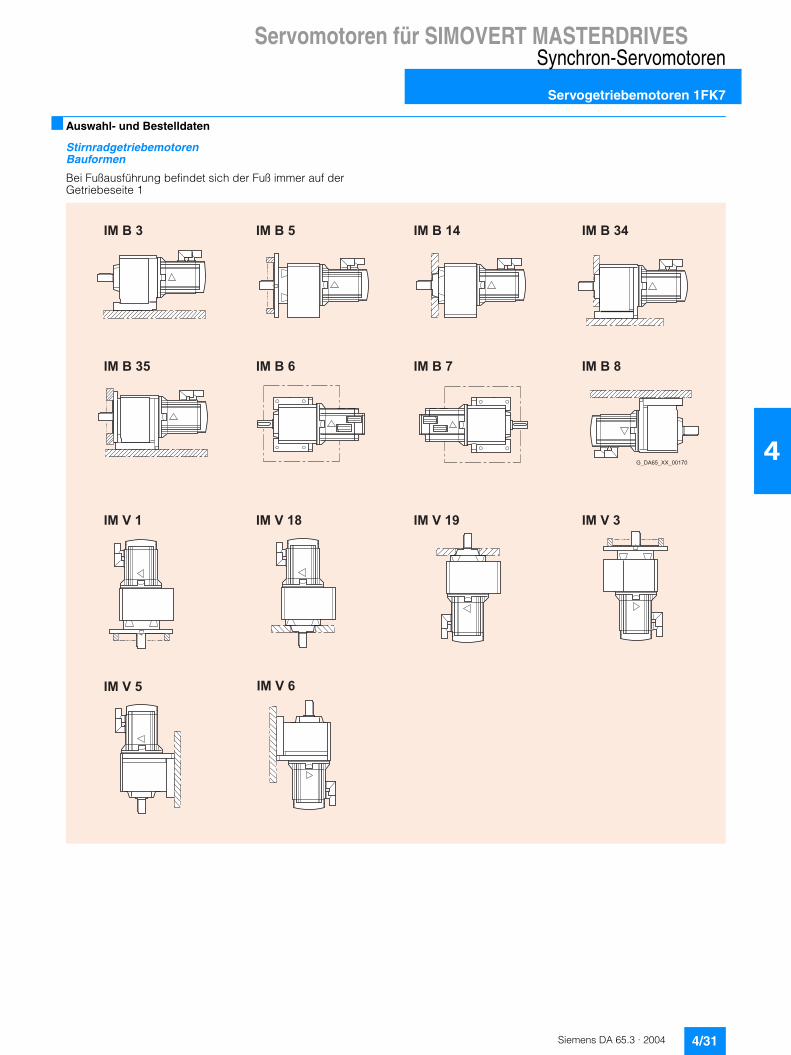
Siemens DA 65.3 · 2004 4/31
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7
4
■ Auswahl- und Bestelldaten
StirnradgetriebemotorenBauformen
Bei Fußausführung befindet sich der Fuß immer auf der Getriebeseite 1
�������������
������ ������
������� ������
����� ������
�����������
������ ������
������ �����
������ ������
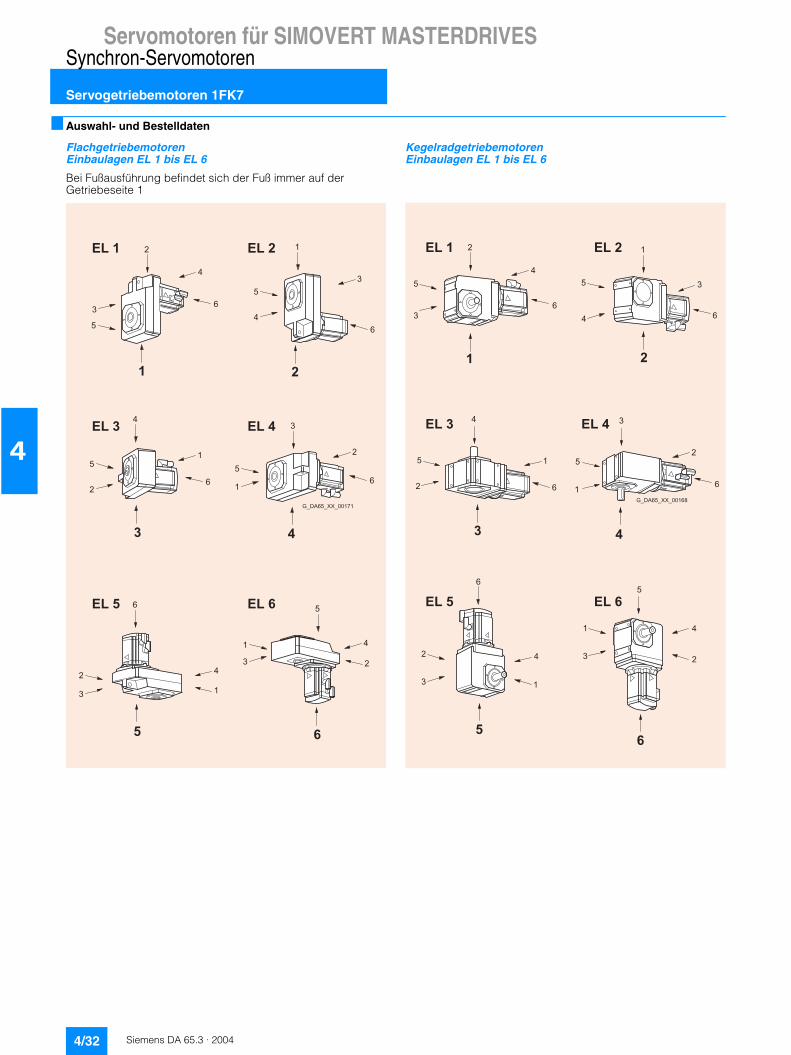
Siemens DA 65.3 · 20044/32
Servomotoren für SIMOVERT MASTERDRIVES
Servogetriebemotoren 1FK7
Synchron-Servomotoren
4
■ Auswahl- und Bestelldaten
FlachgetriebemotorenEinbaulagen EL 1 bis EL 6
Bei Fußausführung befindet sich der Fuß immer auf der Getriebeseite 1
KegelradgetriebemotorenEinbaulagen EL 1 bis EL 6
������������
�
�
�
�
�
���
�
�
�
�
����
���� �
�
�
�
���� �
�
�
�
�
�
�
����� �
��
���
�
��������������
�
�
�
���
�
�
�
�
�
����
�
�
����
�
�
�
����
�
�
�
�
�����
�
�
�
�
����
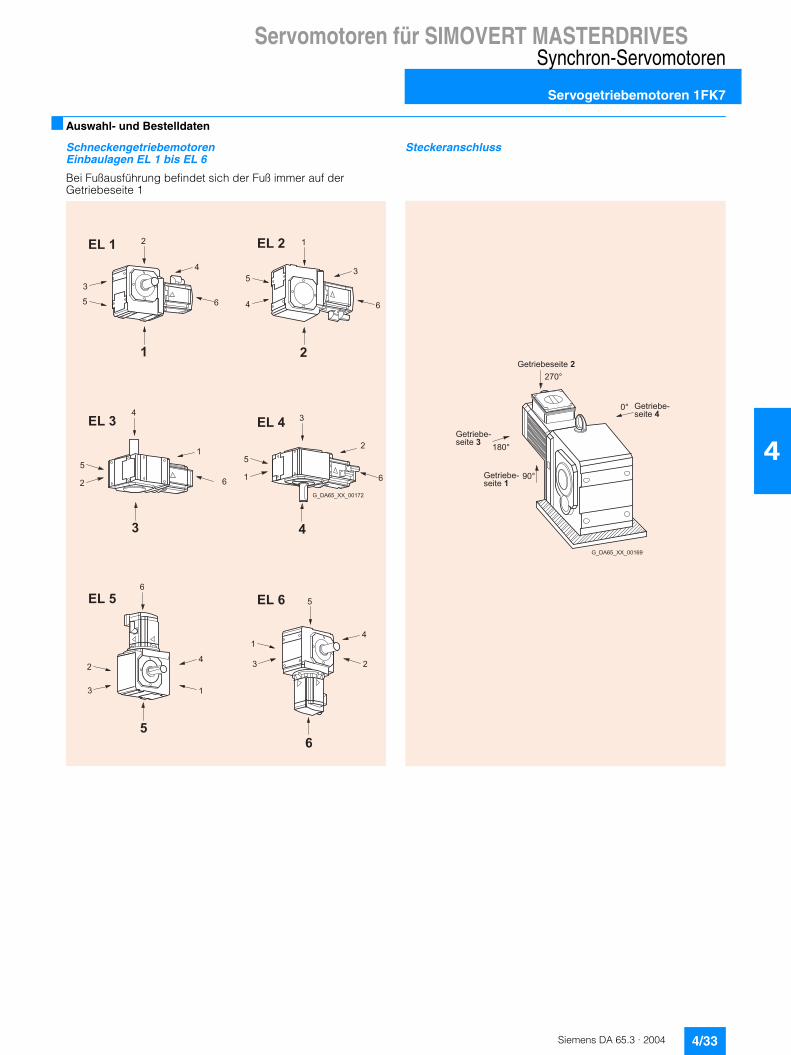
Siemens DA 65.3 · 2004 4/33
Servomotoren für SIMOVERT MASTERDRIVESSynchron-Servomotoren
Servogetriebemotoren 1FK7
4
■ Auswahl- und Bestelldaten
SchneckengetriebemotorenEinbaulagen EL 1 bis EL 6
Bei Fußausführung befindet sich der Fuß immer auf der Getriebeseite 1
Steckeranschluss
������������
���
�
��
�
�
�
�
�
�
����
�
�
����
�
�
�
�����
�
�
�
�����
�
�
�
�
����
��������������
��������������� ��
���
���
�� ���������������
����������������
���������������

Siemens DA 65.3 · 20044/34
Servomotoren für SIMOVERT MASTERDRIVES
Planetengetriebe Baureihe LP
Getriebe für Motoren 1FK7 Standardtyp
4
■ Übersicht
Planetengetriebe Baureihe LP
Die Motoren 1FK7 können mit Planetengetrieben auf einfache Weise zu kompakten koaxialgebauten Antriebseinheiten kombi-niert werden. Die Getriebe werden direkt an die A-Seite der Motoren angeflanscht.
Bei der Auswahl ist zu beachten, dass die zulässige Antriebs-drehzahl des Getriebes nicht von der max. Drehzahl des Motors überschritten wird. Bei hohen Schalthäufigkeiten muss der Zuschlagsfaktor f2 berücksichtigt werden (siehe Projektierungs-anleitung). Grundsätzlich sind bei der Projektierung die Reibungsverluste des Getriebes zu berücksichtigen.
Die Getriebe sind nur ungewuchtet und mit Passfeder lieferbar.
■ Nutzen
7 Hoher Wirkungsgrad > 97%7 Verdrehspiel: 1-stufig � 12 arcmin7 Leistungsverteilung vom zentralen Sonnenrad auf die
Planetenräder7 Durch die symmetrische Kraftverteilung treten keine
Wellenbiegungen im Planetenradsatz auf.7 Die geschlossenen und werkseitig mit Fett befüllten
Getriebe werden über eine integrierte Klemmnabe mit der Motorwelle verbunden. Hierzu ist ein glattes Motorwellen-ende erforderlich. Es genügt die Rundlauftoleranz N nach DIN 42955. Der Motorflansch wird über Adapterplatten angepasst.
7 Getriebeabdichtung zum Motor im Getriebe7 Getriebeabtrieb genau koaxial zum Motor7 Die Getriebe sind für jede Einbaulage geeignet.7 Die Getriebe sind werkseitig mit Fett befüllt.
Sie sind lebenslang geschmiert und abgedichtet (Lebensdauer 20000 h).
7 Schutzart IP647 Kleine Abmessungen7 Geringes Gewicht
■ Integration
Die den einzelnen Motoren zugeordneten Getriebe sowie die für diese Motor-Getriebe-Kombinationen lieferbaren Getriebeüber-setzungen i sind in der nachfolgenden Auswahltabelle zusam-mengestellt. Bei der Auswahl ist die maximal zulässige Ein-gangsdrehzahl des Getriebes (gleich der maximalen Drehzahl des Motors) zu beachten.
Die in der Auswahltabelle zusammengestellten Motor-Getriebe-Kombinationen sind in erster Linie für den Positionierbetrieb (S5) vorgesehen. Bei Bemessungsdrehzahl und Bemessungsdreh-moment ist Dauerbetrieb (S1) zulässig. Eine Getriebetemperatur von +90 °C darf nicht überschritten werden.
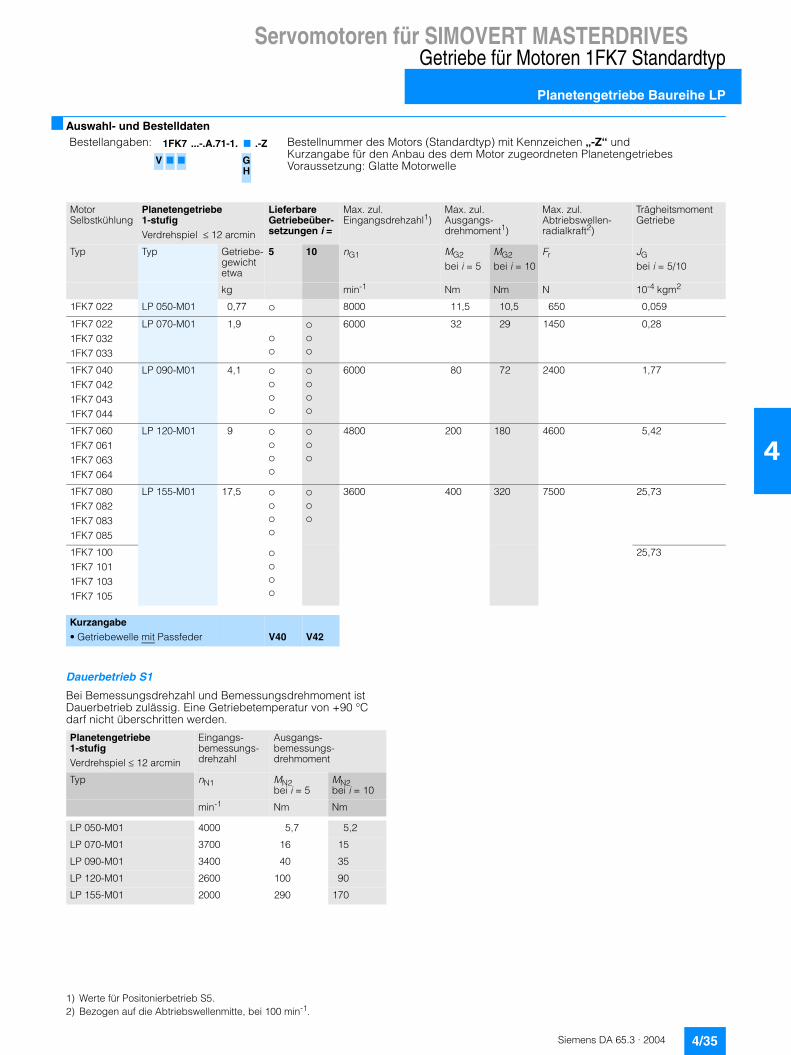
Siemens DA 65.3 · 2004 4/35
Servomotoren für SIMOVERT MASTERDRIVESGetriebe für Motoren 1FK7 Standardtyp
Planetengetriebe Baureihe LP
4
■ Auswahl- und Bestelldaten
Dauerbetrieb S1
Bei Bemessungsdrehzahl und Bemessungsdrehmoment ist Dauerbetrieb zulässig. Eine Getriebetemperatur von +90 °C darf nicht überschritten werden.
1) Werte für Positonierbetrieb S5.2) Bezogen auf die Abtriebswellenmitte, bei 100 min-1.
Bestellangaben: 1FK7 ...-.A.71-1. 7 .-Z Bestellnummer des Motors (Standardtyp) mit Kennzeichen „-Z“ undKurzangabe für den Anbau des dem Motor zugeordneten PlanetengetriebesVoraussetzung: Glatte MotorwelleV 7 7 G
H
Motor Selbstkühlung
Planetengetriebe 1-stufigVerdrehspiel � 12 arcmin
Lieferbare Getriebeüber-setzungen i =
Max. zul. Eingangsdrehzahl1)
Max. zul. Ausgangs-drehmoment1)
Max. zul. Abtriebswellen-radialkraft2)
Trägheitsmoment Getriebe
Typ Typ Getriebe-gewicht etwa
5 10 nG1 MG2
bei i = 5MG2
bei i = 10Fr JG
bei i = 5/10
kg min-1 Nm Nm N 10-4 kgm2
1FK7 022 LP 050-M01 0,77 v 8000 11,5 10,5 650 0,059
1FK7 0221FK7 0321FK7 033
LP 070-M01 1,9vv
vvv
6000 32 29 1450 0,28
1FK7 0401FK7 0421FK7 0431FK7 044
LP 090-M01 4,1 vvvv
vvvv
6000 80 72 2400 1,77
1FK7 0601FK7 0611FK7 0631FK7 064
LP 120-M01 9 vvvv
vvv
4800 200 180 4600 5,42
1FK7 0801FK7 0821FK7 0831FK7 085
LP 155-M01 17,5 vvvv
vvv
3600 400 320 7500 25,73
1FK7 1001FK7 1011FK7 1031FK7 105
vvvv
25,73
Kurzangabe• Getriebewelle mit Passfeder V40 V42
Planetengetriebe 1-stufigVerdrehspiel � 12 arcmin
Eingangs-bemessungs-drehzahl
Ausgangs-bemessungs-drehmoment
Typ nN1 MN2bei i = 5
MN2bei i = 10
min-1 Nm Nm
LP 050-M01 4000 5,7 5,2
LP 070-M01 3700 16 15
LP 090-M01 3400 40 35
LP 120-M01 2600 100 90
LP 155-M01 2000 290 170

Siemens DA 65.3 · 20044/36
Servomotoren für SIMOVERT MASTERDRIVES
Planetengetriebe Baureihe SP
Getriebe für Motoren 1FT6 Standardtyp
4
■ Übersicht
Motoren 1FT6 mit angebautem Planetengetriebe
Die Motoren 1FT6 können mit Planetengetrieben zu kompakten koaxialgebauten Antriebseinheiten kombiniert werden. Die Ge-triebe werden direkt an die A-Seite der Motoren angeflanscht.
Bei der Auswahl ist zu beachten, dass die zulässige Antriebs-drehzahl des Getriebes nicht von der max. Drehzahl des Motors überschritten wird. Bei hohen Schalthäufigkeiten muss der Zuschlagsfaktor f2 berücksichtigt werden (siehe Projektierungs-anleitung). Grundsätzlich sind bei der Projektierung die Rei-bungsverluste des Getriebes zu berücksichtigen.
Die Getriebe sind nur ungewuchtet lieferbar.
■ Nutzen
7 Hoher Wirkungsgrad > 94% 2-stufig, > 97% 1-stufig7 Leistungsverteilung vom zentralen Sonnenrad auf die
Planetenräder7 Durch die symmetrische Kraftverteilung treten keine
Wellenbiegungen im Planetenradsatz auf.7 Sehr geringes Trägheitsmoment; daher kurze Hochlaufzeiten
bei den Motoren7 Abtriebsseitige Lagerung für hohe Quer- und Axialbelastung
durch vorgespannte Kegelrollenlager7 Die geschlossenen und werkseitig mit Öl befüllten Getriebe
werden über eine integrierte Klemmnabe mit der Motorwelle verbunden. Hierzu sind ein glattes Motorwellenende sowie die Schwingungsstärkestufe N nach EN 60034-14 erforderlich. Es genügt die Rundlauftoleranz N nach DIN 42955.
7 Der Betrieb ist in allen Einbaulagen möglich.7 Die Getriebe sind werkseitig mit einem hochwertigen synthe-
tischen Getriebeöl der Viskositätsklasse ISO VG 220 befüllt. Die eingefüllte Ölmenge ist für die Einbaulage IM B5. Bei den 1-stufigen Getrieben der Baugröße SP 060 bis SP 140 sind die Ölmengen für alle Einbaulagen gleich. Bei den Baugrößen SP 180 bis SP 240 und bei allen 2-stufigen Getrieben sind für andere Einbaulagen andere Ölmengen erforderlich. Hier Ein-baulage bei Bestellung angeben.
7 Getriebeabtrieb genau koaxial zum Motor7 Getriebeölabdichtung zum Motor im Getriebe7 Kleine Abmessungen7 Geringes Gewicht 7 Schutzart IP64
■ Integration
Die den einzelnen Motoren zugeordneten Getriebe sowie die für diese Motor-Getriebe-Kombinationen lieferbaren Getriebeüber-setzungen i sind in der nachfolgenden Auswahltabelle zusam-mengestellt. Bei der Auswahl ist die maximal zulässige Ein-gangsdrehzahl des Getriebes (gleich der maximalen Drehzahl des Motors) zu beachten.
Die in den Auswahltabellen zusammengestellten Motor-Ge-triebe-Kombinationen sind in erster Linie für den Positionier-betrieb (S5) vorgesehen. Für den Einsatz im Dauerbetrieb bei hohen Drehzahlen ist Rückfrage beim Getriebehersteller er-forderlich.
Bei der Zuordnung der Getriebe zum Motor ist gemäß der Projektierungsanleitung zu verfahren.
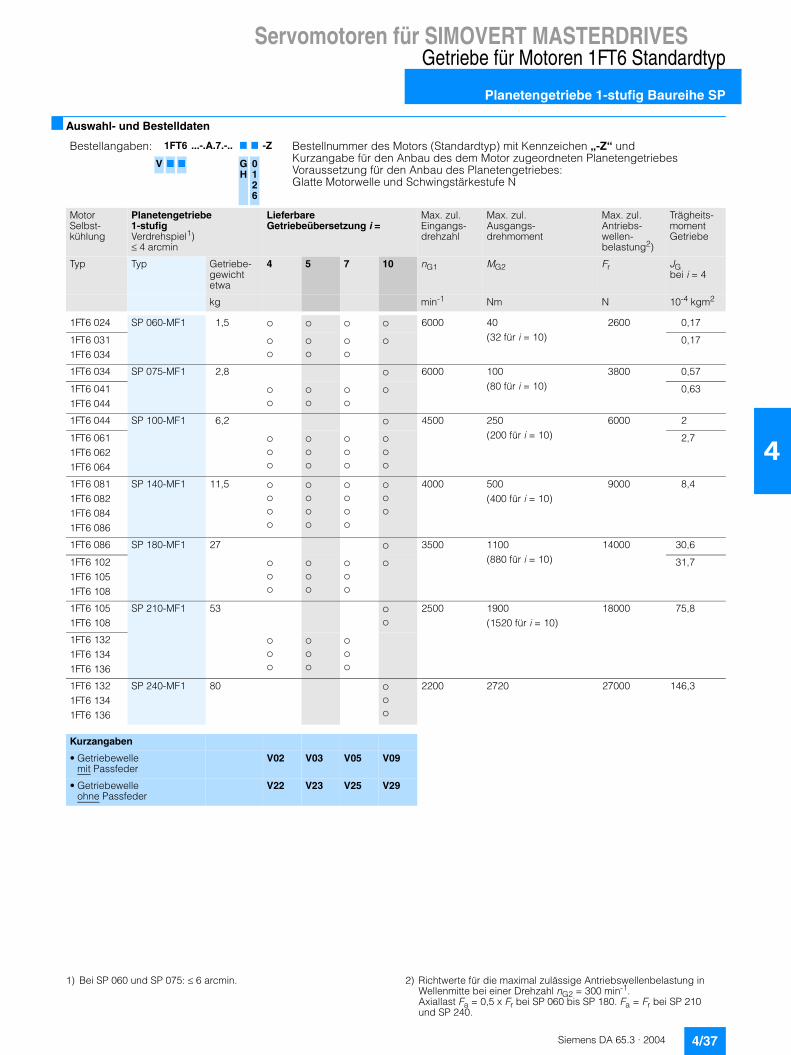
Siemens DA 65.3 · 2004 4/37
Servomotoren für SIMOVERT MASTERDRIVESGetriebe für Motoren 1FT6 Standardtyp
Planetengetriebe 1-stufig Baureihe SP
4
■ Auswahl- und Bestelldaten
Bestellangaben: 1FT6 ...-.A.7.-.. 7 7 -Z Bestellnummer des Motors (Standardtyp) mit Kennzeichen „-Z“ und Kurzangabe für den Anbau des dem Motor zugeordneten PlanetengetriebesVoraussetzung für den Anbau des Planetengetriebes:Glatte Motorwelle und Schwingstärkestufe N
V 7 7 GH
0126
MotorSelbst-kühlung
Planetengetriebe 1-stufigVerdrehspiel1)� 4 arcmin
Lieferbare Getriebeübersetzung i =
Max. zul. Eingangs-drehzahl
Max. zul. Ausgangs-drehmoment
Max. zul. Antriebs-wellen-belastung2)
Trägheits-momentGetriebe
Typ Typ Getriebe-gewicht etwa
4 5 7 10 nG1 MG2 Fr JG bei i = 4
kg min-1 Nm N 10-4 kgm2
1FT6 024 SP 060-MF1 1,5 v v v v 6000 40(32 für i = 10)
2600 0,17
1FT6 0311FT6 034
vv
vv
vv
v 0,17
1FT6 034 SP 075-MF1 2,8 v 6000 100(80 für i = 10)
3800
0,57
1FT6 0411FT6 044
vv
vv
vv
v 0,63
1FT6 044 SP 100-MF1 6,2 v 4500 250(200 für i = 10)
6000 2
1FT6 0611FT6 0621FT6 064
vvv
vvv
vvv
vvv
2,7
1FT6 0811FT6 0821FT6 0841FT6 086
SP 140-MF1 11,5 vvvv
vvvv
vvvv
vvv
4000 500(400 für i = 10)
9000 8,4
1FT6 086 SP 180-MF1 27 v 3500 1100(880 für i = 10)
14000 30,6
1FT6 102 1FT6 1051FT6 108
vvv
vvv
vvv
v 31,7
1FT6 1051FT6 108
SP 210-MF1 53 vv
2500 1900(1520 für i = 10)
18000 75,8
1FT6 1321FT6 1341FT6 136
vvv
vvv
vvv
1FT6 1321FT6 1341FT6 136
SP 240-MF1 80 vvv
2200 2720 27000 146,3
Kurzangaben
• Getriebewellemit Passfeder
V02 V03 V05 V09
• Getriebewelleohne Passfeder
V22 V23 V25 V29
1) Bei SP 060 und SP 075: � 6 arcmin. 2) Richtwerte für die maximal zulässige Antriebswellenbelastung in Wellenmitte bei einer Drehzahl nG2 = 300 min-1.Axiallast Fa = 0,5 x Fr bei SP 060 bis SP 180. Fa = Fr bei SP 210 und SP 240.
