M.Sc. Mechatronik (PO 2014) · 1Grundlagen 1.1Mikrotechnische Systeme Modulname Elektromechanische...
199
M.Sc. Mechatronik (PO 2014) Allgemeine Mechatronik Stand: 01.03.2020 Studienbereich Mechtronik
Transcript of M.Sc. Mechatronik (PO 2014) · 1Grundlagen 1.1Mikrotechnische Systeme Modulname Elektromechanische...
M.Sc. Mechatronik(PO 2014)Allgemeine MechatronikStand: 01.03.2020
Studienbereich Mechtronik

Modulhandbuch: M.Sc. Mechatronik (PO 2014)Allgemeine Mechatronik
Stand: 01.03.2020
Studienbereich MechtronikEmail: [email protected]
I
Inhaltsverzeichnis
1 Grundlagen 1
1.1 Mikrotechnische Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Elektromechanische Systeme I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Dynamische Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Systemdynamik und Regelungstechnik III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Höhere Maschinendynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Weitere Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Werkzeuge und Methoden der Produktentwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Echtzeitanwendungen und Kommunikation mit Microcontrollern und programmierbaren Logikbau-
steinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Systemdynamik und Regelungstechnik II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Digitale Regelungssysteme I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Modellbildung und Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Technische und Naturwissenschaftliche Wahlfächer 13
2.1 Wahlfächer MB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Aktorwerkstoffe und -prinzipien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Aktuatorik in der Prozessautomatisierung verfahrenstechnischer Anlagen . . . . . . . . . . . . . . . . . 15Angewandte Strukturoptimierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Biofluidmechanik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Flugmechanik II: Flugdynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Fluidenergiemaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Grundlagen der Adaptronik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Grundlagen der Navigation I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Grundlagen der Navigation II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Kavitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Leichtbau I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Leichtbau II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Mechatronik und Assistenzsysteme im Automobil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Nano- und Mikrofluidik I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Numerische Strömungssimulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Printed Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Raumfahrtmechanik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Höhere Maschinendynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Grundlagen der Maschinenakustik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Forschungsseminar Fahrzeugtechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Trends der Kraftfahrzeugentwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Fahrdynamik und Fahrkomfort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47Verbrennungskraftmaschinen II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Konstruktion im Motorenbau II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Zuverlässigkeit im Maschinenbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Flugmechanik I: Flugleistungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Sichere Avioniksysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Mechatronische Systemtechnik II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Analyse und Synthese technischer Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Grundlagen der Turbomaschinen und Fluidsysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58Technical Operations Research - Optimierung von technischen Systemen . . . . . . . . . . . . . . . . . . 60
II
Wind-, Wasser- und Wellenkraft - Optimierung und Skalierung von Fluidkraftsystemen . . . . . . . . . 61Verbrennungskraftmaschinen I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Flugmechanik I: Flugleistungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.2 Wahlfächer ETiT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Advanced Power Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Microprocessor Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Software-Engineering - Wartung und Qualitätssicherung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68Software-Engineering - Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70Analog Integrated Circuit Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Control of Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Digitale Regelungssysteme II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Echtzeitsysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75Elektromechanische Systeme I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Mikrosystemtechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Energy Converters - CAD and System Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78Fuzzy-Logik, Neuronale Netze und Evolutionäre Algorithmen . . . . . . . . . . . . . . . . . . . . . . . . . 80Identifikation dynamischer Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81Kommunikationsnetze I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83Mehrgrößenreglerentwurf im Zustandsraum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85Mikroaktoren und Kleinmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86Motor Development for Electrical Drive Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87Neue Technologien bei elektrischen Energiewandlern und Aktoren . . . . . . . . . . . . . . . . . . . . . . 88Numerische Feldberechnung Elektrischer Maschinen und Aktoren . . . . . . . . . . . . . . . . . . . . . . 90Rechnersysteme II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Systemdynamik und Regelungstechnik III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92Technologie der Mikro- und Feinwerktechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93Computer Aided Design for SoCs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94Grundlagen der Schienenfahrzeugtechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95Lichttechnik I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96Lichttechnik II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97Neue Technologien bei elektrischen Energiewandlern und Aktoren . . . . . . . . . . . . . . . . . . . . . . 98Elektrische Bahnen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100Schnelle Randelementmethoden für Ingenieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101Industrieelektronik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103Machine Learning und Deep Learning in der Automatisierungstechnik . . . . . . . . . . . . . . . . . . . 104Anwendungen, Simulation und Regelung leistungselektronischer Systeme . . . . . . . . . . . . . . . . . 105Rechnersysteme I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106Sensortechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107Sensorsignalverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109Praktische Entwicklungsmethodik II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110Sensor Array Processing and Adaptive Beamforming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111Robuste Regelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
3 ADP / Seminare, Praktika, InfINat 114
3.1 ADP / Seminare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1143.1.1 ADP / Seminare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
3.1.1.1 ADP / Seminare MB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114ADP (6 CP) Dynamik und Schwingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114ADP (6 CP) Fahrzeugtechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115ADP (6 CP) Flugsysteme und Regelungstechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116ADP (6 CP) Fluidsystemtechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117ADP (6 CP) Mechatronische Systeme im Maschinenbau . . . . . . . . . . . . . . . . . . . . . . . . 118ADP (6 CP) Produktentwicklung und Maschinenelemente . . . . . . . . . . . . . . . . . . . . . . 119ADP (6 CP) Angewandte Dynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120ADP (6 CP) Systemzuverlässigkeit, Adaptronik und Maschinenakustik . . . . . . . . . . . . . . . 121
Inhaltsverzeichnis III
ADP (6 CP) Verbrennungskraftmaschinen und Fahrzeugantriebe . . . . . . . . . . . . . . . . . . 122ADP (6 CP) Gasturbinen, Luft- und Raumfahrtantriebe . . . . . . . . . . . . . . . . . . . . . . . . 123ADP (6 CP) Technische Thermodynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1243.1.1.2 ADP / Seminare ETiT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125Projektseminar Automatisierungstechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125Projektseminar Multimedia Kommunikation I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126Projektseminar Regelungstechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128Projektseminar Robotik und Computational Intelligence . . . . . . . . . . . . . . . . . . . . . . . . 129Seminar Multimedia Kommunikation I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130Seminar Softwaresystemtechnologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132Praxisorientierte Projektierung elektrischer Antriebe (Antriebstechnik für Elektroautos) . . . . 133Projektseminar Lichttechnische Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134Projektseminar Erweiterte Lichttechnische Anwendungen . . . . . . . . . . . . . . . . . . . . . . . 135Projektseminar Energiewandler und Antriebstechnik . . . . . . . . . . . . . . . . . . . . . . . . . . 136Anwendungen, Simulation und Regelung leistungselektronischer Systeme . . . . . . . . . . . . 137Projektseminar Autonomes Fahren I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138Praktische Entwicklungsmethodik I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140Projektseminar Praktische Anwendungen der Mechatronik . . . . . . . . . . . . . . . . . . . . . . 141Projektseminar Autonomes Fahren I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1423.1.1.3 ADP / Seminare Inf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144Robotik-Projektpraktikum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
3.1.2 Praktika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Praktikum Regelungstechnik II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Antriebstechnisches Praktikum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147Advanced Integrated Circuit Design Lab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Praktikum Elektromechanische Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Praktikum Multimedia Kommunikation I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150Softwarepraktikum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152Tutorium Fahrzeugtechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153Tutorium Pneumatik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154Tutorium Flugmechanik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155Mechatronik-Workshop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156Tutorium Verbrennungskraftmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157Tutorium Fortgeschrittene Cax Methoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158Tutorium Einführung in die statistische Versuchsplanung . . . . . . . . . . . . . . . . . . . . . . . 159Tutorium Maschinenakustik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160Tutorium Grundlagen der Roboterprogrammierung . . . . . . . . . . . . . . . . . . . . . . . . . . 161Praktikum Matlab/Simulink II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162Tutorium Fluidenergiemaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163Tutorium Numerische Simulation strömungsmechanischer Probleme . . . . . . . . . . . . . . . . 164Tutorium Strömungsmechanische Messmethoden im Turbomaschinenlabor . . . . . . . . . . . . 165Tutorium Topologie der Fluidsysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
3.1.3 InfINat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167Einführung in die Numerische Mathematik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167Flughafenplanung (C) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168Luftverkehr B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169Optimierung statischer und dynamischer Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . 170Architekturen und Entwurf von Rechnersystemen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172Bildverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174Computer Vision I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175Computer Vision II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177Grundlagen der Robotik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179Elektrische Antriebstechnik für Automobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181Matrixanalyse und schnelle Algorithmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182Betriebswirtschaft für Ingenieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
Inhaltsverzeichnis IV
Projektseminar Autonomes Fahren II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185Praktikum Matlab/Simulink II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187Machine Learning und Deep Learning in der Automatisierungstechnik . . . . . . . . . . . . . . . 188Grundlagen der Flugantriebe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189Mechatronische Systemtechnik I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190Praktikum Regelungstechnik II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191Mechatronik-Workshop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192Robuste Regelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
Inhaltsverzeichnis V
1 Grundlagen
1.1 Mikrotechnische Systeme
ModulnameElektromechanische Systeme I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kn-1050 5 CP 150 h 90 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Mario Kupnik
1 LerninhaltStruktur und Entwurfsmethoden elektromechanischer Systeme bestehend aus mechanischen, akusti-schen, hydraulischen und thermischen Netzwerken, Wandlern zwischen mechanischen und mechanisch-akustischen Netzwerken und elektromechanischen Wandlern. Entwurf und Anwendungen von elektrome-chanischen Wandlern
2 Qualifikationsziele / LernergebnisseVerstehen, Beschreiben, Berechnen und Anwenden der wichtigsten elektromechanischen Wandler alsSensor- und Aktorprinzipien; Elektrostatische Wandler (z.B. Mikrofone und Beschleunigungssensoren),piezoelektrische Wandler (z.B. Mikromotoren, Mikrosensoren), elektrodynamische Wandler (Lautsprecher,Shaker), piezomagnetische Wandler (z.B. Ultraschallquellen). Entwerfen komplexer elektromechanischerSysteme wie Sensoren und Aktoren und deren Anwendungen unter Verwendung der Netzwerkmethodemit diskreten Bauelementen.
3 Empfohlene Voraussetzung für die TeilnahmeElektrotechnik und Informationstechnik I
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc WI-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturFachbuch: „Elektromechanische Systeme der Mikrotechnik und Mechatronik, Springer 2009, Skript zurVorlesung EMS I, Aufgabensammlung zur Übung EMS 1
Enthaltene Kurse
Kurs-Nr. Kursname18-kn-1050-vl Elektromechanische Systeme I
Dozent Lehrform SWSProf. Dr. Mario Kupnik Vorlesung 2
1
Kurs-Nr. Kursname18-kn-1050-ue Elektromechanische Systeme I
Dozent Lehrform SWSProf. Dr. Mario Kupnik Übung 2
1.1 Mikrotechnische Systeme 2
1.2 Dynamische Systeme
ModulnameSystemdynamik und Regelungstechnik III
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2010 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 LerninhaltBehandelt werden:
• Grundlagen nichtlinearer Systeme,• Grenzzyklen und Stabilitätskriterien,• nichtlineare Regelungen für lineare Regelstrecken,• nichtlineare Regelungen für nichtlineare Regelstrecken,• Beobachter für nichtlineare Regelkreise
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung:
• die grundsätzlichen Unterschiede zwischen linearen und nichtlinearen Systemen benennen,• nichtlineare Systeme auf Grenzzyklen hin testen• verschiedene Stabilitätsbegriffe bennen und Ruhelagen auf Stabilität hin untersuchen,• Vor- und Nachteile nichtlinearer Regler für lineare Strecken nennen,• verschiedenen Regleransätze für nichtlineare Systeme nennen und anwenden,• Beobachter für nichtlineare Strecken entwerfen.
3 Empfohlene Voraussetzung für die TeilnahmeSystemdynamik und Regelungstechnik II
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 180 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Notenverbesserung nach §25 (2)
8 LiteraturAdamy: Systemdynamik und Regelungstechnik III (erhältlich im FG-Sekretariat)
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2010-vl Systemdynamik und Regelungstechnik III
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Vorlesung 2
Kurs-Nr. Kursname18-ad-2010-ue Systemdynamik und Regelungstechnik III
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Übung 1
1.2 Dynamische Systeme 3
ModulnameHöhere Maschinendynamik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-25-5060 6 CP 180 h 105 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Richard Markert
1 LerninhaltEinführung in die Höhere Maschinendynamik.Kinematik des Starrkörpers; Beschreibung der Translation und Rotation räumlicher Bewegungen.Formulierung von Bindungsgleichungen (skleronome, rheonome, holonome und nichtholonome Zwangs-bedingungen); Definition von verallgemeinerten Koordinaten und virtuellen Verschiebungen.Kinematik von Mehrkörpersystemen; baumstrukturierte Systeme und Systeme mit Schleifen; Beschreibungräumlicher Systeme mittels Absolutkoordinaten und mittels Relativkoordinaten.Kinetik von Starrkörpersystemen; Schwerpunktsatz und Drallsatz; Aufstellen von Bewegungsgleichungenin Absolutkoordinaten (Index-3, Index-2 und Index-1 Formulierungen) und in Relativkoordinaten; Prinzipeder Mechanik.Linearisierung von Bewegungsgleichungen; Lösungstheorie für lineare Systeme mit konstanten Koeffizien-ten.Anwendungsbeispiele aus der Fahrzeugtechnik, der Robotik, der Motormechanik, der Getriebetechnik, derRotordynamik, etc.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die räumliche Bewegung eines Starrkörpers mathematisch zu beschreiben.• Komplexe Systeme von starren Körpern kinematisch zu beschreiben und deren Bewegungen zu ana-
lysieren.• Die Bewegungsgleichungen für komplexe, ebene und räumliche Systeme mithilfe der Newton-
Eulerschen Gleichungen zu formulieren.• Die Prinzipien der Mechanik anzuwenden, um mit diesen – alternativ zu den Newton-Eulerschen
Gleichungen – Bewegungsdifferentialgleichungen herzuleiten.• Mathematische Modelle von realen Maschinen und Mechanismen zu erstellen, um die Bewegung
der Körper und die auftretenden Belastungen zu berechnen.
3 Empfohlene Voraussetzung für die TeilnahmeTechnische Mechanik I bis III (Statik, Elastomechanik, Dynamik) und Mathematik I bis III empfohlen.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Standard BWS)Abschlussklausur 150 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMaster MPE PflichtWI/MB, Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 Literatur
1.2 Dynamische Systeme 4
Woernle, C.: „Mehrkörpersysteme“, Springer, 2011.Shabana, A.: „Dynamics of Multibody Systems”, Cambridge University Press, Third Edition, 2010.Haug, E.J.: „Computer-Aided Kinematics and Dynamics of Mechanical Systems“, Allyn and Bacon, 1989.Markert, R.: „Strukturdynamik„, Shaker, 2013.Dresig, H.; Holzweißig, F.: „Maschinendynamik“, 10. Aufla-ge, Springer, 2011.
Enthaltene Kurse
Kurs-Nr. Kursname16-25-5060-vl Höhere Maschinendynamik
Dozent Lehrform SWSVorlesung 3
Kurs-Nr. Kursname16-25-5060-hü Höhere Maschinendynamik - Hörsaalübung
Dozent Lehrform SWSHörsaalübung 2
Kurs-Nr. Kursname16-25-5060-gü Höhere Maschinendynamik - Gruppenübung
Dozent Lehrform SWSGruppenübung 0
1.2 Dynamische Systeme 5
1.3 Weitere Grundlagen
ModulnameWerkzeuge und Methoden der Produktentwicklung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-05-5080 4 CP 120 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dipl.-Ing. Eckhard Alfred Kirchner
1 LerninhaltGrundlagen zur Produktentwicklung und Strukturierung des Entwicklungsprozesses, Aufgabenklärung undAnforderungsliste, Grundlagen der Produktneuentwicklung, Grundlagen des Produktkostenmana-gementsdurch reine Herstellkostensenkung, Wertanalyse und zielkostenorientierte Neuentwicklungen; Entwicklungumweltgerechter Produkte, variantengerechter Produkte und -Strukturen; Grundlagen der Sicherheitstech-nik und Entwicklung sicherheitsgerechter Produkte; Fehler- und Schwachstellenanalyse; Nutzung von Pro-totypen; Entwickeln und Produzieren im globalen Kontext.
2 Qualifikationsziele / LernergebnisseNach dem Abschluss der Lerneinheit sollten die Studierenden in der Lage sein:
• Entwicklungsaufgaben durch Hinterfragen zu analysieren, um Ziele und Kernprobleme zu erkennensowie Kundenwünsche in Anforderungen zu übersetzen und deren Bedeutung zu beurteilen.
• Die Entwicklungsaufgabe formal in Form einer Anforderungsliste zu beschreiben und dabei zwischenWünschen und Anforderungen zu differenzieren.
• Die Prinzipien, Vorteile und Grenzen des Simultaneous Engineering zu beschreiben und die Bedeu-tung und Wirkungsweise in der Praxis zu erklären.
• Vorgehen und Arbeitsschritte bei der Neuproduktentwicklung zu benennen und zu beschreiben, imRahmen der Erstellung eines Morphologischen Kastens und einer systematische Lösungskombinationanzuwenden, sowie ihre Bedeutung im Rahmen von Innovationsprojekten zu erklären.
• Die TQM-Prinzipien und ihre Umsetzung und Bedeutung im Unternehmen zu erklären sowie dieFMEA als präventive Fehlervermeidungsmethode anzuwenden.
• Die Begriffsdefinitionen für die Entwicklung sicherheitsgerechter Produkte zu differenzieren und zuerklären sowie die Prinzipien der Sicherheitstechnik in ihrer Wirksamkeit für konkrete Aufgabenstel-lungen zu beurteilen und zur Konstruktion verbesserter Lösungen zu transferieren.
• Die Grundlagen zur Entstehung von Kosten im Produktlebenslauf und des Produktkostenmaman-gements sowie dessen wesentliche Strategien zu differenzieren und zu erklären, Kostenstruktu-ren mittels Break-Even-Analyse und Funktionskostenanalyse zu analysieren und aufgabenspezifischStrategien und Maßnahmen zur Erreichung von Kostenzielen zu formulieren und hinsichtlich ihrerReichweite zu bewerten.
• Bedingungen der nachhaltigen Produktentwicklung zu beschreiben und das Vorgehen zur Erstellungvon Ökobilanzen zu erklären.
• Unternehmenssituationen hinsichtlich der angebotenen Produktvielfalt zu analysieren und die Ge-fahr von Komplexitätsfallen zu erkennen und zu erklären.
• Grenzen des Einsatz von Protoypen zu erklären sowie zu bewerten.• Herausforderungen der Entwicklung und Produktion in global agierenden Firmen zu benennen und
Lösungstrategien zu identifizieren.
3 Empfohlene Voraussetzung für die TeilnahmeKeine
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)Schriftl. Prüfung 90 min oder mündliche Prüfung 30 min
5 Benotung
1.3 Weitere Grundlagen 6
Modulabschlussprüfung:• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWP Bachelor MPE
7 Notenverbesserung nach §25 (2)
8 LiteraturU. Lindemann. Methodische Entwicklung technischer Produkte: Methoden flexibel und situationsgerechtanwenden. VDI-Buch. Springer-Verlag Berlin Heidelberg, 2009.G. Pahl;W. Beitz; J. Feldhusen; K.H. Grote. Konstruktionslehre – Grundlagen erfolgreicher Produktentwick-lung, Methoden und Anwendungen. Springer Verlag, Berlin, 2006.E. Kirchner & H. Birkhofer. Werkzeuge und Methoden der Produktentwicklung, Vorlesungsunterlagen despmd, 2018
Enthaltene Kurse
Kurs-Nr. Kursname16-05-5080-vl Werkzeuge und Methoden der Produktentwicklung
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-05-5080-ue Werkzeuge und Methoden der Produktentwicklung
Dozent Lehrform SWSÜbung 2
1.3 Weitere Grundlagen 7
ModulnameEchtzeitanwendungen und Kommunikation mit Microcontrollern und programmierbaren Logikbausteinen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-gt-2040 4 CP 120 h 75 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Gerd Griepentrog
1 LerninhaltMikrocontroller und FPGAs werden heute vielfältig zur Realisierung von Steuerungs- und Regelungsaufga-ben eingesetzt. Im Falle des Einsatzes in der Antriebstechnik und Leistungselektronik wird mit Hilfe dieserBausteine häufig die Ansteuerung von Wechselrichtern oder DC/DC Wandlern realisiert.In diesem Kontext sind zum einen praktisch immer Echtzeitanforderungen zu erfüllen und zum anderenviele verschiedene Kommunikationsschnittstellen zu bedienen. Das Modul vermittelt das Hintergrundwis-sen und die Kompetenzen, um in diesem Bereich erfolgreich Steuerungs- und Regelungsaufgaben zu reali-sieren.Im Einzelnen werden folgende Inhalte vermittelt:
• Architektur von Mikrocontrollern• Aufbau und Funktion von FPGAs, Werkzeuge und Sprachen zur Programmierung• Typische Peripheriekomponenten in Mikrocontrollern• Capture & Compare, PWM, A/D-Wandler• I2C, SPI, CAN, Ethernet• Programmierung von Mikrocontrollern in C• Peripheriekomponenten• Interruptbehandlung• Echtzeiteigenschaften der Software, Interrupts, Interruptlatenz• Regelung von induktiven Verbrauchern• Schaltungsgrundlagen, Power-MOSFETS, IGBTsNumerische Verfahren für die Berechnung
2 Qualifikationsziele / LernergebnisseStudierende können nach Abschluss des Moduls
• eine digitale Regelungsaufgabe in HW- und SW-Anteile separieren.• HW-Anteile in einer HW-Beschreibungssprache spezifizieren und mit Hilfe eines Mikrocontrollers die
SW-Anteile implementieren.• die Echtzeitfähigkeit ihres Programms bewerten und können obere Grenzen für Reaktionszeiten des
Systems ermitteln.• die entwickelte Lösung mit Hilfe einer Entwicklungsumgebung auf das Zielsystem übertragen und
dort debuggen.
3 Empfohlene Voraussetzung für die TeilnahmeKenntnisse in C-Programmierung (Syntax, Operatoren, Zeigerarithmetik)
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 120 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc MEC, MSc ETiT
7 Notenverbesserung nach §25 (2)
8 Literatur
1.3 Weitere Grundlagen 8
Skript, Übungsanleitung und ppt-Folien, alles sowohl als Hard-Copy oder als Download; User Manuals derverwendeten Bausteine und Entwicklungsumgebung
Enthaltene Kurse
Kurs-Nr. Kursname18-gt-2040-vl Echtzeitanwendungen und Kommunikation mit Microcontrollern und programmierba-
ren Logikbausteinen
Dozent Lehrform SWSProf. Dr.-Ing. Gerd Griepentrog Vorlesung 1
Kurs-Nr. Kursname18-gt-2040-pr Echtzeitanwendungen und Kommunikation mit Microcontrollern und programmierba-
ren Logikbausteinen
Dozent Lehrform SWSProf. Dr.-Ing. Gerd Griepentrog Praktikum 2
1.3 Weitere Grundlagen 9
ModulnameSystemdynamik und Regelungstechnik II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-1010 7 CP 210 h 135 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 LerninhaltWichtigste behandelte Themenbereiche sind:
• Wurzelortskurvenverfahren (Konstruktion und Anwendung),• Zustandsraumdarstellung linearer Systeme (Systemdarstellung, Zeitlösung, Steuerbarkeit, Beob-
achtbarkeit, Zustandsregler, Beobachter)
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung: 1. Wurzelortskurven erzeugen und analysieren, 2. dasKonzept des Zustandsraumes und dessen Bedeutung für lineare Systeme erklären, 3. die Systemeigen-schaften Steuerbarkeit und Beobachtbarkeit benennen und gegebene System daraufhin untersuchen, 4.verschiedenen Reglerentwurfsverfahren im Zustandsraum benennen und anwenden, 5. nichtlineare Syste-me um einen Arbeitspunkt linearisieren.
3 Empfohlene Voraussetzung für die TeilnahmeSystemdynamik und Regelungstechnik I
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 180 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Notenverbesserung nach §25 (2)
8 LiteraturAdamy: Systemdynamik und Regelungstechnik II, Shaker Verlag (erhältlich im FG-Sekretariat)http://www.rtr.tu-darmstadt.de/lehre/e-learning (optionales Material)
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-1010-vl Systemdynamik und Regelungstechnik II
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Vorlesung 3
Kurs-Nr. Kursname18-ad-1010-ue Systemdynamik und Regelungstechnik II
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Übung 2
1.3 Weitere Grundlagen 10
ModulnameDigitale Regelungssysteme I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2020 4 CP 120 h 75 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 LerninhaltTheoretische Grundlagen von Abtast-Regelungsystemen:Zeitdiskrete Funktionen, Abtast-/Halteglied, z-Transformation, Faltungssumme, z-Übertragungsfunktion,Stabilität von Abtastsystemen, Entwurf zeitdiskreter Regelungen, Diskrete PI-, PD- und PID-Regler,Kompensations- und Deadbeat-Regler, Anti-Windup-Maßnahmen
2 Qualifikationsziele / LernergebnisseDer Student erlangt Kenntnisse im Bereich der digitalen Regelungs- und Steuerungstechnik. Er kennt diegrundlegenden Unterschiede zwischen kontinuierlichen und diskreten Regelungssystemen und kann zeit-diskrete Regelungen nach verschiedenen Verfahren analysieren und entwerfen.
3 Empfohlene Voraussetzung für die TeilnahmeHilfreich sind Kenntnisse der Laplace- und Fourier-Transformation sowie der Grundlagen der zeitkontinu-ierlichen Regelungstechnik. Diese Grundlagen werden in der Vorlesung Systemdynamik und Regelungs-technik I angeboten.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc/MSc Wi-ETiT, MSc ETiT, BSc/MSc CE, MSc MEC, BSc/MSc iST, MSc iCE, MSc Informatik
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript Konigorski: „Digitale Regelungssysteme“Ackermann: Äbtastregelung"Aström, Wittenmark: "Computer-controlled Systems"Föllinger: "Lineare Abtastsysteme"Phillips, Nagle: "Digital control systems analysis and design"Unbehauen: "Regelungstechnik 2: Zustandsregelungen, digitale und nichtlineare Regelsysteme"
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2020-vl Digitale Regelungssysteme I
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Vorlesung 2
Kurs-Nr. Kursname18-ko-2020-ue Digitale Regelungssysteme I
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Übung 1
1.3 Weitere Grundlagen 11
ModulnameModellbildung und Simulation
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2010 4 CP 120 h 75 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 LerninhaltZweck der Modellbildung, Theoretische Modellbildung durch Anwendung physikalischer Grundgesetze,verallgemeinerte Netzwerkanalyse, Modellierung örtlich verteilter Systeme, Modellvereinfachung, Lineari-sierung, Ordnungsreduktion, Digitale Simulation linearer Systeme, Numerische Integrationsverfahren
2 Qualifikationsziele / LernergebnisseDie Studierenden werden in der Lage sein, verschiedene Verfahren zur mathematischen Modellierung dy-namischer Systeme aus unterschiedlichen Anwendungsgebieten anzuwenden. Sie werden die Fähigkeitbesitzen, das dynamische Verhalten der modellierten Systeme digital zu simulieren und die dabei zur Ver-fügung stehenden numerischen Integrationsmethoden gezielt einzusetzen.
3 Empfohlene Voraussetzung für die TeilnahmeGrundkenntnisse der zeitkontinuierlichen und zeitdiskreten Regelungstechnik. Diese Grundlagen werdenin den Vorlesungen „Systemdynamik und Regelungstechnik I und II“ sowie „Digitale Regelungssysteme Iund II“ angeboten.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript Konigorski: „Modellbildung und Simulation“,Lunze: „Regelungstechnik 1 und 2“,Föllinger: „Regelungstechnik: Einführung in die Methoden und ihre Anwendung“
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2010-vl Modellbildung und Simulation
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Vorlesung 2
Kurs-Nr. Kursname18-ko-2010-ue Modellbildung und Simulation
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Übung 1
1.3 Weitere Grundlagen 12
2 Technische und NaturwissenschaftlicheWahlfächer
2.1 Wahlfächer MB
ModulnameAktorwerkstoffe und -prinzipien
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-26-5140 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Thilo Bein
1 LerninhaltDefinitionen; multifunktionale Werkstoffe; Piezokeramiken, Formgedächtnislegierung, polymer-basierteWandlerwerkstoffe und weitere Wandlerwerkstoffe; Aktorprinzipien; Sensoren; Anwendungen.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Bedeutung von Wandlerwerkstoffen sowie Aktor- und Sensorprinzipien für die Adaptronik abzu-schätzen.
• Die physikalischen Prinzipien und Eigenschaften von Wandlerwerkstoffen zu erklären.• Die sachgerechte Anwendung von Wandlerwerkstoffen zu bewerten.• Die grundlegenden Sensor- und Aktorprinzipien zu erläutern.5. Die Wandlerwerkstoffe auf prinzipi-
elle Aktor- und Sensorkonzepte anzuwenden.
3 Empfohlene Voraussetzung für die TeilnahmeKeine
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik (Vertiefung Adaptronik)
7 Notenverbesserung nach §25 (2)
8 Literatur
13
Kopien der Vorlesungsfolien. Auszug aus „Grundwissen des Ingenieurs“, Kapitel 22. Beides erhältlich in derVorlesung.Hering, E.; Modler, H. (ed.): Grundwissen des Ingenieurs, Hansa Verlag, Leipzig, 2002.Gasch, R.; Knothe, K.: Strukturdynamik, Band 1 & 2, Springer-Verlag, Berlin, 1987 und 1989.Heimann, B.; Gerth, W.; Popp, P.: Mechatronik, Fachbuchverlag, Leipzig, 1998.Ruschmeyer, K.; u. a.: Piezokeramik, Expert Verlag, Rennigen-Malmsheim, 1995.Duerig, T. W.: Engineering Aspects of Shape Memory Alloys, London, Butterworth-Heinemann, 1990.Janocha, H.: Actuators: Basics and Applications, 1. Auflage, Springer Verlag, Berlin, 2004.
Enthaltene Kurse
Kurs-Nr. Kursname16-26-5140-vl Aktorwerkstoffe und -prinzipien
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 14
ModulnameAktuatorik in der Prozessautomatisierung verfahrenstechnischer Anlagen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5190 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltProzessautomatisierung; Prozesse und Komponenten der Verfahrenstechnik; Leitsystem und Prozessrege-lung; Pumpen; Sensoren bzw. Messtechnik; Aktoren bzw. Stellgeräte; Regelung und Steuerung; Speicher-programmierbare Steuerungen; Regelstrategien (PID etc.); Normen und Zulassungen (Ex-Schutz, Umwelt,Lärm etc.); Kommunikation im Feld (HART, Feldbusse); Prozessanalyse; Ventilbauarten; Strömungstech-nische Grundlagen; Auslegung von Armaturen; Akustische Aspekte; Stellungsregler; ReglungstechnischesVerhalten bzw. Anforderungen; Anbauteile; Sicherheitsschaltung; Antisurge-Ventile; Drehantriebe für Pum-pen
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Das strömungstechnische und regelungstechnische Zusammenwirken zwischen Leitsystem, Sensorund Aktor auf der Feldebene darzustellen.
• Das Zusammenwirken von Pumpe, Regelarmatur (Aktuator) und Anlagenwiderstand qualitativ undquantitativ zu beschreiben (Pumpenkennlinie, Rohrdruckverlust, Drosselwirkung der Armatur etc.)und dabei die strömungstechnischen Grundlagen anwenden zu können.
• Die Stellkennlinie zu ermitteln sowie den kv-Wert als maßgebliche Drosselkenngröße für inkompres-sible, kompressible sowie zweiphasige Prozessmedien und die richtige Nennweite zu berechnen.
• Kritische Zustände und deren Zusammenhänge mit den Betriebsdaten in Regelarmaturen durch Ka-vitation, Tropfenschlag und Schallemission zu beschreiben und Abhilfemaßnahmen aufzuzählen.
• Den Kraftbedarf für den Stellantrieb zu ermitteln.• Bauarten von Armaturen einschließlich verschiedener Stellantriebsarten sowie Steuer- bzw. Regel-
komponenten mit ihren Vorteilen und Nachteilen zu nennen.• Die regelungstechnischen Zusammenhänge statischer und dynamischer Natur darzustellen und auch
quantitativ zu beschreiben (PID-Regler für Prozess und Ventilstellung, Zeitverhalten und Kurven).• Energetische Zusammenhänge im Fluidssystem qualitativ und quantitativ darzustellen (Drossel- und
Drehzahlregelung getrennt und in Kombination).
3 Empfohlene Voraussetzung für die TeilnahmeStrömungstechnik, Strömungslehre, Thermodynamik, Regelungstechnik empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 45 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Wahlfächer aus Natur- und Ingenieurwissenschaft)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturFolien
Enthaltene Kurse
2.1 Wahlfächer MB 15
Kurs-Nr. Kursname16-10-5190-vl Aktuatorik in der Prozessautomatisierung verfahrenstechnischer Anlagen
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 16
ModulnameAngewandte Strukturoptimierung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-19-5040 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Lothar Harzheim
1 LerninhaltZiele der Strukturoptimierung; Mathematische Grundlagen: Extrema, Konvexität, Lagrange-Funktionund Multiplikatoren, Kuhn-Tucker-Bedingungen, Sattelpunkteigenschaften; Optimierungsverfahren: Gra-dientenverfahren, Approximationsverfahren, Response-Surface-Methoden, Optimalitätskriterien, Evoluti-onsstrategien; Optimierungsstrategien: Mehrzieloptimierung, multidisziplinäre Optimierung, Multilevel-Optimierung, Berücksichtigung der Streuung der Strukturparameter, Robust Design; Einbeziehung derFinite-Elemente-Methode in den Optimierungsprozeß; Programme und Anwendungsbereiche, Wanddi-ckenoptimierung, Gestaltsoptimierung, Topologieoptimierung.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Ziele der Strukturoptimierung und deren mathematische Grundlagen zu beschreiben.• Die Begriffe Extrema, Konvexität, Lagrange-Funktion und Multiplikatoren zu erklären und zu unter-
scheiden.• Die Kuhn-Tucker-Bedingungen und Sattelpunkteigenschaften zu beschreiben und deren Bedeutung
zu erläutern.• Die Grundlagen von Gradientenverfahren, Approximationsverfahren, Response-Surface-Methoden,
Optimalitätskriterien und Evolutionsstrategien zu wiederholen.• Strategien zur Mehrzieloptimierung, multidisziplinären Optimierung, Multilevel-Optimierung und
zur Berücksichtigung der Streuung von Strukturparametern zu erläutern.• Finite-Elemente-Methode in den Optimierungsprozess einzubeziehen.• Wichtige Programme zur Strukturoptimierung zu benennen und wichtige Anwendungsbereiche für
die Wanddickenoptimierung, die Gestaltsoptimierung und die Topologieoptimierung zu beschreiben.
3 Empfohlene Voraussetzung für die TeilnahmeNumerische Mathematik und Numerische Berechnungsverfahren empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript (erhältlich in Vorlesung); Schumacher, Optimierung mechanischer Strukturen, Springer, 2004
Enthaltene Kurse
2.1 Wahlfächer MB 17
Kurs-Nr. Kursname16-19-5040-vl Angewandte Strukturoptimierung
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-19-5040-ue Angewandte Strukturoptimierung
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 18
ModulnameBiofluidmechanik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5230 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltBewegung von Mikroorganismen; Warum bewegen sich Mikroorganismen?; Linearität der Bewegungs-gleichungen; Superposition; Propulsionsmatrix; Froudscher Wirkungsgrad; Bewegung eines schlanken Fi-sches; Virtuelle Massen; Energiebilanz; Energetisch optimale Bewegung; Peristaltik bei kleinen und großenReynoldszahlen; Entstehung von Wirbeln; Elektroosmotische Strömungen
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Ingenieurmethoden auf physiologische Probleme anzuwenden.• Mechanismen physiologischer Systeme auf technische Problemstellungen anzuwenden.• Ähnlichkeiten und Unterschiede zwischen biologischen und technischen Fluidsystemen zu diskutie-
ren.• Die Bewegung von Mikroorganismen zu beschreiben und mithilfe der linearen Bewegungsgleichun-
gen vorherzusagen.• Bedingungen und Eigenschaften für energetisch optimale Bewegung herzuleiten und zu diskutieren.• Die Mechanismen der Peristaltik bei kleinen und großen Reynoldszahen zu erklären.• Elektroosmotische Strömungen zu beschreiben und zu berechnen.
3 Empfohlene Voraussetzung für die TeilnahmeTechnische Strömungslehre, Grundlagen der Turbomaschinen und Fluidsystemte empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)Klausur 90 min oder mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft) [bis WiSe 2017/18 WPB MasterMPE II (Kernlehrveranstaltungen aus dem Maschinenbau)]WPB Master PST III (Wahlfächer aus Natur- und Ingenieurwissenschaft)Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturLernmaterial auf www.fst.tu-darmstadt.deEmpfohlene Bücher:Lighthill: Mathematical Biofluiddynamics, SIAMLighthill: Swimming of Slender Fish, Journal of Fluid MechanicsProbstein: Physicochemical Hydrodynamics – An Introduction, John Wiley & SonsPurcell: Life at low Reynolds Number, Physics and our World
Enthaltene Kurse
2.1 Wahlfächer MB 19
Kurs-Nr. Kursname16-10-5230-vl Biofluidmechanik
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 20
ModulnameFlugmechanik II: Flugdynamik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-23-5040 6 CP 180 h 135 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Uwe Klingauf
1 LerninhaltStatische Stabilität; stationäre Längs- und Seitenbewegung, stationäre Manöver; dynamische Längs- undSeitenbewegung, dynamische Stabilität; 6 Freiheitsgrade Modell
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Das statische und dynamische Verhalten des Flugzeugs zu modellieren, zu analysieren und das Sys-temverhalten zu charakterisieren.
