Pantora - ein 3D Pantograph für archäologische Ausgrabungen · Pantora - ein 3D Pantograph für...
15
Transcript of Pantora - ein 3D Pantograph für archäologische Ausgrabungen · Pantora - ein 3D Pantograph für...

Pantora - ein 3D Pantograph für
archäologische Ausgrabungen
Matthias Guth
20. November 2012
Ruprecht-Karls-Universität HeidelbergSoftwarepraktikum für FortgeschritteneBetreuer: Dr. Michael WincklerInterdisziplinäres Zentrum für Wissenschaftliches Rechnen
I
Inhaltsverzeichnis
1 Idee 1
2 Ausgangssituation 2
3 Methode zur Punktberechnung 3
3.1 Mathematische Grundlage: Trilateration . . . . . . . . . . . . . . . . . . . . . . 3
4 Hardware 4
4.1 Anforderung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44.2 Sensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54.3 Stative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64.4 Interface und Bedienungseinheit . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
5 Software 7
5.1 Anspruch der Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75.2 Kalibrierung des Interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95.3 Berechnen des Schnittpunkts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5.3.1 Schnittebenen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95.4 Schnittgerade g . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.4.1 Schnittpunkt Q . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
6 Fazit 12
II

1 Idee
Archäologische Ausgrabungen sind weitaus mehr als das schlichte Ausheben einer Grube und
das Bergen von Funden. Klassischerweise wird hierbei Schichtweise vorgegangen: zunächst er-
folgt das Abheben einer Bodenschicht von üblicherweise zwischen 20 und 30 cm Höhe, um im
Anschluss eine ebene Fläche zu haben. Diese wird dann in Feinarbeit mit Kellen geputzt und
im letzten Schritt das Vorgefundene dokumentiert.
Abbildung 1: einfacher Pantograph
Abbildung 2: Pantograph in der
Archäologie
Diese Dokumentation ist das eigentliche Ziel einer
Grabung. Hiermit wird die spätere Auswertung und
Analyse, nachdem der eigentliche Prozess der Grabung
bereits abgeschlossen ist, erst ermöglicht. Aufgenom-
men werden hier neben der Lage von eventuellen Fun-
den auch sogenannte "Befunde". Dieser Begri� umfasst
sämtliche Merkmale des Fundplatzes, wie zum Beispiel
Mauerreste oder auch Bodenverfärbungen, die bei der
späteren Bearbeitung ein wichtiger Anhaltspunkt für
die Interpretation der Fundumstände darstellen. Ho-
rizontal aufeinanderfolgende Erdschichten - die soge-
nannte ßtratigraphie lassen beispielsweise Rückschlüs-
se auf die realtive Datierung von Funden innerhalb die-
ser Schichten zu. Eine Grabung ohne Dokumentation
ist für die Wissenschaft völlig nutzlos. Daher ist es auch
logisch, dass dieser Dokumentationsschritt am meisten
Zeit einer Grabung einnimmt.
Die Dokumentation läuft in mehreren Schritten ab:
zunächst werden die Befunde gesichtet, anschlieÿend
einzelne Punkte (z.B. eines Grubenumrisses) eingemes-
sen und auf Millimeterpapier übertragen und im An-
schluss die Punkte zum Umriss verbunden. Zuletzt wird
die Zeichnung coloriert.
In meinem ersten Softwarepraktikum1 habe ich mich mit der Frage auseinandergesetzt, wie
man bereits vorhandene Dokumentation von Grabungen in einem 3D Modell darstellen könnte,
da dies zum einen eine bessere Übersicht als die reine Dokumentation auf Papier bieten würde
1Excave - ein 3D Modell eines archäologischen Grabungsquadranten - http://pille.iwr.uni-heidelberg.de/~grabung01/
1
und zum anderen auch das Darstellen von Perspektiven ermöglicht, die man sich durch das
Studium der Papierdokumentation lediglich vorstellen könnte.
Nach der Beendigung dieses Praktikums kam dann schlieÿlich die Frage auf, ob eine solche
Darstellung nicht auch schon während des eigentlichen Dokumentationsschrittes nützlich sein
könnte. In dieser Überlegung ist die Intention von Pantora zu �nden: die Beschleunigung Ein-
messung für die Dokumentation und die Sicherung weiterer Daten, die bei der Standardmethode
nicht aufgenommen werden.