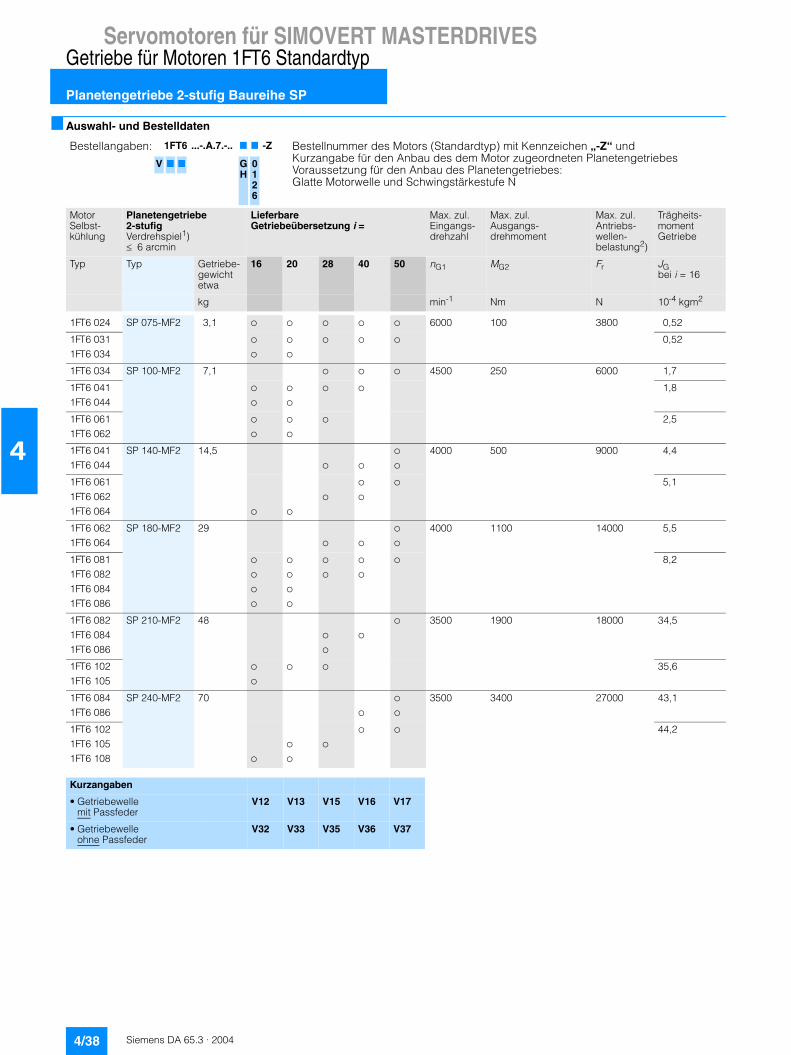
Siemens DA 65.3 · 20044/38
Servomotoren für SIMOVERT MASTERDRIVES
Planetengetriebe 2-stufig Baureihe SP
Getriebe für Motoren 1FT6 Standardtyp
4
■ Auswahl- und Bestelldaten
Bestellangaben: 1FT6 ...-.A.7.-.. 7 7 -Z Bestellnummer des Motors (Standardtyp) mit Kennzeichen „-Z“ undKurzangabe für den Anbau des dem Motor zugeordneten PlanetengetriebesVoraussetzung für den Anbau des Planetengetriebes:Glatte Motorwelle und Schwingstärkestufe N
V 7 7 GH
0126
MotorSelbst-kühlung
Planetengetriebe 2-stufigVerdrehspiel1)� 6 arcmin
Lieferbare Getriebeübersetzung i =
Max. zul. Eingangs-drehzahl
Max. zul. Ausgangs-drehmoment
Max. zul. Antriebs-wellen-belastung2)
Trägheits-momentGetriebe
Typ Typ Getriebe-gewicht etwa
16 20 28 40 50 nG1 MG2 Fr JG bei i = 16
kg min-1 Nm N 10-4 kgm2
1FT6 024 SP 075-MF2 3,1 v v v v v 6000 100 3800 0,52
1FT6 0311FT6 034
v
v
v
v
v v v 0,52
1FT6 034 SP 100-MF2 7,1 v v v 4500 250 6000 1,7
1FT6 0411FT6 044
v
v
v
v
v v 1,8
1FT6 0611FT6 062
v
v
v
v
v 2,5
1FT6 0411FT6 044
SP 140-MF2 14,5v v
v
v
4000 500 9000 4,4
1FT6 0611FT6 0621FT6 064 v v
v
v
v
v 5,1
1FT6 0621FT6 064
SP 180-MF2 29v v
v
v
4000 1100 14000 5,5
1FT6 0811FT6 0821FT6 0841FT6 086
v
v
v
v
v
v
v
v
v
v
v
v
v 8,2
1FT6 0821FT6 0841FT6 086
SP 210-MF2 48v
v
v
v 3500 1900 18000 34,5
1FT6 1021FT6 105
v
v
v v 35,6
1FT6 0841FT6 086
SP 240-MF2 70v
v
v
3500 3400 27000 43,1
1FT6 1021FT6 1051FT6 108 v
v
v
v
v v 44,2
Kurzangaben
• Getriebewellemit Passfeder
V12 V13 V15 V16 V17
• Getriebewelleohne Passfeder
V32 V33 V35 V36 V37

Siemens DA 65.3 · 2004 4/39
Servomotoren für SIMOVERT MASTERDRIVESGetriebe für Motoren 1PH7
Zweigang-Schaltgetriebe (Fa. ZF)
4
■ Übersicht
Schnitt durch ein Planetengetriebe
Schaltgetriebe erhöhen das Antriebsdrehmoment bei niedrigen Motordrehzahlen und erweitern den vom Asynchron-Servomotor angebotenen Bereich konstanter Leistung.
■ Technische Merkmale der Zweigang-Schaltgetriebe
• Antriebsleistung bis 100 kW• Bereich konstanter Leistung an der Antriebsachse bis 1:24• Geeignet für beide Drehrichtungen• Motor-Baugrößen AH 100 bis AH 225• Bauformen IM B 35 und IM V 15 (IM V 36 auf Anfrage)• Getriebe-Wirkungsgrad > 95%• Die Antriebsleistung kann anstatt über Keilriemen auch über
ein Zahnritzel (auf Anfrage) oder koaxial über eine Ausgleichs-Kupplung vom Getriebeabtrieb übertragen werden.
■ Aufbau, Arbeitsweise
Die Zweigang-Schaltgetriebe sind Planetengetriebe. Vom zen-tralen Sonnenrad wird die Leistung auf mehrere Planetenräder verteilt. Durch dieses Getriebesystem ergeben sich besonders kleine Abmessungen. Das Getriebe-Schaltelement, eine axial bewegte, verzahnte Schiebemuffe, ist formschlüssig.
Schaltstellung 1: Getriebeübersetzung i1 = 4.
Schaltstellung 2:Getriebeübersetzung i2 = 1.
Der Motor wird über einen Adapterring am Schaltgetriebe ange-flanscht. Für den Anbau muss der Drehstrommotor entspre-chend vorbereitet sein.
Ab Achshöhe 160 ist der Motor in der Bauform IM B 35 und IM V 15 auf der B-Seite verspannungsfrei abzustützen.
Bei Einleitung von Querkräften auf das Getriebe sind diese vom Getriebe zu tragen und auf das Maschinenfundament zu über-tragen.
Für alle 2K-Getriebe müssen die Motoren mit Passfeder vollkeil-gewuchtet sein. Die Getriebe 2K 120, 2K 250, 2K 300 sind ab-gedichtet, so dass der Motorflansch in Standardausführung ausreichend gedichtet ist.
Vertikale Einbaulagen IM V 15, IM V 36 erfordern bei den Getrie-ben eine Umlaufschmierung.
In der Standardausführung haben die Schaltgetriebe bis 2K 300 ein Verdrehspiel von max. 30 Winkelminuten (am Getriebeab-trieb gemessen). Die Getriebeschaltstellung hat nahezu keinen Einfluss auf das Verdrehspiel. Auf Anfrage sind verschiedene Sonderausführungen lieferbar.• Eingeengtes Spiel mit Sondermaßnahmen: max. 20’• Eingeengtes Spiel für erhöhte Anforderungen: max. 15’
Die Antriebseinheit (Motor + Getriebe) wird in Schwingstärke-stufe R nach EN 60034-14 (IEC 60034-14) geliefert. Das gilt auch, wenn der Motor in Schwingstärkestufe S bestellt wird.
Die Riemenscheibe1) soll als Topfscheibe ausgeführt werden. Zur Befestigung der Riemenscheibe hat die Getriebe-Abtriebs-welle einen Flansch mit Außenzentrierung und Gewindebohrun-gen. Dadurch ist eine sichere Montage und Demontage der Rie-menscheibe gewährleistet.
■ Integration
Die 1PH-Motoren können auch mit angeflanschtem Planetenge-triebe geliefert werden. Die Motor-Getriebe-Einheit ist funktions-geprüft. Die gesamte Antriebseinheit, d. h. 1PH7- oder 1PH4-Motor mit angebautem ZF-Schaltgetriebe, kann bei Siemens di-rekt bestellt werden:
Bei der Bestellung ist folgendes anzugeben:
Bestellbeispiel für 1PH4-Motor:
Motor komplett mit Getriebe 1PH4 133-4NF56-ZK002LG4 315-3FD11
Bestellbeispiel für 1PH7-Motor:
Motor komplett mit Getriebe 1PH7 186-2NF03-0BC22LG4 260-1JD211) Nicht im Lieferumfang enthalten.
Siemens AG
Industrial Solutions and ServicesAnsprechpartner: Hr. BritzIm Schiffelland 10, D-66386 St. IngbertTelefax: +49(0)6894-891-112E-Mail: [email protected]
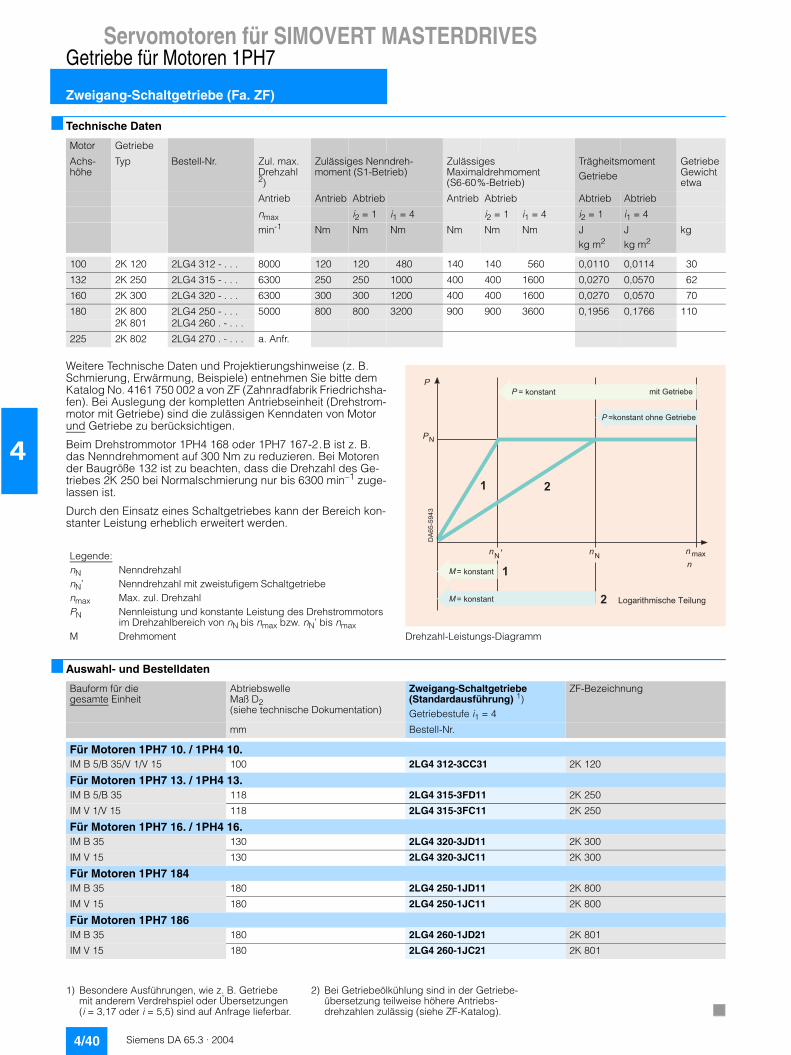
Siemens DA 65.3 · 20044/40
Servomotoren für SIMOVERT MASTERDRIVES
Zweigang-Schaltgetriebe (Fa. ZF)
Getriebe für Motoren 1PH7
4
■ Technische Daten
Weitere Technische Daten und Projektierungshinweise (z. B. Schmierung, Erwärmung, Beispiele) entnehmen Sie bitte dem Katalog No. 4161 750 002 a von ZF (Zahnradfabrik Friedrichsha-fen). Bei Auslegung der kompletten Antriebseinheit (Drehstrom-motor mit Getriebe) sind die zulässigen Kenndaten von Motor und Getriebe zu berücksichtigen.
Beim Drehstrommotor 1PH4 168 oder 1PH7 167-2.B ist z. B. das Nenndrehmoment auf 300 Nm zu reduzieren. Bei Motoren der Baugröße 132 ist zu beachten, dass die Drehzahl des Ge-triebes 2K 250 bei Normalschmierung nur bis 6300 min–1 zuge-lassen ist.
Durch den Einsatz eines Schaltgetriebes kann der Bereich kon-stanter Leistung erheblich erweitert werden.
Drehzahl-Leistungs-Diagramm
■ Auswahl- und Bestelldaten
Motor Getriebe
Achs-höhe
Typ Bestell-Nr. Zul. max. Drehzahl 2)
Zulässiges Nenndreh-moment (S1-Betrieb)
Zulässiges Maximaldrehmoment (S6-60%-Betrieb)
TrägheitsmomentGetriebe
Getriebe Gewicht etwa
Antrieb Antrieb Abtrieb Antrieb Abtrieb Abtrieb Abtrieb
nmax i2 = 1 i1 = 4 i2 = 1 i1 = 4 i2 = 1 i1 = 4
min-1 Nm Nm Nm Nm Nm Nm Jkg m2
Jkg m2
kg
100 2K 120 2LG4 312 - . . . 8000 120 120 480 140 140 560 0,0110 0,0114 30
132 2K 250 2LG4 315 - . . . 6300 250 250 1000 400 400 1600 0,0270 0,0570 62
160 2K 300 2LG4 320 - . . . 6300 300 300 1200 400 400 1600 0,0270 0,0570 70
180 2K 800 2LG4 250 - . . . 5000 800 800 3200 900 900 3600 0,1956 0,1766 1102K 801 2LG4 260 . - . . .
225 2K 802 2LG4 270 . - . . . a. Anfr.
Legende:nN NenndrehzahlnN’ Nenndrehzahl mit zweistufigem Schaltgetriebenmax Max. zul. DrehzahlPN Nennleistung und konstante Leistung des Drehstrommotors
im Drehzahlbereich von nN bis nmax bzw. nN’ bis nmaxM Drehmoment
� �
�
$ "�%
��
����
&�
�$
�
�
�
�$�
� �
�
'�(��������
�'�(�������
�'�(�������
)���� ��" �����*� �#��
�����+��� �,�'(�������
" ��+��� �,�
Bauform für die gesamte Einheit
Abtriebswelle Maß D2(siehe technische Dokumentation)
Zweigang-Schaltgetriebe (Standardausführung) 1)Getriebestufe i1 = 4
ZF-Bezeichnung
mm Bestell-Nr.
Für Motoren 1PH7 10. / 1PH4 10.IM B 5/B 35/V 1/V 15 100 2LG4 312-3CC31 2K 120
Für Motoren 1PH7 13. / 1PH4 13.IM B 5/B 35 118 2LG4 315-3FD11 2K 250
IM V 1/V 15 118 2LG4 315-3FC11 2K 250
Für Motoren 1PH7 16. / 1PH4 16.IM B 35 130 2LG4 320-3JD11 2K 300
IM V 15 130 2LG4 320-3JC11 2K 300
Für Motoren 1PH7 184IM B 35 180 2LG4 250-1JD11 2K 800
IM V 15 180 2LG4 250-1JC11 2K 800
Für Motoren 1PH7 186IM B 35 180 2LG4 260-1JD21 2K 801
IM V 15 180 2LG4 260-1JC21 2K 801
1) Besondere Ausführungen, wie z. B. Getriebe mit anderem Verdrehspiel oder Übersetzungen (i = 3,17 oder i = 5,5) sind auf Anfrage lieferbar.
2) Bei Getriebeölkühlung sind in der Getriebe-übersetzung teilweise höhere Antriebs-drehzahlen zulässig (siehe ZF-Katalog).
Siemens DA 65.3 · 2004
55/2 Allgemeines
5/5 Leistungsleitungen
5/9 Signalleitungen
5/15 Längenschlüssel
VerbindungstechnikMOTION-CONNECT
Siemens DA 65.3 · 20045/2
Servomotoren für SIMOVERT MASTERDRIVES
Allgemeines
Verbindungstechnik MOTION-CONNECT
5
■ Übersicht
Die MOTION-CONNECT-Leitungen sind für den Einsatz bei den verschiedensten Bearbeitungs- und Produktionsmaschinen geeignet.
Die Leistungs- und Signalleitungen sind als Meterware und konfektioniert bestellbar.
MOTION-CONNECT besteht aus den Leitungsausführungen:7 MOTION-CONNECT 500, die Lösung für vorwiegend feste
Verlegung.7 MOTION-CONNECT 500 PLUS ist schleppkettentauglich,
beständig gegen mineralische Öle (ausgenommen sind Bio-Öle und Schneideöle) und deshalb besonders geeignet für Holzbearbeitungsmaschinen, Druckmaschinen und einfache Werkzeugmaschinen.Die aktuellen Signalleitungen MOTION-CONNECT 500 erfüllen bereits die Anforderungen der MOTION-CONNECT 500 PLUS, so dass bei den Signalleitungen keine neue Type notwendig ist.
7 MOTION-CONNECT 700, die optimale Ergänzung zu Linear-motoren und für Maschinen mit hohen mechanischen Anfor-derungen.
7 MOTION-CONNECT 800 erfüllt alle Anforderungen für den Einsatz in Schleppketten bei Bearbeitungs- und Produktions-maschinen.
■ Nutzen
Der Einsatz von konfektionierten Leitungen MOTION-CONNECT bietet Ihnen folgende Vorteile:• Hohe Qualität, daher Sicherheit bei einwandfreier Funktion• Kosteneinsparungen bei Logistik, Konstruktion, Montage und
im Einkauf• Mängelhaftung durch Siemens• Metergenaue Lieferung (Zwischenlängen auf Anfrage).
■ Anwendungsbereich
Bei der Festlegung von Leitungslängen für die in diesem Kata-log beschriebenen Systeme und Anwendungen sind die ange-gebenen technisch zulässigen maximalen Leitungslängen ein-zuhalten. Bei Verwendung längerer Leitungen kann es zu Funktionsstörungen kommen.
Die Siemens AG übernimmt in diesem Fall keine Mängelhaftung für Übertragbarkeit der Signale oder der Leistung.
Die Leitungen sind nicht für die Verwendung im Freien bestimmt.
Schutzart der konfektionierten Leistungs- und Signalleitungen und deren Verlängerungsleitungen in geschlossenem und gestecktem Zustand: IP67
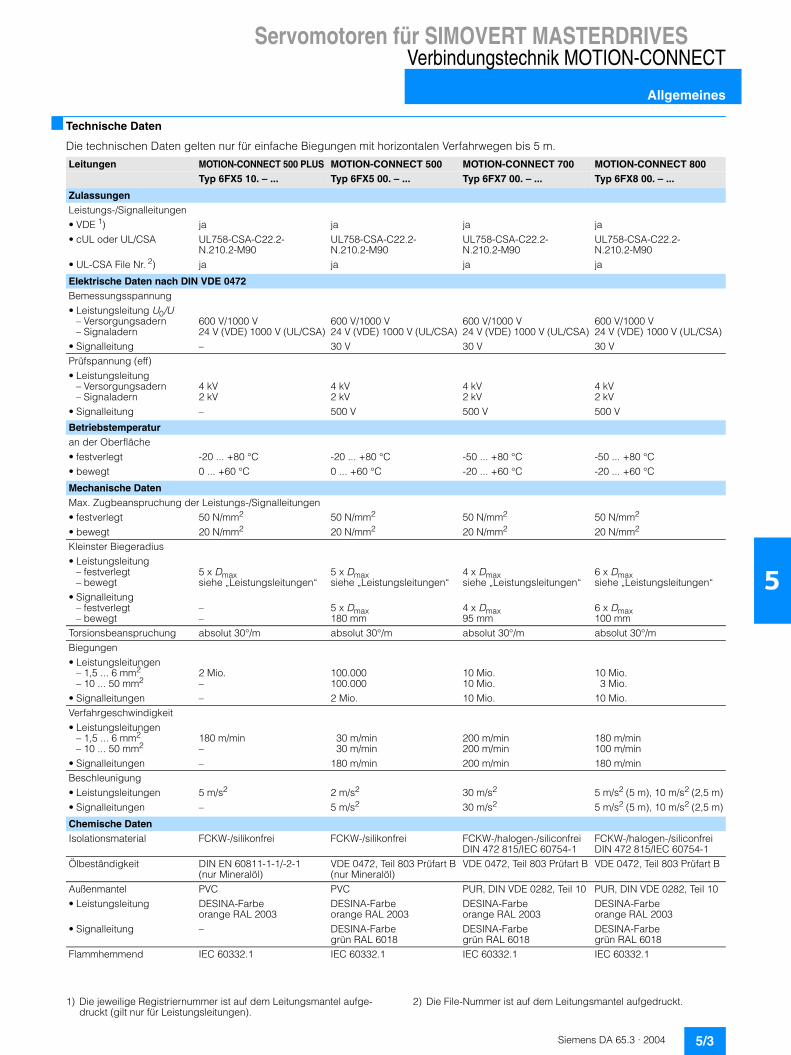
Siemens DA 65.3 · 2004 5/3
Servomotoren für SIMOVERT MASTERDRIVESVerbindungstechnik MOTION-CONNECT
Allgemeines
5
■ Technische Daten
Die technischen Daten gelten nur für einfache Biegungen mit horizontalen Verfahrwegen bis 5 m.
Leitungen MOTION-CONNECT 500 PLUS MOTION-CONNECT 500 MOTION-CONNECT 700 MOTION-CONNECT 800 Typ 6FX5 10. – ... Typ 6FX5 00. – ... Typ 6FX7 00. – ... Typ 6FX8 00. – ...
ZulassungenLeistungs-/Signalleitungen• VDE 1) ja ja ja ja• cUL oder UL/CSA UL758-CSA-C22.2-
N.210.2-M90UL758-CSA-C22.2-N.210.2-M90
UL758-CSA-C22.2-N.210.2-M90
UL758-CSA-C22.2-N.210.2-M90
• UL-CSA File Nr. 2) ja ja ja ja
Elektrische Daten nach DIN VDE 0472Bemessungsspannung• Leistungsleitung U0/U
– Versorgungsadern 600 V/1000 V 600 V/1000 V 600 V/1000 V 600 V/1000 V– Signaladern 24 V (VDE) 1000 V (UL/CSA) 24 V (VDE) 1000 V (UL/CSA) 24 V (VDE) 1000 V (UL/CSA) 24 V (VDE) 1000 V (UL/CSA)
• Signalleitung – 30 V 30 V 30 VPrüfspannung (eff)• Leistungsleitung
– Versorgungsadern 4 kV 4 kV 4 kV 4 kV– Signaladern 2 kV 2 kV 2 kV 2 kV
• Signalleitung – 500 V 500 V 500 V
Betriebstemperaturan der Oberfläche• festverlegt -20 ... +80 °C -20 ... +80 °C -50 ... +80 °C -50 ... +80 °C• bewegt 0 ... +60 °C 0 ... +60 °C -20 ... +60 °C -20 ... +60 °C
Mechanische DatenMax. Zugbeanspruchung der Leistungs-/Signalleitungen• festverlegt 50 N/mm2 50 N/mm2 50 N/mm2 50 N/mm2
• bewegt 20 N/mm2 20 N/mm2 20 N/mm2 20 N/mm2
Kleinster Biegeradius• Leistungsleitung
– festverlegt 5 x Dmax 5 x Dmax 4 x Dmax 6 x Dmax– bewegt siehe „Leistungsleitungen“ siehe „Leistungsleitungen“ siehe „Leistungsleitungen“ siehe „Leistungsleitungen“
• Signalleitung– festverlegt – 5 x Dmax 4 x Dmax 6 x Dmax– bewegt – 180 mm 95 mm 100 mm
Torsionsbeanspruchung absolut 30°/m absolut 30°/m absolut 30°/m absolut 30°/mBiegungen• Leistungsleitungen
– 1,5 ... 6 mm2 2 Mio. 100.000 10 Mio. 10 Mio.– 10 ... 50 mm2 – 100.000 10 Mio. 3 Mio.
