Physikalische Formelsammlung - iwhe.de · 3.1 Kinematik Die Kinematik beschreibt Bewegungen von...
32
Physikalische Formelsammlung Formelsammlung für den Kompaktkurs Physik Dr. rer. nat. Wolfgang Schmid
Transcript of Physikalische Formelsammlung - iwhe.de · 3.1 Kinematik Die Kinematik beschreibt Bewegungen von...
Physikalische Formelsammlung
Formelsammlung für den Kompaktkurs Physik
Dr. rer. nat. Wolfgang Schmid
Impressum
Herausgeber Institut für Weiterbildung der Hochschule Esslingen e.V. Kanalstraße 33 73728 Esslingen www.iwhe.de [email protected] © Institut für Weiterbildung der Hochschule Esslingen e.V. Redaktion Dr. rer. nat. Wolfgang Schmid Prof. Dr. rer. nat. Hanno Käß Dr. rer. nat. Lothar Grösch Koordination Dipl. Verw.Wiss. Martina Fehrlen Umschlaggestaltung/Titelillustration Dipl.-Des. (FH) Veronika Bobke Druck haka print und medien GmbH, Senefelderstraße 19, 73760 Ostfildern Druck auf FSC-Mix zertifiziertes Papier Stand Juni 2018 Schutzgebühr 5,- Euro Die Erstellung der Formelsammlung wurde ermöglicht durch die Unterstützung aus Qualitätssicherungsmitteln der Hochschule Esslingen auf Vorschlag der Studierendenschaft nach dem HoFV-Begleitgesetz. Dieses Werk ist urheberrechtlich geschützt. Alle Rechte, auch die der Übersetzung, des Nachdruckes und der Vervielfältigung des gesamten Dokuments oder Teilen daraus, ist vorbehalten. Kein Teil des Werkes darf ohne schriftliche Genehmigung des Instituts für Weiterbildung der Hochschule Esslingen in irgendeiner Form (Fotokopie, Mikrofilm oder ein anderes Verfahren), auch nicht für Zwecke der Unterrichtsgestaltung – mit Ausnahme der in den §§ 53, 54 URG genannten Sonderfälle –, reproduziert oder unter Verwendung elektronischer Systeme verarbeitet, vervielfältigt oder verbreitet werden.
Kompaktkurs Physik Inhaltsverzeichnis
3
Inhaltsverzeichnis
1 Physikalische Größen und Einheiten ............................................................................. 4
2 Statik ........................................................................................................................... 6
2.1 Kräfte und Kräftezerlegung .......................................................................................... 6
3 Mechanik von Massepunkten ...................................................................................... 8
3.1 Kinematik ..................................................................................................................... 8
3.1.1 Translation ...................................................................................................... 11
3.1.2 Zusammengesetze Bewegungen, Würfe ........................................................ 11
3.1.3 Rotation .......................................................................................................... 14
3.2 Dynamik ..................................................................................................................... 15
3.2.1 Newtonsches Grundgesetz ............................................................................. 15
3.2.2 Kräfte .............................................................................................................. 16
3.2.3 Kreisbewegungen ........................................................................................... 17
3.2.4 Impuls und Impulserhaltung, Rückstoß .......................................................... 18
3.2.5 Arbeit, Energie, Leistung ................................................................................. 18
3.2.6 Stöße ............................................................................................................... 20
4 Mechanik von Starrkörpern........................................................................................ 23
4.1 Drehmoment, Massenträgheitsmoment, Rotationsenergie ..................................... 24
4.2 Drehimpulssatz, Drehimpulserhaltung ...................................................................... 24
5 Gravitationsgesetz, Planetenbewegung ..................................................................... 25
6 Elektrizität ................................................................................................................. 27
6.1 Elektrostatik ............................................................................................................... 27
6.2 Stromkreise ................................................................................................................ 29
7 Schwingungen ............................................................................................................ 30
7.1 Harmonisch ................................................................................................................ 30
7.2 Ungedämpft ............................................................................................................... 31
7.3 Gedämpft ................................................................................................................... 31
7.4 Erzwungen .................................................................................................................. 32
Kompaktkurs Physik Physikalische Größen und Einheiten
4
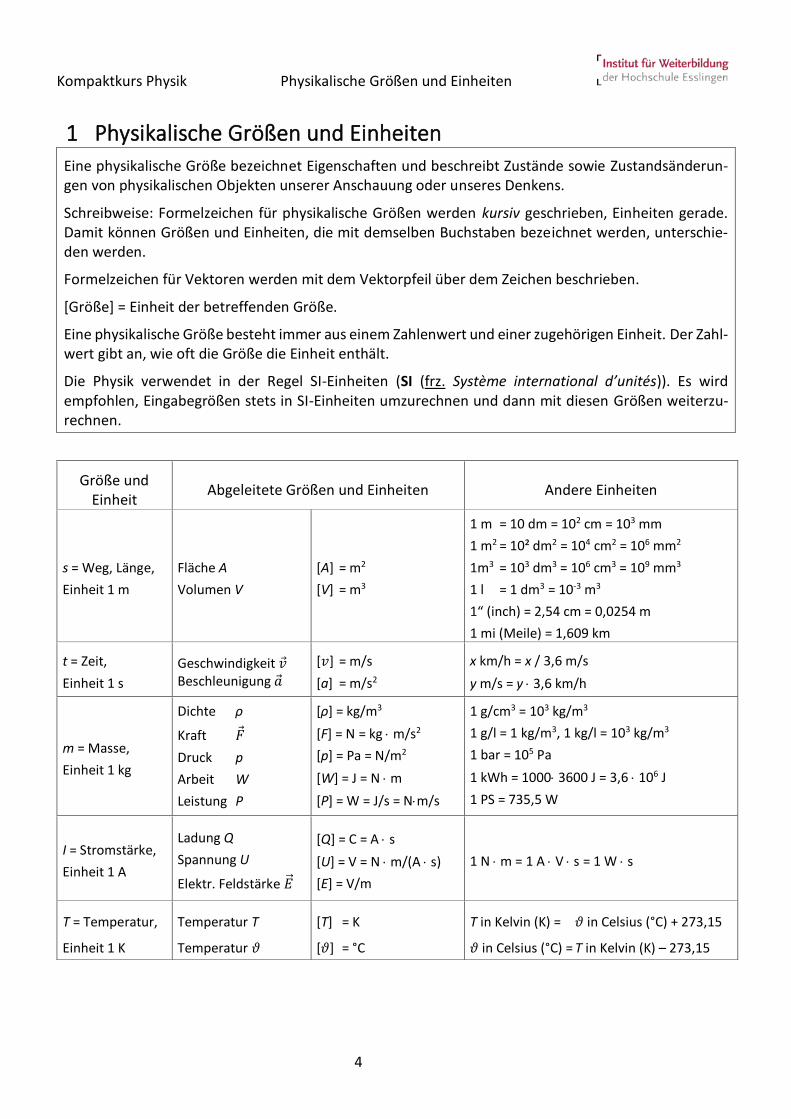
1 Physikalische Größen und Einheiten
Eine physikalische Größe bezeichnet Eigenschaften und beschreibt Zustände sowie Zustandsänderun-gen von physikalischen Objekten unserer Anschauung oder unseres Denkens.
Schreibweise: Formelzeichen für physikalische Größen werden kursiv geschrieben, Einheiten gerade. Damit können Größen und Einheiten, die mit demselben Buchstaben bezeichnet werden, unterschie-den werden.
Formelzeichen für Vektoren werden mit dem Vektorpfeil über dem Zeichen beschrieben.
[Größe] = Einheit der betreffenden Größe.
Eine physikalische Größe besteht immer aus einem Zahlenwert und einer zugehörigen Einheit. Der Zahl-wert gibt an, wie oft die Größe die Einheit enthält.
Die Physik verwendet in der Regel SI-Einheiten (SI (frz. Système international d’unités)). Es wird empfohlen, Eingabegrößen stets in SI-Einheiten umzurechnen und dann mit diesen Größen weiterzu-rechnen.
Größe und Einheit
Abgeleitete Größen und Einheiten Andere Einheiten
s = Weg, Länge,
Einheit 1 m
Fläche A
Volumen V
[A] = m2
[V] = m3
1 m = 10 dm = 102 cm = 103 mm
1 m2 = 10² dm2 = 104 cm2 = 106 mm2
1m3 = 103 dm3 = 106 cm3 = 109 mm3
1 l = 1 dm3 = 10-3 m3
1“ (inch) = 2,54 cm = 0,0254 m
1 mi (Meile) = 1,609 km
t = Zeit,
Einheit 1 s
Geschwindigkeit �⃗� Beschleunigung �⃗�
[𝑣] = m/s
[a] = m/s2
x km/h = x / 3,6 m/s
y m/s = y 3,6 km/h
m = Masse,
Einheit 1 kg
Dichte ρ
Kraft �⃗�
Druck p
Arbeit W
Leistung P
[ρ] = kg/m3
[F] = N = kg m/s2
[p] = Pa = N/m2
[W] = J = N m
[P] = W = J/s = Nm/s
1 g/cm3 = 103 kg/m3
1 g/l = 1 kg/m3, 1 kg/l = 103 kg/m3
1 bar = 105 Pa
1 kWh = 1000 3600 J = 3,6 106 J
1 PS = 735,5 W
I = Stromstärke,
Einheit 1 A
Ladung Q
Spannung U
Elektr. Feldstärke �⃗⃗�
[Q] = C = A s
[U] = V = N m/(A s)
[E] = V/m
1 N m = 1 A V s = 1 W s
T = Temperatur,
Einheit 1 K
Temperatur T
Temperatur 𝜗
[T] = K
[𝜗] = °C
T in Kelvin (K) = 𝜗 in Celsius (°C) + 273,15
𝜗 in Celsius (°C) = T in Kelvin (K) – 273,15
Kompaktkurs Physik Physikalische Größen und Einheiten
5
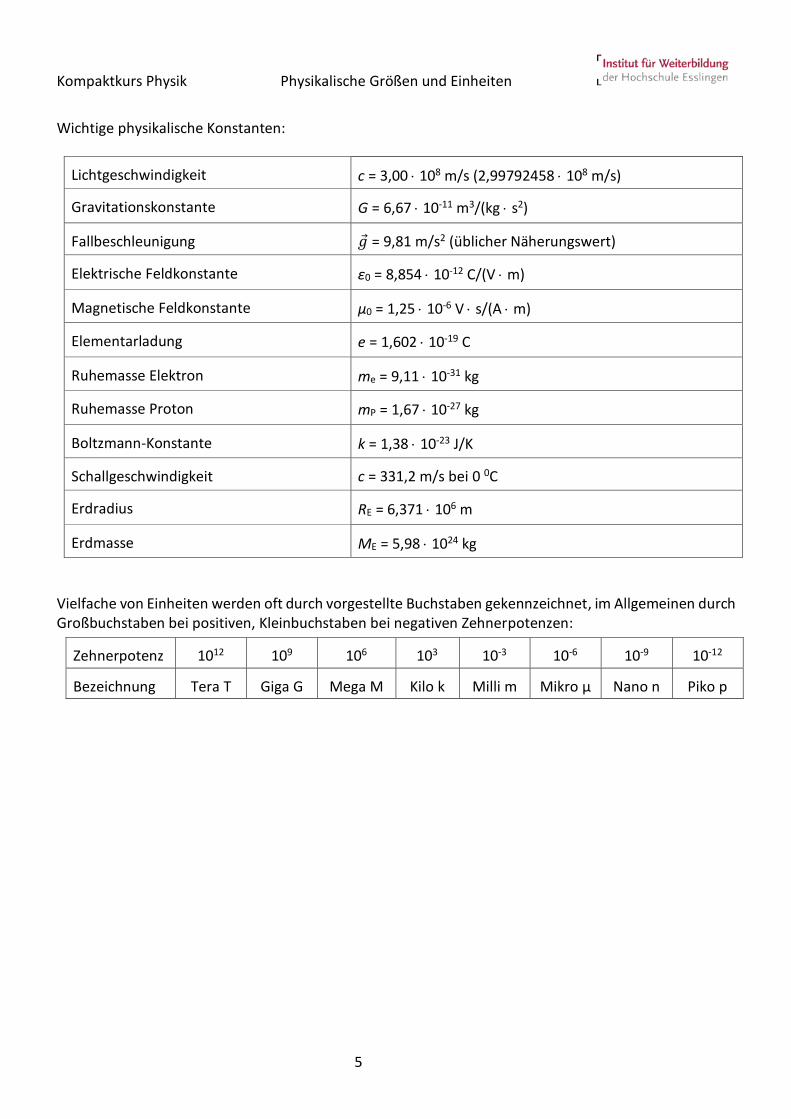
Wichtige physikalische Konstanten:
Vielfache von Einheiten werden oft durch vorgestellte Buchstaben gekennzeichnet, im Allgemeinen durch Großbuchstaben bei positiven, Kleinbuchstaben bei negativen Zehnerpotenzen:
Lichtgeschwindigkeit c = 3,00 108 m/s (2,99792458 108 m/s)
Gravitationskonstante G = 6,67 10-11 m3/(kg s2)
Fallbeschleunigung �⃗� = 9,81 m/s2 (üblicher Näherungswert)
Elektrische Feldkonstante ε0 = 8,854 10-12 C/(V m)
Magnetische Feldkonstante μ0 = 1,25 10-6 V s/(A m)
Elementarladung e = 1,602 10-19 C
Ruhemasse Elektron me = 9,11 10-31 kg
Ruhemasse Proton mP = 1,67 10-27 kg
Boltzmann-Konstante k = 1,38 10-23 J/K
Schallgeschwindigkeit c = 331,2 m/s bei 0 0C
Erdradius RE = 6,371 106 m
Erdmasse ME = 5,98 1024 kg
Zehnerpotenz 1012 109 106 103 10-3 10-6 10-9 10-12
Bezeichnung Tera T Giga G Mega M Kilo k Milli m Mikro μ Nano n Piko p
Kompaktkurs Physik Statik
6
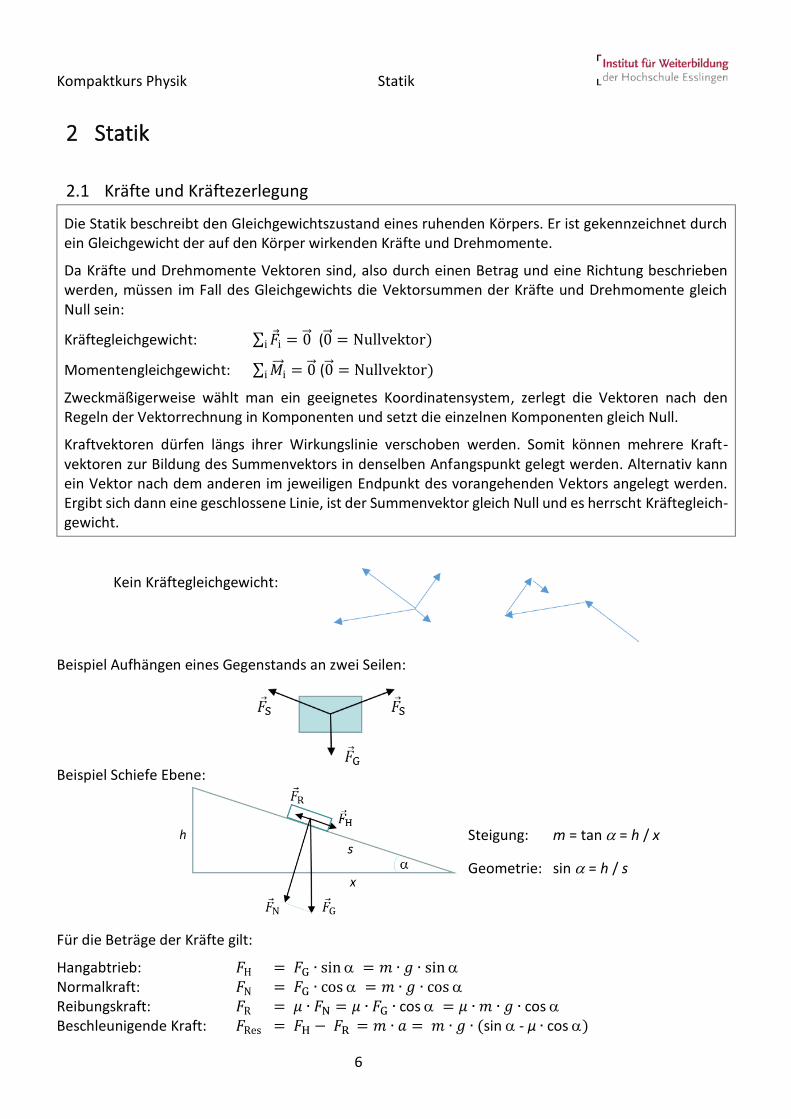
2 Statik
2.1 Kräfte und Kräftezerlegung
Die Statik beschreibt den Gleichgewichtszustand eines ruhenden Körpers. Er ist gekennzeichnet durch ein Gleichgewicht der auf den Körper wirkenden Kräfte und Drehmomente.