Die klassische Aufnahmemethode mit Zollstöcken oder einem auf die Fläche aufgelegtem
Raster ist sehr zeitraubend. Ein sogenannter Pantograph scha�t hier Abhilfe: durch dieses Zei-
chengerät ist es möglich, die Kontouren mit einem Stift abzufahren und die Mechanik zeichnet
dies dann auf Papier. Diese Idee soll Pantora aufgreifen: Dem Archäologen soll ein Werkzeug
gegeben werden, mit dem diese Aufnahme ähnlich wie mit einem Pantographen durchgeführt
werden kann und mit dem verschiedene Daten, wie z.B. die Koordinaten der Punkte, digital auf-
genommen werden können. Weiterführend wäre dann ein Ausdruck der aufgenommenen Punkte
auf Millimeterpapier zur anschlieÿenden Weiterbeabeitung durch den Ausgräber möglich. Dies
würde jedoch den Rahmen dieses Praktikums sprengen.
2 Ausgangssituation
Die zur Verfügung stehenden Vermessungsmöglichkeiten auf Ausgrabungen sind je nach Gelän-
de, Ausrüstung und Notwendigkeit sehr unterschiedlich. Kommen bei gröÿeren Projekten auch
vermessungstechnische Geräte wie Tachymeter oder Totalstation2 oder auch Laserscanner zum
Einsatz, um die Grabungssituation, deren Funde und Befunde möglichst genau aufzunehmen,
so müssen kleinere, �nanziell schwächer gestellte oder in unwegsamen, abgelegenem Gelände
sta�ndenden Grabungen durchaus vorwiegend auf Zollstock, Maÿbänder und Nivelliergerät3
zurückgreifen.
Für das Grabungsareal wird ein lokales Koordinatensystem eingerichtet, das durch Referenz-
punkte in das globale System eingehängt wird.
2Geräte zur Winkel- und Entfernungsbestimmung3Gerät zur Bestimmung der Höhe, bzw. des Höhenunterschieds
2

3 Methode zur Punktberechnung
Abbildung 3: Trilateration
Die Methode der Punktberechnung in Pantora ist von
der Grundidee identisch mit der Methode, wie sie auch
von GPS verwendet wird. Es seien drei Punkte mit x-,
y- und z-Koordinate bekannt. Zwei Methoden der Be-
rechnung der Position eines vierten, gesuchten Punktes
kamen für Pandora in Frage. Die eine Möglichkeit ist
das Triangulationsverfahren, das über Winkelbestim-
mung funktioniert, die andere die Trilateration, für wel-
che zusätzlich zu den bekannten Punkten noch die je-
weilige Entfernung zum gesuchten Punkt benötigt wird.
Mit Blick auf die für diese Methoden nötige Hardwa-
re, war die Bestimmung der Entfernung auf analogem
Weg die einfachere und günstigere Variante, weshalb
für Pantora das Trilaterationsverfahren zum Einsatz
kommt.
3.1 Mathematische Grundlage: Trilateration
Für die Berechnung eines Punktes Q durch Trilateration sind - wie bereits erwähnt - drei
bekannte Punkte P1, P2 und P3 Voraussetzung. Um die Koordinaten von Q berechnen zu
können, werden zudem die Entfernungen der Punkte zu Q, p1, p1 und p3 benötigt. Betrachtet
man nun jeden Punkt einzeln, so beschreibt die Entfernung pn den Radius einer Kugel Kn, auf
deren Mantel sich der gesuchte Punkt Q be�nden muss4 . Der Schnitt zweier dieser Kugeln
ergibt einen Schnittkreis und eine Schnittebene, auf denen sich Q be�ndet. Schneidet man nun
zwei der Schnittebenen K1 ∩ K2, K2 ∩ K3 oder K1 ∩ K3, so erhält man eine Gerade g. An
dieser Stelle muss eine Fallunterscheidung vorgenommen werden:
(a) Schnittgerade g durchstöÿt eine der Kugeln: das Ergebnis ist zweideutig. Die Durchstoÿ-
punkte von g mit K1, K2 oder K3 sind die Punkte Q und Q′, wobei Q′ die Spiegelung von
Q an Ep ist.
(b) Schnittgerade g berührt eine der Kugeln: Q liegt auf der Ebene Ep und das Ergebnis ist
eindeutig.
