Numerische Simulation mit finiten Elementen [-.2em...
269
Institut für Numerische Mathematik und Optimierung Numerische Simulation mit finiten Elementen Antje Franke-Börner Vorlesung im gleichnamigen Modul Hörerkreis: 2. MNC, 2. MGPHY, 4. BGIP, 6. BEC-II, 2. MGIN Sommersemester 2013
Transcript of Numerische Simulation mit finiten Elementen [-.2em...
Institut für Numerische Mathematik und Optimierung
Numerische Simulation mitfiniten Elementen
Antje Franke-Börner
Vorlesung im gleichnamigen ModulHörerkreis: 2. MNC, 2. MGPHY, 4. BGIP, 6. BEC-II, 2. MGINSommersemester 2013
Inhalt I
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 1
Inhalt II
3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 2

Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 3
VorbemerkungenEinordnung
Die Finite-Elemente-Methode (FEM) bezeichnet eine große Klassenumerischer Verfahren zur näherungsweisen Lösung partiellerDifferentialgleichungen (PDG, PDE).
Andere gebräuchliche Verfahrensklassen hierfür sindfinite Differenzen (Differenzenquotienten, Tensorproduktgitter),finite Volumen (Integration mittels Gauß-Quadratur),Spektralverfahren (Integraltransformation, Anpassung vonSpektralkoeffizienten),Kollokationsverfahren (Interpolations-/Ausgleichsrechnung,implizite Runge-Kutta-Verfahren),Randelementverfahren (Diskretisierung der Oberflächen, 3D –>2D).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 4
VorbemerkungenVorteile der FEM
Geometrische Flexibilität: Die Anpassung an komplizierte Geometrienwird in die Gittererzeugung verlagert, das grundlegendeVerfahren bleibt davon unabhängig.
Mathematisches Fundament: Es existiert eine umfassende undausgereifte mathematische Konvergenztheorie, mittelsderer Konvergenzrate, Fehlerschätzer etc. analysiertwerden können.
praktische Handhabung: Randbedingungen; Symmetrien (und weitereStrukturen) bleiben erhalten; hohe Ordnung möglich.
Weite Verbreitung: Es existieren inzwischen sehr viele Softwarepaketehoher Qualität, in denen die FEM realisiert ist, etwa MSCNastran, ANSYS, ABAQUS, STRESS CHECK, COMSOLneben vielen anderen.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 5
VorbemerkungenHistorisches
Johann Bernoulli (1696) Brachistochronen-Problem.
Formulierung von Differentialgleichungen als Extremalprobleme.Beginn der Variationsrechnung.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 6
VorbemerkungenHistorisches
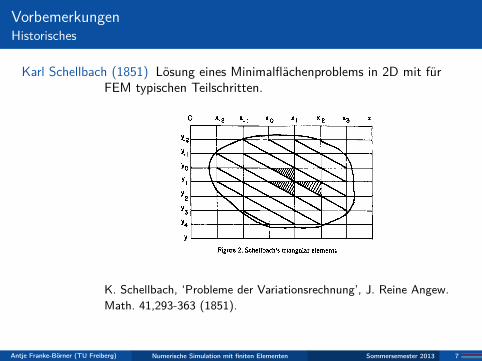
Karl Schellbach (1851) Lösung eines Minimalflächenproblems in 2D mit fürFEM typischen Teilschritten.
932 SHORT COMMUNICATIONS
these, from the finite element point of view (in particular because it treats a problem in two independent variables, which Euler, Leibniz and others did not), was given by Karl Schellbach in 1851.13 The present author knows of no other instance wherein there is so early and pointed a demonstration of as many ingredients of the present-day finite element method. Schellbach’s presentation appears in a paper that is largely devoted to numerous examples in which differential equations are derived from extremum problems. One group of these examples
describes a finite element-like procedure applied to several problems in one and two indepen- dent variables, and the most interesting of these applications is Schellbach’s approach to Plateau’s problem.
He wishes to derive the partial differential equation describing the surface z(x, y ) of minimum area enclosed by a given closed curve in space. This is done through the approximation of the surface whose area is to be minimized by a piecewise linear trial function constructed with triangular elements. Instead of summing the entire collection of plane triangular surfaces in a particular approximation, Schellbach realizes that the sum of the areas for all the surfaces is
minimized when the sum of only half of them reaches a minimum. For example, in Figure 2, of
Figure 2. Schellbach’s triangular elements
the six triangles containing (xl, yl) , the areas of only the triangular surfaces associated with the
three shaded elements enter into the summation. That this is plausible is suggested immediately by the fact that the seven nodal values z(xi , yi) which determine the configurations of the three surfaces above the shaded triangles also completely determine the other three triangular surfaces which contain z(x1, y l ) . t If the sum begins with the surfaces above the three shaded triangles, and if zij = z (xi, yi), the sum is
s =4((x1-xo)2(Yl -Yo)2+(x1 -xo)2(z11 -zlo)2+(Y1 -Yo)2(z10-zoo~2~1’2
+&1 -xoY(y2 - Y d 2 + (Xl -x0)2(z12 - Z 1 d 2 + (Y2 - Yd2(Zll - zo1)2)1/2
+ 5 ~ ~ ~ 2 - x l ~ z ~ y z - y ~ ~ 2 + ~ ~ z - ~ l ~ 2 ~ ~ z z - ~ 2 1 ~ 2 + ~ Y 2 - Y 1 ~ 2 ~ z 2 1 - 2 1 1 ~ 2 ~ 1 ~ 2 + . . . .
S is differentiated with respect to 2 1 1 , or with respect to any other zii which lies at the centre of a similar hexagon, and the result is set to zero giving a difference equation which, as the mesh is
t Of course, this simplification is not applicable in most extremum problems.
K. Schellbach, ‘Probleme der Variationsrechnung’, J. Reine Angew.Math. 41,293-363 (1851).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 7
VorbemerkungenHistorisches
Walter Ritz (1908) Minimierung eines quadratischen Funktionals(Energiefunktional) in einem endlichdimensionalenFunktionenraum.
Boris Galerkin (1915) Lösung einer Randwertaufgabe aufendlichdimensionalem Funktionenraum mittelsVariationsformulierung, „Methode der gewichteten Residuen“.
Richard Courant (1943) Verwendete zum ersten Mal Ansatzfunktionen mitkleinem Träger (lineares Dreieck).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 8
VorbemerkungenHistorisches
50er Jahre. FEM von Mechanikern neu entdeckt. Zerlegung von Festkörpernin endlich viele „Finite Elemente“, Berechnung derVerschiebungen unter gegebenen Lasten in den Knoten derFiniten Elemente.
60er Jahre. Theoretische Untermauerung der FEM seitens der Mathematik.Computer-Programm NASTRAN wird von derMacNeal-Schwendler Corporation vermarktet.
1967. Ingenieur-Monographie The Finite Element Method inContinuum and Structural Mechanics von Zienkiewicz undCheung erscheint.
1973. Mathematische Monographie An Analysis of the Finite ElementMethod von Strang und Fix erscheint.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 9
VorbemerkungenLiteratur
O. C. Zienkiewicz und R. L. Taylor. The Finite Element Method,Volume 1 and 2. 4th ed., McGraw-Hill, New York, 1989.
T. J. R. Hughes. The Finite Element Method – Linear Static andDynamic Finite Element Analysis. Prentice-Hall,Englewood Cliffs, NJ, 1987.
M. Jung und U. Langer. Methode der finiten Elemente für Ingenieure.Teubner, Stuttgart, 2001.
P. Monk. Finite Element Methods for Maxwell’s Equations. OxfordUniversity Press, 2003
J. Jin. The Finite Element Method in Electromagnetics. JohnWiley & Sons, 2002
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 10

Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 11
Rand- und AnfangswertaufgabenTypen von partiellen Differentialgleichungen
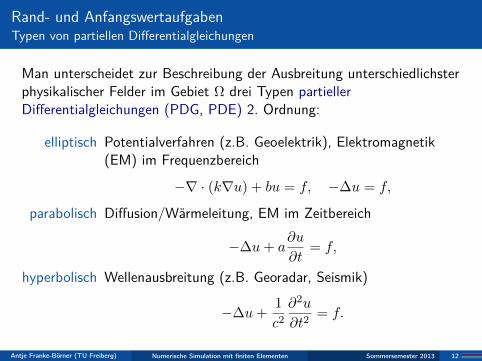
Man unterscheidet zur Beschreibung der Ausbreitung unterschiedlichsterphysikalischer Felder im Gebiet Ω drei Typen partiellerDifferentialgleichungen (PDG, PDE) 2. Ordnung:
elliptisch Potentialverfahren (z.B. Geoelektrik), Elektromagnetik(EM) im Frequenzbereich
−∇ · (k∇u) + bu = f, −∆u = f,
parabolisch Diffusion/Wärmeleitung, EM im Zeitbereich
−∆u+ a∂u
∂t= f,
hyperbolisch Wellenausbreitung (z.B. Georadar, Seismik)
−∆u+1
c2
∂2u
∂t2= f.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 12
Rand- und AnfangswertaufgabenTypen von Randbedingungen
Drei Arten von Randbedingungen (RB, BC) sind auf dem Rand δΩandwendbar:
Dirichletsche RBu = r,
Neumannsche RB∂u
∂ne~n = r,
Gemischte RB (Robin-Typ)α∂u
∂ne~n+ βu = r.
Für r = 0 spricht man von homogenen und für r 6= 0 von inhomogenenRandbedingungen.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 13
Rand- und AnfangswertaufgabenAnfangswerte
Für zeitabhängige Probleme müssen ebenfalls Anfangswerte für t = 0festgelegt werden, z.B.
u0 = u(t = 0) = s,
oderu0 = u(t = 0) = sin(π · x).
Es sind auch zeitabhängige Randwerte denkbar, z.B.
u = u0 + du · sin(kπ · t).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 14

Rand- und AnfangswertaufgabenElliptische PDE - Anwendung in der Geophysik I
Divergenz-Gradient-Operator und Helmholtz-Gleichung−∇ · (k∇u) + bu = f
wobeiu : Ω→ R eine skalare (geo-)physikalische Größe,k, b : Ω→ R positive Koeffizientenfunktionen undf : Ω→ R den sog. Quellterm
darstellen.
Die Koeffizienten k und b können skalar oder auchpositiv-definite Tensoren (d× d Matrix) sein undbeschreiben Material- und/oder Modelleigenschaften.
Laplace-Operator und Poisson-Gleichung (k ≡ const., b ≡ 0)−∆u = f
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 15

Rand- und AnfangswertaufgabenElliptische PDE - Anwendung in der Geophysik II
Geophysikalische Anwendungen zur elliptischen PDE:
Anwendung u k b fGeoelektrik U σ 0 I
stat. Wärmeleitung T κ 0 Q2D MT E/H µ/σ f , ε, σ/µ 0 (RB)Gravimetrie Φ 1 0 ρ
Bemerkung: In vielen Anwendungen ist der Flussvektor ∇u von größeremInteresse als die skalare Potentialfunktion u. Ersterer wird oft durch(numerische) Differentiation der (numerisch berechneten) Lösung u gewonnen,ein instabiler Vorgang. Sog. gemischte FE-Formulierungen gestatten die direktenumerische Berechnung des Flusses.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 16

Rand- und AnfangswertaufgabenParabolische PDE - Anwendung in der Geophysik
Diffusionsgleichung−∆u+ a
∂u
∂t= f
wobei
u : Ω→ R eine skalare (geo-)physikalische Größe,a : Ω→ R eine positive Koeffizientenfunktion undf : Ω→ R den sog. Quellterm
darstellen.
Anwendung u a fTDEM E σ ∂j/∂t, 0 (AB)Wärmeleitung T κ Wärmequelle
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 17
Rand- und AnfangswertaufgabenHyperbolische PDE - Anwendung in der Geophysik
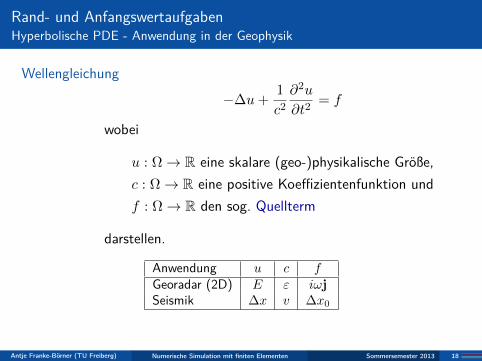
Wellengleichung
−∆u+1
c2
∂2u
∂t2= f
wobei
u : Ω→ R eine skalare (geo-)physikalische Größe,c : Ω→ R eine positive Koeffizientenfunktion undf : Ω→ R den sog. Quellterm
darstellen.
Anwendung u c fGeoradar (2D) E ε iωjSeismik ∆x v ∆x0
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 18

Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 19
Variationsformulierung von RandwertaufgabenVariationsrechnung
Funktional reelle Funktion einer Funktion, z.B. Integral über eineunbekannte Funktion und deren Ableitungen
stationäre Funktionen Funktional nimmt ein Extremum an (Minimum,Maximum, Sattelpunkt)
physikalische Extremalprinzipien z.B. Lagrange-Formalismus derklassischen Mechanik, Energieansätze
Variation kleine Veränderungen um die gesuchte Lösung herum
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 20

Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 21

Bezeichnungen und mathematische HilfsmittelGebiet, Rand
Wir betrachten nun Randwertprobleme, deren Lösung (eine odermehrere) Funktionen von d unabhängigen Variablen sind (d = 2 oderd = 3, d ... Dimensionalität). Als Gebiet Ω ⊂ Rd bezeichnen wir eineoffene und zusammenhängende Menge. Lösungen vonRandwertproblemen seien hier stets auf beschränkten Gebieten definiert:
u : Ω→ R, x 7→ u(x),
wobei wir Punkte x ∈ Ω mit
x =
[x1
x2
]oder x =
[xy
]bzw. x =
x1
x2
x3
oder x =
xyz
bezeichnen. Die Menge aller Punkte auf dem Rand von Ω bezeichnenwir mit ∂Ω oder auch mit Γ.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 22

Bezeichnungen und mathematische HilfsmittelZulässige Gebiete
Die Beschaffenheit von ∂Ω beeinflusst Eigenschaften von Räumen auf Ωdefinierter Funktionen sowie die Regularität von Lösungen auf Ωdefinierter Randwertprobleme. Wir schränken daher die Menge derzulässigen Gebiete wie folgt ein: Eine Funktion f : D ⊂ Rn → R heißtLipschitz-stetig auf D, falls es eine Konstante L gibt, sodass
|f(x)− f(y)| ≤ L|x− y| ∀x,y ∈ D.
Man sagt, ein Gebiet Ω besitze einen Lipschitz-stetigen Rand, falls ∂Ωlokal durch eine Lipschitz-stetige Funktion (als Kurve im R2 bzw. Flächeim R3) parametrisiert werden kann.1 Dies schließt im WesentlichenSchlitzgebiete oder solche mit Spitzen aus. Für die Praxis genügt es oft,zu wissen, dass etwa polygonal berandete Gebiete oder beschränktekonvexe Gebiete einen Lipschitz-stetigen Rand besitzen.
1Die genaue Definition findet der interessierte Leser etwa im Buch von Ciarlet.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 23

Bezeichnungen und mathematische HilfsmittelAbleitungen
Partielle Ableitungen einer Funktion u : Ω→ R bezeichnen wir mit
uxi =∂u
∂xi, uxixj =
∂2u
∂xi∂xj, i, j = 1, . . . , d, oder allgemein:
Dαu =∂|α|u
∂xα11 · · · ∂x
αdd
, α = (α1, . . . , αd),∈ Nd0, |α| = α1 + · · ·+ αd.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 24
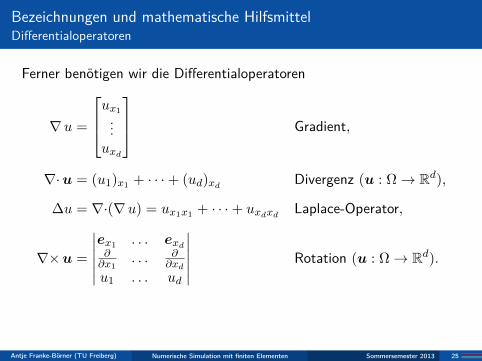
Bezeichnungen und mathematische HilfsmittelDifferentialoperatoren
Ferner benötigen wir die Differentialoperatoren
∇u =
ux1...uxd
Gradient,
∇·u = (u1)x1 + · · ·+ (ud)xd Divergenz (u : Ω→ Rd),
∆u = ∇·(∇u) = ux1x1 + · · ·+ uxdxd Laplace-Operator,
∇×u =
∣∣∣∣∣∣ex1 . . . exd∂∂x1
. . . ∂∂xd
u1 . . . ud
∣∣∣∣∣∣ Rotation (u : Ω→ Rd).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 25
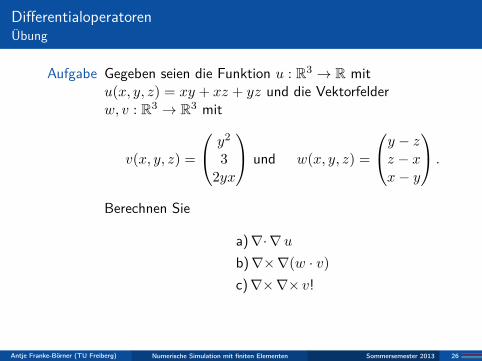
DifferentialoperatorenÜbung
Aufgabe Gegeben seien die Funktion u : R3 → R mitu(x, y, z) = xy + xz + yz und die Vektorfelderw, v : R3 → R3 mit
v(x, y, z) =
y2
32yx
und w(x, y, z) =
y − zz − xx− y
.
Berechnen Sie
a)∇·∇ub)∇×∇(w · v)
c)∇×∇× v!
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 26
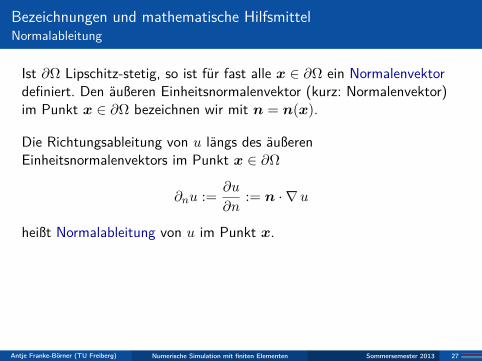
Bezeichnungen und mathematische HilfsmittelNormalableitung
Ist ∂Ω Lipschitz-stetig, so ist für fast alle x ∈ ∂Ω ein Normalenvektordefiniert. Den äußeren Einheitsnormalenvektor (kurz: Normalenvektor)im Punkt x ∈ ∂Ω bezeichnen wir mit n = n(x).
Die Richtungsableitung von u längs des äußerenEinheitsnormalenvektors im Punkt x ∈ ∂Ω
∂nu :=∂u
∂n:= n · ∇u
heißt Normalableitung von u im Punkt x.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 27

Bezeichnungen und mathematische HilfsmittelFunktionenräume
Wie im Eindimensionalen sei
L2(Ω) := u : Ω→ R : ‖u‖0 <∞, ‖u‖0 =
(∫Ωu(x)2 dx
)1/2
.
L2(Ω) ist ein Hilbert-Raum mit Innenprodukt
(u, v) =
∫Ωu(x)v(x) dx, insbesondere ‖u‖0 = (u, u)1/2.
Der Raum H1(Ω) := u ∈ L2(Ω) : uxi ∈ L2(Ω), i = 1, . . . , d istebenfalls ein Hilbert-Raum bezüglich des Innenprodukts
(u, v)1 :=
∫Ω
(uv +d∑i=1
uxivxi) dx =
∫Ω
(∑|α|≤1
DαuDαv
)dx
mit zugehöriger Norm ‖u‖1 = (u, u)1/21 .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 28

Euklidischer VektorraumÜbung
Überlegung Skalarprodukt, Norm/Länge, Winkel, Orthogonalität,Orthonormalbasen in unserem Anschauungsraum, demeuklidischen Vektorraum Rn
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 29
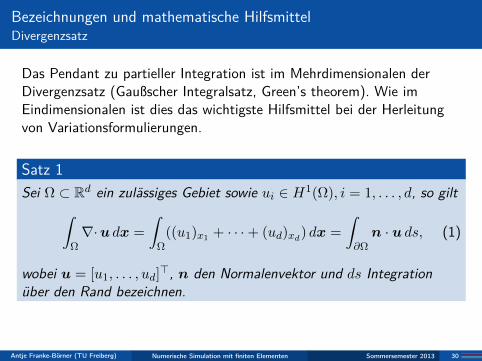
Bezeichnungen und mathematische HilfsmittelDivergenzsatz
Das Pendant zu partieller Integration ist im Mehrdimensionalen derDivergenzsatz (Gaußscher Integralsatz, Green’s theorem). Wie imEindimensionalen ist dies das wichtigste Hilfsmittel bei der Herleitungvon Variationsformulierungen.
Satz 1Sei Ω ⊂ Rd ein zulässiges Gebiet sowie ui ∈ H1(Ω), i = 1, . . . , d, so gilt∫
Ω∇·u dx =
∫Ω
((u1)x1 + · · ·+ (ud)xd) dx =
∫∂Ωn · u ds, (1)
wobei u = [u1, . . . , ud]>, n den Normalenvektor und ds Integration
über den Rand bezeichnen.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 30
Bezeichnungen und mathematische HilfsmittelSchwache Ableitungen
Die auftretenden Ableitungen sind im schwachen Sinne zu verstehen, imAllgemeinen sind H1-Funktionen nicht stetig-differenzierbar. Wirbeschreiben hier kurz das Prinzip schwacher Ableitungen.Besitzt die Funktion u eine stetige partielle Ableitung ux nach x, so giltnach dem Divergenzsatz für jede differenzierbare Funktion φ welche auf∂Ω verschwindet (setze u1 = uφ, u2 = · · · = ud = 0 in (1))∫
Ωuφx dx = −
∫Ωuxφdx. (2)
(2) kann jedoch auch für nicht-differenzierbare Funktionen gelten: sindu und v integrierbare Funktionen mit der Eigenschaft∫
Ωuφx dx = −
∫Ωvφ dx, ∀φ, φ differenzierbar,
so bezeichnet man v als schwache Ableitung von u nach x.Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 31

Schwache AbleitungenBeispiel
Die stückweise lineare Funktion
u(x) =
2x, 0 ≤ x ≤ 1
2 ,
2(1− x), 12 ≤ x ≤ 1
ist wegen des Knicks bei x = 12 auf dem Intervall (0, 1) nicht differenzierbar.
Für jede differenzierbare Funktion φ mit φ(0) = φ(1) = 0 gilt jedoch∫ 1
0
uφ′ dx =
∫ 1/2
0
2xφ′ dx+
∫ 1
1/2
2(1− x)φ′ dx
= −
(∫ 1/2
0
2φdx+
∫ 1
1/2
(−2)φdx
)= −
(∫ 1
0
vφ dx
),
und damit im obigen Sinn u′ = du/dx = v mit
v(x) =
2, 0 ≤ x ≤ 1
2 ,
−2, 12 ≤ x ≤ 1.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 32
Schwache AbleitungenWeiteres Beispiel
Das Gebiet Ω bestehe aus der Vereinigung dreier Dreiecke Ki, i = 1, 2, 3, mitzwei gemeinsamen Kanten. Die Funktion u : Ω→ R sei auf jedem TeildreieckKi stetig differenzierbar, auf Ω jedoch nur stetig. Dann gilt nach (1)∫
Ω
uφx dx =
3∑i=1
∫Ki
uφx dx =
3∑i=1
∫∂Ki
n ·(uφ0
)ds−
3∑i=1
∫Ki
uxφdx.
Da die Randintegrale sich im Inneren des Gebietes wegheben (warum?) folgt,falls φ auf ∂Ω verschwindet,∫
Ω
uφx dx = −3∑
i=1
∫Ki
uxφdx.
Wie man sieht, stimmt die Ableitung von u im Inneren von Ki mit derklassischen Ableitung überein, was auf den Kanten geschieht ist unerheblich.Insbesondere können stückweise differenzierbare Funktionen auch stückweisedifferenziert werden.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 33
Bezeichnungen und mathematische HilfsmittelSobolevsche Einbettung I
Eine Funktion mit schwachen Ableitungen genügend hoher Ordnung besitztauch klassische Stetigkeits- bzw. Differenzierbarkeitseigenschaften. Seien
Hm(Ω) = u ∈ L2(Ω) : ‖u‖m <∞, ‖u‖m =
(∫Ω
∑|α|≤m
|Dαu|2 dx)1/2
,
L∞(Ω) = u : ‖u‖∞ <∞, ‖u‖∞ = supx∈Ω|u(x)|.
Satz 2 (Sobolevscher Einbettungssatz)Sei Ω ⊂ Rd ein zulässiges Gebiet. Für m > k + d/2 existiert eineKonstante C mit
‖Dαu‖∞ ≤ C‖u‖m für alle |α| ≤ k.
Ferner enthält die L∞(Ω)-Äquivalenzklasse jeder Funktion u ∈ Hm(Ω)eine stetige Funktion.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 34

