OVGU - reegssr n lns ml rn...TECHNISCHE MECHANIK 5(1984)Heft1 Manuskripteingang: 21. 2. 1983 reegssr...
7
u u ü v u u u u u öß uu zu u w u u z y y öu z u u ä u zü ä z u u v u ü zu zu — u w zu y ä w ü u u z— u w u w u u u ö u w ü ß uu w ’ zu u v z ä ä u u u w u u u v u w v ä — u u v y u u z w w ü u u u z u u x ü u w w ö öu u v u fi u u öu w u u u z w ä u u ö u w zu ä öu v z w u öu u ü u x u u w u x öß x w u u x u u zw u z » „ ‚ ’ w — w — w „ ’ ’ ‘ ’ “ „ „ “’ ’ u — zw ä x y ä ä u zu zw — uu zu u u x y z zw zw u z zw — zw ä y v u ’ w u y u ä w w u zw u z u u u äuß w w u u zu u v u z ß wä w u u ü u u Ü v zu v v z ü ß u “ {Ü u u ä v ü u z u u w ’ w — w‘ w § ww u u u ä x ä Ü ü x w u u z u u v u ß u u u u z u — u w w u u z u uw u ä w u u ü ü u w ü z u u w ü u z w u u —
Transcript of OVGU - reegssr n lns ml rn...TECHNISCHE MECHANIK 5(1984)Heft1 Manuskripteingang: 21. 2. 1983 reegssr...

TECHNISCHE MECHANIK 5(1984)Heft1
Manuskripteingang: 21. 2. 1983
Uber die mathematische Modellierung eines Vibrorheometers für den
Fall nichtlinearen Materialverhaitens am Beispiel der theologischen
Zustandsgleichung 3. Ordnung
Christian Friedrich
l. Einleitung
Der Rheometrie kommt im Rahmen der theologischen
Forschung eine immer größere Bedeutung zu. Das ist
nicht nur eine Folge der Anwendung (Transport, Verar-
beitung) immer komplizierterer Stoffsysteme (Polymer-
lösungen, Schmelzen, Suspensionen), sondern ist auch
mit den ständig steigenden Forderungen bezüglich einer
stärker differenzierenden Charakterisierung der Fluid-
eigenschaften verbunden. Das führt dazu, dafi die zu be—
stimmenden Materialfunktionen, wie zum Beispiel die
dynamische Viskosität 71* (w, 7) für den sich ausdehnen-
den Frequenz— und Deformationsbereich (w, 7) und sol-
che Parameter, wie Druck und Temperatur, mit immer
höherer Genauigkeit bestimmt werden müssen.
Große Bedeutung kommt den rheologischen Eigenschaf-
ten bei kleinen Deformationsgeschwindigkeiten ’37 zu.
Diese spielen eine Rolle bei der Betrachtung von Prozes-
sen mit freier Oberfläche (Stabilitätsuntersuchungen)
sowie bei der Korrelation der rheologischen Eigenschaf-
ten mit molekularen Daten der Fluide.
Unter solchen kinematischen Bedingungen (kleine
7-Werte) lassen sich viele Fluide (Newtonsche Anfangs-
viskosität n0 ist bei 7 0 endlich) mit einer theologi—
schen Zustandsgleichung vorn rate-Typ ausreichend gut
beschreiben.
In dieser Arbeit soll gezeigt werden, wie für die theolo-
gische Zustandsgleichung 3. Ordnung die Koeffizienten
dieser Gleichung aus einem Experiment, bei dem eine
periodische Deformation mit überkritischer Amplitude
realisiert wird, bestimmt werden können.
2. Theorie
2.1. Die harmonische Scherströmung und die entsprev
chenden Materialfunktionen fiir ein Fluid 3. Ord-
nung
Von einer harmonischen Scherströmung spricht man in
dem Fall, wenn auf ein Fluid eine sich mit der Fre-
quenz w ändernde cosinus- oder sinusförmige Deforma-
tion 7 mit der Deformationsamplitude 70 einwirkt. In
Analogie zur stationären Scherströmung (vgl. z. B.
werden die Materialfunktionen der harmonischen Scher-
strömungen durch Einführung der komplexen Scherspan-
nungsamplitude Ti (hochgestellte Sterne weisen auf
komplexe Größen hin), der komplexen Deformationsge-
schwindigkeitsamplitude 7': und der komplexen Ampli-
tuden der ersten und zweiten Normalsnannungsdifferenz
N172 definiert.
36
4G
» „71 _ ‚ .