• Den Einfluss der Flugzeugkonfiguration auf das statische und dynamische Flugverhalten zu erklären.• Flugeigenschaften zu beurteilen.• Steuerflächen zur Beeinflussung des Flugzustands auszulegen.• Modelle für die Flugsimulation aufzustellen.
3 Empfohlene Voraussetzung für die TeilnahmeFlugmechanik I und Systemtheorie und Regelungstechnik empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung mit schriftlichem Teil (in 3er-Gruppen) 1 h
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript und weitere Unterlagen online zum Download. Literatur: Brockhaus: Flugregelung (Springer),Yechout: Introduction to Aircraft Flight Mechanics (AIAA), McLean: Automatic Flight Control Systems.
Enthaltene Kurse
Kurs-Nr. Kursname16-23-5040-vl Flugmechanik II: Flugdynamik
Dozent Lehrform SWSVorlesung 3
2.1 Wahlfächer MB 21
ModulnameFluidenergiemaschinen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5120 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltFluidkraft- und Fluidarbeitssysteme; Energiewandlungsprinzipien; Einordnung nach Schnellläufigkeit; De-finition von System- und Modulwirkungsgraden; Isentroper Wirkungsgrad; Cordier-Diagramm; Maschinenmit kleiner und großer Schaufelanzahl; Eulersche Turbinengleichung; Auslegung mittels aerodynamischerEntwurfsmethodik; Wirbelflussmaschine; Skalierung
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Funktion und Aufgabe einer Maschine zu ermitteln.• Einen Maschinentyp mithilfe strömungsmechanischer Kennzahlen auszuwählen.• Die Arbeitsumsetzung innerhalb einer Maschine zu berechnen.• Den Wirkungsgrad eines Systems oder Moduls zu bestimmen.• Strömungsmaschinen entsprechend gegebener Anforderungen auszulegen.
3 Empfohlene Voraussetzung für die TeilnahmeTechnische Strömungslehre, Grundlagen der Turbomaschinen und Fluidsysteme empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Klausur 90 min oder mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Wahlfächer aus Natur- und Ingenieurwissenschaft)
7 Notenverbesserung nach §25 (2)
8 LiteraturLernmaterial auf www.fst.tu-darmstadt.de.Empfohlene Bücher:Fister: Fluidenergiemaschinen, Band 1, Springer VerlagFister: Fluidenergiemaschinen, Band 2, Springer Verlag
Enthaltene Kurse
Kurs-Nr. Kursname16-10-5120-vl Fluidenergiemaschinen
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 22
ModulnameGrundlagen der Adaptronik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-26-5030 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Holger Hanselka
1 LerninhaltDefinitionen smarte passive, adaptive und aktive Systeme; multifunktionale Werkstoffe; Piezokeramiken,Formgedächtnismaterialien, elektro- und magnetorheologische Flüssigkeiten; dielektrische Polymere; Ak-torkonzepte; smarte Dämpfer, adaptive Tilger, Inertialmassenaktoren, aktive Lagerungen; Entwurfsverfah-ren; Konstruktionsprinzipien; Prinzipien der Schwingungsminderung; Rückführungen, elektromechanischeAnalogie, Shunt Damping; Anwendungen
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Mechatronische und adaptronische Systeme zu analysieren.• Prinzipien der Schwingungskontrolle und die Wirkweise und die erweiterten Möglichkeiten durch
adaptronische Systeme zu erklären und Lösungskonzepte zu bewerten und abzuleiten.• Physikalische Prinzipien und Eigenschaften von Wandlerwerkstoffen wie Piezokeramiken, Formge-
dächtnismaterialien oder elektro- und magnetorheologischen Fluiden, Einsatzmöglichkeiten und Li-mitationen zu analysieren und für bestimmte Randbedingungen geeignet auszuwählen.
• Smarte Aktoren zur Schwingungskontrolle zu erklären und auf ausgewählte Randbedingungen zuübertragen.
• Anwendungsmöglichkeiten von smarten Struktursystemen inklusive Limitationen zu evaluieren.
3 Empfohlene Voraussetzung für die TeilnahmeSchwingungstechnik
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturVorlesungsfolienFuller, C., Elliot, S., Nelson, P.: Active Control of Vibration. London: Academic Press 1996Hansen, C.H. , Snyder, S.D.: Active Control of Noise and Vibration, London: E&FN Spon 1997Ruschmeyer, K., u.a.: Piezokeramik. Rennigen-Malmsheim: expert verlag 1995Utku, S.: Theory of Adaptive Structures, Boca Raton: CRC Press LLC 1998Duerig, T.W.: Engineering Aspects of Shape Memory Alloys, London, Butterworth-Heinemann, 1990
Enthaltene Kurse
2.1 Wahlfächer MB 23
Kurs-Nr. Kursname16-26-5030-vl Grundlagen der Adaptronik
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 24
ModulnameGrundlagen der Navigation I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-23-5050 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Beyer
1 LerninhaltNavigationsarten, Erdmodelle, Koordinatensyteme, Radionavigation, Grundlagen und Instrumente (ADF,VOR, DME, ILS), Koppelnavigation, Funktionsprinzip und Fehleranalyse, Satellitennavigation, Einfüh-rung in GPS, Signalaufbau und Messprinzip, Verminderung der Präzession (Dilution of Precision, DoP),Differential-GPS, Augmentation Systeme (RAIM, GIC, WAAS, LAAS, EGNOS).
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Physik der Navigation auf der Erde zu erklären.• Die verwendeten Koordinatensysteme und möglichen Kartenprojektionen einzuordnen.• Die Verfahren der Radio-, Koppel- und Satellitennavigation hinsichtlich ihrer Performance und
Einsatzmöglichkeiten zu beurteilen.
3 Empfohlene Voraussetzung für die TeilnahmeEmpfohlen: Systemtheorie und Regelungstechnik
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 60 min, Standard BWS)Mündliche Prüfung (in 3er-Gruppen) 60 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturVorlesungsskript verfügbar.
Enthaltene Kurse
Kurs-Nr. Kursname16-23-5050-vl Grundlagen der Navigation I
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-23-5050-ue Grundlagen der Navigation I
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 25
ModulnameGrundlagen der Navigation II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-23-5060 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Beyer
1 LerninhaltInertialnavigation (Aufbau Strapdown-Algorithmus, Fehlermodell, Schulerschwingung, barometrischeHöhenstützung, Ringlaserkreiselmodell und Funktionsweisen). Integrierte Navigation (Signalmittelung,Luenberger-Beobachter, Wiener-Filter, Kalman-Filter, Fehlerdetektion und –isolation, Open- und Closed-Loop-Konzept, Geländedatenbank basierte Verfahren). Navigation im Flugzeug (Aufbau und Strukturder Hybridnavigation, Navigationsdatenbank, Navigationsmodes im Flugzeug, Guidance and Control, 4D-Navigation, Required Time of Arrival). Anwendungen und Beispiele (Map Shifts, Koppelnavigation).
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Verfahren der Inertialnavigation und der integrierten fehlertoleranten Navigation hinsichtlichihrer Performance und Einsatzmöglichkeiten zu beurteilen.
• Die Funktion und Einsatzmöglichkeiten von Flight Management Systemen zu beschreiben.• Die aktuelle Verfahren der Flugführung einzuordnen.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagen der Navigation I, Systemtheorie und Regelungstechnik empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 60 min, Standard BWS)Mündliche Prüfung (in 3er-Gruppen) 60 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturVorlesungsskript verfügbar.
Enthaltene Kurse
Kurs-Nr. Kursname16-23-5060-vl Grundlagen der Navigation II
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-23-5060-ue Grundlagen der Navigation II
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 26
ModulnameKavitation
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5040 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltEinführung; Entstehungsursachen und Formen der Kavitation; Kavitationskeime; Dynamik von Kavita-tionsblasen; Untersuchungen zum Kavitationsbeginn; Fortgeschrittene Kavitation, Stationäre und insta-tionäre Kavitationsvorgänge; Akustische Effekte; Rückwirkungen der Kavitation auf Strömungsvorgänge;Kavitations-Erosion; Dimensionsanalyse; Kavitation bei Pumpen.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Das Phänomen Kavitation in technischen Systemen (Gleitlager, Strömungsmaschine, Fluidssyteme)zu beschreiben.
• Die physikalischen Zusammenhänge zwischen Kavitation und Kavitationserrosion darzustellen.• Das dynamische Blasenwachstum durch Modellbildung zu beschreiben.• Dimensionsanalytische Methoden bei Kavitationsphänomenen anzuwenden.
3 Empfohlene Voraussetzung für die TeilnahmeTechnische Strömungslehre empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Wahlfächer aus Natur- und Ingenieurwissenschaft)
7 Notenverbesserung nach §25 (2)
8 LiteraturLernmaterial auf www.fst.tu-darmstadt.deEmpfohlene Bücher:Brennen, Christopher E. : Cavitation and Bubble Dynamics, Oxford University Press.
Enthaltene Kurse
Kurs-Nr. Kursname16-10-5040-vl Kavitation
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 27
ModulnameLeichtbau I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-12-5040 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Christian Mittelstedt
1 LerninhaltDie Lehrinhalte orientieren sich an den folgenden Prinzipbauteilen eines Passagierflugzeugs, die ausführ-lich vorgestellt und in ihrer Funktionsweise erläutert werden: 1) Rumpfspant, 2) Hautfeld (System ausStringer/Spant/Haut), 3) Querträger, 4) Druckschott.Die Vorlesungsinhalte sind im Einzelnen:Einführung: Aufgaben des Leichtbaus, Leichtbauprinzipien, IdealisierungskonzepteFestigkeitslehre: Wiederholung: Schnittgrößen und Konstitutivgesetz am Balken; Spannungen und Verzer-rungen im 2D- und 3D-Fall; Ebener Spannungs- und Verzerrungszustand.Prinzipbauteile: Einführung in die Statik des Rumpfes eines Passagierflugzeugs, Prinzipbauteile: 1. Spant,2. Hautfeld (System aus Stringer/Spant/Haut), 3. Druckschott, 4. Querträger.Biegung balkenförmiger Bauteile I: Einfache Biegung am Euler-Bernoulli-Balken und Doppelbiegung, Nach-weisführung, Leichtbaugerechte Vereinfachungen, Beispiel: Querträger.Biegung balkenförmiger Bauteile II: Schubweiche Balkentragwerke, Auswirkung von Schubverformungen,Nachweisführung, Beispiel: Querträger.Biegung balkenförmiger Bauteile III: Querkraftbiegung, Berechnung von Schubspannungen an offenen Pro-filen, Schubmittelpunkt, Leichtbaugerechtes Auslegen, Beispiel: Flugzeugspant (Z-Spant).Biegung balkenförmiger Bauteile IV: Querkraftbiegung, Berechnung von Schubspannungen an geschlos-senen und gemischten Profilen, Leichtbaugerechtes Auslegen, Beispiel: Flugzeugspant mit geschlossenemQuerschnitt (Omega-Spant).Torsion balkenförmiger Bauteile I: St. Venantsche Torsion offener dünnwandiger Profile, Leichtbaugerech-tes Auslegen, Beispiel: Flugzeugspant (Z-Spant).Torsion balkenförmiger Bauteile II: St. Venantsche Torsion geschlossener dünnwandiger Profile, Leichtbau-gerechtes Auslegen, Beispiel: Flugzeugspant (Omega-Spant), Einführung in die Wölbkrafttorsion, Beispiel:Querträger.Torsion balkenförmiger Bauteile III: Weiterführung der Wölbkrafttorsion, Leichtbaugerechtes Auslegen, Bei-spiel: Querträger, Nachweisführung bei kombinierten Beanspruchungen.Stabilität I: Knicken elastischer Stäbe, Perfekte und imperfekte Strukturen, Leichtbaugerechtes Auslegen,Beispiel: Knicken von Stringern.Stabilität II: Weiterführung imperfekte Strukturen, Inelastisches Knicken, Leichtbaugerechtes AuslegenStabilität III: Biegedrillknicken und Kippen, Leichtbaugerechtes Auslegen, Beispiel: Flugzeugspant (Z-Spant).
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:1. Die geeigneten Methoden auszuwählen, um möglichst leichte Strukturen zu gestalten.2. Die spezielle Mechanik der Leichtbaustrukturen auf beliebige praxisrelevante Problemstellungen zu über-tragen.3. Leichtbau-optimale Geometrien auszuwählen und sie zu dimensionieren.
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 20 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
2.1 Wahlfächer MB 28
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturGROSS, D., HAUGER, W. und WRIGGERS, P., 2011. Technische Mechanik 4. 8. Auflage. Berlin et al.: Sprin-ger.
Enthaltene Kurse
Kurs-Nr. Kursname16-12-5040-vl Leichtbau I
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-12-5040-ue Leichtbau I
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 29
ModulnameLeichtbau II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-12-5050 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Christian Mittelstedt
1 LerninhaltDie Vorlesungsinhalte werden ebenfalls anhand der in der Lehrveranstaltung „Konstruktiver LeichtbauI“ eingeführten Prinzipbauteile eines Passagierflugzeugs (1) Rumpfspant, 2) Hautfeld (System aus Strin-ger/Spant/Haut), 3) Querträger, 4) Druckschott) eingehend illustriert. Die Inhalte sind:Tragwerke I: Schubwand- und Schubfeldträger (offen / geschlossen; statisch bestimmt / unbestimmt), Bei-spiel: System Stringer / Spant / Haut.Tragwerke II: Isotrope und orthotrope Scheiben, Scheibengleichung und Lösungen, Beispiel: GelochteScheiben, orthotroper Flugzeugspant.Tragwerke III: Orthotrope Platten, Plattengleichung und Lösungen, Beispiel: Bodenplatte A350 (Sand-wich).Stabilität I: Plattenbeulen: Exakte Lösungsmethoden, Beispiel: Hautfeld.Stabilität II: Beulen ausgesteifter Platten: Exakte Lösungen, Näherungsverfahren, Auswirkung von Ausstei-fungsmustern, Leichtbaugerechtes Auslegen.Stabilität III: Lokales Beulen dünnwandiger Träger, Beispiel: Z-Spant, Omega-Spant.Faserverbund-Bauweisen I: Einführung in die klassische Laminattheorie, Beispiel: Hautfeld A350.Faserverbund-Bauweisen II: Konstruktionsprinzipien, Laminattheorien höherer Ordnung.Sandwich-Bauweisen I: Einführung, Vor- und Nachteile, Kernmaterialien, Herstellverfahren, Einsatzgebie-te, Krafteinleitungen.Sandwich-Bauweisen II: Schubdeformationstheorien, Festigkeitsanalyse, Leichtbaugerechtes Auslegen, Bei-spiel: Druckschott A350.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:1. Die grundlegenden, für Leichtbaustrukturen relevanten Tragwerke hinsichtlich ihres Tragverhaltens ein-zuschätzen und die verfügbaren exakten Lösungsverfahren auf Beispiele der Praxis anzuwenden.2. Statische Probleme von Leichtbautragwerken mittels Approximationsmethoden zu lösen.3.Erlernte Methoden für gegebene spezifische praktische Probleme selbsttätig auszuwählen und zielgerich-tet anzuwenden.4. Bauteile im Rahmen des Leichtbaus hinsichtlich ihres statischen Verhaltens sicher auszulegen und Opti-mallösungen zu finden.
3 Empfohlene Voraussetzung für die TeilnahmeLeichtbau I empfohlen.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 20 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literatur
2.1 Wahlfächer MB 30
ALTENBACH, H., ALTENBACH, J. und NAUMENKO, K., 1998. Ebene Flächentragwerke. Berlin et al.: Sprin-ger.GROSS, D., HAUGER, W. und WRIGGERS, P., 2011. Technische Mechanik 4. 8. Auflage. Berlin et al.: Sprin-ger.WIEDEMANN, J., 1996. Leichtbau 1: Elemente. 2. Auflage. Berlin et al.: Springer Verlag.
Enthaltene Kurse
Kurs-Nr. Kursname16-12-5050-vl Leichtbau II
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-12-5050-ue Leichtbau II
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 31
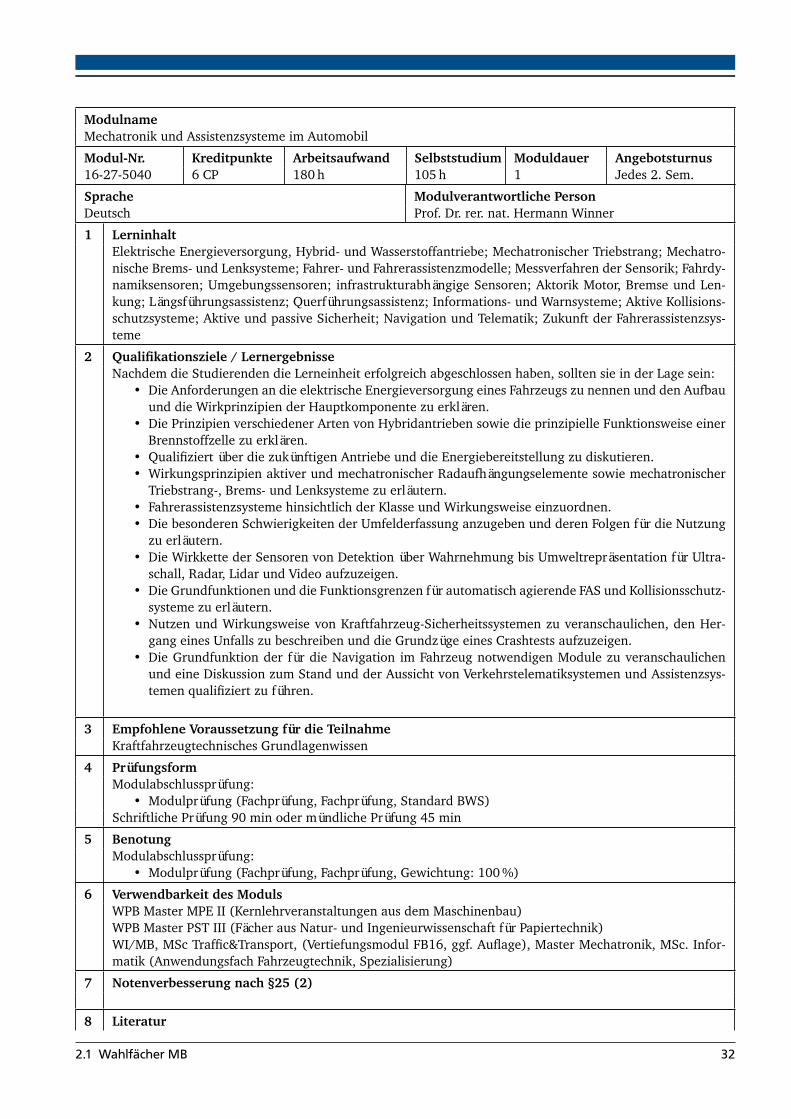
ModulnameMechatronik und Assistenzsysteme im Automobil
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-27-5040 6 CP 180 h 105 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Hermann Winner
1 LerninhaltElektrische Energieversorgung, Hybrid- und Wasserstoffantriebe; Mechatronischer Triebstrang; Mechatro-nische Brems- und Lenksysteme; Fahrer- und Fahrerassistenzmodelle; Messverfahren der Sensorik; Fahrdy-namiksensoren; Umgebungssensoren; infrastrukturabhängige Sensoren; Aktorik Motor, Bremse und Len-kung; Längsführungsassistenz; Querführungsassistenz; Informations- und Warnsysteme; Aktive Kollisions-schutzsysteme; Aktive und passive Sicherheit; Navigation und Telematik; Zukunft der Fahrerassistenzsys-teme
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Anforderungen an die elektrische Energieversorgung eines Fahrzeugs zu nennen und den Aufbauund die Wirkprinzipien der Hauptkomponente zu erklären.
• Die Prinzipien verschiedener Arten von Hybridantrieben sowie die prinzipielle Funktionsweise einerBrennstoffzelle zu erklären.
• Qualifiziert über die zukünftigen Antriebe und die Energiebereitstellung zu diskutieren.• Wirkungsprinzipien aktiver und mechatronischer Radaufhängungselemente sowie mechatronischer
Triebstrang-, Brems- und Lenksysteme zu erläutern.• Fahrerassistenzsysteme hinsichtlich der Klasse und Wirkungsweise einzuordnen.• Die besonderen Schwierigkeiten der Umfelderfassung anzugeben und deren Folgen für die Nutzung
zu erläutern.• Die Wirkkette der Sensoren von Detektion über Wahrnehmung bis Umweltrepräsentation für Ultra-
schall, Radar, Lidar und Video aufzuzeigen.• Die Grundfunktionen und die Funktionsgrenzen für automatisch agierende FAS und Kollisionsschutz-
systeme zu erläutern.• Nutzen und Wirkungsweise von Kraftfahrzeug-Sicherheitssystemen zu veranschaulichen, den Her-
gang eines Unfalls zu beschreiben und die Grundzüge eines Crashtests aufzuzeigen.• Die Grundfunktion der für die Navigation im Fahrzeug notwendigen Module zu veranschaulichen
und eine Diskussion zum Stand und der Aussicht von Verkehrstelematiksystemen und Assistenzsys-temen qualifiziert zu führen.
3 Empfohlene Voraussetzung für die TeilnahmeKraftfahrzeugtechnisches Grundlagenwissen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Schriftliche Prüfung 90 min oder mündliche Prüfung 45 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)WI/MB, MSc Traffic&Transport, (Vertiefungsmodul FB16, ggf. Auflage), Master Mechatronik, MSc. Infor-matik (Anwendungsfach Fahrzeugtechnik, Spezialisierung)
7 Notenverbesserung nach §25 (2)
8 Literatur
2.1 Wahlfächer MB 32
Skriptum zur Vorlesung, e-Learning Angebot bei Moodle
Enthaltene Kurse
Kurs-Nr. Kursname16-27-5040-vl Mechatronik und Assistenzsysteme im Automobil
Dozent Lehrform SWSVorlesung 3
Kurs-Nr. Kursname16-27-5040-ue Mechatronik und Assistenzsysteme im Automobil
Dozent Lehrform SWSÜbung 2
2.1 Wahlfächer MB 33
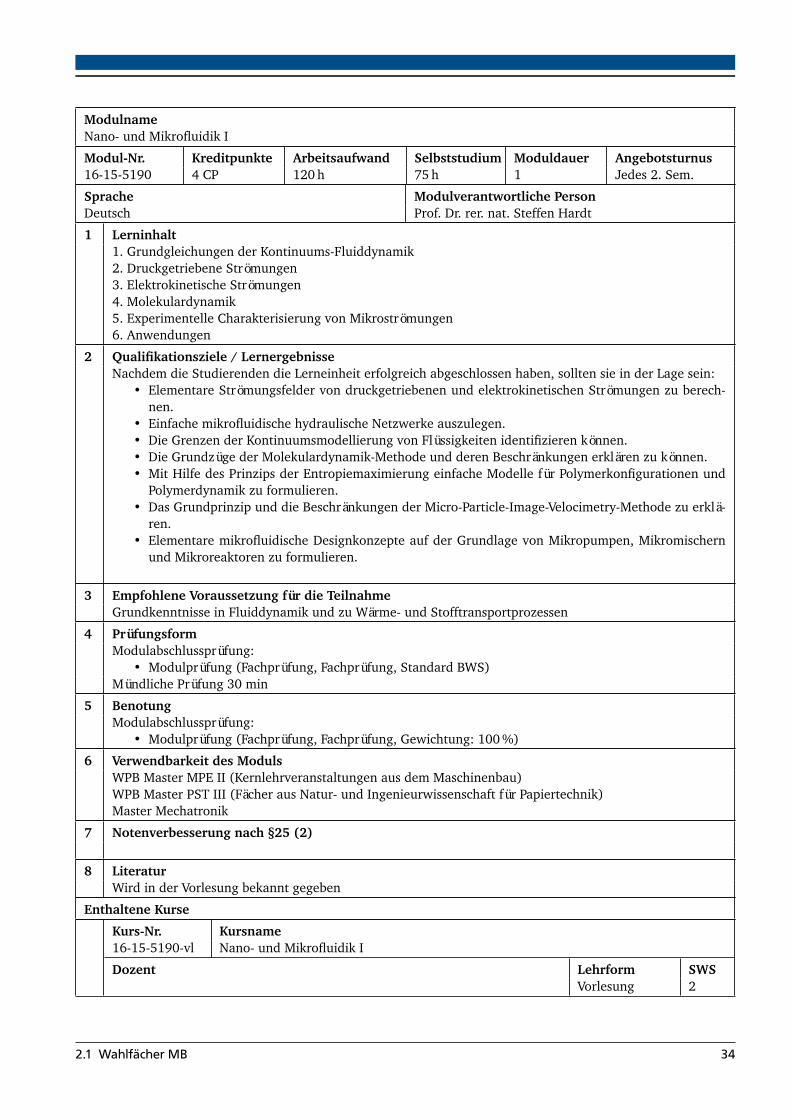
ModulnameNano- und Mikrofluidik I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-15-5190 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Steffen Hardt
1 Lerninhalt1. Grundgleichungen der Kontinuums-Fluiddynamik2. Druckgetriebene Strömungen3. Elektrokinetische Strömungen4. Molekulardynamik5. Experimentelle Charakterisierung von Mikroströmungen6. Anwendungen
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Elementare Strömungsfelder von druckgetriebenen und elektrokinetischen Strömungen zu berech-nen.
• Einfache mikrofluidische hydraulische Netzwerke auszulegen.• Die Grenzen der Kontinuumsmodellierung von Flüssigkeiten identifizieren können.• Die Grundzüge der Molekulardynamik-Methode und deren Beschränkungen erklären zu können.• Mit Hilfe des Prinzips der Entropiemaximierung einfache Modelle für Polymerkonfigurationen und
Polymerdynamik zu formulieren.• Das Grundprinzip und die Beschränkungen der Micro-Particle-Image-Velocimetry-Methode zu erklä-
ren.• Elementare mikrofluidische Designkonzepte auf der Grundlage von Mikropumpen, Mikromischern
und Mikroreaktoren zu formulieren.
3 Empfohlene Voraussetzung für die TeilnahmeGrundkenntnisse in Fluiddynamik und zu Wärme- und Stofftransportprozessen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturWird in der Vorlesung bekannt gegeben
Enthaltene Kurse
Kurs-Nr. Kursname16-15-5190-vl Nano- und Mikrofluidik I
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 34
Kurs-Nr. Kursname16-15-5190-ue Nano- und Mikrofluidik I
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 35
ModulnameNumerische Strömungssimulation
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-19-5020 6 CP 180 h 120 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Michael Schäfer
1 LerninhaltGrundlagen der kontinuumsmechanischen Strömungsmodellierung; numerische Gitter; Gittergenerierung;Finite-Volumen-Verfahren für komplexe Geometrien; Finite-Volumen-Verfahren für inkompressible Strö-mungen; Upwind-Verfahren; Flux-Blending; Druck-Korrektur-Verfahren; Berechnung turbulenter Strömun-gen; statistische Turbulenzmodellierung; k-eps-Modell; Lösung großer dünnbesetzer Gleichungssysteme;ILU-Verfahren; CG-Verfahren; Vorkonditionierung; Mehrgitterverfahren; paralleles Rechnen.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Grundlagen der kontinuumsmechanischen Strömungsmodellierung zu erläutern.• Die Eigenschaften numerischer Gitter zu erklären und Methoden zu deren Generierung anzuwenden.• Finite-Volumen-Verfahren für komplexe Geometrien anzuwenden.• Finite-Volumen-Verfahren auf die Gleichungen für inkompressible Strömungen anzuwenden.• Upwind-Verfahren, Flux-Blending-Verfahren und Druck-Korrektur-Verfahren zu beschreiben und de-
ren Funktionalität zu erläutern.• Die Methoden zur Berechnung turbulenter Strömungen zu beschreiben und die Grundlagen der
statistischen Turbulenzmodellierung zu erklären.• Die wichtigsten Verfahren zur Lösung großer dünnbesetzer linearer und nichtlinearer Gleichungssys-
teme zu erklären und deren Effizienz einzuschätzen.• Die Prinizipien von Mehrgitterverfahren und die Grundlagen des parallelen Rechnens zu beschrei-
ben.
3 Empfohlene Voraussetzung für die TeilnahmeNumerische Mathematik und Numerische Berechnungsverfahren empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturSchäfer, Numerik im Maschinenbau, Springer, 1999; Übungen im WWW; Schäfer, Numerical Methods inEngineering, Springer, 2006
Enthaltene Kurse
Kurs-Nr. Kursname16-19-5020-vl Numerische Strömungssimulation
Dozent Lehrform SWSVorlesung 3
2.1 Wahlfächer MB 36
Kurs-Nr. Kursname16-19-5020-ue Numerische Strömungssimulation
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 37
ModulnamePrinted Electronics
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-17-5110 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Edgar Dörsam
1 LerninhaltDrucktechnologien für funktionales Drucken (Druckverfahren und Drucksysteme); Design und Materialienfür gedruckte Elektronik (Antennen, OFET, RFID); Maßnahmen zur Qualitätssicherung; Anwendungsbei-spiele (Antennen, RFID, OFET, Fotovoltaik, Batterien, Lab on a Chip).
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die geeigneten Drucktechnologien für „Printed Electronics“ zu beschreiben.• Drucktechnisch geeignete Materialien zu benennen und deren Auswirkungen am Beispiel von An-
tennen und OFET’s auf das Design zu beschreiben.• Die verschiedenen Maßnahmen zur Qualitätssicherung einzuordnen und zu bewerten.• Die grundlegenden Funktionen, den Aufbau, die Materialien und die spezifischen Eigenschaften von
gedruckten Antennen, RFID’s, Fotovoltaik und Batterien zu erklären.• Das Drucken von Elektronik als eine interdisziplinäre Aufgabe der Fachdisziplinen Elektrotechnik,
Materialwissenschaften und Maschinenbau zu verstehen und zu kombinieren.
3 Empfohlene Voraussetzung für die TeilnahmeMaschinenelemente und Mechatronik I und II empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master ETiT IMNT; Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturSkriptum wird vorlesungsbegleitend im Internet angeboten.
Enthaltene Kurse
Kurs-Nr. Kursname16-17-5110-vl Printed Electronics
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 38
ModulnameRaumfahrtmechanik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-25-5130 6 CP 180 h 120 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonEnglisch Dr. rer. nat. Markus Landgraf
1 LerninhaltZentralbewegung, Zwei-Körper-Problem; Satellitenbahnen, Bahnelemente und ihre Störungen; Bemerkun-gen zum Drei-Körper-Problem; Drehbewegung der Satelliten; aktive und passive Stabilisierung, Nutations-dämpfer, Bahnwechselmanöver, interplanetare Missionen; das europäische Raumfahrtprogramm.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Flugbahn ungefesselter Raumflugkörper mittels geometrischer Analyse, Randwertproblemdefi-nition, Parametrisierung, algebraischer und/oder numerischer Analyse zu bestimmen.
• Die grundlegenden himmelsmechanischen Gesetze zu erläutern, wie die Anwendbarkeit und Be-schränkungen der Keplerschen Gesetze und die Methoden der Störungsrechung.
• Die verschiedenen Möglichkeiten der Störung der idealen Bewegung und deren Einfluss auf denRaumflugkörper zu erklären und für das Missions-Design zu nutzen.
• Die Probleme und die Möglichkeiten des erdnahen und interplanetaren Raumflugs zu beschreiben.• Die besondere Terminologie und Einheitensystematik der Raumfahrtmechanik zu benennen und zu
verwenden.• Die aktuelle Projekte und Schwierigkeiten der Himmelsmechanik, insbesondere bei der Arbeit der
europäischen Raumfahrtagentur, zu benennen.
3 Empfohlene Voraussetzung für die TeilnahmeKeine
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)schriftliche Hausübung (30 %); schriftliche Endklausur (60 %) mit mündlicher Komponente ( 10%)mehrere Tage (Hausübung); 1 h 20 min (Endklausur) / 10min mündliche Komponente
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturSkriptum, erhältlich in der ersten Vorlesungsstunde
Enthaltene Kurse
Kurs-Nr. Kursname16-25-5130-vl Raumfahrtmechanik
Dozent Lehrform SWSVorlesung 3
2.1 Wahlfächer MB 39
Kurs-Nr. Kursname16-25-5130-ue Raumfahrtmechanik
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 40
ModulnameHöhere Maschinendynamik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-25-5060 6 CP 180 h 105 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Richard Markert
1 LerninhaltEinführung in die Höhere Maschinendynamik.Kinematik des Starrkörpers; Beschreibung der Translation und Rotation räumlicher Bewegungen.Formulierung von Bindungsgleichungen (skleronome, rheonome, holonome und nichtholonome Zwangs-bedingungen); Definition von verallgemeinerten Koordinaten und virtuellen Verschiebungen.Kinematik von Mehrkörpersystemen; baumstrukturierte Systeme und Systeme mit Schleifen; Beschreibungräumlicher Systeme mittels Absolutkoordinaten und mittels Relativkoordinaten.Kinetik von Starrkörpersystemen; Schwerpunktsatz und Drallsatz; Aufstellen von Bewegungsgleichungenin Absolutkoordinaten (Index-3, Index-2 und Index-1 Formulierungen) und in Relativkoordinaten; Prinzipeder Mechanik.Linearisierung von Bewegungsgleichungen; Lösungstheorie für lineare Systeme mit konstanten Koeffizien-ten.Anwendungsbeispiele aus der Fahrzeugtechnik, der Robotik, der Motormechanik, der Getriebetechnik, derRotordynamik, etc.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die räumliche Bewegung eines Starrkörpers mathematisch zu beschreiben.• Komplexe Systeme von starren Körpern kinematisch zu beschreiben und deren Bewegungen zu ana-
lysieren.• Die Bewegungsgleichungen für komplexe, ebene und räumliche Systeme mithilfe der Newton-
Eulerschen Gleichungen zu formulieren.• Die Prinzipien der Mechanik anzuwenden, um mit diesen – alternativ zu den Newton-Eulerschen
Gleichungen – Bewegungsdifferentialgleichungen herzuleiten.• Mathematische Modelle von realen Maschinen und Mechanismen zu erstellen, um die Bewegung
der Körper und die auftretenden Belastungen zu berechnen.
3 Empfohlene Voraussetzung für die TeilnahmeTechnische Mechanik I bis III (Statik, Elastomechanik, Dynamik) und Mathematik I bis III empfohlen.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Standard BWS)Abschlussklausur 150 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMaster MPE PflichtWI/MB, Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 Literatur
2.1 Wahlfächer MB 41
Woernle, C.: „Mehrkörpersysteme“, Springer, 2011.Shabana, A.: „Dynamics of Multibody Systems”, Cambridge University Press, Third Edition, 2010.Haug, E.J.: „Computer-Aided Kinematics and Dynamics of Mechanical Systems“, Allyn and Bacon, 1989.Markert, R.: „Strukturdynamik„, Shaker, 2013.Dresig, H.; Holzweißig, F.: „Maschinendynamik“, 10. Aufla-ge, Springer, 2011.
Enthaltene Kurse
Kurs-Nr. Kursname16-25-5060-vl Höhere Maschinendynamik
Dozent Lehrform SWSVorlesung 3
Kurs-Nr. Kursname16-25-5060-hü Höhere Maschinendynamik - Hörsaalübung
Dozent Lehrform SWSHörsaalübung 2
Kurs-Nr. Kursname16-25-5060-gü Höhere Maschinendynamik - Gruppenübung
Dozent Lehrform SWSGruppenübung 0
2.1 Wahlfächer MB 42
ModulnameGrundlagen der Maschinenakustik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-26-5070 6 CP 180 h 135 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Tobias Melz
1 LerninhaltDer Stoff von Grundlagen 1 umfasst die Erläuterung/Anwendung akustischer Grundbegriffe (z.B. Fre-quenz, Schalldruck, Schallleistung, Schallintensität, Schallschnelle, Schallkennimpedanz, Pegel), Pegel-rechnung, Frequenzanalyse, akustische Filter- und Bewertungsfunktionen, maschinenakustische Grund-gleichung, Spiegelquellen und Interferenz, verschiedene Strahlerarten sowie verschiedene Methoden derSchallleistungsbestimmung
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die verschiedenen, für die (technische) Akustik relevanten physikalischen Größen zu kennen unddie Definitionen und Unterschiede zu erklären sowie diese Größen in einander umzuformen undauseinander abzuleiten.
• Pegel von verschiedenen physikalischen/akustischen Größen berechnen und diverse Pegeloperatio-nen (Berechnung von Summenpegel, Differenzpegel, mittlerem Pegel usw.) durchzuführen.
• Die Grundzüge der Fourier-/Frequenzanalyse zu erklären und die Vor- und Nachteile verschiedenerDarstellungsarten von Frequenzspektren zu erkennen.
• Die verschiedenen akustischen Filter zu unterscheiden und aus gegebenen Schmalbandspektren diezugehörigen Terz- und Oktavspektren zu berechnen.
• Gezielt und sinnvoll akustische Bewertungsfunktionen (A-Bewertung, C-Bewertung, Z-Bewertung)anzuwenden und die Hintergründe für die Einführung dieser Bewertungen zu erklären.
• Die Ursachen für die Schallemission körperschallerregter Maschinenstrukturen physikalisch zu er-klären.
• Die Wirkkette von der dynamischen Anregung bis zur Luftschallabstrahlung anhand der maschinen-akustischen Grundgleichung zu erkennen.
• Den Einfluss und die Auswirkungen von sog. Spiegelquellen zu erkennen und ggf. bei der Auswertungvon akustischen Messungen zu berücksichtigen.
• Die verschiedenen Schallstrahlertypen und deren Charakteristiken zu erklären.• Unterschiedliche Messverfahren zur Schallleistungsbestimmung mit deren Vor- und Nachteilen zu
kennen.