• Signalleitungen – 2 Mio. 10 Mio. 10 Mio.Verfahrgeschwindigkeit• Leistungsleitungen
– 1,5 ... 6 mm2 180 m/min 30 m/min 200 m/min 180 m/min– 10 ... 50 mm2 – 30 m/min 200 m/min 100 m/min
• Signalleitungen – 180 m/min 200 m/min 180 m/minBeschleunigung• Leistungsleitungen 5 m/s2 2 m/s2 30 m/s2 5 m/s2 (5 m), 10 m/s2 (2,5 m)• Signalleitungen – 5 m/s2 30 m/s2 5 m/s2 (5 m), 10 m/s2 (2,5 m)
Chemische DatenIsolationsmaterial FCKW-/silikonfrei FCKW-/silikonfrei FCKW-/halogen-/siliconfrei
DIN 472 815/IEC 60754-1FCKW-/halogen-/siliconfreiDIN 472 815/IEC 60754-1
Ölbeständigkeit DIN EN 60811-1-1/-2-1(nur Mineralöl)
VDE 0472, Teil 803 Prüfart B(nur Mineralöl)
VDE 0472, Teil 803 Prüfart B VDE 0472, Teil 803 Prüfart B
Außenmantel PVC PVC PUR, DIN VDE 0282, Teil 10 PUR, DIN VDE 0282, Teil 10• Leistungsleitung DESINA-Farbe
orange RAL 2003DESINA-Farbe orange RAL 2003
DESINA-Farbe orange RAL 2003
DESINA-Farbe orange RAL 2003
• Signalleitung – DESINA-Farbe grün RAL 6018
DESINA-Farbe grün RAL 6018
DESINA-Farbe grün RAL 6018
Flammhemmend IEC 60332.1 IEC 60332.1 IEC 60332.1 IEC 60332.1
1) Die jeweilige Registriernummer ist auf dem Leitungsmantel aufge-druckt (gilt nur für Leistungsleitungen).
2) Die File-Nummer ist auf dem Leitungsmantel aufgedruckt.
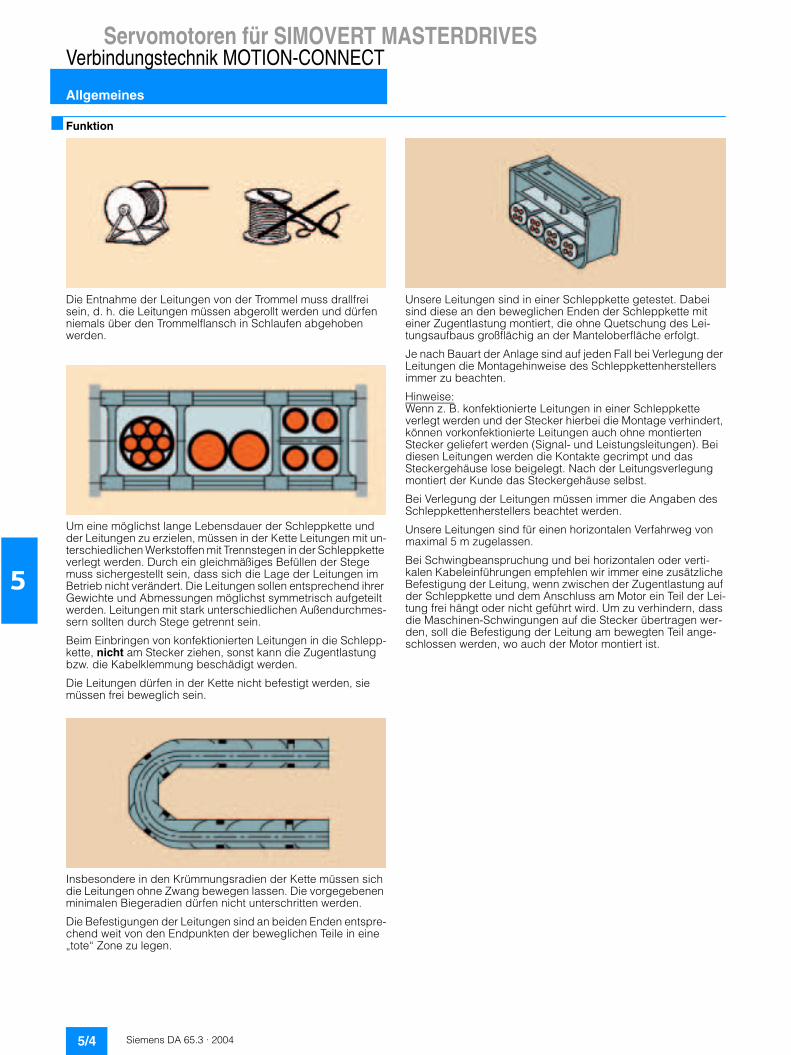
Siemens DA 65.3 · 20045/4
Servomotoren für SIMOVERT MASTERDRIVES
Allgemeines
Verbindungstechnik MOTION-CONNECT
5
■ Funktion
Die Entnahme der Leitungen von der Trommel muss drallfrei sein, d. h. die Leitungen müssen abgerollt werden und dürfen niemals über den Trommelflansch in Schlaufen abgehoben werden.
Um eine möglichst lange Lebensdauer der Schleppkette und der Leitungen zu erzielen, müssen in der Kette Leitungen mit un-terschiedlichen Werkstoffen mit Trennstegen in der Schleppkette verlegt werden. Durch ein gleichmäßiges Befüllen der Stege muss sichergestellt sein, dass sich die Lage der Leitungen im Betrieb nicht verändert. Die Leitungen sollen entsprechend ihrer Gewichte und Abmessungen möglichst symmetrisch aufgeteilt werden. Leitungen mit stark unterschiedlichen Außendurchmes-sern sollten durch Stege getrennt sein.
Beim Einbringen von konfektionierten Leitungen in die Schlepp-kette, nicht am Stecker ziehen, sonst kann die Zugentlastung bzw. die Kabelklemmung beschädigt werden.
Die Leitungen dürfen in der Kette nicht befestigt werden, sie müssen frei beweglich sein.
Insbesondere in den Krümmungsradien der Kette müssen sich die Leitungen ohne Zwang bewegen lassen. Die vorgegebenen minimalen Biegeradien dürfen nicht unterschritten werden.
Die Befestigungen der Leitungen sind an beiden Enden entspre-chend weit von den Endpunkten der beweglichen Teile in eine „tote“ Zone zu legen.
Unsere Leitungen sind in einer Schleppkette getestet. Dabei sind diese an den beweglichen Enden der Schleppkette mit einer Zugentlastung montiert, die ohne Quetschung des Lei-tungsaufbaus großflächig an der Manteloberfläche erfolgt.
Je nach Bauart der Anlage sind auf jeden Fall bei Verlegung der Leitungen die Montagehinweise des Schleppkettenherstellers immer zu beachten.
Hinweise:Wenn z. B. konfektionierte Leitungen in einer Schleppkette verlegt werden und der Stecker hierbei die Montage verhindert, können vorkonfektionierte Leitungen auch ohne montierten Stecker geliefert werden (Signal- und Leistungsleitungen). Bei diesen Leitungen werden die Kontakte gecrimpt und das Steckergehäuse lose beigelegt. Nach der Leitungsverlegung montiert der Kunde das Steckergehäuse selbst.
Bei Verlegung der Leitungen müssen immer die Angaben des Schleppkettenherstellers beachtet werden.
Unsere Leitungen sind für einen horizontalen Verfahrweg von maximal 5 m zugelassen.
Bei Schwingbeanspruchung und bei horizontalen oder verti-kalen Kabeleinführungen empfehlen wir immer eine zusätzliche Befestigung der Leitung, wenn zwischen der Zugentlastung auf der Schleppkette und dem Anschluss am Motor ein Teil der Lei-tung frei hängt oder nicht geführt wird. Um zu verhindern, dass die Maschinen-Schwingungen auf die Stecker übertragen wer-den, soll die Befestigung der Leitung am bewegten Teil ange-schlossen werden, wo auch der Motor montiert ist.
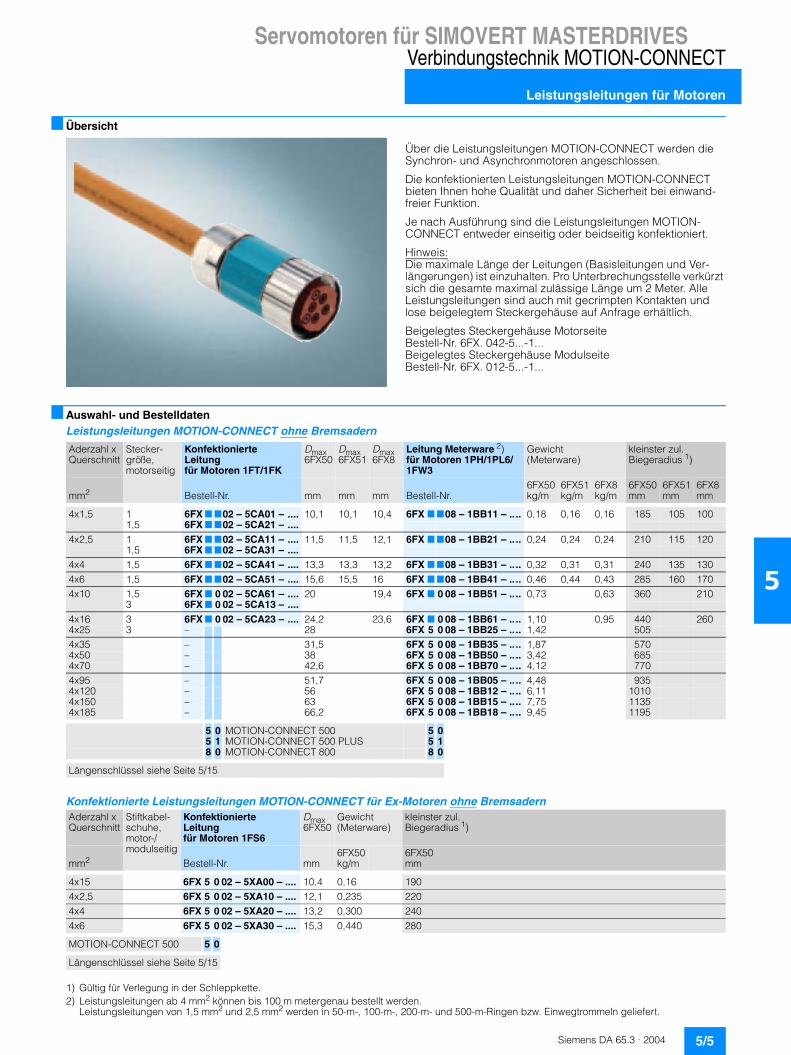
Siemens DA 65.3 · 2004 5/5
Servomotoren für SIMOVERT MASTERDRIVESVerbindungstechnik MOTION-CONNECT
Leistungsleitungen für Motoren
5
■ Übersicht
Über die Leistungsleitungen MOTION-CONNECT werden die Synchron- und Asynchronmotoren angeschlossen.
Die konfektionierten Leistungsleitungen MOTION-CONNECT bieten Ihnen hohe Qualität und daher Sicherheit bei einwand-freier Funktion.
Je nach Ausführung sind die Leistungsleitungen MOTION-CONNECT entweder einseitig oder beidseitig konfektioniert.
Hinweis:Die maximale Länge der Leitungen (Basisleitungen und Ver-längerungen) ist einzuhalten. Pro Unterbrechungsstelle verkürzt sich die gesamte maximal zulässige Länge um 2 Meter. Alle Leistungsleitungen sind auch mit gecrimpten Kontakten und lose beigelegtem Steckergehäuse auf Anfrage erhältlich.
Beigelegtes Steckergehäuse Motorseite Bestell-Nr. 6FX. 042-5...-1...Beigelegtes Steckergehäuse Modulseite Bestell-Nr. 6FX. 012-5...-1...
■ Auswahl- und BestelldatenLeistungsleitungen MOTION-CONNECT ohne Bremsadern
1) Gültig für Verlegung in der Schleppkette.2) Leistungsleitungen ab 4 mm2 können bis 100 m metergenau bestellt werden.
Leistungsleitungen von 1,5 mm2 und 2,5 mm2 werden in 50-m-, 100-m-, 200-m- und 500-m-Ringen bzw. Einwegtrommeln geliefert.
Aderzahl x Querschnitt
Stecker-größe, motorseitig
Konfektionierte Leitung für Motoren 1FT/1FK
Dmax6FX50
Dmax6FX51
Dmax6FX8
Leitung Meterware 2)für Motoren 1PH/1PL6/ 1FW3
Gewicht(Meterware)
kleinster zul.Biegeradius 1)
mm2 Bestell-Nr. mm mm mm Bestell-Nr.6FX50kg/m
6FX51kg/m
6FX8kg/m
6FX50mm
6FX51mm
6FX8mm
4x1,5 1 6FX 7 702 – 5CA01 – .... 10,1 10,1 10,4 6FX 7 708 – 1BB11 – .... 0,18 0,16 0,16 185 105 1001,5 6FX 7 702 – 5CA21 – ....
4x2,5 1 6FX 7 702 – 5CA11 – .... 11,5 11,5 12,1 6FX 7 708 – 1BB21 – .... 0,24 0,24 0,24 210 115 1201,5 6FX 7 702 – 5CA31 – ....
4x4 1,5 6FX 7 702 – 5CA41 – .... 13,3 13,3 13,2 6FX 7 708 – 1BB31 – .... 0,32 0,31 0,31 240 135 1304x6 1,5 6FX 7 702 – 5CA51 – .... 15,6 15,5 16 6FX 7 708 – 1BB41 – .... 0,46 0,44 0,43 285 160 1704x10 1,5 6FX 7 0 02 – 5CA61 – .... 20 19,4 6FX 7 0 08 – 1BB51 – .... 0,73 0,63 360 210
3 6FX 7 0 02 – 5CA13 – ....4x16 3 6FX 7 0 02 – 5CA23 – .... 24,2 23,6 6FX 7 0 08 – 1BB61 – .... 1,10 0,95 440 2604x25 3 – 28 6FX 5 0 08 – 1BB25 – .... 1,42 5054x35 – 31,5 6FX 5 0 08 – 1BB35 – .... 1,87 5704x50 – 38 6FX 5 0 08 – 1BB50 – .... 3,42 6854x70 – 42,6 6FX 5 0 08 – 1BB70 – .... 4,12 7704x95 – 51,7 6FX 5 0 08 – 1BB05 – .... 4,48 9354x120 – 56 6FX 5 0 08 – 1BB12 – .... 6,11 10104x150 – 63 6FX 5 0 08 – 1BB15 – .... 7,75 11354x185 – 66,2 6FX 5 0 08 – 1BB18 – .... 9,45 1195
5 0 MOTION-CONNECT 500 5 05 1 MOTION-CONNECT 500 PLUS 5 18 0 MOTION-CONNECT 800 8 0
Längenschlüssel siehe Seite 5/15
Konfektionierte Leistungsleitungen MOTION-CONNECT für Ex-Motoren ohne BremsadernAderzahl x Querschnitt
Stiftkabel-schuhe, motor-/modulseitig
Konfektionierte Leitung für Motoren 1FS6
Dmax6FX50
Gewicht(Meterware)
kleinster zul.Biegeradius 1)
mm2 Bestell-Nr. mm6FX50kg/m
6FX50mm
4x15 6FX 5 0 02 – 5XA00 – .... 10,4 0,16 1904x2,5 6FX 5 0 02 – 5XA10 – .... 12,1 0,235 2204x4 6FX 5 0 02 – 5XA20 – .... 13,2 0,300 2404x6 6FX 5 0 02 – 5XA30 – .... 15,3 0,440 280
MOTION-CONNECT 500 5 0
Längenschlüssel siehe Seite 5/15
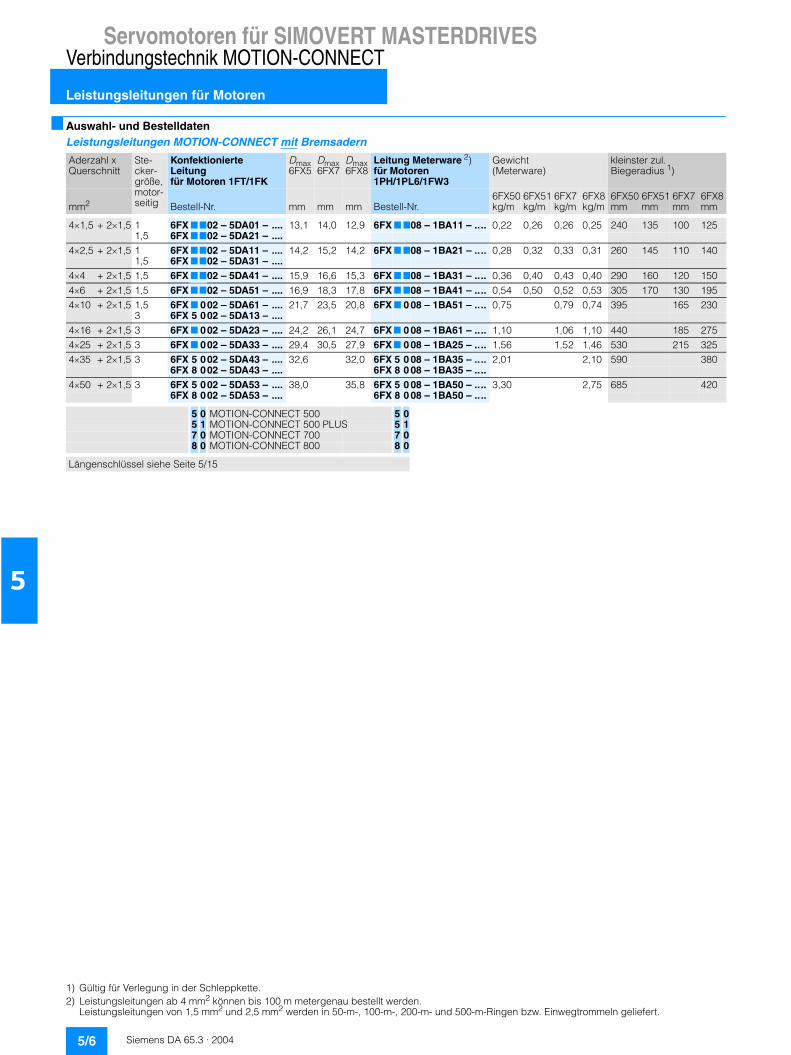
Siemens DA 65.3 · 20045/6
Servomotoren für SIMOVERT MASTERDRIVES
Leistungsleitungen für Motoren
Verbindungstechnik MOTION-CONNECT
5
■ Auswahl- und BestelldatenLeistungsleitungen MOTION-CONNECT mit Bremsadern
1) Gültig für Verlegung in der Schleppkette.2) Leistungsleitungen ab 4 mm2 können bis 100 m metergenau bestellt werden.
Leistungsleitungen von 1,5 mm2 und 2,5 mm2 werden in 50-m-, 100-m-, 200-m- und 500-m-Ringen bzw. Einwegtrommeln geliefert.
Aderzahl xQuerschnitt
Ste-cker-größe, motor-seitig
Konfektionierte Leitung für Motoren 1FT/1FK
Dmax6FX5
Dmax6FX7
Dmax6FX8
Leitung Meterware 2)für Motoren 1PH/1PL6/1FW3
Gewicht(Meterware)
kleinster zul.Biegeradius 1)
mm2 Bestell-Nr. mm mm mm Bestell-Nr.6FX50 kg/m
6FX51 kg/m
6FX7kg/m
6FX8kg/m
6FX50 mm
6FX51 mm
6FX7mm
6FX8mm
4�1,5 + 2�1,5 1 6FX 7 702 – 5DA01 – .... 13,1 14,0 12,9 6FX 7 708 – 1BA11 – .... 0,22 0,26 0,26 0,25 240 135 100 1251,5 6FX 7 702 – 5DA21 – ....
4�2,5 + 2�1,5 1 6FX 7 702 – 5DA11 – .... 14,2 15,2 14,2 6FX 7 708 – 1BA21 – .... 0,28 0,32 0,33 0,31 260 145 110 1401,5 6FX 7 702 – 5DA31 – ....
4�4 + 2�1,5 1,5 6FX 7 702 – 5DA41 – .... 15,9 16,6 15,3 6FX 7 708 – 1BA31 – .... 0,36 0,40 0,43 0,40 290 160 120 1504�6 + 2�1,5 1,5 6FX 7 702 – 5DA51 – .... 16,9 18,3 17,8 6FX 7 708 – 1BA41 – .... 0,54 0,50 0,52 0,53 305 170 130 1954�10 + 2�1,5 1,5 6FX 7 002 – 5DA61 – .... 21,7 23,5 20,8 6FX 7 0 08 – 1BA51 – .... 0,75 0,79 0,74 395 165 230
3 6FX 5 002 – 5DA13 – ....4�16 + 2�1,5 3 6FX 7 002 – 5DA23 – .... 24,2 26,1 24,7 6FX 7 0 08 – 1BA61 – .... 1,10 1,06 1,10 440 185 2754�25 + 2�1,5 3 6FX 7 002 – 5DA33 – .... 29,4 30,5 27,9 6FX 7 0 08 – 1BA25 – .... 1,56 1,52 1,46 530 215 3254�35 + 2�1,5 3 6FX 5 002 – 5DA43 – .... 32,6 32,0 6FX 5 0 08 – 1BA35 – .... 2,01 2,10 590 380
6FX 8 002 – 5DA43 – .... 6FX 8 0 08 – 1BA35 – ....4�50 + 2�1,5 3 6FX 5 002 – 5DA53 – .... 38,0 35,8 6FX 5 0 08 – 1BA50 – .... 3,30 2,75 685 420
6FX 8 002 – 5DA53 – .... 6FX 8 0 08 – 1BA50 – ....
5 0 MOTION-CONNECT 500 5 05 1 MOTION-CONNECT 500 PLUS 5 17 0 MOTION-CONNECT 700 7 08 0 MOTION-CONNECT 800 8 0
Längenschlüssel siehe Seite 5/15
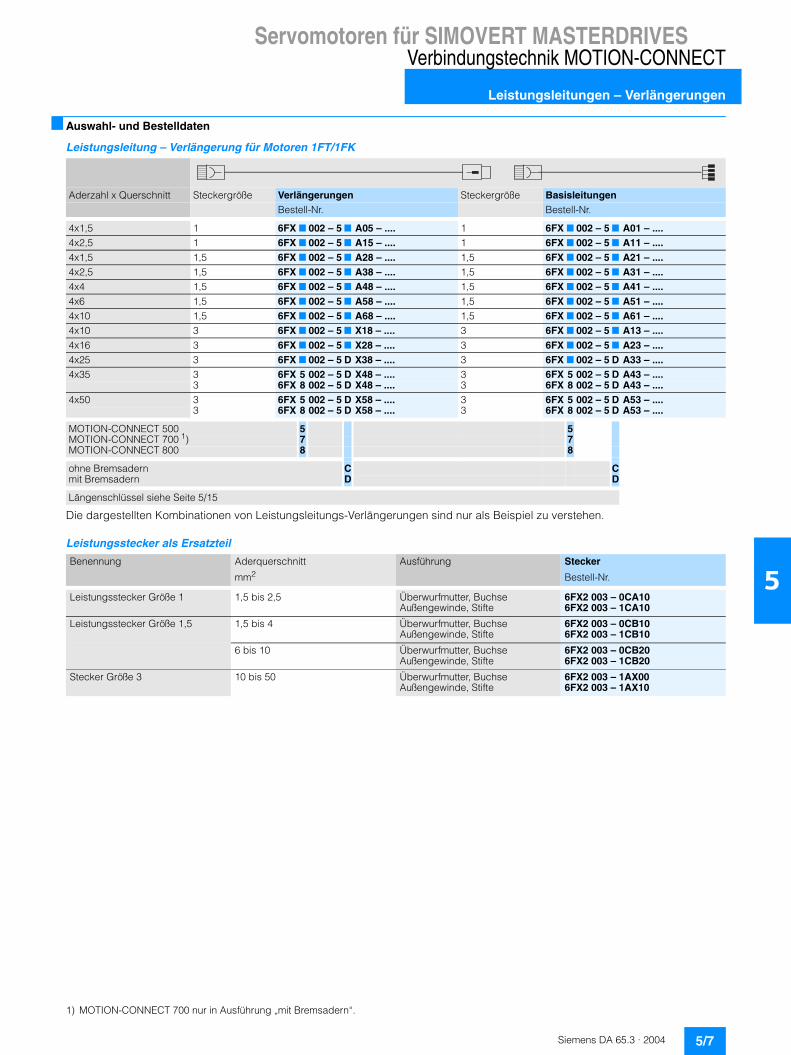
Siemens DA 65.3 · 2004 5/7
Servomotoren für SIMOVERT MASTERDRIVESVerbindungstechnik MOTION-CONNECT
Leistungsleitungen – Verlängerungen
5
■ Auswahl- und Bestelldaten
Leistungsleitung – Verlängerung für Motoren 1FT/1FK
Die dargestellten Kombinationen von Leistungsleitungs-Verlängerungen sind nur als Beispiel zu verstehen.
Leistungsstecker als Ersatzteil
1) MOTION-CONNECT 700 nur in Ausführung „mit Bremsadern“.
Aderzahl x Querschnitt Steckergröße Verlängerungen Steckergröße BasisleitungenBestell-Nr. Bestell-Nr.
4x1,5 1 6FX 7 002 – 5 7 A05 – .... 1 6FX 7 002 – 5 7 A01 – ....4x2,5 1 6FX 7 002 – 5 7 A15 – .... 1 6FX 7 002 – 5 7 A11 – ....4x1,5 1,5 6FX 7 002 – 5 7 A28 – .... 1,5 6FX 7 002 – 5 7 A21 – ....4x2,5 1,5 6FX 7 002 – 5 7 A38 – .... 1,5 6FX 7 002 – 5 7 A31 – ....4x4 1,5 6FX 7 002 – 5 7 A48 – .... 1,5 6FX 7 002 – 5 7 A41 – ....4x6 1,5 6FX 7 002 – 5 7 A58 – .... 1,5 6FX 7 002 – 5 7 A51 – ....4x10 1,5 6FX 7 002 – 5 7 A68 – .... 1,5 6FX 7 002 – 5 7 A61 – ....4x10 3 6FX 7 002 – 5 7 X18 – .... 3 6FX 7 002 – 5 7 A13 – ....4x16 3 6FX 7 002 – 5 7 X28 – .... 3 6FX 7 002 – 5 7 A23 – ....4x25 3 6FX 7 002 – 5 D X38 – .... 3 6FX 7 002 – 5 D A33 – ....4x35 3 6FX 5 002 – 5 D X48 – .... 3 6FX 5 002 – 5 D A43 – ....