Bezeichnungen und mathematische HilfsmittelSobolevsche Einbettung II
Der Sobolevsche Einbettungssatz besagt, dass eine Hm-Funktion alsk-mal stetig differenzierbar angesehen werden kann.2Insbesondere sind im Eindimensionalen (d = 1) die H1-Funktionen(k = 0) stetig, d.h. deren punktweise (diskrete) Auswertung ist sinnvoll.
2Genauer: in der L∞-Äquivalenzklasse von u liegt eine k-mal stetigdifferenzierbare Funktion.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 35
Bezeichnungen und mathematische HilfsmittelRandwerte
Die punktweise Auswertung von Funktionen auf ∂Ω – notwendig für dieFormulierung von Randwertaufgaben – ist auch mit Hilfe der SobolevschenEinbettungen im Allgemeinen nicht möglich.
Es ist jedoch möglich, die Randwerte etwa von Hm-Funktionen und derenAbleitungen als Funktionen in L2(∂Ω) aufzufassen. Für Randwertaufgabenzweiter Ordnung benötigen wir die Randwerte u und ∂nu, diese liegen füru ∈ H2(Ω) in L2(∂Ω).3
Die Zuordnung von Funktionen in Hm(Ω) zu Randwerten in L2(∂Ω)bezeichnet man als Spuroperator, Aussagen über die Regularität vonRandwerten als Spursätze.
Im Sinne dieser Spursätze verstehen wir im Folgenden stillschweigend dieRandwerte von Hm-Funktionen.
3Ist u nur in H1(Ω), so existiert ∂nu in einem schwächeren Sinne.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 36

Bezeichnungen und mathematische HilfsmittelSobolev-Räume
Folgende Sobolev-Räume von Funktionen stellen den natürlichenAnsatzraum für die Variationsformulierung von Randwertaufgabenzweiter bzw. vierter Ordnung mit homogenen Randbedingungen dar:
H10 (Ω) := u ∈ H1(Ω) : u = 0 auf ∂Ω, (3)
H20 (Ω) := u ∈ H2(Ω) : u = ∂nu = 0 auf ∂Ω. (4)
Die homogenen Randbedingungen können sich auch nur über Teile desRandes erstrecken.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 37
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 38

Referenzaufgaben in 2DBeispiel 1
Beispiel 1: Ω = (−1, 1)2, ΓD = Γ, f ≡ 1, gD ≡ 0.Dies stellt ein Modell für Wärmeausbreitung auf einer quadratischen Platte dar.Durch Trennung der Veränderlichen bestimmt man die Reihenlösung
u(x, y) =1− x2
2− 16
π3
∑k∈N,
k ungerade
[sin(kπ(1 + x)/2)
k3 sinh(kπ)
(sinh
kπ(1 + y)
2+ sinh
kπ(1− y)
2
)].
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 39

Referenzaufgaben in 2DBeispiel 2
Beispiel 2: Ω = (−1, 1)2 \ [−1, 0]2, ΓD = Γ, f ≡ 1, gD ≡ 0.
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
10
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 40
Referenzaufgaben in 2DBeispiel 3
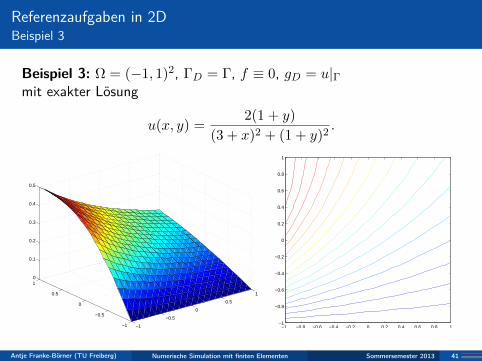
Beispiel 3: Ω = (−1, 1)2, ΓD = Γ, f ≡ 0, gD = u|Γmit exakter Lösung
u(x, y) =2(1 + y)
(3 + x)2 + (1 + y)2.
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
10
0.1
0.2
0.3
0.4
0.5
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 41

Referenzaufgaben in 2DBeispiel 4
Beispiel 4: Ω = (−1, 1)2 \ [−1, 0]2, ΓD = Γ, f ≡ 1, gD = u|Γ mitexakter Lösung
u(r, θ) = r2/3 sin2θ + π
3, x = r cos θ, y = r sin θ.
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
10
0.2
0.4
0.6
0.8
1
1.2
1.4
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 42
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 43
Variationsformulierung der Poisson-GleichungElliptische partielle Differentialgleichung zweiter Ordnung
Viele physikalische Größen erfüllen eine elliptische Differentialgleichungzweiter Ordnung der Form
−∇·(k∇u) + bu = f, u : Ω→ R, (5)
wobei
k, b : Ω→ R positive Koeffizientenfunktionen undf : Ω→ R einen sog. Quellterm
darstellen. Die Koeffizienten k und b können skalar oder auchpositiv-definite Tensoren (d× d Matrix) sein und beschreiben meistMaterial- und Modelleigenschaften.
Die typische Problemstellung besteht darin, u zu gegebenen f , k und bzu bestimmen. (Hinzu kommen noch Randbedingungen auf ∂Ω.)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 44
Variationsformulierung der Poisson-GleichungDie Poisson-Gleichung
Ist k konstant in (5), so kann dies in f zusammengefasst werden und esergibt sich die Poisson-Gleichung
−∆u(x) = f(x), x ∈ Ω, (6a)
wobei Ω ⊂ Rd (d = 2, 3) ein zulässiges Gebiet sei. Den GebietsrandΓ := ∂Ω zerlegen wir in ΓD und ΓN , Γ = ΓD ∪ ΓN , ΓD ∩ ΓN = ∅ undstellen die Randbedingungen
u(x) = gD(x) ∀x ∈ ΓD, kurz: u|ΓD = gD, (6b)∂u
∂n(x) = gN (x) ∀x ∈ ΓN , kurz: ∂nu|ΓN = gN (6c)
mit zwei gegebenen, auf ΓD bzw. ΓN definierten Funktionen g und h.Die RWA (6) besitzt – unter geeigneten Voraussetzungen an das GebietΩ und die Daten f, gD, gN – eine eindeutig bestimmte klassische (d.h.in Ω zweimal stetig differenzierbare) Lösung.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 45
Variationsformulierung der Poisson-GleichungL2-Innenprodukt und Divergenzsatz
Wir multiplizieren (6a) mit einer Testfunktion v und wenden denDivergenzsatz an:
(f, v) = −∫
Ωv∆u dx = −
∫Ω
(∇·(v∇u)−∇u · ∇ v
)dx
=
∫Ω∇u · ∇ v dx−
∫Γv∂u
∂nds = (∇u,∇ v)− (∂nu, v)Γ,
wobei (·, ·) hier auch das L2-Innenprodukt vektorwertiger Funktionenauf Ω sowie (·, ·)Γ das L2-Innenprodukt auf Γ bezeichnen mögen.
Wir wählen nun die Testfunktion v so, dass diese auf ΓD verschwindet.Auf dem Neumann-Rand ΓN gilt nach (6c) ∂nu = gN . Insgesamt ergibtsich
(∇u,∇ v) = (f, v) + (gN , v)ΓN . (7)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 46
Variationsformulierung der Poisson-GleichungFunktionenräume
Wir setzen nun
a(u, v) := (∇u,∇ v) =
∫Ω∇u · ∇ v dx,
`(v) := (f, v) + (gN , v)ΓN =
∫Ωfv dx+
∫ΓN
gNv ds.
Damit alle Integrale definiert sind, reicht es aus, dass die erstenAbleitungen von u und v quadratisch integrierbar sind, wir können alsou, v ∈ H1(Ω) wählen und setzen
S = u ∈ H1(Ω) : u|ΓD = gD, V = v ∈ H1(Ω) : v|ΓD = 0.
Die Variationsformulierung von (6) lautet somit
Bestimme u ∈ S so, dass a(u, v) = `(v) für alle v ∈ V . (8)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 47

Variationsformulierung der Poisson-GleichungBilinearformen I
Definition 3Sei V ein reeller normierter Vektorraum. Eine Bilinearform ist eineAbbildung
a : V × V → R,
welche linear in beiden Argumenten ist, d.h. es gilta(u1 + u2, v) = a(u1, v) + a(u2, v)
a(u, v1 + v2) = a(u, v1) + a(u, v2)
a(λu, v) = λa(u, v)
a(u, vλ) = a(u, v)λ
∀u, u1, u2, v, v1, v2 ∈ V und λ ∈ R.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 48
Variationsformulierung der Poisson-GleichungBilinearformen II
Definition 4Die Bilinearform a heißt stetig, falls es eine Konstante C gibt mit
|a(u, v)| ≤ C‖u‖‖v‖ ∀u, v ∈ V .
Die Bilinearform a heißt symmetrisch, falls
a(u, v) = a(v, u) ∀u, v ∈ V .
Die Bilinearform a heißt koerziv, falls es eine Konstante α > 0 gibt mit
a(u, u) ≥ α‖u‖2 ∀u ∈ V .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 49
Variationsformulierung der Poisson-GleichungBilinearformen III
Bemerkungen 5
(a) Im Falle eines komplexen Vektorraumes fordert man Antilinearitätim zweiten Argument und spricht dann von einer Sesquilinearform.Anstelle der Symmetrie fordert man hier a(u, v) = a(v, u) undspricht von einer Hermiteschen Sesquilinearform.
(b) Eine koerzive symmetrische (Hermitesche) Bilinearform(Sesquilinearform) definiert ein Innenprodukt auf dem reellen(komplexen) Vektorraum V . Oft wird es das zur Bilinearform a(·, ·)gehörende Energie-Innenprodukt genannt.
(c) Die Eigenschaft der Stetigkeit zieht die Stetigkeit in beidenArgumenten nach sich.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 50

Variationsformulierung der Poisson-GleichungEin abstrakter Existenzsatz
Der folgende Satz sichert Existenz und Eindeutigkeit der Lösung einergroßen Klasse von Variationsproblemen:
Satz 6 (Lax-Milgram-Lemma, 1954)Sei V ein Hilbert-Raum mit Norm ‖ · ‖V , a : V × V → R eine Bilinearformauf V sowie ` : V → R ein lineares Funktional auf V für die es KonstantenC,α und L gibt mit
|a(u, v)| ≤ C‖u‖V ‖v‖V ∀u, v ∈ V , („ a ist stetig “)a(v, v) ≥ α‖v‖2V ∀v ∈ V , („ a ist koerziv “)|`(v)| ≤ L‖v‖V ∀v ∈ V , („ ` ist stetig “).
Dann besitzt das Variationsproblem
Bestimme u ∈ V sodass a(u, v) = `(v) ∀v ∈ V
genau eine Lösung.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 51
Variationsformulierung der Poisson-GleichungVariations- und Minimierungsaufgaben I
Anstelle von (8) könnte zunächst folgende Variante einer schwachenFormulierung naheliegender erscheinen: Im einfachsten Fall der reinenDirichletsche Randwertaufgabe (RWA) für die Poisson-Gleichung (Γ = ΓD)
−∆u = f auf Ω, (9a)u = g auf Γ = ∂Ω, (9b)
betrachten wir die sog. verallgemeinerte Randwertaufgabe
Bestimme u ∈ C2(Ω) mit u = g längs Γ und∫Ω∇u · ∇ v dx =
∫Ωfv dx ∀v ∈ C∞0 (Ω).
(10)
Schließlich betrachten wir noch die Minimierungsaufgabe
Minimiere unter allen Funktionen u ∈ C2(Ω) mit u = g längs Γ
das Funktional J(u) :=1
2
∫Ω| ∇u|2 dx−
∫Ωfu dx.
(11)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 52
Variationsformulierung der Poisson-GleichungVariations- und Minimierungsaufgaben II
Es gilt nun:
Satz 7Seien g ∈ C(Γ) sowie f ∈ C(Ω) gegebene Funktionen. Sei ferneru ∈ C2(Ω). Dann gilt(a) Löst u die Minimierungsaufgabe (11), so löst u auch die
Randwertaufgabe (9).(b) Die Funktion u ist genau dann Lösung der RWA (9), wenn u Lösung
der verallgemeinerten RWA (10) ist.
Bemerkung 8Nach Satz 7 löst jede hinreichend glatte Lösung der Variationsaufgaben (10)oder (11) auch die RWA (9).Entscheidend: in vielen Anwendungen tritt der Fall auf, dass keine derartglatte Lösung existiert.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 53
Variationsformulierung der Poisson-GleichungVollständigkeit der Funktionenräume
Die Situation entspricht der bei den Minimierungsaufgaben
f(x) −→min x ∈ [a, b] (12a)und f(x) −→min x ∈ [a, b] ∩Q, (12b)
wobei −∞ < a < b <∞ und f ∈ C[a, b].Aufgabe (12a) besitzt stets Lösungen. Sind diese jedoch allesamtirrationale Zahlen, so besitzt Aufgabe (12b) keine Lösung.
Auf analoge Weise muss im Fall der Variationsaufgaben i.A. derFunktionenraum geeignet vervollständigt werden. Dies führt hier auf diesog. Sobolev-Räume.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 54
Variationsformulierung der Poisson-GleichungHomogenisierung wesentlicher Randbedingungen
Oft ist es praktischer, mit homogenen wesentlichen Randbedingungen zuarbeiten.
Insbesondere kann man dann in der Variationsformulierung (8)denselben Funtionenraum für die Ansatz- und Testfunktionen wählen,d.h. S = V .Sei hierzu ug ∈ H1(Ω) eine auf ganz Ω definierte Funktion mit derEigenschaft
ug = g auf ΓD.
(Für zulässige Gebiete existiert eine solche Fortsetzung von g nachinnen.) Dann liegt aber für jede Funktion u ∈ V die Summe ug + u inS und es gilt
a(u, v) = `(v)− a(ug, v) ∀v ∈ V .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 55
BeispielWärmeleitung in einem Körperquerschnitt I
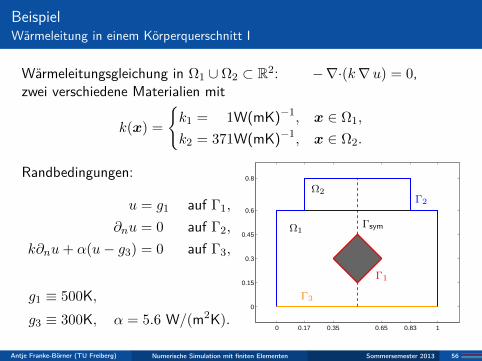
Wärmeleitungsgleichung in Ω1 ∪ Ω2 ⊂ R2: −∇·(k∇u) = 0,zwei verschiedene Materialien mit
k(x) =
k1 = 1W(mK)−1, x ∈ Ω1,
k2 = 371W(mK)−1, x ∈ Ω2.
Randbedingungen:
u = g1 auf Γ1,
∂nu = 0 auf Γ2,
k∂nu+ α(u− g3) = 0 auf Γ3,
g1 ≡ 500K,g3 ≡ 300K, α = 5.6 W/(m2K).
0 0.17 0.35 0.65 0.83 1
0
0.15
0.3
0.45
0.6
0.8
Ω1
Ω2
Γ1
Γ3
Γ2
Γsym
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 56
BeispielWärmeleitung in einem Körperquerschnitt II
Entlang des gemeinsamen Randes von Ω1 und Ω2 sind Temperatur undWärmefluss stetig, d.h. dort gilt
u1(x) = u2(x), ∂n[k1u1(x)] = ∂n[k2u2(x)].
Zur Variationsformulierung wählen wir den AnsatzraumS = u ∈ H1(Ω) : u = g1 auf Γ1,
sowie den TestraumV = u ∈ H1(Ω) : u = 0 auf Γ1,
und suchen u ∈ S sodass a(u, v) = `(v) ∀v ∈ V , mit
a(u, v) =
∫Ω∇ v · (k∇u) dx+ α
∫Γ3
uv ds,
`(v) = α
∫Γ3
vg3 ds.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 57

BeispielSymmetrie-Randbedingung
Da die RWA symmetrisch zur Achse x = 0.5 ist reicht es aus, dieLösung u nur auf einer Hälfte des Gebiets zu bestimmen und in derverbleibenden Hälfte die Lösung aus der Beziehungu(0.5 + x, y) = u(0.5− x, y) zu bestimmen.
Längs der Symmetrieachse erfüllt die Lösung eine homogeneNeumann-Randbedingung:
∂nu(x) = 0, x ∈ Γsym.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 58
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 59
Galerkin-Approximation
Gegeben sei die Variationsaufgabe (ohne Einschränkung: S = V )Bestimme u ∈ V sodass
a(u, v) = `(v) ∀v ∈ V . (13)Bei der Galerkin-Approximation der Lösung u von (13) erstetzt man denVariationsraum durch einen endlichdimensionalen Unterraum V h ⊂ Vund betrachtet die Lösung uh ∈ V h von (13) mit V h anstelle von V alsApproximation an u.Mit anderen Worten: wir bestimmen uh ∈ V h sodass
a(uh, v) = `(v) ∀v ∈ V h.
Bemerkung 9Im o.g. Fall V h ⊂ V spricht man von einer konformenGalerkin-Diskretisierung. Es werden jedoch auch nichtkonformeDiskretisierungen mit endlich-dimensionalen Unterräumen V h mitV h 6⊂ V verwandt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 60

Céa-LemmaEine grundlegende Fehlerabschätzung
Satz 10 (Lemma von Céa)Gelten für die Variationsaufgabe (13) die Voraussetzungen desLax-Milgram-Lemmas, so gilt für den Fehler u− uh derGalerkin-Approximation
‖u− uh‖V ≤C
αinfv∈V h
‖u− v‖V . (14)
Hierbei bezeichnen C und α die Stetigkeits- bzw. Koerzivitätskonstanteaus dem Lax-Milgram-Lemma.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 61

Céa-LemmaErgänzungen
(a) Ist die Bilinearform zusätzlich noch symmetrisch (Hermitesch), solässt sich (14) verbessern zu
‖u− uh‖ ≤√C
αinfv∈V h
‖u− v‖. (15)
(b) Für die Konvergenz einer Folge von Galerkin-Approximationen (imGrenzwert h→ 0) ist somit hinreichend, dass für die zugehörigeFamilie V hh>0 von Unterräumen gilt
limh→0
infv∈V h
‖u− v‖ = 0 ∀u ∈ V .
(c) In diesem Sinne wird durch das Céa-Lemma die Abschätzung desGalerkin-Fehlers zu einem Approximationsproblem.
(d) Die Tatsache, dass a(u− uh, v) = 0 für alle v ∈ V h wird auchGalerkin-Orthogonalität genannt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 62
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 63

Variationsformulierung der Helmholtz-GleichungMagnetotellurik
Die Magnetotellurik (MT) ist eine Methode im Bereich derGeo-Elektromagnetik, welche die natürlichen elektromagnetischen Felderals Quellen nutzt, um aus der Registrierung von induzierten elektrischenund magnetischen Feldern E bzw. H Aussagen über dieUntergrundstruktur hinsichtlich der Verteilung der elektrischenLeitfähigkeit (magnetischen Permeabilität) abzuleiten.
Anwendung
Frequenzbereich: f = 10−4 . . . 104 HzUntersuchung des Aufbaus der Erde von etwa 100 m bis 100 km(Kruste, oberer Mantel)Exploration von Rohstoffen (Erze), Kohlenwasserstoffen,Grundwasser, GeothermieInterpretationsgrößen: Übertragungsfunktionen, z.B. Z = EH−1 ...Impedanz, Hz = T(HxHy)
−1, T ... Tipper
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 64

Variationsformulierung der Helmholtz-GleichungMaxwell-Gleichungen
Ausgangspunkt sind die vier Maxwell-Gleichungen (mit den üblichenBezeichnungen)
∇×H = J + D (16a)∇×E = −B (16b)∇·D = ρ (16c)∇·B = 0. (16d)
Für die Geo-Elektromagnetik sind typischerweise folgende Annahmengerechtfertigt:
B = µH, µ konstant, (lineares Medium, konstante Permeabilität)D ≈ 0, (Vernachlässigung der Verschiebungsströme)J = σE + Je. (Ohmsches Gesetz)
Bei der MT ist Je = 0, die Anregung erfolgt durch die RBen.Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 65
Variationsformulierung der Helmholtz-GleichungHarmonische Zeitabhängigkeit, Gleichungen zweiter Ordnung
Für harmonische Zeitabhängigkeit der Form eiωt gehen das Faradaysche undAmpèresche Gesetz (16b) bzw. (16a) über in
∇×E = −iωµH, (17a)∇×H = σE. (17b)
Oft – besonders im 2D-Fall – ist die Formulierung elektromagnetischerAufgaben in Bezug auf ein einziges Feld ökonomischer. Hierzu wird aus denbeiden Gleichungen (17) jeweils entweder E oder H eliminiert.So erhält man durch Anwendung von ∇× auf (17a) und Einsetzen von∇×H aus (17b)
∇×(∇×E) + iωµσE = 0 (18)
bzw. nach Division von (17b) durch σ > 0 und anschließender Anwendungvon ∇×
∇×(
1
σ∇×H
)+ iωµH = 0. (19)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 66

Variationsformulierung der Helmholtz-Gleichung2D MT Gleichungen E-Polarisation
Annahme: alle Daten (speziell σ) sind in einer Koordinatenrichtung, dersog. Streichrichtung (hier x), uniform. Man unterscheidet zwei Spezialfälle:
E-Polarisation: Ist das elektrische Feld parallel zur Streichrichtung, so gilt
E =
Ex(y, z)00
und somit H =
0Hy(y, z)Hz(y, z)
.Mit
∇×E =
0∂zEx−∂yEx
bzw. ∇×(∇×E) =
−∂yyEx − ∂zzEx00
wird aus (18)
−∆Ex + iωµσEx = 0. (20)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 67
Variationsformulierung der Helmholtz-Gleichung2D MT Gleichungen H-Polarisation
H-Polarisation: Zeigt H in die Streichrichtung, so erhält man mit
H =
Hx(y, z)00
, ∇×H =
0∂zHx
−∂yHx
,
∇×(
1
σ∇×H
)=
−∂y(σ−1∂yHx)− ∂z(σ−1∂zHx)00
aus (19) die skalare Gleichung
−∇·(
1
σ∇Hx
)+ iωµHx = 0. (21)
Die Komponenten des verbleibenden Feldes (E-Polarisation: Hy, Hz,H-Polarisation: Ey, Ez) werden mittels numerischer Differentiationberechnet.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 68
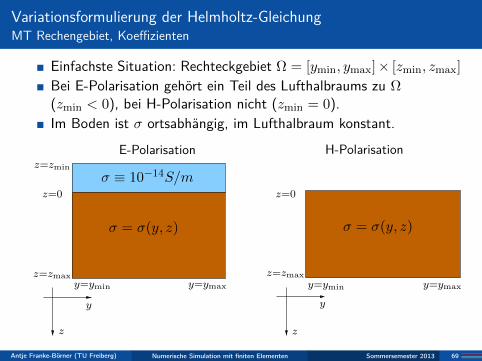
Variationsformulierung der Helmholtz-GleichungMT Rechengebiet, Koeffizienten
Einfachste Situation: Rechteckgebiet Ω = [ymin, ymax]× [zmin, zmax]
Bei E-Polarisation gehört ein Teil des Lufthalbraums zu Ω(zmin < 0), bei H-Polarisation nicht (zmin = 0).Im Boden ist σ ortsabhängig, im Lufthalbraum konstant.
E-Polarisation
y
z
σ = σ(y, z)
σ ≡ 10−14S/mz=0
z=zmin
z=zmaxy=ymin y=ymax
H-Polarisation
y
z
σ = σ(y, z)
z=0
z=zmax
y=ymin y=ymax
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 69

Variationsformulierung der Helmholtz-GleichungMT Randbedingungen I
Grundannahme: im Bereich der lateralen Ränder ist σ = σ(z). Wirbetrachten hier den einfachen Fall, dass σ(z) sogar eine stückweisekonstante Funktion ist.
E-PolarisationIm Fall σ = σ(z) vereinfacht sich (20) zur gewöhnlichenDifferentialgleichung
E′′(z) + k2E(z) = 0, k2 = −iωµσ,
für die Feldkomponente E = Ex. Unter der Zusatzannahme σ ≡ consterhalten wir die allgemeine Lösung
E(z) = Aeikz +Be−ikz, A,B ∈ C.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 70

Variationsformulierung der Helmholtz-GleichungMT Randbedingungen II
Wählt man für k =√−iωµσ denjenigen Zweig der Wurzelfunktion
mit Im(k) > 0 für ω > 0, so zieht die Abklingbedingung
E(z)→ 0 für z →∞
nach sich, dass A = E(0) und B = 0, und somit
E(z) = E0 eikz, z > 0, E0 = E(0).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 71