’7 (w) " ,—* - 77 (w) -— In (w) (1)
70
. NC N*
7* ' : „_ng. : ’1C ’ ‘ "’
WW“) „1,2 T „*2 l*110/20 l “’1/2d +"-1’1/2d
O "0
Dabei sind n'(o.)) und 71"(03) der Real— bzw. imaginär-
teil der (komplexen) dynamischen Viskosität, die die
Fähigkeit des Fluids zur Energiedissipation bzw. Energie—
akkumulation zum Ausdruck bringen. 1111* sind die
(komplexen) dynamischen Koeffizienten der ersten bzw.
zweiten N0rmalspannungsdifferenz, lil'l 2d bzw. d
der Real— bzw. Imaginärteil des rein dynamischen Anteils
von 1bis/2 und ll’15/20
steht, weil die Normalspannungen im dynamischen Fall
der konstante Anteil, der ent-
um einen stationären Mittelwert N]; 2 schwingen. Da
sich die erste und zweite Normalspannungsdifferenz bei
harmonischer Beanspruchung nur äußerst schwierig mes-
sen lassen. wird oft nur Gieichung (l) zur rheologischen
Charakterisierung von Fluiden herangezogen.
Es maß erwähnt werden, da5 die Gleichung nur für
eine Deformationsamplitude gilt, die kleiner als der kriu
tische Wert 7km ist, der den Übergang vom linearen zum
nichtlinearen viskoclastischen Materialverhalten kann
zeichnet. Für die sich anschließenden Deformatione-
amplitudenbereiche 7km < 70 < 7“ {Übergangsbe-
Mich) und 70 > 7n! (Bereich des ausgeprägten nicht-
linearen Materialverhaltens) ergeben sich für Gleichung
(l) die Beziehungen und (1")
72* (wg 70) = n’ (wrro) — in"(wn‘9) (1')
17* (9,70%12: (owe), n§(3wwo) (1")
Die Gleichung deutet auf die Deformationsabhängig-
keit der komplexen Viskosität im Übergangsbereich hin.
Für den nichtlinearen Deformationsbereich existiert
keine weitere Verallgemeinerung der Gleichungen (l)
oder Die Beziehung (1") deutet vielmehr auf die
Tatsache hin, daß bei monofrequenter Erregung des
Fluids mit einer Kreisfrequenz ca und einer Deforma—
tiorisamplitude 70 > 7,11 die Antwortschwingung ein
Frequenzspektrum Q aufweist und deformationsabhän-
gig ist. Im weiteren sollen nun die Folgerungen für eine
Flüssigkeit 3. Ordnung, wie sie sich für die Beziehungen
(l), (T) und(l ") ergehen, betrachtet werden.
Die Flüssigkeit n-ter Ordnung (im speziellen stellt
die Entwicklung des Funktionals der Deformationsge—

schichte als aiigemeinste Formulierung einer rheologi-
sehen Zustandsgleichung nach einer retardierten Defer»
mationsgeschichte (eigentiich die Deformationsgeu
schichte der Ruhe) mit dem Retardationsparameter r
dar‘ Jenachdem Grad der Entwicklung B. n) nimmt
der Reibengsspannungstensor die folgende Form an
[2]:
z E L + 00””); r——>0 (3)
i=1 - -
H
Für n = 3 erhält man die theologische Zustandsgleichung
3. Ordnung mit folgenden gikÄUSdrückcn:
:1 = 21202“) <4)
l2 : 20:11:)(2’ + 4a2[13__‘1)‘]2 (5)
£3 ‘ 2512(3)+852(5P2(2}}2(1)
+453 (2(2)2{1)+2(1)[:)(2)) (6)
Dabei sind 720, 011, (x2, Bl, 62, ß die rheologischen Kon-
stanten g“) bzw. 2‘2) und 23(3) der Deformationsge—
schwindigkeitstensor und sein—e höhere Ableitung, die
folgendermaßen zu bilden sind l1]:
1 _
D‘1>:gs+sT>;i= gy (7)
9mm : D(n) „L
I ist der Geschwindigkeitsvektor und Z der Nablaopera:
tor. Der Punkt über den Großbuchstaben deutet auf die
partielle Zeitahleitung hin und das hochgesteiite T zeigt.