Da Kräfte und Drehmomente Vektoren sind, also durch einen Betrag und eine Richtung beschrieben werden, müssen im Fall des Gleichgewichts die Vektorsummen der Kräfte und Drehmomente gleich Null sein:
Kräftegleichgewicht: ∑ �⃗�ii = 0⃗⃗ (0⃗⃗ = Nullvektor)
Momentengleichgewicht: ∑ �⃗⃗⃗�ii = 0⃗⃗ (0⃗⃗ = Nullvektor)
Zweckmäßigerweise wählt man ein geeignetes Koordinatensystem, zerlegt die Vektoren nach den Regeln der Vektorrechnung in Komponenten und setzt die einzelnen Komponenten gleich Null.
Kraftvektoren dürfen längs ihrer Wirkungslinie verschoben werden. Somit können mehrere Kraft-vektoren zur Bildung des Summenvektors in denselben Anfangspunkt gelegt werden. Alternativ kann ein Vektor nach dem anderen im jeweiligen Endpunkt des vorangehenden Vektors angelegt werden. Ergibt sich dann eine geschlossene Linie, ist der Summenvektor gleich Null und es herrscht Kräftegleich-gewicht.
Kein Kräftegleichgewicht:
Beispiel Aufhängen eines Gegenstands an zwei Seilen:
Beispiel Schiefe Ebene:
Für die Beträge der Kräfte gilt:
Hangabtrieb: 𝐹H = 𝐹G ∙ sin = 𝑚 ∙ 𝑔 ∙ sin Normalkraft: 𝐹N = 𝐹G ∙ cos = 𝑚 ∙ 𝑔 ∙ cos Reibungskraft: 𝐹R = 𝜇 ∙ 𝐹N = 𝜇 ∙ 𝐹G ∙ cos = 𝜇 ∙ 𝑚 ∙ 𝑔 ∙ cos Beschleunigende Kraft: 𝐹Res = 𝐹H − 𝐹R = 𝑚 ∙ 𝑎 = 𝑚 ∙ 𝑔 ∙ (sin - µ ∙ cos )
Steigung: m = tan = h / x
Geometrie: sin = h / s
Kompaktkurs Physik Statik
7
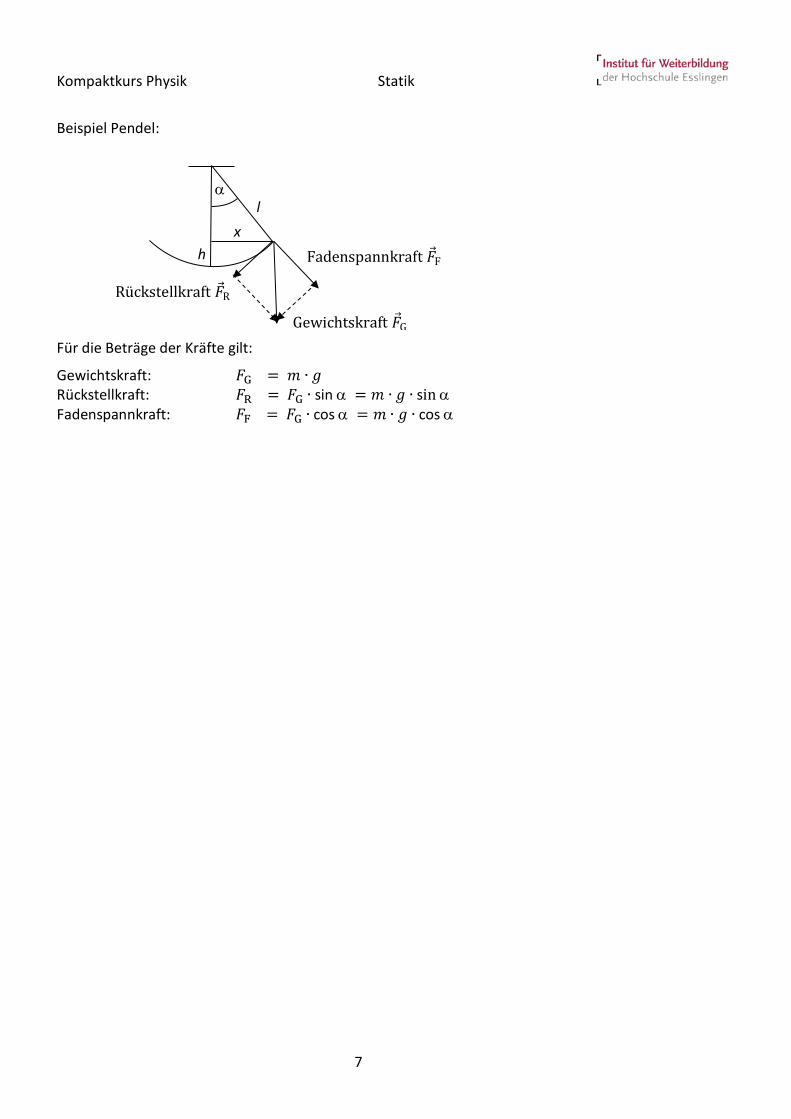
Beispiel Pendel:
Für die Beträge der Kräfte gilt:
Gewichtskraft: 𝐹G = 𝑚 ∙ 𝑔 Rückstellkraft: 𝐹R = 𝐹G ∙ sin = 𝑚 ∙ 𝑔 ∙ sin Fadenspannkraft: 𝐹F = 𝐹G ∙ cos = 𝑚 ∙ 𝑔 ∙ cos
Fadenspannkraft �⃗�F
Rückstellkraft �⃗�R
Gewichtskraft �⃗�G
l
h
x

Kompaktkurs Physik Mechanik von Massepunkten
8
3 Mechanik von Massepunkten
Die Mechanik ist ein Teilgebiet der Physik, das sich mit Kräften, Bewegungen und der Wechselwirkung zwischen Kräften und Bewegungen befasst. Im einfachsten Fall wird ein Körper als Massepunkt behandelt, d.h. er soll eine endliche Masse, aber keine bzw. eine vernachlässigbare Ausdehnung besitzen. Im nächsten Schritt betrachtet man ausgedehnte Körper mit der Einschränkung, dass sie sich unter der Einwirkung von Kräften nicht verformen („Starrkörper“).
In der Mechanik werden grundlegende physikalische Größen wie Masse, Energie und Impuls eingeführt und allgemeine Erhaltungssätze formuliert, die für die gesamte Physik Geltung haben.
3.1 Kinematik
Die Kinematik beschreibt Bewegungen von Körpern ohne nach den Ursachen der Bewegung zu fragen. Es geht also um die mathematische Beschreibung von Bewegungen als solche. Die physikalischen Grundgrößen der Kinematik sind Ortskoordinaten, Geschwindigkeiten und Beschleunigungen sowie deren Abhängigkeit von der Zeit.
Im einfachsten Fall wird eine idealisiert als ausdehnungsloser Punkt angenommene Masse betrachtet. Sie ist daher durch die Angabe ihrer Ortskoordinaten und Geschwindigkeit vollständig beschrieben.
Zunächst wird eine eindimensionale Bewegung betrachtet, d.h. die Masse soll sich nur in einer Dimension bewegen können, so dass eine einzige Ortskoordinate zur Beschreibung genügt. Die Bewegung muss dabei nicht geradlinig sein, sie kann auch auf einer beliebigen Bahn erfolgen, die z.B. durch eine Schiene vorgegeben ist.
Im nächsten Schritt wird eine Bewegung in allen drei Raumrichtungen betrachtet.
Kompaktkurs Physik Mechanik von Massepunkten
9
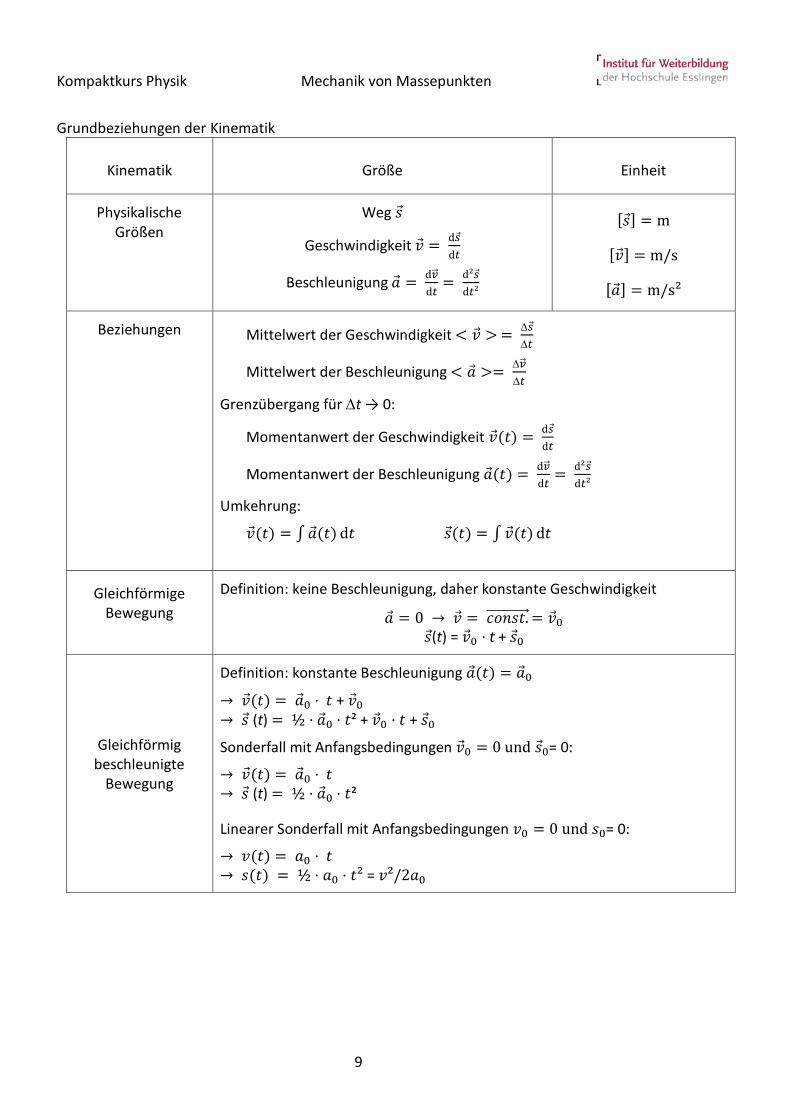
Grundbeziehungen der Kinematik
Kinematik Größe Einheit
Physikalische Größen
Weg 𝑠
Geschwindigkeit �⃗� = d𝑠
d𝑡
Beschleunigung �⃗� = d�⃗⃗�
d𝑡=
d²𝑠
d𝑡²
[𝑠] = m
[�⃗�] = m/s
[�⃗�] = m/s²
Beziehungen Mittelwert der Geschwindigkeit < �⃗� > = 𝑠
𝑡
Mittelwert der Beschleunigung < �⃗� >= �⃗⃗�
𝑡
Grenzübergang für t → 0:
Momentanwert der Geschwindigkeit �⃗�(𝑡) = d𝑠
d𝑡
Momentanwert der Beschleunigung �⃗�(𝑡) = d�⃗⃗�
d𝑡=
d²𝑠
d𝑡²
Umkehrung:
�⃗�(𝑡) = ∫ �⃗�(𝑡) d𝑡 𝑠(𝑡) = ∫ �⃗�(𝑡) d𝑡
Gleichförmige Bewegung
Definition: keine Beschleunigung, daher konstante Geschwindigkeit
�⃗� = 0 → �⃗� = 𝑐𝑜𝑛𝑠𝑡.⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗ = �⃗�0 𝑠(t) = �⃗�0 · t + 𝑠0
Gleichförmig beschleunigte
Bewegung
Definition: konstante Beschleunigung �⃗�(𝑡) = �⃗�0
→ �⃗�(𝑡) = �⃗�0 · 𝑡 + �⃗�0 → 𝑠 (t) = ½ · �⃗�0 · 𝑡² + �⃗�0 · 𝑡 + 𝑠0
Sonderfall mit Anfangsbedingungen �⃗�0 = 0 und 𝑠0= 0:
→ �⃗�(𝑡) = �⃗�0 · 𝑡 → 𝑠 (t) = ½ · �⃗�0 · 𝑡²
Linearer Sonderfall mit Anfangsbedingungen 𝑣0 = 0 und 𝑠0= 0:
→ 𝑣(𝑡) = 𝑎0 · 𝑡 → 𝑠(𝑡) = ½ · 𝑎0 · 𝑡² = 𝑣²/2𝑎0
Kompaktkurs Physik Mechanik von Massepunkten
10
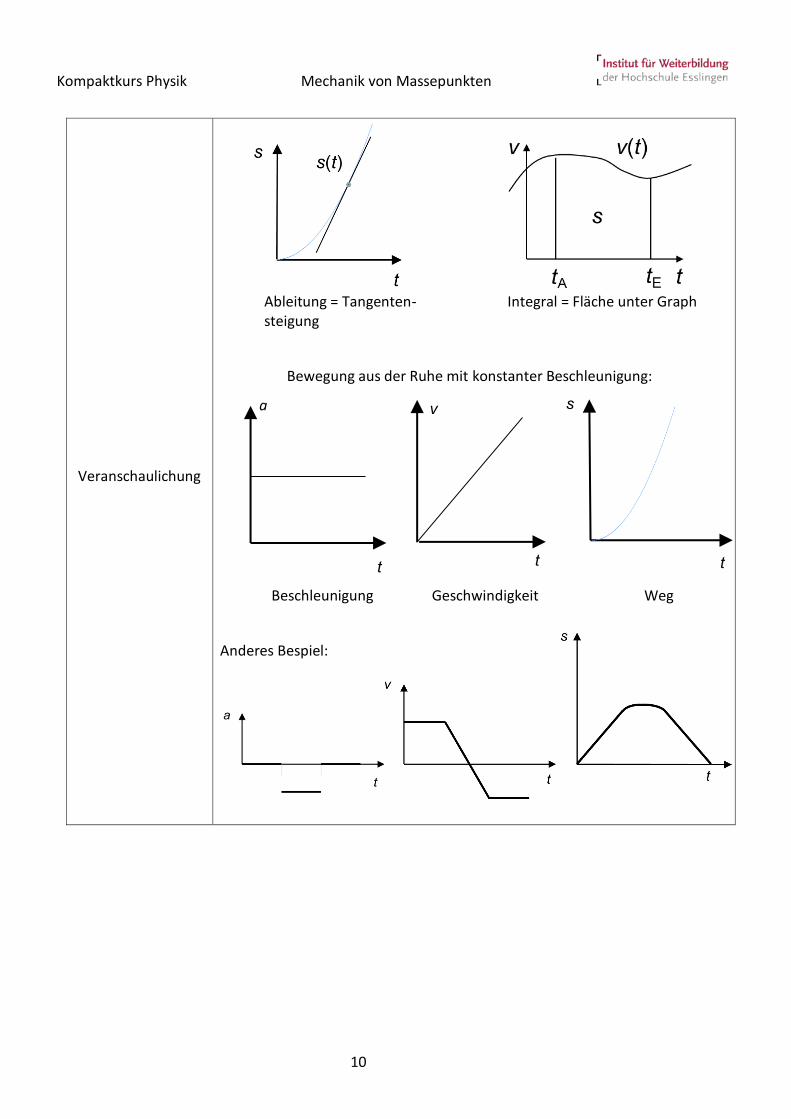
Veranschaulichung
Ableitung = Tangenten- Integral = Fläche unter Graph steigung
Bewegung aus der Ruhe mit konstanter Beschleunigung:
Beschleunigung Geschwindigkeit Weg
Anderes Bespiel:
a𝑥²𝑥²
t
t
v s
t
s
Kompaktkurs Physik Mechanik von Massepunkten
11
3.1.1 Translation
Unter Translation versteht man die Bewegung eines Massepunkts bzw. bei ausgedehnten Körpern die Bewegung des Schwerpunkts im Raum.