Variationsformulierung der Helmholtz-GleichungMT Randbedingungen III
Zur Bestimmung von E0 beachte man, dass im Fall σ = σ(z) neben Hx
auch Hz verschwindet. Wie für E = Ex erhält man mit H0 := Hy(0) diez-Abhängigkeit
Hy(z) = H0 eikz
und durch Vergleich der ersten Komponenten der Gleichung (17b)
σEx = −∂zHy, d.h. Ex(z) =−ikσH0e
ikz, d.h. E0 =−ikσH0.
Wir erhalten somit die beiden lateralen Randwerte im Untergrund z > 0
Ex(ymin, z) =−ikσH0e
ikz, σ = σymin , k = kymin ,
Ex(ymax, z) =−ikσH0e
ikz, σ = σymin , k = kymin .
(22)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 72
Variationsformulierung der Helmholtz-GleichungMT Randbedingungen IV, z < 0
Für den Bereich z < 0 beachten wir zunächst, dass aus den zweitenKomponenten von (17a) folgt
∂zEx = −iωµHy.
Hieraus und aus der Tatsache, dass im Lufthalbraum gilt Hy ≡ H0 folgtsomit für z < 0
Ex(z)− Ex(z = 0) =
∫ z
ζ=0∂zEx(ζ) dζ = −iωµ
∫ z
ζ=0H0 dζ = −iωµH0z.
Mit (22) erhalten wir somit an den lateralen Rändern im Lufthalbraum
Ex(z) = −iH0
(k
σ+ ωµz
), z < 0, (23)
wobei (die Konstante) H0 üblicherweise zu Eins normiert wird.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 73
Variationsformulierung der Helmholtz-GleichungRandbedingungen V
An den horizontalen Rändern z = zmin und z = zmax werden die lateralenRandwerte durch ein kubisches Polynom φ in y interpoliert mit denNebenbedingungen, dass φ′(y) = 0 für y = ymin und y = ymax.Mit den Interpolationsbedingungen
φ(ymin) = φ0, φ′(ymin) = 0,
φ(ymax) = φ1, φ′(ymax) = 0
erhält man das Polynom
φ(y) = φ0 +(φ1−φ0)(3η2 − 2η3
), η =
y − ymin
ymax − ymin, ymin ≤ y ≤ ymax.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 74

Variationsformulierung der Helmholtz-GleichungElliptische partielle Differentialgleichung zweiter Ordnung
Im Falle der Magnetotellurik (MT) erfüllt jeweils eine Komponente deselektrischen Feldes E und des Magnetfeldes H eine elliptischeDifferentialgleichung zweiter Ordnung der Form
−∇·(k∇u) + bu = f = 0, u : Ω→ R, (24)
wobei für
E-Polarisation : k = 1 und b = iωµσ und fürH-Polarisation : k = σ−1 und b = iωµ
gilt, wobei ω = 2πf die Kreisfrequenz und i die imaginäre Einheitbezeichnen.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 75
Variationsformulierung der Helmholtz-GleichungRandwertaufgabe
Mit geeigneten Randbedingungen können wir folgende Randwertaufgabeformulieren
−∇·(k∇u(x)) + bu = 0, x ∈ Ω, (25a)
wobei Ω ⊂ Rd (d = 2, 3) ein zulässiges Gebiet sei. Der GebietsrandΓ := ∂Ω umfasst in diesem Fall nur ΓD. Wir stellen dieRandbedingungen
u(x) = gD(x) ∀x ∈ ΓD, kurz: u|ΓD = gD, (25b)
mit einer gegebenen, auf ΓD definierten Funktion g. Auch diese RWA(25) besitzt – unter geeigneten Voraussetzungen an das Gebiet Ω unddie Daten gD – eine eindeutig bestimmte klassische (d.h. in Ω zweimalstetig differenzierbare) Lösung.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 76

Variationsformulierung der Helmholtz-GleichungL2-Innenprodukt und Divergenzsatz
Wir multiplizieren (25a) mit einer Testfunktion v und wenden denDivergenzsatz an:
(f, v) = 0 = −∫
Ω
(∇·(k∇u)v − buv)
)dx
= −∫
Ω
(∇·(vk∇u)− k∇u · ∇ v − buv
)dx
=
∫Ω
(k∇u · ∇ v + buv
)dx−
∫Γvk∂u
∂nds
= (k∇u,∇ v) + (bu, v),
wobei (·, ·) hier auch das L2-Innenprodukt vektorwertiger Funktionenauf Ω sowie (·, ·)Γ das L2-Innenprodukt auf Γ bezeichnen mögen. Wirwählen nun die Testfunktion v so, dass diese auf ΓD verschwindet.Insgesamt ergibt sich
(k∇u,∇ v) + (bu, v) = 0. (26)Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 77
Variationsformulierung der Helmholtz-GleichungFunktionenräume
Wir setzen nun
a(u, v) := (k∇u,∇ v) + (bu, v) =
∫Ω
(k∇u · ∇ v + buv
)dx,
`(v) := 0.
Damit das Integral definiert ist, reicht es aus, dass die erstenAbleitungen von u und v quadratisch integrierbar sind, wir können alsou, v ∈ H1(Ω) wählen und setzen
S = u ∈ H1(Ω) : u|ΓD = gD, V = v ∈ H1(Ω) : v|ΓD = 0.
Die Variationsformulierung von (25) lautet somit
Bestimme u ∈ S so, dass a(u, v) = `(v) für alle v ∈ V . (27)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 78

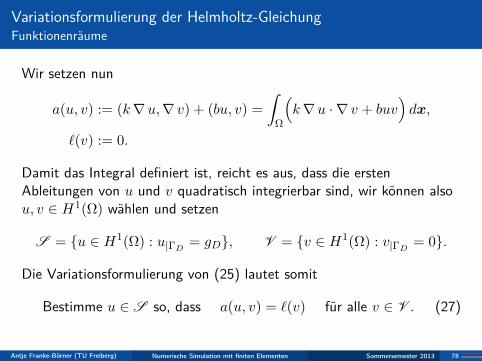
Variationsformulierung der Helmholtz-Gleichung2D VLF FE-Lösung: σ = 0.01Sm−1, f = 20 kHz, E-Polarisation
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 79
Variationsformulierung der Helmholtz-Gleichung2D VLF FE-Lösung: σ = 0.01Sm−1, f = 20 kHz, E-Polarisation
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 80
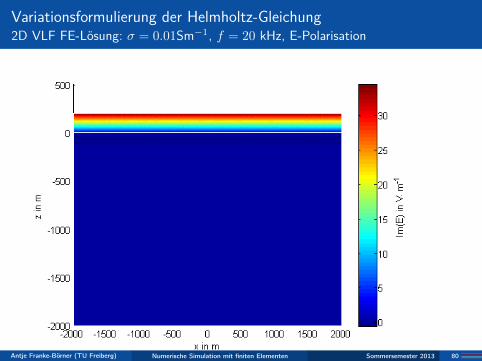
Variationsformulierung der Helmholtz-Gleichung2D VLF FE-Lösung: σ = 0.01Sm−1, f = 20 kHz, H-Polarisation
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 81
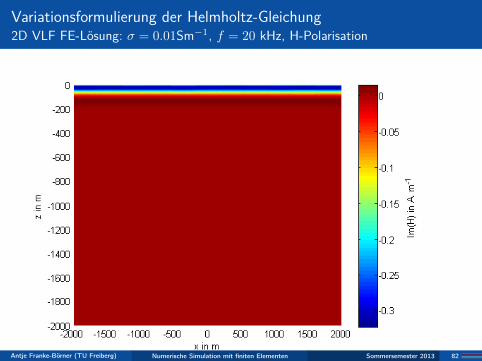
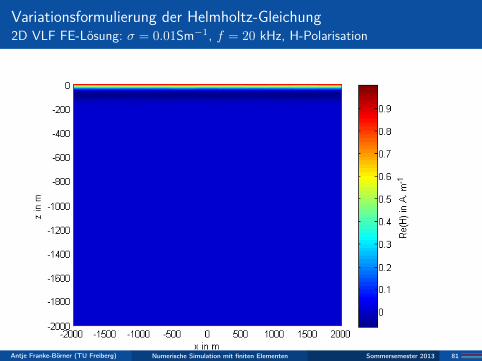
Variationsformulierung der Helmholtz-Gleichung2D VLF FE-Lösung: σ = 0.01Sm−1, f = 20 kHz, H-Polarisation
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 82
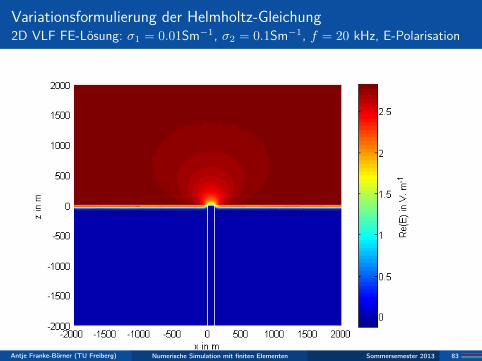
Variationsformulierung der Helmholtz-Gleichung2D VLF FE-Lösung: σ1 = 0.01Sm−1, σ2 = 0.1Sm−1, f = 20 kHz, E-Polarisation
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 83

Variationsformulierung der Helmholtz-Gleichung2D VLF FE-Lösung: σ1 = 0.01Sm−1, σ2 = 0.1Sm−1, f = 20 kHz, E-Polarisation
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 84
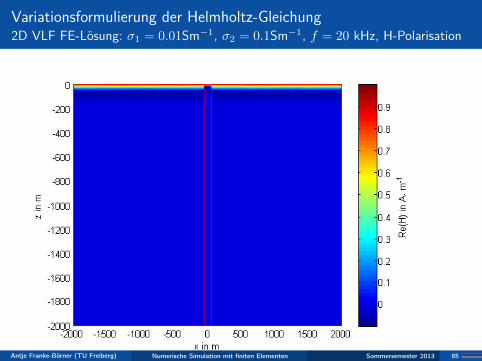
Variationsformulierung der Helmholtz-Gleichung2D VLF FE-Lösung: σ1 = 0.01Sm−1, σ2 = 0.1Sm−1, f = 20 kHz, H-Polarisation
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 85
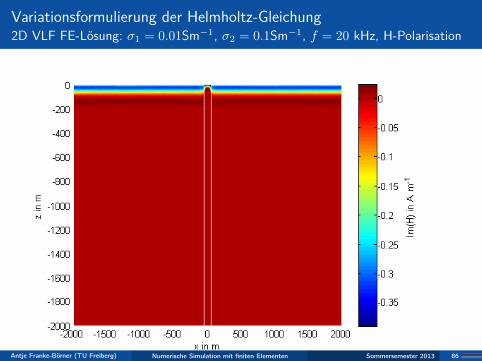
Variationsformulierung der Helmholtz-Gleichung2D VLF FE-Lösung: σ1 = 0.01Sm−1, σ2 = 0.1Sm−1, f = 20 kHz, H-Polarisation
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 86
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 87

Lagrange-ElementeLineare Dreiecks- (2D) und Tetraederelemente (3D)
1
3
2(0,0) (1,0)
(0,1)
1
4
2
3
(0,0,0) (1,0,0)
(0,1,0)
(0,0,1)
AnwendungSimulation skalarer Größen, z.B. 2D EM Feldkomponenten,elektrisches Potential2D MT, 2.5D CSEM, 2D und 3D Geoelektrik (DC)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 88

Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 89
Finite Elemente
Die Finite-Element-Methode (FEM) ist ein Galerkin-Verfahren, dessenzugehörige endlich-dimensionale Ansatz- und Testräume aus stückweisenPolynomen aufgebaut sind (d.h. bei Problemen in Rd sind diesPolynome in d Variablen).
Hierzu wird das zugrundeliegende Gebiet Ω in einfache Teilgebietezerlegt. Am häufigsten sind
Dreiecke und konvexe Vierecke (2D),Tetraeder, Hexaeder und Prismen (3D).
Bei krummlinig berandeten Gebieten können solche Zerlegungen dasGebiet lediglich durch polygonale bzw. polyedrische Gebieteapproximieren.
Das Zerlegen einer gegebenen Geometrie wird heute fast ausschließlichautomatisch durch sogenannte Netz- oder Gittergeneratoren (engl. meshgenerators) übernommen.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 90
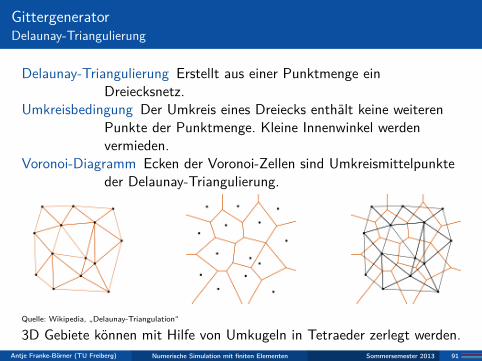
GittergeneratorDelaunay-Triangulierung
Delaunay-Triangulierung Erstellt aus einer Punktmenge einDreiecksnetz.
Umkreisbedingung Der Umkreis eines Dreiecks enthält keine weiterenPunkte der Punktmenge. Kleine Innenwinkel werdenvermieden.
Voronoi-Diagramm Ecken der Voronoi-Zellen sind Umkreismittelpunkteder Delaunay-Triangulierung.
Quelle: Wikipedia, „Delaunay-Triangulation“
3D Gebiete können mit Hilfe von Umkugeln in Tetraeder zerlegt werden.Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 91
Zerlegungen
Unter einer Zerlegung Th des Gebiets Ω verstehen wir ein System vonTeilmengen K ⊂ Ω, welches folgende Bedingungen erfällt:
(Z1) Ω = ∪K∈ThK.
(Z2) Jedes K ∈ Th ist eine abgeschlossene Menge mitnichtleerem Inneren K.
(Z3) Für je zwei verschiedene K1,K2 ∈ Th gilt K1 ∩ K2 = ∅.(Z4) Jedes K ∈ Th besitzt einen Lipschitz-stetigen Rand ∂K.
Der Parameter h sei der maximale Durchmesser aller K ∈ Th.
Eine Zerlegung bezeichnen wir je nach Zusammenhang auch alsTriangulierung (nicht nur bei Dreiecken), Vernetzung, Netz oder Gitter.Es folgen einige grafische Beispiele von Zerlegungen.
Die einzelnen Teilgebiete werden Elemente genannt. (Später wird dieserBegriff jedoch erweitert!)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 92

ZerlegungenBeispiele
Dreieckszerlegung des Äußeren eines Tragflächenquerschnitts.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 93

ZerlegungenBeispiele
Zerlegung aus Drei- und Vierecken.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 94

ZerlegungenBeispiele
Tetraedergitter einer 3D-Werkstücks.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 95
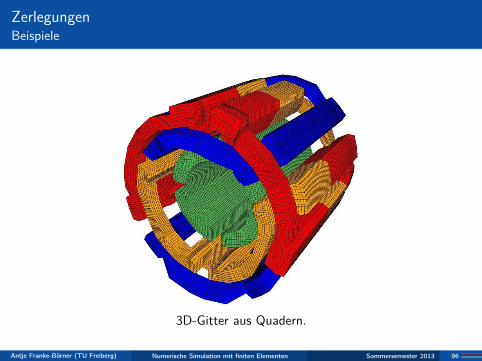
ZerlegungenBeispiele
3D-Gitter aus Quadern.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 96
ZerlegungenBeispiele
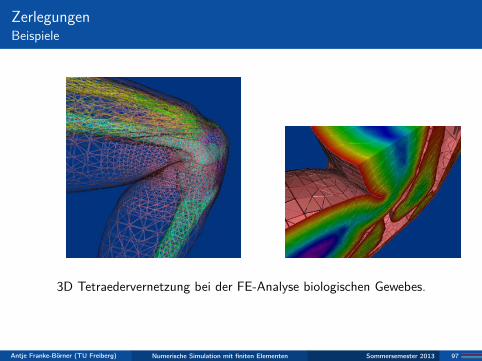
3D Tetraedervernetzung bei der FE-Analyse biologischen Gewebes.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 97
ZerlegungenBeispiele
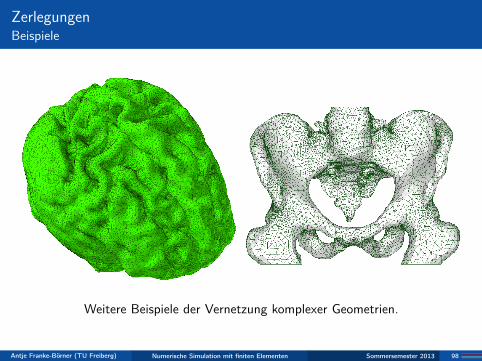
Weitere Beispiele der Vernetzung komplexer Geometrien.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 98
Konformität bei H1(Ω) I
Mit V h sei ein zunächst beliebiger endlichdimensionaler Raum von aufΩ definierten Funktionen bezeichnet. Entsprechend sei
PK := v|K : v ∈ V h
der durch sämtliche Einschränkungen von Funktionen aus V h auf Kaufgespannte Raum.Bei einer konformen FE-Diskretisierung ist V h ⊂ V erforderlich. BeiRandwertaufgaben zweiter Ordnung ist etwa V = H1(Ω) (bzw. einUnterraum hiervon). Eine Charakterisierung von Konformität liefertfolgender Satz.
Satz 11Sei Th eine Zerlegung des Gebietes Ω und V h ein endlichdimensionalerFunktionenraum. Gilt V h ⊂ C0(Ω) sowie PK ⊂ H1(K) für alleK ∈ Th, so gelten
V h ⊂ H1(Ω), sowie V h0 := v ∈ V h : v = 0 auf ∂Ω ⊂ H1
0 (Ω).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 99
Konformität bei H1(Ω) II
Beweis: Aufgrund unserer Annahmen gilt bereits V h ⊂ L2(Ω). Damit auchV h ⊂ H1(Ω) müssen wir zeigen, dass jedes v ∈ V h schwache Ableitungen∂iv, i = 1, . . . , d besitzt, d.h. Funktionen vi ∈ L2(Ω) mit∫
Ω
vi φdx = −∫
Ω
v ∂iφ dx ∀φ, φ differenzierbar, φ|∂Ω = 0.
Elementweise gilt∫K
φ∂i(v|K) dx = −∫K
v|K ∂iφdx+
∫∂K
v|K φnK,i ds,
(nK,i die i-te Komponente der äußeren Einheitsnormalen längs ∂K).Summation über alle K ergibt (mit vi := ∂iv|K∀K)∫
Ω
φ vi dx = −∫
Ω
v ∂iφdx+∑
K∈Th
∫∂K
v|K φnK,i ds.
Die Summe verschwindet jedoch, da φ längs ∂Ω verschwindet und die(orientierten!) Randintegrale längs innerer Ränder je zweimal mitentgegengesetztem Umlaufsinn auftreten.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 100
Konformität bei H1(Ω) III
Bemerkungen 12
1. Dass Stetigkeit auch notwendig ist, sieht man durch einenWiderspruchsbeweis.
2. Analog gilt V h ⊂ H2(Ω), falls PK ∈ H2(K) für alle K undV h ⊂ C1(Ω).
Fazit: Um konforme Diskretisierungen zu erhalten können wir also dieendlichdimensionalen Unterräume V h elementweise definieren undmüssen dabei nur die entsprechenden stetigen Übergänge derFunktionen bzw. deren Ableitungen gewährleisten.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 101

Multivariate PolynomeVollständige Polynome
Für k ∈ N0 bezeichne Pk den Raum aller Polynome vom Grad ≤ k in dVariablen, d.h.
Pk :=
p : Rd → R : p(x) =
∑|α|≤k
bαxα
mit Koeffizienten bα, Multiindices α = (α1, . . . , αd) ∈ Nd0,|α| = α1 + · · ·+ αd sowie xα = xα1
1 · · ·xαdd .
Für M ⊂ Rd sei Pk(M) := p|M : p ∈Pk.
Es gilt dim Pk =(d+kk
). (dim Pk = dim Pk(M) sofern M 6= ∅)
Der Unterraum von Pk aus Polynomen in d Variablen vom exaktenGrad k (sog. homogene Polynome vom Grad k) besitzt die Dimension
dim Pk − dim Pk−1 =
(d+ k − 1
k
).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 102
Simplexelemented-Simplices
Ein nichtentartetes Simplex K in Rd (kurz: d-Simplex) ist die konvexeHülle von d+ 1 nicht in einer Hyperebene gelegener Punkte ajd+1
j=1 ,den Ecken des d-Simplex:
K =
x =
d+1∑j=1
λjaj : 0 ≤ λj ≤ 1,
d+1∑j=1
λj = 1
.
Ein 2-Simplex ist ein Dreieck, ein 3-Simplex ein Tetraeder.
Ein Simplex ist genau dann nicht entartet, wenn die Spalten der Matrix
A :=
[a1 a2 · · · ad+1
1 1 . . . 1
]∈ R(d+1)×(d+1) (28)
linear unabhängig sind.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 103
Baryzentrische KoordinatenEinführung
Für Punkte in einem Simplex K ⊂ Rd ist folgende Darstellung oftzweckmäßig: als baryzentrische Koordinaten λ = (λ1, . . . , λd+1)> einesPunktes x = (x1, . . . , xd)
> ∈ K bezeichnen wir den eindeutigenLösungsvektor λ des linearen Gleichungssystems
Aλ =
[x1
]mit Koeffizientenmatrix A aus (28).Sind a(−1)
i,j d+1i,j=1 die Einträge von A−1, so besitzen die baryzentrischen
Koordinaten die Darstellung
λi =
d∑j=1
a(−1)i,j xj + a
(−1)i,d+1, i = 1, . . . , d+ 1,
und sind damit affine Funktionen von x, d.h. λi = λi(x) ∈P1.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 104
Baryzentrische KoordinatenInvarianz baryzentrische Koordinaten unter affinen Transformationen
Ist der Simplex K mit den Ecken a1, . . . ,ad+1 das Bild eines Simplex Kmit Ecken a1, . . . , ad+1 unter der Abbildung x 7→ x = Bx+ b mit einernichtsingulären Matrix B ∈ Rd×d und b ∈ Rd, so gilt für die zugehörigenbaryzentrischen Koordinaten[Ba1 . . . Bad+1
1 . . . 1
]λ =
[Bx1
]bzw.
[a1 . . . ad+1
1 . . . 1
]λ =
[x1
]also λ = λ.
Baryzentrische Koordinaten werden auch Dreiecks- bzw.Flächenkoordinaten im Fall d = 2 sowie Volumenkoordinaten im Falld = 3 genannt. Letztere Bezeichnungen rühren daher, dass λj dasFlächen- bzw. Volumenverhältnis zwischen K und dem durch(a1, . . . ,aj−1,x,aj+1, . . . ,ad+1) aufgespannten Simplex angibt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 105
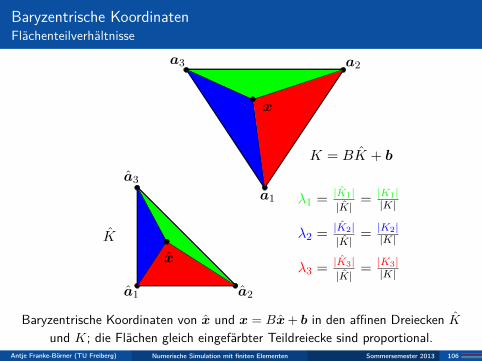
Baryzentrische KoordinatenFlächenteilverhältnisse
a1 a2
a3
K
K = BK + b
a1
a2a3
x
x
λ1 = |K1||K|
= |K1||K|
λ2 = |K2||K|
= |K2||K|
λ3 = |K3||K|
= |K3||K|
Baryzentrische Koordinaten von x und x = Bx+ b in den affinen Dreiecken Kund K; die Flächen gleich eingefärbter Teildreiecke sind proportional.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 106
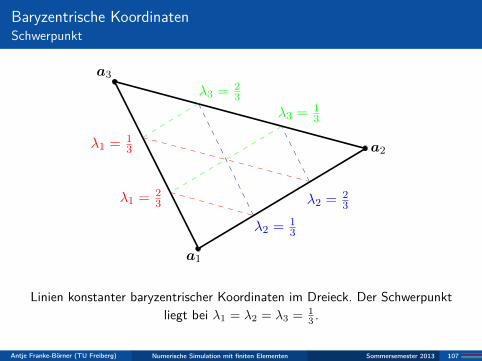
Baryzentrische KoordinatenSchwerpunkt
a1
a2
a3
λ3 = 23
λ3 = 13
λ2 = 13
λ2 = 23
λ1 = 23
λ1 = 13
Linien konstanter baryzentrischer Koordinaten im Dreieck. Der Schwerpunktliegt bei λ1 = λ2 = λ3 = 1
3 .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 107