4Die Abbildungen zeigen aus Gründen der besseren Anschaulichkeit das 2D-Schema. Erweitert man das Schemaum die dritte Dimension, so werden Kreise zu Kugeln, die Schnittgeraden sn−m zu Schnittebenen En−m undder Schnittpunkt Q zur Schnittgeraden g.
3

(c) Schnittgerade g hat keinen gemeinsamen Punkt mit K1, K2 oder K3: Q liegt auÿerhalb
der Kugeln, jedoch auf Ebene Ep. Q ist der Durchstoÿpunkt von der Schnittgeradenen g
und der Ebene Ep.
P1
P2
P3
Q
s1_2
s2_3
s1_3
(a) g schneidet Kn
P1
P2
P3
Q
s2_3
s1_3
(b) g berührt Kn
P1
P2
P3
Q
s2_3
s1_3
(c) Kein Schnitt von g und
Kn
Abbildung 4: Fallunterscheidung
Da in den meisten Fällen Szenario (a) eintritt und nicht ohne weiteres entschieden werden
kann, welcher von beiden Punkten der gesuchte ist, kommt hier eine zusätzliche Voraussetzung
zur Geltung: alle aufgenommenen Punkte be�nden sich entweder ober- oder unterhalb der
aufgespannten Ebene Ep. Im Rahmen dieses Praktikums wird von letzterem Fall ausgegangen.
4 Hardware
4.1 Anforderung
Zur Messung der Strecken zwischen Kugelmittelpunkt und gesuchtem Punkt musste eine Me-
thode gefunden werden, um die Entfernung zwischen zwei Punkten feststellen zu können. Ein
wichtiger Punkt war, die Kosten möglichst gering zu halten, um eine günstige Alternative zum
analogen Pantographen zu bekommen. Zudem handelt es sich hierbei lediglich um einen proof
of concept. Für eine eventuelle Fortführung des Projekts müsste zudem noch berücksichtigt
werden, dass der hauptsächliche Einsatzort von Pantora nicht in Gebäuden, sondern unter frei-
em Himmel zu �nden ist. Äuÿere Ein�üsse wie direkte Sonneneinstrahlung, Staub, Erdpartikel,
Luftfeuchtigkeit, Regen oder ähnliche Gegebenheiten sollten keine oder möglichst geringe Aus-
wirkung auf die Genauigkeit der Messung und zum anderen auf die Haltbarkeit der Harware
haben.
4

Im Rahmen des Projekts und unter Berücksichtigung dieser Anforderungen wurde auf eine
analoge Messung mit Seilzugsensoren entschieden, die zwar recht anfällig für Schmutz, für den
Funktionalitätsbeweis mit einem Prototypen jedoch ausreichend ist.
4.2 Sensoren
Die Entscheidung �el auf drei Seilzugsensoren der Firma MircoEpsilon, genauer gesagt auf das
Modell wireSensor WDS-2000-P96-CA-P. Ausschlaggebend für die Entscheidung waren mehre-
rer Faktoren. Ein wichtiger Punkt war die Tatsache, dass der interne Messvorgang des Sensors
über einen Potentiometer abgewickelt wird, dessen Signal zur Weiterverarbeitung abgreifbar
ist. Es handelt sich hierbei um ein zur gemessenen Strecke lineares Signal, das durch eine ein-
fache Kalibrierung leicht in absolute Millimeterangaben umzurechnen ist. Die Sensoren mit
logarithmischem Ausgangssignal hätten hier mehr Aufwand erfordert.
Jeder der drei Sensoren hat eine maximale Auszugslänge von 2500mm, also einem Messbe-
reich von maximal 2,5m. Zudem wird das Seil automatisch eingezogen und durch eine Zugkraft
zwischen 5,5 N und 9 N sehr stra� gehalten, was die durch das Durchhängen des Seiles verur-
sachte Messabweichung auf diese Distanz vernachlässigbar macht.
Jedes Seil wird mit dem Stift verbunden, der auf den Referenzpunkt zu halten ist.
Abbildung 5: MicroEpsilon wireSensor WDS-2000-P96-CA-P
5

4.3 Stative
Abbildung 6: Konstruktionszeichnung
des Statives
Abbildung 7: gefertiges Stativ mit
Sensor
Ein Problem, das sich durch den Einsatz der gewählten
Sensoren ergibt, ist, dass der Austrittswinkel des Seiles
um höchstens 3% abweichen darf. Da der Stift natür-
lich frei beweglich sein soll um die Punktaufnahme im
gesamten Abdeckungsbereich zu ermöglichen, muss der
Sensor auf irgendeine Weise auf den aufzunehmenden
Punkt ausgerichtet werden.