Entsprechend können die Bewegungen mit den obigen allgemeinen Beziehungen der Kinematik be-schrieben werden.
Im eindimensionalen Fall, also bei einer geradlinigen Bewegung oder der Bewegung entlang einer vor-gegebenen Schiene sind die Größen s (Weg), v (Geschwindigkeit) und a (Beschleunigung) Skalare.
3.1.2 Zusammengesetze Bewegungen, Würfe
Bei Translation in mehreren Dimensionen, z.B. im dreidimensionalen Raum, ist es zweckmäßig, die räumlichen Vektoren in ihre Komponenten zu zerlegen und die Bewegungen in den einzelnen Raumrichtungen zu überlagern. In dieser Formelsammlung beschränken wir uns auf die Bewegung in zwei Dimensionen x und y.
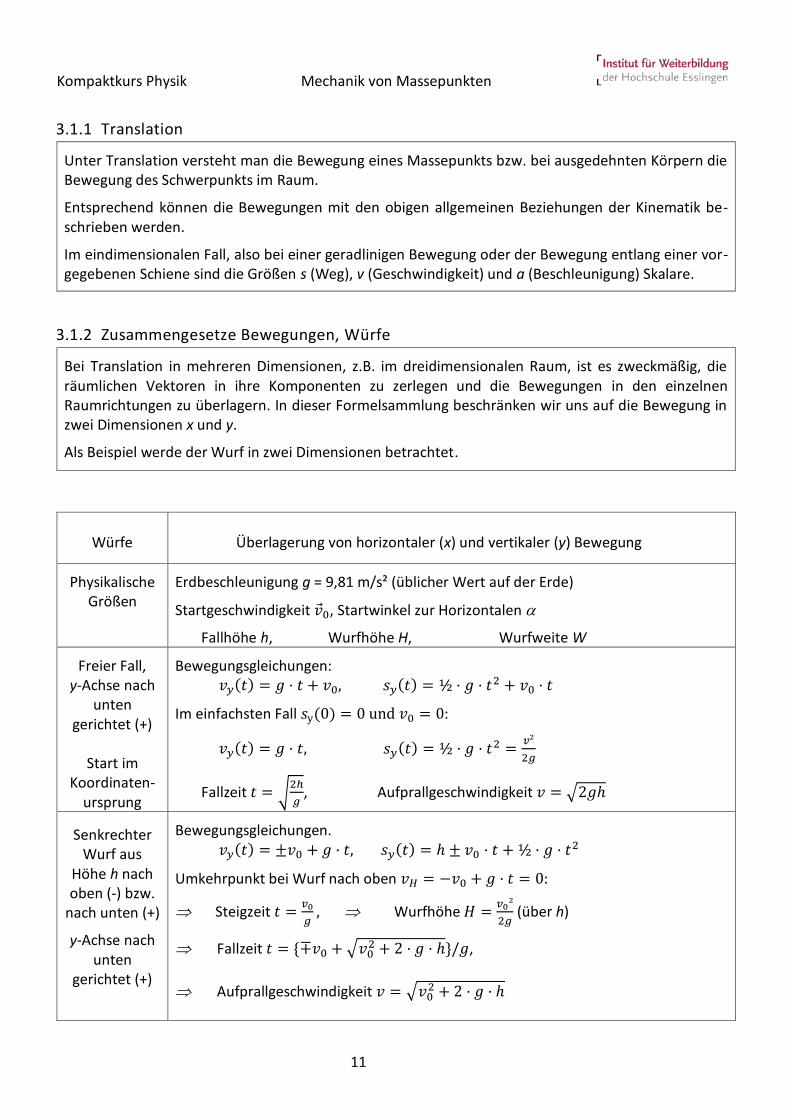
Als Beispiel werde der Wurf in zwei Dimensionen betrachtet.
Würfe Überlagerung von horizontaler (x) und vertikaler (y) Bewegung
Physikalische Größen
Erdbeschleunigung g = 9,81 m/s² (üblicher Wert auf der Erde)
Startgeschwindigkeit �⃗�0, Startwinkel zur Horizontalen
Fallhöhe h, Wurfhöhe H, Wurfweite W
Freier Fall, y-Achse nach
unten gerichtet (+)
Start im
Koordinaten-ursprung
Bewegungsgleichungen: 𝑣𝑦(𝑡) = 𝑔 · 𝑡 + 𝑣0, 𝑠𝑦(𝑡) = ½ · 𝑔 · 𝑡2 + 𝑣0 · 𝑡
Im einfachsten Fall 𝑠y(0) = 0 und 𝑣0 = 0:
𝑣𝑦(𝑡) = 𝑔 · 𝑡, 𝑠𝑦(𝑡) = ½ · 𝑔 · 𝑡2 =𝑣²
2𝑔
Fallzeit 𝑡 = √2ℎ
𝑔, Aufprallgeschwindigkeit 𝑣 = √2𝑔ℎ
Senkrechter Wurf aus
Höhe h nach oben (-) bzw.
nach unten (+)
y-Achse nach unten
gerichtet (+)
Bewegungsgleichungen. 𝑣𝑦(𝑡) = ±𝑣0 + 𝑔 · 𝑡, 𝑠𝑦(𝑡) = ℎ ± 𝑣0 · 𝑡 + ½ · 𝑔 · 𝑡2
Umkehrpunkt bei Wurf nach oben 𝑣𝐻 = −𝑣0 + 𝑔 · 𝑡 = 0:
Steigzeit 𝑡 =𝑣0
𝑔, Wurfhöhe 𝐻 =
𝑣0²
2𝑔 (über h)
Fallzeit 𝑡 = {∓𝑣0 + √𝑣02 + 2 · 𝑔 · ℎ}/𝑔,
Aufprallgeschwindigkeit 𝑣 = √𝑣02 + 2 · 𝑔 · ℎ
Kompaktkurs Physik Mechanik von Massepunkten
12
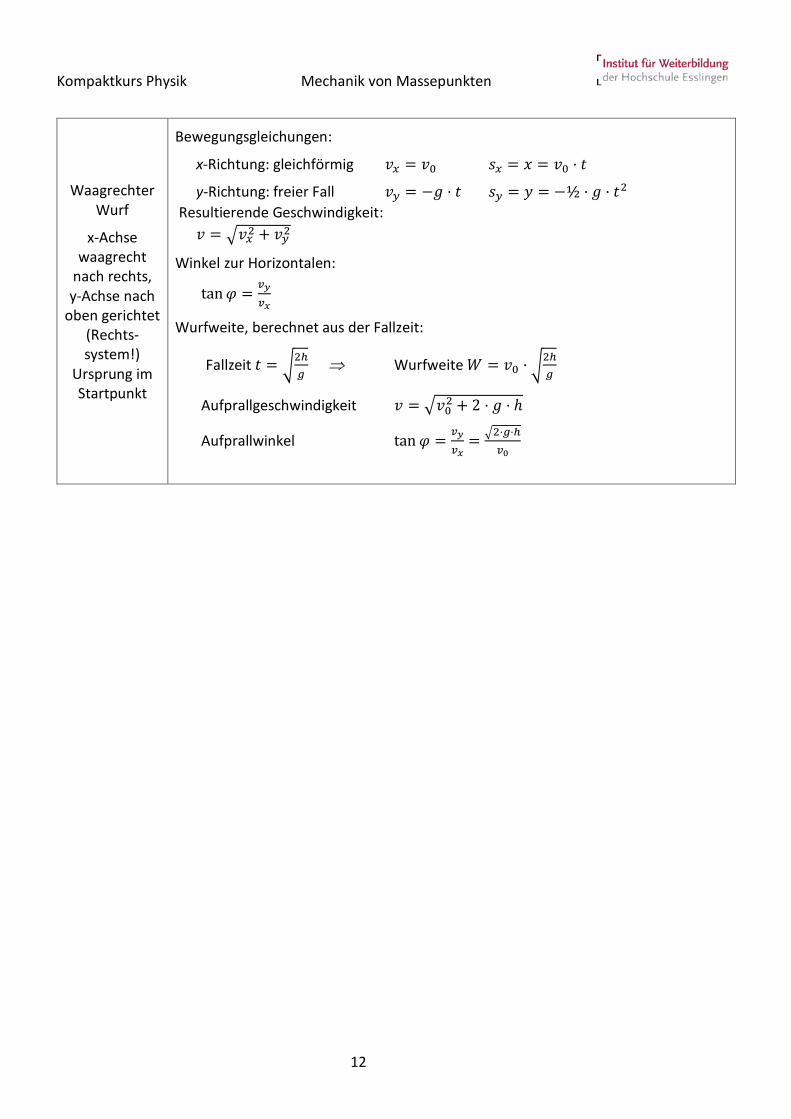
Waagrechter Wurf
x-Achse waagrecht
nach rechts, y-Achse nach
oben gerichtet (Rechts-system!)
Ursprung im Startpunkt
Bewegungsgleichungen:
x-Richtung: gleichförmig 𝑣𝑥 = 𝑣0 𝑠𝑥 = 𝑥 = 𝑣0 · 𝑡
y-Richtung: freier Fall 𝑣𝑦 = −𝑔 · 𝑡 𝑠𝑦 = 𝑦 = −½ · 𝑔 · 𝑡2
Resultierende Geschwindigkeit:
𝑣 = √𝑣𝑥2 + 𝑣𝑦
2
Winkel zur Horizontalen:
tan 𝜑 =𝑣𝑦
𝑣𝑥
Wurfweite, berechnet aus der Fallzeit:
Fallzeit 𝑡 = √2ℎ
𝑔 Wurfweite 𝑊 = 𝑣0 · √
2ℎ
𝑔
Aufprallgeschwindigkeit 𝑣 = √𝑣02 + 2 · 𝑔 · ℎ
Aufprallwinkel tan 𝜑 =𝑣𝑦
𝑣𝑥=
√2·𝑔·ℎ
𝑣0
Kompaktkurs Physik Mechanik von Massepunkten
13
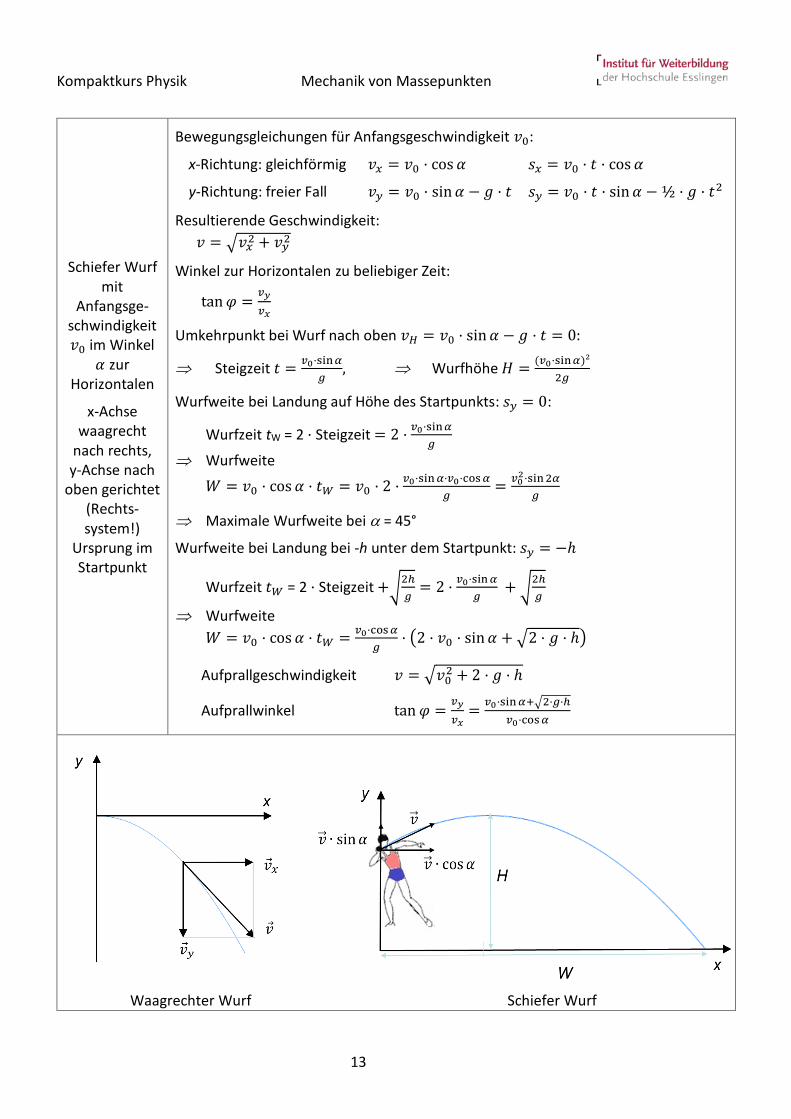
Schiefer Wurf mit
Anfangsge-schwindigkeit 𝑣0 im Winkel
𝛼 zur Horizontalen
x-Achse waagrecht
nach rechts, y-Achse nach
oben gerichtet (Rechts-system!)