3 6FX 8 002 – 5 D X48 – .... 3 6FX 8 002 – 5 D A43 – ....4x50 3 6FX 5 002 – 5 D X58 – .... 3 6FX 5 002 – 5 D A53 – ....
3 6FX 8 002 – 5 D X58 – .... 3 6FX 8 002 – 5 D A53 – ....
MOTION-CONNECT 500 5 5MOTION-CONNECT 700 1) 7 7MOTION-CONNECT 800 8 8
ohne Bremsadern mit Bremsadern
C CD D
Längenschlüssel siehe Seite 5/15
Benennung Aderquerschnitt Ausführung Stecker
mm2 Bestell-Nr.
Leistungsstecker Größe 1 1,5 bis 2,5 Überwurfmutter, BuchseAußengewinde, Stifte
6FX2 003 – 0CA106FX2 003 – 1CA10
Leistungsstecker Größe 1,5 1,5 bis 4 Überwurfmutter, BuchseAußengewinde, Stifte
6FX2 003 – 0CB106FX2 003 – 1CB10
6 bis 10 Überwurfmutter, BuchseAußengewinde, Stifte
6FX2 003 – 0CB206FX2 003 – 1CB20
Stecker Größe 3 10 bis 50 Überwurfmutter, BuchseAußengewinde, Stifte
6FX2 003 – 1AX006FX2 003 – 1AX10
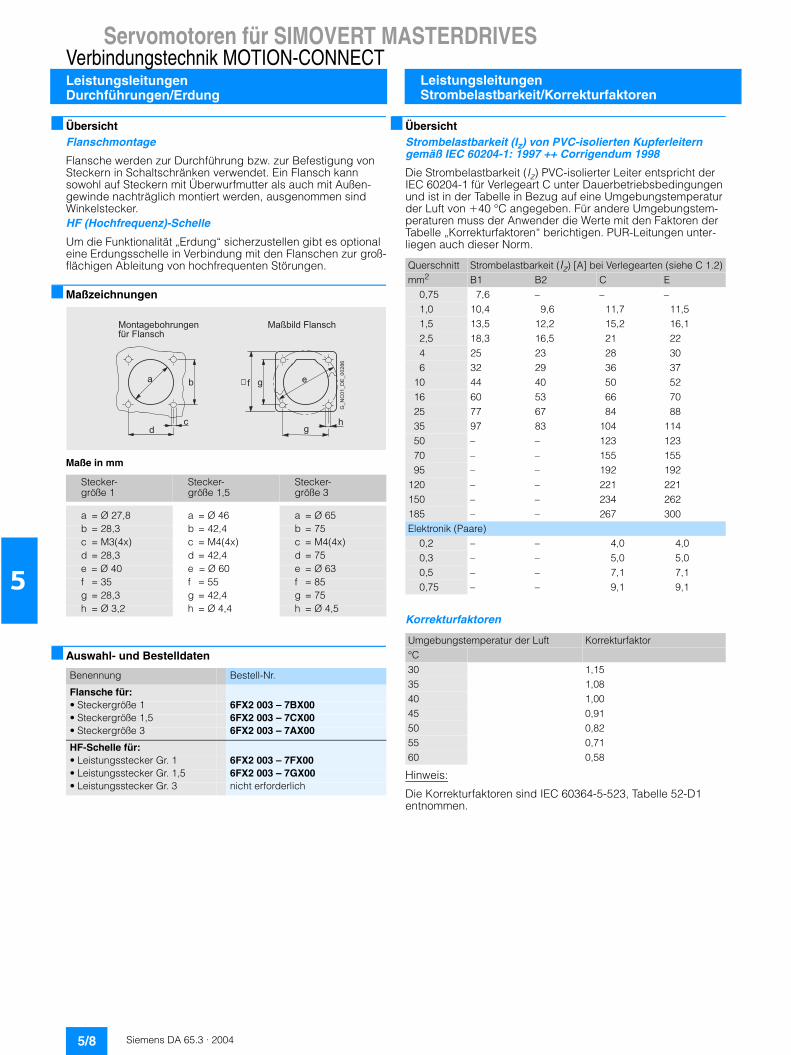
Siemens DA 65.3 · 20045/8
Servomotoren für SIMOVERT MASTERDRIVES
LeistungsleitungenDurchführungen/Erdung
Verbindungstechnik MOTION-CONNECT
5
■ ÜbersichtFlanschmontage
Flansche werden zur Durchführung bzw. zur Befestigung von Steckern in Schaltschränken verwendet. Ein Flansch kann sowohl auf Steckern mit Überwurfmutter als auch mit Außen-gewinde nachträglich montiert werden, ausgenommen sind Winkelstecker.HF (Hochfrequenz)-Schelle
Um die Funktionalität „Erdung“ sicherzustellen gibt es optional eine Erdungsschelle in Verbindung mit den Flanschen zur groß-flächigen Ableitung von hochfrequenten Störungen.
■ Maßzeichnungen
■ Auswahl- und Bestelldaten
■ ÜbersichtStrombelastbarkeit (Iz) von PVC-isolierten Kupferleitern gemäß IEC 60204-1: 1997 ++ Corrigendum 1998
Die Strombelastbarkeit (Iz) PVC-isolierter Leiter entspricht der IEC 60204-1 für Verlegeart C unter Dauerbetriebsbedingungen und ist in der Tabelle in Bezug auf eine Umgebungstemperatur der Luft von 140 °C angegeben. Für andere Umgebungstem-peraturen muss der Anwender die Werte mit den Faktoren der Tabelle „Korrekturfaktoren“ berichtigen. PUR-Leitungen unter-liegen auch dieser Norm.
Korrekturfaktoren
Hinweis:
Die Korrekturfaktoren sind IEC 60364-5-523, Tabelle 52-D1 entnommen.
Maße in mm
Stecker-größe 1
Stecker-größe 1,5
Stecker-größe 3
a = Ø 27,8 a = Ø 46 a = Ø 65b = 28,3 b = 42,4 b = 75c = M3(4x) c = M4(4x) c = M4(4x)d = 28,3 d = 42,4 d = 75e = Ø 40 e = Ø 60 e = Ø 63f = 35 f = 55 f = 85g = 28,3 g = 42,4 g = 75h = Ø 3,2 h = Ø 4,4 h = Ø 4,5
Benennung Bestell-Nr.
Flansche für:• Steckergröße 1 6FX2 003 – 7BX00• Steckergröße 1,5 6FX2 003 – 7CX00• Steckergröße 3 6FX2 003 – 7AX00
HF-Schelle für:• Leistungsstecker Gr. 1 6FX2 003 – 7FX00• Leistungsstecker Gr. 1,5 6FX2 003 – 7GX00• Leistungsstecker Gr. 3 nicht erforderlich
�
� �
��
��
�
�
�� !��"����
#$������$��%�����&��'(�����
#�)��(��'(�����
Querschnitt Strombelastbarkeit (Iz) [A] bei Verlegearten (siehe C 1.2)mm2 B1 B2 C E
0,75 7,6 – – –1,0 10,4 9,6 11,7 11,51,5 13,5 12,2 15,2 16,12,5 18,3 16,5 21 224 25 23 28 306 32 29 36 37
10 44 40 50 5216 60 53 66 7025 77 67 84 8835 97 83 104 11450 – – 123 12370 – – 155 15595 – – 192 192
120 – – 221 221150 – – 234 262185 – – 267 300Elektronik (Paare)
0,2 – – 4,0 4,00,3 – – 5,0 5,00,5 – – 7,1 7,10,75 – – 9,1 9,1
Umgebungstemperatur der Luft Korrekturfaktor°C30 1,1535 1,0840 1,0045 0,9150 0,8255 0,7160 0,58
LeistungsleitungenStrombelastbarkeit/Korrekturfaktoren
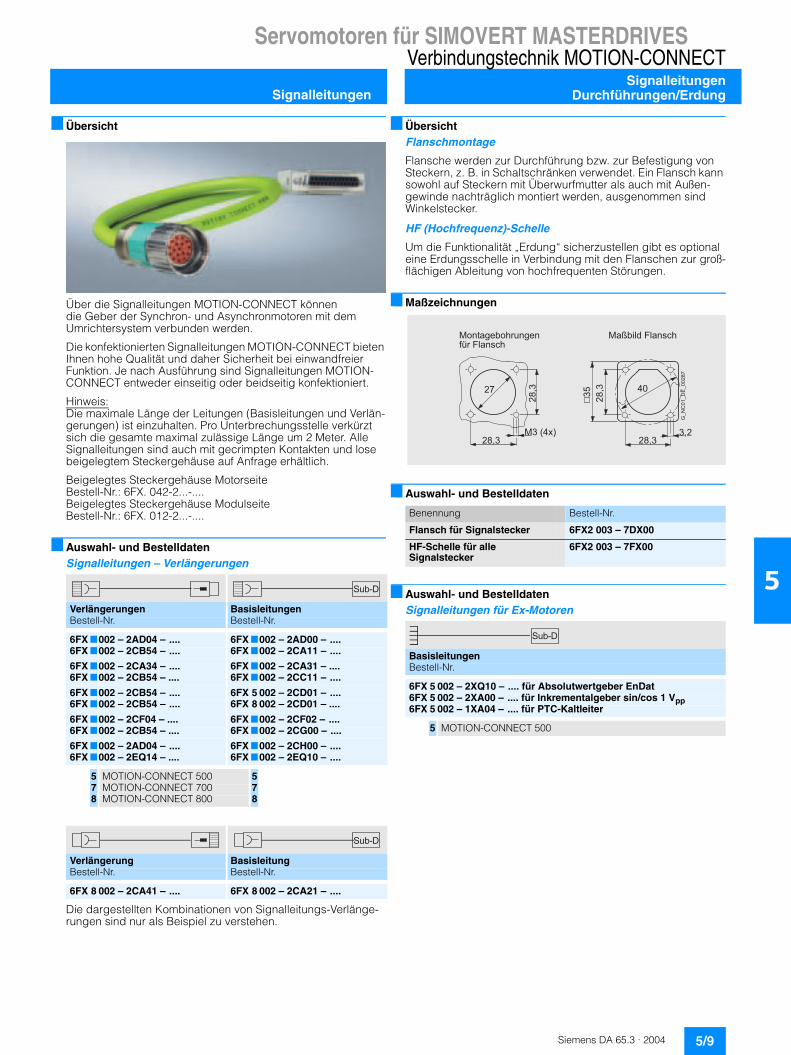
Siemens DA 65.3 · 2004 5/9
Servomotoren für SIMOVERT MASTERDRIVESVerbindungstechnik MOTION-CONNECT
SignalleitungenDurchführungen/Erdung
5
■ Übersicht
Über die Signalleitungen MOTION-CONNECT können die Geber der Synchron- und Asynchronmotoren mit dem Umrichtersystem verbunden werden.
Die konfektionierten Signalleitungen MOTION-CONNECT bieten Ihnen hohe Qualität und daher Sicherheit bei einwandfreier Funktion. Je nach Ausführung sind Signalleitungen MOTION-CONNECT entweder einseitig oder beidseitig konfektioniert.
Hinweis:Die maximale Länge der Leitungen (Basisleitungen und Verlän-gerungen) ist einzuhalten. Pro Unterbrechungsstelle verkürzt sich die gesamte maximal zulässige Länge um 2 Meter. Alle Signalleitungen sind auch mit gecrimpten Kontakten und lose beigelegtem Steckergehäuse auf Anfrage erhältlich.
Beigelegtes Steckergehäuse Motorseite Bestell-Nr.: 6FX. 042-2...-....Beigelegtes Steckergehäuse Modulseite Bestell-Nr.: 6FX. 012-2...-....
■ Auswahl- und BestelldatenSignalleitungen – Verlängerungen
Die dargestellten Kombinationen von Signalleitungs-Verlänge-rungen sind nur als Beispiel zu verstehen.
■ ÜbersichtFlanschmontage
Flansche werden zur Durchführung bzw. zur Befestigung von Steckern, z. B. in Schaltschränken verwendet. Ein Flansch kann sowohl auf Steckern mit Überwurfmutter als auch mit Außen-gewinde nachträglich montiert werden, ausgenommen sind Winkelstecker.
HF (Hochfrequenz)-Schelle
Um die Funktionalität „Erdung“ sicherzustellen gibt es optional eine Erdungsschelle in Verbindung mit den Flanschen zur groß-flächigen Ableitung von hochfrequenten Störungen.
■ Maßzeichnungen
■ Auswahl- und Bestelldaten
■ Auswahl- und BestelldatenSignalleitungen für Ex-Motoren
Verlängerungen BasisleitungenBestell-Nr. Bestell-Nr.
6FX 7002 – 2AD04 – .... 6FX 7002 – 2AD00 – ....6FX 7002 – 2CB54 – .... 6FX 7002 – 2CA11 – ....
6FX 7002 – 2CA34 – .... 6FX 7002 – 2CA31 – ....6FX 7002 – 2CB54 – .... 6FX 7002 – 2CC11 – ....
6FX 7002 – 2CB54 – .... 6FX 5 002 – 2CD01 – ....6FX 7002 – 2CB54 – .... 6FX 8 002 – 2CD01 – ....
6FX 7002 – 2CF04 – .... 6FX 7002 – 2CF02 – ....6FX 7002 – 2CB54 – .... 6FX 7002 – 2CG00 – ....
6FX 7002 – 2AD04 – .... 6FX 7002 – 2CH00 – ....6FX 7002 – 2EQ14 – .... 6FX 7002 – 2EQ10 – ....
5 MOTION-CONNECT 500 57 MOTION-CONNECT 700 78 MOTION-CONNECT 800 8
Verlängerung BasisleitungBestell-Nr. Bestell-Nr.
6FX 8 002 – 2CA41 – .... 6FX 8 002 – 2CA21 – ....
*%���
*%���
Benennung Bestell-Nr.
Flansch für Signalstecker 6FX2 003 – 7DX00
HF-Schelle für alle Signalstecker
6FX2 003 – 7FX00
BasisleitungenBestell-Nr.
6FX 5 002 – 2XQ10 – .... für Absolutwertgeber EnDat6FX 5 002 – 2XA00 – .... für Inkrementalgeber sin/cos 1 Vpp6FX 5 002 – 1XA04 – .... für PTC-Kaltleiter
5 MOTION-CONNECT 500
��+
��
��+
# �,�-.
�� !��"����
��+
� �
+�
��+
#$������$��%�����&��'(�����
#�)��(��'(�����
*%���
Signalleitungen
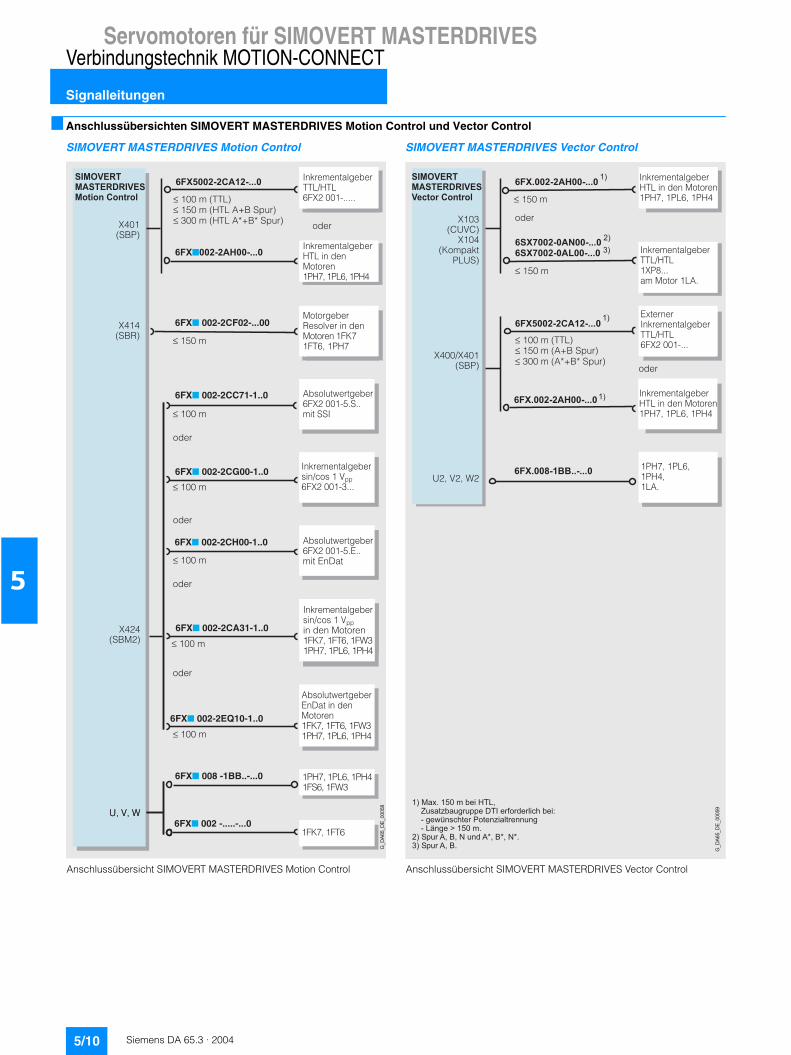
Siemens DA 65.3 · 20045/10
Servomotoren für SIMOVERT MASTERDRIVES
Signalleitungen
Verbindungstechnik MOTION-CONNECT
5
■ Anschlussübersichten SIMOVERT MASTERDRIVES Motion Control und Vector Control
SIMOVERT MASTERDRIVES Motion Control SIMOVERT MASTERDRIVES Vector Control
5��D�9�,E
%**9������
�2� �����
�
*/4%=�*/4'=�*/)%
;=�,=�6
F&!&.5-�!1
F&*&.5-91
F&+*.5- 1
;=�,=�6
F&!&.5-�!1
F&*&.5-91
F&+*.5- 1
* 7'=�* �%=�* 7&*/5%=�*/6"
*/4%=�*/4'=�*/)%
;=�,=�6
��*++��
��*++��
(1I��99,#,F699#-AA9
(1I��99,#,F+-#-AA9
(1I��998�#-��AA#AAA9
*/4'=�*/)%
��*++��
(1I��99,#,F�99#-AA9
��*++��
(1I��99,#,FF'-#-AA9
��*$+��
(1I��99,#,F19,#AAA99
������������������
(1I��99,�#AAAAA#AAA9
�����������������
��*++��
(1I��99,#,D:-9#-AA9
���������������%/F!�++*2$�E��� ��E����
����
���������������� �3����*�,��%/F!�++*2"���
����
����
���������������%/F!�++*2$�5��� ��55�
����
����������9���:��� �������������*/4'*/)%=�* 7'
���������������7)�� ������������* 7'=�* �%=�* 7&
����
���������������� �3����*�,�� �������������*/4'=�*/)%=�*/6"* 7'=�* �%=�* 7&
��*++���.))�1��*$+���.7)���G-�5���1��"++���.7)���HG-H�5���1
���������������))�37)�%/F!�++*2�����
���������������E����� ������������*/4'=�*/)%=�*/6"* 7'=�* �%=�* 7&
����������������������� �!���!�"�#
��������"���
Anschlussübersicht SIMOVERT MASTERDRIVES Motion Control
F&*&.5-91
F&+*.5- 1
F&++3F&+*.5- 1
F*+".I;,I1F*+&
.4������ �;51
;!=�,!=�6!
������������������
����������������������������$�������
��*$+��
�����������������
������������������
����������������� * 7'=�* �%=* 7&=*���
���������������))�37)�*F (������������*���
��*$+��
���������������7)�� �������������* 7'=�* �%=�* 7&
���������������������%&��"���!�"�#
��������"���
����
E?���������������������))�37)�%/F!�++*2���
.�#�-/���0�����123+����4%���5��%��%66���27����$����(�������8��������9&��������:$���5��(�����%��������3;����<���0/�.�*6%���+�=+� �%����>+�=>+� >/ .�*6%���+�=/
.
�.
.
.
.
����
���������������7)�� �������������* 7'=�* �%=�* 7&
��*++���.))�1��*$+���.�G-�5���1��"++���.�HG-H�5���1
Anschlussübersicht SIMOVERT MASTERDRIVES Vector Control
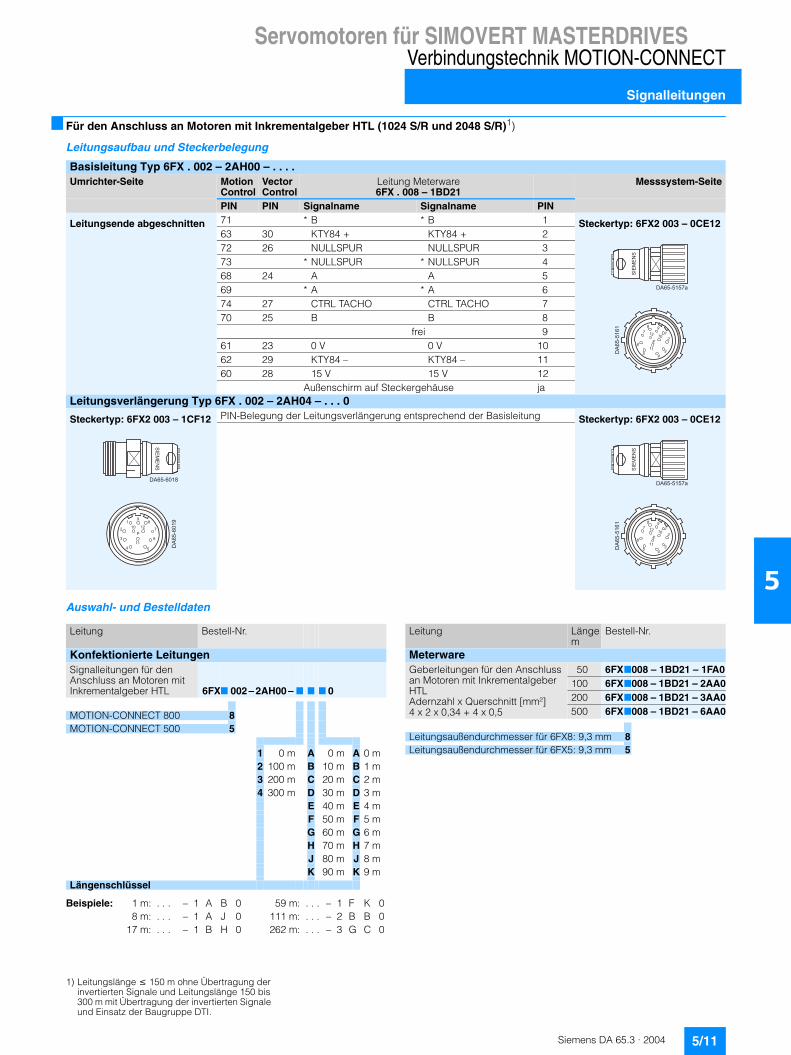
Siemens DA 65.3 · 2004 5/11
Servomotoren für SIMOVERT MASTERDRIVESVerbindungstechnik MOTION-CONNECT
Signalleitungen
5
■ Für den Anschluss an Motoren mit Inkrementalgeber HTL (1024 S/R und 2048 S/R)1)
Leitungsaufbau und Steckerbelegung
Auswahl- und Bestelldaten
Basisleitung Typ 6FX . 002 – 2AH00 – . . . .Umrichter-Seite Motion
ControlVectorControl
Leitung Meterware6FX . 008 – 1BD21
Messsystem-Seite
PIN PIN Signalname Signalname PIN71 * B * B 163 30 KTY84 + KTY84 + 272 26 NULLSPUR NULLSPUR 373 * NULLSPUR * NULLSPUR 468 24 A A 569 * A * A 674 27 CTRL TACHO CTRL TACHO 770 25 B B 8
frei 961 23 0 V 0 V 1062 29 KTY84 – KTY84 – 1160 28 15 V 15 V 12
Außenschirm auf Steckergehäuse jaLeitungsverlängerung Typ 6FX . 002 – 2AH04 – . . . 0
PIN-Belegung der Leitungsverlängerung entsprechend der Basisleitung
Leitungsende abgeschnitten
�� �������
60����6
�� ���� � �
�
��
�
�
2
�
��
�� ���
Steckertyp: 6FX2 003 – 0CE12
60����6
�� �� ���
� �
2
�� �� ��2�
�
�
��� ��
+
��
�
Steckertyp: 6FX2 003 – 1CF12 Steckertyp: 6FX2 003 – 0CE12
�� �������
60����6
�� ���� � �
�
��
�
�
2
�
��
�� ���
Leitung Bestell-Nr.
Konfektionierte LeitungenSignalleitungen für den Anschluss an Motoren mit Inkrementalgeber HTL 6FX7 002 – 2AH00 – 7 7 7 0
MOTION-CONNECT 800 8MOTION-CONNECT 500 5
1 0 m A 0 m A 0 m2 100 m B 10 m B 1 m3 200 m C 20 m C 2 m4 300 m D 30 m D 3 m
E 40 m E 4 mF 50 m F 5 mG 60 m G 6 mH 70 m H 7 mJ 80 m J 8 mK 90 m K 9 m
Längenschlüssel
Beispiele: 1 m: . . . – 1 A B 0 59 m: . . . – 1 F K 08 m: . . . – 1 A J 0 111 m: . . . – 2 B B 0
17 m: . . . – 1 B H 0 262 m: . . . – 3 G C 0
Leitung Länge m
Bestell-Nr.