den transponierten Vektor oder Tensor an. Die Bezeich-
nung Sp erklärt die Operation der Spurbildung eines
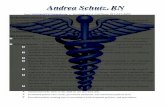
Tensors. Legt man eine eindimensionale Scherströrnung
in dem Koordinatensystem x, y, z (vgl. Bild l) zugrunde,
bei der als äußere Erregung Verschiebung K (es sei
nochmals vermerkt, daß die physikalisch inefibaren Grö-
ßen sie Realteil Re‘der entsprechend komplex eingeführ-
ten sind mit einem Stern versehenen Größen zu verste-
hen sind)
* * r ‘ C
KB : K30 e10“t bei y '—" O
angreift, so wird sich im Fluid ein im allgemeinen nicht-
lineares Verzerrungs- und damit Deformations- und Ge-
schwindigkeitsfeld aufbauen. Berücksichtigt man dabei
die 1. und 3. Harmonische (die geradzahligen Harmoni-
schen verschwinden auf Grund der lsotropiebedingung),
* * * ‘ ‘
n = K (w) = a1 (y) e“ + a3 (y) e3“ (9)
so ergibt sich für die Deformationsgeschwindigkeit über
die Beziehungen
V : _. : _ *at K ‚ 7 ay Vx (10)
die Gleichung (11).
7* 2 ejwt +73 efiiwt(11)
901) . V {LT . 2(11) + Ein) . L (8X/
Biid 1
Schematische Darstellung der Strömungsgeometrie mit ange-
deuteten Umrissen eines Schwingungsrheometers
Die Scherspannungsantwort ist entsprechend zu formu-
lieren.
Tao : ‚131‘6th + T: 533th (12)
Setzt man nun die Gleichungen (10) und (11‘) in die
rheologische Zustandsgleichung (Gleichungen bis
ein und vergleicht die dabei erhaltene Scherspam
nung mit Gleichung (l2), so ergeben sich für ein 3,. 0rd-
nungs-Modeli folgende Ausdrücke für die Materialfunk—
tion (1'):
saure) = no —ßl + 5(52 +83.) 7i <02 + 10:1 w (13)
Für die Beziehung lassen sich keine dem 3. 0rd—
nungs-Modeil entsprechenden Gleichungen angeben, da
kein einheitliches, überzeugendes Konzept existiert, wie
mit den höheren Harmonischen zu verfahren ist. Es gibt
einzelne Ansätze [3] bis [7], die zu unterschiedlichen
Formulierungen von materialspezifischen Funktionen
führen. Deshalb ist es sinnvoll, die Materialkonstanten
der betrachteten theologischen Zustandsgleichung durch
Anpassung der für eine bestimmte Gerätekonfiguration
theoretisch berechneten Schwingung an die experimen-
tell dafür aufgenommene Antwortschwingung vorzu-
nehmen. Dieses mathematische Modell soll im folgenden
dargestellt werdent
2.2. Mathematisches Modell eines Vibrorheometers
Bei der Entwicklung des mathematischen Modells eines
Vibrorheometers soll von einer Gerätekonfiguration aus-
gegangen werden, wie sie in Bild l schematisch darge—
stellt ist. Es befindet sich eine elastisch aufgehängte
Platte bei y = yP = h in einem mit dem zu untersuchen-
den Fluid gefüllten Behälter, von dem die eine Wand bei
y I yB = 0 harmonisch erregt wird. Diese Erregung wird
durch das Fluid auf die Platte übertragen, die dann ihrer—
37

seits entsprechend der Fluideigenschaften schwingt.
Demzufolge muß das mathematische Modell aus der Be-
wegungsgleichung für das Fluid und der Bewegungsglei-
chung für das Platte-Feder-System bestehen. Es soll da-
von ausgegangen werden, daß sich zwischen Platte und
Behälterwand eine Viskosimeterströmung ausbildet, wo-
bei folgende Annahmen zugrunde liegen:
1.
2.
3.
die Haftbedingung zwischen'Fluid und Wand
Randeffekte sind vernachlässigbar
die Bewegung ist von den Anfangsbedingungen un-
abhängig
vx (t) : Vx (t + 21rco“1)
Die Bewegung des Fluids wird durch die Impulsbilanz in
Bewegungsrichtung in der Form, wie sie schon von
Landau, Lifschitz [8] und Schlichting [9] als mathema—
tisches Modell einer oszillierenden Scherströmung ver-
wendet wurde, beschrieben.
öVx _ ö'rxy
p ö t F a y '
Die Größe p stellt die Dichte des Fluids dar.
Für die Bewegung der Platte xP wird die Gleichung des
linearen Oszillators angesetzt, der durch die spezifische
Scherkraft fSCH zur Schwingung angeregt wird.