3 Empfohlene Voraussetzung für die Teilnahmekeine speziellen Vorkenntnisse, gute Kenntnisse in „Maschinendynamik“, "Mechanik/Physikßowie in "Ma-schinenlemente"hilfreich
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 120 min, Standard BWS)Klausur 2 h
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Wahlfächer aus Natur- und Ingenieurwissenschaft)
7 Notenverbesserung nach §25 (2)
8 Literatur
2.1 Wahlfächer MB 43
umfangreiches Vorlesungsskript (2 Bände, ca. 1100 Seiten für „Maschinenakustik – Grundlagen 1+2“)gegen Unkostenerstattungzusätzliche empfohlene Lehrbücher:Kollmann, F.G.: „Maschinenakustik“, 2. Auflage, Springer-Verlag, 2000Kollmann, F.G., Schösser, T.F., Angert, R.: „Praktische Maschinenakustik“, Springer-Verlag, 2006Henn, H., Sinambari, G.R., Fallen, M.: „Ingenieurakustik“, 4. Auflage, Vieweg+Teubner Verlag, 2008Schirmer, W. (Hrsg.): „Technischer Lärmschutz“, 2. Auflage, Springer-Verlag, 2006Möser, M.: „Technische Akustik“, 9. Auflage, Springer-Verlag, 2012Müller, G., Möser, M. (Hrsg.): „Taschenbuch der Technischen Akustik“, 3. Auflage, Springer-Verlag, 2004Möser, M. (Hrsg.): „Messtechnik der Akustik“, Springer-Verlag, 2010Bies, D.A., Hansen, C.H.: „Engineering Noise Control: Theory and Practice“, 4. Auflage, 2009Vér, I.L., Beranek, L. L.: „Noise and Vibration Control Engineering“, 2. Auflage, John Wiley & Sons, 2005Rossing, T.D. (Hrsg.): „Springer Handbook of Acoustics“, Springer-Verlag, 2007.
Enthaltene Kurse
Kurs-Nr. Kursname16-26-5070-vl Grundlagen der Maschinenakustik
Dozent Lehrform SWSVorlesung 3
2.1 Wahlfächer MB 44
ModulnameForschungsseminar Fahrzeugtechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-27-5100 4 CP 120 h 120 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Hermann Winner
1 LerninhaltAktuelle Aufgabenstellungen aus dem Fokus der anbietenden Fachgebiete und deren Randgebiete
2 Qualifikationsziele / LernergebnisseDer Student beherrscht die Grundlagen der wissenschaftlichen Arbeitsweise. Er kann sich selbstständigZugang zu einem für ihn neuen Thema verschaffen und notwendige Informationen aus Datenbanken,Bibliotheken und von Dritten beschaffen. Der Student ist in der Lage, die ihm gestellte Aufgabe zu struk-turieren und zeitlich zu organisieren. Neben der fachlichen Qualifikation in dem von ihm erarbeitetemThema ist er in der Lage, die Ergebnisse in schriftlicher und mündlicher Form wissenschaftlich korrekt zupräsentieren sowie Themenbeiträge anderer Teilnehmer fachlich kritisch zu debattieren.
3 Empfohlene Voraussetzung für die TeilnahmeSpezifische Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Themengebiet; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
Kurs-Nr. Kursname16-27-5100-fs Forschungsseminar Fahrzeugtechnik
Dozent Lehrform SWSForschungsseminar0
2.1 Wahlfächer MB 45
ModulnameTrends der Kraftfahrzeugentwicklung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-27-5030 4 CP 120 h 90 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. rer. nat. Hermann Winner
1 LerninhaltGlobale Mobilität; Entwicklungstendenzen; Aktuelle Forschungsthemen des Fachgebiets: System und Funk-tionsentwicklung in der Fahrerassistenz; Fahrdynamikregelung; Motorradforschung, Testanforderungenund Funktionale Sicherheit; Bremsenforschung; Fahrsimulatoren
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Aktuelle Forschungsprojekte und zukunftsweisende Technologien in den Bereichen Fahrwerk undFahrwerkskomponenten, Fahrerassistenzsysteme, Motorräder, Funktionale Sicherheit, Bremsenfor-schung sowie Fahrsimulatoren fachlich qualifiziert zu diskutieren.
• Die aktuellen Entwicklungen in diesen Bereichen zu benennen.• Die Grenzen und Möglichkeiten verschiedener Ansätze einzuschätzen.
3 Empfohlene Voraussetzung für die TeilnahmeErweitertes kraftfahrzeugtechnisches Grundlagenwissen, erworben durch die Teilnahme an „Fahrdynamikund Fahrkomfort“ oder "Mechatronik und Assistenzsysteme im Automobil"
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Schriftliche Prüfung (90 min) oder mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik, MSc. Informatik (Anwendungsfach Fahrzeugtechnik, Spezialisierung), MSc Traf-fic&Transport, (Vertiefungsmodul FB16, ggf. Auflage)
7 Notenverbesserung nach §25 (2)
8 LiteraturSkriptum zur Vorlesung, e-Learning Angebot bei Moodle
Enthaltene Kurse
Kurs-Nr. Kursname16-27-5030-vl Trends in Automotive Engineering
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 46
ModulnameFahrdynamik und Fahrkomfort
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-27-5020 6 CP 180 h 105 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Hermann Winner
1 LerninhaltLängs- und Querdynamik; Reifeneinfluss auf die Kraftfahrzeugdynamik; Fahrdynamikregelung; Radaufhän-gung und Achskinematik; Schwingungen und Akustik; Fahrdynamiktests und Fahrverhalten Modellbildungvon Reifen, Rad, viertel Fahrzeug sowie Fahrzeug Längs- und Querdynamik.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Längsdynamik (Beschleunigungs- und Verzögerungsvermögen und maximale Fahrgeschwindig-keit) eines Kraftfahrzeugs abhängig von Fahr- und Reibwertbedingungen und der konstruktiven Aus-legung der Bremse und des Antriebsstrang abzuleiten.
• Die Grundgleichungen der Querdynamik mit den wesentlichen Bewegungs- und Kraftgrößen desEinspurmodells anzuwenden und das Verhalten bei stationärer Kreisfahrt und bei Lastwechsel in derKurve qualitativ zu beschreiben und zu bewerten.
• Eine fachlich kompetente Diskussion über Maßnahmen zur Beeinflussung des Eigenlenkverhaltenszu führen.
• Die Übertragung von Seitenkräften zwischen Reifen und Fahrbahn zu erläutern und das Zusammen-spiel von Längs- und Seitenkraft zu diskutieren.
• Die Bedeutung des Reifens für die Fahrzeug-Vertikaldynamik zu veranschaulichen.• Die im ESP angewandten grundlegenden Schätz- und Regelverfahren zu begründen und deren Be-
deutung in der Fahrdynamikregelung zu erläutern.• Die Auswirkungen der Kinematik der Radaufhängung auf das Fahrverhalten zu erläutern, die Achski-
nematik zu beschreiben, die Position von Wank- und Nickzentrum zu bestimmen und die Aufteilungder Kraftabstützung zu skizzieren.
• Die im Fahrzeug auftretenden Schwingungen, die Ursachen für deren Erzeugung und die Bedeutungder Lage der einzelnen Eigenfrequenzen zu erläutern.
• Die Komfortgrößen und ihre Beurteilungsmaßstäbe zu nennen.• Stationäre und instationäre Fahrversuche zur Beurteilung des Fahrverhaltens zu nennen und Rück-
schlüsse aus den Ergebnissen von Fahrversuchen auf das Fahrverhalten zu ziehen.• Die Theorie von Reifen, Rad, Viertelfahrzeug sowie Längs- als auch Querdynamik des Fahrzeugs als
Modell darzustellen und die Ergebnisse der Simulation fachlich kompetent zu diskutieren.
3 Empfohlene Voraussetzung für die TeilnahmeKraftfahrzeugtechnisches Grundlagenwissen, Grundkenntnisse dynamischer (schwingungsfähiger) Syste-me
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)Schriftliche Prüfung 90 min oder mündliche Prüfung 50 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)WI/MB, MSc Traffic&Transport, (Vertiefungsmodul FB16, ggf. Auflage), Master Mechatronik, MSc. Infor-matik (Anwendungsfach Fahrzeugtechnik, Spezialisierung)
7 Notenverbesserung nach §25 (2)
2.1 Wahlfächer MB 47
8 LiteraturSkriptum zur Vorlesung, e-Learning Angebot bei Moodle
Enthaltene Kurse
Kurs-Nr. Kursname16-27-5020-vl Fahrdynamik und Fahrkomfort
Dozent Lehrform SWSVorlesung 3
Kurs-Nr. Kursname16-27-5020-ue Fahrdynamik und Fahrkomfort
Dozent Lehrform SWSÜbung 2
2.1 Wahlfächer MB 48
ModulnameVerbrennungskraftmaschinen II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-03-5020 6 CP 180 h 135 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Christian Beidl
1 Lerninhalt• Motorelektronik: Aufgaben, Aufbau und Struktur, Aktuatoren und Sensoren, Grundfunktionen, Be-
datung, Zugang• Entflammung und Verbrennung von Kohlenwasserstoffen: Kinetische Gastheorie, Entflammung und
Verbrennung, Zusammenhang zwischen Druck und Brennverlauf, Wirkungsgrade, normale Verbren-nung (Otto / Diesel), abnormale Verbrennung, Brennraumform und Brennverfahren
• Abgas: Abgaskomponenten, Schädlichkeit, Entstehung, Einfluß des Betriebspunktes, Reduktion dermotorisschen Abgas, Abgasnachbehandlung, Messsysteme, Testverfahren
• Ladungswechsel: Einfluß des Ladungswechsels, Steuerungsorgane, Nockenwellentriebe, Auslegungdes Ladungswechsels, variable Ventilsteuerung, spezielle Ventiltriebe
• Aufladung: Eigenschaften und Vorteile, Möglichkeiten, Auslegungskriterien, mehrstufige Aufladung,ausgeführte Varianten
• Geräusch: Grundsätzliches, Geräuschquellen, Maßnahmen, gesetzliche Bestimmungen• Hybrid: Grundlagen, Hybridfunktionen, Einteilung, Komponenten, Herausforderungen, Entwick-
lungsmethoden und Zertifizierung, ausgeführte Varianten• Indizierung: Messkette, Druckmessung, Bestimmung des Zylindervolumens, Auswertung, Heizver-
läufe, charakteristische Ergebnisse• Design of Experiments
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Differenziertheit der Arbeitsweisen von Verbrennungsmotoren zu erklären und die Prozesse theo-retisch zu beschreiben.
• Brennräume in Kenntnis des Zusammenhangs von Brennraumform, Brennverfahren und Entflam-mung zu gestalten.
• Die Entstehung von Emissionen (Abgas, Geräusch) durch Motoren zu umschreiben und deren Ver-meidung zu beschreiben.
• Den Ladungswechsel bei Verbrennungsmotoren zu erklären und Varianten zu identifizieren als Basisum Motoren weiterzuentwickeln.
• Die Bedeutung der Aufladung und der unterschiedlichen Varianten zu erkennen.• Die Hybridtechnologie zu erklären.• Spezifische Messverfahren im Bereich der Motorenoptimierung (Indizierung, Design of Experiments)
wiederzugeben.
3 Empfohlene Voraussetzung für die TeilnahmeKeine
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)schriftlich oder mündlich (wahlweise)schriftlich: 1 h 30 min;mündlich: 1 h 30 min (pro 4er-Gruppe)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
2.1 Wahlfächer MB 49
WPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturVKM II - Skriptum, erhältlich im Sekretariat
Enthaltene Kurse
Kurs-Nr. Kursname16-03-5020-vl Verbrennungskraftmaschinen II
Dozent Lehrform SWSVorlesung 3
2.1 Wahlfächer MB 50
ModulnameKonstruktion im Motorenbau II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-03-5060 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Christian Beidl
1 LerninhaltMotorschmierung: Aufgaben, Schmiersysteme, Ölpumpen, Ölfilter und Ölkreislauf, Schäden.Luftfilter und Ansaugsysteme: Aufgaben, Luftfilter, Ansaugsysteme.Motorkühlung: Kühlungsarten, Bauteile.Abgasanlagen: Aufgaben, Schalldämpfer, Abgasnachbehandlung, Beanspruchung.Regler: Aufgaben, Funktionsweise, Fliehkraftregler, Vollastanschlag.Reiheneinspritzpumpe: Aufgaben, Förderpumpe, Funktion der Pumpenelemente, Unterschiede zur Vertei-lereinspritzpumpe.Verteilereinspritzpumpe: Aufgaben, Funktionen.Radialkolbenverteilereinspritzpumpe: Aufgaben, Funktionen.Pumpe-Düse-System: Aufgaben, Pumpe-Düse, Pumpe-Leitung-Düse.Common Rail: Aufgaben, Funktionen.Aufladung: Aufgaben, unterschiedliche Systeme, Funktion der Systeme, Vor- und Nachteile.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Systeme (Kühlsystem, Schmierungssysteme, Aufladesysteme etc.) eines Verbrennungsmotors hin-sichtlich der Funktionsweise, der Aufgaben und den Anforderungen zu beschreiben.
• Die konstruktive Auslegung von Systemen zu beschreiben.• Unterschiedliche Konstruktionen zu vergleichen und zu bewerten.
3 Empfohlene Voraussetzung für die TeilnahmeVKM I und II werden empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)schriftlich oder mündlich (wahlweise) schriftlich: 1 h 30 min mündlich: 1 h 30 min (pro 4er-Gruppe)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)Master Mechatronik
7 Notenverbesserung nach §25 (2)
8 LiteraturKonstruktionen II - Skriptum, erhältlich im Sekretariat
Enthaltene Kurse
Kurs-Nr. Kursname16-03-5060-vl Konstruktion im Motorenbau II
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 51
ModulnameZuverlässigkeit im Maschinenbau
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-26-5020 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Holger Hanselka
1 LerninhaltGrundbegriffe, Kenngrößen und Standards der Zuverlässigkeitsanalyse; Grundlagen der Statistik, derWahrscheinlichkeitstheorie, der Verteilungsfunktionen und des Hypothesentests; grafische und rechneri-sche Zuverlässigkeitsanalyse; Wechselwirkung von Belastung und Belastbarkeit; Planung von Zuverlässig-keitstest und Stichprobengenerierung.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:1. Zuverlässigkeitstest zu planen und durchzuführen.2. Zuverlässigkeitsdaten aus Experimenten zu bestimmen, zu analysieren und darzustellen.3. Die statistischen Zusammenhänge der Wechselwirkung von Belastung und Belastbarkeit in Bezug auf dieBeurteilung der Zuverlässigkeit zu deuten.4. Eine graphische Zuverlässigkeitsanalyse anhand eines Weibullnetzes durchzuführen.5. Statistische Schätzer zur rechnerischen Zuverlässigkeitsanalyse problembezogen anzuwenden.6. Die jeweils geeignete Analyseform für ein definiertes Problem anhand der erlernten Vor- und Nachteilegrafischer und rechnerischer Zuverlässigkeitsanalysen auszuwählen.
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 120 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturVorlesungsskript „Zuverlässigkeit im Maschinenbau“Bertsche, B., Lechner, G.: Zuverlässigkeit im Fahrzeug- und Maschinenbau, Springer-Verlag, 2004
Enthaltene Kurse
Kurs-Nr. Kursname16-26-5020-vl Zuverlässigkeit im Maschinenbau
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 52
ModulnameFlugmechanik I: Flugleistungen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-23-5030 6 CP 180 h 135 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Uwe Klingauf
1 LerninhaltPhysik der Atmosphäre; Schubcharakteristik, Flugzeugpolare; stationäre Flugzustände; Flugbereichsgren-zen; Streckenflug, Start und Landung.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die physikalischen Grundlagen des Fliegens zu erklären.• Flugleistungen und Flugbereichsgrenzen eines Flugzeugentwurfs zu berechnen.• Einen Flugzeugentwurf hinsichtlich der Flugphasen Streckenflug, Start und Landung auszulegen.
3 Empfohlene Voraussetzung für die TeilnahmeMathematik III und Technische Mechanik empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Schriftliche Prüfung 120 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWP Bachelor MPE
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript und weitere Unterlagen online zum Download.Bruening, Hafer, Sachs: Flugleistungen, Springer Verlag.Ruijgrok: Elements of Airplane Performance, VSSD.Scheiderer: Angewandte Flugleistung, Springer Verlag.
Enthaltene Kurse
Kurs-Nr. Kursname16-23-5030-vl Flugmechanik I: Flugleistungen
Dozent Lehrform SWSVorlesung 3
2.1 Wahlfächer MB 53
ModulnameSichere Avioniksysteme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-23-5110 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Uwe Klingauf
1 LerninhaltOperationelle Anforderungen an Flugführungssysteme, Aufbau von Flugführungssystemen, Architekturenund Auslegungsmethoden für zuverlässige Systeme, Pilotenassistenzsysteme im Cockpit, Human Factors.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Grundlagen der automatisierten Flugdurchführung und der Mensch-Maschine Schnittstellen inmodernen Flugzeugcockpits zu beschreiben.
• Die grundlegenden Aspekte und Methoden bei der Auslegung sicherheitskritischer Systeme in derFlugführung zu erklären.
• Die verschiedenen Systemarchitekturen zu unterscheiden.• Das komplexe Zusammenspiel von technischen Systemen, operationellen Abläufen und dem Men-
schen anhand des Beispiels Avioniksysteme zu beschreiben und zu diskutieren.
3 Empfohlene Voraussetzung für die TeilnahmeKeine; Empfohlen: Flugmechanik I, Grundlagen der Navigation I, Flugverkehrsmanagement und Flugsiche-rung, Systemzuverlässigkeit im Maschinenbau
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 20 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)
7 Notenverbesserung nach §25 (2)
8 LiteraturC.C. Rodriges, S.K. Cusick: Commercial Aviation Safety, McGraw Hill 2011Messerschmidt, Bölkow, Blohm (Hrsg.): Technische Zuverlässigkeit, Springer VerlagA. Meyna, G. Pauli: Zuverlässigkeitstechnik: Quantitative Bewertungsverfahren, Hanser 2. Auflage 2010
Enthaltene Kurse
Kurs-Nr. Kursname16-23-5110-vl Sichere Avioniksysteme
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 54
ModulnameMechatronische Systemtechnik II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-24-5030 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Stephan Rinderknecht
1 LerninhaltAktorik; Mensch-Maschine-Schnittstelle; Entwicklungsmethodik; Systemintegration.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Funktionsprinzipien elektromagnetischer, elektrodynamischer und piezoelektrischer Aktoren zu er-klären und diese begründet einsetzen.
• Die Grundprinzipien unterschiedlicher Mensch-Maschine-Schnittstellen anhand von Beispielen zuerklären.
• Methodik und Anforderungen bei der Entwicklung von komplexen mechatronischen Systemen zubeschreiben.
• Mechatronisches Systemdenken zum Zwecke der Systemintegration und Optimierung auf unter-schiedliche Beispiele anzuwenden.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagen in Mechatronik, Technischer Mechanik, Elektrotechnik und Regelungstechnik sind erforderlich.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)
7 Notenverbesserung nach §25 (2)
8 LiteraturHandouts zur Vorlesung werden im Intranet zum Herunterladen bereitgestellt.Nordmann, R.; Birkhofer, H.: Maschinenelemente und Mechatronik I.Schröder, D.: Elektrische Antriebe - Grundlagen.Bertsche, B.; Naunheimer, H.; Lechner, G.: Fahrzeuggetriebe.Löw, P.; Pabst, R.; Petry, E.: Funktionale Sicherheit in der Praxis.
Enthaltene Kurse
Kurs-Nr. Kursname16-24-5030-vl Mechatronische Systeme im Maschinenbau II
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-24-5030-ue Mechatronische Systeme im Maschinenbau II
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 55
ModulnameAnalyse und Synthese technischer Systeme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-98-3034 6 CP 180 h 120 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltSystemgrenzen und Schnittstellen; Systemanalogien; Formulierung von Funktions- und Prozesszusam-menhängen; Formulierung von Zielen; Festlegung eines Spielfeldes; Modellierung von Komponenten undkomplexen Systemen; Systembeschreibung mittels 0D-Methoden; Erhaltungssätze; Materialgesetze; Zeit-liche und räumliche Granularität; Modellreduktion; Modellvalidierung; Planung numerischer und prak-tischer Versuche; Generisches mechatronisches System; Sicherheitskonzepte für Systeme; Bewertung desSystemaufwands; Ermittlung von Herstellkosten (Investitions- und Betriebskosten); Technisch-ökologisch-ökonomisch-soziale Zusammenhänge; Diskrete und kontinuierliche Optimierungsmethoden
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Prozessfunktionen und –ziele zu erkennen und zu formulieren, aus den Prozessfunktionen notwendi-ge Teilfunktionen abzuleiten, ein Spielfeld von Möglichkeiten zu deren Erfüllung aufzuspannen undEntscheidungen für die geeignetsten Möglichkeiten zu treffen.
• Technische Systeme zu abstrahieren und zu modellieren, den erforderlichen Detaillierungsgrad einerModellierung einzuschätzen, Modelle zu validieren und ggf. zu vereinfachen.
• In einem System die generischen Subfunktionen „Prozess“, “Prozesszustandserfassung”, „Eingriffse-valuation” und „Prozessbeeinflussung“ zuzuordnen und zu designen.
• Technisch-ökologisch-ökonomisch-soziale Zusammenhänge zu erkennen, deren gegenseitige Beein-flussung bewusst wahrzunehmen und im möglichen Rahmen zu gestalten.
• Optimierungsziele zu formulieren, geeignete Optimierungsmethoden auszuwählen und Optimie-rungsstrategien hinsichtlich des bestenfalls erreichbaren Optimierungsergebnisses kritisch zu hin-terfragen.
• Entscheidungs- und Syntheseprobleme in Form von mathematischen Optimierungsmodellen zu for-mulieren.
• Grundlegende mathematische Methoden zur Lösung von Optimierungsmodellen anzuwenden unddie Einsetzbarkeit zur Lösung bestimmter Klassen von Optimierungsmodellen zu beurteilen.
3 Empfohlene Voraussetzung für die TeilnahmeKeine
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Standard BWS)Klausur 90 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMaster MPE WPB IMaster Mechatronik
7 Notenverbesserung nach §25 (2)
8 Literatur
2.1 Wahlfächer MB 56
Lernmaterial auf www.fst.tu-darmstadt.deEmpfohlene Bücher:Pahl, Beitz: Konstruktionslehre - Grundlagen erfolgreicher Produktentwicklung, Springer VerlagSuhl, Mellouli: Optimierungssysteme – Modelle, Verfahren, Software, Anwendungen, Springer Verlag
Enthaltene Kurse
Kurs-Nr. Kursname16-98-3034-vl Analyse und Synthese technischer Systeme
Dozent Lehrform SWSVorlesung 3
Kurs-Nr. Kursname16-98-3034-ue Analyse und Synthese technischer Systeme
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 57
ModulnameGrundlagen der Turbomaschinen und Fluidsysteme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5100 8 CP 240 h 165 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltAnwendung der Erhaltungsgleichungen auf technische Fluidsysteme; Übertragungsverhalten; Linearisie-rung; Nachgiebigkeit; Kompressibilität; Effektive Schallgeschwindigkeit; Zweiphasenströmung; Nachgiebi-ge Rohrleitungen; Luftfeder; Druckspeicher; Widerstandsgesetzte; Darcy Medium; Porosität; Sorptionsvor-gänge; Bingham Medium; Stabilität von Suspensionen; Elektro- und magnetorheologische Flüssigkeiten;Viskoelastische Flüssigkeiten; Hydraulikkolben; Trägheitsverluste; Reibungsverluste; Wirkungsgrad; Insta-tionäre Strömungen; Hydraulische Lager; Virtuelle Massen; Charakteristikenmethode; Resonanzaufladungvon Verbrennungsmotoren; Stoßverluste; Dimensionsanalyse; Fluidenergiemaschinen; Kennlinie; Betriebs-kennlinie; Betriebspunkt; Instabilitäten; Akustik
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Pneumatische und hydraulische Fluidsysteme zu analysieren.• Strömungen durch Ventile, Filter und Dichtungen zu beschreiben.• Das Cordier-Diagramm zu nutzen, um für eine Anlage die energetisch optimale Fluidenergiemaschi-
ne auszuwählen.• Das dynamische Verhalten von Fluidsystemen zu beschreiben.• Die Energieeffizienz und die Robustheit von Fluidsystemen zu analysieren.• Nicht-Newtonsche Materialien in ihrem Temperaturverhalten zu beschreiben.• Kompressible, instationäre Strömungen mittels der linearen Charakteristikenmethode zu beschrei-
ben.
3 Empfohlene Voraussetzung für die TeilnahmeTechnische Strömungslehre empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Klausur 90 min oder mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWP Bachelor MPE
7 Notenverbesserung nach §25 (2)
8 LiteraturLernmaterial auf www.fst.tu-darmstadt.de.Empfohlene Bücher:Wylie; Streeter: Fluid Transients in Systems, Prentice Hall.Spurk, Josef: Strömungslehre, Springer Verlag.Betz: Einführung in die Theorie der Strömungsmaschinen, Braun.Brennen: Hydrodynamics of Pumps, Oxford University Press.
Enthaltene Kurse
2.1 Wahlfächer MB 58
Kurs-Nr. Kursname16-10-5100-vl Grundlagen der Turbomaschinen und Fluidsysteme
Dozent Lehrform SWSVorlesung 4
Kurs-Nr. Kursname16-10-5100-ue ENTFALLEN Grundlagen der Turbomaschinen und Fluidsysteme
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 59
ModulnameTechnical Operations Research - Optimierung von technischen Systemen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5250 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltBegriff und Entwicklung des TOR; Optimierungsmodell; Lineare Optimierung (u.a. Simplex-Algorithmus,Dualität); Graphentheoretische Grundlagen; Lösungsprinzipien der ganzzahligen und kombinatorischenOptimierung; Dynamische Optimierung; Metaheuristiken; TOR-Standardsoftware (Cplex)
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Entscheidungs- und Syntheseprobleme in Form von mathematischen Optimierungsmodellen zu for-mulieren.
• Grundlegende mathematische Methoden zur Lösung von Optimierungsmodellen anzuwenden unddie Einsetzbarkeit zur Lösung bestimmter Klassen von Optimierungsmodellen zu beurteilen.
• Software des Operations Research zu entwickeln und zur Optimierung von technischen Systemenanzuwenden.
• Die Leistungsfähigkeit eingesetzter Optimierungsalgorithmen zu bewerten.• Methoden bspw. von Fertigungsprozessen zu statischen Systemen und von Fluidsystemen zu An-
triebssystemen zu transferieren.• Komponenten auf das Funktionsrelevante zu reduzieren.• Aus physikalisch-technischen Modellen mathematischen Optimierungsmodelle zu generieren.
3 Empfohlene Voraussetzung für die TeilnahmeMathematik I + II und Grundlagen der Turbomaschinen und Fluidsysteme empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Wahlfächer aus Natur- und Ingenieurwissenschaft)
7 Notenverbesserung nach §25 (2)
8 LiteraturLehrmaterial auf www.fst.tu-darmstadt.de
Enthaltene Kurse
Kurs-Nr. Kursname16-10-5250-vl Technical Operations Research - Optimierung von technischen Systemen
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-10-5250-ue Technical Operations Research - Optimierung von technischen Systemen
Dozent Lehrform SWSÜbung 1
2.1 Wahlfächer MB 60
ModulnameWind-, Wasser- und Wellenkraft - Optimierung und Skalierung von Fluidkraftsystemen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5220 4 CP 120 h 90 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltFluidkraft- und Fluidarbeitssysteme; Systemoptimierung vs. Moduloptimierung; Absolutes Maß für Ener-gieumwandlungsprozesse; Betrieb eines Wasserkraftwerkes als Optimierungsaufgabe; Auswahl von Ma-schinen mittels Cordier-Diagramm; Skalierung des Wirkungsgrades; Optimaler Betrieb einer Windkraftan-lage; Auslegung von Windkraftanlagen; Konstruktive Lösungen für Wellenkraftanlagen
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Fluidkraftsysteme hinsichtlich der Energieumwandlung zu beurteilen.• Fluidkraftsysteme zu optimieren und zu skalieren.• Wind-, Wasser- und Wellenkraftanlagen auszulegen.• Methoden der Strukturmechanik, Thermodynamik und Strömungsmechanik auf Fluidkraftsysteme
anzuwenden und konstruktiv und innovativ im gesellschaftlichen Kontext zu diskutieren.
3 Empfohlene Voraussetzung für die TeilnahmeTechnische Mechanik und Technische Strömungslehre empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Klausur 90 min oder mündliche Prüfung 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Wahlfächer aus Natur- und Ingenieurwissenschaft)
7 Notenverbesserung nach §25 (2)
8 LiteraturRobert Gasch; Jochen Twele: Windkraftanlagen, Grundlagen, Entwurf, Planung und Betrieb, Verlag Teub-ner.Albert Betz: Einführung in die Theorie der Strömungsmaschinen, Verlag G. Braun Karlsruhe.Peter Pelz: On the upper limit for hydropower in an open channel flow, Article 2011 in: Journal of Hydrau-lic Engineering, URI: http://tubiblio.ulb.tu-darmstadt.de/id/eprint/41338.Johannes Falnes: Ocean Vaves and Oscillating Systems, Cambridge University Press.
Enthaltene Kurse
Kurs-Nr. Kursname16-10-5220-vl Wind-, Wasser- und Wellenkraft - Optimierung und Skalierung von Fluidkraftsystemen
Dozent Lehrform SWSVorlesung 2
2.1 Wahlfächer MB 61
ModulnameVerbrennungskraftmaschinen I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-03-5010 6 CP 180 h 135 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Christian Beidl
1 LerninhaltAllgemeines: geschichtlicher Rückblick, wirtschaftliche und ökologische Bedeutung, Einteilung der Ver-brennungsmotoren.Grundlagen des motorischen Arbeitsprozesses: Carnot-Prozess, Gleichraumprozess, Gleichdruckprozess,Seiliger-Prozess.Konstruktive Grundlagen: Kurbelwelle, Pleuel, Lagerung, Kolben, Kolbenringe, Kolbenbolzen, Laufbuchse,Zylinderkopfdichtung, Zylinderkopf, Ladungswechsel.Kenngrößen: Mitteldruck, Leistung, Drehmoment, Kraftstoffverbrauch, Wirkungsgrad, Zylinderfüllung,Luftverhältnis, Kinematik des Kurbeltriebs, Verdichtungsverhältnis, Kennfelder, Hauptabmessungen.Kraftstoffe: Chemischer Aufbau, Eigenschaften, Heizwert, Zündverhalten, Herstellung, alternative Kraft-stoffe.Allgemeine Grundlagen der Gemischbildung: Ottomotor, Dieselmotor, Verteilung, Aufbereitung.Gemischbildung beim Ottomotor: Vergaser, elektronische Einspritzung, HCCI (Homogeneous Charge Com-pression Ignition).Zündung beim Ottomotor: Anforderungen, Zündkerze, Zündanlagen, Magnetzündung, Klopfregelung.Gemischbildung beim Dieselmotor: Grundlagen, verschiedene Verfahren, Gemischaufbereitung, Einspritz-systeme.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Funktionsweise und den Aufbau von Verbrennungsmotoren (angefangen vom kleinenModellbau-Zweitakter bis zum Schiffsdieselmotor) zu erklären.
• Die physikalischen Grundlagen von Verbrennungsmotoren zu erklären.• Die notwendigen Kenngrößen zu entwickeln und zur Charakterisierung von Motoren anzuwenden.• Die wirtschaftliche und ökologische Bedeutung von Verbrennungsmaschinen zu erklären.• Die thermodynamischen Grundlagen von Verbrennungsmaschinen bei der Entwicklung neuer An-
triebskonzepte anzuwenden.• Die Grundlagen der Konstruktion von Verbrennungsmaschinen zu beschreiben.• Die Wechselwirkung von Kraftstoff, Gemischbildung und Verbrennung zu analysieren und zu bewer-
ten.• Die Unterschiede in der Gemischbildung und Entflammung bei Ottomotoren und bei Dieselmotoren
zu erklären.• Die Zündung beim Ottomotor zu erklären.
3 Empfohlene Voraussetzung für die TeilnahmeKeine
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Schriftliche oder mündliche Prüfung (wahlweise) [schriftlich: 1 h 30 min; mündlich: 1 h 30 min (pro4er-Gruppe)]
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWP Bachelor MPEBachelor Mechatronik
2.1 Wahlfächer MB 62
7 Notenverbesserung nach §25 (2)
8 LiteraturVKM I - Skriptum, erhältlich im Sekretariat
Enthaltene Kurse
Kurs-Nr. Kursname16-03-5010-vl Verbrennungskraftmaschinen I
Dozent Lehrform SWSVorlesung 3
2.1 Wahlfächer MB 63
ModulnameFlugmechanik I: Flugleistungen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-23-5030 6 CP 180 h 135 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Uwe Klingauf
1 LerninhaltPhysik der Atmosphäre; Schubcharakteristik, Flugzeugpolare; stationäre Flugzustände; Flugbereichsgren-zen; Streckenflug, Start und Landung.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die physikalischen Grundlagen des Fliegens zu erklären.• Flugleistungen und Flugbereichsgrenzen eines Flugzeugentwurfs zu berechnen.• Einen Flugzeugentwurf hinsichtlich der Flugphasen Streckenflug, Start und Landung auszulegen.
3 Empfohlene Voraussetzung für die TeilnahmeMathematik III und Technische Mechanik empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Schriftliche Prüfung 120 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWP Bachelor MPE
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript und weitere Unterlagen online zum Download.Bruening, Hafer, Sachs: Flugleistungen, Springer Verlag.Ruijgrok: Elements of Airplane Performance, VSSD.Scheiderer: Angewandte Flugleistung, Springer Verlag.
Enthaltene Kurse
Kurs-Nr. Kursname16-23-5030-vl Flugmechanik I: Flugleistungen
Dozent Lehrform SWSVorlesung 3
2.1 Wahlfächer MB 64
2.2 Wahlfächer ETiT
ModulnameAdvanced Power Electronics
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-gt-2010 5 CP 150 h 90 h 1 WiSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Gerd Griepentrog
1 LerninhaltReales Verhalten von Leistungshalbleitern:Halbleitergrundlagen; Verhalten von Diode, bipolarer Transistor, Thyristor, GTO, MOSFET und IGBTSchaltnetzteile (potentialtrennende GS-Wandler)Schaltungen zum verlustarmen Schalten realer Halbleiter:Löschschaltungen für Thyristoren, Entlastungsschaltungen und quasi-resonanten Schaltungen, ResonantesSchaltenTopologien und Ansteuerverfahren für MehrpunktumrichterThermische Auslegung und thermomechanische Alterung von leistungselektronischen Systemen
2 Qualifikationsziele / LernergebnisseNach aktiver Mitarbeit in der Vorlesung sowie selbständigem Lösen aller Übungsaufgaben vor der jeweili-gen Übungsstunde sollen die Studierenden in der Lage sein:1.) den Aufbau und die prinzipielle Funktionsweise von Leistungshalbleitern (Diode, Thyristor, GTO, Mos-fet und IGBT) darzustellen und deren stationäre und dynamische Eigenschaften zu beschreiben.2.) die Grundschaltungen für potentialbrennende Gleichspannungswandler, insbesondere für Schaltnetz-teile darzustellen sowie die darin auftretenden Ströme und Spannungen unter idealisierenden Annahmenzu berechnen.3.) die wichtigsten Eigenschaften der Gate-Treiberschaltungen für IGBTs darstellen4.) die thermischen Beanspruchung und die Auslegung der Kühleinrichtung für spannungseinprägendeWechselrichter mit IGBTs zu berechnen5.) die Entlastungsschaltungen zur Reduktion der Schaltverluste darzustellen.6.) die Strom- und Spannungsverläufe in quasi-resonanten und resonanten Schaltungen der Leistungselek-tronik zu berechnen7.) Mehrpunktumrichter sowie deren Vor- und Nachteile zu erklären (3L-NPC und MMC)8.) Kühlkonzepte zu kennen und eine Kühlung auszulegen sowie die Einflüsse auf die Lebensdauer zukennen
3 Empfohlene Voraussetzung für die TeilnahmeBSc ETiT oder Gleichwertiges insbes. Leistungselektronik 1 und Halbleitergrundlagen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc EPE, Wi-ETiT
7 Notenverbesserung nach §25 (2)
8 Literatur
2.2 Wahlfächer ETiT 65
Skript verfügbar (als Download in Moodle)Literatur:
• Schröder, D.: “Leistungselektronische Schaltungen”, Springer-Verlag, 1997• Mohan, Undeland, Robbins: Power Electronics: Converters, Applications and Design; John Wiley
Verlag; New York; 2003• Luo, Ye: “Power Electronics, Advanced Conversion Technologies”, Taylor and Francis, 2010
Enthaltene Kurse
Kurs-Nr. Kursname18-gt-2010-vl Advanced Power Electronics
Dozent Lehrform SWSProf. Dr.-Ing. Gerd Griepentrog Vorlesung 2
Kurs-Nr. Kursname18-gt-2010-ue Advanced Power Electronics
Dozent Lehrform SWSProf. Dr.-Ing. Gerd Griepentrog Übung 2
2.2 Wahlfächer ETiT 66
ModulnameMicroprocessor Systems
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ho-2040 4 CP 120 h 75 h 1 SoSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Klaus Hofmann
1 LerninhaltMikroprozessorarchitekturen, DSP-Architekturen und hardwarenahe Programmierung
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung1. einen Überblick über die Grundlagen der Rechnerarithmetik und der verschiedenen Prozessorklassen(RISC, CISC, Mikrocontroller, CPU, DSP) reflektieren,2. die zentralen Bausteine und Blöcke einer CPU verstehen,3. die Eigenschaften der notwendigen Datenspeicher (Halbleiterspeicher), Input/Output Blöcke bzw. Buss-trukturen (USB, PCI, RS232) verstehen,4. die gängigsten Interrupt- und Trapmechanismen verstehen,5. die wichtigsten Entwicklungsmethoden von Software für Mikrorechner (Assembler, Pseudooperationen,Makros, Unterprogramme) kennenlernen,6. die wichtigsten Grundlagen des hardwarenahen Programmierens in der Programmiersprache C verste-hen.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagen Computerarchtekturen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc Wi-ETiT, MSc iCE, MSc iST, MSc MEC, MSc EPE
7 Notenverbesserung nach §25 (2)
8 LiteraturSkriptum
Enthaltene Kurse
Kurs-Nr. Kursname18-ho-2040-vl Microprocessor Systems
Dozent Lehrform SWSDr.-Ing. Matthias Rychetsky Vorlesung 2
Kurs-Nr. Kursname18-ho-2040-ue Microprocessor Systems
Dozent Lehrform SWSDr.-Ing. Matthias Rychetsky Übung 1
2.2 Wahlfächer ETiT 67
ModulnameSoftware-Engineering - Wartung und Qualitätssicherung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-su-2010 6 CP 180 h 120 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Andreas Schürr
1 LerninhaltDie Lehrveranstaltung vertieft Teilthemen der Softwaretechnik, welche sich mit der Pflege und Wei-terentwicklung und Qualitätssicherung von Software beschäftigen. Dabei werden diejenigen Hauptthe-men des IEEE „Guide to the Software Engineering Body of Knowledge“ vertieft, die in einführendenSoftwaretechnik-Lehrveranstaltungen nur kurz angesprochen werden. Das Schwergewicht wird dabei auffolgende Punkte gelegt: Softwarewartung und Reengineering, Konfigurationsmanagement, statische Pro-grammanalysen und Metriken sowie vor allem dynamische Programmanalysen und Laufzeittests. In denÜbungen wird als durchgängiges Beispiel ein geeignetes Öpen SourceProjekt ausgewählt. Die Übungs-teilnehmer untersuchen die Software des gewählten Projektes in einzelnen Teams, denen verschiedeneTeilsysteme des betrachteten Gesamtsystems zugeordnet werden.