MeterwareGeberleitungen für den Anschluss an Motoren mit Inkrementalgeber HTLAdernzahl x Querschnitt [mm²]4 x 2 x 0,34 + 4 x 0,5
50 6FX7008 – 1BD21 – 1FA0100 6FX7008 – 1BD21 – 2AA0200 6FX7008 – 1BD21 – 3AA0500 6FX7008 – 1BD21 – 6AA0
Leitungsaußendurchmesser für 6FX8: 9,3 mm 8Leitungsaußendurchmesser für 6FX5: 9,3 mm 5
1) Leitungslänge � 150 m ohne Übertragung der invertierten Signale und Leitungslänge 150 bis 300 m mit Übertragung der invertierten Signale und Einsatz der Baugruppe DTI.
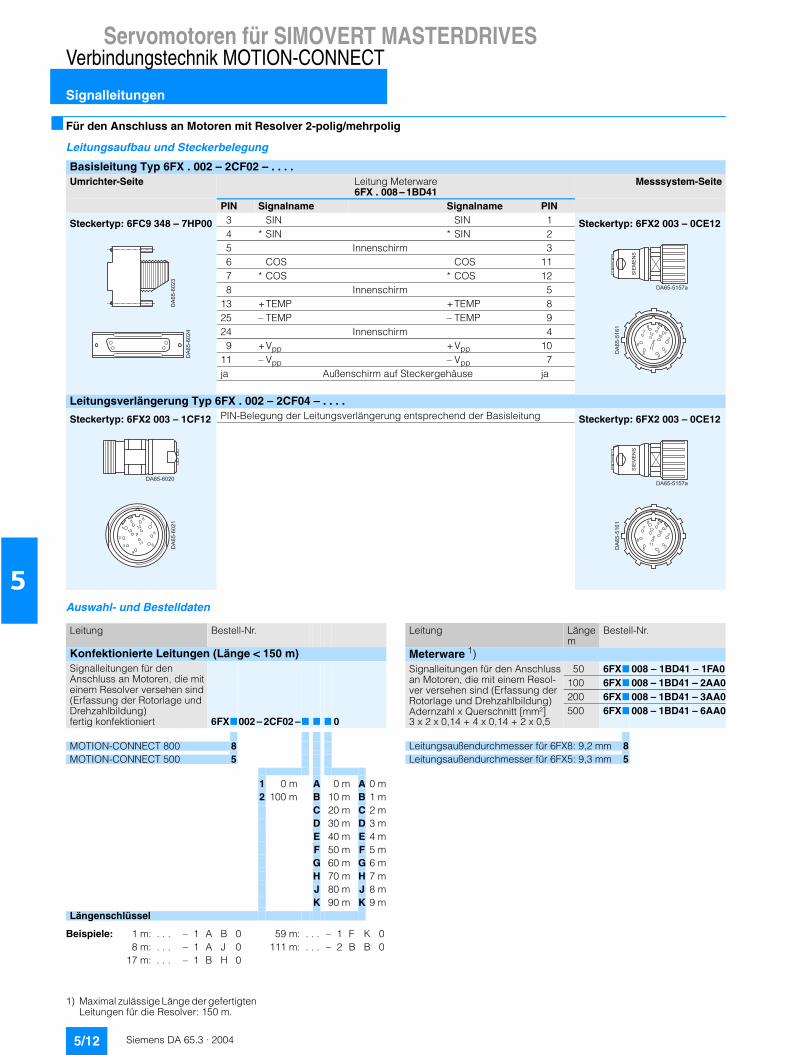
Siemens DA 65.3 · 20045/12
Servomotoren für SIMOVERT MASTERDRIVES
Signalleitungen
Verbindungstechnik MOTION-CONNECT
5
■ Für den Anschluss an Motoren mit Resolver 2-polig/mehrpolig
Leitungsaufbau und Steckerbelegung
Auswahl- und Bestelldaten
Basisleitung Typ 6FX . 002 – 2CF02 – . . . .Umrichter-Seite Leitung Meterware
6FX . 008 – 1BD41Messsystem-Seite
PIN Signalname Signalname PIN3 SIN SIN 14 * SIN * SIN 25 Innenschirm 36 COS COS 117 * COS * COS 128 Innenschirm 5
13 +TEMP +TEMP 825 – TEMP – TEMP 924 Innenschirm 49 +Vpp +Vpp 10
11 – Vpp – Vpp 7ja Außenschirm auf Steckergehäuse ja
Leitungsverlängerung Typ 6FX . 002 – 2CF04 – . . . .PIN-Belegung der Leitungsverlängerung entsprechend der Basisleitung
�� �� ���
�� �� ���
Steckertyp: 6FC9 348 – 7HP00
�� �������
60����6
�� ���� � �
�
��
�
�
2
�
��
�� ���
Steckertyp: 6FX2 003 – 0CE12
�� �� ���
�� �� ���
�
�
2�
�
�
�
����
+
��
�
Steckertyp: 6FX2 003 – 1CF12 Steckertyp: 6FX2 003 – 0CE12
�� �������
60����6
�� ���� � �
�
��
�
�
2
�
��
�� ���
Leitung Bestell-Nr.
Konfektionierte Leitungen (Länge < 150 m)Signalleitungen für den Anschluss an Motoren, die mit einem Resolver versehen sind (Erfassung der Rotorlage und Drehzahlbildung)fertig konfektioniert 6FX7002 – 2CF02 –7 7 7 0
MOTION-CONNECT 800 8MOTION-CONNECT 500 5
1 0 m A 0 m A 0 m2 100 m B 10 m B 1 m
C 20 m C 2 mD 30 m D 3 mE 40 m E 4 mF 50 m F 5 mG 60 m G 6 mH 70 m H 7 mJ 80 m J 8 mK 90 m K 9 m
Längenschlüssel
Beispiele: 1 m: . . . – 1 A B 0 59 m: . . . – 1 F K 08 m: . . . – 1 A J 0 111 m: . . . – 2 B B 0
17 m: . . . – 1 B H 0
Leitung Länge m
Bestell-Nr.
Meterware 1)Signalleitungen für den Anschluss an Motoren, die mit einem Resol-ver versehen sind (Erfassung der Rotorlage und Drehzahlbildung)Adernzahl x Querschnitt [mm²]3 x 2 x 0,14 + 4 x 0,14 + 2 x 0,5
50 6FX7 008 – 1BD41 – 1FA0100 6FX7 008 – 1BD41 – 2AA0200 6FX7 008 – 1BD41 – 3AA0500 6FX7 008 – 1BD41 – 6AA0
Leitungsaußendurchmesser für 6FX8: 9,2 mm 8Leitungsaußendurchmesser für 6FX5: 9,3 mm 5
1) Maximal zulässige Länge der gefertigten Leitungen für die Resolver: 150 m.
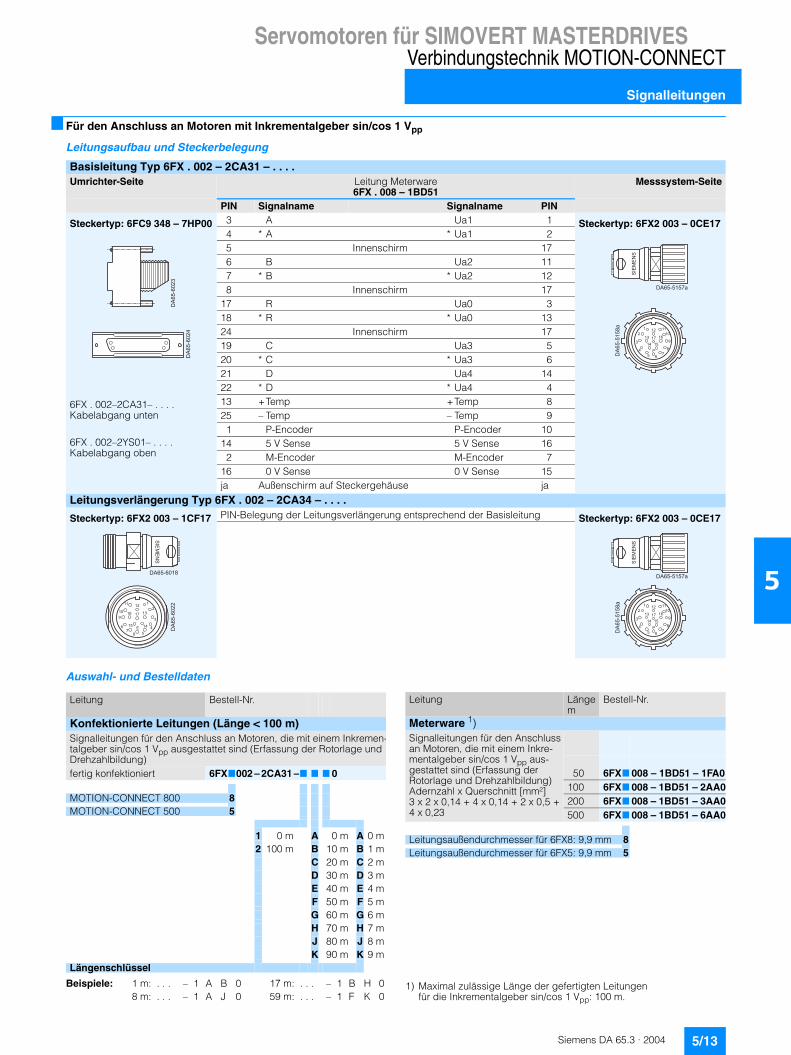
Siemens DA 65.3 · 2004 5/13
Servomotoren für SIMOVERT MASTERDRIVESVerbindungstechnik MOTION-CONNECT
Signalleitungen
5
■ Für den Anschluss an Motoren mit Inkrementalgeber sin/cos 1 Vpp
Leitungsaufbau und Steckerbelegung
Auswahl- und Bestelldaten
Basisleitung Typ 6FX . 002 – 2CA31 – . . . .Umrichter-Seite Leitung Meterware
6FX . 008 – 1BD51Messsystem-Seite
PIN Signalname Signalname PIN3 A Ua1 14 * A * Ua1 25 Innenschirm 176 B Ua2 117 * B * Ua2 128 Innenschirm 17
17 R Ua0 318 * R * Ua0 1324 Innenschirm 1719 C Ua3 520 * C * Ua3 621 D Ua4 1422 * D * Ua4 413 +Temp +Temp 825 – Temp – Temp 91 P-Encoder P-Encoder 10
14 5 V Sense 5 V Sense 162 M-Encoder M-Encoder 7
16 0 V Sense 0 V Sense 15ja Außenschirm auf Steckergehäuse ja
Leitungsverlängerung Typ 6FX . 002 – 2CA34 – . . . .PIN-Belegung der Leitungsverlängerung entsprechend der Basisleitung
�� �� ���
�� �� ���
Steckertyp: 6FC9 348 – 7HP00
6FX . 002–2CA31– . . . .Kabelabgang unten
6FX . 002–2YS01– . . . .Kabelabgang oben
�� �������
60����6
�� ������� �
�
�
�
� �
�
2
��
����
�� �
����
��
+
Steckertyp: 6FX2 003 – 0CE17
60����6
�� �� ���
�� �� ����
�
�
�
� �
�
2
��
����
���
�� ��
��
�
Steckertyp: 6FX2 003 – 1CF17 Steckertyp: 6FX2 003 – 0CE17
�� �������
60����6
�� ������� �
�
�
�
� �
�
2
��
����
�� �
����
��
+
Leitung Bestell-Nr.
Konfektionierte Leitungen (Länge < 100 m)Signalleitungen für den Anschluss an Motoren, die mit einem Inkremen-talgeber sin/cos 1 Vpp ausgestattet sind (Erfassung der Rotorlage und Drehzahlbildung) fertig konfektioniert 6FX7002 – 2CA31 –7 7 7 0
MOTION-CONNECT 800 8MOTION-CONNECT 500 5
1 0 m A 0 m A 0 m2 100 m B 10 m B 1 m
C 20 m C 2 mD 30 m D 3 mE 40 m E 4 mF 50 m F 5 mG 60 m G 6 mH 70 m H 7 mJ 80 m J 8 mK 90 m K 9 m
Längenschlüssel
Beispiele: 1 m: . . . – 1 A B 0 17 m: . . . – 1 B H 08 m: . . . – 1 A J 0 59 m: . . . – 1 F K 0
Leitung Länge m
Bestell-Nr.
Meterware 1)Signalleitungen für den Anschluss an Motoren, die mit einem Inkre-mentalgeber sin/cos 1 Vpp aus-gestattet sind (Erfassung der Rotorlage und Drehzahlbildung)Adernzahl x Querschnitt [mm²]3 x 2 x 0,14 + 4 x 0,14 + 2 x 0,5 + 4 x 0,23
50 6FX7 008 – 1BD51 – 1FA0100 6FX7 008 – 1BD51 – 2AA0200 6FX7 008 – 1BD51 – 3AA0500 6FX7 008 – 1BD51 – 6AA0
Leitungsaußendurchmesser für 6FX8: 9,9 mm 8Leitungsaußendurchmesser für 6FX5: 9,9 mm 5
1) Maximal zulässige Länge der gefertigten Leitungen für die Inkrementalgeber sin/cos 1 Vpp: 100 m.
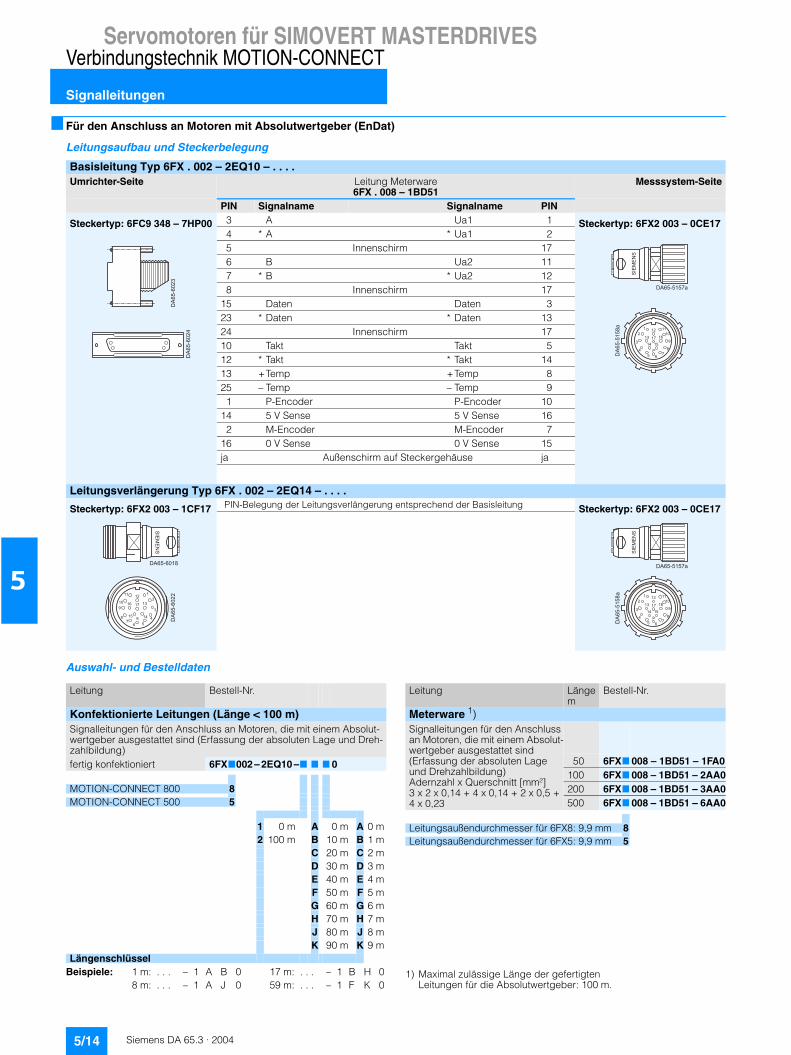
Siemens DA 65.3 · 20045/14
Servomotoren für SIMOVERT MASTERDRIVES
Signalleitungen
Verbindungstechnik MOTION-CONNECT
5
■ Für den Anschluss an Motoren mit Absolutwertgeber (EnDat)
Leitungsaufbau und Steckerbelegung
Auswahl- und Bestelldaten
Basisleitung Typ 6FX . 002 – 2EQ10 – . . . . Umrichter-Seite Leitung Meterware
6FX . 008 – 1BD51Messsystem-Seite
PIN Signalname Signalname PIN3 A Ua1 14 * A * Ua1 25 Innenschirm 176 B Ua2 117 * B * Ua2 128 Innenschirm 17
15 Daten Daten 323 * Daten * Daten 1324 Innenschirm 1710 Takt Takt 512 * Takt * Takt 1413 +Temp +Temp 825 – Temp – Temp 91 P-Encoder P-Encoder 10
14 5 V Sense 5 V Sense 162 M-Encoder M-Encoder 7
16 0 V Sense 0 V Sense 15ja Außenschirm auf Steckergehäuse ja
Leitungsverlängerung Typ 6FX . 002 – 2EQ14 – . . . .PIN-Belegung der Leitungsverlängerung entsprechend der Basisleitung
�� �� ���
�� �� ���
Steckertyp: 6FC9 348 – 7HP00
�� �������
60����6
�� ������� �
�
�
�
� �
�
2
��
����
�� �
����
��
+
Steckertyp: 6FX2 003 – 0CE17
60����6
�� �� ���
�� �� ����
�
�
�
� �
�
2
��
����
���
�� ��
��
�
Steckertyp: 6FX2 003 – 1CF17 Steckertyp: 6FX2 003 – 0CE17
�� �������
60����6
�� ������� �
�
�
�
� �
�
2
��
����
�� �
����
��
+
Leitung Bestell-Nr.
Konfektionierte Leitungen (Länge < 100 m)Signalleitungen für den Anschluss an Motoren, die mit einem Absolut-wertgeber ausgestattet sind (Erfassung der absoluten Lage und Dreh-zahlbildung) fertig konfektioniert 6FX7002 – 2EQ10 –7 7 7 0
MOTION-CONNECT 800 8MOTION-CONNECT 500 5
1 0 m A 0 m A 0 m2 100 m B 10 m B 1 m
C 20 m C 2 mD 30 m D 3 mE 40 m E 4 mF 50 m F 5 mG 60 m G 6 mH 70 m H 7 mJ 80 m J 8 mK 90 m K 9 m
Längenschlüssel Beispiele: 1 m: . . . – 1 A B 0 17 m: . . . – 1 B H 0
8 m: . . . – 1 A J 0 59 m: . . . – 1 F K 0
Leitung Länge m
Bestell-Nr.
Meterware 1)Signalleitungen für den Anschluss an Motoren, die mit einem Absolut-wertgeber ausgestattet sind (Erfassung der absoluten Lage und Drehzahlbildung)Adernzahl x Querschnitt [mm²]3 x 2 x 0,14 + 4 x 0,14 + 2 x 0,5 + 4 x 0,23
50 6FX7 008 – 1BD51 – 1FA0100 6FX7 008 – 1BD51 – 2AA0200 6FX7 008 – 1BD51 – 3AA0500 6FX7 008 – 1BD51 – 6AA0
Leitungsaußendurchmesser für 6FX8: 9,9 mm 8Leitungsaußendurchmesser für 6FX5: 9,9 mm 5
1) Maximal zulässige Länge der gefertigten Leitungen für die Absolutwertgeber: 100 m.
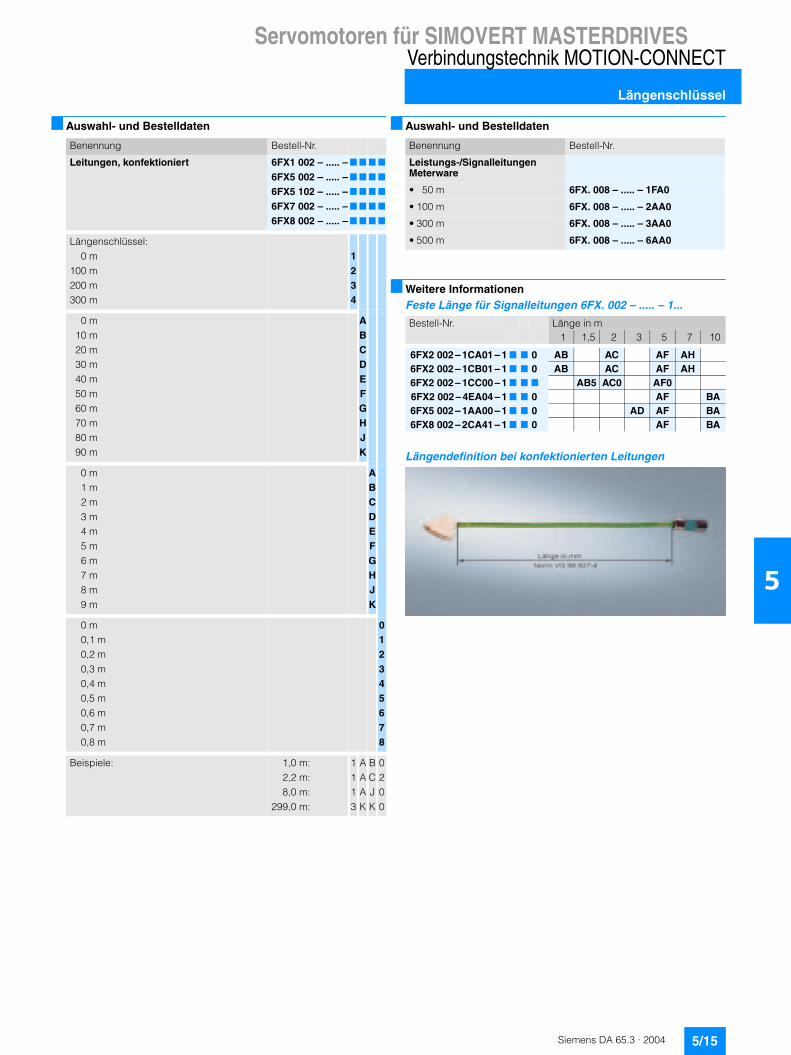
Siemens DA 65.3 · 2004 5/15
Servomotoren für SIMOVERT MASTERDRIVESVerbindungstechnik MOTION-CONNECT
Längenschlüssel
5
■ Auswahl- und Bestelldaten ■ Auswahl- und Bestelldaten
■ Weitere InformationenFeste Länge für Signalleitungen 6FX. 002 – ..... – 1...
Längendefinition bei konfektionierten Leitungen
Benennung Bestell-Nr.
Leitungen, konfektioniert 6FX1 002 – ..... –6FX5 002 – ..... –6FX5 102 – ..... –6FX7 002 – ..... –6FX8 002 – ..... –
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
Längenschlüssel:0 m
100 m200 m300 m
1234
0 m10 m20 m30 m40 m50 m60 m70 m80 m90 m
ABCDEFGHJK
0 m1 m2 m3 m4 m5 m6 m7 m8 m9 m
ABCDEFGHJK
0 m0,1 m0,2 m0,3 m0,4 m0,5 m0,6 m0,7 m0,8 m
012345678
Beispiele: 1,0 m:2,2 m:8,0 m:
299,0 m:
1113
AAAK
BCJK
0200
Benennung Bestell-Nr.
Leistungs-/Signalleitungen Meterware
• 50 m 6FX. 008 – ..... – 1FA0
• 100 m 6FX. 008 – ..... – 2AA0
• 300 m 6FX. 008 – ..... – 3AA0
• 500 m 6FX. 008 – ..... – 6AA0
Bestell-Nr. Länge in m1 1,5 2 3 5 7 10
6FX2 002 – 1CA01 – 1 7 7 0 AB AC AF AH6FX2 002 – 1CB01 – 1 7 7 0 AB AC AF AH6FX2 002 – 1CC00 – 1 7 7 7 AB5 AC0 AF06FX2 002 – 4EA04 – 1 7 7 0 AF BA6FX5 002 – 1AA00 – 1 7 7 0 AD AF BA6FX8 002 – 2CA41 – 1 7 7 0 AF BA

Siemens DA 65.3 · 20045/16
Servomotoren für SIMOVERT MASTERDRIVES
Notizen
Verbindungstechnik MOTION-CONNECT
5
Siemens DA 65.3 · 2004
66/2 Betriebsanleitungen
6/2 Projektierungsanleitungen
Dokumentation
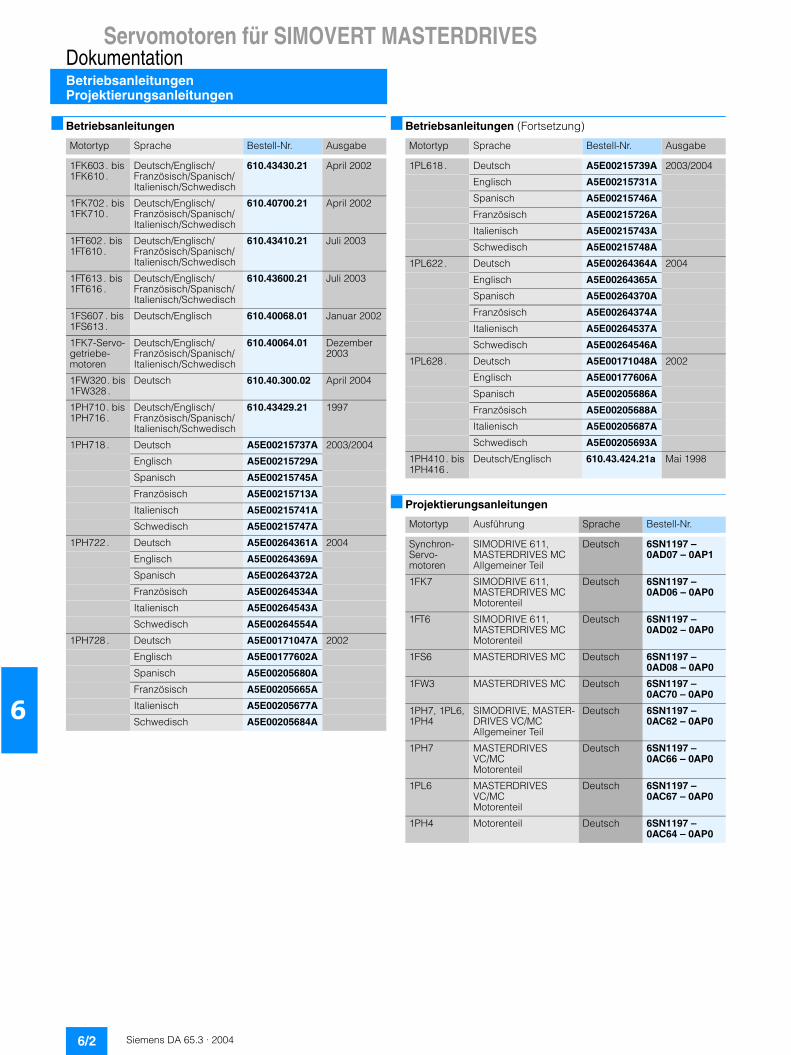
Siemens DA 65.3 · 20046/2
Servomotoren für SIMOVERT MASTERDRIVES
BetriebsanleitungenProjektierungsanleitungen
Dokumentation
6
■ Betriebsanleitungen ■ Betriebsanleitungen (Fortsetzung)
■ Projektierungsanleitungen
Motortyp Sprache Bestell-Nr. Ausgabe
1FK603 . bis 1FK610 .