(14)
kp+280ip4-wäxp: gCH am
Die Größen 80 und wo sind die Dämpfung bzw. die
Eigenfrequenz des Platte-Feder-Systems und die Punkte
über xp zeigen die Zeitableitungen an. Die spezifische
Scherkraft ergibt sich aus der an der gesamten Platten-
fläche PF angreifenden Scherspannung TX), und der
Masse m des Platte-Feder-Systems wie folgt:
PFf 2 _ 16SCH m Txy y 2 h ( )
Da die Scherspannung entsprechend Gleichung (12) aus
der Grundharmonischen und der 3. Harmonischen be-
steht, kann man als Lösung für die Bewegungsgleichung
(15) den Ansatz
* 4 *-
x eth + xN p3 83w
x (17)
verwenden. Die Amplitudenwerte der Harmonischen in
den Gleichungen (l7) und (9) lassen sich wie folgt dar-
stellen:
"3(- *
Xpl : Xplo +iXp11 Ä Xp3 3 Xp30 + ixp3l
81 : 310 + 1311 a3 : 330 + 1331
Setzt man die Gleichungen (16), (l7) und (18) in Glei-
chung (15) ein, so erhält man nach Koeffizientenver-
gleich 4 Gleichungen für Xplo, Xpll, Xp30 und Xp31.
Das die Bewegung des Fluids beschreibende Rechenmo-
dell ergibt sich, wenn die aus den Gleichungen (3) — (8)
erhaltene Scherspannungskomponente Txy in Gleichung
(l4) unter Berücksichtigung von (9) und (10) substitu»
iert wird. Da die Amplitudenwerte im Ansatz (9) ortsab-
hängig sind, erhält man ebenfalls nach Koeffizientenver-
38
K*<0>
K*<h)
gleich ein System von 4 gewöhnlichen nichtlinearen Dif—
ferentialgleichungen 2. Ordnung für die Größen a1 0, a1 1,
a30 und 331. Bei der Berechnung des nichtlinearen
Scherspannungsanteils (entspricht 7'3) wurde von der Be-
Ziehung
REZl- REZz- REZ3 : i RE(zlz2z3+le2z3
+ Z122 Z3 + Z12223)
Gebrauch gemacht, wobei Z1, Z2, Z3 beiiebige kom-
plexe Zahlen und Z1, Z2, Z3 die entsprechenden kom-
plex konjugierten Zahlen sind. Die Koeffizienten des so
erhaltenen Gleichungs- bzw. Differentialgleichungssy—
stems sind Funktionen der Frequenz, Dämpfung, Eigen-
frequenz sowie der zu bestimmenden theologischen Pa-
rameter (vgl. Anhang A 1).
In ähnlicher Weise wurde von Walters bei der Berech—
nung der oszillierenden PlattePlatte-Torsionsströmung
vorgegangen, jedoch führte dort der nichtlineare Ansatz
zu 4 einfachen linearen, homogenen Differentialglei-
chungen 2. Ordnung, für die eine analytische Lösung
angegeben werden kann [1].
Das hier erhaltene System von 4 Differentialgleichungen
2. Ordnung wird auf ein System von 8 Gleichungen
l. Ordnung zurückgeführt und läßt sich zusammen mit
den Bewegungsgleichungen für die Platte in allgemeiner
Form folgendermaßen darstellen (f1 — f8 sind nicht-
lineare Funktionen — vgl. Anhang A 2):
a 2W
"2' Z f1(u1‘u27“3a“4,“;)
ä =M
u' = f2 (ul, u2, u3, u4, (20)
“5' 2 “6
u"j I f3 (ul,u2,u3,u4‚u5,u7,ui)
“ä I “8
u"3 I f4 (u1,u2,u3,u4,u5,u7,ui)
Xpio : f5 (uzhau4h) i
Xpn Z f6(‘12lwu4h) (21}
xp30 : f7 (“2hvu4hv‘16hvu8h) >
Xp31 Z f3 (“2h’u4hvu6h’“8h) J
Dabei sind die uih die Werte der Funktionen ui an der
Stelle y I h. Die Randbedingungen für die 8 Differential-
gleichungen erhält man über die Haftbedingung aus den
Beziehungen
z a;(0)exP(aut)—+a3(0) exp(3kut): K; z “EO
= al(h)exp(k00 4-a;(h) exp(3kol): x: : XZI
4(-
X exp (Biwt), Spaltet man diese Beziehungen in Real-
und lmaginärteil auf, so ergeben sich
u1(0) = Re<af<0>> : K30
u2(0) : x1
%@=m@@po
“101): Xpm
U201) = “2h
“3 (h) 2 Xpil (22)
I exp(iwt) und
exp(iwt) +

“4(0) : Ä2 u4(11) = “4h
“5(0) Z Re(33(0)) = 0 u501) = xp30
“6(0) : >\3 “6(11) Z “6h
W) = 1ms; <0» = 0 we = upsl
“8(0) = M “8(11) 2 “8h
Den Äi-Werten entsprechen die unbekannten Deforma-
tionen. Die Funktionen ui an der Stelle y = h sind eben-
falls unbekannt. Damit macht es sich notwendig, diese
Bandwertaufgabe auf eine Anfangswertaufgabe zurück-
zuführen. Mittels der sogenaunten Schiefsmethode (vgl.
z. B. [10]) werden die Äi—Werte so bestimmt. daß die
Funktionen (pi
891(5) = uih— Xpio: 0
“93(5) Z “311* Xp11 Z 0
905(Ä) = ush— Xp30= 0
WQ) 3 “71.- Xp31 Z 0
im Laufe der Ä-Iteration gegen Null gehen.