Zu diesem Zweck wurden spezielle Stative entwor-
fen5, die mittels zweier Kugellagern eine vollständige
Drehbarkeit des Sensors um zwei Achsen ermöglichen
sollten. Lediglich die extreme Ausrichtung nach unten
wäre durch die Befestigung des Stativs nicht möglich.
Erste Versuche mit einem einfachen Holzmodell zeigten
allerdings, dass der für das nötige Drehmoment aufzu-
bringende Hebel noch zu berücksichtigen ist. Der Sei-
laustritt musste jedoch das Zentrum der beiden Dreh-
achsen bilden, da dies der eingemessene Kugelmittel-
punkt ist, der für die Berechnung des gesuchten Punk-
tes Q nötig ist. Um dies zu realisieren, wurde der Sen-
sor auf einer Platte angebracht, an deren Ende sich eine
Führung aus Silikon für das Seil be�ndet. Beim Bewe-
gen des Stiftes sorgt der Hebel vom Seilaustritt bis zur
Führung dafür, dass sich das Stativ ausrichtet.
Die nächste Frage war, wie man der Zugkraft, die an
den Seilzügen auftritt, entgegenwirken kann. Die Befe-
stigung der Stative durch eine Art Dorn, den man in den Boden rammt, kam nicht in Frage,
da dies im realen Einsatz auf der Grabung die Bodenbefunde beschädigen würde. Dies ist un-
bedingt zu vermeiden. Für den Prototypen war mit einem Sonnenschirmständer eine optimale
Lösung gefunden, deren Tülle exakt den passenden Durchmesser für die Stativköpfe hatte. Zu-
dem verfügten diese über eine solide Basis aus Beton und die niedrige Position der Stativköpfe
sorgte für einen niedrigen Schwerpunkt. Des weiteren war der groÿe, preisliche Vorteil gegenüber
einer speziellen Anfertigung nicht von der Hand zu weisen.
5An dieser Stelle einen herzlichen Dank an meinen Komilitonen Christian Seitz, der mir bei der Konstruktionder Stative mehr als nur behil�ich war
6

4.4 Interface und Bedienungseinheit
Abbildung 8: Das Interface mit der
Bedienungseinheit
Das Interface6 übernimmt einerseits die Wandlung der
analogen Signale in digitale Datenpakete und ist an-
dererseits für die Vermittlung der Signale der Bedie-
nungseinheit an die Software zuständig. Die Software
erhält über eine RS232-Schnittstelle einen Bytestream,
der die Analogen Daten repräsentiert.
Für die Bedienheinheit perfekt geeignet war das
Gri�stück eines alten Joysticks, der vor geraumer Zeit
einmal zu einem Commodore 64 gehörte. Dieses Bedien-
teil liegt gut in der Hand und sollte auch bei längerer
Bedienung für den Benutzer nicht unangenehm werden.
Verbaut sind darin zwei Mikroschalter, was für Pantora absolut ausreichend ist. Tatsächlich ist
kommt in diesem Projekt nur einer der beiden zum Einsatz: ein kurzer Druck signalisiert, dass
die Punktaufnahme gewünscht ist, ein langer Druck weist die Software an, eine neue Linie zu
beginnen. Doch hierzu später mehr.
5 Software
Auf der Softwareseite kommt als Programmiersprache C++ mit der QT-Klassenbibliothek7 zum
Einsatz. Grundlegend startet Pantora zwei Threads. Thread 1 überwacht das Interface und
empfängt und verarbeitet den Bytestream, der die Sensorwerte liefert und sendet ein Signal,
sobald ein neuer Sensorwert vorliegt. Alles andere wird in Thread 2 erledigt, unter anderem
die Darstellung der Punkte, aber auch das Empfangen und Verarbeiten der von Thread 1
gesendeten Signale und die Aktualisierung der Wertvariablen der Sensoren.