2 Qualifikationsziele / LernergebnisseDie Lehrveranstaltung vermittelt an praktischen Beispielen und einem durchgängigen Fallbeispiel grundle-gende Software-Wartungs- und Qualitätssicherungs-Techniken, also eine ingenieurmäßige Vorgehensweisezur zielgerichteten Wartung und Evolution von Softwaresystemen. Nach der Lehrveranstaltung sollte einStudierender in der Lage sein, die im Rahmen der Softwarewartung und -pflege eines größeren Systemsanfallenden Tätigkeiten durchzuführen. Besonderes Augenmerk wird dabei auf Techniken zur Verwaltungvon Softwareversionen und –konfigurationen sowie auf das systematische Testen von Software gelegt. Inder Lehrveranstaltung wird zudem großer Wert auf die Einübung praktischer Fertigkeiten in der Auswahlund im Einsatz von Softwareentwicklungs- Wartungs- und Testwerkzeugen verschiedenster Arten sowieauf die Arbeit im Team unter Einhaltung von vorher festgelegten Qualitätskriterien gelegt.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagen der Softwaretechnik sowie gute Kenntnisse objektorientierter Programmiersprachen (insbe-sondere Java).
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc iST, MSc Wi-ETiT, Informatik
7 Notenverbesserung nach §25 (2)
8 Literaturwww.es.tu-darmstadt.de/lehre/se_ii/
Enthaltene Kurse
Kurs-Nr. Kursname18-su-2010-vl Software-Engineering - Wartung und Qualitätssicherung
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Vorlesung 3
2.2 Wahlfächer ETiT 68
Kurs-Nr. Kursname18-su-2010-ue Software-Engineering - Wartung und Qualitätssicherung
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Übung 1
2.2 Wahlfächer ETiT 69
ModulnameSoftware-Engineering - Einführung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-su-1010 6 CP 180 h 120 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Andreas Schürr
1 LerninhaltDie Lehrveranstaltung bietet eine Einführung in das gesamte Feld der Softwaretechnik. Alle Hauptthemendes Gebietes, wie sie beispielsweise der IEEE „Guide to the Software Engineering Body of Knowledge“ auf-führt, werden hier betrachtet und in der not-wendigen Ausführlichkeit untersucht. Die Lehrveranstaltunglegt dabei den Schwer-punkt auf die Definition und Erfassung von Anforderungen (Requirements Enginee-ring, Anforderungs-Analyse) sowie den Entwurf von Softwaresystemen (Software-Design). Als Modellie-rungssprache wird UML (2.0) eingeführt und verwendet. Grundlegende Kenntnisse der objektorientiertenProgrammierung (in Java) werden deshalb vorausge-setzt.In den Übungen wird ein durchgängiges Beispiel behandelt (in ein technisches System eingebettete Soft-ware), für das in Teamarbeit Anforderungen aufgestellt, ein Design festgelegt und schließlich eine prototy-pische Implementierung realisiert wird.
2 Qualifikationsziele / LernergebnisseDie Lehrveranstaltung vermittelt an praktischen Beispielen und einem durchgängigen Fallbeispiel grund-legende Software-Engineering-Techniken, also eine ingenieurmäßige Vorgehensweise zur zielgerichtetenEntwicklung von Softwaresystemen. Nach dem Besuch der Lehrveranstaltung sollen die Studierenden inder Lage sein, die Anforde-rungen an ein Software-System systematisch zu erfassen, in Form von Model-len präzise zu dokumentieren sowie das Design eines gegebenen Software-Systems zu verstehen und zuverbessern.
3 Empfohlene Voraussetzung für die Teilnahmesolide Kenntnisse einer objektorientierten Programmiersprache (bevorzugt Java)
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc iST, BSc Wi-ETiT
7 Notenverbesserung nach §25 (2)
8 Literaturwww.es.tu-darmstadt.de/lehre/se-i-v/
Enthaltene Kurse
Kurs-Nr. Kursname18-su-1010-vl Software-Engineering - Einführung
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Vorlesung 3
Kurs-Nr. Kursname18-su-1010-ue Software-Engineering - Einführung
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Übung 1
2.2 Wahlfächer ETiT 70
ModulnameAnalog Integrated Circuit Design
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ho-1020 6 CP 180 h 120 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Klaus Hofmann
1 LerninhaltGrundlegende Analogschaltungsblöcke: Stromspiegel, Referenzschaltungen; Mehrstufige Verstärker, inter-ner Aufbau und Eigenschaften von Differenz- und Operationsverstärkern, Gegenkopplung, Frequenzgang,Oszillatoren
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung 1. Eigenschaften des MOS-Transistors aus dem Herstel-lungsprozess bzw. dem Layouteigenschaften herleiten, 2. MOSFET-Grundschaltungen (Stromquelle, Strom-spiegel, Schalter, aktive Widerstände, inv. Verstärker, Differenzverstärker, Ausgangsverstärker, Operations-verstärker, Komparatoren) herleiten und kennt deren wichtigste Eigenschaften (y-Parameter, DC- und AC-Eigenschaften), 3. Simulationsverfahren für analoge Schaltungen auf Transistorebene (SPICE) verstehen, 4.Gegengekoppelte Verstärker bezüglich Frequenzgang und –stabilität, Bandbreite, Ortskurven, Amplitudenund Phasenrand analysieren, 5. die analogen Eigenschaften digitaler Gatter herleiten und berechnen.
3 Empfohlene Voraussetzung für die TeilnahmeVorlesung „Elektronik“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc Wi-ETiT, MSc iCE, BSc/MSc iST, BSc/MSc MEC, MSc EPE
7 Notenverbesserung nach §25 (2)
8 LiteraturSkriptum zur Vorlesung; Richard Jaeger: Microelectronic Circuit Design
Enthaltene Kurse
Kurs-Nr. Kursname18-ho-1020-vl Analog Integrated Circuit Design
Dozent Lehrform SWSProf. Dr.-Ing. Klaus Hofmann Vorlesung 3
Kurs-Nr. Kursname18-ho-1020-ue Analog Integrated Circuit Design
Dozent Lehrform SWSProf. Dr.-Ing. Klaus Hofmann Übung 1
2.2 Wahlfächer ETiT 71
ModulnameControl of Drives
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-gt-2020 5 CP 150 h 90 h 1 SoSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Gerd Griepentrog
1 LerninhaltRegelstrukturen für Antriebe, Auslegung von Antriebsregelungen , Wechselrichter für geregelte AntriebeRaumzeiger als Grundlage für die Modelle der Drehfeldmaschinen. Bezugssysteme für die Behandlung vonDrehfeldmaschinenRegelungstechnisches Blockschaltbild des Antriebs mit Gleichstrommaschine, Reglerstruktur und Ausle-gung der Ansteuerung von GleichstrommaschinenRegelungstechnisches Blockschaltbild für permanenterregte Synchronmaschine (PMSM), Regelungstech-nisches Blockschaltbild der Asynchronmaschine (ASM); Drehmomentregelung für Drehfeldmaschinen mitlinearerem Regler oder Schaltregler, Feldorientierte Regelung und direkte Momentenregelung bei PMSMund ASM. Modelle/Beobachter für Läuferfluss der ASMDrehzahlregelung von Antrieben, auch schwingungsfähige Last.Winkellage- und Beschleunigungsgeber
2 Qualifikationsziele / LernergebnisseNach aktiver Mitarbeit in Vorlesung sowie selbstständigem Lösen aller Übungsaufgaben vor der jeweiligenÜbungsstunde sollen die Studierenden in der Lage sein1.) die regelungstechnischen Blockschaltbilder der Gleichstrommaschine im Grunddrehzahl- und Feld-schwächbereich zu entwickeln2.) die zu 1.) gehörenden Regelkreise hinsichtlich Struktur und Reglerparaneter auszulegen3.) Raumzeiger in verschieden rotierenden Koordinatensystemen zu anzuwenden4.) die dynamischen Gleichungen der PMSM und der ASM herzuleiten und mit Hilfe des jeweils geeignetrotierendem Koordinatensystem zu vereinfachen und als nichtlineares regelungstechnisches Blockschalt-bild darzustellen.5.) die zu 4.) gehörenden Regelkreise, insbesondere die feldorientierte Regelung hinsichtlich Struktur undReglerparameter auszulegen6.) Aufgrund der vermittelten Systematik auch für nicht behandelte Maschinentypen wie die doppelt ge-speiste ASM entsprechende Herleitungen in der Literatur nachvollziehen zu können.7.) Modelle und Beobachter für den Läuferfluss der ASM in verschiedenen Koordinatensystemen herzulei-ten und die jeweiligen Vor- und Nachteile zu beurteilen8.) Die Regelkreise der überlagerten Drehzahlregelung auch für schwingungsfähige mechanische Lastenauszulegen und zu parametrieren.
3 Empfohlene Voraussetzung für die TeilnahmeBSc ETiT oder Gleichwertiges, insbes. Regelungstechnik und elektrische Maschinen/Antriebe
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc EPE, MSc MEC, Wi-ETiT
7 Notenverbesserung nach §25 (2)
8 Literatur
2.2 Wahlfächer ETiT 72
Skript und Übungsanleitung zum Download in Moodle.Literatur:
• Mohan, Ned: “Electric Drives and Machines”• De Doncker, Rik; et. al.: “Advanced Electrical Drives”• Schröder, Dierk: “Elektrische Antriebe – Regelung von Antriebssystemen”• Leonhard, W.: “Control of Electrical Drives”
Enthaltene Kurse
Kurs-Nr. Kursname18-gt-2020-vl Control of Drives
Dozent Lehrform SWSProf. Dr.-Ing. Gerd Griepentrog Vorlesung 2
Kurs-Nr. Kursname18-gt-2020-ue Control of Drives
Dozent Lehrform SWSProf. Dr.-Ing. Gerd Griepentrog Übung 2
2.2 Wahlfächer ETiT 73
ModulnameDigitale Regelungssysteme II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2030 3 CP 90 h 60 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 LerninhaltZustandsdarstellung zeitdiskreter Systeme, Steuerbarkeit, Beobachtbarkeit, Zustandsregler, Polvorgabe, PI-Zustandsregler, diskrete Zustandsbeobachter, modifizierter Luenbergerbeobachter
2 Qualifikationsziele / LernergebnisseDer Studierenden kennen die mathematische Beschreibung von Abtastsystemen im Zustandsraum unddie hierfür zur Verfügung stehenden Verfahren zur Systemanalyse und zum Entwurf digitaler Regelungs-syssteme. Sie können Deadbeat-Regler, Polvorgaberegler sowie PI-Zustandsregler für Eingrößensystemeentwerfen und können diese zusammen mit verschiedenen diskreten Zustandsbeobachtern einsetzen.
3 Empfohlene Voraussetzung für die TeilnahmeKenntnisse der z-Transformation sowie der Grundlagen zeitdiskreter Regelungssysteme. Diese Grundlagenwerden in der Vorlesung „Digitale Regelungssysteme I“ behandelt, die daher vorausgesetzt wird.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc Wi-ETiT, BSc/MSc iST, MSc MEC, MSc iCE
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript Konigorski: „Digitale Regelungssysteme“Ackermann: Äbtastregelung"Aström, Wittenmark: "Computer-controlled Systems"Föllinger: "Lineare Abtastsysteme"Phillips, Nagle: "Digital control systems analysis and design"Unbehauen: "Regelungstechnik 2: Zustandsregelungen, digitale und nichtlineare Regelsysteme"
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2030-vl Digitale Regelungssysteme II
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Vorlesung 1
Kurs-Nr. Kursname18-ko-2030-ue Digitale Regelungssysteme II
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Übung 1
2.2 Wahlfächer ETiT 74
ModulnameEchtzeitsysteme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-su-2020 6 CP 180 h 120 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Andreas Schürr
1 LerninhaltDie Vorlesung Echtzeitsysteme befasst sich mit einem Softwareentwicklungsprozess, der speziell auf dieSpezifika von Echtzeitsystemen zugeschnitten ist. Dieser Softwareentwicklungsprozess wird im weiterenVerlauf während der Übungen in Ausschnitten durchlebt und vertieft. Der Schwerpunkt liegt dabei aufdem Einsatz objektorientierter Techniken. In diesem Zusammenhang wird ein echtzeitspezifisches State-of-the-Art CASE-Tool vorgestellt und eingesetzt. Des weiteren werden grundlegende Charakteristika vonEchtzeitsystemen und Systemarchitekturen eingeführt. Auf Basis der Einführung von Schedulingalgorith-men werden Einblicke in Echtzeitbetriebssysteme gewährt. Die Veranstaltung wird durch eine Gegenüber-stellung der Programmiersprache Java und deren Erweiterung für Echtzeitsysteme (RT-Java) abgerundet.
2 Qualifikationsziele / LernergebnisseStudenten, die erfolgreich an dieser Veranstaltung teilgenommen haben, sollen in der Lage sein, modellba-sierte (objektorientierte) Techniken zur Entwicklung eingebetteter Echtzeitsysteme zu verwenden und zubewerten. Dazu gehören folgende Fähigkeiten:
• Systemarchitekturen zu bewerten und Echtzeitsysteme zu klassifizieren• selbständig ausführbare Modelle zu erstellen und zu analysieren• Prozesseinplanungen anhand üblicher Schedulingalgorithmen durchzuführen• Echtzeitprogrammiersprachen und -Betriebssysteme zu unterscheiden, zu bewerten und einzusetzen.
3 Empfohlene Voraussetzung für die TeilnahmeGrundkennntisse des Software-Engineerings sowie Kenntnisse einer objektorientierten Programmierspra-che
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, BSc iST, MSc Wi-ETiT, BSc Informatik
7 Notenverbesserung nach §25 (2)
8 Literaturwww.es.tu-darmstadt.de/lehre/es/
Enthaltene Kurse
Kurs-Nr. Kursname18-su-2020-vl Echtzeitsysteme
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Vorlesung 3
Kurs-Nr. Kursname18-su-2020-ue Echtzeitsysteme
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Übung 1
2.2 Wahlfächer ETiT 75
ModulnameElektromechanische Systeme I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kn-1050 5 CP 150 h 90 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Mario Kupnik
1 LerninhaltStruktur und Entwurfsmethoden elektromechanischer Systeme bestehend aus mechanischen, akusti-schen, hydraulischen und thermischen Netzwerken, Wandlern zwischen mechanischen und mechanisch-akustischen Netzwerken und elektromechanischen Wandlern. Entwurf und Anwendungen von elektrome-chanischen Wandlern
2 Qualifikationsziele / LernergebnisseVerstehen, Beschreiben, Berechnen und Anwenden der wichtigsten elektromechanischen Wandler alsSensor- und Aktorprinzipien; Elektrostatische Wandler (z.B. Mikrofone und Beschleunigungssensoren),piezoelektrische Wandler (z.B. Mikromotoren, Mikrosensoren), elektrodynamische Wandler (Lautsprecher,Shaker), piezomagnetische Wandler (z.B. Ultraschallquellen). Entwerfen komplexer elektromechanischerSysteme wie Sensoren und Aktoren und deren Anwendungen unter Verwendung der Netzwerkmethodemit diskreten Bauelementen.
3 Empfohlene Voraussetzung für die TeilnahmeElektrotechnik und Informationstechnik I
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc WI-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturFachbuch: „Elektromechanische Systeme der Mikrotechnik und Mechatronik, Springer 2009, Skript zurVorlesung EMS I, Aufgabensammlung zur Übung EMS 1
Enthaltene Kurse
Kurs-Nr. Kursname18-kn-1050-vl Elektromechanische Systeme I
Dozent Lehrform SWSProf. Dr. Mario Kupnik Vorlesung 2
Kurs-Nr. Kursname18-kn-1050-ue Elektromechanische Systeme I
Dozent Lehrform SWSProf. Dr. Mario Kupnik Übung 2
2.2 Wahlfächer ETiT 76
ModulnameMikrosystemtechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bu-2010 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Ph.D. Thomas Peter Burg
1 LerninhaltEinführung und Definitionen zur Mikrosystemtechnik, Werkstofftechnische Grundlagen, Grundlagen derTechnologien, Funktionselemente der Mikrosystemtechnik, Mikroaktoren, Mikrofluidische Systeme, Mikro-sensoren, Integrierte Sensor-Aktor-Systeme, Trends, ökonomische Aspekte.
2 Qualifikationsziele / LernergebnisseDen Aufbau, die Funktionsweise und Herstellungsprozesse von Mikrosystemen wie Mikrosensoren, Mi-kroaktoren, mikrofluidische und mikrooptische Komponenten erläutern können, die werkstofftechnischenGrundlagen erläutern können, einfache Mikrosysteme berechnen können.
3 Empfohlene Voraussetzung für die TeilnahmeBSc
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript zur Vorlesung Mikrosystemtechnik
Enthaltene Kurse
Kurs-Nr. Kursname18-bu-2010-vl Mikrosystemtechnik
Dozent Lehrform SWSProf. Ph.D. Thomas Peter Burg Vorlesung 2
Kurs-Nr. Kursname18-bu-2010-ue Mikrosystemtechnik
Dozent Lehrform SWSProf. Ph.D. Thomas Peter Burg Übung 1
2.2 Wahlfächer ETiT 77
ModulnameEnergy Converters - CAD and System Dynamics
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2010 7 CP 210 h 135 h 1 WiSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltEntwurf von Käfig- und Schleifringläufer-Asynchronmaschinen: Berechnung der Kräfte, Drehmomente, Ver-luste, Wirkungsgrad, Kühlung und Erwärmung. Dynamisches Betriebsverhalten von stromrichtergespeistenGleichstrommaschinen und netz- und umrichtergespeisten Drehfeldmaschinen. Anwendung der Raumzei-gertheorie auf Stosskurzschluss, Lastsprünge, Hochlauf. Beschreibung der E- Maschinen als Regelstreckenfür die Automatisierung. In den Übungen wird der analytische Entwurf von E-Maschinen vertieft und mitComputerprogrammen ergänzt. Die transiente Berechnung elektrischer Maschinen mit Hilfe der Laplace-Transformation und mit dem Programmpaket MATLAB/Simulink wird geübt.
2 Qualifikationsziele / LernergebnisseNach aktiver Mitarbeit in der Vorlesung, insbesondere durch Nachfragen bei den Vorlesungsteilen, die Sienicht vollständig verstanden haben, sowie selbständigem Lösen aller Übungsaufgaben vor der jeweiligenÜbungsstunde (also nicht erst bei der Prüfungsvorbereitung) sollten Sie in der Lage sein:
• den elektromagnetischen Entwurf von Asynchronmaschinen selbständig analytisch und mit einemAuslegungsprogramm durchführen und erläutern zu können,
• das thermische Betriebsverhalten elektrischer Antriebe zu verstehen und einfache Temperatur-Prognosen selbst durchführen zu können,
• das instationäre Betriebsverhalten von Gleichstrommaschinen zu verstehen und für fremderregteAntriebe vorausberechnen zu können
• den dynamischen Betrieb von Drehfeldmaschinen anhand des Raumzeigerkalküls vorhersagen undmit dem Programm MATLAB/Simulink berechnen zu können.
3 Empfohlene Voraussetzung für die TeilnahmeBachelor-Abschluss Elektrotechnik, elektrische Energietechnik oder Vergleichbares
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc EPE
7 Notenverbesserung nach §25 (2)
8 LiteraturAusführliches Skript und Aufgabensammlung; PowerPoint-FolienLeonhard, W.: Control of electrical drives, Springer, 1996Fitzgerald, A.; Kingsley, C.: Kusko, A.: Electric machinery, McGraw-Hill, 1971McPherson, G.: An Introduction to Electrical Machines and Transformers, Wiley, 1980Say, M.: Alternating Current Machines, Wiley, 1983Say, M.; Taylor, E.: Direct Current Machines, Pitman, 1983Vas, P.: Vector control of ac machines, Oxford Univ. Press, 1990Novotny, D.; Lipo, T.: Vector control and dynamics of ac drives, Clarendon, 1996
Enthaltene Kurse
2.2 Wahlfächer ETiT 78
Kurs-Nr. Kursname18-bi-2010-vl Energy Converters - CAD and System Dynamics
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Vorlesung 3
Kurs-Nr. Kursname18-bi-2010-ue Energy Converters - CAD and System Dynamics
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Übung 2
2.2 Wahlfächer ETiT 79
ModulnameFuzzy-Logik, Neuronale Netze und Evolutionäre Algorithmen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2020 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 LerninhaltFuzzy-Systeme: Grundlagen, regelbasierte Fuzzy-Logik, Entwurfsverfahren, Entscheidungsfindung, Fuzzy-Regelung, Mustererkennung, Diagnose; Neuronale Netze: Grundlagen, Multilayer-Perzeptrons, Radiale-Basisfunktionen-Netze, Mustererkennung, Identifikation, Regelung, Interpolation und Approximation;Neuro-Fuzzy: Optimierung von Fuzzy-Systemen, datengetriebene Regelgenerierung; Evolutionäre Algo-rithmen: Optimierungsaufgaben, Evolutionsstrategien und deren Anwendung, Genetische Algorithmen undderen Anwendung
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung:
• die Elemente und Standardstruktur von Fuzzy- Logik-Systemen, Neuronalen Netzen und Evolutio-nären Algorithmen nennen,
• die Vor- und Nachteile der einzelnen Operatoren, die in diesen Systemen der Computational Intelli-gence vorkommen, in Bezug auf eine Problemlösung benennen,
• erkennen, wann sich die Hilfsmittel der Computational Intelligence zur Problemlösung heranziehenlassen,
• die gelernten Algorithmen in Computerprogramme umsetzen,• die gelernten Standartmethoden erweitern, um neue Probleme zu lösen.
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc iST, MSc ETiT, MSc MEC, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Notenverbesserung nach §25 (2)
8 LiteraturAdamy : Fuzzy Logik, Neuronale Netze und Evolutionäre Algorithmen, Shaker Verlag (erhältlich im FG-Sekretariat)www.rtr.tu-darmstadt.de (optionales Material)
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2020-vl Fuzzy-Logik, Neuronale Netze und Evolutionäre Algorithmen
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Vorlesung 2
Kurs-Nr. Kursname18-ad-2020-ue Fuzzy-Logik, Neuronale Netze und Evolutionäre Algorithmen
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Übung 1
2.2 Wahlfächer ETiT 80
ModulnameIdentifikation dynamischer Systeme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2040 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 Lerninhalt• Einführung in die Aufstellung von mathematischen Prozessmodellen aus gemessenen Daten• Theoretische und experimentelle Modellbildung dynamischer Systeme• Systemidentifikation mit zeit-kontinuierlichen Signalen:
– Aperiodische Signale
* Fourieranalyse
* Bestimmung charakteristischer Werte (Sprungantwort)
– Periodische Signale
* Frequenzgangmessung
* Korrelationsanalyse
• Systemidentifikation mit zeit-diskreten Signalen– Deterministische and stochastische Signale– Grundlagen der Schätztheorie– Korrelationsanalyse
• Parameterschätzverfahren:– Methode der kleinsten Quadrate– Modellstrukturermittlung– Rekursive Schätzalgorithmen
• Kalman Filter und Erweitertes Kalman Filter• Numerische Methoden• Implementierung unter MatLab Zahlreiche Übungsbeispiele mit echten Messdaten
2 Qualifikationsziele / LernergebnisseDie Studenten werden in die grundlegenden Verfahren der Signal- und Systemanalyse eingeführt. Außer-dem lernen die Studenten Methoden wie Fourieranalyse, Korrelationsverfahren und Parameterschätzver-fahren kennen. Mit dieser Grundlage können die Studenten die behandelten Methoden beurteilen undanwenden und sind in der Lage, aus gemessenen Daten nicht-parametrische und parametrische Modell zugenerieren.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagen im Bereich der Regelungstechnik werden vorausgesetzt (z.B. Vorlesung „Systemdynamik undRegelungstechnik I“)
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
2.2 Wahlfächer ETiT 81
8 LiteraturPintelon, R.; Schoukens, J.: System Identification: A Frequency Domain Approach. IEEE Press, New York,2001.Ljung, L.: System Identification: Theory for the user. Prentice Hall information and systems sciences series.Prentice Hall PTR, Upper Saddle River NJ, 2. edition, 1999.
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2040-vl Identifikation dynamischer Systeme
Dozent Lehrform SWSDr. Ing. Eric Lenz Vorlesung 2
Kurs-Nr. Kursname18-ko-2040-ue Identifikation dynamischer Systeme
Dozent Lehrform SWSDr. Ing. Eric Lenz Übung 1
2.2 Wahlfächer ETiT 82
ModulnameKommunikationsnetze I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-sm-1010 6 CP 180 h 120 h 1 SoSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Ralf Steinmetz
1 LerninhaltIn dieser Veranstaltung werden die Technologien, die Grundlage heutiger Kommunkationsnetze sind, vor-gestellt und analysiert.Die Vorlesung deckt grundlegendes Wissen über Kommunikationssysteme ab und betrachtet im Detail die4 unteren Schichten des ISO-OSI-Modells: Bitübertragungsschicht, Sicherungsschicht, Vermittlungsschichtund Teile der Transportschicht.Die Bitübertragungsschicht, die zuständig ist für eine adäquate Übertragung über einen Kanal, wird kurzbetrachtet. Danach werden fehlertolerante Kodierung, Flusskontrolle und Zugangskontrollverfahren (Me-dium access control) der Sicherungsschicht betrachtet. Anschließend wird die Netzwerkschicht behandelt.Der Fokus liegt hier auf Wegefindungs- und Überlastkontrollverfahren. Abschließend werden grundlegendeFunktionen der Transportschicht betrachtet. Dies beinhaltet UDP und TCP- Das Internet und dessen Funk-tionsweise wird im Laufe der Vorlesung detailliert betrachtet.Themen sind:
• ISO-OSI und TCP/IP Schichtenmodelle• Aufgaben und Eigenschaften des Bitübertragungsschicht• Kodierungsverfahren der Bitübertragungsschicht• Dienste und Protokolle der Sicherungsschicht• Flußkontrolle (sliding window)• Anwendungen: LAN, MAN, High-Speed LAN, WAN• Dienste der Vermittlungsschicht• Wegefindungsalgorithmen• Broadcast- und Multicastwegefindung• Überlastbehandlung• Adressierung• Internet Protokoll (IP)• Netzbrücken• Mobile Netze• Services und Protokolle der Transportschicht• TCP, UDP
2 Qualifikationsziele / LernergebnisseDiese Vorlesung betrachet Grundfunktionalitäten, Serives, Protokolle, Algorithmen und Standards vonKommunikationssystemen. Vermitteltet Kompetenzen sind grundlegedes Wissen über die vier unterenSchichten des ISO-OSI-Modells: Bitübertragungsschicht, Sicherungsschicht, Vermittlungsschicht und Trans-portschicht. Desweiteren wird Grundwissen über Kommunikationssysteme vermittelt. Besucher der Vorle-sung werden Funktionen heutiger Netzwerketechnologien und des Internets erlernen.
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 120 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
2.2 Wahlfächer ETiT 83
Wi-CS, Wi-ETiT, BSc CS, BSc ETiT, BSc iST
7 Notenverbesserung nach §25 (2)Ein Bonus in Höhe von 0,3 oder 0,7 Notenstufen kann erlangt werden.Für den 0,3-Bonus gilt: 7 von 9 Übungen müssen bestmöglich gelöst werden. Das bedeutet, dass jede Fragebeantwortet sein sollte. Es muss jedoch nicht jede Antwort absolut korrekt sein, damit ein Übungsblatt alskorrekt akzeptiert wird. Zusätzlich muss mindestens ein Wiki-Artikel verfasst oder ein Applet vorgestelltwerden aus dem Themengebiet der Vorlesung.Für den 0,7-Bonus gilt: Es muss eine Präsenz-Übung präsentiert werden und drei statt einem Wiki-Artikelverfasst werden oder fünf Wiki-Artikel verfasst werden.Eine mündliche Prüfung, das Fachgespräch wird abschließend abgenommen. Die Teilnahem daran ist zwin-gend notwendig für den Erhalt des Bonus. Der Bonus kommt nur zur Anwendung, wenn bei der eigentli-chen Prüfung eine 4,0 oder besser erreicht wird.
8 LiteraturAusgewählte Kapitel aus folgenden Büchern:
• Andrew S. Tanenbaum: Computer Networks, 5th Edition, Prentice Hall, 2010• Andrew S. Tanenbaum: Computernetzwerke, 3. Auflage, Prentice Hall, 1998• Larry L. Peterson, Bruce S. Davie: Computer Networks: A System Approach, 2nd Edition, Morgan
Kaufmann Publishers, 1999• Larry L. Peterson, Bruce S. Davie: Computernetze, Ein modernes Lehrbuch, 2. Auflage, Dpunkt Ver-
lag, 2000• James F. Kurose, Keith W. Ross: Computer Networking: A Top-Down Approach Featuring the Internet,
2nd Edition, Addison Wesley-Longman, 2002• Jean Walrand: Communication Networks: A First Course, 2nd Edition, McGraw-Hill, 1998
Enthaltene Kurse
Kurs-Nr. Kursname18-sm-1010-vl Kommunikationsnetze I
Dozent Lehrform SWSDr.-Ing. Amr Rizk Vorlesung 3
Kurs-Nr. Kursname18-sm-1010-ue Kommunikationsnetze I
Dozent Lehrform SWSDr.-Ing. Amr Rizk Übung 1
2.2 Wahlfächer ETiT 84
ModulnameMehrgrößenreglerentwurf im Zustandsraum
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2050 5 CP 150 h 90 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 LerninhaltReglerentwurf durch Polvorgabe (Vollständige Modale Synthese), Entwurf von Ver- und Entkopplungsreg-ler, Reglerentwurf durch Optimierung, Zustandsschätzung mittels Beobachter, Dynamische Zustandsrege-lungen, Strukturbeschränkte Zustandsregelungen
2 Qualifikationsziele / LernergebnisseDie Studierenden werden in der Lage sein, lineare, zeitinvariante Mehrgrößensysteme im Zustandsraumzu analysieren und für diese mittels verschiedener Verfahren Regelungen zu entwerfen.
3 Empfohlene Voraussetzung für die TeilnahmeKenntnisse der in den Vorlesungen „Systemdynamik und Regelungstechnik I“ und SSystemdynamik undRegelungstechnik II"vermittelten Grundlagen der linearen Regelungstechnik.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript Konigorski: „Mehrgrößenreglerentwurf im Zustandsraum“,Anderson, Moore: Öptimal Control: Linear Quadratic Methods", Föllinger: "Regelungstechnik: Einführungin die Methoden und ihre Anwendung". Föllinger: Öptimale Regelung und Steuerung: Eine Einführung fürIngenieure", Roppenecker: SZeitbereichsentwurf linearer Regelungen: Grundlegende Strukturen und eineAllgemeine Methodik ihrer Parametrierung",Unbehauen: "Regelungstechnik II:Zustandsregelungen, digitale und nichtlineare Regelungssysteme",Zurmühl: "Matrizen und ihre Anwendung: Für Angewandte Mathematiker, Physiker und Ingenieure. Teil1: Grundlagen"
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2050-vl Mehrgrößenreglerentwurf im Zustandsraum
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Vorlesung 2
Kurs-Nr. Kursname18-ko-2050-ue Mehrgrößenreglerentwurf im Zustandsraum
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Übung 2
2.2 Wahlfächer ETiT 85
ModulnameMikroaktoren und Kleinmotoren
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-sl-2020 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Helmut Schlaak
1 LerninhaltLineare und rotatorische Bewegungen, Kraftwirkung, Antriebe mit mechanischem und elektronischemKommutator bzw. Ständerwechselfeld, geschaltete Reluktanzmotoren, Schrittmotoren, Mikromotoren, pie-zoelektrische Motoren und Sonderbauformen, Getriebe. Messen, Steuern und Regeln in der Antriebstech-nik, Auswahl elektrischer Kleinantriebe.
2 Qualifikationsziele / LernergebnisseLernziel der Veranstaltung ist das selbstständige Auswählen von Klein- und Mikroantrieben für feinwerk-technische Fragestellungen. Die Studierenden sollen in die Lage versetzt werden, verschiedene Motorkon-zepte und physikalische Prinzipien zu beschreiben und für eine spezifische Anwendung optimal auszuwäh-len.
3 Empfohlene Voraussetzung für die TeilnahmeBSc ETiT
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript zur Vorlesung Elektrische Kleinantriebe
Enthaltene Kurse
Kurs-Nr. Kursname18-sl-2020-vl Mikroaktoren und Kleinmotoren
Dozent Lehrform SWSProf. Dr.-Ing. Helmut Schlaak Vorlesung 2
Kurs-Nr. Kursname18-sl-2020-ue Mikroaktoren und Kleinmotoren
Dozent Lehrform SWSProf. Dr.-Ing. Helmut Schlaak Übung 1
2.2 Wahlfächer ETiT 86
ModulnameMotor Development for Electrical Drive Systems
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2032 4 CP 120 h 75 h 1 SoSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltFor the wide field of the drive technology at low and medium power range from 1 kW up to about 500kW. . . 1 MW the conventional drives and the current trends of developments are explained to the students.Grid operated and inverter-fed induction drives, permanent-magnet synchronous drives with and withoutdamper cage („brushless dc drives“), synchronous and switched reluctance drives and permanent magnetand electrically excited DC servo drives are covered. As a "newcomerïn the electrical machines field, thetransversal flux machines and modular synchronous motors are introduced.
2 Qualifikationsziele / LernergebnisseFor the students who are interested in the fields of design, operation or development of electrical drives intheir future career, the latest knowledge about
• modern computational methods (e.g. finite elements),• advanced materials (e.g. high energy magnets, ceramic bearings),• innovative drive concepts (e.g. transversal flux machines) and• measurement and experiment techniques are imparted.
3 Empfohlene Voraussetzung für die TeilnahmeCompleted Bachelor of Electrical Engineering or equivalent degrees
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, nicht MSc EPE
7 Notenverbesserung nach §25 (2)
8 LiteraturA detailed script is available for the lecture. In the tutorials design of PM machines, switched reluctancedrives and inverter-fed induction motors are explained.
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2030-vl Motor Development for Electrical Drive Systems
Dozent Lehrform SWSDr.-Ing. Andreas Jöckel Vorlesung 2
Kurs-Nr. Kursname18-bi-2030-ue Motor Development for Electrical Drive Systems
Dozent Lehrform SWSDr.-Ing. Andreas Jöckel Übung 1
2.2 Wahlfächer ETiT 87
ModulnameNeue Technologien bei elektrischen Energiewandlern und Aktoren
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2040 4 CP 120 h 75 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltZiel: Der Einsatz neuer Technologien, nämlich Supraleitung, magnetische Schwebetechniken und magneto-hydrodynamische Wandlerprinzipien, werden den Studentinnen und Studenten nahegebracht. Die prinzipi-elle physikalische Wirkungsweise, ausgeführte Prototypen und der aktuelle Stand der Entwicklung werdenausführlich erläutert. Inhalt:Anwendung der Supraleiter für elektrische Energiewandler:
• rotierende elektrische Maschinen (Motoren und Generatoren)• Magnetspulen für die Fusionsforschung,• Lokomotiv- und Bahntransformatoren,• magnetische Lagerung.
Aktive magnetische Lagerung („magnetisches Schweben“):• Grundlagen der magnetischen Schwebetechnik,• Lagerung von Hochdrehzahlantrieben im kW- bis MW-Bereich,• Einsatz für Hochgeschwindigkeitszüge mit Linearantrieben.
Magnetohydrodynamische Energiewandlung:• Physikalisches Wirkprinzip,• Stand der Technikund Perspektiven.
Fusionsforschung:• Magnetfeldanordnungen für den berührungslosenPlasmaeinschluß,• Stand der aktuellen Forschung.
2 Qualifikationsziele / LernergebnisseBasiskenntnisse zur energietechnischen Anwendung der Supraleitung und des magnetischen Schwebens,der magnetohydrodynamischen Energiewandlung und der Fusionstechnologie werden verstanden und ihreaktuellen Anwendungen.