Zur Lösung der Anfangswertaufgabe und damit zur Be-
stimmung der u1h<a u3h-, u5h— und u7h-Werte wird ein
Runge-Kutta-Fehlberg—Verfahren 5. Ordnung eingesetzt.
Die Bestimmung des Enflanektors, für die das Glei-
chungssystem (23)g = 0 (die Unterstreichung deutet
auf die entsprechenden Vektoren hin) mit einer vorge-
gebenen Fehlerschranke erfüllt wird, basiert auf dem von
Schmidt [11] vorgeschlagenen Regula-falsi—Verfahren
MR 2 (siehe Gleichung (24)).
mm) + ELF Mn”) — im) 2 0 <24)
E7 ist dabei eine Matrix, die nach der in [11] angegebe-
nen Vorgehensweise zu bilden ist. Als Startwerte sind
3 Vektoren 5(0), Ä”) und 5(2) vorzugehen. In diesem
Fall hat das Verfahren MR 2 den höchsten Wirkungs—
grad (vgl. [11]).
Die Lösung des linearen Gleichungssysteme (24) mit den
bekannten Standardmethoden liefert dann die gesuchte
n+1-te Näherung für den Ä-Vektor. Damit wird es mög-
lich, bei gegebenen rheologischen und apperativen Kon-
stanten _das Strömungsproblem (direkte Aufgabe) zu lö-
sen. Da die Aufgabe der Rheometrie in der Lösung der
inversen Aufgabe besteht, muß aus der Bewegung der
Platte auf die rheologischen Parameter geschlossen wer—
den. Dies geschieht wie folgt.
Geht man davon aus, daß die aufgezeichnete (experi-
mentell bestimmte) Bewegung der Platte xPE nach reel—
ler Fourieranalyse folgendermaßen
XPE = AE cos wt + BE sin wt + CE cos3wt + DE sin 3wt (25)
dargestellt werden kann, besteht eine Möglichkeit der
Bestimmung des Parametervektors der rheologischen
Konstanten g : (no, (11, a2, ßl, {32, 63) darin, daß man,
wie schon erwähnt, das modellmäßig erhaltene Aus-
gangssignal (Gleichungssystem (21)) an Gleichung (25)
durch Minimierung des Differenzsignals nach der MKQ-
Methode anpaßt. Das dabei entstehende Gütekriterium
(1)1 ist in Gleichung (26) dargestellt.
‘1’1 (E) = t2 (XP (1.") - XPE (t0)2 ”’* min (26)
l
Eine weitere Möglichkeit der Parameterbestimmung be—
ruht auf der Abwandlung von Gleichung (26) in eine an—
dere Form. Wenn man davon ausgeht, daß die Differenz
zwischen den gemessenen (siehe Gleichung (2 ) und den
modellmäßig gegebenen und vom gesuchten Parameter-
vektor g abhängigen Fourier-Koeffizienten A, B, C und
D Null werden soll, so kann man das Gleichungssystem
(27) formulieren.
©21<Q> = AE “A=O
222%) Z BE -B :0
‘1’23(Q) : CE — C : 0 (27)
(924(2) 2 DE "13:0
Mit anderen Worten, es wird der Parametervektor go!)
gesucht, für den 92 (g) Null ist. Auf diese Art und Weise
lassen sich nur 4 Elemente von g bestimmen. Dies ist
jedoch ausreichend, da thermodynamische Gesichts-
punkte (Forderung nach positiver Dissipationsfunktion)
die Beziehung
Cil + (12 : 0
fordern, die Parameter [32 und [33 immer als Summe auf-
tauchen und zu einem Parameter
I32 + I33 = 6m (29)
zusammengefaßt werden können. lm weiteren soll die
rechentechnische Realisierung der vorgestellten Algo-
rithmen und die Ergebnisse beschrieben werden.