5.1 Anspruch der Software
Die Software an sich sollte schlicht und möglichst intuitiv zu bedienen sein, ohne dass eine
längere Einarbeitungszeit benötigt wird. Pantora soll nicht den Anspruch haben, ein Ersatz
für Software wie AutoCAD oder ArchäoCAD8 zu sein, sondern soll in erster Linie eben ein6Hierfür möchte ich Benjamin Reh aus dem Robotiklabor herzlich danken, der das Interface gebaut undprogrammiert hat.
7http://qt.digia.com/8http://www.arctron.de/de/produkte/software/archaeocad/
7
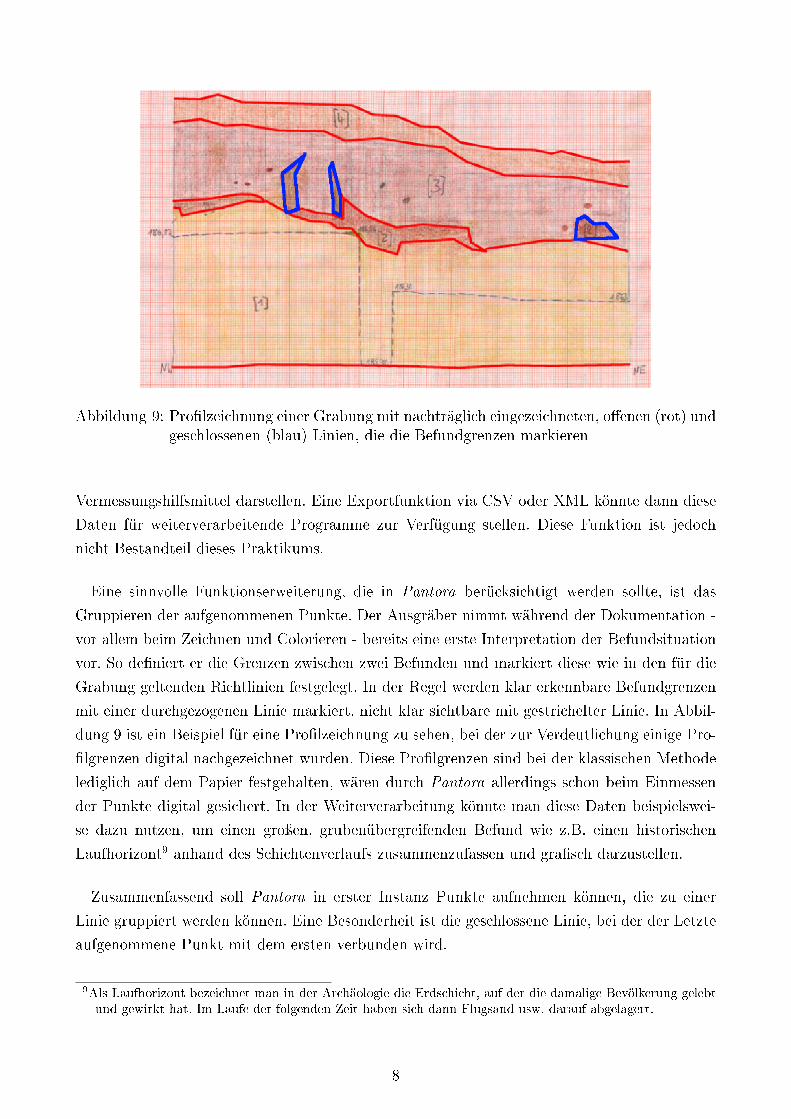
Abbildung 9: Pro�lzeichnung einer Grabung mit nachträglich eingezeichneten, o�enen (rot) undgeschlossenen (blau) Linien, die die Befundgrenzen markieren
Vermessungshilfsmittel darstellen. Eine Exportfunktion via CSV oder XML könnte dann diese
Daten für weiterverarbeitende Programme zur Verfügung stellen. Diese Funktion ist jedoch
nicht Bestandteil dieses Praktikums.