3 Empfohlene Voraussetzung für die TeilnahmePhysik, Eelektrische Maschinen und Antriebe, Energietechnik
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc EPE, MSc ETiT, MSc MEC, MSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 Literatur
2.2 Wahlfächer ETiT 88
Ausführliches Skript; Komarek, P.: Hochstromanwendungen der Supraleitung, Teubner, Stuttgart, 1995Buckel, W.: Supraleitung, VHS-Wiley, Weinheim, 1994Schweitzer, G.; Traxler, A.; Bleuler, H.: Magnetlager, Springer, Berlin, 1993Schmidt, E.: Unkonventionelle Energiewandler, Elitera, 1975
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2040-vl Neue Technologien bei elektrischen Energiewandlern und Aktoren
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Vorlesung 2
Kurs-Nr. Kursname18-bi-2040-ue Neue Technologien bei elektrischen Energiewandlern und Aktoren
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Übung 1
2.2 Wahlfächer ETiT 89
ModulnameNumerische Feldberechnung Elektrischer Maschinen und Aktoren
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2110 5 CP 150 h 120 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltEinführung in Finite Element Method (FEM), einfache Beispiele für Auslegung von elektromagnetischenGeräten in 2D mit FEM, 2D elektro-magnetische Auslegung von Transformatoren, Drehstrommaschinen,Permanentmagnet-Maschinen; Wirbelstrom in Käfigläufermaschinen (Beispiel: Windgenerator); Kühlsyste-me und thermische Auslegung: Berechnung von Temperaturverteilung in Leistungsgeräten
2 Qualifikationsziele / LernergebnisseAls Kompetenz wird der sichere Umgang mit dem Finite-Element-Programmpaket FEMAG und Grund-kenntnisse mit dem Programmpaket ANSYS erworben.
3 Empfohlene Voraussetzung für die TeilnahmeDringend empfohlen der Besuch von Vorlesung und aktive Mitarbeit bei den Übungen „Energy Converters- CAD and System Dynamics“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc EPE, MSc ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturAusführliches Skript; User Manual FEMAG und ANSYS. Müller, C. Groth: FEM für Praktiker – Band 1:Grundlagen, expert-Verlag, 5. Aufl., 2000
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2110-se Numerische Feldberechnung Elektrischer Maschinen und Aktoren
Dozent Lehrform SWSDr.-Ing. Bogdan Funieru Seminar 2
2.2 Wahlfächer ETiT 90
ModulnameRechnersysteme II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-hb-2030 6 CP 180 h 120 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Christian Hochberger
1 Lerninhalt• Konfigurierbare Technologien• FPGA-Architekturen und Eigenschaften• System-On-Chip, HW-Komponenten, SW-Tool-Chain, Support-SW• Coarse Grained Reconfigurable Architectures, PE-Architektur, Modulo-Scheduling
2 Qualifikationsziele / LernergebnisseNach Abschluss des Moduls kennen die Studierenden rekonfigurierbare Technologien und Chip-Architekturen, die diese verwenden (FPGAs und CGRAs). Sie können die passende Technologie für kon-krete Anwendungen auswählen. Sie wissen, welche Komponenten zu einem System-on-Chip gehören, undkönnen ein anwendungsspezifisches SoC konfigurieren und programmieren. Studierende können rechen-intensive Anwendungen auf ein CGRA abbilden und kennen die Einschränkungen und Hürden bei derAbbildung.
3 Empfohlene Voraussetzung für die TeilnahmeSolide Grundkenntnisse der Digitaltechnik und der Rechnerarchitektur (wie sie z.B. in den Vorlesungen “Lo-gischer Entwurf” und “Rechnersysteme I” erworben werden. Grundkenntnisse in der ProgrammierspracheC sollten vorhanden sein.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc iST, MSc iCE, MSc Wi-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturDie Folien zur Vorlesung können über Moodle heruntergeladen werden.
Enthaltene Kurse
Kurs-Nr. Kursname18-hb-2030-vl Rechnersysteme II
Dozent Lehrform SWSProf. Dr.-Ing. Christian Hochberger Vorlesung 3
Kurs-Nr. Kursname18-hb-2030-ue Rechnersysteme II
Dozent Lehrform SWSProf. Dr.-Ing. Christian Hochberger Übung 1
2.2 Wahlfächer ETiT 91
ModulnameSystemdynamik und Regelungstechnik III
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2010 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 LerninhaltBehandelt werden:
• Grundlagen nichtlinearer Systeme,• Grenzzyklen und Stabilitätskriterien,• nichtlineare Regelungen für lineare Regelstrecken,• nichtlineare Regelungen für nichtlineare Regelstrecken,• Beobachter für nichtlineare Regelkreise
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung:
• die grundsätzlichen Unterschiede zwischen linearen und nichtlinearen Systemen benennen,• nichtlineare Systeme auf Grenzzyklen hin testen• verschiedene Stabilitätsbegriffe bennen und Ruhelagen auf Stabilität hin untersuchen,• Vor- und Nachteile nichtlinearer Regler für lineare Strecken nennen,• verschiedenen Regleransätze für nichtlineare Systeme nennen und anwenden,• Beobachter für nichtlineare Strecken entwerfen.
3 Empfohlene Voraussetzung für die TeilnahmeSystemdynamik und Regelungstechnik II
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 180 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Notenverbesserung nach §25 (2)
8 LiteraturAdamy: Systemdynamik und Regelungstechnik III (erhältlich im FG-Sekretariat)
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2010-vl Systemdynamik und Regelungstechnik III
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Vorlesung 2
Kurs-Nr. Kursname18-ad-2010-ue Systemdynamik und Regelungstechnik III
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Übung 1
2.2 Wahlfächer ETiT 92
ModulnameTechnologie der Mikro- und Feinwerktechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bu-1010 4 CP 120 h 75 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Ph.D. Thomas Peter Burg
1 LerninhaltKenntnisse über die vielfältigen Fertigungsverfahren in der Mikro- und Feinwerktechnik und ihren Einflussauf die Entwicklung von Geräten und Komponenten.
2 Qualifikationsziele / LernergebnisseHerstellungsverfahren von Bauteilen durch: Feingießen, Sintern von Metall- und Keramikteilen beschreibenkönnen, Spritzgießen, Metallspritzguss, Rapid Prototyping, erläutern können, Bearbeitungsverfahren vonBauteilen durch: Umformprozesse, Pressen, Prägen, Tiefziehen, Feinschneiden, Ultraschallbearbeitung, La-serbearbeitung, Formteilätzen, Verbinden von Werkstoffen und Bauteilen durch: Schweißen, Bonden, Löt-prozesse, Kleben durchführen können, Erläutern der Modifikation von Stoffeigenschaften durch: Glühen,Härten und Verbundwerkstoffe.
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, MSc MEC, MSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript zur Vorlesung: Technologie der Mikro- und Feinwerktechnik
Enthaltene Kurse
Kurs-Nr. Kursname18-bu-1010-vl Technologie der Mikro- und Feinwerktechnik
Dozent Lehrform SWSProf. Ph.D. Thomas Peter Burg Vorlesung 2
Kurs-Nr. Kursname18-bu-1010-ue Technologie der Mikro- und Feinwerktechnik
Dozent Lehrform SWSProf. Ph.D. Thomas Peter Burg Übung 1
2.2 Wahlfächer ETiT 93
ModulnameComputer Aided Design for SoCs
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ho-2200 5 CP 150 h 90 h 1 SoSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Klaus Hofmann
1 LerninhaltCAD-Verfahren zum Entwurf und Simulation von integrierten System-on-Chips
2 Qualifikationsziele / LernergebnisseEin Student kennt nach Besuch der Veranstaltung
• die wesentlichen Entwurfs- und Verifikationsabstraktionen beim Entwurf integrierter elektronischerSchaltungen, sowie deren Entwurfsabläufe,
• ausgewählte Algorithmen zur Optimierung/zum Lösen von Simulations- und Entwurfsproblemen,• Fortgeschrittene Verfahren zum Entwurf und Simulation analoger Schaltungen in modernen CMOS-
Technologien• Fortgeschrittene Kenntnisse von Hardwarebeschreibungssprachen und deren Konzepte (Verilog,
VHDL, Verilog-A, Verilog-AMS, System-Verilog)
3 Empfohlene Voraussetzung für die TeilnahmeVorlesung „Advanced Digital Integrated Circuit Design“ (kann parallel besucht werden) und „Analog Inte-grated Circuit Design“ und „Logischer Entwurf“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc iST, MSc MEC, MSc Wi-ETiT, MSc iCE
7 Notenverbesserung nach §25 (2)
8 LiteraturSkriptum zur Vorlesung
Enthaltene Kurse
Kurs-Nr. Kursname18-ho-2200-vl Computer Aided Design for SoCs
Dozent Lehrform SWSProf. Dr.-Ing. Klaus Hofmann Vorlesung 2
Kurs-Nr. Kursname18-ho-2200-ue Computer Aided Design for SoCs
Dozent Lehrform SWSProf. Dr.-Ing. Klaus Hofmann Übung 1
Kurs-Nr. Kursname18-ho-2200-pr Computer Aided Design for SoCs
Dozent Lehrform SWSProf. Dr.-Ing. Klaus Hofmann Praktikum 1
2.2 Wahlfächer ETiT 94
ModulnameGrundlagen der Schienenfahrzeugtechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2050 3 CP 90 h 60 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltAus dem umfassenden und interdisziplinären Wissensgebiet der Eisenbahntechnik (Fahrzeugtechnik,Signal- und Sicherungstechnik, Bauingenieurwesen und Eisenbahnbetriebstechnik) greift die Vorlesungden Bereich der Fahrzeugtechnik mit dem Schwerpunkt des Mechanteils heraus. Sie bietet dem Ingenieureinen zusammenhängenden Einstieg in ausgewählte Kapitel des Engineerings von Schienenfahrzeugen mitbesonderen Schwerpunkten in den eisenbahnspezifischen technischen Lösungen und Verfahren. Die Vor-lesung gliedert sich in 7 Kapitel, wobei vier Kapitel theoretische Grundlagenthemen und die drei Kapitelwesentliche Komponenten des Schienenfahrzeugs vertieft behandeln.Im Rahmen einer eintägigen Exkursion besteht die Möglichkeit, Einblicke in die Fertigung moderner Schie-nenfahrzeuge zu erhalten. Die Teilnahme ist freiwillig.
2 Qualifikationsziele / LernergebnisseVerständnis der mechanischen und maschinenbaulichen Grundlagen moderner Schienenfahrzeuge.
3 Empfohlene Voraussetzung für die TeilnahmeBachelor-Abschluss Elektrotechnik oder Mechatronik oder Maschinenbau
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Mündliche/Schriftliche Prüfung, Dauer: 90 min, Standard BWS)In der Regel erfolgt die Prüfung durch eine Klausur (Dauer: 90 Min.). Falls sich in Semestern, in welchendie Vorlesung nicht stattfindet, bis zu einschließlich 20 Studierende anmelden erfolgt die Prüfung mündlich(Dauer: 30 Min.). Die Art der Prüfung wird innerhalb einer Arbeitswoche nach Ende der Prüfungsanmel-dephase bekannt gegeben.
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc EPE, MSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturDetailliertes Skript; Filipovic, Z: Elektrische Bahnen. Springer, Berlin, Heidelberg, 1995. Obermayer, H.J.:Internationaler Schnellverkehr.Franckh-Kosmos, Stuttgart, 1994
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2050-vl Grundlagen der Schienenfahrzeugtechnik
Dozent Lehrform SWSVorlesung 2
2.2 Wahlfächer ETiT 95
ModulnameLichttechnik I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kh-2010 5 CP 150 h 90 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Khanh Quoc Tran
1 LerninhaltBau und Wirkungsweise des menschlichen Auges, Grundgrößen der Lichttechnik, Photometrie, lichttechni-sche Stoffkennzahlen, lichttechnische Bauelemente: Filter, Physiologie des Sehens, Farbe, Grundlagen derLichterzeugung.Messungen von Lichtstrom, Lichtstärke, Beleuchtungsstärke, Leuchtdichte, Bestimmung der Hellempfind-lichkeitsfunktion, Farbmetrik, Farbwiedergabeversuch, Farben im Verkehrsraum, Messung von Stoffkenn-zahlen, Eigenschaften von LED-Lichtquellen
2 Qualifikationsziele / LernergebnisseEinheiten der Lichttechnik und lichttechnische Stoffkennzahlen nennen und in Zusammenhang bringen,Bau und Wirkungsweise des menschlichen Auges und die Physiologie des Sehens erläutern, Lichterzeu-gung, lichttechnische Messmethoden und Anwendungen beschreiben.Messungen an lichttechnischen Grundgrößen durchführen, Kenntnisse von Lichtquellen anwenden unddurch Versuche vertiefen , Verständnis für Licht und Farbe entwickeln
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc Wi-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript zur Vorlesung: Lichttechnik IVersuchsanleitungen zum Praktikum: Lichttechnik I
Enthaltene Kurse
Kurs-Nr. Kursname18-kh-2010-vl Lichttechnik I
Dozent Lehrform SWSProf. Dr.-Ing. Khanh Quoc Tran Vorlesung 2
Kurs-Nr. Kursname18-kh-2010-pr Lichttechnik I
Dozent Lehrform SWSProf. Dr.-Ing. Khanh Quoc Tran Praktikum 2
2.2 Wahlfächer ETiT 96
ModulnameLichttechnik II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kh-2020 5 CP 150 h 90 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Khanh Quoc Tran
1 LerninhaltAusgewählte Kapitel der Lichttechnik – Aktuelle Entwicklungen und Anwendungen: Straßenbeleuchtung,Physiologie – Detektion / Blendung / Licht und Gesundheit, LED: Erzeugung weißer Strahlung / Stand derTechnik, moderne Lichtmesstechnik, Innenraumbeleuchtung, Displaytechnologien, nichtvisuelle Lichtwir-kungen, UV-Anwendungen, KFZ.Beleuchtung, Solarmodule
2 Qualifikationsziele / LernergebnisseAktuelle Entwicklungen und Anwendungen kennen, lichttechnische Messmethoden und Anwendungen be-schreiben können.Messungen an lichttechnischen Grundgrößen durchführen können, Kenntnisse von Lichtquellen und wei-teren Anwendungen verwenden und durch Versuche vertiefen können, Verständnis für Licht, Farbe, Wahr-nehmung und Beleuchtungssituationen entwickeln
3 Empfohlene Voraussetzung für die TeilnahmeLichttechnik I
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc Wi-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturVersuchsanleitungen zum Praktikum: Lichttechnik II
Enthaltene Kurse
Kurs-Nr. Kursname18-kh-2020-vl Lichttechnik II
Dozent Lehrform SWSProf. Dr.-Ing. Khanh Quoc Tran Vorlesung 2
Kurs-Nr. Kursname18-kh-2020-pr Lichttechnik II
Dozent Lehrform SWSProf. Dr.-Ing. Khanh Quoc Tran Praktikum 2
2.2 Wahlfächer ETiT 97
ModulnameNeue Technologien bei elektrischen Energiewandlern und Aktoren
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2040 4 CP 120 h 75 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltZiel: Der Einsatz neuer Technologien, nämlich Supraleitung, magnetische Schwebetechniken und magneto-hydrodynamische Wandlerprinzipien, werden den Studentinnen und Studenten nahegebracht. Die prinzipi-elle physikalische Wirkungsweise, ausgeführte Prototypen und der aktuelle Stand der Entwicklung werdenausführlich erläutert. Inhalt:Anwendung der Supraleiter für elektrische Energiewandler:
• rotierende elektrische Maschinen (Motoren und Generatoren)• Magnetspulen für die Fusionsforschung,• Lokomotiv- und Bahntransformatoren,• magnetische Lagerung.
Aktive magnetische Lagerung („magnetisches Schweben“):• Grundlagen der magnetischen Schwebetechnik,• Lagerung von Hochdrehzahlantrieben im kW- bis MW-Bereich,• Einsatz für Hochgeschwindigkeitszüge mit Linearantrieben.
Magnetohydrodynamische Energiewandlung:• Physikalisches Wirkprinzip,• Stand der Technikund Perspektiven.
Fusionsforschung:• Magnetfeldanordnungen für den berührungslosenPlasmaeinschluß,• Stand der aktuellen Forschung.
2 Qualifikationsziele / LernergebnisseBasiskenntnisse zur energietechnischen Anwendung der Supraleitung und des magnetischen Schwebens,der magnetohydrodynamischen Energiewandlung und der Fusionstechnologie werden verstanden und ihreaktuellen Anwendungen.
3 Empfohlene Voraussetzung für die TeilnahmePhysik, Eelektrische Maschinen und Antriebe, Energietechnik
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc EPE, MSc ETiT, MSc MEC, MSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 Literatur
2.2 Wahlfächer ETiT 98
Ausführliches Skript; Komarek, P.: Hochstromanwendungen der Supraleitung, Teubner, Stuttgart, 1995Buckel, W.: Supraleitung, VHS-Wiley, Weinheim, 1994Schweitzer, G.; Traxler, A.; Bleuler, H.: Magnetlager, Springer, Berlin, 1993Schmidt, E.: Unkonventionelle Energiewandler, Elitera, 1975
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2040-vl Neue Technologien bei elektrischen Energiewandlern und Aktoren
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Vorlesung 2
Kurs-Nr. Kursname18-bi-2040-ue Neue Technologien bei elektrischen Energiewandlern und Aktoren
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Übung 1
2.2 Wahlfächer ETiT 99
ModulnameElektrische Bahnen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2140 5 CP 150 h 105 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 Lerninhalt• Traktionsmechanik• Elektrische Ausrüstung von Triebfahrzeugen• Traktionswechselrichter und Traktionsmaschine• Überwachungseinrichtungen• Bahnstromsysteme im Vergleich• Gleich- und Wechselstromsysteme für Fernbahnen und Nahverkehr• Problem der Erdung und Rückstromführung• Unterwerke, Umformer, Kraftwerke
2 Qualifikationsziele / LernergebnisseVerständnis der Grundkonzepte elektrischer Triebfahrzeuge und elektrischer Bahnstromsysteme
3 Empfohlene Voraussetzung für die TeilnahmeGrundkenntnisse in elektrischen Maschinen und Antrieben
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc Wi-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturDetailliertes Vorlesungsskript. Bendel, H. u.a.: Die elektrische Lokomotive. Transpress, Berlin, 1994. Filipo-vic, Z: Elektrische Bahnen. Springer, Berlin, Heidelberg, 1995. Steimel, A.: Elektrische Triebfahrzeuge undihre Energieversorgung. Oldenburg Industrieverlag, 2006. Bäzold, D. u.a.: Elektrische Lokomotion deut-scher Eisenbahnen. Alba, Düsseldorf, 1993. Obermayer, H. J.: Internationaler Schnellverkehr. Franckh-Kosmos, Stuttgart, 1994; Guckow, A.; Kiessling, F.; Puschmann, R.: Fahrleitungen el. Bahnen. Teubner,Stuttgart, 1997. Schaefer, H.: Elektrotechnische Anlagen für Bahnstrom. Eisenbahn-Fachverlag, Heidel-berg, 1981
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2140-vl Elektrische Bahnen
Dozent Lehrform SWSProf. Harald Neudorfer Vorlesung 3
2.2 Wahlfächer ETiT 100
ModulnameSchnelle Randelementmethoden für Ingenieure
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-dg-2160 3 CP 90 h 60 h 1 WiSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Herbert De Gersem
1 LerninhaltWie kann man Feldprobleme numerisch auf dem Computer lösen? Die Randelementmethode (BEM) hatsich zu einer wichtigen Alternative zu gebietsorientierten Ansätzen (wie Finite Elemente) entwickelt, seitschnelle Implementierungen verfügbar sind. Die BEM reduziert die Dimension des Problems und es könnenunbeschränkte Gebiete leicht berücksichtigt werden.Ausgehend von den Darstellungsformeln von Kirchhoff und Stratton-Chu werden Randintegral-gleichungen abgeleitet. Danach wird deren Diskretisierung mit Kollokations- und Galerkin-Verfahren be-sprochen.Für praktische Anwendungen müssen die resultierenden dicht besetzten Matrizen komprimiert werden,mit Hilfe der schnellen Multipolmethode oder Adaptive Cross Approximation.Beispiele aus der Industrie zur Anwendung der BEM werden betrachtet, wie zum Beispiel akustischeund elektromagnetische Streuung sowie thermische Probleme.Programmieraufgaben helfen dabei, das Ver-ständnis für den Inhalt der der Vorlesung zu vertiefen.
2 Qualifikationsziele / LernergebnisseStudierende erwerben ein detailliertes Verständis der Modellierung und Simulation mit BEM.
• Herleitung: Umwandlung bestimmter partieller Differentialgleichungen in Randintegralgleichungen• Diskretisierung: wie man Randelementmethoden aus Randintegralgleichungen erhält• Kompression: wie man die resultierenden linearen Gleichungssysteme effizient abspeichert und lös-
tAnwendung: Behandlung praktischer Feldprobleme aus Ingenieursanwendungen, in den BereichenAkustik, Elektromagnetismus, Thermik
3 Empfohlene Voraussetzung für die TeilnahmeGrundkenntnisse über numerische Methoden zur Lösung partieller Differentialgleichungen (z.B. Finite Ele-mente)Grundkenntnisse über Modellierung und Simulation in einem Anwendungsbereich (z.B. Akustik: Wellen-gleichung; Elektromagnetismus: Maxwellsche Gleichungen; Thermik: Wärmeleitungsgleichung)
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc CE
7 Notenverbesserung nach §25 (2)
8 LiteraturO. Steinbach: Numerical Approximation Methods for Elliptic Boundary Value ProblemsS. Rjasanow, O. Steinbach: The Fast Solution of Boundary Integral Equations
Enthaltene Kurse
2.2 Wahlfächer ETiT 101

Kurs-Nr. Kursname18-dg-2160-vl Schnelle Randelementmethoden für Ingenieure
Dozent Lehrform SWSProf. Dr.-Ing. Stefan Kurz Vorlesung 2
2.2 Wahlfächer ETiT 102
ModulnameIndustrieelektronik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ho-2210 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr.-Ing. Klaus Hofmann
1 LerninhaltLerninhalte der LV: Aufbau von typischen Baugruppen der Industrieelektronik, Verständnis der einzelnenFunktionsblöcke (Digitaler Kern, Sensor-Frontend, Aktor-Frontend, Versorgungs- und Steuerungsebene),Funktionsweise der wichtigsten Feldbus-Systeme, Kenntnis einschlägiger Normen und der technischenRandbedingungen.
2 Qualifikationsziele / LernergebnisseStudierende erwerben durch den Besuch der Veranstaltung: 1. Verständnis für den Einsatz elektroni-scher Baugruppen im industriellen Umfeld, 2. Kenntnisse über die typischen Funktionseinheiten solcherBaugruppen, 3. Vertiefte Kenntnisse zu den analogen Funktionseinheiten, 4. Kenntnisse zu einschlägi-gen Feldbus-Systemen, 5. Verständnis des regulatorischen und technischen Kontexts des Einsatzes vonIndustrielektronik-Komponenten.
3 Empfohlene Voraussetzung für die TeilnahmeVorlesungen „Elektronik“ und „Analog IC Design“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, M.Sc. iCE, M.Sc. MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• Dietmar Schmid, Gregor Häberle, Bernd Schiemann, Werner Philipp, Bernhard Grimm, Günther
Buchholz, Jörg Oestreich, Oliver Gomber, Albrecht Schilling: „Fachkunde Industrieelektronik undInformationstechnik“; Verlag Europa-Lehrmittel, 11. Auflage 2013.
• Gunter Wellenreuther, Dieter Zastrow; „Automatisieren mit SPS – Theorie und Praxis“; SpringerVerlag Berlin Heidelberg, 6. Auflage 2015.
• Ulrich Tietze, Christoph Schenk, Eberhard Gamm: „Halbleiter-Schaltungstechnik“; Springer VerlagBerlin Heidelberg, 15. Auflage 2016.
Enthaltene Kurse
Kurs-Nr. Kursname18-ho-2210-vl Industrieelektronik
Dozent Lehrform SWSDr.-Ing. Roland Steck Vorlesung 2
Kurs-Nr. Kursname18-ho-2210-ue Industrieelektronik
Dozent Lehrform SWSDr.-Ing. Roland Steck Übung 1
2.2 Wahlfächer ETiT 103
ModulnameMachine Learning und Deep Learning in der Automatisierungstechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2100 3 CP 90 h 60 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 Lerninhalt• Konzepte des Machine Learning• Lineare Verfahren• Support Vector Machines• Bäume und Ensembles• Training und Bewertung• Unüberwachtes Lernen• Neuronale Netze und Deep Learning• Faltende Neuronale Netze (CNNs)• CNN-Anwendungen• Rekurrente Neuronale Netze (RNNs)
2 Qualifikationsziele / LernergebnisseStudierende erhalten einen breiten und praxisnahen Überblick über das Gebiet des maschinellen Lernens.Es werden zunächst die wichtigsten Algorithmen-Klassen des überwachten und unüberwachten Lernensbesprochen. Danach befasst sich die Veranstaltung mit tiefen neuronalen Netzen, die viele aktuelle Anwen-dungen der Bild- und Signalverarbeitung ermöglichen. Die grundlegenden Eigenschaften aller Algorithmenwerden erarbeitet und anhand von Programmbeispielen demonstriert. Studierende sind danach in der La-ge, die Verfahren zu beurteilen und auf praktische Aufgabenstellungen anzuwenden.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlegende Kenntnisse in linearer Algebra und StatistikWünschenswert: Vorlesung „Fuzzy-Logik, Neuronale Netze und Evolutionäre Algorithmen“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc etit, MSc WI-etit, MSc MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• T. Hastie et al.: The Elements of Statistical Learning. 2. Aufl., Springer, 2008• I. Goodfellow et al.: Deep Learning. MIT Press, 2016• A. Géron: Hands-On Machine Learning with Scikit-Learn and TensorFlow. O’Reilly, 2017
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2100-vl Machine Learning und Deep Learning in der Automatisierungstechnik
Dozent Lehrform SWSDr.-Ing. Michael Vogt Vorlesung 2
2.2 Wahlfächer ETiT 104
ModulnameAnwendungen, Simulation und Regelung leistungselektronischer Systeme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-gt-2030 8 CP 240 h 180 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr.-Ing. Gerd Griepentrog
1 LerninhaltBei einem Einführungstreffen werden Themen aus den Gebieten der Leistungselektronik und der An-triebsregelung an die Studierenden vergeben. Im Rahmen der Veranstaltung können Fragestellungen zufolgenden Themen bearbeitet werden:
• Simulation leistungselektronischer Systeme sowie Analyse und Bewertung der Modelle• Aufbau und Inbetriebnahme leistungselektronischer Systeme, Prüfstandentwicklung sowie Messung
charakteristischer Parameter• Modellbildung und Simulation im Bereich der Regelung elektrischer Antriebe• Aufbau und Inbetriebnahme von geregelten Antriebssystemen• Eigene Themenvorschläge können grundsätzliche berücksichtigt werden
Die Teilnehmer bearbeiten anschließend selbstständig die ausgewählte Fragestellung. Die Ergebnisse wer-den in einer schriftlichen Ausarbeitung dokumentiert und es muss am Ende eine Präsentation zum bear-beiteten Thema gehalten werden.
2 Qualifikationsziele / LernergebnisseDie Lernziele sind:
• Selbstständiges Einarbeiten in eine vorgegebene Fragestellung• Auswahl und Bewertung geeigneter Entwicklungswerkzeuge• Kompetenzerwerb beim Umgang mit den verwendeten Entwicklungsumgebungen• Praktische Einblicke in die Leistungselektronik und Antriebsregelung• Logische Darstellung der Ergebnisse in einem Bericht• Präsentationstechniken
3 Empfohlene Voraussetzung für die TeilnahmeVorlesung „Leistungselektronik 1“ oder „Einführung Energietechnik“ und ggf. „Regelungstechnik I“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc Wi-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturThemenstellung der Projektaufgabe
Enthaltene Kurse
Kurs-Nr. Kursname18-gt-2030-se Anwendungen, Simulation und Regelung leistungselektronischer Systeme
Dozent Lehrform SWSProf. Dr.-Ing. Gerd Griepentrog Seminar 4
2.2 Wahlfächer ETiT 105
ModulnameRechnersysteme I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-hb-1020 6 CP 180 h 120 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Christian Hochberger
1 LerninhaltBefehlssatzklassen von Prozessoren, Speicher-organisation und Laufzeitverhalten, Prozessorverhalten und-Struktur, Pipelining, Parallelismus auf Befehlsebene, Multiskalare Prozessoren, VLIW-Prozessoren, Gleit-kommadarstellung, Speichersysteme, Cacheorganisation, virtuelle Adressierung, Benchmarking und Leis-tungsbewertung, Systemstrukturen und Bussysteme, Peripheriegeräte
2 Qualifikationsziele / LernergebnisseStudierende haben nach Besuch dieser Vorlesung ein Verständnis des Aufbaus und der Organisationsprin-zipien moderner Prozessoren, Speicher- und Bussysteme erlangt. Sie wissen, wie Konstrukte von Program-miersprachen wie z.B. Unterprogrammsprünge durch Maschinenbefehle implementiert werden. Sie kennenLeistungsmaße für Rechner und können Rechnersysteme analysieren und bewerten. Sie können die Abläufebei der Befehlsverarbeitung in modernen Prozessoren nachvollziehen. Sie können den Einfluss der Spei-cherhierarchie auf die Verarbeitungszeit von Programmen abschätzen. Sie kennen die Funktionsweise vonProzessor- und Feldbussen und können hierfür wesentliche Parameter berechnen.
3 Empfohlene Voraussetzung für die TeilnahmeBesuch der Vorlesung „Logischer Entwurf“ bzw. Grundkenntnisse in Digitaltechnik
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc Wi-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturHennessy/Patterson: Computer architecture - a quantitative approach
Enthaltene Kurse
Kurs-Nr. Kursname18-hb-1020-vl Rechnersysteme I
Dozent Lehrform SWSProf. Dr.-Ing. Christian Hochberger Vorlesung 3
Kurs-Nr. Kursname18-hb-1020-ue Rechnersysteme I
Dozent Lehrform SWSProf. Dr.-Ing. Christian Hochberger Übung 1
2.2 Wahlfächer ETiT 106
ModulnameSensortechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kn-2120 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Mario Kupnik
1 LerninhaltDas Modul vermittelt Grundprinzipien unterschiedlicher Sensoren und die nötigen Kenntnisse für einesachgerechte Anwendung von Sensoren. In Bezug auf die Messkette liegt der Fokus der Veranstaltung aufder Umformung einer beliebigen, im allgemeinen nicht-elektrischen Größe in ein elektrisch auswertbaresSignal.In der Veranstaltung werden resistive, kapazitive, induktive, piezoelektrische, optische und magnetischeMessprinzipien behandelt, um Kenntnisse über die Messung wichtiger Größen wie Kraft, DrehmomentDruck, Beschleunigung, Geschwindigkeit, Weg und Durchfluss zu vermitteln. Neben der phänomenologi-schen Beschreibung der Prinzipien und einer daraus abgeleiteten technischen Beschreibung sollen auch diewichtigsten Elemente der Primär- und Sekundärelektronik für jedes Messprinzip vorgestellt und nachvoll-zogen werden.Neben den Messprinzipien wird die Beschreibung von Fehlern behandelt. Dabei wird neben statischenund dynamischen Fehlern auch auf die Fehler bei der Signalverarbeitung und die Fehlerbetrachtung dergesamten Messkette diskutiert.
2 Qualifikationsziele / LernergebnisseDie Studierenden erwerben Kenntnisse über die unterschiedlichen Messverfahren und deren Vor- und Nach-teile. Sie können Fehlerbeschreibungen in Datenblättern verstehen und in Bezug auf die Anwendung in-terpretieren und sind somit in der Lage, einen geeigneten Sensor für Anwendungen in der Elektro- undInformations sowie der Verfahrens- und Prozesstechnik auszuwählen und korrekt einzusetzen.
3 Empfohlene Voraussetzung für die TeilnahmeMesstechnik
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc WI-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• Foliensatz zur Vorlesung• Skript• Lehrbuch Tränkler „Sensortechnik“, Springer• Übungsunterlagen
Enthaltene Kurse
Kurs-Nr. Kursname18-kn-2120-vl Sensortechnik
Dozent Lehrform SWSProf. Dr. Mario Kupnik Vorlesung 2
2.2 Wahlfächer ETiT 107
Kurs-Nr. Kursname18-kn-2120-ue Sensortechnik
Dozent Lehrform SWSProf. Dr. Mario Kupnik Übung 1
2.2 Wahlfächer ETiT 108
ModulnameSensorsignalverarbeitung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kn-2130 3 CP 90 h 60 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Mario Kupnik
1 LerninhaltDas Modul vermittelt vertiefende Kenntnisse über die Auswertung und Verarbeitung von Sensorsignalen.Dabei werden im Bereich der Primärelektronik insbesondere Eigenschaften wie Fehler, Rauschen undintrinsische Kompensation von Messbrücken und Messverstärkerschaltungen (Trägerfrequenzverstärker,Chopper-Verstärker, Driftarme Verstärker) in Bezug auf Fehler und unter energetischen Gesichtspunktendiskutiert. Im Bereich der Sekundärelektronik wird auf den Aufbau von klassischen und Optimalfilterschal-tungen, moderne AD-Wandlungsprinzipien sowie die Themenfelder Redundanz und Fehlerkompensationeingegangen.
2 Qualifikationsziele / LernergebnisseDie Studierenden erwerben erweiterte Kenntnisse über den Aufbau von modernen Sensoren und diesensornahe Signalverarbeitung. Sie sind in der Lage, geeignete Grundstrukturen moderner Primär- undSekundärelektronik auszuwählen und unter Berücksichtigung von Fehlereigenschafen und sonstigen An-wendungsanforderungen auszulegen.
3 Empfohlene Voraussetzung für die TeilnahmeMesstechnik, Sensortechnik, Elektronik, Digitale Signalverarbeitung
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc Wi-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• Foliensatz zur Vorlesung• Skript• Lehrbuch Tränkler „Sensortechnik“, Springer• Lehrbuch Tietze/Schenk „Halbleiterschaltungstechnik“, Springer
Enthaltene Kurse
Kurs-Nr. Kursname18-kn-2130-vl Sensorsignalverarbeitung
Dozent Lehrform SWSProf. Dr. Mario Kupnik Vorlesung 2
2.2 Wahlfächer ETiT 109
ModulnamePraktische Entwicklungsmethodik II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ho-1025 5 CP 150 h 105 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Klaus Hofmann
1 LerninhaltPraktische Erfahrungen auf dem Gebiet des methodischen Vorgehens bei der Entwicklung technischerErzeugnisse. Arbeiten im Projektteam, mündliche und schriftliche Darstellung von Ergebnissen und dieselbstständige Organisation des Entwicklungsablaufs.
2 Qualifikationsziele / LernergebnisseAnwenden der Entwicklungsmethodik an einem konkreten Entwicklungsprojekt in einem Team. Dazu müs-sen Studierende einen Terminplan erstellen können, den Stand der Technik analysieren können, eine An-forderungsliste verfassen können, die Aufgabenstellung abstrahieren können, die Teilprobleme herausar-beiten können, nach Lösungen mit unterschiedlichen Lösungsmethoden suchen können, unter Anwendungvon Bewertungsmethoden optimale Lösungen erarbeiten können, ein sinnvolles Gesamtkonzept aufstellenkönnen, die benötigten Parameter durch Rechnung und Modellbildung ableiten können, die Fertigungs-dokumentation mit allen dazu notwendigen Unterlagen wie Stücklisten, technischen Zeichnungen undSchaltplänen erstellen können, den Bau und die Untersuchung eines Labormusters durchführen können,Vorträge zu Projektabschnitten halten können, einen technischen Abschlussbericht schreiben können unddie durchgeführte Entwicklung rückblickend reflektieren können.
3 Empfohlene Voraussetzung für die TeilnahmePraktische Entwicklungsmethodik I
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc WI-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript: Praktische Entwicklungsmethodik (PEM)
Enthaltene Kurse
Kurs-Nr. Kursname18-ho-1025-pj Praktische Entwicklungsmethodik II
Dozent Lehrform SWSProf. Dr.-Ing. Klaus Hofmann Projektseminar 3
2.2 Wahlfächer ETiT 110
ModulnameSensor Array Processing and Adaptive Beamforming
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-pe-2060 4 CP 120 h 75 h 1 SoSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Marius Pesavento
1 LerninhaltDiese Vorlesung führt in die Prinzipien der Sensorgruppensignalverarbeitung und des adaptiven Beamfor-ming ein.Themenübersicht: Motivation und Anwendungen, Schmalband- und Breitbandsignalmodell,Richtungsschätzung (DoA estimation):traditionelle Verfahren basierend auf dem Beamforming, hochauflösende Verfahren, Maximum-LikelihoodVerfahren, Unterraumverfahren, MUSIC, ESPRIT, MODE, root-MUSIC, mehrdimmensionale Quellenloka-lisation, Beamspace-Verarbeitung, Sensorgruppeninterpolationsverfahren, teilkalibrierte Sensorgruppen,Breitband Richtungsschätzung, Räumliche Glättung, Forward-Backward Mittelung, Redundancy averaging,korrelierte Quelen, Minimum redundancy arrays, compressed sensing und sparse reconstruction basierteVerfahren, Performanz-Schranken,Adaptives Beamforming:Punktquellenmodell, Kovarianzmodell, Wiener-Hopf Gleichung, Minimum Variance Distortionless Respon-se (MVDR) Beamformer, Capon Beamformer, Sample matrix inversion, Signal self-nulling Effekt, robustesadaptives Beamformen, Hung-Turner Projection Beamformer, Generalized Sidelobe canceller Beamformer,Eigenspace-based Beamformer, nicht-stationäre Umgebungen, modern Beamforming Verfahren basierendauf konvexer Optimierung Optimierung, Worst-case basiertes Beamforming, Multi-user Beamforming
2 Qualifikationsziele / LernergebnisseDie Studenten lernen Techniken der modernen Sensorgruppensignalverarbeitung zur Quellenlokalisationund für das Sende- und Empfangsbeamforming.