3. Numerische Realisierung und Diskussion der
Ergebnisse
Die numerische Realisierung der vorher vorgestellten
Methoden basiert auf dem erwähnten Runge-Kutta-Fehl-
berg—Integrationsverfahren 5. Ordnung zur Lösung des
Differentialgleichungssystems (20). Für die hier gewählte
Variante des Schießverfahrens sind 3 Startvektoren
Am), A”) und E2) notwendig, die nach numerischen
Experimenten wie folgt formuliert werden können:
im) = («Bob-1; o; o; 0)
5(1) : 0,5(KB0 h—1;10—4;10-4;10—4)
)\(2) : 05 AU)
Bei dieser Wahl der Startvektoren wird im allgemeinen
im n=6ten oder n:7ten Schritt das Abbruchkriterium
man»
“ih
< 0,01 für i = l,3‚5‚7
erfüllt. Die zur Berechnung eines neuen Ä-Vektors not-
wendige Lösung des linearen Gleichungssysteme (24)
wird auf der Basis des im VOPP Numerikenthaltenen
Programmes GELG (Gaußalgorithmus mit vollständiger
39

Pivotisierung) berechnet. Hier sei noch erwähnt, daß das
Programm ab dem nISten Schritt mit der doppeltge-
nauen Version DGELG arbeitet. Damit ist die numeri-
sche Realisierung des Funküonsprogrammes gegeben,
das zur Berechnung des Parametervektors g gebraucht
wird.
Die Minimierung des Gütefunktionals der Gleichung
(26) wird mit Hilfe der Subroutine OPSN 12 durchge—
führt. Diese Suhroutine realisiert das Simplexverfahren
nach Nelder und Mead, wobei ein Startvektor sowie eine
untere und obere Schranke. für den Parametervektor g
vorzugehen sind.
Bei der Bestimmung von g mit Hilfe des Gleichungs—
systems (27) kann wie im Falle der Ä-iteration auf das
schon erwähnte Verfahren MR2 zurückgegriffen wers
den, es wird aber mit den minimal möglichen 2 Start-
Vektoren gestartet und dann zu der mit maximalem Wir-
kungsgrad arbeitenden Variante übergegangen [11]. Als
Abbruchkriterium wird die Erfüllung folgender Bezie-
hung
ai(n+1> _ „im i
‚Q 0,01 i=1,2,3,4oL(n+1)
1
angenommen.
Beide Varianten werden nun bei der Diskussion eines
Modellbeispiels verglichen. Die erforderlichen Geräte-
und Fluidparameter sind folgende:
w = 0,1 s‘l;
PF = 17,5 cm2; KBO =1mm; h = 2 mm.
In einer direkten Hinrechnung wurden für ein Modell-
fluid mit den durch die Beziehungen (28) und (29) redu-
zierten Parametervektor gMR I ('00; a1; ßnl; 51) =
(2; —— 15; -— 210; 25) die folgenden Fourierkoeffizienten
AE = _ 1.077 - 10—5, BE = — 7,628 - 10—6, CE :
8,486 ' 10—8 und DE = — 2,1407 ° 10‘6 bestimmt.
Diese Parameter dienen nun als Ausgangspunkt für die
Lösung der inversen Aufgabe zur Überprüfung der Lei-
stungsfähigkeit und für den Vergleich beider Verfahren.
Für das auf der Lösung von (27) basierende Verfahren
kann generell festgestellt werden, dal3 die Newtonsche
Lösung als einer der zwei Startvektoren ungeeignet ist,
da in diesem Falle das Verfahren divergiert. Da jedoch
auf der Basis der Viskositätsfunktion für das zu unter-
suchende Fluid relativ einfache Angaben über die Größe
von no und die Größenordnung von fin] gemacht werden
können und die Vorzeichen der Werte physikalisch dew
terminiert sind, sind folgende beide Startvektoren'relativ
einfach zu erstellen:
91;) = (1.9;_10;—200;20)
a‘1)=(21-—20-—2000-30)_R ‘ v 7 9
Das mit diesen Vektoren gestartete Verfahren bricht im
5ten Schritt ab und liefert als Lösung
ggf) = (2,69 ; _ 14,99 ; _ 212,4; 86,16).
40
wog: 35 s’1;öo = ls‘l’; p = 103 kg m"3;
Dazu sind 2‘3 Funktionsaufmfe (Lösungen des Differen-
tialgleichungssystems) notwendig. Eine Verbesserung des
Lösungsvektors kann durch wiederhoite Abarbeitunv des
Al orithmus erzielt werden, wenn mit 951;“ und gin :
{35%) gestartet wird.