Ursprung im Startpunkt
Bewegungsgleichungen für Anfangsgeschwindigkeit 𝑣0:
x-Richtung: gleichförmig 𝑣𝑥 = 𝑣0 · cos 𝛼 𝑠𝑥 = 𝑣0 · 𝑡 · cos 𝛼
y-Richtung: freier Fall 𝑣𝑦 = 𝑣0 · sin 𝛼 − 𝑔 · 𝑡 𝑠𝑦 = 𝑣0 · 𝑡 · sin 𝛼 − ½ · 𝑔 · 𝑡2
Resultierende Geschwindigkeit:
𝑣 = √𝑣𝑥2 + 𝑣𝑦
2
Winkel zur Horizontalen zu beliebiger Zeit:
tan 𝜑 =𝑣𝑦
𝑣𝑥
Umkehrpunkt bei Wurf nach oben 𝑣𝐻 = 𝑣0 · sin 𝛼 − 𝑔 · 𝑡 = 0:
Steigzeit 𝑡 =𝑣0·sin 𝛼
𝑔, Wurfhöhe 𝐻 =
(𝑣0·sin 𝛼)²
2𝑔
Wurfweite bei Landung auf Höhe des Startpunkts: 𝑠𝑦 = 0:
Wurfzeit tW = 2 · Steigzeit = 2 ·𝑣0·sin 𝛼
𝑔
Wurfweite
𝑊 = 𝑣0 · cos 𝛼 · 𝑡𝑊 = 𝑣0 · 2 ·𝑣0·sin 𝛼·𝑣0·cos 𝛼
𝑔=
𝑣02·sin 2𝛼
𝑔
Maximale Wurfweite bei = 45°
Wurfweite bei Landung bei -h unter dem Startpunkt: 𝑠𝑦 = −ℎ
Wurfzeit 𝑡𝑊 = 2 · Steigzeit +√2ℎ
𝑔= 2 ·
𝑣0·sin 𝛼
𝑔 + √
2ℎ
𝑔
Wurfweite
𝑊 = 𝑣0 · cos 𝛼 · 𝑡𝑊 =𝑣0·cos 𝛼
𝑔· (2 · 𝑣0 · sin 𝛼 + √2 · 𝑔 · ℎ)
Aufprallgeschwindigkeit 𝑣 = √𝑣02 + 2 · 𝑔 · ℎ
Aufprallwinkel tan 𝜑 =𝑣𝑦
𝑣𝑥=
𝑣0·sin 𝛼+√2·𝑔·ℎ
𝑣0·cos 𝛼
Waagrechter Wurf Schiefer Wurf
Kompaktkurs Physik Mechanik von Massepunkten
14
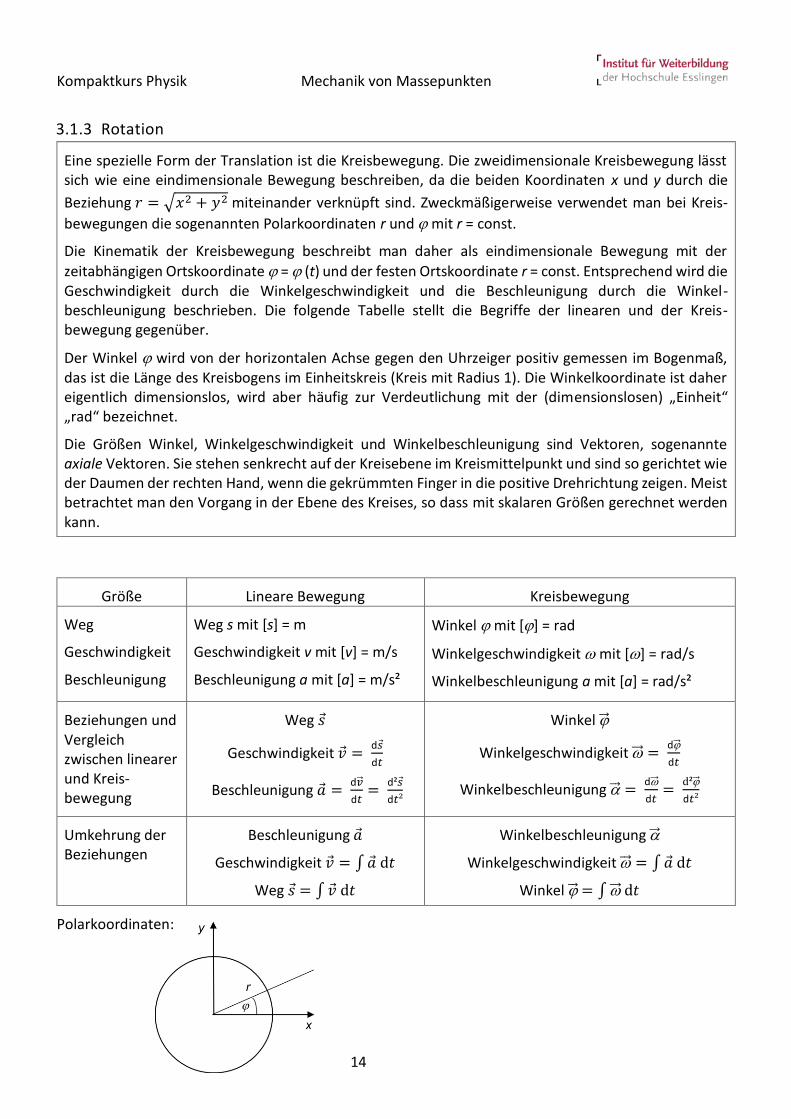
3.1.3 Rotation
Eine spezielle Form der Translation ist die Kreisbewegung. Die zweidimensionale Kreisbewegung lässt sich wie eine eindimensionale Bewegung beschreiben, da die beiden Koordinaten x und y durch die
Beziehung 𝑟 = √𝑥2 + 𝑦2 miteinander verknüpft sind. Zweckmäßigerweise verwendet man bei Kreis-
bewegungen die sogenannten Polarkoordinaten r und mit r = const.
Die Kinematik der Kreisbewegung beschreibt man daher als eindimensionale Bewegung mit der
zeitabhängigen Ortskoordinate = (t) und der festen Ortskoordinate r = const. Entsprechend wird die Geschwindigkeit durch die Winkelgeschwindigkeit und die Beschleunigung durch die Winkel-beschleunigung beschrieben. Die folgende Tabelle stellt die Begriffe der linearen und der Kreis-bewegung gegenüber.
Der Winkel wird von der horizontalen Achse gegen den Uhrzeiger positiv gemessen im Bogenmaß, das ist die Länge des Kreisbogens im Einheitskreis (Kreis mit Radius 1). Die Winkelkoordinate ist daher eigentlich dimensionslos, wird aber häufig zur Verdeutlichung mit der (dimensionslosen) „Einheit“ „rad“ bezeichnet.
Die Größen Winkel, Winkelgeschwindigkeit und Winkelbeschleunigung sind Vektoren, sogenannte axiale Vektoren. Sie stehen senkrecht auf der Kreisebene im Kreismittelpunkt und sind so gerichtet wie der Daumen der rechten Hand, wenn die gekrümmten Finger in die positive Drehrichtung zeigen. Meist betrachtet man den Vorgang in der Ebene des Kreises, so dass mit skalaren Größen gerechnet werden kann.
Größe Lineare Bewegung Kreisbewegung
Weg
Geschwindigkeit
Beschleunigung
Weg s mit [s] = m
Geschwindigkeit v mit [v] = m/s
Beschleunigung a mit [a] = m/s²
Winkel mit [] = rad
Winkelgeschwindigkeit mit [] = rad/s
Winkelbeschleunigung a mit [a] = rad/s²
Beziehungen und Vergleich zwischen linearer und Kreis-bewegung
Weg 𝑠
Geschwindigkeit �⃗� = d𝑠
d𝑡
Beschleunigung �⃗� = d�⃗⃗�
d𝑡=
d²𝑠
d𝑡²
Winkel ⃗⃗⃗
Winkelgeschwindigkeit ⃗⃗⃗ = d⃗⃗⃗
d𝑡
Winkelbeschleunigung ⃗⃗⃗ = d⃗⃗⃗
d𝑡=
d²⃗⃗⃗
d𝑡²
Umkehrung der Beziehungen
Beschleunigung �⃗�
Geschwindigkeit �⃗� = ∫ �⃗� d𝑡
Weg 𝑠 = ∫ �⃗� d𝑡
Winkelbeschleunigung ⃗⃗⃗
Winkelgeschwindigkeit ⃗⃗⃗ = ∫ �⃗� d𝑡
Winkel ⃗⃗⃗ = ∫ ⃗⃗⃗ d𝑡
Polarkoordinaten:
Kompaktkurs Physik Mechanik von Massepunkten
15
3.2 Dynamik
Die Dynamik beschreibt die Wechselwirkung zwischen äußeren Einflüssen und Bewegungen. Im ein-fachsten Fall soll ein Körper punktförmig gedacht sein, d.h. eine Masse, aber keine räumliche Ausdeh-nung besitzen.
Die äußere Einwirkung auf den Körper wird durch die physikalische Größe „Kraft“ beschrieben. Newton erkannte und formulierte die mathematischen Beziehungen in drei sogenannten Axiomen, das sind nicht weiter beweisbare Grundannahmen, die jedoch experimentell bestens bestätigt werden.
Dynamik Größe Einheit
Physikali-sche
Größen
Masse m
Kraft �⃗�
Impuls �⃗�
[m] = kg
[�⃗�] = N = kg m/s2
[�⃗�] = kg m/s
Impuls Definition: �⃗� = 𝑚 ∙ �⃗�
Impulsänderung Δ�⃗� = �⃗�vor - �⃗�nach = m (�⃗�vor - �⃗�nach), dafür erforderliche Kraft:
�⃗� =∆�⃗�
∆𝑡= 𝑚 ∙
∆�⃗⃗�
∆𝑡= 𝑚 ∙ �⃗� für konstante Masse und kleines Zeitintervall oder
�⃗� =d�⃗�
d𝑡= 𝑚 ∙
d�⃗⃗�
d𝑡= 𝑚 ∙ �⃗� für konstante Masse in differenzieller Schreibweise
3.2.1 Newtonsches Grundgesetz
Newton (1643 – 1727) fasste seine Erkenntnisse in drei Axiomen zusammen:
1. Trägheitssatz: Ein Körper behält seine Geschwindigkeit nach Betrag und Richtung bei oder verharrt im Zustand der Ruhe, wenn die Summe aller an ihm wirkenden Kräfte Null ist.
2. Aktionsgesetz oder Newtonsches Grundgesetz: Eine resultierende äußere Kraft �⃗� bewirkt eine zeitliche Änderung der Bewegungsgröße �⃗� – genannt „Impuls“. Der Impuls ist definiert als �⃗� = 𝑚 ∙ �⃗�.
Damit lässt sich das Aktionsgesetz schreiben als �⃗� =d�⃗�
d𝑡. Im häufig auftretenden Fall konstanter Masse
ergibt sich vereinfachend �⃗� =d�⃗�
d𝑡=
d(𝑚∙ �⃗⃗�)
d𝑡= 𝑚 ∙
d�⃗⃗�
d𝑡= 𝑚 ∙ �⃗�. Dies bedeutet:
Um einem Körper der Masse m die konstante Beschleunigung �⃗� zu erteilen, wird eine Kraft �⃗� ent-
sprechend dem Produkt �⃗� = 𝑚 ∙ �⃗� benötigt. Wenn auf einen Körper der Masse m eine konstante Kraft
�⃗� wirkt, erfährt er eine Beschleunigung �⃗� in Richtung dieser Kraft gemäß dem Quotienten �⃗�/m.
3. Wechselwirkungsgesetz actio = reactio: Wirkt ein Körper 1 auf einen Körper 2 mit einer Kraft �⃗�, dann
übt der Körper 2 eine gleich große, entgegengesetzt wirkende Gegenkraft -�⃗� auf Körper 1 aus.
Das Trägheitsgesetz ist genau genommen ein Spezialfall des Aktionsgesetzes für den Fall, dass keine äußeren Kräfte wirken. Wegen seiner Bedeutung für die Definition von sogenannten Inertialsystemen wird es jedoch als eigenständiges Gesetz behandelt.
Kompaktkurs Physik Mechanik von Massepunkten
16
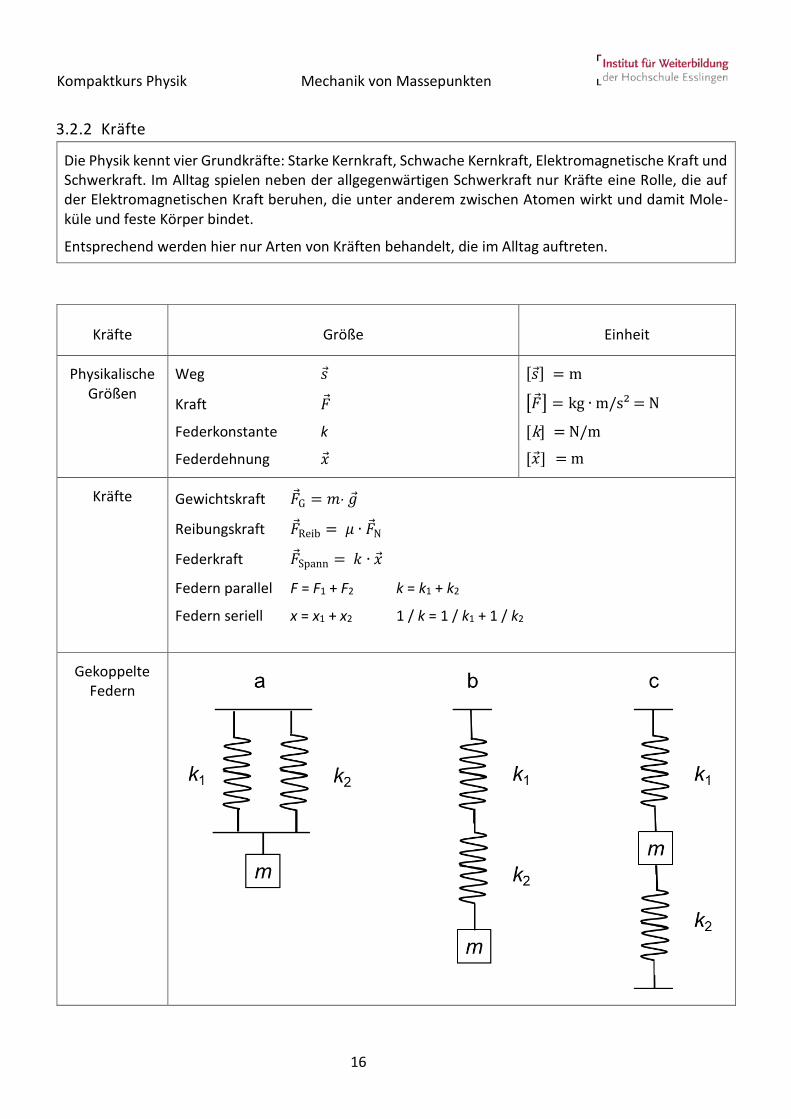
3.2.2 Kräfte
Die Physik kennt vier Grundkräfte: Starke Kernkraft, Schwache Kernkraft, Elektromagnetische Kraft und Schwerkraft. Im Alltag spielen neben der allgegenwärtigen Schwerkraft nur Kräfte eine Rolle, die auf der Elektromagnetischen Kraft beruhen, die unter anderem zwischen Atomen wirkt und damit Mole-küle und feste Körper bindet.