Das lineare SimplexelementBasisfunktionen
Lemma 13Ein Polynom p ∈P1 in d Variablen ist durch dessen Funktionswertep(aj) an den d+ 1 Ecken eines d-Simplex im Rd eindeutig bestimmt.
Beweis: Zu zeigen ist, dass für jeden Vektor µ = (µ1, . . . , µd+1)> ∈ Rd+1 daslineare Gleichungssystem∑
|α|≤1
bαaαj = µj , j = 1, . . . , d+ 1,
eindeutig lösbar ist. Die zugehörige Koeffizientenmatrix ist quadratisch, somitist Existenz einer Lösung äquivalent mit deren Eindeutigkeit. Für diebaryzentrischen Koordinaten der Ecken gilt λi(aj) = δij (1 ≤ i, j ≤ d+ 1),weshalb das Polynom
p(x) :=
d+1∑i=1
µiλi(x)
das Gewünschte leistet.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 108
Das lineare Simplexelement - Definition
Bemerkung 14Aus dem Beweis folgt insbesondere, dass jedes p ∈P1 bezüglich derbaryzentrischen Koordinaten eines Simplex die Darstellungp(x) =
∑d+1i=1 p(ai)λi(x) besitzt.
Das lineare Simplexelement in d Variablen ist nun wie folgt definiert:(i) Das Gebiet K ist ein nichtentartetes Simplex in Rd.(ii) Der endlichdimensionale Funktionenraum PK auf K ist P1(K).(iii) Die Freiheitsgrade ΨK , welche ein Polynom p ∈PK eindeutig
festlegen, sind dessen Funktionswerte an den Ecken, symbolischΨK = p(aj) : 1 ≤ j ≤ d+ 1.
Nach Bemerkung 14 bilden die Funktionenφj(x) = λj(x), j = 1, . . . , d+ 1,
eine Basis von PK mit der Eigenschaft φi(aj) = δij . Eine solche Basisheißt nodale Basis.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 109
Das quadratische SimplexelementEckknoten
Seienaij := 1
2(ai + aj), 1 ≤ i < j ≤ d+ 1
die Seitenmittelpunkte des d-Simplex K. Es gilt
λk(aij) = 12(δki+δkj) =
12 ak und aij liegen auf gemeinsamer Kante0 sonst.
Damit gelten für die Funktionen φi ∈P2 definiert durch
φi(x) := λi(x)(2λi(x)− 1), i = 1, . . . , d+ 1,
die Beziehungen
φi(aj) = δij , φi(ajk) = 0, j < k.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 110
Das quadratische SimplexelementMittelknoten
Für die d(d+ 1)/2 weiteren Funktionen φij ∈P2 definiert durch
φij(x) := 4λi(x)λj(x), 1 ≤ i < j ≤ d+ 1,
gilt
φij(aij) = 1,
φij(ak`) = 0, falls k 6= i oder ` 6= j,
φij(ak) = 0, für alle k.
Wegen dim P2 = (d+ 1)(d+ 2)/2 bilden damit die (d+ 1)(d+ 2)/2Funktionen
φ1, . . . , φd+1, φ1,2, . . . , φd,d+1
die nodale Basis von P2 bezüglich der Knoten
ai, 1 ≤ i ≤ d+ 1, und aij , 1 ≤ i < j ≤ d+ 1.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 111
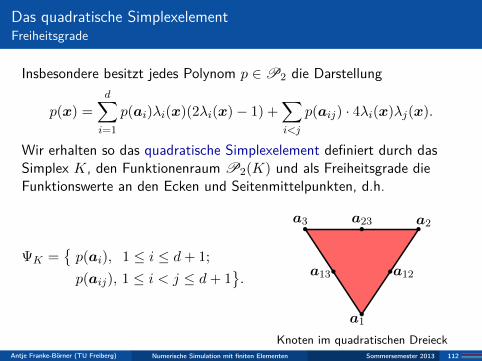
Das quadratische SimplexelementFreiheitsgrade
Insbesondere besitzt jedes Polynom p ∈P2 die Darstellung
p(x) =
d∑i=1
p(ai)λi(x)(2λi(x)− 1) +∑i<j
p(aij) · 4λi(x)λj(x).
Wir erhalten so das quadratische Simplexelement definiert durch dasSimplex K, den Funktionenraum P2(K) und als Freiheitsgrade dieFunktionswerte an den Ecken und Seitenmittelpunkten, d.h.
ΨK =p(ai), 1 ≤ i ≤ d+ 1;
p(aij), 1 ≤ i < j ≤ d+ 1.
a1
a2a3
a12a13
a23
Knoten im quadratischen DreieckAntje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 112
Das quadratische SimplexelementNodale Basisfunktionen
Beispiel: Die nodalen Basisfunktionen im Dreieckelement vom Gradzwei.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 113

Das kubische SimplexelementBasisfunktionen
Mit den Bezeichnungen
aiij := 13(2ai + aj), i 6= j,
aijk := 13(ai + aj + ak), i < j < k,
gilt analog für Polynome p ∈P3 die Beziehung
p =∑i
p(ai)λi(3λi − 1)(3λi − 2)
2+∑i 6=j
p(aiij)9λiλj(3λi − 1)
2
+∑i<j<k
p(aijk) · 27λiλjλk,
was auf das kubische Simplexelement mit Funktionenraum P3(K) undals Freiheitsgrade die Werte an den ai, aiij(i 6= j) und aijk(i < j < k)führt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 114
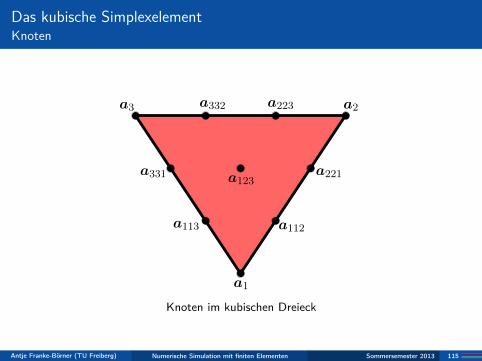
Das kubische SimplexelementKnoten
a1
a2a3
a221
a112a113
a331
a332 a223
a123
Knoten im kubischen Dreieck
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 115

SimplexelementeAllgemeiner Fall
Satz 15Sei K ein d-Simplex mit Ecken ajd+1
j=1 und p ∈Pk für ein k ∈ N.Dann ist p eindeutig bestimmt durch dessen Funktionswerte an denPunkten der Knotenmenge
Nk(K) :=
x =
d+1∑j=1
λjaj :
d+1∑j=1
λj = 1,
λj ∈ i/k, i = 0, . . . , k, j = 1, . . . , d+ 1
.
Beweis: Wegen |Nk(K)| = dim Pk ist durch die Forderungenφi ∈Pk, φi(xj) = δij , 1 ≤ i, j ≤ |Nk(K)|
die nodale Basis von Pk eindeutig bestimmt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 116

Finite-Element-Räume basierend auf SimplicesZerlegung Th
Zur Erinnerung: Wir betrachten eine Zerlegung Th eines polyedrischenGebiets Ω ⊂ Rd in disjunkte Simplices sodass die Eigenschaften(Z1)–(Z4) erfüllt sind:
(Z1) Ω = ∪K∈ThK.
(Z2) Jedes K ∈ Th ist eine abgeschlossene Menge mitnichtleerem Inneren K.
(Z3) Für je zwei verschiedene K1,K2 ∈ Th gilt K1 ∩ K2 = ∅.
(Z4) Jedes K ∈ Th besitzt einen Lipschitz-stetigen Rand ∂K.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 117

Finite-Element-Räume basierend auf SimplicesRänder
Diesen Forderungen fügen wir eine weitere hinzu:(Z5) Jede Kante/Fläche eines Simplex K ∈ Th ist entweder
Teil des Randes ∂Ω oder gleichzeitig Kante/Fläche einesanderen Simplex von Th.
Erlaubt. Verboten.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 118

Finite-Element-Räume basierend auf Simplices
Ein zu einer Zerlegung Th von Ω und einem finiten Element gehörenderFE-Raum V h besteht nun aus Funktionen auf Ω, deren Enschränkung aufjedes Element K ⊂ Th zu PK gehört.
Satz 16Sei V h der zu einer zulässigen Zerlegung Th von Ω und entweder demlinearen, quadratischen oder kubischen Simplex gehörende FE-Raum.Dann gilt
V h ⊂ C(Ω) ∩H1(Ω).
Beweis: Zu zeigen ist nur, dass die Funktionen v ∈ V h stetige Übergängezwischen den Elementen besitzen. Seien K1,K2 ∈ Th zwei benachbarte Simplicesmit gemeinsamer Fläche K ′ sowie v1 := v|K1
, v2 := v|K2für ein v ∈ V h. Die
Einschränkung von v1 bzw. v2 auf die Fläche K ′ ist jeweils ein Polynom vomGrad k in d− 1 Variablen (k = 1, 2, 3). Diese beiden Polynome stimmen an denauf K ′ liegenden Knoten überein. Die Anzahl Knoten auf (dem d− 1-Simplex)K ′ ist aber genau die erforderliche, um ein Polynom vom Grad k in d− 1
Variablen eindeutig festzulegen, also stimmt v1 auf K ′ mit v2 überein.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 119

Affine Familien
Ziel des weiteren Vorgehens ist es nun, ein finites Element zunächst aufeinem Referenzelement K zu definieren und dann beliebige Elemente Keiner Triangulierung durch affine Abbildung von K nach K abzuleiten.
Vorteile dieses Ansatzes:Auf dem Referenzelement besitzt ein finites Element eine besonderseinfache Beschreibung.Berechnungen werden durch Transformation auf dasReferenzelement einheitlicher.Es genügt, theoretische Aussagen (z.B.Approximationseigenschaften) nur für das Referenzelement zubeweisen.
Wir bescheiben in diesem Abschnitt, wie dieser Ansatz im Allgemeinenangewandt werden kann.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 120
Affine FamilienDefinition finites Element
Folgende abstrakte Definition eines finiten Elements geht auf Ciarlet zurück:
Definition 17Ein finites Element ist ein Tripel (K,P,Ψ); hierbei sind(i) K eine abgeschlossene Teilmenge des Rd mit nichtleerem Inneren und
Lipschitz-Rand,(ii) P ein linearer Raum auf K definierter Funktionen sowie(iii) Ψ eine endliche Menge linear unabhängiger linearer Funktionale
Φ1, . . . ,Φn auf P derart, dass jede Funktion φ ∈ P eindeutig durch dieWerte Φ1(φ), . . . ,Φn(φ) festgelegt ist. (Man sagt auch, Ψ seiunisolvent bezüglich P .)
Bemerkung 18Durch Ψ ist eine Basis φ1, . . . , φn von P ausgezeichnet durchΦi(φj) = δij , i, j = 1, . . . , n, die wir in Beispielen bereits als nodale Basisbezeichnet haben. Die Basen Φj und φj sind also zueinander dual.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 121
Affine FamilienBedeutung der Freiheitsgrade
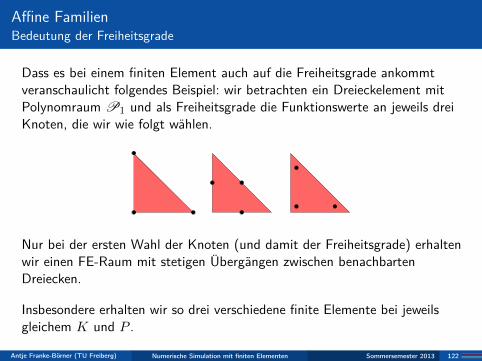
Dass es bei einem finiten Element auch auf die Freiheitsgrade ankommtveranschaulicht folgendes Beispiel: wir betrachten ein Dreieckelement mitPolynomraum P1 und als Freiheitsgrade die Funktionswerte an jeweils dreiKnoten, die wir wie folgt wählen.
Nur bei der ersten Wahl der Knoten (und damit der Freiheitsgrade) erhaltenwir einen FE-Raum mit stetigen Übergängen zwischen benachbartenDreiecken.
Insbesondere erhalten wir so drei verschiedene finite Elemente bei jeweilsgleichem K und P .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 122
Affine FamilienDefinition affin äquivalent
Definition 19Zwei finite Elemente (K,P,Ψ) und (K, P , Ψ) heißen affin äquivalent,falls folgende Bedingungen erfüllt sind:(a) Es existiert eine affine Abbildung F : K → K, x 7→ Bx+ b, mit
B ∈ Rd×d nichtsingulär, b ∈ Rd sodass K = F (K),(b) Für die Funktionenräume gilt P = φ F−1 : φ ∈ P.(c) Für die Freiheitsgrade gilt Ψ = Φ · F−1 : Φ ∈ Ψ.
Proposition 20Affine Äquivalenz finiter Elemente ist eine Äquivalenzrelation.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 123
Affine FamilienBemerkungen
Bemerkungen 21
1. Bedingung (c) besagt, dass die Funktionalmenge Ψ das Bild von Ψist unter der Abbildung
Φ 7→ Φ mit Φ(φ) = Φ(φ F−1) ∀φ ∈ P .
2. Die Zuordnung in (b) zwischen Funktionen auf K und solchen aufK über Verkettung mit F−1 wird auch „Pull-back“ genannt,geschrieben (F−1)∗(φ) := φ F−1.Damit lautet (b) P = (F−1)∗P oder P = F ∗P .
3. Analog nennt man die Zuordnung in (c) zwischen linearenFunktionalen von Funktionen auf K zu solchen von Funktionen aufK auch „Push-Forward“, geschrieben((F−1)∗Φ
)(φ) := Φ
((F−1)∗(φ)
). Eine entsprechende Formulierung
von (c) lautet also Ψ = (F−1)∗Ψ bzw. Ψ = F∗Ψ.Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 124

Affine FamilienDefinition affine Familie
Beispiel: Lagrange-Elemente auf Simplices, deren Knotenmengen durchdie affine Gebietsabbildung F ineinander überführt werden, sind affinäquivalent.
Definition 22Eine Menge von finiten Elementen heißt affine Familie, falls alleElemente affin äquivalent zu einem Referenzelement (K, P , Ψ) sind.(Letzteres braucht selbst nicht zur Familie zu gehören.)
Bei d-Simplexelementen wählt man meist als Referenzelement (-Gebiet)den Einheitssimplex mit Ecken im Ursprung und an der Spitze der dKoordinaten-Einheitsvektoren.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 125
Der InterpolationsoperatorDefinition
Der Interpolationsoperator ist ein wichtiges Hilfsmittel bei derKonstruktion von FE-Räumen aus einzelnen Elementen sowie bei derKonvergenzanalyse.
Definition 23Sei (K,P,Ψ) ein finites Element und φ1, . . . , φn die nodale Basis von Pzu Ψ. Ist u eine Funktion auf K, für die alle Freiheitsgrade Φj ∈ Ψdefiniert sind, so wird die lokale Interpolierende IKu ∈ P definiert durch
IKu =
n∑j=1
Φj(u)φj .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 126
Der InterpolationsoperatorBeispiel
Beispiel: Sei K das lineare Dreieckelement bezüglich des Dreiecks Kmit den Ecken (0, 0), (1, 0) und (0, 1). Die nodale Basis ist gegebendurch
φ1(x, y) = 1− x− y, φ2(x, y) = x, φ3(x, y) = y.
Die lokale Interpolierende der Funktion u(x, y) = exy lautet damit(IKu)(x, y) = e0φ1(x, y)+e0φ2(x, y)+e0φ3(x, y) = (1−x−y)+x+y ≡ 1.
Proposition 24IK ist linear und es gilt Φj(IKu) = Φj(u), j = 1, . . . , n.
Mit anderen Worten: IKu ist diejenige Funktion in P mit denselbenFreiheitsgraden wie u.
Proposition 25Für alle p ∈ P gilt IKp = p, d.h. IK ist eine Projektion auf P .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 127
Der globale Interpolationsoperator
Proposition 26Sind (K,P,Ψ) und (K, P , Ψ) zwei affin äquivalente finite Elementebezüglich der affinen Abbilding F : K → K und bezeichnen IK bzw. IK diezugehörigen lokalen Interpolationsoperatoren, so gilt IK F
∗ = F ∗ IK .
Definition 27Sei Th eine zulässige Zerlegung des polyedrischen Gebiets Ω ⊂ Rd und seiauf jedem Teilgebiet K ∈ Th ein finites Element (K,P,Ψ) definiert. Sindfür eine Funktion u : Ω→ R alle Freiheitsgrade ΨK ,K ∈ Th definiert, sodefinieren wir den globalen Interpolationsoperator Ih durch
(Ihu)|K = IKu, für alle K ∈ Th.
Man nennt ein finites Element Ck-Element, falls die zugehörigenglobalen Interpolierenden stets k mal stetig differenzierbar sind.Lagrange-Elemente sind (bei geeigneter Knotenwahl) C0-Elemente.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 128

Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 129
Das Galerkin-GleichungssystemDiskrete Variationsaufgabe
Das Galerkin-Verfahren zur Approximation der Lösung derPoissongleichung (6) besteht darin, Ansatz- und Testraum durchendlichdimensionale Räume S h bzw. V h (gleicher Dimension) zuersetzen.
Hierbei ist h > 0 der Diskretisierungsparameter.
Wir betrachten zunächst die homogenisierte Variationsaufgabe (8) undeinen n-dimensionalen Unterraum V h ⊂ V . (Oder, äquivalent, den FallgD ≡ 0.)
Die diskrete Variationsaufgabe lautet somit
Bestimme uh ∈ V h sodass a(uh, v) = `(v) ∀v ∈ V h. (29)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 130

Das Galerkin-GleichungssystemMatrix-Vektor-Form
Ist φ1, φ2, . . . , φn eine Basis von V h sowie uh =∑n
j=1 ujφj , so ist(29) äquivalent mit
n∑j=1
uj a(φj , φi) = `(φi), i = 1, 2, . . . , n,
oder, mit A ∈ Rn×n gegeben durch [A]i,j = a(φj , φi), b ∈ Rn durch[b]i = `(φi) sowie u ∈ Rn durch [u]i = ui, zu dem Galerkin-System
Au = b. (30)
Beachte:Die diskrete Variationsaufgabe (29) bzw. (30) besitzt eineeindeutige Lösung.Die Galerkin-Matrix A aus (30) ist symmetrisch und positiv-definit.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 131

Das Galerkin-GleichungssystemVerwendung der nodalen Basis
Wir beschäftigen uns nun mit der Aufstellung des Gleichungssystems(30) anhand des Beispiels linearer Dreieckelemente.
Funktionen aus V h sind eindeutig durch ihre Funktionswerte an denKnoten der Triangulierung (Ecken der Dreiecke) bestimmt. Bei linearenDreiecken stellen diese Funktionswerte sämtliche Freiheitsgrade dar.
Bei V h sind dies alle Knoten bis auf die, die auf ΓD liegen. Ihre Anzahlsei n.Eine besonders nützliche Basis φ1, . . . , φn, die sog. nodale Basis, istcharakterisiert durch
φj(xi) = δij i, j = 1, . . . , n.
Ist N h = x1, . . . , xn die Menge der Knoten mit xj 6∈ ΓD, so giltsuppφj = K ∈ T h : xj ∈ K.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 132
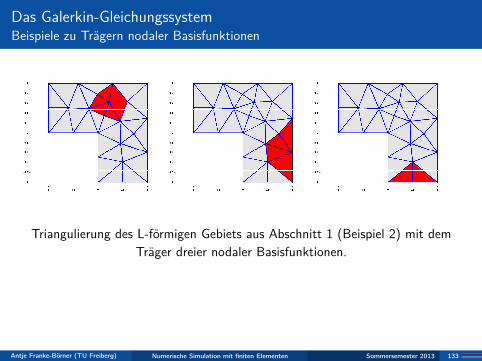
Das Galerkin-GleichungssystemBeispiele zu Trägern nodaler Basisfunktionen
Triangulierung des L-förmigen Gebiets aus Abschnitt 1 (Beispiel 2) mit demTräger dreier nodaler Basisfunktionen.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 133
Das Galerkin-Gleichungssystem
Konsequenz für das Galerkin-System (30):
[b]i = `(φi) =
∫suppφi
fφi dx+
∫suppφi∩ΓN
hφi ds
[A]i,j = a(φj , φi) =
∫suppφi∩suppφj
∇φi · ∇φj dx
Insbesondere: die Galerkin-Matrix A ist dünn besetzt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 134
Aufbau des Galerkin-SystemsVorteile
Großer Vorteil der FEM:Aufbau des FE Gleichungssystems – man nennt diesen VorgangAssemblieren – verläuft auch bei komplizierteren Problemen stetsnach dem gleichen Grundschema.Parametrisierung durch spezielle Eigenschaften der jeweiligenAufgabe.Grundbausteine der Assemblierung stets dieselben, kann bei derSoftwareumsetzung ausgenutzt werden (z.B. Objektorientierung).
Wir stellen nun die Grundschritte der Assemblierung für unserModellproblem zusammen. Das Vorgehen besteht darin, die Rechnungauf Operationen auf den einzelnen Elementen zurückzuführen, derenErgebnisse dann zusammengefügt (assembliert) werden.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 135
Aufbau des Galerkin-SystemsVorgehensweise
Übliches Vorgehen:(1) Ignoriere zunächst die wesentlichen Randbedingungen, d.h. ein
gößerer Raum V h ⊃ V h wird zugrundegelegt, mit nodaler Basis
φ1, φ2, . . . , φn, φn+1, . . . , φn, wobei
n− n die Anzahl der Knoten auf ΓD ist.Liefert A ∈ Rn×n, b ∈ Rn.
(2) Eliminiere zum Schluß die Freiheitsgrade der wesentlichenRandbedingungen.Liefert A, b.
Zunächst naheliegend für (1) ist sukzessives Abarbeiten allerBasisfunktionen (= Einträge in A, b).
Aber: Lage und Anordnung der Träger variieren stark. Deshalb ist eseinfacher elementweise vorzugehen.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 136
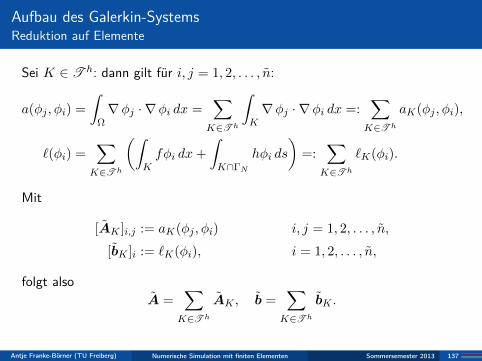
Aufbau des Galerkin-SystemsReduktion auf Elemente
Sei K ∈ T h: dann gilt für i, j = 1, 2, . . . , n:
a(φj , φi) =
∫Ω∇φj · ∇φi dx =
∑K∈T h
∫K∇φj · ∇φi dx =:
∑K∈T h
aK(φj , φi),
`(φi) =∑K∈T h
(∫Kfφi dx+
∫K∩ΓN
hφi ds
)=:
∑K∈T h
`K(φi).
Mit
[AK ]i,j := aK(φj , φi) i, j = 1, 2, . . . , n,
[bK ]i := `K(φi), i = 1, 2, . . . , n,
folgt alsoA =
∑K∈T h
AK , b =∑K∈T h
bK .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 137
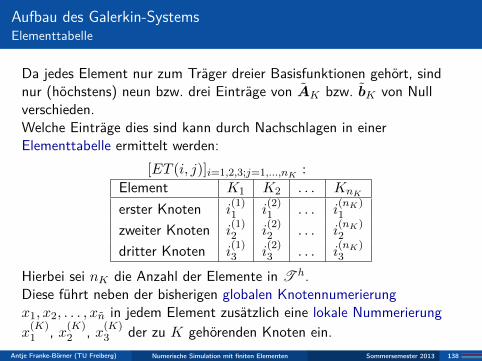
Aufbau des Galerkin-SystemsElementtabelle
Da jedes Element nur zum Träger dreier Basisfunktionen gehört, sindnur (höchstens) neun bzw. drei Einträge von AK bzw. bK von Nullverschieden.Welche Einträge dies sind kann durch Nachschlagen in einerElementtabelle ermittelt werden:
[ET (i, j)]i=1,2,3;j=1,...,nK :
Element K1 K2 . . . KnK
erster Knoten i(1)1 i
(2)1 . . . i
(nK)1
zweiter Knoten i(1)2 i
(2)2 . . . i
(nK)2
dritter Knoten i(1)3 i
(2)3 . . . i
(nK)3
Hierbei sei nK die Anzahl der Elemente in T h.Diese führt neben der bisherigen globalen Knotennumerierungx1, x2, . . . , xn in jedem Element zusätzlich eine lokale Nummerierungx
(K)1 , x(K)
2 , x(K)3 der zu K gehörenden Knoten ein.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 138

Globale Nummerierung der Knoten (rot) und der Elemente (schwarz)einer Triangulierung des L-Gebiets.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 139