Eine sinnvolle Funktionserweiterung, die in Pantora berücksichtigt werden sollte, ist das
Gruppieren der aufgenommenen Punkte. Der Ausgräber nimmt während der Dokumentation -
vor allem beim Zeichnen und Colorieren - bereits eine erste Interpretation der Befundsituation
vor. So de�niert er die Grenzen zwischen zwei Befunden und markiert diese wie in den für die
Grabung geltenden Richtlinien festgelegt. In der Regel werden klar erkennbare Befundgrenzen
mit einer durchgezogenen Linie markiert, nicht klar sichtbare mit gestrichelter Linie. In Abbil-
dung 9 ist ein Beispiel für eine Pro�lzeichnung zu sehen, bei der zur Verdeutlichung einige Pro-
�lgrenzen digital nachgezeichnet wurden. Diese Pro�lgrenzen sind bei der klassischen Methode
lediglich auf dem Papier festgehalten, wären durch Pantora allerdings schon beim Einmessen
der Punkte digital gesichert. In der Weiterverarbeitung könnte man diese Daten beispielswei-
se dazu nutzen, um einen groÿen, grubenübergreifenden Befund wie z.B. einen historischen
Laufhorizont9 anhand des Schichtenverlaufs zusammenzufassen und gra�sch darzustellen.
Zusammenfassend soll Pantora in erster Instanz Punkte aufnehmen können, die zu einer
Linie gruppiert werden können. Eine Besonderheit ist die geschlossene Linie, bei der der Letzte
aufgenommene Punkt mit dem ersten verbunden wird.
9Als Laufhorizont bezeichnet man in der Archäologie die Erdschicht, auf der die damalige Bevölkerung gelebtund gewirkt hat. Im Laufe der folgenden Zeit haben sich dann Flugsand usw. darauf abgelagert.
8

5.2 Kalibrierung des Interfaces
Abbildung 10: unkalibriertes Interface Abbildung 11: kalibriertes Inferface
Damit die vom Interface gelieferten Sensordaten in Längeneinheiten umgerechnet werden kön-
nen, muss eine Kalibrierung vorgenommen werden. Hierzu werden jeweils die Sensordaten für
den Nullzustand bei vollständig eingerolltem Seil und beim Anlegen des Stiftes bei exakt ei-
nem Meter aufgenommen10 Hierzu wird ein Metermaÿ an der Silikonführung angelegt und der
Stift auf die 1m Markierung platziert. Über den Kalibrierungsdialog wird jedem Sensor dieses
Wertepaar zugewiesen und anschlieÿend daraus der Faktor units1m berechnet, mit dem der
aktuelle Sensorwert auf die Längeneinheiten umgerechnet werden kann.
Sensor.faktor =Sensor.actualV alue− Sensor.value0m
Sensor.units1m
5.3 Berechnen des Schnittpunkts
5.3.1 Schnittebenen
Zur Berechnung der Schnittgeraden g werden zunächst zwei Schnittebenen berechnet. Da es
bedingt durch die Hardware unter Umständen11 dazu führen kann, dass sich nicht alle Ku-
geln miteinander schneiden, sondern lediglich zwei der drei Kugelpaare, muss zunächst geprüft
10Eigentlich handelt es sich beim Nullpunkt nicht um den wirklichen Nullpunkt, also dem Seilaustrittspunkt.Vielmehr ist dies der äuÿere Punkt der Silikonführung, da dies die Position des Seiles in Ruhezustand ist. DerSensorwert der Strecke (value0m) zwischen Seilaustrittspunkt und Führung wird intern vor der Berechnungdes Punktes subtrahiert.
11z.B. wenn der gesuchte Punkt sich in der Nähe der von den Punkten aufgespannten Ebene Ep be�ndet
9

werden, welche der Kugeln eine Schnittebene haben. Dies gestaltet sich relativ einfach, indem
man die Entfernungen zweier Kugelmittelpunkte Kn und Km miteinander vergleicht: Wenn die
Summe der Radien gröÿer als der Abstand der Punkte ist, schneiden sich die Kugeln nicht. Ist
sie kleiner, so kann man den Schnittkreis und die Schnittebene, auf die der Kreis sich be�ndet,
berechnen. Ist sie gleich, berühren sich die Kugeln nur und die Gerade durch die Kugelmittel-
punkte Mn und Mm ist die Normale der Schnittebene durch den Berührpunkt.
Gegeben seien:
K1Mittelpunkt =
m1x
m1y
m1z
, K1Radius = r1
K2Mittelpunkt =
m2x
m2y
m2z
, K2Radius = r2
die Koordinatenform der Schnittebene lautet:
K1 = K2 = ax1 + bx2 + cx3 + d = 0
a = 2 ·m2x − 2 ·m1x
b = 2 ·m2y − 2 ·m1y
c = 2 ·m2z − 2 ·m1z
d = m12x −m22x +m12y −m22z +m12z −m22z − r12 + r22
5.4 Schnittgerade g
Vorraussetzung für die Berechnung der Schnittgeraden ist, dass zwei Schnittebenen existieren,
die weder parallel noch identisch sind.