Entsprechend werden hier nur Arten von Kräften behandelt, die im Alltag auftreten.
Kräfte Größe Einheit
Physikalische Größen
Weg 𝑠
Kraft �⃗�
Federkonstante k
Federdehnung �⃗�
[𝑠] = m
[�⃗�] = kg ∙ m/s² = N
[k] = N/m
[�⃗�] = m
Kräfte Gewichtskraft �⃗�G = 𝑚 �⃗�
Reibungskraft �⃗�Reib = 𝜇 ∙ �⃗�N
Federkraft �⃗�Spann = 𝑘 ∙ �⃗�
Federn parallel F = F1 + F2 k = k1 + k2
Federn seriell x = x1 + x2 1 / k = 1 / k1 + 1 / k2
Gekoppelte Federn

Kompaktkurs Physik Mechanik von Massepunkten
17
3.2.3 Kreisbewegungen
Bei Kreisbewegungen treten gegenüber linearen Bewegungen weitere Kräfte auf. Auch bei konstantem Betrag der Geschwindigkeit ist eine Bewegung auf einer Kreisbahn beschleunigt, weil sich die Richtung der Geschwindigkeit ständig ändert und nach dem Aktionsgesetz dafür eine Kraft aufzubringen ist:
�⃗� =d�⃗�
d𝑡= 𝑚 ∙
d�⃗�
d𝑡= 𝑚 ∙ �⃗�
Allgemein gilt: �⃗� =d�⃗�
d𝑡= 𝑚 ∙
d(𝑣𝑒t)
d𝑡= 𝑚 ∙ 𝑒t ∙
d𝑣
d𝑡+ 𝑚 ∙ 𝑣 ∙
d𝑒t
d𝑡= 𝑚 ∙ 𝑒t ∙ 𝑎 + 𝑚 ∙ 𝑣 ∙
d𝑒t
d𝑡
Der erste Term beschreibt die Änderung des Betrags der Geschwindigkeit, die tangential zur Kreisbahn gerichtet ist, der zweite die laufende Richtungsänderung der Geschwindigkeit. Dabei ist 𝑒t der Einheits-vektor in Tangentialrichtung, 𝑒Z der Einheitsvektor in Richtung Zentrum.
Eine detaillierte Betrachtung des zweiten Terms ergibt:
�⃗� =d�⃗�
d𝑡= 𝑚 ∙ 𝑒t ∙ 𝑎 − 𝑚 ∙
𝑣2
𝑟∙ 𝑒Z = �⃗�B + �⃗�Z
mit �⃗�Z = −𝑚 ∙𝑣2
𝑟∙ 𝑒Z der in Richtung des Kreismittelpunkts gerichteten sogenannten Zentripetalkraft.
Wenn es sich um eine beliebig gekrümmte Bahn statt einer Kreisbahn handelt, berechnet sich die
Zentripetalkraft aus �⃗�Z = −𝑚 ∙𝑣2
𝜌∙ 𝑒Z, wenn der Radius des Krümmungskreises an die Bahn im jeweili-
gen Punkt ist.
Neben der Zentripetalkraft wird oft von der Zentrifugalkraft gesprochen, was häufig zu Verwirrung führt, zumal die Zentrifugalkraft denselben Betrag hat, aber vom Kreismittelpunkt nach außen gerichtet ist. Die Unterscheidung ist eine Frage des Koordinatensystems:
Zentripetalkraft: Vom Standpunkt eines außenstehenden Beobachters muss eine Kraft aufgebracht werden, um auf einer Kreisbahn die Richtung des Geschwindigkeitsvektors ständig zu ändern. Diese Kraft wirkt in Richtung des Kreismittelpunkts.
Zentrifugalkraft: Der mitbewegte Beobachter ist relativ zu der Kreisbewegung in Ruhe, stellt aber trotzdem eine Kraft fest, die er aufbringen muss, um in Ruhe zu bleiben. Nach dem dritten Newtonschen Grundgesetz fordert er eine Trägheitskraft zur Kompensation dieser Kraft, eben die Zentrifugalkraft, weil sie nach außen gerichtet ist.
Kompaktkurs Physik Mechanik von Massepunkten
18
3.2.4 Impuls und Impulserhaltung, Rückstoß
Der Impuls, definiert als Produkt aus Masse mal Geschwindigkeit, ist eine fundamentale Größe in der Physik. Der Zusammenhang mit einwirkenden Kräften wurde bereits erläutert. Aus dem ersten Newtonschen Grundgesetz folgt, dass ohne äußere Kräfte der Gesamtimpuls eines Systems nach Betrag und Richtung konstant ist. Daraus folgt: zieht man um ein System (zumindest gedanklich) eine Systemgrenze und wirken nur Kräfte innerhalb dieser Grenze, so bleibt der Gesamtimpuls des Systems konstant. Umgekehrt heißt das, dass man den Gesamtimpuls durch innere Kräfte nicht ändern kann.
Dieses Prinzip nennt man Impulserhaltungssatz oder kurz „Impulssatz“.
Beispiel: der bekannte Lügenbaron von Münchhausen behauptete, er habe sich mit der Hand an seinen Haaren aus einem Sumpf gezogen, in dem er zu versinken drohte. Zieht man um den Baron eine Systemgrenze wird klar, dass auf ihn nur „innere“ Kräfte wirken, mit denen er seinen Schwerpunkt nicht verändern, sich also nicht aus dem Sumpf ziehen kann.
Der Impulssatz findet in der Praxis viele Anwendungen, z.B. bei Flugzeugen. Entgegen weit verbreiteter Meinung schraubt sich ein Propeller nicht wie ein Korkenzieher durch die Luft, sondern beschleunigt Luft nach hinten, die dadurch eine Impulsänderung erfährt. Nach dem Impulssatz muss demnach das Flugzeug einen gleich großen Impuls nach vorne erhalten. Ähnlich verhält es sich beim Düsenflugzeug, das sich nicht etwa von der Luft dahinter abdrückt, sondern ebenfalls einen Impuls erhält durch Beschleunigen von Luft, die aus den Düsen nach hinten ausgestoßen wird.
Im luftleeren Weltraum ist dieses Rückstoßprinzip durch den Impulssatz die einzige Möglichkeit, die Geschwindigkeit eines Raumflugkörpers nach Betrag und Richtung zu ändern: „Raketenantrieb“. Im Gegensatz zum Düsenflugzeug muss bei der Rakete der Treibstoff sowohl die Energie zur Beschleuni-gung des Gases als auch den Impuls beim Ausstoßen liefern.
3.2.5 Arbeit, Energie, Leistung
Arbeit im physikalischen Sinn ist allgemein differenziell definiert als
d𝑊 = �⃗� ∙ d𝑠
wobei �⃗� die wirkende Kraft und d𝑠 ein differenzielles Wegstück ist. Die differenzielle Definition lässt zu, dass sich sowohl die Kraft als auch die Richtung längs des zurückgelegten Wegs ändern kann. Als Skalarprodukt zweier Vektoren sind Arbeit und Energie skalare Größen.
Energie ist gespeicherte Arbeit. Hat man also an einem System Arbeit verrichtet, so besitzt es eine entsprechende Energie, mit der es umgekehrt wieder Arbeit verrichten kann.
Für die Energie gilt in der Physik ein universeller Erhaltungssatz, der Energieerhaltungssatz oder kurz „Energiesatz“. Das heißt, Energie kann weder erzeugt noch vernichtet, sondern nur umgewandelt werden. Für rein mechanische Energieformen kann er aus dem Newtonschen Aktionsgesetz hergeleitet werden. In seiner alle Energieformen umfassenden Form ist er ein nicht beweisbarer Erfahrungssatz.
Leistung ist definiert als Arbeit bzw. Energie pro Zeit. Da sich die Arbeit zeitlich ändern kann, lautet die allgemeine Definition:
𝑃 = d𝐸
d𝑡 bzw. 𝑃 =
d𝑊
d𝑡
Energie und Leistung sind sehr unterschiedliche physikalische Größen, die streng unterschieden werden müssen. Leider werden sie im Alltag häufig verwechselt.
Kompaktkurs Physik Mechanik von Massepunkten
19
Energie Größe Einheit
Physikalische Größen
Arbeit W
Energie E = gespeicherte Arbeit
Leistung P
Höhendifferenz h
[W] = N m = J
[E] = N m = J
[P] = J/s = W
[h] = m
Arbeit, Energie Arbeit allgemein: 𝑊 = ∫ �⃗� ∙ d𝑠, 𝑠peziell für �⃗� ∥ 𝑠 und �⃗� = const.: W = F s
Einige wichtige Energieformen:
Hubarbeit: WHub = ELage = m g h
Beschleunigungsarbeit: WBesch = Ekin = ½ m v²
Spannarbeit: WSpann = Epot = ½ k x²
Reibungsarbeit: WReib = FReib s
Deformationsarbeit: WDef = FDef sDef
Energie-erhaltung
Energieerhaltungssatz allgemein: Evor = Enach
Beispiele für Umwandlungen:
Lage- in Bewegungsenergie: ELage = Ekin => m g h = ½ m v²
Spann- in Bewegungsenergie: Epot = Ekin => ½ k x² = ½ m v²
Bewegungsenergie in Reibungswärme: Ekin = WReib => ½ m v² = μ m g s
Energieumwandlung durch Reibung: ΔE = Evor - Enach = Wreib = μ m g s
Relative Energieumwandlung durch Reibung: ΔE / Evor = 1 - Enach / Evor = z %
Leistung Mittlere Leistung: P = ΔW / Δt
Momentane Leistung: Pmomentan = dW / dt = �⃗� ∙d𝑠
d𝑡= �⃗� ∙ �⃗�
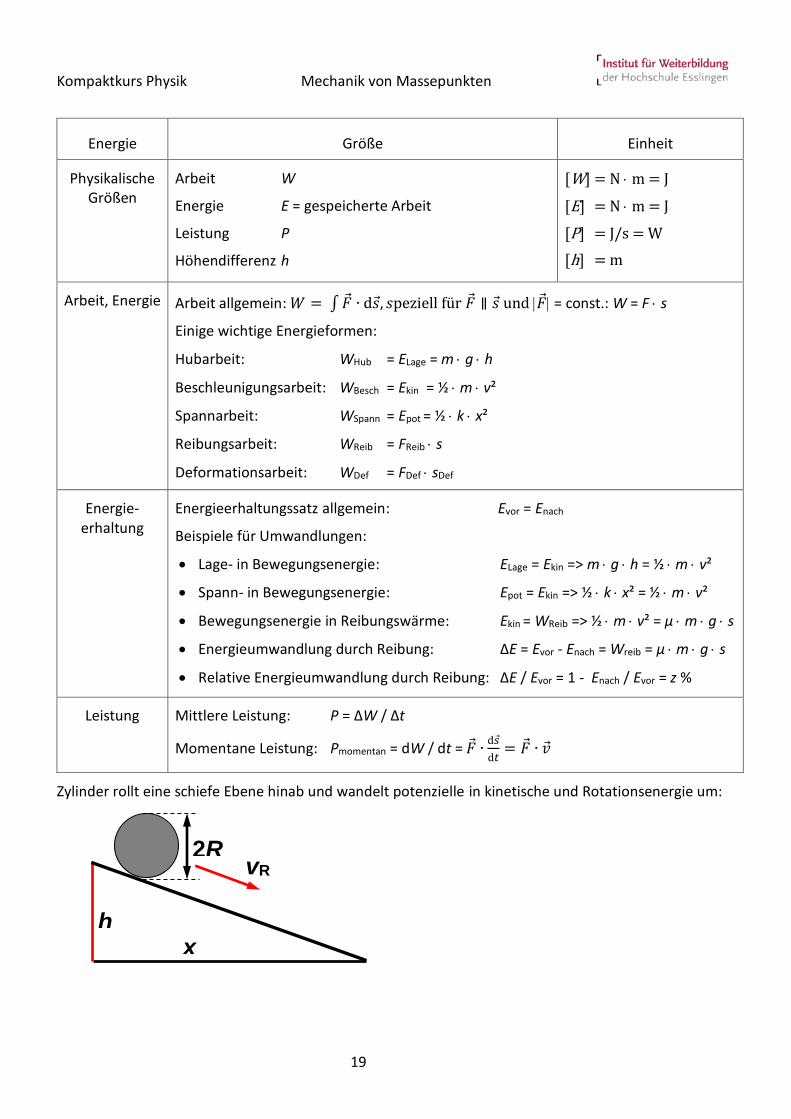
Zylinder rollt eine schiefe Ebene hinab und wandelt potenzielle in kinetische und Rotationsenergie um:
h x
2R vR
Kompaktkurs Physik Mechanik von Massepunkten
20
3.2.6 Stöße
Unter Stößen versteht man das kurzzeitige Aufeinandertreffen von Körpern, die dadurch ihre Bewegun-gen ändern. Im Allgemeinen treten dabei große Kräfte auf, wobei der genaue zeitliche Verlauf kompli-ziert sein kann. Im Alltag findet man Beispiele bei Tennis, Billard, Fußball, aber auch Unfällen mit Fahr-zeugen.
Es zeigt sich, dass der genaue Verlauf der gegenseitigen Kraftwirkung der Körper keine Rolle spielt, sondern dass der Verlauf der Stoßprozesse meist allein mit Hilfe von Erhaltungssätzen berechnet werden kann.
Im Folgenden werden Stöße zwischen zwei Körpern betrachtet. Zunächst sind verschiedene Fälle von Stößen zu unterscheiden:
gerade schief
zentral exzentrisch
elastisch unelastisch
Beim geraden Stoß liegen alle Geschwindigkeiten auf einer Geraden, so dass ein eindimensionales Problem vorliegt; beim schiefen Stoß bilden die Geschwindigkeiten einen Winkel zueinander.
Beim zentralen Stoß liegen die Geschwindigkeitsvektoren der beiden Körper auf einer Geraden durch die beiden Schwerpunkte; beim exzentrischen Stoß dagegen nicht, so dass die Körper durch den Stoß in Drehung versetzt werden können.
Beim elastischen Stoß bleibt die kinetische Energie erhalten, das heißt die beim Stoß kurzzeitig auf-tretende Verformung der Körper wird vollständig rückgängig gemacht; beim unelastischen Stoß geht ein Teil der kinetischen Energie in andere Energieformen über.
Im Folgenden werden nur gerade, zentrale Stöße behandelt.

Kompaktkurs Physik Mechanik von Massepunkten
21
Allgemein
Zwei Körper der Masse m1 und m2 mit den Geschwindigkeiten v1 und v2 stoßen zusammen. Beim geraden, zentralen Stoß liegen alle Geschwindigkeiten auf einer Geraden, so dass mit skalaren Geschwindigkeiten gerechnet werden kann. Beim zentralen Stoß können die Massen punktförmig betrachtet werden. Nach dem Stoß haben die beiden Massen die Geschwindigkeiten u1 und u2.