Deutsch/Englisch/Französisch/Spanisch/Italienisch/Schwedisch
610.43430.21 April 2002
1FK702 . bis 1FK710 .
Deutsch/Englisch/Französisch/Spanisch/Italienisch/Schwedisch
610.40700.21 April 2002
1FT602 . bis 1FT610 .
Deutsch/Englisch/Französisch/Spanisch/Italienisch/Schwedisch
610.43410.21 Juli 2003
1FT613 . bis 1FT616 .
Deutsch/Englisch/Französisch/Spanisch/Italienisch/Schwedisch
610.43600.21 Juli 2003
1FS607 . bis 1FS613 .
Deutsch/Englisch 610.40068.01 Januar 2002
1FK7-Servo-getriebe-motoren
Deutsch/Englisch/Französisch/Spanisch/Italienisch/Schwedisch
610.40064.01 Dezember 2003
1FW320 . bis 1FW328 .
Deutsch 610.40.300.02 April 2004
1PH710 . bis 1PH716 .
Deutsch/Englisch/Französisch/Spanisch/Italienisch/Schwedisch
610.43429.21 1997
1PH718 . Deutsch A5E00215737A 2003/2004
Englisch A5E00215729A
Spanisch A5E00215745A
Französisch A5E00215713A
Italienisch A5E00215741A
Schwedisch A5E00215747A
1PH722 . Deutsch A5E00264361A 2004
Englisch A5E00264369A
Spanisch A5E00264372A
Französisch A5E00264534A
Italienisch A5E00264543A
Schwedisch A5E00264554A
1PH728 . Deutsch A5E00171047A 2002
Englisch A5E00177602A
Spanisch A5E00205680A
Französisch A5E00205665A
Italienisch A5E00205677A
Schwedisch A5E00205684A
Motortyp Sprache Bestell-Nr. Ausgabe
1PL618 . Deutsch A5E00215739A 2003/2004
Englisch A5E00215731A
Spanisch A5E00215746A
Französisch A5E00215726A
Italienisch A5E00215743A
Schwedisch A5E00215748A
1PL622 . Deutsch A5E00264364A 2004
Englisch A5E00264365A
Spanisch A5E00264370A
Französisch A5E00264374A
Italienisch A5E00264537A
Schwedisch A5E00264546A
1PL628 . Deutsch A5E00171048A 2002
Englisch A5E00177606A
Spanisch A5E00205686A
Französisch A5E00205688A
Italienisch A5E00205687A
Schwedisch A5E00205693A
1PH410 . bis 1PH416 .
Deutsch/Englisch 610.43.424.21a Mai 1998
Motortyp Ausführung Sprache Bestell-Nr.
Synchron-Servo-motoren
SIMODRIVE 611, MASTERDRIVES MCAllgemeiner Teil
Deutsch 6SN1197 – 0AD07 – 0AP1
1FK7 SIMODRIVE 611, MASTERDRIVES MCMotorenteil
Deutsch 6SN1197 – 0AD06 – 0AP0
1FT6 SIMODRIVE 611, MASTERDRIVES MCMotorenteil
Deutsch 6SN1197 – 0AD02 – 0AP0
1FS6 MASTERDRIVES MC Deutsch 6SN1197 – 0AD08 – 0AP0
1FW3 MASTERDRIVES MC Deutsch 6SN1197 – 0AC70 – 0AP0
1PH7, 1PL6, 1PH4
SIMODRIVE, MASTER-DRIVES VC/MCAllgemeiner Teil
Deutsch 6SN1197 – 0AC62 – 0AP0
1PH7 MASTERDRIVES VC/MCMotorenteil
Deutsch 6SN1197 – 0AC66 – 0AP0
1PL6 MASTERDRIVES VC/MCMotorenteil
Deutsch 6SN1197 – 0AC67 – 0AP0
1PH4 Motorenteil Deutsch 6SN1197 – 0AC64 – 0AP0
Siemens DA 65.3 · 2004
7Zusätzliche Daten für Motoren1PH7 und 1PL6
7/2 Belüftungsdaten und Schalldruckpegel
7/3 Lagerausführung/Antriebsartund Maximaldrehzahlen
7/4 Querkraftdiagramme7/6 Klemmenkastenzuordnung,
max. anschließbare Kabelquer-schnitte
7/8 Bauformen
Projektierungshinweise
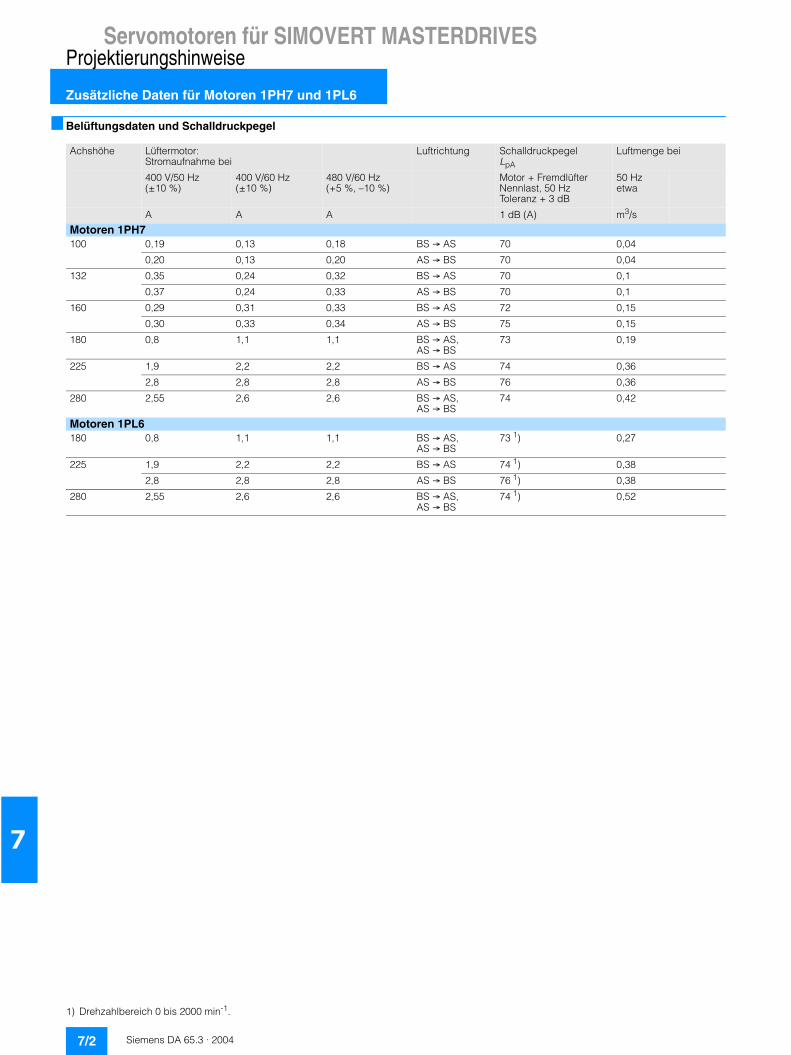
Siemens DA 65.3 · 20047/2
Servomotoren für SIMOVERT MASTERDRIVES
Zusätzliche Daten für Motoren 1PH7 und 1PL6
Projektierungshinweise
7
■ Belüftungsdaten und Schalldruckpegel
Achshöhe Lüftermotor:Stromaufnahme bei
Luftrichtung SchalldruckpegelLpA
Luftmenge bei
400 V/50 Hz(±10 %)
400 V/60 Hz(±10 %)
480 V/60 Hz(+5 %, –10 %)
Motor + FremdlüfterNennlast, 50 HzToleranz + 3 dB
50 Hzetwa
A A A 1 dB (A) m3/s
Motoren 1PH7100 0,19 0,13 0,18 BS � AS 70 0,04
0,20 0,13 0,20 AS � BS 70 0,04
132 0,35 0,24 0,32 BS � AS 70 0,1
0,37 0,24 0,33 AS � BS 70 0,1
160 0,29 0,31 0,33 BS � AS 72 0,15
0,30 0,33 0,34 AS � BS 75 0,15
180 0,8 1,1 1,1 BS � AS, AS � BS
73 0,19
225 1,9 2,2 2,2 BS � AS 74 0,36
2,8 2,8 2,8 AS � BS 76 0,36
280 2,55 2,6 2,6 BS � AS, AS � BS
74 0,42
Motoren 1PL6180 0,8 1,1 1,1 BS � AS,
AS � BS73 1) 0,27
225 1,9 2,2 2,2 BS � AS 74 1) 0,38
2,8 2,8 2,8 AS � BS 76 1) 0,38
280 2,55 2,6 2,6 BS � AS, AS � BS
74 1) 0,52
1) Drehzahlbereich 0 bis 2000 min-1.
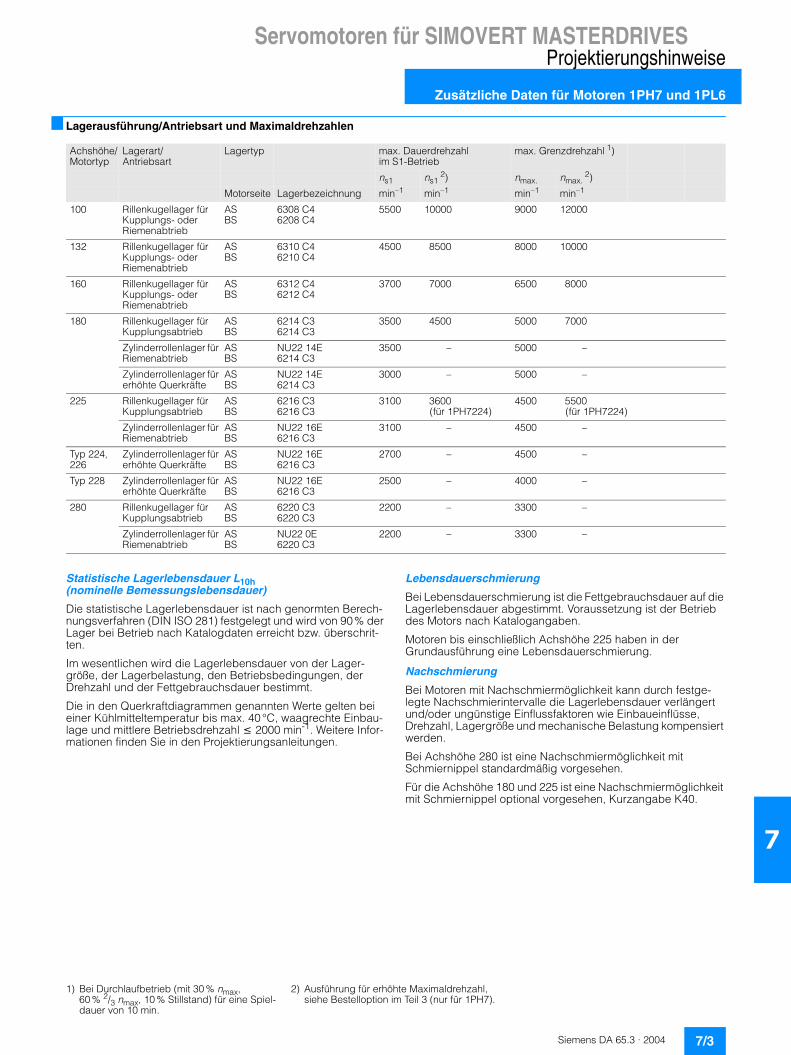
Siemens DA 65.3 · 2004 7/3
Servomotoren für SIMOVERT MASTERDRIVESProjektierungshinweise
Zusätzliche Daten für Motoren 1PH7 und 1PL6
7
■ Lagerausführung/Antriebsart und Maximaldrehzahlen
Statistische Lagerlebensdauer L10h(nominelle Bemessungslebensdauer)
Die statistische Lagerlebensdauer ist nach genormten Berech-nungsverfahren (DIN ISO 281) festgelegt und wird von 90 % der Lager bei Betrieb nach Katalogdaten erreicht bzw. überschrit-ten.
Im wesentlichen wird die Lagerlebensdauer von der Lager-größe, der Lagerbelastung, den Betriebsbedingungen, der Drehzahl und der Fettgebrauchsdauer bestimmt.
Die in den Querkraftdiagrammen genannten Werte gelten bei einer Kühlmitteltemperatur bis max. 40 °C, waagrechte Einbau-lage und mittlere Betriebsdrehzahl � 2000 min-1. Weitere Infor-mationen finden Sie in den Projektierungsanleitungen.
Lebensdauerschmierung
Bei Lebensdauerschmierung ist die Fettgebrauchsdauer auf die Lagerlebensdauer abgestimmt. Voraussetzung ist der Betrieb des Motors nach Katalogangaben.
Motoren bis einschließlich Achshöhe 225 haben in der Grundausführung eine Lebensdauerschmierung.
Nachschmierung
Bei Motoren mit Nachschmiermöglichkeit kann durch festge-legte Nachschmierintervalle die Lagerlebensdauer verlängert und/oder ungünstige Einflussfaktoren wie Einbaueinflüsse, Drehzahl, Lagergröße und mechanische Belastung kompensiert werden.
Bei Achshöhe 280 ist eine Nachschmiermöglichkeit mit Schmiernippel standardmäßig vorgesehen.
Für die Achshöhe 180 und 225 ist eine Nachschmiermöglichkeit mit Schmiernippel optional vorgesehen, Kurzangabe K40.
Achshöhe/Motortyp
Lagerart/Antriebsart
Lagertyp max. Dauerdrehzahlim S1-Betrieb
max. Grenzdrehzahl 1)
ns1 ns12) nmax. nmax.
2)
Motorseite Lagerbezeichnung min–1 min–1 min–1 min–1
100 Rillenkugellager für Kupplungs- oder Riemenabtrieb
ASBS
6308 C46208 C4
5500 10000 9000 12000
132 Rillenkugellager für Kupplungs- oder Riemenabtrieb
ASBS
6310 C46210 C4
4500 8500 8000 10000
160 Rillenkugellager für Kupplungs- oder Riemenabtrieb
ASBS
6312 C46212 C4
3700 7000 6500 8000
180 Rillenkugellager für Kupplungsabtrieb
ASBS
6214 C36214 C3
3500 4500 5000 7000
Zylinderrollenlager für Riemenabtrieb
ASBS
NU22 14E6214 C3
3500 – 5000 –
Zylinderrollenlager für erhöhte Querkräfte
ASBS
NU22 14E6214 C3
3000 – 5000 –
225 Rillenkugellager für Kupplungsabtrieb
ASBS
6216 C36216 C3
3100 3600(für 1PH7224)
4500 5500(für 1PH7224)
Zylinderrollenlager für Riemenabtrieb
ASBS
NU22 16E6216 C3
3100 – 4500 –
Typ 224, 226
Zylinderrollenlager für erhöhte Querkräfte
ASBS
NU22 16E6216 C3
2700 – 4500 –
Typ 228 Zylinderrollenlager für erhöhte Querkräfte
ASBS
NU22 16E6216 C3
2500 – 4000 –
280 Rillenkugellager für Kupplungsabtrieb
ASBS
6220 C36220 C3
2200 – 3300 –
Zylinderrollenlager für Riemenabtrieb
ASBS
NU22 0E6220 C3
2200 – 3300 –
1) Bei Durchlaufbetrieb (mit 30 % nmax, 60 % 2/3 nmax, 10 % Stillstand) für eine Spiel-dauer von 10 min.
2) Ausführung für erhöhte Maximaldrehzahl, siehe Bestelloption im Teil 3 (nur für 1PH7).
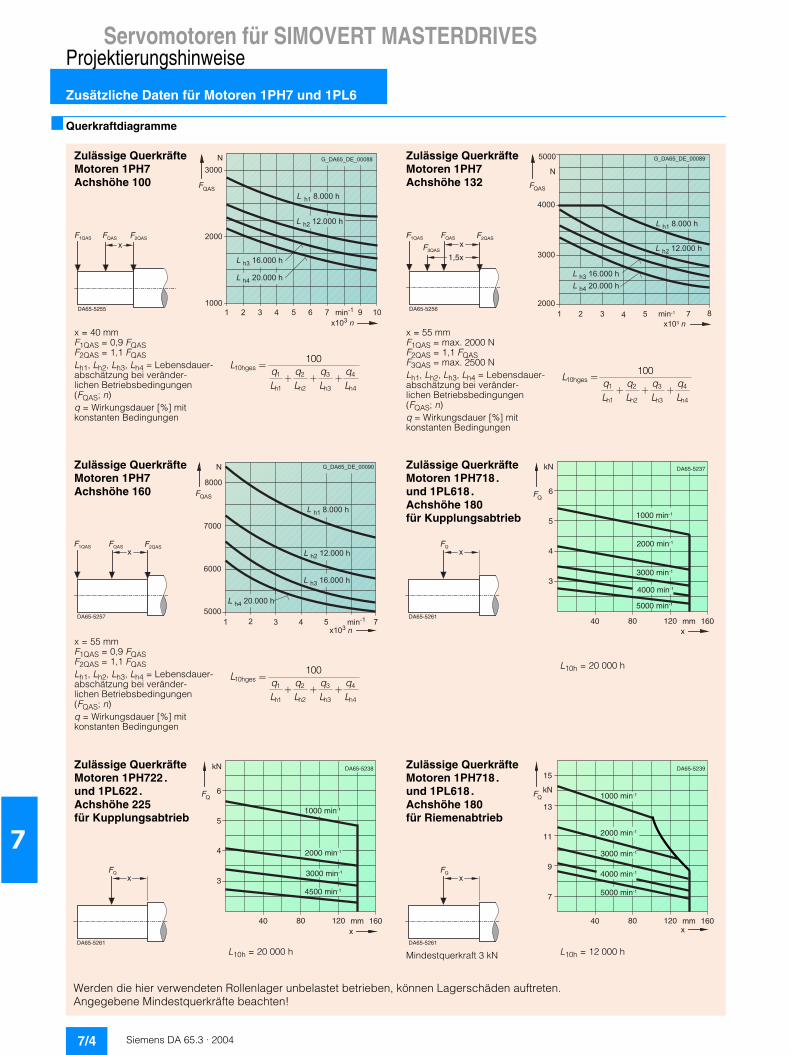
Siemens DA 65.3 · 20047/4
Servomotoren für SIMOVERT MASTERDRIVES
Zusätzliche Daten für Motoren 1PH7 und 1PL6
Projektierungshinweise
7
■ Querkraftdiagramme
FQAS
x
DA65-5255
F1QAS F2QAS
� � � � � � �
�
�
�
� � � � �
� �
�
�
� � � � � �
� � � � � �
� � � �
� � � � �
� � �
� � � � �
� � � � � � � � � � � �Zulässige QuerkräfteMotoren 1PH7Achshöhe 100
x = 40 mmF1QAS = 0,9 FQASF2QAS = 1,1 FQASLh1, Lh2, Lh3, Lh4 = Lebensdauer-abschätzung bei veränder-lichen Betriebsbedingungen (FQAS; n)q = Wirkungsdauer [%] mit konstanten Bedingungen
�� � �
10hges1 2 3 4
h1 h2 h3 h4
100L
q q q qL L L L
x
DA65-5256
FQAS F2QASF1QAS
F3QAS
1,5x
� � � � �
�
�
�
� � � � �
��
�
�
� � � � � �
� � � � � �
� � � �
�
� � � � �
� � � � �
� � �
� � � � � � � � � � � �Zulässige QuerkräfteMotoren 1PH7Achshöhe 132
x = 55 mmF1QAS = max. 2000 NF2QAS = 1,1 FQASF3QAS = max. 2500 NLh1, Lh2, Lh3, Lh4 = Lebensdauer-abschätzung bei veränder-lichen Betriebsbedingungen (FQAS; n)q = Wirkungsdauer [%] mit konstanten Bedingungen
�� � �
10hges1 2 3 4
h1 h2 h3 h4
100L
q q q qL L L L
x
DA65-5257
FQAS F2QASF1QAS
� � � �
�
�
�
� � � � �
�
�
�
� � � � � �
� � � � � �
� � � �
�
�
� � � � �
� � � � �
� � �
� � � � � � � � � � � Zulässige QuerkräfteMotoren 1PH7Achshöhe 160
x = 55 mmF1QAS = 0,9 FQASF2QAS = 1,1 FQASLh1, Lh2, Lh3, Lh4 = Lebensdauer-abschätzung bei veränder-lichen Betriebsbedingungen (FQAS; n)q = Wirkungsdauer [%] mit konstanten Bedingungen
�� � �
10hges1 2 3 4
h1 h2 h3 h4
100L
q q q qL L L L
x
DA65-5261
FQ
40 mm
kN
FQ
DA65-5237
160
3
5000 min-1
x80 120
4000 min-1
3000 min-1
2000 min-1
1000 min-1
4
5
6
Zulässige QuerkräfteMotoren 1PH718 .und 1PL618 .Achshöhe 180für Kupplungsabtrieb
L10h = 20 000 h
x
DA65-5261
FQ
40 mm
kNFQ
DA65-5239
160
7 5000 min-1
x80 120
4000 min-1
3000 min-1
1000 min-1
9
11
13
15
2000 min-1
Zulässige QuerkräfteMotoren 1PH718 .und 1PL618 .Achshöhe 180für Riemenabtrieb
L10h = 12 000 hMindestquerkraft 3 kN
x
DA65-5261
FQ
40 mm
kN
FQ
DA65-5238
160
34500 min-1
x80 120
3000 min-1
2000 min-1
1000 min-1
4
5
6
Zulässige QuerkräfteMotoren 1PH722 .und 1PL622 .Achshöhe 225für Kupplungsabtrieb
L10h = 20 000 h
Werden die hier verwendeten Rollenlager unbelastet betrieben, können Lagerschäden auftreten.Angegebene Mindestquerkräfte beachten!
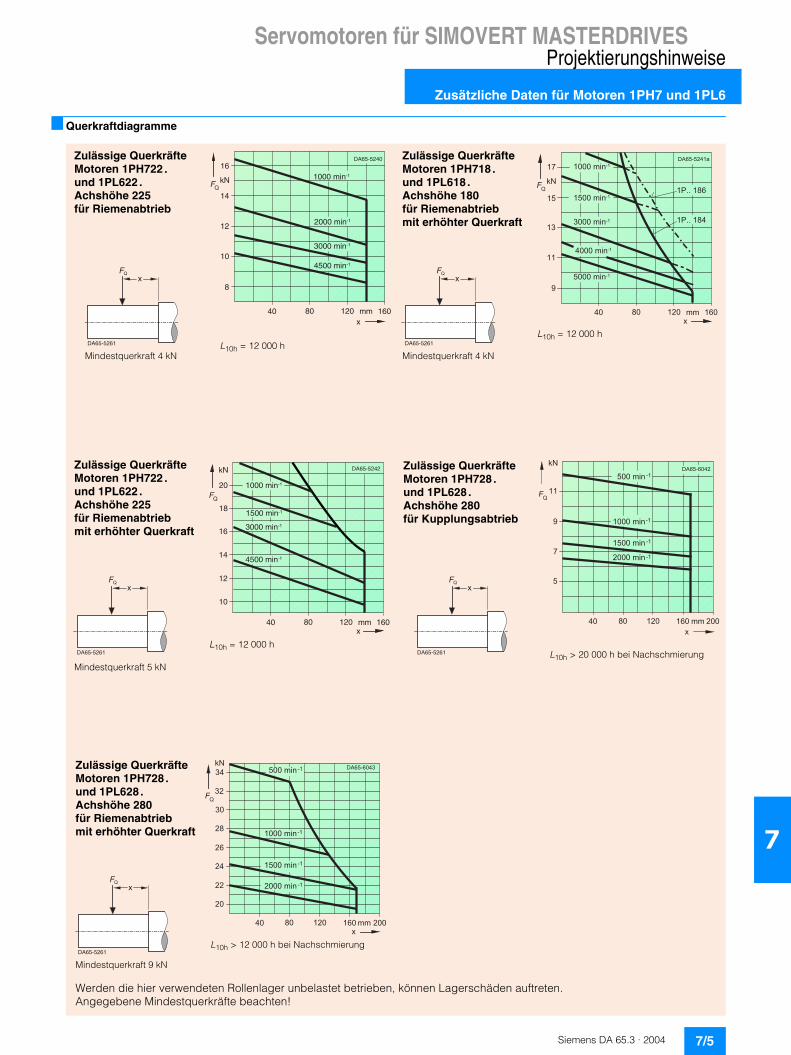
Siemens DA 65.3 · 2004 7/5
Servomotoren für SIMOVERT MASTERDRIVESProjektierungshinweise
Zusätzliche Daten für Motoren 1PH7 und 1PL6
7
■ Querkraftdiagramme
40 mm
kNFQ
DA65-5240
160
8
4500 min-1
x80 120
3000 min-1
1000 min-1
12
14
16
2000 min-1
10
Zulässige QuerkräfteMotoren 1PH722 .und 1PL622 .Achshöhe 225für Riemenabtrieb
x
DA65-5261
FQ
L10h = 12 000 hMindestquerkraft 4 kN
x
DA65-5261
FQ
�� ��
����
����� �
�
�
��������
��� ��
��������
���������
�������
�
�
���������
���� �
���� ��
Zulässige QuerkräfteMotoren 1PH718 .und 1PL618 .Achshöhe 180für Riemenabtriebmit erhöhter Querkraft
L10h = 12 000 h
Mindestquerkraft 4 kN
x
DA65-5261
FQ
40 mm
kN
FQ
DA65-5242
160
4500 min-1
x80 120
1000 min-1
1500 min-1
16
18
20
3000 min-1
10
12
14
Zulässige QuerkräfteMotoren 1PH722 .und 1PL622 .Achshöhe 225für Riemenabtriebmit erhöhter Querkraft
L10h = 12 000 h
Mindestquerkraft 5 kN
Werden die hier verwendeten Rollenlager unbelastet betrieben, können Lagerschäden auftreten. Angegebene Mindestquerkräfte beachten!