3 Empfohlene Voraussetzung für die TeilnahmeKenntnisse in der linearen Algebra.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc / MSc etit, BSc / MSc WI-etit, MSc MEC, MSc iST, MSc iCE
7 Notenverbesserung nach §25 (2)
8 Literatur
2.2 Wahlfächer ETiT 111
• Academic Press Library in Signal Processing: Volume 3 Array and Statistical Signal Processing Editedby Rama Chellappa and Sergios Theodoridis, Section 2, Edited by Mats Viberg, Pages 457-967 (2014)
– Chapter 12 - Adaptive and Robust Beamforming, Sergiy A. Vorobyov, Pages 503-552– Chapter 14 - DOA Estimation Methods and Algorithms, Pei-Jung Chung, Mats Viberg, Jia Yu,
Pages 599-650– Chapter 15 - Subspace Methods and Exploitation of Special Array Structures, Martin Haardt,
Marius Pesavento, Florian Roemer, Mohammed Nabil El Korso, Pages 651-717
• Spectral Analysis of Signals, Petre Stoica, Randolph Moses, Prentice Hall, April 2005Optimum ArrayProcessing: Part IV of Detection, Estimation, and Modulation Theory, Harry L. Van Trees, WileyOnline, 2002.
Enthaltene Kurse
Kurs-Nr. Kursname18-pe-2060-vl Sensor Array Processing and Adaptive Beamforming
Dozent Lehrform SWSProf. Dr.-Ing. Marius Pesavento Vorlesung 2
Kurs-Nr. Kursname18-pe-2060-ue Sensor Array Processing and Adaptive Beamforming
Dozent Lehrform SWSProf. Dr.-Ing. Marius Pesavento Übung 1
2.2 Wahlfächer ETiT 112
ModulnameRobuste Regelung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2140 3 CP 90 h 60 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 Lerninhalt• Grundlagen (SVD, Normen, Systemdarstellungen)• Reglerentwurf im Frequenzbereich
– Formulierung von Regelzielen als H2- und Hinf-Optimierungsprobleme– Entwurf von H2- und Hinf-optimalen Reglern
• Robuste Regelung– Unsicherheitsbeschreibung (Additive und multiplikative Unsicherheiten, Multimodellbeschrei-
bungen)– Robustheitsanalyse (Small-Gain-Theorem, mu-Analyse)– Synthese robuster Regler im FrequenzbereichSynthese robuster Regler durch Polbereichsvor-
gabe
2 Qualifikationsziele / LernergebnisseDie Studierenden werden in der Lage sein, Regelungsaufgaben als H2- und H8-Problem zu formulieren,Systemunsicherheiten in geeigneter Form zu beschreiben und einen Reglerentwurf durchzuführen, derrobuste Stabilität und Güte sicherstellt.
3 Empfohlene Voraussetzung für die TeilnahmeSystemdynamik und Regelungstechnik I und II
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• S. Skogestad, I. Postlethwaite, Multivariable Feedback Control,2. Auflage, 2005, Wiley• K. Zhou, Essentials of Robust Control, 1998, Prentice-Hall• O. Föllinger, Regelungstechnik, 11. Auflage, 2013, VDE Verlag
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2140-vl Robuste Regelung
Dozent Lehrform SWSDr. Ing. Eric Lenz Vorlesung 2
2.2 Wahlfächer ETiT 113
3 ADP / Seminare, Praktika, InfINat
3.1 ADP / Seminare
3.1.1 ADP / Seminare
3.1.1.1 ADP / Seminare MB
ModulnameADP (6 CP) Dynamik und Schwingungen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-62-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Hagedorn
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
114
ModulnameADP (6 CP) Fahrzeugtechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-27-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Hermann Winner
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 115
ModulnameADP (6 CP) Flugsysteme und Regelungstechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-23-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Uwe Klingauf
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 116
ModulnameADP (6 CP) Fluidsystemtechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 117
ModulnameADP (6 CP) Mechatronische Systeme im Maschinenbau
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-24-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Stephan Rinderknecht
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 118
ModulnameADP (6 CP) Produktentwicklung und Maschinenelemente
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-05-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Herbert Birkhofer
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 119
ModulnameADP (6 CP) Angewandte Dynamik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-25-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Richard Markert
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 120
ModulnameADP (6 CP) Systemzuverlässigkeit, Adaptronik und Maschinenakustik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-26-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Tobias Melz
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 121
ModulnameADP (6 CP) Verbrennungskraftmaschinen und Fahrzeugantriebe
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-03-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Christian Beidl
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 122
ModulnameADP (6 CP) Gasturbinen, Luft- und Raumfahrtantriebe
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-04-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Heinz-Peter Schiffer
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 123
ModulnameADP (6 CP) Technische Thermodynamik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-14-a061 6 CP 180 h 180 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Christian Stephan
1 LerninhaltAktuelle Aufgbenstellungen aus dem Fokus der anbietenden Fachgebiete
2 Qualifikationsziele / LernergebnisseDie Studenten sind in der Lage, im Team komplexe Probleme zu erkennen und zu benennen sowie mög-liche Lösungen zu finden und zu bewerten. Sie beherrschen die Grundzüge der genauen Arbeits- undZeitplanung bei komplexen Aufgaben und übernehmen Leitungsaufgaben eines Teams. Sie erwerben dieFertigkeiten, zwischen divergierenden Standpunkten zu vermitteln und erkennen die Notwendigkeit vonKompromissen sowohl in zwischenmenschlichen Beziehungen als auch beim Lösen ingenieurtypischer Pro-bleme.
3 Empfohlene Voraussetzung für die TeilnahmeMögliche Voraussetzungen werden vom anbietenden Fachgebiet bei der Aufgabenstellung angegeben.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literaturabhängig vom Projekt; wird vom Fachgebiet bekannt gegeben
Enthaltene Kurse
3.1 ADP / Seminare 124
3.1.1.2 ADP / Seminare ETiT
ModulnameProjektseminar Automatisierungstechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2080 8 CP 240 h 180 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 LerninhaltIn einer kleinen Projektgruppe unter der Anleitung eines wissenschaftlichen Mitarbeiters werden individu-elle, kleine Projekte aus dem Themenbereich der Automatisierungstechnik bearbeitet. ProjektbegleitendeSchulungen über 1. Teamarbeit und Projektmanagement, 2. Professionelle Vortragstechnik und 3. Wissen-schaftliches Schreiben sind in den Kurs integriert; die Teilnahme an den Schulungen ist Pflicht.
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung: 1. ein kleines Projekt planen, 2. ein Projekt innerhalbder Projektgruppe organisieren, 3. im Rahmen einer wissenschaftlichen Arbeit recherchieren, 4. eigeneIdeen zur Lösung der anstehenden Probleme in dem Projekt entwickeln, 5. Die Ergebnisse in Form eineswissenschaftlichen Textes zusammenfassen und 6. die Ergebnisse in einem Vortrag präsentieren.
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Notenverbesserung nach §25 (2)
8 LiteraturSchulungsmaterial
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2080-pj Projektseminar Automatisierungstechnik
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Projektseminar 4
3.1 ADP / Seminare 125
ModulnameProjektseminar Multimedia Kommunikation I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-sm-1030 9 CP 270 h 210 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr.-Ing. Ralf Steinmetz
1 LerninhaltDer Kurs bearbeitet aktuelle Forschungs- und Entwicklungsthemen aus dem Bereich der Multimedia Kom-munikationssysteme. Neben einem generellen Überblick wird ein tiefgehender Einblick in ein speziellesForschungsgebiet vermittelt. Die Themen bestimmen sich aus den spezifischen Arbeitsgebieten der Mitar-beiter und vermitteln technische und wissenschaftliche Kompetenzen in einem oder mehreren der folgen-den Gebiete:
• Netzwerk und Verkehrsplanung und Analyse• Leistungsbewertung von Netzwerk-Anwendungen• Diskrete Event-basierte Simulation von Netzdiensten• Protokolle für mobile Ad hoc Netze / Sensor Netze• Infrastruktur Netze zur Mobilkommunikation / Mesh-Netze• Kontext-abhängige/bezogene Kommunikation und Dienste• Peer-to-Peer Systeme und Architekturen• Verteil-/ und Managementsysteme für Multimedia-/e-Learning-Inhalte• Multimedia Authoring- und Re-Authoring Werkzeuge• Web Service Technologien und Service-orientierte Architekturen• Anwendungen für Verteilte Geschäftsprozesse• Ressourcen- basiertes Lernen
2 Qualifikationsziele / LernergebnisseDie Fähigkeit selbständig technische Probleme im Bereich des Design und der Entwicklung von Kommuni-kationsnetzen und -anwendungen für Multimediasysteme mit wissenschaftlichen Methoden zu lösen undzu evaluieren. Erworbene Kompetenzen sind unter anderem:
• Suchen und Lesen von Projekt relevanter Literatur• Design komplexer Kommunikationsanwendungen und Protokolle• Implementierung und Testen von Software Komponenten für Verteilte Systeme• Anwendung von Objekt-Orientierten Analyse und Design Techniken• Erlernen von Projekt-Management Techniken für Entwicklung in kleine Teams• Evaluation und Analyse von wissenschaftlichen/technischen Experimenten• Schreiben von Software-Dokumentation und Projekt-Berichten• Präsentation von Projektfortschritten und -ergebnissen
3 Empfohlene Voraussetzung für die TeilnahmeDas Interesse herausfordernde Lösungen und Anwendungen in aktuellen Multimedia Kommunikationssys-temen zu entwickeln und zu untersuchen. Außerdem erwarten wir
• Erfahrungen in der Programmierung mit Java/C# (C/C++)• Grundlegende Kenntnisse von Objekt-Orientierten Analyse und Design-Techniken• Kenntnisse in Computer Kommunikationsnetzen. Die Vorlesungen Kommunikationsnetze I und/oder
Net Centric Systems werden empfohlen.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 Benotung
3.1 ADP / Seminare 126
Modulabschlussprüfung:• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc/MSc iST, MSc MEC, Wi-CS, Wi-ETiT, BSc/MSc CS
7 Notenverbesserung nach §25 (2)
8 LiteraturDie Literatur besteht aus einer Auswahl an Fachartikeln zu den einzelnen Themen. Als Ergänzung wird dieLektüre ausgewählter Kapitel aus folgenden Büchern empfohlen:
• Andrew Tanenbaum: „Computer Networks“. Prentice Hall PTR (ISBN 0130384887)• Raj Jain: "The Art of Computer Systems Performance Analysis: Techniques for Experimental Design,
Measurement, Simulation, and Modeling"(ISBN 0-471-50336-3)• Erich Gamma, Richard Helm, Ralph E. Johnson: "Design Patterns: Objects of Reusable Object Orien-
ted Software"(ISBN 0-201-63361-2)• Kent Beck: Ëxtreme Programming Explained - Embrace Changes"(ISBN-13: 978-0321278654)
Enthaltene Kurse
Kurs-Nr. Kursname18-sm-1030-pj Projektseminar Multimedia Kommunikation I
Dozent Lehrform SWSProf. Dr.-Ing. Ralf Steinmetz Projektseminar 4
3.1 ADP / Seminare 127
ModulnameProjektseminar Regelungstechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2090 8 CP 240 h 180 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 LerninhaltUnterschiedliche Projekte aus dem Gebiet der Regelungstechnik werden in Projektgruppen (je nach Aufga-benstellung 2 bis 4 Studierende) bearbeitet und von Mitarbeitern des Instituts betreut.Die Projekte deckenschwerpunktmäßig folgende Themenbereiche ab:
• Modellierung, Analyse und Entwurf von Mehrgrößenregelungen• Modellierung, Analyse und Entwurf örtlich verteilter Systeme• Entwurf robuster Regelungen• Systemanalyse, Überwachung und Fehlerdiagnose• Modellbildung und Identifikation
Exemplarische Anwendungsgebiete sind Werkzeugmaschinen, Produktions-anlagen, Betriebsfestigkeits-prüfstände, verfahrenstechnische Prozesse, Kraftfahrzeuge.
2 Qualifikationsziele / LernergebnisseDie Studierenden kennen nach Abschluss des Projektseminars die einzelnen Schritte bei der Bearbeitungeines regelungstechnischen Projekts. Dies umfasst insbesondere die Erstellung einer Systemspezifikation so-wie die kritische Diskussion und systematische Auswahl geeigneter regelungstechnischer Lösungskonzepteund deren konkrete technische Umsetzung. Dabei lernen die Studierenden die praktische Anwendung derin der Vorlesung „Systemdynamik und Regelungstechnik I“ vermittelten regelungstechnischen Methodenauf reale Problemstellungen. Die Studierenden sollen mit diesem Projektseminar aber auch dazu angelei-tet werden, ihre Professional Skills weiter auszuprägen und zu schärfen. Zu den Professional Skills zählendabei Aspekte wie Teamwork, Präsentationstechniken und die systematische Recherche von Informationen.
3 Empfohlene Voraussetzung für die TeilnahmeVorlesung „Systemdynamik und Regelungstechnik I“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturUnterlagen werden am Anfang verteilt (z.B. Anleitung zur Erstellung von schriftlichen Arbeiten etc.)
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2090-pj Projektseminar Regelungstechnik
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Projektseminar 4
3.1 ADP / Seminare 128
ModulnameProjektseminar Robotik und Computational Intelligence
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2070 8 CP 240 h 180 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 LerninhaltIn dieser Vorlesung werden die folgenden Kentnisse vermittelt: 1. Industrieroboter, 1a. Typen und Anwen-dungen, 1b. Geometrie und Kinematik, 1c. Dynamisches Modell, 1d. Regelung von Industrierobotern, 2.Mobile Roboter, 2a. Typen und Anwendungen, 2b. Sensoren, 2c. Umweltkarten und Kartenaufbau, 2d.Bahnplannung. Nach diesen einführenden Vorlesungen sind konkrete Projekte vorgesehen, in denen dasGelernte in Kleingruppen zum Einsatz gebracht werden kann.
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung: 1. die elementaren Bausteine eines Industrierobotersbenennen, 2. die dynamischen Gleichungen für Roboterbewegungen aufstellen und für die Beschreibungeines gegebenen Roboters nutzen, 3. Standardprobleme und Lösungsansätze für diese Probleme aus dermobilen Robotik nennen, 4. ein kleines Projekt planen, 5. den Arbeitsaufwand innerhalb einer Projekt-gruppe aufteilen, 6. nach Zusatzinformationen über das Projekt suchen, 7. eigene Ideen zur Lösung deranstehenden Probleme in dem Projekt entwickeln, 8. die Ergebnisse in einem wissenschaftlichen Text dar-stellen und 9. die Ergebnisse in einem Vortrag präsentieren.
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Notenverbesserung nach §25 (2)
8 LiteraturAdamy: Skript zur Vorlesung (erhältlich im FG-Sekretariat)
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2070-pj Projektseminar Robotik und Computational Intelligence
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Projektseminar 4
3.1 ADP / Seminare 129
ModulnameSeminar Multimedia Kommunikation I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-sm-2300 4 CP 120 h 75 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr.-Ing. Ralf Steinmetz
1 LerninhaltDas Seminar befasst sich mit aktuellen und aufkommenden Themen im Bereich multimedialer Kommu-nikationssysteme, welche als relevant für die zukünftige Entwicklung des Internets sowie der Informa-tionstechnologie im Allgemeinen erachtet werden. Hierzu erfolgt nach einer ausführlichen Literaturar-beit die Zusammenfassung sowie die Präsentation von ausgewählten, hochwertigen Arbeiten und Trendsaus aktuellen Top-Zeitschriften, -Magazinen und -Konferenzen im Themenfeld Kommunikationsnetze undMultimediaanwendungen. Die Auswahl der Themen korrespondiert dabei mit dem Arbeitsfeld der wissen-schaftlichen Mitarbeiter.Mögliche Themen sind:
• Knowledge & Educational Technologies• Self organizing Systems & Overlay Communication• Mobile Systems & Sensor Networking• Service-oriented Computing• Multimedia Technologies & Serious Games
2 Qualifikationsziele / LernergebnisseDie Studierenden erarbeiten sich an Hand von aktuellen wissenschaftlichen Artikeln, Standards und Fach-büchern tiefe Kenntnisse über Multimedia Kommunikationssysteme und Anwendungen, welche die Zukunftdes Internet bestimmen.Dabei werden Kompetenzen in folgenden Gebieten erworben:
• Suchen und Bewerten von relevanter wissenschaftlicher Literatur• Analysieren und Einschätzen von komplexen technischen und wissenschaftlichen Informationen• Schreiben von technischen und wissenschaftlichen Zusammenfassungen und Kurzberichten• Präsentation von technischer und wissenschaftlicher Information
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsCS, WiCS, ETiT, Wi-ETiT, BSc/MSc iST
7 Notenverbesserung nach §25 (2)
8 LiteraturEntsprechend des gewählten Themenbereichs (ausgewählte Artikel aus Journalen, Magazine und Konfe-renzen).
Enthaltene Kurse
3.1 ADP / Seminare 130

Kurs-Nr. Kursname18-sm-2300-se Seminar Multimedia Kommunikation I
Dozent Lehrform SWSProf. Dr.-Ing. Ralf Steinmetz Seminar 3
3.1 ADP / Seminare 131
ModulnameSeminar Softwaresystemtechnologie
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-su-2080 4 CP 120 h 90 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Andreas Schürr
1 LerninhaltIn diesem Seminar werden von den Studenten wissenschaftliche Ausarbeitungen aus wechselnden Themen-bereichen angefertigt. Dies umfasst die Einarbeitung in ein aktuelles Thema der IT-Systementwicklung mitschriftlicher Präsentation in Form einer Ausarbeitung und mündlicher Präsentation in Form eines Vortrages.Die Themen des aktuellen Semesters sind der Webseite der Lehrveranstaltung zu entnehmen www.es.tu-darmstadt.de/lehre/sst.
2 Qualifikationsziele / LernergebnisseNach erfolgreicher Absolvierung des Seminars sind die Studenten in der Lage sich in ein unbekanntesThemengebiet einzuarbeiten und dieses nach wissenschaftlichen Aspekten aufzuarbeiten. Die Studentenerlernen die Bearbeitung eines Themas durch Literaturrecherche zu unterstützen und kritisch zu hinter-fragen. Weiterhin wird die Fähigkeit erworben, ein klar umrissenes Thema in Form einer schriftlichenAusarbeitung und in Form eines mündlichen Vortrags unter Anwendung von Präsentationstechniken zupräsentieren.
3 Empfohlene Voraussetzung für die TeilnahmeGrundkenntnisse der Softwaretechnik sowie Programmiersprachenkenntnisse
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc iST, BSc Informatik, MSc ETiT
7 Notenverbesserung nach §25 (2)
8 Literaturwww.es.tu-darmstadt.de/lehre/sst
Enthaltene Kurse
Kurs-Nr. Kursname18-su-2080-se Seminar Softwaresystemtechnologie
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Seminar 2
3.1 ADP / Seminare 132
ModulnamePraxisorientierte Projektierung elektrischer Antriebe (Antriebstechnik für Elektroautos)
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2120 5 CP 150 h 120 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltInhalt des Vortragsteils: Mono- und Hybridkonzepte - Antriebsmotoren - Hybridstrategien - ElektrischeMaschinen (GSM, ASM, SRM, PSM) - Antriebskonzepte - Fahrdynamik – EnergiespeicherInhalt der Seminararbeit: - Simulation eines Straßenfahrzeuges mit elektrischem Antriebsstrang - Gege-benenfalls Vergleich der Rechnung mit Messergebnissen - Präsentation der Seminararbeit
2 Qualifikationsziele / LernergebnisseKenntnisse der grundlegenden Auslegungsverfahren für E-Antriebe in Hybrid- und Elektroautomobilen
3 Empfohlene Voraussetzung für die TeilnahmeBachelor-Abschluss Elektrotechnik oder Mechatronik, Ëlektrische Maschinen und Antriebeünd „Leistungs-elektronikëmpfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc EPE, MSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturVortragsskriptum Binder,A.: Elektrische Maschinen und Antriebe 1, TUD (Institut für elektr. Energiewand-lung)Mitschke, M.: Dynamik der Kraftfahrzeuge, Springer Verlag Berlin
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2120-se Praxisorientierte Projektierung elektrischer Antriebe (Antriebstechnik für Elektroautos)
Dozent Lehrform SWSProf. Harald Neudorfer Seminar 2
3.1 ADP / Seminare 133
ModulnameProjektseminar Lichttechnische Anwendungen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kh-2051 5 CP 150 h 105 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr.-Ing. Khanh Quoc Tran
1 LerninhaltDas Projektseminar beschäftigt sich mit den folgenden Themenbereichen: KFZ-Lichttechnik, Innenraum-und Außenbeleuchtung; Erzeugung, Wahrnehmung und Kognition des visuellen Reizes (Leuchten, Dis-plays, Projektion); LED-/OLED-Technologie; physikalische und psychophysikalische Lichtmesstechnik; Be-leuchtungstechnologie, Farbwahrnehmung.
2 Qualifikationsziele / LernergebnisseZiel dieses Projektseminars ist die praxisbezogene Umsetzung des im Studium angeeigneten Stoffes in Formeiner Projektarbeit. Durch die Vermittlung der interdisziplinären Denkweise des lichttechnischen Ingenieurssollen die Studierenden eine selbständige Projektarbeit allein oder im Team durchführen.
3 Empfohlene Voraussetzung für die TeilnahmeLichttechnik I-II (wünschenswert)
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc iST, MSc WI-ETiT, MSc MEC, MSc MPE, MSc Phys
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript Lichttechnik I (Khanh); Vorlesungsfolien des FGLT; Buch „LED Lighting: Technology and Percepti-on“ (Khanh et al., Wiley); Buch „Farbwiedergabe“ (Khanh et al., Pflaum-Verlag) sowie themenbezogeneFachliteratur und Publikationen.
Enthaltene Kurse
Kurs-Nr. Kursname18-kh-2051-pj Projektseminar Lichttechnische Anwendungen
Dozent Lehrform SWSProf. Dr.-Ing. Khanh Quoc Tran Projektseminar 3
3.1 ADP / Seminare 134
ModulnameProjektseminar Erweiterte Lichttechnische Anwendungen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kh-2052 5 CP 150 h 105 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Khanh Quoc Tran
1 LerninhaltFür das Projektseminar kann eine Fragestellung aus folgenden Themenbereichen bearbeitet werden: KFZ-Lichttechnik, Licht für das automatisierte Auto, Innenraum- und Außenbeleuchtung; Smart Lighting; Hu-man Centric Lighting (HCL); Pflanzenbeleuchtung; Erzeugung, Wahrnehmung und Kognition des visuellenReizes (Leuchten, Displays, Projektion); LED/OLED-Technologie; physikalische und psychophysikalischeLichtmesstechnik; Beleuchtungstechnologie, Farbwahrnehmung, virtual reality Tests für Lichtsimulationen.
2 Qualifikationsziele / LernergebnisseZiel dieses Projektseminars ist die praxisbezogene Umsetzung des im Studium angeeigneten Stoffes inForm einer Projektarbeit. Diese erfolgt selbstständig oder im Team. Die Studierenden lernen in diesem Pro-jektseminar die Planung, Realisierung und Validierung lichttechnischer Fragestellungen. Dabei werden dievermittelten Grundlagen der Vorlesung und des Projektseminars „Lichttechnische Anwendungenängewandtund vertieft. Dies umfasst üblicherweise die Auswahl geeigneter Leuchtmittel, Entwicklung elektronischerHardware sowie den Umgang mit lichttechnischen Messgeräten. Darüber hinaus lernen die Studieren-den das Abstrahieren von Fragestellungen, projektabhängige Kommunikation von Informationen sowie diePräsentation und Diskussion von erarbeiteten Ergebnissen.
3 Empfohlene Voraussetzung für die TeilnahmeLichttechnik I-II (wünschenswert), Projektseminar Lichttechnische Anwendungen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, Mündliche/Schriftliche Prüfung, Standard BWS)Als Abschluss des Projektes ist ein Vortrag von jedem Studierenden zu halten und in einer kurzen Fra-gerunde zu verteidigen. Ferner muss pro Projekt ein schriftlicher Arbeits- und Ergebnisbericht abgegebenwerden.Der Vortrag mit Fragerunde und der Arbeits- und Ergebnisbericht werden benotet.
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc etit
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript Lichttechnik I (Khanh); Vorlesungsfolien des FGLT; Buch „LED Lighting: Technology and Percepti-on„ (Khanh et al., Wiley); Buch „Farbwiedergabe“ (Khanh et al., Pflaum-Verlag) sowie themenbezogeneFachliteratur und Publikationen.
Enthaltene Kurse
Kurs-Nr. Kursname18-kh-2052-pj Projektseminar Erweiterte Lichttechnische Anwendungen
Dozent Lehrform SWSProf. Dr.-Ing. Khanh Quoc Tran Projektseminar 3
3.1 ADP / Seminare 135
ModulnameProjektseminar Energiewandler und Antriebstechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2130 6 CP 180 h 135 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltAus den Aufgabenstellungen der aushängenden wissenschaftlichen Abschlussarbeiten werden Teilaufgabenabgeleitet, die von den Studierenden in Gruppen von zwei bis vier Personen unter Anleitung zu bearbeitensind. Die Arbeitsschwerpunkte können sowohl theoretisch als auch experimentell sein und beinhalten wis-senschaftliche Fragestellungen zur elektrischen Energiewandlung und elektrischen Antriebstechnik.Für den Studiengang Mechatronik entspricht dies dem Advanced Design Projekt
2 Qualifikationsziele / LernergebnisseElektrische Energiewandler, Elektrische Antriebstechnik, Regelung elektrischer Antriebe, Teamarbeit, Ver-fassen von wissenschaftlichen Berichten, Halten von Vorträgen
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagen Elektrotechnik, Drehstromtechnik, Mechanik, Vorlesung „Elektrische Maschinen und Antriebe“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc MEC, MSc ETiT,MSc EPE
7 Notenverbesserung nach §25 (2)
8 LiteraturJe nach Aufgabenstellung; Vorlesungsskripte zu den Veranstaltungen „Elektrische Maschinen und Antrie-be“, „Motor development for electric Drive Systems“, „Regelungstechnik 1“, usw.
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2130-pj Projektseminar Energiewandler und Antriebstechnik
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Projektseminar 3
3.1 ADP / Seminare 136
ModulnameAnwendungen, Simulation und Regelung leistungselektronischer Systeme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-gt-2030 8 CP 240 h 180 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr.-Ing. Gerd Griepentrog
1 LerninhaltBei einem Einführungstreffen werden Themen aus den Gebieten der Leistungselektronik und der An-triebsregelung an die Studierenden vergeben. Im Rahmen der Veranstaltung können Fragestellungen zufolgenden Themen bearbeitet werden:
• Simulation leistungselektronischer Systeme sowie Analyse und Bewertung der Modelle• Aufbau und Inbetriebnahme leistungselektronischer Systeme, Prüfstandentwicklung sowie Messung
charakteristischer Parameter• Modellbildung und Simulation im Bereich der Regelung elektrischer Antriebe• Aufbau und Inbetriebnahme von geregelten Antriebssystemen• Eigene Themenvorschläge können grundsätzliche berücksichtigt werden
Die Teilnehmer bearbeiten anschließend selbstständig die ausgewählte Fragestellung. Die Ergebnisse wer-den in einer schriftlichen Ausarbeitung dokumentiert und es muss am Ende eine Präsentation zum bear-beiteten Thema gehalten werden.
2 Qualifikationsziele / LernergebnisseDie Lernziele sind:
• Selbstständiges Einarbeiten in eine vorgegebene Fragestellung• Auswahl und Bewertung geeigneter Entwicklungswerkzeuge• Kompetenzerwerb beim Umgang mit den verwendeten Entwicklungsumgebungen• Praktische Einblicke in die Leistungselektronik und Antriebsregelung• Logische Darstellung der Ergebnisse in einem Bericht• Präsentationstechniken
3 Empfohlene Voraussetzung für die TeilnahmeVorlesung „Leistungselektronik 1“ oder „Einführung Energietechnik“ und ggf. „Regelungstechnik I“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc Wi-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturThemenstellung der Projektaufgabe
Enthaltene Kurse
Kurs-Nr. Kursname18-gt-2030-se Anwendungen, Simulation und Regelung leistungselektronischer Systeme
Dozent Lehrform SWSProf. Dr.-Ing. Gerd Griepentrog Seminar 4
3.1 ADP / Seminare 137
ModulnameProjektseminar Autonomes Fahren I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-su-2070 6 CP 180 h 135 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Andreas Schürr
1 Lerninhalt• Praktische Programmiererfahrung mit C++ bei der Entwicklung eingebetteter Systemsoftware aus
dem Bereich des autonomen Fahrens anhand eines Modellautos• Anwenden von Regelungs- und Steuerungsmethoden aus dem Bereich des autonomen Fahrens• Einsatz von Software-Engineering-Techniken (Design, Dokumentation, Test, . . . ) eines nicht trivialen
eingebetteten Software-Systems mit harten Echtzeit-Anforderungen und beschränkten Ressourcen(Speicher, . . . )
• Nutzung eines vorgegebenen Software-Rahmenwerks und Anwendung von weiteren Bibliothekeninklusive eines modular aufgebauten (Echtzeit-)Betriebssystems
• Einsatz von Source-Code-Management-Systemen, Zeiterfassungswerkzeugen und sonstigenProjektmanagement-Tools
• Präsentation von Projektergebnissen im Rahmen von Vorträgen
2 Qualifikationsziele / LernergebnisseStudierende sammeln im Rahmen dieses Projektseminars praktische Erfahrung in der Software-Entwicklung für eingebettete Systeme aus dem Bereich des autonomen Fahrens anhand eines Modellautos.Dabei lernen sie in Teamarbeit eine umfangreiche Aufgabe zu bewältigen. Zur Lösung dieser Aufgabe wirdgeübt, dass in der Gruppe vorhandene theoretische Wissen (aus anderen Lehrveranstaltungen wie Echt-zeitsysteme, Software-Engineering - Einführung, C++ Praktikum, Digitale Regelungssysteme) gezielt zurLösung der praktischen Aufgabe einzusetzen.Studierende, die an diesem Projektseminar erfolgreich teilgenommen haben, sind in der Lage, zu einer vor-gegebenen Problemstellung ein größeres Softwareprojekt in einem interdisziplinären Team eigenständig zuorganisieren und auszuführen. Die Teilnehmer erwerben folgende Fähigkeiten im Detail:
• Eigenständiges Einarbeiten in ein vorgegebenes Rahmenwerk und vorgefertigten Bibliotheken• Umsetzung von theoretischem Wissen in ein Softwaresystem• Umfangreicher Einsatz von Werkzeugen zur Versions-, Konfiguration- und Änderungsverwaltung• Realistische Zeitplanung und Ressourceneinteilung (Projektmanagement)• Entwicklung von Hardware-/Software-Systemen mit C++ unter Berücksichtigung wichtiger Ein-
schränkungen eingebetteter Systeme• Planung und Durchführung umfangreicherer Qualitätssicherungsmaßnahmen• Zusammenarbeit und Kommunikation in und zwischen mehreren Teams
3 Empfohlene Voraussetzung für die TeilnahmeEmpfohlene Voraussetzungen sind:
• ETiT, WI-ETiT (DT), iST, Informatik: Grundlegende Softwaretechnik-Kenntnisse sowie vertiefteKenntnisse objektorientierter Programmiersprachen (insbesondere: C++)
Zusätzlich erwünscht:• Grundlagen der Entwicklung von Echtzeitsystemen oder der Bildverarbeitung• ETiT, WI-ETiT (AUT), MEC: Grundlagen der Regelungstechnik, Reglerentwurf im Zustandsraum,
ggf. Grundlagen der digitalen Regelung
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
3.1 ADP / Seminare 138
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, BSc iST
7 Notenverbesserung nach §25 (2)
8 Literaturhttps://www.es.tu-darmstadt.de/lehre/aktuelle-veranstaltungen/ps-af-i/ und Moodle
Enthaltene Kurse
Kurs-Nr. Kursname18-su-2070-pj Projektseminar Autonomes Fahren I
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Projektseminar 3
3.1 ADP / Seminare 139
ModulnamePraktische Entwicklungsmethodik I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kn-1025 5 CP 150 h 105 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Mario Kupnik
1 LerninhaltPraktische Erfahrungen auf dem Gebiet des methodischen Vorgehens bei der Entwicklung technischer Er-zeugnisse. Arbeiten im Projektteam.
2 Qualifikationsziele / LernergebnisseAnwenden der Entwicklungsmethodik an einem konkreten Entwicklungsprojekt in einem Team. Dazu müs-sen Studierende einen Terminplan erstellen können, den Stand der Technik analysieren können, eine An-forderungsliste verfassen können, die Aufgabenstellung abstrahieren können, die Teilprobleme herausar-beiten können, nach Lösungen mit unterschiedlichen Lösungsmethoden suchen können, unter Anwendungvon Bewertungsmethoden optimale Lösungen erarbeiten können, ein sinnvolles Gesamtkonzept aufstellenkönnen, die benötigten Parameter durch Rechnung und Modellbildung ableiten können, die Fertigungs-dokumentation mit allen dazu notwendigen Unterlagen wie Stücklisten, technischen Zeichnungen undSchaltplänen erstellen können, den Bau und die Untersuchung eines Labormusters durchführen könnenund die durchgeführte Entwicklung rückblickend reflektieren können.
3 Empfohlene Voraussetzung für die TeilnahmeGleichzeitige Teilnahme am Proseminar ETiT Vertiefung MFT
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript: Praktische Entwicklungsmethodik (PEM)
Enthaltene Kurse
Kurs-Nr. Kursname18-kn-1025-pj Praktische Entwicklungsmethodik I
Dozent Lehrform SWSProf. Dr. Mario Kupnik Projektseminar 3
3.1 ADP / Seminare 140
ModulnameProjektseminar Praktische Anwendungen der Mechatronik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2130 8 CP 240 h 180 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 LerninhaltUnterschiedliche Projekte aus dem Gebiet der Mechatronik werden in Projektgruppen (je nach Aufgaben-stellung 2 bis 4 Studierende) bearbeitet und von Mitarbeitern des Instituts betreut.Die Projekte deckenschwerpunktmäßig folgende Themenbereiche ab:
• Modellierung, Analyse und Entwurf von mechatronischen Systemen• Entwurf robuster Regelungen• Systemanalyse, Überwachung und Fehlerdiagnose• Modellbildung und Identifikation
Exemplarische Anwendungsgebiete sind Werkzeugmaschinen, mechatronische Aktuatoren, Produktionsan-lagen, Betriebsfestigkeitsprüfstände, Kraftfahrzeuge, Quadrokopter.
2 Qualifikationsziele / LernergebnisseDie Studierenden kennen nach Abschluss des Projektseminars die einzelnen Schritte bei der Bearbeitungeines mechatronischen Projekts. Dies umfasst insbesondere die Erstellung einer Systemspezifikation sowiedie kritische Diskussion und systematische Auswahl geeigneter mechatronischer Lösungskonzepte und de-ren konkrete technische Umsetzung. Dabei lernen die Studierenden die praktische Anwendung der in denVorlesungen vermittelten mechatronischen Methoden auf reale Problemstellungen. Die Studierenden sollenmit diesem Projektseminar aber auch dazu angeleitet werden, ihre Professional Skills weiter auszuprägenund zu schärfen. Zu den Professional Skills zählen dabei Aspekte wie Teamwork, Präsentationstechnikenund die systematische Recherche von Informationen.