Aufbau des Galerkin-SystemsElementmatrizen/-vektoren
Damit sind die von Null verschiedenen Teilmatrizen bzw. -vektoren von AK undbK gegeben durch
AK :=
aK(φ(K)1 , φ
(K)1 ) aK(φ
(K)2 , φ
(K)1 ) aK(φ
(K)3 , φ
(K)1 )
aK(φ(K)1 , φ
(K)2 ) aK(φ
(K)2 , φ
(K)2 ) aK(φ
(K)3 , φ
(K)2 )
aK(φ(K)1 , φ
(K)3 ) aK(φ
(K)2 , φ
(K)3 ) aK(φ
(K)3 , φ
(K)3 )
, bK :=
`K(φ(K)1 )
`K(φ(K)2 )
`K(φ(K)3 )
.
Trägt K in der Nummerierung der Elemente den Index k, so ist die Zuordnungder lokalen Nummerierung φ(K)
i i=1,2,3 der zu K gehörenden Basisfunktionenzur globalen Nummerierung φjnj=1 gegeben durch
φ(K)i = φj , j = ET (i, k), i = 1, 2, 3.
Man bezeichnet AK und bK auch als Elementsteifigkeitsmatrix bzw.Elementlastvektor.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 140
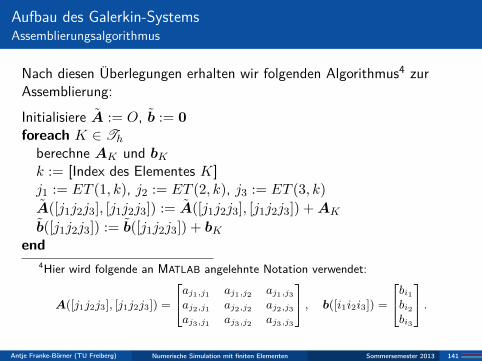
Aufbau des Galerkin-SystemsAssemblierungsalgorithmus
Nach diesen Überlegungen erhalten wir folgenden Algorithmus4 zurAssemblierung:
Initialisiere A := O, b := 0foreach K ∈ Th
berechne AK und bKk := [Index des Elementes K]j1 := ET (1, k), j2 := ET (2, k), j3 := ET (3, k)
A([j1j2j3], [j1j2j3]) := A([j1j2j3], [j1j2j3]) +AK
b([j1j2j3]) := b([j1j2j3]) + bKend
4Hier wird folgende an MATLAB angelehnte Notation verwendet:
A([j1j2j3], [j1j2j3]) =
aj1,j1 aj1,j2 aj1,j3aj2,j1 aj2,j2 aj2,j3aj3,j1 aj3,j2 aj3,j3
, b([i1i2i3]) =
bi1bi2bi3
.Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 141
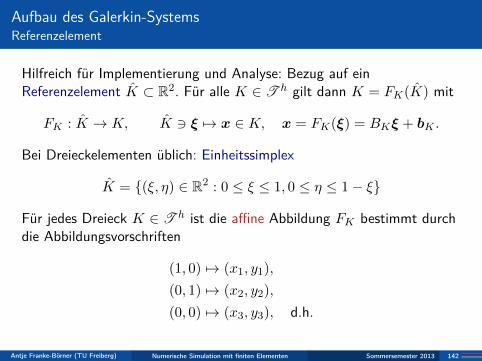
Aufbau des Galerkin-SystemsReferenzelement
Hilfreich für Implementierung und Analyse: Bezug auf einReferenzelement K ⊂ R2. Für alle K ∈ T h gilt dann K = FK(K) mit
FK : K → K, K 3 ξ 7→ x ∈ K, x = FK(ξ) = BKξ + bK .
Bei Dreieckelementen üblich: Einheitssimplex
K = (ξ, η) ∈ R2 : 0 ≤ ξ ≤ 1, 0 ≤ η ≤ 1− ξ
Für jedes Dreieck K ∈ T h ist die affine Abbildung FK bestimmt durchdie Abbildungsvorschriften
(1, 0) 7→ (x1, y1),
(0, 1) 7→ (x2, y2),
(0, 0) 7→ (x3, y3), d.h.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 142
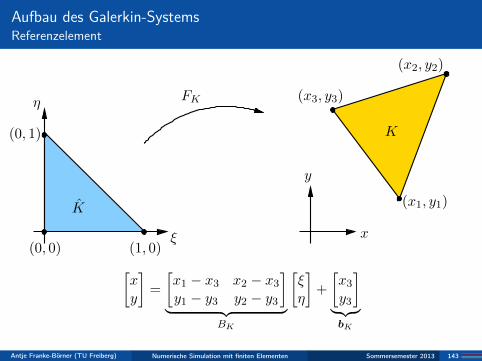
Aufbau des Galerkin-SystemsReferenzelement
K
ξ
η
(0, 0) (1, 0)
(0, 1)
x
y
FK
K
(x1, y1)
(x2, y2)
(x3, y3)
[xy
]=
[x1 − x3 x2 − x3
y1 − y3 y2 − y3
]︸ ︷︷ ︸
BK
[ξη
]+
[x3
y3
]︸︷︷︸bK
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 143
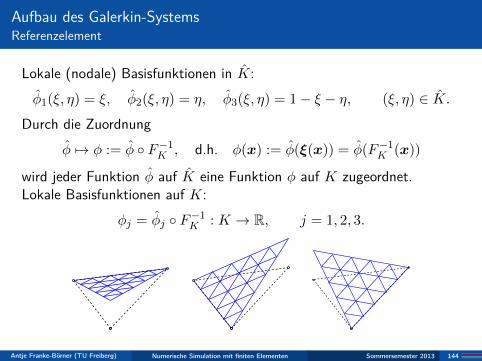
Aufbau des Galerkin-SystemsReferenzelement
Lokale (nodale) Basisfunktionen in K:
φ1(ξ, η) = ξ, φ2(ξ, η) = η, φ3(ξ, η) = 1− ξ − η, (ξ, η) ∈ K.
Durch die Zuordnung
φ 7→ φ := φ F−1K , d.h. φ(x) := φ(ξ(x)) = φ(F−1
K (x))
wird jeder Funktion φ auf K eine Funktion φ auf K zugeordnet.Lokale Basisfunktionen auf K:
φj = φj F−1K : K → R, j = 1, 2, 3.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 144
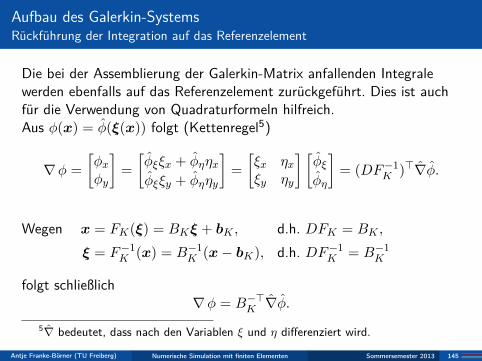
Aufbau des Galerkin-SystemsRückführung der Integration auf das Referenzelement
Die bei der Assemblierung der Galerkin-Matrix anfallenden Integralewerden ebenfalls auf das Referenzelement zurückgeführt. Dies ist auchfür die Verwendung von Quadraturformeln hilfreich.Aus φ(x) = φ(ξ(x)) folgt (Kettenregel5)
∇φ =
[φxφy
]=
[φξξx + φηηxφξξy + φηηy
]=
[ξx ηxξy ηy
] [φξφη
]= (DF−1
K )>∇φ.
Wegen x = FK(ξ) = BKξ + bK , d.h. DFK = BK ,
ξ = F−1K (x) = B−1
K (x− bK), d.h. DF−1K = B−1
K
folgt schließlich∇φ = B−>K ∇φ.
5∇ bedeutet, dass nach den Variablen ξ und η differenziert wird.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 145

Aufbau des Galerkin-SystemsRückführung der Integration auf das Referenzelement
Damit ergibt sich (φi = φ(K)i , i = 1, 2, 3)
aK(φj , φi) =
∫K∇φj · ∇φi dx
=
∫K
(B−>K ∇φj
)·(B−>K ∇φi
)|detBK | dξ
(31)
lK(φi) =
∫Kfφi dx+
∫K∩ΓN
hφi ds
=
∫Kf(x(ξ)) φi(ξ) | detBK | dξ
+
∫K∩ΓN
h(x(ξ)) φi(ξ) | detBK | ds.
(32)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 146
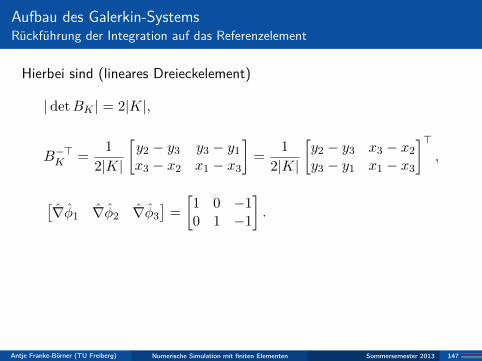
Aufbau des Galerkin-SystemsRückführung der Integration auf das Referenzelement
Hierbei sind (lineares Dreieckelement)
| detBK | = 2|K|,
B−>K =1
2|K|
[y2 − y3 y3 − y1
x3 − x2 x1 − x3
]=
1
2|K|
[y2 − y3 x3 − x2
y3 − y1 x1 − x3
]>,
[∇φ1 ∇φ2 ∇φ3
]=
[1 0 −10 1 −1
].
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 147
Aufbau des Galerkin-SystemsEinbringung wesentlicher Randbedingungen
Bei Lagrange-Elementen läßt sich die wesentliche Randbedingungu(x) = gD(x) ∀x ∈ ΓD
am einfachsten durch die Forderunguh(x) = gD(x) x ∈ N h \N h,
umsetzen, wobei mit N h := x1, . . . ,xn,xn+1, . . . ,xn die Mengealler Knoten des zu T h gehörenden FE-Raums bezeichnet sei.Zerlegt man N h in N h = NI ∪NW mitN hI := N h = x1, . . . ,xn, N h
W := N h \N h = xn+1, . . . ,xn
und nummeriert die Freiheitsgrade von uh entsprechend, so zerfällt dasbisher assemblierte Galerkin-System Au = b in[
AII AIW
AWI AWW
] [uIuW
]=
[bIbW
]. (33)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 148
Aufbau des Galerkin-SystemsEinbringung wesentlicher Randbedingungen
Hierbei beschreiben die Teilmatrizen AII und AWW die Kopplung derden Knoten aus N h
I bzw. N hW zugeordneten Freiheitsgrade jeweils
untereinander, sowie AIW und AWI die gegenseitigen Kopplungen.
Bezeichnet gD ∈ Rn−n den Vektor mit den KomponentengD,i = gD(xi), so lauten unter Hinzunahme der Nebenbedingungen
uW = gD
die diskreten Gleichungen (33)[AII AIW
O I
] [uIuW
]=
[bIgD
].
Die nicht durch die wesentlichen Randbedingungen festgelegtenFreiheitsgrade uI ergeben sich somit aus dem reduzierten linearenGleichungssystem
AIIuI = bI −AIWgD.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 149
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 150
Aufgabenstellung
Gesucht ist die Lösung u in Ω = (0, 1) für
−d2u
dx2= f in (0, 1) mit
u(0) = 0 und du
dx(1) = 0.
Die Variationsformulierung lautet: Gesucht ist u ∈ V , so dassa(u, v) = l(v) mit
a(u, v) =
∫ 1
0
du
dx
dv
dxdx und l(v) =
∫ 1
0fvdx.
Die Galerkin-Diskretisierung uh =∑N
j=1 ujφj liefert die diskreteVariationsaufgabe: Gesucht ist uh ∈ V h, so dass
N∑j=1
uj
∫ 1
0
dφidx
dφjdx
dx =
∫ 1
0fφidx ∀i = 1, ..., N.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 151

Lineare Simplex-Elemente in 1D
1. Berechnen Sie die baryzentrischen Koordinatenfunktionen zum1-Simplex!
2. Wie ergeben sich daraus die zugehörigen linearen Basisfunktionen?3. Wie lässt sich die lokale Interpolierende Iku darstellen?
x1 x2
λ1(x) λ2(x)
e
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 152
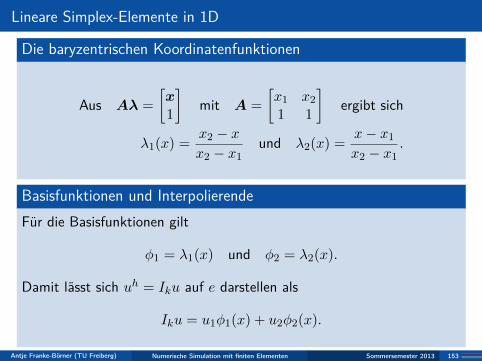
Lineare Simplex-Elemente in 1D
Die baryzentrischen Koordinatenfunktionen
Aus Aλ =
[x1
]mit A =
[x1 x2
1 1
]ergibt sich
λ1(x) =x2 − xx2 − x1
und λ2(x) =x− x1
x2 − x1.
Basisfunktionen und InterpolierendeFür die Basisfunktionen gilt
φ1 = λ1(x) und φ2 = λ2(x).
Damit lässt sich uh = Iku auf e darstellen als
Iku = u1φ1(x) + u2φ2(x).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 153

Zerlegung des Intervalls (0, 1) in drei Elemente
Wir zerlegen das Intervall (0, 1) in drei Elemente (Nk = 3) mit ∆x = 13
und f ≡ 1:
0 13
23
1x1
x2 x3 x4
φ1 φ2 φ3 φ4
e1 e2 e3
k = 1 k = 2 k = 3
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 154

Steifigkeitsmatrix und Lastvektor
Summation der Elementsteifigkeitsmatrizen akij und -lastvektoren bkiliefert die globale Steifigkeitsmatrix und den globalen Lastvektor:
N∑j=1
uj
Nk∑k=1
∫ek
dφidx
dφjdx
dx =
Nk∑k=1
∫ek
φidx ∀i = 1, ..., N mit
Ak = akij(φi, φj) =
∫ek
dφidx
dφjdx
dx und bk = bki (φi) =
∫ek
φidx sowie
aij =
Nk∑k=1
akij und bi =
Nk∑k=1
bki ,
wobei Nk = 3 die Anzahl der Elemente ist. Es gilt nun dasGleichungssystem Au = b zu lösen mit
A = aij(φi, φj), b = bi(φi),u = ui, i, j = 1, ..., N.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 155

Elementsteifigkeitsmatrix und -lastvektor
Ak =
[ ∫ek
dφkdx
dφkdx dx
∫ek
dφkdx
dφk+1
dx dx∫ek
dφk+1
dxdφkdx dx
∫ek
dφk+1
dxdφk+1
dx dx
]
bk =
[ ∫ekφkdx∫
ekφk+1dx
]
Berechnen Sie φk, φk+1 sowie dφkdx ,
dφk+1
dx (affine Abbildung)!
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 156
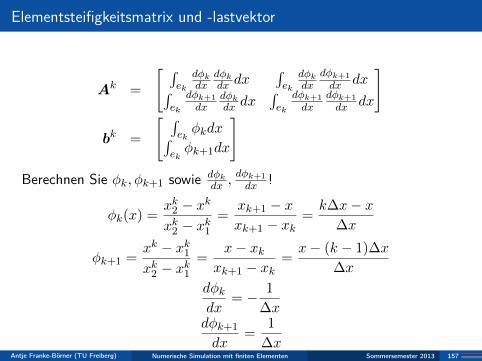
Elementsteifigkeitsmatrix und -lastvektor
Ak =
[ ∫ek
dφkdx
dφkdx dx
∫ek
dφkdx
dφk+1
dx dx∫ek
dφk+1
dxdφkdx dx
∫ek
dφk+1
dxdφk+1
dx dx
]
bk =
[ ∫ekφkdx∫
ekφk+1dx
]Berechnen Sie φk, φk+1 sowie dφk
dx ,dφk+1
dx !
φk(x) =xk2 − xk
xk2 − xk1=
xk+1 − xxk+1 − xk
=k∆x− x
∆x
φk+1 =xk − xk1xk2 − xk1
=x− xk
xk+1 − xk=x− (k − 1)∆x
∆x
dφkdx
= − 1
∆xdφk+1
dx=
1
∆xAntje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 157

Elementsteifigkeitsmatrix und -lastvektor
Ak =
[∫ek
(− 1∆x)(− 1
∆x)dx∫ek
(− 1∆x)( 1
∆x)dx∫ek
( 1∆x)(− 1
∆x)dx∫ek
( 1∆x)( 1
∆x)dx
]=
1
∆x
[1 −1−1 1
]
bk =
[ ∫ek
k∆x−x∆x dx∫
ek
x−(k−1)∆x∆x dx
]= ?
Berechnen Sie die Einträge von bk durch bestimmte Integration!
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 158

Elementsteifigkeitsmatrix und -lastvektor
Ak =
[∫ek
(− 1∆x)(− 1
∆x)dx∫ek
(− 1∆x)( 1
∆x)dx∫ek
( 1∆x)(− 1
∆x)dx∫ek
( 1∆x)( 1
∆x)dx
]=
1
∆x
[1 −1−1 1
]
bk =
[ ∫ek
k∆x−x∆x dx∫
ek
x−(k−1)∆x∆x dx
]=
∆x
2
[11
]
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 159
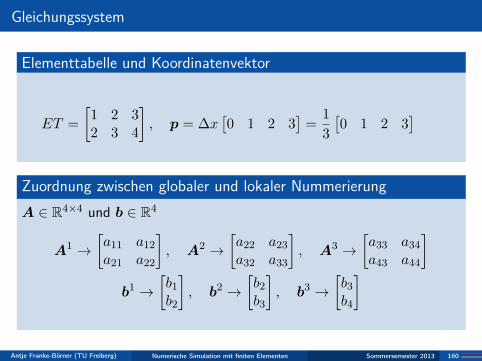
Gleichungssystem
Elementtabelle und Koordinatenvektor
ET =
[1 2 32 3 4
], p = ∆x
[0 1 2 3
]=
1
3
[0 1 2 3
]
Zuordnung zwischen globaler und lokaler NummerierungA ∈ R4×4 und b ∈ R4
A1 →[a11 a12
a21 a22
], A2 →
[a22 a23
a32 a33
], A3 →
[a33 a34
a43 a44
]b1 →
[b1b2
], b2 →
[b2b3
], b3 →
[b3b4
]
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 160
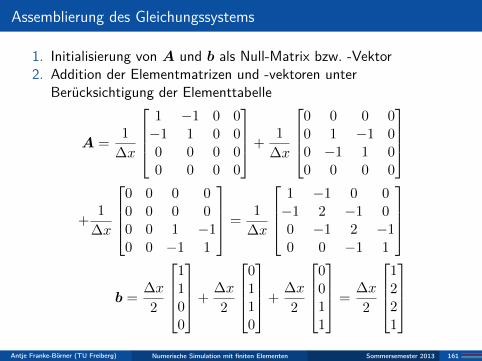
Assemblierung des Gleichungssystems
1. Initialisierung von A und b als Null-Matrix bzw. -Vektor2. Addition der Elementmatrizen und -vektoren unter
Berücksichtigung der Elementtabelle
A =1
∆x
1 −1 0 0−1 1 0 00 0 0 00 0 0 0
+1
∆x
0 0 0 00 1 −1 00 −1 1 00 0 0 0
+1
∆x
0 0 0 00 0 0 00 0 1 −10 0 −1 1
=1
∆x
1 −1 0 0−1 2 −1 00 −1 2 −10 0 −1 1
b =∆x
2
1100
+∆x
2
0110
+∆x
2
0011
=∆x
2
1221
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 161
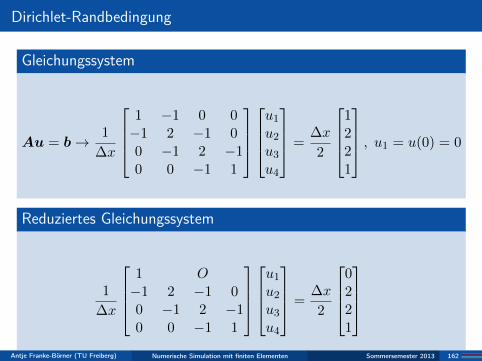
Dirichlet-Randbedingung
Gleichungssystem
Au = b→ 1
∆x
1 −1 0 0−1 2 −1 00 −1 2 −10 0 −1 1
u1
u2
u3
u4
=∆x
2
1221
, u1 = u(0) = 0
Reduziertes Gleichungssystem
1
∆x
1 O−1 2 −1 00 −1 2 −10 0 −1 1
u1
u2
u3
u4
=∆x
2
0221
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 162
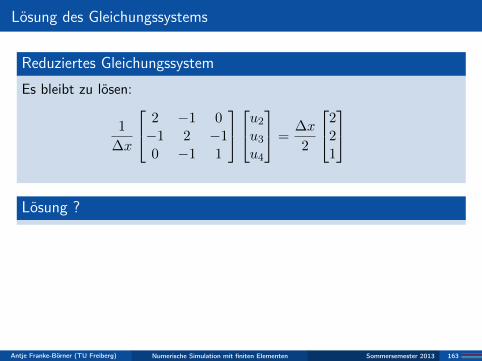
Lösung des Gleichungssystems
Reduziertes GleichungssystemEs bleibt zu lösen:
1
∆x
2 −1 0−1 2 −10 −1 1
u2
u3
u4
=∆x
2
221
Lösung ?
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 163
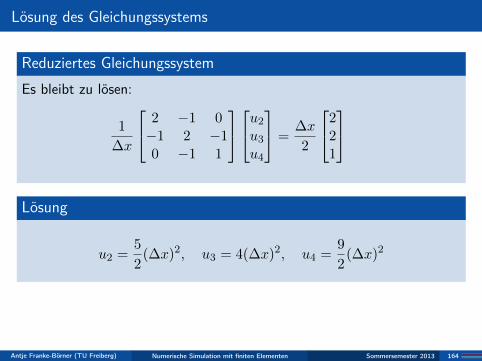
Lösung des Gleichungssystems
Reduziertes GleichungssystemEs bleibt zu lösen:
1
∆x
2 −1 0−1 2 −10 −1 1
u2
u3
u4
=∆x
2
221
Lösung
u2 =5
2(∆x)2, u3 = 4(∆x)2, u4 =
9
2(∆x)2
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 164

Vergleich mit der exakten Lösung
Aus zweimaliger Integration von −∆u = 1 unter Berücksichtigung derRandbedingungen erhalten wir die exakte Lösung u(x) = x− 1
2x2.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
x
u(x)
uh1, Nk = 3
uh2, Nk = 10
u(x) = x−1/2 x2
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 165
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 166
Konvergenz
Im Lemma von Céa (Satz 10) haben wir bereits gesehen, dass dieGalerkin-Approximation der Lösung einer Variationsaufgabe, welche denVoraussetzungen des Lax-Milgram-Lemmas genügt, bis auf eineKonstante die Bestapproximation der Lösung im verwendetenUnterraum liefert.
Somit konvergiert die FE-Approximation gegen die Lösung derentsprechenden RWA, sofern diese bei Vergrößerung des FE-Raumes(durch Verfeinerung des Gitters und/oder Erhöhung des Polynomgrades)immer besser durch Funktionen aus diesem Raum approximiert werdenkann.
Wir werden sehen, dass dies im Wesentlichen von der Regularität derLösung, d.h. der maximalen Ordnung ihrer (schwachen)Differenzierbarkeit, abhängt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 167
Konvergenz bei h-VerfeinerungFolgen von Triangulierungen
Wir betrachten den Fall, dass der FE-Raum ausschließlich durchVerfeinerung des Gitters vergrößert wird, d.h. der Polynomgrad derFE-Funktionen bleibt konstant.
Wir betrachten im Folgenden Triangulierungen aus Dreiecken (mitoffensichtlichen Verallgemeinerungen auf Tetraeder in 3D).
Die Feinheit h einer Triangulierung T h ist definiert als
h := max
diam(K) : K ∈ T h.
Bei der Konvergenzanalyse betrachtet man den Fehler ‖u− uh‖ imGrenzwert h→ 0. Letzterem liegt also eine Folge von FE-Räumen V hzugrunde, jeweils basierend auf einer Triangulierung T h, wobei in dieserFolge die Feinheit h beliebig klein wird.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 168

Konvergenz bei h-VerfeinerungDie Form von Dreiecken
Die Approximierbarkeit einer Funktion in Räumen aus stückweisenPolynomen bezüglich einer Folge T h von Triangulierungen hängtwesentlich davon ab, dass die Dreiecke in dieser Folge nicht beliebig spitzwerden können.
Der Inkreisradius ρK eines Dreiecks K ist definiert durch
ρK := maxρ : K enthält einen Kreis mit Radius ρ
.
Das Verhältnis ρK/diam(K) gibt an, wie spitz das Dreieck K ist.
Definition 28Eine Folge von Triangulierungen T h heißt quasiuniform, falls es eineuntere Schranke σ > 0 gibt, mit
ρKdiamK
≥ σ für alle K ∈ T h für alle h.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 169
Konvergenz bei h-VerfeinerungApproximation durch stückweise lineare Funktionen
Eine obere Schranke für den Fehler der Bestapproximation einerFunktion u ∈ H1(Ω) aus dem Raum V h stetiger stückweise linearerFunktionen bezüglich einer Triangulierung T h von Ω erhält manbeispielsweise durch den Approximationsfehler der InterpolierendenIhu ∈ V h.
Mit dem Céa-Lemma gilt also für den Fehler der Galerkin-Approximation
‖u− uh‖1 ≤C
αinfv∈V h
‖u− v‖1 ≤C
α‖u− Ihu‖1.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 170

Konvergenz bei h-VerfeinerungApproximation durch stückweise lineare Funktionen
Satz 29Sei T h eine quasiuniforme Familie von Triangulierungen einespolygonalen Gebiets Ω ⊂ R2, V h der zugehörige Raum stetigerstückweise linearer Funktionen, Ih die globale Interpolierende sowieu ∈ H2(Ω). Dann existiert eine Konstante C = C(Ω, σ) sodass
‖u− Ihu‖1 ≤ Ch|u|2,‖u− Ihu‖0 ≤ Ch2|u|2.
Hierbei bezeichnet |u|2 die Halbnorm in H2(Ω) gegeben durch
|u|22 =
∫Ω
∑|α|=2
|Dαu|2 dx.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 171