Gegeben seien die Normalenformen der Ebenen:
E1 : (~x1 − ~p1) · ~n1 = 0
E1 : (~x2 − ~p2) · ~n2 = 0
10

Berechnung der Geraden:
~g = t ·~N1 × ~N2
| ~N1 × ~N2|+ c1 ~N1 + c2 ~N2
d1 = ~n1 · ~g = c1(~n1 · ~n1) + c2(~n1 · ~n2) = c1 + c2 · d
d2 = ~n2 · ~g = c1(~n1 · ~n2) + c2(~n2 · ~n2) = c1 · d+ c2
wobei gilt: d = ~N1 · ~N2
hieraus folgt:
c1 =d1 − d · d2
det
c2 =d2 − d · d1
det
wobei gilt: det = 1− ( ~N1 · ~N2)2 = 1− d2
5.4.1 Schnittpunkt Q
gegeben sind die Gerade g und die Kugel K mit Mittelpunkt M und Raduis r:
g : ~g = ~p+ t~a
K : (~x− ~m)2 = r2
Berechnung des Punktes:~d = ~p− ~m
a1 = ~d · ~d− r2
a2 = ~a · ~d
discr = a2 · a2 − a1
Wenn Diskriminante discr < 0, dann existiert kein Schnittpunkt. Ist discr = 0 ist das
Ergebnis eindeutig, bei discr > 0 zweideutig.
Zwei Schnittpunkte:
Q = ~p+ (−a1 ±√discr) · ~a
11

Ein Schnittpunkt (discr = 0):
Q = ~p+ (−a1 · ~a)
Abbildung 12: eindeutiger Schnittpunkt
Abbildung 13: zweideutiges Ergebnis, Kugeln
ausgeblendet
6 Fazit
Während der Entwicklung und Benutzung von Pantora sind einige Probleme aufgetreten, die
hauptsächlich auf den Einsatz des mechanisch-analogen Streckenmessverfahrens mittels Seil-
zugsensoren zurückzuführen sind.
Zur Messungenauigkeit führt die Tatsache, dass der Kraft, die aufgewendet werden muss, um
die Sensoren über die Hebelwirkung der Stative auszurichten, eine Gegenkraft entgegenwirkt.
Diese lässt das Seil abknicken (Abb. 14). Dies ist zu erwähnen, auch wenn die Auswirkungen
auf die Berechnung von Q relativ gering sind.
Ein weiteres Problem, das durch die Ausrichtung der Sensoren auftritt, ist ein relativ langes
Nachpendeln der Stative. Diese Tatsache hat doch recht groÿe Auswirkung auf die Geschwin-
digkeit der Punktaufnahme.
Generelle Probleme beim Einsatz der Sensoren sind die bereits eingangs erwähnten Ver-
schleiÿerscheinungen z.B. durch Reibung der Seile an den Silikonführungen oder der Ein�uss
von Wind und Wetter, die schweren Stative und die Seile an sich, die dadurch, dass sie stra�
gespannt sein müssen, den Benutzer des Öfteren zu Verrenkungen zwingen.
12

Abbildung 14: Durch die auf das Stativ wirkenden Gegenkräfte abgeknicktes Seil
Ein weiteres Manko ist das für eine Person recht umständliche Kalibrieren der Sensoren, das
sich allerdings durch kleinere Modi�kationen der Stative. Den Zollstock anzulegen, gleichzeitig
das Seil auf die 1m Marke auszuziehen und parallel dazu den Button zu klicken erfordert
einiges an Geschick. Dies lieÿe sich allerdings durch eine kleine Modi�kation wie beispielsweise
ein zwischen Stativ und Stift gespannter, geeichter Stab, der das Seil auf der korrekten Länge
hält, recht einfach beheben.
All diese kleineren Probleme sollen aber nicht von der Tatsache ablenken, dass die Punktbe-
stimmung unter den gegeben Voraussetzungen doch erstaunlich gut und genau funktioniert. Für
einen produktiven Einsatz wäre allerdings aus diesen Gründen die Nutzung einer berührungs-
losen Methode der Längenmessung wie beispielsweise mittels Laufzeitmessung von Funkwellen
wünschenswert.
13