3 Empfohlene Voraussetzung für die TeilnahmeVorlesung „Systemdynamik und Regelungstechnik I“ und „Systemdynamik und Regelungstechnik II“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc iST
7 Notenverbesserung nach §25 (2)
8 LiteraturUnterlagen werden am Anfang verteilt (z.B. Anleitung zur Erstellung von schriftlichen Arbeiten etc.)
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2130-pj Projektseminar Praktische Anwendungen der Mechatronik
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Projektseminar 4
3.1 ADP / Seminare 141
ModulnameProjektseminar Autonomes Fahren I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-su-2070 6 CP 180 h 135 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Andreas Schürr
1 Lerninhalt• Praktische Programmiererfahrung mit C++ bei der Entwicklung eingebetteter Systemsoftware aus
dem Bereich des autonomen Fahrens anhand eines Modellautos• Anwenden von Regelungs- und Steuerungsmethoden aus dem Bereich des autonomen Fahrens• Einsatz von Software-Engineering-Techniken (Design, Dokumentation, Test, . . . ) eines nicht trivialen
eingebetteten Software-Systems mit harten Echtzeit-Anforderungen und beschränkten Ressourcen(Speicher, . . . )
• Nutzung eines vorgegebenen Software-Rahmenwerks und Anwendung von weiteren Bibliothekeninklusive eines modular aufgebauten (Echtzeit-)Betriebssystems
• Einsatz von Source-Code-Management-Systemen, Zeiterfassungswerkzeugen und sonstigenProjektmanagement-Tools
• Präsentation von Projektergebnissen im Rahmen von Vorträgen
2 Qualifikationsziele / LernergebnisseStudierende sammeln im Rahmen dieses Projektseminars praktische Erfahrung in der Software-Entwicklung für eingebettete Systeme aus dem Bereich des autonomen Fahrens anhand eines Modellautos.Dabei lernen sie in Teamarbeit eine umfangreiche Aufgabe zu bewältigen. Zur Lösung dieser Aufgabe wirdgeübt, dass in der Gruppe vorhandene theoretische Wissen (aus anderen Lehrveranstaltungen wie Echt-zeitsysteme, Software-Engineering - Einführung, C++ Praktikum, Digitale Regelungssysteme) gezielt zurLösung der praktischen Aufgabe einzusetzen.Studierende, die an diesem Projektseminar erfolgreich teilgenommen haben, sind in der Lage, zu einer vor-gegebenen Problemstellung ein größeres Softwareprojekt in einem interdisziplinären Team eigenständig zuorganisieren und auszuführen. Die Teilnehmer erwerben folgende Fähigkeiten im Detail:
• Eigenständiges Einarbeiten in ein vorgegebenes Rahmenwerk und vorgefertigten Bibliotheken• Umsetzung von theoretischem Wissen in ein Softwaresystem• Umfangreicher Einsatz von Werkzeugen zur Versions-, Konfiguration- und Änderungsverwaltung• Realistische Zeitplanung und Ressourceneinteilung (Projektmanagement)• Entwicklung von Hardware-/Software-Systemen mit C++ unter Berücksichtigung wichtiger Ein-
schränkungen eingebetteter Systeme• Planung und Durchführung umfangreicherer Qualitätssicherungsmaßnahmen• Zusammenarbeit und Kommunikation in und zwischen mehreren Teams
3 Empfohlene Voraussetzung für die TeilnahmeEmpfohlene Voraussetzungen sind:
• ETiT, WI-ETiT (DT), iST, Informatik: Grundlegende Softwaretechnik-Kenntnisse sowie vertiefteKenntnisse objektorientierter Programmiersprachen (insbesondere: C++)
Zusätzlich erwünscht:• Grundlagen der Entwicklung von Echtzeitsystemen oder der Bildverarbeitung• ETiT, WI-ETiT (AUT), MEC: Grundlagen der Regelungstechnik, Reglerentwurf im Zustandsraum,
ggf. Grundlagen der digitalen Regelung
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
3.1 ADP / Seminare 142
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, BSc iST
7 Notenverbesserung nach §25 (2)
8 Literaturhttps://www.es.tu-darmstadt.de/lehre/aktuelle-veranstaltungen/ps-af-i/ und Moodle
Enthaltene Kurse
Kurs-Nr. Kursname18-su-2070-pj Projektseminar Autonomes Fahren I
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Projektseminar 3
3.1 ADP / Seminare 143
3.1.1.3 ADP / Seminare Inf
ModulnameRobotik-Projektpraktikum
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus20-00-0248 9 CP 270 h 180 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. rer. nat. Oskar Stryk
1 Lerninhalt- selbständige Bearbeitung einer konkreten Aufgabenstellung aus der Entwicklung und Anwendung mo-derner Robotersysteme unter Anleitung und (nach Möglichkeit) in einem Team von Entwicklern- Erarbeitung eines Lösungsvorschlags und dessen Umsetzung- Anwendung und Evaluierung anhand von Roboterexperimenten oder -simulationen- Dokumentation von Aufgabenstellung, Vorgehensweise, Implementierung und Ergebnissen in einem Ab-schlussbericht und Durchführung einer Abschlusspräsentation
2 Qualifikationsziele / LernergebnisseDurch erfolgreiche Teilnahme erwerben Studierende vertiefte Kenntnisse in ausgewählten Bereichen undTeilsystemen moderner Robotersysteme sowie vertiefte Fähigkeiten zu deren Entwicklung, Implementie-rung und experimentellen Evaluation. Sie trainieren Präsentationsfähigkeiten und (nach Möglichkeit) Fä-higkeit zur Arbeit in einem Team.
3 Empfohlene Voraussetzung für die Teilnahme- grundlegende Fachkenntnisse und methodische Fähigkeiten in der Robotik, wie diese durch die Lehrver-anstaltung “Grundlagen der Robotik” vermittelt werden- spezifische Programmierkenntnisse je nach Aufgabenstellung
4 PrüfungsformBausteinbegleitende Prüfung:
• [20-00-0248-pp] (Studienleistung, Mündliche/Schriftliche Prüfung, Standard BWS)
5 BenotungBausteinbegleitende Prüfung:
• [20-00-0248-pp] (Studienleistung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikKann im Rahmen fachübergreifender Angebote auch in anderen Studiengängen verwendet werden.
7 Notenverbesserung nach §25 (2)
8 Literatur
Enthaltene Kurse
3.1 ADP / Seminare 144
Kurs-Nr. Kursname20-00-0248-pp Robotik-Projektpraktikum
Dozent Lehrform SWSProjekt 6
3.1 ADP / Seminare 145
3.1.2 Praktika
ModulnamePraktikum Regelungstechnik II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2060 5 CP 150 h 90 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 LerninhaltIn diesem Praktikum werden die Grundlagen der folgenden Versuche erarbeitet und anschließend durchge-führt und dokumentiert: Verkoppelte Regelung eines Helikopters, Nichtlineare Regelung eines Gyroskops,Nichtlineare Mehrgrößenregelung eines Flugzeugs, Regelung von Servoantrieben, Regelung einer Verlade-brücke, Speicherprogrammierbare Steuerung eines Mischprozesses
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung:
• die Grundlagen der Versuche nennen,• sich mit Hilfsmaterial in ein neues Themengebiet einarbeiten,• Versuchsaufbauten nach Anleitung zusammenstellen,• Experimente durchführen,• die Relevanz der Versuchsergebnisse bezüglich ihrer Vergleichbarkeit mit theoretischen Vorhersagen
einschätzen,• die Versuchsergebnisse protokollieren und präsentieren.
3 Empfohlene Voraussetzung für die TeilnahmeSystemdynamik und Regelungstechnik II, der parallele Besuch der Veranstaltung Systemdynamik und Re-gelungstechnik III wird empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, Klausur, Dauer: 180 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc iST, MSc Wi-ETiT, Biotechnik
7 Notenverbesserung nach §25 (2)
8 LiteraturAdamy: Versuchsanleitungen (erhältlich am Einführungstreffen)
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2060-pr Praktikum Regelungstechnik II
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Praktikum 4
3.1 ADP / Seminare 146
ModulnameAntriebstechnisches Praktikum
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2100 4 CP 120 h 75 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltZiel ist die Vertiefung der Kenntnisse über Ausführung und Betriebsverhalten von elektrischen Antriebssys-temen und das Heranführen an messtechnische Probleme in der Antriebstechnik. Inhalt des Praktikums istdie Inbetriebnahme und Untersuchung von labormäßig aufgebauten Antriebssystemen, insbesondere vonumrichtergespeisten Drehfeldmaschinen. Die Laborversuche werden inhaltlich auf die Vorkenntnisse derjeweiligen Studiengänge (ETiT bzw. MEC) individuell abgestimmt.
2 Qualifikationsziele / LernergebnisseDie Studierenden sind nach erfolgreichem Absolvieren der Lehrveranstaltung in der Lage, die Vermessungelektrischer Maschinen als Motoren, Generatoren und Transformatoren selbstständig durchzuführen.
3 Empfohlene Voraussetzung für die TeilnahmeBachelor-Abschluss Elektrotechnik, elektrische Energietechnik oder Vergleichbares
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc WI-ETiT
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript mit Versuchsanleitungen;Nürnberg, W.: Die Prüfung elektrischer Maschinen, Springer, 2000;Brosch, P.: Moderne Stromrichterantriebe, Kamprath-Reihe, Vogel-Verlag, 1998;Vorlesungsskript – Binder, A.: Motor Developement for Electrical Drive Systems; Vorlesungsfolien – Mutsch-ler, P.: Control of Drives
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2100-pr Antriebstechnisches Praktikum
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Praktikum 3
Kurs-Nr. Kursname18-bi-2090-tt Praktikumsvorbesprechung (für alle von EW angebotenen Praktika)
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Tutorium 0
3.1 ADP / Seminare 147
ModulnameAdvanced Integrated Circuit Design Lab
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ho-2120 6 CP 180 h 135 h 1 SoSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Klaus Hofmann
1 LerninhaltPraktische Entwurfsaufgaben auf dem Gebiet des „Full Custom“-Entwurfs digitaler oder analoger Schaltun-gen unter Verwendung von gängigen professionellen kommerziellen CAD-Entwurfswerkzeugen
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung 1. Transistorschaltungen mit Hilfe einer CAD- Entwurf-sumgebung (Cadence) entwickeln und verifizieren, 2. Logik- und Analogsimulation der entworfenen Schal-tung durchführen (Prä- und Postlayout, 3. Layout erstellen, verifizieren und extrahieren
3 Empfohlene Voraussetzung für die TeilnahmeVorlesung „Advanced Digital Integrated Circuit Design“ oder “Analog Integrated Circuit Design”
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc Wi-ETiT, MSc iCE, MSc iST, MSc MEC, MSc EPE
7 Notenverbesserung nach §25 (2)
8 LiteraturSkriptum zur VLSI-Vorlesung; John P. Uyemura: Fundamentals of MOS Digital Integrated Circuits; NeilWeste et al.: Principles of CMOS VLSI Design
Enthaltene Kurse
Kurs-Nr. Kursname18-ho-2120-pr Advanced Integrated Circuit Design Lab
Dozent Lehrform SWSProf. Dr.-Ing. Klaus Hofmann Praktikum 3
3.1 ADP / Seminare 148
ModulnamePraktikum Elektromechanische Systeme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-kn-2090 4 CP 120 h 75 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Mario Kupnik
1 LerninhaltElektromechanische Sensoren, Antriebe und Aktoren, elektronische Signalverarbeitungseinrichtungen, Sys-teme aus Aktoren, Sensoren und elektronischer Signalverarbeitungseinrichtung.
2 Qualifikationsziele / LernergebnisseIm Rahmen des Praktikums EMS werden konkrete Beispiele von elektromechanischen Systemen, die imRahmen der Vorlesungen EMS I + II hinsichtlich des Entwurfs erläutert wurden, analysiert. Hierzu zählen,elektromechanische Sensoren, Antriebe und Aktoren, elektronische Signalverarbeitungseinrichtungen so-wie Systeme aus Aktoren, Sensoren und elektronischer Signalverarbeitungseinrichtung.Die Zielstellung der 6 Praktikumsversuche besteht im Kennenlernen der Funktionsweise der jeweiligenelektromechanischen Systeme, in der experimentellen Analyse der Kennwerte, im Erkennen von Schwach-stellen und der Ableitung von Lösungsvorschlägen.
3 Empfohlene Voraussetzung für die TeilnahmeBachelor ETiT
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc WI-ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturVersuchsanleitungen zum Praktikum EMS
Enthaltene Kurse
Kurs-Nr. Kursname18-kn-2090-pr Praktikum Elektromechanische Systeme
Dozent Lehrform SWSProf. Dr. Mario Kupnik Praktikum 3
Kurs-Nr. Kursname18-kn-2090-ev Praktikum Elektromechanische Systeme - Einführungsveranstaltung
Dozent Lehrform SWSProf. Dr. Mario Kupnik Einführungs-
veranstaltung0
3.1 ADP / Seminare 149
ModulnamePraktikum Multimedia Kommunikation I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-sm-1020 3 CP 90 h 45 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr.-Ing. Ralf Steinmetz
1 LerninhaltDer Kurs bearbeitet aktuelle Entwicklungsthemen aus dem Bereich der Multimedia Kommunikationssyste-me. Neben einem generellen Überblick wird ein tiefgehender Einblick in ein spezielles Entwicklungsgebietvermittelt. Die Themen bestimmen sich aus den spezifischen Arbeitsgebieten der Mitarbeiter und vermit-teln technische und einleitende wissenschaftliche Kompetenzen in einem oder mehreren der folgendenGebiete:
• Netzwerk und Verkehrsplanung und Analyse• Leistungsbewertung von Netzwerk-Anwendungen• Diskrete Event-basierten Simulation von Netzdiensten• Protokolle für mobile Ad hoc Netze / Sensor Netze• Infrastrukturnetze zur Mobilkommunikation / Mesh-Netze• Kontext-abhängige/bezogene Kommunikation und Dienste• Peer-to-Peer Systeme und Architekturen• Verteil-/ und Managementsysteme für Multimedia-/e-Learning-Inhalte• Multimedia Authoring- und Re-Authoring Werkzeuge• Web Service Technologien und Service-orientierte Architekturen• Anwendungen für Verteilte Geschäftsprozesse• Ressourcen-basiertes Lernen
2 Qualifikationsziele / LernergebnisseDie Fähigkeit einfache Probleme im Bereich der Multimedia Kommunikation lösen zu können. ErworbeneKompetenzen sind unter anderem:
• Design einfacher Kommunikationsanwendungen und Protokolle• Implementierung und Testen von Software Komponenten für Verteilten Systeme• Anwendung von Objekt-Orientierten Analyse und Design Techniken• Präsentation von Projektfortschritten und -ergebnissen
3 Empfohlene Voraussetzung für die TeilnahmeDas Interesse grundlegenden Themen aktueller Kommunikations- und Multimedia Technologien zu erkun-den. Außerdem erwarten wir:
• Erfahrungen in der Programmierung mit Java/C# (C/C++)• Kenntnisse in Computer Kommunikationsnetzen. Die Vorlesungen Kommunikationsnetze I und/oder
Net Centric Systems werden empfohlen.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc/MSc iST, MSc MEC, Wi-CS, Wi-ETiT, BSc/MSc CS
7 Notenverbesserung nach §25 (2)
8 Literatur
3.1 ADP / Seminare 150
Die Literatur besteht aus einer Auswahl an Fachartikeln zu den einzelnen Themen. Als Ergänzung wird dieLektüre ausgewählte Kapitel aus folgenden Büchern empfohlen:
• Andrew Tanenbaum: „Computer Networks“. Prentice Hall PTR (ISBN 0130384887)• Christian Ullenboom: "Java ist auch eine Insel: Programmieren mit der Java Standard Edition Version
5 / 6"(ISBN-13: 978-3898428385)• Kent Beck: Ëxtreme Programming Explained - Embrace Changes"(ISBN-13: 978-0321278654)
Enthaltene Kurse
Kurs-Nr. Kursname18-sm-1020-pr Praktikum Multimedia Kommunikation I
Dozent Lehrform SWSProf. Dr.-Ing. Ralf Steinmetz Praktikum 3
3.1 ADP / Seminare 151
ModulnameSoftwarepraktikum
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-st-1020 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Florian Steinke
1 LerninhaltDie Lehrveranstaltungen behandelt folgende Themen:
• Vor- und Nachteile von Arbeitsteilung in der Softwareentwicklung• leichtgewichtiger Softwareentwicklungsprozess eXtreme Programming (XP)• Vertiefung von OO-Programmierkenntnissen und Coding-Standards mit Java• Dokumentieren von Software mit JavaDoc,• Grundkenntnisse der Entwicklungsumgebung Eclipse,• Regressionstestmethoden (JUnit-Rahmenwerk)• Einführung in / Wiederholung von Datenstrukturen und Algorithmen
2 Qualifikationsziele / LernergebnisseTeilnehmende Studierende vertiefen Ihre in Allgemeine Informatik erworbenen Fähigkeiten zur Software-entwicklung (Programmierung). Hierbei wird der Schwerpunkt von der Lösung kleiner, in sich abgeschlos-sener und exakt definierter Programmierarbeiten hin in Richtung „reale“ Softwareentwicklung verlagert.Vermittelt werden Fähigkeiten zur Zusammenarbeit im Team und zur systematischen Weiterentwicklungeines vorgegebenen Softwaresystems (Rahmenwerks). Mit dem erfolgreichen Abschluss des Praktikumsverfügen die Teilnehmer über die Fähigkeiten zur ordnungsgemäßen Implementierung, Test und Doku-mentation kleinerer Softwaresysteme und besitzen das Verständnis für die Notwendigkeit des Einsatzesumfassender Software-Engineering-Techniken für die Entwicklung großer Software-Systeme.
3 Empfohlene Voraussetzung für die TeilnahmeGrundkenntnisse der Programmiersprache Java (wie in Allgemeine Informatik I und II vermittelt).Windows-Account des ETiT PC-Pools
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc ETiT, BSc Wi-ETiT
7 Notenverbesserung nach §25 (2)
8 Literaturwww.es.tu-darmstadt.de/lehre/sp/
Enthaltene Kurse
Kurs-Nr. Kursname18-st-1020-pr Softwarepraktikum
Dozent Lehrform SWSProf. Dr. rer. nat. Florian Steinke Praktikum 3
3.1 ADP / Seminare 152
ModulnameTutorium Fahrzeugtechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-27-5080 4 CP 120 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Hermann Winner
1 LerninhaltDas Fahrzeugtechnische Tutorium dient dazu, ausgewählte Inhalte aus den Vorlesungen KraftfahrzeugeI+II anhand praktischer Versuche zu vertiefen. Dabei richtet sich die Auswahl der Versuche, die überwie-gend auf einem abgesperrten Versuchsgelände durchgeführt werden, unter Anderem nach der Verfügbar-keit von Versuchsfahrzeugen oder nach aktuellen Fragestellungen.
2 Qualifikationsziele / LernergebnisseAnhand einer gegebenen kraftfahrzeugtechnischen Problemstellung sind die Studierenden in der Lage,selbstständig ein Versuchs- bzw. Prüfablauf mit der entsprechenden Messtechnik festzulegen und durchzu-führen. Dabei werden Prüfparameter festgelegt und variiert, um so eine Bearbeitung der Problemstellungzu ermöglichen. Das in der Vorlesung vermittelte theoretische Verständnis wird für die Lösung der prakti-schen Problemstellung angewendet.
3 Empfohlene Voraussetzung für die TeilnahmeKraftfahrzeugtechnisches Grundlagenwissen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturUnterlagen zu den Versuchen werden den Teilnehmern ausgehändigt
Enthaltene Kurse
Kurs-Nr. Kursname16-27-5080-tt Tutorium Fahrzeugtechnik
Dozent Lehrform SWSTutorium 4
3.1 ADP / Seminare 153
ModulnameTutorium Pneumatik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5200 4 CP 120 h 120 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 Lerninhalteinpflegen !!
2 Qualifikationsziele / Lernergebnisse
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literatur
Enthaltene Kurse
Kurs-Nr. Kursname16-10-5200-tt Tutorium Pneumatik I
Dozent Lehrform SWSTutorium 0
3.1 ADP / Seminare 154
ModulnameTutorium Flugmechanik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-23-5080 4 CP 120 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Uwe Klingauf
1 LerninhaltMessungen am Boden; Durchführung von Messflügen mit einem 2-sitzigen Motorsegler unter Leitung einesFluglehrers: Untersuchungen zu Flugleistungen und Flugeigenschaften; Versuchsprotokoll mit anschließen-der Auswertung der Flugmanöver.
2 Qualifikationsziele / LernergebnisseDie Studierenden sind in der Lage: ausgewählte Flugleistungen und Flugeigenschaften messtechnisch zubestimmen; Flugleistungen und Flugeigenschaften eines Motorseglers aufgrund eigener Erfahrung einzu-ordnen und zu beurteilen; Möglichkeiten und Grenzen der Flugmesstechnik zu beurteilen.
3 Empfohlene Voraussetzung für die TeilnahmeFlugmechanik I und II
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturPraktikumsanleitung verfügbar.
Enthaltene Kurse
Kurs-Nr. Kursname16-23-5080-tt Tutorium Flugmechanik
Dozent Lehrform SWSTutorium 4
3.1 ADP / Seminare 155
ModulnameMechatronik-Workshop
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-1050 2 CP 60 h 45 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltIm Mechatronik-Workshop fertigen die Studierenden selbstständig eine Kugelbahn mit elektrischer Beför-derungsanlage. Hierzu gilt es die Maßpläne zu erfassen und die erfoderlichen Komponenten (u.a. Leiter-platine, Bahnwege und -halterungen) sowohl im Elektroniklabor als auch in der Werkstatt zu fertigen. DerWorkshop ermöglicht den Studierenden somit wichtige Einblicke in die Konstruktion und die Modellarbeit.
2 Qualifikationsziele / LernergebnisseErfassen von Maßplänen, Platinenlayout-Erstellung, Arbeiten an Bohr-, Dreh-, Fräsmaschinen.
3 Empfohlene Voraussetzung für die TeilnahmeZum ersten Veranstaltungstermin ist von den Studierenden eine persönliches Exemplar des Praktikums-skripts in ausgedruckter Form mitzubringen. Ohne ein ausgedrucktes Exemplar des Skripts ist eine Teil-nahme nicht möglich. Das Skript wird in Moodle bereitgestellt.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc/MSc ETiT, BSc/MSc MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• Skriptum zur Lehrveranstaltung• J. Dillinger et al.: Fachkunde Metall, Europa-Lehrmittel, 2007• U. Tietze, C. Schenk, E. Gamm: Halbleiter-Schaltungstechnik, Springer, 2012
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-1050-pr Mechatronik-Workshop
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Praktikum 1
3.1 ADP / Seminare 156
ModulnameTutorium Verbrennungskraftmaschinen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-03-5070 4 CP 120 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Christian Beidl
1 LerninhaltEs werden praktische Versuche an den Motorenprüfständen durchgeführt und anschließend die Ergebnis-se ausgewertet. Schwerpunktthema dieser Versuchsreihe sind die Emissionen von Verbrennungsmotoren.Während des Tutoriums werden neben üblichen Untersuchungen an Verbrennungskraftmaschinenn ver-schiedene Verfahren zur Abgasmessung an Otto- und Dieselmotoren vorgestellt.Die Auswahl der Versuche richtet sich nach den aktuellen Forschungsprojekten.
2 Qualifikationsziele / LernergebnisseNach dem Tutorium hat der Student Kenntnisse über den Aufbau und den Betrieb eines Motorenprüfstan-des. Er weiß, wie die motorische Forschung bzw. Entwicklung in der Praxis durchgeführt wird und hateigene Erfahrungen beim Einsatz der motorischen Messtechnik, wie z.B. Abgasmesstechnik..
3 Empfohlene Voraussetzung für die TeilnahmeVKM I und II werden empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturVKM I / II - Skriptum, erhältlich im Sekretariat
Enthaltene Kurse
Kurs-Nr. Kursname16-03-5070-tt Tutorium Verbrennungskraftmaschinen
Dozent Lehrform SWSTutorium 4
3.1 ADP / Seminare 157
ModulnameTutorium Fortgeschrittene Cax Methoden
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-07-5100 4 CP 120 h 60 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Reiner Anderl
1 LerninhaltWährend des Tutoriums erlernen die Studierenden anhand aktueller Beispiele der industriellen Anwendungfortgeschrittene CA Methoden. Die Veranstaltung baut auf den Grundlagen der Vorlesung „Einführung indas rechnerunterstützte Konstruieren (CAD)“ und vertieft und erweitert dort erlerntes Wissen.
2 Qualifikationsziele / LernergebnisseDie Studierenden besitzen Kenntnisse in der Anwendung fortgeschrittener CA Methoden. Sie sind in derLage die generische Vorgehensweise von CA Prozessketten zu erkennen, anzuwenden und zu planen. Fernersind sie befähigt das exemplarisch erlernte Wissen in der industrielle Praxis umzusetzen.
3 Empfohlene Voraussetzung für die TeilnahmeEinführung in das rechnergestützte Konstruieren (CAD)Virtuelle Produktentwicklung A, B, C
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literatur
Enthaltene Kurse
Kurs-Nr. Kursname16-07-5100-tt Tutorium Fortgeschrittene CAx Methoden
Dozent Lehrform SWSTutorium 4
3.1 ADP / Seminare 158
ModulnameTutorium Einführung in die statistische Versuchsplanung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-26-5160 4 CP 120 h 120 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Holger Hanselka
1 LerninhaltGrundlagen der Statistik und der statistischen Versuchsplanung, Anwendung anhand eines Beispielsystems.
2 Qualifikationsziele / LernergebnisseStudierende können die grundlegenden Methoden der statistischen Versuchsplanung anwenden. Sie ken-nen die Vorgehensweise zurIdentifizierung von unkontrollierbaren Störgrößen und wissen, wie deren Einfluss auf betrachtete Aus-gangsgrößen statistisch eliminiert werden können. Die Studenten beherrschen die Aufstellung voll- undteilfaktorieller Versuchspläne, können die entstehenden Vermengungen benennen und können dieses Wis-sen auch auf komplexere Versuchspläne übertragen. Sie kennen die prinzipielle Vorgehensweise von Hy-pothesentests, beherrschen die Durchführung und Mathematik der zugehörigen wichtigsten Methoden(T-Test, F-Test) und können darüber hinaus Lösungsansätze bei Verletzung der mathematischen Voraus-setzungen benennen.
3 Empfohlene Voraussetzung für die TeilnahmeDie Teilnahme an der Vorlesung Systemzuverlässigkeit im Maschinenbau und/oder Zuverlässigkeit im Ma-schinenbau wird empfohlen.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript, Aufgabenstellungen, Ausdruck der Präsentationsfolien.Douglas C. Montgomery: Design and Analysis of Experiments, John Wiley & Sons, 2008.
Enthaltene Kurse
Kurs-Nr. Kursname16-26-5160-tt Tutorium Einführung in die statistische Versuchsplanung
Dozent Lehrform SWSTutorium 0
3.1 ADP / Seminare 159
ModulnameTutorium Maschinenakustik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-26-5100 4 CP 120 h 120 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Holger Hanselka
1 LerninhaltThema: „Experimentelle und rechnersiche Bestimmung des akustischen Übertragungsverhaltens eineskrafterregten Maschinenghäuses“; Umgang mit moderner akustischer Messtechnik für Luft-, Körperschall-,Kraft- und Dämpfungsmessung; Matlab/Excel-Kenntnisse; Abgleich Messung-Rechnung
2 Qualifikationsziele / LernergebnisseDen Umgang mit moderner akustischer Messtechnik kennenlernen; Normen/Richtlinien/Bestimmungenanwenden; Validierung von Softwareegebnissen mit akustischen Messergebnissen.
3 Empfohlene Voraussetzung für die TeilnahmeVorlesung „Maschinenakustik - Grundlagen I“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturUnterlagen mit Themenstellung, Formelsammlung, Literaturhinweisen, Verhaltensregeln, Sicherheitsbe-stimmungen, Bewertungsschema, Anforderungsliste, Datenblätter, Bedienungsanleitungen usw. werdenausgegeben
Enthaltene Kurse
Kurs-Nr. Kursname16-26-5100-tt Tutorium Maschinenakustik
Dozent Lehrform SWSTutorium 0
3.1 ADP / Seminare 160
ModulnameTutorium Grundlagen der Roboterprogrammierung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-09-5180 4 CP 120 h 60 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Eberhard Abele
1 Lerninhaltfehlt noch !!
2 Qualifikationsziele / Lernergebnisse
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literatur
Enthaltene Kurse
Kurs-Nr. Kursname16-09-5180-tt Tutorium Grundlagen der Roboterprogrammierung
Dozent Lehrform SWSTutorium 4
3.1 ADP / Seminare 161
ModulnamePraktikum Matlab/Simulink II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2070 4 CP 120 h 60 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 LerninhaltDas Praktikum ist in die zwei Teile Simulink und Regelungstechnik II aufgeteilt. Im ersten Teil werdendie Bedienkonzepte sowie die Modellbildung und Simulation mit Simulink vorgestellt und deren Einsatz-möglichkeiten an Beispielen aus verschiedenen Anwendungsgebieten geübt. Im zweiten Abschnitt wirddieses Wissen dann genutzt, um selbständig verschiedene regelungstechnische Aufgaben im Bereich derSimulation und des Reglerentwurfs rechnergestützt zu bearbeiten.
2 Qualifikationsziele / LernergebnisseDer Studierenden werden in der Lage sein, selbständig mit dem Tool Matlab/Simulink umzugehen unddamit Aufgaben aus dem Bereich der Regelungstechnik und numerischen Simulation zu bearbeiten. Siewerden die Methoden der Control System Toolbox sowie die grundlegenden Konzepte der Simulationsum-gebung Simulink kennengelernt haben und das in den Vorlesungen „Systemdynamik und RegelungstechnikI und II“ sowie „Modellbildung und Simulation“ erworbene Wissen praktisch anwenden können.
3 Empfohlene Voraussetzung für die TeilnahmeDas Praktikum sollte parallel oder nach den Vorlesungen „Systemdynamik und Regelungstechnik II“ sowie„Modellbildung und Simulation“ besucht werden.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSC MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript zum Praktikum im FG-Sekretariat erhältlich
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2070-pr Praktikum Matlab/Simulink II
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Praktikum 4
3.1 ADP / Seminare 162
ModulnameTutorium Fluidenergiemaschinen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5150 4 CP 120 h 120 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Peter Pelz
1 LerninhaltDurchführung, Auswertung und Dokumentation von experimentellen Versuchen an verschiedenen Artenvon Fluidenergiemaschinen mithilfe unterschiedlicher Messverfahren und –einrichtungen
2 Qualifikationsziele / LernergebnisseDie Studierenden gewinnen Erfahrung mit der Durchführung von experimentellen Untersuchungen anverschiedenen Arten von Fluidenergiemaschinen. Sie können geeignete Messaufnehmer auswählen undkalibrieren und deren Messunsicherheit abschätzen. Sie können die aufgenommenen Messdaten auswertenund in geeigneter Form darstellen und die durchgeführten Versuche dokumentieren.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagen der Turbomaschinen und Fluidsysteme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturLernmaterial auf www.fst.tu-darmstadt.de
Enthaltene Kurse
Kurs-Nr. Kursname16-10-5150-tt Tutorium Fluidenergiemaschinen
Dozent Lehrform SWSTutorium 0
3.1 ADP / Seminare 163
ModulnameTutorium Numerische Simulation strömungsmechanischer Probleme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-19-5060 4 CP 120 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Michael Schäfer
1 LerninhaltNutzung der CFD-Software STAR CD. Gittererzeugung für Strömungsprobleme. Berechnung praktischerlaminarer und turbulenter Strömungsprobleme. Ergebnisauswertung und Fehlerabschätzung. Dokumenta-tion der Ergebnisse.
2 Qualifikationsziele / LernergebnisseDie Studierenden kennen den Umgang mit dem Strömungssimulationsprogramm STAR-CD für die Anwen-dung auf praktische technische Strömungsprobleme. Sie können numerische Gitter erzeugen. Sie kennendie Unterschiede in der Behandlung von laminaren und turbulenten Strömungen. Sie wissen, wie zusätz-lich Wärmetransportphänomene berücksichtigt werden können. Sie können die Berechnungsergebnisseauswerten, analysieren und deren Qualität einschätzen. Sie können die Ergebnisse in einem Bericht zu-sammenfassen.
3 Empfohlene Voraussetzung für die TeilnahmeNumerische Strömungssimulation
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturAufgabenbeschreibung im WWW unter www.fnb.tu-darmstadt.de
Enthaltene Kurse
Kurs-Nr. Kursname16-19-5060-tt Tutorium Numerische Simulation strömungsmechanischer Probleme
Dozent Lehrform SWSTutorium 4
3.1 ADP / Seminare 164
ModulnameTutorium Strömungsmechanische Messmethoden im Turbomaschinenlabor
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-04-5030 4 CP 120 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Heinz-Peter Schiffer
1 LerninhaltExperimente an ausgewählten Komponenten; Anwendung moderner Meßtechnik; Datenerfassung und Aus-wertung
2 Qualifikationsziele / LernergebnisseBei diesem Tutorium hat der Student die wesentlichen Messmethoden bei thermischen Turbomaschinenkennen gelernt und kann die den Messmethoden zugrunde liegenden Verfahren erklären. Ihm sind die Pro-bleme und Fehler die beim Messen auftreten können bewusst. Während der Veranstaltung hat der StudentLabormessmethoden angewendet, Fehlerbetrachtungen durchgeführt und elektronische Messdatenerfas-sunganlagen bedient, so dass er nun deren Funktionsweise kennt. Die Auswertung und Darstellung vonMessergebnissen hat er praktiziert. Der Student ist nun in der Lage, eine Messkette in der Strömungsmess-technik zu verstehen und zielgerichtet zur Lösung einer Messaufgabe im Turbomaschinenlabor anzuwen-den.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagenkenntnisse in Thermodynamik und Strömungslehre (hier insbesondere kompressible Strö-mung) sind erforderlich, Flugantriebe, Thermische Turbomaschinen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literatur
Enthaltene Kurse
Kurs-Nr. Kursname16-04-5030-tt Tutorium Strömungsmechanische Messmethoden im Turbomaschinenlabor
Dozent Lehrform SWSTutorium 4
3.1 ADP / Seminare 165
ModulnameTutorium Topologie der Fluidsysteme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-10-5240 4 CP 120 h 120 h 1 Jedes Sem.
Sprache Modulverantwortliche PersonDeutsch Dr.-Ing. Jörg Kiesbauer
1 Lerninhaltfehlt noch !
2 Qualifikationsziele / Lernergebnisse
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literatur
Enthaltene Kurse
Kurs-Nr. Kursname16-10-5240-tt Tutorium Topologie der Fluidsysteme
Dozent Lehrform SWSTutorium 0
3.1 ADP / Seminare 166
3.1.3 InfINat
Alle Module aus den Wahlfächern im Wahlbereich MB und ETiTAlle Module aus dem Bereich ADP und Seminare aus Maschinenbau sowie die Projektseminare aus dem BereichADP und Seminare aus Elektrotechnik und Informationstechnik
ModulnameEinführung in die Numerische Mathematik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus04-00-0013 9 CP 270 h 180 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch
1 LerninhaltKondition, lineare und nichtlineare Gleichungssysteme, Ausgleichsrechnung,Interpolation, Integration und Differentiation, Differentialgleichungen,Differenzenverfahren, Programmierübungen.
2 Qualifikationsziele / LernergebnisseDie Studierenden können die grundlegenden elementaren numerischen Verfahrenbeschreiben, erklären, implementieren und anwenden.Sie sollen die Methoden vergleichen, modifizieren und kombinieren können.
3 Empfohlene Voraussetzung für die TeilnahmeAnalysis, Lineare Algebra, Einführung in das wissenschaftlichtechnische Programmieren
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsPflicht
7 Notenverbesserung nach §25 (2)
8 LiteraturDeuflhard, Hohmann: Numerische Mathematik I, de Gruyter, 2008Schwarz, Köckler: Numerische Mathematik; Vieweg und Teubner, 2009Matlab User Guide
Enthaltene Kurse
Kurs-Nr. Kursname04-00-0056-vu Einführung in die numerische Mathematik
Dozent Lehrform SWSProf. Dr. rer. nat. Jens Lang Vorlesung und
Übung6
3.1 ADP / Seminare 167
ModulnameFlughafenplanung (C)
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus13-J0-M009 3 CP 90 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch
1 LerninhaltWirtschaftlichkeit; Kapazität: Standortwahl und Masterplan; Vorfeldplanung und Betrieb; Terminals; Inter-modalität; Vorfelddienste; Betriebsverfahren; Luftfracht
2 Qualifikationsziele / LernergebnisseDie Studierenden besitzen ein vertieftes Verständnis der unterschiedlichen Bereiche eines Flughafens undderen zu bewältigende Herausforderungen.Sie besitzen die Fähigkeit, auch schwierige fachspezifische Probleme der Flughafenplanung nach wissen-schaftlichen Grundsätzen selbstständig zu bearbeiten. Sie sind in der Lage, Lösungen für die unterschied-lichen Bereiche zu entwickeln, abzuwägen, sachlich und verständlich zu erläutern, Entscheidungen zutreffen und zu begründen.
3 Empfohlene Voraussetzung für die TeilnahmeLuftverkehr
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Mündliche/Schriftliche Prüfung, Dauer: 60 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Mündliche/Schriftliche Prüfung, Gewichtung: 1)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturHandouts und Fachartikel
Enthaltene Kurse
Kurs-Nr. Kursname13-J0-0004-vl Flughafenplanung
Dozent Lehrform SWSVorlesung 2
3.1 ADP / Seminare 168
ModulnameLuftverkehr B
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus13-J0-M003 6 CP 180 h 120 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch
1 LerninhaltVerkehrsabläufe am Flughafen; Methoden zur Planung und Dimensionierung von Terminals und Abferti-gungsanlagen; Flugsicherung; landseitige Anbindung, Schienenanbindung; Planung, Ausstattung, Dimen-sionierung, konstruktive Bemessung und Betrieb von Flugbetriebsflächen; Bodenbetriebsdienste.Basierend auf den Vorlesungsinhalten ist von den Studierenden eine Hausübung anzufertigen.
2 Qualifikationsziele / LernergebnisseDie Studierenden haben vertieftes Verständnis für die Zusammenhänge und Methoden zur Planung, zumBau und zum Betrieb von Flughäfen sowie der Wechselwirkungen zu anderen Bereichen des Ingenieurwe-sens sowie des belebten und unbelebten Umfeldes.Die Studierenden besitzen die Fähigkeit, insbesondere aus diesem Gebiet, fachspezifische Probleme nachwissenschaftlichen Grundsätzen selbstständig zu bearbeiten.Sie besitzen die vertiefte Fähigkeit, unterschiedliche Lösungen zu erarbeiten, gegeneinander abzuwägen,sachlich und verständlich zu erläutern, Entscheidungen zu treffen und zu begründen.
3 Empfohlene Voraussetzung für die TeilnahmeEmpfohlen: Verkehr II
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)• Modulprüfung (Studienleistung, fakultativ, b/nb BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 1)• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 0)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 LiteraturVorlesungsumdruckAshford, Norman J.; Mumayiz, Saleh A.; Wright, Paul H. (2011): Airport engineering. Planning, design,and development of 21st century airports. 4. ed. Hoboken, N.J: Wiley.International Air Transport Association (2004): Airport development
Enthaltene Kurse
Kurs-Nr. Kursname13-J0-0005-vl Luftverkehr
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname13-J0-0006-ue Luftverkehr - Übung
Dozent Lehrform SWSÜbung 2
3.1 ADP / Seminare 169
ModulnameOptimierung statischer und dynamischer Systeme
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus20-00-0186 10 CP 300 h 210 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Oskar Stryk
1 LerninhaltOptimierung statischer Systeme:- nichtlineare Optimierung ohne und mit Nebenbedingungen, notwendige Bedingungen- numerische Newton-Typ- und SQP-Verfahren- nichtlineare kleinste Quadrate- gradientenfreie Optimierungsverfahren- praktische Aspekte wie Problemformulierung, Approximation von Ableitungen, Verfahrensparameter, Be-wertung einer berechneten LösungOptimierung dynamischer Systeme:- Parameteroptimierungs- und Schätzprobleme- optimale Steuerungsprobleme- Maximumprinzip und notwendige Bedingungen- numerische Verfahren zur Berechnung optimaler Trajektorien- optimale Rückkopplungssteuerung- linear-quadratischer RegulatorAnwendungen und Fallstudien aus den Ingenieurwissenschaften und der RobotikTheoretische und praktische Übungen sowie Programmieraufgaben zur Vertiefung der Fachkenntnisse undmethodischen Fähigkeiten
2 Qualifikationsziele / LernergebnisseStudierende besitzen nach erfolgreicher Teilnahme grundlegende Kenntnisse und methodische Fähigkeitender Konzepte und Berechnungsverfahren der Optimierung statischer und dynamischer Systeme und derenAnwendungen bei Optimierungsaufgaben in den Ingenieurwissenschaften.