Konvergenz bei h-VerfeinerungApproximation durch stückweise Polynome höheren Grades
Satz 30Sei T h eine quasiuniforme Familie von Triangulierungen einespolygonalen Gebiets Ω ⊂ R2, V h der zugehörige Raum stetigerstückweiser Polynome vom Grad k, Ih die globale Interpolierende sowieu ∈ Hk+1(Ω). Dann existiert eine Konstante C = C(Ω, σ) sodass
‖u− Ihu‖1 ≤ Chk|u|k+1,
‖u− Ihu‖0 ≤ Chk+1|u|k+1.
Hierbei bezeichnet |u|k+1 die Halbnorm in Hk+1(Ω) gegeben durch
|u|2k+1 =
∫Ω
∑|α|=k+1
|Dαu|2 dx.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 172

Konvergenz bei h-VerfeinerungKonvergenzsatz
Aus dem Céa-Lemma und den Interpolationsabschätzungen ergibt sichnun ein Konvergenzresultat.
Satz 31Für die Lösung der RWA (6) auf dem polygonalen Gebiet Ω ⊂ R2 gelteu ∈ Hk+1(Ω). Ist T h eine quasiuniforme Familie von Zerlegungen,V h der zugehörige Raum stetiger stückweiser Polynome vom Grad kund uh ∈ V h die zugehörige Galerkin-Approximation, so gilt
‖u− uh‖1 ≤ C hk |u|k+1.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 173
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 174
Numerische Integration
Die Berechnung der bei der Assemblierung auftretenden Integrale ist oftzu aufwändig (bei komplizierten Elementen) oder unmöglich (etwa beinicht geschlossen integrierbaren Koeffizientenfunktionen). Man behilftsich deshalb zur Approximationen der Integrale mit Quadraturformelnder Bauart ∫
Kf(x) dx ≈
m∑i=1
γif(xi) (34)
mit Knoten xi = xKi ∈ K und Gewichten γi = γKi > 0 und erhält somitNäherungen∫
Ωf(x) dx =
∑K∈Th
∫Kf(x) dx ≈
∑K∈Th
m∑i=1
γKi f(xKi ).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 175
Numerische IntegrationQuadraturformeln
Bei affinen Familien können alle Integrale auf solche über einReferenzelement K zurückgeführt werden. Daher genügt es in diesemFall, Quadraturformeln für Referenzelemente zu betrachten.
Quadraturformeln klassifiziert man nach deren Exaktheitsgrad, d.h. demhöchsten Polynomgrad der durch eine Formel noch exakt integriert wird.Eine Quadraturformel für zwei Raumdimensionen besitzt alsoExaktheitsgrad q ∈ N0, falls∫
Kξjηk dξdη =
m∑i=1
γiξji ηki ∀j, k : j + k ≤ q.
Beispiel: Die Gauß-Quadraturformeln für eindimensionale Integralebesitzen bei m Knoten und Gewichten den (maximalen) Exaktheitsgradq = 2m− 1.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 176
Numerische IntegrationKonstruktion von Quadraturformeln
Bei Newton-Cotes-Quadraturformeln werden die Knoten xi vorgegebenund die Gewichte γi so gewählt, dass ein möglichst hoherExaktheitsgrad erreicht wird. Vorausgesetzt die Knoten sind so gewählt,dass sie ein eindeutiges Interpolationspolynom definieren (etwa wie inSatz 15) so sind für Exaktheitsgrad q höchstens n = (q + 1)(q + 2)/2Knoten erforderlich. Bei Integrationsgebieten mit Symmetrien reichenoft auch weniger Knoten aus.
Bei Gauß-Quadraturformeln wird neben den Gewichten auch die Lageder Knoten zur Maximierung des Exaktheitsgrades variiert. Dies führtoft zu wesentlich weniger Knoten als bei Newton-Cotes Formeln gleicherExaktheit. Diese stimmen aber meist nicht mit Knoten fürFreiheitsgrade überein.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 177
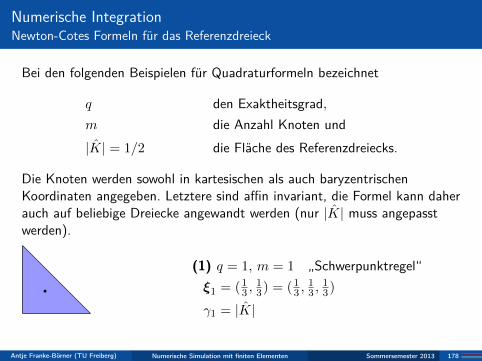
Numerische IntegrationNewton-Cotes Formeln für das Referenzdreieck
Bei den folgenden Beispielen für Quadraturformeln bezeichnet
q den Exaktheitsgrad,m die Anzahl Knoten und|K| = 1/2 die Fläche des Referenzdreiecks.
Die Knoten werden sowohl in kartesischen als auch baryzentrischenKoordinaten angegeben. Letztere sind affin invariant, die Formel kann daherauch auf beliebige Dreiecke angewandt werden (nur |K| muss angepasstwerden).
(1) q = 1, m = 1 „Schwerpunktregel“ξ1 = (1
3 ,13) = (1
3 ,13 ,
13)
γ1 = |K|
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 178
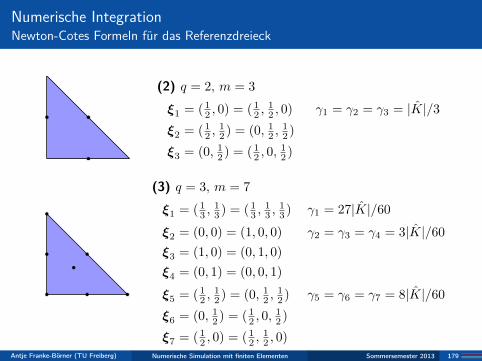
Numerische IntegrationNewton-Cotes Formeln für das Referenzdreieck
(2) q = 2, m = 3
ξ1 = ( 12 , 0) = (1
2 ,12 , 0) γ1 = γ2 = γ3 = |K|/3
ξ2 = ( 12 ,
12 ) = (0, 1
2 ,12 )
ξ3 = (0, 12 ) = (1
2 , 0,12 )
(3) q = 3, m = 7
ξ1 = ( 13 ,
13 ) = (1
3 ,13 ,
13 ) γ1 = 27|K|/60
ξ2 = (0, 0) = (1, 0, 0) γ2 = γ3 = γ4 = 3|K|/60
ξ3 = (1, 0) = (0, 1, 0)
ξ4 = (0, 1) = (0, 0, 1)
ξ5 = ( 12 ,
12 ) = (0, 1
2 ,12 ) γ5 = γ6 = γ7 = 8|K|/60
ξ6 = (0, 12 ) = (1
2 , 0,12 )
ξ7 = ( 12 , 0) = ( 1
2 ,12 , 0)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 179
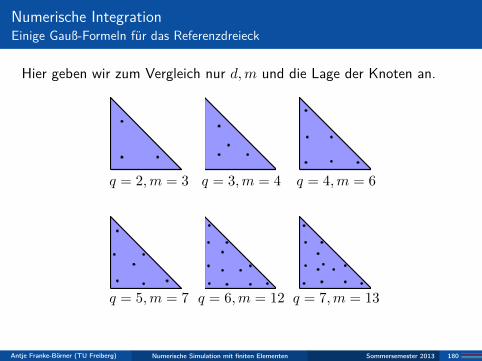
Numerische IntegrationEinige Gauß-Formeln für das Referenzdreieck
Hier geben wir zum Vergleich nur d,m und die Lage der Knoten an.
q = 2,m = 3 q = 3,m = 4 q = 4,m = 6
q = 5,m = 7 q = 6,m = 12 q = 7,m = 13
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 180
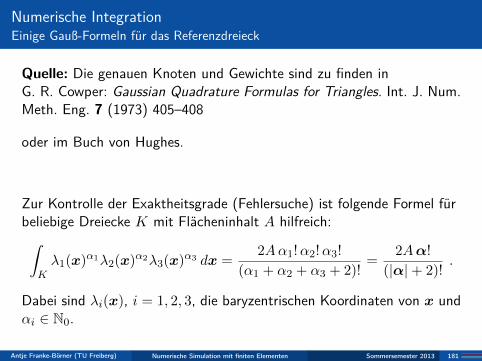
Numerische IntegrationEinige Gauß-Formeln für das Referenzdreieck
Quelle: Die genauen Knoten und Gewichte sind zu finden inG. R. Cowper: Gaussian Quadrature Formulas for Triangles. Int. J. Num.Meth. Eng. 7 (1973) 405–408
oder im Buch von Hughes.
Zur Kontrolle der Exaktheitsgrade (Fehlersuche) ist folgende Formel fürbeliebige Dreiecke K mit Flächeninhalt A hilfreich:∫
Kλ1(x)α1λ2(x)α2λ3(x)α3 dx =
2Aα1!α2!α3!
(α1 + α2 + α3 + 2)!=
2Aα!
(|α|+ 2)!.
Dabei sind λi(x), i = 1, 2, 3, die baryzentrischen Koordinaten von x undαi ∈ N0.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 181
Numerische IntegrationAuswirkungen numerischer Integration
Man kann recht allgemein zeigen, dass bei Verwendung vonQuadraturformeln hinreichend hohen Exaktheitsgrades (in Abhängigkeitvom Polynomgrades im FE-Raum) dieselbe Konvergenzrate in Bezug aufh→ 0 erreicht wird wie bei exakter Auswertung der Integrale.
Im Modellproblem (6) unter Verwendung eines FE-Raumes aus stetigenstückweisen Polynomen vom Grad k reicht hierfür ein Exaktheitsgradvon q = 2k − 2.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 182

Numerische IntegrationBeispiel
Gesucht ist der Wert des Integrals∫ 1−1(2x+ 3)dx.
(1) exakte Integration:∫ 1
−1(2x+ 3)dx =
[x2 + 3x
]1−1
= 1 + 3− 1 + 3 = 6
(2) Gauß-Quadratur: ξ1 = −1/√
3, ξ2 = 1/√
3, γ1 = γ2 = 1/2∫ 1
−1(2x+ 3)dx = 2 ·
(1
2·(− 2√
3+ 3
)+
1
2·(
2√3
+ 3
))= − 2√
3+ 3 +
2√3
+ 3 = 6
(3) Newton-Cotes-Formeln: ξ1 = −1, ξ2 = 1, γ1 = γ2 = 1/2∫ 1
−1(2x+ 3)dx = 2 · (1/2 · (−2 + 3) + 1/2 · (2 + 3)) = 6
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 183
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 184
Vorgehensweise zur Assemblierung des Galerkin-Gleichungssystems
Ausgangspunkt klassisches Randwertproblem1. Schritt Aufstellen der Variationsformulierung2. Schritt Formulierung des diskreten Gleichungssystems mit Hilfe
der Galerkin-Diskretisierung uh =∑N
j=1 ujφj
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 185
Aufgabenstellung
Gesucht ist die Lösung u in Ω = (0, 1) für
−d2u
dx2= f in (0, 1) mit
u(0) = 0 und du
dx(1) = 0.
Die Variationsformulierung lautet: Gesucht ist u ∈ V , so dassa(u, v) = l(v) mit
a(u, v) =
∫ 1
0
du
dx
dv
dxdx und l(v) =
∫ 1
0fvdx.
Die Galerkin-Diskretisierung uh =∑N
j=1 ujφj liefert die diskreteVariationsaufgabe: Gesucht ist uh ∈ V h, so dass
N∑j=1
uj
∫ 1
0
dφidx
dφjdx
dx =
∫ 1
0fφidx ∀i = 1, ..., N.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 186

Vorgehensweise zur Assemblierung des Galerkin-Gleichungssystems
Ausgangspunkt klassisches Randwertproblem1. Schritt Aufstellen der Variationsformulierung2. Schritt Formulierung des diskreten Gleichungssystems mit Hilfe
der Galerkin-Diskretisierung uh =∑N
j=1 ujφj
3. Schritt Bereitstellung der Basisfunktionen und ihrer Gradientenauf dem Referenzelement
Aλ =
[x1
]φi = λi(x) (abhängig von der Ordnung der FE)∇φ
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 187
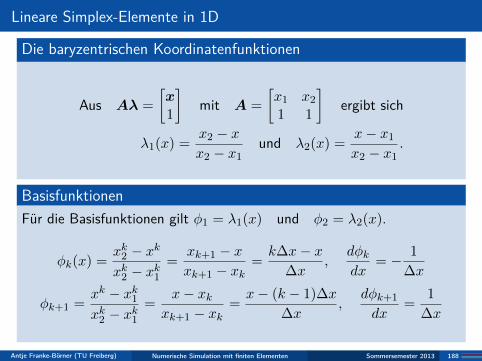
Lineare Simplex-Elemente in 1D
Die baryzentrischen Koordinatenfunktionen
Aus Aλ =
[x1
]mit A =
[x1 x2
1 1
]ergibt sich
λ1(x) =x2 − xx2 − x1
und λ2(x) =x− x1
x2 − x1.
BasisfunktionenFür die Basisfunktionen gilt φ1 = λ1(x) und φ2 = λ2(x).
φk(x) =xk2 − xk
xk2 − xk1=
xk+1 − xxk+1 − xk
=k∆x− x
∆x,
dφkdx
= − 1
∆x
φk+1 =xk − xk1xk2 − xk1
=x− xk
xk+1 − xk=x− (k − 1)∆x
∆x,
dφk+1
dx=
1
∆x
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 188
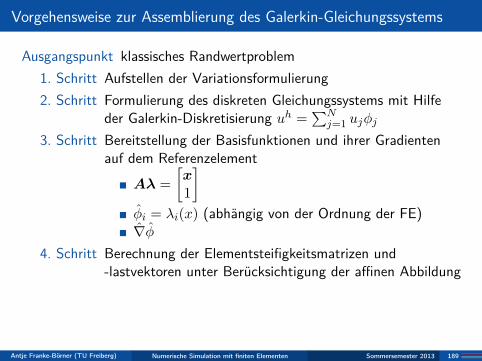
Vorgehensweise zur Assemblierung des Galerkin-Gleichungssystems
Ausgangspunkt klassisches Randwertproblem1. Schritt Aufstellen der Variationsformulierung2. Schritt Formulierung des diskreten Gleichungssystems mit Hilfe
der Galerkin-Diskretisierung uh =∑N
j=1 ujφj
3. Schritt Bereitstellung der Basisfunktionen und ihrer Gradientenauf dem Referenzelement
Aλ =
[x1
]φi = λi(x) (abhängig von der Ordnung der FE)∇φ
4. Schritt Berechnung der Elementsteifigkeitsmatrizen und-lastvektoren unter Berücksichtigung der affinen Abbildung
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 189
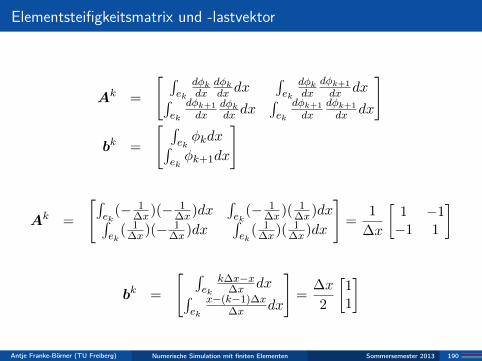
Elementsteifigkeitsmatrix und -lastvektor
Ak =
[ ∫ek
dφkdx
dφkdx dx
∫ek
dφkdx
dφk+1
dx dx∫ek
dφk+1
dxdφkdx dx
∫ek
dφk+1
dxdφk+1
dx dx
]
bk =
[ ∫ekφkdx∫
ekφk+1dx
]
Ak =
[∫ek
(− 1∆x)(− 1
∆x)dx∫ek
(− 1∆x)( 1
∆x)dx∫ek
( 1∆x)(− 1
∆x)dx∫ek
( 1∆x)( 1
∆x)dx
]=
1
∆x
[1 −1−1 1
]
bk =
[ ∫ek
k∆x−x∆x dx∫
ek
x−(k−1)∆x∆x dx
]=
∆x
2
[11
]
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 190

Vorgehensweise zur Assemblierung des Galerkin-Gleichungssystems
Ausgangspunkt klassisches Randwertproblem1. Schritt Aufstellen der Variationsformulierung2. Schritt Formulierung des diskreten Gleichungssystems mit Hilfe
der Galerkin-Diskretisierung uh =∑N
j=1 ujφj
3. Schritt Bereitstellung der Basisfunktionen und ihrer Gradientenauf dem Referenzelement
Aλ =
[x1
]φi = λi(x) (abhängig von der Ordnung der FE)∇φ
4. Schritt Berechnung der Elementsteifigkeitsmatrizen und-lastvektoren unter Berücksichtigung der affinen Abbildung
5. Schritt Assemblierung der Steifigkeitsmatrix und des Lastvektorsunter Berücksichtigung der Elementtabelle
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 191
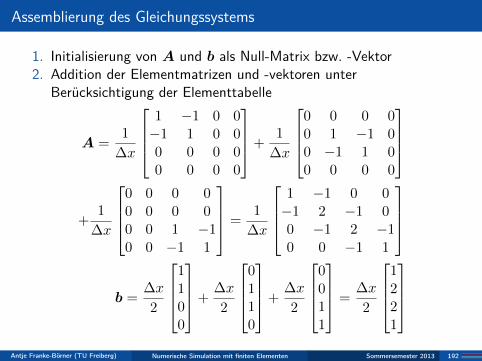
Assemblierung des Gleichungssystems
1. Initialisierung von A und b als Null-Matrix bzw. -Vektor2. Addition der Elementmatrizen und -vektoren unter
Berücksichtigung der Elementtabelle
A =1
∆x
1 −1 0 0−1 1 0 00 0 0 00 0 0 0
+1
∆x
0 0 0 00 1 −1 00 −1 1 00 0 0 0
+1
∆x
0 0 0 00 0 0 00 0 1 −10 0 −1 1
=1
∆x
1 −1 0 0−1 2 −1 00 −1 2 −10 0 −1 1
b =∆x
2
1100
+∆x
2
0110
+∆x
2
0011
=∆x
2
1221
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 192
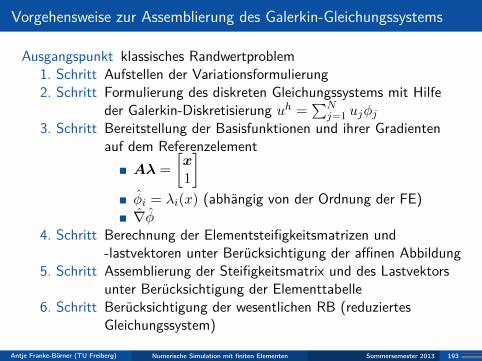
Vorgehensweise zur Assemblierung des Galerkin-Gleichungssystems
Ausgangspunkt klassisches Randwertproblem1. Schritt Aufstellen der Variationsformulierung2. Schritt Formulierung des diskreten Gleichungssystems mit Hilfe
der Galerkin-Diskretisierung uh =∑N
j=1 ujφj3. Schritt Bereitstellung der Basisfunktionen und ihrer Gradienten
auf dem ReferenzelementAλ =
[x1
]φi = λi(x) (abhängig von der Ordnung der FE)∇φ
4. Schritt Berechnung der Elementsteifigkeitsmatrizen und-lastvektoren unter Berücksichtigung der affinen Abbildung
5. Schritt Assemblierung der Steifigkeitsmatrix und des Lastvektorsunter Berücksichtigung der Elementtabelle
6. Schritt Berücksichtigung der wesentlichen RB (reduziertesGleichungssystem)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 193
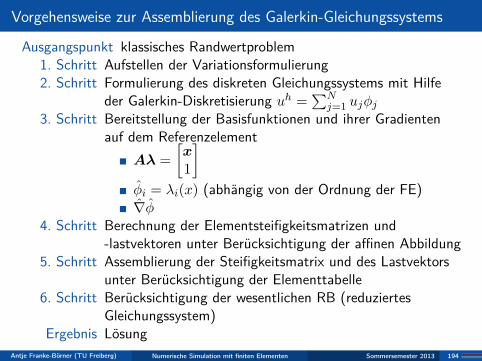
Vorgehensweise zur Assemblierung des Galerkin-Gleichungssystems
Ausgangspunkt klassisches Randwertproblem1. Schritt Aufstellen der Variationsformulierung2. Schritt Formulierung des diskreten Gleichungssystems mit Hilfe
der Galerkin-Diskretisierung uh =∑N
j=1 ujφj3. Schritt Bereitstellung der Basisfunktionen und ihrer Gradienten
auf dem ReferenzelementAλ =
[x1
]φi = λi(x) (abhängig von der Ordnung der FE)∇φ
4. Schritt Berechnung der Elementsteifigkeitsmatrizen und-lastvektoren unter Berücksichtigung der affinen Abbildung
5. Schritt Assemblierung der Steifigkeitsmatrix und des Lastvektorsunter Berücksichtigung der Elementtabelle
6. Schritt Berücksichtigung der wesentlichen RB (reduziertesGleichungssystem)
Ergebnis LösungAntje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 194
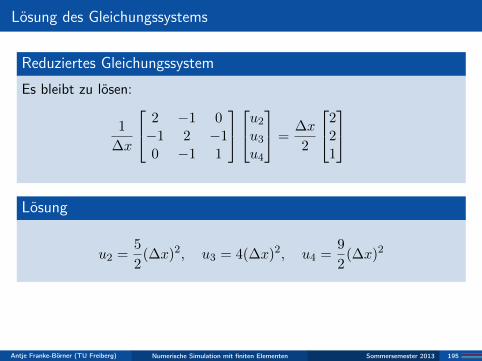
Lösung des Gleichungssystems
Reduziertes GleichungssystemEs bleibt zu lösen:
1
∆x
2 −1 0−1 2 −10 −1 1
u2
u3
u4
=∆x
2
221
Lösung
u2 =5
2(∆x)2, u3 = 4(∆x)2, u4 =
9
2(∆x)2
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 195
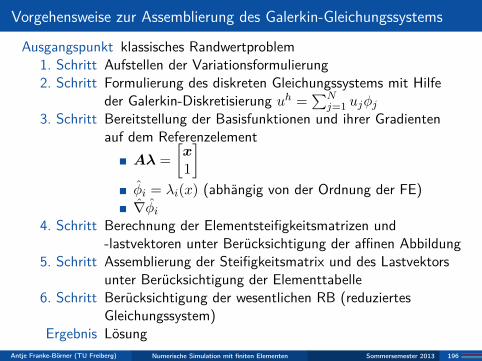
Vorgehensweise zur Assemblierung des Galerkin-Gleichungssystems
Ausgangspunkt klassisches Randwertproblem1. Schritt Aufstellen der Variationsformulierung2. Schritt Formulierung des diskreten Gleichungssystems mit Hilfe
der Galerkin-Diskretisierung uh =∑N
j=1 ujφj3. Schritt Bereitstellung der Basisfunktionen und ihrer Gradienten
auf dem ReferenzelementAλ =
[x1
]φi = λi(x) (abhängig von der Ordnung der FE)∇φi
4. Schritt Berechnung der Elementsteifigkeitsmatrizen und-lastvektoren unter Berücksichtigung der affinen Abbildung
5. Schritt Assemblierung der Steifigkeitsmatrix und des Lastvektorsunter Berücksichtigung der Elementtabelle
6. Schritt Berücksichtigung der wesentlichen RB (reduziertesGleichungssystem)
Ergebnis LösungAntje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 196
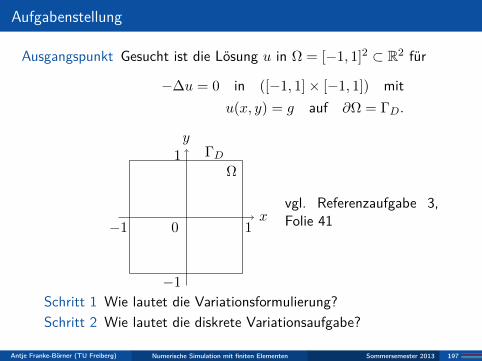
Aufgabenstellung
Ausgangspunkt Gesucht ist die Lösung u in Ω = [−1, 1]2 ⊂ R2 für
−∆u = 0 in ([−1, 1]× [−1, 1]) mitu(x, y) = g auf ∂Ω = ΓD.
x
y
0
Ω
ΓD
−1 1
−1
1
vgl. Referenzaufgabe 3,Folie 41
Schritt 1 Wie lautet die Variationsformulierung?Schritt 2 Wie lautet die diskrete Variationsaufgabe?
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 197