Ein anderes Paar von Startx’ektoren ggf? 1' (1,5; —- 10;
176.: 30) und ER") (2.0; 4 15; if 200: nach
21 Berechnungen des Differentialgieich.zngssysteins zu
dem LösungsVektor ggf) {1:29; w 14,99; „was;
— 5,66). Diese zwei Beispiele und andere, nicht ange-
führte Rechnungen zeigen, daß die Bestimmung der er—
sten 3 Komponenten von 9g von der Wahl der Startvek—
toren relativ unabhängig ist. Die Größe ß} hängt dem-
gegenüber sehr stark von den Startvektoren ab und ist
auch für die starke Empfindlichkeit des. Fourierkoeffi-
zienten C gegenüber den Ausgangswerten verantwort-
lich. Während bei allen Rechnungen die Fourierkoef—
fizienten A, B und D mit einem relativen Fehler kleiner
1 Prozent Bestimmt werden konnten, schwankt dieser
Fehler für C in großen Grenzen 100 95 bis 300 9/0).
Anhang
Anhang A 1:
Parameter des Differentialgleichungssystems (20)
A1 z 0‘1‘” ‚ A2 3 770—31 0-92, A3 I 170—961qu2
ßnl 2 ßg+ßg‚ B] :ßn1w2‚ B2 : g
„_ 2 _ ‘ 2
W1 — wo~~w2, “72—50(2), W3: COO—9032
2 A A
A1+A2 A1+A2
2 - A1 2 A3
L30_ "gpw 2 2 ’ L31__3p°’ 2 29A1+A3 9Al+A3
K 2 _ 2 A1
10— —1a5ßnlw 2 a 2 2
1+A2 A1+A2
A3 A
K30‘ 0,5131 2 2 K31 1,5131 21 29A1+A3 9A1+A3
M _ 2B W2A2—W1A1 M 2B W2A1+A2W1
10 2 W2+w2 7 11- 2 2 2
1 2 W1+W2
w2A2—A1W3 9A W +A W
W3 +9W2 W3+9W2
Nlo— 2 2 ‚N11 =3B2w 21
W1+W2 w1+w2
A w —A w 9A w +A w‘
W3 +9W2 W§+9w§

d R (53)
x; I05
[m]
Xp (gems!) {é/Il 1h: Rahmen der
10ze/bhenungenauzgie/l rn/I xP (06,412)
zusammen .
5
0
217.)" Ms]
<5
40
1
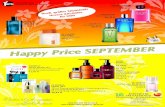
Bild 2
Graphische Darstellung der Plattensehwingung x (t) in Ab-
hängigkeit von verschiedenen Parametervektoren. Dabei ent-
spricht der Parametervektor
(_XMR = (1 ; —15 ; ~210; 25) dem Modellfluid und die
Parametervektoren g(OR) = (1,5, — 100 ; — 100 ; — 100),
“(89) 2
(1(53) = (1,88 ; — 14,98 ; — 210,3 ; 2,63), der Startnähe-
rung, der Lösung nach einmaliger Anwendung des Simplexver-
fahrens und der Lösung nach wiederholter Anwendung des
Simplexverfahrens, wobei 9(89) als Startvektor diente.
Auch für das auf Gleichung (26) beruhende Verfahren
kann festgestellt werden, daß der Startvektor, der der
Newtonschen Näherung entspricht (ggf) = (2, 0, 0, 0))
zur Divergenz des Verfahrens führt. Es zeigt sich aber,
dafs eine sehr grobe Schätzung der Parameter, die für
das nicht-Newtonsche Materialverhalten verantwortlich
(1,58; —l4,91 ; —134; 5,76) und
zeichnen, zu einer vernünftigen Näherung führt. Mit
ggf) = (1,5; w 100; — 100; — 100) gelangt man nach
89 Funktionsaufrufen (Lösungen des Differentialglei-
)= (1,58; _ 14,91; e 134; 5,76).
Benutzt man diesen Vektor als Startvektor, so erhält
man QR“) z (1,88; _ 15, 8- -2108; 2,63). Die den9
Parametervektoren ggMR , gggs und 3) entsprechende
chungssystems) zu QR
A2:
Darstellung der Funktionen f1 — f8
f1:
2 2
Lil u3—Lä0 111 +u‘i(2K10u2 u4—K11(u2+3u4))
2 2
1+2K11u2U4—K10(3u2+u4)
2 2 2 2*Ln “1-L10 “3+u§(2 K10 u2 “4+K11(3“2+“4))
1—2K11u2u4—K10(u:+3ui)
L2 u —L2 u +u'(K (u2—u2)-2K u. u)—31 7 30 5 2 30 2 4 31 2 4
2 2
u; (K31 (112 —U4)+2K30 112 114)
2 2 2
_L§1 u5 _L30 u7+ué(K31(u2 —u4)+2K30 u2 114) +
‚ 2 2
114 (K30(u2 --ll4) —2K31 112 114)
2 2‘ M10 “2h -M1 1 “4h +012}, + 114b) (N10 11211 *N11 “4h)
41

_ 2f6 - M10 “4h + M11 “2h +01%}, + u“90‘110 “411 + N11 “21.)