Elastischer Stoß
In jedem Fall gilt der Impulserhaltungssatz:
𝑚1 ∙ 𝑣1 + 𝑚2 ∙ 𝑣2 = 𝑚1 ∙ 𝑢1 + 𝑚2 ∙ 𝑢2
Beim elastischen Stoß bleibt die gesamte kinetische Energie erhalten:
1
2∙ 𝑚1 ∙ 𝑣1
2 +1
2∙ 𝑚2 ∙ 𝑣2
2 = 1
2∙ 𝑚1 ∙ 𝑢1
2 +1
2∙ 𝑚2 ∙ 𝑢2
2
Aus diesen beiden Gleichungen lassen sich die Geschwindigkeiten u1 und u2 nach dem Stoß allgemein berechnen:
𝑢1 = (𝑚1 − 𝑚2) ∙ 𝑣1 + 2 ∙ 𝑚2 ∙ 𝑣2
𝑚1 + 𝑚2
𝑢2 = (𝑚2 − 𝑚1) ∙ 𝑣2 + 2 ∙ 𝑚1 ∙ 𝑣1
𝑚1 + 𝑚2
Besonders einfach ist der Fall gleicher Massen m1 = m2 = m:
𝑢1 = 𝑣2
𝑢2 = 𝑣1
In diesem Fall tauschen die beiden Massen einfach ihre Geschwindigkeiten aus.
Ein anderer einfacher Fall ist der elastische Stoß auf einen ruhenden Körper, das heißt v2 = 0:
𝑢1 = 𝑚1 − 𝑚2
𝑚1 + 𝑚2∙ 𝑣1
𝑢2 = 2 ∙ 𝑚1
𝑚1 + 𝑚2∙ 𝑣1

Kompaktkurs Physik Mechanik von Massepunkten
22
Unelastischer Stoß
In jedem Fall gilt der Impulserhaltungssatz:
𝑚1 ∙ 𝑣1 + 𝑚2 ∙ 𝑣2 = 𝑚1 ∙ 𝑢1 + 𝑚2 ∙ 𝑢2
Beim unelastischen Stoß bleibt die gesamte kinetische Energie nicht erhalten, vielmehr
geht ein Teil E davon in andere Energieformen über:
1
2∙ 𝑚1 ∙ 𝑣1
2 +1
2∙ 𝑚2 ∙ 𝑣2
2 = 1
2∙ 𝑚1 ∙ 𝑢1
2 +1
2∙ 𝑚2 ∙ 𝑢2
2 + 𝐸
Dieser Fall lässt sich nicht allgemein lösen, da nur zwei Gleichungen mit drei Unbe-kannten zur Verfügung stehen. Es muss also eine weitere Bedingung gegeben sein.
Eine Möglichkeit ist der vollkommen unelastische oder inelastische Stoß, bei dem die beiden Körper nach dem Stoß fest zusammenbleiben, also eine gemeinsame Geschwin-digkeit u haben. Dann genügt der Impulserhaltungssatz:
𝑢 =𝑚1 ∙ 𝑣1 + 𝑚2 ∙ 𝑣2
𝑚1 + 𝑚2
Der relative Verlust E an kinetischer Energie ergibt sich aus aus dem Energieerhal-tungssatz für die Gesamtenergie:
Eges,vor = Eges,nach = Ekin,nach + E und damit:
ΔE / Evor = 1 - Ekin,nach / Evor = z %
Drehstöße Drehstöße können auftreten, wenn etwa zwei rotierende Scheiben zusammenstoßen. Sie können analog zu linearen Stößen behandelt werden, wenn man den Impuls-erhaltungssatz durch den Drehimpulserhaltungssatz ersetzt. Der Energieerhaltungssatz gilt entsprechend für die Rotationsenergie statt für die lineare kinetische Energie.
Kompaktkurs Physik Mechanik von Starrkörpern
23
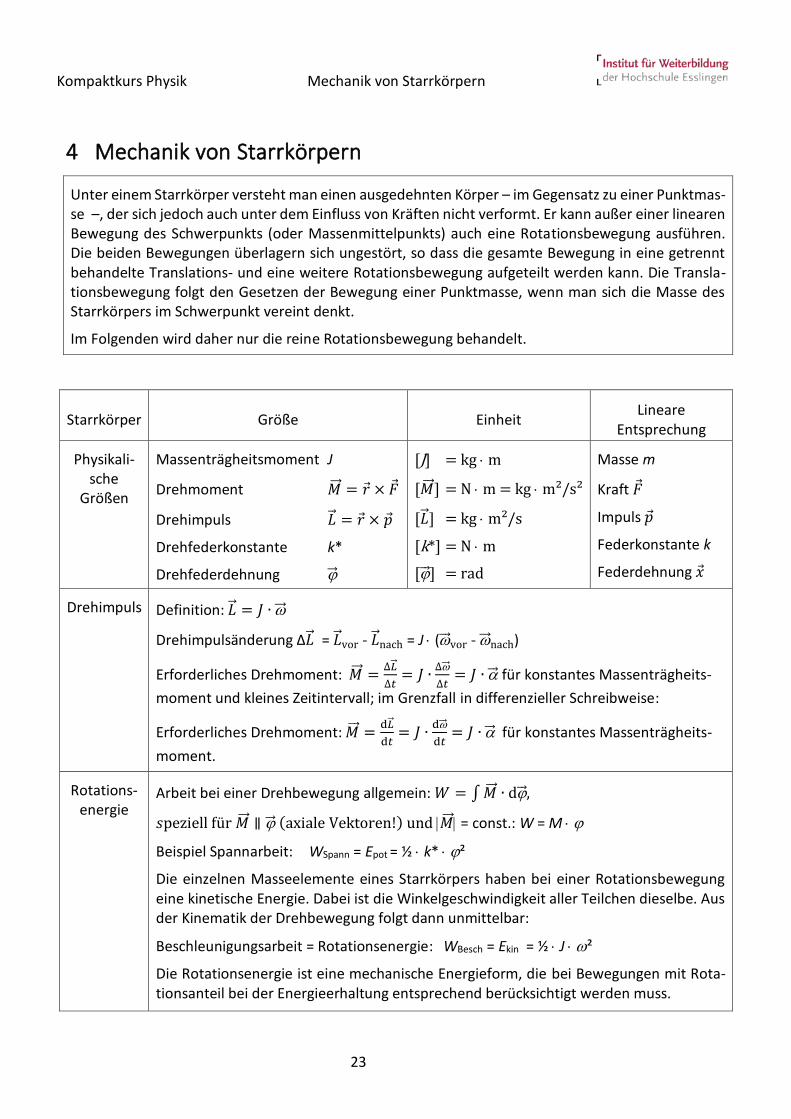
4 Mechanik von Starrkörpern
Starrkörper Größe Einheit Lineare
Entsprechung
Physikali-sche
Größen
Massenträgheitsmoment J
Drehmoment �⃗⃗⃗� = 𝑟 × �⃗�
Drehimpuls �⃗⃗� = 𝑟 × �⃗�
Drehfederkonstante k*
Drehfederdehnung ⃗⃗⃗
[J] = kg m
[�⃗⃗⃗�] = N m = kg m²/s²
[�⃗⃗�] = kg m²/s
[k*] = N m
[⃗⃗⃗] = rad
Masse m
Kraft �⃗�
Impuls �⃗�
Federkonstante k
Federdehnung �⃗�
Drehimpuls Definition: �⃗⃗� = 𝐽 ∙ ⃗⃗⃗
Drehimpulsänderung Δ�⃗⃗� = �⃗⃗�vor - �⃗⃗�nach = J (⃗⃗⃗vor - ⃗⃗⃗nach)
Erforderliches Drehmoment: �⃗⃗⃗� =∆�⃗⃗�
∆𝑡= 𝐽 ∙
∆⃗⃗⃗
∆𝑡= 𝐽 ∙ ⃗⃗⃗ für konstantes Massenträgheits-
moment und kleines Zeitintervall; im Grenzfall in differenzieller Schreibweise:
Erforderliches Drehmoment: �⃗⃗⃗� =d�⃗⃗�
d𝑡= 𝐽 ∙
d⃗⃗⃗
d𝑡= 𝐽 ∙ ⃗⃗⃗ für konstantes Massenträgheits-
moment.
Rotations-energie
Arbeit bei einer Drehbewegung allgemein: 𝑊 = ∫ �⃗⃗⃗� ∙ d⃗⃗⃗,
𝑠peziell für �⃗⃗⃗� ∥ ⃗⃗⃗ (axiale Vektoren!) und �⃗⃗⃗� = const.: W = M
Beispiel Spannarbeit: WSpann = Epot = ½ k* ²
Die einzelnen Masseelemente eines Starrkörpers haben bei einer Rotationsbewegung eine kinetische Energie. Dabei ist die Winkelgeschwindigkeit aller Teilchen dieselbe. Aus der Kinematik der Drehbewegung folgt dann unmittelbar:
Beschleunigungsarbeit = Rotationsenergie: WBesch = Ekin = ½ J ²
Die Rotationsenergie ist eine mechanische Energieform, die bei Bewegungen mit Rota-tionsanteil bei der Energieerhaltung entsprechend berücksichtigt werden muss.
Unter einem Starrkörper versteht man einen ausgedehnten Körper – im Gegensatz zu einer Punktmas-se –, der sich jedoch auch unter dem Einfluss von Kräften nicht verformt. Er kann außer einer linearen Bewegung des Schwerpunkts (oder Massenmittelpunkts) auch eine Rotationsbewegung ausführen. Die beiden Bewegungen überlagern sich ungestört, so dass die gesamte Bewegung in eine getrennt behandelte Translations- und eine weitere Rotationsbewegung aufgeteilt werden kann. Die Transla-tionsbewegung folgt den Gesetzen der Bewegung einer Punktmasse, wenn man sich die Masse des Starrkörpers im Schwerpunkt vereint denkt.
Im Folgenden wird daher nur die reine Rotationsbewegung behandelt.
Kompaktkurs Physik Mechanik von Starrkörpern
24
4.1 Drehmoment, Massenträgheitsmoment, Rotationsenergie
Zwischen Translations- und Rotationsbewegungen bestehen Analogien, das heißt Gesetze gelten entsprechend, wenn man die betreffenden Größen der Translation durch Größen der Rotation ersetzt. Allerdings ist dabei zu beachten, dass Größen der Rotation häufig sogenannte axiale Vektoren sind. Ein Sonderfall ist das Massenträgheitsmoment, das im allgemeinen Fall ein dreidimensionaler Tensor ist, im Gegensatz zu seinem Translations-Analogon Masse, die ein reiner Skalar ist.
Im Folgenden wird das Massenträgheitsmoment jedoch als Skalar behandelt.
4.2 Drehimpulssatz, Drehimpulserhaltung
Aus �⃗⃗⃗� =d�⃗⃗�
d𝑡 folgt für �⃗⃗⃗� = 0:
d�⃗⃗�
d𝑡= 0 und damit �⃗⃗� = 𝑐𝑜𝑛𝑠𝑡⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ .
Wirkt kein äußeres Drehmoment, bleibt der Drehimpuls konstant (Drehimpulserhaltungssatz oder kurz „Drehimpulssatz“).
Kompaktkurs Physik Gravitationsgesetz, Planetenbewegung
25
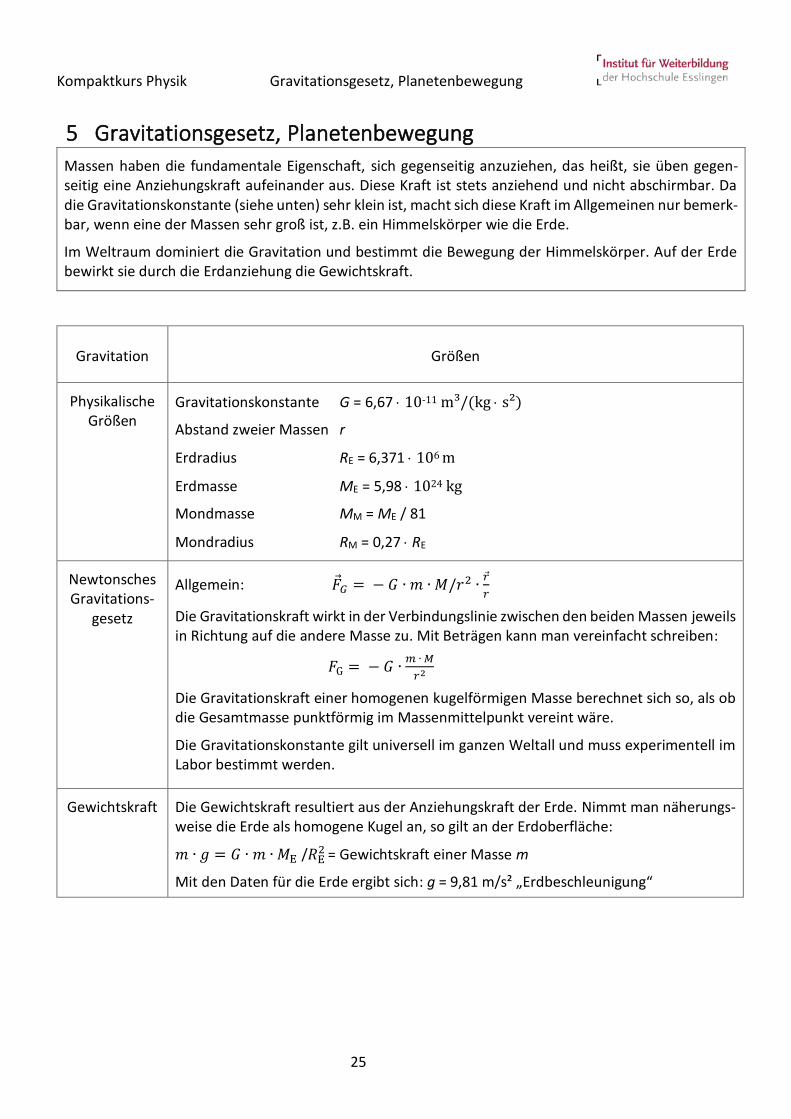
5 Gravitationsgesetz, Planetenbewegung
Massen haben die fundamentale Eigenschaft, sich gegenseitig anzuziehen, das heißt, sie üben gegen-seitig eine Anziehungskraft aufeinander aus. Diese Kraft ist stets anziehend und nicht abschirmbar. Da die Gravitationskonstante (siehe unten) sehr klein ist, macht sich diese Kraft im Allgemeinen nur bemerk-bar, wenn eine der Massen sehr groß ist, z.B. ein Himmelskörper wie die Erde.
Im Weltraum dominiert die Gravitation und bestimmt die Bewegung der Himmelskörper. Auf der Erde bewirkt sie durch die Erdanziehung die Gewichtskraft.