Aufgabenstellung
Ausgangspunkt Gesucht ist die Lösung u in Ω = [−1, 1]2 ⊂ R2 für−∆u = 0 in ([−1, 1]× [−1, 1]) mit
u(x, y) = g auf ∂Ω = ΓD.
Schritt 1 Die Variationsformulierung lautet: Gesucht ist u ∈ V , sodass
a(u, v) = 0 mit
a(u, v) =
∫Ω∇u∇ vdx.
Schritt 2 Die Galerkin-Diskretisierung uh =∑N
j=1 ujφj liefert diediskrete Variationsaufgabe: Gesucht ist uh ∈ V h, so dass
N∑j=1
uj
∫Ω∇φi∇φjdx = 0 ∀i = 1, ..., N.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 198
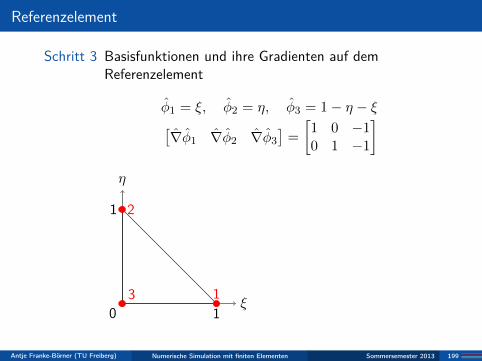
Referenzelement
Schritt 3 Basisfunktionen und ihre Gradienten auf demReferenzelement
φ1 = ξ, φ2 = η, φ3 = 1− η − ξ[∇φ1 ∇φ2 ∇φ3
]=
[1 0 −10 1 −1
]
ξ
η
1
1
01
2
3
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 199
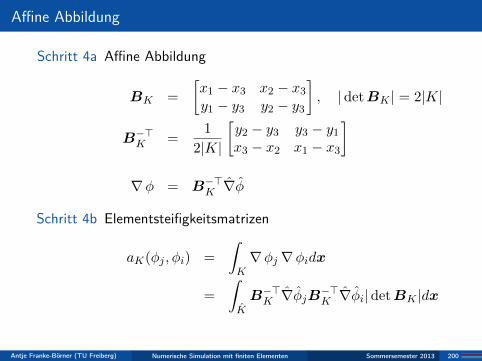
Affine Abbildung
Schritt 4a Affine Abbildung
BK =
[x1 − x3 x2 − x3
y1 − y3 y2 − y3
], |detBK | = 2|K|
B−>K =1
2|K|
[y2 − y3 y3 − y1
x3 − x2 x1 − x3
]
∇φ = B−>K ∇φ
Schritt 4b Elementsteifigkeitsmatrizen
aK(φj , φi) =
∫K∇φj ∇φidx
=
∫KB−>K ∇φjB
−>K ∇φi|detBK |dx
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 200
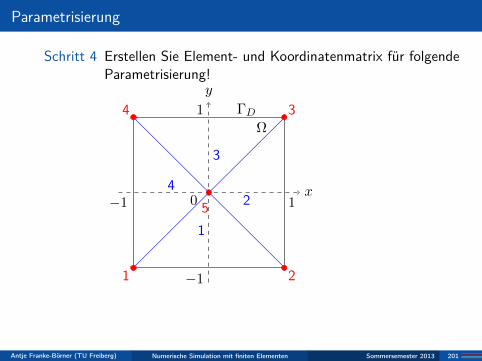
Parametrisierung
Schritt 4 Erstellen Sie Element- und Koordinatenmatrix für folgendeParametrisierung!
x
y
0
Ω
ΓD
−1 1
−1
1
1 2
34
51
2
3
4
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 201

Parametrisierung
Schritt 4 Element- und Koordinatenmatrix
ET =
1 2 3 42 3 4 15 5 5 5
, p =
[−1 1 1 −1 0−1 −1 1 1 0
]
x
y
0
Ω
ΓD
−1 1
−1
1
1 2
34
51
2
3
4
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 202
Elementsteifigkeitsmatrizen
Schritt 4 Berechnen Sie die Elementsteifigkeitsmatrizen! 4 Elemente- 4 Gruppen.Überlegung: Die Berechnung wievieler Einträge ist nötigbei Berücksichtigung der Symmetrie?
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 203

Elementsteifigkeitsmatrizen
Schritt 4 Elementsteifigkeitsmatrizen
a1 = a2 = a3 = a4 = aK =1
2
1 0 −10 1 −1−1 −1 2
Wieso ist die Elementsteifigkeitsmatrix für alle Elementegleich?
Schritt 5 Assemblieren Sie die Steifigkeitsmatrix A!
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 204

Steifigkeitsmatrix
Schritt 5 Assemblierung der Steifigkeitsmatrix A ∈ R5×5
A =1
2
1 0 0 0 −10 1 0 0 −10 0 0 0 00 0 0 0 0−1 −1 0 0 2
+1
2
0 0 0 0 00 1 0 0 −10 0 1 0 −10 0 0 0 00 −1 −1 0 2
+1
2
0 0 0 0 00 0 0 0 00 0 1 0 −10 0 0 1 −10 0 −1 −1 2
+1
2
1 0 0 0 −10 0 0 0 00 0 0 0 00 0 0 1 −1−1 0 0 −1 2
=1
2
2 0 0 0 −20 2 0 0 −20 0 2 0 −20 0 0 2 −2−2 −2 −2 −2 8
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 205

Reduziertes Gleichungssystem
Schritt 6 Berücksichtigung der wesentlichen Randbedingungen:Referenzproblem 3 auf Folie 41 liefert Randwerte u1, u2, u3
und u4[AWW AWI
AIW AII
] [uwuI
]=
[g0
]mit uW = g
[I O
AIW AII
] [uwuI
]=
[g0
]AIWuW +AIIuI = AIWg +AIIuI = 0
AIIuI = −AIWg
Lösung Berechnen Sie u5 = uI ! Vergleichen Sie mit der exaktenLösung u(x, y) = 2(1+y)
(3+x)2+(1+y)2für (0, 0)!
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 206

Lösung
Ergebnis
g =
00
0.20.5
, AIW =[−1 −1 −1 −1
], AII = 4
4u5 = 0.2 + 0.5 = 0.7
u5 = 0.175
Vergleich mit exakter Lösung: u(0, 0) = 0.2
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 207
Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 208
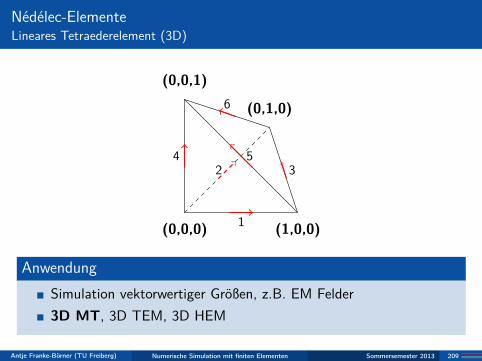
Nédélec-ElementeLineares Tetraederelement (3D)
1
2 34 5
6
(0,0,0) (1,0,0)
(0,1,0)
(0,0,1)
AnwendungSimulation vektorwertiger Größen, z.B. EM Felder3D MT, 3D TEM, 3D HEM
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 209

Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 210
Nédélec-Elemente
Bisher: Differentialgleichungen mit Gradientenoperator imVariationsintegral. Diese führten auf Variationsraum H1(Ω).
In vielen Gleichungen der mathematischen Physik treten neben demGradienten auch Rotations- und Divergenzoperator auf.
Beispiel: Zeitharmonische Maxwell-Gleichung (16) nach Elimination desMagnetfeldes:
∇×(∇×E) + iωµσE = −iωµJe . (35)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 211
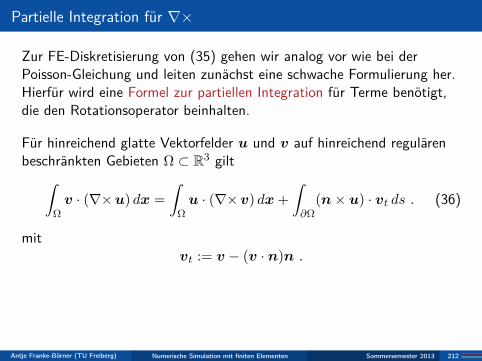
Partielle Integration für ∇×
Zur FE-Diskretisierung von (35) gehen wir analog vor wie bei derPoisson-Gleichung und leiten zunächst eine schwache Formulierung her.Hierfür wird eine Formel zur partiellen Integration für Terme benötigt,die den Rotationsoperator beinhalten.
Für hinreichend glatte Vektorfelder u und v auf hinreichend regulärenbeschränkten Gebieten Ω ⊂ R3 gilt∫
Ωv · (∇×u) dx =
∫Ωu · (∇×v) dx+
∫∂Ω
(n× u) · vt ds . (36)
mitvt := v − (v · n)n .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 212
Tangentialkomponenten
Bezeichnungen: vt : Tangentialkomponente von v,n× v : „rotierte“ Tangentialkomponente von v.
Es gilt:
(i) vt = n× (v × n)(ii) n× v = n× vt(iii) (n× u) · vt = (n× u) · v(iv) (n× u) · vt = −ut · (n× v)
Diese Beziehungen folgen unmittelbar aus folgenden beiden Identitätenfür das Vektorprodukt im Euklidischen Anschauungsraum: Für allea, b, c ∈ R3 gilt
a× (b× c) = (a · c)b− (a · b)c,a · (b× c) = b · (c× a) = c · (a× b).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 213

FunktionenräumeQuadratisch integrierbare Rotation
Damit die Integrale in (36) definiert sind, müssen die Vektorfelder u undv sowie ∇×u und ∇×v quadratisch integrierbar sein. Dies führt aufdie Funktionenräume
L2(Ω) := u : Ω→ C3 :
∫Ω|u|2 dx <∞ = L2(Ω)3,
H(rot; Ω) := u ∈ L2(Ω) : ∇×u ∈ L2(Ω).Man nennt ein Vektorfeld v ∈ L2(Ω) schwache Rotation vonu ∈ L2(Ω), falls für jedes auf ∂Ω verschwindende differenzierbareVektorfeld φ gilt ∫
Ωu · (∇×φ) dx =
∫Ωv · φ dx.
(36) legt auch nahe, welche wesentliche Randbedingung in H(rot; Ω) zustellen ist: man definiert
H0(rot; Ω) := u ∈H(rot; Ω) : n× u = 0 längs ∂Ω.Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 214
Konformität in H(rot; Ω)
Das Zusammenstückeln von Funktionen u ∈H(rot; Ω) aus Funktionenauf Teilgebieten von Ω erfordert an den Übergängen die Stetigkeit derTangentialkomponenten
n× u.
Satz 32Seien Ω1,Ω2 zwei nichtüberlappende Lipschitz-Gebiete mitgemeinsamem Randstück Γ von positivem Maß, d.h. Ω1 ∩Ω2 = Γ. Seienferner ui ∈ L2(Ωi), (i = 1, 2) und bezeichne
Ω := Ω1 ∪ Ω2 ∪ Γ, u(x) :=
u1(x), x ∈ Ω1,
u2(x), x ∈ Ω2.
Gilt ui ∈H(rot; Ωi) (i = 1, 2) und n× u1 = n× u2 längs Γ, so istu ∈H(rot; Ω).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 215
Randbedingungen
Dirichlet RB:n×E = ED. (37)
Längs der Ränder von perfekten elektrischen Leitern gilt z.B.n×E = 0.Neumann RB: Vorgabe einer Flächenstromdichte n×H = JeF ,was nach der Faradayschen Gleichung auf
n× (∇×E) = −iωµJeF (38)
führt.Gemischte RB: Flächenstromdichte JeF bei Impedanz Z(Impedanz-RB):
n× (∇×E)− iωµZ−1Et = −iωµJeF . (39)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 216
Variationsformulierung
Anwendung der partiellen Integrationsformel (36) auf dieMaxwell-Gleichung (35) zweiter Ordnung nach Multiplikation mit einerTestfunktion v führt auf
−iωµ∫
ΩJe · v dx =
∫Ω
[(∇×E) · (∇×v)− k2E · v
]dx
+
∫∂Ω
[n× (∇×E)] · vt ds.
Besteht der Rand ∂Ω aus drei Teilstücken ΓD, ΓN und ΓG, auf denenjeweils die Dirichlet-RB (37), die Neumann-RB (38) bzw. die gemischteRB (39) gestellt sind, so bieten sich als Ansatz- bzw. Testräume an:
S := E ∈H(rot; Ω) : n×E = ED längs ΓD (40a)V := v ∈H(rot; Ω) : n× v = 0 längs ΓD (40b)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 217
Variationsformulierung
Die Variationsformulierung dieser RWA lautet somit:
Bestimme E ∈ S sodass
a(E,v) = `(v) ∀v ∈ V (41)
mit
a(E,v) =
∫Ω
[(∇×E) · (∇×v)− k2E · v
]dx+ iωµ
∫ΓG
Z−1Et · vt ds,
`(v) = −iωµ∫
ΩJe · v dx+ iωµ
∫ΓN∪ΓG
JeF · vt ds.
Die Bilinearform im zweiten Argument bzw. die Linearform sind hier (imKomplexen) antilinear.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 218
FunktionenräumeQuadratisch integrierbare Divergenz
Man nennt eine Funktion v ∈ L2(Ω) schwache Divergenz vonu ∈ L2(Ω), falls für jede auf ∂Ω verschwindende differenzierbareFunktion φ gilt ∫
Ωu · ∇φdx = −
∫Ωvφ dx.
Der Raum aller Vektorfelder mit quadratisch integrierbarer Divergenzwird bezeichnet mit
H(div; Ω) := u ∈ L2(Ω) : ∇·u ∈ L2(Ω).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 219
FunktionenräumeQuadratisch integrierbare Divergenz
Für hinreichend glatte Funktionen u und v auf hinreichend regulärenbeschränkten Gebieten Ω gilt∫
Ωv(∇·u) dx = −
∫Ωu · ∇ v dx+
∫∂Ωvun ds
mit un := n · u.Anhand dieser Greenschen Formel erkennt man auch, dass fürH(div; Ω)-Funktionen als Randwerte die Normalkomponente unvorzuschreiben ist. Daher setzt man
H0(div; Ω) := u ∈H(div; Ω) : un = 0 längs ∂Ω.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 220

FunktionenräumeInnenprodukte
Die Räume H(rot; Ω) und H(div; Ω) sind Hilbert-Räume ausgestattetmit den Innenprodukten
(u,v)H(rot;Ω) :=
∫Ω
(u · v + (∇×u) · (∇×v)) dx
bzw.(u,v)H(div;Ω) :=
∫Ω
(u · v + (∇·u) · (∇·v)) dx.
Die zugehörigen Normen werden mit ‖ · ‖H(rot;Ω) bzw. ‖ · ‖H(div;Ω)
bezeichnet.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 221
Skalarpotentiale
Es ist oft nützlich, Vektorfelder durch Potentiale in skalarer odervektorieller Form darzustellen. Dieser Abschnitt befasst sich damit, wanndies möglich ist.
Für glatte Funktionen ist bekannt, dass ein Vektorfeld durch ein skalaresPotential darstellbar ist, wenn seine Rotation verschwindet.
Satz 33Sei Ω ⊂ R3 ein einfach zusammenhängendes Lipschitz-Gebiet sowieu ∈ L2(Ω). Dann gilt ∇×u = 0 genau dann, wenn ein skalaresPotential φ ∈ H1(Ω) existiert mit u = ∇φ. Ferner ist φ bis auf eineadditive Konstante eindeutig bestimmt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 222
Vektorpotentiale
Um der Frage nachzugehen, wann ein Vektorpotential existiert, müssenwir das Grundgebiet Ω zunächst genauer beschreiben.
Wir nehmen an, Ω sei ein beschränktes, zusammenhängendesLipschitz-Gebiet und bezeichnen mit ∂ΩjJj=0 die zusammenhängendenKomponenten von ∂Ω. ∂Ω0 bezeichne dabei diejenige Komponente von∂Ω, welche den Rand der unbeschränkten Komponente von R3 \ Ωbildet.
Mit ΩjJj=0 bezeichnen wir das Teilgebiet von R3 \ Ω mit Rand ∂Ωj ,d.h. Ω0 ist unbeschränkt.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 223
Vektorpotentiale
Satz 34Zu jeder Funktion u ∈H(div; Ω) mit
∇·u = 0 in Ω sowie∫∂Ωj
un ds = 0, j = 0, . . . , J,
existiert ein Vektorpotential A ∈ H1(Ω)3 mit
u = ∇×A und ∇·A = 0 in Ω.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 224
Helmholtz-Zerlegung
Ebenfalls häufig von Nutzen ist es, ein Vektorfeld als Summe einesSkalar- und eines Vektorpotentials zu schreiben. Eine solche Darstellungheißt Helmholtz-Zerlegung.Wir benötigen für das Weitere noch folgende Notation bezüglich Ω,welches hier nicht als einfach zusammenhängend vorausgesetzt wird.Wir nehmen an, es gäbe L offene, zusammenhängende, in Ω enthalteneFlächen Σ`L`=1, genannt innere Schnitte, sodass für alle ` gilt:1. Jede Fläche Σ` ist der offene Teil einer glatten Fläche;2. ∂Σ` ⊂ ∂Ω;3. Σ` ∩ Σm = ∅ falls ` 6= m;4. die Menge Ω0 := Ω \ ∪L`=1Σ` ist einfach zusammenhängend und
pseudo-Lipschitz.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 225

Helmholtz-Zerlegungde-Rham-Diagramm
Angefangen bei Unterräumen von H1(Ω) bilden die behandeltenDifferentialoperatoren ab in die Folge von Räumen
H1(Ω)/R ∇−→H(rot; Ω)∇×−→H(div; Ω)
∇·−→ L2(Ω) (42)
bzw. mit Nullrandbedingungen
H10 (Ω)
∇−→H0(rot; Ω)∇×−→H0(div; Ω)
∇·−→ L2(Ω)/R. (43)
Diese Darstellung wird als de-Rham-Diagramm bezeichnet.
Satz 35In den Diagrammen (42) und (43) ist der Bildraum des jeweilsvorangehenden Operators enthalten im Nullraum des nachfolgendenOperators. Der Bildraum ist jeweils ein abgeschlossener Unterraum desentsprechenden Nullraumes mit endlicher Kodimension6.
6Dimension des orthogonalen Komplements eines abgeschlossenen Unterraumes
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 226

Helmholtz-Zerlegung
Wir betrachten speziell die Folge (43). Da ∇H10 (Ω) ein abgeschlossener
Unterraum des Nullraums des Rotations-Operators ist, können wir nachdem Projektionssatz diesen Nullraum schreiben als
N (rot) = ∇H10 (Ω)⊕ (∇H1
0 (Ω))⊥,
wobei das orthogonale Komplement bezüglich desH(rot; Ω)-Innenprodukts zu vestehen ist.Sei nun u ∈ N (rot) ⊂H0(rot; Ω), und zwar u ∈ (∇H1
0 (Ω))⊥. Danngilt ∇×u = 0 in Ω, n× u = 0 längs ∂Ω, sowie
(u,∇φ) = 0 ∀φ ∈ H10 (Ω).
Partielle Integration liefert nun ∇·u = 0 in Ω. Diese Argumentationlässt sich umkehren und man erhält
(∇H10 (Ω))⊥ = u ∈H0(rot; Ω) : ∇×u = 0,∇·u = 0 in Ω.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 227
Helmholtz-Zerlegung
Dieser Raum heißt normaler Kohomologieraum von Ω und wird mitKn(Ω) bezeichnet.
Analoge Betrachtung zeigt: das orthogonale Komplement von∇×H0(rot; Ω) im Nullraum des Divergenzoperators ist gegeben durchden tangentialen Kohomologieraum Kt(Ω) definiert durch
Kt(Ω) := u ∈H0(div; Ω) : ∇·u = 0,∇×u = 0 in Ω.
Satz 35 besagt, dass die Dimensionen von Kn(Ω) und Kt(Ω) endlichsind.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 228
Helmholtz-ZerlegungBezug zur Elektrostatik
Diese Kohomologieräume treten auf natürliche Weise z.B. in derElektrostatik (und Magnetostatik) auf.
Gesucht sei eine statische/stationäre Lösung der Maxwell-Gleichungen ineinem beschränkten Gebiet mit metallischem Rand und ε = 1, σ = 0(Vakuum) sowie J = 0 (kein Quellstrom).
Es gelten also
∇×E = 0 in Ω (statisches Feld),∇·E = 0 in Ω (keine Quellen),n×E = 0 längs ∂Ω (metallischer Rand).
Damit liegt E in Kn(Ω).Analog liegt die magnetische Flussdichte B eines quellenfreienstatischen Feldes in Kt(Ω).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 229
Helmholtz-ZerlegungZusammenfassung
Satz 36
1. Ist u ∈H0(rot; Ω) mit ∇×u = 0 in Ω, so existieren eineindeutiges Skalarpotential φ ∈ H1
0 (Ω) sowie eine Funktionfn ∈ Kn(Ω) mit
u = ∇φ+ fn.
2. Ist u ∈H0(div; Ω) mit ∇·u = 0 in Ω, so existiert einVektorpotential A ∈H0(rot; Ω) und eine Funktion f t ∈ Kt(Ω) mit
u = ∇×A+ f t.
Das Vektorpotential wird eindeutig, wenn wir verlangen, dass∇·A = 0 in Ω sowie
∫∂Ωj
n ·A ds = 0 für j = 0, 1, . . . , J .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 230
Helmholtz-ZerlegungZusammenfassung
Satz 37Jede Funktion in L2(Ω) besitzt die Zerlegung
u = ∇ p+ fn +∇×A
mit eindeutigem p ∈ H10 (Ω), fn ∈ Kn(Ω) sowie
A ∈ w ∈H(rot; Ω) :∇×w = 0 in Ω,n ·w = 0 längs ∂Ω,∫Σ`
n ·w ds = 0, ` = 1, . . . , L.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 231
Helmholtz-ZerlegungZusammenfassung
Bemerkungen 38
1. Eine analoge Zerlegung gilt mit p ∈ H1(Ω), f t ∈ Kt(Ω) sowieA ∈H0(rot; Ω).
2. Es ist dimKn(Ω) = J sowie dimKt(Ω) = L.3. Im Fall, dass Ω einfach zusammenhängend ist, ist L = 0.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 232

Inhalt
1. Einleitung1.1 Vorbemerkungen1.2 Rand- und Anfangswertaufgaben2. Variationsformulierung von Randwertaufgaben2.1 Vorbemerkungen2.2 Bezeichnungen und mathematische Hilfsmittel2.3 Referenzaufgaben in 2D2.4 Variationsformulierung der Poisson-Gleichung2.5 Galerkin-Approximation2.6 Variationsformulierung der Helmholtz-Gleichung3. Lagrange-Elemente3.1 Einleitung3.2 Konstruktion von Finite-Element-Räumen3.3 Assemblierung der Galerkin-Gleichungen3.4 Beispiel: 1D Poissongleichung3.5 Konvergenz3.6 Numerische Integration3.7 Beispiel: 2D Poissongleichung
Schema zur Assemblierung des Galerkin-GleichungssystemsBeispiel zur 2D Poissongleichung
4. Nédélec-Elemente4.1 Einleitung4.2 Neue Variationsräume
VariationsformulierungHelmholtz-Zerlegung
4.3 Divergenz- und Rotationskonforme ElementeGebietstransformationen - GradientoperatorRotationskonforme Finite Elemente
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 233

Divergenz- und Rotationskonforme ElementeGebietstransformationen
Seien
K, K ⊂ R3 beschränkte Gebiete,FK : K → K, x 7→ x = FK(x) stetig differenzierbare Bijektion,detF ′K ohne Vorzeichenwechsel.
Einer skalaren Funktion u ∈ H1(K) wird durch
u = u FK (44)
eine skalare Funktion u ∈ H1(K) zugeordnet.
Seien ∇, ∇ die Gradienten bezüglich x, x, dann gilt nach derKettenregel
∇u = (F ′K)−> ∇u. (45)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 234

Divergenz- und Rotationskonforme ElementeGebietstransformationen - Vektorfelder
Die Transformation von Vektorfeldern erfordert zusätzlich eineAnpassung der abhängigen Variablen:
Für u, u ∈ H1(Ω) wie oben gelten
∇u ∈H(rot; K) und ∇u ∈H(rot;K)
(vgl. (42)).
Damit die Gradienten durch die gesuchte Transformation ebenfallsaufeinander abgebildet werden, müssen zwei Vektorfelder
v ∈H(rot;K) und v ∈H(rot; K)
transformiert werden gemäß
v FK = (F ′K)−>v. (46)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 235