= _ 2 2 2 2f7 M30 “61: M31 “8h +N30 “2h (“2h -3u4h) -N31 “411(“4h + 31121,)
= 2 2 2f3 M30 “81: + M31 “6h + N30 “4h (“4h + 3%,.) + N31 “2h (“2h - 3112;.)
Uih = U101); i=2‚4‚6‚8
Schwingung der Platte xp ist im Bild 2 graphisch darge-
stellt. Es ist zu erkennen, dali zwischen xp (gMR, t) und
xp (Elfen, t) kaum noch ein Unterschied besteht, wohin-
gegen sich die anderen Schwingungen deutlich von
xp (QMR,t) abheben. Auch hier (und an weiteren Test-
beispielen) zeigt es sich, dalä besonders der Parameter Bl
stark von der Wahl der Ausgangsnäherung abhängt und
zu starken Schwankungen des Fourierkoeffizienten C
führt.
Der Vergleich beider Vorgehensweisen zeigt, daß das mit
einem Vektor zu startende Verfahren zu besseren Lösun-
gen im Sinne kleinerer mittlerer relativer Fehler des Para-
metervektors führt, obwohl weniger Information über
die Anfangsnäherungen erbracht werden muß. Dieser
Vorteil wird durch eine 3 bis 4fach höhere Rechenzeit
erkauft. Für das auf der Lösung des Gleichungssystems
(27) beruhende Verfahren wurde je nach Wahl der Start-
vektoren 70 — 90 Sekunden CPU-Zeit auf der IBM-An-
lage 370 benötigt, wohingegen für das andere Verfahren
250 — 300 Sekunden benötigt werden. Da Rechenzeiten
in dieser Größenordnung akzeptabel sind, wird dem Ver-
fahren, das nur einen Startvektor benötigt, der Vorrang
gegeben.
Der Autor möchte hiermit Frau G. Palm vom ORZ der
Technischen Hochschule Leuna-Merseburg für die Unter-
stützung bei den umfangreichen Programmierarbeiten
Dank sagen.
LITERATUR ‘
[l ] Astarita, G., Marrucci, G.: Prinziples of Non-Newtonien
Fluid Mechanics, London, Mc Graw-Hill, 1974-.
[2] Truesdell, C.: A First Course in Rational Continuum
Mechanics. The Johns Hopkins University Baltimore,
Maryland, 1972.
l 3 J Ziprin, M. G.: Nelinejnaja sdvigovaja reakzia tekuéich
polimerov na periodic’eskoe deformirovanie. Mechanika
Polimerov, 1977, Nr. 6, S. 1093 — 1100.
[4] Ziprin, M. C.: Garmoniceskie isk‘aienija pri nelinejnom
pefiodi‘c’eskom deformirovanii tekucich polimerov. Mecha-
nika Polimerov, 1978, Nr. 5, S. 893 — 898.
[5 ] Parker, N. S., Hibberd, G. E.: The interpretation of dyna-
mic measurements of non-linear viscoelastic materials.
Rheol. Acta 13 (1974), S. 910 — 915.
[6] Tee, T.-T., Dealy, J. M.: Non linear Viscoelasticity of
Polymer Melts. Trans. Soc. Rheol. l9 (1975), S. 595 —-
615.
[7 ] Davis, W. M., Macosko, C. W.: Non linear Dynamic Mo-
duli for Polycarbonate and PMMA. J. Rheol. 22 (1978),
S. 53 — 71.
[8] Landau, L. 0., Lifschitz, E. M.: Lehrbuch der theoreti-
schen Physik — Hydrodynamik, Akademie-Verlag Berlin,
1970.
[9] Schlichting, H.: Grenzschichttheorie, Verlag K. Braun
Karlsruhe, 1954.
[10] Walters, K.: Rheometry, Chapman and Hall, London,
1975.
[11] Schmidt, J. W.: Uberlinear konvergente Mehrschrittver-
fahren vom Regula falsi- und Newton-Typ. ZAMM 53
(1973), S. 103 — 114-.
Anschrift des Verfassers:
Dr.-lng. Christian Friedrich
Akademie der Wissenschaften der DDR
Institut für Mechanik
9010 Karl-MarxStadt
PSF 408