�� ��
��
��
���
�
�� ��
�
�
�
������
������
�������
������
�������� �
�
�
�
Zulässige QuerkräfteMotoren 1PH728 .und 1PL628 .Achshöhe 280für Kupplungsabtrieb
x
DA65-5261
FQ
L10h > 20 000 h bei Nachschmierung
�� ��
���
�
������
��� ��
��
��
��
� ���
��
��
�
��
��������
�������
������
�������� �
�
�
�
x
DA65-5261
FQ
Zulässige QuerkräfteMotoren 1PH728 .und 1PL628 .Achshöhe 280für Riemenabtriebmit erhöhter Querkraft
L10h > 12 000 h bei Nachschmierung
Mindestquerkraft 9 kN
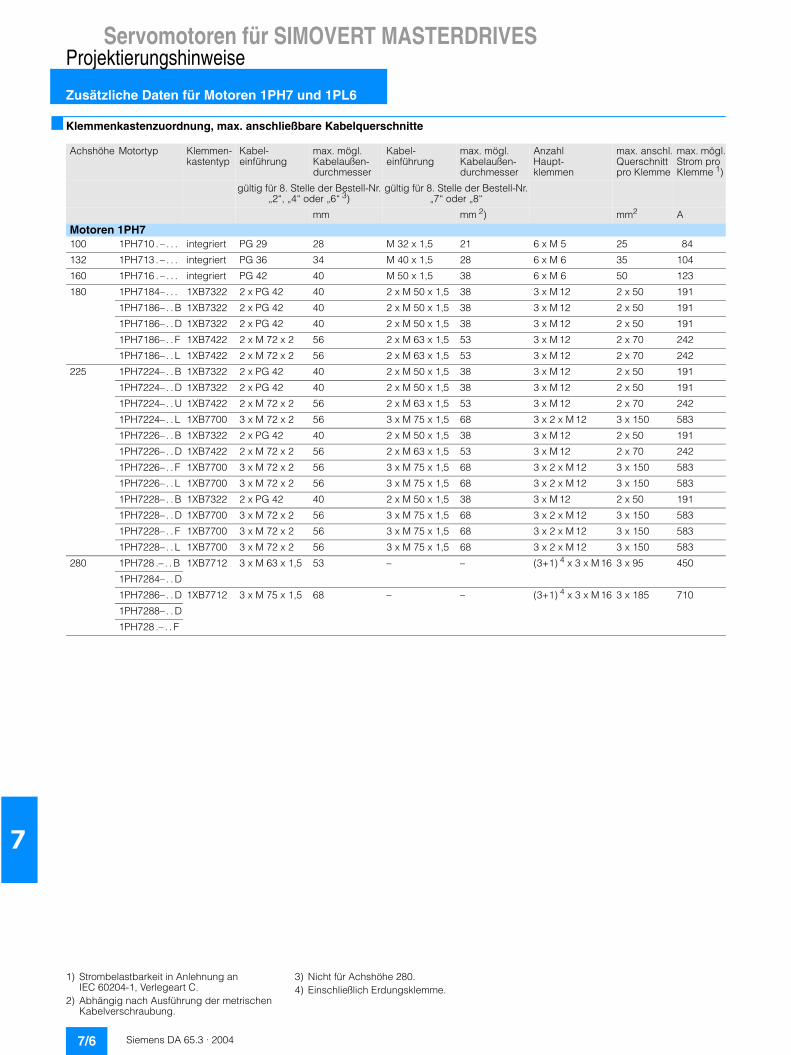
Siemens DA 65.3 · 20047/6
Servomotoren für SIMOVERT MASTERDRIVES
Zusätzliche Daten für Motoren 1PH7 und 1PL6
Projektierungshinweise
7
■ Klemmenkastenzuordnung, max. anschließbare Kabelquerschnitte
Achshöhe Motortyp Klemmen-kastentyp
Kabel-einführung
max. mögl. Kabelaußen-durchmesser
Kabel-einführung
max. mögl. Kabelaußen-durchmesser
AnzahlHaupt-klemmen
max. anschl.Querschnittpro Klemme
max. mögl.Strom pro Klemme 1)
gültig für 8. Stelle der Bestell-Nr.„2“, „4“ oder „6“ 3)
gültig für 8. Stelle der Bestell-Nr.„7“ oder „8“
mm mm 2) mm2 A
Motoren 1PH7100 1PH710 . – . . . integriert PG 29 28 M 32 x 1,5 21 6 x M 5 25 84
132 1PH713 . – . . . integriert PG 36 34 M 40 x 1,5 28 6 x M 6 35 104
160 1PH716 . – . . . integriert PG 42 40 M 50 x 1,5 38 6 x M 6 50 123
180 1PH7184– . . . 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PH7186– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PH7186– . . D 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PH7186– . . F 1XB7422 2 x M 72 x 2 56 2 x M 63 x 1,5 53 3 x M 12 2 x 70 242
1PH7186– . . L 1XB7422 2 x M 72 x 2 56 2 x M 63 x 1,5 53 3 x M 12 2 x 70 242
225 1PH7224– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PH7224– . . D 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PH7224– . . U 1XB7422 2 x M 72 x 2 56 2 x M 63 x 1,5 53 3 x M 12 2 x 70 242
1PH7224– . . L 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PH7226– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PH7226– . . D 1XB7422 2 x M 72 x 2 56 2 x M 63 x 1,5 53 3 x M 12 2 x 70 242
1PH7226– . . F 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PH7226– . . L 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PH7228– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PH7228– . . D 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PH7228– . . F 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PH7228– . . L 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
280 1PH728 .– . . B 1XB7712 3 x M 63 x 1,5 53 – – (3+1) 4 x 3 x M 16 3 x 95 450
1PH7284– . . D
1PH7286– . . D 1XB7712 3 x M 75 x 1,5 68 – – (3+1) 4 x 3 x M 16 3 x 185 710
1PH7288– . . D
1PH728 .– . . F
1) Strombelastbarkeit in Anlehnung an IEC 60204-1, Verlegeart C.
2) Abhängig nach Ausführung der metrischen Kabelverschraubung.
3) Nicht für Achshöhe 280.4) Einschließlich Erdungsklemme.
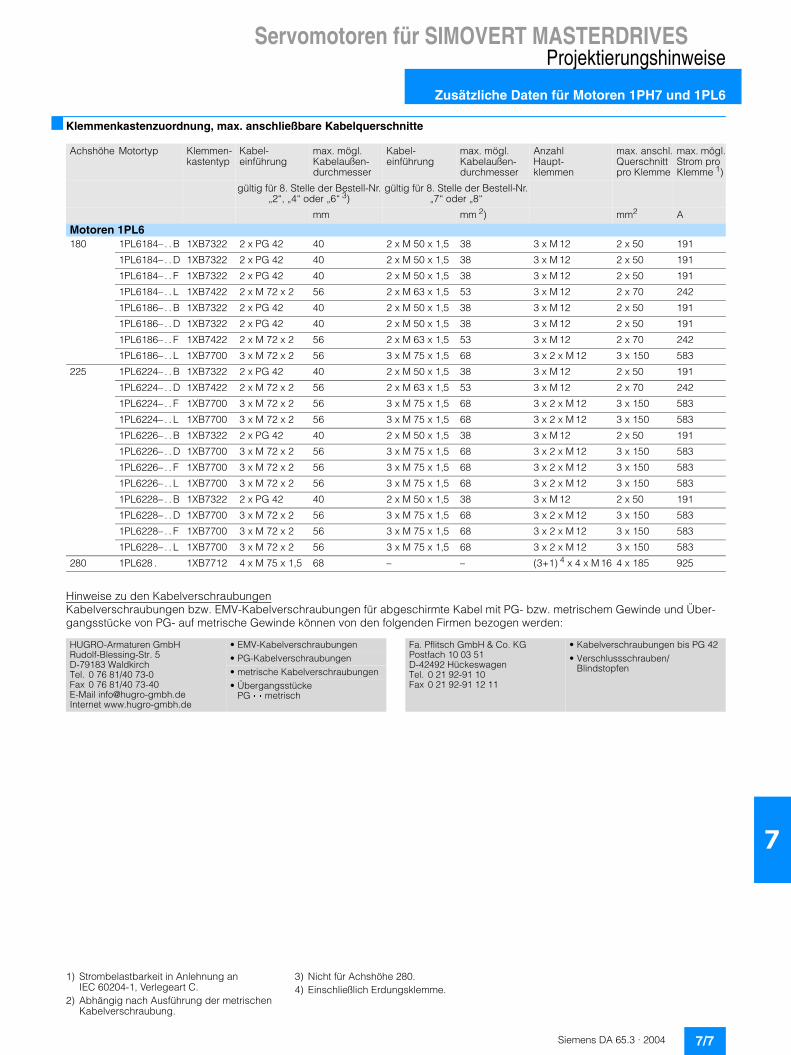
Siemens DA 65.3 · 2004 7/7
Servomotoren für SIMOVERT MASTERDRIVESProjektierungshinweise
Zusätzliche Daten für Motoren 1PH7 und 1PL6
7
■ Klemmenkastenzuordnung, max. anschließbare Kabelquerschnitte
Hinweise zu den KabelverschraubungenKabelverschraubungen bzw. EMV-Kabelverschraubungen für abgeschirmte Kabel mit PG- bzw. metrischem Gewinde und Über-gangsstücke von PG- auf metrische Gewinde können von den folgenden Firmen bezogen werden:
Achshöhe Motortyp Klemmen-kastentyp
Kabel-einführung
max. mögl. Kabelaußen-durchmesser
Kabel-einführung
max. mögl. Kabelaußen-durchmesser
AnzahlHaupt-klemmen
max. anschl.Querschnittpro Klemme
max. mögl.Strom pro Klemme 1)
gültig für 8. Stelle der Bestell-Nr.„2“, „4“ oder „6“ 3)
gültig für 8. Stelle der Bestell-Nr.„7“ oder „8“
mm mm 2) mm2 A
Motoren 1PL6180 1PL6184– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PL6184– . . D 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PL6184– . . F 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PL6184– . . L 1XB7422 2 x M 72 x 2 56 2 x M 63 x 1,5 53 3 x M 12 2 x 70 242
1PL6186– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PL6186– . . D 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PL6186– . . F 1XB7422 2 x M 72 x 2 56 2 x M 63 x 1,5 53 3 x M 12 2 x 70 242
1PL6186– . . L 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
225 1PL6224– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PL6224– . . D 1XB7422 2 x M 72 x 2 56 2 x M 63 x 1,5 53 3 x M 12 2 x 70 242
1PL6224– . . F 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PL6224– . . L 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PL6226– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PL6226– . . D 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PL6226– . . F 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PL6226– . . L 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PL6228– . . B 1XB7322 2 x PG 42 40 2 x M 50 x 1,5 38 3 x M 12 2 x 50 191
1PL6228– . . D 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PL6228– . . F 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
1PL6228– . . L 1XB7700 3 x M 72 x 2 56 3 x M 75 x 1,5 68 3 x 2 x M 12 3 x 150 583
280 1PL628 . 1XB7712 4 x M 75 x 1,5 68 – – (3+1) 4 x 4 x M 16 4 x 185 925
HUGRO-Armaturen GmbHRudolf-Blessing-Str. 5D-79183 WaldkirchTel. 0 76 81/40 73-0Fax 0 76 81/40 73-40E-Mail [email protected] www.hugro-gmbh.de
• EMV-Kabelverschraubungen Fa. Pflitsch GmbH & Co. KGPostfach 10 03 51D-42492 HückeswagenTel. 0 21 92-91 10Fax 0 21 92-91 12 11
• Kabelverschraubungen bis PG 42• Verschlussschrauben/
Blindstopfen• PG-Kabelverschraubungen• metrische Kabelverschraubungen• Übergangsstücke
PG � metrisch
1) Strombelastbarkeit in Anlehnung an IEC 60204-1, Verlegeart C.
2) Abhängig nach Ausführung der metrischen Kabelverschraubung.
3) Nicht für Achshöhe 280.4) Einschließlich Erdungsklemme.
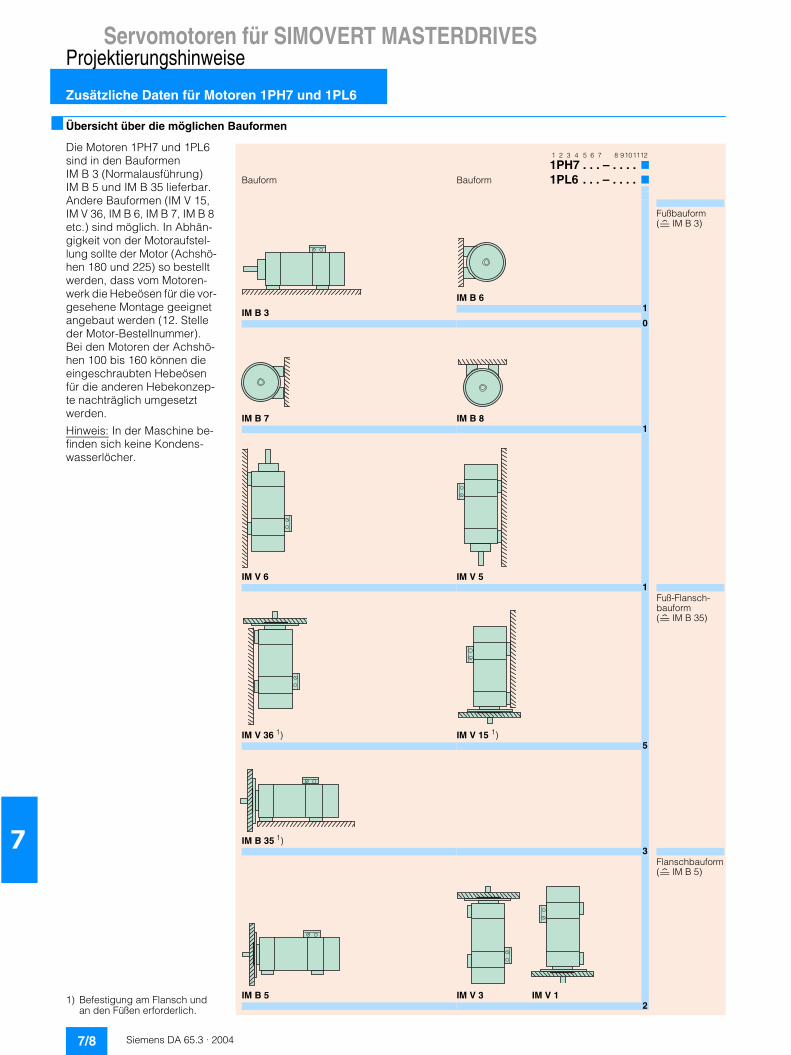
Siemens DA 65.3 · 20047/8
Servomotoren für SIMOVERT MASTERDRIVES
Zusätzliche Daten für Motoren 1PH7 und 1PL6
Projektierungshinweise
7
■ Übersicht über die möglichen Bauformen
Die Motoren 1PH7 und 1PL6 sind in den Bauformen IM B 3 (Normalausführung) IM B 5 und IM B 35 lieferbar. Andere Bauformen (IM V 15, IM V 36, IM B 6, IM B 7, IM B 8 etc.) sind möglich. In Abhän-gigkeit von der Motoraufstel-lung sollte der Motor (Achshö-hen 180 und 225) so bestellt werden, dass vom Motoren-werk die Hebeösen für die vor-gesehene Montage geeignet angebaut werden (12. Stelle der Motor-Bestellnummer). Bei den Motoren der Achshö-hen 100 bis 160 können die eingeschraubten Hebeösen für die anderen Hebekonzep-te nachträglich umgesetzt werden.
Hinweis: In der Maschine be-finden sich keine Kondens-wasserlöcher.
Bauform Bauform
IM B 6
Fußbauform(q IM B 3)
IM B 3 1
0
IM B 7 IM B 81
IM V 6 IM V 51
IM V 36 1) IM V 15 1)
Fuß-Flansch-bauform(q IM B 35)
5
IM B 35 1)3
IM B 5 IM V 3 IM V 1
Flanschbauform(q IM B 5)
2
1 2 3 4 5 6 7 8 9 10 1112
1PH7 . . . – . . . . 71PL6 . . . – . . . . 7
1) Befestigung am Flansch und an den Füßen erforderlich.

Siemens DA 65.3 · 2004
AA/2 Umwelt, Ressourcen und
Recycling
A/2 Bestellnummernverzeichnis
A/3 Sachverzeichnis
A/4 Siemens Ansprechpartner weltweit
A/5 Informationen und Bestell-möglichkeiten im Internet und auf CD-ROM
A/6 Customer Support
A/9 Verkaufs- und Lieferbedingungen
A/9 Exportvorschriften
A/10 Fax-Bestellvorlage für PFAD PLUS-Demoversion
Anhang
Siemens DA 65.3 · 2004A/2
Servomotoren für SIMOVERT MASTERDRIVES
Umwelt, Ressourcen und Recycling, EG-Konformitätserklärungen
Anhang
A
Die Siemens AG fühlt sich verpflichtet, die Umwelt zu schützen und natürliche Ressourcen einzusparen. Dies gilt sowohl für un-sere Fertigung als auch für unsere Produkte.
Bereits bei der Entwicklung bedenken wir mögliche Folgelasten für unsere Umwelt. Wir streben an, Umweltbelastungen zu ver-meiden oder auf ein Minimum zu reduzieren – auch über die der-zeit geltenden Vorschriften hinaus.
Die wichtigsten Aktivitäten zum Schutz der Umwelt sind:
Der Einsatz gefährlicher Stoffe (z.B. Arsen, Asbest, Berylium, Cadmium, FCKW, Halogen u.v.m.) wurde bereits in der Entwick-lungsphase vermieden.
Demontagefreundliche Verbindungen wurden konstruiert, und auf erhöhte Sortenreinheit der verwendeten Materialien geach-tet. Außerdem wurden wiederverwertbare Materialien bevorzugt, oder Materialien, die sich problemlos entsorgen lassen.
Werkstoffe werden zur Fertigung entsprechend der Verwer-tungsforderung gekennzeichnet. Hier besonders die Bauteile, die unvermeidlich gefährliche Stoffe enthalten. Diese Bauteile sind außerdem leicht abtrennbar eingefügt, um deren umweltge-rechte Entsorgung zu erleichtern. Wo immer es möglich ist, wer-den recycelte Teile eingebaut.
Zum Versand und zur Lagerung werden umweltverträgliche Ver-packungsmaterialien (Sperrholz und PE-Folie) möglichst spar-sam verwendet. Wenn möglich, setzen wir Mehrwegverpackun-gen ein.
Wir haben bereits jetzt Vorbereitungen getroffen, die Geräte nach ihrem Gebrauch gemäß der Elektronikschrottverordnung „ESVO“ (gegenwärtig noch nicht verabschiedet) zu entsorgen.
Die gesamte Dokumentation wird auf chlorfrei gebleichtem Pa-pier gedruckt.
Die Geschäftsgebiete von A&D der Siemens AG sind alle zertifi-ziert.
Seite1FK1FK7 2/41FK702. 2/41FK703. 2/4, 4/111FK704. 2/4, 4/111FK706. 2/4, 4/111FK708. 2/4, 4/131FK710. 2/4, 4/13
1FS1FS6 2/321FS6074 2/321FS6096 2/321FS6115 2/321FS6134 2/32
1FT1FT6 2/101FT602. 2/201FT603. 2/101FT604. 2/101FT606. 2/101FT608. 2/101FT610. 2/101FT613. 2/121FT616. 2/24
1FW31FW3 2/361FW320. 2/361FW328. 2/36
1PH1PH4 3/48, 3/501PH410. 33/48, 3/501PH413. 3/48, 3/501PH416. 3/48, 3/501PH7 3/41PH710. 3/41PH713. 3/41PH716. 3/41PH718. 3/61PH722. 3/61PH728. 3/8
Seite1PL1PL6 3/30, 3/341PL618. 3/30, 3/341PL622. 3/30, 3/341PL628. 3/32, 3/36
6FX6FX.002 5/116FX.008 5/156FX2003 5/86FX5002 5/56FX5008 5/56FX7002 5/66FX8002 5/56FX8008 5/5
2LG2LG4250 4/402LG4260 4/402LG4312 4/402LG4315 4/402LG4320 4/40
LPLP050 4/35LP070 4/35LP090 4/35LP120 4/35LP155 4/35
SPSP060 4/37SP075 4/37SP100 4/37SP140 4/37SP180 4/37SP210 4/37SP240 4/37
Bestellnummernverzeichnis
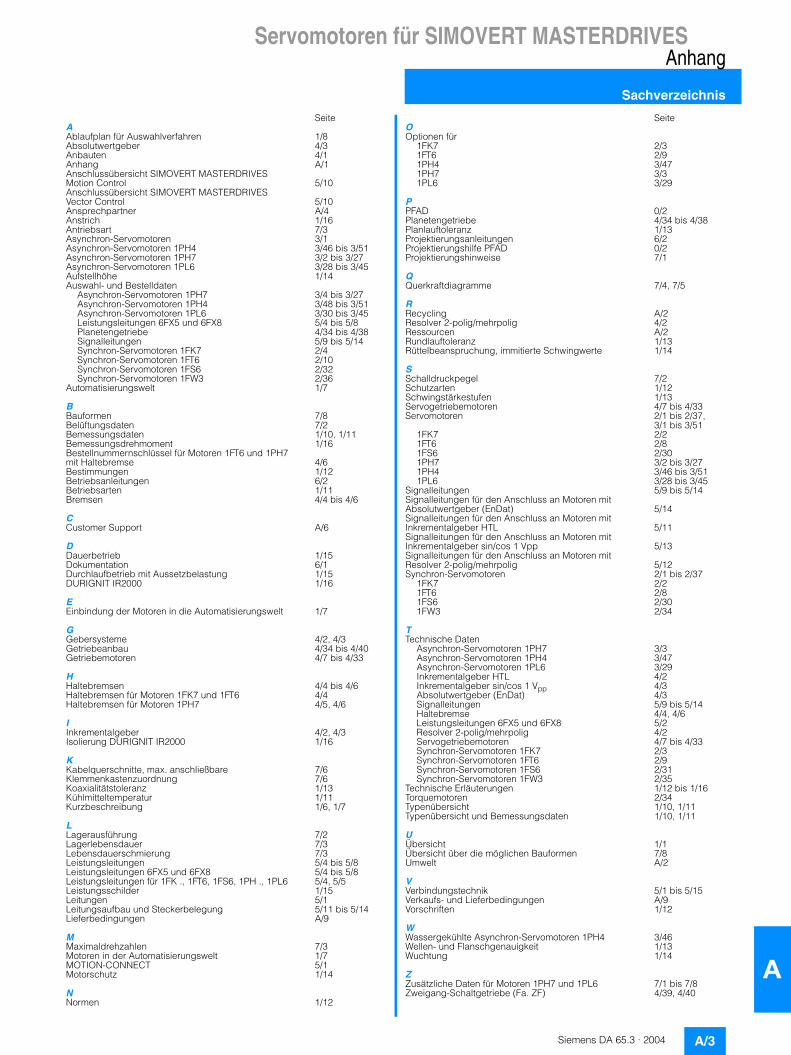
Siemens DA 65.3 · 2004 A/3
Servomotoren für SIMOVERT MASTERDRIVESAnhang
Sachverzeichnis
A
SeiteAAblaufplan für Auswahlverfahren 1/8Absolutwertgeber 4/3Anbauten 4/1Anhang A/1Anschlussübersicht SIMOVERT MASTERDRIVES Motion Control 5/10Anschlussübersicht SIMOVERT MASTERDRIVES Vector Control 5/10Ansprechpartner A/4Anstrich 1/16Antriebsart 7/3Asynchron-Servomotoren 3/1Asynchron-Servomotoren 1PH4 3/46 bis 3/51Asynchron-Servomotoren 1PH7 3/2 bis 3/27Asynchron-Servomotoren 1PL6 3/28 bis 3/45Aufstellhöhe 1/14Auswahl- und Bestelldaten
Asynchron-Servomotoren 1PH7 3/4 bis 3/27Asynchron-Servomotoren 1PH4 3/48 bis 3/51Asynchron-Servomotoren 1PL6 3/30 bis 3/45Leistungsleitungen 6FX5 und 6FX8 5/4 bis 5/8Planetengetriebe 4/34 bis 4/38Signalleitungen 5/9 bis 5/14Synchron-Servomotoren 1FK7 2/4Synchron-Servomotoren 1FT6 2/10Synchron-Servomotoren 1FS6 2/32Synchron-Servomotoren 1FW3 2/36
Automatisierungswelt 1/7
BBauformen 7/8Belüftungsdaten 7/2Bemessungsdaten 1/10, 1/11Bemessungsdrehmoment 1/16Bestellnummernschlüssel für Motoren 1FT6 und 1PH7 mit Haltebremse 4/6Bestimmungen 1/12Betriebsanleitungen 6/2Betriebsarten 1/11Bremsen 4/4 bis 4/6
CCustomer Support A/6
DDauerbetrieb 1/15Dokumentation 6/1Durchlaufbetrieb mit Aussetzbelastung 1/15DURIGNIT IR2000 1/16
EEinbindung der Motoren in die Automatisierungswelt 1/7
GGebersysteme 4/2, 4/3Getriebeanbau 4/34 bis 4/40Getriebemotoren 4/7 bis 4/33
HHaltebremsen 4/4 bis 4/6Haltebremsen für Motoren 1FK7 und 1FT6 4/4Haltebremsen für Motoren 1PH7 4/5, 4/6
IInkrementalgeber 4/2, 4/3Isolierung DURIGNIT IR2000 1/16
KKabelquerschnitte, max. anschließbare 7/6Klemmenkastenzuordnung 7/6Koaxialitätstoleranz 1/13Kühlmitteltemperatur 1/11Kurzbeschreibung 1/6, 1/7
LLagerausführung 7/2Lagerlebensdauer 7/3Lebensdauerschmierung 7/3Leistungsleitungen 5/4 bis 5/8Leistungsleitungen 6FX5 und 6FX8 5/4 bis 5/8Leistungsleitungen für 1FK ., 1FT6, 1FS6, 1PH ., 1PL6 5/4, 5/5Leistungsschilder 1/15Leitungen 5/1Leitungsaufbau und Steckerbelegung 5/11 bis 5/14Lieferbedingungen A/9
MMaximaldrehzahlen 7/3Motoren in der Automatisierungswelt 1/7MOTION-CONNECT 5/1Motorschutz 1/14
NNormen 1/12
SeiteOOptionen für
1FK7 2/31FT6 2/91PH4 3/471PH7 3/31PL6 3/29
PPFAD 0/2Planetengetriebe 4/34 bis 4/38Planlauftoleranz 1/13Projektierungsanleitungen 6/2Projektierungshilfe PFAD 0/2Projektierungshinweise 7/1
QQuerkraftdiagramme 7/4, 7/5
RRecycling A/2Resolver 2-polig/mehrpolig 4/2Ressourcen A/2Rundlauftoleranz 1/13Rüttelbeanspruchung, immitierte Schwingwerte 1/14
SSchalldruckpegel 7/2Schutzarten 1/12Schwingstärkestufen 1/13Servogetriebemotoren 4/7 bis 4/33Servomotoren 2/1 bis 2/37,
3/1 bis 3/511FK7 2/21FT6 2/81FS6 2/301PH7 3/2 bis 3/271PH4 3/46 bis 3/511PL6 3/28 bis 3/45
Signalleitungen 5/9 bis 5/14Signalleitungen für den Anschluss an Motoren mit Absolutwertgeber (EnDat) 5/14Signalleitungen für den Anschluss an Motoren mit Inkrementalgeber HTL 5/11Signalleitungen für den Anschluss an Motoren mit Inkrementalgeber sin/cos 1 Vpp 5/13Signalleitungen für den Anschluss an Motoren mit Resolver 2-polig/mehrpolig 5/12Synchron-Servomotoren 2/1 bis 2/37
1FK7 2/21FT6 2/81FS6 2/301FW3 2/34
TTechnische Daten
Asynchron-Servomotoren 1PH7 3/3Asynchron-Servomotoren 1PH4 3/47Asynchron-Servomotoren 1PL6 3/29Inkrementalgeber HTL 4/2Inkrementalgeber sin/cos 1 Vpp 4/3Absolutwertgeber (EnDat) 4/3Signalleitungen 5/9 bis 5/14Haltebremse 4/4, 4/6Leistungsleitungen 6FX5 und 6FX8 5/2Resolver 2-polig/mehrpolig 4/2Servogetriebemotoren 4/7 bis 4/33Synchron-Servomotoren 1FK7 2/3Synchron-Servomotoren 1FT6 2/9Synchron-Servomotoren 1FS6 2/31Synchron-Servomotoren 1FW3 2/35
Technische Erläuterungen 1/12 bis 1/16Torquemotoren 2/34Typenübersicht 1/10, 1/11Typenübersicht und Bemessungsdaten 1/10, 1/11
UÜbersicht 1/1Übersicht über die möglichen Bauformen 7/8Umwelt A/2
VVerbindungstechnik 5/1 bis 5/15Verkaufs- und Lieferbedingungen A/9Vorschriften 1/12
WWassergekühlte Asynchron-Servomotoren 1PH4 3/46Wellen- und Flanschgenauigkeit 1/13Wuchtung 1/14
ZZusätzliche Daten für Motoren 1PH7 und 1PL6 7/1 bis 7/8Zweigang-Schaltgetriebe (Fa. ZF) 4/39, 4/40
Siemens DA 65.3 · 2004A/4
Servomotoren für SIMOVERT MASTERDRIVES
Siemens Ansprechpartner weltweit
Anhang
A
Unter der Adresse
www.siemens.de/automation/partner
können Sie sich weltweit über Siemens-Ansprechpartner zu bestimmten Technologien informieren.