Gravitation Größen
Physikalische Größen
Gravitationskonstante G = 6,67 10-11 m³/(kg s²)
Abstand zweier Massen r
Erdradius RE = 6,371 106 m
Erdmasse ME = 5,98 1024 kg
Mondmasse MM = ME / 81
Mondradius RM = 0,27 RE
Newtonsches Gravitations-
gesetz
Allgemein: �⃗�𝐺 = − 𝐺 ∙ 𝑚 ∙ 𝑀/𝑟2 ∙𝑟
𝑟
Die Gravitationskraft wirkt in der Verbindungslinie zwischen den beiden Massen jeweils in Richtung auf die andere Masse zu. Mit Beträgen kann man vereinfacht schreiben:
𝐹G = − 𝐺 ∙𝑚 ∙ 𝑀
𝑟2
Die Gravitationskraft einer homogenen kugelförmigen Masse berechnet sich so, als ob die Gesamtmasse punktförmig im Massenmittelpunkt vereint wäre.
Die Gravitationskonstante gilt universell im ganzen Weltall und muss experimentell im Labor bestimmt werden.
Gewichtskraft Die Gewichtskraft resultiert aus der Anziehungskraft der Erde. Nimmt man näherungs-weise die Erde als homogene Kugel an, so gilt an der Erdoberfläche:
𝑚 ∙ 𝑔 = 𝐺 ∙ 𝑚 ∙ 𝑀E /𝑅E 2 = Gewichtskraft einer Masse m
Mit den Daten für die Erde ergibt sich: g = 9,81 m/s² „Erdbeschleunigung“
Kompaktkurs Physik Gravitationsgesetz, Planetenbewegung
26
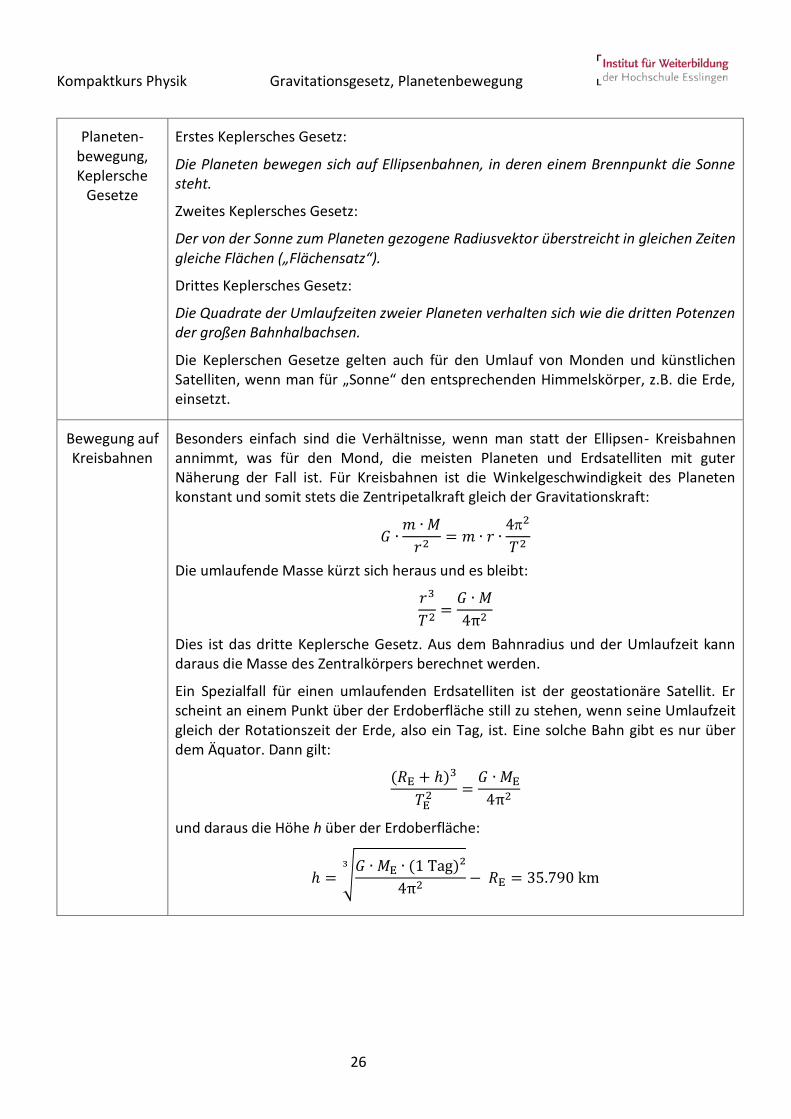
Planeten-bewegung, Keplersche
Gesetze
Erstes Keplersches Gesetz:
Die Planeten bewegen sich auf Ellipsenbahnen, in deren einem Brennpunkt die Sonne steht.
Zweites Keplersches Gesetz:
Der von der Sonne zum Planeten gezogene Radiusvektor überstreicht in gleichen Zeiten gleiche Flächen („Flächensatz“).
Drittes Keplersches Gesetz:
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die dritten Potenzen der großen Bahnhalbachsen.
Die Keplerschen Gesetze gelten auch für den Umlauf von Monden und künstlichen Satelliten, wenn man für „Sonne“ den entsprechenden Himmelskörper, z.B. die Erde, einsetzt.
Bewegung auf Kreisbahnen
Besonders einfach sind die Verhältnisse, wenn man statt der Ellipsen- Kreisbahnen annimmt, was für den Mond, die meisten Planeten und Erdsatelliten mit guter Näherung der Fall ist. Für Kreisbahnen ist die Winkelgeschwindigkeit des Planeten konstant und somit stets die Zentripetalkraft gleich der Gravitationskraft:
𝐺 ∙𝑚 ∙ 𝑀
𝑟2= 𝑚 ∙ 𝑟 ∙
42
𝑇2
Die umlaufende Masse kürzt sich heraus und es bleibt:
𝑟3
𝑇2=
𝐺 ∙ 𝑀
4π2
Dies ist das dritte Keplersche Gesetz. Aus dem Bahnradius und der Umlaufzeit kann daraus die Masse des Zentralkörpers berechnet werden.
Ein Spezialfall für einen umlaufenden Erdsatelliten ist der geostationäre Satellit. Er scheint an einem Punkt über der Erdoberfläche still zu stehen, wenn seine Umlaufzeit gleich der Rotationszeit der Erde, also ein Tag, ist. Eine solche Bahn gibt es nur über dem Äquator. Dann gilt:
(𝑅E + ℎ)3
𝑇E2 =
𝐺 ∙ 𝑀E
4π2
und daraus die Höhe h über der Erdoberfläche:
ℎ = √𝐺 ∙ 𝑀E ∙ (1 Tag)²
4π2
3
− 𝑅E = 35.790 km
Kompaktkurs Physik Elektrizität
27
6 Elektrizität
6.1 Elektrostatik
Elektrostatik Größe Einheit
Physikalische Größen
Elektrische Ladung Q, q
Elektrische Spannung U
Elektrische Stromstärke I
Kapazität C
Widerstand R
[Q, q] = C = A s (C = Coulomb, A = Ampere)
[U] = V (Volt)
[I] = A (Ampere)
[C] = F (Farad)
[R] = (Ohm)
Physikalische Konstanten
Elementarladung e = 1,6 ∙ 10-19 C
Elektrische Feldkonstante 0 = 8,854∙ 10-12 C /(V ∙ m)
Elektrische Permeabilität r = 1 in Luft
Magnetische Feldkonstante 0 = 4 ∙ 10-7 (V ∙ s) /(A ∙ m)
Coulomb-Konstante kC = 1 / (4 ∙ ∙ r ∙ 0) = 8,988∙ 109 V ∙ m / C
In dieser Formelsammlung werden nur zwei ausgewählte Kapitel der Elektrizitätslehre in kurzer Form behandelt.
Die Elektrostatik befasst sich mit zwei grundlegenden Phänomenen der Elektrizitätslehre, der elektri-schen Ladung und dem elektrischen Feld. In Atomen tragen die Protonen im Atomkern eine positive Elementarladung, die Elektronen in der umgebenden Hülle eine negative Elementarladung. Da die Atome – und damit die Atomkerne – in Festkörpern wie Metallen oder Halbleitern ihre Positionen im Gitter nicht verlassen können, beruhen elektrische Leitungsvorgänge hier in der Regel allein auf den leicht beweglichen negativ geladenen Elektronen.
Der Feldbegriff ist von grundlegender Bedeutung in der Physik. Er beschreibt eine Eigenschaft des Raums, die z.B. durch die Anwesenheit von elektrischen Ladungen verursacht wird. Beim elektrischen Feld bedeutet dies, dass eine Probeladung in diesem Feld eine Kraft erfährt. Das Feld existiert jedoch auch ohne die Probeladung; sie dient nur dem Nachweis, dass ein Feld vorhanden und wie groß seine Feldstärke ist.
Kompaktkurs Physik Elektrizität
28
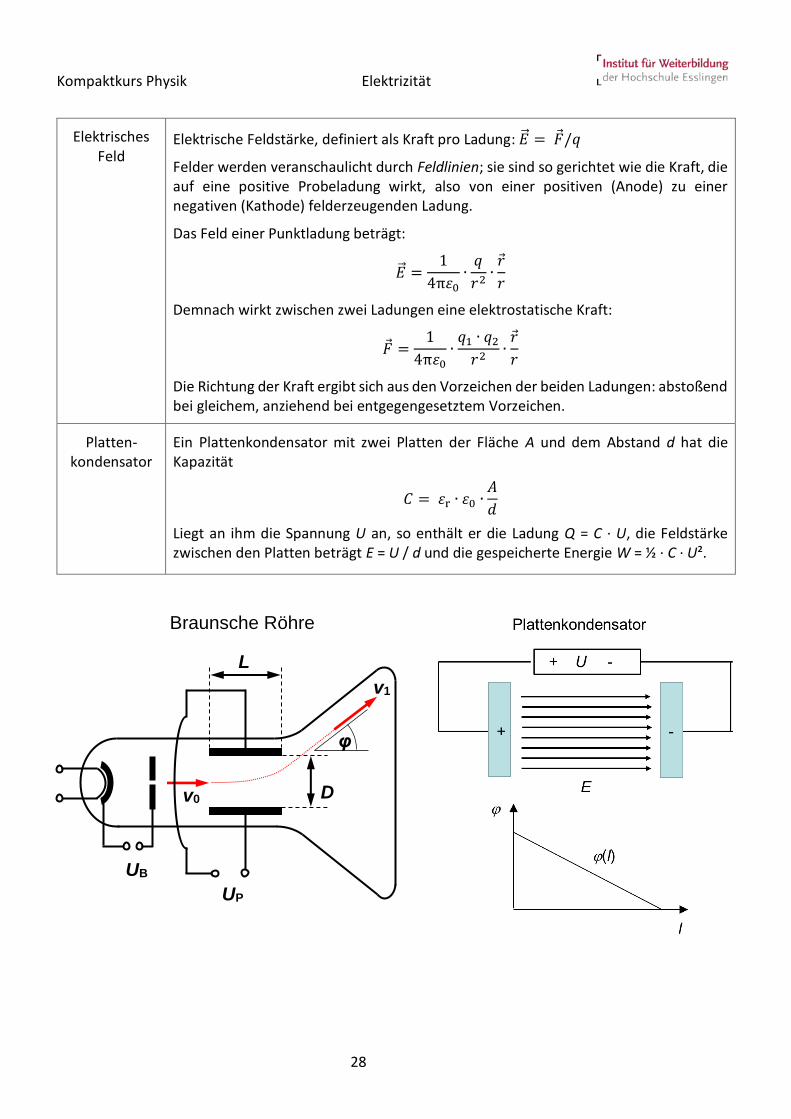
Elektrisches Feld
Elektrische Feldstärke, definiert als Kraft pro Ladung: �⃗⃗� = �⃗�/𝑞
Felder werden veranschaulicht durch Feldlinien; sie sind so gerichtet wie die Kraft, die auf eine positive Probeladung wirkt, also von einer positiven (Anode) zu einer negativen (Kathode) felderzeugenden Ladung.
Das Feld einer Punktladung beträgt:
�⃗⃗� =1
4π휀0∙
𝑞
𝑟2∙
𝑟
𝑟
Demnach wirkt zwischen zwei Ladungen eine elektrostatische Kraft:
�⃗� =1
4π휀0∙
𝑞1 ∙ 𝑞2
𝑟2∙
𝑟
𝑟
Die Richtung der Kraft ergibt sich aus den Vorzeichen der beiden Ladungen: abstoßend bei gleichem, anziehend bei entgegengesetztem Vorzeichen.
Platten-kondensator
Ein Plattenkondensator mit zwei Platten der Fläche A und dem Abstand d hat die Kapazität
𝐶 = 휀r ∙ 휀0 ∙𝐴
𝑑
Liegt an ihm die Spannung U an, so enthält er die Ladung Q = C · U, die Feldstärke zwischen den Platten beträgt E = U / d und die gespeicherte Energie W = ½ · C · U².
Braunsche Röhre
UB
φ
UP
D v0
L
v1
Kompaktkurs Physik Elektrizität
29
6.2 Stromkreise
Stromkreise Größe Einheit
Physikalische Größen
Elektrische Ladung Q, q
Elektrische Spannung U
Elektrische Stromstärke I
Widerstand R
Kapazität C
Induktivität L
[Q, q] = C = A s (C = Coulomb, A = Ampere)
[U] = V (Volt)
[I] = A (Ampere)
[R] = (Ohm)
[C] = F (Farad)
[L] = H (Henry)
Strom Elektrischer Strom ist fließende Ladung: 𝐼 =d𝑞
d𝑡. Im Allgemeinen wird er getragen von
beweglichen negativ geladenen Elektronen in elektrischen Leitern, er kann aber auch aus frei fliegenden Elektronen, z.B. in der Braunschen Röhre, bestehen.