Divergenz- und Rotationskonforme ElementeGebietstransformationen - Rotationsoperator
Lemma 39Für die Funktionen v ∈H(rot;K) und v ∈H(rot; K) gelte dieBeziehung (46) mit einer stetig differenzierbaren BijektionFK : K → K. Bezeichnet [∇×v] die 3× 3-Matrix
[∇×v]i,j =∂vi∂xj− ∂vj∂xi
, (i, j = 1, 2, 3),
so gilt[∇×v] FK = (F ′K)−> [∇ × v] (F ′K)−1.
Mit v ∈H(rot; K) ist somit auch v ∈H(rot;K).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 236
Divergenz- und Rotationskonforme ElementeGebietstransformationen - Rotationsoperator
Korollar 40Unter den Voraussetzungen von Lemma 39 bestehe zwischenv ∈H(rot;K) und v ∈H(rot; K) die Beziehung (46). Dann istv ∈H(rot;K) und es gilt
[∇×v] FK =1
detF ′KF ′K [∇ × v].
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 237
Divergenz- und Rotationskonforme ElementeGebietstransformationen - Divergenzoperator
Analoge Transformation für Divergenz: nach (42) gilt mitv ∈H(rot; K) auch ∇ × v ∈H(div; K).
Eine Funktion w ∈H(div; K) muss also so transformiert werden, dass
w FK =1
detF ′KF ′K w. (47)
Lemma 41Seien w,w zwei differenzierbare Funktionen, welche (47) erfüllen miteiner stetig differenzierbaren Bijektion FK : K → K. Dann gilt
(∇·w) FK =1
detF ′K(∇ · w).
Insbesondere ist mit w ∈H(div; K) auch w ∈H(div;K).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 238
Divergenz- und Rotationskonforme ElementeGebietstransformationen: Weitere nützliche Fakten
Ist n äußere Einheitsnormale an K und x ∈ ∂K, so ist n definiert durch
n(FK(x)) :=(F ′K)−>n
‖(F ′K)−>n‖(x),
äußere Einheitsnormale an K.
Ist t ein Einheitstangentenvektor an ∂K im Punkt x ∈ ∂K, so ist
t(FK(x)) :=F ′K t
‖F ′K t‖(x)
ein Einheitstangentenvektor an ∂K im Punkt FK(x).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 239
Divergenz- und Rotationskonforme ElementeGebietstransformationen: Oberflächenintegrale
Gilt für u, u (44), so gilt mit Jn(x) := |detF ′K | ‖(F ′K)−>n‖∫∂K
u ds =
∫∂K
uJn ds. (48)
Gilt für w, w (47) und für φ, φ (44), so gilt∫∂K
(n ·w)φds = sgn(detF ′K)
∫∂K
(n · w)φ ds. (49)
Gilt für u, u (46) und ebenso für v, v, so gilt∫∂K
(n× u) · vt ds = sgn(detF ′K)
∫∂K
(n× u) · vt ds. (50)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 240
Rotationskonforme Elemente
Whitney, 1957Nédélec, 1980„Kantenelemente“, (edge elements)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 241
Rotationskonforme ElementePolynomraum
Sk :=p ∈ P3
k : x · p(x) = 0
P3k meint den Raum der homogenene Polynome p(x) (x ∈ R3) vom
exakten Grad k. Damit ist klar: p ∈ P3k ⇒ x · p ∈ Pk+1.
Umgekehrt kann jedes q ∈ Pk+1 geschrieben werden als q = x · p miteinem p ∈ P3
k .
Somit folgt:
dim Sk = 3 dim Pk − dim Pk+1 = k(k + 2).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 242
Rotationskonforme Elemente. . . noch ein Polynomraum
Rk := P3k−1 ⊕Sk.
Es gilt dim Rk = 3 dim Pk−1 + dim Sk = 12k(k + 2)(k + 3).
Lemma 42P3k = Rk ⊕∇ Pk+1.
Lemma 43Gilt ∇×u = 0 für ein u ∈ Rk, so gilt u = ∇ p für ein p ∈Pk.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 243
Rotationskonforme Elemente2D Fall
Bemerkung 44Analoger Polynomraum für zweidimensionale Gebiete bzw. Oberflächen:für ein Dreieck f in der (x1, x2)-Ebene:
Sk(f) :=p ∈ P2
k : x · p(x) = 0,
Rk(f) := Pk−1(f)2 ⊕Sk(f)
Lemma 43 gilt dann bezüglich des skalaren Rotationsoperators∇×u = ∂u2
∂x1− ∂u1
∂x2.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 244

Rotationskonforme Elemente
Definition 45Ein rotationskonformes finites Element (K, PK ,ΨK) der Ordnungk ∈ N auf dem Referenzelement wird definiert durch(a) K sei das Referenztetraeder,(b) der Funktionenraum sei gegeben durch PK = Rk,(c) die Freiheitsgrade ΨK = Me ∪Mf ∪MK seien gegeben durch die
Momente
Me(u) =
∫e
(u · t)q ds : q ∈Pk−1(e), e Kante von K, (51a)
Mf (u) =
1
|f |
∫f
u · q ds : q ∈Pk−2(f)3, n · q = 0, f Fläche von K,
(51b)
MK(u) =
∫K
u · q dx : q ∈P3k−3(K)
. (51c)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 245
Rotationskonforme ElementeTransformation auf Gebietselement
Mit u ∈ Rk auf K assoziieren wir gemäß (46) im speziellen Fall einer affinenAbbildung FK : K → K
u FK = B−>K u. (52)
Gemäß Korollar 40 besteht zwischen den Rotationen der beiden Vektorfelder dieBeziehung
∇×u =1
detBKBK(∇ × u).
Ist t ein Einheitsvektor in Richtung der Kanten e von K, so ist
t :=BK t
‖BK t‖(53)
ein Einheitsvektor in Richtung des Bildes e der Kante e unter FK .
Lemma 46Rk ist invariant unter der Transformation (52).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 246
Rotationskonforme Elemente
Definition 47Das rotationskonforme finite Element (K,PK ,ΨK) auf einem beliebigenTetraeder K ⊂ R3 ist definiert durch(a) K sei ein beliebiges (nichtentartetes) Tetraeder.
(b) der Funktionenraum sei gegeben durch PK = Rk.
(c) Bezeichnen t und n Einheitsvektoren längs einer beliebigen Kante e bzw.normal zu einer beliebigen Fläche f von K, E (K) und F (K) die Mengeder Kanten bzw. Flächen von K, so seien die Freiheitsgrade gegebendurch
Me(u) =
∫e
(u · t)q ds : q ∈Pk−1(e), e ∈ E (K)
, (54a)
Mf (u) = 1
|f |
∫f
u · q ds : q ∈ BKPk−2(f)3,n · q = 0, f ∈ F (K),
(54b)
MK(u) =
∫K
u · q dx : q FK ∈ BK/(detBK)P3k−3(K)
. (54c)
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 247

Rotationskonforme Elemente
Lemma 48Sei detBK > 0 und es mögen die Tangentenvektoren an die Kanten von Kund K in der Beziehung (53) stehen. Dann sind unter der Voraussetzung(52) die Freiheitsgrade (51) von u auf K identisch mit den Freiheitsgraden(54) von u auf K.
Konformität: Nach Lemma 32 zu zeigen: n× u stetig überElementgrenzen. Da die Kanten- und Flächenfreiheitsgrade an gemeinsamenFlächen übereinstimmen, sind die Freiheitsgrade der Differenz dort Null.
Lemma 49Verschwinden für eine Funktion u ∈ Rk alle zu einer Fläche f oder derenKanten e gehörenden Freiheitsgrade aus (54), so gilt n× u = 0 auf f .
Lemma 50Verschwinden für eine Funktion u ∈ Rk alle Freiheitsgrade (54), so istu = 0.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 248
Hausaufgabe
1. Schritt Finden Sie die Variationsformulierung für folgendesklassisches Randwertproblem
∇×(µ−1∇×E) + (iωσ − ω2ε)E = 0 in Ω
n×E = 0 auf Γ⊥
n×H = 0 auf Γ||
µ−1∇×E = −iωHn(x, y, z) auf Γtop ∪ Γbottom!
2. Schritt Wie lautet die diskrete Variationsaufgabe unterBerücksichtigung von
uh(x) =
n∑i=1
lhi (uh)φhi (x)?
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 249

Hausaufgabe - Lösung
1. Schritt Die Variationsformulierung des Randwertproblems lautet:Finde E ∈ S , so dass
a(E,v) = l(v) ∀v ∈ V mit
a(E,v) =
∫Ω
(µ−1∇×E · ∇×v + (iωσ − ω2ε)E · v
)dx,
l(v) = iω
∫Γtop∪Γbottom
(n×Hn) · vtds
S := E ∈H(rot; Ω) : n×E = 0 auf Γ⊥ undV := v ∈H(rot; Ω) : n× v = 0 auf Γ⊥.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 250
Hausaufgabe - Lösung
2. Schritt Das diskrete Gleichungssystem lautet:
Au = b mit
Ai,j = a(φi,φj), bi = l(φi), uj = lhj (Eh) und
a(φi,φj) =
∫Ωµ−1∇×φi · ∇×φjdx
+
∫Ω
(iωσ − ω2ε)φi · φjdx,
l(φi) = iω
∫Γtop∪Γbottom
n×Hn · φi,tds
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 251

Rotationskonforme ElementeDas rotationskonforme Element niedrigster Ordnung
Für den Fall k = 1 zeigt man leicht
R1 =u(x) = a+ b× x : a, b ∈ C3
.
Hier treten nur Kantenmomente auf, daher auch der Name„Kantenelemente“. Die 6 Freiheitsgrade (d.h. die Komponenten derVektoren a und b) werden durch die 6 Kantenmomente bestimmt.
Durch Nachrechnen bestätigt man: die nodale Basisfunktion mitKantenmoment Eins längs der Kante von Knoten i nach Knoten j istgegeben durch
φi,j = λi∇λj − λj ∇λi, i, j = 1, . . . 4, i < j.
wobei λi die baryzentrischen Koordinaten im Tetraeder bezeichnen.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 252
Rotationskonforme Elemente
Da die Mittelpunktregel exakt für Polynome vom Grad ≤ 1 ist, kannman durch Auswertung von φi,j an den Kantenmittelpunkten zeigen,dass ∫
ei,j
φi,j · t ds = 1.
Ferner gilt∇×φi,j = 2∇λi ×∇λj .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 253
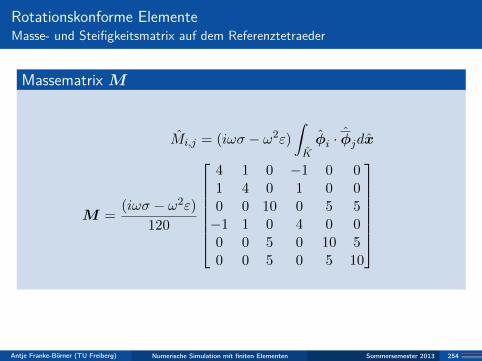
Rotationskonforme ElementeMasse- und Steifigkeitsmatrix auf dem Referenztetraeder
Massematrix M
Mi,j = (iωσ − ω2ε)
∫Kφi · φjdx
M =(iωσ − ω2ε)
120
4 1 0 −1 0 01 4 0 1 0 00 0 10 0 5 5−1 1 0 4 0 00 0 5 0 10 50 0 5 0 5 10
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 254
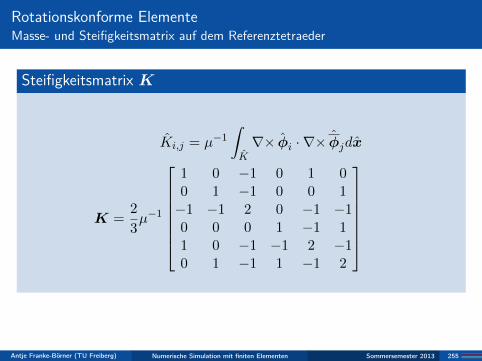
Rotationskonforme ElementeMasse- und Steifigkeitsmatrix auf dem Referenztetraeder
Steifigkeitsmatrix K
Ki,j = µ−1
∫K∇× φi · ∇× φjdx
K =2
3µ−1
1 0 −1 0 1 00 1 −1 0 0 1−1 −1 2 0 −1 −10 0 0 1 −1 11 0 −1 −1 2 −10 1 −1 1 −1 2
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 255
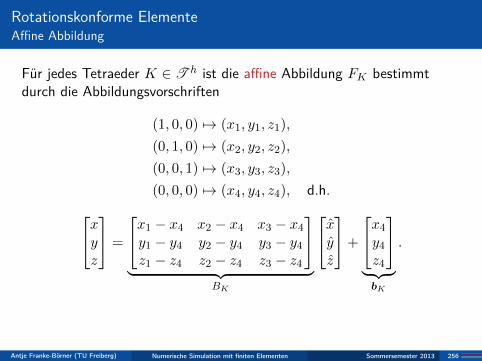
Rotationskonforme ElementeAffine Abbildung
Für jedes Tetraeder K ∈ T h ist die affine Abbildung FK bestimmtdurch die Abbildungsvorschriften
(1, 0, 0) 7→ (x1, y1, z1),
(0, 1, 0) 7→ (x2, y2, z2),
(0, 0, 1) 7→ (x3, y3, z3),
(0, 0, 0) 7→ (x4, y4, z4), d.h.xyz
=
x1 − x4 x2 − x4 x3 − x4
y1 − y4 y2 − y4 y3 − y4
z1 − z4 z2 − z4 z3 − z4
︸ ︷︷ ︸
BK
xyz
+
x4
y4
z4
︸ ︷︷ ︸bK
.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 256

Rotationskonforme Elemente
Theorem 51Das in Definition 47 definierte finite Element ist H(rot)-konform undunisolvent.
Ist Th ein zulässiges Tetraedergitter auf Ω, so definieren wir den globalenFE-Raum durch
V h := u ∈H(rot; Ω) : u|K ∈ Rk ∀K ∈ Th. (55)
Die lokale Interpolierende IK = I(R)K auf einem Element K ordnet einer
Funktion u ∈H(rot;K), für welche alle Freiheitsgrade (54) definiert sind,eine Funktion IKu ∈ Rk zu, welche charakterisiert ist durch
Me(u− IKu) = Mf (u− IKu) = MK(u− IKu) = 0.
Die globale Interpolierende Ih = I(R)h ist dann wie üblich definiert durch
Ihu = IKu für alle K ∈ Th.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 257

Rotationskonforme Elemente
Da dies für die Kantenmomente nicht der Fall ist, ist die Interpolierendenicht für alle Vektorfelder u ∈H(rot; Ω) definiert.Im Buch [Monk (2003)] werden folgende hinreichende Bedingungenangegeben:
u ∈ H12
+δ(K)3, ∇×u ∈ Lp(K)3 ∀K ∈ Th, (δ > 0, p > 2).
Von [Amrouche et al. (1998)] stammt die Abschwächung auf
u ∈ Lp(K)3, ∇×u ∈ Lp(K)3, n× u ∈ Lp(∂K)3, (p > 2).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 258

Rotationskonforme ElementeEigenschaften der Interpolierenden
Lemma 52Sei W h der divergenzkonforme FE-Raum
Wh := u ∈H(div; Ω) : u|K ∈ Dk ∀K ∈ Th,
wobei Dk := P3k−1 ⊕ Pk−1x und V h der rotationskonforme FE-Raum
V h := u ∈H(rot; Ω) : u|K ∈ Rk ∀K ∈ Th.
Dann gilt ∇×V h ⊂ W h und, sofern für u sowohl I(R)h u als auch
I(D)h (∇×u) definiert sind, gilt auch
I(D)h (∇×u) = ∇×(I
(R)h u).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 259
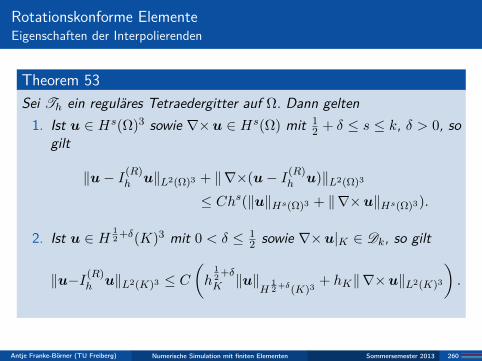
Rotationskonforme ElementeEigenschaften der Interpolierenden
Theorem 53Sei Th ein reguläres Tetraedergitter auf Ω. Dann gelten1. Ist u ∈ Hs(Ω)3 sowie ∇×u ∈ Hs(Ω) mit 1
2 + δ ≤ s ≤ k, δ > 0, sogilt
‖u− I(R)h u‖L2(Ω)3 + ‖∇×(u− I(R)
h u)‖L2(Ω)3
≤ Chs(‖u‖Hs(Ω)3 + ‖∇×u‖Hs(Ω)3).
2. Ist u ∈ H 12
+δ(K)3 mit 0 < δ ≤ 12 sowie ∇×u|K ∈ Dk, so gilt
‖u−I(R)h u‖L2(K)3 ≤ C
(h
12
+δ
K ‖u‖H
12+δ(K)3
+ hK‖∇×u‖L2(K)3
).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 260

Rotationskonforme ElementeEinbeziehung wesentlicher Randbedingungen
Bei der Variationsformulierung (41) wurden auf einem Teil ΓD desGebietsrandes die wesentliche Randbedingung n× u = 0 (vgl. (40))gestellt. Ein weiterer Vorteil des Nédélecschen FE-Raumes ist, dass dieErfüllung dieser homogenen wesentlichen Randbedingung durchNullsetzen der Freiheitsgrade auf ΓD erreicht wird.
Lemma 54Liegt u im Variationsraum V für die in (41) definierte RWA, so gilt diesauch für I(R)
h u.
Demnach ist ein FE-Unterraum V h ⊂ V , wobei V wie in (40) definiertist, gegeben durch
V h := u ∈H(rot; Ω) : u|K ∈ Rk ∀K ∈ Th,n× u = 0 längs ΓD.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 261
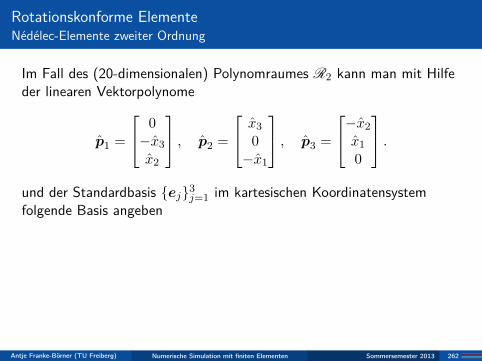
Rotationskonforme ElementeNédélec-Elemente zweiter Ordnung
Im Fall des (20-dimensionalen) Polynomraumes R2 kann man mit Hilfeder linearen Vektorpolynome
p1 =
0−x3
x2
, p2 =
x3
0−x1
, p3 =
−x2
x1
0
.und der Standardbasis ej3j=1 im kartesischen Koordinatensystemfolgende Basis angeben
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 262
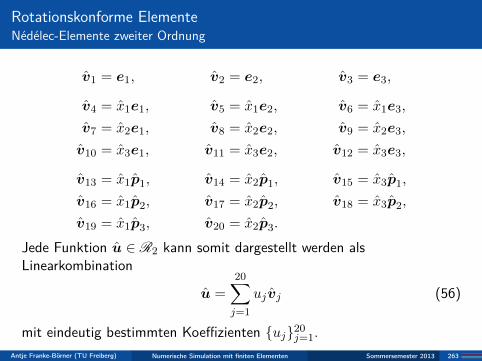
Rotationskonforme ElementeNédélec-Elemente zweiter Ordnung
v1 = e1, v2 = e2, v3 = e3,
v4 = x1e1, v5 = x1e2, v6 = x1e3,
v7 = x2e1, v8 = x2e2, v9 = x2e3,
v10 = x3e1, v11 = x3e2, v12 = x3e3,
v13 = x1p1, v14 = x2p1, v15 = x3p1,
v16 = x1p2, v17 = x2p2, v18 = x3p2,
v19 = x1p3, v20 = x2p3.
Jede Funktion u ∈ R2 kann somit dargestellt werden alsLinearkombination
u =
20∑j=1
uj vj (56)
mit eindeutig bestimmten Koeffizienten uj20j=1.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 263

Rotationskonforme ElementeNédélec-Elemente zweiter Ordnung
Zur Bestimmung der nodalen Basis von R2 bezüglich der Freiheitsgrade(51) auf dem Referenzelement bezeichnen wir die Ecken desReferenztetraeders mit
a1 =
100
, a2 =
010
, a3 =
001
, a4 =
000
.Jeder Kante e = [ai, aj ] wird der Tangenteneinheitsvektor
ti,j :=aj − ai‖aj − ai‖
, i, j = 1, . . . , 4, i < j.
zugeordnet. Somit sind die Kantenfreiheitsgrade des Referenzelementesgegeben durch ∫ aj
ai
(u · ti,j) q ds, q ∈P1(ei,j).
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 264
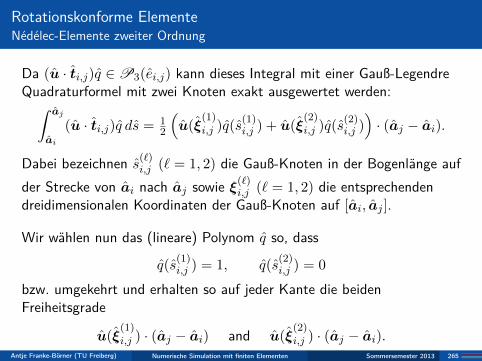
Rotationskonforme ElementeNédélec-Elemente zweiter Ordnung
Da (u · ti,j)q ∈P3(ei,j) kann dieses Integral mit einer Gauß-LegendreQuadraturformel mit zwei Knoten exakt ausgewertet werden:∫ aj
ai
(u · ti,j)q ds = 12
(u(ξ
(1)
i,j )q(s(1)i,j ) + u(ξ
(2)
i,j )q(s(2)i,j ))· (aj − ai).
Dabei bezeichnen s(`)i,j (` = 1, 2) die Gauß-Knoten in der Bogenlänge auf
der Strecke von ai nach aj sowie ξ(`)i,j (` = 1, 2) die entsprechenden
dreidimensionalen Koordinaten der Gauß-Knoten auf [ai, aj ].
Wir wählen nun das (lineare) Polynom q so, dass
q(s(1)i,j ) = 1, q(s
(2)i,j ) = 0
bzw. umgekehrt und erhalten so auf jeder Kante die beidenFreiheitsgrade
u(ξ(1)
i,j ) · (aj − ai) and u(ξ(2)
i,j ) · (aj − ai).Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 265
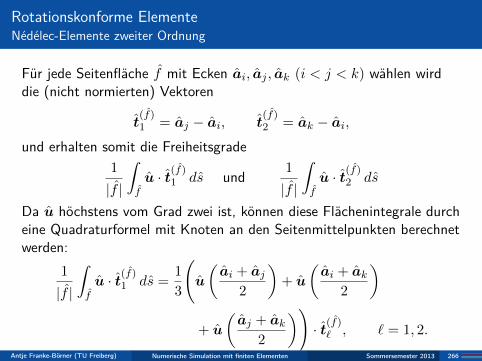
Rotationskonforme ElementeNédélec-Elemente zweiter Ordnung
Für jede Seitenfläche f mit Ecken ai, aj , ak (i < j < k) wählen wirddie (nicht normierten) Vektoren
t(f)1 = aj − ai, t
(f)2 = ak − ai,
und erhalten somit die Freiheitsgrade1
|f |
∫fu · t(f)
1 ds und 1
|f |
∫fu · t(f)
2 ds
Da u höchstens vom Grad zwei ist, können diese Flächenintegrale durcheine Quadraturformel mit Knoten an den Seitenmittelpunkten berechnetwerden:
1
|f |
∫fu · t(f)
1 ds =1
3
(u
(ai + aj
2
)+ u
(ai + ak
2
)
+ u
(aj + ak
2
))· t(f)` , ` = 1, 2.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 266

Rotationskonforme ElementeNédélec-Elemente zweiter Ordnung
Mit diesen Freiheitsgraden können wir nun die nodale Basis von R2
konstruieren. Die Basisfunktion mit Freiheitsgrad Eins am erstenQuadraturknoten der Kante [a1, a2] erhalten wir beispielsweise, indemwir die Koeffizienten uj in der Darstellung (56) bestimmen aus denGleichungen
u(ξ(1)
1,2) · (a2 − a1) = 1,
u(ξ(2)
1,2) · (a2 − a1) = 0,
u(ξ(k)
i,j ) · (aj − ai) = 0, i < j, (i, j) 6= (1, 2), 1 ≤ i, j ≤ 4,
1
|fk|
∫fk
u · t(fk)` ds = 0, 1 ≤ k ≤ 4, 1 ≤ ` ≤ 2.
Hier bezeichnet fk die k-te Seitenfläche des Referenztetraeders K.
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 267
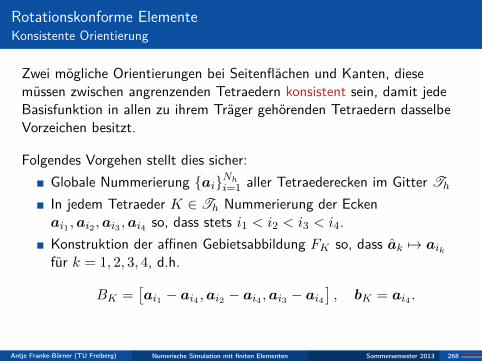
Rotationskonforme ElementeKonsistente Orientierung
Zwei mögliche Orientierungen bei Seitenflächen und Kanten, diesemüssen zwischen angrenzenden Tetraedern konsistent sein, damit jedeBasisfunktion in allen zu ihrem Träger gehörenden Tetraedern dasselbeVorzeichen besitzt.
Folgendes Vorgehen stellt dies sicher:Globale Nummerierung aiNhi=1 aller Tetraederecken im Gitter Th
In jedem Tetraeder K ∈ Th Nummerierung der Eckenai1 ,ai2 ,ai3 ,ai4 so, dass stets i1 < i2 < i3 < i4.Konstruktion der affinen Gebietsabbildung FK so, dass ak 7→ aikfür k = 1, 2, 3, 4, d.h.
BK =[ai1 − ai4 ,ai2 − ai4 ,ai3 − ai4
], bK = ai4 .
Antje Franke-Börner (TU Freiberg) Numerische Simulation mit finiten Elementen Sommersemester 2013 268


