3 Empfohlene Voraussetzung für die Teilnahmegrundlegende mathematische Kenntnisse und Fähigkeiten in Linearer Algebra, Analysis mehrerer Verän-derlicher und Grundlagen gewöhnlicher Differentialgleichungen
4 PrüfungsformBausteinbegleitende Prüfung:
• [20-00-0186-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Standard BWS)
5 BenotungBausteinbegleitende Prüfung:
• [20-00-0186-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikKann im Rahmen fachübergreifender Angebote auch in anderen Studiengängen verwendet werden.
7 Notenverbesserung nach §25 (2)
3.1 ADP / Seminare 170

In dieser Vorlesung findet eine Anrechnung von vorlesungsbegleitenden Leistungen statt, die lt. §25 (2)der 5. Novelle der APB und den vom FB 20 am 30.3.2017 beschlossenen Anrechnungsregeln zu einerNotenverbesserung um bis zu 1.0 führen kann.
8 Literatur- vorlesungsbegleitende Folienzu einzelnen Themen der Lehrveranstaltung:- J. Nocedal, S.J. Wright: Numerical Optimization, Springer- C.T. Kelley: Iterative Methods for Optimization, SIAM Frontiers in Applied Mathematics- L.M. Rios, N.V. Sahinidis: Derivative-free optimization: a review of algorithms and comparison of softwareimplementations, Journal of Global Optimization (2013) 56:1247-1293- A.E. Bryson, Y.-C. Ho: Applied Optimal Control: Optimization, Estimation and Control, CRC Press- J.T. Betts: Practical Methods for Optimal Control and Estimation Using Nonlinear Programming, SIAMAdvances in Design and Control
Enthaltene Kurse
Kurs-Nr. Kursname20-00-0186-iv Optimierung statischer und dynamischer Systeme
Dozent Lehrform SWSIntegrierte Ver-anstaltung
6
3.1 ADP / Seminare 171
ModulnameArchitekturen und Entwurf von Rechnersystemen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus20-00-0012 5 CP 150 h 105 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. phil. nat. Marc Fischlin
1 Lerninhalt- Technologische Grundlagen und Trends der Mikroelektronik- Entwurfsflüsse für mikroelektronische Systeme- Beschreibung von Hardware-Systemen- Charakteristika von Rechnersystemen- Architekturen für parallele Ausführung- Speichersysteme- Heterogene Systems-on-Chip- On-Chip und Off-Chip Kommunikationsstrukturen- Aufbau eingebetteter Systeme, z.B. im Umfeld von Cyber-Physical Systems
2 Qualifikationsziele / LernergebnisseStudierende kennen nach erfolgreichem Besuch der Veranstaltung funktionale und nichtfunktionale An-forderungen an heterogene diskrete und integrierte Rechnersysteme. Sie verstehen Techniken zum Aufbausolcher Systeme und können Entwurfsverfahren und -werkzeuge anwenden, um selbständig mit Hilfe derTechniken Rechner(teil)systeme zu konstruieren, die gegebene Anforderungen erfüllen. Sie können dieQualität der Systeme in verschiedenen Gütemaßen bewerten.
3 Empfohlene Voraussetzung für die TeilnahmeEmpfohlen:Erfolgreicher Besuch der Vorlesungen „Digitaltechnik“ und „Rechnerorganisation“ bzw. entsprechendeKenntnisse aus anderen Studiengängen
4 PrüfungsformBausteinbegleitende Prüfung:
• [20-00-0012-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Standard BWS)
5 BenotungBausteinbegleitende Prüfung:
• [20-00-0012-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsB.Sc. InformatikB.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikB.Sc. InformationssystemtechnikKann im Rahmen fachübergreifender Angebote auch in anderen Studiengängen verwendet werden.
7 Notenverbesserung nach §25 (2)
8 LiteraturLiteraturempfehlungen werden kontinuierlich aktualisiert, Beispiele für verwendete Literatur könnten sein:Nikhil/Czeck: Bluespec by ExampleArvind/Nikhil/Emer/Vijayaraghavan: Computer Architecture: A Constructive ApproachHennessy/Patterson: Computer Architecture – A Quantitative ApproachCrockett/Elliott/Enderwitz/Stewart: The Zynq BookFlynn/Luk: Computer System DesignSass/Schmidt: Embedded Systems Design
3.1 ADP / Seminare 172
Enthaltene Kurse
Kurs-Nr. Kursname20-00-0012-iv Architekturen und Entwurf von Rechnersystemen
Dozent Lehrform SWSIntegrierte Ver-anstaltung
3
3.1 ADP / Seminare 173
ModulnameBildverarbeitung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus20-00-0155 3 CP 90 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. Bernt Schiele
1 LerninhaltÜberblick über die Grundlagen der Bildverarbeitung:- Bildeigenschaften- Bildtransformationen- einfache und komplexere Filterung- Bildkompression- Segmentierung- Klassifikation
2 Qualifikationsziele / LernergebnisseNoch erfolgreichem Besuch der Veranstaltung haben die Studierenden einen Überblick über die Funktions-weise und die Möglichkeiten der modernen Bildverarbeitung. Studierende sind dazu in der Lage, einfachebis mittlere Bildverarbeitungsaufgaben selbständig zu lösen.
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformBausteinbegleitende Prüfung:
• [20-00-0155-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Standard BWS)
5 BenotungBausteinbegleitende Prüfung:
• [20-00-0155-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikKann im Rahmen fachübergreifender Angebote auch in anderen Studiengängen verwendet werden.
7 Notenverbesserung nach §25 (2)
8 Literatur- Gonzalez, R.C., Woods, R.E., „“Digital Image Processing, Addison- Wesley Publishing Company, 1992- Haberaecker, P., Praxis der Digitalen Bildverarbeitung und Mustererkennung, Carl Hanser Verlag, 1995- Jaehne, B., Digitale Bildverarbeitung, Springer Verlag, 1997
Enthaltene Kurse
Kurs-Nr. Kursname20-00-0155-iv Bildverarbeitung
Dozent Lehrform SWSIntegrierte Ver-anstaltung
2
3.1 ADP / Seminare 174
ModulnameComputer Vision I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus20-00-0157 6 CP 180 h 120 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonEnglisch Prof. Dr. Bernt Schiele
1 Lerninhalt- Grundlagen der Bildformierung- Lineare und (einfache) nichtlineare Bildfilterung- Grundlagen der Mehransichten-Geometrie- Kamerakalibrierung & -posenschätzung- Grundlagen der 3D-Rekonstruktion- Grundlagen der Bewegungsschätzung aus Videos- Template- und Unterraum-Ansätze zur Objekterkennung- Objektklassifikation mit Bag of Words- Objektdetektion- Grundlagen der Bildsegmentierung
2 Qualifikationsziele / LernergebnisseStudierende beherrschen nach erfolgreichem Besuch der Veranstaltung die Grundlagen der Computer Visi-on. Sie verstehen grundlegende Techniken der Bild- und Videoanalyse, und können deren Annahmen undmathematische Formulierungen benennen, sowie die sich ergebenden Algorithmen beschreiben. Sie sindin der Lage diese Techniken praktisch so umzusetzen, dass sie grundlegende Bildanalyseaufgaben an Handrealistischer Bilddaten lösen können.
3 Empfohlene Voraussetzung für die TeilnahmeBesuch von Visual Computing ist empfohlen.
4 PrüfungsformBausteinbegleitende Prüfung:
• [20-00-0157-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Standard BWS)
5 BenotungBausteinbegleitende Prüfung:
• [20-00-0157-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikKann im Rahmen fachübergreifender Angebote auch in anderen Studiengängen verwendet werden.
7 Notenverbesserung nach §25 (2)
8 LiteraturLiteraturempfehlungen werden regelmässig aktualisiert und beinhalten beispielsweise:- R. Szeliski, „“Computer Vision: Algorithms and Applications, Springer 2011- D. Forsyth, J. Ponce, Computer Vision – A Modern Approach, Prentice Hall, 2002
Enthaltene Kurse
3.1 ADP / Seminare 175

Kurs-Nr. Kursname20-00-0157-iv Computer Vision
Dozent Lehrform SWSIntegrierte Ver-anstaltung
4
3.1 ADP / Seminare 176
ModulnameComputer Vision II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus20-00-0401 6 CP 180 h 120 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonEnglisch Prof. Dr. Bernt Schiele
1 Lerninhalt- Computer Vision als (probabilistische) Inferenz- Robuste Schätzung und Modellierung- Grundlagen der Bayes’schen Netze und Markov’schen Zufallsfelder- Grundlegende Inferenz- und Lernverfahren der Computer Vision- Bildrestaurierung- Stereo- Optischer Fluß- Bayes’sches Tracking von (artikulierten) Objekten- Semantische Segmentierung- Aktuelle Themen der Forschung
2 Qualifikationsziele / LernergebnisseStudierende haben nach erfolgreichem Besuch der Veranstaltung ein vertieftes Verständnis der ComputerVision. Sie formulieren Fragestellungen der Bild- und Videoanalyse als Inferenzprobleme und berücksichti-gen dabei Herausforderungen reeller Anwendungen, z.B. im Sinne der Robustheit. Sie lösen das Inferenz-problem mittels diskreter oder kontinuierlicher Inferenzalgorithmen, und wenden diese auf realistischeBilddaten an. Sie evaluieren die anwendungsspezifischen Ergebnisse quantitativ.
3 Empfohlene Voraussetzung für die TeilnahmeBesuch von Visual Computing und Computer Vision I ist empfohlen.
4 PrüfungsformBausteinbegleitende Prüfung:
• [20-00-0401-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Standard BWS)
5 BenotungBausteinbegleitende Prüfung:
• [20-00-0401-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikKann im Rahmen fachübergreifender Angebote auch in anderen Studiengängen verwendet werden.
7 Notenverbesserung nach §25 (2)
8 LiteraturLiteraturempfehlungen werden regelmässig aktualisiert und beinhalten beispielsweise:- S. Prince, “Computer Vision: Models, Learning, and Inference”, Cambridge University Press, 2012- R. Szeliski, „“Computer Vision: Algorithms and Applications, Springer 2011
Enthaltene Kurse
3.1 ADP / Seminare 177

Kurs-Nr. Kursname20-00-0401-iv Computer Vision II
Dozent Lehrform SWSIntegrierte Ver-anstaltung
4
3.1 ADP / Seminare 178
ModulnameGrundlagen der Robotik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus20-00-0735 10 CP 300 h 210 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. rer. nat. Oskar Stryk
1 Lerninhalt- Räumliche Darstellungen und Transformationen- Manipulatorkinematik- Fahrzeugkinematik- kinematische Geschwindigkeit und Jacobi-Matrix- Bewegungsdynamik von Robotern- Roboterantriebe, interne und externe Sensoren- grundlegende Roboterregelungen- Bahnplanung- Lokalisierung und Navigation mobiler Roboter- Fallstudien- theoretische und praktische Übungen sowie Programmieraufgaben zur Vertiefung der Fachkenntnisse undmethodischen Fähigkeiten
2 Qualifikationsziele / LernergebnisseStudierende besitzen nach erfolgreicher Teilnahme die für grundlegende Untersuchungen und ingenieur-wissenschaftliche Entwicklungen in der Robotik notwendigen grundlegenden Fachkenntnisse und metho-dischen Fähigkeiten im Bereich der Modellierung, Kinematik, Dynamik, Regelung, Bahnplanung und Navi-gation von Robotern.
3 Empfohlene Voraussetzung für die Teilnahmegrundlegende mathematische Kenntnisse und Fähigkeiten in Linearer Algebra, Analysis mehrerer Verän-derlicher und Grundlagen gewöhnlicher Differentialgleichungen
4 PrüfungsformBausteinbegleitende Prüfung:
• [20-00-0735-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Standard BWS)
5 BenotungBausteinbegleitende Prüfung:
• [20-00-0735-iv] (Fachprüfung, Mündliche/Schriftliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikKann im Rahmen fachübergreifender Angebote auch in anderen Studiengängen verwendet werden.
7 Notenverbesserung nach §25 (2)In dieser Vorlesung findet eine Anrechnung von vorlesungsbegleitenden Leistungen statt, die lt. §25 (2)der 5. Novelle der APB und den vom FB 20 am 30.3.2017 beschlossenen Anrechnungsregeln zu einerNotenverbesserung um bis zu 1.0 führen kann.
8 Literatur
3.1 ADP / Seminare 179
- vorlesungsbegleitendes Skript und VorlesungsfolienUmfassende Übersicht der Robotik:- B. Siciliano, O. Khatib: Springer Handbook of Robotics, Springer Verlagzu einzelnen Themen der Lehrveranstaltung:- J.J. Craig: Introduction to Robotics: Mechanics and Control, 3rd edition, Prentice Hall- M.W. Spong, S. Hutchinson, M. Vidyasagar: Robot Modeling and Control, Wiley- R. Siegwart, I.R. Nourbakhsh, D. Scaramuzza: Introduction to Autonomous Mobile Robots, MIT Press- H. Choset, K.M. Lunch, S. Hutchinson, G.A. Kantor,W. Burgard, L.E. Kavraki, S. Thrun: Principles of RobotMotion: Theory, Algorithms, and Implementations, Bradford- S. Thrun,W. Burgard, D. Fox: Probabilistic Robotics, MIT Press
Enthaltene Kurse
Kurs-Nr. Kursname20-00-0735-iv Grundlagen der Robotik
Dozent Lehrform SWSProf. Dr. rer. nat. Oskar Stryk Integrierte Ver-
anstaltung6
3.1 ADP / Seminare 180
ModulnameElektrische Antriebstechnik für Automobile
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-2150 4 CP 120 h 75 h 1 WiSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltThis course introduces the students to the different design aspects of electric drives used in automotiveapplications, comprising both high power density high speed traction and small mass produced auxiliarydrives. Since the target audience comprises students from different degree programmes, the course firstreviews basics of electromagnetic power conversion principles and design principles of PM based machines.The discussion of the electric drives themselves comprises the various facets of their design as part of acomplex system, such as operating requirements, configurations, material choices, parasitic effects andtheir mitigation, electric and thermal stress, as well as manufacturing related questions, notably as theyaffect the design of the mass produced auxiliary drives.
2 Qualifikationsziele / LernergebnisseAt the end of the course, the students will know about design principles of PM based machines, electricdrives: topologies, operating areas, dynamic performance and configuration of traction drives for hybridcars and electric vehicles as they apply to electric drives for cars. In addition to traction drives, they willalso be familiar with auxiliary drives used in cars. They will understand the parasitic effects of inverterinduced bearing currents, the insulation material used for the electric winding and the winding stress atinverter supply. They will be familiar with the different cooling principles and thermal modelling, as well asthe thermal aspects of the integration into the car. They will also know about the main failure modes thatmay occur with electric drives used for cars, the different lamination sheets used and their manufacturing.
3 Empfohlene Voraussetzung für die TeilnahmeAbgeschlossenes Bachelorstudium in Elektrotechnik oder äquivalenter Abschluss.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)Modulabschlussprüfung:* Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literatur
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-2150-vl Elektrische Antriebstechnik für Automobile
Dozent Lehrform SWSProf. Dr. Annette Mütze Vorlesung 2
Kurs-Nr. Kursname18-bi-2150-ue Elektrische Antriebstechnik für Automobile
Dozent Lehrform SWSProf. Dr. Annette Mütze Übung 1
3.1 ADP / Seminare 181
ModulnameMatrixanalyse und schnelle Algorithmen
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-pe-2070 6 CP 180 h 120 h 1 SoSe
Sprache Modulverantwortliche PersonEnglisch Prof. Dr.-Ing. Marius Pesavento
1 LerninhaltIn dieser Vorlesung werden die Grundlagen der Matrixanalyse und der Matrizenrechnung vermit-telt, wel-che in vielfältigen technischen Bereichen wie z.B. dem Maschinellen Lernen, dem Ma-schinellen Sehen,der Regelungstechnik, der Signal- und Bildverarbeitung, der Kommunikations-technik, der Netzwerktech-nik und der Optimierungstheorie, von fundamentaler Bedeutung sind. Neben den grundlegenden theore-tischen Eigenschaften von Matrizen legt dieser Kurs besonderes Augenmerk auf schnelle Algorithmen zurBerechnungen von Matrizen. Darüber hinaus werden die Themen anhand von vielen Anwendungsbeispie-len aus den oben genannten Bereichen erör-tert. Dies beinhaltet die Analyse sozialer Netze, die Bildanalyseund Bildgebende Verfahren der Medizintechnik, die Analyse und Optimierung von Kommunikationsnetzenund das maschinelle Lesen.Themenübersicht: (i) Grundlegende Konzepte der Matrixanalyse, Unterräume, Normen, (ii) Lineare kleins-te Quadrate (iii) Eigenwertzerlegung, Singulärwertzerlegung, Positive Semidefinite Matrizen, (iv) LineareGleichungssysteme, LU Zerlegung, Cholesky Zerlegung (v) Pseudo-inverse Matrizen, QR Zerlegung (vi)(fortgeschrittene) Tensor Zerlegung, (fortgeschrittene) Matixanalyse, Compressive Sensing, StrukturierteMatrizenfaktorisierung
2 Qualifikationsziele / LernergebnisseDie Studenten lernen fortgeschrittene Themen der Matrix Analyse und die damit verbunden Algorithmenauf fortgeschrittenem Niveau
3 Empfohlene Voraussetzung für die TeilnahmeGrundkenntnisse in der linearen Algebra
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
7 Notenverbesserung nach §25 (2)
8 Literatur*Gene H. Golub and Charles F. van Loan, Matrix Computations (Fourth Edition), John Hopkins UniversityPress, 2013.*Roger A. Horn and Charles R. Johnson, Matrix Analysis (Second Edition), Cambridge University Press,2012.*Jan R. Magnus and Heinz Neudecker, Matrix Differential Calculus with Applications in Statistics andEconometrics (Third Edition), John Wiley and Sons, New York, 2007.*Giuseppe Calaore and Laurent El Ghaoui, Optimization Models, Cambridge University Press, 2014.*ECE 712 Course Notes by Prof. Jim Reilly, McMaster University, Canada (friendly notes for engineers)http://www.ece.mcmaster.ca/faculty/reilly/ece712/course_notes.htm
Enthaltene Kurse
3.1 ADP / Seminare 182
Kurs-Nr. Kursname18-pe-2070-vl Matrixanalyse und schnelle Algorithmen
Dozent Lehrform SWSProf. Dr.-Ing. Marius Pesavento Vorlesung 3
Kurs-Nr. Kursname18-pe-2070-ue Matrixanalyse und schnelle Algorithmen
Dozent Lehrform SWSProf. Dr.-Ing. Marius Pesavento Übung 1
3.1 ADP / Seminare 183
ModulnameBetriebswirtschaft für Ingenieure
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-09-5050 4 CP 120 h 90 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Joachim Metternich
1 LerninhaltDiese Vorlesung soll zukünftigen Ingenieurinnen und Ingenieuren grundlegende betriebswirtschaftlicheKenntnisse vermittelt. Hierzu gehören die Grundlagen der Buchführung und des Jahresabschlusses, derKostenrechnung und der Wirtschaftlichkeitsrechnung. Anschließend werden die relevantesten Aspekte derBereiche Personalwirtschaft, Beschaffungswirtschaft, Logistik, Marketing und Strategisches Managementbeleuchtet. Damit sollen die Studentinnen und Studenten für einen erfolgreichen Einstieg ins Berufsle-ben und insbesondere auch auf ein wirtschaftliches Gestalten ihrer Innovationen vorbereitet werden. DieVorlesung ist zum besseren Verständnis mit Praxisbeispielen aus dem industriellen Umfeld ausgestattet.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die Grundzüge der Kostenrechnung und der Wirtschaftslichkeitsrechnung zu erklären.• Entscheidungen in den Bereichen Produktion, Qualitätssicherung, Entwicklung oder Einkauf an wirt-
schaftlichen Maßstäben auszurichten.• Die Aufgaben des technischen Einkaufs, des Vertriebs sowie des technischen Marketings zu beschrei-
ben.• Prozesse in einem produktionsnahen Unternehmen zu erklären und die Vorgehensweise zur Opti-
mierung der Prozesse zu beschreiben.• Auf Augenhöhe mit Betriebswirten und Kaufleuten in Unternehmen zu diskutieren und sachgerechte
Entscheidungen in produktionsnahen Unternehmen herbeizuführen.
3 Empfohlene Voraussetzung für die TeilnahmeKeine
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Klausur 1 h 30 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript.Schultz,Volker: Basiswissen Betriebswirtschaft. Beck-Wirtschaftsberater im dtv. München 2014
Enthaltene Kurse
Kurs-Nr. Kursname16-09-5050-vl Betriebswirtschaft für Ingenieure
Dozent Lehrform SWSVorlesung 2
3.1 ADP / Seminare 184
ModulnameProjektseminar Autonomes Fahren II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-su-2100 6 CP 180 h 135 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch und Englisch Prof. Dr. rer. nat. Andreas Schürr
1 Lerninhalt• Weiterentwicklung und Optimierung eines robusten C++ Rahmenwerks zur Lösung von nicht tri-
vialen Problemstellungen aus dem Bereich des autonomen Fahrens anhand von realitätsnahen Her-ausforderungen aus dem Carolo Cup, einem internationalen studentischen Wettbewerb für autonomfahrende Modellfahrzeuge
• Entwicklung und Umsetzung von unterschiedlichen Algorithmen (z.B. zur Bewegungsplanung, Bild-verarbeitung, Steuerung und Hindernisvermeidung) in einem eingebetteten System mit hartenEchtzeit-Anforderungen und beschränkten Ressourcen (Speicher, . . . )
• Anwendung und Weiterentwicklung von Regelungs- und Steuerungsmethoden aus dem Bereich desautonomen Fahrens
• Nutzung von Software-Engineering-Techniken (Design, Dokumentation, Test, . . . ) zur Lösung derProblemstellungen
• Anwendung von Methoden zum Source-Code- und zum Projektmanagement und zur Unterstützungder Teamarbeit
• Präsentation von Projektergebnissen im Rahmen von Vorträgen
2 Qualifikationsziele / LernergebnisseDie Studierenden lernen sich eigenständig in neue Konzepte und Algorithmen aus dem Bereich des au-tonomen Fahrens einzuarbeiten, diese umzusetzen und zu präsentieren. Dabei werden realitätsnahe Pro-blemstellungen aus dem Carolo Cup mit vorhandenem Wissen und Kenntnissen praktisch gelöst und dieUmsetzungen durch Qualitätssicherungsmaßnahmen sichergestellt.Studierende, die an diesem Projektseminar erfolgreich teilgenommen haben, sind in der Lage, eine Lö-sung zu einer komplexen und realitätsnahen Problemstellung aus dem Bereich des autonomen Fahrensselbstständig zu analysieren und zu lösen. Die Teilnehmer erwerben folgende Fähigkeiten im Detail:
• Eigenständige Weiterentwicklung und Optimierung eines vorhandenen Softwaresystems und der ver-wendeten Algorithmen
• Lösung und Umsetzung von nicht trivialen realitätsnahen regelungstechnischen Problemstellungen• Umfangreicher Einsatz von Werkzeugen zur Versions-, Konfigurations-, Änderungs- und Qualitätssi-
cherungsverwaltung• Realistische Zeitplanung und Ressourceneinteilung (Projektmanagement)• Weiterentwicklung und Optimierung von komplexen Hardware-/Software-Systemen unter realitäts-
nahen Umgebungsbedingungen• Planung und Durchführung umfangreicher Qualitätssicherungsmaßnahmen• Zusammenarbeit, Kommunikation und Organisation innerhalb des Teams
3 Empfohlene Voraussetzung für die Teilnahme
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Dauer: 30 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des Moduls
3.1 ADP / Seminare 185
7 Notenverbesserung nach §25 (2)
8 Literaturhttps://www.es.tu-darmstadt.de/lehre/aktuelle-veranstaltungen/ps-af-ii und Moodle
Enthaltene Kurse
Kurs-Nr. Kursname18-su-2100-pj Projektseminar Autonomes Fahren II
Dozent Lehrform SWSProf. Dr. rer. nat. Andreas Schürr Projektseminar 3
3.1 ADP / Seminare 186
ModulnamePraktikum Matlab/Simulink II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2070 4 CP 120 h 60 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 LerninhaltDas Praktikum ist in die zwei Teile Simulink und Regelungstechnik II aufgeteilt. Im ersten Teil werdendie Bedienkonzepte sowie die Modellbildung und Simulation mit Simulink vorgestellt und deren Einsatz-möglichkeiten an Beispielen aus verschiedenen Anwendungsgebieten geübt. Im zweiten Abschnitt wirddieses Wissen dann genutzt, um selbständig verschiedene regelungstechnische Aufgaben im Bereich derSimulation und des Reglerentwurfs rechnergestützt zu bearbeiten.
2 Qualifikationsziele / LernergebnisseDer Studierenden werden in der Lage sein, selbständig mit dem Tool Matlab/Simulink umzugehen unddamit Aufgaben aus dem Bereich der Regelungstechnik und numerischen Simulation zu bearbeiten. Siewerden die Methoden der Control System Toolbox sowie die grundlegenden Konzepte der Simulationsum-gebung Simulink kennengelernt haben und das in den Vorlesungen „Systemdynamik und RegelungstechnikI und II“ sowie „Modellbildung und Simulation“ erworbene Wissen praktisch anwenden können.
3 Empfohlene Voraussetzung für die TeilnahmeDas Praktikum sollte parallel oder nach den Vorlesungen „Systemdynamik und Regelungstechnik II“ sowie„Modellbildung und Simulation“ besucht werden.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSC MEC
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript zum Praktikum im FG-Sekretariat erhältlich
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2070-pr Praktikum Matlab/Simulink II
Dozent Lehrform SWSProf. Dr.-Ing. Ulrich Konigorski Praktikum 4
3.1 ADP / Seminare 187
ModulnameMachine Learning und Deep Learning in der Automatisierungstechnik
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2100 3 CP 90 h 60 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 Lerninhalt• Konzepte des Machine Learning• Lineare Verfahren• Support Vector Machines• Bäume und Ensembles• Training und Bewertung• Unüberwachtes Lernen• Neuronale Netze und Deep Learning• Faltende Neuronale Netze (CNNs)• CNN-Anwendungen• Rekurrente Neuronale Netze (RNNs)
2 Qualifikationsziele / LernergebnisseStudierende erhalten einen breiten und praxisnahen Überblick über das Gebiet des maschinellen Lernens.Es werden zunächst die wichtigsten Algorithmen-Klassen des überwachten und unüberwachten Lernensbesprochen. Danach befasst sich die Veranstaltung mit tiefen neuronalen Netzen, die viele aktuelle Anwen-dungen der Bild- und Signalverarbeitung ermöglichen. Die grundlegenden Eigenschaften aller Algorithmenwerden erarbeitet und anhand von Programmbeispielen demonstriert. Studierende sind danach in der La-ge, die Verfahren zu beurteilen und auf praktische Aufgabenstellungen anzuwenden.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlegende Kenntnisse in linearer Algebra und StatistikWünschenswert: Vorlesung „Fuzzy-Logik, Neuronale Netze und Evolutionäre Algorithmen“
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Dauer: 90 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc etit, MSc WI-etit, MSc MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• T. Hastie et al.: The Elements of Statistical Learning. 2. Aufl., Springer, 2008• I. Goodfellow et al.: Deep Learning. MIT Press, 2016• A. Géron: Hands-On Machine Learning with Scikit-Learn and TensorFlow. O’Reilly, 2017
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2100-vl Machine Learning und Deep Learning in der Automatisierungstechnik
Dozent Lehrform SWSDr.-Ing. Michael Vogt Vorlesung 2
3.1 ADP / Seminare 188
ModulnameGrundlagen der Flugantriebe
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-04-5010 8 CP 240 h 180 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Heinz-Peter Schiffer
1 LerninhaltTheoretische Grundlagen des Flugantriebs; Thermodynamischer Kreisprozess; Komponenten; Schadstoff-bildung.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die verschiedenen Arten von Strahlantrieben zu klassifizieren und die Funktionsweise eines einfa-chen, luftatmenden Strahltriebwerks zu erklären.
• Den Kreisprozess eines Flugantriebs darzustellen und die Auswirkungen variierender Kreisprozess-parameter (z.B. Turbineneintrittstemperatur, Flugmachzahl) auf den Kreisprozess zu erläutern
• Verschiedene Triebwerks- und Komponentenwirkungsgrade zu erklären.• Die Schubgleichung, die Eulersche Turbinengleichung und die Gleichungen zur Beschreibung der
Triebwerkswirkungsgrade (thermischer Wirkungsgrad, Vortriebswirkungsgrad) durch Anwendungder Erhaltungsgleichungen (Masse, Energie, Impuls) herzuleiten.
• Die Kernkomponenten eines Strahltriebwerks und die spezifischen Komponenteneigenschaften und-funktionsweisen zu erklären.
• Die jetzigen und zukünftigen Anforderungen an ein Triebwerk aufzulisten sowie deren Bedeutungfür die Komponenten, deren Auswirkung auf die Verlustmechanismen und Schadstoffentstehung zuerklären.
3 Empfohlene Voraussetzung für die TeilnahmeGrundlagenkenntnisse in Thermodynamik und Strömungslehre (hier insbeondere kompressible Strömung)sind zwingend erforderlich.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Standard BWS)Schriftliche Prüfung 90 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, Fachprüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWP Bachelor MPE
7 Notenverbesserung nach §25 (2)
8 LiteraturSkript ’Flugantriebe und Gasturbinen’ und Vorlesungsfolien (Internet Homepage des Fachgebiets:www.glr.maschinenbau.tu-darmstadt.de).Bräunling, W. J. G.: Flugzeugtriebwerke, Springer Verlag.Cohen, H.; Rogers, G. F. C.: Gas Turbine Theory, Longman Group Limited.
Enthaltene Kurse
Kurs-Nr. Kursname16-04-5010-vl Grundlagen der Flugantriebe
Dozent Lehrform SWSVorlesung 4
3.1 ADP / Seminare 189
ModulnameMechatronische Systemtechnik I
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus16-24-5020 4 CP 120 h 60 h 1 Jedes 2. Sem.
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Stephan Rinderknecht
1 LerninhaltStrukturdynamik für mechatronische Systeme; Regelstrategien für mechatronische Systeme; Komponentenmechatronischer Systeme: Aktoren, Verstärker, Regler, Mikroprozessoren, Sensoren.
2 Qualifikationsziele / LernergebnisseNachdem die Studierenden die Lerneinheit erfolgreich abgeschlossen haben, sollten sie in der Lage sein:
• Die strukturdynamischen Gleichungen der mechanischen Komponenten aufzustellen.• Die passenden Regler für starre und elastische Systemkomponenten auszulegen.• Mechatronische Gesamtsysteme (Regelkreis) unter vereinfachter Berücksichtigung von Sensoren und
Aktoren zu simulieren.• Das Verhalten mechatronischer Gesamtsysteme zu erklären.
3 Empfohlene Voraussetzung für die TeilnahmeKeine
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Dauer: 20 min, Standard BWS)Mündliche Prüfung 20 min
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, mündliche Prüfung, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)
7 Notenverbesserung nach §25 (2)
8 LiteraturSkriptum
Enthaltene Kurse
Kurs-Nr. Kursname16-24-5020-vl Mechatronische Systeme im Maschinenbau I
Dozent Lehrform SWSVorlesung 2
Kurs-Nr. Kursname16-24-5020-ue Mechatronische Systeme im Maschinenbau I
Dozent Lehrform SWSÜbung 2
3.1 ADP / Seminare 190
ModulnamePraktikum Regelungstechnik II
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ad-2060 5 CP 150 h 90 h 1 WiSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Jürgen Adamy
1 LerninhaltIn diesem Praktikum werden die Grundlagen der folgenden Versuche erarbeitet und anschließend durchge-führt und dokumentiert: Verkoppelte Regelung eines Helikopters, Nichtlineare Regelung eines Gyroskops,Nichtlineare Mehrgrößenregelung eines Flugzeugs, Regelung von Servoantrieben, Regelung einer Verlade-brücke, Speicherprogrammierbare Steuerung eines Mischprozesses
2 Qualifikationsziele / LernergebnisseEin Student kann nach Besuch der Veranstaltung:
• die Grundlagen der Versuche nennen,• sich mit Hilfsmaterial in ein neues Themengebiet einarbeiten,• Versuchsaufbauten nach Anleitung zusammenstellen,• Experimente durchführen,• die Relevanz der Versuchsergebnisse bezüglich ihrer Vergleichbarkeit mit theoretischen Vorhersagen
einschätzen,• die Versuchsergebnisse protokollieren und präsentieren.
3 Empfohlene Voraussetzung für die TeilnahmeSystemdynamik und Regelungstechnik II, der parallele Besuch der Veranstaltung Systemdynamik und Re-gelungstechnik III wird empfohlen
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, Klausur, Dauer: 180 min, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, Klausur, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC, MSc iST, MSc Wi-ETiT, Biotechnik
7 Notenverbesserung nach §25 (2)
8 LiteraturAdamy: Versuchsanleitungen (erhältlich am Einführungstreffen)
Enthaltene Kurse
Kurs-Nr. Kursname18-ad-2060-pr Praktikum Regelungstechnik II
Dozent Lehrform SWSProf. Dr.-Ing. Jürgen Adamy Praktikum 4
3.1 ADP / Seminare 191
ModulnameMechatronik-Workshop
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-bi-1050 2 CP 60 h 45 h 1 WiSe/SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr. techn. Dr.h.c. Andreas Binder
1 LerninhaltIm Mechatronik-Workshop fertigen die Studierenden selbstständig eine Kugelbahn mit elektrischer Beför-derungsanlage. Hierzu gilt es die Maßpläne zu erfassen und die erfoderlichen Komponenten (u.a. Leiter-platine, Bahnwege und -halterungen) sowohl im Elektroniklabor als auch in der Werkstatt zu fertigen. DerWorkshop ermöglicht den Studierenden somit wichtige Einblicke in die Konstruktion und die Modellarbeit.
2 Qualifikationsziele / LernergebnisseErfassen von Maßplänen, Platinenlayout-Erstellung, Arbeiten an Bohr-, Dreh-, Fräsmaschinen.
3 Empfohlene Voraussetzung für die TeilnahmeZum ersten Veranstaltungstermin ist von den Studierenden eine persönliches Exemplar des Praktikums-skripts in ausgedruckter Form mitzubringen. Ohne ein ausgedrucktes Exemplar des Skripts ist eine Teil-nahme nicht möglich. Das Skript wird in Moodle bereitgestellt.
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Studienleistung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsBSc/MSc ETiT, BSc/MSc MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• Skriptum zur Lehrveranstaltung• J. Dillinger et al.: Fachkunde Metall, Europa-Lehrmittel, 2007• U. Tietze, C. Schenk, E. Gamm: Halbleiter-Schaltungstechnik, Springer, 2012
Enthaltene Kurse
Kurs-Nr. Kursname18-bi-1050-pr Mechatronik-Workshop
Dozent Lehrform SWSProf. Dr. techn. Dr.h.c. Andreas Binder Praktikum 1
3.1 ADP / Seminare 192
ModulnameRobuste Regelung
Modul-Nr. Kreditpunkte Arbeitsaufwand Selbststudium Moduldauer Angebotsturnus18-ko-2140 3 CP 90 h 60 h 1 SoSe
Sprache Modulverantwortliche PersonDeutsch Prof. Dr.-Ing. Ulrich Konigorski
1 Lerninhalt• Grundlagen (SVD, Normen, Systemdarstellungen)• Reglerentwurf im Frequenzbereich
– Formulierung von Regelzielen als H2- und Hinf-Optimierungsprobleme– Entwurf von H2- und Hinf-optimalen Reglern
• Robuste Regelung– Unsicherheitsbeschreibung (Additive und multiplikative Unsicherheiten, Multimodellbeschrei-
bungen)– Robustheitsanalyse (Small-Gain-Theorem, mu-Analyse)– Synthese robuster Regler im FrequenzbereichSynthese robuster Regler durch Polbereichsvor-
gabe
2 Qualifikationsziele / LernergebnisseDie Studierenden werden in der Lage sein, Regelungsaufgaben als H2- und H8-Problem zu formulieren,Systemunsicherheiten in geeigneter Form zu beschreiben und einen Reglerentwurf durchzuführen, derrobuste Stabilität und Güte sicherstellt.
3 Empfohlene Voraussetzung für die TeilnahmeSystemdynamik und Regelungstechnik I und II
4 PrüfungsformModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Standard BWS)
5 BenotungModulabschlussprüfung:
• Modulprüfung (Fachprüfung, fakultativ, Gewichtung: 100 %)
6 Verwendbarkeit des ModulsMSc ETiT, MSc MEC
7 Notenverbesserung nach §25 (2)
8 Literatur• S. Skogestad, I. Postlethwaite, Multivariable Feedback Control,2. Auflage, 2005, Wiley• K. Zhou, Essentials of Robust Control, 1998, Prentice-Hall• O. Föllinger, Regelungstechnik, 11. Auflage, 2013, VDE Verlag
Enthaltene Kurse
Kurs-Nr. Kursname18-ko-2140-vl Robuste Regelung
Dozent Lehrform SWSDr. Ing. Eric Lenz Vorlesung 2
3.1 ADP / Seminare 193