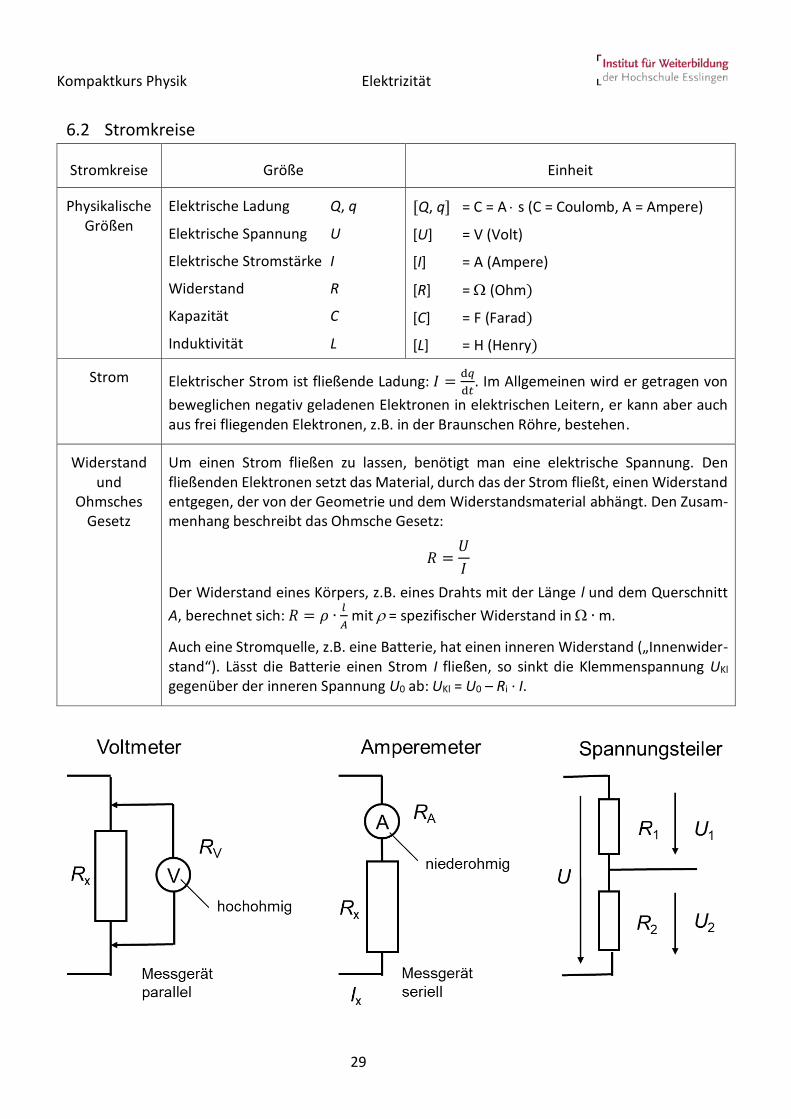
Widerstand und
Ohmsches Gesetz
Um einen Strom fließen zu lassen, benötigt man eine elektrische Spannung. Den fließenden Elektronen setzt das Material, durch das der Strom fließt, einen Widerstand entgegen, der von der Geometrie und dem Widerstandsmaterial abhängt. Den Zusam-menhang beschreibt das Ohmsche Gesetz:
𝑅 =𝑈
𝐼
Der Widerstand eines Körpers, z.B. eines Drahts mit der Länge l und dem Querschnitt
A, berechnet sich: 𝑅 = 𝜌 ∙𝑙
𝐴 mit = spezifischer Widerstand in ∙ m.
Auch eine Stromquelle, z.B. eine Batterie, hat einen inneren Widerstand („Innenwider-stand“). Lässt die Batterie einen Strom I fließen, so sinkt die Klemmenspannung UKl gegenüber der inneren Spannung U0 ab: UKl = U0 – Ri · I.

Kompaktkurs Physik Schwingungen
30
7 Schwingungen
Schwingungen Größe Einheit
Physikalische Größen
Schwingungsdauer T
Frequenz f = 1 / T
Kreisfrequenz = 2 · · f = 2 · / T
Abklingkoeffizient
Dämpfungsgrad 𝜗 = /𝜔0
Logarithmisches Dekrement = ln (�̂�i
�̂�i+1) = 𝛿 ∙ 𝑇d
[T] = s
[f] = 1/ s = Hz
[] = 1/ s = Hz
[] = 1/ s
dimensionslos
dimensionslos
7.1 Harmonisch
Eine besondere Form von Schwingungen sind die sogenannten harmonischen Schwingungen. Sie sind dadurch charakterisiert, dass sie mathematisch als Sinus- bzw. Cosinusfunktion beschrieben werden können. Das Auslenkungs-Zeit-Gesetz lautet dann:
𝑦(𝑡) = �̂� ∙ cos (𝜔 ∙ 𝑡 + 𝜑0)
dabei ist �̂� die Amplitude, d.h. der Maximalwert, die Kreisfrequenz 𝜔 = 2 ∙ 𝑓 und 𝜑0 der Anfangs-phasenwinkel (oft auch Nullphasenwinkel).
Die zeitliche Änderung dieser Größe heißt Schnelle:
�̇�(𝑡) =d𝑦
d𝑡= −�̂� ∙ 𝜔 ∙ sin (𝜔 ∙ 𝑡 + 𝜑0)
mit der Schnelleamplitude �̂� ∙ 𝜔 . Die zweite Zeitableitung, bei mechanischen Auslenkungen die Be-schleunigung, lautet:
�̈�(𝑡) =d�̇�
d𝑡= −�̂� ∙ 𝜔² ∙ cos (𝜔 ∙ 𝑡 + 𝜑0)
Daraus erhält man die Differenzialgleichung
�̈� + 𝜔2 ∙ 𝑦 = 0.
Jedes physikalische System, das sich mit dieser Differenzialgleichung beschreiben lässt, kann eine har-monische Schwingung ausführen.
Eine Schwingung ist eine zeitlich periodische Bewegung, bei der sich eine physikalische Größe nach einer Zeit T in gleicher Form wiederholt, d.h. es gilt y(t + T) = y(t). Diese Größe kann eine Auslenkung, eine elektrische Spannung, ein Druck, eine Temperatur usw. sein.
Charakteristisch ist die Periodendauer T bzw. die Frequenz f, das ist die Zahl der Wiederholungen pro Zeiteinheit. Damit gilt 𝑇 = 1/𝑓 oder 𝑓 = 1/𝑇.
Kompaktkurs Physik Schwingungen
31
7.2 Ungedämpft
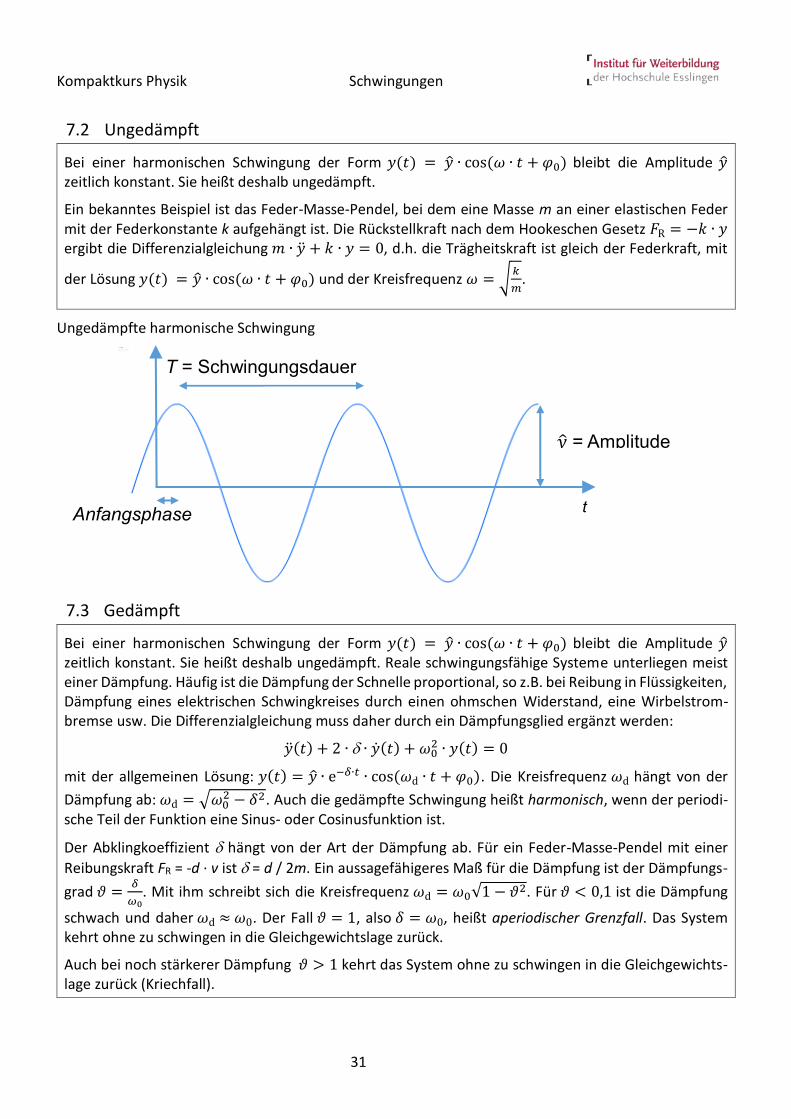
Bei einer harmonischen Schwingung der Form 𝑦(𝑡) = �̂� ∙ cos (𝜔 ∙ 𝑡 + 𝜑0) bleibt die Amplitude �̂� zeitlich konstant. Sie heißt deshalb ungedämpft.
Ein bekanntes Beispiel ist das Feder-Masse-Pendel, bei dem eine Masse m an einer elastischen Feder mit der Federkonstante k aufgehängt ist. Die Rückstellkraft nach dem Hookeschen Gesetz 𝐹R = −𝑘 ∙ 𝑦 ergibt die Differenzialgleichung 𝑚 ∙ �̈� + 𝑘 ∙ 𝑦 = 0, d.h. die Trägheitskraft ist gleich der Federkraft, mit
der Lösung 𝑦(𝑡) = �̂� ∙ cos (𝜔 ∙ 𝑡 + 𝜑0) und der Kreisfrequenz 𝜔 = √𝑘
𝑚.
Ungedämpfte harmonische Schwingung
7.3 Gedämpft
Bei einer harmonischen Schwingung der Form 𝑦(𝑡) = �̂� ∙ cos (𝜔 ∙ 𝑡 + 𝜑0) bleibt die Amplitude �̂� zeitlich konstant. Sie heißt deshalb ungedämpft. Reale schwingungsfähige Systeme unterliegen meist einer Dämpfung. Häufig ist die Dämpfung der Schnelle proportional, so z.B. bei Reibung in Flüssigkeiten, Dämpfung eines elektrischen Schwingkreises durch einen ohmschen Widerstand, eine Wirbelstrom-bremse usw. Die Differenzialgleichung muss daher durch ein Dämpfungsglied ergänzt werden:
�̈�(𝑡) + 2 ∙ ∙ �̇�(𝑡) + 𝜔02 ∙ 𝑦(𝑡) = 0
mit der allgemeinen Lösung: 𝑦(𝑡) = �̂� ∙ e−𝛿∙𝑡 ∙ cos (𝜔d ∙ 𝑡 + 𝜑0). Die Kreisfrequenz 𝜔d hängt von der
Dämpfung ab: 𝜔d = √𝜔02 − 𝛿2. Auch die gedämpfte Schwingung heißt harmonisch, wenn der periodi-
sche Teil der Funktion eine Sinus- oder Cosinusfunktion ist.
Der Abklingkoeffizient hängt von der Art der Dämpfung ab. Für ein Feder-Masse-Pendel mit einer
Reibungskraft FR = -d · v ist = d / 2m. Ein aussagefähigeres Maß für die Dämpfung ist der Dämpfungs-
grad 𝜗 =𝛿
𝜔0. Mit ihm schreibt sich die Kreisfrequenz 𝜔d = 𝜔0√1 − 𝜗2. Für 𝜗 < 0,1 ist die Dämpfung
schwach und daher 𝜔d ≈ 𝜔0. Der Fall 𝜗 = 1, also 𝛿 = 𝜔0, heißt aperiodischer Grenzfall. Das System kehrt ohne zu schwingen in die Gleichgewichtslage zurück.
Auch bei noch stärkerer Dämpfung 𝜗 > 1 kehrt das System ohne zu schwingen in die Gleichgewichts-lage zurück (Kriechfall).
t
y
�̂� = Amplitude
T = Schwingungsdauer
Anfangsphase
Kompaktkurs Physik Schwingungen
32
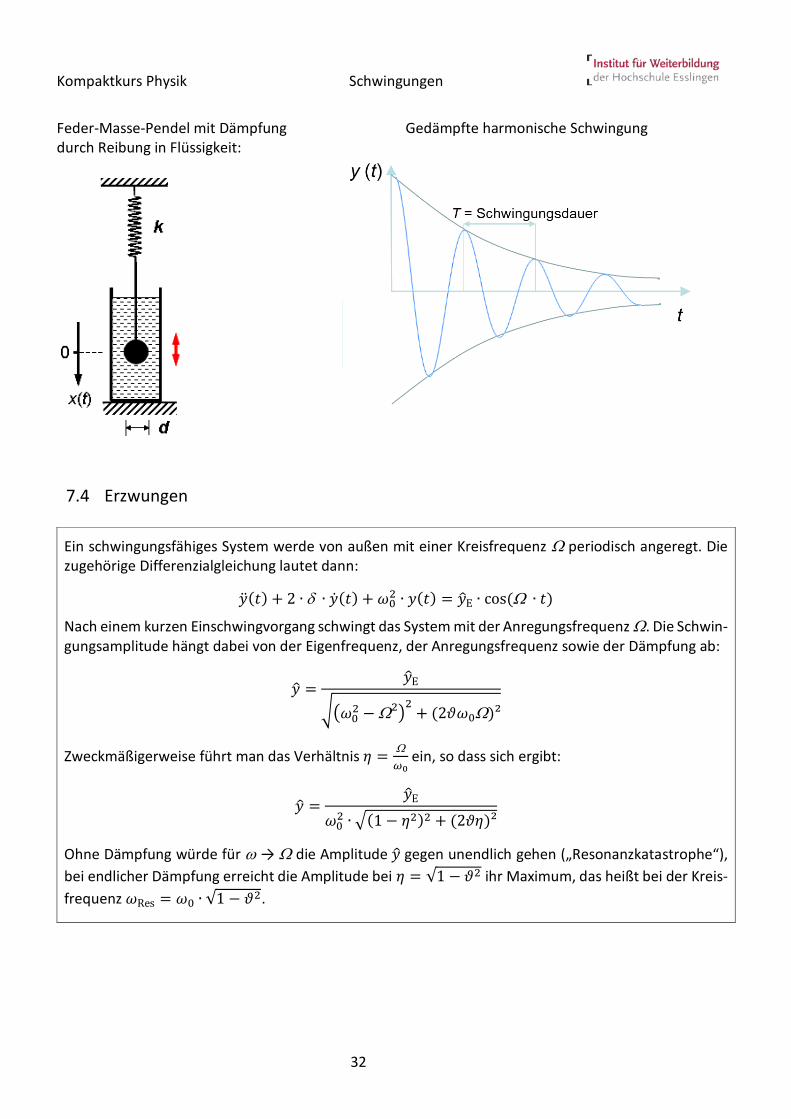
Feder-Masse-Pendel mit Dämpfung Gedämpfte harmonische Schwingung durch Reibung in Flüssigkeit:
7.4 Erzwungen
Ein schwingungsfähiges System werde von außen mit einer Kreisfrequenz periodisch angeregt. Die zugehörige Differenzialgleichung lautet dann:
�̈�(𝑡) + 2 ∙ ∙ �̇�(𝑡) + 𝜔02 ∙ 𝑦(𝑡) = �̂�E ∙ cos ( ∙ 𝑡)
Nach einem kurzen Einschwingvorgang schwingt das System mit der Anregungsfrequenz . Die Schwin-gungsamplitude hängt dabei von der Eigenfrequenz, der Anregungsfrequenz sowie der Dämpfung ab:
�̂� =�̂�E
√(𝜔02 − 2)
2+ (2𝜗𝜔0)²
Zweckmäßigerweise führt man das Verhältnis 𝜂 =
𝜔0 ein, so dass sich ergibt:
�̂� =�̂�E
𝜔02 ∙ √(1 − 𝜂2)2 + (2𝜗𝜂)²
Ohne Dämpfung würde für → die Amplitude �̂� gegen unendlich gehen („Resonanzkatastrophe“),
bei endlicher Dämpfung erreicht die Amplitude bei 𝜂 = √1 − 𝜗2 ihr Maximum, das heißt bei der Kreis-
frequenz 𝜔Res = 𝜔0 ∙ √1 − 𝜗2.