Soweit möglich, erhalten Sie je Ort einen Ansprechpartner für � Technischen Support, � Ersatzteile/Reparaturen, � Service, � Training, � Vertrieb oder � Fachberatung/Engineering.Der Wahlvorgang startet mit der Auswahl � eines Landes, � eines Produktes oder � einer Branche.Durch anschließende Festlegung der übrigen Kriterien werden genau die gewünschten Ansprechpartner mit Angabe der jeweiligen Kompetenzen gefunden.
Siemens DA 65.3 · 2004 A/5
Servomotoren für SIMOVERT MASTERDRIVESAnhang
Informationen und Bestellmöglichkeitenim Internet und auf CD-ROM
A
■ A&D im WWWBei der Planung und Projektierung von Automatisierungsanla-gen sind detaillierte Kenntnisse über das einsetzbare Produkt-spektrum und zur Verfügung stehende Serviceleistungen uner-lässlich. Es liegt auf der Hand, dass diese Informationen immer möglichst aktuell sein müssen.
Der Siemens-Geschäftsbereich Automation and Drives (A&D) hat deshalb ein umfangreiches Informationsangebot im World Wide Web aufgebaut, das alle erforderlichen Informationen problemlos und komfortabel zugänglich macht.
Unter der Adresse
http://www.siemens.de/automation
finden Sie alles, was Sie über Produkte, Systeme und Service-angebote wissen müssen.
■ Produktauswahl mit dem interaktiven KatalogAusführliche Informationen zusammen mit komfortablen inter-aktiven Funktionen: Der interaktive Katalog CA 01 vermittelt mit über 80 000 Produk-ten einen umfassenden Überblick über das Angebot von Siemens Automation and Drives.
Hier finden Sie alles, was Sie zum Lösen von Aufgaben der Automatisierungs-, Schalt-, Installations- und Antriebstechnik benötigen. Alle Informationen sind in eine Oberfläche eingebun-den, die das Arbeiten leicht und intuitiv von der Hand gehen lässt.
Bestellen können Sie nach erfolgter Auswahl auf Knopfdruck per Fax oder per Online-Anbindung.
Informationen zum interaktiven Katalog finden Sie im Internet unter
http://www.siemens.de/automation/ca01
oder auf CD-ROM: • Automation & Drives CA 01, Bestell-Nr.: E86060-D4001-A100-C1
■ Easy Shopping mit der A&D Mall Die A&D Mall ist das virtuelle Kaufhaus der Siemens AG im Internet. Hier haben Sie Zugriff auf ein riesiges Produkt-spektrum, das in elektronischen Katalogen informativ und übersichtlich vorgestellt wird.
Der Datenaustausch über EDIFACT ermöglicht die gesamte Abwicklung von der Auswahl über die Bestellung bis hin zur Ver-folgung des Auftrags online über das Internet.
Dabei stehen umfangreiche Funktionen zu Ihrer Unterstützung bereit.
So erleichtern leistungsfähige Suchfunktionen das Finden der gewünschten Produkte, deren Verfügbarkeit gleich geprüft werden kann. Kundenindividuelle Rabattierung und Angebots-erstellung sind online möglich, genauso wie Statusabfragen zu Ihrem Auftrag (Tracking & Tracing).
Die A&D Mall finden Sie im Internet unter:
http://www.siemens.de/automation/mall
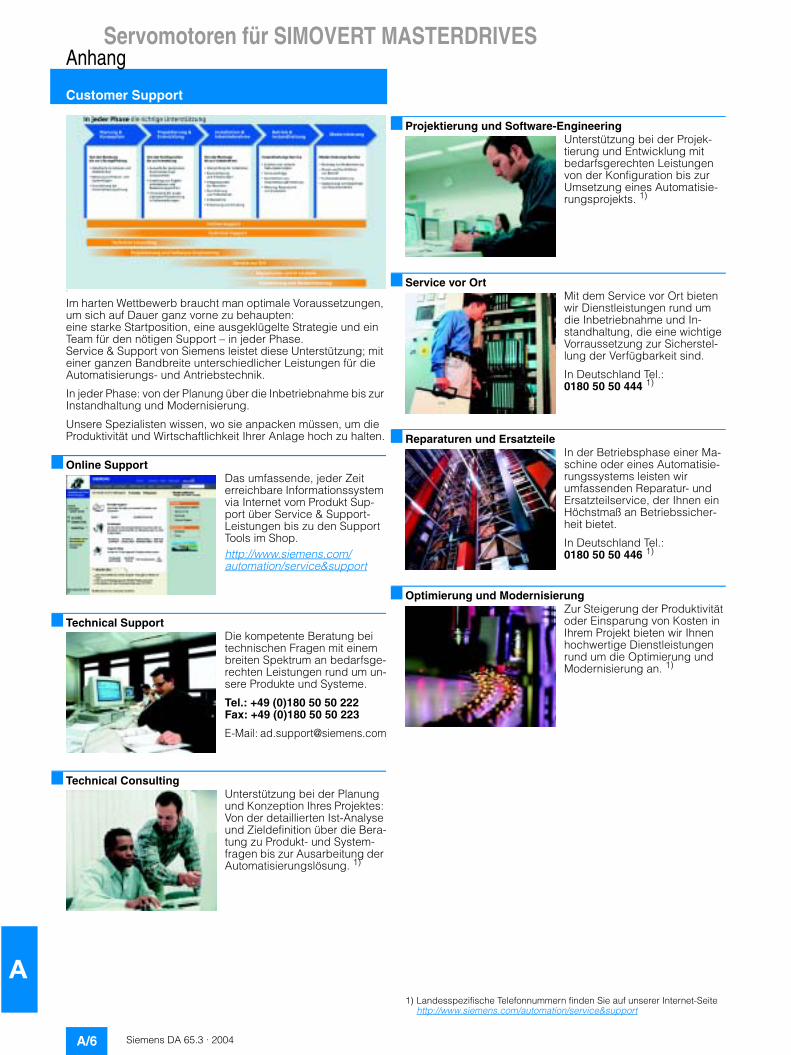
Siemens DA 65.3 · 2004A/6
Servomotoren für SIMOVERT MASTERDRIVES
Customer Support
Anhang
A
.I
Im harten Wettbewerb braucht man optimale Voraussetzungen, um sich auf Dauer ganz vorne zu behaupten: eine starke Startposition, eine ausgeklügelte Strategie und ein Team für den nötigen Support – in jeder Phase. Service & Support von Siemens leistet diese Unterstützung; mit einer ganzen Bandbreite unterschiedlicher Leistungen für die Automatisierungs- und Antriebstechnik.
In jeder Phase: von der Planung über die Inbetriebnahme bis zur Instandhaltung und Modernisierung.
Unsere Spezialisten wissen, wo sie anpacken müssen, um die Produktivität und Wirtschaftlichkeit Ihrer Anlage hoch zu halten.
■ Online SupportDas umfassende, jeder Zeit erreichbare Informationssystem via Internet vom Produkt Sup-port über Service & Support-Leistungen bis zu den Support Tools im Shop.http://www.siemens.com/automation/service&support
■ Technical SupportDie kompetente Beratung bei technischen Fragen mit einem breiten Spektrum an bedarfsge-rechten Leistungen rund um un-sere Produkte und Systeme.
Tel.: +49 (0)180 50 50 222Fax: +49 (0)180 50 50 223
E-Mail: [email protected]
■ Technical ConsultingUnterstützung bei der Planung und Konzeption Ihres Projektes: Von der detaillierten Ist-Analyse und Zieldefinition über die Bera-tung zu Produkt- und System-fragen bis zur Ausarbeitung der Automatisierungslösung. 1)
■ Projektierung und Software-EngineeringUnterstützung bei der Projek-tierung und Entwicklung mit bedarfsgerechten Leistungen von der Konfiguration bis zur Umsetzung eines Automatisie-rungsprojekts. 1)
■ Service vor OrtMit dem Service vor Ort bieten wir Dienstleistungen rund um die Inbetriebnahme und In-standhaltung, die eine wichtige Vorraussetzung zur Sicherstel-lung der Verfügbarkeit sind.
In Deutschland Tel.: 0180 50 50 444 1)
■ Reparaturen und ErsatzteileIn der Betriebsphase einer Ma-schine oder eines Automatisie-rungssystems leisten wir umfassenden Reparatur- und Ersatzteilservice, der Ihnen ein Höchstmaß an Betriebssicher-heit bietet.
In Deutschland Tel.: 0180 50 50 446 1)
■ Optimierung und ModernisierungZur Steigerung der Produktivität oder Einsparung von Kosten in Ihrem Projekt bieten wir Ihnen hochwertige Dienstleistungen rund um die Optimierung und Modernisierung an. 1)
1) Landesspezifische Telefonnummern finden Sie auf unserer Internet-Seite http://www.siemens.com/automation/service&support

Siemens DA 65.3 · 2004 A/7
Servomotoren für SIMOVERT MASTERDRIVESAnhang
Notizen
A

Siemens DA 65.3 · 2004A/8
Servomotoren für SIMOVERT MASTERDRIVES
Notizen
Anhang
A
Siemens DA 65.3 · 2004 A/9
Servomotoren für SIMOVERT MASTERDRIVESAnhang
Verkaufs- und LieferbedingungenExportvorschriften
A
■ Verkaufs- und Lieferbedingungen ■ Exportvorschriften
Sie können über diesen Katalog die dort beschriebenen Pro-dukte (Hard- und Software) bei der Siemens Aktiengesellschaft nach Maßgabe der nachfolgenden Bedingungen erwerben. Bitte beachten Sie, dass für den Umfang, die Qualität und die Bedingungen für Lieferungen und Leistungen einschließlich Software durch Siemens Einheiten/Regionalgesellschaften mit Sitz außerhalb Deutschlands ausschließlich die jeweiligen Allge-meinen Bedingungen der jeweiligen Siemens Einheit/Regional-gesellschaft mit Sitz außerhalb Deutschlands gelten. Die nachfolgenden Bedingungen gelten ausschließlich für Bestellungen bei der Siemens Aktiengesellschaft.
Für Kunden mit Sitz in Deutschland
Es gelten die Allgemeinen Zahlungsbedingungen sowie dieAllgemeinen Lieferbedingungen für Erzeugnisse und Leistun-gen der Elektroindustrie.
Für Softwareprodukte gelten die Allgemeinen Bedingungen zur Überlassung von Software für Automatisierungs- und Antriebs-technik an Lizenznehmer mit Sitz in Deutschland.
Für Kunden mit Sitz außerhalb Deutschlands
Es gelten die Allgemeinen Zahlungsbedingungen sowie dieAllgemeinen Lieferbedingungen von Siemens, Automation and Drives für Kunden mit Sitz außerhalb Deutschlands.
Für Softwareprodukte gelten die Allgemeinen Bedingungen zur Überlassung von Softwareprodukten für Automation and Drives an Lizenznehmer mit Sitz außerhalb Deutschlands.
Allgemein
Die Preise gelten in � (Euro) ab Lieferstelle, ausschließlich Ver-packung.
Die Umsatzsteuer (Mehrwertsteuer) ist in den Preisen nicht ent-halten. Sie wird nach den gesetzlichen Vorschriften zum jeweils gültigen Satz gesondert berechnet.
Auf die Preise der Erzeugnisse, die Silber und/oder Kupfer ent-halten, können, wenn die jeweiligen Grenzwerte der Notierun-gen überschritten werden, Zuschläge verrechnet werden.
Wir behalten uns Preisänderungen vor und werden die jeweils bei Lieferung gültigen Preise verrechnen.
Die Abmessungen sind in mm angegeben, Abbildungen sind unverbindlich.
Soweit auf den einzelnen Seiten dieses Kataloges nichts anderes vermerkt ist, bleiben Änderungen, insbesondere der angegebenen Werte, Maße und Gewichte, vorbehalten.
Ausführliche Geschäftsbedingungen der Siemens AG können Sie kostenlos bei Ihrer Siemens Geschäftsstelle unter der Bestell-Nr.:• 6ZB5310-0KR30-0BA0
„Geschäftsbedingungen für Kunden mit Sitz innerhalb der Bundesrepublik Deutschland“
• 6ZB5310-0KS53-0BA0„Geschäftsbedingungen für Kunden mit Sitz außerhalb der Bundesrepublik Deutschland“
anfordern
oder downloaden aus der A&D Mall unterhttp://www.siemens.de/automation/mall (Deutschland-A&D Mall Online-Hilfesystem)
Die in diesem Katalog geführten Produkte können den europäi-schen/deutschen und/oder den US-Ausfuhrbestimmungen unterliegen.
Jeder genehmigungspflichtige Export bedarf daher der Zustim-mung der zuständigen Behörden.
Für die Erzeugnisse dieses Kataloges sind nach den derzeitigen Bestimmungen folgende Exportvorschriften zu beachten:
Auch ohne Kennzeichen bzw. bei Kennzeichen „AL: N“ oder „ECCN: N“ kann sich eine Genehmigungspflicht, unter anderem durch den Endverbleib und Verwendungszweck der Güter, ergeben.
Maßgebend sind die auf Auftragsbestätigungen, Lieferscheinen und Rechnungen angegebenen Exportkennzeichen AL und ECCN.
Änderungen vorbehalten.
AL Nummer der deutschen AusfuhrlisteErzeugnisse mit Kennzeichen ungleich „N“ sind ausfuhr-genehmigungspflichtig. Bei Softwareprodukten müssen generell auch die Export-kennzeichen des jeweiligen Datenträgers beachtet werden.Die mit „AL ungleich N“ gekennzeichneten Güter unterliegen bei der Ausfuhr aus der EU der europäischen bzw. deut-schen Ausfuhrgenehmigungspflicht.
ECCN Nummer der US-Ausfuhrliste(Export Control Classification Number).Erzeugnisse mit Kennzeichen ungleich „N“ sind in bestimmte Länder reexport-genehmigungspflichtig.Bei Softwareprodukten müssen generell auch die Export-kennzeichen des jeweiligen Datenträgers beachtet werden.Die mit „ECCN ungleich N“ gekennzeichneten Güter unter-liegen der US-Reexportgenehmigungspflicht.
Siemens AGAutomation and DrivesMotion Control SystemsPostfach 31 80D-91050 Erlangen
Verantwortlich für:Technischen Inhalt:Siemens AG, A&D MC PM4, Erlangen
Redaktion:Siemens AG, A&D PT 5, Erlangen
Bestell-Nr. der gebundenen Ausgabe:E86060-K5465-A301-A2
Printed in the Federal Republic of GermanyKG K 0404 22.0 E 184 De/422280 IWI:ID65

Siemens DA 65.3 · 2004A/10
Servomotoren für SIMOVERT MASTERDRIVES
Fax-Bestellvorlage für PFAD Plus-Demoversion
Anhang
A
Fax-Bestellung Siemens AG InfoservicePostfach 23 4890713 Fürth
AD/Z330
@Senden Sie mir bitte kostenlosdie PFAD Plus-Demoversion
Senden Sie mir bitte die aktuellen Informationen der SIMOVERT MASTERDRIVES
@Motion Control
@Vector Control
Fax-Nr.: +49 (0) 9 11/9 78-33 21
Firma
Abteilung
Name
Straße
PLZ/Ort
Für eventuelle Rückfragen bin ich tagsüber unter folgender Rufnummer zu erreichen:
Telefon
Fax
Datum
Unterschrift
Die Kataloge des BereichesAutomation and Drives (A&D)
Anforderungen richten Sie bitte an Ihre Siemens GeschäftsstelleAdressen finden Sie im Anhang dieses Kataloges
Automatisierungs- und Antriebstechnik KatalogInteraktiver Katalog auf CD-ROM• Die Offline-Mall von A&D CA 01
AntriebssystemeDrehzahlveränderbare AntriebeUmrichter-Schrankgeräte SINAMICS G150 D 11Umrichter-Einbaugeräte SINAMICS G110 D 11.1Gleichstrommotoren DA 12Stromrichter-Einbaugeräte SIMOREG DA 21Stromrichter-Schrankgeräte SIMOREG DA 22Modulares Umrichtersystem SIMOVERT PM DA 45Synchronmotoren SIEMOSYN DA 48Umrichter MICROMASTER 410/420/430/440 DA 51.2MICROMASTER 411/COMBIMASTER 411 DA 51.3Mittelspannungsantriebe SIMOVERT MV DA 63PDF: Spannungszwischenkreis-Umrichter
MICROMASTER, MIDIMASTERDA 64
SIMOVERT MASTERDRIVES Vector Control DA 65.10SIMOVERT MASTERDRIVES Motion Control DA 65.11Servomotoren für SIMOVERT MASTERDRIVES DA 65.3SIMODRIVE 611 universal und POSMO DA 65.4Spannungszwischenkreis-Umrichter SIMOVERT P DA 66Wechsel- und Drehstromsteller SIVOLT DA 68Thyristorsätze SITOR DA 91Halbleiterschutz-Sicherungen SITOR DA 94Ansteuereinrichtungen SITOR DA 95Regelsystem SIMADYN C DA 97Regelsystem MODULPAC C DA 98Drehstrom-NiederspannungsmotorenPlanungsunterlagen M 10Käfigläufermotoren M 11Getriebemotoren 2KG1 M 15Antriebssysteme für Bearbeitungsmaschinen SIMODRIVE
NC 60
• Hauptspindelmotoren• Vorschubmotoren• Umrichtersysteme SIMODRIVE 611/POSMODrehstrom-Hochspannungsmotoren M 2Antriebs- und Steuerungskomponenten für Hebezeuge HE 1
Automatisierungssysteme für Bearbeitungsmaschinen
Gesamtkatalog SINUMERIK & SIMODRIVE NC 60
Bedien- und Beobachtungssysteme SIMATIC HMI ST 80
Elektrische Stellantriebe SIPOSElektrische Dreh-, Schub- und Schwenkantriebe MP 35Elektrische Drehantriebe für kerntechnische Anlagen MP 35.1/.2
Industrie-Automatisierungssysteme SIMATICProzessüberwachungssystem SIMATIC PCS ST 45PDF: Automatisierungssysteme SIMATIC S5/505 ST 50Produkte für Totally Integrated Automation und Micro Automation
ST 70
Prozessleitsystem SIMATIC PCS 7 ST PCS 7PDF: Add Ons für das Prozessleitsystem SIMATIC ST PCS 7.ARegelsysteme SIMATIC ST DA
Industrielle Kommunikation für Automation and Drives
IK PI
PDF: Diese Kataloge liegen ausschließlich im PDF-Format vor.
Installationstechnik KatalogALPHA Klein- und Installationsverteiler ET A1ALPHA 400-ZS Zählerschränke ET A2ALPHA Reihenklemmen ET A5BETA Installationseinbaugeräte ET B1GAMMA Gebäudesystemtechnik ET G1DELTA Schalter und Steckdosen ET D1
Motion Control System SIMOTION PM 10
Prozessleitsystem TELEPERM MAutomatisierungssysteme AS 235, AS 235H, AS 235K PLT 111PDF: Automatisierungssysteme AS 488/TM PLT 112Bedienen und Beobachten mit WinCC/TM PLT 123Bussystem CS 275 PLT 130
Prozessinstrumentierung und AnalytikFeldgeräte für die ProzessautomatisierungMessgeräte für Druck, Differenzdruck, Durchfluss,Füllstand und Temperatur, Stellungsregler und Flüssigkeitsmengenmessgeräte
FI 01
PDF: Anzeiger für Schalttafeleinbau MP 12SIREC Schreiber und Zubehör MP 20SIPART, Regler und Software MP 31Wägesysteme SIWAREX WT 01Kontinuierliche Verwiegung und Prozessüberwachung WT 02Gasanalytik PA 10PDF: Prozessanalytik,
Komponenten für die SystemintegrationPA 11
Flüssigkeitsanalytik PA 20
Niederspannungs-SchalttechnikSchaltgeräte für die Industrie LV 10BERO – Sensorik für die Automatisierung LV 20Produkte und Systeme zur Energieverteilung LV 30SICUBE Systemschränke und Schrankklimatisierung LV 50Power Supplies & Components for Drives PDTransformatoren SIDAC-T PD 10Stromversorgungen SIDAC-S PD 20Drosseln SIDAC-D und Filter SIDAC-F LV 63Components for Drives PD 50Technische Informationen PD 60
SITRAIN Information und Training ITC
Systemlösungen für die IndustrieApplikationen und Produkte für Branchen sind Bestandteil des interaktiven Katalogs CA 01
Systems EngineeringStromversorgungen SITOP power, LOGO!Power KT 10.1Systemverkabelung SIMATIC TOP connect KT 10.2Identifikationssysteme MOBY KT 21Industrie-Microcomputer SICOMP KT 51
A&D/3U/De 05.04.04

Bestell-Nr. E86060-K5465-A301-A2
Siemens Aktiengesellschaft
Automation and Drives
Motion Control Systems
Postfach 31 80, D-91050 Erlangen
www.siemens.com
Schutzgebühr: € 5,–
Die Informationen in diesem Katalog enthalten Beschreibun-gen bzw. Leistungsmerkmale, welche im konkreten Anwen-dungsfall nicht immer in der beschriebenen Form zutreffenbzw. welche sich durch Weiterentwicklung der Produkte än-dern können. Die gewünschten Leistungsmerkmale sind nurdann verbindlich, wenn sie bei Vertragsschluss ausdrücklichvereinbart werden. Liefermöglichkeiten und technische Ände-rungen vorbehalten.